

Page 1
HIGH-SPEED, HIGH-PERFORMANCE
INDUSTRIAL ROBOTS
The new R-Series Robots are setting the benchmark for all small to medium
duty industrial robots. The compact design, along with industry leading speed,
reach and work range make the R-Series Robots ideal for a wide range of
applications throughout a multitude of diverse industries.
Applications
RS10L
Payload 10 kg
Horizontal Reach 1,925 mm
Vertical Reach 3,478 mm
Repeatability ±0.06 mm
Maximum Speed 13,100 mm/s
• Assembly
• Dispensing
• Inspection
• Machine Tending
• Material Handling
• Material Removal
• Welding
ULTRA HIGH-SPEED OPERATION
The new lightweight arm along with high-output
high-revolution motors provide industry leading
acceleration and high-speed operation. The
acceleration rate automatically adjusts to suit the
payload and robot posture to deliver optimum
performance and the shortest cycle times.
WIDE WORK RANGE
In addition to extending the robot’s maximum
reach, the rotation range of each axis has also been
increased. The extended motion range translates to a
larger usable work area with minimal dead-space and
greater flexibility.
ENVIRONMENTAL PROTECTION
The R-Series incorporates a double-seal construction
on all axes and the electrical connections are water-
resistant offering an IP67 classification for wrist and
IP65 for the remaining axes. If a wash-down arm is
required, the entire robot can be provided as IP67.
HIGH TORQUE
High-output motors, combined with a rigid arm
construction, allow for superior wrist torque
and load capacity.
INTEGRATED FEATURES
Built-in pneumatic lines and internal wiring are
standard. Mounting pads and taps are provided to
allow easy installation of additional cabling, tubing or
equipment.
SPACE SAVING
The slim arm design requires very little floor space.
Multiple robots can be installed in “high-density”
applications without impeding performance.
EASY MAINTENANCE
The Kawasaki design requires very little maintenance
while boasting ndustry leading mean time between
failures (MTBF).
Page 2
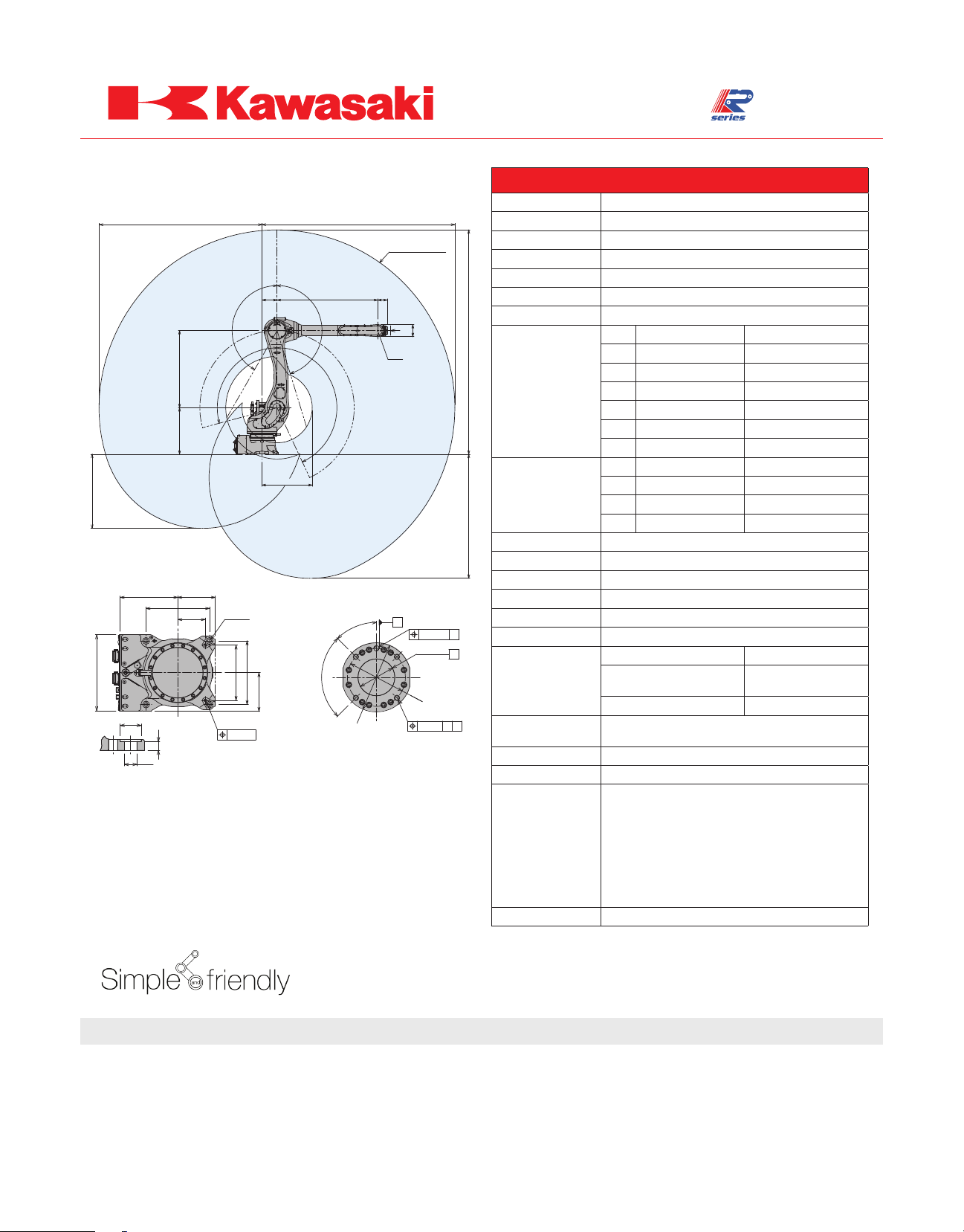
RS10L
MOTION RANGE & DIMENSIONS
1,9251,625
90°
