

LM2622
600kHz/1.3MHz Step-up PWM DC/DC Converter
General Description
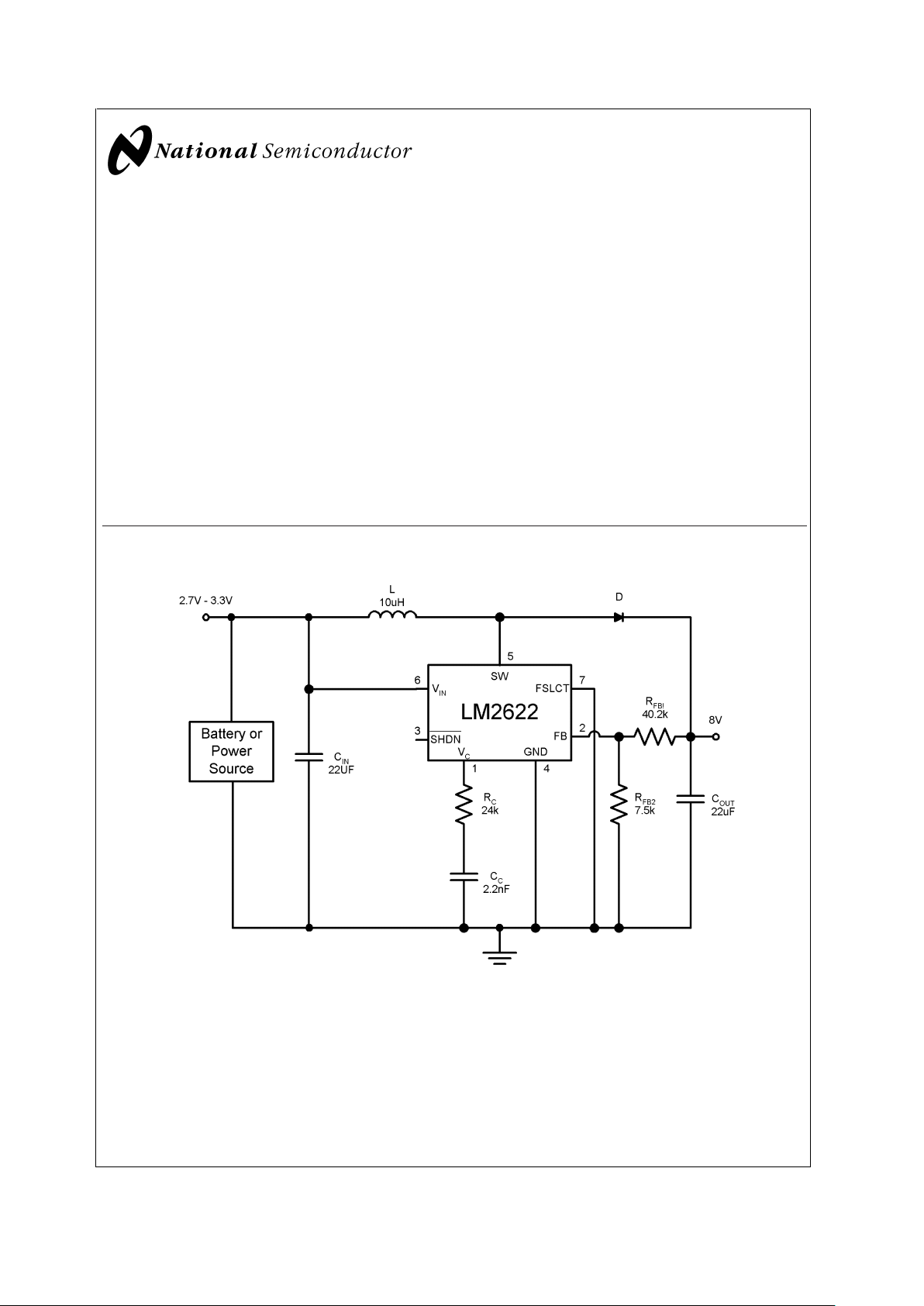
The LM2622 is a step-up DC/DC converter with a 1.6A, 0.2Ω
internal switch and pin selectable operating frequency. With
the ability to convert 3.3V to multiple outputs of 8V, -8V, and
23V, the LM2622 is an ideal part for biasing TFT displays.
The LM2622 can be operated at switching frequencies of
600kHz and 1.3MHz allowingforeasyfilteringandlownoise.
An external compensation pin gives the user flexibility in
setting frequency compensation, which makes possible the
use of small, low ESR ceramic capacitors at the output. The
LM2622 is available in a low profile 8-lead MSOP package.
Features
n 1.6A, 0.2Ω, internal switch
n Operating voltage as low as 2.0V
n 600kHz/1.3MHz pin selectable frequency operation
n Over temperature protection
n 8-Lead MSOP package
Applications
n TFT Bias Supplies
n Handheld Devices
n Portable Applications
n GSM/CDMA Phones
n Digital Cameras
Typical Application Circuit
10127331
600 kHz Operation
October 2001
LM2622 600kHz/1.3MHz Step-up PWM DC/DC Converter
