

Page 1
SMVector ESVZAR0 RS-485 Modbus Communication Module
Communications Interface Reference Guide
Page 2
About These Instructions
This documentation applies to the ESVZAR0 RS-485/Modbus communications option for the SMVector inverter models
up to 10HP. This documentation should be used in conjunction with the SMVector Operating Instructions (Document
SV01) that shipped with the drive. These documents should be read in their entirety as they contain important technical
data and describe the installation and operation of the drive and this option.
WARNING!
The information in this document is based on RS-485 Modbus Communication Module
software version 1.01. If a future revision of software contains differences in the register
numbering or register definitions, drive operation could be seriously affected. If drive
parameter P494 does not display 1.01, 1.10 or 1.30, then writing to any drive register
over the Modbus® network MUST NOT BE ATTEMPTED as it would have the potential
for unexpected consequences potentially resulting in damage to the equipment or
harm to personnel. Future releases of module software require that the appropriate
documentation be used for implementation.
© 2007 Lenze AC Tech Corporation
No part of this documentation may be copied or made available to third parties without the explicit written approval
of Lenze AC Tech Corporation.
All information given in this documentation has been carefully selected and tested for compliance with the hardware
and software described. Nevertheless, discrepancies cannot be ruled out. We do not accept any responsibility nor
liability for damages that may occur. Any necessary corrections will be implemented in subsequent editions.
Page 3

Contents
1 Safety Information .............................................................................................................................................................3
2 Introduction .......................................................................................................................................................................5
2.1 Module Specifications ............................................................................................................................................5
2.2 Module Identification ..............................................................................................................................................6
3 Installation ........................................................................................................................................................................7
3.1 Mechanical Installation...........................................................................................................................................7
3.2 RS-485 Terminal Block ..........................................................................................................................................8
3.3 Electrical Installation ..............................................................................................................................................8
3.3.1 Cable Types ................................................................................................................................................8
3.3.2 Connections and Shielding ..........................................................................................................................8
3.3.3 Network Termination ..................................................................................................................................9
4 Extended Parameters for Modbus RTU.............................................................................................................................10
4.1 Parameter Menu ..................................................................................................................................................10
5 Modbus Protocol Details ..................................................................................................................................................12
5.1 Data Transmission ...............................................................................................................................................12
5.2 Register Numbering .............................................................................................................................................12
5.3 Supported Function Codes ...................................................................................................................................12
6 Modbus Message Details ................................................................................................................................................13
6.1 Register Reading ..................................................................................................................................................13
6.1.1 Message structure for reading one 16-bit register.....................................................................................13
6.1.2 Message structure for reading two 16-bit registers ...................................................................................13
6.1.3 Message structure for reading one 32-bit register.....................................................................................14
6.1.4 Message structure for reading one 4 word register ...................................................................................14
6.1.5 Message structure for reading six 16-bit registers ....................................................................................14
6.2 Register Writing ...................................................................................................................................................15
6.2.1 Message structure for reading one word ...................................................................................................15
6.3 No Response Conditions.......................................................................................................................................15
6.4 Exception Responses ...........................................................................................................................................15
6.4.1 Message structure for an exception response to a read request (03) .........................................................15
6.4.2 Message structure for an exception response to a write request (06) ........................................................15
6.4.3 Exception Codes (EC) ................................................................................................................................15
7 Commissioning ...............................................................................................................................................................16
7.1 Drive Monitoring ..................................................................................................................................................16
7.2 Drive Programming and Control ...........................................................................................................................16
7.3 Unlocking & Locking Drive Controls & Parameters ................................................................................................16
7.4 Network Watchdog Timer .....................................................................................................................................17
7.5 Watchdog Timer Controls .....................................................................................................................................17
7.5.1 Watchdog Time-out Period (P425) ............................................................................................................17
7.5.2 Watchdog Time-out Action (P426) .............................................................................................................17
8 Typical Network Applications ...........................................................................................................................................18
8.1 Controlling the Drive ............................................................................................................................................18
8.2 Changing Drive Parameters ..................................................................................................................................18
8.3 Controlling Frequency, PID & Torque Setpoints .....................................................................................................18
CMVMB401C
1
Page 4

Contents
9 Drive Registers ................................................................................................................................................................19
9.1 Data Internal vs. Display Representation ..............................................................................................................19
9.2 Drive Control Registers .........................................................................................................................................19
9.2.1 Drive Control - Register #1........................................................................................................................20
9.2.2 Drive Size - Register #21 ..........................................................................................................................21
9.2.3 Drive Status - Register #23 .......................................................................................................................22
9.2.4 Load - Register #26 ..................................................................................................................................22
9.2.5 Run Status - Register #26 .........................................................................................................................23
9.2.6 Actual Direction - Register #27 .................................................................................................................23
9.2.7 Control Mode - Register #27 .....................................................................................................................23
9.2.8 Speed Source - Register #28 ....................................................................................................................24
9.2.9 Auto/Manual Reference - Register #28 .....................................................................................................24
9.2.10 Present Fault - Register #29 .....................................................................................................................25
9.2.11 Commanded Direction - Register #29 .......................................................................................................25
9.2.12 PID Registers ............................................................................................................................................25
9.2.13 Parameter Version - Register #50 .............................................................................................................26
9.2.14 Network Controlled Digital Output - Register #70 ......................................................................................26
9.2.15 Network Controlled Analog Output - Register #71 .....................................................................................26
10 Programming Parameters ................................................................................................................................................27
10.1 Negative Number Transmission ............................................................................................................................27
10.2 Terminal and Protection Status (P530) .................................................................................................................27
10.3 Keypad Status (P531) ...........................................................................................................................................28
11 Troubleshooting and Fault Elimination .............................................................................................................................29
11.1 Faults...................................................................................................................................................................29
11.2 Troubleshooting ...................................................................................................................................................29
2
CMVMB401C
Page 5

