


NEXCOM International Co., Ltd.
Mobile Computing Solutions
Vehicle Telematics Computer
VTC 1010
User Manual
NEXCOM International Co., Ltd.
Published September 2014
www.nexcom.com
Contents
Contents
Preface
Copyright .............................................................................................. v
Disclaimer .............................................................................................. v
Acknowledgements ............................................................................... v
Regulatory Compliance Statements ........................................................ v
Declaration of Conformity ....................................................................... v
RoHS Compliance .................................................................................. vi
Warranty and RMA ................................................................................vii
Technical Support and Assistance ............................................................ x
Conventions Used in this Manual ............................................................ x
Global Service Contact Information ........................................................ xi
Package Contents ................................................................................. xiii
Chapter 1: Product Introduction
Physical Features .....................................................................................1
Front View ...........................................................................................1
Rear View ............................................................................................ 1
Overview ................................................................................................2
Key Features ...........................................................................................2
Hardware Specifications ..........................................................................3
Connector Numbering ............................................................................5
Chapter 2: External Connectors Pinout Description
LED Indicators (PWR, Status, LAN & GPIO) ..........................................6
LED Indicators (SSD, GPS, WLAN & WWAN) .........................................6
USB 3.0 Port ........................................................................................ 7
Audio Jack 3.5mm ...............................................................................7
SD Card Connector .............................................................................8
SIM1 Socket ........................................................................................8
SIM2 Socket ........................................................................................9
Event Button .......................................................................................9
Reset Button ......................................................................................10
Power Input .......................................................................................10
Multiport Connector ..........................................................................11
VGA Connector ................................................................................. 12
RS232 Connector ..............................................................................12
Line-out ............................................................................................13
Mic-in ................................................................................................13
DisplayPort ........................................................................................14
USB 2.0 Port ...................................................................................... 14
LAN Connector ..................................................................................15
Chapter 3: Jumpers and Switches
Before You Begin ................................................................................. 16
Precautions ..........................................................................................16
Jumper Settings ....................................................................................17
VTC 1010 Jumper and Switch Settings .................................................. 19
CMOS Clear Switch ........................................................................... 19
Voltage Selector (For CN10 Connector) ..............................................19
WWAN Module Selector (For Wake-Up & Voice on CN10) .................20
RTC Battery Connector ...................................................................... 20
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
ii
VTC 1010 User Manual

Contents
External Thermal Sensor Module........................................................21
Debug 80 Port Connector .................................................................21
VGA Connector ................................................................................ 22
COM Port Connector ........................................................................22
High Speed UART Connector ............................................................ 23
OBDII Module Connector ..................................................................23
Capture Card Connector ..................................................................24
Capture Card Connector ..................................................................24
5V Output ......................................................................................... 25
Event Button Connector ...................................................................25
SATA HDD Connector ........................................................................ 26
MCU Debug Port ............................................................................... 26
GAL Download Port ...........................................................................27
MCU Download Port .........................................................................27
GPIO Setting ......................................................................................28
Voltage Setup Selection .....................................................................28
FAN Connector ..................................................................................29
VIOB-GPS-DR02 .................................................................................29
GPS Module Connector ..................................................................... 30
MCU GPIO Connector .......................................................................30
PCIe Connector .................................................................................31
Expand Connector ............................................................................. 31
Mini-PCIe (USB + PCIe) ................................................................... 32
Mini-PCIe (mSATA or PCIe [default]) ...............................................33
Mini-PCIe (USB + PCIe) ................................................................... 34
Mini-PCIe (USB) .............................................................................. 35
Chapter 4: Mechanical Dimensions........................36
Chapter 5: System Setup
Removing the Chassis Cover ................................................................37
Installing the First WWAN Module ........................................................38
Installing the Second WWAN Module ...................................................40
Installing a Wireless LAN Module ..........................................................42
Installing a SATA SSD Drive ...................................................................44
Installing a SO-DIMM ............................................................................ 45
Installing a Capture Card ......................................................................45
Appendix A:
Software Demo Utility for I/O Ports of Function Control
Menu Screen .....................................................................................46
1.1 Status ........................................................................................ 47
1.2 GPIO Setting ...............................................................................48
1.3 MCU GPIO Setting ......................................................................48
1.4 WDT Setting .............................................................................. 49
1.5 3G Module ................................................................................ 49
1.6 RS-422/RS-485 ..........................................................................50
1.7 Power On Delay Time ................................................................ 50
1.8 Power Off Delay Time ................................................................ 50
1.9 Wake Up Function .....................................................................51
2.0 Mini-PCIe Module Power On/Off ................................................51
2.1 CAN Bus Setting ....................................................................... 52
Appendix B: Using the GPS Feature
Setup and Using GPS Information .........................................................53
Appendix C: Pin Definition for the Multiport Cable
P1 Connector Pinout ............................................................................. 58
P2 to P17 Connector Pinouts ................................................................58
Power Output Connector ..................................................................58
RS232 Connector ..............................................................................58
GPIO + CAN Bus 2.0B Connector ......................................................59
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
iii
VTC 1010 User Manual

Contents
OBDII Connector ...............................................................................59
USB Connector .................................................................................. 60
RS422/485 Connector .......................................................................60
Reset Button ......................................................................................61
Odometer Connector ........................................................................61
A/V1 Jack ..........................................................................................62
A/V2 Jack ..........................................................................................62
A/V3 Jack ..........................................................................................63
A/V4 Jack ..........................................................................................63
Front Audio .......................................................................................64
Center Audio .....................................................................................64
Surround Audio .................................................................................65
Rear Audio ........................................................................................65
Appendix D: Signal Connection of DI/DO
GPIO Pinout Description ........................................................................ 66
SW1 Setting ..........................................................................................66
Digital Input .......................................................................................... 67
Digital Output ....................................................................................... 68
Appendix E: Vehicle Power Management Setup
External Power Output Setting .............................................................. 69
Startup and Shutdown Voltage Setting .................................................69
Power-on Delay Setting .........................................................................71
Power-off Delay Setting ........................................................................73
Simple Data Protocol: (HEX CODE) ........................................................78
J1939 Raw Data Protocol (HEX CODE) ..................................................79
J1708 Raw Data Protocol (HEX CODE) ..................................................79
J1939 Packaged Messages Protocol ......................................................80
J1708 Packaged Messages Protocol ......................................................88
J1708 Command Example ....................................................................92
Appendix G: Pin Definition for GPS Dead Reckoning
Module -- VIOB-GPS-DR02
S2532DR Overview ...............................................................................93
Technical Specifications ......................................................................... 93
Appendix H: Power Consumption.........................95
Appendix F: OBDII Module Setup and Command
OBDII Module .......................................................................................75
VIOX-CAN01 Setup ...............................................................................75
AT Command Summary ........................................................................76
Simple Data Protocol: (ASCII CODE) ......................................................77
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
iv
VTC 1010 User Manual

Preface
Preface
Copyright
This publication, including all photographs, illustrations and software, is
protected under international copyright laws, with all rights reserved. No
part of this manual may be reproduced, copied, translated or transmitted
in any form or by any means without the prior written consent from
NEXCOM International Co., Ltd.
Disclaimer
The information in this document is subject to change without prior notice
and does not represent commitment from NEXCOM International Co., Ltd.
However, users may update their knowledge of any product in use by constantly
checking its manual posted on our website: http://www.nexcom.com. NEXCOM
shall not be liable for direct, indirect, special, incidental, or consequential
damages arising out of the use of any product, nor for any infringements
upon the rights of third parties, which may result from such use. Any implied
warranties of merchantability or fitness for any particular purpose is also
disclaimed.
Acknowledgements
VTC 1010 is a trademark of NEXCOM International Co., Ltd. All other
product names mentioned herein are registered trademarks of their
respective owners.
Regulatory Compliance Statements
This section provides the FCC compliance statement for Class B devices and
describes how to keep the system CE compliant.
Declaration of Conformity
FCC
This equipment has been tested and verified to comply with the limits for
a Class B digital device, pursuant to Part 15 of FCC Rules. These limits are
designed to provide reasonable protection against harmful interference when
the equipment is operated in a commercial environment. This equipment
generates, uses, and can radiate radio frequency energy and, if not installed
and used in accordance with the instructions, may cause harmful interference
to radio communications. Operation of this equipment in a residential area
(domestic environment) is likely to cause harmful interference, in which
case the user will be required to correct the interference (take adequate
measures) at their own expense.
CE
The product(s) described in this manual complies with all applicable
European Union (CE) directives if it has a CE marking. For computer systems
to remain CE compliant, only CE-compliant parts may be used. Maintaining
CE compliance also requires proper cable and cabling techniques.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
v
VTC 1010 User Manual

Preface
e13 Mark
The “e” mark is the proof of compliance with directives (laws) required
by the European Union. The Council of European communities in Brussels
issues these directives and all members must accept approved products.
e13 - Luxembourg
For more information, visit http://www.tuv.com/jp/en/_e_mark_and_e_
mark_homologation_for_vehicles_vehicle_components_.html.
RoHS Compliance
NEXCOM RoHS Environmental Policy and Status
Update
NEXCOM is a global citizen for building the digital
infrastructure. We are committed to providing green
products and services, which are compliant with
European Union RoHS (Restriction on Use of Hazardous Substance in
Electronic Equipment) directive 2011/65/EU, to be your trusted green
partner and to protect our environment.
RoHS restricts the use of Lead (Pb) < 0.1% or 1,000ppm, Mercury (Hg)
< 0.1% or 1,000ppm, Cadmium (Cd) < 0.01% or 100ppm, Hexavalent
Chromium (Cr6+) < 0.1% or 1,000ppm, Polybrominated biphenyls (PBB) <
0.1% or 1,000ppm, and Polybrominated diphenyl Ethers (PBDE) < 0.1% or
1,000ppm.
In order to meet the RoHS compliant directives, NEXCOM has established an
engineering and manufacturing task force in to implement the introduction
of green products. The task force will ensure that we follow the standard
NEXCOM development procedure and that all the new RoHS components
and new manufacturing processes maintain the highest industry quality
levels for which NEXCOM are renowned.
How to recognize NEXCOM RoHS Products?
For existing products where there are non-RoHS and RoHS versions, the
suffix “(LF)” will be added to the compliant product name.
All new product models launched after January 2013 will be RoHS compliant.
They will use the usual NEXCOM naming convention.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
vi
VTC 1010 User Manual

Preface
Warranty and RMA
NEXCOM Warranty Period
NEXCOM manufactures products that are new or equivalent to new in
accordance with industry standard. NEXCOM warrants that products will
be free from defect in material and workmanship for 2 years, beginning on
the date of invoice by NEXCOM. HCP series products (Blade Server) which
are manufactured by NEXCOM are covered by a three year warranty period.
NEXCOM Return Merchandise Authorization (RMA)
▪ Customers shall enclose the “NEXCOM RMA Service Form” with the
returned packages.
▪ Customers must collect all the information about the problems
encountered and note anything abnormal or, print out any on-screen
messages, and describe the problems on the “NEXCOM RMA Service
Form” for the RMA number apply process.
▪ Customers can send back the faulty products with or without accessories
(manuals, cable, etc.) and any components from the card, such as CPU
and RAM. If the components were suspected as part of the problems,
please note clearly which components are included. Otherwise, NEXCOM
is not responsible for the devices/parts.
▪ Customers are responsible for the safe packaging of defective products,
making sure it is durable enough to be resistant against further damage
and deterioration during transportation. In case of damages occurred
during transportation, the repair is treated as “Out of Warranty.”
Repair Service Charges for Out-of-Warranty Products
NEXCOM will charge for out-of-warranty products in two categories, one is
basic diagnostic fee and another is component (product) fee.
System Level
▪ Component fee: NEXCOM will only charge for main components such as
SMD chip, BGA chip, etc. Passive components will be repaired for free,
ex: resistor, capacitor.
▪ Items will be replaced with NEXCOM products if the original one cannot
be repaired. Ex: motherboard, power supply, etc.
▪ Replace with 3rd party products if needed.
▪ If RMA goods can not be repaired, NEXCOM will return it to the customer
without any charge.
Board Level
▪ Component fee: NEXCOM will only charge for main components, such
as SMD chip, BGA chip, etc. Passive components will be repaired for free,
ex: resistors, capacitors.
▪ If RMA goods can not be repaired, NEXCOM will return it to the customer
without any charge.
▪ Any products returned by NEXCOM to other locations besides the
customers’ site will bear an extra charge and will be billed to the customer.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
vii
VTC 1010 User Manual
Preface
Warnings
Read and adhere to all warnings, cautions, and notices in this guide and
the documentation supplied with the chassis, power supply, and accessory
modules. If the instructions for the chassis and power supply are inconsistent
with these instructions or the instructions for accessory modules, contact
the supplier to find out how you can ensure that your computer meets
safety and regulatory requirements.
Cautions
Electrostatic discharge (ESD) can damage system components. Do the
described procedures only at an ESD workstation. If no such station is
available, you can provide some ESD protection by wearing an antistatic
wrist strap and attaching it to a metal part of the computer chassis.
Safety Information
Before installing and using the device, note the following precautions:
▪ Read all instructions carefully.
▪ Do not place the unit on an unstable surface, cart, or stand.
▪ Follow all warnings and cautions in this manual.
▪ When replacing parts, ensure that your service technician uses parts
specified by the manufacturer.
▪ Avoid using the system near water, in direct sunlight, or near a heating
device.
▪ The load of the system unit does not solely rely for support from the
rackmounts located on the sides. Firm support from the bottom is highly
necessary in order to provide balance stability.
▪ The computer is provided with a battery-powered real-time clock circuit.
There is a danger of explosion if battery is incorrectly replaced. Replace
only with the same or equivalent type recommended by the manufacturer.
Discard used batteries according to the manufacturer’s instructions.
Installation Recommendations
Ensure you have a stable, clean working environment. Dust and dirt can
get into components and cause a malfunction. Use containers to keep
small components separated.
Adequate lighting and proper tools can prevent you from accidentally
damaging the internal components. Most of the procedures that follow
require only a few simple tools, including the following:
• A Philips screwdriver
• A flat-tipped screwdriver
• A grounding strap
• An anti-static pad
Using your fingers can disconnect most of the connections. It is recommended that you do not use needlenose pliers to disconnect connections
as these can damage the soft metal or plastic parts of the connectors.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
viii
VTC 1010 User Manual

Preface
Safety Precautions
▪ Read these safety instructions carefully.
▪ Keep this User Manual for later reference.
▪ Disconnect this equipment from any AC outlet before cleaning. Use a
damp cloth. Do not use liquid or spray detergents for cleaning.
▪ For plug-in equipment, the power outlet socket must be located near the
equipment and must be easily accessible.
▪ Keep this equipment away from humidity.
▪ Put this equipment on a stable surface during installation. Dropping it or
letting it fall may cause damage.
▪ Do not leave this equipment in either an unconditioned environment or
o
in a above 40
C storage temperature as this may damage the equipment.
▪ The openings on the enclosure are for air convection to protect the
equipment from overheating. DO NOT COVER THE OPENINGS.
▪ Make sure the voltage of the power source is correct before connecting
the equipment to the power outlet.
▪ Place the power cord in a way so that people will not step on it. Do not
place anything on top of the power cord. Use a power cord that has been
approved for use with the product and that it matches the voltage and
current marked on the product’s electrical range label. The voltage and
current rating of the cord must be greater than the voltage and current
rating marked on the product.
▪ All cautions and warnings on the equipment should be noted.
▪ If the equipment is not used for a long time, disconnect it from the power
source to avoid damage by transient overvoltage.
▪ Never pour any liquid into an opening. This may cause fire or electrical
shock.
▪ Never open the equipment. For safety reasons, the equipment should be
opened only by qualified service personnel.
▪ If one of the following situations arises, get the equipment checked by
service personnel:
a. The power cord or plug is damaged.
b. Liquid has penetrated into the equipment.
c. The equipment has been exposed to moisture.
d. The equipment does not work well, or you cannot get it to work
according to the user’s manual.
e. The equipment has been dropped and damaged.
f. The equipment has obvious signs of breakage.
▪ Do not place heavy objects on the equipment.
▪ The unit uses a three-wire ground cable which is equipped with a third
pin to ground the unit and prevent electric shock. Do not defeat the
purpose of this pin. If your outlet does not support this kind of plug,
contact your electrician to replace your obsolete outlet.
▪ CAUTION: DANGER OF EXPLOSION IF BATTERY IS INCORRECTLY
REPLACED. REPLACE ONLY WITH THE SAME OR EQUIVALENT TYPE
RECOMMENDED BY THE MANUFACTURER. DISCARD USED BATTERIES
ACCORDING TO THE MANUFACTURER’S INSTRUCTIONS.
▪ The computer is provided with CD drives that comply with the appropriate
safety standards including IEC 60825.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
ix
VTC 1010 User Manual
Preface
CAUTION!
Technical Support and Assistance
1. For the most updated information of NEXCOM products, visit NEXCOM’s
website at www.nexcom.com.
2. For technical issues that require contacting our technical support team or
sales representative, please have the following information ready before
calling:
– Product name and serial number
– Detailed information of the peripheral devices
– Detailed information of the installed software (operating system,
version, application software, etc.)
– A complete description of the problem
– The exact wordings of the error messages
Warning!
1. Handling the unit: carry the unit with both hands and handle it with care.
2. Maintenance: to keep the unit clean, use only approved cleaning products
or clean with a dry cloth.
3. CompactFlash: Turn off the unit’s power before inserting or removing a
CompactFlash storage card.
Conventions Used in this Manual
Warning:
Information about certain situations, which if not observed,
can cause personal injury. This will prevent injury to yourself
when performing a task.
CAUTION!CAUTION!
Caution:
Information to avoid damaging components or losing data.
Note:
Provides additional information to complete a task easily.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
x
VTC 1010 User Manual
Preface
Global Service Contact Information
Headquarters
NEXCOM International Co., Ltd.
15F, No. 920, Chung-Cheng Rd.,
ZhongHe District, New Taipei City, 23586,
Taiwan, R.O.C.
Tel: +886-2-8226-7786
Fax: +886-2-8226-7782
www.nexcom.com
America
USA
NEXCOM USA
2883 Bayview Drive,
Fremont CA 94538, USA
Tel: +1-510-656-2248
Fax: +1-510-656-2158
Email: sales@nexcom.com
www.nexcom.com
Asia
Taiwan
NEXCOM Intelligent Systems
Taipei Office
13F, No.920, Chung-Cheng Rd.,
ZhongHe District,
New Taipei City, 23586, Taiwan, R.O.C.
Tel: +886-2-8226-7796
Fax: +886-2-8226-7792
Email: sales@nexcom.com.tw
www.nexcom.com.tw
NEXCOM Intelligent Systems
Taichung Office
16F, No.250, Sec. 2, Chongde Rd.,
Beitun Dist.,
Taichung City 406, R.O.C.
Tel: +886-4-2249-1179
Fax: +886-4-2249-1172
Email: sales@nexcom.com.tw
www.nexcom.com.tw
Japan
NEXCOM Japan
9F, Tamachi Hara Bldg.,
4-11-5, Shiba Minato-ku,
Tokyo, 108-0014, Japan
Tel: +81-3-5419-7830
Fax: +81-3-5419-7832
Email: sales@nexcom-jp.com
www.nexcom-jp.com
China
NEXCOM China
1F & 2F, Block A, No. 16 Yonyou Software Park,
No. 68 Beiqing Road, Haidian District,
Beijing, 100094, China
Tel: +86-010-5704-2680
Fax: +86-010-5704-2681
Email: sales@nexcom.cn
www.nexcom.cn
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
xi
VTC 1010 User Manual
Preface
Chengdu Office
9F, Shuxiangxie, Xuefu Garden,
No.12 Section 1, South Yihuan Rd.,
Chengdu, 610061, China
Tel: +86-28-8523-0186
Fax: +86-28-8523-0186
Email: sales@nexcom.cn
www.nexcom.cn
Shanghai Office
Room 603/604, Huiyinmingzun Plaza Bldg., 1,
No.609, Yunlin East Rd.,
Shanghai, 200333, China
Tel: +86-21-5278-5868
Fax: +86-21-3251-6358
Email: sales@nexcom.cn
www.nexcom.cn
Shenzhen Office
Room1707, North Block, Pines Bldg.,
No.7 Tairan Rd., Futian Area,
Shenzhen, 518040, China
Tel: +86-755-8332-7203
Fax: +86-755-8332-7213
Email: sales@nexcom.cn
www.nexcom.cn
Wuhan Office
1-C1804/1805, Mingze Liwan, No. 519
South Luoshi Rd., Hongshan District,
Wuhan, 430070, China
Tel: +86-27-8722-7400
Fax: +86-27-8722-7400
Email: sales@nexcom.cn
www.nexcom.cn
Europe
United Kingdom
NEXCOM EUROPE
10 Vincent Avenue,
Crownhill Business Centre,
Milton Keynes, Buckinghamshire
MK8 0AB, United Kingdom
Tel: +44-1908-267121
Fax: +44-1908-262042
Email: sales.uk@nexcom.eu
www.nexcom.eu
Italy
NEXCOM ITALIA S.r.l
Via Gaudenzio Ferrari 29,
21047 Saronno (VA), Italia
Tel: +39 02 9628 0333
Fax: +39 02 9625570
Email: nexcomitalia@nexcom.eu
www.nexcomitalia.it
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
xii
VTC 1010 User Manual

Preface
Package Contents
Before continuing, verify that the VTC 1010 series package that you received is complete. Your VTC 1010 series package should have all the items listed in the
following table.
Item P/N Name Specification Qty
1 4NCPM00302X00 (T)Terminal Blocks 3P Phoenix Contact:1777992 5.08mm Male DIP Green 1
2 50311F0100X00
(H)Round Head Screw w/Spring+Flat Washer Long
FEI:P3x6L
3 50311F0110X00 (H)Flat Head Screw Long FEI:F3x5ISO+NYLOK NIGP F3x5 NI NYLOK 4
4 5040420015X00 VTC 1010 HDD Bracket VER:A PANADVANCE 95.35x112x12 SPCC NI PAINTING 1
5 60233AT134X00 SATA Cable ST:MD-6102069 SATA7P/L 180D TO 90D L=75mm 1
6 60233PW197X00 SATA Power Cable Best:900-0415-070R
7 602DCD0769X00 (N)VTC 1010 CD Driver VER:1.0 JCL 1
8 6030000039X00 Composite Cable for VTC 1010 ST:13-210-E012 DMS 60PIN L=300mm 1
9 603VED0001X00 Capture Card Cable for MPX-885 ST:VT-1009F2 27-54 IDC10P PH:1.24x2.54 TI PH:1.27x1.27 L=90mm 1
P3x6 iso/SW6x0.5 NI 4
Female Connector 15P to Housing 4P PIT:2.54mm
L:70mm
1
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
xiii
VTC 1010 User Manual

