

Page 1
Intel® Core™2 Extreme Processor
Δ
QX6800
Extreme Processor QX9770
Thermal and Mechanical Design Guidelines
— For the Intel® Core™2 Extreme Processor QX6800Δ B3
Stepping and the Intel® Core™2 Extreme Processor
QX9770Δ C0 Stepping
March 2008
and Intel® Core™2
Δ
Document Number: 316854-002
Page 2
LGA775 Socket Heatsink Loading
THIS DOCUMENT AND RELATED MATERIALS AND INFORMATION ARE PROVIDED “AS IS” WITH NO WARRANTIES, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO ANY IMPLIED WARRANTY OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE,
NON-INFRINGEMENT OF INTELLECTUAL PROPERTY RIGHTS, OR ANY WARRANTY OTHERWISE ARISING OUT OF ANY PROPOSAL,
SPECIFICATION, OR SAMPLE. INTEL ASSUMES NO RESPONSIBILITY FOR ANY ERRORS CONTAINED IN THIS DOCUMENT AND HAS NO
LIABILITIES OR OBLIGATIONS FOR ANY DAMAGES ARISING FROM OR IN CONNECTION WITH THE USE OF THIS DOCUMENT. Intel
products are not inten ded for use in medical, life saving, life sustaining, critical control or safety systems, or in nuclear facility
applications.
Intel Corporation may have patents or pend ing patent applications, trademarks, copyrights, or other intellectual property rights
that relate to the presented subject matter. The furnishing of documents and other materials and information does not provide
any license, express or implied, by estoppel or otherwise, to any such patents, trademarks, copyrights, or othe r intellectual
property rights.
Intel may make changes to specificatio ns and product descriptions at any time, without notice. Intel accepts no duty to
update specifications or product descriptions with information. Designers must not rely on the absence or characteristics of any
features or instructions marked “reserved” or “undefined.” Intel reserves these for future definition and shall have no
responsibility whatso ever for conflicts or inc ompatibilities arising from future changes to them.
The hardware vendor remains solely responsible for the design, sale and fu nctionality of its product, including any liability arising
from product infringem ent or product warran ty. Intel provides this information for customer ’s convenience only. Use at your own
risk. Intel accepts no liability for results if customer chooses at its discretion to implement these methods within its business
operations. Intel makes no representations or warranties regarding the accuracy or completeness of the information provided.
Copies of documents which have an order number and are referenced in this document, or other Intel literature, may be
obtained by calling 1 -800-548-4725, or by visiting
The Intel
errors known as errata, which may cause the product to deviate from published specifications. Current characterized errata are
available on request.
Not all specified units of this p rocessor support Thermal Monitor 2 (TM2). See the Processor Spec Finder at
http://processorfinder.intel.com or contact your Intel representative for more information.
∆
family, not across differe nt processor families. Over time processor numbers will increment based on changes in clock, speed,
cache, FSB, or other features, and increments are not intended to represent proportional or quantitative increases in any
particular feature. Current roadmap processor number progression is not necessarily representative of future roadmaps. See
www.intel.com/products/processor_number for details.
Intel, Pentium, Core, and the Int el logo are trademarks of Intel Corporation in the U.S. and other countries.
*Other names and brands may be claimed as the property of others.
Copyright © 2007–2008 Intel Corporation
®
Core™2 Extreme Processor QX6800 and Intel® Core™2 Extreme Processor QX9770 may contain design defects or
Intel processor numbers are not a measure of performance. Processor numbers differentiate features within each processor
http://www.intel.com .
2 Thermal and Mechanical Design Guidelines
Page 3
Contents
1 Introduction.....................................................................................................9
1.1 Document Goals and Scope .....................................................................9
1.1.1 Importance of Thermal Management............................................9
1.1.2 Document Goals........................................................................9
1.1.3 Document Scope.....................................................................10
1.2 References..........................................................................................11
1.3 Definition of Terms...............................................................................11
2 Processor Thermal/Mechanical Information.........................................................13
2.1 Mechanical Requirements ......................................................................13
2.1.1 Processor Package ...................................................................13
2.1.2 Heatsink Attach ......................................................................15
2.1.2.1 General Guidelines....................................................15
2.1.2.2 The Pump Assembly Clip Load Requirement..................15
2.1.2.3 Additional Guidelines.................................................16
2.2 Thermal Requirements..........................................................................16
2.2.1 Processor Case Temperature.....................................................16
2.2.2 Thermal Profile .......................................................................17
2.2.3 T
2.3 Heatsink Design Considerations..............................................................19
2.3.1 Heatsink Size..........................................................................20
2.3.2 Package IHS Flatness...............................................................20
2.3.3 Thermal Interface Material........................................................21
2.4 System Thermal Solution Considerations .................................................21
2.4.1 Chassis Thermal Design Capabilities...........................................21
2.4.2 Improving Chassis Thermal Performance ....................................21
2.4.3 Summary...............................................................................22
2.5 System Integration Considerations..........................................................22
..................................................................................18
CONTROL
3 Thermal Metrology..........................................................................................23
3.1 Characterizing Cooling Performance Requirements....................................23
3.1.1 Example ................................................................................25
3.2 Processor Thermal Solution Performance Assessment................................26
3.3 Local Ambient Temperature Measurement Guidelines.................................26
3.4 Processor Case Temperature Measurement Guidelines...............................29
4 Thermal Management Logic and Thermal Monitor Feature.....................................31
4.1 Processor Power Dissipation ...................................................................31
4.2 Thermal Monitor Implementation............................................................31
4.2.1 PROCHOT# Signal...................................................................32
4.2.2 Thermal Control Circuit ............................................................32
4.2.3 Thermal Monitor 2...................................................................33
4.2.4 Operation and Configuration .....................................................34
4.2.5 On-Demand Mode ...................................................................35
4.2.6 System Considerations.............................................................35
4.2.7 Operating System and Application Software Considerations...........36
Thermal and Mechanical Design Guidelines 3
Page 4

LGA775 Socket Heatsink Loading
4.2.8 THERMTRIP# Signal.................................................................36
4.2.9 Cooling System Failure Warning ................................................36
4.2.10 Digital Thermal Sensor.............................................................37
4.2.11 Platform Environmental Control Interface (PECI)..........................38
5 Intel Thermal/Mechanical Reference Design Information.......................................39
5.1 Validation Results for the ATX Reference Design .......................................39
5.1.1 Heatsink Performance..............................................................40
5.1.2 Acoustics ...............................................................................40
5.1.3 Altitude..................................................................................41
5.1.4 Reference Heatsink Thermal Validation.......................................41
5.1.5 Fan Motor Performance ............................................................42
5.1.6 Pump Motor Performance .........................................................43
5.2 Environmental Reliability Testing............................................................44
5.2.1 Structural Reliability Testing .....................................................44
5.2.1.1 Random Vibration Test Procedure................................44
5.2.1.2 Shock Test Procedure................................................45
5.2.2 Power Cycling.........................................................................46
5.2.3 Reliability Testing....................................................................46
5.2.3.1 Tubing Material Selection...........................................48
5.2.3.2 Reservoir Sizing .......................................................48
5.2.3.3 Reliability Test Results...............................................50
5.2.4 Recommended BIOS/CPU/Memory Test Procedures......................51
5.3 Material and Recycling Requirements ......................................................52
5.4 Safety Requirements ............................................................................52
5.5 Geometric Envelope for Intel Reference ATX Thermal Mechanical Design......52
5.6 Reference Attach Mechanism..................................................................54
5.7 Socket and Voltage Regulation Cooling Strategy .......................................55
6 Intel® Quiet System Technology (Intel® QST) .....................................................57
6.1 Intel® Quiet System Technology Algorithm...............................................57
6.1.1 Output Weighting Matrix ..........................................................58
6.1.2 Proportional-Integral-Derivative (PID)........................................58
6.2 Board and System Implementation of Intel® Quiet System Technology .......60
6.3 Intel® QST Configuration & Tuning..........................................................62
6.4 Fan Hub Thermistor and Intel® QST ........................................................62
Appendix A LGA775 Socket Heatsink Loading ......................................................................63
A.1 LGA775 Socket Heatsink Considerations..................................................63
A.2 Metric for Heatsink Preload for ATX/uATX Designs Non-Compliant with Intel®
Reference Design .................................................................................
64
A.2.1 Heatsink Preload Requirement Limitations...................................64
A.2.2 Motherboard Deflection Metric Definition.....................................64
A.2.3 Board Deflection Limits ............................................................66
A.2.4 Board Deflection Metric Implementation Example.........................66
A.2.5 Additional Considerations .........................................................67
A.2.5.1 Motherboard Stiffening Considerations.........................68
A.3 Heatsink Selection Guidelines.................................................................68
Appendix B Heatsink Clip Load Metrology............................................................................69
B.1 Overview ............................................................................................69
B.2 Test Preparation...................................................................................69
4 Thermal and Mechanical Design Guidelines
Page 5

B.2.1 Heatsink Preparation................................................................69
B.2.2 Typical Test Equipment ............................................................72
B.3 Test Procedure Examples.......................................................................72
B.3.1 Time-Zero, Room Temperature Preload Measurement...................73
B.3.2 Preload Degradation under Bake Conditions ................................73
Appendix C Thermal Interface Management.........................................................................75
C.1 Bond Line Management.........................................................................75
C.2 Interface Material Area..........................................................................75
C.3 Interface Material Performance...............................................................75
Appendix D Case Temperature Reference Metrology..............................................................77
D.1 Objective and Scope .............................................................................77
D.2 Supporting Test Equipment....................................................................78
D.3 Thermal Calibration and Controls............................................................79
D.4 IHS Groove .........................................................................................79
D.5 Thermocouple Attach Procedure .............................................................82
D.5.1 Thermocouple Conditioning and Preparation................................82
D.5.2 Thermocouple Attachment to the IHS.........................................83
D.5.3 Solder Process........................................................................88
D.5.4 Cleaning and Completion of Thermocouple Installation..................91
D.6 Thermocouple Wire Management............................................................95
Appendix E Legacy Fan Speed Control................................................................................97
E.1 Thermal Solution Design .......................................................................97
E.1.1 Determine Thermistor Set Points ...............................................97
E.1.2 Minimum Fan Speed Set Point...................................................98
E.2 Board and System Implementation .........................................................99
E.2.1 Choosing Fan Speed Control Settings .........................................99
E.2.1.1 Temperature to Begin Fan Acceleration......................100
E.2.1.2 Minimum PWM Duty Cycle........................................ 102
E.3 Combining Thermistor and Digital Thermal sensor Control........................103
E.4 Interaction of Thermal Profile and T
CONTROL
.............................................103
Appendix F BTX System Thermal Considerations................................................................ 109
Appendix G Mechanical Drawings .....................................................................................113
Appendix H Intel Enabled Reference Solution Information.................................................... 123
Thermal and Mechanical Design Guidelines 5
Page 6

Figures
LGA775 Socket Heatsink Loading
Figure 1. Package IHS Load Areas.....................................................................13
Figure 2. Processor Case Temperature Measurement Location ...............................17
Figure 3. Example Thermal Profile.....................................................................18
Figure 4. Processor Thermal Characterization Parameter Relationships....................24
Figure 5. Locations for Measuring Local Ambient Temperature, Active Heatsink........27
Figure 6. Locations for Measuring Local Ambient Temperature, Liquid-Cooling Heat
Exchanger.........................................................................................
28
Figure 7. Locations for Measuring Local Ambient Temperature, Passive Heatsink......28
Figure 8. Concept for Clocks under Thermal Monitor Control..................................33
Figure 9. Thermal Monitor 2 Frequency and Voltage Ordering................................34
Figure 10. T
for Digital Thermometer ........................................................37
CONTROL
Figure 11. Random Vibration PSD......................................................................44
Figure 12. Shock Acceleration Curve..................................................................45
Figure 13. The Assembly Cumulative Mass Loss Data in Continuous Operation
Test at 50 ºC and 1450 RPM..............................................................
49
Figure 14. Thermal Resistance Curve for Liquid Loss of Reservoir...........................49
Figure 15. Reservoir Location............................................................................50
Figure 16. Intel® ALCT Reference Design Major Components.................................53
Figure 17. Heat Exchanger Fan Combination Foot Print View .................................53
Figure 18. Structure to Motherboard Interface.....................................................54
Figure 19. Diagram of Location of Heat Exchanger VR and Socket Airflow Cooling
Feature...........................................................................................
55
Figure 20. CPU Maximum Current Draw for Heat Exchanger Fan Speed...................56
Figure 21. Intel® Quiet System Technology Overview...........................................58
Figure 22. PID Controller Fundamentals .............................................................59
Figure 23. Intel® Quiet System Technology Platform Requirements ........................60
Figure 24. Example Acoustic Fan Speed Control Implementation............................61
Figure 25. Digital Thermal Sensor and Thermistor................................................62
Figure 26. Board Deflection Definition................................................................65
Figure 27. Example: Defining Heatsink Preload Meeting Board Deflection Limit ........67
Figure 28. Load Cell Installation in Machined Heatsink Base Pocket – Bottom View ...70
Figure 29. Load Cell Installation in Machined Heatsink Base Pocket – Side View .......71
Figure 30. Preload Test Configuration.................................................................71
Figure 31. Omega Thermocouple.......................................................................79
Figure 32. 775-LAND LGA Package Reference Groove Drawing...............................80
Figure 33. IHS Groove on the 775-LAND LGA Package..........................................81
Figure 34. IHS Groove Orientation Relative to the LGA775 Socket..........................81
Figure 35. Inspection of Insulation on Thermocouple............................................82
Figure 36. Bending the Tip of the Thermocouple..................................................83
Figure 37. Securing Thermocouple Wires with Kapton* Tape Prior to Attach ............83
Figure 38. Thermocouple Bead Placement...........................................................84
Figure 39. Position Bead on the Groove Step.......................................................85
Figure 44. Detailed Thermocouple Bead Placement ..............................................85
Figure 41. Third Tape Installation......................................................................86
Figure 42. Measuring Resistance between Thermocouple and IHS ..........................86
Figure 43. Applying Flux to the Thermocouple Bead.............................................87
Figure 44. Cutting Solder.................................................................................87
Figure 45. Positioning Solder on IHS..................................................................88
Figure 46. Solder Station Setup ........................................................................89
Figure 47. View Through Lens at Solder Station...................................................90
Figure 48. Moving Solder back onto Thermocouple Bead.......................................90
6 Thermal and Mechanical Design Guidelines
Page 7

Figure 49. Removing Excess Solder ...................................................................91
Figure 50. Thermocouple placed into groove.......................................................92
Figure 51. Removing Excess Solder ...................................................................92
Figure 52. Filling Groove with Adhesive..............................................................93
Figure 53. Application of Accelerant...................................................................93
Figure 54. Removing Excess Adhesive from IHS ..................................................94
Figure 55. Finished Thermocouple Installation.....................................................94
Figure 56. Thermocouple Wire Management........................................................95
Figure 57. Thermistor Set Points .......................................................................98
Figure 58. Example Fan Speed Control Implementation........................................99
Figure 59. Fan Speed Control..........................................................................100
Figure 60. Temperature Range = 5 °C ............................................................. 101
Figure 61. Temperature Range = 10 °C............................................................ 102
Figure 62. Digital Thermal Sensor and Thermistor..............................................103
Figure 63. FSC Definition Example................................................................... 105
Figure 64. System Airflow Illustration with System Monitor Point Area Identified.... 110
Figure 65. Thermal sensor Location Illustration ................................................. 111
Figure 66. ATX/µATX Motherboard Keep-out Footprint Definition and Height
Restrictions for Enabling Components - Sheet 1..................................
114
Figure 67. ATX/µATX Motherboard Keep-out Footprint Definition and Height
Restrictions for Enabling Components - Sheet 2..................................
115
Figure 68. ATX/µATX Motherboard Keep-out Footprint Definition and Height
Restrictions for Enabling Components - Sheet 3..................................
116
Figure 69. Balanced Technology Extended (BTX) Thermal Module Keep Out
Volumetric – Sheet 1......................................................................
117
Figure 70. Balanced Technology Extended (BTX) Thermal Module Keep Out
Volumetric – Sheet 2......................................................................
118
Figure 71. Balanced Technology Extended (BTX) Thermal Module Keep Out
Volumetric – Sheet 3......................................................................
119
Figure 72. Balanced Technology Extended (BTX) Thermal Module Keep Out
Volumetric – Sheet 4......................................................................
120
Figure 73. Balanced Technology Extended (BTX) Thermal Module Keep Out
Volumetric – Sheet 5......................................................................
121
Figure 74. Intel Advanced Liquid Cooling Technology Assembly............................122
Tables
Table 1. Heatsink Inlet Temperature of Intel Reference Thermal Solutions..............21
Table 2. Intel Liquid Cooled Reference Design Performance (ALCT).........................40
Table 3. Acoustic Results.................................................................................. 40
Table 4. Fan Electrical Performance Requirements ...............................................42
Table 5. Pump Electrical Performance Requirements.............................................43
Table 6. The Reliability Test Matrix ....................................................................47
Table 7. The Weekly Loss Rate of Different Tubing Materials..................................48
Table 8. Reliability Test Results.........................................................................51
Table 9. Maximum Estimated Processor Current Capability at 35 ºC External
Ambient.............................................................................................
Table 10. Board Deflection Configuration Definitions ............................................65
Table 11. Typical Test Equipment......................................................................72
Table 12. FSC Definitions...............................................................................104
Table 13. ATX FSC Settings............................................................................106
Table 14. BTX Fan Speed Control Settings........................................................106
Table 15. Intel Representative Contact for Licensing Information ......................... 123
Table 16. Intel Reference Component ATX Thermal Solution Providers.................. 123
Thermal and Mechanical Design Guidelines 7
56
Page 8
LGA775 Socket Heatsink Loading
Revision History
Revision
Number
-001 • Initial release April 2007
-002 • Added Intel® Core™2 Extreme processor QX9770 C0 Stepping
• Edits throughout
Description Revision Date
March 2008
§
8 Thermal and Mechanical Design Guidelines
Page 9
Introduction
1 Introduction
1.1 Document Goals and Scope
1.1.1 Importance of Thermal Management
The objective of thermal management is to ensure that the temperatures of all
components in a system are maintained within their functional temperature range.
Within this temperature range, a component is expected to meet its specified
performance. Operation outside the functional temperature range can degrade
system performance, cause logic errors or cause component and/or system damage.
Temperatures exceeding the maximum operating limit of a component may result in
irreversible changes in the operating characteristics of this component.
In a system environment, the processor temperature is a function of both system and
component thermal characteristics. The system level thermal constraints consist of
the local ambient air temperature and airflow over the processor as well as the
physical constraints at and above the processor. The processor temperature depends
in particular on the component power dissipation, the processor package thermal
characteristics, and the processor thermal solution.
All of these parameters are affected by the continued push of technology to increase
processor performance levels and packaging density (more transistors). As operating
frequencies increase and packaging size decreases, the power density increases while
the thermal solution space and airflow typically become more constrained or remains
the same within the system. The result is an increased importance on system design
to ensure that thermal design requirements are met for each component, including
the processor, in the system.
1.1.2 Document Goals
Depending on the type of system and the chassis characteristics, new system and
component designs may be required to provide adequate cooling for the processor.
The goal of this document is to provide an understanding of these thermal
characteristics and discuss guidelines for meeting the thermal requirements imposed
on single processor systems using the Intel
Stepping and Intel
The concepts given in this document are applicable to any system form factor.
Specific examples used will be the Intel enabled reference solution for ATX/uATX
systems. See the applicable BTX form factor reference documents to design a thermal
solution for that form factor.
®
Core™2 Extreme processor QX9770 C0 Stepping.
®
Core™2 Extreme processor QX6800 B3
Thermal and Mechanical Design Guidelines 9
Page 10