1 Safety Information
General
Some parts of Lenze controllers (frequency inverters, servo inverters, DC controllers) can be live, moving and rotating.
Some surfaces can be hot.
Non-authorized removal of the required cover, inappropriate use, and incorrect installation or operation creates the
risk of severe injury to personnel or damage to equipment.
All operations concerning transport, installation, and commissioning as well as maintenance must be carried out
by qualified, skilled personnel (IEC 364 and CENELEC HD 384 or DIN VDE 0100 and IEC report 664 or DIN VDE0110
and national regulations for the prevention of accidents must be observed).
According to this basic safety information, qualified skilled personnel are persons who are familiar with the installation,
assembly, commissioning, and operation of the product and who have the qualifications necessary for their occupation.
Application as directed
Drive controllers are components which are designed for installation in electrical systems or machinery. They are
not to be used as appliances. They are intended exclusively for professional and commercial purposes according to
EN 61000-3-2. The documentation includes information on compliance with the EN 61000-3-2.
When installing the drive controllers in machines, commissioning (i.e. the starting of operation as directed) is
prohibited until it is proven that the machine complies with the regulations of the EC Directive 2006/42/EC (Machinery
Directive); EN 60204 must be observed.
Safety Information
Commissioning (i.e. starting of operation as directed) is only allowed when there is compliance with the EMC
Directive (2004/108/EEC). The drive controllers meet the requirements of the Low Voltage Directive 2006/95/EC.
The harmonised standards of the series EN 50178/DIN VDE 0160 apply to the controllers.
The availability of controllers is restricted according to EN 61800-3. These products can cause radio
interference in residential areas. In this case, special measures can be necessary.
Installation
Ensure proper handling and avoid excessive mechanical stress. Do not bend any components and do not change
any insulation distances during transport or handling. Do not touch any electronic components and contacts.
Controllers contain electrostatically sensitive components, which can easily be damaged by inappropriate handling.
Do not damage or destroy any electrical components since this might endanger your health!
Electrical connection
When working on live drive controllers, applicable national regulations for the prevention of accidents (e.g. VBG 4)
must be observed.
The electrical installation must be carried out according to the appropriate regulations (e.g. cable cross-sections,
fuses, PE connection). Additional information can be obtained from the documentation.
The documentation contains information about installation in compliance with EMC (shielding, grounding, filters and
cables). These notes must also be observed for CE-marked controllers.
The manufacturer of the system or machine is responsible for compliance with the required limit values demanded
by EMC legislation.
CMVMB401C
3
Page 6
Safety Information
Operation
Systems including controllers must be equipped with additional monitoring and protection devices according to the
corresponding standards (e.g. technical equipment, regulations for prevention of accidents, etc.). You are allowed
to adapt the controller to your application as described in the documentation.
DANGER!
• After the controller has been disconnected from the supply voltage, live components and power
connection must not be touched immediately, since capacitors could be charged. Please observe the
corresponding notes on the controller.
• Do not continuously cycle input power to the controller more than once every three minutes.
• Please close all protective covers and doors during operation.
WARNING!
Network control permits automatic operation of the inverter drive. The system design must incorporate
adequate protection to prevent personnel from accessing moving equipment while power is applied to the
drive system.
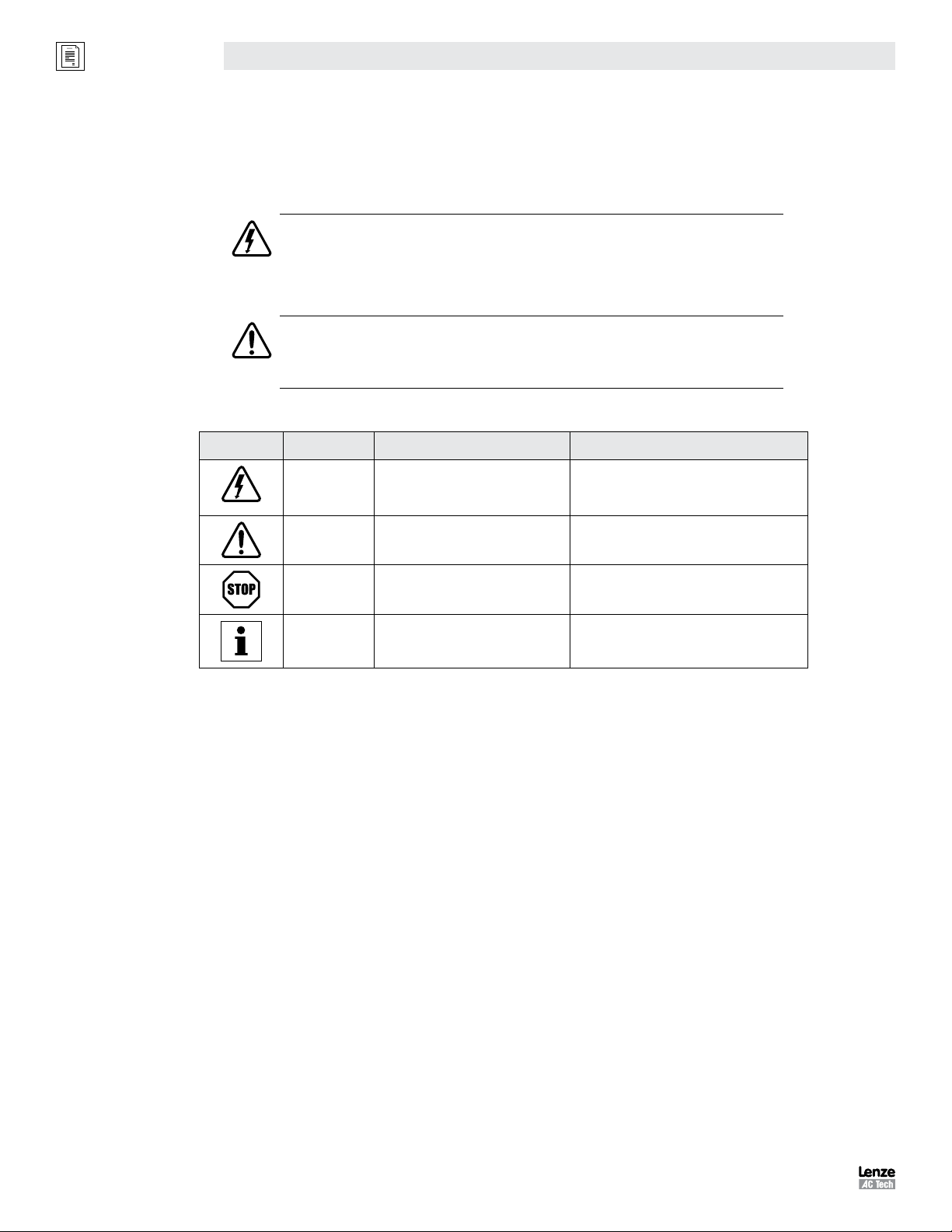
Table 1: Pictographs used in these instructions
Pictograph Signal word Meaning Consequences if ignored
DANGER! Warning of Hazardous Electrical
Voltage.
WARNING! Impending or possible danger for
persons
STOP! Possible damage to equipment Damage to drive system or its surroundings
NOTE Useful tip: If observed, it will make
using the drive easier
Reference to an imminent danger that may
result in death or serious personal injury if the
corresponding measures are not taken.
Death or injury
4
CMVMB401C
Page 7

