

Page 1
VECTOR INVERTER
FR-V500
INSTRUCTION MANUAL (Detailed)
HIGH PRECISION & FAST
RESPONSE VECTOR INVERTER
FR-V520-1.5K to 55K
FR-V540-1.5K to 55K
.
WIRING
VECTOR
CONTROL
1
2
PARAMETERS
SPECIFICATIONS
3
4
Page 2
Thank you for choosing this Mitsubishi vector inverter. This Instruction Manual (detailed) provides instructions for advanced use of the
FR-V500 series inverters. Incorrect handling might cause an unexpected fault. Before using the inverter, always read this Instruction
Manual and the Instruction Manual (basic) [IB-0600064] packed with the product carefully to use the equipment to its optimum
performance.
This section is specifically about safety matters
Do not attempt to install, operate, maintain or inspect the inverter until you have read through the Instruction Manual (basic) and appended
documents carefully and can use the equipment correctly. Do not use the inverter until you have a full knowledge of the equipment, safety
information and instructions. In this Instruction Manual, the safety instruction levels are classified into "WARNING" and "CAUTION".
WARNING
CAUTION
Note that even the level may lead to a serious consequence according to conditions. Please follow the instructions of
both levels because they are important to personnel safety.
CAUTION
Assumes that incorrect handling may cause hazardous conditions, resulting in death or severe injury.
Assumes that incorrect handling may cause hazardous conditions, resulting in medium or slight
injury, or may cause physical damage only.
1. Electric Shock Prevention
WARNING
z While power is on or when the inverter is running, do not open the front cover. You may get an electric shock.
z Do not run the inverter with the front cover or wiring cover removed. Otherwise, you may access the exposed high-voltage terminals
or the charging part of the circuitry and get an electric shock.
z Even If power is off, do not remove the front cover except for wiring or periodic inspection. You may access the charged inverter
circuits and get an electric shock.
z Before starting wiring or inspection, check to make sure that the inverter power indicator lamp is off, wait for at least 10 minutes after
the power supply has been switched off, and check that there are no residual voltage using a tester or the like. The capacitor is
charged with high voltage for some time after power off and it is dangerous.
z This inverter must be earthed (grounded). Earthing (Grounding) must conform to the requirements of national and local safety
regulations and electrical codes. (NEC section 250, IEC 536 class 1 and other applicable standards).
z Any person who is involved in wiring or inspection of this equipment should be fully competent to do the work.
z Always install the inverter before wiring. Otherwise, you may get an electric shock or be injured.
z Perform setting dial and key operations with dry hands to prevent an electric shock.
z Do not subject the cables to scratches, excessive stress, heavy loads or pinching. Otherwise, you may get an electric shock.
z Do not change the cooling fan while power is on. It is dangerous to change the cooling fan while power is on.
2. Fire Prevention
CAUTION
z Install the inverter on an incombustible wall without holes, etc. Mounting it to or near combustible material can cause a fire.
z If the inverter has become faulty, switch off the inverter power. A continuous flow of large current could cause a fire.
z When a brake resistor is used, use an alarm signal to switch power off. Otherwise, the brake resistor will overheat abnormally due to
a brake transistor or other fault, resulting in a fire.
z Do not connect a resistor directly to the DC terminals P, N. This could cause a fire.
3.Injury Prevention
CAUTION
z Apply only the voltage specified in the instruction manual to each terminal to prevent damage etc.
z Ensure that the cables are connected to the correct terminals. Otherwise damage etc. may occur.
z Always make sure that polarity is correct to prevent damage etc.
z While power is on and for some time after power-off, do not touch the inverter or brake resistor as they are hot and you may get burnt.
4. Additional Instructions
Also note the following points to prevent an accidental failure, injury, electric shock, etc.
1) Transportation and installation
CAUTION
z When carrying products, use correct lifting gear to prevent injury.
z Do not stack the inverter boxes higher than the number recommended.
z Ensure that installation position and material can withstand the weight of the inverter. Install according to the information i
instru
ction manual.
z Do not operate if the inverter is damaged or has parts missing.
z When carrying the inverter, do not hold it by the front cover; it may fall off or fail.
z Do not stand or rest heavy objects on the inverter.
z Check the inverter mounting orientation is correct.
z Prevent screws, wire fragments, other conductive bodies, oil or other flammable substances from entering the inverter.
z Do not drop the inverter, or subject it to impact
z Use the inverter under the following environmental conditions:
Ambient temperature -10°C to +50°C (non-freezing)
Ambient humidity 90%RH or less (non-condensing)
Storage temperature -20°C to +65°C*
Ambience Indoors (free from corrosive gas, flammable gas, oil mist, dust and dirt)
Environment
Altitude, vibration
*Temperature applicable for a short time, e.g. in transit.
Maximum 1000m above sea level for standard operation.
After that derate by 3% for every extra 500m up to 2500m (91%). 5.9m/s
2
or less
n the
A-1
Page 3
2) Wiring
CAUTION
z Do not fit capacitive equipment such as power factor correction capacitor, surge suppressor or radio noise filter (option FR-BIF) to
the inverter output side.
z The connection orientation of the output cables (terminals U, V, W) to the motor will affect the direction of rotation of the motor.
3) Trial run
CAUTION
z Check all parameters, and ensure that the machine will not be damaged by a sudden start-up.
4) Operation
WARNING
z When you have chosen the retry function, stay away from the equipment as it will restart suddenly after an alarm stop.
z Since the [STOP] key is valid only when functions are set (refer to page 115) provide a circuit and switch separately to make an
emergency stop (power off, mechanical brake operation for emergency stop, etc).
z Make sure that the start signal is off before resetting the inverter alarm. A failure to do so may restart the motor suddenly.
z The load used should be a three-phase induction motor only. Connection of any other electrical equipment to the inverter output may
damage the equipment.
z Do not modify the equipment.
z Do not perform parts removal which is not instructed in this manual. Doing so may lead to fault or damage of the inverter.
CAUTION
z The electronic thermal relay function does not guarantee protection of the motor from overheating.
z Do not use a magnetic contactor on the inverter input for frequent starting/stopping of the inverter.
z Use a noise filter to reduce the effect of electromagnetic interference. Otherwise nearby electronic equipment may be affected.
z Take measures to suppress harmonics. Otherwise power supply harmonics from the inverter may heat/damage the power capacitor
and generator.
z When a 400V class motor is inverter-driven, please use an insulation-enhanced motor or measures taken to suppress surge
voltages. Surge voltages attributable to the wiring constants may occur at the motor terminals, deteriorating the insulation of the
motor.
z When parameter clear or all clear is performed, each parameter returns to the factory setting. Each parameter returns to the factory
setting.
z The inverter can be easily set for high-speed operation. Before changing its setting, fully examine the performances of the motor and machine.
z In addition to the inverter's holding function, install a holding device to ensure safety.
z Before running an inverter which had been stored for a long period, always perform inspection and test operation. In addition to the
inverter's holding function, install a holding device to ensure safety.
5) Emergency stop
CAUTION
z Provide a safety backup such as an emergency brake which will prevent the machine and equipment from hazardous conditions if
the inverter fails.
z When the breaker on the inverter input side trips, check for the wiring fault (short circuit), damage to internal parts of the inverter, etc.
Identify the cause of the trip, then remove the cause and power on the breaker.
z When the protective function is activated, take the appropriate corrective action, then reset the inverter, and resume operation.
6) Maintenance, inspection and parts replacement
CAUTION
z Do not carry out a megger (insulation resistance) test on the control circuit of the inverter.
7) Disposing of the inverter
CAUTION
z Treat as industrial waste.
8) General instructions
Many of the diagrams and drawings in this Instruction Manual (basic) show the inverter without a cover, or partially open. Never operate
the inverter in this manner. Always replace the cover and follow this Instruction Manual (basic) when operating the inverter.
A-2
Page 4

CONTENTS
1 WIRING 1
1.1 Internal block diagram......................................................................................... 2
1.2 Main circuit terminal specifications ...................................................................3
1.3 Connection of stand-alone option units ............................................................4
1.3.1 Connection of the dedicated external brake resistor (FR-ABR) .........................................................4
1.3.2 Connection of the brake unit (FR-BU)................................................................................................5
1.3.3 Connection of the brake unit (BU type) ..............................................................................................6
1.3.4 Connection of the high power factor converter (FR-HC)....................................................................6
1.3.5 Connection of the power regeneration common converter (FR-CV)..................................................7
1.3.6 Connection of the DC reactor (FR-HEL/BEL).....................................................................................7
1.4 Control circuit terminal specifications ..............................................................8
1.4.1 Connecting the control circuit to a power supply separately from the main circuit...........................10
1.5 Precautions for use of the vector inverter....................................................... 11
1.6 Others ................................................................................................................. 12
1.6.1 Leakage currents and countermeasures..........................................................................................12
1.6.2 Power off and magnetic contactor (MC)...........................................................................................14
1.6.3 Installation of reactor........................................................................................................................15
1.6.4 Notes on earthing (grounding)..........................................................................................................16
1.6.5 Inverter-generated noises and their reduction techniques ...............................................................17
1.6.6 Power supply harmonics ..................................................................................................................19
1.6.7 Harmonic suppression guidelines ....................................................................................................20
1.6.8 Inverter-driven 400V class motor .....................................................................................................22
1.6.9 Using the PU connector for computer link........................................................................................23
CONTENTS
1.7 Input terminals ................................................................................................... 26
1.7.1 Run (start) and stop (STF, STR, STOP) ..........................................................................................26
1.7.2 External thermal relay input (OH).....................................................................................................27
1.7.3 Speed setting potentiometer connection (10E, 2 (1), 5)...................................................................27
1.7.4 Torque setting input signal and motor-generated torque (terminals 3, 5) ........................................28
1.7.5 Meter connection method and adjustment (DA1, DA2)....................................................................28
1.7.6 Common terminals (SD, 5, SE)........................................................................................................29
1.7.7 Signal inputs by contact-less switches.............................................................................................29
1.8 How to use the input signals (assigned terminals DI1 to DI4, STR)
(Pr. 180 to Pr. 183, Pr. 187)................................................................................ 30
1.8.1 Multi-speed setting (RL, RM, RH, REX signals): Pr. 180 to Pr. 183, Pr. 187 setting
"0, 1, 2, 8"
Remote setting (RL, RM, RH signals): Pr. 180 to Pr. 183, Pr. 187 setting "0, 1, 2" .........................30
1.8.2 Second function selection/second motor switchover (RT signal)
: Pr. 180 to Pr. 183, Pr. 187 setting "3" ............................................................................................30
1.8.3 Jog operation (jog signal): Pr. 180 to Pr. 183, Pr. 187 setting "5" ....................................................30
1.8.4 Third function selection (X9 signal): Pr. 180 to Pr. 183, Pr. 187 setting "9" .....................................31
1.8.5 FR-HC, FR-CV connection (X10 signal): Pr. 180 to Pr. 183, Pr. 187 setting "10"............................31
1.8.6 PU operation external interlock signal (X12 signal): Pr. 180 to Pr. 183, Pr. 187 setting "12"...........31
1.8.7 PID control enable terminal: Pr. 180 to Pr. 183, Pr. 187 setting "14" ...............................................31
1.8.8 Brake sequence opening signal (BRI signal): Pr. 180 to Pr. 183, Pr. 187 setting "15" ....................31
1.8.9 PU operation/external operation switchover: Pr. 180 to Pr. 183, Pr. 187 setting "16"......................31
1.8.10 S-pattern acceleration/deceleration C switchover terminal (X20 signal)
: Pr. 180 to Pr. 183, Pr. 187 setting "20" ..........................................................................................31
1.8.11 Orientation command (X22 signal): Pr. 180 to Pr. 183, Pr. 187 setting "22"....................................32
1.8.12 Pre-excitation/servo on (LX signal): Pr. 180 to Pr. 183, Pr. 187 setting "23" ...................................32
I
Page 5
1.8.13 Output stop (MRS signal): Pr. 180 to Pr. 183, Pr. 187 setting "24" ..................................................32
1.8.14 Start self-holding selection (STOP signal): Pr. 180 to Pr. 183, Pr. 187 setting "25".........................32
1.8.15 Control mode changing (MC signal): Pr. 180 to Pr. 183, Pr. 187 setting "26"..................................33
1.8.16 Torque limit selection (TL signal): Pr. 180 to Pr. 183, Pr. 187 setting "27" ......................................33
1.8.17 Start time tuning (X28 signal): Pr. 180 to Pr. 183, Pr. 187 setting "28" ............................................33
1.8.18 Torque bias selection 1 (X42 signal): Pr. 180 to Pr. 183, Pr. 187 setting "42"
Torque bias selection 2 (X43 signal): Pr. 180 to Pr. 183, Pr. 187 setting "43".................................33
1.8.19 P control selection (P/PI control switchover) (X44 signal):
Pr. 180 to Pr. 183, Pr. 187 setting "44" ............................................................................................34
1.9 How to use the output signals (assigned terminals DO1 to DO3, ABC)
(Pr. 190 to Pr. 192, Pr. 195)................................................................................ 35
1.10 Design information to be checked ...................................................................37
1.11 Using the second motor ....................................................................................38
1.11.1 Wiring diagram (second motor)........................................................................................................38
1.11.2 Second motor setting parameters ...................................................................................................38
1.12 Using the conventional motor and other motors............................................ 39
1.12.1 Conventional motor (SF-VR, SF-JR with encoder) ..........................................................................39
1.12.2 Precautions for and wiring of the motor with encoder (SF-JR with encoder) ...................................40
2 VECTOR CONTROL 41
2.1 What is vector control? .....................................................................................42
2.2 Speed control ..................................................................................................... 44
2.2.1 Outline of speed control ...................................................................................................................44
2.2.2 Easy gain tuning function block diagram..........................................................................................44
2.3 Fine adjustment of gains for speed control .................................................... 45
2.3.1 Control block diagram ......................................................................................................................45
2.3.2 Concept of adjustment of manual input speed control gains............................................................46
2.3.3 Speed control gain adjustment procedure (Pr. 820, Pr. 821)...........................................................46
2.3.4 Troubleshooting................................................................................................................................47
2.3.5 Speed feed forward control, model adaptive speed control (Pr. 828, Pr. 877 to Pr. 881)................49
2.4 Torque control.................................................................................................... 51
2.4.1 Outline of torque control...................................................................................................................51
2.5 Fine adjustment for torque control .................................................................. 52
2.5.1 Control block diagram ......................................................................................................................52
2.6 Gain adjustment for torque control.................................................................. 53
2.6.1 Concept of torque control gains .......................................................................................................53
2.6.2 Gain adjustment procedure..............................................................................................................53
2.6.3 Troubleshooting................................................................................................................................54
2.7 Position control (Pr. 419 to Pr. 430, Pr. 464 to Pr. 494) .................................. 55
2.7.1 Connection diagram .........................................................................................................................55
2.7.2 Position control step.........................................................................................................................56
2.7.3 Control block diagram ......................................................................................................................57
2.7.4 Parameter.........................................................................................................................................57
2.7.5 Conditional position feed function by contact input (Pr. 419 = 0).....................................................59
2.7.6 Setting the electronic gear................................................................................................................60
2.7.7 In-position width (Pr. 426) ................................................................................................................62
2.7.8 Excessive level error (Pr. 427) .........................................................................................................62
II
Page 6
2.7.9 Pulse monitor selection (Pr. 430) .....................................................................................................62
2.7.10 Concept of position control gains .....................................................................................................62
2.7.11 Troubleshooting................................................................................................................................63
2.7.12 Position control is not exercised normally ........................................................................................64
3 PARAMETERS 65
3.1 Parameter list ..................................................................................................... 66
3.2 At-a-glance guide to functions ......................................................................... 73
3.3 Basic functions (Pr. 0 to Pr. 9).......................................................................... 76
3.3.1 Torque boost (Pr. 0) .........................................................................................................................76
3.3.2 Maximum and minimum speed settings (Pr. 1 , Pr. 2) ....................................................................76
3.3.3 Base frequency, base frequency voltage (Pr. 3, Pr. 19)...................................................................77
3.3.4 Multi-speed operation (Pr. 4 to Pr. 6, Pr. 24 to Pr. 27, Pr. 232 to Pr. 239)......................................77
3.3.5 Acceleration and deceleration time (Pr. 7, Pr. 8, Pr. 20, Pr. 21, Pr. 44, Pr. 45, Pr. 110, Pr. 111)...78
3.3.6 Motor overheat protection (Pr. 9, Pr. 452, Pr. 876 ) .........................................................................80
3.4 Standard operation functions (Pr. 10 to Pr. 16) .............................................. 82
3.4.1 DC injection brake operation (Pr. 10, Pr.11, Pr. 12, Pr.802) ...........................................................82
3.4.2 Starting speed (Pr. 13) .....................................................................................................................84
3.4.3 Jog operation (Pr. 15, Pr. 16)...........................................................................................................85
3.5 Operation selection functions 1 (Pr. 17 to Pr. 37) ...........................................86
3.5.1 Inverter output stop (MRS) (Pr. 17)..................................................................................................86
3.5.2 Torque limit (Pr. 22, Pr. 803, Pr. 810 to Pr. 817)............................................................................87
3.5.3 RH, RM, RL signal input compensation (Pr. 28) ..............................................................................88
3.5.4 S-pattern acceleration/deceleration curve (Pr. 29, Pr. 140 to Pr. 143, Pr. 380 to Pr. 383) ..............89
3.5.5 Regenerative brake duty (Pr. 30, Pr. 70)..........................................................................................92
3.5.6 Speed jump (Pr. 31 to Pr. 36)...........................................................................................................93
3.5.7 Speed display (Pr. 37, Pr. 144, Pr. 505 )..........................................................................................93
CONTENTS
3.6 Output terminal functions (Pr. 41 to Pr. 50)..................................................... 95
3.6.1 Up-to-speed sensitivity (Pr. 41)........................................................................................................95
3.6.2 Speed detection (Pr. 42, Pr. 43, Pr. 50, Pr. 116)..............................................................................95
3.7 Display functions 1 (Pr. 52 to Pr. 56)................................................................ 97
3.7.1 Monitor display/DA1, DA2 terminal function selection (Pr. 52 to Pr. 54, Pr. 158) ...........................97
3.7.2 Monitoring reference (Pr. 55, Pr. 56, Pr. 866) ................................................................................100
3.8 Automatic restart (Pr. 57, Pr. 58) .................................................................... 101
3.8.1 Automatic restart after instantaneous power failure (Pr. 57, Pr. 58, Pr. 162 to Pr. 165) ................101
3.9 Additional functions (Pr. 59) ...........................................................................103
3.9.1 Remote setting function selection (Pr. 59 ) ....................................................................................103
3.10 Brake sequence (Pr. 60, Pr. 278 to Pr. 285) ................................................... 106
3.10.1 Brake sequence function (Pr. 60, Pr. 278 to Pr. 285).....................................................................106
3.11 Operation selection function 2 (Pr. 65 to Pr. 79) ........................................... 109
3.11.1 Retry function (Pr. 65, Pr. 67 to Pr. 69)..........................................................................................109
3.11.2 Applied motor (Pr. 71, Pr. 450).......................................................................................................111
3.11.3 PWM carrier frequency selection (Pr. 72, Pr. 240).........................................................................112
3.11.4 Speed setting signal on/off selection (Pr. 73).................................................................................113
3.11.5 Reset selection/disconnected PU detection/PU stop selection (Pr. 75) .........................................115
3.11.6 Parameter write disable selection (Pr. 77) .....................................................................................116
III
Page 7

3.11.7 Reverse rotation prevention selection (Pr. 78 ) ..............................................................................117
3.11.8 Operation mode selection (Pr. 79) .................................................................................................117
3.12 Offline auto tuning (Pr. 80 to Pr. 96)............................................................... 120
3.12.1 Offline auto tuning function
(Pr. 9, Pr. 80, Pr. 81, Pr. 83, Pr. 84, Pr. 71, Pr. 96, Pr. 450, Pr. 452).............................................120
3.12.2 Parameters.....................................................................................................................................120
3.12.3 Execution of offline auto tuning ......................................................................................................121
3.12.4 Utilizing or changing offline auto tuning data for use......................................................................123
3.12.5 Setting the motor constants directly ...............................................................................................124
3.12.6 Direct input + offline auto tuning.....................................................................................................125
3.13 Online auto tuning (Pr. 95) .............................................................................. 126
3.13.1 Online auto tuning selection (Pr. 95, Pr. 9, Pr. 71, Pr. 80, Pr. 81 ).................................................126
3.14 Communication functions (Pr. 117 to Pr. 124, Pr. 342) ................................ 128
3.14.1 Computer link operation (RS-485 communication) (Pr. 117 to Pr. 124)........................................128
3.14.2 E2PROM write selection (Pr. 342) .................................................................................................139
3.15 PID control (Pr. 128 to Pr. 134) ....................................................................... 139
3.15.1 PID control (Pr. 128 to Pr. 134)......................................................................................................139
3.16 Current detection (Pr. 150 to Pr. 153)............................................................. 146
3.16.1 Output current detection function (Pr. 150, Pr. 151).......................................................................146
3.16.2 Zero current detection (Pr. 152, Pr. 153)........................................................................................147
3.17 Auxiliary functions (Pr. 156, Pr. 157).............................................................. 148
3.17.1 Stall prevention operation selection (Pr. 156) ................................................................................148
3.17.2 OL signal output timer (Pr. 157) .....................................................................................................149
3.18 Display function 3 (Pr. 160) .............................................................................150
3.18.1 Extended function display selection (Pr. 160) ................................................................................150
3.19 Initial monitor (Pr. 171) ....................................................................................150
3.19.1 Actual operation hour meter clear (Pr. 171) ...................................................................................150
3.20 Terminal assignment functions (Pr. 180 to Pr. 195) ..................................... 150
3.20.1 Input terminal function selection (Pr. 180 to Pr. 183, Pr. 187).......................................................150
3.20.2 Output terminal function selection (Pr. 190 to Pr. 192, Pr. 195).....................................................152
3.21 Auxiliary function (Pr. 244) ............................................................................. 154
3.21.1 Cooling fan operation selection (Pr. 244).......................................................................................154
3.22 Stop selection function (Pr. 250) .................................................................... 154
3.22.1 Stop selection (Pr. 250)..................................................................................................................154
3.23 Operation selection function (Pr. 251) ........................................................... 155
3.23.1 Output phase failure protection selection (Pr. 251)........................................................................155
3.24 Additional function 2 (Pr. 252, Pr. 253) .......................................................... 156
3.24.1 Override bias, gain (Pr. 252, Pr. 253).............................................................................................156
3.25 Power failure stop functions (Pr. 261 to Pr. 266) ..........................................156
3.25.1 Power-failure deceleration stop function (Pr. 261 to Pr. 266).........................................................156
3.26 Droop (Pr. 286 to Pr. 288) ................................................................................158
3.26.1 Droop control (Pr. 286 to Pr. 288) ..................................................................................................158
3.27 Orientation (Pr. 350 to Pr. 362, Pr. 393 to Pr. 399) ........................................ 159
3.27.1 Orientation control (Pr. 350, Pr. 351, Pr. 356, Pr. 357, Pr. 360 to Pr. 362, Pr. 393,
Pr. 396 to Pr. 399).........................................................................................................................159
IV
Page 8

3.28 Control system function (Pr. 374) .................................................................. 166
3.28.1 Overspeed detection (Pr. 374) .......................................................................................................166
3.29 Position control (Pr. 419 to Pr. 430, Pr. 464 to Pr. 494) ................................167
3.29.1 Position control (Pr. 419 to Pr. 430, Pr. 464 to Pr. 494).................................................................167
3.30 Remote output (Pr. 495 to Pr.497) .................................................................. 168
3.30.1 Remote output function (Pr. 495 to Pr.497)....................................................................................168
3.31 Operation selection functions 4 (Pr. 800 to Pr. 809) .....................................169
3.31.1 Control selection (Pr. 800, Pr. 451)................................................................................................169
3.31.2 Torque characteristic selection (Pr. 801)........................................................................................169
3.31.3 Torque command source selection (Pr. 804 to Pr. 806).................................................................171
3.31.4 Speed limit (Pr. 807 to Pr. 809)......................................................................................................173
3.32 Control system functions (Pr. 818 to Pr. 837) ............................................... 175
3.32.1 Easy gain tuning selection (Pr. 818, Pr. 819).................................................................................175
3.32.2 Speed loop proportional gain setting (Pr. 820, Pr. 830) .................................................................175
3.32.3 Speed control integral time setting (Pr. 821, Pr. 831) ....................................................................175
3.32.4 Speed setting circuit filter function (Pr. 822, Pr. 832).....................................................................175
3.32.5 Speed detection filter function (Pr. 823, Pr. 833) ...........................................................................176
3.32.6 Current loop proportional gain setting for vector control (Pr. 824, Pr. 834)...................................176
3.32.7 Current control integral time setting for vector control (Pr. 825, Pr. 835)......................................176
3.32.8 Torque setting filter function (Pr. 826, Pr. 836) ..............................................................................176
3.32.9 Torque detection filter function (Pr. 827, Pr. 837) ..........................................................................177
3.32.10 Model speed control gain (Pr. 828) ................................................................................................177
CONTENTS
3.33 Torque biases (Pr. 840 to Pr. 848) .................................................................. 177
3.33.1 Torque bias function (Pr. 840 to Pr. 848) .......................................................................................177
3.34 Additional functions (Pr. 851 to Pr. 865) ........................................................ 180
3.34.1 Selection of number of encoder pulses (Pr. 851)...........................................................................180
3.34.2 Selection of encoder rotation direction (Pr. 852)............................................................................180
3.34.3 Excitation ratio (Pr. 854).................................................................................................................181
3.34.4 Notch filter (Pr. 862, Pr. 863)..........................................................................................................181
3.34.5 Torque detection (Pr. 864) .............................................................................................................182
3.34.6 Low speed detection (Pr. 865) .......................................................................................................182
3.35 Display function (Pr. 867) ................................................................................183
3.35.1 DA1 output response level adjustment (Pr. 867)............................................................................183
3.36 Terminal function assignment (Pr. 868)......................................................... 183
3.36.1 Terminal 1 function assignment (Pr. 868) ......................................................................................183
3.37 Protective functions (Pr. 870 to Pr. 874) ........................................................ 184
3.37.1 Speed deviation excessive (Pr. 870, Pr. 871) ................................................................................184
3.37.2 Speed limit (Pr. 873).......................................................................................................................185
3.37.3 Stop by OLT level prevention (Pr. 874)..........................................................................................185
3.38 Operation selection functions 5 (Pr. 875) ...................................................... 186
3.38.1 Fault definition (Pr. 875).................................................................................................................186
3.39 Control system function 2 (Pr. 877 to Pr. 881) .............................................. 186
3.39.1 Speed feed forward control, model adaptive speed control (Pr. 877 to Pr. 881)...........................186
3.40 Maintenance function (Pr. 890 to Pr. 892)...................................................... 187
3.40.1 Maintenance output function (Pr. 890 to Pr. 892)...........................................................................187
3.41 Calibration functions (Pr. 900 to Pr. 920)....................................................... 188
V
Page 9
3.41.1 DA1/DA2 terminal calibration (Pr. 900, Pr. 901).............................................................................188
3.41.2 Biases and gains of speed setting terminals
(speed setting terminal 2, torque command terminal 3, multi function terminal 1)
(Pr. 902 to Pr. 905, Pr. 917 to Pr. 920)...........................................................................................190
3.42 Additional function (Pr. 990) ........................................................................... 193
3.42.1 PU buzzer control (Pr. 990)............................................................................................................193
4 SPECIFICATIONS 195
4.1 Model specifications........................................................................................ 196
4.2 Common specifications .................................................................................. 199
4.3 Outline dimension drawings........................................................................... 200
4.3.1 Inverter outline dimension drawings...............................................................................................200
4.3.2 Control panel (FR-DU04-1) outline dimension drawings................................................................203
4.3.3 Parameter unit (FR-PU04V) outline dimension drawings...............................................................203
4.3.4 Dedicated encoder cable outline dimension drawings ...................................................................204
4.3.5 Dedicated motor outline dimension drawings.................................................................................206
APPENDICES 211
Appendix1 Setting a thermistor of a dedicated motor (SF-V5RU*****T)
(when used with the FR-V5AX).......................................................................... 212
Appendix2 Parameter Instruction Code List .............................................................213
Appendix3 SERIAL number check............................................................................ 220
VI
Page 10
1
WIRING
This chapter describes the basic "wiring" for use of this
product.
Always read the instructions and other information before
using the equipment.
1.1 Internal block diagram ..........................................2
1.2 Main circuit terminal specifications ....................3
1.3 Connection of stand-alone option units..............4
1.4 Control circuit terminal specifications................8
1.5 Precautions for use of the vector inverter ..........11
1.6 Others.....................................................................12
1.7 Input terminals ......................................................26
1.8 How to use the input signals (assigned terminals
DI1 to DI4, STR) (Pr. 180 to Pr. 183, Pr. 187)...........
1.9 How to use the output signals (assigned terminals
DO1 to DO3, ABC) (Pr. 190 to Pr. 192, Pr. 195)........
1.10 Design information to be checked ......................37
1.11 Using the second motor .......................................38
1.12 Using the conventional motor and other motors .. 39
30
35
<Abbreviations>
DU : Control panel (FR-DU04-
PU : Control panel (FR-DU04-
Inverter : Mitsubishi vector inverter FR-V500 series
Pr. : Parameter number
PU operation : Operation using the PU (FR-DU04-
External operation : Operation using the control circuit signals
Combined operation : Operation using both the PU (FR-DU04-
Mitsubishi dedicated motor : SF-V5R
Mitsubishi standard motor with encoder : SF-JR
Mitsubishi constant-torque motor : SF-HRCA
<Trademarks>
CC-Link is a registered trademark of CC-Link Partner Association.
Ethernet is a registered trademark of XEROX corporation.
DeviceNet is a registered trademark of ODVA (Open DeviceNet Vender Association, Inc.)
Profibus is a registered trademark of PROFIBUS User Organization.
Other company and product names herein are the trademarks or registerd trademarks of
their respective owners.
1)
1) and parameter unit (FR-PU04V)
1/FR-PU04V)
1/FR-PU04V) and external
operation
1
111
2
3
4
Page 11
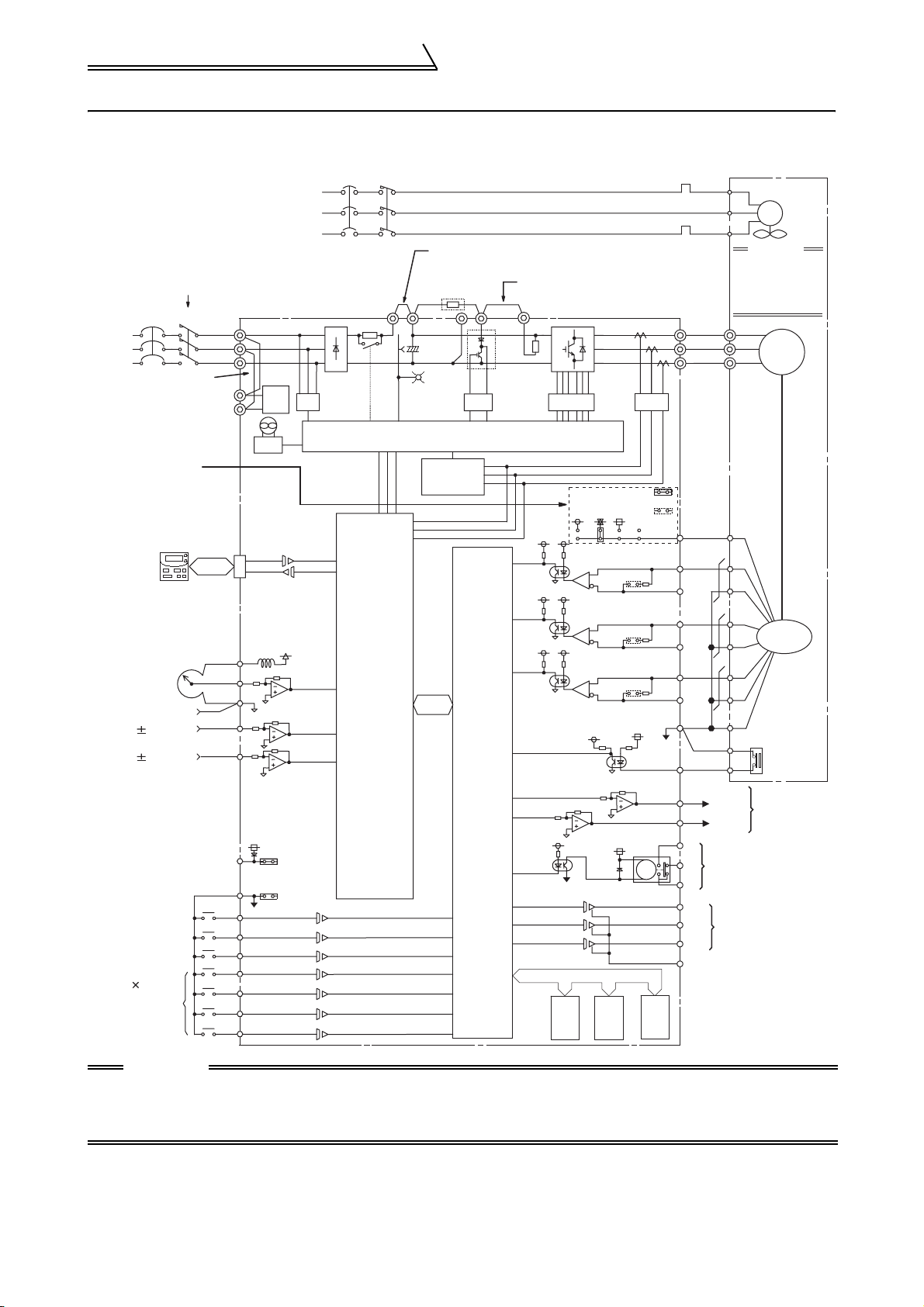
Internal block diagram
1.1 Internal block diagram
Verify the power specification
of the motor cooling fan when
performing wiring.
Refer to page 196.
Avoid frequent ON-OFF.
Repeated inrush current at power on
will shorten the converter life.
(switching life is about 100,000 times)
MCCB
MC
FR-V500
R
S
T
Jumper
R1
S1
Control
power
supply
MCCB MC
Mitsubishi dedicated
motor (SF-V5RU)
R
S
T
Jumper: Remove this jumper when connecting
the FR-HEL/BEL.
Jumper: Remove this jumper when
connecting the FR-ABR.
(5.5K or less only)
P1
PN
PR
*
TR
PX
*
R
CHARGE
ASIC
OCR
U
V
W
A
B
FAN
C
CAUTION
Match the phase
sequence. (The fan
should have intake
rotation.)
U
V
IM
W
Change the jumper
connector and parameter
according to the encoder
specifications.
RS485
-1
DU04
Output speed
setting
potentiometer
Analog common
0 to 10VDC
0 to 10VDC
10E
2
5
3
1
External transistor
common
SD
Forward rotation
Reverse rotation
Reset
Multi-function
input 4
Four different
signals can be
selected using
the parameters.
STF
STR
RES
DI1
DI2
DI3
DI4
PC
SINK
SOURCE
10V
CPU
Protective
circuit
ASIC
OPTION
#1
24V5.5V12V EXT
TA
TB
TZ
OPTION
#2
RA
CMP
LDV
OPTION
#3
PG
PA
PAR
PB
PBR
PZ
PZR
SD
OH
DA1
DA2
A
Alarm output
B
C
Three different
DO1
signals can be
selected using the
DO2
parameters.
DO3
(Open collector
output)
SE
S
A
B
C
Encoder
D
F
G
R
G2
G1
Analog
signal output
Thermal
protector
* *
CAUTION
1. The 18.5K or more is not equipped with the built-in brake resistor and brake transistor marked *. The brake transistor is
provided for the 15K or less and the built-in brake resistor for the 5.5K or less.
2. Always earth (ground) the inverter and motor.
3. **: When using an external thermal relay protection, set "1" (external thermal relay valid) in Pr. 876. (factory setting)
(Refer to page 80.)
2
Page 12

