

Page 1

Introduction
Contents
.........................................................................................................................................
4
Part I General questions
How to connect Makeblock robot with mBlock
How to upgrade firmware for Makeblock robot with mBlock
How to reset default program manually with mBlock
How to upload my program to the Makeblock robot with mBlock
What is the difference between upgrade firmware and reset default program
Why my Makeblock robot doesn't move when I set low motor speed
A Comparison among Bluetooth connection, 2.4G connection and USB connection
What troubleshooting I can try if my Makeblock robot cannot connect to my phone App
Part II mBot
How to replace motor shaft for mBot
Why the Ultrasonic Obstacle Avoidance Mode doesn’t work on mBot
.......................................................................................................................................
......................................................................................................................
.........................................................................
.................................................
..............................................................
.........................................
.........................
.....................................
.......................................................................................
...................................
.............
.....
5
5
10
12
13
16
18
19
21
22
22
23
Why the Line Follower Mode doesn't work on mBot
How to connect 2.4G wireless serial to my mBot
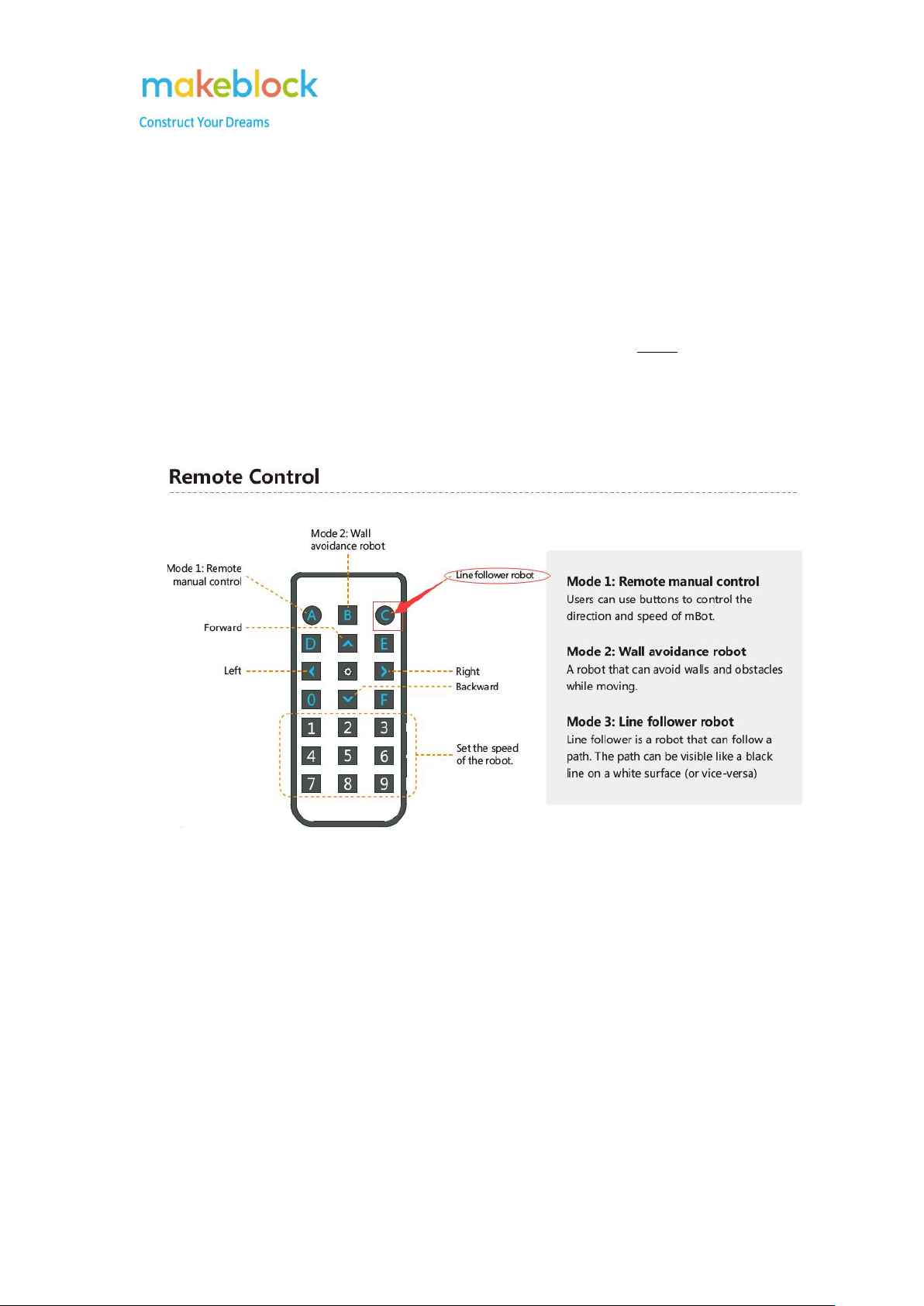
How to change the speed of mBot with IR remote controller
Issues related to Battery
Useful links for mBot
Part III Ranger
Why the motors are not working properly as they should be
Can I use 2.4G wireless module for my Ranger
Why the Ranger cannot avoid objects in object avoidance mode
What should I do if the Nervous Bird could not keep balanced?
Questions related to Bluetooth connection on Mobile devices
What should I do if the Makeblock App says “synchronization fails”
...................................................................................................................................
............................................................................................................
................................................................................................................
..............................................................
....................................................................
.......................................................................
..................................................
...................................................
............................................
.............................................
................................................
....................................
24
27
28
29
31
33
33
35
36
37
38
42
Why my Ranger moves once I turn it on
1
..................................................................................
44
Page 2

Why the line follower doesn’t work on Ranger?
......................................................................
45
Part IV Starter
What should I do if my starter motors are not working properly
What is the difference between Starter IR version and Bluetooth version
How to play with IR version Starter
Can I use 2.4G module to replace the Bluetooth module on Starter
Questions related to Bluetooth connection on Mobile devices
....................................................................................................................................
.............................................
...............................
.........................................................................................
........................................
................................................
What I should do when Ultrasonic Obstacle Avoidance Mode of my Starter fails to work
How to check if the Starter main board lose its bootloader
Questions for Starter Battery
.....................................................................................................
How to program the add-on Robotic Arm for Starter
Part V Ultimate 2.0
............................................................................................................................
What should I do if my Ultimate 2.0 motors are not working properly
......................................................
...............................................................
...................................
....
47
47
49
50
53
54
58
59
63
64
66
66
questions related to Bluetooth connection on Mobile devices
Can I use 2.4G wireless module to control my Ultimate 2.0
What should I do if the self-balancing robot could not keep balanced?
Questions to Ultimate 2.0 Battery
.............................................................................................
Why my Ultimate 2.0 starts to run every time I turn it on
Part VI LaserBot
................................................................................................................................
.................................................
....................................................
..................................
.......................................................
How to test if the wire connection for X, Y axis connected properly on Laserbot
How to test Your Laser to see if it is Faulty
Why the laser head reaches to the X-axis or Y-axis without stop
How to fix if the X-axis or Y-axis cannot move when test home?
..............................................................................
............................................
...........................................
Why does the LaserBot cut or engrave the image in different size on X axis (or Y axis)
Why the serial port of LaserBot doesn’t appear on mLaser while using Mac?
..................
.......
.......................
68
72
73
74
75
76
76
78
82
86
90
92
How should I enter mLaser when the opening page is in Chinese
2
...........................................
94
Page 3

Why the interface of the mLaser is black rather than white
.....................................................
98
Why the mLaser showed damaged when I opened it on my Mac
Why the Laser is on but it cannot cut or engrave anything?
Part VII XY Plotter
Why the stepper motor doesn’t run or runs abnormal?
Why I cannot draw correct pictures?
Why it runs abnormal when testing home?
Why the laser doesn’t light on or it is weak?
Why the laser cut discontinued lines?
Why Pen-up and Pen-down is not working properly?
..........................................................................................................................
..........................................................
......................................................................................
............................................................................
..........................................................................
.....................................................................................
............................................................
What I should pay attention when switch from mDraw to Benbox?
............................................
..................................................
.....................................
99
100
103
103
107
110
114
117
118
120
3
Page 4
Introduction
Here are some frequently asked questions about Makeblock robot kits which are based on mCore,
Orion, Auriga, and MegaPi boards, and the related PC software in this document is mBlock 3
(latest 3.4.12). If you haven’t downloaded the software, click here to download and install.
If you still have question after reading this document, please contact Makeblock Support Team at
support@makeblock.com.
4
Page 5

Part I General Questions
How to connect Makeblock robot with mBlock
This article applies to: mBot, mBot Ranger, Starter, Ultimate, Ultimate 2.0
Devices required: PC (here we use windows); Makeblock robot kit (here we use mBot as an
example); USB cable
Step 1
Connect mBot to PC with USB cable and turn on the mBot.
Step 2
Open mBlock software, choose mBot(mCore) under Boards.
If you are using a starter, select Orion; for ultimate 2.0, select Megapi, etc.
5
Page 6

Step 3
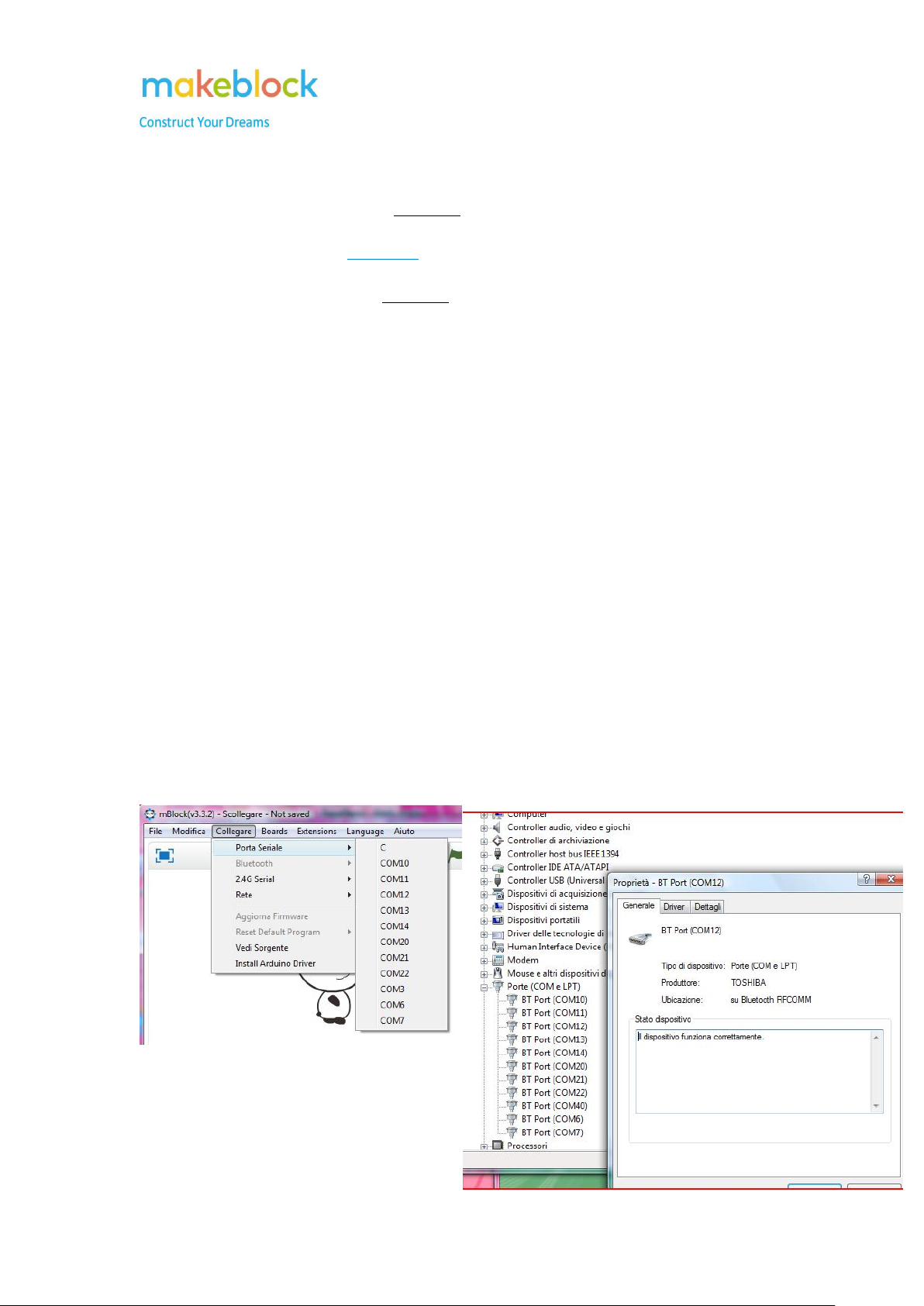
Choose the correct Serial Port for mBot under Connect->Serial Port. (Here my mBot's serial port
is COM3, and you can check your mBot serial port under your computer's Device
Manager->Ports (COM&LPT))
6
Page 7

