

N2020 Controller
TEMPERATURE CONTROLLER – INSTRUCIONS MANUAL – V1.0x C
SAFETY ALERTS
CAUTION:
Read the manual thoroughly
equipment.
CAUTION OR DANGER:
Electrical shock hazard
TYPE
CODE
RANGE OF MEASUREMENT
Thermocouple J
Tc j
Range: -110 to 950 °C (-166 to 1742 °F)
Thermocouple K
Tc k
Range: -150 to 1370 °C (-238 to 2498 °F)
Thermocouple T
Tc t
Range: -160 to 400 °C (-256 to 752 °F)
Pt100
Pt
Range: -200 to 850 °C (-328 to 1562 °F)
Fig. 02 - Connection of
thermocouple
Fig. 03 - Connection of 3-wires
Pt100
The symbols below are used on the equipment and throughout this
document to draw the user’s attention to important operational and
safety information.
All safety related instructions that appear in the manual must be
observed to ensure personal safety and to prevent damage to either
the instrument or the system. If the instrument is used in a manner not
specified by the manufacturer, the protection provided by the
equipment may be impaired.
INSTALLATION / CONNECTIONS
The controller must be fastened on a panel, following the sequence
of steps described below:
Prepare a panel cut-out of 93 x 45 mm;
Remove the mounting clamps from the controller;
Insert the controller into the panel cut-out;
Slide the mounting clamp from the rear to a firm grip at the panel.
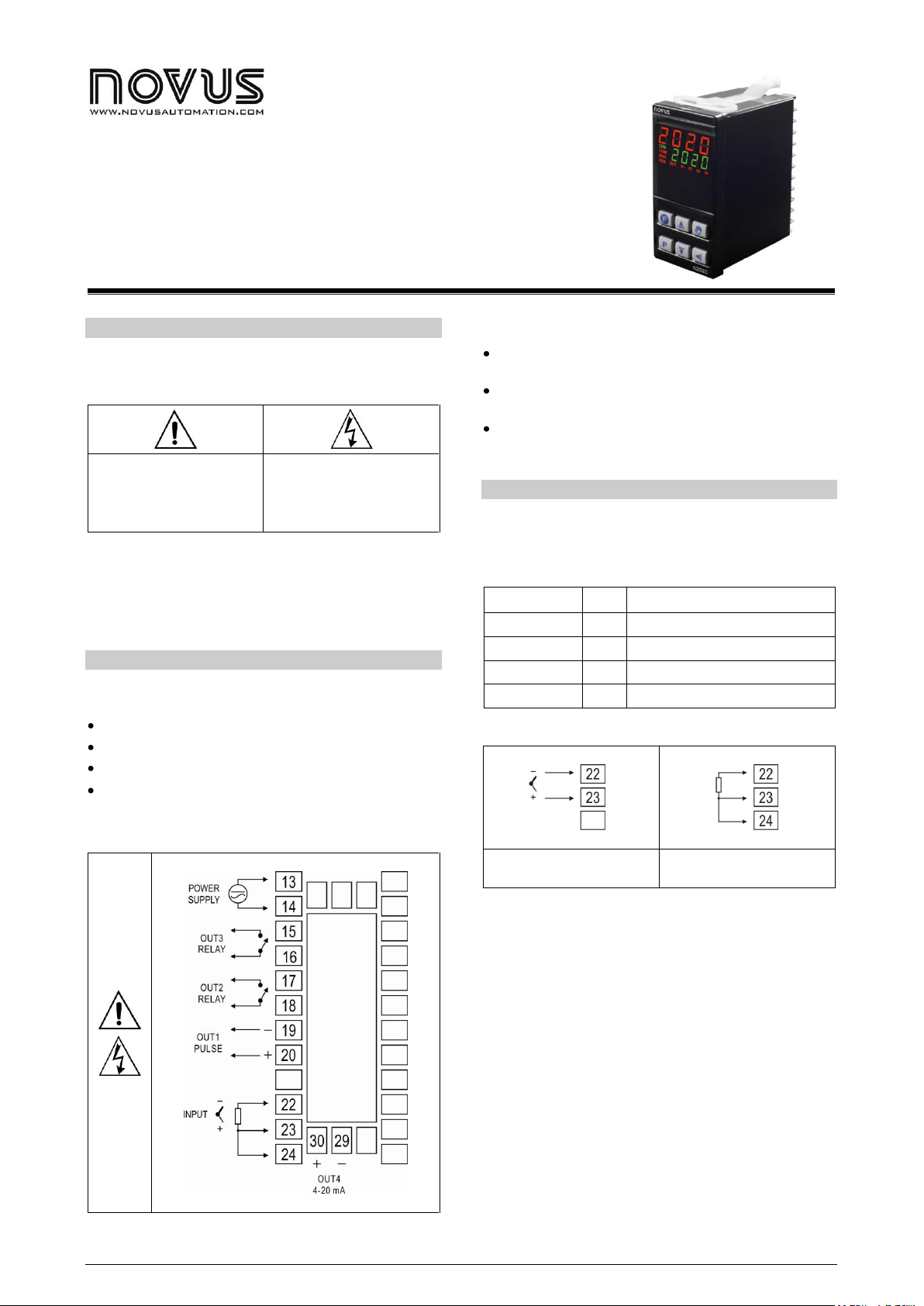
ELECTRICAL CONNECTIONS
The controller complete set of features is drawn in Fig. 01:
RECOMMENDATIONS FOR THE INSTALLATION