Main circuit terminal specifications
1.2 Main circuit terminal specifications
Terminal Symbol Terminal Name Description
Connect to the commercial power supply.
R, S, T AC power input
U, V, W Inverter output Connect a three-phase squirrel-cage motor or Mitsubishi dedicated motor.
R1, S1
P, P R
P, N
P, P 1
PR, PX
Power supply for
control circuit
Brake resistor
connection
Brake unit
connection
DC reactor
connection
Built-in brake circuit
connection
Keep these terminals open when using the high power factor converter (FRHC) or power regeneration common converter (FR-CV).
Connected to the AC power supply terminals R and S. To retain the alarm
display and alarm output or when using the high power factor converter (FRHC) or power regeneration common converter (FR-CV), remove the jumpers
from terminals R-R1 and S-S1 and apply external power to these terminals.
Do not turn off the power supply for control circuit (R1, S1) with the main
circuit power (R, S, T) on. Doing so may damage the inverter. The circuit
should be configured so that the main circuit power (R, S, T) is also turned off
when the power supply for control circuit (R1, S1) is off.
15K or less: 60VA, 18.5K to 55K: 80VA
Disconnect the jumper from terminals PR-PX (5.5K or less) and connect the
optional brake resistor (FR-ABR) across terminals P-PR.
For the 15K or less, connecting the resistor further provides regenerative
braking power.
Connect the optional FR-BU type brake unit, BU type brake unit, power
regeneration common converter (FR-CV) or high power factor converter
(FR-HC).
Disconnect the jumper from terminals P-P1 and connect the optional DC
reactor (FR-HEL/BEL).
When the jumper is connected across terminals PX-PR (factory setting),
the built-in brake circuit is valid. (Provided for the 5.5K or less.)
Earth (Ground) For earthing (grounding) the inverter chassis. Must be earthed (grounded).
CAUTION
• The inverter will be damaged if power is applied to the inverter output terminals (U, V, W). Never
perform such wiring.
• When connecting the dedicated external brake resistor (FR-ABR), remove jumpers across terminals
PR-PX (5.5K or less).
• When connecting the brake unit (FR-BU, BU type), remove jumpers across terminals PR-PX (5.5K or
less). Refer to page 5, 6.
1
WIRING
3
Page 13
Connection of stand-alone option units
r
1.3 Connection of stand-alone option units
The inverter accepts a variety of stand-alone option units as required.
Incorrect connection will cause inverter damage or accident. Connect and operate the option unit carefully in
accordance with the corresponding option unit manual.
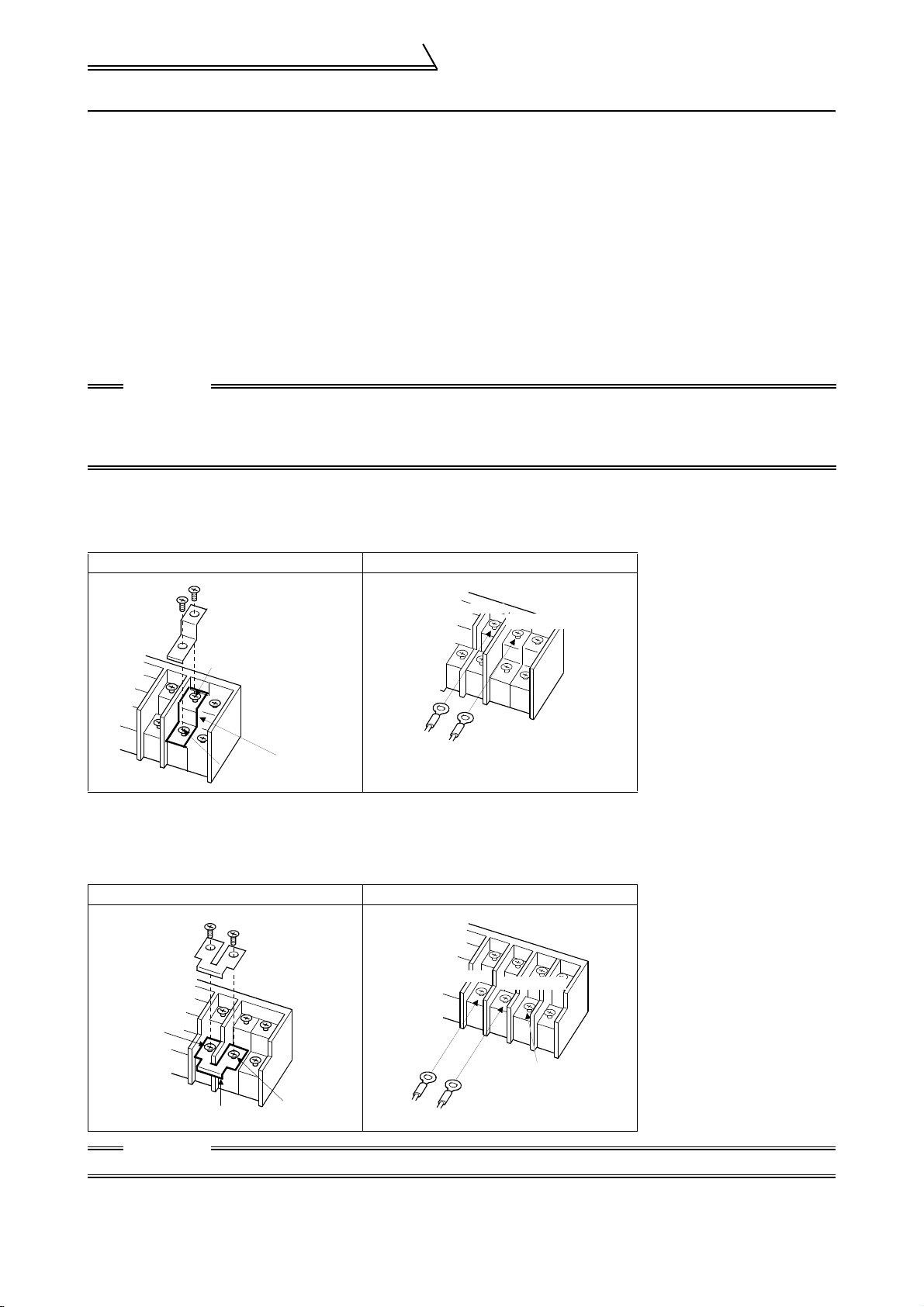
1.3.1 Connection of the dedicated external brake resistor (FR-ABR)
The built-in brake resistor is connected across terminals P and PR. Fit the external dedicated brake resistor (FRABR) when the built-in brake resistor does not have enough thermal capability for high-duty operation. At this time,
remove the jumper from across terminals PR-PX and connect the dedicated brake resistor (FR-ABR) across
terminals P-PR.
Set "1" in Pr. 30 "regenerative function selection".
Set Pr.70 "special regenerative brake duty" as follows: (Refer to page 92.)
7.5K or less. . . . . . .10%
11K or more . . . . . .6%
CAUTION
1. The brake resistor connected should only be the dedicated brake resistor.
2. The jumper across terminals PR-PX (5.5K or less) must be disconnected before connecting the
dedicated brake resistor. A failure to do so may damage the inverter.
3. Do not remove a jumper across terminal P and P1 except when connecting a DC reactor.
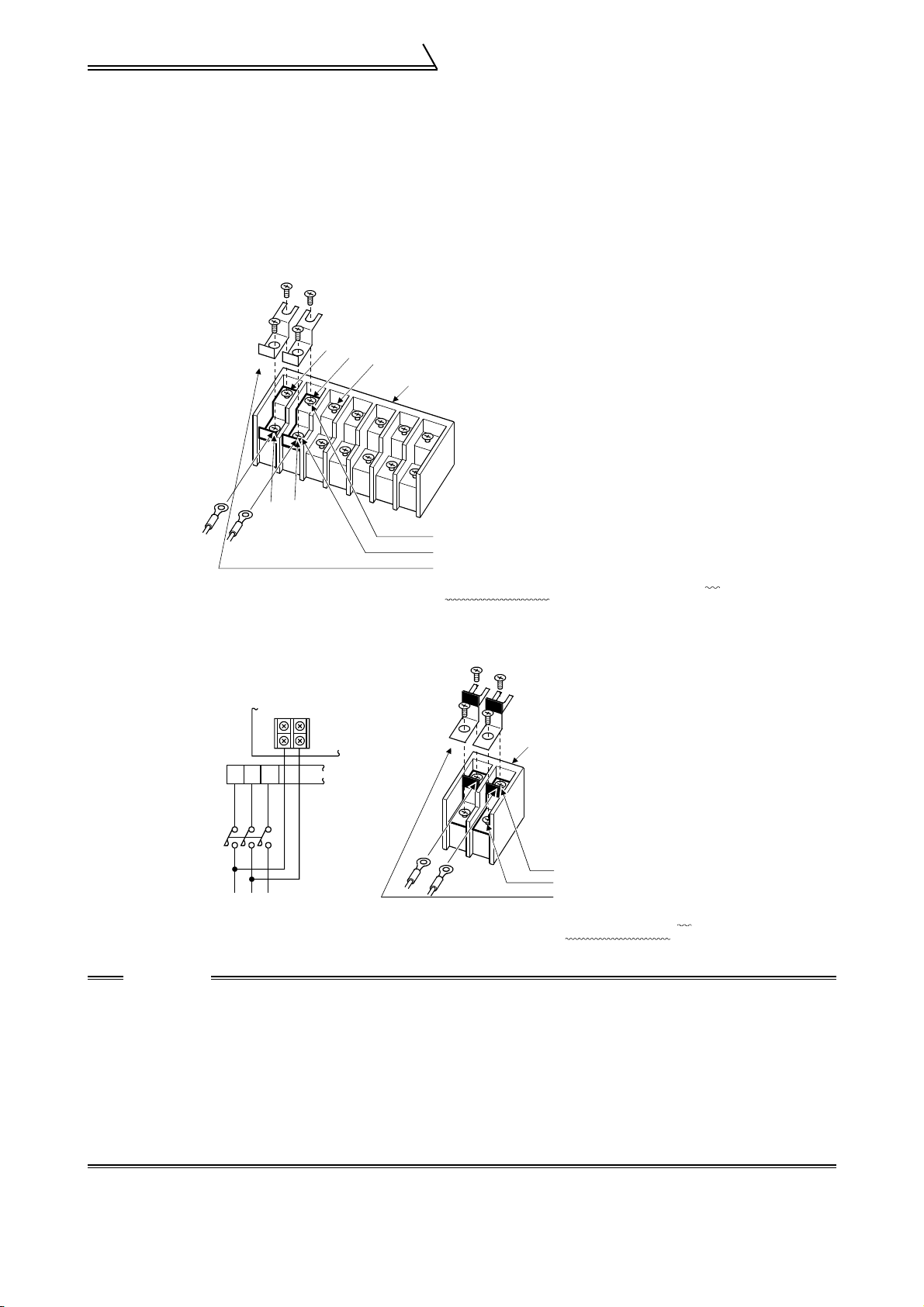
z Model ..... FR-V520-1.5K, 2.2K, FR-V540-1.5K, 2.2K
1)Remove the screws in terminals PR and PX and remove the jumper.
2)Connect the brake resistor across terminals P and PR. (The jumper should remain disconnected.)
1) Removal of jumper 2) Connection of brake resistor
Terminal P
Terminal PR
Jumpe
Terminal PX
Terminal PR
z Model ..... FR-V520-3.7K to 7.5K, FR-V540-3.7K, 5.5K
1)Remove the screws in terminals PR and PX and remove the jumper.
2)Connect the brake resistor across terminals P and PR. (The jumper should remain disconnected.)
1) Removal of jumper 2) Connection of brake resistor
Terminal P
Terminal PR
Terminal PR
Terminal PX
Jumper
Terminal PX
CAUTION
The FR-V520-7.5K does not have the PX terminal. Since it is a free terminal, keep it open.
4
Page 14
Connection of stand-alone option units
z Model ..... FR-V520-11K to 15K, FR-V540-7.5K to 15K
1) Connect the brake resistor across terminals P and PR.
S1
R1
PR
Power supply terminal
block for control circuit
V
U
W
Dedicated brake resistor
(FR-ABR)
P1
NPRST
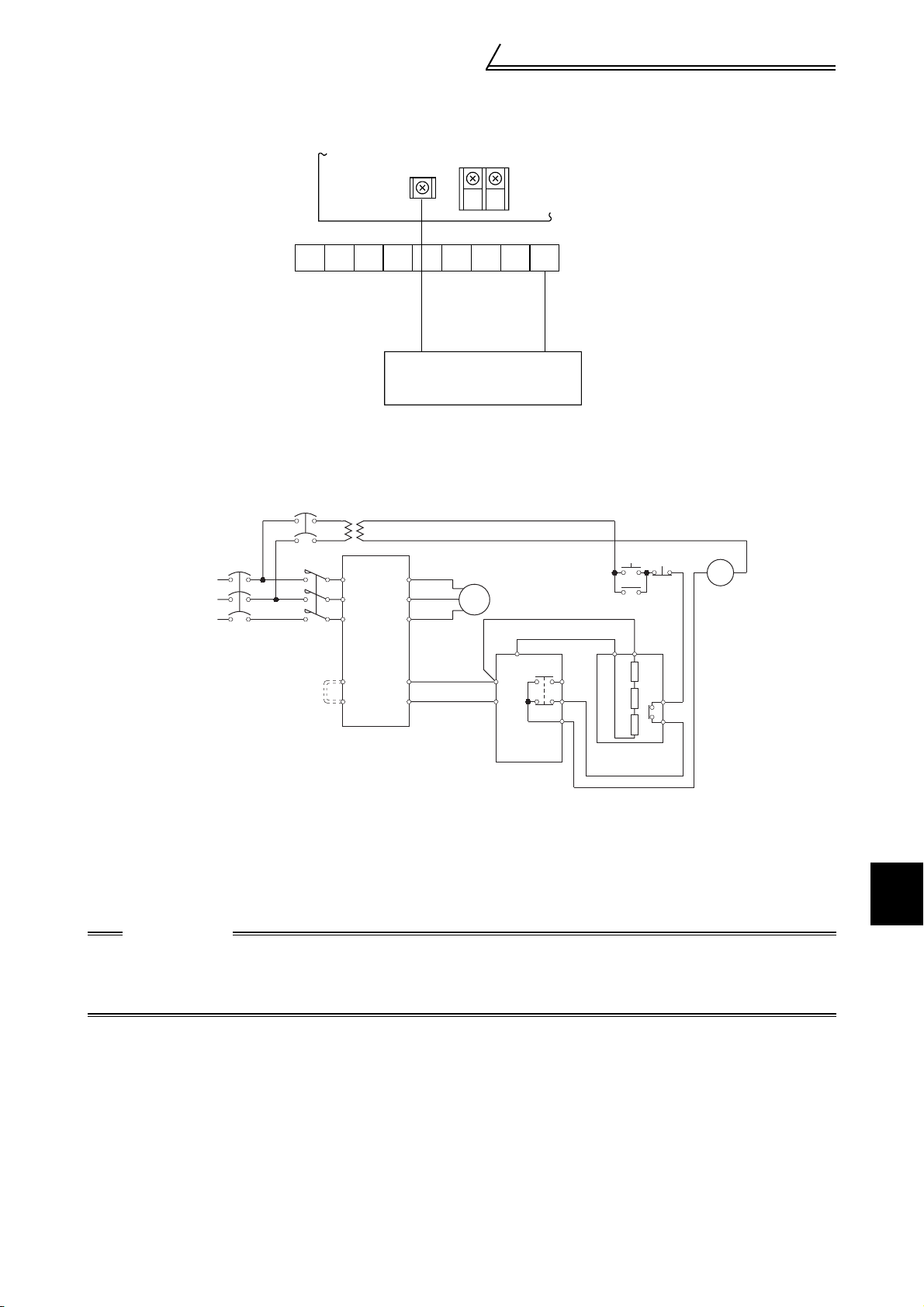
1.3.2 Connection of the brake unit (FR-BU)
Connect the optional FR-BU brake unit as shown below to improve the braking capability during deceleration.
T *2
ON
MC
PPR
THS TH2
Resistor unit
FR-BR
OFF
TH1
MC
Power
supply
*3
Remove
jumper.
MC
R
S
T
Inverter
PR
PX
*1
*4
Motor
IM
PR
P
N
Brake unit
FR-BU
HA
HB
HC
U
V
W
P
N
*1 Connect the inverter terminals (P, N) and brake unit (FR-BU (H)) terminals so that their terminal signals match with each other.
(Incorrect connection will damage the inverter.)
*2 When the power supply is 400V class, install a step-down transformer.
*3 Be sure to remove a jumper across terminal PR-PX when using the FR-BU with the inverter of 5.5K or less.
*4 The wiring distance between the inverter, brake unit (FR-BU) and resistor unit (FR-BR) should be within 5m. If twisted wires
are used, the distance should be within 10m.
CAUTION
• If the transistors in the brake unit should become faulty, the resistor can be unusually hot, causing a
fire. Therefore, install a magnetic contactor on the inverter's input side to configure a circuit so that a
current is shut off in case of fault.
• Do not remove a jumper across terminal P and P1 except when connecting a DC reactor.
5
1
WIRING
Page 15
Connection of stand-alone option units
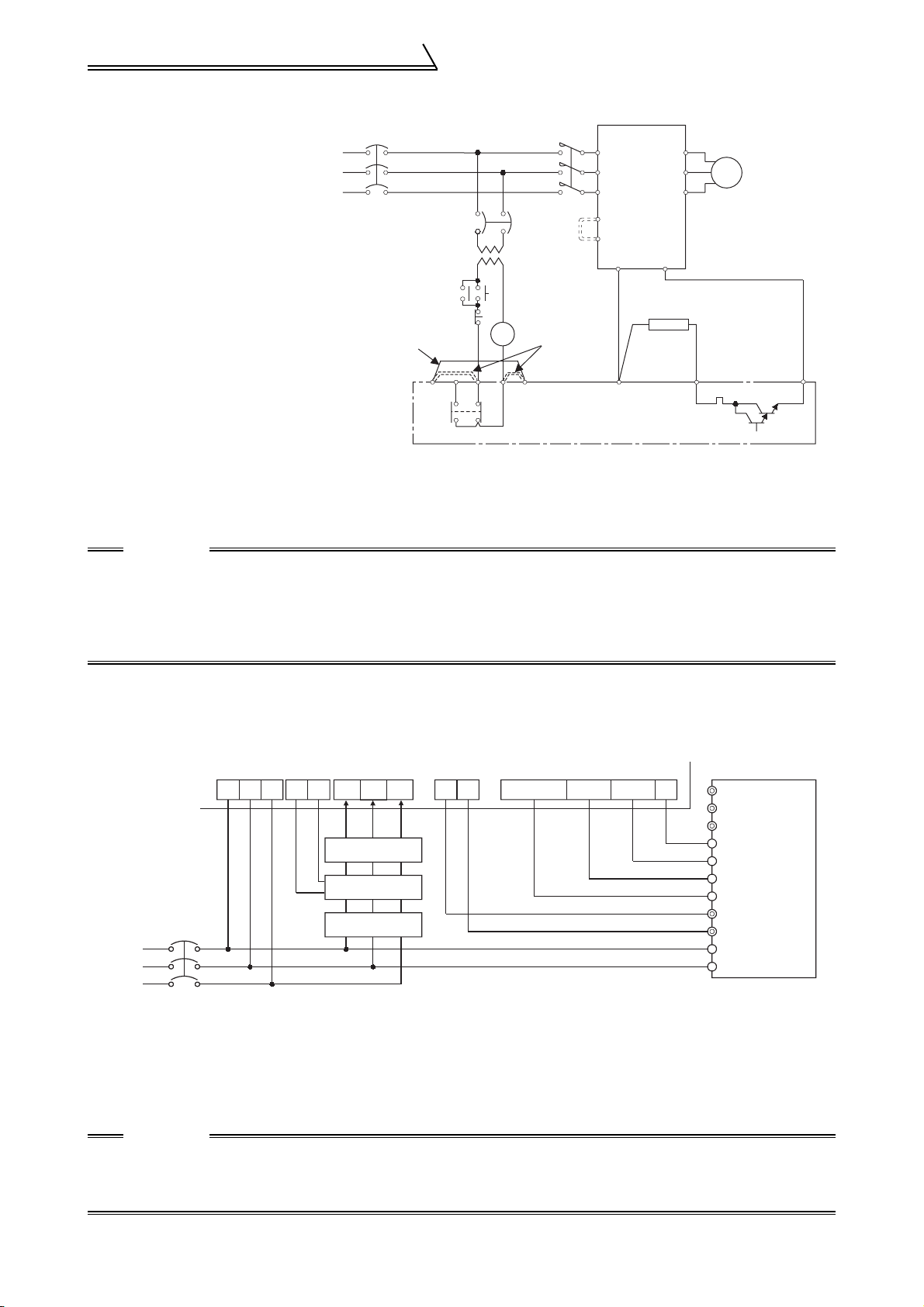
1.3.3 Connection of the brake unit (BU type)
Connect the BU type
brake unit correctly as
shown on the right.
Incorrect connection will
Power
supply
MCCB
MC
R
S
T
Inverter
Motor
U
V
W
IM
damage the inverter.
Remove the jumpers
from terminals HB-PC
and TB-HC and fit a
jumper across terminals
PC-TB of the brake unit.
Fit a jumper.
*1 Connect the inverter terminals (P, N) and brake unit (BU type) terminals so that their terminal signals match with each
other. (Incorrect connection will damage the inverter.)
*2 When the power supply is 400V class, install a step-down transformer.
*3 For capacity 5.5K or less, remove the jumper across terminals PR-PX.
T*2
MC
OFF
PC
Remove
jumpers.
ON
OCR
Remove
jumpers.
BU type brake unit
MC
HCHBHA TB P
PR
PX
*3
P
N
*1
Discharging resistor
PR
N
OCR
CAUTION
• The wiring distance between the inverter, brake unit and resistor unit should be within 2m . If twisted
wires are used, the distance should be within 5m.
• If the transistors in the brake unit should become faulty, the resistor can be unusually hot, causing a
fire. Therefore, install a magnetic contactor on the inverter's power supply side to configure a circuit
so that a current is shut off in case of fault.
• Do not remove a jumper across terminal P and P1 except when connecting a DC reactor.
1.3.4 Connection of the high power factor converter (FR-HC)
When connecting the high power factor converter (FR-HC) to suppress power supply harmonics, perform wiring
securely as shown below. Incorrect connection will damage the high power factor converter and inverter.
After making sure that the wiring is correct, set "2" in Pr. 30 "regenerative function selection".
High power factor converter (FR-HC)
Power
supply
RST R4S4T4 N
MCCB
*1 Remove the jumpers across the inverter terminals R-R1, S-S1, and connect the control circuit power supply to the R1
and S1 terminals. Always keep the power input terminals R, S, T open. Incorrect connection will damage the inverter.
(E.OPT (option alarm) will occur. (Refer to the Instruction Manual (basic).))
*2 Do not insert the MCCB between terminals P-N (P-P, N-N). Connect the inverter terminals (P, N) and high power factor converter
(FR-HC) terminals so that their terminal signals match with each other. (Incorrect connection will damage the inverter.)
*3 Use Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) to assign the terminals used for the X10 (X11) signal. (Refer to
page 150.)
For communication where the start command is sent only once, e.g. when used with the computer link plug-in option (A5NR),
use the X11 signal when making setting to hold the mode at occurrence of an instantaneous power failure. (Refer to page 92.)
MC1MC2
S4
R4
From FR-HCL02
R3 S3 T3
MC2
Outside box
MC1
R2
FR-HCL01
R
S2
S
T4
T2
T
P
Y1 or Y2 RDY RSO SE
CAUTION
• The voltage phases of terminals R, S, T and terminals R4, S4, T4 must be matched.
• Use sink logic (factory setting) when the FR-HC is connected. The FR-HC cannot be connected when
source logic is selected.
• Do not remove a jumper across terminal P and P1 except when connecting a DC reactor.
Inverter
R
S
*1
T
SD
RES
X10 *3
X11 *3
N
*2
P
R1
*1
S1
6
Page 16
Connection of stand-alone option units
A
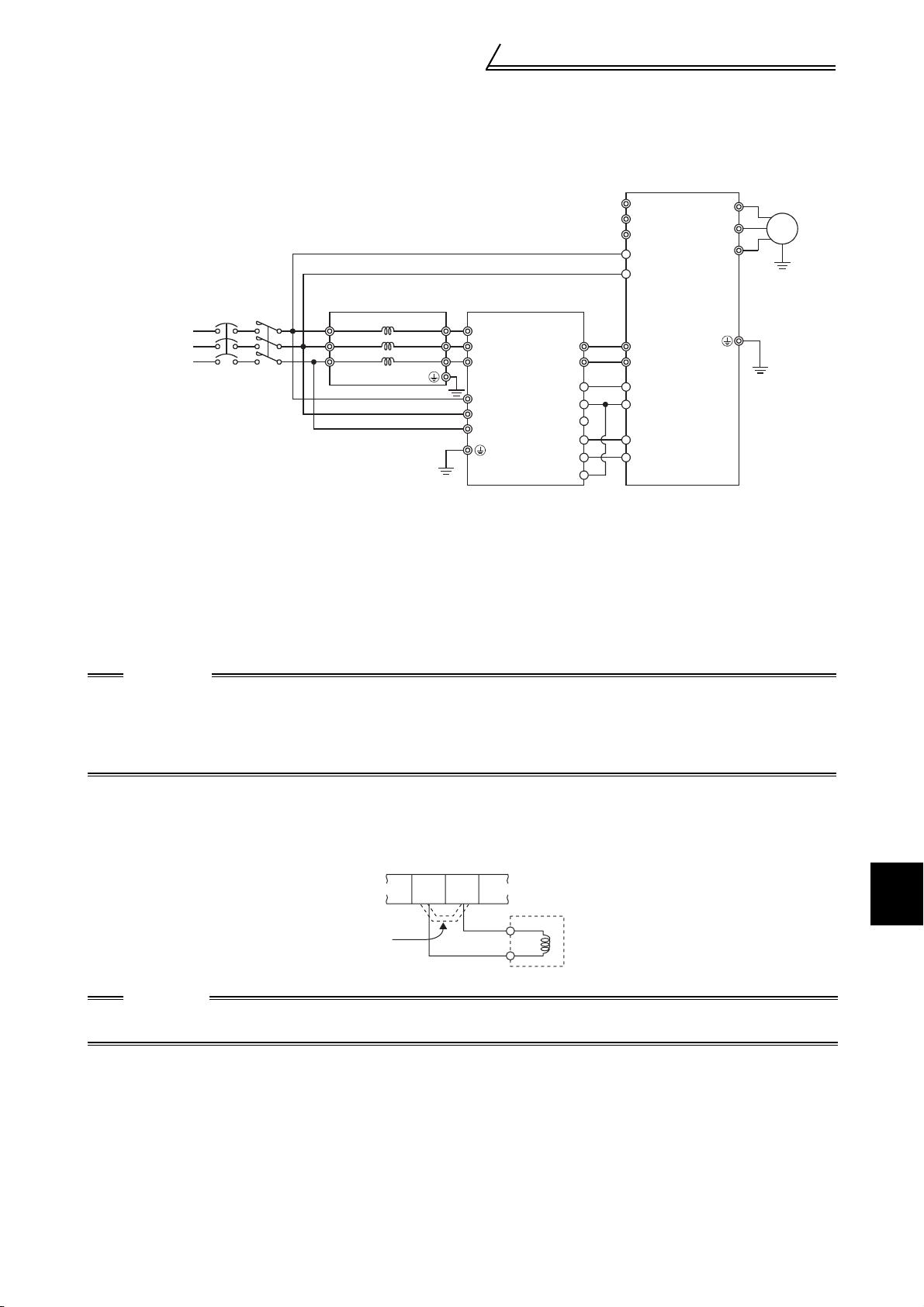
1.3.5 Connection of the power regeneration common converter (FR-CV)
When connecting the FR-CV type power regeneration common converter, connect the inverter terminals (P, N) and
FR-CV type power regeneration common converter terminals as shown below so that their symbols match with
each other. After making sure that the wiring is correct, set "2" in Pr. 30 "regenerative function selection". Use the
FR-CV with capacity one rank greater than the inverter.
Three-phase
C power
supply
R
S
*1
T
R1
Dedicated stand-alone
1
MCCB
*1 Remove the jumpers across terminals R-R1 and S-S1 of the inverter, and connect the control circuit power supply across
terminals R1-S1. Always keep the power input terminals R, S, T open. Incorrect connection will damage the inverter.
(E.OPT (option alarm) will occur. (Refer to the Instruction Manual (basic).))
*2 Do not insert an MCCB between the terminals P − N (between P/L+ − P, between N/L- − N). Connect the inverter terminals
(P, N) and power regeneration common converter (FR-CV) terminals so that their terminal signals match with each other.
(Incorrect connection will damage the inverter.).
*3 Assign the terminal for X10 signal using any of Pr. 180 to Pr. 183. Pr.187 (input terminal function selection).
(Refer to page 150)
*4 Be sure to connect the power supply and terminals R/L11, S/L21, T/MC1.
Operating the inverter without connecting them will damage the power regeneration common converter.
MC
reactor (FR-CVL)
11
R/L
S/L
T/L
R2/L
21
S2/L
31
T2/L
FR-CV power regeneration
common converter
12
22
32
R2/L
S2/L
T2/L
11
R/L
21
S/L
T/MC1
1
2
3
P/L+
N/L-
*4
P24
SD
RDYA
RDYB
RSO
SE
S1
P
*2
N
PC
SD
X10 *3
RES
Inverter
U
V
W
IM
CAUTION
1. The voltage phases of terminals R/L11, S/L21, T/MC1 and terminals R2/L1, S2/L2, T2/L3 must be
matched.
2. Use sink logic (factory setting) when the FR-CV is connected. The FR-CV cannot be connected when
source logic is selected.
3. Do not remove a jumper across terminal P and P1 except when connecting a DC reactor.
1.3.6 Connection of the DC reactor (FR-HEL/BEL)
When using the FR-HEL/BEL DC reactor, connect it between terminals P1-P. In this case, the jumper connected
across terminals P1-P must be removed. Otherwise, the reactor will not exhibit its function.
P
P1
FR-HEL/BEL
Remove
the jumper.
CAUTION
1. The wiring distance should be within 5m.
2. The size of the cables used should be equal to or larger than that of the power supply cables (R, S, T).
1
WIRING
7
Page 17
Control circuit terminal specifications
1.4 Control circuit terminal specifications
Type
Input signals
Terminal
Symbol
STF
STR
DI1 to DI4
OH
Contact input
RES Reset
SD
PC
10E
2
3
Speed setting
1
5
Terminal Name Description Rated Specifications
Forward rotation
start
Reverse rotation
start
Digital input
terminals 1 to 4
Thermal relay
protector input
Contact input
common (sink)
24VDC power
supply and
external transistor
common, contact
input common
(source)
Speed setting
power supply
Speed setting
(voltage)
Torque setting
terminal
Multi-function
setting terminal
Speed setting
common, Analog
signal output
common
Turn on the STF signal to start
forward rotation and turn it off to
stop.
Turn on the STR signal to start
reverse rotation and turn it off to
stop.
The function of the terminals
changes according to the output
terminal function selection
(Pr. 187).
Refer to page 150 for details.
The function of the terminals changes according to the
output terminal function selection (Pr. 180 to Pr. 183).
Refer to page 150 for details.
Temperature sensor terminal input for motor overheat
protection.
OHT error occurs when terminals OH and SD are open.
Used to reset alarm output provided when protective
circuit is activated. Turn on the RES signal for more than
0.1s, then turn it off.
Recover about 1s after reset is cancelled.
Contact input common terminal. Common output
terminal for 24VDC 0.1A power supply (PC terminal).
Isolated from terminals 5 and SE.
When connecting a transistor output (open collector
output) such as a programmable controller, connect the
external power supply common for transistor output to
this terminal to prevent a malfunction caused by a sneak
current. PC-SD can be used as a 24VDC and 0.1A
power supply. Note that a sneak current may not be
prevented in this case. When source logic has been
selected, this terminal serves as a contact input
common.
Used as power supply when connecting volume for
speed setting (torque setting) from outside of the
inverter. (terminal 5 is a common terminal)
By entering 0 to 10VDC, the maximum output speed is
reached at 10V and I/O are proportional.
Acts as a torque setting signal for torque control or as a
torque limit signal for speed control or position control.
Acts as an input terminal for the external analog-based
torque bias function.
0 to ±10VDC input
Since this is a multi-function selection terminal, its
function varies with the Pr.868 "terminal 1 function
assignment" setting. Refer to page 183 for details.
0 to ±10VDC input
Common terminal for speed setting signal (terminal 2, 1
or 3) or DA1 and DA2.
Isolated from terminals SD and SE. Do not earth
(ground).
When the STF and
STR signals are
turned on
simultaneously, the
stop command is
given.
Input resistance 4.7kΩ
Voltage at opening 21 to
27VDC
Current at short-circuited
4 to 6mADC
Control by open collector
output or 0V contact
signal
Input resistance 150kΩ
Voltage at opening 21 to
27VDC
Current at short-circuited
140 to 180mADC
Isolate by photocoupler
Input resistance 4.7kΩ
Voltage at opening 21 to
27VDC
Current at short-circuited
4 to 6mADC
Control by open collector
output or 0V contact
signal.
—
Voltage range 18 to 26
VDC
Permissible load current
0.1A
10VDC±0.4V
Permissible load current
10mA
Input resistance
10kΩ±1kΩ
Permissible maximum
voltage 20VDC
—
8
Page 18
Control circuit terminal specifications
Type
Input signals
Output signals
Communication
Terminal
Symbol
PA
PAR
PB
PBR
PZ
Encoder signal
PZR
PG
SD
A, B, C Alarm output
Contact
DO1 to
DO3
Open
collector
SE
DA1, DA2
Analog
5
— PU connector
RS-485
Terminal Name Description Rated Specifications
A-phase signal
input terminal
A-phase inverted
signal input
terminal
B-phase signal
input terminal
B-phase inverted
signal input
terminal
Z-phase signal
input terminal
Z-phase inverted
signal input
terminal
Encoder power
supply terminal
(Positive side)
Contact input
common (sink),
Power supply earth
(ground) terminal
Digital output
terminals 1 to 3
Open collector
output common
Analog signal
output
Analog signal
output common
* Not output during inverter reset.
Differential line receiver
input (AM26LS32
equivalent) or
complimentary input
Differential line receiver
input (AM26LS32
equivalent)
A-, B- and Z-phase signals are input from the encoder.
The jumper connector is factory-set to complimentary.
Thus, the encoder need not be connected to PAR, PBR
and PZR.
Power supply for encoder. You can switch the power
supply between 5 (5.5), 12 and 24VDC. Can be
switched to the external power supply.
( Refer to the instruction manual (basic) for the
switchover method.)
Common terminal for contact input or encoder power
supply.
Isolated from terminals 5 and SE.
Do not earth (ground).
1 changeover contact output indicating that the output
has been stopped by the inverter protective function.
230VAC 0.3A, 30VDC 0.3A. Alarm: discontinuity across
B-C (continuity across A-C), normal: continuity across
B-C (discontinuity across A-C).
The terminal function varies with the output terminal
function selection (Pr. 195) setting.
Refer to page 152 for details.
The terminal functions vary with the output terminal
function selection (Pr. 190 to Pr. 192) settings. Refer to
page 152 for details.
Common terminal for terminals DO1, DO2 and DO3.
Isolated from terminals SD and 5.
One selected from monitoring items, such as the speed,
is output.
The output signal is proportional to the magnitude of the
corresponding monitoring item.
Common terminal for DA1 and DA2. Isolated from terminals SD and SE. Do not
earth (ground).
With the PU connector, communication can be made
through RS-485.
• Conforming standard : EIA-485 (RS-485)
• Transmission format : Multidrop link
• Communication speed : Maximum. 19200bps
• Overall length : 500m
*
Differential line receiver
input (AM26LS32
equivalent) or
complimentary input
Differential line receiver
input (AM26LS32
equivalent)
Differential line receiver
input (AM26LS32
equivalent) or
complimentary input
Differential line receiver
input (AM26LS32
equivalent)
5.5VDC 350mA
12VDC 150mA
24VDC 80mA
Power supply common
Contact output
Permissible contact
230VAC 0.3A
30VDC 0.3A
Open collector output
Permissible load 24VDC
0.1A
—
0 to ±10VDC (DA1),
0 to 10VDC (DA2),
Permissible load current
1mA
Resolution 12 bit
load impedance
10kΩ or more
1
WIRING
9
Page 19
Control circuit terminal specifications
1.4.1 Connecting the control circuit to a power supply separately from the main circuit
If the magnetic contactor (MC) in the inverter power supply is opened when the protective circuit is operated, the
inverter control circuit power is lost and the alarm output signal cannot be kept on. To keep the alarm signal on
terminals R1 and S1 are available. In this case, connect the power supply terminals R1 and S1 of the control circuit
to the primary side of the MC.
• Model FR-V520-1.5K, 2.2K, FR-V540-1.5K, 2.2K
<Connection procedure>
R
S
T
Terminal block for main circuit
S1
R1
1) Loosen the upper screws
2) Remove the lower screws.
3) Remove the jumpers.
4) Connect the separate power supply cables for control circuit to the
lower terminals (R1, S1). (Note 4)
• Model FR-V520-3.7K to 55K, FR-V540-3.7K to 55K
<Connection procedure>
R1
S1
Power supply terminal
block for control circuit
RST
MC
Main power supply
CAUTION
1. When the main circuit power (R, S, T) is on, do not switch off the control power (terminals R1, S1).
Otherwise the inverter may be damaged.
2. When using a separate power supply, the jumpers across R-R1 and S-S1 must be removed. Otherwise
the inverter may be damaged.
3. For a different power supply system, which takes the power of the control circuit from other than the
primary side of the MC, the voltage should be equal to the main circuit voltage.
4. For the FR-V520-3.7K to 55K, FR-V540-3.7K to 55K, the power supply cables must not be connected
to the lower terminals. If connected, the inverter may be damaged.
5. Supplying power to only the R1 and S1 terminals and entering the start signal will result in an error
indication (E.OC1).
Power supply terminal
block for control circuit
1) Loosen the upper screws.
2) Remove the lower screws.
3) Pull out and remove the jumper.
4) Connect the separate power supply
cables for control circuit to the
upper terminals (R1, S1). (Note 4)
10
Page 20
Precautions for use of the vector inverter
1.5 Precautions for use of the vector inverter
The FR-V500 series is a highly reliable product, but incorrect peripheral circuit making or operation/handling
method may shorten the product life or damage the product.
Before starting operation, always recheck the following items.
(1) Use insulation-sleeved crimping terminals for the power supply and motor cables.
(2) The inverter will be damaged if power is applied to the inverter output terminals (U, V, W).
(3) After wiring, wire offcuts must not be left in the inverter.
Wire offcuts can cause an alarm, fault or malfunction. Always keep the inverter clean.
When drilling mounting holes in an enclosure etc., take care not to allow chips and other foreign matter to enter
the inverter.
(4) Wire the cables of the recommended size to make a voltage drop 2% or less.
If the wiring distance is long between the inverter and motor, a main circuit cable voltage drop will cause the
motor torque to decrease especially at the output of a high frequency.
Refer to Instruction Manual (basic) for the recommended wire sizes.
(5) The overall wiring length should be 100m maximum.
Especially for long distance wiring, the fast response current limit function may be reduced or the equipment
connected to the secondary side may malfunction or become faulty under the influence of a charging current
due to the stray capacity of the wiring. Therefore, note the overall wiring length.
(6) Electromagnetic wave interference
The input/output (main circuit) of the inverter includes high frequency components, which may interfere with the
communication devices (such as AM radios) used near the inverter. In this case, install the optional FR-BIF radio
noise filter (for use on the input side only) or FR-BSF01 or FR-BLF line noise filter to minimize interference.
(7) Do not install a power factor correction capacitor, surge suppressor or radio noise filter (FR-BIF option) on the
output side of the inverter.
This will cause the inverter to trip or the capacitor and surge suppressor to be damaged. If any of the above devices is
installed, immediately remove it. (When the FR-BIF radio noise filter is connected, switching power off during motor
operation may result in E. UVT. In this case, connect the radio noise filter in the primary side of the magnetic contactor.)
(8) Before starting wiring or other work after the inverter is operated, wait for at least 10 minutes after the power
supply has been switched off, and check that there are no residual voltage using a tester or the like. The
capacitor is charged with high voltage for some time after power off and it is dangerous.
(9) A short circuit or earth (ground) fault in the inverter output side may damage the inverter modules.
• Fully check the insulation resistance of the circuit prior to inverter operation since repeated short circuits
caused by peripheral circuit inadequacy or an earth (ground) fault caused by wiring inadequacy or reduced
motor insulation resistance may damage the inverter modules.
• Fully check the to-earth (ground) insulation and inter-phase insulation of the inverter secondary side before power on.
Especially for an old motor or use in hostile atmosphere, securely check the motor insulation resistance etc.
(10) Do not use the inverter power supply side magnetic contactor to start/stop the inverter.
Always use the start signal (turn on/off terminals STF, STR-SD) to start/stop the inverter. (Refer to page 14.)
(11) Across the P and PR terminals, connect only an external regenerative brake discharge resistor.
Do not connect a mechanical brake.
(12) Do not apply a voltage higher than the permissible voltage to the inverter I/O signal circuits.
Application of a voltage higher than the permissible voltage to the inverter I/O signal circuits or opposite polarity
may damage the I/O devices. Especially check the wiring to prevent the speed setting potentiometer from
being connected incorrectly to short terminals 10E-5.
(13) Use of single-phase power supply
Do not use single-phase power input.
(14) Precautions for use of any motor other than the vector control dedicated motor (SF-V5RU, SF-VR) and
standard motor with encoder (SF-JR)
a)Vector control cannot be exercised without encoder.
b)Connect the encoder to the backlash-free motor shaft.
(15) Since the rated voltage differs from the commercial power supply voltage, the Mitsubishi dedicated motor
cannot perform bypass operation.
SF-V5RU
SF-V5RUH
z Capacity (VA) of separate power supply
The capacity is 60VA or more for 15kW or less and 80VA for 18.5kW to 55kW when separate power is supplied from
R1, S1.
3.7kW or less 170V
5.5kW or more 160V
3.7kW or less 340V
5.5kW or more 320V
1
WIRING
11
Page 21

