

Page 1

Page 2

Page 3
SAFETY PRECAUTIONS
(Read these precautions before using this product.)
Before using this product, please read this manual and the relevant manuals carefully and pay full
attention to safety to handle the product correctly.
The precautions given in this manual are concerned with this product only. For the safety precautions of
the programmable controller system, refer to the user’s manual for the CPU module used.
!
In this manual, the safety precautions are classified into two levels: "
WARNING
CAUTION
Under some circumstances, failure to observe the precautions given under "
serious consequences.
Observe the precautions of both levels because they are important for personal and system safety.
Make sure that the end users read this manual and then keep the manual in a safe place for future
reference.
Indicates that incorrect handling may cause hazardous conditions,
resulting in death or severe injury.
Indicates that incorrect handling may cause hazardous conditions,
resulting in minor or moderate injury or property damage.
[Design Precautions]
WARNING" and "!CAUTION".
!
CAUTION" may lead to
!
WARNING
Provide a safety circuit outside the programmable controller so that the entire system will
operate safely even when an external power supply error or programmable controller fault
occurs.
Failure to observe this could lead to accidents for incorrect outputs or malfunctioning.
(1) Configure an emergency stop circuit and interlock circuit such as a positioning upper
limit/lower limit to prevent mechanical damage outside the programmable controller.
(2) The machine OPR operation is controlled by the OPR direction and OPR speed data.
Deceleration starts when the near-point dog turns ON. Thus, if the OPR direction is
incorrectly set, deceleration will not start and the machine will continue to travel. Configure
an interlock circuit to prevent mechanical damage outside the programmable controller.
(3) When the module detects an error, normally deceleration stop or sudden stop will take
place according to the parameter stop group settings.
Set the parameters to the positioning system specifications.
Make sure that the OPR parameter and positioning data are within the parameter setting
values.
A - 1
Page 4
[Design Precautions]
!
CAUTION
Do not bundle or adjacently lay the connection cable connected to the module external I/O
signals or drive unit with the main circuit line, power line, or the load line other than that for the
programmable controller. Separate these by 100mm as a guide. Failure to observe this could
lead to malfunctioning caused by noise, surge, or induction.
[Mounting Precautions]
!
CAUTION
Use the programmable controller in an environment that meets the general specifications
contained in QCPU User's Manual(Hardware Design, Maintenance and Inspection) to use.
Using this programmable controller in an environment outside the range of the general
specifications may cause electric shock, fire, malfunction, and damage to or deterioration of the
product.
While pressing the installation lever located at the bottom of module, insert the module fixing
tab into the fixing hole in the base unit until it stops. Then, securely mount the module with the
fixing hole as a supporting point.
Incorrect loading of the module can cause a malfunction, failure or drop.
When using the programmable controller in the environment of much vibration, tighten the
module with a screw.
Tighten the screw in the specified torque range.
Undertightening can cause a drop, short circuit or malfunction.
Overtightening can cause a drop, short circuit or malfunction due to damage to the screw or
module.
Completely turn off the externally supplied power used in the system before mounting or
removing the module.
Not doing so may damage the product.
[Wiring Precautions]
!
WARNING
Always confirm the terminal layout before connecting the wires to the module.
A - 2
Page 5
[Wiring Precautions]
!
CAUTION
Use applicable solderless terminals and tighten them within the specified torque range. If any
spade solderless terminal is used, it may be disconnected when the terminal screw comes
loose, resulting in failure.
Tighten the connector screws within the specified torque range.
Undertightening can cause short circuit, fire, or malfunction.
Overtightening can damage the screw and/or module, resulting in drop, short circuit, fire, or
malfunction.
Connectors for external devices must be crimped with the tool specified by the manufacturer, or
must be correctly soldered. Incomplete connections may cause short circuit, fire, or malfunction.
When disconnecting the cable from the module, do not pull the cable by the cable part.
For the cable with connector, hold the connector part of the cable.
Pulling the cable connected to the module may result in malfunction or damage to the module
or cable.
Prevent foreign matter such as dust or wire chips from entering the module. Such foreign matter
can cause a fire, failure, or malfunction.
A protective film is attached to the top of the module to prevent foreign matter, such as wire
chips, from entering the module during wiring. Do not remove the film during wiring. Remove it
for heat dissipation before system operation.
[Startup/Maintenance Precautions]
!
WARNING
Completely turn off the externally supplied power used in the system before cleaning or
tightening the screws.
Failure to turn all phases OFF could lead to electric shocks.
A - 3
Page 6
[Startup/Maintenance Precautions]
!
CAUTION
Never disassemble or modify the module.
Failure to observe this could lead to trouble, malfunctioning, injuries or fires.
Completely turn off the externally supplied power used in the system before installing or
removing the module.
Failure to turn all phases OFF could lead to module trouble or malfunctioning.
Do not install/remove the module to/from the base unit, or the terminal block to/from the module
more than 50 times after the first use of the product. (IEC 61131-2 compliant)
Failure to do so may cause malfunction.
Before starting test operation, set the parameter speed limit value to the slowest value, and
make sure that operation can be stopped immediately if a hazardous state occurs.
Always make sure to touch the grounded metal to discharge the electricity charged in the body,
etc., before touching the module.
Failure to do so may cause a failure or malfunctions of the module.
[Precautions for use]
!
CAUTION
Note that when the reference axis speed is designated for interpolation operation, the speed of
the partner axis (2nd axis, 3rd axis and 4th axis) may be larger than the set speed (larger than
the speed limit value).
[Disposal Precautions]
!
CAUTION
When disposing of the product, handle it as industrial waste.
A - 4
Page 7

• CONDITIONS OF USE FOR THE PRODUCT •
(1) Mitsubishi programmable controller ("the PRODUCT") shall be used in conditions;
i) where any problem, fault or failure occurring in the PRODUCT, if any, shall not lead to any major or
serious accident; and
ii) where the backup and fail-safe function are systematically or automatically provided outside of the
PRODUCT for the case of any problem, fault or failure occurring in the PRODUCT.
(2) The PRODUCT has been designed and manufactured for the purpose of being used in general
industries.
MITSUBISHI SHALL HAVE NO RESPONSIBILITY OR LIABILITY (INCLUDING, BUT NOT LIMITED
TO ANY AND ALL RESPONSIBILITY OR LIABILITY BASED ON CONTRACT, WARRANTY, TORT,
PRODUCT LIABILITY) FOR ANY INJURY OR DEATH TO PERSONS OR LOSS OR DAMAGE TO
PROPERTY CAUSED BY the PRODUCT THAT ARE OPERATED OR USED IN APPLICATION NOT
INTENDED OR EXCLUDED BY INSTRUCTIONS, PRECAUTIONS, OR WARNING CONTAINED IN
MITSUBISHI'S USER, INSTRUCTION AND/OR SAFETY MANUALS, TECHNICAL BULLETINS AND
GUIDELINES FOR the PRODUCT.
("Prohibited Application")
Prohibited Applications include, but not limited to, the use of the PRODUCT in;
y Nuclear Power Plants and any other power plants operated by Power companies, and/or any other
cases in which the public could be affected if any problem or fault occurs in the PRODUCT.
y Railway companies or Public service purposes, and/or any other cases in which establishment of a
special quality assurance system is required by the Purchaser or End User.
y Aircraft or Aerospace, Medical applications, Train equipment, transport equipment such as Elevator
and Escalator, Incineration and Fuel devices, Vehicles, Manned transportation, Equipment for
Recreation and Amusement, and Safety devices, handling of Nuclear or Hazardous Materials or
Chemicals, Mining and Drilling, and/or other applications where there is a significant risk of injury to
the public or property.
Notwithstanding the above, restrictions Mitsubishi may in its sole discretion, authorize use of the
PRODUCT in one or more of the Prohibited Applications, provided that the usage of the PRODUCT is
limited only for the specific applications agreed to by Mitsubishi and provided further that no special
quality assurance or fail-safe, redundant or other safety features which exceed the general
specifications of the PRODUCTs are required. For details, please contact the Mitsubishi
representative in your region.
A - 5
Page 8
REVISIONS
The manual number is given on the bottom left of the back cover.
Print Date Manual Number Revision
Dec., 1999 SH (NA)-080058-A First edition
Oct., 2000 SH (NA)-080058-B Addition of function version B
(Overall revisions based on the Japanese Manual Version
SH-080047-E)
Jun., 2001 SH (NA)-080058-C The software package names (GPP function software package,
QD75 software package) have been replaced by the product names
(GX Developer, GX Configurator-QP) for standardization.
Partial corrections and additions
CONTENTS, About Manuals, Generic Terms and Abbreviations,
Section 1.4, Section 2.2, Section 2.3, Section 3.2.2 to Section 3.2.4,
Section 3.3.2, Section 3.3.3, Section 3.4.1, Section 3.4.3, Section
3.4.4, Section 4.1.2, Section 4.3, Section 5.1.2, Section 5.1.3, Section
5.2.3, Section 5.2.5, Section 5.6.2, Section 5.7.1, Section 6.2 to
Section 6.4, Section 6.5.3, Section 7.2, Section 8.2.2, Section 8.2.5,
Section 8.2.6, Section 9.1.2, Section 9.2.1, Section 9.2.16, Section
9.2.17, Section 10.3.2, Section 10.6.2, Section 11.2.3, Section 11.3.3,
Section 11.3.4, Section 11.4.3, Section 12.1.1, Section 12.5 to Section
12.7, Section 13.1, Section 13.3, Section 13.4, Section 14.2 to Section
14.7, Section 15.1, Section 15.2, Section 15.4, Appendix 1, Appendix
9.2, Appendix 11, INDEX
Apr., 2003 SH (NA)-080058-D
Partial corrections and additions
SAFETY INSTRUCTIONS, CONTENTS, Component List,
Section 1.2.3, Section 1.4, Section 2.3, Section 2.4, Section 3.1,
Section 3.2.1, Section 3.2.3, Section 3.2.4, Section 3.4.1, Section
3.4.4, Section 4.1.2, Section 4.3.1, Section 4.3.2, Section 5.1.1,
Section 5.1.7, Section 5.1.8, Section 5.2.1, Section 5.2.4, Section
5.6.2, Section 5.7.1, Section 6.4, Section 6.5.4, Section 6.5.6, Section
8.2.3 to Section 8.2.8, Section 9.2.17, Section 9.2.19, Section 11.2.1,
Section 11.3.1, Section 11.4.1, Section 12.1.1, Section 12.5.1, Section
12.5.2, Section 12.7.3, Section 12.7.5, Section 12.7.9, Section 14.4,
Section 15.2, Appendix 1.1, Appendix 4.1 to Appendix 4.3, Appendix
7.1, Appendix 9.2, Appendix 10 to Appendix 13, INDEX
Oct., 2003 SH (NA)-080058-E
Partial corrections and additions
CONTENTS, Section 1.1.1, Section 1.4, Section 2.2, Section 2.4,
Section 3.2.1, Section 3.2.3, Section 3.2.4, Section 3.3.2, Section
3.4.3, Section 3.4.4, Section 5.1.1, Section 5.1.8, Section 5.7.1,
Section 6.5.3, Section 6.5.6, Section 7.1.2, Section 9.1.2, Section
9.2.3 to Section 9.2.9, Section 11.2.1, Section 11.3.1, Section 11.4.1,
Section 12.2.1, Section 12.7.10, Appendix 9.2, Appendix 12, INDEX
Feb., 2004 SH (NA)-080058-F
Partial corrections and additions
CONTENTS, Section 3.4.1, Section 3.4.3, Section 3.4.4,
Section 5.2.1, Section 5.4, Section 5.5, Section 5.6.2, Section 8.2.6,
Section 10.1.2, Section 10.3.3, Section 10.3.5, Section 10.3.7,
Appendix 9.2, Appendix 12
A - 6
Page 9
The manual number is given on the bottom left of the back cover.
Print Date Manual Number Revision
Nov., 2004 SH (NA)-080058-G
Partial corrections and additions
SAFETY INSTRUCTIONS, Section 1.4, Section 2.3, Section 2.4,
Section 4.2.1, Section 4.3.1, Section 4.5.1, Section 5.1.7,
Section 5.2.1, Section 5.2.6, Section 5.6.2, Section 6.1,
Section 9.2.19, Section 12.2.1, Section 12.4.4, Section 12.7.4,
Appendix 1.1, Appendix 9.1
Jun., 2005 SH (NA)-080058-H
Partial corrections and additions
Section 5.1.2, Section 9.1.2, Section 9.2.10, Section 9.2.21,
Section 10.3.8, Section 11.4.1, Section 12.5.2, Section 12.7.1,
Section 12.7.6, Section 15.1, Section 15.2
Aug., 2006 SH (NA)-080058-I
Partial corrections and additions
Section 3.4.4, Section 5.2.1, Section 14.5 to 14.7, Appendix 6.1,
INDEX
Jul., 2008 SH (NA)-080058-J
Partial corrections and additions
SAFETY INSTRUCTIONS, ABOUT MANUALS, Compliance with the
EMC and Low Voltage Directives, Section 1.3, Section 2.3, 2.4,
Section 3.1, 3.4.1, Section 4.1.2, 4.2.1, 4.3.1, Section 5.1.2, 5.2.1,
5.2.4, 5.2.5, Section 6.2, Section 6.4, Section 9.2.16, 9.2.17,
Section 12.6, Section 12.7.2, Section 14.3 to14.7, Appendix 12,13
Oct., 2010 SH (NA)-080058-K Full revision
Apr., 2011 SH (NA)-080058-L
Partial corrections and additions
Section 3.4.1, Section 4.3.1, 4.3.2, Section 5.6.1, 5.7.2, Section 6.2,
6.4, Section 7.2, Section 8.2.7, 8.2.8, Section 9.2.3, 9.2.16, 9.2.18,
Section 10.5, Section 11.2.1, Section 12.4.2, 12.6, 12.7.4,
Section 13.2, 13.3, 13.5, Section 14.3, Appendix 3, Appendix 9.2,
Appendix 10, 10.2, 10.3
Additions
Appendix 10.4
Changed item numbers
Appendix 10.4 to 10.12 → Appendix 10.5 to 10.13
Sep., 2011 SH (NA)-080058-M
Partial corrections and additions
Generic Terms and Abbreviations, Component List, Section 1.1.1,
1.2.1, Section 2.2, 2.3, 2.4, Section 3.1, 3.4.1 to 3.4.4, Section 4.1.2,
4.3.2, Section 5.1.1, 5.1.7, 5.2.1 to 5.2.4, 5.3, 5.4, 5.6.1, 5.6.2, 5.7.1,
5.7.2, Section 6.1, 6.4, 6.5.3, Section 7.1.1, 7.1.2, Section 8.2.2, 8.2.5,
8.3.1, Section 9.1.2, 9.1.4, 9.2.9, 9.2.16 to 9.2.18, Section 11.1.1,
11.2.1, 11.3.1, 11.3.4, 11.4.1, 11.4.4, Section 12.3.2, 12.7.5, 12.7.7,
Section 13.5, Section 14.3, 14.6, Section 15.3, 15.4, Appendix 1.1,
Appendix 2.2, Appendix 10.1 to 10.13, Appendix 12 to 14
Additions
Appendix 1.2
Addition model
QD75P1N, QD75P2N, QD75P4N, QD75D1N, QD75D2N, QD75D4N
A - 7
Page 10
The manual number is given on the bottom left of the back cover.
Print Date
Dec., 2011 SH (NA)-080058-N
Manual Number Revision
Partial corrections and additions
COMPLIANCE WITH EMC AND LOW VOLTAGE DIRECTIVES,
Section 2.4, Section 3.4.2, Section 9.1.2, Appendix 2.2
Mar., 2012
SH (NA)-080058-O
Partial corrections and additions
Section 3.2.1, Section 3.2.3, Section 3.2.4, Section 5.7.1,
Section 9.1.2, Chapter 12, Section 12.1.1, Section 12.3,
Appendix 1.1, Appendix 13
Additions
Section 12.3.4
Japanese Manual Version SH-080047-U
This manual confers no industrial property rights or any rights of any other kind, nor does it confer any patent licenses.
Mitsubishi Electric Corporation cannot be held responsible for any problems involving industrial property rights which
may occur as a result of using the contents noted in this manual.
© 1999 MITSUBISHI ELECTRIC CORPORATION
A - 8
Page 11
INTRODUCTION
Thank you for purchasing the Mitsubishi general-purpose programmable controller MELSEC-Q Series.
Always read through this manual, and fully comprehend the functions and performance of the Q Series
programmable controller before starting use to ensure correct usage of this product.
CONTENTS
SAFETY PRECAUTIONS..............................................................................................................................A- 1
CONDITIONS OF USE FOR THE PRODUCT .............................................................................................A- 5
REVISIONS ....................................................................................................................................................A- 6
INTRODUCTION ...........................................................................................................................................A- 9
CONTENTS....................................................................................................................................................A- 9
ABOUT MANUALS .......................................................................................................................................A- 17
USING THIS MANUAL .................................................................................................................................A- 17
COMPLIANCE WITH EMC AND LOW VOLTAGE DIRECTIVES ..............................................................A- 18
GENERIC TERMS AND ABBREVIATIONS ................................................................................................A- 18
COMPONENT LIST ......................................................................................................................................A- 19
PART 1 PRODUCT SPECIFICATIONS AND HANDLING
1. PRODUCT OUTLINE 1- 1 to 1- 24
1.1 Positioning control .................................................................................................................................... 1- 2
1.1.1 Features of QD75.............................................................................................................................. 1- 2
1.1.2 Purpose and applications of positioning control............................................................................... 1- 5
1.1.3 Mechanism of positioning control ..................................................................................................... 1- 7
1.1.4 Outline design of positioning system ................................................................................................ 1- 9
1.1.5 Communicating signals between QD75 and each module............................................................. 1- 12
1.2 Flow of system operation ........................................................................................................................ 1- 15
1.2.1 Flow of all processes........................................................................................................................ 1- 15
1.2.2 Outline of starting ............................................................................................................................. 1- 18
1.2.3 Outline of stopping ........................................................................................................................... 1- 20
1.2.4 Outline of restarting .......................................................................................................................... 1- 22
1.3 Restrictions with a system using a stepping motor................................................................................ 1- 23
1.4 Function additions/modifications according to function version B ......................................................... 1- 23
2. SYSTEM CONFIGURATION 2- 1 to 2- 12
2.1 General image of system ......................................................................................................................... 2- 2
2.2 Configuration list....................................................................................................................................... 2- 4
2.3 Applicable system .................................................................................................................................... 2- 6
2.4 How to check the function version and SERIAL No. ............................................................................ 2- 10
A - 9
Page 12
3. SPECIFICATIONS AND FUNCTIONS 3- 1 to 3- 28
3.1 Performance specifications...................................................................................................................... 3- 2
3.2 List of functions ....................................................................................................................................... 3- 6
3.2.1 QD75 control functions...................................................................................................................... 3- 6
3.2.2 QD75 main functions......................................................................................................................... 3- 8
3.2.3 QD75 sub functions and common functions ...................................................................................3- 10
3.2.4 Combination of QD75 main functions and sub functions................................................................ 3- 14
3.3 Specifications of input/output signals with CPU module........................................................................ 3- 16
3.3.1 List of input/output signals with CPU module.................................................................................. 3- 16
3.3.2 Details of input signals (QD75
3.3.3 Details of output signals (CPU module
3.4 Specifications of input/output interfaces with external devices ............................................................. 3- 19
3.4.1 Electrical specifications of input/output signals ............................................................................... 3- 19
3.4.2 Signal layout for external device connection connector.................................................................. 3- 23
3.4.3 List of input/output signal details...................................................................................................... 3- 24
3.4.4 Input/output interface internal circuit................................................................................................ 3- 26
4. INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT 4- 1 to 4- 16
CPU module) ............................................................................. 3- 17
QD75) ...........................................................................3- 18
4.1 Outline of installation, wiring and maintenance....................................................................................... 4- 2
4.1.1 Installation, wiring and maintenance procedures............................................................................. 4- 2
4.1.2 Names of each part ........................................................................................................................... 4- 3
4.1.3 Handling precautions ........................................................................................................................ 4- 5
4.2 Installation ................................................................................................................................................ 4- 7
4.2.1 Installation precautions ..................................................................................................................... 4- 7
4.3 Wiring........................................................................................................................................................ 4- 8
4.3.1 Wiring precautions............................................................................................................................. 4- 8
4.3.2 Wiring of the differential driver common terminal............................................................................ 4- 14
4.4 Checking installation and wiring ............................................................................................................. 4- 15
4.4.1 Items to check when installation and wiring are completed............................................................ 4- 15
4.5 Maintenance............................................................................................................................................ 4- 16
4.5.1 Maintenance precautions ................................................................................................................. 4- 16
4.5.2 Disposal precautions ........................................................................................................................ 4- 16
5. DATA USED FOR POSITIONING CONTROL 5- 1 to 5-128
5.1 Types of data............................................................................................................................................ 5- 2
5.1.1 Parameters and data required for control......................................................................................... 5- 2
5.1.2 Setting items for positioning parameters .......................................................................................... 5- 5
5.1.3 Setting items for OPR parameters.................................................................................................... 5- 7
5.1.4 Setting items for positioning data...................................................................................................... 5- 8
5.1.5 Setting items for block start data ..................................................................................................... 5- 10
5.1.6 Setting items for condition data ....................................................................................................... 5- 11
5.1.7 Types and roles of monitor data ......................................................................................................5- 12
5.1.8 Types and roles of control data ....................................................................................................... 5- 15
A - 10
Page 13
5.2 List of parameters ................................................................................................................................... 5- 18
5.2.1 Basic parameters 1 .......................................................................................................................... 5- 18
5.2.2 Basic parameters 2 .......................................................................................................................... 5- 24
5.2.3 Detailed parameters 1 ...................................................................................................................... 5- 26
5.2.4 Detailed parameters 2 ...................................................................................................................... 5- 34
5.2.5 OPR basic parameters..................................................................................................................... 5- 43
5.2.6 OPR detailed parameters ................................................................................................................ 5- 50
5.3 List of positioning data ............................................................................................................................ 5- 54
5.4 List of block start data .............................................................................................................................5- 68
5.5 List of condition data ...............................................................................................................................5- 74
5.6 List of monitor data.................................................................................................................................. 5- 80
5.6.1 System monitor data ........................................................................................................................ 5- 80
5.6.2 Axis monitor data.............................................................................................................................. 5- 90
5.7 List of control data .................................................................................................................................. 5-104
5.7.1 System control data ........................................................................................................................ 5-104
5.7.2 Axis control data .............................................................................................................................. 5-108
6. SEQUENCE PROGRAM USED FOR POSITIONING CONTROL 6- 1 to 6- 46
6.1 Precautions for creating program ............................................................................................................ 6- 2
6.2 List of devices used.................................................................................................................................. 6- 5
6.3 Creating a program .................................................................................................................................6- 11
6.3.1 General configuration of program .................................................................................................... 6- 11
6.3.2 Positioning control operation program............................................................................................. 6- 12
6.4 Positioning program examples ...............................................................................................................6- 15
6.5 Program details ....................................................................................................................................... 6- 24
6.5.1 Initialization program ........................................................................................................................6- 24
6.5.2 Start details setting program ............................................................................................................ 6- 25
6.5.3 Start program.................................................................................................................................... 6- 27
6.5.4 Continuous operation interrupt program.......................................................................................... 6- 37
6.5.5 Restart program ............................................................................................................................... 6- 39
6.5.6 Stop program.................................................................................................................................... 6- 43
7. MEMORY CONFIGURATION AND DATA PROCESS 7- 1 to 7- 12
7.1 Configuration and roles of QD75 memory .............................................................................................. 7- 2
7.1.1 Configuration and roles of QD75 memory........................................................................................ 7- 2
7.1.2 Buffer memory area configuration .................................................................................................... 7- 5
7.2 Data transmission process ...................................................................................................................... 7- 6
A - 11
Page 14

