

Page 1

Anwenderhandbuch
NAVIGON Integration Kit 4.0
Stand September 2004
Page 2

irgendwelche Zwecke vervielfältigt oder übertragen werden, unabhängig davon, auf welche Art und Weise oder
Impressum
NAVIGON GmbH
Berliner Platz 11
D-97080 Würzburg
Hotline (dtms-Service, 0,12 €/min): 0180-5-NAVIKIT (0180-5-6284548)
Die in diesen Unterlagen enthaltenen Angaben und Daten können ohne vorherige Ankündigung geändert
werden. Ohne ausdrückliche schriftliche Genehmigung der NAVIGON GmbH darf kein Teil dieser Unterlagen für
mit welchen Mitteln, elektronisch oder mechanisch, dies geschieht. Alle technischen Angaben, Zeichnungen
usw. unterliegen dem Gesetz zum Schutz des Urheberrechts.
Copyright 2004, NAVIGON GmbH
Alle Rechte vorbehalten.
Page 3

Inhaltsverzeichnis
1 Einleitung....................................................................6
1.1
Zu diesem Benutzerhandbuch ............................................ 7
1.2
Leistungsbeschreibung ...................................................... 7
1.2.1 Unterstützte Betriebssysteme.................................. 8
1.3
Systemvoraussetzungen.................................................... 9
1.4
Installation ...................................................................... 9
1.4.1 Installationsergebnis Notebook ...............................10
1.4.2 Installationsergebnis Windows CE ...........................10
1.5
Zugriffshilfen und Konventionen ........................................11
1.6
Gewährleistung ...............................................................11
1.6.1 Support ...............................................................12
1.7
Warenzeichen .................................................................12
Anwenderhandbuch NAVIGON Integration Kit 4.0
2 Programmierschnittstellen........................................13
2.1
Voraussetzungen der Entwicklungsumgebung .....................14
2.1.1 Allgemeines zur Benutzung der Interfaces................14
2.1.2 Schnittstellen im Überblick.....................................15
2.2
Schnittstelle IMNNIK ........................................................15
2.2.1 Methode MNOpen() ...............................................16
2.2.2 Methode MNClose() ...............................................16
2.2.3 Methode GetMNOpen() ..........................................17
2.2.4 Methode GetMNVersion() .......................................17
2.2.5 Öffnen und schließen des NIK .................................18
2.3
Schnittstelle IADDRESS ....................................................19
2.3.1 Methode OpenAddress() ........................................20
2.3.2 Methode CloseAdress() ..........................................20
2.3.3 Methode SearchFirstCityAddress()...........................21
2.3.4 Methode SearchFirstCityPostalCodeAddress() ...........22
2.3.5 Methode SearchNextCityAddress() ..........................23
2.3.6 Methode SearchFirstStreetAddress() .......................25
2.3.7 Methode SearchNextStreetAddress() .......................26
2.3.8 Methode SearchPoiByRadiusAddress() .....................28
2.3.9 Methode SearchNextPoiAddress() ...........................29
2.3.10 Methode ConvertCoordInAddress()........................30
2.3.11 Methode ConvertCoordInAddress2() ......................32
2.3.12 Methode ConvertCoordInCountry()........................33
2.4
Schnittstelle IROUTING ....................................................34
2.4.1 Methode OpenRoute() ...........................................35
2.4.2 Methode CloseRoute() ...........................................36
2.4.3 Methode AddDestCoordRoute()...............................36
2.4.4 Methode GetDestCoordRoute() ...............................37
2.4.5 Methode ClearDestCoordRoute() .............................38
2.4.6 Methode StartRoute()............................................38
2.4.7 Methode ShowRoute() ...........................................39
2.4.8 Methode ClearRoute() ...........................................39
2.4.9 Methode ZoomInRoute()........................................40
2.4.10 Methode ZoomOutRoute() ....................................40
2.4.11 Methode ShowDownRoute() .................................40
Inhaltsverzeichnis - I -
Page 4

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.5
2.6
2.4.12 Methode ShowUpRoute() .....................................41
2.4.13 Methode ShowLeftRoute() ....................................41
2.4.14 Methode ShowRightRoute() ..................................41
2.4.15 Methode ShowStartPointRoute() ...........................42
2.4.16 Methode ShowEndPointRoute() .............................42
2.4.17 Methode SetRotationRoute().................................43
2.4.18 Methode GetRotationRoute() ................................43
2.4.19 Methode GetStatusRoute() ...................................44
2.4.20 Methode GetResultRoute() ...................................44
2.4.21 Methode MapShowRoute()....................................45
2.4.22 Methode GetFirstWayListRoute()...........................45
2.4.23 Methode GetNextWayListRoute()...........................46
2.4.24 Methode SetZoomLevelInRoute() ..........................47
2.4.25 Methode GetZoomLevelInRoute()..........................48
2.4.26 Methode SetMaxResolutionRoute() ........................48
2.4.27 Methode GetMaxResolutionRoute()........................49
2.4.28 Methode ChangeGeoToMapCoordRoute() ...............49
2.4.29 Methode ChangeMapToGeoCoordRoute()................50
2.4.30 Beispiel einer Routenberechnung ..........................51
Schnittstelle IPOSITION ...................................................52
2.5.1 Methode OpenPosition().........................................53
2.5.2 Methode ClosePosition() ........................................54
2.5.3 Methode StartPosition() .........................................54
2.5.4 Methode GetPosition() ...........................................55
2.5.5 Methode ZoomInPosition() .....................................55
2.5.6 Methode ZoomOutPosition() ...................................56
2.5.7 Methode ShowDownPosition() ................................56
2.5.8 Methode ShowUpPosition().....................................56
2.5.9 Methode ShowLeftPosition() ...................................57
2.5.10 Methode ShowRightPosition() ...............................57
2.5.11 Methode SetRotationPosition()..............................57
2.5.12 Methode GetRotationPosition()..............................58
2.5.13 Methode MapShowPosition() .................................59
2.5.14 Methode SetBirdViewPosition() .............................59
2.5.15 Methode SetZoomLevelInPosition() .......................60
2.5.16 Methode GetZoomLevelInPosition() .......................60
2.5.17 Methode SetMaxResolutionPosition() .....................61
2.5.18 Methode GetMaxResolutionPosition() .....................61
2.5.19 Methode ChangeGeoToMapCoordPosition().............62
2.5.20 Methode ChangeMapToGeoCoordPosition().............62
Schnittstelle INAVIGATION ...............................................64
2.6.1 Methode OpenNavigation().....................................66
2.6.2 Methode CloseNavigation() ....................................67
2.6.3 Methode SetDestIdNavigation() ..............................67
2.6.4 Methode GetDestIdNavigation()..............................68
2.6.5 Methode SetDestCoordNavigation().........................68
2.6.6 Methode GetDestCoordNavigation() ........................69
2.6.7 Methode SetDestTrackNavigation() .........................70
2.6.8 Methode StartNavigation() .....................................71
2.6.9 Methode ShowRouteNavigation() ............................71
2.6.10 Methode RepeatLastAdviceNavigation()..................72
2.6.11 Methode ZoomInNavigation() ...............................72
2.6.12 Methode ZoomOutNavigation() .............................72
2.6.13 Methode ShowDownNavigation()...........................73
2.6.14 Methode ShowUpNavigation()...............................73
2.6.15 Methode ShowLeftNavigation() .............................73
2.6.16 Methode ShowRightNavigation() ...........................74
- II - Inhaltsverzeichnis
Page 5

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.7
2.8
2.6.17 Methode ShowStartPointNavigation().....................74
2.6.18 Methode ShowEndPointNavigation() ......................74
2.6.19 Methode SetRotationNavigation()..........................75
2.6.20 Methode GetRotationNavigation()..........................75
2.6.21 Methode GetStatusNavigation() ............................76
2.6.22 Methode GetRoutingResultNavigation()..................76
2.6.23 Methode ShematicViewOpenNavigation() ...............77
2.6.24 Methode ShematicViewShowNavigation() ...............78
2.6.25 Methode DistanceBarOpenNavigation() ..................79
2.6.26 Methode DistanceBarShowNavigation()..................80
2.6.27 Methode MapShowNavigation().............................80
2.6.28 Methode SetBirdViewNavigation() .........................81
2.6.29 Methode GetFirstWayListNavigation() ....................81
2.6.30 Methode GetNextWayListNavigation()....................82
2.6.31 Methode SetZoomLevelInNavigation() ...................83
2.6.32 Methode GetZoomLevelInNavigation() ...................84
2.6.33 Methode SetMaxResolutionNavigation() .................84
2.6.34 Methode GetMaxResolutionNavigation() .................85
2.6.35 Methode ChangeGeoToMapCoordNavigation().........85
2.6.36 Methode ChangeMapToGeoCoordLocationMap() ......86
2.6.37 Beispiele ............................................................87
Schnittstelle IOPTIONS.....................................................89
2.7.1 Methode SetRoutingAlgorithmOptions() ...................90
2.7.2 Methode SetRoutingAlgorithmOptions2() .................91
2.7.3 Methode GetRoutingAlgorithmOptions()...................91
2.7.4 Methode GetRoutingAlgorithmOptions2() .................92
2.7.5 Methode SetRoutingAvoidTypeOptions() ..................93
2.7.6 Methode GetRoutingAvoidTypeOptions() ..................94
2.7.7 Methode SetStyleMapOptions()...............................95
2.7.8 Methode GetStyleMapOptions() ..............................95
2.7.9 Methode SetKeyboardMapModeOptions() .................96
2.7.10 Methode GetKeyboardMapModeOptions() ...............96
2.7.11 Methode GetBasicMapFolderOptions()....................97
2.7.12 Methode SetBasicMapFolderOptions() ....................97
2.7.13 Methode GetMapsNumberOptions() .......................98
2.7.14 Methode GetMapsPathsOptions()...........................98
2.7.15 Methode SetCurrentMapOptions() .........................99
2.7.16 Methode GetCurrentMapOptions() .........................99
2.7.17 Methode GetRadioMutingOptions() ......................100
2.7.18 Methode SetRadioMutingOptions() ......................100
2.7.19 Methode GetLanguageCodeOptions()...................101
2.7.20 Methode SetLanguageCodeOptions() ...................101
2.7.21 Methode GetDistUnitOptions() ............................102
2.7.22 Methode SetDistUnitOptions().............................102
2.7.23 Methode SetLouderOptions() ..............................103
2.7.24 Methode SetQuieterOptions() .............................103
2.7.25 Methode SetPoiMapFolderOptions() .....................104
2.7.26 Methode OpenPoiMapsOptions()..........................104
2.7.27 Methode ClosePoiMapsOptions()..........................105
Schnittstelle IGPS..........................................................106
2.8.1 Methode OpenGPS()............................................107
2.8.2 Methode CloseGPS()............................................107
2.8.3 Methode GetStatusGPS() .....................................108
2.8.4 Methode SetGpsReceiverType() ............................109
2.8.5 Methode GetGpsReceiverType() ............................109
2.8.6 Methode SetGpsReceiverPort() .............................110
2.8.7 Methode GetGpsReceiverPort() .............................110
Inhaltsverzeichnis - III -
Page 6

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.8.8 Methode SetGpsReceiverBaudRate() .....................111
2.8.9 Methode GetGpsReceiverBaudRate() .....................111
2.8.10 Methode SetDataSourceGps() .............................112
2.8.11 Methode SetDataGps() ......................................113
2.9
Schnittstelle ITMC..........................................................114
2.9.1 Methode OpenTmc()............................................115
2.9.2 Methode OpenTmc2() ..........................................116
2.9.3 Methode CloseTmc() ...........................................116
2.9.4 Methode GetStatusTmc() .....................................117
2.9.5 Methode UpdateTmc() .........................................118
2.9.6 Methode GetRadioStationTmc() ............................119
2.9.7 Methode SearchFirstMessageTmc() .......................120
2.9.8 Methode SearchNextMessageTmc() .......................121
2.9.9 Methode GetLastKnownFreqTmc().........................123
2.9.10 Methode GetLastKnownPiCodeTmc()....................123
2.10 Schnittstelle ILOCATIONMAP...........................................124
2.10.1 Methode OpenLocationMap() ..............................125
2.10.2 Methode CloseLocationMap() ..............................126
2.10.3 Methode StartLocationMap()...............................126
2.10.4 Methode ShowCoordInLocationMap()...................126
2.10.5 Methode ShowObjectIDInLocationMap()...............128
2.10.6 Methode ZoomInLocationMap()...........................129
2.10.7 Methode ZoomOutLocationMap().........................129
2.10.8 Methode ShowDownLocationMap() ......................129
2.10.9 Methode ShowUpLocationMap() ..........................130
2.10.10 Methode ShowLeftLocationMap().......................130
2.10.11 Methode ShowRightLocationMap().....................130
2.10.12 Methode SetZoomLevelInLocationMap() .............131
2.10.13 Methode GetZoomLevelInLocationMap().............131
2.10.14 Methode SetMaxResolutionLocationMap() ...........132
2.10.15 Methode GetMaxResolutionLocationMap()...........132
2.10.16 Methode ChangeGeoToMapCoordLocationMap() ..133
2.10.17 Methode ChangeMapToGeoCoordLocationMap() ..133
2.10.18 Methode SetReceivePointLocationMap() .............134
2.10.19 Methode GetReceivePointLocationMap() .............135
2.10.20 Methode MapShowLocationMap() ......................135
2.11 Schnittstelle ITRACK ......................................................136
2.11.1 Methode RecordTrack()......................................137
2.11.2 Methode GetRecordTrackMode() .........................137
2.11.3 Methode GetCoordTrack() ..................................138
2.11.4 Methode SetAngleTrack() ...................................139
2.11.5 Methode GetAngleTrack()...................................139
2.11.6 Methode SetMaxNumberTrack() ..........................140
2.11.7 Methode GetMaxNumberTrack()..........................140
2.12 Schnittstelle ISIMULATION .............................................141
2.12.1 Methode CreateGPSFile() ...................................142
2.12.2 Methode StartSimulationGPS() ...........................143
2.12.3 Methode StopSimulationGPS () ...........................143
2.12.4 Methode StartSimulationTMC() ...........................144
2.12.5 Methode StopSimulationTMC()............................144
2.12.6 Methode SetSimulationSpeed() ...........................145
2.12.7 Methode GetSimulationSpeed()...........................145
2.12.8 Methode SetSimulationPosition().........................146
2.12.9 Methode GetSimulationPosition() ........................146
2.13 Schnittstelle IMNNIKEvents.............................................147
2.13.1 Klasse für Events deklarieren..............................148
- IV - Inhaltsverzeichnis
Page 7

