

Moovo XW User Manual
Swing gate opener
XW4 - XW5
EN Installation and use instruc-
tions and warnings
IT Istruzioni ed avvertenze
per l’installazione e l’uso
FR Instructions et avertisse-
ments pour l’installation et
l’utilisation
ES Instrucciones y adverten-
cias para la instalación y
el uso
DE Anweisungen und Hinweise
für die Installation und die
Bedienung
PL Instrukcje instalacji i
użytkowania i ostrzeżenia
NL Aanwijzingen en aanbeve-
lingen voor installering en
gebruik
Codice: ISTXW.4865 - Rev. 01 del 06 - 06 - 2007


CONTENTS
GENERAL SAFETY WARNINGS AND
PRECAUTIONS
STEP 1
– Working in safety! 4
– Installation warnings 4
KNOWLEDGE OF THE PRODUCT AND PREPARATION
FOR INSTALLATION
STEP 2
2.1 - Product description and intended use 5
2.2 - Components used to set up a complete system 5
STEP 3
Preliminary checks for installation 6
3.1 - Checking suitability of the environment and gate to be automated 6
3.2 - Checking product application limits 6
STEP 4
4.1 - Preliminary set-up work 7
- 4.1.1 - Typical reference system 7
- 4.1.2 - Establishing positions of components 7
- 4.1.3 - Establishing which gate leaf is to mount the gearmotor
with control unit 7
- 4.1.4 - Identifying “leaf 1” and “leaf 2” on the gate 7
- 4.1.5 - Establishing the device connection layout 7
- 4.1.6 - Check all tools required for the work 9
- 4.1.7 - Complete set-up work 9
4.2 - Preparing the electrical cables 9
TASKS RESERVED FOR QUALIFIED TECHNICIANS
– Connecting the automation to the electrical mains using a cable other than
the version supplied 26
– Automation testing and commissioning 27
– Product disposal 27
TECHNICAL SPECIFICATIONS OF PRODUCT
COMPONENTS 28
WHAT TO DO IF ... (Troubleshooting guide) 30
Enclosures: “TECHNICAL DOCUMENTATION” I-VII
English
INSTALLATION: COMPONENT ASSEMBLY AND
CONNECTIONS
STEP 5
– Installing the automation components 10
STEP 6
– Installation and connections of system devices 13
6.1 - Setting the control unit for operation on “leaf 2” or to automate a
single-leaf gate 14
6.2 - Installing and connecting the gearmotor without control unit 14
6.3 - Installing and connecting flashing light mod. MF 15
6.4 - Installing and connecting photocells mod. MP 17
– Selecting operating mode of photocell pair 18
6.5 - Installing and connecting keypad mod. MK 19
6.6 - Installing buffer battery mod. MB 20
POWER SUPPLY CONNECTION
STEP 7 21
INITIAL START-UP AND ELECTRICAL CONNECTION
CHECK
STEP 8 21
PROGRAMMING THE AUTOMATION
STEP 9
9.1 - Memorising devices connected by means of “Bus” cable and leaf travel
limit positions “0” and “1” 22
9.2 - Memorisation of transmitter mod. MT4 23
9.3 - Programming keypad mod. MK 23
ADJUSTMENTS AND OTHER OPTIONAL FUNCTIONS
10 - Automation operation adjustment 24
11 - Memorisation of a new transmitter with control unit “in the vicinity”
procedure 24
12 - Deleting data from the control unit memory 24
English – 3
SAFETY WARNINGS AND PRECAUTIONS
STEP 1
English
WORKING IN SAFETY!
Please note – These instructions must be followed
toguarantee personal safety.
Please note – Important safety instructions. Keep for
future reference.
The design and manufacture of the devices making up the product
and the information in this manual fully comply with current standards governing safety. However, incorrect installation or programming may cause serious physical injury to those working on or using
the system. For this reason, during installation, always strictly
observe all instructions in this manual.
If in any doubt regarding installation, do not proceed and contact the
Moovo Technical Assistance for clarifications.
If this is the first time you are setting up an automation for swing gates or
doors, we recommend that you read this entire manual with care. This is
preferable before any work, without any hurry to start practical tasks.
Also keep product devices on hand while consulting the manual to enable
testing and checking (excluding any programming phases) with the information provided in the manual.
While reading this manual, take care to observe all instructions
marked with the following symbol:
These symbols indicate subjects that may be the source of potential
hazards and therefore the prescribed operations must be performed
exclusively by qualified and skilled personnel, in observance of
these instructions current safety standards.
Considering the risk situations that may arise during installation
phases and use of the product, the automation must be installed in
observance of the following warnings:
– never make any modifications to part of the automation other than those
specified in this manual. Operations of this type will lead to malfunctions.
The manufacturer declines all liability for damage caused by makeshift
modifications to the product.
– ensure that parts of the automation cannot come into contact with
water or other liquids. During installation ensure that no liquids penetrate
the gearmotors or other devices present.
– Should this occur, disconnect the power supply immediately and contact a Moovo service centre. Use of the automation in these conditions
constitutes a hazard.
– never place automation components near to sources of heat and never
expose to naked flames. This may damage system components and
cause malfunctions, fire or hazardous situations.
– all operations requiring opening of the protection housings of various
automation components must be performed with the control unit disconnected from the power supply. If the disconnect device is not in a visible location, affix a notice stating: “WARNING! MAINTENANCE IN
PROGRESS”.
– the product may not be considered an efficient system of protection
against intrusion. If an efficient protection system is required, the automation must be integrated with other devices.
– Connect the control unit to an electric power line equipped with an
earthing system.
– the product may only be used after completing the automation “commissioning” procedure as specified in paragraph “Automation testing
and commissioning” provided in the section “Tasks reserved for
qualified technicians”.
– The automation component packaging material must be disposed of in
full observance of current local legislation governing waste disposal.
INSTALLATION WARNINGS
According to the most recent legislation, the installation of an automatic door or gate must be in full observance of the standards envisaged by European Directive 98/37/EC (Machinery Directive) and in
particular standards EN 12445, EN 12453 EN 12635 and EN 13241-1,
which enable declaration of presumed conformity of the automation.
The final connection of the automation to the electrical mains, system testing, commissioning and periodic maintenance must be performed by skilled and qualified personnel, in observance of the
instructions in the section “Tasks reserved for qualified technicians”.
These personnel are also responsible for the tests required according to the risks present, and for ensuring observance of all legal provisions, standards and regulations , and in particular all requirements
of the standard EN 12445, which establishes the test methods for
checking automations for gates.
However, all preliminary set-up, installation and programming operations may be performed by personnel with standard skills, provided that all instructions and the relative sequences in this manual are
strictly observed, with special reference to the warnings in STEP 1.
Before starting installation, perform the following checks and
assessments:
– ensure that each device used to set up the automation is suited to the
intended system. For this purpose, pay special attention to the data provided in the paragraph “Technical specifications”. Do not proceed with
installation if any one of these devices does not correspond to specifications.
– ensure that the devices in the kit are sufficient to guarantee system safety and functionality.
– an assessment of the associated risks must be made, including a list of
the essential safety requirements as envisaged in Appendix I of the
Machinery Directive, specifying the relative solutions adopted. Note that
the risk assessment is one of the documents included in the automation
Technical documentation. This must be compiled by a professional
installer.
In consideration of the above,
4 – English
KNOWLEDGE OF THE PRODUCT AND PREPARATION FOR INSTALLATION
STEP 2
2.1 – PRODUCT DESCRIPTION AND INTENDED USE
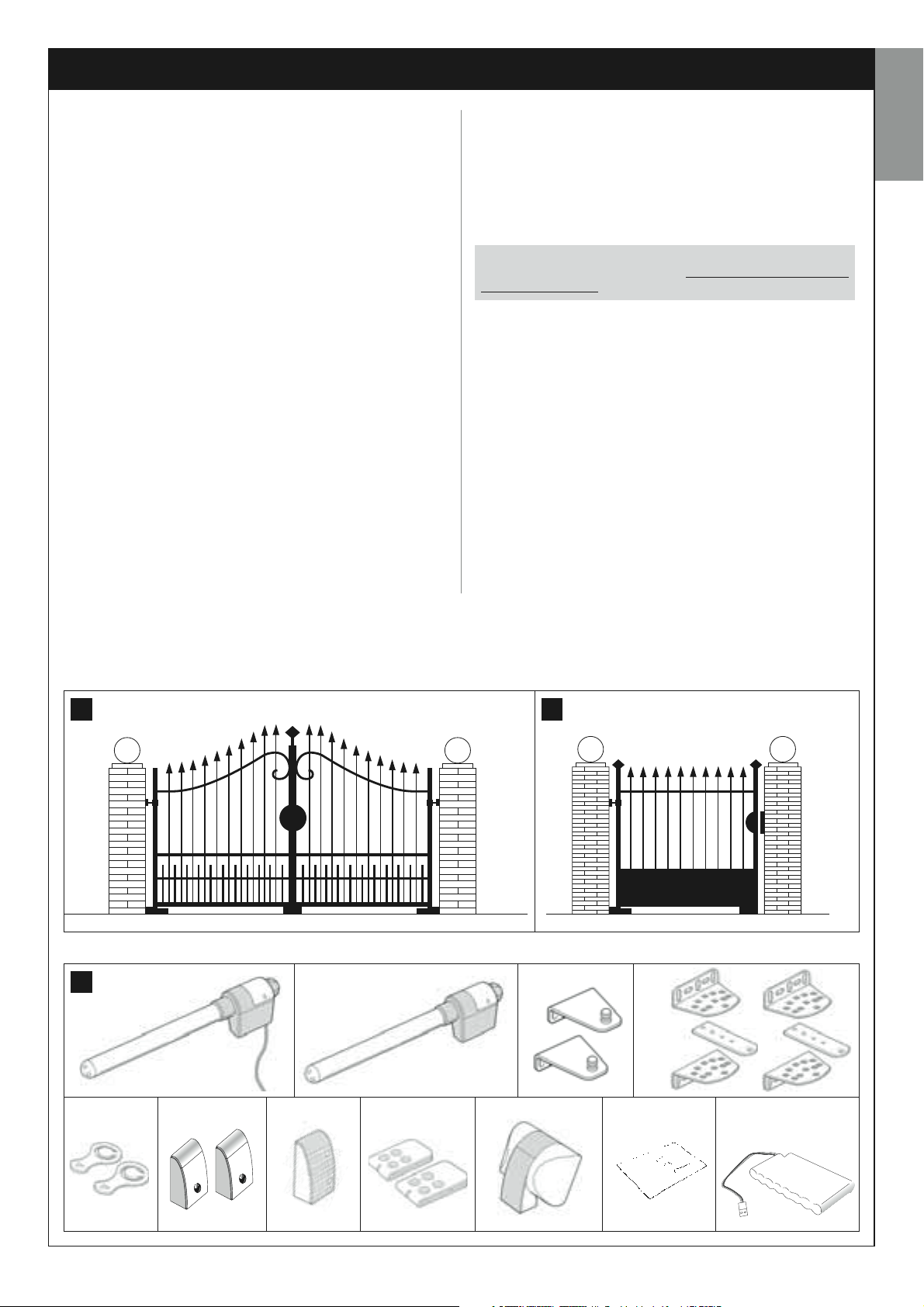
The series of devices that make up this product serve to automate a 2leaf gate or door (fig. 1a). It may also be used to automate a single leaf
gate or door (fig. 1b).
Any other use than as specified herein or in environmental conditions other than as stated in STEP 3 is to be considered improper
and is strictly prohibited!
The main part of the automation comprises two electromechanical gearmotors each equipped with a 12 V dc motor and a worm gear. One of the
gearmotors is also fitted with a control unit.
The control unit governs all devices present in the automation and manages all relative functions. It is made of a board and incorporated radio
receiver which receives the commands sent by a transmitter. It may also
be controlled via a wall-mounted keypad or a pair of photocells set with
the single opening command.
The control unit is able to manage different types of manoeuvre, each programmable and usable according to specific needs.
Other special functions are also available to enable personalisation of the
automation parameters.
The automation is designed for use of various accessories that enhance
functionality and guarantee optimal safety. In particular, the control unit
can memorise up to 150 keys of MT4 transmitters; up to 4 MK control
keypads or alternatively up to 4 pairs of MP photocells, set for the opening command only.
Connections of the various devices are by means of the “Bus” system.
This system reduces complexity of the connections between devices, as
it envisages the use of a single cable between one device and another.
The product is mains powered and in the event of a power failure it
enables manual release of the gearmotors for manual movement of the
gate leafs.
In this situation, the gate can also be opened using the buffer battery (MB
model) if fitted on the system.
English
2.2 – COMPONENTS USED TO SET UP A
COMPLETE SYSTEM
fig. 2 illustrates all components used to set up a complete system, such
as that shown in fig. 8.
WARNING!
Some components shown in fig. 2 are optional and may not be
supplied in the pack.
List of components:
[a] - Electromechanical operator with control unit
[b] - Electromechanical gearmotor without control unit
[c] - Front brackets (for fixing gearmotors onto gate)
[d] - Rear brackets (for fixing gearmotors onto wall)
[e] - Keys for manual release of gearmotors
[f] - Pair of photocells model. MP (for wall-mounting)
[g] - Control keypad model. MK (for wall-mounting)
[h] - Portable transmitter model. MT4
[i] - Flashing light model. MF
[l] - Metal hardware (screws, washers, etc.)
[m] - Back-up battery model. MB
1a 1b
2
a b
g i l me f
h
c
d
English – 5
STEP 3
3
model XW532
PRELIMINARY CHECKS FOR INSTALLATION
Before proceeding with installation, check the condition of the product
English
components, suitability of the selected model and conditions of the
intended installation environment.
IMPORTANT –The gearmotors cannot be used to power a gate that
is not fully efficient and safe. Neither can it solve defects caused by
poor installation or insufficient maintenance of the gate itself.
3.1 – CHECKING SUITABILITY OF THE ENVIRONMENT AND
GATE TO BE AUTOMATED
• Ensure that the mechanical structure of the gate complies with current
national standards and that it is suitable for automation. (If present, refer
to the information specified on the gate dataplate).
• Move the gate leafs manually to open and close, checking that move-
ment has the same degree of friction throughout all points of travel (no
increase in friction must occur).
• Manually move the leafs to any position and leave stationary, ensuring
that they do not move from this position.
• Ensure that the space around the gearmotors enables safe and easy
manual release of the leafs.
• Ensure that the selected surfaces for installation of the various devices
are solid and guarantee a stable fixture.
• Ensure that all devices to be installed are in a sheltered location and pro-
tected against the risk of accidental impact.
• Ensure that the selected surfaces for fixing the photocells are flat and
enable correct alignment between photocells.
161 mm
4
110 mm
110 mm
161 mm
892 mm
594 mm
model XW432
742 mm
444 mm
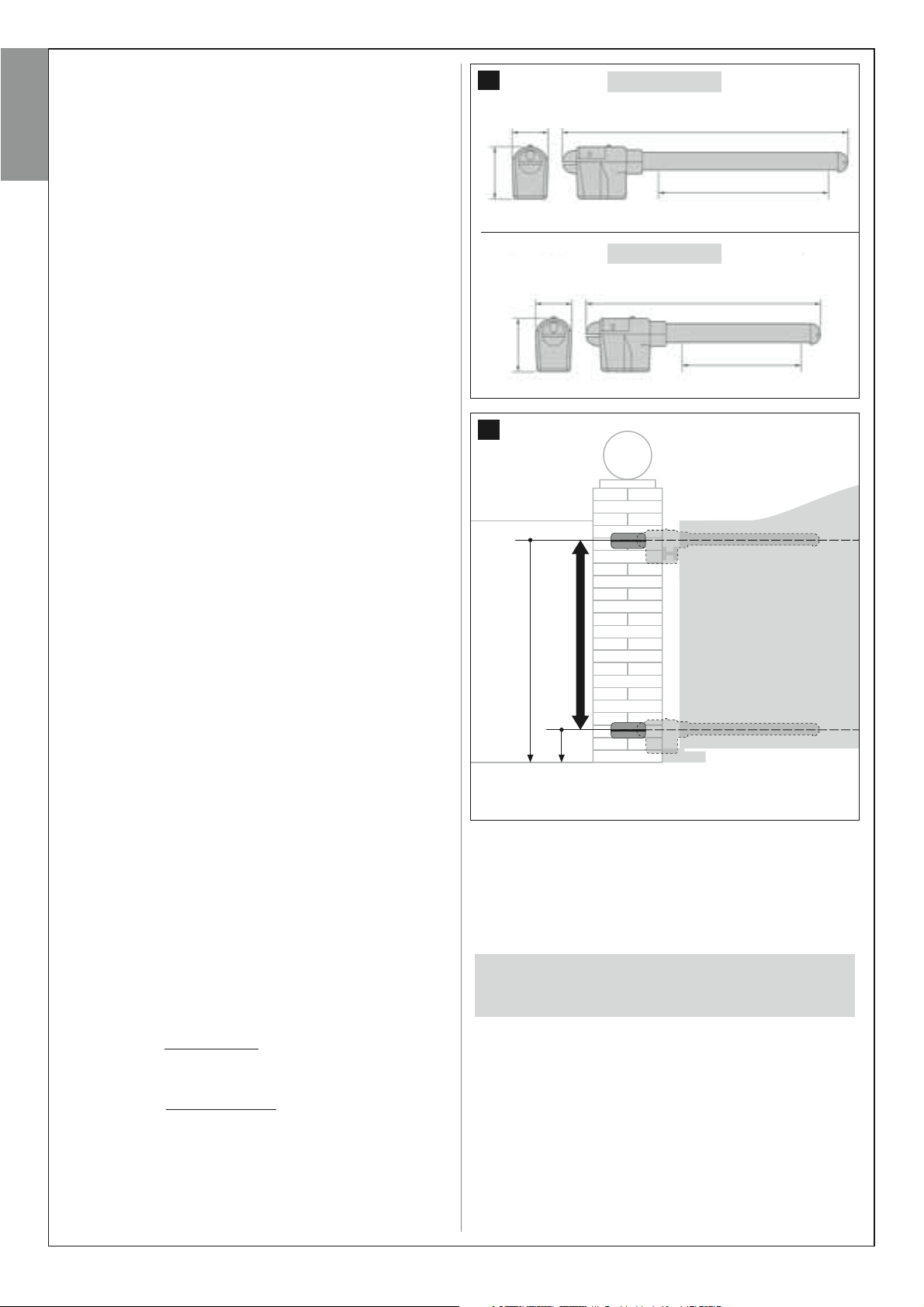
3.2 – CHECKING PRODUCT APPLICATION LIMITS
The gearmotors must be installed by fixing the relative rear support to the
wall (or column) of the gate and the front support bracket on the leaf of
the gate.