Preface
Ordering Information
The following provides ordering information for VTC 1010.
• VTC 1010-BK (P/N: 10V00101000X0)
®
Atom™ processor E3827 1.75GHz CPU, 2GB DDR3L SO-DIMM,
Intel
VGA/DP Output, 1x LAN, 2x RS-232, 1x RS-422/485, 3x DI, 3x DO, 3x
USB, 12VDC output
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
xiv
VTC 1010 User Manual
Chapter 1: Product Introduction
Chapter 1: Product Introduction
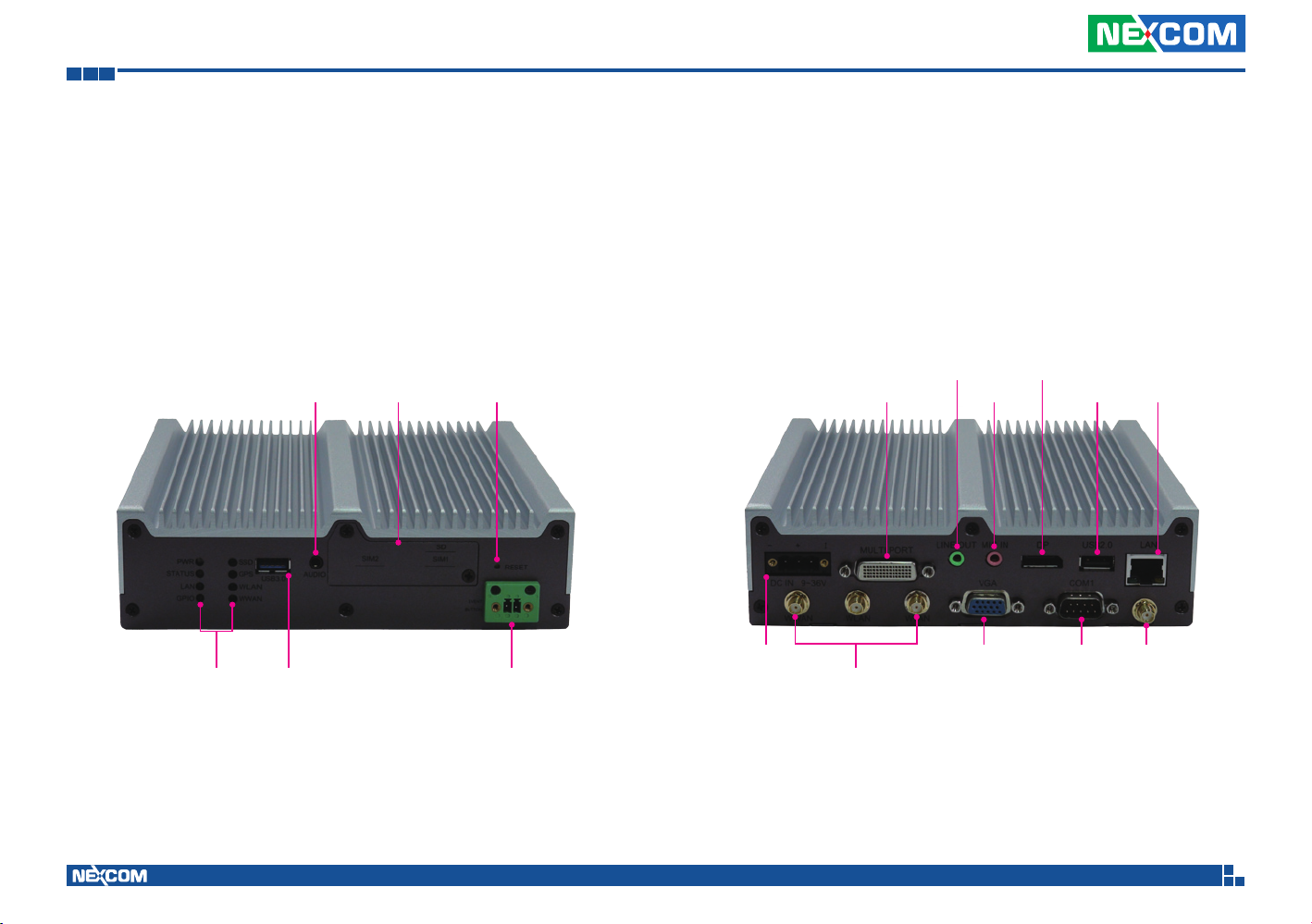
Physical Features
Front View
LED indicators
Audio
(WWAN Voice)
USB 3.0 Event Button
SD/ SIM1/ SIM2
slot cover
Reset button
Rear View
9V~36V
Multi Port
Antenna holes
Line-out
Mic-in
VGA COM1 Antenna holeDC input
DisplayPort
USB 2.0 LAN
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
1
VTC 1010 User Manual

Chapter 1: Product Introduction
Overview
VTC 1010 features next generation Intel® Atom™ processor E3827, 1.75GHz,
with powerful graphic and multimedia enhancement. VTC 1010 is packed
rugged, fanless, and 1 DIN compact enclosure. It is specifically designed to
comply with stringent MIL-STD-810G military standard. VTC 1010 comes
with built-in CAN BUS 2.0B interface and optional OBDII (ASE J1939/ J1708)
port to monitor the vehicle operating status real-time and troubleshoot a
non-working vehicle. With dual SIM card design, it allows the choice of
the best service carrier network and minimizes roaming cost. VTC 1010
can be configured to work with two independent WWAN connections and
can effectively increase the bandwidth for faster massive data transfer over
the air. VTC 1010 also supports two-way voice communication. Equipped
with intelligent vehicle power management, VTC 1010 can be waked up
by ignition, timer, or remote dial-up for flexible operation or maintenance.
VTC 1010 can satisfy different demands for versatile telematics applications,
such as infotainment, fleet management, dispatching system and mobile
video surveillance.
Key Features
• Intel® Atom™ processor E3827, 1.75GHz
• Dual SIM cards + dual WWAN modules support
• Built-in Ublox 6 GPS, optional Dead Reckoning support
• Built-in CAN 2.0B. Optional OBDII function (SAE J1939/J1708)
• 4x Mini-PCIe expansions
• Wake on RTC/SMS via WWAN module
• Compliant with MIL-STD-810G
• Built-in G-sensor, Gyroscope, and e-Compass sensors
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
2
VTC 1010 User Manual

Chapter 1: Product Introduction
Hardware Specifications
CPU
▪ Intel® Atom™ processor E3827, dual core 1.75GHz
Memory
▪ 1x 204-pin DDR3L SO-DIMM socket support 1066MHz / 1333MHz up to 8GB.
Default 2GB
Storage
▪ 1x 2.5” SATA 2.0
▪ 1x SD card socket
Expansion
▪ 1x full size Mini-PCIe socket (USB 2.0)
▪ 1x full size Mini-PCIe socket (USB 2.0 + PCIe)
▪ 1x full size Mini-PCIe socket (mSATA or PCIe)
▪ 1x half size Mini-PCIe socket (USB 2.0 + PCIe)
Function
▪ 1x default u-blox UBX-G6010 GPS module (50-channel and GALIELO) or
optional modules with dead reckoning or GLONASS support
▪ Built-in G-sensor, Gyroscope, and e-Compass sensors
I/O Interface-Front
▪ 8x LED for power, system status, storage, WWAN, WLAN, GPS, LAN, GPIO
▪ 2x external accessible SIM card socket (selectable) with cover
▪ 1x audio jack 3.5mm for WWAN voice communication, including 1x Mic-in and
1x Line-out
▪ 1x external accessible SD card socket with cover
▪ 1x event button (trigger type)
▪ 1x reset button
▪ 1x type A USB 3.0 compliant host, supporting system boot up.
I/O Interface-Rear
▪ 1x 9~36VDC input with ignition and 11W typical power consumption
▪ 1x type A USB 2.0 compliant host, supporting system boot up
▪ 1x RJ45 10/100/1000 Fast Ethernet with LED
▪ 1x phone jack 3.5mm for Mic-in (for WWAN voice communication)
▪ 1x phone jack 3.5mm for Line-out (for PC audio)
▪ 1x DB-15 VGA. Resolution up to 2500 x 1600 @60Hz
▪ 1x DP port. Resolution up to 2500 x 1600 @60Hz
▪ 1x DB-9 for RS-232
▪ 4x antenna hole for GPS/ WWAN/ WLAN/ BT
▪ 1x LHF 60-pin connector
1x 6-pin power connector, 12VDC output (max: 1A)
1x type A female USB 2.0 compliant host, supporting system boot up.
1x DB-9 RS-232
1x DB-9 RS-422/ 485
1x DB-9 female 3x DI and 3x DO. Onboard CAN 2.0B signals
(Programmable Digital Input)
Input Voltage (Internal Type): 5VDC TTL (default)
Input Voltage (Source Type): 3~12VDC
(Programmable Digital Output)
Digital Output (Sink Type): 5VDC TTL (default), max current: 20mA
Digital Output (Source Type): 3~24VDC, max current: 150mA
1x DB-9 for optional ODBII module (ASE J1939 or J1708)
1x DB-9 for optional GPS Dead Reckoning module
4x BNC connector video-in for optional 4-channel video capture card
4x audio connector for 7.1 channel audio output
(front, center/ woofer, rear surround, side surround)
Power Management
▪ Selectable boot-up & shut-down voltage for low power protection by
software
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
3
VTC 1010 User Manual

Chapter 1: Product Introduction
▪ Setting 8-level power on/off delay time by software
▪ Status of ignition and low voltage can be detected by software
▪ Support S3/ S4 suspend mode
Operating System
▪ Windows 8 Professional, WES8
▪ Windows 7, WES7
▪ Tizen IVI
▪ Fedora
Dimensions
▪ 180 mm (W) x 180 mm (D) x 50 mm (H) (7.09” x 7.09” x 1.97”)
▪ 1.7kg
Construction
▪ Fanless
▪ Aluminum fin top cover and front/ rear panels
▪ SECC bottom enclosure
Environment
▪ Operating temperatures: -30°C to 70°C (w/ industrial SSD) with air flow
-20°C to 50°C (w/ commercial HDD) with air flow
▪ Storage temperatures: -35°C to 85°C
▪ Relative humidity: 10% to 90% (non-condensing)
▪ Vibration (random): 1g@5~500 Hz (in operation, SSD)
▪ Vibration (SSD):
Operating: MIL-STD-810G, Method 514.6, Category 4, common
carrier US highway truck vibration exposure
Storage: MIL-STD-810G, Method 514.6, Category 24, minimum integrity test
▪ Shock (SSD):
Operating: MIL-STD-810G, Method 516.6, Procedure I, functional shock=20g
Non-Operating: MIL-STD-810G, Method 516.6, Procedure V, crash hazard
shock test=75g
Certifications
▪ CE approval
▪ FCC Class B
▪ E13 Mark
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
4
VTC 1010 User Manual

Chapter 1: Product Introduction
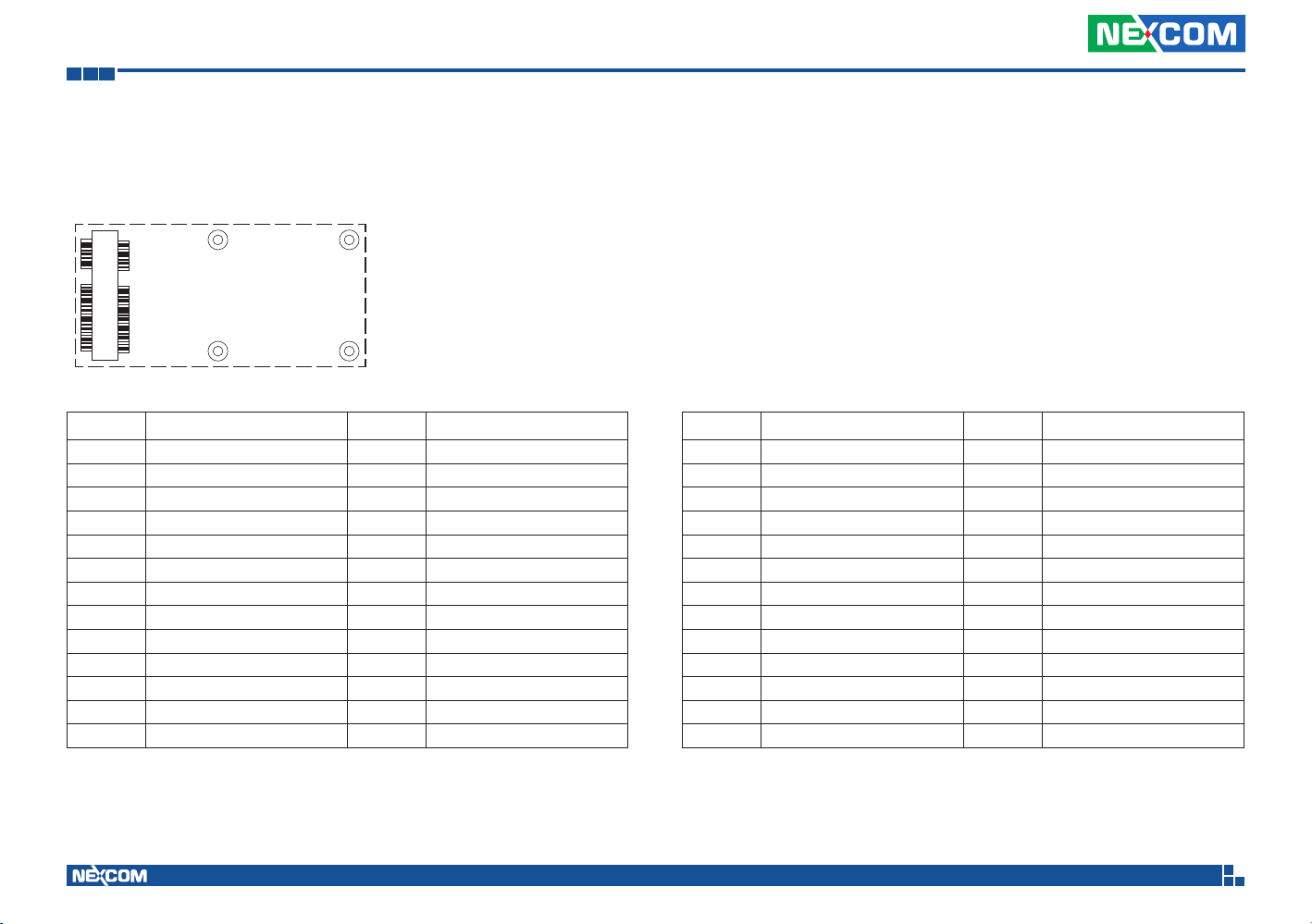
Connector Numbering
The following diagrams indicate the numbers of the connectors. Use these
numbers to locate the connectors’ respective pinout assignments on chapter
2 of the manual.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
5
VTC 1010 User Manual

Chapter 2: External Connectors Pinout Description
Chapter 2: External Connectors Pinout Description
LED Indicators (PWR, Status, LAN & GPIO)
Connector Number: 1
LED4 LED4
LED3 LED3
LED2 LED2
LED1 LED1
LED LED Behavior
LED1 (GPIO)
LED2 (LAN)
LED3 (HEALTH)
LED4 (POWER)
Off (Default)
Green: On. Programmable by user.
Green: Link
Blinking: Active
Steady Green: System ready
Steady Red: System booting
Blue: Power good
Red: Power failure
LED Indicators (SSD, GPS, WLAN & WWAN)
Connector Number: 2
LED LED Behavior
LED1 (WWAN) Green: WWAN On
LED2 (WLAN) Green: WLAN Connected. Off: Disconnected
LED3 (GPS) Green: GPS power On
LED4 (SSD) Green: Storage access
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
6
VTC 1010 User Manual

Chapter 2: External Connectors Pinout Description
USB 3.0 Port
Connector Number: 3
1
Pin Definition Pin Definition
1 5V 2 USB_N
3 USB_P 4 GND
5 USB3_RXN 6 USB3_RXP
7 GND 8 USB3_TXN
9 USB3_TXP
59
4
Audio Jack 3.5mm
Connector Number: 4
Pin Definition Pin Definition
1 MIC-C1 2 GND
3 FRONT_RC1 4 FRONT_LC1
5 CON DET G1 GND
G2 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
7
VTC 1010 User Manual

Chapter 2: External Connectors Pinout Description
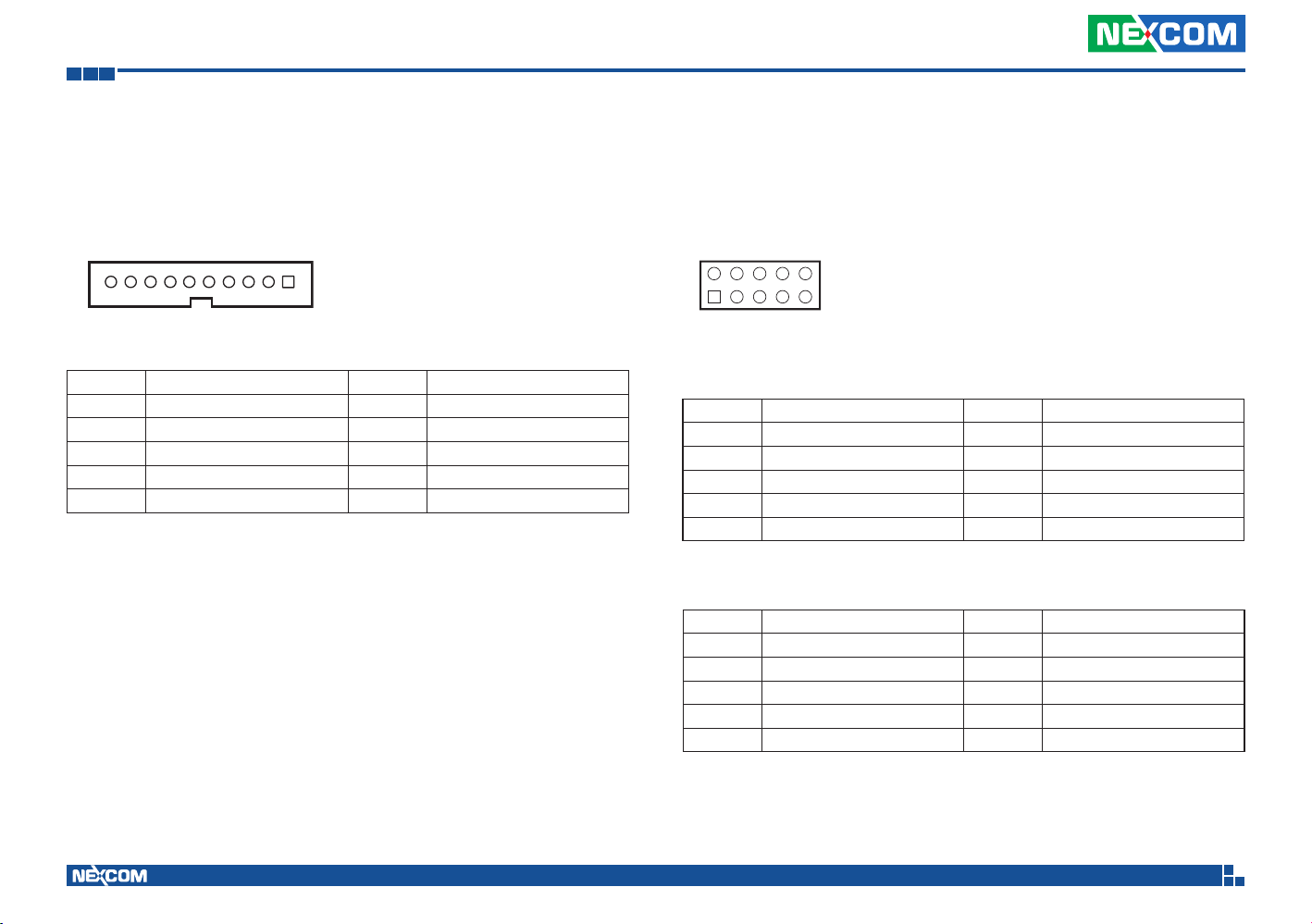
SD Card Connector
Connector Number: 5
Pin Definition Pin Definition
1 D3 2 CMD
3 GND 4 VDD
5 CLK 6 GND
7 D0 8 D1
9 D2 WP WP
Cd CDZ SC GND
G GND
SIM1 Socket
Connector Number: 5
C3
C2
C1
Pin Definition Pin Definition
C1 UIM1_PWR2 C5 GND
C2 UIM1_RST2 C6 NC
C3 UIM1_CLK2 C7 UIM1_DAT2
C7
C6
C5
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
8
VTC 1010 User Manual

Chapter 2: External Connectors Pinout Description
SIM2 Socket
Connector Number: 5
C3
C2
C1
Pin Definition Pin Definition
C1 UIM2_PWR2 C5 GND
C2 UIM2_RST2 C6 NC
C3 UIM2_CLK2 C7 UIM2_DAT2
C7
C6
C5
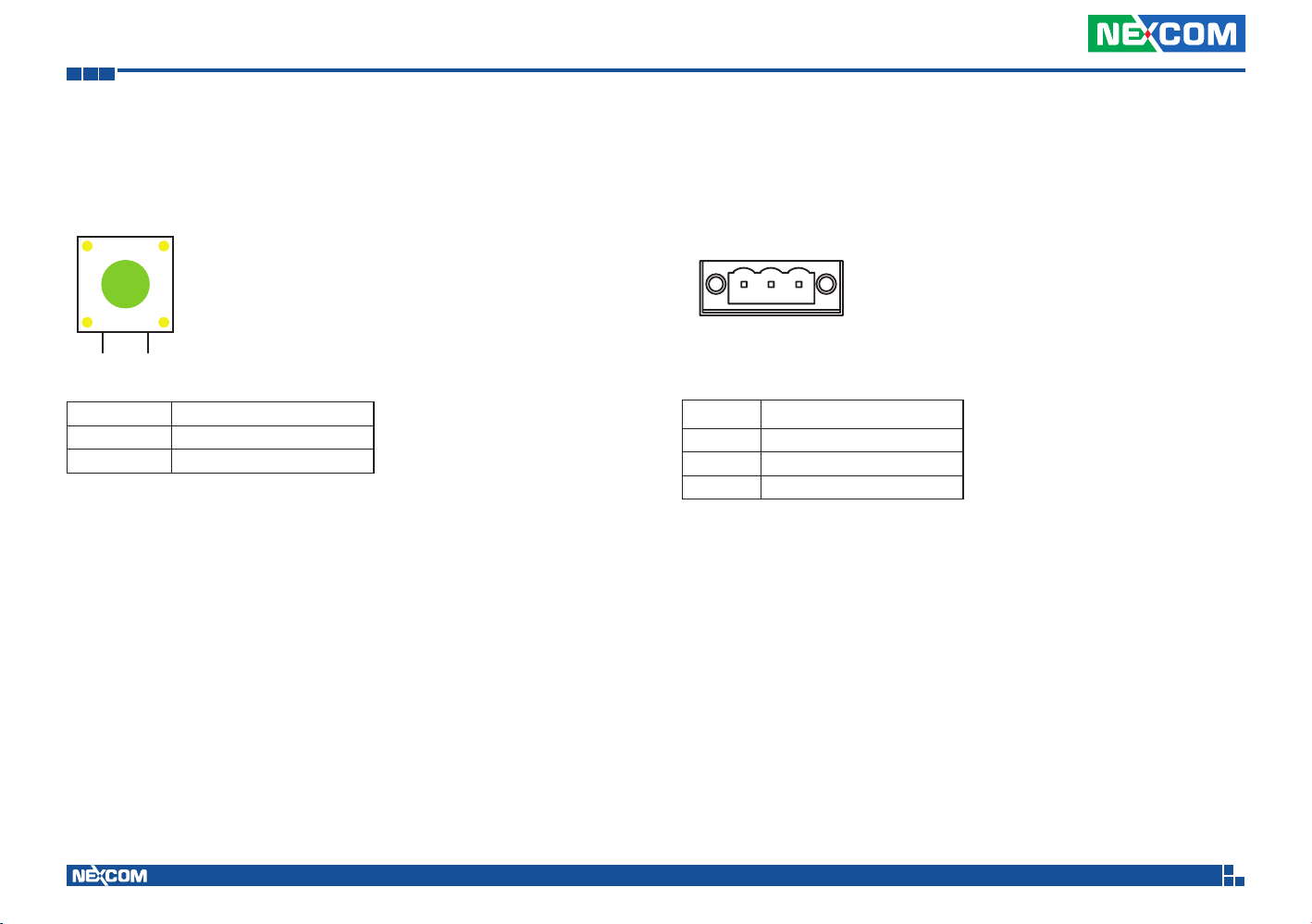
Event Button
Connector Number: 6
1 2
Pin Definition
1 Front Event
2 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
9
VTC 1010 User Manual
Chapter 2: External Connectors Pinout Description
Reset Button
Connector Number: 7
1 2
Pin Definition
1-2 Open NORMAL
1-2 Short RESET#
Power Input
Connector Number: 8
+ I
-
1
Pin Definition
1 GND_IN
2 V_IN
3 IGNITION
3
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
10
VTC 1010 User Manual

