

QUICK START GUIDE
M2-D
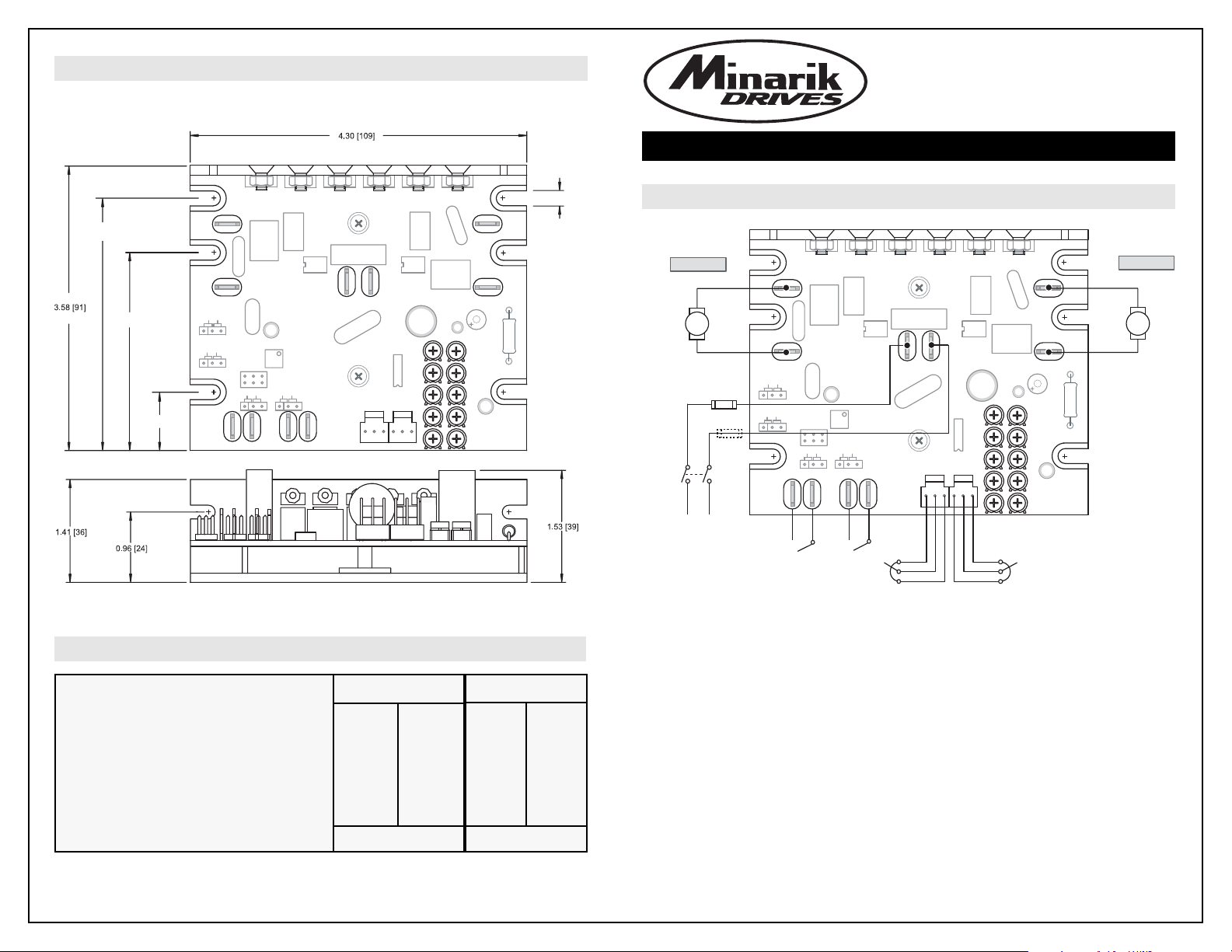
DIMENSIONS
SPECIFICATIONS
* Heatsink (part number 223-0159) is required if one side provides more than 5A or the total output of both
sides is more than 6.5A.
Dual Motor Control SCR DC Drive
CONNECTIONS
S1 S2 S1 S2 S3
MIN-SPEED-MAX
IR COMP
S3
L2
L1
A-/A
A+/A
1
ACC/DEC CUR LIM
A -- INHIBIT -- B
A B
J504
J505
J507
J506
A-B
IC503
IC502
J503
J502
C507
C508
180
90
C510
C506
C505
C503
D501
D502
U1
R503
R501
C15
Q504
Q503
Q502
R38
MOV502
C501
J501
Y501
C504
A- / B
A+ / B
M
TORQUE
SPEED
INDEP.
RATIO
180
90
LINE
VOLTAGE
INPUT
115 VAC
or
230 VAC
MASTER
POWER
SWITCH
FUSE
MOTOR A
MOTOR B
SPEED A
POTENTIOMETER
RATIO OR SPEED B
POTENTIOMETER
CLOSE TO INHIBIT DRIVE
Motor Connections
M2-D drives supply motor voltage from A+ and A- terimnals. It is assumed that when A+ is
positive with respect to A-, the motor will rotate clockwise (CW) while looking at the output of
the shaft protruding from the front of the motor. If this is opposite of the desired rotation,
reverse the wiring of the A+ and A- terminals.
