

NOVUS N120 User Manual
Controlle
INSTRUCTIONS MANUAL
P
B
r N120
– V2.0x
INTRODUCTION
N120 has all the main features needed for control and alarm functions in
different industrial proces ses. It accepts in a s ingle model the majori ty
of the sensors and signals used in the indus try and provides the main
output types required for dual action control (Heat and Cool) and
alarm monitoring.
The configuration can be performed directly on the controller or
through the USB interface. The NConfig software (free) is the
configuration management tool. Connected to the USB of a Wi ndows
computer, the controller is recognized as a serial communications
port (COM) running with a Modbus RTU protocol.
Through the USB interface, even if disconnected from the power
supply, the configuration performed in a piece of equi pment can be
can be saved in a file and repeated in other pieces of equipment that
require the same configuration.
The N120 in addition to being a controller is an electronic datalogger.
The logger function operates independently of the controller. The
parameter setting of the datalogger is made using LogChart-II
software.
It is important that the users read carefully thi s manual before using
the controller. Verify if the release of this manual matches the
instrument version (the firmware versi on is shown when the c ontroll er
is energized).
CARACTERÍSTICAS PRINCIPAIS
• Capable of storing 32700 registers (datalogger);
• Universal multi-sensor input without hardware change;
• Protection for open sensor in any condition;
• Relay and logic pulse control outputs available in the standard
model;