Notes:
1. If you cannot detect any serial port, it may be caused by the following reasons.
a. Failing to install Arduino driver.
Normally when we install mBlock software, Arduino driver will be installed automatically at the
same time. But sometimes we may need to install Arduino driver manually.
For windows users, we can select “Install Arduino Driver” under “connect” and install it easily.
7
Page 8
For Mac OS users, please download and install correct driver as below says:
Below Mac OS sierra users, download this driver;
Mac OS sierra users, download this driver;
Mac OS high sierra users, download this driver.
When choose Serial port under Connect->Serial Port, please choose port similar to
/dev/tty.wchusbserial1410.
b. The power switch of the main board (mCore) has not been turned ON (this cause is only for
mBot/mCore).
c. The Bluetooth connection from the robot may capture the serial port. Remove the Bluetooth
module from the robot while using the USB cable.
d. Paired Bluetooth devices on the PC may interfere the Serial port of the USB connection too.
e. The USB port or USB cable is faulty. Please try changing the USB port (you may change the
PC have a check too), USB cable etc.
2. Cannot find the serial port for my robot on mBlock and there are lots of BT port under the
device manager like below.
8
Page 9

Cause: The Bluetooth module you paired before would be mapped into COM ports. Even if they
are not present, they still appear in the “Serial Port” list. So, uninstall these paired Bluetooth
devices will resolve this issue.
Solution: disable or uninstall all the Bluetooth ports (COM ports) from the PC.
9
Page 10
How to upgrade firmware for Makeblock robot with mBlock
This article applies to: mBot, mBot Ranger, Starter, Ultimate, Ultimate 2.0
Devices required: PC (here we use windows); Makeblock robot kit (here we use mBot as an
example); USB cable
Step 1
Refer to FAQ to connect your Makeblock robot to mBlock
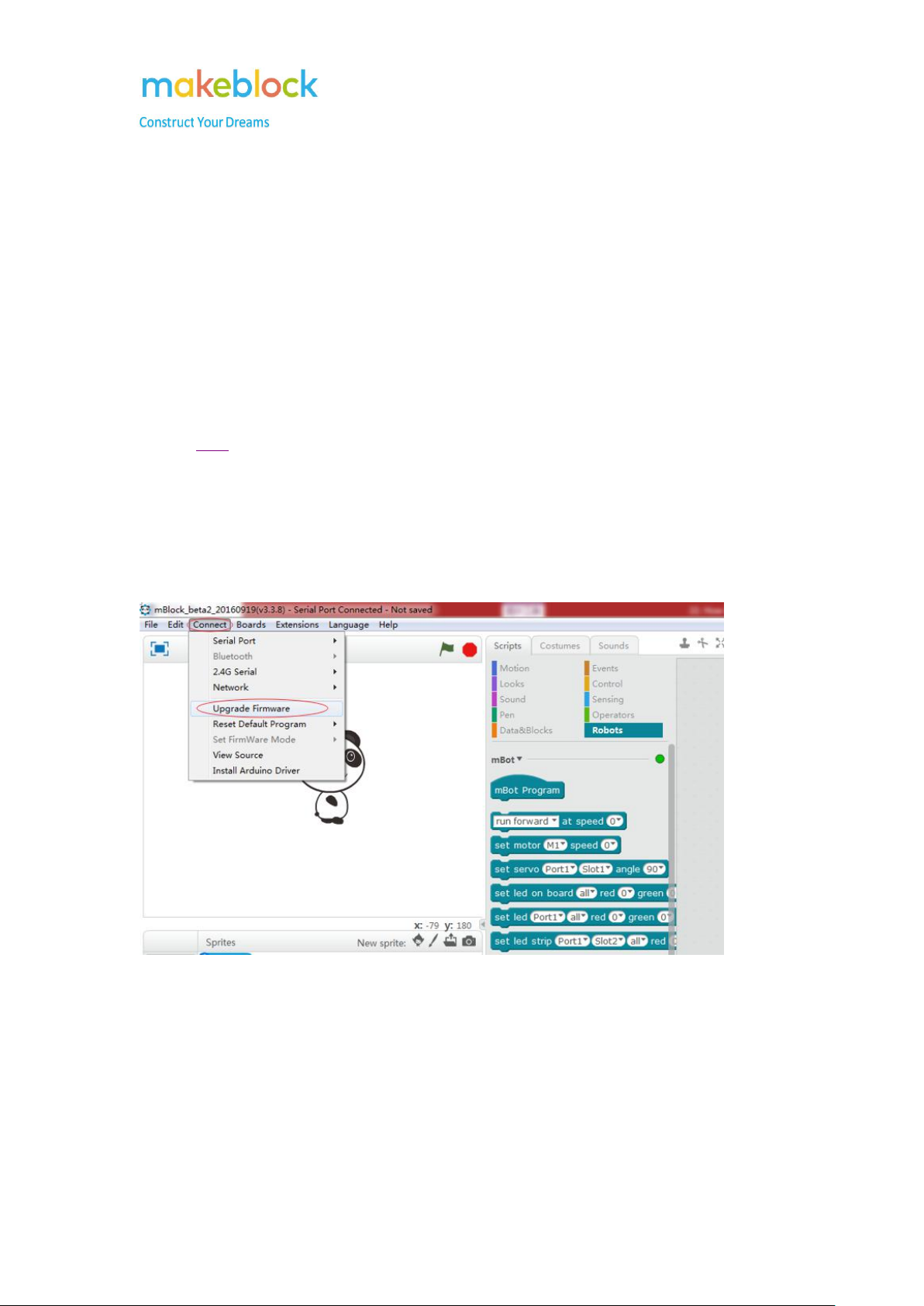
Step 2
Go to Connect->Upgrade Firmware, wait until it says Upload Finish.
Ps: online debug only works after firmware update.
Note:
what should I do if firmware upgrade fails and shows below picture?
10
Page 11

