

Page 1

RC3000 MOBILE ANTENNA CONTROLLER
USER’S MANUAL
Contents subject to change
1 December 2005
RESEARCH CONCEPTS INC.
5420 Martindale Road
Shawnee, Kansas 66218-9680 USA
VOICE: (913) 422-0210
FAX: (913) 422-0211
www.researchconcepts.com
support@researchconcepts.com
Serial No________
Page 2

Page 3

REVISION HISTORY
DATE MODIFICATION SOFTWARE VERSION
8 March 1999 Preliminary document 1.00
13 April 1999 Initial Release 1.04
1 June 1999 Update 1.07
13 March 2000 Software Update 1.16
15 November 2002 Chapter 2 Update 1.37
10 January 2003 Appendix E Update 1.38
3 January 2005 Manual Format Update 1.46
1 December 2005 Software Update 1.55
Page 4

WARRANTY INFORMATION
Research Concepts, Inc.(RCI) warrants to the original purchaser, this product shall be free from defects
in material and workmanship for one year, unless expressed otherwise, from the date of the original
purchase.
During the warranty period, RCI will provide, free of charge, both parts and labor necessary to correct
such defects.
To obtain such a warranty service, the original purchaser must:
(1) Notify RCI as soon as possible after discovery of a possible defect, of:
(a) the model and serial number
(b) identify of the seller and date of purchase
(c) detailed description of the problem, including details on the electrical connection to associated
equipment and list of such equipment, and circumstances when problem arose.
(2) Deliver the product to RCI, or ship the same in its original container or equivalent, fully insured
and shipping charges prepaid.
Correct maintenance, repair, and use are important to obtain proper performance from this product.
Therefore, read the instruction manual carefully and completely. This warranty does not apply to any
defect that RCI determines is due to:
- Improper maintenance or repair, including the installation of parts or accessories that do not
conform to the quality and specifications of the original parts.
- Misuse, abuse, neglect, or improper installation including disregard for installation of backup or
safety override equipment.
- Accidental or intentional damage.
- Lightning or acts of God.
There are no implied warranties.
The foregoing constitutes RCI's entire obligation with respect to this product, and the original purchaser
and any user or owner shall have no other remedy and no claim for incidental or consequential damages.
Some states do not allow limitations or exclusions of incidental or consequential damages, so the above
limitation and exclusion may not apply to you. This warranty gives you specific legal rights and you may
also have other rights which may vary from state to state.
RCI retains the right to make changes to these specifications any time, without notice.
Copyright – Research Concepts Inc., 2005
REPAIR RETURN INFORMATION
To help guarantee a fast and efficient repair, the user should request and receive a Return Merchandise
Authorization number (RMA#) from Research Concepts Inc. prior to shipping the unit.
In addition, international returns are required to complete the correct documents necessary for achieving
U.S. Customs clearance. In order to avoid duties and taxes, export documents must be accurately
completed to meet Export Administration Regulations. Contact RCI for guidance with respect to the
correct completion of shipping documents.
Page 5

TABLE OF CONTENTS
1.0 INTRODUCTION.................................................................................................................................................1
1.1 MANUAL ORGANIZATION.....................................................................................................................................1
1.2 RC3000 FEATURES ..............................................................................................................................................3
1.3 THEORY OF OPERATION .......................................................................................................................................5
1.3.1 Controller Description.................................................................................................................................5
1.3.2 System Interface Requirements ....................................................................................................................6
1.3.3 Operational Overview..................................................................................................................................7
1.3.4 Antenna Pointing Solution ...........................................................................................................................9
1.3.5 Timekeeping ...............................................................................................................................................11
1.3.6 Drive System...............................................................................................................................................11
1.3.7 Polarization Control ..................................................................................................................................13
1.3.8 Magnetic Variation ....................................................................................................................................14
1.3.9 System Performance...................................................................................................................................15
1.4 SPECIFICATIONS .................................................................................................................................................16
2.0 INSTALLATION................................................................................................................................................17
2.1 EQUIPMENT MOUNTING .....................................................................................................................................18
2.1.1 RC3000 Antenna Controller.......................................................................................................................18
2.1.2 GPS Receiver..............................................................................................................................................19
2.1.3 Fluxgate Compass......................................................................................................................................20
2.1.4 Electronic Clinometer ................................................................................................................................22
2.2 ELECTRICAL CONNECTIONS ...............................................................................................................................24
2.2.1 Power Entry................................................................................................................................................25
2.2.2 Motor Drive................................................................................................................................................26
2.2.3 Drive Sense.................................................................................................................................................27
2.2.4 Limit Switches ............................................................................................................................................28
2.2.5 Signal Strength...........................................................................................................................................29
2.2.6 Navigation Sensors.....................................................................................................................................30
2.2.7 Accessories.................................................................................................................................................31
2.2.8 RF Autopeak...............................................................................................................................................32
2.2.9 Hand Held Remote.....................................................................................................................................33
2.2.10 Pulse Sensors ...........................................................................................................................................35
2.2.11 Remote Control ........................................................................................................................................38
2.2.12 Waveguide Switch ....................................................................................................................................39
2.2.13 Resolver Inputs.........................................................................................................................................40
2.3 INITIAL CONFIGURATION....................................................................................................................................41
2.3.1 Software Initialization................................................................................................................................41
2.3.2 Elevation Calibration.................................................................................................................................43
2.3.3 Azimuth Calibration...................................................................................................................................47
2.3.4 Polarization Calibration ............................................................................................................................50
2.3.5 Fast/Slow Motor Speed ..............................................................................................................................53
2.3.6 Pulse Sensor Checkout...............................................................................................................................53
2.3.7 Drive System Checkout...............................................................................................................................53
2.3.8 Navigation Sensor Communication............................................................................................................53
2.4 FINAL CALIBRATION ..........................................................................................................................................54
2.4.1 Compass Calibration..................................................................................................................................54
2.4.2 Azimuth and Elevation Alignment..............................................................................................................55
2.4.3 Signal Strength Adjustment........................................................................................................................57
2.4.3.1 L-Band Power Detector .........................................................................................................................................57
2.4.3.2 Signal Strength Channel ........................................................................................................................................57
2.4.3.3 Signal Strength Channel Calibration......................................................................................................................58
2.4.3.4 Amplifier Gain vs. Frequency Characterization ....................................................................................................59
2.4.4 Pulse Scale Factors....................................................................................................................................60
2.4.5 Operational Presets....................................................................................................................................62
2.4.6 Miscellaneous Adjustments ........................................................................................................................62
2.4.7 Mechanizing Automatic Locates ................................................................................................................62
Page 6

3.0 DETAILED OPERATION ................................................................................................................................ 63
3.1 OPERATION OVERVIEW...................................................................................................................................... 63
3.1.1 Modes......................................................................................................................................................... 63
3.1.2 Keypad Usage............................................................................................................................................ 64
3.1.3 Data Entry ................................................................................................................................................. 66
3.1.4 Display Layout........................................................................................................................................... 67
3.2 OPERATING GROUP............................................................................................................................................ 68
3.2.1 Manual Mode............................................................................................................................................. 69
3.2.1.1 Heading Fix........................................................................................................................................................... 71
3.2.1.2 Waveguide Switch................................................................................................................................................. 72
3.2.2 Menu Mode................................................................................................................................................73
3.2.2.1 Deploy................................................................................................................................................................... 74
3.2.2.2 Stow....................................................................................................................................................................... 75
3.2.2.3 Locate.................................................................................................................................................................... 76
3.2.2.3.1 Satellite Selection........................................................................................................................................... 77
3.2.2.3.2 LOCATE Automatic Movement............................................................................................ ........................ 79
3.2.2.3.3 Azimuth Scanning Autopeak ......................................................................................................................... 80
3.2.2.3.4 Spiral Search Autopeak.................................................................................................................................. 82
3.2.2.3.5 Terminal Peak Up.......................................................................................................................................... 83
3.2.2.3.6 Polarization Tilt Compensation...................................................................................................................... 83
3.2.2.4 Store ...................................................................................................................................................................... 84
3.2.2.5 Recall..................................................................................................................................................................... 85
3.2.2.6 Delete .................................................................................................................................................................... 85
3.2.2.7 Position.................................................................................................................................................................. 86
3.2.2.7.1 LAT/LON ...................................................................................................................................................... 86
3.2.2.7.2 HEADING ..................................................................................................................................................... 87
3.2.2.7.3 INIT ............................................................................................................................................................... 87
3.2.2.8 Settings.................................................................................................................................................................. 89
3.2.2.9 Track ..................................................................................................................................................................... 90
3.2.2.10 Remote ................................................................................................................................................................ 90
3.2.2.11 VSAT Mode........................................................................................................................................................91
3.3 PROGRAMMING GROUP...................................................................................................................................... 94
3.3.1 Configuration Mode................................................................................................................................... 94
3.3.1.1 NORMAL ACCESS ITEMS................................................................................................................................. 96
3.3.1.1.1 Expert Access Permission.............................................................................................................................. 96
3.3.1.1.2 Preset Locations............................................................................................................................................. 97
3.3.1.1.3 Preset Satellites.............................................................................................................................................. 98
3.3.1.2 INSTALLATION ACCESS ITEMS..................................................................................................................... 99
3.3.1.2.1 System Definition .......................................................................................................................................... 99
3.3.1.2.2 Elevation Calibration ................................................................................................................................... 100
3.3.1.2.3 Azimuth Calibration..................................................................................................................................... 102
3.3.1.2.4 Polarization Calibration ............................................................................................................................... 104
3.3.1.2.5 Signal Strength Factors................................................................................................................................ 105
3.3.1.2.6 Autopeak...................................................................................................................................................... 106
3.3.1.3 Super-User Access Items..................................................................................................................................... 108
3.3.1.3.1 Reset Defaults.............................................................................................................................................. 108
3.3.1.3.2 Azimuth Pot Drive.......................................................................................................................................109
3.3.1.3.3 Azimuth Pulse Drive ................................................................................................................................... 110
3.3.1.3.4 Azimuth Drive Monitoring .......................................................................................................................... 111
3.3.1.3.5 Elevation Pot Drive...................................................................................................................................... 113
3.3.1.3.6 Elevation Pulse Drive.................................................................................................................................. 114
3.3.1.3.7 Elevation Drive Monitoring........................................................................................................................ 114
3.3.1.3.8 Polarization Drive........................................................................................................................................115
3.3.1.3.9 Pol Drive Monitoring................................................................................................................................... 115
3.3.1.3.10 Stow & Deploy Positions........................................................................................................................... 116
3.3.1.3.11 SHAKE...................................................................................................................................................... 117
3.3.2 Maintenance Items................................................................................................................................... 118
3.3.2.1 Analog to Digital Voltage ................................................................................................................................... 119
3.3.2.2 Drive Error Resets............................................................................................................................................... 120
3.3.2.3 Time Maintenance............................................................................................................................................... 120
3.3.2.4 Signal Strength Offset Calculator........................................................................................................................ 122
Page 7

3.3.2.5 Limits Maintenance .............................................................................................................................................123
3.3.2.6 GPS Serial Port Diagnostics ................................................................................................................................124
3.3.2.7 Fluxgate Serial Port Diagnostics.......................................................................................................................... 124
3.3.2.8 MOVETO............................................................................................................................................................125
3.3.2.9 Fluxgate Calibration Procedure ...........................................................................................................................126
3.3.2.10 Shake .................................................................................................................................................................127
3.3.2.11 Configuration Item Record ................................................................................................................................128
3.4 ALARM DISPLAYS ............................................................................................................................................129
4.0 TROUBLESHOOTING....................................................................................................................................131
4.1 LIMIT SWITCHES...............................................................................................................................................131
4.2 MOTOR DRIVE..................................................................................................................................................132
4.3 AUTOMATIC MOVEMENTS................................................................................................................................133
4.4 GPS..................................................................................................................................................................133
4.5 FLUXGATE COMPASS........................................................................................................................................134
5.0 DRAWINGS & SCHEMATICS......................................................................................................................135
APPENDIX A - EXPERT ACCESS / RESET DEFAULTS CODE
APPENDIX B - MOUNT SPECIFIC DATA
APPENDIX C - DC MOTOR CONTROLLER
The following appendices describe optional features of the RC3000. These appendices will be
included in the manual if the option is present.
APPENDIX REM - REMOTE CONTROL
APPENDIX TRK - INCLINED ORBIT TRACKING
APPENDIX DVB - INTEGRATED DVB RECEIVER
APPENDIX DSI - ANTENNA DEPLOYMENT SAFETY INTERLOCK
APPENDIX TLE - TWO LINE ELEMENT TRACKING
Page 8

Page 9

RC3000 Antenna Controller Chapter 1 Introduction
1.0 INTRODUCTION
The RC3000 antenna controller is designed for use with elevation over azimuth antennas on mobile
satellite uplink vehicles. The RC3000 assists both the technically-oriented and the non-technical operator
of a mobile satellite antenna system by automating the process of locating and locking on to a particular
satellite. This process can be time-consuming due to several factors. For each shoot, the antenna may
be located in a different location, with its own local magnetic variation, and oriented in a different
direction. Since the beamwidth of the antenna is extremely narrow, the elevation and azimuth pointing
angles require a significant degree of accuracy to even be in the neighborhood of the satellite.
The design and function of the RC3000 is derived from two other proven antenna controllers from
Research Concepts Inc.: the RC8097 satellite locator and the RC2000C tracking antenna controller.
This pedigree allows the RC3000 to automate all operational steps within one piece of equipment. First,
a microcontroller based calculator function provides an accurate pointing solution through a collection of
sensor data. The RC3000 then uses the data from the sensors to accurately steer the antenna to the
calculated azimuth and elevation angles. The RC3000 also optionally automates the function of tracking
inclined orbit satellites.
PLEASE READ AND UNDERSTAND THE MANUAL. Due to the complexity of the functions performed
by the RC3000, time invested in understanding its installation and operation will be well spent.
1.1 Manual Organization
This manual contains five chapters and multiple appendices. Each chapter is divided into multiple
sections.
This section (1.1) summarizes the contents of the remainder of the manual and the conventions and
notations used throughout the manual. Section 1.2 highlights the functionality and features of the
RC3000. Section 1.3 reviews the theory of the RC3000’s operation and should be understood before
installation and initial use of the RC3000.
Chapter 2 describes the installation and configuration procedures for the RC3000. The rest of the
manual should be reviewed prior to installation in order to provide context for the installation procedures.
Chapter 3 provides detailed instructions on the operation of the RC3000. This chapter will describe the
data presented and user action required for every operational display screen.
Chapter 4 covers RC3000 error conditions and provides help for system troubleshooting.
Chapter 5 provides RC3000 schematics and drawings.
The appendices provide additional support for working with the RC3000:
Appendix A supplies the expert access codes on a single page, which at management’s discretion, may
be removed to eliminate the possibility of inexperienced users inadvertently corrupting configuration data.
Appendix B provides unique information for a specific mount or family of mounts. Please refer to
appendix B now to note what paragraphs in the base manual are different for your mount.
Appendix C provides information on the applicable motor controller for your mount.
A test data sheet is included with the manual that accompanies a new RC3000 controller. The mount
configuration of a particular controller is noted on the test data sheet.
1
Page 10

RC3000 Antenna Controller Chapter 1 Introduction
MANUAL CONVENTIONS
Throughout the manual, representations of screens the user will see will be shown in the boxed format
that follows:
AZIM: 0.0 STOW SS1: 50 MANUAL
ELEV: -67.5 STOW SAT:TELSTAR 402
POL: 0.0 SPD:FAST CST
<0-9>JOG ANTENNA <MODE>MENU 14:25:47
The following table shows typical abbreviations used both on RC3000 screens and in the manual’s text.
ITEM ABREVIATION(S)
Azimuth AZ
AZIM, Azim
Elevation EL
ELEV, Elev
Polarization PL
POL, Pol
Clockwise CW
Counter-Clockwise (Anti-Clockwise) CCW
Down DN
Latitude LAT
Longitude LON
Satellite SAT
Global Positioning System GPS
Liquid Crystal Display LCD
Automatic Gain Control AGC
Satellite longitudes are presented in degree/decimal degree (79.0 W) format since that is the standard
representation of satellite position. Latitude and longitude of the mount are presented in degree/minute
(38°56 N) format.
When referring to a particular RC3000 mode of operation, that mode’s name will be capitalized – ex.
LOCATE.
Throughout the RC3000 manual and software, the latitude, longitude and true heading of the mount are
collectively referred to as the mount’s “position”.
Movements of the mount are represented by graphing the azimuth and elevation axes as shown below.
2
Page 11

RC3000 Antenna Controller Chapter 1 Introduction
1.2 RC3000 Features
The RC3000 antenna controller is designed to automate the operation of mobile (both vehicle mounted
and deployable) mounts. Features provided include:
- Automatic azimuth and elevation pointing solution calculation
- Optional GPS receiver for determination of antenna latitude and longitude
- Optional fluxgate compass for determination of antenna centerline heading
- Optional automatic tracking of inclined orbit satellites
- Automatic polarization control of rotating feeds
- Battery backed-up non-volatile memory for storing satellite locations and configuration data
- Automatic repositioning to stored satellites
- Slim 2U rack mounted unit
- Continuous monitoring of antenna drive status
- Optional RS-422/-232 remote control interface
- Support for C, Ku, Ka, L, X - band satellite operations
- 4 row x 40 column Liquid Crystal Display (LCD) for user interface
- 16 key keypad for data entry
The RC3000 supports mounts from multiple antenna manufacturers and provides optional software
configurations. When the RC3000 is powered on, the following identification screen appears for three
seconds.
RC3000A MOBILE ANTENNA CONTROLLER
(c) RESEARCH CONCEPTS INC. 2004
SHAWNEE, KANSAS (USA) 913-422-0210
SW:RC3K-P1-GTN version 1.44
Hardware Configuration. There are two basic versions of the RC3000 hardware. The “A” version is
configured with circuitry to support mounts with low voltage (12-36 VDC) DC motors. The “B” version
supports higher voltage (40-120 VDC) DC motors. Other hardware configurations provide customized
backpanel configurations, etc. Refer to the appendix B (mount specific data).
In late 2004, internal board configurations changed. These changes did not affect interface definitions or
software functionality. RC3000 units with serial numbers larger than 2000 contain the second generation
boards. Typically, low voltage drive units with second generation board configurations may be referred to
as "A2" units vs."A" which designates units with the original board configuration.
3
Page 12

RC3000 Antenna Controller Chapter 1 Introduction
Software Configuration. The software configuration (SW:) field is presented in the form RC3K-ab-xyz:
RC3K-(Mount Manufacturer/Model #)-(Nav Sensor Option)(Tracking Option)(Remote Option)
Descriptions of the software configuration designations are provided in the following tables:
Mount Manufacturer/Model #
The software within the RC3000 is customized to account for specifics of individual mounts. A particular
mount is referred to by a two character designation with the first character typically associated with the
mount manufacturer and the second character associated with a specific mount/antenna model from that
manufacturer.
CATEGORY DESIGNATION DESCRIPTION
Mount Manufacturer / Letter / # Example: V1 – Vertex 2.4m. DMK
Model Number S1 – SweDish 1.5m. DA
A3 - AVL 1.2m. USA
N1 - Andrew 4.5m. TriFold
As of December 2005, the RC3000 supported over 80 different mount models.
Navigation Sensor Options
The RC3000 may be provided with multiple navigation sensor options. Navigation sensors allow the
RC3000 to determine the mount's latitude, longitude and heading. If no navigation sensors are present,
estimates of this data may be entered manually.
CATEGORY DESIGNATOR DESCRIPTION
Navigation Sensors N No Navigation Sensors supported
G GPS & Fluxgate compass supported
A GPS, Fluxgate and integrated DVB
F GPS and DVB receiver (no compass)
C GPS Compass
receiver supported
Tracking Options
The RC3000 may provide optional support for tracking inclined orbit satellites.
CATEGORY DESIGNATOR DESCRIPTION
Inclined Orbit N Tracking not supported
Tracking T Step & Memory Track supported
E Step & Memory plus Two Line Element
set tracking supported
Remote Control Options
The RC3000 may provide optional support for controlling the mount from a remote (away from the front
panel) location.
CATEGORY DESIGNATOR DESCRIPTION
Remote Control N No Remote Control Supported
R Remote Monitor & Control Supported
O Antenna Deployment Safety Interlock
P Both Monitor & Control and
Deployment Safety Interlock
NOTE: Descriptions of the optional features are typically provided by separate appendices.
4
Page 13

RC3000 Antenna Controller Chapter 1 Introduction
1.3 Theory of Operation
The RC3000 performs its functions via digital and analog electronic equipment interfaced to the antenna’s
motor drive and position feedback systems. This equipment is controlled through embedded software
algorithms run by the RC3000’s microcontroller. This section provides an overview of the equipment,
interfaces and major software functions.
1.3.1 Controller Description
The following figure is a block diagram showing the major components of the RC3000 :
LIQUID CRYSTAL DISPLAY (LCD). The 4 row by 40 column LCD provides the user interface for
monitoring the status of the RC3000 and for entering data.
KEYPAD. The 4 row by 4 column keypad allows the user to enter data and commands to the RC3000.
DIGITAL BOARD. The digital board is essentially a small computer containing a microcontroller,
memory, real-time clock and circuitry to monitor and drive the keypad and LCD. The digital board
performs the following major functions:
- monitors user inputs from the keypad
- displays information on the LCD screen according to controller mode, antenna status and user input
- monitors antenna drive status
- battery backs up non-volatile memory (configuration data, etc.) and the real-time clock
5
Page 14

