

查询COP87L84供应商
COP87L84BC
8-Bit CMOS OTP Microcontrollers with 16k Memory,
Comparators, and CAN Interface
General Description
The COP87L84BC OTP (One Time Programmable) microcontrollers are highly integrated COP8
vices with 16k OTP EPROM memory and advanced features
including a CAN 2.0B (passive) interface and two Analog
comparators. These multi-chip CMOS devices are suited for
applications requiring a full featured controller with a CAN interface, and 8-bit 39 kHz PWM timer, and as pre-production
devices for a masked ROM design. Pin and software compatible 2k ROM versions are available (COP884BC) with a
range of COP8 software and hardware development tools.
™
Feature core de-
September 1999
Features include an 8-bit memory mapped architecture, 10
MHz CKI (-XE=crystal oscillator) with 1µs instruction cycle,
one multi-function 16-bit timer/counter, 8-bit 39 kHz PWM
timer with 2 outputs, CAN 2.0B (passive) interface,
MICROWIRE/PLUS
two power saving HALT/IDLE modes, idle timer, MIWU, software selectable I/O options, low EMI 4.5V to 5.5V operation,
and 28 pin packages.
Note: The companion devices with CAN interface, more I/O
and memory, A/D, and USART are the COP87L88EB/RB.
Device included in this datasheet is:
™
serial I/O, two Analog comparators,
COP87L84BC 8-Bit CMOS OTP Microcontrollers with 16k Memory, Comparators, and CAN
Interface
Device Memory (bytes) RAM (bytes) I/O Pins Packages Temperature
COP87L84BC 16k OTP EPROM 64 18 28 SOIC -40 to +85˚C
Key Features
n CAN 2.0B (passive) Interface
n One 16-bit timer, with two 16-bit registers supporting:
— Processor Independent PWM mode
— External Event counter mode
— Input Capture mode
n High speed, constant resolution 8-bit PWM/frequency
monitor timer with 2 output pins
n 16 kbytes on-board OTP EPROM with security feature
n 64 bytes on-board RAM
Additional Peripheral Features
n Idle Timer
n Multi-Input Wake Up (MIWU) with optional interrupts (7)
n Two analog comparators
n MICROWIRE/PLUS serial I/O
I/O Features
n Memory mapped I/O
n Software selectable I/O options (TRI-STATE
Push-Pull Output, Weak Pull-Up Input, High Impedance
Input)
n Schmitt trigger inputs on ports G and L
n Packages: 28 SO with 18 I/O pins
®
Output,
CPU/Instruction Set Features
n 1 µs instruction cycle time
n Eleven multi-source vectored interrupts servicing
— External Interrupt
— Idle Timer T0
— Timer T1 (with 2 Interrupts)
— MICROWIRE/PLUS
— Multi-Input Wake Up
— Software Trap
— PWM Timer
— CAN Interface (with 3 interrupts)
n Versatile and easy to use instruction set
n 8-bit Stack Pointer (SP)—stack in RAM
n Two 8-bit Register Indirect Data Memory Pointers
(B and X)
Fully Static CMOS
n Two power saving modes: HALT and IDLE
n Single supply operation: 4.5V–5.5V
n Temperature ranges: −40˚C to +85˚C
Development Support
n Emulation device for COP884BC/COP885BC
n Real time emulation and full program debug offered by
MetaLink Development Systems
COP8™, and MICROWIRE/PLUS™are trademarks of National Semiconductor Corporation.
®
TRI-STATE
is a registered trademark of National Semiconductor Corporation.
®
iceMASTER
is a registered trademark of MetaLink Corporation.
© 1999 National Semiconductor Corporation DS101137 www.national.com
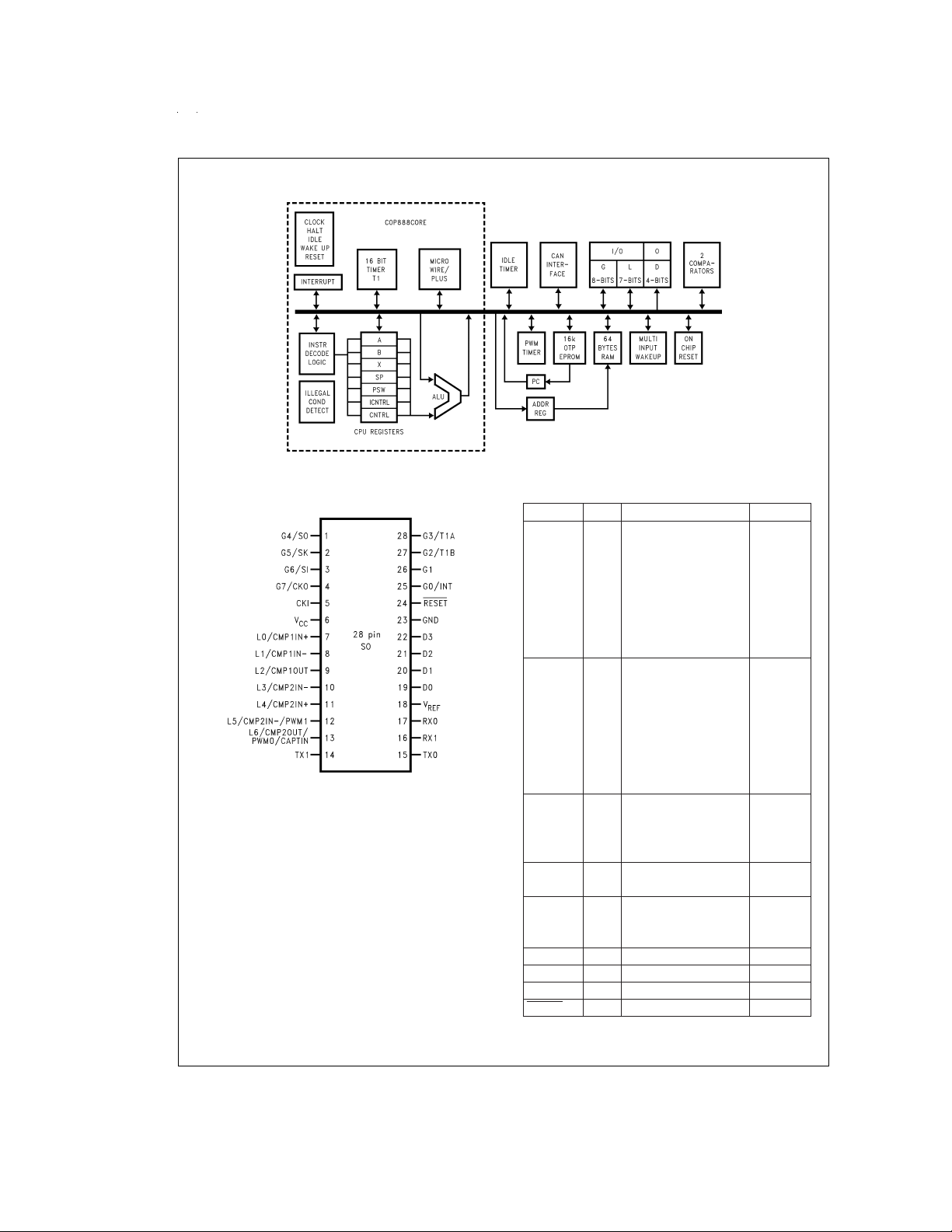
Block Diagram
Connection Diagrams
Note:X=Crystal Oscillator
E=Halt Mode Enabled
Order Number COP87L84BCM-XE
See NS Package Number M28B
FIGURE 2. Connection Diagrams
Top View
FIGURE 1. Block Diagram
Pinouts for 28-Pin SO Package
DS101137-2
DS101137-1
Port Pin Type Alt. Function 28-Pin SO
G0 I/O INTR 25
G1 I/O 26
G2 I/O T1B 27
G3 I/O T1A 28
G4 I/O SO 1
G5 I/O SK 2
G6 I SI 3
G7 I CKO 4
L0 I/O CMP1IN+/MIWU 7
L1 I/O CMP1IN−/MIWU 8
L2 I/O CMP10UT/MIWU 9
L3 I/O CMP2IN−/MIWU 10
L4 I/O CMP2IN+/MIWU 11
L5 I/O CMP2IN−/PWM1/MIWU 12
L6 I/O CMP2OUT/PWM0/
13
CAPTIN/MIWU
D0 O 19
D1 O 20
D2 O 21
D3 O 22
CAN V
REF
18
CAN Tx0 O 15
CAN Tx1 O 14
CAN Rx0 I MIWU 17
CAN Rx1 I MIWU 16
V
CC
6
GND 23
CKI I 5
RESET
I24
www.national.com 2
Absolute Maximum Ratings (Note 1)
If Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales Office/
Distributors for availability and specifications.
Supply Voltage (V
Voltage at Any Pin −0.3V to V
)6V
CC
CC
+0.3V
Total Current into V
Pin (Source) 90 mA
CC
Total Current out of GND Pin (Sink) 100 mA
Storage Temperature Range −65˚C to +150˚C
Note 1: Absolute maximum ratings indicate limits beyond which damage to
the device may occur. DC and AC electrical specifications are not ensured
when operating the device at absolute maximum ratings.
DC Electrical Characteristics
−40˚C ≤ TA≤ +85˚C
Parameter Conditions Min Typ Max Units
Operating Voltage 4.5 5.5 V
Power Supply Ripple (Note 2) Peak-to-Peak 0.1 V
Supply Current
CKI = 10 MHz (Note 3) V
HALT Current (Notes 4, 5) V
= 5.5V, tc=1µs 19 mA
CC
= 5.5V, CKI=0MHz
CC
Power-On Reset Enabled 480 µA
Power-On Reset Disabled 380 µA
IDLE Current (Note 5)
CKI = 10 MHz V
Input Levels (V
IH,VIL
)
= 5.5V, tc= 1 µs 5.5 mA
CC
Reset, CKI
Logic High 0.8 V
CC
Logic Low 0.2 V
All Other Inputs
Logic High 0.7 V
CC
Logic Low 0.2 V
Hi-Z Input Leakage V
Input Pull-up Current V
G and L Port Input Hysteresis 0.05 V
= 5.5V
CC
= 5.5V, VIN= 0V −40 −250 µA
CC
CC
Output Current Levels D Outputs
Source V
Sink V
= 4.5V, VOH= 3.3V −0.4 mA
CC
= 4.5V, VOL= 1.0V 10 mA
CC
Comparator Output (L2, L6)
Source (Push-Pull) V
Sink (Push-Pull) V
= 4.5V, VOH= 3.3V −1.6 mA
CC
= 4.5V, VOL= 0.4V 1.6 mA
CC
CAN Transmitter Outputs
Source (Tx1) V
Sink (Tx0) V
= 4.5V, VOH=VCC− 0.1V −1.5 mA
CC
V
= 4.5V, VOH=VCC− 0.6V −10 mA
CC
= 4.5V, VOL= 0.1V 1.5 mA
CC
V
= 4.5V, VOL= 0.6V 10 mA
CC
All Others
Source (Weak Pull-Up) V
Source (Push-Pull) V
Sink (Push-Pull) V
TRl-STATE Leakage V
= 4.5V, VOH= 2.7V −10 −110 µA
CC
= 4.5V, VOH= 3.3V −0.4 mA
CC
= 4.5V, VOL= 0.4V 1.6 mA
CC
= 5.5V
CC
Allowable Sink/Source Current per
Pin
D Outputs (Sink) 15 mA
Tx0 (Sink) 30 mA
Tx1 (Source)
All Other
CC
CC
CC
±
2µA
±
2.0 µA
30
3
V
V
V
V
V
V
mA
mA
www.national.com3
DC Electrical Characteristics (Continued)
−40˚C ≤ TA≤ +85˚C
Parameter Conditions Min Typ Max Units
Maximum Input Current
without Latchup Room Temp
RAM Retention Voltage, V
r
500 ns Rise and Fall Time 2.0 V
Input Capacitance 7pF
Load Capacitance on D2 1000 pF
Note 2: Maximum rate of voltage change must be less than 0.5 V/ms
Note 3: Supply current is measured after running 2000 cycles with a square wave CKI input, CKO open, inputs at V
Note 4: The HALTmode will stop CKI from oscillating in the Crystal configurations. Halt test conditions: All inputs tied to V
and programmed low; D outputs programmed low. Parameter refers to HALT mode entered via setting bit 7 of the G Port data register. Part will pull up CKI during
HALT in crystal clock mode.
Note 5: HALT and IDLE current specifications assume CAN block and comparators are disabled.
or GND, and outputs open.
CC
; L, and G port I/Os configured as outputs
CC
±
100 mA
www.national.com 4
Absolute Maximum Ratings (Note 1)
If Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales Office/
Distributors for availability and specifications.
Supply Voltage (V
Voltage at Any Pin −0.3V to V
)6V
CC
CC
+0.3V
Total Current into V
Pin (Source) 90 mA
CC
Total Current out of GND Pin (Sink) 100 mA
Storage Temperature Range −65˚C to +150˚C
Note 6: Absolute maximum ratings indicate limits beyond which damage to
the device may occur. DC and AC electrical specifications are not ensured
when operating the device at absolute maximum ratings.
AC Electrical Characteristics:
−40˚C ≤ TA≤ +85˚C
Parameter Conditions Min Typ Max Units
Instruction Cycle Time (t
Crystal/Resonator V
Inputs
t
SETUP
t
HOLD
PWM Capture Input
t
SETUP
t
HOLD
Output Propagation Delay
(t
)C
PD1,tPD0
SK, SO V
PWM Outputs V
All Others V
MICROWIRE
Setup Time (t
Hold Time (t
UWS
UWH
Output Prop Delay (t
Input Pulse Width
Interrupt High Time 1 t
Interrupt Low Time 1 t
Timer 1,2 High Time 1 t
Timer 1,2 Low Time 1 t
Reset Pulse Width 1.0 µs
Power Supply Rise Time for Proper 50 µs 256*t
Operation of On-Chip RESET
Note 7: For device testing purposes of all AC parameters, VOHwill be tested at 0.5*VCC.
Note 8: The output propagation delay is referenced to the end of the instruction cycle where the output change occurs.
Note 9: Parameter not tested.
Note 10: t
= Instruction Cycle Time.
c
)
c
≥ 4.5V 1.0 DC µs
CC
VCC≥ 4.5V 200 ns
VCC≥ 4.5V 60 ns
VCC≥ 4.5V 30 ns
VCC≥ 4.5V 70 ns
= 100 pF, RL= 2.2 kΩ
L
≥ 4.5V 0.7 µs
CC
≥ 4.5V 75 ns
CC
≥ 4.5V 1 µs
CC
)20ns
)56ns
) 220 ns
UPD
c
c
c
c
c
On-Chip Voltage Reference:
−40˚C ≤ TA≤ +85˚C
Parameter Conditions Min Max Units
<
Reference Voltage I
V
REF
Reference Supply Current, I
I
DD
Note 11: Reference supply IDDis supplied for information purposes only, it is not tested.
80 µA, 0.5 VCC−0.12 0.5 VCC+0.12 V
OUT
VCC=5V
= 0A, (No Load) 120 µA
OUT
VCC= 5V (Note 11)
www.national.com5
Comparator DC/AC Characteristics:
4.5V ≤ VCC≤ 5.5V, −55˚C ≤ TA≤ +125˚C
Parameter Conditions Min Typ Max Units
<
<
V
Input Offset Voltage 0.4V
IN
VCC−1.5V
Input Common Mode Voltage Range 0.4 V
±
10
±
25 mV
−1.5 V
CC
Voltage Gain 300k V/V
Outputs Sink/Source See I/O-Port DC Specifications
DC Supply Current (when enabled) V
= 6.0V 250 µA
CC
Response Time TBD mV Step, TBD mV Overdrive, 1 µs
100 pF Load
CAN Comparator DC and AC Characteristics:
4.8V ≤ VCC≤ 5.2V, −40˚C ≤ TA≤ +125˚C
Parameters Conditions Min Typ Max Units
±
Differential Input Voltage
<
Input Offset Voltage 1.5V
V
IN
<
VCC− 1.5V
Input Common Mode Voltage Range 1.5 V
Input Hysteresis 8mV
25 mV
±
10 mV
− 1.5 V
CC
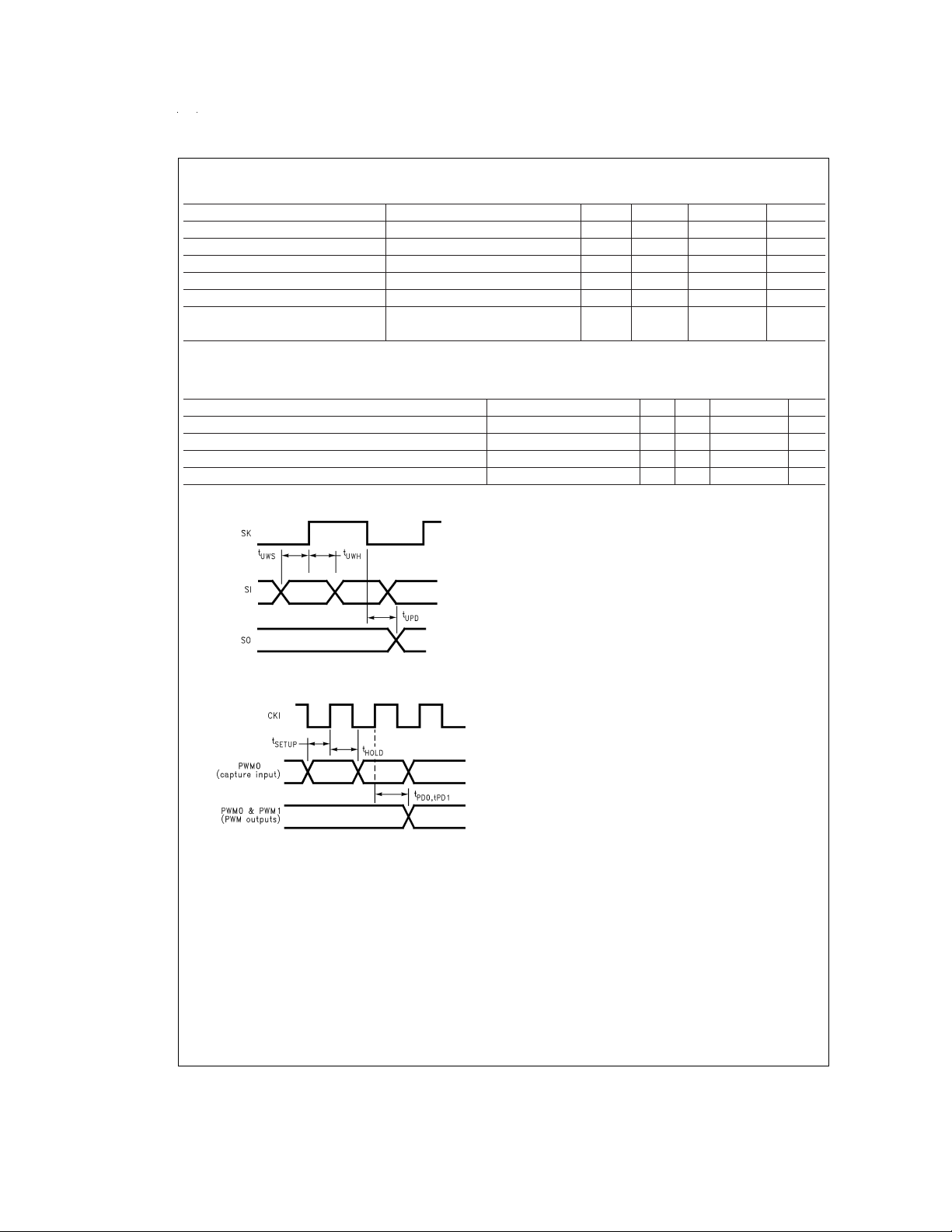
DS101137-3
FIGURE 3. MICROWIRE/PLUS Timing Diagram
DS101137-4
FIGURE 4. PWM/CAPTURE Timer
Input/Output Timing Diagram
www.national.com 6
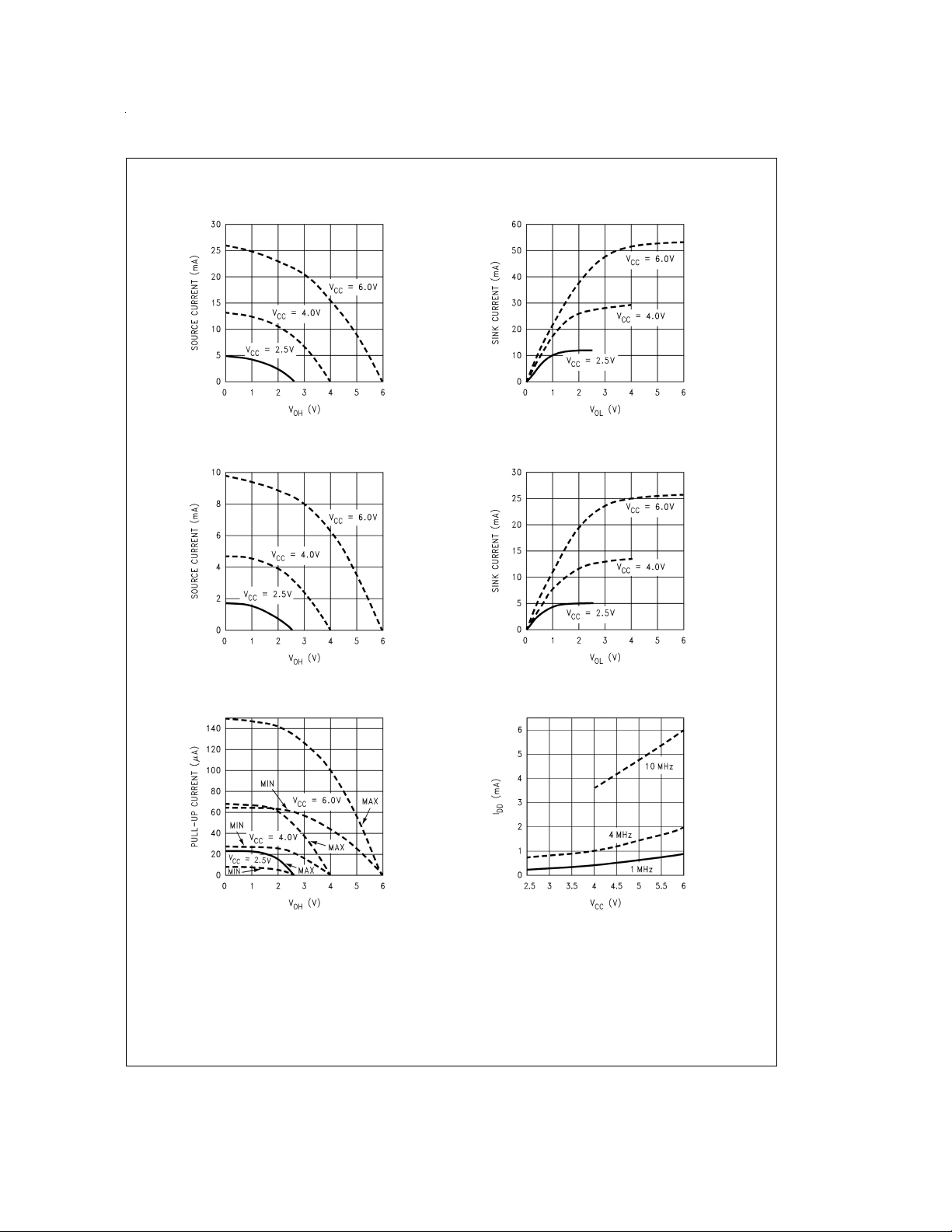
Typical Performance Characteristics −55˚C ≤ T
Port D Source Current
Port D Sink Current
≤ +125˚C
A
Ports G/L Source Current
Ports G/L Weak Pull-Up Source Current
DS101137-39
DS101137-41
Port G/L Sink Current
Dynamic IDDvs V
CC
DS101137-40
DS101137-42
DS101137-43
DS101137-44
www.national.com7
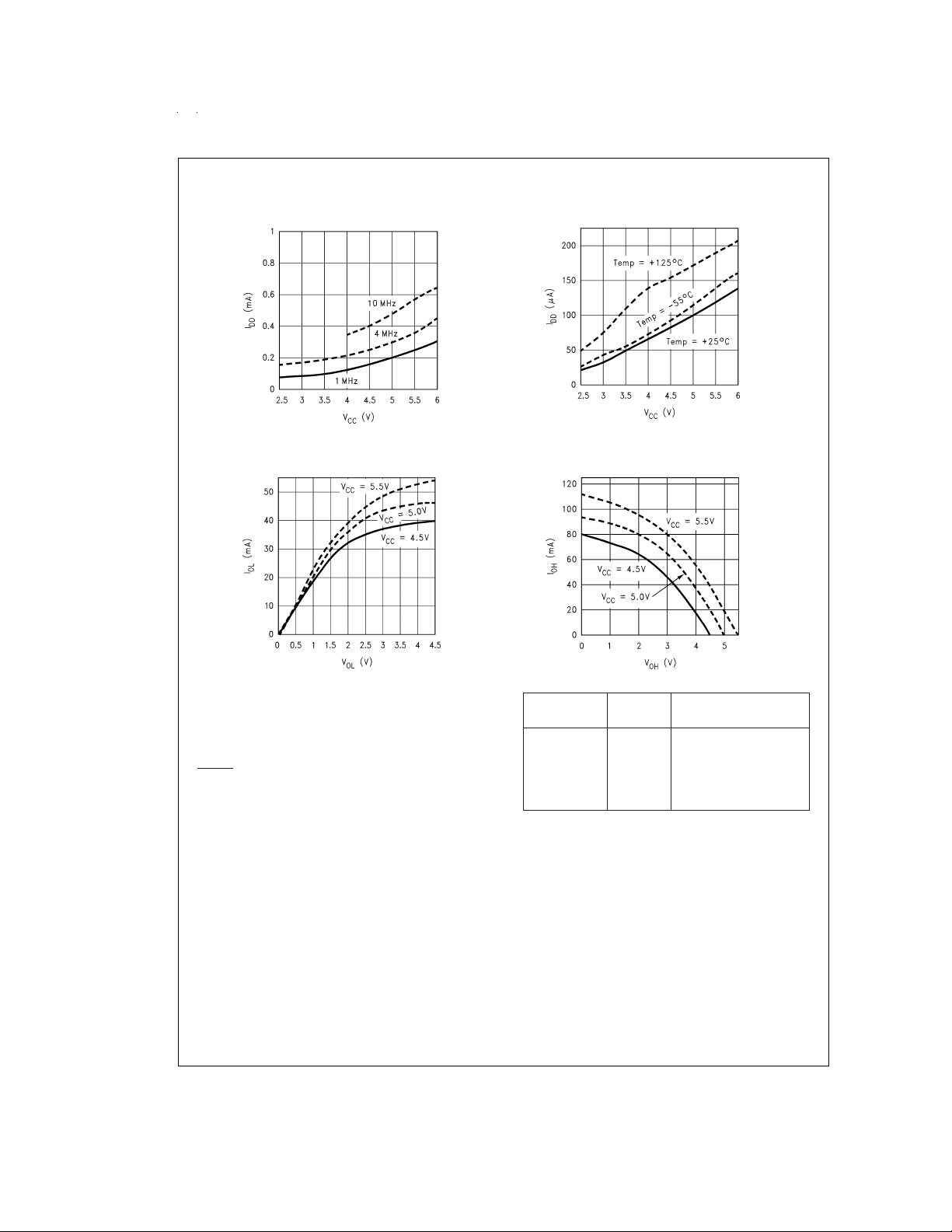
Typical Performance Characteristics −55˚C ≤ T
Idle I
vs V
DD
CC
Halt Supply Current
≤ +125˚C (Continued)
A
DS101137-45
CAN Tx0 Sink Current
DS101137-47
Pin Descriptions
VCCand GND are the power supply pins.
CKI is the clock input. The clockcan come from a crystalos-
cillator (in conjunction with CKO). See Oscillator Description
section.
RESET is the master reset input. See Reset Description section.
The device contains one bidirectional 8-bit I/O port (G), and
one 7-bit bidirectional I/O port (L) where each individual bit
may be independently configured as an input (Schmitt trigger inputs on ports G and L), output or TRI-STATE
program control. Three data memory address locations are
allocated for each of these I/O ports. Each I/O port has two
associated 8-bit memory mapped registers, the CONFIGURATION register and the output DATA register. A memory
mapped address is also reserved for the input pins of each
I/O port. (See the memory map for the various addresses associated with the I/O ports.)
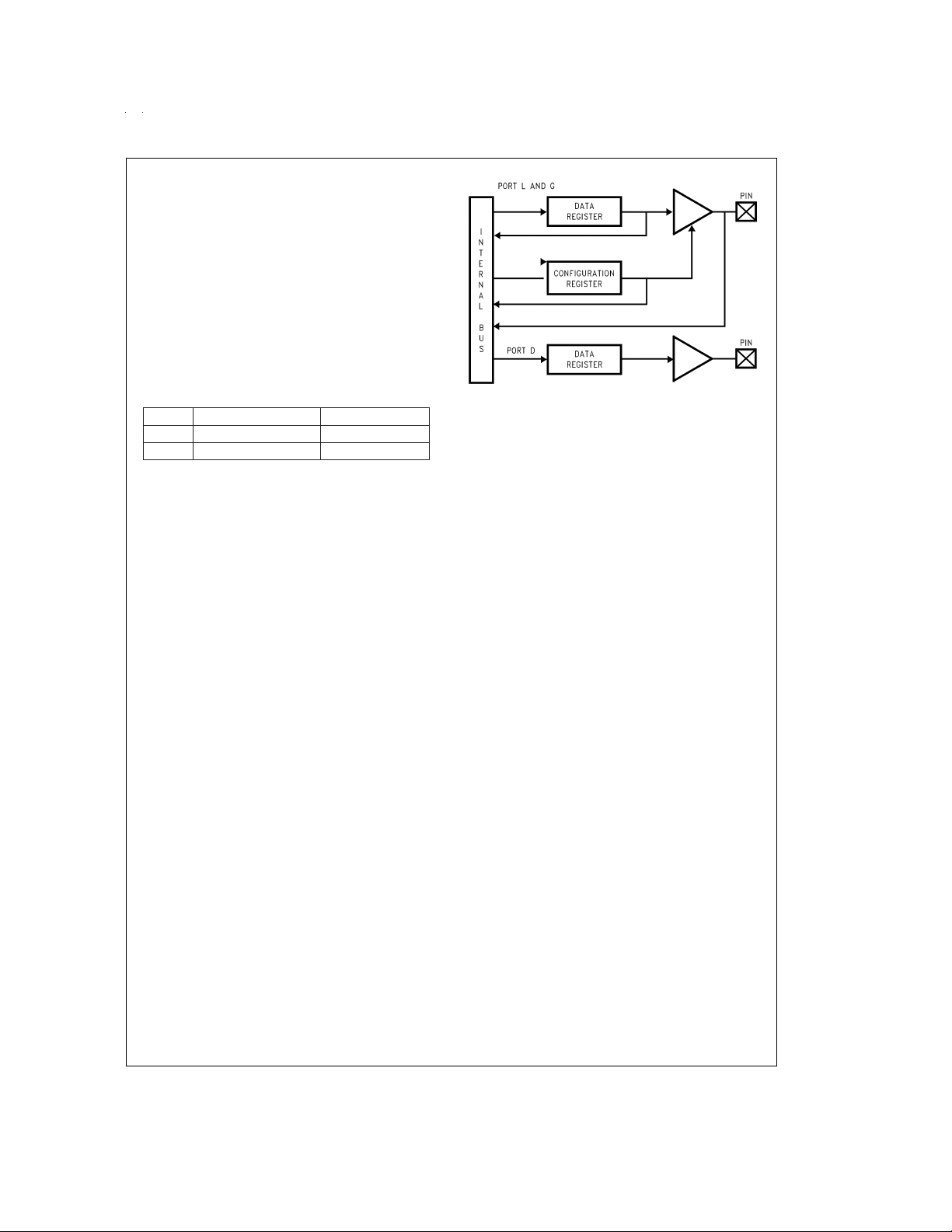
Figure 5
shows the I/O port configurations for the device. The DATAand CONFIGURATION
registers allow for each port bit to be individually configured
under software control as shown below:
®
under
DS101137-46
CAN Tx1 Source Current
DS101137-48
Configuration Data
Register Register
Port Set-Up
0 0 Hi-Z Input (TRI-STATE
Output)
0 1 Input with Weak Pull-Up
1 0 Push-Pull Zero Output
1 1 Push-Pull One Output
PORT L is a 7-bit I/O port. All L-pins have Schmitt triggers on
the inputs.
Port L supports Multi-Input Wake Up (MIWU) on all seven
pins.
Port L has the following alternate features:
L6 MIWU or CMP2OUT or PWM0 or CAPTIN
L5 MIWU or CMP2IN− or PWM1
L4 MIWU or CMP2IN+
L3 MIWU or CMP2IN−
L2 MIWU or CMP1OUT
L1 MIWU or CMP1IN−
L0 MIWU or CMP1IN+
Port G is an 8-bit port with 5 I/O pins (G0–G5), an input pin
(G6), and one dedicated output pin (G7). Pins G0–G6 all
have Schmitt Triggerson their inputs. G7 serves as the dedicated output pin for the CKO clock output. There are two reg-
www.national.com 8
Pin Descriptions (Continued)
isters associated with the G Port, a data register and a configuration register. Therefore, each of the 6 I/O bits (G0–G5)
can be individually configured under software control.
Since G6 is an input only pin and G7 is the dedicated CKO
clock output pin the associated bits in the data and configuration registers for G6 and G7 are used for special purpose
functions as outlined below. Reading the G6 and G7 data
bits will return zeroes.
Note that the chip will be placed in the HALT mode bywriting
a “1” to bit 7 of the Port G Data Register. Similarly the chip
will be placed in the IDLE mode by writing a “1” tobit 6 of the
Port G Data Register.
Writing a “1” to bit 6 of the Port G Configuration Register enables the MICROWIRE/PLUS to operate with the alternate
phase of the SK clock.
Config. Register Data Register
G7 HALT
G6 Alternate SK IDLE
CAN pins: For the on-chip CAN interface thisdevice has five
dedicated pins with the following features:
V
On-chip reference voltage with the value of VCC/2
REF
Rx0 CAN receive data input pin.
Rx1 CAN receive data input pin.
Tx0 CAN transmit data output pin. This pin may beput in
the TRI-STATE mode with the TXEN0 bit in the CAN
Bus control register.
Tx1 CAN transmit data output pin. This pin may beput in
the TRI-STATE mode with the TXEN1 bit in the CAN
Bus control register.
Port G has the following alternate features:
G6 SI (MICROWIRE Serial Data Input)
G5 SK (MICROWIRE Serial Clock)
G4 SO (MICROWIRE Serial Data Output)
G3 T1A (Timer T1 I/O)
G2 T1B (Timer T1 Capture Input)
G0 INTR (External Interrupt Input)
Port G has the following dedicated function:
G7 CKO Oscillator dedicated output
Port D is a 4-bit output port that is preset high when RESET
goes low. The user can tie two or more D port outputs (except D2) together in order to get a higher drive.
Note: Care must be exercised with the D2 pin operation. At RESET, the ex-
ternal loads on this pin must ensure that the output voltages stay
above 0.8 V
keep the external loading on D2 to less than 1000 pF.
to prevent the chip from entering special modes. Also
CC
DS101137-5
FIGURE 5. I/O Port Configurations
Functional Description
The architecture of the device utilizes a modifiedHarvard architecture. With the Harvard architecture, the control store
program memory (ROM) is separated from the data store
memory (RAM). Both ROM and RAM have their own separate addressing space with separate address buses. The architecture, though based on Harvard architecture, permits
transfer of data from ROM to RAM.
CPU REGISTERS
The CPU can do an 8-bit addition, subtraction, logical or shift
operation in one instruction (t
There are five CPU registers:
A is the 8-bit Accumulator Register
PC is the 15-bit Program Counter Register
PU is the upper 7 bits of the program counter (PC)
PL is the lower 8 bits of the program counter (PC)
B is an 8-bit RAM address pointer, which can be optionally
post auto incremented or decremented.
X is an 8-bit alternate RAM address pointer, which can be
optionally post auto incremented or decremented.
SP is the 8-bit stack pointer, which points to the subroutine/
interrupt stack (in RAM). The SP is initialized to RAM address 02F with reset.
All the CPU registers are memory mapped with the exception of the Accumulator (A) and the Program Counter (PC).
PROGRAM MEMORY
Program memory for the device consists of 16 kbytes of OTP
EPROM. These bytes may hold program instructions or constant data (data tables tor the LAID instruction, jump vectors
for the JID instruction, and interrupt vectors for the VIS instruction). The program memory is addressed by the 15-bit
program counter (PC). All interrupts in the device vector to
program memory location 0FF Hex.
The device can be configured to inhibit external reads of the
program memory. This is done by programming the Security
Byte.
SECURITY FEATURE
The program memory array has an associate Security Byte
that is located outside of the program address range. This
byte can be addressed only from programming mode by a
programmer tool.
) cycle time.
c
www.national.com9
Functional Description (Continued)
Security is an optional feature and can only be asserted after
the memory array has been programmed and verified. A secured part will read all 00(hex) by a programmer. The part
will fail Blank Check and will fail Verify operations. A Read
operation will fill the programmer’s memory with 00(hex).
The Security Byte itself is always readable with value of
00(hex) if unsecure and FF(hex) if secure.
DATA MEMORY
The data memory address space includes the on-chip RAM
and data registers, the I/O registers (Configuration, Data and
Pin), the control registers, the MICROWIRE/PLUS SIO shift
register, and the various registers, and counters associated
with the timers (with the exception of the IDLE timer). Data
memory is addressed directly by the instruction or indirectly
by the B, X and SP pointers.
The device has 64 bytes of RAM. Sixteen bytes of RAM are
mapped as “registers” at addresses 0F0 to 0FF Hex. These
registers can be loaded immediately, and also decremented
and tested with the DRSZ (decrement register and skip if
zero) instruction. The memory pointer registers X, SP, and B
are memory mapped into this space at address locations
0FC to 0FE Hex respectively, with the other registers (other
than reserved register 0FF) being available for general usage.
The instruction set permits any bit in memory to beset, reset
or tested. All I/O and registers (except A and PC) are
memory mapped; therefore, I/O bits and register bits can be
directly and individually set, reset and tested. The accumulator (A) bits can also be directly and individually tested.
Note: RAM contents are undefined upon power-up.
RESET
The RESET input when pulled low initializes the microcontroller. lnitialization will occur whenever the RESET input is
pulled low. Upon initialization, the data and configuration
registers for Ports L and G, are cleared, resulting in these
Ports being initialized to the TRI-STATE mode. Port D is initialized high with RESET. The PC, PSW, CNTRL, and ICNTRL control registers are cleared. The Multi-Input Wake Up
registers WKEN, WKEDG, and WKPND are cleared. The
Stack Pointer, SP, is initialized to 02F Hex.
The following initializations occur with RESET:
Port L: TRI-STATE
Port G: TRI-STATE
Port D: HIGH
PC: CLEARED
PSW, CNTRL and ICNTRL registers: CLEARED
Accumulator and Timer 1:
RANDOM after RESET with power already applied
RANDOM after RESET at power-on
SP (Stack Pointer): Loaded with 2F Hex
CMPSL (Comparator control register): CLEARED
PWMCON (PWM control register): CLEARED
B and X Pointers:
UNAFFECTED after RESET with power already applied
RANDOM after RESET at power-up
RAM:
UNAFFECTED after RESET with power already applied
RANDOM after RESET at power-up
CAN:
The CAN Interface comes out of external reset in the
“error-active” state and waits until the user’s software
sets either one or both of the TXEN0, TXEN1 bits to “1”.
After that, the device will not start transmission or reception of a frame until eleven consecutive “recessive” (undriven) bits have been received. This is done to ensure
that the output drivers are not enabled during an active
message on the bus.
CSCAL, CTlM, TCNTL, TEC, REC: CLEARED
RTSTAT: CLEARED with the exception of the TBE bit
which is set to 1
RID, RIDL, TID, TDLC: RANDOM
ON-CHIP POWER-ON RESET
The device is designed with an on-chip power-on reset circuit which will trigger a 256 t
minimum RAM retention voltage (V
oscillator to stabilize before the device exits the reset state.
delay as VCCrises above the
c
). This delay allows the
r
The contents of data registers and RAM are unknown following an on-chip power-on reset. The external reset takes priority over the on-chip reset and will deactivate the 256 t
lay if in progress.
de-
c
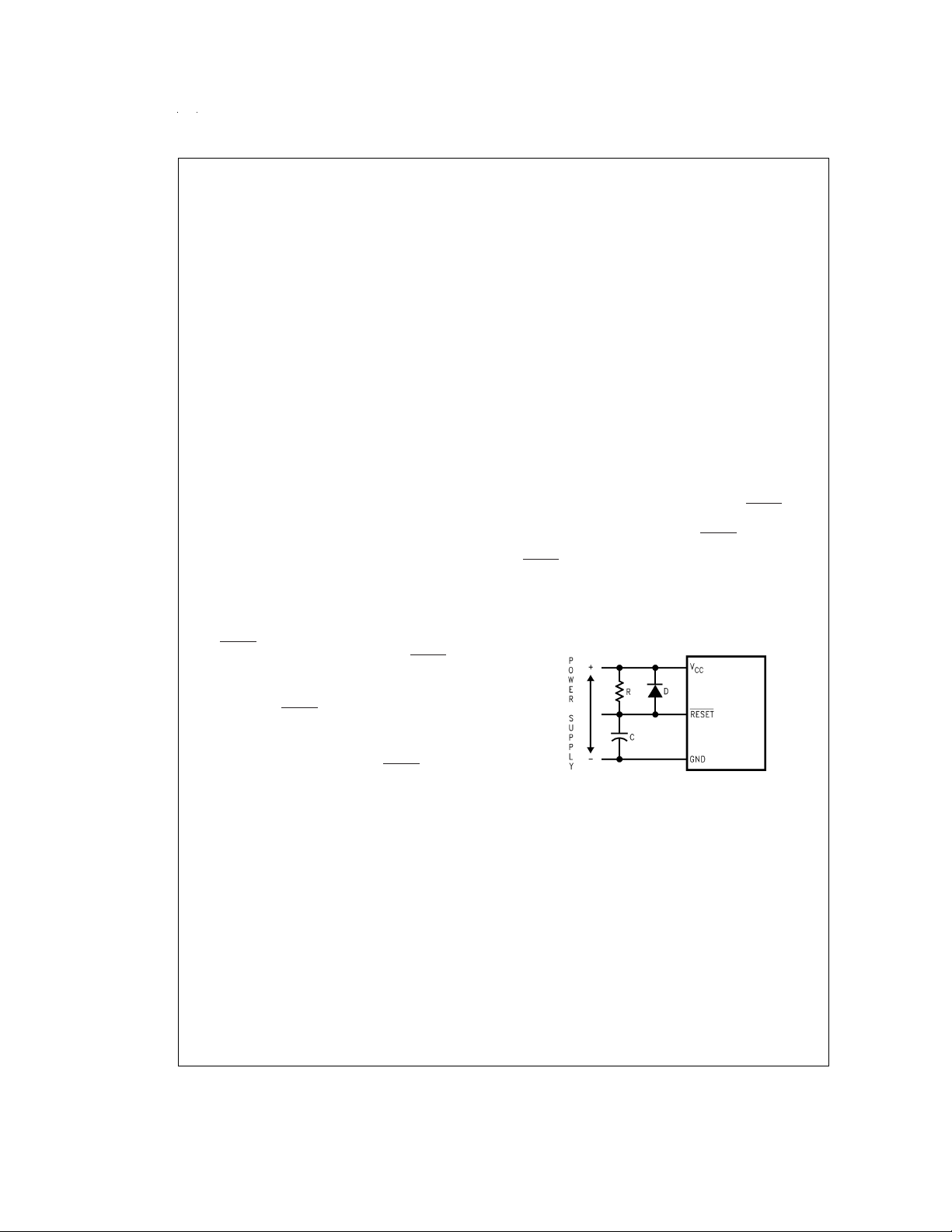
When using external reset, the external RC network shown
in
Figure 6
should be used to ensure that the RESET pin is
held low until the power supply to the chip stabilizes.
Under no circumstances should the RESET pin be allowed
to float. If the on-chip power-on reset feature is being used,
RESET should be connected directly to V
the Power Supply Rise Time requirements specified in the
. Be aware of
CC
DC Specifications Table. These requirements must be met
for the on-chip power-on reset to function properly.
The on-chip power-on reset circuit may reset the device if
the operating voltage (V
RC>5 x Power Supply Rise Time
) goes below Vr.
CC
DS101137-6
FIGURE 6. Recommended Reset Circuit
Oscillator Circuits
The chip can be driven by a clock input on the CKI input pin
which can be between DC and 10 MHz. The CKO output
clock is on pin G7. The CKI input frequency is divided by 10
to produce the instruction cycle clock (1/t
Figure 7
shows the Crystal diagram.
).
c
www.national.com 10