2 Introduction
This reference guide assumes that the reader has a working knowledge of the Modbus RTU Protocol and familiarity
with the programming and operation of motion control equipment. This guide is intended as a reference only.
Modbus is an internationally accepted asynchronous serial protocol designed for commercial and industrial automation
applications. The Modbus RTU architecture is based upon a PLC to device communication structure and, as such
is Master-Slave in orientation. The SMV drive, in this case, always acts as the slave in this network, responding to
commands and requests from the Master.
While the Modbus RTU protocol does not specify the physical layer, the ESVZAR0 module uses the RS-485 physical
interface which is quite common and well suited for the industrial environment. The ESVZAR0 module provides both
galvanic and optical isolation of this physical interface.
2.1 Module Specifications
Table 2 identifies the Modbus serial communication specifications. If the specification is fixed (non-adjustable)
the value is shown under “Range”, if the specification is selectable, Table 2 identifies the Parameter and available
range of selections.
Introduction
Table 2: Modbus Specifications
Description Type Range
Baud Rate Selectable P411 (2400, 4800, 9600, 19200, 38400, 57600, or 115200 bps)
Data Bits Fixed 8
Parity / Stop Bits Selectable P412 (None/1, None/2, Even/1, Odd/1)
Network Address Selectable P410 (1 - 247)
Typical communications between master and slave would be:
• Write commands from Master
• Run command
• Frequency Reference
• Modification of Drive operating parameters
• Requests from Master
• Reporting of drive status
• Fault status (and fault history)
The SMVector drive most nearly conforms to the Modicon® Micro 84 in capabilities. This may be of importance
when configuring networks for DDE Servers.
CMVMB401C
5
Page 8
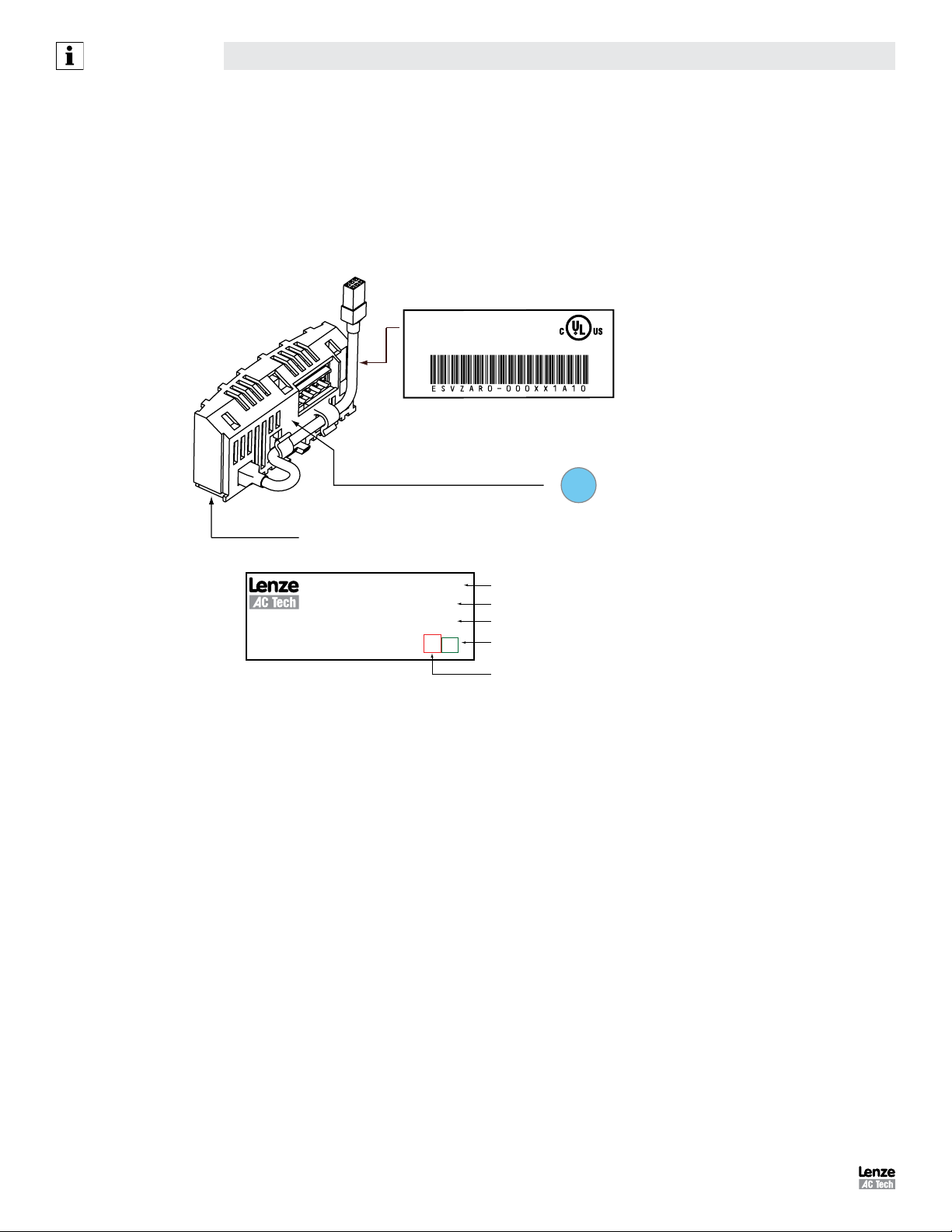
2.2 Module Identification
Right-hand Label:
Figure 1 illustrates the labels on the SMV RS-485 communications module. The SMVector RS-485 module is
identifiable by:
• Two labels affixed to either side of the module.
• The color coded identifier label in the center of the module.
Introduction
Ratings & Certifications
COMM I/O ONLY
S/N: 123456789
LISTED
Fieldbus Identifier:
R = RS-485 (Modbus RTU/LECOM)
R0
Left-hand Label:
Module Data
TYPE: ESVZAR0
ID-NO: 12345678
ESVZAR0-000XX1A10
SMV RS-485
A
B
C
D
E
Figure 1: RS-485 Module Labels
A: Fieldbus Protocol
B: Model Number
C: Lenze Order Number
D: Firmware Revision
E: Hardware Revision
6
CMVMB401C
Page 9
3 Installation
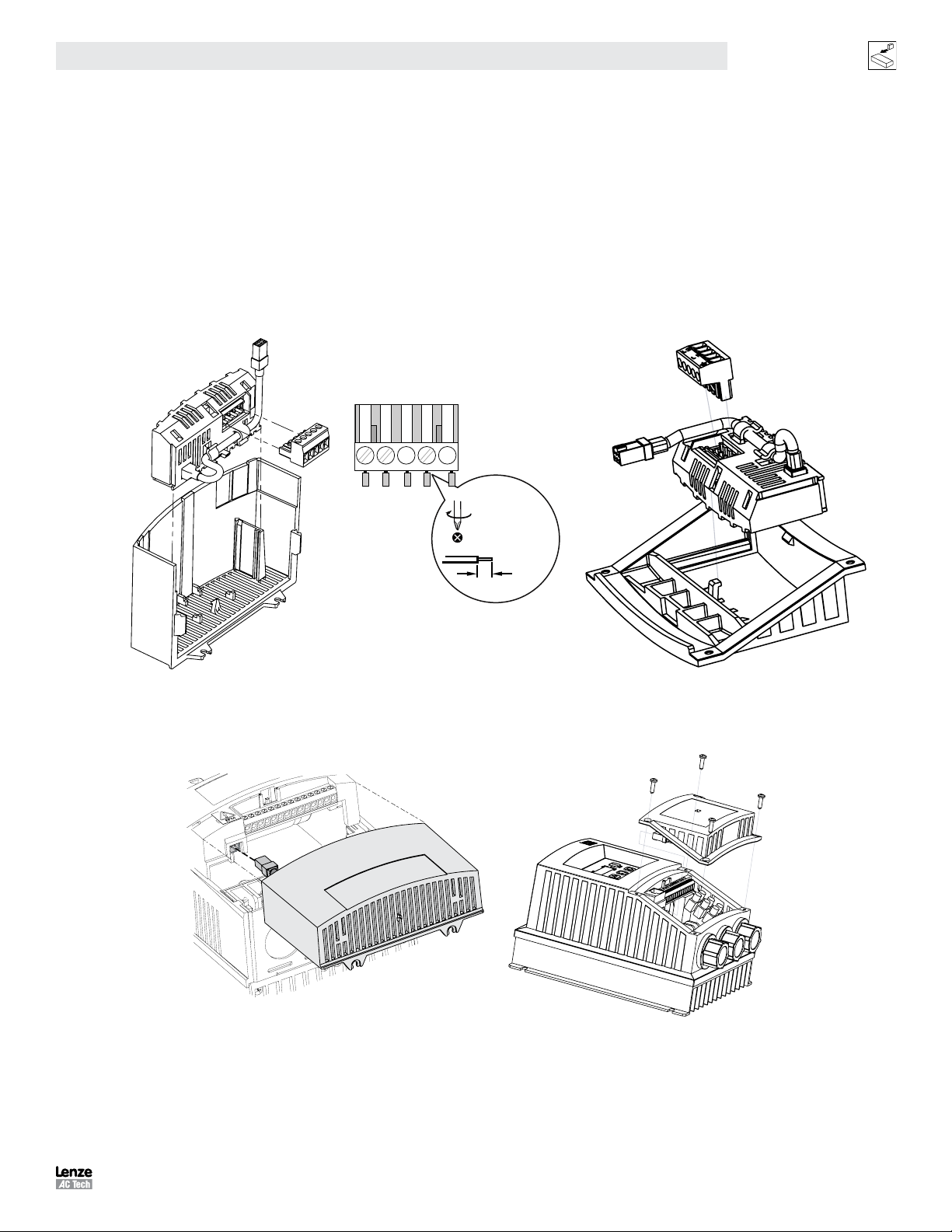
3.1 Mechanical Installation
1. Ensure that for safety reasons the AC supply has been disconnected before opening the terminal cover.
2. Insert the RS-485 option module in the terminal cover and securely “click” into position as illustrated in Figure 2.
3. Wire the network cables to the connector provided, as detailed in paragraphs 3.2 (RS-485 Terminal Block) and
3.3 (Electrical Installation), and plug the connector into the option module.
4. Align terminal cover for re-fitting, connect the module umbilical cord to the drive then close the cover and
secure, as shown in Figure 3.
Installation
1 2 3 4 5
0.5 Nm/ 4.5 lb-in
<_ 2.8 mm
(12-22 AWG)
7mm
NEMA 1 (IP31) Models NEMA 4X (IP65) Models
Figure 2: Installing the RS-485 Communications Module
NEMA 1 (IP31) Models NEMA 4X (IP65) Models
Figure 3: Re-installing the Terminal Cover
CMVMB401C
7
Page 10
3.2 RS-485 Terminal Block
Table 3 describes the RS-485 terminal block. The 5 pole connector provides 2-wire connection to the network.
Terminal Description Important Connector
1 Earth ground /
2 TXA If controller is located at either end of the network,
3 No connection
4 TXB
5 No connection
Protection against contact
• All terminals have basic isolation (single insulating distance)
• Protection against contact can only be ensured by additional measures (i.e. double insulation)
3.3 Electrical Installation
3.3.1 Cable Types
Installation
shield
Table 3: RS-485 Terminal Block
For reliable communication make sure terminal is
connected to the Modbus network GND/common.
If only two wires are used (TXA and TXB) in the
network, connect Terminal 1 to chassis/earth GND.
a terminating resistor (120ohm typical) should be
connected across TXA and TXB
5
4
3
2
1
For RS-485 Modbus networks, use a quality shielded twisted pair cable. The use of low quality cable will result in
excess signal attenuation and data loss.
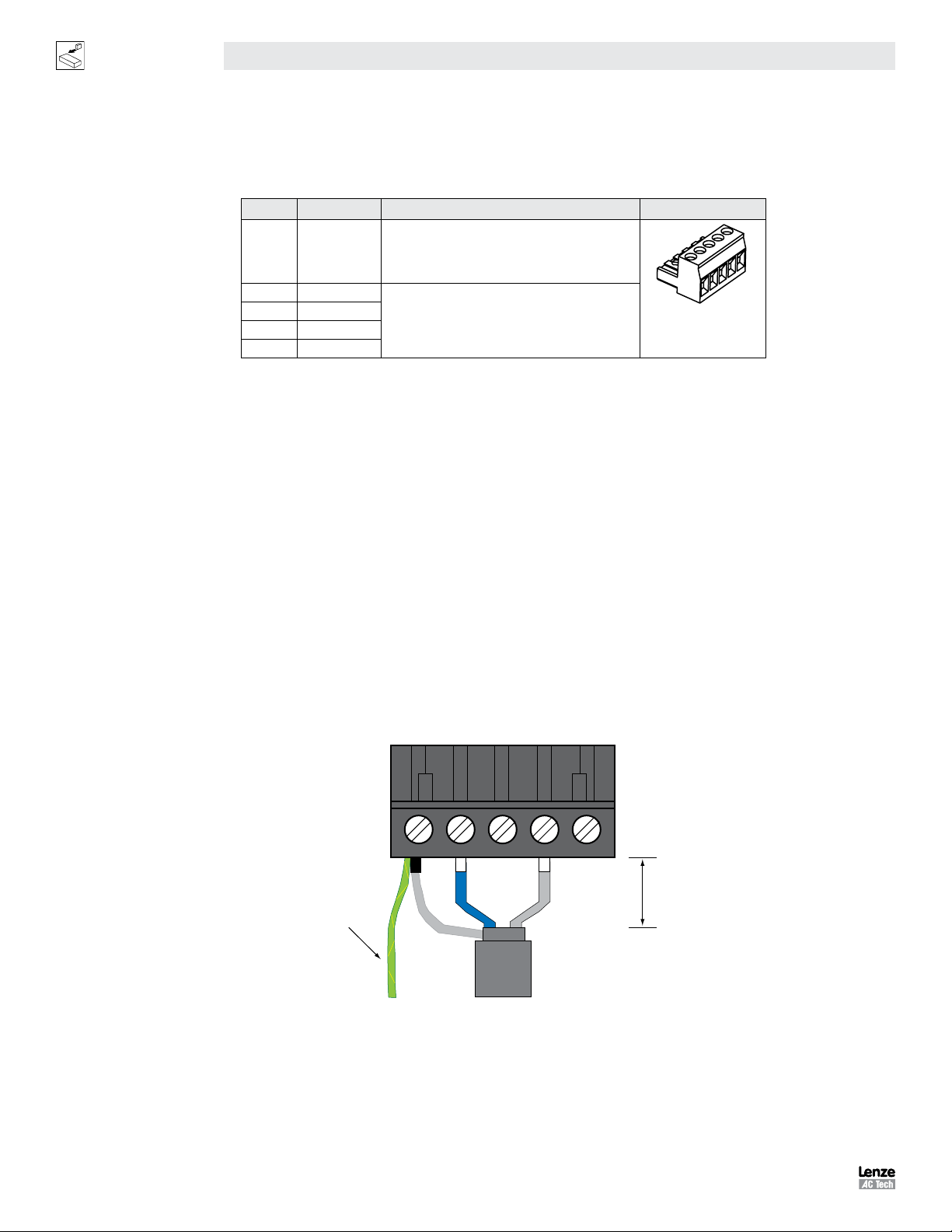
3.3.2 Connections and Shielding
To ensure good system noise immunity all networks cables should be correctly grounded:
• Minimum grounding recommendation: ground the network cable once in every cubical.
• Ideal grounding recommendation: ground the network cable on or as near to each drive as possible.
• For wiring of cable to the connector plug the unscreened cable cores should be kept as short as possible;
recommended maximum of 20mm. The shield connection of terminal 1 should also be wired to earth (PE).
Connect to
drive earth
(PE)
2
1
3 4
5
20mm
max
Figure 4: Connector Wiring Diagram
8
CMVMB401C
Page 11

