

NOVUS N1200 User Manual
Controller N1200
UNIVERSAL CONTRO
tYPE
TYPE
CODE
RANGE OF MEASUREME NT
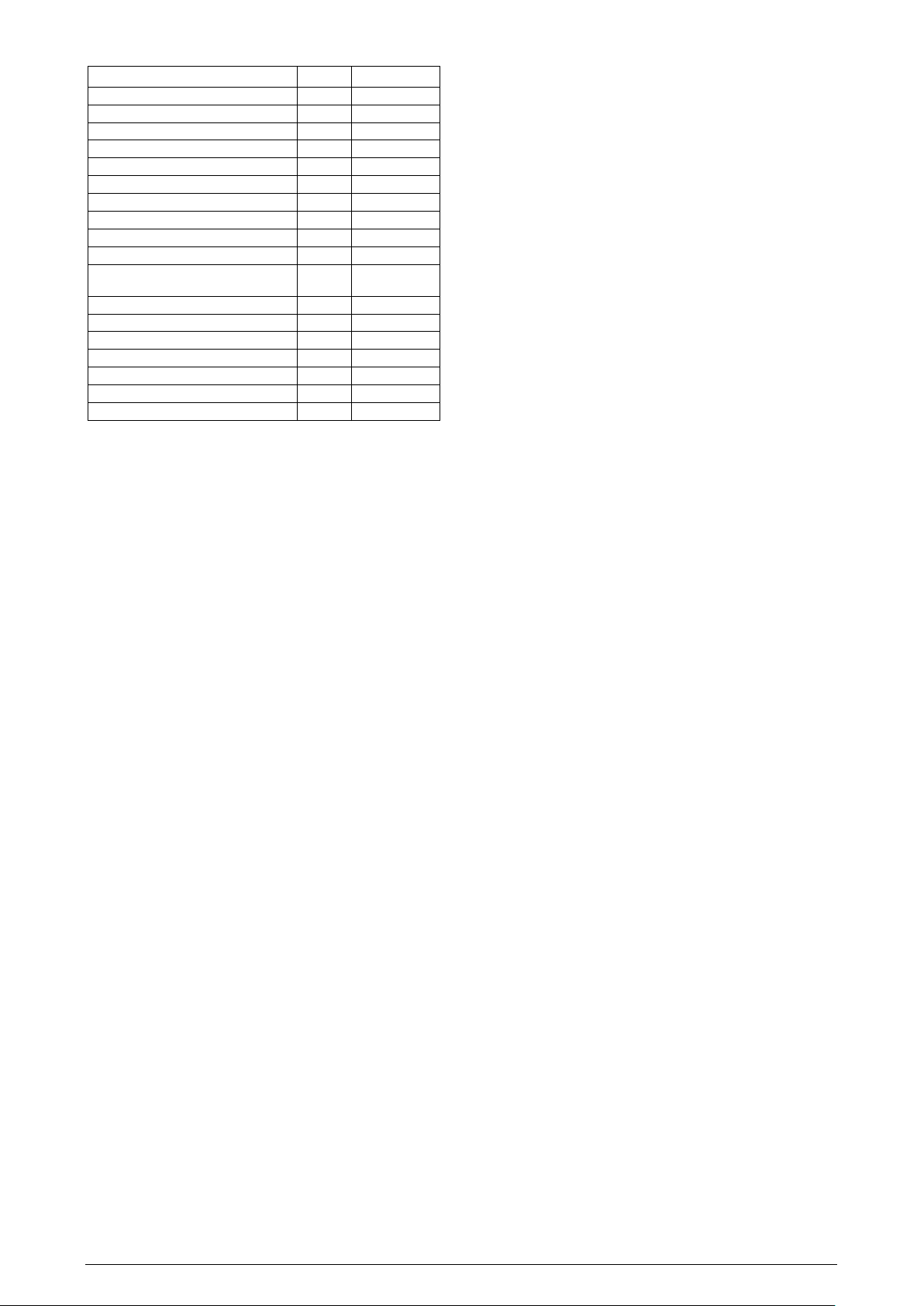
J
Tc j
Range: -110 to 950 ºC (-166 to 1742 ºF)
K
Tc k
Range: -150 to 1370 ºC (-238 to 2498 ºF)
T
Tc t
Range: -160 to 400 ºC (-256 to 752 ºF)
N
Tc n
Range: -270 to 1300 ºC (-454 to 2372 ºF)
R
Tc r
Range: -50 to 1760 ºC (-58 to 3200 ºF)
Tc s
B
Tc b
Range: 400 to 1800 ºC (752 to 3272 ºF)
Tc e
Pt100
Pt
Range: -200 to 850 ºC (-328 to 1562 ºF)
0-20 mA
L0.20
4-20 mA
L4.20
0–50 mV
L0.50
L0.5
0-10 Vdc
L0.10
ln j
Ln k
ln t
ln n
ln r
ln s
ln b
ln E
Ln.Pt
SAFETY ALERTS
The symbols below are used on th e equipment and throughout this
document to draw the user’s att ention to important operational and
safety information.