To ascertain suitability of the product with respect to the specific features
of the gate and area to be automated, the following checks should be performed as well as a check for compliance of the technical data in this
paragraph and the paragraph “Product technical specifications”.
• Ensure that the dimensions and weight of each leaf are within the fol-
lowing limits of use.
Using Kit XW4... the reference values are:
- maximum width 1,80 m;
- max. height 2 m;
- maximum weight 180 kg.
Using Kit XW5... the reference values are:
- maximum width 2,50 m;
- max. height 2 m;
- maximum weight 250 kg.
• Considering the source from which the power line is supplied (if already
fitted) used to power the system, select which gate leaf is to be used to
mount the gearmotor with control unit.
• On each leaf and the adjacent wall (or column) ensure that there is suf-
ficient space to fit the gearmotor. Refer to the values specified in fig. 3-4-
5-6-7 and the following notes:
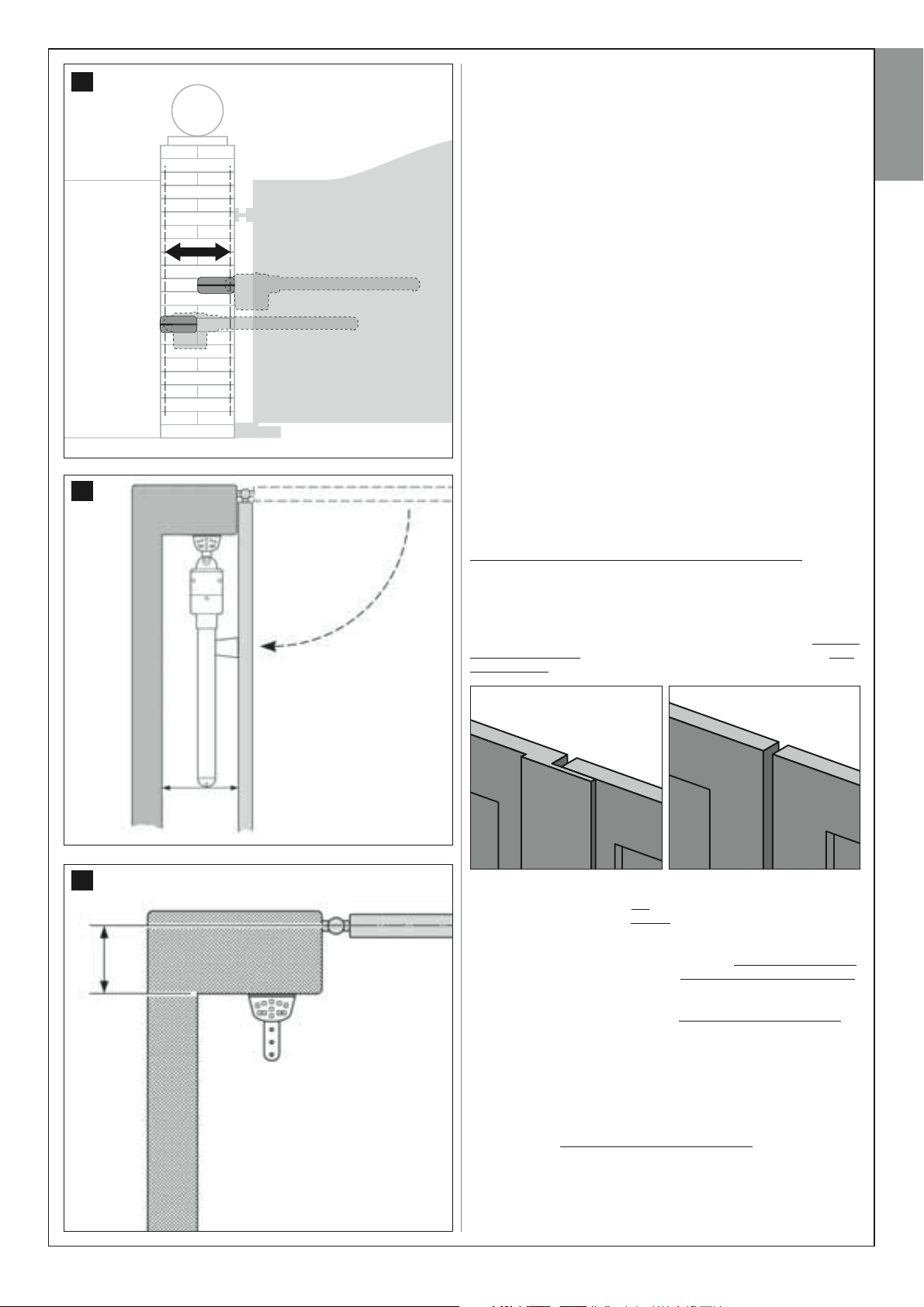
– Fig. 3: indicates the overall dimensions of the gearmotor.
– Fig. 4: indicates the vertical space within which the gearmotor is to be
fitted. Measurement “E” specifies the minimum distance from the ground.
Measurement “F” (maximum distance from ground) depends on the
height of the gate leaf.
– Fig. 5: indicates the horizontal space within which the rear gearmotor
support is to be fitted. The exact point at which to position this support
must be calculated with reference to point 01 of STEP 5.
F
E
mod. XW432 / mod. XW532: Measurement E = min 150 mm
– Fig. 6: Indicates the minimum measurement “G” required between the
leaf and a possible obstacle present when the leaf is open (wall, edge of
a flowerbed etc.). Note – This position must be measured in correspon-
dence to the point of the gearmotor.
– Fig. 7: Indicates the maximum measurement “D” required between the
point of leaf rotation and the surface of the wall on which the rear gearmotor support is fixed.
Caution! – If the results of these checks do not conform to
specifications, this model cannot be used for automation of
your gate.
6 – English
5
STEP 4
4.1 – PRELIMINARY SET-UP WORK
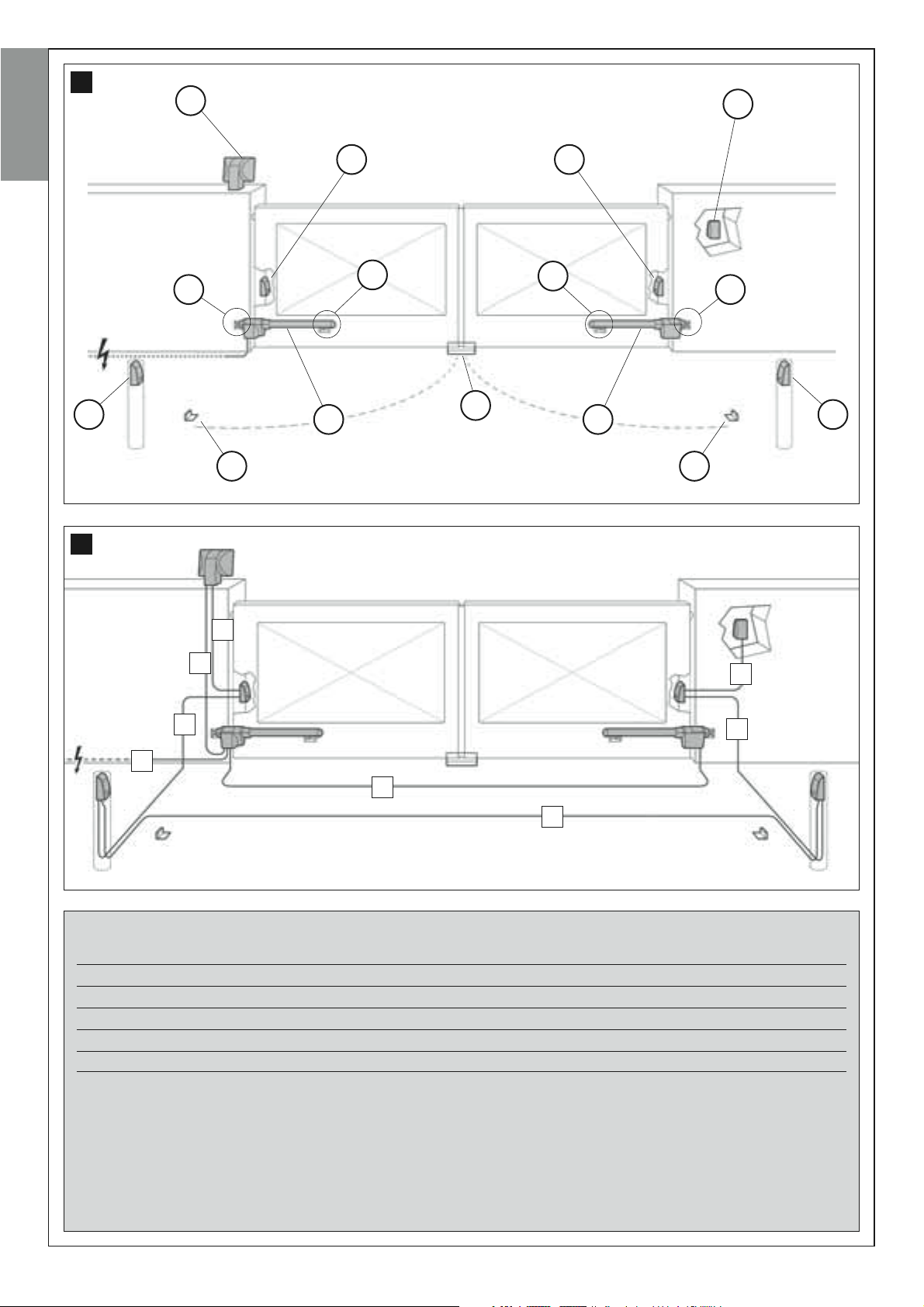
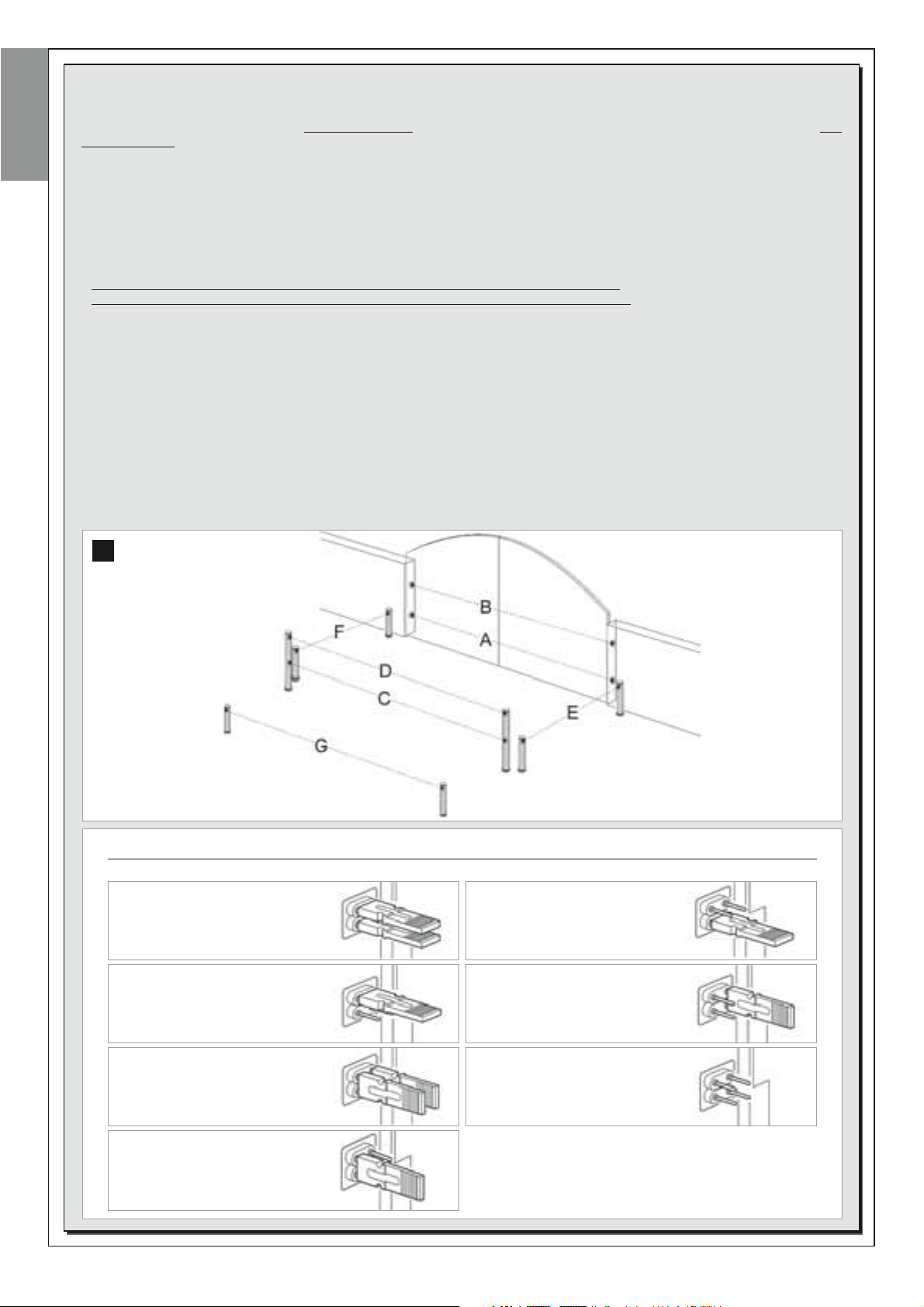
4.1.1 – Typical reference system
Fig. 8 is an example of an automation system set up using the various
components of Moovo. These parts are positioned according to a typical
standard layout. The following components are used:
a - Electromechanical gearmotor with control unit
b - Electromechanical gearmotor without control unit
c - Rear supports (wall-mounted)
d - Front brackets (on leaf)
e - Pair of photocells (wall-mounted)
f - Flashing light
g - Control keypad (wall-mounted)
h - Pair of posts for photocells
i - Mechanical stops on Opening (Note – Alternatively, leaf movement
may terminate against a natural stop, i.e. wall, edge of a flowerbed etc. or use a mechanical limit switch present on the gearmotor)
l - Mechanical stop on Closing
4.1.2 - Establishing positions of components
With reference to fig. 8, locate the approximate position for installation of
each component envisaged in the system.
English
6
4.1.3 – Establishing which gate leaf is to mount the gearmotor
with control unit
The gearmotor with control unit is factory-set to be installed on Leaf 1 (i.e.
the leaf that opens first at the start of the Opening manoeuvre
to ensure correct installation identify Leaf 1 on your gate, according to the
instructions in point D.
); therefore
4.1.4 – Identifying “leaf 1” and “leaf 2” on the gate
There are 2 types of two-leaf gate (or door): a version with one leaf that
overlaps the other when they close (fig. A) and a version with independent leafs that do not overlap on closing (fig. B).
model XW4
Measurement G = min 165 mm
32:
AB
model XW532:
G
7
D
Measurement G = min 200 mm
The leafs in these 2 types of gate are defined as follows:
- “Leaf 1”, the leaf that opens first at the start of the Opening manoeuvre;
- “Leaf 2”, the leaf that opens second at the start of the Opening manoeu-
vre;
Note – On gates with “overlapping leafs” (fig. A), the leaf that opens first,
at the start of the Opening manoeuvre, is the one that overlaps the other.
CAUTION!
• Otherwise, if forced to install the gearmotor with control unit on
leaf 2 (for example to exploit the power source in the vicinity of
this leaf) refer to the instructions in STEP 6.1.
• If the gate t be automated is a single-leaf version, refer to the
instructions in STEP 6.1.
model XW432:
Measurement D = maximum 150 mm
model XW532:
Measurement D = maximum 230 mm
4.1.5 – Establishing the device connection layout
The product envisages a “Bus” type connection between all system
devices, using a single cable with two electrical wires. In this type of connection, data communication between devices is via cable, using the specific protocol named “Bus-Moovo”. CAUTION! – only devices compati-
ble with this protocol may be installed in the system.
On a “Bus” network, devices can be connected using various connection
layouts, and in each one, each device becomes a node of this network.
English – 7
8
f
g
English
h
9
e e
c
d
l
a b
i
d
c
h
i
D
A
D
B
C
D
TABLE 1 – Technical specifications of electric cables (note 1)
Connection Cable type Maximum admissible len
A - FLASHING LIGHT cable Cable 2 x 1.0 mm
B - POWER SUPPLY cable Cable 3 x 1.5 mm2(note 2) 30 m
C - MOTOR cable Cable 3 x 1.5 mm
D - BUS cable Cable 2 x 0.5 mm
2
2
2
10 m (read paragraph 4.2)
10 m
20 m (read paragraph 4.2)
D
D
Note 1 – The cables required for the set-up of the system (not included in the pack) may vary according to the quantity and type
of devices envisaged for the installation.
Note 2 – If the power cable supplied is not long enough, replace with a cable of this type. This task must be performed by skilled
and qualified personnel: Refer to the section “Tasks reserved for qualified technicians”.
CAUTION! - The cables used must be suited to the installation environment; for example a cable type H07RN -F for outdoor environments is recommended.
8 – English
The possible connection layouts are the following:
– “star”: In this configuration, each device is autonomous as it is connect-
ed directly to the two Bus terminals on the control unit.
– “chain”: In this configuration one device is connected to another and
the latter to another and so on, like links of a chain. Therefore only the first
device in the chain is connected to the two Bus terminals on the control
unit.
– “mixed”: This configuration comprises a combination of the two configurations described above.
To select the most suitable connection configuration for the connection of
all system devices, refer to the example shown in fig. 9 / fig. 22. In general, it is recommended to connect the flashing light as the first device connected to the control unit.