PART 2 CONTROL DETAILS AND SETTING
8. OPR CONTROL 8- 1 to 8- 24
8.1 Outline of OPR control ............................................................................................................................. 8- 2
8.1.1 Two types of OPR control ................................................................................................................. 8- 2
8.2 Machine OPR ........................................................................................................................................... 8- 4
8.2.1 Outline of the machine OPR operation............................................................................................. 8- 4
8.2.2 Machine OPR method....................................................................................................................... 8- 5
8.2.3 OPR method (1): Near-point dog method ........................................................................................ 8- 7
8.2.4 OPR method (2): Stopper method 1) ............................................................................................... 8- 9
8.2.5 OPR method (3): Stopper method 2) .............................................................................................. 8- 12
8.2.6 OPR method (4): Stopper method 3) .............................................................................................. 8- 15
8.2.7 OPR method (5): Count method 1) ................................................................................................. 8- 17
8.2.8 OPR method (6): Count method 2) ................................................................................................. 8- 20
8.3 Fast OPR ................................................................................................................................................. 8- 23
8.3.1 Outline of the fast OPR operation.................................................................................................... 8- 23
9. MAJOR POSITIONING CONTROL 9- 1 to 9-120
9.1 Outline of major positioning controls ....................................................................................................... 9- 2
9.1.1 Data required for major positioning control ...................................................................................... 9- 4
9.1.2 Operation patterns of major positioning controls ............................................................................. 9- 5
9.1.3 Designating the positioning address................................................................................................ 9- 16
9.1.4 Confirming the current value............................................................................................................ 9- 17
9.1.5 Control unit "degree" handling ......................................................................................................... 9- 19
9.1.6 Interpolation control.......................................................................................................................... 9- 22
9.2 Setting the positioning data ................................................................................................................... 9- 26
9.2.1 Relation between each control and positioning data ...................................................................... 9- 26
9.2.2 1-axis linear control .......................................................................................................................... 9- 28
9.2.3 2-axis linear interpolation control ..................................................................................................... 9- 30
9.2.4 3-axis linear interpolation control ..................................................................................................... 9- 34
9.2.5 4-axis linear interpolation control ..................................................................................................... 9 -40
9.2.6 1-axis fixed-feed control ................................................................................................................... 9- 44
9.2.7 2-axis fixed-feed control (interpolation) ........................................................................................... 9- 46
9.2.8 3-axis fixed-feed control (interpolation) ........................................................................................... 9- 49
9.2.9 4-axis fixed-feed control (interpolation) .......................................................................................... 9- 54
9.2.10 2-axis circular interpolation control with sub point designation .................................................... 9- 57
9.2.11 2-axis circular interpolation control with center point designation ................................................ 9- 63
9.2.12 1-axis speed control ....................................................................................................................... 9- 71
9.2.13 2-axis speed control ....................................................................................................................... 9- 74
9.2.14 3-axis speed control ....................................................................................................................... 9- 77
9.2.15 4-axis speed control ....................................................................................................................... 9- 81
9.2.16 Speed-position switching control (INC mode) ............................................................................... 9- 86
9.2.17 Speed-position switching control (ABS mode).............................................................................. 9- 95
9.2.18 Position-speed switching control .................................................................................................. 9-103
9.2.19 Current value changing ................................................................................................................. 9-110
A - 12
Page 15
9.2.20 NOP instruction .............................................................................................................................9-115
9.2.21 JUMP instruction ...........................................................................................................................9-116
9.2.22 LOOP............................................................................................................................................. 9-118
9.2.23 LEND ............................................................................................................................................. 9-119
10. HIGH-LEVEL POSITIONING CONTROL 10- 1 to 10- 28
10.1 Outline of high-level positioning control............................................................................................... 10- 2
10.1.1 Data required for high-level positioning control............................................................................ 10- 3
10.1.2 "Block start data" and "condition data" configuration ................................................................... 10- 4
10.2 High-level positioning control execution procedure ........................................................................... 10- 6
10.3 Setting the block start data ..................................................................................................................10- 7
10.3.1 Relation between various controls and block start data ..............................................................10- 7
10.3.2 Block start (normal start) .............................................................................................................. 10- 8
10.3.3 Condition start ..............................................................................................................................10- 10
10.3.4 Wait start....................................................................................................................................... 10- 11
10.3.5 Simultaneous start ...................................................................................................................... 10- 12
10.3.6 Repeated start (FOR loop) ......................................................................................................... 10- 14
10.3.7 Repeated start (FOR condition) .................................................................................................. 10- 15
10.3.8 Restrictions when using the NEXT start...................................................................................... 10- 16
10.4 Setting the condition data ................................................................................................................... 10- 17
10.4.1 Relation between various controls and the condition data ......................................................... 10- 17
10.4.2 Condition data setting examples ................................................................................................. 10- 20
10.5 Multiple axes simultaneous start control ............................................................................................10- 21
10.6 Start program for high-level positioning control ................................................................................. 10- 24
10.6.1 Starting high-level positioning control .......................................................................................... 10- 24
10.6.2 Example of a start program for high-level positioning control .................................................... 10- 25
11. MANUAL CONTROL 11- 1 to 11- 34
11.1 Outline of manual control .................................................................................................................... 11- 2
11.1.1 Three manual control methods ..................................................................................................... 11- 2
11.2 JOG operation...................................................................................................................................... 11- 4
11.2.1 Outline of JOG operation .............................................................................................................. 11- 4
11.2.2 JOG operation execution procedure ............................................................................................ 11- 7
11.2.3 Setting the required parameters for JOG operation..................................................................... 11- 8
11.2.4 Creating start programs for JOG operation................................................................................. 11- 10
11.2.5 JOG operation example ............................................................................................................... 11- 13
11.3 Inching operation................................................................................................................................. 11- 16
11.3.1 Outline of inching operation ......................................................................................................... 11- 16
11.3.2 Inching operation execution procedure ....................................................................................... 11- 19
11.3.3 Setting the required parameters for inching operation................................................................ 11- 20
11.3.4 Creating a program to enable/disable the inching operation ...................................................... 11- 21
11.3.5 Inching operation example........................................................................................................... 11- 24
11.4 Manual pulse generator operation...................................................................................................... 11- 26
11.4.1 Outline of manual pulse generator operation .............................................................................. 11- 26
11.4.2 Manual pulse generator operation execution procedure ............................................................11- 30
11.4.3 Setting the required parameters for manual pulse generator operation .................................... 11- 31
A - 13
Page 16
11.4.4 Creating a program to enable/disable the manual pulse generator operation .......................... 11- 32
12. CONTROL SUB FUNCTIONS 12- 1 to 12-108
12.1 Outline of sub functions ....................................................................................................................... 12- 2
12.1.1 Outline of sub functions ................................................................................................................ 12- 2
12.2 Sub functions specifically for machine OPR ....................................................................................... 12- 4
12.2.1 OPR retry function......................................................................................................................... 12- 4
12.2.2 OP shift function ........................................................................................................................... 12- 8
12.3 Functions for compensating the control ............................................................................................. 12- 12
12.3.1 Backlash compensation function ................................................................................................. 12- 12
12.3.2 Electronic gear function ............................................................................................................... 12- 14
12.3.3 Near pass function ....................................................................................................................... 12- 20
12.3.4 Output timing selection of near pass control ............................................................................... 12- 22
12.4 Functions to limit the control ............................................................................................................... 12- 26
12.4.1 Speed limit function ...................................................................................................................... 12- 26
12.4.2 Torque limit function ..................................................................................................................... 12- 28
12.4.3 Software stroke limit function ....................................................................................................... 12- 32
12.4.4 Hardware stroke limit function ..................................................................................................... 12- 38
12.5 Functions to change the control details.............................................................................................. 12- 40
12.5.1 Speed change function ................................................................................................................ 12- 40
12.5.2 Override function .......................................................................................................................... 12- 47
12.5.3 Acceleration/deceleration time change function ......................................................................... 12- 50
12.5.4 Torque change function ............................................................................................................... 12- 55
12.5.5 Target position change function .................................................................................................. 12- 57
12.6 Absolute position restoration function ................................................................................................ 12- 61
12.7 Other functions .................................................................................................................................... 12- 72
12.7.1 Step function................................................................................................................................. 12- 72
12.7.2 Skip function ................................................................................................................................. 12- 77
12.7.3 M code output function................................................................................................................. 12- 80
12.7.4 Teaching function ......................................................................................................................... 12- 84
12.7.5 Command in-position function .....................................................................................................12- 91
12.7.6 Acceleration/deceleration processing function............................................................................ 12- 94
12.7.7 Pre-reading start function............................................................................................................. 12- 97
12.7.8 Deceleration start flag function ...................................................................................................12-102
12.7.9 Stop command processing for deceleration stop function......................................................... 12-106
13. COMMON FUNCTIONS 13- 1 to 13- 8
13.1 Outline of common functions ............................................................................................................... 13- 2
13.2 Parameter initialization function........................................................................................................... 13- 3
13.3 Execution data backup function .......................................................................................................... 13- 5
13.4 External I/O signal logic switching function ......................................................................................... 13- 7
13.5 External I/O signal monitor function .................................................................................................... 13- 8
14. DEDICATED INSTRUCTIONS 14- 1 to 14- 24
14.1 List of dedicated instructions ............................................................................................................... 14- 2
14.2 Interlock during dedicated instruction is executed .............................................................................. 14- 2
A - 14
Page 17
14.3 Z.ABRST1, Z.ABRST2, Z.ABRST3, Z.ABRST4 ................................................................................. 14- 3
14.4 ZP.PSTRT1, ZP.PSTRT2, ZP.PSTRT3, ZP.PSTRT4........................................................................ 14- 8
14.5 ZP.TEACH1, ZP.TEACH2, ZP.TEACH3, ZP.TEACH4 ..................................................................... 14- 12
14.6 ZP.PFWRT.......................................................................................................................................... 14- 16
14.7 ZP.PINIT .............................................................................................................................................. 14- 20
15. TROUBLESHOOTING 15- 1 to 15- 48
15.1 Troubleshooting ................................................................................................................................... 15- 2
15.2 Error and warning details ..................................................................................................................... 15- 6
15.3 List of errors ........................................................................................................................................ 15- 10
15.4 List of warnings ................................................................................................................................... 15- 40
APPENDICES Appendix- 1 to Appendix-156
Appendix 1 Version up of the functions ............................................................................................Appendix- 2
Appendix 1.1 Comparison of functions according to function versions .......................................Appendix- 2
Appendix 1.2 Precautions for the replacement of QD75P
.......................................................................................................................................................Appendix- 3
Appendix 2 Format sheets ................................................................................................................Appendix- 6
Appendix 2.1 Positioning Module operation chart ....................................................................... Appendix- 6
Appendix 2.2 Parameter setting value entry table .......................................................................Appendix- 8
Appendix 2.3 Positioning data setting value entry table ............................................................Appendix- 14
Appendix 3 Positioning data (No. 1 to 600) List of buffer memory addresses...............................Appendix- 15
Appendix 4 Connection examples with servo amplifiers manufactured by MITSUBISHI Electric Corporation
.......................................................................................................................................Appendix- 39
Appendix 4.1 Connection example of QD75D
Appendix 4.2 Connection example of QD75D
Appendix 4.3 Connection example of QD75D
Appendix 4.4 Connection example of QD75D
Appendix 5 Connection examples with stepping motors manufactured by ORIENTALMOTOR Co., Ltd.
.......................................................................................................................................Appendix- 43
Appendix 5.1 Connection example of QD75P
Appendix 6 Connection examples with servo amplifiers manufactured by Panasonic Corporation
.......................................................................................................................................Appendix- 44
Appendix 6.1 Connection example of QD75D
Appendix 7 Connection examples with servo amplifiers manufactured by SANYO DENKI Co., Ltd.
.......................................................................................................................................Appendix- 45
Appendix 7.1 Connection example of QD75D
Appendix 8 Connection examples with servo amplifiers manufactured by YASKAWA Electric Corporation
.......................................................................................................................................Appendix- 46
Appendix 8.1 Connection example of QD75D
Appendix 9 Comparisons with conventional positioning modules.................................................. Appendix- 47
Appendix 9.1 Comparisons with A1SD71S2 model....................................................................Appendix- 47
Appendix 9.2 Comparisons with A1SD75P1-S3/A1SD75P2-S3/ A1SD75P3-S3 models.........Appendix- 48
Appendix 10 When using GX Works2 ............................................................................................. Appendix- 71
Appendix 10.1 Adding a module ..................................................................................................Appendix- 72
Appendix 10.2 Setting parameters ..............................................................................................Appendix- 73
N and MR-J3- A (Differential driver) ...........Appendix- 39
N and MR-H A (Differential driver).............. Appendix- 40
N and MR-J2/J2S- A (Differential driver) .... Appendix- 41
N and MR-C A (Differential driver).............. Appendix- 42
N and VEXTA UPD (Open collector) .............. Appendix- 43
N and MINAS-A series (Differential driver) ....Appendix- 44
N and PYO series (Differential driver) ............ Appendix- 45
N and Σ- series (Differential driver)...............Appendix- 46
/QD75D with QD75P N/QD75D N
A - 15
Page 18
Appendix 10.3 Setting auto refresh .............................................................................................Appendix- 78
Appendix 10.4 Positioning monitor ..............................................................................................Appendix- 79
Appendix 10.5 Positioning test..................................................................................................... Appendix- 89
Appendix 10.6 Wave trace ..........................................................................................................Appendix- 97
Appendix 10.7 Location trace .....................................................................................................Appendix-100
Appendix 10.8 Parameter initialization function .........................................................................Appendix-103
Appendix 10.9 Execution data backup function .........................................................................Appendix-105
Appendix 10.10 External I/O signal logic switching function......................................................Appendix-107
Appendix 10.11 External I/O signal monitor function .................................................................Appendix-108
Appendix 10.12 History monitor function .................................................................................... Appendix-109
Appendix 10.13 Checking errors.................................................................................................Appendix-111
Appendix 11 MELSEC Explanation of positioning terms...............................................................Appendix-115
Appendix 12 Positioning control troubleshooting ...........................................................................Appendix-135
Appendix 13 List of buffer memory addresses...............................................................................Appendix-141
Appendix 14 External dimension drawing ......................................................................................Appendix-150
INDEX Index- 1 to Index- 12
A - 16
Page 19
ABOUT MANUALS
The following manuals are also related to this product.
In necessary, order them by quoting the details in the tables below.
Related Manuals
Manual Name
GX Configurator-QP Version 2 Operating Manual
Data creation (such as parameters and positioning data) and operations of transferring data to modules,
positioning monitor, and tests using GX Configurator-QP........................................... (sold separately)
Manual Number
(Model Code)
SH-080172
*1
(13JU19)
GX Developer Version 8 Operating Manual
Operating methods of GX Developer, such as programming, printing, monitoring, and debugging
(sold separately)
GX Works2 Version1 Operating Manual
(Common)
System configuration, parameter settings, and online operations (common to Simple project and
Structured project) of GX Works2.................................................................................. (sold separately)
GX Works2 Version1 Operating Manual
(Intelligent Function Module)
Parameter settings, monitoring, and operations of the pre-defined protocol support function of intelligent
function modules, using GX Works2 ............................................................................. (sold separately)
1: The manual is included in the CD-ROM of the software package in a PDF-format file.
For users interested in buying the manual separately, a printed version is available. Please contact us with the manual
number (model code) in the list above.
SH-080373E
(13JU41)
SH-080779ENG
(13JU63)
SH-080921ENG
(13JU69)
USING THIS MANUAL
The symbols used in this manual are shown below.
Pr.
Da.
........ Symbol indicating positioning parameter and OPR parameter item.
....... Symbol indicating positioning data, block start data and condition
data item.
Md.
Cd.
....... Symbol indicating monitor data item.
....... Symbol indicating control data item.
(A serial No. is inserted in the
mark.)
Representation of numerical values used in this manual.
Buffer memory addresses, error codes and warning codes are represented in
decimal.
X/Y devices are represented in hexadecimal.
Setting data and monitor data are represented in decimal or hexadecimal. Data
ended by "H" are represented in hexadecimal.
(Example) 10.........Decimal
10H ......Hexadecimal
A - 17
Page 20
COMPLIANCE WITH EMC AND LOW VOLTAGE DIRECTIVES
(1) Method of ensuring compliance
To ensure that Mitsubishi programmable controllers maintain EMC and Low
Voltage Directives when incorporated into other machinery or equipment, certain
measures may be necessary. Please refer to one of the following manuals.
• QCPU User's Manual (Hardware Design, Maintenance and Inspection)
• Safety Guidelines (this manual is included with the CPU module or base unit)
The CE mark on the side of the programmable controller indicates compliance
with EMC and Low Voltage Directives.
(2) Additional measures
To ensure that this product maintains EMC and Low Voltage Directives, please
refer to Section 4.3.1.
GENERIC TERMS AND ABBREVIATIONS
Unless specially noted, the following generic terms and abbreviations are used in this
Generic term/abbreviation Details of generic term/abbreviation
CPU module Generic term for CPU module on which QD75 can be mounted.
QD75 Generic term for positioning module QD75P1N, QD75P2N, QD75P4N, QD75D1N, QD75D2N,
QD75P N Generic term for positioning module QD75P1N, QD75P2N, QD75P4N.
QD75D N Generic term for positioning module QD75D1N, QD75D2N, QD75D4N.
QD75P Generic term for positioning module QD75P1, QD75P2, QD75P4.
QD75D Generic term for positioning module QD75D1, QD75D2, QD75D4.
Peripheral device Generic term for DOS/V personal computer that can run the following "GX Developer" and
GX Configurator-QP Abbreviation for GX Configurator-QP (SW2D5C-QD75P-E or later).
GX Developer Abbreviation for GX Developer (SW4D5C-GPPW-E or later).
GX Works2 Product name of the software package for the MELSEC programmable controllers.
Drive unit (servo amplifier) Abbreviation for pulse input compatible drive unit (servo amplifier).
Manual pulse generator Abbreviation for manual pulse generator (prepared by user).
DOS/V personal computer
Personal computer
Workpiece Generic term for moving body such as workpiece and tool, and for various control targets.
Axis 1, axis 2, axis 3, axis 4 Indicates each axis connected to QD75.
1-axis, 2-axis, 3-axis, 4-axis Indicates the number of axes. (Example: 2-axis = Indicates two axes such as axis 1 and axis
manual.
QD75D4N, QD75P1, QD75P2, QD75P4, QD75D1, QD75D2, and QD75D4.
The module type is described to indicate a specific module.
"GX Configurator-QP".
IBM PC/AT
Generic term for personal computer which supports Windows
2, axis 2 and axis 3, and axis 3 and axis 1.)
®
and compatible DOS/V compliant personal computer.
®
.
A - 18
Page 21

COMPONENT LIST
Module name Description Quantity
QD75P1N QD75P1N Positioning Module(1-axis open collector output system) 1
QD75P2N QD75P2N Positioning Module(2-axes open collector output system) 1
QD75P4N QD75P4N Positioning Module(4-axes open collector output system) 1
QD75D1N
QD75D2N
QD75D4N
QD75P1 QD75P1 Positioning Module(1-axis open collector output system) 1
QD75P2 QD75P2 Positioning Module(2-axes open collector output system) 1
QD75P4 QD75P4 Positioning Module(4-axes open collector output system) 1
QD75D1
QD75D2
QD75D4
The table below shows the component included in respective positioning modules:
QD75D1N Positioning Module(1-axis differential driver output system) 1
Differential driver common terminal 1
QD75D2N Positioning Module(2-axes differential driver output system) 1
Differential driver common terminal 1
QD75D4N Positioning Module(4-axes differential driver output system) 1
Differential driver common terminal 1
QD75D1 Positioning Module(1-axis differential driver output system) 1
Differential driver common terminal 1
QD75D2 Positioning Module(2-axes differential driver output system) 1
Differential driver common terminal 1
QD75D4 Positioning Module(4-axes differential driver output system) 1
Differential driver common terminal 1
A - 19
Page 22
MEMO
A - 20
Page 23
PART 1 PRODUCT SPECIFICATIONS AND HANDLING
PART 1 is configured for the following purposes (1) to (5).
(1) To understand the outline of positioning control, and the QD75 specifications and
functions
(2) To carry out actual work such as installation and wiring
(3) To set parameters and data required for positioning control
(4) To create a sequence program required for positioning control
(5) To understand the memory configuration and data transmission process
Read PART 2 for details on each control.
CHAPTER 1 PRODUCT OUTLINE................................................................................. 1- 1 to 1- 24
CHAPTER 2 SYSTEM CONFIGURATION..................................................................... 2- 1 to 2- 12
CHAPTER 3 SPECIFICATIONS AND FUNCTIONS ...................................................... 3- 1 to 3- 28
CHAPTER 4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT ... 4- 1 to 4- 16
CHAPTER 5 DATA USED FOR POSITIONING CONTROL.......................................... 5- 1 to 5-126
CHAPTER 6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL .......... 6- 1 to 6- 46
CHAPTER 7 MEMORY CONFIGURATION AND DATA PROCESS ............................ 7- 1 to 7- 12
PART 1
Page 24
MEMO
Page 25