CAUTION:
Read the manual thoroughly
before installing and operating the
equipment.
All safety related instructions that appear in the manual must be
observed to ensure personal safet y and to prevent damage to either
the instrument or the s ystem. If the instrument is used i n a manner
not specified by the manufacturer, the protection provided by the
equipment may be impaired.
INTRODUCTION
The N1200 is an extraordinarily versatile process controller. It holds
in one single instrument all the main features needed for the vast
majority of indust rial processes . It accepts in a singl e model virtually
all the sensors and signals used in the industry and provides the
main output types required for the operation of diverse processes.
The configuration can be performed directly on the controller or
through the USB interface. The NConfig software (free) is the
configuration management tool. Con nected to the USB of a Wi ndows
computer, the controller is recognized as a serial communications
port (COM) running with a Modbus RTU protocol.
Through the USB interface, even if disconnected from the power
supply, the configuration p erformed in a piece of equipment can be
can be saved in a file and repeated in other piec es of eq uipment th at
require the same configuration.
It is important that the users read carefull y this manual before us ing
the controller. Verify if the release of this manual matches the
instrument version (the firmware version is shown when the controller
is energized). The N1200 main characteristics are:
• Multi-sensor universal input;
• Protection for open sensor in any condition;
• Relay, 4-20 mA an d logic pulse control outputs all avail able in
the standard model;
• Self-tuning of PID parameters;
• Automatic / Manual function with “bumpless” transfer;
• Four modes of independents alarms, with functions of mini mum,
maximum, differential (deviation), open sensor and event;
• Timer functions that can be associated to the alarms;
• Retransmission of PV or SP in 0-20 mA or 4-20 mA;
• Input for remote setpoint;
• Digital input with 5 functions;
• Programmable soft-start;
• 20 setpoint profile programs with 9 segments each, with the
ability to be linked together for a total of 180 segments;
• Password for parameters protection;
• Universal power supply.
NOVUS AUTOMATION 1 / 13
LLER - INSTRUCTIONS MANUAL – V2.0x
CONFIGURATION / FEATURES
INPUT TYPE SELECTION
Select the input type (in parameter “
CAUTION OR DAN GER:
Electrical Shock Hazard
0-5 Vdc
4-20 mA
LINEAR
Note: All input types are factory calibrated. CONFIGURATION OF OUTPUTS, ALARMS AND DIGITAL INPUTS
The controller input and output chan nels (I / O) can assume multi ple
functions: control output, digital input, digital output, alarm output,
retransmission of PV and SP. These channel s are identified as I / O
1, I / O 2, I / O 3, I / O 4 and I / O 5.
The basic controller model comes loaded with the following features:
I / O 1- output to Relay SPST-NA;
I / O 2- output to Relay SPST-NA;
Optionally, other features can be a dded, as shown under the item
“Identification” in this manual:
The function to be used in eac h cha nnel of I/ O is de fined by t he us er
in accordance with the options shown in the Table 2.
”) from Table 1 below.
S
E
NON
Range: -50 to 1760 ºC (-58 to 3 200 ºF)
Range: -90 to 730 ºC (-130 to 1346 ºF)
Linear Signals
Programmable indicati on from -1999 to 9999.