1.1.3 Document Scope
This design guide supports the following processor:
• Intel® Core™2 Extreme processor QX6800 B3 Stepping
• Intel® Core™2 Extreme processor QX9770 C0 Stepping
In this document when a reference is made to “the processor” it is intended that this
includes all the processors supported by this document. If needed for clarity, the
specific processor will be listed.
LGA775 Socket Heatsink Loading
In this document, when a reference is made to “the datasheet”, the reader should
refer to the Intel
Processor Q9000 Series Datasheet and Intel
QX6000
Δ
Sequence and Intel® Core™2 Quad Processor Q6000Δ Sequence Datasheet,
®
Core™2 Extreme Processor QX9000 Series and Intel® Core™2 Quad
®
Core™2 Extreme Quad-Core Processor
as appropriate. If needed for clarity the specific processor datasheet will be
referenced.
Chapter
2 of this document discusses package thermal mechanical requirements to
design a thermal solution for the processor in the context of personal computer
applications. Chapter
3 discusses the thermal solution considerations and metrology
recommendations to validate a processor thermal solution.
Chapter
4 addresses the benefits of the processor’s integrated thermal management
logic for thermal design.
Chapter
Advanced Liquid Cooling Technology) for the processor. Chapter 6 discusses the
implementation of Intel
5 gives information on the Intel reference thermal solution called ALCT (Intel
®
Quiet System Technology.
The physical dimensions and thermal specifications of the processor that are used in
this document are for illustration only. Refer to the datasheet for the product
dimensions, thermal power dissipation and maximum case temperature. In case of
conflict, the data in the datasheet supersedes any data in this document.
10 Thermal and Mechanical Design Guidelines
Page 11
Introduction
1.2 References
Material and concepts available in the following documents may be beneficial when
reading this document.
Document Location
Intel® Core™2 Extreme Processor QX9000 Series and Intel®
Core™2 Quad Processor Q9000 Series Datasheet
Intel® Core™2 Extreme Quad-Core Processor QX6000Δ
Sequence and Intel
Datasheet
LGA775 Socket Mechanical Design Guide
Fan Specification for 4-wire PWM Controlled Fans http://www.formfactors.org/
ATX Thermal Design Suggestions http://www.formfactors.org/
microATX Thermal Design Suggestions http://www.formfactors.org/
Balanced Technology Extended (BTX) System Design Guide http://www.formfactors.org/
®
Core™2 Quad Processor Q6000Δ Sequence
1.3 Definition of Terms
Term Description
The measured ambient temperature locally surrounding the processor. The ambient
T
T
Ψ
Ψ
Ψ
T
A
TC
T
E
T
S
C-MAX
LIQUID
CA
CS
SA
temperature should be measured just upstream of a passive heatsink or at the fan
inlet for an active heatsink.
The case temperature of the processor, measured at the geometric center of the
topside of the IHS.
The ambient air temperature external to a system chassis. This temperature is usually
measured at the chassis air inlets.
Heatsink temperature measured on the underside of the heatsink base, at a location
corresponding to
The maximum case temperature as specified in a component specification.
Working fluid temperature as it leaves the pump (or enters the heat exchanger).
Case-to-ambient thermal characterization parameter (psi). A measure of thermal
solution performance using total package power. Defined as (T
Power.
Note: Heat source must be specified for
Case-to-sink thermal characterization parameter. A measure of thermal interface
material performance using total package power. Defined as (T
Power.
Note: Heat source must be specified for
Sink-to-ambient thermal characterization parameter. A measure of heatsink thermal
performance using total package power. Defined as (T
Note: Heat source must be specified for
T
http://w.ww.intel.com/design/pro
cessor/datashts/318726.htm
http://developer.intel.com/design
/processor/datashts/315592.htm
http://intel.com/design/
Pentium4/guides/ 302666.htm
.
C
– TA) / Total Package
C
Ψ measurements.
– TS) / Total Package
C
Ψ measurements.
– TA) / Total Package Power.
S
Ψ measurements.
Thermal and Mechanical Design Guidelines 11
Page 12
LGA775 Socket Heatsink Loading
Term Description
Thermal Interface Material: The thermally conductive compound between the heatsink
TIM
and the processor case. This material fills the air gaps and voids, and enhances the
transfer of the heat from the processor case to the heatsink.
P
MAX
TDP
IHS
LGA775 Socket
The maximum power dissipated by a semiconductor component.
Thermal Design Power: a power dissipation target based on worst-case applications.
Thermal solutions should be designed to dissipate the thermal design power.
Integrated Heat Spreader: a thermally conductive lid integrated into a processor
package to improve heat transfer to a thermal solution through heat spreading.
The surface mount socket designed to accept the processors in the 775–Land LGA
package.
ACPI
Bypass
Thermal
Monitor
TCC
DTS
T
DIODE
FSC
T
CONTROL_BASE
T
CONTROL_OFFSET
T
CONTROL
PWM
Health Monitor
Component
BTX
TMA
T
Advanced Configuration and Power Interface.
Bypass is the area between a passive heatsink and any object that can act to form a
duct. For this example, it can be expressed as a dimension away from the outside
dimension of the fins to the nearest surface.
A feature on the processor that attempts to keep the processor die temperature within
factory specifications.
Thermal Control Circuit: Thermal Monitor uses the TCC to reduce die temperature by
lowering effective processor frequency when the die temperature has exceeded its
operating limits.
Digital Thermal Sensor: Processor die sensor temperature defined as an offset from
the onset of PROCHOT#.
Temperature reported from the on-die thermal diode.
Fan Speed Control: Thermal solution that includes a variable fan speed which is
driven by a PWM signal and uses the digital thermal sensor as a reference to change
the duty cycle of the PWM signal.
Constant from the processor datasheet that is added to the T
results in the value for
T
CONTROL
CONTROL_OFFSET
Value read by the BIOS from a processor MSR and added to the T
results in the value for
is the specification limit for use with the digital thermal sensor.
CONTROL
T
CONTROL
CONTROL_BASE
that
that
Pulse width modulation is a method of controlling a variable speed fan. The enabled
4 wire fans use the PWM duty cycle % from the fan speed controller to modulate the
fan speed.
Any standalone or integrated component that is capable of reading the processor
temperature and providing the PWM signal to the 4 pin fan header.
Balanced Technology Extended
Thermal Module Assembly. The heatsink, fan and duct assembly for the BTX thermal
solution
§
12 Thermal and Mechanical Design Guidelines
Page 13
Processor Thermal/Mechanical Information
2 Processor Thermal/Mechanical
Information
2.1 Mechanical Requirements
2.1.1 Processor Package
The processors covered in the document are packaged in a 775-Land LGA package
that interfaces with the motherboard via a LGA775 socket. Refer to the datasheet for
detailed mechanical specifications.
The processor connects to the motherboard through a land grid array (LGA) surface
mount socket. The socket contains 775 contacts arrayed about a cavity in the center
of the socket with solder balls for surface mounting to the motherboard. The socket is
named LGA775 socket. A description of the socket can be found in the LGA775 Socket
Mechanical Design Guide.
The package includes an integrated heat spreader (IHS) that is shown in
illustration only. Refer to the processor datasheet for further information. In case of
conflict, the package dimensions in the processor datasheet supersedes dimensions
provided in this document.
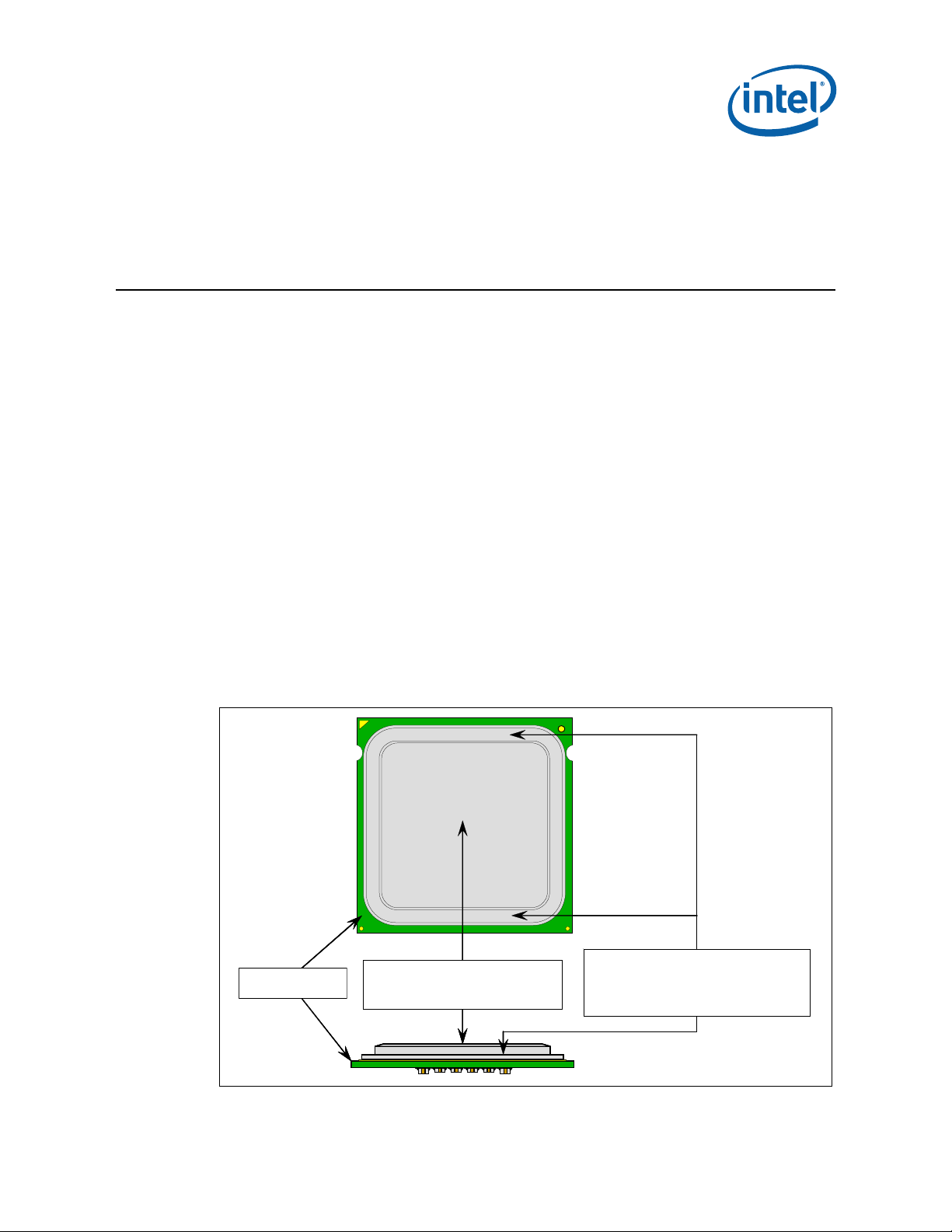
Figure 1. Package IHS Load Areas
Top Surface of IHS
Substrate
Substrate
Top Surface of IHS
to install a heatsink
to install a heatsink
Figure 1 for
IHS Step
IHS Step
to interface with LGA775
to interface with LGA775
Socket Load Plate
Socket Load Plate
Thermal and Mechanical Design Guidelines 13
Page 14

LGA775 Socket Heatsink Loading
The primary function of the IHS is to transfer the non-uniform heat distribution from
the die to the top of the IHS, out of which the heat flux is more uniform and spread
over a larger surface area (not the entire IHS area). This allows more efficient heat
transfer out of the package to an attached cooling device. The top surface of the IHS
is designed to be the interface for contacting a heatsink.
The IHS also features a step that interfaces with the LGA775 socket load plate, as
described in LGA775 Socket Mechanical Design Guide. The load from the load plate is
distributed across two sides of the package onto a step on each side of the IHS. It is
then distributed by the package across all of the contacts. When correctly actuated,
the top surface of the IHS is above the load plate allowing proper installation of a
heatsink on the top surface of the IHS. After actuation of the socket load plate, the
seating plane of the package is flush with the seating plane of the socket. Package
movement during socket actuation is along the Z direction (perpendicular to
substrate) only. Refer to the LGA775 Socket Mechanical Design Guide for further
information about the LGA775 socket.
The processor package has mechanical load limits that are specified in the processor
datasheet. The specified maximum static and dynamic load limits should not be
exceeded during their respective stress conditions. These include heatsink
installation, removal, mechanical stress testing, and standard shipping conditions.
• When a compressive static load is necessary to ensure thermal performance of the
thermal interface material between the heatsink base and the IHS, it should not
exceed the corresponding specification given in the processor datasheet.
• When a compressive static load is necessary to ensure mechanical performance, it
should remain in the minimum/maximum range specified in the processor
datasheet
• The heatsink mass can also generate additional dynamic compressive load to the
package during a mechanical shock event. Amplification factors due to the impact
force during shock must be taken into account in dynamic load calculations. The
total combination of dynamic and static compressive load should not exceed the
processor datasheet compressive dynamic load specification during a vertical
shock. For example, with a 0.550 kg [1.2 lb] heatsink, an acceleration of 50G
during an 11 ms trapezoidal shock with an amplification factor of 2 results in
approximately a 539 N [117 lbf] dynamic load on the processor package. If a
178 N [40 lbf] static load is also applied on the heatsink for thermal performance
of the thermal interface material the processor package could see up to a
717 N [156 lbf]. The calculation for the thermal solution of interest should be
compared to the processor datasheet specification.
No portion of the substrate should be used as a load- bearing surface.
Finally, the processor datasheet provides package handling guidelines in terms of
maximum recommended shear, tensile and torque loads for the processor IHS relative
to a fixed substrate. These recommendations should be followed in particular for
heatsink removal operations.
14 Thermal and Mechanical Design Guidelines
Page 15

Processor Thermal/Mechanical Information
2.1.2 Heatsink Attach
2.1.2.1 General Guidelines
There are no features on the LGA775 socket to directly attach a heatsink: a
mechanism must be designed to attach the heatsink directly to the motherboard. In
addition to holding the heatsink in place on top of the IHS, this mechanism plays a
significant role in the robustness of the system in which it is implemented, in
particular:
• Ensuring thermal performance of the thermal interface material (TIM) applied
between the IHS and the heatsink. TIMs based on phase change materials are
very sensitive to applied pressure: the higher the pressure, the better the initial
performance. TIMs, such as thermal greases, are not as sensitive to applied
pressure. Designs should consider a possible decrease in applied pressure over
time due to potential structural relaxation in retention components.
• Ensuring system electrical, thermal, and structural integrity under shock and
vibration events. The mechanical requirements of the heatsink attach mechanism
depend on the mass of the heatsink and the level of shock and vibration that the
system must support. The overall structural design of the motherboard and the
system have to be considered when designing the heatsink attach mechanism.
Their design should provide a means for protecting LGA775 socket solder joints.
The Intel ALCT reference design attach mechanism described in Section.
5.6
Note: Package pull-out during mechanical shock and vibration i s constrained by the LGA775
socket load plate (refer to the LGA775 Socket Mechanical Design Guide for further
information).
2.1.2.2 The Pump Assembly Clip Load Requirement
The attach mechanism for the pump assembly developed to support the processor
should create a static preload on the package between 18 lbf and 70 lbf throughout
the life of the product for designs compliant with the Intel reference design
assumptions:
• 72 mm x 72 mm mounting hole span (refer to
The minimum load is required to protect against fatigue failure of socket solder joint in
temperature cycling.
It is important to take into account potential load degradation from creep over time
when designing the pump assembly clip to the required minimum load. This means
the initial preload at beginning of life of the product may be significantly higher than
the minimum preload that must be met throughout the life of the product. For
additional guidelines on mechanical design, in particular on designs departing from the
reference design assumptions, refer to
For clip load metrology guidelines, refer to
Appendix A.
Appendix B.
Figure 66)
Thermal and Mechanical Design Guidelines 15
Page 16

2.1.2.3 Additional Guidelines
In addition to the general guidelines given above, the heatsink attach mechanism for
the processor should be designed to the following guidelines:
• Holds the heatsink in place under mechanical shock and vibration events and
applies force to the heatsink base to maintain desired pressure on the thermal
interface material. Note that the load applied by the heatsink attach mechanism
must comply with the package specifications described in the processor datasheet.
One of the key design parameters is the height of the top surface of the processor
IHS above the motherboard. The IHS height from the top of board is expected to
vary from 7.517 mm to 8.167 mm. This data is provided for information only, and
should be derived from:
⎯ The height of the socket seating plane above the motherboard after reflow,
given in the LGA775 Socket Mechanical Design Guide with its tolerances
⎯ The height of the package, from the package seating plane to the top of the
IHS, and accounting for its nominal variation and tolerances that are given in
the corresponding processor datasheet.
• Engages easily, and if possible, without the use of special tools. In general, the
heatsink is assumed to be installed after the motherboard has been installed into
the chassis.
• Minimizes contact with the motherboard surface during installation and actuation
to avoid scratching the motherboard.
LGA775 Socket Heatsink Loading
2.2 Thermal Requirements
Refer to the datasheet for the processor thermal specifications. The majority of
processor power is dissipated through the IHS. There are no additional components,
e.g., BSRAMs, which generate heat on this package. The amount of power that can
be dissipated as heat through the processor package substrate and into the socket is
usually minimal.
The thermal limits for the processor are the Thermal Profile and T
Profile defines the maximum case temperature as a function of power being
dissipated. T
CONTROL
reported by the digital thermal sensor and a fan speed control method. Designing to
these specifications allows optimization of thermal designs for processor performance
and acoustic noise reduction.
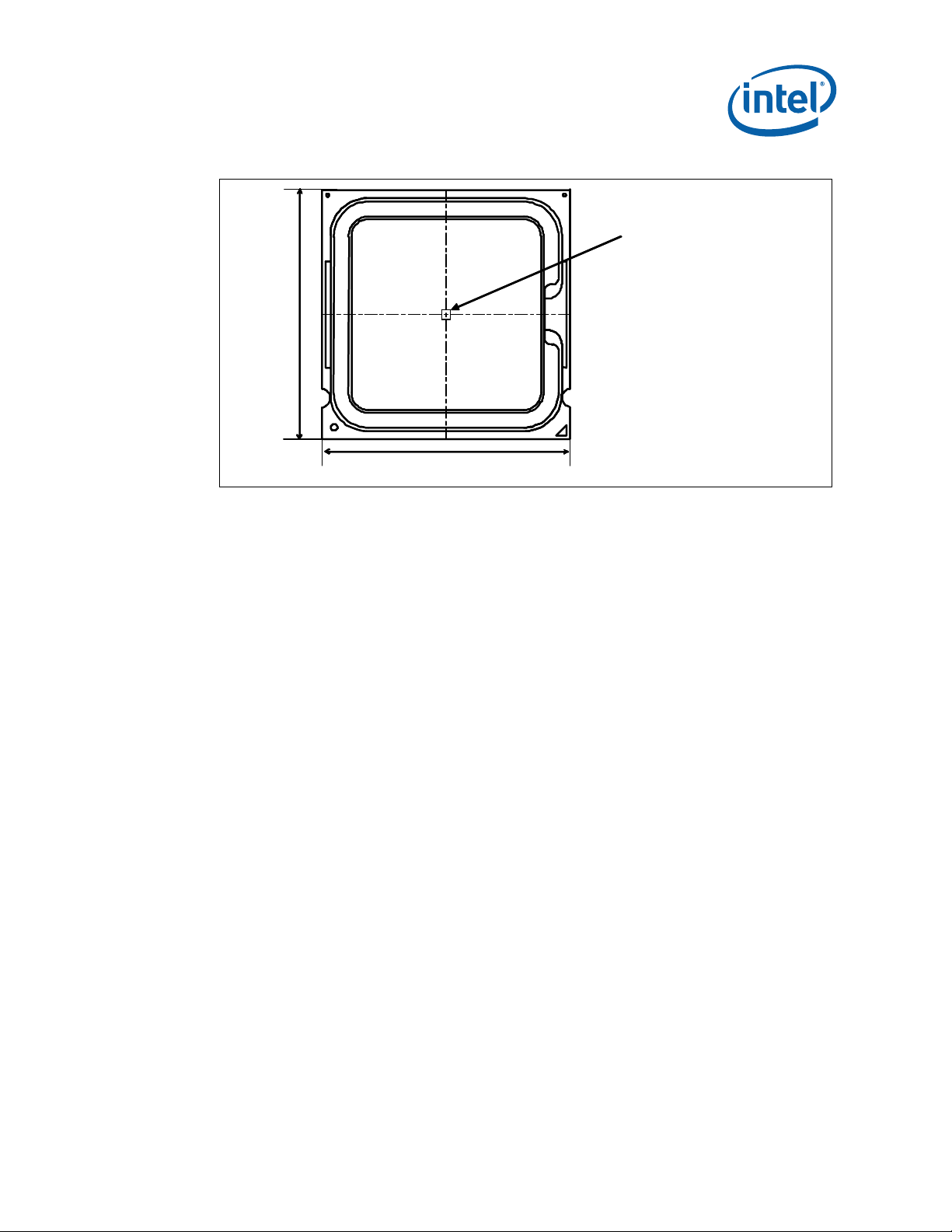
2.2.1 Processor Case Temperature
For the processor, the case temperature is defined as the temperature measured at
the geometric center of the package on the surface of the IHS. For illustration,
Figure 2 shows the measurement location for a 37.5 mm x 37.5 mm [1.474 in x 1.474
in] 775-Land LGA processor package with a 28.7 mm x 28.7 mm [1.13 in x 1.13 in]
IHS top surface. Techniques for measuring the case temperature are detailed in
Section
Note: In case of conflict, the package dimensions in the processor datasheet supersedes
dimensions provided in this document.
3.4.
is a specification used in conjunction with the temperature
. The Thermal
CONTROL
16 Thermal and Mechanical Design Guidelines
Page 17
Processor Thermal/Mechanical Information
Figure 2. Processor Case Temperature Measurement Location
37.5 mm
37.5 mm
2.2.2 Thermal Profile
The Thermal Profile defines the maximum case temperature as a function of processor
power dissipation. Refer to the datasheet for the further information.
While the thermal profile provides flexibility for ATX /BTX thermal design based on its
intended target thermal environment, thermal solutions that are intended to function
in a multitude of systems and environments need to be designed for the worst-case
thermal environment. The majority of ATX /BTX platforms are targeted to function in
an environment that will have up to a 35 °C ambient temperature external to the
system.
For ATX platforms using the Intel
and QX9770 C0 stepping, an active liquid-cooled design should be designed to
manage the heat exchanger inlet temperature of 35 ºC + 3 ºC = 38 ºC (see
Chapter
5).
Measure TCat this point
Measure TCat this point
(geo metric center of the package)
(geo metric center of the package)
37.5 mm
37.5 mm
®
Core™2 Extreme processor QX6800 B3 stepping
For BTX platforms, the similar BTX liquid cooling design should be designed to manage
the heat exchanger inlet temperature of 35 ºC + 0.5 ºC = 35.5 ºC.
The slope of the thermal profile was established to be the same as the Intel liquid
cooling solution thermal solution performance. This performance is expressed as the
slope on the thermal profile and can be thought of as the thermal resistance of the
heatsink attached to the processor, Ψ
(Refer to Section 3.1). The intercept on the
CA
thermal profile assumes a maximum ambient operating condition that is consistent
with the available chassis solutions.
The thermal profiles for the processor are defined such that a single thermal solution
(e.g., ALCT reference design) can be used for Intel
QX6800 B3 Stepping and QX9770 C0 Stepping processors. See Chapter
®
Core™2 Extreme processor
5 for a
discussion of the ALCT reference design. To determine compliance to the thermal
profile, a measurement of the actual processor power dissipation is required. The
measured power is plotted on the Thermal Profile to determine the maximum case
Thermal and Mechanical Design Guidelines 17
Page 18
temperature. Using the example in Figure 3 for a processor dissipating 110W the
maximum case temperature is 52.2°C. See the datasheet for the thermal profile.
Figure 3. Example Thermal Profile
LGA775 Socket Heatsink Loading
2.2.3 T
T
when the thermal solution fan speed is being controlled by the digital thermal sensor.
The T
speed can be reduced. This allows the system integrator a method to reduce the
acoustic noise of the processor cooling solution, while maintaining compliance to the
processor thermal specification.
Note: The T
activation set point which will be seen as 0 via the digital thermometer. As a result the
T
the thermal management logic and features and Chapter 6 on Intel® Quiet System
Technology (Intel
The value of T
of these is the processor idle power. As a result a processor with a high (closer to 0)
T
more negative number) of T
The value of T
T
some parts is offset by a higher value of T
behave similarly in the acoustic performance.
CONTROL
CONTROL
CONTROL
CONTROL
CONTROL
CONTROL
CONTROL
defines the maximum operating temperature for the digital thermal sensor
parameter defines a very specific processor operating region where fan
value for the processor is relative to the Thermal Control Circuit (TCC)
value will always be a negative number. See Chapter 4 for the discussion
®
QST).
CONTROL
will dissipate more power than a part with lower value (farther from 0, e.g.
CONTROL
value the thermal solution should perform similarly. The higher power of
is driven by a number of factors. One of the most significant
CONTROL
when running the same application.
is calculated such that regardless of the individual processor’s
CONTROL
in such a way that they should
18 Thermal and Mechanical Design Guidelines
Page 19

