

Page 1
Pilot 3380
Fish 4432 / 4433
FISHFINDERS
Operation Manual
AUTOPILOT
Installation and
www.navman.com
www.navman.com
Page 2

Contents
1 Introdu ction .......................................................................................................................................... 5
1-1 Benefits of the FISH 4432/4433 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1-2 How the FISH 4432/4433 works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Basic Op eration ......................................................................................................................................6
3 Setti ng up the FISH 4432/4433 ............................................................................................................... 8
3-1 Setup > System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
3-2 Setup > Sonar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3-3 Setup > Fuel
3-4 Setup > Logs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3-5 Setup > Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3-6 Setup > Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3-7 Setup > Comms (4433 only) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
3-8 Setup > Calibrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4 Using the FISH 4432 /4 433 ..................................................................................................................... 16
4-1 Interpreting the display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4-2 Single and Dual frequency fishfinding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
4-3 Fish detection and display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4-4 Gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4-5 Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5 The Disp lays ......................................................................................................................................... 23
5-1 Sonar display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
5-2 Sonar Zoom display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
5-3 Sonar Bottom display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
5-4 Sonar 83/200 display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
5-5 Sonar A-Scope display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
5-6 A-Scope perspective view . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
5-7 Fuel display
5-8 Data display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5-9 About display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
6 Instal lation and Maintenance .............................................................................................................. 28
Wiring Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
6-1 What comes with this product? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
6-2 Options and Accessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
(available on 4433 only) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
(4433 only) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
FISH 4432/4433 Installation and Operation Manual 4
NAVMAN
Page 3
6-3 Mounting and removing the display unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
6-4 Systems of several instruments (4433 0nly) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6-5 Cleaning and maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
Append ix A - Specifica tions .................................................................................................................... 33
Append ix B - Dimensions ........................................................................................................................34
Append ix C - Tr oubleshootin g ................................................................................................................. 34
Important
It is the owner’s sole responsibility to install and use the instrument and transducers in a
manner that will not cause accidents, personal injury or propert y damage. The user of this
product is solely responsible for observing safe boating prac tices.
NAVMAN NZ LIMITED DISCLAIMS ALL LIABILITY FOR ANY USE OF THIS PRODUCT IN A WAY
THAT MAY CAUSE ACCIDENTS, DAMAGE OR THAT MAY VIOLATE THE LAW.
Governing Language: This statement, any instruc tion manuals, user guides and other
information relating to the product (Documentation) may be translated to, or has been
translated from, another language (Translation). In the event of any conflict between any
Translation of the Documentation, the English language version of the Documentation will be
the off icial version of the Documentation.
This manual represents the FISH 4432/4433 as at the time of printing. Navman NZ Limited reserves
the right to make changes to specifications without notice.
Copyright © 20 05 Navman NZ Limited, New Zealand, all rights reserved. NAVMAN is a
registered trademark of Navman NZ Limited.
NAVMAN
FISH 4432/4433 Installation and Operation Manual5
Page 4
1 Introduction
Congratulations on choosing a Navman
fish-finder. For maximum benefit, please read this
manual carefully before installation and use.
This manual describes how to install and set
up the FISH 4432/4433 and the associated
dual-frequency transom transducer. (If a through
hull transducer is used, refer to the Installation
Instructions supplied with that transducer.)
This manual also explains how to operate
the FISH 4432/4433 effectively and provides
troubleshooting information and performance tips.
1-1 Benefits of the FISH 4432/4433
The FISH 4432/4 433 is a high quality, dualfrequency sonar fishf inder that is supplied
with a dual-frequency transducer. It uses a 16
level greyscale FSTN display for easy daylight
viewing that can be dimmed for night fishing.
The bracket mounting option also allows
the fishfinder to be tilted and swivelled for
optimum viewing.
The dual frequenc y capability enables the
FISH 4432/4433 to operate and display:
• At a high frequency of 200 kHz.
• At a low frequency of 83 kHz.
• Both frequencies side-by-side on a split
display.
• Both frequencies combined together into a
single display.
This capability, combined with a variable power
output of up to 250 watts, ensures that the FISH
4432/4433 operates effectively in shallow and
deep water.
The FISH 4432/4433 can detect the bottom to
a depth of 750 feet (230 metres) depending
on the clarity of the water, the ultrasonic
frequency chosen and the type of transducer
used.
The Navman fishfinder can be used to find
fish, to locate features on the bottom such as
reefs or wrecks and to help recognize favourite
fishing spots from the bottom profile.
The Navman fishfinder can also assist with
navigation by providing depth information to
Important
It is vital to the performance of the fishf inder
that the transducer is installed in the best
location. Please follow the installation
instructions very carefully.
help identify the depth contours marked on
charts. The FISH 4 432/4433 is par ticularly suited
to work with the TRACKER 5430/5380.
The two instruments can be connected
together using either NavBus or NMEA, so they
can share data. (only applies to FISH 4433)
IMPOR TANT NOTE ON USE. While any
fishfinder can be used as an aid to navigation,
accuracy can be limited by many fac tors,
including the location of the transducer. It is
the user’s responsibility to ensure the Navman
fishfinder is installed and used correctly.
With the optional fuel kit, the FISH 4433 also
becomes a sophisticated and easy-to- use
fuel computer.
All of the Navman 4000 Series f ishfinders use
new proprietary SBN-II Technology for sonar
processing to improve Signal enhancement,
Bottom recognition and Noise rejection.
SBN-II Technology uses digital adaptive filter
algorithms to enhance all returned signals. At
the same time, SBN-II Technology uses active
noise control to reject interference, which
can often be mistaken by fishf inders for true
returns.
Using SBN-II Technology, the Navman
fishf inder analyses the reflections from each
pulse, filters false returns and displays what is
in the water under the boat. See section 4-1
Interpreting the display, for more information.
FISH 4432/4433 Installation and Operation Manual 6
NAVMAN
Page 5
1-2 How the FISH 4432/4433 works
The FISH 4432/4 433 has two par ts:
- the transducer attached to the hull
- the display unit.
The transducer generates an ultrasonic pulse
(sound that is above the hearing range of
the human ear), which travels down towards
the bottom at a speed of about 4800 ft/sec
(1463 m/sec), spreading out into a cone shape.
When the pulse meets an objec t, such as a
fish or the bottom, it is partly reflected back
up towards the boat as an echo. The depth
of the object or bot tom is calculated by the
FISH 4432/4433 by measuring the time taken
between sending a pulse and receiving the
echo. When an echo has been returned, the
next pulse is sent.
The FISH 4432/4 433 converts each echo into
an electronic signal, displayed as a vertical
2 Basic Operation
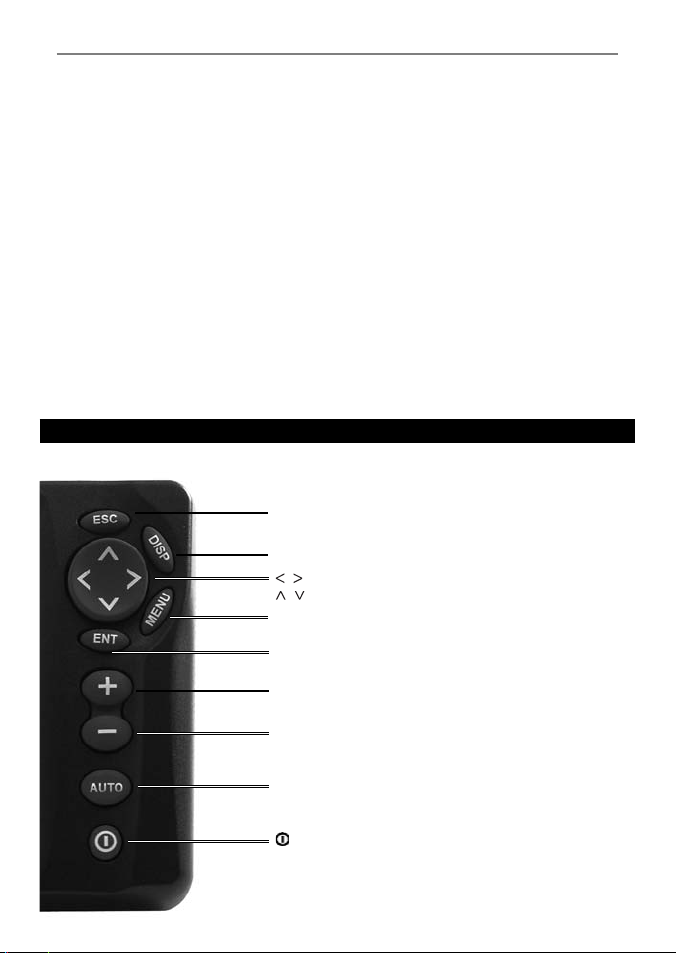
Key Names
If a menu is not displayed then go to the sonar
ESC display. If a menu is displayed then cancel any
changes and return to the previous menu.
DISP Shows the Display menu.
, Cursor keys move the selection highlight and
, change settings.
MENU Press to show the Options menu on a display; press
again to show the Setup menu.
ENT Confirms any changes or from a sonar display shows
the Gain controls.
+ Increases the Range.
line of pixels. The most recent echo appears
on the extreme right of the display, with the
older echoes being scrolled towards the left,
eventually disappearing off the display.
The scroll speed depends upon the water
depth and scroll speed setting. See section 3-2
Setup > Sonar and section 4-1 Interpreting the
display, for more information.
The appearance of echoes displayed are
affected by:
• the fishf inder settings (frequency selected,
range and gain settings)
• echoes (different fish types, different
bottom t ypes, wrecks and seaweed)
• noise (water clarity and bubbles).
See section 4-1 Interpreting the display, for
more information.
— Decreases the Range.
AUTO Select fishing/cruising or manual operating mode
Powers On and O ff; shows the Back light control.
NAVMAN
FISH 4432/4433 Installation and Operation Manual7
Page 6
Power On / Auto Power
Press to turn the fishfinder on.
If the fishfinder is wired for auto power, it turns
on automatically whenever the boat’s ignition
is turned on. This ensures that the engine
hours counter and optional fuel functions are
activated. A title display a ppears briefly. Th is is
followed au tomatically by the Installa tion menu
the fir st time the fishf inder is switched on. Use
this menu to spe cify the language (s ee section 3-1
Setup > System) a nd units (see section 3 -6 Setup
> Units).
At all other times, the title display is followed
by the display that was used most recently.
If the transducer is not connected, the
message: Enter simulate mode? will
appear. Press
Yes, No or Never. (If the transducer was
not intentionally disconnected, turn of f
the fishfinder and refer to the section on
Troubleshooting in Appendix B.)
to
or
switch between
Press ENT to confirm the selection and the
startup sequence will continue.
Key Operation
The fishfinder is operated through menus.
To select a me nu item:
1. Press DISP or MENU
2. Press
3. Press ENT to select the item.
To change a number, word or se tting:
1. Use the cursor keys,
the number, word or setting and to make the
change(s).
2. Press ENT to confirm; ESC to cancel.
or to move the highlight to
the item.
, , ,
to highlight
Power Off
To turn the fishfinder off, hold . A countdown
box appears. Continue to hold for 3 seconds
until the fishfinder turns off.
Note: If the unit is wired for Auto Power
(section 6-5 Wiring options) the fishfinder can
be turned off only when the boat’s ignition is
turned off.
Backlight Adjustment
To change the backlight level :
1. Press
2. The display and keys are backlit, with a
Press
3. To change contrast:
4. Press ENT to save settings.
5. Press ESC to exit.
Press
backlight setting and default contrast.
FISH 4432/4433 Installation and Operation Manual 8
briefly to show the display
controls.
choice of 16 brightness levels.
to dim or to brighten.
i Press
ii Press <, > to adjust
twice to return to the maximum
Menu Note:
Some menu items in the
FISH 4432/4433 menu’s
utilize checkboxes.
If the box is selected or
‘checked’ (contains a check
or tick), then that function is
enabled or ON.
If the box is de-selected
or ‘un-checked’ (does not
contain a check or tick), then
that function is disabled
or OFF.
To select or de-select
a checkbox, highlight the
menu item and press ENT.
NAVMAN
Page 7
Simulate Mode
An internal simulator allows users to learn how to operate the fishfinder off the water.
In Simulate mode the word Si mulat e flashes on the bottom of the display. The f ishfinder
generates data so that all the main displays
appear to be operational.
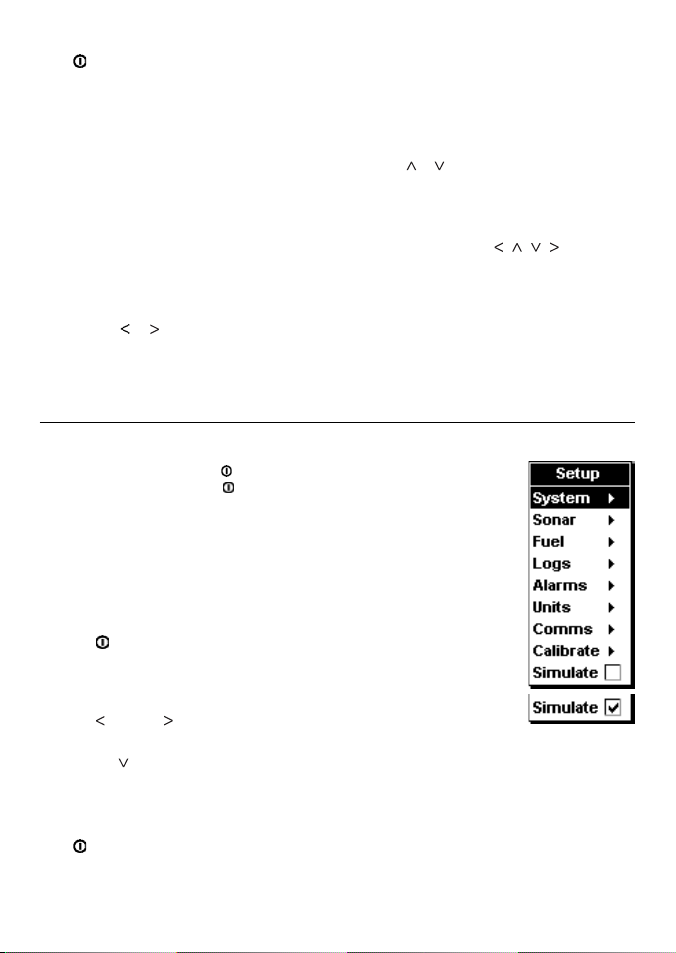
Use Setup > Simulate as follows:
1. Press MENU twice to show the Setup menu.
2. Highlight Simulat e.
3. Press ENT to select or de-select.
Manual, Fishing and Cruising Modes
Press AUTO to select one of the three following operating modes:
• Cruise mode. Use this when on the move. The FISH 4432/4433 prominently displays the water
depth and automatically adjust s Range and Gain so that the bottom trace is displayed. Depth is
displayed in large digits.
• Fishing mode. Use this when fishing.
The FISH 4432/4 433 prominently displays fish, the bottom profile, wreck s, rocks and all the
details that help to find fish. Gain and Range are optimized automatically, increasing the
sensitivity and f ishfinding ability.
• Manual mode. Use this to fine-tune the fishfinding ability of the FISH 4432/4433. Best results
are often achieved in manual mode, but practice and experience are required to obtain the
optimum settings for different conditions. Gain, gain threshold and pulse power can all be
adjusted. Manual mode stores the most recent settings, so these do not have to be reset each
time manual mode is selected.
3 Setting up the FISH 4432/4433
Press MENU twice, to show the Setup menu, then select a particular option using the or cursor
keys. (Sec tion 2 Basic Operation, describes the basic use of keys.)
The Setup menu and options are summarized b elow. The factory default settings are shown
where applicable.
Each Setup menu option is explained in the following sections.
NAVMAN
FISH 4432/4433 Installation and Operation Manual9
Page 8