Chapter 2: External Connectors Pinout Description
CAUTION!
Multiport Connector
Connector Number: 9
CAUTION!CAUTION!
When connecting the multiport cable, please make sure the
top side labeled “TOP” is facing upwards.
This side facing upwards
Pin Definition Pin Definition
1 OUT_12V 16 CEN_JD
2 SP_DTR_3 17 CEN_C
3 SP_TXD_3 18 LFE_C
4 GPIO1 19 AGND
5 GPIO2 20 RS485_6 USB1_POWER 21 RS485_+
7 USB_2N_L 22 ISO_GND
8 USB_2P_L 23 ISO_GND
9 USB_GND 24 ISO_GND
10 RS422_TX- 25 ISO_GND
11 RS422_TX+ 26 GPIO3
12 AGND 27 GPIO4
13 FRONT_L_C 28 SP_RXD_3
14 FRONT_R_C 29 SP_DCD_3
15 FRONT_JD 30 OUT_12V
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
11
Pin Definition Pin Definition
31 GND 46 SIDE_JD
32 SP_CTS_3 47 SIDE_R_C
33 SP_DSR_3 48 SIDE_L_C
34 GPIO5 49 AGND
35 GPIO6 50 C1708_1_L
36 CAP2_A 51 C1708_1_H
37 CAN1_H 52 DIRECTION
38 CAN1_L 53 ODOMETER
39 CAN_M_L 54 1PPS
40 CAN_M_H 55 CAP2_B
41 REAR_PANIC 56 CAP1_A
42 AGND 57 CAP1_B
43 SURR_OUT_L_C 58 SP_RTS_3
44 SURR_OUT_R_C 59 SP_RI_3
45 SURR_JD 60 GND
VTC 1010 User Manual
Chapter 2: External Connectors Pinout Description
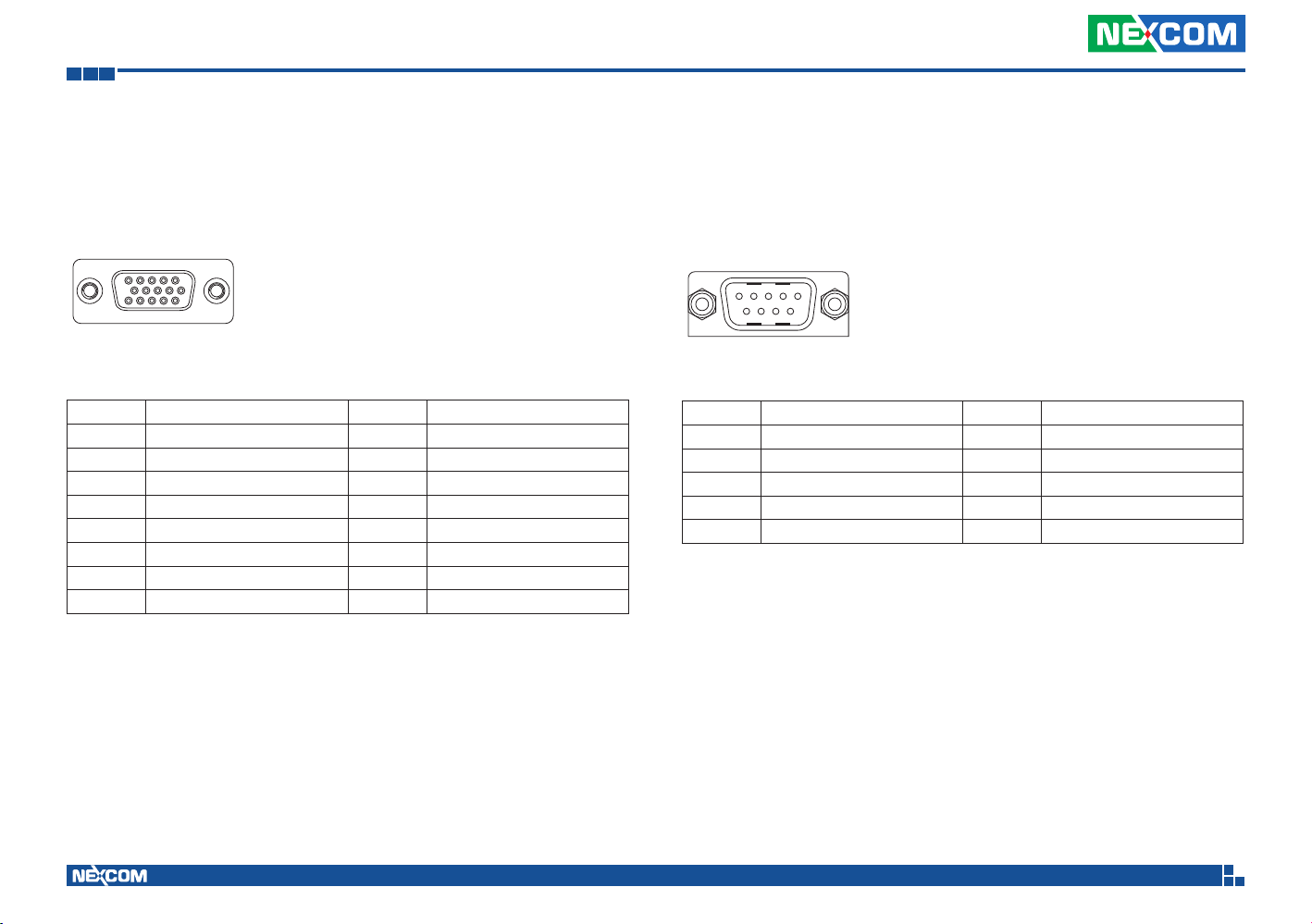
VGA Connector
Connector size: DB15, Female
Connector Number: 10
5 1
15 11
Pin Definition Pin Definition
1 Red 2 Green
3 Blue 4 NC
5 Gnd 6 Red_RTN
7 Green_RTN 8 Blue_RTN
9 +5V 10 GND
11 NC 12 I2C_Data
13 H SYNC 14 V SYNC
15 I2C_CLK
RS232 Connector
Connector size: DB9, Male
Connector Number: 11
1 5
6 9
Pin Definition Pin Definition
1 DCD 2 RXD
3 TXD 4 DTR
5 GND 6 DSR
7 RTS 8 CTS
9 RI
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
12
VTC 1010 User Manual
Chapter 2: External Connectors Pinout Description
Line-out
Connector Number: 12
Pin Definition Pin Definition
1 Line2 LC 2 Line2 JD
3 NC 4 Line2 RC
5 GND 6 GND
Mic-in
Connector Number: 13
Pin Definition Pin Definition
1 Mic1 C 2 Mic2 JD
3 NC 4 Mic1 CL
5 GND 6 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
13
VTC 1010 User Manual

Chapter 2: External Connectors Pinout Description
DisplayPort
Connector Number: 14
19
20 2
Pin Definition Pin Definition
1 DP0_DATA0_P 2 GND
3 DP0_DATA0_N 4 DP0_DATA1_P
5 GND 6 DP0_DATA1_N
7 DP0_DATA2_P 8 GND
9 DP0_DATA2_N 10 DP0_DATA3_P
11 GND 12 DP0_DATA3_N
13 CONFIG1 14 CONFIG2
15 DPC0_AUXP_C 16 GND
17 DPC0_AUXN_C 18 HPD
19 RETURN 20 DP0_PWR
1
USB 2.0 Port
Connector Number: 15
4
Pin Definition Pin Definition
1 5V 2 USB_N
3 USB_P 4 GND
1
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
14
VTC 1010 User Manual
Chapter 2: External Connectors Pinout Description
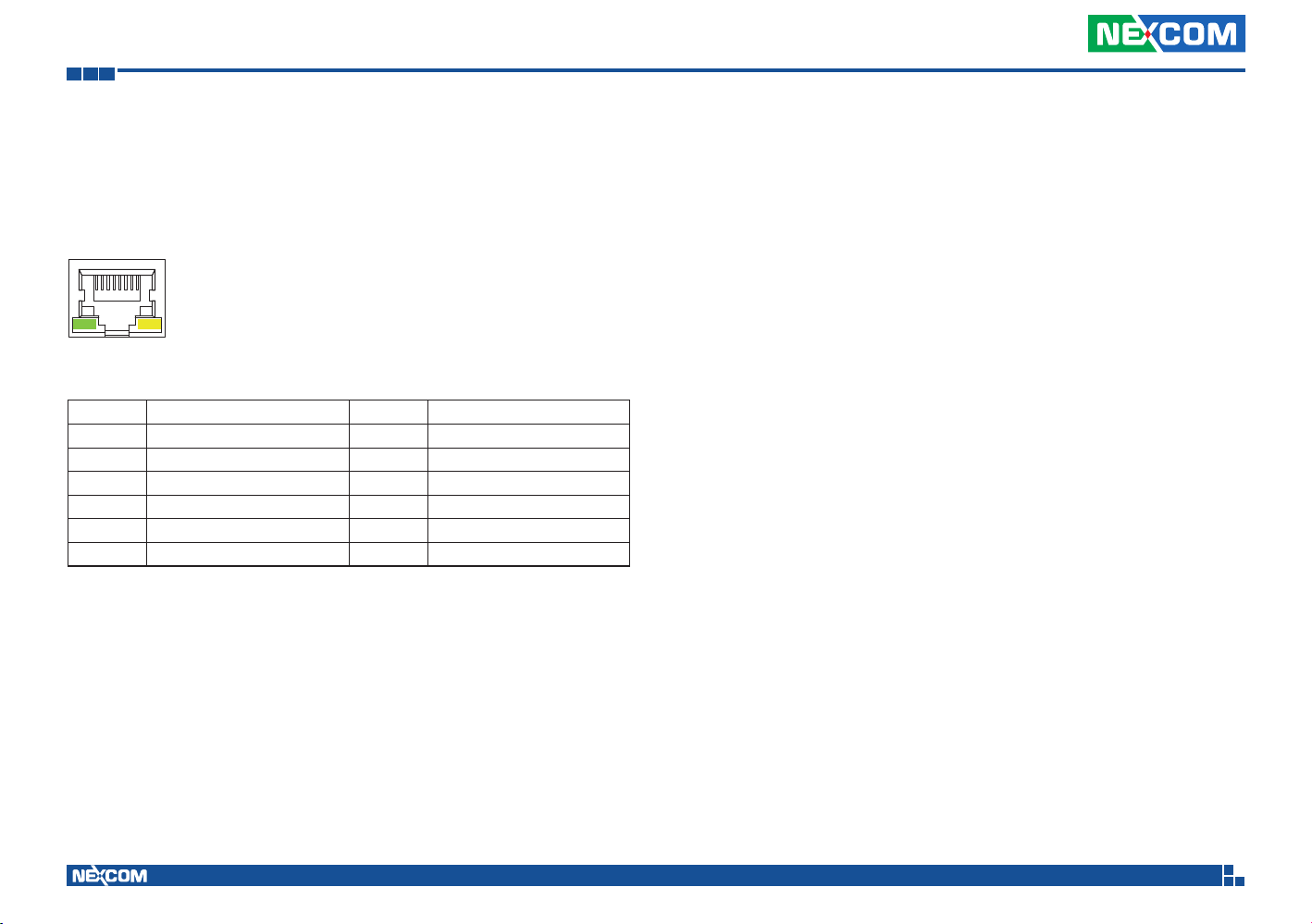
LAN Connector
Connector Number: 16
1 8
Pin Definition Pin Definition
1 MDI0P 2 MDI0N
3 MDI1P 4 MDI2P
5 MDI2N 6 MDI1N
7 MDI3P 8 MDI3N
9 LED1- 10 LED1+
11 LED2- 12 LED2+
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
15
VTC 1010 User Manual
Chapter 3: Jumpers and Switches
Chapter 3: Jumpers and Switches
This chapter describes how to set the jumpers on the motherboard. Note
that the following procedures are generic for all VTC 1010 series.
Before You Begin
▪ Ensure you have a stable, clean working environment. Dust and dirt can
get into components and cause a malfunction. Use containers to keep
small components separated.
▪ Adequate lighting and proper tools can prevent you from accidentally
damaging the internal components. Most of the procedures that follow
require only a few simple tools, including the following:
– A Philips screwdriver
– A flat-tipped screwdriver
– A set of jewelers screwdrivers
– A grounding strap
– An anti-static pad
▪ Using your fingers can disconnect most of the connections. It is
recommended that you do not use needle-nosed pliers to disconnect
connections as these can damage the soft metal or plastic parts of the
connectors.
▪ Before working on internal components, make sure that the power is off.
Ground yourself before touching any internal components, by touching
a metal object. Static electricity can damage many of the electronic
components. Humid environment tend to have less static electricity than
dry environments. A grounding strap is warranted whenever danger of
static electricity exists.
Precautions
Computer components and electronic circuit boards can be damaged by
discharges of static electricity. Working on the computers that are still
connected to a power supply can be extremely dangerous.
Follow the guidelines below to avoid damage to your computer or yourself:
▪ Always disconnect the unit from the power outlet whenever you are
working inside the case.
▪ If possible, wear a grounded wrist strap when you are working inside the
computer case. Alternatively, discharge any static electricity by touching
the bare metal chassis of the unit case, or the bare metal body of any
other grounded appliance.
▪ Hold electronic circuit boards by the edges only. Do not touch the
components on the board unless it is necessary to do so. Don’t flex or
stress the circuit board.
▪ Leave all components inside the static-proof packaging that they shipped
with until they are ready for installation.
▪ Use correct screws and do not over tighten screws.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
16
VTC 1010 User Manual
Chapter 3: Jumpers and Switches
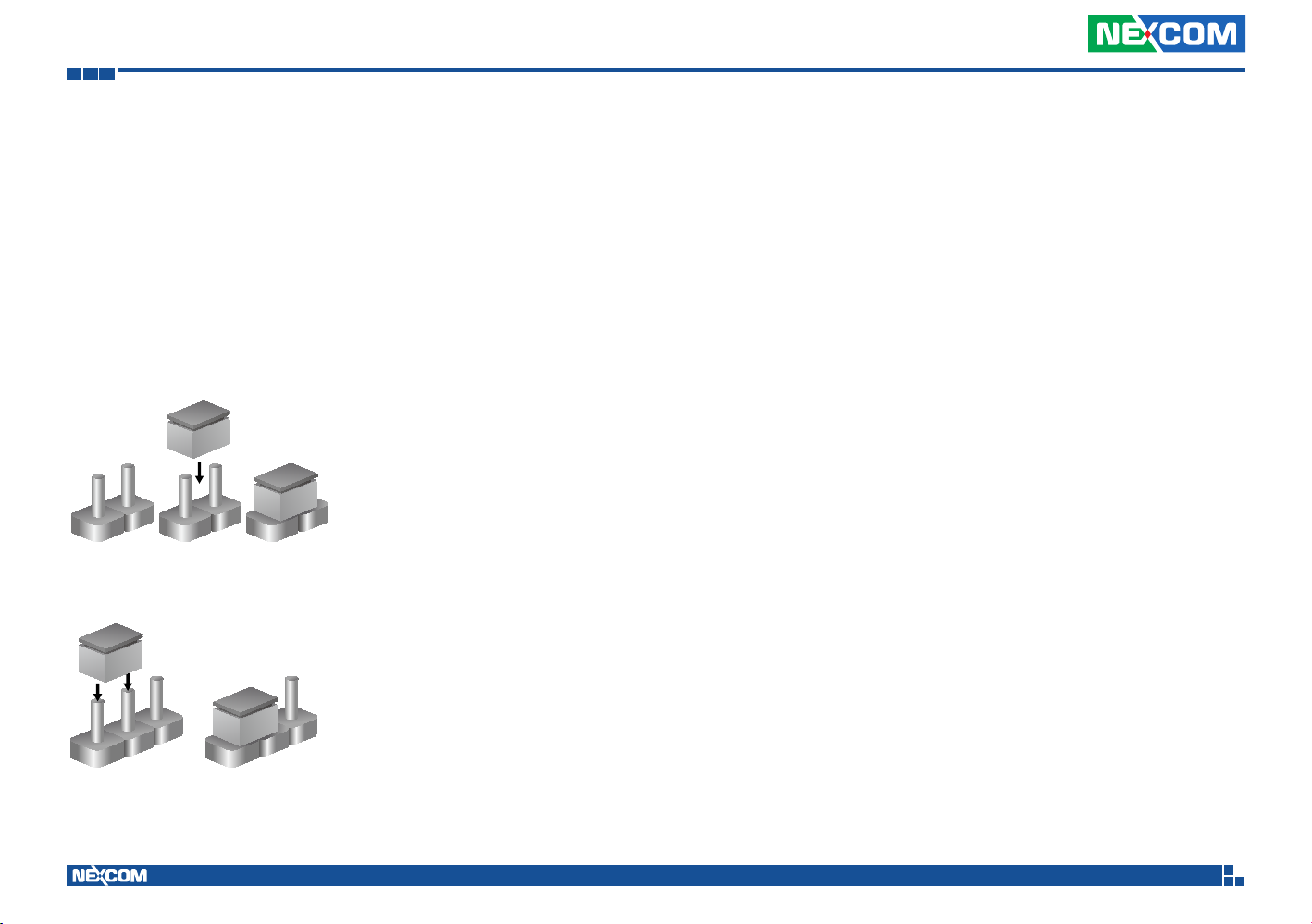
Jumper Settings
A jumper is the simplest kind of electric switch. It consists of two metal
pins and a cap. When setting the jumpers, ensure that the jumper caps are
placed on the correct pins. When the jumper cap is placed on both pins, the
jumper is short. If you remove the jumper cap, or place the jumper cap on
just one pin, the jumper is open.
Refer to the illustrations below for examples of what the 2-pin and 3-pin
jumpers look like when they are short (on) and open (off).
Two-Pin Jumpers: Open (Left) and Short (Right)
Three-Pin Jumpers: Pins 1 and 2 are Short
3
2
1
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
1
3
2
17
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
VTC 1010 Connector Specification & Jumper Setting
VTC 1010 carrier board placement
The figure below is the carrier board used in the VTC 1010 system. It shows the locations of the jumpers and connectors.
Top View Bottom View
SW1
JP3
J19
J11
SW6
J20
J9
SW2
JP2
DIMM1
SW3
J5
JP10
J6
CN7
CN6
CN8
J10
J12
J13 J14
CN10
SW7
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
SIM1
CN17
CN11
SIM2
CN16
J15
CN15
JP7
JP6
J21
JP9
JP8
CN9
CN14
18
CN20
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
VTC 1010 Jumper and Switch Settings
CMOS Clear Switch
Connector location: SW2
O
N
1
2
On Off
SW2.1 Clear CMOS Normal
SW2.2 Clear ME Normal
Default Settings:
SW2.1 Off
SW2.2 Off
Note: Once CMOS is cleared and the power connector is plugged in, VTC 1010 will power on and
power off automatically in the first Power-On. After first Power-On, VTC 1010 will work normally.
Voltage Selector (For CN10 Connector)
Connector location: SW6
O
N
1
2
3.3V 3.6V
SW6.1 Off On
SW6.2 Off On
Default Settings:
SW6.1 Off
SW6.2 Off
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
19
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
WWAN Module Selector (For Wake-Up & Voice on CN10)
Connector location: SW7
O
N
1
2
WWAN HE910
Wake-Up & Voice
SW7.1 On Off Off
SW7.2 Off On On
Digital Voice* HE910 (I2S) Disabled (default) MC8090(PCM)
Default Settings:
SW7.1 Off
SW7.2 On
*Digital voice is selectable in BIOS.
WWAN CM8000
Wake-Up & Voice
WWAN
MC8090/8092
RTC Battery Connector
Connector size: 1 x 2 = 2-pin header (1.25mm)
Connector location: J11
1
Pin Definition
2
1 GND
2 RTC_BAT
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
20
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
12
External Thermal Sensor Module
Connector size: 1 x 2 = 2-pin header
Connector location: JP7
Pin Definition
1 Sensor
2 Sensor
Debug 80 Port Connector
Connector size: 1 x 10 = 10-pin header (1.0mm)
Connector location: J15
10
Pin Definition Pin Definition
1 GND 2 PCIRST#
3 33M_CLK 4 LPC_FRAME#
5 LPC_AD3 6 LPC_AD2
7 LPC_AD1 8 LPC_AD0
9 VCC3 10 VCC3
1
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
21
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
VGA Connector
Connector size: 1 x 16 = 16-pin header (1.0mm)
Connector location: J6
116
Pin Definition Pin Definition
1 GND 2 VGA +5V
3 VGA_CLK 4 VGA_DATA
5 VGA_VS 6 VGA_HS
7 GND 8 GND
9 GND 10 VGA_GND
11 VGA_BLUE 12 VGA_GND
13 VGA_GREEN 14 VGA_GND
15 VGA_RED 16 M_DET
COM Port Connector
Connector size: 1 x 10 = 10-pin header (1.0mm)
Connector location: CN7
10
Pin Definition Pin Definition
1 GND 2 GND
3 CTS 4 DSR
5 DTR 6 RXD
7 RI 8 RTS
9 TXD 10 DCD
1
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
22
VTC 1010 User Manual
Chapter 3: Jumpers and Switches
19
21
High Speed UART Connector
Connector size: 1 x 10 = 10-pin header (1.0mm)
Connector location: CN15
10
Pin Definition Pin Definition
1 GND 2 SIO_RTS_1
3 SIO_TXD_1 4 SIO_CTS_1
5 SIO_RXD_1 6 GND
7 SIO_CTS_0 8 SIO_RXD_0
9 SIO_RTS_0 10 SIO_TXD_0
1
OBDII Module Connector
Connector size: 2 x 5 = 10-pin header (2.0mm)
Connector location: JP2 & JP3
0
JP2
Pin Definition Pin Definition
1 CAN_M_H 2 C1708_1_H
3 CAN_M_L 4 C1708_1_L
5 GND 6 GND
7 NC 8 NC
9 NC 10 NC
JP3
Pin Definition Pin Definition
1 TXD 2 RXD
3 CAN_DI1 4 CAN_DO1
5 GND 6 GND
7 NC 8 NC
9 CAN_M_VCC5 10 NC
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
23
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
19
21
Capture Card Connector
(Connector for SC330 video capture card)
Connector size: 1 x 6 = 6-pin header (1.0mm)
Connector location: J5
16
Pin Definition Pin Definition
1 GND 2 CAP2_B
3 CAP2_A 4 CAP1_B
5 CAP1_A 6 GND
Capture Card Connector
(Connector for MPX-885 video capture card)
Connector size: 2 x 5 = 10-pin header (1.27mm)
Connector location: JP10
0
Pin Definition Pin Definition
1 CAP1_A 2 CAP1_B
3 CAP2_A 4 CAP2_B
5 GND 6 NC
7 NC 8 NC
9 NC 10 NC
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
24
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
5V Output
Connector size: 1 x 2 = 2-pin header (1.25mm)
Connector location: J21
1
Pin Definition
2
1 +
2 -
Event Button Connector
Connector size: 1 x 2 = 2-pin header (1.25mm)
Connector location: J10
1
J10
Pin Definition
2
1 GND
2 FRONT_EVENT
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
25
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
14
13
SATA HDD Connector
Connector size: CN11, 1 x 4 = 4-pin header (2.54mm)
CN14, 1 x 7 = 7-pin header (1.27mm)
Connector location: CN11 & CN14
CN11
Pin Definition Pin Definition
1 VCC12 2 GND
3 GND 4 VCC5
1 7
CN14
Pin Definition Pin Definition
1 GND 2 SATA_TXP0
3 SATA_TXN0 4 GND
5 SATA_RXN0 6 SATA_RXP0
7 GND
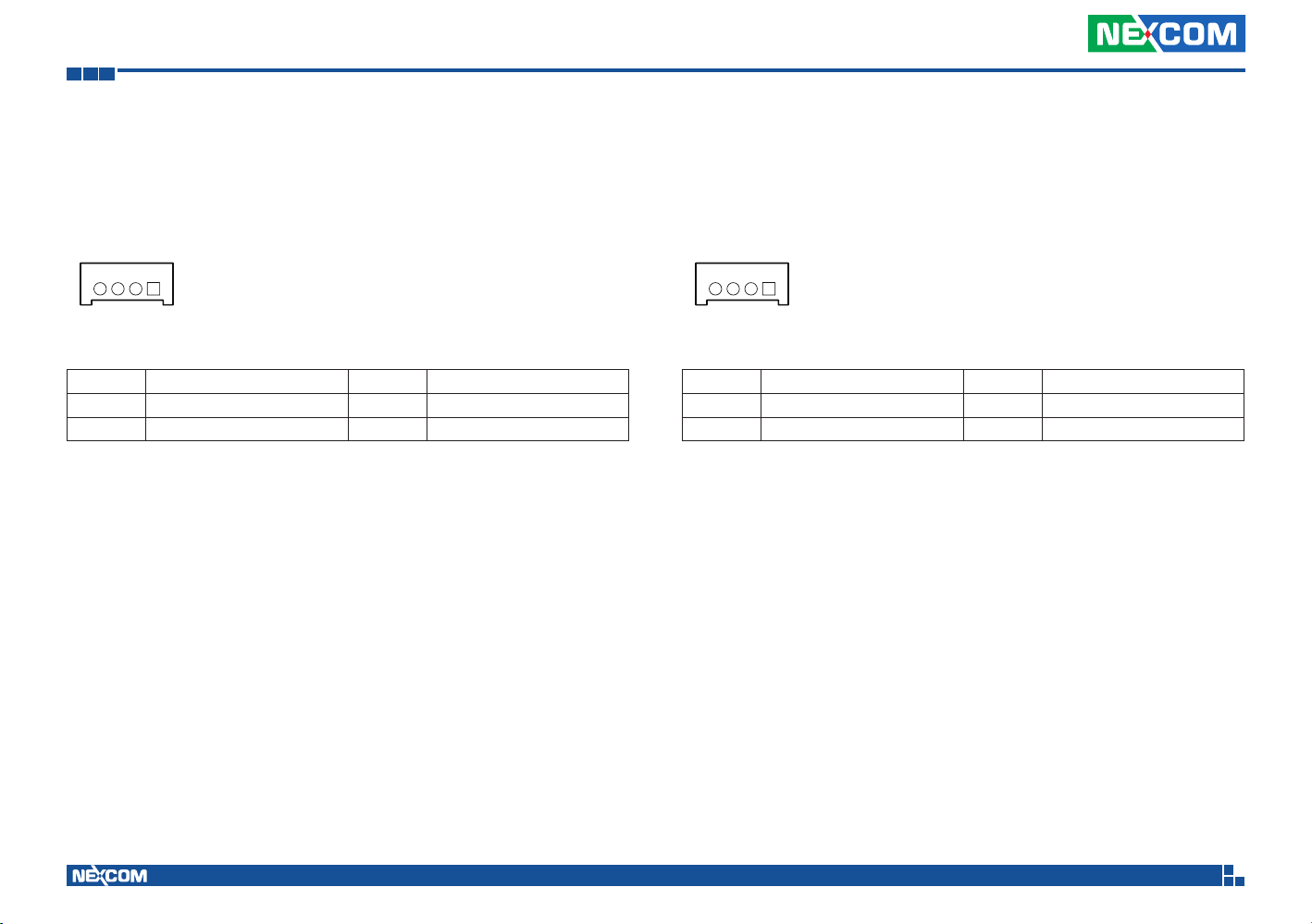
MCU Debug Port
Connector size: 1 x 3 = 3-pin header (2.54mm)
Connector location: JP6
Pin Definition
1 TX6
2 RX6
3 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
26
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
16
15
GAL Download Port
Connector size: 1 x 6 = 6-pin header (2.54mm)
Connector location: JP8
Pin Definition Pin Definition
1 VCC3 2 GND
3 TCK 4 TDO
5 TDI 6 TMS
MCU Download Port
Connector size: 1 x 5 = 5-pin header (2.54mm)
Connector location: JP9
Pin Definition Pin Definition
1 V3.3ALW 2 C2D
3 MRST 4 C2CK
5 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
27
VTC 1010 User Manual
Chapter 3: Jumpers and Switches
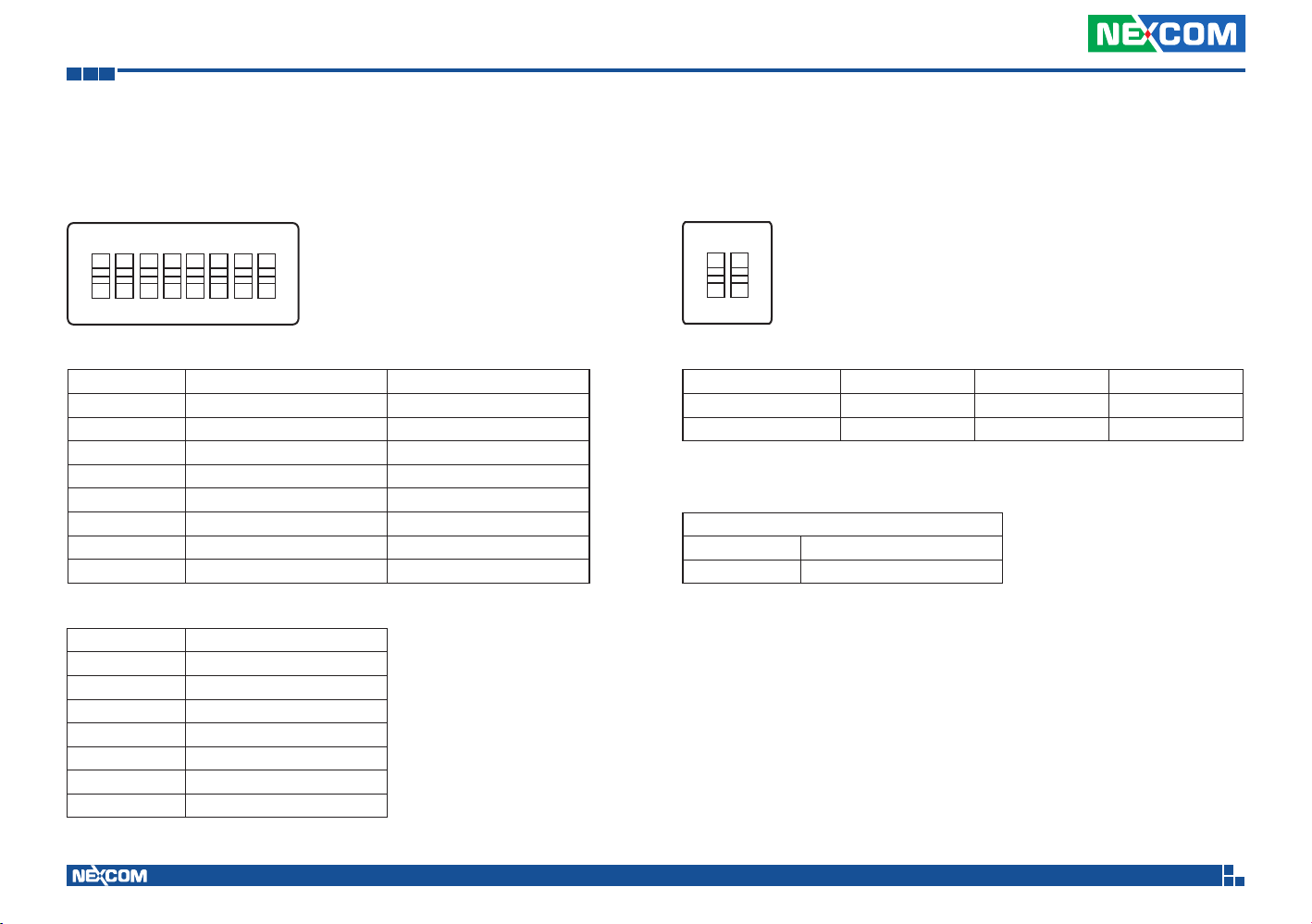
GPIO Setting
Connector location: SW1
N
O
7
3
4
1
2
SW On Off
SW1.1 Pull up VCC5 Don’t care
SW1.2 Pull up VCC5 Don’t care
SW1.3 Pull up VCC5 Don’t care
SW1.4 Pull up VCC5 Don’t care
SW1.5 Pull up VCC5 Don’t care
SW1.6 Pull up VCC5 Don’t care
SW1.7 NC NC
SW1.8 NC NC
Default Settings:
SW1.1 On
SW1.2 On
SW1.3 On
SW1.4 On
SW1.5 On
SW1.6 On
SW1.7 On
SW1.8 On
5
8
6
Voltage Setup Selection
Connector location: SW3
O
N
1
2
PowerSW (SW3.1) Off Off On
12V 24V (SW3.2) Off On Don’t Care
12V 24V 9~36V
Default Settings:
Power Range (9~36V)
SW3.1 On
SW3.2 Don’t Care
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
28
VTC 1010 User Manual
Chapter 3: Jumpers and Switches
FAN Connector
Connector size: 1 x 4 = 4-pin header
Connector location: J9
14
Pin Definition Pin Definition
1 GND 2 Power
3 FAN_TACT 4 FAN_CTRL
VIOB-GPS-DR02
Connector size: 1 x 4 = 4-pin header
Connector location: J13
14
Pin Definition Pin Definition
1 GND 2 IPPS
3 ODOMETER 4 DIRECTION
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
29
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
GPS Module Connector
Connector size: 1 x 6 = 6-pin header
Connector location: J14
16
Pin Definition Pin Definition
1 GPS_BAT 2 GPS_LED
3 GPS_CTX 4 GPS_CRX
5 GND 6 VCC3_GPS
MCU GPIO Connector
Connector size: 1 x 6 = 6-pin header
Connector location: J12
16
Pin Definition Pin Definition
1 GND 2 MCU GPO2
3 MCU GPO1 4 MCU GPI2
5 MCU GPI1 6 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
30
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
PCIe Connector
Connector size: 1 x 16 = 16-pin header
Connector location: J19
116
Pin Definition Pin Definition
1 GND 2 PCIE_CLKN
3 PCIE_CLKP 4 GND
5 PCIE_RXN 6 PCIE_RXP
7 GND 8 PCIE_TXN
9 PCIE_TXP 10 GND
11 USBHUB_3N 12 USBHUB_3P
13 GND 14 PLTRST
15 EXP_Disable 16 GND
Expand Connector
Connector size: 1 x 6 = 6-pin header
Connector location: J20
16
Pin Definition Pin Definition
1 GND 2 GND
3 GND 4 12VSB
5 12VSB 6 12VSB
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
31
VTC 1010 User Manual
Chapter 3: Jumpers and Switches
Mini-PCIe (USB + PCIe)
Connector location: CN6
12
51 52
Pin Definition Pin Definition
1 WAKE# 2 +V3.3A_MINI1
3 NC 4 GND
5 NC 6 +V1.5S_MINI1
7 CLK_REQ# 8 NC
9 GND 10 NC
11 PCIE_CLK# 12 NC
13 PCIE_CLK 14 NC
15 GND 16 NC
17 NC 18 GND
19 NC 20 WLAN_DIS#
21 GND 22 RESET#
23 PCIE_RX_N 24 +V3.3A_MINI1
25 PCIE_RX_P 26 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
32
Pin Definition Pin Definition
27 GND 28 +V1.5S_MINI1
29 GND 30 SMBCLK
31 PCIE_TX_N 32 SMBDAT
33 PCIE_TX_P 34 GND
35 GND 36 USB37 GND 38 USB+
39 +V3.3A_MINI1 40 GND
41 +V3.3A_MINI1 42 NC
43 GND 44 WLAN_LED#
45 NC 46 NC
47 NC 48 +V1.5S_MINI1
49 NC 50 GND
51 BT_EN 52 +V3.3A_MINI1
VTC 1010 User Manual
Chapter 3: Jumpers and Switches
Mini-PCIe (mSATA or PCIe [default])
Connector location: CN9
1 2
51 52
Pin Definition Pin Definition
1 WAKE# 2 +V3.3_MINI_3
3 NC 4 GND
5 NC 6 +V1.5S_MINI_3
7 CLKREQ 8 NC
9 GND 10 NC
11 REFCLK- 12 NC
13 REFCLK+ 14 NC
15 GND 16 NC
17 NC 18 GND
19 NC 20 MINICARD3_DIS#
21 GND 22 WLAN_RESET#
23 SATA_RXP0_C 24 +V3.3_MINI_3
25 SATA_RXN0_C 26 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
33
Pin Definition Pin Definition
27 GND 28 +V1.5S_MINI_3
29 GND 30 SMBCLK
31 SATA_TXN0_C 32 SMBDAT
33 SATA_TXP0_C 34 GND
35 GND 36 USB_D37 GND 38 USB_D+
39 +V3.3_MINI_3 40 GND
41 +V3.3_MINI_3 42 WWAN_LED#
43 GND 44 NC
45 NC 46 NC
47 NC 48 +V1.5S_MINI_3
49 NC 50 GND
51 CTRL0 52 +V3.3_MINI_3
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
Mini-PCIe (USB + PCIe)
Connector location: CN8
SIM Socket: SIM 2 (CN16)
1 2
51 52
Pin Definition Pin Definition
1 PCIE_WAKE#2 2 +V3.3A_MINI_2
3 NC 4 GND
5 NC 6 +V1.5S_MINI_2
7 CLK_REQ#2 8 UIM2_PWR2_MINI
9 GND 10 UIM2_DAT2_MINI
11 PCIE_CLK#2 12 UIM2_CLK2_MINI
13 PCIE_CLK2 14 UIM2_RST2_MINI
15 GND 16 NC
17 NC 18 GND
19 NC 20 PCIE2_DIS#
21 GND 22 PCIE2_RST#
23 PCIE_RX_N2 24 +V3.3A_MINI_2
25 PCIE_RX_P2 26 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
34
Pin Definition Pin Definition
27 GND 28 +V1.5S_MINI_2
29 GND 30 SMBCLK
31 PCIE_TX_N2 32 SMBDAT
33 PCIE_TX_P2 34 GND
35 GND 36 USB37 GND 38 USB+
39 +V3.3A_MINI_2 40 GND
41 +V3.3A_MINI_2 42 NC
43 GND 44 PCIE2_LED
45 NC 46 NC
47 NC 48 +V1.5S_MINI_2
49 NC 50 GND
51 NC 52 +V3.3A_MINI_2
VTC 1010 User Manual