RC3000 Antenna Controller Chapter 1 Introduction
- performs communications between the microcontroller and the three (GPS, compass, remote control)
serial channels
- performs analog to digital conversion of drive position and signal strength inputs
- performs automatic antenna movement algorithms (locate, stow, recall, track, etc)
FEATURE BOARD. The feature board contains circuitry to implement many of the optional features of
the RC3000. The feature board provides the following major functions:
- signal drivers for PC remote control and navigation sensor serial communication
- circuitry for multiplexing signal strength indications from 1 of 3 sources
- circuitry for conditioning pulse based position feedback signals
- power transformation to supply required voltages to other modules
RF AUTOPEAK MODULE. This module accepts the output of an LNB (950-1450MHZ, -50 to –5dBm)
and generates a signal indicative of power across the band. This signal may be used for autopeak
operations.
ANALOG BOARD. The analog board contains circuitry to control the antenna motors and condition
antenna feedback signals. The analog board provides the following major functions:
- generation of azimuth and polarization limit indications based on sensed potentiometer feedback
- conditioning of elevation inclinometer input
- conditioning of azimuth stow and elevation up/down/stow limit switch inputs
- activation of relays (based on digital board control) to direct motor drive signals from the DC motor
control module.
DC MOTOR CONTROL MODULE. The solid state DC motor speed and reversing control module
contains circuitry for antenna motor regulation. This module provides:
- acceleration adjustment for smooth motor acceleration
- deceleration adjustment for ramp down time when motor speed lowered
- anti-plug instant reverse, solid state dynamic braking
- current limiting circuitry to protect the motor against overloads and demagnetization and to
limit inrush current during startup
- IR compensation to improve load regulation
POWER ENTRY MODULE. The power entry module allows the RC3000 to be configured for 115 or 230
VAC operation.
POWER TRANSFORMER. The power supply module transforms AC input voltage to a regulated DC
voltage for use by the digital and drive boards.
RESOLVER BOARD. To support mounts that use resolvers for position feedback, an optional resolver to
digital conversion board may be added to the baseline RC3000 hardware.
NOTE: Second Generation RC3000's (serial number > 2000) will have the circuitry of the analog board
and the feature board combined. Section 5.0 will contain the appropriate schematics for a particular
controller.
1.3.2 System Interface Requirements
The RC3000 is designed to interface with many different mobile antenna mounts. This manual attempts
to describe installation and operation in a manner applicable to most mounts.
The typical interfaces required for the RC3000 to perform all its automatic functions are described in
section 2.2 (Electrical Connections). Known differences to these interfaces and how they are
accommodated for a particular mount are described in appendix B (Mount Specific Data).
6
Page 15

RC3000 Antenna Controller Chapter 1 Introduction
1.3.3 Operational Overview
The RC3000 allows easy antenna operation via its menu based user interface. The screen displayed to
the user is based on the current controller mode. Controller modes are divided into two major groups:
operational and programming (see mode map in section 3.1.1). The operational modes provide for the
normal operation of the antenna. The programming group provides for initial configuration of the
controller and will typically not be used on a day by day basis. The following example highlights the basic
modes of operation provided by the RC3000.
Operational Group Functions
MANUAL. In MANUAL mode the user may jog the antenna in azimuth, elevation and polarization. Upon
power up, the fluxgate compass and GPS receiver initialize and begin providing data.
AZIM: 0.0 STOW SIG: 50 MANUAL
ELEV: -67.5 STOW SAT:TELSTAR 402
POL: 0.0 SPD:FAST CST
<0-9>JOG ANTENNA <MODE>MENU 14:25:47
AUTOMATIC LOCATION OF A SATELLITE. In LOCATE mode, azimuth and elevation pointing angles
are automatically calculated based on position (lat/lon), heading and the selected satellite. Position may
be obtained automatically from the optional GPS, selected from a preset list of user defined positions or
entered manually. Heading may be automatically obtained from the optional fluxgate compass or entered
manually. The user selects which satellite to locate from either a preset user defined list of commonly
used satellites, a provided extensive list of satellites or by manually entering satellite data. The RC3000
checks that the calculated pointing solution is within the mount’s range of movement and prompts the
user to automatically position the antenna.
POS: 38°56N 94°44W 180.0 LOCATE
SAT:GALAXY 6 74.0W AZ:-31.1
EL: 40.0
<1>SELECT NEW SAT READY TO LOCATE
STORING SATELLITE LOCATION. After verifying the antenna is precisely on the satellite, the user may
STORE the satellite’s azimuth and elevation angles along with horizontal and vertical polarization data. If
the satellite has been identified as having an inclined orbit, the TRACK mode will be automatically
entered as described below.
SAT LON INCLIN BAND STORE
BRASIL A1 79.0 2 C
VERIFY SATELLITE DATA OK FOR STORING
1-CORRECT, 2-INCORRECT
RECALLING STORED SATELLITES. The user may quickly and precisely move between previously
STOREd satellites via RECALL mode.
RECALL
STORED SATELLITE: BRASIL A1
SELECT SAT(SCROLL UP/DOWN) <ENTER>
AUTOMATIC ANTENNA STOWING. From STOW mode, the user may ask for the antenna to be
automatically moved to the stow position.
AZIM: -42.5 ( 0.0) STOW
ELEV: 23.4 (-67.5)
MOVING TO (TARGET),<STOP> TO HALT MOTION
7
Page 16

RC3000 Antenna Controller Chapter 1 Introduction
Programming Group Functions
The programming group modes provide for initial configuration of the controller and also provide screens
to aid in maintenance and troubleshooting of the controller.
Configuration mode screens allow the user to customize and calibrate the operation of the RC3000 for
use with a particular mount. Note that most configuration items will be factory set for correct operation
with a particular mount.
REF_VOLT:2.50 OFF: 0.0 CONFIG-AZIM
CCW:180 CW:180 SF:76.35
SET REFERENCE VOLTAGE <2.00 - 3.00>
Maintenance mode screens allow the user to monitor sensor inputs and perform periodic maintenance
actions such as setting time and resetting drive errors.
SYSTEM:11/10/97 22:26:40 TIME
GPS UTC:11/10/97 22:26:40 ZONE:CST
DISPLAY:11/10/97 16:26:40 OFFSET:- 6
1-DATE 2-TIME 3-SYNCH 4-ZONE 5-OFFSET
8
Page 17

RC3000 Antenna Controller Chapter 1 Introduction
1.3.4 Antenna Pointing Solution
The position (latitude and longitude) of the mount and the longitude of a selected satellite are required to
calculate a pointing vector from the mount to the selected satellite.
Given the mount’s latitude and longitude and the pointing vector to the satellite, the RC3000 calculates
the elevation (with respect to local horizontal) required. Feedback from the inclinometer on the elevation
axis will be used to move the mount to the required elevation.
9
Page 18

RC3000 Antenna Controller Chapter 1 Introduction
The azimuth portion of the pointing vector is calculated with respect to local true North. The fluxgate
compass is used to determine the heading of the centerline of azimuth travel and the required movement
in the azimuth axis is calculated.
In the above example a true heading of 135 degrees to the satellite has been calculated. Based on the
mount’s latitude, longitude and date, a local magnetic variation (see 1.3.8) of 10 degrees is calculated.
The compass senses a magnetic heading of 55 for the azimuth reference direction. Applying the
magnetic variation, this yields an apparent true heading of 45 degrees for the antenna reference
direction. An azimuth movement of 90 (135 – 45) degrees clockwise is therefore needed to point at the
satellite.
Since a position sensor on the azimuth axis is always active, the RC3000's default displayed azimuth
value is that of the antenna angle. Derived estimates of the magnetic and true heading of the mount may
be selected in the MANUAL (3.2.1) and LOCATE (3.2.2.3) modes.
10
Page 19

RC3000 Antenna Controller Chapter 1 Introduction
1.3.5 Timekeeping
There are several versions of time (system, sidereal, referenced and GPS) discussed within this manual.
System time is maintained by the RC3000’s real time clock. The real-time clock is backed up by battery
so that system time is available as soon as the RC3000 powers up. The system time is used to calculate
sidereal time for maintaining track tables. Since satellite’s do not experience time shifts (such as from
Standard Time to Daylight Savings Time or when moving from one time zone to another), it is
recommended that system time not be modified while active track tables are present. If system time is
changed, the information stored in track tables for inclined orbit satellites will no longer be valid.
The RC3000’s system time is set to approximately Universal Coordinated Time (UTC) at the factory. It
will vary from UTC due to the tolerance of the real-time clock.
If the optional GPS receiver is installed, the RC3000 parses UTC from the data sent by the GPS receiver.
This data is only available when the GPS receiver is sufficiently locked on to GPS satellites to determine
UTC. The RC3000 allows the user to synchronize system time to the UTC reported by the GPS receiver.
The period of a satellite’s motion is one sidereal day (approximately 23 hours 56 minutes 4 seconds).
Entries in the track table for an inclined orbit satellite are stored at intervals of 1/48th of a sidereal day.
The RC3000 determines at what point in a sidereal day (with respect to the RC3000 reference) it is by
calculating how many sidereal days have passed from January 1, 1992 until the present system time.
In several screens the RC3000 displays a reference time. The user may designate a three letter
timezone designation and an hourly offset from system time. This allows the user to display local time or
some other reference time without modifying system time. If system time is maintained close to UTC, the
reference time displayed may be of use to operators for coordinating events.
See section 3.3.2.3 for details on time maintenance.
1.3.6 Drive System
The RC3000 implements several mechanisms for the driving and monitoring of the azimuth, elevation
and polarization axis.
Position Sensing and Limits
The RC3000 senses absolute axis position using feedback from various sensors (potentiometers,
resolvers, inclinometer for elevation, etc). The sensed voltage is scaled appropriately for the particular
mount. This sensed position is displayed in angular format.
For systems requiring very small movements for inclined orbit tracking, the RC3000 also supports pulse
feedback from the azimuth and elevation axis. Sensed pulses from the axis motor don’t provide an
absolute indication of position but allow for very precise relative movements.
The boresight of the antenna is displayed for the azimuth and elevation axis. In elevation, this angle is
with respect to the local horizontal. In azimuth, this angle is with respect to the centerline of azimuth
travel.
The following diagram shows a typical range of movement for mobile satellite antennas. Note that
elevation movement to the stow position is limited about a small range of azimuth movement in order to
ensure safe stowing of the antenna.
11
Page 20

RC3000 Antenna Controller Chapter 1 Introduction
In the azimuth axis, movement in one direction is disabled when clockwise and counterclockwise limit
switches are activated. There is also typically a region in the center of azimuth travel indicating that the
azimuth axis is in a position that will allow for moving the elevation axis down to the stow position.
In the elevation axis, there are typically three limit switches. The UP switch prevents further movement
up. The “DOWN” switch delimits the elevation the mount may not move further downward unless it has
been placed in the azimuth stow region. The STOW switch indicates when the mount has reached its
furthest down position which is typically where the dish is stowed for travel.
Jam and Runaway Sensing
The RC3000 continuously monitors the axis positions to detect incorrect movement of the mount. If an
axis has been commanded to move and the RC3000 does not detect movement within a prescribed time,
the controller will declare a “JAM” condition and not allow further movement in that axis until the condition
has been reset.
Similarly if the RC3000 senses movement in an axis when no movement should be occurring, the
RC3000 will declare a “RUNAWAY” condition. Like JAM, the RUNAWAY condition must be reset before
further movement in the axis may occur.
Anti-Reversal
In order to save wear on the drive motors, the RC3000 limits how fast an axis may reverse its direction.
This mechanism prevents a motor from instantly changing direction before coasting to a stop in the
original direction. This mechanism is also useful for correct counting of pulses. Since the RC3000
counts a pulse as being in the direction that the controller thinks the axis should be going, it is imperative
to stop the motor completely before moving in the opposite direction.
Automatic Movements
In order to provide smooth automatic movement to target positions, the RC3000 utilizes several
parameters to account for different mount characteristics.
12
Page 21

RC3000 Antenna Controller Chapter 1 Introduction
The Fast/Slow Transition parameter defines how far away from a target position the RC3000 will switch
from fast to slow motor speed. The Coast Range defines where the RC3000 will de-energize the motor
drive to allow the mount’s inertia to coast into the target position. The Max Error parameter defines how
close to the target position will be considered good enough.
Note that the DC motor control module in the RC3000 provides for smooth acceleration/deceleration, load
regulation and dynamic braking of the motors.
1.3.7 Polarization Control
The RC3000 calculates the required position and automatically moves the polarization axis as part of the
satellite LOCATE function. The following diagram shows the polarization axis sign convention used. The
diagram depicts looking at the arc of satellites from behind the antenna.
The RC3000 allows the user to specify the type of polarization axis mechanism present. If a circular
polarization scheme is present, no automatic movement of the polarization axis is performed. If a linear
polarization scheme is present, the RC3000 will calculate the theoretical position as a function of mount
latitude, mount longitude and satellite longitude.
13
Page 22

RC3000 Antenna Controller Chapter 1 Introduction
1.3.8 Magnetic Variation
In order to calculate satellite pointing solutions, the mount’s orientation with respect to true North must be
known. The RC3000 uses the fluxgate compass to measure the local horizontal component of the earth’s
magnetic field. The earth’s magnetic field is very irregular as shown in the following diagram from the
National Geophysical Data Center.
The magnetic field also changes slowly over time. The following table shows how the magnetic variation
for Washington D.C. has changed over the last 250 years.
YEAR MAGNETIC VARIATION
1750 -3.3
1800 -1.0
1850 -2.5
1900 -5.5
1950 -7.5
2000 -10.6
To calculate the local magnetic variation (difference between magnetic North and true North), the
RC3000 uses the International Geomagnetic Reference Field (IGRF) model. The IGRF is a mathematical
model of the earth’s magnetic field and how it is changing. The IGRF is based on world wide
observations and is updated every five years. The IGRF model cannot account for short term effects
such as magnetic storms, etc.
Local magnetic variation is calculated given the mount’s latitude, longitude and the current date. The
magnetic variation calculation cannot account for isolated local anomalies (typically less then a few
degrees). It also cannot account for local external effects (power lines, train tracks, etc). The autopeak
scan functions (3.2.2.3.2.3) used by the RC3000 attempt to compensate for the small heading calculation
errors that may occur at any particular location.
14
Page 23

RC3000 Antenna Controller Chapter 1 Introduction
1.3.9 System Performance
The performance achieved by the RC3000 in locating and tracking satellites is dependent on the
mechanical tolerances of the mount, the correctness of the installation and the accuracy of the various
sensors.
The largest source of error for the system is due to errors in determining the truck's magnetic heading.
Errors in heading primarily affect the accuracy of the antenna's calculated azimuth position. The flux gate
determines the magnetic heading by measuring the direction of the magnetic field at the sensor tower.
Problems arise because the earth's magnetic field can be distorted by ferrous metals (such as steel and
iron; aluminum is a non-ferrous metal) and man-made magnetic fields. These man-made fields can be
generated by electric motors, generators, and transformers, as well as those "worked into" the coach
body during manufacturing.
For the flux gate sensor, there are two unique categories of objects that distort the magnetic field in the
vicinity of the truck. Some of the distortion is due to objects and electrical devices on the truck itself. This
component of the distortion can be largely compensated for during system calibration.
The other component of the distortion is due to large metal objects and man-made magnetic fields around
the site where the truck is being operated. This component of the distortion varies as the truck moves
from one location to another, and it affects the accuracy of the calculated azimuth position. Environments
which typically produce the largest errors include railroad yards, areas around electrical substations, and
sites near structures containing large amounts of steel or iron, such as bridges or large buildings.
To date, the largest known azimuth error due to these interactions is less than 10 degrees. To help
alleviate this azimuth error, the Auto Peak feature scans an azimuth range about the target azimuth and
seeks the strongest signal. This feature is explained in full in section 3.2.2.3.
The RC3000 uses a 10 bit analog to digital converter for measuring voltages from azimuth, elevation and
polarization potentiometers as well as measuring signal strength inputs. In most cases this provides
adequate resolution but should be considered. For example, if the azimuth axis has 360 degrees of
travel, the resolution achieved is 360 / 1024 (approximately 0.35 degrees). This example highlights why
pulse or resolver sensors are used to make precise movements for inclined orbit tracking. The optional
resolver interface uses a 16 bit resolver to digital converter. This allows resolution of 0.0055 ( 360 /
65536) degrees.
15
Page 24

RC3000 Antenna Controller Chapter 1 Introduction
1.4 Specifications
Physical
Size 19.0 inches x 3.5 inches x 17.5 inches
Weight 19 lbs 13 lbs
Input Power
Fusing
Temperature -20C to +50C 0C to +50C
Humidity 35% to 85% (optional special-environmental kit available)
Antenna Drive
Azimuth/Elevation 12-36 VDC, 10 Amps max
Polarization 12-36 VDC, 10 Amps max 12 VDC, 1 Amp max
Electromechanical
Brakes (optional)
Waveguide/Switch
(optional) 24VDC 2Amps max or 115VAC 1 Amp max (specify on order)
Position Sense
Azimuth
Elevation
Polarization Potentiometer, 10-bit resolution standard; optional resolver, 16-bit resolution
Limit Switch Inputs
Locate Mode
Elevation Accuracy +0.2 degrees (typical)
Azimuth Accuracy +1.5 degrees (typical)
Polarization Accuracy +3 degrees (typical)
GPS Lockup Time 0 seconds (when configured for accessory powered GPS receiver)
VSAT Mode Single key-press-to-locate-operation for untrained operators
Autopeak Input
Modem Receive-Lock
Input TTL or contact closure, (optional non-invasive modem lock detector available)
Track Mode
Antenna Size 0.4 – 12.0 meters
Tracking Accuracy 0.1 to 3.0 dB selectable; mount dependent
Maximum Inclination 16 deg., standard
Tacking Modes
Signal-Strength Input -15VDC to +15VDC; 2Mohm input impedance, two channels
Non-volatile Memory
Backup Duracell DL2450
RC3000A RC3000B
115/230 VAC switchable 50/60Hz; 50W max
Idle;850W max Antenna Moving; optional
universal input
115 VAC, 8Amp Slow-Blow; 230 VAC,4
AMP Slow-Blow
115 OR 230 VAC 50/60Hz; 50W
max Idle;850W max Antenna
Moving
115VAC and 230VAC, 12 AMP Fast
Blow
90VDC (3/4 HP max) for 115VAC,90
or 180 VDC (1.5 HP max) for
230VAC input
28 VDC 300mA, or 115 VAC 1Amp
max(specify on order)
115 VAC 1Amp max (specify on
order)
Potentiometer, 10-bit resolution standard; optional single phase pulse sensors
(Reed, Hall-Effect, Optical); optional resolver, 16-bit resolution
Inclinometer, 10-bit resolution standard; optional single phase pulse sensors (Reed,
Hall-Effect, Optical); optional resolver, 16-bit resolution
Five- 12 VDC inputs, standard: EL Up, EL Down, EL Stow, AZ Stow, Pol Stow.Four
additional inputs optional, mount dependent
full L-Band power detection to find strongest signal.(configurable to AGC voltage or
Beacon receiver output -15VDC to +15VDC; 2Mohm input impedance, two
channels)
Step-Track, Memory-Track, Intelli-Searchtm , Program Track, optional Ephemeris
Track
16
Page 25

RC3000 Antenna Controller Chapter 2 Installation
2.0 INSTALLATION
Proper installation is important if the full capability and accuracy of the RC3000 is to be realized. The
procedures that follow will insure the optimum level of performance from all sensors and the system in
general.
Installation will be more efficient if each step in the physical installation and calibration be performed in
the order in which it appears in the following schedule. Each step is referenced to a particular section of
this manual, and should be checked off as it is completed. Coordination between the mount
manufacturer, vehicle integrator and end user is required. Some steps are applicable only if the tracking
or remote control options were purchased with the unit. The installation procedures are written to cover
the most common mount installations. Some steps are slightly different according to the type of mount
the RC3000 is interfacing to (see appendix B). Installation requires basic operational knowledge of the
RC3000. Please review chapter 3 for information on how to navigate the RC3000’s screens and how to
enter data.
SECTION ACTION COMPLETE
2.1 Equipment Mounting
2.1.1 RC3000 Antenna Controller
2.1.2 GPS Receiver
2.1.3 Fluxgate Compass
2.1.4 Inclinometer
2.2 Electrical Connections
2.2.1 Power Entry
2.2.2 Motor Drive
2.2.3 Drive Sense
2.2.4 Limit Switches
2.2.5 Signal Strength
2.2.6 Navigation Sensors
2.2.7 Accessories
2.2.8 RF Autopeak
2.2.9 Hand Held Remote
2.2.10 Pulse Sensors
2.2.11 PC Remote Control
2.2.12 Waveguide Switch
2.2.13 Resolver Inputs
2.3 Initial Configuration
2.3.1 Software Initialization
2.3.2 Elevation Calibration
2.3.3 Azimuth Calibration
2.3.4 Polarization Calibration
2.3.5 Fast/Slow Motor Speed
2.3.6 Pulse Sensor Checkout
2.3.7 Drive System Checkout
2.3.8 Navigation Sensor Communication
2.4 Final Calibration
2.4.1 Compass Calibration
2.4.2 Azimuth and Elevation Alignment
2.4.3 Signal Strength Adjustment
2.4.4 Pulse Scale Factors
2.4.5 Miscellaneous Adjustments
2.4.6 Mechanizing Automatic Locate
17
Page 26

RC3000 Antenna Controller Chapter 2 Installation
2.1 Equipment Mounting
This section describes the physical mounting requirements for the RC3000 and optional sensor units.
Wiring requirements are discussed in section 2.2.
2.1.1 RC3000 Antenna Controller
NOTE: The RC3000 unit should not be installed in the rack until the final step of the Initial
Configuration (section 2.3) because access to the interior of the unit may be necessary prior to
that procedure. The cables may be run through the chosen location in the rack and connected to
their respective components.
The RC3000 enclosure is a standard rack mount chassis that occupies two rack units (2U). The front
panel is mounted via four (4) 10-32 screws. Due to the length and weight of the RC3000, much strain
can be put on the faceplate, particularly in a mobile unit. To help alleviate stress on the front panel
mounting, additional mounting points accepting 10-32 and M4 screws are provided on each side, back
and bottom of the unit. The user may use any of these additional mounting points to provide support for
the RC3000 via strapping, shelving, etc. The additional mounting screws on the back of the unit may be
also used to provide strain relief for cabling.
CAUTION: support of the back of the RC3000 is a requirement. RCI’s warranty does not cover
repair to units with ripped faceplates.
The RC3000’s LCD is optimized for viewing from a 6 o’clock position. The optimum position to mount the
unit would therefore be above the operator’s eye level.
The following diagram shows the typical dimensions (in inches) of the RC3000. See appendix B for exact
dimensions of your controller. See section 5 for a detailed depiction of the side mounting holes.
18
Page 27