3.3.3 Network Termination
For an RS-485 network it is essential to install the specified termination resistors (120W), i.e. one at both ends of a
network segment. Failure to do so will result in signals being reflected back along the cable which will cause data
corruption.
An external 120W 1/4W resistor can be connected as shown in Figure 5.
Installation
2
1
3 4
5
Connect to
drive earth
(PE)
120Ω
1/4W
Figure 5: Network Termination Resistor
20mm
max
CMVMB401C
9
Page 12

Extended Parameters
4 Extended Parameters for Modbus RTU
In addition to the drive parameters that are detailed in the Operating Instructions (SV01), the installation of the
RS485/Modbus RTU module will give access to the 400 series parameters that are exclusive to this communication
module. Table 4 lists these 400 Series parameters.
4.1 Parameter Menu
Table 4: 400 Series Parameters for Modbus RTU Operation
Code Possible Settings
No. Name Default Selection
RS485/Modbus: Modbus Module Specific parameters
P400 Network Protocol 0 Not Active
1 Remote Keypad
2 Modbus RTU
P401 Module Revision 01.0.0 Display reads 01.x.x where:
P402 Module Status 0 0 Not Initialized
P403 Module Reset 0 0 No Action
P404 Module Time-out
Action
P405 Network Fault 0 0 No Fault
P406 Proprietary Manufacturer specific Read only
P410 Network address 1 1 247 The Drive does not support the Modbus “broadcast”
P411 Network
Baud Rate
P412 Network Data
Format
01 = RS485/Modbus Module
x.x = Module Revision
1 Initialization: Module to EPM
2 Initialization: EPM to Module
3 Online
4 Failed Initialization Error
5 Time-out Error
6 Initialization Failed Module type mismatch (P401)
7 Initialization Error Protocol Selection mismatch (P400)
1 Reset Module parameter values to default. Returns module parameters 401…499 to the default values
3 0 Ignore • Action to be taken in the event of a Module/Drive Time-
1 STOP (see P111)
2 Quick Stop
3 Fault (
1 Network Time-out,
2 0 2400 bps
1 4800 bps
2 9600 bps
3 19200 bps
4 38400 bps
5 57600 bps
6 115200 bps
0 0 8 Data bits, No Parity, 2 stop bits
1 8 Data bits, No Parity, 1 stop bit
2 8 Data bits, Even Parity, 1 stop bit
3 8 Data bits, Odd Parity, 1 stop bit
n )
n
RS485/Modbus: System bus parameters
IMPORTANT
Read only
Read only
Online state “3” indicates that the communications between
the drive and module are working properly.
shown in this manual.
out.
• Time-out is fixed at 200ms.
• Selection 1 (STOP) is by the method selected in P111.
Read only, see P425 and P426
function.
10
CMVMB401C
Page 13