Oscillator Circuits (Continued)
DS101137-7
FIGURE 7. Crystal Oscillator Diagram
CRYSTAL OSCILLATOR
CKI and CKO can be connected to make a closedloop crystal (or resonator) controlled oscillator.
Table 1
shows the component values required for various
standard crystal values.
TABLE 1. Crystal Oscillator Configuration, T
R1 R2 C1 C2 CKI Freq.
(kΩ)(MΩ) (pF) (pF) (MHz)
0 1 30 30–36 10 V
0 1 30 30–36 4 V
0 1 200 100–150 0.455 V
= 25˚C
A
Conditions
=5V
CC
=5V
CC
=5V
CC
T1ENA Timer T1 Interrupt Enable for Timer Underflow
or T1A Input capture edge
EXPND External interrupt pending
BUSY MICROWIRE/PLUS busy shifting flag
EXEN Enable external interrupt
GIE Global interrupt enable (enables interrupts)
The Half-Carry flag is also affected by all the instructions that
affect the Carry flag. The SC (Set Carry) and R/C (Reset
Carry) instructions will respectively set or clear both the carry
flags. In addition to the SC and R/C instructions, ADC,
SUBC, RRC and RLC instructions affect the Carry and Half
Carry flags.
ICNTRL Register (Address X'00E8)
Reserved LPEN T0PND T0EN µWPND µWEN T1PNDB T1ENB
Bit 7 Bit 0
The ICNTRL register contains the following bits:
Reserved This bit is reserved and must be zero.
LPEN L Port Interrupt Enable (Multi-Input Wakeup/
Interrupt)
T0PND Timer T0 Interrupt pending
T0EN Timer T0 Interrupt Enable (Bit 12 toggle)
µWPND MICROWIRE/PLUS interrupt pending
µWEN Enable MICROWIRE/PLUS interrupt
T1PNDB Timer T1 Interrupt Pending Flag for T1B cap-
ture edge
T1ENB Timer T1 Interrupt Enable for T1B Input cap-
ture edge
Control Registers
CNTRL Register (Address X'00EE)
T1C3 T1C2 T1C1 T1C0 MSEL IEDG SL1 SL0
Bit 7 Bit 0
The Timer1 (T1) and MICROWIRE/PLUS control register
contains the following bits:
T1C3 Timer T1 mode control bit
T1C2 Timer T1 mode control bit
T1C1 Timer T1 mode control bit
T1C0 Timer T1 Start/Stop control in timer
modes 1 and 2, T1 Underflow Interrupt
Pending Flag in timer mode 3
MSEL Selects G5 and G4 as MICROWIRE/PLUS
signals SK and SO respectively
IEDG External interrupt edge polarity select
(0 = Rising edge, 1 = Falling edge)
SL1 & SL0 Select the MICROWIRE/PLUS clock divide
by (00 = 2, 01 = 4, 1x = 8)
PSW Register (Address X'00EF)
HC C T1PNDA T1ENA EXPND BUSY EXEN GIE
Bit 7 Bit 0
The PSW register contains the following select bits:
HC Half Carry Flag
C Carry Flag
T1PNDA Timer T1 Interrupt Pending Flag (Autoreload
RA in mode 1, T1 Underflow in Mode 2, T1A
capture edge in mode 3)
Timers
The device contains a very versatile set of timers (T0, T1,
and an 8-bit PWM timer). All timers and associated
autoreload/capture registers power up containing random
data.
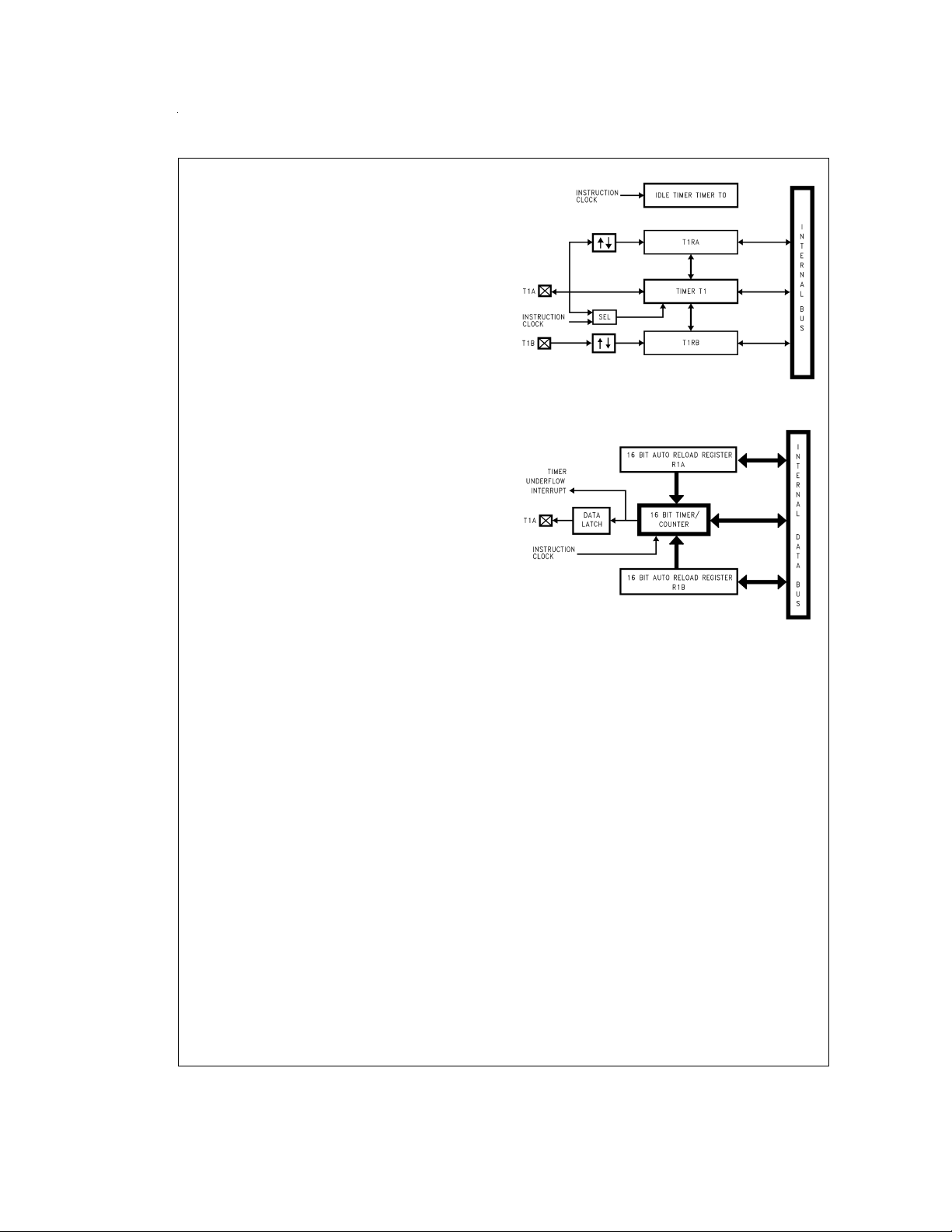
Figure 8
shows a block diagram for timers T1 and T0 on the
device.
TIMER T0 (IDLE TIMER)
The device supports applications that require maintaining
real time and low power with the IDLE mode. This IDLE
mode support is furnished by the IDLE timer T0, which is a
16-bit timer. The Timer T0 runs continuously at the fixed rate
of the instruction cycle clock, t
write to the IDLE Timer T0, which is a count down timer.
The Timer T0 supports the following functions:
Exit out of the Idle Mode (See Idle Mode description)
Start up delay out of the HALT mode
The IDLE Timer T0 can generate an interrupt when the thirteenth bit toggles. This toggle is latched into the T0PND
pending flag, and will occur every 4.096 ms at the maximum
clock frequency (t
terrupt from the thirteenth bit of Timer T0 to be enabled or
= 1 µs). A control flag T0EN allows the in-
c
disabled. Setting T0EN will enable the interrupt, while resetting it will disable the interrupt.
TIMER T1
The device has a powerful timer/counter block, T1.
The timer block consists of a 16-bit timer, T1, and two sup-
porting 16-bit autoreload/capture registers, R1A and R1B.
The timer block has two pins associated with it, T1A and
T1B. The pin T1A supports I/O required by the timer block,
. The user cannot read or
c
www.national.com11
Timers (Continued)
while the pin T1B is an input to the timer block.The powerful
and flexible timer block allows the device to easily perform all
timer functions with minimal software overhead. The timer
block has three operating modes: Processor Independent
PWM mode, External Event Counter mode, and Input Capture mode.
The control bits T1C3, T1C2, and T1C1 allow selection of the
different modes of operation.
Mode 1. Processor Independent PWM Mode
As the name suggests, this mode allows the device to generate a PWM signal with very minimal user intervention.
The user only has to define the parameters of the PWM signal (ON time and OFF time). Once begun, the timer block will
continuously generate the PWM signal completely independent of the microcontroller. The user software services the
timer block only when the PWM parameters require updating.
In this mode the timer T1 counts down at a fixed rate of t
Upon every underflow the timer is alternately reloaded with
the contents of supporting registers, R1Aand R1B. The very
first underflow of the timer causes the timer to reload from
the register R1A. Subsequent underflows cause the timer to
be reloaded from the registers alternately beginning with the
register R1B.
The T1 Timer control bits, T1C3, T1C2 and T1C1 set up the
timer for PWM mode operation.
Figure 9
shows a block diagram of the timer in PWM mode.
The underflows can be programmed to toggle the T1Aoutput
pin. The underflows can also be programmed to generate interrupts.
Underflows from the timer are alternately latched into two
pending flags, T1PNDA and T1PNDB. The user must reset
these pending flags under software control. Two control enable flags, T1ENAand T1ENB, allow the interrupts from the
timer underflow to be enabled or disabled. Setting the timer
enable flag T1ENA will cause an interrupt when a timer underflow causes the R1A register to be reloaded into the
timer. Setting the timer enable flag T1ENB will cause an interrupt when a timer underflow causes the R1B register to be
reloaded into the timer. Resetting the timer enable flags will
disable the associated interrupts.
Either or both of the timer underflow interrupts may be enabled. This gives the user the flexibility of interrupting once
per PWM period on either the rising or falling edge of the
PWM output. Alternatively, the user may choose to interrupt
on both edges of the PWM output.
FIGURE 8. Timers T1 and T0
.
c
FIGURE 9. Timer 1 in PWM MODE
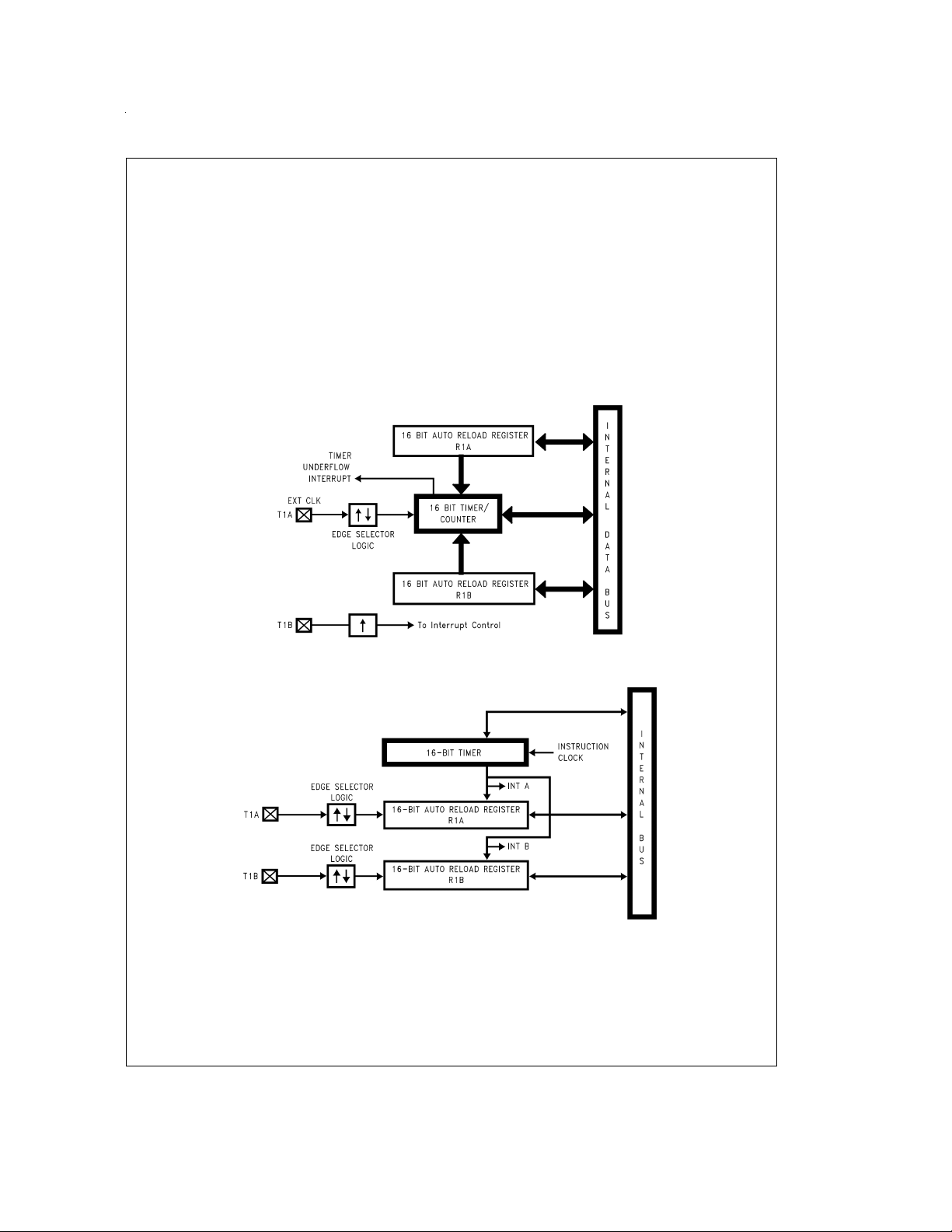
Mode 2. External Event Counter Mode
This mode is quite similar to the processor independent
PWM mode described above. The main difference is that the
timer,T1, is clocked by the input signal from theT1A pin. The
T1 timer control bits, T1C3, T1C2 and T1C1 allow the timer
to be clocked either on a positive or negative edge from the
T1A pin. Underflows from the timer are latched into the
T1PNDA pending flag. Setting the T1ENA control flag will
cause an interrupt when the timer underflows.
In this mode the input pin T1B can be used as an independent positive edge sensitive interrupt input if the T1ENB control flag is set. The occurrence of a positive edge on the T1B
input pin is latched into the T1PNDB flag.
Figure 10
shows a block diagram of the timer in External
Event Counter mode.
Note: The PWM output is not available in this mode since the T1A pin is be-
ing used as the counter input clock.
Mode 3. Input Capture Mode
The device can precisely measure external frequencies or
time external events by placing the timer block, T1, in the input capture mode.
In this mode, the timer T1 is constantly running at the fixed t
rate. The two registers, R1A and R1B, act as capture registers. Each register acts in conjunction with a pin. The register
R1A acts in conjunction with the T1A pin and the register
R1B acts in conjunction with the T1B pin.
DS101137-8
DS101137-9
c
www.national.com 12
Timers (Continued)
The timer value gets copied over into the register when a
trigger event occurs on its corresponding pin. Control bits,
T1C3, T1C2 and T1C1, allow the trigger events to be specified either as a positive or a negative edge. The trigger condition for each input pin can be specified independently.
The trigger conditions can also be programmed to generate
interrupts. The occurrence of the specified trigger condition
on the T1A and T1B pins will be respectively latched into the
pending flags, T1PNDA and T1PNDB. The control flag
T1ENA allows the interrupt on T1A to be either enabled or
disabled. Setting the T1ENA flag enables interrupts to be
generated when the selected trigger condition occurs on the
T1A pin. Similarly, the flag T1ENB controls the interrupts
from the T1B pin.
Underflows from the timer can also be programmed to generate interrupts. Underflows are latched into the timer T1C0
pending flag (the T1C0 control bit serves as the timer underflow interrupt pending flag in the Input Capture mode). Consequently, the T1C0 control bit should be reset when entering the Input Capture mode. The timer underflow interrupt is
enabled with the T1ENA control flag. When a T1A interrupt
occurs in the Input Capture mode, the user must check both
the T1PNDA and T1C0 pending flags in order to determine
whether a T1A input capture or a timer underflow (or both)
caused the interrupt.
Figure 11
shows a block diagram of the timer in Input Cap-
ture mode.
FIGURE 10. Timer 1 in External Event Counter Mode
FIGURE 11. Timer 1 in Input Capture Mode
DS101137-10
DS101137-11
www.national.com13
Timers (Continued)
TIMER CONTROL FLAGS
T1PNDA Timer Interrupt Pending Flag
T1ENA Timer Interrupt Enable Flag
The control bits and their functions are summarized below.
T1C3 Timer mode control
T1C2 Timer mode control
T1C1 Timer mode control
T1PNDB Timer Interrupt Pending Flag
T1ENB Timer Interrupt Enable Flag
T1C0 Timer Start/Stop control in Modes 1 and 2 (Pro-
cessor Independent PWM and External Event
Counter), where 1 = Start, 0 = Stop
Timer Underflow Interrupt Pending Flag in
Mode 3 (Input Capture)
The timer mode control bits (T1C3, T1C2 and T1C1) are detailed below:
1 = Timer Interrupt Enabled
0 = Timer Interrupt Disabled
1 = Timer Interrupt Enabled
0 = Timer Interrupt Disabled
Mode T1C3 T1C2 T1C1 Description
1 0 1 PWM: T1A Toggle Autoreload RA Autoreload RB t
1
1 0 0 PWM: No T1A
Toggle
0 0 0 External Event
2
0 0 1 External Event
Counter
Counter
0 1 0 Captures: Pos. T1A Edge Pos. T1B Edge t
T1A Pos. Edge or Timer
T1B Pos. Edge Underflow
1 1 0 Captures: Pos. T1A Neg. T1B t
T1A Pos. Edge Edge or Timer Edge
3
0 1 1 Captures: Neg. T1A Neg. T1B t
T1B Neg. Edge Underflow
T1A Neg. Edge Edge or Timer Edge
T1B Neg. Edge Underflow
1 1 1 Captures: Neg. T1A Neg. T1B t
T1A Neg. Edge Edge or Timer Edge
T1B Neg. Edge Underflow
HIGH SPEED, CONSTANT RESOLUTION
PWM TIMER
The device has one processor independent PWM timer.The
PWM timer operates in two modes: PWM mode and capture
mode. In PWM mode the timer outputs can be programmed
to two pins PWM0 and PWM1. In capture mode, pin PWM0
functions as the capture input.
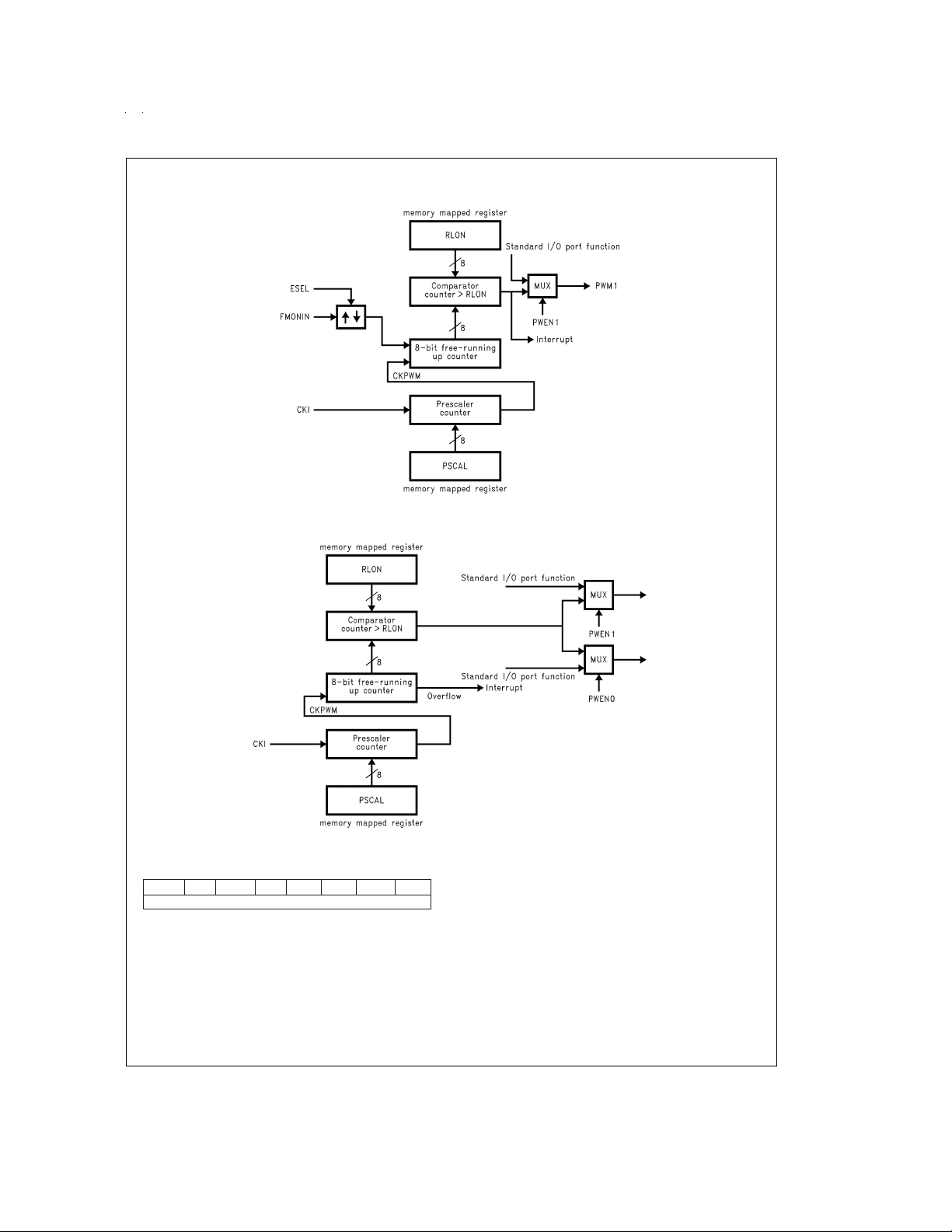
gram for this timer in capture mode and
Figure 12
shows a block dia-
Figure 13
shows a
block diagram for the timer in PWM mode.
PWM Timer Registers
The PWM Timer has three registers: PWMCON, the PWM
control register, RLON, the PWM on-time register and
PSCAL, the prescaler register.
PWM Prescaler Register (PSCAL)(Address X’00A0)
The prescaler is the clock source for the counter in both
PWM mode and in frequency monitor mode.
PSCAL is a read/write register that can be used to program
the prescaler.The clock source to the timer in both PWM and
capture modes can be programmed to CKI/N where N =
Interrupt A
Source
Autoreload RA Autoreload RB
Timer
Underflow
Timer
Underflow
Interrupt B
Source
Timer
Counts On
C
t
C
Pos. T1B Edge Pos. T1A
Edge
Pos. T1B Edge Pos. T1A
Edge
C
C
C
C
PSCAL + 1, so the maximum PWM clock frequency = CKI
and the minimum PWM clock frequency = CKI/256. The processor is able to modify the PSCAL register regardless of
whether the counter is running or not and the change in frequency occurs with the next underflow of the prescaler (CKPWM).
PWM On-time Register (RLON)(Address X’00A1)
RLON is a read/write register. In PWM mode the timer output
will be a “1” for RLON counts out of a total cycle of 255 PWM
clocks. In capture mode it is used to program the threshold
frequency.
The PWM timer is specially designed to have a resolution of
255 PWM clocks. This allows the duty cycle of the PWM output to be selected between 1/255 and 254/255. A value of 0
in the RLON register will result in the PWM output being continuously low and a value of 255 will result in the PWM output
being continuously high.
Note: The effect of changing the RLON register during active PWM mode op-
eration is delayed until the boundary of a PWM cycle. In capture mode
the effect takes place immediately.
www.national.com 14
Timers (Continued)
DS101137-12
FIGURE 12. PWM Timer Capture Mode Block Diagram
FIGURE 13. PWM Timer PWM Mode Block Diagram
PWM Control Register (PWMCON)(Address X’00A2)
Reserved ESEL PWPND PWIE PWMD PWON PWEN1 PWEN0
Bit 7 Bit 0
The PWMCON Register Bits are:
Reserved This bit is reserved and should be zero.
ESEL Edge select bit, “1” for falling edge, “0” for rising
edge.
PWPND PWM interrupt pending bit.
PWIE PWM interrupt enable bit.
PWMD PWM Mode bit, “1” for PWM mode, “0” for fre-
quency monitor mode.
PWON PWM start Bit, “1” to start timer, “0” to stop timer.
DS101137-13
PWEN1 Enable PWM1 output function on I/O port.
Note: The associated bits in the configuration and data register of the I/O-
port have to be setup as outputs and/or inputs in addition to setting the
PWEN bits.
PWEN0 Enable PWM0 output/input function on I/O port.
PWM Mode
The PWM timer can generate PWM signals at frequencies
up to 39 kHz (
@
tc= 1 µs) with a resolution of 255 parts.
Lower PWM frequencies can be programmed via the prescaler.
If the PWM mode bit (PWMD) in the PWM configurationregister (PWMCON) is set to “1” the timer operates in PWM
mode. In this mode, the timer generates a PWM signal with
www.national.com15
Timers (Continued)
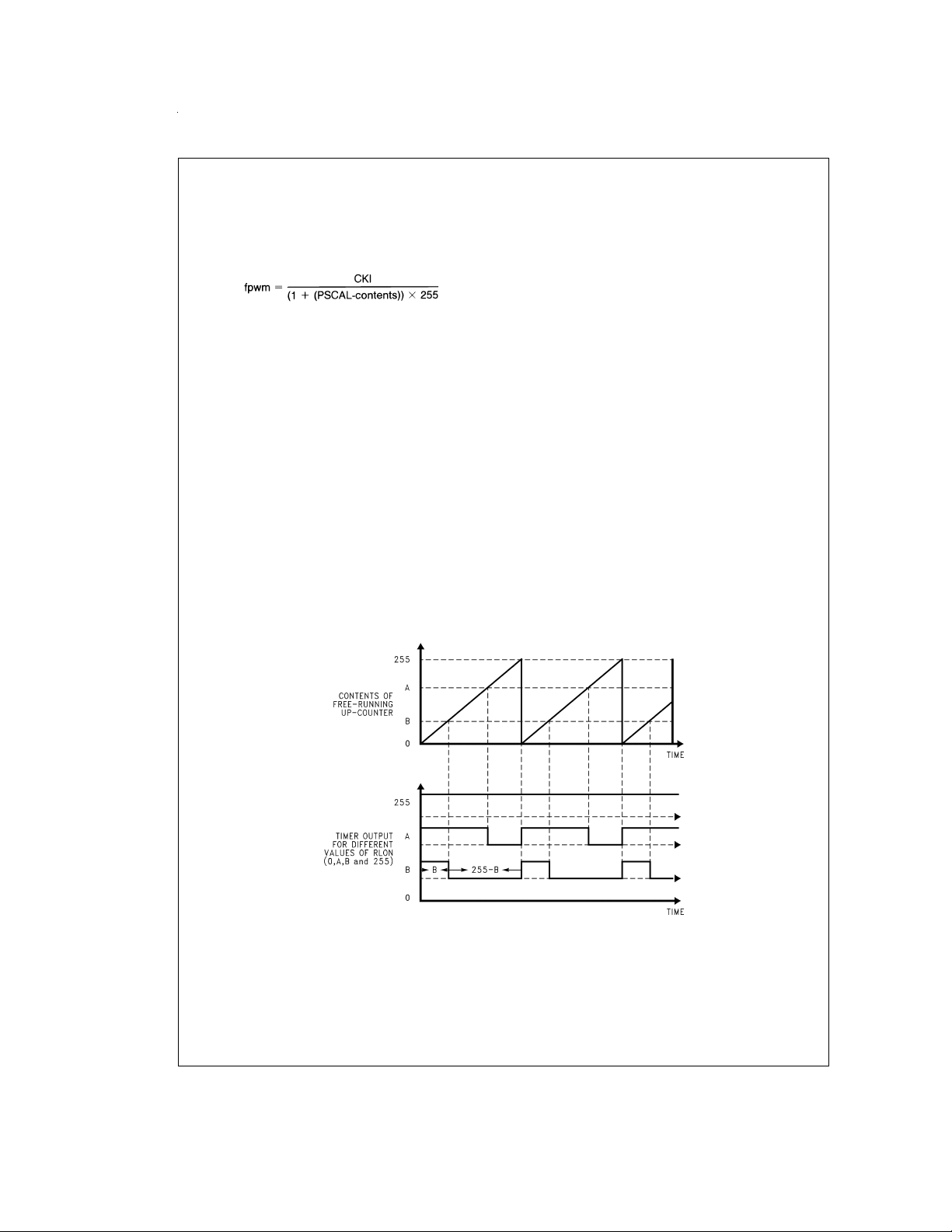
a fixed, non-programmable repetition rate of 255 PWM clock
cycles. The timer is clocked by the output of an 8-bit, programmable prescaler, which is clocked with the chip’s CKI
frequency. Thus the PWM signal frequency can be calculated with the formula:
Selecting the PWM mode by setting PWMD to “1”, but not
yet starting the timer (PWON is “0”), will set the timer output
to “1”.
The contents of an 8-bit register, RLON, multiplied by the
clock cycle of the prescaler output defines the time between
overflow (or starting) and the falling edge of the PWM output.
Once the timer is started, the timer output goes low after
RLON cycles and high after a total of 255cycles. The procedure is continually repeated. In PWM mode the timer is available at pins PWM0 and/or PWM1,provided the port configuration bits for those pins are defined as outputs and the
PWEN0 and/or PWEN1 bits in the PWMCON register are
set.
The PWM timer is started by the software setting the PWON
bit to “1”. Starting the timer initializes the timer register. From
this point, the timer will continually generate the PWM signal,
independent of any processor activity, until the timer is
stopped by software setting the PWON bit to “0”. The processor is able to modify the RLON register regardless of
whether the timer is running. If RLON is changed while the
timer is running, the previous value of RLON is used for comparison until the next overflow occurs, when the new value of
RLON is latched into the comparator inputs.
When the timer overflows, the PWM pending flag (PWPND)
is set to “1”. If the PWM interrupt enable bit (PWIE) is also
set to “1”, timer overflow will generate an interrupt. The
PWPND bit remains set until the user’s software writes a “0”
to it. If the software writes a “1” to the PWPND bit, this has no
effect. If the software writes a “0” to the PWPND bit at the
same time as the hardware writes to the bit, the hardware
has precedence.
Note: The software controlling the duty cycle is able to change the PWM duty
cycle without having to wait for the timer overflow.
Figure 14
shows how the PWM output is implemented. The
PWM Timer output is set to “1” on an overflow of the timer
and set to “0” when the timer is greater than RLON.The output can be multiplexed to two pins.
Capture Mode
If the PWM mode bit (PWMD) is set to “0” the PWM Timer
operates in capture mode. Capture mode allows the programmer to test whether the frequency of an external source
exceeds a certain threshold.
If PWMD is “0” and PWON is “0”, the timer output is set to
“0”. In capture mode the timer output is available at pin
PWM1, provided the port configuration register bit for that
pin is set up as an output and the PWEN1 bit in the
PWMCON register is set. Setting PWON to “1” will initialize
the timer register and start the counter.A rising edge, or if selected, a falling edge, on the FMONIN input pin will initialize
the timer register and clear the timer output. The counter
continues to count up after being initialized. The ESELbit determines whether the active edge is a rising or a falling edge.
FIGURE 14. PWM Mode Operation
If, in capture mode PWM0 is configured incorrectly as an
output and is enabled via the PWEN0 bit, the timer output
will feedback into the PWM block as the timer input.
The contents of the counter are continually compared with
the RLON register. If the frequency of the input edges is sufficiently high, the contents of the counter will always be less
www.national.com 16
DS101137-14
than the value in RLON. However, if the frequency of the input edges is too low, the free-running counter value will
count up beyond the value in RLON.
When the counter is greater than RLON, the PWM timer output is set to “1”. It is set to “0” by a detected edge on the timer
input or when the counter overflows. When the counter be-
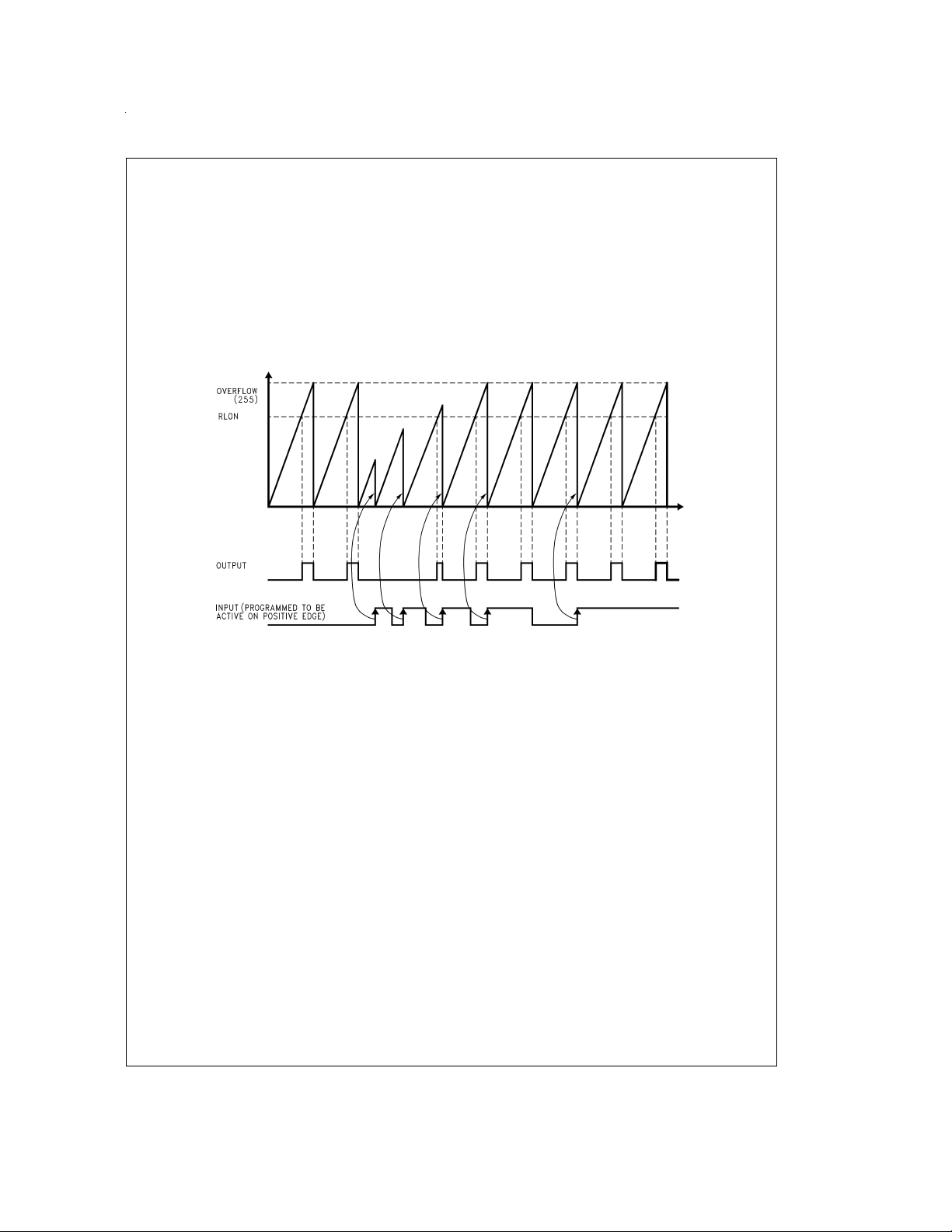
Timers (Continued)
comes greater than RLON, the PWPND bit in the PWM control register is set to “1”. If the PWIE bit is also set to “1”, the
PWPND bit is enabled to request an interrupt.
It should be noted that two other conditions could also set
the PWPND bit:
1. If the mode of operation is changed on the fly the timer
output will toggle. If frequency monitor mode is entered
on the fly such that the timer output changes from 0 to 1,
PWPND will be set.
2. If the timer is operating in frequency monitor mode and
the RLON value is changed on the fly so that RLON be-
comes less than the current timer value, PWPND will be
set.
The PWPND bit remains set until the user’s software writes
a “0” to it. If the software writes a “1” to the PWPND bit, this
has no effect. If the software writes a “0” to the PWPND bit at
the same time as the hardware writes to the bit, the hardware has precedence. (See
Figure 17
for Frequency Monitor
Mode Operation.)
Note: If the clock to the device stops while PWM0 is high,
and a subsequent Reset occurs while the clock is stopped,
the PWM0/L6 output will be put in the weak pull-up mode until the clock resumes.
FIGURE 15. Frequency Monitor Mode Operation
Power Save Modes
The device offers the user two power save modes of operation: HALT and IDLE. In the HALT mode, all microcontroller
activities are stopped. In the IDLE mode, the on-board oscillator circuitry and timer T0 are active but all other microcontroller activities are stopped. In either mode, all on-board
RAM, registers, I/O states, and timers (with the exception of
T0) are unaltered.
HALT MODE
The contents of all PWM Timer registers are frozen during
HALT mode and are left unchanged when exiting HALT
mode. The PWM timer resumes its previous mode of operation when exiting HALT mode.
The device is placed in the HALTmode by writing a “1” to the
HALT flag (G7 data bit). All microcontroller activities, including the clock, and timers, are stopped. In the HALT mode,
the power requirements of the device are minimal and the
applied voltage (V
without altering the state of the machine.
The device supports two different ways of exiting the HALT
mode. The first method of exiting the HALT mode is with the
Multi-Input Wake Up feature on the L port. The second
method of exiting the HALT mode is by pulling the RESET
pin low.
Since a crystal or ceramic resonator may be selected as the
oscillator, the Wake Up signal is not allowed to start the chip
) may be decreased to Vr(Vr= 2.0V)
CC
DS101137-15
running immediately since crystal oscillators and ceramic
resonators have a delayed start up time to reach full amplitude and frequency stability. The IDLE timer is used to generate a fixed delay to ensure that the oscillator has indeed
stabilized before allowing instruction execution. In this case,
upon detecting a valid WakeUp signal, only the oscillator circuitry is enabled. The IDLE timer is loaded with a value of
256 and is clocked with the t
clock is derived by dividing the oscillator clock down by a fac-
instruction cycle clock. The t
c
tor of 10. The Schmitt trigger following the CKI inverter on
the chip ensures that the IDLE timer is clocked only when the
oscillator has a sufficiently large amplitude to meet the
Schmitt trigger specifications. This Schmitt trigger is not part
of the oscillator closed loop. The start-up time-out from the
IDLE timer enables the clock signals to be routed to the rest
of the chip.
The device has two mask options associated with the HALT
mode. The first mask option enables the HALTmode feature,
while the second mask option disables the HALTmode. With
the HALT mode enable mask option, the device will enter
and exit the HALT mode as described above. With the HALT
disable mask option, the device cannot be placed in the
HALT mode (writing a “1” to the HALT flag will have no effect).
IDLE MODE
The device is placed in the IDLE mode bywriting a “1” to the
IDLE flag (G6 data bit). In this mode, all activities,except the
associated on-board oscillator circuitry, and the IDLE Timer
www.national.com17
c