RC3000 Antenna Controller Chapter 2 Installation
2.1.2 GPS Receiver
The optional GPS receiver (RC3000GPS) should be mounted in a position (such as the truck’s roof)
where it has an unobstructed view of the horizon and sky. It should be mounted outside of the reflector
when in a stowed position, with the connector (on the underside) towards the cable’s entry point into the
truck. Care should be taken in the routing of the cable to avoid any problems.
The GPS receiver should be mounted at least three feet from other antennas and electrical generating
equipment. Strong RF interference from other sources may disrupt the GPS receiver’s signal reception.
Wiring of the GPS connector is discussed in section 2.2.6.
Recent RC3000s have been supplied with the GPS17 receiver model. The following diagram shows its
dimensions.
Earlier RC3000s were supplied with the GPS35 receiver model. The following diagram shows its
dimensions.
The GPS35 unit is supplied with 25 feet of cable. The GPS35 unit is supplied with a flange mounting
bracket as shown above. An optional marine mounting bracket is also provided.
19
Page 28

RC3000 Antenna Controller Chapter 2 Installation
2.1.3 Fluxgate Compass
The optional fluxgate compass unit (RC3000FG) should be placed on the roof of the vehicle away from
ferrous metals, electric motors, and any equipment that generates magnetic fields such as air
conditioners, generators, and traveling wave tube (TWT) amplifiers. Experience has shown that the
fluxgate performs best when mounted as high as possible on the vehicle. The fluxgate compass must be
mounted in an upright position.
Some mounts position the compass on the mount so that the compass may be lifted well above the top of
the vehicle. If the compass is attached to the mount, the compass configuration item (3.3.1.2.1) must be
set to the “antenna mounted” value.
The RC3000 uses the fluxgate to determine the true heading of the mount’s azimuth centerline (0.0
degrees azimuth). If the compass is not aligned in the direction of the azimuth centerline, that difference
must be described in the azimuth offset configuration item (3.3.1.2.3). Some operators prefer to mount
the compass pointing forward on the vehicle. If the mount faced rearward, an azimuth offset of 180
degrees would need to be input.
Refer to the drawing of the fluxgate enclosure to verify the proper orientation of the fluxgate. NOTE: An
unhoused version of the compass is available for use in a user-designed enclosure.
The Fluxgate Compass box may be either bracket mounted or flush mounted. Without the bracket it may
be attached to a flat surface by four 10-32 screws from inside or outside the box through the four corner
holes shown in the FRONT view diagram above. When using the bracket mount, it may be mounted with
four 1/4 inch bolts using the holes shown in the bottom view of the bracket in the above diagram. The
cable may be routed through either hole in the bracket. The circuit board may also be removed from the
housing or an unhoused model is available on order for custom installations.
The following method may be used to determine the best location for the compass.
Park the vehicle in a location that is away from large metal objects or sources of magnetic fields. NOTE:
for best results, the vehicle should be parked facing in an easterly or westerly direction. The
vehicle's generator should be running, as well as all electrical equipment on the vehicle that generates
magnetic fields.
20
Page 29

RC3000 Antenna Controller Chapter 2 Installation
Stand on the roof of the vehicle with a standard magnetic compass. Slowly lower the compass to the
proposed fluxgate mounting location on the vehicle without changing the orientation (or heading) of the
compass body. If the needle of the compass swings as the compass is lowered to the mounting location,
it is due to distortion of the earth's magnetic field by ferrous metals on the vehicle, or magnetic fields
generated by the vehicle.
The fluxgate should be mounted in the location where the needle of the compass experiences the
minimum amount of swing as the compass is lowered to the proposed mounting location.
21
Page 30

RC3000 Antenna Controller Chapter 2 Installation
2.1.4 Electronic Clinometer
The electronic clinometer (also referred to as the inclinometer) should be positioned on the mount
structure in an orientation that allows the inclinometer’s linear range of movement to rotate through the
antenna’s RF boresight operational range.
Determining the correct orientation of the inclinometer requires knowledge of the mount’s mechanical
structure and the antenna’s RF offset. Typically the mount manufacturer will place the inclinometer in the
correct position on the mount. See appendix B for the correct orientation for a particular mount.
The elevation position sense circuit of the RC3000 is designed to interface to the Lucas/Schaevitz
AccuStar model 0211 1002-000 or 0211 1102-000 inclinometers. The inclinometer’s position reference is
marked on the body of the inclinometer. The inclinometer should be mounted such that the body of the
inclinometer is rotated CW (as viewed by an observer looking at the front of the inclinometer) as the
antenna’s elevation angle increases. The inclinometer must also be oriented properly on the antenna
mount.
To describe the orientation of the inclinometer, the term ‘elevation offset angle’ needs to be defined.
Elevation offset angle is defined as the antenna’s RF elevation pointing angle (relative to horizontal) when
a straight edge oriented vertically across the face of the antenna reflector (reflector top to bottom) is
plumb. The inclinometer should be oriented so that, when the antenna reflector is plumb, the reference
mark is deflected CCW (from the vertical position) by an amount equal to the 35 degrees minus the
‘elevation offset angle’. If the inclinometer is attached as described the sensor will operate in its most
accurate region for elevation look angles up to 80 degrees.
The inclinometer mounting flange allows for some adjustment of the device’s rotational orientation. The
mounting position selected for the inclinometer should allow for adjustment of the inclinometer’s
orientation. The inclinometer should be mounted in a location such that it is protected somewhat from
blowing rain.
See section 2.2.3 for wiring of the inclinometer.
22
Page 31

RC3000 Antenna Controller Chapter 2 Installation
23
Page 32

RC3000 Antenna Controller Chapter 2 Installation
2.2 Electrical Connections
This section provides cabling requirements for interfacing to the RC3000. Note that cables should be
made long enough to allow the unit to be open while still connected to the system.
The following sections supply a schedule of connection requirements. Note that the pinout requirements
for J1, J3, J6, J7 and J10 are the same as required for RC8097 installations and therefore should not
require rework of those cables for retrofitting to the RC3000. The following diagram shows the typical
location of the backpanel connectors on original (serial # < 2000) controllers.
Second Generation RC3000s (serial # > 2000) have a slightly different connector arrangement. For
example, rather than having a single DB-37 for navigation sensors, the second generation controllers
have individual DB-9s for each sensor. Any differences between original and second generation
connectors will be described in the following paragraphs.
Also, some versions of the RC3000 have customized backpanels to accommodate existing antenna
connector schemes.
See appendix B for your exact backpanel configuration.
24
Page 33

RC3000 Antenna Controller Chapter 2 Installation
2.2.1 Power Entry
J6 is an IEC male power connector on the backpanel for supplying AC power to the RC3000.
The RC3000 is shipped from the factory with a line cord appropriate for the line voltage selected. If the
line cord received with the unit is not appropriate for the power available at the installation site, the
installer should check the controller to ensure that the proper line voltage has been selected.
The RC3000A can be configured to operate on either 115 VAC or 230 VAC. The AC input voltage the
unit is currently configured for is displayed in a window located in the fuse holder. To change the AC
input voltage selection, remove the fuse holder and reverse the jumper assembly (on which the ‘115’ and
‘230’ labels are located).
To convert AC Voltage. Switch the power off at the front panel. Remove the IEC power cord from the
back panel power entry module. With a small straight-blade screwdriver, remove the fuse drawer from
the power entry module. With the same tool, remove the small plastic circuit card. Rotate the card so
that the desired operating voltage will be displayed through the front of the fuse drawer and reinsert the
card so that it firmly seats into the power entry module.
NOTE: The RC3000B can only be configured for 115 or 230 VAC since the internal DC motor
controller module is different for each voltage. The fuse holder is glued into the correct voltage
position and cannot be modified as in the RC3000A case.
The fuse holder is designed to accommodate 1/4” by 1 1/4” fuses. “Slow Blow” type fuses should be
used. The following table shows the appropriate fuse for each model and line voltage combination.
LINE VOLTAGE
MODEL 115 VAC 230 VAC
RC3000A 8 Amp 4 Amp
RC3000B 12 Amp 6 Amp
Some RC3000 units may be fitted with an optional card that automatically senses 115 or 230 VAC input.
25
Page 34

RC3000 Antenna Controller Chapter 2 Installation
2.2.2 Motor Drive
J7 is an MS3102A22-20S (Female on backpanel) connector, which terminates three motor cables. The
minimum wire size for these cables is 16AWG.
The RC3000A is designed to drive 12 to 36 volt DC azimuth, elevation, and polarization motors. The
absolute maximum allowed motor current is 12 Amps. The RC3000A employs a built-in, solid-state motor
controller (model 25A8 from Advanced Motion Controls). The motor drive module supports IR
compensation, current limiting, dual speed operation, and dynamic braking. The drive train is also
protected with resettable fuses.
The RC3000B is designed to drive 90 volt (3/4 horsepower max) or 180 volt (1.5 horsepower max) DC
azimuth and elevation motors. Ideally, 90 volt DC motors would be specified with 115 VAC input power
and 180 volt DC motors with 230 VAC input power. 180 volt motors cannot be used with 115 VAC input
power. The motor drive in the RC3000B is the model KBPB by KB Electronics . This motor drive
supports IR compensation, current limiting, dual speed operation, and dynamic braking.
The polarization drive of the RC3000B is designed to power a 12 volt DC motor which draws less than
400 ma.
The following table describes the polarity of the RC3000’s motor drive output signals.
Axis RC3000 Connector
J7 Terminals
Azimuth G, F Azimuth CW – G has higher potential
Elevation H, J Elevation UP – H has higher potential
Polarization A, B RC3000A:Polarization CW – B has higher potential
Polarity
RC3000B:Polarization CW – A has higher potential
26
Page 35

RC3000 Antenna Controller Chapter 2 Installation
2.2.3 Drive Sense
J1 (DB-15 Female on backpanel) receives position sense from the azimuth and polarization
potentiometers and the elevation inclinometer.
Normally, it is not necessary to modify the sensors on the antenna. The antenna manufacturer should
insure that the antenna is compatible with the RC3000. This information is provided for informational
purposes only.
The directional sense of azimuth movement is defined as clockwise (CW) or counter-clockwise (CCW),
as viewed by an observer located above the antenna. On the controller, CW movement results in a
greater sensed azimuth position.
The directional sense of elevation movement is defined as UP when the RF look angle of the antenna is
increasing.
The directional sense of polarization movement is defined as CW or CCW, as seen by an observer
standing behind the antenna reflector looking ‘through’ the reflector at the satellite. See diagram in
section 1.3.7 – Polarization Control. The reference position for the polarization position angle is
vertical polarization for a satellite located at the same longitude as the antenna. In the northern
hemisphere, for vertically polarized satellites to the west of the antenna, the polarization deflection is
defined as CW relative to the reference position. In the northern hemisphere, the polarization angle
increases for satellites farther to the west. In some modes of operation the controller predicts the
polarization value required to align the antenna with a given satellite’s horizontal or vertical polarization
position. For this feature to function properly the antenna’s polarization directional sense characteristics
(defined by the polarization motor and position sensor) must be consistent with that of the controller.
27
Page 36
RC3000 Antenna Controller Chapter 2 Installation
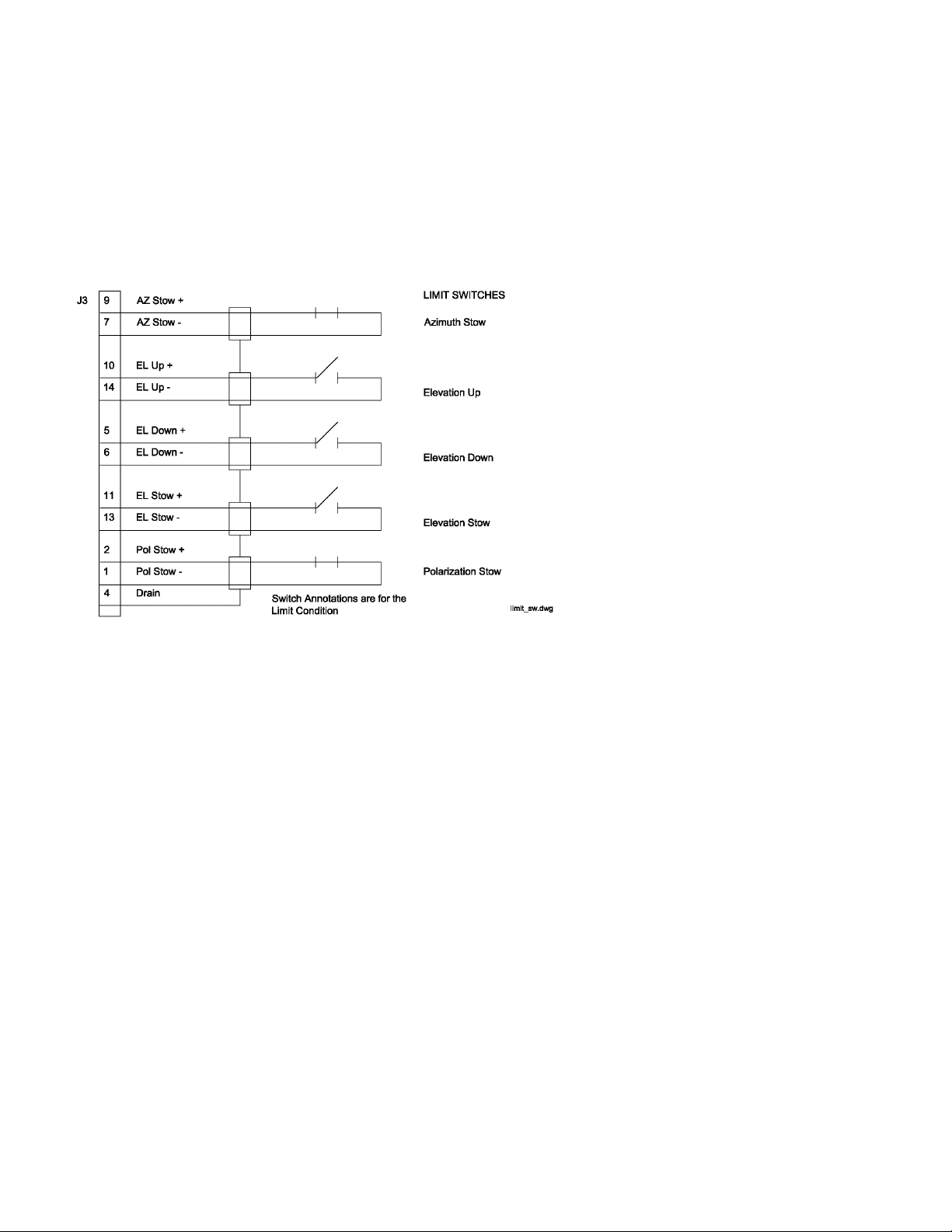
2.2.4 Limit Switches
J3 (DB-15 Female on backpanel) connects to the azimuth stow, elevation stow, elevation up and
elevation down limit switches.
The + side of each limit switch circuit supplies 12 VDC. This 12 VDC supply is protected by a resettable
fuse rated at 250 mA.
The azimuth stow switch must be closed when at the azimuth stow position. If the azimuth stow limit
switch cable is severed, the RC3000 will think that the azimuth axis is not at the stowed position. Logic
within the RC3000 will not allow elevation to move below the elevation down limit switch if an azimuth
stowed condition is not recognized.
The elevation up switch must be open when the elevation axis has reached the up limit. If the elevation
up limit switch cable is severed, the RC3000 will think that the elevation axis is at the up limit. Logic
within the RC3000 will not allow the elevation axis to move up if an up limit condition is recognized.
The elevation down switch must open when the elevation axis has reached the down limit. If the
elevation down limit switch cable is severed, the RC3000 will think that the elevation axis is below the
down limit. Logic within the RC3000 will not allow the azimuth axis to move when the elevation down
condition is recognized.
The elevation stow switch must open when the elevation axis has reached the stow position. If the
elevation stow limit switch cable is severed, the RC3000 will think that the elevation axis is at the stow
position. Logic within the RC3000 will not allow the elevation axis to move down when the elevation stow
condition is recognized.
NOTE: When the elevation stow limit is sensed, the RC3000’s hardware also internally generates an
elevation down indication. To test the elevation down limit switch from the RC3000’s backpanel (pins 5 &
6), pins 11 & 13 (elevation stow) must be jumpered to simulate a situation where the elevation axis is not
stowed.
28
Page 37

RC3000 Antenna Controller Chapter 2 Installation
2.2.5 Signal Strength
J2 (DB-15 Female on backpanel) connects to receivers, modems, etc., to provide signal strength
indication for autopeaking and tracking. J2 also supports 4 bits of digital I/O and various bus voltages that
allow for future expansion.
The received signal strength from the system receiver must be between –15 VDC and +15 VDC. The
signal may be of either positive or negative polarity (see section 2.4.3 - signal strength adjustment).
A shielded pair, such as Alpha 1292C, should be used to minimize external noise pickup on the signal
strength line. The shield should be connected at the RC3000 system ground and open circuited at the
receiver.
The offset test points need to be made available (flying leads, etc) for use in the signal strength
calibration step.
Associated with J2 are offset and gain potentiometers for signal strength channels 1 and 2. These
potentiometers are accessible via the back panel.
The two signal lock inputs require TTL level (<0.8 VDC-low, >3.5VDC-high) signals. Signal_Lock 1 is
associated with the AGC1 input (SS1) and Signal_Lock 2 with the AGC2 input (SS2). Either of the two
signal lock inputs may be associated with a RF autopeak scan as described in section 3.3.1.2.5.
The unregulated 24 VDC available at pin 9 may be used to provide DC bias to a LNB. This voltage
supply is protected by a resettable fuse. Please consult Research Concepts Inc. for assistance if you
wish to use this supplied voltage.
29
Page 38

RC3000 Antenna Controller Chapter 2 Installation
2.2.6 Navigation Sensors
J9 (DB-37 Female on backpanel) provides four RS-232 ports to connect the optional fluxgate compass
and up to 3 GPS receivers. Route the cable away from electrically noisy devices (motors, air
conditioners, etc.) to avoid unnecessary problems.
Original RC3000s
A DB-37 to two DB-9 Female cable is supplied for connecting to the GPS receiver and the Fluxgate
compass. Pinouts for the third and fourth serial ports available from J9 are not shown as these ports are
currently not used.
The J13 DB-9 (Female on backpanel) connector (below the J7 drive connector) provides a “GPS loopout”
interface. Another device (such as a TDMA modem) may listen to the output of the GPS receiver in order
to obtain latitude, longitude, height, time, etc. The pinout of J13 is identical to the GPS DB-9 connector
shown above.
Second Generation RC3000s
Rather than having the DB-37 connector, there is an individual DB-9 Female (J13) for the GPS interface
and an individual DB-9 Female (J9) for the compass. The pinouts of these connectors will be as shown
above for the DB9s.
NOTE: the GPS loopout connector is designated J15 (DB9 Female on backpanel) on second generation
RC3000s.
30
Page 39
RC3000 Antenna Controller Chapter 2 Installation
2.2.7 Accessories
J8 (9 pin DB-Receptacle) is an accessory connector. It contains pins that support the following functions
of the RC3000: High-power-amplifier (HPA) disable, system alarm contact closure output, 1 pulse-persecond output (optional depending on GPS in-use), and a circuit that can allow for instant access to the
GPS position solution. On some units, two of the pins may be diverted to power auxiliary equipment.
The HPA disable is in a form-C contact arrangement with a normally-open, normally-closed and common
contacts. While the antenna is below the down elevation limit or while the antenna is performing any
large-scale auto-moves, such as deploy, locate, or stow, the normally-closed and common pins will be
connected. After the auto-move is complete, the connection will be released.
The Alarm output contact closure consists of a normally closed and a common contact. In the advent of a
RC3000 mains power failure, the contact will close allowing an audible alarm or lamp to be lit.
The instant GPS solution feature is realized by powering the GPS receiver(s) during transit to the shoot
location and for a roughly 30 minute period after the vehicle ignition is turned off. Without this feature,
GPS solution lock-up time will range from 2 to 4 minutes after RC3000 power up. The exact time
depends on how long it has been since the receiver last had a solution and how far the receiver has
moved from its last location.
The Instant GPS feature requires a connection to the vehicle +12V battery system (+12V to +14V on all of
the time), a connection to the +12V vehicle accessory voltage (+12V on while the vehicle ignition system
is on), and a connection to the vehicle chassis ground. While the vehicle ignition system is on and for 30
minutes after the ignition is shut off, power is routed to ports 1, 3, and 4 of the navigation sensor
connector, J9. This feature must be enabled on the RC3000 feature board by installing diodes D31 and
D29. The GPS receiver will typically draw less than 200 mA. at 12VDC.
On certain units, when requested at the time of order, an unregulated power supply voltage can be made
available on pins 2 and 8 of this connector at the expense of the instant GPS feature.
Earlier RC3000 models mechanized J8 via a round Amphenol 126 series connector. Second Generation
controllers put the HPA and alarm relays on a DB-25 (Female on backpanel) connector. The following
table shows the pin connections for all connector types.
DB-9 AMP
126
1 A 1 HPA Disable, normally-open, 3A @ 30VDC max or 3A @ 250VAC max
2 B +12 - +14V Vehicle Battery input (OR +Vunreg. for auxiliary output models, 2A
3 C Ground, Vehicle chassis ground input
4 D 15 HPA Disable, common, 3A @ 30VDC max or 3A @ 250VAC max
5 E 3 HPA Disable, normally-closed, 3A @ 30VDC max or 3A @ 250VAC max
6 F 16 Alarm common, 3A @ 30VDC max or 3A @ 250VAC max
7 H 4 Alarm normally-closed, 3A @ 30VDC max or 3A @ 250VAC max
8 J +12 to +14V Vehicle accessory input (Vunreg. Return for auxiliary output models)
9 K 1PPS output, TTL compatible (only available GPS model 36 receiver)
DB-
DESCRIPTION
25
The other pins on the DB-25 connector are available for custom interface requirements. See Appendix B.
31
Page 40

RC3000 Antenna Controller Chapter 2 Installation
2.2.8 RF Autopeak
J11 (Type F Female connector on backpanel) is the input to the RF Autopeak circuit. This input accepts
the output of an LNB (950-2150MHZ, -50 to –5dBm.)
The RF autopeak module inside the RC3000 produces an output proportional to the broadband energy
received. The RF autopeak circuitry includes a “DC block”. When this input is being used, it is indicated
on RC3000 screens as the “RF” signal source.
See sections 2.4.3.1 and 3.3.1.2.6 regarding use of the L-Band power detector input.
32
Page 41

RC3000 Antenna Controller Chapter 2 Installation
2.2.9 Hand Held Remote
J10 (DB-25 Female on backpanel) connects to the optional hand-held remote control (RC3000HRC)
which allows antenna jog operations independent of the front panel. The remote control is housed in a
3” x 6” x 1.75” aluminum case. The remote control should be connected to the RC3000 with a 25’ multiconductor cable.
33
Page 42