Others
1.6 Others
1.6.1 Leakage currents and countermeasures
Leakage currents flow through static capacitances existing in the inverter I/O wiring and motor. Since their values
depend on the static capacitances, carrier frequency, etc., take the following measures.
(1) To-earth (ground) leakage currents
Leakage currents may flow not only into the inverter's own line but also into the other lines through the earth
(ground) cable, etc.
These leakage currents may operate earth (ground) leakage breakers and earth (ground) leakage relays
unnecessarily.
z Countermeasures
• When the carrier frequency setting is high, decrease the carrier frequency (Pr. 72) of the inverter.
Note that motor noise increases. Selection of Soft-PWM (Pr. 240) will make it unoffending.
• By using earth (ground) leakage circuit breakers designed for harmonic and surge suppression in the inverter's
own line and other line, operation can be performed with the carrier frequency kept high (with low noise).
(2) Line-to-line leakage currents
Harmonics of leakage currents flowing in static capacitances between the inverter output cables may operate the
external thermal relay unnecessarily. When the wiring length is long (50m or more) for the 400V class smallcapacity model (7.5kW or less), the external thermal relay is likely to operate unnecessarily because the ratio of the
leakage current to the rated motor current increases.
z Line-to-line leakage current data example (200V class)
Motor Capacity
(kW)
1.5 9.0 370 560
2.2 13.0 400 590
Rated Motor
Current(A)
Wiring length 50m Wiring length100m
Leakage Current (mA)
• Motor SF-V5RU 4P
• Carrier frequency: 13.5KHz
• Cable :2mm
• Cab tyre cable
2
4-core
*The leakage currents of the 400V class are about twice larger.
Power supply
MCCB
Inverter
Line-to-Line Leakage Current Path
Thermal relay
Line static capacitances
Motor
IM
z Measures
• Use the electronic thermal relay function (Pr. 9) of the inverter.
• Decrease the carrier frequency. Note that motor noise increases. Selection of Soft-PWM (Pr. 240) will make it
unoffending.
For other than the dedicated motor (SF-V5RU), using a temperature sensor to directly detect the motor
temperature is recommended to ensure that the motor is protected against line-to-line leakage currents.
z Installation and selection of moulded case circuit breaker
Install a moulded case circuit breaker (MCCB) on the power receiving side to protect the wiring of the inverter
primary side. Select the MCCB according to the power supply side power factor (which depends on the power
supply voltage, output frequency and load). Especially for a completely electromagnetic MCCB, one of a slightly
large capacity must be selected since its operation characteristic varies with harmonic currents. (Check it in the
data of the corresponding breaker.) As an earth (ground) leakage breaker, use the Mitsubishi earth (ground)
leakage breaker designed for harmonics and surges.
12
Page 22
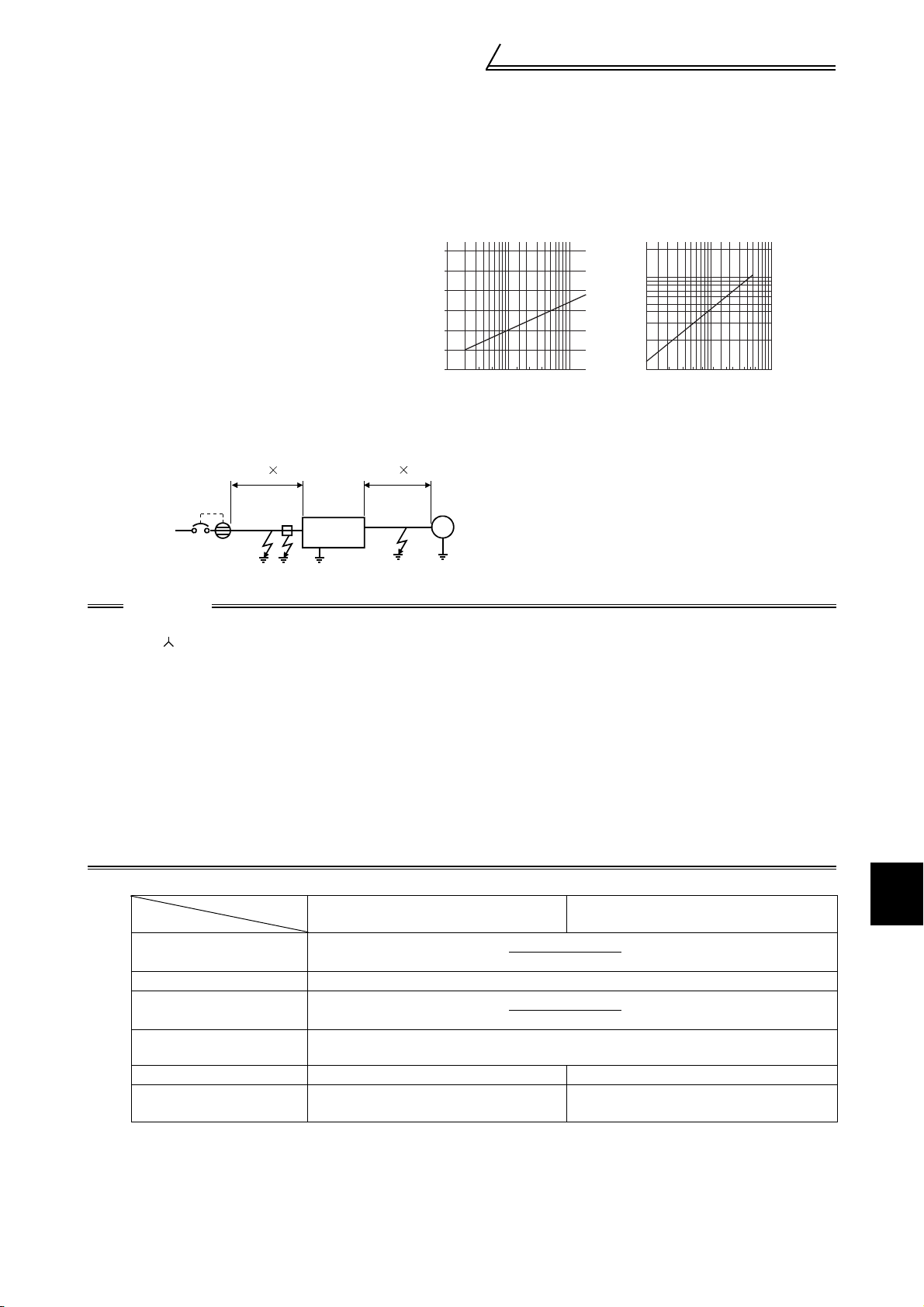
Others
(3) Selection of rated sensitivity current of earth (ground) leakage breaker
When using the earth (ground) leakage breaker with the inverter circuit, select its rated sensitivity current as follows,
independently of the PWM carrier frequency.
• Breaker designed for harmonic and surge
Rated sensitivity current
IΔn ≥10
× (Ig1 + lgn + Ig2 + Igm)
• Standard breaker
Rated sensitivity current
IΔn ≥10 × {Ig1 + Ign + 3 × (Ig2 + Igm)}
Ig1, Ig2: Leakage currents of cable path
during commercial power supply operation
Ign *: Leakage current of noise filter on
inverter input side
Igm: Leakage current of motor during
commercial power supply operation
<Example>
Leakage Current Example of Cable
Path per 1km during Commercial
Power Supply Operation When CV
Cable Is Routed in Metal Conduit
(200V 60Hz)
120
100
80
60
40
20
Leakage current (mA)
0
23.5
8142230386080
5.5
Cable size (mm
150
100
2
) Motor capacity (kW)
Leakage Current Example of
three-Phase Induction Motor during
Commercial Power Supply Operation
(200V 60Hz)
2.0
1.0
0.7
0.5
0.3
0.2
Leakage current (mA)
0.1
1.5 3.7
7.5 152211373055
2.2
5.5 18.5
45
2
2mm
5m
NV
Noise
filter
Inverter
Ig1 Ign Ig2 Igm
2mm
2
70m
3
IM
200V1.5kW
φ
CAUTION
• Install the NV on the primary (power supply) side of the inverter.
• In the connection neutral point earthing (grounding) system, the sensitivity current is purified
against an earth (ground) fault in the inverter secondary side. Earthing (Grounding) must conform to
the requirements of national and local safety regulations and electrical codes. (NEC section 250, IEC
536 class 1 and other applicable standards)
• When the breaker is installed on the secondary side of the inverter, it may be unnecessarily operated
by harmonics even if the effective value is less than the rating.
In this case, do not install the breaker since the eddy current and hysteresis loss will increase, leading
to temperature rise.
• The following models are standard breakers:
BV-C1, BC-V, NVB, NV-L, NV-G2N, NV-G3NA, and NV-2F type leakage current relays (except for NVZHA), NV with AA neutral wire open phase protection
The following models are breakers for harmonic and surge suppression:
NV-C/NV-S/MN series, NV30-FA, NV50-FA, BV-C2, leakage current alarm breaker (NF-Z), NV-ZHA, NV-H
* Note the leakage current value of the noise filter installed on the inverter input side.
Breaker Designed for Harmonic and
Surge
Leakage current Ig1 (mA) 20 ×
5m
1000m
Leakage current Ign (mA) 0 (without noise filter)
Leakage current Ig2 (mA) 20 ×
Motor leakage current Igm
(mA)
70m
1000m
0.14
Total leakage current (mA) 1.66 4.78
Rated sensitivity current
(mA)
( ≥Ig × 10)
30 100
Standard Breaker
= 0.10
= 1.40
1
WIRING
13
Page 23
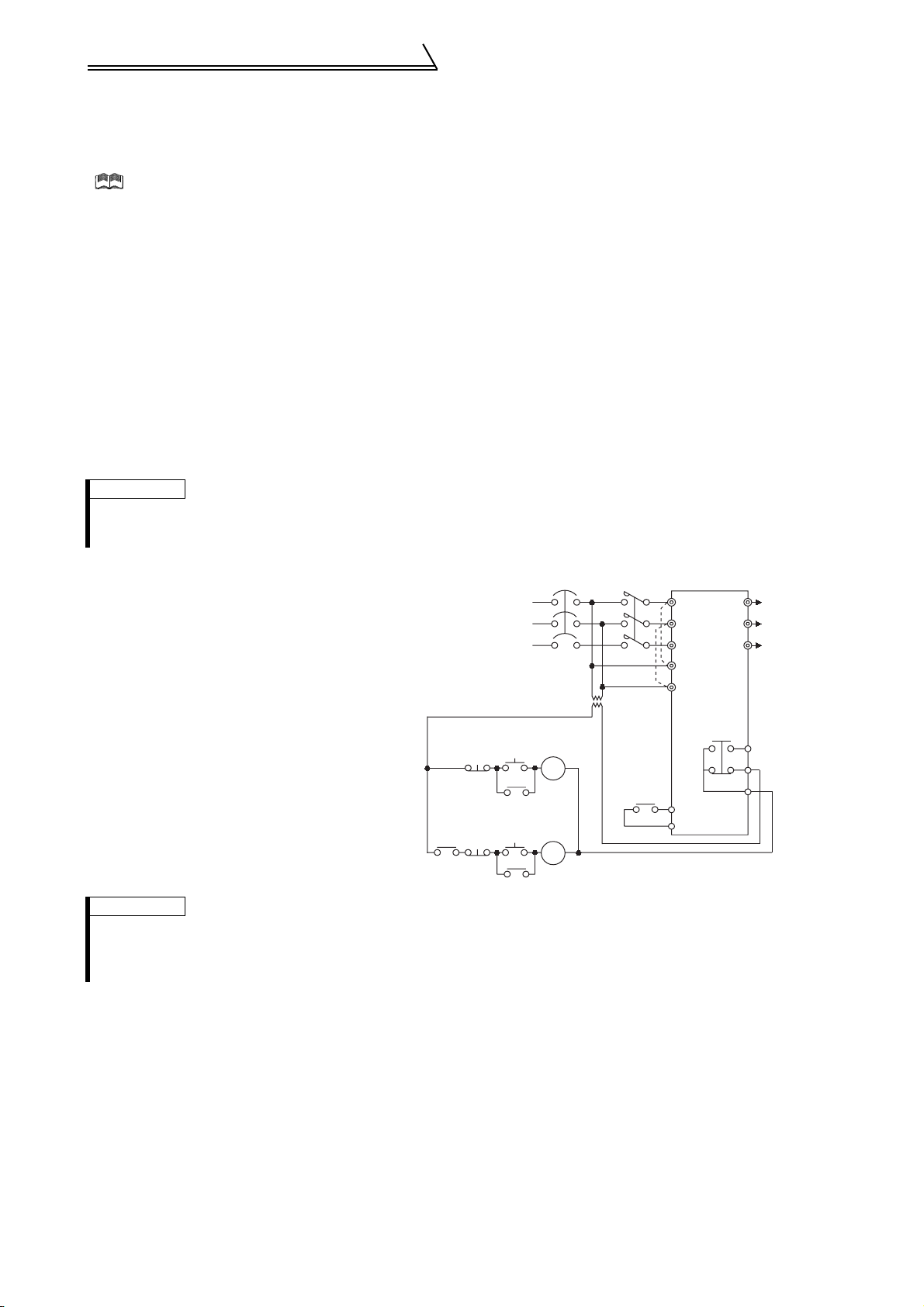
Others
r
1.6.2 Power off and magnetic contactor (MC)
(1) Inverter primary side magnetic contactor (MC)
On the inverter primary side, it is recommended to provide an MC for the following purposes.
( Refer to the Instruction Manual (basic) for selection.)
1) To release the inverter from the power supply when the inverter protective function is activated or the drive
becomes faulty (e.g. emergency stop operation)
When cycle operation or heavy-duty operation is performed with an optional brake resistor connected,
overheat and burnout of the discharging resistor can be prevented if a regenerative brake transistor is
damaged due to insufficient heat capacity of the discharging resistor and excess regenerative brake duty.
2) To prevent any accident due to an automatic restart at restoration of power after an inverter stop made by a
power failure
3) To rest the inverter for an extended period of time
The control power supply for inverter is always running and consumes a little power. When stopping the
inverter for an extended period of time, powering off the inverter will save power slightly.
4) To separate the inverter from the power supply to ensure safe maintenance and inspection work
Since the MC on the inverter input side is used for the above purposes, they correspond to the standard duties.
Therefore, when making an emergency stop during running, select a JEM1038 class AC3 MC for the inverter
input side currents.
REMARKS
The MC may be switched on/off to start/stop the inverter. However, since repeated inrush currents at power on will shorten the
life of the converter circuit (switching life is about 100,000 times), frequent starts and stops must be avoided. Turn on/off the
inverter start controlling terminals (STF, STR) to run/stop the inverter.
.
z Inverter start/stop circuit example
As shown on the right, always use the start
signal (turn on/off terminals STF, STR-SD) to
start/stop the inverter.
(Refer to page 26.)
Power
supply
Operation ready
ON
OFF
MC
Start/Stop
MC
Operation
OFF
RA
MCCB
MC
RA
MC
*2
Inverter
U
V
To moto
W
A
B
C
R
S
T
R1
*1
T
S1
RA
STF(STR)
SD
REMARKS
*1. When the power supply is 400V class, install a step-down transformer.
*2. Connect the power supply terminals R1, S1 to the primary side of the MC to hold an alarm signal when the inverter's
protective circuit is activated. At this time, remove jumpers across terminals R-R1 and S-S1. (Refer to page 10 for
removal of jumpers)
(2) Handling of secondary side magnetic contactor
In principle, do not provide a magnetic contactor between the inverter and motor and switch it from off to on during
operation. If it is switched on during inverter operation, a large inrush current may flow, stopping the inverter due to
overcurrent shut-off. When an MC is provided for switching to the commercial power supply, for example, switch it
on/off after the inverter and motor have stopped.
14
Page 24
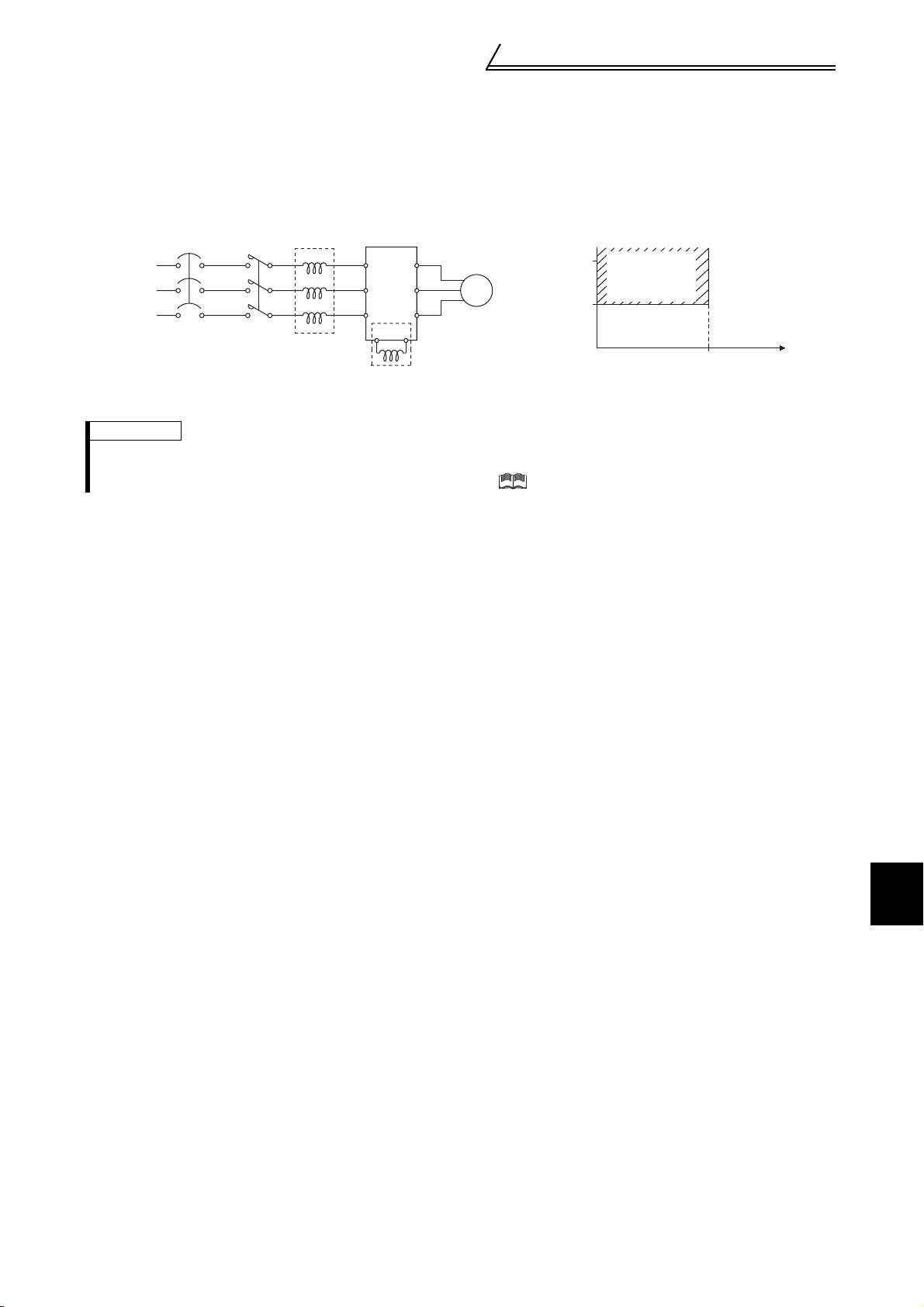
Others
1.6.3 Installation of reactor
When the inverter is connected near a large-capacity power transformer (1000kVA or more and wiring length 10m
max.) or when a power capacitor is to be switched over, an excessive peak current may flow in the power input
circuit, damaging the converter circuit. To prevent this, always install the DC reactor or AC reactor (FR-HEL/BEL or
FR-HAL/BAL).
Power
supply
MCCB
AC reactor
(FR-HAL/BAL)
MC
R
S
T
Inverter
X
Y
Z
(FR-HEL/BEL) *
U
R
S
V
W
T
P1
P
DC reactor
IM
1500
1000
Power supply
equipment capacity
(kVA)
0
Reactor
installation
range
Wiring length (m)
10
REMARKS
* When connecting the FR-HEL/BEL, remove the jumper across terminals P-P1.
The wiring length between the FR-HEL/BEL and inverter should be 5m maximum and minimized.
Use the same wire size as that of the power supply wire (R, S, T). ( Refer to the Instruction Manual (basic).)
15
1
WIRING
Page 25
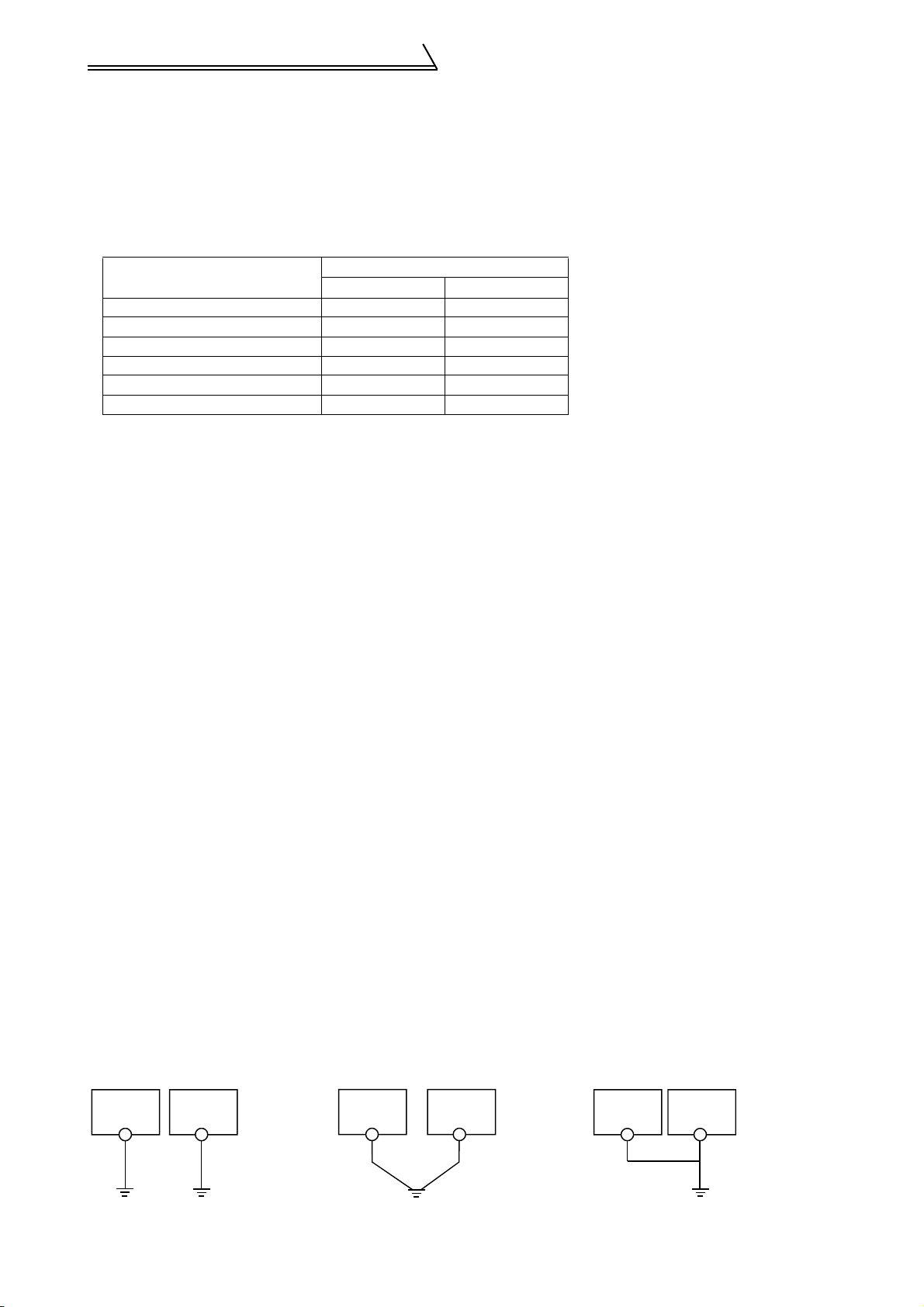
Others
1.6.4 Notes on earthing (grounding)
z Use the dedicated earth (ground) terminal to earth (ground) the inverter. (Do not use the screw in the case,
chassis, etc.)
Use a tinned crimping terminal which does not contain zinc to connect the earth (ground) cable. Tighten the
screw, taking care not to break its threads.
z Use the largest possible gauge for the earth (ground) cable. The gauge should be equal to or larger than those
indicated in the following table. The earthing (grounding) point should be as near as possible to the inverter to
minimize the earth (ground) cable length.
(Unit: mm
Motor Capacity
2.2kW or less 2 (2.5) 2 (2.5)
3.7kW 3.5 (4) 2 (2.5)
5.5kW, 7.5kW 5.5 (6) 3.5 (4)
11kW, 15kW 14 (16) 8 (10)
18.5kW to 37kW 22 (25) 14 (16)
45kW, 55kW 38 (35) 22 (25)
Earth (Ground) Cable Gauge
200V 400V
For use as a Low Voltage Directive-compliant product, use the PVC cables indicated in the parentheses for earthing
(grounding).
z Earth (Ground) the motor on the inverter side using one wire of the 4-core cable.
z Always earth (ground) the motor and inverter.
(1)Purpose of earthing (grounding)
Generally, an electrical apparatus has an earth (ground) terminal, which must be connected to the ground
before use.
An electrical circuit is usually insulated by an insulating material and encased. However, it is impossible to
manufacture an insulating material that can shut off a leakage current completely, and actually, a slight current
flow into the case. The purpose of earthing (grounding) the case of an electrical apparatus is to prevent
operator from getting an electric shock from this leakage current when touching it.
To avoid the influence of external noises, this earthing (grounding) is important to audio equipment, sensors,
computers and other apparatuses that handle low-level signals or operate very fast.
(2)Earthing (Grounding) methods and earthing (grounding) work
As described previously, earthing (grounding) is roughly classified into an electrical shock prevention type and
a noise-affected malfunction prevention type. Therefore, these two types should be discriminated clearly, and
the following work must be done to prevent the leakage current having the inverter's high frequency
components from entering the malfunction prevention type earthing (grounding):
(a) Where possible, use independent earthing (grounding) for the inverter.
If independent earthing (grounding) (I) is impossible, use joint earthing (grounding) (II) where the inverter is
connected with the other equipment at an earthing (grounding) point. Joint earthing (grounding) as in (III)
must be avoided as the inverter is connected with the other equipment by a common earth (ground) cable.
Also a leakage current including many high frequency components flows in the earth (ground) cables of the
inverter and inverter-driven motor. Therefore, they must use the independent earthing (grounding) method
and be separated from the earthing (grounding) of equipment sensitive to the aforementioned noises.
In a tall building, it will be a good policy to use the noise malfunction prevention type earthing (grounding)
with steel frames and carry out electric shock prevention type earthing (grounding) in the independent
earthing (grounding) method.
(b) Earthing (Grounding) must conform to the requirements of national and local safety regulations and
electrical codes.
(NEC section 250, IEC 536 class 1 and other applicable standards).
(c) Use the thickest possible earth (ground) cable. The earth (ground) cable should be of not less than the size
indicated in the above table.
(d) The earthing (grounding) point should be as near as possible to the inverter to minimize the earth (ground)
cable length.
(e) Run the earth (ground) cable as far away as possible from the I/O wiring of equipment sensitive to noises
and run them in parallel in the minimum distance.
(f) Use one wire in a 4-core cable with the earth (ground) terminal of the motor and earth (ground) it on the
inverter side.
2
)
Inverter
(I) Independent earthing (grounding) ... Best
Other
equipment
200V class
class D earthing (grounding)
400V class
class C earthing (grounding)
Inverter
(II) Joint
Other
equipment
200V class
class D earthing (grounding)
400V class
class C earthing (grounding)
earthing (grounding)
16
... Good
Inverter
(III) Joint earthing (grounding) ... Not allowed
Other
equipment
200V class
class D earthing (grounding)
400V class
class C earthing (grounding)
Page 26
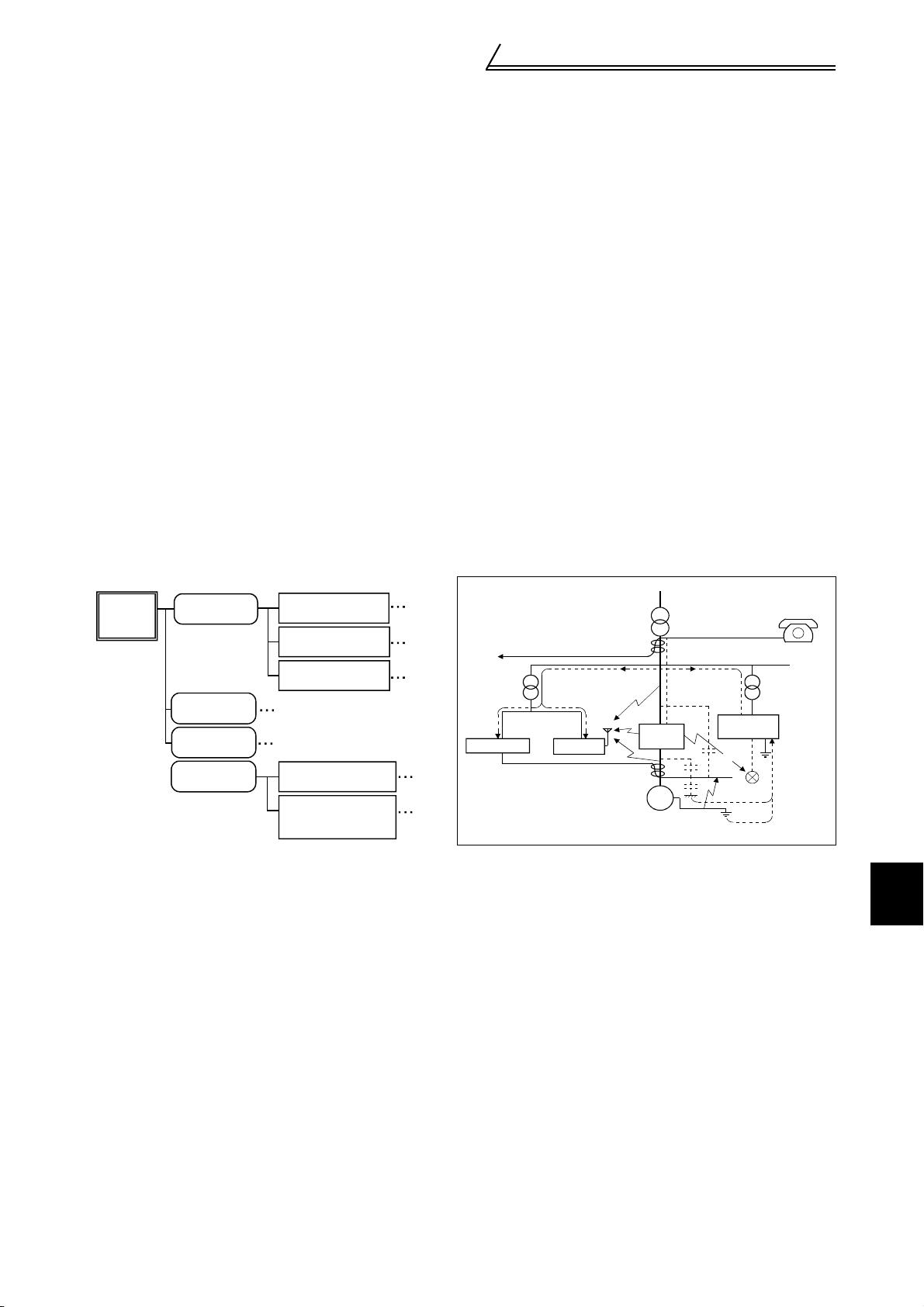
Others
1.6.5 Inverter-generated noises and their reduction techniques
Some noises enter the inverter to malfunction it and others are radiated by the inverter to malfunction peripheral
devices. Though the inverter is designed to be insusceptible to noises, it handles low-level signals, so it requires the
following basic techniques. Also, since the inverter chops outputs at high carrier frequency, that could generate
noises. If these noises cause peripheral devices to malfunction, measures should be taken to suppress noises.
These techniques differ slightly depending on noise propagation paths.
1) Basic techniques
• Do not run the power cables (I/O cables) and signal cables of the inverter in parallel with each other and do
not bundle them.
• Use twisted pair shielded cables for the detector connection and control signal cables, and connect the
sheathes of the shield cables to terminal SD.
• Earth (Ground) the inverter, motor, etc. at one point.
2) Techniques to reduce noises that enter and malfunction the inverter
When devices that generate many noises (which use magnetic contactors, magnetic brakes, many relays, for
example) are installed near the inverter and the inverter may be malfunctioned by noises, the following
measures must be taken:
•Provide surge suppressors for devices that generate many noises to suppress noises.
•Fit data line filters (page 18) to signal cables.
•Earth (Ground) the shields of the detector connection and control signal cables with cable clamp metal.
3) Techniques to reduce noises that are radiated by the inverter to malfunction peripheral devices
Inverter-generated noises are largely classified into those radiated by the cables connected to the inverter and
inverter main circuits (I/O), those electromagnetically and electrostatically induced to the signal cables of the
peripheral devices close to the main circuit power supply, and those transmitted through the power supply
cables.
Invertergenerated
noise
Air-propagated
noises
Magnetic
induction noises
Static induction
noises
Cable-propagated noises
Noises directly
radiated by inverter
Noises radiated
by power cables
Noises radiated
by motor cables
Path 4, 5
Path 6
Noises propagated
through power cables
Noise from earth
(Ground) cable due to
leakage current
Path 1
Path 2
Path 3
Path 7
Path 8
Instrument
7)
Receiver
2)
1)
3)
Motor
5)
Inverter
IM
Telephone
7)
Sensor
power supply
1)
6)
4)
Sensor
3)
8)
• By decreasing the carrier frequency, the mains terminal interface voltage* can be reduced. When motor noise
does not pose a problem, set the carrier frequency to a low value using Pr. 72.
(*Mains terminal interface voltage represents the magnitude of noise propagated from the inverter to the power
supply side.)
• Using shield cables as signal cables, induction noise can be reduced greatly (to 1/10 - 1/100). Induction noise
can also be reduced by separating the signal cables from the inverter output cables. (Separation of 30cm
reduces noise to 1/2-1/3.)
By fitting the FR-BSF01 or BLF on the inverter output side, induction noise to the signal cables can be reduced.
1
WIRING
17
Page 27
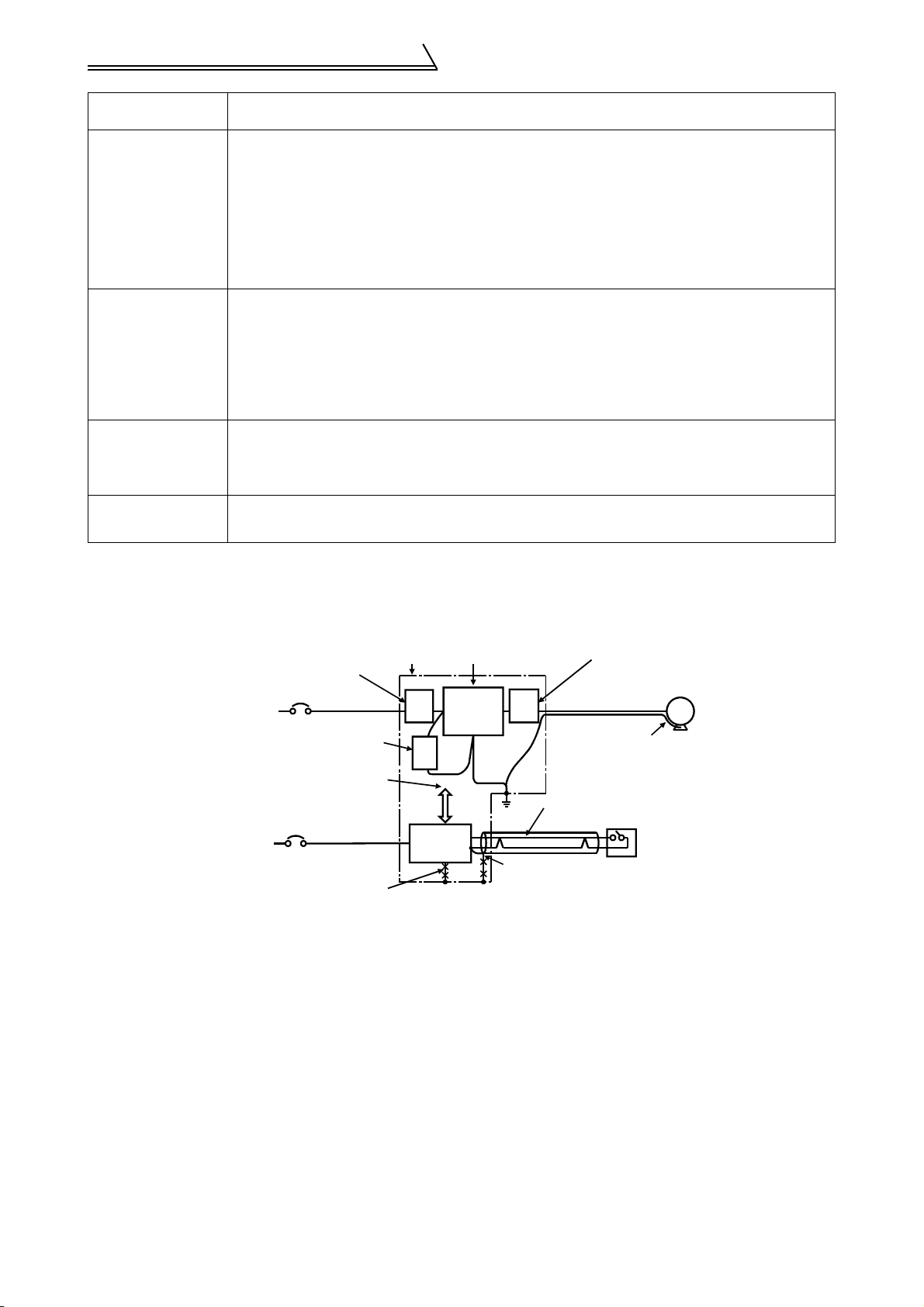
Others
Noise Propagation
Path
1), 2), 3)
4), 5), 6)
7)
8)
z Data line filters
Measures
When devices that handle low-level signals and are liable to malfunction due to noises, e.g.
instruments, receivers and sensors, are contained in the enclosure that contains the inverter or when
their signal cables are run near the inverter, the devices may be malfunctioned by air-propagated
noises. The following measures must be taken:
(1) Install easily affected devices as far away as possible from the inverter.
(2) Run easily affected signal cables as far away as possible from the inverter and its I/O cables.
(3) Do not run the signal cables and power cables (inverter I/O cables) in parallel with each other and
do not bundle them.
(4) Insert line noise filters into I/O and radio noise filters into input to suppress cable-radiated noises.
(5) Use shielded cables as signal cables and power cables and run them in individual metal conduits
to produce further effects.
When the signal cables are run in parallel with or bundled with the power cables, magnetic and static
induction noises may be propagated to the signal cables to malfunction the devices and the following
measures must be taken:
(1) Install easily affected devices as far away as possible from the inverter.
(2) Run easily affected signal cables as far away as possible from the I/O cables of the inverter.
(3) Do not run the signal cables and power cables (inverter I/O cables) in parallel with each other and
do not bundle them.
(4) Use shielded cables as signal cables and power cables and run them in individual metal conduits
to produce further effects.
When the power supplies of the peripheral devices are connected to the power supply of the inverter in
the same line, inverter-generated noises may flow back through the power supply cables to
malfunction the devices and the following measures must be taken:
(1) Install the radio noise filter (FR-BIF) to the power cables (input cables) of the inverter.
(2) Install the line noise filter (FR-BLF, FR-BSF01) to the power cables (I/O cables) of the inverter.
When a closed loop circuit is formed by connecting the peripheral device wiring to the inverter, leakage
currents may flow through the earth (ground) cable of the inverter to malfunction the device. In such a
case, disconnection of the earth (ground) cable of the device may cause the device to operate properly.
Noise entry can be prevented by providing a data line filter for the detector cable etc.
z Example of noise reduction techniques
Install filter
(FR-BLF, FR-BSF01)
on inverter input side.
Inverter
power supply
Install FR-BIF filter
on inverter input side.
Separate inverter and power
line by more than 30cm
(at least 10cm) from sensor circuit.
Control
power supply
Do not earth (ground)
control box directly.
Do not earth (ground)
control cable.
Control box
FR-
BLF
FRBIF
Power supply
for sensor
Reduce carrier
frequency.
FR-
Inverter
BLF
Do not earth (ground) shield but connect
it to common cable of signal.
Use twisted pair shield cable.
Install filter
(FR-BLF, FR-BSF01)
on inverter output side.
Use 4-core cable as motor
power cable and use one wire
as earth (ground) wire.
Sensor
IM
Motor
18
Page 28
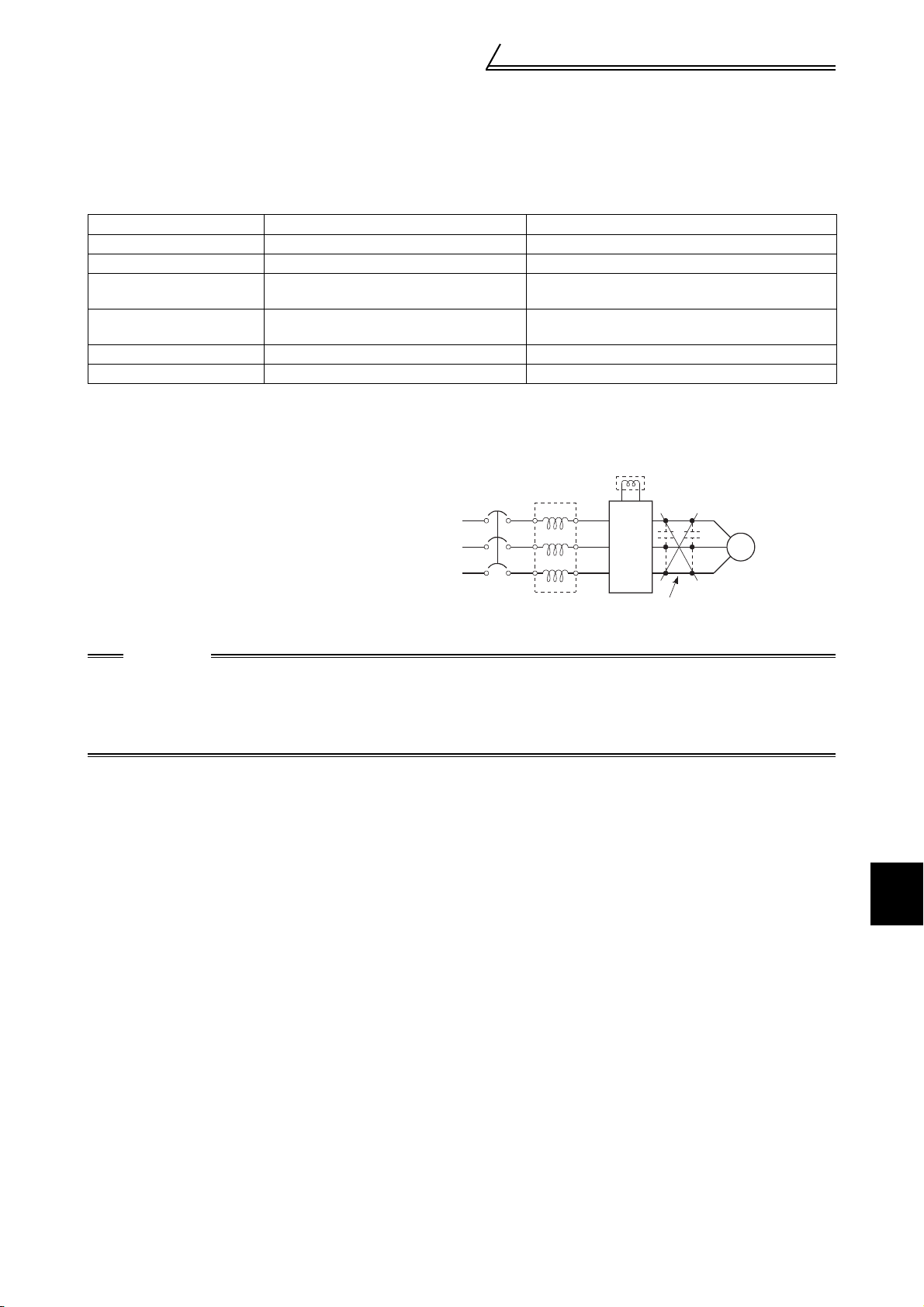
Others
1.6.6 Power supply harmonics
Power supply harmonics may be generated from the converter section of the inverter, affecting the power supply
equipment, power capacitors, etc. Power supply harmonics are different in generation source, frequency and
transmission path from radio frequency (RF) noise and leakage currents. Take the following measures.
z The differences between harmonics and RF noises are indicated below:
Item Harmonics RF Noise
Frequency Normally 40 to 50th degrees (3kHz or less) High frequency (several 10kHz to 1GHz order)
Environment To wire paths, power impedance Across spaces, distance, laying paths
Quantitative understanding Logical computation is possible
Generated amount
Immunity of affected device Specified in standards for each device. Differs according to maker's device specifications.
Examples of safeguard Install a reactor. Increase the distance.
Approximately proportional to load
capacity
z Safeguard
The harmonic current generated from the inverter
to the power supply differs according to various
conditions such as the wiring impedance, whether
a reactor is used or not, and output frequency and
output current on the load side.
MCCB
For the output frequency and output current, the
adequate method is to obtain them under rated
load at the maximum operating frequency.
Occurs randomly, quantitative understanding is
difficult.
According to current fluctuation rate (larger with
faster switching)
DC reactor
IM
Inverter
Motor
AC reactor
Do not insert power factor
improving capacitor.
CAUTION
The power factor improving capacitor and surge suppressor on the inverter output side may be
overheated or damaged by the high frequency components of the inverter output. Also, since an
excessive current flows in the inverter to activate overcurrent protection, do not provide a capacitor and
surge suppressor on the inverter output side when the motor is driven by the inverter. To improve the
power factor, insert a reactor on the inverter's primary side or in the DC circuit.
1
WIRING
19
Page 29
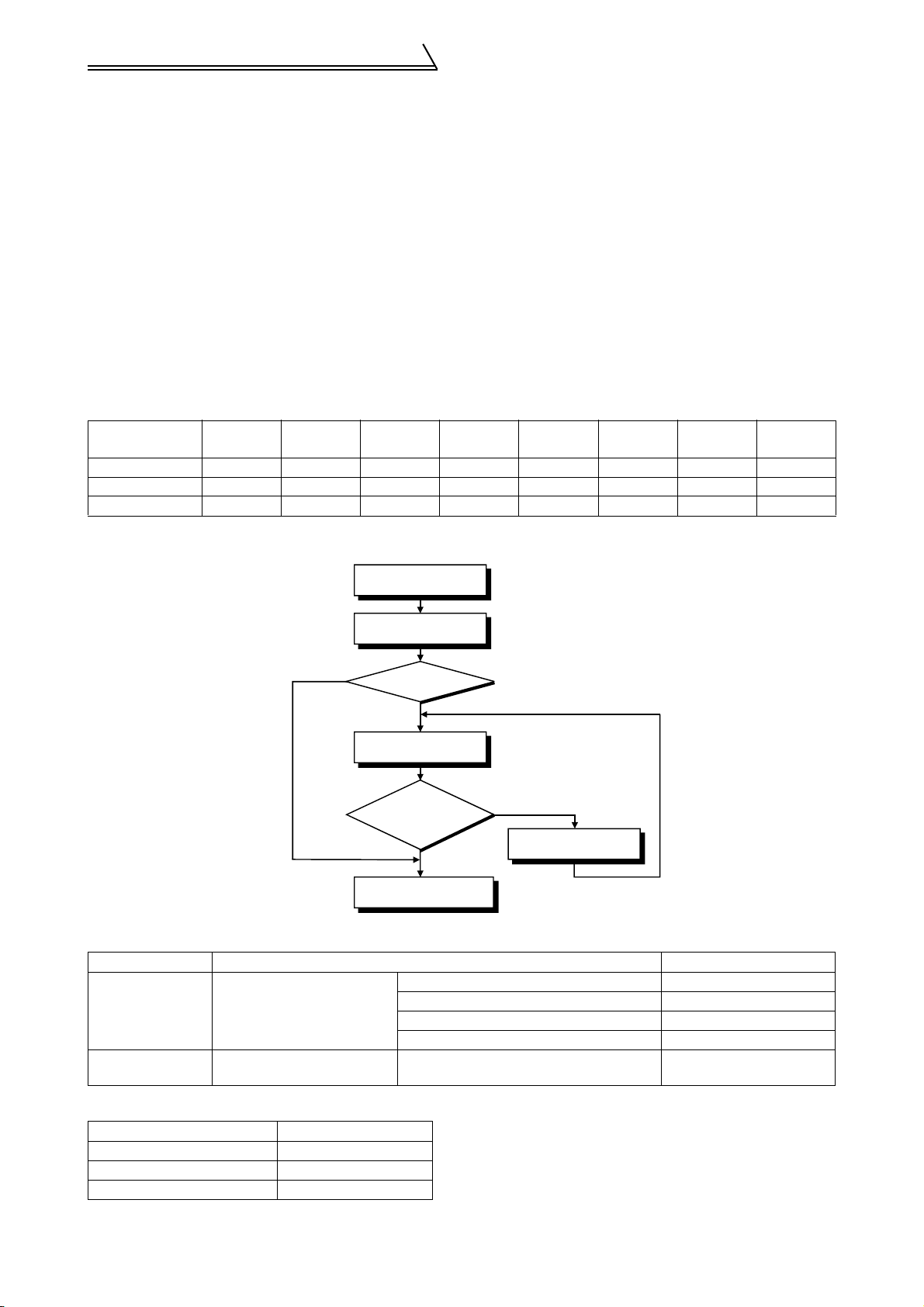
Others
1.6.7 Harmonic suppression guidelines
Harmonic currents flow from the inverter to a power receiving point via a power transformer. The harmonic
suppression guidelines were established to protect other consumers from these outgoing harmonic currents.
The three-phase 200V input specifications 3.7kW or less are previously covered by "Harmonic suppression
guideline for household appliances and general-purpose products" and other models are covered by "Harmonic
suppression guideline for consumers who receive high voltage or special high voltage". However, the generalpurpose inverter has been excluded from the target products covered by "Harmonic suppression guideline for
household appliances and general-purpose products" in January 2004. Later, this guideline was repealed on
September 6, 2004. All capacities of all models are now target products of "Harmonic suppression guideline for
consumers who receive high voltage or special high voltage" (hereinafter referred to as "guideline for specific
consumers").
"Guideline for specific consumers"
This guideline sets forth the maximum values of harmonic currents outgoing from a high-voltage or especially
high-voltage consumer who will install, add or renew harmonic generating equipment. If any of the maximum
values is exceeded, this guideline requires that consumer to take certain suppression measures.
Table 1 Maximum Values of Outgoing Harmonic Currents per 1kW Contract Power
Received
Power Voltage
5th 7th 11th 13th 17th 19th 23rd Over 23rd
6.6kV 3.5 2.5 1.6 1.3 1.0 0.9 0.76 0.70
22kV 1.8 1.3 0.82 0.69 0.53 0.47 0.39 0.36
33kV 1.2 0.86 0.55 0.46 0.35 0.32 0.26 0.24
(1) Application of the guideline for specific consumers
New installation/addition/
renewal of equipment
Calculation of equivalent
capacity sum
Not more than
reference capacity
Over reference capacity
Sum of
equivalent capacities
Calculation of outgoing
harmonic current
Is outgoing
harmonic current equal to
or lower than maximum
value?
Not more than
maximum value
Harmonic suppression
technique is not required.
Over maximum value
Harmonic suppression
technique is not required.
Table 2 Conversion Factors for FR-V500 Series
Class Circuit Type Conversion Factor Ki
Without reactor K31 = 3.4
3
Three-phase bridge
(Capacitor-smoothed)
With reactor (AC side) K32 = 1.8
With reactor (DC side) K33 = 1.8
With reactors (AC, DC sides) K34 = 1.4
5
Self-excitation three-phase
bridge
When high power factor converter is used K5 = 0
Table 3 Equivalent Capacity Limits
Received Power Voltage Reference Capacity
6.6kV 50kVA
22/33kV 300kVA
66kV or more 2000kVA
20
Page 30
Others
Table 4 Harmonic Content (Values of the fundamental current is 100%.)
Reactor 5th 7th 11th 13th 17th 19th 23rd 25th
Not used 65 41 8.5 7.7 4.3 3.1 2.6 1.8
Used (AC side) 38 14.5 7.4 3.4 3.2 1.9 1.7 1.3
Used (DC side) 30 13 8.4 5.0 4.7 3.2 3.0 2.2
Used (AC, DC sides) 28 9.1 7.2 4.1 3.2 2.4 1.6 1.4
1) Calculation of equivalent capacity P0 of harmonic generating equipment
The "equivalent capacity" is the capacity of a 6-pulse converter converted from the capacity of consumer's
harmonic generating equipment and is calculated with the following equation. If the sum of equivalent
capacities is higher than the limit in Table 3, harmonics must be calculated with the following procedure:
P0 = Σ Ki × Pi [kVA]
Ki : Conversion factor (refer to Table 2)
Pi : Rated capacity of harmonic generating
equipment* [kVA]
i : Number indicating the conversion circuit type
* Rated capacity: Determined by the capacity of the applied
motor and found in Table 5. It should be noted that the
rated capacity used here is used to calculate generated
harmonic amount and is different from the power supply
capacity required for actual inverter drive.
2) Calculation of outgoing harmonic current
Outgoing harmonic current = fundamental wave current (value converted from received power voltage)
× operation ratio × harmonic content
• Operation ratio: Operation ratio = actual load factor × operation time ratio during 30 minutes
• Harmonic contents: Found in Table 4
Table 5 Rated Capacities and Outgoing Harmonic Currents for Inverter Drive
Rated Current
Applied
Motor
kW
1.5 5.50 2.75 167 1.95 108.6 68.47 14.20 12.86 7.181 5.177 4.342 3.006
2.2 7.93 3.96 240 2.81 156.0 98.40 20.40 18.48 10.32 7.440 6.240 4.320
3.7 13.0 6.50 394 4.61 257.1 161.5 33.49 30.34 16.94 12.21 10.24 7.092
5.5 19.1 9.55 579 6.77 376.1 237.4 49.22 44.58 24.90 17.95 15.05 10.42
7.5 25.6 12.8 776 9.07 504.4 318.2 65.96 59.75 33.37 24.06 20.18 13.97
11 36.9 18.5 1121 13.1 728.7 459.6 95.29 86.32 48.20 34.75 29.15 20.18
15 49.8 24.9 1509 17.6 980.9 618.7 128.3 116.2 64.89 46.78 39.24 27.16
18.5 61.4 30.7 1860 21.8 1209 762.6 158.1 143.2 79.98 57.66 48.36 33.48
22 73.1 36.6 2220 25.9 1443 910.2 188.7 170.9 95.46 68.82 57.72 39.96
30 98.0 49.0 2970 34.7 1931 1218 252.5 228.7 127.7 92.07 77.22 53.46
37 121 60.4 3660 42.8 2379 1501 311.1 281.8 157.4 113.5 95.16 65.88
45 147 73.5 4450 52.1 2893 1825 378.3 342.7 191.4 138.0 115.7 80.10
55 180 89.9 5450 63.7 3543 2235 463.3 419.7 234.4 169.0 141.7 98.10
[A]
200V 400V 5th 7th 11th 13th 17th 19th 23rd 25th
Fundamen
tal Wave
Current
Converted
from 6.6kV
(mA)
Rated
Capacity
(kVA)
Outgoing Harmonic Current Converted from 6.6kV (mA)
(No reactor, 100% operation ratio)
1
3) Harmonic suppression technique requirement
If the outgoing harmonic current is higher than the maximum value per 1kW contract power × contract power, a
harmonic suppression technique is required.
21
WIRING
Page 31