1
CHAPTER 1 PRODUCT OUTLINE
The purpose and outline of positioning control using QD75 are explained in this chapter.
Reading this chapter will help you understand what can be done using the positioning
system and which procedure to use for a specific purpose.
By understanding "What can be done", and "Which procedure to use" beforehand, the
positioning system can be structured smoothly.
1.1 Positioning control ........................................................................................................1- 2
1.1.1 Features of QD75 ...........................................................................................1- 2
1.1.2 Purpose and applications of positioning control ............................................1- 5
1.1.3 Mechanism of positioning control ...................................................................1- 7
1.1.4 Outline design of positioning system.............................................................. 1- 9
1.1.5 Communicating signals between QD75 and each module .......................... 1- 12
1.2 Flow of system operation ............................................................................................1- 15
1.2.1 Flow of all processes .....................................................................................1- 15
1.2.2 Outline of starting........................................................................................... 1- 18
1.2.3 Outline of stopping ......................................................................................... 1- 20
1.2.4 Outline of restarting........................................................................................1- 22
1.3 Restrictions with a system using a stepping motor ....................................................1- 23
1.4 Function additions/modifications according to function version B .............................1- 23
1 - 1
Page 26
1 PRODUCT OUTLINE
1.1 Positioning control
1.1.1 Features of QD75
The features of the QD75 are shown below.
(1) Availability of one, two, and four axis modules
(2) Wide variety of positioning control functions
MELSEC-Q
(a) The pulse output types of the available modules are either the open
collector output system or the differential driver output system. A module
can be selected from the following depending on the drive unit type and the
number of axes. (Refer to Section 2.2.)
• Open collector output system:
QD75P1N/QD75P2N/QD75P4N (QD75P1/QD75P2/QD75P4)
• Differential driver output system:
QD75D1N/QD75D2N/QD75D4N (QD75D1/QD75D2/QD75D4)
(b) For connecting any of the QD75 modules to the base unit, a single slot and
32 dedicated I/O channels are required.
Within the limit imposed by the maximum number of inputs and outputs
supported by the CPU module, up to 64 modules can be used. (Refer to
Section 3.1.)
(a) A wide variety of positioning control functions essential to any positioning
system are supported: positioning to an arbitrary position, fixed-feed
control, equal-speed control, and so on. (Refer to Section 5.3 and 9.2.)
1) Up to 600 positioning data items, including such information as
positioning addresses, control systems, and operation patterns, can be
prepared for each axis.
Using the prepared positioning data, the positioning control is
performed independently for each axis. (In addition, such controls as
interpolation involving two to four axes and simultaneous startup of
multiple axes are possible.)
2) Independent control of each axis can be achieved in linear control
mode (executable simultaneously over four axes).
Such control can either be the independent positioning control using a
single positioning data or the continuous positioning control enabled by
the continuous processing of multiple positioning data.
3) Coordinated control over multiple axes can take the form of either the
linear interpolation through the speed or position control of two to four
axes or the circular interpolation involving two axes.
Such control can either be the independent positioning control using a
single positioning data or the continuous positioning control enabled by
the continuous processing of multiple positioning data.
(b) For each positioning data, the user can specify any of the following control
systems: position control, speed control, speed-position switching control,
position-speed switching control, and so on. (Refer to Section 5.3 and 9.2.)
1 - 2
Page 27
1 PRODUCT OUTLINE
(3) Quick startup (Refer to Section 3.1.)
(4) Faster pulse output and allowance of longer distance to drive unit
(5) Easy maintenance
MELSEC-Q
(c) Continuous positioning control using multiple positioning data can be
executed in accordance with the operation patterns the user assigned to
the positioning data. (Refer to Section 5.3 and 9.1.2)
Continuous positioning control can be executed over multiple blocks, where
each block consists of multiple positioning data. (Refer to Section 10.3.2.)
(d) OPR control is given additional features (Refer to Section 8.2.)
1) Six different machine OPR methods are provided: near point dog
method (one method), stopper methods (three methods), and count
methods (two methods).
2) OPR retry function facilitates the machine OPR control from an
arbitrary position.
(The machine OP a premier reference position for positioning control.
The machine is set to the machine OP through one of the machine
OPR methods mentioned in 1) above.)
(e) Two acceleration/deceleration control methods are provided: trapezoidal
acceleration/deceleration and S-curve acceleration/deceleration. (Refer to
Section 12.7.6.)
(The S-curve acceleration/deceleration control is disabled if stepping
motors are used. Refer to Section 1.3.)
The processing time to start the positioning operation is shortened.
QD75P
When operation using simultaneous start function or interpolation operation is
executed, the axes start without delay.
(Example) Axis 1 and Axis 3 are started by the
Axis 2 and Axis 4 are started by the
N/QD75D N: 1.5ms (QD75P /QD75D : 6ms)
: No delay in Axis 1 and
simultaneous start function
interpolation operation
Axis 3 start
: No delay in Axis 2 and
Axis 4 start
(Refer to Section 3.1.)
The modules with a differential driver (QD75D N (QD75D )) incorporate the
improvements in pulse output speed and maximum distance to the drive unit.
• QD75D
• QD75P N: 200kpulse/s, 2m max. (QD75P : 200kpulse/s, 2m max.)
Each QD75 positioning module incorporates the following improvements in
maintainability:
(a) Data such as the positioning data and parameters can be stored on a flash
(b) Error messages are classified in more detail to facilitate the initial
(c) The module retains 16 error messages and 16 warning messages recently
N: 4Mpulse/s, 10m max. (QD75D : 1Mpulse/s, 10m max.)
ROM inside the QD75, eliminating the need of a battery for retaining data.
(Refer to Section 7.1.1.)
troubleshooting procedure. (Refer to Section 15.1.)
output, offering more complete error and warning histories.
(Refer to Section 5.6.1.)
1 - 3
Page 28

1 PRODUCT OUTLINE
(6) Support of intelligent function module dedicated instructions
(7) Setups, monitoring, and testing through GX Configurator-QP
MELSEC-Q
Dedicated instructions such as the absolute position restoration instruction,
positioning start instruction, and teaching instruction are provided.
The use of such dedicated instruction simplifies sequence programs.(Refer to
CHAPTER 14.)
Using GX Configurator-QP, the user can control the QD75 parameters and
positioning data without having to be conscious of the buffer memory addresses.
Moreover, GX Configurator-QP has a test function which allows the user to check
the wiring before creating a sequence program for positioning control, or test
operation the QD75 using created parameters and positioning data for checking
their integrity.
The control monitor function of GX Configurator-QP allows the user to debug
programs efficiently.
1 - 4
Page 29
•
•
•
•
•
•
•
1 PRODUCT OUTLINE
1.1.2 Purpose and applications of positioning control
"Positioning" refers to moving a moving body, such as a workpiece or tool (hereinafter,
generically called "workpiece") at a designated speed, and accurately stopping it at the
target position. The main application examples are shown below.
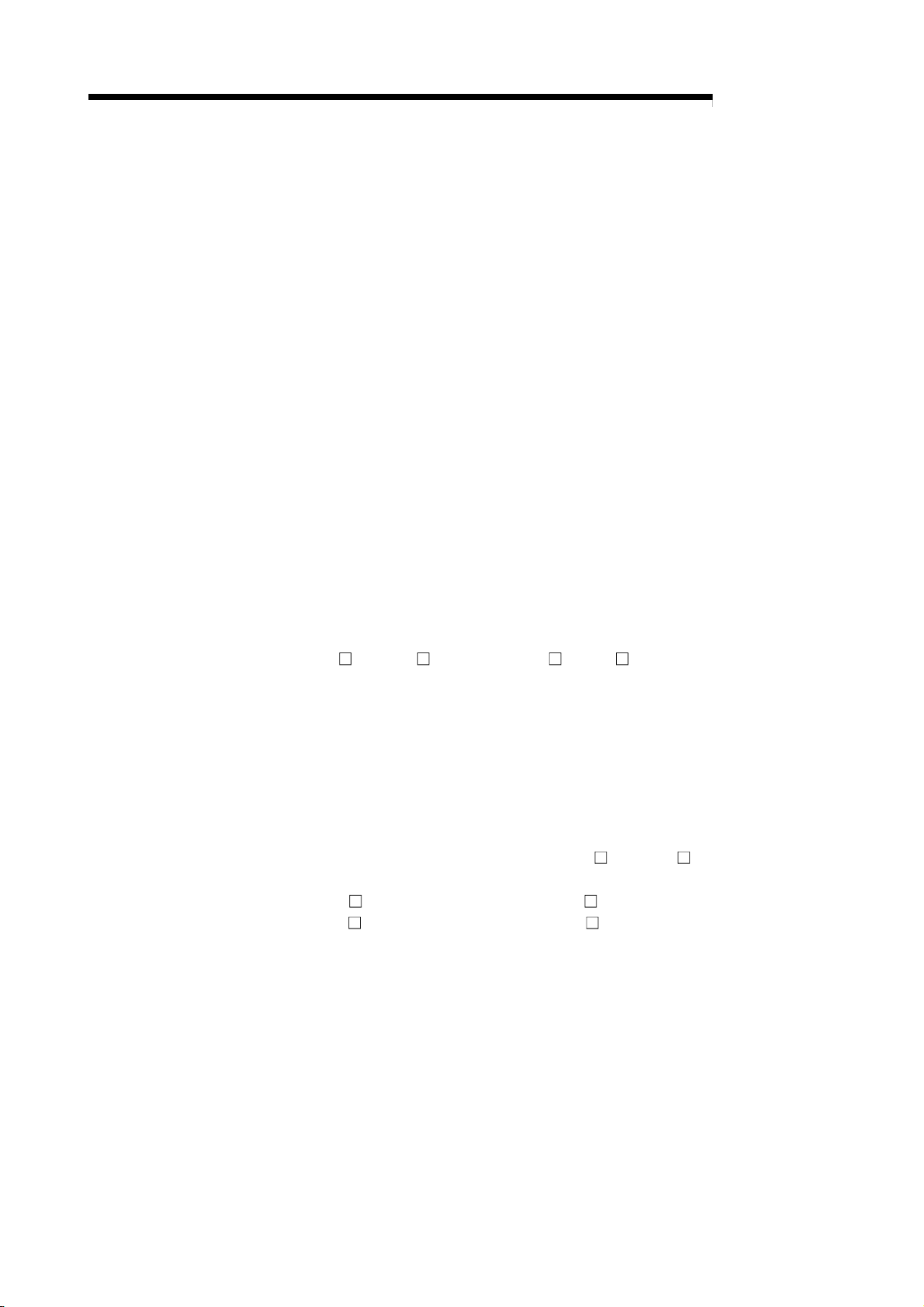
Punch press (X, Y feed positioning)
Y axis
servomotor
Gear and ball screw
Servo
amplifier
Servo amplifier
Press head
Y axis
X axis
Y axis
X axis
servomotor
160mm
320mm
Press punching
12s
X axis
Gear and rack & pinion
QD75
15m/min
(2000r/min)
15m/min
(1875r/min)
MELSEC-Q
To punch insulation material or leather, etc.,
as the same shape at a high yield, positioning
is carried out with the X axis and Y axis
servos.
After positioning the table with the X axis
servo, the press head is positioned with the Y
axis servo, and is then punched with the
press.
When the material type or shape changes, the
press head die is changed, and the positioning
pattern is changed.
X axis
Y axis
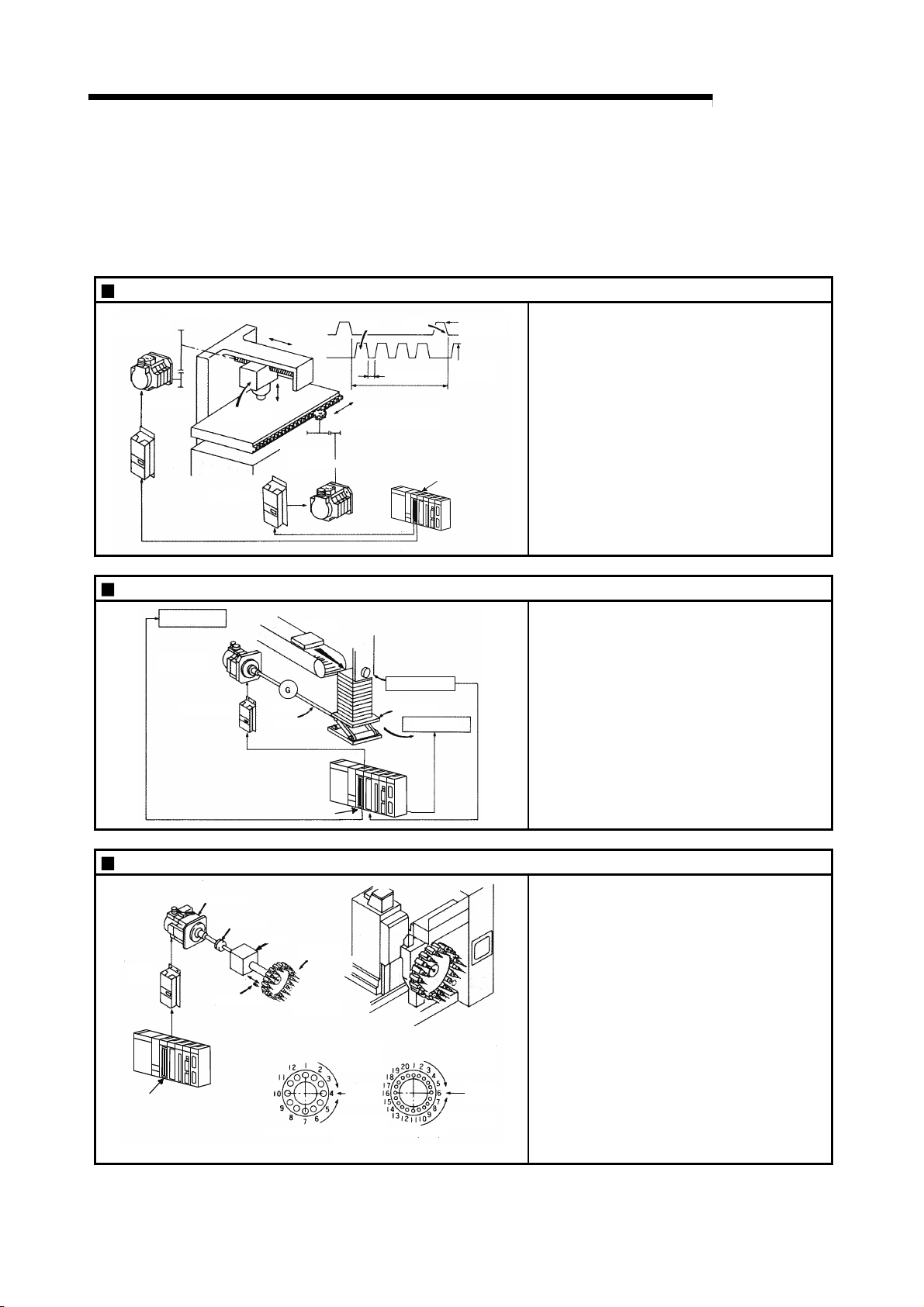
Palletizer
Conveyor control
Servomotor
(with brakes)
Servo amplifier
Reduction
gears
Ball screw
(From QD75)
Conveyor
Position detector
Palletizer
Unloader control
QD75
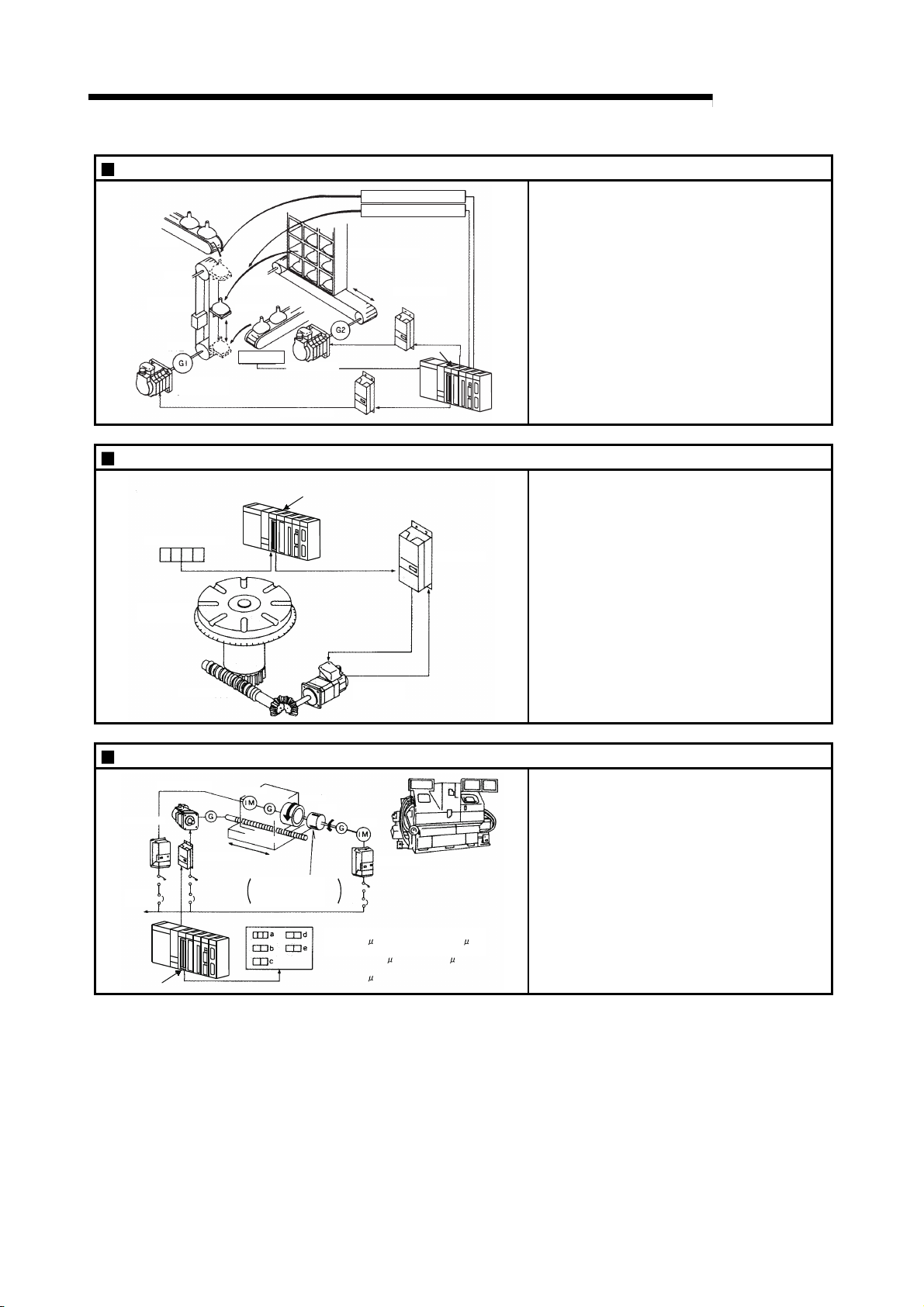
Compact machining center (ATC magazine positioning)
Servomotor
Servo
amplifier
QD75
Coupling
Positioning pin
Reduction
gears
Tool
(12 pcs., 20 pcs.)
ATC tool
magazine
Rotation direction
for calling
11, 12, 1, 2 or 3
Current
value
retrieval
position
Rotation direction
for calling
5, 6, 7, 8, 9 or 10
<No. of tools: 20><No. of tools: 12>
Rotation direction
for calling
17 to 20, 1 to 5
Current
value
retrieval
position
Rotation direction
for calling 7 to 16
Using the servo for one axis, the palletizer is
positioned at a high accuracy.
The amount to lower the palletizer according to
the material thickness is saved.
The ATC tool magazine for a compact
machining center is positioned.
The relation of the magazine's current value
and target value is calculated, and positioning
is carried out with forward run or reverse run to
achieve the shortest access time.
1 - 5
Page 30
•
•
•
•
•
1 PRODUCT OUTLINE
Lifter (Storage of Braun tubes onto aging rack)
B conveyor
Lifter
Counterweight
Reduction
gears
Servomotor
(with brakes)
C conveyor
A conveyor
Loader
Servomotor
Servo amplifier
Aging rack
Index table (High-accuracy indexing of angle)
QD75
Unloader
Loader/unloader
Servo amplifier
QD75
MELSEC-Q
During the aging process of braun tubes,
storage onto the rack is carried out by
positioning with the AC servo.
The up/down positioning of the lifter is carried
out with the 1-axis servo, and the horizontal
position of the aging rack is positioned with the
2-axis servo.
The index table is positioned at a high accuracy
using the 1-axis servo.
Digital switch
Index table
Worm gears
Inner surface grinder
Servomotor
Inverter
220VAC
60Hz
QD75
Servo
amplifier
Motor
Workpiece
Fix the grinding stone,
feed the workpiece,
and grind.
Operation panel
Detector
Servomotor
Grinding stone
Motor
Inverter
a. Total feed
amount ( m)
b. Finishing
feed amount ( m)
c. Compensation
amount ( m)
Servo
amplifier
d. Rough grind ing speed ( m/s)
e. Fine grinding
speed ( m/s)
The grinding of the workpiece's inner surface
is controlled with the servo and inverter.
The rotation of the workpiece is controlled with
the 1-axis inverter, and the rotation of the
grinding stone is controlled with the 2-axis
inverter. The workpiece is fed and ground with
the 3-axis servo.
1 - 6
Page 31