© 2001 National Semiconductor Corporation DS101273 www.national.com
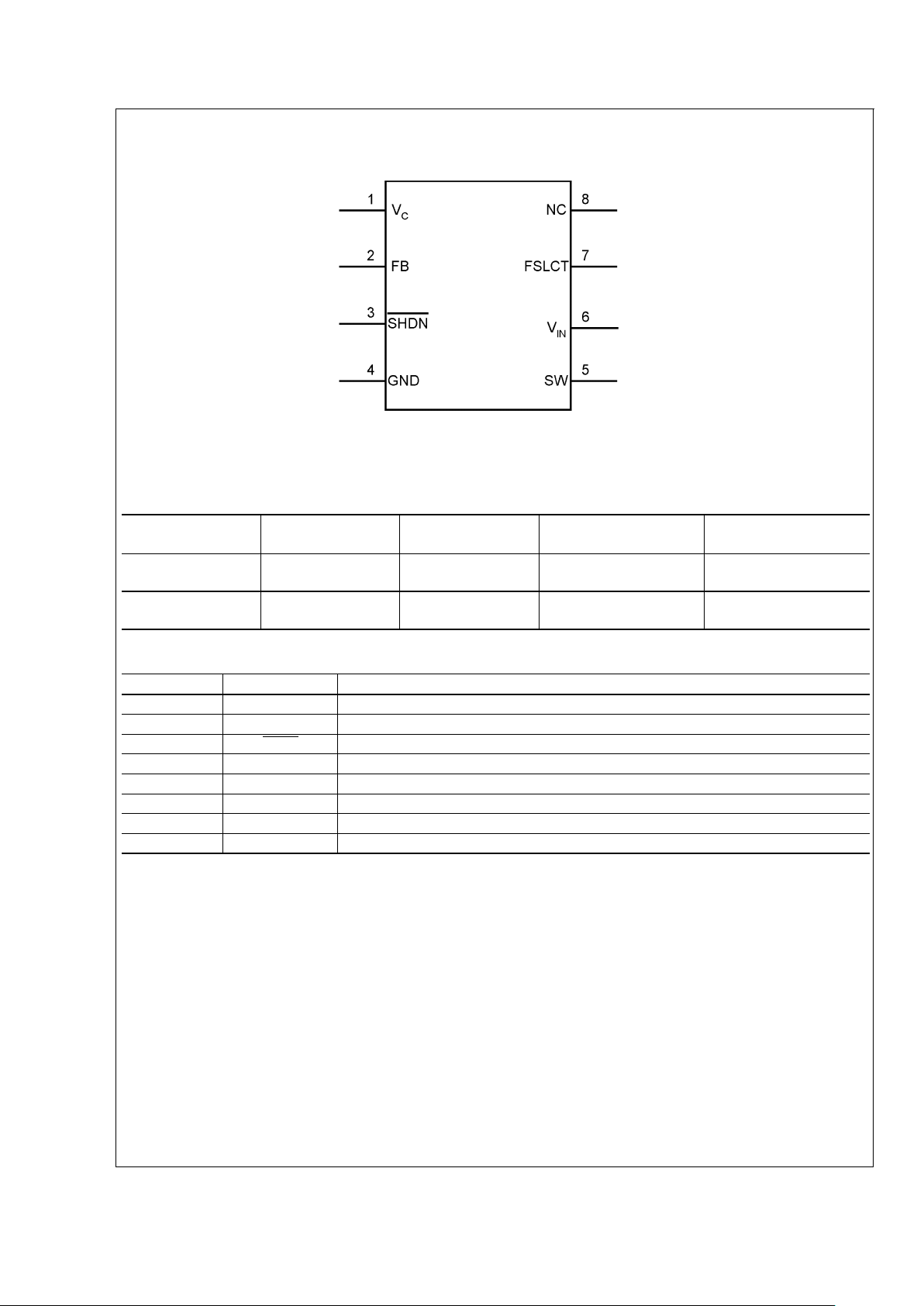
Connection Diagram
Top View
10127304
8-Lead Plastic MSOP
NS Package Number MUA08A
Ordering Information
Order Number Package Type NSC Package
Drawing
Supplied As Package ID
LM2622MM-ADJ MSOP-8 MUA08A 1000 Units, Tape and
Reel
S18B
LM2622MMX-ADJ MSOP-8 MUA08A 3500 Units, Tape and
Reel
S18B
Pin Description
Pin Name Function
1V
C
Compensation network connection. Connected to the output of the voltage error amplifier.
2 FB Output voltage feedback input.
3 SHDN
Shutdown control input, active low.
4 GND Analog and power ground.
5 SW Power switch input. Switch connected between SW pin and GND pin.
6V
IN
Analog power input.
7 FSLCT Switching frequency select input. V
IN
= 1.3MHz. Ground = 600kHz.
8 NC Connect to ground.
LM2622
www.national.com 2
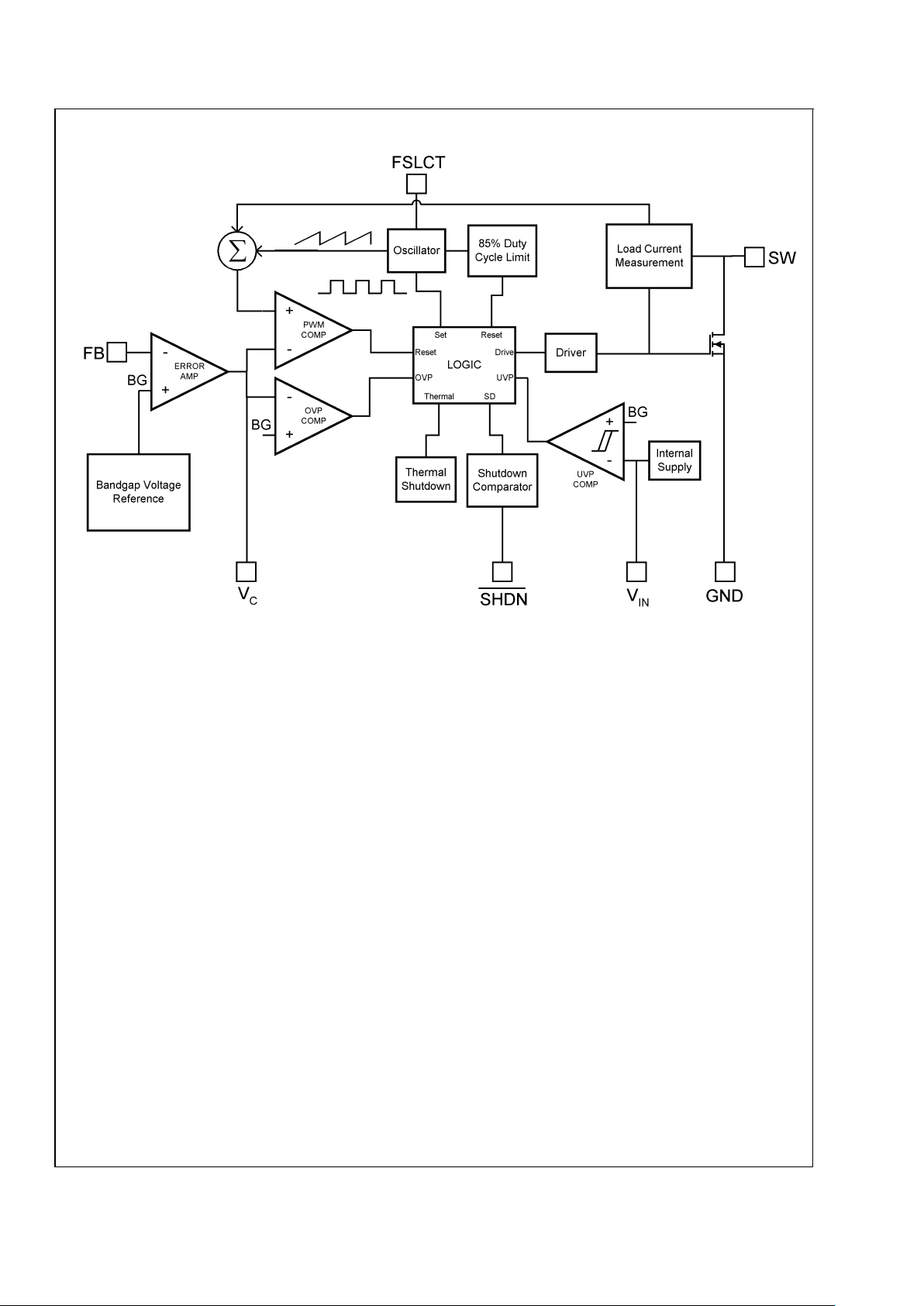
Block Diagram
10127303
LM2622
www.national.com3
Absolute Maximum Ratings (Note 1)
If Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales Office/
Distributors for availability and specifications.