1. You may select the wrong board.
Please select the corresponding board then try to upgrade firmware or reset default
program.
2. The upload failed issue might be caused by using defective modules, faulty serial
port chip, or faulty main board.
1) Please remove all the modules from main board, including RJ 25 cables, then
upgrade firmware again.
2) If it is still the same issue, try to upload “Blink” program on Arduino IDE
environment to test if the main board lose its bootloader.
PS: Only USB connection allows us to do firmware upgrade.
11
Page 12
How to reset default program manually with mBlock
This article applies to: mBot, mBot Ranger, Starter, Ultimate, Ultimate 2.0
Devices required: PC (here we use windows); Makeblock robot kit (here we use mBot as an
example); USB cable
Step 1
Refer to this FAQ to connect your Makeblock robot to mBlock
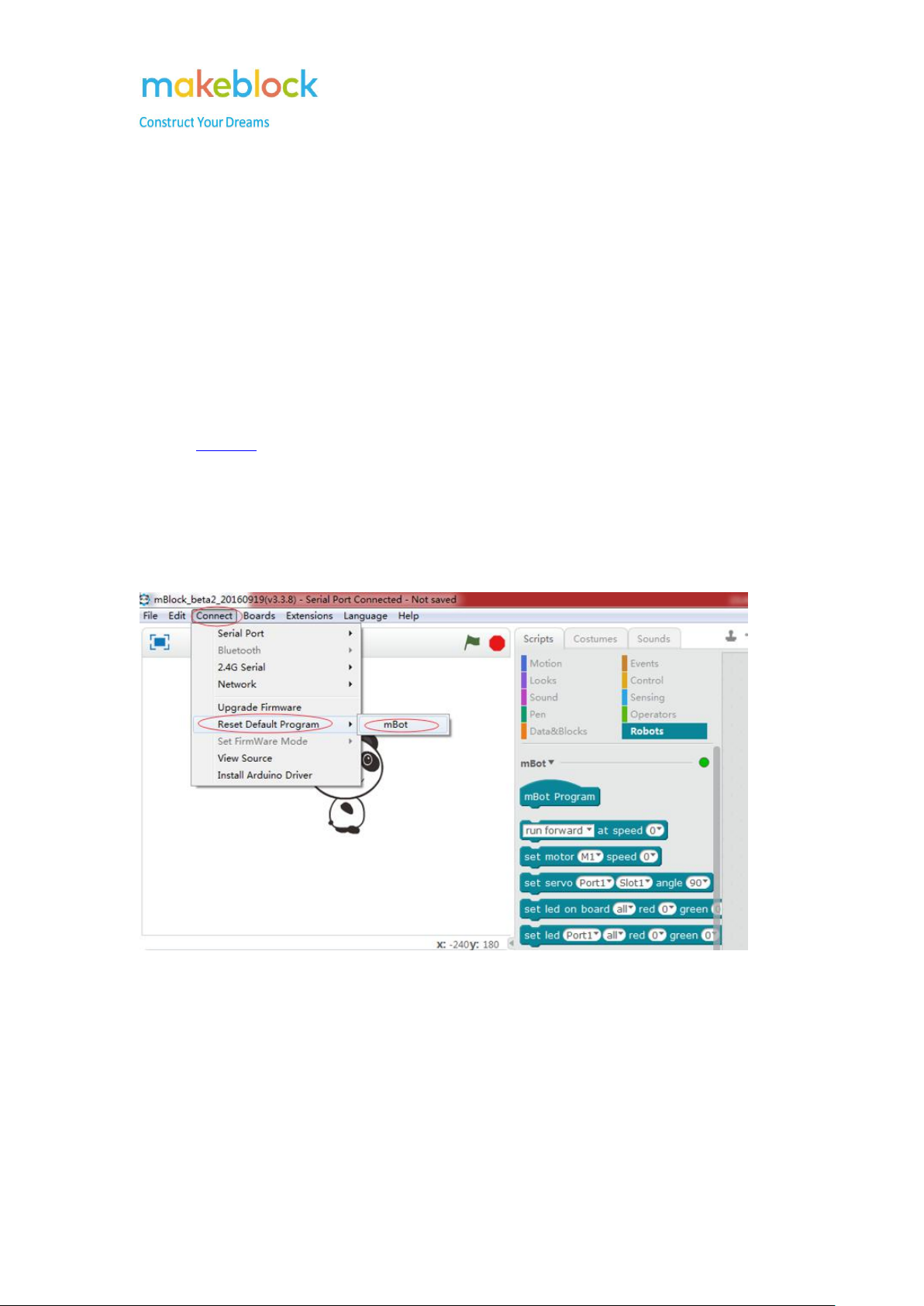
Step 2
Go to Connect->Reset Default Program->mBot, wait until it says Upload Finish.
12
Page 13
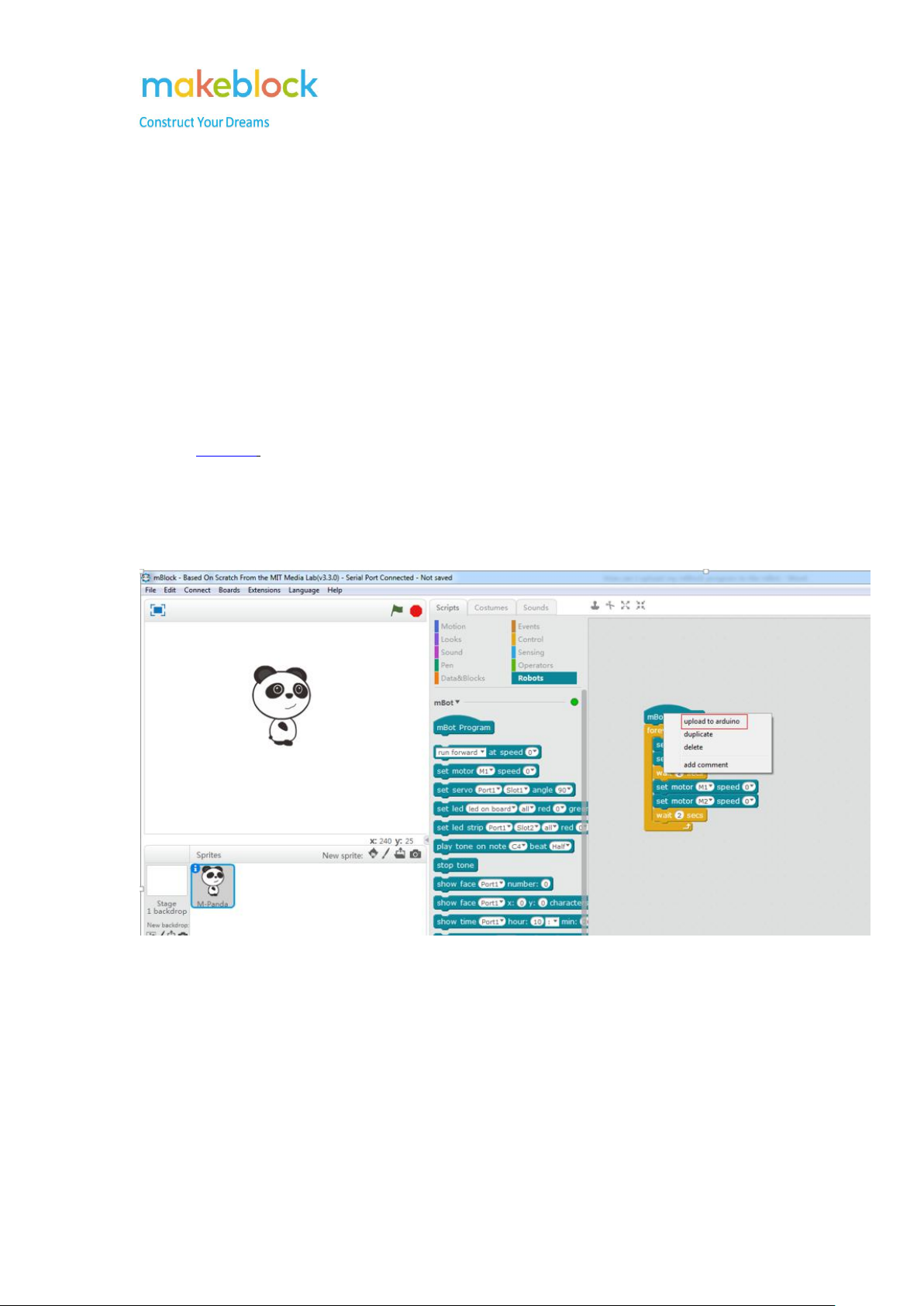
How to upload my program to the Makeblock robot with
mBlock
This article applies to: mBot, mBot Ranger, Starter, Ultimate, Ultimate 2.0
Devices required: PC (here we use windows); Makeblock robot kit (here we use mBot as an
example; USB cable
Step 1
Refer to this FAQ to connect your Makeblock robot to mBlock
Step 2
Edit your own program, then right click on the program and select upload to Arduino.
Step 3
You can see following page and click on Upload to Arduino.
13
Page 14
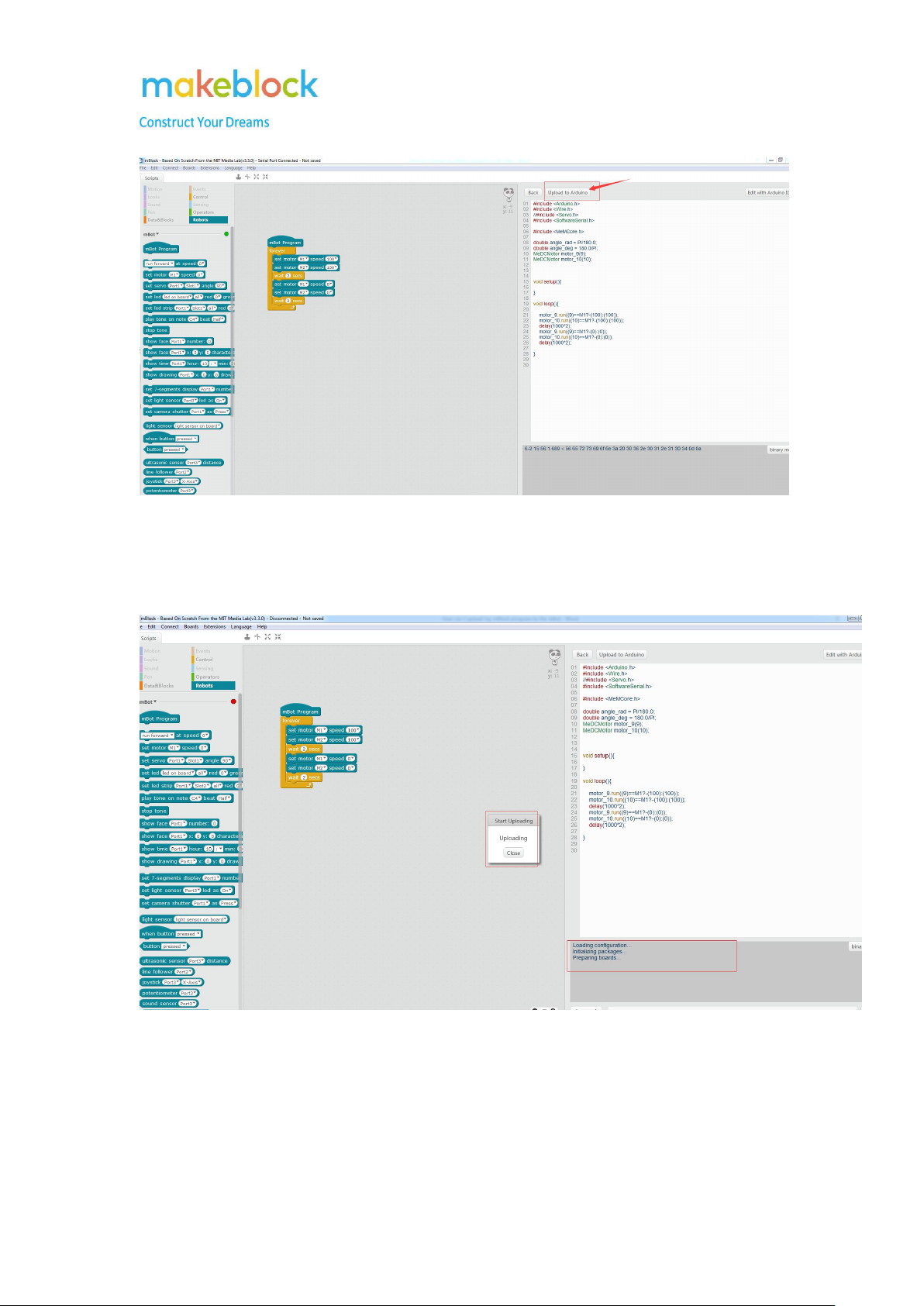
Step 4
Then the program will start uploading, wait until it shows Upload Finish.
Notes 1: In case you fail to upload a new program, please refer to below steps to do some
troubleshooting by yourself.
14
Page 15

a. Make sure you strictly follow the above steps to upload the program. (make sure
connected with USB cable, choose correct serial port and Board).
b. Please remove the Bluetooth/2.4G module from the main board, then upload program
again to have a check.
c. If it says “upload finished” when you do upgrade firmware, while says “upload failed”
when upload a new program, please check if there is any other Arduino software installed in the
system. Please close it if there is.
d. If both the Upgrade firmware and upload program fail, try to change the USB cable, USB
port or change a PC to have a check.
e. Try to change some new batteries. According to our test and research, it is suggested to
use rechargeable Li-ion battery or rechargeable nickel-metal hydride, nickel-cadmium which can
be bought from amazon or local shop. Or Alkaline battery with good quality like Energizer,
DURACELL.
Note 2: In case the new program uploaded to my Makeblock robot doesn't take effect.
Please reset default program referring to this FAQ and try again.
If it says “upload finished” but the uploaded program doesn’t take effect, then the board may lose
its bootloader. Please double check it refer to this document.
15
Page 16

What is the difference between upgrade firmware and reset
default program
This article applies to: mBot, mBot Ranger, Starter, Ultimate, Ultimate 2.0
Upgrade firmware
This firmware is a built-in program for online programming.
If you want to do the online program as below, we need to do upgrade firmware first.
Online programming & offline programming
mBlock we defined two modes of programming, “online” and “offline”.
“online” mode means programming robot with USB, Bluetooth and 2.4G connection; it is the
computer that sends the instruction to the Robot;
“offline” means using Arduino mode to program robot and upload the program into the controller;
the instructions are running on the Robot;
The difference between “online” and “offline” programming is that “online” uses communication
protocol to instruct Robot, while “offline” runs program on the board, so the “offline” mode has
better efficiency.
You may refer to this FAQ for the steps to upgrade firmware.
Reset default program
This firmware is a preset factory program in the robot (such as manual control mode, obstacle
avoidance mode, line inspection mode of mBot) in order to increase the robot's playability.
Under below situation we need to reset default program for the robot:
16
Page 17
To run default program or controlling the robot with mobile App after we did “upload to Arduino”.
For example, you have uploaded a program to mBot before and now you want to use Makeblock
App to control it, then you need to reset default program. Surely if it is your first time to control it
with Makeblock App and failed, you are also suggested to reset default program.
And for guidance to reset default program, please refer to this FAQ.
17
Page 18