• Self-tuning of PID parameters;
• Automatic / Manual function with “bumpless” transfer;
• Up to 4 alarm outputs, with functions of minimum, maximum,
differential (deviation), open sensor and event;
• Timer functions that can be associated to the alarms;
• Digital input with 4 functions;
• Programmable soft-start;
• 20 setpoint profile programs with 9 segments each, with the ability
to be linked together for a total of 180 segments;
• Password for parameters protection;
• Função LBD (loop break detector);
• Universal power supply: 100-240 Vac, ±10 %.
OPERATION
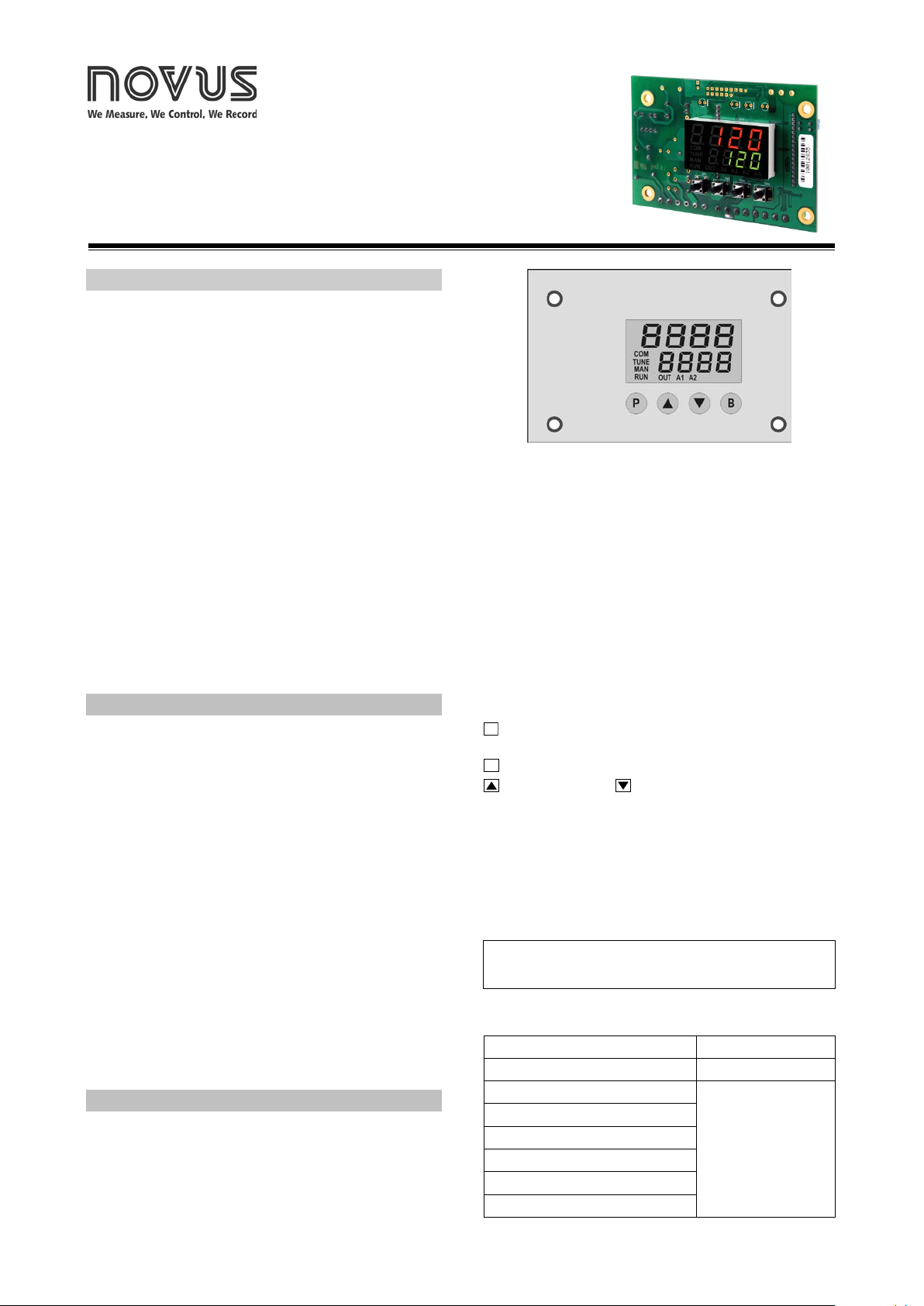
The controller front panel is shown in Fig. 1.
Fig. 1 – Front panel elements
Display: Shows the value and status of the controller parameters.
COM indicator: Flashes to indicate communication activity in the
RS485 interface.
TUNE indicator: Stays ON while the controller is in tuning process.
MAN indicator: Signals that the controll er is in the manual control
mode.
RUN indicator: Indicates t hat the controll er is acti ve, with the c ontrol
output and alarms enabled.
OUT indicator: For relay or pulse control output; it reflects the actual
state of the output. If an analog output is assigned for control, the
OUT indicator lights continuously.
A1, A2, A3 and A4 indicators: signaliz e the occurrence of alarm
situation.
P Key (Program key): used to walk through the menu
parameters.
Back Key: used to retrocede parameters.
Increment key and
values of the parameters.
When the controller is turned on, its fi rmware version is delayed for 3
seconds, after which the controller starts normal operation. The