V
IN
12V
SW Voltage 18V
FB Voltage 7V
V
C
Voltage 7V
SHDN Voltage
7V
FSLCT 12V
Maximum Junction
Temperature
150˚C
Power Dissipation(Note 2) Internally Limited
Lead Temperature 300˚C
Vapor Phase (60 sec.) 215˚C
Infrared (15 sec.) 220˚C
ESD Susceptibility
(Note 3)
Human Body Model 2kV
Machine Model 200V
Operating Conditions
Operating Junction
Temperature Range (Note 4) −40˚C to +125˚C
Storage Temperature −65˚C to +150˚C
Supply Voltage 2V to 12V
Electrical Characteristics
Specifications in standard type face are for TJ= 25˚C and those with boldface type apply over the full Operating Temperature Range (T
J
= −40˚C to +125˚C)Unless otherwise specified. VIN=2.0V and IL= 0A, unless otherwise specified.
Symbol Parameter Conditions
Min
(Note 4)
Typ
(Note 5)
Max
(Note 4)
Units
I
Q
Quiescent Current FB = 0V (Not Switching) 1.3 2.0 mA
V
SHDN
=0V 5 10 µA
V
FB
Feedback Voltage 1.2285 1.26 1.2915 V
I
CL
(Note 6) Switch Current Limit VIN= 2.7V (Note 7) 1.0 1.65 2.3 A
∆V
O
/∆I
LOAD
Load Regulation VIN= 3.3V 6.7 mV/A
%V
FB
/∆VINFeedback Voltage Line
Regulation
2.0V ≤ VIN≤ 12.0V 0.013 0.1 %/V
I
B
FB Pin Bias Current (Note 8) 0.5 20 nA
V
IN
Input Voltage Range 212V
g
m
Error Amp Transconductance ∆I = 5µA 40 135 290 µmho
A
V
Error Amp Voltage Gain 135 V/V
D
MAX
Maximum Duty Cycle 78 85 %
f
S
Switching Frequency FSLCT = Ground 480 600 720 kHz
FSLCT = V
IN
1 1.25 1.5 MHz
I
SHDN
Shutdown Pin Current V
SHDN=VIN
0.01 0.1 µA
V
SHDN
=0V −0.5 -1
I
L
Switch Leakage Current VSW= 18V 0.01 3 µA
R
DSON
Switch R
DSON
VIN= 2.7V, ISW= 1A 0.2 0.4 Ω
Th
SHDN
SHDN Threshold Output High 0.9 0.6 V
Output Low 0.6 0.3 V
UVP On Threshold 1.8 1.92 2.0 V
Off Threshold 1.7 1.82 1.9 V
θ
JA
Thermal Resistance Junction to Ambient(Note 9) 235 ˚C/W
Junction to Ambient(Note 10) 225
Junction to Ambient(Note 11) 220
Junction to Ambient(Note 12) 200
Junction to Ambient(Note 13) 195
Note 1: Absolute maximum ratings are limits beyond which damage to the device may occur. Operating Ratings are conditions for which the device is intended to
be functional, but device parameter specifications may not be guaranteed. For guaranteed specifications and test conditions, see the Electrical Characteristics.
Note 2: The maximum allowable power dissipation is a function of the maximum junction temperature, T
J
(MAX), the junction-to-ambient thermal resistance, θJA,
and the ambient temperature, T
A
. See the Electrical Characteristics table for the thermal resistance of various layouts. The maximum allowable power dissipation
at any ambient temperature is calculated using: P
D
(MAX) = (T
J(MAX)−TA
)/θJA. Exceeding the maximum allowable power dissipation will cause excessive die
temperature, and the regulator will go into thermal shutdown.
LM2622
www.national.com 4
Electrical Characteristics (Continued)
Note 3: The human body model is a 100 pF capacitor discharged through a 1.5kΩ resistor into each pin. The machine model is a 200pF capacitor discharged
directly into each pin.
Note 4: All limits guaranteed at room temperature (standard typeface) and at temperature extremes (bold typeface). All room temperature limits are 100%
production tested. All limits at temperature extremes are guaranteed via correlation using standard Statistical Quality Control (SQC) methods. All limits are used to
calculate Average Outgoing Quality Level (AOQL).
Note 5: Typical numbers are at 25˚C and represent the most likely norm.
Note 6: Duty cycle affects current limit due to ramp generator.
Note 7: Current limit at 0% duty cycle. See TYPICAL PERFORMANCE section for Switch Current Limit vs. V
IN
Note 8: Bias current flows into FB pin.
Note 9: Junction to ambient thermal resistance (no external heat sink) for the MSO8 package with minimal trace widths (0.010 inches) from the pins to the circuit.
See ’Scenario ’A’’ in the Power Dissipation section.
Note 10: Junction to ambient thermal resistance for the MSO8 package with minimal trace widths (0.010 inches) from the pins to the circuit and approximately
0.0191 sq. in. of copper heat sinking. See ’Scenario ’B’’ in the Power Dissipation section.
Note 11: Junction to ambient thermal resistance for the MSO8 package with minimal trace widths (0.010 inches) from the pins to the circuit and approximately
0.0465 sq. in. of copper heat sinking. See ’Scenario ’C’’ in the Power Dissipation section.
Note 12: Junction to ambient thermal resistance for the MSO8 package with minimal trace widths (0.010 inches) from the pins to the circuit and approximately
0.2523 sq. in. of copper heat sinking. See ’Scenario ’D’’ in the Power Dissipation section.
Note 13: Junction to ambient thermal resistance for the MSO8 package with minimal trace widths (0.010 inches) from the pins to the circuit and approximately
0.0098 sq. in. of copper heat sinking on the top layer and 0.0760 sq. in. of copper heat sinking on the bottom layer, with three 0.020 in. vias connecting the planes.
See ’Scenario ’E’’ in the Power Dissipation section.
