


Page 1
USER
MANUAL
Mathematics
II
Page 2
CALCULUS
MATHEMATICS
II
VER1.0
A
mathematical
program
for
calculators
Odd
Bringslid
tsv
Postbox
1014 3601 Kongsberg
NORWAY
.
Page 3
Copyright©
1991
Odd
Bringslid
ISV
All
rights
reserved
The
author should
not be
liable
for any
errors
or
conse-
quential
or
incidential damages connecting with
the
furnis-
hing
performance
or use of the
application card.
JS5
First
edition August 1992
Page 4
Contents
Generaly
6
Hardware
requirements
6
Starting
up 7
User
interface
7
The
input
editor
9
Echoing from
the
stack
10
Calculation
finished
10
Moving
in
the
menu
10
STAT
and
MATR
menu
11
Leaving CALCULUS
11
Intermediate results
12
Flag status
and CST
menu
12
Linear
algebra
13
Linear
equations (Gauss algo-
rithm)
13
Matrix
calculations
16
Addition
16
Multiplication
16
Inverting
16
Determinant
16
Rank
17
Trace
17
Orthogonal
matrix
17
Transposed matrix
17
Symmetric
17
Page 5
Linear
transformations
18
2 D
transformations
(two
dimen-
sions)
18
Rotation
18
Translation
19
Scaling
20
Concatinating
21
3 D
transformations
(3
dimen-
sions)
23
Translation
23
Scaling
23
Rotation
23
Concatinating
24
Eigenvalueproblems
25
Eigenvalues
25
Eigenvectors
26
Diagonalization
27
Diffequations
28
Vector spaces
30
Basis?
30
Norm
31
Norming
31
Scalar
product
31
Orthogonalization
31
Orthogonal?
32
Orthonorming
32
Vector
in new
basis
32
Transformation matrix
in new
basis
34
rr
-~
L
Page 6
Laplace transforms
36
Laplace
transform
37
Invers
Laplace transform
38
Inverse L Partial fractions
39
Diffequations
41
Probability
42
Without replacement
43
Combinations unordered
43
Combinations ordered
44
Hypergeometric
distribution
44
Hypergeometric
distr. function
44
With replacement
46
Combinations unordered
46
Combinations ordered
47
Binomial
distribution
48
Binomial
dsitr.
function
49
Negative
binomial
distribution
49
Negative binomial
distribution
func-
tion
50
Pascal
distribution
51
Pascal distribution
function
52
Normal
distribution
53
Poisson
distribution
54
Poisson
distribution function
55
Info
55
Binomial coefficients
55
Statistics
57
Distributions
58
Page 7