RC3000 Antenna Controller Chapter 2 Installation
The RC3000HRC places all of the antenna move functions and antenna limit indicators into the operator’s
hand. The LEDs on the remote switch-pad indicate the antenna limit status:
Azimuth Axis: STOW, CCW Limit, CW Limit.
Elevation Axis: STOW, Up Limit, Down Limit.
Polarization Axis: CCW Limit, CW Limit.
When the COMP/MANUAL SELECT switch is at MANUAL, control of the azimuth, elevation and
polarization axes is via the handheld remote panel. The SELECT and MOVE switches may then be used
to configure and initiate movement of one of the three (azimuth, elevation or polarization) axes. Moving
the switch back to the COMP position returns control to the RC3000’s frontpanel.
34
Page 43

RC3000 Antenna Controller Chapter 2 Installation
2.2.10 Pulse Sensors
NOTE: Pulse sensors are typically only installed on some mounts in order to mechanize the
optional inclined orbit tracking feature. This section may be skipped if pulse sensors are not
present.
In order to obtain higher resolution azimuth and elevation axis position feedback, the RC3000 may use
single phase pulse type sensors to determine the position of the antenna. A pulse type sensor produces
a rectangular shaped waveform as the antenna moves about the axis associated with the sensor. A
quadrature pulse type sensor produces 2 rectangular waveforms, one being 90 degrees out of phase with
the other. With a quadrature type pulse sensor it is possible to determine which way the antenna is
moving. The RC3000 software currently does not yet support quadrature sensors.
The RC3000 controller counts the number of rising and falling edges of the waveform. The position count
is decremented for counter-clockwise movement and incremented for clockwise movement. The
waveform's high level should be 4.5 to 5.7 volts, and the low level should be 0.0 to 0.5 volts. The
waveform's minimum high or low pulse duration should be at least 10 milliseconds. This means that
pulses less than 10 milliseconds long may not be detected by the antenna controller. The maximum
number of counts from the antenna's east limit to its west limit should be less than 65535. Remember,
each rising edge and each falling edge of the sensor's output waveform is a separate count.
Many large antennas use a sensor attached directly to each of the fundamental axis of the antenna. The
sensor used may be a synchro, potentiometer, or a quadrature pulse encoder. A pulse type sensor
attached to the fundamental axis of the antenna is not suitable for use with the RC1000A or RC2000A
antenna controllers. When a rising or falling edge is detected on the antenna controller's sensor input,
the antenna controller must determine whether to increment or decrement the position count. Since
single phase pulse sensors are used, the antenna controller must determine which way the antenna was
last commanded to move, and decrement or increment the count accordingly. With a pulse sensor
connected directly to the antenna's fundamental axis, when the antenna vibrates back and forth due to
wind, the pulse sensor produces a steady stream of pulses. The antenna controller will increment or
decrement the count depending on which way the antenna was last commanded to move. In reality the
antenna is just vibrating in the wind and not really moving. The result of this is an error in the position
count maintained by the antenna controller.
On a large antenna, the solution to the sensor dilemma is to place a sensor on the output of the motor.
Most motors attach to the gear reduction systems via a C56 type flange. There are pulse sensors which
may be placed between the motor and the transmission at this flange. Remember that any pulse sensor
used must conform to the requirements of the antenna controller, which are: 1) the total number of rising
35
Page 44

RC3000 Antenna Controller Chapter 2 Installation
and falling edges must not exceed 65535, 2) the duration of the high and low segments of the waveform
must be at least 10 milliseconds, 3) the high level of the waveform must be 4.5 to 5.7 volts, and 4) the low
level of the waveform must be 0.0 to 0.5 volts.
A number of manufacturers make sensors which may be placed directly between the motor and the
transmission on the C56 flange; Dart's CF Series (ph. 317-873-5211) and Fenner's QRK 56C model (ph.
612-424-7800) are two examples. Regardless of what type of sensors used, the user must ensure that
the four requirements outlined above for the sensor waveform are met. Some signal conditioning circuits
may be required to meet the waveform high and low level specification. Note that there is a 5.7 volt
supply available on the back of the antenna controller. The maximum current draw from this supply
should not exceed 200 milliamps. To insure that the pulse duration requirement is not violated, the user
should consider the speed of the motor (RPM) and the number of pulses produced by the sensor for each
revolution of the motor. To make sure that the total sensor waveform edge count requirement is satisfied,
the user must determine how many revolutions of the motor are required to move from the east limit to
the west limit (and from the down to the up limit) along with how many edges are produced for each
revolution of the motor.
J4 (DB-15 Male on backpanel) connects to the pulse sensors.
*1 Sensor supply voltage may be configured via resistor changes for 5.79,8.07, 8.59, 10.11, 12.0, 14.94
VDC (5.79 default). NOTE: Reed Switch type sensors do not require the pulse power (pins 10 & 14)
signal.
If reed switch sensors are used, each axis requires 2 wires in a shielded cable. If Hall Effect sensors are
used, each axis requires 3 wires in a shielded cable. Shielded cables are required to minimize noise
pickup which can result in antenna positioning errors.
NOTE: SHIELDED CABLES ARE REQUIRED FOR THE POSITION SENSORS. THE SHIELDS MUST
BE CONNECTED TO PINS J4-9 OR J4-15 ON THE BACK OF THE CONTROLLER AND MUST NOT BE
CONNECTED AT THE ANTENNA.
36
Page 45

RC3000 Antenna Controller Chapter 2 Installation
Position count errors due to improper use of the position sense line’s shield is one of the most frequent
problems encountered during the installation of the RC3000. Here are the problems that are encountered:
1) A shielded cable was not used for the position sense wires.
2) The shield is not connected at connector J4 on the rear panel of the RC3000.
3) The shield is connected to earth ground at the antenna. This results in ground currents flowing in the
shield. The shield must not be connected to anything at the antenna.
4) The insulator on the sensor cable is broken and the shield is grounded to something. As in #3, this
results in ground currents.
5) The sensor cable is spliced but the shield has not been spliced, or the shield is spliced but is also
shorted to earth ground.
See the troubleshooting (section 4) for more information on count problems.
37
Page 46

RC3000 Antenna Controller Chapter 2 Installation
2.2.11 Remote Control
J5 (DB-9 Female on backpanel) allows for optional remote control (RC3000CRC) of the RC3000. The
RC3000 may be configured to communicate either by the RS-232 or the RS-422 / RS-485 standards.
The RC3000 is shipped from the factory configured for RS-422/RS-485 operation.
Original RC3000s
To configure the RC3000 for RS-422 or RS-485, connect the remote control ribbon cable inside the
RC3000 to connector J10 on the feature board. Jumper J12 on the feature board must be placed in the
RS-422 position.
To configure the RC3000 for RS-232, connect the remote control ribbon cable inside the RC3000 to
connector J11 on the feature board. Jumper J12 on the feature board must be placed in the RS-232
position.
Second Generation RC3000s
To configure the RC3000 for RS-422 or RS-485, set the J12 jumper on the analog board to the -422
position and set jumpers X1 through X5 to the -422 position.
To configure the RC3000 for RS-232, set the J12 jumper on the analog board to the -232 position and set
jumpers X1 through X5 to the -232 position.
Newer RC3000s also allow for the remote control to interface with an optional internal card hosting a web
page. To configure the RC3000 for this, set the J12 jumper to the "RABBIT" position.
38
Page 47

RC3000 Antenna Controller Chapter 2 Installation
2.2.12 Waveguide Switch
J12 (DB-15 Female on backpanel) connects the optional waveguide switch (RC3KF-WG-DRV1) module
to a waveguide switch of the type shown in the following diagram.
Drive Out 1,2 provide 28 VDC to energize the waveguide switch.
NOTE: The RC3000 (3.2.1.2) assumes the waveguide switch’s position 1 is the horizontal (H)
position. If the H and V positions need to be reversed, both the position volts (9/10 and 14/15) and
the position indicator (3 and 4) lines need to be swapped.
39
Page 48

RC3000 Antenna Controller Chapter 2 Installation
2.2.13 Resolver Inputs
Original RC3000s
When the optional resolver input board (RC3000RSLVR) is required, J12 (DB15 Male on backpanel) is
used for azimuth and elevation position information.
Second Generation RC3000s
Individual connectors (DB-9 Female on backpanel) are provided as needed for each axis.
Suggested resolver cables would have three shielded, twisted pairs of 22 AWG (such as Belden 87777).
40
Page 49

RC3000 Antenna Controller Chapter 2 Installation
2.3 Initial Configuration
Whereas Final Calibration (section 2.4) requires an open area with an unobstructed view of satellites,
initial configuration may be done in any area (possibly a shop environment) where the antenna may be
moved throughout its entire range of travel.
At this point, the installer will have to start operating the RC3000 from the front panel. Section 3 will need
to be reviewed to perform the steps described below.
2.3.1 Software Initialization
Initial Power Application. Before powering the unit on for the first time, please confirm that the input
voltage the unit is configured for matches the intended input supply voltage. See section 2.2.1.
Software Version Verification. When the RC3000 is turned on, a power up banner appears for 3
seconds. This banner indicates the software options enabled in the RC3000’s EPROM and PLD. The
software option data shown should be checked to confirm that all desired options are available. See 1.2
(Controller Features) for a description of the various software options.
Enable Expert Access. To perform RC3000 programming steps described below, expert access
permission must be enabled. Expert access permission is enabled as the factory default, but may have
been turned off if this is not the initial system configuration attempt. See 3.3.1.1.1 (Expert Access
Permission) for description of how to view/modify the expert access configuration item.
After installation is complete, expert access may be turned off to lessen risk of configuration settings
being unintentionally modified. Disabling expert access will also present a less complex set of screens
for normal operation.
Reset System Defaults. The RC3000 is shipped with the default parameters set for the particular mount
and software options. Most of the default values stored in non-volatile memory should be applicable. A
few items (antenna size, etc) may not be initially set to values appropriate for a particular installation.
Setting these values will be described next.
If the RC3000 has previously been configured, the installer may want to reset the system defaults as
described in 3.3.1.3.1. NOTE: the current value of all configuration items should be recorded prior
to resetting system defaults.
System Definition. The SYSTEM DEFINITION configuration screen (3.3.1.2.1) allows the user to
indicate whether or not the optional GPS receiver is present, if and how the fluxgate compass is mounted,
whether or not the optional waveguide switch module is present, the size of the reflector in use and what
mode the user prefers the RC3000 to go to upon power up. The user may also enter the unit's serial
number for later reference.
GPS: 1 CONFIG-SYSTEM
COMPASS: 1 SN:1234 WAVEGUIDE:0
MODE: 2 ANT_SIZE: 120
<1>GPS PRESENT <0>NOT PRESENT
Follow the description in section 3.3.1.2.1 and set the SYSTEM DEFINTION items to the correct value for
this installation.
41
Page 50

RC3000 Antenna Controller Chapter 2 Installation
Azimuth/Elevation/Polarization Calibration. The next three steps calibrate the mount’s elevation,
azimuth and polarization axes. Place the RC3000 in MANUAL mode. Values for the azimuth, elevation
and polarization axes should be displayed, though they may not be reasonable since calibration has not
yet been performed.
For each axis, limit switch status will be confirmed, position feedback will be calibrated and total range of
movement will be tested.
NOTE: be careful when initially moving a mount since limit switches may not yet be configured
correctly. In MANUAL mode, movement will stop whenever a particular jog key is released. The
RC3000 may also always be turned off to stop movement.
Throughout the 3 axis’ calibration procedures, two MAINTENANCE screens will be used extensively.
One of the MAINTENANCE screens used is the Analog to Digital Voltage screen (see 3.3.2.1). This
screen shows raw data coming from antenna position sensors (potentiometers and resolvers).
AZ: 1.114 181.30 33004 AD VOLTAGES
EL: 1.143 1 122.30 22264 22.3 L1:1
POL:2.237 181.30 33044 L2:1
SIG: 3.756(1) <1>RF <2>SS1 <3>SS2 <4>GND
Another MAINTENANCE screen that will be used is the Limits Maintenance screen ( see 3.3.2.5). This
screen shows the current sensed state of limit switches for all three axes.
AZIM CW:0 CCW:1 STOW:0 (0-OFF) LIMITS
ELEV UP:1 DN:1 STOW:1 (1- ON) ACTIVE
POL CW:0 CCW:1 STOW:0
<BKSP>MAKE LIMITS INACTIVE <MODE>EXIT
Before beginning axes calibration, the installer should become familiar with accessing these screens.
42
Page 51

RC3000 Antenna Controller Chapter 2 Installation
2.3.2 Elevation Calibration
Steps to perform elevation calibration will be described starting with the elevation axis in the stowed
position.
STEP 1.- STOW Limit Confirmation
With the elevation axis in the stowed position, go to the Limits Maintenance screen (3.3.2.5) to confirm
that the ELEV STOW and Down (DN) limits are active.
Also confirm that the elevation UP limit is inactive. If the UP limit is active, the RC3000 will be prevented
from moving the elevation axis up from the stowed position.
If the initial state of the elevation STOW, DOWN and UP limits is not correct, check the limit switches and
wiring (2.2.4).
STEP 2. – Initial Movement
The next action is to raise the antenna in elevation. Push the UP key from MANUAL mode. The antenna
should rise. If not, check the polarity of the motor drive lines (section 2.2.2).
As the elevation axis comes out of the stow position, the STOW limit should inactivate but the DOWN limit
should remain active. This may be observed from the MANUAL screen by seeing the elevation “STOW”
indication change to a “DOWN” indication.
The elevation sensor should be mounted on the antenna so that the sense voltage produced at the
sensor increases as the antenna is jogged upward. In MANUAL mode, when the EL UP (2) key of the
RC3000 is depressed (and if the antenna moves up) the elevation position should increase (see section
2.2.3).
Note that the elevation position seen in the MANUAL screen might not initially change if the inclinometer
is still outside of its operational range or if the inclinometer is mounted on a feedboom that doesn’t rise
until the reflector has moved up a certain distance.
The following steps will require values to be entered in the ELEVATION CALIBRATION configuration
screen (see 3.3.1.2.2).
REF_V:1.69 OFF: 0.0 CONFIG-ELEV
DOWN: 0 UP: 90.0 SF:50.00
LOOK:1
SET REFERENCE VOLTAGE <0.50 – 3.50>
NOTE: the elevation offset item should be set to 0.0 before any further elevation calibration is
performed. Any required elevation offset will be determined during the azimuth and elevation alignment
step (2.4.2) as part of the final calibration steps. The LOOK configuration item is meaningful for only a
small number of mounts (see appendix B). In most cases the value of this item is irrelevant.
43
Page 52

RC3000 Antenna Controller Chapter 2 Installation
STEP 3a. – Inclinometer Reference Voltage
To perform this step, raise the antenna until the reflector is in the reference position appropriate for this
mount (see Appendix B). For the majority of mounts, the reference position corresponds to having the
reflector’s face vertical. This angle can be confirmed by use of a level or digital inclinometer placed on a
correct portion of the antenna structure.
The elevation voltage shown on the AD VOLTAGES screen (3.3.2.1) should be near the target value for
your mount as noted in appendix B. For the majority of mounts, this target voltage will be around 1.69
volts. This voltage allows for the greatest range of linear feedback from the elevation inclinometer
throughout the mount’s operational range. If not, loosen the elevation sense restraining plate and rotate
the inclinometer until the elevation voltage is as near to the target voltage as possible. Secure the
restraining plate and record the voltage.
Recorded Elevation Reference Voltage ______________V
Move to the Elevation Calibration configuration screen and enter the recorded value in the REF_V item.
This will define to the RC3000’s software the voltage that should be seen when the elevation axis is in its
reference position. To verify that data has been entered correctly, return to the MANUAL mode screen.
The displayed elevation angle should be near the RF look angle offset of the reflector (see appendix B).
STEP 3b. Elevation Resolver Reference
NOTE: this step only needs to be performed for those mounts that incorporate a resolver sensor
on the elevation axis.
This step should be performed at the same elevation axis position as in step 3a. Additionally, the
vehicle/platform should be level since the resolver will not compensate for tilt as the inclinometer does.
Rotate the elevation resolver until a raw resolver angle of approximately 180.0 degrees in seen in the
MAINTENANCE-VOLTS screen. Lock the elevation resolver in place and observe the raw resolver
angle. Subtract this observed angle from the reflector’s RF angle and enter it as the elevation resolver
offset (see 3.3.1.2.2).
EXAMPLE
Raw resolver angle at elevation reference position: 179.2
Reflector’s RF angle at elevation reference position: 22.3
Required elevation resolver offset: -156.9 ( 22.3 – 179.2)
NOTE: on mounts equipped with an elevation resolver sensor, the elevation angle displayed when below
the DOWN limit is derived from the resolver not the inclinometer. To perform a “sanity check” of the
resolver calibration, move the reflector up and down around the point that the DOWN limit occurs. With
the vehicle/platform level there should be very little discernable jump in the displayed elevation angle.
44
Page 53

RC3000 Antenna Controller Chapter 2 Installation
STEP 4. Elevation Scale Factor Calibration
This step is performed to characterize the output signal from the elevation inclinometer.
1) With the elevation axis in the reference position, note the angle (using an accurate inclinometer
placed on the mount itself not the angle displayed on the RC3000) and the A/D voltage at that
point.
Physical_Angle_1 (Reference) _______________Degrees
Voltage_1 (Reference) ______________Volts
2) Raise the antenna approximately 30 to 50 degrees and note the angle and voltage.
Physical_Angle_2_____________ Degrees
Voltage_2 ___________ Volts
3) Calculate the output signal from the elevation inclinometer.
Degrees/Volt = (Voltage_2 – Reference Voltage) / (Physical_Angle_2 – Reference_Angle)
MilliVolts/Degree = Volts/Degree * 1000
4) Enter the mV./deg. in the SF field of the configuration screen.
45
Page 54

RC3000 Antenna Controller Chapter 2 Installation
NOTE: an alternate method for calculating the output signal from the inclinometer is to use the data
supplied by the inclinometer manufacturer for each individual inclinometer and multiply by the gain
(0.823) in the RC3000’s circuitry. (example: 59.27 mV/deg * 0.823 = 48.78 )
STEP 5. Up Limit Confirmation
Move the elevation axis to the UP physical limit and confirm that the “UP” limit is displayed in the
MANUAL mode.
Go to the Limits Maintenance screen (3.3.2.5) to confirm that the ELEV STOW and Down (DN) limits are
inactive.
If the state of the elevation STOW, DOWN and UP limits is not correct, check the limit switches and
wiring (2.2.4).
STEP 6. Software Elevation Limits
The DOWN and UP elevation limit values in the configuration screen should be set to reflect the physical
limits of elevation travel. Note that these limits don’t actually limit the elevation travel but are used by
software during the LOCATE function to determine if a calculated pointing solution is outside of the
mount’s range of movement. If a calculated pointing solution is beyond these limits, the message “ELEV
RANGE ERROR” will be displayed in the LOCATE screen.
46
Page 55

RC3000 Antenna Controller Chapter 2 Installation
2.3.3 Azimuth Calibration
Steps to perform azimuth calibration will be described starting with the azimuth axis in the stowed position
and the elevation axis above the DOWN limit. Movement in the azimuth axis is not allowed until the
elevation DOWN limit switch is inactive.
The mount should be moved to the exact azimuth position that it will be stowed. Typically this is near the
midway point of its range of movement in azimuth. Also, the azimuth stow limit switch should be in the
center of its activation region. It is very important that this position be confirmed in this manner or
problems could be encountered during the automatic stow function.
The following steps will require values to be entered in the AZIMUTH CALIBRATION configuration screen
(see 3.3.1.2.3). NOTE: RES and REV items only appear if an azimuth resolver is present.
REF_V:2.50 FG: 0.0 CONFIG-AZIM
CCW:180 CW:180 SF:65.62
RES:0.0 REV:0
SET REFERENCE VOLTAGE <2.00 – 3.00>
STEP 1a. Azimuth Potentiometer Reference Voltage.
This step is applicable if the mount is fitted with a potentiometer to sense azimuth position. If the mount is
fitted with a resolver, go to step 1b.
Move to the MAINTENANCE MENU screen and select the AD VOLTS item. Voltage values read from
the azimuth potentiometer can be read from the AD VOLTS screen (3.3.2.1).
The azimuth voltage shown on the screen should be 2.5 +/- 0.1 volts (Since 5 volts is sent to the sensor,
if the pot is adjusted at the center tap position correctly, the reading should be half). If the value is within
this range, record it for later entry in the configuration items. If not, loosen the potentiometer restraining
collar and rotate the shaft such that the displayed value is as near 2.50 volts as possible. Secure the
collar and record the voltage.
RECORDED AZIMUTH CENTER VOLTAGE______________ V.
Move to the Azimuth Calibration screen and enter the recorded value in the REF_V item. This will define
to the RC3000’s software the voltage that should be seen when the azimuth axis is in its centerline
position. . To verify that data has been entered correctly, return to the MANUAL mode screen. The
displayed azimuth angle should be 0.0 +/- 0.1 degrees.
STEP 1b. Azimuth Resolver Reference Angle.
NOTE: this step only needs to be performed for those mounts that incorporate a resolver sensor
on the azimuth axis.
Loosen and adjust the azimuth resolver to be as close to 180 degrees (seen at a/d volts screen 3.3.2.1)
as possible. Lock the elevation resolver in place and observe the raw resolver angle. Subtract this
observed angle from 0.0 and enter it as the azimuth resolver offset (3.3.1.2.3).
After entering the azimuth resolver offset, the azimuth angle displayed in MANUAL mode should be 0.0.
47
Page 56