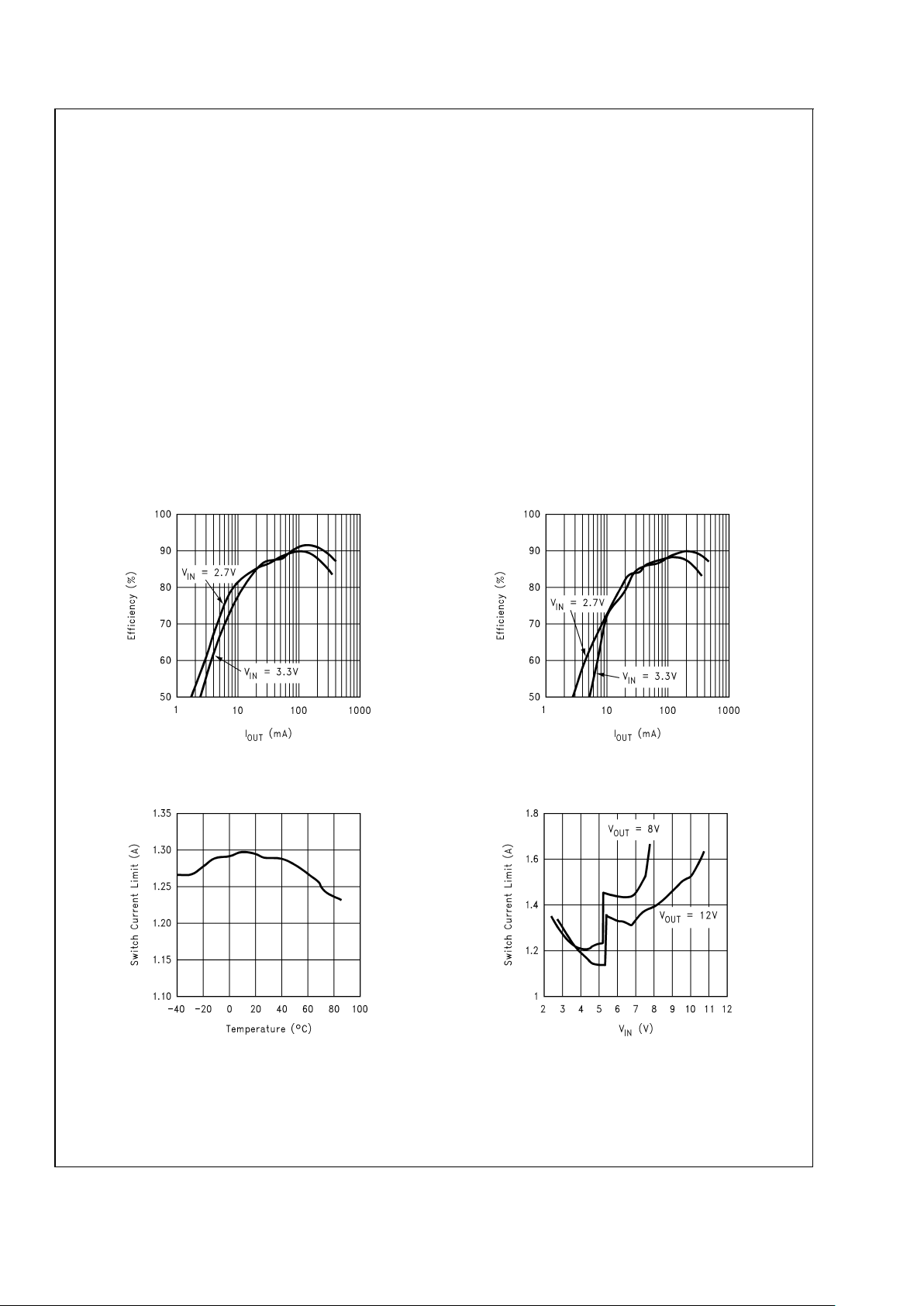
Typical Performance Characteristics
Efficiency vs. Load Current
(V
OUT
= 8V, fS= 600 kHz)
Efficiency vs. Load Current
(V
OUT
= 8V, fS= 1.3 MHz)
10127326 10127325
Switch Current Limit vs. Temperature
(V
IN
= 3.3V, V
OUT
= 8V) Switch Current Limit vs. V
IN
10127320
10127322
LM2622
www.national.com5

Typical Performance Characteristics (Continued)
R
DSON
vs. V
IN
(ISW= 1A)
I
Q
vs. V
IN
(600 kHz, not switching)
10127327 10127328
IQvs. V
IN
(600 kHz, switching)
I
Q
vs. V
IN
(1.3 MHz, not switching)
10127329 10127321
IQvs. V
IN
(1.3 MHz, switching)
I
Q
vs. V
IN
(In shutdown)
10127319
10127318
LM2622
www.national.com 6

Typical Performance Characteristics (Continued)
Frequency vs. V
IN
(600 kHz)
Frequency vs. V
IN
(1.3 MHz)
10127323
10127324
Load Transient Response
(600 kHz operation)
Load Transient Response
(1.3 MHz operation)
10127316
Test circuit is shown in
Figure 4
.
10127317
Test circuit is shown in
Figure 5
LM2622
www.national.com7

Operation
Continuous Conduction Mode
The LM2622 is a current-mode, PWM boost regulator. A
boost regulator steps the input voltage up to a higher output
voltage. In continuous conduction mode (when the inductor
current never reaches zero at steady state), the boost regulator operates in two cycles.
In the first cycle of operation, shown in
Figure 1
(a), the
transistor is closed and the diode is reverse biased. Energy
is collected in the inductor and the load current is supplied by
C
OUT
.
The second cycle isshown in
Figure 1
(b). During this cycle,
the transistor is open and the diode is forward biased. The
energy stored in the inductor is transferred to the load and
output capacitor.
The ratio of these two cycles determines the output voltage.
The output voltage is defined approximately as:
where D is the duty cycle of the switch, D and D' will be
required for design calculations.
Setting the Output Voltage
The output voltage is set using the feedback pin and a
resistor divider connected to the output as shown in the
typical operating circuit. The feedback pin voltage is 1.26V,
so the ratio of the feedback resistors sets the output voltage
according to the following equation:
Introduction to Compensation
10127302
FIGURE 1. Simplified Boost Converter Diagram
(a) First Cycle of Operation (b) Second Cycle Of Operation
10127305
FIGURE 2. (a) Inductor current. (b) Diode current.
LM2622
www.national.com 8

Operation (Continued)
The LM2622 is a current mode PWM boost converter. The
signal flow of this control scheme has two feedback loops,
one that senses switch current and one that senses output
voltage.
To keep a current programmed control converter stable
above duty cycles of 50%, the inductor must meet certain
criteria. The inductor, along with input and output voltage,
will determine the slope of the current through the inductor
(see
Figure 2
(a)). If the slope of the inductor current is too
great, the circuit will be unstable above duty cycles of 50%.
A 10µH inductor is recommended for most 600 kHz applications, while a 4.7µH inductor may be used for most 1.25 MHz
applications. If the duty cycle is approaching the maximum of
85%, it may be necessary to increase the inductance by as
much as 2X. See
Inductor and Diode Selection
for more
detailed inductor sizing.