Others
4) Harmonic suppression techniques
No. Item Description
Reactor installation
1
(ACL, DCL)
High power factor
2
converter
(FR-HC)
Installation of power
3
factor improving capacitor
Transformer multi-phase
4
operation
Passive filter
5
(AC filter)
6Active filter
Install a reactor (ACL) on the AC side of the inverter or a reactor (DCL) on its DC side or
both to suppress outgoing harmonic currents.
The converter circuit is switched on-off to convert an input current waveform into a sine
wave, suppressing harmonic currents substantially. The high power factor converter (FRHC) is used with the standard accessory.
When used with a series reactor, the power factor improving capacitor has an effect of
absorbing harmonic currents.
Use two transformers with a phase angle difference of 30° as in -delta, delta-delta
combination to provide an effect corresponding to 12 pulses, reducing low-degree
harmonic currents.
A capacitor and a reactor are used together to reduce impedance at specific frequencies,
producing a great effect of absorbing harmonic currents.
This filter detects the current of a circuit generating a harmonic current and generates a
harmonic current equivalent to a difference between that current and a fundamental wave
current to suppress a harmonic current at a detection point, providing a great effect of
absorbing harmonic currents.
1.6.8 Inverter-driven 400V class motor
In the PWM type inverter, a surge voltage attributable to wiring constants is generated at the motor terminals.
Especially for a 400V class motor, the surge voltage may deteriorate the insulation. When the 400V class motor is
driven by the inverter, consider the following measures:
z Measures
It is recommended to take either of the following measures.
(1) Rectifying the motor insulation
For the 400V class motor, use an insulation-enhanced motor. Specifically,
1) Specify the "400V class inverter-driven, insulation-enhanced motor".
2) For the dedicated motor such as the constant-torque motor or low-vibration motor, use the "inverter-driven,
dedicated motor".
CAUTION
• If the wiring length between the motor and inverter is 40m or longer, set Pr. 240 to long wiring mode in
addition to the above countermeasures to operate the inverter. (Refer to page 112 for Pr. 240 "Soft-
PWM selection".)
22
Page 32

Others
1.6.9 Using the PU connector for computer link
(1) When connecting the control panel or parameter unit using a connection cable
Refer to the Instruction Manual (basic).
(2) For RS-485 communication
The PU connector can be used to perform communication operation from a personal computer etc.
When the PU connector is connected with a personal, FA or other computer by a communication cable, a user
program can run and monitor the inverter or read and write to parameters.
<PU connector pin-outs>
Viewed from the inverter (receptacle side) front
8)
1)
1) SG
2) P5S
3) RDA
4) SDB
5) SDA
6) RDB
7) SG
8) P5S
CAUTION
1. Do not connect the PU connector to the computer's LAN board, FAX modem socket or telephone
modular connector. Otherwise, the product may be damaged due to electrical specification
differences.
2. Pins No. 2 and 8 (P5S) provide power to the control panel or parameter unit.
Do not use these pins for RS-485 communication.
<System configuration example>
(1) Connection of a computer to the inverter (1:1 connection)
Station 0
Inverter
RS-485
connector
RJ-45 connector 2)
RS-485
Interfase
terminal
Computer
Station 0
Inverter
RS-485
connector
10BASE-T cable 1)
RJ-45
connector 2)
RS-232C
cable
Computer
RS-232C
connector
Maximum 15m
RS-232C RS-485
converter
10BASE-T cable 1)
zComputer - inverter connection cable
For a connection cable between the computer having RS-232C and the inverter (RS-232C⇔RS-485
converter), refer to the table below.
Examples of commercially available products (as of September, '06)
Typ e Ma ker
FA-T-RS40 type* Mitsubishi Electric Engineering Co., Ltd
* The converter cable cannot connect two or more inverters (the computer and inverter are connected on a 1:1
basis). Since the product is packed with the RS-232C cable and RS-485 cable (10BASE-T + RJ-45 connector),
the cable and connector need not be prepared separately. Contact a maker for details of the product.
REMARKS
When fabricating the cable on the user side, see below.
Examples of commercially available products (as of September, '06)
Product Type Maker
1) 10BASE-T cable
2) RJ-45 connector 5-554720-3 Tyco Electronics Corporation
SGLPEV-T 0.5mm
* Do not use No. 2 and No. 8 pin (P5S).
× 4P
Mitsubishi Cable Industries, Ltd.
1
WIRING
23
Page 33

Others
(2) Connection of a computer to multiple inverters (1:n connection)
RS-485
Computer
Station 1
Inverter
RS-485
connector
Station 2
Inverter
RS-485
connector
Station n (up to 32)
Inverter
RS-485
connector
interface
terminal
RS-232C
cable
Computer
RS-232C
connector
Converter
Distributor
10BASE-T cable 1)
Maximum
15m
Station 1
Inverter
RS-485
connector
Distributor
RJ-45 connector
Station 2
Inverter
RS-485
connector
2)
Terminating
resistor
Station n
Inverter
RS-485
connector
Terminating
resistor
10BASE-T cable
1)
RJ-45 connector 2)
REMARKS
When fabricating the cable on the user side, see below.
Examples of commercially available products (as of September, '06)
Product Type Maker
1) 10BASE-T cable SGLPEV-T 0.5mm × 4P * Mitsubishi Cable Industries, Ltd.
2) RJ-45 connector 5-554720-3 Tyco Electronics Corporation
* Do not use No. 2 and No. 8 pin (P5S) of the 10 BASE-T cable.
24
Page 34

<Wiring method>
1) Wiring of one RS-485 computer and one inverter
Others
Computer Side Terminals
Signal name
RDA
RDB
SDA
SDB
RSA
RSB
CSA
CSB
SG
FG
Request to send
Request to send
Clear to send
Clear to send
Signal ground
Frame ground
Description
Receive data
Receive data
Send data
Send data
Cable connection and signal direction
10 BASE-T cable
(Caution 1)
0.2mm or more
2
Inverter
PU connector
SDA
SDB
RDA
RDB
SG
2) Wiring of one RS-485 computer and "n" (multiple) inverters
Computer
RDA
RDB
SDA
SDB
RSA
RSB
CSA
CSB
SG
FG
(Caution 1)
Cable connection and signal direction
10 BASE-T cable
RDB
RDA
SDB
SDA
SG
Station 1
Inverter
RDB
SG
Station 2
Inverter
RDA
SDB
SDA
SG
RDB
RDA
Station n
Inverter
SDB
Terminating
resistor
(Caution 2)
SDA
CAUTION
1. Make connections in accordance with the manual of the computer used.
Fully check the terminal numbers of the computer since they vary with the model.
2. There may be the influence of reflection depending on the transmission speed and/or transmission
distance. If this reflection hinders communication, provide a terminating resistor. If the PU connector
is used to make a connection, use a distributor since a terminating resistor cannot be fitted.
Connect the terminating resistor to only the inverter remotest from the computer.
(terminating resistor: 100Ω)
1
25
WIRING
Page 35

Input terminals
1.7 Input terminals
1.7.1 Run (start) and stop (STF, STR, STOP)
To start and stop the motor, first switch on the input power of the inverter (when there is a magnetic contactor on the
input side, use the operation-ready switch to turn on the magnetic contactor), then start the motor with the forward
or reverse rotation start signal.
(1) Two-wire type (STF, STR)
A two-wire type connection is shown on the right.
1) The forward/reverse rotation signal is used as both
the start and stop signals. Turn on either of the
forward and reverse rotation signals to start the
motor in the corresponding direction. Turn on both or
turn off the start signal during operation to decelerate
the inverter to a stop.
2) The speed setting signal may either be given by
entering 0 to 10VDC across the speed setting input
terminal 2-5 or by setting the required values in Pr. 4
to Pr. 6 "three-speed setting" (high, middle, low
speeds). (Refer to page 77 for three-speed
operation.)
(2) Three-wire type (STF, STR, STOP)
A three-wire type connection is shown on the right. Assign
the start self-holding signal (STOP) to any of the input
terminals.
1) Short signals STOP-SD to enable the start self-holding
function. In this case, the forward/reverse rotation
signal functions only as a start signal.
REMARKS
Assign the STOP signal to any of Pr. 180 to Pr. 183 and
Pr. 187 (input terminal function selection).
2) If the start signal terminals STF (STR)-SD are once
shorted, then opened, the start signal is kept on and
starts the inverter. To change the rotation direction,
short the start signal STR (STF)-SD once, then open it.
3) The inverter is decelerated to a stop by opening
terminals STOP-SD once. The three-wire connection
is shown on the right.
4) When terminals JOG-SD are shorted, the STOP signal
is invalid and jog signal has precedence.
5) If the output stop terminals MRS-SD are shorted, the
self-holding function is not deactivated.
Power
supply
MCCB
Forward
rotation start
Reverse
rotation start
Output speed
Across STF-SD
(STR)
R, S, T
Inverter
STF
STR (Pr.187 = "9999")
SD
ON
Two-Wire Type Connection Example
Power
supply
MCCB
Stop
Output speed
Start
Stop
Forward rotation
start
Reverse rotation
start
ON
R, S, T
Inverter
STF
STR (Pr.187 = "9999")
STOP
SD
Three-Wire Type Connection Example
Time
(Set "25" in any of
Pr. 180 to Pr. 183)
Time
ON
26
Page 36

Input terminals
1.7.2 External thermal relay input (OH)
When the external thermal relay or the built-in thermal relay of the motor (thermal
U
V
W
Thermal relay
Motor
IM
relay protector) is actuated to protect the motor from overheat, the inverter output
can be shut off and the corresponding alarm signal can be provided to hold a stop
status. Even if the thermal relay contact resets, the motor cannot be restarted unless
the reset terminal RES-SD are shorted for more than 0.1s and then opened or a
power-on reset is made.
Inverter
OH
SD
Therefore, this function can be used as an externals emergency stop signal input.
1.7.3 Speed setting potentiometer connection (10E, 2 (1), 5)
As an analog speed setting input signal, a voltage signal can be input.
The relationships between the speed setting input voltages and output speeds are as shown below. The speed
setting input signals are proportional to the output speeds. Note that when the input signal is less than the starting
speed, the output speed of the inverter is 0r/min.
If the input signal of 10VDC or higher is entered, it cannot exceed Pr. 1 "maximum speed".
Speed setting terminal 2 gain speed
(Terminal 1 gain)
(30r/min to 3600r/min)
Maximum speed
(0 to 3600r/min)
Minimum speed
(0 to 3600r/min)
Starting speed
(0 to 1500r/min)
Output speeds (r/min)
Input voltage is
proportional to
output speed.
1
0
Speed setting signals
10V
Pr.13
Pr.73
Pr.2
Pr.1
Pr.903
Pr.918
Relationships between Speed Setting Inputs and Output Speeds
Related parameters
Maximum speed setting Pr. 1 "maximum speed" (Refer to page 76.)
(1) Voltage input (10E, 2, 5)
Enter the speed setting input signal of 0 to 10VDC across the speed setting input terminals 2-5. The maximum
output speed is reached when 10V is input across terminals 2-5.
The power supply used may either be the inverter's built-in power supply or an external power supply. For the builtin power supply, terminals 10E-5 provide 10VDC output.
• Use terminal 10E for the built-in power supply.
+10V
0 to 10VDC
10E
2
5
1
(2) Multi-function input (1, 5)
The analog input function can be multi-functioned, e.g. compensation signal may be entered across the main speed
setting terminals 2-5 for synchronous operation.
Across auxiliary input terminals 1-5 ... 0 to ±10VDC
The function of terminal 1 depends on the setting of Pr. 868 "terminal 1 function assignment". Refer to page 183 for
details of Pr. 868.
27
WIRING
Page 37

Input terminals
1.7.4 Torque setting input signal and motor-generated torque (terminals 3, 5)
Refer to the diagrams shown at below right for the relationship between the torque setting input signal and output
voltage. The torque setting input signal is in proportion to the output torque. However, motor-generated torque
varies with the motor temperature. The guideline of the output torque accuracy relative to the torque setting input is
torque accuracy ±3% (under condition of 75°C) when the SF-V5RU vector control inverter motor is used.
0 to ±10VDC
Common(-)
3
5
Analog Input Block Diagram
Gain Pr. 905
Bias
Pr.904
-10V
Output torque
(Torque command)
150%
Bias
Pr.904
-150%
Torque Setting Input vs. Output Torque
Gain
Pr.905
10V
Terminal 3
1.7.5 Meter connection method and adjustment (DA1, DA2)
The output speed etc. of the inverter can be displayed by connecting a meter (speed meter) across terminals DA1
(DA2)-5.
The meter can be calibrated from the control panel or parameter unit. However, if the meter is away from the
inverter, the display value will vary with the wiring distance.
The terminals DA1, DA2 are non-isolated from the control circuit of the inverter. Using a shield cable of within 30m
for wiring.
Load impedance
or more
10k
Ω
(+)
Meter
(Speed meter)
(-)
Inverter
DA1
5
0 to ±10VDC
Zero-center
Load impedance
10k
Ω
(+)
Meter
(Speed meter)
(-)
or more
Inverter
DA2
0 to 10VDC
5
Types of Connected Meters
REMARKS
Using Pr. 867 "DA1 output filter", you can function the primary delay filter. (Refer to page 183.)
CAUTION
Refer to page 188 for the meter adjustment procedure.
[Example] To provide a 10V DA1-5 (DA2-5) output of 10V at the inverter output speed of 3000r/min, set "3000" (r/
min) in Pr. 55. (factory setting : 1500r/min)
CAUTION
Note that when wiring is long, a voltage type meter is susceptible to a voltage drop, induction noise, etc.
and may not read correctly.
28
Page 38

Input terminals
1.7.6 Common terminals (SD, 5, SE)
Terminals 5, SD and SE are common to the I/O signals and isolated from each other. Do not earth (ground) these
terminals. Avoid connecting the terminal SD and 5 and the terminal SE and 5.
Terminal SD is a common terminal for the contact input terminals (STF, STR, OH, RES, DI1, DI2, DI3 and DI4) and
the encoder output signals. When using the terminal SD as a common terminal for the encoder output signals, use
a shielded or twisted cable to protect it from external noise.
Terminal 5 is a common terminal for the speed setting analog input signals and analog output signals. Use a
shielded or twisted cable to protect it from external noise.
Terminal SE is a common terminal for the open collector output terminals (DO1, DO2, DO3).
1.7.7 Signal inputs by contact-less switches
The contacted input terminals of the inverter
(STF, STR, RH, RM, AU) can be controlled using
a transistor instead of a contacted switch as
shown on the right.
Input resistance : 4.7kΩ
Voltage when contacts are open : 21 to 27VDC
When contacts are short-circuited : 4 to 6mADC
External Signal Input by Transistor
REMARKS
• When using an external transistor connected to the external power supply, use terminal PC to prevent a
malfunction due to a sneak current.
( Refer to the Instruction Manual (basic) for details.)
• Note that when off, an SSR (solid-state relay) has a relatively large leakage current and it may be accidentally
input to the inverter.
STF etc.
Inverter
SD
+24V
29
1
WIRING
Page 39

How to use the input signals
A
A
(assigned terminals DI1 to DI4, STR)
1.8 How to use the input signals (assigned terminals DI1 to DI4, STR) (Pr. 180 to Pr. 183, Pr. 187)
These terminals vary in functions with the settings of Pr. 180 to Pr. 183 and Pr. 187.
Parameter
Pr. 180 "DI1 terminal function selection" 0 RL
Pr. 181 "DI2 terminal function selection" 1 RM
Pr. 182 "DI3 terminal function selection" 2 RH
Pr. 183 "DI4 terminal function selection" 3 RT
Pr. 187 "STR terminal function selection" 9999 STR
Factory-Set
Value
Factory-Set
Signal
Setting Range
0 to 3, 5, 8 to 16, 20, 22 to 28,
42 to 44, 9999
(9999 is valid for Pr. 187 only)
Page 150
The priorities of the speed commands are in order of jog, multi-speed setting (RH, RM, RL, REX) and PID (X14).
1.8.1 Multi-speed setting (RL, RM, RH, REX signals): Pr. 180 to Pr. 183, Pr. 187 setting
"0, 1, 2, 8"
Remote setting (RL, RM, RH signals): Pr. 180 to Pr. 183, Pr. 187 setting "0, 1, 2"
• When Pr. 59 = 0, turning on/off the RL, RM, RH and REX signals input as the speed commands enables multi-
speed operation (15 speeds). (Refer to page 77 for details. Pr. 59 = 0)
• When Pr. 59 "0", you can use contact signals to perform continuous variable-speed operation without using
analog signals even if the control panel is away from the control box. (Refer to page 103 for details.)
1.8.2 Second function selection/second motor switchover (RT signal)
: Pr. 180 to Pr. 183, Pr. 187 setting "3"
Pr. 44 "second acceleration/deceleration
time"
Pr. 45 "second deceleration time"
Pr. 450 "second applied motor"
Pr. 451 "second motor control method
selection"
Pr. 452 "second electronic thermal O/L relay"
Pr. 453 "second motor capacity"
Pr. 454 "number of second motor poles"
Pr. 830 "speed control P gain 2"
Pr. 831 "speed control integral time 2"
Pr. 832 "speed setting filter 2
Pr. 833 "speed detection filter 2"
Pr. 834 "torque control P gain 2"
Pr. 835 "torque control integral time 2"
Pr. 836 "torque setting filter 2"
Pr. 837 "torque detection filter 2"
Start
Second acc/dec
Inverter
STF(STR)
RT
SD
Entering the RT signal enables the second functions (above parameters). However, when Pr. 450 = 9999, it is
judged that the second motor functions are not selected, and parameters Pr. 451 and Pr. 453, Pr. 454 are invalid.
The second functions other than the above are enabled with the first motor.
1.8.3 Jog operation (jog signal):
Pr. 180 to Pr. 183, Pr. 187 setting "5"
(1) Jog operation using external signals
Jog operation can be started/stopped by shorting the jog mode select terminal JOG-SD and shorting/opening the
start signal terminal STF or STR-SD. The jog speed and jog acceleration/deceleration time are set in Pr. 15 (factory
setting 150r/min, variable between 0 and 1500r/min) and Pr. 16 (factory setting 0.5s, variable between 0 and 3600s
(when Pr. 21 = 0)/0 to 360s (when Pr. 21 = 1)), respectively, and their settings can be changed from the control
panel or parameter unit.
The jog signal has higher priority than the multi-speed signals. (external)
Jog speed Pr. 15
Across JOG-SD
Forward rotation
cross STF-SD
Reverse rotation
cross STR-SD
15r/min
Output speed
Forward
rotation
ON
90r/min
DC injection brake
Reverse
rotation
ON
Time
ON
30
Page 40

How to use the input signals
(assigned terminals DI1 to DI4, STR)
1.8.4 Third function selection (X9 signal): Pr. 180 to Pr. 183, Pr. 187 setting "9"
Turn on this "X9 signal" to set:
Pr. 110 "third acceleration/deceleration time"
Pr. 111 "third deceleration time"
Select either the first motor or the second motor according to the
RT signal input.
X9 signal RT signal Applied Motor Other Function
OFF OFF First motor First function
OFF ON Second motor Second function
ON OFF First motor Third function
ON ON Second motor Third function
Start
Third acc/dec
Inverter
STF(STR)
X9
SD
1.8.5 FR-HC, FR-CV connection (X10 signal): Pr. 180 to Pr. 183, Pr. 187 setting "10"
• FR-HC, FR-CV connection (inverter operation enable signal)
To provide protective coordination with the high power factor converter (FR-HC) or power regeneration common
converter (FR-CV), use the inverter operation enable signal to shut off the inverter output. Enter the RDY signal of
the high power factor converter or power regeneration common converter.
1.8.6
This function prevents the inverter from being inoperative during operation using an external command if the mode
is accidentally left unswitched from PU operation mode. (Refer to page 115.)
X12 signal on ..... Shift to PU operation mode enabled (output stop during external operation)
X12 signal off ..... Shift to PU operation mode disabled (output stop during external operation)
PU operation external interlock signal (X12 signal):
P
r. 180 to Pr. 183, Pr. 187 setting "12"
1.8.7 PID control enable terminal: Pr. 180 to Pr. 183, Pr. 187 setting "14"
Turn the X14 signal on to exercise PID control. When this signal is off, normal inverter operation is performed. Refer
to page 139 for details.
Related parameters
Pr. 128 "PID action selection", Pr. 129 "PID proportional band", Pr. 130 "PID integral time", Pr. 131 "upper limit", Pr. 132 "lower limit",
Pr. 133 "PID action set point for PU operation", Pr. 134 "PID differential time" (Refer to page 139.)
1.8.8 Brake sequence opening signal (BRI signal): Pr. 180 to Pr. 183, Pr. 187 setting "15"
Used when the method of inputting the mechanical brake opening completion signal to the inverter is used for the
brake sequence functions. (Refer to page 106.)
Related parameters
Pr. 60 "intelligent mode selection", Pr. 278 "brake opening speed", Pr. 279 "brake opening current", Pr. 280 "brake opening current
detection time", Pr. 281 "brake operation time at start", Pr. 282 "brake operation speed", Pr. 283 "brake operation time at stop", Pr. 284
"deceleration detection function selection", Pr. 285 "overspeed detection speed" (Refer to page 106.)
1.8.9 PU operation/external operation switchover: Pr. 180 to Pr. 183, Pr. 187 setting "16"
1
You can change the operation mode.
When Pr. 79 "operation mode selection" = "8", turning the X16 signal on shifts the current operation mode to the
external operation mode and turning that signal off shifts to the PU operation mode. Refer to page 117 for details.
Related parameters
Pr. 79 "operation mode selection" (Refer to page 117)
1.8.10 S-pattern acceleration/deceleration C switchover terminal (X20 signal)
: Pr. 180 to Pr. 183, Pr. 187 setting "20"
When Pr. 29 = "4", you can use the S-pattern acceleration/deceleration C switchover terminal to set the acceleration
of S-pattern acceleration/deceleration in the parameter. (Refer to page 89.)
Related parameters
Pr. 29 "acceleration/deceleration pattern", Pr. 380 "acceleration S pattern 1", Pr. 381 "deceleration S pattern 1", Pr. 382 "acceleration
S pattern 2", Pr. 383 "deceleration S pattern 2" (Refer to page 89.)
31
WIRING
Page 41