Why my Makeblock robot doesn't move when I set low
motor speed
This article applies to: mBot, mBot Ranger, Starter, Ultimate, Ultimate 2.0
For example, we set the speed value 50 for mBot, here the "50" is not the real speed value. The
real running speed depends on the voltage and speed value.
Here we take mBot as an example:
The setting speed is 50, and the maximum speed is 255.
The battery is 3.7V, and it is fully charged.
The rated voltage is 6V for TT Geared Motor, and the no load speed: 200RPM±10%
)
Thus, setting speed to 50 might be too slow for TT Geared Motors to run. Try 100 above to have a
look.
For other robot kits, setting speed at 20 will not let it move.
18
Page 19
A Comparison among Bluetooth connection, 2.4G
Connection
types
Modules
required for
PC mBlock
Features with
PC mBlock
Advantages
Disadvantages
Main board
supported
USB cable
connection
USB cable
Reset default
program; update
firmware;
upload program;
do online
program
Only need one
USB cable
Short USB
cable makes it
inconvenient
mCore, Auriga,
Orion, MegaPi
2.4G wireless
serial
2.4G module
(included a
2.4G wireless
dongle)
Do online
program only
No interference
when there are
several robots in
2.4G connection
cannot work
with Phone App
mCore, Auriga,
MegaPi
Bluetooth
connection
Bluetooth
module
(computer
built-in
Bluetooth
dongle)
Do online
program only
Work with
mobile Apps
like Makeblock
App and
mBlock
Some Bluetooth
module may not
be compatible
with PC built-in
Bluetooth and
connection
stability is not
very good.
mCore, Auriga,
Orion, MegaPi
and the new
bluetooth
module (labeled
with ble_v1_c)
is not working
in this way
Bluetooth
connection
with
makeblock
official dongle
Bluetooth
module and
Makeblock
Bluetooth
dongle
Do online
program; can
also upload
program to
mCore and
Auriga
Good
connection, get
rid of USB
cable
Need to buy a
single
Makeblock
Bluetooth
Dongle
mCore, Auriga,
Orion, MegaPi
connection and USB connection
This article applies to: mBot, mBot Ranger, Starter, Ultimate, Ultimate 2.0
We know that there are several ways to connect Makeblock robots and mBlock. There is a chart to
show differences among these connection ways.
19
Page 20
Notes:
1. 2.4G wireless module (included a 2.4G wireless dongle): If you have a mBot Bluetooth version, you can
simply buy a 2.4G wireless module to replace the Bluetooth module.
2. Bluetooth module: for mBot (mCore), Ultimate 2.0 (MegaPi) and mBot Ranger (Auriga), it is Bluetooth
Module. And the newer Bluetooth module (labeled with “BLE_V1_C” doesn’t support PC built-in Bluetooth.
For starter, it is Me Bluetooth Module.
3. Computer built-in Bluetooth dongle: many computers especially laptops can support Bluetooth as it has
built-in Bluetooth dongle. But sometimes there may be incompatibility between computer and Bluetooth module.
And this method is not suggestable, it is non-official usage.
4. Bluetooth connection with dongle: for mCore, Auriga, besides do online programming, connection with
Bluetooth Dongle can upload program and run online program.
5. Makeblock Bluetooth dongle: some computers’ built-in Bluetooth dongle may not be working very well with
Makeblock Bluetooth module, so we strongly suggest to use Makeblock Bluetooth Dongle. And there is no need to
use Bluetooth dongle for mobile App control.
20
Page 21
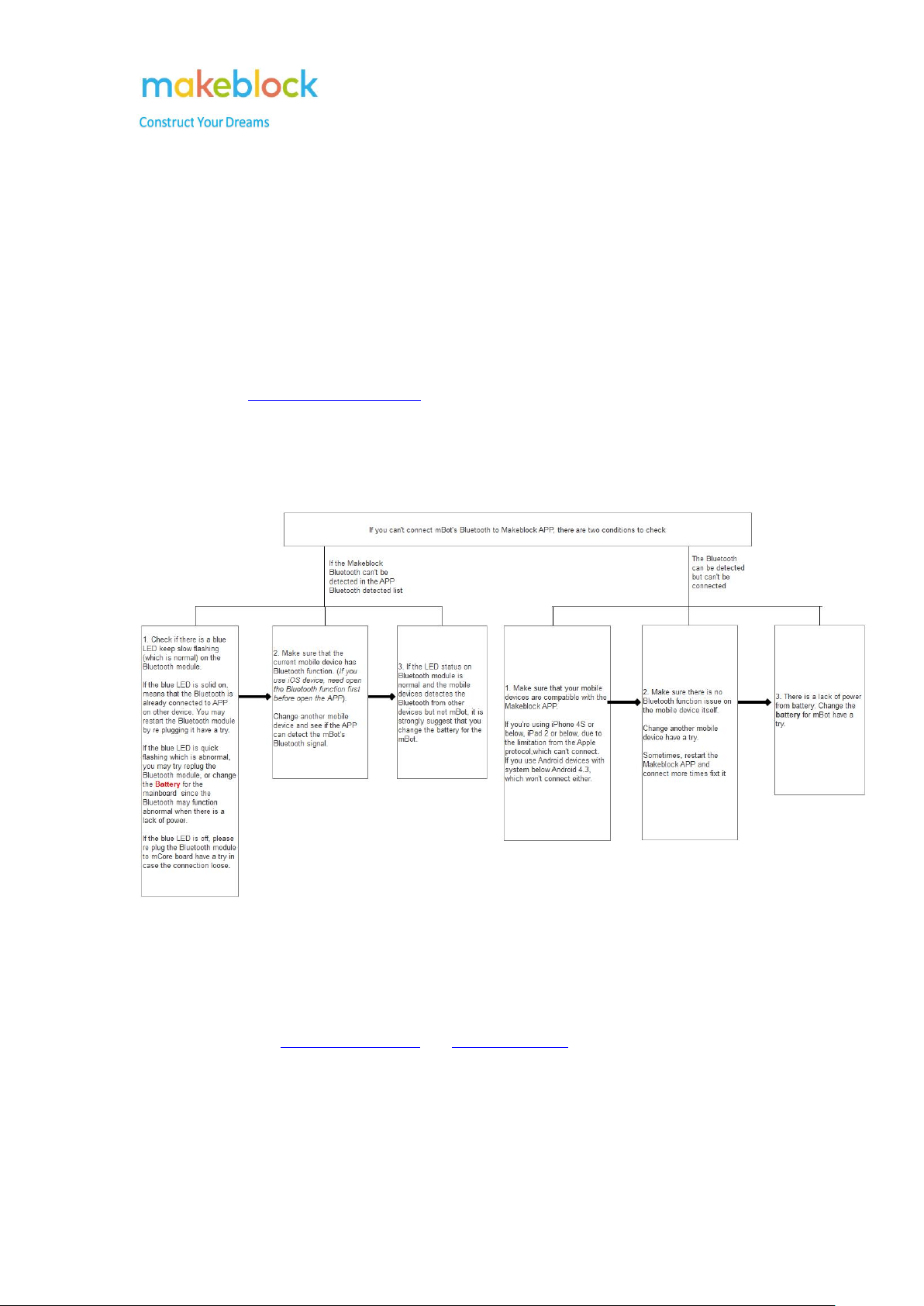
What troubleshooting I can try if my Makeblock robot
cannot connect to my phone App
This article applies to: mBot, mBot Ranger, Starter, Ultimate, Ultimate 2.0
We now have developed Makeblock App which allows us to control and program for Makeblock
robots in one App. Also, Makeblock App supports all Makeblock robots except neuron. So, you
are suggested to download Makeblock App. Also mBlock App is under construction, which
supports mBot, Ranger, Codey Rocky, Neuron, Motion Block, Halocode (soon).
If you find Bluetooth cannot be connected to Makeblock App, please refer to below chart to do
some troubleshooting.
Notes:
1. For starter, we use Me Bluetooth Module, so also check if anything wrong with the port and
RJ25 cable when this issue happens.
2. We can also try to reset default program and upgrade firmware with USB cable connection on
PC mBlock first, and then connect Bluetooth to Makeblock App.
3. Enable GPS and location permission are useful and important sometimes.
21
Page 22
Part II mBot
How to replace motor shaft for mBot
There is spare motor shaft in the mBot package, please find it and refer to the video tutorial in this
link to replace it if your shaft is broken: https://www.youtube.com/watch?v=MDb1uWpbK6Y
22
Page 23
Why the Ultrasonic Obstacle Avoidance Mode doesn’t work
on mBot
If you find your mBot cannot avoid obstacle when you set it in Ultrasonic Obstacle Avoidance
mode, please follow below steps to do troubleshooting.
1. Make sure the ultrasonic module is connected to Port 3 (required by default program).
2. Double check the wiring of the ultrasonic module and make sure the connection is firm and
well. Check whether the red indicator of the ultrasonic module is on. If not, the problem is caused
by wiring.
3. Press button B on the IR remote control to enter Ultrasonic Obstacle Avoidance Mode if you
use the IR remote controller. When it set in Ultrasonic Obstacle Mode, onboard light should be
green on.
4. Refer to this FAQ to reset default program to have a try.
5. Make sure the battery on mBot can provide enough power.
According to our test and research, it is suggested to use rechargeable Li-ion battery or
rechargeable nickel-metal hydride, nickel-cadmium which can be bought from amazon or local
shop. Or Alkaline battery with good quality like Energizer, DURACELL.
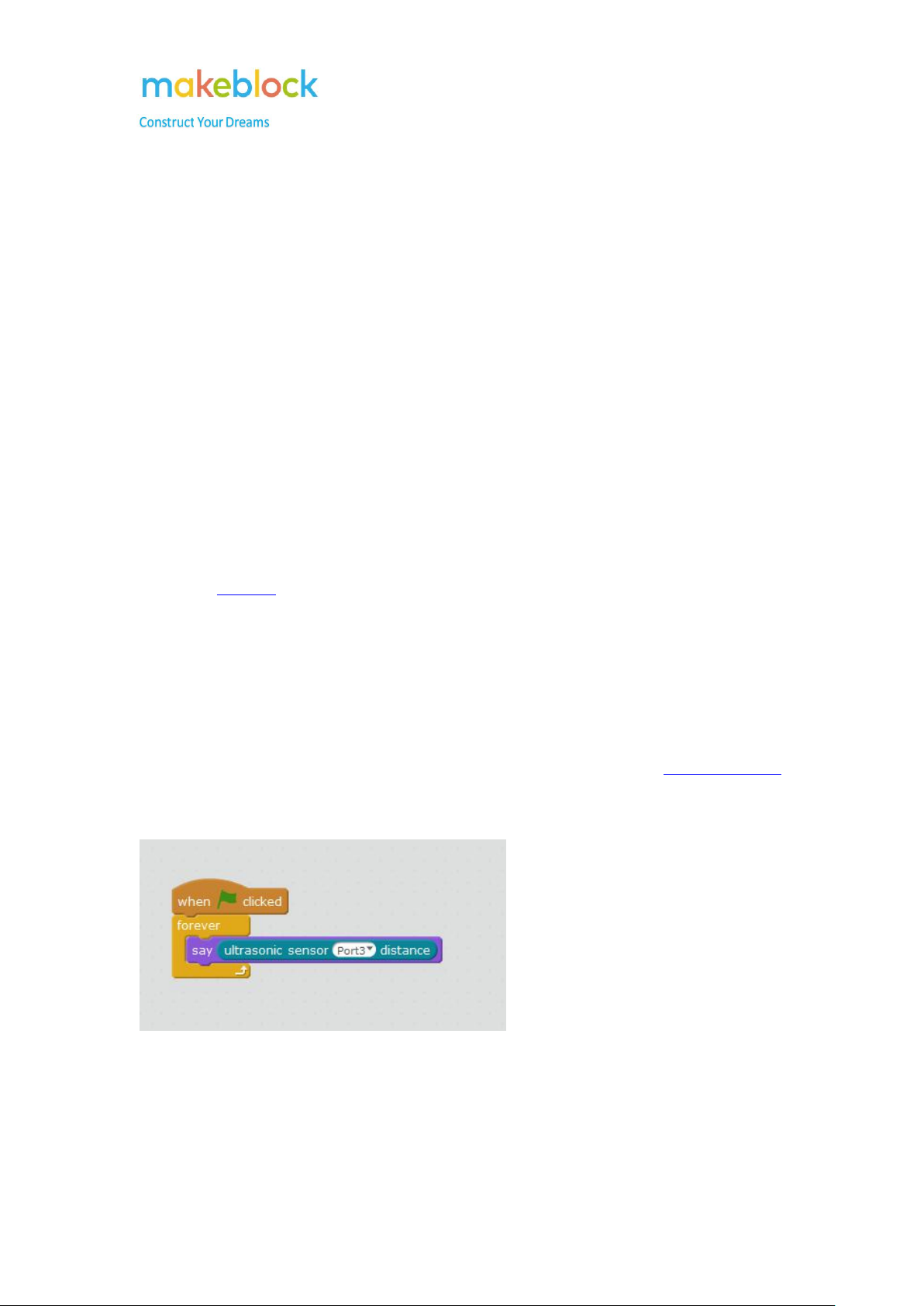
6. Write below example program to test the Ultrasonic module. First of all, upgrade firmware,
then click on green flag and move your hand at the front of the Ultrasonic sensor to check the
distance from panda.
Notes: Here the ultrasonic module is connected to port 3.
If it is always 400, that means the module maybe faulty. But you may try to change to port 4 or try
with another RJ25 cable in case faulty cable or port.
23
Page 24