Leads of input signals may travel the plant, separately of output
and feeding leads, if is possible in grounded conduits.
All electronic instruments must be powered by a clean mains
supply, proper for instrumentation.
It is strongly recommended to apply RC'S FILTERS (noise
suppressor) to contactor coils, solenoids, etc.
FEATURES
INPUT TYPE SELECTION
The input type to be used by the controller is defined in the
equipment settings. Table 01 shows the input options available for
the user, one of them must be selected during the controller setting.
Table 01 – Inputs types
NOVUS PRODUTOS ELETRÔNICOS LTDA. RS: (51) 3323-3600 SP: (11) 3097-8466 Campinas/SP: (19) 3372-7992 PR: (41) 3244-0514 1/7
Fig. 01 - Input connections, outputs and power supply
Notes:
1- The specification of controller accuracy does not consider the
error showed by the temperature sensor used.
2- Suitable extension cables must be used with thermocouples.
3- In order to use 2-wire Pt100 thread, connect 23 and 24 terminals.
The sensor must be connected between 22 and 23 terminals. If
the sensor is 4-wired, keep one of the wires disconnected close to
the controller. The wires used must always have the same section
(same gauge).
OUTPUTS
The controller offers two, three or four output channels, depending on
the loaded optional features. Those channels are configured by the
user to act as control outputs, alarm outputs, LBD Function or PV or
SP retransmission.