1 PRODUCT OUTLINE
1.1.3 Mechanism of positioning control
Positioning control using the QD75 is carried out with "pulse signals". (The QD75 is a
module that generates pulses). In the positioning system using the QD75, various
software and devices are used for the following roles. The QD75 realizes complicated
positioning control when it reads in various signals, parameters and data and is
controlled with the CPU module.
Creates control order and
conditions as a sequence
program.
Stores the created program.
The QD75 outputs the start signal and
stop signal following the stored program.
QD75 errors, etc., are detected.
MELSEC-Q
GX Developer
GX
Configurator
-QP
Sets the parameters and
positioning data for control.
Outputs the start command for
JOG operation, etc., during test
operation with the test mode.
Monitors the positioning operation.
CPU module
QD75 positioning
module
Servo
amplifier
Motor
Outputs signals such as the start
signal, stop signal, limit signal and
control changeover signal to the QD75.
External signal Issues commands by
transmitting pulses.
Manual pulse
generator
Stores the parameter and data.
Outputs pulses to the servo according to the
instructions from the CPU module, GX Configurator-QP,
external signals and manual pulse generator.
Receives pulse commands from QD75, and
drives the motor.
Outputs the drive unit READY signal and
zero signal to the QD75.
Carries out the actual work according to commands
from the servo.
Workpiece
1 - 7
Page 32

A
1 PRODUCT OUTLINE
The principle of "position control" and "speed control" operation is shown below.
Position control
The total No. of pulses required to move the designated distance is obtained in the
following manner.
When this total No. of pulses is issued from the QD75 to the servo amplifier, control to
move the designated distance can be executed.
The machine side movement amount when one pulse is issued to the servo amplifier is
called the "movement amount per pulse". This value is the min. value for the workpiece
to move, and is also the electrical positioning precision.
Speed control
The "Total No. of pulses" mentioned above is invariably required for controlling the
distance. For positioning or speed control, the speed must be controlled as well.
The speed is determined by the frequency of pulses sent from the QD75 to the drive
unit.
MELSEC-Q
Total No. of pulses
required to move
designated distance
The No. of pulses required for the motor to rotate once is the "encoder resolution"
described in the motor catalog specification list.
=
Movement amount of machine (load)
side when motor rotates once
Designated distance
No. of pulses
required for motor to
rotate once
Pulse frequency
[pps]
ta td (s)
0.4 1.2 0.4
Movement amount t = 2
This area is the total
No. of commanded
pulses.
Positioning
module
Speed = Pulses frequency
Movement amount = No.of pulses
Feedback pulses =
Pulses generated by detector
Servo
amplifier
Detector
(Pulse
encoder)
Feedback pulses
Servo
motor
Fig. 1.1 Relationship between position control and speed control
POINT
The QD75 controls the position with the "total No. of pulses", and the speed with
the "pulse frequency".
1 - 8
Page 33

1 PRODUCT OUTLINE
1.1.4 Outline design of positioning system
The outline of the positioning system operation and design, using the QD75, is shown
below.
(1) Positioning system using QD75
MELSEC-Q
CPU module
Program
Peripheral
devices
interface
Read, write, etc.
GX Configurator-QP
Read, write, etc.
Read, write, etc.
Positioning module
QD75
Forward run
pulse train
Reverse run
Setting
pulse train
data
Deviation
counter
Drive unit
D/A
converter
Speed
command
Interface
Feedback pulse
Servo
amplifier
Servomotor
M
PLG
Fig. 1.2 Outline of the operation of positioning system using QD75
(a) Positioning operation by the QD75
1) The QD75 output is a pulse train.
The pulse train output by the QD75 is counted by and stored in the
deviation counter in the drive unit.
The D/A converter outputs an analog DC current proportionate to the
count maintained by the deviation counter (called "pulse droop"). The
analog DC current serves as the servomotor speed control signal.
2) The motor rotation is controlled by the speed control signal from the
drive unit.
As the motor rotates, the pulse encoder (PLG) attached to the motor
generates feedback pulses, the frequency of which is proportionate to
the rotation speed.
The feedback pulses are fed back to the drive unit and decrements the
pulse droop, the pulse count maintained by the deviation counter.
The motor keeps on rotating as the pulse droop is maintained at a
certain level.
3) When the QD75 terminates the output of a pulse train, the motor
decelerates as the pulse droop decreases and stops when the count
drops to zero.
Thus, the motor rotation speed is proportionate to the pulse frequency,
while the overall motor rotation angle is proportionate to the total
number of pulses output by the QD75.
Therefore, when a movement amount per pulse is given, the overall
movement amount can be determined by the number of pulses in the
pulse train.
The pulse frequency, on the other hand, determines the motor rotation
speed (feed speed).
1 - 9
Page 34

ε
1 PRODUCT OUTLINE
MELSEC-Q
(b) Pulse train output from the QD75
1) As shown in Fig. 1.3, the pulse frequency increases as the motor
accelerates. The pulses are sparse when the motor starts and more
frequent when the motor speed comes close to the target speed.
2) The pulse frequency stabilizes when the motor speed equals the target
speed.
3) The QD75 decreases the pulse frequency (sparser pulses) to
decelerate the motor before it finally stops the output.
There will be a little difference in timing between the decrease in the
pulse frequency and the actual deceleration and stopping of the motor.
This difference, called "the stop settling time", is required for gaining a
stopping accuracy.
Servomotor
Speed V Pulse droop
amount
Pulse
distribution
speed
Acceleration
Pulse train Rough Dense Rough
Deceleration
Time t
Stop
settling time
Fig. 1.3 QD75 output pulses
(2) Movement amount and speed in a system using worm gears
A : Movement amount per pulse (mm/pulse)
Vs : Command pulse frequency (pulse/s)
V
Workpiece
Pulse encoder
(PLG)
Servomotor
R
Table
P0
Worm gear
L
Fig. 1.4 System using worm gears
n : Pulse encoder resolution (pulse/rev)
L : Worm gear lead (mm/rev)
R : Deceleration ratio
V : Movable section speed (mm/s)
N : Motor speed (r/min)
K : Position loop gain (1/s)
P
: Deviation counter droop pulse amount
P0 : OP (pulse)
P : Address (pulse)
1 - 10
Page 35

1 PRODUCT OUTLINE
MELSEC-Q
(a) In the system shown in Fig. 1.4, the movement amount per pulse,
command pulse frequency, and the deviation counter droop pulse amount
are determined as follows:
1) Movement amount per pulse
The movement amount per pulse is determined by the worm gear lead,
deceleration ratio, and the pulse encoder resolution.
The movement amount, therefore, is given as follows: (Number of
pulses output) × (Movement amount per pulse).
A =
L
R × n
[mm/pulse]
2) Command pulse frequency
The command pulse frequency is determined by the speed of the
moving part and movement amount per pulse:
Vs =
V
A
[pulse/s]
3) Deviation counter droop pulse amount.
The deviation counter droop pulse amount is determined by the
command pulse frequency and position loop gain.
Vs
K
[pulse]
ε =
(b) The QD75 allows the user to select from the following four units as the unit
used by positioning commands to any of the axes (1 to 4, if the module
supports four axes): mm, inch, degree, and pulse.
The unit selected for one axis may differ from the unit selected for another
axis.
When such data as the acceleration/deceleration time, positioning speed,
and positioning address are correctly set in consideration of the chosen
unit, the QD75 can calculate the number of pulses required for a movement
amount to the target positioning address and execute the positioning by
outputting a pulse train that includes the calculated number of pulses.
1 - 11
Page 36

1 PRODUCT OUTLINE
1.1.5 Communicating signals between QD75 and each module
The outline of the signal communication between the QD75 and CPU module,
peripheral device and drive unit, etc., is shown below.
(A peripheral device communicates with the QD75 via the CPU module to which it is
CPU module
Y8,YA,YC,YE
Y9,YB,YD,YF
Y14,Y15,Y16,Y17
Y0
X0
X1
Forward run JOG start signal
Reverse run JOG start signal
connected)
QD75
PLC READY signal
QD75 READY signal
Syncronization flag
Execution prohibition flag
External
interface
MELSEC-Q
Drive unit READY signal
Upper/lower limit signal
Near-point dog signal
External
signal
Zero signal
Deviation counter clear
Pulse train
Drive
unit
Y10,Y11,Y12,Y13
X14,X15,X16,X17
XC,XD,XE,XF
X10,X11,X12,X13
Y4,Y5,Y6,Y7
X4,X5,X6,X7
X8,X9,XA,XB
Peripheral
device
interface
Positioning start signal
Positioning complete signal
BUSY signal
Start complete signal
Axis stop signal
M code ON signal
Error detection signal
Data write/read
Parameter write/read
Positioning data write/read
Block start data write/read
OPR operation (test)
JOG/Inching operation
Positioning operation (test)
Operation monitor
Interface
with
CPU
module
Manual pulse generator A-phase
Manual pulse generator B-phase
Stop signal
External command signal
Manual pulse
generator
External
signal
Peripheral
device
1 - 12
Page 37

1 PRODUCT OUTLINE
MELSEC-Q
QD75 CPU module
Communication
Control signal
Data (read/write)
Refer to Section 3.3 "Specifications of input/output signals with CPU module " for details.
The QD75 and CPU module communicate the following data via the base unit.
Direction
Signal indicating QD75 state, such as
QD75 READY signal, BUSY signal.
• Parameter
• Positioning data
• Block start data
• Control data
• Monitor data
QD75
CPU module CPU module QD75
Signal related to commands such as PLC
READY signal, various start signals, stop
signals
• Parameter
• Positioning data
• Block start data
• Control data
QD75 Peripheral device
The QD75 and peripheral device communicate the following data via the CPU
Communication
Data (read/write)
Test operation –
Operation monitor • Monitor data –
module:
Direction
QD75
• Parameter
• Positioning data
• Block start data
Peripheral device Peripheral device QD75
• Parameter
• Positioning data
• Block start data
• OPR control start command
• Positioning control start command
• JOG/Inching operation start command
• Teaching start command
• Manual pulse generator operation
enable/disable command
QD75 Drive unit
The QD75 and drive unit communicate the following data via the external device
Communication
Control signal
Pulse train • Pulse train output –
connection connector.
Direction
Signals related to commands such as
deviation counter clear signal
QD75
Drive unit Drive unit QD75
Signals indicating drive unit state such as
drive unit READY signal
QD75 Manual pulse generator
The QD75 and manual pulse generator communicate the following data via the
external device connection connector.
(The manual pulse generator should be connected to an external device connection
Communication
Pulse signal –
connector for axis 1 or for axes 1 and 2.)
Direction
QD75
Manual pulse generator Manual pulse generator QD75
1 - 13
Manual pulse generator A-phase, manual
pulse generator B-phase
Page 38

•
•
1 PRODUCT OUTLINE
QD75 External signal
The QD75 and external signal communicate the following data via the external
Communication
Control signal –
device connection connector.
Direction
QD75
MELSEC-Q
External signal External signal QD75
Signals from detector such as near-point
dog signal, upper/lower limit signal, zero
signal
Control signals from external device such
as stop signal, external command signal
1 - 14
Page 39

1 PRODUCT OUTLINE
1.2 Flow of system operation
1.2.1 Flow of all processes
The positioning control processes, using the QD75, are shown below.
MELSEC-Q
Design
Preparation
GX Configurator-QP
1)
Understand the functions and performance, and determine the positioning operation method
3) 4)
Setting of the:
• Parameters
• Positioning data
• Block start data
• Condition data
Writing of setting data
QD75
2)
5) 6)
Servo, etc.
(system design)
Installation, wiring
CPU module
Creation of sequence
program for operation
Refer to (Note)
GX Developer
Writing of program
Operation
Maintenance
7) 8)
Monitoring with
test operation,
and debugging
of setting data
Monitor
9)
10)
11)
Connection confirmation
Test operation
Actual operation
Maintenance
Disposal
Monitoring and
debugging of
operation
program
Monitor
(Note)
When not using
GX Configurator
-QP, carry out
setting, monitoring
and debugging of
the data in 3) with
GX Developer.
1 - 15
Page 40

•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
1 PRODUCT OUTLINE
MELSEC-Q
Details Reference
Understand the product functions and usage methods, the configuration devices
1)
and specifications required for positioning control, and design the system.
Install the QD75 onto the base unit, wire the QD75 and external connection
2)
devices (drive unit, etc.).
Using GX Configurator-QP, set the parameters, positioning data, block start data
3)
and condition data required for the positioning control to be executed.
Using GX Developer, create the sequence program required for positioning
4)
operation. (When not using GX Configurator-QP, also create the sequence
program for setting data.)
Write the parameters and positioning data, etc., created with GX Configurator-QP
5)
into the QD75.
Using GX Developer, write the created sequence program into the CPU module.
6)
(When not using GX Configurator-QP, also write in the sequence program for
setting data.)
Carry out test operation and adjustments in the test mode to check the connection
with the QD75 and external connection device, and to confirm that the designated
7)
positioning operation is executed correctly. (Debug the set "parameters" and
"positioning data", etc.)
Carry out test operation and adjustment to confirm that the designated positioning
8)
operation is executed correctly. (Debug the created sequence program. When not
using GX Configurator-QP, also debug the set data.
Actually operate the positioning operation. At this time, monitor the operation state
9)
as required. If an error or warning occurs, remedy.
10) Service the QD75 as required.
11) Dispose of the QD75.
1: When setting the QD75P N/QD75D N using GX Configurator-QP, there are restrictions on the setting ranges of
some items. (Refer to Appendix 1.2.)
The following work is carried out with the processes shown on the previous page.
CHAPTER 1
CHAPTER 2
CHAPTER 3
CHAPTER 8 to CHAPTER 13
CHAPTER 4
CHAPTER 5
1
CHAPTER 8 to CHAPTER 13
GX Configurator-QP
Operating Manual
CHAPTER 6
GX Developer Operating
Manual
CHAPTER 7
GX Configurator-QP
Operating Manual
CHAPTER 7
GX Developer Operating
Manual
GX Configurator-QP
Operating Manual
CHAPTER 13
GX Developer Operating
Manual
GX Developer Operating
Manual
CHAPTER 5
CHAPTER 15
GX Configurator-QP
Operating Manual
GX Developer Operating
Manual
CHAPTER 4
CHAPTER 4
1 - 16
Page 41

1 PRODUCT OUTLINE
MEMO
MELSEC-Q
1 - 17
Page 42

1 PRODUCT OUTLINE
1.2.2 Outline of starting
The outline for starting each control is shown with the following flowchart.
It is assumed that each module is installed, and the required system configuration,
etc., has been prepared.
Flow of starting
MELSEC-Q
Preparation
Control
functions
Positioning
parameters
OPR parameters
Positioning
data
Block start data
Control data
Start signal
Installation and connection of module
Setting of hardware
Major positioning control
•Position control
•Speed control
•Speed-position
switching control
•Position-speed
switching control
•Other control
High-level positioning
control
•Block start (Normal start)
•Condition start
•Wait start
•Simultaneous start
•Repeated start
OPR control
•Machine OPR control
•Machine OPR control
•Fast OPR control
Set the positioning parameters.
Set the OPR parameters.
)
Pr.43
Set the positioning data.
)
to
Da.1)Da.10
Set the block start
data.
)
to
Da.19
)
)
)
Cd.3
Da.11
Set the positioning start No.
Set the positioning
starting point No.
)
)
Cd.4
Input the start signal.
Method (1) Turn ON the QD75 start signal from the
CPU module
Method (2) Issue the Z.PSTRT instruction from the CPU module
Method (3) Turn the QD75 external start signal ON
•JOG operation
)
to ,
Pr.1
Pr.42
to
)
Pr.57
Set the JOG speed.
)
)
Cd.17
Set the inching
movement amount
to other than 0.
Set the inching
movement
amount to 0.
)
)
Cd.16
Turn the QD75 JOG start signal
ON from the CPU module
Manual control
•Inching operation
•Manual pulse generator operation
•Manual pulse generator operation
)
Pr.150
Set the manual pulse
generator enable flag to "1".
)
)
Cd.16
Set the manual pulse generator
1 pulse input magnification.
)
Cd.21
)
Cd.20
Operate the
manual pulse
generator
)
)
Control start
Operation
Control end
Stop
1 - 18
Page 43

1 PRODUCT OUTLINE
<GX Configurator-QP>
Setting method
: Indicates the sequence program that must be created.
MELSEC-Q
Set with GX Configurator-QP
Set the parameter and data for executing main function,
and the sub functions that need to be set beforehand.
<GX Developer>
Create sequence program
for setting data
When set with "GX Configurator-QP",
this does not need to be created.
<GX Developer>
Create sequence program for
executing main function
Create sequence program for
outputting control signals, such
as start signal, to QD75.
<GX Developer>
Write
Operation sequence program
CPU
module
Write
Write
QD75
Write
CPU
module
• Speed change
• Current value changing
• Torque limit
• Restart, etc.
Create a sequence
program for the
sub functions.
1 - 19
Page 44

1 PRODUCT OUTLINE
1.2.3 Outline of stopping
MELSEC-Q
Stop cause
Forced stop
Fatal stop
(Stop group 1)
Emergency
stop
(Stop group 2)
Relatively safe
stop
(Stop group 3)
Intentional stop
(Stop group 3)
Each control is stopped in the following cases.
(1) When each control is completed normally.
(2) When the drive unit READY signal is turned OFF.
(3) When a CPU module error occurs
(4) When the PLC READY signal is turned OFF.
(5) When an error occurs in the QD75.
(6) When control is intentionally stopped (Stop signal from CPU module turned ON,
The outline for the stopping process in these cases is shown below. (Excluding (1) for
normal stopping.)
Drive unit
READY
signal OFF
Hardware
stroke limit
upper/lower
limit error
occurrence
CPU module
error
occurrence
PLC READY
signal OFF
Error in test
mode
Axis error
detection
(Error other
than stop
group 1 or 2)
1
"Stop signal"
from
peripheral
device
"Stop signal"
ON from
external
source
"Axis stop
signal" ON
from CPU
module
stop signal from an external device, etc.)
Axis
Stop
axis
Each
axis
Each
axis
All
axes
Each
axis
Each
axis
M code
ON signal
after stop
No
change
No
change
No
change
Turns
OFF
No
change
No
change
No
change
operation
status
after
stopping
Md.26
(
Error Immediate stop
Error
Error
Error
Stopped
(Standby)
OPR control Manual control
Machine
OPR
control
)
Fast
OPR
control
Deceleration stop/sudden stop
(Select with "
stop selection")
Deceleration stop/sudden stop
(Select with "
stop selection")
Deceleration stop/sudden stop
(Select with "
stop selection")
Stop process
Major
positioning
control
Pr.37
Pr.38
Pr.39 Stop group 3 sudden
High-level
positioning
control
Stop group 1 sudden
Stop group 2 sudden
JOG/
Inching
operation
Manual
pulse
generator
operation
Deceleration
stop
Deceleration
stop
Deceleration
stop
Deceleration
stop
1 - 20
Page 45

1 PRODUCT OUTLINE
MELSEC-Q
1: When multiple positioning data is executed by the continuous positioning control and there is invalid setting value in a
positioning data, an error occurs and deceleration is performed at the previous positioning data. In this case, sudden
stop is not performed even when it is set for the stop group 3.If any of the following error occurs, the operation is
immediately stopped after executing up to previous positioning data of the positioning data where an error occurred.
• No command speed (error code: 503)
• Outside linear movement amount range (error code: 504)
• Large arc error deviation (error code: 506)
• Software stroke limit + (error code: 507)
• Software stroke limit - (error code: 508)
• Sub point setting error (error code: 525)
• End point setting error (error code: 526)
• Center point setting error (error code: 527)
• Outside radius range (error code: 544)
• Illegal setting of ABS direction in unit of degree (error code: 546)
1 - 21
Page 46

4
4
1 PRODUCT OUTLINE
1.2.4 Outline of restarting
When a stop cause has occurred during operation with position control causing the
axis to stop, positioning to the end point of the positioning data can be restarted from
the stopped position by using the "
If issued during a continuous positioning or continuous path control operation, the
restart command will cause the positioning to be re-executed using the
current position (pointed by the positioning data No. associated with the
moment when the movement was interrupted) as the start point.
When "
(1) If the "
(2) When "
[Example for incremental system]
Axis 1
MELSEC-Q
Cd.6
Restart command".
Cd.6
Restart command" is ON
Md.26
Axis operation status" is "Stopped", positioning to the end point
of the positioning data will be restarted from the stopped position regardless of
the absolute system or incremental system.
Md.26
Axis operation status" is not "Stopped", the warning "Restart
not possible" (warning code: 104) will be applied, and the restart command will
be ignored.
(a) The restart operation when the axis 1 movement amount is 300, and the
axis 2 movement amount is 600 is shown below.
Axis 1
Stop position due to stop cause
00
Start point
address
200
100
100 300 700
Designated end
point position
Axis 2
Restart
Stop position due to stop cause
400
200
100
100 300 700
Stop position
after restart
Operation during
restart
Axis 2
Reference
If the positioning start signal [Y10 to Y13]/external command signal
while the "
Md.26
Axis operation status" is "Standby" or "Stopped", positioning will
be restarted from the start of the positioning start data regardless of the absolute
system or incremental system. (
: When the external command signal is set to
"External positioning start")
(Same as normal positioning.)
[Example for incremental system]
(a) The positioning start operation when the axis 1 movement amount is 300
Axis 1
Stop position due to stop cause
00
Start point
address
200
100
100 300 700
and the axis 2 movement amount is 600 is shown below.
Axis 1
Stop position due to stop cause
500
Axis 2
Positioning
start
200
100
100 300 900
Designated end
point position
1 - 22
is turned ON
Stop position
after restart
Operation during
positioning start
Axis 2
Page 47

