

Page 1

User’s manual
NAVIGON Integration Kit 4.0
as on October 2004
Page 2

Impressum
NAVIGON GmbH
Berliner Platz 11
D-97080 Würzburg
Hotline (dtms-Service, 0,12 €/min): +49 180-5-NAVIGON (+49 180-5-6284466)
The information contained herein may be changed at any time without prior notification. This manual nor any
parts thereof may not be reproduced for any purpose whatsoever without the express written consent of
NAVIGON GmbH, nor transmitted in any form either electronically or mechanically, including photocopying and
recording.
Copyright 2004, NAVIGON GmbH
All rights reserved.
Page 3

Table of contents
1 Introduction................................................................6
1.1
On this manual................................................................. 7
1.2
Specification of services .................................................... 7
1.2.1 Supported operating systems .................................. 8
1.3
System requirements ........................................................ 9
1.4
Installation ...................................................................... 9
1.4.1 Installation of the Windows 2000/XP version ............10
1.4.2 Installation of the Windows CE version ....................10
1.5
Search facilities and conventions .......................................11
1.6
Liability ..........................................................................11
1.6.1 Support ...............................................................12
1.7
Trademarks ....................................................................12
User’s manual NAVIGON Integration Kit 4.0
2 Programming interfaces............................................13
2.1
Requirements for using NIK with a development environment
14
2.2
2.3
2.4
2.1.1 Using the interfaces ..............................................14
2.1.2 A survey on the interfaces .....................................15
IMNNIK ..........................................................................15
2.2.1 MNOpen() method ................................................16
2.2.2 MNClose() method ................................................16
2.2.3 GetMNOpen() method ...........................................17
2.2.4 GetMNVersion() method ........................................17
2.2.5 Starting and closing NIK ........................................18
IADDRESS ......................................................................19
2.3.1 OpenAddress() method) ........................................20
2.3.2 CloseAdress() method ...........................................20
2.3.3 SearchFirstCityAddress() method............................21
2.3.4 SearchFirstCityPostalCodeAddress() method ............22
2.3.5 SearchNextCityAddress() method ...........................23
2.3.6 SearchFirstStreetAddress() method.........................25
2.3.7 SearchNextStreetAddress() method ........................27
2.3.8 SearchPoiByRadiusAddress() method ......................28
2.3.9 SearchNextPoiAddress() method .............................30
2.3.10 ConvertCoordInAddress() method .........................31
2.3.11 ConvertCoordInAddress2() method .......................32
2.3.12 ConvertCoordInCountry() method .........................33
IROUTING ......................................................................34
2.4.1 OpenRoute() method.............................................35
2.4.2 CloseRoute() method ............................................36
2.4.3 AddDestCoordRoute() method ................................36
2.4.4 GetDestCoordRoute() method ................................37
2.4.5 ClearDestCoordRoute() method ..............................38
2.4.6 StartRoute() method .............................................38
2.4.7 ShowRoute() method ............................................39
2.4.8 ClearRoute() method .............................................39
2.4.9 ZoomInRoute() method .........................................40
2.4.10 ZoomOutRoute() method .....................................40
Table of contents - I -
Page 4

User’s manual NAVIGON Integration Kit 4.0
2.5
2.6
2.4.11 ShowDownRoute() method...................................40
2.4.12 ShowUpRoute() method .......................................41
2.4.13 ShowLeftRoute() method .....................................41
2.4.14 ShowRightRoute() method ...................................41
2.4.15 ShowStartPointRoute() method.............................42
2.4.16 ShowEndPointRoute() method ..............................42
2.4.17 SetRotationRoute() method ..................................43
2.4.18 GetRotationRoute() method..................................43
2.4.19 GetStatusRoute() method ....................................44
2.4.20 GetResultRoute() method.....................................44
2.4.21 MapShowRoute() method .....................................45
2.4.22 GetFirstWayListRoute() method ............................45
2.4.23 GetNextWayListRoute() method ............................46
2.4.24 SetZoomLevelInRoute() method ...........................47
2.4.25 GetZoomLevelInRoute() method ...........................48
2.4.26 SetMaxResolutionRoute() method .........................48
2.4.27 GetMaxResolutionRoute() method .........................49
2.4.28 ChangeGeoToMapCoordRoute() method .................49
2.4.29 ChangeMapToGeoCoordRoute() method .................50
2.4.30 Example for route calculation................................51
IPOSITION......................................................................52
2.5.1 OpenPosition() method ..........................................53
2.5.2 ClosePosition() method..........................................54
2.5.3 StartPosition() method ..........................................54
2.5.4 GetPosition() method ............................................55
2.5.5 ZoomInPosition() method ......................................55
2.5.6 ZoomOutPosition() method ....................................56
2.5.7 ShowDownPosition() method ..................................56
2.5.8 ShowUpPosition() method ......................................56
2.5.9 ShowLeftPosition() method ....................................57
2.5.10 ShowRightPosition() method.................................57
2.5.11 SetRotationPosition() method ...............................57
2.5.12 GetRotationPosition() method ...............................58
2.5.13 MapShowPosition() method ..................................59
2.5.14 SetBirdViewPosition() method...............................59
2.5.15 SetZoomLevelInPosition() method.........................60
2.5.16 GetZoomLevelInPosition() method ........................60
2.5.17 SetMaxResolutionPosition() method.......................61
2.5.18 GetMaxResolutionPosition() method ......................61
2.5.19 ChangeGeoToMapCoordPosition() method ..............62
2.5.20 ChangeMapToGeoCoordPosition() method ..............62
INAVIGATION .................................................................64
2.6.1 OpenNavigation() method ......................................66
2.6.2 CloseNavigation() method ......................................67
2.6.3 SetDestIdNavigation() method ...............................67
2.6.4 GetDestIdNavigation() method ...............................68
2.6.5 SetDestCoordNavigation() method ..........................68
2.6.6 GetDestCoordNavigation() method..........................69
2.6.7 SetDestTrackNavigation() method...........................70
2.6.8 StartNavigation() method ......................................71
2.6.9 ShowRouteNavigation() method .............................71
2.6.10 RepeatLastAdviceNavigation() method ...................72
2.6.11 ZoomInNavigation() method.................................72
2.6.12 ZoomOutNavigation() method ..............................72
2.6.13 ShowDownNavigation() method ............................73
2.6.14 ShowUpNavigation() method ................................73
2.6.15 ShowLeftNavigation() method...............................73
- II - Table of contents
Page 5

User’s manual NAVIGON Integration Kit 4.0
2.7
2.8
2.6.16 ShowRightNavigation() method.............................74
2.6.17 ShowStartPointNavigation() method ......................74
2.6.18 ShowEndPointNavigation() method........................74
2.6.19 SetRotationNavigation() method ...........................75
2.6.20 GetRotationNavigation() method ...........................75
2.6.21 GetStatusNavigation() method..............................76
2.6.22 GetRoutingResultNavigation() method ...................76
2.6.23 ShematicViewOpenNavigation() method.................77
2.6.24 ShematicViewShowNavigation() method ................78
2.6.25 DistanceBarOpenNavigation() method ...................79
2.6.26 DistanceBarShowNavigation() method ...................80
2.6.27 MapShowNavigation() method ..............................80
2.6.28 SetBirdViewNavigation() method...........................81
2.6.29 GetFirstWayListNavigation() method......................81
2.6.30 GetNextWayListNavigation() method .....................82
2.6.31 SetZoomLevelInNavigation() method.....................83
2.6.32 GetZoomLevelInNavigation() method ....................84
2.6.33 SetMaxResolutionNavigation() method...................84
2.6.34 GetMaxResolutionNavigation() method ..................85
2.6.35 ChangeGeoToMapCoordNavigation() method ..........85
2.6.36 ChangeMapToGeoCoordLocationMap() method........86
2.6.37 Examples ...........................................................87
IOPTIONS.......................................................................89
2.7.1 SetRoutingAlgorithmOptions() method ....................90
2.7.2 SetRoutingAlgorithmOptions2() method...................91
2.7.3 GetRoutingAlgorithmOptions() method ....................91
2.7.4 GetRoutingAlgorithmOptions2() method ..................92
2.7.5 SetRoutingAvoidTypeOptions() method....................93
2.7.6 GetRoutingAvoidTypeOptions() method ...................94
2.7.7 SetStyleMapOptions() method ................................95
2.7.8 GetStyleMapOptions() method ................................95
2.7.9 SetKeyboardMapModeOptions() method ..................96
2.7.10 GetKeyboardMapModeOptions() method ................96
2.7.11 GetBasicMapFolderOptions() method .....................97
2.7.12 SetBasicMapFolderOptions() method .....................97
2.7.13 GetMapsNumberOptions() method ........................98
2.7.14 GetMapsPathsOptions() method ............................98
2.7.15 SetCurrentMapOptions() method...........................99
2.7.16 GetCurrentMapOptions() method ..........................99
2.7.17 GetRadioMutingOptions() method .......................100
2.7.18 SetRadioMutingOptions() method........................100
2.7.19 GetLanguageCodeOptions() method ....................101
2.7.20 SetLanguageCodeOptions() method ....................101
2.7.21 GetDistUnitOptions() method..............................102
2.7.22 SetDistUnitOptions() method ..............................102
2.7.23 SetLouderOptions() method ...............................103
2.7.24 SetQuieterOptions() method ...............................103
2.7.25 SetPoiMapFolderOptions() method ......................104
2.7.26 OpenPoiMapsOptions() method ...........................104
2.7.27 ClosePoiMapsOptions() method ...........................105
IGPS ............................................................................106
2.8.1 OpenGPS() method .............................................107
2.8.2 CloseGPS() method .............................................107
2.8.3 GetStatusGPS() method ......................................108
2.8.4 SetGpsReceiverType() method .............................109
2.8.5 GetGpsReceiverType() method .............................109
2.8.6 SetGpsReceiverPort() method ..............................110
Table of contents - III -
Page 6

User’s manual NAVIGON Integration Kit 4.0
2.8.7 GetGpsReceiverPort() method ..............................110
2.8.8 SetGpsReceiverBaudRate() method.......................111
2.8.9 GetGpsReceiverBaudRate() method ......................111
2.8.10 SetDataSourceGps() method ..............................112
2.8.11 SetDataGps() method ........................................113
2.9
ITMC............................................................................114
2.9.1 OpenTmc() method .............................................115
2.9.2 OpenTmc2() method ...........................................116
2.9.3 CloseTmc() method.............................................116
2.9.4 GetStatusTmc() method ......................................117
2.9.5 UpdateTmc() method ..........................................118
2.9.6 GetRadioStationTmc() method..............................118
2.9.7 SearchFirstMessageTmc() method.........................120
2.9.8 SearchNextMessageTmc() method ........................121
2.9.9 GetLastKnownFreqTmc() method ..........................123
2.9.10 GetLastKnownPiCodeTmc() method .....................123
2.10 ILOCATIONMAP .............................................................124
2.10.1 OpenLocationMap() method................................125
2.10.2 CloseLocationMap() method ...............................126
2.10.3 StartLocationMap() method ................................126
2.10.4 ShowCoordInLocationMap() method ....................126
2.10.5 ShowObjectIDInLocationMap() method ................128
2.10.6 ZoomInLocationMap() method ............................129
2.10.7 ZoomOutLocationMap() method ..........................129
2.10.8 ShowDownLocationMap() method .......................129
2.10.9 ShowUpLocationMap() method............................130
2.10.10 ShowLeftLocationMap() method ........................130
2.10.11 ShowRightLocationMap() method ......................130
2.10.12 SetZoomLevelInLocationMap() method ..............131
2.10.13 GetZoomLevelInLocationMap() method ..............131
2.10.14 SetMaxResolutionLocationMap() method ............132
2.10.15 GetMaxResolutionLocationMap() method ............132
2.10.16 ChangeGeoToMapCoordLocationMap() method .... 133
2.10.17 ChangeMapToGeoCoordLocationMap() method .... 133
2.10.18 SetReceivePointLocationMap() method...............134
2.10.19 GetReceivePointLocationMap() method ..............135
2.10.20 MapShowLocationMap() method ........................135
2.11 ITRACK ........................................................................137
2.11.1 RecordTrack() method .......................................138
2.11.2 GetRecordTrackMode() method ...........................138
2.11.3 GetCoordTrack() method ...................................139
2.11.4 SetAngleTrack() method ....................................140
2.11.5 GetAngleTrack() method ....................................140
2.11.6 SetMaxNumberTrack() method ...........................141
2.11.7 GetMaxNumberTrack() method ...........................141
2.12 ISIMULATION................................................................142
2.12.1 CreateGPSFile() method.....................................143
2.12.2 StartSimulationGPS() method .............................144
2.12.3 StopSimulationGPS () method ............................144
2.12.4 StartSimulationTMC() method ............................145
2.12.5 StopSimulationTMC() method .............................145
2.12.6 SetSimulationSpeed() method ............................146
2.12.7 GetSimulationSpeed() method ............................146
2.12.8 SetSimulationPosition() method ..........................147
2.12.9 GetSimulationPosition() method..........................147
2.13 IMNNIKEvents...............................................................148
- IV - Table of contents
Page 7