Normal
distribution
58
Inverse
normal distribution
58
Kjisquare
distribution
59
Inverse
Kjisquare
60
Studen-t
distribution
60
Inversestudent-t
61
Confidence
intervals
62
Mean,
known
o-
62
Mean,
uknown
a
Variance
uknown ^ 63
Sample mean,
stdev,
median
65
Fitting
66
Normal
ditsribution,
"best
fit"
66
Hypothesis
normal distribution
67
Hypothesis
binomial distribution
68
Hypothesis
Poisson
distribution
69
L_
—
Class
table
69
^^T
Mean,
stdev
70
—
Discrete
table
70
it
Description
of
samples
71
Diskrete
table
£DAT
71
Classes
KSDAT
71
Cummulativ
table
72
72
^
2DAT
mean
and
st.deviation
72
[gr-
Histogram
KXDAT
73
Frequency
polygon
KXDAT
74
§2*j
Linear
regression
and
correlation
74
j
Page 8
Fourier series
75
Fourier
series,
symbolic
form
76
Fourier
series
numeric form
78
Half
range expansions
79
Linear programming
81
Page 9
1
Generaly
This
is
part
II of
CALCULUS mathematics. Together with
part
HI
this will represent a complete math
pac for
higher
technical education.
As
in
part
I a
pedagogical interface
is
stressed. CALCULUS
mathematics
is a
pedagogical tool
in
addition
to a
package
for
getting things calculated.
Hardware
requirements
CALCULUS Math
II
runs under
the
calculator
HP
48SX.
The
program card
may be
inserted
into
either
of
the two
ports
and
Math I could
be in the
other port.
1.
Generaly
Page 10
Starting
up
The
LIBRARY menu will
show
up
MAIL Pushing
the
MAJI
key
will lead
you
into
the
main,
menu
and
then
you
simply
push
the
START key.
User
interface
The
CALCULUS
meny
system
is
easy
to
use. Using
the ar-
row
keys
allows
you to
move
the
dark
bar and
select
by
pus-
hing
ENTER.
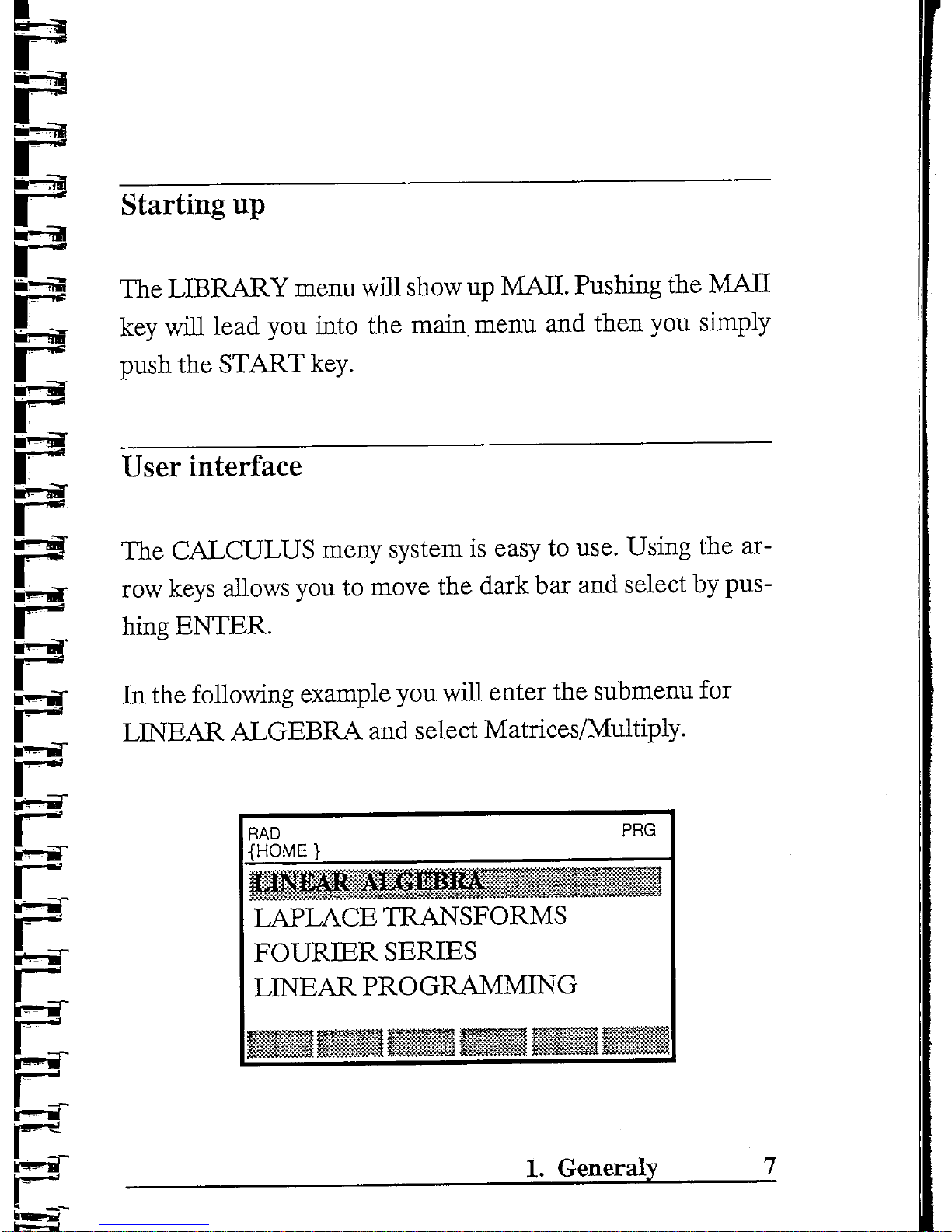
In the
following
example
you
will enter
the
submenu
for
LINEAR ALGEBRA
and
select Matrices/Multiply.
RAD
{HOME
}
PRG
LAPLACE TRANSFORMS
FOURIER
SERIES
LINEAR PROGRAMMING
\r^
-
1.
Generaly
Page 11
RAD
{HOME
}
PRG
Linear equations
+
J&~
-k
t
Transformations
Eigenvalueproblems
*m*r-
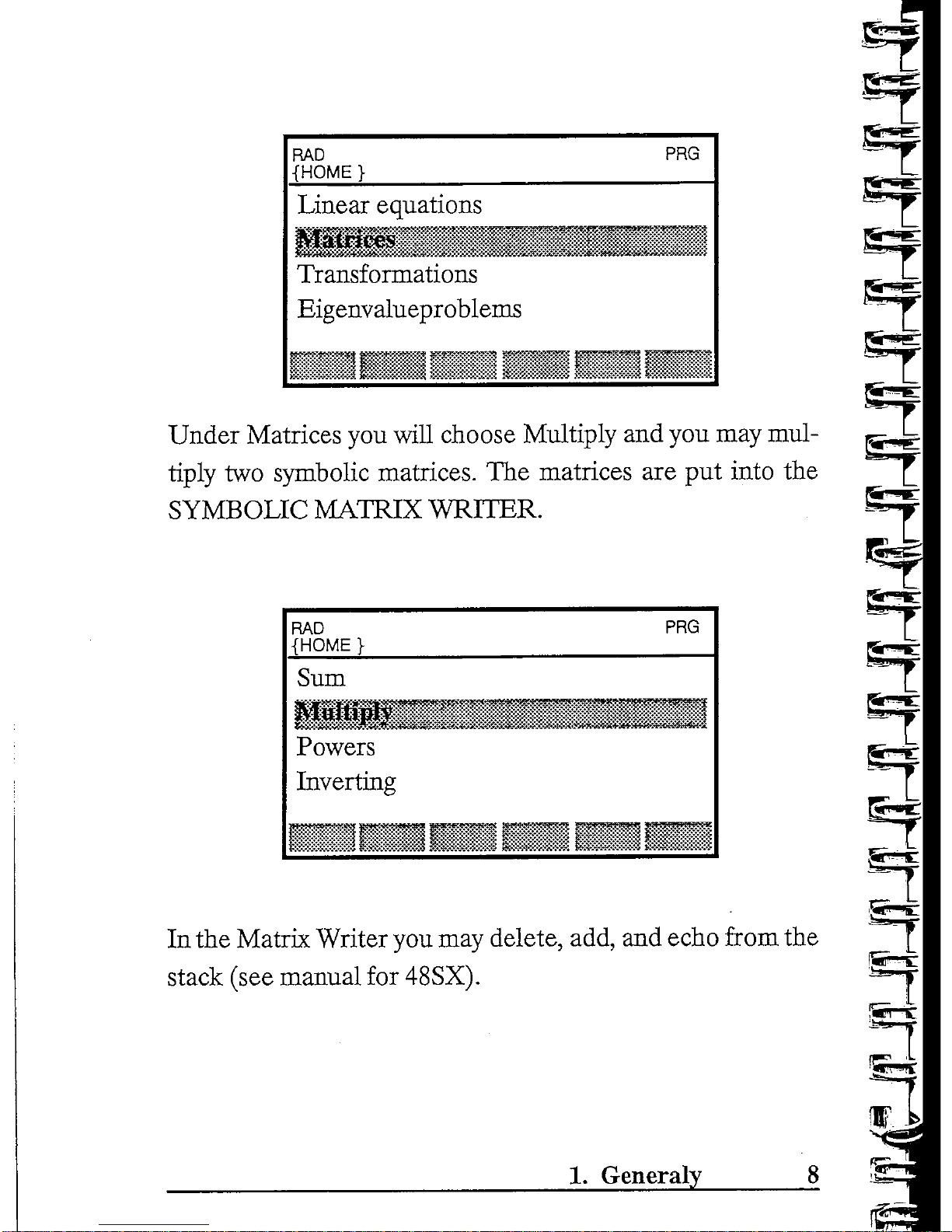
Under Matrices
you
will choose Multiply
and you may
mul-
tiply
two
symbolic matrices.
The
matrices
are put
into
the
SYMBOLIC MATRIX
WRITER.
RAD
{HOME}
PRG
Sum
Powers
Inverting
»*-<-»—»>«^
p«-v~«
1-
2*-
In the
Matrix Writer
you may
delete, add,
and
echo
from
the
stack
(see manual
for
48SX).
1.
Generaly
Page 12

