

Page 1
EUROPE
3–60 kg Payload
Page 2
Flexibility
as a mainspring for developments
Further developments in the automation of modern production lines is
part of the development of Kawasaki Heavy Industries.
In 1969, Kawasaki Heavy Industries produced the rst Japanese-made
industrial robot. Since then, Kawasaki has consistently asserted its
pioneering role in the robotics industry. The experience that is gathered
benets users and is consistently used to improve the Kawasaki range of
products. For example, in the development of our small to medium-sized
robots in the “F Series”.
Each manipulator in the “F Series” is a logically designed workhorse that
combines a high working speed with a lightweight and slim arm construction. In addition, the modular design of the manipulators offers a high
exibility to optimise the reach or payload.
The robot arm of the “F Series”, as a unit with the current controller from
the “D Series” – gives Kawasaki customers the necessary exibility to re-
spond to permanent changes in working conditions with clear-cut concepts.
Page 3
Reduced cycle time
A weight-optimised construction, the use of high-speed motors and high-efciency gears permit an
optimisation of the maximum speed and acceleration.
Compact work cell layout
More space means higher costs. The small base sizes and slim arm prole (integrated user signals)
of the “F Series” robot arm allows a space-saving construction of working cells.
Arm conguration tailored to system requirements
Simple hardware and software modications allow an optimisation of “F Series” robots in terms of
reach or payload. A subsequent adjustment of the robot to different tasks poses no problems and can
be carried out at low cost.
Pre-dened congurations, for example for welding, clean rooms or DownWash also permit a sim-
plied adaptation to specic customer requirements.
Handling
Arc Welding
Page 4
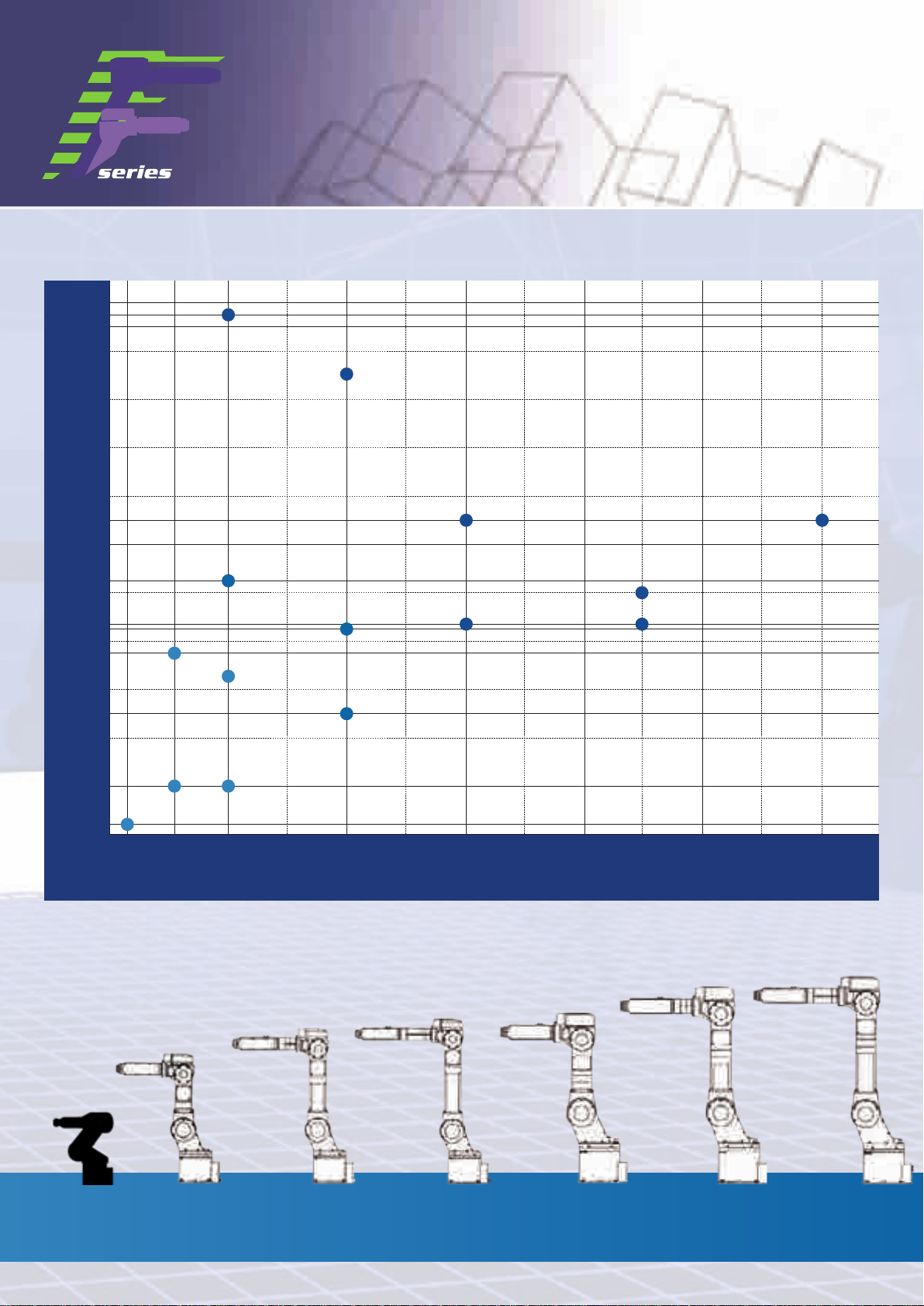
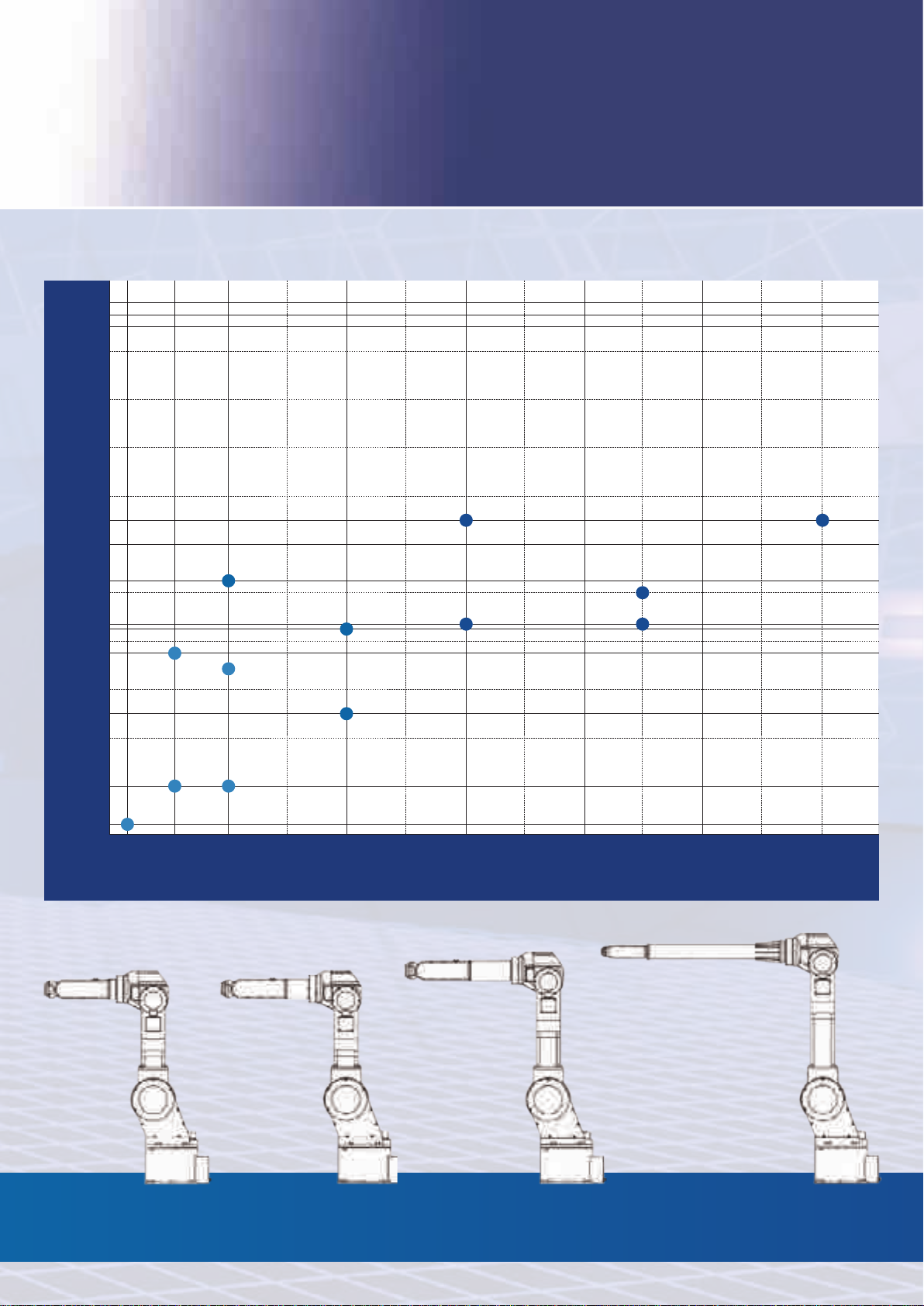
Installation, handling and gluing applications (FS Series)
3,000
2,950
2,950
2,800
2,600
2,400
2,200
2,000
1,800
1,600
Max. Reach* (mm)
1,550
1,400
1,350
1,300
1,200
1,670
FS06L
FS10X
FS10L
FS10E
FS20X
FS20N
FS20C
FS60LFS30L
FS45N
FS30N FS45C
1,000
620
600
* Distance from JT1-center to JT5-center.