OUT1 - Logical pulse, 5 Vdc / 25 mA
Available at terminals 19 and 20 of controller
OUT2 - Relay SPST-NA
Available at terminals 17 and 18 of controller
OUT3 - Relay SPST-NA
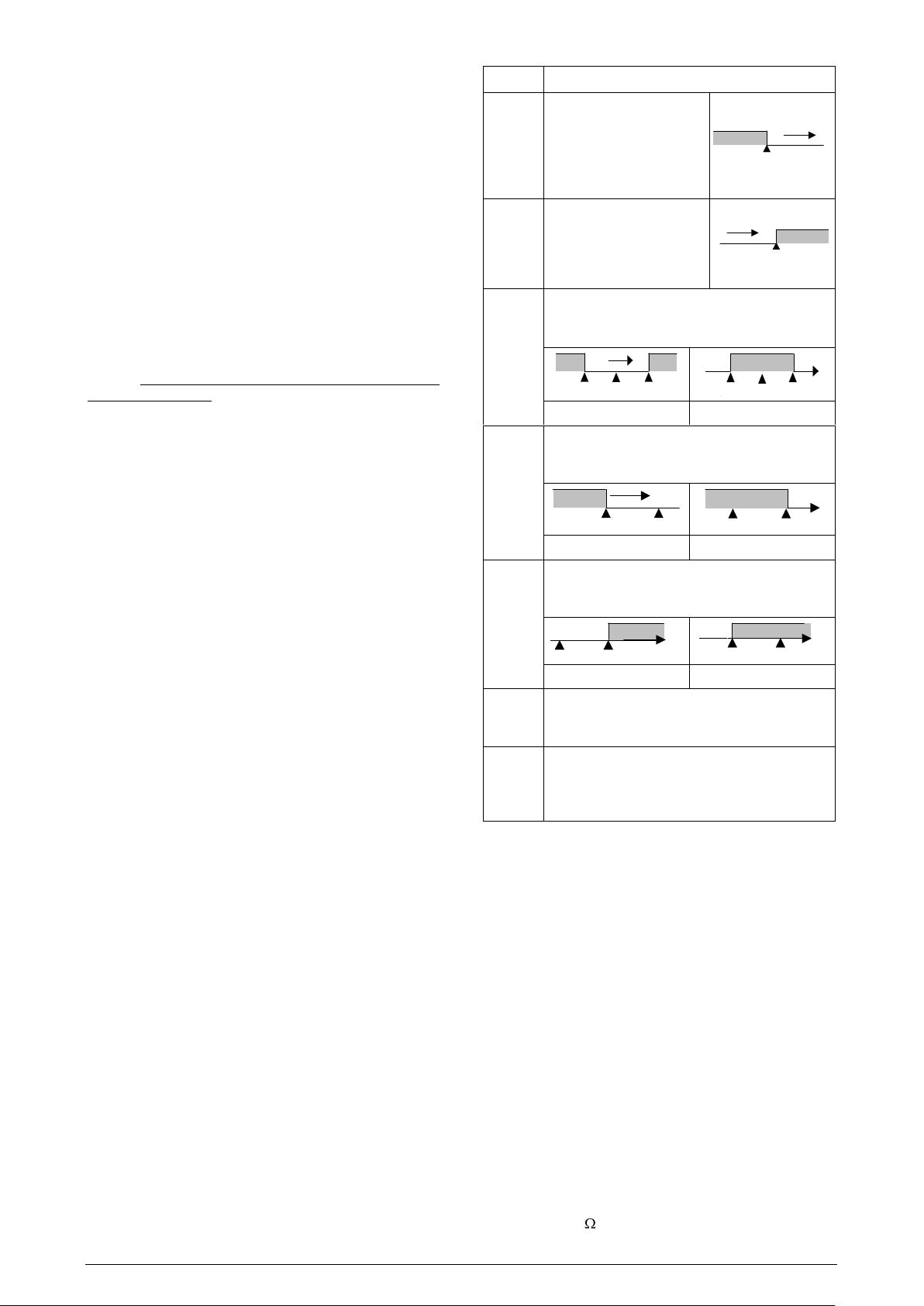
off
Alarms turned off.
lo
Alarm of Absolute Minimum
Value. Triggers when the
value of measured PV is
below the value defined for
alarm Setpoint (SPA1 or
SPA2).
SPA1
PV
ki
Alarm of Valor Absolute
Maximum Value. Triggers
when the value of measured
PV is above the value
defined for alarm Setpoint.
SPA1
PV
dif
Alarm of Differential Value. In this function the
parameters SPA1 and SPA2 represent the deviation of
PV in relation to the SP of CONTROL.
SP
PV
SP + SPA1
SP – SPA1
SP
PV
SV – SPA1
SV + SPA1
SPA1 positive
SPA1 negative
difl
Alarm of Minimum Differential Value. It triggers when
the value of PV is below the defined point by (using
the Alarm 1 as example):
SP
PV
SP – SPA1
SP
PV
SP – SPA1
SPA1 positive
SPA1 negative
difk
Alarm of Valor Maximum Differential Value. Triggers
when the value of PV is above the defined point by
(using Alarm 1 as example):
SP
PV
SP + SPA1
SP
PV
SP + SPA1
SPA1 positive
SPA1 negative
ierr
Sensor Break Alarm. Activated when the input signal of
PV is interrupted, out of the range limits or Pt100 in shortcircuit.