JT2:
155°
1,005
JT3:
163°
45°
JT3:
150°
JT2:
739.3
276
330
Ø30
13
Ø18
INSTALLATION DIMENSIONS
770465
105°
163±0.1250
4-Ø18
120
2-Ø13H9
Ø0.06
±
500.5
276
240
168±0.1
Note: Detailed drawings are available upon request.
Ø75
VIEW A
Working range
based on point P
95150
A
P
Y
Ø6H7 Dp 6
4-M6 D p9
120
Ø0.04
Ø40H7
Dp6
Ø63
X
XXYØ0.3
(mm)
Type
Degrees of Freedom
Payload
Horizontal Reach
Vertical Reach
Repeatability
Maximum Speed
2,240
Work
Envelope
(degrees)
&
Maximum Speed
(degrees/s)
Wrist Load
Capacity
1,237.9
Motor(s)
Brakes
Hard Stops
Mass
Body Color
Installation
Environmental
Conditions
Protection
Classification
Built-in Harness
Built-in Utilities
Options
Controller
RS10L SPECIFICATIONS
Articulated
6 axes
10 kg
1,925 mm
3,478 mm
±0.06 mm
13,100 mm/s
Axis Motion Range Maximum Speed
JT1 ±180° 190°/s
JT2 +155° ~ - 105° 205°/s
JT3 +150° ~ -163° 210°/s
JT4 ±270° 400°/s
JT5 ±145° 360°/s
JT6 ±360° 610°/s
Axis Maximum Torque Moment of Inertia
JT4 22 N·m 0.7 kg·m
JT5 22 N·m 0.7 kg·m
JT6 10 N·m 0.2 kg·m
Brushless AC Servomotor
All axes
Adjustable mechanical stopper JT1/JT2/JT3
230 kg (excluding Options)
Kawasaki Standard
Floor, wall, ceiling
Temperature 0 ~ 45º C
Humidity
35 ~ 85 % (no dew, nor
frost allowed)
Vibration Less than 0.5 G
Wrist: IP67 Base: IP65 * Equivalent
Sensor harness 12 inputs, 24VDC, GND
Pneumatic piping (ø8 x 2 lines)
IP67 entire arm
JT1/JT2 motor cover
Linear track options
Riser (300/600 mm)
Base plate
Double/single solenoid valves (4 units max.)
Air cleaning equipment (filter, regulator, mist separator)
Limit switch JT1
E30 (see E Controller data sheet for specifications)
2
2
2
Assembly • Cutting • Dispensing • Grinding • Handling
Kawasaki Robotics (USA), Inc.
United States
28140 Lakeview Drive
Wixom, Michigan 48393
Phone (248) 446-4100
Email sales@kri-us.com
Canada
Phone (905) 304-7784
Mexico
Phone (52) 33-3110-1895
•
Inspection • Packaging • Painting • Palletizing • Polishing • Tending • Welding
www.kawasakirobotics.com
RS10L - REV04/11
© Kawasaki Robotics (USA), Inc. All rights reserved.
Technical specifications subject to change without notice.
 Loading...
Loading...