

METER ATMOS 22 User Manual
ATMOS 22 INTEGRATOR GUIDE
SENSOR DESCRIPTION
The ATMOS22 Ultrasonic Anemometer is designed for continuous monitoring of wind speed and direction
(see Measurement Specifications). Ultra-low power consumption and a robust, no moving parts design that
prevents errors because of wear or fouling, make the ATMOS22 ideal for long-term, remote installations.
NOTE: The ATMOS22 replaces the DS-2 (discontinued) and the outputs and order are not the same as the DS-2. Any DS-2 replaced by
the ATMOS 22 will require data acquisition system reprogramming based on information located in the tech note Integrators replacing
DS-2 with ATMOS 22.
APPLICATIONS
• Weather monitoring
• Microenvironment monitoring
• In-canopy wind measurement
• Spatially distributed environmental monitoring
• Wind profiling
• Crop weather monitoring
• Fire danger monitoring/mapping
• Weather networks
18195-06
7.31.2020
ADVANTAGES
• Robust, no moving parts design
• Small form factor
• Low-input voltage requirements
• Low-power design supports battery-operated
dataloggers
• Supports the SDI-12 three-wire interface
• Tilt sensor informs user of out-of-level conditions
• No configuration necessary
PURPOSE OF THIS GUIDE
METER provides the information in this integrator
guide to help ATMOS22 Ultrasonic Anemometer
customers establish communication between these
sensors and their data acquisition equipment or
field data loggers. Customers using data loggers
that support SDI-12 sensor communications
should consult the data logger user manual. METER
sensors are fully integrated into the METER system
of plug-and-play sensors, cellular-enabled data
loggers, and data analysis software.
COMPATIBLE FIRMWARE VERSIONS
This guide is compatible with firmware versions 1.07 or newer.
Figure 1 ATMOS22 Ultrasonic Anemometer
METER Group, Inc. USA
2365 NE Hopkins Court, Pullman, WA 99163
T +1.509.332.2756 F +1.509.332.5158
E info@metergroup.com W metergroup.com
SPECIFICATIONS
MEASUREMENT SPECIFICATIONS
Horizontal Wind Speed
Range 0 –30 m/s
Resolution 0.01 m/s
Accuracy The greater of 0.3 m/s or 3%
of measurement
Wind Gust
Range 0 –30 m/s
Resolution 0.01 m/s
Accuracy The greater of 0.3 m/s or 3%
of measurement
COMMUNICATION SPECIFICATIONS
Output
SDI-12 communication
PHYSICAL SPECIFICATIONS
Dimensions
Diameter 10 cm (3.94 in)
Height 16 cm (6.30 in), includes rain
gauge filter
Operating Temperature Range
Minimum –50 °C
Typical NA
Maximum 60 °C
Wind Direction
Range 0° –359°
Resolution 1°
Accuracy ±5°
Tilt
Range –90° to 90°
Resolution 0.1°
Accuracy ±1°
Data Logger Compatibility
METER ZL6, Em50, and EM60 data loggers or
any data acquisition systems capable of 3.6- to
15.0-VDC excitation and SDI-12 communication
Cable Length
5 m (standard)
75 m (maximum custom cable length)
NOTE: Contact Customer Support if nonstandard cable length
is needed.
Connector Types
3.5-mm stereo plug connector or stripped and
tinned wires
ELECTRICAL AND TIMING CHARACTERISTICS
Supply Voltage (VCC to GND)
Minimum 3.6 VDC continuous
Typical NA
Maximum 15.0 VDC continuous
NOTE: The ATMOS 22 must be continuously powered to
workproperly.
NOTE: For the ATMOS 22 to meet digital logic levels specified
by SDI-12, it must be excited to 3.9 VDC or greater.
Digital Input Voltage (logic high)
Minimum 2.8 V
Typical 3.6 V
Maximum 5.0 V
Digital Input Voltage (logic low)
Minimum –0.3 V
Typical 0.0 V
Maximum 0.8 V
Digital Output Voltage (logic high)
Minimum NA
Typical 3.6 V
Maximum NA
NOTE: For the ATMOS 22 to meet digital logic levels specified
by SDI-12, it must be excited to 3.9 VDC or greater.