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.13.2 Anbindung im Programm....................................148
2.13.3 Methode RTProgressCallback()............................149
2.13.4 Methode TMCMessageActivateCallback() ..............149
2.13.5 Methode TMCMessageDeactivateCallback()...........150
2.13.6 Methode GPSMessageCallback()..........................151
2.13.7 Methode NAVAudioAdviceCallback().....................151
2.13.8 Methode NAVVisualAdviceCallback() ....................152
2.13.9 Methode LButtonDownNavigationMapCallback() ....153
2.13.10 Methode MouseMoveNavigationMapCallback().....153
2.13.11 Methode LButtonDownRouteMapCallback() .........154
2.13.12 Methode MouseMoveRouteMapCallback()............155
2.13.13 Methode LButtonDownPositionMapCallback() ......155
2.13.14 Methode MouseMovePositionMapCallback().........156
2.13.15 Methode LButtonDownLocationMapCallback()......157
2.13.16 Methode MouseMoveLocationMapCallback() ........157
2.13.17 Methode MAPKeyBoardCallback() ......................158
2.13.18 Methode NAVOnDrawingCallback() ....................159
2.13.19 Methode RoutingOnDrawingCallback() ...............160
2.13.20 Methode PositionOnDrawingCallback() ...............161
2.13.21 Methode LocationOnDrawingCallback() ..............162
2.13.22 Methode NAVOnRunningCallback() ....................163
2.13.23 Methode NAVOnStopCallback() .........................163
3 Anhänge..................................................................165
3.1
3.2
3.3
Anhang A: Aufzählungstypen ..........................................166
Anhang B: Benutzerdefinierte POIs (optional) ...................174
Anhang D: Demo-Applikation..........................................174
4 Glossar....................................................................175
Inhaltsverzeichnis - V -
Page 8
Anwenderhandbuch NAVIGON Integration Kit 4.0
1 Einleitung
In diesem Kapitel finden Sie Informationen zu den folgenden Themen:
1.1 Zu diesem Benutzerhandbuch Seite 7
1.2 Leistungsbeschreibung Seite 7
Unterstützte Betriebssysteme
1.3 Systemvoraussetzungen Seite 9
1.4 Installation Seite 9
Installationsergebnis Notebook
Installationsergebnis Windows CE
1.5 Zugriffshilfen und Konventionen Seite 11
1.6 Gewährleistung Seite 11
Support
1.7 Warenzeichen Seite 12
- 6 - Zu diesem Benutzerhandbuch
Page 9
Anwenderhandbuch NAVIGON Integration Kit 4.0
1.1 Zu diesem Benutzerhandbuch
Einleitung In diesem Handbuch finden Sie eine Beschreibung des NAVIGON
Integration Kit (NIK). Es enthält neben der Installation und
Registrierung der COM DLL alle Funktionen der Schnittstellen und
erklärt die enthaltenen Methoden.
Hinweis: Auf Ihrer CD-ROM finden Sie eine Online-Hilfe, in der
ebenfalls alle Methoden enthalten sind. Sie können die OnlineHilfe nutzen, um schnell und effizient nach Inhalten zu suchen.
1.2 Leistungsbeschreibung
NIK im Überblick Das NAVIGON Integration KIT (NIK) ist eine weltweit
einzigartige Entwicklungsumgebung. Es bietet Ihrem Unternehmen die Möglichkeit, je nach Ansprüchen und Bedürfnissen
verschiedene Navigationsfunktionen zu nutzen. Speziell für Ihr
Unternehmen entwickeln NAVIGON und seine autorisierten
Partner eine jeweils individuelle und maßgeschneiderte Softwareund Integrationslösung. Diese ist speziell auf Ihre Anforderungen
zugeschnitten.
Das NIK bietet Ihnen die einmalige Kombination aus schneller
Navigation und dem Zugriff auf Ihre Unternehmensdatenbank
und nutzt dafür die standardisierte COM-Schnittstelle.
COM-DLL Das NIK besteht aus einer COM-DLL mit diversen Interfaces, die
unabhängig von der verwendeten Programmiersprache (z. B.
C++, Visual Basic, Java) eingesetzt werden können. Dadurch
wird eine einfache Integration einer kompletten Navigationslösung in Drittsysteme wie Tourenplanung, Auftragsplanung oder
Warenwirtschaft möglich (Übernahme und Übergabe von
Koordinaten oder Adressinformationen). Das NIK lässt sich so
vollständig in Ihre Softwareapplikation implementieren.
Die Kartendarstellung für die Navigation erfolgt in einem
beliebigen Fenster unter Angabe eines Window-Handle.
Funktionalitäten Das NIK unterstützt alle für die Navigation typischen
Funktionalitäten, die Sie individuell einsetzen können. Zusätzlich
ermöglicht Ihnen NIK die Darstellung von Daten aus DrittSystemen.
Einleitung - 7 -
Page 10
Anwenderhandbuch NAVIGON Integration Kit 4.0
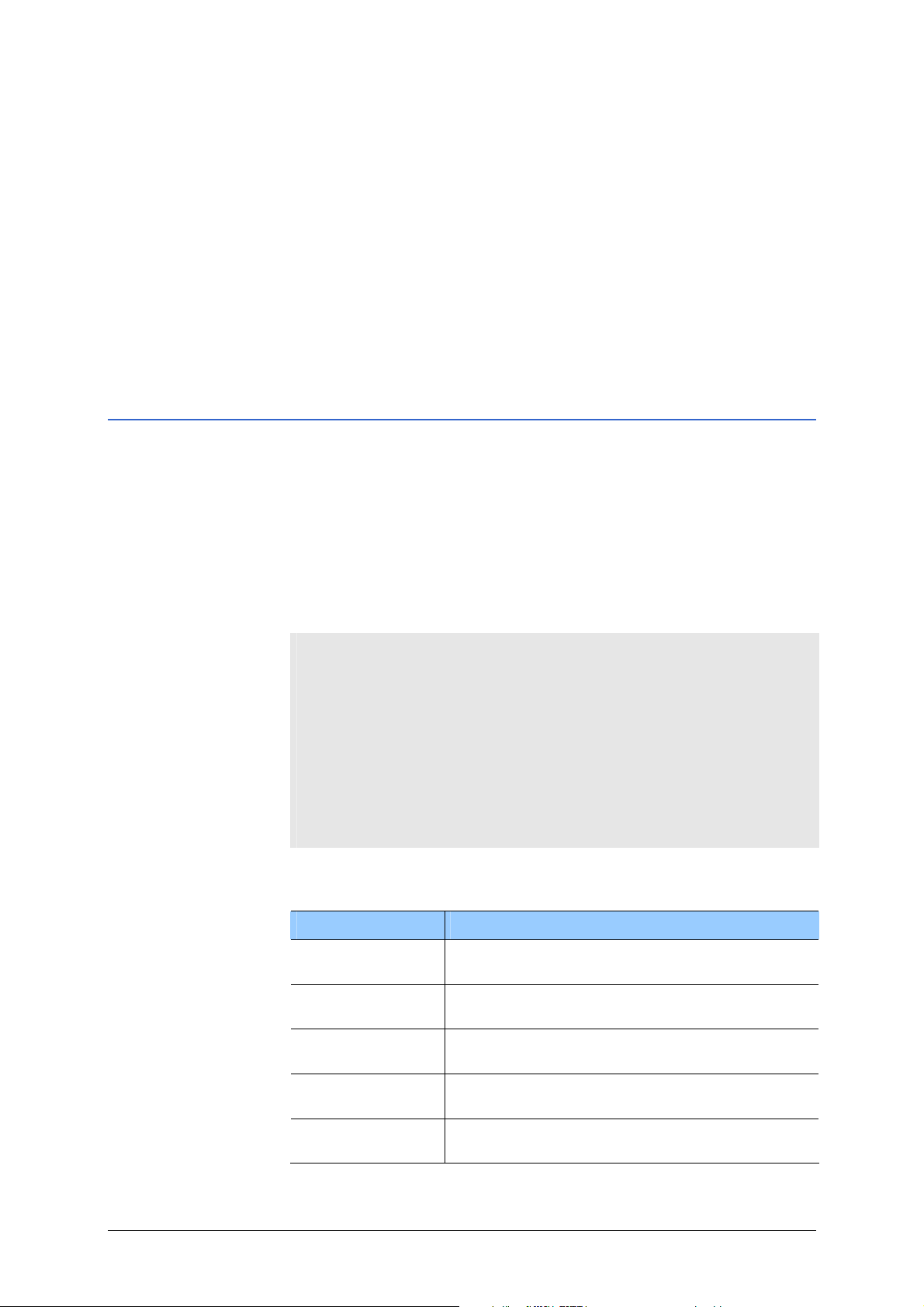
Methoden Das Integration Kit stellt eine große Anzahl an Methoden zur
Verfügung, um auf die Funktionalität des Navigator zuzugreifen.
Die folgenden Programmierschnittstellen stehen zur Verfügung:
Schnittstelle Beschreibung
IMNNIK Starten und Beenden der Navigationssoftware.
IADDRESS Zugriff auf Städte, Straßen und POIs.
IROUTING Erstellung und Berechnung von Routen.
IPOSITION Darstellung der aktuellen Position in der Karte.
INAVIGATION Navigation zu beliebigen Zielen.
IOPTIONS Festlegung globaler Parameter.
IGPS Zugriff auf aktuelle GPS-Daten.
ITMC Einbindung von TMC-Meldungen.
ILOCATIONMAP Darstellung einer individuellen Karte.
ITRACK Aufzeichnung von Spuren (Tracks).
ISIMULATION Ermöglicht die Verwendung von
Simulationsdateien für GPS und TMC.
IMNNIKEvents Handhabung von Ereignissen.
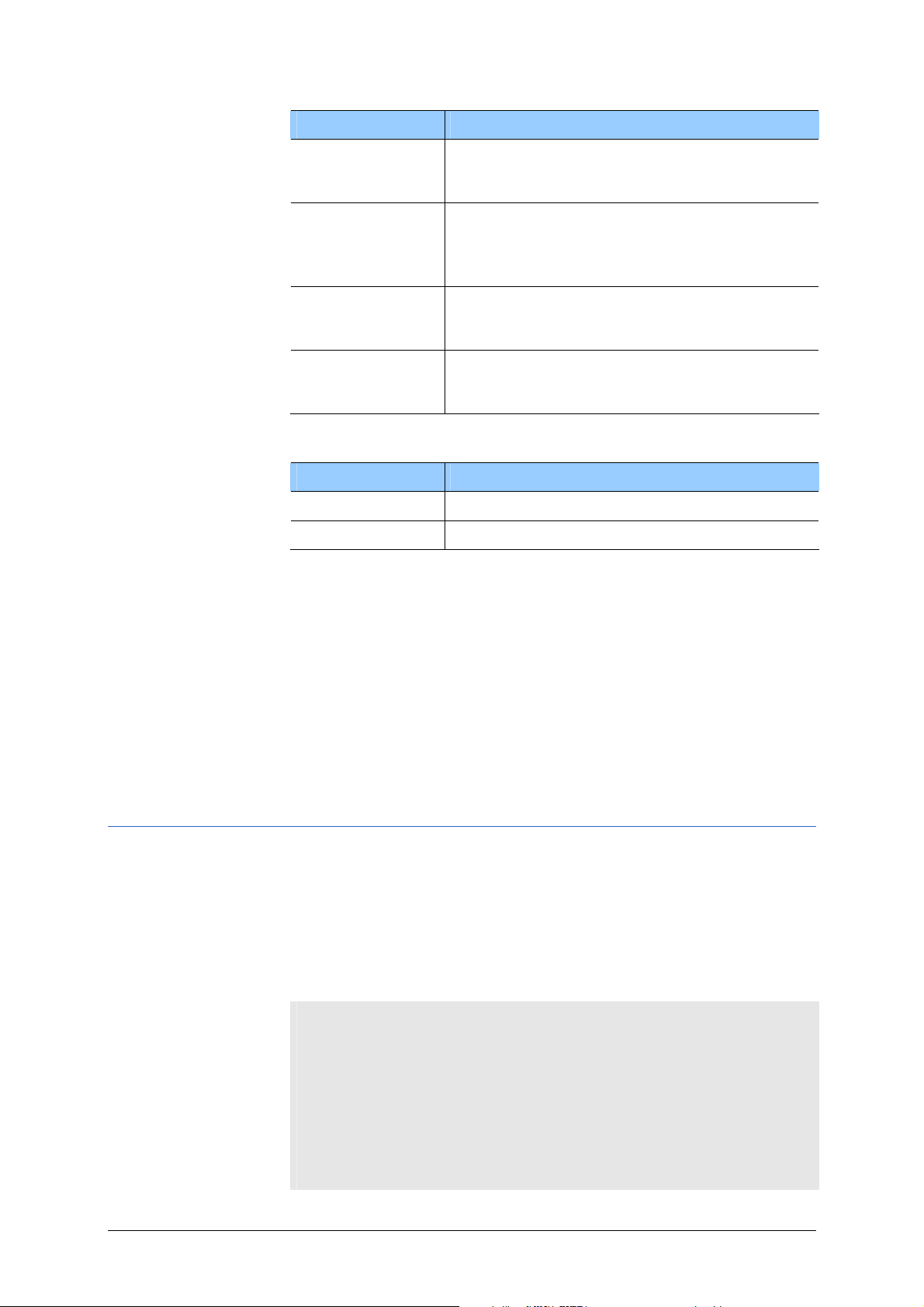
1.2.1 Unterstützte Betriebssysteme
Betriebssysteme Die folgenden Betriebssysteme werden unterstützt:
MS Windows 2000 (mit Service Pack 4) und
XP (mit Service Pack 1)
Windows Mobile 2003
Das NAVIGON Integration Kit wurde unter den folgenden
Systemumgebungen und Programmiersprachen getestet:
Plattform Betriebs-
system
Notebook and
PC
Notebook and
PC
Pocket PC
Windows 2000
Windows XP
Windows 2000
Windows XP
Windows
Mobile 2003
Programmiersprache
C++ Microsoft Visual
Visual Basic Microsoft Visual
C++ Microsoft
Entwicklungsumgebung
Studio 6.0
Basic 6.0
eMbedded Visual
C++ 4.0
Hinweis: Setzen Sie die Demo-Applikation ein, um weitere
Informationen zur Verwendung des NAVIGON Integration Kit
in Ihrer bevorzugten Umgebung zu erhalten.
- 8 - Leistungsbeschreibung
Page 11
Anwenderhandbuch NAVIGON Integration Kit 4.0
1.3 Systemvoraussetzungen
PC Zur Entwicklung einer auf dem Integration Kit basierenden
Applikation auf dem PC werden die folgenden Systemvoraussetzungen benötigt:
Pentium PC 266 MHz
MS Windows 2000 (mit Service Pack 4) oder
XP (mit Service Pack 1)
32-fach CD-ROM Laufwerk
DVD Laufwerk
64 MB RAM (128 MB RAM empfohlen)
VGA-Graphik Adapter mit mindestens 32000 Farben
Microsoft kompatible Maus
rund 40 MB Festplattenspeicher für das Programm
rund 1.1 GB optional für die gesamte Europa-Karte
Pocket PC Zur Entwicklung einer auf dem Integration Kit basierenden
Applikation auf dem Pocket PC werden die folgenden
Systemvoraussetzungen benötigt:
ARM Prozessor
Windows Mobile 2003
64 MB RAM (128 MB RAM empfohlen)
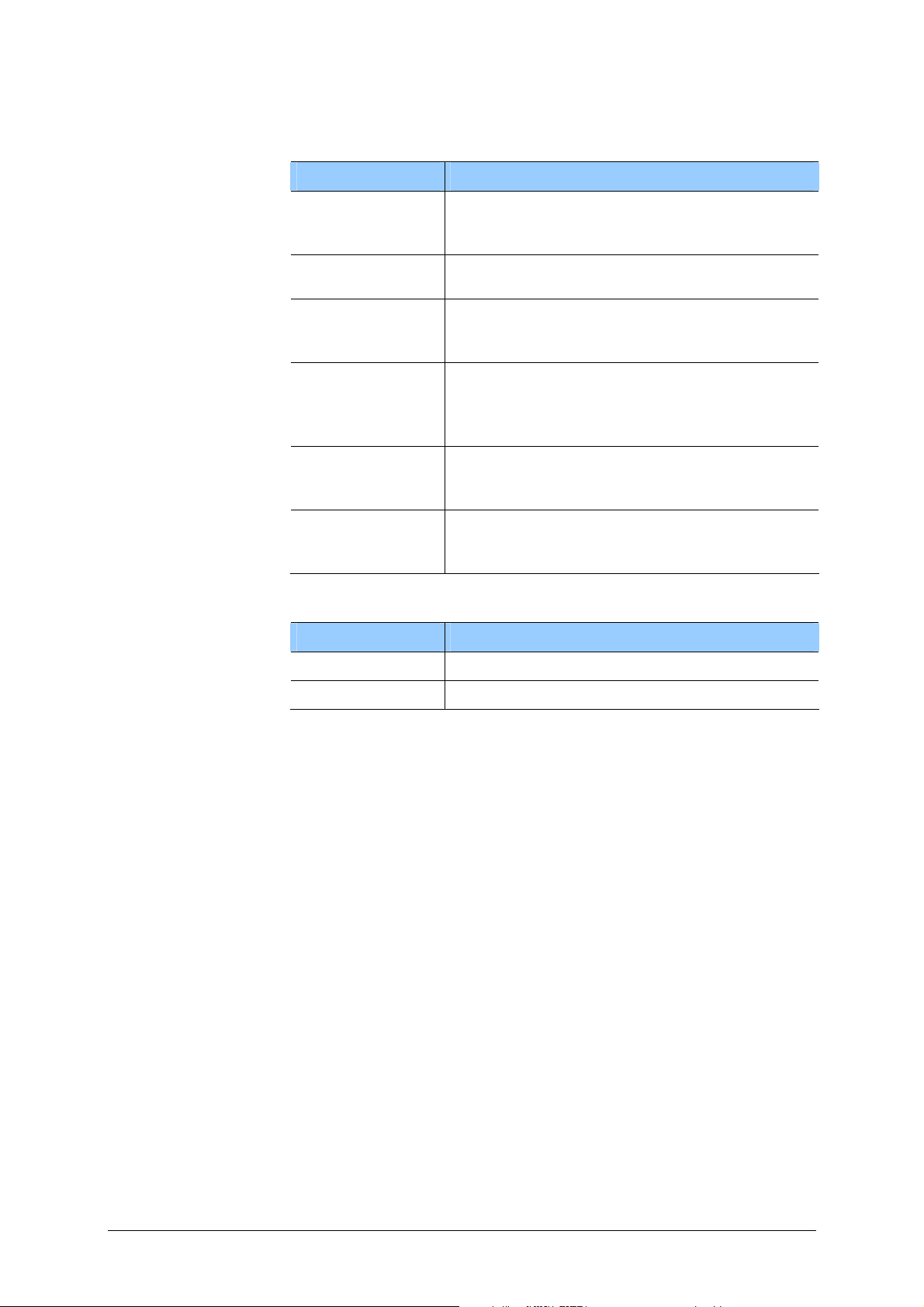
1.4 Installation
Überblick Das NAVIGON Integration Kit wird auf CD-ROMs geliefert und
enthält:
NIK-DLL
Europakarte
Dateien für die Programmierung (header und tlb)
Demo Applikation
Software MapExport (nur für die Windows CE Versionen)
Installation 1. Starten Sie das Setup-Programm der ersten CD-ROM.
2. Wählen Sie zwischen der Option User´s mode und
Developer´s mode.
Sie wollen... dann...
nur die Laufzeit-Umgebung
für das NAVIGON
Integration Kit installieren,
die Entwicklungsumgebung
mit allen Dateien und der
Demo-Applikation installieren,
wählen Sie die Option User´s
mode aus.
wählen Sie die Option
Developer´s mode aus.
Einleitung - 9 -
Page 12
Anwenderhandbuch NAVIGON Integration Kit 4.0
Demo-Applikation Nach erfolgreicher Installation können Sie die NAVIGON
Integration Kit Demo-Applikation starten, um einen ersten
Eindruck zu gewinnen, wie das NIK in Ihre Applikation integriert
werden kann.
Achtung: Verwenden Sie Windows CE, müssen Sie zuerst eine
Karte mit MapExport exportieren, bevor Sie die DemoApplikation starten.
1.4.1 Installationsergebnis Notebook
Notebook, alle Modi Die Navigationssoftware ist installiert und die NIK-DLL registriert.
Die Europakarte und MapExport wurden in das Installationsverzeichnis installiert.
Notebook, Developer
Modus
NIK-SDK Benutzerhandbuch
Im Developer Modus wurden die folgenden Dateien zusätzlich in
das Installationsverzeichnis kopiert
Schnittstellen-Dateien (Header, TLB, LIB und DLL)
Quellcode für die Demo-Applikation
Demo-Applikation
1.4.2 Installationsergebnis Windows CE
Windows CE, alle
Modi
CE, Developer Modus Im Developer Modus werden die folgenden Dateien zusätzlich auf
NIK-SDK Benutzerhandbuch
Die NIK Umgebeung ist installiert und die NIK-DLL registriert.
das Notebook installiert:
Schnittstellen-Dateien (Header, TLB, LIB und DLL)
Quellcode für die Demo-Applikation
Demo-Applikation
Europakarte
MapExport
- 10 - Installation
Page 13
Anwenderhandbuch NAVIGON Integration Kit 4.0
1.5 Zugriffshilfen und Konventionen
Diese Zugriffshilfen bietet Ihnen das Handbuch: Informationen
schnell finden
Konventionen In den beiden folgenden Tabellen finden Sie die durchgängig im
An der Fußzeile im Handbuch können Sie erkennen, in
welchem Kapitel und welchem Abschnitt Sie sich gerade
befinden.
Am Ende des Handbuchs finden Sie ein Glossar, in dem Sie
eine Erklärung verwendeter Fachbegriffe nachschlagen
können.
ganzen Handbuch verwendeten Konventionen in Bezug auf
verwendete Schreibweisen und Symbole.
Stil Verwendung
fett Schaltflächen, Felder und Oberflächen-
elemente der Software. Hervorhebung von
Warnungen und Hinweisen.
fett und kursiv Rechtlich geschützte Eigennamen.
K
APITÄLCHEN
Quellcode
Symbol Verwendung
Fenster- und Dialognamen.
Dateinamen und Quellcode.
Dieses Symbol gibt Ihnen Hinweise und
Tipps, die Ihnen die Arbeit mit dem
Integration Kit erleichtern.
Dieses Symbol weist Sie auf Stellen im
Handbuch hin, an denen Sie weiterführende
Informationen finden.
Dieses Symbol warnt Sie vor Gefahren, die
zu Personenschäden oder Sachschäden
führen können.
1.6 Gewährleistung
Einschränkung der
Gewährleistung
Einleitung - 11 -
Wir behalten uns inhaltliche Änderungen der Dokumentation und
der Software ohne Ankündigung vor. Die NAVIGON GmbH
übernimmt keine Haftung für die Richtigkeit des Inhalts oder für
Schäden, die sich aus dem Gebrauch des Handbuchs ergeben.
Wir sind jederzeit dankbar für Hinweise auf Fehler oder für
Verbesserungsvorschläge, um Ihnen in Zukunft noch
leistungsfähigere Produkte anbieten zu können.
Page 14
Anwenderhandbuch NAVIGON Integration Kit 4.0
1.6.1 Support
Sie benötigen Hilfe? Unsere Servicemitarbeiter sind montags bis freitags von 9:00 Uhr
bis 18:00 Uhr telefonisch für Sie da. Sie erreichen unsere Hotline
für Deutschland, Österreich und die Schweiz unter der Rufnummer
Kundenhotline (dtms-Service, 0,12 €/min):
0049-(0)180-5-NAVIKIT (0049-(0)180-5-6284548)
Fax-Hotline (dtms-Service, 0,12 €/min):
0049-(0)180-5-6284444
Daneben finden Sie auf den Internet-Seiten der NAVIGON GmbH
unter http://www.navigon.com im Bereich Support unter FAQ
Listen, die Antworten auf häufig gestellte Fragen bereitstellen.
1.7 Warenzeichen
Geschützte
Warenzeichen
Outlook, Windows, Access, Excel, SQL Server, Visual Studio,
Alle innerhalb des Handbuchs genannten und ggf. durch Dritte
geschützten Marken- und Warenzeichen unterliegen uneingeschränkt den Bestimmungen des jeweils gültigen Kennzeichenrechts und den Besitzrechten der jeweiligen eingetragenen
Eigentümer. Alle hier bezeichneten Warenzeichen, Handelsnamen
oder Firmennamen sind oder können Warenzeichen oder
eingetragene Warenzeichen ihrer jeweiligen Eigentümer sein. Alle
Rechte, die hier nicht ausdrücklich gewährt werden sind
vorbehalten.
Aus dem Fehlen einer expliziten Kennzeichnung der in diesem
Handbuch verwendeten Warenzeichen kann nicht geschlossen
werden, dass ein Name von den Rechten Dritter frei ist.
Visual Basic, eMbedded Visual C++ und ActiveSync sind
Warenzeichen der Microsoft Corporation
- 12 - Warenzeichen
Page 15
Anwenderhandbuch NAVIGON Integration Kit 4.0
2 Programmierschnittstellen
In diesem Kapitel finden Sie Informationen zu den folgenden Themen:
2.1 Voraussetzungen der Entwicklungsumgebung Seite 14
2.2 Schnittstelle IMNNIK Seite 15
2.3 Schnittstelle IADDRESS Seite 19
2.4 Schnittstelle IROUTING Seite 34
2.5 Schnittstelle IPOSITION Seite 52
2.6 Schnittstelle INAVIGATION Seite 64
2.7 Schnittstelle IOPTIONS Seite 89
2.8 Schnittstelle IGPS Seite 106
2.9 Schnittstelle ITMC Seite 114
2.10 Schnittstelle ILOCATIONMAP Seite 124
2.11 Schnittstelle ITRACK Seite 136
2.12 Schnittstelle ISIMULATION Seite 141
2.13 Schnittstelle IMNNIKEvents Seite 147
Programmierschnittstellen - 13 -
Page 16
Anwenderhandbuch NAVIGON Integration Kit 4.0
2.1 Voraussetzungen der Entwicklungsumgebung
Überblick Um die Schnittstellen in eigenen Applikationen anwenden zu
können dienen die Header-Datei NIKxx.h und die
Objektbibliothek NIKxx.TLB als die Programmierschnittstelle.
Diese beiden Dateien müssen bei Einsatz von Microsoft Visual
Studio als Entwicklungsumgebung in das Projekt eingebunden
werden.
Plattform Dateien
MS-Windows 2000
und XP
Header-Datei: NIK32.h
Objektbibliothek: NIK32.TLB
COM-DLL: NIK32.DLL
Windows Mobile
2003
Header-Datei: NIKCE.h
Objektbibliothek: NIKCE.TLB
COM-DLL: NIKCE.DLL
2.1.1 Allgemeines zur Benutzung der Interfaces
Instanziierung der
Interfaces
Freigabe der
Interfaces
Methoden der
Interfaces benutzen
CoCreateInstance erzeugt eine Instanz von IMNNIK
QueryInterface erzeugt Instanzen aller anderen Interfaces
CComObject::CreateInstance erzeugt Instanz von
IMNNIKEvents
AtlAdvise stellt die Verbindung zum NAVIGON Integration
Kit her
Release gibt die Instanzen der Interfaces frei
AtlUnadvise beendet die Verbindung von IMNNIKEvents mit dem
NAVIGON Integration Kit.
Hinweis: Weitere Informationen dazu finden Sie z.B. in der
MSDN (Microsoft Developer Network).
Die meisten Interfaces verfügen über Open- und Close-Methoden,
die entsprechend vor bzw. nach der Ausführung der jeweiligen
Methoden des Interface aufgerufen werden müssen
- 14 - Voraussetzungen der Entwicklungsumgebung
Page 17