Extended Parameters
Code Possible Settings
No. Name Default Selection
P425 Network Message
time-out
P426 Network Message
time-out action
P427 Valid Network
messages
Received
P494 Communication
Module software
version
P495 Internal Code • Read only
P498 Missed Messages
Drive to Module
P499 Missed Messages
Module to Drive
10.0 0.0 {s} 300.0
4 0 Not active
1 STOP (see P111)
2 Quick stop
3 Inhibit
4 Trip fault,
0
0 {messages} 9999 • Read-only
n
RS485/Modbus: Module Specific parameters
IMPORTANT
• When number of messages exceed 9999, counter
resets to 0 and continues.
• Read only
• Format: x.yz
• Alternating Display: xxx-; -yy
• Read only
• Read only
CMVMB401C
11
Page 14

5 Modbus Protocol Details
5.1 Data Transmission
This drive uses the RTU (Remote Terminal Unit) transmission mode of the Modbus Protocol and operates as a Slave
device on the network. All devices communicating with the drive(s) must be a Modbus Master.
5.2 Register Numbering
Modbus 3X and 4X register numbers are always one greater than the actual drive register numbers. For example:
drive register #24 would correspond to Modbus 3X / 4X register #25.
All the register numbers referred to in this document are drive register numbers.
5.3 Supported Function Codes
The Modbus function codes supported by the drive are:
03 - Read Holding Register (4X references)
04 - Read Input Register (3X references)
Typically only one register (or one word of data) can be read at a time. Exceptions to this rule are:
Modbus Protocol
NOTE
We do not differentiate between 4X and 3X references. Therefore, function
codes 03 and 04 are treated identically.
• Register #24 (Command Frequency) can be read as a single register or as a group of 6 drive status registers
(#24-29).
• Register #32 (low word of Total kWh) can be read as a single register or as a group of 2 registers (#32-33).
• Register #60 (low word of Total Runtime Hours) can be read as a single register or as a group of 2 registers
(#60-61).
• Register #64 (low word of Total Power On Hours) can be read as a single register or as a group of 2 registers
(#64-65).
• In some instances, multiple words can be read for a single register. When this is done for the registers below,
the response from the drive will be for the number of words, rather than the number of registers, requested:
• Register #500 (Fault History) can be read as 1 word (returning the two most recent faults) or as 4 words (returning
the entire fault history).
• Register #511 (Total kWh) can be read as 1 word (returning only the low word of the 32-bit register value) or
as 2 words (returning the complete 32-bit register value).
• Register #540 (Total Runtime Hours) can be read as 1 word (returning only the low word of the 32-bit register
value) or as 2 words (returning the complete 32-bit register value).
• Register #541 (Total Power On Hours) can be read as 1 word (returning only the low word of the 32-bit register
value) or as 2 words (returning the complete 32-bit register value).
06 - Preset Single Register (4X references)
12
Write a single register.
16 - Preset Multiple Registers (4X references)
While code 16 is supported it’s implementation is limited to addressing only one register per write.
CMVMB401C
Page 15

6 Modbus Message Details
These abbreviations will be used throughout this section to illustrate the message structure:
R Read
W Write
RS Response
SA Slave Address (01 ... F7 hex)
EC Exception Code
RH Register Address (high byte)
RL Register Address (low byte)
DxH Data (high byte)
DxL Data (low byte)
CRCH Cyclic Redundancy Check (high byte)
CRCL Cyclic Redundancy Check (low byte)
6.1 Register Reading
Modbus Message
6.1.1 Message structure for reading one 16-bit register
All registers except #1
R
SA 03 RH RL 00 01 CRCH CRCL
RS
SA 03 02 DH DL CRCH CRCL
6.1.2 Message structure for reading two 16-bit registers
Registers 32, 60 and 64 only
R
SA 03 RH RL 00 02 CRCH CRCL
RS
SA 03 04 D1H D1L D2H D2L CRCH CRCL
D1H and D1L are the high and low bytes of the first 16-bit register value (32, 60, 64)
D2H and D2L are the high and low bytes of the second 16-bit register value (33, 61, 65)
Example: Total Run-time Hours = 305419896 (12345678h)
Register #60 (low word of total run-time hours) = 5678h
Register #61 (high word of total run-time hours) = 1234h
R
SA 03 00 3C 00 02 CRCH CRCL
RS
SA 03 04 56 78 12 34 CRCH CRCL
CMVMB401C
13
Page 16

Modbus Message
6.1.3 Message structure for reading one 32-bit register
Registers 511, 540 and 541 only
R
SA 03 RH RL 00 02 CRCH CRCL
RS
SA 03 04 DHH DHL DLH DLL CRCH CRCL
DHH and DHL are the high and low bytes of the high word (i.e. the first 16 bits) of the 32-bit register value
DLH and DLL are the high and low bytes of the low word (i.e. the last 16 bits) of the 32-bit register value
Example: Total Run-time Hours (Register #540) = 305419896 (12345678h)
R
SA 03 01 FF 00 02 CRCH CRCL
RS
SA 03 04 12 34 56 78 CRCH CRCL
6.1.4 Message structure for reading one 4 word register
Register 500 only
R
SA 03 01 F4 00 04 CRCH CRCL
RS
SA 08 D1 D2 D3 D4 D5 D6 D7 D8 CRCH CRCL
D1 holds the value of Fault 1 (the most recent fault in the fault history)
D2 holds the value of Fault 2 in the fault history
…
D8 holds Fault 8 (the oldest fault in the fault history).
6.1.5 Message structure for reading six 16-bit registers
Register 24 only
R
SA 03 00 18 00 06 CRCH CRCL
RS
Operation Byte Register
Command Frequency D1H D1L Register #24 (DH DL)
Actual Frequency D2H D2L Register #25 (DH DL)
Load D3H Register #26 (DH)
Operation Status D3L Register #26 (DL)
Rotational Direction D4H Register #27 (DH)
Control Mode D4L Register #27 (DL)
Speed Command Source D5H Register #28 (DH)
Auto/Manual Status D5L Register #28 (DL)
Present Fault D6H Register #29 (DH)
Command Rotation D6L Register #29 (DL)
SA 0C D1H D1L D2H D2L D3H D3L
D4H D4L D5H D5L D6H D6L CRCH CRCL
14
CMVMB401C
Page 17

6.2 Register Writing
6.2.1 Message structure for reading one word
All writable registers
Modbus Message
W
RS
SA 06 RH RL DH DL CRCH CRCL
SA 06 RH RL DH DL CRCH CRCL
6.3 No Response Conditions
The drive will not respond to any message that:
• contains one or more parity errors
• has an invalid CRC value
• was not directed to the drive’s network address.
• This drive does not support the broadcast function of the Modbus protocol.
• is not at least 8 bytes long (minimum required for the supported functions)
• is more than 18 bytes long (maximum allowed before input buffer overflow occurs)
6.4 Exception Responses
If a valid message is received (i.e. parity, crc, address and message length all pass validity checks), but the message
contents are somehow invalid, the drive will respond with a Modbus exception.
6.4.1 Message structure for an exception response to a read request (03)
W
SA 83 EC CRCH CRCL
6.4.2 Message structure for an exception response to a write request (06)
W
SA 86 EC CRCH CRCL
6.4.3 Exception Codes (EC)
EC Description
01 Command rejected; Illegal function
02 Invalid register number
03 Data value is out-of-range
04 Wrong data format
06 Slave device (drive) busy
CMVMB401C
15
Page 18