Power Save Modes (Continued)
T0, are stopped. The power supply requirements of the microcontroller in this mode of operation are typically around
30%of normal power requirement of the microcontroller.
As with the HALT mode, the device can be returned to normal operation with a reset, or with a Multi-Input Wake Up
from the L Port or CAN Interface. Alternately, the microcontroller resumes normal operation from the IDLE mode when
the thirteenth bit (representing 4.096 ms at internal clockfrequency of 1 MHz, t
= 1 µs) of the IDLE Timer toggles.
c
This toggle condition of the thirteenth bit of the IDLE Timer
T0 is latched into the T0PND pending flag.
The user has the option of being interrupted with a transition
on the thirteenth bit of the IDLE Timer T0. The interrupt can
be enabled or disabled via the T0EN control bit. Setting the
T0EN flag enables the interrupt and vice versa.
The user can enter the IDLE mode with the Timer T0 interrupt enabled. In this case, when the T0PND bit gets set, the
device will first execute the TimerT0 interrupt service routine
and then return to the instruction following the “Enter Idle
Mode” instruction.
Alternatively, the user can enter the IDLE mode with the
IDLE TimerT0 interrupt disabled. In thiscase, the device will
resume normal operation with the instruction immediately
following the “Enter IDLE Mode” instruction.
Note: It is necessary to program two NOP instructions following both the set
HALT mode and set IDLE mode instructions. These NOP instructions
are necessary to allow clock resynchronization following the HALT or
IDLE modes.
Multi-Input Wake Up
The Multi-Input Wake Up feature is used to return (wake up)
the device from either the HALT or IDLE modes. Alternately,
the Multi-Input Wake Up/Interrupt feature may also be used
to generate up to 7 edge selectable external interrupts.
Figure 18
controller. The Multi-Input Wake Up feature utilizes the L
Port. The user selects which particular L port bit (or combination of L Port bits) will cause the device to exit the HALT or
IDLE modes. The selection is done through the Reg: WKEN.
The Reg: WKEN is an 8-bit read/write register, which contains a control bit for every L port bit. Setting a particular
WKEN bit enables a Wake Up from the associated port pin.
The user can select whether the trigger condition on the selected L Port pin is going to be either a positive edge (low to
shows the Multi-Input Wake Up logic for the micro-
high transition) or a negative edge (high to low transition).
This selection is made via the Reg: WKEDG, which is an
8-bit control register with a bit assigned to each L Port pin.
Setting the control bit will select the trigger condition to be a
negative edge on that particular L Port pin. Resetting the bit
selects the trigger condition to be a positive edge. Changing
an edge select entails several steps in order to avoid a
pseudo Wake Up condition as a result of the edge change.
First, the associated WKEN bit should be reset, followed by
the edge select change in WKEDG. Next, the associated
WKPND bit should be cleared, followed by the associated
WKEN bit being re-enabled.
An example may serve to clarify this procedure. Suppose we
wish to change the edge select from positive (low going high)
to negative (high going low) for L Port bit 5, where bit 5 has
previously been enabled for an input interrupt. The program
would be as follows:
RBIT 5, WKEN ; Disable MIWU
SBIT 5, WKEDG ; Change edge polarity
RBIT 5, WKPND ; Reset pending flag
SBIT 5, WKEN ; Enable MIWU
If the L port bits have been used as outputs and then
changed to inputs with Multi-Input Wake Up/Interrupt, a
safety procedure should also be followed to avoid inherited
pseudo wake up conditions. After the selected L port bits
have been changed from output to input but before the associated WKEN bits are enabled, the associated edge select
bits in WKEDG should be set or reset for the desired edge
selects, followed by the associated WKPND bits being
cleared.
This same procedure should be used following reset, since
the L port inputs are left floating as a result of reset. The occurrence of the selected trigger condition for Multi-Input
Wake Up is latched into a pending register called WKPND.
The respective bits of the WKPND register will be set on the
occurrence of the selected trigger edge on the corresponding Port L pin. The user has the responsibility of clearing
these pending flags. Since WKPND is a pending register for
the occurrence of selected wake up conditions, the device
will not enter the HALT mode if any Wake Up bit is both enabled and pending. Consequently, the user has the responsibility of clearing the pending flags before attempting to enter the HALT mode.
The WKEN, WKPND and WKEDG are all read/write registers, and are cleared at reset.
www.national.com 18