How to use the input signals
A
A
(assigned terminals DI1 to DI4, STR)
1.8.11 Orientation command (X22 signal): Pr. 180 to Pr. 183, Pr. 187 setting "22"
With the position detector (encoder) fitted to the motor end, you can perform position stop (orientation) control of the
rotation shaft. Refer to page 159 for details.
Related parameters
Pr. 350 "stop position command selection", Pr. 351 "orientation switchover speed", Pr. 356 "internal stop position command", Pr. 357
"orientation in-position zone", Pr. 360 "external position command selection", Pr. 361 "position shift", Pr. 362 "orientation position loop
gain", Pr. 393 "orientation selection", Pr. 396 "orientation speed gain (P term)", Pr. 397 "orientation speed integral time", Pr. 398
"orientation speed gain (D term)", Pr. 399 "orientation deceleration ratio" (Refer to page 159.)
1.8.12 Pre-excitation/servo on (LX signal): Pr. 180 to Pr. 183, Pr. 187 setting "23"
z Pre-excitation
When the start signal (STF, STR) is not input to the inverter (during a stop), turning on the pre-excitation terminal LX
enables 0 speed control or servo lock. (Refer to page 82 for details.)
z Servo on
Use the LX signal to exercise position control.
Turning on the LX signal switches the servo on and cancels the base circuit shut-off, resulting in a servo lock status.
(Refer to page 55 for details.)
Related parameters
Pre-excitation ⇒ Pr. 802 "pre-excitation selection" (Refer to page 82.)
Servo-on
⇒ Pr. 419 "position command source selection", Pr. 420 "command pulse scaling factor numerator", Pr. 421 "command
pulse scaling factor denominator", Pr. 422 "position loop gain", Pr. 423 "position feed forward gain", Pr. 424 "position
command acceleration/deceleration time constant", Pr. 425 "position feed forward command filter", Pr. 426 "in-position
width", Pr. 427 "excessive level error", Pr. 430 "pulse monitor selection", Pr. 464 "digital position control sudden stop
deceleration time", Pr. 465 to Pr. 494 (position feed amount) (Refer to page 55.)
1.8.13 Output stop (MRS signal): Pr. 180 to Pr. 183, Pr. 187 setting "24"
Short the output stop terminals MRS-SD during inverter output to cause
the inverter to stop the output immediately.
This function is valid in any mode independently of the control mode.
Motor coasts
to stop
Open terminals MRS-SD to resume operation in about 20ms.
Terminal MRS may be used as described below.
(1) To stop the motor by mechanical brake (e.g. electromagnetic brake)
Terminals MRS-SD must be shorted when the mechanical brake is
operated and be opened before the motor that has stopped restarts.
(2) To provide interlock to disable operation by the inverter
After terminals MRS-SD have been shorted, the inverter cannot be
operated if the start signal is given to the inverter.
(3) To coast the motor to stop
The motor is decelerated according to the preset deceleration time
cross MRS-SD
cross STF
(STR)-SD
ON
ON
0.5r/min
Approx.
20ms
and is stopped by operating the DC injection brake at the DC
injection brake operation speed or less. Using terminal MRS, the
motor is coasted to a stop.
1.8.14 Start self-holding selection (STOP signal): Pr. 180 to Pr. 183, Pr. 187 setting "25"
The connection example given here is used to self-hold
the start signal (forward rotation, reverse rotation).
* Connected to the STOP signal to disable forward or
reverse rotation if forward or reverse rotation and stop
are turned on at the same time.
Forward
rotation
Reverse
rotation
Stop
*
STOP
SD
STF
STR
(Wiring example for sink logic)
32
Page 42

How to use the input signals
(assigned terminals DI1 to DI4, STR)
1.8.15 Control mode changing (MC signal): Pr. 180 to Pr. 183, Pr. 187 setting "26"
By setting Pr. 800 "control system selection", change the control mode between speed, torque and position. Refer
to page 169 for details.
1.8.16 Torque limit selection (TL signal): Pr. 180 to Pr. 183, Pr. 187 setting "27"
By setting Pr. 815 "torque limit level 2", you can change the torque limit value. Refer to the Instruction Manual
(basic) for details.
1.8.17 Start time tuning (X28 signal): Pr. 180 to Pr. 183, Pr. 187 setting "28"
You can perform online tuning before turning on (during stop) the start signals (STF, STR) to prevent a start time
delay due to tuning.
POINT
• Perform offline auto tuning (page 120) and set "1" in Pr. 95 (start time tuning).
• You can perform start time tuning by X28 signal when the Y39 signal is off.
• It takes 500ms maximum for start time tuning to complete.
Speed
(r/min)
Time(h)
X28 signal
Start time tunig
Y39 signal
Start signal
ON
In execution
Completion
REMARKS
• Start time tuning is also performed with the LX signal on and a start signal by the speed command less than the starting
speed (e.g. zero speed command) on.
• The Y39 signal is kept on while the second magnetic flux remains after a motor stop.
• The X28 signal is not made valid while the Y39 signal is on.
• The STF, STR and LX signals are made valid after completion of start time tuning.
• During tuning, only the output signals below are valid IPF, THP, PU, Y12, RY, ER, LF, MT, DA1, DA2, ABC.
• Invalid during V/F control.
1.8.18 Torque bias selection 1 (X42 signal): Pr. 180 to Pr. 183, Pr. 187 setting "42" Torque bias selection 2 (X43 signal): Pr. 180 to Pr. 183, Pr. 187 setting "43"
1
When using the torque bias function, you can combine the on/off of the X42 and X43 signals to select the torque
bias amount. Refer to page 177 for details.
Related parameters
Pr. 840 "torque bias selection", Pr. 841 "torque bias 1", Pr. 842 "torque bias 2", Pr. 843 "torque bias 3", Pr. 844 "torque bias filter", Pr.
845 "torque bias operation time", Pr. 846 "torque bias balance compensation", Pr. 847 "fall-time torque bias terminal 3 bias", Pr. 848
"fall-time torque bias terminal 3 gain" (Refer to page 177.)
33
WIRING
Page 43

How to use the input signals
(assigned terminals DI1 to DI4, STR)
1.8.19 P control selection (P/PI control switchover) (X44 signal):
Pr. 180 to Pr. 183, Pr. 187 setting "44"
By turning the X44 signal on/off during speed control operation under vector control, you can select whether to add
the integral time (I) or not when performing gain adjustment with P gain and integral time.
When the X44 signal is off: PI control
When the X44 signal is on: P control
Related parameters
Pr. 820 "speed control P(proportional) gain 1"
Pr. 821 "speed control integral time 1"
Pr. 830 "speed control P(proportional) gain 2"
Pr. 831 "speed control integral time 2"
Refer to page 46 for details.
Speed command
Speed
command
+
-
Speed
proportional
operation
0
X44 OFF
X44 ON
Integration
cleared to 0
Speed
integral
operation
+
+
Torque
control
Motor
Encoder
34
Page 44

How to use the output signals (assigned terminals
DO1 to DO3, ABC) (Pr. 190 to Pr. 192, Pr. 195)
1.9 How to use the output signals (assigned terminals DO1 to DO3, ABC) (Pr. 190 to Pr. 192, Pr. 195)
The output terminals DO1, DO2, DO3, ABC vary in functions with the Pr. 190 to Pr. 192 and Pr. 195 settings.
Parameter Name
Ter min al
Symbol
Factory
Setting
DO1 terminal
190
function
RUN 0 Inverter running
selection
DO2 terminal
191
function
SU 1 Up to speed
selection
DO3 terminal
192
function
IPF 2
selection
ABC terminal
195
function
A, B, C 99 Alarm output
selection
<Setting>
Refer to the following table for the settings of Pr. 190 to Pr. 192 and Pr. 195.
Setting
Positive
logic
Negative
logic
0 100 RUN Inverter running
1 101 SU Up to speed Refer to Pr. 41 "up-to-speed sensitivity" (page 95).
2102IPF
3 103 OL Overload alarm
4104FU
5105FU2
6106FU3
7107RBP
8108THP
10 110 PU PU operation mode Output when the PU operation mode is selected.
11 111 RY
12 112 Y12
13 113 Y13
14 114 FDN PID lower limit
15 115 FUP PID upper limit
16 116 RL
20 120 BOF
25 125 FAN Fan fault output Output at the time of a fan fault.
26 126 FIN
27 127 ORA
30 130 Y30
31 131 Y31
Signal
Name
Instantaneous
power failure or
undervoltage
Output speed
detection
Second output
speed detection
Third output speed
detection
Regenerative brake
prealarm
Electronic thermal
relay function
prealarm
Inverter operation
ready
Output current
detection
Zero current
detection
PID forward-reverse
rotation output
Brake opening
request
Fin overheat
prealarm
Orientation
in-position
Forward rotation
output
Reverse rotation
output
Function Operation
Output when the start command is input.
For V/F control, this signal is output during operation when the inverter output
speed rises to or above the starting speed.
During DC injection brake, 0 speed control or servo lock, this signal is not output.
Output at occurrence of an instantaneous power failure or undervoltage.
Output when torque or speed limit is activated.
For V/F control, this signal is output while the stall prevention function is activated.
Refer to Pr. 42, Pr. 43 (speed detection) (page 95).
Refer to Pr. 50 "second speed detection" (page 95).
Refer to Pr. 116 "third speed detection" (page 95).
Output when 85% of the regenerative brake duty set in Pr. 70 is reached.
Output when the electronic thermal relay function cumulative value reaches 85% of
the preset level.
Output when the inverter can be started by switching the start signal on or while it
is running.
Refer to Pr. 150 and 151 (output current detection) (page 146).
Refer to Pr. 152 and 153 (zero current detection) (page 147).
Refer to Pr. 128 to 134 (PID control) (page 139).
Refer to Pr. 278 to Pr. 285 (brake sequence function) (page 106).
Output when the heatsink temperature reaches about 85% of the heatsink
overheat protection activating temperature.
When orientation is valid
For vector control
Factory-Set
Terminal Function
Instantaneous power
failure, undervoltage
Setting Range Remarks
0 to 8, 10 to 16, 20, 25 to 27,
30 to 37, 39, 40 to 44, 96 to 99,
100 to 108, 110 to 116, 120,
125 to 127, 130 to 137, 139,
140 to 144, 196 to 199, 9999
Extended
mode
1
WIRING
35
Page 45

How to use the output signals (assigned terminals
DO1 to DO3, ABC) (Pr. 190 to Pr. 192, Pr. 195)
Setting
Positive
logic
Negative
logic
32 132 Y32
33 133 RY2 Operation ready 2
34 134 LS Low speed output Output when the speed falls to or below any preset low speed.
35 135 TU Torque detection
36 136 Y36 In-position
37 137 MT
39 139 Y39
40 140 Y40 Trace status Acts as a trace completion signal.
41 141 FB Speed detection
42 142 FB2
43 143 FB3
Signal
Name
Regenerative status
output
Maintenance timer
output
Start time tuning
completion
Second speed
detection
Third speed
detection
Function Operation
For vector control
Output on completion of pre-excitation. Turned on at an output start when preexcitation is not made.
Output when the motor torque rises above the predetermined value (Pr.864).
(Refer to page 182.)
Acts as an in-position signal.
Refer to Pr. 890 to Pr. 892 (maintenance output function) (page 187).
Output on completion of start time tuning
Output when the motor output speed (feed back value) exceeds the preset
speed.
Perform in the same way as FU, FU2 and FU3 under V/F control.
• Output during forward rotation or the reverse rotation signal is on.
• Output at deceleration even during forward rotation or the reverse rotation
44 144 RUN2
Inverter running 2
signal is off. (Does not output during pre-excitation LX is on.)
• Output during the orientation command signal (X22) is on.
• Switched on when the servo is on (LX-on) under position cotrol. (Switched
off when the servo is off. (LX-off)
96 196 REM Remote output Refer to Pr. 495 to Pr.497 (page 168).
At occurrence of a major fault, the base circuit is shut off immediately. At
97 197 ER Minor fault output 2
occurrence of a minor fault, the base circuit is shut off after deceleration to a
stop.
98 198 LF Minor fault output Output when a minor fault (fan fault or communication error alarm) occurs.
99 199 ABC Alarm output
9999 —— No function —
Output when the inverter's protective function is activated to stop the output (major
fault).
0 to 99: Positive logic, 100 to 199: Negative logic
36
Page 46

Design information to be checked
1.10 Design information to be checked
1) When performing bypass operation for the motor other than the vector control dedicated motor, securely
provide electrical and mechanical interlocks for the MC1 and MC2 used for bypass.
When the wiring is wrong or there is a bypass circuit as shown below, the inverter will be damaged by a sneak
current from the power supply due to arcs generated at the time of switchover or chattering caused by a
sequence error.
2) If the machine must not be restarted when power is restored after a power failure, provide a magnetic contactor
in the inverter's primary side and also make up a sequence that will not turn on the start signal.
If the start signal (start switch) remains on after a power failure, the inverter will automatically restart as soon as
the power is restored.
3) When the power supply used with the control circuit is different from the one used with the main circuit, make
up a circuit which will switch off the main circuit power supply terminals R, S, T when the control circuit power
supply terminals R1, S1 are switched off.
4) Since the input signals to the control circuit are on a low level, use two parallel low-level signal contacts or a
twin contact for contact inputs to prevent poor contact.
5) Do not apply a voltage to the contact input terminals (e.g. STF) of the control circuit.
6) Do not apply a voltage directly to the alarm output terminals (A, B, C). Always apply a voltage to these
terminals via a relay coil, lamp, etc.
7) Fully make sure that the specifications and rating match the system requirements.
Bypass
Low-level signal contacts
(other than the vector control dedicated motor)
MC1
Interlock
R
S
T
Inverter
U
V
W
MC2
Sneak current
IM
Low-level signal contacts Twin contact
Power
supply
1
37
WIRING
Page 47

Using the second motor
r
1.11 Using the second motor
1.11.1 Wiring diagram (second motor)
CAUTION
1. Provide interlocks to prevent the MC1 and MC2
from being turned on simultaneously.
2. For the second motor (motor without encoder),
use Pr. 452 "second electronic thermal O/L relay"
or provide an external thermal relay.
3. *: Give one external thermal relay signal to across
OH-SD.
Related parameters
Second electronic thermal relay function setting ⇒ (Pr. 452 "second
electronic thermal O/L relay" (Refer to page 80.))
1.11.2 Second motor setting parameters
Param
eter
Name
Factory
Setting
Inverter
U
V
W
OH
*
SD
PA
PAR
PB
PBR
PZ
PZR
PG
SD
Setting Range
Motor without encode
MC2
MC1
(Second motor)
U
V
W
E
Mitsubihi dedicated motor
(SF-V5RU) (First motor)
U
V
W
E
G1
G2
A
B
C
D
F
G
S
R
N
IM
IM
Thermal
protector
Encoder
Inverter internal
constant
Inverter internal
constant Refer to
Inverter internal
page 111.
constant
450 Second applied motor 9999
0 Mitsubishi standard motor (SF-JR)
Mitsubishi constant torque motor
10
(SF-HRCA)
30
9999
SF-V5RU dedicated motor
(includes SF-VR type motor)
Function invalid
Pr. 71 "applied motor" is made valid.
20 V/F control Speed control
Second motor control
451
method selection
9999
9999
Function invalid
The setting is the same as that of control system of Pr. 800 "control
system selection". (*)
Second electronic
452
thermal O/L relay
Second motor
453
capacity
Number of second
454
motor poles
9999
Inverter
capacity
Set the rated motor current.
0 to 500A (Refer to page 80.)
9999 Function invalid
Set the motor capacity.
0.4 to 55kW
Set the number of motor poles.
4
2, 4, 6P
Setting can
be made
when
Pr. 450
"9999"
z Turn on/off the RT signal to switch between the first and second motors using contacts information of the
magnetic contactor (MC).
(Use the RT signal after setting it to any of the DI1 to DI4 signals using Pr. 180 to Pr. 183, Pr. 187 (input terminal
function selection).
z Select V/F control for the Pr. 451 setting. Vector control with encoder can not be selected.
z By setting values other than "9999" in Pr. 451 when Pr. 450 = "9999" (factory setting), the control system of the first
motor can be changed by switching the RT terminal on and off.
(In this case, turning the RT signal on makes the second function of Pr. 44, Pr. 45, Pr. 452, and Pr. 830 to Pr. 837 valid.)
CAUTION
* Even when the first motor is under vector control, the second motor is V/F controlled while the RT
signal is on independently of the Pr. 451 setting when Pr. 450 "9999".
38
Page 48

Using the conventional motor and
other motors
1.12 Using the conventional motor and other motors
1.12.1 Conventional motor (SF-VR, SF-JR with encoder)
CAUTION
• When using the dedicated encoder cable (FR-VCBL/FR-JCBL) of the conventional motor for the FRV500 series, change the size of crimping terminals of the dedicated encoder cable from M3 to M3.5.
• For the FR-V500 series inverters, the encoder jumper connector is factory set to "12V, complimentary."
When using the conventional Mitsubishi motor (SF-VR-5.5 to 45kW, SF-JR with encoder), whose PLG is
"5V, differential line driver" type, be sure to fit the encoder jumper connector to "5V, differential line
driver" before powering on.
(1) Dedicated encoder cable
z SF-VR motor
Type Length L
FR-VCBL5 5m
FR-VCBL15 15m
FR-VCBL30 30m
FR-V500 Encoder
PA
PAR
PB
PBR
PZ
PZR
A
B
C
D
F
G
z SF-JR motor with encoder
Type Length L
FR-JCBL5 5m
FR-JCBL15 15m
FR-JCBL30 30m
FR-V500 Encoder
PA
PAR
PB
PBR
PZ
PZR
C
R
A
N
B
P
Positioning
keyway
A
PG
SD
2
Inverter earth (ground) terminal
Inverter earth (ground) terminal
2mm
S
R
N
M
L
K
J
(As viewed from wiring side)
B
C
N
D
P
T
E
S
R
F
H
G
MS3106B20-29S
PG
SD
2
Inverter earth (ground) terminal
Inverter earth (ground) terminal
2mm
H
K
E
(2) Encoder jumper connector setting
Make encoder setting according to the encoder.( Refer to the Instruction Manual (basic).)
Item
Resolution 1000 pulse/rev 1024 pulse/rev 2048 Pulse/Rev
Power supply
voltage
Current
consumption
Output signal
form
Output circuit
Output voltage
Encoder for SF-VR-5.5 to
45 kW
Encoder for SF-JR
5VDC±10% 5VDC±10%
150mA 150mA
A, B phases (90° phase shift)
Z phase: 1 pulse/rev
Differential line driver
AM26LS31 equivalent
"H" level 2.4V or more
"L" level 0.4V or less
A, B phases (90° phase shift)
Z phase: 1 pulse/rev
Differential line driver 74LS113
equivalent
"H" level 2.4V or more
"L" level 0.5V or less
12VDC±10%
150mA
A, B phases (90° phase shift)
Z phase: 1 pulse/rev
Complimentary
(Constant voltage output
matched by emitter follow)
"H" level -3V or more
"L" level 3V or less
Positioning
keyway
A
B
M
L
T
K
J
MS3106B20-29S
(As viewed from wiring side)
C
N
D
P
E
S
R
F
H
G
Encoder for SF-V5RU
(for reference)
1
WIRING
CAUTION
Encoder with resolution of 1000 to 4096 pulse/rev is recommended.
39
Page 49

Using the conventional motor and
r
other motors
(3) Parameter setting
Parameters below are extended parameters. Set "1" in Pr. 160 "extended function selection" to read and make setting.
Parameter Name Factory Setting Setting Range Refer to
9 Electronic thermal O/L relay 0A 0 to 500A 80
71 Applied motor 30 0, 3 to 8, 10, 13 to 18, 20, 23, 24, 30, 33, 34 111
80 Motor capacity Inverter capacity 0.4 to 55kW
81 Number of motor poles 4 2, 4, 6
851 Number of encoder pulses 2048
0 to 4096
(Number of pulses before multiplied by 4)
CAUTION
• Pr. 71 setting
· SF-VR: "30"
· SF-JR (2, 4, 6P)- 2.2 to 55kW: "0"
SF-JR (4P)- 1.5kW or less: "20"
· SF-HRCA (4P): "10"
• When using motors other than the dedicated motor (SF-V5RU) or above motors, perform offline auto
tuning. (Refer to page 120.)
120
Refer to the
Instruction
Manual (basic)852 Encoder rotation direction 1 0, 1
1.12.2 Precautions for and wiring of the motor with encoder (SF-JR with encoder)
• When the motor used is other than the dedicated motor, use the offline auto tuning function. (Refer to page 120
for details of offline auto tuning.)
• Set Pr. 800 to select the control method. (Refer to page 169.)
• To protect the motor from overheat, set electronic thermal relay function or provide an external thermal relay.
(Refer to page 27.)
Motor with encoder
Inverter
U
V
W
OH
*
SD
PA
PAR
PB
PBR
PZ
PZR
PG
SD
Motor with encode
U
V
W
E
C
R
A
N
B
P
H
K
E
IM
Encoder
CAUTION
• *Leave the unused terminals open.
• When not using an external thermal relay, set "0" in Pr. 876 "thermal relay protector input". Set Pr. 9
"electronic thermal O/L relay".
• Check the power supply specification of encoder and change a jumper connector. (Refer to the
Instruction Manual (basic).)
40
Page 50

2
VECTOR CONTROL
This chapter explains the basic "adjustment for vector control" for
use of this product.
Always read the instructions and other information before using
the equipment.
2.1 What is vector control? ........................................42
2.2 Speed control ........................................................44
2.3 Fine adjustment of gains for speed control........45
2.4 Torque control .......................................................51
2.5 Fine adjustment for torque control...................... 52
2.6 Gain adjustment for torque control .....................53
2.7 Position control (Pr. 419 to Pr. 430, Pr. 464 to Pr. 494).55
41
1
112
3
4
Page 51

What is vector control?
2.1 What is vector control?
Vector control is one of the control techniques for driving an induction motor. To help explain vector control, the
fundamental equivalent circuit of an induction motor is shown below:
r1 : Primary resistance
im
1
r
1
2
Mid iq
2
r
S
In the above diagram, currents flowing in the induction motor can be classified into a current id (excitation current)
for making a magnetic flux in the motor and a current iq (torque current) for causing the motor to develop a torque.
.
iq motor current im
r2 : Secondary resistance
: Primary leakage inductance
1
: Secondary leakage inductance
2
M : Mutual inductance
S: Slip
id : Excitation current
iq : Torque current
im : Motor current
In vector control, the voltage and output frequency are
calculated to control the motor so that the excitation
current and torque current (as shown in the left figure)
flow to the optimum as described below:
(1) The excitation current is controlled to place the
internal magnetic flux of the motor in the optimum
status.
torque current
excitation current
id
(2) Derive the torque command value so that the
difference between the motor speed command and
the actual speed obtained from the encoder
connected to the motor shaft is zero. Torque current
is controlled so that torque as set in the torque
command is developed.
Motor-generated torque (TM), slip angular velocity (ωs) and the motor's secondary magnetic flux (φ2) can be found
by the following calculation:
∝ φ2 ⋅ iq
T
M
φ
= M ⋅ id
2
ωs =
iq
L2r2id
where, L2 = secondary inductance
2 + M
L2 =
Vector control provides the following advantages:
(1) Excellent control characteristics when compared to
V/F control and other control techniques, achieving
the control characteristics equal to those of DC
machines.
(2) Applicable to fast response applications with which
induction motors were previously regarded as
difficult to use. Applications requiring a wide
variable-speed range from extremely low speed to
high speed, frequent acceleration/deceleration
operations, continuous four-quadrant operations etc.
(3) Allows torque control.
(4) Allows servo-lock torque control which generates a
torque at zero speed (i.e. status of motor shaft =
stopped).
42
Page 52

What is vector control?
Encoder
PWM
modulation
IM
magnetic
φ
2
flux
control
*
ω
+
-
ω
FB
speed
control
+
ω
FB
+
ω
s
*
id
+
-
*
iq
ω
0
slip
calculation
id
iq
φ
2
+
-
iq
magnetic
calculation
pre-excitation
current
control
torque
current
control
id
flux
Vd
Vq
id
iq
output
voltage
conversion
ω
current
conversion
0
(1) Speed control
Speed control operation is performed to zero the difference between the speed command (
rotation detection value (
current controller as a torque current command (i
ωFB). At this time, the motor load is found and its result is transferred to the torque
q*).
(2) Torque current control
A voltage (Vq) is calculated to start a current (i
q*) which is identical to the torque current command (iq) found by
the speed controller.
ω*) and actual
(3) Magnetic flux control
The magnetic flux (
(id*) is calculated to use that motor magnetic flux (
φ 2) of the motor is derived from the excitation current (id). The excitation current command
φ 2) as a predetermined magnetic flux.
(4) Excitation current control
A voltage (Vd) is calculated to start a current (id) which is identical to the excitation current command (id*)
found by magnetic flux control.
(5) Output frequency calculation
Motor slip (
frequency (w
ωs) is calculated on the basis of the torque current value (iq) and magnetic flux (φ 2). The output
0) is found by adding that slip (ωs) to the feedback (ωFB) found by a feedback from the encoder.
The above results are used to make PWM modulation and run the motor.
43
2
VECTOR CONTROL
Page 53

Speed control
This inverter can control a motor under speed, torque or position control. (As required, set "1" (extended function
parameters valid) in Pr. 160 "extended function selection".)
Refer to page 150 for details of Pr. 160 "extended function selection". (Since the factory setting of Pr. 77 is "0",
perform parameter write in the PU mode or during a stop.)
2.2 Speed control
2.2.1 Outline of speed control
The basics of speed control are explained in the Instruction Manual (basic).
Set any of "0 (speed control), 2 (speed-torque switchover), 4 (speed-position switchover)" in Pr. 800 "control
system selection" to make speed control valid.
Pr. 800 is factory-set to 0 (speed control) (Refer to page 169.)
Set the motor. (Refer to the Instruction Manual (basic).)
Set the run command. (Refer to page 117.)
Test ru n
As required
1) Gain adjustment
Perform easy gain tuning. (Refer to the Instruction Manual (basic).)
To achieve faster responsiveness to the speed command change
(when faster responsiveness is desired)
Perform model adaptive control/speed feed forward control. (Refer to page 49.)
For further fine adjustment of gains
Perform manual input gain adjustment. (Refer to page 46.)
2) Set the torque limit value.
Refer to the Instruction Manual (basic) for the connection diagram, test run and
easy gain tuning.
2.2.2 Easy gain tuning function block diagram
Automatic setting
Speed control/position loop gain
Model speed control gain
Command
+
Pr.820, Pr.821,
-
Pr.828, Pr.422
Gain table
Turn on with the
Pr. 819 setting "1 or 2"
Load inertia ratio
Pr.880
+
-
Turn on with the
Pr. 819 setting "1"
Current
control
Torque command
Load inertia
ratio estimation
section
Load
inertia
moment
Motor
Actual speed
Detector
Encoder
Easy gain tuning
response level
setting
(Pr.818)
Speed/position feedback
Easy gain tuning
selection
(Pr.819)
44
Page 54

Fine adjustment of gains for speed control
2.3 Fine adjustment of gains for speed control
If easy gain tuning does not provide high accuracy, refer to the next page and make adjustment.
Make adjustment when vibration, noise or any other unfavorable phenomenon occurs due to large load inertia or
gear backlash, for example, or when you want to exhibit the best performance that matches the machine.
2.3.1 Control block diagram
Speed
Terminal 1 at
setting Pr.868="0"
Terminal
1
Terminal
2
Speed
setting filter
RH
RM
RL
REX
Option
PU04V
--1
DU04
OFF
ON
Terminal
3
Torque
setting filter
Pr.902 "speed setting
terminal 2 bias"
Pr.903 "speed setting
terminal 2 gain
Pr.902 "speed setting terminal 2 bias"
Pr.903 "speed setting terminal 2 gain"
RT
OFF
ON
Speed feed
Load inertia
Pr.877
1
+
2 Model speed
-
RT
Pr.822
Pr.832
forward/model
adaptive speed
control selection
Speed feed
forward control
Model adaptive
speed control
2
0
1
RT
Pr.826
Pr.836
Speed setting
signal
Pr.73
"
4,14
+
0,10
+
Override
ratio
Pr.880
Speed feed
forward gain
Pr.881
control gain
Pr.828
+
-
Pr.904 Torque
command terminal 3 bias
Pr.905 Torque
command terminal 3 gain
Operation
mode
Pr.79
Speed feed
torque control
J (Pr.880)
Torque factor
RT
OFF
ON
Maximum, minimum
speeds
Pr.1
Pr.2
Pre-excitation
Pr.802
0 : 0 speed control
1 : Servo lock
forward
Pr.879
Model speed calculation
Speed feed
forward filter
Pr.878
1
J·s
Speed control
P gain 1
Pr.820
X44 OFF
X44 ON
Speed control
P gain 2
Pr.830
0
Integration cleared to 0
X44 OFF
X44 ON
0
FWD
REV
STF
Speed
jump
Pr.31 to
Pr.36
*
Pr.7, Pr.8
Pr.44, Pr.45 RT ON
Pr.110, Pr.111 X9 ON
Pr.16 Jog acceleration/
STR
Starting speed
Pr.13
LX
Pr.29, Pr.20, Pr.21
Pr.140 to Pr.143
Pr.380 to Pr.383
deceleration
Torque bias
Pr.840 to Pr.848
Torque
input
method
12
Pr.877
Speed control
integral time 1
Pr.821
Speed control
integral time 2
Pr.831
Integration cleared to 0
:
Parameters automatically tuned when tuning
is selected in Pr.819 "easy gain tuning". Refer
to the Instruction Manual (basic) for details.
selection
Pr.810
+
+
+
detection filter
limit
0
1
Speed
Torque
limit
Pr. 22,
Pr.812
to Pr.817
Pr.823
Pr.833
*
Acc/dec
processing
(Torque control)
Current control of iq
IM
Encoder
RT
OFF
ON
2
45
VECTOR CONTROL
Page 55

Fine adjustment of gains for speed control
2.3.2 Concept of adjustment of manual input speed control gains
1) Speed control P gain 1
Pr. 820 = 60% is equivalent to 120rad/s (speed responce of
the motor alone). (factory setting)
Increasing the proportional gain increases the response level.
However, a too high gain will produce vibration and/or
unusual noise.
2) Speed control integral time
Pr. 821 = 0.333s (factory setting)
Decreasing the integral time shortens the return time taken at
a speed change. However, a too short time will generate an
overshoot.
When there is load inertia, the actual speed gain decreases as given below.
Proportional gain
200rad/s
120rad/s
60%
(Factory setting)
100%
Pr.820
setting
Actual speed gain = speed gain of motor without load ×
Load variation
Speed
Decreasing the integral time shortens this return time.
JM
JM+JL
Since increasing the proportional gain increases the
response level, this speed variation decreases.
M : Inertia of motor
J
J
L : Motor shaft-equivalent load inertia
2.3.3 Speed control gain adjustment procedure (Pr. 820, Pr. 821)
• Set "0" in Pr. 819 "easy gain tuning". (Easy gain tuning is not performed.)
Refer to the Instruction Manual (basic) for easy gain tuning.
• Refer to the following for manually input gain adjustment.
z Manual input gain adjustment
• Pr. 820 "speed control P (proportional) gain 1", Pr. 830 "speed control P (proportional) gain 2"
• Pr. 821 "speed control integral time 1", Pr. 831 "speed control integral time 2"
Make adjustment when any of such phenomena as unusual machine vibration/noise, low response level and
overshoot has occurred.
1) First check the conditions and simultaneously change Pr. 820 "speed control P gain 1" value.
2) If you cannot make proper adjustment, change Pr. 821 "speed control integral time 1" value and repeat step (1).
CAUTION
Pr. 830 "speed control P(proportional) gain 2" and Pr. 831 "speed control integral time 2" are made valid when
the RT terminal is switched on. Make adjustments in the same way as Pr. 820 and Pr. 821.
No.
Phenomenon/Condition
1 Large load inertia
Vibration/noise generated
2
from mechanical system
3 Slow response
Adjustment Method
Set the Pr. 820 and Pr. 821 values a little higher.
Pr. 820
Pr. 821
Set the Pr. 820 value a little lower and the Pr. 821 value a little higher.
Pr. 820
Pr. 821
Set the Pr. 820 value a little higher.
Pr. 820
When a speed rise is slow, increase the value 10% by 10% until just before
vibration/noise is produced, and set about 0.8 to 0.9 of that value.
If an overshoot occurs, double the value until an overshoot does not occur, and
set about 0.8 to 0.9 of that value.
Decrease the value 10% by 10% until just before vibration/noise is not produced,
and set about 0.8 to 0.9 of that value.
If an overshoot occurs, double the value until an overshoot does not occur, and
set about 0.8 to 0.9 of that value.
When a speed rise is slow, increase the value 5% by 5% until just before
vibration/noise is produced, and set about 0.8 to 0.9 of that value.
46
Page 56

Fine adjustment of gains for speed control
No.
Phenomenon/Condition
Long return time
4
(response time)
Overshoot or unstable
5
phenomenon occurs.
Set the Pr. 821 value a little lower.
Decrease the value by half until just before an overshoot or the unstable phenomenon does
not occur, and set about 0.8 to 0.9 of that value.
Set the Pr. 821 value a little higher.
Double the value until just before an overshoot or the unstable phenomenon does not occur,
and set about 0.8 to 0.9 of that value.
Adjustment Method
REMARKS
You can switch between PI control and P control under speed control using the X44 signal. (Refer to page 34.)
2.3.4 Troubleshooting
Phenomenon Cause Corrective Action
Motor does not rotate. (1) The motor or encoder wiring is
wrong.
(2) The encoder specifications
(jumper connector setting) are
wrong.
(3) The encoder wiring is wrong. (3) Check that FWD is displayed when running the
1
(1) Check the wiring.
* Choose V/F control (Pr. 800 = 20) and check the
rotation direction of the motor and the speed monitor
output from the DA1 output terminal. For the FRV5RU, set "170V" for 3.7kW or less and " 160V "
for more in Pr. 19 "base frequency voltage", and set
"50Hz" in Pr. 3 "base frequency".
When the forward rotation signal is
input, the motor running in the
counterclockwise direction as viewed
from the motor shaft is normal. (If it runs
in the clockwise direction, the phase
sequence of the inverter secondary side
wiring is incorrect.)
(2) Check the encoder specifications.
Check the positions of the 5V/12V/24V/External
and differential/complimentary jumper connectors.
motor in the counter-clockwise direction from
outside during a stop of the inverter.
If REV is displayed, the encoder phase sequence
is wrong. Perform the correct wiring or match the
Pr. 852 "encoder rotation direction" setting.
Motor does not run at
correct speed.
(Speed command does
not match actual speed)
2
(4) The Pr. 851 "number of encoder
pulses" setting and the number of
encoder used are different.
(1) The speed command from the
command device is incorrect.
The speed command is
compounded with noise.
(2) The speed command value does
not match the inverter-recognized
value.
(3) The number of encoder pulses
setting is incorrect.
Pr. 852
Setting
(factory
setting)
Relationship between the motor and
encoder
0
Encoder
Forward rotation is clockwise rotation
when viewed from A.
1
Encoder
Forward rotation is counterclockwise rotation
when viewed from A.
A
CCW
A
CW
(4) The motor will not run if the parameter setting is
smaller than the number of encoder pulses used.
Set Pr. 851 "number of encoder pulses" correctly.
(1) Check that a correct speed command comes from
the command device.
Decrease the PWM carrier frequency in Pr. 72.
(2) Readjust the speed command bias and gain in Pr.
902, Pr. 903, Pr. 917, and Pr. 918.
(3)
Check the setting of the number of encoder pulses
in Pr. 851.
2
VECTOR CONTROL
47
Page 57

Fine adjustment of gains for speed control
Phenomenon Cause Corrective Action
Speed does not rise to
the speed command.
3
Motor speed is
unstable.
4
Motor or machine hunts
(vibration/noise is
produced).
5
Acceleration/
deceleration time does
not match the setting.
6
Machine operation is
unstable
7
Speed fluctuates at low
speed.
8
(1) Insufficient torque.
Torque limit is actuated.
(2) Only P (proportional) control is
selected.
(1) The speed command varies. (1)-1 Check that a correct speed command comes
(2) Insufficient torque. (2)-1 Increase the torque limit value.
(3) The speed control gains do not
match the machine.
(mechanical resonance)
(1)The speed control gain is high. (1)-1 Perform easy gain tuning.
(2) High torque control gain. (2) Decrease Pr. 824. (Refer to page 53.)
(3) Motor wiring and encoder wiring
are not correct.
(1) Insufficient torque. (1)-1 Increase the torque limit value.
(2) Large load inertia. (2) Set the acceleration/deceleration time that
(1) The speed control gains do not
match the machine.
(2) Slow response because of
improper acceleration/
deceleration time of the inverter.
(1) Adverse effect of high carrier
frequency.
(2) Adverse effect of weak excitation. (2) Return the excitation ratio in Pr. 854 to the factory
(3) Low speed control gain. (3) Increase Pr. 820 "speed control P gain".
(1)-1 Increase the torque limit value.
( Refer to the torque limit of speed
control in the Instruction Manual (basic).)
(1)-2 Insufficient capacity
(2) When the load is heavy, speed deviation will
occur under P (proportional) control. Select PI
control.
from the command device. (Take measures
against noises.)
(1)-2 Decrease the PWM carrier frequency in Pr.
(1)-3 Increase the speed setting filter in Pr. 822.
(2)-2 Return the excitation ratio in Pr. 854 to the
(3)-1 Perform easy gain tuning.
(3)-2 Adjust Pr. 820 and Pr. 821. (Refer to gain
(3)-3 Perform speed feed forward control and
(1)-2 Decrease Pr. 820 and increase Pr. 821.
(1)-3 Perform speed feed forward control and
(3) Check wiring.
(1)-2 Return the excitation ratio in Pr. 854 to the
(1)-3 Perform speed feed forward control.
(1)-1 Perform easy gain tuning.
(1)-2 Adjust Pr. 820 and Pr. 821. (Refer to page 46.)
(1)-3 Perform speed feed forward control and
(2) Change the acceleration/deceleration time to
(1) Decrease the PWM carrier frequency in Pr. 72.
72.
( Refer to the torque limit of speed
control in the Instruction Manual (basic).)
factory setting (100%).
adjustment.)
model adaptive speed control.
model adaptive speed control.
Check Pr. 852 setting for the encoder rotation
direction.
( Refer to the torque limit of speed
control in the Instruction Manual (basic).)
factory setting.
meets the load.
model adaptive speed control.
an optimum value.
setting
.
Related parameter reference pages
• Pr. 71 "applied motor" (Refer to page 111.)
• Pr. 72 "PWM frequency selection" (Refer to page 112.)
• Pr. 800 "control system selection" (Refer to page 169.)
• Pr. 820 "speed control P gain 1" (Refer to page 175.)
• Pr. 821 "speed control integral time 1" (Refer to page 175.)
• Pr. 822 "speed setting filter 1" (Refer to page 175.)
• Pr. 851 "number of encoder pulses" (Refer to the Instruction Manual (basic).)
• Pr. 854 "excitation ratio" (Refer to page 181.)
• Pr. 902 "speed setting terminal 2 bias" (Refer to page 190.)
• Pr. 903 "speed setting terminal 2 gain" (Refer to page 190.)
• Pr. 917 "terminal 1 bias (speed)" (Refer to page 190.)
• Pr. 918 "terminal 1 gain (speed)" (Refer to page 190.)
48
Page 58