Non Linear An alog Signals
Indication range depends on the selected sensor
Table 1 - Input types
I / O 5- current output, digital output, digital input;
- 3R: I / O3 with output to SPDT relay;
- DIO: I / O3 and I / O4 as digital input and output channels;
- HBD: Heater break detect;
- 485: Serial Communication;
Controller N1200
Without Function
OFF
Output
Output of Alarm 1
A1
Output
Output of Alarm 2
A2
Output
Output of Alarm 3
A3
Output
A4
LBD - Loop break detection
Lbd
Output
Control Output (Relay or Digital Pulse)
CTRL
Output
Automatic / Manual mode selection
mAN
Digital Input
Run / Stop mode selection
RVN
Digital Input
Remote SP selection
RSP
Digital Input
program execution)
KPRG
Setpoint Profi le Pr o gram 1 selection
PR 1
Digital Input
0 to 20 mA control output selection
(.0.20
Analogical Output
(.4.20
Retransmiss i on of PV in 0 to 20 mA
P.0.20
Analogical Output
Retransmiss i on of PV in 4 to 20 mA
P.4.20
Analogical Output
Retransmiss i on of Sp in 0 to 20 mA
S.0.20
Analogical Output
Retransmiss i on of SP in 4 to 20 mA
S.4.20
Analogical Output
off
off
Lbd
(trL
mAn
rvn
RvN
rsp
kprg
Pr 1
(.0.20
(.4.20 -
P.0.20
P.4.20
s.0.20
s.4.20
off
off
ierr
Rfai1
dif
SPA1
SPA2
SPA3
SPA4
difl
FUNCTION OF I/O CODE TYPE OF I/O
Output of Alarm 4
Setpoint profil e pr ogr am HO LD ( Freezes
4 to 20 mA control out put sel ec ti on
Table 2 - Types of functions for the I/O channels
During the configuration of the I/O channels, only the valid options for
each channel will be shown on the display. These functions are
described below:
•
- Without function
The I/O channel programmed with code
controller. Although without func ti on, thi s c hannel i s avai labl e through
the serial communication as digital I/O (command 5 MODBUS).
• a1, a2, a3, a4 – Alarm Outputs
The selected channel can be used as output to Alarms 1 to 4.
Defines that the programmed I/O channel acts as alarm outputs.
Available for all the I/O channels.
•
–Loop Break Detector function.
Assigns the output of the Loop Break Detector alarm to an I/O
channel. Available to all I/O channels.
•
– PWM Control Output
Defines the I/O channel to be used as the PWM control out put (relay
or digital pulse). Availabl e for all th e I/O channels. The digital pul s e is
available on I/O5 (standard) or on I/O3 and I/O4 (when the DIO
optional is installed). Check the specifications of each channel.
•
- Digital Input with Auto/Manual function
Defines the I/O chann el as Digi tal In put with t he func tion of switching
the control mode between Automatic an d Man ual . Av ailable on I/O5
(standard) or on I/O3 and I/O4 (when the DIO optional is installed).
Closed = Manual control;
Open = Automatic control
•
- Digital Input with RUN function
Defines channel as Digital Input with the function of
enabling/disabling the control an d alarm outputs (“
Available for I/O5 or I/O3 and I/O4, when installed.
Closed = outputs enabled
Open = control and alarms output shut off
•
- Digital Input with Remote SP function
Defines channel as Digital Input with the function of selecting the
remote SP as the control setpoint. Available for I/O5 or I/O3 and
I/O4, when available.
Closed = remote SP
Open = uses main SP
•
- Digital Input with Hold Program function
Defines channel as Digi tal Input with the funct ion of comman ding th e
execution of the selected setpoint profi le program. Available for I/O5
or I/O3 and I/O4, when available.
Closed = Enables execution of the program
Open = Interrupts (freezes) execution of the program
NOVUS AUTOMATION 2 / 13
Output
Digital Input
Analogical Output
will not be used by t he
”: YES / no).
Note: Even when the execution of the program is interrupted, the
control outp ut remains active a nd controlling the proces s at the point
(Setpoint) of inter rupti o n. T he pr og ram wil l resu me i ts n ormal execution
starting from this same point when the digital input is closed.
•
- Digital Input with function to Execute Program 1
Defines the IO channel as Digital Input with the function of
commanding the execution of the setpoing profile program 1.
Available for I/O5 or I/O3 and I/O4, when available.