2.1.2 Schnittstellen im Überblick
Anwenderhandbuch NAVIGON Integration Kit 4.0
Verfügbare
Schnittstellen
IMNNIK (Default-Interface), siehe Seite 15
Die folgenden Schnittstellen stehen Ihnen im NAVIGON
Integration Kit zur Verfügung:
IADDRESS, siehe Seite 19
IROUTING, siehe Seite 34
IPOSITION, siehe Seite 52
INAVIGATION, siehe Seite 59
IOPTIONS, siehe Seite 89
IGPS, siehe Seite 106
ITMC, siehe Seite 114
ILOCATIONMAP, siehe Seite 124
ITRACK, siehe Seite 136
ISIMULATION, siehe Seite 141
IMNNIKEvents, siehe Seite 141
2.2 Schnittstelle IMNNIK
Überblick
Typische
Verwendung
Methoden
Methode MNOpen(), siehe Seite 16
Die Programmierschnittstelle IMMNIK wird zum Starten und
Beenden der Navigationssoftware verwendet.
Das Integration Kit muss zu Beginn einer Applikation geöffnet
und bei deren Beendigung geschlossen werden. Ein Öffnen
während einer gestarteten Applikation ist nicht empfehlenswert.
Hinweis: Stellen Sie sicher, dass die Methode MNOpen()
abgeschlossen ist, bevor Sie andere Methoden (ausgenommen
der Methoden GetMNOpen() und GetMNVersion() s.u.) dieser
oder anderer Programmierschnittstellen aufrufen.
MNOpen();
// Andere Schnittstellen|Methoden
MNClose();
In der Schnittstelle IMNNIK stehen Ihnen die folgenden Methoden
zur Verfügung:
Methode MNClose(), siehe Seite 16
Methode GetMNOpen(), siehe Seite 17
Methode GetMNVersion(), siehe Seite 17
Programmierschnittstellen - 15 -
Page 18

2.2.1 Methode MNOpen()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode MNOpen() startet die Navigationssoftware als
Hintergrundprozess. Dabei wird eine grundlegende Initialisierung
durchgeführt, die das NIK für alle weiteren Interfaces vorbereitet.
C++ Syntax
IMNNIK::MNOpen
Typ
HRESULT MNOpen()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Anmerkungen Da die Navigationssoftware einige Zeit zum Initialisieren und
Starten benötigt, sollte eine entsprechende Wartezeit
eingebunden werden, bis Methoden anderer Schnittstellen
aufgerufen werden. Sie können die aktuelle Startdauer mit der
Methode GetMNOpen() (siehe Seite 17) abfragen und so
herausfinden, wann die Navigationssoftware komplett gestartet
wurde.
Die Methode erkennt, ob eine andere Instanz der Navigationssoftware bereits ausgeführt wird und schließt diese.
Achtung: Rufen Sie keine andere Methode auf, bevor MNOpen()
nicht abgeschlossen ist.
2.2.2 Methode MNClose()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode MNClose() beendet die Navigationssoftware.
IMNNIK::MNClose
HRESULT MNClose()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 16 - Schnittstelle IMNNIK
Page 19
2.2.3 Methode GetMNOpen()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode GetMNOpen() liefert den aktuellen Startvorgang der
Navigationssoftware zurück.
C++ Syntax
IMNNIK::GetMNOpen
Typ
HRESULT GetMNOpen([out] BOOL * a_open )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_open
Zeiger auf eine BOOL Variable, die den
Status enthält. Ist dieser Parameter TRUE, so
ist das NIK erfolgreich geöffnet. Ist dieser
Parameter FALSE, so ist das NIK noch nicht
geöffnet, sondern befindet sich
möglicherweise noch in der Initialisierung.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.2.4 Methode GetMNVersion()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Die Methode GetMNOpen() liefert den aktuellen Startvorgang der
Navigationssoftware zurück.
IMNNIK::GetMNVersion
HRESULT GetMNVersion(
[out] int * a_rnMajor,
[out] int * a_rnMinor,
[out] int * a_rnBuild )
werden:
Parameter Bedeutung
a_rnMajor
Zeiger auf eine int Variable, die die
Hauptversionsnummer enthält.
a_rnMinor
Zeiger auf eine int Variable, die die
Unterversionsnummer enthält.
a_rnBuild
Zeiger auf eine int Variable, die die BuildNummer enthält.
Programmierschnittstellen - 17 -
Page 20
Anwenderhandbuch NAVIGON Integration Kit 4.0
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.2.5 Öffnen und schließen des NIK
Beispiel
/* erzeuge eine Instanz des Default-Interface IMNNIK */
CoCreateInstance( __uuidof(MNNIK), NULL,
CLSCTX_INPROC_SERVER,__uuidof(IMNNIK),
(void**)&m_NIK );
/* Öffnen des NIK */
m_NIK->MNOpen();
/* Warte bis das NIK erfolgreich geöffnet wurde */
while( !bOpen )
m_NIK->GetMNOpen( &bOpen );
/* Schließen des NIK */
m_NIK->MNClose();
- 18 - Schnittstelle IMNNIK
Page 21
2.3 Schnittstelle IADDRESS
Anwenderhandbuch NAVIGON Integration Kit 4.0
Überblick
Funktionsumfang Zugriff auf Adressen und POI der verwendeten Karte
Typische
Verwendung
Methoden
Die Programmierschnittstelle IADDRESS ermöglicht den Zugriff auf
Städte, Straßen, POI im verwendeten Kartenmaterial. Sie können
mit dieser Schnittstelle Koordinaten für das Routing oder die
Navigation ermitteln.
Suche nach Städten, Straßen und POI (z.B. alle Tankstellen in
einer Stadt)
Ermittlung der Koordinaten zu einer Adresse oder eines POI
Ermittlung der Identifikation in der Karte zu einer Adresse
oder POI
Ermittlung der Adresse zu einer Koordinate
Hinweis: Koordinaten werden immer im Format WGS-84
geliefert.
OpenAddress();
// Andere Methoden von IADDRESS
CloseAddress();
In der Schnittstelle IADDRESS stehen Ihnen die folgenden
Methoden zur Verfügung:
Methode OpenAddress(), siehe Seite 20
Methode CloseAdress(), siehe Seite 20
Methode SearchFirstCityAddress(), siehe Seite 21
Methode SearchFirstCityPostalCodeAddress, siehe Seite 22
Methode SearchNextCityAddress(), siehe Seite 23
Methode SearchFirstStreetAddress(), siehe Seite 25
Methode SearchNextStreetAddress(), siehe Seite 26
Methode SearchPoiByRadiusAddress(), siehe Seite 28
Methode SearchNextPoiAddress(), siehe Seite 29
Methode ConvertCoordInAddress(), siehe Seite 30
Methode ConvertCoordInAddress2(), siehe Seite 32
Methode ConvertCoordInCountry(), siehe Seite 33
Programmierschnittstellen - 19 -
Page 22
2.3.1 Methode OpenAddress()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Schnittstelle IADDRESS wird mit der Methode OpenAddress()
gestartet.
C++ Syntax
IADDRESS::OpenAddress
Typ
HRESULT OpenAddress()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.3.2 Methode CloseAdress()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode CloseAddress() schließt das Interface. Nach dieser
Methode können keine weiteren Methoden des Interfaces mehr
aufgerufen werden.
IADDRESS::CloseAddress
HRESULT CloseAddress()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 20 - Schnittstelle IADDRESS
Page 23

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.3.3 Methode SearchFirstCityAddress()
Beschreibung
Die Methode SearchFirstCityAddress() wird bei der Suche
nach einer Stadt zuerst aufgerufen. Die Länderkennzeichen und
das Präfix des Stadtnames initialisieren die Suche. Anschließend
können durch wiederholtes Aufrufen der Methode
SearchNextCityAddress() (siehe Seite 23) , alle weiteren
Städte gefunden werden, die dem Muster aus Länderkennzeichen
und Präfix des Stadtnamens entsprechen.
C++ Syntax
IADDRESS::SearchFirstCityAddress
Typ
HRESULT SearchFirstCityAddress(
[in] int a_country,
[in] BSTR prefix,
[out] BSTR * city,
[out] BSTR * plz,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_country
Spezifiziert das Länderkennzeichen des
Landes, in dem die Stadt gesucht werden
soll, z.B. DEU für Deutschland, FRA für
Frankreich (siehe Aufzählungstypen auf
Seite 166).
prefix
Spezifiziert das Präfix der Stadt, nach der
gesucht werden soll.
city
Zeiger auf eine BSTR Variable, die den
Stadtnamen für die gefundene Stadt enthält.
plz
Zeiger auf eine BSTR Variable, die die
Postleitzahl für die gefundene Stadt enthält.
a_id
Zeiger auf eine long Variable, die die
Identifikationsnummer der gefundenen Stadt
enthält (Stadt-Id).
a_find Zeiger auf eine BOOL Variable die angibt, ob
eine Stadt gefunden wurde. Ist der Wert
TRUE, so wurde eine Stadt gefunden,
andernfalls wurde keine Stadt gefunden.
a_latx
Zeiger auf eine double Variable die den
Breitengrad der gefundenen Stadt im Format
WGS-84 enthält.
a_longy
Zeiger auf eine double Variable die den
Längengrad der gefundenen Stadt im Format
WGS-84 enthält.
Programmierschnittstellen - 21 -
Page 24