The Setup menu and options
System - see section 3-1
Sonar - see section 3-2
Fuel - see section 3-3
Logs - see section 3-4
Alarms - see section 3-5
Units - see section 3-6
Comms - see section 3-7
Calibrate - see section 3-8
Simulate - see section 2
FISH 4432/4433 Installation and Operation Manual 10
NAVMAN
Page 9
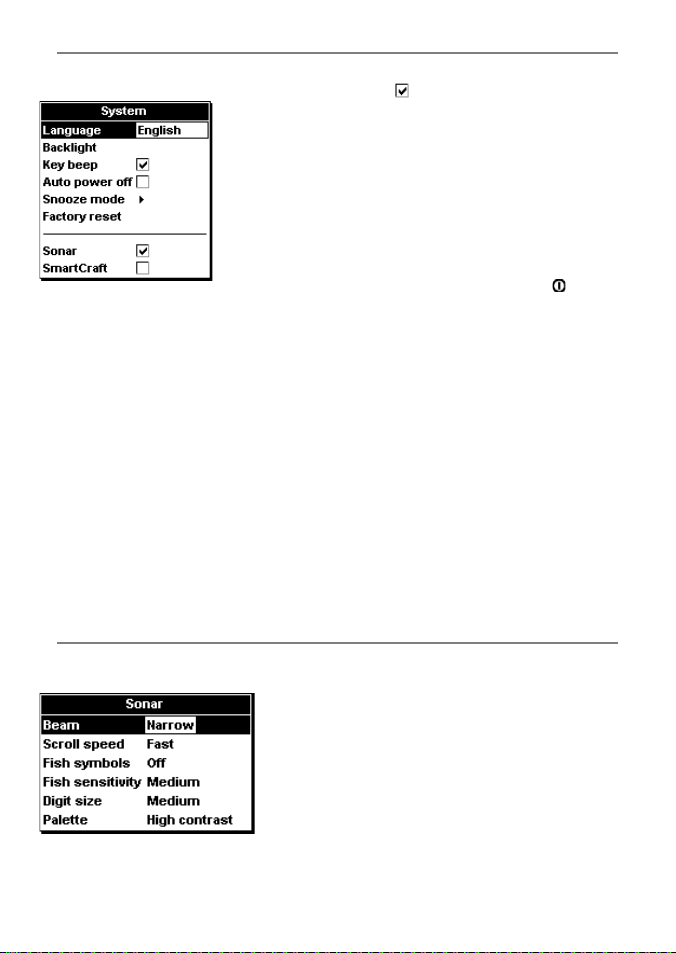
3-1 Setup > System
Press MENU once or more until the Setup
menu is displayed, then selec t System:
Language
Select the language for the displays. The
options are: English, Italian, French, German,
Spanish, Dutch, Swedish, Portuguese, Finnish
Greek and Croatian.
Tip: In case you can’t read th e current language,
the languag e setting is found at the to p of the
system menu.
Backlight
Select this option to adjust backlighting and
contrast controls.
Key beep
Enables or disables the beep when a key
is pressed.
Auto power of f
Select to have the fishfinder power of f
automatically every time the boat’s ignition
is switched off. This applies only if the display
unit is wired for Auto Power. See section 6-5
Wiring Options.
Snooze Mode
This power saving option slows the sounding
rate (time between each ultrasonic pulse) to
a user specified interval from 5 minutes to
2 hours. The fishf inder appears to turn off,
however all alarms operate normally. To return
to normal op eration, press Power button.
Ideal to be used as an anchor alarm.
Factory r eset
This option returns all of the fishfinder settings
(except the language) to the default factor y
settings shown in section 3 Setting up the FISH
4432/4433.
A warning b ox asks: Are you sure? Select
Yes and p ress ENT to confir m.
Sonar (FISH 4433)
Select to enable sonar func tions. Deselec t if the
unit is to be used as a SmartCraft only display.
SmartCraft (FISH 4433)
Select to enable SmartCraft func tions.
SmartCraft is only available with certain
Mercury engines, and requires an optional
SmartCraft Gateway.
3-2 Setup > Sonar
Press MENU once or more until the Setup
menu is displayed, then selec t Sonar:
Beam
There is a choice of Narrow (200kHz),
Wide(83kHz), Mixed and Auto. For more info
about selecting a suitable frequency for water
conditions, see section 4 -2 Single and Dual
Frequency Fishfinding.
NAVMAN
FISH 4432/4433 Installation and Operation Manual11
Page 10
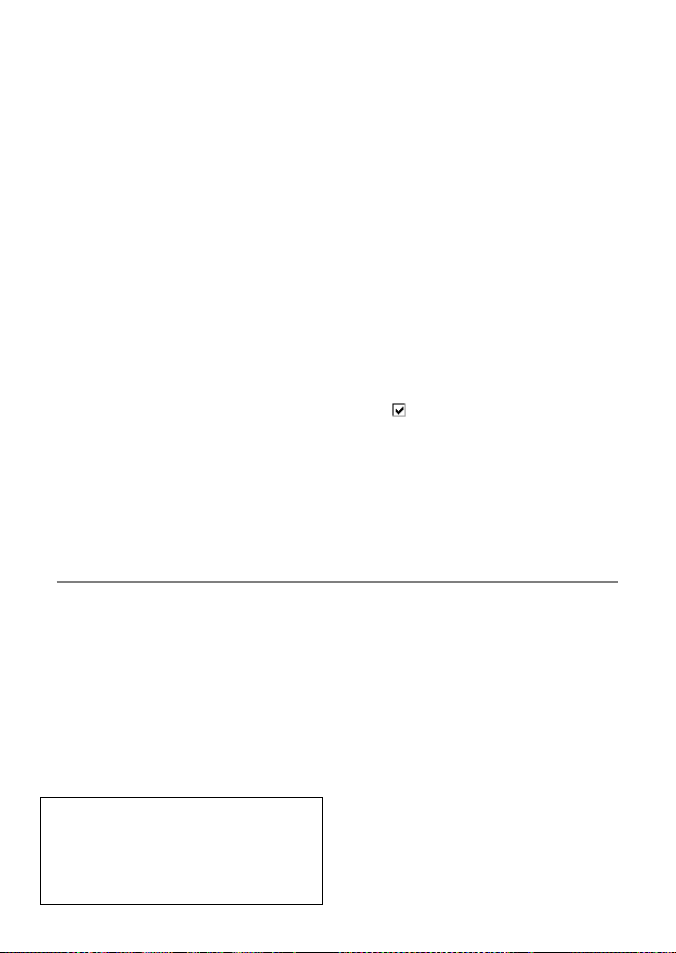
Scroll speed
Use this to set the scroll speed on the display.
There is a choice of: Very Fast, Fast,
Medium, Slow and Pause. The depth of the
water also af fects the speed of the display.
Faster scroll speeds combined with a slow
boat speed (typically between 2 and 6 knots)
shows the most fish detail. Medium or Slow
scroll speeds result in sonar information being
displayed over a longer period, but with less
detail. See Section 4-1 Interpreting the display,
for more information.
Fish symbols
These appear only in the main sonar displays.
Fish symbols can be shown in three ways:
• As a fish symbol (Sy m bol).
• As a fish symbol with the depth
(Sym bol+ dept h). The depth is shown
beside the fish symbol.
• As a depth (Depth). The depth is shown
above where the fish was detected
• Switched off (Off) so that echoes are not
converted to f ish symbols but are displayed
directly.
See section 4-3 Fish detection and display, for
more information about fish symbols.
Fish sensitivity
Use this func tion to adjust the minimum fish
detection level. Select Low to reject noise and
small fish. Selec t High to detect maximum
number of f ish.
Digit size
Use this to remove or change the size of the
depth display on the sonar displays. There is a
choice of: Small, Medium and Large.
Palette
Use this to select a color palette. Each color
within the palette represents a different echo
strength, as shown on the sonar displays.
There is a choice of three color palettes: Bl ack,
White and High Contrast.
Interference filter
This filters the echo signal to reduce high- level,
spiky interference, such as engine noise and
makes small f ish harder to see.
Select to add filter.
Pulse power
This can be used to specify the p ower output
of the transmitted ultrasonic pulse. Low power
output conserves the boat’s bat tery, but only
works in shallow water.
There is a choice of Auto, Low, Medium or
High. The Auto setting is recommended.
3-3 Setup > Fuel (available on 4433 only)
These features can be used only when the
optional single or t win engine fuel kit has been
installed.
Press MENU once or more until the Setup
menu is displayed, then selec t Fuel:
It is recommended that the fuel tank capacity is
measured by draining the fuel tank, then filling
it to capacity. After filling, note the reading
from the fuel dispenser’s gauge.
Note: Beware of air p ockets, especiall y in
underfloor tanks.
Warnin g
Navman fuel kits are only suitable for petrol/
gasoline engines. Fuel consumption can
change drasticall y depending upon the boat
loading and the sea conditions. Always carry
adequate f uel for the journey, plus a reserve.
FISH 4432/4433 Installation and Operation Manual 12
Tan k ful l
Select Tank full each time the fuel tank(s)
are completely refilled. When asked Are you
sure? select Yes. Otherwise, the reading on
the Fuel display (see section 5-6 Fuel Display)
and the Low Fuel Alarm (see section
3 -5 Setup > Alarms) are meaningless.
Set remaining
Before doing a partial refill of the tank or
removing fuel manually from the tank (for
example, by siphoning it off):
1. No te the Remaining reading on the
Fuel display.
2. Note how much fuel is added or removed.
3. Calculate how much fuel is now in the tank.
4. Select Set remaining and update
the reading.
NAVMAN
Page 11
It is essential to do this whenever some fuel is
added or removed. Otherwise, the reading on
the Fuel display (see section 5-6 Fuel Display)
and the Low Fuel Alarm (see section
3-5 Setup > Alarms) are meaningless.
Clear used
Select Clear used to set Use d (the
amount of fuel used) to zero. Do this to start
measuring the amount of fuel used over a
certain time or distance.
When asked A re you sure? select Yes.
Tank size
Enter the capacity of the fuel tank.
Flow filter
Most engines do not draw fuel from the tank at
a steady rate. To give a stable fuel flow reading,
the fishfinder calculates the flow value(s) by
taking several measurements and averaging
them. Use the Flow filter to set the period over
which the fuel flow is averaged.
The Flow filter can be set from 0 to 30 seconds.
Use the lowest value which gives a stable flow.
Usually a value of 5 to 10 seconds will give a
satisfactory result for two-stroke carburettor
engines. Fuel injec ted or four-stroke engines
may require a larger value.
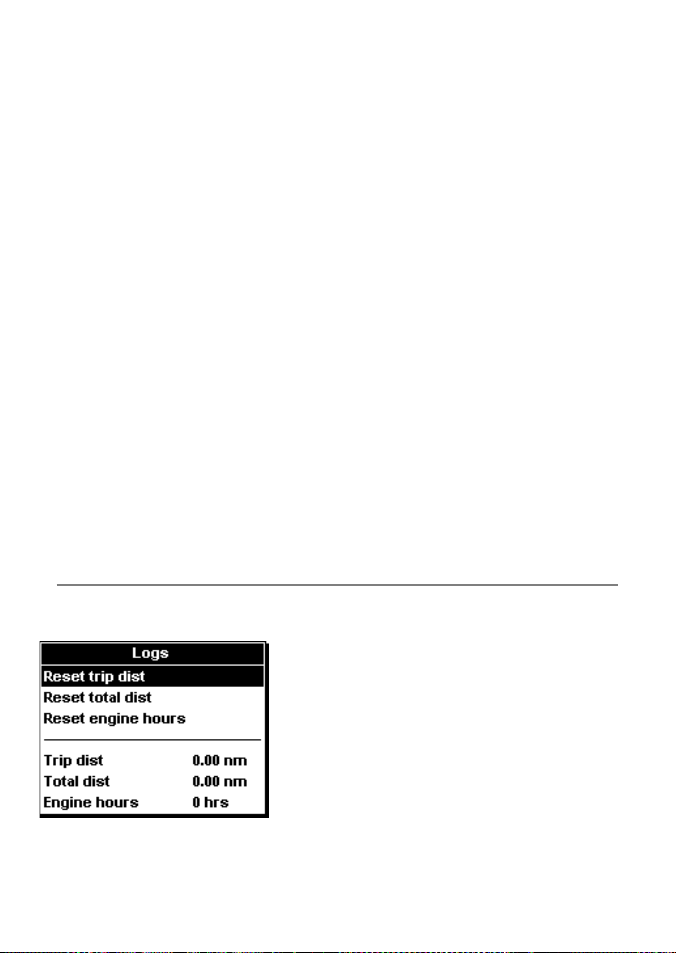
3-4 Setup > Logs
Press MENU one or more times until the Setup
menu is displayed, then selec t Logs:
This setting affects the Fuel flow and Fuel
economy reading on the Fuel display (see
section 5-6 Fuel display) but it does not affec t
the Fuel used reading.
Speed Sou rce
Select speed input from water speed
transducer or external GPS source (an
external GPS source must be connected to the
Fishfinder via NavBus – see sec tion 3-7 Setup
> Comms.)
Num engines
Set the number of engines to 0, 1 or 2. If 0 is
selected the fuel features are turned off.
Calibrate
See section 3-8 Setup > Calibrate, for
information about calibrating the fuel
transducer(s).
The values can be changed independently of
each other. These log values are saved when
the unit is turned off.
Reset trip dist
This reset s the trip distance to zero.
Reset total dist
This option resets the total distance to zero.
Reset engine hours
Use this option to reset the engine hours
to zero. This can be useful after an engine
service or to count the engine hours between
service intervals.
NAVMAN
FISH 4432/4433 Installation and Operation Manual13
Page 12
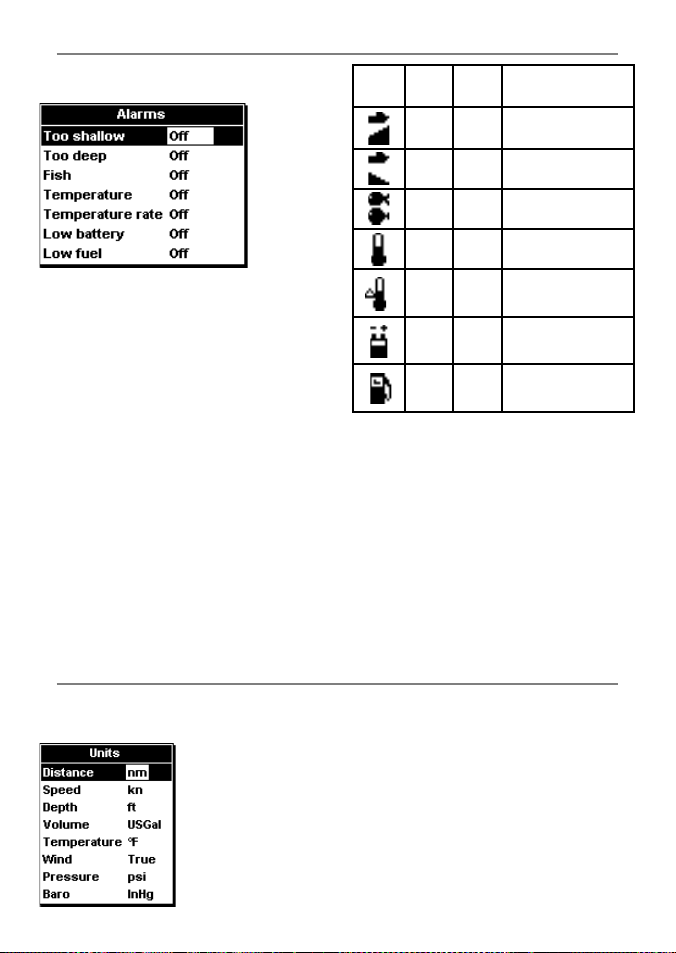
3-5 Setup > Ala rms
Press MENU one or more times until the Setup
menu is displayed, then selec t Alarms:
Trigger settings can be defined to suit the boat
and individual preferences as follows:
Alarms can be set (enabled) to automatically
detect cer tain conditions, such as the water
being too shallow. Alarms that are enabled are
shown as black icons in the Alarm status box on
the sonar displays.
When an enabled alarm is triggered, the
beeper sounds, an alarm message is displayed
and the alarm status icon flashes.
Press ENT or ESC to acknowledge the alarm,
stop the beeper and close the alarm window.
This does not disable the alarm.
Alarms automatically re-enable
The Too shallow, Too Deep and Low
battery alarms automatically re-enable
when the value moves outside the alarm
trigger setting.
The Temperature alarm automatically
re-enables when the temperature is more
Symbol Alarm
Beeper
Name
Cycle
1
/5 sec Depth is les s than
Too
shallow
1
Too
/2 sec Depth is gr eater than
deep
Fish 1 short
beep
1
/2 sec Temperature equals
Temp.
1
/2 sec Rate of chan ge of
Temp.
rate
1
Low
/2 sec Batter y voltage is
battery
1
Low
/2 sec Fuel remai ning equals the
fuel *
Alarm condition is met
when the:
the alarm tr igger value
the alarm tr igger value
Echo matches t he
profil e of a fish
the alarm tr igger value
temperat ure equals the
alarm tri gger value
less than th e alarm
trigger v alue
alarm tri gger value
*Only 4432
than 0.45°F (0.25°C) above or below the alarm
trigger setting.
The Temperature rate alarm
automatically re- enables when the rate of
temperature change falls below the trigger
setting by more than 0. 2°F (0.1°C) per minute.
Flashing light and/or external beeper
If a secondary alarm indicator is required,
a flashing light and/or external beeper can
be installed. These can be positioned
anywhere suitable on the boat. See section
6-5 Wiring options.
3-6 Setup > Un its
Press MENU one or more times until the Setup
menu is displayed, then selec t Units:
The default units
are shown in this
example.
Distance
Select from:
• nm (nautical miles)
• mi (miles)
• km (kilometres)
FISH 4432/4433 Installation and Operation Manual 14
Baro
• InHg (Inches of mercury)
• Mb (Millibars) - sometimes called kPa
Speed
Select from:
• kn (knots)
• mph (miles per hour)
• kph (kilometres per hour)
Wind
• True
• Apparent
NAVMAN
Depth
Select from:
• ft (feet)
• m (metres)
• fa (fathoms)
Pressure
• kPa
• psi
Page 13