values of PV and SP are displayed and the outputs are enabled.
In order to operate appropriately, the controll er needs a configuration
that is the definition of each one of the several parameters presented by
the controller. The user must be aware of the importance of each
parameter and for each one determine a valid condition or a valid value.
Always the first parameter to set is the input type.
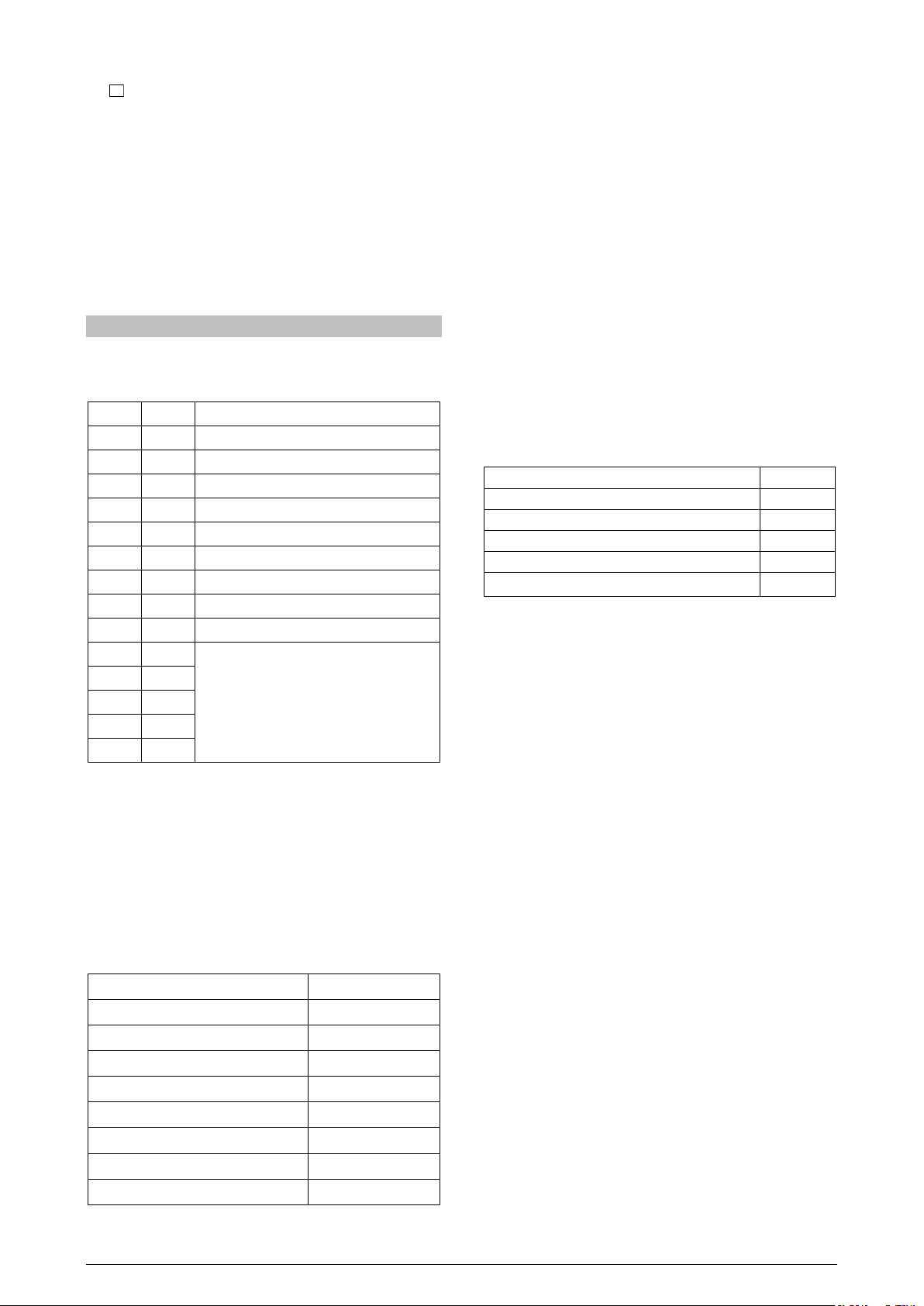
The parameters are grouped in levels according to their functionali ty
and operation easiness. The 7 levels of parameters are:
LEVEL ACCESS
1 - Operation Free access
2 - Tuning
3- R&S Programs
4- Alarms
5- Scale
6- Outputs
7- Calibration
- Decrement key: allow altering the
Important:
Reserved access
Table 1 – Cycles of Parameters
The parameters in the operation l evel have easy access through the
P
tYPE
Tc j
Tc k
Tc t
Tc n
Tc r
Tc s
Tc b
Tc e
Pt
L0.20
L4.20
L0.50
L0.5
L0.10
OvT1, OvT2
OvT3
OFF
A1
A2
A3
A4
Lbd
(TR1
(TR2
off
Lbd
(tr1
(tr2
OFF
mAN
RVN
K.PRG
PR 1
mAn
rvn
kprg
Pr 1
off
ierr
. The access deeper levels use the combination of keys:
key
P and B pressed simultaneously
Press P to advance or B to retrocede parameters within a level. At
the end of each lev el, the controller returns to the operation level.
Keep pressing the P key to move fast forward in the level.
Alternatively, the controller returns to the operation level after
pressing the B
key for 3 seconds.
All configuration parameters are stored in protected memory. The
values are saved when the Keys P or B are pressed after changing a
parameter value. The value of SP is saved upon press ing the P key
or every 25 seconds.