1 PRODUCT OUTLINE
1.3 Restrictions with a system using a stepping motor
Note the following restrictions applicable to a system that uses a stepping motor:
(1) For the system that uses a stepping motor, executing the S-curve
acceleration/deceleration may cause step-out.
Before using the S-curve acceleration/deceleration, confirm that step-out does
not occur.
(2) Although setting the bias speed at start is required by the characteristics of the
stepping motor, the setting of the bias speed at start is disabled for circular
interpolation control.
1.4 Function additions/modifications according to function version B
MELSEC-Q
POINT
When it is desired to check the following items, refer to the corresponding
explanation sections.
How to check the function version and SERIAL No. (Refer to Section 2.4)
The following function additions/modifications according to the function version B of the
Multiple CPU compatible function Refer to QCPU User's Manual (Multiple CPU System).
Speed-position switching control (ABS mode)
Pre-reading start function Function which shortens virtual start time. Section 12.7.7
External I/O signal monitor function
Deceleration start flag function 2
Stop command processing for deceleration stop
function 3
1: For the QD75P /QD75D , this function is available in GX Developer (SW6D5C-GPPW-E or later). For details, refer to
GX Developer Operating Manual.
For the QD75P
GX Works2. For details on the system monitor of GX Works2, refer to GX Works2 Version 1 Operating Manual
(Common).
2: For the QD75P /QD75D , this function is available for modules whose serial No. (first five digits) is "03042" or later.
3: For the QD75P /QD75D , this function is available for modules whose serial No. (first five digits) is "05072" or later.
QD75:
Function Outline Reference
Function which starts the axis under speed control,
switches to position control at the external command
signal input, then positions the axis to a stop at the
designated address.
Function which monitors the external I/O signal monitor
information in the module's detailed information which
can be displayed on the system monitor of GX
Developer
Function that turns ON the flag when the constant
speed status or acceleration status switches to the
deceleration status during position control whose
operation pattern is "Positioning complete".
Function that selects a deceleration curve when a stop
cause occurs during deceleration stop processing to
speed 0.
N/QD75D N, external I/O signals cannot be monitored on GX Developer. Use the system monitor of
1.
Section 9.2.17
Section 13.5
Section 12.7.8
Section 12.7.9
1 - 23
Page 48

1 PRODUCT OUTLINE
MEMO
MELSEC-Q
1 - 24
Page 49

CHAPTER 2 SYSTEM CONFIGURATION
2
In this chapter, the general image of the system configuration of the positioning control
using QD75, the configuration devices, applicable CPU and the precautions of configuring
the system are explained.
Prepare the required configuration devices to match the positioning control system.
2.1 General image of system .............................................................................................2- 2
2.2 Configuration list ...........................................................................................................2- 4
2.3 Applicable system.........................................................................................................2- 6
2.4 How to check the function version and SERIAL No. .................................................. 2- 10
2 - 1
Page 50

2 SYSTEM CONFIGURATION
2.1 General image of system
The general image of the system, including the QD75, CPU module and peripheral
devices is shown below.
(The Nos. in the illustration refer to the "No." in Section 2.2 "Component list".
MELSEC-Q
Extension
cable
CPU
module 1
Main base unit 2
Positioning
module
1
I/O
module
Extension
system
USB cable
5
RS-232 cable
4
REMARK
1 Refer to Section 2.3 "Applicable system" for the CPU modules that can be used.
2 Refer to the CPU module User's Manual for the base units that can be used.
2 - 2
Page 51

g
2 SYSTEM CONFIGURATION
MELSEC-Q
6
Drive
unit
Motor
Manual pulse generator
7
Cable
Machine system inputs (switches)
8
Near point dog
Limit switch
External command
signal
Stop signal
Peripheral device
GX Configurator
-QP
Personal
computer
3
2
SWnD5C
-QD75P-E
(For details, refer to GX Configurator
-QP Operatin
Manual.)
2 - 3
Page 52

2 SYSTEM CONFIGURATION
2.2 Configuration list
MELSEC-Q
No. Part name Type Remarks
1 Positioning module
2 GX Configurator-QP
3 Personal computer
4 RS-232 cable QC30R2
5 USB cable –
6 Drive unit – (Prepared by user)
Manual pulse
7
generator
Connection cable
(For connecting
8
between the QD75
and the drive unit)
The positioning system using the QD75 is configured of the following devices.
QD75P1N
QD75P2N
QD75P4N
QD75D1N
QD75D2N
QD75D4N
QD75P1
QD75P2
QD75P4
QD75D1
QD75D2
QD75D4
SW
D5C-
QD75P-E
Personal
computer which
supports
Windows
®
.
–
–
QD75
No. of control axes
P: Open collector output system
Refer to Appendix 1.2 for differences between QD75P
QD75P /QD75D .
Refer to GX Configurator-QP Operating Manual for details.
(Prepared by user)
Refer to GX Configurator-QP Operating Manual for details.
(Prepared by user)
An RS-232 cable is needed for connecting the CPU module with a
personal computer.
For details, refer to GX Configurator-QP Operating Manual.
(Prepared by user)
A USB cable is needed for connecting the CPU module with a personal
computer.
For details, refer to GX Configurator-QP Operating Manual.
(Prepared by user)
Recommended: MR-HDP01 (Mitsubishi Electric)
(Prepared by user)
Cables are needed to connect the QD75 with the drive unit, manual pulse
generator, and input devices in the machine system.
(Prepare them referring to the manuals for the connected devices and
information given in 3.4.2 of this manual.)
D: Differential driver output system
N/QD75D N and
2 - 4
Page 53

2 SYSTEM CONFIGURATION
Specifications of recommended manual pulse generator
Model name MR-HDP01
Pulse resolution 25pulse/rev (100 pulse/rev after magnification by 4)
Output method
Power supply voltage
Current consumption 60mA
Output level
Life time 100 revolutions (at 200r/min)
Permitted axial loads
Operation temperature -10 to 60 (14 to 140 )
Weight 0.4 (0.88) [kg(lb)]
Number of max. revolution Instantaneous Max. 600r/min. normal 200r/min
Pulse signal status 2 signals: A phase, B phase, 90 phase difference
Start friction torque 0.06N·m (at 20 (68 ))
1:
Use the stabilized power supply of 4.5 to 6.1 VDC for the power supply of the manual
pulse generator.
MELSEC-Q
Item Specifications
Voltage-output (power supply voltage -1V or more),
Output current
4.5 to 13.2VDC*1
"H" level: power supply voltage
"L" level: 0.5V or less (with maximum leading-in)
Radial load: Max. 19.6N
Thrust load: Max. 9.8N
Max. 20mA
*1
-1V or more (in no-load)
2 - 5
Page 54

2 SYSTEM CONFIGURATION
2.3 Applicable system
The QD75 can be used in the following system.
(1) Applicable modules and base units, and No. of modules
(a) When mounted with a CPU module
The table below shows the CPU modules and base units applicable to the
QD75 and quantities for each CPU model.
Depending on the combination with other modules or the number of
mounted modules, power supply capacity may be insufficient.
Pay attention to the power supply capacity before mounting modules, and if
the power supply capacity is insufficient, change the combination of the
Applicable CPU module
CPU type CPU model
Basic model
QCPU
High
Performance
model QCPU
Process CPU
Redundant CPU
Programmable
controller CPU
Universal model
QCPU
modules.
Q00JCPU Up to 8
Q00CPU
Q01CPU
Q02CPU
Q02HCPU
Q06HCPU
Q12HCPU
Q25HCPU
Q12PHCPU
Q25PHCPU
Q12PRHCPU
Q25PRHCPU
Q00UJCPU Up to 8
Q00UCPU
Q01UCPU
Q02UCPU Up to 36
Q03UDCPU
Q04UDHCPU
Q06UDHCPU
Q10UDHCPU
Q13UDHCPU
Q20UDHCPU
Q26UDHCPU
Q03UDECPU
Q04UDEHCPU
Q06UDEHCPU
Q10UDEHCPU
1: Limited within the range of I/O points for the CPU module.
2: Can be installed to any I/O slot of a base unit.
No. of modules*1
Up to 24
Up to 64
Up to 64
Up to 53
Up to 24
Up to 64
MELSEC-Q
Base unit*2
Main base unit Extension base unit
: Applicable, : N/A
2 - 6
Page 55

2 SYSTEM CONFIGURATION
Applicable CPU module
CPU type CPU model
Q13UDEHCPU
Programmable
controller CPU
C Controller module*3
Universal model
QCPU
Safety CPU QS001CPU N/A
Q20UDEHCPU
Q26UDEHCPU
Q50UDEHCPU
Q100UDEHCPU
Q06CCPU-V-H01
Q06CCPU-V
Q06CCPU-V-B
Q12DCCPU-V
1:
Limited within the range of I/O points for the CPU module.
2: Can be installed to any I/O slot of a base unit.
3: Use the QD75 of function version B or later.
(b) Mounting to a MELSECNET/H remote I/O station
The table below shows the network modules and base units applicable to
the QD75 and quantities for each network module model.
Depending on the combination with other modules or the number of
mounted modules, power supply capacity may be insufficient.
Pay attention to the power supply capacity before mounting modules, and if
the power supply capacity is insufficient, change the combination of the
Applicable network
module
QJ72LP25-25
QJ72LP25G
QJ72LP25GE
QJ72BR15
modules.
1: Limited within the range of I/O points for the CPU module.
2: Can be installed to any I/O slot of a base unit.
No. of modules*1
Up to 64
Up to 64
No. of modules
Up to 64
*1
Main base unit of
remote I/O station
MELSEC-Q
Base unit*2
Main base unit Extension base unit
: Applicable, : N/A
Base unit*2
Extension base unit of
remote I/O station
: Applicable, : N/A
REMARK
The basic model QCPU and C controller cannot configure MELSECNET/H remote
I/O network.
(2) Compatibility with multiple CPU system
When using the QD75 in a multiple CPU system, refer to the QCPU User's Manual
(Multiple CPU System).
2 - 7
Page 56

2 SYSTEM CONFIGURATION
(3) Supported software packages
The following table lists the compatibility between the systems using the QD75 and
the software packages. GX Developer or GX Works2 is required for use of the
Q00J/Q00/Q01CPU
Q02/Q02H/Q06H/
Q12H/Q25HCPU
Q02PH/Q06PHCPU
Q12PH/Q25PHCPU
Q02U/Q03UD/
Q04UDH/
Q06UDHCPU
Q13UDH/Q26UDH/
Q03UDE/Q04UDEH/
Q06UDEH/Q13UDE
H/Q26UDEHCPU
Q00U/Q00UJ/Q01U/
Q10UDH/Q20UDH/
Q10UDEH/
Q20UDEHCPU
Q50UDEH/
Q100UDEHCPU
For use on MELSECNET/H remote I/O
station
QD75.
(a) QD75P N/QD75D N
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
1:
To use the QD75P
QD75P /QD75D as the model name. The QD75P N/QD75D N can be used in the
same manner as the QD75P
speed exceeding 1000000pulse/s cannot be set in some items. (Refer to Appendix 1.2)
Software version
GX Developer
Version 7 or later
Version 8 or later
Version 4 or later
Version 6 or later
Version 8.68W or
later
Version 7.10L or
later
Version 8.48A or
later
Version 8.68W or
later
Version 8.76E or
later
Not available Not available
Version 6 or later Version 2.00A or later
N/QD75D N with GX Configurator-QP, select the
GX Configurator-QP
Version 2.10L or later
Version 2.00A or later
Version 2.29F or later
Version 2.13P or later
Version 2.25B or later
Version 2.29F or later
Version 2.32J or later
/QD75D ; the setting ranges are the same. Therefore, a
2 - 8
MELSEC-Q
*1
GX Works2
Version 1.64S or later
Not available
Version 1.64S or later
Page 57

2 SYSTEM CONFIGURATION
Q00J/Q00/Q01CPU
Q02/Q02H/Q06H/
Q12H/Q25HCPU
Q02PH/Q06PHCPU
Q12PH/Q25PHCPU
Q02U/Q03UD/
Q04UDH/
Q06UDHCPU
Q13UDH/Q26UDH/
Q03UDE/Q04UDEH/
Q06UDEH/Q13UDE
H/Q26UDEHCPU
Q00U/Q00UJ/Q01U/
Q10UDH/Q20UDH/
Q10UDEH/
Q20UDEHCPU
Q50UDEH/
Q100UDEHCPU
For use on MELSECNET/H remote I/O
station
(b) QD75P /QD75D
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
Single
programmable
controller system
Multiple
programmable
controller system
MELSEC-Q
Software version
GX Developer GX Configurator-QP GX Works2
Version 7 or later
Version 2.10L or later
Version 8 or later
Version 1.15R or later
Version 4 or later
Version 2.00A or later
Version 6 or later
Version 8.68W or
later
Version 7.10L or
later
Version 8.48A or
later
Version 8.68W or
later
Version 8.76E or
later
Not available Not available Version 1.31H or later
Version 6 or later Version 2.00A or later Version 1.40S or later
Version 2.29F or later
Version 2.13P or later
Version 2.25B or later
Version 2.29F or later
Version 2.32J or later
Not available
Version 1.15R or later
2 - 9
Page 58

2 SYSTEM CONFIGURATION
2.4 How to check the function version and SERIAL No.
(1) Confirming the serial number on the rating plate
The rating plate is situated on the side face of the QD75.
100113
(2) Checking on the front of the module
The serial No. on the rating plate is also indicated on the front of the module
(lower part).
MELSEC-Q
Serial number (The first six digits)
Function version
Relevant regulation standards
100113000000000-B
Serial No.
Function version
2 - 10
Page 59

2 SYSTEM CONFIGURATION
(3) Confirming the serial number with software
Check the function version and SERIAL No. in "Product information"
displayed on System monitor "Module's Detailed Information" of GX
Developer or on "OS information" of GX Configurator-QP
(a) Checking on the System monitor (Product Information List) screen
To open the screen, select [Diagnostics]
[System monitor] and click
the Product Information List button in GX Developer.
<GX Developer display screen>
Serial
number
MELSEC-Q
*1
Function
version
Product
number
[Production No. display]
Since the QD75 does not support the production number display, "-" is
POINT
displayed.
The serial No. on the rating plate may be different from the serial No. displayed on
the product information screen of GX Developer.
•
The serial No. on the rating plate indicates the management information of the
product.
•
The serial No. displayed on the product information screen of GX Developer
indicates the function information of the product. The function information of the
product is updated when a new function is added.
(b) Checking with GX Configurator-QP
<GX Configurator-QP display screen>
100113000000000
SERIAL No.
Function version
1: For details, refer to GX Configurator-QP Operating Manual.
2 - 11
Page 60

2 SYSTEM CONFIGURATION
MEMO
MELSEC-Q
2 - 12
Page 61

CHAPTER 3 SPECIFICATIONS AND
FUNCTIONS
3
The various specifications of the QD75 are explained in this chapter.
The "Performance specifications", "List of functions", "Specifications of input/output
signals with CPU module", and the "Specifications of input/output interfaces with
external devices", etc., are described as information required when designing the
positioning system.
Confirm each specification before designing the positioning system.
3.1 Performance specifications .......................................................................................... 3- 2
3.2 List of functions ............................................................................................................3- 6
3.2.1 QD75 control functions ................................................................................... 3- 6
3.2.2 QD75 main functions ...................................................................................... 3- 8
3.2.3 QD75 sub functions and common functions ................................................. 3- 10
3.2.4 Combination of QD75 main functions and sub functions ............................. 3- 14
3.3 Specifications of input/output signals with CPU module ............................................3- 16
3.3.1 List of input/output signals with CPU module ...............................................3- 16
3.3.2 Details of input signals (QD75
3.3.3 Details of output signals (CPU module
3.4 Specifications of input/output interfaces with external devices .................................. 3- 19
3.4.1 Electrical specifications of input/output signals............................................. 3- 19
3.4.2 Signal layout for external device connection connector ............................... 3- 23
3.4.3 List of input/output signal details ...................................................................3- 24
3.4.4 Input/output interface internal circuit .............................................................3- 26
CPU module) ...........................................3- 17
QD75).........................................3- 18
3 - 1
Page 62

3 SPECIFICATIONS AND FUNCTIONS
3.1 Performance specifications
MELSEC-Q
QD75P N/QD75D N
Item
No. of control axes 1 axis 2 axes 4 axes
Interpolation function None
Control system
Control unit mm, inch, degree, pulse
Positioning data
Backup
Positioning system
Positioning range
Positioning
Speed command
Acceleration/
deceleration process
Acceleration/
deceleration time
Sudden stop
deceleration time
1: QD75P N represents the open collector output system, and QD75D N represents the differential driver output system.
2: In speed-position switching control (ABS mode), the control unit available is "degree" only. (For details, refer to Section 9.2.17 "Speed-
position switching control (ABS mode)".
Model
PTP (Point To Point) control, path control (both linear and arc can be set), speed control, speedposition switching control, position-speed switching control
600 data /axis
(Can be set with peripheral device or sequence program.)
Parameters, positioning data, and block start data can be saved on flash ROM
(battery-less backup)
PTP control: Incremental system/absolute system
Speed-position switching control: Incremental system/absolute system
Position-speed switching control: Incremental system
Path control: Incremental system/absolute system
In absolute system
• –214748364.8 to 214748364.7 (µm)
• –21474.83648 to 21474.83647 (inch)
• 0 to 359.99999 (degree)
• –2147483648 to 2147483647 (pulse)
In incremental system
• –214748364.8 to 214748364.7 (µm)
• –21474.83648 to 21474.83647 (inch)
• –21474.83648 to 21474.83647 (degree)
• –2147483648 to 2147483647 (pulse)
In speed-position switching control (INC mode) / position-speed switching control
• 0 to 214748364.7 (µm)
• 0 to 21474.83647 (inch)
• 0 to 21474.83647 (degree)
• 0 to 2147483647 (pulse)
In speed-position switching control (ABS mode) 2
• 0 to 359.99999 (degree)
0.01 to 20000000.00 (mm/min)
0.001 to 2000000.000 (inch/min)
0.001 to 2000000.000 (degree/min)
1 to 4000000 (pulse/s)
Trapezoidal acceleration/deceleration, S-curve acceleration/deceleration
1 to 8388608 (ms)
Four patterns can be set for each of acceleration time and deceleration time
1 to 8388608 (ms)
QD75P1N 1
QD75D1N
QD75P2N 1
QD75D2N
2-axis linear interpolation
2-axis circular interpolation
QD75P4N 1
QD75D4N
2-, 3-, or 4-axis linear
interpolation
2-axis circular interpolation
2
3 - 2
Page 63

×
3 SPECIFICATIONS AND FUNCTIONS
MELSEC-Q
Item
Starting time 3
External wiring connection system 40-pin connector
Applicable wire size
Applicable connector for external
device
Max. output pulse
Max. connection distance between
servos
Internal current consumption
(5VDC)
Flash ROM write count Max. 100000 times
No. of occupied I/O points 32 points (I/O assignment: intelligent 32 points)
Outline dimensions
Weight
1: QD75P N represents the open collector output system, and QD75D N represents the differential driver output system.
3: Using the "Pre-reading start function", the virtual start time can be shortened. (For details, refer to Section 12.7.7 "Pre-reading start
function".
Model
1-axis linear control 1.5ms
1-axis speed control 1.5ms
2-axis linear interpolation control (Composite speed) 1.5ms
2-axis linear interpolation control (Reference axis
speed)
2-axis circular interpolation control 2.0ms
2-axis speed control 1.5ms
3-axis linear interpolation control (Composite speed) 1.7ms
3-axis linear interpolation control (Reference axis
speed)
3-axis speed control 1.7ms
4-axis linear interpolation control 1.8ms
4-axis speed control 1.8ms
0.3mm
0.088 to 0.24mm
A6CON1, A6CON2, A6CON4 (sold separately)
QD75P1N, QD75P2N, QD75P4N: 200kpps
QD75D1N, QD75D2N, QD75D4N: 4Mpps
QD75P1N, QD75P2N, QD75P4N: 2m
QD75D1N, QD75D2N, QD75D4N: 10m
98 (H)
QD75P1N 1
QD75D1N
2
(22AWG) (for A6CON1 or A6CON4),
QD75P1N: 0.29A
QD75D1N: 0.43A
QD75P1N: 0.14kg
QD75D1N: 0.15kg
2
(28 to 24AWG) (for A6CON2)
27.4 (W) × 90 (D) mm
QD75P2N: 0.30A
QD75D2N: 0.45A
QD75P2N: 0.14kg
QD75D2N: 0.15kg
QD75P2N 1
QD75D2N
QD75P4N 1
QD75D4N
Factors in starting time extension
The following times will be added to
1.5ms
1.7ms
the starting time in the described
conditions:
• S-curve acceleration/
deceleration is selected: 0.1ms
• Other axis is in
operation: 0.5ms
• During continuous
positioning control: 0.3ms
• During continuous path
control: 0.3ms
QD75P4N: 0.36A
QD75D4N: 0.66A
QD75P4N: 0.16kg
QD75D4N: 0.16kg
3 - 3
Page 64

3 SPECIFICATIONS AND FUNCTIONS
MELSEC-Q
QD75P /QD75D
Item
No. of control axes 1 axis 2 axes 4 axes
Interpolation function None
Control system
Control unit mm, inch, degree, pulse
Positioning data
Backup
Positioning system
Positioning range
Positioning
Speed command
Acceleration/
deceleration process
Acceleration/
deceleration time
Sudden stop
deceleration time
1: QD75P represents the open collector output system, and QD75D represents the differential driver output system.
2: In speed-position switching control (ABS mode), the control unit available is "degree" only. (For details, refer to Section 9.2.17 "Speed-
position switching control (ABS mode)".
Model
PTP (Point To Point) control, path control (both linear and arc can be set), speed control, speedposition switching control, position-speed switching control
600 data /axis
(Can be set with peripheral device or sequence program.)
Parameters, positioning data, and block start data can be saved on flash ROM
(battery-less backup)
PTP control: Incremental system/absolute system
Speed-position switching control: Incremental system/absolute system
Position-speed switching control: Incremental system
Path control: Incremental system/absolute system
In absolute system
• –214748364.8 to 214748364.7 (µm)
• –21474.83648 to 21474.83647 (inch)
• 0 to 359.99999 (degree)
• –2147483648 to 2147483647 (pulse)
In incremental system
• –214748364.8 to 214748364.7 (µm)
• –21474.83648 to 21474.83647 (inch)
• –21474.83648 to 21474.83647 (degree)
• –2147483648 to 2147483647 (pulse)
In speed-position switching control (INC mode) / position-speed switching control
• 0 to 214748364.7 (µm)
• 0 to 21474.83647 (inch)
• 0 to 21474.83647 (degree)
• 0 to 2147483647 (pulse)
In speed-position switching control (ABS mode) 2
• 0 to 359.99999 (degree)
0.01 to 20000000.00 (mm/min)
0.001 to 2000000.000 (inch/min)
0.001 to 2000000.000 (degree/min)
1 to 1000000 (pulse/s)
Trapezoidal acceleration/deceleration, S-curve acceleration/deceleration
1 to 8388608 (ms)
Four patterns can be set for each of acceleration time and deceleration time
1 to 8388608 (ms)
QD75P1 1
QD75D1
QD75P2 1
QD75D2
2-axis linear interpolation
2-axis circular interpolation
QD75P4 1
QD75D4
2-, 3-, or 4-axis linear
interpolation
2-axis circular interpolation
2
3 - 4
Page 65