Power Line Slew Rate
Minimum 1.0 V/ms
Typical NA
Maximum NA
2
Power (brown)
GND
Current Drain (during measurement)
Minimum 0.2 mA
Typical 8.0 mA
Maximum 33.0 mA
Power Up Time (SDI-12, DDI disabled)
Minimum NA
Typical 200 ms
Maximum NA
Current Drain (while asleep)
Minimum 0.2 mA
Typical 0.3 mA
Maximum 0.4 mA
Power Up Time (SDI ready)—aRx! Commands
Minimum NA
Typical 10 s
Maximum NA
Power Up Time (SDI ready)—Other Commands
Minimum NA
Typical 130 ms
Maximum NA
Measurement Duration
Minimum NA
Typical 110 ms
Maximum 3,000 ms
COMPLIANCE
Manufactured under ISO 9001:2015
EM ISO/IEC 17050:2010 (CE Mark)
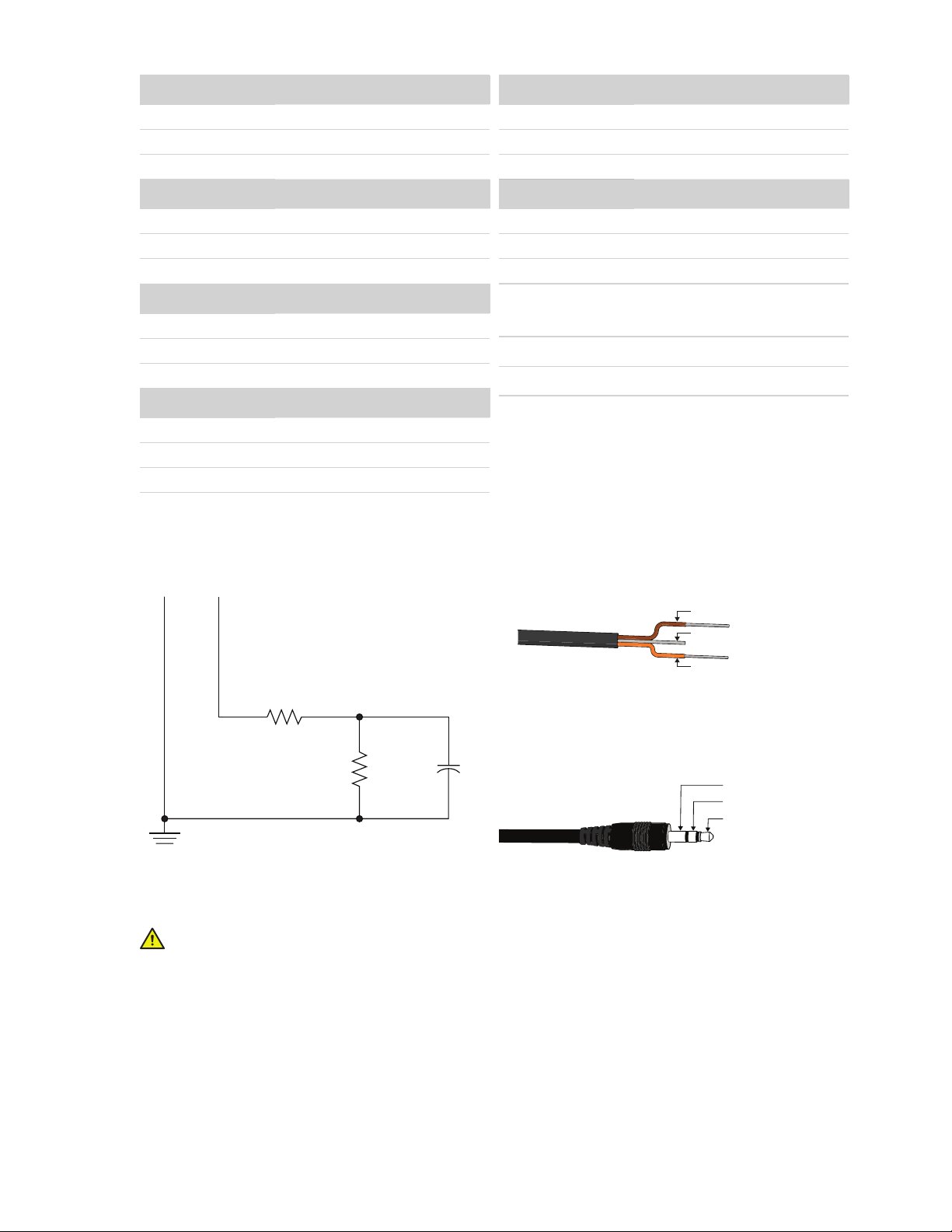
EQUIVALENT CIRCUIT AND CONNECTION TYPES
Refer to Figure 2 and Figure 3 to connect the ATMOS22 to a logger. Figure 2 provides a low-impedance variant
of the recommended SDI-12 Specification v1.3.
PIGTAIL CABLE
GND
DATA
Ground (bare)
Digital
communication (orange)
R1
510
NOTE: Some early ATMOS22 units may have the older Decagon
wiring scheme where the power supply is white, the digital out is red,
and the bare wire is ground.