Anwenderhandbuch NAVIGON Integration Kit 4.0
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel
m_NIK_Address->OpenAddress();
/* Suche erste Stadt */
m_NIK_Address->SearchFirstCityAddress( DEU, “Frankf“,
&bstrCity, &bstrPlz, &nCityId,
&bFoundMore, &dLatX, &dLongY);
m_NIK_Address->CloseAddress();
2.3.4 Methode SearchFirstCityPostalCodeAddress()
Beschreibung
Die Methode SearchFirstCityPostalCodeAddress() wird bei
der Suche nach einer Stadt zuerst aufgerufen. Die
Länderkennzeichen und das Präfix der Postleitzahl initialisieren
die Suche. Anschließend können durch ein wiederholtes Aufrufen
der Methode SearchNextCityAddress() (siehe Seite 23), alle
weiteren Städte gefunden werden, die dem Muster aus
Länderkennzeichen und Präfix der Postleitzahl entsprechen.
C++ Syntax
IADDRESS::SearchFirstCityPostalCodeAddress
Typ
HRESULT SearchFirstCityPostalCodeAddress(
[in] int a_country,
[in] BSTR prefix_postalcode,
[out] BSTR * city,
[out] BSTR * postalcode,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_country
Spezifiziert das Länderkennzeichen des
Landes, in dem die Stadt gesucht werden
soll, z.B. DEU für Deutschland, FRA für
Frankreich (siehe Aufzählungstypen auf Seite
166).
- 22 - Schnittstelle IADDRESS
Page 25
Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Bedeutung
prefix_
postalcode
city
Spezifiziert das Präfix der Postleitzahl, nach
der gesucht werden soll.
Zeiger auf eine BSTR Variable, die den
Stadtnamen für die gefundene Stadt enthält.
postalcode
Zeiger auf eine BSTR Variable, die die
Postleitzahl für die gefundene Stadt enthält.
a_id
Zeiger auf eine long Variable, die die
Identifikationsnummer der gefundenen Stadt
enthält (Stadt-Id).
a_find
Zeiger auf eine BOOL Variable die angibt, ob
eine Stadt gefunden wurde. Ist der Wert
TRUE, so wurde eine Stadt gefunden,
andernfalls wurde keine Stadt gefunden.
a_latx
Zeiger auf eine double Variable die den
Breitengrad der gefundenen Stadt im Format
WGS-84 enthält.
a_longy
Zeiger auf eine double Variable die den
Längengrad der gefundenen Stadt im Format
WGS-84 enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Anmerkungen
Wird mit der Methode SearchFirstCityPostalCodeAddress()
eine Stadt gefunden (a_find ist TRUE), dann können mit der
Methode SearchNextCityAddress() alle weiteren Städte
gefunden werden.
2.3.5 Methode SearchNextCityAddress()
Beschreibung
C++ Syntax
Typ
Programmierschnittstellen - 23 -
Die Methode SearchNextCityAddress() wird zur Suche nach
weiteren Städten verwendet. Vorher muss durch den Aufruf von
SearchFirstCityAddress() oder SearchFirstCityPostalCodeAddress() die Suche nach Städten eingeleitet worden sein.
IADDRESS::SearchNextCityAddress
HRESULT SearchNextCityAddress (
[out] BSTR * city,
[out] BSTR * plz,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Page 26
Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
city
Zeiger auf eine BSTR Variable, die den
Stadtnamen für die gefundene Stadt enthält.
plz
Zeiger auf eine BSTR Variable, die die
Postleitzahl für die gefundene Stadt enthält.
a_id
Zeiger auf eine long Variable, die die
Identifikationsnummer der gefundenen Stadt
enthält (Stadt-Id).
a_find
Zeiger auf eine BOOL Variable die angibt, ob
eine Stadt gefunden wurde. Ist der Wert
TRUE, so wurde eine Stadt gefunden,
andernfalls wurde keine Stadt gefunden.
a_latx
Zeiger auf eine double Variable die den
Breitengrad der gefundenen Stadt im Format
WGS-84 enthält.
a_longy
Zeiger auf eine double Variable die den
Längengrad der gefundenen Stadt im Format
WGS-84 enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel
m_NIK_Address->OpenAddress();
/* suche erste Stadt */
m_NIK_Address->SearchFirstCityAddress( DEU, “Frankf“,
&bstrCity, &bstrPlz, &nCityId,
&bFoundMore, &dLatX, &dLongY );
/* suche nach weiteren Städten */
while( bFoundMore )
m_NIK_Address->SearchNextCityAddress( &bstrCity,
&bstrPlz, &nCityId, &bFoundMore,
&dLatX, &dLongY );
m_NIK_Address->CloseAddress();
- 24 - Schnittstelle IADDRESS
Page 27
Anwenderhandbuch NAVIGON Integration Kit 4.0
2.3.6 Methode SearchFirstStreetAddress()
Beschreibung
C++ Syntax
Typ
Die Methode SearchFirstStreetAddress() muss bei der Suche
nach einer Straße oder einem POI als erstes aufgerufen werden.
Die Stadt-Id und das Präfix für den Straßen- oder POI-Namen
initialisieren die Suche. Anschließend können durch wiederholtes
Aufrufen der Methode SearchNextStreetAddress() alle weiteren
Straßen oder POI gefunden werden, die dem Muster aus Stadt-Id
und Präfix des Straßen- oder POI-Namens entsprechen.
IADDRESS:: SearchFirstStreetAddress
HRESULT SearchFirstStreetAddress (
[in] long id_city,
[in] BSTR prefix,
[in] int type_from,
[in] int type_to,
[in] BSTR hn,
[out] BSTR * street,
[out] BSTR * plz,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
id_city
Spezifiziert die Identifikationsnummer der
Stadt (Stadt-Id).
refix
Spezifiziert das Präfix der Straße oder POI,
nach denen gesucht werden soll.
type_from
Legt für die Einschränkung der POI-Kategorie
das Minimum fest (siehe GeoTypeId).
type_to
Legt die maximale POI-Kategorie fest.
type_to ist der erste POI der aus der Reihe
ausgeschlossen wird. Z. Bsp. alle Tankstellen
finden:
type_from = enPetrolStation
type_to = enRentACar
hn
Legt die Hausnummer fest, nach der in der
Strasse gesucht werden soll.
street
Zeiger auf eine BSTR Variable, die den
Straßennamen für das die gefundene Strasse
enthält.
plz
Zeiger auf eine BSTR Variable, die die
Postleitzahl für die gefundene Straße enthält.
Programmierschnittstellen - 25 -
Page 28
Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Bedeutung
a_id
Zeiger auf eine long Variable, die die
Identifikationsnummer der gefundenen
Straße enthält (Straßen-Id).
a_find
Zeiger auf eine BOOL Variable die angibt, ob
eine Strasse gefunden wurde. Ist der Wert
TRUE, so wurde eine Strasse gefunden,
andernfalls wurde keine Strasse gefunden.
a_latx
Zeiger auf eine double Variable die den
Breitengrad der gefundenen Strasse im
Format WGS-84 enthält.
a_longy
Zeiger auf eine double Variable die den
Längengrad der gefundenen Strasse im
Format WGS-84 enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel
m_NIK_Address->OpenAddress();
/* suche erste Straße für Stadt nCityId */
m_NIK_Address->SearchFirstStreetAddress( nCityId,
“Bahn“,enAllTypes, enAllTypes, NULL,
&bstrStreet, &bstrPlz, &nStreetId,
&bFoundMore, &dLatX, &dLongY );
m_NIK_Address->CloseAddress();
2.3.7 Methode SearchNextStreetAddress()
Beschreibung
C++ Syntax
Typ
Die Methode SearchNextStreetAddress() wird zur Suche nach
weiteren Straßen verwendet. Vorher muss durch Aufruf von
SearchFirstStreetAddress() die Suche nach Straßen
eingeleitet worden sein.
IADDRESS::SearchNextStreetAddress
HRESULT SearchNextStreetAddress (
[out] BSTR * street,
[out] BSTR * plz,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
- 26 - Schnittstelle IADDRESS
Page 29
Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
street
Zeiger auf eine BSTR Variable, die den
Straßennamen für das die gefundene Strasse
enthält.
plz
Zeiger auf eine BSTR Variable, die die
Postleitzahl für die gefundene Straße enthält.
a_id
Zeiger auf eine long Variable, die die
Identifikationsnummer der gefundenen
Straße enthält (Straßen-Id).
a_find
Zeiger auf eine BOOL Variable die angibt, ob
eine Strasse gefunden wurde. Ist der Wert
TRUE, so wurde eine Strasse gefunden,
andernfalls wurde keine Strasse gefunden.
a_latx
Zeiger auf eine double Variable die den
Breitengrad der gefundenen Strasse im
Format WGS-84 enthält.
a_longy
Zeiger auf eine double Variable die den
Längengrad der gefundenen Strasse im
Format WGS-84 enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel: Suche nach
Straßen
m_NIK_Address->OpenAddress();
/* suche erste Straße für Stadt nCityId */
m_NIK_Address->SearchFirstStreetAddress( nCityId,
“Bahn“,enAllTypes, enAllTypes, NULL,
&bstrStreet, &bstrPlz, &nStreetId,
&bFoundMore, &dLatX, &dLongY );
/* suche nach weiteren Straßen */
while( bFoundMore )
m_NIK_Address->SearchNextStreetAddress( &bstrStreet,
&bstrPlz,&nStreetId,&bFoundMore, &dLatX, &dLongY );
m_NIK_Address->CloseAddress();
Programmierschnittstellen - 27 -
Page 30
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beispiel: Suche nach
POIs
m_NIK_Address->OpenAddress();
/* suche erste Tankstelle für Stadt nCityId */
m_NIK_Address->SearchFirstStreetAddress( nCityId, ““,
enPetrolStation, enPetrolStation+1,
NULL,&bstrStreet, &bstrPlz, &nPoiId,
&bFoundMore, &dLatX, &dLongY );
/* suche nach weiteren Tankstellen */
while( bFoundMore )
m_NIK_Address->SearchNextStreetAddress( &bstrStreet,
&bstrPlz,&nPoiId,&bFoundMore, &dLatX, &dLongY );
m_NIK_Address->CloseAddress();
2.3.8 Methode SearchPoiByRadiusAddress()
Beschreibung
C++ Syntax
Typ
Die Methode SearchPoiByRadiusAddress() muss bei der
Umkreissuche nach POI als erstes aufgerufen werden. Das Präfix
für den POI-Namen und ein Mittelpunkt initialisieren die Suche.
Anschließend können durch ein wiederholtes Aufrufen der
Methode SearchNextPoiAddress() alle POI gefunden werden,
die sich im Umkreis befinden und dem Muster des POI-Namens
entsprechen.
IADDRESS::SearchPoiByRadiusAddress
HRESULT SearchPoiByRadiusAddress(
[in] BSTR prefix,
[in] double a_lat,
[in] double a_long,
[in] int a_radius,
[in] int type_from,
[in] int type_to,
[out] BOOL * a_find )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
prefix
Spezifiziert das Präfix des POI-Namens, nach
dem gesucht werden soll.
a_lat
Spezifiziert den Breitengrad des
Mittelpunktes im Format WGS-84.
a_long
Spezifiziert den Längengrad des
Mittelpunktes im Format WGS-84.
a_radius
Spezifiziert den Radius in Meter für den
Umkreis.
type_from
Legt für die Einschränkung der POI-Kategorie
das Minimum fest.
- 28 - Schnittstelle IADDRESS
Page 31

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Bedeutung
type_to
Legt für die Einschränkung der POI-Kategorie
das Maximum fest. type_to ist der erste POI
der aus der Reihe ausgeschlossen wird. Z.B.
alle Tankstellen finden:
type_from = enPetrolStation
type_to = enPetrolStation+1
a_find
Zeiger auf eine BOOL Variable die angibt, ob
es POI im Umkreis gibt. Ist der Wert TRUE,
so wurden POI gefunden, andernfalls wurden
keine POI gefunden.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.3.9 Methode SearchNextPoiAddress()
Beschreibung
Die Methode SearchNextPoiAddress() wird zur Suche nach
weiteren POI verwendet. Vorher muss durch Aufruf von
SearchPoiByRadiusAddress() die Suche nach POI eingeleitet
worden sein.
C++ Syntax
IADDRESS::SearchNextPoiAddress
Typ
HRESULT SearchNextPoiAddress (
[out] BSTR * poi_name,
[out] BSTR * postalcode,
[out] BSTR * city_name,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
poi_name
Zeiger auf eine BSTR Variable, die den POINamen für den gefundenen POI enthält.
postalcode
Zeiger auf eine BSTR Variable, die die
Postleitzahl für den gefundenen POI enthält.
city_name
Zeiger auf eine BSTR Variable, die den
Stadtnamen für den gefundenen POI enthält.
Programmierschnittstellen - 29 -
Page 32

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Bedeutung
a_id
Zeiger auf eine long Variable, die die
Identifikationsnummer des gefundenen POI
enthält (POI-Id).
a_find
Zeiger auf eine BOOL Variable die angibt, ob
ein POI gefunden wurde. Ist der Wert TRUE,
so wurde ein POI gefunden, andernfalls
wurde kein POI gefunden.
a_latx
Zeiger auf eine double Variable die den
Breitengrad des gefundenen POI im Format
WGS-84 enthält.
a_longy
Zeiger auf eine double Variable die den
Längengrad des gefundenen POI im Format
WGS-84 enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Anmerkungen
Solange die Variable a_find TRUE ist, können weitere POI
gefunden werden.
2.3.10 Methode ConvertCoordInAddress()
Achtung: Veraltete Methode!
Für neue Projekte sollte die Methode ConvertCoordInAddress2()
(siehe nächste Seite) verwendet werden, da sie auch das
Länderkennzeichen und die Hausnummer (falls vorhanden)
zurückliefert.
Beschreibung
C++ Syntax
Typ
Die Methode ConvertCoordInAddress() konvertiert die
geografischen Koordinaten eines Punktes in eine Adresse.
IADDRESS::ConvertCoordInAddress
HRESULT ConvertCoordInAddress (
[in] double a_latx,
[in] double a_longy,
[out] BSTR * city,
[out] BSTR * street,
[out] BSTR * plz,
[out] BOOL * a_find )
- 30 - Schnittstelle IADDRESS
Page 33

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_latx
Spezifiziert den Breitengrad des Punktes im
Format WGS-84.
a_longy
Spezifiziert den Längengrad des Punktes im
Format WGS-84.
city
Zeiger auf eine BSTR Variable, die den
Stadtnamen für die Koordinate enthält.
street
Zeiger auf eine BSTR Variable, die den
Straßennamen für die Koordinate enthält.
plz
Zeiger auf eine BSTR Variable, die die
Postleitzahl für die Koordinate enthält.
a_find
Zeiger auf eine BOOL Variable die angibt, ob
eine Konvertierung der Koordinate in eine
Adresse erfolgen konnte. Ist der Wert TRUE,
so konnte eine Adresse ermittelt werden,
andernfalls konnte keine Adresse ermittelt
werden.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel
m_NIK_Address->OpenAddress();
/* Konvertierung einer Koordinate in eine Adresse */
m_NIK_Address->ConvertCoordInAddress( dLatX, dLongY,
&bstrCity, &bstrStreet, &bstrPlz,&bFound );
m_NIK_Address->CloseAddress();
Programmierschnittstellen - 31 -
Page 34

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.3.11 Methode ConvertCoordInAddress2()
Beschreibung
Die Methode ConvertCoordInAddress2() konvertiert die
geografischen Koordinaten eines Punktes in eine Adresse.
C++ Syntax
IADDRESS::ConvertCoordInAddress2
Typ
HRESULT ConvertCoordInAddress2 (
[in] double a_latx,
[in] double a_longy,
[out] int * a_country,
[out] BSTR * city,
[out] BSTR * street,
[out] BSTR * plz,
[out] BSTR * hn,
[out] BOOL * a_find )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_latx
Spezifiziert den Breitengrad des Punktes im
Format WGS-84.
a_longy
Spezifiziert den Längengrad des Punktes im
Format WGS-84.
a_country
Zeiger auf eine in Variable, die das
Länderkennzeichen enthält, z.B. DEU für
Deutschland, FRA für Frankreich (siehe
Aufzählungstypen auf Seite 166).
city
Zeiger auf eine BSTR Variable, die den
Stadtnamen für die Koordinate enthält.
street
Zeiger auf eine BSTR Variable, die den
Straßennamen für die Koordinate enthält.
plz
Zeiger auf eine BSTR Variable, die die
Postleitzahl für die Koordinate enthält.
hn
Zeiger auf eine BSTR Variable, die die
Hausnummer für die Koordinate enthält.
a_find
Zeiger auf eine BOOL Variable die angibt, ob
eine Konvertierung der Koordinate in eine
Adresse erfolgen konnte. Ist der Wert TRUE,
so konnte eine Adresse ermittelt werden,
andernfalls konnte keine Adresse ermittelt
werden.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 32 - Schnittstelle IADDRESS
Page 35

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.3.12 Methode ConvertCoordInCountry()
Beschreibung
Die Methode ConvertCoordInCountry() konvertiert die
geografischen Koordinaten eines Punktes in ein
Länderkennzeichen.
C++ Syntax
IADDRESS::ConvertCoordInCountry
Typ
HRESULT ConvertCoordInCountry (
[in] double a_latx,
[in] double a_longy,
[out] int * a_country,
[out] BOOL * a_find )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_latx
Spezifiziert den Breitengrad des Punktes im
Format WGS-84.
a_longy
Spezifiziert den Längengrad des Punktes im
Format WGS-84.
a_country
Zeiger auf eine in Variable, die das
Länderkennzeichen enthält, z.B. DEU für
Deutschland, FRA für Frankreich (siehe
Aufzählungstypen auf Seite 166).
a_find
Zeiger auf eine BOOL Variable die angibt, ob
eine Konvertierung der Koordinate in eine
Adresse erfolgen konnte. Ist der Wert TRUE,
so konnte eine Adresse ermittelt werden,
andernfalls konnte keine Adresse ermittelt
werden.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 33 -
Page 36

2.4 Schnittstelle IROUTING
Anwenderhandbuch NAVIGON Integration Kit 4.0
Überblick
Funktionsumfang Berechnung von Routen über zwei oder mehr Routenpunkte
Typische
Verwendung
Methoden
Die Programmierschnittstelle IROUTING ermöglicht die
Berechnung und Darstellung von Routen.
Ermittlung der Distanz zwischen Routenpunkten
Ermittlung der geschätzten Fahrzeit
Anzeige der Route in der Karte
Hinweis: Koordinaten werden immer im Format WGS-84
geliefert.
OpenRoute( hWnd, x, y, width, height );
ClearDestCoordRoute();
AddDestCoordRoute( cSize, a_lat, a_long );
StartRoute();
// Andere Methoden von IROUTING
CloseRoute();
In der Schnittstelle IROUTING stehen Ihnen die folgenden
Methoden zur Verfügung:
Methode OpenRoute(), siehe Seite 35
Methode CloseRoute(), siehe Seite 36
Methode AddDestCoordRoute(), siehe Seite 36
Methode GetDestCoordRoute(), siehe Seite 37
Methode ClearDestCoordRoute(), siehe Seite 38
Methode StartRoute(), siehe Seite 38
Methode ShowRoute(), siehe Seite 39
Methode ClearRoute(), siehe Seite 39
Methode ZoomInRoute(), siehe Seite 40
Methode ZoomOutRoute(), siehe Seite 40
Methode ShowDownRoute(), siehe Seite 40
Methode ShowUpRoute(), siehe Seite 41
Methode ShowLeftRoute(), siehe Seite 41
Methode ShowRightRoute(), siehe Seite 41
Methode ShowStartPointRoute(), siehe Seite 42
Methode ShowEndPointRoute(), siehe Seite 42
Methode SetRotationRoute(), siehe Seite 43
Methode GetRotationRoute(), siehe Seite 43
Methode GetStatusRoute(), siehe Seite 44
Methode GetResultRoute(), siehe Seite 44
- 34 - Schnittstelle IROUTING
Page 37