The
input Editor
If
you
select Linear equations under LINEAR ALGEBRA
you
will enter
the
editor
for
input (input screen).
RAD
{HOME
}
:PartAns
w
-"'•
sp"*r
, , ,JV.
»
PRG
Y/N:J
.}:
{123}
}:
{xyz}
Here
the
input data
can
be
modified
and
deleted
and
you can
move
around
by
using
the
arrow keys.
The
cursor
is
placed right behind
:PartAns
Y/N:
and
here
you
enter
Y if you
want intermediate results.
The
arrow
keys
are
used
to get
right behind
:B
{Bl...}:
and
here
you
enter
the
right
side vector
of the
system.
If
you
have done a mistake
you may
alter
your input
by
using
the
delete
keys
on the
calculator keyboard.
You
will
not be
able
to
continue before
the
data
are
correctly
put in.
1.
Generaly
Page 13
In the
input screen there
is
often
information about
the
pro-
blem
you are
going
to
solve
(formulaes
etc).
Remember
the
' ' in
algebraics
and
separation
of
several data
on the
same
input
line
by
using blanks
(space).
Echoing
from the
stack
If
an
expression
or a
value laying
on the
stack
is
going
to be
used, then
the
EDrT/tSTK/ECHO/ENTER
sequence will
load
data into
the
input screen.
Be
sure
to
place
the
cursor
correctly
Calculation
finished
When a calculation
is finished
CALCULUS will
either
show
up
intermediate results
by
using
the
VIEW
routine (intrinsic
MAII)
or
return directly
to the
menu.
In the
last case
you
will
need
to use
the
->STKkey
to see the
result laying
on the
stack.
Moving
up and
down
in the
menu
You
can
move downwards
in the
menu system
by
scrolling
the
dark
bar and
pressing
ENTER.
If you
need
to
move
up-
wards
the
UPDIR
key
will
help.
At any
time
you may
HALT
CALCULUS
and use the
calculator independent
of
CAL-
CULUS
by
pressing
the
-^STK
key.
CONT
will
get you
back
to
the
menu system.
1.
Generaly
10
Page 14
STAT
and
MATR
menues
On
the
menu
line
at
the
bottom
the
choices
STAT
and
MATR
are
possible.
Here
you
will have access
to
some routines
re-
gardless
of
your current menu position.
STAT:
MATR:
•
NORM Normal distribution
•
INVN
Inverse normal distribution
•
USD
AT
Sample mean,
st.
dev.,
median
•
KSDAT
Class table
•
SDAT
Discrete table,
two
columns
• ADD Add
symbolic matrices
•
MULT Multiply
•
INV
Invert
•
TRN
Transpose
• DET
Determinant
Leaving
CALCULUS
Pushing
the
EXIT
key
will leave
CALCULUS.
1.
Generaly
11
Page 15
Intermediate
results
In the
input screen
you may
choose
PartAns
Y/N.
Choosing
N
the
result
will
be
laying
on the
stack
and you
have
to use
-^STK
to see the
answer. Choosing
Y,
different
pages
of in-
termediate results will
show
up or
more than
one
result
is
lay-
ing
on the
stack.
The
degree
of
details
in the
partial answers
is
somewhat dif-
ferent,
but
some
of the
results covers "the whole answer".
In
E:'"^
"~
~-~""
every
case this will give
the
user a good help.
Different
parts
of an
answer
may be
found
on
different
pages
and
the
page number
can bee
seen (use arrow up/down).
When PartAns Y(es)
is
chosen
all
numbers will show
up
with
two
figures
behind comma.
If a
more accurate answer
is ne-
cessary,
you
will have
to
look
on the
stack
and
perhaps
use
the N FIX
option.
s=^-r
Flag
status
and CST
menu
The flag
status
and CST
menu
you
have before going into
CALCULUS will
be
restored when
you
leave
by
pushing
EXIT.
3
5
s=*
1.
Generaly
12
Page 16
Linear algebra
The
subject linear algebra covers
linear
eqautions
with solu-
tion also
for
singular systems, matrix manipulation (symbo-
lic), eigenvalue problems included systems
of
linear
differential
equations,
linear
transformations