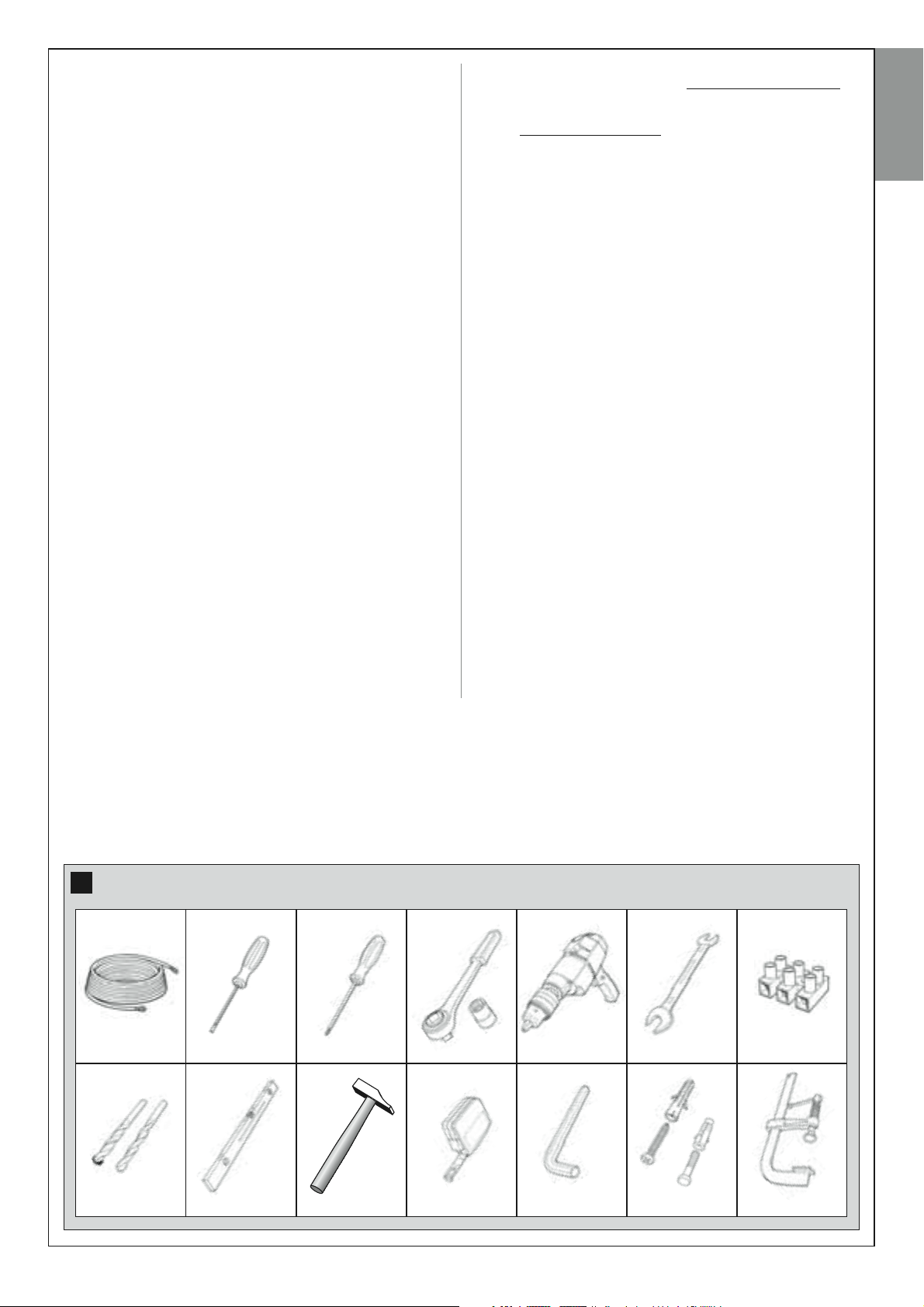
4.1.6 – Check all tools required for the work
Before starting installation, ensure that there is all equipment and materials required for the work concerned (see example in fig. 10); also ensure
that all items are in good condition and comply with local safety standards.
4.1.7 – Complete set-up work
Lastly, dig the routes for the ducting used for electrical cables, or alternatively external ducting can be laid, after which the pipelines can be
embedded in concrete and other preparation work for the installation can
be completed to finalise the site ready for subsequent installation operations.
CAUTION! – Position the ends of the ducting used for electrical
cables at the points envisaged for fixture of the various components.
– In the “star” configuration, NONE of the individual cables linking up
any of the devices to the Control Unit may exceed 20 m in length
– In the “chain” configuration”, the sum of the lengths of each cable
used to connect one device to the other and, last of all, to the Control Unit MUST NOT exceed 20 m
– All operations to lay the electric cables and connect them to the
various devices must be carried out during installation of the components.
.
.
English
Note:
• The ducting serves to protect electrical cables and prevent accidental
damage in the event of impact.
• The “fixed” control devices must be visible from the gate but positioned
far from moving parts.
4.2 – PREPARING THE ELECTRICAL CABLES
When preparing the electrical cables required for your system, please
refer to fig. 9 and “Table 1 – Technical characteristics of the electric
cables”. In addition to this, you should always remember the following:
10
English – 9
INSTALLATION: ASSEMBLY AND CONNECTION OF COMPONENTS
STEP 5
English
INSTALLING THE AUTOMATION COMPONENTS
WARNINGS
• Incorrect installation may cause serious physical injury to those
working on or using the system.
• Before starting automation assembly, make the preliminary checks
as described in STEP 3.
IMPORTANT! – The following assembly phases (STEP 5) illustrate
the “physical” installation of a single gearmotor. If the gate to be automated is a two-leaf model, repeat the same operations to install the
second gearmotor. In particular, to install the gearmotor with control
unit, refer to STEP 4 to establish on which gate leaf it is to be
installed.
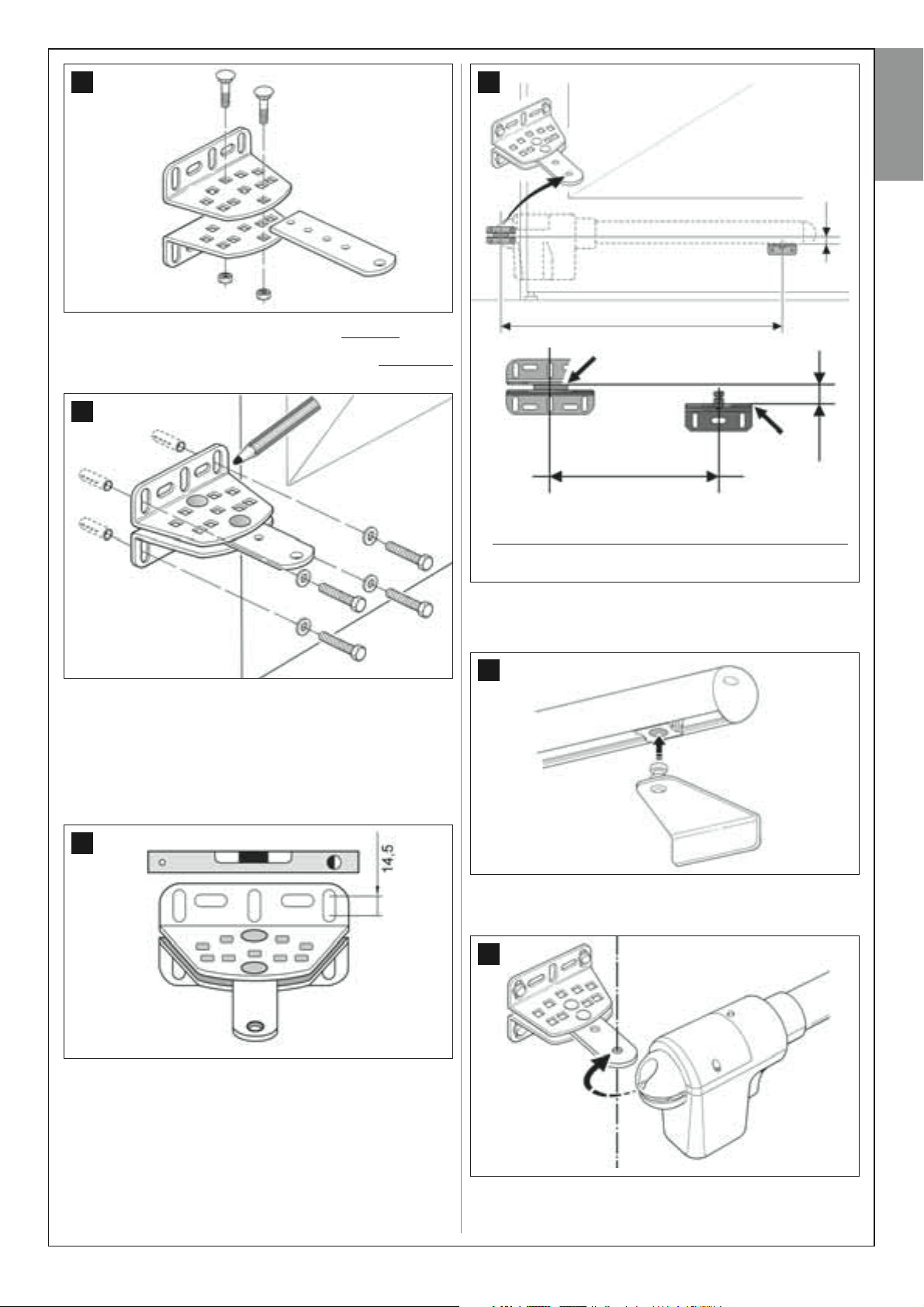
Wall-mounting of the rear gearmotor support
To fix the rear support to the wall or column of the gate, its position both
vertically and horizontally must be established as follows:
– Vertically positioned (fig.4): follow the general instructions in STEP 3
and in fig. 4; then, after locating the position, use a pencil to trace a horizontal line on the wall (or column).
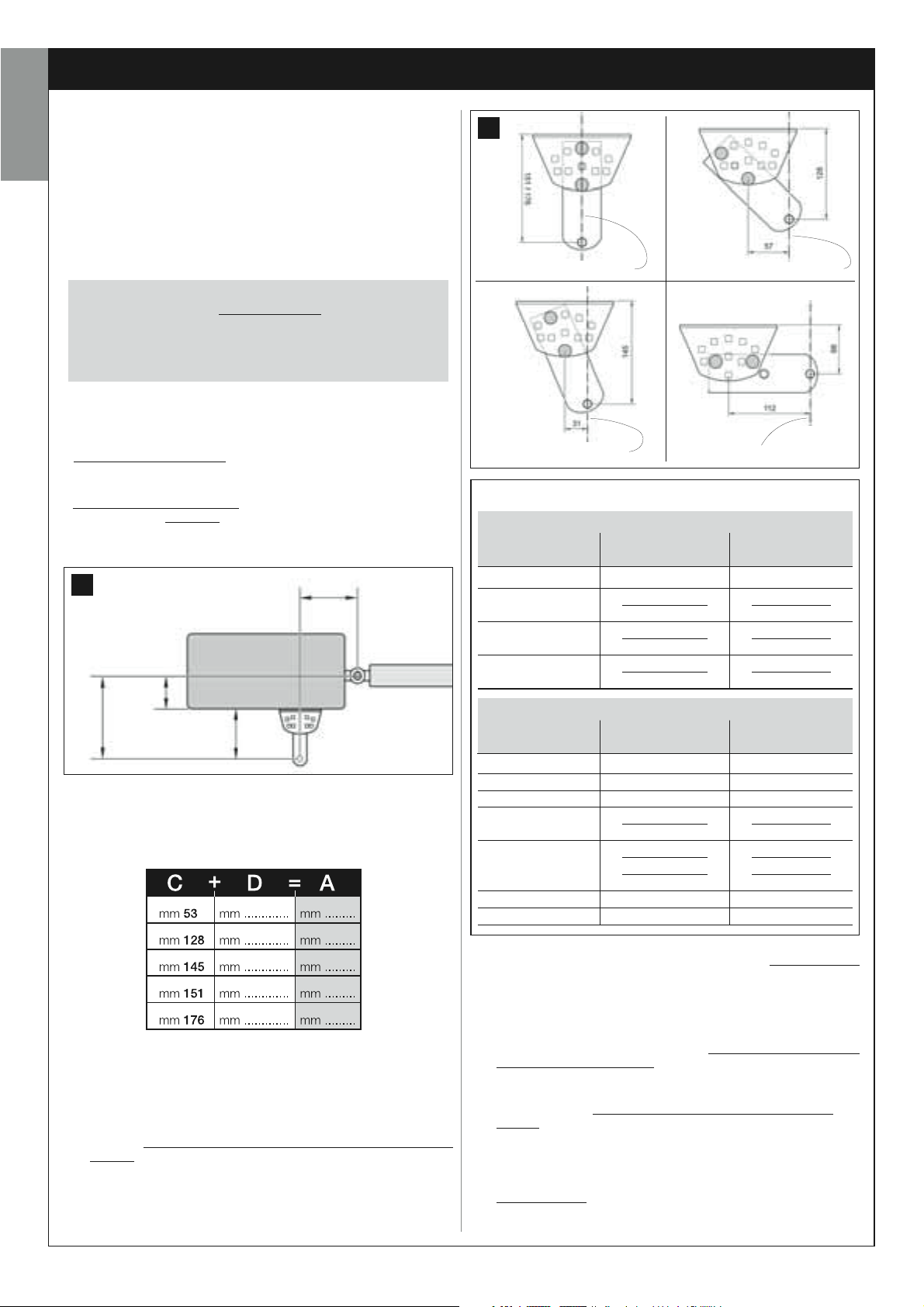
– Horizontally positioned (fig.5): to position the rear support of the gearmotor horizontally (position B in fig. 11) proceed as follows:
01. With reference to fig. 11 measure value D on the wall (or column).
12
“axis of rotation B”
“axis of rotation B” “axis of rotation B”
TABLE 2
model XW432
“ANGLE”
“A” mm
“axis of rotation B”
“B” mm
11
B
D
A
C
02. Add value D to each of the measurements C specified below (see
also fig. 12). Measurements C correspond to the assembly options
available with the parts of the rear gearmotor support.
The total values obtained will each represent a probable measure-
ment A (see fig. 11):
03. At this point, move the gate leaf to the maximum opening position
required (take care to observe the warning in STEP 3.2) and measure the degrees of the leaf opening angle using the goniometer
shown on the last page of this manual
04. In Table 2, identify the angle closest to the one measured, and in col-
umn “A”, check which one of measurements A previously found in
point 02, is the closest in value to the value in column “A”.
.
120°
110°
100°
90°
“ANGLE”
130°
115°
120°
110°
100°
95°
90°
05. Then check column “B”, identify the recommended measurement B
(corresponding to the leaf opening angle). Then using this value trace
a vertical line on the wall (or column).
WARNING – The more values A and B differ, the more irregular
the gate travel (movement will tend to accelerate at some points
of the stroke). Therefore, to guarantee optimal leaf movement
and reduced effort of the gearmotor it is important that value B
should be similar to value A. If necessary, the value of measurement B can be adapted slightly with respect to the value specified in Table 2.
06. With reference to the selected measurement to obtain
value C (which forms this measurement) to assemble the parts of the
rear gearmotor support (fig. 12 and 13).
CAUTION! – On the basis of the configuration adopted for
assembly of the support, it is important to check that the overall
dimensions of the rear section of the gearmotor ensure that this
does not touch
the wall or column when mounted.
100
130
140
160
180
200
250
model XW532
“A” mm
200
180
160
160
160
150
150
150
140
130
160
160
150
140
130
130
120
“B” mm
100
130
140
160
180
200
220
240
260
280
value A, use
10 – English
13
16
English
N
07. Place the support against the wall, aligning the vertical line previous-
ly traced (value B) with the “axis of rotation B” of the support (see
fig. 11). At the same time check alignment with the horizontal line
previously traced. Lastly, mark the drilling holes with a pencil (fig. 14).
14
08. Drill the holes in the wall, insert the plugs (minimum 8 mm; not sup-
plied) and fix the support using suitable screws and washers.
Important – Check that the support is completely level; the slots on
the brackets enable adjustments during fixture to correct small differences in alignment (fig. 15).
Note – The screws required for fixing components on the wall are no
included in the pack, as their type depends on the material and thickness of the wall in which they are inserted.
M
N
M
model XW432: M = 682 mm / N = 30 mm
model XW532: M = 832 mm / N = 30 mm
10. Take the gearmotor and position the front section on the front brack-
et, so that the pin of the bracket is inserted into the hole on the drive
carriage (screw) of the gearmotor (fig. 17).
17
15
09. With the aid of a clamp, provisionally position the front bracket on the
gate leaf at the distance M from the “axis of rotation B” of the rear
support and below the axis by the value N (see fig. 16).
Suggestion – To facilitate measurement of N use a clamp and fix a
straight rod in the vicinity of the “axis of rotation B” on the support
plate.
11. Then, keeping the gearmotor raised, manually open the gate so that
the rear section of the gearmotor is inserted and positioned above
the hole (axis of rotation B) of the plate (fig. 18).
18
12. Fix the gearmotor to the rear support by means of the screw, nut and
washer supplied (fig. 19).