Why the Line Follower Mode doesn't work on mBot
When mBot works properly with Manual mode and Wall avoidance mode but doesn’t work
properly with Line follower mode, please test if the line follower sensor is faulty referring to the
below steps.
Step 1
Put the two sensors of the Me Line follower above (Detection range: 1~2cm) a white desk or
white paper and check if the two LEDs corresponding to the two sensors lit up?
Step 2
Move it away from the white desk or white paper and check if the two LEDs corresponding to the
two sensors turn off?
24
Page 25
If the LED corresponding to each sensor lights up when you put the sensor above a white
paper/desk and goes off when it is away from white paper/desk, which means the line follower
sensor is ok. Otherwise, the sensor should be faulty.
If the sensor is ok according to the above test but the line follower mode doesn’t work, there are
several possible reasons that we should check.
a. The default program may not function properly in mBot, please refer to FAQ3 to reset default
program to have a try.
b. Make sure you have pressed Button C to enter Line Follower Mode if you use the IR remote
controller to control the mBot.
c. The Me Line Follower sensor may not be connected to the correct RJ25 port. Please connect
the Line follower sensor to the Port 2 on mCore board.
25
Page 26
d. The wire connection may be loose or the RJ25 cable between the line follower module and
mCore may be faulty. Please re-plug the RJ25 cable for both sides, or change a RJ25 cable
to have a check.
e. The power from battery is not enough. Please change the battery to have a check.
According to our test and research, it is suggested to use rechargeable Li-ion battery or
rechargeable nickel-metal hydride, nickel-cadmium which can be bought from amazon or local
shop. Or Alkaline battery with good quality like Energizer, DURACELL.
26
Page 27

How to connect 2.4G wireless serial to my mBot
There are three steps to use the 2.4G wireless serial for mBot and mBlock: Upgrade firmware for
mBot with USB cable; Connect with 2.4G wireless serial; Program for mBot and run it online.
1) Upgrade firmware for mBot with USB cable
2) Connect with 2.4G wireless serial: Remove the USB cable, plug the Wi-Fi dongle into your
computer, the light on the mBot’s Wi-Fi module will stop blinking and be steady on. Go to the
Connect -> 2.4G Serial –>Connect (Check that the √ mark stays on, if there is no check
mark after you clicked on ‘Connect’, that means the 2.4G is still disconnected. In this case,
please restart the mBlock software have a try).
3) Program for mBot and run it online: With 2.4G wireless serial connected, you will now
find that you can run the mBot "on-line". That is, starting the command sequence with a
choice from the Events category of commands: "When green flag clicked", "When SPACE
key pressed", etc.
There is also a video to show these steps, you may have a look in this link:
https://www.youtube.com/watch?v=kiO8VYpIGsw
Ps: if there are several 2.4G mBot in same location, please only keep one mBot on and plug in
2.4G dongle, then follow the above steps to pair them. After that, power the second and pair it.
Please keep only one mBot on during pairing.
27
Page 28

How to change the speed of mBot with IR remote controller
If we control the mBot through IR remote controller with the factory default program, the 1-9 keys
on the IR remote controller are set to adjust the speed of mBot. 1 for slowest and 9 for fastest.
We can also write our own program for mBot with mBlock software, which can modify the speed
on following program block:
28
Page 29

Issues related to Battery
1. What is the working voltage of the mCore?
A: 3.7V-6V
2. While the lithium battery of mBot is being charged, is there any protection?
A: Yes. It has over-current and over-charge protection.
3. What is size of mCore battery holder and its cover?
A: Size for the battery holder cover:
Size for the battery holder:
29
Page 30

4. Is there any recommended li-po battery for mBot v1.1
A: The 3.7v rechargeable Li-ion battery is suitable for mBot. Now you can purchase mBot battery
from Amazon:
https://www.amazon.com/Makeblock-iPo-Battery-mBot-3-7V/dp/B07KPVH8H3/ref=sr_1_fkmrn
ull_1?keywords=makeblock+battery&qid=1556507880&s=gateway&sr=8-1-fkmrnull
5. Is there any special phenomenon if the robot cannot get enough power from battery?
A: Currently, there is no visible indicator for low power from battery. But according to our test
and feedback, please check and change the battery if you encounter below phenomenon.
a. Program runs on only when the USB cable is connected, and it won’t do anything once I
unplug the USB cable.
b. Makeblock App fails to connect its Bluetooth when I try to connect them; Or Bluetooth
connection is unstable.
c. Any other abnormal performance that it shouldn’t be.
30
Page 31

Useful links for mBot
Instruction downloads
1. Where can I download the program course for mBot
mBlock maker rocks with robots:
https://www.dropbox.com/s/3dwpdyt1ygrpi3t/mBlock%20Kids%20maker%20rocks%20with
%20the%20robots.pdf?dl=0
The Adventures of Mike:
https://www.dropbox.com/s/3v2w8wnym9aubnf/Scratch%202.0%20The%20Adventures%20
of%20Mike.pdf?dl=0
2. The download link for Mac version Arduino driver
http://blog.sengotta.net/wp-content/uploads/2015/11/CH34x_Install.zip
Tutorials for mBot:
1. Video tutorials for mBot: https://www.youtube.com/watch?v=FxAsufUNcII
2. Makeblock Programming Tutorial by 5 Years Old Andy
https://www.youtube.com/watch?v=89VNohLyXeM
3. Tutorial for Combined Line Following and Object Avoidance on mBot
http://learn.makeblock.com/en/tutorial-for-combined-line-following-and-object-avoidance-2/
Function extension projects from Geeks
1. mBot controlled by Wireless Joystick using Me USB Host
https://forum.makeblock.com/t/mbot-controlled-by-wireless-joystick-using-me-usb-host/1658
2. Programming with Scratch X for Makeblock mBot
http://www.instructables.com/id/Programming-With-Scratch-X-for-Makeblock-MBot/
3. How to make mBot follow objects with Pixy CMUcam5 Image Sensor
http://openlab.makeblock.com/topic/57e1e26b695004350cceb478
4. Makeblock mBot default program with added servo features
http://alpermbot.blogspot.com.tr/
31
Page 32

Extended programming method for mBot
1.Use mBot with iOS (Swift)
http://learn.makeblock.com/en/use-mbot-with-ios-swift/
2.python-for-mbot
https://github.com/xeecos/python-for-mbot
3.Different language with Makeblock products:
https://shimo.im/doc/7D1Z1WfJa1c5XFJj
Others
1. Use mBot with App Inventor:
http://learn.makeblock.com/en/use-mbot-with-app-inventor/
2. Makeblock mBot Protocol:
http://learn.makeblock.com/en/makeblock-orion-protocol/
3. mBot Serial Port Protocol:
http://learn.makeblock.com/en/mbot-serial-port-protocol/
4. User Makeblock Computer Vision Extension for App Inventor
http://learn.makeblock.com/en/user-makeblock-computer-vision-extension-for-app-invent
or/
32
Page 33

Part III Ranger
Why the motors are not working properly as they should be
Situation 1 Motor(s) is not turning at all when command given.
Please check:
a. Make sure the wheels are installed correctly as there are wheels in different sizes.
b. Cable from motor to the main board is connected properly and make sure the cables are
working.
c. If the Makeblock App cannot let it move, try to write an online program or upload a program in
mBlock like below to test:
Remember to upgrade firmware before running an online program.
d. Check if there is anything get stuck in the wheels, like cables. You can turn the wheels in
clockwise or anti-clockwise order to test.
e. Try some new batteries.
f. It may not move if the speed is too slow like 20 or 30. So try speed at 200.
Situation 2 Ranger cannot move straightly (two motors have different speed)
Due to the motors’ installation difference, it is normal that two motors don’t have exactly same
speed. If they differ a lot, please check:
a. If there is anything get in the left or right wheel, like cables.
b. Speed is set too slow that one side moves a little while the other side doesn’t move. So try a
larger speed like 100.
c. Motors cannot get enough power energy. Try to change the battery or charge the battery.
If the speed of both sides still differs a lot, you may try to adjust the speed to with different power,
like setting left speed as 100, while right 110. Several tests are necessary to get expected result.
Situation 3 Ranger moves forward when I tap backward?
33
Page 34