Multi-Input Wake Up (Continued)
FIGURE 16. Multi-Input Wake Up Logic
CAN RECEIVE WAKE UP
The CAN Receive Wake Up source is always enabled and is
always active on a falling edge of the CAN comparator output. There is no specific enable bit for the CAN Wake Up feature. Although the wake up feature on pins L0..L6 can be
programmed to generate an interrupt (L-port interrupt), no interrupt is generated upon a CAN receive wake up condition.
The CAN block has its own, dedicated receiver interrupt
upon receive buffer full.
PORT L INTERRUPTS
Port L provides theuser with an additional seven fullyselectable, edge sensitive interrupts which are all vectored into the
same service subroutine.
The interrupt from Port L shares logic with the wake up circuitry.The register WKEN allows interrupts from Port Lto be
individually enabled or disabled. The register WKEDG specifies the trigger condition to be either a positive or a negative
edge. Finally, the register WKPND latches in the pending
trigger conditions.
The GIE (global interrupt enable) bit enables the interrupt
function. A control flag, LPEN, functions as a global interrupt
enable for Port L interrupts. Setting the LPEN flag will enable
interrupts and vice versa. A separate global pending flag is
not needed since the register WKPND is adequate.
Since Port L is also used for waking the device out of the
HALTor IDLE modes, the user can elect to exit the HALT or
IDLE modes either with or without the interrupt enabled. If he
elects to disable the interrupt, then the device will restart execution from the instruction immediately following the instruction that placed the microcontroller in the HALT or IDLE
modes. In the other case, the device will first execute the interrupt service routine and then revert to normal operation.
The Wake Up signal will not start the chip running immediately since crystal oscillators or ceramic resonators have a fi-
DS101137-16
nite start up time. The IDLE Timer (T0) generates a fixed delay to ensure that the oscillator has indeed stabilized before
allowing the device to execute instructions. In this case,
upon detecting a valid WakeUp signal, only the oscillator circuitry and the IDLE Timer T0 are enabled.The IDLE Timer is
loaded with a value of 256 and is clocked from the t
tion cycle clock. The t
oscillator clock by a factor of 10. A Schmitt trigger following
the CKI on-chip inverter ensures that the IDLE timer is
clocked only when the oscillator has a sufficiently large amplitude to meet the Schmitt trigger specifications. This
Schmitt trigger is not part of the oscillator closed loop. The
start-up time-out from the IDLE timer enables the clock signals to be routed to the rest of the chip.
clock is derived by dividing down the
c
instruc-
c
CAN Block Description *
This device contains a CAN serial bus interface as described
in the CAN Specification Rev. 2.0 part B.
*Patents Pending.
CAN Interface Block
This device supports applications which require a low speed
CAN interface. It is designed to be programmed with two
transmit and two receive registers. The user’s program may
check the status bytes in order to get information of the bus
state and the received or transmitted messages. The device
has the capability to generate an interrupt as soon as one
byte has been transmitted or received. Care must be taken if
more than two bytes in a message frame are to be
transmitted/received. In this case the user’s program must
poll the transmit buffer empty (TBE)/receive buffer full (RBF)
bits or enable their respective interrupts and perform a data
exchange between the user data and the Tx/Rx registers.
www.national.com19

CAN Interface Block (Continued)
Fully automatic transmission on error is supported for messages not longer than two bytes. Messages which are longer
than two bytes have to be processed by software.
The interface is compatible with CAN Specification 2.0 part
B, without the capability to receive/transmit extended
frames. Extended frames on the bus are checked and acknowledged according to the CAN specification.
The maximum bus speed achievable with the CAN interface
is a function of crystal frequency, message length and soft-
ware overhead. The device can support a bus speed of up to
1 Mbit/s with a 10 MHz oscillator and 2 byte messages. The
1 Mbit/s bus speed refers to the rate at which protocol and
data bits are transferred on the bus. Longer messages require slower bus speeds due to the time required for software intervention between data bytes. The device will support a maximum of 125k bit/s with eight byte messages and
a 10 MHz oscillator.
FIGURE 17. CAN Interface Block Diagram
Functional Block Description of
the CAN Interface
Interface Management Logic (IML)
The IML executes the CPU’s transmission and reception
commands and controls the data transfer between CPU,
Rx/Tx and CAN registers. It provides the CAN Interface with
Rx/Tx data from the memory mapped Register Block. It also
sets and resets the CAN status information and generates
interrupts to the CPU.
www.national.com 20
DS101137-49
Bit Stream Processor (BSP)
The BSP is a sequencer controlling the data stream between
The Interface Management Logic (parallel data) and the bus
line (serial data). It controls the transceive logic with regard
to reception and arbitration, and creates error signals according to the bus specification

Functional Block Description of
the CAN Interface
Transceive Logic (TCL)
The TCL is a state machine which incorporates the bit stuff
logic and controls the output drivers, CRC logic and the
Rx/Tx shift registers. It also controls the synchronization to
the bus with the CAN clock signal generated by the BTL.
Error Management Logic (EML)
The EML is responsible for the fault confinement of the CAN
protocol. It is also responsible for changing the error
counters, setting the appropriate error flag bits and interrupts
and changing the error status (passive, active and bus off).
Cyclic Redundancy Check (CRC) Generator and
Register
The CRC Generator consists of a 15-bit shift register and the
logic required to generate the checksum of the destuffed bitstream. It informs the EML about the result of a receiver
checksum.
The checksum is generated by the polynomial:
Receive/Transmit (Rx/Tx) Registers
The Rx/Tx registers are 8-bit shift registers controlled by the
TCL and the BSP. They are loaded or read by the Interface
Management Logic, which holds the data to be transmitted
or the data that was received.
Bit Time Logic (BTL)
The bit time logic divider divides the CKI input clock by the
value defined in the CAN prescaler (CSCAL) and bus timing
register (CTIM). The resultig bit time (tcan) can be computed
by the formula:
15
14
χ
+
χ
+
χ
10
8
+
χ
(Continued)
7
4
+
χ
+
χ
3
+
χ
+1
Where
divider
is the value of the clock prescaler,PSis the
programmable value of phase segment 1 and 2 (1..8) and
PPS
the programmed value of the propagation segment
(1..8) (located in CTIM).
Bus Timing Considerations
The internal architecture of the CAN interface has been optimized to allow fast software response times within messages of more than two data bytes. The TBE (Transmit
Buffer Empty) bit is set on the last bit of odd data bytes when
CAN internal sample points are high.
It is the user’s responsibility to ensure that the time between
setting TBE and a reload of TxD2 is longer than the length of
phase segment 2 as indicated in the following equation:
Table 2
shows examples of the minimum required t
different CSCAL settings based on a clock frequency of
LOAD
for
10 MHz. Lower clock speeds require recalculation of the
CAN bit rate and the mimimum t
TABLE 2. CAN Timing (CKI = 10 MHz t
PS CSCAL CAN Bit Rate (kbit/s)
LOAD
.
= 1 µs)
c
Minimum
t
(µs)
LOAD
4 3 250 2.0
4 9 100 5.0
4 15 62 8.0
4 24 40 12.5
439 25 20
499 10 50
4 199 5 100
Figure 19
FIGURE 18. Bit Rate Generation
illustrates the minimum time required for t
.
LOAD
FIGURE 19. TBE Timing
DS101137-50
DS101137-51
www.national.com21