English – 11
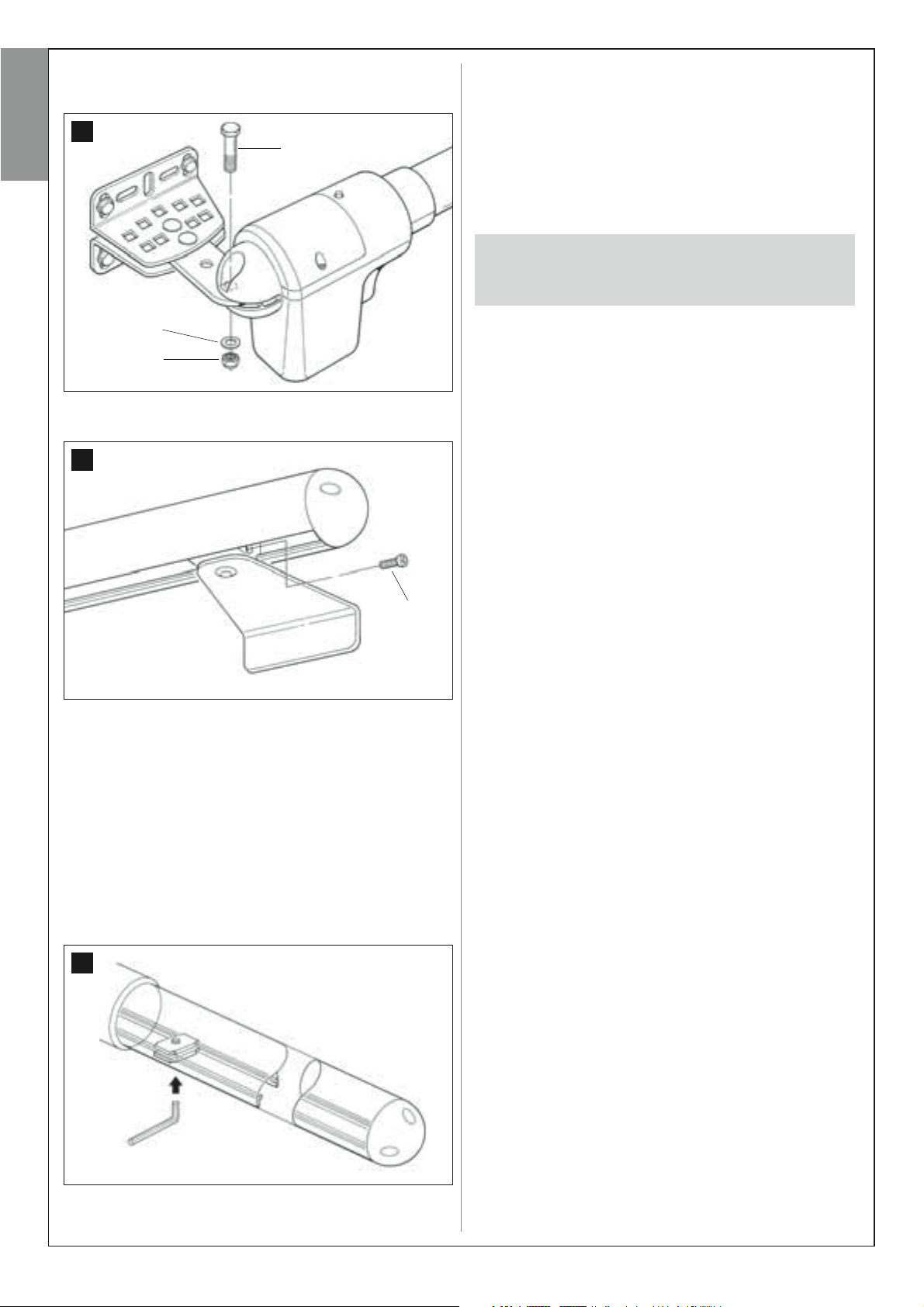
IMPORTANT – Tighten the nut fully down then loosen by approximately half a turn to enable free rotation of the gearmotor on the support.
19
English
V8 x 35
R8 x 24
M8
13. On the front bracket, secure the gearmotor to the bracket pin by
means of the screw supplied (tighten fully down) (fig. 20).
20
16. At the end of all assembly procedures, make the final fixture of the
front bracket on the gate leaf.
IMPORTANT – Perform all drilling and fixture operations leaving
the bracket exactly in its original position, held by the clamp
through to final fixture. On completion, remove the clamp.
–––––––––––––––––––
17. At this point, if the gate to be automated is a two-leaf model, repeat the same operations as described in this STEP 5
to install the second gearmotor.
V4 x 10
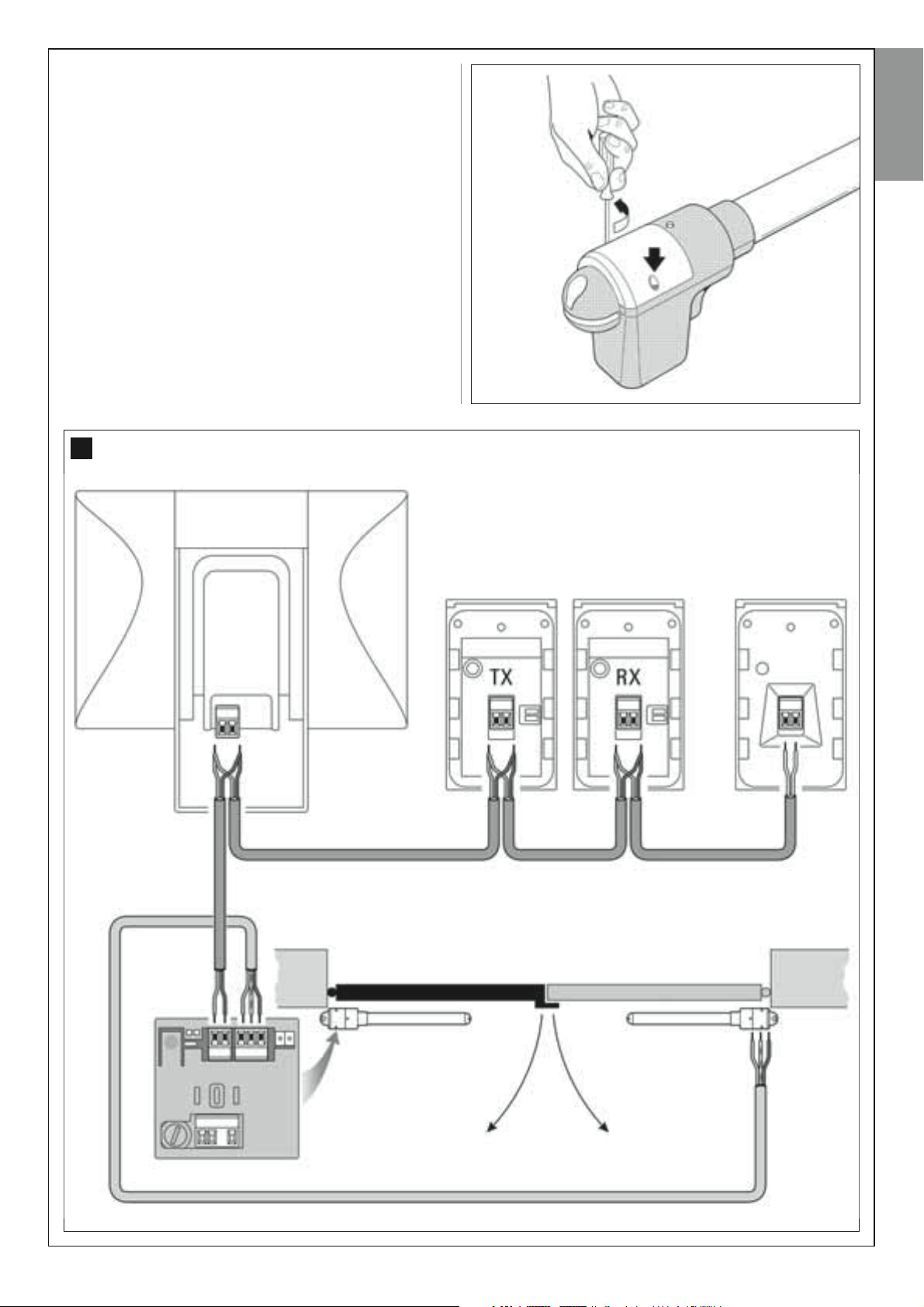
14. Release the gearmotor by means of the special release key (see
chapter “Manually releasing or locking the gearmotor” in the
TECHNICAL DOCUMENTATION) and make a number of manual
gate opening and closing manoeuvres to check the following points:
- avoid excessive tightening of the screw on the rear support;
- the drive carriage (screw) of the gearmotor must slide perfectly
along the worm gear.
15. If the system is not equipped with mechanical stops on the ground
to block the gate leaf at the end of the opening movement, proceed
as described below.
With the gearmotor released, open the gate leaf and move it to the
maximum opening position as established in point 03. Then, using a
hex wrench, slightly loosen the screw of the mechanical limit switch
and move the latter against the drive carriage (screw). Then tighten
the mechanical limit switch screw fully down (fig. 21).
21
12 – English
STEP 6
INSTALLATION AND CONNECTIONS OF SYSTEM DEVICES
Install and connect the system devices with reference to the STEPS below
and the example in fig. 22.
CAUTION! – Strictly observe the electrical connections specified in
this paragraph, as incorrect connections could lead to serious faults
or hazards.
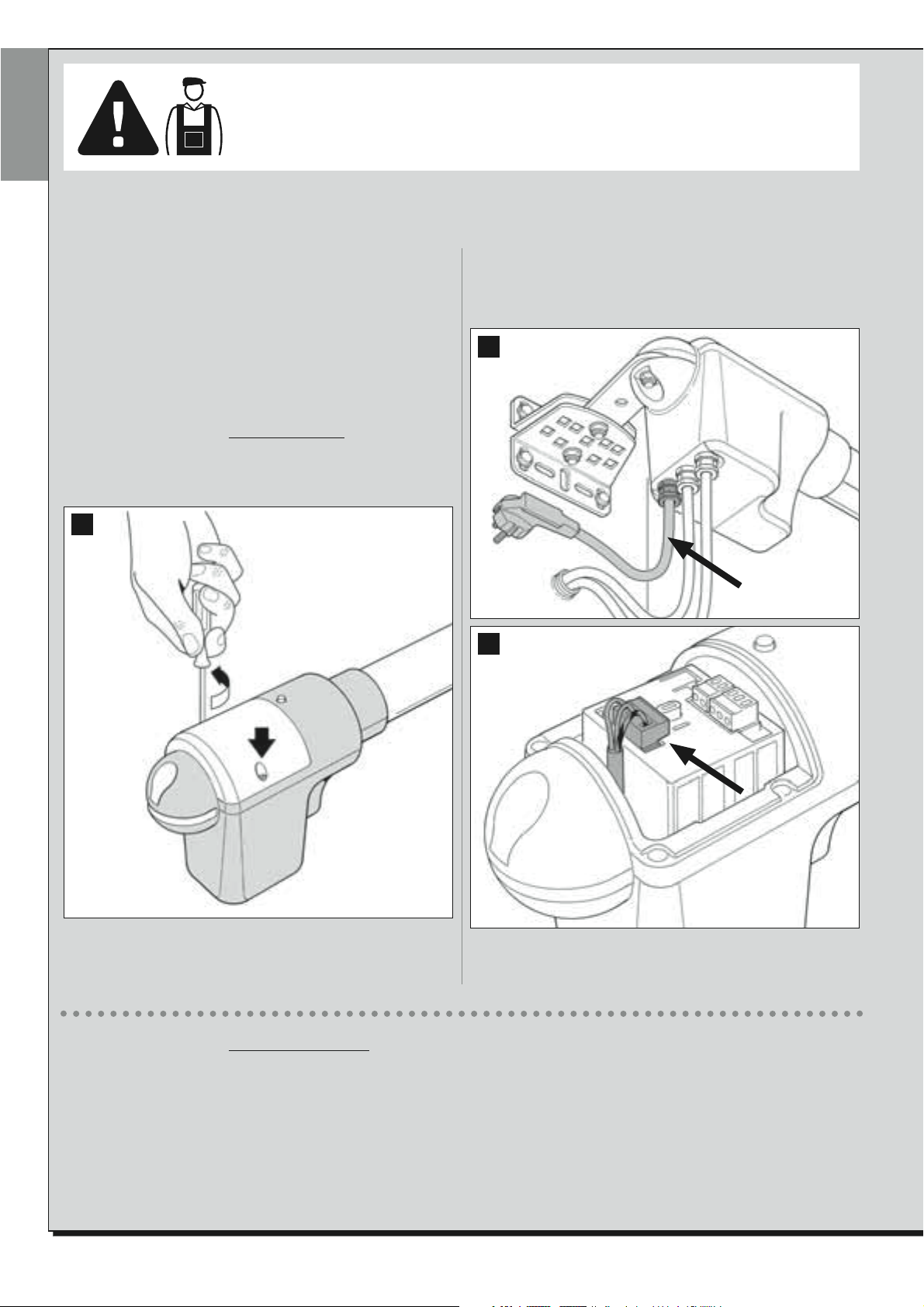
To access the control unit, remove the cover from the gearmotor with
control unit, loosening the two lateral screws with a screwdriver (see figure alongside).
To access the control unit, remove the cover from the gearmotor with
control unit, loosening the two lateral screws with a screwdriver (see figure alongside).
22
Flashing light
English
“BUS SYSTEM”
DEVICE CONNECTION LAYOUT
Pair of photocells Keypad
English – 13
6.1 – SETTING THE CONTROL UNIT FOR OPERATION ON
“LEAF 2” OR TO AUTOMATE A SINGLE-LEAF GATE
6.2 – INSTALLING AND CONNECTING
THE GEARMOTOR WITHOUT CONTROL UNIT
The control unit is factory set with the electric jumper “Sel” set in the position shown in fig. A.
English
fig. A
This configuration enables installation of the gearmotor with control unit
exclusively on a 2-leaf gate
(Note – For the definition of “Leaf 1” and “Leaf 2” refer to STEP 4).
The electric jumper “Sel” must be moved to the new position shown
in fig. B, only in the following cases:
– If forced to install the gearmotor with control unit on leaf 2
gate (for example to exploit the power source in the vicinity of this leaf) .
– If the gate to be automated is a single–leaf version
and more specifically on Leaf 1 of these gates
.
of a 2-leaf
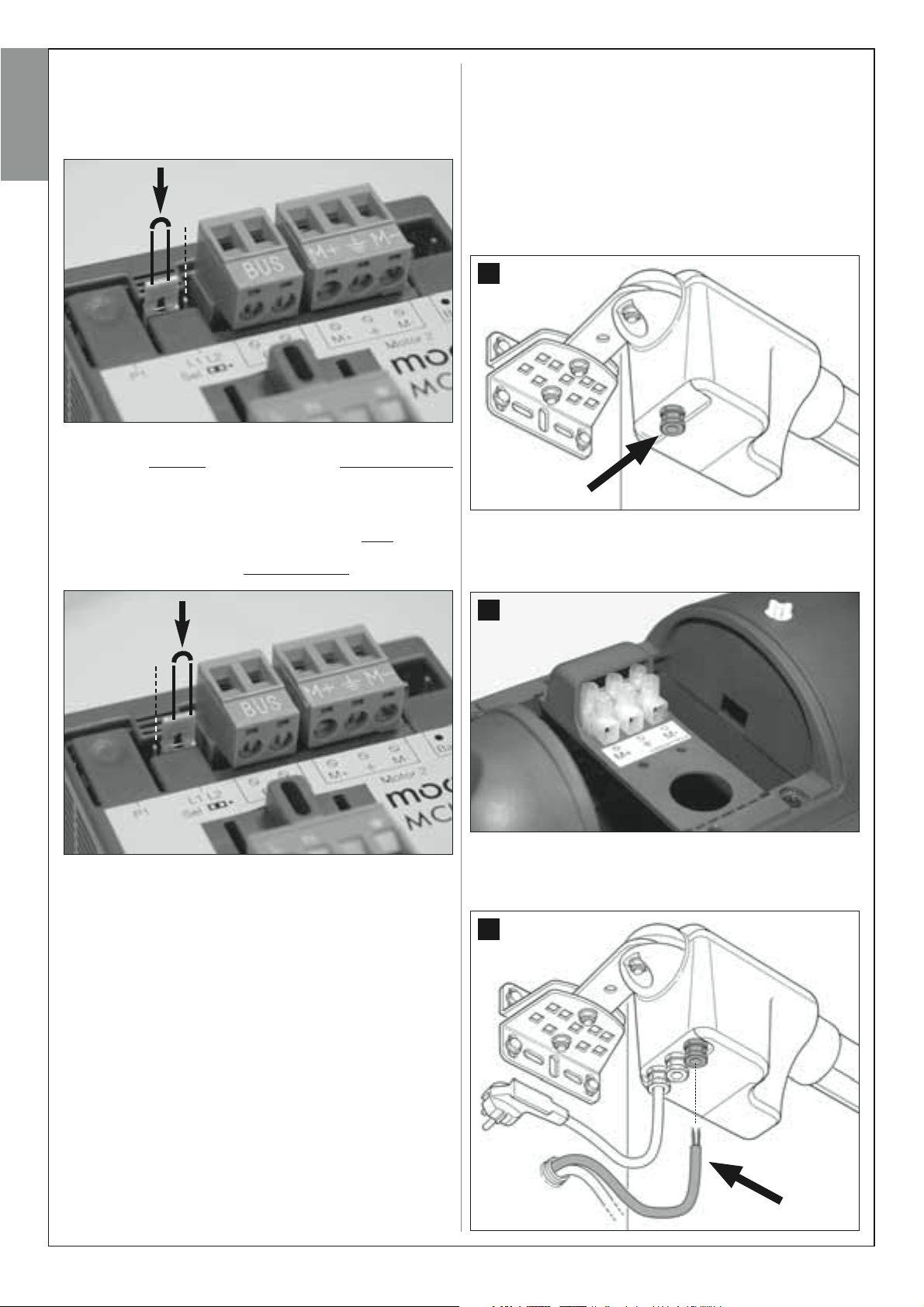
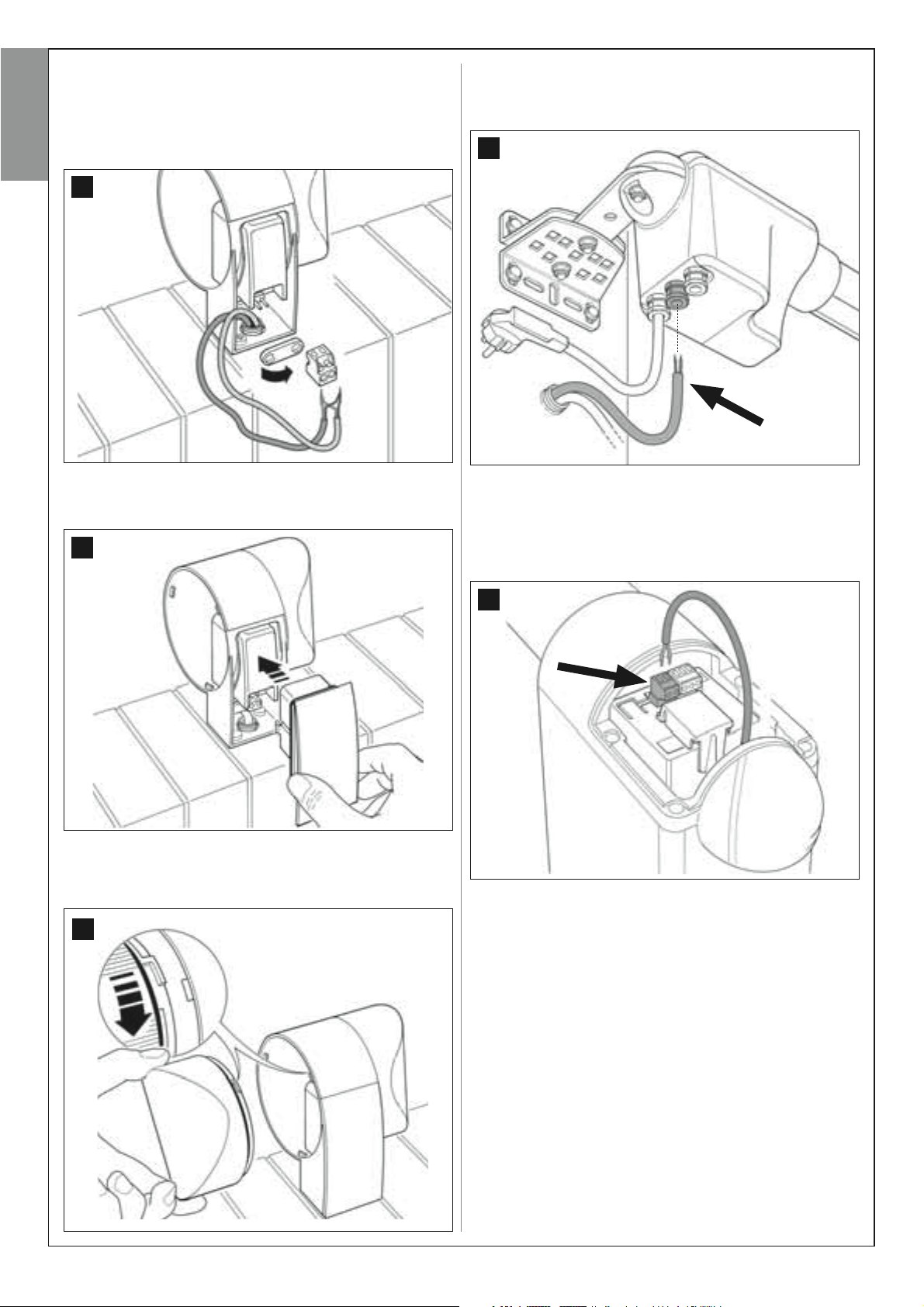
If the system envisages the use of two gearmotors, connect the gearmotor without control unit to the version with control unit as follows:
01. Remove the cover from the gearmotor, loosening the two lateral
screws with a screwdriver.