Fuel Temperature
Select from: Select either:
• Litres • °F (Fahrenheit)
• USGal (US gallons) • °C (Celsius)
• ImpGal ( Imperial Gallons)
3-7 Setup > Comms (4433 only)
Use this feature when the FISH 4432/4433
is connected to other Navman instruments
through NavBus or any compatible NMEA
instrument.
Press MENU once or more until the Setup
menu is displayed, then selec t Comms:
NMEA Out
NMEA is generally used with third part y
instruments. Select to transmit NMEA
sentences (see Appendix A - Specifications).
3-8 Setup > Calibrate
Press MENU once or more until the Setup
menu is displayed, then selec t Cali brate:
The fuel options
can be calibrated
only when the
optional single
or twin engine
kit is installed on
petrol/gasoline
engines.
Speed*
Calibration may be required because different
hull shapes have different flow characteristics.
Obtain an accurate measurement of the boat’s
speed from a GPS receiver; or by following
another boat travelling at a known speed; or
by making a timed run over a known distance.
NMEA data
Use this to specify which NMEA sentences will
be transmitted (see Appendix A - Specifications
and section 5-7 Data display, for information
about how to display NMEA data).
NavBus
NavBus is the preferred method for connecting
the FISH 4433 to other Navman instruments.
Select if the instruments are connected using
NavBus.
NavBus Group
Use this when a group of Navman instruments
are connected together using NavBus, to
specif y a group of instruments for backlighting,
if required. Then, if the backlight setting on one
instrument in the group is adjusted, the other
instruments change automatically. Otherwise,
select 0.
Note: for accurate calibration:
• The speed from a GPS receiver should be
greater than 5 knots.
• The speed from another paddlewheel
transducer should be between 5 and 20
knots.
• Best results are achieved in calm conditions
where there is minimal current (best at high
or low tide).
Use the cursor keys to display the speed readout
box, then increase or decrease the readout to
match the independent speed value.
Speed Filter*
Increase this setting to stabilise an erratic
speed reading. Decrease to improve reading
responsiveness. The speed f ilter can be set
from 0 to 30 seconds.
* only avai lable on 4433
NAVMAN
FISH 4432/4433 Installation and Operation Manual15
Page 14