in two and
three dimensions
and
vector spaces.
Linear equations (Gauss method)
Linear equations with symbolic parameters
are
handled.
The
equations have
to be
ordered
to
reckognize
the
coefficient
matrix
and the
right
side.
The
equations
are
given
in the
form:
E^-sr
r~
Br-g
A is the
coefficient
matrix
, X a
column vector
for the un-
I
j
knowns
and
B the
right
side column vector. Symbolic
coeffi-
|
cients
are
possible.
2.
Linear algebra _ 13
Page 17
If
Det(A) = 0
(determinant)
the
system will
be
singular (self
contradictory
or
indefinite).
This
is
stated
as
"Self
contradic-
tory"
or the
solution will given
in
terms
of one ore
more
of
the
unknowns (indefinite). Example:
{x,y,z} = {x,2*x-l,x-4}
The
value
of x is
arbitrary
so
there
is an
infinite number
of
solutions.
If
the
system
is
underdetermined
(too
few
equations),
the so-
JS^g
lution
will b e
given
in the
idefinite
form.
If the
system
is
over-
[__
determined (too many equations)
the
solution will
be
given
in the
indefinite
form
if the
equations
are
lineary dependent
or as
"Self
contradictory"
if
they
are
lineary independent.
L
The
solution algorithm
is the
Gauss elimination.
If
PartAns
Y(es)
is
selected,
the
different stages
in the
process will
be
given
as
matrices
on the
stack which
may be
viewed
by
using
the
MATW
option (LIBRARY).
The
coefficient
matrix
and
the right
side vector
are
assembled
in one
matrix
(B is the
^;_^
rightmost
column).
^-
L
2.
Linear algebra
14
Page 18
Interface:
RAD
{HOME}
PRG
A*X
= B
:
PartAns
Y/N:
Y
:
B{B1...}:
{7
6 0}
...}:
{xlx2x3x4x5}
V,
f,
m
j,,.>™»
„,,«
'
.-
H
tt
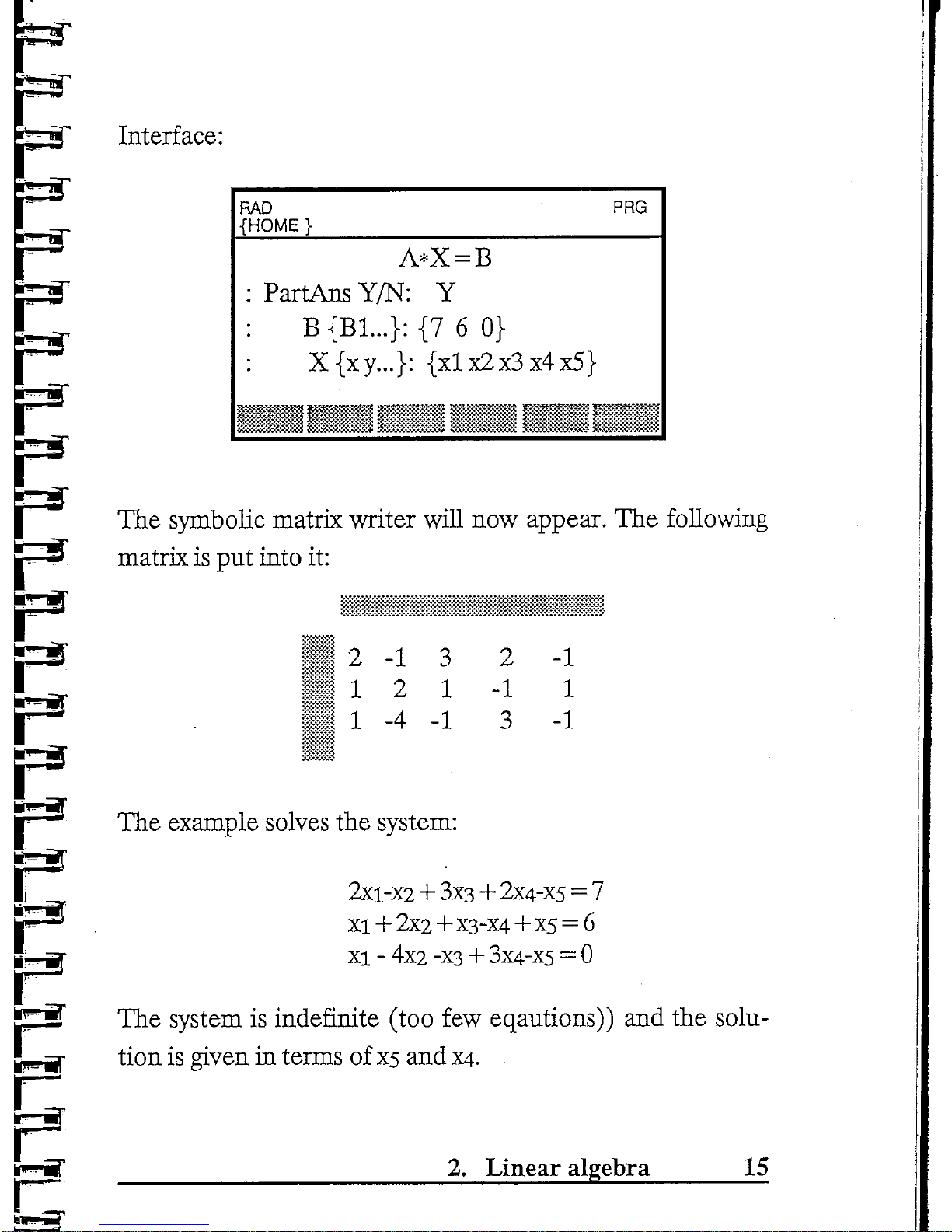
The
symbolic matrix writer will
now
appear.
The
following
matrix
is put
into
it:
'
2
i
i
1
1
5
-1
2
-4
3
1
-1
2
-1
3
-1
1
-1
The
example solves
the
system:
2xi-X2
+ 3x3 + 2x4-xs = 7
xi + 2x2+X3-X4+xs
= 6
xi
- 4x2
-xs + 3x4-xs
= 0
The
system
is
indefinite (too
few
eqautions))
and the
solu-
tion
is
given
in
terms
of
xs
and
X4.
2.
Linear algebra
15
Page 19
Matrix
calculations
Some
operations
on
symbolic matrices
are
done (not cove-
gjr
red
by the
48SX intrinsic
functions).
The
matrices
are
put
into
the
SYMBOLIC MATRIX
WRITER
and the
matrix
is put
*"**
on
the
stack
by
pushing
ENTER.
Addition
Both
matices
are put
into
the
matrix writer
and
added.
An er-
ror
message
is
given
for
wrong dimension.
Multiplication
Both
matrices
are put
into
the
matrix writer
and
multiplied.
An
error message
is
given
for
wrong dimensions.
The
first
matrix
has to
have
the
same number
of
columns
as the
sec-
ond
has
rows.
Be
aware
of the
order
of the
matrices.
Inverting
The
mark
is put
into
the
matrix writer
and
inverted.
An er-
^
ror
message
is
given
if its not
quadratic.
Determinant
^T
The
determinant
of a
symbolic matrix
is
calculated.
The ma-
~~
trix
is put
into
the
matrix writer.
An
error message
is
given
if
its
not
quadratic.
2.
Linear algebra
16
Page 20
Rank
of a
matrix
The
rank
of a
mark
is
calculated. This
routine
may be
used
for
testing
linear
independency
of
rowvectors.
The
routine
makes
the
matrix upper
traingular
and
PartAns Y gives
the
different
stages
of the
process.
Trace
The
trace
of a
square matrix
is
calculated.
An
error message
is
given
if the
matrix
is not
quadratic.
Orthogonal matrix
This routine
is
testing whether
the
matrix
is
orthogonal i.e.
the
inverse
is
equal
to the
transpose.
An
error message
is gi-
ven for
wrong dimension (must
be
quadratic).
The
answer
is
logic
0 or 1. May be
used
to
investigate
if
rowvectors