Commissioning
7 Commissioning
7.1 Drive Monitoring
The network can always read drive parameters as long as the Modbus communications are enabled (i.e. P400 = 2)
and configured properly (see P410-412).
7.2 Drive Programming and Control
Network Control must be enabled for the network to program drive parameters or take control of an actual drive.
This is done by …
1. Setting P121…P123 equal to 09 (NET ENABLE) and asserting the corresponding TB-13x terminal
2. Setting P100 to 00, 01, 03 or 04. Network control cannot be enabled when P100 is set to 02 (REMOTE KEYPAD
ONLY) or 05 (TERMINAL STRIP/REMOTE KEYPAD).
Once network control is enabled, the drive must unlock controls and/or parameters in order to write to any of the
drive registers.
7.3 Unlocking & Locking Drive Controls & Parameters
Writing to Register #48 (Unlock Controls) with a value of 0 will unlock write access to the Drive Control register (#1)
only. Write commands to any other drive registers will not be allowed.
Writing to Register #48 (Unlock Controls) with a value equal to the drive’s programming password (P194) will unlock
the Drive Control register (#1) and all other writable drive registers. This enables the writing of any drive register
that is not designated as read-only.
NOTE
The factory default password is 225
Writing to Register #49 (Unlock Parameters) with a value equal to the drive’s programming password (P194) will
unlock all writable drive registers EXCEPT for the Drive Control register (#1). This enables the writing of any drive
register that is not designated as read-only, except for Register #1.
Once write access to the drive registers has been unlocked, it will remain unlocked until any of the following
conditions occur …
• Register #1 (Drive Control) is written with bit 1 (Lock Security) set
• A network watchdog time-out occurs (see Sections 7.4 and 7.5)
• The TB-13x terminal assigned to NETWORK ENABLE is de-asserted or is assigned to a function other than
NETWORK ENABLE.
Writing to Register #1 (Drive Control) with bit 1 (Lock Security) set will lock both Drive Controls and Parameters,
disabling the watchdog timer and preventing any further writing to drive registers (other than #48 and #49).
When the Lock Security (bit 1) is set, the drive drops out of NETWORK control and switches to the normal source of
control. If P100 = 3 (NETWORK ONLY) and the drive is running, the drive will also be stopped (according to P111).
16
Drive parameters and status registers can always be read, even when P100=2,5 and/or drive control and parameters
are locked.
Stop commands (STOP, QUICK STOP, INHIBIT) will always be accepted, even when network control is not enabled
or drive controls are locked.
CMVMB401C
Page 19

7.4 Network Watchdog Timer
The drive is equipped with a network communications watchdog timer. If the Modbus Master wishes to control the
drive (start, forward, reverse, etc.) it must first Unlock Controls (see Section 7.3). If the watchdog timer is enabled
(i.e. P426 is not set to IGNORE) and drive controls have been unlocked, the Master must periodically communicate
with the drive or a watchdog time-out will occur. The watchdog timer does not operate unless Controls have been
UNLOCKED via Register #48 and a time-out action (other than IGNORE) has been specified using parameter P426.
7.5 Watchdog Timer Controls
7.5.1 Watchdog Time-out Period (P425)
The maximum amount of time that should be allowed to pass between network messages to a specific drive will
vary from one network to the next. Therefore, we have made the watchdog time-out period user settable via Drive
Programming Parameter P425 (see 4.1 for details).
7.5.2 Watchdog Time-out Action (P426)
The appropriate action to be taken when a watchdog time-out occurs will also vary from one application to the
next. Therefore, we have provided five user selectable time-out actions which can be set via Drive Programming
Parameter P426 (see 4.1 for details).
Commissioning
If the Watchdog Timer has been disabled (i.e. P426 is set to IGNORE), Controls and/or Parameters must still be
unlocked in order to gain write access to the drive control and/or program parameter registers. However, there are
no longer any constraints on how often the Master must communicate with the drive.
CMVMB401C
17
Page 20

Network Applications
8 Typical Network Applications
8.1 Controlling the Drive
The following is the sequence of events to start the drive via the network:
1. Unlock the Drive Control register (#1) by writing a 0 (or the drive password) to Register #48.
2. Control drive operation with various commands to Register #1 (Start, Stop, Forward, Reverse, etc.). To start
the drive, a value of 0x0008 should be sent to Register #1.
3. If the watchdog timer is enabled, keep it from timing out by assuring that a read command (to any register) is
performed within the time specified by P426.
4. Lock Control when drive operations are complete by writing a 0x0002 (i.e. setting the Lock Security bit) to
Register #1.
NOTE
If P100 = 3 (NETWORK ONLY) and the drive is still running when the Lock Security bit is set, it
will be brought to a stop by the method specified in Drive Programming Parameter P111 (STOP).
5. The drive will return to its normal control mode.
8.2 Changing Drive Parameters
The following is the sequence of events for changing drive parameters:
1. Unlock write access to the drive parameters by writing the drive password (P194) to Register #49. The drive
will remain in its normal control mode.
2. Write to all necessary drive configuration or parameters registers.
3. The watchdog timer is not enabled when only the parameters have been unlocked so there is no need to send
repeated read commands to prevent it from timing out.
4. Lock Control when drive operations are complete by writing a 0x0002 (i.e. setting the Lock Security bit) to
Register #1.
8.3 Controlling Frequency, PID & Torque Setpoints
The following is the sequence of events for changing the drive frequency, PID or torque setpoint:
1. Configure the setpoint reference for NETWORK. The network can be set as the frequency, PID or torque setpoint
reference in any of the following ways:
a) Set P101 (Standard Reference Source) to NETWORK (06) and make sure that no AUTO source has been
selected.
b) Set P121…P123 to AUTO: NETWORK (07) and assert the corresponding TB-13x terminal.
c) Unlock drive controls and write a value of 0xC000 to Register #1 (see Section 9.2.1).
2. Unlock parameters by writing the drive password (P194) to Register #49. The drive will remain in its normal
control mode. The watchdog timer is not enabled when only parameters have been unlocked so there is no
need to send repeated read commands to prevent it from timing out.
18
3. Modify the appropriate NETWORK setpoint register.
Register #44 - Network Speed Command
Register #45 - Network PID Setpoint Command
Register #46 - Network Torque Command
4. Lock Control when drive operations are complete by writing a 0x0002 (i.e. setting the Lock Security bit) to
Register #1.
CMVMB401C
Page 21

9 Drive Registers
9.1 Data Internal vs. Display Representation
Register data passed across the Modbus communications link is always in INTERNAL units, although the drive itself
may show the information in some alternate DISPLAY units.
For register values with 1 or more decimal places, the actual value sent over the Modbus communications will be
the value times 10DP, where DP is the number of decimal places.
Example
An actual frequency of 34.3Hz would be sent over the network as 343 (34.3*101).
If the drive is setup to display the actual frequency in RPM using P178 = 29.17, the actual speed would be displayed
on the drive as 1000 (RPM) but would still be sent over the Modbus communications as 343 (or 01 57 hex).
9.2 Drive Control Registers
Table 5 describes the SMV Drive Con trol Registers in ascending order of SMV Register #. Registers #1 through #99
are reserved for configuration and control over the network and cannot be accessed via the drive’s local keypad.
Table 5: SMV Drive Control Registers
Drive Registers
Reg # Register Name Default
1 Drive Control (write only) See Sections 8.1 and 9.2.1
19 Drive Family Read only, drive family is 72
21 Drive Size Read only. See section 9.2.2
23 Drive Status Read only. See section 9.2.3
24 Command Frequency 0.0 Hz 0.0 … 500.0 Read only.
25 Actual Frequency 0.0 Hz 0.0 … 500.0 Read only.
26
27
28
29
30 Motor Voltage Read only. See P506 in drive manual
32 Total kWh (low word)
33 Total kWh (high word)
37 Actual PID setpoint 0.0 -999.0 … 3100.0 Read only. See section 9.2.12
38 PID Setpoint Command 0.0 -999.0 … 3100.0 Read only. See section 9.2.12
39 PID Feedback 0.0 -999.0 … 3100.0 Read only. See section 9.2.12
40 Keypad Speed Command 20.0 Hz P102 … P103
41 Keypad PID Setpoint Command 0.0 -999.0 … 3100.0 Read only. See section 9.2.12
42 Keypad Torque Command 100% 0.0 … 400.0
44 Network Speed Command 0.0 Hz P102 … P103 See Section 8.3
45 Network PID Setpoint Command 0.0 -999.0 … 3100.0 Read-only See Sections 8.3 and 9.2.12
46 Network Torque Command 0% 0.0 … 400.0 See Sections 8 3
48 Unlock Controls See Sections 7 3
49 Unlock Parameters See Sections 7 3
50 Parameter Version Read only. See section 9.2.13
Load (DH)
Run Status (DL)
Actual Direction (DH)
Control Mode (DL)
Speed Source (DH)
Auto/Manual (DL)
Present Fault (DH)
Commanded Direction (DL)
Range of
Adjustment
Important
Read only. See section 9.2.4
Read only. See section 9.2.5
Read only. See section 9.2.6
Read only. See section 9.2.7
Read only. See section 9.2.8
Read only. See section 9.2.9
Read only. See section 9.2.10
Read only. See section 9.2.11
Read only. See P511 in drive manual
CMVMB401C
19
Page 22