Tem per at ure
The factory settings should be sufficiently
accurate for normal usage. To calibrate the
temperature readout, first measure the water
temperature with a thermometer known to
be accurate.
Use the cursor keys to display the temperature
readout box, then increase or decrease the
value to match the measured temperature. The
temperature can be set from 32° to 99.9° F (0° to
37.7°C) with a resolution of 0.1° unit.
To change the units between °F (Fahrenheit) or
°C (Celsius), see section 3-6 Setup > Units.
Tem p fi lter
Increase this setting to stabilise an erratic
temperature reading. Decrease to improve
reading responsiveness. The temperature f ilter
can be set from 0 to 30 seconds.
Fuel
Warning:
Extreme precautions must be
observed when carrying out this
procedure.
Failure to do so could create
hazardous conditions that can
cause serious personal or
property damage.
Calibrating the fuel usage can improve the
accuracy of fuel measurements.
Twin engine installations require each fuel
transducer to be calibrated. This can be done
at the same time with two portable tanks or at
different times using one portable tank.
Calibrating the fuel transducer(s) requires
accurate measurement of the fuel
consumption. This is best done using a small
portable tank. At least 4 gallons (15 litres) of
fuel should be used to ensure an accurate
calibration.
It is often very dif ficult to fill underfloor tank s
to the same level twice due to air pockets, so
the more fuel used, the more accurate the
calibration.
To calibrate the fuel transducer(s), perform the
following steps:
1. Record the level of the fuel in the tank(s).
2. Connect the p ortable tank(s) to the engine
through the fuel transducer(s).
3. Run the engine at normal cruising speed
until at least 4 gallons (15 litres) of fuel has
been used per engine.
4. Check the actual amount of fuel used per
engine by refilling the portable tank (s) to
the original level and noting the reading(s)
from the fuel dispenser’s gauge.
5. Select Fuel. Use the cursor keys to change
the reading for each engine to match that
on the fuel dispenser’s gauge.
6. Press ENT when the reading is correct.
Note: If the fuel calibration options appear
to give erroneous readings after a while,
first check that the fuel sensor has been
installed correctly according to the installation
instruc tions supplied with it. Then see
Appendix B - Troubleshooting.
Keel of fset
Keel offset is a depth correction representing
the vertical distance between the depth
transducer and the location from which the
depth is to be measured.
Enter a positive keel offset value when the
transducer is located below the water surface
but the total depth is required.
Enter a negative keel offset value when the
depth below the deepest par t of the boat is
required (such as the keel, the rudder or the
propeller) and the transducer is located closer
to the water sur face.
Use the cursor keys to select Keel offset,
then press
Use the
to display the Keel offset box.
or cursor keys to adjust the value.
Water surface
Positive
Depth of transducer
Transducer
Note: Boat illustrated uses a through hull transducer
value
Negative
value
FISH 4432/4433 Installation and Operation Manual 16
NAVMAN
Page 15

4 Using the FISH 4432/4433
This section explains how to interpret the sonar
displays, when and why to use the different
frequencies and how f ish are detected
and displayed.
4-1 Interpreting the display
The sonar displays do not show a fixed distance
travelled by the boat; rather, they display a
history, showing what has passed b elow the
boat during a certain period of time.
The history of the sonar signal displayed
depends on the depth of the water and the
scroll speed setting.
In shallow water, the echoes have a short
distance to travel between the bottom and the
boat. In deep water, the history moves across
the display more slowly because the echoes
take longer to travel bet ween the bottom and
the boat. For example, when the scroll speed is
set to Fast, at depths over 600ft it takes about
2.5 minutes for each vertical line of pixels to
move across the display, whereas at 20ft it
takes only about 4-5 seconds.
The scroll speed can be set by the user to
display either a longer histor y with less fish
information or a shor ter history with more fish
details. See sec tion 3-2 Setup > Sonar.
If the boat is anchored, the echoes all come
from the same area of bottom. This produces a
flat bot tom trace on the display.
The screen shot shows a typical sonar display
with the Fish symbols turned Off.
Single fish
Large
school of
fish
Small school
of fish
Bottom
It also describes Gain and Range and shows
examples of some of the different sonar
displays. Also see section 1-2 How the FISH
4432/4433 works.
Strengt h of echoes
The colors indicate differences in the strength
of the echo. The strength varies with several
factors, such as the:
• Size of the fish, school of fish or other object.
• Depth of the f ish or object.
• Location of the fish or object. (The area
covered by the ultrasonic pulse is a rough
cone shape and the echoes are strongest in
the middle.)
• Clarity of water. Particles or air in the water
reduce the strength of the echo.
• Composition or density of the object or
bottom.
Note: Planing h ulls at speed produce ai r bubbles
and turbul ent water that bombard the trans ducer.
The resulting u ltrasonic noise may be picke d up by
the transducer and obscure the real echoes.
Soft bottoms
such as mud,
weed and
sand show
as narrow
bands
Hard bottoms
such as rock
or coral
show as wide
bands
Bottom types
Mud, weed and sandy bottoms tend to weaken
and scatter the sonar pulse, resulting in a weak
echo. Hard, rocky or coral bottoms reflect the
pulse, resulting in a strong echo. See section
5-3 Sonar Bottom display.
NAVMAN
FISH 4432/4433 Installation and Operation Manual17
Page 16

Frequenc y and cone width
The pulse generated by the FISH 4432/4433
transducer travels down through the water,
spreading outwards to form a rough cone shape.
However, the cone width is dependent upon
the frequency of the pulse; at 83 kHz it is 20°,
whereas at 200 kHz it is 14°. The chart shows
how the cone width varies over depth for each
frequency used. Figures are approximate.
Depth 83 kHz 200 kHz
100
150
200
250
0
50
20°
18
30
55
73
91
14°
12
25
37
50
62
Water Cone width Cone width
Depth at 83 kHz at 200 kHz
10 4 2
20 7 5
30 11 7
40 15 10
50 18 12
60 22 15
70 25 17
80 29 20
90 33 22
100 36 25
150 55 37
200 73 50
300 109 75
400 146 100
500 182 125
600 218 149
700 255 174
800 291 199
900 328 224
1000 364 249
The differences in the cone width affect what is displayed. See section 4-2 Single and Dual Frequency fishfinding.
Shadows
Shadows are created around areas where the ultrasonic beam cannot ‘see’. These areas include
hollows on the bottom or beside rocks and ledges, where the strong echoes returned off the rocks
obscure the weak echoes of the fish and may also create a double bottom trace. See following for
an example of the sonar display in such an environment. A double bottom trace is shown on the
display.
When looking for f ish with the wide angled 83 kHz frequency, be aware of increased shadows. Use
the high frequency 200 kHz in areas that have rocks and ledges because this frequenc y reduces the
shadow effect considerably.
Example of shadows
Sonar display of same area
Fish is visible on the display
Fish is hidden by the strong echoes of f the
bottom and is not shown on the display
Fish is visible on the display
FISH 4432/4433 Installation and Operation Manual 18
NAVMAN
Page 17

4-2 Single and D ual frequency fishf inding
When to use 200 kHz
The 200 kHz frequency is best for seeing deep
bottoms, showing detail and reducing noise.
When to use 83 kHz
The 83 kHz frequency is h as a w ider bea m –g ood
for locating features that can be examined in
detail at 200kHz.
Auto frequency
This shows 20 0kHz detail on screen, but uses
83kHz beam for locating fish further from boat.
Wide angle,
less detailed
83 kHz cone
Comparison of the same fish scenario displayed at differ ent frequencies:
Narrow angle,
more detailed
200 kHz cone
1 minute ago
30 seconds ago
NAVMAN
Now
FISH 4432/4433 Installation and Operation Manual19
Page 18
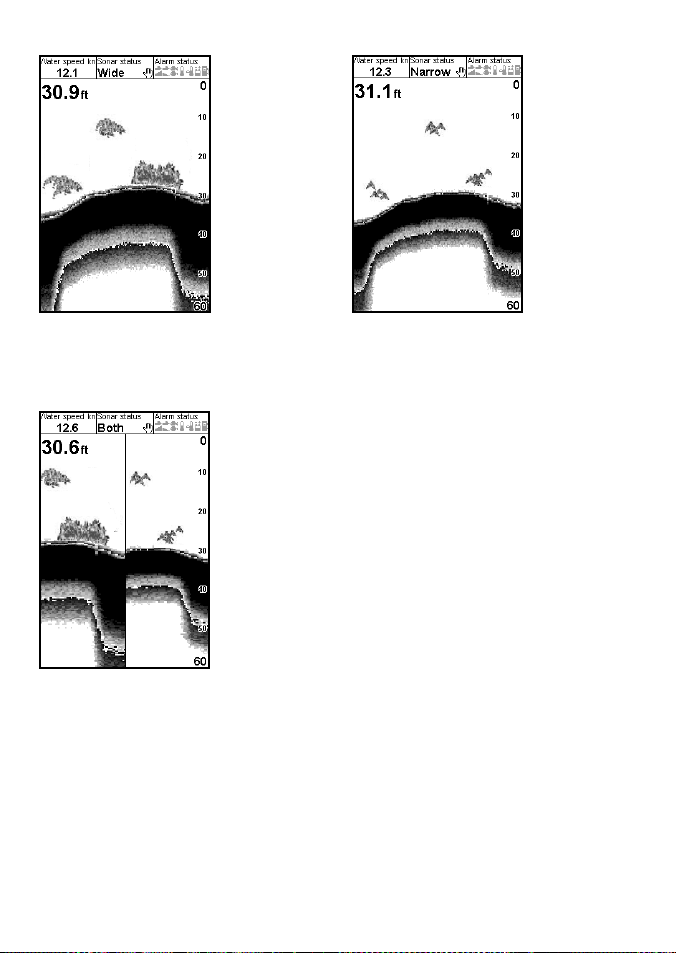
83 kHz display
200 kHz display
200/83 Khz display
Note the wider
bottom trace
Dual screen
Note the
smaller,
defined fish
arches and
more bottom
detail.
FISH 4432/4433 Installation and Operation Manual 20
NAVMAN
Page 19