are
ort-
hogonal
i.e.
is an
orthogonal basis
of a
vector space.
Transpose
matrix
The
transpose
of a
symbolic matrix
is
calculated.
Symmetric
Investigates
whether a matrix
is
symmetric
or
not. Logic
0 or
1.
2.
Linear algebra
17
Page 21
Linear transformations
Linear transformations include coordinate transformations
in
the
plane
and in the
three dimensional space.
The
trans-
formations
are
rotation, translation
and
scaling.
The
point
to
be
transformed
is
given relative a rectangular coordinate sys-
tem.
Mixed
transformations
(concatinating)
is
possible.
The
order
of
the
transformations
is
important
if
rotation
is one of the
them.
2
gir-TC
2 D
transformations (two
dimensions)
Rotation
The
rotation angle must
be
given
in
degrees'
and the
transfor-
med
point
is
given
as
components
of a
list
(to
allow symbols).
The
rotation
is
counterclockwise
for
positive angles about
an
arbitrary
point.
Bf
3
a
„
2.
Linear algebra
18
Page 22
50
0
2'Q
4-0
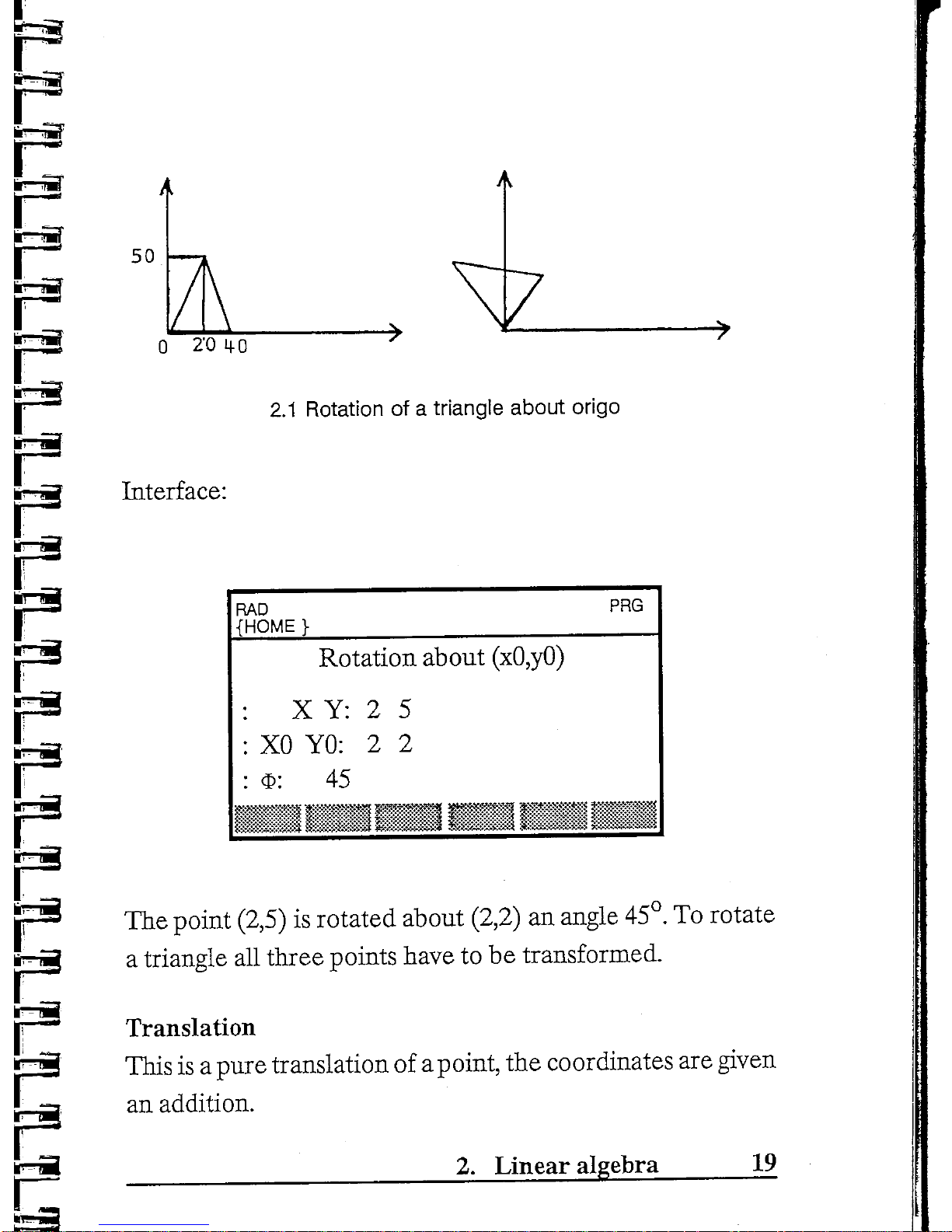
2.1
Rotation
of a
triangle
about
origo
Interface:
RAD
{HOME
}
PRG
Rotation
about
(xO,yO)
X
Y: 2 5
XO
YO: 2 2
$:
45
T5^ra.*\
]£KO*.
•* « -^
±
*
>
*.
*
J
*^ ^ > A
*
The
point
(2,5)
is
rotated about
(2,2)
an
angle
45°.
To
rotate
a
triangle
all
three points have
to be
transformed.
Translation
*E15?
This
is a
pure translation
of a
point,
the
coordinates
are
given
r?
an
addition.
2.
Linear algebra
19
Page 23
50"
60 -•
10 •
0
20 40
80
100
120
fi£
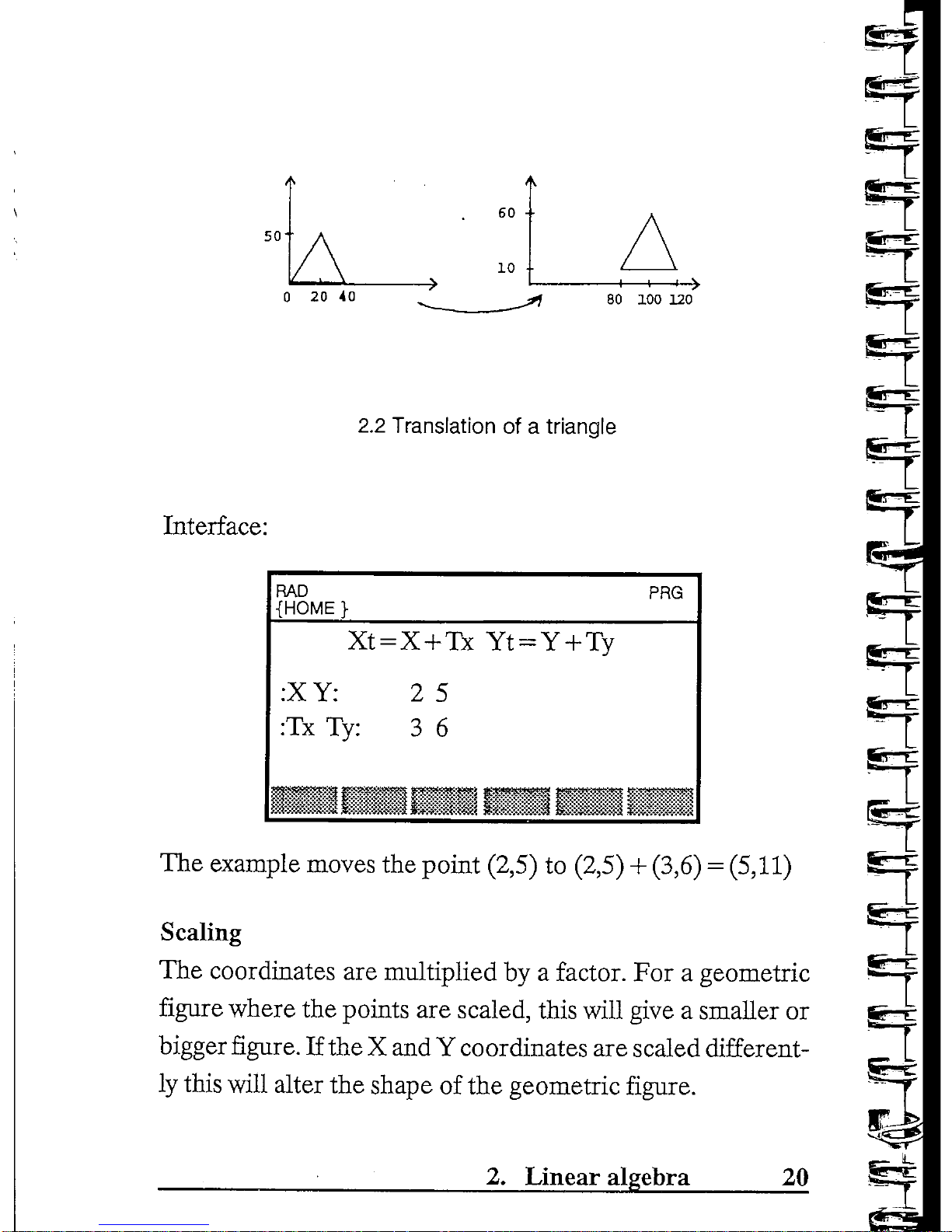
2.2
Translation
of a
triangle
Interface:
RAD
{HOME}
Xt
=
:XY:
:Tx Ty:
rrnrr
PRG
X+Tx
Yt = Y + Ty
2
5
3 6
inrir^cTi;—
i
The
example moves
the
point (2,5)
to
(2,5) + (3,6) = (5,11)
Scaling
The
coordinates
are
multiplied
by a
factor.
For a
geometric
figure
where
the
points
are
scaled, this will give a smaller
or
bigger
figure.
If the X and Y
coordinates
are
scaled different-
ly
this
will
alter
the
shape
of the
geometric
figure.
3
ff
»
2.
Linear algebra
20
Page 24
r
F
50
A
100
-^
0
40
120
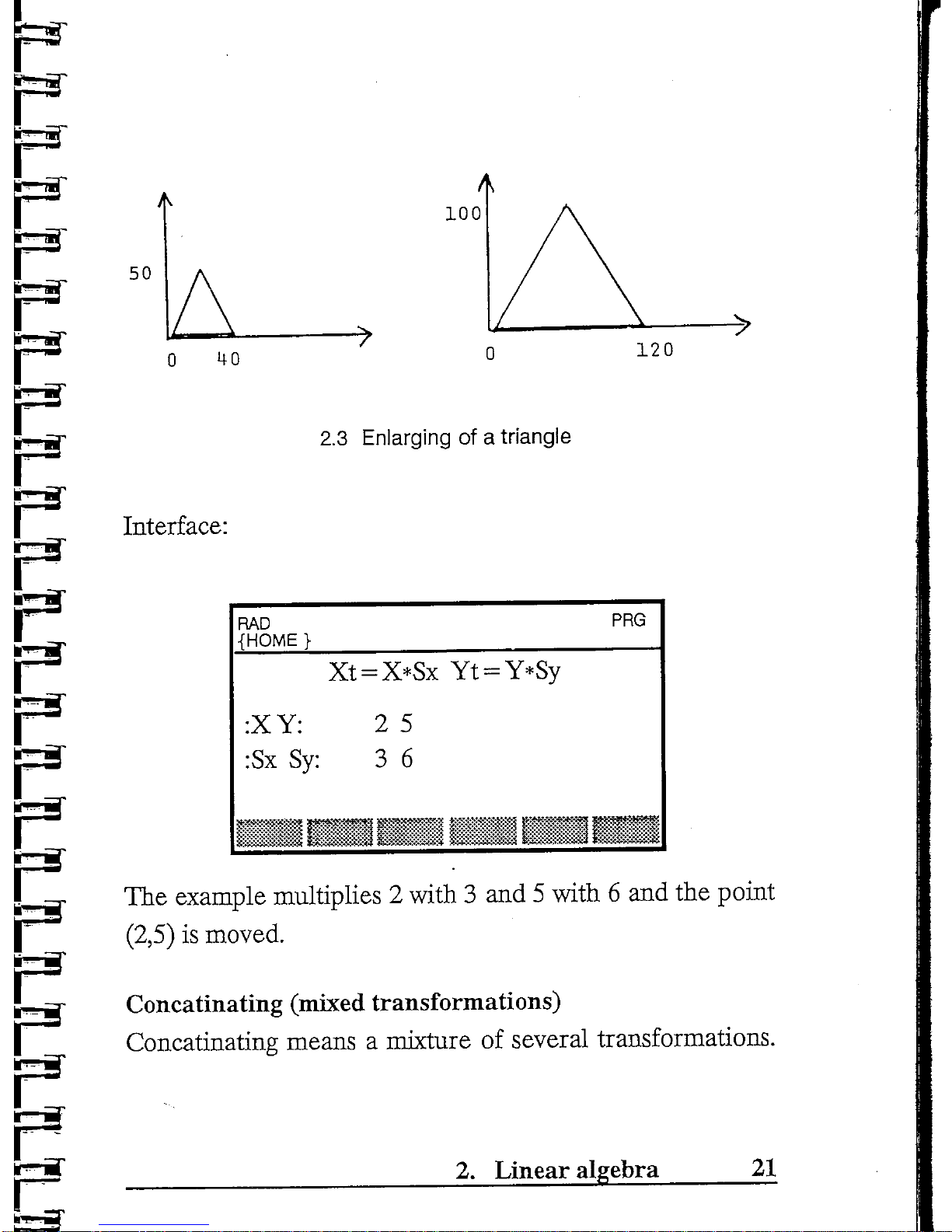
2.3
Enlarging
of a
triangle
Interface:
RAD
{HOME
}
PRO
:XY:
:Sx Sy:
; = X*Sx
Yt =
'
2
5
3 6
,_,^
,1*
--
The
example multiplies 2 with
3 and 5
with
6 and the
point
(2,5)
is
moved.
Concatinating (mixed transformations)
Concatinating means a mixture
of
several transformations.
2.
Linear algebra
21
Page 25
The
order
of the
transformations
is
important, given
in a
list
as
{R S T}
(rotation,
scaling
and
translation).
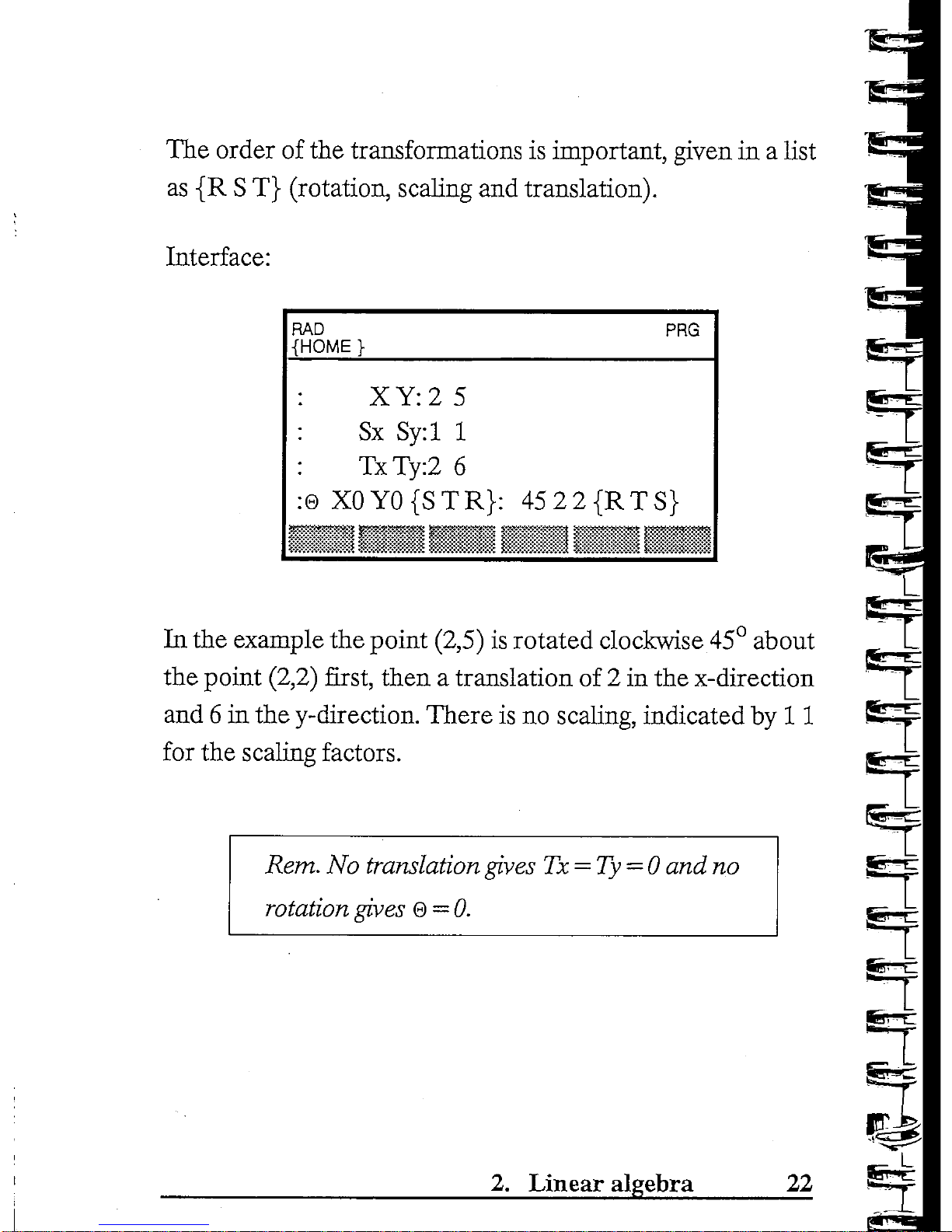
Interface:
RAD
{HOME
}
PRG
:
XY:25
: Sx
Sy:l
1
:
TxTy:2
6
:0XOYO{STR}:
4522{RTS}
In the
example
the
point
(2,5)
is
rotated
clockwise
45°
about
the
point (2,2)
first,
then a translation
of 2 in the
x-direction
and
6 in the
y-direction.
There
is no
scaling, indicated
by
11
for
the
scaling
factors.
Rent.
No
translation gives
Tx =
Ty = 0 and no
rotation
gives
0 = 0.
Sa-
2.
Linear algebra
22
Page 26
3 D
transformations
(three
dimensions)
Translation
The
interface
is the
same
as 2D
translation, with
one
extra
coordinate
and one
extra translation.
Scaling
The
interface
is the
same
as 2D
scaling, with
one
extra coor-
dinate
and one
extra scaling.
Rotation
3D
rotation
is
somewhat more complicated than
in two di-
mensions.
The
rotation axes
has to be
specified,
i.e
angles
re-
lative
the
coordinate
axes
and a
point.
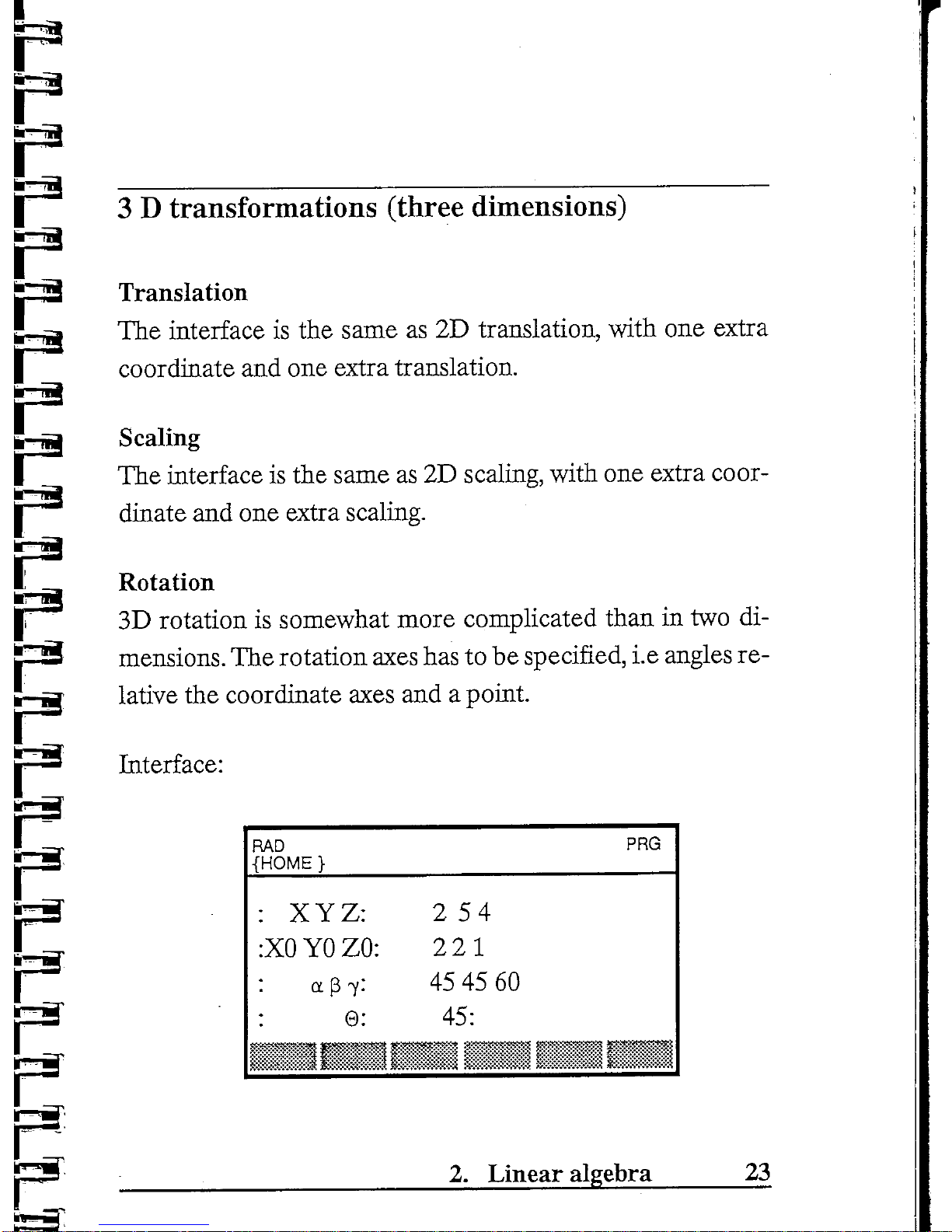
Interface:
RAD
{HOME
}
:
XYZ:
:XO
YO ZO:
:
ap-y:
: 0:
"
-v-^w**-*™
-
•••
*§•
PRG
2 54
221
45 45 60
45:
i
S
2.
Linear
algebra
23
Page 27

