

Page 1
EUROPE
K-ROSET
Simulation Tool
Tools and Peripherals
Prospekt A4 K-Roset_E.indd 1 Prospekt A4 K-Roset_E.indd 1 09.01.13 11:4109.01.13 11:41
Page 2
K-ROSET
Planning reliability
for your Automation
K-ROSET – The Kawasaki Simulation Tool
Easy 3D Simulation
Î
Offline Programming
Î
Useful for different Robot applications
Î
Working out the system beforehand
Î
Cycle time Analysis and interference contour check on PC
Î
Automatic reachability study
Î
Robot training on PC
Î
and much more
K-Roset
»Functional Overview«
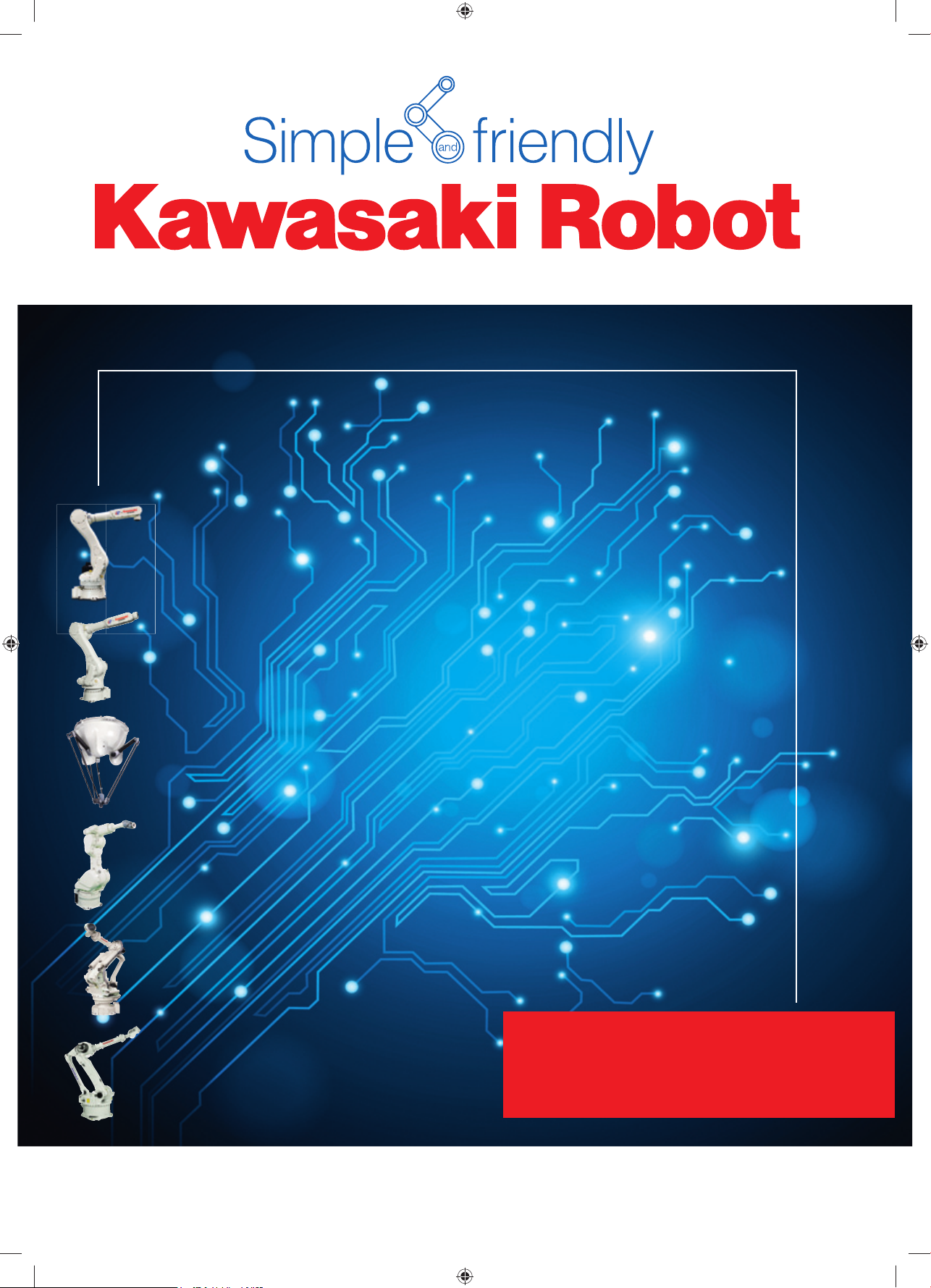
Optimize your Cycle time for spot welding processes
Train your colleagues at the target!