FS03N
0
FS03N
FC03N
FS06N FS10C
6 10 15 20 25 30 35 40 45 50 55 603
FS06N FA06N
FC10C FC06N
FS10C
Max. Payload (kg)
FS10E FA06L
FC10E FA10N
FS06L
FC06L
FS20C
FC20C
FS20N
FA20N
FC20N
FS10L
FA10L
FC20N
Page 5
Specications
3,000
2,950
2,950
2,800
2,600
2,400
2,200
2,000
FC10L
FA10L
1,800
1,600
Max. Reach* (mm)
1,550
1,400
1,350
1,300
1,200
1,670
FC06L
FA06E
FC10E
FC06N
1,000
620
600
* Distance from JT1-center to JT5-center.
FC03N
0
FA06N
6
FC10C
10 15 20 25 30 35 40 45 50 55 603
FC20N
FA20N
FC20C
FC30L
FA30L
FC30N FC45C
Max. Payload (kg)
FC60L
FC45N
FS30N FS45C
FC30N FC45C
FS45N
FC45N
FS30L FA30L
FC60L FC30L
FS60L
FS10X
FS20X
Page 6

Standard Specifications
TYPE
FS03N
FC03N
FS06N
FC06N
FA06N
Degrees of Freedom
Maximum Reach*
¹
Maximum Payload
JT1
JT2
Maximum
JT3
Stroke
JT4
JT5
JT6
JT1
JT2
Maximum
JT3
Speed
JT4
JT5
JT6
JT4
Moment
JT5
JT6
JT4
Moment of
JT5
Inertia
JT6
Repeatability mm
Mass
Max. linear Speed
Recommended Controller*
620 mm
3 kg
± 160°
+150°~-60°
+120°~-150°
± 360°
± 135°
± 360°
360°/s
250°/s
225°/s
540°/s
225°/s
540°/s
5.8 N·m
5.8 N·m
2.9 N·m
0.12 kg·m²
0.12 kg·m²
0.03 kg·m²
± 0.05 mm
20 kg
6,000 mm/s
²
D70
1,000 mm
6 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 145°
± 360°
240°/s
200°/s
250°/s
430°/s
430°/s
720°/s
12.0 N·m
12.0 N·m
6.0 N·m
0.24 kg·m²
0.24 kg·m²
0.07 kg·m²
± 0.05 mm
165 kg
8,000 mm/s
D71/D40
Body Color
Installation
Temperature
Humidity
Vibration
Ambient
conditions
Others
The robot installing place should be free from inammable or corrosive liquid or gas, electric noise inter ference
Pneumatic Circuit
Degree of Protection
Max. Payload on Upper Arm
*¹: Distance between centre of axis JT1 and centre of axis JT5. *²: Please contact us separately as regards the controller for the FC Series.
*³: Not available for the FA Series *
IP54
4
: Not available for the FA Series.
FS06L
FC06L
FS10C
FC10C
FS10E
FC10E
FA06E
6 axes
1,550 mm
6 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 145°
± 360°
200°/s
140°/s
200°/s
360°/s
360°/s
600°/s
12.0 N·m
12.0 N·m
6.0 N·m
0.24 kg·m²
0.24 kg·m²
0.07 kg·m²
± 0.1 mm
170 kg
9,200 mm/s
D71/D40
1,000 mm
10 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 145°
± 360°
200°/s
140°/s
200°/s
360°/s
360°/s
600°/s
21.5 N·m
21.5 N·m
9.8 N·m
0.63 kg·m²
0.63 kg·m²
0.15 kg·m²
± 0.05 mm
165 kg
6,200 mm/s
D71/D40
1,450 mm
10 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 145°
± 360°
200°/s
140°/s
200°/s
360°/s
360°/s
600°/s
21.5 N·m
21.5 N·m
9.8 N·m
0.63 kg·m²
0.63 kg·m²
0.15 kg·m²
± 0.1 mm
170 kg
8,800 mm/s
D71/D40
Munsell 10GY9/1 equivalent
Floor or Ceiling installation ( Wall installation as option)
0 ~ 45 °C
35 ~ 85 % /(No dew, nor frost allowed.)