4-3 Fish detec tion and display
Where to find fis h
Underwater features like reefs, wrecks and
rocky outcrops attract fish. Use the 83/20 0
kHz frequency display to find these features,
then look for fish by passing over the feature
slowly several times using the Zoom display
(see section 5-2 Sonar Zoom display). If there
is a current, the fish will often be found
downstream of the feature.
When fishing with the FISH 4432/4433 with
the Fish symbols Off, a weak fuz zy band
may a ppear betwee n the bottom trace an d
surfa ce. This might indicate a thermoc line - a
rapid chan ge in water temperature , such as the
edge of a war m or cold current. The te mperature
diffe rence can form a barr ier which the fish may
not swim through. In fre sh water, fish often
collec t around a thermocli ne.
Fish symbols
The fish symbol can be customized or switched off
altogether so that the echoes are not converted to
fish symbols on the display. See section 3-2 Setup
> Sonar. The differences between Fish symbol On
and Off are:
Fish symbols On
Using Navman’s SBN -II sonar technology the
fishfinder analyses all echoes and eliminates most
false signals and clutter so that remaining targets
are most likely fish. Depending on the strength
of the remaining echoes, they are displayed as
either small, medium or large fish symbols - with
or without depth. While the SBN -II processing is
very sophisticated it is not foolproof - the re will
be times wh en
the fishfinder
will not be a ble
to differentiate
betwe en large air
bubble s, rubbish
containing air,
fishin g floats etc.
and genui ne fish.
The pic ture shows
the Sonar d isplay
with the Fish
symbol: symbol
+ depth:
Fish symbols Off
For experienced users this always provides the
best information as every echo is displayed,
whether it is surface clutter, a thermocline or
a fish.
The picture in section 4-1 Interpreting the
display, shows the Sonar display with the Fish
symbols Off. The fish appear as arches.
Fish arches
In good conditions and with Fish symbols
Off, a fish passing through the cone-shaped
ultrasonic pulse is displayed as a fish arch. The
83 kHz frequency uses a wider cone than the
200 kHz frequency. This makes the f ish arches
easier to see.
A fish arch occurs when a f ish enters the weak
edge of the sonar cone, generating a weak
echo that is displayed as the first pixel of
the fish arch. As the fish moves closer to the
middle of the cone, the distance between the
transducer and the fish reduces and the echo
is displayed at progressively shallower depths,
producing the star t of an arch. When the fish
passes directly beneath the middle of the cone,
the echo becomes strongest and thickest. As
the fish passes out of the middle of the cone
the reverse happens with a progressively
weaker and deeper echo.
There are many reasons why fish arches may
not be seen. For example:
• Poor transducer installation (see Tran som
Transducers Installa tion Guide).
• If the boat is anchored then fish will tend
to show on the display as horizontal lines
as they swim into and out of the transducer
sonar beam. Slow speeds in deeper water
give the best fish arch returns.
• Range is important. It will be much easier
to see fish arches when using zoom mode
to concentrate on a particular sec tion
of water, rather than just displaying
every thing from the surface to the bot tom.
Zooming increases screen resolution and is
necessar y for good fish arches.
NAVMAN
FISH 4432/4433 Installation and Operation Manual21
Page 20

• It is difficult to get fish arches in shallow water as the transducer sonar beam is very narrow near
the surface and fish do not stay within the beam long enough to display an arch. Several fish in
shallow water tend to display as randomly stacked blocks of pixels.
• Wave motion may result in distorted fish arches
4-4 Gain
Gain (sensitivity) controls the amount of
detail displayed on the FISH 4432/4 433.
Understanding how to set suitable
Gain settings is important for optimum
performance.
The Navman fishfinder has three gain modes,
Cruising, Fishing and Manual.
• Cruising Mode
Use this mode to show only the bottom and
large fish.
• Fishing Mode
Use this mode to show as much detail as
possible.
• Manual Mode
The gain can be adjusted by the user to
compensate for water depth and clarity.
High Gain settings may amplif y the normal
background noise until it appears as random
pixels.
Note: The Gain mode a utomatically changes to
Manual Gai n if the gain or threshold sett ings are
adjusted by th e user.
Obtaining the best results
To obtain the best detection capability for both
fish and bottom we recommend the use of the
Sonar A-Scope display:
1. Set the threshold to 0% .
2. Adjust the gain until the threshold line is
just to the right of the unwanted noise.
Changing betwee n Cruising, Fishi ng
and Manual
To change between Cruising, Fishing
and Manual
1. From any Sonar display, press ENT.
2. Use the
mode option, then use the cursor key
then select desired option from list.
or cursor keys to highlight
Gain
Threshold
line
Unwanted
signal
Adjust ing Gain and Thres hold settin gs
The gain settings and the threshold set tings
can be adjusted independently for each
frequency (83kHz and 200 kHz).
Use threshold to eliminate colors in the sonar
display.
1. From any Sonar display, press ENT.
2. Use the
desired setting, then use the cursor key
to change it.
or cursor keys to highlight the
Gain line
FISH 4432/4433 Installation and Operation Manual 22
NAVMAN
Page 21

4-5 Range
Range is the vertical depth displayed on the
FISH 4432/4 433.
The Navman fishfinder has two range modes,
Auto Range and Manual Range:
• In Auto Range, the f ishfinder adjusts
the depth range automatically so the
bottom is always shown in the lower part
of the display. The use of Auto Range is
recommended for normal conditions.
• In Manual Range, the fishfinder shows only
a selected depth range. In areas of rapidly
changing b ottom depth, such as the sea
floor around pinnacles, it can be useful
to prevent the display from rescaling to
always show the bottom. If the bottom is
deeper than the specified depth range, it
will not be shown on the display.
Changin g the Range Mode
Press the + or - key to change to Manual Range
mode and to increase or decrease the range to
the desired depth. Values can be set between
10 ft. (3 m) to 1000 f t. (300 m).
To change from the current mode:
1. From any Sonar display, press MENU to
display the Options menu.
2. Highlight Range, then use the cursor keys
to select Auto or Manual.
3. Press ENT to confirm.
Tip: To quickly enlarge fro m manual to autorange hold do wn + or - key for 1.5 seconds.
Zoom Range and Zoom Offset
On the Sonar Zoom and Sonar Bottom displays,
a vertical bar is shown on the far right of the
display. This is the zoom bar. The zoom bar
shows the zoom range; that is, the area that
is magnified.
Use the
or cursor keys to adjust the
zoom range.
Use the
or cursor keys to adjust the
zoom offset.
NAVMAN
FISH 4432/4433 Installation and Operation Manual23
Page 22

5 The Displays
Press DISP to show the Display menu. Use or
to select display tab, then select a particular
display using the or cursor keys.
The Display menu
Note: Refer to Sec tion 3-2 Setup > Sonar, for inform ation about
customizing fe atures on the sonar displa ys.
Sonar display at a single or mixed frequency (section 5-1)
Sonar split display with zoomed section (section 5-2)
Show zoomed section of sonar
Sonar flat bottom trace in zoomed sec tion (section 5-3)
Sonar split display with 83 and 200 frequencies (section 5-4)
Sonar split display with echo strength (sec tion 5-5)
Show perspective view of sonar (section 5- 6)
Fuel data (sectio n 5-7)
Water temperature and depth history and boat data (section 5-8)
Product and wiring information (section 5-9)
5-1 Sonar display
Data header, set up to show the
boat speed, sonar status etc.
Depth (medium size digits)
To show the Sonar display, press
DISP and selec t Sonar Tab,
select Sonar and press ENT.
This display scrolls from right
(most recent echoes) to left
(oldest echoes) at the selec ted
frequency (see section 3-2 Setup
> Sonar).
To change items, press MENU until the
Options menu is shown.
Gain is explained in
section 4-4 Gain.
Range is explained
in section 4-5 Range.
A-scop e is
explained in sec tion
5-5 Sonar A-Scope
display.
FISH 4432/4433 Installation and Operation Manual 24
The Display menu is summarized here and each
display is shown in the following sections.
Most displays have an Options menu so that
relevant features can be changed quickly.
Surface
Fish symbols with depth
Bottom
Range
Data header
The data header can
be selected on or off.
When selected, it
is a customizable
feature that can be
used to display up
to 9 data items, such
as alarms or water
temperature.
NAVMAN
Page 23

To customize the size of the Data header,
highlight Size and press ENT. There is a
choice of Small and Large.
To customize the data items to be displayed:
1. Highlight Data setup and press ENT.
The Data header increases in size to display
all data fields. Some data fields may be
blank.
2. Use the cursor keys to move from data field
to data field.
3. Press ENT at any data field to show the list of
data items that can be displayed there.
5-2 Sonar Zoom display
To show the Sonar Zoom display, press DISP
and select Sonar Tab, select Sona r Zoom
and press ENT.
Sonar history
Zoom bar
Zoom section
Divider line
The split display shows the sonar history on the
right side and the zoom section on the lef t.
The zoom bar on the far right shows the area
that is magnified in the zoom section. See
section 4-5 Range, for information about
adjusting the Zoom Range and Zoom Offset.
To change items, press MENU until the
Options menu is shown.
4. Highlight the required data item and press
ENT. The data item is immediately displayed
in that data field.
5. Press ESC when finished and the Data
header resizes automatically.
Sonar History
To review an old sonar echo, use < and > to
move back and forward through the sonar
history. The time since the echoes shown on
the screen were recorded is displayed at the
bottom of the screen. Press ESC to return to the
most recent echo.
Gain
Gain is explained in sec tion 4-4 Gain.
Range
Range is explained in section 4-5 Range.
A-Scope
A-Sco pe is explained in section 5-5 Sonar
A-Scope display.
Bottom lock
If Bottom lock is selected, the zoom section
moves so the bottom is always displayed in the
zoom sec tion, regardless of changes in depth.
If Bottom lock is not selected, the bottom
will not be displayed in the zoom section when
it is outside the range covered by the zoom bar.
Using the Bot tom Lock and the A-Scope
features together can b e a powerful aid in
recognising the type of bottom.
Split Ratio
Use this to change the split ratio between the
zoom and the sonar history sections displayed.
The default split ratio is 50%.
1. Highlight Split Ratio and press ENT.
A left arrow and right arrow appear on
either side of the divider line.
2. Use the
or
position of the divider line, then press
ENT. The adjustable range of the split ratio
is from 20% to 80%. For 100% zoom, use
‘full-screen zoom’ display.
cursor keys to adjust the
Data header
Data header is explained in section 5 -1
Sonar display.
NAVMAN
FISH 4432/4433 Installation and Operation Manual25
Page 24