Drive Registers
Reg # Register Name Default
60 Total Run Time hours (low word)
61 Total Run Time hours (high word)
64 Total Power-on Hours (low word)
65 Total Power-on Hours (high word)
70
71 Network Controlled Analog Output 0.0% 0.0 … 100.0 See section 9.2.15
Network Controlled Digital Output
(TB14) + Relay
9.2.1 Drive Control - Register #1
Table 6 illustrates the Data High Byte and Data Low Byte format of Register #1, Drive Control.
Table 6: Drive Control - Register #1
Byte Bit Status
0 Quick Stop
1 Lock Security
2 STOP drive (P111)
3 Start drive
4 Inhibit
5 Network Reference Off
Data Low Byte
6 Set Reverse
7 Set Forward
8 Stop Forcing Manual Reference
9 Force Manual Reference (P101)
10 DC Braking ON
11 DC Braking OFF
12 Network Reference (enumeration):
0 Network Reference OFF (used only when bit 5 is set)
13
1 AUTO: Keypad
14
Data High Byte
2 AUTO: 0-10VDC
3 AUTO: 4-20mA
15
4…10 AUTO: Presets 1-7
11 AUTO: MOP
12 AUTO: Network
Range of
Adjustment
Important
Read only. See P540 in drive manual
Read only. See P541 in drive manual
0: de-energized, 1: energized
bit 9: TB-14 state
bit 10: Relay state
other bits are not used
See section 9.2.14
20
Drive Controls must be unlocked in order to write to this register (refer to section 7.3).
The appropriate bit for the desired action should be set to 1. For example, to stop the drive according to P111, bit 2
should be set (i.e. send 0004h). To start the drive, bit 3 should be set (i.e. send 0008h). Locking security (i.e. setting
bit 1) disables network drive control and the communications watchdog timer and prevents any further writing to
control or parameter registers.
NOTE
During each write to Register #1 only one action can be performed at one time. This means that either a single bit
(0-11) is set to perform a specific action OR the network reference is set using bits 12-15. The drive will respond to
INHIBIT, QUICK STOP and STOP bits even if more than 1 bit is set. But, if more than 1 bit is set and none of them is
either an INHIBIT, QUICK STOP or STOP bit, all bits will be ignored and the drive will respond with exception 04.
CMVMB401C
Page 23

9.2.2 Drive Size - Register #21
This register returns an index value that is associated with the voltage and power rating of the drive as shown in
Table 7.
Drive Registers
Table 7: Drive Size - Register #21
Index Input Voltage Power Rating
8 240 VAC, Single-Phase 0.33 HP (0.25 kW)
12
13 2 HP (1.5 kW)
14 3 HP (2.2 kW)
21
23 1 HP (0.75 kW)
24 1.5 HP (1.1 kW)
25 2 HP (1.5 kW)
26 3 HP (2.2 kW)
28 5 HP (4 kW)
29 7.5 HP (5.5 kW)
30 10 HP (7.5 kW)
42
44 1 HP (0.75 kW)
45 1.5 HP (1.1 kW)
46 2 HP (1.5 kW)
47 3 HP (2.2 kW)
49 5 HP (4 kW)
50 7.5 HP (5.5 kW)
51 10 HP (7.5 kW)
69
71 2 HP (1.5 kW)
72 3 HP (2.2 kW)
74 5 HP (4 kW)
75 7.5 HP (5.5 kW)
76 10 HP (7.5 kW)
91
92 0.5 HP (0.37 kW)
94 1 HP (0.75 kW)
240 VAC
Single or Three-Phase
240 VAC
Three-Phase
480 VAC
Three-Phase
600 VAC
Three-Phase
120 or 240 VAC
Single-Phase
1.5 HP (1.1 kW)
0.5 HP (0.37 kW)
0.5 HP (0.37 kW)
1 HP (0.75 kW)
0.33 HP (0.25 kW)
All unused Index values are reserved for future use
CMVMB401C
21
Page 24

9.2.3 Drive Status - Register #23
Table 8 lists the status of the bits in Register 23, Drive Status.
Drive Registers
Table 8: Drive Status - Register #23
Bit Status
0 0 = STOP
1 = RUN
1 0 = Quick Stop not active
1 = Quick Stop active
2 0 = Direction Forward
1 = Reverse (commanded direction)
3 0 = Direction Forward
1 = Reverse (actual direction)
4 0 = Network Reference not active
1 = Network Ref., sets active source
5 0 = Network Enable not active
1 = Network Enable active
6 0 = Open Loop (PID off)
1 = Closed Loop (PID on)
7 0 = Manual Source (P101)
1 = AUTO Source
8 Actual set point source:
0 = Keypad
9
1 = 0-10VDC
10
2 = 4-20 mA
3 = Preset #1
11
4 = Preset #2
5 = Preset #3
6 = Preset #4
7 = Preset #5
8 = Preset #6
9 = Preset #7
10 = MOP
11 = Network
12 Control:
0 = Keypad
1 = Terminal
13
2 = Remote Keypad
3 = Network
14 0 = Network Control DISABLED
1 = Network control ENABLED
15 0 = DC Braking not active
1 = DC Braking active
9.2.4 Load - Register #26
The high byte (DH) of register 26 provides the load as a percentage of the drives output current rating. Example:
This byte is 64 (one byte in hex) equivalent to 100 (decimal) = 100% drive load.
22
CMVMB401C
Page 25

9.2.5 Run Status - Register #26
The low byte (DL) of register 26 provides the Operational Status as listed in Table 9.
Drive Registers
Table 9: Operational Status - Register #26 DL
Value Description
0 Fault Lockout
1 Fault
2 Start Pending
3 IDE not done
4 Inhibit
5 STOP
6 Lower Transistors switching on
7 Run IDE
8 Run
9 Accel
10 Decel
11 Decel Override
12 DC Brake
13 Flying Restart
14 Slow Current Limit
15 Fast Current Limit
16 Sleep
9.2.6 Actual Direction - Register #27
The high byte (DH) of register 27 provides the actual rotational direction of the motor.
Table 10: Actual Rotational Direction - Register #27 DH
9.2.7 Control Mode - Register #27
The low byte (DL) of register 27 provides the Control Mode as listed in Table 11.
Value Control Mode Description
0 Local Start commands from drive keypad (P100 = 0 or 4)
1 Terminal Start commands from control wiring on drive terminal Strip (P100 = 1, 4 or 5)
2 Remote Keypad Only Start commands from optional remote keypad (P100 = 2 or 5)
3 Network Only Start commands from Network, but Network control is not active (P100 = 3)
4 Network Control Start commands from Network and Network control is active (P100 = 0, 1, 3 or 4)
Setting Direction
0 Forward
1 Reverse
Table 11: Control Mode - Register #27 DL
CMVMB401C
23
Page 26