Less than 0.5G
Double solenoid valve: 1 Circuit
IP 65 equivalent (Wrist (axes 5 and 6) IP67)
Please contact us
FS10L
FC10L
FA10L
1,850 mm
10 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 145°
± 360°
160°/s
140°/s
160°/s
330°/s
330°/s
500°/s
21.5 N·m
21.5 N·m
9.8 N·m
0.63 kg·m²
0.63 kg·m²
0.15 kg·m²
± 0.1 mm
280 kg
9,400 mm/s
D40
³
*
4
*
FS20C
FC20C
1,300 mm
20 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 145°
± 360°
160°/s
140°/s
160°/s
330°/s
330°/s
500°/s
39.3 N·m
39.3 N·m
19.6 N·m
0.88 kg·m²
0.88 kg·m²
0.25 kg·m²
± 0.1 mm
275 kg
6,900 mm/s
D40
FS20N
FC20N
FA20N
1,650 mm
20 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 145°
± 360°
160°/s
140°/s
160°/s
330°/s
330°/s
500°/s
39.3 N·m
39.3 N·m
19.6 N·m
0.88 kg·m²
0.88 kg·m²
0.25 kg·m²
± 0.1 mm
280 kg
8,500 mm/s
D40
FS06N FS10E FS20NFS03N
Page 7

Specications
Standard Specifications
FS30N
FC30N
1,670 mm
30 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 130°
± 360°
160°/s
140°/s
160°/s
240°/s
240°/s
340°/s
176.4 N·m
176.4 N·m
98.0 N·m
7.2 kg·m²
7.2 kg·m²
3.3 kg·m²
± 0.15 mm
575 kg
8,900 mm/s
D42
The robot installing place should be free from inammable or corrosive liquid or gas, electric noise inter ference
*¹: Distance between centre of axis JT1 and centre of axis JT5. *²: Please contact us separately as regards the controller for the FC Series.
*³: Not available for the FA Series *
FS30L
FC30L
FA30L
2,100 mm
30 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 130°
± 360°
160°/s
140°/s
160°/s
240°/s
240°/s
340°/s
176.4 N·m
176.4 N·m
98.0 N·m
7.2 kg·m²
7.2 kg·m²
3.3 kg·m²
± 0.15 mm
585 kg
11,100 mm/s
D42
4
: Not available for the FA Series.
FS45C
FC45C
1,670 mm
45 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 130°
± 360°
160°/s
140°/s
160°/s
240°/s
240°/s
340°/s
176.4 N·m
176.4 N·m
98.0 N·m
10.8 kg·m²
10.8 kg·m²
5.0 kg·m²
± 0.15 mm
575 kg
8,900 mm/s
D42
Munsell 10GY9/1 equivalent
Floor or Ceiling installation ( Wall installation as option)
35 ~ 85 % /(No dew, nor frost allowed.)
Double solenoid valve: 1 Circuit
IP 65 equivalent (Wrist (axes 5 and 6) IP67)
FS45N
FC45N
1,800 mm
45 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 130°
± 360°
160°/s
140°/s
160°/s
240°/s
240°/s
340°/s
176.4 N·m
176.4 N·m
176.4 N·m
10.8 kg·m²
10.8 kg·m²
5.0 kg·m²
± 0.15 mm
580 kg
9,700 mm/s
D42
0 ~ 45 °C
Less than 0.5G
Please contact us
FS60L
FC60L
6 axes
2,100 mm
± 160°
+140°~-105°
+120°~-155°
± 270°
± 130°
± 360°
160°/s
140°/s
110°/s
180°/s
175°/s
260°/s
235.2 N·m
235.2 N·m
130.3 N·m
24.8 kg·m²
24.8 kg·m²
6.7 kg·m²
± 0.15 mm
585 kg
9,000 mm/s
*
60 kg
D42
³
4
*
FS10X FS20X
2,950 mm
10 kg
± 160°
+140°~-105°
+120°~-155°
± 270°
± 145°
± 360°
160°/s
140°/s
200°/s
300°/s
360°/s
600°/s
21.5 N·m
21.5 N·m
9.8 N·m
0.63 kg·m²
0.63 kg·m²
0.15 kg·m²
± 0.23 mm
580 kg
15,000 mm/s
D42
2,730 mm
+140°~-105°
+120°~-155°
39.3 N·m
39.3 N·m
19.6 N·m
0.88 kg·m²
0.88 kg·m²
0.25 kg·m²
± 0.5 mm
15,000 mm/s
20 kg
± 160°
± 270°
± 145°
± 360°
160°/s
140°/s
200°/s
300°/s
330°/s
500°/s
585 kg
D42
TYPE
Degrees of Freedom
Maximum Reach*
Maximum Payload
JT1
JT2
JT3
JT4
JT5
JT6
JT1
JT2
JT3
JT4
JT5
JT6
JT4
JT5
JT6
JT4
JT5
JT6
Repeatability mm
Mass
Max. linear Speed
Recommended Controller*
Body Color
Installation
Temperature
Humidity
Vibration
Others
Pneumatic Circuit