×
3 SPECIFICATIONS AND FUNCTIONS
MELSEC-Q
Item
Starting time 3
External wiring connection system 40-pin connector
Applicable wire size
Applicable connector for external
device
Max. output pulse
Max. connection distance between
servos
Internal current consumption
(5VDC)
Flash ROM write count Max. 100000 times
No. of occupied I/O points 32 points (I/O assignment: intelligent 32 points)
Outline dimensions
Weight 0.15 kg 0.15 kg 0.16 kg
1: QD75P represents the open collector output system, and QD75D represents the differential driver output system.
3: Using the "Pre-reading start function", the virtual start time can be shortened. (For details, refer to Section 12.7.7 "Pre-reading start
function".
Model
1-axis linear control 6ms
1-axis speed control 6ms
2-axis linear interpolation control (Composite speed) 7ms
2-axis linear interpolation control (Reference axis speed) 7ms
2-axis circular interpolation control 7ms
2-axis speed control 6ms
3-axis linear interpolation control (Composite speed) 7ms
3-axis linear interpolation control (Reference axis speed) 7ms
3-axis speed control 6ms
4-axis linear interpolation control 7ms
4-axis speed control 7ms
0.3mm
0.088 to 0.24mm
A6CON1, A6CON2, A6CON4 (sold separately)
QD75P1, QD75P2, QD75P4 : 200kpps
QD75D1, QD75D2, QD75D4 : 1Mpps
QD75P1, QD75P2, QD75P4 : 2m
QD75D1, QD75D2, QD75D4 : 10m
98 (H)
QD75P1 1
QD75D1
2
(22AWG) (for A6CON1 or A6CON4),
QD75P1 : 0.40A
QD75D1 : 0.52A
2
(28 to 24AWG) (for A6CON2)
27.4 (W) × 90 (D) mm
QD75P2 : 0.46A
QD75D2 : 0.56A
QD75P2 1
QD75D2
QD75P4 1
QD75D4
Factors in starting time extension
The following times will be added to
the starting time in the described
conditions:
• S-curve acceleration/
deceleration is selected: 0.5ms
• Other axis is in
operation: 1.5ms
• During continuous
positioning control: 0.2ms
• During continuous path
control: 1.0ms
QD75P4 : 0.58A
QD75D4 : 0.82A
Differential driver common terminal specifications(QD75D N/QD75D only)
Applicable wire size 0.24 to 2.5mm2 (24 to 12AWG)
Applicable sizes of two
wires inserted into same
spot of terminal
Screw tightening torque 0.5 to 0.6N • m
Solid wire: 0.2 to 0.8mm2 2 pcs.
2
Stranded wire: 0.2 to 0.8mm
2 pcs.
Fig. 3.1 Two wires inserted into same spot of terminal
3 - 5
Page 66

3 SPECIFICATIONS AND FUNCTIONS
3.2 List of functions
3.2.1 QD75 control functions
The QD75 has several functions. In this manual, the QD75 functions are categorized
and explained as follows.
Main functions
(1) OPR control
"OPR control" is a function that established the start point for carrying out
positioning control, and carries out positioning toward that start point. This is
used to return a workpiece, located at a position other than the OP when the
power is turned ON or after positioning stop, to the OP. The "OPR control" is
preregistered in the QD75 as the "Positioning start data No. 9001 (Machine
OPR)", and "Positioning start data No. 9002 (Fast OPR). (Refer to CHAPTER 8
"OPR CONTROL".)
(2) Major positioning control
This control is carried out using the "Positioning data" stored in the QD75.
Positioning control, such as position control and speed control, is executed by
setting the required items in this "positioning data" and starting that positioning
data. An "operation pattern" can be set in this "positioning data", and with this
whether to carry out control with continuous positioning data (ex.: positioning
data No. 1, No. 2, No. 3, ...) can be set. (Refer to CHAPTER 9 "MAJOR
POSITIONING CONTROL".)
(3) High-level positioning control
This control executes the "positioning data" stored in the QD75 using the
"block start data". The following types of applied positioning control can be
carried out.
•
Random blocks, handling several continuing positioning data items as
"blocks", can be executed in the designated order.
•
"Condition judgment" can be added to position control and speed control.
•
The operation of the designated positioning data No. that is set for multiple
axes can be started simultaneously. (Pulses are output simultaneously to
multiple servos.)
•
The designated positioning data can be executed repeatedly, etc.,
(Refer to CHAPTER 10 "HIGH-LEVEL POSITIONING CONTROL".)
(4) Manual control
By inputting a signal into the QD75 from an external source, the QD75 will
output a random pulse train and carry out control. Use this manual control to
move the workpiece to a random position (JOG operation), and to finely adjust
the positioning (inching operation, manual pulse generator operation), etc.
(Refer to CHAPTER 11 "MANUAL CONTROL".)
Sub functions
When executing the main functions, control compensation, limits and functions can
be added. (Refer to CHAPTER 12 "CONTROL SUB FUNCTIONS".)
Common functions
Common control using the QD75 for "parameter initialization" or "backup of
execution data" can be carried out. (Refer to CHAPTER 13 "COMMON
FUNCTIONS".)
MELSEC-Q
3 - 6
Page 67

3 SPECIFICATIONS AND FUNCTIONS
Main functions
MELSEC-Q
Sub functions
OPR control
[Positioning start No.]
[9001]
[9002]
Major positioning control
<Control system>
Position control
Speed control
Speed-position switching control
Position-speed switching control
Other control
High-level positioning control
Major positioning control
[Positioning start No.]
[9004]
Manual control
[Positioning start signal]
JOG start signal ON
Pulse input from manual pulse
generator
Control registered in QD75
Machine OPR
Fast OPR
Control using "Positioning data"
•1-axis linear control
•2-, 3-, or 4-axis linear
interpolation control
•1-axis fixed-feed control
•2-, 3-, or 4-axis fixed-feed
control
•2-axis circular interpolation
control
•1-axis linear control
•2-axis linear interpolation
control
•3-axis linear interpolation
control
•4-axis linear interpolation
control
•Current value changing,
NOP instruction
•JUMP instruction,
LOOP to LEND
<Operation pattern>
Independent
positioning control
(Positioning complete)
Continuous
positioning control
Continuous path
control
Control using "positioning data"
+ "Block start data"
Block start
(Normal start)
Condition start
[Block start data
Wait start
Simultaneous start
Repeated start
(FOR loop)
Repeated start
(FOR condition)
Multiple axes
simultaneous start
control
ol with signals input from external source
JOG operation, Inching
operation
Manual pulse generator
operation
(Functions characteristic to
machine OPR)
OPR retry function
OP shift function
<Functions that compensate
control>
Backlash compensation
function
Electronic gear function
Near pass function
Output timing selection of
near pass control
<Functions that limit control>
Speed limit function
Torque limit function
Software stroke limit function
Hardware stroke limit function
<Functions that change
control details>
Speed change function
Override function
Acceleration/deceleration
time change function
Torque change function
Target position change
function
<Absolute position restoration
function>
<Other functions>
Step function
Skip function
Continuous operation
interrupt function
M code output function
Teaching function
Command in-position
function
Acceleration/deceleration
processing function
Pre-reading start function
Deceleration start flag
function
Stop command processing
for deceleration stop function
Common
functions
Parameter initialization function Execution data backup function External I/O logic switching function
External I/O signal monitor function
3 - 7
Page 68

3 SPECIFICATIONS AND FUNCTIONS
3.2.2 QD75 main functions
The outline of the main functions for positioning control with the QD75 is described
Machine OPR control
Fast OPR control
OPR control
Linear control
(1-axis linear control)
(2-axis linear interpolation control)
(3-axis linear interpolation control)
(4-axis linear interpolation control)
Position
control
Speed
control
Speed-position switching control
Major positioning control
Position-speed switching control
Other
control
Fixed-feed control
(1-axis fixed-feed control)
(2-axis fixed-feed control)
(3-axis fixed-feed control)
(4-axis fixed-feed control)
2-axis circular interpolation control
Linear control
(1-axis speed control)
(2-axis speed control)
(3-axis speed control)
(4-axis speed control)
Current value changing
NOP instruction
JUMP instruction
LOOP Carries out loop control with repeated LOOP to LEND. 9.2.22
LEND
below. (Refer to PART 2 for details on each function.)
Main functions Details
MELSEC-Q
Mechanically establishes the positioning start point using
a near-point dog or stopper. (Positioning start No. 9001)
Positions a target to the OP address (
feed value) stored in the QD75 using machine OPR.
(Positioning start No. 9002)
Positions a target using a linear path to the address set in
the positioning data or to the position designated with the
movement amount.
Positions a target by the movement amount designated
with the amount set in the positioning data.
(With fixed-feed control, the "
is set to "0" when the control is started. With
2-, 3-, or 4-axis fixed-feed control, the fixed-feed is fed
along a linear path obtained by interpolation.)
Positions a target using an arc path to the address set in
the positioning data, or to the position designated with the
movement amount, sub point or center point.
Continuously outputs the pulses corresponding to the
command speed set in the positioning data.
First, carries out speed control, and then carries out
position control (positioning with designated address or
movement amount) by turning the "speed-position
switching signal" ON.
First, carries out position control, and then carries out
speed control (continuous output of the pulses
corresponding to the designated command speed) by
turning the "position-speed switching signal" ON.
Changes the Current feed value (
set in the positioning data.
The following two methods can be used.
(The machine feed value cannot be changed.)
• Current value changing using positioning data
• Current value changing using current value changing
start No. (No. 9003)
No execution control system. When NOP instruction is
set, this instruction is not executed and the operation of
the next data is started.
Unconditionally or conditionally jumps to designated
positioning data No.
Returns to the beginning of the loop control with repeated
LOOP to LEND.
Md.20
Md.21
Machine
Current feed value"
Md.20
) to the address
Reference
section
8.2
8.3
9.2.2
9.2.3
9.2.4
9.2.5
9.2.6
9.2.7
9.2.8
9.2.9
9.2.10
9.2.11
9.2.12
9.2.13
9.2.14
9.2.15
9.2.16
9.2.17
9.2.18
9.2.19
9.2.20
9.2.21
9.2.23
3 - 8
Page 69

3 SPECIFICATIONS AND FUNCTIONS
Main functions Details
Block start (Normal start)
Condition start
Wait start
Simultaneous start
High-level positioning control
Repeated start (FOR loop)
Repeated start (FOR condition)
Multiple axes simultaneous start
control
JOG operation Outputs a pulse to drive unit while the JOG start signal is ON. 11.2
Inching operation
Manual control
Manual pulse generator operation
With one start, executes the positioning data in a random block
with the set order.
Carries out condition judgment set in the "condition data" for
the designated positioning data, and then executes the "block
start data".
When the condition is established, the "block start data" is
executed. When not established, that "block start data" is
ignored, and the next point's "block start data" is executed.
Carries out condition judgment set in the "condition data" for
the designated positioning data, and then executes the "block
start data".
When the condition is established, the "block start data" is
executed. When not established, stops the control until the
condition is established. (Waits.)
Simultaneously executes the positioning data having the No.
for the axis designated with the "condition data". (Outputs
pulses at the same timing.)
Repeats the program from the block start data set with the
"FOR loop" to the block start data set in "NEXT" for the
designated No. of times.
Repeats the program from the block start data set with the
"FOR condition" to the block start data set in "NEXT" until the
conditions set in the "condition data" are established.
Starts the operation of multiple axes simultaneously according
to the pulse output level.
(Positioning start No. 9004, same as the "simultaneous start"
above)
Outputs pulses corresponding to minute movement amount by
manual operation to drive unit.
(Performs fine adjustment with the JOG start signal.)
Outputs pulses commanded with the manual pulse generator to
drive unit. (Carry out fine adjustment, etc., at the pulse level.)
With the "major positioning control" ("high-level positioning control"), whether or not to
continuously execute the positioning data can be set with the "operation pattern".
Da.1
Operation pattern
Independent positioning control
(Positioning complete)
Continuous positioning control
Continuous path control
Outlines of the "operation patterns" are given below.
Details
When "independent positioning control" is set for the operation
pattern of the started positioning data, only the designated
positioning data will be executed, and then the positioning will
end.
When "continuous positioning control" is set for the operation
pattern of the started positioning data, after the designated
positioning data is executed, the program will stop once, and
then the next following positioning data will be executed.
When "continuous path control" is set for the operation pattern
of the started positioning data, the designated positioning data
will be executed, and then without decelerating, the next
following positioning data will be executed.
MELSEC-Q
Reference
section
10.3.2
10.3.3
10.3.4
10.3.5
10.3.6
10.3.7
10.5
11.3
11.4
Reference
section
9.1.2
3 - 9
Page 70

3 SPECIFICATIONS AND FUNCTIONS
3.2.3 QD75 sub functions and common functions
MELSEC-Q
Functions
characteristic
to machine
OPR
Functions that
compensate
control
Functions that
limit control
Functions that
change control
details
Sub functions
The functions that assist positioning control using the QD75 are described below.
(Refer to PART 2 for details on each function.
Sub function Details
This function retries the machine OPR with the upper/lower
OPR retry function
OP shift function
Backlash compensation
function
Electronic gear function
Near pass function 1
Output timing selection of
near pass control
Speed limit function
Torque limit function 2
Software stroke limit
function
Hardware stroke limit
function
Speed change function
Override function
Acceleration/deceleration
time change function
Torque change function This function changes the "torque limit value" during control.
Target position change
function
limit switches during machine OPR. This allows machine OPR
to be carried out even if the axis is not returned to before the
near-point dog with JOG operation, etc.
After returning to the machine OP, this function compensates
the position by the designated distance from the machine OP
position and sets that position as the OP address.
This function compensates the mechanical backlash. Feed
pulses equivalent to the set backlash amount are output each
time the movement direction changes.
By setting the movement amount per pulse, this function can
freely change the machine movement amount per commanded
pulse.
A flexible positioning system that matches the machine system
can be structured with this function.
This function suppresses the machine vibration when the
positioning data is switched during continuous path control in
the interpolation control.
This function allows the user to select the timing to output the
difference (
end addresses in continuous path control, in which the
difference ( ) is output during the execution of the next
positioning data.
If the command speed exceeds "
during control, this function limits the commanded speed to
within the "
If the torque generated by the servomotor exceeds "
Torque limit setting value" during control, this function limits the
generated torque to within the "
value" setting range.
If a command outside of the upper/lower limit stroke limit
setting range, set in the parameters, is issued, this function will
not execute positioning for that command.
This function carries out deceleration stop with the limit switch
connected to the QD75 external device connector.
This function changes the speed during positioning.
Set the new speed in the speed change buffer memory
Cd.14
(
Speed change request (
This function changes the speed within a percentage of 1 to
300% during positioning. This is executed using "
Positioning operation speed override".
This function changes the acceleration/deceleration time during
speed change. (Functions added to the speed change function
and override function)
This function changes the target position during positioning.
Position and speed can be changed simultaneously.
) between the actual and the set positioning
Pr.8
Speed limit value"
Pr.8
Speed limit value" setting range.
Pr.17
Pr.17
Torque limit setting
New speed value), and change the speed with the
Cd.15
).
Cd.13
Reference
section
12.2.1
12.2.2
12.3.1
12.3.2
12.3.3
12.3.4
12.4.1
12.4.2
12.4.3
12.4.4
12.5.1
12.5.2
12.5.3
12.5.4
12.5.5
3 - 10
Page 71

3 SPECIFICATIONS AND FUNCTIONS
MELSEC-Q
1: The near pass function is featured as standard and is valid only for position control. It cannot be set to be invalid with parameters.
2: Using "Torque limit function" requires a "D/A conversion module" and a "drive unit capable of torque limit command with analog voltage".
Sub function Details
This function restores the absolute position of designated axis.
Absolute position restoration function 3
3: An I/O module (or general-purpose I/O function of QCPU) with arbitrary number of points and "the drive unit capable of configuring an
absolute position detection system (, which is a Mitsubishi General-Purpose AC Servo and has an absolute position detection function
(absolute position data transference protocol) equivalent to that of MR-J3restoration function".
By this function, the OPR after power ON from OFF is not
required once the OPR is executed when the system operation
is started.
A)" are required to execute the "absolute position
Reference
section
12.6
3 - 11
Page 72

3 SPECIFICATIONS AND FUNCTIONS
Sub function Details
This function temporarily stops the operation to confirm the
positioning operation during debugging, etc.
The operation can be stopped at each "automatic deceleration"
or "positioning data".
This function stops (decelerates to a stop) the positioning being
executed when the skip signal is input, and carries out the next
positioning.
This function issues a command for a sub work (clamp or drill
stop, tool change, etc.) corresponding to the M code No.
(0 to 65535) that can be set for each positioning data.
This function stores the address positioned with manual control
into the positioning address having the designated positioning
data No. (
At each automatic deceleration, this function calculates the
remaining distance for the QD75 to reach the positioning stop
position. When the value is less than the set value, the
"command in-position flag" is set to "1".
When using another auxiliary work before ending the control,
use this function as a trigger for the sub work.
This function adjusts the control acceleration/deceleration.
(acceleration/deceleration time and curve).
This function interrupts continuous operation. When this
request is accepted, the operation stops when the execution of
the current positioning data is completed.
Function that turns ON the flag when the constant speed status
or acceleration status switches to the deceleration status during
position control, whose operation pattern is "Positioning
complete", to make the stop timing known.
Function that selects a deceleration curve when a stop cause
occurs during deceleration stop processing to speed 0.
Other functions
Step function
Skip function
M code output function
Teaching function
Command in-position
function
Acceleration/deceleration
process function
Continuous operation
interrupt function
Pre-reading start function This function shortens the virtual start time. 12.7.7
Deceleration start flag
function
Stop command processing
for deceleration stop
function
Cd.39
MELSEC-Q
Reference
section
12.7.1
12.7.2
12.7.3
12.7.4
).
12.7.5
12.7.6
6.5.4
12.7.8
12.7.9
3 - 12
Page 73

3 SPECIFICATIONS AND FUNCTIONS
Common functions
The outline of the functions executed as necessary are described below.
Common functions Details
Parameter initialization function
Execution data backup function
External I/O signal logic switching function
External I/O signal monitor function
4: For the QD75P /QD75D , this function is available in GX Developer (SW6D5C-GPPW-E or later).
For the QD75P
N/QD75D N, external I/O signals cannot be monitored on GX Developer. Use the system monitor of GX Works2.
(Refer to PART 2 for details on each function.)
This function returns the "parameters" stored in the QD75
buffer memory and flash ROM to the default values.
The following two methods can be used.
1) Method using sequence program
2) Method using GX Configurator-QP
This functions stores the "setting data", currently being
executed, into the flash ROM.
1) Method using sequence program
2) Method using GX Configurator-QP
This function switches I/O signal logic according to externally
connected devices.
This function enables the use of the system that does not use b
(N.C.)-contact signals, such as Drive unit READY or
Upper/lower limit signal, by setting parameters to positive logic.
This function monitors the external I/O signal monitor
information in the module's detailed information which can be
displayed on the system monitor of GX Developer*4.
MELSEC-Q
Reference
section
13.2
13.3
13.4
13.5
3 - 13
Page 74

3 SPECIFICATIONS AND FUNCTIONS
MELSEC-Q
3.2.4 Combination of QD75 main functions and sub functions
With positioning control using the QD75, the main functions and sub functions can be
combined and used as necessary. A list of the main function and sub function
Main functions
OPR control
Major positioning
control
Manual control
: Always combine, : Combination possible, : Combination limited, : Combination not possible
1 The operation pattern is one of the "positioning data" setting items.
2 The near pass function is featured as standard and is valid only for setting continuous path control for position control.
3 Invalid during creep speed.
4 Invalid during continuous path control.
5 Combination with the inching operation is not available. (Inching operation does not perform acceleration/deceleration
processing.)
6 Valid for the reference axis only.
7 Valid for only the case where a deceleration start is made during position control.
8 Valid when using the positioning data but invalid when using the positioning start No. 9003.
combinations is given below.
Machine OPR control
Fast OPR control
1-axis linear control
2-, 3-, or 4-axis linear
interpolation control
1-axis fixed-feed
Position control
Speed control (1- to 4-axis)
Speed-position switching control
Position-speed switching control
Other control
JOG operation, inching operation
Manual pulse generator operation
control
2-, 3-, or 4-axis fixedfeed control
(interpolation)
2-axis circular
interpolation control
Current value changing
NOP instruction
JUMP instruction
LOOP to LEND
Sub functions
Combination with operation
pattern.
(Continuous path control
cannot be set)
(Continuous path control
cannot be set)
(Only independent positioning
control can be set)
(Continuous path control
cannot be set)
(Only independent positioning
control can be set)
(Continuous path control
cannot be set)
1
3 - 14
Functions characteristic
to machine OPR
OPR retry function
OP shift function
Page 75