The LM2622 provides a compensation pin(V
C
) to customize
the voltage loop feedback. It is recommended that a series
combination of R
C
and CCbe used for the compensation
network, as shown in the typical application circuit. For any
given application, there exists a unique combination of R
C
and CCthat will optimize the performance of the LM2622
circuit in terms of its transient response. The series combination of R
C
and CCintroduces a pole-zero pair according to
the following equations:
where ROis the output impedance of the error amplifier,
approximately 1MegΩ. For most applications, performance
can be optimized bychoosing valueswithin the range 5kΩ≤
R
C
≤20kΩ (RCcan be up to 200kΩ if CC2is used, see
High
Output Capacitor ESR Compensation
) and 680pF ≤ CC≤
4.7nF. Refer to the
Applications Information
section for recommended values for specific circuits and conditions. Refer
to the
Compensation
section for other design requirement.
Compensation
This section will present a general design procedure to help
insure a stable and operational circuit. The designs in this
datasheet are optimized for particular requirements. If different conversions are required, some of the components may
need to be changed to ensure stability. Below is a set of
general guidelines in designing a stable circuit for continuous conduction operation (loads greater than approximately
75mA), in most all cases this will provide for stability during
discontinuous operation as well. The power components and
their effects will be determined first, then the compensation
components will be chosen to produce stability.
Inductor and Diode Selection
Although the inductor sizes mentioned earlier are fine for
most applications, a more exact value can be calculated. To
ensure stability at duty cycles above 50%, the inductor must
have some minimum value determined by the minimum
input voltage and the maximum output voltage. This equation is:
where fs is the switching frequency, D is the duty cycle, and
R
DSON
is the ON resistance ofthe internal switchtaken from
the graph ’R
DSON
vs. VIN’ in the
Typical Performance Char-
acteristics
section. This equation is only good for dutycycles
greater than 50% (D
>
0.5), for duty cycles less than50% the
recommended values may be used. The corresponding inductor current ripple as shown in
Figure 2
(a) is given by:
The inductor ripple current is important for a few reasons.
One reason is because the peak switch current will be the
average inductor current (input current or I
LOAD
/D’) plus ∆iL.
As a side note, discontinuous operation occurs when the
inductor current falls to zero during a switching cycle, or ∆i
L
is greater than the average inductor current. Therefore, continuous conduction mode occurs when ∆i
L
is less than the
average inductor current. Care must be taken to make sure
that the switch will not reach its current limit during normal
operation. The inductor must also be sized accordingly. It
should have a saturation current rating higher than the peak
inductor current expected. The output voltage ripple is also
affected by the total ripple current.
The output diode for a boost regulator must be chosen
correctly depending on the output voltage and the output
current. The typical current waveform for the diode in continuous conduction mode is shown in
Figure 2
(b). The diode
must be rated for a reverse voltage equal to or greater than
the output voltage used. The average current rating must be
greater than the maximum load current expected, and the
peak current rating must be greater than the peak inductor
current. During short circuit testing, or if short circuit conditions are possible in the application, the diode current rating
must exceed the switch current limit. Using Schottky diodes
with lower forward voltage drop will decrease power dissipation and increase efficiency.
DC Gain and Open-loop Gain
Since the control stage of the converter forms a complete
feedback loop with the power components, it forms a closedloop system that must be stabilized to avoid positive feedback and instability. A value for open-loop DC gain will be
required, from which you can calculate, or place, poles and
zeros to determine the crossover frequency and the phase
margin.A high phase margin (greater than 45˚)is desired for
the best stability and transient response. For the purpose of
stabilizing the LM2622, choosing a crossover point well below where the right half plane zero is located will ensure
sufficient phase margin. A discussion of the right half plane
zero and checking the crossover using the DC gain will
follow.
Input and Output Capacitor Selection
The switching action of a boost regulator causes a triangular
voltage waveform at the input. A capacitor is required to
reduce the input ripple and noise for proper operation of the
regulator.The size used is dependanton the applicationand
board layout. If the regulator will be loaded uniformly, with
LM2622
www.national.com9

Operation (Continued)
very little load changes, and at lower current outputs, the
input capacitor size can often be reduced. The size can also
be reduced if the input of the regulator is very close to the
source output. The size will generally need to be larger for
applications where the regulator is supplying nearly the
maximum rated output or if large load steps are expected.A
minimum value of 10µF should be used for the less stressful
condtions while a 22µF to 47µF capacitor may be required
for higher power and dynamic loads. Larger values and/or
lower ESR may be needed if the application requires very
low ripple on the input source voltage.
The choice of output capacitors is also somewhat arbitrary
and depends on the design requirements for output voltage
ripple. It is recommended that low ESR (Equivalent Series
Resistance, denoted R
ESR
) capacitors be used such as
ceramic, polymer electrolytic, or low ESR tantalum. Higher
ESR capacitors may be used but will require more compensation which will be explained later on in the section. The
ESR is also important because it determines the peak to
peak output voltage ripple according to the approximate
equation:
∆V
OUT
) 2∆iLR
ESR
(in Volts)
A minimum value of 10µF is recommended and may be
increased to a larger value. After choosing the output capacitor you can determine a pole-zero pair introduced into the
control loop by the following equations:
Where RLis the minimum load resistance corresponding to
the maximum load current. The zero created by the ESR of
the output capacitor is generally very high frequency if the
ESR is small. If low ESR capacitors are used it can be
neglected. If higher ESR capacitors are used see the
High
Output Capacitor ESR Compensation
section.
Right Half Plane Zero
A current mode control boost regulator has an inherent right
half plane zero (RHP zero). This zero hasthe effect of a zero
in the gain plot, causing an imposed +20dB/decade on the
rolloff, but has the effect of a pole in the phase, subtracting
another 90˚ in the phase plot. This can cause undesirable
effects if the control loop is influenced by this zero. To ensure
the RHP zero does not cause instability issues, the control
loop should be designed tohave a bandwidthof less than
1
⁄
2
the frequency of the RHP zero. This zero occurs at a frequency of:
where I
LOAD
is the maximum load current.
Selecting the Compensation Components
The first step in selecting the compensation components R
C
and CCis to set a dominant low frequency polein the control
loop. Simply choose values for R
C
and CCwithin the ranges
given in the
Introduction to Compensation
section to set this
pole in the area of 10Hz to500Hz. The frequency of thepole
created is determined by the equation:
where ROis the output impedance of the error amplifier,
approximately 1MegΩ. Since R
C
is generally much less than
R
O
, it does not have much effect on the above equation and
can be neglected until a value is chosen to set the zero f
ZC
.
f
ZC
is created to cancel out the pole created by the output
capacitor, f
P1
. The output capacitor pole will shift with different load currents as shown by the equation, so setting the
zero is not exact. Determine the range of f
P1
over the ex-
pected loads and then set the zero f
ZC
to a point approximately in the middle. The frequency of this zero is determined by:
Now RCcan be chosen with the selected value for CC.