Degree of Protection
Max. Payload on Upper Arm
Maximum
Maximum
Moment
Moment of
¹
Stroke
Speed
Inertia
Ambient
²
conditions
FS30N FS45N FS60L
Page 8

Motion Range & Dimensions
Ø0.04
VIEW A
Ø6H7
+0.012
0
Depth 6
20
4–M6 Depth 8
Ø25H7 Depth 6
Ø40
Dimensions for Base
Y
X
VIEW B
A
JT6:720°
JT4:540°
JT2:245°
JT3:275°
JT1:320°
B
X
Y
JT5:290°
270
270
220
220
138
138
4–Ø18
71
199
R416
120°
155°
450
450
R234
105°
R452
366
R902
140°
1,002
138
R452
107
140
125
1,332
430
880
183
173171.5
12.5
50
4–M6 Depth 11
8
off-set:40
off-set:100
71
125
2–M12 Depth 18
50 50
125
222
802
160°
160°
100
R452
Point P
Working range based on point P
2–M12 Depth 18
Point P
105
157
106
±0.2
±0.2
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
B
B
Ø31.5
±0.2
Ø5H7
+0.012
0
Ø20H7
+0.021
0
4
C0.5
8
Ø40H8
-0.039
0
4–M5
JT6:720°
JT2:210°
JT5:270°
JT1:320°
JT4:720°
JT3:270°
B-B
A
VIEW A Sec.
CN
R500
R250
R250
R250
R250
R129
150°
60°
150°
120°
250
80
250 250
120
700
R620
160°
160°
152
170
130
152
170
130
4–Ø9
10
8
Ø14
Base
Dimensions for Base
FS03N
FC03N
FS06N
FC06N
FA06N
FS10C
FC10C
Page 9

Motion Range & Dimensions
Ø0.02
VIEW A
Dimensions for Base
Ø40
Ø25H7 Depth 6
4–M6 Depth 8
20
Ø6H7
+0.012
0
Depth 6
JT2:245°
JT5:290°
JT3:275°
JT6:720°
JT4:540°
A
X
Y
Z
X
Y
JT1:320°
off-set:100
off-set:40
R601
160°
160°
100
1,080
650430
220
220
138
+0.2
138
+0.2
4–Ø18
140°
105°
157
140
107
192
106
199 183
270
270
171.5 173
125
Air Outlet 2–PT1/8
Sensor Harness Outlet
700
1,781
1,2511,451
R1,351
R701
769
439
R701
R643
R334
Ø0.02
VIEW A
Ø6H7
+0.012
0
Depth 6
20
4–M6 Depth 8
Ø25H7 Depth 6
Ø40
JT5:290°
Y
X
B
JT1:320°
JT2:245°
JT6:720°
A
VIEW B
Y
X
JT3:275°
JT4:540°
105°
846
1,881
10
160°
160°
222
125
5050
2–M12 Depth 18
125
7171
8
4–M6 Depth 11
50
12.5
171.5 173
R701
183
430
140°
125
140
107
R1,451
R701
R701
off-set:40
off-set:100
R691
1,351
465
1,551
R358
270
270
220
220
138
138
4–Ø18
700
750
1,180
155°
120°
199
Point P
Working range based on point P
2-M12 Depth 18
Point P
105
157
106
Dimensions for Base
±0.2
±0.2
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
FS10E
FC10E
FS06L
FC06L
FA06E
Page 10

Motion Range & Dimensions
Ø0.04
VIEW A
Ø40H7 Depth 6
4–M6 Depth 8
Ø6H7
Depth 6
Ø63
31.5
Y
X
B
A
Z
VIEW B
JT6:720°
JT4:540°
JT1:320°
JT3:275°
JT2:245°
Y
JT5:290°
X
85
340
4–Ø18
173
276
85
150
276
2–M12 Depth 24
340
105°
140°
R703
R703
R703
123
off-set:60
2,073
745
R1,503
1,653
340
1,353
R399
160
65
off-set:150
120°
R700
150
65
170
2–M12 Depth
257
570
800
1,370
4–M6 Depth
12
13013.6
74
220
189.5197
173
160°
160°
700120
155°
243
Point P
Working range based on point P
Point P
185
130
+0.012
0
±0.2
±0.2
Dimensions for Base
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
Ø0.02
VIEW A
Ø40H7 Depth 6
4–M6 Depth 8
Ø6H7
Depth 6
Ø63
31.5
Dimensions for Base
Y
X
Y
X
B
A
Z
VIEW B
JT6:720°
JT4:540°
JT1:320°
JT3:275°
JT2:245°
JT5:290°
340
4-Ø18
173
276
276
340
173
8585
150
2–M12 Depth 24
R1,153
R553
R523
105°
123
off-set:60
R553
1,303
R314
R553
140°
443
139
1,723
160
65
off-set:150
1,003
150
65
170
257
570
1,170
4–M6 Depth 11
12
13013.6
74
220
189.5197
160°
160°
120
600
550
155°
120°
243
Point P
Working range based on point P
2–M12 Depth 24
Point P
183
130
+0.012
0
±0.2
±0.2
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
FS20C
FC20C
FS20N
FC20N
FA20N
Page 11

Motion Range & Dimensions