RC3000 Antenna Controller Chapter 2 Installation
STEP 2. Initial Movement.
The next step is to move the azimuth axis to confirm drive and sensor polarity. Azimuth clockwise and
counterclockwise is defined as seen by an observer located above the antenna looking down on the
antenna.
In MANUAL mode, when the AZ CW (6) key of the RC3000 is depressed the antenna motors must be
wired (see 2.2.2) so that the antenna moves clockwise.
The azimuth potentiometer or resolver should be wired so that clockwise movement results in a higher
azimuth position. When moving clockwise, the displayed azimuth position should increase.
STEP 3. Stow Limit Confirmation.
Move the azimuth axis clockwise and counterclockwise through the stow limit switch’s area of activation.
Confirm that the STOW indication appears and disappears in MANUAL mode.
Failure of the stow switch to deactivate would allow the reflector to potentially move below the elevation
DOWN limit in an unsafe manner. If the initial stow limit does not function correctly, check the limit switch
and wiring (2.2.4).
STEP 4. Clockwise and Counterclockwise Limits.
Discrete Limit Switches. Some mounts may mechanize azimuth clockwise and counterclockwise limits
via actual limit switches. If this is the case, move the azimuth axis through its range of motion and verify
that the CW and CCW limit indications appear in the MANUAL screen. After confirming these indications
move on to the next step.
Azimuth Electrical Limits. Other mounts may not have azimuth limit switches. In this case, the
RC3000 allows for the CW and CCW limits to be set based on the azimuth potentiometer voltage.
In this case, the antenna's azimuth electrical limits must be set. These limits are set using two
potentiometers on the controller's analog board and thus it will be necessary to remove the controller's
top cover. These two pots are labeled A-CW (azimuth clockwise) and A-CCW (azimuth counterclockwise). These 2 pots on the analog board are accessed via holes in the feature board. Note that the
Azimuth range limits specified below merely trigger the azimuth limit message and do not set the azimuth
motion limits for the antenna.
To set the azimuth clockwise limit, go to MANUAL mode and jog the antenna in azimuth to the desired
azimuth clockwise limit. If the controller indicates that the azimuth clockwise limit is reached before the
antenna reaches the desired position for that limit, the A-CW pot may have to be adjusted to allow the
antenna to move. Adjust the A-CW pot until the azimuth limit indication flickers between CW and blank.
To verify that the A-CW has been adjusted properly, verify that the antenna cannot move clockwise in
azimuth but can move counter-clockwise.
A similar procedure is used to set the azimuth counter-clockwise limit.
STEP 5. Azimuth Scale Factor.
NOTE: in most cases the default azimuth scale factor for a mount will be correct and should not
be changed. Perform this substep only if appendix B suggests that the azimuth scale factor for
your mount should be characterized.
To calculate the azimuth scale factor, move the dish between two known physical azimuth positions and
note the difference in the sensed azimuth voltage between the two locations. If definite reference points
are available on the mount (+/-90 degree positions for example), these may be used. Otherwise use the
difference in azimuth pointing solutions to two satellites. Record the azimuth voltage at the peaked up
position of the two satellites.
48
Page 57

RC3000 Antenna Controller Chapter 2 Installation
Example: at +90 degree reference position the azimuth voltage is 3.86. At the –90 degree reference
position the azimuth voltage is 1.14. The azimuth scale factor is calculated as:
180 degrees / (3.86 –1.14) = 66.16 degrees / volt.
66.16 would be entered as the scale factor.
STEP 6. Azimuth Software Limits.
The CCW and CW configuration item values should be set to reflect the physical limits of azimuth travel.
Note that these limits don’t physically limit azimuth travel but are used by software to determine if a
calculated pointing solution is outside of the mount’s range of movement. If a calculated pointing solution
is beyond these limits the message “AZIM RANGE ERROR” will be displayed in the LOCATE screen.
STEP 7. Fluxgate Offset.
NOTE: this item defines the difference in orientation (in the azimuth axis) between the fluxgate
compass (2.1.3) and the azimuth reference (displayed 0.0) position. This value should initially be set
to the apparent difference between the compass’ and azimuth axis orientations. For example, if the
compass is placed on the vehicle facing forward and the dish actually faces backward, an azimuth offset
of 180 would be entered. It is recommended that the compass be placed facing in the same direction as
the azimuth centerline thus requiring an offset of 0.0.
49
Page 58

RC3000 Antenna Controller Chapter 2 Installation
2.3.4 Polarization Calibration
The following steps will require values to be entered in the POLARIZATION CALIBRATION configuration
screen (see 3.3.1.2.4).
REF_V:2.50 OFF: 0.0 CONFIG-POL
CCW: 90.0 CW: 90.0 SF:41.67
TYPE:2 REF:1 H: -45.0 V: 45.0 AUTO: 1
SET REFERENCE VOLTAGE <2.00 – 3.00>
STEP 1. Polarization Type.
Typically the default polarization type will be appropriate for a particular mount. If not, the type of
polarization axis configuration must be specified as one of the following:
Circular – no movement of the polarization axis is required. NOTE: if the polarization configuration is
circular, the rest of the polarization calibration steps may be skipped.
Single – If the polarization axis must be moved to distinct positions to orient with horizontal and vertical,
the type is considered single.
Dual – If the polarization system contains two feeds (or sets of feeds) such that the axis only has to be
moved to one position to achieve both horizontal and vertical orientation, the type is considered dual.
STEP 2. Polarization Reference Position.
The polarization axis should be positioned so that it is aligned with the local vertical. Local vertical is
considered the 0.0 polarization angle. Clockwise and counterclockwise is defined as seen by a person
looking from behind the antenna out towards the arc of satellites. In MANUAL mode, when the Pol CW
key is pushed the polarization axis must rotate in the clockwise direction as shown in the figure repeated
from section 1.3.8.
50
Page 59

RC3000 Antenna Controller Chapter 2 Installation
The following diagram shows a typical situation of two waveguides that rotate together. Note that the
diagram should be considered as if the observer is behind the reflector looking towards the arc of
satellites. This representation is relevant for both prime focus and dual reflector antennas.
The polarity of a waveguide is determined by its narrow dimension. In the diagram, position A shows port
1 as being at the 0.0 degree orientation. In position B, port 2 is at the 0.0 degree orientation.
NOTE: before establishing the polarization reference position, the antenna platform must be
leveled so there is no pitch or roll. Any platform pitch and/or roll present in this calibration step
will later cause inaccuracy in automatic polarization movements.
Using an accurate inclinometer or level, position the polarization axis so that the waveguides align with
the local vertical and horizontal. Typically this position will also be close to the center or travel of the
polarization potentiometer. If not, adjust the polarization potentiometer to achieve this value. Secure the
pot and record the voltage read from the VOLTAGES maintenance screen (3.3.2.1).
Recorded Polarization Reference Voltage ______________ V.
Enter the recorded voltage in the REF_V configuration item. To verify that data has been entered
correctly, return to the MANUAL mode screen. The displayed polarization angle should be 0.0 +/- 0.1
degrees.
STEP 3. Drive and Sensor Polarity.
The polarization motor should be wired so that the polarization axis rotates per the convention shown in
the above diagram. Jog the polarization from the MANUAL mode to confirm the correct rotation. If not
correct, check the polarity of the motor drive lines (2.2.2).
The polarization potentiometer must be wired so that the sensed polarization position increases as the
Pol CW key is depressed. If not correct, check the sensor wiring (2.2.3).
51
Page 60

RC3000 Antenna Controller Chapter 2 Installation
STEP 4. Clockwise and Counterclockwise Limits.
Discrete Limit Switches. Some mounts may mechanize polarization clockwise and counterclockwise
limits via actual limit switches. If this is the case, move the polarization axis through its range of motion
and verify that the CW and CCW limit indications appear in the MANUAL screen. After confirming these
indications move on to the next step.
Polarizaiton Electrical Limits. Many mounts do not have polarization limit switches. In this case, the
RC3000 allows for the CW and CCW limits to be set based on the polarization potentiometer voltage.
In this case, the antenna's polarization electrical limits must be set. These limits are set using two
potentiometers on the controller's analog board and thus it will be necessary to remove the controller's
top cover. These two pots are labelled P-CW (polarization clockwise), P-CCW (polarization counterclockwise). These 2 pots on the analog board are accessed via holes in the feature board.
To set the polarization clockwise limit, go to MANUAL mode and jog the antenna in polarization to the
desired polarization clockwise limit. If the controller indicates that the polarization clockwise limit is
reached before the antenna reaches the desired position for that limit, the P-CW pot may have to be
adjusted to allow the feed to move. Adjust the P-CW pot until the polarization limit indication flickers
between CW and blank. To verify that the P-CW has been adjusted properly, verify that the feed system
cannot move clockwise but can move counter-clockwise.
A similar procedure is used to set the polarization counter-clockwise limit.
STEP 5. Polarization Scale Factor.
NOTE: in most cases the default polarization scale factor for a mount will be correct and should
not be changed. Perform this substep only if appendix B suggests that the polarization scale
factor for your mount should be characterized.
To calculate the polarization scale factor, move the feed between two known physical polarization
positions and note the difference in the sensed polarization voltage between the two locations
Example: at +90 degree reference position the polarization voltage is 3.86. At the –90 degree reference
position the polarization voltage is 1.14. The polarization scale factor is calculated as:
180 degrees / (3.86 –1.14) = 66.16 degrees / volt.
66.16 would be entered as the scale factor.
STEP 6. Polarization Reference Orientation Definition.
The orientation achieved by placing the polarization axis in the reference position must be specified as
horizontal or vertical. This choice will depend on whether the operator wants to refer to the receive or the
transmit port when commanding the controller to move polarization to the horizontal or vertical position.
The RC3000 uses this definition when automatically calculating the polarization angle for single port
feeds.
STEP 7. Additional Polarization Settings.
Polarization Offset. This item describes any difference between the electrical and physical position of
the polarization axis. In almost all cases the polarization offset will be 0.0. Offset might not be able to be
characterized until final calibration.
Default Horizontal and Vertical Positions. Preset locations for polarization horizontal and vertical
positions (3.2.1) are entered for use in the MANUAL mode.
Automatic Polarization Movement. Automatic movement of the polarization axis as part of the
LOCATE function may be enabled/disabled by the AUTO configuration item.
52
Page 61

RC3000 Antenna Controller Chapter 2 Installation
2.3.5 Fast/Slow Motor Speed
The fast and slow output voltages for your particular mount will be set at the factory and typically will not
need to be adjusted. On RC3000B models, there is only one fast/slow adjustment potentiometer on the
analog board. On RC3000A models, there are fast/slow adjustment potentiometers for each axis on the
auxiliary relay board next to the digital board.
The slow speed for an axis should be set low enough that automatic movements perform smoothly. Care
should be taken that slow speed is not set so low that the axis is prone to jamming.
2.3.6 Pulse Sensor Checkout
This step resets and tests the pulse sensor system. It is only applicable for controllers that have software
options (such as inclined orbit tracking) requiring pulse feedback.
The first step is to position the mount to the appropriate place for resetting the pulse count (see appendix
B). After moving to this position initiate the pulse count reset from the DRIVE RESET maintenance
screen (see 3.3.2.2).
Next move the mount to the limits of azimuth and elevation travel and note the pulse count. The pulse
count can be viewed from the MANUAL screen by pressing the Scroll Up/Yes key. Record the pulse
count values at the four limits.
Azimuth CW Pulse Count______________ Azimuth CCW Pulse Count______________
Elevation UP Pulse Count______________ Elevation Down Pulse Count_____________
At the Azimuth Pulse Drive (3.3.1.7) and the Elevation Pulse Drive (3.3.1.10) configuration screens, enter
a value for the appropriate limit that is slightly within the recorded value. The value entered is within the
recorded value to account for any slop limit switches may exhibit.
NOTE that these pulse count limits are used by automatic movement routines such as tracking and spiral
search to limit the area of an automatic pulsed-based movement. These limits are not the actual
mechanism that will stop the mount’s movement.
2.3.7 Drive System Checkout
This step confirms the configuration of the drive system for all three axis. Manually move the mount to
each axis limit and confirm drive current to the motor is shut off when the limit is reached. Also check the
displayed position value and confirm that it is reasonable.
Perform the STOW (3.2.2.2) and DEPLOY (3.2.2.3) functions and confirm the mount correctly stows and
deploys.
STORE (3.2.2.4) several dummy satellites and RECALL 3.2.2.5 them to checkout the automatic drive
system. If the mount does not smoothly move to the target position, the drive parameters may have to be
adjusted.
2.3.8 Navigation Sensor Communication
If the optional GPS receiver and/or fluxgate compass are present, confirm that valid serial data is coming
from the unit(s). See the GPS COMM (3.3.2.6) or FLUX COMM (3.3.2.7) maintenance screen
descriptions.
53
Page 62

RC3000 Antenna Controller Chapter 2 Installation
2.4 Final Calibration
The final calibration steps tune up the system for performing automatic location of satellites.
2.4.1 Compass Calibration
Ferrous metal on the vehicle distorts the earth's magnetic field in the vicinity of the vehicle. The flux gate
indicates the direction of the distorted magnetic field. The flux gate calibration procedure provides a
method to correct for this distortion (caused by the vehicle/platform) of the earth's magnetic field and
obtain the vehicle's actual magnetic heading.
Review the discussion of system accuracy in Chapter 1. Since the flux gate calibration only corrects for
distortion of the magnetic field caused by the vehicle itself, it is important that the calibration take place in
an area where the earth's magnetic field is not disturbed by structures or objects containing ferrous
metals. Below is a listing of the characteristics of a good calibration site.
1. Level ground, preferably higher than the surrounding area. Avoid low valleys.
2. Free from structures containing a large amount of ferrous metal. It is of key importance to avoid areas
adjacent to multi-story buildings, railroad tracks, bridges, truck yards, parking lots full of cars, and high
voltage power lines.
3. Trees and wooden objects pose no problem for calibration.
4. Asphalt parking lots can provide a good calibration site. Care should be taken, though, in that asphalt
is often laid over concrete which may contain reinforcing rod.
If a particular location is questionable, walking around with a simple wet compass will often show whether
magnetic irregularities are present. A good site is important since the overall performance of the Satellite
Locator is only as good as its calibration.
Section 3.3.2.9 describes how to perform the compass calibration procedure.
54
Page 63

RC3000 Antenna Controller Chapter 2 Installation
2.4.2 Azimuth and Elevation Alignment
This step attempts to discover and compensate for offsets in azimuth and elevation position sensing.
Offsets may be introduced due to mechanical tolerances, slight inaccuracies in installation, etc. For
example, the compass may not be exactly aligned with the azimuth reference position or the elevation
inclinometer was not rigged perfectly.
The alignment procedure relies on the fact that is it possible to determine how the dish is pointing based
on the actual antenna angles required to intercept a satellite (at a known longitude) when the vehicle's
latitude and longitude are known.
NOTE: before performing this step, the elevation offset value should be set to 0.0.
To determine the azimuth and elevation offsets, the vehicle is positioned at a number of different
headings. At a given heading, the operator allows the controller to calculate the azimuth and elevation
positions required to LOCATE a pair of satellites. These calculated positions are recorded. The operator
then manually peaks the antenna to align the antenna with the satellites perfectly. The azimuth and
elevation angles where the satellites are actually found are recorded. The difference between the
calculated (or target) positions and the positions where the satellites were actually found are calculated.
The results should be tabulated as shown in the table below.
AZIMUTH ELEVATION
HDG. SAT CALC’D ACTUAL DIFF. CALC’D ACTUAL DIFF.
1 1
2
2 1
2
3 1
2
4 1
2
5 1
2
6 1
2
7 1
2
8 1
2
TOTAL
AVG.
NOTE: As many tests (different locations, etc.) as possible should be run to determine if
consistent offsets are observed.
55
Page 64

RC3000 Antenna Controller Chapter 2 Installation
Elevation Alignment
It is fairly easy to observe errors in the elevation calibration.
If test data shows that the actual elevation angle that a satellite is found is consistently above or below
the calculated target, then it can be concluded that an elevation offset should be applied. Enter the
appropriate value in the OFF field of the elevation calibration screen (3.3.1.3.2).
If the difference between actual and calculated elevation angle is not consistently of the same magnitude,
then the calculated elevation inclinometer scale factor should be questioned. Step 4 of the elevation
calibration procedure should possibly be rerun.
Also consider that a combination of elevation offset and inaccurate scale factor may be applicable. Rerun
tests across the arc of satellites to confirm that applied corrections yield good results.
Azimuth Alignment
It is not as easy to observe errors in azimuth calibration. This is mainly due to the fact that the error from
the compass reading will not be consistent from location to location and even from different vehicle
headings at the same location.
If, after multiple tests, a consistent error in actual vs. calculated azimuth target is observed, then a
modification of the offset in the azimuth calibration screen may be applied.
56
Page 65

RC3000 Antenna Controller Chapter 2 Installation
2.4.3 Signal Strength Adjustment
The RC3000 can sense satellite signal strength via the L-band power detector (2.2.8) or the signal
strength input circuits (2.2.5). This section describes how to configure the signal strength input circuits for
use with the satellite receivers used for a particular installation. Correct adjustment of the signal strength
circuitry is required for autopeak and tracking operations to peak up on a satellite.
2.4.3.1 L-Band Power Detector
The simplest detection scheme is to connect LNB output to the L-band power detector. For best results,
insert inline attenuation or amplification so that the RF display is approximately 400 when the reflector is
pointed at open sky.
See section 3.3.1.2.6 (Autopeak configuration) for a discussion of the characteristics of the L-Band power
detector.
2.4.3.2 Signal Strength Channel
To implement tracking algorithms and the LOCATE mode’s scan/search, the controller requires an input
signal which indicates the strength of the received signal. Such a signal is generated within a satellite
receiver, and is referred to as an AGC signal. (AGC is the abbreviation for Automatic Gain Control.) On
satellite receivers, this signal may also be referred to as a 'Signal Strength' or 'Tuning Meter' output. An
AGC output typically varies in proportion to the received power of the transponder which the receiver is
currently tuned to.
Signal strength indications from receivers, modems, etc. vary widely. The RC3000 provides two circuits
that are designed to accommodate any signal strength input that varies between +/- 15 VDC. The 2
circuits have the same design, but different component values installed optimize channel 1 for use with
signal strength inputs that vary by less than 1.3 VDC. Channel 2 circuitry has a lower gain that would be
more optimal for use with signal strength inputs that vary by more than 1.3 VDC. A particular
installation’s unique set of receiver(s) will dictate which channel(s) are used.
The following figure shows 2 examples of signal strength inputs that may be accommodated. Example A
shows a signal strength indication that increases from –10 VDC when no signal is present (“Off Satellite”)
to +13 VDC when the signal is strongest (“On Satellite”). With respect to the RC3000, this transition is
termed positive polarity. Example B shows a signal strength indication that decreases as the received
signal becomes stronger. This type of transition is termed negative polarity.
The goal of this procedure is to transform the linear portion of the signal strength input into a 0 to 5 VDC
signal for interpretation by the RC3000’s analog to digital conversion circuitry. This is accomplished by
adjusting gain and offset pots for each signal strength channel on the back of the RC3000 and by
specifying the polarity of the signal strength input via the signal strength configuration screen.
57
Page 66

RC3000 Antenna Controller Chapter 2 Installation
2.4.3.3 Signal Strength Channel Calibration
This section describes the calibration procedure for a single channel. If two channels are to be used, the
procedure will need to be run for each. The procedure requires multiple steps and some steps are
iterative. The procedure also requires the use of a voltmeter (preferably with a resolution of millivolts).
Step 1. Align the antenna with a strong satellite of the proper frequency band. Place a voltmeter on the
receiver’s signal strength output and record the voltage. The term “on satellite” will be used to refer to
the antenna aligned (peaked up) with a strong satellite.
ON SATELLITE VOLTAGE________________
Step 2. Jog the antenna so the antenna is looking at nothing. Record the receiver’s signal strength
voltage. The term “off satellite” will be used to refer to the antenna positioned well off of any satellite
looking at nothing.
OFF SATELLITE VOLTAGE_______________
Step 3. Having recorded the On Satellite and Off Satellite voltages, go the SIG_ADJUST maintenance
screen (3.3.2.4). Enter the two voltages and record the polarity and voltage offsets calculated by the SIG
ADJUST screen.
POLARITY_____________ AGC1_OFFSET____________ AGC2_OFFSET_____________
Note that the SIG ADJUST screen will calculate voltage offsets for both channels and suggest which
channel would be optimum for the entered On and Off Satellite voltages. Use the voltage offset for the
channel determined to be used for this receiver (see discussion above).
The calculated voltage offset will provide for the best transformation of signal strength input and will be
used in step 6 below.
Step 4. Go to the Signal Strength Factors configuration screen (3.3.1.2.5) and specify the polarity
required for the channel (1 or 2) that is currently being calibrated. This information will be used by the
RC3000’s software so that stronger signals will correspond to stronger indicated signal strength on the
RC3000’s displays.
Step 5. Go to MANUAL mode. Ensure that the channel that is currently being calibrated is displayed as
the signal source. If not, select the channel as the signal source by using the SCROLL DOWN / NO key.
Note that the displayed signal strength will currently be meaningless since the gain and offset calibration
steps have yet to be accomplished.
Step 6. Measure the offset voltage for the appropriate channel at the test point on connector J2 (refer to
2.2.5). Adjust the OFFSET pot for the appropriate channel until the value calculated in step 3 is obtained.
To increase the offset voltage turn the OFFSET pot clockwise (counterclockwise to decrease) when
looking at the backpanel.
Step 7. Move back onto the satellite. Observe the displayed signal strength on the manual mode
screen. Adjust the GAIN pot for the appropriate channel until displayed signal strength of approximately
650 is obtained. The direction to turn the GAIN pot to increase displayed signal strength is dependent on
the characteristic of the signal strength input as indicated by the following table.
ON SATELLITE VOLTAGE
POLARITY Positive (>0) Negative (<0)
Positive CW CCW
Negative CCW CW
58
Page 67