02. Fig. 23:
Loosen the cable clamp and insert the connection cable through the
hole.
23
03. Fig. 24:
Connect the cable wires to the terminal board, with reference to the
symbols present. Then tighten the cable clamp to secure the cable
to the gearmotor.
fig. B
24
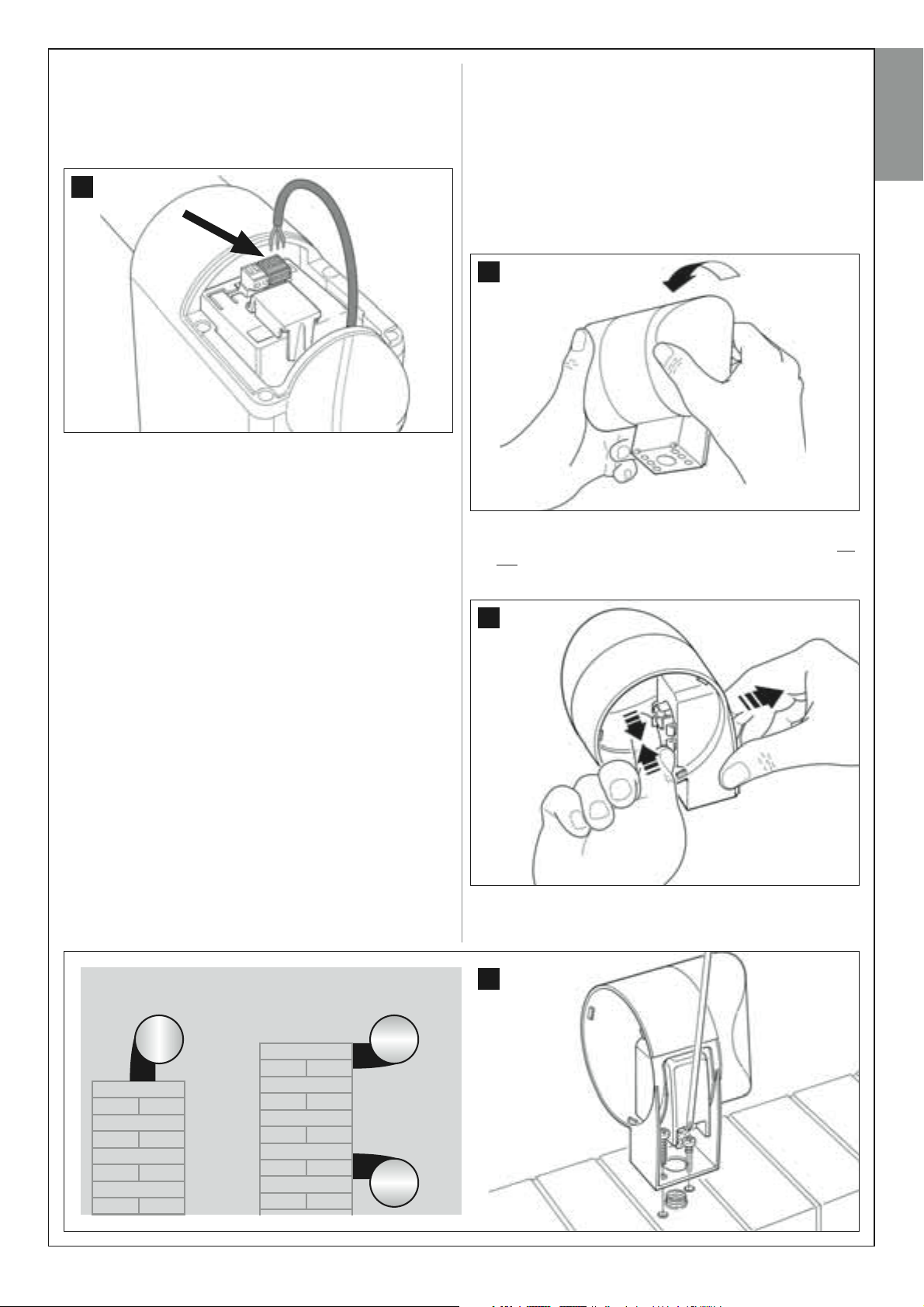
04. Fig. 25:
On the gearmotor with control unit, loosen the cable clamp at the
centre and pass the connection cable of the flashing light through the
hole.
25
14 – English
05. Fig. 26:
a) Remove the power terminal board from its seat to enable loosen-
ing of the three terminal screws.
b) Proceed with connection of the cable wires, observing the symbols on the terminal board and refit the latter in its seat.
c) Then tighten the cable clamp to secure the cable to the gearmotor.
6.3 – INSTALLING AND CONNECTING
FLASHING LIGHT MODEL MF
This flashing device indicates execution of each manoeuvre. It is also connected to the diagnostics system of the control unit and in the event of
malfunctions signals the type of problem by means of a pre-set sequence
of flashes (see paragraph “What to do if…”).
English
26
To install and connect the flashing light proceed as follows:
01. Fig. 27:
Extract one of the two transparent covers, turning it anti-clockwise
and set aside.
27
02. Fig. 28:
Use two fingers and at the same time press the two tabs at the bot
tom and use the other hand to remove the external cap of the flashing light.
28
-
CAUTION! – never assemble the product in a position other
than those specified.
03. Fig. 29:
Drill the marked sections on the base of the flashing light for fixture
of the screws and routing of the cables.
29
English – 15
04. Fix the body of the flashing light to the wall with the relative screws,
routing the cables through the prepared holes.
05. Fig. 30:
a) Connect the wires of the two cables and secure on the terminal
English
board.
b) Lock the cable by means of the relative cable clamp.
30
08. Fig. 33:
On the gearmotor with control unit, loosen the cable clamp at the
centre and pass the connection cable of the flashing light through the
hole.
33
06. Fig. 31:
Insert the cap of the flashing unit in its seat until the tabs click in
place.
31
07. Fig. 32:
Refit the transparent cover in its seat and turn clockwise, taking care
that the serrated section engages with those on the flashing light
body.
32
09. Fig. 34:
a) On the control unit, remove the BUS connection terminal board
from its seat to enable loosening of the 2 terminal screws.
b) Proceed with connection of the cable wires, observing the symbols on the terminal board and refit the latter in its seat.
c) Then tighten the cable clamp to secure the cable to the gearmotor.
34
16 – English
6.4 – INSTALLING AND CONNECTING
PHOTOCELL MODELS MP
The pair of photocells is made up of one photocell that transmits (named
TX) and one that receives (named RX). TX and RX are marked by a label
inside the cover. The photocells are installed on each side of the point of
transit and are connected to the control unit via the flashing light by
means of the BUS cable.
The photocells are safety devices that enable the detection of obstacles
when the latter cross the trajectory of the two photocells. The system can
be equipped with up to 6 pairs of photocells for safety
tocells used to command an Opening manoeuvre only (to install additional photocells, refer to section “Selecting operating modes of photocell
pairs”).
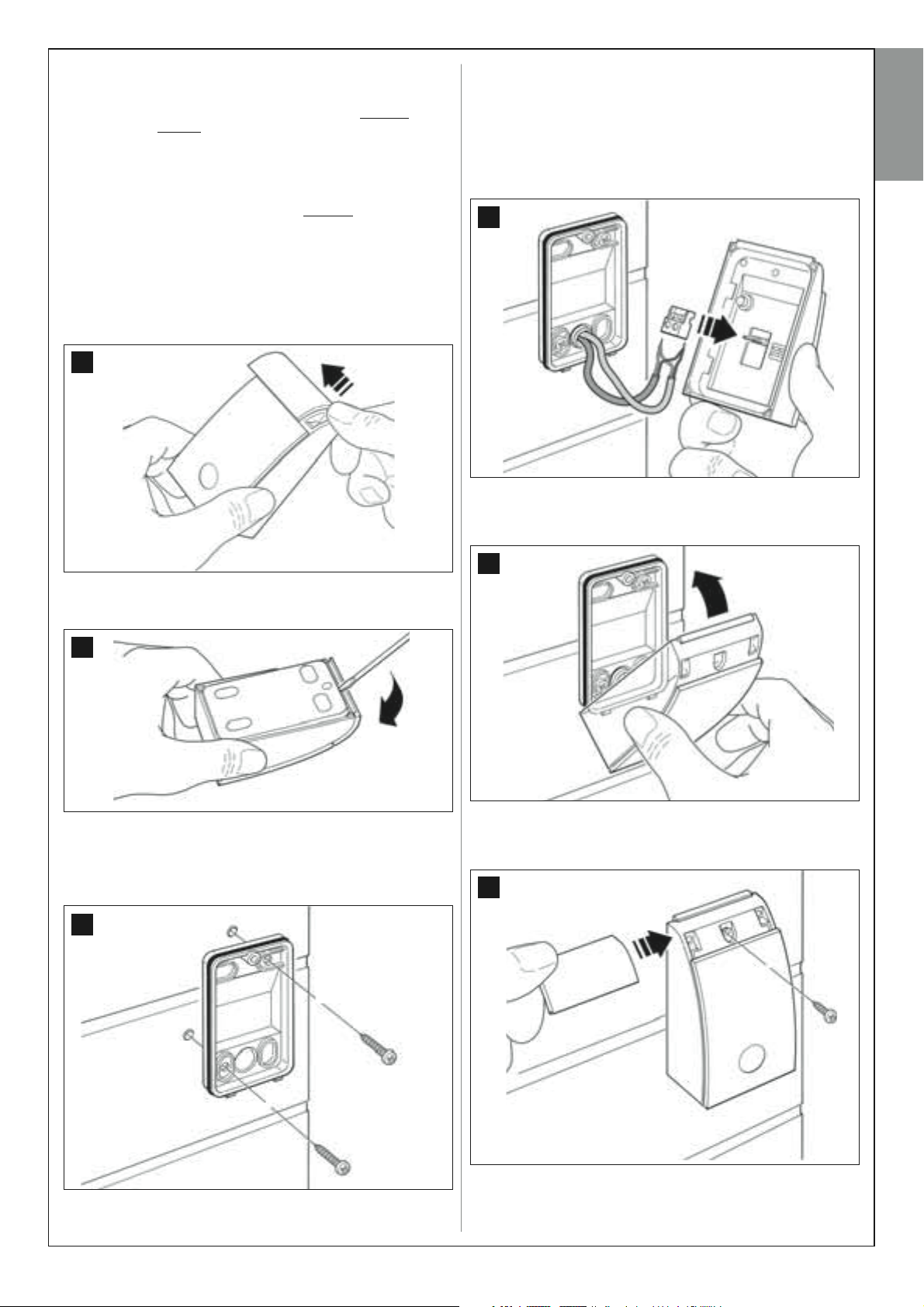
To install and connect a pair of photocells proceed as follows:
01. Fig. 35:
Remove the screw cover cap by pushing down one side as shown
in the figure.
and a pair of pho-
35
04. Fig. 38:
a) Connect the wires of the two cables and secure on the terminal
board.
b) Insert the terminal board in the male connector at the rear of the
photocell.
IMPORTANT! – Before closing the photocell, the photocell operating
mode must be selected by means of the relative jumper (refer to sec-
tion “Selecting operating modes of photocell pairs”).
38
05. Fig. 39:
Refit the cover, ensuring that the serrated section engages with that
of the photocell base.
English
02. Fig. 36:
Using a screwdriver, open and detach the base of the photocell
36
03. Fig. 37:
a) Drill a hole on the pre-cut section on the base for routing the connection cables.
b) Fix the photocell base to the wall with the relative screws, routing
the cables through the prepared hole.
37
39
06. Fig. 40:
Fix the photocell cover to the base by means of the screw supplied.
Lastly refit the screw cover cap as shown in the figure.
40
English – 17
Additional pairs of photocells can be installed at any time on a system for swing gates.
Up to a maximum of 6 pairs of photocells with safety functions can be added (as shown in the example A-B-C-D-E-F in fig. 54) and 1 pair with
English
a control function (as shown in the example G in fig. 54) which performs an Opening manoeuvre only.
For the correct location of these pairs of photocells, refer to fig. 54.
In order for the control unit to recognise each pair of photocells and the specifically assigned function, the devices must be assigned with
addresses by the insertion of one or two electric jumpers (Table 3) or no jumper at all (Table 3). In this way when the control unit receives the
input from the photocells it will activate the motor for the corresponding manoeuvre.
The address assignment procedure is performed both on the TX and RX photocell as follows:
For photocells “A-B-C-D-E-F”
Take care to observe the following warnings:
• the electric jumpers must be positioned on the two photocells using the same configuration
• the same configuration used on one pair of photocells must NOT be used on other photocells.
To program these pairs of photocells (if fitted on the system) proceed as follows:
01. Open the cover of the photocell.
02. In fig. 54 locate the position in which the specific photocells are installed.
03. In Table 3 select the required configuration and insert electric jumpers in the two photocells.
For photocells “G”
Take care to observe the following warnings:
• These photocells have a different function from the other (controlling the automation), and therefore must be positioned at a specific distance
to avoid possible interference.
• These photocells remain powered also when the automation is on standby and in the event of a power failure, if the buffer battery is fitted,
this will reduce the standard lifetime (see paragraph 6.6).
To program these pairs of photocells (if fitted on the system) no electric jumper must be inserted (see Table 3).
SELECTING OPERATING MODES OF PHOTOCELL PAIRS
;
54
Pair of photocells Electric jumpers
A Photocells h = 50 cm
(these are activated when
the gate is in the Closing phase)
B Photocells h = 100 cm
(these are activated when
the gate is in the Closing phase)
TABLE 3
Pair of photocells Electric jumpersi
E Photocell to right
(these are activated when the gate
is in the Opening phase)
F Photocell to left
(these are activated when
the gate is in the Opening phase)
18 – English
C Photocells h = 50 cm
(these are activated when the gate
is in the Opening or Closing Phase)
D Photocells h = 100 cm
(these are activated when the gate
is in the Opening or closing Phase)
G Photocell with
Gate opening only
command
6.5 – INSTALLING AND CONNECTING
KEYPAD model MK
The control keypad is a wall-mounted device used for control of the
automation via a Bus connection. Up to 4 keypads can be connected in
a single system and the device can be programmed to operate in two
modes: Traditional mode
tion – factory set) and safety mode (to activate a manoeuvre, a secret key
sequence must be entered, as set by the user).
The keypad is backlit for poorly lit conditions.