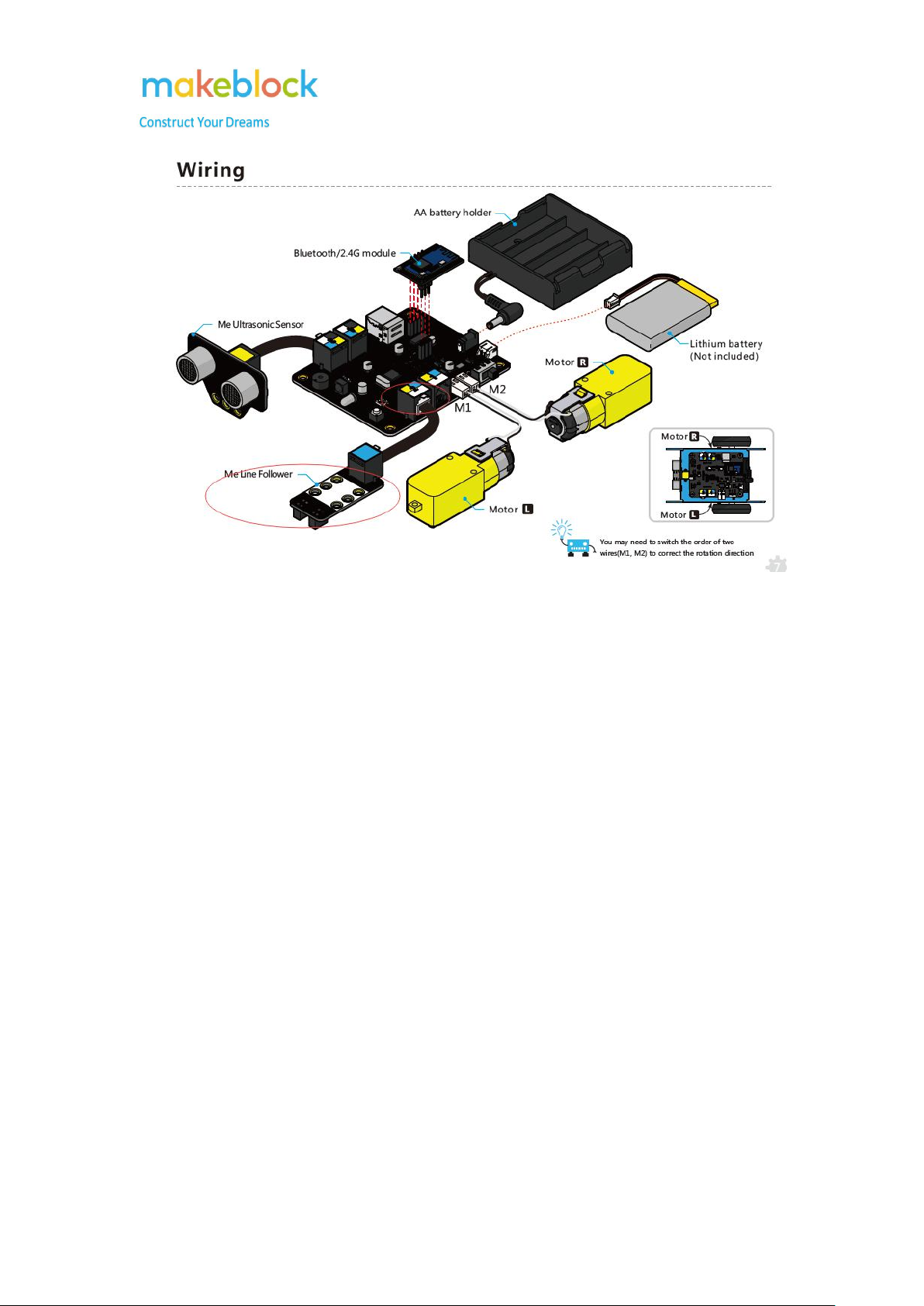
This should be caused by wrong wiring. So, change the M1 and M2 connection.
Situation 4 Ranger doesn’t move constantly and sometimes there is sound from the main board.
a. The speed level maybe too low, try a higher like 200 to test.
b. Battery cannot provide enough power, try new battery to test.
34
Page 35

Can I use 2.4G wireless module for my Ranger
I. Is it possible to replace the Bluetooth connection with a 2.4G wireless module?
Yes. As the module connection interface is the same with Ranger Bluetooth module.
II. How to use 2.4G wireless connection?
Refer to mBot FAQ How to connect 2.4G wireless serial to my mBot.
35
Page 36

Why the Ranger cannot avoid objects in object avoidance
mode
A. Check wiring. The default setting for Ranger object avoidance mode is that the ultrasonic
sensor connects to Port 10 on Auriga port.
B. Download and install the latest version mBlock software, then reset default program for
Ranger.
C. Test if the Ultrasonic sensor is defective.
How to test if the ultrasonic sensor is defective?
1. Download and install the latest version of Makeblock software on your PC. If you have a Mac,
then you also need to install a driver.
2. Connect Ranger with PC via USB.
3. Make sure the ultrasonic module is connected to Port 10 (required). You should feel a slight
click when the RJ 25 cable is properly inserted.
4. Check whether the red indicator of the ultrasonic module is on. If not, the problem is caused
by wiring.
5. Upgrade firmware.
6. Try to run this program, and move your hand in front of the ultrasonic sensor.
7. If the panda doesn't say an ever-changing number, try to change another RJ 25 cable to
connect the ultrasonic sensor and the Port 9. Then try to repeat the above instruction 3-6.
8. If the step 7 doesn't work for you either, attach the RJ25 cable with the ultrasonic sensor with
port 8. Then try to run the program example, but choose "ultrasonic sensor Port 8 distance"
this time.
9. If the panda does say ever-changing number, please reset default program for Ranger, then try
the obstacle avoidance mode again.
36
Page 37

What should I do if the Nervous Bird could not keep
balanced?
When you find the Nervous Bird cannot keep balanced, please refer to the below steps to check:
1. Make sure you did follow the guidance strictly to assemble it.
2. Make sure power is enough as self-balancing robot requires to be working with full power. If
you are sure assembling is perfect but it still fails to be balanced, please do insert 6 totally new
batteries in. This is very important.
3. Make sure the Gyro module is working properly. You can write a simple program to test the
module.
37
Page 38

Questions related to Bluetooth connection on Mobile devices
I. What Apps do you have for Ranger?
For mobile devices, there are mBlock and Makeblock App that support Ranger. Makeblock App
requires Android 4.3+ and iPhone 4S/iPad 3 +, iOS 9+. mBlock requires Android 5.0 + and iOS
9+. You can search Makeblock in googleplay or appstore.
II. How to connect Ranger to Makeblock App?
As Makeblock App connects to Ranger via Bluetooth, make sure Bluetooth module is plugged
properly. Download and install the latest Makeblock App and refer to below steps to connect
Ranger:
1. Power on Ranger and there is a blue LED keeping slow flashing on the Bluetooth module.
2. Open the Makeblock APP on mobile device and move the mobile device close to the Bluetooth
module, normally it will connect automatically.
Note: if you use iOS mobile device, you need open Bluetooth function on mobile device first.
3. If the Bluetooth can’t be connected automatically, please go to Search icon on the upper right
corner, check if you can find the Ranger Bluetooth in the detected list. If there is, please connect to
it from the list.
38
Page 39

III. What is the troubleshooting if my Ranger fails to connect Makeblock App through
Bluetooth?
If you tried above steps to connect Bluetooth but failed, please follow below chart to check step by
step.
39
Page 40

Note: Battery is very important, for any abnormal phenomenon happens to the robot, you are
strongly suggested to change new battery.
If you fail to connect in mBlock App, you can also refer to the above chart.
40
Page 41

IV. Why iPad 2 and below doesn't support Bluetooth from Makeblock
The Bluetooth module on our product supports BLE protocol, while for Apple products, only the
products published after the year 2011 support BLE protocol which can work with the Bluetooth
on our product.
Since the iPad 2 doesn't support BLE protocol, so it cannot work with our APPs which need
connect with Bluetooth.
The APPs of our product work with iPad 3 and above and the iOS should be iOS 9.0 and above.
V. The Bluetooth connection to the Ranger is unstable?
For the issue that the Bluetooth connection is unstable between Robot and Makeblock App, it may
be caused by the power issue, or the Bluetooth module is not well plugged. So, you may change
the battery for the Ranger to have a try since it is easy to lead disconnect issue on Bluetooth when
it lacks power.
According to our test and research, it is suggested to use rechargeable Li-ion battery or
rechargeable nickel-metal hydride, nickel-cadmium which can be bought from amazon or local
shop. Or alkaline battery with good quality like Energizer, DURACELL.
Besides, please check if the issue goes to the same when use other devices.
41
Page 42

What should I do if the Makeblock App says
“synchronization fails”
Problem:
When I try to connect Bluetooth in Makeblock App, the screen says “synchronization fails” as
below picture:
42
Page 43

Solution:
Connect Ranger to PC, open mBlock 3 or 5 and do reset default program.
43
Page 44

Why my Ranger moves once I turn it on
Problem:
Once I turn on my Ranger, it moves very fast. Everything connected well, and I reset default
program with PC software mBlock 3, it doesn’t help.
Cause:
This Ranger was set to Nervous Bird in the Makeblock App (or in mBlock3) and was turned off,
then the Ranger is assembled to another form like Land Ralder, at this time, once we turn on the
power, it will move automatically and won’t listen to the command.
Reset default program or upgrade firmware won’t help this issue.
Solution:
1) Through Makeblock App: turn on the robot though it is moving (you can hold it), go to
Makeblock App, choose the correct mode (instead of Nervous Bird) when connect Bluetooth.
Once connected, it will stop moving.
2) Through mBlock 3: connect robot to mBlock as this guide, then go to connect>set firmware
mode>Bluetooth mode or the mode you need instead of balance mode (nervous bird). After
that, it won’t move once you turn it on.
44
Page 45

Why the line follower doesn’t work on Ranger?
There are several possible reasons, please check one by one:
1) The line follower module doesn’t connect to Port 9 on Auriga as requested.
2) The map is placed in a place where is surrounded by bright lights, such as under the sunlight,
or very close to the lights in the room. Please move it to a darker place to do the test.
3) If the line follower module is connected to Port 9 but Ranger still cannot follow the line,
please reset default program on mBlock software environment. It might be the line follower
faulty or other hardware issues.
Please follow below steps to test the line follower module.
Step 1: Put the two sensors on the Me Line follower above (Detection range: 1~2cm) a white desk
or white paper and check if the two LEDs corresponding to the two sensors lit up?
Step 2: Remove the line follower sensor from the white desk or white paper and check if the two
LEDs corresponding to the two sensors turn off?
45
Page 46

If the led corresponding to each sensor lit up when above a white paper/desk and turn off when
remove from the white paper/desk, means the line follower sensor is ok. Otherwise, the sensor
should be faulty.
46
Page 47

Part IV Starter
What should I do if my starter motors are not working
properly
Situation 1 Motor(s) is not turning at all.
Please check:
1.Cable from motor to the main board is connected properly and make sure the cables are
working.
2.If the IR controller or Makeblock App cannot let it move, try to write an online program or
upload a program like below to test:
Remember to upgrade firmware before running an online program.
3.Check if there is anything get stuck in the wheels, like cables. You can turn the wheels in
clockwise or anti-clockwise order to test.
4.Try some new batteries.
5.It may not move if the speed is too slow like 20 or 30. So try speed at 100+.
Situation 2 Starter cannot move straightly (two motors have different speed though set to same
value)
Due to the motors’ installation difference, it is normal that two motors don’t have exactly same
speed. If they differ a lot, please check:
1. If there is anything get in the left or right wheel, like cables.
2. Speed is set too slow that one side moves a little while the other side doesn’t move. So, try a
larger speed like 100.
3. Motors cannot get enough power energy. Try to change the battery or charge the battery.
If the speed of both sides still differs a lot, you may try to adjust the speed to with different power,
like setting left speed as 100, while right 110. Several tests are necessary to get expected result.
47
Page 48

Situation 3 Starter always works in wrong direction, it doesn't move according the commands on
IR remote or Makeblock APP
1.When it was given “turn left” command, the robot turns right, when given “turn right” command,
it turns left. The reason should be the motors are connected to the wrong motor interfaces M1, M2
(Yellow) on Orion board, please switch the places of the two motors.
2.When given “move forward” command, it moves backward, while “move backward” command,
it moves forward. The reason is the two thin wires (white and black) coming from each motor are
inserted into the yellow interface in wrong order. Please switch the order of the two wires for each
motor. (You can screw loose the screws, then insert the wires and screw them tight)
There may be other situation too, but normally you can fix it by checking the wiring connection
and order and correcting them.
48
Page 49