Power Input
Connect the AC power leads to terminals L1 and L2, or to a double-pole single-throw master
power switch (recommended). Suitable for use on a circuit capable of delivering not more than
5000 rms symetrical Amperes, 240 Volt maximum.
Line Fuse
If 115 VAC input line is used, wire an external line fuse in the hot leg between the stop switch
(if installed) and the L1 terminal. If 230 VAC input is used, fuse both legs.
Speed Potentiomenter Connections
Speed adjustments are supplied by speed potentiometers connected to J507 and J506
(Factory supplied pot kit includes two sets of potentiometer hardware. Part number: 202-0112).
Input Voltage +/- 10%, 50/60 Hz
Output Voltage (VDC)
Maximum Continuous Output from each side (Amps)
Maximum Total output from both sides (Amps)
HP Rating for each side
Maximum Total HP rating of both sides
Form Factor
115 VAC
0 - 90
5
6.5
1/15 - 1/2
5/8
230 VAC
0 - 180
5
6.5
1/8 - 1
1 1/4
* Without Heatsink
1.37
115 VAC
0 - 90
10
11.5
1/15 - 1
1 1/8
230 VAC
0 - 180
10
11.5
1/8 - 2
2 1/4
* With Heatsink
1.37
3.175 [80.7]3.175 [80.7]
2.43 [61.7]
.675 [17.2]
.186 [5]
6 PLACES
Q504
J505
C505
IC502
Q502
L1
MOV502
L2
J507
C15
S1 S2 S1 S2 S3
A-B
C506
IC503
C501
U1
J506
M
S3
D501
A+/A
R501
A-/A
C503
TORQUE
SPEED
Y501
R38
180
90
A -- INHIBIT -- B
C510
1
180
90
J502
INDEP.
RATIO
J503
J501
J504
Q503
D502
A+ / B
C504
R503
A- / B
C507
C508
A B
ACC/DEC CUR LIM
IR COMP
MIN-SPEED-MAX
Copyright 2006 by Minarik Corporation - All rights reserved. No part of this document may be reproduced or transmitted in any form without
written permission from Minarik Corporation. The information and technical data in this document are subject to change without notice.
Minarik Corporation and its Divisions make no warranty of any kind with respect to this material, including, but not limited to, the implied
warranties of its merchantability and fitness for a given purpose. Minarik Corproation and its Divisions assume no responsibility for any
errors that may appear in this document and make no commitment to update or to keep current the information in this document.
mvd101403
CALIBRATION / OPERATION
MOTOR VOLTAGE SELECTION
Use J504 to match the motor voltage rating for motor A and J505 for motor B. ( Jumper on pins 1 & 2 for 180
VDC, 2 & 3 for 90 VDC.
INDEPENDENT MODE (Jumper on pins 1 & 2 of J503)
There are two sets of potentiometers independently used to adjust each motor operation. Each set consists of
five on board trimmer potentiometers and one external potentiometer (commonly called SPEED POT). To
calibrate one side (A or B), use the following procedure for speed mode:
1. Turn the SPEED POTENTIOMETER A (B) to full CCW. Use MIN SPEED A (B) trimmer potentiometer
to adjust minimum speed for motor A (B).
2. Turn the SPEED POTENTIOMETER A (B) to full CW. Use MAX SPEED A (B) trimmer potentiometer to
adjust maximum speed for motor A (B). Repeat steps 1 and 2 a few times due to a level of interaction
between MIN SPEED and MAX SPEED pots.
3. Set the CUR LIM A (B) to full CCW. Turn the SPEED POTENTIOMETER A (B) to full CW. Stall the
motor shaft and turn the CUR LIM A (B) CW until the desired current limit is reached.
4. Set the IR COMP A (B) to full CCW. Set the motor speed at approximately half of the rated speed. Load
motor to its full load. Keep turning the IR COMP CW until the speed equals the no load speed.
5. Use ACC/DEC A (B) trimmer potentiometer to adjust acceleration (deceleration) ramp time.
RATIO MODE (Jumper on pins 2 & 3 of J503)
In RATIO MODE, SPEED POT A is used to adjust the speed of both motors, while SPEED POT B sets the ratio
between speeds. Turning the SPEED POT B CW will increase speed of motor B thus increasing the ratio
speed B/speed A. MIN SPEED B and MAX SPEED B are now used to adjust minimum and maximum ratio.
INHIBIT
Short inhibit terminals A(B) to bring motor A(B) to a stop. Inhibit A(B) is independant of inhibit B(A). The inhibit A
and inhibit B can be paralleled together.
J501
J501 is used by the factory to program the M2-D drive. Do NOT add any jumpers to J501.