Check to make sure that the pole f
PC
is still in the 10Hz to
500Hz range, change each value slightly if needed to ensure
both component values are in the recommended range.After
checking the design at the end of this section, these values
can be changed a little more to optimize performance if
desired. This is best done in the lab on a bench, checking the
load step response with different values until the ringing and
overshoot on the output voltage at the edge of the load steps
is minimal. This should produce a stable, high performance
circuit. For improved transient response, higher values of R
C
should be chosen. This will improve the overall bandwidth
which makes the regulator respond more quickly to transients. If more detail is required, or the most optimal performance is desired, refer to a more in depth discussion of
compensating current mode DC/DC switching regulators.
High Output Capacitor ESR Compensation
When using an output capacitor with a high ESR value, or
just to improve the overall phase margin of the control loop,
another pole may be introduced to cancel the zero created
by the ESR. This is accomplishedby adding another capacitor, C
C2
, directly from the compensation pin VCto ground, in
parallel with the series combination of R
C
and CC. The pole
should be placed at the same frequency as f
Z1
, the ESR
zero. The equation for this pole follows:
To ensure this equation is valid, and that CC2can be used
without negatively impacting the effects of R
C
and CC,f
PC2
must be greater than 10fZC.
Checking the Design
The final step is to check the design. This is to ensure a
bandwidth of
1
⁄2or less of the frequency of the RHP zero.
This is done by calculating the open-loop DC gain, A
DC
.After
this value is known, you can calculate the crossover visually
by placing a −20dB/decade slope at each pole, and a
+20dB/decade slope for each zero. The point at which the
gain plot crosses unity gain, or 0dB, is the crossover frequency. If the crossover frequency is less than
1
⁄2the RHP
zero, the phase margin should be high enough for stability.
LM2622
www.national.com 10

Operation (Continued)
The phase margin can also be improved by adding C
C2
as
discussed earlier in the section. The equation for A
DC
is
given below with additional equations required for the calculation:
mc ) 0.072fs (in V/s)
where RLis the minimum load resistance, VINis the maximum input voltage, g
m
is the error amplifier transconduc-
tance found in the
Electrical Characteristics
table, and R
D
-
SON
is the value chosen from the graph ’R
DSON
vs. VIN’in
the
Typical Performance Characteristics
section.
Layout Considerations
The input bypass capacitor C
IN
, as shown in the typical
operating circuit, must be placed close to the IC. This will
reduce copper trace resistance which effects input voltage
ripple of the IC. For additional input voltage filtering,a 100nF
bypass capacitor can be placed in parallel with C
IN
, close to
the V
IN
pin, to shunt any high frequency noise to ground. The
output capacitor, C
OUT
, should also be placed close to the
IC. Any copper trace connections for the C
OUT
capacitor can
increase the series resistance, which directly effects output
voltage ripple. The feedback network, resistors R
FB1
and
R
FB2
, should be kept close to the FB pin, and away from the
inductor, to minimize copper trace connections that can inject noise into the system. Trace connections made to the
inductor and schottky diode should be minimized to reduce
power dissipation and increase overall efficiency. For more
detail on switching power supply layout considerations see
Application Note AN-1149:
Layout Guidelines for Switching
Power Supplies
.
LM2622
www.national.com11
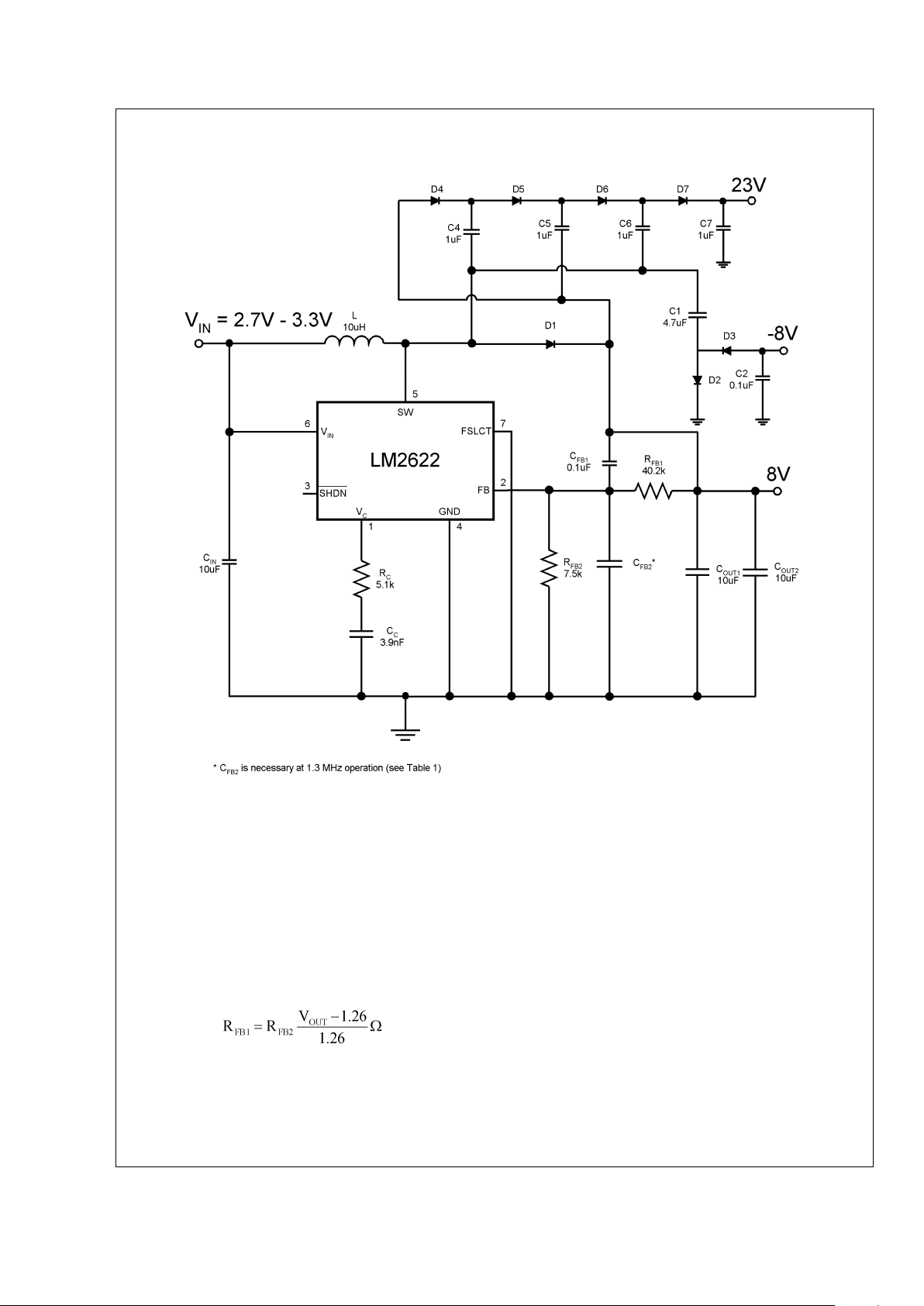
Application Information
Triple Output TFT Bias
The circuit in
Figure 3
shows how the LM2622 can be
configured to provide outputs of 8V, −8V, and 23V, convenient for biasing TFT displays. The 8V output is regulated,
while the −8V and 23V outputs are unregulated.