What is the difference between Starter IR version and
Bluetooth version
You can control the IR version Starter with IR controller, and control the Bluetooth version Starter
with Makeblock APP on mobile devices.
That is the only difference as IR version starter includes the Me Infrared Receiver Decode and IR
Remote Controller, while the Bluetooth version starter doesn’t includes these two parts, but a Me
Bluetooth module instead.
If you have bought an IR version Starter and you want to control it with mobile APP too, you just
need to buy an extra Me Bluetooth module for the robot. The same to the Bluetooth version.
49
Page 50

How to play with IR version Starter
I. How to control Starter under default mode
Below is the command of each key on the IR controller. If it is not working, please use mBlock 3
to reset default program as this guide.
If it works in the PC software mBlock but not with the IR controller, please test if the IR controller
and IR module is working or not.
a. Make sure the IR controller has installed correct number and correct type of batteries. Open the
camera application on an Android phone, and put the Infrared head on the IR remote controller
toward to the camera on the Android phone, then press the key on the IR remote controller.
Meanwhile, through the camera on Android phone, notice if you can see the red light from the
Infrared head. If there is red light means the IR remote controller is working.
Note: the red light should be always on (or a very quick flash) when you keep holding a button on
IR Controller.
b. Test the communication between the remote and the Infrared Receiver.
Turn on the power switch of Starter. Long press the number button on remote. The
indicator D3 should have blue light on.
The blue light should be off once you released the button.
50
Page 51

If there are no lights on, which means the infrared receiver cannot communicate with the
remote.
II. Program for the IR controller instead of using default program.
First of all, learn the Code of each key
Then you can write your personal program. Here is an example.
51
Page 52

52
Page 53

Can I use 2.4G module to replace the Bluetooth module on
Starter
Here is Starter Bluetooth Module, with RJ 25 connector.
While the 2.4G module interface is different:
So, we cannot use 2.4G module to replace the Bluetooth module. That is too say, Starter doesn’t
support 2.4G module.
53
Page 54

Questions related to Bluetooth connection on Mobile devices
I. What Apps do you have for Starter?
For mobile devices, there is Makeblock App that supports Starter. It requires Android 4.3+ and
iPhone 4S/iPad 3 +, iOS 9+.
II. How to connect Starter to Makeblock App?
As Makeblock App connects to Starter via Bluetooth, we have to use Bluetooth version Starter. Or
buy a separate Me Bluetooth Module for IR version Starter.
Download and installed latest Makeblock App and refer to below steps to connect Starter:
1. Connect the Me Bluetooth module to Port 5 on Orion board.
2. Power on the Starter and there is a blue LED keeping slow flashing on the Me Bluetooth
module.
3. Open the Makeblock APP on mobile device and move the mobile device close to the Bluetooth
module, normally the Starter Bluetooth will connect automatically.
Note: if you use iOS mobile device, you need open Bluetooth function on mobile device first.
3. If the Bluetooth can’t be connected automatically, please go to Search icon on the upper right
corner, check if you can find the starter Bluetooth in the detected list. If there is, please connect to
it from the list.
54
Page 55

Note:
Sometimes you may see the screen says “synchronization fails”, which means the Starter current
firmware is not compatible with Makeblock App, please connect it to mBlock 3 and reset default
program.
III. What is the troubleshooting if my Starter fails to connect Makeblock App through
Bluetooth?
If you tried above steps to connect Bluetooth but failed, please follow below chart to check step by
step.
55
Page 56

Note: Battery is very important, for any abnormal phenomenon happens to the robot, you are
strongly suggested to change new battery.
And many cases show that GPS should be enabled for Makeblock App.
IV. Why iPad 2 and below doesn't support Bluetooth from Makeblock
The Bluetooth module on our product supports BLE protocol, while for Apple products, only the
products published after the year 2011 support BLE protocol which can work with the Bluetooth
on our product.
Since the iPad 2 doesn't support BLE protocol, it cannot work with our APPs which need connect
with Bluetooth.
The APPs of our product work with iPad 3 and above and the iOS should be iOS 9.0 and above.
V. The Bluetooth connection to the Starter is unstable?
For the issue that the Bluetooth connection is unstable between Robot and Makeblock App, it may
be caused by the power issue, or the Bluetooth module is not connected well to Port 5 on Orion
board, or you may change the battery for the Starter have a try since it is easy to lead disconnect
issue on Bluetooth when it lacks power.
56
Page 57

According to our test and research, it is suggested to use rechargeable Li-ion battery or
rechargeable nickel-metal hydride, nickel-cadmium which can be bought from amazon or local
shop. Or alkaline battery with good quality like Energizer, DURACELL.
Besides, please check if the issue goes to the same when use other devices.
57
Page 58

What I should do when Ultrasonic Obstacle Avoidance Mode
of my Starter fails to work
1. Make sure the ultrasonic module is connected to Port 3 (required) on Orion board.
2. Check whether the red indicator of the ultrasonic module is on. If not, the problem is caused by
wire connection or the sensor itself.
3. If you control the Starter with IR remote controller, need press mode switch button D on the IR
remote control to switch to Ultrasonic Obstacle Avoidance Mode.
4. The starter may lose its default program.
5. Make sure the battery on starter can provide enough power.
According to our test and research, it is suggested to use rechargeable Li-ion battery or
rechargeable nickel-metal hydride, nickel-cadmium which can be bought from amazon or local
shop. Or Alkaline battery with good quality like Enegizer, DURACELL.
6. Test the Ultrasonic sensor.
Here is an example to test the ultrasonic sensor:
Move the hand at the front of the Ultrasonic sensor when the program is running. If it always says
400 or less than 1 which is abnormal, please try:
a. Upgrade firmware and test the above program again
b. Change the RJ25 cable between the Ultrasonic module and main Board (you can
temporarily use the RJ25 cable from other modules).
c. Connect the Ultrasonic module to Port 4 instead port 3, then modify the above program
to Port 4 and see if there is valid data from Ultrasonic module.
58
Page 59

How to check if the Starter main board lose its bootloader
When your uploaded program is not working with the Starter, you need to check if the main board
is working or not. Below are the steps.
1. Please open the Arduino software through the mBlock software:
2. On Arduino software, go to Tools->Board and choose the correct Board type for
your robot. If it is mBot, Starter, Ultimate Blue, here you can choose the Arduino/Genuine
Uno.
59
Page 60

Go to Tools->Port, then choose the correct serial port for your robot. You can
3.
check your robot/main board serial port under your computer's Device Manager->Ports
(COM&LPT))
4. Go to File->Examples, find and open the example program file “Blink”.
60
Page 61

5. Upload the program to the Robot and see if it can be upload successfully.
61
Page 62

Result:
1. If the program upload successfully. Please check if there is a LED keep blinking
on the Main board. If there is a led blinking, it means the main board is working ok.
If there is an error like below, it means the board has lost its bootloader.
2.
Normally you need a new board in this case. If you have two Orion boards and you are
experienced with this staff, you can try to follow this post to reburn bootloader. But
usually you are suggested to contact Makeblock support.
62
Page 63

Questions for Starter Battery
Working voltage of Starter/Orion
6-12V
Output voltage
5V
How to power on the Starter
A. 6 AA batteries (not included in the package)
B. 6-12V DC Rechargeable Li-ion Battery Pack
And you are suggested to choose B. Here are the suggestions from other users:
https://forum.makeblock.com/t/12v-rechargable-battery/707/12
https://forum.makeblock.com/t/mbot-ranger-best-high-capacity-lipo-battery/5103/7
Power adapter specification
DC 5.5*2.1mm, Orion, Auriga and MegaPi use same; while mCore is DC 3.5*1.1mm
Note: Any abnormal/improper behavior happens to your robot, like fails to move, Bluetooth
cannot connect, etc, you should check the battery and try some new battery.
63
Page 64

How to program the add-on Robotic Arm for Starter
The best way to use the Robotic Arm is controlling the Arm with mobile APP (Makeblock
APP). In this case, you need the Bluetooth version starter (you may need buy a Bluetooth
module individually if you only have IR version Starter)
If you have IR version starter instead of Bluetooth version, you can program for the Robot Arm
with the mBlock software:
Program for the arm, actually, you only need to program the 37 motor which drives the arm and
the motor in the Gripper.
About programming with mBlock IDE for the 37 Motor and Gripper, you can see the 37 motor is
connected to Port 2 on Orion board and Gripper is connected to Port 1 on Orion board. Below is
an example program.
64
Page 65

Finally, if you want to control the arm and gripper with IR remote controller, you need program
the IR controller and refer to this post:
http://forum.makeblock.com/t/trouble-programming-ir-buttons-in-3-2/3131/9
65
Page 66

Part V Ultimate 2.0
What should I do if my Ultimate 2.0 motors are not working
properly
Situation 1 Motor(s) is not turning at all.
Please check:
a. Make sure the motors are installed and connected correctly.
b. Cable from motor to the main board is connected properly and make sure the cables are
working.
c. Check if there is anything get stuck in the wheels, like cables. You can turn the wheels in
clockwise or anti-clockwise order to test.
d. Try some new batteries.
e. It may not move if the speed is too slow like 20 or 30. So try speed at 200.
This is Ultimate 2.0 instruction link.
Situation 2 Ultimate 2.0 cannot move straightly (two motors have different speed)
Due to the motors’ installation difference, it is normal that two motors don’t have exactly same
speed. If they differ a lot, please check:
a. If there is anything get in the left or right wheel, like cables.
b. Speed is set too slow that one side moves a little while the other side doesn’t move. So try a
larger speed like 100.
c. Motors cannot get enough power energy. Try to change the battery or charge the battery.
If the speed of both sides still differs a lot, you may try to adjust the speed to with different power,
like setting left speed as 100, while right 110. Several tests are necessary to get expected result.
Situation 3 Why it moves backward when I ask it to move forward? It unclamps when I tap
clamp?
It is wiring issue. Check the wiring refer to below chart.
66
Page 67

67
Page 68

Questions related to Bluetooth connection on Mobile devices
I. What Apps do you have for Ultimate 2.0?
For mobile devices, Makeblock App that supports Ultimate 2.0. It requires Android 4.3+ and
iPhone 4S/iPad 3 +, iOS 9+.
II. How to connect Ultimate 2.0 to Makeblock App?
As Makeblock App connects to Ultimate 2.0 via Bluetooth, make sure Bluetooth module is
plugged properly. Download and installed latest Makeblock App and refer to below steps to
connect Ultimate 2.0:
1. Power on the Ultimate 2.0 and there is a blue LED keeping slow flashing on the Bluetooth
module.
2. Open the Makeblock APP on mobile device and move the mobile device close to the Bluetooth
module, normally it will connect automatically.
Note: if you use iOS mobile device, you need open Bluetooth function on mobile device first.
3. If the Bluetooth can’t be connected automatically, please go to Search icon on the upper right
corner, check if you can find the Ultimate 2.0 Bluetooth in the detected list. If there is, please
connect to it from the list.
68
Page 69

Note:
Sometimes you may see the screen says “synchronization fails”, which means the Ultimate 2.0
current firmware is not compatible with Makeblock App, please connect it to mBlock 3 and reset
default program.
III. What is the troubleshooting if my Ultimate 2.0 fails to connect Makeblock App through
Bluetooth?
If you tried above steps to connect Bluetooth but failed, please follow below chart to check step by
step.
69
Page 70