Methode MapShowRoute(), siehe Seite 45
Methode GetFirstWayListRoute(), siehe Seite 45
Methode GetNextWayListRoute(), siehe Seite 46
Methode SetZoomLevelInRoute(), siehe Seite 47
Methode GetZoomLevelInRoute(), siehe Seite 48
Methode SetMaxResolutionRoute(), siehe Seite 48
Methode GetMaxResolutionRoute(), siehe Seite 49
Methode ChangeGeoToMapCoordRoute(), siehe Seite 49
Methode ChangeMapToGeoCoordRoute(), siehe Seite 50
2.4.1 Methode OpenRoute()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode OpenRoute() initialisiert die Schnittstelle und muss
als erstes aufgerufen werden.
C++ Syntax
IROUTING::OpenRoute
Typ
HRESULT OpenRouteOpenRoute(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wx,
[in] int a_wy )
Parameter Die folgenden Parameter verwendet werden:
Parameter Bedeutung
a_hwnd
Fenster Handle des Elternfensters, in dem die
Routenkarte dargestellt werden soll.
a_ox
Legt die X-Koordinate des Karten-Fensters,
relativ zum Ursprungsfenster fest.
a_oy
Legt die Y-Koordinate des Karten-Fensters,
relativ zum Ursprungsfenster fest.
a_wx
a_wy
Legt die Breite des Kartenfensters fest.
Legt die Höhe des Kartenfensters fest.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Um die Routenplanung ohne eine Darstellung der Karte
zu ermöglichen, müssen Sie die Methode in der folgenden Art
aufrufen: OpenRoute(hWnd, 0, 0, 0, 0). Beachten Sie bitte,
dass das Fenster Handle gültig sein muss.
Programmierschnittstellen - 35 -
Page 38

2.4.2 Methode CloseRoute()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode CloseRoute() schließt die Routenplanung und die
korrespondierende Karte. Nach dem Methodenaufruf können
keine weiteren Methoden der Schnittstelle IROUTING mehr
aufgerufen werden.
C++ Syntax
IROUTING::CloseRoute
Typ
HRESULT CloseRoute();
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.3 Methode AddDestCoordRoute()
Beschreibung
C++ Syntax
Typ
Die Methode AddDestCoordRoute() fügt neue Ziele in Form von
Koordinaten zu der Route hinzu. Für eine Routenplanung müssen
immer mindestens zwei Orte angegeben werden. Die erste
Koordinate entspricht dem Startort, die zweite dem Zielort.
Zwischen Start- und Zielort dürfen beliebig viele weitere
Zwischenziele liegen.
IROUTING::AddDestCoordRoute
HRESULT AddDestCoordRoute(
[in] int cSize,
[in, size_is(cSize)] double * a_lat,
[in, size_is(cSize)] double * a_long )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
cSize
a_lat
Legt die Anzahl der Koordinaten fest.
Zeiger auf eine double Variable, die ein Array
von Breitengraden-Koordinaten im Format
WGS-84 enthält.
a_long
Zeiger auf eine double Variable, die ein Array
von Längengraden-Koordinaten im Format
WGS-84 enthält.
- 36 - Schnittstelle IROUTING
Page 39

Anwenderhandbuch NAVIGON Integration Kit 4.0
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Anmerkungen Die Navigationssoftware muss ebenfalls die Koordinaten in einer
separaten Liste halten. Direkt vor dem Aufruf der Methode
StartRoute() (siehe Methode StartRoute(), auf Seite 38) werden
die Koordinaten über den Methodenaufruf AddDestCoordRoute()
hinzugefügt.
Achtung: Die Größe der Arrays für die Parameter a_lat und
a_long muss genau mit dem im Parameter cSize angegebenen
Wert übereinstimmen.
2.4.4 Methode GetDestCoordRoute()
Beschreibung
Die Methode GetDestCoordRoute() gibt die Koordinaten zurück,
die beim letzten Aufruf der Methode AddDestCoordRoute()
hinzugefügt wurden.
C++ Syntax
IROUTING::GetDestCoordRoute
Typ
HRESULT GetDestCoordRoute(
[in] int cSize,
[out, size_is(cSize)] double * a_lat,
[out, size_is(cSize)] double * a_long )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
cSize
Legt die Anzahl der zu erhaltenden
Koordinaten fest. Dieser Wert darf nicht
größer sein, als die Anzahl der Koordinaten
die beim letzten Aufruf der Methode
AddDestCoordRoute() hinzugefügt wurden.
a_lat
Zeiger auf eine double Variable, die ein Array
von Breitengraden-Koordinaten im Format
WGS-84 enthält.
a_long
Zeiger auf eine double Variable, die ein Array
von Längengraden-Koordinaten im Format
WGS-84 enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 37 -
Page 40

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.4.5 Methode ClearDestCoordRoute()
Beschreibung
Die Methode ClearDestCoordRoute() löscht die Koordinaten, die
beim letzten Aufruf der Methode AddDestCoordRoute()
hinzugefügt wurden.
C++ Syntax
IROUTING::ClearDestCoordRoute
Typ
HRESULT ClearDestCoordRoute()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Die Methode ClearDestCoordRoute() sollte direkt vor
der Methode AddDestCoordRoute() aufgerufen werden.
2.4.6 Methode StartRoute()
Beschreibung
Die Methode StartRoute() berechnet und zeigt die Route, für die
über die Methode AddDestCoordRoute() hinzugefügten
Koordinaten, neu.
C++ Syntax
IROUTING::StartRoute
Typ
HRESULT StartRoute()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 38 - Schnittstelle IROUTING
Page 41

2.4.7 Methode ShowRoute()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode ShowRoute() stellt eine maximierte Ansicht der
zuletzt berechneten Route dar.
C++ Syntax
IROUTING::ShowRoute
Typ
HRESULT ShowRoute()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Die Methode ShowRoute() kann direkt nach der
Methode StartRoute() aufgerufen werden.
Beispiel Anzeige der zuletzt berechneten Route:
m_NIK_Routing->ShowRoute();
2.4.8 Methode ClearRoute()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ClearRoute() entfernt die letzte berechnete Route
und verbirgt die Karte.
IROUTING::ClearRoute
HRESULT ClearRoute()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 39 -
Page 42

2.4.9 Methode ZoomInRoute()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode ZoomInRoute() zoomt in die Karte.
C++ Syntax
IROUTING::ZoomInRoute
Typ
HRESULT ZoomInRoute()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.10 Methode ZoomOutRoute()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ZoomOutRoute() zoomt aus der Karte heraus.
IROUTING::ZoomOutRoute
HRESULT ZoomOutRoute()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.11 Methode ShowDownRoute()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
- 40 - Schnittstelle IROUTING
Die Methode ShowDownRoute() verschiebt die Karte nach unten.
IROUTING::ShowDownRoute
HRESULT ShowDownRoute()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Page 43

2.4.12 Methode ShowUpRoute()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode ShowUpRoute() verschiebt die Karte nach oben.
C++ Syntax
IROUTING::ShowUpRoute
Typ
HRESULT ShowUpRoute()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.13 Methode ShowLeftRoute()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ShowLeftRoute() verschiebt die Karte nach links.
IROUTING::ShowLeftRoute
HRESULT ShowLeftRoute()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.14 Methode ShowRightRoute()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Programmierschnittstellen - 41 -
Die Methode ShowRightRoute() verschiebt die Karte nach rechts.
IROUTING::ShowRightRoute
HRESULT ShowRightRoute()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Page 44

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.4.15 Methode ShowStartPointRoute()
Beschreibung
Die Methode ShowStartPointRoute() zeigt den Startpunkt der
Route in der Karte an.
C++ Syntax
IROUTING::ShowStartPointRoute
Typ
HRESULT ShowStartPointRoute()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.16 Methode ShowEndPointRoute()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ShowEndPointRoute() zeigt den Endpunkt der
Route in der Karte an.
IROUTING::ShowEndPointRoute
HRESULT ShowEndPointRoute()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 42 - Schnittstelle IROUTING
Page 45

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.4.17 Methode SetRotationRoute()
Beschreibung
Die Methode SetRotationRoute() stellt die Kartenausrichtung
genordet oder in Fahrtrichtung dar.
C++ Syntax
IROUTING::SetRotationRoute
Typ
HRESULT SetRotationRoute([in] BOOL a_rotation)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_rotation
TRUE: Karte in Fahrtrichtung
FALSE: Karte genordet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel Kartenausrichtung genordet
m_NIK_Routing->SetRotationRoute( FALSE );
2.4.18 Methode GetRotationRoute()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode GetRotationRoute() liefert den Status der
Kartenausrichtung zurück.
IROUTING::GetRotationRoute
HRESULT GetRotationRoute([in] BOOL a_rotation)
werden:
Parameter Bedeutung
a_rotation
TRUE: Karte in Fahrtrichtung
FALSE: Karte genordet
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 43 -
Page 46

2.4.19 Methode GetStatusRoute()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode GetStatusRoute() liefert den Status der letzten
Routenberechnung über einen Aufruf der Methode StartRoute()
zurück.
C++ Syntax
IROUTING::GetStatusRoute
Typ
HRESULT GetStatusRoute([out] int * a_status)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_status
Zeiger auf integer Variable, die den Status
der letzten Routenberechnung enthält (siehe
Aufzählungstypen auf Seite 172).
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.20 Methode GetResultRoute()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode GetResultRoute() liefert die Distanz zwischen
Start- und Zielpunkt der Route sowie die geschätzte Fahrtzeit
zurück.
IROUTING::GetResultRoute
HRESULT GetResultRoute(
[out] int * a_meter,
[out] int * a_sec )
werden:
Parameter Bedeutung
a_meter
Zeiger auf integer Variable, die die
Entfernung zwischen Start- und Endpunkt der
Route in Metern enthält.
a_sec
Zeiger auf integer Variable, die die
geschätzte Fahrtzeit der Route in Sekunden
enthält.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 44 - Schnittstelle IROUTING
Page 47

2.4.21 Methode MapShowRoute()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode MapShowRoute() blendet die Routenkarte ein oder
aus.
C++ Syntax
IROUTING::MapShowRoute
Typ
HRESULT MapShowRoute([in] BOOL a_show)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_show
TRUE Karte wird angezeigt
FALSE Karte wird ausgeblendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.22 Methode GetFirstWayListRoute()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Die Methode GetFirstWayListRoute() gibt den ersten Wegpunkt
der zuletzt berechneten Route zurück. Alle weiteren Wegpunkte
können im Anschluss durch Aufruf der Methode
GetNextWayListRoute() ermittelt werden.
IROUTING::GetFirstWayListRoute
HRESULT GetFirstWayListRoute(
[out] BSTR * a_FromStreet,
[out] BSTR * a_ToStreet,
[out] long * a_nMeterFrom,
[out] BSTR * a_AdviceDesc,
[out] int * a_dAction,
[out] BOOL * a_bFind )
werden:
Parameter Bedeutung
a_FromStreet
Zeiger auf eine BSTR Variable, die die Straße
enthält von wo aus der Wegpunkt startet.
a_ToStreet
Zeiger auf eine BSTR Variable, die die Straße
enthält in die der Wegpunkt führt.
Programmierschnittstellen - 45 -
Page 48

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Bedeutung
a_nMeterFrom
Zeiger auf eine long Variable, die die
Entfernung zur nächsten Aktion enthält.
a_AdviceDesc
Zeiger auf eine BSTR Variable, die eine
Beschreibung der Ansage enthält.
a_dAction
Zeiger auf eine int Variable, die die
auszuführende Aktion enthält (siehe
Aufzählungstypen auf Seite 169).
a_bFind
Zeiger auf eine BOOL Variable, die angibt, ob
ein Wegpunkt gefunden wurde.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Anmerkungen
Wird mit der Methode GetFirstWayListRoute() ein Wegpunkt
gefunden (a_bFind ist TRUE), dann können mit der Methode
GetNextWayListRoute() alle weiteren Wegpunkte ermittelt
werden.
2.4.23 Methode GetNextWayListRoute()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Die Methode GetNextWayListRoute() gibt den nächsten
Wegpunkt der zuletzt berechneten Route zurück. Vorher muss
durch Aufruf der Methode GetFirstWayListRoute() die
Ermittlung der Wegpunkte eingeleitet worden sein.
IROUTING::GetNextWayListRoute
HRESULT GetNextWayListRoute(
[out] BSTR * a_FromStreet,
[out] BSTR * a_ToStreet,
[out] long * a_nMeterFrom,
[out] BSTR * a_AdviceDesc,
[out] int * a_dAction,
[out] BOOL * a_bFind )
werden:
Parameter Bedeutung
a_FromStreet
Zeiger auf eine BSTR Variable, die die Straße
enthält von wo aus der Wegpunkt startet.
a_ToStreet
Zeiger auf eine BSTR Variable, die die Straße
enthält in die der Wegpunkt führt.
- 46 - Schnittstelle IROUTING
Page 49

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Bedeutung
a_nMeterFrom
Zeiger auf eine long Variable, die die
Entfernung zur nächsten Aktion enthält.
a_AdviceDesc
Zeiger auf eine BSTR Variable, die eine
Beschreibung der Ansage enthält.
a_dAction
Zeiger auf eine int Variable, die die
auszuführende Aktion enthält (siehe
Aufzählungstypen auf Seite 169).
a_bFind
Zeiger auf eine BOOL Variable, die angibt, ob
ein Wegpunkt gefunden wurde.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Anmerkungen
Solange die Variable a_bFind TRUE ist, können weitere
Wegpunkte ermittelt werden.
2.4.24 Methode SetZoomLevelInRoute()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode SetZoomLevelInRoute() setzt die Zoom-Stufe für
die Karte.
IROUTING::SetZoomLevelInRoute
HRESULT SetZoomLevelInRoute([in] double a_level)
werden:
Parameter Bedeutung
a_level
Legt die Zoom-Stufe der Karte in Metern pro
Pixel fest.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 47 -
Page 50

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.4.25 Methode GetZoomLevelInRoute()
Beschreibung
Die Methode GetZoomLevelInRoute() liefert die Zoom-Stufe für
die Karte zurück.
C++ Syntax
IROUTING::GetZoomLevelInRoute
Typ
HRESULT GetZoomLevelInRoute([in] double a_level)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_level
Zeiger auf eine double Variable, die die
aktuell eingestellte Zoom-Stufe der Karte in
Metern pro Pixel enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.26 Methode SetMaxResolutionRoute()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode SetMaxResolutionRoute() setzt die maximale
Auflösung der Karte in Pixel pro Meter.
IROUTING::SetMaxResolutionRoute
HRESULT SetMaxResolutionRoute([in] double a_maxres)
werden:
Parameter Bedeutung
a_level
Legt die maximale Auflösung der Karte in
Pixel pro Meter fest.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 48 - Schnittstelle IROUTING
Page 51

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.4.27 Methode GetMaxResolutionRoute()
Beschreibung
Die Methode GetMaxResolutionRoute() liefert die maximale
Auflösung der Karte in Pixel pro Meter zurück.
C++ Syntax
IROUTING::GetMaxResolutionRoute
Typ
HRESULT GetMaxResolutionRoute([in] double a_maxres)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_level
Zeiger auf eine double Variable, die die
maximale Auflösung der Karte in Pixel pro
Meter enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.28 Methode ChangeGeoToMapCoordRoute()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können verwendet werden:
Die Methode ChangeGeoToMapCoordRoute() konvertiert eine
geografische Koordinate in eine Fensterkoordinate.
IROUTING::ChangeGeoToMapCoordRoute
HRESULT ChangeGeoToMapCoordRoute(
[in] double a_lat,
[in] double a_long,
[out] int * a_x,
[out] int * a_y )
Parameter Bedeutung
a_lat
Legt den Breitengrad im Format WGS-84 für
eine Umwandlung fest.
a_long
Legt den Längengrad im Format WGS-84 für
eine Umwandlung fest.
a_x
Zeiger auf eine int Variable, die die
konvertierte X-Koordinate des Fensters
enthält.
a_y
Zeiger auf eine int Variable, die die
konvertierte Y-Koordinate des Fensters
enthält.
Programmierschnittstellen - 49 -
Page 52

Anwenderhandbuch NAVIGON Integration Kit 4.0
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.4.29 Methode ChangeMapToGeoCoordRoute()
Beschreibung
Die Methode ChangeMapToGeoCoordRoute() konvertiert eine
Fensterkoordinate in eine geografische Koordinate.
C++ Syntax
IROUTING::ChangeMapToGeoCoordRoute
Typ
HRESULT ChangeMapToGeoCoordRoute(
[in] int a_x,
[in] int a_y,
[out] double * a_lat,
[out] double * a_long )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_x
Legt die X-Koordinate des Fensters fest, die
konvertiert werden soll.
a_y
Legt die Y-Koordinate des Fensters fest, die
konvertiert werden soll.
a_lat
Zeiger auf eine double Variable, die den
konvertierten Breitengrad im Format WGS-84
enthält.
a_long
Zeiger auf eine double Variable, die den
konvertierten Längengrad im Format WGS-84
enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 50 - Schnittstelle IROUTING
Page 53

Anwenderhandbuch NAVIGON Integration Kit 4.0
/* Hole die Distanz und geschätzte Dauer der Route */
2.4.30 Beispiel einer Routenberechnung
Routenberechnung
m_NIK_Routing->OpenRoute( (long)hWnd, 0, 0, 300, 200 );
/* Füge die Routenpunkte hinzu */
m_NIK_Routing->AddDestCoordRoute( nArrSize, arrLat,
arrLong );
/* Starte die Routenberechnung */
m_NIK_Routing->StartRoute();
/* Hole den Status der Routenberechnung */
m_NIK_Routing->GetStatusRoute( &nStatus );
m_NIK_Routing->GetResultRoute( &nMeter, &nSec );
m_NIK_Routing->CloseRoute();
Programmierschnittstellen - 51 -
Page 54