3 SPECIFICATIONS AND FUNCTIONS
MELSEC-Q
Functions that
compensate control
Backlash compensation
function
Electronic gear function
Near pass function
2
Functions that limit
control
Output timing selection of
near pass control
Speed limit function
Torque limit function
Software stroke limit
Functions that change control
details
function
Hardware stroke limit
function
Speed change function
Override function
3 3 3
5 5 5
Acceleration/ deceleration
time change function
Torque change function
Target position change
function
Step function
Skip function
4
Other functions
M code output function
Teaching function
Command in-position
function
Acceleration/deceleration
process function
Pre-reading start function
8
5
Deceleration start flag
function
Stop command processing
for deceleration stop
function
6
6
7
3 - 15
Page 76

3 SPECIFICATIONS AND FUNCTIONS
3.3 Specifications of input/output signals with CPU module
3.3.1 List of input/output signals with CPU module
The QD75 uses 32 input points and 32 output points for exchanging data with the CPU
module.
The input/output signals when the QD75 is mounted in slot No. 0 of the main base unit
are shown below.
Device X refers to the signals input from the QD75 to the CPU module, and device Y
Device No. Signal name Device No. Signal name
X1A Y1A
X1B Y1B
X1C Y1C
X1D Y1D
X1E Y1E
Important
[Y1 to Y3], [Y18 to Y1F], [X2, X3], and [X18 to X1F] are used by the system, and cannot be
used by the user.
If these devices are used, the operation of the QD75 will not be guaranteed.
refers to the signals output from the CPU module to the QD75.
Signal direction: QD75 CPU module Signal direction: CPU module QD75
X0 QD75 READY Y0 PLC READY
X1 Synchronization flag Y1
X2 Y2
X3
X4 Axis 1 Y4 Axis 1
X5 Axis 2 Y5 Axis 2
X6 Axis 3 Y6 Axis 3
X7 Axis 4
X8 Axis 1 Y8 Axis 1 Forward run JOG start
X9 Axis 2 Y9 Axis 1 Reverse run JOG start
XA Axis 3 YA Axis 2 Forward run JOG start
XB Axis 4
XC Axis 1 YC Axis 3 Forward run JOG start
XD Axis 2 YD Axis 3 Reverse run JOG start
XE Axis 3 YE Axis 4 Forward run JOG start
XF Axis 4
X10 Axis 1 Y10 Axis 1
X11 Axis 2 Y11 Axis 2
X12 Axis 3 Y12 Axis 3
X13 Axis 4
X14 Axis 1 Y14 Axis 1
X15 Axis 2 Y15 Axis 2
X16 Axis 3 Y16 Axis 3
X17 Axis 4
X18 Y18
X19 Y19
X1F
Use prohibited
M code ON
Error detection
BUSY
Start complete
Positioning complete
Use prohibited
Y3
Y7 Axis 4
YB Axis 2 Reverse run JOG start
YF Axis 4 Reverse run JOG start
Y13 Axis 4
Y17 Axis 4
Y1F
MELSEC-Q
Use prohibited
Axis stop
Positioning start
Execution prohibition flag
Use prohibited
3 - 16
Page 77

3 SPECIFICATIONS AND FUNCTIONS
3.3.2 Details of input signals (QD75 CPU module)
MELSEC-Q
Device
No.
X0 QD75 READY ON: READY
X1 Synchronization
flag
X4
Axis 1
X5
X6
X7
X8
X9
XA
XB
XC
XD
XE
XF
X10
X11
X12
X13
M code ON OFF: M code is
Axis 2
Axis 3
Axis 4
Axis 1
Error
detection
Axis 2
Axis 3
Axis 4
BUSY
Axis 1
Axis 2
Axis 3
Axis 4
Start
Axis 1
complete
Axis 2
Axis 3
Axis 4
The ON/OFF timing and conditions of the input signals are shown below.
Signal name Details
OFF: Not READY/
Watch dog
timer error
OFF: Module
access
disabled
ON: Module
access
enabled
not set
ON: M code is
set
OFF: No error
ON: Error
occurrence
1 OFF: Not BUSY
ON: BUSY
OFF: Start
incomplete
ON: Start
complete
• When the PLC READY signal [Y0] turns from OFF to ON, the parameter setting
range is checked. If no error is found, this signal turns ON.
• When the PLC READY signal [Y0] turns OFF, this signal turns OFF.
• When watch dog timer error occurs, this signal turns OFF.
• This signal is used for interlock in a sequence program, etc.
PLC READY signal [Y0] OFF
QD75 READY signal [X0] OFF
• After the programmable controller is turned ON or the CPU module is reset, this
signal turns ON if the access from the CPU module to the QD75 is possible.
• When "Asynchronous" is selected in the module synchronization setting of the CPU
module, this signal can be used as interlock for the access from a sequence program
to the QD75.
• In the WITH mode, this signal turns ON when the positioning data operation is
started. In the AFTER mode, this signal turns ON when the positioning data
operation is completed.
• This signal turns OFF with the "
• When M code is not designated (when "
remain OFF.
• With using continuous path control for the positioning operation, the positioning will
continue even when this signal does not turn OFF. However, the warning "M CODE
ON SIGNAL START" (warning code: 503) will occur.
• When the PLC READY signal [Y0] turns OFF, the M code ON signal will also turn
OFF.
• If the operation is started while the M code is ON, the error "M CODE ON SIGNAL
START" (error code: 536) will occur.
• This signal turns ON when an error listed in Section 15.2 occurs, and turns OFF
when the error is reset on "
• This signal turns ON at the start of positioning, OPR or JOG operation. It turns OFF
when the "
remains ON during positioning.) This signal turns OFF when the positioning is
stopped with step operation.
• During manual pulse generator operation, this signal turns ON while the "
Manual pulse generator enable flag" is ON.
• This signal turns OFF at error completion or positioning stop.
• This signal turns ON when the positioning start signal turns ON and the QD75 starts
the positioning process.
(The start complete signal also turns ON during OPR control.)
Da.9
Dwell time" has passed after positioning stops. (This signal
Positioning start signal [Y10]
Cd.5 Axis error rest".
ON
ON
Cd.7
M code OFF request".
Da.10
ON
OFF
M code" is "0"), this signal will
Cd.21
ON
X14
X15
X16
X17
Axis 1
Axis 2
Axis 3
Axis 4
Positioning
complete
2
OFF: Positioning
incomplete
ON: Positioning
complete
Start complete signal [X10]
• This signal turns ON for the time set in "
time" from the instant when the positioning control for each positioning data No. is
completed. For the interpolation control, the positioning completed signal of
interpolation axis turns ON during the time set to the reference axis.
(It does not turn ON when "
• If positioning (including OPR), JOG/Inching operation, or manual pulse generator
operation is started while this signal is ON, the signal will turn OFF.
• This signal will not turn ON when speed control or positioning is canceled midway.
OFF
Pr.40
Positioning complete signal output
Pr.40
Positioning complete signal output time" is "0".)
3 - 17
Page 78

3 SPECIFICATIONS AND FUNCTIONS
Important
: The BUSY signal turns ON even when position control of movement amount 0 is
1
executed. However, since the ON time is short, the ON status may not be detected in the
sequence program.
: "Positioning complete" of the QD75 refers to the point when the pulse output from QD75 is
2
completed.
Thus, even if the QD75's positioning complete signal turns ON, the system may continue
operation.
3.3.3 Detail of output signals (CPU module QD75)
MELSEC-Q
Device No. Signal name Details
Y0 PLC READY OFF:
Y4
Axis 1
Y5
Y6
Y7
Y8
Y9
YA
YB
YC
YD
YE
YF
Y10
Y11
Y12
Y13
Y14
Y15
Y16
Y17
Axis stop OFF:
Axis 2
Axis 3
Axis 4
Axis 1
Forward run JOG start
Axis 1
Reverse run JOG start
Axis 2
Forward run JOG start
Axis 2
Reverse run JOG start
Axis 3
Forward run JOG start
Axis 3
Reverse run JOG start
Axis 4
Forward run JOG start
Axis 4
Reverse run JOG start
Axis 1
Positioning start OFF:
Axis 2
Axis 3
Axis 4
Execution prohibition
Axis 1
flag
Axis 2
Axis 3
Axis 4
The ON/OFF timing and conditions of the output signals are shown below.
PLC READY OFF
ON:
PLC READY ON
Axis stop not
requested
ON:
Axis stop requested
OFF:
JOG not started
ON:
JOG started
Positioning start not
requested
ON:
Positioning start
requested
OFF:
Not during execution
prohibition
ON:
During execution
prohibition
(a) This signal notifies the QD75 that the CPU module is normal.
• It is turned ON/OFF with the sequence program.
• The PLC READY signal is turned ON during positioning
control, OPR control, JOG operation, inching operation, and
manual pulse generator operation, unless the system is in the
peripheral device test mode.
(b) When parameters are changed, the PLC READY signal is turned
OFF depending on the parameter (Refer to CHAPTER 7.).
(c) The following processes are carried out when the PLC READY
signal turns from OFF to ON.
• The parameter setting range is checked.
• The QD75 READY signal [X0] turns ON.
(d) The following processes are carried out when the PLC READY
signal turns from ON to OFF.
In these cases, the OFF time should be set to 100ms or more.
• The QD75 READY signal [X0] turns OFF.
• The operating axis stops.
• The M code ON signal [X4 to X7] for each axis turns OFF, and
Md.25
"0" is stored in "
(e) When parameters or positioning data (No. 1 to 600) are written
from the peripheral device or CPU module to the flash ROM, the
PLC READY signal will turn OFF.
• When the axis stop signal turns ON, the OPR control, positioning
control, JOG operation, inching operation and manual pulse
generator operation will stop.
• By turning the axis stop signal ON during positioning operation, the
positioning operation will be "stopped".
• Whether to decelerate or suddenly stop can be selected with
Pr.39
"
• During interpolation control of the positioning operation, if the axis
stop signal of any axis turns ON, all axes in the interpolation
control will decelerate and stop.
• When the JOG start signal is ON, JOG operation will be carried
out at the "
OFF, the operation will decelerate and stop.
• When inching movement amount is set, the designated movement
amount is output for one control cycle and then the operation
stops.
• OPR operation or positioning operation is started.
• The positioning start signal is valid at the rising edge, and the
operation is started.
• When the positioning start signal turns ON during BUSY, the
warning "Start during operation" (warning code: 100) will occur.
• If the execution prohibition flag is ON when the positioning start
signal turns ON, positioning control does not start until the
execution prohibition flag turns OFF. (Pulse output not provided)
Used with the "Pre-reading start function". (Refer to Section
12.7.7)
Stop group 3 sudden stop selection".
Cd.17
Valid M code".
JOG speed". When the JOG start signal turns
3 - 18
Page 79

s
A
3 SPECIFICATIONS AND FUNCTIONS
3.4 Specifications of input/output interfaces with external devices
3.4.1 Electrical specifications of input/output signals
QD75P N/QD75D N
Signal name
Drive unit READY
(READY)
Stop signal (STOP)
Upper limit signal
(FLS)
Lower limit signal
(RLS)
(1) Input specifications
Rated input
voltage/current
24VDC/5mA
5VDC/5mA 4.5 to 6.1VDC
24VDC/5mA 12 to 26.4VDC
Working
voltage range
19.2 to
26.4VDC
ON
voltage/current
17.5VDC or more/
3.5mA or more
2VDC or more/
2mA or more
10VDC or more/
3mA or more
OFF
voltage/current
7VDC or less/
1.7mA or less
0.5VDC or less/
0.5mA or less
3VDC or less/
0.2mA or less
Input
resistance
Approx. 4.7k
Approx. 620
Approx. 4.7k
MELSEC-Q
Response
time
4ms or less
Ω
1ms or less
Ω
1ms or less
Ω
Zero signal
(PG05/PG024)
Manual pulse
generator A phase
(PULSE
GENERATOR A)
Manual pulse
generator B phase
(PULSE
GENERATOR B)
Near-point dog signal
(DOG)
External command
signal (CHG)
ON
3 s or less
1ms or more
OFF
Differential receiver equivalent to AM26LS32
(ON/OFF level ON: 1.8V or more, OFF: 0.6V or less)
5VDC/5mA 4.5 to 6.1VDC
1
Pulse width
4ms or more
2ms
or more
2ms or more
phase
(Duty ratio: 50%)
1ms or more
19.2 to
26.4VDC
19.2 to
26.4VDC
2
Phase difference
B phase
24VDC/5mA
24VDC/5mA
2.5VDC or more/
2mA or more
17.5VDC or more/
3.5mA or more
19VDC or more/
2.7mA or more
1VDC or less/
0.1mA or less
When the A phase leads the B phase, the
positioning address (current value) increases.
7VDC or less/
1.7mA or less
7VDC or less/
0.8mA or less
3 s or les
1ms or less
Approx. 1.1k
Approx. 4.3k
Approx. 7.7k
Ω
1ms or less
Ω
1ms or less
Ω
3 - 19
Page 80

φ
φ
3 SPECIFICATIONS AND FUNCTIONS
Signal name
QD75P N:
Pulse output F
(PULSE F)
(CW/PULSE/Phase A)
Pulse output R
(PULSE R)
(CCW/SIGN/Phase B)
QD75D
Pulse output F (+)
(PULSE F+)
(CW/PULSE/Phase A)
Pulse output R (+)
(PULSE R+)
(CCW/SIGN/Phase B)
Deviation counter clear
(CLEAR)
QD75P N
QD75D
N:
(2) Output specifications
Rated load
voltage
5 to 24VDC 4.75 to 30VDC
The rise/fall time and duty ratio must be adjusted, using the external device to be connected, to the
specifications of the external device. After confirming the specifications of the external device to be connected
in the above load voltage or max. load voltage current range, adjust the pulse waveform.
N Differential driver equivalent to Am26C31
•
Select the CW/CCW type, PULSE/SIGN type and A phase/B phase type using the parameter (
output mode) according to the drive unit specifications.
•
The relation of the pulse output with the "
selection" is shown below:
Pr.5
Positive logic Negative logic
Pulse
output mode
CW
CCW
PULSE
SIGN
A
B
5 to 24VDC 4.75 to 30VDC
Working load
voltage range
Forward run Reverse run Forward run Reverse run
High
Max. load
current/rush
current
50mA/1 point/
200mA 10ms or
less
Pr.5
Pulse output mode" and "
Pr.23
Output signal logic selection (bit 0)
Low
0.1A/1 point/0.4A
10ms or less
MELSEC-Q
Max. voltage
drop at ON
0.5VDC (TYP) 0.1mA or less —
1VDC (TYP)
2.5VDC (MAX)
Leakage current
at OFF
Pr.23
Output signal logic
Low
0.1mA or less
Response time
Pr.5
High
2ms or less
(resistance load)
Pulse
3 - 20
Page 81

s
A
3 SPECIFICATIONS AND FUNCTIONS
QD75P /QD75D
Signal name
Drive unit READY
(READY)
Stop signal (STOP)
Upper limit signal
(FLS)
Lower limit signal
(RLS)
(1) Input specifications
Rated input
voltage/current
24VDC/5mA
5VDC/5mA 4.5 to 6.1VDC
24VDC/5mA 12 to 26.4VDC
Working
voltage range
19.2 to
26.4VDC
ON
voltage/current
17.5VDC or more/
3.5mA or more
2VDC or more/
2mA or more
10VDC or more/
3mA or more
OFF
voltage/current
7VDC or less/
1.7mA or less
0.5VDC or less/
0.5mA or less
3VDC or less/
0.2mA or less
Input
resistance
Approx. 4.7k
Approx. 0.3k
Approx. 4.7k
MELSEC-Q
Response
time
4ms or less
Ω
1ms or less
Ω
1ms or less
Ω
Zero signal
(PG05/PG024)
Manual pulse
generator A phase
(PULSE
GENERATOR A)
Manual pulse
generator B phase
(PULSE
GENERATOR B)
Near-point dog signal
(DOG)
External command
signal (CHG)
ON
3 s or less
1ms or more
OFF
Differential receiver equivalent to AM26LS32
(ON/OFF level ON: 1.8V or more, OFF: 0.6V or less)
5VDC/5mA 4.5 to 6.1VDC
1
Pulse width
4ms or more
2ms
or more
2ms or more
phase
(Duty ratio: 50%)
1ms or more
19.2 to
26.4VDC
2
Phase difference
B phase
24VDC/5mA
2.5VDC or more/
2mA or more
17.5VDC or more/
3.5mA or more
1VDC or less/
0.1mA or less
When the A phase leads the B phase, the
positioning address (current value) increases.
7VDC or less/
1.7mA or less
3 s or les
1ms or less
Ω
Approx. 1.5k
1ms or less
Approx. 4.3k
Ω
3 - 21
Page 82

φ
φ
3 SPECIFICATIONS AND FUNCTIONS
Signal name
QD75P :
Pulse output F
(PULSE F)
(CW/PULSE/Phase A)
Pulse output R
(PULSE R)
(CCW/SIGN/Phase B)
QD75D
Pulse output F (+)
(PULSE F+)
(CW/PULSE/Phase A)
Pulse output R (+)
(PULSE R+)
(CCW/SIGN/Phase B)
Deviation counter clear
(CLEAR)
QD75P
QD75D
:
(2) Output specifications
Rated load
voltage
5 to 24VDC 4.75 to 30VDC
The rise/fall time and duty ratio must be adjusted, using the external device to be connected, to the
specifications of the external device. After confirming the specifications of the external device to be connected
in the above load voltage or max. load voltage current range, adjust the pulse waveform.
Differential driver equivalent to Am26C31
•
Select the CW/CCW type, PULSE/SIGN type and A phase/B phase type using the parameter (
output mode) according to the drive unit specifications.
•
The relation of the pulse output with the "
selection" is shown below:
Pr.5
Positive logic Negative logic
Pulse
output mode
CW
CCW
PULSE
SIGN
A
B
5 to 24VDC 4.75 to 30VDC
Working load
voltage range
Forward run Reverse run Forward run Reverse run
High
Max. load
current/rush
current
50mA/1 point/
200mA 10ms or
less
Pr.5
Pulse output mode" and "
Pr.23
Output signal logic selection (bit 0)
Low
0.1A/1 point/0.4A
10ms or less
MELSEC-Q
Max. voltage
drop at ON
0.5VDC (TYP) 0.1mA or less —
1VDC (TYP)
2.5VDC (MAX)
Leakage current
at OFF
Pr.23
Output signal logic
Low
0.1mA or less
Response time
Pr.5
High
2ms or less
(resistance load)
Pulse
3 - 22
Page 83

3 SPECIFICATIONS AND FUNCTIONS
3.4.2 Signal layout for external device connection connector
The specifications of the connector section, which is the input/output interface for the
QD75 and external device, are shown below.
The signal layout for the QD75 external device connection connector is shown.
MELSEC-Q
Axis 4(AX4) Axis 3(AX3) Axis 2(AX2) Axis 1(AX1)
Pin No. Signal name Pin No. Signal name
2B20 Vacant 2A20 Vacant 1B20 PULSER B– 1A20 PULSER B+
2B19 Vacant 2A19 Vacant 1B19 PULSER A– 1A19 PULSER A+
2B18
2B17
2B16
2B15
2B14 CLRCOM 2A14 CLRCOM 1B14 CLRCOM 1A14 CLRCOM
2B13 CLEAR 2A13 CLEAR 1B13 CLEAR 1A13 CLEAR
2B12 RDYCOM 2A12 RDYCOM 1B12 RDYCOM 1A12 RDYCOM
2B11 READY 2A11 READY 1B11 READY 1A11 READY
2B10 PG0COM 2A10 PG0COM 1B10 PG0COM 1A10 PG0COM
PULSE COM
3
PULSE R–
PULSE R
3
PULSE R+
PULSE COM
3
PULSE F–
PULSE F
3
PULSE F+
2B9 PG05 2A9 PG05 1B9 PG05 1A9 PG05
2B8 PG024 2A8 PG024 1B8 PG024 1A8 PG024
2B7 COM 2A7 COM 1B7 COM 1A7 COM
2B6 COM 2A6 COM 1B6 COM 1A6 COM
2B5 CHG 2A5 CHG 1B5 CHG 1A5 CHG
2B4 STOP 2A4 STOP 1B4 STOP 1A4 STOP
2B3 DOG 2A3 DOG 1B3 DOG 1A3 DOG
2B2 RLS 2A2 RLS 1B2 RLS 1A2 RLS
2B1 FLS 2A1 FLS 1B1 FLS 1A1 FLS
2A183 PULSE COM
PULSE R–
2A173 PULSE R
2A163 PULSE COM
2A15
3
PULSE R+
PULSE F–
PULSE F
PULSE F+
Pin No.
1B183 PULSE COM
1B173 PULSE R
1B163 PULSE COM
1B153 PULSE F
Signal name Pin No. Signal name
2
PULSE R–
PULSE R+
PULSE F–
PULSE F+
B20
B19
B18
B17
B16
B15
B14
B13
B12
B11
B10
B9
B8
B7
B6
B5
B4
B3
B2
B1
Pin layout
A20
A19
A18
A17
A16
A15
A14
A13
A12
A11
A10
A9
A8
A7
A6
A5
A4
A3
A2
A1
1A18 3 PULSE COM
1A17 3 PULSE R
1A16 3 PULSE COM
1A15 3 PULSE F
Front view of
the module
1: Pin No. "1
2: When a 1-axis module is used, pin Nos. 1B1 to 1B18 are "vacant".
3: The upper line indicates the signal name for the QD75P N/QD75P , and the lower line indicates the signal name for the
QD75D
N/QD75D .
" indicates the pin No. for the right connector. Pin No. "2
" indicates the pin No. for the left connector.
PULSE R–
PULSE R+
PULSE F–
PULSE F+
3 - 23
Page 84