Ø0.02
VIEW A
Ø40H7 Depth 6
4–M6 Depth 8
Ø6H7
Depth 6
Ø63
31.5
Dimensions for Base
+0.012
0
±0.2
±0.2
Y
X
B
A
VIEW B
JT6:720°
JT4:540°
JT1:320°
JT3:275°
JT2:245°
Y
X
JT5:290°
85
340
4-Ø18
173
276
85
150
276
2–M12 Depth 24
340
R802
140°
105°
R1,702
R800
123
2,272922
R802
R802
1,852
465
65
off-set:150
1,552
150
65
170
2–M12 Depth 24
257
R441
570
4–M6 Depth 11
12
130
13.6
74
220
189.5197
173
160°
160°
120
900
1,470
800
off-set:60
160
155°
120°
243
Point P
Working range based on point P
Point P
183
130
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
Ø0.02
VIEW A
Ø50H7 Depth 6
40
Ø80
6-M8 Depth 14
Ø8H7
+0.015
0
Depth 8
±0.2
±0.2
VIEW B
JT5:260°
Y
X
Z
JT6:720°
A
JT4:540°
JT1:320°
JT3:275°
B
JT2:245°
X
Y
210
2–M16 Depth 25
105105
720165
160°
160°
140°
105°
off-set:150
185
322
R726
150
1,376
R1526
R726
658
1,676
R726
R428
253
160
2,206
R682
off-set:90
62
210
2-M16 Depth 25
62
200
155°
120°
20
800
680
1,480
65
272
275 222
10
6–M6 Depth 9
80
277
Point P
Working range based on point P
Point P
210
65
40
300
40
300
8–Ø18
218
40
430
430
218
40
Dimensions for Base
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
FS10L
FC10L
FA10L
FS30N
FC30N
FS45C
FC45C
Page 12

Motion Range & Dimensions
Ø0.02
VIEW A
Ø50H7 Depth 6
40
Ø80
6–M8 Depth 14
Ø8H7
+0.015
0
Depth 8
Dimensions for Base
±0.2
±0.2
B
A
JT6:720°
JT1:320°
JT3:275°
Y
X
JT5:260°
JT2:245°
JT4:540°
Z
VIEW B
X
Y
120°
277
off-set:90
150
155°
20
off-set:150
185
322
6–M6 Depth 9
1,630
R901
680
160°
160°
160
R511
2–M16 Depth 25
210
105105
950
165 1,000
R1,954
272
222275
65
10
105°
140°
R1,004
1,804
80
R1,004
1,052
R1,004
2,634
210
570
62 62
2–M16 Depth 25
200
210
65
40
300
40
300
8–Ø18
218
40
430
430
218
40
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
Ø0.02
VIEW A
Dimensions for Base
Ø50H7 Depth 6
40
Ø80
6–M8 Depth 14
Ø8H7
+0.015
0
Depth 8
X
Z
JT6:720°
A
JT4:540°
B
JT1:320°
Y
JT5:260°
JT2:245°
JT3:275°
VIEW B
X
Y
322
2–M16 Depth 25
62
150
62
210
R752
382
R446
185
200
160
off-set:150
788
off-set:90
R855
R855
2,335
1,5051,805
140°
105°
R1,655
6–M6 Depth 9
80
10
65
275 222
272
R855
1,480
680 800
160°
160°
165
850
20
155°
120°
277
210
2–M16 Depth 25
105105
Point P
Working range based on point P
Point P
210
65
40
300
40
300
8–Ø18
218
40
430
430
218
40
±0.2
±0.2
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
FS45N
FC45N
FS30L
FC30L
FA30L
FS60L
FC60L
Page 13

Motion Range & Dimensions
Ø0.04
VIEW A
Ø6H7
Depth 6
20
4–M6 Depth 8
Ø25H7 Depth 6
Ø40
+0.012
0
±0.2
±0.2
Dimensions for Base
X
VIEW B
Y
A
JT6:720°
JT4:540°
JT2:245°
JT3:275°
JT1:320°
B
X
Y
JT5:290°
2–M16 Depth 25
62
210
62
1,307
1,865
R2,802
R1,438
R1,702
3,482
185
200
105 105
210
2–M16 Depth 25
8–Ø18
430
off-set:150
off-set:90
R896
140°
105°
R1,702
R1,702
680
272
1,100
277
160°
160°
6–M6 Depth 9
120°
155°
150
322
Point P
Working range based on point P
Point P
157
106
2,6522,952
275 222
20 65 65
10 80
1,780
100 1,700
40
300
40
218
40
300
40
430
218
Air Outlet 2–PT1/8
Sensor Harness Outlet
Base
Air Inlet PT 3/8
120 1,600
160°
160°
Z
2,403
2,730
JT5:290°
Point P
Working range based on point P
Y
3,2331,650
A
132
Point P
JT6:720°
2–M16 Depth 25
200
6262
210
R888
R2,553
140°
155°
185
322
120°
1,168
JT4:540°
185
X
X
JT1:320°
275
222
6–M6 Depth 9
80
10
1,630
950680
272
277
JT2:245°
B
Dimensions for Base
20
65 65