2.5 Schnittstelle IPOSITION
Anwenderhandbuch NAVIGON Integration Kit 4.0
Überblick
Funktionsumfang Anzeige der aktuellen Position in der Karte
Typische
Verwendung
Methoden
Methode OpenPosition(), siehe Seite 53
Die Programmierschnittstelle IPOSITION ermöglicht die Anzeige
der aktuellen GPS-Position in der Karte.
Koordinaten der aktuellen Position ermitteln
Hinweis: Nur verfügbar, wenn ein gültiges GPS-Signal vorhanden
ist. Die Koordinaten werden immer im Format WGS-84 geliefert.
OpenPosition( hWnd, x, y, width, height );
StartPosition();
// Andere Methoden der Schnittstelle IPOSITION
ClosePosition();
In der Schnittstelle IPOSITION stehen Ihnen die folgenden
Methoden zur Verfügung:
Methode ClosePosition(), siehe Seite 54
Methode StartPosition(), siehe Seite 54
Methode GetPosition(), siehe Seite 55
Methode ZoomInPosition(), siehe Seite 55
Methode ZoomOutPosition(), siehe Seite 56
Methode ShowDownPosition(), siehe Seite 56
Methode ShowUpPosition(), siehe Seite 56
Methode ShowLeftPosition(), siehe Seite 57
Methode ShowRightPosition(), siehe Seite 57
Methode SetRotationPosition(), siehe Seite 57
Methode GetRotationPosition(), siehe Seite 58
Methode MapShowPosition(), siehe Seite 59
Methode SetBirdViewPosition(), siehe Seite 59
Methode SetZoomLevelInPosition(), siehe Seite 60
Methode GetZoomLevelInPosition(), siehe Seite 60
Methode SetMaxResolutionPosition(), siehe Seite 61
Methode GetMaxResolutionPosition(), siehe Seite 61
Methode ChangeGeoToMapCoordPosition(), siehe Seite 62
Methode ChangeMapToGeoCoordPosition(), siehe Seite 62
- 52 - Schnittstelle IPOSITION
Page 55

2.5.1 Methode OpenPosition()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode OpenPosition()initialisiert die Schnittstelle und
muss zu Beginn aufgerufen werden.
C++ Syntax
IPOSITION::OpenPosition
Typ
HRESULT OpenPosition(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wx,
[in] int a_wy )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_hwnd
Fenster Handle des Elternfensters, in dem die
Positionskarte dargestellt werden soll.
a_ox
X-Koordinate der Positionskarte relativ zum
Ursprung des Elternfensters.
a_oy
Y-Koordinate der Positionskarte relativ zum
Ursprung des Elternfensters.
a_wx
a_wy
Breite der Positionskarte.
Höhe der Positionskarte.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Um die Positionsbestimmung ohne eine Darstellung zu
ermöglichen, müssen Sie die Methode folgendermaßen aufrufen:
OpenPosition(hWnd, 0, 0, 0, 0). Beachten Sie bitte, dass das
Fenster Handle gültig sein muss.
Programmierschnittstellen - 53 -
Page 56

2.5.2 Methode ClosePosition()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode ClosePosition() schließt das Interface und blendet
die Positionskarte wieder aus.
C++ Syntax
IPOSITION::ClosePosition
Typ
HRESULT ClosePosition()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.3 Methode StartPosition()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode StartPosition() zeigt die Karte mit der aktuelle
GPS-Position an. Sie muss direkt nach der Methode
OpenPosition() aufgerufen werden.
IPOSITION::StartPosition
HRESULT StartPosition()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 54 - Schnittstelle IPOSITION
Page 57

2.5.4 Methode GetPosition()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode GetPosition() liefert die aktuelle GPS-Position.
C++ Syntax
IPOSITION::GetPosition
Typ
HRESULT GetPosition(
[out] double * a_lat,
[out] double * a_long )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_lat
Zeiger auf eine double Variable, die den
aktuellen Breitengrad im Format WGS-84
enthält.
a_long
Zeiger auf eine double Variable, die den
aktuellen Längengrad im Format WGS-84
enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel Aktuelle Position ("matched") auf der Karte ermitteln:
m_NIK_Position->GetPosition( &dLatX, &dLongY );
Hinweis: Alternativ kann die Position mit der Methode
GPSMessageCallback()des Interface IMNNIKEvents ermittelt
werden, die die ursprünglichen GPS-Daten liefert.
2.5.5 Methode ZoomInPosition()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ZoomInPosition() zoomt in die Positionskarte.
IPOSITION::ZoomInPosition
HRESULT ZoomInPosition()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 55 -
Page 58

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.5.6 Methode ZoomOutPosition()
Beschreibung
Die Methode ZoomOutPosition() zoomt aus der Positionskarte
heraus.
C++ Syntax
IPOSITION::ZoomOutPosition
Typ
HRESULT ZoomOutPosition()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.7 Methode ShowDownPosition()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ShowDownPosition() verschiebt die Karte nach
unten.
IPOSITION::ShowDownPosition
HRESULT ShowDownPosition()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.8 Methode ShowUpPosition()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
- 56 - Schnittstelle IPOSITION
Die Methode ShowUpPosition() verschiebt die Karte nach oben.
IPOSITION::ShowUpPosition
HRESULT ShowUpPosition()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Page 59

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.5.9 Methode ShowLeftPosition()
Beschreibung
Die Methode ShowLeftPosition() verschiebt die Karte nach
links.
C++ Syntax
IPOSITION::ShowLeftPosition
Typ
HRESULT ShowLeftPosition()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.10 Methode ShowRightPosition()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ShowRightPosition() verschiebt die Karte nach
rechts.
IPOSITION::ShowRightPosition
HRESULT ShowRightPosition()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.11 Methode SetRotationPosition()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Programmierschnittstellen - 57 -
Die Methode SetRotationPosition() stellt die
Kartenausrichtung genordet oder in Fahrtrichtung dar.
IROUTING::SetRotationPosition
HRESULT SetRotationPosition([in] BOOL a_rotation)
werden:
Parameter Bedeutung
a_rotation
TRUE: Karte in Fahrtrichtung
FALSE: Karte genordet
Page 60

Anwenderhandbuch NAVIGON Integration Kit 4.0
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.12 Methode GetRotationPosition()
Beschreibung
Die Methode GetRotationPosition() liefert den Status der
Kartenausrichtung zurück.
C++ Syntax
IROUTING::GetRotationPosition
Typ
HRESULT GetRotationPosition([out] BOOL * a_rotation)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_rotation
TRUE: Karte in Fahrtrichtung
FALSE: Karte genordet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel Positionsanzeige:
m_NIK_Position->OpenPosition((long)hWnd,0,0,300,200 );
/* Karte mit aktueller Position anzeigen */
m_NIK_Position->StartPosition();
m_NIK_Position ->ClosePosition();
- 58 - Schnittstelle IPOSITION
Page 61

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.5.13 Methode MapShowPosition()
Beschreibung
Die Methode MapShowPosition() blendet die Positionskarte ein
oder aus.
C++ Syntax
IROUTING::MapShowPosition
Typ
HRESULT MapShowPosition([in] BOOL a_show)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_show
TRUE: Karte wird angezeigt
FALSE: Karte wird ausgeblendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.14 Methode SetBirdViewPosition()
Beschreibung
Die Methode SetBirdViewPosition() schaltet die
Vogelperspektive ein oder aus.
C++ Syntax
IROUTING::SetBirdViewPosition
Typ
HRESULT SetBirdViewPosition([in] BOOL a_birdview)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_birdview
TRUE Karte wird in Vogelperspektive
angezeigt
FALSE Karte wird in 2-D-Darstellung
angezeigt
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 59 -
Page 62

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.5.15 Methode SetZoomLevelInPosition()
Beschreibung
Die Methode SetZoomLevelInPosition() setzt die Zoom-Stufe
für die Karte.
C++ Syntax
IPOSITION::SetZoomLevelInPosition
Typ
HRESULT SetZoomLevelInPosition([in] double a_level)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_level
Legt die Zoom-Stufe der Karte in Metern pro
Pixel fest.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.16 Methode GetZoomLevelInPosition()
Beschreibung
Die Methode GetZoomLevelInPosition() liefert die Zoom-Stufe
für die Karte zurück.
C++ Syntax
IPOSITION::GetZoomLevelInPosition
Typ
HRESULT GetZoomLevelInPosition([in] double a_level)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_level
Zeiger auf eine double Variable, die die
aktuell eingestellte Zoom-Stufe der Karte in
Metern pro Pixel enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 60 - Schnittstelle IPOSITION
Page 63

Anwenderhandbuch NAVIGON Integration Kit 4.0
a_maxres )
2.5.17 Methode SetMaxResolutionPosition()
Beschreibung
Die Methode SetMaxResolutionPosition() setzt die maximale
Auflösung der Karte in Pixel pro Meter.
C++ Syntax
IPOSITION::SetMaxResolutionPosition
Typ
HRESULT SetMaxResolutionPosition([in] double a_maxres)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_level
Legt die maximale Auflösung der Karte in
Pixel pro Meter fest.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.18 Methode GetMaxResolutionPosition()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode GetMaxResolutionPosition() liefert die maximale
Auflösung der Karte in Pixel pro Meter zurück.
IPOSITION::GetMaxResolutionPosition
HRESULT GetMaxResolutionPosition([in] double
werden:
Parameter Bedeutung
a_level
Zeiger auf eine double Variable, die die
maximale Auflösung der Karte in Pixel pro
Meter enthält.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 61 -
Page 64

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.5.19 Methode ChangeGeoToMapCoordPosition()
Beschreibung
Die Methode ChangeGeoToMapCoordPosition() konvertiert eine
geografische Koordinate in eine Fensterkoordinate.
C++ Syntax
IPOSITION::ChangeGeoToMapCoordPosition
Typ
HRESULT ChangeGeoToMapCoordPosition(
[in] double a_lat,
[in] double a_long,
[out] int * a_x,
[out] int * a_y )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_lat
Legt den Breitengrad im Format WGS-84 für
eine Umwandlung fest.
a_long
Legt den Längengrad im Format WGS-84 für
eine Umwandlung fest.
a_x
Zeiger auf eine int Variable, die die
konvertierte X-Koordinate des Fensters
enthält.
a_y
Zeiger auf eine int Variable, die die
konvertierte Y-Koordinate des Fensters
enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.5.20 Methode ChangeMapToGeoCoordPosition()
Beschreibung
C++ Syntax
Typ
- 62 - Schnittstelle IPOSITION
Die Methode ChangeMapToGeoCoordPosition() konvertiert eine
Fensterkoordinate in eine geografische Koordinate.
IPOSITION::ChangeMapToGeoCoordPosition
HRESULT ChangeMapToGeoCoordPosition(
[in] int a_x,
[in] int a_y,
[out] double * a_lat,
[out] double * a_long )
Page 65

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_x
Legt die X-Koordinate des Fensters fest, die
konvertiert werden soll.
a_y
Legt die Y-Koordinate des Fensters fest, die
konvertiert werden soll.
a_lat
Zeiger auf eine double Variable, die den
konvertierten Breitengrad im Format WGS-84
enthält.
a_long
Zeiger auf eine double Variable, die den
konvertierten Längengrad im Format WGS-84
enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 63 -
Page 66

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6 Schnittstelle INAVIGATION
Überblick
Funktionsumfang Routenberechnung und Navigation von der aktuellen Position
Typische
Verwendung
Die Programmierschnittstelle INAVIGATION ermöglicht die
Navigation von der aktuellen Position zu einem Zielpunkt.
zu einem Zielpunkt in der Karte
Ermittlung der Distanz zum Zielpunkt
Ermittlung der geschätzten Fahrzeit zum Zielpunkt
Anzeige der Route in der Karte
Anzeige der aktuellen Position in der Karte
Anzeige einer schematischen Darstellung (Pfeildarstellung)
Anzeige eines Entfernungsbalkens (z.B. bei Abbiegeankündi-
gungen)
Hinweis: Die Route kann sich durch TMC-Meldungen während
der Fahrt ändern. Die Koordinaten werden immer im Format
WGS-84 geliefert.
OpenNavigation( hWnd, x, y, width, height );
SetDestCoordNavigation( a_lat, a_long );
// Optional: setze Koordinaten für Spuren (tracks)
SetDestTrackNavigation( a_size, a_latArr, a_longArr );
StartNavigation();
// Andere methoden der Schnittstelle INAVIGATION
CloseNavigation();
- 64 - Schnittstelle INAVIGATION
Page 67

Anwenderhandbuch NAVIGON Integration Kit 4.0
Methoden
In der Schnittstelle INAVIGATION stehen Ihnen die folgenden
Methoden zur Verfügung:
Methode OpenNavigation(), siehe Seite 66
Methode CloseNavigation(), siehe Seite 67
Methode SetDestIdNavigation(), siehe Seite 67
Methode GetDestIdNavigation(), siehe Seite 68
Methode SetDestCoordNavigation(), siehe Seite 68
Methode GetDestCoordNavigation(), siehe Seite 69
Methode SetDestTrackNavigation(), siehe Seite 70
Methode StartNavigation(), siehe Seite 71
Methode ShowRouteNavigation(), siehe Seite 71
Methode RepeatLastAdviceNavigation(), siehe Seite 72
Methode ZoomInNavigation(), siehe Seite 72
Methode ZoomOutNavigation(), siehe Seite 72
Methode ShowDownNavigation(), siehe Seite 73
Methode ShowUpNavigation(), siehe Seite 73
Methode ShowLeftNavigation(), siehe Seite 73
Methode ShowRightNavigation(), siehe Seite 74
Methode ShowStartPointNavigation(), siehe Seite 74
Methode ShowEndPointNavigation(), siehe Seite 74
Methode SetRotationNavigation(), siehe Seite 75
Methode GetRotationNavigation(), siehe Seite 75
Methode GetStatusNavigation(), siehe Seite 76
Methode GetRoutingResultNavigation(), siehe Seite 76
Methode ShematicViewOpenNavigation(), siehe Seite 77
Methode ShematicViewShowNavigation(), siehe Seite 78
Methode DistanceBarOpenNavigation(), siehe Seite 79
Methode DistanceBarShowNavigation(), siehe Seite 80
Methode MapShowNavigation(), siehe Seite 80
Methode SetBirdViewNavigation(), siehe Seite 81
Methode GetFirstWayListNavigation(), siehe Seite 81
Methode GetNextWayListNavigation(), siehe Seite 82
Methode SetZoomLevelInNavigation(), siehe Seite 83
Methode GetZoomLevelInNavigation(), siehe Seite 84
Methode SetMaxResolutionNavigation(), siehe Seite 84
Methode GetMaxResolutionNavigation(), siehe Seite 85
Methode ChangeGeoToMapCoordNavigation(), siehe Seite 85
Methode ChangeMapToGeoCoordLocationMap(), siehe
Seite 86
Programmierschnittstellen - 65 -
Page 68

2.6.1 Methode OpenNavigation()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode OpenNavigation() initialisiert die Navigation und
muss als erstes aufgerufen werden.
C++ Syntax
INAVIGATION::OpenNavigation
Typ
HRESULT OpenNavigation(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wx,
[in] int a_wy )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_hwnd
Fenster Handle des Elternfensters, in dem die
Navigationskarte dargestellt werden soll.
a_ox
X-Koordinate der Navigationskarte relativ
zum Ursprung des Elternfensters .
a_oy
Y-Koordinate der Navigationskarte relativ
zum Ursprung des Elternfensters.
a_wx
a_wy
Breite der Navigationskarte.
Höhe der Navigationskarte.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Um die Navigation ohne eine die Navigationskarte zu
ermöglichen, müssen Sie die Methode folgendermaßen aufrufen:
OpenNavigation (hWnd, 0, 0, 0, 0). Beachten Sie bitte, dass
das Fenster Handle gültig sein muss.
- 66 - Schnittstelle INAVIGATION
Page 69

2.6.2 Methode CloseNavigation()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode CloseNavigation() beendet die Navigation und
schließt die Karte. Nach dieser Methode können keine weiteren
Methoden aus der Schnittstelle mehr aufgerufen werden.
C++ Syntax
INAVIGATION::CloseNavigation
Typ
HRESULT CloseNavigation()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.3 Methode SetDestIdNavigation()
Achtung: Veraltete Methode!
Die Methode SetDestIdNavigation() wird ab NIK 4.0 nicht mehr
unterstützt.
Beschreibung
Die Methode SetDestIdNavigation() setzt das Ziel der
Navigation in Form einer Identifikationsnummer der Stadt,
Strasse oder POI.
C++ Syntax
INAVIGATION::SetDestIdNavigation
Typ
HRESULT SetDestIdNavigation([in] long a_id )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_id
Legt die Identifikationsnummer des Ziels
fest.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Wird die Zieladresse als Identifikationsnummer
angegeben, dann wird die Meldung "Ziel erreicht" ausgegeben,
sobald das Ziel erreicht wurde. Siehe auch Methode
SetDestCoordNavigation().
Programmierschnittstellen - 67 -
Page 70

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.4 Methode GetDestIdNavigation()
Achtung: Veraltete Methode!
Die Methode GetDestIdNavigation() wird ab NIK 4.0 nicht mehr
unterstützt.
Beschreibung
Die Methode GetDestIdNavigation() liefert die Identifikationsnummer des Ziels zurück, das vorher mit der Methode
SetDestIdNavigation() gesetzt wurde.
C++ Syntax
INAVIGATION::GetDestIdNavigation
Typ
HRESULT GetDestIdNavigation([out] long * a_id)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_id
Zeiger auf eine long Variable, die die
Identifikationsnummer des Ziels enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.5 Methode SetDestCoordNavigation()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Die Methode SetDestCoordNavigation() setzt das Ziel der
Navigation in Form von WGS-84 Koordinaten.
INAVIGATION::SetDestCoordNavigation
HRESULT SetDestCoordNavigation(
[in] double a_lat,
[in] double a_long )
werden:
Parameter Bedeutung
a_lat
Legt den aktuellen Breitengrad im Format
WGS-84 fest.
a_long
Legt den aktuellen Längengrad im Format
WGS-84 fest.
- 68 - Schnittstelle INAVIGATION
Page 71