Chapter 3: Jumpers and Switches
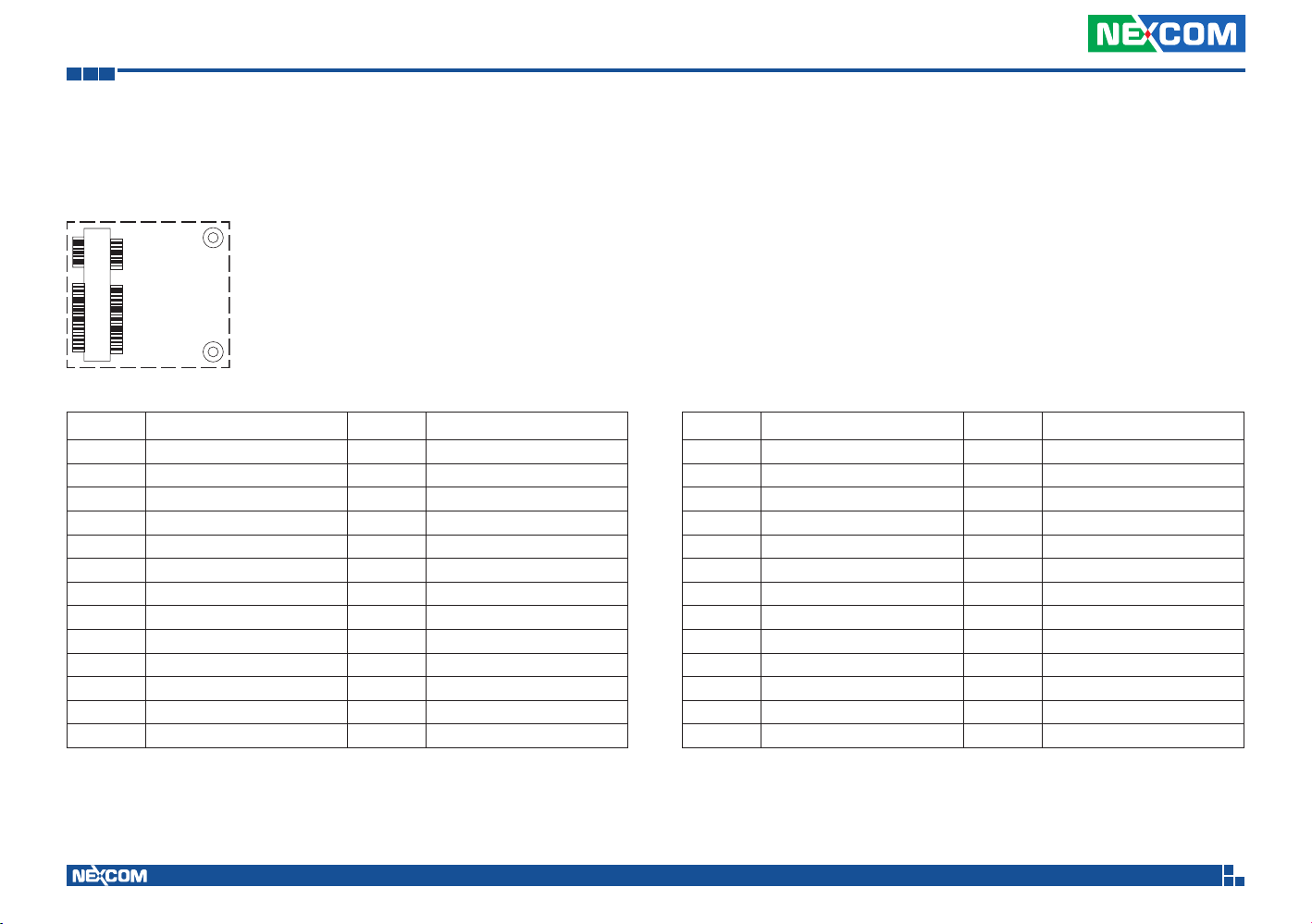
Mini-PCIe (USB)
Connector location: CN10
SIM Socket: SIM1 (CN17)
1 2
51 52
Pin Definition Pin Definition
1 MINI_MIC_P 2 +V3.3A_MINI_4
3 MINI_MIC_N 4 GND
5 MINI_SPK_PRR 6 NC
7 U_GND 8 UIM_PWR2
9 GND 10 UIM_DAT2
11 VCC_MSM26_DIG 12 UIM_CLK2
13 NC 14 UIM_RST2
15 GND 16 NC
17 NC 18 GND
19 NC 20 3.5G_DIS#
21 GND 22 3.5G_RST#
23 NC 24 +V3.3A_MINI_4
25 NC 26 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
35
Pin Definition Pin Definition
27 GND 28 NC
29 GND 30 NC
31 NC 32 SMS_RI_3.5G_R
33 UMTS_RESET#_R 34 GND
35 GND 36 USB37 GND 38 USB+
39 +V3.3A_MINI_4 40 GND
41 +V3.3A_MINI_4 42 3.5G_LED#_R
43 GND 44 NC
45 PCM_CLK 46 NC
47 PCM_RX 48 NC
49 PCM_TX 50 GND
51 PCM_SYNC 52 +V3.3A_MINI_4
VTC 1010 User Manual

Chapter 4: Mechanical Dimensions
Chapter 4: Mechanical Dimensions
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
180
36
180
50
VTC 1010 User Manual

Chapter 5: System Setup
CAUTION!
Chapter 5: System Setup
Removing the Chassis Cover
Prior to removing the chassis cover, make sure the unit’s power
CAUTION!CAUTION!
is off and disconnected from the power sources to prevent
electric shock or system damage.
Front View Rear View
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
37
VTC 1010 User Manual

Chapter 5: System Setup
Installing the First WWAN Module
1. The Mini PCI Express slot (CN10) shown below is used to install a
WWAN communication module such as GPRS, UMTS or HSDPA module.
This WWAN module is paired with SIM socket 1.
2. Insert the module into the Mini PCI Express slot at a 45 degrees angle
until the gold-plated connector on the edge of the module completely
disappears inside the slot. Then fasten screws into the mounting holes
to secure the module.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
38
VTC 1010 User Manual

Chapter 5: System Setup
3. Attach one end of the RF cable onto the module. 4. Mount the other end of the cable to the antenna mounting hole
(WWAN) located at the front panel of the chassis.
WWAN
antenna hole
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
39
VTC 1010 User Manual

Chapter 5: System Setup
Installing the Second WWAN Module
1. The Mini PCI Express slot (CN8) shown below is used to install a WWAN
communication module such as GPRS, UMTS or HSDPA module. This
WWAN module is paired with SIM socket 2.
2. Insert the module into the Mini PCI Express slot at a 45 degrees angle
until the gold-plated connector on the edge of the module completely
disappears inside the slot. Then fasten screws into the mounting holes
to secure the module.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
40
VTC 1010 User Manual

Chapter 5: System Setup
3. Attach one end of the RF cable onto the module. 4. Mount the other end of the cable to the antenna mounting hole
(WWAN) located at the front panel of the chassis.
WWAN
antenna hole
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
41
VTC 1010 User Manual

Chapter 5: System Setup
Installing a Wireless LAN Module
1. The Mini PCI Express slot (CN6) shown below is used to install a wireless
LAN module.
2. Insert the module into the Mini PCI Express slot at a 45 degrees angle
until the gold-plated connector on the edge of the module completely
disappears inside the slot. Then fasten screws into the mounting holes
to secure the module, and attach one end of the RF cable onto the
module.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
42
VTC 1010 User Manual

Chapter 5: System Setup
3. Mount the other end of the cable to the antenna mounting hole
(WLAN) located at the front panel of the chassis.
WLAN
antenna hole
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
43
VTC 1010 User Manual

Chapter 5: System Setup
Installing a SATA SSD Drive
1. Place the SDD drive into the HDD mounting bracket and then tighten
the four screws.
2. Fasten the HDD bracket within the chassis and connect the SATA data
and power cable onto connectors CN14 and CN11.
SATA data
connector
(CN14)
SATA power
connector
(CN11)
Mounting
screws
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
44
VTC 1010 User Manual

Chapter 5: System Setup
Installing a SO-DIMM
1. Push the ejector tabs which are at the ends of the socket outward. Then
insert the module into the socket at an approximately 30 degrees angle.
Apply firm even pressure to each end of the module until it slips down
into the socket. The contact fingers on the edge of the module will
almost completely disappear inside the socket.
Installing a Capture Card
Model: Yuan SC330 N4
1. Connect capture card cable onto the capture card.
2. Connect capture card cable to the J5 connector on VTC 1010.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
Ejector tab
45
VTC 1010 User Manual
Appendix A: Software Demo Utility for I/O Ports of Function Control
Appendix A:
Software Demo Utility for I/O Ports of Function Control
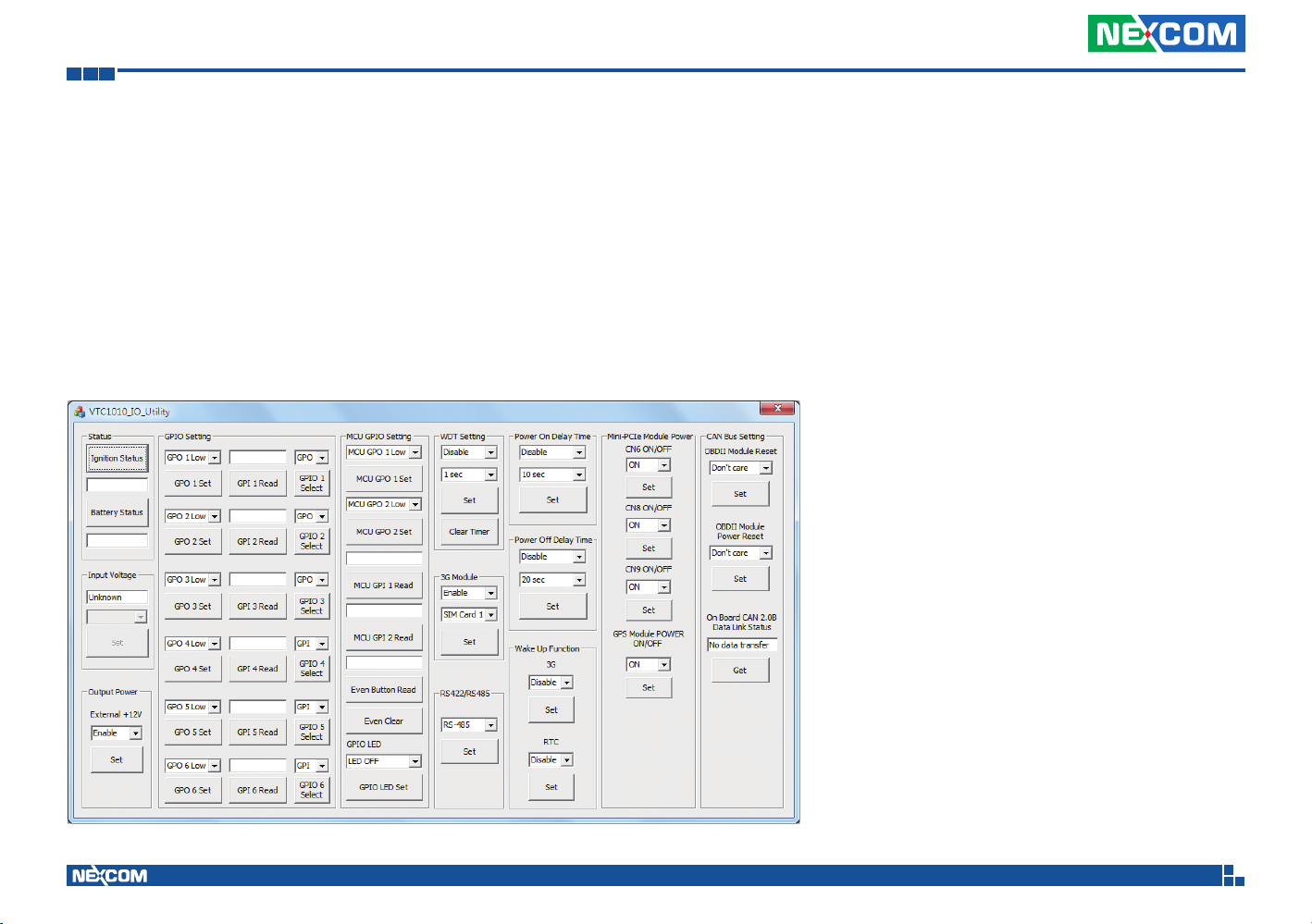
NEXCOM’s software demo utility enables users to test and control different I/O port functions on the VTC 1010. This document shows how to use the utility.
There are also source code files of the utility in the CD. Users can refer to the source codes to develop their applications.
Menu Screen
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
46
VTC 1010 User Manual
Appendix A: Software Demo Utility for I/O Ports of Function Control
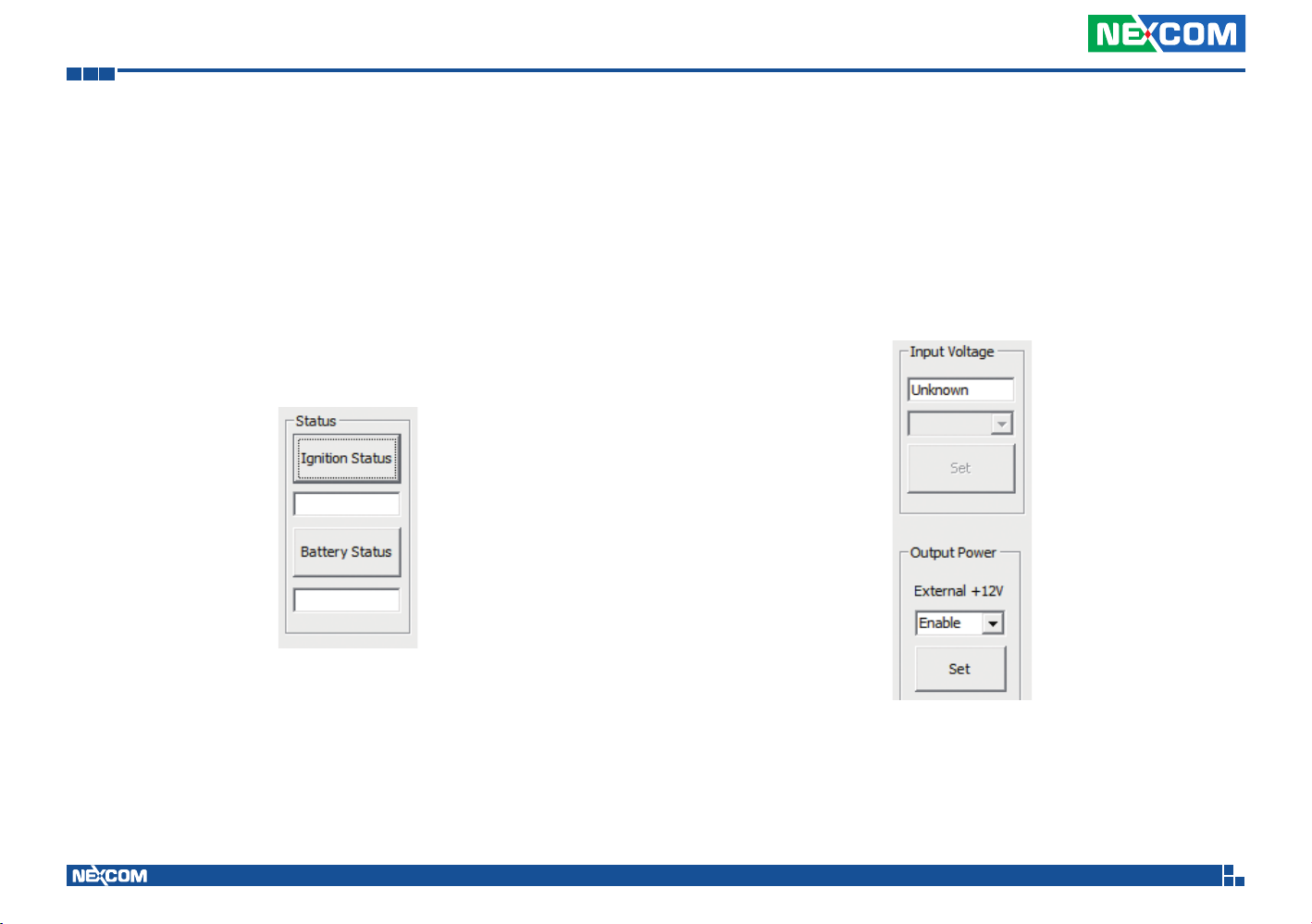
1.1 Status
1.1.1 Ignition Status
Press the button of Ignition Status, the signal of ignition will be shown.
ON …… Signal of ignition is high.
OFF ….. Signal of ignition is low.
1.1.2 Battery Status
Press the button of Battery Status, the status of battery voltage will be shown.
Low voltage …… Car battery is at low voltage.
OFF .......…......... Car battery is not at low voltage.
1.1.3 Input Voltage
Shows the setting of input voltage on SW3.
1.1.4 Output Power
External +12V
Enables or disables the output of 12VDC.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
47
VTC 1010 User Manual