Rs
Program Segment Alarms. It acts when a certain
segment of the ramps and soaks programs is
reached. The respective segment is defined on the
creation of ramps and soaks programs.
Available at terminals 15 and 16 of controller
OUT4 - Analog output:
Electrical current, 0-20 mA or 4-20 mA
Electrical voltage pulse, 10 Vdc / 20 mA
Available at 29 and 30 terminals of controller
CONTROL OUTPUT
It is the output channel which effectively actuates on the process.
Main exit.
ALARM OUTPUT
Output channels which actuates on the protection and signalization
of process condition.
RUN FUNCTION
RUN parameter (rvn) works as a main key of output channels of
controller. It enables channels defined as control output and channels
defined as alarm output. With YES in this parameter, the control and
alarm outputs are able to operate, turning on / off, according to the
controller’s determinations. With NO, all outputs remain off, regardless
of the process requirements. In this condition, the controller’s display
starts to show the STOP message, alternately with the measured
temperature value (PV).
This function can also be obtained by the F key when configured to
operate in such mode.
N2020 Controller
AUTOMATIC CONTROL MODE
The controller may act in two different modes of operation: Automatic
mode or Manual mode.
In automatic mode, the controller determines the control output
behavior in order to lead the process up to the defined value in SP. It
determines the duration the control output remains on and off,
balancing the energy quantity applied to the process. In a technical
language: it determines the MV value (Manipulated Variable). This is
the normal mode of the controller operation.
The parameter “(trl” defines the control mode to be adopted:
Avto for automatic control.
Man for manual control.
This exchange functionality between automatic and manual mode
can also be obtained by the key, when configured to operate in
such mode.
The period (PWM cycle period) is defined in Cycle time parameter
((t). In it, a time interval (seconds), is defined and considered as a
reference for the determination of MV.
For instance: For a 10 seconds interval ((t = 10), 20 % MV means
output on for 2 seconds and off for 8 seconds, balancing the energy
quantity applied to the process.
MANUAL CONTROL MODE
In the manual mode, is the user who determines the control output
behavior. It defines the MV value, this value will not be interfered by
the controller.
By exchanging the automatic mode to manual mode, the value
adopted for MV will be the last value defined automatically by the
controller. It is known as “bumpless transfer”.
ON-OFF CONTROL / PID CONTROL
In the automatic mode, it acts with ON-OFF adjustable hysteresis
control and also with the PID control with the automatic tuning
resource.
ALARM OUTPUT
The controller has two alarms which may be directed for any of the
output channels. These alarms can be configured to operate the
different functions described on Table 02.
NOVUS AUTOMATION 2/7
Table 02 – Alarme functions
Note: Alarm functions on Table 02 are also valid for Alarm 2 (SPA2).
INITIAL BLOCKING OF ALARM
The initial blocking option inhibits the alarm from being recognized
if an alarm condition is present when the controller is first energized
(or after a transition from run YES or NO). The alarm will be enabled
only after the occurrence of a non-alarm condition followed by a new
occurrence for the alarm.
The initial blocking is useful, for instance, when one of the alarms is
configured as a minimum value alarm, causing the activation of the
alarm soon upon the process start-up, an occurrence that may be
undesirable.
The first lock out is not valid for ierr function (Open Sensor).
PV AND SP ANALOGICAL RETRANSMISSION
The analogical output, OUT4, when available, may perform the
retransmission of PV or SP values, with 0-20 mA or 4-20 mA signs.
The analogical retransmission is scalable, i.e., it has minimum and
maximum limits, which define the output range, defined in rtLL and
rtkL parameters.
To obtain a retransmission in voltage, the user should install one
shunt resistor (500 max.) on the analogical output terminals. The
value of this resistor depends on the voltage tension desired.