off-set:90
150
105°
R1,603
R1,343
R1,603
off-set:150
R1,603
JT3:275°
105 105
2–M16 Depth 25
VIEW B
210
Ø0.02
6H7
Depth 6
+0.012
0
4–M6 Depth 8
31.5
Ø40H7 Depth 6
VIEW A
Ø63
218
40
40
40
300
430
430
300
±0.2
218
±0.2
Y
40
8–Ø18
FS10X
FS20X
Page 14

Ergonomic operation
The Teach Pendant (TP) is a combination of control
keyboard and an easy-read, 6.4 inch colour LCD touchscreen. A new hardware structure for the TP reduces the
key response time and the ergonomic arrangement of
the keys helps the operator achieve optimised inputs and
programming. The workow is optimised and the TP becomes an ergonomic user platform for operating the robot
Special software
combined with standards
Application Software Modules facilitate programming for
a wide range of applications such as palletising, handling,
spot welding, gluing and arc welding. The simplied block
programming and Kawasaki‘s high level robot language
(AS-language) provides enormous possibilities for innovative movement- and process control. Using the available
options – such as servo-welding, network support and
a high-performance visualisation system – a platform is
created to nd exible solutions for even the most complex
of applications.
High performance through
modern control technology
Modular and exible
control design
• Connection of peripheral equipment
Standard I/O connections and a number of eld bus inter-
faces such as Interbus, Probus, CC-Link and DeviceNet
etc. are available as interfaces to the peripheral equipment. The peripheral equipment is connected directly
and permits the system‘s high exibility.
Furthermore, K-Logic (integrated software PLC) allows
the creation of a highly complex Integrated system at a
minimum cost.
• Network communication
The controller also supports network communication via
Ethernet to communicate with a host computer and for
an easy upload and download of the programs to be run.
Furthermore, the status of the robot can be monitored
per remote access via an Intranet/Internet connection.
• Extension with additional axes
A further two axes can be integrated in the standard
controller without any problems and without an additional housing. Three or more additional axes are available
by selecting SSCNET-compatible motors. This allows
multi-axial systems to be easily congured to match the
customer‘s requirements.
A RISC, 64-bit high-speed dual processor provides the
computing power. The use of a fully digitally controlled
servo-system has signicantly improved operating performance, cycle time and path accuracy.
The controller is of course fully downwardly compatible.
This means that the D controller can be integrated in
existing old systems with no problems.
Teach Pendant
• Large LCD colour monitor with
touchscreen functions.
• Ergonomically arranged cursor keys.
he key layout has been optimised
• T
with respect to the frequency of use
by the operator.
• Deadman‘s switch with three positions
on rear.
User-friendly design
A reduction of the controller‘s internal wiring and the use
of modular assemblies facilitates servicing and ensures
shorter working times when repairing or replacing parts
with no long and costly downtimes.
What‘s more, supporting service functions such as data
storage help the user locate the causes of existing problems.