Functional Block Description of the CAN Interface (Continued)
In the case of an interrupt driven CAN interface, the calculation of the actual t
INT: ; Interrupt latency = 7t<inf>c<reset>=7µs
PUSH A ; 3t<inf>c<reset>=3µs
LD A,AB ; 2t<inf>c<reset>=2µs
PUSH A ; 3t<inf>c<reset>=3µs
VIS ; 5t<inf>c<reset>=5µs
CANTX: ; 20t<inf>c<reset> = µs to this point
. ; additional time for instructions which check
. ; status prior to reloading the transmit data
. ; registers with subsequent data bytes.
LD TXD2,DATA
.
.
.
Interrupt driven programs use more time than programs
which poll the TBE flag, however programs which operate at
lower baud rates (which are more likely to be sensitive to this
issue) have more time for interrupt response.
Output Drivers/Input Comparators
The output drivers/input comparators are the physical interface to the bus. Control bits are provided to TRI-STATE the
output drivers.
A dominant bit on the bus is represented as a “0” in the data
registers and a recessive bit on the bus is represented as a
“1” in the data registers.
TDLC3..TDLC0 Transmit Data Length Code
These bits determine the number of data bytes to be trans-
mitted within a frame. The CAN specification allows a maximum of eight data bytes in any message.
TRANSMIT IDENTIFIER HIGH (TID) (Address X’00B3)
TRTR TID10 TID9 TID8 TID7 TID6 TID5 TID4
Bit 7 Bit 0
This register is read/write.
TRTR Transmit Remote Frame Request
This bit is set if the frame to be transmitted is a remote frame
request.
TABLE 3. Bus Level Definition
Bus Level Pin Tx0 Pin Tx1 Data
“dominant”
drive low drive high
(GND) (V
)
CC
0
“recessive” TRI-STATE TRI-STATE 1
Register Block
The register block consists of fifteen 8-bit registers which are
described in more detail in the following paragraphs.
Note: The contents of the receiver related registers RxD1, RxD2, RDLC,
RIDH and RTSTAT are only changed if a received frame passes the
acceptance filter or the Receive Identifier Acceptance Filter bit (RIAF)
is set to accept all received messages.
TRANSMIT DATA REGISTER 1 (TXD1) (Address
X’00B0)
The Transmit Data Register 1 contains the first data byte to
be transmitted within a frame and then the successive odd
byte numbers (i.e., bytes number 1,3,..,7).
TRANSMIT DATA REGISTER 2 (TXD2)(Address X’00B1)
The Transit Data Register 2 contains the second data byte to
be transmitted within a frame and then the successive even
byte numbers (i.e., bytes number 2,4,..,8).
TRANSMIT DATA LENGTH CODE AND IDENTIFIER
LOW REGISTER (TDLC) (Address X’00B2)
TID3 TID2 TID1 TID0 TDLC3 TDLC2 TDLC1 TDLC0
Bit 7 Bit 0
This register is read/write.
TID3..TIDO Transmit Identifier Bits 3..0 (lower 4 bits)
The transmit identifier is composed of eleven bits in total, bits
3 to 0 of the TID are stored in bits 7 to 4 of this register.
TID10..TID4 Transmit Identifier Bits 10 .. 4 (higher 7 bits)
Bits TID10..TID4 are the upper 7 bits of the 11 bit transmit
identifier.
RECEIVER DATA REGISTER 1 (RXD1) (Address
X’00B4)
The Receive Data Register 1 (RXD1) contains the first data
byte received in a frame andthen successive odd byte numbers (i.e., bytes 1, 3,..7). This register is read-only.
RECEIVE DATA REGISTER 2 (RXD2) (Address X’00B5)
The Receive Data Register 2 (RXD2) contains the second
data byte received in a frame and then successive even byte
numbers (i.e., bytes 2,4,..,8). This register is read-only.
REGISTER DATA LENGTH CODE AND IDENTIFIERLOW
REGISTER (RIDL) (Address X’00B6)
RID3 RID2 RID1 RID0 RDLC3 RDLC2 RDLC1 RDLC0
Bit 7 Bit 0
This register is read only.
RID3..RID0 Receive Identifier bits (lower four bits)
The RID3..RID0 bits are the lower four bits of the eleven bit
long Receive Identifier. Any received message that matches
the upper 7 bits of the Receive Identifier (RID10..RID4) is accepted if the Receive Identifier Acceptance Filter (RIAF) bit is
set to zero.
RDLC3..RDLC0 Receive Data Length Code bits
The RDLC3..RDLC0 bits determine the number of data
bytes within a received frame.
RECEIVE IDENTIFIER HIGH (RID) (Address X’00B7)
Reserved RID10 RID9 RID8 RID7 RID6 RID5 RID4
Bit 7 Bit 0
time would be done as follows:
LOAD
www.national.com 22

Functional Block Description of
the CAN Interface
This register is read/write.
Reserved Bit 7 is reserved and must be zero.
RID10..RID4 Receive Identifier bits (upper bits)
The RID10...RID4 bits are the upper 7 bits of the eleven bit
long Receive Identifier. If the Receive Identifier Acceptance
Filter (RIAF) bit (see CBUS register) is set to zero, bits 4 to
10 of the received identifier are compared with the maskbits
of RID4..RID10. If the corresponding bits match, the message is accepted. If the RIAF bit is set to a one, the filter
function is disabled and all messages, independent of identifier, will be accepted.
CAN PRESCALER REGISTER (CSCAL) (Address
X’00B8)
CKS7 CKS6 CKS5 CKS4 CKS3 CKS2 CKS1 CKS0
Bit 7 Bit 0
This register is read/write.
CKS7..0 Prescaler divider select.
The resulting clock value is the CAN Prescaler clock.
CAN BUS TIMING REGISTER (CTIM) (00B9)
PPS2 PPS1 PPS0 PS2 PS1 PS0 Reserved Reserved
Bit 7 Bit 0
This register is read/write.
PPS2..PPS0 Propagation Segment, bits 2..0
The PPS2..PPS0 bits determine the length of the propaga-
tion delay in Prescaler clock cycles (PSC) per bit time. (For
a more detailed discussion of propagation delay and phase
segments, see SYNCHRONIZATION.)
PS2..PS0 Phase Segment 1, bits 2..0
The PS2..PS0 bits fix the number of Prescaler clock cycles
per bit time for phase segment 1 and phase segment 2. The
PS2..PS0 bits also set the synchronization Jump Width to a
value equal to the lesser of: 4 PSC, or the length of PS1/2
(Min: 4 l length of PS1/2).
TABLE 4. Synchronization Jump Width
PS2 PS1 PS0 Phase Jump Width
000 1t
001 2t
010 3t
011 4t
100 5t
101 6t
110 7t
111 8t
LENGTH OF TIME SEGMENTS (See
The Synchronization Segment is 1 CAN Prescaler clock
•
(PSC)
The Propagation Segment can be programmed (PPS) to
•
be 1,2...,8 PSC in length.
Phase Segment 1 and Phase Segment 2 are program-
•
mable (PS) to be 1,2,..,8 PSC long.
(Continued)
Length of Synchronization
Segment
1
⁄
2
Figure 31
1t
2t
3t
4t
4t
4t
4t
4t
can
can
can
can
can
can
can
can
)
can
can
can
can
can
can
can
can
Note: (BTL settings at high speed; PSC = 0) Due to the on-chip delay from
the rx-pins through the receive comparator (worst case assumption: 3
clocks delay * 2 (devices on the bus)+1txdelay) the user needs to set
the sample point to (2*3 + 1) i.e., 7 CKI clocks to ensure correct communication on the bus under all circumstances. With prescaler settings
of 0 this is a given (i.e., no caution has to be applied).
Example: for 1 Mbit CTIM = b’10000100 (PSS = 5; PS1 = 2). Example
for 500 kbit CTIM = b’01011100 (PPS = 3; PS1 = 8). − all at 10 MHz
CKI and CSCAL = 0.
CAN BUS CONTROL REGISTER (CBUS) (00BA)
Re- RIAF TxEN1 TxEN0 RxREF1 RxREF0 Re- FMOD
served served
Bit 7 Bit 0
Reserved This bit is reserved and must be zero.
RIAF Receive identifier acceptance filter bit
If the RIAF bit is set to zero, bits4 to 10 ofthe received iden-
tifier are compared with the mask bits of RID4..RID10 and if
the corresponding bits match, the message is accepted. If
the RIAF bit is set to a one, the filter function is disabled and
all messages independent of the identifier will be accepted.
TxEN0, TxEN1 TxD Output Driver Enable
TABLE 5. Output Drivers
TxEN1 TxEN0 Output
0 0 Tx0, Tx1 TRI-STATE, CAN
input comparator disabled
0 1 Tx0 enabled
1 0 Tx1 enabled
1 1 Tx0 and Tx1 enabled
Bus synchronization of the device is done in the following
way:
If the output was disabled (TxEN1, TxEN0 = “0”) and either
TxEN1 orTxEN0, or both are set to 1, the device will not start
transmission or reception of a frame until eleven consecutive
“recessive” bits have been received. Resetting the TxEN1
and TxEN0 bits will disable the output drivers and the CAN
input comparator. All other CAN related registers and flags
will be unaffected. It is recommended that the user reset the
TxEN1 and TxEN0 bits before switching the device into the
HALTmode (the CAN receive wakeup will still work) in order
to reduce current consumption and to assure a proper resychronization to the bus after exiting the HALT mode.
Note: A “bus off” condition will also cause Tx0 and Tx1 to be at TRI-STATE
(independent of the values of the TxEN1 and TxEN0 bits).
RXREF1 Reference voltage applied to Rx1 if bit is set
RXREF0 Reference voltage applied to Rx0 if bit is set
FMOD Fault Confinement Mode select
Setting the FMOD bit to “0” (defaultafter power on reset) will
select the Standard Fault Confinement mode. In this mode
the device goes from “bus off” to “error active” after monitoring 128*11recessive bits (including bus idle) on the bus. This
mode has been implemented for compatibility with existing
solutions. Setting the FMOD bit to “1” will select the Enhanced Fault Confinement mode. In this mode the device
goes from “bus off” to “error active” after monitoring 128
“good” messages, as indicated by the reception of 11 consecutive “recessive” bits including the End of Frame,
whereas the standard mode may time out after 128 x 11 recessive bits (e.g., bus idle).
www.national.com23

Functional Block Description of
the CAN Interface
TRANSMIT CONTROL/STATUS (TCNTL) (00BB)
NS1 NS0 TERR RERR CEIE TIE RIE TXSS
Bit 7 Bit 0
NS1..NS0 Node Status, i.e., Error Status.
TABLE 6. Node Status
NS1 NS0 Output
0 0 Error active
0 1 Error passive
1 0 Bus off
1 1 Bus off
The Node Status bits are read only.
TERR Transmit Error
This bit is automatically set when an error occurs during the
transmission of a frame. TERR can be programmed to generate an interrupt by setting the Can Error Interrupt Enable
bit (CEIE). This bit must be cleared by the user’s software.
Note: This is used for messages for more than two bytes. If an error occurs
during the transmission of a frame with more than 2 data bytes, the user’s software has to handle the correct reloading of the data bytes to
the TxD registers for retransmission of the frame. For frames with 2 or
fewer data bytes the interface logic of this chip does an automatic retransmission. Regardless of the number of data bytes, the user’s software must reset this bit if CEIE is enabled. Otherwise a new interrupt
will be generated immediately after return from the interrupt service
routine.
RERR Receiver Error
This bit is automatically set when an error occurred during
the reception of a frame. RERR can be programmed to generate an interrupt by setting the Can Error Interrupt Enable
bit (CEIE). This bit has to be cleared by the user’s software.
CEIE CAN Error Interrupt Enable
If set by the user’s software, this bit enables the transmit and
receive error interrupts. The interrupt pending flags are
TERR and RERR. Resetting this bit with a pending error interrupt will inhibit the interrupt, but will not clear the cause of
the interrupt (RERR or TERR). If the bit is then set without
clearing the cause of the interrupt, the interrupt will reoccur.
TIE Transmit Interrupt Enable
If set by the user’s software, this bit enables the transmit in-
terrupt. (See TBE and TXPND.) Resetting this bit with a
pending transmit interrupt will inhibit the interrupt, but will not
clear the cause of the interrupt. If the bit is then set without
clearing the cause of the interrupt, the interrupt will reoccur.
RIE Receive Interrupt Enable
If set by the user’s software, this bit enables the receive in-
terrupt or a remote transmission request interrupt (see RBF,
RFV and RRTR). Resetting this bit with a pending receive interrupt will inhibit the interrupt, but will not clear the cause of
the interrupt. If the bit is then set without clearing the cause
of the interrupt, the interrupt will reoccur.
TXSS Transmission Start/Stop
This bit is set by the user’s software to initiate the transmis-
sion of a frame. Once this bit is set, a transmission is pending, as indicated by the TXPND flag being set. It can be reset
by software to cancel a pending transmission. Resetting the
TXSS bit will only cancel a transmission, if the transmission
of a frame hasn’t been started yet (bus idle), if arbitration has
been lost (receiving) or if an error occurs during transmis-
(Continued)
sion. If the device has already started transmission (won arbitration) the TXPND and TXSS flags will stay set until the
transmission is completed, even if the user’s software has
written zero to the TXSS bit. If one or more data bytes are to
be transmitted, care must be taken by the user, that the
Transmit Data Register(s) have been loaded before the
TXSS bit is set. TXSS will be cleared on three conditions
only: Successful completion of a transmitted message; successful cancellation of a pending transmision; Transition of
the CAN interface to the bus-off state.
DS101137-52
FIGURE 20. Acceptance Filter Block-Diagram
Writing a zero to the TXSS bit will request cancellation of a
pending transmission but TXSS will not be cleared until
completion of the operation. If an error occurs during transmission of a frame, the logic will check for cancellation requests prior to restarting transmission. If zero has been written to TXSS, retransmission will be canceled.
RECEIVE/TRANSMIT STATUS (RTSTAT) (Address
X’00BC)
TBE TXPND RRTR ROLD RORN RFV RCV RBF
10 000000
Bit 7 Bit 0
This register is read only.
TBE Transmit Buffer Empty
This bit is set assoon as the TxD2 register is copied into the
Rx/Tx shift register, i.e., the 1st data byte of each pair has
been transmitted. The TBE bit is automatically reset if the
TxD2 register is written (the user should write a dummy byte
to the TxD2 register when transmitting an odd number of
bytes of zero bytes). TBE can be programmed to generate
an interrupt by setting the Transmit Interrupt Enable bit (TIE).
When servicing the interrupt the user has to make sure that
TBE gets cleared by executing a WRITE instruction on the
TxD2 register, otherwise a new interrupt will be generated
immediately after return from the interrupt service routine.
The TBE bit is read only. It isset to 1 uponreset. TBE is also
set upon completion of transmission of a valid message.
TXPND Transmission Pending
This bit is set as soon as the Transmit Start/Stop (TXSS) bit
is set by the user. It will stay setuntil the frame was successfully transmitted, until the transmission was successfully canceled by writing zero to the Transmission Start/Stop bit
(TXSS), or the device enters the bus-off state. Resetting the
TXSS bit will only cancel a transmission if the transmission
of a frame hasn’t been started yet (bus idle) or if arbitration
has been lost (receiving). If the device has already started
transmission (won arbitration) the TXPND flag will stay set
until the transmission is completed, even if the user’s software has requested cancellation of the message. If an error
occurs during transmission, a requested cancellation may
occur prior to the begining of retransmission.
RRTR Received Remote Transmission Request
www.national.com 24

Functional Block Description of
the CAN Interface
This bit is set when the remote transmission request (RTR)
bit in a received frame was set. It is automatically reset
through a read of the RXD1 register.
To detect RRTR the user can either poll this flag or enable
the receive interrupt (the reception of a remote transmission
request will also cause an interrupt if the receive interrupt is
enabled). If the receive interrupt is enabled, the user should
check the RRTR flag in the service routine in order to distinguish between a RRTR interrupt and a RBF interrupt. It is the
responsibility of the user to clear this bit by reading the RXD1
register, before the next frame is received.
ROLD Received Overload Frame
This bit is automatically set when an Overload Frame was
received on the bus. It is automatically reset through a read
of the Receive/Transmit Status register. It is the responsibility of the user to clear this bit by reading the Receive/
Transmit Status register, before the next frame is received.
RORN Receiver Overrun
This bit is automatically set on an overrun of the receive data
register, i.e., if the user’s program does not maintain the
RxDn registers when receiving a frame. It itautomatically reset through a read of the Receive/TransmitStatus register. It
is the responsibility of the user to clear thisbit by readingthe
Receive/Transmit Status register beforethe next frame is received.
RFV Received Frame Valid
This bit is set if the received frame is valid, i.e., after the pen-
ultimate bit of the End of Frame is received. It is automatically reset through a read of the Receive/Transmit Status
register. It is the responsibility of the user to clear this bit by
reading the receive/transmit status register (RTSTAT), before the next frame is received. RFV will cause aReceive Interrupt if enabled by RIE. The user should be careful to read
the last data byte (RxD1) of odd length messages (1, 3, 5 or
7 data bytes) on receipt of RFV. RFV is the only indication
that the last byte of the message has been received.
RCV Receive Mode
This bit is set after the data length code of a message that
passes the device’s acceptance filter has been received. It is
automatically reset after the CRC-delimiter of the same
frame has been received. It indicates to the user’s software
that arbitration is lost and that data is coming in for that node.
RBF Receive Buffer Full
This bit is set if the second Rx data byte was received. It is
reset automatically, after the RxD1-Register has been read
by the software. RBF can beprogrammed to generate an interrupt by setting the Receive Interrupt Enable bit (RIE).
When servicing the interrupt, the user has to make sure that
RBF gets cleared by executing a LD instruction from the
RxD1 register, otherwise a new interrupt will be generated
immediately after return from the interrupt service routine.
The RBF bit is read only.
TRANSMIT ERROR COUNTER (TEC) (Address X’00BD)
TEC7 TEC6 TEC5 TEC4 TEC3 TEC2 TEC1 TEC0
Bit 7 Bit 0
This register is read/write.
(Continued)
For test purposes and to identify the node status, the transmit error counter, an 8-bit error counter, is mapped into the
data memory. If the lower seven bits of the counter overflow,
i.e., TEC7 is set, the device is error passive.
CAUTION
To prevent interference with the CAN fault confinement, the
user must not write to the REC/TEC registers. Bothcounters
are automatically updated following the CAN specification.
RECEIVE ERROR COUNTER (REC) (00BE)
ROVL REC6 REC5 REC4 REC3 REC2 REC1 REC0
Bit 7 Bit 0
This register is read/write.
ROVL receive error counter overflow
For test purposes and to identify the node status the receive
error counter, a 7-bit error counter, is mapped into the data
memory. If the counter overflows the ROVL bit is set to indicate that the device is error passive and won’t transmit any
active error frames. If ROVL is set then the counter is frozen.
MESSAGE IDENTIFICATION
a. Transmitted Message
The user can select all 11 Transmit Identifier Bits to transmit
any message whigh fulfills the CAN2.0, part B spec without
an extended identifier (see note below). Fully automatic retransmission is supported for messages no longer than 2
bytes.
b. Received Messages
The lower four bits of the Receive Identifier are don’t care,
i.e., the controller will receive all messages that fit in that window (16 messages). The upper 7 bits can be defined by the
user in the Receive Identifier High Register to mask out
groups of messages. If the RIAF bit is set, all messages will
be received.
Note: The CAN interface tolerates the extended CAN frame format of 29
identifier bits and gives an acknowledgment. If an error occurs the receive error counter will be increased, and decreased if the frame is
valid.
BUS SYNCHRONIZATION DURING OPERATION
Resetting the TxEN1 and TxEN0 bits in Bus Control Register
will disable the output drivers and do a resynchronization to
the bus. All other CAN related registers and flags will be unaffected.
Bus synchronization of the device is this case is done in the
following way:
If the output was disabled (TxEN1, TxEN0 = “0”) and either
TxEN1 orTxEN0, or both are set to 1, the device will not start
transmission or reception of a frame until eleven consecutive
“recessive” bits have been received.
A “bus off” condition will also cause the output drivers Tx1
and Tx0 to be at TRI-STATE (independent of the status of
TxEN1 and TxEN0). The device will switch from “bus off” to
“error active” mode as described under the FMOD-bit description (see Can Bus Control register). This will ensure that
the device is synchronized to the bus, before starting to
transmit or receive.
For information on bus synchronization and status of the
CAN related registers after external reset refer to the RESET
section.
www.national.com25

Functional Block Description of
the CAN Interface
ON-CHIP VOLTAGE REFERENCE
The on-chip voltage reference is a ratiometric reference. For
electrical characteristics of the voltage reference refer to the
electrical specifications section.
ANALOG SWITCHES
Analog switches are used for selecting between Rx0 and
V
and between Rx1 and V
REF
(Continued)
.
REF
Basic CAN Concepts
The following paragraphs provide a generic overview of the
basic concepts of the Controller Area Network (CAN) as described in
lated issues of the National Semiconductor device will be
discussed as well.
This device will process standard frame format only. Extended frame formats will be acknowledged, however the
data will be discarded. For this reason the description of
frame formats in the following section will cover only the
standard frame format.
The following section provides some more detail on how the
device will handle received extended frames:
If the device’s remote identifier acceptancefilter bit (RIAF) is
set to “1”, extended frame messages will be acknowledged.
However, the data will be discarded and the device will not
reply to a remote transmission request received in extended
frame format. If the device’s RIAF bit is set to “0”, the upper
7 received ID bits of an extended frame that match the device’s receive identifier (RID) acceptance filtler bits, are
stroed in the device’s RID register. However,the device does
not reply to an RTR and any data is discarded. The device
will only acknowledge the message.
MULTI-MASTER PRIORITY BASED BUS ACCESS
The CAN protocol is message based protocol that allows a
total of 2032 (= 2
format and 512 million (= 2
extended frame format.
MULTICAST FRAME TRANSFER BY
ACCEPTANCE FILTERING
Every CAN Frame is put on the common bus. Each module
receives every frame and filters out the frames which are not
required for the module’s task.
REMOTE DATA REQUEST
A CAN master module has the ability to set a specific bit
called the “remote transmission request bit” (RTR) in a
frame. This causes another module, either another master or
a slave, to transmit a data frame after the current frame has
been completed.
SYSTEM FLEXIBILITY
Additional modules can be added to an existing network
without a configuration change. These modules can either
perform completely new functions requiring new data or process existing data to perform a new function.
Chapter 4 of ISO/DIS11519-1.
11
−16) different messages in the standard
29
−16) different messages in the
Implementation re-
SYSTEM WIDE DATA CONSISTENCY
As the CAN network is message oriented, a message can be
used like a variable which is automatically updated by the
controlling processor.If any module cannotprocess information it can send an overload frame. The device is incapable
of initiating an overload frame, but will join a overload frame
initiated by another device as required by CAN specifications.
NON-DESTRUCTIVE CONTENTION-BASED
ARBITRATION
The CAN protocol allows several transmitting modules to
start a transmission at the same time as soon as they monitor the bus to be idle. During the start of transmission every
node monitors the bus line to detect whether its message is
overwritten by a message with a higher priority.As soon as a
transmitting module detects another module with a higher
priority accessing the bus, it stopstransmitting its own frame
and switches to receive mode. Forillustration see
AUTOMATIC RETRANSMISSION OF FRAMES
If a data or remote frame is overwritten by either a higherprioritized data frame, remote frame or an error frame, the
transmitting module will automatically retransmit it. This device will handle the automatic retransmission of up to two
data bytes automatically. Messages with more than 2 data
bytes require the user’s software to update the transmit registers.
ERROR DETECTION AND ERROR SIGNALING
All messages on the bus are checked by each CAN node
and acknowledge if they are correct. If any node detects an
error it starts the transmission of an error frame.
Switching Off Defective Nodes
There are two error counters, one for transmitted data and
one for received data, which are incremented, depending on
the error type, as soon as an error occurs. If either counter
goes beyond a specific value the node goes to an error state.
A valid frame causes the error counters to decrease.
The device can be in one of three states with respect to error
handling:
Error active
•
An error active unit can participate in bus communication
and sends an active (“dominant”) error flag.
Error passive
•
An error passive unit can participate in bus communication. However, if the unit detects an error it is not allowed
to send an active error flag. The unit sends only a passive
(“recessive”) error flag.
Bus off
•
A unit that is “bus off” has the output drivers disabled, i.e., it
does not participate in any bus activity.
(See ERROR MANAGEMENT AND DETECTION for more
detailed information.)
Figure 21
.
www.national.com 26

Frame Formats
INTRODUCTION
There are basically two different types of frames used in the
CAN protocol.
The data transmission frames are: data/remote frame
The control frames are: error/overload frame
Note: This device cannot send an overload frame as a result of not being
able to process all information. However, the device is able to recognize an overload condition and join overload frames initiated by other
devices.
If no message is being transmitted, i.e., the bus is idle, the
bus is kept at the “recessive” level.
give an overview of the various CAN frame formats.
DATA AND REMOTE FRAME
Data frames consist of seven bit fields and remote frames
consist of six different bit fields:
1. Start of Frame (SOF)
2. Arbitration field
3. Control field (IDE bit, R0 bit, and DLC field)
4. Data field (not in remote frame)
5. CRC field
Figure 22
and
Figure 23
6. ACK field
7. End of Frame (EOF)
A remote frame has no data field and is used for requesting
data from other (remote) CAN nodes.
Figure 24
shows the
format of a CAN data frame.
FRAME CODING
Remote and Data Frames are NRZ codes with bit-stuffing in
every bit field which holds computable information for the interface, i.e., Start of Frame arbitration field, control field, data
field (if present) and CRC field.
Error and overload frames are NRZ coded without bit stuffing.
BIT STUFFING
After five consecutive bits of the same value, a stuff bit of the
inverted value is inserted by the transmitter and deleted by
the receiver.
Destuffed Bit Stream 100000x 011111x
Stuffed Bit Stream 1000001x 0111110x
Note: x = {0,1}
FIGURE 21. CAN Message Arbitration
DS101137-53
www.national.com27