Anwenderhandbuch NAVIGON Integration Kit 4.0
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Wird das Ziel in Form von WGS-84 Koordinaten
angegeben, dann wird die Ansage "Ziel erreicht" ausgegeben,
sobald die Koordinaten erreicht wurden. Siehe auch
SetDestTrackNavigation() für die Navigation zu einem Punkt
im nicht-digitalisierten Gebiet.
2.6.6 Methode GetDestCoordNavigation()
Beschreibung
Die Methode GetDestCoordNavigation() liefert die Koordinaten
der Ziels zurück, das vorher mit der Methode
SetDestCoordNavigation() gesetzt wurde.
C++ Syntax
INAVIGATION::GetDestCoordNavigation
Typ
HRESULT GetDestCoordNavigation(
[out] double * a_lat,
[out] double * a_long )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_lat
Zeiger auf double Variable, die den aktuellen
Breitengrad im Format WGS-84 enthält.
a_long
Zeiger auf double Variable, die den aktuellen
Längengrad im Format WGS-84 enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 69 -
Page 72

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.7 Methode SetDestTrackNavigation()
Beschreibung
Die Methode SetDestTrackNavigation() fügt neue Koordinaten
für Spuren (tracks) der Navigation hinzu. Die erste Koordinate ist
der Startpunkt der Spur, der im Regelfall der letzte verfügbare
Punkt des Straßennetzes ist. Die letzte Koordinate ist der
Zielpunkt außerhalb des digitalisierten Straßennetzes, der im
Regelfall mit dem Ziel übereinstimmt, das mit der Methode
SetDestCoordNavigation() gesetzt wurde.
Hinweis: Die Spuren-Koordinaten müssen gesetzt werden, bevor
die Navigation mit der Methode StartNavigation() gestartet
wird.
C++ Syntax
INAVIGATION::SetDestTrackNavigation
Typ
HRESULT SetDestTrackNavigation(
[in] int a_size,
[in, size_is(a_size)] double * a_lat,
[in, size_is(a_size)] double * a_long )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_size
Legt die Anzahl der Koordinaten fest, die in
den Arrays für a_lat und a_long stehen.
a_lat
Zeiger auf eine double Variable, die ein Array
von Breitengraden-Koordinaten im Format
WGS-84 enthält.
a_long
Zeiger auf eine double Variable, die ein Array
von Längengraden-Koordinaten im Format
WGS-84 enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Die Methode SetDestTrackNavigation() wird anstelle
der Methode SetDestCoordNavigation() verwendet, muss also
aufgerufen werden bevor die Navigation mit der Methode
StartNavigation() gestartet wird.
- 70 - Schnittstelle INAVIGATION
Page 73

2.6.8 Methode StartNavigation()
Anwenderhandbuch NAVIGON Integration Kit 4.0
Beschreibung
Die Methode StartNavigation() wird aufgerufen, um die
Navigation zu starten. D.h. das Ziel und eventuell Spurkoordinaten müssen bereits zuvor gesetzt sein. StartNavigation()
berechnet eine Route von der aktuellen GPS-Position zum Ziel
und zeigt diese zusammen mit der aktuellen Position in der
Navigationskarte an.
C++ Syntax
INAVIGATION::StartNavigation
Typ
HRESULT StartNavigation()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.9 Methode ShowRouteNavigation()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ShowRouteNavigation() zeigt die letzte berechnete
Route maximiert in der Navigationskarte an.
INAVIGATION::ShowRouteNavigation
HRESULT ShowRouteNavigation()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Hinweis: Die Methode kann erst nach der Methode
StartNavigation() aufgerufen werden.
Programmierschnittstellen - 71 -
Page 74

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.10 Methode RepeatLastAdviceNavigation()
Beschreibung
Die Methode RepeatLastAdviceNavigation() wiederholt die
letzte akustische Navigationsanweisung.
C++ Syntax
INAVIGATION::RepeatLastAdviceNavigation
Typ
HRESULT RepeatLastAdviceNavigation()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.11 Methode ZoomInNavigation()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ZoomInNavigation() zoomt in die Navigationskarte.
INAVIGATION::ZoomInNavigation
HRESULT ZoomInNavigation()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.12 Methode ZoomOutNavigation()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
- 72 - Schnittstelle INAVIGATION
Die Methode ZoomOutNavigation() zoomt aus der Navigationskarte heraus.
INAVIGATION::ZoomOutNavigation
HRESULT ZoomOutNavigation()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Page 75

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.13 Methode ShowDownNavigation()
Beschreibung
Die Methode ShowDownNavigation() verschiebt die Navigationskarte nach unten.
C++ Syntax
INAVIGATION::ShowDownNavigation
Typ
HRESULT ShowDownNavigation()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.14 Methode ShowUpNavigation()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ShowUpNavigation() verschiebt die Navigationskarte nach oben.
INAVIGATION::ShowUpNavigation
HRESULT ShowUpNavigation()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.15 Methode ShowLeftNavigation()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Programmierschnittstellen - 73 -
Die Methode ShowLeftNavigation() verschiebt die Navigationskarte nach links.
INAVIGATION::ShowLeftNavigation
HRESULT ShowLeftNavigation()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Page 76

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.16 Methode ShowRightNavigation()
Beschreibung
Die Methode ShowRightNavigation() verschiebt die Navigationskarte nach rechts.
C++ Syntax
INAVIGATION::ShowRightNavigation
Typ
HRESULT ShowRightNavigation()
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.17 Methode ShowStartPointNavigation()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode ShowStartPointNavigation() zeigt den Startpunkt
in der Karte an.
INAVIGATION::ShowStartPointNavigation
HRESULT ShowStartPointNavigation()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.18 Methode ShowEndPointNavigation()
Beschreibung
C++ Syntax
Typ
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
- 74 - Schnittstelle INAVIGATION
Die Methode ShowEndPointNavigation() zeigt den Zielpunkt in
der Karte an.
INAVIGATION::ShowEndPointNavigation
HRESULT ShowEndPointNavigation()
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Page 77

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.19 Methode SetRotationNavigation()
Beschreibung
Die Methode SetRotationNavigation() stellt die
Kartenausrichtung genordet oder in Fahrtrichtung dar.
C++ Syntax
INAVIGATION::SetRotationNavigation
Typ
HRESULT SetRotationNavigation([in] BOOL a_rotation)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_rotation
TRUE: Karte in Fahrtrichtung
FALSE: Karte genordet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.20 Methode GetRotationNavigation()
Beschreibung
Die Methode GetRotationNavigation() liefert den Status der
Kartenausrichtung zurück.
C++ Syntax
INAVIGATION::GetRotationNavigation
Typ
HRESULT GetRotationNavigation([out] BOOL * a_rotation)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_rotation
Zeiger auf eine BOOL Variable die den Status
der Kartenausrichtung enthält. Ist dieser
Parameter TRUE, so ist die Karte in
Fahrtrichtung ausgerichtet. Ist dieser
Parameter FALSE, so ist die Karte genordet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 75 -
Page 78

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.21 Methode GetStatusNavigation()
Beschreibung
Die Methode GetStatusNavigation() liefert den Status der
letzten Routenberechnung über einen Aufruf der Methode
StartNavigation() zurück.
C++ Syntax
INAVIGATION::GetStatusNavigation
Typ
HRESULT GetStatusNavigation([out] int * a_status)
Parameter Die folgenden Parameter können verwendet werden:
Parameter Bedeutung
a_status
Zeiger auf integer Variable, die den Status
der letzten Routenberechnung enthält (siehe
Aufzählungstypen auf Seite 172).
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.22 Methode GetRoutingResultNavigation()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode GetRoutingResultNavigation() liefert die
Entfernung zwischen Start- und Zielpunkt sowie die geschätzte
Fahrtzeit zurück.
INAVIGATION::GetRoutingResultNavigation
HRESULT GetRoutingResultNavigation(
[out] int * a_meter,
[out] int * a_sec )
werden:
Parameter Bedeutung
a_meter
Zeiger auf eine integer Variable, die die
Entfernung zwischen Start- und Endpunkt der
Route in Metern enthält.
a_sec
Zeiger auf eine integer Variable, die die
geschätzte Fahrtzeit der Route in Sekunden
enthält.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 76 - Schnittstelle INAVIGATION
Page 79

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.23 Methode ShematicViewOpenNavigation()
Beschreibung
C++ Syntax
Typ
Die Methode ShematicViewOpenNavigation() initialisiert die
schematische Navigationsdarstellung. Dabei handelt es sich um
eine Pfeildarstellung die die aktuelle Straßensituation widerspiegelt.
INAVIGATION::ShematicViewOpenNavigation
HRESULT ShematicViewOpenNavigation(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wxy,
[in] int a_size )
Parameter Die folgenden Parameter verwendet werden:
Parameter Bedeutung
a_hwnd
Fenster Handle des Elternfensters, in dem die
schematische Navigationsdarstellung
angezeigt werden soll.
a_ox
X-Koordinate der schematische Navigationsdarstellung relativ zum Ursprung des
Elternfensters .
a_oy
Y-Koordinate der schematische Navigationsdarstellung relativ zum Ursprung des
Elternfensters .
a_wxy
Höhe und Breite der schematische
Navigationsdarstellung (die Darstellung ist
immer quadratisch).
a_size
Schriftgröße in der schematischen
Navigationsdarstellung.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 77 -
Page 80

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.24 Methode ShematicViewShowNavigation()
Beschreibung
Die Methode ShematicViewShowNavigation() zeigt die
schematische Navigationsdarstellung an. Sie muss nach der
Methode ShematicViewOpenNavigation() aufgerufen werden.
C++ Syntax
INAVIGATION::ShematicViewShowNavigation
Typ
HRESULT ShematicViewShowNavigation([in] BOOL a_show)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_show
TRUE Schematische Navigationsdarstellung
wird angezeigt
FALSE Schematische Navigationsdarstellung
wird ausgeblendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel
m_NIK_Navigation->ShematicViewOpenNavigation(
(long)hWnd, 0, 0, 200, 20 );
m_NIK_Navigation->ShematicViewShowNavigation( TRUE );
- 78 - Schnittstelle INAVIGATION
Page 81

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.25 Methode DistanceBarOpenNavigation()
Beschreibung
C++ Syntax
Typ
Die Methode DistanceBarOpenNavigation() initialisiert die
Anzeige des Entfernungsbalken, der bei Abbiegeankündigungen
dargestellt werden kann.
INAVIGATION::DistanceBarOpenNavigation
HRESULT DistanceBarOpenNavigation(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wx,
[in] int a_wy )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_hwnd
Fenster Handle des Elternfensters, in dem
der Entfernungsbalken dargestellt werden
soll.
a_ox
X-Koordinate des Entfernungsbalkens relativ
zum Ursprung des Elternfensters.
a_oy
Y-Koordinate des Entfernungsbalkens relativ
zum Ursprung des Elternfensters.
a_wx
a_wy
Breite des Entfernungsbalkens.
Höhe des Entfernungsbalkens.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 79 -
Page 82

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.26 Methode DistanceBarShowNavigation()
Beschreibung
Die Methode DistanceBarShowNavigation() zeigt den
Entfernungsbalken an. Sie muss nach der Methode
DistanceBarOpenNavigation() aufgerufen werden.
C++ Syntax
INAVIGATION::DistanceBarShowNavigation
Typ
HRESULT DistanceBarShowNavigation([in] BOOL a_show )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_show
TRUE Entfernungsbalken wird angezeigt
FALSE Entfernungsbalken wird ausgeblendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Beispiel
m_NIK_Navigation->DistanceBarOpenNavigation(
(long)hWnd, 0, 0, 100, 200 );
m_NIK_Navigation->DistanceBarShowNavigation( TRUE );
2.6.27 Methode MapShowNavigation()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode MapShowNavigation() blendet die Navigationskarte
ein oder aus.
INAVIGATION:: MapShowNavigation
HRESULT MapShowNavigation([in] BOOL a_show )
werden:
Parameter Bedeutung
a_show
TRUE Karte wird angezeigt
FALSE Karte wird ausgeblendet
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 80 - Schnittstelle INAVIGATION
Page 83

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.28 Methode SetBirdViewNavigation()
Beschreibung
Die Methode SetBirdViewNavigation() schaltet die
Vogelperspektive der Navigationskarte ein oder aus.
C++ Syntax
IROUTING::SetBirdViewNavigation
Typ
HRESULT SetBirdViewNavigation([in] BOOL a_birdview)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_rotation
TRUE Navigationskarte wird in
Vogelperspektive angezeigt
FALSE Navigationskarte wird in 2-D-
Darstellung angezeigt
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.29 Methode GetFirstWayListNavigation()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Die Methode GetFirstWayListNavigation() gibt den ersten
Wegpunkt der zuletzt berechneten Route zurück. Alle weiteren
Wegpunkte können im Anschluss durch Aufruf der Methode
GetNextWayListNavigation() ermittelt werden.
IROUTING::GetFirstWayListNavigation
HRESULT GetFirstWayListNavigation (
[out] BSTR * a_FromStreet,
[out] BSTR * a_ToStreet,
[out] long * a_nMeterFrom,
[out] BSTR * a_AdviceDesc,
[out] int * a_dAction,
[out] BOOL * a_bFind )
werden:
Parameter Bedeutung
a_FromStreet
Zeiger auf eine BSTR Variable, die die Straße
enthält von wo aus der Wegpunkt startet.
a_ToStreet
Zeiger auf eine BSTR Variable, die die Straße
enthält in die der Wegpunkt führt.
Programmierschnittstellen - 81 -
Page 84

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Bedeutung
a_nMeterFrom
Zeiger auf eine long Variable, die die
Entfernung zur nächsten Aktion enthält.
a_AdviceDesc
Zeiger auf eine BSTR Variable, die eine
Beschreibung der Ansage enthält.
a_dAction
Zeiger auf eine int Variable, die die
auszuführende Aktion enthält (siehe
Aufzählungstypen auf Seite 169).
a_bFind
Zeiger auf eine BOOL Variable, die angibt, ob
ein Wegpunkt gefunden wurde.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Anmerkungen
Wird mit der Methode GetFirstWayListNavigation() ein
Wegpunkt gefunden (a_bFind ist TRUE), dann können mit der
Methode GetNextWayListNavigation() alle weiteren Wegpunkte
ermittelt werden.
2.6.30 Methode GetNextWayListNavigation()
Beschreibung
C++ Syntax
Typ
Die Methode GetNextWayListNavigation() gibt den nächsten
Wegpunkt der zuletzt berechneten Route zurück. Vorher muss
durch Aufruf der Methode GetFirstWayListNavigation() die
Ermittlung der Wegpunkte eingeleitet worden sein.
IROUTING::GetNextWayListNavigation
HRESULT GetNextWayListNavigation (
[out] BSTR * a_FromStreet,
[out] BSTR * a_ToStreet,
[out] long * a_nMeterFrom,
[out] BSTR * a_AdviceDesc,
[out] int * a_dAction,
[out] BOOL * a_bFind )
- 82 - Schnittstelle INAVIGATION
Page 85

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_FromStreet
Zeiger auf eine BSTR Variable, die die Straße
enthält von wo aus der Wegpunkt startet.
a_ToStreet
Zeiger auf eine BSTR Variable, die die Straße
enthält in die der Wegpunkt führt.
a_nMeterFrom
Zeiger auf eine long Variable, die die
Entfernung zur nächsten Aktion enthält.
a_AdviceDesc
Zeiger auf eine BSTR Variable, die eine
Beschreibung der Ansage enthält.
a_dAction
Zeiger auf eine int Variable, die die
auszuführende Aktion enthält (siehe
Aufzählungstypen auf Seite 169).
a_bFind
Zeiger auf eine BOOL Variable, die angibt, ob
ein Wegpunkt gefunden wurde.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Anmerkungen
Solange die Variable a_bFind TRUE ist, können weitere
Wegpunkte ermittelt werden.
2.6.31 Methode SetZoomLevelInNavigation()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode SetZoomLevelInNavigation() setzt die Zoom-Stufe
für die Karte.
INAVIGATION::SetZoomLevelInNavigation
HRESULT SetZoomLevelInNavigation([in] double a_level)
werden:
Parameter Bedeutung
a_level
Legt die Zoom-Stufe der Karte in Metern pro
Pixel fest.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 83 -
Page 86

Anwenderhandbuch NAVIGON Integration Kit 4.0
a_level)
2.6.32 Methode GetZoomLevelInNavigation()
Beschreibung
Die Methode GetZoomLevelInNavigation() liefert die ZoomStufe für die Karte zurück.
C++ Syntax
INAVIGATION::GetZoomLevelInNavigation
Typ
HRESULT GetZoomLevelInNavigation([in] double
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_level
Zeiger auf eine double Variable, die die
aktuell eingestellte Zoom-Stufe der Karte in
Metern pro Pixel enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.33 Methode SetMaxResolutionNavigation()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode SetMaxResolutionNavigation() setzt die maximale
Auflösung der Karte in Pixel pro Meter.
INAVIGATION::SetMaxResolutionNavigation
HRESULT SetMaxResolutionNavigation(
[in] double a_maxres )
werden:
Parameter Bedeutung
a_level
Legt die maximale Auflösung der Karte in
Pixel pro Meter fest.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 84 - Schnittstelle INAVIGATION
Page 87

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.6.34 Methode GetMaxResolutionNavigation()
Beschreibung
Die Methode GetMaxResolutionNavigation() liefert die
maximale Auflösung der Karte in Pixel pro Meter zurück.
C++ Syntax
IPOSITION::GetMaxResolutionNavigation
Typ
HRESULT GetMaxResolutionNavigation(
[in] double a_maxres )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_level
Zeiger auf eine double Variable, die die
maximale Auflösung der Karte in Pixel pro
Meter enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.35 Methode ChangeGeoToMapCoordNavigation()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Die Methode ChangeGeoToMapCoordNavigation() konvertiert
eine geografische Koordinate in eine Fensterkoordinate.
INAVIGATION::ChangeGeoToMapCoordNavigation
HRESULT ChangeGeoToMapCoordNavigation(
[in] double a_lat,
[in] double a_long,
[out] int * a_x,
[out] int * a_y )
werden:
Parameter Bedeutung
a_lat
Legt den Breitengrad im Format WGS-84 für
eine Umwandlung fest.
a_long
Legt den Längengrad im Format WGS-84 für
eine Umwandlung fest.
a_x
Zeiger auf eine int Variable, die die
konvertierte X-Koordinate des Fensters
enthält.
Programmierschnittstellen - 85 -
Page 88