5-3 Sonar Bottom display
To show the Sonar Bottom display, press DISP
and select Sonar Tab, select Sonar Bottom
and press ENT.
This shows a split display, with the sonar histor y
on the right side and the zoom section on the
left. The bottom signal is shown as a flat trace
in the centre of the zoom section.
Showing the bottom as a flat trace can make
it easy to compare the echo strengths shown
in the bottom signals. This can help to identify
the type of bottom and objects close to the
bottom.
The zoom bar can only indicate the zoom
range. It cannot indicate the zoom offset as
this changes for each sounding displayed on
the display.
The zoom bar is fixed in the middle of the
display.
See section 4-5 Range, for information about
adjusting the Zoom Range and Zoom Offset.
To change items, press MENU until the
Options menu is shown.
Gain is explained in section 4 -4 Gain.
Range is explained in section 4-5 Range.
A-scop e is explained in section 5-5 Sonar
A-Scope display.
Data header is explained in section 5 -1
Sonar display.
Bottom lock and Split ratio are
explained in section 5-2 Sonar Zoom display.
5-4 Sonar 83/200 display
To show the Sonar 83/200 display, press DISP
and select Sonar Tab, select Sonar 83/200
and press ENT.
This shows a split display, with the 83 kHz sonar
history on the lef t side and the 200 kHz sonar
history on the right side. Gain settings can be
set independently for each frequenc y. Range
settings apply to both sections of the display.
To change items, press MENU until the
Options menu is shown. Gain is explained
in section 4-4 Gain.
Range is explained in section 4-5 Range.
A-scop e is explained in section 5-5 Sonar
A-Scope display.
Data header is explained in section 5-1
Sonar display.
Split ratio is explained in section 5-2
Sonar Zoom display.
5-5 Sonar A-Scope d isplay
To show the Sonar A-Scope display, press
DISP and selec t Sonar Tab, select Sonar
A-Sco pe and press ENT.
Use this to analyse the sonar data in detail and
optimize the Gain settings.
Divider line
between sonar
history and
A-scope
Gain setting
(strongest echo
for display)
Gain threshold
(weakest echo for
display)
FISH 4432/4433 Installation and Operation Manual 26
The user can define the level of the weakest
and strongest echoes to be shown on the sonar
displays, by using the Gain and Threshold
settings. See se ction 4-4 Gain, for more
information.
The strength of an echo at a particular depth
is shown by the length of the horizontal line at
that depth. A strong echo produces a long line
whereas a weak echo produces a shor t line.
To change items, press MENU until the
Options menu is shown.
Gain is explained in section 4 -4 Gain.
Range is explained in section 4-5 Range.
Data header is explained in section 5 -1
Sonar display.
Split ratio is explained in section 5-2
Sonar Zoom display.
NAVMAN
Page 25

Fish recognition
The echo strengths shown on the A-scope
can be useful in recognising the t ype of fish.
Different species of fish have different sizes
and shapes of swim bladders. The air in the
swim bladder reflects the ultrasonic pulse, so
the strength of the echo varies between fish
species according to the size and shape of the
swim bladder.
5-6 A-Scope perspec tive view
The strength of echoes on this view are
determined by the’height’ of the echo shown
on the screen.
5-7 Fuel display (4433 only)
To show the Fuel display, press DISP and select
Other Tab, select Fuel and press ENT.
There are no options.
(See sec tion 3-3 Setup > Fuel for information
about setting up the fuel values. If the number
of engines is set to 0, the fuel features are
turned off.)
Used shows total fuel used since this was last
reset with the Clear Used command.
Remaining shows the amount of fuel
remaining in the tank(s).
Flow shows the fuel consumption per hour.
For twin engine installations, the fuel f low for
each engine is shown separately. This is useful
for checking that both engines are under the
same load.
When fishing among a school of fish and
catching them, note the fish species and the
strength of the echo that it returns on the
A-scope. Then, when that par ticular echo is
seen at future times on the fishf inder, it is likely
to be the same fish species.
NAVMAN
FISH 4432/4433 Installation and Operation Manual27
Page 26

Economy is the distance travelled per unit of
fuel used. The Fishf inder calculates this using
the fuel used and boat speed (water speed or
GPS speed - which ever is selected as the speed
source – see section 3-3 Setup > Fuel).
5-8 Data display
5-9 About display
The bigger this number, the better the fuel
economy. Adjust the throttle and trim to
achieve the best fuel economy.
Note: when water speed is selected as the
speed source, calibration of the boat speed
measurement is essential for an accurate fuel
economy reading – see section 3-8 Setup >
Calibrate.
To show the Data display, press DISP and select
Other Tab, select Data and press ENT.
This shows a graph of the water temperature
and depth over the last 20 minutes and
selected data items.
The graph is useful for locating warm and cold
spots in the water.
To change data items:
1. Press MENU until the Options menu is
shown.
2. Highlight Data setup and press ENT.
3. Use the cursor keys to move from data field
to data field.
4. Press ENT at any data field to show the list
of data items that can be displayed there.
5. Highlight the required data item and
press ENT. The data item is immediately
displayed.
6. Press ESC when finished.
Time base of graph can be changed by pressing
Menu, selecting Time Base with cursor key,
pressing ENT, and selecting the required time
base from list - 5min, 10min, 20min, 1hr, 2hr.
To show the About display, press DISP, select
Other Tab, select About and press ENT.
There are no options.
This shows the fishf inder model number, the
software and hardware versions and wiring
information.
Note the sof tware version before contacting
your Navman dealer for technical advice.
For more information on wiring, see section 6-5
Wiring options.
For more information on NMEA and NavBus,
see section 6- 6 Systems of several instruments.
FISH 4432/4433 Installation and Operation Manual 28
NAVMAN
Page 27

6 Installation and Maintenance
Correct installation is critical to the
performance of the FISH 4432/4433. There are
two components to install, the display unit and
Wiring Options
The power/data cable contains 5 wires:
Wire Function
Black Ground (power negative)
White* NMEA out
Red Positive power in, 12 V DC
Yellow Auto power in (connect to red
wire. Positive power in, to enable
Auto power).
Green* External beeper or light out,
switched to ground, 30 V DC 200
mA maximum.
Note: The cable shield i s connected to Pin 1 (black
wire) and doe s not need to be grounded .
* Denotes FISH 4433 only.
Warni ng
1 Amp fuses must be po sitioned whe re
shown in t he wiring diagra ms.
Basic wiring
This requires the FISH 4 432 and FISH 4433 to be
powered on manually with the key.
Black wire: Connect this to the negative
battery terminal.
Red wire: Connect this to the positive battery
terminal af ter the main switch. Fit a 1 Amp fuse
as shown.
Yel low w ire : Connect this to the black wire.
This disables the engine hours counter.
the transducer. It is vital to read the entire
installation sec tion of this manual before
attempting to install the components.
Six wiring options are described in this section:
• Basic wiring. This do es not star t the fishf inder
automa tically wh en the boat ig nition is sw itched on
and it di sables the e ngine hour s counter.
• Auto power wiring. This m ust be used f or the
engin e hours and f uel compute r options.
• Seco ndary Alarm wiring
• NMEA wiring
• Single engine fuel wiring
• Twin engine fuel wiring
Note: If a wire colour is no t specifically
mentioned , it is not used in that wiring o ption.
Section 6-5 Systems of several instruments,
describes NMEA and NavBus.
Power on the f ishfinder manually whenever the
main switch is on.
Basic wiring
Main
switch
Fuse
12 V DC
Red
Yellow
Black
NMEA wiring Option (FISH 4433 only)
White Wire: Use this, if desired, to connect the fishfinder to other NMEA instruments such as
Navman’s REPEAT 3100. (See sec tion 6-5 Systems of several instruments.)
NAVMAN
FISH 4432/4433 Installation and Operation Manual29
Page 28

Secondary alar m wiring option (FISH 4433 onl y)
Green Wire: Use this to connect a secondary alarm indicator such as a flashing light or external
beeper with a built-in drive circuit. See the Auto power wiring diagram.
If the external beeper or light requires more than 200 mA total, fit a relay. Consult your Navman
dealer for more advice.
Fuel kit wiring (FISH 4433 only)
See the Fuel K it Installation Guide for information about the fuel transducer cable.
Wire the power cable for Auto power (as described in this sec tion) to make sure the fuel counter
starts as soon as the engine starts.
For twin en gine installation , a T- connector needs to be installed on the fu el transducer cable.
Auto power opt ion
Black wire: Connect this to the negative
battery terminal.
Red wire: Connect this to the positive battery
terminal af ter the main switch. Fit a 1 Amp fuse
as shown.
Yel low w ire : To enable the engine hours
counter and fuel counter; and to start the
fishfinder automatically when the ignition
is turned on, connect the yellow wire to the
ignition system through a 1 Amp fuse.
Note: The fishfin der cannot be turned of f while
the ignitio n is on.
Auto power opt ion
To ig niti on s yste m
Ignition
switch
Main
switch
Fuse
Fuse
External Beeper
or Light
12 V DC
White (N MEA out)
Yel low
Red
Green
Black
Through hull transducers
Through hull transducers are supplied wth ‘Y’
adapter cable for connection of both transducers
into top socket with blue nut.
8 pin
Speed /Temperature t hrough hull tran sducer
phono
Throug h hull depth trans ducer
FISH 4432/4433 Installation and Operation Manual 30
NAVMAN
Page 29

6-1 What comes with this pro duct?
Standard configuration:
• FISH 4432/4433 display unit
• Power cable
• Mounting bracket (screws included)
• Warranty registration card
• This manual
• Sun cover for display unit
• Flush mounting kit
• Dual frequency transom transducer
(includes cable kit and screws)
• Transom Mount Transducer Installation
Manual.
6-2 Options and Accessories
• TRACKER series of char tplotters
• Through hull dual frequency transducer
• Through hull speed/temperature
transducer
• Fuel flow kit (single or twin engine)
• Replacement paddle wheel
• SmartCraft Gateway*
• REPEAT 3100 (see section 6-6 Systems of
several instruments)*
• Diesel 3200 for fuel f low on diesel engines*
6-3 Mounting and removing the display unit
There are t wo mounting arrangements:
• Flush mounting requires a solid panel with
access behind for wiring and mounting
screws. Af ter flush mounting, the FISH
4432/4433 cannot be tilted or moved after
installation to reduce any unwanted glare
or reflections. Carefully select the best
viewing position before installation. This
would generally be in a shaded area.
• Bracket mounting requires a panel for
mounting the bracket. Ensure that the
panel is not likely to deform and is not
subject to excessive vibration. The bracket
can be tilted and rotated and the FISH
4432/4433 can be removed after each use.
Mounting bracket
Screws
Display unit
Dual frequency
transom transducer
Power cable
Please consult your Navman dealer for more
information.
* Fish 4433 only
TRACKER
5430 or 5380 chartplotter
Fuel flow kit
Select a position where the display unit will be:
• At leas t 4” (100 m m) away from the compass .
• At least 12” (300 mm ) away from any radio
transmitter.
• At least 4 f t. (1. 2 m) away from any antenna.
• Easy to rea d by the helmsman and crew while
underway.
• Protecte d from physical damage du ring
r ough sea passages .
• Eas y to access the 12V DC power sour ce.
• Convenient to r oute the transducer ca bles.
NAVMAN
FISH 4432/4433 Installation and Operation Manual31
Page 30
Flush Mounting
1. Cut a hole in the bulkhead for the display
unit using the flush mount template.
2. Drill four holes for the mounting studs
using the flush mount template.
3. Screw the four studs into the brass inser ts
in the back of the display unit.
4. Sit the display unit in place and fit the
washers and nuts to the studs.
Bracket Mounting
1. Fix the mounting bracket onto the boat
using the three stainless steel screws. Do not
overtighten the screws, as the bracket may
not rotate.
2. Push the display unit onto the mounting
bracket and tighten it firmly using the knob
on the mounting bracket.
3. Attach the cables.
6-4 Systems of severa l instruments (4433 0nly)
Several Navman instruments can be connected
together to share data.
The FISH 4432/4433 is particularly suited
to work with the TRACKER 5430 (4.3”
greyscale)/5380 (3.8” color) - Navman’s GPS
chartplotters with worldwide coverage.
There are t wo ways of connecting instruments
together; NavBus or NMEA.
NavBus
NavBus is a Navman proprietary system that
allows systems of multiple instruments to be
built using a single set of transducers. When
instruments are connected by NavBus:
• If the units, alarms or calibration are
changed in one instrument, then the values
will automatically change in all instruments
of the same t ype.
• Each instrument can be assigned to
a group of instruments. Then, if the
backlight setting is changed in one group,
Removing the display unit
The display unit can be removed after each
use for protection against the environment or
security reasons.
When removing the display unit, ensure that
the plugs left in the boat are not exposed to
the elements. Push the at tached dust covers
over the exposed ends of the plugs. Keep the
display unit in a dry clean place such as an
optional Navman carry bag.
it will automatically change for the other
instruments in that group. However, the
backlight setting will not change for
instruments in dif ferent groups.
• If an alarm sounds, mute it by clearing the
alarm on any instrument which can display
that alarm.
NMEA
NMEA is an industry standard for marine
instrument connections. Data sent by one
instrument over an NMEA line can be read and
displayed by another instrument that accepts
NMEA 0183 Version 2. It is not as flexible as
NavBus as it requires dedicated connections
between instruments.
Please contact your Navman dealer for
information on Navman’s full range of NMEA
enabled instruments and connection options.
FISH 4432/4433 Installation and Operation Manual 32
NAVMAN
Page 31