N2020 Controller
SP
Time
T1
T2
T3
SP0
SP1
SP2
SP3
T4=0
LBD – LOOP BREAK DETECTION
The parameter defines a time interval, in minutes, within which the
PV is expect to react to a control output signal. If the PV does not
react properly within the time interval configured in lbd.t, the
controller interprets this as a control loop break and signals this
occurrence in the display.
A LBD event may be sent to any output channel. Simply configure
the LBD function to the desired output channel (OUT1 or OUT2): the
selected output will be activated when a LBD condition is detected.
When the Lbd.t parameter is programmed with 0 (zero), the LBD
function is disabled.
The LBD is useful in detecting system failures, such us defective
sensors or actuators, loads and power supply, among others.
SAFE OUTPUT VALUE WITH SENSOR FAILURE
This function defines an output value (user defined) to be assigned to
the control output in the event of a sensor failure.
When the input sensor is identified as broken, the controller switches
the control mode to MANUAL while forcing MV to assume the user
configured value in the 1E.ov parameter. This function requires that
one of the alarms be configured as 1Err and the 1E.ov parameter
(control output percentage) programmed with a value other then 0
(zero).
Once this function is triggered, the controller remains in SAFE mode
(MANUAL control output) even after the sensor failure appears to be
fixed. The operator intervention is required for switching back to
AUTO mode.
1E.ov values are only 0 and 100 % when in ON/OFF control mode.
For PID control mode any value in the range from 0 to 100 % is
accepted.
OFFSET
Allows fine adjustments to the PV reading for compensation of
sensor error.
PROGRAMS OF RAMP AND SOAK
The controller allows the creation of one ramps and temperature
soaks program. This program is created from the values definition of
SP and time intervals, defining up to nine (9) program segments.
The figure below shows a program model with 9 segments:
Program Toleration Function - PtoL
The program toleration function “PtoL” defines the maximum error
limit between PV and SP values during the program execution. If this
limit is exceeded, the time counting of the segment (Pt1...Pt9) is
stopped until the error is within the established tolerance. With a
value >0 the user indicates in its program that priority must be given