Useful function for switching between the main setpoint and a
secondary one defined by the program 1.
Closed = selects program 1;
Open = selects main setpoint
•
–0-20 mA Control Output
Available for I/O 5 only, defines the channel as a 0-20 mA control
output.
•
4-20 mA Control Output
Defines the channel as a 4-20 mA control output.
•
– 0-20 mA PV retransmission
Available for I/O 5 only, configures the channel to retransmit the
values of PV in 0-20 mA.
•
- 4-20 mA PV retransmission
Available for I/O 5 only, configures the channel to retransmit the
values of PV in 4-20 mA.
•
– 0-20 mA SP (Setpoint) retransmission
Available for I/O 5 only, configures the channel to retransmit the values of SP in 0-20 mA.
•
– 4-20 mA SP (Setpoint) retransmission
Available for I/O 5 only, configures the channel to retransmit the
values of SP in 0-20 mA.
CONFIGURATION OF ALARMS
The controller has 4 independent alarms. These alarms can be
configured to operate with nine different functions, as shown in Table 3.
•
•
– Alarms turned
– Open Sensor alarms - (Loop Break)
.
The open sensor alarm acts whenever the i nput sensor is broken or
badly connected.
• rs – Program Event Alarm
Configures the alarm to act in (a) specific segment(s) of the
programs of ramps and baselines to be created by the user.
•
– Burnt-out Resistance Alarm - (Heat Break)
Signals that the heating element has broken up. This alarm func tion
requires the accessory Cur rent tr ansform er CT1. Details for us e of the
option “burnt-out resistance ” are found in the sp ecific documentation
that accompanies the product whenever this option is requested.
• lo – Alarm of Absolute Minimum Value
Triggers when the value of measure d PV is below the value defined
for alarm Setpoint.
• ki – alarm of Absolute Maximum Value
Triggers when the value of meas ured PV is above the value define d
for alarm Setpoint.
•
– Alarm of Differential Value
In this function the parameters “
”, “
”,”
” and “
represent the Deviation of PV in relation to the SP.
Using the Alarm 1 as example: for Positive SPA1 values, the
Differential alarm t riggers when the value of PV is out of the range
defined for:
(SP – SPA1) to (SP + SPA1)
For a negative SPA1 value, the Differenti al alarm triggers when the
value of PV is within the range defined above:
•
– Alarm of Minimum Differential Value
It triggers when the value of PV is below the defined point by:
(SP – SPA1)
”
Controller N1200
difk
Off
Ierr
Activated when the input signal of PV is
Rs
Event (ramp and
rfail
Resist. burnt out
)
Lo
Minimum val ue
SPAn
PV
Ki
Maximum value
SPAn
PV
Dif
SV
PV
SV + SPAn
SV - SPAn
SV
PV
SV - SPAn
SV + SPAn
Difl
SV
PV
SV - SPAn
SV
PV
SV - SPAn
Difk
SV
PV
SV + SPAn
SV
PV
SV + SPAn
SPA1
SPA2
SPA3
SPA4
A1t1, A1t2, A2t1, A2t2, A3t1, A3t2
A4t1
A4t2
Alarm Event
Alarm
Output
a defined time
Alarm Event
Alarm
Output
T1
Activation wi th
Alarm Event
Alarm
Output
T2
Alarm Event
Alarm
Output
T1
T2
T1
rtLL
rtkL
rsp
E.rsp
(trl
Using the Alarm 1 as example.
•
– Alarm of Maximum Differential Value
Triggers when the value of PV is above the defined point by:
Using the Alarm 1 as example.
SCREEN TYPE ACTUATION
Inoperative Output is not used as alar m .