A
3 SPECIFICATIONS AND FUNCTIONS
3.4.3 List of input/output signal details
MELSEC-Q
Signal name
Manual pulse generator A
phase (PULSER A+)
Manual pulse generator B
phase (PULSER B+)
Manual pulse generator A
common (PULSER A-)
Manual pulse generator B
common (PULSER B-)
Zero signal (+24V)
(PG024)
Zero signal (+5V)
(PG05)
Zero signal common
(PG0COM)
Pulse output F (+)
(PULSE F+)
Pulse output F (–)
(PULSE F-)
Pulse output R (+)
(PULSE R+)
Pulse output R (–)
(PULSE R-)
Pulse output F
(PULSE F)
Pulse output F common
(PULSE COM)
Pulse output R
(PULSE R)
Pulse output R common
(PULSE COM)
Upper limit signal (FLS) 1A1 1B1 2A1 2B1
Lower limit signal (RLS) 1A2 1B2 2A2 2B2
The details of each QD75 external device connection connector are shown below:
Pin No.
AX1 AX2 AX3 AX4
1A19
1A20
1B19
1B20
1A8 1B8 2A8 2B8
1A9 1B9 2A9 2B9
1A10 1B10 2A10 2B10 • Common for zero signal (+5V) and zero signal (+24V).
1A15
1B15
1A16
1B16
1B17
1A17
1B18
1A18
1B15
1A15
1B16
1A16
1B17
1A17
1B18
1A18
—
—
2A15
2B15
2A16
2B16
2B17
2A17
2B18
2A18
2B15
2A15
2B16
2A16
2B17
2A17
2B18
2A18
Signal details
(Negative logic is selected by external I/O signal logic selection)
• Input the pulse signal from the manual pulse generator A phase and B
phase.
• If the A phase leads the B phase, the positioning address will increase at the
rising and falling edges of each phase.
• If the B phase leads the A phase, the positioning address will decrease at the
rising and falling edges of each phase.
[When increased] [When decreased]
phase
B phase
Positioning
address
• Input the zero signal for machine OPR.
Use the pulse encoder's zero signal and so on.
• Also use this signal when the machine OPR method is the stopper method
and the OPR complete is input from an external source.
• The zero signal is detected at turning from OFF to ON.
• Output the positioning pulses and pulse sign for the differential driver output
system compatible drive unit.
(QD75D
• Output the positioning pulses and pulse sign for the open collector output
system compatible drive unit.
(QD75P
• This signal is input from the limit switch installed at the upper limit position of
the stroke.
• Positioning will stop when this signal turns OFF.
• When OPR retry function is valid, this will be the upper limit for finding the
near-point dog signal.
• This signal is input from the limit switch installed at the lower limit position of
the stroke.
• Positioning will stop when this signal turns OFF.
• When OPR retry function is valid, this will be the lower limit for finding the
near-point dog signal.
+1+1+1+1+1+1+1+1 -1 -1 -1 -1 -1 -1 -1 -1
N/QD75D only)
N/QD75P only)
A phase
B phase
Positioning
address
3 - 24
Page 85

3 SPECIFICATIONS AND FUNCTIONS
Signal name
Near-point dog signal (DOG) 1A3 1B3 2A3 2B3
Stop signal (STOP) 1A4 1B4 2A4 2B4
External command signal
(CHG)
Common (COM)
Drive unit READY (READY) 1A11 1B11 2A11 2B11
Drive unit READY common
(RDYCOM)
1A12 1B12 2A12 2B12 • Common for drive unit READY signal.
Pin No.
AX1 AX2 AX3 AX4
1A5 1B5 2A5 2B5
1A6
1B6
2A6
2B6
1A7
1B7
2A7
2B7
• This signal is used for detecting the near-point dog during OPR.
• The near-point dog signal is detected at turning from OFF to ON.
• Input this signal to stop positioning.
• When this signal turns ON, the QD75 will stop the positioning being
• Input a control switching signal during speed-position or position-speed
• Use this signal as the input signal of positioning start, speed change request,
• Common for upper/lower limit, near-point dog, stop, and external command
• This signal turns ON when the drive unit is normal and can accept the feed
• The QD75 checks the drive unit READY signal, and outputs the OPR request
• When the drive unit is inoperable, such as if an error occurs in the drive unit's
• If this signal is turned OFF during positioning, the system will stop. The
• When this signal turns OFF, the OPR complete signal will also turn OFF.
• This signal is output during machine OPR. (Note that it is not output during
MELSEC-Q
Signal details
(Negative logic is selected by external I/O signal logic selection)
executed.
After that, even if this signal is turned from ON to OFF, the system will not
start.
switching control.
and skip request from an external source.
Set the function to use this signal in "
Pr.42
External command function
selection".
signals.
pulse.
if the system is not in the READY state.
control power supply, this signal will turn OFF.
system will not start even if this signal is turned ON again.
Speed
2
Pr.46
.)
OPR speed
Pr.47
Creep speed
2
method.
Stopper
the count method
(Example) When machine OPR is carried out in the stopper
Deviation counter clear
(CLEAR)
Deviation counter clear common
(CLRCOM)
Near-point dog
1A13 1B13 2A13 2B13
CLEAR
Zero signal
Deviation counter
Pr.55
clear signal output time
• The output time of the deviation counter clear signal is set in "
Deviation counter clear signal output time".
• Use the drive unit that can reset the droop pulse amount in the internal
deviation counter when the QD75 turns this signal ON.
(Note) The deviation counter clear is a signal output by the QD75 during
machine OPR. It cannot be output randomly by the user.
1A14 1B14 2A14 2B14 • Common for deviation counter clear signal
3 - 25
After feed pulse output stops
Pr.55
Time
OFF
ON
OFF
ON
Page 86

3 SPECIFICATIONS AND FUNCTIONS
3.4.4 Input/output interface internal circuit
The outline diagrams of the internal circuits for the
QD75P1N/QD75D1N/QD75P1/QD75D1 external device connection interface are
shown below.
External wiring Pin No. Internal circuit Signal name
(1) Input (Common to QD75P1N, QD75D1N, QD75P1, and QD75D1)
MELSEC-Q
Need for wiring
1
5VDC
When upper
limit switch is
not used
When lower
limit switch is
not used
24VDC
5V
A
B
0V
Manual pulse
generator
(MR-HDP01)
1A3
1A1
1A2
1A4
1A5
1A6
1A7
(+)
1A19
(–)
1B19
(+)
1A20
(–)
1B20
Near-point dog signal DOG
Upper limit signal FLS
Lower limit signal RLS
Stop signal STOP
External command
signal
CHG
Common COM
PULSER A+
Manual pulse generator
A phase
PULSER A–
PULSER B+
Manual pulse generator
B phase
PULSER B–
1A11
1A12
Drive unit READY READY
Drive unit READY
common
1A8 PG024
Zero signal
1A9
1A10
Zero signal common PG0 COM
1: The symbols in Need for wiring column indicate the following meanings:
• : Wiring is necessary for positioning.
• : Wiring is necessary depending on the situation.
2: Either polarity can be connected to the common (COM).
3 - 26
RDY COM
PG05
Page 87

3 SPECIFICATIONS AND FUNCTIONS
(a) Input signal ON/OFF status
The input signal ON/OFF status is defied by the external wiring and logic
setting.
This is explained below with the example of near-point dog signal (DOG).
(The other input signals also perform the same operations as the near-point
Logic setting
3, 4
Negative logic
(Initial value)
dog signal (DOG).)
External wiring
(Voltage not applied)
(Voltage applied)
24VDC
24VDC
4
DOG
COM
DOG
COM
MELSEC-Q
ON/OFF status of near-point dog
signal (DOG) as seen from QD75
OFF
ON
(Voltage not applied)
DOG
24VDC
COM
Positive logic
3: Set the logic setting using "
"Section 5.2.3 Detailed parameters 1" and "Section 13.4 External I/O signal logic switching function".
4: When using the upper limit signal (FLS) or lower limit signal (RLS), always wire it as a "b" (normally
closed) contact in the negative logic setting. The signal will turn OFF to stop positioning.
(Voltage applied)
Pr.22
DOG
24VDC
COM
Input signal logic selection". For details of the settings, refer to
ON
OFF
(b) About logic setting and internal circuit
In the QD75, the case where the internal circuit (photocoupler) is OFF in
the negative logic setting is defined as "input signal OFF".
Reversely, the case where the internal circuit (photocoupler) is OFF in the
positive logic setting is defined as "input signal ON".
<Photocoupler ON/OFF status>
When voltage is not applied : Photocoupler OFF
When voltage is applied : Photocoupler ON
3 - 27
Page 88

3 SPECIFICATIONS AND FUNCTIONS
External wiring Pin No. Internal circuit Signal name
Load
5 to 24VDC
(2) Output (For QD75P1N and QD75P1)
1A13 Deviation counter clear CLEAR
1A14 Common CLEAR COM
MELSEC-Q
Need for wiring
1
Load
Load
5 to 24VDC
1A15 PULSE F
1A16
1A17 PULSE R
1A18
CW
A phase
PULSE
CCW
B phase
SIGN
External wiring Pin No. Internal circuit Signal name
Load
5 to 24VDC
(3) Output (For QD75D1N and QD75D1)
1A13 Deviation counter clear CLEAR
1A14
1A15 PULSE F+
1A16
1A17
1A18
2
2
Common CLEAR COM
CW
A phase
PULSE PULSE F–
CCW
B phase
SIGN
Differential driver
common terminal
PULSE COM
PULSE COM
PULSE R+
PULSE R–
PULSE COM
Need for wiring
1
1: The symbols in Need for wiring column indicate the following meanings:
• : Wiring is necessary for positioning.
•
: Wiring is necessary depending on the situation.
2: A terminal block at the bottom of the module. (Refer to Section 4.1.2)
3 - 28
Page 89

CHAPTER 4 INSTALLATION, WIRING AND
MAINTENANCE OF THE
PRODUCT
4
The installation, wiring and maintenance of the QD75 are explained in this chapter.
Important information such as precautions to prevent malfunctioning of the QD75,
accidents and injuries as well as the proper work methods are described.
Read this chapter thoroughly before starting installation, wiring or maintenance,
and always following the precautions.
4.1 Outline of installation, wiring and maintenance ........................................................... 4- 2
4.1.1 Installation, wiring and maintenance procedures .......................................... 4- 2
4.1.2 Names of each part ........................................................................................ 4- 3
4.1.3 Handling precautions ...................................................................................... 4- 5
4.2 Installation ..................................................................................................................... 4- 7
4.2.1 Installation precautions ................................................................................... 4- 7
4.3 Wiring ......................................................................................................................... 4- 8
4.3.1 Wiring precautions .......................................................................................... 4- 8
4.3.2 Wiring of the differential driver common terminal .........................................4- 14
4.4 Checking the installation and wiring ........................................................................... 4- 15
4.4.1 Items to check when installation and wiring are completed ......................... 4- 15
4.5 Maintenance ................................................................................................................4- 16
4.5.1 Maintenance precautions .............................................................................. 4- 16
4.5.2 Disposal precautions .....................................................................................4- 16
4 - 1
Page 90

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
4.1 Outline of installation, wiring and maintenance
4.1.1 Installation, wiring and maintenance procedures
The outline and procedures for QD75 installation, wiring and maintenance are shown
below.
Preparation
Installing the
module
STEP 1
Refer to
Section 4.1
STEP 2
Refer to
Section 4.2
Understand the "Handling precautions" and
"Names of each part" of the module (QD75)
Install the module (QD75) on the base unit.
MELSEC-Q
Wiring the
module
Checking
installation and
wiring
Servicing the
module
STEP 3
Refer to
Section 4.3
STEP 4
Refer to
Section 4.3
Wire the external device connection
connector pins, and assemble the connector.
Connect the cable to the module (QD75)
STEP 5
Refer to
Section 4.4
STEP 6
Refer to
Section 4.5
STEP 7
Refer to
Section 4.5
Operation of the positioning system.
Check the connection
Carry out maintenance
Dispose of the QD75
The cables used to connect the QD75 with the
drive unit, with the mechanical system input
(each input/output signal), and with the manual
pulse generator are manufactured by soldering
each signal wire onto the "external device
connection connector" sold separately.(Refer to
"Applicable connector for external wiring" in
Section 3.1 "Performance specifications" for
the optional connector.)
Wire and connect the manufactured cable to QD75
after reading the precautions for wiring.
Check the connection using GX Configurator-QP.
Carry out maintenance as necessary.
When the QD75 is no longer necessary,
dispose of it with the specified methods.
4 - 2
Page 91

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
4.1.2 Names of each part
(1) The part names of the QD75 are described with the QD75P N/QD75D N as an
example. The QD75P
indication of their model names and serial numbers
QD75P4N QD75D4N
1)
N/QD75D N and QD75P /QD75D are different in the
MELSEC-Q
1)
2)
3)
5)
2)
3)
5)
4)
No. Name Details
1) RUN indicator LED, ERR indicator LED
2) Axis display LED (AX1 to AX4)
3) External device connector
Differential driver common terminal
4)
(Differential driver output system (the
QD75D
5) Serial number plate Indicates the serial number of the QD75
N/QD75D ) only)
Refer to the next page.
Connector for connection with the drive unit, mechanical
system input or manual pulse generator. (40-pin connector)
AX1: Axis 1, AX2: Axis 2, AX3: Axis 3, AX4: Axis 4
For details, refer to Section 3.4.2 "Signal layout for external
device connection connector".
Terminal connected to the differential receiver common of the
drive unit. For details, refer to Section 4.3.2 "Wiring of the
differential driver common terminal".
4 - 3
Page 92

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
(2) The LED display indicates the following operation statuses of the QD75 and axes.
Display Attention point Description Display Attention point Description
RUN
ERR
RUN
ERR
RUN
ERR
RUN
ERR
AX1
AX2
RUN is OFF.
AX3
AX4
AX1
RUN illuminates.
AX2
AX3
ERR is OFF.
AX4
Hardware failure,
watch dog timer
error
The module
operates
normally.
AX1
AX2
ERR illuminates. System error
AX3
AX4
AX1
AX2
AX1 to AX4 are
AX3
OFF.
AX4
: Turns OFF. : Illuminates. : Flashes.
The axes are
stopped or on
standby.
RUN
ERR
RUN
ERR
RUN
ERR
The symbols in the Display column indicate the following
statuses:
AX1
AX2
AX1 (or other
AX3
axis) illuminates.
AX4
AX1
ERR flashes.
AX2
AX1 (or other
AX3
axis) flashes.
AX4
AX1
AX2
All LEDs
illuminate.
AX3
AX4
(3) The interface of each QD75 is as shown below.
QD75P1N QD75P2N QD75P4N QD75D1N QD75D2N QD75D4N
MELSEC-Q
The
corresponding
axis is in
operation.
An error occurs
on the
corresponding
axis.
Hardware failure
4 - 4
Page 93

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
4.1.3 Handling precautions
Handle the QD75 and cable while observing the following precautions.
Use the programmable controller in an environment that meets the general specifications
contained in QCPU User's Manual(Hardware Design, Maintenance and Inspection) to use.
Using this programmable controller in an environment outside the range of the general
specifications may cause electric shock, fire, malfunction, and damage to or deterioration of the
product.
Do not directly touch the conductive section and electronic parts of the module.
Failure to observe this could lead to module malfunctioning or trouble.
Make sure that foreign matter, such as cutting chips or wire scraps, do not enter the module.
Failure to observe this could lead to fires, trouble or malfunctioning.
Never disassemble or modify the module.
Failure to observe this could lead to trouble, malfunctioning, injuries or fires.
[1] Handling precautions
!
CAUTION
MELSEC-Q
4 - 5
Page 94

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
[2] Other precautions
(1) Main body
•
The main body case is made of plastic. Take care not to drop or apply
strong impacts onto the case.
•
Do not remove the QD75 PCB from the case. Failure to observe this
could lead to faults.
(2) Cable
•
Do not press on the cable with a sharp object.
•
Do not twist the cable with force.
•
Do not forcibly pull on the cable.
•
Do not step on the cable.
•
Do not place objects on the cable.
•
Do not damage the cable sheath.
(3) Installation environment
Do not install the module in the following type of environment.
•
Where the ambient temperature exceeds the 0 to 55°C range.
•
Where the ambient humidity exceeds the 5 to 95%RH range.
•
Where there is sudden temperature changes, or where dew condenses.
•
Where there is corrosive gas or flammable gas.
•
Where there are high levels of dust, conductive powder, such as iron
chips, oil mist, salt or organic solvents.
•
Where the module will be subject to direct sunlight.
•
Where there are strong electric fields or magnetic fields.
•
Where vibration or impact could be directly applied onto the main body.
MELSEC-Q
4 - 6
Page 95

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
4.2 Installation
4.2.1 Installation precautions
The precautions for installing the QD75 are given below. Refer to this section as well
as "4.1.3 Handling precautions" when carrying out the work.
Completely turn off the externally supplied power used in the system before cleaning or
tightening the screws.
Failure to turn all phases OFF could lead to electric shocks.
Installation precautions
!
WARNING
MELSEC-Q
!
CAUTION
Never disassemble or modify the module.
Failure to observe this could lead to trouble, malfunctioning, injuries or fires.
Completely turn off the externally supplied power used in the system before installing or
removing the module.
Failure to turn all phases OFF could lead to module trouble or malfunctioning.
Do not install/remove the module to/from the base unit, or the terminal block to/from the module
more than 50 times after the first use of the product (IEC 61131-2 compliant). Failure to do so
may cause the module to malfunction due to poor contact of connector.
Use the programmable controller in an environment that meets the general specifications
contained in QCPU User's Manual(Hardware Design, Maintenance and Inspection) to use.
Using this programmable controller in an environment outside the range of the general
specifications may cause electric shock, fire, malfunction, and damage to or deterioration of the
product.
Hold down the module mounting lever at the bottom of the module and securely insert the
module fixing projection into the fixing holes of the base module. Improper mounting of the
module may lead to malfunctioning, faults, or dropping.
When using the module in the environment subject to much vibration, secure the module with a
screw.
Tighten the screw within the range of the specified tightening torque.
Insufficient tightening may lead to dropping, short-circuit, or malfunctioning.
Excessive tightening may damage the screw or module, leading to dropping, short-circuit, or
malfunctioning
.
4 - 7
Page 96

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
4.3 Wiring
The precautions for wiring the QD75 are given below. Refer to this section as well as
"4.1.3 Handling precautions" when carrying out the work.
4.3.1 Wiring precautions
(1) Always confirm the terminal layout before connecting the wires to the QD75.
(For the terminal layout, refer to Section 3.4.2 "Signal layout for external device
connection connector".)
(2) Correctly solder the external wiring connector. An incomplete soldering could lead
to malfunctioning.
(3) Make sure that foreign matter such as cutting chips and wire scraps does not
enter the QD75. Failure to observe this could lead to fires, faults or
malfunctioning.
(4) A protective label is attached on the top of the QD75 to avoid foreign matter such
as wire scraps from entering inside during wiring process. Do not remove the label
until the wiring is completed. Before starting the system, however, be sure to
remove the label to ensure heat radiation.
(5) Tighten the connector screws within the specified torque range.
Undertightening can cause short circuit, fire, or malfunction.
Overtightening can damage the screw and/or module, resulting in drop, short
circuit, fire, or malfunction.
(6) When disconnecting the cable from the QD75 or the drive unit, do not pull the
cable by the cable part. Hold the connector part of the cable. Pulling the cable
connected to the QD75 or the drive unit may result in malfunction or damage to
the module, drive unit, or cable.
(7) Do not bundle or adjacently lay the connection cable connected to the QD75
external I/O signals or drive unit with the main circuit line, power line, or the load
line other than that for the programmable controller. Separate these by 100mm as
a guide. Failure to observe this could lead to malfunctioning caused by noise,
surge, or induction.
(8) The shielded cable for connecting QD75 can be secured in place.
If the shielded cable is not secured, unevenness or movement of the shielded
cable or careless pulling on it could result in damage to the QD75 or drive unit or
shielded cable or defective cable connections could cause mis-operation of the
unit.
(9) If the cable connected to the QD75 and the power line must be adjacently laid
(less than 100mm), use a shielded cable. Ground the shield of the cable securely
to the control panel on the QD75 side.
page.)
(A wiring example is given on the next
MELSEC-Q
4 - 8
Page 97

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
[Applicable connectors]
The table below shows applicable connectors for external devices. When wiring, use
applicable wires and an appropriate tightening torque.
Mitsubishi 40-pin connector Wire
Model Tightening torque Diameter Type Material
A6CON1 0.3mm2(22AWG)
A6CON2
0.20 to 0.29N • m
0.088 to 0.24mm
(28 to 24AWG)
2
Stranded Copper
MELSEC-Q
Temperature
rating
75°C or more
A6CON4
[Wiring example of shielded cable]
The following shows a wiring example for noise reduction in the case where the
connector A6CON1 is used.
Connector (A6CON1)
To QD75
The length between the connector and the shielded
cables should be the shortest possible.
To external devices
(for two drive units)
0.3mm2(22AWG)
Use the shortest possible length to
ground the 2mm
(The shield must be grounded on
the QD75 side.)
Shielded
cable
To external device
To drive unit
Connector
2
or more FG wire.
Drive
unit
4 - 9
Page 98

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
[Processing example of shielded cables]
Connect a cable with the FG wire and bind all shielded cables as shown below.
Coat the wire with
insulaing tape.
Remove the covering from all shielded cables and bind
th e ap p eared s h i e ld with a c o nducti v e t ape.
Solder the shield of any one of the
shielded cables to the FG wire.
MELSEC-Q
4 - 10
Page 99

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
Assembling of connector (A6CON1)
Wrap the coated parts
with a heat contractile
tube.
MELSEC-Q
4 - 11
Page 100

4 INSTALLATION, WIRING AND MAINTENANCE OF THE PRODUCT
(10) For compliance with the EMC and Low Voltage Directives, satisfy the
following requirements.
•
The cable connecting the drive unit and the QD75 must be the length
below.
QD75P
QD75D
•
The cables connected to the external device for the QD75 must be 30m or
shorter. (except the one for pulse output)
Even when compliance with the EMC Directive is not required, attaching an
AD75CK type cable clamp to the cable connected to the QD75 may reduce
the influence of external noise.
N/QD75P : 2m or shorter
N/QD75D : 10m or shorter
•
Use shielded twisted pair cables and an AD75CK type cable clamp
(manufactured by Mitsubishi Electric) to ground the cables to the
control box.
MELSEC-Q
Inside control box
QD75
20cm(7.88inch)
to 30cm(11.82inch)
AD75CK
For details on AD75CK, refer to the following.
AD75CK-type Cable Clamping Instruction Manual
4 - 12
 Loading...
Loading...