Processor Thermal/Mechanical Information
This is achieved in part by using the ΨCA vs. RPM and RPM vs. Acoustics (dBA)
performance curves from the Intel enabled thermal solution. A thermal solution
designed to meet the thermal profile would be expected to provide similar acoustic
performance of different parts with potentially different T
The value for T
CONTROL
is calculated by the system BIOS based on values read from a
factory configured processor register. The result can be used to program a fan speed
control component. See the processor datasheet for further details on reading the
register and calculating T
See Chapter
6 Intel
CONTROL
®
Quiet System Technology (Intel® QST) for details on
implementing a design using T
.
and the Thermal Profile.
CONTROL
2.3 Heatsink Design Considerations
To remove the heat from the processor, three basic parameters should be considered:
The area of the surface on which the heat transfer takes place. Without
•
any enhancements, this is the surface of the processor package IHS. One method
used to improve thermal performance is by attaching a heatsink to the IHS. A
heatsink can increase the effective heat transfer surface area by conducting heat
out of the IHS and into the surrounding air through fins attached to the heatsink
base.
The conduction path from the heat source to the heatsink fins. Providing a
•
direct conduction path from the heat source to the heatsink fins and selecting
materials with higher thermal conductivity typically improves heatsi nk
performance. The length, thickness, and conductivity of the conduction path from
the heat source to the fins directly impact the thermal performance of the
heatsink. In particular, the quality of the contact between the package IHS and
the heatsink base has a higher impact on the overall thermal solution performance
as processor cooling requirements become stricter. Thermal interface material
(TIM) is used to fill in the gap between the IHS and the bottom surface of the
heatsink, and thereby improve the overall performance of the stack-up (IHS-TIMHeatsink). With extremely poor heatsink interface flatness or roughness, TIM may
not adequately fill the gap. The TIM thermal performance depends on its thermal
conductivity as well as the pressure applied to it. Refer to Section
Appendix C for further information on TIM and on bond line management between
the IHS and the heatsink base.
The heat transfer conditions on the surface on which heat transfer takes
•
place. Convective heat transfer occurs between the airflow and the surface
exposed to the flow. It is characterized by the local ambient temperature of the
, and the local air velocity over the surface. The higher the air velocity over
air, T
A
the surface, and the cooler the air, the more efficient is the resulting cooling. The
nature of the airflow can also enhance heat transfer via convection. Turbulent
flow can provide improvement over laminar flow. In the case of a heatsink, the
surface exposed to the flow includes in particular the fin faces and the heatsink
base.
CONTROL
values.
2.3.3 and
Liquid Cooling Technology typically incorporates a fan, an integrated pump with
cold plate and an air radiator type heat exchanger. The design takes advantage of a
pump to provide a uniform liquid-flow across the cold plate taking away the heat then
go to the exchanger. Finally, a fan manages the airflow through the exchanger.
Active heatsinks typically incorporate a fan that helps manage the airflow through
the heatsink.
Thermal and Mechanical Design Guidelines 19
Page 20

Passive heatsink solutions require in-depth knowledge of the airflow in the chassis.
Typically, passive heatsinks see lower air speed. These heatsinks are therefore
typically larger (and heavier) than active heatsinks due to the increase in fin surface
required to meet a required performance. As the heatsink fin density (the number of
fins in a given cross-section) increases, the resistance to the airflow increases: it is
more likely that the air travels around the heatsink instead of through it, unless air
bypass is carefully managed. Using air-ducting techniques to manage bypass area
can be an effective method for controlling airflow through the heatsink.
2.3.1 Heatsink Size
The size of the heatsink is dictated by height restrictions for installation in a system
and by the real estate available on the motherboard and other considerations for
component height and placement in the area potentially impacted by the processor
heatsink. The height of the heatsink must comply with the requirements and
recommendations published for the motherboard form factor of interest. Designing a
heatsink to the recommendations may preclude using it in system adhering strictly to
the form factor requirements, while still in compliance with the form factor
documentation.
For the ATX/microATX form factor, it is recommended to use:
The ATX motherboard keep-out footprint definition and height restrictions for
•
enabling components, defined for the platforms designed with the LGA775 socket
in Appendix G of this design guide.
LGA775 Socket Heatsink Loading
The motherboard primary side height constraints defined in the ATX Specification
•
V2.2 and the microATX Motherboard Interface Specification V1.2 found at
http://www.formfactors.org/.
The resulting space available above the motherboard is generally not entirely available
for the heatsink. The target height of the heatsink must take into account airflow
considerations (for fan performance for example) as well as other design
considerations (air duct, etc.).
For BTX form factor, it is recommended to use:
The BTX motherboard keep-out footprint definitions and height restrictions for
•
enabling components for platforms designed with the LGA77 socket in
of this design guide.
•
An overview of other BTX system considerations for thermal solutions can be
obtained in the Balanced Technology Extended (BTX) System Design Guide v1.0
found at
http://www.formfactors.org/.
2.3.2 Package IHS Flatness
The package IHS flatness for the product is specified in the datasheet and can be used
as a baseline to predict heatsink performance during the design phase.
Intel recommends testing and validating heatsink performance in full mechanical
enabling configuration to capture any impact of IHS flatness change due to combined
socket and heatsink loading. While socket loading alone may increase the IHS
warpage, the heatsink preload redistributes the load on the package and improves the
resulting IHS flatness in the enabled state.
Appendix G
20 Thermal and Mechanical Design Guidelines
Page 21
Processor Thermal/Mechanical Information
2.3.3 Thermal Interface Material
Thermal interface material application between the processor IHS and the heatsink
base is generally required to improve thermal conduction from the IHS to the
heatsink. Many thermal interface materials can be pre-applied to the heatsink base
prior to shipment from the heatsink supplier and allow direct heatsink attach, without
the need for a separate thermal interface material dispense or attach process in the
final assembly factory.
All thermal interface materials should be sized and positioned on the heatsink base in
a way that ensures the entire processor IHS area is covered. It is important to
compensate for heatsink-to-processor attach positional alignment when selecting the
proper thermal interface material size.
When pre-applied material is used, it is recommended to have a protective application
tape over it. This tape must be removed prior to heatsink installation.
2.4 System Thermal Solution Considerations
2.4.1 Chassis Thermal Design Capabilities
The Intel liquid cooling thermal solution assumes that chassis delivers a maximum TA
at the inlet of the processor heat exchanger (refer to Section
the T
requirements for the ALCT and the similar BTX solutions.
A
Table 1. Heatsink Inlet Temperature of Intel Reference Thermal Solutions
Topic ATX ALCT BTX Liquid Cooling
Heatsink Inlet
Temperature
38 °C 35.5 °C
5.1.1). Table 1 shows
2.4.2 Improving Chassis Thermal Performance
The heat generated by components within the chassis must be removed to provide an
adequate operating environment for both the processor and other system
components. Moving air through the chassis brings in air from the external ambient
environment and transports the heat generated by the processor and other system
components out of the system. The number, size and relative position of fans and
vents determine the chassis thermal performance, and the resulting ambient
temperature around the processor. The size and type (passive or active) of the
thermal solution and the amount of system airflow can be traded off against each
other to meet specific system design constraints. Additional constraints are board
layout, spacing, component placement, acoustic requirements and structural
considerations that limit the thermal solution size. For more information, refer to the
ATX Thermal Design Suggestions or microATX Thermal Design Suggestions or
Balanced Technology Extended (BTX) System Design Guide v1.0 documents available
on the http://www.formfactors.org/
In addition to passive heatsinks, fan heatsinks and system fans are other solutions
that exist for cooling integrated circuit devices. For example, ducted blowers, heat
web site.
Thermal and Mechanical Design Guidelines 21
Page 22

pipes and liquid cooling are all capable of dissipating additional heat. Due to their
varying attributes, each of these solutions may be appropriate for a particular system
implementation.
To develop a reliable, cost-effective thermal solution, thermal characterization and
simulation should be carried out at the entire system level, accounting for the thermal
requirements of each component. In addition, acoustic noise constraints may limit the
size, number, placement, and types of fans that can be used in a particular design.
To ease the burden on thermal solutions, the Thermal Monitor feature and associated
logic have been integrated into the silicon of the processor. By taking advantage of
the Thermal Monitor feature, system designers may reduce thermal solution cost by
designing to TDP instead of maximum power. Thermal Monitor attempts to protect
the processor during sustained workload above TDP. Implementation options and
recommendations are described in Chapter
2.4.3 Summary
In summary, considerations in heatsink design include:
• The local ambient temperature TA at the heatsink, which is a function of chassis
design.
• The thermal design power (TDP) of the processor, and the corresponding
maximum T
combined in a single lump cooling performance parameter, Ψ
thermal characterization parameter). More information on the definition and the
use of Ψ
• Heatsink i nterface to IHS surface characteristics, including flatness and roughness.
•
The performance of the thermal in terface material used between the heatsink and
the IHS.
• The required heatsi nk clip static load, between 18 lbf to 70 lbf throughout the life
of the product (Refer to Section
• Surface area of the heatsink.
•
Heatsink material and technology.
•
Volume of airflow over the heatsink surface area.
•
Development of airflow entering and within the heatsink area.
•
Physical volumetric constraints placed by the system
CA
LGA775 Socket Heatsink Loading
4.
as calculated from the thermal profile. These parameters are usually
C
(case to air
CA
is given section 3.1
2.1.2.2 for further information).
2.5 System Integration Considerations
Manufacturing with Intel® Components using 775–Land LGA Package and LGA775
Socket documentation provides Best Known Methods for all aspects LGA775 socket
based platforms and systems manufacturing. Of particular interest for package and
heatsink installation and removal is the System Assembly module. A video covering
system integration is also available. Contact your Intel field sales representative for
further information.
22 Thermal and Mechanical Design Guidelines
Page 23

Thermal Metrology
3 Thermal Metrology
This section discusses guidelines for testing thermal solutions, including measuring
processor temperatures. In all cases, the thermal engineer must measure power
dissipation and temperature to validate a thermal solution. To define the performance
of a thermal solution the “thermal characterization parameter”, Ψ
3.1 Characterizing Cooling Performance Requirements
The idea of a “thermal characterization parameter”, Ψ (“psi”), is a convenient way to
characterize the performance needed for the thermal solution and to compare thermal
solutions in identical si tuations (same heat source and local ambient conditions). The
thermal characterization parameter is calculated using total package power.
(“psi”) will be used.
Note: Heat transfer is a three-dimensional phenomenon that can rarely be accurately and
easily modeled by a single resistance parameter like Ψ.
The case-to-local ambient thermal characterization parameter value (Ψ
measure of the thermal performance of the overall thermal solution that is attached to
the processor package. It is defined by the following equation, and measured in units
of °C/W:
Ψ
= (TC – TA) / PD (Equation 1)
CA
Where:
= Case-to-local ambient thermal characterization parameter (°C/W)
Ψ
CA
T
= Processor case temperature (°C)
C
TA = Local ambient temperature in chassis at processor (°C)
P
= Processor total power dissipation (W) (assumes all power dissipates
D
through the IHS)
) is used as a
CA
Thermal and Mechanical Design Guidelines 23
Page 24
LGA775 Socket Heatsink Loading
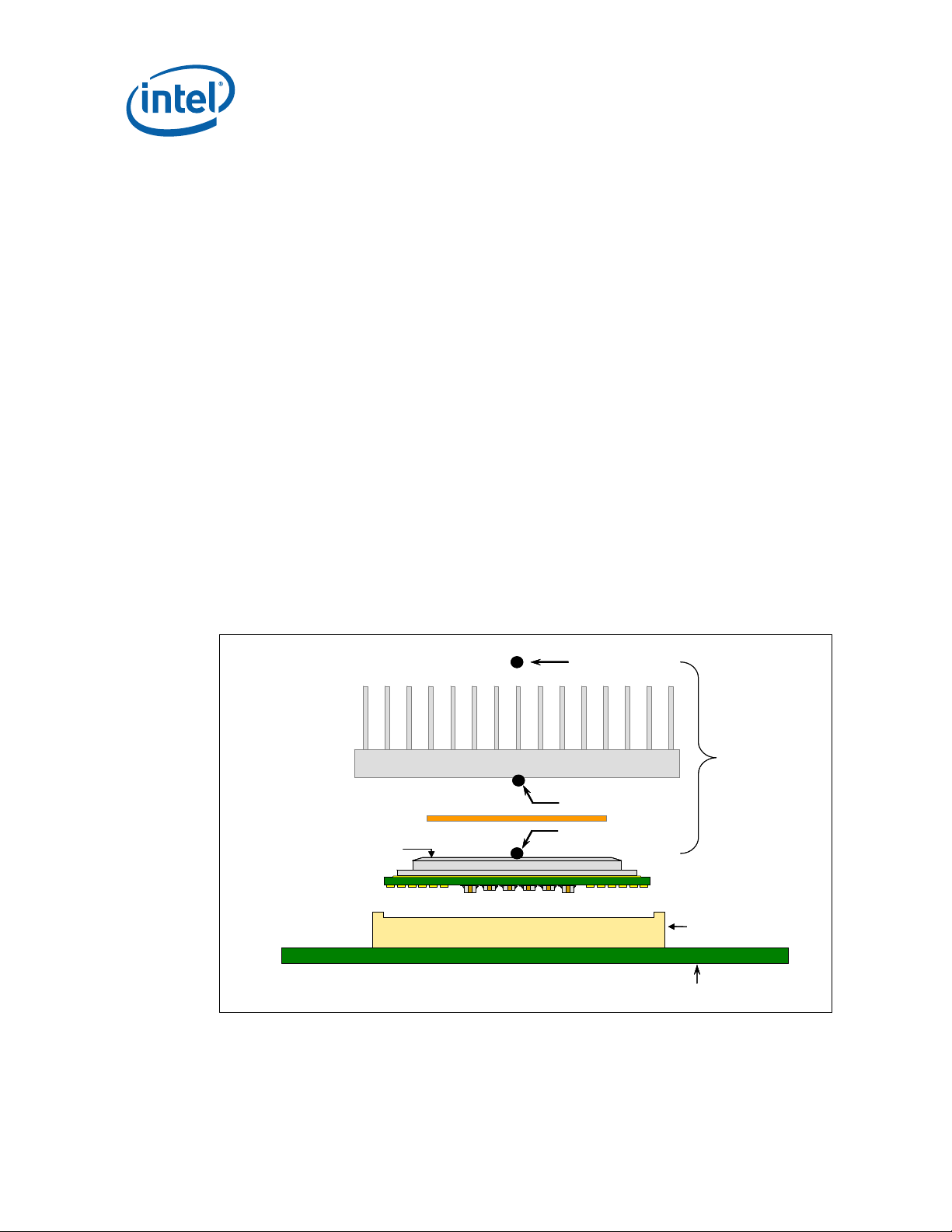
The case-to-local ambient thermal characterization parameter of the processor, ΨCA, is
comprised of Ψ
and of Ψ
Ψ
Where:
is strongly dependent on the thermal conductivity and thickness of the TIM
Ψ
CS
between the heatsink and IHS.
is a measure of the thermal characterization parameter from the bottom of the
Ψ
SA
heatsink to the local ambient air. Ψ
conductivity, and geometry. It is also strongly dependent on the air velocity through
the fins of the heatsink.
, the sink-to-local ambient thermal characterization parameter:
SA
= ΨCS + ΨSA (Equation 2)
CA
= Thermal characterization parameter of the thermal interface material
Ψ
CS
= Thermal characterization parameter from heatsink-to-local ambient
Ψ
SA
, the thermal interface material thermal characterization parameter,
CS
(°C/W)
(°C/W)
is dependent on the heatsink material, thermal
SA
Figure 4 illustrates the combination of the different thermal characterization
parameters.
Figure 4. Processor Thermal Characterization Parameter Relationships
T
T
A
A
Heatsink
Heatsink
T
T
S
T
T
S
C
C
System Board
System Board
TIM
TIM
Processor
Processor
IHS
IHS
Ψ
Ψ
CA
CA
LGA775 Socket
LGA775 Socket
24 Thermal and Mechanical Design Guidelines
Page 25

Thermal Metrology
3.1.1 Example
The cooling performance, Ψ
is then defined using the principle of thermal
CA,
characterization parameter described above:
•
The case temperature T
and thermal design power TDP given in the processor
C-MAX
datasheet.
Define a target local ambient temperature at the processor, T
•
A
.
Since the processor thermal profile applies to all processor frequencies, it is important
to identify the worst case (lowest Ψ
) for a targeted chassis characterized by TA to
CA
establish a design strategy.
The following provides an illustration of how one might determine the appropriate
performance targets. The example power and temperature numbers used here are
not related to any specific Intel processor thermal specifications, and are for
illustrative purposes only.
Assume the TDP, as listed in the datasheet, is 100W and the maximum case
temperature from the thermal profile for 100W is 67 °C. Assume as well that the
system airflow has been designed such that the local ambient temperature is 38°C.
Then the following could be calculated using equation 1 from above:
Ψ
= (TC,– TA) / TDP = (67 – 38) / 100 = 0.29 °C/W
CA
To determine the required heatsink performance, a heatsink solution provider would
need to determine Ψ
performance for the selected TIM and mechanical load
CS
configuration. If the heatsink solution were designed to work with a TIM material
performing at Ψ
≤ 0.10 °C/W, solving for equation 2 from above, the performance of
CS
the heatsink would be:
Ψ
= ΨCA − ΨCS = 0.29 − 0.10 = 0.19 °C/W
SA
Thermal and Mechanical Design Guidelines 25
Page 26