User’s manual NAVIGON Integration Kit 4.0
2.13.1 Declaring an event class ....................................149
2.13.2 Implementation in your application .....................149
2.13.3 RTProgressCallback() method .............................150
2.13.4 TMCMessageActivateCallback() method ...............150
2.13.5 TMCMessageDeactivateCallback() method ............151
2.13.6 GPSMessageCallback() method ...........................152
2.13.7 NAVAudioAdviceCallback() method......................152
2.13.8 NAVVisualAdviceCallback() method .....................153
2.13.9 LButtonDownNavigationMapCallback() method .....154
2.13.10 MouseMoveNavigationMapCallback() method ......154
2.13.11 LButtonDownRouteMapCallback() method ..........155
2.13.12 MouseMoveRouteMapCallback() method .............156
2.13.13 LButtonDownPositionMapCallback() method........ 156
2.13.14 MouseMovePositionMapCallback() method .......... 157
2.13.15 LButtonDownLocationMapCallback() method ....... 158
2.13.16 MouseMoveLocationMapCallback() method .........158
2.13.17 MAPKeyBoardCallback() method........................159
2.13.18 NAVOnDrawingCallback() method......................160
2.13.19 RoutingOnDrawingCallback() method.................161
2.13.20 PositionOnDrawingCallback() method.................162
2.13.21 LocationOnDrawingCallback() method................163
2.13.22 NAVOnRunningCallback() method......................164
2.13.23 NAVOnStopCallback() method ...........................164
3 Appendix.................................................................165
3.1
3.2
3.3
Appendix A: Enumerations..............................................166
Appendix B: User defined POI (optional)...........................174
Appendix C: Demo application.........................................174
4 Glossary ..................................................................175
Table of contents - V -
Page 8
User’s manual NAVIGON Integration Kit 4.0
1 Introduction
Topics covered in this chapter:
1.1 On this manual page 7
1.2 Specification of services page 7
Supported operating systems
1.3 System requirements page 9
1.4 Installation page 9
Installation of the Windows 2000/XP version
Installation of the Windows CE version
1.5 Search facilities and conventions page 11
1.6 Liability page 11
Support
1.7 Trademarks page 12
- 6 - On this manual
Page 9
User’s manual NAVIGON Integration Kit 4.0
1.1 On this manual
Introduction This manual describes the NAVIGON Integration Kit (NIK). It
explains the installation procedure and the registration of the
COM DLL, its methods, and the complete interface functionality.
Notice: Your CD contains an online help that also explains all
methods. Use the online help to look for contents quickly and
efficiently.
1.2 Specification of services
General survey on
NIK
COM-DLL NIK is a COM-DLL providing several interfaces which may be
Features NIK supports all features that are typical for navigation.
The NAVIGON Integration KIT (NIK) is a worldwide unique
development environment which meets the requirements of
individual and company specific claims. Based on NIK, NAVIGON
and their partners are developing customised navigation and
integration solutions – mobile navigation custom-tailored to your
requirements.
NIK offers a unique combination of both powerful navigation and
access to the company’s database using a standardised COM
interface.
applied irrespective of the used programming language (as e.g.
C++, Visual Basic, or Java). Thus it enables the easy integration
of an entire navigation solution into third-party systems as route
planning, order processing, or merchandise management
(transfer of positional coordinates or address data in both
directions).
The map for navigation may be displayed in any window using a
windows handle.
Additionally, it provides the possibility to represent data
transmitted by third party systems.
Introduction - 7 -
Page 10
User’s manual NAVIGON Integration Kit 4.0
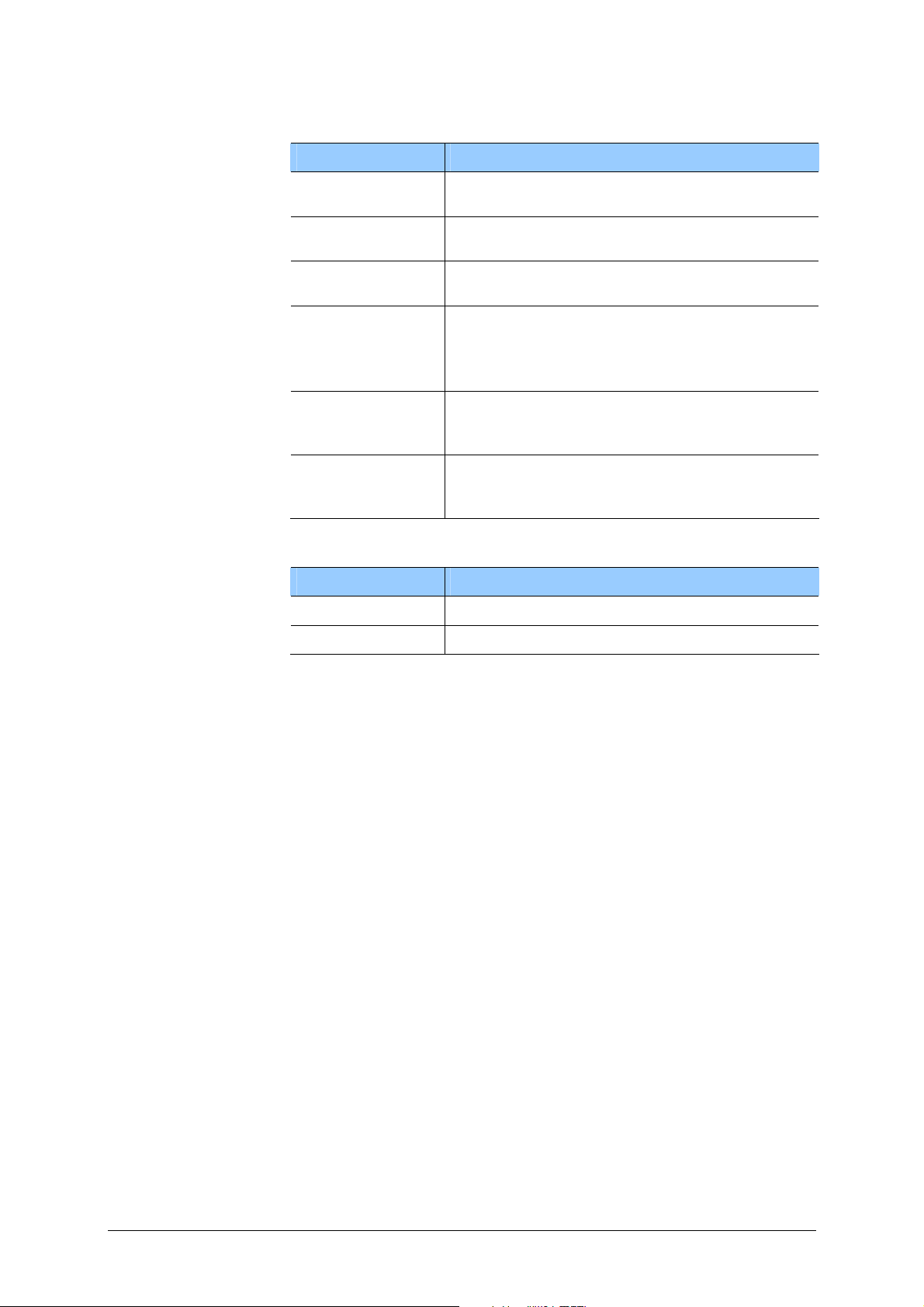
Methods The Integration Kit provides numerous methods for using the
functionality of the navigation software. Make use of the following
interfaces:
Interface Description
IMNNIK Running and closing the navigation software.
IADDRESS Connecting to the database of places.
IROUTING Route planning and calculation.
IPOSITION Displaying the current position on the map.
INAVIGATION Navigation to any destination.
IOPTIONS Determining global parameters.
IGPS Getting current GPS data.
ITMC Including TMC data.
ILOCATIONMAP Displaying customised maps.
ITRACK Recording tracks.
ISIMULATION Using GPS / TMC simulation files.
IMNNIKEvents Event handling.
1.2.1 Supported operating systems
Operating systems NIK supports the following operating systems:
MS Windows 2000 (with service pack 4)
MS Windows XP (with service pack 1)
MS Windows Mobile 2003
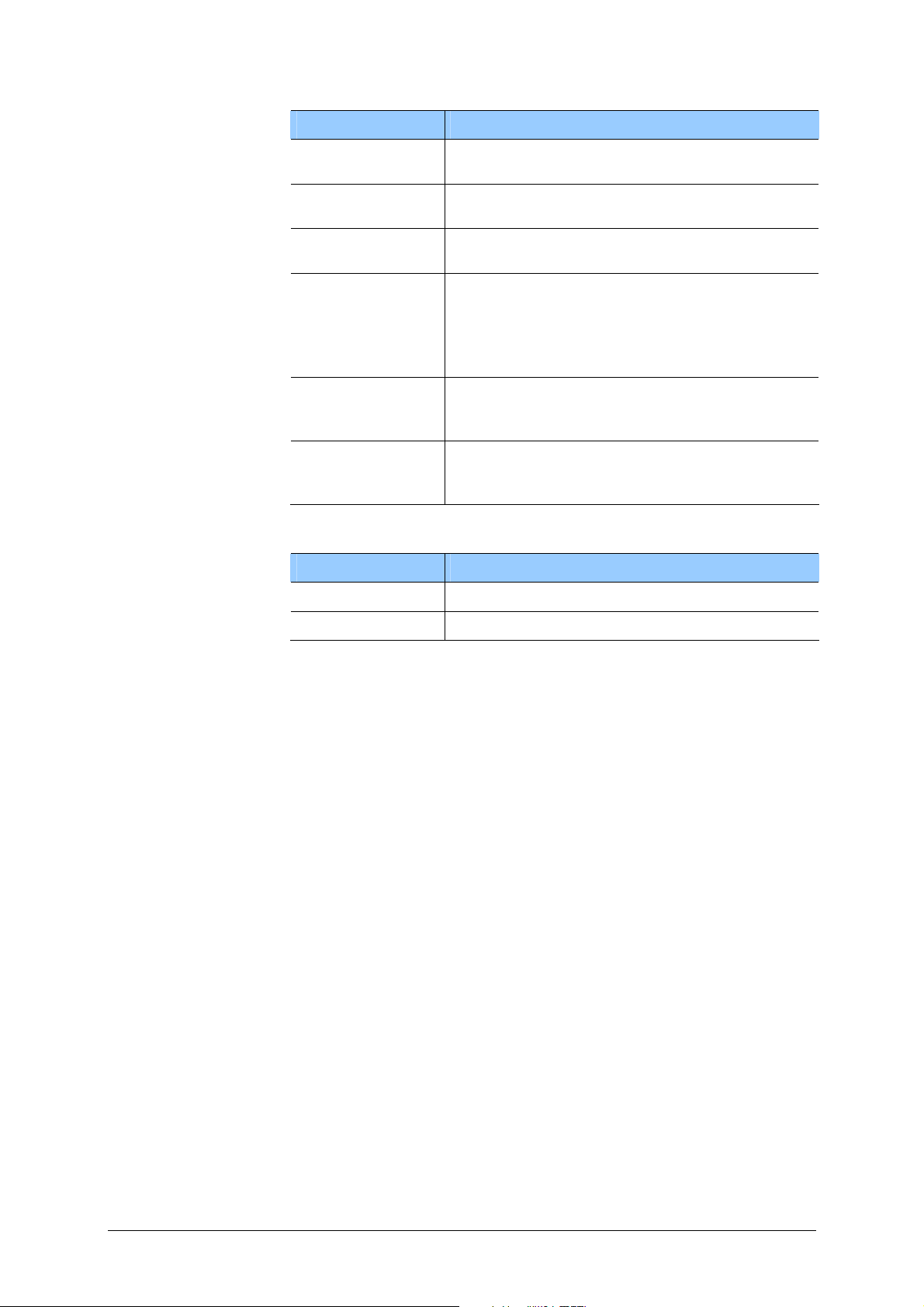
The NAVIGON Integration Kit has been tested under the
following environments:
Platform Operating
system
Notebook and
PC
Notebook and
PC
Pocket PC Windows Mobile
Windows 2000
Windows XP
Windows 2000
Windows XP
2003
Programming
language
C++ Microsoft Visual
Visual Basic Microsoft Visual
C++ Microsoft
Development
environment
Studio 6.0
Basic 6.0
eMbedded Visual
C++ 4.0
Notice: For further information on using the NAVIGON
Integration Kit with your preferred development environment,
please refer to the demo software.
- 8 - Specification of services
Page 11
User’s manual NAVIGON Integration Kit 4.0
1.3 System requirements
PC The following requirements must be fulfilled for Integration Kit
based applications to be developed on a PC:
Pentium PC 266 MHz
MS Windows 2000 (with service pack 4) or
MS Windows XP (with service pack 1)
32x CD drive
DVD drive
64 MB RAM (128 MB RAM recommended)
VGA-graphics adapter with at least 32000 colours
Microsoft compatible mouse
about 40 MB of free hard disk capacity for the program data
optional: about 1.1 GB of free hard disk capacity for the
complete map of Europe
Pocket PC The following requirements must be fulfilled for Integration Kit
based applications to be developed on a Pocket PC:
ARM Processor
Windows Mobile 2003
64 MB RAM (128 MB RAM recommended)
1.4 Installation
Survey The NAVIGON Integration Kit is delivered on CDs and
contains:
NIK-DLL
Map of Europe
Files for programming (header and tlb)
Demo application
Software MapExport (Windows CE version only)
Installation 1. Insert CD 1 and run Setup.exe.
2. Select either the User’s mode or the Developer’s mode.
You want to... then...
install only the NIK runtime
environment,
install the development
environment with all files,
and the demo application,
select User’s mode.
select Developer’s mode.
Introduction - 9 -
Page 12
User’s manual NAVIGON Integration Kit 4.0
Demo application Having executed the installation successfully, you may run the
NAVIGON Integration Kit demo application for getting
information on how to integrate NIK into your application.
Attention: You will have to export a map with MapExport
before running the demo application when you are using the
Windows CE version.
1.4.1 Installation of the Windows 2000/XP version
Windows 2000/XP,
all modes
Windows 2000/XP,
developer’s mode
NIK-SDK user’s manual
Setup installs the navigation software, the map of Europe, and
the MapExport software; and it registers the NIK-DLL with the
operating system.
In developer’s mode, setup copies the following additional files to
the program folder:
Interface files (Header, TLB, LIB und DLL)
Source code of the demo application
Demo application
1.4.2 Installation of the Windows CE version
Windows CE, all
modes
Windows CE,
developer’s mode
NIK-SDK user’s manual
Setup installs the NIK runtime environment; and it registers the
NIK-DLL with the operating system.
In developer’s mode, setup copies the following additional files to
the PC:
Interface files (Header, TLB, LIB und DLL)
Code for the demo application
Demo application
Map of Europe
MapExport software
- 10 - Installation
Page 13