Appendix A: Software Demo Utility for I/O Ports of Function Control
1.2 GPIO Setting
1.2.1 GPIO Select
Defines GPIO port as GPO or GPI.
1.2.2 GPO Set
Selects the GPO ports and makes the output low or high.
1.2.3 GPI Read
Reads the status of GPI.
1.3 MCU GPIO Setting
1.3.1 MCU GPO Set
Selects MCU GPO ports and makes the output low or high.
1.3.2 MCU GPI Status
Shows the status of the MCU GPI.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
48
VTC 1010 User Manual
Appendix A: Software Demo Utility for I/O Ports of Function Control
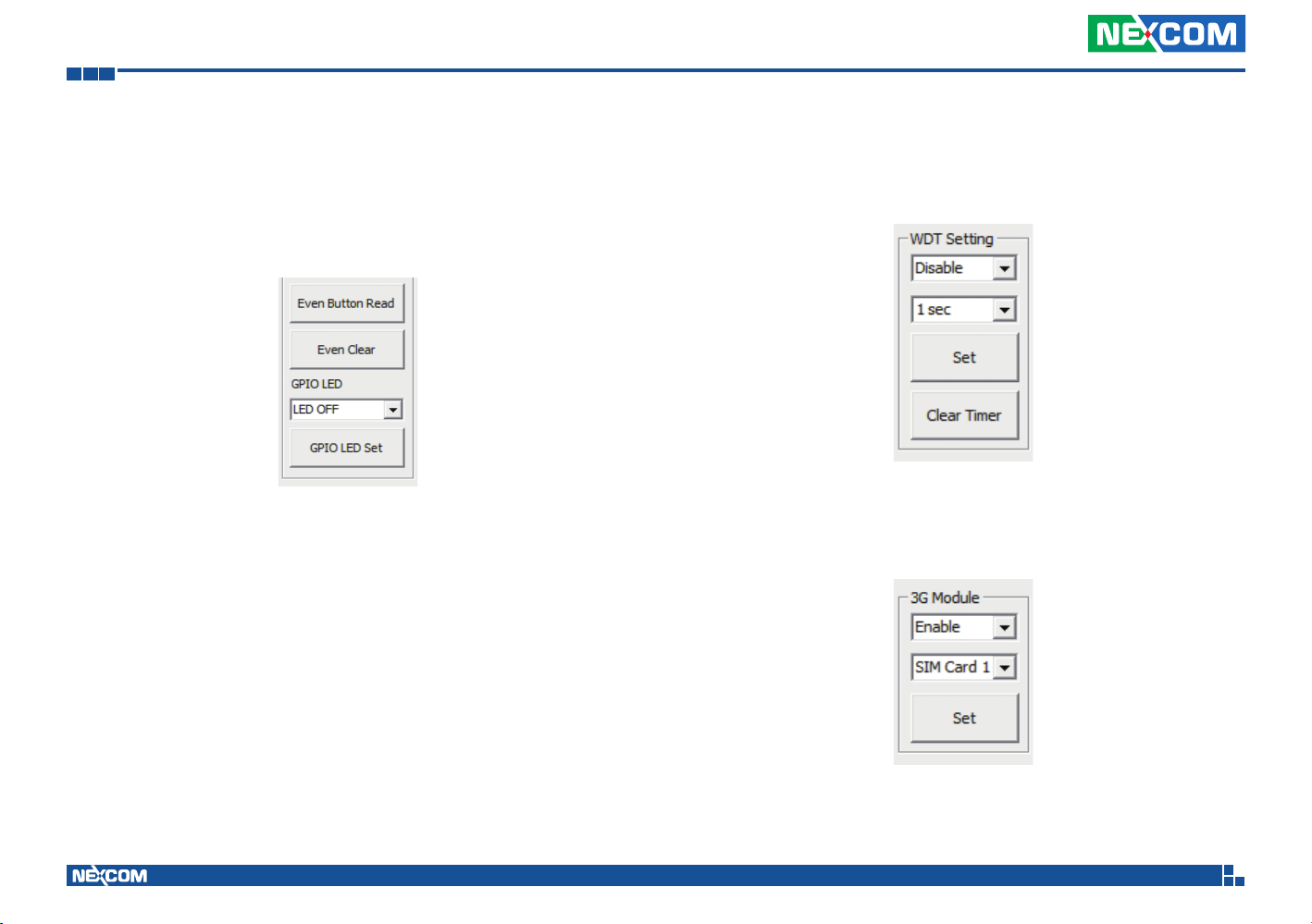
1.3.3 Even Button Read
Shows the status of the Event Button.
1.3.4 GPIO LED
Sets the On/Off of the GPIO LED on front panel.
1.4 WDT Setting
Enables or disables the WDT function. There are 9 selections of time. The
timer of WDT can also be cleared by button.
1.5 3G Module
Enables or disables the WWAN function. SIM card 1 or SIM card 2 can also
be selected for the WWAN module.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
49
VTC 1010 User Manual
Appendix A: Software Demo Utility for I/O Ports of Function Control
1.6 RS-422/RS-485
Selects RS-422 or RS-485
1.7 Power On Delay Time
Enables or disables the power on delay time function. There are 8 selections
of delay time.
1.8 Power Off Delay Time
Enables or disables the power off delay time function. There are 8 selections
of delay time.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
50
VTC 1010 User Manual

Appendix A: Software Demo Utility for I/O Ports of Function Control
1.9 Wake Up Function
1.9.1 3G
Enables or disables the wake up function for the WWAN module on
mini-PCIe socket (CN10).
1.9.2 RTC
Enables or disables the RTC wake up function. The timer setting of RTC is
located in BIOS setting.
2.0 Mini-PCIe Module Power On/Off
2.0.1 CN6 On/Off
Power on or off CN6.
2.0.2 CN8 On/Off
Power on or off CN8.
2.0.3 CN9 On/Off
Power on or off CN9.
2.0.4 GPS Module Power On/Off
Power on or off the GPS module.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
51
VTC 1010 User Manual

Appendix A: Software Demo Utility for I/O Ports of Function Control
2.1 CAN Bus Setting
2.1.1 OBDII Module Reset
Reset OBDII module.
2.1.2 OBDII Module Power Reset
Reset the power of OBDII module.
2.1.3 On Board CAN2.0B Data Link Status
Reads the connection status of CAN2.0B
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
52
VTC 1010 User Manual

Appendix B: Using the GPS Feature
Appendix B: Using the GPS Feature
Module: DGM-U2525T
Chip:
• Receiver Type:
• 50-channel u-blox UBX-G6010 chip
• GALILEO
• GPS L1 C/A code
• SBAS: WAAS, EGNOS, MSAS, GAGAN
• Navigation Update Rate:
• Up to 5 Hz
• Accuracy Position:
• < 2.5 m autonomous
• < 2.0 m SBAS
• Acquisition:
• Cold starts: 26s
• Aided starts: 1s
• Hot starts: 1s
• Sensitivity:
• Tracking: –162 dBm
• Cold starts: –160 dBm
• Hot starts: –148 dBm
The VTC has a built-in u-blox UBX-G6010 GPS receiver module by default.
Global Positioning System (GPS) uses a constellation of 50 medium earth
orbit satellites to transmit and receive microwave signals to determine its
current location.
You need to install the third-party GPS navigation software to take advantage
of the GPS feature.
Setup and Using GPS Information
Users can use the GPSinfo.exe program to verify that the GPS is correctly
configured and working properly. Also, users can use the GPSinfo.exe program to enable WAAS/EGNOS and power saving mode.
1. Go to Device Manager to ensure the device is installed correctly.
AGPS
®
Supports Assist Now
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
Online and Offline, OMA SUPL compliant.
53
VTC 1010 User Manual

Appendix B: Using the GPS Feature
2. Insert the Installation Disc into CD-Rom drive and execute the “Gpsinfo.
exe” file (the file also saved in C:\Utility\GPS_Utility).
3. Follow the given instructions to complete the installation.
4. When the setup complete, press <Finish>.
5. Once the installation is completed, installation of GPS Information onto
PDA device will be launched automatically. Select <Yes> to continue.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
54
VTC 1010 User Manual

Appendix B: Using the GPS Feature
Setup Window Screenshot
Double click GpsInfo_Vista icon from Desktop to start GPS.
Com Port Selection
Baud Rate Selection
Scan Com Port
Cold Start
Tab Menu
Start GPS button
VTG check box
WAAS/EGNOSPower Save
Main GPS data
Window
• Scan Com Port” - Scan all available communication port for GPS recep-
tion
• “Cold Start” - Cold start the GPS receiver
• “Power Save” - Check the box to enable/disable the Power Save Mode
(the option is available only when a GPS device is found)
• “Tab Menu” - Switch between Setup and GPSINFO windows
• “Com Port Selection” - Select the appropriate communication port
where GPS receiver is configured (it may be necessary to try several communication ports until the right one is found)
• “Baud Rate Selection” - Select the appropriate transferring rate (Please
set the baud rate at 9600)
• “Start GPS button” - Turn on/off the GPS device
• “VTG check box” - Some navigation or map software requires to receive
VTG data output for during operation. Check the box to activate the
VTG data output.
• “WAAS/EGNOS” - Check the box to activate WAAS/EGNOS in order to
increase the accuracy of positioning
• “Main GPS data Window” - Display data received by GPS device.
GPS Info Window Screenshot
Date
Time
Satellite
Distribution
Map
Latitude
Satellite Status
Chart
Direction
Speed
Positioning Status
Horizontal Accuracy
Position Accuracy
Longitude
• “Satellite Distribution Map” – Display the position of all connected
Satellites
• A unique number is assigned to each satellite.
• Red circle indicates that the satellite location is known from almanac
information; however, the satellite is not currently being tracked.
• Green circle indicates that the satellite is being tracked; however, it is
not being used in the current position solution.
• Blue circle indicates that is being tracked and is being used in the cur-
rent position.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
55
VTC 1010 User Manual

Appendix B: Using the GPS Feature
• “Latitude” – User’s current latitude is displayed in N/S degree (North/
South Hemisphere) format
• “Satellite Status Chart” – display the status of each connected satellite
• The number under each bar marks corresponding Satellite, and the
height of each bar represents the strength of the satellite.
• Red bar indicates that the satellite location is known from almanac
information; however, the satellite is not currently being tracked.
• Green solid bar indicates that the satellite is being tracked; however, it
is not being used in the current position solution.
• Blue bar indicates that the tracked and is being used in the current
position.
• “Date” – display the current date in (dd/mm/yy) format.
• “Time” – display the current (UTC) time in (hh:mm:ss) format.
• “Direction” – display the current direction from 000.0° to 359.9°
• “Speed” – Display the current moving speed in km/hour
• “Positioning Status”- Three Modes
1. No Fix
2. 2D Positioning
3. 3D Positioning
• “Horizontal Accuracy” - Range from 0.5 to 99.9, the smaller the better
• “Position Accuracy” - Range from 0.5 to 99.9, the smaller the better
• “Longitude” – Display current longitude in E/W (East/West Hemisphere)
Time (hhmmss)
GPS Information Instructions
1. Make sure that the GPS device is properly inserted.
2. Start GPS Information Software.
3. Choose and select the proper communication port. (It might be neces-
sary to try each available port to find the right one since the default
communication port varies according to different hardware device.)
4. Click “Start GPS button” to activate the GPS receiver.
5. Upon successful connection, GPS output data should be displayed in
“Main GPS data Window”. If no data is observed, make sure the GPS
receiver is working and properly inserted. Otherwise choose another
communication port.
6. Satellite status can be observed in the “GPS Info Window”. Use the
“Tab Menu” to switch between Setup window and GPS info window.
7. Please make sure to de-activate the GPS device before exiting this pro-
gram.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
56
VTC 1010 User Manual

Appendix C: Pin Definition for Multiport Cable
300 20mm
CAUTION!
Appendix C: Pin Definition for the Multiport Cable
The multiport consists of a 60-pin connector (P1) and multiple output connectors. The tables in this appendix list the pin signals of the P1 connector and its
corresponding pin signals to the output connectors.
CAUTION!CAUTION!
P1
When connecting the multiport cable, please make sure the
top side labeled “TOP” is facing upwards.
This side facing upwards
Qpxfs!Pvuqvu
ST343
HQJP.DBO
PCEJJ
USB
RS422/485
Event Button
Dead Reckening
Wjefp.Jo!2
Wjefp.Jo!3
Wjefp.Jo!4
Wjefp.Jo!5
Gspou!Bvejp
Dfoufs0Xppgfs!Bvejp
Sfbs!Tvsspvoe!Bvejp
Tjef!Tvsspvoe!Bvejp
P2
P3
P4
P5
USB
P6
P7
P8
P9
P10
P11
P12
P13
P14
P15
P16
P17
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
57
VTC 1010 User Manual