Open sensor
(input Error)
Soak)
(resistance fail
(Low)
(High)
Differential
(diFerential)
Minimum
Differential
(diFerential
Low)
Maximum
differential
(diFerential
High)
Where SPAn refers to Setpoints of Alarm “
“
” and “
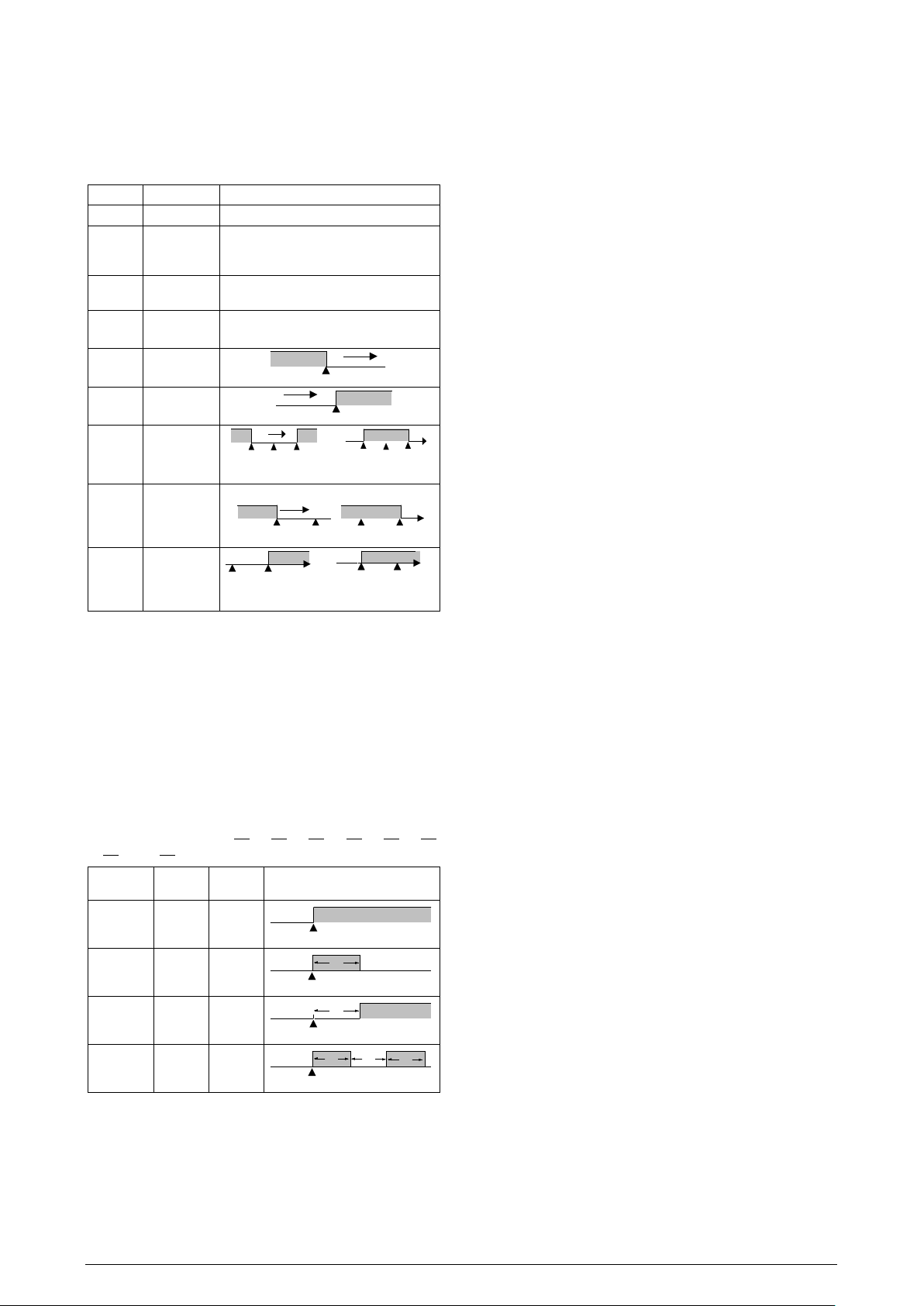
ALARM TIMER MODES
The controller alarms can be configured to perform 3 timer modes:
• One pulse with defined duration;
• Delayed activation;
• Repetitive pulses;
The illustrations in Table 4 show the behavior of the alarm output for
various combinations of times t1 an d t2. The timer functions can be
configured in parameters
and
.
OPERATION T 1 T 2 ACTION
Normal
Operation
Activation for
delay
Intermittent
Activation
0 0
1 to 6500 s 0
0 1 to 6500 s
1 to 6500 s 1 to 6500 s
Table 4 – Temporization Functions for th e Alarms
The LEDs associated to the alarms will light when the alarm
condition is recognized, not foll owing the actual state of the output,
which may be temporarily OFF because of the temporization.