User’s manual NAVIGON Integration Kit 4.0
1.5 Search facilities and conventions
This manual offers the following search facilities: Find information
quickly
Conventions The conventions on the fonts and symbols used in this manual
In the footnote at the bottom of the page, you may check
which chapter and which section you are actually reading.
A glossary at the end of the manual contains explanations on
the technical terms used in this manual.
are explained in the two following tables:
Font Signification
bold Buttons, icons, names of entry fields, and
elements of the software’s user interface.
Also used for highlighting warnings and
notices.
bold italic Registered names and trademarks.
SMALL CAPITALS
Source code
Symbol Signification
Window and dialogue box titles.
File names and source code.
Indicates hints and notices that may ease the
use of Configuration Kit.
Indicates additional information.
Warns against dangers that might cause
damage to objects and persons.
1.6 Liability
Limitation of liability The present software and the present manual are subject to
change without notice. NAVIGON GmbH may not be liable for the
correctness of the information contained in this manual nor for
any damages resulting from the use of this manual.
To improve the quality of our products and our services, we
appreciate all suggestions for improvement and all error notices.
Introduction - 11 -
Page 14
User’s manual NAVIGON Integration Kit 4.0
1.6.1 Support
You need help? Call our support staff for Telephone support:
Mondays to Fridays 9am to 6pm
+49 180-5-NAVIKIT (0180-5-6284548)
(dtms-Service, 0,12 €/min)
Or call our Fax support:
+49 180-5-6284444
(dtms-Service, 0,12 €/min)
On the web site of NAVIGON GmbH (http://www.navigon.com)
you will find a Support section with a FAQ-list which gives
answers to frequently asked questions.
1.7 Trademarks
Registered
trademarks
Outlook, Windows, Access, Excel, SQL Server, Visual Studio,
All brands and trademarks mentioned in this document are
possibly registered by third party and subject to the current
legislation and to the rights of their respective owners without
reservation. All mentioned names of products, societies, or
brands may be registered trademarks of their respective owners.
Every right that is not explicitly accorded is reserved.
The absence of an explicit labelling of registered trademarks does
not allow the conclusion that this brand was not subject to the
rights of third party.
Visual Basic, eMbedded Visual C++, and ActiveSync are
registered trademarks of the Microsoft Corporation.
- 12 - Trademarks
Page 15
User’s manual NAVIGON Integration Kit 4.0
2 Programming interfaces
Topics covered in this chapter:
2.1 Requirements for using NIK with a development environment page 14
2.2 IMNNIK page 15
2.3 IADDRESS page 19
2.4 IROUTING page 34
2.5 IPOSITION page 52
2.6 INAVIGATION page 64
2.7 IOPTIONS page 89
2.8 IGPS page 106
2.9 ITMC page 114
2.10 ILOCATIONMAP page 124
2.11 ITRACK page 137
2.12 ISIMULATION page 142
2.13 IMNNIKEvents page 148
Programming interfaces - 13 -
Page 16
User’s manual NAVIGON Integration Kit 4.0
2.1 Requirements for using NIK with a development
environment
Survey
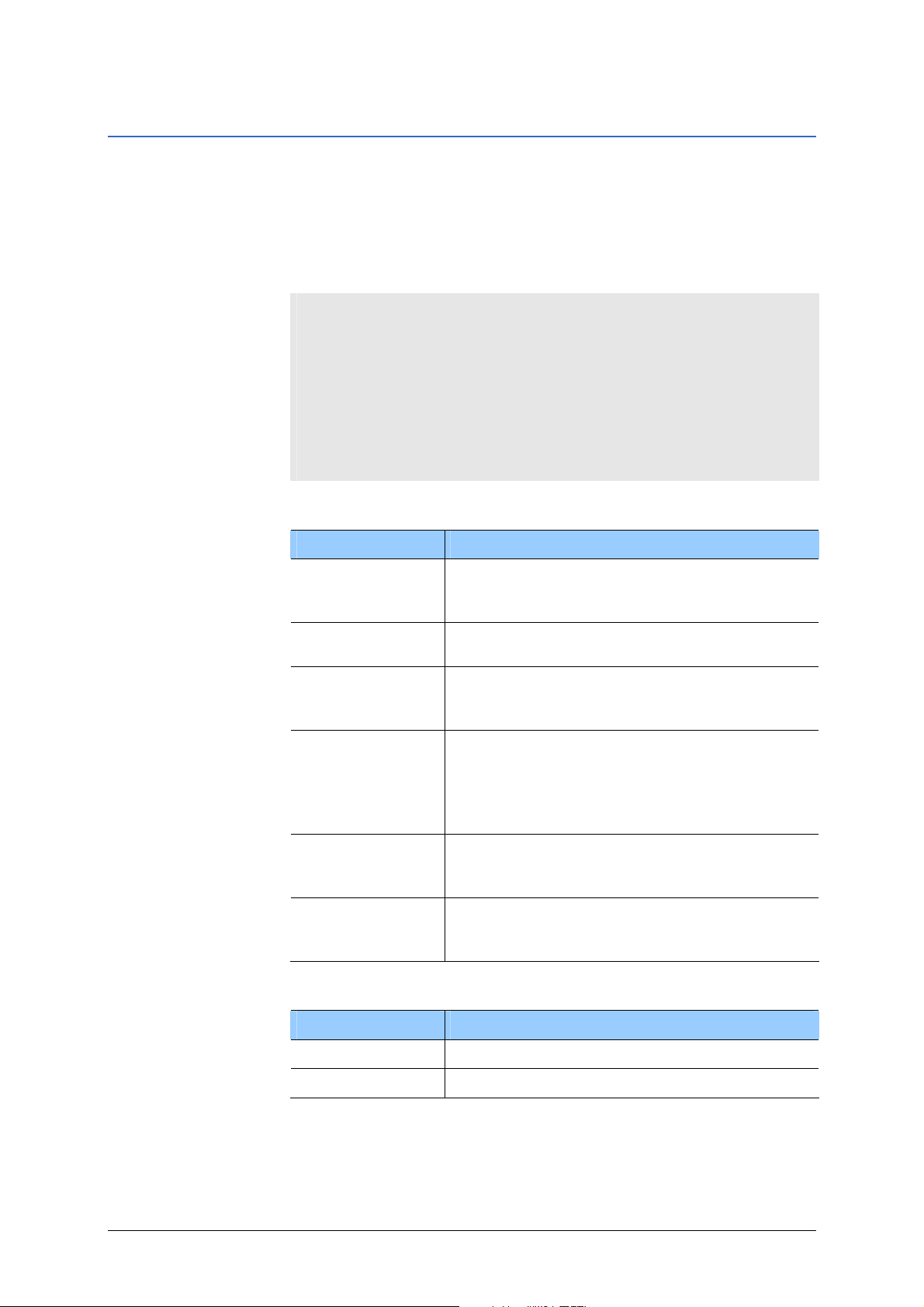
The header file NIKxx.h, the object library NIKxx.TLB, and the
NIKxx.DLL are the programming interface. They enable the use
of the other interfaces with your specific environment. Your
project’s development environment (e.g. Microsoft Visual
Studio) must therefore be bound to these files.
Platform Files
MS Windows 2000
MS Windows XP
Windows Mobile
2003
2.1.1 Using the interfaces
Interface
instantiation
Releasing an
interface instance
CoCreateInstance creates an instance of IMNNIK
QueryInterface creates instances of all other interfaces
CComObject::CreateInstance creates an instance of
IMNNIKEvents
AtlAdvise connects to the NAVIGON Integration Kit
Release releases instances of interfaces
AtlUnadvise closes the connection of IMNNIKEvents to the
NAVIGON Integration Kit.
Header file: NIK32.h
Object library: NIK32.TLB
COM-DLL: NIK32.DLL
Header file: NIKCE.h
Object library: NIKCE.TLB
COM-DLL: NIKCE.DLL
Notice: You may find further information e.g. in the MSDN
(Microsoft Software Developer’s Network).
Using interface
methods
- 14 - Requirements for using NIK with a development environment
Most interfaces have open/close methods which have to be called
before/after calling other methods of the respective interface.
Page 17
User’s manual NAVIGON Integration Kit 4.0
2.1.2 A survey on the interfaces
Provided interfaces The NAVIGON Integration Kit provides the following
interfaces:
IMNNIK (Default-Interface), see page 15
IADDRESS, see page 19
IROUTING, see page 34
IPOSITION, see page 52
INAVIGATION, see page 59
IOPTIONS, see page 89
IGPS, see page 106
ITMC, see page 114
ILOCATIONMAP, see page 124
ITRACK, see page 137
ISIMULATION, see page 142
2.2 IMNNIK
Survey
Typical use
Methods
IMNNIKEvents, see page 142
The IMMNIK programming interface is used to run and to close
the navigation software.
The Integration Kit must be opened at the start of an
application and be closed at its end. Opening the Integration
Kit when the application is running is not recommended.
Notice: Make sure that the MNOpen() method has completed
before calling another method of this or of another interface
(except GetMNOpen() and GetMNVersion(), see below).
MNOpen();
// other interfaces|methods
MNClose();
The IMNNIK interface defines the following methods:
MNOpen(), see page 16
MNClose() method, see page 16
GetMNOpen() method, see page 17
GetMNVersion() method, see page 17
Programming interfaces - 15 -
Page 18
2.2.1 MNOpen() method
User’s manual NAVIGON Integration Kit 4.0
Description
The MNOpen() method starts the navigation software as a
background process. It also executes a basic initialisation which
makes NIK ready to use the other interfaces.
C++ syntax
IMNNIK::MNOpen
Type
HRESULT MNOpen()
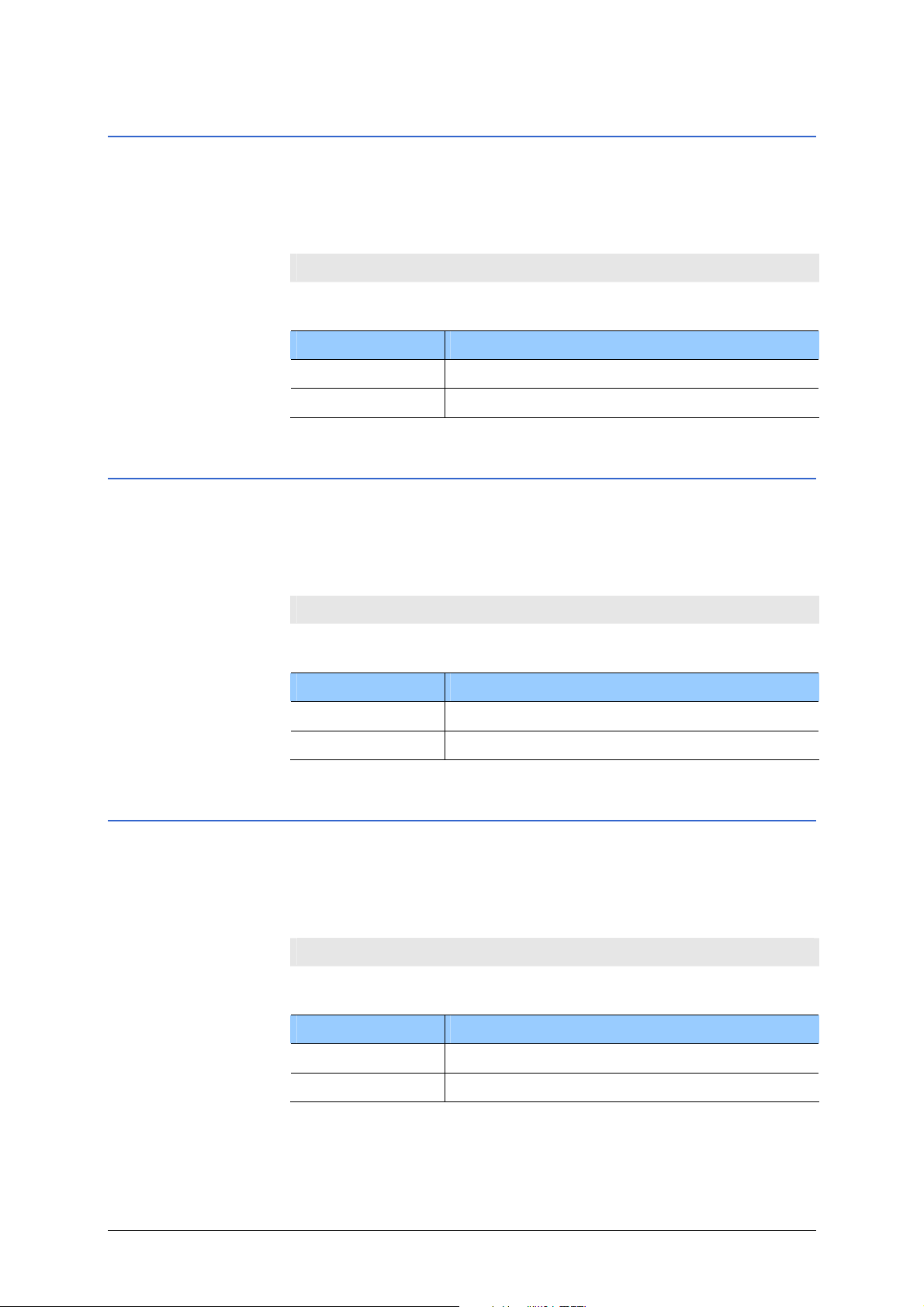
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notes The navigation software needs a certain time for initialising and
running. Make sure not to call methods of other interfaces before
the initialisation and start process has been completed. Use the
GetMNOpen() method (see page 17) to find out whether it has
been completed or not.
The MNOpen() method identifies other instances of the navigation
software and closes them.
Attention: Do not call another method before MNOpen() has
been completed.
2.2.2 MNClose() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The MNClose() method closes the navigation software.
IMNNIK::MNClose
HRESULT MNClose()
Return value Signification
S_OK
S_FALSE
Done
Error
- 16 - IMNNIK
Page 19
2.2.3 GetMNOpen() method
User’s manual NAVIGON Integration Kit 4.0
Description
The GetMNOpen() method returns the status of the current
initialisation and starting process of the navigation software.
C++ syntax
IMNNIK::GetMNOpen
Type
HRESULT GetMNOpen([out] BOOL * a_open )
Parameters The method takes the following parameter:
Parameter Signification
a_open
Pointer to a BOOL variable which contains the
status.
Return values The method returns one of the following values:
Return value Signification
S_OK
The initialisation and starting process has
been completed.
S_FALSE
The initialisation and starting procedures has
not yet been completed or is faulty.
2.2.4 GetMNVersion() method
Description
C++ syntax
Type
Parameters The method takes the following parameters:
The GetMNversion() method retrieves the version number
(major version, minor version, and build) of the navigation
software.
IMNNIK::GetMNVersion
HRESULT GetMNVersion(
[out] int * a_rnMajor,
[out] int * a_rnMinor,
[out] int * a_rnBuild )
Parameter Signification
a_rnMajor
Pointer to an INT variable which contains the
major version number.
a_rnMinor
Pointer to an INT variable which contains the
minor version number.
a_rnBuild
Pointer to an INT variable which contains the
build number.
Programming interfaces - 17 -
Page 20

User’s manual NAVIGON Integration Kit 4.0
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.2.5 Starting and closing NIK
Example
/* create an instance of the IMNNIK interface */
CoCreateInstance( __uuidof(MNNIK), NULL,
CLSCTX_INPROC_SERVER,__uuidof(IMNNIK),
(void**)&m_NIK );
/* Open NIK */
m_NIK->MNOpen();
/* Wait until NIK has been opened */
while( !bOpen )
m_NIK->GetMNOpen( &bOpen );
/* Close NIK */
m_NIK->MNClose();
- 18 - IMNNIK
Page 21
2.3 IADDRESS
User’s manual NAVIGON Integration Kit 4.0
Survey
Exposed functionality Access to the address and POI data of the map which is
Typical use
Methods
The IADDRESS programming interface is designed to retrieve
town, street, and POI data from the cartographic data of the map
which is currently loaded. You may as well retrieve geographic
coordinates for routing or navigation purposes.
currently loaded
Query for towns, streets and POI (e.g. all petrol stations in a
specific town)
Retrieval of the geographic coordinates of an address or of a
POI
Retrieval of addresses belonging to given geographic
coordinates
Notice: The format of geographic coordinates is always WGS-84.
OpenAddress();
// More IADDRESS methods
CloseAddress();
The IADDRESS interface defines the following methods:
OpenAddress() method), see page 20
CloseAdress() method, see page 20
SearchFirstCityAddress() method, see page 21
SearchFirstCityPostalCodeAddress() method, see page 22
SearchNextCityAddress() method, see page 23
SearchFirstStreetAddress() method, see page 25
SearchNextStreetAddress() method, see page 27
SearchPoiByRadiusAddress() method, see page 28
SearchNextPoiAddress() method, see page 30
ConvertCoordInAddress() method, see page 31
ConvertCoordInAddress2() method, see page 32
ConvertCoordInCountry() method, see page 33
Programming interfaces - 19 -
Page 22
2.3.1 OpenAddress() method)
User’s manual NAVIGON Integration Kit 4.0
Description
The OpenAddress() method opens the IADDRESS interface.
C++ syntax
IADDRESS::OpenAddress
Type
HRESULT OpenAddress()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.3.2 CloseAdress() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The CloseAddress() method closes the IADDRESS interface. You
will have to open the interface again before calling more of its
methods.
IADDRESS::CloseAddress
HRESULT CloseAddress()
Return value Signification
S_OK
S_FALSE
Done
Error
- 20 - IADDRESS
Page 23
User’s manual NAVIGON Integration Kit 4.0
2.3.3 SearchFirstCityAddress() method
Description
The SearchFirstCityAddress() method retrieves the first entry
from a list of towns which are in a specified country and have a
given string in or at the beginning of their names. When you are
searching for POI, you may also specify a category.
Use the SearchNextCityAddress() method to retrieve further
entries from the list (see page 23).
C++ syntax
IADDRESS::SearchFirstCityAddress
Type
HRESULT SearchFirstCityAddress(
[in] int a_country,
[in] BSTR prefix,
[out] BSTR * city,
[out] BSTR * plz,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameters The method takes the following parameters:
Parameter Signification
a_country
Specifies the country in which towns shall be
looked for. Must be a member of the
_CountryCode enumeration (e.g. cc_DEU for
Germany or cc_FRA for France, see
_CountryCode on page 166)
prefix
The string towns to be found must have in or
at the beginning of their names.
city
Pointer to a BSTR variable which contains the
name of the retrieved town.
plz
Pointer to a BSTR variable which contains the
postcode of the retrieved town.
a_id
Pointer to a LONG variable which contains
the ID of the retrieved town (town ID).
a_find Pointer to a BOOL variable which indicates
whether a town has been found: TRUE when
a town has been retrieved, FALSE when no
town matches both the a_country and the
prefix_postalcode search criteria.
a_latx
Pointer to a DOUBLE variable which contains
the latitude of the retrieved town in WGS-84
format.
a_longy
Pointer to a DOUBLE variable which contains
the longitude of the retrieved town in WGS84 format.
Programming interfaces - 21 -
Page 24
User’s manual NAVIGON Integration Kit 4.0
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example
m_NIK_Address->OpenAddress();
/* Search for the first town */
m_NIK_Address->SearchFirstCityAddress( DEU, “Frankf“,
&bstrCity, &bstrPlz, &nCityId,
&bFoundMore, &dLatX, &dLongY);
m_NIK_Address->CloseAddress();
2.3.4 SearchFirstCityPostalCodeAddress() method
Description
The SearchFirstCityPostalCodeAddress() method retrieves
the first entry from a list of towns which are in a specified
country and have a given string at the beginning of their
postcodes.
Use the SearchNextCityAddress() method to retrieve further
entries from the list (see page 23).
C++ syntax
IADDRESS::SearchFirstCityPostalCodeAddress
Type
HRESULT SearchFirstCityPostalCodeAddress(
[in] int a_country,
[in] BSTR prefix_postalcode,
[out] BSTR * city,
[out] BSTR * postalcode,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameters The method takes the following parameters:
Parameter Signification
a_country
Specifies the country in which towns shall be
looked for. Must be a member of the
_CountryCode enumeration (e.g. cc_DEU for
Germany or cc_FRA for France, see
_CountryCode page 166).
- 22 - IADDRESS
Page 25
User’s manual NAVIGON Integration Kit 4.0
Parameter Signification
prefix_
postalcode
city
The string towns to be found must have at
the beginning of their postcodes.
Pointer to a BSTR variable which contains the
name of the retrieved town.
postalcode
Pointer to a BSTR variable which contains the
postcode of the retrieved town.
a_id
Pointer to a LONG variable which contains
the ID of the retrieved town (town ID).
a_find
Pointer to a BOOL variable which indicates
whether a town has been found: TRUE when
a town has been retrieved, FALSE when no
town matches both the a_country and the
prefix_postalcode search criteria.
a_latx
Pointer to a DOUBLE variable which contains
the latitude of the retrieved town in WGS-84
format.
a_longy
Pointer to a DOUBLE variable which contains
the longitude of the retrieved town in WGS84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notes
If the SearchFirstCityPostalCodeAddress() method has
retrieved a town (a_find is TRUE), you may find all further towns
that match the search criteria by calling the
SearchNextCityAddress() method.
2.3.5 SearchNextCityAddress() method
Description
C++ syntax
Type
Programming interfaces - 23 -
The SearchNextCityAddress() method retrieves the next entry
from a search result list which must have been created by calling
the SearchFirstCityAddress() method or the
SearchFirstCityPostalCodeAddress() method.
IADDRESS::SearchNextCityAddress
HRESULT SearchNextCityAddress (
[out] BSTR * city,
[out] BSTR * plz,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Page 26
User’s manual NAVIGON Integration Kit 4.0
Parameters The method takes the following parameters:
Parameter Signification
city
Pointer to a BSTR variable which contains the
name of the retrieved town.
plz
Pointer to a BSTR variable which contains the
postcode of the retrieved town.
a_id
Pointer to a LONG variable which contains
the ID of the retrieved town (town ID).
a_find Pointer to a BOOL variable which indicates
whether a town has been found: TRUE when
a town has been retrieved, FALSE when the
end of the list has been reached.
a_latx
Pointer to a DOUBLE variable which contains
the latitude of the retrieved town in WGS-84
format.
a_longy
Pointer to a DOUBLE variable which contains
the longitude of the retrieved town in WGS84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example
m_NIK_Address->OpenAddress();
/* Search for the first town */
m_NIK_Address->SearchFirstCityAddress( DEU, “Frankf“,
&bstrCity, &bstrPlz, &nCityId,
&bFoundMore, &dLatX, &dLongY );
/* Search for all further towns */
while( bFoundMore )
m_NIK_Address->SearchNextCityAddress( &bstrCity,
&bstrPlz, &nCityId, &bFoundMore,
&dLatX, &dLongY );
m_NIK_Address->CloseAddress();
- 24 - IADDRESS
Page 27