DEPTH 2100
REPEAT 3100
Depth Repeater
Repeater for depth, speed, water temperature and battery
voltage. Accepts NavBus or NMEA data inputs from other
instruments.
6-5 Cleaning and mainte nance
To avoid damage, clean the screen only with
a damp cloth and mild detergent when dirty
or covered in sea salt. Avoid abrasive cleaners,
petrol or other solvents.
Cover or remove a transom-mounted
transducer when repainting the hull. If painting
over a through hull transducer with antifouling
paint, use only one coat of paint. Remove the
previous coat of antifouling paint by sanding
it lightly.
To optimize performance, avo id walk ing on
or jamming cables and connectors. Keep the
transducer free of weed, paint and debris. Do
not use a high pressure water blast on a speed
sensor paddlewheel as it may damage the
bearings.
When not in use, the FISH 4432/4433 can be
removed from the installation bracket and
stored in the Navman carry bag, or left on the
installation bracket and securely covered with
the sun cover supplied.
TRACKER 5430/5380
Color GPS Chartplotter with
worldwide coverage
NAVMAN
FISH 4432/4433 Installation and Operation Manual33
Page 32

Appendix A - Specifications
Specifications FISH 4432 FISH 4433
Displ ay type:
Display size: 4.3” (110mm) diagon al
Supply voltage: 10 to 16V DC
Suppl y current at 13. 8 V:
Operating temperature: 32 ° to 122°F (0° to 50°C )
Environment: IPx6 and IPx7
Standards Compliance EMC:
Depth:
Output power: Variabl e, up to 250W RMS
Dual Transducer frequency: 200 kHz / 83 kHz
Receiver sensitivity:
Typical depth acquisition time
from startup:
Transom tr ansduce r cable
length:
Temperature measurement
range:
Speed range: 1 to 50 kn (57.5 mph, 96 .6 kph)
Communicat ions:
NMEA Output:
NMEA (0183) is a st andard for
interfacing marine electronic
devices . The Navman
fishf inder can outp ut the
followi ng sentences
Fuel Comp uter:*
(option al fuel transdu cer(s)
required)
*4433 only
Smar tCr aft Suppo rt: No Yes, single engine
FISH 4432/4433 Installation and Operation Manual 34
16 Gr eysca les
Screen R esolution 360 h igh x 240 wide(pi xels)
White LED b acklighting
170 mA min - no backl ighting
250 mA max - fu ll backlighti ng
USA FCC Part 15 Class B
Europe (CE ) EN60945 (EMC on ly)
New Zeala nd and Australia ( C-T ick) CISPR 22
2 ft (0. 6 m) to 750ft with sup plied transdu cer.
Depth ca pabilities of t ransducer used a nd installatio n and water clarit y.
Bette r than 10 micro volts RMS
Dynami c range 4.0 milli on to 1 (120 d B)
2 seconds a t 100 ft (30 m )
33 ft (10 m) 26 ft (8 m)
32° to 99.9°F ( 0° to 37. 7°C) Resolut ion of 0.1° unit
NMEA 0183 (Ver 2. 0) 4800 baud
NavBus
DBT (De pth Below Transduce r)
DPT (De pth and Keel off set)
VHW (Spe ed)
VLW (Dist ance traveled – Total & Trip )
MTW (Sea Water temperatur e)
XDR (Bat tery voltag e and fuel flow)
Outboa rd carbureted t wo stroke and EFI p etrol/gasoli ne
engine s: 30 to 300 hp
Outboa rd four stroke pe trol/gasoli ne engines: 90 to 3 00 hp
Inboar d petrol/gaso line engines: 5 0 to 300 hp
Minimum f low rate: 1.3 U. S. gallons per ho ur (5 litres per ho ur)
Maximu m flow rate: 34 U. S. gallons per h our (13 0 litres per hour)
NAVMAN
Page 33

Appendix B - Dimensions
Appendix C - Troubleshooting
This troubleshooting guide is written with
the assumption that the user has read and
understood the relevant sections in this
manual.
It is possible in many cases to solve difficulties
without having to send the display unit back to
the manufacturer for repair. Please follow this
troubleshooting section before contacting the
nearest Navman dealer.
There are no user ser viceable parts. Specialized
methods and testing equipment are required
to ensure that the display unit is reassembled
correctly and is waterproof. Users who service
the product themselves will void the warranty.
Repairs to the product may only be carried out
by a service centre approved by Navman. If the
product must be sent into a service centre for
repair, it is essential to send in the transducer(s)
at the same time.
More information can be found on our Website:
www.navman.com.
1. The fish finder won’t turn on:
a) The FISH 4 432/4433 is designed to operate
on a 12 volt battery system, where the
voltage may vary from 10 to 16 volts. If an
excessive voltage is supplied, the unit will
turn off/not star t.
b) Check that the power cable connector
at the back of the display unit is securely
plugged in and the collar is locked in place.
The collar must be secure for watertight
connection.
c) Measure the battery voltage while the
batter y is under load - turn on some
lights, radio or other electrical equipment
connected to the battery. If the voltage is
less than 10 volts:
- the batter y terminals or wiring on the
terminals may be corroded.
- the batter y may not be charging
correctly or may need replacing.
d) Inspect the power cable from end to end
for damage such as cuts, breaks, squashed
or trapped sections.
e) Ensure that the red wire is connected to the
positive battery terminal and the black wire
to the negative batter y terminal. If wired for
the Auto Power option, ensure the yellow
wire is connected to the ignition circuit.
Also check the boat’s main switch circuit
(see sec tion 6-5 Wiring options).
f) Check for corrosion on the power cable
connector and clean or replace if required.
g) Check fuses that are placed in line with the
power cable. A fuse can be blown despite
appearing to be good or the fuse may be
corroded. Test the fuse or replace it with a
fuse known to be good.
NAVMAN
FISH 4432/4433 Installation and Operation Manual35
Page 34

2. The fish finder won’t turn off:
The fishf inder may have been wired for
Auto power. In this case, the fishfinder
cannot be turned of f while the ignition
power is on. (See Auto power wiring in
section 6-5 Wiring options.)
3. The fishfinder operates erratically:
a) Check that the transducer does not have
debris (e.g. weed, plastic bag) caught
around it.
b) The transducer may have been damaged
during launching, running aground or while
underway with debris etc. If the transducer
has been impacted, it may have been kicked
up on the bracket. If it is not physically
damaged, reset the transducer back to
its original position. (See the Tra nso m
Transducer Installation Guide.)
c) When the transducer is less that 2 ft. (0.6 m)
from the bottom, the depth readings may
become inconsistent and erratic.
d) Manual Gain may be set too low, which may
cause weak bottom echo or no fish signals. If
in Manual Gain, try increasing the Gain.
e) Ensure the back of the bottom surface of
the transducer is slightly lower than the
front and the front is as deep in the water as
possible in order to minimize the generation
of bubbles through cavitation. (See the
Transom Transducers Installat ion Guide.)
f) Check the transducer and power cable
connectors at the back of the display unit
are securely plugged in and the collars are
locked in place. The collars must b e secure
for watertight connec tion.
g) Inspect the power cable from end to end
for damage such as cuts, breaks, squashed
or trapped sections.
h) Ensure there is not another fishfinder
or depth sounder turned on, which may
interfere with this fishfinder.
i) Elec trical noise from the boat ’s engine
or an accessor y may be interfering with
the transducer(s) and /or the Navman
fishf inder. This may cause the f ishfinder
to automatically decrease the Gain unless
using Manual Gain.
The fishf inder thus eliminates weaker
signals such as fish or even the bot tom
FISH 4432/4433 Installation and Operation Manual 36
from the display. This may be checked
by switching off other instruments,
accessories (e.g. bilge pump) and the motor
until the of fending device is located. To
stop problems from electrical noise, try:
- re-routing the power and transducer
cable(s) away from the boat’s other
electrical wiring.
- routing the display unit ’s power cable
directly to the battery with an in-line
fuse.
4. Bottom is not displ ayed:
a) The fishfinder may have Manual Range
selected and the depth may be outside the
range value selec ted. Either change the
fishfinder to Auto Range or select another
depth range (see section 4 -5 Range).
b) The depth may be outside the fishfinder’s
range. While in Auto Range, the display unit
will display “--.-” to indicate that there is no
bottom detected. A display of the bottom
should reappear when in shallower water.
5. The bottom is disp layed too far up
the screen:
The fishf inder may have Manual Range
selected and the selected Range value is
too high for the depth. Either change the
fishfinder to Auto Range or select another
depth range (see section 4 -5 Range).
6. Bottom echo disappears or erratic
digital readi ng while the boat i s moving:
a) Ensure the back of the bottom sur face
of the transducer is slightly lower than
the front and the front is as deep in the
water as possible in order to minimise the
generation of bubbles through cavitation.
(See the Transom Transducers I nstallation
Guide, for more information.)
b) The transducer may be in turbulent water.
Air bubbles in the water disrupt the echoes
returned, interfering with the fishf inder’s
ability to find the bottom or other targets.
This often happens when the boat is
reversed. The transducer must be mounted
in a smooth flow of water in order for the
fishfinder to work at all boat speeds.
c) Electrical noise from the boat ’s motor can
interfere with the fishfinder. Try some
suppression spark plugs.
NAVMAN
Page 35