NOVUS AUTOMATION 3 / 13
(SP + SPA1)
interrupted, out of the range lim its or Pt100
in short-circuit.
Activated in a specific s egment of program.
Signals a failure in the he ating element.
Positive SPAn Negative SP A n
Positive SPAn Negative SPAn
Positive SPAn Negative SPAn
Table 3 – Alarm F unctions
”, “
”.
INITIAL BLOCKING OF ALARM
The initial blocking opti on inhibits t he alarm from being recognized if
an alarm condition is present when the controller is first ene rgi zed ( or
after a transition from run YES NO). The alarm will be enabled
only after the occurrence of a non-alarm condition followed by a new
occurrence for the alarm.
The initial blocking is useful, for instance, when one of the alarms is
configured as a minimum val ue alarm, causing the activ ation of the
alarm soon upon the process start -up, an occurrence that may be
undesirable.
The initial blocking is disabled for the sensor break alarm function.
EXTRACTION OF THE SQUARE ROOT
With this feature enabled the control ler uses for di splay and c ontrol a
value that corresponds to the square root of the applied input signal.
Available only for the inputs belonging to the group of l inear analogic
signals: 0-20 mA, 4-20 mA, 0-50 mV, 0-5 V and 0-10 V.
ANALOG RETRANSMISSION OF PV AND SP
The analog output, when not use d for control purposes, i s available
for retransmitting the PV and SP values in 0-20 or 4-20 mA. This
analog output is electrically isolated from other inputs and outputs.
The anal og output signal is scalable, with the output rang e defined by
” and “
the values programmed in the parameters “
”.
To obtain a voltage output, the user must i nstall a resistor shunt (550
Ω max.) to the current output terminals (terminals 7 and 8). The
actual resistor value depends on the desired output voltage span.
SOFT-START
The soft-start feature avoids abrupt variations in the powe r delivered
to the load regardless of the system power demand. .
This is accomplished by d efining a li miting ramp fo r the control outpu t.
”,
The output is all owed to reach m aximum value (100 %) only after the
time programmed in t he soft-start parameter has elapse d. The Softstart function is gene rally used in p rocesses tha t require slo w start-up,
where the instant an eous ap pl ic ati o n o f 10 0 % of the available powe r to
the load may cause damages to parts of the system.
In order to disable this function, the soft-start parameter must be
configured with 0 (zero).
REMOTE SETPOINT
The controller can have its Setpoint value defined by an analog,
remotely generated signal. This feature is enabled through the
,
channels I/O3, I/O4 or I/O5 when configured as digital inputs and
configured with the function
the parameter
. The remote setpoint input accepts the signals
(Remote SP selection) or through
0-20 mA, 4-20 mA, 0-5 V and 0-10 V.
For the signals of 0-20 and 4-20 m A, a shunt resistor of 100 Ω is
required between terminals 9 and 10, as shown in Figure 4c.
CONTROL MODE
The controller can operate in two di fferent manners: Autom atic mode
or Manual mode. In automatic mode the c ontroller defines the amount
of power to be applied on the proc ess, based on defined paramete rs
(SP, PID, etc.).
In the manual mode the user himse lf defines this amount of powe r.
The parameter “
” defines the control mode to be adopted.
PID AUTOMATIC MODE
For the Automatic mode, there a re two differ ent strategies of control:
PID control and ON/OFF control.
PID control has its acti on b as ed on a c ontrol al gorit h m tha t tak es into
account the deviati on of P V with res pect to SP, the rate o f change of
PV and the steady state error.
On the other hand, the ON/OFF control (obtained when Pb=0)
operates with 0 % or 100 % of power, when PV deviates from SP.
The determination of the PID parameters (Pb, Ir and Dt ) i s described
in the item DETERMINATION OF PID PARAMETERS of this manual.
Controller N1200
lbd.t
LDB
LDB
lbd.t
LDB
LDB
1E.ov
1E.ov
nd MONITORING
completely disconnected from the input/output
signals. Using the USB in any other type of
LBD - LOOP BREAK DETECTION ALARM
The parameter defines a time interval, in mi nutes, within which the
PV is expect to react to a control output signal. If the PV does not
react properly within the time interval configured in
, the
controller interprets this as a control loop break and signals this
occurrence in the display.