User’s manual NAVIGON Integration Kit 4.0
2.3.6 SearchFirstStreetAddress() method
Description
C++ syntax
Type
The SearchFirstStreetAddress() method retrieves the first
entry from a list of streets or POI which are in a specified town and
have a given string in or at the beginning of their names. When
you are searching for POI, you may also specify a category.
Use the SearchNextStreetAddress() method to retrieve further
entries from the list (see page 27).
IADDRESS:: SearchFirstStreetAddress
HRESULT SearchFirstStreetAddress (
[in] long id_city,
[in] BSTR prefix,
[in] int type_from,
[in] int type_to,
[in] BSTR hn,
[out] BSTR * street,
[out] BSTR * plz,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameters The method takes the following parameters:
Parameter Signification
id_city
Specifies the ID of the town in which streets
or POI shall be looked for (town ID).
prefix
The string streets or POI to be found must
have in or at the beginning of their names.
type_from
When you are looking for POI, you may
indicate categories which a retrieved POI
shall be assigned to. type_from specifies the
first category from the enumeration.
Should be enAllTypes when looking for
streets.
type_to
Specifies the first category from the
enumeration which does no more belong to
the specified category list. Example: looking
for petrol stations:
type_from = enPetrolStation
type_to = enRentACar
Should be enAllTypes when looking for
streets.
hn
Specifies a house number to be searched for
when searching for streets.
Programming interfaces - 25 -
Page 28
User’s manual NAVIGON Integration Kit 4.0
Parameter Signification
street
Pointer to a BSTR variable which contains the
name of the retrieved street.
plz
Pointer to a BSTR variable which contains the
postcode of the retrieved street.
a_id
Pointer to a LONG variable which contains
the ID of the retrieved street (street ID).
a_find
Pointer to a BOOL variable which indicates
whether a street or POI has been found:
TRUE when a street or POI has been
retrieved, FALSE when no street or POI
matches the search criteria.
a_latx
Pointer to a DOUBLE variable which contains
the latitude of the retrieved street or POI in
WGS-84 format.
a_longy
Pointer to a DOUBLE variable which contains
the longitude of the retrieved street or POI in
WGS-84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example
m_NIK_Address->OpenAddress();
/* search for the first street in nCityId */
m_NIK_Address->SearchFirstStreetAddress( nCityId,
“Bahn“,enAllTypes, enAllTypes, NULL,
&bstrStreet, &bstrPlz, &nStreetId,
&bFoundMore, &dLatX, &dLongY );
m_NIK_Address->CloseAddress();
- 26 - IADDRESS
Page 29
User’s manual NAVIGON Integration Kit 4.0
2.3.7 SearchNextStreetAddress() method
Description
The SearchNextStreetAddress() method retrieves the next
entry from a search result list which must have been created by
calling the SearchFirstStreetAddress() method.
C++ syntax
IADDRESS::SearchNextStreetAddress
Type
HRESULT SearchNextStreetAddress (
[out] BSTR * street,
[out] BSTR * plz,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameters The method takes the following parameters:
Parameter Signification
street
Pointer to a BSTR variable which contains the
name of the retrieved street or the street
name of the retrieved POI.
plz
Pointer to a BSTR variable which contains the
postcode of the retrieved street or POI.
a_id
Pointer to a LONG variable which the ID of
the retrieved street (street ID) or of the
street of a retrieved POI.
a_find
Pointer to a BOOL variable which indicates
whether a street or POI has been found:
TRUE when a street or POI has been
retrieved, FALSE when the end of the list has
been reached.
a_latx
Pointer to a DOUBLE variable which contains
the latitude of the retrieved street or POI in
WGS-84 format.
a_longy
Pointer to a DOUBLE variable which contains
the longitude of the retrieved street or POI in
WGS-84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 27 -
Page 30

User’s manual NAVIGON Integration Kit 4.0
Example: Searching
for streets
Example: Searching
for POI
m_NIK_Address->OpenAddress();
/* search for the first street in nCityId */
m_NIK_Address->SearchFirstStreetAddress( nCityId,
“Bahn“,enAllTypes, enAllTypes, NULL,
&bstrStreet, &bstrPlz, &nStreetId,
&bFoundMore, &dLatX, &dLongY );
/* search for further streets */
while( bFoundMore )
m_NIK_Address->SearchNextStreetAddress( &bstrStreet,
&bstrPlz,&nStreetId,&bFoundMore, &dLatX, &dLongY );
m_NIK_Address->CloseAddress();
m_NIK_Address->OpenAddress();
/* search for the first petrol station in nCityId */
m_NIK_Address->SearchFirstStreetAddress( nCityId, ““,
enPetrolStation, enPetrolStation+1,
NULL,&bstrStreet, &bstrPlz, &nPoiId,
&bFoundMore, &dLatX, &dLongY );
/* search for further petrol stations */
while( bFoundMore )
m_NIK_Address->SearchNextStreetAddress( &bstrStreet,
&bstrPlz,&nPoiId,&bFoundMore, &dLatX, &dLongY );
m_NIK_Address->CloseAddress();
2.3.8 SearchPoiByRadiusAddress() method
Description
C++ syntax
Type
The SearchPoiByRadiusAddress() method retrieves the first
entry from a list of POI which are to be found within a specified
radius round a specified geographic point, which have a given
string in or at the beginning of their names, and which belong to
a given category.
Use the SearchNextPoiAddress() method to retrieve further
entries from the list (see page 30).
IADDRESS::SearchPoiByRadiusAddress
HRESULT SearchPoiByRadiusAddress(
[in] BSTR prefix,
[in] double a_lat,
[in] double a_long,
[in] int a_radius,
[in] int type_from,
[in] int type_to,
[out] BOOL * a_find )
- 28 - IADDRESS
Page 31

User’s manual NAVIGON Integration Kit 4.0
Parameters The method takes the following parameters:
Parameter Signification
prefix
The string that POI to be found must have in
or at the beginning of their names.
a_lat
Specifies the latitude of a geographical point
in WGS-84 format.
a_long
Specifies the longitude of a geographical
point in WGS-84 format.
a_radius
Specifies the radius (in meters) round the
geographical point in which POI are to be
found.
type_from
Specifies the first category from an
enumeration which a retrieved POI has to be
assigned to.
type_to
Specifies the first category from the
enumeration which does no more belong to
the specified category list. Example: looking
for petrol stations:
type_from = enPetrolStation
type_to = enPetrolStation+1
a_find
Pointer to a BOOL variable which indicates
whether a street or POI has been found
within the specified circle: TRUE when a POI
has been retrieved, FALSE when no POI
matches the search criteria.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 29 -
Page 32

User’s manual NAVIGON Integration Kit 4.0
2.3.9 SearchNextPoiAddress() method
Description
The SearchNextPoiAddress() method retrieves the next entry
from a search result list which must have been created by calling
the SearchPoiByRadiusAddress() method.
C++ syntax
IADDRESS::SearchNextPoiAddress
Type
HRESULT SearchNextPoiAddress (
[out] BSTR * poi_name,
[out] BSTR * postalcode,
[out] BSTR * city_name,
[out] long * a_id,
[out] BOOL * a_find,
[out] double * a_latx,
[out] double * a_longy )
Parameters The method takes the following parameters:
Parameter Signification
poi_name
Pointer to a BSTR variable which contains the
name of the retrieved POI.
postalcode
Pointer to a BSTR variable which contains the
postcode of the retrieved POI.
city_name
Pointer to a BSTR variable which contains the
city of the retrieved POI.
a_id
Pointer to a LONG variable which contains
the ID of the retrieved POI (POI ID).
a_find
Pointer to a BOOL variable which indicates
whether a POI has been found: TRUE when a
POI has been retrieved, FALSE when the end
of the list has been reached.
a_latx
Pointer to a DOUBLE variable which contains
the latitude of the retrieved POI in WGS-84
format.
a_longy
Pointer to a DOUBLE variable which contains
the longitude of the retrieved POI in WGS-84
format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notes
Further POI may be retrieved as long as the a_find variable is
TRUE.
- 30 - IADDRESS
Page 33

User’s manual NAVIGON Integration Kit 4.0
2.3.10 ConvertCoordInAddress() method
Attention: Old method!
This method has been kept for compatibility reasons. Use the
ConvertCoordInAddress2() for new projects as it returns, in
addition to the parameters returned by this method, the country
code and the house number (if retrievable).
Description
The ConvertCoordInAddress() method converts the given
coordinates of a geographic point into a postal address.
C++ syntax
IADDRESS::ConvertCoordInAddress
Type
HRESULT ConvertCoordInAddress (
[in] double a_latx,
[in] double a_longy,
[out] BSTR * city,
[out] BSTR * street,
[out] BSTR * plz,
[out] BOOL * a_find )
Parameters The method takes the following parameters:
Parameter Signification
a_latx
The latitude of a geographic point in WGS-84
format.
a_longy
The longitude of a geographic point in
WGS-84 format.
city
Pointer to a BSTR variable which contains the
name of the town of the geographic point.
street
Pointer to a BSTR variable which contains the
name of the street of the geographic point.
plz
Pointer to a BSTR variable which contains the
postcode of the geographic point.
a_find
Pointer to a BOOL variable which indicates
whether the conversion was successful: TRUE
when an address has been retrieved, FALSE if
not.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example
m_NIK_Address->OpenAddress();
/* Conversion of a geographical pt into an Address */
m_NIK_Address->ConvertCoordInAddress( dLatX, dLongY,
&bstrCity, &bstrStreet, &bstrPlz,&bFound );
m_NIK_Address->CloseAddress();
Programming interfaces - 31 -
Page 34

User’s manual NAVIGON Integration Kit 4.0
2.3.11 ConvertCoordInAddress2() method
Description
The ConvertCoordInAddress2() method converts the given
coordinates of a geographic point into a postal address.
C++ syntax
IADDRESS::ConvertCoordInAddress2
Type
HRESULT ConvertCoordInAddress2 (
[in] double a_latx,
[in] double a_longy,
[out] int * a_country,
[out] BSTR * city,
[out] BSTR * street,
[out] BSTR * plz,
[out] BSTR * hn,
[out] BOOL * a_find )
Parameters The method takes the following parameters:
Parameter Signification
a_latx
The latitude of a geographic point in WGS-84
format.
a_longy
The longitude of a geographic point in
WGS-84 format.
a_country
Pointer to an INT variable which contains the
country code of the geographic point. Is a
member of the _CountryCode enumeration
(e.g. cc_DEU for Germany or cc_FRA for
France, see _CountryCode page 166).
city
Pointer to a BSTR variable which contains the
name of the town of the geographic point.
street
Pointer to a BSTR variable which contains the
name of the street of the geographic point.
plz
Pointer to a BSTR variable which contains the
postcode of the geographic point.
hn
Pointer to a BSTR variable which contains the
postcode of the geographic point (if
retrievable).
a_find
Pointer to a BOOL variable which indicates
whether the conversion was successful: TRUE
when an address has been retrieved, FALSE if
not.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 32 - IADDRESS
Page 35

User’s manual NAVIGON Integration Kit 4.0
2.3.12 ConvertCoordInCountry() method
Description
The ConvertCoordInCountry() method retrieves the country
code of the country a specified geographic point belongs to.
C++ syntax
IADDRESS::ConvertCoordInCountry
Type
HRESULT ConvertCoordInCountry (
[in] double a_latx,
[in] double a_longy,
[out] int * a_country,
[out] BOOL * a_find )
Parameters The method takes the following parameters:
Parameter Signification
a_latx
The latitude of a geographic point in WGS-84
format.
a_longy
The longitude of a geographic point in
WGS-84 format.
a_country
Pointer to an INT variable which contains the
country code of the geographic point. Is a
member of the _CountryCode enumeration
(e.g. cc_DEU for Germany or cc_FRA for
France, see _CountryCode page 166).
a_find
Pointer to a BOOL variable which indicates
whether a country has been identified: TRUE
when a country has been retrieved, FALSE if
not.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 33 -
Page 36

2.4 IROUTING
User’s manual NAVIGON Integration Kit 4.0
Survey
Exposed functionality Calculation of routes between two or more route points (a
Typical use
Methods
The IROUTING programming interface is designed to calculate
and to display routes.
start point, a destination point, and an unlimited number of
stage points)
Retrieval of the distance between route points.
Calculation of the estimated duration of the travel
Display of the route on the map
Notice: The format of geographic coordinates is always WGS-84.
OpenRoute( hWnd, x, y, width, height );
ClearDestCoordRoute();
AddDestCoordRoute( cSize, a_lat, a_long );
StartRoute();
// More methods of IROUTING
CloseRoute();
The IROUTING interface defines the following methods:
OpenRoute() method, see page 35
CloseRoute() method, see page 36
AddDestCoordRoute() method, see page 36
GetDestCoordRoute() method, see page 37
ClearDestCoordRoute() method, see page 38
StartRoute() method, see page 38
ShowRoute() method, see page 39
ClearRoute() method, see page 39
ZoomInRoute() method, see page 40
ZoomOutRoute() method, see page 40
ShowDownRoute() method, see page 40
ShowUpRoute() method, see page 41
ShowLeftRoute() method, see page 41
ShowRightRoute() method, see page 41
ShowStartPointRoute() method, see page 42
ShowEndPointRoute() method, see page 42
SetRotationRoute() method, see page 43
GetRotationRoute() method, see page 43
GetStatusRoute() method, see page 44
GetResultRoute() method, see page 44
- 34 - IROUTING
Page 37

MapShowRoute() method, see page 45
GetFirstWayListRoute() method, see page 45
GetNextWayListRoute() method, see page 46
SetZoomLevelInRoute() method, see page 47
GetZoomLevelInRoute() method, see page 48
SetMaxResolutionRoute() method, see page 48
GetMaxResolutionRoute() method, see page 49
ChangeGeoToMapCoordRoute() method, see page 49
ChangeMapToGeoCoordRoute() method, see page 50
2.4.1 OpenRoute() method
User’s manual NAVIGON Integration Kit 4.0
Description
The OpenRoute() method opens the IROUTING interface. It also
initialises a window for displaying the map.
C++ syntax
IROUTING::OpenRoute
Type
HRESULT OpenRouteOpenRoute(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wx,
[in] int a_wy )
Parameters The method takes the following parameters:
Parameter Signification
a_hwnd
Windows handle of the parent window in
which the map shall be displayed.
a_ox
The X-coordinate of the map window, related
to the parent window.
a_oy
The Y-coordinate of the map window, related
to the parent window.
a_wx
a_wy
Width of the map window.
Height of the map window.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: Call OpenRoute(hWnd, 0, 0, 0, 0) to enable route
planning without displaying a map. Note that the windows handle
must be valid.
Programming interfaces - 35 -
Page 38