RC3000 Antenna Controller Chapter 2 Installation
Adjusting the gain of the AGC channel in step 7 will modify the offset voltage in step 6. Steps 6 and 7
should be run at least twice and possibly several times until the required adjustments are minimal.
NOTE: When correctly adjusted, the displayed signal strength will be approximately 50 when “off”
the satellite and approximately 650 when “on” the satellite. These values allow for conditions
when the signal strength may be stronger than they were at the time of adjustement.
Step 8. Set Thresholds
Having observed the displayed value for signal strength, the user should set the autopeak threshold
(3.3.1.2.6) and SS1/SS2 thresholds (3.3.1.2.5) for correct operation of autopeak and tracking operations.
The signal strength system is now adjusted correctly for use by the autopeak and tracking functions. A
common situation affecting signal strength measurement performance is discussed next.
2.4.3.4 Amplifier Gain vs. Frequency Characterization
An amplifier's gain vs. frequency characteristic, or gain flatness, is the variation of the amplifier's gain with
changing frequency. The ideal response is to have a flat gain characteristic (the gain does not vary with
frequency). Amplifiers with poor gain flatness characteristics can cause problems for the tracker. This
section describes a simple test (no equipment required) that the user can carry out to check the receiving
system's gain flatness.
There are four places in a satellite receiving system that may have gain flatness problems that can affect
the operation of the tracker. These are the LNB, the coaxial cable connecting the LNB to the receiver,
line amps (or bullet amps) inserted in the 950 - 1750 MHz IF, and the receiver's IF or AGC stages. If a
spectrum analyzer is connected into the receiver's block IF line, the gain flatness of the LNB and any line
amps present can be observed. When the antenna is pointed away from any satellite, the spectrum
analyzer displays the received noise, which should be constant with frequency. If the display is not a
horizontal line then some gain variation with frequency is present.
To understand how a poor gain flatness characteristic can cause problems, remember that the purpose
of the signal strength input is to let the controller determine whether a satellite signal is present or not,
and to provide relative signal strength information when peaking the antenna. A signal is assumed to be
present whenever the input is above the threshold level for whichever band has been selected. When the
receiver is tuned to various transponders, gain flatness problems could cause the signal to be above the
threshold, when in fact no satellite signal is present. For certain transponders, gain flatness problems
could also cause the controller's input scaling network to be saturated when the antenna is aligned with a
strong satellite, making it impossible for the controller to detect changes in signal strength when
attempting to peak the antenna.
To test the gain flatness of the satellite receiver, perform the following procedure. The procedure
assumes a single receiver, single frequency band system.
1. Position the antenna well off of any satellite. Tune the receiver to each transponder. Make sure that
the signal strength reading is below the threshold assigned via CONFIG mode.
2. Align the antenna with a strong satellite. Tune the receiver to each active transponder on the satellite.
Make sure that the signal strength is well above the threshold and below 999.
If the system fails either of the tests above, then the user can either attempt to correct the problem by
readjusting the GAIN and OFFSET pots (using the procedure outlined earlier), or by correcting the gain
flatness problem. Most gain flatness problems can be traced to a problem with the coaxial cable
connecting the antenna to the receiver (sometimes called a 'suck-out') or to bullet amplifiers. Some bullet
amplifiers have been observed to have terrible gain flatness characteristics.
59
Page 68

RC3000 Antenna Controller Chapter 2 Installation
2.4.4 Pulse Scale Factors
The pulse scale factors specify the number of pulses counted per degrees (in radians) of movement for
the azimuth and elevation axis. It is critical that these numbers are accurate since the tracking algorithms
use them to determine step sizes (in pulse counts). Note that the RC3000 counts both rising and falling
edges of the position pulses so that a single position pulse generates 2 position counts.
NOTE: In the majority of cases, the antenna scale factors will have already been characterized for
a mount and the appropriate values stored as defaults. The following procedures will only be
required if a condition exists (different gear ratios, different pulse sensors, etc.) exists.
The azimuth and elevation scale factors may be derived from the antenna mount manufacturer’s data or
from data measured by moving the mount.
SCALE FACTORS FROM MANUFACTURER’S SPECIFICATIONS
If the antenna manufacturer gives the position pulses per degree specification for the antenna’s azimuth
and elevation axis, simply multiply the value by 2 to obtain 'position counts per degree' (because the
RC3000 counts both the rising and falling edges of the position pulses). Multiply this 'position counts per
degree' value by 57.29 to obtain 'position counts per radian'. Round to the nearest whole number value
to obtain the Elev Constant CONFIG mode item.
Elev position pulses per degree _______ * 2 * 57.29 = _______ (position counts per radian)
SCALE FACTORS FROM MOUNT MEASUREMENTS
The elevation scale factor is obtained by moving the antenna in elevation over a known angle (as
determined by an inclinometer) and obtaining the number of counts which corresponds to the angular
movement.
Here is the procedure:
Step 1. Identify a location on the antenna to place the inclinometer. The location on the mount should be
selected so that one degree of movement about the elevation axis registers as one degree on the
inclinometer. It is best to use an inclinometer which has a magnetic base. These are available in
hardware stores.
Step 2. Record the elevation position count and the reading of the inclinometer. These will be
designated CNT_1 and DEG_1, respectively.
Step 3. Jog the antenna in elevation. It is recommended that the antenna be moved 15 to 20 degrees in
elevation. Record the elevation position count and the inclinometer reading. These will be designated
CNT_2 and DEG_2.
The elevation region over which the measurements are made should correspond to the range of elevation
angles which will be encountered in operation (i.e. the elevation values over which the satellites will be
found).
Step 4. Use the following formula to calculate the Elev Constant:
( (CNT_2 - CNT_1) / (DEG_2 - DEG_1) ) * 57.29
If the result is negative, change the sign to positive. Here is an example:
Inclinometer
Angle
Higher Position 50.2 32768
Lower Position 29.8 541
Difference 20.4 32227
(32227 / 20.4) * 57.29 = 9062 pulses/radian
60
Pulse
Count
Page 69

RC3000 Antenna Controller Chapter 2 Installation
The azimuth scale factor is obtained by noting the difference in the azimuth pointing solution angles
between two satellites and the pulse counts when on the satellites. For best results, use satellites that
are as far apart as possible and make sure you have positively identified the satellites.
Example : Kansas City (38’56N,94’45W) heading of 180.0
SATELLITE AZIMUTH POINTING
SOLUTION ANGLE
PULSE
COUNT
SPACENET 2 (69.0W) -37.5 33333
SATCOM C5 (135.0W) 53.4 11000
Difference 90.9 22333
(22333 / 90.9) * 57.29 = 14075 pulses/radian
SCALE FACTOR FOR RESOLVER SYSTEMS
The RC3000 uses the actual digitized resolver count in the same way it uses a pulse count. The RC3000
utilizes a 16 bit resolver to digital converter which generates a count value from 0 to 65,535. Typically the
resolver sensor rotates with the antenna. The resulting “pulse scale factor” therefore is:
65536 reslover counts / ( 360 degrees * 1 radian/57.29 degrees) = 10430.2 “pulses” / radian
The default scale factor for a resolver system is therefore rounded up to 10431.
The constants are entered via the azimuth pulse drive (3.3.1.7) and elevation pulse drive (3.3.1.10)
configuration item screens.
61
Page 70

RC3000 Antenna Controller Chapter 2 Installation
2.4.5 Operational Presets
This section has been included in the outline because it may simplify the user’s day-to-day operation.
The user cannot make use of preset truck locations or preset satellites if they are never entered into the
memory. This is a straightforward procedure, but one which can be overlooked once the system is
installed, since the RC3000 functions perfectly well without the presets. However, the presets streamline
the operation by allowing the user to tell the program very quickly where the truck is, and what satellite is
desired, without entering the data each time.
If a list of user preferred satellites or truck locations are available, they may be entered as described in
sections 3.3.1.1.2 and 3.3.1.1.3.
2.4.6 Miscellaneous Adjustments
LCD Contrast. An LCD contrast potentiometer (P2) is located on the RC3000 digital board. This
potentiometer will be set at the factory, but the user may want to adjust its setting for a particular
installation’s lighting conditions.
Setting Time. Set the time, specify local time zone and offset per instructions for Time Maintenance
(3.3.2.3.)
2.4.7 Mechanizing Automatic Locates
Performing all of the previous installation steps correctly should place the RC3000 into a state where
automatic locating of satellites may be accomplished. This section discusses the typical final actions
necessary to mechanize an automatic locate. The LOCATE mode is described in section 3.2.2.3.
The first issue typically related to LOCATE performance is the pointing accuracy of the compass. The
azimuth and elevation alignment calibration step (2.4.2) should be performed in order to fine tune the
mount’s position sensing.
Even with a well calibrated compass, local magnetic effects will cause the estimated mount heading to
not be consistently perfect. Mechanizing the “autopeak” search movements described in sections
3.2.2.3.3 and 3.2.2.3.4 will provide a way to compensate for the inherent variability in heading estimate
performance.
In order to mechanize the autopeak function, the RC3000 must be interfaced with the antenna system’s
receiving equipment. The receiving equipment must provide a signal strength indication to the RC3000
as a “positive identification” of the selected satellite during the autopeak function. Section 3.3.1.2.6
describes enabling and configuring the autopeak function. Having selected a signal source, the
characteristics of the signal must be described to the RC3000 via the signal strength configuration screen
(3.3.1.2.5.)
Many variations of receiving equipment exist. The following provides one example setup.
Example Usage. Suppose an installation has a modem that generates a signal lock output but no
relative signal strength output. An indication of relative signal strength may be obtained by inputting a
RF signal (2.2.8) into J11. The modem’s signal lock output may be input to either pin 1 or 2 of J2 (2.2.5.)
Program the RF LOCK item to indicate which signal lock input (1 or 2) is being used and what is the
polarity (high or low) of the signal lock input. Program the RF TIME item with a large enough delay to
ensure that a signal lock indication is generated by the modem before the autopeak scan operation steps
past the satellite of interest.
In the AUTOPEAK configuration screen (3.3.1.2.6), enable the autopeak function (ON:1) and set the
signal source to RF (SIG:1.)
62
Page 71

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.0 DETAILED OPERATION
3.1 Operation Overview
3.1.1 Modes
The functionality of the RC3000 is achieved by placing the controller in the desired mode of operation.
The figure shows the hierarchy of the RC3000’s modes. Each mode has a unique display screen that
presents the information applicable to that mode’s operation.
As the figure shows, there are two main groups of modes – operating and programming. Transitions
between modes within a group are initiated via a momentary press of the Mode key, while a transition
between the two groups requires the Mode key to be held down for three seconds.
After installation, the programming group of modes will typically not be used for day to day operations.
Sections 3.2 (operating modes) and 3.3 (programming modes) detail each mode.
The rest of section 3.1 introduces common elements of all modes.
63
Page 72

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.1.2 Keypad Usage
The keypad provides a flexible method of controlling the functionality of the RC3000. While each
RC3000 mode has different requirements for user input, the use of the keypad remains consistent
throughout all modes.
The keypad provides for both specific actions and general data input. As an example, the UP_2_N key
initiates an antenna up movement while in MANUAL mode but also allows for the entry of the number 2
when numeric entry is required or the indication of North when entering a latitude value. The required
key usage is provided in the detailed description of each mode.
NOTE: keypads on earlier RC3000s may not have included the exact nomenclature depicted above.
Keypad usage has remained the same though for all RC3000s.
The following table describes both the specific action and general data entry function of each key.
64
Page 73

RC3000 Antenna Controller Chapter 3 Detailed Operation
KEY LABEL SPECIFIC FUNCTION GENERAL FUNCTION
Mode no specific function momentary push switches between modes
within group
button held for 3 seconds switches between
operational and programming groups
Scroll Up/
Angle CT
Scroll Dn /
RF/SS
Toggles between potentiometer and
pulse az/el position display in Manual
Toggles between RF/SS1/SS2 signal
strength display in Manual
scrolls forward through lists
provides YES answer to prompts
scrolls backward through lists
provides NO answer to prompts
Enter Heading Fix in manual complete entry of data
select entry from list
1 Pol CCW jogs polarization motor counter-
clockwise when pol movement allowed
2 N
El UP
3
Pol CW
4 E
Az CCW
5
H/V
6 W
Az CW
7
Sat-H
jogs elevation axis up when in MANUAL
mode
jogs polarization motor clockwise when
pol movement allowed
move azimuth axis Counter ClockWise in
MANUAL mode
Commands Cross-Polarization
movement in Manual, Store
move azimuth axis ClockWise in
MANUAL mode
requests move to predefined Horizontal
polarity position
supplies 1 for numeric entry *
supplies 2 for numeric entry *
supplies NORTH for latitude entry
supplies 3 for numeric entry *
supplies 4 for numeric entry *
supplies East for longitude entry (123°45E)
supplies 5 for numeric entry *
supplies 6 for numeric entry *
supplies West for longitude entry (123°45W)
supplies 7 for numeric entry *
signals current polarization value to be stored
as the Horizontal value
8 S
El DN
9
Sat-V
0
Speed
. (decimal
point)
Stop
jogs elevation axis down when in
MANUAL mode
requests move to defined Vertical
polarization
toggles motor drive speed between
FAST and SLOW
provides way to stop automatic
movements
supplies 8 for numeric entry *
scrolls down during alphanumeric entries
supplies 9 for numeric entry *
supplies 0 for numeric entry *
provides delimiter for various data entries
decimal point for floating point entry ( 3.15)
degree sign for lat/lon entry (38°56N)
colon for time entry (12:34:56)
slash for date entry (10/11/97)
+/BKSP
provides way to exit out of certain
conditions
- Selects Waveguide Switch in Manual
toggles sign of numeric data entry when
cursor at beginning of entry field
backspaces one field to the left during data
entry
* - numbered keys may also be used to select from a set of choices such as <1>LOCATE <2>STOW
65
Page 74

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.1.3 Data Entry
Many RC3000 screens request some type of user input. This section provides instructions on the entry of
various types of data.
Selection From List ( <0-9>SELECT )
When the user is prompted to select an action from a displayed list, pressing the numbered key
corresponding to the desired action will initiate the action.
Scrolling Through List ( <SCR>THRU LIST )
When the user is prompted to scroll through a list of items, pressing the Scroll Up/Yes key will move
forward through the list and pressing the Scroll Dn/No key will move backward through the list. Pressing
the Enter key when the desired item from the list is displayed will select the item.
Alphanumeric Entry ( NAME:SATCOM K2 )
To manually enter the name of a satellite or location, the user scrolls through the list of characters (A-Z,
0-9 and blank) and selects the character by pressing the Enter key. To scroll forward through the list of
characters use the 2/UP/N key and use the 8/DN/S key to scroll backward.
Note: scrolling through the alphanumeric characters is not implemented via the Scroll Up/Yes or Scroll
Dn/No keys since these keys will typically be used to move forward or backward through other fields from
the field requiring alphanumeric input.
After selecting one character, the flashing cursor is placed in the next space awaiting character selection.
To complete the entry of the alphanumeric string, press Enter for a second time. The user may backup
through the string by using the BKSP key.
Integer Data Entry ( SIZE: 240)
To enter whole numbers, use the 0-9 keys to enter the desired numeric string followed by the Enter key.
Note that the data field will initially show the current value for the item until numeric entry is started. To
terminate the entry without changing the value, the user may use the Scroll Up/Yes or Scroll Dn/No key.
The BKSP key may be used to move back in the string to correct the input. When the input has been
backed up past the first entry, the current value of the item will again be displayed. Pressing the Enter
key with the current value displayed will also result in no update.
Floating Point Data Entry (HEADING:180.0)
Entering floating point values is very similar to entering integer values except that the decimal point is
inserted by using the (decimal pt.) Stop key.
Degree/Minute Latitude/Longitude Entry (TRUCK LAT:38°56N)
Entering Latitude or Longitude is similar to entering a floating point value but the decimal point is used to
place the degree sign delimiter. Following the degree sign, only values from 0 to 59 are valid since they
represent minutes. After entering the numeric value of latitude or longitude, the user is prompted to
supply W(est) or E(ast) for longitude or N(orth) or S(outh) for latitude.
Degree/Decimal Longitude Entry (SAT LON:179.0E)
This entry is similar to the degree/minute entry but allows decimal fractions of degrees. This format will
be used for satellite longitude entry where the degree/minute format is standard for vehicle position entry.
Time/Date
Time is entered in HH:MM:SS format and date in DD/MM/YY format.
66
Page 75

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.1.4 Display Layout
The following screen shows many elements common to RC3000 mode displays.
AZIM: 31561 SS1:625(Ku) TRACK
ELEV: 11060 SAT:BRASIL A1
POL: -45.0 H STEP:IDLE 16:03
WAITING FOR NEXT PEAKUP <0>MENU
MODE TITLE: in the upper right corner the title of the current RC3000 mode is displayed – in this
example TRACK designates that the RC3000 is currently in track mode.
NOTE: if the mode title is proceeded by an exclamation point ( ! ), the mode was initiated by a remote
command.
DATA LABELS: since each mode presents a unique set of data, labels describing the data must be
presented. The label will typically be followed by a colon to delimit between the label and the actual data.
In the example shown, AZIM: is the label for the current azimuth pulse count.
DATA VALUES: the current value of relevant data for the mode is displayed following the appropriate
data label. In the example, the current azimuth pulse count (AZIM:) is 31561. Likewise the current
satellite being tracked (SAT:) is BRASIL A1.
USER PROMPTS: since each mode requires unique (but similar) keypad inputs, prompts for relevant
user action are included on the fourth line to the extent possible. In the above example, <0> tells the user
that pushing the 0 key will transistion the RC3000 to TRACK MENU mode. There are several types of
user data inputs as described in 3.1.3.
USER INFORMATION: when room allows, information about the current state of the RC3000 is
displayed. In the above example, “WAITING FOR NEXT PEAKUP” describes the fact that since the
RC3000 is currently in the IDLE portion of the STEP track operation the controller is waiting until the
appropriate calculated time to perform the next peakup movement.
TIME: in some modes where data (such as azimuth position) may not change for long periods of time,
the current time is displayed to reassure the user that the RC3000 is functioning. In the above example,
the current system time (16:03) is displayed with the colon flashing once per second.
ALARM STATUS: while not shown in the above example, row 4 is used to display any alarm conditions
the RC3000 has detected. The alarm message will alternate with the text normally on row 4. See section
3.4 for more description of the alarm system.
67
Page 76

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2 Operating Group
Within the operating group of modes exists two high level modes – MANUAL and MENU. The MANUAL
mode allows the user to manually jog the antenna while the MENU mode allows the user to select the
modes that implement the RC3000’s automatic movement features. While in either one of these modes,
a momentary push of the Mode key will transition the RC3000 to the other mode.
POWER ON
Upon powering up the RC3000, an identification screen is displayed for five seconds. The software
version data is discussed in 1.2 (Controller Features).
RC3000A MOBILE ANTENNA CONTROLLER
(c) RESEARCH CONCEPTS INC. 2005
SHAWNEE, KANSAS (USA) 913-422-0210
SW:RC3K-P1-GTN version 1.55
MOUNT POSITION CONFIRMATION
Following the power on screen, the RC3000 transitions to the appropriate screen based on whether or
not a mount position (latitude/longitude/true heading) has been “saved”.
If the mount’s position has been previously saved via the POSITION mode (3.2.2.7) or the STORE
(3.2.2.4) mode, the following screen appears at power up requesting that the user confirm that this
position is correct (i.e. the mount hasn’t moved since the position was saved). The SAVED MOUNT
POSITION screen shows the position and the date and time that the position was saved.
SAVED MOUNT POSITION
38°56N 94°44W 218.1 31DEC99 23:59
<SCROLL UP>USE SAVED POSITION
<BKSP>CLEAR POS (DELETES STORED SATS)
If the saved position is still appropriate, pressing the Scroll Up/Yes key will instruct the RC3000 to
continue to use that position. The RC3000 will use the saved position rather than attempting to
automatically determine position.
Note that using a saved position may be desirable because the position may have been previously “fixed”
to account for the local compass inaccuracy, etc. Also the saved position may have been manually
determined and inserted due to a possible navigation sensor (GPS receiver or fluxgate compass)
malfunction. Using a saved position also allows the LOCATE mode to instantly begin calculating pointing
solutions rather than waiting for the GPS receiver to form a navigation solution.
If the user determines that the saved mount position is no longer appropriate (the mount has moved),
pressing the BKSP key will invalidate the saved position. The RC3000 will then proceed to MENU mode.
The LOCATE mode will automatically attempt to determine latitude/longitude from the GPS receiver and
heading from the fluxgate compass. If the unit does not have the GPS and Fluxgate, control will pass to
the POSITION mode.
68
Page 77

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.1 Manual Mode
AZIM: 0.0 STOW SS1: 50 MANUAL
ELEV: -42.5 DOWN SAT:TELSTAR 402
POL: 30.0 V SPD:FAST CST
<0-9>JOG ANTENNA <MODE>MENU 14:25:47
In MANUAL mode, the user may jog the antenna in all three axes. A momentary push of the Mode key
will move the controller from the MANUAL mode to the MENU mode.
AZIM:
MAG:/mag:
TRUE:/true
The azimuth field shows a current position value of the azimuth axis. It also shows the status of azimuth
limits (STOW, CCW, CW). The azimuth axis may be moved by pressing the Az CCW or Az CW keys.
The value displayed may be changed by the Scroll Up/Angle CT key. The display will rotate between
showing antenna angle, antenna pulse count, magnetic heading and true heading values. When first
entering MANUAL mode, the field will always be initialized in the display mode selected by the
initial_azimuth_display configuration item (3.3.1.2.3).
The magnetic and true heading values are derived by taking the current heading estimate of the mount
(see the LOCATE function) and adding the antenna angle. If there is currently no mount heading
estimate, the field will display "-------". If the current heading estimate has not been "fixed" (either
manually or automatically by the DVB receiver function), the field will be annunciated by small letters
(mag: or true:) to indicate that the heading value may be inaccurate due to compass error. If the
RC3000's heading estimate has been "fixed", the field will be annunciated in capital letters (MAG: or
TRUE:) to indicate confidence that the value represents an accurate magnetic or true heading.
ELEV:
The ELEV field shows a current position value of the elevation axis. It also shows the status of elevation
limits (STOW, DOWN, UP). The elevation axis may be moved by pressing the El Up or El DN keys.
NOTE: when the azimuth field shows a pulse count value (due to pressing of the Scroll Up/Angle CT
key), the ELEV field will also show the current elevation pulse count. During the other three choices of
azimuth display, the field will show the elevation angle derived from the inclinometer.
Following a LOCATE operation, the azimuth and elevation limit fields will display the target angles in
parenthesis. If a limit condition is active, the limit display will overwrite the target values.
POL:
This field shows the current angular value of the polarization axis along with its limits (CCW, CW). This
field will also show if the polarization axis has been placed at a predefined horizontal (H) or vertical (V)
position. An asterisk (*) placed before the POL label indicates that the proceeding LOCATE function
calculated that a waveguide switch “flip” will have to occur.
The value of the predefined horizontal and vertical positions depends on what mode was active prior to
entering the MANUAL mode. If a LOCATE operation occurred prior to MANUAL, the H and V values will
be those automatically calculated by the LOCATE mode. Otherwise H and V depend on whether or not
satellites have been STOREd. If MANUAL was entered following a RECALL operation, H and V will be
those stored for the RECALLed satellite. If multiple satellites have been STOREd, H and V will
correspond to the values for the closest (in terms of azimuth location) STOREd satellite. If no satellites
have been STOREd, H and V will be that of the default horizontal and vertical positions set by the user.
69
Page 78