Drive Registers
9.2.8 Speed Source - Register #28
The high byte (DH) of register 28 provides the Speed Command Source as listed in Table 12.
Table 12: Speed Source - Register #28 DH
9.2.9 Auto/Manual Reference - Register #28
Value Command Source
0 Keypad
1 0-10 VDC
2 4-20 mA
3 Preset #1
4 Preset #2
5 Preset #3
6 Preset #4
7 Preset #5
8 Preset #6
9 Preset #7
10 MOP
11 Network
12 JOG
The low byte (DL) of register 28 provides the Auto/Manual Reference as shown in Table 13.
Table 13: Auto/Manual Reference - Register #28 DL
Setting Reference
0 Manual
1 Auto
24
CMVMB401C
Page 27

9.2.10 Present Fault - Register #29
The high byte (DH) of register 29 provides the active Fault Message as listed in Table 14.
Value Fault Display Value Fault Display
0 No Fault 19 Internal Fault 3
1 TMP Output Fault 20 Internal Fault 5
2 Output (Transistor) Fault
3 Ground Fault
4 High Drive Temperature
5 Flying Start Fault
6 High DC Bus Voltage
7 Low DC Bus Voltage
8 Thermal Overload
9 OEM Fault
10 Illegal Setup
11 Dynamic Brake Over Temperature
12 Single Phase Fault
13 External Fault
14 Control Fault
15 Start Error
16 Incompatibility Fault
17 Internal Fault 1 (EPM)
18 Internal Fault 2
Drive Registers
Table 14: Present Fault
O
O
A
F HF
F PF
G
d
F UF
F 1
21 Internal Fault 5
22 Internal Fault 6
23 Internal Fault 7
24 Internal Fault 8
25 Internal Fault 9
26 Personality Fault
27 AD Offset Fault
28 Remote Keypad Lost
29 Assertion Level Fault
30 Internal Fault 4
31 Internal Fault 0
32 Follower Lost
33 ISO Comm Fault
34 SPI Time-out
35 Invalid Message Received
36 Network Time-out
F 9
F 12
J
A
F ntF
F nF
9.2.11 Commanded Direction - Register #29
The low byte (DL) of register 29 provides the Commanded Rotation Direction (Table 15).
Table 15: Commanded Rotation Direction - Register #29 DL
9.2.12 PID Registers
Registers 37, 38, 39, 41 and 45 are associated with the PID function and are sent over the modbus communication
network in signed internal units.
Example: An Actual PID setpoint value of 999.0 would be transmitted as 9990 (27 06 hex) where an actual PID
setpoint value of -999.0 would be transmitted as -9990 (D8 FA hex).
Setting Direction
0 Foward
1 Reverse
CMVMB401C
25
Page 28

Drive Registers
9.2.13 Parameter Version - Register #50
The Parameter Version identifies the parameter set for the current version of software. If the Parameter version is
different between two drives, it could indicate that a register has been added or deleted, a register’s min/max limits
have changed, a register’s function has been changed, or a register’s default value has been changed.
9.2.14 Network Controlled Digital Output - Register #70
To control the state of the relay or digital output (TB14), Drive Programming Parameter P140 and/or P142 must be
set to 25 (Network Controlled).
9.2.15 Network Controlled Analog Output - Register #71
To control the state of the analog output (TB30), Drive Programming Parameter P150 must be set to 09 (Network
Controlled).
26
CMVMB401C
Page 29

10 Programming Parameters
Registers #100-399 are programming parameters used to set up the drive for a specific application. For details
regarding these registers, refer to the SMV Operating Instructions (SV01) that accompanied the drive.
Registers #400-499 are communication specific programming parameters and will vary depending on which, if
any, of the optional communication modules is installed in the drive. Refer to Section 4.1 for details regarding the
communication registers associated with the RS-485 communication module.
Registers #500-599 are read-only drive diagnostic parameters, the details of which can also be found in the drive’s
operating instructions.
There is a direct correspondence between the Drive Programming Parameter numbers and the register numbers
used in the Modbus messages. For example, if you want to read Drive Programming Parameter P103 (Maximum
Frequency) over the Modbus network, you would read register #103.
10.1 Negative Number Transmission
Drive parameters P160, P161, P204, P205, P214, P215, P231, P232, P233, P522, and P523 are signed integer
values and could be negative (refer to the SMV Operating Instructions, SV01, for details on these parameters).
These registers are sent over the modbus communications in signed internal units. For example: A preset PID
setpoint value of 500.0 would be transmitted as 5000 (13 88 hex). A preset PID setpoint value of -500.0 would be
transmitted as -5000 (EC 78 hex).
Programming Parameters
10.2 Terminal and Protection Status (P530)
When a read command is issued over the Modbus network to Programming Parameter P530 (register #530), the
Terminal and Protection Status data returned is shown in Table 16.
Byte Bit Status
Table 16: Terminal Status
0 Unused
1 Unused
2 Protection Status
3 Fast Current Limit Status
4 Input TB-1 Status
Data Low Byte
Data High Byte
5 Unused
6 TB-13A Input Status
7 TB-13B Input Status
8 TB-13C Input Status
9 TB-14 Output Status
10 Relay Output Status
11 Charge Relay State
12 Assertion Level Switch State
13 Unused
14 Unused
15 Unused
CMVMB401C
27
Page 30

10.3 Keypad Status (P531)
When a read command is issued over the Modbus network to Programming Parameter P531 (register #531), the
Keypad Status data returned is shown in Table 17.
Programming Parameters
Table 17: Keypad Status
Byte Bit Status
0 UP Push-button State
1 DOWN Push-button State
2 MODE Push-button State
3 FWD/REV Push-button State
4 STOP Push-button State
Data Low Byte
Data High Byte
5 START Push-button State
6 Unused
7 Unused
8 Unused
9 Unused
10 Unused
11 Unused
12 Unused
13 Unused
14 Unused
15 Unused
28
CMVMB401C
Page 31

Troubleshooting and fault elimination
11 Troubleshooting and Fault Elimination
11.1 Faults
Table 18 lists faults relating to Modbus communication. Refer to section 9.2.10, Present Fault, for a list of drive faults.
Table 18: Communication Faults
Display Status Cause Remedy
n
n
11.2 Troubleshooting
Table 19 lists common communication errors and suggests methods to verify and correct the problem.
No communication from the drive Module is not initialized properly • Verify the module connection
Module to Drive communication
time out
Network Time-out Fault Drive under NETWORK control and network
Symptom Possible Cause Remedy
Connection between drive and module is not
Table 19: Communication Errors
Incorrect Modbus settings • Use P403 to reset Modbus parameters.
Improper wiring • Check wiring between the Modbus Network and
made.
communications have been lost.
Check cable and connection between module
and drive
See parameters P425, P426
• Check P400 and P402
• Verify P410 and P411, P412
communication module.
• Ensure that terminal block is properly seated.
• Check connection between module and drive.
Modbus write commands are ignored or
return exceptions.
Drive stops without obvious reason Modbus message monitoring time-out
“Network Enabled terminal is either open
or not configured.
occurred. The timeout reaction is set to
STOP, Quick stop or Inhibit..
Configure one of the input terminals (P121, P122, or
P123) to “Network Enabled” function (selection 9)
and close the corresponding contact.
Modify the setting of time-out time (P425) or the
reaction to the time-out (P426).
CMVMB401C
29
Page 32

Page 33

Lenze AC Tech Corporation
630 Douglas Street • Uxbridge, MA 01569 • USA
Sales: 800-217-9100 • Service: 508-278-9100
www.lenzeamericas.com
Document
CMVMB401C-en1
 Loading...
Loading...