CONFIGURATION / FEATURES
INPUT TYPE SELECTION
Select the input type (in parameter “
TYPE CODE RANGE OF MEASUREMENT
J
K
T
N
R
S
B
E
Pt100
0-20 mA
4-20 mA
0–50 mV
0-5 Vdc
0-10 Vdc
Range: -110 to 950 ºC (-166 to 1742 ºF)
Range: -150 to 1370 ºC (-238 to 2498 ºF)
Range: -160 to 400 ºC (-256 to 752 ºF)
Range: -270 to 1300 ºC (-454 to 2372 ºF)
Range: -50 to 1760 ºC (-58 to 3200 ºF)
Range: -50 to 1760 ºC (-58 to 3200 ºF)
Range: 400 to 1800 ºC (752 to 3272 ºF)
Range:-90 to 730 ºC (-130 to 1346 ºF)
Range: -200 to 850 ºC (-328 to 1562 ºF)
Linear Signals
Programmable indicat ion from -1999 to 9999.
OUTPUTS
Up to 3 outputs can be conf igured for control (1 or 2) or alarm. The
available outputs are identified on the rear panel as
. Electrical characteristics of each output are:
OUT1: Voltage Pulse, 5 Vdc / 25 mA;
OUT2 output to Relay SPST-NA;
OUT3 output to Relay SPST-NA;
The option to be used on each output is user-defined according to the
options shown in Table 3 e Table 4.
Outputs Functions Code
Inoperative
Alarm 1 output
Alarm 2 output
Alarm 3 output
Alarm 4 output
Loop break detection output
Control 1 output
Control 2 output
Table 3 – Outputs Functi ons
”) from Table 2 below.
Table 2 - Input types
e
• In the channel configurati on are shown on the display, only the
valid options for each channel. These functions are described
below:
•
- No function.
The I/O channel programmed with code 0 will not be used by the
controller.
• Note: Even though functionless, this c hannel can be activated by
commands via serial communication (MODBUS command 5).
• a1, a2, a3, a4 - - Alarm output.
Available for all I/O channels. The selected channel can be us ed as
output to Alarms 1 to 4.
•
– Loop Break Detector function.
Assigns the output of the Loop Break Detector alarm to an I/O
channel. Available to all I/O channels.
•
- Control output 1.
•
- Control output 2.
DIGITAL INPUT
Defines the operation adopted by the available digital input terminals
7 and 8 of the controller. The D.in1 parameter defines the desired
function. There are 5 options possible.
Digital Input Funct ions Code
No function
Automatic/Man mode c hange
Run/Stop mode change
Freezes program execution
Program 1 selecti on
• Table 4 – Functions for the digital input channels
• These functions are described below:
•
- Digital Input with Auto/Manual function
Closed: Manual control
Opened: Automatic control
•
- Digital Input with RUN function
Closed: = outputs enabled
Opened = outputs disabled
•
- Digital Input with Hold Program function
Closed: = Enables execution of the program
Opened: = Interrupts (freezes) execution of the program
• Note: Even when the exec uti on of the program is interrupted, the
control output remains active and controlli ng the process at the
point (Setpoint) of interruption. The program will resume its
normal execution starting from this same point when the digital
input is closed.
•
- Digital Input with function to Execute Program 1
Defines the IO channel as Digital Input with the function of
commanding the execution of the setpoing profile program 1.
Closed: = Selects program 1
Opened: = Uses main Setpoint
Even with ED in OFF the LogChart can start Logging.
ALARMS FUNCTIONS
The controller has 4 independent alarms. They can be programmed
to operate with eight different functions, represented in Table 5.
•
– Alarms turned off.
•
– Sensor break alarm.
It is activated whenever the input sensor is broken or disconnected.
• rs – Ramp & soak program event alarm
This alarm is activated by the Ramp & Soak program (refer to the
programs of ramp and soak section on how to set the event alarm).