Fine adjustment of gains for speed control
2.3.5 Speed feed forward control, model adaptive speed control (Pr. 828, Pr. 877 to Pr. 881)
By making parameter setting, select the speed feed forward control or model adaptive speed control.
The speed feed forward control enhances the trackability of the motor in response to a speed command
change.
The model adaptive speed control enables individual adjustment of speed trackability and motor disturbance
torque response.
Parameter Name Factory Setting Setting Range
828 Model speed control gain 60% 0 to 1000%
877
878 Speed feed forward filter 0s 0 to 1s
879 Speed feed forward torque limit 150% 0 to 400%
880 Load inertia ratio 7 0,1 to 200 times
881 Speed feed forward gain 0% 0 to 1000%
POINT
When model adaptive speed gain is selected, the data obtained from easy gain tuning is used for Pr. 828 "model
speed control proportional gain". Perform easy gain tuning also (simultaneously). (Refer to the Instruction Manual
(basic).)
Speed feed forward control/model
adaptive speed control selection
0 0,1,2
Speed
command
1
2
2
0
1
Pr.877
Load inertia
ratio
Js
Pr.880
Model adaptive speed control
-
Model speed
control gain
+
-
+
Speed feed
forward gain
Pr.828
Speed control
Actual speed controller
Pr.881
P gain 1
Pr.820
Pr.879
Speed feed
forward torque
limit
J
Torque factor
(J : Pr.880)
Pr.878
Speed feed
forward filter
Speed control
integral time 1
Pr.821
1
Pr.877
1
2
+
+
+
iq current
control
J·s
Model speed
operation
IM
Encoder
2
49
VECTOR CONTROL
Page 59

Fine adjustment of gains for speed control
Pr. 877 Setting
0 Normal speed control is exercised.
Speed feed forward control is exercised.
c Calculate required torque in responce to the acceleration/deceleration command for the inertia ratio set in
Pr. 880 and generate torque immediately.
d When inertia ratio estimation has been made by easy gain tuning, the inertia ratio estimation result is used
1
2
as the Pr. 880 setting, from which the speed feed forward is calculated.
e When the speed feed forward gain is 100%, the calculation result of the speed feed forward in 1) is
reflected as-is.
f If the speed command changes suddenly, large torque is generated due to the speed feed forward
calculation. The maximum value of the speed feed forward is restricted using Pr. 879.
g Using Pr. 878, the speed feed forward result can be dulled by the primary delay filter.
Model adaptive speed control is enabled.
At this time, the motor's model speed is calculated to feed back the model side speed controller. This model
speed is also used as the actual speed controller command.
The inertia ratio in Pr. 880 is used for calculation of the torque current command value given by the model
side speed controller.
When inertia ratio estimation has been made by easy gain tuning, Pr. 880 is overwritten by the inertia ratio
estimation result, and that value is used to calculate the torque current command value.
The torque current command value of the model side speed controller is added to the output of the actual
speed controller, and the result is used as the iq current control input.
Pr. 828 is used for model side speed control (P control), and the first gain in Pr. 820 is used for the actual
speed controller. The model adaptive speed control is valid for the first motor only.
When Pr. 877 = 2, switching to the second motor handles the second motor as Pr. 877 = 0.
Description
CAUTION
The adequate gain value for the model and actual loop parts are set according to the responce setting of
easy gain tuning under model adaptive speed control. To increase the responce level, Pr. 818 "responce
setting"needs to be changed (increased).
The following table indicates the relationships between the speed feed forward control and easy gain tuning
function.
Easy Gain Tuning Selection (Pr. 819) Setting
012
Inertia ratio estimation value
Load inertia ratio
(Pr. 880)
Model speed control gain
(Pr. 828)
Speed feed forward gain
(Pr. 881)
Manual input
Manual input
Manual input Manual input Manual input
found by easy gain tuning is
displayed.
Manual input enabled only
during a stop.
Tuning results are displayed.
Write disabled.
Manual input
Tuning results are displayed.
Write disabled.
REMARKS
Calculate the inertia reference of the SF-V5RU (H) using the moment of inertia J on page 196.
For details of easy gain tuning, refer to the Instruction Manual (basic) for details.
Related parameters
• Pr. 820 "speed control P gain 1" (Refer to page 175.)
• Pr. 821 "speed control integral time 1" (Refer to page 175.)
• Pr. 830 "speed control P gain 2" (Refer to page 175.)
• Pr. 831 "speed control integral time 2" (Refer to page 175.)
50
Page 60

Torque control
2.4 Torque control
2.4.1 Outline of torque control
The basics of torque control are explained in the Instruction Manual (basic).
Set any of "1 (torque control), 2 (speed-torque switchover), 5 (position-torque switchover)" in Pr. 800 "control
system selection" to make torque control valid.
(The parameter is factory-set to enable speed control.) (Refer to page 169.)
Set the motor. (Refer to the Instruction Manual (basic).)
Set the torque command. (terminal 3)
When using the parameter or communication to input the torque command, refer to Pr. 804 "torque command
source selection" (page 171).
When giving the torque command from the option (FR-A5NC, FR-V5AH, FR-A5AX, FR-V5AP), refer to the
instruction manual of the corresponding option.
Set the speed limit value. (Refer to the Instruction Manual (basic))
Test run
Set online auto tuning (adaptive magnetic flux observer) as required.
Refer to the Instruction Manual (basic) for the details of connection diagram, test run,
and online auto tuning.
51
2
VECTOR CONTROL
Page 61

Fine adjustment for torque control
2.5 Fine adjustment for torque control
Current loop gain parameter for adjusting torque control operation state is available with the FR-V500 series. Stable
operation is possible with the factory-set parameter.
Refer to the next page and adjust the parameters when torque pulsation or any other unfavorable phenomenon
occurs depending on the machine and operating conditions or when you want to exhibit the best performance that
matches the machine.
2.5.1 Control block diagram
Speed
feedback
< speed
limit
value
+
-
detection filter
RT
OFF
ON
Torque
Pr.827
Pr.837
Torque
control
p gain 1
Pr. 824
Torque
control
p gain 2
Pr. 834
RT
Torque control
integral time 1
Pr. 825
Torque control
integral time 2
Pr. 835
OFF
ON
+
IM
+
+
Encoder
+
Terminal
Parameter
FR-V5AP
Pulse
train
option
3
RT
Torque
setting filter
Pr.826
Pr.836
OFF
ON
Pr.805 torque command source/RAM
Pr.806 torque command source /E PROM
Torque command source selection
Pr.804
Pr. 904, torque
command terminal 3 bias
Pr. 905, torque
command terminal 3 gain
2
Constant power
0
range torque
characteristic
selection
Pr.803
1
2
FR-A5NC
option
FR-A5AX
FR-V5AH
digital
input
option
Terminal
Terminal
RH
RM
RL
REX
PU
Pr.902 speed
setting terminal 2
bias
Pr.903 speed
setting terminal 2
gain
2
1
OFF
ON
Pr.432 pulse train torque command bias
Pr.433 pulse train torque command gain
Pr.805 torque
Pr.806 torque
command source
command source
Pr.447 digital torque command bias
Pr.448 digital torque command gain
speed limit selection
Pr. 807
0
2
Pr. 917
terminal 1 bias
Pr. 918
terminal 1 gain
Speed
RT
setting filter
Pr.822
Pr.832
0
Pr. 808 forward
rotation speed
limit
Pr. 809 reverse
rotation speed
limit
Speed limit
direct setting
1
0
External
PU
Pr.79
PU/external
/RAM
2
/E PROM
Max./min. speed
Pr.1
Pr.2
processing
*
*
Pr.7, Pr.8
Pr.44, Pr.45 RT ON
Pr.110, Pr.111 X9 ON
Pr.16 Jog acceleration/
deceleration
Acc/dec
3
4
+
-
Speed
control
Speed feedback
speed limit value
Pr.29, Pr.20, Pr.21
Pr.140 to Pr.143
Pr.380 to Pr.383
52
Page 62

Gain adjustment for torque control
2.6 Gain adjustment for torque control
When exercising torque control, do not perform easy gain tuning. Easy gain tuning produces no effects.
If torque accuracy is necessary, perform online auto tuning. (Refer to the Instruction Manual (basic).)
2.6.1 Concept of torque control gains
(1) Torque control P gain 1
2000rad/s when Pr. 824 = 100% (factory setting).
(2) Torque control integral time 1
Pr. 825 = 5ms (factory setting)
2.6.2 Gain adjustment procedure
Refer to the following table for manual input gain adjustment.
CAUTION
Normally, the current loop gains in Pr. 824 and Pr. 825 need not be changed. Fully note that unnecessarily
changing the settings of the current loop gains will result in unstable phenomena and/or reduced response level.
z Manual input gain adjustment
Pr. 824 "torque control P gain 1", Pr. 834 "torque control P gain 2"
Pr. 825 "torque control integral time 1", Pr. 835 "torque control integral time 2"
Make adjustment when any of such phenomena as unusual machine vibration/noise and overcurrent has occurred.
(1) First check the conditions and simultaneously change Pr. 824 "torque control P gain 1" value.
(2) If you cannot make proper adjustment, change Pr. 825 "torque control integral time 1" value and repeat step (1).
CAUTION
Pr. 834 "torque control P gain 2" and Pr. 835 "torque control integral time 2" are made valid when the RT
terminal is switched on. Make adjustments in the same way as Pr. 824 and Pr. 825.
No.
Phenomenon/Condition
• Unusual noise
1
generated from motor
• Unusual current flows
2 Overcurrent occurs.
Set Pr. 824 a little lower and Pr. 825 a little higher. First lower Pr. 824 and check the motor for
unusual vibration/noise and overcurrent. If the problem still persists, increase Pr. 825.
Decrease the value 10% by 10% until just before the phenomenon on the left is
Pr. 824
Pr. 825
Set Pr. 824 a little lower and Pr. 825 a little higher. First lower Pr. 824 and check the motor for
unusual vibration/noise and overcurrent. If the problem still persists, increase Pr. 825.
Pr. 824
Pr. 825
improved, and set about 0.8 to 0.9 of that value.
Note that a too low value will produce current ripples, causing the motor to
generate sound synchronizing the cycle of current ripples.
Double the value until just before the phenomenon on the left is improved, and
set about 0.8 to 0.9 of that value.
Note that a too high value will produce current ripples, causing the motor to
generate sound synchronizing the cycle of current ripples.
Decrease the value 10% by 10% until just before an overcurrent does not occur,
and set about 0.8 to 0.9 of that value.
Double the value until just before the phenomenon on the left is improved, and
set about 0.8 to 0.9 of that value.
Adjustment Method
53
2
VECTOR CONTROL
Page 63

Gain adjustment for torque control
2.6.3 Troubleshooting
Phenomenon Cause Corrective Action
Torque control is not
exercised normally.
1
When the torque
command is small, the
2
motor rotates in the
direction opposite to the
start signal.
Normal torque control
cannot be exercised
during acceleration/
3
deceleration.
The motor vibrates.
Output torque is not linear
4
in response to the torque
command.
(1) The phase sequence of the
motor or encoder wiring is
wrong.
(2) The control mode selection, Pr.
800, setting is improper.
(3) The speed limit value is not
input.
(4) The torque command varies. (4) Check that the command device gives a correct
(5) Torque variation due to the
change in the motor
temperature.
(6) The torque command does not
match the inverter-recognized
value.
The offset calibration of the torque
command does not match.
Since the speed limit value
changes with the setting of the
acceleration/deceleration time in
Pr. 7, Pr. 8, the speed limit may be
activated. (When the speed limit is
activated, torque control cannot be
exercised.)
Insufficient torque. Return the excitation ratio to the factory setting.
(1) Check the wiring. (Refer to the Instruction Manual
(basic).)
(2) Check the Pr. 800 setting. (The factory setting is
speed control)
(3) Set the speed limit value. (If the speed limit value
is not input, the motor will not rotate since the
speed limit value is regarded as 0r/min.)
torque command.
Decrease the PWM carrier frequency in Pr. 72.
Increase the torque setting filter in Pr. 826.
(5) Set the adaptive magnetic flux observer in Pr. 95.
(6) Recalibrate the torque command bias and gain in
Pr. 904 and Pr. 905.
Recalibrate the torque command bias in Pr. 904.
Reduce the acceleration/deceleration time.
Alternatively, set the acceleration/deceleration time to
0. (Speed limit during acceleration/deceleration is
speed limit during constant speed)
Related parameter reference pages
• Pr. 7 "acceleration time" (Refer to page 78.)
• Pr. 8 "deceleration time" (Refer to page 78.)
• Pr. 800 "control system selection" (Refer to page 169.)
• Pr. 802 "pre-excitation selection"
• Pr. 810 "torque limit input method selection" (Refer to page 87.)
• Pr. 826 "torque setting filter 1" (Refer to page 176.)
• Pr. 904 "torque command terminal 3 bias" (Refer to page 190.)
• Pr. 905 "torque command terminal 3 gain" (Refer to page 190.)
(Refer to page 82.)
For online auto tuning, refer to the Instruction Manual (basic)
54
Page 64

Position control (Pr. 419 to Pr. 430,
2.7 Position control (Pr. 419 to Pr. 430, Pr. 464 to Pr. 494)
2.7.1 Connection diagram
(Dedicated Motor: SF-V5RU)
Verify the power specification
of the motor cooling fan when
performing wiring.
(Refer to page 196)(Refer to page 196)
Avoid frequent ON-OFF.
Repeated inrush currents at
power-on will shorten the
converter life.
(Switching life is 100,000)
Terminals DI1 to
DI4 and STR vary
in function with
the input terminal
function selection
(Pr. 180 to Pr. 183,
Pr. 187) settings.
Conditional position feed by contact input
Three-phase AC
power supply
Take care not to
short terminals
PC-SD.
Control input signals (no voltage input allowed)
MCCB MC
External transistor common
24VDC power supply
Contact input common (source)
Forward rotation start
Reverse rotation start
Reset
Digital input
signal 4
Torque limit
command
Position command by pulse train input
STOP
RDY COM
(Positioning module)
QD75
MELSEC-Q
PGO 24
PGO COM
CLEAR
CLEAR COM
PULSE F
PULSE R
FLS
RLS
DOG
COM
RDY
MCCB
MC
R
OCR
S
T
Vector inverter
(FR-V500)
R
S
T
R1
S1
U
V
W
OH
Earth (Ground)
(Refer to page 16)
SD
PA
PAR
PC
STF
STR
RES
DI1(RL)
DI2(RM)
PB
PBR
PZ
PZR
PG
SD
DI3(RH)
DI4(RT)
Contact
SD
input
common
SINK
SOURCE
10E(+10V)
+
1( 10V)
+
3( 10V)
2
(0 to +10V)
5(Common)
PGP
DGN
SD
VDD
RDY
VDD
OP
CR
SD
OPC
R
DO1
DO2
DO3
5V
12V
24V
EXT
Differential
Jumper
(When using the
FR-HEL/BEL, remove
this jumper.)
P1
P
PX
PR
N
(RUN)
Any of three different
(SU)
signals can be selected
using the parameter.
(IPF)
(Open collector output)
SE
A
B
C
DA1
DA2
Jumper (Remove this jumper
when using the FR-ABR.)
Terminal PX is provided for
the 5.5K or less.
Open collector output
common
Alarm output
(Contact output)
PP
PGP
NP
Complimentary
5
PGN
(FR-V5AP)
(Analog output common)
Match phase sequence.
(Fan should have intake rotation.)
A
B
C
U
Match phase sequence.
V
W
E
G2
Thermal
protector
A
B
C
D
F
G
S
R
N
REMARKS
When the motor used is not the Mitsubishi
standard motor, the pin numbers are
different.
The N pin of the encoder designed for
Mitsubishi standard motor is case-earthed.
FR-HEL/BEL
DC reactor (option)
FR-ABR high-duty
brake resistor
(option)
R
load impedance of 10k Ω or more
(+)
+
10V
12 bits
1ch
(+)
0 to 10V
12 bits
1ch
(-)
Pr. 464 to Pr. 494)
FAN
IM
When using the motor
not equipped with a
thermal protector,
set Pr. 9 and set "0" in
Pr. 876
Encoder
Across terminals P
and PR, connect only
the optional,
recommended brake
resistor. In addition,
never short these
terminals.
Terminal PR is
provided for the 15K
or less.
Terminals DO1 to DO3
and ABC vary in function
with the output terminal
function selection
(Pr. 190 to Pr. 192,
Pr. 195) settings.
2
Analog signal output
Main circuit terminal
Control circuit terminal
REMARKS
Refer to the Instruction Manual (basic) for the terminal function change when the mode has been changed to the position
control mode.
55
VECTOR CONTROL
Page 65

Position control (Pr. 419 to Pr. 430,
Pr. 464 to Pr. 494)
This inverter is allowed to perform position control by setting conditional position feed by contact input or the
position control option (FR-V5AP, FR-V5NS). And the position loop gain that adjusts this position control status is
provided for the inverter. It is not used independently but is used with the speed loop parameter to determine the
value. Therefore, first adjust the speed loop gain and then adjust the position loop gain parameter.
2.7.2 Position control step
• Conditional position command by parameter setting
• Position command from the PLC
• Position command from the motion controller
(SSCNET)
Set Pr. 419 "position command source selection" (Refer to page 58.)
Set parameters for position feed data setting (Pr. 465 to Pr. 494). (Refer to page 59.)
Test ru n
As required
1. Set the electronic gear. (Refer to page 60.)
2. Set Pr. 426 "in-position width". (Refer to page 62.)
3. Pr. 427 "excessive level error" (Refer to page 62.)
4. Pr. 430 "pulse monitor selection" (Refer to page 62.)
5. Perform gain adjustment. (Refer to page 62.)
Fit the FR-V5AP (option) and refer to the instruction
manual of the FR-V5AP.
Fit the FR-V5NS (option) and refer to the
instruction manual of the FR-V5NS.
56
Page 66

2.7.3 Control block diagram
Position control (Pr. 419 to Pr. 430,
Pr. 464 to Pr. 494)
RH
RM
RL
REX
STF
STR
Command
pulse
Pr.4 to 6
Pr.24 to 27
Pr.232 to 239
Command pulse selection
Positioning option
Pr.465 to Pr.494
Travel
Pr.7 Pr.8
(Pr.44, Pr.110)(Pr.45, Pr.111)
Pr.428
Position command
source selection
Multispeed
communication
Pr.419
2
0
Position command
Electronic
gear
Pr.420
Pr.421
acceleration/
deceleration
time constant
Pr.424
Position feed
forward
command filter
Pr.425
Deviation
counter
Pr.429
Clear signal
selection
Position feed
forward gain
Pr.423
Position
loop gain
Pr.422
Differentiation
Speed
control
2.7.4 Parameter
Set the following parameters when exercising position control with the inverter.
Parameter Name
419
420
421
Position command source
selection
Command pulse scaling factor
numerator
Command pulse scaling factor
denominator
Factory
Setting
0 0, 1 Set position command input. 58
1 0 to 32767
1 0 to 32767
422 Position loop gain 25
423 Position feed forward gain 0% 0 to 100%
424
425
Position command acceleration/
deceleration time constant
Position feed forward command
filter
0s 0 to 50s 61
0s 0 to 5s
426 In-position width 100 pulses
427 Excessive level error 40K
430 Pulse monitor selection 9999 0 to 5, 9999 Display the number of pulses. 62
464
Digital position control sudden
stop deceleration time
0 0 to 360.0s 60
Setting
Range
0 to 150s
-1
0 to 32767
pulses
0 to 400K,
9999
Description
Set the electronic gear. 60
Set the gain of the position loop. 62
Function to cancel a delay
caused by the droop pulses of
the deviation counter.
Enter the primary delay filter in
response to the feed forward
command.
The in-position signal turns on
when the droop pulses become
less than the setting.
An error becomes excessive
when the droop pulses exceed
the setting.
IM
Encoder
Refer
To
62
62
62
57
2
VECTOR CONTROL
Page 67

Position control (Pr. 419 to Pr. 430,
Pr. 464 to Pr. 494)
(1) Position command source selection (Pr. 419)
Pr. 419 Setting Description
0
(factory setting)
1
(2) Operation
The speed command given to rotate the motor is calculated to zero the difference between the number of
internal command pulse train pulses (when Pr. 419 = 0, the number of pulses set by parameter (Pr. 465 to Pr.
494) is changed to the command pulses in the inverter) and the number of pulses fed back from the motor end
encoder.
1) When a pulse train is input, pulses are accumulated in the deviation counter and these droop pulses act
as position control pulses to give the speed command.
2) As soon as the motor starts running under the speed command of the inverter, the encoder generates feed
back pulses and the droop of the deviation counter is counted down. The deviation counter maintains a
given droop pulse value to keep the motor running.
3) When the command pulse input stops, the droop pulses of the deviation counter decrease, reducing the
speed. The motor stops when there are no droop pulses.
4) When the number of droop pulses has fallen below the value set in Pr.426 (in-position width), it is regarded
as completion of positioning and the in-position signal (Y36) turns on.
Position control function by contact input. (using parameters)
Position command by pulse train input (when the FR-V5AP is fitted).
(Refer to the instruction manual of the option for details.)
Droop pulse value
Motor speed
[r/min]
Pulse train Rough Fine Rough
LX signal
Servo on
STF (STR)
Forward (reverse)
Y36 signal
in-position signal
frequency
Command pulse
[PPS]
Acceleration
Pulse distribution
Time Deceleration
Motor speed
Stop settling time
• For position control function by contact input, the STF and STR terminals provide the forward (reverse) command
signal. The motor can run only in the direction where the forward (reverse) signal is on.
• Opening STF-SD disables the forward rotation, and opening STR-SD disables the reverse rotation.
• The pulse train is rough during acceleration and fine at the maximum speed.
During deceleration the pulse train is rough and at last there are no pulses.
The motor stops shortly after the command pulses stop. This time lag is necessary for maintaining the stop
accuracy and called stop setting time.
Related parameters
• Servo on signal (LX) ⇒ Set "23" in any of Pr. 180 to Pr. 183 and Pr. 187 (input terminal function selection). (Refer to page 150.)
• In-position signal (Y36)
⇒
Set "36" in any of Pr.190 to Pr.192 and Pr.195 (output terminal function selection). (Refer to page 152.)
58
Page 68

Position control (Pr. 419 to Pr. 430,
Pr. 464 to Pr. 494)
2.7.5 Conditional position feed function by contact input (Pr. 419 = 0)
Inputting the number of pulses (positions) in the parameters and setting multi-speed and forward (reverse)
commands enable position control during servo operation. This position feed function does not return to the home
position.
(1) Setting position command using parameters
Set position command using any two of Pr. 465 to Pr. 494 (position feed amount).
Resolution of encoder × speed × 4
(When stopping the motor after 100 rotations using the SF-V5RU)
2048 (pulse/rev) × 100 (speed) × 4 = 819200 (feed amount)
Setting the first amount 819200
Pr. 466 (upper digits)=
0081
<Position feed data setting parameters>
• Factory setting : 0
• Setting range : 0 to 9999
• Minimum setting range : 1
Parameter
465
466 (upper digits)
467
468 (upper digits)
469
470 (upper digits)
471
472 (upper digits)
473
474 (upper digits)
475
476 (upper digits)
477
478 (upper digits)
479
480 (upper digits)
481
482 (upper digits)
483
484 (upper digits)
485
486 (upper digits)
487
488 (upper digits)
489
490 (upper digits)
491
492 (upper digits)
493
494 (upper digits)
First position feed amount
Second position feed amount
Third position feed amount
Fourth position feed amount
Fifth position feed amount
Sixth position feed amount
Seventh position feed amount
Eighth position feed amount
Ninth position feed amount
Tenth position feed amount
Eleventh position feed amount
Twelfth position feed amount
Thirteenth position feed amount
Fourteenth position feed amount
Fifteenth position feed amount
Name
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
(lower digits)
Pr. 465 (lower digits)=
Selection Method
REX
OFF ON OFF OFF High speed, Pr. 4
OFF OFF ON OFF Middle speed, Pr. 5
OFF OFF OFF ON Low speed, Pr. 6
OFF OFF ON ON Speed 4, Pr. 24
OFF ON OFF ON Speed 5, Pr. 25
OFF ON ON OFF Speed 6, Pr. 26
OFF ON ON ON Speed 7, Pr. 27
ON OFF OFF OFF Speed 8, Pr. 232
ON OFF OFF ON Speed 9, Pr. 233
ON OFF ON OFF Speed 10, Pr. 234
ON OFF ON ON Speed 11, Pr. 235
ON ON OFF OFF Speed 12, Pr. 236
ON ON OFF ON Speed 13, Pr. 237
ON ON ON OFF Speed 14, Pr. 238
ON ON ON ON Speed 15, Pr. 239
92 00
RH RM RL
(decimal numeration)
Position Feed
Speed
2
59
VECTOR CONTROL
Page 69

Position control (Pr. 419 to Pr. 430,
Y
Pr. 464 to Pr. 494)
(2) Operation by position command using parameters
Speed
Servo on (LX)
Pr.7
(Pr. 44, Pr. 110)
Feed speed
Pr.4
Pr.8
(Pr. 45, Pr. 111)
Shaded part is the travel
Feed amount pulses
Pr.466 10000 Pr.465
Pr.5
Sudden stop
when STF turns off
Pr. 464
RH
RM
STF
STR
36
In-position
Position feed is
effected by sending
run command by
contact input.
• Acceleration/deceleration time is 0.1s minimum and 360s maximum.
• Acceleration/deceleration reference speed (Pr. 20) is clamped at a minimum of 500r/min.
• Deceleration time can be set in Pr. 464 "digital position control sudden stop deceleration time".
• At this time, the acceleration/deceleration patterns are all linear acceleration and the setting of Pr. 29
"acceleration/deceleration pattern" is invalid. (Refer to page 89 for Pr. 29.)
CAUTION
Information on multi-speed command (position command) is determined at rising of the forward
(reverse) command to perform position control.
Therefore, set forward (reverse) command after multi-speed command (position command).
Position feed is invalid if the multi-speed command is given after forward (reverse) command.
2.7.6 Setting the electronic gear
Adjust the ratio of the machine side gear and the motor side gear.
The position resolution (travel per pulse
feedback pulses Pf [pulse/rev] of the detector, and is represented by the following expression.
Δ [mm]) is determined by the travel per motor revolution Δ s [mm] and the
:Travel per pulse [mm]
Pf
:Travel per motor revolution [mm]
:Number of feedback pulses [pulse/rev]
Pf
(the number of pulses after multiplying the number of encoder pulses by 4)
Using the parameters, the travel per command pulse can be set separately to set the travel per command pulse
without a fraction.
Pr. 420
Pf
Pr. 421
The relationship between the motor speed and internal command pulse frequency is as follows.
Pr. 420
fo
Pr. 421
= Pf
No
60
fo: Internal command pulse frequency [pps]
No:Motor speed [r/min]
CAUTION
Set the electronic gear in the range of 1/50 to 20.
For products manufactured in July 2003 and thereafter, the electronic gear will function within the range
of 1/900 to 900. However, it is recommended to use the electronic gear within the range of 1/50 to 20.
Note that too small a value will decrease the speed command and too large a value will increase the
speed ripples. Check the rating plate for the month when the inverter was manufactured. (Refer to page
220.)
60
Page 70

Position control (Pr. 419 to Pr. 430,
y
Pr. 464 to Pr. 494)
"Setting example 1"
The travel per pulse is
reduction ratio 1/n = 1 and the electronic gear ratio is
4000 (pulse/rev). According to the following expression,
Pr. 420
Pr. 421
Therefore, set "4" in Pr. 420 and "1" in Pr. 421.
"Setting example 2"
Find the internal command pulse frequency of the dedicated motor rated speed.
Note that the command pulse scaling factor Pr. 420/Pr. 421 = 1.
Assuming that the number of encoder pulses is 2048 (pulses/rev) (feedback pulse Pf = 2048 × 4),
2048
fo
204800
Therefore, the internal command pulse frequency is 204800 (pps).
Pf
0.01
No
60
Δ = 0.01 (mm) in a drive system where the ballscrew pitch PB = 10 (mm) and the
Δs = 10 (mm) when the number of feedback pulses Pf =
Pr. 420
Pr. 421
Pf
4000
10
Pr. 421
Pr. 420
4
1
4
<Relationship between position resolution Δ and overall accuracy>
Since overall accuracy (positioning accuracy of machine) is the sum of electrical error and mechanical error,
normally take measures to prevent the electrical system error from affecting the overall error. As a guideline, refer to
the following relationship.
1
1
to
5
10
<Stopping characteristic of motor>
When parameters are used to run the motor, the command pulse frequency and motor speed have the relationship
as shown in the chart on page 58, and as the motor speed decreases, pulses are accumulated in the deviation
counter of the inverter. These pulses are called droop pulses (
(fo) and position loop gain (Kp: Pr. 422) is as represented by the following expression.
fo
[pulse]
Kp
When the factory setting of Kp is 25s
Since the inverter has droop pulses during running, a stop settling time (ts) is needed from when the command has
zeroed until the motor stops. Set the operation pattern in consideration of the stop settling time.
1
Kp
[s]
3
ts
When the factory setting of Kp is 25s
204800
: Positioning accurac
ε) and the relationship between command frequency
[pulse] (motor rated speed)
25
-1
, the droop pulses (ε) are 8192 pulses.
-1
, the stop settling time (ts) is 0.12s.
2
The positioning accuracy
Δ ε is (5 to 10) × Δ = Δ ε [mm]
z Position command acceleration/deceleration time constant (Pr. 424)
1) When the electronic gear ratio is large (about 10 or more times) and the speed is low, rotation will not be
smooth, resulting in pulse-wise rotation. At such a time, set this parameter to smooth the rotation.
2) When acceleration/deceleration time cannot be provided for the command pulses, a sudden change in
command pulse frequency may cause an overshoot or error excess alarm. At such a time, set this parameter to
provide acceleration/deceleration time.
Normally set 0.
61
VECTOR CONTROL
Page 71

Position control (Pr. 419 to Pr. 430,
Pr. 464 to Pr. 494)
2.7.7 In-position width (Pr. 426)
The Y36 terminal signal acts as an in-position signal. The in-position signal turns on when the number of droop
pulses becomes less than the setting.
2.7.8 Excessive level error (Pr. 427)
A position error becomes excessive when the droop pulses exceed the Pr. 427 setting. Error (E.OD) is displayed
and the motor stops.
When you decreased the position loop gain (Pr. 422) setting, increase the error excessive level setting.
Also decrease the setting when you want to detect an error slightly earlier under large load.
When Pr. 472="9999", an excessive position error (E.OD) is not output regardless of the droop pulses.
Parameter Name Factory Setting Setting Range Remarks
427 Excessive level error 40 0 to 400, 9999 9999: function invalid
2.7.9 Pulse monitor selection (Pr. 430)
The states of various pulses during operation are displayed in terms of the number of pulses.
Set "6" in Pr. 52 "DU/PU main display data selection" to display output frequency monitor.
Pr. 430 Description
0
1 Upper 4 digits Upper 5 digits
2
3 Upper 4 digits Upper 5 digits
4
5 Upper 4 digits Upper 5 digits
9999 The frequency monitor is displayed. (factory setting)
The cumulative command pulse value is displayed.
The cumulative feedback pulse value is displayed.
The droop pulses are monitored.
Display Range
(FR-DU04
Lower 4 digits Lower 5 digits
Lower 4 digits Lower 5 digits
Lower 4 digits Lower 5 digits
-1)
Display Range
(FR-PU04V)
REMARKS
• Count the number of pulses when the servo is on.
• The cumulative pulse value is cleared when the base is shut off or the clear signal is turned on.
Related parameters
Pr. 52 "DU/PU main display data selection" (Refer to page 97.)
2.7.10 Concept of position control gains
Easy gain tuning is available as an easy tuning method. For easy gain tuning, refer to the Instruction Manual
(basic). If it does not produce any effect, make fine adjustment by using the following parameters. Set "0" in Pr. 819
"easy gain tuning" before setting the parameters below.
(1) Pr. 422 "position loop gain" (factory setting 25s-1)
Make adjustment when any of such phenomena as unusual vibration, noise and overcurrent of the motor/
machine occurs.
Increasing the setting improves trackability for the position command and also improves servo rigidity at a stop,
but oppositely makes an overshoot and vibration more liable to occur. Normally set this parameter within the
range about 5 to 50.
No.
Phenomenon/Condition
1 Slow response
Overshoot, stop-time
vibration or other
2
instable phenomenon
occurs.
(2) Pr. 423 "position feed forward gain" (factory setting 0)
This function is designed to cancel a delay caused by the droop pulses of the deviation counter.
When a tracking delay for command pulses poses a problem, increase the setting gradually and use this
parameter within the range where an overshoot or vibration will not occur.
This function has no effects on servo rigidity at a stop.
Normally set this parameter to 0.
Adjustment Method
Increase the Pr. 422 value.
-1
Pr. 422
Decrease the Pr. 422 value.
Pr. 824
Increase the value 3s
or other instable phenomenon occurs, and set about 0.8 to 0.9 of that value.
Decrease the value 3s
or other instable phenomenon occurs, and set about 0.8 to 0.9 of that value.
by 3s-1 until just before an overshoot, stop-time vibration
-1
by 3s-1 until just before an overshoot, stop-time vibration
62
Page 72

2.7.11 Troubleshooting
Phenomenon Cause Corrective Action
1 Motor does not rotate. (1) The phase sequence of the
motor or encoder wiring is
wrong.
(2) The control mode selection, Pr.
800, setting is improper.
(3) The servo on signal or start
signal (STF, STR) is not input.
(4) The command pulses are not
input correctly. (FR-V5AP)
(5) The position command source
selection, Pr. 419, setting is not
correct.
(6) When the position command
source selection, Pr. 419,
setting is 0, the position feed
amount, Pr. 465 to Pr. 494,
settings are not correct.
2 Position shift occurs. (1) The command pulses are not
input correctly.
(2) The command is affected by
noise or the encoder feedback
is compounded with noise.
3 Motor or machine
hunts.
4 Machine operation is
unstable.
(1) The position loop gain is high. (1) Decrease Pr. 422.
(2) The speed loop gain is high. (2)-1 Perform easy gain tuning.
(1) The acceleration/deceleration
time setting has adverse effect.
Position control (Pr. 419 to Pr. 430,
Pr. 464 to Pr. 494)
(1) Check the wiring. (Refer to page 55)
(2) Check the Pr. 800 setting. (Factory setting is speed
control)
(3) Check that the signals are input normally.
(4)-1 Check that the command pulses are input
normally. (Check the cumulative command pulse
value in Pr. 430.)
(4)-2 Check the command pulse form and command
pulse selection, Pr. 428, setting.
(5) Check the position command source selection in
Pr. 419.
(6) Check the position feed amounts in Pr. 465 to Pr. 494.
(1)-1 Check the command pulse form and command
pulse selection, Pr. 428, setting.
(1)-2 Check that the command pulses are input
normally. (Check the cumulative command pulse
value in Pr. 430.)
(2)-1 Decrease the PWM carrier frequency in Pr. 72.
(2)-2 Change the shielded cable earthing (grounding)
place or raise the cable.
(2)-2 Decrease Pr. 820 and increase Pr. 821.
(1) Decrease Pr. 7 and Pr. 8.
Related parameter reference pages
• Pr. 800 "control system selection" (Refer to page 169.)
• Pr. 802 "pre-excitation selection" (Refer to page 82.)
• Pr. 820 "speed control P gain 1" (Refer to page 175.)
• Pr. 7 "acceleration time" (Refer to page 78.)
• Pr. 8 "deceleration time" (Refer to page 78.)
• Pr. 72 "PWM frequency selection" (Refer to page 112.)
• Pr. 821 "speed control integral time 1" (Refer to page 175.)
2
63
VECTOR CONTROL
Page 73

Position control (Pr. 419 to Pr. 430,
Pr. 464 to Pr. 494)
2.7.12 Position control is not exercised normally
(1) Position control
Position control is not
exercised normally.
Have you checked the
speed control items?
Y
Does a position
shift occur?
N
Is the motor or
machine hunting?
N
N
Check the speed
control techniques.
Y
Y
Have you made the
electronic gear setting?
Y
Has the forward (reverse)
rotation stroke end signal
turned off before
completion of positioning?
N
Y
Is the position loop gain
(Pr. 422) high?
N
Set the electronic gear
(Pr. 420, Pr. 421).
Y
Do not turn off the forward
(reverse) rotation stroke end
signal before completion of
positioning.
N
Perform easy gain tuning.
The speed control gain is high.
Decrease the speed control
P gain (Pr. 820).
Increase the speed control
integral time (Pr. 821).
Is machine operation
unstable?
N
Please contact your sales
representative.
Y
Decrease the position
loop gain (Pr. 422).
Y
Torque is insufficient.
Increase the excitation
ratio (Pr. 854).
REMARKS
The speed command of position control relates to speed control. Refer to the Instruction Manual (basic) for details.
64
Page 74

3
PARAMETERS
This chapter explains the "parameters" for use of this
product.
Always read the instructions and other information before
using the equipment.
The following marks indicate availability of parameters under each control.
speed
torque
position
position
: Available under speed control
: Available under torque control
: Available under position control
: Available under position control by parameter settings
1
2
3
65
4
Page 75