Frame Formats (Continued)
DS101137-54
A remote frame is identical to a data frame, except that the RTR bit is “recessive”, and there is no data field.
IDE = Identifier Extension Bit
The IDE bit in the standard format is transmitted “dominant”, whereas in the extended format the IDE bit is “recessive” and the id is expanded to 29 bits.
r = recessive
d = dominant
DS101137-55
FIGURE 22. CAN Data Transmission Frames
An error frame can start anywhere in the middle of a frame.
INT = Intermission
Suspend Transmission is only for error passive nodes.
DS101137-56
DS101137-57
An overload frame can only start at the end of a frame.
FIGURE 23. CAN Control Frames
www.national.com 28
DS101137-58

Frame Formats (Continued)
FIGURE 24. CAN Frame Format
START OF FRAME (SOF)
The Start of Frame indicates the beginning of data and remote frames. It consists of a single “dominant” bit. A node is
only allowed to start transmission when the bus is idle. All
nodes have to synchronize to the leading edge (first edge after the bus was idle) caused by SOF of the node which starts
transmission first.
ARBITRATION FIELD
The arbitration field is composed of the identifier field and the
RTR (Remote Transmission Request) bit. The value of the
RTR bit is “dominant” in a data frame and “recessive” in a remote frame.
CONTROL FIELD
The control field consists of six bits. It starts with two bits reserved for future expansion followed by the four-bit Data
Length Code. Receivers must accept all possible combinations of the two reserved bits. Until the function of these reserved bits is defined, the transmitter only sends “0” (dominant) bits. The first reserved bit (IDE) is actually defined to
indicate an extended frame with 29 Identifierbits if setto “1”.
CAN chips must tolerate extended frames, even if they can
only understand standard frames, to prevent the destruction
of an extended frames on an existing network.
The Data Length Code indicates the number of bytes in the
data field. This Data Length Code consists of four bits. The
data field can be of length zero. The permissible number of
data bytes for a data frame ranges from 0 to 8.
DATA FIELD
The Data field consists of the data to be transferred within a
data frame. It can contain 0 to 8 bytes and each byte contains 8 bits. A remote frame has no data field.
CRC FIELD
The CRC field consists of the CRC sequence followed by the
CRC delimiter. The CRC sequence is derived by the transmitter from the modulo 2 division of the preceding bit fields,
starting with the SOF up to the end of the data field, excluding stuff-bits, by the generator polynomial:
The remainder of this division is the CRC sequence transmitted over the bus. On the receiver side the module divides all
bit fields up to the CRC delimiter, excluding stuff-bits, and
checks if the result is zero. This will then be interpreted as a
valid CRC. After the CRC sequence a single “recessive” bit
is transmitted as the CRC delimiter.
15
χ
+ χ14+ χ10+ χ8+ χ7+ χ4+ χ3+1
DS101137-59
ACK FIELD
The ACK field is two bits long and contains the ACK slot and
theACK delimiter. The ACK slotis filled witha “recessive” bit
by the transmitter.This bit is overwritten with a “dominant” bit
by every receiver that has received a correct CRC sequence. The second bit of the ACK field is a “recessive” bit
called the acknowledge delimiter.As a consequence the acknowledge flag of a valid frame is surrounded by two“recessive” bits, the CRC-delimiter and the ACK delimiter.
EOF FIELD
The End of Frame Field closes a data anda remote frame.It
consists of seven “recessive” bits.
INTERFRAME SPACE
Data and remote frames are separate from every preceding
frame (data, remote, error and overload frames) by theinterframe space see
Figure 25
and
Figure 26
for details. Error
and overload frames are not preceded by an interframe
space. They can be transmitted as soon as the condition occurs. The interframe space consists of a minimum of three
bit fields depending on the error state of the node.
These bit fields are coded as follows:
The intermission has the fixed form of three “recessive” bits.
While this bit field is active, no node is allowed to start a
transmission of a data or a remote frame. The only action to
be taken is signaling an overload condition. This means that
an error in this bit field would be interpreted as an overload
condition. Suspend transmission has to be inserted by errorpassive nodes that were transmitter for the last message.
This bit field has the form of eight “recessive” bits. However,
it may be overwritten by a “dominant” start-bit from another
non error passive node which starts transmission. The bus
idle field consists of “recessive” bits. Its length is not specified and depends on the bus load.
ERROR FRAME
The Error Frame consists of two bit fields: the error flag and
the error delimiter. The error field is built up from the various
error flags of the different nodes. Therefore, its length may
vary from a minimum of six bits up to a maximum of twelve
bits depending on when a module detects the error. Whenever a bit error, stuff error, form error, or acknowledgment error is detected by a node, this node starts transmission of the
error flag at the next bit. If a CRC error is detected, transmission of the error flag starts at the bit following the acknowledge delimiter, unless an error flag for a previous error condition has already been started.
Figure 27
shows how a local
fault at one module (module 2) leads to a 12-bit error frame
on the bus.
The bus level may either be “dominant” for an error-active
node or “recessive” for an error-passive node. An error ac-
www.national.com29

Frame Formats (Continued)
tive node detecting an error, starts transmitting an active error flag consisting of six “dominant” bits. This causes the destruction of the actual frame on the bus. The other nodes
detect the error flag as either a violation of the rule of bitstuffing or the value of a fixed bit field is destroyed. As a consequence all other nodes start transmission of their own error flag. This means, that the error sequence which can be
monitored on the bus as a maximum length of twelve bits. If
an error passive node detects an error it transmits six “reces-
FIGURE 25. Interframe Space for Nodes Which Are Not
Error Passive or Have Been Receiver for the Last Frame
FIGURE 26. Interframe Space for Nodes Which Are Error Passive
and Have Been Transmitter for the Last Frame
sive” bits on the bus. This sequence does not destroy a message sent by another node and is not detected by other
nodes. However, if the node detecting an error was the
transmitter of the frame the other modules will get an error
condition by a violation ofthe fixed bit or stuff rule.
Figure 26
shows how an error passive transmitter transmits a passive
error frame and when it is detected by the receivers.
After any module has transmitted its active or passive error
flag it waits for the error delimiter which consists of eight “recessive” bits before continuing.
DS101137-60
DS101137-61
OVERLOAD FRAME
Like an error frame, an overload frame consists of two bit
fields: the overload flag and the overload delimiter. The bit
fields have the same length as the error frame field: six bits
for the overload flag and eight bits for the delimiter. The overload frame can only be sent after the end of frame (EOF)
field and in they way destroys the fixed form of the intermission field.
ORDER OF BIT TRANSMISSION
A frame is transmitted starting with the Start of Frame, sequentially followed by the remaining bit fields. In every bit
field the MSB is transmitted first.
FRAME VALIDATION
Frames have a different validation point for transmitters and
receivers.A frame is valid for the transmitter of amessage, if
there is no error until the end of the last bit of the End of
Frame field. A frame is validfor a receiver, ifthere is no error
until and including the end of the penultimate bit of the End
of Frame.
www.national.com 30
FRAME ARBITRATION AND PRIORITY
Except for an error passive node which transmitted the last
frame, all nodes are allowed to start transmission of a frame
after the intermission, which can lead to two or more nodes
starting transmission at the same time. To prevent a node
from destroying another node’s frame, it monitors the bus
during transmission of the identifier field and the RTR-bit. As
soon as it detects a “dominant” bit while transmitting a “recessive” bit it releases the bus, immediately stops transmission and starts receiving the frame. This causes no data or
remote frame to be destroyed by another. Therefore the
highest priority message with the identifier 0x000 out of
0x7EF (including the remote data request (RTR) bit) always
gets the bus. This is only valid for standard CAN frame format. Note that while the CAN specification allows valid standard identifiers only in the range 0x000 to 0x7EF, the device
will allow identifiers to 0x7FF.
There are three more items that should be taken into consideration to avoid unrecoverable collisions on the bus:

Frame Formats (Continued)
module 1 = error active transmitter detects bit error at t2
module 2 = error active receiver with a local fault at t1
module 3 = error active receiver detects stuff error at t2
FIGURE 27. Error Frame—Error Active Transmitter
Within one system each message must be assigned a
•
unique identifier.This is to prevent bit errors, as one module may transmit a “dominant” data bit while the other is
transmitting a “recessive” data bit. This could happen if
two or more modules start transmission of a frame at the
same time and all win arbitration.
Data frames with a given identifier and a non-zero data
•
length code may be initiated by one node only. Otherwise, in worst case, two nodes would count up to the busoff state, due to bit errors, if they always start transmitting
the same ID with different data.
Every remote frame should have a system-wide data
•
length code (DLC). Otherwise two modules starting
transmission of a remote frame at the same time will
overwrite each other’s DLC which result in bit errors.
DS101137-62
ACCEPTANCE FILTERING
Every node may perform acceptance filtering on the identifier of a data or a remote frame to filter out the messages
which are not required by the node. In they way only the data
of frames which match the acceptance filter is stored in the
corresponding data buffers. However, every node which is
not in the bus-off state and has received a correct CRCsequence acknowledges each frame.
ERROR MANAGEMENT AND DETECTION
There are multiple mechanisms in the CAN protocol, to detect errors and to inhibit erroneous modules from disabling
all bus activities.
www.national.com31

Frame Formats (Continued)
module 1 = error active receiver with a local fault at t1
module 2 = error passive transmitter detects bit error at t2
module 3 = error passive receiver detects stuff error at t2
FIGURE 28. Error Frame—Error Passive Transmitter
FIGURE 29. Order of Bit Transmission within a CAN Frame
The following errors can be detected:
Bit Error
•
A CAN device that is sending also monitors the bus. If the
monitored bit value is different fromthe bitvalue thatis sent,
a bit error is detected. The reception of a “dominant” bit instead of a “recessive” bit during the transmission of a passive error flag, during the stuffed bit stream of the arbitration
field or during the acknowledge slot, is not interpreted as a
bit error.
Stuff error
•
A stuff error is detected, if the bit level after 6 consecutive bit
times has not changed in a message field that has to be
coded according to the bit stuffing method.
Form Error
•
Aform error is detected, ifa fixed frame bit (e.g.,CRC delimiter,ACK delimiter) does not have the specified value. For a
receiver a “dominant” bit during the last bit of End of Frame
does NOT constitute a form error.
Bit CRC Error
•
DS101137-63
DS101137-64
ACRC error is detected ifthe remainder ofthe CRC calculation of a received CRC polynomial is non-zero.
Acknowledgment Error
•
An acknowledgment error is detected whenever a transmitting node does not get an acknowledgment from any other
node (i.e., when the transmitter does not receive a “dominant” bit during the ACK frame).
The device can be in one of three states with respect to error
handling:
Error active
•
An error active unit can participate in bus communication
and sends an active (“dominant”) error flag.
Error passive
•
www.national.com 32

Frame Formats (Continued)
An error passive unit can participate in bus communication.
However, if the unit detects an error it is not allowed to send
an active error flag. The unit sends only a passive (“recessive”) error flag. A device is error passive when the transmit
error counter is greater than 127 or when the receive error
counter is greater than 127. A device becoming error passive
sends an active error flag. An error passive device becomes
error active again when both transmit and receive error
counter are less than 128.
Bus off
•
A unit that is “bus off” has the output drivers disabled, i.e., it
does not participate in any bus activity. A device is bus off
when the transmit error counter is greater than 255. A bus off
device will become error active again in one of two ways depending on which mode is selected by the user through the
Fault Confinement Mode select bit (FMOD) in the CAN Bus
Control Register (CBUS). Setting the FMOD bit to “0” (default after power on reset) will select the Standard Fault Confinement mode. In this mode the device goes from “bus off”
to “error active” after monitoring 128*11 recessive bits (including bus idle) on the bus. This mode has been implemented for compatibility reasons with existing solutions. Setting the FMOD bit to “1” will select the Enhanced Fault
Confinement mode. In this mode the device goes from “bus
off” to “error active” after monitoring 128 “good” messages,
as indicated by the reception of 11 consecutive “recessive”
bits including the End of Frame. The enhanced mode offers
the advantage that a “bus off” device (i.e., a device with a serious fault) is not allowed to destroy any messages on the
bus until other devices can transmit at least 128 messages.
This is not guaranteed in the standard mode,where a defective device could seriously impact bus communication. When
the device goes from “bus off” to “error active”, both error
counters will have the value “0”.
In each CAN module there are two error counters toperform
a sophisticated error management. The receive error
counter (REC) is 7 bits wide and switches the device to the
error passive state if it overflows. The transmit error counter
(TEC) is 8 bits wide. If it is greater than 127, the device is
switched to the error passive state. As soon as the TEC
overflows, the device is switched bus-off, i.e., it does not participate in any bus activity.
The counters are modified by the device’s hardware according to the following rules:
TABLE 7. Receive Error Counter Handling
Condition
A receiver detects a Bit Error
during sending an active error
flag.
A receiver detects a
“dominant” bit as the first bit
after sending an error flag.
After detecting the 14th
consecutive “dominant” bit
following an active error flag
or overload flag or after
detecting the 8th consecutive
“dominant” bit following a
passive error flag. After each
sequence of additional 8
consecutive “dominant” bits.
Any other error condition
(stuff, frame, CRC, ACK).
A valid reception or
transmission.
TABLE 8. Transmit Error Counter Handling
Condition
A transmitter detects a Bit
Error during sending an active
error flag.
After detecting the 14th
consecutive “dominant” bit
following an active error flag
or overload flag or after
detecting the 8th consecutive
“dominant” bit following a
passive error flag. After each
sequence of additional 8
consecutive “dominant” bits.
Any other error condition
(stuff, frame, CRC, ACK).
A valid reception or
transmission.
Special error handling for the TEC counter is performed in
the following situations:
A stuff error occurs during arbitration, when a transmitted
•
“recessive” stuff bit is received as a “dorminant” bit. This
does not lead to an incrementation of the TEC.
Receive Error
Counter
Increment by 8
Increment by 8
Increment by 8
Increment by 1
Decrement by 1 if
Counter is not 0
Transmit Error
Counter
Increment by 8
Increment by 8
Increment by 8
Decrement by
1 if Counter is not 0
www.national.com33

Frame Formats (Continued)
An ACK-error occurs in an error passive device and no
•
“dominant” bits are detected while sending the passive
error flag. This does not lead to an incrementation of the
TEC.
If only one device is on the bus and this device transmits
•
a message, it will get no acknowledgment. This will be
detected as an error and message will be repeated.
When the device goes “error passive” and detects an acknowledge error, the TEC counter is not incremented.
Therefore the device will not go from “error passive” to
the “bus off” state due to such a condition.
FIGURE 30. CAN Bus States
Figure 30
cording to the error counters.
shows the connection of different bus states ac-
DS101137-65
SYNCHRONIZATION
Every receiver starts with a “hard synchronization” on the
falling edge of the SOF bit. One bit time consists of four bit
segments: Synchronization segment, propagation segment,
phase segment 1 and phase segment 2.
A falling edge of the data signal should be in the synchronization segment. This segment has the fixed length of one
time quanta. To compensate for the various delays within a
network, the propagation segment is used. Its length is programmable from 1 to 8 time quanta. Phase segment 1 and
phase segment 2 are used to resynchronize during an active
frame. The length of these segments is from 1 to 8 time
quanta long.
Two types of synchronization are supported:
Hard synchronization is done with the falling edge on the
bus while the bus is idle, which is then interpreted as the
SOF. It restarts the internal logic.
Soft synchronization is used to lengthen or shorten the bit
time while a data or remote frame is received. Whenever a
falling edge is detected in the propagation segment or in
phase segment 1, the segment is lengthened by a specific
value, the resynchronization jump width (see
If a falling edge lies in the phase segment 2 (as shown in
ure 32
) it is shortened by the resynchronization jump width.
Figure 32
).
Fig-
Only one resynchronization is allowed during one bit time.
The sample point lies between the two phase segments and
is the point where the received data is supposed to be valid.
The transmission point lies at the endof phase segment2 to
start a new bit time with the synchronization segment.
Note 12: The resynchronization jump width (RJW) is automatically determined from the programmed value of PS. If a soft resynchronization is done
during phase segment 1 or the propagation segment, then RJW will either be
equal to 4 internal CAN clocks (CKI/(1
PS, whichever is less. PS2 will never be shorter than 1 internal CAN clock.
Note 13: (PS1— BTL settings any PSC setting) The PS1 of the BTL should
always be programmed to values greater than 1. To allow device resynchronization for positive and negative phase errors on the bus. (if PS1 is programmed to one, a bit time could only be lengthened and never shortened
which basically disables half of the synchronization).
+ divider)
) or the programmed value of
A) Synchronization segment
B) Propagation segment
FIGURE 31. Bit Timing
www.national.com 34
DS101137-66

Frame Formats (Continued)
DS101137-67
FIGURE 32. Resynchronization 1
FIGURE 33. Resynchronization 2
Comparators
The device has two differential comparators. Port L is used
for the comparators. The output of the comparators is multiplexed out to two pins. The following are the Port L assignments:
L6 Comparator 2 output
L5 Comparator 2 negative input
L4 Comparator 2 positive input
L3 Comparator 2 negative input
L2 Comparator 1 output
L1 Comparator 1 negative input
L0 Comparator 1 positive input
Additionally the comparator output can be connected inter-
nally to the L-Port pin of the respective positive input and
thereby generate an interrupt using the L-Port interrupt
structure (neg/pos. edge, enable/disable).
Note that in
of supporting the PWM0 output. The comparator 2 output
MUST be disabled in order to use PWM0 output on L6.
Figure 34
Figure 34
, pin L6 has a second alternate function
shows the Comparator Block Diagram.
DS101137-68
COMPARATOR CONTROL REGISTER (CMPSL) (00D3)
These bits reside in the Comparator Register
CMP2 CMP2 CMP2 CMP2 CMP1 CMP1 CMP1 Re-
SEL OE RD EN OE RD EN served
Bit 7 Bit 0
The register contains the following bits:
CMP2SEL Selects which L port pin to use for comparator2
negative input. (CMP2SEL = 0 selects L5;
CMP2SEL = 1 selects pin L3).
CMP2OE Enables comparator 2 output (“1”=enable),
CMP2EN bit must be set to enable this function.
CMP2RD Reads comparator 2 output internally
(CMP2EN=1) Read-only, reads as a “0” if comparator not enabled.
CMP2EN Enables comparator 2 (“1”=enable). If compara-
tor 2 is disabled the associated L-pins can be
used as standard I/O.
CMP1OE Enables comparator 1 output (“1”=enable),
CMP1EN bit must be set to enable this function.
CMP1RD Reads comparator 1 output internally
(CMP1EN=1) Read-only, reads as a “0” if comparator not enabled.
www.national.com35

Comparators (Continued)
CMP1EN Enables comparator 1 (“1”=enable). If compara-
tor 1 is disabled the associated L-pins can be
used as standard I/O.
Reserved This bit is reserved and should be zero.
The Comparator Select/Control bits are cleared on RESET
(the comparator is disabled). To save power, the program
should also disable the comparator before the device enters
the HALT mode.
The Comparator rise and fall times are symmetrical. The
user program must set up the Configuration and Data registers of the L port correctly for comparator Inputs/Output.
The BOXED area shows logic from PWM Timer. Comparator 2 output (CMP2OE) must be disabled in order to use PWM0 output.
FIGURE 34. Comparator Block
Interrupts
INTRODUCTION
Each device supports eleven vectored interrupts. Interrupt
sources include Timer 0, Timer 1, Port L Wakeup, Software
Trap, MICROWIRE/PLUS, and External Input.
All interrupts force a branch to location 00FF Hex in program
memory. The VIS instruction may be used to vector to the
appropriate service routine from location 00FF Hex.
www.national.com 36
The Software trap has the highest priority while the default
VIS has the lowest priority.
Each of the 11 maskable inputs has a fixed arbitration ranking and vector.
Figure 35
shows the Interrupt Block Diagram.
DS101137-36

Interrupts (Continued)
FIGURE 35. Interrupt Block Diagram
MASKABLE INTERRUPTS
All interrupts other than the Software Trap are maskable.
Each maskable interrupt has an associated enable bit and
pending flag bit. The pending bit is set to 1 when the interrupt
condition occurs. The state of the interrupt enable bit, combined with the GIE bit determineswhether an active pending
flag actually triggers an interrupt. All of the maskable interrupt pending and enable bits are contained in mapped control registers, and thus can be controlled by the software.
Amaskable interrupt condition triggers an interrupt under the
following conditions:
1. The enable bit associated with that interrupt is set.
2. The GIE bit is set.
3. The device is not processing a non-maskable interrupt.
(If a non-maskable interrupt is being serviced, a
maskable interrupt must wait until that service routine is
completed.)
An interrupt is triggered only when all of these conditions are
met at the beginning of an instruction. If different maskable
interrupts meet these conditions simultaneously, the highest
priority interrupt will be serviced first, and the other pending
interrupts must wait.
Upon Reset, all pending bits, individual enable bits, and the
GIE bit are reset to zero. Thus, a maskable interrupt condition cannot trigger an interrupt until the program enables it by
setting both the GIE bit and the individual enable bit. When
enabling an interrupt, the user should consider whether or
not a previously activated (set) pending bit should be acknowledged. If, at the time an interrupt is enabled, any previous occurrences of the interrupt should be ignored, the associated pending bit must be reset to zero prior to enabling
the interrupt. Otherwise, the interrupt may be simply enabled; if the pending bit is already set, it will immediately trigger an interrupt. A maskable interrupt is active if its associated enable and pending bits are set.
An interrupt is an asychronous event which may occur before, during, or after an instruction cycle. Any interrupt which
occurs during the execution of an instruction is not acknowledged until the start of the next normally executed instruction
DS101137-17
is to be skipped, the skip is performed before thepending interrupt is acknowledged.
At the start of interrupt acknowledgment, the following actions occur:
1. The GIE bit is automatically reset to zero, preventing any
subsequent maskable interrupt from interrupting the current service routine. This feature prevents one maskable
interrupt from interrupting another one being serviced.
2. The address of the instruction about to be executed is
pushed onto the stack.
3. The program counter (PC) is loaded with 00FF Hex,
causing a jump to that program memory location.
The device requires seven instruction cycles to perform the
actions listed above.
If the user wishes to allow nested interrupts, the interrupts
service routine may set the GIE bit to 1 by writing to the PSW
register,and thus allow other maskable interrupts to interrupt
the current service routine. If nested interrupts are allowed,
caution must be exercised. The user must write the program
in such a way as to prevent stack overflow, loss of saved
context information, and other unwanted conditions.
The interrupt service routine stored at location 00FF Hex
should use the VIS instruction to determine the cause of the
interrupt, and jump to the interrupt handling routine corresponding to the highest priority enabled and active interrupt.
Alternately, the user may choose to poll all interrupt pending
and enable bits to determine the source(s) of the interrupt. If
more than one interrupt is active, the user’s program must
decide which interrupt to service.
Within a specific interrupt service routine, the associated
pending bit should be cleared. This is typically done as early
as possible in the service routine in order to avoid missing
the next occurrence of the same type of interrupt event.
Thus, if the same event occurs a second time, even while the
first occurrence is still being serviced, the second occurrence will be serviced immediately upon return from the current interrupt routine.
www.national.com37