2.4.2 CloseRoute() method
User’s manual NAVIGON Integration Kit 4.0
Description
The CloseRoute() method closes the IROUTING interface and the
map window. You will have to open the interface again before
calling more of its methods.
C++ syntax
IROUTING::CloseRoute
Type
HRESULT CloseRoute();
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.3 AddDestCoordRoute() method
Description
C++ syntax
Type
The AddDestCoordRoute() method adds route points to a route.
Route points must be given as coordinates in WGS-84 format. For
route calculation purposes, you need two or more route points: a
start point, a destination point, and an unlimited number of stage
points.
IROUTING::AddDestCoordRoute
HRESULT AddDestCoordRoute(
[in] int cSize,
[in, size_is(cSize)] double * a_lat,
[in, size_is(cSize)] double * a_long )
Parameters The method takes the following parameters:
Parameter Signification
cSize
Specifies the number of route points that will
be specified by this method call.
a_lat
Pointer to an array of DOUBLE values which
contain latitudes in WGS-84 format.
a_long
Pointer to an array of DOUBLE values which
contain longitudes in WGS-84 format.
- 36 - IROUTING
Page 39

User’s manual NAVIGON Integration Kit 4.0
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notes The navigation software must keep the coordinates in a separate
list, too. These coordinates will be added just before calling
StartRoute() (see StartRoute() method, page 38) by calling
AddDestCoordRoute().
Attention: The number of coordinates in the a_lat and a_long
arrays must be the same as indicated by the cSize parameter.
2.4.4 GetDestCoordRoute() method
Description
The GetDestCoordRoute() method retrieves the route point
coordinates which have been added by the last call of
AddDestCoordRoute().
C++ syntax
IROUTING::GetDestCoordRoute
Type
HRESULT GetDestCoordRoute(
[in] int cSize,
[out, size_is(cSize)] double * a_lat,
[out, size_is(cSize)] double * a_long )
Parameters The method takes the following parameters:
Parameter Signification
cSize
Specifies the number of route point
coordinates to return. This number must not
be higher than the number of route points
that have been added by the last call of
AddDestCoordRoute().
a_lat
Pointer to an array of DOUBLE values which
contain latitudes in WGS-84 format.
a_long
Pointer to an array of DOUBLE values which
contain longitudes in WGS-84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 37 -
Page 40

User’s manual NAVIGON Integration Kit 4.0
2.4.5 ClearDestCoordRoute() method
Description
The ClearDestCoordRoute() method deletes the route point
coordinates which have been added by the last call of
AddDestCoordRoute().
C++ syntax
IROUTING::ClearDestCoordRoute
Type
HRESULT ClearDestCoordRoute()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: The ClearDestCoordRoute() should be called just
before calling AddDestCoordRoute().
2.4.6 StartRoute() method
Description
The StartRoute() method (re)calculates the route using the
route points that have been added by the last call of
AddDestCoordRoute() and displays the route on the map.
C++ syntax
IROUTING::StartRoute
Type
HRESULT StartRoute()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 38 - IROUTING
Page 41

2.4.7 ShowRoute() method
User’s manual NAVIGON Integration Kit 4.0
Description
The ShowRoute() method displays the whole route which has
been calculated by the last call of AddDestCoordRoute().
C++ syntax
IROUTING::ShowRoute
Type
HRESULT ShowRoute()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: The ShowRoute() method may be called just after having
called StartRoute().
Example Display the route resulting from the prior calculation:
m_NIK_Routing->ShowRoute();
2.4.8 ClearRoute() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ClearRoute() method clears the route resulting from the
prior calculation and hides the map window.
IROUTING::ClearRoute
HRESULT ClearRoute()
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 39 -
Page 42

2.4.9 ZoomInRoute() method
User’s manual NAVIGON Integration Kit 4.0
Description
The ZoomInRoute() method zooms into the map.
C++ syntax
IROUTING::ZoomInRoute
Type
HRESULT ZoomInRoute()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.10 ZoomOutRoute() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ZoomOutRoute() method zooms out of the map.
IROUTING::ZoomOutRoute
HRESULT ZoomOutRoute()
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.11 ShowDownRoute() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
- 40 - IROUTING
The ShowDownRoute() method scrolls the map down.
IROUTING::ShowDownRoute
HRESULT ShowDownRoute()
Return value Signification
S_OK
S_FALSE
Done
Error
Page 43
2.4.12 ShowUpRoute() method
User’s manual NAVIGON Integration Kit 4.0
Description
The ShowUpRoute() method scrolls the map up.
C++ syntax
IROUTING::ShowUpRoute
Type
HRESULT ShowUpRoute()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.13 ShowLeftRoute() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ShowLeftRoute() method scrolls the map to the left.
IROUTING::ShowLeftRoute
HRESULT ShowLeftRoute()
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.14 ShowRightRoute() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
Programming interfaces - 41 -
The ShowRightRoute() method scrolls the map to the right.
IROUTING::ShowRightRoute
HRESULT ShowRightRoute()
Return value Signification
S_OK
S_FALSE
Done
Error
Page 44

User’s manual NAVIGON Integration Kit 4.0
2.4.15 ShowStartPointRoute() method
Description
The ShowStartPointRoute() method displays the start point on
the map.
C++ syntax
IROUTING::ShowStartPointRoute
Type
HRESULT ShowStartPointRoute()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.16 ShowEndPointRoute() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ShowEndPointRoute() method displays the final destination
point of a route on the map.
IROUTING::ShowEndPointRoute
HRESULT ShowEndPointRoute()
Return value Signification
S_OK
S_FALSE
Done
Error
- 42 - IROUTING
Page 45

2.4.17 SetRotationRoute() method
User’s manual NAVIGON Integration Kit 4.0
Description
The SetRotationRoute() method sets the orientation of the map
to "north oriented" or to "in driving direction".
C++ syntax
IROUTING::SetRotationRoute
Type
HRESULT SetRotationRoute([in] BOOL a_rotation)
Parameters The method takes the following parameter:
Parameter Signification
a_rotation
TRUE: north oriented
FALSE: in driving direction
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example Map orientation in driving direction
m_NIK_Routing->SetRotationRoute( FALSE );
2.4.18 GetRotationRoute() method
Description
C++ syntax
Type
Parameters The method takes the following parameter:
Return values The method returns one of the following values:
The GetRotationRoute() method retrieves the current
orientation of the map.
IROUTING::GetRotationRoute
HRESULT GetRotationRoute([in] BOOL a_rotation)
Parameter Signification
a_rotation
TRUE: north oriented
FALSE: in driving direction
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 43 -
Page 46

2.4.19 GetStatusRoute() method
User’s manual NAVIGON Integration Kit 4.0
Description
The GetStatusRoute() method returns the status of route
calculation (executed by the last call of StartRoute()).
C++ syntax
IROUTING::GetStatusRoute
Type
HRESULT GetStatusRoute([out] int * a_status)
Parameters The method takes the following parameter:
Parameter Signification
a_status
Pointer to an INT variable which contains the
status of route calculation. Is a member of
the RouteStatus enumeration (see
page 172).
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.20 GetResultRoute() method
Description
The GetResultRoute() method retrieves the distance from the
start point to the destination point of a route and the estimated
duration of the travel.
C++ syntax
IROUTING::GetResultRoute
Type
HRESULT GetResultRoute(
[out] int * a_meter,
[out] int * a_sec )
Parameters The method takes the following parameters:
Parameter Signification
a_meter
Pointer to an INT variable which contains the
distance between the start point and the
destination point of a route in meters.
a_sec
Pointer to an INT variable which contains the
estimated duration of the travel in seconds.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 44 - IROUTING
Page 47

2.4.21 MapShowRoute() method
User’s manual NAVIGON Integration Kit 4.0
Description
The MapShowRoute() method shows or hides the map window.
C++ syntax
IROUTING::MapShowRoute
Type
HRESULT MapShowRoute([in] BOOL a_show)
Parameters The method takes the following parameter:
Parameter Signification
a_show
TRUE Shows the map
FALSE Hides the map
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.22 GetFirstWayListRoute() method
Description
The GetFirstWayListRoute() method retrieves the first way
point of the current route (A way point is a point where the driver
has to execute a driving manoeuvre like, e.g., turning left).
Retrieve all further way points by calling the
GetNextWayListRoute() method.
C++ syntax
IROUTING::GetFirstWayListRoute
Type
HRESULT GetFirstWayListRoute(
[out] BSTR * a_FromStreet,
[out] BSTR * a_ToStreet,
[out] long * a_nMeterFrom,
[out] BSTR * a_AdviceDesc,
[out] int * a_dAction,
[out] BOOL * a_bFind )
Parameters The method takes the following parameters:
Parameter Signification
a_FromStreet
Pointer to a BSTR variable which contains the
name of the street which leads to the way
point.
a_ToStreet
Pointer to a BSTR variable which contains the
name of the street to turn into.
a_nMeterFrom
Pointer to a LONG variable which contains
the distance to the way point in meters.
Programming interfaces - 45 -
Page 48

User’s manual NAVIGON Integration Kit 4.0
Parameter Signification
a_AdviceDesc
Pointer to a BSTR variable which contains the
text (a description) of the voice instruction.
a_dAction
Pointer to an INT variable which contains the
manoeuvre to be executed. Is a member of
the _ManeuevreDesc enumeration (see
page 169).
a_bFind
Pointer to a BOOL variable which indicates
whether a way point has been retrieved.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notes
When the GetFirstWayListRoute() has retrieved a way point
(a_bFind is TRUE), you may retrieve all further way points by
calling GetNextWayListRoute().
2.4.23 GetNextWayListRoute() method
Description
C++ syntax
Type
Parameters The method takes the following parameters:
The GetNextWayListRoute() method retrieves the next way
point from the current way point list which must have been
created by calling the GetFirstWayListRoute() method.
IROUTING::GetNextWayListRoute
HRESULT GetNextWayListRoute(
[out] BSTR * a_FromStreet,
[out] BSTR * a_ToStreet,
[out] long * a_nMeterFrom,
[out] BSTR * a_AdviceDesc,
[out] int * a_dAction,
[out] BOOL * a_bFind )
Parameter Signification
a_FromStreet
Pointer to a BSTR variable which contains the
name of the street which leads to the way
point.
a_ToStreet
Pointer to a BSTR variable which contains the
name of the street to turn into.
- 46 - IROUTING
Page 49

User’s manual NAVIGON Integration Kit 4.0
Parameter Signification
a_nMeterFrom
Pointer to a LONG variable which contains
the distance to the way point in meters.
a_AdviceDesc
Pointer to a BSTR variable which contains the
text (a description) of the voice instruction.
a_dAction
Pointer to an INT variable which contains the
manoeuvre to be executed. Is a member of
the _ManeuevreDesc enumeration (see
page 169).
a_bFind
Pointer to a BOOL variable which indicates
whether a way point has been retrieved.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notes
You may retrieve further way points as long as the a_bFind
variable is TRUE.
2.4.24 SetZoomLevelInRoute() method
Description
C++ syntax
Type
Parameters The method takes the following parameter:
Return values The method returns one of the following values:
The SetZoomLevelInRoute() method sets the zoom level of the
displayed map.
IROUTING::SetZoomLevelInRoute
HRESULT SetZoomLevelInRoute([in] double a_level)
Parameter Signification
a_level
Specifies the zoom level of the displayed map
in meters per pixel.
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 47 -
Page 50

User’s manual NAVIGON Integration Kit 4.0
2.4.25 GetZoomLevelInRoute() method
Description
The GetZoomLevelInRoute() method retrieves the current zoom
level of the displayed map.
C++ syntax
IROUTING::GetZoomLevelInRoute
Type
HRESULT GetZoomLevelInRoute([in] double a_level)
Parameters The method takes the following parameter:
Parameter Signification
a_level
Pointer to a DOUBLE variable which contains
the current zoom level of the displayed map
in meters per pixel.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.26 SetMaxResolutionRoute() method
Description
C++ syntax
Type
Parameters The method takes the following parameter:
Return values The method returns one of the following values:
The SetMaxResolutionRoute() method sets the maximum
resolution of the map (in pixels per meter).
IROUTING::SetMaxResolutionRoute
HRESULT SetMaxResolutionRoute([in] double a_maxres)
Parameter Signification
a_level
Specifies the maximum resolution of the map
(in pixels per meter).
Return value Signification
S_OK
S_FALSE
Done
Error
- 48 - IROUTING
Page 51

User’s manual NAVIGON Integration Kit 4.0
2.4.27 GetMaxResolutionRoute() method
Description
The GetMaxResolutionRoute() method retrieves the maximum
resolution of the map (in pixels per meter).
C++ syntax
IROUTING::GetMaxResolutionRoute
Type
HRESULT GetMaxResolutionRoute([in] double a_maxres)
Parameters The method takes the following parameter:
Parameter Signification
a_level
Pointer to a DOUBLE variable which contains
the maximum resolution of the map (in pixels
per meter).
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.28 ChangeGeoToMapCoordRoute() method
Description
C++ syntax
Type
Parameters The method takes the following parameters:
The ChangeGeoToMapCoordRoute() method converts the given
geographic coordinates of a point into window coordinates.
IROUTING::ChangeGeoToMapCoordRoute
HRESULT ChangeGeoToMapCoordRoute(
[in] double a_lat,
[in] double a_long,
[out] int * a_x,
[out] int * a_y )
Parameter Signification
a_lat
Specifies the latitude of the point in WGS-84
format.
a_long
Specifies the longitude of the point in
WGS-84 format.
a_x
Pointer to an INT variable which contains the
X-coordinate of the point in the map window.
a_y
Pointer to an INT variable which contains the
Y-coordinate of the point in the map window.
Programming interfaces - 49 -
Page 52

User’s manual NAVIGON Integration Kit 4.0
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.4.29 ChangeMapToGeoCoordRoute() method
Description
The ChangeMapToGeoCoordRoute() method converts the given
window coordinates of a point into geographic coordinates.
C++ syntax
IROUTING::ChangeMapToGeoCoordRoute
Type
HRESULT ChangeMapToGeoCoordRoute(
[in] int a_x,
[in] int a_y,
[out] double * a_lat,
[out] double * a_long )
Parameters The method takes the following parameters:
Parameter Signification
a_x
Specifies the X-coordinate of the point in the
map window.
a_y
Specifies the Y-coordinate of the point in the
map window.
a_lat
Pointer to a DOUBLE variable which contains
the latitude of the point in WGS-84 format.
a_long
Pointer to a DOUBLE variable which contains
the longitude of the point in WGS-84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 50 - IROUTING
Page 53

2.4.30 Example for route calculation
/* Get distance and estimated duration of the route */
User’s manual NAVIGON Integration Kit 4.0
Route calculation
m_NIK_Routing->OpenRoute( (long)hWnd, 0, 0, 300, 200 );
/* Add route points */
m_NIK_Routing->AddDestCoordRoute( nArrSize, arrLat,
arrLong );
/* Start route calculation */
m_NIK_Routing->StartRoute();
/* Get the status of route calculation */
m_NIK_Routing->GetStatusRoute( &nStatus );
m_NIK_Routing->GetResultRoute( &nMeter, &nSec );
m_NIK_Routing->CloseRoute();
Programming interfaces - 51 -
Page 54