Parameter list
3.1 Parameter list
The inverter is factory-set to display only the simple mode parameters.
Set Pr. 160 "extended function selection" as required.
Parameter Name
160
Extended function
selection
Factory
Setting
0
Setting
Range
Remarks
0 Accessible to only the simple mode parameters.
1 Accessible to all parameters.
CAUTION
• The blacked out parameters in the table below indicate simple mode parameters.
• The shaded parameters in the table allow its setting to be changed during operation even if "0" (factory
setting) is set in Pr. 77 (parameter write disable selection).
• *: Accessible when Pr. 77 = 801.
Function
Basic functions
Standard
operation
functions
Operation
selection
functions
Parameter
No.
Name Setting Range
0 Torque boost (manual)
1 Maximum speed
2 Minimum speed
3 Base frequency
4 Multi-speed setting (high speed)
5 Multi-speed setting (middle speed)
6 Multi-speed setting (low speed)
7 Acceleration time
8 Deceleration time
9 Electronic thermal O/L relay
10 DC injection brake operation speed
11 DC injection brake operation time
12 DC injection brake voltage
13 Starting speed
15 Jog speed setting
16 Jog acceleration/deceleration time
17 MRS input selection
19 Base frequency voltage
Acceleration/deceleration reference
20
speed
21 Acceleration/deceleration time increments
22 Torque limit level
24 Multi-speed setting (speed 4)
25 Multi-speed setting (speed 5)
26 Multi-speed setting (speed 6)
27 Multi-speed setting (speed 7)
28 Multi-speed input compensation
29 Acceleration/deceleration pattern
30 Regenerative function selection
31 Speed jump 1A
32 Speed jump 1B
Minimum
Setting
Increments
0 to 30% 0.1%
0 to 3600r/min 1r/min 1500r/min 76
0 to 3600r/min 1r/min 0r/min 76
10 to 200Hz 0.01Hz 60Hz 77
0 to 3600r/min 1r/min 1500r/min 77
0 to 3600r/min 1r/min 750r/min 77
0 to 3600r/min 1r/min 150r/min 77
0 to 3600s/0 to
360s
0 to 3600s/0 to
360s
0 to 500A 0.01A 0A 80
0 to 1500r/min,
9999
0 to 0.5s 0.1s 0.5s 82
0 to 30% 0.1%
0 to 1500r/min 0.1r/min 15r/min 84
0 to 1500r/min 0.1r/min 150r/min 85
0 to 3600s/0 to
360s
0, 2 1 0 86
0 to 1000V, 8888,
9999
1 to 3600r/min 1r/min 1500r/min 78
0, 1 1 0 78
0 to 400% 0.1% 150% 87
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0, 1 1 0 88
0, 1, 2, 3, 4 1 0 89
0, 1, 2 1 0 92
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0.1s/0.01s
0.1s/0.01s
0.1r/min 15r/min 82
0.1s/0.01s 0.5s 85
0.1V 9999 77
1r/min 9999 77
1r/min 9999 77
1r/min 9999 77
1r/min 9999 77
1r/min 9999 93
1r/min 9999 93
Factory Setting
4%/3%/2%
(3.7K or less/
5.5K, 7.5K/
11K or m o re)
5s/15s
(1.5K to 5.5K
/7.5K to 55K)
5s/15s
(1.5K to 5.5K
/7.5K to 55K)
4%/2%
(7.5K or less/
11K or m o re)
Refer
To
76
78
78
82
Custo
Setting
mer
66
Page 76

Parameter list
Function
Operation
selection
functions
Display
function
Output terminal
functions
Second
functions
Output terminal
function
Display
functions
Automatic
restart
Additional
function
Operation
selection
functions
Motor
constants
Third functions
Parameter
No.
Name Setting Range
33 Speed jump 2A
34 Speed jump 2B
35 Speed jump 3A
36 Speed jump 3B
37 Speed display
41 Up-to-speed sensitivity
42 Speed detection
43 Speed detection for reverse rotation
44 Second acceleration/deceleration time
45 Second deceleration time
50 Second speed detection
52 DU/PU main display data selection
53 PU level display data selection
54 DA1 terminal function selection
55 Speed monitoring reference
56 Current monitoring reference
57 Restart coasting time
58 Restart cushion time
59 Remote setting function selection
60 Intelligent mode selection
65 Retry selection
67 Number of retries at alarm occurrence
68 Retry waiting time
69 Retry count display erasure
70 Special regenerative brake duty
71 Applied motor
72 PWM frequency selection
73 Speed setting signal
Reset selection/disconnected PU
75
detection/PU stop selection
77 Parameter write disable selection
78 Reverse rotation prevention selection
79 Operation mode selection
80 Motor capacity
81 Number of motor poles
82 Motor excitation current (no load current) *
83 Rated motor voltage
84 Rated motor frequency
90 Motor constant R1 *
91 Motor constant R2 *
92 Motor constant L1 *
93 Motor constant L2 *
94 Motor constant X *
95 Online auto tuning selection
96 Auto tuning setting/status
110 Third acceleration/deceleration time
111 Third deceleration time
Minimum
Setting
Increments
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0, 1 to 9998 1 0 93
0 to 100% 0.1% 10% 95
0 to 3600r/min 1r/min 300r/min 95
0 to 3600r/min,
9999
0 to 3600s/0 to
360s
0 to 3600s/0 to
360s, 9999
0 to 3600r/min 1r/min 750r/min 95
0, 5 to 12, 17 to
20, 23, 24,
32 to 35, 38, 100
0 to 3, 5 to 12,
17, 18
1 to 3, 5 to 12,
17, 18, 21,
32 to 34, 36
0 to 3600r/min 1r/min 1500r/min 100
0 to 500A 0.01A
0, 0.1 to 5s, 9999 0.1s 9999 101
0 to 60s 0.1s 1.0s 101
0, 1, 2, 3 1 0 103
0, 7, 8 1 0 106
0 to 5 1 0 109
0 to 10, 101 to
110
0 to 10s 0.1s 1s 109
0 1 0 109
0 to 15%/0 to
30%
0, 3 to 8, 10, 13
to 18,20,23,24,
30, 33, 34
1 to 6 1 1 112
0, 4, 10, 14 1 0 113
0 to 3, 14 to 17 1 14 115
0, 1, 2 1 0 116
0, 1, 2 1 0 117
0 to 4, 6 to 8 1 0 117
0.4 to 55kW 0.01kW Inverter capacity 120
2, 4, 6 1 4 120
0 to , 9999 9999 123
0 to 1000V 0.1V
10 to 200Hz 0.01Hz 60Hz 120
0 to, 9999 9999 123
0 to , 9999 9999 123
0 to , 9999 9999 123
0 to , 9999 9999 123
0 to , 9999 9999 123
0, 1, 2 1 0 126
0, 1, 101 1 0 120
0 to 3600/0 to
360s
0 to 3600/0 to
360s, 9999
1r/min 9999 93
1r/min 9999 93
1r/min 9999 93
1r/min 9999 93
1r/min 9999 95
0.1s/0.01s 5s 78
0.1s/0.01s 9999 78
1097
1197
1197
1 0 109
0.1% 0% 92
130111
0.1s/0.01s 5s 78
0.1s/0.01s 9999 78
Factory Setting
Inverter rated
current
200V (200V class) /
400V (400V class)
Refer
To
100
120
Custo
mer
Setting
PARAMETERS
PARAMETERS
3
67
Page 77

Parameter list
Function
Output terminal
function
Communication
functions
PID control
Backlash
Display
functions
Current
detection
Sub functions
Display
functions
Automatic
restart after
instantaneous
power failure
Maintenance
functions
Initial monitor
Te rm i na l
assignment
functions
Multi-speed
operation
Parameter
No.
Name Setting Range
116 Third speed detection
117 Commucication station number
118 Communication speed
119 Stop bit length/data length
120 Parity check presence/absence
121 Number of communication retries
122 Communication check time interval
123 Waiting time setting
124 CR, LF selection
128 PID action selection
129 PID proportional band
130 PID integral time
131 Upper limit
132 Lower limit
133 PID action set point for PU operation
134 PID differential time
140 Backlash acceleration stopping speed
141 Backlash acceleration stopping time
142 Backlash deceleration stopping speed
143 Backlash deceleration stopping time
144 Speed setting switchover
145 Parameter for the option (FR-PU04V)
150 Output current detection level
151 Output current detection period
152 Zero current detection level
153 Zero current detection period
156 Stall prevention operation selection
157 OL signal output timer
158 DA2 terminal function selection
160 Extended function selection
Automatic restart after instantaneous
162
power failure selection
163 First cushion time for restart
164 First cushion voltage for restart
165 Restart current limit level
168
Maker setting parameters. Do not set.
169
171 Actual operation hour meter clear
180 DI1 terminal function selection
181 DI2 terminal function selection
182 DI3 terminal function selection
183 DI4 terminal function selection
187 STR terminal function selection
190 DO1 terminal function selection
191 DO2 terminal function selection
192 DO3 terminal function selection
195 A,B,C terminal function selection
232 Multi-speed setting (speed 8)
233 Multi-speed setting (speed 9)
234 Multi-speed setting (speed 10)
235 Multi-speed setting (speed 11)
236 Multi-speed setting (speed 12)
Minimum
Setting
Increments
0 to 3600r/min 1r/min 1500r/min 95
0 to 31 1 0 128
48, 96, 192 1 192 128
0, 1, 10, 11 1 1 128
0, 1, 2 1 2 128
0 to 10, 9999 1 1 128
0 to 999.8s, 9999 0.1s 0 128
0 to 150ms, 9999 1ms 9999 128
0, 1, 2 1 1 128
10, 11, 30, 31 1 10 139
0.1 to 1000%,
9999
0.1 to 3600s,
9999
0 to 100%, 9999 0.1% 9999 139
0 to 100%, 9999 0.1% 9999 139
0 to 100% 0.01% 0% 139
0.01 to 10s, 9999 0.01s 9999 139
0 to 3600r/min 1r/min 30r/min 89
0 to 360s 0.1s 0.5s 89
0 to 3600r/min 1r/min 30r/min 89
0 to 360s 0.1s 0.5s 89
0, 2, 4, 6, 8, 10 1 0 93
0 to 200% 0.1% 150% 146
0 to 10s 0.1s 0 146
0 to 200.0% 0.1% 5.0% 147
0 to 1s 0.01s 0.5s 147
0 to 31, 100, 101 1 1 148
0 to 25s, 9999 0.1s 0 149
1 to 3, 5 to 12,
17, 18, 21,
32 to 34, 36
0, 1 1 0 150
0, 1, 10 1 0 101
0 to 20s 0.1s 0s 101
0 to 100% 0.1% 0% 101
0 to 200% 0.1% 150% 101
0 1 0 150
0 to 3, 5, 8 to
12,14 to 16, 20,
22 to 28, 42 to
44, 9999
0 to 8, 10 to 16,
20, 25 to 27, 30
to 37, 39, 40 to
44, 96 to 99, 100
to 108, 110 to
116, 120,125 to
127, 130 to 137,
,139, 140 to 144,
196 to 199, 9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0.1% 100% 139
0.1s 1s 139
1197
10
11
12
13
1 9999
10
11
12
199
1r/min 9999 77
1r/min 9999 77
1r/min 9999 77
1r/min 9999 77
1r/min 9999 77
Factory Setting
Refer
To
150
152
Custo
mer
Setting
68
Page 78

Parameter list
Function
Multi-speed
operation
Sub functions
Stop selection
function
Operation
selection
function
Additional
functions
Power failure
stop functions
Brake
sequence
Droop
Additional
function
Orientation
Control system
function
S-pattern C
Orientation
Additional
function
Parameter
No.
Name Setting Range
237 Multi-speed setting (speed 13)
238 Multi-speed setting (speed 14)
239 Multi-speed setting (speed 15)
240 Soft-PWM setting
244 Cooling fan operation selection
250 Stop selection
251 Output phase failure protection selection
252 Override bias
253 Override gain
261 Power failure stop selection
262 Subtracted speed at deceleration start
263 Subtraction starting speed
264 Power-failure deceleration time 1
265 Power-failure deceleration time 2
Power-failure deceleration time
266
switchover speed
278 Brake opening speed
279 Brake opening current
280 Brake opening current detection time
281 Brake operation time at start
282 Brake operation speed
283 Brake operation time at stop
284 Deceleration detection function selection
285 Overspeed detection speed
286 Droop gain
287 Droop filter time constant
288 Droop function activation selection
342
2
E
PROM write selection
350 Stop position command selection
351 Orientation switchover speed
356 Internal stop position command
357 In-position zone
360 External position command selection
361 Position shift
362 Orientation position loop gain
374 Overspeed detection level
380 Acceleration S pattern 1
381 Deceleration S pattern 1
382 Acceleration S pattern 2
383 Deceleration S pattern 2
393 Orientation selection
396 Orientation speed gain (P term)
397 Orientation speed integral time
398 Orientation speed gain (D term)
399 Orientation deceleration ratio
408 Motor thermistor selection
Minimum
Setting
Increments
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
0, 1, 10, 11 1 10 112
0, 1 1 0 154
0 to 100s, 9999 0.1s 9999 154
0, 1 1 1 155
0 to 200% 0.1% 50% 156
0 to 200% 0.1% 150% 156
0, 1 1 0 156
0 to 600r/min 1r/min 90r/min 156
0 to 3600r/min,
9999
0 to 3600/0 to
360s
0 to 3600/0 to
360s, 9999
0 to 3600r/min 1r/min 1500r/min 156
0 to 900r/min 1r/min 20r/min 106
0 to 200% 0.1% 130% 106
0 to 2s 0.1s 0.3s 106
0 to 5s 0.1s 0.3s 106
0 to 900r/min 1r/min 25r/min 106
0 to 5s 0.1s 0.3s 106
0, 1 1 0 106
0 to 900r/min,
9999
0 to 100.0% 0.01% 0% 158
0.00 to 1.00s 0.01s 0.3s 158
0, 1, 2 1 0 158
0, 1 1 0 128
0, 1, 2, 3, 9999 1 9999 159
0 to 1000r/min 1r/min 200r/min 159
0 to 16383 1 0 159
0 to 8192 1 11 159
0, 1, 2 to 127 1 0 159
0 to 16383 1 0 159
0.1 to 100 0.1 10 159
0 to 4200r/min 1r/min 3450r/min 166
0 to 50% 1% 0% 89
0 to 50% 1% 0% 89
0 to 50% 1% 0% 89
0 to 50% 1% 0% 89
1, 2, 10, 11, 12 1 0 159
0 to 1000% 1 60% 159
0 to 20.0s 0.001 0.333 159
0 to 100.0% 0.1 1 159
0 to 1000 1 20 159
0, 1 1 0 212
1r/min 9999 77
1r/min 9999 77
1r/min 9999 77
1r/min 1500r/min 156
0.1s/0.01s 5s 156
0.1s/0.01s 9999 156
1r/min 9999 106
Factory Setting
Refer
To
Custo
mer
Setting
PARAMETERS
PARAMETERS
69
3
Page 79

Parameter list
Function
Position control
Position control
Motor
constants
Position control
Parameter
No.
Name Setting Range
419 Position command source selection
420 Command pulse scaling factor numerator
Command pulse scaling factor
421
denominator
422 Position loop gain
423 Position feed forward gain
Position command acceleration/
424
deceleration time constant
425 Position feed forward command filter
426 In-position width
427 Excessive level error
430 Pulse monitor selection
450 Second applied motor
451 Second motor control method selection
452 Second electronic thermal O/L relay
453 Second motor capacity
454 Number of second motor poles
Digital position control sudden stop
464
deceleration time
465 First position feed amount lower 4 digits
466 First position feed amount upper 4 digits
Second position feed amount lower 4
467
digits
Second position feed amount upper 4
468
digits
469 Third position feed amount lower 4 digits
470 Third position feed amount upper 4 digits
471 Fourth position feed amount lower 4 digits
Fourth position feed amount upper 4
472
digits
473 Fifth position feed amount lower 4 digits
474 Fifth position feed amount upper 4 digits
475 Sixth position feed amount lower 4 digits
476 Sixth position feed amount upper 4 digits
Seventh position feed amount lower 4
477
digits
Seventh position feed amount upper 4
478
digits
479 Eighth position feed amount lower 4 digits
480 Eighth position feed amount upper 4 digits
481 Ninth position feed amount lower 4 digits
482 Ninth position feed amount upper 4 digits
483 Tenth position feed amount lower 4 digits
484 Tenth position feed amount upper 4 digits
Eleventh position feed amount lower 4
485
digits
Eleventh position feed amount upper 4
486
digits
487
Twelfth position feed amount lower 4 digits
488
Twelfth position feed amount upper 4 digits
Thirteenth position feed amount lower 4
489
digits
Thirteenth position feed amount upper 4
490
digits
Fourteenth position feed amount lower 4
491
digits
Fourteenth position feed amount upper 4
492
digits
Fifteenth position feed amount lower 4
493
digits
Fifteenth position feed amount upper 4
494
digits
Minimum
Setting
Increments
0, 1 1 0 57
0 to 32767 1 1 57
0 to 32767 1 1 57
-1
0 to 150s
0 to 100% 1% 0% 57
0 to 50s 0.001s 0s 57
0 to 5s 0.001s 0s 57
0 to 32767 pulses 1 pulse 100 pulses 57
0 to 400K, 9999 1K 40K 57
0 to 5, 9999 1 9999 57
0, 10, 30, 9999 1 9999 111
20, 9999 1 9999 169
0 to 500A, 9999 0.01A 9999 80
0.4 to 55kW 0.01kW Inverter capacity 38
2, 4, 6 1 4 38
0 to 360.0s 0.1s 0 57
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
0 to 9999 1 0 59
-1
1s
Factory Setting
-1
25s
Refer
To
57
Custo
mer
Setting
70
Page 80

Parameter list
Function
Remote output
Operation
selection
functions
Control system
functions
Torque biases
Parameter
No.
Name Setting Range
495 Remote output selection
496 Remote output data 1
497 Remote output data 2
505 Speed setting reference
800 Control system selection
801 Torque characteristic selection
802 Pre-excitation selection
Constant power range torque
803
characteristic selection
804 Torque command source selection
805 Torque command source (RAM)
806
Torque command source (RAM, E2PROM)
807 Speed limit selection
808 Forward rotation speed limit
809 Reverse rotation speed limit
810 Torque restriction input method selection
811 Set resolution switchover
812 Torque limit level (regeneration)
813 Torque limit level (3 quadrant)
814 Torque limit level (4 quadrant)
815 Torque limit level 2
816 Acceleration torque limit level
817 Deceleration torque limit level
818 Easy gain tuning response level setting
819 Easy gain tuning selection
820 Speed control P gain 1
821 Speed control integral time 1
822 Speed setting filter 1
823 Speed detection filter 1
824 Torque control P gain 1
825 Torque control integral time 1
826 Torque setting filter 1
827 Torque detection filter 1
828 Model speed control gain
830 Speed control P gain 2
831 Speed control integral time 2
832 Speed setting filter 2
833 Speed detection filter 2
834 Torque control P gain 2
835 Torque control integral time 2
836 Torque setting filter 2
837 Torque detection filter 2
840 Torque bias selection
841 Torque bias 1
842 Torque bias 2
843 Torque bias 3
844 Torque bias filter
845 Torque bias operation time
846 Torque bias balance compensation
847 Fall-time torque bias terminal 3 bias
848 Fall-time torque bias terminal 3 gain
Minimum
Setting
Increments
0, 1 1 0 168
0 to 4095 1 0 168
0 to 4095 1 0 168
1 to 3600r/min 1 1500r/min 93
0 to 5, 9, 20 1 0 169
0, 1 1 1 169
0, 1 1 0 82
0, 1 1 0 87
0 to 6 1 0 171
600 to 1400% 1% 1000% 171
600 to 1400% 1% 1000% 171
0, 1, 2 1 0 173
0 to 3600r/min 1r/min 1500r/min 173
0 to 3600r/min,
9999
0, 1 1 0 87
0, 1, 10, 11 1 0 87
0 to 400%, 9999 0.1% 9999 87
0 to 400%, 9999 0.1% 9999 87
0 to 400%, 9999 0.1% 9999 87
0 to 400%, 9999 0.1% 9999 87
0 to 400%, 9999 0.1% 9999 87
0 to 400%, 9999 0.1% 9999 87
1 to 15 1 2 175
0, 1, 2 1 0 175
0 to 1000% 1% 60% 175
0 to 20s 0.001s 0.333s 175
0 to 5s 0.001s 0s 175
0 to 0.1s 0.001s 0.001s 176
0 to 200% 1% 100% 176
0 to 500ms 0.1ms 5ms 176
0 to 5s 0.001s 0s 176
0 to 0.1s 0.001s 0s 177
0 to 1000% 1% 60% 49
0 to 1000%, 9999 1% 9999 175
0 to 20s, 9999 0.001s 9999 175
0 to 5s, 9999 0.001s 9999 175
0 to 0.1s, 9999 0.001s 9999 176
0 to 200%, 9999 1% 9999 176
0 to 500ms, 9999 0.1ms 9999 176
0 to 5s, 9999 0.001s 9999 176
0 to 0.1s, 9999 0.001s 9999 177
0 to 3, 9999 1 9999 177
600 to 1400%,
9999
600 to 1400%,
9999
600 to 1400%,
9999
0 to 5s, 9999 0.001s 9999 177
0 to 5s, 9999 0.01s 9999 177
0 to 10V, 9999 0.1V 9999 177
0 to 400%, 9999 1% 9999 177
0 to 400%, 9999 1% 9999 177
1r/min 9999 173
1% 9999 177
1% 9999 177
1% 9999 177
Factory Setting
Refer
To
Custo
mer
Setting
PARAMETERS
PARAMETERS
71
3
Page 81

Parameter list
Function
Additional
functions
Display
functions
Te rm i na l
assignment
function
Protective
functions
Operation
selection
functions
Control system
functions
Maintenance
functions
Calibration
functions
Additional
functions
Parameter
No.
Name Setting Range
849 Analog input offset adjustment *
851 Number of encoder pulses
852 Encoder rotation direction
854 Excitation ratio
859 Torque current *
862 Notch filter frequency
863 Notch filter depth
864 Torque detection
865 Low speed detection
866 Torque monitoring reference
867 DA1 output filter
868 Terminal 1 function assignment
870 Speed deviation level
871 Speed deviation time
873 Speed limit
874 OLT level setting
875 Fault definition
876 Thermal relay protector input
Speed feed forward control/model
877
adaptive speed control selection
878 Speed feed forward filter
879 Speed feed forward torque limit
880 Load inertia ratio
881 Speed feed forward gain
890 Maintenance output setting time
891 Maintenance output timer
892 Maintenance output signal clear
900 DA1 terminal calibration
901 DA2 terminal calibration
902 Speed setting terminal 2 bias
903 Speed setting terminal 2 gain
904 Torque command terminal 3 bias
905 Torque command terminal 3 gain
917 Terminal 1 terminal bias (speed)
918 Terminal 1 terminal gain (speed)
Terminal 1 terminal bias (torque/magnetic
919
flux)
Terminal 1 terminal gain (torque/magnetic
920
flux)
990 PU buzzer control
991 Parameter for the option (FR-PU04V)
Minimum
Setting
Increments
0 to 200% 0.1% 100% 193
0 to 4096 1 2048 180
0, 1 1 1 180
0 to 100% 1% 100% 181
0 to , 9999 1 9999 123
0 to 31 1 0 181
0 to 3 1 0 181
0 to 400% 0.1% 150% 182
0 to 3600r/min 1r/min 45r/min 182
0 to 400% 0.1% 150% 100
0 to 5s 0.001s 0.05s 183
0, 1, 2, 5, 9999 1 0 183
0 to 1500r/min,
9999
0 to 100s 0.1s 12s 184
0 to 3600r/min 1r/min 600r/min 185
0 to 200% 0.1% 150% 185
0, 1 1 0 186
0, 1 1 1 80
0, 1, 2 1 0 49
0 to 1s 0.01s 0s 49
0 to 400% 0.1% 150% 49
0, 1 to 200 times 0.1 7 49
0 to 1000% 1% 0% 49
0 to 9998, 9999 10hr 9999 187
0 to 9998 10hr 0 187
0 1 0 187
0 to 10V, 0 to
3600r/min
0 to 10V, 0 to
3600r/min
0 to 10V, 0 to
400%
0 to 10V, 0 to
400%
0 to 10V, 0 to
3600r/min
0 to 10V, 0 to
3600r/min
0 to 10V, 0 to
400%
0 to 10V, 0 to
400%
0, 1 1 1 193
1r/min 9999 184
0.1r/min 0V, 0r/min 190
1r/min 10V, 1500r/min 190
0.1% 0V, 0% 190
0.1% 10V, 150% 190
0.1r/min 0V, 0r/min 190
1r/min 10V, 1500r/min 190
0.1% 0V, 0% 190
0.1% 10V, 150% 190
Factory Setting
Refer
To
188
188
Custo
mer
Setting
72
Page 82

At-a-glance guide to functions
3.2 At-a-glance guide to functions
{....Usable function, × ..... Unusable function
Control
Applicable
Function
Category
Pr. number Terminal
Speed limit
Torque limit
Offline auto tuning
Online auto tuning (start time) Pr. 95 = 1 Pr. 95 {{
Online auto tuning
(adaptive magnetic flux observer) Pr. 95 = 2
Easy gain tuning Pr. 818, Pr. 819 {
Gain adjustment Pr. 820 to Pr. 827, Pr. 830 to Pr. 837 {{{
Machine analyzer (notch filter) Pr. 862, Pr. 863 {
Control
0 speed control Pr. 802 {
Servo lock Pr. 802 {
Variable excitation Pr. 854 {{{
Speed feed-forward, model adaptive speed control
P/PI switchover Pr. 180 to Pr. 183, Pr. 187 X44 signal {{{
Speed feedback filter Pr. 823, Pr. 833 {{{
Extended function display Pr. 160 {{{
Maximum speed Pr. 1 {{{
Minimum speed Pr. 2 {{
Acceleration time
Acceleration/deceleration pattern
Jog operation mode Pr. 15, Pr. 16 {{
PWM frequency selection Pr. 72, Pr. 240 {{{
Operation mode (PU/external/combined) Pr. 79 {{
Basic functions
Switchover mode Pr. 79 {{
PU operation interlock mode Pr. 79, Pr. 180 to Pr. 183, Pr. 187 X12 {{{
Operation mode external signal switchover mode Pr. 79, Pr. 180 to Pr. 183, Pr. 187 X16 {{{
Start command (2-wire, 3-wire) Pr. 180 to Pr. 183, Pr. 187 STOP {{{
Parameter write disable selection Pr. 77 {{{
Starting speed Pr. 13 {{
DC injection brake Pr. 10, Pr. 11, Pr. 12 {{
Second, third functions Pr. 180 to Pr. 183, Pr. 187 RT, X9 {{{
Multi-speed setting
Remote setting Pr. 59
Speed jump Pr. 31 to Pr. 36 {{
PID control
Stop selection Pr. 250 {{
Power failure stop Pr. 261 to Pr. 266 {{
PU stop Pr. 75 {{{
Reset selection Pr. 75 {{{
Application functions
Forward/reverse rotation prevention Pr. 78 {{{
Automatic restart after instantaneous power failure Pr. 57, Pr. 58 {{
Cooling fan on/off control Pr. 244 {{{
Retry function Pr. 65, Pr. 67 to Pr. 69 {{
Inverter RS485 communication Pr. 117 to Pr. 124 {{{
Droop control Pr. 286 to Pr. 288 {
Pr. 807 to Pr. 809, Pr. 873, Pr. 902,
Pr. 903, Pr. 917, Pr. 918
Pr. 22, Pr. 803, Pr. 810 to Pr. 817,
Pr. 904, Pr. 905, Pr. 919, Pr. 920
Pr. 9, Pr. 71, Pr. 80 to Pr. 84,
Pr. 90 to Pr. 94, Pr. 96, Pr. 859
Pr. 95
Pr. 877 to Pr. 881, Pr. 820,
Pr. 821, Pr. 828
Pr. 7, Pr. 8, Pr. 20, Pr. 21,
Pr. 44, Pr. 45, Pr. 110, Pr. 111
Pr. 29, Pr. 140 to Pr. 143,
Pr. 380 to Pr. 383
Pr. 4 to Pr. 6, Pr. 24 to Pr. 27, Pr. 28,
Pr. 232 to Pr. 239
Pr. 128 to Pr. 134, Pr. 180 to Pr. 183,
Pr. 187
Terminal 2 (1),
multi-speed
Terminal 3 (1)
X14 {
Motor
Vector with encoder
Speed Torque Position
"Motor with encoder (standard,
*: This function can be usable under
position control by parameter
setting.
SF-V5RU
constant torque)"
× {
{ × {
{{
{{{
×
×
×
×
{
{{
{{
{{
{{
×
××
××
×
×
×
{
{
{
{
{
×
×*
×
×
×
×
×
×
×*
×
×
×
×
×
PARAMETERS
×
3
73
Page 83

At-a-glance guide to functions
Control
Applicable
Function
Category
Pr. number Terminal
Brake sequence Pr. 60, Pr. 278 to Pr. 285 {
Torque bias
Regenerative function selection Pr. 30, Pr. 70 {{{
Soft-PWM Pr. 240 {{{
Torque characteristic selection Pr. 801 {{{
Encoder rotation direction Pr. 852 {{{
Number of encoder pulses Pr. 851 {{{
Conditional position control by contact input Pr. 465 to Pr. 494
Application functions
Direct display and direct setting of motor constants Pr. 71, Pr. 82, Pr. 90 to Pr. 94, Pr. 859 {{{
Speed setting/display unit switchover
Electronic gear Pr. 420, Pr. 421, Pr.505, Pr.811
Multi-function input terminal assignment Pr. 180 to Pr. 183, Pr. 187 {{{
Analog input assignment/calibration Pr. 868 / Pr. 902 to Pr. 920
Analog command filter time constant Pr. 822, Pr. 826, Pr. 832, Pr. 836 {{{
Override, polarity reversible Pr. 73, Pr. 252, Pr. 253 {{
Output stop Pr. 17, Pr. 180 to Pr. 183, Pr. 187 MRS {{{
Input functions
Multi-function output terminal assignment Pr. 190 to Pr. 192, Pr. 195 {{{
Speed limit output Pr. 190 to Pr. 192, Pr. 195 SL
Inverter running signal Pr. 13, Pr.190 to Pr. 192, Pr. 195 RUN {{{
Up-to-speed signal Pr. 41, Pr. 190 to Pr. 192, Pr. 195 SU {
Overload alarm signal Pr. 190 to Pr. 192, Pr. 195 OL
Speed detection signal
Regenerative brake prealarm signal Pr. 190 to Pr. 192, Pr. 195 RBP {{{
Electronic thermal relay function prealarm signal Pr. 190 to Pr. 192, Pr. 195 THP {{{
PU operation mode signal Pr. 190 to Pr. 192, Pr. 195 PU {{{
Operation ready signal Pr. 190 to Pr. 192, Pr. 195 RY {{{
Output current detection signal, zero current detection
signal
Fan fault output signal Pr. 190 to Pr. 192, Pr. 195 FAN {{{
Fin overheat prealarm signal Pr. 190 to Pr. 192, Pr. 195 FIN {{{
Forward, reverse rotation output signal Pr. 190 to Pr. 192, Pr. 195 Y30, Y31 {{{
Output functions
Regenerative status output signal Pr. 190 to Pr. 192, Pr. 195 Y32 {{{
Operation ready 2 signal Pr. 190 to Pr. 192, Pr. 195 RY2 {{{
Low speed detection signal Pr. 190 to Pr. 192, Pr. 195, Pr. 865 LS {{{
Torque detection signal Pr. 190 to Pr. 192, Pr. 195, Pr. 864 TU {{{
Maintenance output
Remote output
Instantaneous power failure (undervoltage) signal Pr. 190 to Pr. 192, Pr. 195 IPF {{{
Fault definition Pr. 190 to Pr. 192, Pr. 195, Pr. 875 ER {{
Minor fault output signal Pr. 190 to Pr. 192, Pr. 195 LF {{{
Alarm output signal Pr. 190 to Pr. 192, Pr. 195 ABC {{{
DU/PU display data selection Pr. 52, Pr. 53 {{{
DA1, DA2 output/calibration
DA1 output filter Pr. 867 DA1 {{{
Running speed monitor Pr. 52 to Pr. 55, Pr.158 {{{
Output current monitor/output current peak value
monitor
Output voltage monitor Pr. 52 to Pr. 54, Pr. 158 {{{
Preset speed monitor Pr. 52 to Pr. 55, Pr. 158 {{{
Monitor functions
Output frequency monitor Pr. 52 to Pr. 55, Pr. 158 {{{
Motor torque monitor Pr. 52 to Pr. 54, Pr. 158, Pr. 866 {{{
Converter output voltage monitor, converter output
voltage peak value monitor
Pr. 180 to Pr. 183, Pr. 187, Pr. 840
to Pr. 848, Pr. 904, Pr. 905
Pr. 37, Pr. 144, Pr. 81, Pr. 454, Pr. 505,
Pr. 811
Pr. 42, Pr. 43, Pr. 50, Pr. 116,
Pr. 190 to Pr. 192, Pr. 195
Pr. 150, Pr. 151, Pr. 152, Pr. 153,
Pr. 190 to Pr. 192, Pr. 195
Pr. 190 to Pr. 192, Pr. 195,
Pr. 890 to Pr. 892
Pr. 190 to Pr.192, Pr. 195,
Pr. 495 to Pr. 497
Pr. 54 to Pr. 56, Pr. 866, Pr. 158,
Pr. 900, Pr. 901
Pr. 52 to Pr. 54, Pr. 56, Pr. 158
Pr. 52 to Pr. 54, Pr. 158
X42, X43
Terminals 1, 2, 3
FU, FU2, FU3
FB, FB2, FB3 {{{
Y12, Y13
MT
REM
DA1, DA2
Motor
Vector with encoder
Speed Torque Position
"Motor with encoder (standard,
*: This function can be usable under
position control by parameter
setting.
SF-V5RU
constant torque)"
××
{
××
{{{
××
{{{
××
{
{
×
×
{
×
××
{
{{{
{{{
{{{
××
×
{{{
{{{
{{{
74
Page 84

At-a-glance guide to functions
Control
Applicable
Function
Category
Pr. number Terminal
Input terminal monitor, output terminal monitor — {{{
Load meter monitor Pr. 52 to Pr. 54, Pr. 158, Pr. 866 {{{
Motor excitation current monitor Pr. 52 to Pr. 54, Pr. 158, Pr. 56 {{{
Cumulative energization time monitor Pr. 52 {{{
Actual operation time monitor Pr. 52, Pr. 171 {{{
Motor load factor Pr. 52 {{{
Orientation status Pr. 52 {
Option fitting status monitor — {{{
Monitor functions
Terminal assignment status monitor — {{{
Motor output monitor Pr. 52 {{{
Feedback pulse monitor Pr. 52 {{{
Torque command/torque current command Pr. 52, Pr. 54, Pr. 158, Pr. 866 {{{
Overcurrent protection — {{{
Overvoltage protection — {{{
Electronic thermal O/L relay Pr. 9 {{{
Fin overheat — {{{
Brake transistor alarm Pr. 30, Pr. 70 {{{
Earth (Ground) fault overcurrent protection — {{{
External thermal relay <OHT> Pr. 876 OH {{{
Motor overload (OLT) Pr. 865, Pr. 874 {{{
Option alarm — {{{
Parameter error — {{{
Disconnected PU detection Pr. 75 {{{
Output phase failure protection Pr. 251 {{{
CPU error — {{{
12/24VDC power supply short circuit protection — {{{
Protective functions
Control panel power supply short circuit protection — {{{
Overspeed occurrence Pr. 374 {{{
Speed deviation large Pr. 870, Pr. 871 {{{
Encoder no-signal — {{{
Encoder A no-signal — {
Position error large Pr. 427
Output short circuit protection — {{{
Encoder phase error (E. EP) — {{{
PU language changing Pr. 145 {{{
PU buzzer control Pr. 990 {{{
PU
PU contrast adjustment Pr. 991 {{{
12-bit digital input "A5AX" Pr. 300 to Pr. 305, Pr. 329 {{
Digital setting of torque command "A5AX" Pr. 447, Pr. 448, Pr. 804
Machine end orientation "V5AM" Pr. 350 to Pr. 369, Pr. 390 to Pr. 396 {
Pulse position control "V5AP" Pr. 419 to Pr. 431
Encoder output "V5AY" Pr. 410 to Pr. 413 {{{
Thermistor secondary resistance compensation "V5AX" Pr. 407, Pr. 408, Pr. 925 {{{
Extension analog input "V5AX" Pr. 406 {{{
Extension contact input "V5AX" Pr. 400 to Pr. 405 {{{
Digital output "A5AY, V5AY" Pr. 313 to Pr. 319 / Pr. 410 to Pr. 413 {{{
Extension analog output "A5AY" Pr. 306 to Pr. 312 {{{
Relay output "A5AR" Pr. 320 to Pr. 322, Pr. 330 {{{
Options
Pulse train input "A5AP" Pr. 384 to Pr. 386 {{
SSCNET "V5NS"
Ethernet "V5NE" Pr. 434 to Pr. 438 {{{
RS485 communication "A5NR" Pr. 331 to Pr. 342 {{{
CC-Link "A5NC" Pr. 338 to Pr. 342 {{{
Profibus DP "A5NPA" Pr. 338 to Pr. 342 {{{
DeviceNet "A5ND" Pr. 338 to Pr. 342, Pr. 345 to Pr. 348 {{{
16-bit digital input "V5AH" Pr. 300 to Pr. 305, Pr. 329 {{
Trace (plug-in option) Pr. 520 to Pr. 536 {{{
Pr. 79, Pr. 117, Pr. 338 to Pr. 342,
Pr. 499
Motor
Vector with encoder
Speed Torque Position
"Motor with encoder (standard,
*: This function can be usable under
position control by parameter
setting.
SF-V5RU
constant torque)"
××
××
××
{
×
×
{
×
××
××
{
×
{
×
{
×
PARAMETERS
3
75
Page 85