Anwenderhandbuch NAVIGON Integration Kit 4.0
Parameter Bedeutung
a_y
Zeiger auf eine int Variable, die die
konvertierte Y-Koordinate des Fensters
enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.6.36 Methode ChangeMapToGeoCoordLocationMap()
Beschreibung
C++ Syntax
Typ
Die Methode ChangeMapToGeoCoordNavigation() konvertiert
eine Fensterkoordinate in eine geografische Koordinate.
INAVIGATION::ChangeMapToGeoCoordNavigation
HRESULT ChangeMapToGeoCoordNavigation(
[in] int a_x,
[in] int a_y,
[out] double * a_lat,
[out] double * a_long )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_x
Legt die X-Koordinate des Fensters fest, die
konvertiert werden soll.
a_y
Legt die Y-Koordinate des Fensters fest, die
konvertiert werden soll.
a_lat
Zeiger auf eine double Variable, die den
konvertierten Breitengrad im Format WGS-84
enthält.
a_long
Zeiger auf eine double Variable, die den
konvertierten Längengrad im Format WGS-84
enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 86 - Schnittstelle INAVIGATION
Page 89

2.6.37 Beispiele
*/
Anwenderhandbuch NAVIGON Integration Kit 4.0
Routenberechnung
und Navigation
Angabe des
Zielpunktes
m_NIK_Navigation->OpenNavigation(
(long)hWnd, 0, 0, 300, 200 );
/* Setzen des Zielpunktes */
m_NIK_Navigation->SetDestCoordNavigation(dLat, dLong );
/* Starte die Routenberechnung und Navigation */
m_NIK_Navigation->StartNavigation();
/* Hole den Status der Routenberechnung */
m_NIK_Navigation->GetStatusNavigation( &nStatus );
/* Hole die Distanz und geschätzte Dauer der Route
m_NIK_Navigation->GetRoutingResultNavigation
( &nMeter, &nSec );
m_NIK_Navigation->CloseNavigation();
/* Zielpunkt als Koordinate */
m_NIK_Navigation->SetDestCoordNavigation(dLatX,dLongY);
Darstellung
/* Zielpunkt als ID */
m_NIK_Navigation->SetDestIdNavigation( nAreaId );
/* Rückgabe des Zielpunktes */
m_NIK_Navigation->GetDestCoordNavigation(
&dLatX, &dLongY );
/* bzw. */
m_NIK_Navigation->GetDestIdNavigation( &nAreaId );
/* Anzeige der gesamten Route */
m_NIK_Navigation->ShowRouteNavigation();
/* Start- und Zielpunkt der Route */
m_NIK_Navigation->ShowStartPointNavigation();
m_NIK_Navigation->ShowEndPointNavigation();
Programmierschnittstellen - 87 -
Page 90

Anwenderhandbuch NAVIGON Integration Kit 4.0
Karte
Ansage Navigationsanweisung
/* Verschieben des Kartenausschnitts */
m_NIK_Navigation->ShowDownNavigation();
m_NIK_Navigation->ShowUpNavigation();
m_NIK_Navigation->ShowLeftNavigation();
m_NIK_Navigation->ShowRightNavigation();
/* Zoom */
m_NIK_Navigation->ZoomInNavigation();
m_NIK_Navigation->ZoomOutNavigation();
/* Kartenausrichtung -norden- */
m_NIK_Navigation->SetRotationNavigation( FALSE );
m_NIK_Navigation->GetRotationNavigation( &bDir );
/* Aktuelle Ansage auslösen */
m_NIK_Navigation->RepeatLastAdviceNavigation();
- 88 - Schnittstelle INAVIGATION
Page 91

2.7 Schnittstelle IOPTIONS
Anwenderhandbuch NAVIGON Integration Kit 4.0
Überblick
Funktionsumfang Einstellungen für Routenberechnung
Typische
Verwendung
Über die Programmierschnittstelle IOPTIONS werden globale
Parameter festgelegt,
für die Routenberechnung in den Schnittstellen IROUTING und
INAVIGATION,
für die Darstellung der Karten in den Schnittstellen IROUTING,
INAVIGATION und IPOSITION.
Einstellungen für die Kartendarstellung
Hinweis: Für jede Einstellungsmöglichkeit gibt es entsprechende
Get- und Set-Methoden
GetRoutingAlgorithmOptions
( &bDynamicRoute, &bQuickest, &bShortest );
/* Einstellungen für die Routenberechnung ändern */
SetRoutingAlgorithmOptions
( bDynamicRoute, bQuickest, bShortest );
GetRoutingAvoidTypeOptions
( &bHighWays, &bFerries, &bMaudStreets );
/* Einstellungen für Ausschluss von Verbindungswegen */
SetRoutingAvoidTypeOptions
( bHighWays, bFerries, bMaudStreets );
Methoden
Methode SetRoutingAlgorithmOptions(), siehe Seite 90
In der Schnittstelle IOPTIONS stehen Ihnen die folgenden
Methoden zur Verfügung:
Methode SetRoutingAlgorithmOptions2(), siehe Seite 91
Methode GetRoutingAlgorithmOptions(), siehe Seite 91
Methode GetRoutingAlgorithmOptions2(), siehe Seite 92
Methode SetRoutingAvoidTypeOptions(), siehe Seite 93
Methode GetRoutingAvoidTypeOptions(), siehe Seite 94
Methode SetStyleMapOptions(), siehe Seite 95
Methode GetStyleMapOptions(), siehe Seite 95
Methode SetKeyboardMapModeOptions(), siehe Seite 96
Methode GetKeyboardMapModeOptions(), siehe Seite 96
Methode GetBasicMapFolderOptions(), siehe Seite 97
Methode SetBasicMapFolderOptions(), siehe Seite 97
Methode GetMapsNumberOptions(), siehe Seite 98
Methode GetMapsPathsOptions(), siehe Seite 98
Methode SetCurrentMapOptions(), siehe Seite 99
Methode GetCurrentMapOptions(), siehe Seite 99
Programmierschnittstellen - 89 -
Page 92

Anwenderhandbuch NAVIGON Integration Kit 4.0
Methode GetRadioMutingOptions(), siehe Seite 100
Methode SetRadioMutingOptions(), siehe Seite 100
Methode GetLanguageCodeOptions(), siehe Seite 101
Methode SetLanguageCodeOptions(), siehe Seite 101
Methode GetDistUnitOptions(), siehe Seite 102
Methode SetDistUnitOptions(), siehe Seite 102
Methode SetLouderOptions(), siehe Seite 103
Methode SetQuieterOptions(), siehe Seite 103
Methode SetPoiMapFolderOptions(), siehe Seite 104
Methode OpenPoiMapsOptions(), siehe Seite 104
Methode OpenPoiMapsOptions(), siehe Seite 104
2.7.1 Methode SetRoutingAlgorithmOptions()
Achtung: Veraltete Methode!
Erweiterte Einstellungen sind über die Methode
SetRoutingAlgorithmOptions2() möglich, die deshalb auch für
neue Projekte verwendet werden sollte.
Beschreibung
Die Methode SetRoutingAlgorithmOptions() für die Routenberechnung ein. Einer der folgenden Parameter muss TRUE sein.
C++ Syntax
IOPTIONS:: SetRoutingAlgorithmOptions
Typ
HRESULT SetRoutingAlgorithmOptions(
[in] BOOL bDynamicRoute,
[in] BOOL bQuickest,
[in] BOOL bShortest )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
bDynamicRoute
Legt fest, ob eine dynamische Route
berechnet werden soll. Dabei handelt es sich
um eine schnelle Route unter Verwendung
von TMC, falls vorhanden. Die Route kann
sich somit auch dynamisch ändern, falls
Verkehrsbehinderungen auf der Strecke
gemeldet sind.
bQuickest
Legt fest, ob eine möglichst schnelle Route,
bezogen auf die Dauer, berechnet werden
soll.
bShortest
Legt fest, ob eine möglichst kurze Route,
bezogen auf die Entfernung, berechnet
werden soll.
- 90 - Schnittstelle IOPTIONS
Page 93

Anwenderhandbuch NAVIGON Integration Kit 4.0
Achtung: Nur einer der Parameter darf auf den Wert TRUE
gesetzt werden.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.7.2 Methode SetRoutingAlgorithmOptions2()
Beschreibung
Die Methode SetRoutingAlgorithmOptions2() stellt die
Parameter für die Vermeidung von bestimmten
Verbindungswegen ein
C++ Syntax
IOPTIONS:: SetRoutingAlgorithmOptions2
Typ
HRESULT SetRoutingAlgorithmOptions2 (
[in] int a_nRouteType )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_nRouteType
Legt den Typ der Routenberechnung fest
(siehe Aufzählungstypen auf Seite 171).
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.7.3 Methode GetRoutingAlgorithmOptions()
Achtung: Veraltete Methode!
Erweiterte Einstellungen sind über die Methode
GetRoutingAlgorithmOptions2() möglich, die deshalb auch für
neue Projekte verwendet werden sollte.
Beschreibung
C++ Syntax
Programmierschnittstellen - 91 -
Die Methode GetRoutingAlgorithmOptions() liefert die
Parameter für die Routenberechnung zurück.
IOPTIONS::GetRoutingAlgorithmOptions
Page 94

Anwenderhandbuch NAVIGON Integration Kit 4.0
Typ
HRESULT GetRoutingAlgorithmOptions(
[out] BOOL * bDynamicRoute,
[out] BOOL * bQuickest,
[out] BOOL * bShortest )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
bDynamicRoute
Zeiger auf eine BOOL Variable die TRUE
enthält, falls die Routenberechnung auf
dynamisch eingestellt ist.
bQuickest
Zeiger auf eine BOOL Variable, die TRUE
enthält, falls die Routenberechnung auf
schnell eingestellt ist.
bShortest
Zeiger auf eine BOOL Variable, die TRUE
enthält, falls die Routenberechnung auf kurz
eingestellt ist.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.7.4 Methode GetRoutingAlgorithmOptions2()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode GetRoutingAlgorithmOptions2() liefert die
Parameter für die Routenberechnung zurück.
IOPTIONS::GetRoutingAlgorithmOptions2
HRESULT GetRoutingAlgorithmOptions2 (
[out] int * a_nRouteType )
werden:
Parameter Bedeutung
a_nRouteType
Zeiger auf eine int Variable, die den Typ der
Routenberechnung enthält (siehe
Aufzählungstypen auf Seite 171).
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 92 - Schnittstelle IOPTIONS
Page 95

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.7.5 Methode SetRoutingAvoidTypeOptions()
Beschreibung
Die Methode SetRoutingAvoidTypeOptions() stellt die
Parameter für die Vermeidung von bestimmten Verbindungswegen ein.
C++ Syntax
IOPTIONS::SetRoutingAvoidTypeOptions
Typ
HRESULT SetRoutingAvoidTypeOptions(
[in] BOOL bHighWays,
[in] BOOL bFerries,
[in] BOOL bMaudStreets )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
bHighWays
Legt fest, ob Autobahnen verwendet oder,
falls möglich, vermieden werden sollen. Wird
TRUE gesetzt, so werden Autobahnen wenn
möglich vermieden, andernfalls werden sie
verwendet.
bFerries
Legt fest, ob Fähren verwendet oder, falls
möglich, vermieden werden sollen. Wird TRUE
gesetzt, werden Fähren wenn möglich
vermieden, andernfalls werden sie
verwendet.
bMaudStreets
Legt fest, ob gebührenpflichtige Straßen
verwendet oder, falls möglich, vermieden
werden sollen. Wird TRUE gesetzt, so werden
Mautstraßen wenn möglich vermieden,
andernfalls werden sie verwendet.
Hinweis: Beliebige der Parameter dürfen auf den Wert TRUE
gesetzt werden.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 93 -
Page 96

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.7.6 Methode GetRoutingAvoidTypeOptions()
Beschreibung
Die Methode GetRoutingAvoidTypeOptions() liefert die
Parameter für die Vermeidung von bestimmten Verbindungswegen zurück.
C++ Syntax
IOPTIONS::GetRoutingAvoidTypeOptions
Typ
HRESULT GetRoutingAvoidTypeOptions(
[out] BOOL * bHighWays,
[out] BOOL * bFerries,
[out] BOOL * bMaudStreets )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
bHighWays
Zeiger auf eine BOOL Variable die TRUE
enthält, falls Autobahnen wenn möglich
vermieden werden sollen.
bFerries
Zeiger auf eine BOOL Variable die TRUE
enthält, falls Fähren wenn möglich vermieden
werden sollen.
bMaudStreets
Zeiger auf eine BOOL Variable die TRUE
enthält, falls gebührenpflichtige Strassen
wenn möglich vermieden werden sollen.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 94 - Schnittstelle IOPTIONS
Page 97

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.7.7 Methode SetStyleMapOptions()
Beschreibung
Die Methode SetStyleMapOptions() stellt die Parameter für die
Tag- und Nachtdarstellung ein.
C++ Syntax
IOPTIONS::SetStyleMapOptions
Typ
HRESULT SetStyleMapOptions([in] BOOL a_style)
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_style
Legt fest, ob die Tag- oder Nachtdarstellung
aktiv ist. Ist der Wert TRUE, wo ist die
Tagdarstellung aktiv, andernfalls ist die
Nachtdarstellung aktiv.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.7.8 Methode GetStyleMapOptions()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode GetStyleMapOptions() liefert die Parameter für die
Tag- und Nachtdarstellung.
IOPTIONS::GetStyleMapOptions
HRESULT GetStyleMapOptions([out] BOOL * a_style)
werden:
Parameter Bedeutung
a_style
Zeiger auf eine BOOL Variable die angibt, ob
die Tag- oder Nachtdarstellung aktiv ist. Ist
der Wert TRUE, wo ist die Tagdarstellung
aktiv, andernfalls ist die Nachtdarstellung
aktiv.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 95 -
Page 98

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.7.9 Methode SetKeyboardMapModeOptions()
Beschreibung
Die Methode SetKeyboardMapModeOptions() stellt den
Parameter für Tastaturereignisse in der Karte ein. Sind die
Tastaturereignisse aktiviert, so können die sie über
entsprechende Callback-Methoden behandelt werden.
Hinweis: Standardmäßig werden für die Karte Tastaturereignisse
vom NIK behandelt. Möchte man jedoch darauf selber reagieren,
so kann man dies hier einschalten
C++ Syntax
IOPTIONS::SetKeyboardMapModeOptions
Typ
HRESULT SetKeyboardMapModeOptions([in] BOOL a_keyboard)
Parameter Die folgenden Parameter können verwendet werden:
Parameter Bedeutung
a_keyboard
Legt fest, ob die Tastaturereignisse aktiviert
oder deaktiviert sind. Ist der Wert TRUE, so
sind die Tastaturereignisse aktiviert,
andernfalls sind sie deaktiviert.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.7.10 Methode GetKeyboardMapModeOptions()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können verwendet werden:
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode GetKeyboardMapModeOptions() liefert die
Parameter für Tastaturereignisse in der Karte zurück.
IOPTIONS::GetKeyboardMapModeOptions
HRESULT GetKeyboardMapModeOptions(
[out] BOOL a_keyboard );
Parameter Bedeutung
a_keyboard
Zeiger auf eine BOOL Variable die angibt, ob
die Tastaturereignisse aktiviert oder
deaktiviert sind. Ist der Wert TRUE, so sind
die Tastaturereignisse aktiviert, andernfalls
sind sie deaktiviert.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 96 - Schnittstelle IOPTIONS
Page 99

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.7.11 Methode GetBasicMapFolderOptions()
Beschreibung
Die Methode GetBasicMapFolderOptions() liefert den Suchpfad
der installierten Basiskarten zurück.
C++ Syntax
IOPTIONS::GetBasicMapFolderOptions
Typ
HRESULT GetBasicMapFolderOptions(
[out] BSTR * a_sFolder )
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_sFolder
Zeiger auf eine BSTR Variable, die den
Suchpfad der installierten Basiskarten
enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.7.12 Methode SetBasicMapFolderOptions()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode SetBasicMapFolderOptions() setzt den Suchpfad
für die installierten Basiskarten.
IOPTIONS::SetBasicMapFolderOptions
HRESULT SetBasicMapFolderOptions (
[out] BSTR * a_sFolder )
werden:
Parameter Bedeutung
a_sFolder
Gibt den Suchpfad der für die installierten
Basiskarten an.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
Programmierschnittstellen - 97 -
Page 100

Anwenderhandbuch NAVIGON Integration Kit 4.0
2.7.13 Methode GetMapsNumberOptions()
Beschreibung
Die Methode GetMapsNumberOptions() liefert die Anzahl der
installierten Karten.
C++ Syntax
IOPTIONS:: GetMapsNumberOptions
Typ
HRESULT GetMapsNumberOptions([out] int* a_size);
Parameter Die folgenden Parameter können mit der Methode verwendet
werden:
Parameter Bedeutung
a_size
Zeiger auf eine int Variable, die die Anzahl
der aktuell installierten Karten enthält.
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
2.7.14 Methode GetMapsPathsOptions()
Beschreibung
C++ Syntax
Typ
Parameter Die folgenden Parameter können mit der Methode verwendet
Rückgabewerte Die Methode liefert die folgenden Rückgabewerte:
Die Methode GetMapsPathsOptions() liefert die Pfade aller
installierten Karten zurück.
IOPTIONS:: GetMapsPathsOptions
HRESULT GetMapsPathsOptions(
[in] int csize,
[out, size_is(csize)] BSTR * a_maps )
werden:
Parameter Bedeutung
csize
Legt die Größe des Arrays a_maps fest. Der
Wert sollte durch Aufruf der Methode
GetMapsNumberOptions() ermittelt werden.
a_maps
Zeiger auf ein Array von BSTR Variablen, das
die Pfade der installierten Karten enthält.
Rückgabewerte Bedeutung
S_OK
S_FALSE
Erfolg
Misserfolg
- 98 - Schnittstelle IOPTIONS
 Loading...
Loading...