Appendix C: Pin Definition for Multiport Cable
P1 Connector Pinout
1 15
30
31
16
45
4660
P2 to P17 Connector Pinouts
Power Output Connector
Connector type: 2x3 6-pin header
Connector location: P2
1
4 6
P1 Pin P2 Pin Definition
30 2 OUT_12V
31 5 GND
60 5 GND
3
1 2 OUT_12V
1, 3, 4, 6 NC
RS232 Connector
Connector type: DB9, Male
Connector location: P3
1 5
6 9
P1 Pin P3 Pin Definition
29 1 SP_DCD_3
28 2 SP_RXD_3
3 3 SP_TXD_3
2 4 SP_DTR_3
22 5 ISO_GND
33 6 SP_DSR_3
58 7 SP_RTS_3
32 8 SP_CTS_3
59 9 SP_RI_3
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
58
VTC 1010 User Manual
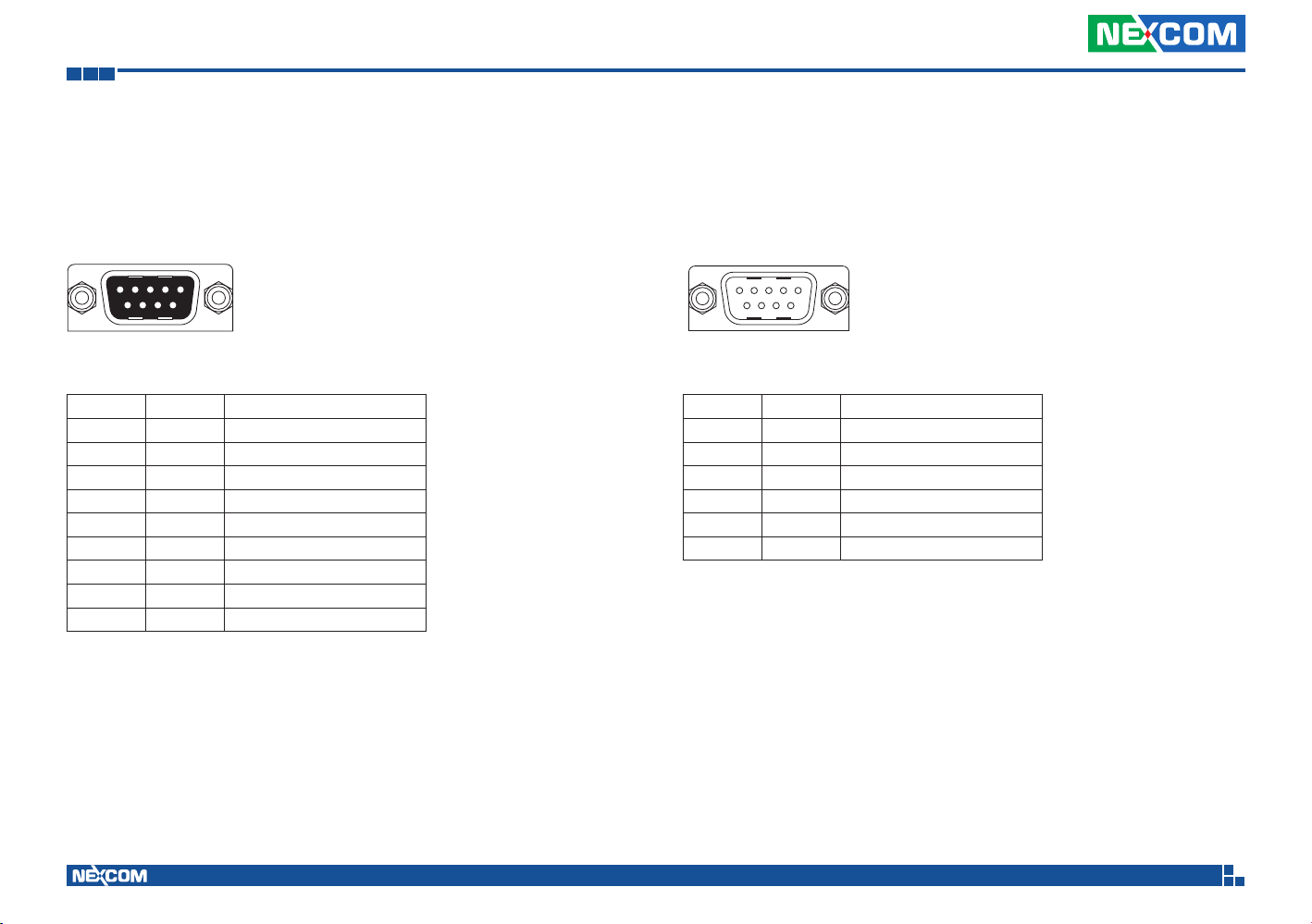
Appendix C: Pin Definition for Multiport Cable
GPIO + CAN Bus 2.0B Connector
Connector type: DB9, Female
Connector location: P4
51
96
P1 Pin P4 Pin Definition
4 1 GPIO1
5 2 GPIO2
26 3 GPIO3
27 4 GPIO4
23 5 ISO_GND
34 6 GPIO5
37 7 CAN1_H
38 8 CAN1_L
35 9 GPIO6
OBDII Connector
Connector type: DB9, Male
Connector location: P5
1 5
6 9
P1 Pin P5 Pin Definition
39 3 CAN_M_L
50 4 C1708_1_L
24 5 ISO_GND
40 8 CAN_M_H
51 9 C1708_1_H
1, 2, 6, 7 NC
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
59
VTC 1010 User Manual
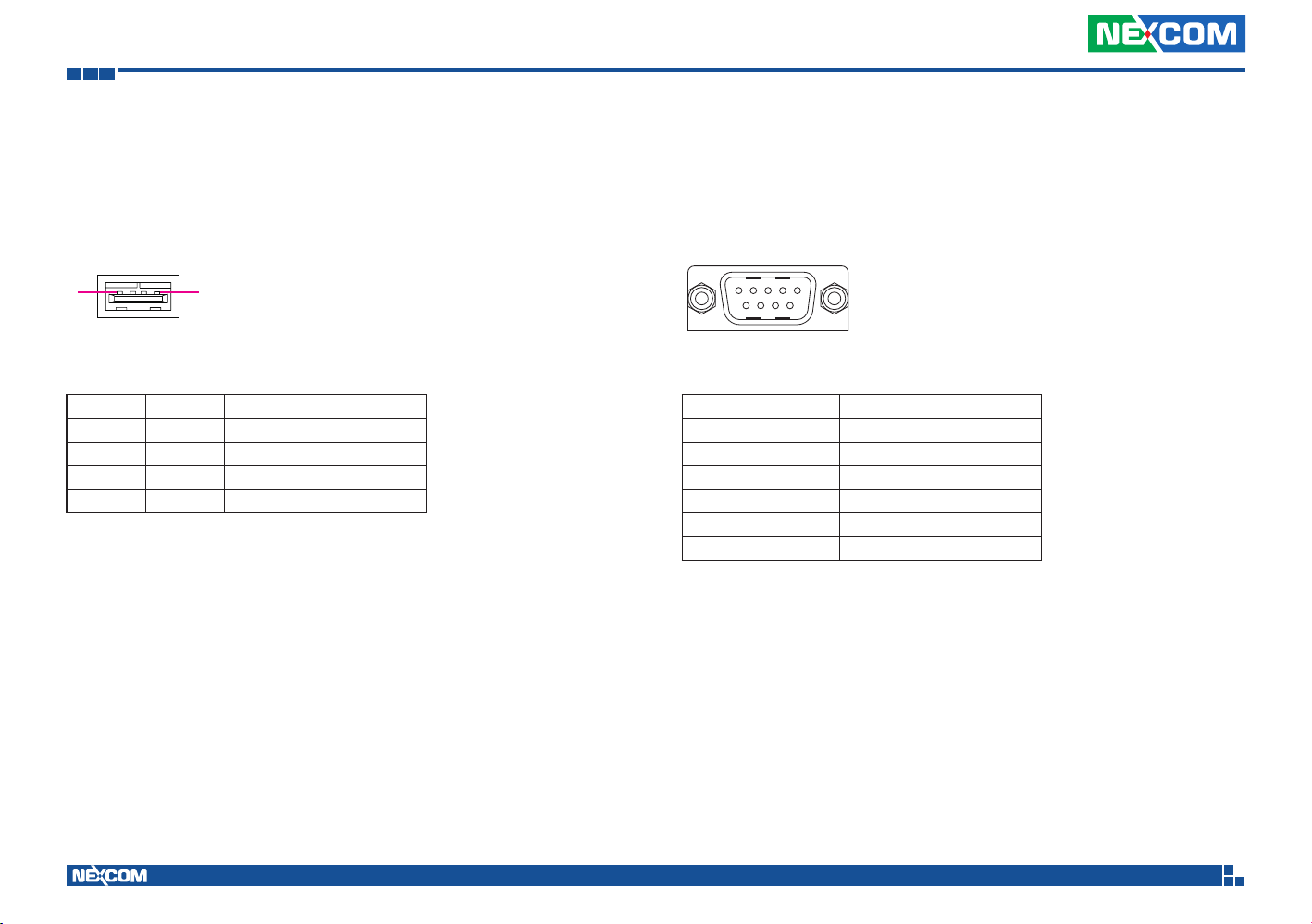
Appendix C: Pin Definition for Multiport Cable
USB Connector
Connector type: USB Female, Type A
Connector location: P6
1 4
P1 Pin P6 Pin Definition
6 1 USB1_POWER (+5V)
7 2 USB_2N_L (-)
8 3 USB_2P_L (+)
9 4 USB_GND (GND)
RS422/485 Connector
Connector type: DB9, Male
Connector location: P7
1 5
6 9
P1 Pin P7 Pin Definition
21 1 RS485_+
20 2 RS485_11 3 RS422_TX+
10 4 RS422_TX25 5 ISO_GND
6, 7, 8, 9 NC
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
60
VTC 1010 User Manual
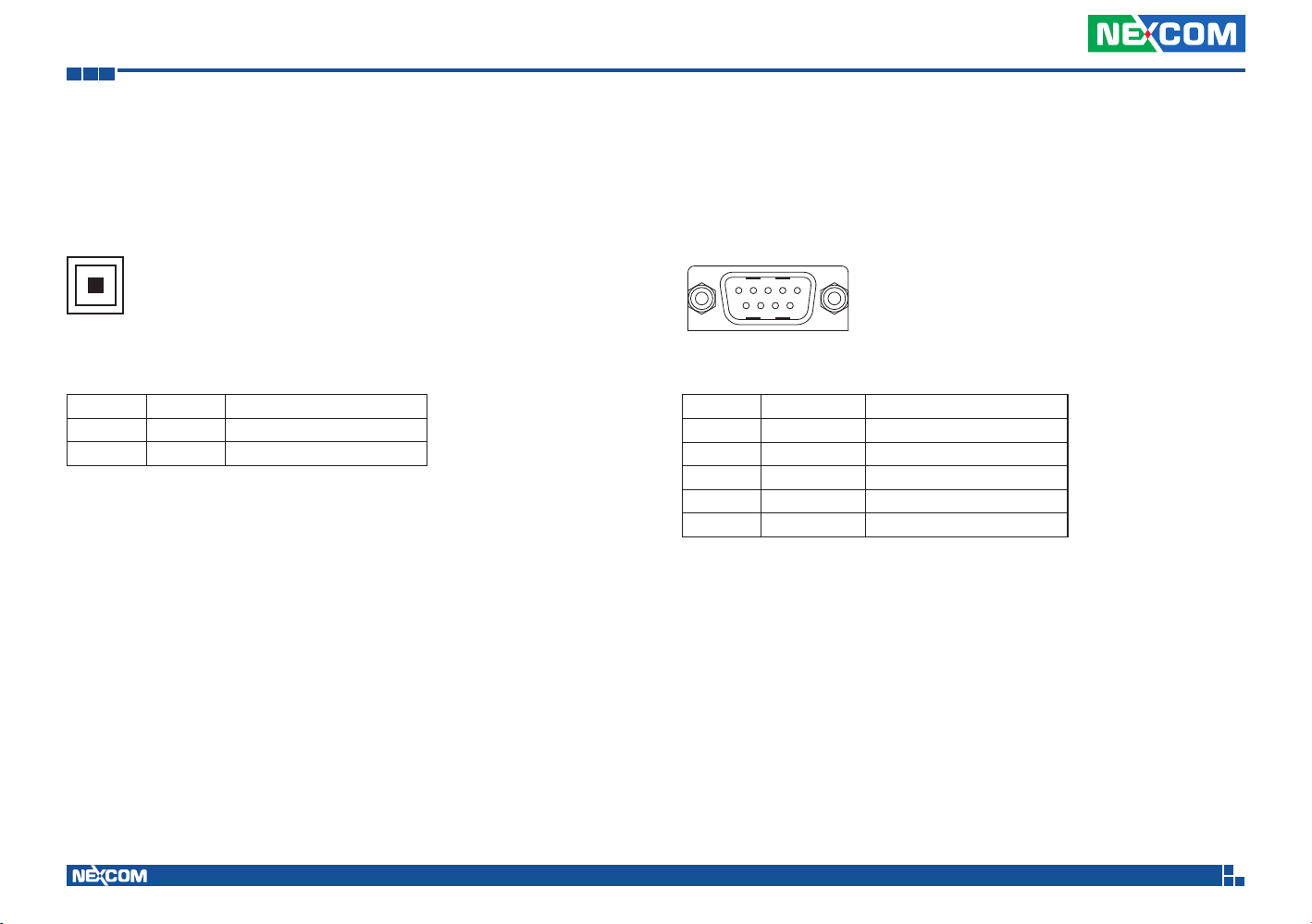
Appendix C: Pin Definition for Multiport Cable
Reset Button
Connector location: P8
P1 Pin P8 Pin Definition
41 1 Rear Panic (+)
22 2 ISO_GND (-)
Odometer Connector
Connector type: DB9, Male
Connector location: P9
1 5
6 9
P1 Pin P9 Pin Definition
52 1 DIRECTION
53 3 ODOMETER
54 5 1PPS
23 6 ISO_GND
2, 4, 7, 8, 9 NC
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
61
VTC 1010 User Manual
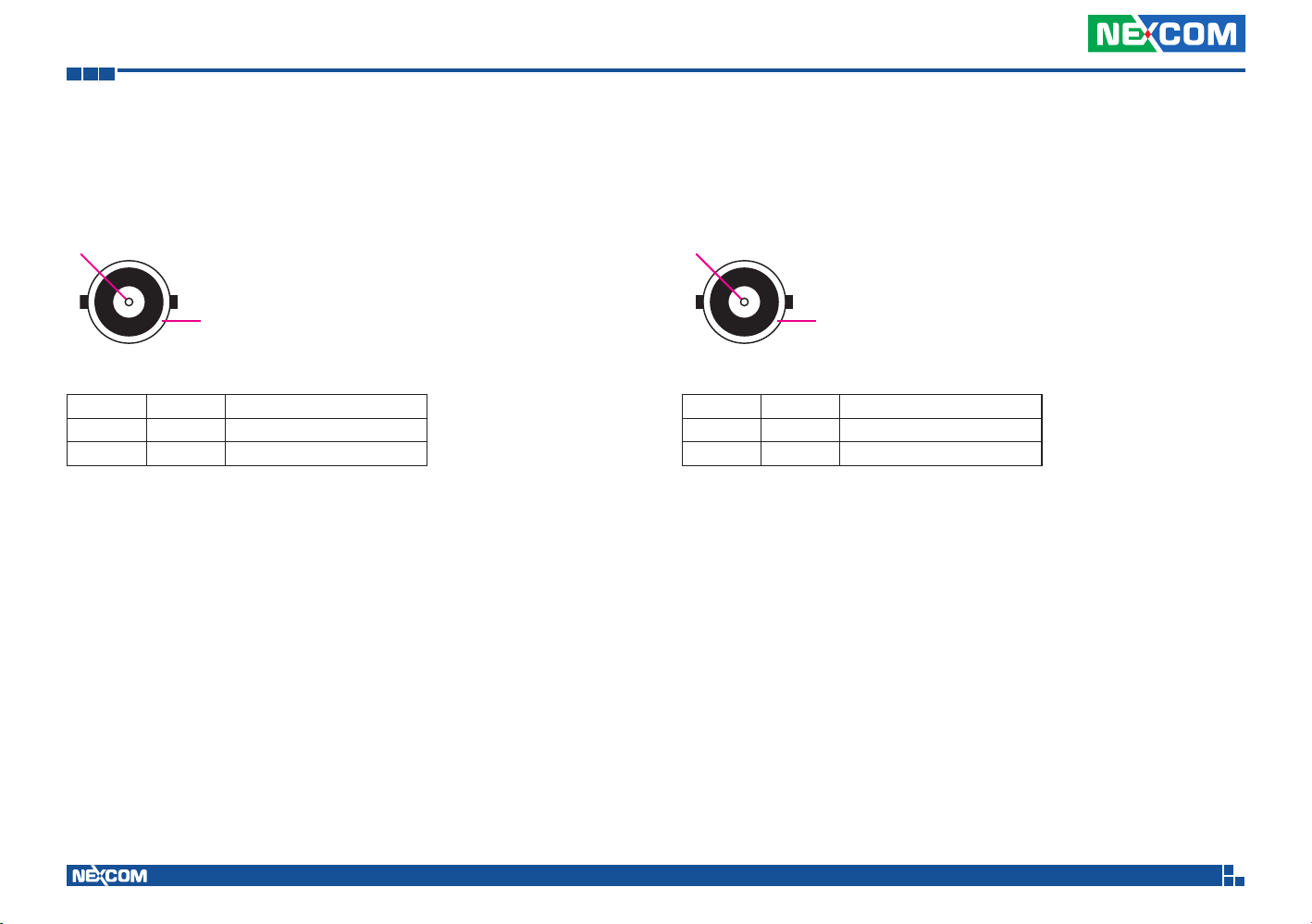
Appendix C: Pin Definition for Multiport Cable
A/V1 Jack
Connector type: BNC
Connector location: P10
1
2
P1 Pin P10 Pin Definition
56 1 CAP1_A (+)
22 2 ISO_GND (-)
A/V2 Jack
Connector type: BNC
Connector location: P11
1
2
P1 Pin P11 Pin Definition
57 1 CAP1_B (+)
23 2 ISO_GND (-)
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
62
VTC 1010 User Manual
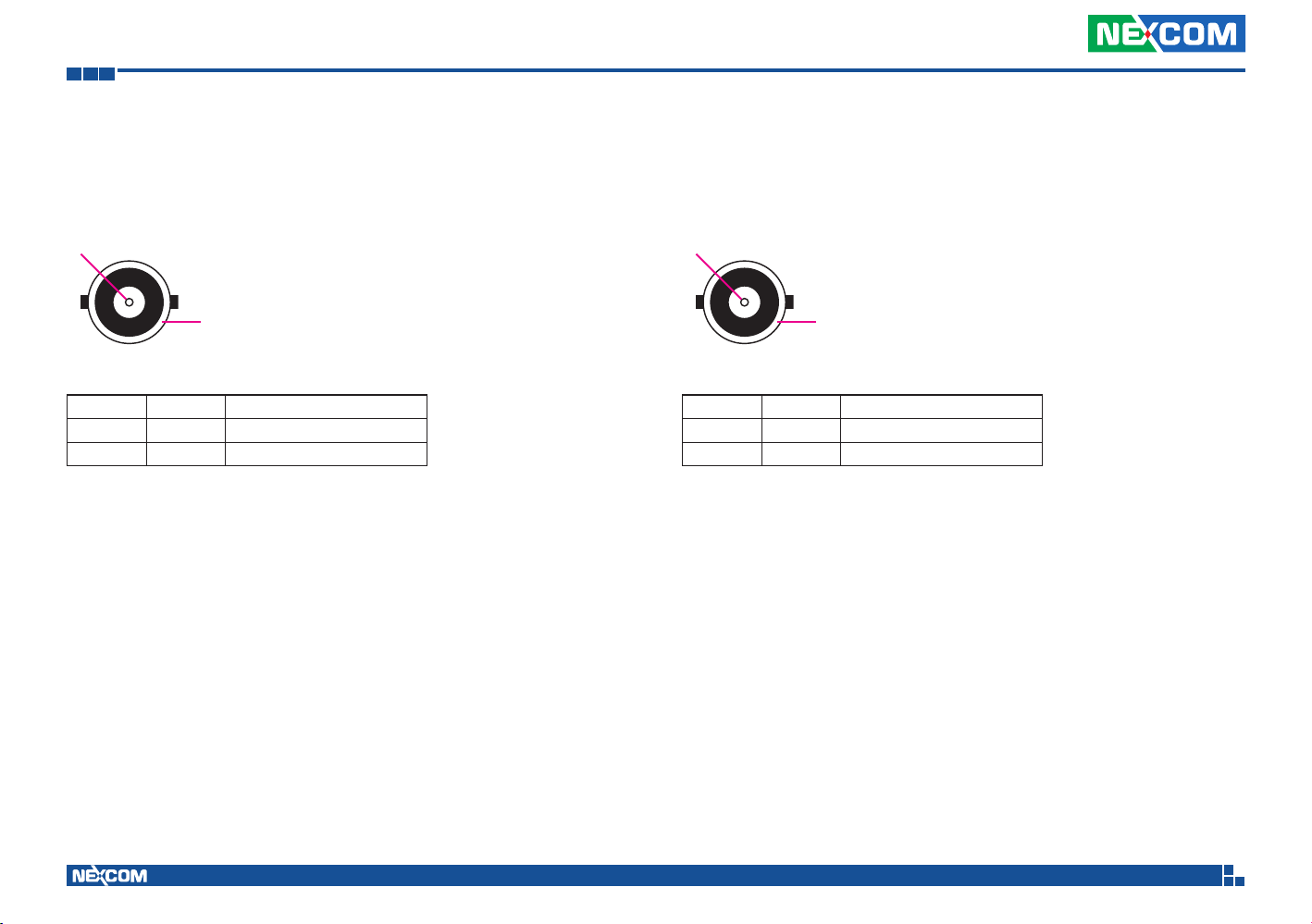
Appendix C: Pin Definition for Multiport Cable
A/V3 Jack
Connector type: RCA
Connector location: P12
1
2
P1 Pin P12 Pin Definition
36 1 CAP2_A (+)
24 2 ISO_GND (-)
A/V4 Jack
Connector type: RCA
Connector location: P13
1
2
P1 Pin P13 Pin Definition
55 1 CAP2_B (+)
25 2 ISO_GND (-)
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
63
VTC 1010 User Manual
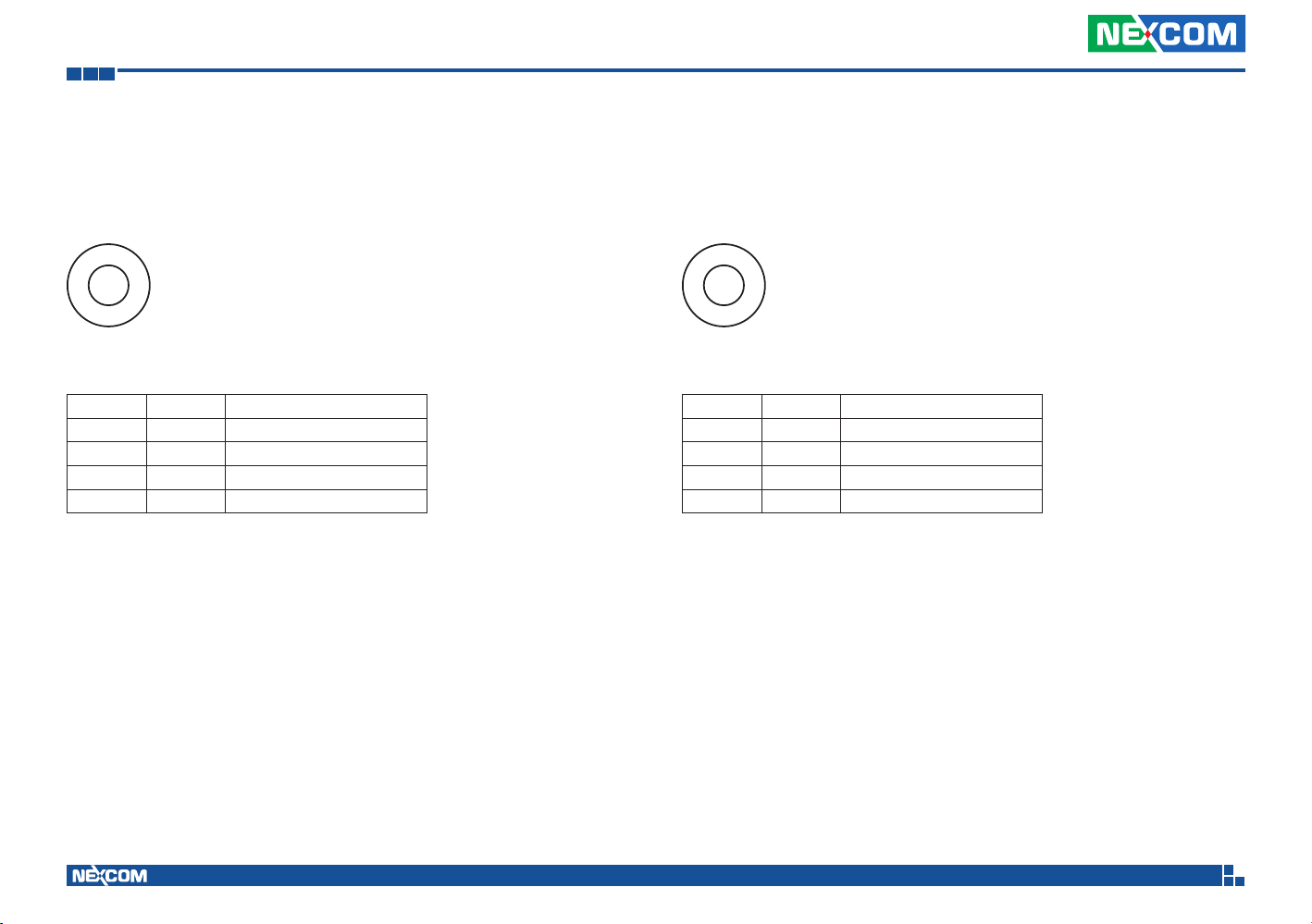
Appendix C: Pin Definition for Multiport Cable
Front Audio
Connector type: TRS 3.5mm
Connector location: P14
P1 Pin P14 Pin Definition
12 1 AGND
13 2 FRONT_L_C
15 4 Jack Detection
14 5 FRONT_R_C
Center Audio
Connector type: TRS 3.5mm
Connector location: P15
P1 Pin P15 Pin Definition
19 1 AGND
17 2 CEN_C
16 4 Jack Detection
18 5 LFE_C
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
64
VTC 1010 User Manual
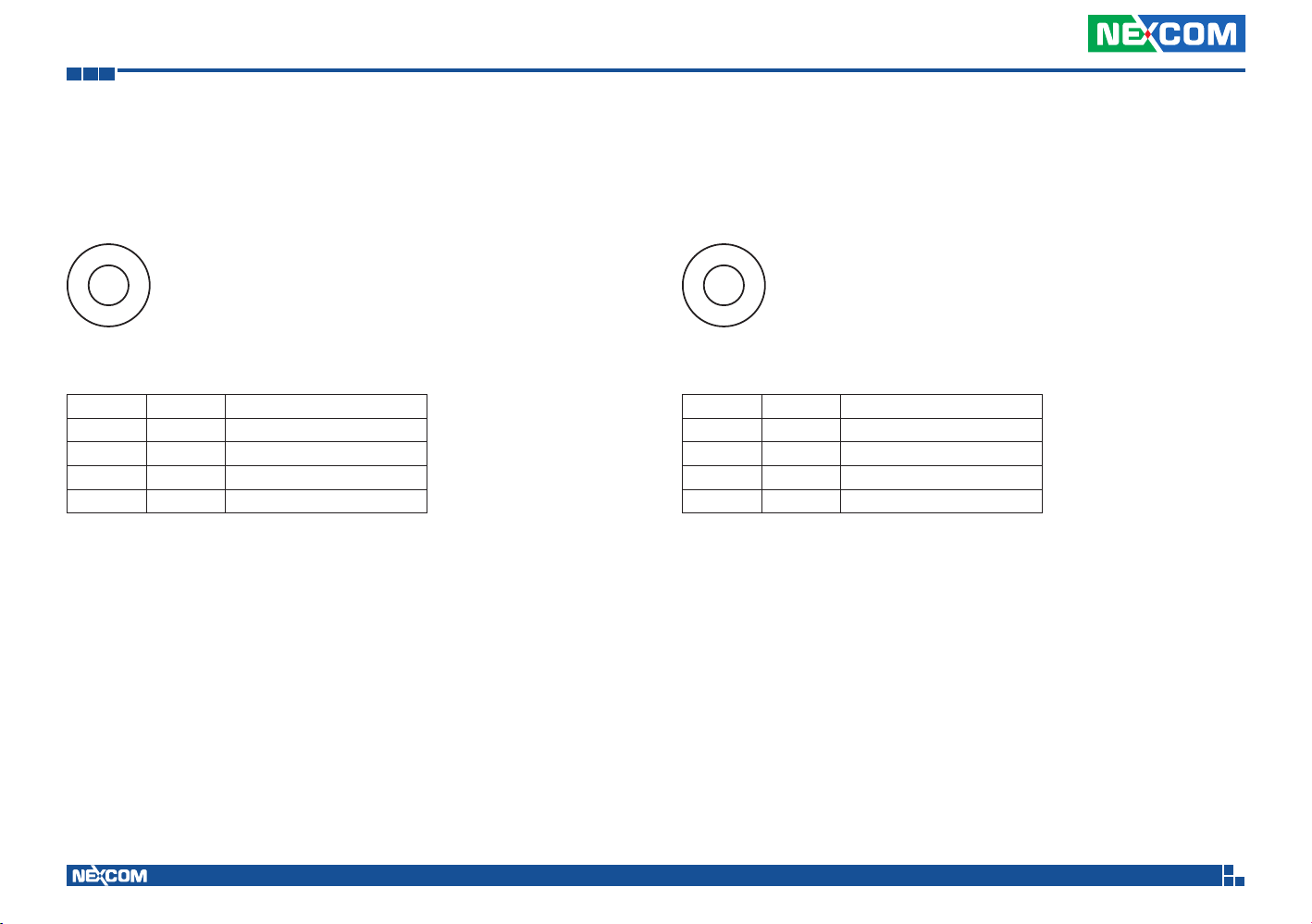
Appendix C: Pin Definition for Multiport Cable
Surround Audio
Connector type: TRS 3.5mm
Connector location: P16
P1 Pin P16 Pin Definition
42 1 AGND
43 2 SURR_OUT_L_C
45 4 Jack Detection
44 5 SURR_OUT_R_C
Rear Audio
Connector type: TRS 3.5mm
Connector location: P17
P1 Pin P17 Pin Definition
49 1 AGND
48 2 SIDE_L_C
46 4 Jack Detection
47 5 SIDE_R_C
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
65
VTC 1010 User Manual

Appendix D: Signal Connection of DI/DO
SIO-F-90-5.08mm
SIO-F-90-5.08mm
SW1
Appendix D: Signal Connection of DI/DO
GPIO Pinout Description SW1 Setting
GPIO1
GPIO5
GPIO2
CAN1_H
GPIO3
CAN1_L
GPIO4
GPIO6
ISO_GND
Note: By default, pin 1, 2 and 3 are configured for GPO, while pin 4, 5 and 6 are configured
for GPI.
1
6
2
7
3
8
4
9
5
P4
GPIO1
GPIO2
GPIO3
GPIO4
GPIO5
GPIO6
1
2
3
4
5
6
7
8
DIP SW 2X8
DIP SW 2X8
GPIO (SW1)
On Pull up VCC5
Off Don’t Care
Default Settings:
GPIO (SW1)
SW1.1~SW1.6 Pull up VCC5
PO
PO
16
15
14
13
12
11
10
9
330Ω
VCC5
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
66
VTC 1010 User Manual