LGA775 Socket Heatsink Loading
3.2 Processor Thermal Solution Performance Assessment
Thermal performance of a heatsink should be assessed using a thermal test vehicle
(TTV) provided by Intel. The TTV is a stable heat source that the user can make
accurate power measurement, whereas processors can introduce additional factors
that can impact test results. In particular, the power level from actual processors
varies significantly, even when running the maximum power application provided by
Intel, due to variances in the manufacturing process. The TTV provides consistent
power and power density for thermal solution characterization and results can be
easily translated to real processor performance. Accurate measurement of the power
dissipated by an actual processor is beyond the scope of this document.
Once the thermal solution is designed and validated with the TTV, it is strongly
recommended to verify functionality of the thermal solution on real processors and on
fully integrated systems. The Intel maximum power application enables steady power
dissipation on a processor to assist in this testing.
3.3 Local Ambient Temperature Measurement Guidelines
The local ambient temperature TA is the temperature of the ambient air surrounding
the processor. For a passive heatsink, T
temperature; for an actively cooled heatsink, it is the temperature of inlet air to the
active cooling fan; for a liquid cooled solution it is the temperature of the air entering
the heat exchanger.
It is worthwhile to determine the local ambient temperature in the chassis around the
processor to understand the effect it may have on the case temperature.
is best measured by averaging temperature measurements at multiple locations in
T
A
the heatsink or heat exchanger inlet airflow. This method helps reduce error and
eliminate minor spatial variations in temperature. The following guidelines are meant
to enable accurate determination of the localized air temperature around the
processor during system thermal testing.
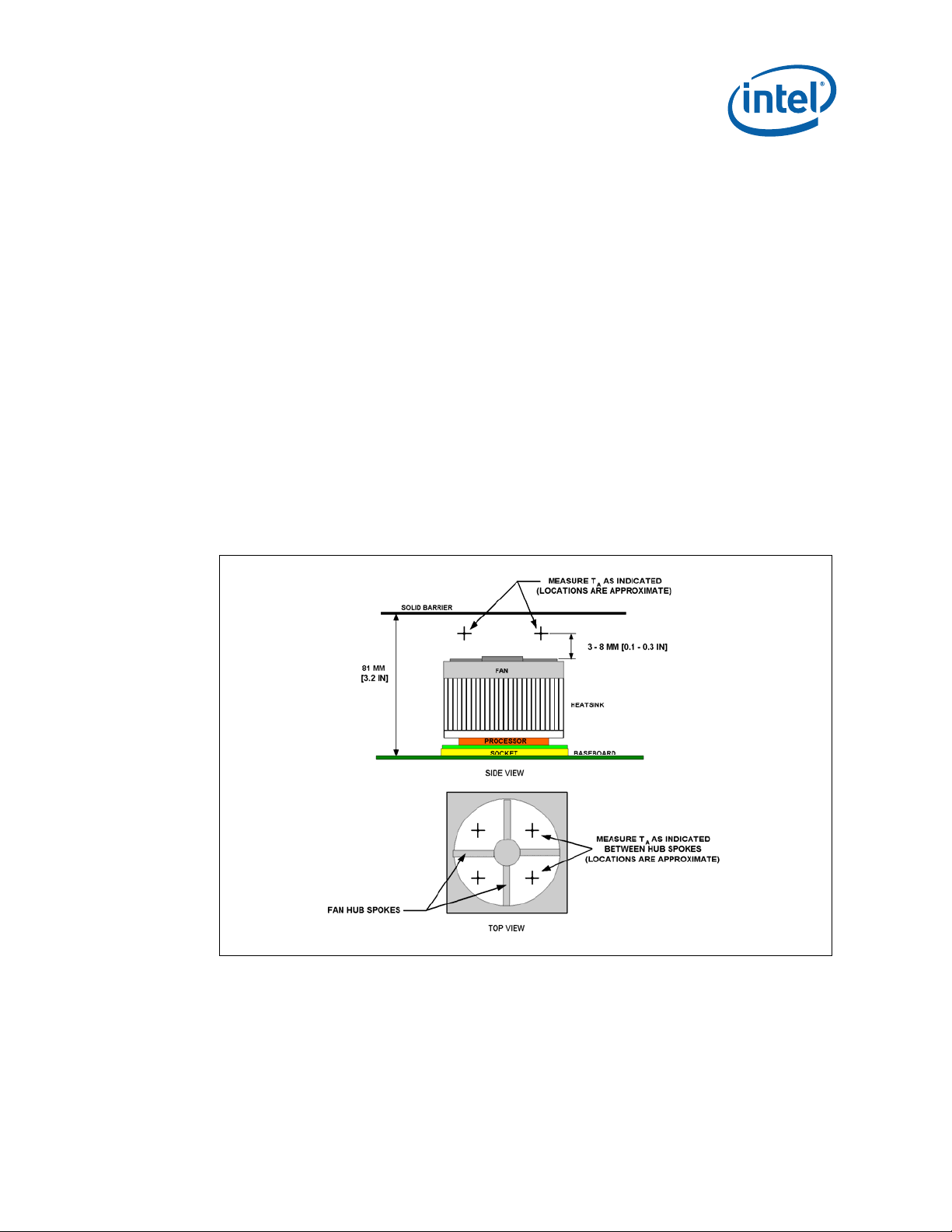
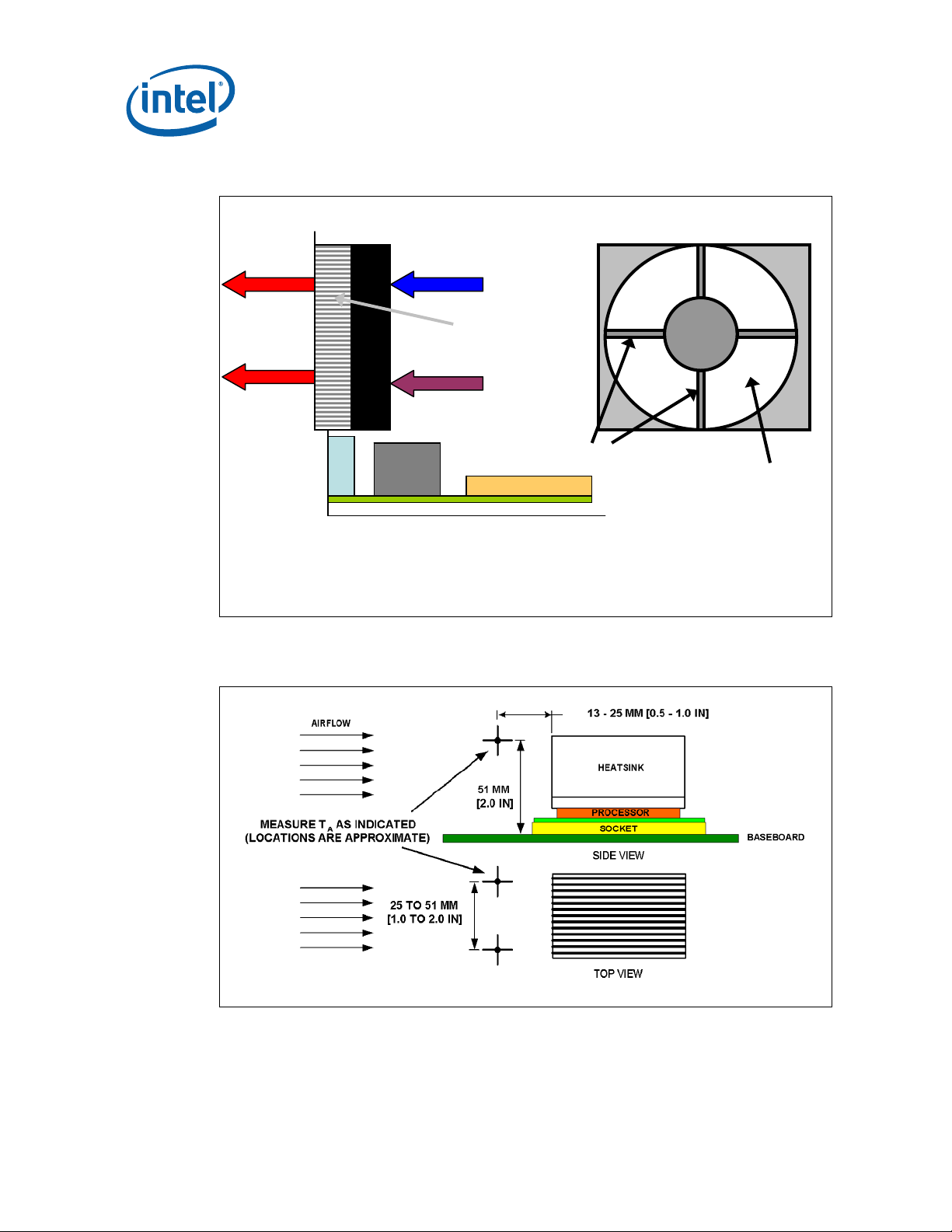
For active heatsinks and liquid cooled solutions, it is important to avoid taking
measurement in the dead flow zone that usually develops above the fan hub and hub
spokes. Measurements should be taken at four different locations uniformly placed at
the center of the annulus formed by the fan hub and the fan housing to evaluate the
uniformity of the air temperature at the fan inlet. The thermocouples should be
placed approximately 3 mm to 8 mm [0.1 to 0.3 in] above the fan hub vertically and
halfway between the fan hub and the fan housing horizontally as shown in
Figure 6 (avoiding the hub spokes). Using an open bench to characterize an
and
active heatsink can be useful, and usually ensures more uniform temperatures at the
fan inlet. However, additional tests that include a solid barrier above the test
motherboard surface can help evaluate the potential impact of the chassis. This
barrier is typically clear Plexiglas*, extending at least 100 mm [4 i n ] in all directions
beyond the edge of the thermal solution. Typical distance from the motherboard to
the barrier is 81 mm [3.2 in]. For even more realistic airflow, the motherboard should
be populated with significant elements like memory cards, graphic card, and chipset
is defined as the heatsink approach air
A
Figure 5
26 Thermal and Mechanical Design Guidelines
Page 27
Thermal Metrology
heatsink. If a barrier is used, the thermocouple can be taped directly to the barrier
with a clear tape at the horizontal location as previously described, half way between
the fan hub and the fan housing. If a variable speed fan is used, it may be useful to
add a thermocouple taped to the barrier above the location of the temperature sensor
used by the fan to check its speed setting against air temperature. When measuring
in a chassis with a live motherboard, add-in cards, and other system components,
T
A
it is likely that the T
distribution across the inlet fan section.
For passive heatsinks, thermocouples should be placed approximately 13 mm to
25 mm [0.5 to 1.0 in] away from processor and heatsink as shown in
thermocouples should be placed approximately 51 mm [2.0 in] above the baseboard.
This placement guideline is meant to minimize the effect of localized hot spots from
baseboard components.
Note: Testing an active heatsink with a variable speed fan can be done in a thermal chamber
to capture the worst-case thermal environment scenarios. Otherwise, when doing a
bench top test at room temperature, the fan regulation prevents the heatsink from
operating at its maximum capability. To characterize the heatsink capability in the
worst-case environment in these conditions, it is then necessary to disable the fan
regulation and power the fan directly, based on guidance from the fan supplier.
measurements will reveal a highly non-uniform temperature
A
Figure 7. The
Figure 5. Locations for Measuring Local Ambient Temperature, Active Heatsink
NOTE: Drawing Not to Scale
Thermal and Mechanical Design Guidelines 27
Page 28
LGA775 Socket Heatsink Loading
+
Figure 6. Locations for Measuring Local Ambient Temperature, Liquid-Cooling Heat
Exchanger
Side View
Fa
n
Airflow
Heat
Exchanger
Front View
+
+
+
I
O
NOTE: Drawing Not to Scale
Figure 7. Locations for Measuring Local Ambient Temperature, Passive Heatsink
VR
Fan Hub Spokes
Measure TA as
indicated between the
hub spokes at mid-
blade length
NOTE: Drawing Not to Scale
28 Thermal and Mechanical Design Guidelines
Page 29

Thermal Metrology
3.4 Processor Case Temperature Measurement Guidelines
To ensure functionality and reliability, the processor is specified for proper operation
when T
measurement location for T
location for T
Special care is required when measuring TC to ensure an accurate temperature
measurement. Thermocouples are often used to measure T
measurements are made, the thermocouples must be calibrated, and the complete
measurement system must be routinely checked against known standards. When
measuring the temperature of a surface that is at a different temperature from the
surrounding local ambient air, errors could be introduced in the measurements. The
measurement errors could be caused by poor thermal contact between the junction of
the thermocouple and the surface of the integrated heat spreader, heat loss by
radiation, convection, by conduction through thermocouple leads, or by contact
between the thermocouple cement and the heatsink base.
Appendix D defines a reference procedure for attaching a thermocouple to the IHS of
a 775-Land LGA processor package for T
account the specific features of the 775-Land LGA package and of the LGA775 socket
for which it is intended.
is maintained at or below the thermal profile as listed in the datasheet. The
C
measurement.
C
is the geometric center of the IHS. Figure 2 shows the
C
. Before any temperature
C
measurement. This procedure takes into
C
§
Thermal and Mechanical Design Guidelines 29
Page 30

LGA775 Socket Heatsink Loading
30 Thermal and Mechanical Design Guidelines
Page 31

Thermal Management Logic and Thermal Monitor Feature
4 Thermal Management Logic and
Thermal Monitor Feature
4.1 Processor Power Dissipation
An increase in processor operating frequency not only increases system performance,
but also increases the processor power dissipation. The relationship between
frequency and power is generalized in the following equation: P = CV
P = power, C = capacitance, V = voltage, F = frequency). From this equation, it is
evident that power increases linearly with frequency and with the square of voltage.
In the absence of power saving technologies, ever increasing frequencies will result in
processors with power dissipations in the hundreds of watts. Fortunately, there are
numerous ways to reduce the power consumption of a processor, and Intel is
aggressively pursuing low power design techniques. For example, decreasing the
operating voltage, reducing unnecessary transistor activity, and using more power
efficient circuits can significantly reduce processor power consumption.
2
F (where
An on-die thermal management feature called Thermal Monitor is available on the
processor. It provides a thermal management approach to support the continued
increases in processor frequency and performance. By using a highly accurate on-die
temperature sensing circuit and a fast acting Thermal Control Circuit (TCC), the
processor can rapidly initiate thermal management control. The Thermal Monitor can
reduce cooling solution cost, by allowing thermal designs to target TDP.
The processor also supports an additional power reduction capability known as
Thermal Monitor 2 described in Section
4.2.3.
4.2 Thermal Monitor Implementation
The Thermal Monitor consists of the following components:
• A highly accurate on-die temperature sensing circuit
• A bi-directional signal (PROCHOT#) that indicates if the processor has exceeded
its maximum temperature or can be asserted externally to activate the Thermal
Control Circuit (TCC) (see Section 4.2.1 for more details on user activation of TCC
via PROCHOT# signal)
•
FORCEPR# signal that will activate the TCC.
• A Thermal Control Circuit that will attempt to reduce processor temperature by
rapidly reducing power consumption when the on-die temperature sensor indicates
that it has exceeded the maximum operating point.
Registers to determine the processor thermal status.
•
Thermal and Mechanical Design Guidelines 31
Page 32

4.2.1 PROCHOT# Signal
The primary function of the PROCHOT# signal is to provide an external indication that
the processor has exceeded its maximum operating temperature. While PROCHOT# is
asserted, the TCC will be active. Assertion of the PROCHOT# signal is independent of
any register settings within the processor. It is asserted any time the processor die
temperature reaches the trip point.
PROCHOT# can be configured via BIOS as an output or bi-directional signal. As an
output, PROCHOT# will go active when the processor temperature of either core
exceeds its maximum operating temperature. This indicates the TCC has been
activated. As an input, assertion of PROCHOT# will activate the TCC for both cores.
The TCC will remain active until the system de-asserts PROCHOT#
The temperature at which the PROCHOT# signal goes active is individually calibrated
during manufacturing. The power dissipation of each processor affects the set point
temperature. The temperature where PROCHOT# goes active roughly parallels the
thermal profile. Once configured, the processor temperature at which the PROCHOT#
signal is asserted is not re-configurable.
One application is the thermal protection of voltage regulators (VR). System
designers can create a circuit to monitor the VR temperature and activate the TCC
when the temperature limit of the VR is reached. By asserting PROCHOT# (pulledlow) or FORCEPR#, which activates the TCC, the VR can cool down as a result of
reduced processor power consumption. Bi-directional PROCHOT# can allow VR
thermal designs to target maximum sustained current instead of maximum current.
Systems should still provide proper cooling for the VR, and rely on bi-directional
PROCHOT# signal only as a backup in case of system cooling failure.
LGA775 Socket Heatsink Loading
Note: A thermal solution designed to meet the thermal profile targets should rarely
experience activation of the TCC as indicated by the PROCHOT# signal going active.
4.2.2 Thermal Control Circuit
The Thermal Control Circuit portion of the Thermal Monitor must be enabled for the
processor to operate within specifications. The Thermal Monitor’s TCC, when active,
will attempt to lower the processor temperature by reducing the processor power
consumption. In the original implementation of thermal monitor this is done by
changing the duty cycle of the internal processor clocks, resulting in a lower effective
frequency. When active, the TCC turns the processor clocks off and then back on with
a predetermined duty cycle. The duty cycle is processor specific, and is fixed for a
particular processor. The maximum time period the clocks are disabled is ~3 μs. This
time period is frequency dependent and higher frequency processors will disable the
internal clocks for a shorter time period.
the internal processor clocks and PROCHOT#.
Performance counter registers, status bits in model specific registers (MSRs), and the
PROCHOT# output pin are available to monitor the Thermal Monitor behavior.
Figure 8 illustrates the relationship between
32 Thermal and Mechanical Design Guidelines
Page 33

N
k
Thermal Management Logic and Thermal Monitor Feature
Figure 8. Concept for Clocks under Thermal Monitor Control
PROCHOT#
ormal cloc
Internal clock
Duty cycle
control
Resultant
internal clock
4.2.3 Thermal Monitor 2
The processor supports an enhanced Thermal Control Circuit. In conjunction with the
existing Thermal Monitor logic, this capability is known as Thermal Monitor 2. This
enhanced TCC provides an efficient means of reducing the power consumption within
the processor and limiting the processor temperature.
When Thermal Monitor 2 is enabled, and a high temperature situation is detected, the
enhanced TCC will be activated. The enhanced TCC causes the processor to adjust its
operating frequency (by dropping the bus-to-core multiplier to its minimum available
value) and input voltage identification (VID) value. This combination of reduced
frequency and VID results in a reduction in processor power consumption.
A processor enabled for Thermal Monitor 2 includes two operating points, each
consisting of a specific operating frequency and voltage. The first operating point
represents the normal operating condition for the processor.
The second operating point consists of both a lower operating frequency and voltage.
When the TCC is activated, the processor automatically transitions to the new
frequency. This transition occurs very rapidly (on the order of 5 microseconds).
During the frequency transition, the processor is unable to service any bus requests,
all bus traffic is blocked. Edge-triggered interrupts will be latched and kept pending
until the processor resumes operation at the new frequency.
Once the new operating frequency is engaged, the processor will transition to the new
core operating voltage by issuing a new VID code to the voltage regulator. The
voltage regulator must support VID transitions in order to support Thermal Monitor 2.
During the voltage change, it will be necessary to transition through multiple VID
codes to reach the target operating voltage. Each step will be one VID table entry
(i.e., 12.5 mV steps). The processor continues to execute instructions during the
voltage transition. Operation at the lower voltage reduces the power consumption of
the processor, providing a temperature reduction.
Thermal and Mechanical Design Guidelines 33
Page 34

LGA775 Socket Heatsink Loading
Once the processor has sufficiently cooled, and a minimum activation time has
expired, the operating frequency and voltage transition back to the normal system
operating point. Transition of the VID code will occur first, in order to insure proper
operation once the processor reaches its normal operating frequency. Refer to
Figure 9 for an illustration of this ordering.
Refer to the datasheet for further information on Thermal Monitor 2.
Figure 9. Thermal Monitor 2 Frequency and Voltage Ordering
T
TM2
Temperature
PROCHOT#
f
MAX
f
TM2
Frequency
VID
VID
TM2
Time
4.2.4 Operation and Configuration
To maintain compatibility with previous generations of processors, which have no
integrated thermal logic, the Thermal Control Circuit portion of Thermal Monitor is
disabled by default. During the boot process, the BIOS must enable the Thermal
Control Circuit. Thermal Monitor must be enabled to ensure proper processor
operation.
The Thermal Control Circuit feature can be configured and monitored in a number of
ways. OEMs are required to enable the Thermal Control Circuit while using various
registers and outputs to monitor the processor thermal status. The Thermal Control
Circuit is enabled by the BIOS setting a bit in an MSR (model specific register).
Enabling the Thermal Control Circuit allows the processor to attempt to maintain a
safe operating temperature without the need for special software drivers or interrupt
handling routines. When the Thermal Control Circuit has been enabled, processor
power consumption will be reduced after the thermal sensor detects a high
temperature, i.e. PROCHOT# assertion. The Thermal Control Circuit and PROCHOT#
transitions to inactive once the temperature has been reduced below the thermal trip
point, although a small time-based hysteresis has been included to prevent multiple
PROCHOT# transitions around the trip point. External hardware can monitor
VID
34 Thermal and Mechanical Design Guidelines
Page 35