K-Roset provides simulation of the robot control
system in AS and Block programming languages.
User operations can be tested using virtual Teach
Pendent, with the same interaction as the actual robot.
K-Roset, the Kawasaki simulation tool, is a powerful
PC-Program, containing the functions of the Kawasaki
Robot Families to create real time simulations.
K-Roset implements the kinematic models and soft-
ware structure of Kawasaki Robot control system, to
provide an accurate simulation of the robot.
K-Roset is providing practical relevant results, which
correspond to real requirements.
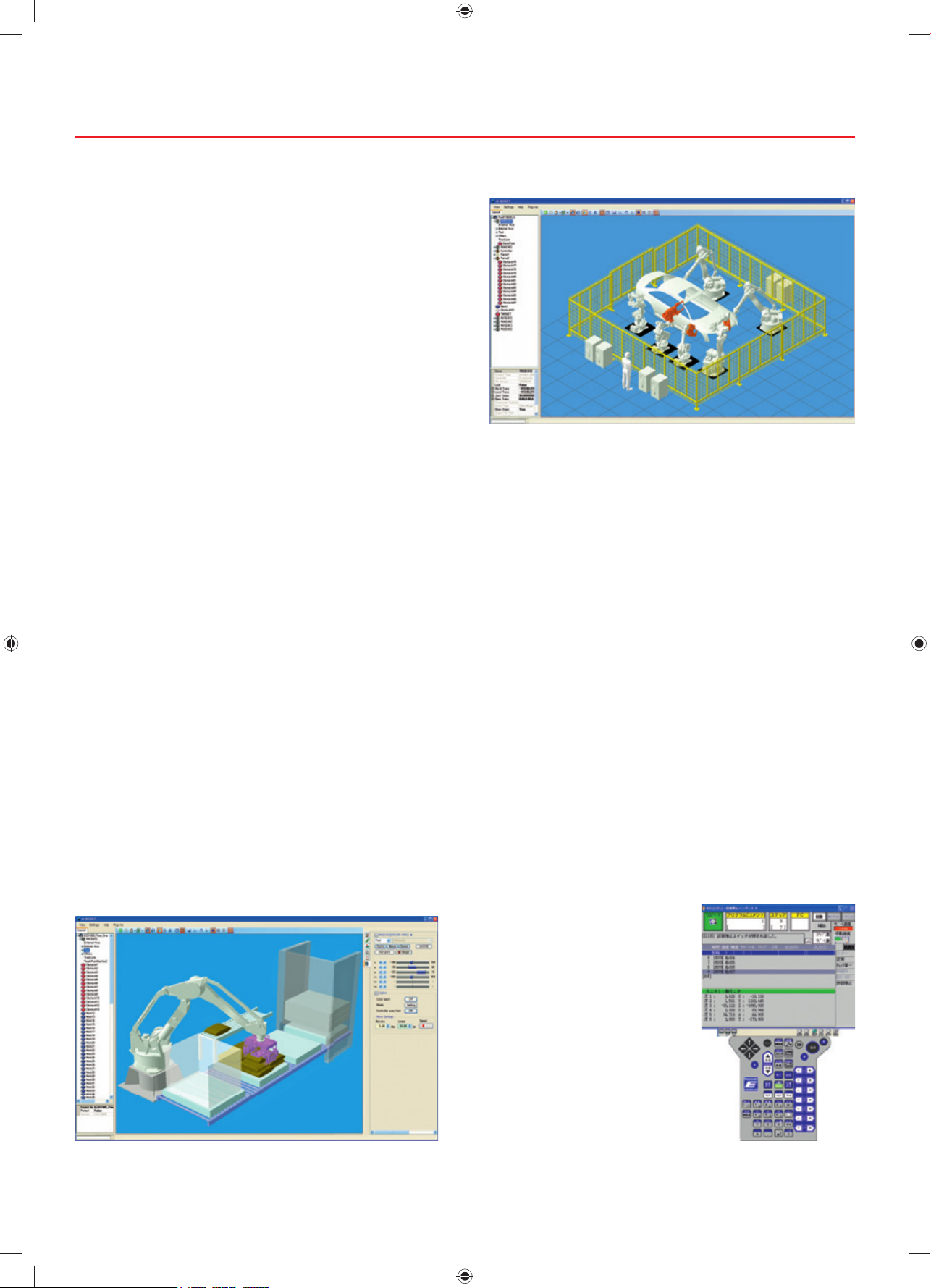
Make up your own project!