STEREO CABLE
R2
Figure 2 Equivalent circuit diagram
C1
100K
220PF
Figure 3 Connection types
Ground
Digital communication
Power
SAFETY PRECAUTIONS
METER sensors are built to the highest standards, but misuse, improper protection, or improper installation
may damage the sensor and possibly void the warranty. Before integrating sensors into a sensor network,
followthe recommended installation instructions and implement safeguards to protect the sensor from
damaging interference.
SURGE CONDITIONS
Sensors have built-in circuitry that protects them against common surge conditions. Installations in
lightning-prone areas, however, require special precautions, especially when sensors are connected to a
well-grounded third-party logger.
Visit metergroup.com for articles containing more information.
3

CABLES
Improperly protected cables can lead to severed cables or disconnected sensors. Cabling issues can be
caused by many factors, including rodent damage, driving over sensor cables, tripping over the cable, not
leaving enough cable slack during installation, or poor sensor wiring connections. To relieve strain on the
connections and prevent loose cabling from being inadvertently snagged, gather and secure the cable
traveling between the ATMOS 22 and the data acquisition device to the mounting mast in one or more places.
Install cables in conduit or plastic cladding when near the ground to avoid rodent damage. Tie excess cable to
the data logger mast to ensure cable weight does not cause sensor to unplug.
SENSOR COMMUNICATIONS
METER digital sensors feature a 3-wire interface following SDI-12 protocol for communicating
sensor measurements.
SDI12 INTRODUCTION
SDI-12 is a standards-based protocol for interfacing sensors to data loggers and data acquisition equipment.
Multiple sensors with unique addresses can share a common 3-wire bus (power, ground, and data). Two-way
communication between the sensor and logger is possible by sharing the data line for transmit and receive
as defined by the standard. Sensor measurements are triggered by protocol command. The SDI-12 protocol
requires a unique alphanumeric sensor address for each sensor on the bus so that a data logger can send
commands to and receive readings from specific sensors.
Download the SDI-12 Specification v1.3 to learn more about the SDI-12 protocol.
DDI SERIAL INTRODUCTION
The DDI serial protocol is the method used by the METER family of data loggers for collecting data from
the sensor. This protocol uses the data line configured to transmit data from the sensor to the receiver only
(simplex). Typically, the receive side is a microprocessor UART or a general-purpose IO pin using a bitbang
method to receive data. Sensor measurements are triggered by applying power to the sensor. When the
ATMOS22 is set to address 0, a DDI serial string is sent on power up, identifying the sensor.
INTERFACING THE SENSOR TO A COMPUTER
The serial signals and protocols supported by the sensor require some type of interface hardware to be
compatible with the serial port found on most computers (or USB-to-serial adapters). There are several
SDI-12 interface adapters available in the marketplace; however, METER has not tested any of these
interfaces and cannot make a recommendation as to which adapters work with METER sensors. METER data
loggers and the ZSC and PROCHECK handheld devices can operate as a computer-to-sensor interface for
making on-demand sensor measurements. For more information, please contact NORTH AMERICA.
METER SDI12 IMPLEMENTATION
METER sensors use a low-impedance variant of the SDI-12 standard sensor circuit (Figure 2). During the
power-up time, sensors output some sensor diagnostic information and should not be communicated with
until the power-up time has passed. After the power up time, the sensors are compatible with all commands
listed in the SDI-12 Specification v1.3 except for the continuous measurement commands (aR0–aR9 and aRC0–
aRC9). M, R, and C command implementations are found on page 7.
Out of the factory, all METER sensors start with SDI-12 address 0 and print out the DDI serial startup string
during the power-up time. This can be interpreted by non-METER SDI-12 sensors as a pseudo-break condition
followed by a random series of bits.
The ATMOS22 will omit the DDI serial startup string (sensor identification) when the SDI-12 address is nonzero.
Changing the address to a nonzero address is recommended for this reason.
ATMOS22 INTERNAL MEASUREMENT SEQUENCE
Upon power up, the ATMOS 22 initializes an internal timer to 55. This internal timer is incremented by 1 every
second and resets to 0 after incrementing to 59. In addition, issuing an averaging command (aM!, aR0!, aR3!,
and aC!) resets this timer to 55.
While powered up, the ATMOS 22 takes wind and air temperature measurements every 10 s at internal timer
intervals of 0, 10, 20, 30, 40, 50 and logs these values internally. Orientation is measured every 60 s at the
internal timer interval of 4 and logged internally. The aR4! command will output instantaneous measurements
of theseparameters.
4
 Loading...
Loading...