Thermal Management Logic and Thermal Monitor Feature
PROCHOT# and generate an interrupt whenever there is a transition from active-toinactive or inactive-to-active. PROCHOT# can also be configured to generate an
internal interrupt which would initiate an OEM supplied interrupt service routine.
Regardless of the configuration selected, PROCHOT# will always indicate the thermal
status of the processor.
The power reduction mechanism of thermal monitor can also be activated manually
using an “on-demand” mode. Refer to Section
4.2.5 On-Demand Mode
For testing purposes, the thermal control circuit may also be activated by setting bits
in the ACPI MSRs. The MSRs may be set based on a particular system event (e.g., an
interrupt generated after a system event), or may be set at any time through the
operating system or custom driver control thus forcing the thermal control circuit on.
This is referred to as “on-demand” mode. Activating the thermal control circuit may
be useful for thermal solution investigations or for performance implication studies.
When using the MSRs to activate the on-demand clock modulation feature, the duty
cycle is configurable in steps of 12.5%, from 12.5% to 87.5%.
For any duty cycle, the maximum time period the clocks are disabled is ~3 μs. This
time period is frequency dependent, and decreases as frequency increases. To
achieve different duty cycles, the length of time that the clocks are disabled remains
constant, and the time period that the clocks are enabled is adjusted to achieve the
desired ratio. For example, if the clock disable period is 3 µs, and a duty cycl e of ¼
(25%) is selected, the clock on time would be reduced to approximately 1 μs [on time
(1 μs) ÷ total cycle time (3 + 1) μs = ¼ duty cycle]. Similarly, for a duty cycle of 7/8
(87.5%), the clock on time would be extended to 21 μs [21 ÷ (21 + 3) = 7/8 duty
cycle].
In a high temperature situation, if the thermal control circuit and ACPI MSRs
(automatic and on-demand modes) are used simultaneously, the fixed duty cycle
determined by automatic mode would take precedence.
4.2.5 for details on this feature.
Note: On-demand mode can not activate the power reduction mechanism of Thermal
Monitor 2
4.2.6 System Considerations
Intel requires the Thermal Monitor and Thermal Control Circuit to be enabled for all
processors. The thermal control circuit is intended to protect against short term
thermal excursions that exceed the capability of a well designed processor thermal
solution. Thermal Monitor should not be relied upon to compensate for a thermal
solution that does not meet the thermal profile up to the thermal design power (TDP).
Each application program has its own unique power profile, although the profile has
some variability due to loop decisions, I/O activity and interrupts. In general,
compute intensive applications with a high cache hit rate dissipate more processor
power than applications that are I/O intensive or have low cache hit rates.
The processor TDP is based on measurements of processor power consumption while
running various high power applications. This data is used to determine those
applications that are interesting from a power perspective. These applications are
then evaluated in a controlled thermal environment to determine their sensitivity to
Thermal and Mechanical Design Guidelines 35
Page 36

LGA775 Socket Heatsink Loading
activation of the thermal control circuit. This data is used to derive the TDP targets
published in the processor datasheet.
A system designed to meet the thermal profile at TDP and T
the processor datasheet greatly reduces the probability of real applications causing the
thermal control circuit to activate under normal operating conditions. Systems that do
not meet these specifications could be subject to more frequent activation of the
thermal control circuit depending upon ambient air temperature and application power
profile. Moreover, if a system is significantly under designed, there is a risk that the
Thermal Monitor feature will not be capable of maintaining a safe operating
temperature and the processor could shutdown and signal THERMTRIP#.
For information regarding THERMTRIP#, refer to the processor datasheet and to
Section
4.2.8 of this Thermal Design Guidelines.
C-MAX
4.2.7 Operating System and Application Software Considerations
The Thermal Monitor feature and its thermal control circuit work seamlessly with ACPI
compliant operating systems. The Thermal Monitor feature is transparent to
application software since the processor bus snooping, ACPI timer, and interrupts are
active at all times.
values published in
4.2.8 THERMTRIP# Signal
In the event of a catastrophic cooling failure, the processor will automatically shut
down when the silicon temperature has reached its operating limit. At this point the
system bus signal THERMTRIP# goes active and power must be removed from the
processor. THERMTRIP# activation is independent of processor activity and does not
generate any bus cycles. Refer to the processor datasheet for more information about
THERMTRIP#.
The temperature where the THERMTRIP# signal goes active is individually calibrated
during manufacturing. The temperature where THERMTRIP# goes active is roughly
parallel to the thermal profile and greater than the PROCHOT# activation
temperature. Once configured, the temperature at which the THERMTRIP# signal is
asserted is neither re-configurable nor accessible to the system.
4.2.9 Cooling System Failure Warning
It may be useful to use the PROCHOT# signal as an indication of cooling system
failure. Messages could be sent to the system administrator to warn of the cooling
failure, while the thermal control circuit would allow the system to continue
functioning or allow a normal system shutdown. If no thermal management action is
taken, the silicon temperature may exceed the operating limits, causing THERMTRIP#
to activate and shut down the processor. Regardless of the system design
requirements or thermal solution ability, the Thermal Monitor feature must still be
enabled to ensure proper processor operation.
36 Thermal and Mechanical Design Guidelines
Page 37

Thermal Management Logic and Thermal Monitor Feature
4.2.10 Digital Thermal Sensor
The processor utilizes the Digital Thermal Sensor (DTS) as the on-die sensor to use
for fan speed control (FSC). The DTS replaces the on-die thermal diode used in
previous product. The DTS is monitoring the same sensor that activates the TCC
(See Section
The DTS value where TCC activation occurs is 0 (zero).
The DTS can be accessed by two methods. The first is via a MSR. The value read via
the MSR is an unsigned number of degrees C away from TCC activation. The second
method which is expected to be the primary method for FSC is via the PECI interface.
The value of the DTS when read via the PECI interface is always negative and again is
degrees C away from TCC activation.
4.2.2). Readings from the DTS are relative to the activation of the TCC.
A T
the DTS is the same as with the on-die thermal diode:
The calculation of T
value to sum with the T
The BIOS only needs to read the T
control device.
Figure 10. T
value will be provided for use with DTS. The usage model for T
CONTROL
If the Digital Thermometer is less than T
•
CONTROL,
the fan speed can be reduced.
• If the Digi tal Thermometer is greater than or equal to T
CONTROL,
then TC must be
CONTROL
maintained at or below the Thermal Profile for the measured power dissipation.
CONTROL
for Digital Thermometer
CONTROL
is slightly different from previous product. There is no base
located in the same MSR as used in previous processors.
OFFSET
MSR and provide this value to the fan speed
OFFSET
with
Multiple digital thermal sensors can be implemented within the package without
adding a pair of signal pins per sensor as required with the thermal diode. The digital
thermal sensor is easier to place in thermally sensitive locations of the processor than
the thermal diode. This is achieved due to a smaller foot print and decreased
sensitivity to noise. Since the DTS is factory set on a per-part basis there is no need
for the health monitor components to be updated at each processor family.
Thermal and Mechanical Design Guidelines 37
Page 38

LGA775 Socket Heatsink Loading
Note: Intel® Core™2 Extreme processor QX6800 B3 stepping and QX9770 C0 stepping do
not have an on-die thermal diode. The T
CONTROL
in the MSR is relevant only to the
DTS.
4.2.11 Platform Environmental Control Interface (PECI)
The PECI interface is a proprietary single wire bus between the processor and the
chipset or other health monitoring device. At this time the digital thermal sensor is
the only data being transmitted. For an overview of the PECI interface see PECI
Feature Set Overview. For additional information on the PECI see the processor
datasheet.
The PECI bus is available on pin G5 of the LGA 775 socket. Intel chipsets beginning
with the ICH8 have included PECI host controller. The PECI interface and the
Manageability Engine are key elements to the Intel
®
(Intel
QST), see Chapter 6 and the Intel® Quiet System Technology (Intel® QST)
Configuration and Tuning Manual.
Intel has worked with many vendors that provide fan speed control devices to provide
PECI host controllers. Consult the local representative for your preferred vendor for
their product plans and availability.
®
Quiet System Technology
§
38 Thermal and Mechanical Design Guidelines
Page 39

Intel Thermal/Mechanical Reference Design Information
5 Intel Thermal/Mechanical
Reference Design Information
The Intel Advanced Liquid Cooling Technology or ALCT is composed of three
components: a liquid to air radiator type heat exchanger; a 12 0mm fan; and an
integrated pump with cold plate. The heat exchanger is connected to the pump with
flexible hoses.
The heart of the design is the integrated pump cold plate combination. The cold plate
is nested within a centrifugal pump impeller. This unique design takes advantage of
the radial pull of the impeller to provide a uniform flow across the cold plate. The inlet
flow returning from the heat exchanger impinges on the center of the cold plate. The
centrifugal impeller then pulls the fluid across and through the cold pl ate fins. The fins
in turn act as an inducer for the impeller. The fluid is then accelerated through the
impeller and collected in a double involute and returned to the exchanger.
There are several unique features of the design in addition to the integration of pump
and cold plate. There are no dynamic seals in the pump. The impeller is an integral
part of the motor and is directly driven through a magnetic couple. There are no seals
between the upper and lower pump housings. The seal is a function of the molding
process. The copper cold plate is molded into the lower housing. The metal to plastic
seal is also a function of the molding process.
The unit is maintenance free. Through careful selection of materials and the unique
heat exchanger design that contains a reservoir the units are sealed for life. In
addition every unit is proof pressure tested, vacuum decay tested, helium leak
checked and the motor RPM is verified.
5.1 Validation Results for the ATX Reference Design
The reference thermal solution is a liquid cooled design, with an integrated pump and
cold-plate (or chiller) and a remote heat exchanger with an attached fan. This solution
is called the Intel Advanced Liquid Cooling Technology Reference Design (Intel ALCT
Reference Design).
The reference solution pump and cold-plate module is compliant with the reference
ATX motherboard keep-out and height recommendations defined Section
the tubing that carries the working fluid from the pump/cold-plate protrudes through
this keep-out and the heat exchanger is located on the back panel of the chassis.
The solution comes as an integrated assembly. The major ALCT components are
provided Figure 16.
Note: If this fan design is used in your product and you will deliver it to end use customers,
you have the responsibility to determine an adequate level of protection (e.g.,
protection barriers, a cage, or an interlock) against contact with the energized fan by
the user during user servicing.
5.5 through
Thermal and Mechanical Design Guidelines 39
Page 40

LGA775 Socket Heatsink Loading
5.1.1 Heatsink Performance
Table 2 provides the Intel ALCT Reference Design performance for the Intel® Core™2
Extreme processor QX6800 B3 Stepping and QX9770 C0 Stepping. The results are
based on the test procedure described in Section 5.1.4.
The table also includes a TA assumption of 38 °C for the Intel reference thermal
solution at the inlet to the heat exchanger fan discussed in Section
ambient temperature to the chassis of 35 °C is assumed, resulting in a temperature
rise, T
(refer to Sections
acoustics.
Table 2. Intel Liquid Cooled Reference Design Performance (ALCT)
, of 3 °C. Meeting TA and ΨCA targets can maximize processor performance
R
2.2, 2.4. and Chapter 4). Minimizing T
3.3. An external
, can lead to improved
R
Intel® Core™ 2 Extreme processor QX6800 B3 stepping 0.13 °C/W TA = 38 °C
Intel® Core™ 2 Extreme processor QX9770 C0 stepping 0.13 °C/W TA = 38 °C
5.1.2 Acoustics
To optimize acoustic emission by the heat exchanger fan and pump, the reference
design implements a variable speed fan and pump. A variable speed fan and pump
allows the reference design performance to adjust for changes in processor utilization
and ambient air conditions. The required fan speed necessary to meet thermal
specifications can be controlled by the silicon sensor temperature and should comply
with requirements in
Table 3. Acoustic Results
Fan Speed
PWM
(RPM)
100%
(3300)
25%
(900)
NOTES:
1. Acoustic performance is defined in terms of measured sound power (LwAm) as defined in
ISO 9296 standard, and measured according to ISO 7779.
2. Pump speed represents 3 pulses per rotation and if read by MB circuitry that assumes 2
pulses per rotation. It will perceive its operating (rotating) faster than specified in the table
(e.g., the real pump speed is 600 rpm, 3 pulses, but MB would report 900rpm per 2 pulses
calculated.)
3. If only 3 pin headers are available on MB that operate at a constant 12 V, the fan and
pump will operate at full speed and this condition does not represent the minimum speed.
The design is intended to run using 4 pin header PWM signals specified in Sections
and
5.1.6.
4. If only one
recommended to run the pump off of the 4 pin header and the fan off of the 3 pin header
and to have both headers respond to the CPU temperature to deliver the performance
indicated in
Processor Target Thermal
Performance, Ψca
(Mean + 3σ)
T
Assumption
Table 3.
Pump Speed
PWM
(RPM)
100%
(1700)
25%
(600)
4 pin header is available on MB (all others are 3 pin headers), it is
Table 3.
Acoustic Thermal
6.0BA 0.13 °C/W Maximum fan and pump
3.6BA ~0.23 °C/W Minimum fan and pump
Performance
Ψca
Descriptions
speed
speed
A
5.1.5
40 Thermal and Mechanical Design Guidelines
Page 41

Intel Thermal/Mechanical Reference Design Information
This design does not use a fan hub thermistor. Additional acoustic improvements can
be achieved at lower processor workload by using the T
in section
2.2.3. Intel recommendation is to use the Fan Specification for 4 Wire PWM
CONTROL
Controlled Fans to implement fan speed control capability based on the digital thermal
sensor. Refer to Chapter
6 for further details.
5.1.3 Altitude
The reference heatsink solutions were evaluated at sea level. However, many
companies design products that must function reliably at high altitude, typically
1,500 m [5,000 ft] or more. Air-cooled temperature calculations and measurements
at sea level must be adjusted to take into account altitude effects like variation in air
density and overall heat capacity. This often leads to some degradation in thermal
solution performance compared to what is obtained at sea level, with lower fan
performance and higher surface temperatures. The system designer needs to account
for altitude effects in the overall system thermal design to make sure that the T
requirement for the processor is met at the targeted altitude.
5.1.4 Reference Heatsink Thermal Validation
specifications described
C
The Intel reference heatsink was validated within the specific boundary conditions
based on the methodology described Section
5.2, and using a thermal test vehicle
(refer to section Error! Reference source not found.).
Thermal testing is done in a thermal chamber (due to the slight change in fluid
properties at elevated temperatures) on test fixtures to secure the heat exchangers at
the appropriate ambient temperatures. Acoustic testing is completed in an ATX
chassis representing a micro-tower configuration.
The test results, for a number of samples, are reported in terms of a worst-case
mean + 3σ value for thermal characterization parameter using real processors (based
on the thermal test vehicle correction factors).
Thermal and Mechanical Design Guidelines 41
Page 42

5.1.5 Fan Motor Performance
The fan power requirements for proper operation are given Table 4.
Table 4. Fan Electrical Performance Requirements
Requirement Value
Maximum Average fan current draw 1.5 A
Fan start-up current draw 2.2 A
Fan start-up current draw maximum duration 1.0 second
Fan header voltage 12 V ± 5%
Tachometer output 2 pulse per revolution
Tachometer output signal Open-collector (open-drain)
PWM signal input frequency 21 kHz to 28 kHz
PWM signal pull up in fan 3.3 V (recommended max);
PWM signal current source Imax = 5 mA (short circuit current)
PWM signal maximum voltage for logic low VIL = 0.8 V
PWM compliant function RPM must be within spec for specified duty
LGA775 Socket Heatsink Loading
5.25 V (absolute max)
cycle
In addition to comply with overall thermal requirements (see Section 5.1.1), and the
general environmental reliability requirements (see Section 5.2) the fan should meet
the following performance requirements:
•
Mechanical wear out represents the highest risk reliability parameter for fans. The
capability of the functional mechanical elements (ball bearing, shaft, and tower
assembly) must be demonstrated to a minimum useful lifetime of 50,000 hours.
In addition to passing the environmental reliability tests described in Section 5.2,
•
the fan must demonstrate adequate performance after 7,500 on/off cycles with
each cycle specified as 3 minutes on, 2 minutes off, at a temperature of 70 °C.
See the Fan Specification for 4-wire PWM Controlled Fans for additional details on the
fan specification.
42 Thermal and Mechanical Design Guidelines
Page 43

Intel Thermal/Mechanical Reference Design Information
5.1.6 Pump Motor Performance
The pump power requirements for proper operation are given Table 5
Table 5. Pump Electrical Performance Requirements
Requirement Value
Maximum Average motor current draw 1.5 A
Motor start-up current draw 2.2 A
Motor header voltage 12 V ±5%
Tachometer output 3 pulse per revolution
Tachometer output signal Open-collector (open-drain)
Tachometer output signal current sink capability 10 mA
PWM signal input frequency 25 kHz (nominal)
PWM signal pull up in fan 3.3 V (recommended max)
PWM signal current source Imax = 5 mA
PWM signal maximum voltage for logic low VIL = 0.8 V
PWM compliant function RPM must be within spec for specified
21 kHz to 28kHz (allowable range)
5.25 V (absolute max)
(short circuit current)
duty cycle
In addition to comply with overall thermal requirements (see section 5.1.1), the pump
should meet the environment reliability requirements (see Section 5.2).
Thermal and Mechanical Design Guidelines 43
Page 44

LGA775 Socket Heatsink Loading
5.2 Environmental Reliability Testing
5.2.1 Structural Reliability Testing
Structural reliability tests consist of unpackaged, board-level vibration and shock tests
of a given thermal solution in the assembled state. The thermal solution should meet
the specified thermal performance targets after these tests are conducted; however,
the test conditions outlined here may differ from your own system requirements.
5.2.1.1 Random Vibration Test Procedure
Duration: 10 min/axis, 3 axes
Frequency Range: 5 Hz to 500 Hz
Power Spectral Density (PSD) Profile: 3.13 G RMS
Figure 11. Random Vibration PSD
0.1
PSD (g^2/Hz)
0.001
0.01
3.13GRMS (10 minutes per axis)
(20, 0.02)
(5, 0.01)
1
5 Hz
10 100 1000
Frequency (Hz)
(500, 0.02)
500 Hz
44 Thermal and Mechanical Design Guidelines
Page 45

2
8
)
Intel Thermal/Mechanical Reference Design Information
5.2.1.2 Shock Test Procedure
Recommended performance requirement for a motherboard:
Quantity: 3 drops for + and - directions in each of 3 perpendicular axes (i.e.,
•
total 18 drops).
Profile: 50 G trapezoidal waveform, 11 ms duration, 170 in/sec minimum
•
velocity change.
Setup: Mount sample board on test fixture.
•
Figure 12. Shock Acceleration Curve
A
c
c
60
50
e
40
l
e
30
r
a
t
20
i
o
10
n
(g)
0
0
5.2.1.2.1 Recommended Test Sequence
Each test sequence should start with components (i.e., motherboard, heatsink
assembly, etc.) that have never been previously submitted to any reliability testing.
The test sequence should always start with a visual inspection after assembly, and
BIOS/CPU/Memory test (refer to Section 5.2.3).
Prior to the mechanical shock & vibration test, the units under test should be
preconditioned for 72 hours at 45 ºC. The pre-conditioning is intended to present the
system burn-in and shipping/storage environment stress.
4 6
Time (milliseconds
10 12
The stress test should be followed by a visual inspection and then BIOS/CPU/Memory
test.
Thermal and Mechanical Design Guidelines 45
Page 46