2.5 IPOSITION
User’s manual NAVIGON Integration Kit 4.0
Survey
Exposed functionality Display of the current position on the map
Typical use
Methods
OpenPosition() method, see page 53
The IPOSITION programming interface is designed to display the
current GPS position on the map.
Retrieval of the coordinates of the current position
Notice: Only available on the reception of sufficient GPS signals.
The format of geographic coordinates is always WGS-84.
OpenPosition( hWnd, x, y, width, height );
StartPosition();
// More methods of IPOSITION
ClosePosition();
The IPOSITION interface defines the following methods:
ClosePosition() method, see page 54
StartPosition() method, see page 54
GetPosition() method, see page 55
ZoomInPosition() method, see page 55
ZoomOutPosition() method, see page 56
ShowDownPosition() method, see page 56
ShowUpPosition() method, see page 56
ShowLeftPosition() method, see page 57
ShowRightPosition() method, see page 57
SetRotationPosition() method, see page 57
GetRotationPosition() method, see page 58
MapShowPosition() method, see page 59
SetBirdViewPosition() method, see page 59
SetZoomLevelInPosition() method, see page 60
GetZoomLevelInPosition() method, see page 60
SetMaxResolutionPosition() method, see page 61
GetMaxResolutionPosition() method, see page 61
ChangeGeoToMapCoordPosition() method, see page 62
ChangeMapToGeoCoordPosition() method, see page 62
- 52 - IPOSITION
Page 55

2.5.1 OpenPosition() method
User’s manual NAVIGON Integration Kit 4.0
Description
The OpenPosition() method opens the IPOSITION interface. It
also initialises a window for displaying the map.
C++ syntax
IPOSITION::OpenPosition
Type
HRESULT OpenPosition(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wx,
[in] int a_wy )
Parameters The method takes the following parameters:
Parameter Signification
a_hwnd
Windows handle of the parent window in
which the map shall be displayed.
a_ox
The X-coordinate of the map window, related
to the parent window.
a_oy
The Y-coordinate of the map window, related
to the parent window.
a_wx
a_wy
Width of the map window.
Height of the map window.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: Call OpenPosition(hWnd, 0, 0, 0, 0) to enable
determination of the current position without displaying it on the
map. Note that the windows handle must be valid.
Programming interfaces - 53 -
Page 56

2.5.2 ClosePosition() method
User’s manual NAVIGON Integration Kit 4.0
Description
The ClosePosition() method closes the IPOSITION interface
and the map window. You will have to open the interface again
before calling more of its methods.
C++ syntax
IPOSITION::ClosePosition
Type
HRESULT ClosePosition()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.3 StartPosition() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The StartPosition() method shows the current GPS position on
the map. It must be called just after the OpenPosition()
method.
IPOSITION::StartPosition
HRESULT StartPosition()
Return value Signification
S_OK
S_FALSE
Done
Error
- 54 - IPOSITION
Page 57

2.5.4 GetPosition() method
User’s manual NAVIGON Integration Kit 4.0
Description
The GetPosition() method retrieves the current GPS position.
C++ syntax
IPOSITION::GetPosition
Type
HRESULT GetPosition(
[out] double * a_lat,
[out] double * a_long )
Parameters The method takes the following parameters:
Parameter Signification
a_lat
Pointer to a DOUBLE variable which contains
the latitude of the current position in WGS-84
format.
a_long
Pointer to a DOUBLE variable which contains
the longitude of the current position in
WGS-84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example Determine the current position ("matched") and display it on the
map:
m_NIK_Position->GetPosition( &dLatX, &dLongY );
Notice: You may as well determine the current position by
calling the GPSMessageCallback() method of the IMNNIKEvents
interface which retrieves received positional data according to the
NMEA protocol.
2.5.5 ZoomInPosition() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ZoomInPosition() method zooms into the map which shows
the current position.
IPOSITION::ZoomInPosition
HRESULT ZoomInPosition()
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 55 -
Page 58

2.5.6 ZoomOutPosition() method
User’s manual NAVIGON Integration Kit 4.0
Description
The ZoomOutPosition() method zooms out of the map.
C++ syntax
IPOSITION::ZoomOutPosition
Type
HRESULT ZoomOutPosition()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.7 ShowDownPosition() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ShowDownPosition() method scrolls the map down.
IPOSITION::ShowDownPosition
HRESULT ShowDownPosition()
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.8 ShowUpPosition() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
- 56 - IPOSITION
The ShowUpPosition() method scrolls the map up.
IPOSITION::ShowUpPosition
HRESULT ShowUpPosition()
Return value Signification
S_OK
S_FALSE
Done
Error
Page 59

2.5.9 ShowLeftPosition() method
User’s manual NAVIGON Integration Kit 4.0
Description
The ShowLeftPosition() method scrolls the map to the left.
C++ syntax
IPOSITION::ShowLeftPosition
Type
HRESULT ShowLeftPosition()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.10 ShowRightPosition() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ShowRightPosition() method scrolls the map to the right.
IPOSITION::ShowRightPosition
HRESULT ShowRightPosition()
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.11 SetRotationPosition() method
Description
C++ syntax
Type
Parameters The method takes the following parameter:
Return values The method returns one of the following values:
Programming interfaces - 57 -
The SetRotationPosition() method sets the orientation of the
map to "north oriented" or to "in driving direction".
IROUTING::SetRotationPosition
HRESULT SetRotationPosition([in] BOOL a_rotation)
Parameter Signification
a_rotation
TRUE: in driving direction
FALSE: north oriented
Return value Signification
S_OK
S_FALSE
Done
Error
Page 60

2.5.12 GetRotationPosition() method
User’s manual NAVIGON Integration Kit 4.0
Description
The GetRotationPosition() method retrieves the current
orientation of the map.
C++ syntax
IROUTING::GetRotationPosition
Type
HRESULT GetRotationPosition([out] BOOL * a_rotation)
Parameters The method takes the following parameter:
Parameter Signification
a_rotation
TRUE: in driving direction
FALSE: north oriented
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example Display the current position on the map:
m_NIK_Position->OpenPosition((long)hWnd,0,0,300,200 );
/* Display the current position on the map */
m_NIK_Position->StartPosition();
m_NIK_Position ->ClosePosition();
- 58 - IPOSITION
Page 61

2.5.13 MapShowPosition() method
User’s manual NAVIGON Integration Kit 4.0
Description
The MapShowPosition() method shows or hides the map
window.
C++ syntax
IROUTING::MapShowPosition
Type
HRESULT MapShowPosition([in] BOOL a_show)
Parameters The method takes the following parameter:
Parameter Signification
a_show
TRUE Shows the map
FALSE Hides the map
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.14 SetBirdViewPosition() method
Description
The SetBirdViewPosition() method enables 3D-view or 2Dview of the map.
C++ syntax
IROUTING::SetBirdViewPosition
Type
HRESULT SetBirdViewPosition([in] BOOL a_birdview)
Parameters The method takes the following parameter:
Parameter Signification
a_birdview
TRUE 3D-view of the map
FALSE 2D-view of the map
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 59 -
Page 62

User’s manual NAVIGON Integration Kit 4.0
2.5.15 SetZoomLevelInPosition() method
Description
The SetZoomLevelInPosition() method sets the zoom level of
the displayed map.
C++ syntax
IPOSITION::SetZoomLevelInPosition
Type
HRESULT SetZoomLevelInPosition([in] double a_level)
Parameters The method takes the following parameter:
Parameter Signification
a_level
Specifies the zoom level of the displayed map
in meters per pixel.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.16 GetZoomLevelInPosition() method
Description
The GetZoomLevelInPosition() method retrieves the current
zoom level of the displayed map.
C++ syntax
IPOSITION::GetZoomLevelInPosition
Type
HRESULT GetZoomLevelInPosition([in] double a_level)
Parameters The method takes the following parameter:
Parameter Signification
a_level
Pointer to a DOUBLE variable which contains
the current zoom level of the displayed map
in meters per pixel.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 60 - IPOSITION
Page 63

User’s manual NAVIGON Integration Kit 4.0
a_maxres )
2.5.17 SetMaxResolutionPosition() method
Description
The SetMaxResolutionPosition() method sets the maximum
resolution of the map (in pixels per meter).
C++ syntax
IPOSITION::SetMaxResolutionPosition
Type
HRESULT SetMaxResolutionPosition([in] double a_maxres)
Parameters The method takes the following parameter:
Parameter Signification
a_level
Specifies the maximum resolution of the map
(in pixels per meter).
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.18 GetMaxResolutionPosition() method
Description
The GetMaxResolutionPosition() method retrieves the
maximum resolution of the map (in pixels per meter).
C++ syntax
IPOSITION::GetMaxResolutionPosition
Type
HRESULT GetMaxResolutionPosition([in] double
Parameters The method takes the following parameter:
Parameter Signification
a_level
Pointer to a DOUBLE variable which contains
the maximum resolution of the map (in pixels
per meter).
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 61 -
Page 64

User’s manual NAVIGON Integration Kit 4.0
2.5.19 ChangeGeoToMapCoordPosition() method
Description
The ChangeGeoToMapCoordPosition() method converts the
given geographic coordinates of a point into window coordinates.
C++ syntax
IPOSITION::ChangeGeoToMapCoordPosition
Type
HRESULT ChangeGeoToMapCoordPosition(
[in] double a_lat,
[in] double a_long,
[out] int * a_x,
[out] int * a_y )
Parameters The method takes the following parameters:
Parameter Signification
a_lat
Specifies the latitude of the point in WGS-84
format.
a_long
Specifies the longitude of the point in
WGS-84 format.
a_x
Pointer to an INT variable which contains the
X-coordinate of the point in the map window.
a_y
Pointer to an INT variable which contains the
Y-coordinate of the point in the map window.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.5.20 ChangeMapToGeoCoordPosition() method
Description
C++ syntax
Type
- 62 - IPOSITION
The ChangeMapToGeoCoordPosition() method converts the
given window coordinates of a point into geographic coordinates.
IPOSITION::ChangeMapToGeoCoordPosition
HRESULT ChangeMapToGeoCoordPosition(
[in] int a_x,
[in] int a_y,
[out] double * a_lat,
[out] double * a_long )
Page 65

User’s manual NAVIGON Integration Kit 4.0
Parameters The method takes the following parameters:
Parameter Signification
a_x
Specifies the X-coordinate of the point in the
map window.
a_y
Specifies the Y-coordinate of the point in the
map window.
a_lat
Pointer to a DOUBLE variable which contains
the latitude of the point in WGS-84 format.
a_long
Pointer to a DOUBLE variable which contains
the longitude of the point in WGS-84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 63 -
Page 66

2.6 INAVIGATION
User’s manual NAVIGON Integration Kit 4.0
Survey
Exposed functionality Route calculation and navigation from the current position to
Typical use
The INAVIGATION programming interface is designed to enable
navigation from the current position to a destination point.
a destination point which is covered by the currently loaded
map
Retrieval of the distance to the destination point
Retrieval of the estimated duration of the travel to the
destination point
Display of the route on the map
Display of the current position on the map
Display of the schematic intersection view (with arrows
indicating the direction to follow)
Display of a distance bar (distance to the next way point, e.g.
turning manoeuvres)
Notice: The route may change due to TMC broadcasts while you
are travelling. The format of geographic coordinates is always
WGS-84.
OpenNavigation( hWnd, x, y, width, height );
SetDestCoordNavigation( a_lat, a_long );
// Optionally: set track coordinates
SetDestTrackNavigation( a_size, a_latArr, a_longArr );
StartNavigation();
// More methods of INAVIGATION
CloseNavigation();
- 64 - INAVIGATION
Page 67

User’s manual NAVIGON Integration Kit 4.0
Methods
The INAVIGATION interface defines the following methods:
OpenNavigation() method, see page 66
CloseNavigation() method, see page 67
SetDestIdNavigation() method, see page 67
GetDestIdNavigation() method, see page 68
SetDestCoordNavigation() method, see page 68
GetDestCoordNavigation() method, see page 69
SetDestTrackNavigation() method, see page 70
StartNavigation() method, see page 71
ShowRouteNavigation() method, see page 71
RepeatLastAdviceNavigation() method, see page 72
ZoomInNavigation() method, see page 72
ZoomOutNavigation() method, see page 72
ShowDownNavigation() method, see page 73
ShowUpNavigation() method, see page 73
ShowLeftNavigation() method, see page 73
ShowRightNavigation() method, see page 74
ShowStartPointNavigation() method, see page 74
ShowEndPointNavigation() method, see page 74
SetRotationNavigation() method, see page 75
GetRotationNavigation() method, see page 75
GetStatusNavigation() method, see page 76
GetRoutingResultNavigation() method, see page 76
ShematicViewOpenNavigation() method, see page 77
ShematicViewShowNavigation() method, see page 78
DistanceBarOpenNavigation() method, see page 79
DistanceBarShowNavigation() method, see page 80
MapShowNavigation() method, see page 80
SetBirdViewNavigation() method, see page 81
GetFirstWayListNavigation() method, see page 81
GetNextWayListNavigation() method, see page 82
SetZoomLevelInNavigation() method, see page 83
GetZoomLevelInNavigation() method, see page 84
SetMaxResolutionNavigation() method, see page 84
GetMaxResolutionNavigation() method, see page 85
ChangeGeoToMapCoordNavigation() method, see page 85
ChangeMapToGeoCoordLocationMap() method, see page 86
Programming interfaces - 65 -
Page 68
2.6.1 OpenNavigation() method
User’s manual NAVIGON Integration Kit 4.0
Description
The OpenNavigation() method initialises navigation. It also
initialises a window for displaying the map.
C++ syntax
INAVIGATION::OpenNavigation
Type
HRESULT OpenNavigation(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wx,
[in] int a_wy )
Parameters The method takes the following parameters:
Parameter Signification
a_hwnd
Windows handle of the parent window in
which the map shall be displayed.
a_ox
The X-coordinate of the map window, related
to the parent window.
a_oy
The Y-coordinate of the map window, related
to the parent window.
a_wx
a_wy
Width of the map window.
Height of the map window.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: Call OpenNavigation (hWnd, 0, 0, 0, 0) to enable
navigation without displaying a map. Note that the windows
handle must be valid.
- 66 - INAVIGATION
Page 69

2.6.2 CloseNavigation() method
User’s manual NAVIGON Integration Kit 4.0
Description
The CloseNavigation() method closes the INAVIGATION
interface and the map window. You will have to open the
interface again before calling more of its methods.
C++ syntax
INAVIGATION::CloseNavigation
Type
HRESULT CloseNavigation()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.3 SetDestIdNavigation() method
Attention: Old method!
The SetDestIdNavigation() method is not supported by NIK 4.0
and higher.
Description
The SetDestIdNavigation() method takes a town ID, a street
ID or a POI ID to specify the destination point for navigation
purposes.
C++ syntax
INAVIGATION::SetDestIdNavigation
Type
HRESULT SetDestIdNavigation([in] long a_id )
Parameters The method takes the following parameter:
Parameter Signification
a_id
Specifies the object ID of the destination.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: When you have reached your destination, the system
prompts the “You have reached the destination” message.
See also SetDestCoordNavigation().
Programming interfaces - 67 -
Page 70

User’s manual NAVIGON Integration Kit 4.0
2.6.4 GetDestIdNavigation() method
Attention: Old method!
The GetDestIdNavigation() method is not supported by NIK 4.0
and higher.
Description
The GetDestIdNavigation() method retrieves the ID of a
destination which has been set by calling the
SetDestIdNavigation() method.
C++ syntax
INAVIGATION::GetDestIdNavigation
Type
HRESULT GetDestIdNavigation([out] long * a_id)
Parameters The method takes the following parameter:
Parameter Signification
a_id
Pointer to a LONG variable which contains the
ID of the destination.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.5 SetDestCoordNavigation() method
Description
The SetDestCoordNavigation() method specifies a destination
for navigation purposes. The destination must be given as
coordinates in WGS-84 format.
C++ syntax
INAVIGATION::SetDestCoordNavigation
Type
HRESULT SetDestCoordNavigation(
[in] double a_lat,
[in] double a_long )
Parameters The method takes the following parameters:
Parameter Signification
a_lat
Specifies the latitude of the destination in
WGS-84 format.
a_long
Specifies the longitude of the destination in
WGS-84 format.
- 68 - INAVIGATION
Page 71

User’s manual NAVIGON Integration Kit 4.0
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: When you have reached your destination, the system
prompts the “You have reached the destination” message.
See also SetDestTrackNavigation() for navigation to a
destination which is not covered by the road network of the
currently loaded map.
2.6.6 GetDestCoordNavigation() method
Description
The GetDestCoordNavigation() method retrieves the
geographic coordinates of a destination that has been set by
calling the SetDestCoordNavigation() method.
C++ syntax
INAVIGATION::GetDestCoordNavigation
Type
HRESULT GetDestCoordNavigation(
[out] double * a_lat,
[out] double * a_long )
Parameters The method takes the following parameters:
Parameter Signification
a_lat
Pointer to a DOUBLE variable which contains
the latitude of the destination in WGS-84
format.
a_long
Pointer to a DOUBLE variable which contains
the longitude of the destination in WGS-84
format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 69 -
Page 72