To install and connect the keypad proceed as follows:
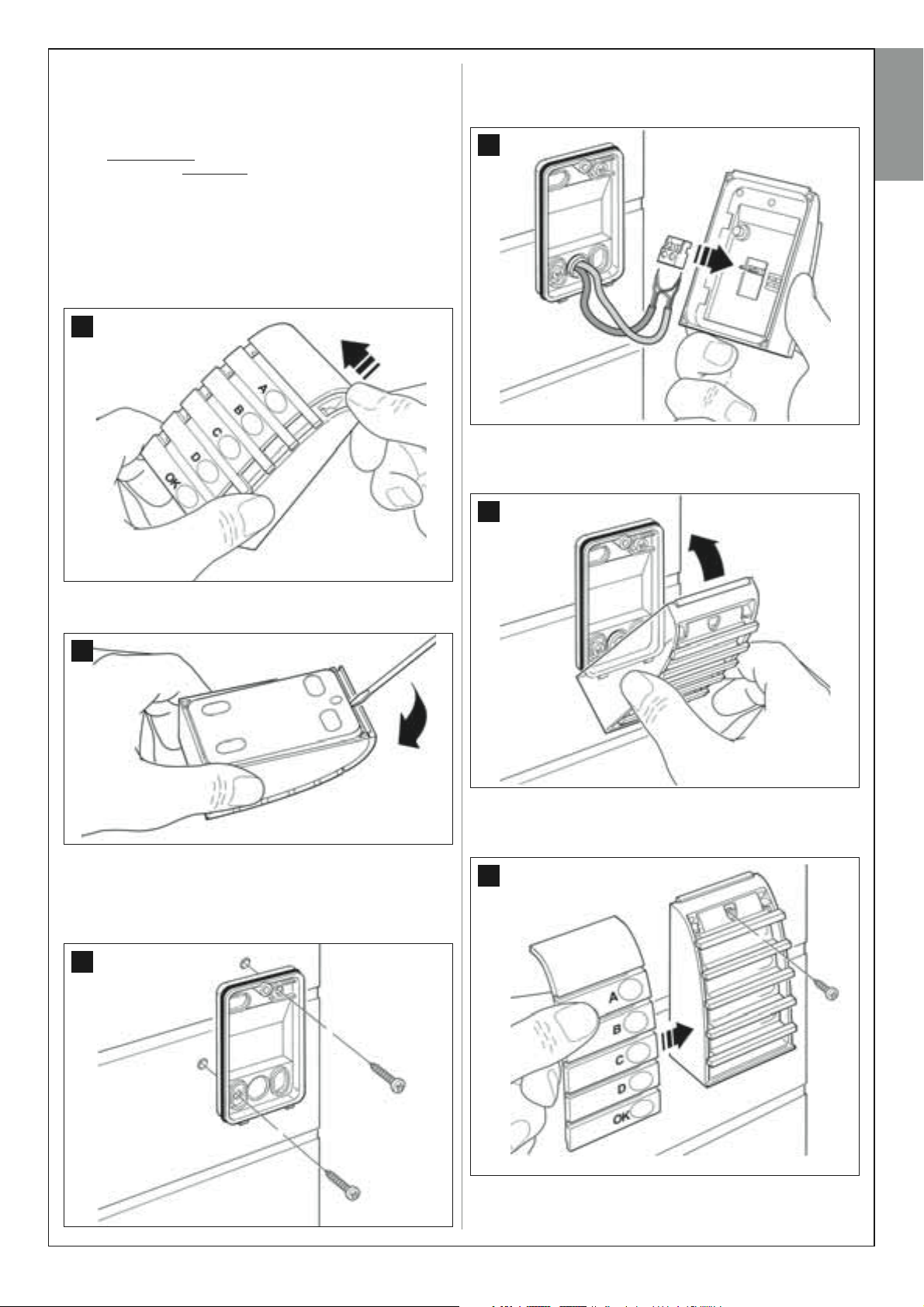
01. Fig. 42:
Remove the keypad cover by pushing down one side as shown in
the figure.
(each key performs a specifically assigned func-
42
04. Fig. 45:
a) Connect the cable wires to the respective terminals.
b) Insert the cable connector in the male connector at the rear of the
keypad.
45
05. Fig. 46:
Refit the cover, ensuring that the serrated section engages with that
of the keypad base.
46
English
02. Fig. 43:
Using a screwdriver, open and detach the base of the keypad.
43
03. Fig. 44:
a) Drill a hole on the pre-cut section on the base for routing the connection cables.
b) Fix the keypad base to the wall with the relative screws, routing
the cables through the prepared hole.
44
06. Fig. 47:
Fix the keypad cover to the base by means of the screw supplied.
Lastly refit the screw cover cap as shown in the figure.
47
English – 19
6.6 – INSTALLING THE BUFFER
BATTERY mod. MB
The buffer battery is self-charging with a voltage of 12V and power of
2100mAh. This is particularly useful in the event of a sudden power failure.
English
The gearmotor with control unit enables the installation of 1 battery.
Depending on the type and weight of the gate, when charged, the battery
guarantees an autonomy of approx. 6 - 7 consecutive movement cycles
(1 cycle = opening- closing).
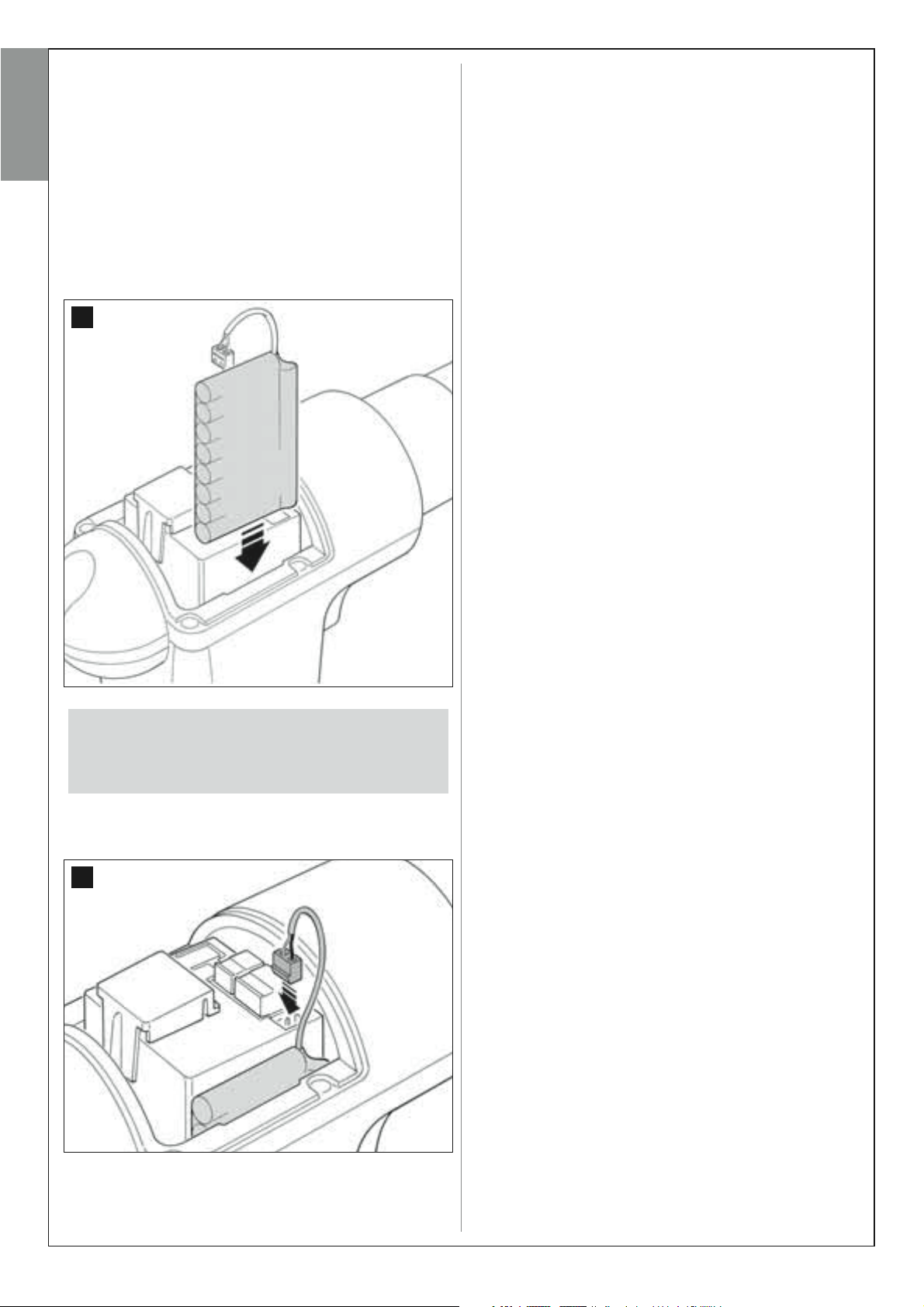
To install the buffer battery proceed as follows:
01. Fig. 48:
Inside the gearmotor with control unit, insert the battery in the space
alongside the control unit.
48
WARNINGS
To guarantee optimal lifetime of the buffer battery, the following warnings should be
observed:
• The buffer battery is an emergency device: Therefore it should only be used moderately in the event of real necessity. Excessive and continuous use can lead to
overheating of the elements, which over time may reduce the normal lifetime of the
battery.
• Never leave the automation powered exclusively by the buffer battery for periods
longer than a day: The elements may overheat excessively and impair lifetime of
the battery.
Therefore, if absent from the installation site of the automation for prolonged periods, it is recommended to detach the buffer battery terminal connected to the
control unit.
• When the buffer battery is completely discharged, around 24 hours are required to
completely recharge.
• In the event of prolonged periods of disuse, the optional battery should be
removed and stored in a dry location to avoid the risk of leaks of harmful substances.
–––––––––––––––––––
Battery disposal
CAUTION! – Even if discharged, the batteries can contain pollutant substances and therefore must NEVER be disposed of in common waste collection points. Dispose of according to separate waste collection methods
as envisaged by current local standards.
CAUTION! - The point below (02 – electrical connection of
the buffer battery to the control unit ) must only be performed after completing all installation and programming
phases, as the battery is an emergency power source.
02. Fig. 49:
Insert the battery connector in the male connector on the control
unit.
49
20 – English
POWER SUPPLY CONNECTION
STEP 7
WARNINGS
– The PVC power supply cable supplied with the product is ide-
al for internal installation; an insulated tube must be used to
protect the cables when installed outside, or the specific
H07RN-F type cable can be requested to replace this version
if required.
– Final connection
ment of the cable supplied must be performed by a skilled and
qualified electrician, in observance of local current safety
standards and the instructions in the section “Tasks reserved
for qualified technicians”.
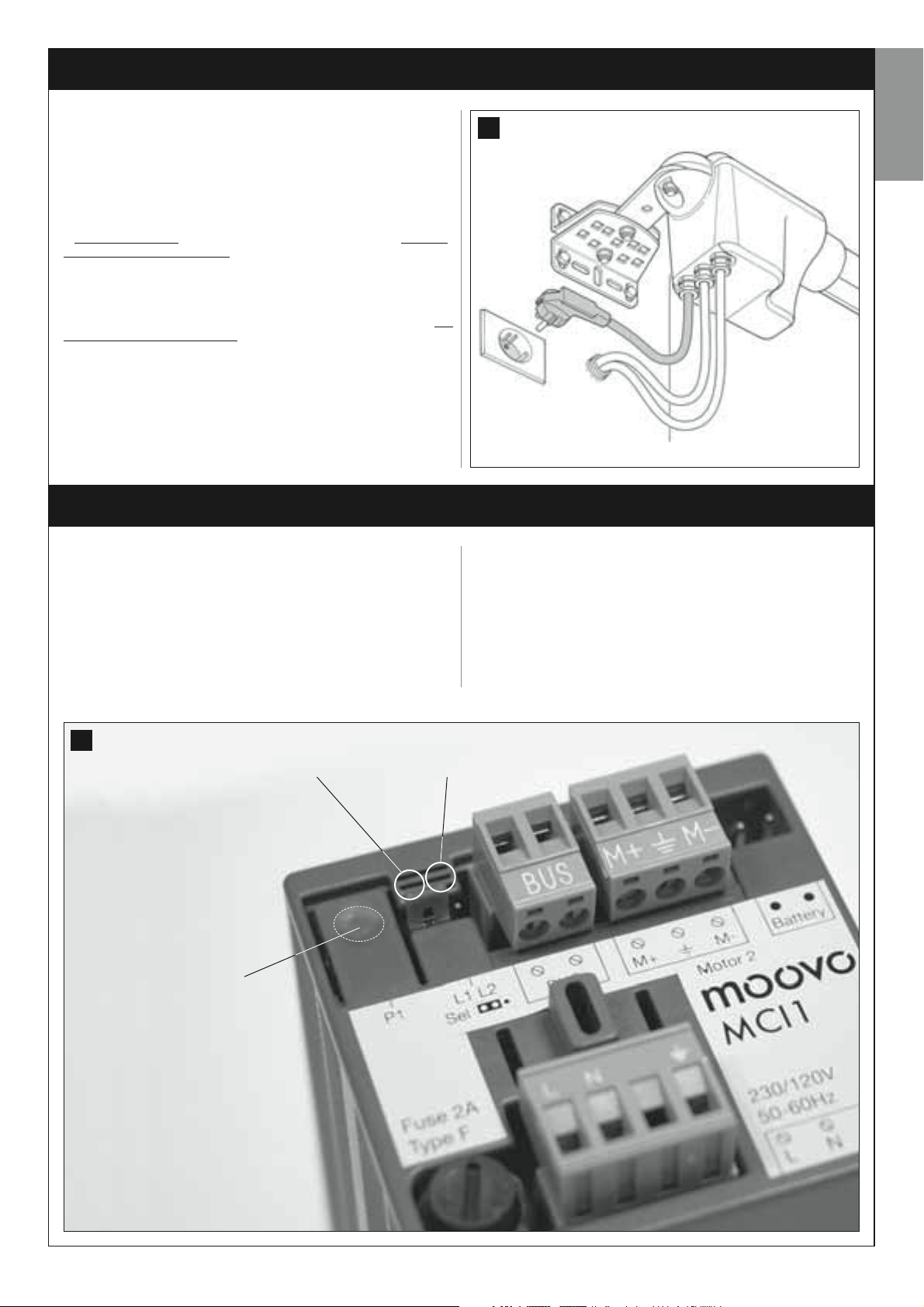
To perform the automation operation and programming tests, insert the
power plug of the control unit (supplied) in a mains socket (fig. 50). If
the socket is far from the automation, use a suitable extension lead.
of the automation to the mains or replace-
INITIAL START-UP AND ELECTRICAL CONNECTION CHECK
STEP 8
CAUTION! – The following operations described in this manual will
be performed on live electrical circuits and therefore manoeuvres
may be hazardous! Therefore proceed with care.
50
English
CAUTION! – If the red led does not flash as described above, disconnect the Control unit from the power supply and carefully check
all connections (refer also to the paragraph “What to do if....”).
After powering up the control unit (fig. 50), the red led and green led (fig.
51) emit a series of flashes.
At the end of this phase, the red led starts flashing at regular intervals.
This confirms correct operation of the control unit.
51
“L2” green led“L1” red led
Key “P1”
English – 21
PROGRAMMING THE AUTOMATION
WARNINGS for programming:
• Always read the procedure first and then perform the operations in the
English
correct sequence.
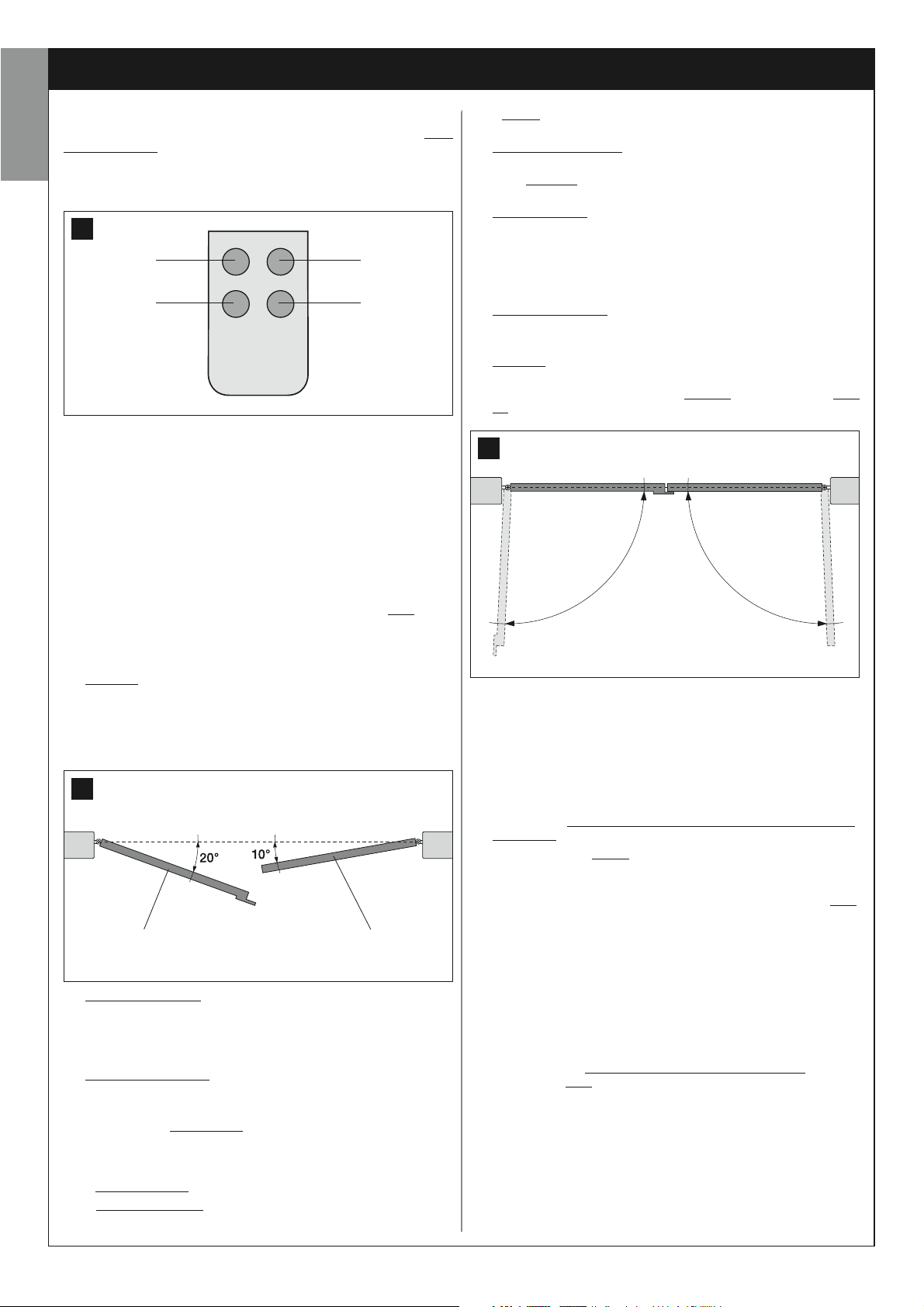
• In this manual the transmitter keys are identified by means of numbers.
To check the correspondence of numbers and the transmitter keys see
fig. 52.
52
T1
T3
T2
T4
STEP 9
9.1 – MEMORISING DEVICES CONNECTED BY MEANS
OF “BUS” CABLE AND LEAF TRAVEL LIMIT
POSITIONS “0” AND “ 1”.
After ensuring correct operation of the control unit, it must be programmed as described in the sequence below:
Note – During this procedure, the user can exit the process at any time
(without saving the operations performed) by pressing “P1” once on the
control unit (fig. 51). In particular, from point 07 onwards, the user can
also exit the procedure by activation of a safety device (photocell or other...).