5.2.1.2.2 Post-Test Pass Criteria
The post-test pass criteria are:
1. No significant physi cal damage to the pump assembly attach mechanism
(including such items as clip and motherboard fasteners).
The assembly must remain attached to the motherboard.
2.
3. The assembly remains seated and its bottom remains mated flatly against IHS
surface. No visible gap between the heatsink base and processor IHS. No visible
tilt of the heatsink with respect to its attach mechanism.
No signs of physical damage on motherboard surface due to impact of the
4.
assembly or its attach mechanism.
No visible physical damage to the processor package.
5.
6. Successful BIOS/Processor/memory test of post-test samples.
7. Thermal compliance testin g to demonstrate that the case temperature
specification can be met.
5.2.2 Power Cycling
LGA775 Socket Heatsink Loading
Thermal performance degradation due to TIM degradation is evaluated using power
cycling testing. The test is defined by 7500 cycles for the case temperature from room
temperature (~23 ºC) to the maximum case temperature defined by the thermal
profile at TDP. Thermal Test Vehicle (refer to Section Error! Reference source not
found.) is used for this test.
5.2.3 Reliability Testing
The ALCT solution is a complex assembly with multiple joints and injection molded
plastic parts. The selection of materials for pump and tubing as well as joint designs
are done to provide a liquid-tight environment and to minimize the loss of liquid to
ambient through vapor transmission. A reservoir is included in the heat exchanger to
mitigate the impact of the vapor transmission loss. The design approach that is used
for the selection of tubing and for reservoir sizing based on reliability testing is shown
Table 6. The results of the reliability testing and their impact on thermal resistance
in
pump motor performance and on pump integrity are summarized.
The complex assembly of ALCT and the sensitivity of reliability to manufacturing
environment would require frequent verification of parts for reliability. The objective of
the reliability testing of the design is to identify key failure mechanisms and to
develop design paths to mitigate them under a reasonable set of use conditions. The
reliability testing and results are not expected to represent the performance of the
design and may require additional testing to verify the performance in a particular use
condition environment.
46 Thermal and Mechanical Design Guidelines
Page 47

Intel Thermal/Mechanical Reference Design Information
A list of failure mechanisms that were considered in design reliability testing are:
1. Pump assembly cracking causing liquid loss
2. Vapor loss through plastic walls and joints causing liquid loss
3. Thermal performance degradation due to internal mechanisms affecting
CPU T
temperature
C
4. Pump motor and printed circuit board performance degradation affecting
the pump RPM
All of the above mechanisms are expected to be active during the pump operation and
relatively inactive during the off mode and so all reliability testing needs to be
performed with pump on. The fatigue mechanisms (# 1) are additionally excited by
the cycling of temperature caused by on-off cycles. The real use condition is a
combination of continuous operation and on-off cycling and for the purpose of testing
can be separated into a) continuous operation and b) on-off power cycles. The liquid
temperature during continuous operation can be estimated by the heat exchanger
thermal resistance, TDP, and T
Ψ
= 0.05 ºC /W gives T
HX
speed and T
= 26 ºC is expected to be approximately the same. A typical on-off cycle
A
(e.g., at TA = 38 ºC, TDP = 130 W, and
A
= 45 ºC). The calculated T
LIQUID
can be assumed to be from ambient condition to T
also controlled similar to a fan for acoustics and expected mean pump RPM was
estimated to be 1450 (range = 600-1700). The pump speed of 1450 was used to
simulate typical condition during with use condition.
when fan is at its low
LIQUID
= 45 ºC. The pump speed is
LIQUID
Note: The heat exchanger thermal resistance, Ψ
approaching the heat exchanger.
The complete test matrix is summarized in the
were slightly accelerated to reduce duration for failure. The cracking mechanism #1
was accelerated significantly by running at 75 ºC. The T
applying a film heater to the bottom of the pump assembly alone (tubing and heat
exchanger were not included by a closed loop tube was used to provide impedance
from pump outlet to inlet).
Table 6. The Reliability Test Matrix
Use Condition Test Conditions Pump Speed Included Failure
Continuous operation T
T
T
On-off cycles T
LIQUID
LIQUID
LIQUID
LIQUID
7500 cycles
HX
= (T
– TA )/(CPU power). TA is the air
LIQUID
Table 6. The continuous operation tests
value was achieved by
LIQUID
Mechanisms
= 50 ºC 1450 2
= 50 ºC 1450 3, 4
= 75 ºC for 16
weeks
= 35-60 ºC,
1450 1
1450 1,2,3,4
Thermal and Mechanical Design Guidelines 47
Page 48

5.2.3.1 Tubing Material Selection
Tubing material selection requires balancing several different criteria. The parameters
that were considered were cost, flexibility, flammability and vapor transmissibility.
Three different types of tubing materials were tested for liquid loss by connecting a
know length of tubing to the ALCT pump and measuring the assembly weight prior to
the start and periodically during the test to quantify the loss. The liquid evaporation
and migration of vapor through the plastic walls to atmosphere is the mode of liquid
loss that is affected by the internal structure of plastic and its wall thickness. The
pumps were run at 1450 RPM and T
accurate scale is required to measure the weekly losses that allow for the calculation
of a loss rate.
LGA775 Socket Heatsink Loading
was maintained at 50 ºC. An extremely
LIQUID
The results for 3 different materials are summarized in
configuration had the lowest loss rate of 0.25 grams/week and was chosen as the
tubing material for ALCT. Material parameters are 3/8” internal diameter and 5/8”
outer diameter (1/8” wall thickness).
Table 7. The Weekly Loss Rate of Different Tubing Materials
Tubing Material Loss Rate (grams/week)
Polyurethene 5.0
PVC 1.2
Norprene® 0.25
5.2.3.2 Reservoir Sizing
The liquid loss through vapor migration through the tubing walls and joints can be
minimized but not eliminated as shown by the relatively impermeable material of
Norprene
needed for the assembly of the solution inside of a chassis. The effect of liquid loss
can be mitigated at least for a reasonable operational life of the solution by providing
a liquid reservoir. A continuous operation test at 50 ºC and 1450 RPM was conducted
with assembly mass monitored every week to identify weekly mass loss rate. The
assembly mass loss data with 3 samples for 7 weeks duration is shown in
The data shows that average loss rate was 0.25-0.30 grams/week and is reasonably
consistent for 3 samples. The reservoir size of 38 milli-liters (38 grams for water) was
chosen to provide 152 weeks (approximately 3 years) of operational life. The pump is
expected to have additional resilience to liquid loss prior to significant impact to
thermal performance.
®
rubber. The metal tubing was not a good option due to the flexibility
Table 7. The Norprene® tubing
Figure 13.
48 Thermal and Mechanical Design Guidelines
Page 49

Intel Thermal/Mechanical Reference Design Information
Figure 13. The Assembly Cumulative Mass Loss Data in Continuous Operation Test at
50 ºC and 1450 RPM
2.5
2.0
1.5
1.0
0.5
Cumulative mass loss (grams)
0.0
02468
Week
The reservoir presence in assembly and its impact on thermal performance was also
confirmed by drawing the liquid out in the increment of 5 mL and measuring thermal
performance at each increment. The Thermal resistance data are shown in
It can be seen that when the liquid of 65 mL or more is drawn, thermal resistance
goes up significantly. The test verifies the role of reservoir in maintaining thermal
performance with liquid loss up to the reservoir size of 38 mL and 27 mL beyond that.
Figure 14. Thermal Resistance Curve for Liquid Loss of Reservoir
Theta ca vs. fluid level
Pump-1
Pump-2
Pump-3
Figure 14.
1.200
1.000
0.800
0.600
0.400
Theta ca [C/W]
0.200
0.000
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
Fluid Removed [ml]
Pump-1
Pump 3
Pump 2
Thermal and Mechanical Design Guidelines 49
Page 50

The reservoir is located in the heat exchanger at its top as shown in Figure 15. An air
spring or an accumulator is needed to prevent high-pressure situation due to
operating or storage temperature changes. 8 mL air volume is provided on the top of
the reservoir to develop an air spring that minimizes the sensitivity to temperature
change on pump internal pressure.
Figure 15. Reservoir Location
LGA775 Socket Heatsink Loading
5.2.3.3 Reliability Test Results
The reliability test results are summarized in Table 8. A small sample size was used to
evaluate design against reliability. Test results showed no assembly cracking failure in
either continuous operation or on-off cycles. The liquid loss measured was smaller
than the reservoir capability for either use condition. Thermal resistance showed
change of -0.01 to +0.007 ºC /W which is insignificant compared to the measurement
accuracy of approximately +/- 0.01 ºC /W. The pump motor and PCB also did not
show significant RPM degradation. The pump internal mechanisms (e.g., corrosion)
that affect thermal performance were not expected to be active with the cycling use
condition only and so thermal performance after cycling test was not measured.
50 Thermal and Mechanical Design Guidelines
Page 51

Intel Thermal/Mechanical Reference Design Information
Table 8. Reliability Test Results
Use
Condition
Continuous
Operation
On-off
Cycles
Test Conditions Failure
T
= 75 ºC
LIQUID
for 16 weeks
T
= 50 ºC 2 0.25-0.30 grams/week
LIQUID
T
= 50 ºC 3 Insignificant change in Ψca for 3
LIQUID
T
= 50 ºC 4 2% average RPM degradation after 8
LIQUID
T
= 35-60 ºC,
LIQUID
5500 cycles
T
= 35-60 ºC,
LIQUID
5500 cycles
= 35-60 ºC,
T
LIQUID
7500 cycles
mechanism
1 0/10 failure
samples
weeks for 3 samples
1 0/3 failure
2 3 grams loss after all cycles for 3
samples
4 No RPM degradation for 0/3 samples
Results
5.2.4 Recommended BIOS/CPU/Memory Test Procedures
This test is to ensure proper operation of the product before and after environmental
stresses, with the thermal mechanical enabling components assembled. The test shall
be conducted on a fully operational motherboard that has not been exposed to any
battery of tests prior to the test being considered.
Testing setup should include the following components, properly assembled and/or
connected:
Appropriate system motherboard
•
• Processor
All enabling components, including socket and thermal solution parts
•
• Power supply
•
Disk drive
• Video card
DIMM
•
• Keyboard
• Monitor
The pass criterion is that the system under test shall successfully complete the
checking of BIOS, basic processor functions and memory, without any errors.
Thermal and Mechanical Design Guidelines 51
Page 52

LGA775 Socket Heatsink Loading
5.3 Material and Recycling Requirements
Material shall be resistant to fungal growth. Examples of non-resistant materials
include cellulose materials, animal and vegetable based adhesives, grease, oi ls, and
many hydrocarbons. Synthetic materials such as PVC formulations, certain
polyurethane compositions (e.g., polyester and some polyethers), plastics which
contain organic fillers of laminating materials, paints, and varnishes also are
susceptible to fungal growth. If materials are not fungal growth resistant, then MILSTD-810E, Method 508.4 must be performed to determine material performance.
Material used shall not have deformation or degradation in a temperature life test.
Any plastic component exceeding 25 grams must be recyclable per the European Blue
Angel recycling standards.
5.4 Safety Requirements
Heatsink and attachment assemblies shall be consistent with the manufacture of units
that meet the safety standards:
UL Recognition-approved for flammability at the system level. All mechanical and
•
thermal enabling components must be a minimum UL94V-2 approved.
CSA Certification. All mechanical and thermal enabling components must have
•
CSA certification.
All components (in particular the heatsink fins) must meet the test requirements
•
of UL1439 for sharp edges.
If the International Accessibility Probe specified in IEC 950 can access the moving
•
parts of the fan, consider adding safety feature so that there is no risk of personal
injury.
5.5 Geometric Envelope for Intel Reference ATX Thermal Mechanical Design
Figure 66, Figure 67, and Figure 68 in Appendix G gives detailed reference ATX/μATX
motherboard keep-out information for the reference thermal/mechanical enabling
design. These drawings include height restrictions in the enabling component region.
The maximum height of the reference solution above the motherboard is 71.12 mm
[2.8 inches] except for the flexible hoses which transit the area to the heat exchanger
which is mounted on the back panel, and is compliant with the motherboard primary
side height constraints defined in the ATX Specification revision 2.2 and the microATX
Motherboard Interface Specification revision 1.2 found at http://www.formfactors.org
Figure 16 shows the Intel® ALCT Reference Design Major Components. The reference
solution also requires suitable space to mount the heat exchanger fan combination on
the back panel.
52 Thermal and Mechanical Design Guidelines
Figure 17 gives the required foot print on the back panel.
.
Page 53

Intel Thermal/Mechanical Reference Design Information
Figure 16. Intel® ALCT Reference Design Major Components
Development vendor information for the Intel® ALCT Reference Solution is provided in
Appendix A.
Figure 17. Heat Exchanger Fan Combination Foot Print View
Thermal and Mechanical Design Guidelines 53
Page 54

5.6 Reference Attach Mechanism
The ALCT pump is attached to the motherboard through the use of a backside stiffener
plate. Prior to motherboard installation in the chassis the backside stiffener plate is
attached with two screws. Once installed these screws remain installed unless the
stiffener plate requires removal. After installation of the board into the chassis the
pump and upper structure are secured to the motherboard and backside stiffener with
two additional screws (
panel and is secured in place using four screws provided in the accessory kit. The
heat exchanger can be mounted on most back panels that will accept 120 mm fans.
The range of recommended positions of the heat exchanger relative to the pump is
defined in
Figure 74.
Figure 18. Structure to Motherboard Interface
Figure 18). The heat exchanger is positioned on the back
LGA775 Socket Heatsink Loading
54 Thermal and Mechanical Design Guidelines
Page 55

Intel Thermal/Mechanical Reference Design Information
5.7 Socket and Voltage Regulation Cooling Strategy
Consideration for the cooling of power delivery components and CPU socket needs to
be addressed when using a remote heat exchanger. The use of a remote heat
exchanger for processor cooling can remove the cooling air that the motherboard
components around the socket need and traditionally get from an active heatsink
directly attached to the processor IHS. The Intel ALCT Reference Design incorporates
a voltage regulation and socket cooling scheme that eliminates the need for additional
fan(s) on these components. The proximity of the remote heat exchanger on the rear
panel of the ATX miniTower /Tower allows for direct impingement of airflow to the
voltage regulation components.
the fan’s pressure side and the heat exchanger inlet that is integrated into the heat
exchanger design allows for air to be introduced directly to the VR region for cooling.
This approach introduces an airflow path that doesn’t significantly impact the airflow
through the heat exchanger due to the reduced total impedance the fan sees and the
subsequent increase in the operating point of the fan. Effectively the fan operating
point increase is near the flow that is delivered to the VR and socket.
Figure 19. Diagram of Location of Heat Exchanger VR and Socket Airflow Cooling
Feature
Figure 19 illustrates how a small gap or exit between
HX Fan
Built-in VR and Socket
cooling feature
Pump/coldplate
I/O
This method of VR and socket cooling was validated by testing this configuration as
well as not having a gap. Analysis indicates that the momentum component
attributed with the pressurized airflow in the configuration shown in
help the cooling flow penetrated the VR components down to the MB surface thus
providing the best thermal performance.
VR HS
Socket
Figure 19 would
Thermal and Mechanical Design Guidelines 55
Page 56

LGA775 Socket Heatsink Loading
Using the cooling approach on the Intel D975XBX2 Desktop Board the CPU current
draw vs. heat exchanger fan speed is shown in
Figure 20 and Table 9 as well as the
performance of not having this cooling feature. This was measured as the maximum
current draw before the VR circuitry reaches its maximum temperature and asserts
the PROCHOT# signal.
The socket has a maximum temperature specification to maintain proper electrical
performance at the contacts. Based on this temperature the current capability is
slightly reduced but still shows improved capability of over 20 A at 100% speed over
not having this feature.
Figure 20. CPU Maximum Current Draw for Heat Exchanger Fan Speed
CPU max imum curre nt dra w capability
at 35C external ambient
190
180
170
160
150
140
130
CPU Cu r r en t (A)
120
110
100
0% 20% 40% 60% 80% 100% 120%
VR/Socket Cooling Feature No Cooling Feature
Hea t Excha nger Fa n S pee d (PWM)
Table 9. Maximum Estimated Processor Current Capability at 35 ºC External Ambient
Fan Speed (PWM) Max. Current Draw for
25% – VR Requirements 115 105
60% – VR Requirements 150 120
100% – VR Requirements 180 150
100% – Socket Requirements
NOTES:
1. Socket temperature requirement is based on the maximum temperature necessary for
end of life socket electrical performance
(1)
165 140
Heat Exchanger with VR
and Socket Airflow
Cooling Feature (A)
Max. Current Draw
for Heat Exchanger
and fan with no
Cooling Feature (A)
§
56 Thermal and Mechanical Design Guidelines
Page 57

Intel® Quiet System Technology (Intel® QST)
6 Intel® Quiet System
®
Technology (Intel
In the Intel® 965 Express Chipset Family a new control algorithm for fan speed control
is being introduced. It is composed of a Manageability Engine (ME) in the Graphics
Memory Controller Hub (GMCH) which executes the Intel
®
(Intel
circuits.
The ME provides integrated fan speed control in lieu of the mechanisms available in a
SIO or a stand-alone ASIC. The Intel QST is time based as compared to the linear or
state control used by the current generation of FSC devices.
A short discussion of Intel QST will follow along with thermal solution design
recommendations. For a complete discussion of programming the Intel QST in the ME
please consult the Intel
Tuning Manual.
QST) algorithm and the ICH8 containing the sensor bus and fan control
®
Quiet System Technology (Intel® QST) Configuration and
QST)
®
Quiet System Technology
6.1 Intel® Quiet System Technology Algorithm
The objective of Intel QST is to minimize the system acoustics by more closely
controlling the thermal sensors to the corresponding processor or chipset device
T
control algorithm and a Fan Output Weighting Matrix. The PID algorithm takes into
account the difference between the current temperature and the target (T
rate of change and direction of change to minimize the required fan speed change.
The Fan Output Weighting Matrix utilizes the effects of each fan on a thermal sensor
to minimize the required fan speed changes
Figure 21 shows in a very simple manner how Intel QST works. See the Intel® Quiet
System Technology (Intel
discussion of the inputs and response.
value. This is achieved by the use of a Proportional-Integral-Derivative (PID)
CONTROL
®
QST) Configuration and Tuning Manual for a detail
CONTROL
), the
Thermal and Mechanical Design Guidelines 57
Page 58

Figure 21. Intel® Quiet System Technology Overview
LGA775 Socket Heatsink Loading
6.1.1 Output Weighting Matrix
Intel QST provides an Output Weighting Matrix that provides a means for a single
thermal sensor to affect the speed of multiple fans. An example of how the matrix
could be used is if a sensor located next to the memory is sensitive to changes in both
the processor heatsink fan and a 2
matrix additional the Intel QST could command the processor thermal solution fan and
nd
this 2
fan to both accelerate a small amount. At the system level these two small
nd
fan in the system. By placing a factor in this
changes can result in a smaller change in acoustics than having a single fan respond
to this sensor.
6.1.2 Proportional-Integral-Derivative (PID)
The use of Proportional-Integral-Derivative (PID) control algorithms allow the
magnitude of fan response to be determined based upon the difference between
current temperature readings and specific temperature targets. A major advantage of
a PID Algorithm is the ability to control the fans to achieve sensor temperatures much
closer to the T
Figure 22 is an illustration of the PID fan control algorithm. As illustrated in the figure,
when the actual temperature is below the target temperature, the fan will slow down.
The current FSC devices have a fixed temperature vs. PWM output relationship and
miss this opportunity to achieve additional acoustic benefits. As the actual
temperature starts ramping up and approaches the target temperature, the algorithm
will instruct the fan to speed up gradually, but will not abruptly increase the fan speed
to respond to the condition. It can allow an overshoot over the target temperature for
a short period of time while ramping up the fan to bring the actual temperature to the
target temperature. As a result of its operation, the PID control algorithm can enable
an acoustic-friendly platform.
CONTROL
.
58 Thermal and Mechanical Design Guidelines
Page 59

Intel® Quiet System Technology (Intel® QST)
Figure 22. PID Controller Fundamentals
Integral (time averaged)
Integral (time averaged)
Integral (time averaged)
Integral (time averaged)
RPM Temperature
Proportional
Proportional
Proportional
Proportional
Error
Error
Error
Error
+ dPWM
+ dPWM
+ dPWM
+ dPWM
+ dPWM
dPWM
dPWM
dPWM
dPWM
dPWM
dPWM
-
-
-
-
-
-
+ dPWM
Actual
Actual
Temperature
Temperature
Limit
Limit
Temperature
Temperature
Derivative (Slope)
Derivative (Slope)
Derivative (Slope)
Derivative (Slope)
Time
Fan
Fan
Speed
Speed
For a PID algorithm to work limit temperatures are assigned for each temperature
sensor. For Intel QST the T
limit temperature. The ME will measure the error, slope and rate of change using the
equations below:
Proportional Error (P) = T
•
• Integral (I) = Time averaged error
• Derivative (D) = ΔTemp / ΔTime
Three gain values are used to control response of algorithm.
• Kp = proportional gain
• Ki = Integral gain
Kd = derivative gain
•
The Intel
provides initial values for the each of the gain constants. In addition it provides a
methodology to tune these gain values based on system response.
Finally the fan speed change will be calculated using the following formula:
ΔPWM = -P*(Kp) – I*(Ki) + D*(Kd)
®
Quiet System Technology (Intel® QST) Configuration and Tuning Manual
for the processor and chipset are to be used as the
CONTROL
LIMIT
– T
ACTUAL
Thermal and Mechanical Design Guidelines 59
Page 60