RC3000 Antenna Controller Chapter 3 Detailed Operation
The polarization axis may be moved manually be pressing the Pol CCW or Pol CW keys. The axis may
also be moved automatically to the predefined horizontal or vertical positions by pressing the H or V keys.
In the MANUAL mode, whenever the “5 H/V” key is pressed the polarization axis will automatically move
90 degrees from its current position. The target position for this automatic “cross polarization” movement
takes into account the user defined polarization axis limits. For example, if a cross polarization movement
of 90 degrees clockwise will move the axis beyond the clockwise limit, the movement will be achieved by
moving 90 degrees counter-clockwise.
SS1/SS2/RF:
This field shows the current signal strength sensed on the selected signal strength channel. By pressing
the “Scroll Dn RF/SS” key the source of signal strength will rotate between signal strength channel 1
(SS1), signal strength channel 2 (SS2) and the RF autopeak input (RF).
The current signal strength will be displayed as a value between 0 and 999 (see 2.5.3 Signal Strength
Adjustment). If the selected signal source is saturated (value greater than 999), *** will be displayed.
If a signal lock input has been enabled associated with RF, SS1 or SS2, an “L” will be displayed to the
right of the signal strength value whenever the signal lock condition has been satisfied.
SPD:
This field shows the selected drive speed. The speed may be toggled between FAST and SLOW by
pressing the Speed key.
SAT:
This field shows the name of a satellite. The satellite shown depends on which of the following actions
occurred most recently:
1) if an automatic LOCATE of a satellite was performed, the selected satellite’s name will appear in
lowercase letters (brasil a1). This is to indicate the RC3000 has moved to where it believes the
selected satellite is located. The name is in lowercase letters to remind the user to positively identify
and peak up on the satellite before storing.
2) If during manual jogging of the antenna, the azimuth and elevation approach a position where a
satellite has been stored, the stored satellite’s name will appear in lowercase letters when the
antenna is in the general vicinity and in uppercase letters when the antenna is almost exactly in the
position the satellite was stored.
3) Following a RECALL of a stored satellite, that satellite’s name will appear in uppercase letters until
the antenna has been moved enough for case 2 to apply.
TIME DISPLAY
MANUAL mode will display the reference time (1.3.5) and time zone in the lower right hand corner.
70
Page 79

RC3000 Antenna Controller Chapter 3 Detailed Operation
AUXILLARY FUNCTIONS
According to the RC3000’s configuration and current conditions, several additional functions may be
initiated via the MANUAL mode.
3.2.1.1 Heading Fix
From the MANUAL mode the user is given the ability to correct the mount’s true heading based on where
the selected satellite is found. This HEADING FIX capability is available when all of the following
conditions are true:
1) MANUAL mode was automatically entered following a LOCATE
2) The selected satellite is geostationary (inclination = 0 )
3) The mount’s position has not already been saved
4) The RC3000 is equipped with the GPS and Fluxgate compass options
When the above conditions are present, the “<0-9>JOG ANTENNA” message will alternate with a
“<ENTER>FIX HEADING” message. The user should positively identify that he is on the selected
satellite (the satellite named in the SAT: field) and then manually peak up in azimuth and elevation.
When the Enter key is pushed the MANUAL mode will switch to the following screen.
PREDICTED AZIM: -50.9 HEADING FIX
CURRENT AZIM: -48.7 SAT:galaxy 7
DIFFERENCE: 2.2
<BKSP>APPLY DIFF. TO HEADING <MODE>EXIT
The HEADING FIX screen shows the name of the selected satellite in the SAT: field. The PREDICTED
AZIM field shows the target azimuth originally predicted by the LOCATE function based on the mount’s
current position. The CURRENT AZIM field shows the where the user peaked up on the satellite while in
MANUAL mode.
The DIFFERENCE field shows the value obtained by subtracting the predicted azimuth from the current
azimuth. This difference should reflect the error in the mount’s true heading currently in use. Pushing the
BKSP key will apply the difference to the mount’s heading for use in subsequent LOCATE operations. In
the above example, if the current true heading of the mount was 195.0 it would be “fixed” to 197.2.
NOTE: to make this “fixed heading” persist through the next powering down of the RC3000, the mount’s
position would need to be “saved” via the POSITION mode. If the difference is applied, the RC3000 will
proceed to the POSITION screen.
If the user is unsure that applying the difference is the correct thing to do, pressing the Mode key will
return the RC3000 to the MANUAL mode.
71
Page 80

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.1.2 Waveguide Switch
For mounts equipped with the optional waveguide switch control module, manual control of the
waveguide switch may be initiated via the MANUAL mode.
NOTE: The WAVEGUIDE SWITCH configuration item on the System Definition screen (3.3.1.2.1) must
be set in order for software to allow the changing of the waveguide switch position from the Manual
mode.
When a waveguide switch is present, the Manual mode screen appears as shown below:
AZIM: 0.0 STOW SS1: 50 MANUAL
ELEV: -42.5 DOWN SAT:TELSTAR 402
POL: 30.0 V SPD:FAST WAVE:H CST
<0-9>JOG<BKSP>WAVE <MODE>MENU 14:25:47
WAVE:
This field shows the currently sensed position of the waveguide switch. “H” denotes the horizontal
position, “V” the vertical, “?” indicates that neither position is sensed and “*” indicates that both H and V
are sensed (probably an error condition).
Pressing the BKSP button will toggle the switch position. During the switch transition, a “+” will be
displayed when going to the H position and a “-“ will be shown while going to the V position. Note that
after 5 seconds the switching operation will timeout and drive voltage will be stopped if the desired
position has not been sensed.
72
Page 81

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2 Menu Mode
MENU mode allows the user to select one of listed modes. Pressing the Mode key will move to MANUAL
mode. Note: RECALL and DELETE will not be displayed if no satellites are currently STOREd.
1-DEPLOY 2-STOW 3-LOCATE MENU
4-STORE 5-RECALL 6-DELETE
7-POSITION 8-SETTINGS CST
<0-9>SELECT <MODE>MANUAL 14:37:23
MENU mode displays the reference time and time zone in the lower right hand corner.
73
Page 82

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.1 Deploy
The DEPLOY mode automatically moves to the mount’s predefined “deploy” position. See appendix B for
the list of deploy positions for the various mounts supported. The deploy command requires an explicit
confirmation in order to initiate antenna movement.
<MODE> MENU (DO NOT DEPLOY) DEPLOY
<BKSP>CONTINUE DEPLOY
Pressing the BKSP key will initiate the DEPLOY movement. If the DEPLOY mode was inadvertently
entered, pressing the Mode key will return to the MENU mode without initiating antenna movement.
AZIM: 0.0 ( 0.0) DEPLOY
ELEV: -42.1 ( 22.3)
POL: -56.7 ( 0.0)
MOVING TO (DEPLOY) <STOP>HALT MOTION
As each axis moves, its label (AZIM/ELEV/POL) will flash and the current position will update. The target
deploy positions will be displayed in parenthesis. The sequence of axis movement will be mount
dependent.
Following completion of movement to the deploy position, the RC3000 will return to MANUAL mode. The
automatic movement may be terminated anytime by pressing the Stop key.
The azimuth, elevation and polarization deploy positions are defined in the Stow/Deploy configuration
screen (3.3.1.3.10).
74
Page 83

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.2 Stow
The STOW mode automatically moves to the mount’s predefined “stow” position. See appendix B for the
list of stow positions for the various mounts supported.
Like the DEPLOY mode, STOW requires an explicit confirmation to initiate movement.
<MODE>MENU (DO NOT STOW) STOW
<BKSP>CONTINUE STOW
After initiation a sequence of movements will be performed to stow the antenna. The sequence of axes
movements will be mount dependent. As each axis moves, its label (AZIM/ELEV/POL) will flash and the
current position will update. The target stow positions will be displayed in parenthesis.
AZIM:-123.4 ( 0.0) STOW
ELEV: 55.1 ( -67.5)
POL: -56.7 ( 0.0)
MOVING TO (STOW) <STOP>HALT MOTION
The following describes a typical sequence of movements:
- the azimuth axis is moved to its stow position (typically AZIM:0.0). After moving to this indicated
position, the RC3000 will confirm the position by looking to see if the azimuth stow switch is active. If the
azimuth stow switch is not recognized, the mount will be moved a short distance either side of the current
position trying to find the azimuth stow switch. If the controller fails to see the azimuth stow switch the
following message will be displayed: “*CANNOT FIND AZ STOW SWITCH* <MODE>EXIT” and no
further stow movements will be performed.
- if stowing of the polarization axis is enabled, the polarization axis will next move to its defined stow
position. As with the azimuth axis, if a polarization stow switch (if the mount is so equipped) is not
confirmed then the message “*CANNOT FIND POL STOW SWITCH* <MODE>EXIT” will be displayed
and no further stow movements will be performed.
- if the azimuth and optional polarization movements complete successfully then the elevation axis will
move to its stow position. Typically this movement ends when the elevation stow limit is encountered.
Following completion of movement to the stow position, the RC3000 will return to MANUAL mode. The
automatic movement may be terminated anytime by pressing the Stop key.
Many mounts have unique stow sequence requirements. Check appendix B to see if your mount has any
unique stow situations. Stow and deploy parameters may be customized via the Stow and Deploy
Positions configuration screen (3.3.1.3.10). Typically the default parameters will be correct for a
particular mount.
75
Page 84

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.3 Locate
The LOCATE mode performs a calculation of the pointing angle (1.3.4) to a selected satellite based on
the RC3000’s estimate of where the antenna is positioned (lat/lon) and oriented (true heading). After the
calculation is performed the user may initiate an automatic antenna movement to locate the selected
satellite.
When the mode is first entered the following screen appears.
POS: 38°56N 94°44W 180.0 LOCATE
SAT:GALAXY 6 74.0W AZ:-31.1
EL: 40.0
<1>SELECT NEW SAT READY TO LOCATE
POS: 38°56N 94°44W 180.0
The POS: field shows the RC3000’s current estimate of antenna position. If no estimate of antenna
position is available, the RC3000 will automatically attempt to obtain position information from the
navigation sensors (GPS receiver and fluxgate compass) if present.
Mount Position Initialization. In order to calculate a pointing solution, the RC3000 requires knowledge
of the mount’s “position”. The three components of mount position are latitude, longitude and true
heading.
The current latitude, longitude and true heading where the RC3000 believes the antenna is positioned is
displayed on the top line. The position data obviously affects the pointing angle that the RC3000
calculates and is displayed as a crosscheck for the user in case the vehicle has been moved and the
RC3000’s position has not been updated. If the lat/lon or heading data is not considered valid by the
RC3000, asterisks will be displayed in the appropriate field and the “parameter needed” message will be
triggered in the location readiness field.
The RC3000 polls the GPS receiver first to get latitude and longitude information. If no communication
with the GPS is received, the error message “GPS OFFLINE” will be displayed. In this case the interface
between the RC3000 and the GPS receiver would need to be checked. If the RC3000 is communicating
with the GPS receiver but the GPS indicates it has not yet been able to generate a valid lat/lon, then the
message “NAV NOT READY” will be displayed. The “NAV NOT READY” situation should not last for
more than a minute. If it does, then investigate whether or not the GPS receiver’s view of the sky is
blocked by buildings, etc.
If a valid lat/lon is received from the GPS then the lat/lon information will be displayed. Next the RC3000
will flash “MAGVAR” while it calculates the local magnetic deviation as a function of latitude, longitude
and time. After calculating the local magnetic variation, the RC3000 will poll the fluxgate compass for
magnetic heading information. The magnetic variation will be applied to the magnetic heading to form the
estimated true heading of the mount.
76
Page 85

RC3000 Antenna Controller Chapter 3 Detailed Operation
If the navigation sensors (GPS and/or compass) are not working (or not available), the position
information may be entered manually via the POSITION mode (3.2.2.7).
SAT: GALAXY 6 74.0W
<1>SELECT NEW SAT
The SAT: field shows the currently selected satellite’s name and longitude. When the mode is first
entered the name of the last satellite selected will be displayed. If the user wishes to locate another
satellite, he may start the process of selecting the new satellite by pressing the "1" key. See 3.2.2.3.1 for
further details on the three methods of selecting a satellite.
When the selected satellite is changed the LOCATE mode will automatically calculate new azimuth and
elevation pointing targets.
AZ: -31.1
EL: 40.0
These fields show the azimuth and elevation pointing angles calculated for the selected satellite based on
the current mount position estimate. If one of the required parameters is missing or the calculation has
yielded an invalid answer, asterisks will be displayed in these fields.
NOTE: the displayed AZ target is not a true heading display but rather a mount-relative angle. The
elevation target is a true elevation value.
MAG:/TRU:
If the user wishes to display a magnetic or true heading pointing solution (rather than antenna relative),
he may choose how the azimuth data is presented by changing the initial_azimuth_display configuration
item via the Azimuth Calibration (3.3.1.2.3) screen.
Location Readiness Status
In the lower right corner of the display, a message is displayed showing the status of the location
calculation. Three messages may be displayed:
1) PARAMETER NEEDED. The pointing angle calculation requires 3 sets of data a) vehicle lat/lon
b)vehicle heading and c)satellite information. If lat/lon and/or heading is missing/invalid, the user will
need to go to POSITION mode to enter valid data. If satellite information is missing/invalid, the user will
need to supply that information via the mechanisms described in 3.2.2.3.1.
2) AZIM/ELEV RANGE ERROR. If the pointing solution calculation yields an azimuth angle that is
outside the clockwise or counter-clockwise azimuth limit (3.3.1.2.3) or outside the up or down elevation
limit (3.3.1.2.2), one these messages will be displayed to indicate that the RC3000 does not think it can
move the antenna to the correct position to acquire the satellite. The user may have to move the vehicle
to place it in an orientation that will allow the mount to move to the required position. Note that this
message may indicate that the current position data is incorrect (example: wrong heading).
3) READY TO LOCATE / PRESS <ENTER>. This alternating message indicates that the RC3000
considers the calculated pointing solution valid. Pressing the Enter key will initiate automatic movement
to find the selected satellite as described in 3.2.2.3.2.
3.2.2.3.1 Satellite Selection
Several pieces of information must be provided to describe a satellite to the RC3000 before the satellite
may be automatically located (and subsequently stored, recalled, tracked,etc):
NAME: up to 10 characters (A-Z, 0-9, space)
77
Page 86

RC3000 Antenna Controller Chapter 3 Detailed Operation
LONGITUDE: described in decimal degrees (180.0W to 180.0E)
INCLINATION: the number of degrees of orbital inclination. If a satellite is described as having an
inclination greater than zero, the RC3000 will consider it an inclined orbit satellite and subsequently
attempt to track its movement.
BAND: the RF band that the user’s equipment will be receiving from the satellite. The band information
helps determine tracking movement size and timing. Throughout the RC3000, the bands are assigned
numbers from the following list: <0-C 1-Ku 2-CK 3-L 4-X 5-Ka 6-S>
POLARIZATION OFFSET: predicted polarization angles (horizontal and vertical) assume that the
spacecraft maintains its polarization axis oriented with the equatorial plane. A few satellites don't
maintain this orientation. The amount of offset from this standard in degrees must be defined. The sign
convention used is that the offset is defined from the perspective of looking from the earth to the satellite
(clockwise positive, counterclockwise negative). If no offset exists, the default value of 0 is described.
When the <1> key is selected from the main LOCATE screen, the following screen appears to allow the
user to select new satellite information via three methods.
1-MANUALLY ENTER SAT DATA LOCATE
2-CHOOSE SAT FROM PRESET LIST
3-SELECT SAT LONGITUDE
<1-3>SELECT SAT DATA SOURCE <BKSP>EXIT
manual satellite entry
NAME: LON: LOCATE
INCLIN: BAND:
PL_OFF:
ENTER NAME
When the user chooses to manually enter the satellite data, a screen appears with fields to enter the four
required pieces of data.
Preset satellite list
LOCATE
# NAME LON INC BAND
1 BRASIL A1 79.0W 2 C
<SCR>THRU PRESET LIST <BKSP>EXIT
When the user chooses to select a satellite from the user programmed list of satellites, a screen appears
allowing the user to scroll through the list and select a satellite by pressing the Enter key. The preset list
contains data for 20 satellites programmed by the user via the Preset Satellite configuration mode
(3.3.1.1.3). It is strongly suggested that the user program and use the preset satellite list.
Satellite Longitude
LOCATE
LON: 94W BAND:Ku
(ASSUMES NO INCLINATION & POL OFFSET)
<SCR>LON <7>BAND <ENTER>SELECT <0>EXIT
When the user chooses to select a satellite longitude, a screen appears showing the satellite orbital slot
closes to the mount's current longitude. The user may change the orbital slot by one degree at a time by
scrolling up or down (down for more Westerly, up for more Easterly). The selected satellite's band may
also be changed. The name used by the LOCATE function will reflect the orbital slot selected ( "94W" in
the above example.)
NOTE: Selected satellite data pertains only to information about a particular satellite. With respect to the
RC3000 this is not considered “STOREd” data. See the STORE mode (3.2.2.4) for more information.
78
Page 87

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.3.2 LOCATE Automatic Movement
Before automatic movement to the calculated position is initiated, the RC3000 requests that a polarization
position be selected. This is so the polarization mechanism will be in the correct position to be able to
detect received signal strength.
Note: this selection is not requested if the polarization configuration is defined as “circular” or if the
polarization automove is disabled via the polarization configuration screen (3.3.1.2.4). In this case the
RC3000 will only request that the user press the BKSP key to confirm that the automatic LOCATE
movement is to proceed.
H-HORIZONTAL: 85.4 LOCATE
V- VERTICAL: -4.6 SAT:GALAXY 7
8- NEUTREAL: 40.4 <MODE>MENU
<H/V/8> SELECT POLARIZATION <BKSP>NONE
The RC3000 calculates the vertical polarization position as a function of mount latitude/longitude and
satellite longitude. The horizontal position is calculated as 90 degrees from the vertical in the direction
(Clockwise/Counter-Clockwise) that will maintain the horizontal position within the polarization axis’ range
of movement. The “neutral” position represents the polarization angle halfway between the calculated
vertical and horizontal values. The neutral position may be appropriate if the autopeak function is using
the L-Band detector (RF) input for signal strength observation. If the user does not want a polarization
movement to be performed for this LOCATE, pressing the BKSP key will initiate the elevation and
azimuth automatic movements but a polarization movement will not be performed.
NOTE: If the polarization calculation determines that the correct orientation is outside the polarization
axis’ limits, the target position will be achieved by moving the position by 90 degrees. This situation is
annotated by placing an “*” next to the calculated horizontal and vertical positions. The user may need to
“flip” a waveguide switch in this case.
Immediately following the polarization selection, the RC3000 will begin moving to the calculated position.
The progress of the movement is displayed on the following screen.
AZIM: 0.0 ( -5.9) LOCATE
ELEV: -61.7 ( 44.8) SAT:GALAXY 7
POL: 0.0 ( -45.0)
MOVING TO (TARGETS) <STOP>HALT MOTION
The current angular values for az/el/pol are displayed along with the target position for each axis in
parenthesis. The label for the current axis being moved will flash. Movement may be halted at any time
by pressing the Stop key. Halting movement will return the controller to the MANUAL mode.
The first automatic movement will be in the elevation axis to ensure that the mount is brought out of the
elevation stow and down regions. The next movement will be in the polarization axis to ready the feed
system to detect signal strength. If enabled, tilt compensation (3.2.2.3.6) movements will be performed.
The final movement will be in the azimuth axis. How this movement is accomplished depends on
whether the autopeak system (see Autopeak Configuraion 3.3.1.2.6) is enabled and whether the selected
satellite is described as having an inclined orbit or not.
If the autopeak system is not enabled, the LOCATE mode will finish by moving to the nominal target
azimuth position. A final movement to the target elevation will also be performed to account for change in
mount elevation due to vehicle tilt. Following this movement, the controller will return to MANUAL mode
where the user should peak up and confirm the identity of the satellite.
If the autopeak system is enabled, an azimuth scanning autopeak movement (see 3.2.2.3.3) will be
performed if the selected satellite does not have an inclined orbit. If the satellite does have an inclined
orbit a spiral search movement (see 3.2.2.3.4) will be performed. For both autopeak movements to be
successful, the user is required to have the receiving equipment (prior to the movement) configured for
the RC3000 to be able to detect signal strength.
79
Page 88

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.3.3 Azimuth Scanning Autopeak
The figure shows the movements made to perform an azimuth scanning (SCAN) operation. This SCAN
operation enables the RC3000 to try to compensate for any azimuth inaccuracy caused by truck heading
calculation errors.
1) as part of the basic LOCATE movement, the mount will be moved to the target elevation position and
the polarization axis will be moved to the correct orientation.
2) SCAN moves to the closest azimuth position “scan range” away from the nominal target azimuth.
SCAN will begin trying to detect a satellite from this position.
3) SCAN steps and samples signal strength following each step. The signal strength measurements
are used to calculate the average background signal noise and to determine if a signal strength peak
has been detected indicating the presence of a satellite at a particular position. The size of steps
taken is calculated as a function of the antenna diameter and the signal band the receiving equipment
is using to ensure that the satellite is not “stepped over”. Note that in order to compensate for any
vehicle tilt, occasionally elevation movements are also made to stay on the target elevation. Note
also that the stepping movements may be truncated due to the physical limit of azimuth movement.
4) After completing the total number of step movements, SCAN moves to the position that gave the best
indication of a satellite. If no satellite was clearly indicated, SCAN moves back to the original target.
During the SCAN operation, line 4 of the display shows the total number of steps to be made and the
current step being performed.
AZIM: 0.0 ( -5.9) SS1:523 LOCATE
ELEV: -61.7 ( 44.8) SAT:GALAXY 7
POL: 0.0 ( -45.0)
SCAN( 1/17) AZIMUTH FOR PEAK <STOP>HALT
The scan range is a user-defined angular value (see autopeak configuration 3.3.1.2.6) that determines
the range to be searched by the SCAN routine. Since this angular range is user-defineable, there are
80
Page 89

RC3000 Antenna Controller Chapter 3 Detailed Operation
several factors to take into consideration. If the range is too narrow, it might not be able to compensate
for a heading error. If the range is too wide, it will take the unit slightly longer to lock up, although this is
usually not a significant amount of time. There might also be certain situations in which two satellites will
be at a given elevation within that specified wider range, and the RC3000 will position the antenna at the
point of the strongest signal, even though it is not the desired satellite. This value can be changed at any
time. It is recommended that the narrowest scan range that results in consistently locating the desired
satellites be used.
Following the completion of the SCAN operation, the RC3000 will move to MANUAL mode. As in the
case of the basic LOCATE, the user should peak and confirm the identity of the satellite.
81
Page 90