TORQUE MODE (Jumper on pins 1 & 2 of J502 and pins 1 & 2 on J503)
TORQUE MODE regulates motor current (torque). In TORQUE MODE, the external potentiometer A (B) sets the
torque reference for Motor A (B) and the CUR LIM trimmer potentiometer A (B) sets the speed limit for Motor A
(B). The MIN SPEED A (B) and MAX SPEED A (B) are used to adjust the minimum and maximum torque
available.
Rotation: CW = Clockwise CCW = Counterclockwise
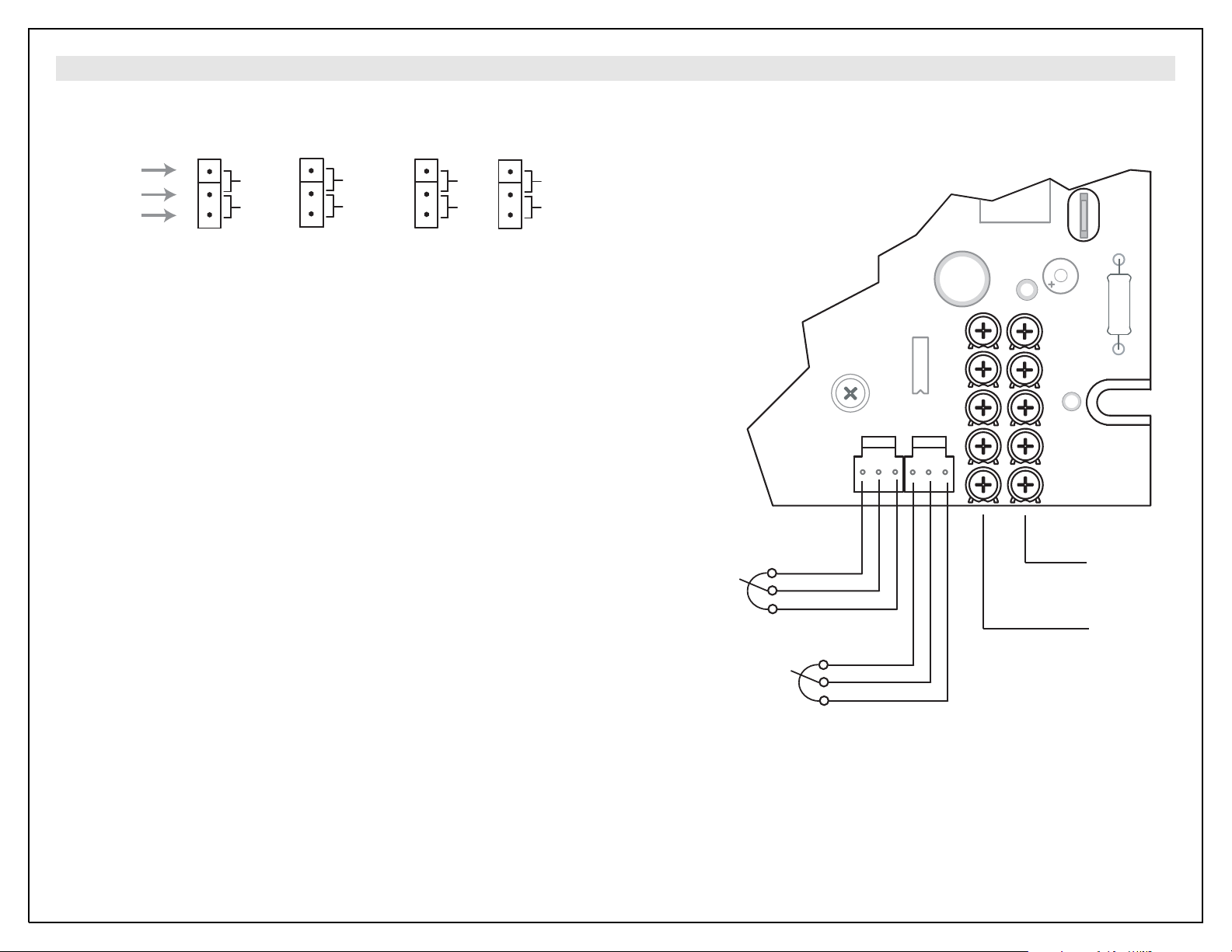
M2-D POTENTIOMETER CONNECTIONS
PINS
1
2
3
INDEP.
RATIO
J503
TORQUE
SPEED
J502
J505
180
90
180
90
J504
SPEED A
POTENTIOMETER
CW
RATIO SPEED B
POTENTIOMETER
CW
R503
C508
C507
ACC/DEC CUR LIM
IR COMP
MIN-SPEED-MAX
TRIMMER POTS
FOR MOTOR B
TRIMMER POTS
FOR MOTOR A
S3
J507
C501
A B
U1
C15
J506
A-B
S1S2 S1S2S3
A- / B
 Loading...
Loading...