Basic functions (Pr. 0 to Pr. 9)
3.3 Basic functions (Pr. 0 to Pr. 9)
3.3.1 Torque boost (Pr. 0)
Use this parameter for V/F control only.
z Motor torque in the low speed region can be adjusted according to the load to increase the starting motor
torque.
Parameter Name Factory Setting
0 Torque boost (manual)
(3.7K or less/5.5K, 7.5K/11K or more)
4%/3%/2%
Setting
Range
0 to 30% Extended mode
Remarks
<Setting>
• Increase the setting value when the distance between the inverter and motor is long or when the motor torque in
the low speed range is insufficient (when the stall prevention protective function is activated), etc.
• Assuming that the base frequency voltage is 100%, set the 0Hz voltage in %.
CAUTION
If the setting is too large, the motor may result in overheat or overcurrent trip. The guideline for
maximum value is about 10%.
3.3.2 Maximum and minimum speed settings
(Pr. 1 , Pr. 2 )
You can limit the maximum (minimum) speed.
z Speed control
The maximum setting is placed on the running speed.
The minimum setting is placed on the preset speed.
z Torque control
The maximum and minimum settings are made on the speed
limit commands. (Limit is not placed on the running speed.)
z Position control
The maximum setting is valid for the speed command obtained
from the droop pulses. The minimum setting is invalid.
speed torque position speed torque
Output speed (r/min)
Pr.1
Pr.2
Set speed
0
10V
Parameter Name Factory Setting Setting Range Remarks
1 Maximum speed 1500r/min 0 to 3600r/min Simple mode
2 Minimum speed 0r/min 0 to 3600r/min Simple mode
<Setting>
z Speed control
• When the upper limit of the output speed is set in Pr. 1, the output speed is clamped at the maximum speed even if
the speed command entered is higher than the speed set in Pr.1. (This also applies to the minimum speed setting.)
CAUTION
When the Pr. 2 setting is higher than Pr. 13 "starting speed" value, note that the motor will run at the
preset speed by merely turning the start signal on, even if the command speed has not been entered.
Related parameters
• Starting speed setting ⇒ Pr. 13 "starting speed" (Refer to page 84.)
• Speed limit command selection for torque control
• External (example: terminal 2-5 connection) speed setting potentiometer adjustment
(Refer to page 190.),
Pr. 903 "speed setting terminal 2 gain" (Refer to page 190.)
⇒ Pr. 807 "speed limit selection" (Refer to page 173.)
⇒ Pr. 902 "speed setting terminal 2 bias"
76
Page 86

Basic functions (Pr. 0 to Pr. 9)
3.3.3 Base frequency, base frequency voltage (Pr. 3, Pr. 19)
Use this parameter for V/F control only.
This parameter matches the inverter outputs (voltage, frequency) to the motor rating.
Parameter Name Factory Setting
Setting
Range
Remarks
3 Base frequency 60Hz 10 to 200Hz Extended mode
Extended mode
8888: 95% of power supply voltage
9999: Same as power supply voltage
19 Base frequency voltage 9999
0 to 1000V,
8888, 9999
<Setting>
• Use Pr. 3 to set the base frequency (rated motor frequency).
• If only "50Hz" is given on the motor rating plate as the frequency, always set the "base frequency" to "50Hz". If it
remains at "60Hz", the voltage may become too low and torque shortage occurs, resulting in an overload trip.
• Use Pr. 19 to set the base voltage (e.g. rated motor voltage).
The motor whose rated voltage is lower than the power supply voltage of the inverter can be used optimally. This
function is useful when a motor rated at 200V is used with a 230V power supply.
• Set Pr. 19 "base frequency voltage" according to the motor as shown below.
SF-V5RU-3.7kW or less . . . . . . . . . . . "170V"
SF-V5RU-5.5kW or more . . . . . . . . . . "160V"
SF-V5RUH-3.7kW or less . . . . . . . . . "340V"
SF-V5RUH-5.5kW or more. . . . . . . . . "320V"
SF-VR. . . . . . . . . . . . . . . . . . . . . . . . . "160V"
SF-VRH . . . . . . . . . . . . . . . . . . . . . . . "320V"
Set "50Hz" in Pr. 3 "base frequency".
REMARKS
If vector control is disabled due to an encoder fault, setting "20" in Pr. 800 "control system selection" enables operation under
V/F control. (Refer to page 169.)
Related parameters
Motor setting ⇒ Pr. 71 "applied motor", Pr. 450 "second applied motor" (Refer to page 111.)
3.3.4 Multi-speed operation
(Pr. 4 to Pr. 6, Pr. 24 to Pr. 27, Pr. 232 to Pr. 239 )
speed torque
Can be used to change between the predetermined running speeds by switching from one terminal to
another.
z Any speed can be selected by merely turning on-off the contact signals (RH, RM, RL, REX signals).
z Using these parameters with Pr. 1 "maximum speed" and Pr. 2 "minimum speed" allows the setting of up to
17 speeds.
POINT
z Valid in the external operation mode or in the combined operation mode that is made available by setting "3 or
4" in Pr. 79.
z Valid when "0" is set in Pr. 59.
Speed 1
(high speed)
Output speed (r/min)
RH
RM
RL
Priority: RL > RM > RH
Speed 2
(middle speed)
Speed 4
Speed 3
(low speed)
ON ON ON ON
ON
ON
Speed 5
Speed 6
ON
Speed 7
ON
ONONON
Time
Output speed (r/min)
RH
RM
RL
REX
*1 If "9999" is set in Pr. 232 "multi-speed setting (speed 8)",
the output speed is 0r/min when RH, RM and RL are turned off and REX is turned on.
Speed 10
Speed 11
Speed 9
Speed 8
ON
ONONON ONON ON ON ON
Speed 12
ON
ON ON ON ON
ON
*1
Speed 13
Speed 14
Speed 15
ON ONON
ON
ON
position
Time
PARAMETERS
3
77
Page 87

Basic functions (Pr. 0 to Pr. 9)
Parameter Name Factory Setting Setting Range Remarks
4 Multi-speed setting (high speed) 1500r/min 0 to 3600r/min Simple mode
5
6 Multi-speed setting (low speed) 150r/min 0 to 3600r/min Simple mode
24 to 27
232 to 239
Multi-speed setting
(middle speed)
Multi-speed setting
(speeds 4 to 7)
Multi-speed setting
(speeds 8 to 15)
<Setting>
• Set the running speeds in the corresponding parameters.
Each speed can be set as desired in the range 0 to 3600r/min during inverter operation.
With any multi-speed setting parameter being read, press to change the setting.
In this case, press to store the preset speed. (This is also enabled in the external mode.)
Pressing reflects the preset speed.
SET
REMARKS
SET
750r/min 0 to 3600r/min Simple mode
9999
9999
0 to 3600r/min,
9999
0 to 3600r/min,
9999
"9999" No setting
"9999" No setting
• Press when the FR-PU04V (option) is used.
• Use Pr. 180 to Pr. 183 and Pr. 187 to assign the terminals used for signals RH, RM, RL, and REX. (*)
• The priorities of the external terminals for speed commands are as follows.
WRITE
*Changing the terminal assignment using Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) may affect the other
functions. Please make setting after confirming the function of each terminal.
Jog > pulse train input (option FR-A5AP) > digital setting (option FR-A5AX) > multi-speed operation > PID > terminal 2
CAUTION
1. The multi-speed settings override the main speed (across terminals 2-5).
2. The multi-speeds can also be set in the PU or external operation mode.
3. For 3-speed setting, if two or more speeds are simultaneously selected, priority is given to the preset
speed of the lower signal. (RL > RM > RH)
4. Pr. 24 to Pr. 27 and Pr. 232 to Pr. 239 settings have no priority between them.
5. The settings can also be changed during operation.
6. When the jog signal is used with multi-speed signals, the jog signal has priority.
Related parameters
• Maximum, minimum speed setting⇒ Pr. 1 "maximum speed", Pr. 2 "minimum speed" (Refer to page 76.)
• Signal RH, RM, RL, REX terminal assignment
• External operation mode setting
• Extended mode/simple mode setting
⇒ Pr. 79 "operation mode selection" (Refer to page 117.)
⇒ Pr. 160 "extended function selection" (Refer to page 150.)
⇒ Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) (Refer to page 150.)
3.3.5 Acceleration and deceleration time
(Pr. 7, Pr. 8, Pr. 20, Pr. 21, Pr. 44, Pr. 45, Pr. 110, Pr. 111 )
speed torque
position
Set the acceleration/deceleration time of the motor
during speed control and position control by
parameter setting.
Set a larger value for a slower speed increase/
decrease or a smaller value for a faster speed
increase/decrease.
Under torque control, the speed limit value varies
with the acceleration/deceleration time.
78
Output speed
Pr.7
Pr.44
Pr.110
Pr.20
(r/min)
Acceleration
Acceleration
time
Constant
speed Deceleration
Deceleration
time
Running speed
(speed limit value)
Time
Pr.8
Pr.45
Pr.111
Page 88

Basic functions (Pr. 0 to Pr. 9)
Parameter Name Factory Setting
5s/15s
7 Acceleration time
8 Deceleration time
Acceleration/
20
21
44
45
110
111
deceleration
reference speed
Acceleration/
deceleration time
increments
Second
acceleration/
deceleration time
Second
deceleration time
Third acceleration/
deceleration time
Third deceleration
time
(5.5K or less/7.5K or
more)
5s/15s
(5.5K or less/7.5K or
more)
1500r/min
00, 1
5s
9999
5s
9999
Setting
Range
0 to 3600s
0 to 360s
0 to 3600s
0 to 360s
1 to 3600
r/min
0 to 3600s Pr. 21 = 0
0 to 360s Pr. 21 = 1
0 to 3600s Pr. 21 = 0
0 to 360s Pr. 21 = 1
9999
0 to 3600s Pr. 21 = 0
0 to 360s Pr. 21 = 1
0 to 3600s Pr. 21 = 0
0 to 360s Pr. 21 = 1
9999
Simple mode
Simple mode
Extended mode
0: 0 to 3600s
1: 0 to 360s
Acceleration time =
deceleration time
Acceleration time =
deceleration time
Remarks
Extended mode
Extended mode
Extended mode
Extended mode
Extended mode
<Setting>
• Use Pr. 21 to set the acceleration/deceleration time and minimum setting range.
Value "0" (factory setting) 0 to 3600s (minimum setting increments: 0.1s)
Value "1" 0 to 360s (minimum setting increments: 0.01s)
Changing the Pr. 21 value changes the setting of Pr. 7, Pr. 8, Pr. 44, Pr. 45, Pr. 110 and Pr. 111.
CAUTION
Changing the Pr. 21 setting changes the acceleration/deceleration time setting (Pr. 7, Pr. 8, Pr. 16, Pr. 44,
Pr. 45, Pr. 110, Pr. 111)
<Example>
When Pr.21="0" and the setting of Pr.7="5.0"s, and if the setting of Pr.21 is changed to "1", the setting
value of Pr.7 will change to "0.5"s.
• Use Pr. 7, Pr. 44 and Pr. 110 to set the acceleration time taken to reach the speed set in Pr. 20 from 0r/min.
• Use Pr. 8, Pr. 45 and Pr. 111 to set the deceleration time taken to reach 0r/min from the speed set in Pr. 20.
• Use Pr. 180 to Pr. 183 and Pr. 187 to assign the terminals used to input the RT and X9 signals.
CAUTION
• Pr. 44 and Pr. 45 are valid when the RT signal is on.
When the RT signal is on, the other second functions (Pr. 450 to Pr. 454, Pr. 815, Pr. 830 to Pr. 837) are
also valid.
• Pr. 110 and Pr. 111 are valid when the X9 signal is on.
When the X9 signal is on, Pr. 820 to Pr. 827 are also valid.
• When both RT and X9 are on, Pr. 110 and Pr. 111 are valid.
• Switching the RT and X9 signals during operation does not change the acceleration/deceleration time
imediately when position control is exercised with the conditional position control function (Pr. 419 =
"0") by the contact input.
REMARKS
• Changing the Pr. 20 "acceleration/deceleration reference speed" setting does not adjust the speed gain setting signal. To
adjust the gain, adjust the calibration function (Pr. 903).
• When the setting of Pr. 7, Pr. 8, Pr. 44, Pr. 45, Pr. 110 or Pr. 111 is 0.03 or less under V/F control, the acceleration/
deceleration time is 0.04s.
• However short the acceleration/deceleration time setting is, the actual motor acceleration/deceleration time cannot be made
shorter than the shortest acceleration/deceleration time that is determined by the mechanical system J (moment of inertia)
and the motor torque.
Related parameters
• Jog acceleration/deceleration time ⇒ Pr. 16 "jog acceleration/deceleration time" (Refer to page 85.)
• RT signal, X9 signal setting
⇒ Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) (Refer to page 150.)
79
PARAMETERS
3
Page 89

Basic functions (Pr. 0 to Pr. 9)
3.3.6 Motor overheat protection (Pr. 9, Pr. 452, Pr. 876 )
speed torque position
When an external thermal relay is not used, protect the motor from overheat by integration processing of the
inverter output current. This feature provides the optimum protective characteristics, including reduced motor
cooling capability, at low speed.
Parameter Name Factory Setting Setting Range Remarks
9 Electronic thermal O/L relay 0 0 to 500A Extended mode
Extended mode
452
876 Thermal relay protector input 1 0, 1 Extended mode
Second electronic thermal
O/L relay
9999 0 to 500A, 9999
9999: Without second
electronic thermal relay
function
<Setting>
• When not using an external thermal relay, set the rated current value [A] of the motor in Pr. 9 (Pr. 452) to make
the electronic thermal relay function valid.
(Normally set the rated current value at 50Hz. When the rated current value of 50Hz is not indicated on the name
plate, set the value obtained from multiplying the rated current value of 60Hz by 1.1.)
• Setting "0" in Pr. 9 (Pr. 452) deactivates the electronic thermal relay function (motor protective function). (The
inverter's output transistor protective function is activated.)
When using the dedicated motor, set "0" since the thermal relay protector is onboard (outside).
• When using a Mitsubishi constant-torque motor, first set "10" in Pr.71 "applied motor". (This provides a 100%
continuous torque characteristic in the low-speed region.) Then, set the rated current of the motor in Pr. 9
"electronic thermal O/L relay".
• The electronic thermal relay function of the second motor (Pr. 452 "second electronic thermal O/L relay" is made
valid by:
Turning on the RT signal; and
Setting other than 9999 in Pr. 450.
(The value set in Pr. 9 is valid when Pr. 452 = 9999.)
z Selection for whether to use an external thermal relay or not (Pr. 876 "thermal relay
protector input")
Pr. 876 Setting Motor with encoder (e.g. SF-JR)
0 When thermal relay etc. is not used (thermal relay protector input invalid)
1
(factory setting)
OH
SD
CAUTION
• When two or more motors are connected to the inverter under V/F control, they cannot be protected by
the electronic thermal relay function. Install an external thermal relay to each motor.
• When a difference between the inverter and motor capacities is large and the setting is small, the
protective characteristics of the electronic thermal relay function will be deteriorated. In this case, use
an external thermal relay.
• A special motor cannot be protected by the electronic thermal relay function. Use an external thermal
relay.
When thermal relay etc. is used (thermal relay protector input valid)
Set value 1Set value 0
U
V
W
Not used
IM
OH
SD
IM
OHT error occurs when terminals OH-SD are open.
80
Page 90

Basic functions (Pr. 0 to Pr. 9)
REMARKS
• When running two motors with one inverter, you can set the electronic thermal relay function of each inverter.
Pr. 450
"second applied
motor"
9999 0
9999 Other than 0
Other than 9999 0
Other than 9999 Other than 0
Pr. 9
"electronic
thermal O/L
relay"
Pr. 452
"second
First Motor Electronic
Thermal Relay Function
Second Motor Electronic
Thermal Relay Function
electronic
thermal
RT = OFF RT = ON RT = OFF RT = ON
O/L relay"
9999
0
0.01 to 500
9999
0
0.01 to 500
9999
0
0.01 to 500
9999
0
0.01 to 500
... Output current value is used to perform integration processing.
... Output current is assumed as 0A to perform integration processing. (cooling processing)
... Electronic thermal relay function is not activated.
• It is valid for controlling one motor with one inverter in two different control systems.
• It is valid for controlling the first motor with an external thermal relay and the second motor with an electronic thermal relay
function.
Related parameters
• When constant-torque motor is used ⇒ Pr. 71 "applied motor", Pr. 450 "second applied motor" (Refer to page 111.)
• Use of second motor
• RT signal setting
⇒ Pr. 450 "second applied motor" (Refer to page 111.)
⇒ Set "3" in any of Pr. 180 to Pr. 183 and Pr. 187 (input terminal function selection). (Refer to page 150.)
PARAMETERS
81
3
Page 91

Standard operation functions (Pr. 10 to Pr. 16)
3.4 Standard operation functions (Pr. 10 to Pr. 16)
3.4.1 DC injection brake operation (Pr. 10, Pr.11 , Pr. 12,
Pr.802 )
speed position
speed torque
By setting the DC injection brake voltage (torque) at a stop, operation time and operation starting speed, the
stopping accuracy of positioning operation, etc. or the timing of applying the DC injection brake to stop the
braking torque and the motor is adjusted.
Parameter Name Factory Setting
10
11
12
802
DC injection brake
operation speed
DC injection brake
operation time
DC injection brake
voltage
Pre-excitation
selection
15r/min
0.5s 0 to 0.5s
4%/2%
(7.5K or less/11K or more)
0 0, 1 Use during speed control.
Setting
Range
0 to 1500
r/min, 9999
0 to 30% Use during V/F control.
9999: Operated at or below
Pr. 13 value.
Remarks
Extended
mode
<Setting>
• Use Pr. 10 to set the speed at which the DC injection brake application is started.
By setting "9999", the brake is operated at or below the speed set in Pr. 13.
• When stopping the motor by using a STOP key or turning the STF/STR off, the DC injection brake application is
started at the speed set in Pr.10. When stopping the motor by setting speed to 0r/min (with PU or Volume), the
DC injection brake application is started at the speed set in Pr.13.
• Use Pr. 11 to set the duration period the brake is applied. During this period, DC injection brake operation is
exercised.
When this period has elapsed, the motor is coasted to a stop.
• Use Pr. 12 to set the percentage to the power supply voltage. (Use this parameter only during V/F control.)
When using the inverter dedicated motor (Mitsubishi constant-torque motor SF-JRCA and Mitsubishi energy
saving motor SF-HR, SF-HRCA), change the Pr. 12 setting as follows:
•SF-JRCA: 3.7K or less ... 4%, 5.5K or more ... 2%
•SF-HR, SF-HRCA: 3.7K or less ... 4%, 5.5K, 7.5K ... 3%, 11K or more ... 2%
REMARKS
• For the 5.5K and 7.5K, the Pr. 12 setting is automatically changed to 2% if Pr. 71 "applied motor" value is set to the
Mitsubishi constant torque motor. To the contrary, the Pr. 12 setting is changed to 4% if the Pr. 71 value is set to the general
purpose motor.
Select either 0 speed control or servo lock control for brake operation when pre-excitation is performed with the LX
signal using Pr.802.
Turning on the LX signal enables the pre-excitation operation. (valid only during speed control)
Parameter Name Description
0: 0 speed control (factory setting)
Even under load, an attempt is made to maintain 0r/min to keep the motor shaft stopped.
Note that if the shaft is overcome and turned by external force, it does not return to the
original position.
Position control is not exercised and only speed control is carried out to perform operation.
1: Servo lock
Even under load, an attempt is made to maintain the motor shaft position. Note that if the
shaft is turned by external force, it returns to the original position after the external force has
gone away.
Since position control is exercised, you can adjust this position loop gain using Pr. 422
"position loop gain".
802
Pre-excitation
selection
82
Page 92

Standard operation functions (Pr. 10 to Pr. 16)
z Relationship between DC injection brake operation and pre-excitation operation in each
control mode
Operation
LX terminal OFF
Control Mode
V/F control DC injection brake DC injection brake No operation No operation
Speed control (vector control) 0 speed control Servo lock 0 speed control Servo lock
Position control (vector control) No operation No operation Servo lock Servo lock
(Deceleration to stop)
Pre-excitation
selection
Pr. 802 = 0
Pre-excitation
selection
Pr. 802 = 1
Pre-excitation
selection
Pr. 802 = 0
z The control block diagram during pre-excitation
LX terminal ON
Pre-excitation
selection
Pr. 802 = 1
0r/min speed command
0rad position command
Position control Speed control Motor
Pr.802 = 0
Pr.802 = 1
z Timing chart
Speed
LX pre-excitation
STF
Pre-excitation operation
0 speed control or servo lock
DC injection brake time (Pr.11)
is made invalid.
Normal operation
DC injection brake operation
speed (Pr. 10)
Pre-excitation operation
0 speed control or servo lock
DC injection brake time (Pr.11)
is made invalid.
* When the LX (pre-excitation) terminal is off, the pre-excitation operation functions for the time set in the DC
injection brake operation time (Pr. 11).
CAUTION
The DC injection brake functions during speed limit under speed control or torque control. (It does not
function under position control.)
CAUTION
Install a mechanical brake.
After the machine stops fully and the mechanical brake is applied, switch the LX signal (preexcitation) off.
Related parameters
• DC injection brake operation speed when Pr. 10 = 9999 ⇒ Pr. 13 "starting speed" (Refer to page 84.)
• Motor setting when using constant-torque motor
page 111.)
• Setting control mode ⇒ Pr. 800 "control system selection" (Refer to page 169.)
• LX signal terminal assignment ⇒ Set "23" in any of Pr. 180 to Pr. 183 and Pr. 187 (input terminal function selection).
(Refer to page 150.)
⇒ Pr. 71 "applied motor", Pr. 450 "second applied motor" (Refer to
83
PARAMETERS
3
Page 93

Standard operation functions (Pr. 10 to Pr. 16)
3.4.2 Starting speed (Pr. 13 )
speed torque
You can set the starting speed
at which the start signal is
turned on.
Operation pattern after
input of speed setting
signal depends on Pr. 29
"acceleration/deceleration
pattern".
Output speed
Setting
range
Pr.13
Forward
(reverse)
rotation
Speed setting is 1500r/min
(r/min)
1500
0
ON
Time
Parameter Name Factory Setting Setting Range Remarks
13 Starting speed 15r/min 0 to 1500r/min Extended mode
CAUTION
• If the speed setting signal is less than the value set in Pr. 13 "starting speed", the operation is either 0
speed or servo lock.
For example, when 150r/min is set in Pr. 13, the motor will start running when the speed setting signal
reaches 150r/min.
• When the analog voltage command (example: across 2-5) is used as speed for operation, too low of a
setting of the rotation speed at a start may start the motor running by merely entering the start signal
although the voltage command is zero. In this case, adjustment can be made using the calibration
function, Pr. 902.
CAUTION
When the Pr. 13 setting is equal to or less than the Pr. 2 "minimum speed" value, note that merely
switching on the start signal will start the motor at the preset speed if the command speed is not
input.
Related parameters
• Minimum speed setting ⇒ Pr. 2 "minimum speed" (Refer to page 76.)
• Acceleration/deceleration pattern setting
• Adjustment for analog voltage command
⇒ Pr. 29 "acceleration/deceleration pattern" (Refer to page 89.)
⇒ Pr. 902 "speed setting terminal 2 bias" (Refer to page 190.)
84
Page 94

Standard operation functions (Pr. 10 to Pr. 16)
3.4.3 Jog operation (Pr. 15, Pr. 16 )
To start/stop jog operation in the external operation
mode, choose the jog operation function in input
terminal function selection, turn on the jog signal, and
turn on/off the start signal (STF, STR).
When using the parameter unit (FR-PU04V), choose
the jog operation mode and use or to
FWD REV
speed torque
Output speed (r/min)
Pr.15
Pr.20
Jog speed
setting
range
Forward
rotation
Pr.16
Reverse
rotation
Time
perform jog operation.
(When the FR-PU04V is connected, these parameters
Jog signal
ON
can be read as the basic parameters.)
Perform PU jog operation using PU (FR-DU04
PU04V) in the PU jog operation mode.
-1, FR-
Forward rotation, STF
Reverse rotation, STR
ON
ON
z Set the speed and acceleration/deceleration time for jog operation.
Parameter Name Factory Setting Setting Range Remarks
15 Jog speed setting 150r/min 0 to 1500r/min ————
16
Jog acceleration/
deceleration time
0.5s
0 to 3600s When Pr. 21 = 0
0 to 360s When Pr. 21 = 1
Extended mode
REMARKS
For the operation method from the control panel (FR-DU04-1), refer to the Instruction Manual (basic).
CAUTION
• The acceleration time and deceleration time cannot be set separately for jog operation.
• The Pr. 15 "jog speed setting" value should be equal to or higher than the Pr. 13 "starting speed" setting.
• Assign the jog signal to any of Pr. 180 to Pr. 183 and Pr. 187 (input terminal function selection).
• The priorities of the external terminals for speed commands are:
Jog > multi-speed operation > terminal 2
• During jog operation, the RT and X9 signals cannot be used to switch to the second and third
acceleration/deceleration time.
• Under torque control, the jog speed acts as the speed limit value by turning on the jog signal.
• Jog operation is invalid under position control.
• When Pr. 79 "operation mode selection" = "4", push / of the PU (FR-DU04
a start or push to make a stop.
STOP
RESET
FWD REV
-1/FR-PU04V) to make
Related parameters
• Jog signal terminal assignment ⇒ Set "5" in any of Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) (Refer to page 150.)
• S-shaped acceleration/deceleration pattern A
• Pr. 16 setting range, minimum setting increments condition setting
⇒ Pr. 29 "acceleration/deceleration pattern" (Refer to page 89.)
⇒ Pr. 21 "acceleration/deceleration time increments" (Refer to page 78.)
PARAMETERS
3
85
Page 95

Operation selection functions 1 (Pr. 17 to Pr. 37)
A
3.5 Operation selection functions 1 (Pr. 17 to Pr. 37)
3.5.1 Inverter output stop (MRS) (Pr. 17 )
speed torque position
The setting of this parameter needs to be changed to:
z Stop the motor with a mechanical brake (e.g.
electromagnetic brake);
z Provide interlocks to prevent the inverter from
running if the start signal is input to the inverter; or
Output
speed
z Coast the motor to a stop.
About 20ms
When Pr. 17 = 0
Across MRS-SD
Parameter Name Factory Setting
17 MRS input selection 0
When Pr. 17 = 2
cross MRS-SD
Across STF-SD
Setting
Range
0 Output stops when MRS signal turns on.
2
(STR)
MRS Signal Specifications Remarks
Output stops when MRS signal turns off.
(NC contact input specifications)
ON ON
<Wiring example> For sink logic
Motor is coasted to stop.
Start at starting speed
About 20ms
ON
OFF
ON
Extended
mode
Setting 0 Setting 2
Output
stop
(factory setting)
Inverter
MRS
SD
Output
stop
Inverter
MRS
SD
REMARKS
• Set the MRS signal using the input terminal function selection (Pr. 180 to Pr. 183, Pr. 187).
• The setting cannot be changed during operation.
• Refer to the Instruction Manual (basic) for inverter reset.
CAUTION
• When Pr. 30 = 2 (FR-HC connection), use the X10 signal.
• When the operation mode is the NET mode and Pr. 338 = 0, the MRS signal is used as both the external
terminal and communication-based signals, and the output stops when either signal turns on. At the
Pr. 17 setting of 2, the output stops when either signal turns off. (Oppositely, at the Pr. 17 setting of 2,
both the external terminal and communication-based signals should turn on to make a start.)
Related parameters
• Starting speed setting ⇒ Pr. 13 "starting speed" (Refer to page 84.)
• MRS signal terminal assignment
⇒ Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) (Refer to page 150.)
Pr. 19 Refer to Pr. 3 (page 77)
Pr. 20, Pr. 21 Refer to Pr. 7, Pr. 8 (page 78)
86
Page 96

Operation selection functions 1 (Pr. 17 to Pr. 37)
3.5.2 Torque limit (Pr. 22 , Pr. 803 , Pr. 810 to
Pr. 817 )
speed position
speed position speed torque position
Used to restrict the output torque to the predetermined value during speed control.
For details of the setting method, refer to tlimithe torque limit of the Instruction Manual (basic).
Parameter Name Factory Setting
22 Torque limit level (*1) 150% 0 to 400%
Constant power range
803
810
811
812
813
814
815 Torque limit level 2 9999
816
817
torque characteristic
selection
Torque limit input
method selection
Set resolution
switchover
Torque limit level
(regeneration)
Torque limit level
(3rd quadrant)
Torque limit level
(4th quadrant)
Acceleration torque limit
level (*2)
Deceleration torque limit
level (*2)
0
0
0
9999
9999
9999
9999
9999
Setting
Range
When Pr. 810 = 0, 1st quadrant Pr. 22
Constant power limit
0
(torque current limit and control)
Constant torque limit
1
(torque limit and control(*3))
Internal torque limit
0
Parameter-set torque limit operation is performed.
External torque limit
1
Torque limit based on the analog voltage from
terminal 3
Speed setting and
running speed monitor
increments from the RS485 communication or
communication option.
01r/min
10.1r/min
10 1r/min
11 0.1r/min
0 to 400%,
9999
0 to 400%,
9999
0 to 400%,
9999
0 to 400%,
9999
0 to 400%,
9999
0 to 400%,
9999
Valid in the regeneration mode when Pr. 810 = 0.
9999: Pr. 22 value is used for limit.
Valid in the reverse rotation driving mode when Pr.
810 = 0.
9999: Pr. 22 value is used for limit.
Valid in the regeneration mode when Pr. 810 = 0.
9999: Pr. 22 value is used for limit.
When the torque limit selection (TL) signal is on,
Pr. 815 is used as the torque limit value regardless
of Pr. 810.
Valid when torque limit selection (TL) terminal input
is provided.
9999: Depending on Pr. 22 setting
Set the torque limit value during acceleration.
9999: Same torque limit as at constant speed
Set the torque limit value during deceleration.
9999: Same torque limit as at constant speed
Remarks
2nd quadrant Pr. 812
3rd quadrant Pr. 813
4th quadrant Pr. 814
Torque limit setting
increments
Pr. 22, Pr. 812 to
Pr. 817
0.1%
0.01%
CAUTION
*1.Output current level (stall prevention function) is activated to prevent the inverter from alarm stop due
to overcurrent etc. during V/F control. When "0" is set in Pr. 22, stall prevention function is invalid.
*2.Pr. 816 "acceleration torque limit level" and Pr. 817 "deceleration torque limit level" are invalid during
position control.
*3.For torque limit and torque control, torque is restricted and controled not by magnetic flux.
Extended mode
<Details>
Torque limit is activated so that the output torque does not exceed the predetermined value during speed control.
The block diagram is shown below. The output of speed control is suppressed within the torque limit value.
Speed control
Speed command
Torque limit
Iq current control
IM
Encoder
At this time, set Pr. 810 to select the way to make torque limit.
87
PARAMETERS
3
Page 97

Operation selection functions 1 (Pr. 17 to Pr. 37)
<Setting>
Pr. 810 Setting Torque Limit Input Method Operation
Parameter-set torque limit operation is performed.
0 Internal torque limit
1 External torque limit Torque limit using the analog voltage from terminal 3 is made valid.
REMARKS
Refer to the Instruction Manual (basic) for details of the other parameters.
CAUTION
Whether the torque limit in the constant power range is set to constant torque limit or constant power
limit in the torque limit setting depends on the setting of Pr. 803 "constant power range torque
characteristic selection".
Related parameters
• Torque command bias adjustment ⇒ Pr. 904 "torque command terminal 3 bias" (Refer to page 190.)
• Torque command gain adjustment
⇒ Pr. 905 "torque command terminal 3 gain" (Refer to page 190.)
Pr. 24 to Pr. 27 Refer to Pr. 4 to Pr. 6 (page 77)
Changing the torque limit parameter value by communication
enables torque limit to be adjusted by communication.
3.5.3 RH, RM, RL signal input compensation (Pr. 28 )
speed torque
By entering 0 to ±10V into terminal 1 (speed setting auxiliary terminal), the speeds of the RH, RM and RL
signals (command speeds for multi-speed operation) can be compensated for.
Middle
speed
Setting
Range
0 Without compensation
1 With compensation
Low
speed
Description Remarks
t
Time
Extended
mode
Parameter Name Factory Setting
28
Multi-speed input
compensation
0
High
speed
Output
speed
(r/min)
CAUTION
• When "4 or 14" is set in Pr. 73, the compensation signal is input from terminal 2, not from terminal 1.
(Override function)
• Since terminal 1 is a multi-function selection terminal, its function varies with the Pr. 868 setting. Set
"0" in Pr. 868. Refer to Pr. 902 and Pr. 903 for calibration of the terminal 1.
Related parameters
• Multi-speed setting ⇒ Pr. 4 to Pr. 6, Pr. 24 to Pr. 27, Pr. 232 to Pr. 239 (multi-speed setting) (Refer to page 77.)
• RH, RM, RL signals
• Speed compensation using terminal 2
• Function assignment to terminal 1
• Pr. 59 "remote setting function selection"
• Calibration of terminal 1
⇒ Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) (Refer to page 150.)
⇒ Pr. 73 "speed setting signal" (Refer to page 113.)
⇒ Set "0" in Pr. 868 "terminal 1 function assignment" (Refer to page 183.)
⇒ Refer to page 103.
⇒ Pr. 902 "speed setting terminal 2 bias", Pr. 903 "speed setting terminal 2 gain" (Refer to page 190)
88
Page 98

Operation selection functions 1 (Pr. 17 to Pr. 37)
3.5.4 S-pattern acceleration/deceleration curve (Pr. 29, Pr. 140 to Pr. 143, Pr. 380 to
Pr. 383 )
speed torque
When you have changed the preset speed during start, acceleration, deceleration, stop, or operation, you can
change the running speed by acceleration/deceleration to make adjustment to reach the preset speed. Set
the acceleration/deceleration pattern in Pr. 29 "acceleration/deceleration pattern".
Parameter Name
29
140
141
142
143
380 Acceleration S pattern 1 0% 0 to 50%
381 Deceleration S pattern 1 0% 0 to 50%
382 Acceleration S pattern 2 0% 0 to 50%
383 Deceleration S pattern 2 0% 0 to 50%
Acceleration/
deceleration pattern
Backlash acceleration
stopping speed
Backlash acceleration
stopping time
Backlash deceleration
stopping speed
Backlash deceleration
stopping time
Factory
Setting
0
30r/min 0 to 3600r/min
0.5s 0 to 360s
30r/min 0 to 3600r/min
0.5s 0 to 360s
Setting Range Remarks
0 Linear acceleration/deceleration
1 S-pattern acceleration/deceleration A
2 S-pattern acceleration/deceleration B
3
4 S-pattern acceleration/deceleration C
Backlash measures acceleration/
deceleration
Accessible when Pr. 29 = 3
Accessible when Pr. 29 = 4
Extended mode
89
PARAMETERS
3
Page 99

Operation selection functions 1 (Pr. 17 to Pr. 37)
<Setting>
Pr. 29
Setting
0
1
Function Description Operation
[Linear acceleration
Linear
acceleration/
deceleration
(factory setting)
Acceleration/deceleration is made linearly up/down to
the preset speed .
Output
speed
(r/min)
The motor torque is utilized effectively to make fast
acceleration/deceleration in a large motor-generated
torque area and smooth acceleration/deceleration in a
small motor-generated torque area.
In this acceleration/deceleration pattern, the base
S-pattern
acceleration/
deceleration A
(torque variation
technique)
frequency is the inflection point of an S shape, and you
can set the acceleration/deceleration time according to
the reduction in motor torque in the constant-power
operation range at higher than the rated speed.
This function is valid for V/F control only. For other than
V/F control, linear acceleration/deceleration is made.
[S-pattern acceleration
Output
speed
(r/min)
CAUTION
As the acceleration/deceleration time, set the
time taken to reach Pr. 3 "base frequency", not Pr.
20 "acceleration/deceleration reference speed".
/deceleration]
Time
/deceleration A]
Base frequency
Time
S-pattern
acceleration/
2
deceleration B
(shock absorption)
Backlash
measures
3
acceleration/
deceleration
S-pattern
4
acceleration/
deceleration C
For prevention of load shifting in conveyor and other
applications
This setting always provides S-pattern acceleration/
deceleration from s2 (current speed) to s1 (preset
speed), easing an acceleration/deceleration shock and
Output
speed
(r/min)
producing an effect on the prevention of load shifting in
conveyor and other applications.
Backlash measures for reduction gear, etc.
This function stops a speed change temporarily during
acceleration/deceleration, reducing a shock generated
when a reduction gear backlash is eliminated suddenly.
Use Pr. 140 to Pr. 143 to set the stopping times and
stopping speed in accordance with the chart on the right.
Output
(r/min)
[Backlash measures function]
speed
The acceleration/deceleration time is increased by the
stopping time.
t1
REMARKS
Output speed is retained for the time for the starting
speed (Pr. 13) and s1 (Pr. 140) time at a start and
accelerate again after t1 time has elapsed. Speed
reaches or below s2 (Pr. 142) is retained for t2
(Pr. 143) time at a start of deceleration and
decelerate again after t2 time has elapsed.
See next page. See next page.
[S-pattern acceleration
/deceleration B]
s1
s2
Time
s1
Pr.140
Pr.141
Pr.143
t2
s2
Pr.142
Time
REMARKS
For the acceleration/deceleration time, turning on the RT signal makes Pr. 44 "second acceleration/deceleration time" and Pr.
45 "second deceleration time" valid (turning on the X9 signal makes Pr. 110 and Pr. 111 valid). Refer to page 78.
90
Page 100

Operation selection functions 1 (Pr. 17 to Pr. 37)
Pr. 29 = 4 (S-pattern acceleration/deceleration C)
With the S-pattern acceleration/deceleration C switch signal (X20), an acceleration/deceleration curve S-pattern 1
or S-pattern 2 can be selected.
Pr.382
Pr.381
CAUTION
Change the S pattern acceleration/
deceleration C switch (X20) after the speed
becomes constant. S pattern operation
before switching continues even if the X20 is
changed during acceleration or
Pr.380
Pr.380
Pr.382
Pr.381
Pr.383
Pr.383
deceleration.
Set speed
ON
During Acceleration During Deceleration
S-pattern C switch
(X20)
X20 Signal
OFF
ON
OFF
Operation
OFF Pr. 380 "acceleration S pattern 1" Pr. 381 "deceleration S pattern 1"
ON Pr. 382 "acceleration S pattern 2" Pr. 383 "deceleration S pattern 2"
As the acceleration/deceleration time during acceleration/deceleration, set the percentage to the acceleration/
deceleration time T in Pr. 380 to Pr. 383.
Parameter setting (%) = Ts / T ×100%
S-pattern acceleration
Linear acceleration
Ts
Ts
T
REMARKS
• At a start, the motor starts at Pr. 13 "starting speed" when the start signal turns on.
• If there is a difference between the speed command and speed at a start of deceleration due to torque limit operation etc.,
the speed command is matched with the speed to make deceleration.
Related parameters
• Base frequency setting (acceleration/deceleration time setting) ⇒ Pr. 3 "base frequency" (Refer to page 77.)
• Pr. 20 "acceleration/deceleration reference speed"
• X20 signal setting when Pr. 29 = 4 (S-pattern acceleration/deceleration switch)
selection) (Refer to page 150.)
• Starting speed setting
⇒ Pr. 13 "starting speed" (Refer to page 84.)
⇒ Refer to page 78.
⇒ Pr. 180 to Pr. 187 (input terminal function
PARAMETERS
3
91
 Loading...
Loading...