NOVUS AUTOMATION 2/14

• lo – Alarm of Absolute Minimum Value
dif
SPA1
SPA2
SPA3
SPA4
difl
difk
Off
Ierr
Rs
Activated in a specific segment of
Lo
SPAn
PV
Ki
SPAn
PV
Dif
SV
PV
SV + SPAn
SV - SPAn
SV
PV
SV - SPAn
SV + SPAn
Difl
SV
PV
SV - SPAn
SV
PV
SV - SPAn
Difk
igh)
SV
PV
SV + SPAn
SV
PV
SV + SPAn
SPA1
SPA2
SPA3
SPA4
A1t1, A1t2, A2t1, A2t2, A3t1, A3t2
A4t1
A4t2
Alarm Event
Alarm
Output
Alarm Event
Alarm
Output
T1
Alarm Event
Alarm
Output
T2
Alarm Event
Alarm
Output
T1
T2
T1
(trl
It is activated when the measured value is below the value defined in
the alarm Setpoint.
• ki – Alarm of Absolute Maximum Value
It is activated when the measured value is above the value defined in
the alarm Setpoint.
•
– Alarm of Differential Value
In this function, the parameters “
”, “
”,”
” and “
represent the PV deviation as compared to the main SP.
Using the Alarm 1 as example: for Positive SPA1 values, the
differential alarm will be triggered when the PV val ue is out of the
range defined in:
(SP –SPA1) to (SP + SPA1)
For a negative SPA1 value, the differential alarm will be triggered
when the PV value is within the range defined above
•
– Alarm of Minimum Differential Value
It is activated when the PV value is below the value defined in:
(SP –SPA1)
Using the Alarm 1 as example.
•
– Alarm of Maximum Differential Value
It is activated when the PV value is above the value defined in:
(SP + SPA1)
Using the Alarm 1 as example.
The alarm functions are described in Table 5.
SCREEN TYPE ACTUATION
Inoperative Output is not used as alarm.
Open sensor
(input Error)
Activated when the input signal of PV is
interrupted, out of the range limits or
Pt100 in short-circuit.
Event (ramp and
Soak)
program.
Minimum value
(Low)
Maximum value
(High)
Differential
(diFerential)
Positive SPAn Negative SPAn
Minimum
Positive SPAn Negative SPAn
Differential
(diFerential Low)
Maximum
differential
(diFerential H
Positive SPAn Negative SPAn
Table 5 – Alarm Functions
Where SPAn refers to Setpoints of Alarm “
and “
”.
”, “
”, “
”
ALARM TIMER MODES
The controller alarms can be configured to perform 3 timer modes:
• One pulse with defined duration;
• Delayed activation;
• Repetitive pulses;
The illustrations in Table 6 show the behavior of the alarm output for
various combinations of times t1 and t2. The timer functions c an be
configured in parameters
and
.
OPERATION T 1 T 2 ACTION
Normal
Operation
Activation for a
defined time
”
Activation wi th
delay
Intermittent
Activation
0 0
1
to
6500 s
0
1
to
6500 s
0
1
to
6500 s
1
to
6500 s
Table 6 – Temporization Func tions for the Alarms
The signs associated to the alarms wi ll l ight when the alarm conditi on
is recognized, not following the actual state of the output, which may
be temporarily OFF because of the temporization.
INITIAL BLOCKING OF ALARM
The initial blocking opti on inhibits the alarm from being recognized if
an alarm condition is present when the controller is first energized (or
after a transition from run YES NO). The alarm will be enabled only
after the occurrence of a non alarm condition followed by a new
occurrence for the alarm.
The initial blocking i s useful, for instance, when one of the alarms is
configured as a minimum value alarm, causi ng the activation of the
alarm soon upon the process start-up, an occurrence t hat may be
undesirable.
The initial blocking is disabled for the sensor break alarm function.
SOFT-START
The soft-start feature avoids abrupt variations i n the power delivered
to the load regardless of the system power demand. .
This is accomplished by defining a limiting ramp for the control
output. The output is allowed to reach maximum value (100 %) only
after the time programmed in the soft-start parameter has elapsed.
The Soft-start function is generally used in processes that require
slow start-up, where the instantaneous application of 100% of the
available power to the load may cause damages to parts of the
system.
In order to disable this function, the soft-start parameter must be
configured with 0 (zero). Soft Start is available only for Control Output 1.
CONTROL MODE
The controller can operate in two different manners: Automatic mode
or Manual mode. In automati c mode the c ontroller defi nes the amount
of power to be applied on the process, based on defined parameters
(SP, PID, etc.).