Interrupts (Continued)
An interrupt service routine typically ends with an RETI instruction. This instruction sets the GIE bit back to 1, pops the
address stored on the stack, and restores that address to the
program counter. Program execution then proceeds with the
next instruction that would have been executed had there
been no interrupt. If there are any valid interrupts pending,
the highest-priority interrupt is serviced immediately upon return from the previous interrupt.
VIS INSTRUCTION
The general interrupt service routine, which starts at address
00FF Hex, must be capable of handling all types of interrupts. The VIS instruction, together with an interrupt vector
table, directs the device to the specific interrupt handling routine based on the cause of the interrupt.
VIS is a single-byte instruction, typically used at the very beginning of the general interrupt service routine at address
00FF Hex, or shortly after that point, just after thecode used
for context switching. The VIS instruction determines which
enabled and pending interrupt has the highest priority, and
causes an indirect jump to the address corresponding to that
interrupt source. The jump addresses (vectors) for all possible interrupts sources are stored in a vector table.
The vector table may be as long as 32 bytes (maximum of 16
vectors) and resides at the top of the 256-byte block containing the VIS instruction. However, if the VIS instruction is at
the very top of a 256-byte block (such as at 00FF Hex), the
vector table resides at the top of the next 256-byte block.
Thus, if the VIS instruction is located somewhere between
00FF and 01DF Hex (the usual case), the vector table is located between addresses 01E0 and 01FFHex. If the VIS instruction is located between 01FF and 02DF Hex, then the
vector table is located between addresses 02E0 and 02FF
Hex, and so on.
Each vector is 15 bits long and points to the beginning of a
specific interrupt service routine somewhere in the 32 kbyte
memory space. Each vector occupies two bytes of the vector
table, with the higher-order byte at the lower address. The
vectors are arranged in order of interrupt priority. The vector
of the maskable interrupt with the lowest rank is located to
0yE0 (higher-order byte) and 0yE1 (lower-order byte). The
next priority interrupt is located at 0yE2 and 0yE3, and so
forth in increasing rank. The Software Trap has the highest
rank and its vector is always located at 0yFE and 0yFF. The
number of interrupts which can become active defines the
size of the table.
Table9
shows the types of interrupts, the interrupt arbitration
ranking, and the locations of the corresponding vectors in
the vector table.
The vector table should be filled by the user with the memory
locations of the specific interrupt service routines. For example, if the Software Trap routine is located at 0310 Hex,
then the vector location 0yFE and -0yFF should contain the
data 03 and 10 Hex, respectively. When a Software Trap interrupt occurs and the VIS instruction is executed, the program jumps to the address specified in the vector table.
The interrupt sources in the vector tableare listed inorder of
rank, from highest to lowest priority. If two or more enabled
and pending interrupts are detected at the same time, the
one with the highest priority is serviced first. Upon return
from the interrupt service routine, the next highest-level
pending interrupt is serviced.
If the VIS instruction is executed, but no interrupts are enabled and pending, the lowest-priority interrupt vector is
used, and a jump is made to the corresponding address in
the vector table. This is an unusual occurrence, and may be
the result of an error. It can legitimately result from a change
in the enable bits or pending flags prior to the execution of
the VIS instruction, such as executing a single cycle instruction which clears an enable flag at the same time that the
pending flag is set. It can also result, however, from inadvertent execution of the VIS command outside of the context of
an interrupt.
The default VIS interrupt vector can be useful for applications in which time critical interrupts can occur during the
servicing of another interrupt. Rather than restoring the program context (A, B, X, etc.) and executing the RETI instruction, an interrupt service routine can be terminated by returning to the VIS instruction. In this case, interrupts will be
serviced in turn until no further interrupts are pending and
the default VIS routine is started. After testing the GIE bit to
ensure that execution is not erroneous, the routine should
restore the program context and execute the RETI to return
to the interrupted program.
This technique can save up to fifty instruction cycles (t
more, (50µs at 10 MHz oscillator) of latency for pending interrupts with a penalty of fewer than ten instruction cycles if
no further interrupts are pending.
To ensure reliable operation, the user should always use the
VIS instruction to determine the source of an interrupt. Although it is possible to poll the pending bits to detect the
source of an interrupt, this practice is not recommended. The
use of polling allows the standard arbitration ranking to be altered, but the reliability of the interrupt system is compromised. The polling routine must individually test the enable
and pending bits of each maskable interrupt. If a Software
Trap interrupt should occur, it will be serviced last, even
though it should have the highest priority. Under certain conditions, a Software Trap could be triggered but not serviced,
resulting in an inadvertent “locking out”of all maskable interrupts by the Software Trap pending flag. Problems such as
this can be avoided by using VIS instruction.
c
), or
www.national.com 38

Interrupts (Continued)
TABLE 9. Interrupt Vector Table
Arbitration
Ranking Hi-Low
1 Software Trap 0yFE–0yFF
2 Reserved 0yFC–0yFD
3 CAN Receive 0yFA–0yFB
4 CAN Error 0yF8–0yF9
5 CAN Transmit 0yF6–0yF7
6 Pin G0 Edge 0yF4–0yF5
7 IDLE Timer Underflow 0yF2–0yF3
8 Timer T1A/Underflow 0yF0–0yF1
9 Timer T1B 0yEE–0yEF
10 MlCROWIRE/PLUS 0yEC–0yED
11 PWM timer 0YEA–0yEB
12 Reserved 0yE8–0yE9
13 Reserved 0yE6–0yE7
14 Reserved 0yE4–0yE5
15 Port L/Wake Up 0yE2–0yE3
16 Default VIS Interrupt 0yE0–0yE1
Source
(transmit/receive)
Vector
Address
Byte
Note 14: y is VIS page, y≠0
If, by accident, a VIS gets executed and no interrupt is active, then the PC (Program Counter) will branch to a vector
located at 0yE0-0yE1.
VIS Execution
When the VIS instruction is executed it activates the arbitration logic. The arbitration logic generates an even number
between E0 and FE (E0, E2, E4, E6 etc...) depending on
which active interrupt has the highest arbitration ranking at
the time of the 1st cycle of VIS is executed. For example, if
the software trap interrupt is active, FE is generated. If the
external interrupt is active and the software trap interrupt is
not, then FAis generated and so forth. If the only active interrupt is software trap, than E0 is generated. This number replaces the lower byte of the PC. The upper byte of the PC remains unchanged. The new PC is therefore pointing to the
vector of the active interrupt with the highest arbitration ranking. This vector is read from program memory and placed
into the PC which is now pointed to the 1st instruction of the
service routine of the active interrupt with the highest arbitration ranking.
Figure 36
instruction.
illustrates the different steps performed by the VIS
Figure 37
shows a flowchart for the VIS instruc-
tion.
The non-maskable interrupt pending flag is cleared by the
RPND (Reset Non-Maskable Pending Bit) instruction (under
certain conditions) and upon RESET.
FIGURE 36. VIS Operation
DS101137-29
www.national.com39

Interrupts (Continued)
DS101137-30
FIGURE 37. VIS Flowchart
www.national.com 40

Interrupts (Continued)
Programming Example: External Interrupt
PSW =00EF
CNTRL =00EE
RBIT 0,PORTGC
RBIT 0,PORTGD ; G0 pin configured Hi-Z
SBIT IEDG, CNTRL ; Ext interrupt polarity; falling edge
SBIT EXEN, PSW ; Enable the external interrupt
WAIT: JP WAIT ; Wait for external interrupt
INT_EXIT:
SERVICE: RBIT EXPND, PSW ; Interrupt Service Routine
SBIT GIE, PSW ; Set the GIE bit
.
.
.
.=0FF ; The interrupt causes a
VIS ; branch to address 0FF
; The VIS causes a branch to
;interrupt vector table
.
.
.
.=01FA ; Vector table (within 256 byte
.ADDRW SERVICE ; of VIS inst.) containing the ext
; interrupt service routine
.
.
RETI
.
.
; Reset ext interrupt pend. bit
.
.
.
JP INT_EXIT ; Return, set the GIE bit
www.national.com41

Interrupts (Continued)
NON-MASKABLE INTERRUPT
Pending Flag
There is a pending flag bit associated with the non-maskable
interrupt, called STPND. This pending flag is not memorymapped and cannot be accessed directly by the software.
The pending flag is reset to zero when a device Reset occurs. When the non-maskable interrupt occurs, the associated pending bit is set to 1. The interrupt service routine
should contain an RPND instruction to reset the pending flag
to zero. The RPND instruction always resets the STPND
flag.
Software Trap
The Software Trap is a special kind of non-maskable interrupt which occurs when the INTR instruction (used to acknowledge interrupts) is fetched from program memory and
placed in the instruction register. This can happen in a variety of ways, usually because of an errorcondition. Some examples of causes are listed below.
If the program counter incorrectly points to a memory location beyond the available program memory space, the nonexistent or unused memory location returns zeroes which is
interpreted as the INTR instruction.
If the stack is popped beyond the allowed limit (address 06F
Hex), a 7FFF will be loaded into the PC, if this last location in
program memory is unprogrammed or unavailable, a Software Trap will be triggered.
A Software Trap can be triggered by a temporary hardware
condition such as a brownout or power supply glitch.
The Software Trap has the highest priority of all interrupts.
When a Software Trap occurs, the STPND bit is set.The GIE
bit is not affected and the pending bit (not accessible by the
user) is used to inhibit other interrupts and to direct the program to the ST service routine with the VIS instruction. Nothing can interrupt a Software Trap service routine except for
another Software Trap. The STPND can be reset only bythe
RPND instruction or a chip Reset.
The Software Trap indicates an unusual or unknown error
condition. Generally, returning to normal execution at the
point where the Software Trap occurred cannot be done reliably. Therefore, the Software Trap service routine should
reinitialize the stack pointer and perform a recovery procedure that restarts the software at some known point, similar
to a device Reset, but not necessarily performing all the
same functions as a device Reset. The routine must also execute the RPND instruction to reset the STPND flag. Otherwise, all other interrupts will be locked out. To the extent possible, the interrupt routine should record or indicate the
context of the device so that the cause of the Software Trap
can be determined.
If the user wishes to return to normal execution from the
point at which the Software Trap was triggered, the user
must first execute RPND, followed by RETSK rather than
RETI or RET. This is because the return address stored on
the stack is the address of the INTR instruction that triggered
the interrupt. The program must skip that instruction in order
to proceed with the next one. Otherwise, an infinite loop of
Software Traps and returns will occur.
Programming a return to normal execution requires careful
consideration. If the Software Trap routine is interrupted by
another Software Trap, the RPND instruction in the service
routine for the second Software Trap will reset the STPND
flag; upon return to the first Software Trap routine, the
STPND flag will have the wrong state. This will allow
maskable interrupts to be acknowledged during the servicing
of the first Software Trap. Toavoid problems such as this, the
user program should contain the Software Trap routine to
perform a recovery procedure rather than a return to normal
execution.
Under normal conditions, the STPND flag is reset by a
RPND instruction in the Software Trap service routine. If a
programming error or hardware condition (brownout, power
supply glitch, etc.) sets the STPND flag without providing a
way for it to be cleared, all other interruptswill be lockedout.
To alleviate this condition, the user can use extra RPND instructions in the main program and in the WATCHDOG service routine (if present). There is no harm in executing extra
RPND instructions in these parts of the program.
PORT L INTERRUPTS
Port L provides the user with an additional eight fully selectable, edge sensitive interrupts which are all vectored into the
same service subroutine.
The interrupt from Port L shares logic with the wake up circuitry.The register WKEN allows interrupts from Port Lto be
individually enabled or disabled. The register WKEDG specifies the trigger condition to be either a positive or a negative
edge. Finally, the register WKPND latches in the pending
trigger conditions.
The GIE (Global Interrupt Enable) bit enables the interrupt
function.
A control flag, LPEN, functions as a global interrupt enable
for Port L interrupts. Setting the LPEN flag will enable interrupts and vice versa. A separate global pending flag is not
needed since the register WKPND is adequate.
Since Port L is also used for waking the device out of the
HALTor IDLE modes, the user can elect to exit the HALT or
IDLE modes either with or without the interrupt enabled. If he
elects to disable the interrupt, then the device will restart execution from the instruction immediately following the instruction that placed the microcontroller in the HALT or IDLE
modes. In the other case, the device will first execute the interrupt service routine and then revert to normal operation.
(See HALT MODE for clock option wakeup information.)
INTERRUPT SUMMARY
The device uses the following types of interrupts, listed below in order of priority:
1. The Software Trap non-maskable interrupt, triggered by
the INTR (00 opcode) instruction. The Software Trap is
acknowledged immediately. This interrupt service routine can be interrupted only by another Software Trap.
The Software Trap should end with two RPND instructions followed by a restart procedure.
2. Maskable interrupts, triggered by an on-chip peripheral
block or an external device connected to the device.Under ordinary conditions, a maskable interrupt will not interrupt any other interrupt routine in progress. A
maskable interrupt routine in progress can be interrupted by the non-maskable interrupt request. A
maskable interrupt routine should end with an RETI instruction or, prior to restoring context, should return to
execute the VIS instruction. This is particularly useful
when exiting long interrupt service routiness if the time
between interrupts is short. In this case the RETI instruction would only be executed when the default VIS routine is reached.
www.national.com 42

Detection of Illegal Conditions
The device can detect various illegal conditions resulting
from coding errors, transient noise, power supply voltage
drops, runaway programs, etc.
Reading of undefined ROM gets zeroes. The opcode for
software interrupt is zero. If the program fetches instructions
from undefined ROM, this will force a software interrupt, thus
signaling that an illegal condition has occurred.
The subroutine stack grows down for each call (jump tosubroutine), interrupt, or PUSH, and grows up for each return or
POP. The stack pointer is initialized to RAM location 02F Hex
during reset. Consequently, if there are more returns than
calls, the stack pointer will point to addresses 030 and 031
Hex (which are undefined RAM). Undefined RAM from addresses 030 to 03F Hex is read as all 1’s, which in turn will
cause the program to return to address 7FFF Hex. This is an
undefined ROM location and the instruction fetched (all 0’s)
from this location will generate a software interrupt signaling
an illegal condition.
Thus, the chip can detect the following illegal conditions:
1. Executing from undefined ROM.
2. Over “POP”ing the stack by having more returns than
calls.
When the software interrupt occurs, the user can re-initialize
the stack pointer and do a recovery procedure before restarting (this recovery program is probably similar to that following reset, but might not contain the same program initialization procedures).
MICROWIRE/PLUS
MICROWIRE/PLUS is a serial synchronous communications
interface. The MICROWIRE/PLUS capability enables the device to interface with any of National Semiconductor’s MICROWIRE peripherals (i.e., A/D converters, display drivers,
E2PROMs etc.) and with other microcontrollers which support the MICROWIRE interface. It consists of an 8-bit serial
shift register (SIO) with serial data input (SI), serial data output (SO) and serial shift clock (SK).
diagram of the MICROWlRE/PLUS logic.
The shift clock can be selected from either an internal source
or an external source. Operating the MICROWIRE/ PLUS arrangement with the internal clock source is called the Master
mode of operation. Similarly, operating the MICROWIRE arrangement with an external shift clock is called the Slave
mode of operation.
The CNTRL register is used to configure and control the
MICROWIRE/PLUS mode. To use the MICROWIRE/PLUS,
the MSEL bit in the CNTRL register is set to one. In the master mode the SK clock rate is selected by the two bits, SL0
and SL1, in the CNTRL register.
clock rates that may be selected.
Figure 38
Table10
shows a block
details the different
MICROWIRE/PLUS OPERATION
Setting the BUSY bit in the PSW register causes the
MICROWIRE/PLUS to start shifting the data. It gets reset
when eight data bits have been shifted. The user may reset
the BUSY bit by software to allow less than 8 bits to shift. If
enabled, an interrupt is generated when eight data bits have
been shifted. The device may enter the MICROWIRE/PLUS
mode either as a Master or as a Slave.
two COP888 family microcontrollers and several peripherals
may be interconnected using the MICROWIRE/PLUS arrangements.
Warning:
The SIO register should only be loaded when the SK clock is
low. Loading the SIO register while the SK clock is high will
result in undefined data in the SlO register. SK clock is normally low when not shifting.
Setting the BUSY flag when the input SK clock is high in the
MICROWIRE/PLUS slave mode may cause the current SK
clock for the SIO shift register to be narrow. For safety, the
BUSY flag should only be set when the input SK clock is low.
MICROWIRE/PLUS Master Mode Operation
In the MlCROWIRE/PLUS Master mode of operation the
shift clock (SK) is generated internally. The MICROWIRE
Master always initiates all data exchanges. The MSEL bit in
the CNTRL register must be set to enable the SO and SK
functions onto the G Port. TheSO andSK pinsmust alsobe
selected as outputs by setting appropriate bits in the Port G
configuration register.
required for Master or Slave mode of operation.
FIGURE 38. MICROWIRE/PLUS Block Diagram
Table 11
Figure 39
summarizes the bit settings
shows how
DS101137-37
www.national.com43

MICROWIRE/PLUS (Continued)
FIGURE 39. MICROWIRE/PLUS Application
TABLE 10. MICROWIRE/PLUS
Master Mode Clock Selection
SL1 SL0 SK
0 0 2xt
0 1 4xt
1 x 8xt
Where tcis the instruction cycle clock
MICROWIRE/PLUS Slave Mode Operation
In the MICROWIRE/PLUS Slave mode of operation the SK
clock is generated by an external source. Setting the MSEL
bit in the CNTRL register enables the SO and SK functions
onto the G Port. The SK pin must be selected as an input
and the SO pin is selected as an output pin by setting and resetting the appropriate bit in the Port G configuration register.
Table 2
summarizes the settings required to enter the
Slave mode of operation.
The user must set the BUSY flag immediately upon entering
the Slave mode. This will ensure that all data bits sent by the
Master will be shifted properly. After eight clock pulses the
BUSY flag will be cleared and the sequence may be repeated.
Alternate SK Phase Operation
The device allows either the normal SK clock or an alternate
phase SK clock to shift data in and outof the SIO register. In
both the modes the SK is normally low. In the normal mode
data is shifted in on the rising edge of the SK clock and the
data is shifted out on the falling edge of the SK clock. The
SIO register is shifted on each falling edge ofthe SK clockin
the normal mode. In the alternate SK phase mode the SIO
register is shifted on the rising edge of the SK clock.
A control flag, SKSEL, allows either the normal SK clock or
the alternate SK clock to be selected. Resetting SKSEL
causes the MICROWIRE/PLUS logic to be clocked from the
normal SK signal. Setting the SKSEL flag selects the alternate SK clock. The SKSEL is mapped into the G6 configuration bit. The SKSEL flag will power up in the reset condition,
selecting the normal SK signal.
c
c
c
DS101137-38
TABLE 11. MICROWIRE/PLUS Mode Selection
This table assumes that the control flag MSEL is set.
G4 (SO) G5 (SK) G4 G5
Config. Config. Fun. Fun. Operation
Bit Bit
1 1 SO Int. MICROWIRE/PLUS
SK Master
0 1 TRI- Int. MICROWIRE/PLUS
STATE SK Master
1 0 SO Ext. MICROWIRE/PLUS
SK Slave
0 0 TRI- Ext. MICROWIRE/PLUS
STATE SK Slave
www.national.com 44

Memory Map
All RAM, ports and registers (except A and PC) are mapped
into data memory address space.
Address Contents
00 to 2F On-Chip RAM bytes (48 bytes)
30 to 7F Unused RAM Address Space (Reads As All
Ones)
80 to 9F Unused RAM Address Space (Reads
Undefined Data)
A0 PSCAL, PWM timer Prescaler Register
A1 RLON, PWM timer On-Time Register
A2 PWMCON, PWM Control Register
A3 to AF Reserved
B0 TXD1, Transmit 1 Data
B1 TXD2, Transmit 2 Data
B2 TDLC, Transmit Data Length Code and
Identifier Low
B3 TID, Transmit Identifier High
B4 RXD1, Receive Data 1
B5 RXD2, Receive Data 2
B6 RIDL, Receive Data Length Code
B7 RID, Receive Identify High
B8 CSCAL, CAN Prescaler
B9 CTIM, Bus Timing Register
BA CBUS, Bus Control Register
BB TCNTL, Transmit/Receive Control Register
BC RTSTAT Receive/Transmit Status Register
BD TEC, Transmit Error Count Register
BE REC, Receive Error Count Register
BF Reserved
C0 to C7 Reserved
C8 WKEDG, MIWU Edge Select Register
C9 WKEN, MIWU Enable Register
CA WKPND, MIWU Pending Register
CB to CF Reserved
D0 PORTLD, Port L Data Register
D1 PORTLC, Port L Configuration Register
D2 PORTLP, Port L Input Pins (Read Only)
D3 CMPSL, Comparator control register
D4 PORTGD, Port G Data Register
D5 PORTGC, Port G Configuration Register
D6 PORTGP, Port G Input Pins (Read Only)
D7 to DB Reserved
DC PORTD, Port D output register
DD to DF Reserved for Port D
E0 to E5 Reserved
E6 T1RBLO, Timer T1 Autoload Register Lower
Byte
E7 T1RBHI, Timer T1 Autoload Register Upper
Byte
E8 ICNTRL, Interrupt Control Register
E9 SIOR, MICROWIRE/PLUS Shift Register
Address Contents
EA TMR1LO, Timer T1 Lower Byte
EB TMR1HI, Timer T1 Upper Byte
EC T1RALO, Timer T1 Autoload Register Lower
Byte
ED T1RAHI, Timer T1 Autoload Register T1RA
Upper Byte
EE CNTRL, Control Register
EF PSW, Processor Status Word Register
F0 to FB On-Chip RAM Mapped as Registers
FC X Register
FD SP Register
FE B Register
FF Reserved (Note 16)
Note 15: Reading memory locations 30–7FHex will return all ones. Reading
other unused memory locations will return undefined data.
Note 16: In devices with more than 128 bytes of RAM, location 0FF is used
as the Segment register to switch between different Segments of RAM
memory. In this device location 0FF can be used as a general purpose, onchip RAM mapped register. However, the user is advised that caution should
be taken in porting software utilizing this memory location to a chip with more
than 128 bytes of RAM.
Addressing Modes
There are ten addressing modes, six for operand addressing
and four for transfer of control.
OPERAND ADDRESSING MODES
Register Indirect
This is the “normal” addressing mode. The operand is the
data memory addressed by the B pointer or X pointer.
Register Indirect (with auto post Increment or
decrement of pointer)
This addressing mode is used with the LD and X instructions. The operand is the data memory addressed by the B
pointer or X pointer. This is a register indirect mode that automatically post increments or decrements the B or X register after executing the instruction.
Direct
The instruction contains an 8-bit address field that directly
points to the data memory for the operand.
Immediate
The instruction contains an 8-bit immediate field as the operand.
Short Immediate
This addressing mode is used with the Load B Immediate instruction. The instruction contains a 4-bit immediate field as
the operand.
Indirect
This addressing mode is used with the LAID instruction. The
contents of the accumuiator are used as a partial address
(lower 8 bits of PC) for accessing a data operand from the
program memory.
www.national.com45

Addressing Modes (Continued)
TRANSFER OF CONTROL ADDRESSING MODES
Relative
This mode is used for the JP instruction, with the instruction
field being added to the program counter to get the new program location. JP has a range from −31 to +32 to allow a
1-byte relative jump (JP + 1 is implemented by a NOP instruction). There are no “pages” when using JP, since all 15
bits of PC are used.
Absolute
This mode is used with the JMP and JSR instructions, with
the instruction field of 12 bits replacing the lower 12 bits of
the program counter (PC). This allows jumping to any location in the current 4k program memory segment.
Absolute Long
This mode is used with the JMPL and JSRL instructions, with
the instruction field of 15 bits replacing the entire 15 bits of
the program counter (PC). This allows jumping to any location up to 32k in the program memory space.
Indirect
This mode is used with the JID instruction. The contents of
the accumulator are used as a partial address (lower 8 bits of
PC) for accessing a location in the program memory. The
contents of this program memory location serve as a partial
address (lower 8 bits of PC) for the jump to the next instruction.
Note: The VIS is a special case of the Indirect Transfer of Control addressing
mode, where the double byte vector associated with the interrupt is
transferred from adjacent addresses in the program memory into the
program counter (PC) in order to jump to the associated interrupt service routine.
Instruction Set
Register and Symbol Definition
Registers
A 8-Bit Accumulator Register
B 8-Bit Address Register
X 8-Bit Address Register
SP 8-Bit Stack Pointer Register
PC 15-Bit Program Counter Register
PU Upper 7 Bits of PC
PL Lower 8 Bits of PC
C 1-Bit of PSW Register for Carry
HC 1-Bit of PSW Register for Half Carry
GIE 1-Bit of PSW Register for Global Interrupt
VU Interrupt Vector Upper Byte
VL Interrupt Vector Lower Byte
[B] Memory Indirectly Addressed by B Register
[X] Memory Indirectly Addressed by X Register
MD Direct Addressed Memory
Mem Direct Addressed Memory or [B]
Meml Direct Addressed Memory or [B] or
Imm 8-Bit Immediate Data
Reg Register Memory: Addresses F0 to FF
Bit Bit Number (0 to 7)
←
↔
Enable
Symbols
Immediate Data
(Includes B, X and SP)
Loaded with
Exchanged with
www.national.com 46