Note: Battery is very important, for any abnormal phenomenon happens to the robot, you are
strongly suggested to change new battery.
IV. Why Ipad 2 and below doesn't support Bluetooth from Makeblock
The Bluetooth module on our product supports BLE protocol, while for Apple products, only the
products published after the year 2011 support BLE protocol which can work with the Bluetooth
on our product.
70
Page 71

Since the iPad 2 doesn't support BLE protocol, so it cannot work with our Apps which need
connect with Bluetooth.
The Apps of our product work with iPad 3 and above and the iOS should be iOS 9.0 and above.
V. The Bluetooth connection to the Ultimate 2.0 is unstable?
For the issue that the Bluetooth connection is unstable between Robot and Makeblock App, it may
be caused by the power issue, or the Bluetooth module is not well plugged. So, you may change
the battery for the Ultimate 2.0 to have a try since it is easy to lead disconnect issue on Bluetooth
when it lacks power.
According to our test and research, it is suggested to use rechargeable Li-ion battery or
rechargeable nickel-metal hydride, nickel-cadmium which can be bought from amazon or local
shop. Or alkaline battery with good quality like Energizer, DURACELL.
Besides, please check if the issue goes to the same when use other devices.
71
Page 72

Can I use 2.4G wireless module to control my Ultimate 2.0
I. Is it possible to replace the Bluetooth connection with a 2.4G wireless module?
Yes. As the module connection interface is the same.
II. How to use 2.4G wireless connection?
You can refer to this mBot FAQ to connect.
72
Page 73

What should I do if the self-balancing robot could not keep
balanced?
When you find the Ultimate 2.0 -- Self-Balancing Robot cannot keep balanced, please refer to
below steps to check:
1. Make sure you did follow the guidance strictly to assemble the self-balancing robot. In
Ultimate 2.0 package, there are 3 motors, remember to use the two 9V/185RPM motors. Here is
the guidance of self-balancing robot, including assembling video:
https://openlab.makeblock.com/topic/5729b96b591c0ad43a4764b2
2. Make sure power is enough as self-balancing robot requires to be working with full power. If
you are sure assembling is perfect but it still fails to be balanced, please do insert 6 totally new
batteries in. This is very important.
3. Make sure the Gyro module is working properly. You can write a simple program to test the
module.
73
Page 74

Questions about Ultimate 2.0 Battery
Working voltage of Ultimate 2.0/MegaPi
6-12V
Output voltage
5V
How to power on the Ultimate 2.0
6 AA batteries (not included in the package)
6-12V DC Rechargeable Li-ion Battery Pack
And you are suggested to choose B. Here are the suggestions from other users:
https://forum.makeblock.com/t/12v-rechargable-battery/707/12
https://forum.makeblock.com/t/mbot-ranger-best-high-capacity-lipo-battery/5103/7
Power adapter specification?
DC 5.5*2.1mm, Orion, Auriga and MegaPi use same; while mCore is DC 3.5*1.1mm
Note: Any abnormal/improper behavior happens to your robot, like fails to move, Bluetooth
cannot connect, etc, you should check the battery and try some new battery.
74
Page 75

Why my Ultimate 2.0 starts to run every time I turn it on
Problem:
Once I turn on the robot, it begins to run at fast speed and it doesn’t listen to my command.
Reason:
The reason should be that we changed its form/mode to self-balancing robot in Makeblock App and the powered it
off, then when we reassemble it to other form like robotic arm tank, it will run once we power it on.
Solution:
To fix the issue, power on the main board, then connect it with Makeblock App and change the
mode to correct one, then it will stop running and listen to your control.
75
Page 76

Part VI LaserBot
How to test if the wire connection for X, Y axis connected
properly on Laserbot
Please kindly test it through home position referring to the following steps:
1. Manually move the carriage to a position (any position where X>0, Y>0).
2. Power on the Laserbot and connect it to PC with USB cable.
3. Upgrade firmware for it with mLaser software as below picture.
4. After upgrade firmware done, reconnect USB cable and connect serial port on mLaser.
76
Page 77

5. Go to test if the LaserBot works with home position (refer to steps below):
If the carriage goes to Home position (X=0, Y=0) properly, means both the X axis and Y axis are
working.
77
Page 78

How to test your Laser to see if it is Faulty
Learn how to troubleshoot the following laser symptoms.
The LaserBot is assembled and the XY module works appropriately, but the laser doesn’t
work.
Laser doesn’t turn on while the fan rotates fine.
This test requires to connect the laser directly to the power supply. Please use the adapter which
comes with the kit to do the test.
1. Plug the power adapter (12V/2A) into a working AC wall outlet.
2. Put laser’s black and red wires metallic parts to touch the DC connector.
3. Red in, black out.
78
Page 79

Only put red wire metallic part inside of the DC connector interface, the laser is off. Then
make the black wire metallic part touch the interface metal outside, check if the laser turns on.
Notes: If the wire didn't touch with the inner metal part of the DC connector, the laser won't
work. Sometimes, if we spin the wire metallic part inside of the DC connector in different
directions, to make the wire metallic part contact the metal part, then the laser works.
79
Page 80

4. Black in, red out.
If the laser still keeps off, please switch the red wire metallic part and black wire metallic part
to test it again have a try (put the black wire metallic part touch the inner metal part of the DC
connector, then touch the interface metal outside with red wire metallic part, check if the laser
turns on.
5. Please also check if the small fan above the laser rotates while testing.
Here is location of the small fan.
80
Page 81

Conclusion:
If both the laser and the small fan don’t work during above test, the module wire which should
connect to the power is faulty.
If the fan works but the laser doesn’t turn on, it should be the laser problem.
81
Page 82

Why the laser head reaches to the X-axis or Y-axis without
stop
Issue: The laser head reaches to the X-axis or Y-axis without stopping.
Reason: The limit switches on X-axis or Y-axis connect to the wrong pins on MegaPi.
Troubleshooting:
1. In the "self-test", check if the icon X and Y turns into green when press the corresponding
limit switch. As the video “Software Tutorial of LaserBot” shows starting from 00:59.
82
Page 83

If the X icon turns green while pressing Y-axis limit switch, which means both X-axis and
Y-axis limit switch connecting to the wrong pins. Please check if the X-Axis limit switch
connects to A6 on MegaPi, and Y-Axis limit switch connects to A7 as picture shown below.
83
Page 84

2. Check both X-axis and Y-axis limit switch, make sure the pin doesn't connect to anything as I
circled below.
84
Page 85

3. If you have followed step 1 and 2, but it is still the same issue, please switch the position of
limit switches. Put the X-axis limit switch on Y-axis, and the Y-axis limit switch on X-axis,
then test step 1 again.
85
Page 86

How to fix if the X or Y-axis cannot move when test home?
Issue: The X-axis or Y-axis cannot move while clicking the home button on mLaser.
I. Wiring
1. Make sure the motor which control X axis is connected to correct motor port (Port 1) on
MegaPi. The motor which controls Y-axis is connected to Port 2 on MegaPi.
2. Make sure the wire connection is plugged into the particular port properly without loose.
3. Make sure the MegaPi stepper motor driver is plugged well. You can re plug it have a try.
4. Make sure the line order of the color wires for the motor is inserted correctly.
86
Page 87

5. Make sure you have screwed each color wire into the hole on green interface properly:
6. If you have other Makbelock’s drivers which didn’t come with the LaserBot kit, please check if
the LaserBot has been installed the wrong motor driver.
1) The picture shown below shows that the LaserBot has been supplied with encoder
motor drivers. The correct motor driver for LaserBot is called MegaPi Stepper Motor Driver.
2) The picture below shown the LaserBot has installed the correct stepper motor drivers.
87
Page 88

II. Testing on mLaser
1. Click "Enter mLaser"
2. After update firmware successfully, remove the USB cable. Open mLaser again, connect serial
port on "Serial" until it shows connected.
88
Page 89

3. Click "control panel," then click Y+, Y-, X+, X-, check if the laser head could move to the
expected direction. If one of them doesn't move, then swap the driver and do the test again.
89
Page 90

Why does the LaserBot cut or engrave the image in different
size on X axis (or Y axis)
If the LaserBot cuts or engraves the image in different size on X axis (or Y axis) as the picture
shown below (the image's Y axis is stretched), here are troubleshooting you could try.
1. Update firmware.
2. Swap the two motor drivers’ position on Mega Pi and check if the image’s X axis is stretched
(like the second picture below).
90
Page 91

3. If the other axis of the image is stretched after switched the driver position, one of the
motor drivers is faulty.
91
Page 92

Why the serial port of LaserBot doesn’t appear on mLaser
while using Mac?
Issue: The LaserBot connects to Mac via USB cable, but the serial port doesn’t appear on mLaser.
Reason: For Mac users, you need to download driver in order to run mLaser.
1. For Mac OS Sierra user, please follow the instruction on this link to install driver
(http://www.mblock.com/docs/run-makeblock-ch340-ch341-on-mac-os-sierra/). Please note to
allow "app downloaded from anywhere".
Note: if the driver can’t be installed properly, please follow the video instruction to set allow
apps downloaded from "anywhere".
2. For other Mac users, including Mac OS High Sierra users, please download the driver on this
link
https://blog.sengotta.net/signed-mac-os-driver-for-winchiphead-ch340-serial-bridge/
3. When choose Serial port under Connect->Serial Port, please choose the port similar to
/dev/tty.wchusbserial1410.
4. If you could update firmware this time, remember to unplug the USB after successfully updated,
then plug the USB back to LaserBot again.
92
Page 93

93
Page 94

How should I enter mLaser when the opening page is in
Chinese
Recently, we got some feedback regarding the language setting issue of mLaser. Even though the
installation language is set as English, the very first page after installation is still Chinese. We
have reported this issue to related personnel, and you could follow the instruction below to enter
the main interface before the problem solved. The following pictures are showing the
corresponding English version mLaser.
1. Download the latest version mLaser V2.4 from this link:
https://www.makeblock.com/project/laserbot
2. Enter password at the login page
Password: 123
94
Page 95

3. Select “Enter mLaser”
95
Page 96

4. Go to the language setting at the top right corner.
96
Page 97

5. Close mLaser and reopen it. You will find the menu is in English, and you could test LaserBot
now.
97
Page 98

Why the interface of the mLaser is black rather than white
Issue: In some cases, the interface of the mLaser appears black rather than white in older
computer systems.
Reason: The graphics driver of the computer is out of date.
Troubleshooting:
1. Please update the computer graphics driver to the latest version.
2. If step 1 doesn’t help, please use another PC to install mLaser.
98
Page 99

Why the mLaser showed damaged when I opened it on my
Mac
Please follow the instruction to solve this issues:
http://www.tech-recipes.com/rx/45404/mac-downloaded-app-is-damaged-and-cant-be-opened-erro
r-solved/
For Mac OS Sierra, here is a video tutorial for your reference:
https://www.youtube.com/watch?v=A6EUI5kn1vM
99
Page 100

Why the Laser is on but it cannot cut or engrave anything?
When you engrave or cut an image, if the laser is on but there is nothing on the
wood/leather/cardboard/paper etc, or the graphics are not clear, here are the trouble shoot we
could try together.
1. Adjust the laser light according to this video tutorial.
Figure 1
2. When you engrave an image: you can modify the Laser Power and the Engraving Time,
please refer to figure 2.
(you can check the definition for the Laser Power and Engraving Time parameters on figure 3).
100
 Loading...
Loading...