LGA775 Socket Heatsink Loading
6.2 Board and System Implementation of
®
Intel
To implement the board it must be configured as shown in Figure 23 and listed in the
following bullets.
ME system (S0-S1) with Controller Link connected and powered
•
• DRAM with Channel A DIMM 0 installed and 2 MB reserved for Intel QST FW
SPI Flash with sufficient space for the Intel QST Firmware
•
•
SST-based thermal sensors to provide board thermal data for Intel QST algorithms
• Intel QST firmware
Figure 23. Intel® Quiet System Technology Platform Requirements
Quiet System Technology
execution
Processor
Intel® (G)MCH
ME
ME
Controller Link
DRAM
DRAM
Intel®
ICH8
Note: Simple Serial Transport (SST) is a single wire bus that is included in the ICH8 to
provide additional thermal and voltage sensing capability to the Manageability Engine
(ME)
FSC
Control
SPI
SPI
Flash
SST
Sensor
60 Thermal and Mechanical Design Guidelines
Page 61

Intel® Quiet System Technology (Intel® QST)
Figure 24 shows the major connections for a typical implementation that can support
processors with digital thermal sensor or a thermal diode. In this configuration an
SST Thermal Sensor has been added to read the on-die thermal diode that is in all of
the processors in the 775-land LGA packages shipped before the Intel
processor. With the proper configuration information, the ME can accommodate inputs
from PECI or SST for the processor socket. Additional SST sensors can be added to
monitor system thermal (see
Appendix F for BTX recommendations for placement).
Figure 24. Example Acoustic Fan Speed Control Implementation
®
Core™2 Duo
Intel has engaged with a number of major manufacturers of thermal / voltage sensors
to provide devices for the SST bus. Contact your Intel Field Sales representative for
the current list of manufacturers and visit their web sites or local sales representatives
for a part suitable for your design.
Thermal and Mechanical Design Guidelines 61
Page 62

LGA775 Socket Heatsink Loading
6.3 Intel® QST Configuration & Tuning
Initial configuration of the Intel QST is the responsibility of the board manufacturer.
The SPI flash should be programmed with the hardware configuration of the
motherboard and initial settings for fan control, fan monitoring, voltage and thermal
monitoring. This initial data is generated using the Intel provided Configuration Tool
At the system integrator the Configuration Tool can be used again but this time to
tune the Intel QST subsystem to reflect the shipping system configuration. In the
tuning process the Intel QST can be modified to have the proper relationships between
the installed fans and sensors in the shipping system. A Weighting Matrix Utility and
Intel QST Log program are planned to assist in optimizing the fan management and
achieve acoustic goal.
See your Intel field sales representative for availability of these tools.
6.4 Fan Hub Thermistor and Intel® QST
There is no closed loop control between Intel QST and the thermistor, but they can
work in tandem to provide the maximum fan speed reduction. The BTX reference
design includes a thermistor on the fan hub. This Variable Speed Fan curve will
determine the maximum fan speed as a function of the inlet ambient temperature and
by design provides a Ψ
QST, by measuring the processor digital thermal sensor will command the fan to
reduce speed below the VSF curve in response to processor workload. Conversely if
the processor workload increases, the FSC will command the fan via the PWM duty
cycle to accelerate the fan up to the limit imposed by the VSF curve. Care needs to
be taken in BTX designs to ensure the fan speed at the minimum operating speed that
sufficient air flow is being provided to support the other system components.
sufficient to meet the thermal profile of the processor. Intel
CA
Figure 25. Digital Thermal Sensor and Thermistor
Variable Speed Fan (VSF) Curve
Variable Speed Fan (VSF) Curve
Full
Speed
Speed
(RPM)
(RPM)
Fan Speed
Fan Speed
Operating
Operating
Full
Min.
Min.
34
30
30
Inlet Temperature (°C)
Inlet Temperature (°C)
34
Fan Speed
Fan Speed
Operating Range
Operating Range
with FSC
with FSC
38
38
100 %
100 %
Min %
Min %
Fan Speed
Fan Speed
(% PWM Duty Cycle)
(% PWM Duty Cycle)
§
62 Thermal and Mechanical Design Guidelines
Page 63

LGA775 Socket Heatsink Loading
Appendix A LGA775 Socket Heatsink
Loading
A.1 LGA775 Socket Heatsink Considerations
Heatsink clip load is traditionally used for:
•
Mechanical performance in mechanical shock and vibration
⎯
Refer to Section 5.6 above for information on the structural design strategy
for the Intel ALCT Reference Design
•
Thermal interface performance
⎯
Required preload depends on TIM
⎯
Preload can be low for thermal grease
In addition to mechanical performance in shock and vibration and TIM performance,
LGA775 socket requires a minimum heatsink preload to protect against fatigue failure
of socket solder joints.
Solder ball tensile stress is originally created when, after inserting a processor into the
socket, the LGA775 socket load plate is actuated. In addition, solder joint shear
stress is caused by coefficient of thermal expansion (CTE) mismatch induced shear
loading. The solder joint compressive axial force (F
preload helps to reduce the combined joint tensile and shear stress.
Overall, the heatsink required preload is the minimum preload needed to meet all of
the above requirements: Mechanical shock and vibration and TIM performance AND
LGA775 socket protection against fatigue failure.
) induced by the heatsink
axial
Thermal and Mechanical Design Guidelines 63
Page 64

LGA775 Socket Heatsink Loading
A.2 Metric for Heatsink Preload for ATX/uATX
®
Designs Non-Compliant with Intel
Reference Design
A.2.1 Heatsink Preload Requirement Limitations
Heatsink preload by itself is not an appropriate metric for solder joint force across
various mechanical designs and does not take into account for example (not an
exhaustive list):
Heatsink mounting hole span
•
•
Heatsink clip assembly stiffness and creep
• Board stiffness and creep
• Board stiffness is modified by fixtures like backing plate, chassis attach, etc.
Simulation shows that the solder joint force (F
deflection measured along the socket diagonal. The matching of F
protect the LGA775 socket solder joint in temperature cycling is equivalent to
matching a target MB deflection.
Therefore, the heatsink preload for LGA775 socket solder joint protection against
fatigue failure can be more generally defined as the load required to create a target
board downward deflection throughout the life of the product
) is proportional to the board
axial
required to
axial
This board deflection metric provides guidance for mechanical designs that differ from
the reference design for ATX//µATX form factor.
A.2.2 Motherboard Deflection Metric Definition
Motherboard deflection is measured along either diagonal (refer to Figure 26):
d = dmax – (d1 + d2)/2
d’ = dmax – (d’1 + d’2)/2
Configurations in which the deflection is measured are defined in the Table 10.
To measure board deflection, follow industry standard procedures (such as IPC) for
board deflection measurement. Height gauges and possibly dial gauges may also be
used.
64 Thermal and Mechanical Design Guidelines
Page 65

LGA775 Socket Heatsink Loading
Table 10. Board Deflection Configuration Definitions
Configuration
Parameter
d_ref yes no BOL deflection, no
d_BOL yes yes BOL deflection with
d_EOL yes yes EOL deflection
Processor + Socket
load plate
BOL: Beginning of Life
EOL: End of Life
Figure 26. Board Deflection Definition
d1
Heatsink Parameter Name
preload
preload
d’1
d2
d’2
Thermal and Mechanical Design Guidelines 65
Page 66

LGA775 Socket Heatsink Loading
A.2.3 Board Deflection Limits
Deflection limits for the ATX/µATX form factor are:
d_BOL - d_ref ≥ 0.09 mm and d_EOL - d_ref ≥ 0.15 mm
And
d’_BOL – d’_ref ≥ 0.09 mm and d_EOL’ – d_ref’ ≥ 0.15 mm
NOTES:
1. The heatsink preload must remain within the static load limits defined in the processor
datasheet at all times.
2. Board deflection should not exceed motherboard manufacturer specifications.
A.2.4 Board Deflection Metric Implementation Example
This section is for illustration only, and relies on the following assumptions:
• 72 mm x 72 mm hole pattern of the reference design
• Board stiffness = 900 lb/in at BOL, with degradation that simulates board creep
over time
⎯ Though these values are representative, they may change with selected
material and board manufacturing process. Check with your motherboard
vendor.
Clip stiffness assumed constant – No creep.
•
Using Figure 27, the heatsink preload at beginning of life is defined to comply with
d_EOL – d_ref = 0.15 mm depending on clip stiffness assumption.
Note that the BOL and EOL preload and board deflection differ. This is a result of the
creep phenomenon. The example accounts for the creep expected to occur in the
motherboard. It assumes no creep to occur in the clip. However, there is a small
amount of creep accounted for in the plastic fasteners. This situation is somewhat
similar to the Intel Reference Design.
The impact of the creep to the board deflection is a function of the clip stiffness:
The relatively compliant clips store strain energy in the clip under the BOL preload
•
condition and tend to generate increasing amounts of board deflection as the
motherboard creeps under exposure to time and temperature.
In contrast, the stiffer clips store very little strain energy, and therefore does not
•
generate substantial additional board deflection through life.
NOTES:
Board and clip creep modify board deflection over time and depends on board
1.
stiffness, clip stiffness, and selected materials.
Designers must define the BOL board deflection that will lead to the correct end
2.
of life board deflection
66 Thermal and Mechanical Design Guidelines
Page 67

LGA775 Socket Heatsink Loading
Figure 27. Example: Defining Heatsink Preload Meeting Board Deflection Limit
A.2.5 Additional Considerations
Intel recommends to design to {d_BOL – d_ref = 0.15 mm} at BOL when EOL
conditions are not known or difficult to assess
The following information is given for illustration only. It is based on the reference
keep-out, assuming there is no fixture that changes board stiffness:
d_ref is expected to be 0.18 mm on average, and be as high as 0.22 mm
As a result, the board should be able to deflect 0.37 mm minimum at BOL
Additional deflection as high as 0.09 mm may be necessary to account for additional
creep effects impacting the board/clip assembly. As a result, designs could see as
much as 0.50mm total downward board deflection under the socket.
In addition to board deflection, other elements need to be considered to define the
space needed for the downward board total displacement under load, like the potential
interference of through-hole mount component pin tails of the board with a
mechanical fixture on the back of the board.
NOTES:
The heatsink preload must remain below the maximum load limit of the package
1.
at all times (Refer to processor
Board deflection should not exceed motherboard manufacturer specifications.
2.
datasheet)
Thermal and Mechanical Design Guidelines 67
Page 68

LGA775 Socket Heatsink Loading
A.2.5.1 Motherboard Stiffening Considerations
To protect LGA775 socket solder joint, designers need to drive their mechanical design
to:
Allow downward board deflection to put the socket balls in a desi rable force state
•
to protect against fatigue failure of socket solder joint (refer to sections
A.2.2, and A.2.3.)
Prevent board upward bending during mechanical shock event
•
• Define load paths that keep the dynamic load applied to the package within
specifications published in the processor datasheet
Limiting board deflection may be appropriate in some situations like:
Board bending during shock
•
• Board creep with high heatsink preload
However, the load required to meet the board deflection recommendation (refer to
Section
package maximum load specification. For example, such a situation may occur when
using a backing plate that is flush with the board in the socket area, and prevents the
board to bend underneath the socket.
A.2.3) with a very stiff board may lead to heatsink preloads exceeding
A.2.1,
A.3 Heatsink Selection Guidelines
Evaluate carefully heatsinks coming with motherboard stiffening devices (like backing
plates), and conduct board deflection assessments based on the board deflection
metric.
Solutions derived from the reference design comply with the reference heatsink
preload, for example:
The Intel ALCT reference design available from licensed suppliers (refer to
•
Appendix H for contact information)
§
68 Thermal and Mechanical Design Guidelines
Page 69

Heatsink Clip Load Metrology
Appendix B Heatsink Clip Load
Metrology
B.1 Overview
This section describes a procedure for measuring the load applied by the heatsink
assembly on a processor package.
This procedure is recommended to verify the preload is within the design target range
for a design, and in different situations. For example:
Heatsink preload for the LGA775 socket
•
• Quantify preload degradation under bake conditions.
Note: This document reflects the current metrology used by Intel. Intel is continuously
exploring new ways to improve metrology. Updates will be provided later as this
document is revised as appropriate.
B.2 Test Preparation
B.2.1 Heatsink Preparation
Three load cells are assembled into the base of the heatsink under test, in the area
interfacing with the processor Integrated Heat Spreader (IHS), using load cells
equivalent to those listed in Section B.2.2.
To install the load cells, machine a pocket in the heatsink base, as shown
Figure 29. The load cells should be distributed evenly, as close as possible to the
and
pocket walls. Apply wax around the circumference of each load cell and the surface of
the pocket around each cell to maintain the load cells in place during the heatsink
installation on the processor and motherboard (Refer to
The depth of the pocket depends on the height of the load cell used for the test. It is
necessary that the load cells protrude out of the heatsink base. However, this
protrusion should be kept minimal, as it will create additional load by artificially
raising the heatsink base. The measurement offset depends on the whole assembly
stiffness (i.e. motherboard, clip, etc.).
Heatsink.
Figure 28
Figure 29).
Figure 30 shows an example using the
Note: When optimizing the heatsink pocket depth, the variation of the load cel l height
should also be taken into account to make sure that all load cells protrude equally
from the heatsink base. It may be useful to screen the load cells prior to installation to
minimize variation.
Thermal and Mechanical Design Guidelines 69
Page 70

Heatsink Clip Load Metrology
)
Remarks: Alternate Heatsink Sample Preparation
As mentioned above, making sure that the load cells have minimum protrusion out of
the heatsink base is paramount to meaningful results. An alternate method to make
sure that the test setup will measure loads representative of the non-modified design
is:
Machine the pocket in the heat sink base to a depth such that the tips of the load
•
cells are just flush with the heat sink base
Then machine back the heatsink base by around 0.25 mm [0.01”], so that the
•
load cell tips protrude beyond the base.
Proceeding this way, the original stack height of the heatsink assembly should be
preserved. This should not affect the stiffness of the heatsink significantly.
Figure 28. Load Cell Installation in Machined Heatsink Base Pocket – Bottom View
Heatsink Base Pocket
Diameter ~ 29 mm
[~1.15”]
Package IHS
Outline (Top
Surface
Load Cells
70 Thermal and Mechanical Design Guidelines
Page 71

Heatsink Clip Load Metrology
Figure 29. Load Cell Installation in Machined Heatsink Base Pocket – Side View
Wax to maintain load cell in position
during heatsink installation
Height of pocket
~ height of
selected load
cell
Load cell protrusion
(Note: to be optimized depending on assembly
stiffness)
Figure 30. Preload Test Configuration
Preload Fixture (copper
core with milled out pocket)
Load Cells (3x)
Thermal and Mechanical Design Guidelines 71
Page 72

B.2.2 Typical Test Equipment
Loa
d
c
e
Note
s
1
5
D
a
a Logge
r
o
r scann
e
r
Notes
2
3
4
For the heatsink clip load measurement, use equivalent test equipment to the one
Table 11.
listed
Table 11. Typical Test Equipment
Heatsink Clip Load Metrology
Item Description
Honeywell*-Sensotec* Model
13 subminiature load cells,
compression only
Select a load range depending
on load level being tested.
Part Number
(Model)
AL32
2BL
www.sensotec.com
:
l
l
t
,
NOTES:
1. Select load range depending on expected load level. It is usually better, whenever possible,
to operate in the high end of the load cell capability. Check with your load cell vendor for
further information.
2. Since the load cells are calibrated in terms of mV/V, a data logger or scanner is required to
supply 5 volts DC excitation and read the mV response. An automated model will take the
sensitivity calibration of the load cells and convert the mV output into pounds.
3. With the test equipment listed above, it is possible to automate data recording and control
with a 6101-PCI card (GPIB) added to the scanner, allowing it to be connected to a PC
running LabVIEW* or Vishay's StrainSmart* software.
4. IMPORTANT: In addition to just a zeroing of the force reading at no applied load, it is
important to calibrate the load cells against known loads. Load cells tend to drift. Contact
your load cell vendor for calibration tools and procedure information.
5. When measuring loads under thermal stress (bake for example), load cell thermal capability
must be checked, and the test setup must integrate any hardware used along with the load
cell. For example, the Model 13 load cells are temperature compensated up to 71°C, as
long as the compensation package (spliced into the load cell's wiring) is also placed in the
temperature chamber. The load cells can handle up to 121°C (operating), but their
uncertainty increases according to 0.02% rdg/°F.
:
,
(
,
)
Vishay* Measurements Group
Model 6100 scanner with a
6010A strain card (one card
required per channel).
Model
6100
B.3 Test Procedure Examples
The following sections give two examples of load measurement. However, this is not
meant to be used in mechanical shock and vibration testing.
Any mechanical device used along with the heatsink attach mechanism will need to be
included in the test setup (i.e., back plate, attach to chassis, etc.).
Prior to any test, make sure that the load cell has been calibrated against known
loads, following load cell vendor’s instructions.
72 Thermal and Mechanical Design Guidelines
Page 73

Heatsink Clip Load Metrology
B.3.1 Time-Zero, Room Temperature Preload
Measurement
1. Pre-assemble mechanical components on the board as needed prior to mounting
the motherboard on an appropriate support fixture that replicate the board attach
to a target chassis
For example: standard ATX board should sit on ATX compliant stand-offs. If
⎯
the attach mechanism includes fixtures on the back side of the board, those
must be included, as the goal of the test is to measure the load provided by
the actual heatsink mechanism.
Install relevant test vehicle (TTV, processor) in the socket
2.
3. Assemble the heatsink reworked with the load cells to motherboard as shown for
the heatsink example in
4. Collect continuous load cell data at 1 Hz for the duration of the test. A minimum
time to allow the load cell to settle is generally specified by the load vendors
(often of order of 3 minutes). The time zero reading should be taken at the end of
this settling time.
Record the preload measurement (total from all three l oad cells) at the target time
5.
and average the values over 10 seconds around this target time as well, i.e. in the
interval , for example over [target time – 5 seconds ; target time + 5 seconds].
Figure 30, and actuate attach mechanism.
B.3.2 Preload Degradation under Bake Conditions
This section describes an example of testing for potential clip load degradation under
bake conditions.
Preheat thermal chamber to target temperature (45 ºC or 85 ºC for example)
1.
2. Repeat time-zero, room temperature preload measurement
3. Place unit into preheated thermal chamber for specified time
4. Record continuous load cell data as follows:
⎯
Sample rate = 0.1 Hz for first 3 hrs
⎯
Sample rate = 0.01 Hz for the remainder of the bake test
5. Remove assembly from thermal chamber and set into room temperature
conditions
Record continuous load cell data for next 30 minutes at sample rate of 1 Hz.
6.
§
Thermal and Mechanical Design Guidelines 73
Page 74

Heatsink Clip Load Metrology
74 Thermal and Mechanical Design Guidelines
Page 75

Thermal Interface Management
Appendix C Thermal Interface
Management
To optimize a heatsink design, it is important to understand the impact of factors
related to the interface between the processor and the heatsink base. Specifically, the
bond line thickness, interface material area and interface material thermal
conductivity should be managed to realize the most effective thermal solution.
C.1 Bond Line Management
Any gap between the processor integrated heat spreader (IHS) and the heatsink base
degrades thermal solution performance. The larger the gap between the two surfaces,
the greater the thermal resistance. The thickness of the gap is determined by the
flatness and roughness of both the heatsink base and the integrated heat spreader,
plus the thickness of the thermal interface material (for example thermal grease) used
between these two surfaces and the clamping force applied by the heatsink attach
clip(s).
C.2 Interface Material Area
The size of the contact area between the processor and the heatsink base will impact
the thermal resistance. There is, however, a point of diminishing returns.
Unrestrained incremental increases in thermal interface material area do not translate
to a measurable improvement in thermal performance.
C.3 Interface Material Performance
Two factors impact the performance of the interface material between the processor
and the heatsink base:
Thermal resistance of the material
•
• Wetting/filling characteristics of the material
Thermal resistance is a description of the ability of the thermal interface material to
transfer heat from one surface to another. The higher the thermal resistance, the less
efficient the interface material is at transferring heat. The thermal resistance of the
interface material has a significant impact on the thermal performance of the overall
thermal solution. The higher the thermal resistance, the larger the temperature drop
is across the interface and the more efficient the thermal solution (heatsink, fan) must
be to achieve the desired cooling.
The wetting or filling characteristic of the thermal interface material is its ability,
under the load applied by the heatsink retention mechanism, to spread and fill the gap
between the processor and the heatsink. Since air is an extremely poor thermal
conductor, the more completely the interface material fills the gaps, the lower the
temperature drops across the interface. In this case, thermal interface material area
also becomes significant; the larger the desired thermal interface material area, the
higher the force required to spread the thermal interface material.
Thermal and Mechanical Design Guidelines 75
Page 76