The 8V output is generated by a typical boost topology. The
basic operation of the boost converter is described in the
OPERATION section. The output voltage is set with R
FB1
and R
FB2
by:
CFBis placed across R
FB1
to act as a pseudo soft-start. The
compensation network of R
C
and CCare chosen to optimally
stabilize the converter. The inductor also affects the stability.
When operating at 600 kHz, a 10uH inductor is recom-
mended to insure the converter is stable at duty cycles
greater than 50%. Refer tothe COMPENSATION section for
more information.
The -8V output is derived from a diode inverter. During the
second cycle, when the transistor is open, D2 conducts and
C1 charges to 8V minus a diode drop ()0.4V if using a
Schottky). When the transistor opens in the first cycle, D3
conducts and C1’s polarity is reversed with respect to the
output at C2, producing -8V.
The 23V output is realized with a series of capacitor charge
pumps. It consists of fourstages: the firststage includes C4,
D4, and the LM2622 switch; the second stage uses C5, D5,
and D1; the third stage includes C6, D6, and the LM2622
switch; the final stage is C7 and D7. In the first stage, C4
charges to 8V when the LM2622 switch is closed, which
causes D5 to conduct when the switch is open. In the second
stage, the voltage across C5 is VC4 + VD1 - VD5 = VC4 )
8V when the switch is open. However, because C5 is referenced to the 8V output, the voltage at C5 is 16V when
referenced to ground. In the third stage, the 16V at C5
10127308
FIGURE 3. Triple Output TFT Bias (600 kHz operation)
LM2622
www.national.com 12
Application Information (Continued)
appears across C6 when the switch is closed. When the
switch opens, C6 is referenced to the 8V output minus a
diode drop, which raises the voltage at C6 with respect to
ground to about 24V. Hence, in the fourth stage, C7 is
charged to 24V when the switch is open. From the first stage
to the last, there are three diode drops that make the output
voltage closer to 24 - 3xVDIODE (about 22.8V if a 0.4V
forward drop is assumed).
TABLE 1. Components For Circuits in
Figure 3
Component 600 kHz 1.3 MHz
L 10µH 4.7µH
COUT1 10µF 22µF
COUT2 10µF NOT USED
CC 3.9nF 1.5nF
CFB1 0.1µF 15nF
CFB2 NOT USED 560pF
CIN 10µF 22µF
C1 4.7µF 4.7µF
Component 600 kHz 1.3 MHz
C2 0.1µF 0.1µF
C4 1µF 1µF
C5 1µF 1µF
C6 1µF 1µF
C7 1µF 1µF
RFB1 40.2kΩ 91kΩ
RFB2 7.5kΩ 18kΩ
RC 5.1kΩ 10kΩ
D1 MBRM140T3 MBRM140T3
D2
BAT54S BAT54S