The
example rotates
the
point (2,5,4) about
an
axes through
the
point
(2,2,1)
and
with angles
relative
the x-, y-, and
z-axes
equal
to
45°,
45° and
60°.
Concatinating
(mixed)
The
same interface
as in the 2D
case,
but the
rotation axes
now
has to be
specified.
Interface:
e:
s
gr
fe
RAD
{HOME
}
:
XYZ:
:XO YO ZO:
:Sx Sy Sz:
:TxTyTz:
PRG
2
54
221
346
252
RAD
{HOME
}
a p
7:
45 45 60
0{STR}:
45{RTS}
PRG
3
rt
2.
Linear algebra
24
Page 28

In the
example
the
point (2,5,4)
is
rotated about
the
given
axes
and
then
the
specified translation
and
scaling
is
carried
out.
Eigenvalueproblems
Here
you may
find
the
eigenvalues
and the
eigenvectors
of a
matrix,
diagonalize a matrix
and
solve a system
of
linear dif-
ferential
equations.
Eigenvalues
The
eigenvalues
of a
matrix
are
determined
by the
equation
A*X = x*X,
where
A is the
matrix
and X a
column vector (ei-
genvector),
x.
is
called
the
eigenvalue.
Interface:
RAD
{HOME
}
Det(A-x*I)
= 0
rPartAns
Y/N:
Y
PRG
"WJ-J
|f?«SS»«!yS»
l#,i
->,
2.
Linear algebra
25
Page 29