In the manual mode the user himself defines this amount of power.
The parameter “
” defines the control mode to be adopted.
PID AUTOMATIC MODE
For the Automatic mode, there are two different strategies of control:
PID control and ON/OFF control 1.
PID control has its action based on a control al gorithm that tak es i nto
account the deviation of PV with respect to SP , the rate of change of
PV and the steady state error.
On the other hand, the ON/OFF control (obtained when Pb=0)
operates with 0% or 100% of power, when PV deviates from SP.
The determination of the PID parameters (Pb, Ir and Dt) is des cribed
in the item DETERMINATION OF PID PARAMETERS of this manual.
CONTROL 2
The N120 offers a second independent control output (Control Output
,
2). This output, with only proportional action is generally used in
cooling processes when using the heating action the control output 1.
NOVUS AUTOMATION 3/14

When the application requires both heating and cooli ng at the same
ACt=re
OLAP
OLAP
Control output
Process variable
Overlap
Pb1
Pb2
Output 1
Output 2
Set Point
OLAP
Control Output
Process Variable
Dead band
Pb1
Pb2
Output 1
Output 2
SetPoint
OLAP
Control Output
Process Variable
Pb1
Pb2
Output 1
Output 2
Set Point
OLAP
Control Output
Process Variable
Pb1
HIST2
Output 1
Output 2
OFF
ON
Set Point
lbd.t
LDB
LDB
lbd.t
LDB
LDB
1E.ov
1Err
1E.ov
nd MONITORING
completely disconnected from the input/output
signals. Using the USB in any other type of
time, you must set the parameters
) to determine the type of operation.
(
There are three situations:
> 0; when there are overlapping between heating and cooling
actions.
< 0; for setting a dead-band.
= 0; no superposition or dead-band for the outputs.
Output 2 has independent proportional band and PWM period, as
well as maximum and minimum limits for the output.
If Pb2=0, the control #2 becomes ON-OFF.
Both outputs can be on at the same time even with negative
Control Output 1 is using PID control.
LBD - LOOP BREAK DETECTION ALARM
The parameter defines a t ime interval, in minutes, within which the
PV is expect to react to a control output signal . If the PV does not
react properly within the time interval configured in
controller interprets this as a control loop break and signals this
occurrence in the display.
A LBD event may be sent to any I/O channel. Simply c onfigure the
function to the desired I/O channel: the selected output will be
activated when a
condition is detected. When the
parameter is programmed with 0 (zero), the
The
is useful in system supervisi on and troubleshooting, allowing
early detection of problems in the actuator, power source or load.
SAFE OUTPUT VALUE WITH SENSOR FAILURE
(Output 1 only)
This function defines an output v al ue (user defined) to be as si gned to
the control output in the event of a sensor failure.
When the input sensor is identified as broken, the controller switches
the control mode to MANUAL while forcing MV to ass ume the user
configured value in the
This function requires that one of the alarms be conf igured as
and the
with a value other then 0 (zero).
parameter.
parameter (control output percentage) programmed
and adjust the overlap
function is disabled.
, the
if
Once this function i s triggered, the controller remains i n SAFE mode
(MANUAL control output) even after the sensor failure appears to be
fixed. The operator intervention is required for switching back to
AUTO mode.
USB INTERFACE
The USB interface is us ed for CONFIGURING or MONITORING the
controller. The NConfig software must be used for the configuration.
It makes it possible to create, view, save and open configurations
from the equipment or files in your computer. The tool for saving and
opening configurations in files makes it possible to transfer
configurations between pieces of equipment and to make backup
copies. For specific models, the NConfig software also makes it
possible to update the firmware (internal software) of the controll er
through the USB.
For MONITORING purposes you can use any supervisory software
(SCADA) or laboratory software that supports the MODBUS RTU
communication on a serial communicati ons port. When connected to
the USB of a computer, the controller is recognized as a conventional
serial port (COM x). Use the NConfig software or consult the
DEVICE MANAGER in the Windows CONTROL PANEL to identify
the COM port that was assigned to the controller. Consult the
mapping of the MODBUS memory in the controller’s communicat ions
manual and the documentation of your supervisory software to
conduct the MONITORING process.