• light off
photocells).
04. (on control Photocells)
Activate this type of photocell (if fitted on the system), interrupting the
beam once only. Successful learning is confirmed by the flashing light
(1 flash) and the keypad (1 beep), if fitted on the system.
05. (on the keypads)
Activate the keypads (if fitted on the system) by pressing any key on
each one as required.
Successful learning is confirmed by 2 beeps at short intervals, emit-
ted by the keypad and 1 flash of the flashing light, if fitted on the system.
06. (on the Control unit)
Pres and hold the key “P1” on the Control unit for at least 5 seconds
until the green Led turns off. Then release the key.
07. (on Gate)
Note – the manoeuvres that follow enable the control unit to auto-
matically memorise the positions of point “0” (total closing) and point
“1” (total opening), as shown in fig. 54.
= photocells installed incorrectly (check “Bus” connection of
54
Positions “0”
Positions “1” Positions “1”
01. (on Gate)
Release the two gearmotors by means of the special release key (see
chapter “Manually releasing or locking the gearmotor” in the
TECHNICAL DOCUMENTATION) and manually move the two gate
leafs to the position shown in fig. 53. Then lock the two gearmotors
again.
53
Leaf 1 Leaf 2
02. (on the Control unit)
Pres and hold the key “P1” on the Control unit for at least 5 seconds
until the green Led turns off and the red led illuminates (this remains
lit through to the end of the procedure). Then release the key and proceed as follows:
03. (on safety Photocells)
Note – The time available for this check is unlimited.
Check correct operation of these types of photocells, ensuring that
the relative Led flashes slowly. Otherwise if it is lit or off, correct alignment between the photocells attempting to obtain a flashing frequency that is slow as possible (the slower the flashing speed, the better
the photocell alignment).
• slow flashing light = correct photocell alignment;
• light permanently lit
ment);
= incorrect alignment (revise photocell align-
At this point the Control unit automatically activates 3 manoeuvres,
also indicated by the flashing light:
1 - Closure of Leaf 2, followed by closure of Leaf 1.
2 - Opening of the two leafs.
3 - Closing of the two leafs.
At the end of the last manoeuvre, the red led turns off (= procedure
completed) and then resumes flashing at regular intervals
CAUTION! – As soon as the first manoeuvre starts, check imme
diately that:
a - Leaf 2 moves before Leaf 1;
b - Leaf 2 moves in the Closing direction.
If the results of these checks do not conform with specifications, stop
the procedure immediately by pressing P1 on the control unit once.
Then identify the problem “a” with reference to STEP 6.1, and problem “b” by inverting the electrical wires connected to terminals “M+”
and “M-” on the control unit. Then repeat the entire procedure 9.1
Memorising other devices connected by Bus cable at a later
date
If in future the user decides to install and memorise other devices connected to the control unit by means of the Bus, and procedure 9.1 has
been completed previously, the new devices can be memorised using
the same procedure, starting from point 01 through to point 06. On completion, press P1 once on the control unit to complete the memorisation
process.
-
22 – English
9.2 – MEMORISATION OF TRANSMITTER mod. MT4
CAUTION! - Always read the procedure first and then perform the
operations in the correct sequence without allowing more than 10 seconds to pass between releasing one key and pressing the next.
To enable control of the automation with the transmitter, the keys must be
memorised in the control unit memory.
Memorisation enables the association of each key with the required command, selecting from the following:
1 = Step-Step: Corresponding to the sequence ... Open - Stop - Close
- Stop ... The first command activates Opening; the next, with the leaf
moving, activates Stop; the third activates Closure; the fourth with the leaf
moving activates Stop and so on.
2 = Step-Open: Corresponding to the sequence ... Open - Stop -
Close - Open ... The first command activates Opening; the next, with the
leaf moving, activates Stop; the third activates Closure; the fourth with the
leaf moving activates Open and so on.
3 = Partial open: Corresponding to total opening of one leaf only This
command is only activated if Leaf 2, the subordinate leaf, is completely
closed.
4 = Apartment block open: This command is used for apartment
blocks and envisages programming of all apartment block transmitters
with a single “apartment block opening” key. This command operates as
follows:
• if the command is sent while an Opening manoeuvre is in progress, the
manoeuvre continues;
• if the command is sent while a Closing manoeuvre is in progress, the
manoeuvre is interrupted and an Opening manoeuvre is started;
• if the command is sent when the gate is stationary and completely open,
the Closing manoeuvre is started. Note – Automatic closure of the gate is
also possible, by programming a pause time as required (see chapter 10).
A single procedure memorises a single key of the transmitter; this can be
memorised both on the present control unit and on control units of other
automations. The control unit memory can memorise up to 150 keys.
For each key to be memorised, repeat the following procedure.
01. Select which transmitter key is to be memorised (for example: Key
T3).
02. Decide on the command (from those listed below) to be associated
with the selected key (for example: Command “2”).
03. Press “P1” (on the Control unit) the same number of times as the
selected command number (in the example “2”, i.e. twice) and check
that the green led emits the same number of quick flashes (repeated
at regular intervals).
04. (within 10 seconds) Press and hold the transmitter key to be memorised for at least 2 seconds (in the example, key T3).
“Safety” operating mode”
In this mode the keypad is enabled on entry of a password set by the user
(from 1 to 10 letters) followed by the key OK. This combination of keys
only sends the specific command that the user set during the mode programming phase.
Note – If the Step-Step command is programmed, after the command is
sent the user has 10 seconds in which to send a subsequent command,
by simply pressing “OK”. This eliminates the need to repeat password
entry.
“SAFETY” MODE PROGRAMMING
01. Press and hold keys “A” and “B” simultaneously for a few seconds,
until the keypad emits a sequence of beeps that indicate start-up of
programming.
02. Using the keys enter the “PUK code” (10-letter code supplied with the
keypad); and then press “OK”.
If the code is correct the keypad emits a series of beeps; if incorrect
a single continuous tone is emitted.
03. Using the keys enter the personal password (from 1 to 10-letters);
and then press “OK”.
The keypad emits a series of beeps.
04. From the list below, select the command to be programmed and on
the keypad press the key to be associated with the command fol-
lowed by OK.
Step-Step command = key A
“Partial open” command = key B
Open command = key C
Close command = key D
Stop command = key OK
The keypad emits a series of beeps to indicate completion of programming.
Modifying the Personal Password
To modify you personal password, repeat the entire “Safety mode” procedure, changing the existing password at point 03.
“TRADITIONAL” MODE PROGRAMMING
To program this mode, perform the “Safety mode programming” procedure, and at point 03 and 04 press “OK” only.
English
If the memorisation procedure is successful, the green led emits 3 long
flashes (= memorisation OK). Note – Before the 10 second interval elaps-
es, the key of a NEW transmitter with the same command can be memorised (useful, for example, when several transmitters need to be memorised on the same control unit).
Otherwise wait until the green led turns off (= procedure completed) and
for the red led to resume flashing at regular intervals.
9.3 – PROGRAMMING KEYPAD mod. MK
The control keypad can be programmed for two alternative operating
modes:
- TRADITIONAL mode (without the use of a personal password)
- SAFETY mode (with use of a personal password)
After memorisation (see STEP 9.1) the keypad is set to “Traditional mode”
(factory setting) but this may be modified as described below.
“Traditional” operating mode”
In this mode the keys are independent and each commands a specific
action. The commands are:
Key “A” = Step-step command
Key “B” = Partial open command
Key “C” = Open Command
Key “D” = Close command
Key “OK” = Stop Command
English – 23
ADJUSTMENTS AND OTHER OPTIONAL FUNCTIONS
The control unit has a number of optional functions to enable the user to
add specific functionalities to the automation, thus personalising the product according to special needs.
English
10 – AUTOMATION OPERATION ADJUSTMENT
To personalise operation of the automation, a number of functions can be
enabled or disabled, also with the option for modifications to settings as
required. The functions are:
• AUTOMATIC LEAF CLOSURE When this function is enabled, at the
end of an Opening manoeuvre activated by the client, the control unit
automatically closes the gate after a set time interval.
• LEAF MOVEMENT SPEED This function enables the user to set the
required speed used by the automation to move the gate leafs.
• LEAF SENSITIVITY TO OBSTACLES During a manoeuvre, if an obsta-
cle accidentally stops gate leaf movement (a gust of wind, a vehicle, person etc.) this function promptly detects the increase in motor stress to
contract the obstacle and activates immediate and total inversion of
movement. If “automatic leaf closure” is set, the control unit re-attempts
the movement a second time and on the third time, after a brief inversion,
it stops the manoeuvre permanently.
• LEAF PRESSURE DISCHARGE At the end of the Closing manoeuvre,
after the leafs have reached limit switch “0”, the motor continues to “push”
the leafs for a brief interval, to ensure perfect closure. Immediately afterwards, this function activates a very brief inversion of movement, to
reduce excessive pressure exerted by the motor on the leafs
The values of these functions can be set according to personal requirements using the following procedure with a transmitter that has at least
one key already memorised on the control unit.
Note – During this procedure, each time a key is pressed the flashing light
emits one flash.
01. Press and hold the keys “T1” and “T2” simultaneously on the transmitter for at least 5 seconds, after which release.
The two leds (green and red) on the Control unit flash to indicate entry
to function programming mode (the leds continue to flash throughout
the procedure).
02. Press and hold a transmitter key (already memorised on that of the
control unit) for at least 1 second (the green Led emits one flash).
03. Then select one of the four functions available and on the transmitter
press the key associated with the function for at least 1 second (the
green Led emits one flash):
• Automatic leaf closure = (press key “T1”)
• Leaf movement speed = (press key “T2”)
• Leaf sensitivity to obstacles = (press key “T3”)
• leaf pressure discharge = (press key “T4”)
04. Lastly, refer to Table 4, select the required value in correspondence
with the selected function and on the transmitter press the key associated with the selected value for at least 1 second (the green and
red Leds emit one confirmation flash).
TABLE 4
Automatic leaf closure
No closure—> (press key “T1”)
Closure after 15 seconds —> (press key “T2”)
Closure after 30 seconds —> (press key “T3”)
Closure after 60 seconds —> (press key “T4”)
Leaf movement speed
Low —> (press key “T1”)
Medium low —> (press key “T2”)
Medium high —> (press key “T3”)
High —> (press key “T4”)
Leaf SENSITIVITY TO OBSTACLES
High —> (press key “T1”)
Medium high —> (press key “T2”)
Medium low —> (press key “T3”)
Low —> (press key “T4”)
Leaf PRESSURE DISCHARGE
No discharge —> (press key “T1”)
Minimum —> (press key “T2”)
Medium —> (press key “T3”)
Maximum —> (press key “T4”)
Notes to Table 4:
– The Table states the values available for each of the 4 special functions
and the corresponding key to be pressed on the transmitter for selection
of the specific value.
– The factory settings are highlighted in grey.
– In caso di mancanza dell’energia elettrica, al ripristino della corrente la
prima manovra comandata verrà eseguita dall’automazione a velocità
ridotta, indipendentemente dal tipo di velocità impostata.
11 – MEMORISING A NEW TRANSMITTER WITH
PROCEDURE IN THE VICINITY OF THE CONTROL
UNIT [with a transmitter already memorised]
A NEW transmitter can be memorised in the control unit memory without
acting directly on key P1 of the control unit, but by simply working within
its reception range. To use this procedure, an OLD transmitter, previously
memorised and operative, is required. The procedure enables the NEW
transmitter to receive the settings of the OLD version.
24 – English
Warning – The procedure must be performed within the reception
range of the receiver (maximum 10-20 m from receiver).
01. On the NEW transmitter, press and hold the key to be memorised for
at least 5 seconds and then release.
02. On the OLD transmitter, slowly press the control key to be memo-
rised on the other transmitter 3 times.
03. On the NEW transmitter, press the same key pressed in point 01
once.
Note – Repeat the same procedure for each key to be memorised.
12 – DELETING DATA FROM THE CONTROL UNIT MEMORY
Data in the control unit memory can be deleted partially or totally as
required. To do this, the following procedures can be used, as required:
• Deletion of a command on a transmitter already memorised
• Deletion of other data memorised on the control unit
on a transmitter already memorised
The following procedure enables deletion of a single command assigned
to a transmitter key from the control unit memory.
Note – During the procedure, the red and green leds remain permanently lit.
01. Pres and hold the key “P1” on the Control unit for at least 10 sec-
onds: the green Led illuminates first, then the red led illuminates after
5 seconds and then both, to indicate that the Control unit has
entered memory deletion mode (WARNING
key P1!).
02. Without releasing key P1 press the transmitter key to be deleted: if
the control unit recognises this operation, the green led emits a short
flash, after which the P1 key and transmitter key can be released.
Deleting a command
! – do not release the
English
data memorised on the control unit
The following procedure enables deletion of various types of memorised
data from the control unit memory, as specified in Table 5.
Note – During the procedure, the red and green leds remain permanently lit.
01. Pres and hold the key “P1” on the Control unit for at least 10 sec-
onds: the green Led illuminates first, then the red led illuminates after
5 seconds and then both, to indicate that the Control unit has entered
memory deletion mode. Then release the key.
02. With reference to Table 5, select the data to be deleted and press P1
the same number of times as the number of presses specified in
brackets (the green led emits one flash each time the P1 key is
pressed).
03. 5 seconds after the key “P1” is pressed for the last time, if deletion is
successful, both leds (red and green) flash quickly (= memory delet-
ed!).
Note – Before deletion, there is a margin time of 5 seconds, in which
the user has the option to change decision and exit the procedure
without deleting data by pressing key P1 five times.
IMPORTANT! – After deletion of the “Memory of positions 0 and 1” and
“TOTAL Memory”, the procedure 9.1 – “Memorising devices connect-
ed by means of Bus cable and leaf travel limit positions 0 and 1”
must be repeated.
Deleting other
TABLE 5
• Memory of Optional Function values (= 1 press)
• Memory of positions “0” and “1” (= 2 presses)
• Memory of Transmitters (= 3 presses)
• TOTAL memory (= 4 presses) Note – deletes the first three mem-
ories in one process
English – 25
English
Tasks reserved for qualified technicians
CAUTION! – All operations in this section must be performed exclusively by skilled and quali-
fied personnel, in observance of the instructions in the manual, and current local legislation and
safety standards in the place of installation.
CONNECTING THE AUTOMATION TO THE ELECTRICAL MAINS
USING A CABLE OTHER THAN THE VERSION SUPPLIED
CAUTION! – Strictly observe the electrical connections specified in
this paragraph, as incorrect connections could lead to serious faults
or hazards.
If the distance of the gate from the electrical mains is greater than the
length of the power cable supplied, this cable may be replaced with an
electric line that is adequately protected and suited to the application.
In this case, use a power cable with the dimensions 3 x 1,5 mm2, and
maximum length of 30 m. For greater lengths, use a cable with a larger
section: For example , 3 x 2,5 mm2, ensuring safety earthing in the vicinity of the automation. Then proceed as follows:
To connect the new cable to the Control unit
01. Fig. A - Remove the cover from the gearmotor with control unit,
loosening the two lateral screws with a screwdriver.
:
A
ing the relative symbols. Note – the terminal board can be removed
from its seat to facilitate wiring.
– Brown wire, to connect to “Phase”
– Blue wire, to connect to “Neutral”
– Yellow-green wire, to connect to “Earth”
B
C
02. Fig. B e C – Loosen the power cable clamp, loosen the screw of the
terminal board cover using a Phillips screwdriver and remove the
existing cable. Then fix the new cable to the terminal board, observ-
To connect the new cable to the electrical mains:
CAUTION! – When making this connection, the electrical mains power line must be equipped with short-circuit protection device (between the
automation and the mains).
The electrical mains line must also be equipped with a power disconnect device (with overvoltage category III, i.e. minimum gap between contacts of
3.5 mm) or an equivalent system such as socket with removable plug.
This device, when necessary, guarantees fast and safe disconnection of the power supply and therefore must be placed in a location visible from the
automation. If the power disconnect device is not in the vicinity of the automation and not visible from the latter, it must be fitted with a lockout facility to prevent inadvertent or unauthorised connection.
Note – The disconnect devices are not supplied with the product.
03. Then refit the terminal board cover and close the gearmotor with its
cover.a
26 – English
AUTOMATION TESTING AND COMMISSIONING
These are the most important phases of automation set-up to ensure maximum system safety.
The testing procedure described can also be performed as a periodic check of automation devices.
Testing and commissioning of the automation must be performed by skilled and qualified personnel, who are responsible for the tests required to verify the solutions adopted according to the risks present, and for ensuring observance of all legal provisions, standards and regulations , and in particular all requirements of the standard EN 12445, which establishes the test methods for checking automations for doors and gates.
English
AUTOMATION TESTING
1 Ensure that all specifications in STEP 1 regarding safety have been
strictly observed.
2 Using the transmitter, perform door opening and closing tests and
ensure that the movement corresponds to specifications.
Test several times to assess smooth operation of the door and check
for any defects in assembly or adjustment and any possible points of
friction.
3 Check operation of all system safety devices one at a time (photocells,
sensitive edges, etc.) Photocells: Activate the device during an Opening
or Closing manoeuvre and check that the control unit stops the
manoeuvre and activates a total inversion of the movement (the flashing light emits 2 flashes, twice). Sensitive edges: Activate the device
during an Opening or Closing manoeuvre and check that the control
unit stops the manoeuvre and activates a short inversion of the movement (the flashing light emits 4 flashes, twice).