to PV in relation to the indeterminate value times.
If 0 is programmed in the tolerance (Ptol= 0), the controller
executes the program defined without considering eventual errors
between PV and SP. Thus, the user defines that the priority has to be
given for the execution time of the program.
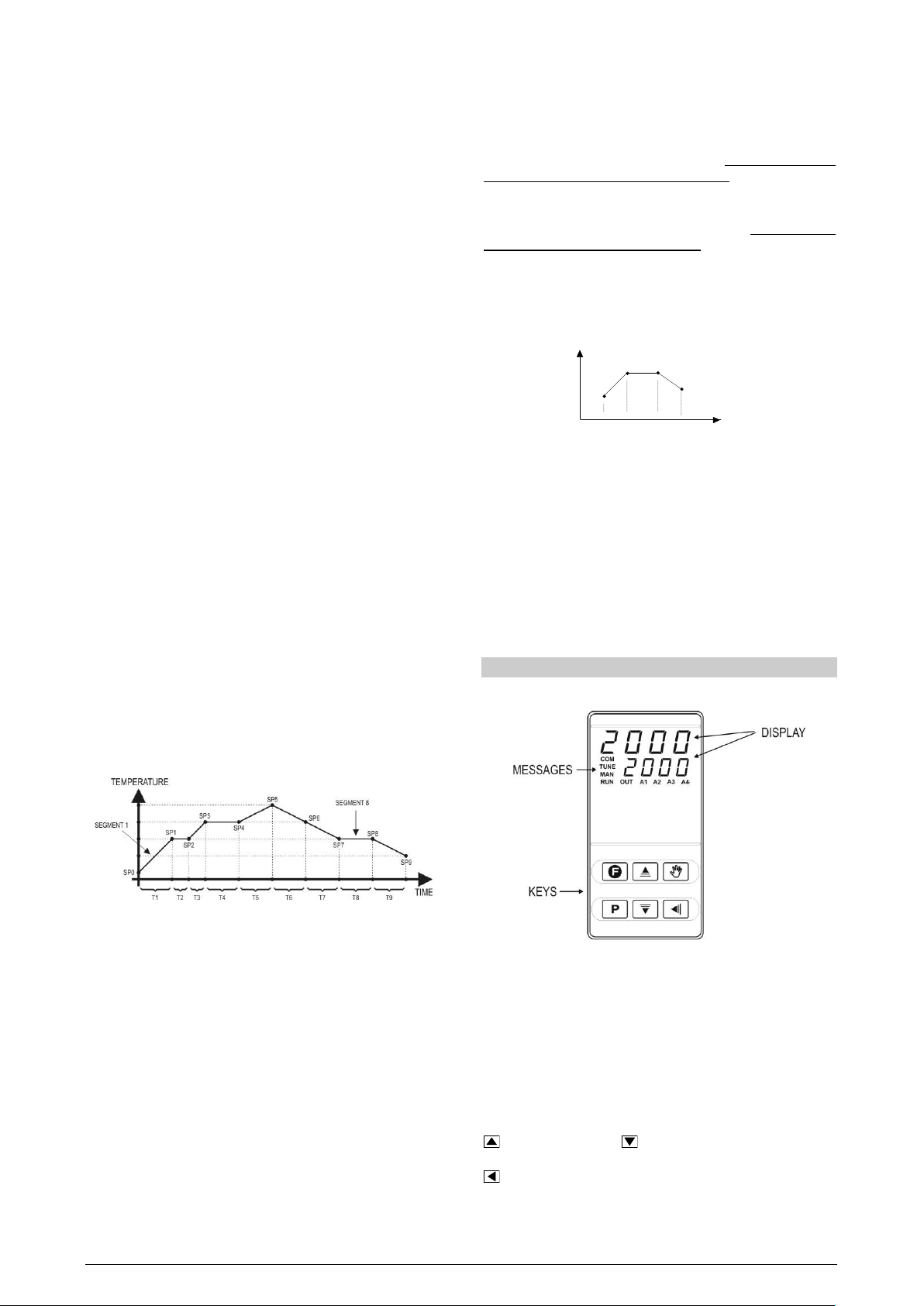
Programs with few Segments
For the execution of programs with few segments, it is enough to
program 0 (zero) for the time interval of the segment, which
succeeds the last segment of the desired program.
Fig. 05 - Program example with three segments
Successive Repetitions of a Program
The program created may be repeated for several times, always
restarting immediately after the end of each execution.
The parameter rPt.p (rePeat Program) in the Programs cycle
configures the number of times the program must be REPEATED. It
determines the number of executions besides the first execution.
With 0, the program is executed once. It won’t repeat.
Important: After the last execution of the program, all controller
outputs will be turned off and the RUN parameter is OFF.
OPERATION
The controller’s front panel, with its parts, can be seen in the Fig. 06:
Fig. 04 - Example of ramps and soaks program
The program created is storage permanently on the controller’s ram.
Fig. 06 - Identification of the parts referring to the front panel
It may be always changed, executed and repeated whenever
necessary.
For the program’s execution:
1- Turn off the outputs (rvn= NO);
2- Enable the parameter execution E.Pr= yes;
3- Start-up the outputs: (rvn= yes).
Once the program execution is started, the controller starts to create
automatically the SP values defined for each program segment. The
SP adjustment on the indication screen is blocked.
Display: It shows the variable measured, configuration parameters
symbols and its respective values/conditions.
TUNE indicator: Stays ON while the controller is in tuning process.
OUT indicator: It shows the instantaneous state of the controller
output(s).
A1 and A2 indicator: signalize the occurrence of alarm situation.
P key: Key used to forward the successive parameters and
parameters cycles.
Increment key and Decrement key: allow altering the
values / conditions of the parameters.
Back key: allow altering the values of the parameters.
NOVUS AUTOMATION 3/7
 Loading...
Loading...