Follow the procedure below to use the USB c ommunication of the
equipment:
• Download the NConfig software from our website and i nstall i t on
your computer. The USB drivers necessary for operating the
communication will be installed together with the software.
• Connect the USB cable between the equipment and the
computer. The controller does not have to be connected to a
power supply. The USB will provide enough power to operate the
communication (other equipment functions cannot operate).
• Open the NConfig software, configure the communication and
start recognition of the device.
• Consult the NConfig help desk for detailed instructions about how
to use it and solve problems.
The USB interface IS NOT SEPARATE from the
signal input (PV) or the controller’s/indi cator’s digital
inputs and outputs. It is i ntended for temporary use
during CONFIGURATION a
periods. For the safety of people and equipment, it
must only be used when the piece of equipment is
connection is possible but requires a careful analysis
by the person responsible for installing it. When
MONITORING for long periods of time and with
connected inputs and outputs, we recommend using
the RS485 interface, which is availabl e or optional in
most of our products.
INSTALATION
The controller was desi gned to be fixed by screws, behind a face of
metal panels of equipment or machinery. Display and keyboard
should fit in appropri ate cut of this panel. The following fi gures show
the dimensions and distances required for attachment.
NOVUS AUTOMATION 4/14
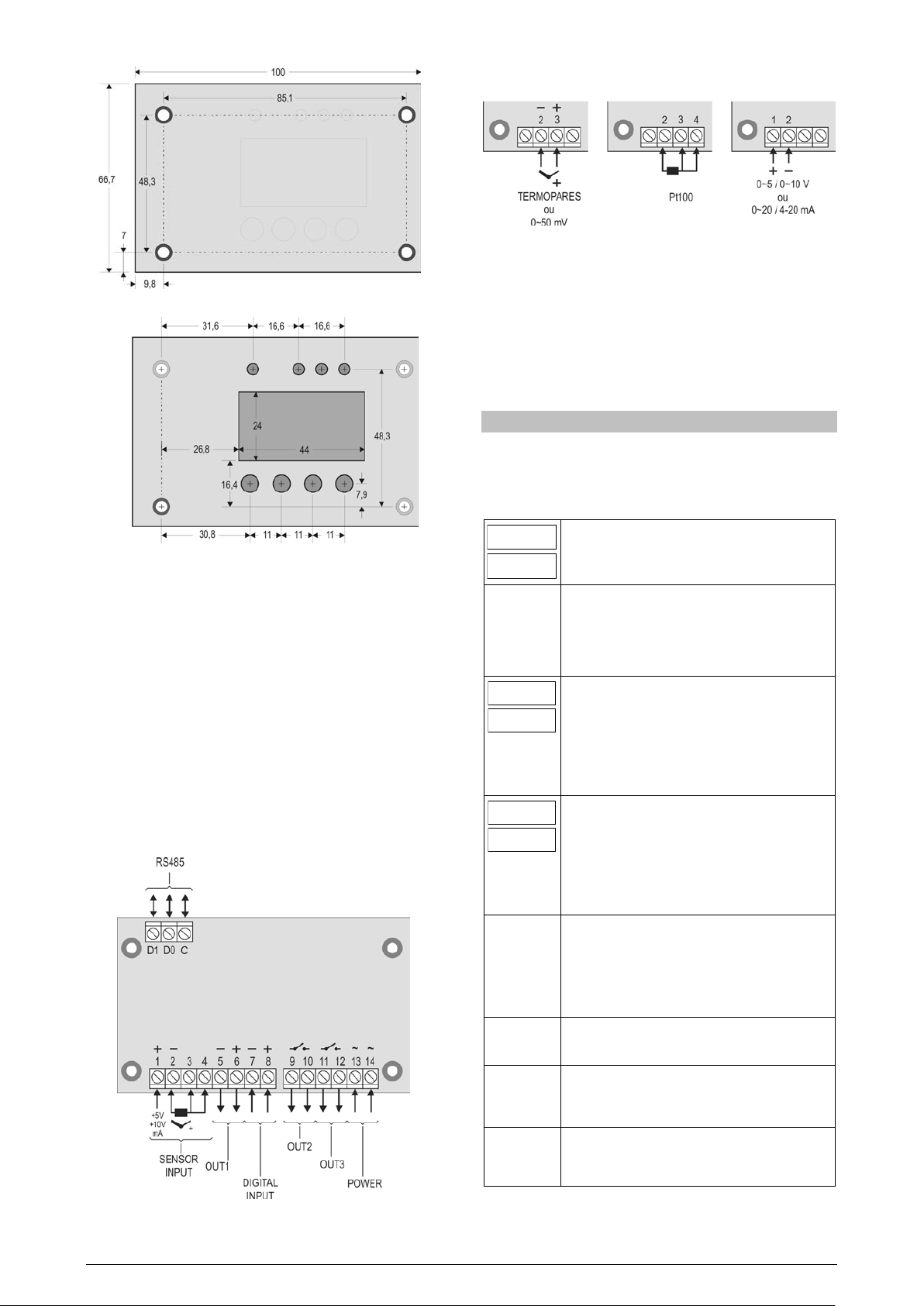
Sensor Input Connections
Type
Indicação de PV
(Visor Vermelho)
Indicação de SP
(Visor Verde)
(trl
avto
Man
PV Indication
(Red Screen)
MV Indication
(Green Screen)
The upper display
shows PV value and the lower display shows the
ntrol output. When in
When in
PV Indication
(Red Screen)
MV Indication
(Green Screen)
upper display
shows PV value and the lower display shows the
applied to the control output. When in
When in
E pr
RvN= YES
p.seg
under execution, fr om 1 t o 9.
t.seg
the end of the current segment, in units of time
configured in the Pr.tb parameter.
rvn
YES
NO
Fig. 2a – Screws mounting holes. Frontal view
Fig. 2b – Keypad, display and leds distances. Front view.
RECOMMENDATIONS FOR THE INSTALLATION
• The input signals conductors shall be positioned throughout the
factory separate from the output and the power supply