§
Thermal Interface Management
76 Thermal and Mechanical Design Guidelines
Page 77

Case Temperature Reference Metrology
Appendix D Case Temperature
Reference Metrology
D.1 Objective and Scope
This appendix defines a reference procedure for attaching a thermocouple to the IHS
of a 775-land LGA package for T
specific features of the 775-land LGA package and of the LGA775 socket for which it is
intended. The recommended equipment for the reference thermocouple installation,
including tools and part numbers are also provided.
measurement. This procedure takes into account the
C
Thermal and Mechanical Design Guidelines 77
Page 78

Case Temperature Reference Metrology
D.2 Supporting Test Equipment
To apply the reference thermocouple attach procedure, it is recommended to use the
equipment (or equivalent) given in the table below.
Item Description Part Number
Measurement and Output
Microscope Olympus* Light microscope or equivalent SZ-40
DMM Digital Multi Meter for resistance measurement Fluke 79 Series
Thermal Meter Hand held thermocouple meter Multiple Vendors
Solder Station (see note 1 for ordering information)
Heater Block Heater assembly to reflow solder on IHS 30330
Heater WATLOW120V 150W Firerod 0212G G1A38-
Transformer Superior Powerstat transformer 05F857
L12
Miscellaneous Hardware
Solder Indium Corp. of America
Alloy 57BI / 42SN / 1AG 0.010 Diameter
Flux Indium Corp. of America 5RMA
Loctite* 498
Adhesive
Adhesive
Accelerator
Kapton* Tape For holding thermoco uple in place Not Available
Thermocouple Omega *,36 gauge, “T” Type
Ice Point Cell Omega*, stable 0 ºC temperature source for
Hot Point Cell Omega *, temperature source to control and
NOTES:
1. The Solder Station consisting of the Heater Block, Heater, Press and Transformer are
available from Jemelco Engineering 480-804-9514
2. This part number is a custom part with the specified insulation trimming and packaging
requirements necessary for quality thermocouple attachment, See
from Omega Anthony Alvarez, Direct phone (203) 359-7671, Direct fax (203) 9687142, E-Mail: aalvarez@omega.com
Super glue w/thermal characteristics 49850
Loctite* 7452 for fast glue curing 18490
(see note 2 for ordering information)
Calibration and Control
calibration and offset
understand meter slope gain
52124
OSK2K1280/5SR
TC-TT-T-36-72
TRCIII
CL950-A-110
Figure 31. Order
78 Thermal and Mechanical Design Guidelines
Page 79

Case Temperature Reference Metrology
Figure 31. Omega Thermocouple
D.3 Thermal Calibration and Controls
It is recommended that full and routine calibration of temperature measurement
equipment be performed before attempting to perform case temperature
measurements. Intel recommends checking the meter probe set against known
standards. This should be done at 0 ºC (using ice bath or other stable temperature
source) and at an elevated temperature, around 80 ºC (using an appropriate
temperature source).
Wire gauge and length also should be considered as some less expensive
measurement systems are heavily impacted by impedance. There are numerous
resources available throughout the industry to assist with implementation of proper
controls for thermal measurements.
NOTES:
It is recommended to follow company standard procedures and wear safety
1.
items like glasses for cutting the IHS and gloves for chemical handling.
Ask your Intel field sales representative if you need assistance to groove
2.
and/or install a thermocouple according to the reference process.
D.4 IHS Groove
Cut a groove in the package IHS according to the drawing given in Figure 32.
Thermal and Mechanical Design Guidelines 79
Page 80

Case Temperature Reference Metrology
Figure 32. 775-LAND LGA Package Reference Groove Drawing
80
Thermal and Mechanical Design Guidelines
Page 81

Case Temperature Reference Metrology
The orientation of the groove relative to the package pin 1 indicator (gold triangle in
one corner of the package) is shown.
Figure 33 for the 775-Land LGA package IHS.
Figure 33. IHS Groove on the 775-LAND LGA Package
Pin1
indicator
IHS Groove
When the processor is installed in the LGA775 socket, the groove is perpendicular to
the socket load lever, and on the opposite side of the lever, as shown
Figure 34. IHS Groove Orientation Relative to the LGA775 Socket
Select a machine shop that is capable of holding drawing specified tolerances. IHS
groove geometry is critical for repeatable placement of the thermocouple bead,
ensuring precise thermal measurements. The specified dimensions minimize the
impact of the groove on the IHS under the socket load. A larger groove may cause the
IHS to warp under the socket load such that it does not represent the performance of
an ungrooved IHS on production packages.
Figure 34.
Inspect parts for compliance to specifications before accepting from machine shop.
Thermal and Mechanical Design Guidelines 81
Page 82

Case Temperature Reference Metrology
D.5 Thermocouple Attach Procedure
The procedure to attach a thermocouple with solder takes about 15 minutes to
complete. Before proceeding turn on the solder block heater, as it can take up to
30 minutes to reach the target temperature of 153 – 155°C.
Note: To avoid damage to the TTV or processor ensure the IHS temperature does not
exceed 155 °C.
D.5.1 Thermocouple Conditioning and Preparation
1. Use a calibrated thermocouple as specified in Sections D.2 and D.3.
Under a microscope verify the thermocouple insulation meets the quality
2.
requirements. The insulation should be about 1/16 inch (0.062 ± 0.030) from the
end of the bead (
Figure 35. Inspection of Insulation on Thermocouple
Figure 35).
3. Measure the thermocouple resistance by holding both contacts on the connector
on one probe and the tip of thermocouple to the other probe of the DMM
(measurement should be about~3.0 ohms for 36-gauge type T thermocouple).
Straighten the wire for about 38 mm [1 ½ inch] from the bead.
4.
82 Thermal and Mechanical Design Guidelines
Page 83

Case Temperature Reference Metrology
5. Using the microscope and tweezers, bend the tip of the thermocouple at
approximately 10 degree angle by about 0.8 mm [.030 inch] from the tip
Figure 36).
(
Figure 36. Bending the Tip of the Thermocouple
D.5.2 Thermocouple Attachment to the IHS
6. Clean groove and IHS with Isopropyl A lcohol (IPA) and a lint free cloth removing
all residues prior to thermocouple attachment.
Place the thermocouple wire inside the groove; letting the exposed wire and bead
7.
extend about 1.5 mm [0.030 inch] past the end of groove. Secure it with Kapton*
Figure 37). Clean the IHS with a swab and IPA.
tape (
8. Verify under the microscope that the thermocouple wires are straight and parallel
in the groove and that the bead is still bent.
Figure 37. Securing Thermocouple Wires with Kapton* Tape Prior to Attach
Thermal and Mechanical Design Guidelines 83
Page 84

9. Lift the wire at the middle of groove with tweezers and bend the front of wire to
place the thermocouple in the groove ensuring the tip is in contact with the end
and bottom of the groove in the IHS (
Figure 38. Thermocouple Bead Placement
(A)
Case Temperature Reference Metrology
Figure 38-A and B).
(B)
10. Place the package under the microscope to continue with process. It is also
recommended to use a fixture (like processor tray or a plate) to help holding the
unit in place for the rest of the attach process.
84 Thermal and Mechanical Design Guidelines
Page 85

Case Temperature Reference Metrology
11. While still at the microscope, press the wire down about 6mm [0.125”] from the
thermocouple bead using the tweezers or your finger. Place a piece of Kapton*
tape to hold the wire inside the groove (
bead placement.
Figure 39. Position Bead on the Groove Step
Figure 39). Refer to Figure 40 for detailed
Kapton* tape
Figure 40. Detailed Thermocouple Bead Placement
TC Wire with Insulation
IHS with Groove
Wire section
into the
groove to
prepare for
final bead
placement
TC Bead
Thermal and Mechanical Design Guidelines 85
Page 86

Figure 41. Third Tape Installation
12. Place a 3rd piece of tape at the end of the step in the groove as shown in
Figure 41. This tape will create a solder dam to prevent solder from flowing into
the larger IHS groove section during the melting process.
Measure resistance from thermocouple end wires (hold both wires to a DMM
13.
probe) to the IHS surface. This should be the same value as measured during the
thermocouple conditioning Section D.5.1, step 3 (Figure 42)
Case Temperature Reference Metrology
Figure 42. Measuring Resistance between Thermocouple and IHS
86 Thermal and Mechanical Design Guidelines
Page 87

Case Temperature Reference Metrology
14. Using a fine point device, place a small amount of flux on the thermocouple bead.
Be careful not to move the thermocouple bead during this step (
the flux remains in the bead area only.
Figure 43. Applying Flux to the Thermocouple Bead
Figure 43). Ensure
15. Cut two small pieces of solder 1/16 inch (0.065 inch / 1.5 mm) from the roll usi n g
tweezers to hold the solder while cutting with a fine blade(
Figure 44. Cutting Solder
Figure 44)
Thermal and Mechanical Design Guidelines 87
Page 88

16. Place the two pieces of solder in parallel, directly over the thermocouple bead
Figure 45)
(
Figure 45. Positioning Solder on IHS
Case Temperature Reference Metrology
17. Measure the resistance from the thermocouple end wires again using the DMM
(refer to Section
D.5.1, step 2) to ensure the bead is still properly contacting the
IHS.
D.5.3 Solder Process
18. Make sure the thermocouple that monitors the Solder Block temperature is
positioned on the Heater block. Connect the thermocouple to a handheld meter to
monitor the heater block temperature
Verify the temperature of the Heater block station has reached 155°C ±5°C before
19.
you proceed.
Connect the thermocouple for the device being soldered to a second hand held
20.
meter to monitor IHS temperature during the solder process.
88 Thermal and Mechanical Design Guidelines
Page 89

Case Temperature Reference Metrology
Figure 46. Solder Station Setup
21. Remove the land side protective cover and place the device to be soldered in the
solder station. Make sure the thermocouple wire for the device being soldered is
exiting the heater toward you.
Note: Do not touch the copper heater block at any time as this is very hot.
22. Move a magnified lens light close to the device in the solder status to get a better
view when the solder begins to melt.
Lower the Heater block onto the IHS. Monitor the device IHS temperature during
23.
this step to ensure the maximum IHS temperature is not exceeded
Note: The target IHS temperature during reflow is 150°C ±3°C. At no time should the IHS
temperature exceed 155 °C during the solder process as damage to the device may
occur.
Thermal and Mechanical Design Guidelines 89
Page 90

24. You may need to move the solder back toward the groove as the IHS begins to
heat. Use a fine tip tweezers to push the solder into the end of the groove until a
solder ball is built up (
Figure 47 and Figure 48)
Figure 47. View Through Lens at Solder Station
Case Temperature Reference Metrology
Figure 48. Moving Solder back onto Thermocouple Bead
90 Thermal and Mechanical Design Guidelines
Page 91

Case Temperature Reference Metrology
25. Lift the heater block and magnified lens, using tweezers quickly rotate the device
90 degrees clockwise. Using the back of the tweezers press down on the solder
this will force out the excess solder
Figure 49. Removing Excess Solder
26. Allow the device to cool down. Blowing compressed air on the device can
accelerate the cooling time. Monitor the device IHS temperature with a handheld
meter until it drops below 50° C before moving it to the microscope for the final
steps
D.5.4 Cleaning and Completion of Thermocouple
Installation
27. Remove the device from the solder station and continue to monitor IHS
Temperature with a handheld meter. Place the device under the microscope and
remove the three pieces of Kapton* tape with Tweezers, keeping the longest for
re-use.
Straighten the wire and work the wire in to the groove. Bend the thermocouple
28.
over the IHS. Replace the long piece of Kapton* tape at the edge of the IHS.
Note: The wire needs to be straight so it doesn’t sit above the IHS surface at anytime
Figure 50).
(
Thermal and Mechanical Design Guidelines 91
Page 92

Figure 50. Thermocouple placed into groove
29. Using a blade carefully shave the excess solder above the IHS surface. Only shave
in one direction until solder is flush with the groove surface (
Case Temperature Reference Metrology
Figure 51).
Figure 51. Removing Excess Solder
Note: Take usual precautions when using open blades
30.
Clean the surface of the IHS with Alcohol and use compressed air to remove any
remaining contaminants.
92 Thermal and Mechanical Design Guidelines
Page 93

Case Temperature Reference Metrology
31. Fill the rest of the groove with Loctite* 498 Adhesive. Verify under the microscope
that the thermocouple wire is below the surface along the entire length of the IHS
groove (
Figure 52).
Figure 52. Filling Groove with Adhesive
32. To speed up the curing process apply Loctite* Accelerator on top of the Adhesive
and let it set for a couple of minutes(
Figure 53. Application of Accelerant
Figure 53).
Thermal and Mechanical Design Guidelines 93
Page 94

Figure 54. Removing Excess Adhesive from IHS
33. Using a blade, carefully shave any adhesive that is above the IHS surface
Figure 54). The preferred method is to shave from the edge to the center of the
(
IHS.
Case Temperature Reference Metrology
Note: The adhesive shaving step should be performed while the adhesive is partially cured,
but still soft. This will help to keep the adhesive surface flat and smooth with no pi ts
or voids. If there are voids in the adhesive, refill the voids with adhesive and shave a
second time.
34. Clean IHS surface with IPA and a wipe.
35. Clean the LGA pads with IPA and a wipe.
36. Replace the land side cover on the device.
37. Perform a final continuity test.
38. Wind the thermocouple wire into loops and secure or if provided by the vendor
back onto the plastic roll. (
Figure 55).
Figure 55. Finished Thermocouple Installation
39. Place the device in a tray or bag until it’s ready to be used for thermal testing use.
94 Thermal and Mechanical Design Guidelines
Page 95

Case Temperature Reference Metrology
D.6 Thermocouple Wire Management
When installing the processor into the socket, make sure that the thermocouple wires
exit above the load plate as
load plate and the IHS will likely damage the wires.
Note: When thermocouple wires are damaged, the resulting reading maybe wrong. For
example, if there are any cuts into the wires insulation where the wires are pinched
between the IHS and the load plate, the thermocouple wires can get in contact at this
location. In that case, the reported temperature would be the edge of the IHS/socket
load plate area. This temperature is usually much lower than the temperature at the
center of the IHS.
Prior to installing the heatsink, make sure that the thermocouple wires remain below
the IHS top surface, by running a flat blade on top of the IHS for example.
Figure 56. Thermocouple Wire Management
Figure 56. Pinching the thermocouple wires between the
§
Thermal and Mechanical Design Guidelines 95
Page 96

Case Temperature Reference Metrology
96 Thermal and Mechanical Design Guidelines
Page 97

Legacy Fan Speed Control
Appendix E Legacy Fan Speed
Control
A motherboard design may opt to use a SIO or ASIC based fan speed control device
that uses the existing look up or state based fan speed control.
The fan speed control implementations consist of the following items
• A motherboard designed with a fan speed controller with the following
functionality:
PWM fan control output
⎯
⎯
Remote digital thermal sensor measurement capability over the PECI bus.
A motherboard with a 4 pin fan header for the processor heatsink fan.
•
• Processor heatsink with 4–wire PWM controlled Fan.
A thermistor in the fan hub is recommended, but not a requirement. The
reference solution and the Boxed Processor will implement a thermistor into the
design.
The following sections will discuss the necessary steps to implement Legacy Fan
Speed Control.
E.1 Thermal Solution Design
The first step is to select or design a processor thermal solution that meets the
thermal profile for the processor. See Section
profile and consult the processor datasheet for the specific values.
The designer needs to ensure that when the heat sink fan is operating at full speed
the thermal solution will meet the T
profile will allow the designer to make tradeoffs in thermal performance versus the
inlet temperature to the processor fan heatsink.
limits at TDP. The slope of the thermal
C-MAX
E.1.1 Determine Thermistor Set Points
A thermistor implemented in the hub of a fan is a first level of fan speed control. It
provides an easy and cost effective means to begin acoustic noise reduction. It will,
by design, run the fan at an appropriate speed based on the ambient conditions.
Chapter
fan speed based on temperature to ensure that T
at a given ambient temperature. The resulting variable speed fan (VSF) curve is the
upper limit on fan speed.
The benefit of this upper limit will become more apparent when the fan speed
controller is responding to the digital thermal sensor.
5 discussed in detail the reference thermal solution, including the target Ψ
2.2.2 for the definition of the thermal
is not exceeded for TDP power
C-MAX
CA
,
Thermal and Mechanical Design Guidelines 97
Page 98

Figure 57. Thermistor Set Points
Full
Full
Speed
Speed
(RPM)
(RPM)
Fan Speed
Fan Speed
Min.
Min.
Operating
Operating
Legacy Fan Speed Control
Variable Speed Fan (VSF) Curve
Variable Speed Fan (VSF) Curve
30
30
Fan Inlet
Fan Inlet
Temperature (°C)
Temperature (°C)
38
38
E.1.2 Minimum Fan Speed Set Point
The final aspect of thermal solution design is to determine the minimum speed the fan
will be allowed to operate. This value can be driven by the cooling requirements for
another portion of the design, such as the processor voltage regulator, or by
functional limits of the fan design.
Per the Fan Specification for 4 wire PWM Controlled Fans; there are three possible
options to consider
Type A: The fan will run at minimum RPM for all PWM duty cycle values less than
•
minimum duty cycle. This would be programmed into the fan controller located on
the fan hub. It can not be overridden by the external fan speed control.
Type B: The fan will run at minimum RPM for all non-zero PWM duty cycle values
•
less than minimum duty cycle and turn off the fan at 0% PWM duty cycle.
Type C: The fan will stop running when the current provided to the motor
•
windings is insufficient to support commutation. The fan would turn off at 0%
PWM duty cycle input.
For the reference thermal solution Type A was implemented.
98 Thermal and Mechanical Design Guidelines
Page 99

Legacy Fan Speed Control
E.2 Board and System Implementation
Once the thermal solution is defined, the system designer and board designer can
define the fan speed control implementation. The first step is to select the
appropriate fan speed controller (FSC).
typical implementation.
Figure 58. Example Fan Speed Control Implementation
Figure 58 shows the major connections for a
A number of major manufacturers have FSC components that include the necessary
functionality to measure the temperature of the digital thermal sensor via the PECI
interface and output a PWM signal. These components can be a discrete device or a
super IO (SIO) with the functionality embedded. Intel has engaged with a number of
major manufacturers of FSC components to provide devices that have a PECI host
controller. Please contact your Intel Field Sales representative for the current list of
manufacturers and visit their web sites or contact your local sales representatives for
a part suitable for your design.
E.2.1 Choosing Fan Speed Control Settings
Fan speed control algorithms allow the system thermal engineer a number of options
to consider. The typical control settings that need to be considered are:
The temperature when the fan will begin to accelerate in response to the digital
•
thermal sensor temperature (T
•
The temperature where the fan is operating at full speed (100% PWM duty cycle).
By specification this is T
CONTROL
• The minimum fan speed (PWM duty cycle). For any digital thermal sensor
temperature less than T
the fan will run at this speed
LOW
LOW
.
)
Thermal and Mechanical Design Guidelines 99
Page 100

These are the minimum parameters required to implement acoustic fan speed control.
Figure 59 for an example. There may be vendor specific options that offer
See
enhanced functionality. See the appropriate vendor datasheet on how to implement
those features.
Figure 59. Fan Speed Control
Legacy Fan Speed Control
Full Speed
Full Speed
(RPM)
(RPM)
Fan Speed
Fan Speed
Min Speed
Min Speed
T
T
LOW
LOW
Diode Temperature
Diode Temperature
(°C)
(°C)
T
T
CONTROL
CONTROL
E.2.1.1 Temperature to Begin Fan Acceleration
The first item to consider is the value for T
temperature to set as the threshold to begin increasing PWM duty cycle to the fan.
. The FSC device needs a minimum
LOW
100 %
100 %
X %
X %
Fan Speed
Fan Speed
(% PWM Duty Cycle)
(% PWM Duty Cycle)
The system designer might initially consider a small temperature range (T
= T
T
LOW
the longest time after an increase in T
), 5°C to accelerate the fan. That would delay the fan accelerating for
RANGE
. There are a number of issues that
SENSOR
CONTROL
–
should be considered with this strategy
There is little granularity in the fan speeds. For each 1°C of i ncrease in diode
•
temperature = 20% jump in PWM duty cycle %
Fan speed oscillation as the thermal solution chases the digital thermal sensor
•
temperature
Having T
•
SENSOR
overshoot T
and the thermal profile causing the Thermal
CONTROL
Control Circuit to activate to reduce the temperature.
In extreme cases Thermtrip# activates and shuts down the processor
•
The first two cases can create a poor acoustic response for the user. The third case
the user could notice a drop in performance as the thermal control circuit reduces the
power. The
Figure 60 is an example of this situation. The system begins at idle and
the Maxpower program is started at 65% workload.
100 Thermal and Mechanical Design Guidelines
 Loading...
Loading...