User’s manual NAVIGON Integration Kit 4.0
2.6.7 SetDestTrackNavigation() method
Description
The SetDestTrackNavigation() method adds geographical
points for a track which may be used for navigation outside the
road network which is covered by the currently loaded map.
The first point is the start point of the track. Normally, this is the
point where you leave the road network which is covered by the
map.
The last point is the destination point outside the road network
covered by the currently loaded map. Normally, this is the point
you have specified by calling the SetDestCoordNavigation()
method.
Notice: You must have specified the track points before starting
navigation by calling the StartNavigation() method.
C++ syntax
INAVIGATION::SetDestTrackNavigation
Type
HRESULT SetDestTrackNavigation(
[in] int a_size,
[in, size_is(a_size)] double * a_lat,
[in, size_is(a_size)] double * a_long )
Parameters The method takes the following parameters:
Parameter Signification
a_size
Specifies the number of track points that will
be specified by this method call (the number
of coordinates in the a_lat and a_long
arrays).
a_lat
Pointer to an array of DOUBLE values which
contain latitudes in WGS-84 format.
a_long
Pointer to an array of DOUBLE values which
contain longitudes in WGS-84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: The SetDestTrackNavigation() method is used instead
of the SetDestCoordNavigation() method. Like this, it must
have been called before starting navigation by calling
StartNavigation().
- 70 - INAVIGATION
Page 73

2.6.8 StartNavigation() method
User’s manual NAVIGON Integration Kit 4.0
Description
The StartNavigation() method starts navigation. This means
that the destination and, if necessary, track points must have
been specified before calling this method.
StartNavigation() calculates a route from the current position
to the destination point and displays it, together with the current
position, on the map.
C++ syntax
INAVIGATION::StartNavigation
Type
HRESULT StartNavigation()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.9 ShowRouteNavigation() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ShowRouteNavigation() method displays the whole current
route on the map.
INAVIGATION::ShowRouteNavigation
HRESULT ShowRouteNavigation()
Return value Signification
S_OK
S_FALSE
Done
Error
Notice: Do not call this method before having called
StartNavigation().
Programming interfaces - 71 -
Page 74

User’s manual NAVIGON Integration Kit 4.0
2.6.10 RepeatLastAdviceNavigation() method
Description
The RepeatLastAdviceNavigation() method repeats the last
voice instruction.
C++ syntax
INAVIGATION::RepeatLastAdviceNavigation
Type
HRESULT RepeatLastAdviceNavigation()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.11 ZoomInNavigation() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ZoomInNavigation() method zooms into the map.
INAVIGATION::ZoomInNavigation
HRESULT ZoomInNavigation()
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.12 ZoomOutNavigation() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
- 72 - INAVIGATION
The ZoomOutNavigation() method zooms out of the map.
INAVIGATION::ZoomOutNavigation
HRESULT ZoomOutNavigation()
Return value Signification
S_OK
S_FALSE
Done
Error
Page 75

User’s manual NAVIGON Integration Kit 4.0
2.6.13 ShowDownNavigation() method
Description
The ShowDownNavigation() method scrolls the map down.
C++ syntax
INAVIGATION::ShowDownNavigation
Type
HRESULT ShowDownNavigation()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.14 ShowUpNavigation() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ShowUpNavigation() method scrolls the map up.
INAVIGATION::ShowUpNavigation
HRESULT ShowUpNavigation()
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.15 ShowLeftNavigation() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
Programming interfaces - 73 -
The ShowLeftNavigation() method scrolls the map to the left.
INAVIGATION::ShowLeftNavigation
HRESULT ShowLeftNavigation()
Return value Signification
S_OK
S_FALSE
Done
Error
Page 76

User’s manual NAVIGON Integration Kit 4.0
2.6.16 ShowRightNavigation() method
Description
The ShowRightNavigation() method scrolls the map to the
right.
C++ syntax
INAVIGATION::ShowRightNavigation
Type
HRESULT ShowRightNavigation()
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.17 ShowStartPointNavigation() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
The ShowStartPointNavigation() method displays the start
point on the map.
INAVIGATION::ShowStartPointNavigation
HRESULT ShowStartPointNavigation()
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.18 ShowEndPointNavigation() method
Description
C++ syntax
Type
Return values The method returns one of the following values:
- 74 - INAVIGATION
The ShowEndPointNavigation() method displays the destination
point on the map.
INAVIGATION::ShowEndPointNavigation
HRESULT ShowEndPointNavigation()
Return value Signification
S_OK
S_FALSE
Done
Error
Page 77

User’s manual NAVIGON Integration Kit 4.0
2.6.19 SetRotationNavigation() method
Description
The SetRotationNavigation() method sets the orientation of
the map to "north oriented" or to "in driving direction".
C++ syntax
INAVIGATION::SetRotationNavigation
Type
HRESULT SetRotationNavigation([in] BOOL a_rotation)
Parameters The method takes the following parameter:
Parameter Signification
a_rotation
TRUE: in driving direction
FALSE: north oriented
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.20 GetRotationNavigation() method
Description
The GetRotationNavigation() method retrieves the current
orientation of the map.
C++ syntax
INAVIGATION::GetRotationNavigation
Type
HRESULT GetRotationNavigation([out] BOOL * a_rotation)
Parameters The method takes the following parameter:
Parameter Signification
a_rotation
Pointer to a BOOL variable contains the
current map orientation.
TRUE: in driving direction
FALSE: north oriented
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 75 -
Page 78
2.6.21 GetStatusNavigation() method
User’s manual NAVIGON Integration Kit 4.0
Description
The GetStatusNavigation() method returns the status of route
calculation (executed by the last call of StartNavigation()).
C++ syntax
INAVIGATION::GetStatusNavigation
Type
HRESULT GetStatusNavigation([out] int * a_status)
Parameters The method takes the following parameters:
Parameter Signification
a_status
Pointer to an INT variable which contains the
status of route calculation. Is a member of
the RouteStatus enumeration (see
RouteStatus page 172).
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.22 GetRoutingResultNavigation() method
Description
C++ syntax
Type
Parameters The method takes the following parameters:
Return values The method returns one of the following values:
The GetRoutingResultNavigation() method retrieves the
distance from the start point to the destination and the estimated
duration of the travel.
INAVIGATION::GetRoutingResultNavigation
HRESULT GetRoutingResultNavigation(
[out] int * a_meter,
[out] int * a_sec )
Parameter Signification
a_meter
Pointer to an INT variable which contains the
distance between the start point and the
destination in meters.
a_sec
Pointer to an INT variable which contains the
estimated duration of the travel in seconds.
Return value Signification
S_OK
S_FALSE
Done
Error
- 76 - INAVIGATION
Page 79

User’s manual NAVIGON Integration Kit 4.0
2.6.23 ShematicViewOpenNavigation() method
Description
C++ syntax
Type
The ShematicViewOpenNavigation() method initialises
schematic intersection view. An arrow indicates the next
manoeuvre to be executed.
INAVIGATION::ShematicViewOpenNavigation
HRESULT ShematicViewOpenNavigation(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wxy,
[in] int a_size )
Parameters The method takes the following parameters:
Parameter Signification
a_hwnd
Windows handle of the parent window in
which the schematic intersection view shall
be displayed.
a_ox
The X-coordinate of the schematic
intersection view window, related to the
parent window.
a_oy
The Y-coordinate of the schematic
intersection view window, related to the
parent window.
a_wxy
Height and width of the schematic
intersection view window (it is always a
square).
a_size
Character size for the schematic intersection
view window.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 77 -
Page 80

User’s manual NAVIGON Integration Kit 4.0
2.6.24 ShematicViewShowNavigation() method
Description
The ShematicViewShowNavigation() method shows or hides the
schematic intersection view. It must be preceded by
ShematicViewOpenNavigation().
C++ syntax
INAVIGATION::ShematicViewShowNavigation
Type
HRESULT ShematicViewShowNavigation([in] BOOL a_show)
Parameters The method takes the following parameter:
Parameter Signification
a_show
TRUE Shows the schematic intersection
view
FALSE Hides the schematic intersection
view
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example
m_NIK_Navigation->ShematicViewOpenNavigation(
(long)hWnd, 0, 0, 200, 20 );
m_NIK_Navigation->ShematicViewShowNavigation( TRUE );
- 78 - INAVIGATION
Page 81

User’s manual NAVIGON Integration Kit 4.0
2.6.25 DistanceBarOpenNavigation() method
Description
C++ syntax
Type
The DistanceBarOpenNavigation() method initialises the
distance bar which may be displayed to indicate the distance to
the next way point (to the next manoeuvre to be executed) in a
graphical manner.
INAVIGATION::DistanceBarOpenNavigation
HRESULT DistanceBarOpenNavigation(
[in] long a_hwnd,
[in] int a_ox,
[in] int a_oy,
[in] int a_wx,
[in] int a_wy )
Parameters The method takes the following parameters:
Parameter Signification
a_hwnd
Windows handle of the parent window in
which the distance bar shall be displayed.
a_ox
The X-coordinate of the distance bar, related
to the parent window.
a_oy
The Y-coordinate of the distance bar, related
to the parent window.
a_wx
a_wy
Width of the distance bar.
Height of the distance bar.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 79 -
Page 82

User’s manual NAVIGON Integration Kit 4.0
2.6.26 DistanceBarShowNavigation() method
Description
The DistanceBarShowNavigation() method shows or hides the
distance bar. It must be preceded by
DistanceBarOpenNavigation().
C++ syntax
INAVIGATION::DistanceBarShowNavigation
Type
HRESULT DistanceBarShowNavigation([in] BOOL a_show )
Parameters The method takes the following parameter:
Parameter Signification
a_show
TRUE Shows the distance bar
FALSE Hides the distance bar
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Example
m_NIK_Navigation->DistanceBarOpenNavigation(
(long)hWnd, 0, 0, 100, 200 );
m_NIK_Navigation->DistanceBarShowNavigation( TRUE );
2.6.27 MapShowNavigation() method
Description
C++ syntax
Type
Parameters The method takes the following parameter:
Return values The method returns one of the following values:
The MapShowNavigation() method shows or hides the map
window.
INAVIGATION:: MapShowNavigation
HRESULT MapShowNavigation([in] BOOL a_show )
Parameter Signification
a_show
TRUE Shows the map
FALSE Hides the map
Return value Signification
S_OK
S_FALSE
Done
Error
- 80 - INAVIGATION
Page 83

User’s manual NAVIGON Integration Kit 4.0
2.6.28 SetBirdViewNavigation() method
Description
The SetBirdViewNavigation() method enables 3D-view or 2Dview of the map.
C++ syntax
IROUTING::SetBirdViewNavigation
Type
HRESULT SetBirdViewNavigation([in] BOOL a_birdview)
Parameters The method takes the following parameter:
Parameter Signification
a_rotation
TRUE 3D-view of the map
FALSE 2D-view of the map
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.29 GetFirstWayListNavigation() method
Description
The GetFirstWayListNavigation() method retrieves the first
way point of the current route (A way point is a point where the
driver has to execute a driving manoeuvre like, e.g., turning left).
Retrieve all further way points by calling the
GetNextWayListNavigation() method.
C++ syntax
IROUTING::GetFirstWayListNavigation
Type
HRESULT GetFirstWayListNavigation (
[out] BSTR * a_FromStreet,
[out] BSTR * a_ToStreet,
[out] long * a_nMeterFrom,
[out] BSTR * a_AdviceDesc,
[out] int * a_dAction,
[out] BOOL * a_bFind )
Parameters The method takes the following parameters:
Parameter Signification
a_FromStreet
Pointer to a BSTR variable which contains the
name of the street which leads to the way
point.
a_ToStreet
Pointer to a BSTR variable which contains the
name of the street to turn into.
Programming interfaces - 81 -
Page 84

User’s manual NAVIGON Integration Kit 4.0
Parameter Signification
a_nMeterFrom
Pointer to a LONG variable which contains
the distance to the way point in meters.
a_AdviceDesc
Pointer to a BSTR variable which contains the
text (a description) of the voice instruction.
a_dAction
Pointer to an INT variable which contains the
manoeuvre to be executed. Is a member of
the _ManeuevreDesc enumeration (see
page 169).
a_bFind
Pointer to a BOOL variable which indicates
whether a way point has been retrieved.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notes
When the GetFirstWayListNavigation() has retrieved a way
point (a_bFind is TRUE), you may retrieve all further way points
by calling GetNextWayListNavigation().
2.6.30 GetNextWayListNavigation() method
Description
C++ syntax
Type
The GetNextWayListNavigation() method retrieves the next
way point from the current way point list which must have been
created by calling the GetFirstWayListNavigation() method.
IROUTING::GetNextWayListNavigation
HRESULT GetNextWayListNavigation (
[out] BSTR * a_FromStreet,
[out] BSTR * a_ToStreet,
[out] long * a_nMeterFrom,
[out] BSTR * a_AdviceDesc,
[out] int * a_dAction,
[out] BOOL * a_bFind )
- 82 - INAVIGATION
Page 85

User’s manual NAVIGON Integration Kit 4.0
a_level)
Parameters The method takes the following parameters:
Parameter Signification
a_FromStreet
Pointer to a BSTR variable which contains the
name of the street which leads to the way
point.
a_ToStreet
Pointer to a BSTR variable which contains the
name of the street to turn into.
a_nMeterFrom
Pointer to a LONG variable which contains
the distance to the way point in meters.
a_AdviceDesc
Pointer to a BSTR variable which contains the
text (a description) of the voice instruction.
a_dAction
Pointer to an INT variable which contains the
manoeuvre to be executed. Is a member of
the _ManeuevreDesc enumeration (see
page 169).
a_bFind
Pointer to a BOOL variable which indicates
whether a way point has been retrieved.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Notes
You may retrieve further way points as long as the a_bFind
variable is TRUE.
2.6.31 SetZoomLevelInNavigation() method
Description
C++ syntax
Type
Parameters The method takes the following parameter:
Return values The method returns one of the following values:
The SetZoomLevelInNavigation() method sets the zoom level
of the displayed map.
INAVIGATION::SetZoomLevelInNavigation
HRESULT SetZoomLevelInNavigation([in] double
Parameter Signification
a_level
Specifies the zoom level of the displayed map
in meters per pixel.
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 83 -
Page 86

User’s manual NAVIGON Integration Kit 4.0
a_level)
2.6.32 GetZoomLevelInNavigation() method
Description
The GetZoomLevelInNavigation() method retrieves the current
zoom level of the displayed map.
C++ syntax
INAVIGATION::GetZoomLevelInNavigation
Type
HRESULT GetZoomLevelInNavigation([in] double
Parameters The method takes the following parameter:
Parameter Signification
a_level
Pointer to a DOUBLE variable which contains
the current zoom level of the displayed map
in meters per pixel.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.33 SetMaxResolutionNavigation() method
Description
C++ syntax
Type
Parameters The method takes the following parameter:
Return values The method returns one of the following values:
The SetMaxResolutionNavigation() method sets the maximum
resolution of the map (in pixels per meter).
INAVIGATION::SetMaxResolutionNavigation
HRESULT SetMaxResolutionNavigation(
[in] double a_maxres )
Parameter Signification
a_level
Specifies the maximum resolution of the map
(in pixels per meter).
Return value Signification
S_OK
S_FALSE
Done
Error
- 84 - INAVIGATION
Page 87

User’s manual NAVIGON Integration Kit 4.0
2.6.34 GetMaxResolutionNavigation() method
Description
The GetMaxResolutionNavigation() method retrieves the
maximum resolution of the map (in pixels per meter).
C++ syntax
IPOSITION::GetMaxResolutionNavigation
Type
HRESULT GetMaxResolutionNavigation(
[in] double a_maxres )
Parameters The method takes the following parameter:
Parameter Signification
a_level
Pointer to a DOUBLE variable which contains
the maximum resolution of the map (in pixels
per meter).
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.35 ChangeGeoToMapCoordNavigation() method
Description
C++ syntax
Type
Parameters The method takes the following parameters:
The ChangeGeoToMapCoordNavigation() method converts the
given geographic coordinates of a point into window coordinates.
INAVIGATION::ChangeGeoToMapCoordNavigation
HRESULT ChangeGeoToMapCoordNavigation(
[in] double a_lat,
[in] double a_long,
[out] int * a_x,
[out] int * a_y )
Parameter Signification
a_lat
Specifies the latitude of the point in WGS-84
format.
a_long
Specifies the longitude of the point in
WGS-84 format.
a_x
Pointer to an INT variable which contains the
X-coordinate of the point in the map window.
a_y
Pointer to an INT variable which contains the
Y-coordinate of the point in the map window.
Programming interfaces - 85 -
Page 88