7. If the fi shfinder beeps when t urned on
but nothing is displayed:
The fishf inder may be operating, but the
backlight settings may have been set
too low. See section 2 Basic Operation,
to adjust the f ishfinder backlight. Press
twice to restore default backlight settings.
8. The wrong language is displayed:
See section 3-1 Setup > System.
9. Fuel used or remaining seem inaccurate:
a) If the engine is run while the fishfinder is
powered off, the fishfinder does not record
the amount of fuel used during that engine
run. Consequently, the Fuel remaining
value will be higher than the actual amount
of fuel remaining in the tank.
To avoid this problem, use the Auto
Power Wiring option described in section
6-5 Wiring options. This ensures that
the fishfinder powers on automatically
whenever the boat’s ignition is switched on.
b) In rough seas, fuel may surge back and
forth through the fuel transducer, resulting
in incorrect readings. Try installing a
one-way valve between the fuel transducer
and the fuel tank.
c) The Set remaining fuel value must be
reset after every refuelling (see section 3-3
Setup > Fuel).
d) The fuel tank may not ref ill to the same
capacit y each time due to air pockets.
This is par ticularly noticable with
underfloor tanks.
e) Fuel transducers wear out over time and
should be replaced af ter every 5000 litres
of fuel.
10. Flow indic ates no fuel or low fuel:
a) Check that the number of engines is set to
1. See section 3-3 Setup > Fuel.
b) Check that the fuel cable connectors are
securely plugged in and the collar is locked
in place. The collar must be locked in place
to give a watertight connection.
c) A fuel transducer may be clogged. If so,
remove the transducer from the fuel line
and gently blow through it in the opposite
direction to the fuel flow.
A fuel filter between the fuel transducer
and the fuel tank must be installed as per
the fuel installation guide. Failure to do so
will void the warranty.
d) Inspect the fuel cable from end to end for
damage such as cuts, breaks, trapped or
squashed sections.
e) Check that the fuel filter is clean.
11. A twin engin e installation shows only
one flow rate:
a) Check that the number of engines is set to
2. See sec tion 3-3 Setup > Fuel.
12. Erratic Fuel Flow rea dings:
a) The fuel flow transducer may have been
mounted too close to the fuel pump or may
be subjec t to excessive vibration. Refer to
the installation instructions supplied with
the fuel transducer.
b) Check for leaks in the fuel line or in the fuel
pickup in the tank.
c) The Flow filter value is not suitable for
the engine. Check that the value is not set
to zero, then try increasing the value until
a steady flow rate is shown. See section 3-3
Setup > Fuel.
d) A higher fuel Flow filter setting be
used on EFI (fuel injec ted) engines. See
section 3-3 Setup > Fuel.
13. There is no rea ding for fuel economy:
a) The boat must be travelling through the
water to generate an Econom y reading.
b) Check that the paddlewheel on the
transducer is spinning freely and that the
two magnets in the paddlewheel are still
in place.
14. There is a doub le bottom trace
displayed:
a) The boat may be in an area that generates
shadows. See section 4-1 Interpreting the
display.
b) In shallow water, the echoes may bounce.
Reduce the gain setting (see section 4 -4
Gain) and/or reduce the sonar pulse power
(see sec tion 3-2 Setup > Sonar).
c) Decrease the Range.
15. No Sonar Display
Sonar is turned off. See Section 3-1
System > Setup.
NAVMAN
FISH 4432/4433 Installation and Operation Manual37
Page 36

How to contact us www.navman.com
NORTH AMERICA
BNT - Marine Electronics
30 Sudbury Rd, Acton, MA 01720.
Toll Free: +1 866 628 6261
Fax: +1 978 897 8264
e-mail: sales@navmanusa.com
web: www.navman.com
OCEANIA
Australia
Navman Australia Pty. Limited
Suite 2, 408 Victoria Road
Gladesville, NSW 2111, Australia.
Ph: +61 2 9879 9000
Fax: +61 2 9879 9001
e-mail: sales@navman.com.au
web: w ww.navman.com
New Zealand
Absolute Marine Ltd.
Unit B, 138 Harris Road,
East Tamaki, Auckland.
Ph: +64 9 273 9273
Fax: +64 9 273 9099
e-mail: navman@absolutemarine.co.nz
Papua New Gu inea
Lohberger Engineering,
Lawes Road, Konedobu.
PO Box 810, Port Moresby.
Ph: +675 321 2122
Fax: +675 321 2704
e-mail: loheng@online.net.pg
web: www.lohberger.com.pg
LATIN AMERICA
Argentina
Costanera Uno S.A.
Av Pte Ramón S. Castillo y Calle 13
Zip 1425 Buenos Aires, Argentina.
Ph: +54 11 4312 4545
Fax +54 11 4312 5258
e-mail: purchase@costanerauno.com.ar
web: www.costanerauno.ar
Brazil
Equinautic Com Imp Exp de Equip
Nauticos Ltda.
Rua Ernesto Paiva, 139
Clube dos Jangadeiros
Porto Alegre - RS - Brasil
CEP: 91900-200.
Ph: +55 51 3268 6675
+55 51 3269 2975
Fax: +55 51 3268 1034
e-mail: equinautic@equinautic.com.br
web: w ww.equinautic.com.br
REALMARINE
Av Inf Dom Henrique s/nº - Loja 12
Marina da Glória - Rio de Janeiro - R.J.
Brasil
Cep: 2021-140
Ph: +55 21 3235-6222
Fax: +55 21 3235-6228
e-mail: vendas@realmarine.com.br
website: www.realmarine.com.br
Chile
Equimar
Manuel Rodrigurez 27
Santiago, Chile.
Ph: +56 2 698 0055
Fax +56 2 698 3765
e-mail: mmontecinos@equimar.cl
Mera Vennik
Colon 1148, Talcahuano,
4262798, Chile.
Ph: +56 41 541 752
Fax +56 41 543 489
e-mail: meravennik@entel.chile.net
Mexico
Mercury Marine de Mexico
Anastacio Bustamente #76
Interior 6 Colonia Francisco Zarabia,
Zapapan, Jalisco, C.P. 45236 Mexico.
Ph: +52 33 3283 1030
Fax: +52 33 3283 1034
web: www.equinautic.com.br
Uruguay
Alvaro Burmudez, Nautica
Puerto del Buceo
1130 0 M on te vi deo , U ru gu ay.
Phone & Fax +59 82 628 6562
e-mail : alvaro@nautica.com.uy
web: www.nautica.com.uy
ASIA
China
Peaceful Marine Electronics Co. Ltd.
Guangzhou, Hong Kong, Dalian,
Qingdao, Shanghai
1701 Yanjiang Building
195 Yan Jiang Zhong Rd. 510115
Guangzhou, China.
Ph: +86 20 3869 8839
Fax: +86 20 3869 8780
e-ma il: sales@peaceful-marine.com
web: www.peaceful-marine.com
India
Access India Overseas Pvt. Ltd.
A-98, Sector 21,
Noida - 201 301, India.
Ph: +91 120 244 2697
TeleFax: +91 120 253 7881
Mobile: +91 98115 04557
e-mail: vkapil@del3.vsnl.net.in
Esmario Export Enterprises
Block No. F-1, 3rd Floor, Surya Towers
Sardar Patel Rd, Secunderbad 500 003.
Ph: +91 40 2784 5163
Fax: +91 40 2784 0595
e-mail: gjfeee@hd1.vsnl.net.in
web: w ww.esmario.com
Korea
Kumhomarine Technology Co. Ltd.
#604-842, 2F, 1118-15, Janglim1-Dong,
Saha-Gu, Busan, Korea.
Ph: +82 51 293 8589
Fax: +82 51 265 8984
e-mail: info@kumhomarine.com
web: www.kumhomarine.com
Japan
PlusGain Inc.
1-A 324-3 Matunoki-Tyou
Takayama-City, Gifu-Ken, Japan
Ph: +81 577 36-1263
Fax: +81 577 36-1296
email: info@plusgain.co.jp
web: www.plusgain.co.jp
Maldives
Maizan Electronics Pte. Ltd.
Henveyru, 08 Sosunmagu.
Male', Maldives.
Mobile: +960 78 24 44
Ph: +960 32 32 11
Fax: +960 32 57 07
e-mail: ahmed@maizan.com.mv
Singapo re and Malaysia, B runei
and Indonesia
RIQ PTE Ltd.
Blk 3007, 81 Ubi Road 1, #02-440,
Singapore 408701.
Ph: +65 6741 3723
Fax : +65 6741 3746
e-mail: email@riq.com.sg
web: www.riq.com.sg
Taiw an
Seafirst International Corporation
No. 281, Hou-An Road, Chien-Chen
Dist. Kaohsiung, Taiwan R.O.C.
Ph: +886 7 831 2688
Fax: +886 7 831 5001
e-mail: seafirst@seed.net.tw
web: www.seafirst.com.tw
Thailand
Thong Electronics (Thailand) Co. Ltd.
923/588 Ta Prong Road, Mahachai,
Muang, Samutsakhon 74000, Thailand.
Ph: +66 34 411 919
Fax: +66 34 422 919
e-mail: sales@thongelectronics.com
admins@thongelectronics.com
web: www.thongelectronics.com
Vietnam
HaiDang Co. Ltd.
763 Le Hong Phong St. Ward 12
District 10, Hochiminh City, Vietnam
Ph: +84 8 863 2159
Fax: +84 8 863 2524
e-mail: haidang-co@hcm.vnn.vn
web: www.haidangvn.com
MIDDLE EAST
United Arab Emirates
Kuwait, Oma n, Saudi Arabia , Bahrain
and Qatar
Abdullah Moh’d Ibrahim Trading, opp
Creak Rd. Baniyas Road, Dubai.
Ph: +971 4 229 1195
Fax: +971 4 229 1198
e-mail: sales@amitdubai.com
Egypt
18 Abou El-Ataheya St., via Abbas
Al-Akkad St.,
Nasr City, Cairo Egypt
Ph: +202 274 2911
+202 272 8493
Fax: +202 274 5219
e-mail: seet@internetegypt.com
Lebanon
Balco Stores
Balco Building, Moutran Street,
Tripoli (via Beirut). Lebanon
P.O. Box: 622.
Ph: +961 6 624 512
Fax: +961 6 628 211
e-mail: balco@cyberia.net.lb
AFRICA
South Africa
Pertec (Pty) Ltd (Coastal Division)
16 Paarden Eiland Road.
Paarden Eiland, 7405
PO Box 527,
Paarden Eiland, 7420
Cape Town, South Africa.
Ph: +27 21 508 4707
Fax: +27 21 508 4888
e-mail: info@kfa.co.za
web: www.pertec.co.za
EUROPE
Plastimo International
15, rue Ingénieur Verrière,
BP435,
56325 Lorient Cedex.
Ph: +33 2 97 87 36 36
Fax: +33 2 97 87 36 49
e-mail: plastimo@plastimo.fr
web: www.plastimo.fr
OTHER COUNTRIES IN EUROPE
Norway
ProNav AS
Fiskarvik Maritime Senter,
Hovlandsveien 52,
N-4370 Egersund, Norway.
Ph: +47 51 494 300
Fax: +47 51 492 100
e-mail: mail@pronav.no
web: www.pronav.no
Finland
Vator Oy
Puuskarinne 8,
00850 Helsinki, Finland.
Ph: +35 8 040 300 7212
Fax: +35 8 040 300 7200
e-mail: info@vator.com
web: www.vator.com
Croatia
Meridian Projekt d.o.o.
Savska 58,
Ph: +38 5 1 617 6364
Fax: +38 5 1 617 6365
e-mail: navman@meridianprojekt.com
web: www.meridianprojekt.com
HEADQUARTERS
Navman NZ Limited
7-21 Kawana St.
Northcote.
P.O. Box 68 155,
Newton,
Auckland,
New Zealand.
Ph: +64 9 481 0500
Fax: +64 9 481 0590
e-mail: marine.sales@navman.com
web: www.navman.com
Page 37

Made in New Zealand
MN000433B
FISH 4432 / 4433
Lon 174° 44.535’E
Lat 36° 48.404’S
 Loading...
Loading...