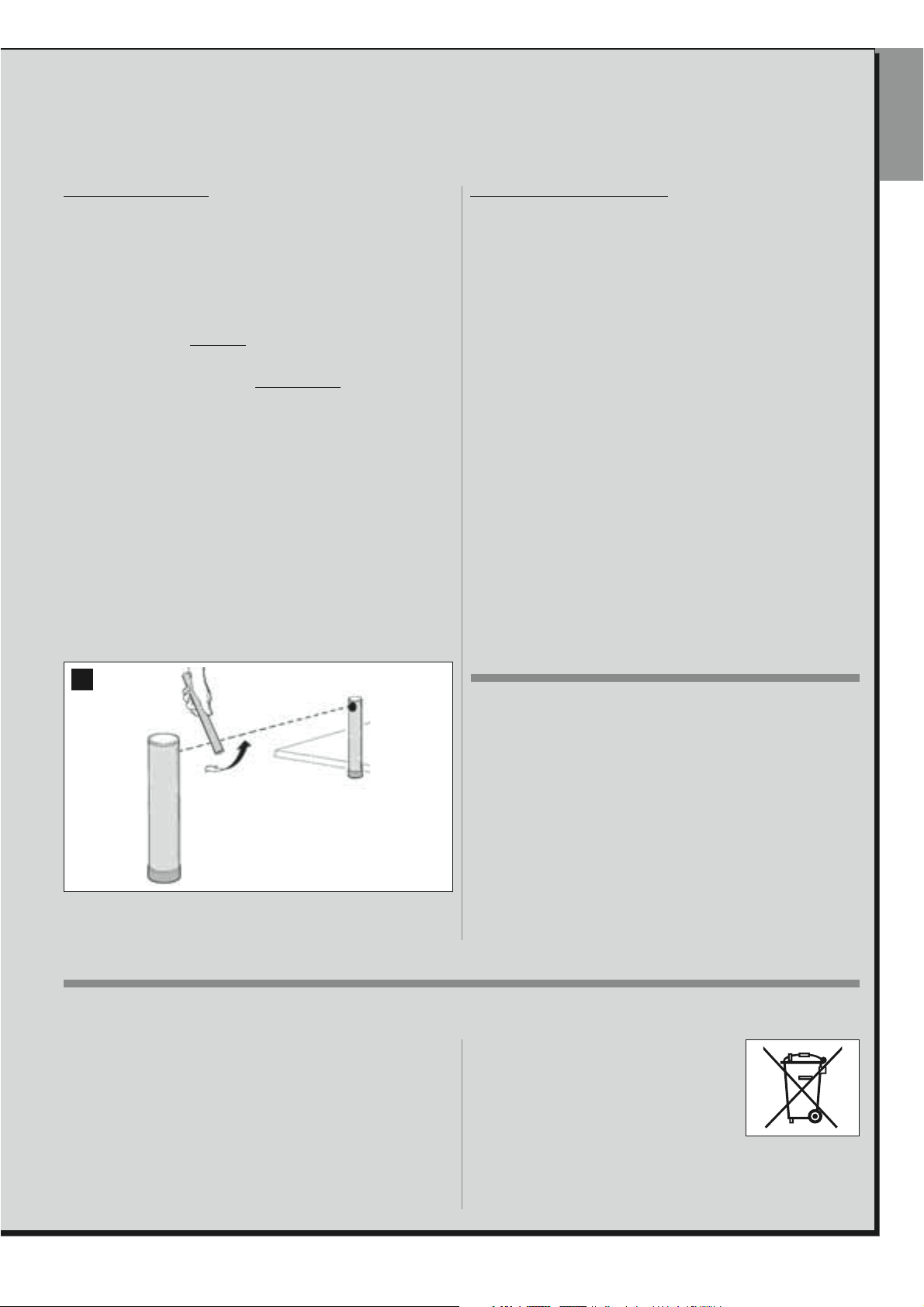
4 To check the photocells, and to ensure there is no interference with oth-
er devices, pass a cylinder (diameter 5 cm, length 30 cm) through the
optic axis joining the pair of photocells (fig. 55): pass the cylinder first
close to the TX photocell, then close to the RX and lastly at the centre
between the two . Ensure that in all cases the device engages, changing from the active status to alarm status and vice versa, and that the
envisaged action is generated in the control unit (for example movement inversion in the Closing manoeuvre).
5 Measure the force as specified in the standard EN 12445. If the motor
force control is used as an auxiliary function for reduction of impact
force, test and identify the setting that obtains the best results.
6 Activate a closing manoeuvre and check impact force of the leaf
against the mechanical stop. If necessary, test by discharging pressure
to obtain the best results.
AUTOMATION COMMISSIONING
Commissioning can only be performed after positive results of all
test phases. Partial or “makeshift” commissioning is strictly prohibited.
1 Prepare the automation technical documentation, which must contain
the following documents: Overall layout drawing (see example in fig. 8),
electrical wiring diagram (see example in fig. 22), risk assessment and
relative solutions adopted (see forms to be compiled on the website
www.moovo.com), manufacturer’s declaration of conformity for all
devices used and the declaration of conformity compiled by the installer
(see section TECHNICAL DOCUMENTATION).
2 Affix a dataplate on the door, specifying at least the following data: type
of automation, name and address of manufacturer (responsible for
commissioning), serial number, year of construction and CE mark.
3 Prepare and provide the owner with the declaration of conformity; the
“CE Declaration of conformity” in the section TECHNICAL DOCUMENTATION must be compiled for this purpose.
4 Prepare and provide the owner with the form “Operation manual” in
the section TECHNICAL DOCUMENTATION.
5 Prepare and provide the owner with the form “Maintenance schedule”
in the section TECHNICAL DOCUMENTATION, containing all maintenance instructions for all devices in the automation.
6 Before commissioning the automation, ensure that the owner is ade-
quately informed of all associated risks and hazards.
55
PRODUCT DISPOSAL
This product is an integral part of the automation and therefore must
be disposed together with the latter.
As in installation, also at the end of product lifetime, the disassembly and
scrapping operations must be performed by qualified personnel.
This product comprises various types of materials: some may be recycled
others must be disposed of. Seek information on the recycling and disposal systems envisaged by the local regulations in your area for this
product category.
Caution! – some parts of the product may contain pollutant or hazardous
substances which, if disposed of into the environment, may cause serious
damage to the environment or physical health.
PERIODIC MAINTENANCE OPERATIONS
This product does not generally require any special maintenance; nevertheless, regular check-ups are advisable to ensure the system is in good
working order and that the safety devices installed work properly.
To carry out this maintenance correctly, please refer to the “Maintenance
Schedule”, which you will find in the “TECHNICAL DOCUMENTATION”
section at the end of the manual.
As indicated by the symbol alongside, disposal of
this product in domestic waste is strictly prohibited
Separate the waste into categories for disposal,
according to the methods envisaged by current
legislation in your area, or return the product to the
retailer when purchasing a new version.
Caution! - Local legislation may envisage serious fines in the event of
abusive disposal of this product.
English – 27
TECHNICAL SPECIFICATIONS OF PRODUCT COMPONENTS
WARNINGS:
– The product XW4... - XW5. is manufactured by NICE S.p.a. (TV) I. MOOVO is a registered trademark owned by Nice S.p.a.
– All technical specifications stated in this section refer to an ambient temperature of 20°C (± 5°C).
– Nice S.p.a. reserves the right to apply modifications to the product at any time when deemed necessary, while maintaining the same functionalities and intended use.
English
XW...GEARMOTORS
Note – The models XW432e and XW532e contain the control unit.
DESCRIPTION DATA
Mod. XW432 Mod. XW432e Mod. XW532 Mod. XW532e
Power supply (Vac) – 230 – 230
Power supply (Vdc) 12 – 12 –
Maximum power absorption (W)
Of motor
Maximum thrust (N) 800
Nominal thrust (N) 380
Speed under load
Stroke (mm) 417 567
Dimensions (mm) 742 x 110 h x 161 892 x 110 h x 161
Maximum number of cycles
continuous
Cycles/hour at nominal
torque (20°C)
Weight (kg) 3 3,1 3,5 3,6
Protection class IP 44
Estimated durability (*) from 40.000 to 80.000 manoeuvre cycles
(mm/sec)
low high low high low high low high
9 16,6 9 16,6 9 16,6 9 16,6
250 W
5
8
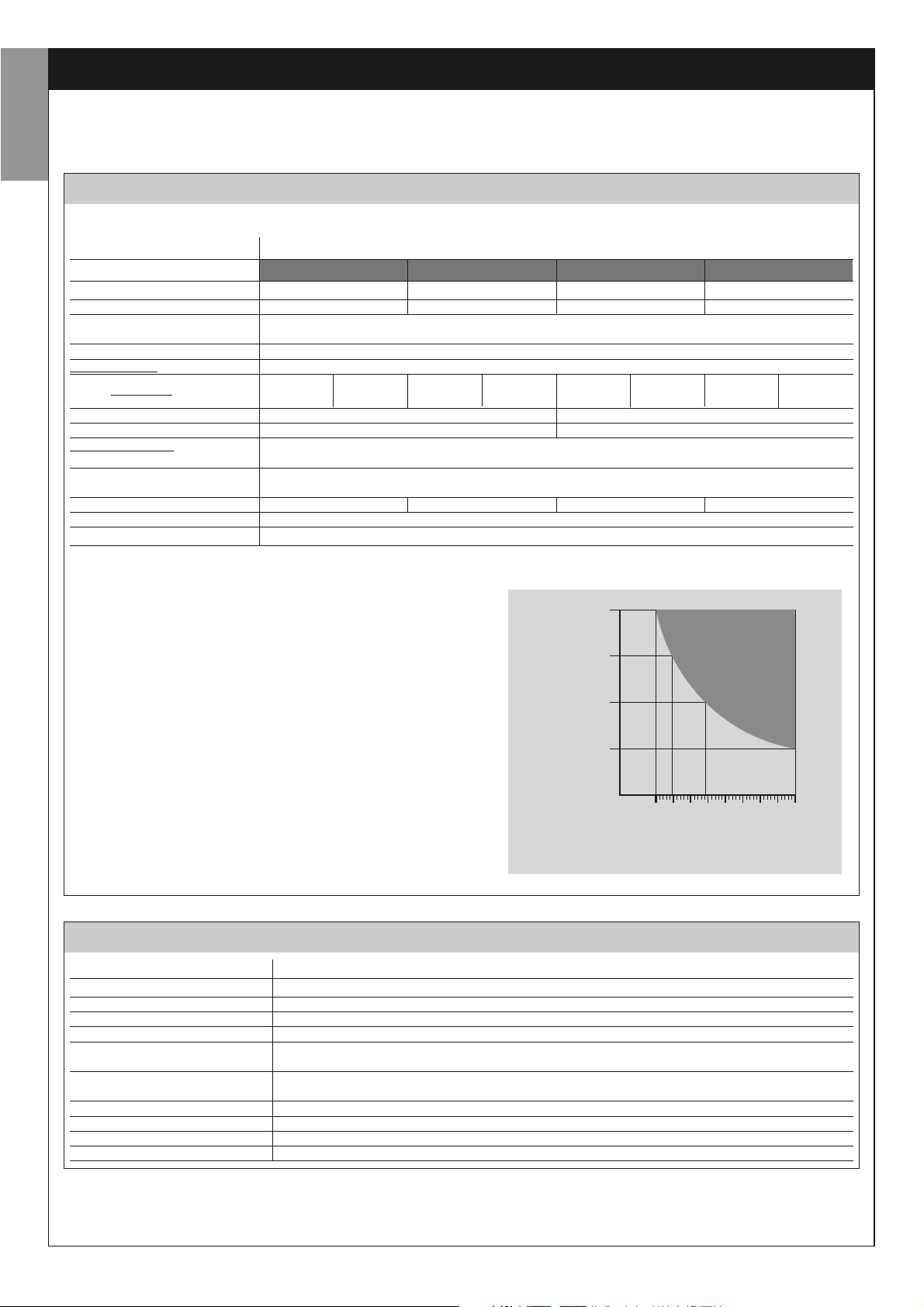
(*) Note – The estimated product durability ranges from 40.000 to
80.000 manoeuvre cycles. To calculate the probable durability of your
automation proceed as follows:
a) – evaluate the conditions of use and force levels involved on your system, for example:
• the weight and length of the leaf;
• perfect balancing of the leaf;
• maintenance conditions of the leaf hinges;
• type of leaf; Solid or with many openings;
• the presence of strong winds;
• frequency of automation use.
b) – from these values, obtain a value expressed as a percentage which,
in general, defines the greatest or smallest degree of automation wear.
c) – on the graph alongside, locate the estimated percentage (at point
"b") and read the corresponding number of manoeuvre cycles.
100 %
75 %
50 %
25 %
0 %
40.000
50.000
60.000
70.000
MF FLASHING LIGHT
DESCRIPTION DATA
Type Flashing light for automations on gates and doors
Technology adopted Luminous indicator with lamp controlled by Moovo control units with “Bus” system for automation
Lamp 12V 21W fitting BA15 (car type lamp)
Power supply The device must be connected to the “Bus” terminal of the Moovo control units for automations
Ambient operating temperature -20 ÷ 50°C
Use in acid, saline or potentially
explosive atmospheres
Assembly Vertical on surface or horizontal wall-mounted
Protection class IP 44
Dimensions 135 x 120h x 110 mm
Weight 340 g
No
80.000
28 – English
MT4 TRANSMITTER
DESCRIPTION DATA
Type Radio transmitters for control of automations on gates and doors
Technology adopted AM OOK radio encoded modulation
Frequency 433.92 MHz (± 100 kHz)
Coding Rolling code with 64 Bit code (18 billion, billion combinations)
Keys 4, each key can be used for different commands of the same control unit or different control units
Radiated power 1 dBm e.r.p.
Power supply 3V +20% -40% with 1 lithium battery type CR2032
Battery lifetime
Ambient operating temperature -20°C ÷ 50°C
Use in acid, saline or potentially
explosive atmospheres
Protection class IP 40 (use in the home or protected environments)
Dimensions 40 x 70h x 8 mm
Weight 25 g
Capacity estimated at 200 m outdoors; 35 m if inside buildings (*)
(*) The Transmitter (range) and the Receiver (reception capacity) are both highly susceptible to disturbance from other devices that may be operating at the same fre-
quency in the surrounding area (e.g. alarms, radio headphones, etc.). Therefore, in the event of interference, Nice cannot offer any guarantees as to the actual
range/capacity of its devices.
3 years, estimated on the basis of 10 commands/day of the duration of 1s at 20°C
(battery efficiency is reduced at low temperatures)
No
MP PHOTOCELLS
DESCRIPTION DATA
Type
Technology adopted Direct TX-RX optical interpolation with modulated infrared beam
Detection capacity
TX transmission angle approx. 20°
RX transmission angle approx. 20°
Useful range
Power supply / Output
Absorbed power 450mW in operation; 40mW on stand by
Maximum cable length Up to 20 m (observe warnings regarding the minimum section and type of cables)
Possibility of addressing
Ambient operating temperature -20 ÷ 50°C
Use in acid, saline or potentially
explosive atmospheres
Assembly Vertical on surface or horizontal wall-mounted
Protection class IP 44
Dimensions 50 x 85h x 35 mm
Weight (pair) 140 g
Presence detector for automations of automatic gates and doors (type D according to standard EN 12453)
Comprising a pair of transmitters “TX” and receiver “RX
Opaque objects placed on optical axis between TX-RX with dimensions greater than 50mm
and speed less than 1.6m/s
Up to 7 m for maximum TX-RX offset ±4° (the device can signal an obstacle also in the event
di condizioni meteorologiche particolarmente avverse)
The device must be connected to the Moovo “Bus” terminal from which it is powered
and sends the output signals
Up to 6 detectors with safety function and up to 4 with an opening control function.
Automatic synchronisation prevents interference between the various detectors.
No
English
MK KEYPAD
DESCRIPTION DATA
Type 5-key keypad, with possibility of activating the automation with or without entry of the code
Technology adopted Possibility of entering an activation code of up to 10 digits (over 1 million possible combinations)
Power supply / Output
Absorbed power 120mW in funzionamento; 45mW in stand by
Ambient operating temperature -20 ÷ 50°C
Use in acid, saline or potentially
explosive atmospheres
Assembly Vertical wall-mounted
Protection class IP 44
Dimensions 50 x 85h x 35 mm
Weight 80 g
The device must be connected to the Moovo “Bus” networks from which it is powered and
sends the output signals
No
English – 29
WHAT TO DO IF... (Troubleshooting guide)
During normal operation, the control unit constantly monitors the automation processes and is designed to indicate any faults that arise, by means of
a pre-set sequence of flashes emitted by the flashing light and red led “L1” on the control unit (the diagnostics flashes always refer to the last action
performed by the automation). For an explanation of the number of flashes and associated cause, refer to Table 6 below:
English
TABLE 6
Flashes
2 flashes - pause - 2 flashes
3 flashes - pause - 3 flashes
4 flashes - pause - 4 flashes
5 flashes - pause - 5 flashes
6 flashes - pause - 6 flashes
Problem
During the Opening or Closing manoeuvre the leafs
block or invert the manoeuvre in progress.
• During the Opening or Closing manoeuvre the
leafs block suddenly and the control unit activates
total inversion of the manoeuvre in progress to reach
the travel limit.
• During the Opening or Closing manoeuvre the
control unit blocks the manoeuvre suddenly and unit
activates partial inversion of the manoeuvre in
progress without reaching the travel limit, then
attempts two partial inversions consecutively with
subsequent permanent shutdown of movement.
• During the Opening or Closing manoeuvre the
leafs block suddenly and the control unit activates a
“Stop” command and a brief inversion of the movement.
The automation does not respond to commands.
After a series of manoeuvres sent consecutively, the
automation is blocked.
Solution
This reaction is caused by the activation of a
specific pair of photocells in the system, on
detection of an obstacle. Therefore remove the
obstacle on the trajectory of these photocells.
The leafs are subject to increased friction due to
a sudden obstruction (gust of wind, vehicle, person etc.) If adjustment to sensitivity is required,
refer to the Chapter “Adjustments and other
optional Functions”.
A safety device installed (other than photocells,
such as sensitive edges) has detected a sudden
obstacle.
Therefore remove the obstacle.
There is a system configuration error. Therefore
repeat installation.
The maximum admissible number of consecutive manoeuvres has been exceeded, causing
excessive overheating. Wait for a few minutes to
enable the temperature to return below the maximum limit
7 flashes - pause - 7 flashes
8 flashes - pause - 8 flashes
The automation does not respond to commands.
The automation does not respond to commands.
Error in internal electric circuits Disconnect all
power circuits, wait a few seconds and then reconnect. Retry a command; if the automation
does not respond this may indicate a serious
fault with the electrical board of the control unit
or motor wiring. Check and make replacements
as necessary.
Error in “Bus” electric circuits Check operation of
the connected devices one by one. These may
be short circuited or malfunctioning
30 – English
 Loading...
Loading...