By loading external 3D Data the Cell with robot gripper
peripherals can be integrated and simulated. Signals
can be set and monitored and gripper and conveyor
movements can be simulated.
Realistic robot handling
by complete simulation of
the Teach Pendant
Realize your palletizing cell on the PC
2
Prospekt A4 K-Roset_E.indd 2 Prospekt A4 K-Roset_E.indd 2 09.01.13 11:4109.01.13 11:41
Page 3

Provide your customer with planning
reliability!
easily possible to realize presentation videos including
change of perspectives of the customer projects and
presents an animation of the application process.
The integrated video function makes it
Optimize your project course!
After removing interference contours, detecting the
right positioning and optimization of cycle time, the
result of the simulation can be adopted by the robot
Use the integrated special functions to simulate arc
welding processes
Realize automated paint movements
K-Roset Standard: handling
System requirements:
Supperted operating systems
CPU Intel Processor necessary
Memory required
Resolution 1024 x 768 or higher
Grafik supports Open GL NVidia min. 1 GB
Data media CD
Additional programms Adobe Reader from Version 7
Supported CAD Format STL
Windows XP Professional x86 SP3, x64 SP2, Windows Vista x86, x64 SP1
Windows 7 Proffesional x86, x64 SP1
min. 1 GB needed for Windows XP
min. 2 GB needed for Windows 7
3
Prospekt A4 K-Roset_E.indd 3 Prospekt A4 K-Roset_E.indd 3 09.01.13 11:4109.01.13 11:41
Page 4

Cautions to be taken to ensure safety
For those persons involved with the operation / service of your system, including Kawasaki Robot, they must
strictly observe all safety regulations at all times. They should carefully read the Manuals and other related
safety documents.
Products described in this catalogue are general industrial robots. Therefore, if a customer wishes to use the
Robot for special purposes, which might endanger operators or if the Robot has any problems, please contact
us. We will be pleased to help you.
Inquiries
Tel. +49-(0)2131 342 60
Kawasaki Robotics GmbH Deutschland
Headquarter Neuss
Sperberweg 29 ∙ 41468 Neuss
E-Mail: info@kawasakirobot.de ∙ www.kawasakirobot.de
Kawasaki Robotics (UK) Ltd.
Unit 4 Easter Court, Europa Boulevard, Westbrook
Warrington WA5 7ZB ∙ United Kingdom
E-Mail: sales@kawasakirobot.uk.com ∙ www.kawasakirobot.co.uk
Tel. +49-(0)2131 34 26 0
Fax +49-(0)2131 34 26 22
Fax +49-(0)2131 34 26 22
Tel. +44-(0)1925 71 30 00
Tel. +44-(0)1925 71 30 00
Fax +44-(0)1925 71 30 01
Fax +44-(0)1925 71 30 01
Agent
Printed in Germany September 2012 Catalogue Nr. GD125
Prospekt A4 K-Roset_E.indd 4 Prospekt A4 K-Roset_E.indd 4 09.01.13 11:4109.01.13 11:41
Materials and specification are subject to change without notice.
 Loading...
Loading...