Page 15

SIDE VIEW
FRONT VIEWSIDE VIEW
FRONT VIEW
SIDE VIEW
REAR VIEW
600550
27236500
4701,200
ÇqÇdÇoÇdÇ`ÇsÇsÇdÇ`ÇbÇg
ÇgÇnÇkÇc
ÇdÇqÇqÇnÇq
ÇqÇdÇrÇdÇs
ÇoÇnÇvÇdÇq
ÇlÇnÇsÇnÇq
ÇdÇqÇqÇnÇq
Å@ÇoÇnÇvÇdÇq
ÇbÇnÇmÇsÇqÇnÇk
ÇrÇsÇ`ÇqÇs
ÇbÇxÇbÇkÇd
ÇqÇtÇm
520
D-series Controller
Specifications
MODEL
Structure
Number of controlled axes
Servo motor
Position detector
Drive System
Programming
Coordinate systems
Types of motion control
Ext. operatin signals
Genral
purpose
Input signals
signals
Output signals
Memory capacity
External Storage
Commu-
PC, Network, etc.
nication
Fieldbus
interface
Teach Pendant
Operation Panel
Teach Pendant
Cable
length
Robot Controller
Dimensions (WxDxH)
Weight (kg)
Power requirements
Robot dedicated grounding
Ambient temperature/humidity
Color
D 70/71 D 40 D 42
self standing main enclosure
6 6 + additional axes 6 + additional axes
AC servo motor
Absolute encoder
Full digital servo system
Block teaching or AS language
Joint, Base, Tool
Joint, Linear, Circular interpolated motions
External motor power off, External Hold
32 channels (including dedicated signals)
32 channels (including dedicated signals)
1 MB (including system memory), approx. 5,000 steps
PCMCIA card slot
RS232C
Ethernet
6.4“ TFT color LCD with touch panel, 640x480 VGA, Emergency stop SW,
Teach Lock SW, Deadman SW, 58 hard keys (Robot manual ope. keys, Cursor keys, etc.)
Basic switches: Motor Power ON, Cycle start, Error Reset, Emergency stop, RUN/HOLD, TEACH/REPEAT, etc.
10m (optional: 5m, 15m, 20m, 25m, 30m)
10m (optional: 5m, 15m, 20m, 25m, 30m, 35m, 40m)
272/308mm x 500mm x 520mm
30kg
AC 200/220V ± 10%,
50/60 Hz, 1 Phase, 5,4 KVA
600mm x 550mm x 1,200mm
155kg
AC 380/400/415/440V ± 10%, 50/60 Hz, 3-phase
5,9 KVA
600mm x 550mm x 1,200mm
190kg
11,4 KVA
D-class ground (Ground for Robot), Max. leakage current 100mmA
0-45°C, 35-85% RH without condensation
Munsell 10GY9/1 equivalent
Input/Output signals
Memory capacity
Fieldbus
Options
Coordinate system
External View & Dimensions
D70
D71
64/96/128 channels (including didicated signals)
4 MB (including system memory), approx. 35,000 steps
CC-Link, DeviceNet, Probus-DP, Interbus-S, ControlNet
Fixed tool point
D40
D42
Page 16

Cautions to be taken to ensure safety
For those persons involved with the operation/service of your system, including Kawasaki Robot, they must
strictly observe all safety regulations at all times. They should carefully read the manuals and other related
safety documents.
Products described in this catalogue are general industrial robots. Therefore, if a customer wishes to use the
Robot for special purposes, which might endanger operators or if the robot has any problems, please contact
us. We will be pleased to help you.
Be careful as photographs illustrated in this catalogue are frequently taken after removing safety fences and
other safety devices stipulated in the safety regulations from the Robot operation system.
Inquiries
Kawasaki Robotics GmbH
Sperberweg 29 · 41468 Neuss · Germany Tel.
e-mail: info@kawasakirobot.de · www.kawasakirobot.de Fax
Munich Ofce:
K
onrad-Zuse-Platz 12 · 81829 München · Germany Tel.
e-mail: info@kawasakirobot.de · www.kawasakirobot.de Fax
+49-(0)21313426-0
+49-(0)21313426-22
+49-(0)89454591-30
+49-(0)89454591-45
Kawasaki Robotics (UK) Ltd.
Units 6&7 Easter Court, Europa Boulevard, Westbrook
W
arrington WA5 5ZB · United Kingdom Tel.
e-mail: info@kawasakirobot.uk.com · www.kawasakirobot.uk.com Fax
French Ofce:
P
arc d‘activites de la clef de Saint-Pierre
Rond Point de l‘Epine des champs
78996 Elancourt Cedex, France Tel.
e-mail: info@kawasakirobot.fr · www.kawasakirobot.fr Fax
Agent
+44-(0)1925713000
+44-(0)1925713001
+33-(0)130689522
+33-(0)130689139
printed in Germany Jan. 2008 � No. GE108 Materials and specications are subject to change without notice.
 Loading...
Loading...