Appendix D: Signal Connection of DI/DO
ExternalInternal
ExternalInternal
Digital Input
P4 connector for GPI signal (digital signal input)
The P4 has 3 digital input channels by default.
Wet Contact (default)
The GPI signals have a pull up resistor to 5V internally.
The figure below shows how to connect an external output source to one
of the input channel.
Dry Contact:
VCC5
13
12
RN11KRN1
1K
4
6115
G_IN6
G_IN5
G_IN4
GPIO1
GPIO5
GPIO2
CAN1_H
GPIO3
CAN1_L
GPIO4
GPIO6
ISO_GND
SIO-F-90-5.08mm
SIO-F-90-5.08mm
1
6
2
7
3
8
4
9
5
P4
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
External
Switch
Port
Register
ON (Short) GND 0
OFF (Open) OPEN 1
GPI
67
G_IN6
G_IN5
G_IN4
GPIO1
GPIO5
GPIO2
CAN1_H
GPIO3
CAN1_L
GPIO4
GPIO6
ISO_GND
SIO-F-90-5.08mm
SIO-F-90-5.08mm
1
6
2
7
3
8
4
9
5
P4
External power
Resistor
External
Switch
ON (Short) GND 0
OFF (Open) HIGH 1
Port
GPI
Register
VTC 1010 User Manual
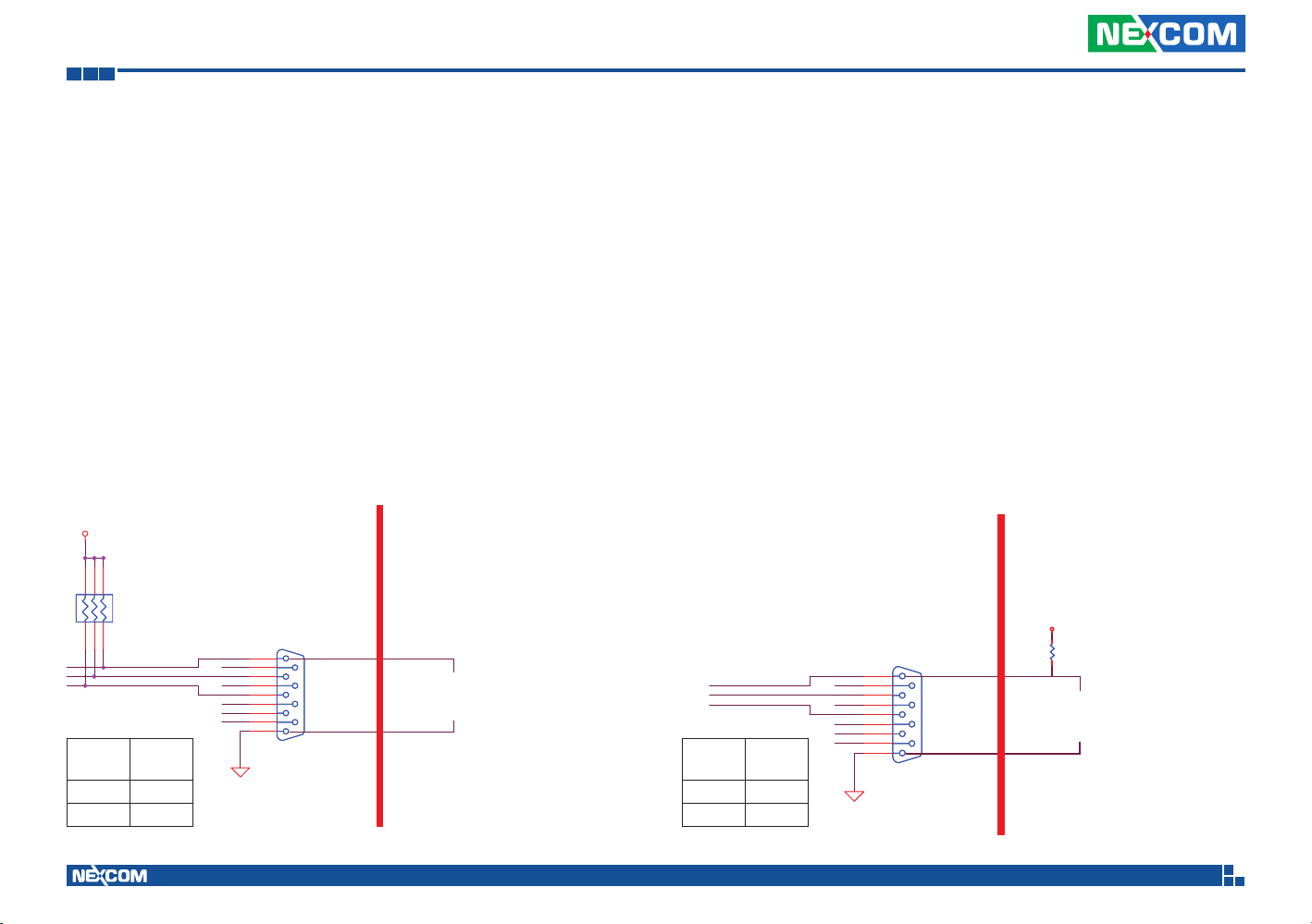
Appendix D: Signal Connection of DI/DO
ExternalInternal
ExternalInternal
Digital Output
P4 connector for GPO signal (digital signal output)
The P4 has 3 digital output channels by default. The signal connection of P4
support two connected methods for output signal type.
The output signal has two states, one is low level (driven to 0V from GPO
signal) other is open (high voltage is provided from external device).
Wet Contact (default)
The SW1 needs to switch to “ON” state. The GPO signal will have a pull up
resistor to 5V internally when you switch “SW1” to “ON” state. The output
signal has two states, one is low level (driven to 0V from GPO signal ) other
is high level (driven to 5V from GPO signal).
The figure below shows how to connect an external input source to one of
the output channel.
VCC5
Dry Contact
Each channel can accept 3~24Vdc voltage. And it is able to drive 150mA
current for low level.
The SW1 needs to switch to “OFF” state. The GPO signal will no have a pull
up resistor internally when you switch “SW1” to “OFF” state.
The figure below shows how to connect an external input source to one of
the output channel.
14
15
RN11KRN1
1K
3
1162
G_IN1
G_IN2
G_IN3
GPO
Register
1 HIGH
0 GND
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
Port
GPIO1
GPIO5
GPIO2
CAN1_H
GPIO3
CAN1_L
GPIO4
GPIO6
ISO_GND
SIO-F-90-5.08mm
SIO-F-90-5.08mm
1
6
2
7
3
8
4
9
5
P4
68
G_IN1
G_IN2
G_IN3
GPO
Register
1 OPEN
0 GND
Port
GPIO1
GPIO5
GPIO2
CAN1_H
GPIO3
CAN1_L
GPIO4
GPIO6
ISO_GND
SIO-F-90-5.08mm
SIO-F-90-5.08mm
1
6
2
7
3
8
4
9
5
P4
External power
Resistor
VTC 1010 User Manual

Appendix E: Vehicle Power Management Setup
Appendix E: Vehicle Power Management Setup
External Power Output Setting
VTC 1010 has four modes for external power output setting.
1. External +12V and By Pass Car Battery Turn On Simultaneously
2. External +12V and By Pass Car Battery Turn Off Simultaneously
3. External +12V Turn On Only
4. By Pass Car Battery Turn On Only
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
External Power
Turn On Booth
Turn Off Booth
Turn On +12V
Turn On By Pass Car Battery
External +12V & By Pass Car
Battery Power Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Startup and Shutdown Voltage Setting
Set the startup voltage to 11.5V or 23V and the shutdown voltage to 10.5V or 21V
If the input voltage is 12V: the startup voltage to 11.5V and the shutdown
voltage to 10.5V.
If the input voltage is 24V: the startup voltage to 23V and the shutdown
voltage to 21V.
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
Startup,Shutdown
(11.5, 10.5) / (23,21)
(12.0, 11.0) / (24,22)
(12.5, 11.0) / (25,22)
(12.5, 11.5) / (25,23)
Startup,Shutdown Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
69
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
VTC 1010 User Manual

Appendix E: Vehicle Power Management Setup
Set the startup voltage to 12.0V or 24V and the shutdown voltage to 11.0V or 22V
If the input voltage is 12V: the startup voltage to 12V and the shutdown
voltage to 11V.
If the input voltage is 24V: the startup voltage to 24V and the shutdown
voltage to 22V.
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
Startup,Shutdown
(11.5, 10.5) / (23,21)
(12.0, 11.0) / (24,22)
(12.5, 11.0) / (25,22)
(12.5, 11.5) / (25,23)
Startup,Shutdown Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Set the startup voltage to 12.5V or 25V and the shutdown voltage to 11.0V or 22V
If the input voltage is 12V: the startup voltage to 12.5V and the shutdown
voltage to 11V.
If the input voltage is 24V: the startup voltage to 25V and the shutdown
voltage to 22V.
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
Startup,Shutdown
(11.5, 10.5) / (23,21)
(12.0, 11.0) / (24,22)
(12.5, 11.0) / (25,22)
(12.5, 11.5) / (25,23)
Startup,Shutdown Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
70
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
VTC 1010 User Manual

Appendix E: Vehicle Power Management Setup
Set the startup voltage to 12.5V or 25V and the shutdown voltage to 11.0V or 22V
If the input voltage is 12V: the startup voltage to 12.5V and the shutdown
voltage to 11.5V.
If the input voltage is 24V: the startup voltage to 25V and the shutdown
voltage to 23V.
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
Startup,Shutdown
(11.5, 10.5) / (23,21)
(12.0, 11.0) / (24,22)
(12.5, 11.0) / (25,22)
(12.5, 11.5) / (25,23)
Startup,Shutdown Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Power-on Delay Setting
Disable Power-on Delay
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
[Disable]
[Disable]
External +12V & By Pass Car
Battery Poewer Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
71
VTC 1010 User Manual

Appendix E: Vehicle Power Management Setup
Enable Power-on Delay
Delay time can be set at 10sec/30sec/1min./5min./10min./15min./30min./1hour.
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
Power On Delay
Disable
Enable
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
Power On Delay Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Delay On Time Selection
Power Off Delay
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
Delay On Time selection
10 sec
30 sec
01 min
05 min
10 min
15 min
30 min
01 hour
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
Delay On Time Selection
Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
72
VTC 1010 User Manual

Appendix E: Vehicle Power Management Setup
Power-off Delay Setting
Disable Power-off Delay
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
[Disable]
[Disable]
External +12V & By Pass Car
Battery Poewer Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Enable Power-off Delay
Delay time can be set at 20sec/1min./5min./10min./30min./1hour/6hour/
18hour.
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
Power Off Delay
Disable
Enable
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
Delay Off Delay Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
73
VTC 1010 User Manual

Appendix E: Vehicle Power Management Setup
Aptio Setup Utility - Copyright (C) 2010 America Megatrends, Inc.
Advanced
Power Management Conguration
** External +12V & By Pass Car Battery Setting **
External Power
** External +12V & By Pass Car Battery Setting **
Input Voltage
Startup.Shutdown
**Delay Time Setting**
Power On Delay
Power Off Delay
Delay Off Time Selection
[Turn On Both]
9-36V
[(11.5.10.5)/(23,21)]
Delay On Time selection
20 sec
01 min
05 min
10 min
30 min
01 hour
06 hour
18 hour
Delay Off Time Selection
Setting
→←: Select Screen
↑↓: Select Item
Enter: Select
+/-: Change Opt.
F1: General Help
F2: Previous Values
F3: Optimized Defaults
F4: Save & Exit
ESC: Exit
Version 2.14.1219. Copyright (C) 2010 American Megatrends, Inc.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
74
VTC 1010 User Manual

Appendix F: OBDII Module Setup and Command
Appendix F: OBDII Module Setup and Command
OBDII Module
You can also type HEX code instead:
“41”, “54”, “5A”, “0D”
If you see strange characters instead of “>”, you may set the incorrect baud
rate. Please check baud rate. If you send the incorrect command, the
device will show a single question mark (“?”) to indicate your input is not
understood. If VTC fails to link to the BUS, it will show “PLEASE REBOOT”.
VTC series offer an option to integrate the OBDII module, VIOX-CAN01, into
VTC system. The form factor of this VIOX-CAN01 is proprietary and it can
support either SAE J1939 or SAE J1708 via connection in the first time. The
maximum VIOX-CAN01 installed in VTC series is up to three units. Please
note they are factory option.
VIOX-CAN01 Setup
When you start connecting VTC device to CAN bus device, you need a
terminal program to send and receive data. To use the terminal program,
please follow the setting below.
(1) Set the proper corresponding “COM” port and its data rate is 9600
(2) Set data bits at 8, stop bit at 1 and no parity bits.
After the setting, you will see the prompt with “>” character. This indicates
that the device is in the idle state and ready to receive characters on the
COM port.
If you do not see prompt string, please reset the device with ATR (reset)
command and then press the return key:
>ATR or >AT R (spaces are optional; and case is in-sensetive).
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
Once VTC connect to BUS, it will start to try which protocol is connected
either J1939 or J1708. Once it is determined, it will only accept the
successful protocol next time unless using ATR command to reset it. This
means you can change the protocol by reset command. After the reset
command, please power off the device and turn on it again.
In case, the device cannot find correct protocol after 180 seconds, it will
enter sleeping mode for power saving.
There are several output format available for the different application
including:
(1) Simple Data by ASCII Code
(2) Raw Data
(3) Packaged Messages by ASCII or HEX code.
The default setting is Simple Data Format. The device will send messages
out after it communicates with vehicle successfully. The output format can
be changed via setting the AT command. Please refer the following section
of AT command.
75
VTC 1010 User Manual

Appendix F: OBDII Module Setup and Command
AT Command Summary
@1 AT@1: Display version information
Setting RS232 baud rate. xy is baud rate parameter.
ATBR09: 9600
ATBR19: 19200
BRxy
ATBR38: 38400
ATBR57: 57600
ATBR99: 115200
ATE0: echo off(Default)
Eh
ATE1; echo on
T ATT: Terminate sending. To use ATS will continue it.
ATI : Request vehicle ID, the length is variable.
1.) J1708:
Output format: ASCII code
Byte 0:0x2A
Byte 1: Vehicle ID byte 1
Byte 2: Vehicle ID byte 2
Byte N:Vehicle ID byte N
Byte N+1: Check Sum=Byte 1+Byte2+…….+Byte N
Byte N+2:0x0D
Byte N+3:0x0A
I
N: Max 20
2.)J1939
Byte 0:0x2A
Byte 1: Vehicle ID byte 1
Byte 2: Vehicle ID byte 2
Byte N:Vehicle ID byte N
Byte N+1: Check Sun= Byte1+Byte2 +…..ByteN
Byte N+1:0x0D
Byte N+2:0x0A
N: Max 35
PA ATPA: Print data by ASCII CODE format
PH ATPH: Print data by HEX CODE format
ATRJ: Request J1939 FMS High Resolution Total Vehicle Distance
RJ
#33~#36
RH ATRH: Request Hino Truck Total vehicle distance (#33~#36)
ATS: Continue auto-send data every 100~200ms. To use ATT
S
will terminal it.
ATSS: Auto- send Simple Data every 100~200 ms.
SS
Refer to Simple Data format Protocol
ATSP: Auto-send Packaging Messages every 100~200 ms.
SP
Refer to Packaging Messages protocol.
ATSR: Auto-send J1939/J1708 Raw Data, Refer to Raw Data
SR
Protocol.
ATX: Request to send data of alternate, data format as
ATS/ATSP command.
For J1939 protocol:
X
Packing1→Packing2→Packing 3→Packing4→Packing5→
Packing6→Packing1
For J1708 protocol:
Packing1→Packing2→Packing 3→Packing4→Packing5→ Packing1
AT#xy: The command will print designated data by ASCII code.
“xy” is data address, it is decimal.
#xy
J1708: 00~53
J1939: 00~99.
EX: AT#01 , to get speed high byte.
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
76
VTC 1010 User Manual