Instruction Set (Continued)
INSTRUCTION SET
ADD A,Meml ADD A←A + Meml
ADC A,Meml ADD with Carry A←A+Meml+C,C←Carry,
HC←Half Carry
SUBC A,Meml Subtract with Carry A←A−MemI+C,C←Carry,
HC←Half Carry
AND A,Meml Logical AND A←A and Meml
ANDSZ A,Imm Logical AND Immed., Skip if Zero Skip next if (A and Imm) = 0
OR A,Meml Logical OR A←A or Meml
XOR A,Meml Logical EXclusive OR A←A xor Meml
IFEQ MD,Imm IF EQual Compare MD and Imm, Do next if MD = Imm
IFEQ A,Meml IF EQual Compare A and Meml, Do next if A = Meml
IFNE A,Meml IF Not Equal Compare A and Meml, Do next if A
IFGT A,Meml IF Greater Than Compare A and Meml, Do next if A Meml
IFBNE # If B Not Equal Do next if lower 4 bits of B
DRSZ Reg Decrement Reg., Skip if Zero Reg←Reg − 1, Skip if Reg = 0
SBIT #,Mem Set BIT 1 to bit, Mem (bit=0to7immediate)
RBIT #,Mem Reset BIT 0 to bit, Mem
IFBIT #,Mem IF BIT If bit in A or Mem is true do next instruction
RPND Reset PeNDing Flag Reset Software Interrupt Pending Flag
X A,Mem EXchange A with Memory A
X A,[X] EXchange A with Memory [X] A
LD A,Meml LoaD A with Memory A←Meml
LD A,[X] LoaD A with Memory [X] A←[X]
LD B,Imm LoaD B with Immed. B←Imm
LD Mem,Imm LoaD Memory Immed. Mem←Imm
LD Reg,Imm LoaD Register Memory Immed. Reg←Imm
XA,[B
XA,[X
LD A, [B
LD A, [X
LD [B
CLR A CLeaR A A←0
INC A INCrement A A←A+1
DEC A DECrementA A←A−1
LAID Load A InDirect from ROM A←ROM (PU,A)
DCOR A Decimal CORrect A A←BCD correction of A (follows ADC, SUBC)
RRC A Rotate A Right thru C C→A7→…→A0→C
RLC A Rotate A Left thru C C←A7←…←A0←C
SWAP A SWAP nibbles of A A7…A4
SC Set C C←1, HC←1
RC Reset C C←0, HC←0
IFC IF C IF C is true, do next instruction
IFNC IF Not C If C is not true, do next instruction
POP A POP the stack into A SP←SP+1,A←[SP]
PUSH A PUSH A onto the stack [SP]←A, SP←SP−1
VIS Vector to Interrupt Service Routine PU←[VU], PL←[VL]
JMPL Addr. Jump absolute Long PC←ii (ii = 15 bits, 0k to 32k)
JMP Addr. Jump absolute PC9…0←i (i = 12 bits)
JP Disp. Jump relative short PC←PC+r(ris−31to+32, except 1)
±
] EXchange A with Memory [B] A↔[B], (B←B±1)
±
] EXchange A with Memory [X] A↔[X], (X
±
] LoaD A with Memory [B] A←[B], (B←B±1)
±
] LoaD A with Memory [X] A←[X], (X←X±1)
±
],Imm LoaD Memory [B] Immed. [B]←Imm, (B←B±1)
↔
Mem
↔
[X]
←
±
1)
↔
A3…A0
≠
Meml
≠
Imm
www.national.com47

Instruction Set (Continued)
JSRL Addr. Jump SubRoutine Long [SP]←PL, [SP−1]←PU,SP−2, PC←ii
JSR Addr. Jump SubRoutine [SP]←PL, [SP−1]←PU,SP−2, PC9…0←i
JID Jump InDirect PL←ROM (PU,A)
RET RETurn from subroutine SP + 2, PL←[SP], PU←[SP−1]
RETSK RETurn and SKip SP + 2, PL←[SP],PU←[SP−1]
RETI RETurn from Interrupt SP + 2, PL←[SP],PU←[SP−1],GIE←1
INTR Generate an Interrupt [SP]←PL, [SP−1]←PU, SP−2, PC←0FF
NOP No OPeration PC←PC+1
www.national.com 48

Instruction Execution Time
Most instructions are single byte (with immediate addressing
mode instructions taking two bytes).
Most single byte instructions take one cycle time to execute.
Skipped instructions require x number of cycles to be
skipped, where x equals the number of bytes in the skipped
instruction opcode.
See the BYTES and CYCLES per INSTRUCTION table for
details.
Bytes and Cycles per Instruction
The following table shows the number of bytes and cycles for
each instruction in the format of byte/cycle.
Arithmetic and Logic Instructions
[B] Direct Immed.
ADD 1/1 3/4 2/2
ADC 1/1 3/4 2/2
SUBC 1/1 3/4 2/2
AND 1/1 3/4 2/2
OR 1/1 3/4 2/2
XOR 1/1 3/4 2/2
IFEQ 1/1 3/4 2/2
IFGT 1/1 3/4 2/2
IFBNE 1/1
DRSZ 1/3
SBIT 1/1 3/4
RBIT 1/1 3/4
IFBIT 1/1 3/4
RPND 1/1
Instructions Using A and C
CLRA 1/1
INCA 1/1
DECA 1/1
LAID 1/3
DCORA 1/1
RRCA 1/1
RLCA 1/1
SWAPA 1/1
SC 1/1
RC 1/1
IFC 1/1
IFNC 1/1
PUSHA 1/3
POPA 1/3
ANDSZ 2/2
Transfer of Control
Instructions
JMPL 3/4
JMP 2/3
JP 1/3
JSRL 3/5
JSR 2/5
JID 1/3
VIS 1/5
RET 1/5
RETSK 1/5
RETI 1/5
INTR 1/7
NOP 1/1
Memory Transfer Instructions
Register Direct Immed. Register Indirect
Indirect Auto Incr. and Decr.
[B] [X] [B+, B−] [X+, X−]
X A, (Note 17) 1/1 1/3 2/3 1/2 1/3
LD A, (Note 17) 1/1 1/3 2/3 2/2 1/2 1/3
LD B, Imm 1/1 (IF B
LD B, Imm 2/3 (IF B
LD Mem, Imm 2/2 3/3 2/2
LD Reg, Imm 2/3
IFEQ MD, Imm 3/3
Note 17:>Memory location addressed by B or X or directly.
<
16)
>
15)
www.national.com49

LOWER NIBBLE
UPPER NIBBLE
JP+17 INTR 0
JMP
x000–x0FF
x000–x0FF
IFBNE 0 JSR
#0F
LD B,
A, #i
ANDSZ
0,[B]
IFBIT
ADC
A,[B]
#i
JP+18 JP+2 1
JMP
x100–x1FF
x100–x1FF
IFBNE 1 JSR
#0E
*LDB,
1,[B]
IFBIT
SUB
A,[B]
A, #i
JP+19 JP+3 2
JMP
x200–x2FF
x200–x2FF
IFBNE 2 JSR
#0D
*LDB,
2,[B]
IFBIT
A,[B]
IFEQ
A, #i
IFEQ
[B+]
XA,
JP+20 JP+4 3
JMP
x300–x3FF
x300–x3FF
IFBNE 3 JSR
#0C
*LDB,
3,[B]
IFBIT
A,[B]
IFGT
#i
IFGT A,
[B−]
XA,
JP+21 JP+5 4
JMP
IFBNE 4 JSR
CLRA LD B,
IFBIT
ADD
x400–x4FF
x400–x4FF
#0B
4,[B]
A,[B]
#i
JP+22 JP+6 5
JMP
IFBNE 5 JSR
SWAPA LD B,
IFBIT
AND
x500–x5FF
x500–x5FF
#0A
5,[B]
A,[B]
#i
JP+23 JP+7 6
JMP
IFBNE 6 JSR
DCORA LD B,
IFBIT
XOR
XOR A,
x600–x6FF
x600–x6FF
#09
6,[B]
A,[B]
#i
[B]
JP+24 JP+8 7
JMP
x700–x7FF
x700–x7FF
IFBNE 7 JSR
#08
PUSHA LD B,
7,[B]
IFBIT
A,[B]
JP+25 JP+9 8
JMP
IFBNE 8 JSR
LD B,
RBIT
x800–x8FF
x800–x8FF
#07
0,[B]
0,[B]
JP+26 JP+10 9
JMP
IFBNE 9 JSR
LD B,
RBIT
IFNC SBIT
IFNE
IFEQ
x900–x9FF
x900–x9FF
#06
1,[B]
1,[B]
A,#i
Md,#i
JP+27 JP+11 A
JMP
IFBNE 0A JSR
LD B,
RBIT
INCA SBIT
LD
LD A,
xA00–xAFF
xA00–xAFF
#05
2,[B]
2,[B]
[B+], #i
[B+]
JP+28 JP+12 B
JMP
IFBNE 0B JSR
LD B,
RBIT
DECA SBIT
LD
LD A,
xB00–xBFF
xB00–xBFF
#04
3,[B]
3,[B]
[B−], #i
[B−]
JP+29 JP+13 C
JMP
IFBNE 0C JSR
LD B,
RBIT
JMPL X A,Md POPA SBIT
xC00–xCFF
xC00–xCFF
#03
4,[B]
4,[B]
JP+30 JP+14 D
JMP
IFBNE 0D JSR
LD B,
RBIT
RETSK SBIT
xD00–xDFF
xD00–xDFF
#02
5,[B]
5,[B]
A,Md
JP+31 JP+15 E
JMP
IFBNE 0E JSR
LD B,
RBIT
RET SBIT
LD
LD A,
xE00–xEFF
xE00–xEFF
#01
6,[B]
6,[B]
[B],#i
[B]
JP+32 JP+16 F
JMP
IFBNE 0F JSR
LD B,
RBIT
xF00–xFFF
xF00–xFFF
#00
7,[B]
7,[B]
XA,[X] XA,
0F6
JP−9 JP−25 LD 0F6, #i DRSZ
* * OR A,#i OR
JP−8 JP−24 LD 0F7, #i DRSZ
* SC SUBC
[X+]
0F1
JP−14 JP−30 LD 0F1, #i DRSZ
XA,
0F2
JP−13 JP−29 LD 0F2, #i DRSZ
RRCA RC ADC A,
0F0
F E D C BA9 876 5 4 3 2 10
Opcode Table
www.national.com 50
JP−15 JP−31 LD 0F0, #i DRSZ
[X−]
XA,
0F3
JP−12 JP−28 LD 0F3, #i DRSZ
VIS LAID ADD A,
0F4
JP−11 JP−27 LD 0F4, #i DRSZ
RPND JID AND A,
0F5
JP−10 JP−26 LD 0F5, #i DRSZ
0F7
NOP RLCA LD A,#i IFC SBIT
0F8
JP−7 JP−23 LD 0F8, #i DRSZ
[B]
IFNE A,
0F9
JP−6 JP−22 LD 0F9, #i DRSZ
[X+]
LD A,
0FA
JP−5 JP−21 LD 0FA, #i DRSZ
[X−]
LD A,
0FB
JP−4 JP−20 LD 0FB, #i DRSZ
LD
Md,#i
0FC
JP−3 JP−19 LD 0FC, #i DRSZ
DIR JSRL LD
0FD
JP−2 JP−18 LD 0FD, #i DRSZ
[X]
LD A,
0FE
JP−1 JP−17 LD 0FE, #i DRSZ
* * LD B,#i RETI SBIT
0FF
JP−0 JP−16 LD 0FF, #i DRSZ
is the immediate data
where,
Md is a directly addressed memory location
* is an unused opcode
The opcode 60 Hex is also the opcode for IFBIT #i,A

Development Tools Support
OVERVIEW
National is engaged with an international community of independent 3rd party vendors who provide hardware and software development tool support. Through National’s interaction and guidance, these tools cooperate to form a choice of
solutions that fits each developer’s needs.
This section provides a summary of the tool and development kits currently available. Up-to-date information, selection guides, free tools, demos, updates, and purchase information can be obtained at our web site at:
www.national.com/cop8.
SUMMARY OF TOOLS
COP8 Evaluation Tools
COP8–NSEVAL: Free Software Evaluation package for
•
Windows. A fully integrated evaluation environment for
COP8, including versions of WCOP8 IDE (Integrated Development Environment), COP8-NSASM, COP8-MLSIM,
COP8C, DriveWay
information.
COP8–MLSIM: Free Instruction Level Simulator tool for
•
Windows. For testing and debugging software instructions only (No I/O or interrupt support).
COP8–EPU: Very Low cost COP8 Evaluation & Pro-
•
gramming Unit. Windows based evaluation and
hardware-simulation tool, with COP8 device programmer
and erasable samples. Includes COP8-NSDEV, Driveway COP8 Demo, MetaLink Debugger, I/O cables and
power supply.
COP8–EVAL-ICUxx: Very Low cost evaluation and de-
•
sign test board for COP8ACC and COP8SGx Families,
from ICU. Real-time environment with add-on A/D, D/A,
and EEPROM. Includes software routines and reference
designs.
Manuals,Applications Notes, Literature: Available free
•
from our web site at: www.national.com/cop8.
COP8 Integrated Software/Hardware Design Development Kits
COP8-EPU: Very Low cost Evaluation & Programming
•
Unit. Windows based development and hardwaresimulation tool for COPSx/xG families, with COP8 device
programmer and samples. Includes COP8-NSDEV,
Driveway COP8 Demo, MetaLink Debugger, cables and
power supply.
COP8-DM: Moderate cost Debug Module from MetaLink.
•
A Windows based, real-time in-circuit emulation tool with
COP8 device programmer. Includes COP8-NSDEV,
DriveWay COP8 Demo, MetaLink Debugger, power supply, emulation cables and adapters.
COP8 Development Languages and Environments
COP8-NSASM: Free COP8 Assembler v5 for Win32.
•
Macro assembler, linker, and librarian for COP8 software
development. Supports all COP8 devices. (DOS/Win16
v4.10.2 available with limited support). (Compatible with
WCOP8 IDE, COP8C, and DriveWay COP8).
COP8-NSDEV: Very low cost Software Development
•
Package for Windows. An integrated development environment for COP8, including WCOP8 IDE, COP8NSASM, COP8-MLSIM.
COP8C: Moderately priced C Cross-Compiler and Code
•
Development System from Byte Craft (no code limit). In-
™
COP8, Manuals, and other COP8
cludes BCLIDE (Byte Craft Limited Integrated Development Environment) for Win32, editor, optimizing C CrossCompiler, macro cross assembler, BC-Linker, and
MetaLink tools support. (DOS/SUN versions available;
Compiler is installable under WCOP8 IDE; Compatible
with DriveWay COP8).
EWCOP8-KS: Very Low cost ANSI C-Compiler and Em-
•
bedded Workbench from IAR (Kickstart version:
COP8Sx/Fx only with 2k code limit; No FP). A fully integrated Win32 IDE, ANSI C-Compiler, macro assembler,
editor, linker, Liberian, C-Spy simulator/debugger, PLUS
MetaLink EPU/DM emulator support.
EWCOP8-AS: Moderately priced COP8 Assembler and
•
Embedded Workbenchfrom IAR (no code limit).A fully integrated Win32 IDE, macro assembler, editor, linker, librarian, and C-Spy high-level simulator/debugger with
I/O and interrupts support. (Upgradeable with optional
C-Compiler and/or MetaLink Debugger/Emulator support).
EWCOP8-BL: Moderately priced ANSI C-Compiler and
•
Embedded Workbench from IAR (Baseline version: All
COP8 devices; 4k code limit; no FP). A fully integrated
Win32 IDE, ANSI C-Compiler, macro assembler, editor,
linker,librarian, and C-Spy high-level simulator/debugger.
(Upgradeable; CWCOP8-M MetaLink tools interface support optional).
EWCOP8: Full featured ANSI C-Compiler and Embed-
•
ded Workbench for Windows from IAR (no code limit). A
fully integrated Win32 IDE, ANSI C-Compiler, macro assembler, editor, linker, librarian, and C-Spy high-level
simulator/debugger. (CWCOP8-M MetaLink tools interface support optional).
EWCOP8-M: Full featuredANSI C-Compiler and Embed-
•
ded Workbench for Windows from IAR (no code limit). A
fully integrated Win32 IDE, ANSI C-Compiler, macro assembler, editor, linker, librarian, C-Spy high-level
simulator/debugger, PLUS MetaLink debugger/hardware
interface (CWCOP8-M).
COP8 Productivity Enhancement Tools
WCOP8 IDE: Very Low cost IDE (Integrated Develop-
•
ment Environment) from KKD. Supports COP8C, COP8NSASM, COP8-MLSIM, DriveWay COP8, and MetaLink
debugger under a common Windows Project Management environment. Code development, debug, and emulation tools can be launched from the project window
framework.
DriveWay-COP8: Low cost COP8 Peripherals Code
•
Generation tool from Aisys Corporation. Automatically
generates tested and documented C orAssembly source
code modules containing I/O drivers and interrupt handlers for each on-chip peripheral. Application specific
code can be inserted for customization using the integrated editor. (Compatible with COP8-NSASM, COP8C,
and WCOP8 IDE.)
COP8-UTILS: Free set of COP8 assembly code ex-
•
amples, device drivers, and utilities to speed up code development.
COP8-MLSIM: Free Instruction Level Simulator tool for
•
Windows. For testing and debugging software instructions only (No I/O or interrupt support).
www.national.com51

Development Tools Support
(Continued)
COP8 Real-Time Emulation Tools
COP8-DM: MetaLink Debug Module. A moderately
•
priced real-time in-circuit emulation tool, with COP8 device programmer. Includes COP8-NSDEV, DriveWay
COP8 Demo, MetaLink Debugger, power supply, emulation cables and adapters.
IM-COP8: MetaLink iceMASTER®. A full featured, real-
•
time in-circuit emulator for COP8 devices. Includes MetaLink Windows Debugger, and power supply. Packagespecific probes and surface mount adaptors are ordered
separately.
TOOLS ORDERING NUMBERS FOR THE COP87L84BC FAMILY DEVICES
Vendor Tools Order Number Cost Notes
National COP8-NSEVAL COP8-NSEVAL Free Web site download
COP8-NSASM COP8-NSASM Free Included in EPU and DM. Web site download
COP8-MLSIM COP8-MLSIM Free Included in EPU and DM. Web site download
COP8-NSDEV COP8-NSDEV VL Included in EPU and DM. Order CD from website
COP8-EPU Not available for this device
COP8-DM Contact MetaLink
Development
Devices
IM-COP8 Contact MetaLink
MetaLink COP8-EPU Not available for this device
COP8-DM DM4-COP8-888BC (10
DM Target
Adapters
IM-COP8 IM-COP8-AD-464 (-220)
IM-Probe Card PC-888BC28D5-AD-10 M 10 MHz 28 DIP probe card; 2.5V to 6.0V
IM Probe Target
Adapter
ICU COP8-EVAL Not available for this device
KKD WCOP8-IDE WCOP8-IDE VL Included in EPU and DM
IAR EWCOP8-xx See summary above L - H Included all software and manuals
Byte
COP8C COP8C M Included all software and manuals
Craft
Aisys DriveWay COP8 DriveWay COP8 L Included all software and manuals
OTP Programmers Contact vendor L - H For approved programmer listings and vendor
Cost: Free; VL =
<
$100; L = $100 - $300; M = $300 - $1k; H = $1k - $3k; VH = $3k - $5k
COP87L84BC VL 16k OTP devices. No wondowed devices.
MHz), plus PS-10, plus
DM-COP8/xxx (ie. 28D)
MHW-CONV39 L DM target converters for 28SO
(10 MHz maximum)
MHW-SOIC28 L 28 pin SOIC adapter for probe card
COP8 Device Programmer Support
MetaLink’s EPU and Debug Module include development
•
device programming capability for COP8 devices.
Third-party programmers and automatic handling equip-
•
ment cover needs from engineering prototype and pilot
production, to full production environments.
Factory programming available for high-volume require-
•
ments.
M Included p/s (PS-10), target cable of choice (i.e.
DM-COP8/28D), 16/20/28/40 DIP/SO and 44 PLCC
programming sockets
H Base unit 10 MHz; -220 = 220V; add probe card
(required) and target adapter (if needed); included
software and manuals
information, go to our OTP support page at:
www.national.com/cop8
www.national.com 52

Development Tools Support (Continued)
WHERE TO GET TOOLS
Tools are ordered directly from the following vendors. Please go to the vendor’s web site for current listings of distributors.
Vendor Home Office Electronic Sites Other Main Offices
Aisys U.S.A.: Santa Clara, CA www.aisysinc.com Distributors
1-408-327-8820 info
fax: 1-408-327-8830
Byte Craft U.S.A. www.bytecraft.com Distributors
1-519-888-6911 info
fax: 1-519-746-6751
IAR Sweden: Uppsala www.iar.se U.S.A.: San Francisco
+46 18 16 78 00 info
fax: +46 18 16 78 38 info
ICU Sweden: Polygonvaegen www.icu.se Switzeland: Hoehe
+46 8 630 11 20 support
fax: +46 8 630 11 70 support
KKD Denmark: www.kkd.dk
MetaLink U.S.A.: Chandler, AZ www.metaice.com Germany: Kirchseeon
1-800-638-2423 sales
fax: 1-602-926-1198 support
National U.S.A.: Santa Clara, CA www.national.com/cop8 Europe: +49 (0) 180 530 8585
1-800-272-9959 support
fax: 1-800-737-7018 europe.support
The following companies have approved COP8 programmers in a variety of configurations. Contact your local office
or distributor. You can link to their web sites and get the latest listing of approved programmers from National’s COP8
OTP Support page at: www.national.com/cop8.
Advantech; Advin; BP Microsystems; Data I/O; Hi-Lo Systems; ICE Technology; Lloyd Research; Logical Devices;
MQP; Needhams; Phyton; SMS; Stag Programmers; System General; Tribal Microsystems; Xeltek.
@
aisysinc.com
@
bytecraft.com
@
iar.se 1-415-765-5500
@
iar.com fax: 1-415-765-5503
@
info
iarsys.co.uk U.K.: London
@
info
iar.de +44 171 924 33 34
fax: +44 171 924 53 41
Germany: Munich
+49 89 470 6022
fax: +49 89 470 956
@
icu.se +41 34 497 28 20
@
icu.ch fax: +41 34 497 28 21
@
metaice.com 80-91-5696-0
@
metaice.com fax: 80-91-2386
bbs: 1-602-962-0013 islanger
@
metalink.de
www.metalink.de Distributors Worldwide
@
nsc.com fax: +49 (0) 180 530 8586
@
nsc.com Distributors Worldwide
Customer Support
Complete product information and technical support is available from National’s customer response centers, and from
our on-line COP8 customer support sites.
www.national.com53

Physical Dimensions inches (millimeters) unless otherwise noted
Interface
COP87L84BC 8-Bit CMOS OTP Microcontrollers with 16k Memory, Comparators, and CAN
Order Number COP87L84BC-xxx/M or COP684BC-xxx/M
NS Package Number M28B
LIFE SUPPORT POLICY
NATIONAL’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT
DEVICES OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT AND GENERAL
COUNSEL OF NATIONAL SEMICONDUCTOR CORPORATION. As used herein:
1. Life support devices or systems are devices or
systems which, (a) are intended for surgical implant
into the body, or (b) support or sustain life, and
whose failure to perform when properly used in
accordance with instructions for use provided in the
2. A critical component is any component of a life
support device or system whose failure to perform
can be reasonably expected to cause the failure of
the life support device or system, or to affect its
safety or effectiveness.
labeling, can be reasonably expected to result in a
significant injury to the user.
National Semiconductor
Corporation
Americas
Tel: 1-800-272-9959
Fax: 1-800-737-7018
Email: support@nsc.com
www.national.com
National Semiconductor
Europe
Fax: +49 (0) 1 80-530 85 86
Email: europe.support@nsc.com
Deutsch Tel: +49 (0) 1 80-530 85 85
English Tel: +49 (0) 1 80-532 78 32
Français Tel: +49 (0) 1 80-532 93 58
Italiano Tel: +49 (0) 1 80-534 16 80
National Semiconductor
Asia Pacific Customer
Response Group
Tel: 65-2544466
Fax: 65-2504466
Email: sea.support@nsc.com
National Semiconductor
Japan Ltd.
Tel: 81-3-5639-7560
Fax: 81-3-5639-7507
National does not assume any responsibility for use of any circuitry described, no circuit patent licenses are implied and National reserves the right at any time without notice to change said circuitry and specifications.
 Loading...
Loading...