D3
D4
BAT54S BAT54S
D5
D6
BAT54S BAT54S
D7
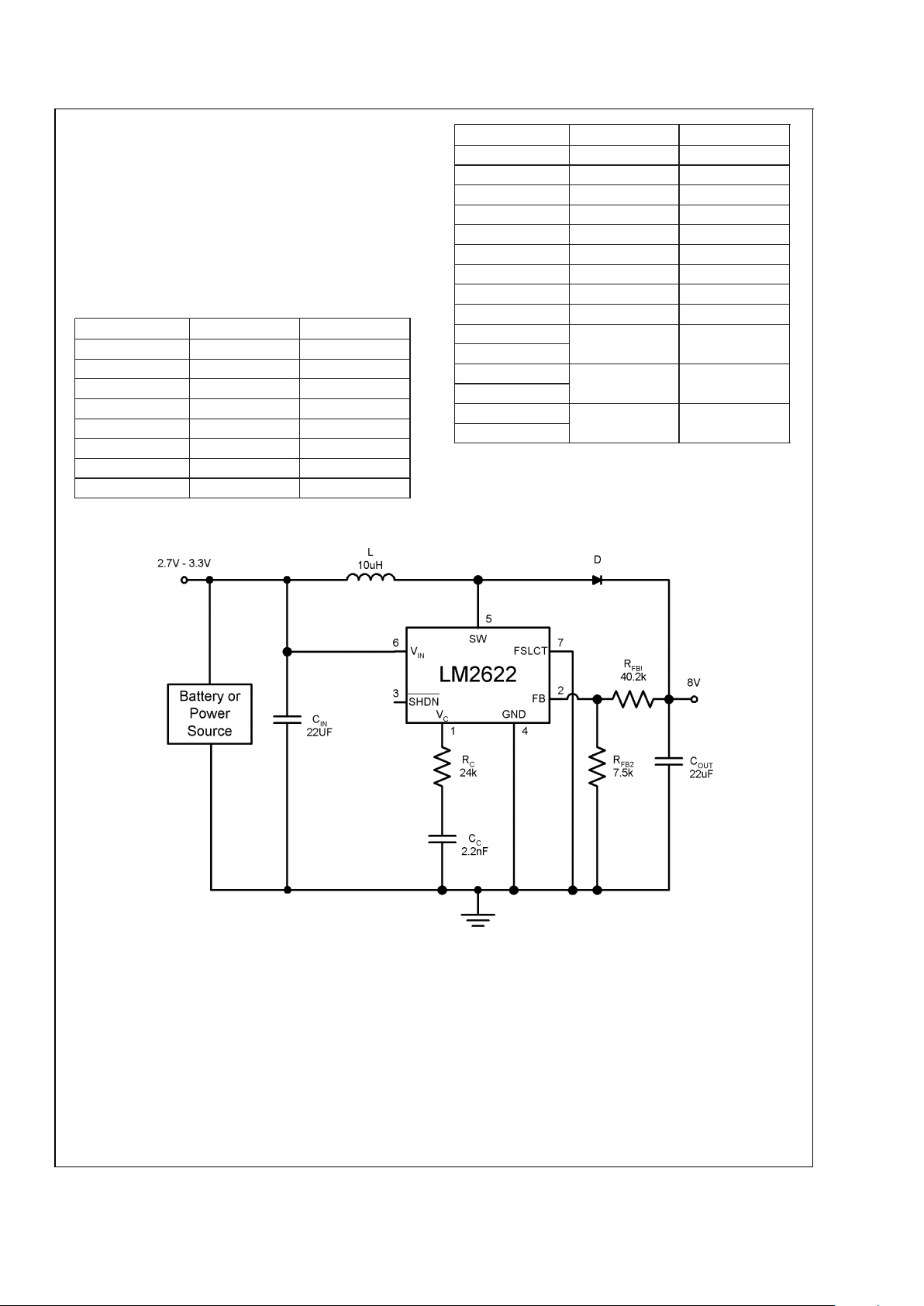
600 kHz Operation
10127331
FIGURE 4. 600 kHz operation
LM2622
www.national.com13
Application Information (Continued)
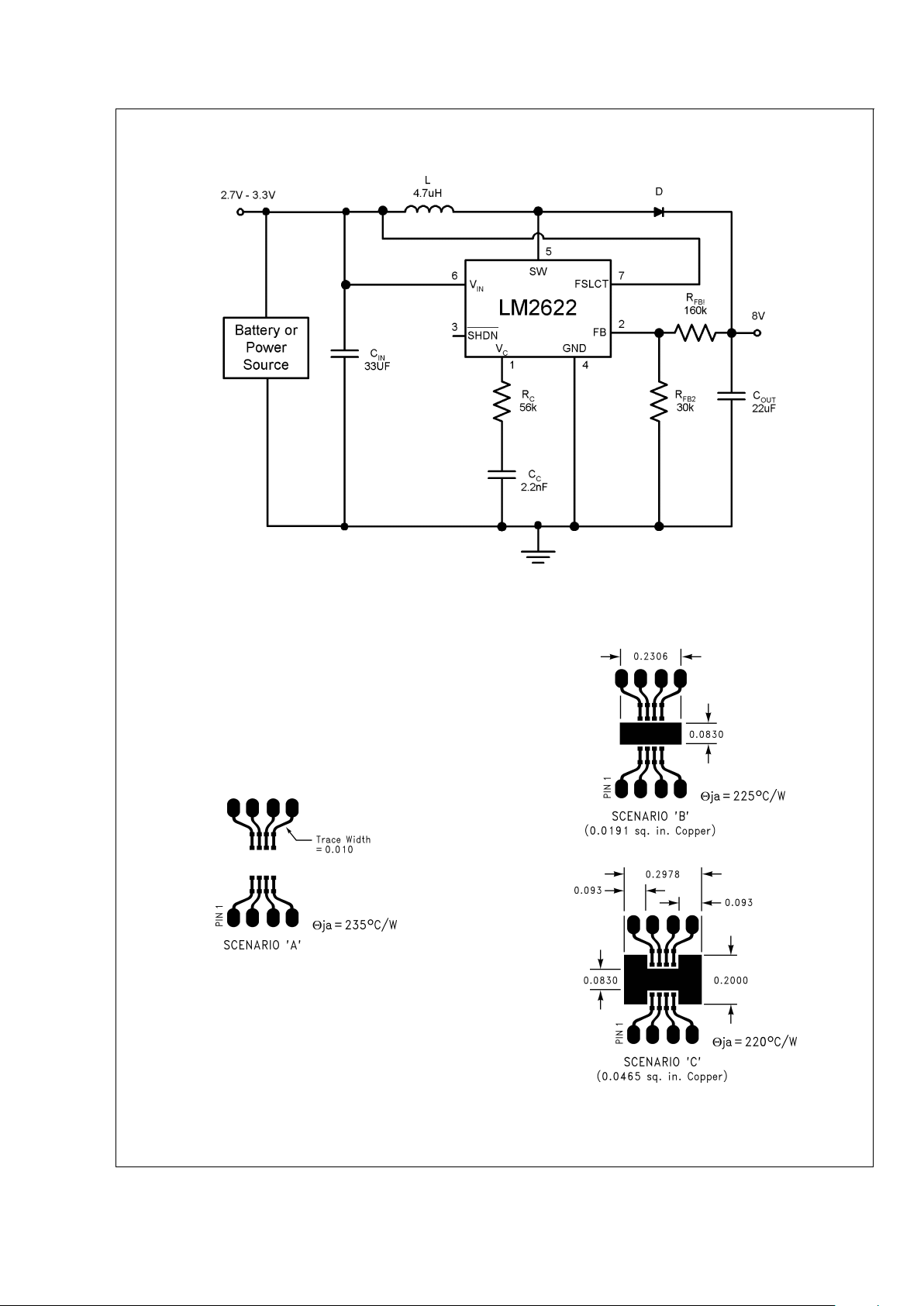
1.3 MHz Operation
Power Dissipation
The output power of the LM2622 is limited by its maximum
power dissipation. The maximum power dissipation is determined by the formula
P
D
=(T
jmax-TA
)/θ
JA
where T
jmax
is the maximum specidfied junction temperature
(125˚C), T
A
is the ambient temperature, and θJAis the ther-
mal resistance of the package. θ
JA
is dependant on the
layout of the board as shown below.
10127311
10127312
10127313
10127330
FIGURE 5. 1.3 MHz operation
LM2622
www.national.com 14

Application Information (Continued)
10127314
10127315
LM2622
www.national.com15

Physical Dimensions inches (millimeters)
unless otherwise noted
LIFE SUPPORT POLICY
NATIONAL’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT
DEVICES OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT AND GENERAL
COUNSEL OF NATIONAL SEMICONDUCTOR CORPORATION. As used herein:
1. Life support devices or systems are devices or
systems which, (a) are intended for surgical implant
into the body, or (b) support or sustain life, and
whose failure to perform when properly used in
accordance with instructions for use provided in the
labeling, can be reasonably expected to result in a
significant injury to the user.
2. A critical component is any component of a life
support device or system whose failure to perform
can be reasonably expected to cause the failure of
the life support device or system, or to affect its
safety or effectiveness.
National Semiconductor
Corporation
Americas
Email: support@nsc.com
National Semiconductor
Europe
Fax: +49 (0) 180-530 85 86
Email: europe.support@nsc.com
Deutsch Tel: +49 (0) 69 9508 6208
English Tel: +44 (0) 870 24 0 2171
Français Tel: +33 (0) 1 41 91 8790
National Semiconductor
Asia Pacific Customer
Response Group
Tel: 65-2544466
Fax: 65-2504466
Email: ap.support@nsc.com
National Semiconductor
Japan Ltd.
Tel: 81-3-5639-7560
Fax: 81-3-5639-7507
www.national.com
LM2622 600kHz/1.3MHz Step-up PWM DC/DC Converter
National does not assume any responsibility for use of any circuitry described, no circuit patent licenses are implied and National reserves the right at any time without notice to change said circuitry and specifications.
 Loading...
Loading...