Appendix F: OBDII Module Setup and Command
Simple Data Protocol: (ASCII CODE)
Data Description
HEAD @
Byte 0 ,
Byte 1 Speed , (0~255) KM/HR
Byte 2 ,
Byte 3 RPM High Byte (RPMHB)
Byte 4 ,
Byte 5 RPM Low Byte(RPMLB) , RPM=RPMHB*256+RPMLB
Byte 6 ,
Byte 7 Engine Loading, (0~100%)
Byte 8 ,
Byte 9 Battery Voltage (BV), = (BV+100)/10 (v)
Byte 10 ,
Byte 11 Engine Temperature( ET), =ET-40°C
Byte 12 ,
Byte 13 Throttle position 0~100 %
Byte 14 ,
Byte 15 Status , Note 2
Byte 16 ,
Byte 17 MAF (0~255), MAF RATE= MAF * 3;
Byte 18 ,
Byte 19 Distance : D1
Byte 20 ,
Byte 21 Distance: D2
Byte 22 ,
Byte 23 FU, Average Fuel Economy (km/L) =Fu /10
Byte 24 ,
Check sum (odd numbers)= Byte1+ Byte3+Byte5+
Byte 25
Byte7+Byte9+Byte11+ Byte13+ Byte15+Byte17+
Byte19+Byte21+Byte23
Byte 26 Carry return ( 0x0D )
Byte 27 Line feed ( 0x0A)
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
77
VTC 1010 User Manual
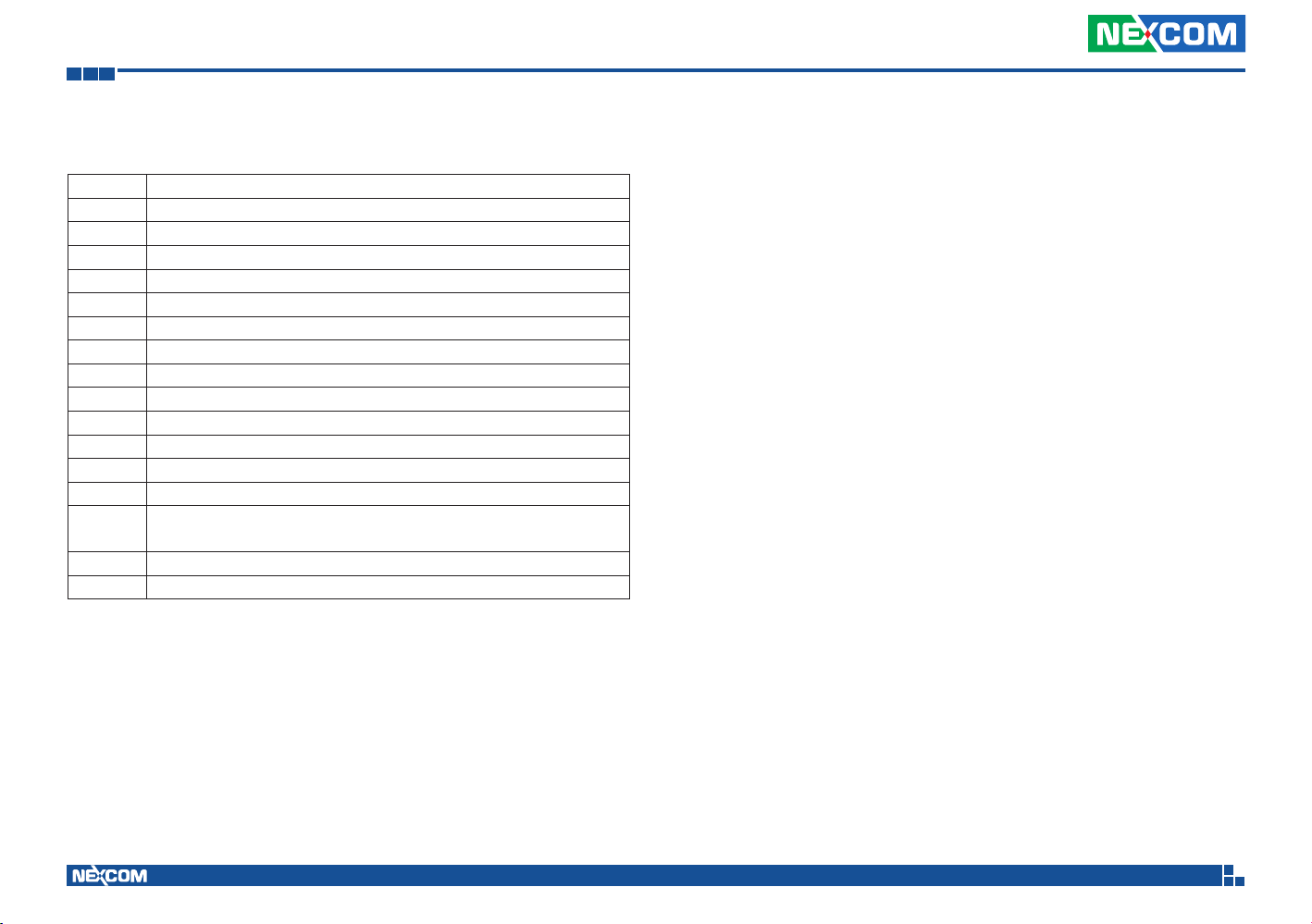
Appendix F: OBDII Module Setup and Command
Simple Data Protocol: (HEX CODE)
Data Description
HEAD @ (=0x40)
Byte 1 Speed , (0~255) KM/HR
Byte 2 RPM High Byte (RPMHB)
Byte 3 RPM Low Byte(RPMLB) , RPM=RPMHB*256+RPMLB
Byte 4 Engine Loading, (0~100%)
Byte 5 Battery Voltage (BV), = (BV+100)/10 (v)
Byte 6 Engine Temperature( ET), =ET-40°C
Byte 7 Engine Loading, (0~100%)
Byte 8 Status , Note 2
Byte 9 MAF (0~255), MAF RATE= MAF * 3;
Byte 10 Distance: D1
Byte 11 Distance: D2
Byte 12 FU, Average Fuel Economy (km/L) =Fu /10
Byte 13
Byte 14 Carry return ( 0x0D )
Byte 15 Line feed ( 0x0A)
TCheck sum (odd numbers)= Byte1+ Byte2+Byte3+ Byte4+
Byte5+Byte6+ Byte7+ Byte8+Byte9+ Byte10+ Byte11+Byte12
NOTE:
1.) Data format : ASCII CODE
@ , 7 8 , 0 E , 7 0 , 0 0 ,0 3 , 9 8 , 2 8 , Status ,MAF,D1,D2,Fu,CS
speed=78 km/hr
rpm=0x0E70= 3696
2.) status:
Bit 7:
0: Normal
1: Emergency Braking ( Acceleration < - 6 m/s2 )
Bit 6:
0: Brake OFF
1: Brake ON
Bit 5:
0: Clutch OFF
1: clutch ON
Bit 4:
0: Cruise Control OFF
1: Cruise Control ON
Bit 3:
0: Brake (ON/OFF) unavailable
1: Brake(ON/OFF) available
Bit 2:
0:Clutch (ON/OFF) unavailable
1: Clutch (ON/OFF) available
Bit 1:
0: Cruise Control (ON/OFF) unavailable
1: Cruise Control (ON/OFF) available
Bit 0:
0: NORMAL
1: DTC ON
2.) Distance = D1*256+D2
3.) Average Fuel Economy =Fu /10
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
78
VTC 1010 User Manual
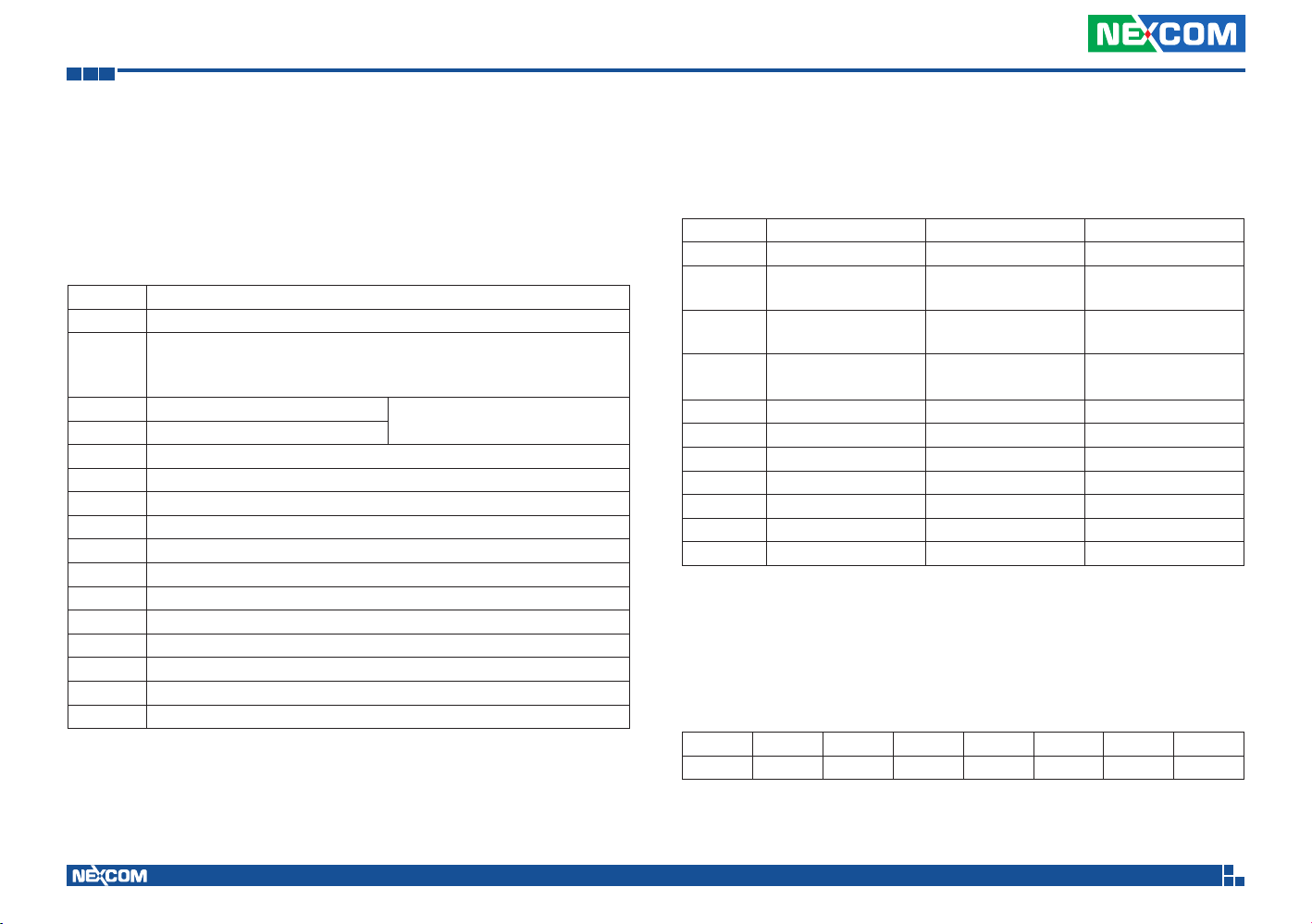
Appendix F: OBDII Module Setup and Command
J1939 Raw Data Protocol (HEX CODE)
Support for J1939 PGN / SPN access as defined in the J1939 standards.
This function will report all PGNs and their source node on the J1939
network.
Each SPN under this function should be set to a size of 32 bits.
J1939 Format
Byte 0 @ ( =0x40)
Bit4,3,2: Priority
Byte 1
Byte 2 PDU Format (PF)
Byte 3 PDU Specific (PS)
Byte 4 Source Address
Byte 5 Data1
Byte 6 Data2
Byte 7 Data3
Byte 8 Data4
Byte 9 Data5
Byte 10 Data6
Byte 11 Data7
Byte 12 Data8
Byte 13 Check Sum
Byte 14 0x0D
Byte 15 0x0A
Bit0: Data Page
Bit1,5,6,7:Reversed
PGN
J1708 Raw Data Protocol (HEX CODE)
This function will report all MID and PID that broadcasting on the J1708
network. Its data length is not fixed, please refer to SAEJ1708.
J1939 Format PIDs 128-191 PIDs 0-127
Byte 0 @ (= 0x40) @ (= 0x40) @ (= 0x40)
Byte 1
Byte 2
Byte 3
Byte 4 Data 1 Data2 Check Sum
Byte 5 Data 2 Check Sum 0x0D
Byte 6 …….. 0x0D 0x0A
Byte 7 Data N 0x0A
Byte 8 Check Sum
Byte 9 0x0D
Byte 10 0x0A
PIDs 0-127 describe data parameters that are one byte long.
PIDs 128-191 describe data parameters that consist of two bytes.
PIDs 192-253 The first byte following these PIDs will contain the number of
data parameter bytes.
EX:
MID=128
0x40 0x80 0x15 0x01 0x32 0xC8 0x0D 0x0A
64 128 21 1 50 200 130 10
PID=21 (Engine ECU temperature)
Data=50
Message
identification (MID)
Parameter
identification (PID)
Number of data
bytes
MID MID
PID PID
Data1 Data1
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
79
VTC 1010 User Manual
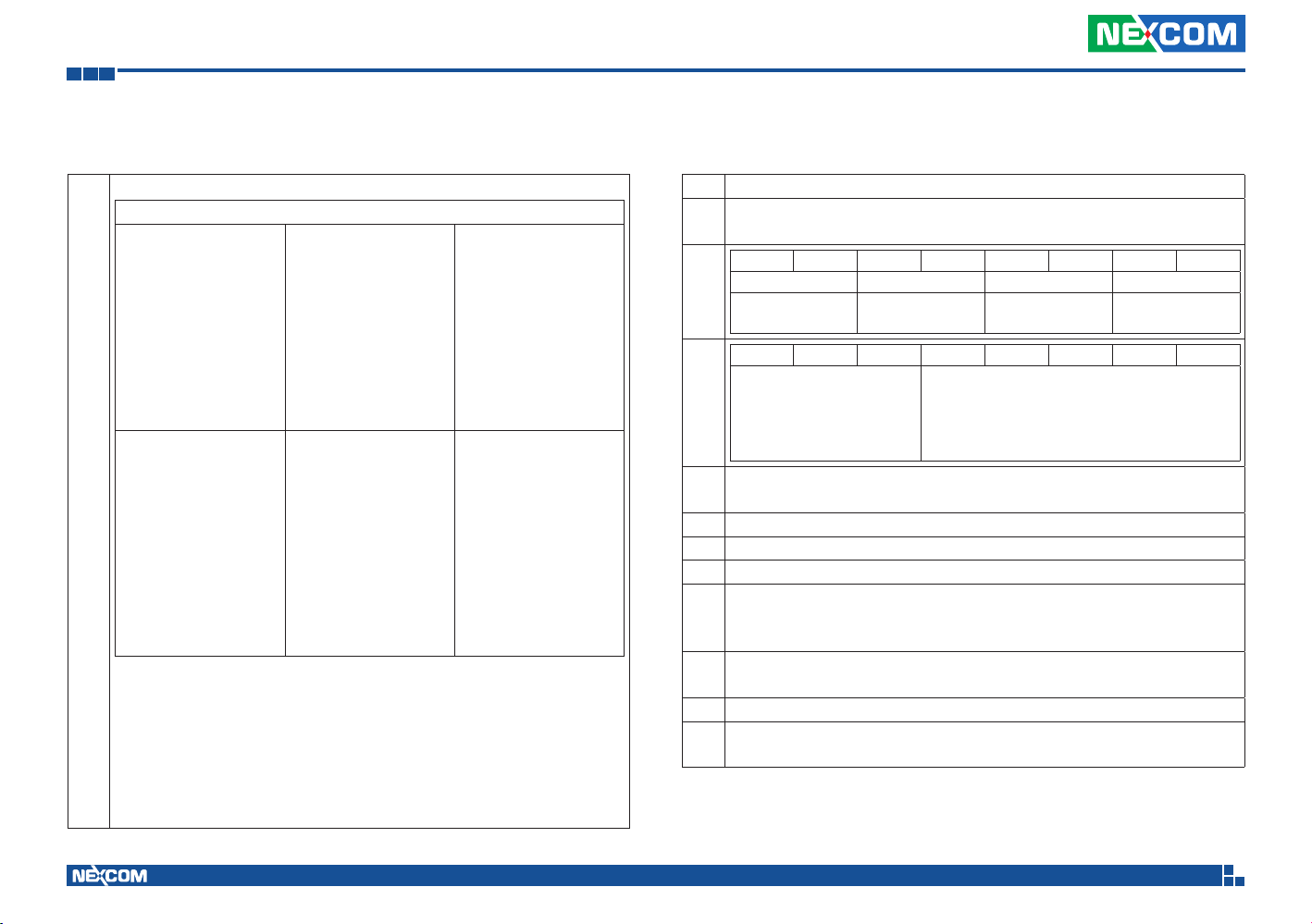
Appendix F: OBDII Module Setup and Command
J1939 Packaged Messages Protocol
ATS: send packaged messages by turns.
Response HEX CODE (default) after ATPH command
Packing 1:
Byte 0:“ @” ,( 0x40)
Byte 1: “1”, (0x31)
Byte 2: #00
Byte 3: #01 ......
Byte 19:#17
Byte 20:
Check sum =
Byte2 + ..+Byte 19
Byte 21: 0X0D
Byte 22: 0X0A
Packing 4:
Byte 0:“ @” ,( 0x40)
Byte 1: “a”,(0x41)
Byte 2: #54
S
Byte 3: #55 ......
Byte 19:#71
Byte 20:
Check sum =
Byte2 + ..+Byte 19
Byte 21: 0X0D
Byte 22: 0X0A
Packing 2:
Byte 0: “ @” ,( 0x40)
Byte 1: “2”,(0x32)
Byte 2: #18
Byte 3: #19 ......
Byte 19:#35
Byte 20:
Check sum = Byte2
+ ..+Byte 19
Byte 21: 0X0D
Byte 22: 0X0A
Packing 5:
Byte 0: “ @” ,( 0x40)
Byte 1: “b”,(0x42)
Byte 2: #72
Byte 3: #73 ......
Byte 19:#89
Byte 20:
Check sum = Byte2
+ ..+Byte 19
Byte 21: 0X0D
Byte 22: 0X0A
Packing 3:
Byte 0: “ @” ,( 0x40)
Byte 1: “3”,(0x33)
Byte 2: #36
Byte 3: #37 ......
Byte 19:#53
Byte 20:
Check sum = Byte2
+ ..+Byte 19
Byte 21: 0X0D
Byte 22: 0X0A
Packing 6:
Byte 0: “ @” ,( 0x40)
Byte 1: “c”,(0x43)
Byte 2: #90
Byte 3: #91 ......
Byte 14:#102
Byte 19:0
Byte 20:
Check sum = Byte2
+ ..+Byte 19
Byte 21: 0X0D
Byte 22: 0X0A
NOTE :
1. AT#00 ~ AT#102 respond ASCII CODE format data.
2. Packing 6, Byte15~Byte19 not defined (set to ”0”)
3. After ATPA command, byte 21& 22 were ignored.
4. This is the common J1939 measurement overview showing which
measurements are available. Note that not all measurements are
supported by the individual engines.
#00 Speed Low Byte (SLB)
Speed High Byte (SHB)
#01
speed=(SHB*256+SLB)/256
B7 B6 B5 B4 B3 B2 B1 B0
Clutch switch Brake switch NOT USED Cruise control active
#02
00 = pedal released
01 = pedal depressed
B7 B6 B5 B4 B3 B2 B1 B0
B7: Emergency brake(-6m/s2)
B6: speed up (6m/s2)
#03
B5: Double Emergency brake
(over -12m/s2)
1: Enable, 0:Disable
0.4 % / Bit gain, Accelerator Pedal Position(APP) , 0 to 100 %
#04
APP= Data* 0.4
00 = pedal released
01 = pedal depressed
PTO state
00000 = off/disabled
00101 = Set
11111 = not available
00 = switched off
01 = switched on
#05 Engine Total Fuel used 0,5 L / Bit gain , ETF1
#06 Engine Total Fuel used 0,5 L / Bit gain , ETF2
#07 Engine Total Fuel used 0,5 L / Bit gain , ETF3
Engine Total Fuel used 0,5 L / Bit gain , ETF4
#08
Engine Total Fuel used
=((ETF4*256*256*256)+(ETF3*256*256)+(ETF2*256)+ETF1)*0.5
Fuel Level (FL) , 0 to 100 %, 0.4 %/bit
#09
Fuel Level=FL*0.4
#10 RPM Low byte, RL
RPM High byte, RH
#11
RPM= (RH*256+ RL)* 0.125
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
80
VTC 1010 User Manual
Appendix F: OBDII Module Setup and Command
B7 B6 B5 B4 B3 B2 B1 B0
NOT USED Engine Starter Mode
B7: 1, Total Vehicle Distance is provided by vehicle ECU
0, Total Vehicle Distance is calculation value
B3~B0:
0000 start not requested
0001 starter active, gear not engaged
0010 starter active, gear engaged
0011 start finished; starter not active after having been actively
engaged ?
#12
(after 50ms mode goes to 0000)?
0100 starter inhibited due to engine already running
0101 starter inhibited due to engine not ready for start (preheating)
0110 starter inhibited due to driveline engaged
0111 starter inhibited due to active immobilizer
1000 starter inhibited due to starter over-temp
1001-1011 Reserved
1100 starter inhibited - reason unknown
1101 error
1111 not available
Axle location The value 0xFF indicates not available.
B7 B6 B5 B4 B3 B2 B1 B0
Axle location Bit-mapped position
number counting front to back facing
forward
#13
F = not available
position number, counting front to
back on the vehicle. B7,B6,B5,B4
Axle location Bit-mapped position
number counting front to back facing
forward.
Tire location Bit-mapped counting left
to right facing forward
F = not available
The low order 4 bits represent a
position number, counting left to right
when facing in the direction of normal
vehicle travel
#14 Axle weight 0.5 kg / Bit gain (Low Byte),AWL
Axle weight 0.5 kg / Bit gain (High Byte), AWH
#15
Weight=(AWH*256+AWL)*0.5
#16 Engine total hours of Operation, EH1
#17 Engine total hours of Operation, EH2
#18 Engine total hours of Operation, EH3
Engine total hours of Operation, EH4
#19
Accumulated
time=((EH4*256*256*256)+(EH3*256*256)+(EH2*256)+EH1)*0.05
#20
Vehicle identification number, aabbccddeeffgghh (If the Vehicle ID
|
contains more than 8 Bytes then #20~#27 are “00”, please use ATI
#27
command to request.
#20 aa
#21 bb
#22 cc
#23 dd
#24 ee
#25 ff
#26 gg
#27 hh
#28 Engine Percent Load At Current Speed ( 0~125 %)
#29
SW-version supported for trucks, Version number in the format
|
ab.cd where this byte represents ASCII code #29 : “a” , #30: ‘b’,
#32
#31:’c’ , #32:’d’
#33
High Resolution Total Vehicle Distance, 5 m/bit, 0 to 21,055,406 km
|
=((D4*256*256*256)+(D3*256*256)+(D2*256)+D1)*0.005 (KM)
#36
#33 D1
#34 D2
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
81
VTC 1010 User Manual

Appendix F: OBDII Module Setup and Command
#35 D3
#36 D4
#37
The distance which can be traveled by the vehicle before the next
|
service inspection is required
#38
SERV=(V2*256+V1)*5-160635 (KM)
#37 V1
#38 V2
B7 B6 B5 B4 B3 B2 B1 B0
Vehicle
motion(B7,B6):
00 = Vehicle
#39
motion not
detected
01 = vehicle
motion detected
B7 B6 B5 B4 B3 B2 B1 B0
Vehicle Overspeed Driver 1 card Driver 1 time related state
Driv. 2 working stat
state (B5,B4,B3)
000 = Rest
001 = Driver available
010 = Work
011 = Drive
110 = Error
111 = not available
G
°
Driv. 1 working state
(B2,B1,B0):
000 = Rest
001 = Driver available
010 = Work
011 = Drive
110 = Error
111 = not avaiable
Vehicle Over speed (B7,B6)°GIndicates whether the vehicle is
exceeding the legal speed limit set in the tachograph.
00 = No over speed
01 = Over speed Driver 1 card (B5,B4)
00 = Card not present
01 = Card present
Driver 1 time related state (B3,B2,B1,B0)
#40
approaches or exceeds working time limits (or other limits).
GIndicates if the driver
°
0000 = normal
0001 = 15 min bef. 4.5 h
0010 = 4.5 h reached
0011 = 15 min bef. 9 h
0100 = 9 h reached
0101 = 15 min bef. 16 h
0110 = 16h reached
1110 = Error
1111 = not available
B7 B6 B5 B4 B3 B2 B1 B0
Driver 2 time related state (B3,B2,B1,B0)
GIndicates if the driver approaches or
exceeds working time limits (or other limits).
0000 = normal
0001 = 15 min bef. 4.5 h
0010 = 4.5 h reached
0011 = 15 min bef. 9 h
0100 = 9 h reached
0101 = 15 min bef. 16 h
0110 = 16h reached
1110 = Error
1111 = not available
Handling
information
#41
NOT USED
Direction indicator
Driver 2 card (B5,B4)
00 = Card not
present
01= Card present
B7 B6 B5 B4 B3 B2 B1 B0
Tachgraph
performance
Direction indicator (B7,B6)°G
00 = Forward
01 = Reverse Tachgraph performance (B5,B4)
#42
00 = Normal performance
01 = Performance analysis Handling information (B3,B2)
00 = no handling information
01 = handling information System event (B1,B0)
00 = no tachogr. Event
01 = tachogr. Event
#43
Tachogr. vehicle speed 1/256 km/h Bit gain
|
Speed= ((VS2*256)+VS1)/256
#44
#43 VS1
#44 VS2
°
System event
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
82
VTC 1010 User Manual

Appendix F: OBDII Module Setup and Command
Engine Coolant Temperature(ECT) , -40 to 210 deg C
#45
ECT=data-40°C
Engine Turbocharger Boost Pressure(ETBP), 2 kPa/bit , 0~500 KPA
#46
ETPB=data *2 (KPA)
Engine Intake Manifold 1 Temperature(EIMT) , -40 to 210 deg C
#47
EIMT=data-40°C
Bit7,6 Anti-Lock Braking (ABS) Active
00 - ABS passive but installed
01 - ABS active
#48
10 – Reserved
G
°
11 - Not available
Bit5~Bit0: Resvered.
Brake Pedal Position (BPP), 0.4 %/bit, 0~100%
#49
BPP=data*0.4 (%)
Parking and/or Trailer Air Pressure(PTAP), 8 kPa/bit
#50
PTAP=data *8 (KPA)
Service Brake Air Pressure Circuit #1 (SBAPC1), 8 kPa/bit
#51
SBAPC1=data*8 (KPA)
Service Brake Air Pressure Circuit #2 (SBAPC2), 8 kPa/bit
#52
SBAPC2=data*8 (KPA)
Parking Brake Switch
#53
00 = Parking brake not set
01 = Parking brake set
Bit 1 ,Bit 0: Diagnostics supported
00 = diagnostics is not supported
01 = diagnostics is supported
10 = reserved
11 = don´t care
Bit 3 ,Bit 2: Requests supported
#54
00 = request is not supported
01= request is supported
10 = reserved
11 = don´t care
Bit4~Bit7:Resvered
Ambient Air Temperature: Temperature of air surrounding vehicle.
#55
AAT=(AATH* 256+AATL)*0.03125 -273 deg C
|
#55: AATL
#56
#56: AATH
Door Control 1:
Bit 7,Bit6: Status 2 of doors
00 = all bus doors disabled
01 = at least 1 bus door enabled
10 = error
11 = not available
Bit 5, Bit4: Ramp/Wheel chairlift
00 = inside bus
#57
01 = outside bus
10 = Error
11 = not available
Bit 3,2,1,0 : Position of doors
0000 = at least 1 door is open
0001 = closing last door
0010 = all doors closed
1110 = Error
1111 = not available
Door Control 2, #58~#65
Lock Status:
locked→doors cannot be operated by the driver or a passenger
unlocked→door may be operated by the driver or a passenger
#58
Open Status:
|
closed→door is completely closed
#56
open→door is not completely closed
Enable Status:
disabled→door cannot be opened by a passenger
enabled→door can be opened by a passenger
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
83
VTC 1010 User Manual

Appendix F: OBDII Module Setup and Command
Bit 7, Bit 6: Lock
Status Door 2
#58
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit 7, Bit 6: Open
Status Door 3
#59
00 = Closed
01 = Open
10 = Error
11 = Not available
Bit 7, Bit 6: Enable
Status Door 4
#60
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
Bit 7, Bit 6: Lock
Status Door 6
#61
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit 7, Bit 6: Open
Status Door 7
#62
00 = Closed
01 = Open
10 = Error
11 = Not available
B7 B6 B5 B4 B3 B2 B1 B0
Bit 5,Bit 4: Enable
Status Door 1
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
B7 B6 B5 B4 B3 B2 B1 B0
Bit 5, Bit 4: Lock
Status Door 3
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
B7 B6 B5 B4 B3 B2 B1 B0
Bit 5, Bit 4: Open
Status Door 4
00 = Closed
01 = Open
10 = Error
11 = Not available
B7 B6 B5 B4 B3 B2 B1 B0
Bit 5, Bit 4: Enable
Status Door 5
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
B7 B6 B5 B4 B3 B2 B1 B0
Bit 5, Bit 4: Lock
Status Door 7
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit 3,Bit 2: Open
Status Door 1
00 = Closed
01 = Open
10 = Error
11 = Not available
Bit 3, Bit 2: Enable
Status Door 2
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
Bit 3, Bit 2: Lock
Status Door 4
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit 3, Bit 2: Open
Status Door 5
00 = Closed
01 = Open
10 = Error
11 = Not available
Bit 3, Bit 2: Enable
Status Door 6
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
Bit 1,Bit 0: Lock
Status Door 1
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit 1, Bit 0: Open
Status Door 2
00 = Closed
01 = Open
10 = Error
11 = Not available
Bit 1, Bit 0: Enable
Status Door 3
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
Bit 1, Bit 0: Lock
Status Door 5
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit1, Bit 0: Open
Status Door 6
00 = Closed
01 = Open
10 = Error
11 = Not available
B7 B6 B5 B4 B3 B2 B1 B0
Bit 7, Bit 6: Enable
Status Door 8
#63
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
Bit 7, Bit 6: Lock
Status Door 10
#64
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit 3, Bit 2: Enable
Status Door 10
#65
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
B7 B6 B5 B4 B3 B2 B1 B0
B7 B6 B5 B4 B3 B2 B1 B0
Bit 5, Bit 4: Open
Status Door 8
00 = Closed
01 = Open
10 = Error
11 = Not available
Bit 5, Bit 4: Enable
Status Door 9
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
Bit1, Bit 0: Open
Status Door 10
00 = Closed
01 = Open
10 = Error
11 = Not available
Time / Date:
#66 : Second=data * 0.25
#66
#67 : Minutes=data
|
#68 : Hours=data
#69 : Month=data
#71
#70 : Day=data * 0.25
#71 : Year=data-1985 (1985 to 2235 years)
Alternator Status
B7 B6 B5 B4 B3 B2 B1 B0
Bit 7, Bit6:
Alternator Status 4
#72
00 = not charging
01 = charging
10 = error
11 = not available
Bit 5, Bit4:
Alternator Status 3
00 = not charging
01 = charging
10 = error
11 = not available
Bit 3, Bit 2: Lock
Status Door 8
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit 3, Bit 2: Open
Status Door 9
00 = Closed
01 = Open
10 = Error
11 = Not available
Bit 3, Bit 2:
Alternator Status 2
00 = not charging
01 = charging
10 = error
11 = not available
Bit1, Bit 0: Enable
Status Door 7
00 = Disabled
01 = Enabled
10 = Error
11 = Not available
Bit1, Bit 0: Lock
Status Door 9
00 = Unlocked
01 = Locked
10 = Error
11 = Not available
Bit 1, Bit 0:
Alternator Status 1
00 = not charging
01 = charging
10 = error
11 = not available
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
84
VTC 1010 User Manual

Appendix F: OBDII Module Setup and Command
Selected Gear = data -125negative gear are reverse gears
#73
00000000 = neutral
11111011 = park
Current Gear=data-125
negative gear are reverse gears
#74
00000000 = neutral
11111011 = park
Bellow Pressure Front Axle Left
#75
Information of the pressure of the air suspension bellow at the left
|
side of the front axle
#76
Pressure= ((BPFAL2*256)+BPFAL1)* 0.1 ,KPA
#75 BPFAL1
#76 BPFAL2
Bellow Pressure Front Axle Right
#77
Information of the pressure of the air suspension bellow at the left
|
side of the front axle
#78
Pressure= ((BPFAR2*256)+BPFAR1)* 0.1 ,KPA
#77 BPFAR1
#78 BPFAR2
Bellow Pressure Rear Axle Left
#79
Information of the pressure of the air suspension bellow at the left
|
side of the front axle
#80
Pressure= ((BPRAL2*256)+BPRAL1)* 0.1 ,KPA
#79 BPRAL1
#80 BPFAR2
Bellow Pressure Rear Axle Right
#81
Information of the pressure of the air suspension bellow at the left
|
side of the
#82
front axle
Pressure= ((BPRAR2*256)+BPRAR1)* 0.1 ,KPA
#81 BPRAL1
#82 BPFAR2
Driver’s Identification (Driver 1 & Driver 2 identification)
#83
#83 #84 #85 #86 #87 #88 #89 #90
|
#90
The driver ID is only available if a digital tachograph is present
Engine Fuel Rate (EFR). Amount of fuel consumed by engine per
#91
liter of hour.
|
EFR=(EFR2*256+EFR1)* 0.05 , L/h
#92
Data Range: 0 to 3,212.75 L/h
#91 EFR1
#92 EFR2
Engine Instantaneous Fuel Economy(EIFE). Current fuel economy at
#93
current vehicle velocity.
|
EIFE=(EIFE2*256+EIFE1) / 512 , km/L
#94
Data Range: 0 to 125.5 km/L
FMS Tell Tale Status
#95
#
#95 #96 #97 #98 #99 #100 #101 #102
|
The Tell Tale Status information is derived from information
102
displayed to the
driver’s dashboard.
Bit 3,2,1,0: Telltale Block ID
Bit 7,6,5,4: Telltale Status 1
1000 = off
1001 = Cond. Red
#95
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
85
VTC 1010 User Manual

Appendix F: OBDII Module Setup and Command
Bit 3,2,1,0: Telltale Status 2
1000 = off
1001 = Cond. Red
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
#96
Bit 7,6,5,4: Telltale Status 3
1000 = off
1001 = Cond. Red
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
Bit 3,2,1,0: Telltale Status 4
1000 = off
1001 = Cond. Red
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
#97
Bit 7,6,5,4: Telltale Status 5
1000 = off
1001 = Cond. Red
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
Bit 3,2,1,0: Telltale Status 6
1000 = off
1001 = Cond. Red
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
#98
Bit 7,6,5,4: Telltale Status 7
1000 = off
1001 = Cond. Red
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
Bit 3,2,1,0: Telltale Status 8
1000 = off
1001 = Cond. Red
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
#99
Bit 7,6,5,4: Telltale Status 9
1000 = off
1001 = Cond. Red
1010 = Cond. Yellow
1011 = Cond. Info
1100–1110 = Reserved
1111 = not available
Copyright © 2013 NEXCOM International Co., Ltd. All Rights Reserved.
86
VTC 1010 User Manual
 Loading...
Loading...