Now
the
matrix
has to be
specified,
and you may put it
into
the
symbolic matrix writer:
466
1 3 2
-1 -5 -2
The
example
finds
the
eigenvalues
of the
matrix:
466
132
-1 -5 -2
,
L
The
matrix
has an
eigenvalue with multiplicity 2 (x. = 2).
Eigenvectors
A
matrix
has
infinite
many
eigenvectors because
the
system
of
equations
that
determines
the
vectors
are
indefinite.
The
eigenvectors
are
given
in
terms
of
arbitrary parameters. A set
of
eigenvectors will
normaly
be
linear
independent even
if
the
eigenvalues have multiplicity greater than
1. But
this
is
not
always
the
case.
fcr
2.
Linear algebra
26
•n
Page 30

Interface:
RAD
{HOME}
PRG
Finds
X
: x: 2
:PartAnsY/N:
Y
The
matrix
now has to be put
into
the
matrix writer.
We use
the
same matrix
as in the
determination
of
eigenvalues.
By
choosing
PartAns
Y the
indefinite system
of
equations that
determines
the
eigenvectors will
be
given.
We see
that
only
two
of
the
eigenvectors
are
lineary
independent (only
one ar-
bitrary
parameter
c).
Diagonalization
For a
matrix
A we can
write:
Here
K is a
matrix composed
of the
eigenvectors
of A
which
have
to be
lineary independent.
D is a
diagonal matrix with
the
eigenvalues
on the
diagonal.
If the
eigenvectors
are
2.
Linear algebra
27
Page 31