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.3.4 Spiral Search Autopeak
The spiral search autopeak operation (SEARCH) performs somewhat differently from the SCAN
operation. Whereas SCAN counts on the fact that a non-inclined orbit satellite should be at the
calculated elevation, SEARCH must account for the fact that at a particular time an inclined orbit satellite
may be above or below the nominal target elevation. The figure shows the movements made to perform
the SEARCH operation.
1) as part of the basic LOCATE movement, the mount will be moved to the target elevation position and
the polarization axis will be moved to the correct orientation.
2) SEARCH will move to the target azimuth (correcting for elevation if needed) and take an initial signal
strength sample. Note that the target azimuth may be slightly off due to initial compass error.
3) If no hot spot is initially found, SEARCH will begin searching an area around the target position by
stepping in an CW/UP/CCW/DN sequence using increasing number of steps in each direction to
effect a spiral like pattern. Unlike SCAN, SEARCH looks for a signal strength above a defined
threshold in order to declare an end to the SEARCH operation. Performing the total search pattern
could be time consuming so the search is terminated when a hot spot is found.
4) If no satellite was detected, SEARCH moves back to the original target.
During the SEARCH operation, line 4 of the display shows the current direction and step number so the
user can keep track of the operation’s progress.
AZIM: 0.0 ( -5.9) SS1:523 LOCATE
ELEV: -61.7 ( 44.8) SAT:GALAXY 7
POL: 0.0 ( -45.0)
SPIRAL SEARCH(CCW 12) <STOP>HALT
Note that when pulse-based position feedback is available, the automatic azimuth and elevation
movements are pulse rather than pot based for greater accuracy.
82
Page 91

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.3.5 Terminal Peak Up
NOTE: this option is only functional if the mount has been fitted with high resolution pulse or
resolver sensors for both the azimuth and elevation axes. This option will not be available on
some mounts where the ability to fit high resolution sensors is not available. The performance of
this movement depends on whether or not the correct azimuth and elevation pulse scale factors
(3.3.1.3.3 and 3.3.1.3.6) have been characterized for the mount.
The terminal peakup option is selected via the AUTOPEAK ON configuration item (3.3.1.2.6).
If an azimuth scan finds a peak, it will return to the azimuth position where it noted the peak. This
position may not be the absolute peak position due to the relatively large steps taken during the azimuth
scan. If enabled, the terminal peakup option will next perform a “fine tune” peakup. While executing this
peakup, line 4 will display “PERFORMING PEAKUP” and the AZIM and ELEV fields will display pulse or
resolver counts rather than angles.
During the peakup, small jogs in azimuth and elevation will be made to find the local peak position.
These movements will be similar to the Step Track maneuver described in 3.2.2.9.1. The step sizes
taken will approximate a theoretical signal strength change of 0.3 dB (according to antenna size,
operating band, etc).
3.2.2.3.6 Polarization Tilt Compensation
If enabled via the TILT configuration item in the AUTOPEAK screen (3.3.1.2.6), additional movements in
azimuth will be made during the LOCATE function in order to characterize the pitch and roll of the
antenna platform.
Rather than going directly to the beginning point for a scan operation, azimuth will be moved to points 90
and 45 degrees away. The elevation axis will not be changed during these moves so the effect of
platform pitch and roll can be measured via the inclinometer. During these additional azimuth
movements a message such as "DETERMINE TILT: MOVE AZIM TO FIRST POINT" will be displayed on
line 4 to indicate that the tilt is being characterized.
After the platform tilt has been characterized, the normal LOCATE sequence will be finished. After
reaching the target location, an additional step will be performed to move polarization to compensate for
any platform tilt. During this step the message "ADJUSTING POL TO COMPENSATE FOR TILT" will be
displayed.
83
Page 92

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.4 Store
The STORE mode saves a satellite’s name, azimuth and elevation positions, horizontal and vertical
polarization positions and RF band in memory for use in later RECALLing the satellite.
When the STORE mode is entered, it is assumed that the user has peaked up on the satellite. The first
screen that appears asks the user to confirm the name of the satellite to be stored. The name displayed
is that of the latest satellite “selected” in LOCATE mode.
SAT LON INCLIN BAND STORE
BRASIL A1 79.0 2 C
VERIFY SATELLITE DATA OK FOR STORING
<1>CORRECT <2>INCORRECT <MODE>EXIT
If this is not the correct satellite (<2>), the following message will be displayed on lines 3 & 4 to remind
the user to “select” the correct satellite from the LOCATE mode.
GO TO LOCATE MODE TO SELECT SATELLITE
<MODE> RETURN TO MENU
If the satellite data is correct(<1>), the user will next be asked to store values for horizontal and vertical
polarization positions. While this screen is displayed, the Pol CW and Pol CCW keys are active allowing
the user to peak up in this axis. The “5” key is also active to initiate a 90 degree “cross polarization”
movement. Note that the user will need to tune the receiving equipment to correct frequencies for the
different polarizations. To store a polarization position, press the H key for horizontal and V for vertical.
When a polarization is stored, the display for that orientation will change from “NOT SET” to SET.
HORIZONTAL: NOT SET STORE
VERTICAL: NOT SET
POL: -4.3 SS1:795 L
<5>X-POL <POL CW/CCW>PEAK <H/V>STORE POL
Note that if the signal strength source is not correct to peak up on, go to the MANUAL mode to change
signal strength source.
If the selected satellite is not inclined, the following screen will appear momentarily and the RC3000 will
return to MANUAL mode.
*** SATELLITE DATA STORED ***
RETURNING TO MANUAL MODE
RECALL SATELLITE VIA MENU-RECALL
If an inclined satellite is selected (and the inclined orbit tracking option is present), control will
automatically move to the TRACK (3.2.2.9) mode.
If the STORE function is completed correctly, the mount’s position will saved (see POSITION 3.2.2.7). If
the position is saved, the user will be asked to verify the position upon power up of the RC3000. If the
mount has moved, STORED’d data will no longer be valid since the azimuth and elevation angles will no
longer be correct.
84
Page 93

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.5 Recall
NOTE: RECALL and DELETE modes will not be available from MENU if no satellites are currently
“stored”.
Satellites which have been stored in the controller's non-volatile memory (via STORE) can be recalled
from the RECALL mode. Azimuth, elevation, and horizontal and vertical polarization data for up to 20
satellites may be stored in non-volatile memory.
RECALL
STORED SATELLITE: SBS 4
<SCR>THRU LIST <ENTER>SELECT
Use the Scroll Up and/or Scroll Dn keys to scroll through the list of satellites stored in non-volatile
memory. Press the ENTER key to select the desired satellite.
If no satellites are currently stored the following screen will appear.
RECALL
** NO SATELLITES STORED **
SETUP SATELLITES VIA STORE MODE
<MODE> TO EXIT
If invalid data was somehow stored for a satellite the following screen will appear.
RECALL
** INVALID DATA STORED FOR SATELLITE **
<ENTER>SELECT ANOTHER SAT <MODE>EXIT
After a satellite has been selected, the controller will prompt the user to specify the desired polarization
Antenna movement to the stored position will proceed similar to the STOW and DEPLOY automatic
movements. Antenna movement can be stopped at any time by pressing the Stop key.
When the automatic move is completed, control will transfer to MANUAL mode if the target is a
geostationary satellite. If the target of the automatic move is an inclined orbit satellite, TRACK mode
receives control.
3.2.2.6 Delete
The DELETE mode allows a stored satellite to be removed from non-volatile memory.
# OF STORED SATS: 12 DELETE
DELETE: AMERISTAR
<SCR>THRU LIST <ENTER>DELETE <MODE>EXIT
The user may scroll through the list of stored satellites and delete the displayed satellite by pressing the
Enter key. Note that at the end of the list is a delete all stored satellites option. If no satellites are stored,
the message “RETURNING TO MENU” will momentarily appear and control will return to the MENU
mode.
85
Page 94

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.7 Position
The POSITION mode allows the user to set the latitude, longitude and heading of the vehicle for
subsequent use in calculating pointing angles to satellites. The first screen that appears shows the
current mount position used in the RC3000. Note: Mount “position” consists of the mounts latitude,
longitude and true heading of the azimuth centerline.
L/L:38°56N 94°44W GPS POSITION
ANT BEARING:225.0 FLUXGATE NOT SAVED
<1>LAT/LON <4>SAVE
<2>HEADING <3>AUTO INIT <MODE>EXIT
The mount’s position will not be retained at power off unless the position is explicitly saved by pressing
the “4” key. If the position is saved, the date and time that the position was saved is noted.
3.2.2.7.1 LAT/LON
When the user chooses to modify latitude and longitude, a screen appears showing the current lat/lon
and the source of that value. In the example screen the source shows that the current lat/lon was
obtained from the GPS. If the current values had been entered manually “MANUAL” would show for the
source. If the current values had come from the preset vehicle location list (see Preset Locations
configuration 3.3.1.15), the name (ex. WICHITA) of the preset location would appear. If there is currently
no valid lat/lon “NO POS SOURCE” would be displayed.
The user is prompted to select what type of source (manual entry, preset location list, gps) to use to
modify lat/lon.
Manual Lat/Lon Entry
The user is provided two fields to manually enter lat and lon. See 3.1.4 (Data Entry) for instructions on
how to enter latitude and longitude.
Preset Location List
38°56N 94°44W GPS LAT/LON
SELECT LAT/LON SOURCE #
<1>MANUAL <2>PRESET <3>GPS
38°56N 94°44W GPS LAT/LON
LAT: LON:
MANUALLY ENTER LAT/LON <MODE>EXIT
38°56N 94°44W GPS LAT/LON
2 37°36N 97°18W WICHITA
<SCR>THRU LIST <ENTER>SELECT <BKSP>EXIT
The user scrolls through the list of preset locations and selects the displayed location by pressing the
Enter key. Note that the number within the list (2) is displayed along with the name and lat/lon.
86
Page 95

RC3000 Antenna Controller Chapter 3 Detailed Operation
GPS Lat/Lon
37°36N 97°18W WICHITA LAT/LON
GPS:38°56N 94°44W 17:36:59
<ENTER>USE GPS LAT/LON <BKSP>EXIT
The current lat/lon the gps has calculated is displayed. The UTC the gps is outputting is also displayed to
show that the data is being updated. To select this lat/lon press the Enter key. Note that if the gps is not
reporting a valid position fix the message “WAITING FOR GPS” will appear.
3.2.2.7.2 HEADING
When the user chooses to modify heading, a screen appears showing the current heading (HDG:) and
source (SRC:) of heading. If valid heading data is coming from the fluxgate, this data will appear in the
FLUX HDG: field. The MAG VAR: field displays the calculated magnetic variation for the current
lat/lon/date. If the RC3000 thinks it needs to recalculate magnetic variation (thinks lat/lon has changed)
the MAG VAR: field will flash “CALC”. The magnetic variation calculation may take up to 10 seconds.
FLUX HDG:214.3 HDG:180.0 HEADING
MAG VAR: 3.8 SRC:MANUAL
AZ OFF: 0.0 <1>MAG <2>TRU <3>COMPASS
TRUE HDG:218.1 SELECT SOURCE <MODE>EXIT
To modify the heading to the value determined via the fluxgate (flux heading + azimuth offset +mag var)
press the 3 key.
If the user wishes to enter a magnetic heading of the vehicle press 1.
MAG HDG=> HDG:180.0 HEADING
MAG VAR: 3.8 SRC:MANUAL
AZ OFF: 0.0 <1>MAG <2>TRU <3>COMPASS
TRUE HDG: **** SELECT SOURCE <MODE>EXIT
After the magnetic heading is entered, the RC3000 will apply the magnetic variation and azimuth offset to
generate the true heading of the mount’s azimuth centerline.
If the user wishes to manually enter true heading press the 1 key and the prompt to enter heading will
appear on line 3 as shown below.
FLUX HDG:214.3 HDG:180.0 HEADING
MAG VAR: 3.8 SRC:MANUAL
AZ OFF: 0.0 ENTER HDG=>
TRUE HDG:218.1 SELECT SOURCE <MODE>EXIT
3.2.2.7.3 INIT
The INIT mode automatically performs the function of getting latitude/longitude from the GPS and
heading from the fluxgate compass.
The first stage of the INIT mode obtains latitude and longitude from the GPS.
87
Page 96
RC3000 Antenna Controller Chapter 3 Detailed Operation
INIT
LAT/LON:*INITIALIZING GPS*
GETTING LAT/LON FROM GPS
The LAT/LON: field initially displays the status of communications with the GPS receiver. The following
messages may be displayed:
“*INITIALIZING GPS*” – The RC3000 is establishing communications with the GPS receiver.
“*NO GPS NAV*” – Communications with the GPS is proceeding but the GPS reports has not yet
calculated a valid navigation solution. This typically indicates one of two situations:
1) The GPS receiver has not been powered on long enough to have “acquired” enough satellites to form
a solution. Typically the GPS receiver will acquire the required number of satellites within several
minutes from powerup.
2) The GPS receiver’s view of the sky is obstructed such that it cannot “see” enough GPS satellites to
form a solution.
“*GPS OFFLINE*” – This message indicates that the RC3000 has not established communication with
the GPS receiver. The cabling between the RC3000 and the GPS should be checked.
After obtaining latitude and longitude, the INIT mode waits 10 seconds before pulling in magnetic heading
from the compass. During this time the bottom line will flash “GETTING HEADING”. The 10 second
delay is to ensure that the compass has settled following any previous platform movement.
INIT
FLUX HDG:215.2
LAT/LON:38°56N 94°45W MAG VAR: 3.9
TRUE HDG:219.1
The INIT mode calculates magnetic variation and applies it to the magnetic heading to derive true
heading.
Following successful initialization of latitude, longitude and true heading the INIT mode will display a
“POSITION INITIALIZED” message for two seconds then return to the CALCULATE mode.
88
Page 97

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.8 Settings
The SETTINGS mode provides a way to change the operational characteristics of the RC3000 without
having to go to the configuration group of screens. It also provides a way to reset a drive error without
going to the DRIVE RESET maintenance screen.
1-AUTOPEAK:OFF SETTINGS
2- AP SIG:SS1
<0>RESET DRIVE
<1-2>CHANGE SETTING <MODE>MENU
<0>RESET DRIVE
This selection is only available if an azimuth, elevation or polarization drive error (jam or runaway) is
active. Selecting 0 will attempt to clear the error.
1-AUTOPEAK:
AUTOPEAK <0>DISABLE <1>ENABLE <2>+PEAK
Selection 0 allows the user to disable the autopeak function (OFF).
Selection 1 allows the user to turn the basic autopeak function on (ON).
Selection 2 allows the user to enable the terminal peakup function (ON+) described in 3.2.2.3.5. NOTE:
Verify that the required conditions for terminal peakup as described in 3.2.2.3.5 are present before
selecting this option.
2-AP SIG:
SIGNAL SOURCE <1>RF <2>SS1 <3>SS2
Selection 2 allows the user to change the signal source that will be used with the autopeak function.
89
Page 98

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.9 Track
The optional TRACK mode may be entered via the STORE or RECALL modes if the selected satellite
has been described as having a inclined orbit.
Details of TRACK mode are available in the separate appendix TRK describing inclined orbit tracking.
The following descriptions give an overview of how tracking is performed.
TRACKING INCLINED ORBIT SATELLITES. The RC3000 tracking algorithm can be divided into three
distinct stages - STEP_TRACK, MEMORY_TRACK, and SEARCH.
AZIM: 31561 SIG:735(C) TRACK
ELEV: 11060 SAT:BRASIL A1
POL: 8.2 STEP:PEAKING AGC
JOGGING ANTENNA TO FIND MAXIMUM SIGNAL
In STEP_TRACK, the controller periodically peaks on the receiver' signal strength by jogging the
antenna. The time and position are recorded in a track table maintained in the controller’s non-volatile
memory. The interval between peakups is determined by antenna beamwidth (determined from antenna
size and frequency band), satellite inclination and a user specified maximum allowable error (in dB).
When a track table entry exists for the current sidereal time, STEP_TRACK switches to
MEMORY_TRACK.
In MEMORY_TRACK, the controller smoothly moves the antenna to azimuth and elevation positions
derived from entries in the track table. The time between movements is determined by the same factors
which govern the time between peakup operations in STEP_TRACK. By increasing the maximum
allowable error, antenna movements can be performed less frequently. In MEMORY_TRACK, the
accuracy of the track table is monitored by periodically peaking up on the receiver’s signal strength. If the
error exceeds a level set by the user, all entries in the track table are flagged for update.
TRACK_SEARCH is entered when the satellite signal has been lost. The RC3000 utilizes Intelli-Search,
an efficient search algorithm that minimizes errors associated with traditional box searches and frees the
user from having to update vague search window parameters. This scheme accounts for the specific
mount geometry, calculates the nominal trajectory for the satellite, and then searches in an area that
coincides with the satellite's expected path. When the satellite is located, the controller re-enters the
STEP_TRACK mode.
3.2.2.10 Remote
In REMOTE mode the controller only responds to commands received via the built-in RS-422/232 serial
port. REMOTE mode can only become active if the Remote Mode Enable CONFIG item is enabled. If
REMOTE mode is enabled, it can become active either in response to receipt of a valid command from
the PC. Note that TRACK mode can process certain commands received via the serial port. The RS-422
communication protocol, interface specification and the RC3000 command set is found in Appendix REM.
The REMOTE mode screen is similar to the MANUAL mode screen. Only the MODE key is active when
REMOTE mode is active.
90
Page 99

RC3000 Antenna Controller Chapter 3 Detailed Operation
3.2.2.11 VSAT Mode
INTRODUCTION This section details operations of the RC3000’s “VSAT” mode.
VSAT mode is intended to be used when the following conditions exist:
1) the mobile satellite terminal is to be run by operators with limited or no satellite communication
training or experience
2) the same satellite and the same polarization orientation are to be used
3) the RC3000 is equipped with a GPS receiver and Fluxgate compass to allow automatic calculation of
the satellite pointing solution
VSAT mode limits the RC3000 functions that the operator may perform to LOCATE and STOW. To
perform other functions or to change operating parameters, expert access permission must be
established and the RC3000 must be taken out of VSAT mode.
NOTE: VSAT “mode” refers to the overall functioning of the RC3000. VSAT is not a mode in the same
sense as MANUAL, LOCATE, TRACK, etc. are modes.
PRIOR TO ENTERING VSAT MODE
VSAT mode should not be entered until the RC3000 has been well calibrated with the antenna and
receiving systems. VSAT mode requires that the LOCATE and STOW modes consistently work well.
In order to achieve good performance, ensure that:
1) the azimuth, elevation and polarization axes are well calibrated
2) the Fluxgate calibration procedure as been performed and yields good results
3) the source of signal strength has been well calibrated
Before entering VSAT mode, the satellite to be used and the polarization orientation (Horizontal, Vertical
or None) has been selected as part of a completed LOCATE function.
ENTERING VSAT MODE
VSAT mode is selected from the SYSTEM DEFINITION configuration screen (3.3.1.2.1).
GPS: 1 CONFIG-SYSTEM
COMPASS: 1 ANT_SIZE: 120 WAVEGUIDE:0
MODE: 2
<1>LOCATE <2>MENU <3>MANUAL <4>VSAT
When the value of 4 is entered for the MODE item, the RC3000 will enter VSAT “mode”.
When VSAT mode is entered, expert access permission (3.3.1.1.1) is set to NORMAL. This in itself will
prevent the operator from accessing most configuration items and some functions of the RC3000. VSAT
mode will further limit operator actions as now described.
After VSAT mode is entered, the RC3000 switches to the MENU screen. The following describes VSAT
mode operation by showing a typical sequence of events.
91
Page 100

RC3000 Antenna Controller Chapter 3 Detailed Operation
VSAT MODE OPERATION
After powering up the RC3000, the MENU screen will appear.
1-LOCATE SATELLITE MENU
2-STOW ANTENNA
CST
<1-2>SELECT <MODE>MANUAL 14:37:23
In VSAT mode, the MENU screen only gives the operator two automatic functions that may be performed.
LOCATE
Selecting <1> will put the RC3000 into LOCATE mode.
If the antenna system has an antenna mounted compass, the following screen will prompt the operator to
confirm that the antenna’s platform is in a safe location (not in a garage, not under power lines, etc.) for
deployment of the antenna.
* ANTENNA MOVEMENT REQUIRED TO LOCATE *
* CONFIRM PLATFORM IN SAFE POSITION *
<ENTER>BEGIN MOVEMENT <MODE>EXIT
After initiating antenna movement, the antenna will be deployed and the LOCATE mode entered.
POS: 39°01N 94°49W 180.1 LOCATE
SAT:GALAXY 7 91.0W AZ:-31.1
EL: 40.0
READY TO LOCATE
PRESS <ENTER>
In VSAT mode, the LOCATE screen does not allow the operator to select a satellite. The selected
satellite (and polarization) will be the last one chosen prior to entering VSAT mode.
When LOCATE is first entered, the mount’s position will be automatically initialized with data from the
GPS receiver and the Fluxgate compass. There may be a delay of several minutes while the GPS
receiver generates a navigation solution. After the GPS generates lat/lon, the local magnetic variation is
calculated and applied to the magnetic heading from the compass to form and estimate of the true
heading of the mount.
The latitude, longitude and true heading will be displayed in the POS: field. The pointing solution will be
displayed in AZ: and EL: and the messages “READY TO LOCATE” and “PRESS ENTER” will be flashed.
When ENTER is selected (or the antenna deployment has previously been confirmed), the RC3000 will
automatically begin positioning the antenna to locate the satellite. The previously selected polarization
orientation (Horizontal or Vertical) will be automatically calculated.
The autopeak function will be performed according to how it was configured (signal source, lock
condition, scan range, etc.) prior to entering VSAT mode. Descriptions of the various operations in the
LOCATE sequence will be displayed as the operation progresses.
AZIM: 0.0 ( -6.1) LOCATE
ELEV: -61.7 ( 44.7) SAT:GALAXY 7
POL: 0.0 ( 40.3)
MOVING TO (TARGETS) <STOP>HALT MOTION
Following the completion of the LOCATE function, the RC3000 will display the following screen:
92
 Loading...
Loading...