User’s manual NAVIGON Integration Kit 4.0
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.6.36 ChangeMapToGeoCoordLocationMap() method
Description
The ChangeMapToGeoCoordNavigation() method converts the
given window coordinates of a point into geographic coordinates.
C++ syntax
INAVIGATION::ChangeMapToGeoCoordNavigation
Type
HRESULT ChangeMapToGeoCoordNavigation(
[in] int a_x,
[in] int a_y,
[out] double * a_lat,
[out] double * a_long )
Parameters The method takes the following parameters:
Parameter Signification
a_x
Specifies the X-coordinate of the point in the
map window.
a_y
Specifies the Y-coordinate of the point in the
map window.
a_lat
Pointer to a DOUBLE variable which contains
the latitude of the point in WGS-84 format.
a_long
Pointer to a DOUBLE variable which contains
the longitude of the point in WGS-84 format.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 86 - INAVIGATION
Page 89

2.6.37 Examples
User’s manual NAVIGON Integration Kit 4.0
Route calculation
and navigation
Specify the
destination
m_NIK_Navigation->OpenNavigation(
(long)hWnd, 0, 0, 300, 200 );
/* Specify the destination */
m_NIK_Navigation->SetDestCoordNavigation(dLat, dLong );
/* Start route calculation and navigation */
m_NIK_Navigation->StartNavigation();
/* Retrieve the status of route calculation */
m_NIK_Navigation->GetStatusNavigation( &nStatus );
/* Retrieve the distance and the estimated duration of
the travel */
m_NIK_Navigation->GetRoutingResultNavigation
( &nMeter, &nSec );
m_NIK_Navigation->CloseNavigation();
/* Geographic point */
m_NIK_Navigation->SetDestCoordNavigation(dLatX,dLongY);
Display
/* ID */
m_NIK_Navigation->SetDestIdNavigation( nAreaId );
/* Retrieve the destination */
m_NIK_Navigation->GetDestCoordNavigation(
&dLatX, &dLongY );
/* or */
m_NIK_Navigation->GetDestIdNavigation( &nAreaId );
/* Display the whole route */
m_NIK_Navigation->ShowRouteNavigation();
/* Start and destination points of the route */
m_NIK_Navigation->ShowStartPointNavigation();
m_NIK_Navigation->ShowEndPointNavigation();
Programming interfaces - 87 -
Page 90

User’s manual NAVIGON Integration Kit 4.0
Map
Voice instruction
/* Scroll the map */
m_NIK_Navigation->ShowDownNavigation();
m_NIK_Navigation->ShowUpNavigation();
m_NIK_Navigation->ShowLeftNavigation();
m_NIK_Navigation->ShowRightNavigation();
/* Zoom */
m_NIK_Navigation->ZoomInNavigation();
m_NIK_Navigation->ZoomOutNavigation();
/* Orientate the map north up */
m_NIK_Navigation->SetRotationNavigation( FALSE );
m_NIK_Navigation->GetRotationNavigation( &bDir );
/* Repeat the last voice instruction */
m_NIK_Navigation->RepeatLastAdviceNavigation();
- 88 - INAVIGATION
Page 91

2.7 IOPTIONS
User’s manual NAVIGON Integration Kit 4.0
Survey
Exposed functionality Configuration of route calculation
Typical use
Methods
The IOPTIONS interface is designed to set global parameters for
route calculation (IROUTING and INAVIGATION),
map representation (IROUTING, INAVIGATION, and
IPOSITION).
Configuration of map representation
Notice: There are get and set methods for each of the
configuration items.
GetRoutingAlgorithmOptions
( &bDynamicRoute, &bQuickest, &bShortest );
/* Einstellungen für die Routenberechnung ändern */
SetRoutingAlgorithmOptions
( bDynamicRoute, bQuickest, bShortest );
GetRoutingAvoidTypeOptions
( &bHighWays, &bFerries, &bMaudStreets );
/* Einstellungen für Ausschluss von Verbindungswegen */
SetRoutingAvoidTypeOptions
( bHighWays, bFerries, bMaudStreets );
The IOPTIONS interface defines the following methods:
SetRoutingAlgorithmOptions() method, see page 90
SetRoutingAlgorithmOptions2() method, see page 91
GetRoutingAlgorithmOptions() method, see page 91
GetRoutingAlgorithmOptions2() method, see page 92
SetRoutingAvoidTypeOptions() method, see page 93
GetRoutingAvoidTypeOptions() method, see page 94
SetStyleMapOptions() method, see page 95
GetStyleMapOptions() method, see page 95
SetKeyboardMapModeOptions() method, see page 96
GetKeyboardMapModeOptions() method, see page 96
GetBasicMapFolderOptions() method, see page 97
SetBasicMapFolderOptions() method, see page 97
GetMapsNumberOptions() method, see page 98
GetMapsPathsOptions() method, see page 98
SetCurrentMapOptions() method, see page 99
GetCurrentMapOptions() method, see page 99
GetRadioMutingOptions() method, see page 100
SetRadioMutingOptions() method, see page 100
Programming interfaces - 89 -
Page 92

User’s manual NAVIGON Integration Kit 4.0
GetLanguageCodeOptions() method, see page 101
SetLanguageCodeOptions() method, see page 101
GetDistUnitOptions() method, see page 102
SetDistUnitOptions() method, see page 102
SetLouderOptions() method, see page 103
SetQuieterOptions() method, see page 103
SetPoiMapFolderOptions() method, see page 104
OpenPoiMapsOptions() method, see page 104
OpenPoiMapsOptions() method, see page 104
2.7.1 SetRoutingAlgorithmOptions() method
Attention: Old method!
The SetRoutingAlgorithmOptions2() method offers enhanced
configuration possibilities and should therefore be used in current
and future projects.
Description
The SetRoutingAlgorithmOptions() method specifies the kind
of route to be calculated. Exactly one of the following parameters
must be TRUE.
C++ syntax
IOPTIONS:: SetRoutingAlgorithmOptions
Type
HRESULT SetRoutingAlgorithmOptions(
[in] BOOL bDynamicRoute,
[in] BOOL bQuickest,
[in] BOOL bShortest )
Parameters The method takes the following parameters:
Parameter Signification
bDynamicRoute
Specifies a dynamic route to be calculated
(TRUE) or not (FALSE). A dynamic route is a
quick route, but TMC broadcasts are
permanently being considered (if received).
The route may automatically be recalculated
due to broadcasted traffic obstructions on the
route which originally was calculated.
bQuickest
Specifies the quickest route to be calculated
(TRUE) or not (FALSE).
bShortest
Specifies the shortest route to be calculated
(TRUE) or not (FALSE).
Attention: Exactly one of these parameters must be TRUE.
- 90 - IOPTIONS
Page 93

User’s manual NAVIGON Integration Kit 4.0
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.7.2 SetRoutingAlgorithmOptions2() method
Description
The SetRoutingAlgorithmOptions2() method specifies the kind
of route to be calculated.
C++ syntax
IOPTIONS:: SetRoutingAlgorithmOptions2
Type
HRESULT SetRoutingAlgorithmOptions2 (
[in] int a_nRouteType )
Parameters The method takes the following parameter:
Parameter Signification
a_nRouteType
Specifies the kind of route to be calculated.
Must be a member of the _RouteType
enumeration (see page 171).
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.7.3 GetRoutingAlgorithmOptions() method
Attention: Old method!
Use this method to retrieve parameters that have been set by the
SetRoutingAlgorithmOptions() method.
The SetRoutingAlgorithmOptions2() method offers enhanced
configuration possibilities and should therefore be used in current
and future projects.
Description
C++ syntax
Type
The GetRoutingAlgorithmOptions() method retrieves the
current route calculation parameters which have been set by
calling SetRoutingAlgorithmOptions().
IOPTIONS::GetRoutingAlgorithmOptions
HRESULT GetRoutingAlgorithmOptions(
[out] BOOL * bDynamicRoute,
[out] BOOL * bQuickest,
[out] BOOL * bShortest )
Programming interfaces - 91 -
Page 94

User’s manual NAVIGON Integration Kit 4.0
Parameters The method takes the following parameters:
Parameter Signification
bDynamicRoute
Pointer to a BOOL variable which is TRUE if
dynamic routes are to be calculated.
bQuickest
Pointer to a BOOL variable which is TRUE if
quick routes are to be calculated.
bShortest
Pointer to a BOOL variable which is TRUE if
short routes are to be calculated.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.7.4 GetRoutingAlgorithmOptions2() method
Description
The GetRoutingAlgorithmOptions2() method retrieves the
current route calculation parameter which has been set by calling
SetRoutingAlgorithmOptions2().
C++ syntax
IOPTIONS::GetRoutingAlgorithmOptions2
Type
HRESULT GetRoutingAlgorithmOptions2 (
[out] int * a_nRouteType )
Parameters The method takes the following parameter:
Parameter Signification
a_nRouteType
Pointer to an INT variable which contains the
kind of route to be calculated. Is a member
of the _RouteType enumeration (see
page 171).
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 92 - IOPTIONS
Page 95

User’s manual NAVIGON Integration Kit 4.0
2.7.5 SetRoutingAvoidTypeOptions() method
Description
The SetRoutingAvoidTypeOptions() method instructs the route
calculation module to consider or, if reasonable, to avoid certain
types of traffic facilities.
C++ syntax
IOPTIONS::SetRoutingAvoidTypeOptions
Type
HRESULT SetRoutingAvoidTypeOptions(
[in] BOOL bHighWays,
[in] BOOL bFerries,
[in] BOOL bMaudStreets )
Parameters The method takes the following parameters:
Parameter Signification
bHighWays
Specifies motorways to be considered (TRUE)
or, if reasonable, to be avoided (FALSE) by
the route calculation module.
bFerries
Specifies ferries to be considered (TRUE) or, if
reasonable, to be avoided (FALSE) by the
route calculation module.
bMaudStreets
Specifies toll roads to be considered (TRUE)
or, if reasonable, to be avoided (FALSE) by
the route calculation module.
Notice: Set as many of these parameters to TRUE as convenient.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 93 -
Page 96

User’s manual NAVIGON Integration Kit 4.0
2.7.6 GetRoutingAvoidTypeOptions() method
Description
The GetRoutingAvoidTypeOptions() method retrieves which
types of traffic facilities are currently being considered or, if
reasonable, are being avoided by the route calculation module.
C++ syntax
IOPTIONS::GetRoutingAvoidTypeOptions
Type
HRESULT GetRoutingAvoidTypeOptions(
[out] BOOL * bHighWays,
[out] BOOL * bFerries,
[out] BOOL * bMaudStreets )
Parameters The method takes the following parameters:
Parameter Signification
bHighWays
Pointer to a BOOL variable which indicates
motorways to be considered (TRUE) or, if
reasonable, to be avoided (FALSE) by the
route calculation module.
bFerries
Pointer to a BOOL variable which indicates
ferries to be considered (TRUE) or, if
reasonable, to be avoided (FALSE) by the
route calculation module.
bMaudStreets
Pointer to a BOOL variable which indicates
toll roads to be considered (TRUE) or, if
reasonable, to be avoided (FALSE) by the
route calculation module.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 94 - IOPTIONS
Page 97

2.7.7 SetStyleMapOptions() method
User’s manual NAVIGON Integration Kit 4.0
Description
The SetStyleMapOptions() method switches between the
daylight mode and the night mode of the screen.
C++ syntax
IOPTIONS::SetStyleMapOptions
Type
HRESULT SetStyleMapOptions([in] BOOL a_style)
Parameters The method takes the following parameter:
Parameter Signification
a_style
Specifies daylight mode (TRUE) or night mode
(FALSE) to be activated.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.7.8 GetStyleMapOptions() method
Description
The GetStyleMapOptions() method retrieves a BOOL variable
which indicates whether the daylight mode or the night mode of
the screen is currently activated.
C++ syntax
IOPTIONS::GetStyleMapOptions
Type
HRESULT GetStyleMapOptions([out] BOOL * a_style)
Parameters The method takes the following parameter:
Parameter Signification
a_style
Pointer to a BOOL variable which indicates
daylight mode (TRUE) or night mode (FALSE)
currently being activated.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 95 -
Page 98

User’s manual NAVIGON Integration Kit 4.0
2.7.9 SetKeyboardMapModeOptions() method
Description
The SetKeyboardMapModeOptions() method enables your
application to handle keyboard events of the map window. When
an event occurs, the system notifies your application by calling
the appropriate callback method. Your application may then react
in an appropriate manner.
Notice: By default, NIK handles keyboard events of the map
window. Calling this method you may specify that your
application will handle these events.
C++ syntax
IOPTIONS::SetKeyboardMapModeOptions
Type
HRESULT SetKeyboardMapModeOptions([in] BOOL a_keyboard)
Parameters The method takes the following parameter:
Parameter Signification
a_keyboard
Specifies whether your application (TRUE) or
NIK (FALSE) handles keyboard events of the
map window.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.7.10 GetKeyboardMapModeOptions() method
Description
C++ syntax
Type
Parameters The method takes the following parameters:
Return values The method returns one of the following values:
The GetKeyboardMapModeOptions() method retrieves a BOOL
variable which indicates whether your application handles
keyboard events of the map window.
IOPTIONS::GetKeyboardMapModeOptions
HRESULT GetKeyboardMapModeOptions(
[out] BOOL a_keyboard );
Parameter Signification
a_keyboard
Pointer to a BOOL variable which indicates
whether your application TRUE or NIK FALSE
handles keyboard events of the map window.
Return value Signification
S_OK
S_FALSE
Done
Error
- 96 - IOPTIONS
Page 99

User’s manual NAVIGON Integration Kit 4.0
2.7.11 GetBasicMapFolderOptions() method
Description
The GetBasicMapFolderOptions() method retrieves the path of
the folder of the basic map.
C++ syntax
IOPTIONS::GetBasicMapFolderOptions
Type
HRESULT GetBasicMapFolderOptions(
[out] BSTR * a_sFolder )
Parameters The method takes the following parameter:
Parameter Signification
a_sFolder
Pointer to a BSTR variable which indicates
the path of the folder of the basic map.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.7.12 SetBasicMapFolderOptions() method
Description
C++ syntax
Type
Parameters The method takes the following parameter:
Return values The method returns one of the following values:
The SetBasicMapFolderOptions() method specifies the path of
the folder of the basic map.
IOPTIONS::SetBasicMapFolderOptions
HRESULT SetBasicMapFolderOptions (
[out] BSTR * a_sFolder )
Parameter Signification
a_sFolder
Specifies the path of the folder of the basic
map.
Return value Signification
S_OK
S_FALSE
Done
Error
Programming interfaces - 97 -
Page 100

User’s manual NAVIGON Integration Kit 4.0
2.7.13 GetMapsNumberOptions() method
Description
The GetMapsNumberOptions() method retrieves the number of
currently available maps.
C++ syntax
IOPTIONS:: GetMapsNumberOptions
Type
HRESULT GetMapsNumberOptions([out] int* a_size);
Parameters The method takes the following parameter:
Parameter Signification
a_size
Pointer to an INT variable which contains the
number of currently available maps.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
2.7.14 GetMapsPathsOptions() method
Description
The GetMapsPathsOptions() method retrieves the paths of all
currently available maps.
C++ syntax
IOPTIONS:: GetMapsPathsOptions
Type
HRESULT GetMapsPathsOptions(
[in] int csize,
[out, size_is(csize)] BSTR * a_maps )
Parameters The method takes the following parameters:
Parameter Signification
csize
Specifies the size of the a_maps array. This
value should be retrieved by calling
GetMapsNumberOptions().
a_maps
Pointer to an array of BSTR variables which
contains paths of currently available maps.
Return values The method returns one of the following values:
Return value Signification
S_OK
S_FALSE
Done
Error
- 98 - IOPTIONS
 Loading...
Loading...