conductors, in grounded conduits if possible.
• All electronic instruments must be powered by a clean mains
supply, proper for instrumentation.
• It is strongly recommended to apply RC'S FILTERS (noise
suppressor) to contactor coils, solenoids, etc.
• In any application it is essenti al to consider what can happen when
any part of the sys tem fails. The controller features by themsel ves
can not assure total protection.
ELECTRICAL WIRING
Fig. 3a and Fig. 3b: shows the electrical connections.
Fig. 3b – Input wiring, outputs, power supply and serial communiction
connections
The input types 0~20 and 4~20 mA are not available in the
controller’s standard model, although shown as an option at the
parameter. T hese inputs are only available in some custom
models.
The models with 0~20 and 4~20 mA i nputs do not accept 0~5 V and
0~10 V inputs types.
DESCRIPTION OF THE PARAMETERS
OPERATION LEVEL
To access the operation level parameters, press the
desired parameter is displays.
PV and SP indication - The upper display shows the
current value of PV. The lower display shows the control
SP value.
Control Mode -
- Means automatic control mode.
- Means manual control m ode.
(bumpless transfer between automatic and manual control
modes).
Manipulated Variable 1 Value (MV) -
percentage of MV1 applied to the co
manual control, the MV1 value can be changed.
auto mode the MV value can only be viewed.
To distinguish the MV1 display from the SP display, the
MV1 is shown flashing intermittentl y.
Manipulated Variable 2 Value (MV) - The
percentage of MV2
manual control, the MV2 value can be changed.
auto mode the MV value can only be viewed.
To distinguish the MV2 display from the SP display, the
MV2 is shown flashing intermittentl y.
Enable Program. Selects the ramp and soak profile
program to be executed.
0 - does not execute program
1 to 20 number of the program to be executed
With enabled outputs (
right after the program is selected.
Screen for indication onl y. When a ramp and soak program
is active, this parameter shows the number of the segment
P key until t he
), the program starts
Fig. 3a – Input, outputs , mains supply and RS485 i nterface.
NOVUS AUTOMATION 5/14
Screen for indication only. When a ramp and soak
program is in execution, it shows the remaining time to
Enables control out puts and alarms.
- Outputs enables.
- Outputs not enabled.
 Loading...
Loading...