A LBD event may be sent to any I/O channel. Simply confi gure the
function to the desired I/O channel: the selected out put will be
activated when a
parameter is programmed with 0 (zer o), the
The
is useful in system supervi sion and troubleshooting, allowing
condition is detected. When the
function is disabled.
early detection of problems in the actuator, power source or load.
HBD - HEATER BREAK DETECTION
Available in the products i dentified wi th the suffix HBD. Visit our w eb
site for further information www.novusautomation.com.
SAFE OUTPUT VALUE WITH SENSOR FAILURE
This function defines an output val ue (user defined) to be as si gned to
the control output in the event of a sensor failure.
When the input senso r is identified as broken, the con troller forcing
MV to assume the user configured value in the
When the parameter
is configured with 0.0 (zero ) value, this
parameter.
function is disabled and the control output is s imply turned off upon
input sensor error.
USB INTERFACE
The USB interface is used for CONFIGURING or MO NITORING the
controller. The NConfig software must be used for the co nfiguration.
It makes it possible to create, view, save and open configurations
from the equipment or fil es in your compute r. The t ool fo r savi ng and
opening configurations in files makes it possible to transfer
configurations between pieces of equipment and to make backup
copies. For specific models, the NConfig software also makes it
possible to update the firmware (internal s oftware) of the controller
through the USB.
For MONITORING purposes you c an use any supervisory software
(SCADA) or laboratory software that supports the MODBUS RTU
communication on a serial communi cations port. When connec ted to
the USB of a computer, the controller is recognized as a conventional
serial port (COM x). Use the NConfig software or consult the
DEVICE MANAGER in the Wi ndows CONTROL PANEL to identify
the COM port that was assigned to the controller. Consult the
mapping of the MODBUS memory in the c ontroller’s communications
manual and the documentation of your supervisory software to
conduct the MONITORING process.
Follow the procedure below to use the USB communic ation of the
equipment:
• Download the NConfig s oftware fro m our website and ins tall i t on
your computer. The USB drivers necessary for operating the
communication will be installed together with the software.
• Connect the USB cable between the equipment and the
computer. The controller does not have to be connected to a
power supply. The USB will provide enough power to operate t he
communication (other equipment functions cannot operate).
• Open the NConfig software, configure the communication and
start recognition of the device.
• Consult the NConfig help desk for detailed instructions about
how to use it and solve problems.
The USB interface IS NOT SEPARATE from the
signal input (PV) or the controller’s /indicator’s digital
inputs and outputs. It is intended for tempora ry use
during CONFIGURATION a
periods. For the safety o f people and equipment, it
must only be used when the piece of equipment is
connection is possible but r equires a careful analysis
by the person responsible for installing it. When
MONITORING for long periods of time and with
connected inputs and outputs, we re commend using
the RS485 interface, which is avail able or optional in
most of our products.
INSTALLATION / CONNECTIONS
The controller must be fastened on a panel, following the seq uence
of steps described below:
• Prepare a panel cut-out of 45.5 x 45.5 mm;
• Remove the mounting clamps from the controller;
• Insert the controller into the panel cut-out;
• Slide the mounting clamp from the rear to a firm grip at the
panel.
RECOMMENDATIONS FOR THE INSTALLATION
• All electrical connections are made to the s crew terminals at the
rear of the controller. They accept wi r e si zes from 0.5 to 1.5 mm
(16 to 22 AWG). The terminals should be ti ghtened to a torque
of 0.4 Nm (3.5 lb in)
• To minimize the pick-up of elect rical noise, the low voltage DC
connections and the sensor input wiring should be routed away
from high-current power conductors. If this is impractical, use
shielded cables. In general, keep cable lengths to a minimum.
• All electronic instruments must be powered by a clean mains
supply, proper for instrumentation.
• It is strongly recommended to apply RC'S FILTERS (noise
suppressor) to contactor coils, solenoids, etc.
• In any application it is essential to consider what can happen when
any part of the system f ails. The co ntroller f eatures by themselv es
can not assure total protection.
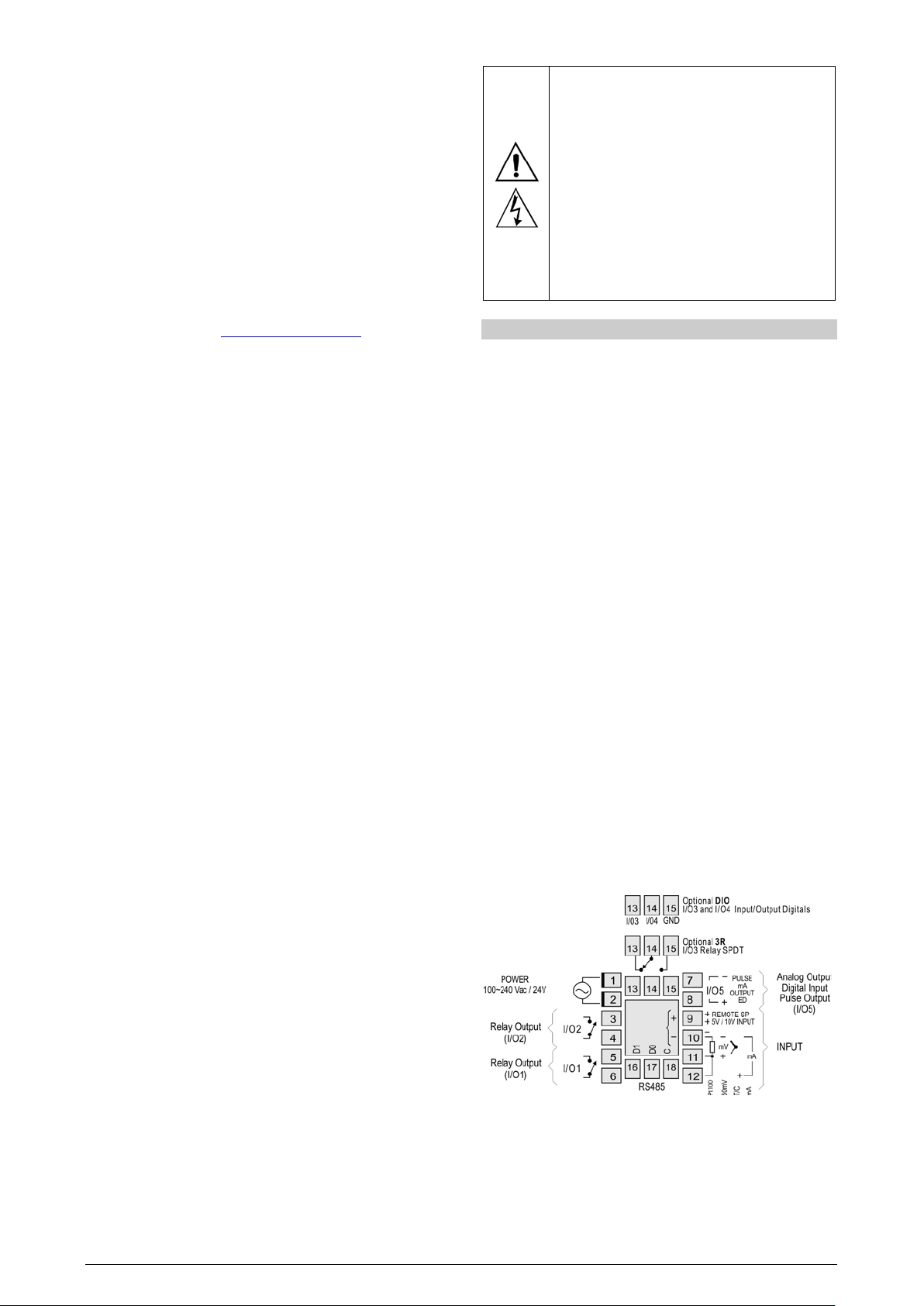
ELECTRICAL CONNECTIONS
The controller's internal ci rcuits can be removed without und oing the
connections on the back panel.
The controller complete set of features is drawn in Figure 1. The
features loaded in a particular unit are shown on its label
Figure 1 - Con nections of the back panel
2
NOVUS AUTOMATION 4 / 13
 Loading...
Loading...