lineary dependent
(as in the
example
of
eigenvectors), then
|£
the
matrix cannot
be
diagonalized
(not
diagonalizable).
^,
Interface:
The
matrix
has to be put
into
the
matrix writer:
-455
-565
-556
The
output
is the
matrices K and
D.
The
matrix
K may be
found
by
inverting
K.
.Rera.
If
intermediate
results
are
wanted,
you
may
look
at the
problems
of finding
eigenva-
lues
and
eigenvectors
separately.
£•—
r
g*
System
of
differential
equations
Here
a set of
linear, homogenous differential equations with
constant
coefficients
are
solved
by
using
the
method
of
dia-
^
-
gonalization.
—-
L
2.
Linear algebra
28
Page 32

Interface:
RAD
{HOME
}
PRG
dX/dt=
A*X
:X = {x,y...}:
{XYZ}
: t: t
'',%
*r
*
*"jfv*'?ifTx"
-455
-565
-556
The
following
system
is
solved:
dx/dt
= -
dy/dt
= -5x +
6y
+ 5
The
output contains
the
constants
Cl,
C2
and C3 and the in-
dependent variable
is t.
2.
Linear algebra
29
Page 33

Rem.
If
intermediate
results
are
wanted,
you
may
look
at the
problems
of finding
eigenva-
lues
and
eigenvectors
separately.
Under
Info
some information about
the
solving strategy
is gi-
ven.
Vector
spaces
A
vector space
is a
collection
of
vectors relative a basis whe-
re
certain operations
on
them
are
defined. A basis
is a set of
linear independent vectors
from
the
space.
In an
orthogonal
basis
the
vectors
are
mutualy
orthogonal
(inner
product
equals
zero).
Basis?
This
routine
examines whether
a set of
vectors
in the
space
is
linear independent.
The
vectors
are
put
into
the
matrix
wri-
ter as
rows
and the
output
is
logic
0 or 1.
2.
Linear algebra
30
Page 34

Interface:
466
132
-1 -5 -2
The
example examines whether
the
vectors
in
RB
{4 6 6}, { 1
3 2} and
{-1
-5 -2} are
lineary
independent
and
then
form
a
basis
in
RS
(three
dimensional vector space).
Norm
Here
the
length
or
absolute value
is
calculated.
The
input
vector
is
{vi
V2
vs....}
and the
output
is a
number
or an
expres-
sion
if the
vector
is
symbolic.
Norming
A
vector
is
transformed into
an
unit
vector
e = V/NORM(V).V
=
Scalar
product (inner product)
The
scalar product
of two
vectors
is
calculated.
Symbolic
vec-
tors
are
possible.
Orthogonalization
An
orthogonal basis
is
calculated with
an
arbitrary basis
as a
starting
point using
the
Gram-Schmidt process.
_
2.
Linear algebra
_
31
Page 35

Interface:
466
132
-1 -5 -2
The
basis
bl = [4 6 6], b2 =
[13
2] and b3 = [-1 -5 -2] is
given
in
RS.
The
basis
is not
orthogonal,
but the
routine
makes
it
orthogonal.
Rem.
Symbolic
vectors
are not
possible
Orthogonal?
The
routine
examines whether a matrix
is
orthogonal.
If the
row
vectors building
up the
matrix
form
an
orthogonal basis,
then
the
matrix
is
orthogonal.
Orthonorming
The
routine
is
norming
an
orthogonal basis.
Vector
in new
basis
^
U
Given a vector
VBI,
i.e. relative a basis
Bl. A new
vector
re-
I
lative a basis
B2 is
calculated.
2.
Linear algebra
32
Page 36

Interface:
RAD
{HOME
}
Xbl-Xb2
:X
{xl...}:
{142}
PRG
123
312
225
•113
-412
'265
The
vector
{142}
relative
the
basis
{[12
3], [3 1
2],
[225]}
is
transformed
to the new
basis
2.
Linear algebra
33
Page 37

Interface:
1 1 0
0
1 1
1 0 1
2.
Linear algebra
34
A
matrix defines a linear
transformation
in a
vector
sp
ace
re-
tp
lative
the
"natural" basis. This routine calculates
a new
trans-
formation
matrix
relative
a new
basis.
The
"natural" basis
is
{[100],[010],[001]}inR3.
£
111
Oil
**-
001 frr-
The
transformation
matrix
{{110}{011}{101}}in
natu-
*""*•
ral
basis defines
the
transformation:
§E
L(X1,X2,X3) = (XI + X2,X2 + X3,X3 + Xl)
|
&
Page 38

The
example calculates
the new
transformation matrix
rela-
tive basis
{[111],[0
11],[0 0 1]}.
Symbolic elements
are
pos-
sible
in the
matrices.
5-53
S-H
n
1-3
r:
•—a
e
2.
Linear algebra
35
Page 39

Laplace
transforms
u(t-a):
IF t a <
THEN 0 ELSE
IF t a >
then
1 END END
Laplace transforms
are
used
for
solving differential equa-
tions
and
can, contrary
to
other methods, deal with functions
f(t)
that
are
discontinous
in the
equation
a*y"
+b*y' + c*y=f(t)
*e^~
£
Discontinous f(t)
may be
composed
by
using
the
Unit Step
function
u(t-a) defined
as:
~
This
function
is not
implemented
in
CALCULUS
in
other
ways
than
as a
symbol,
and the
user
has to
make a program
~
<--
to
define
it
for
evaluation.
"
I
3
3
3.
Laplace
transforms _ 36
Page 40

Laplace
transform
The
Laplace transform
of the
following functions
may be fo-
und:
• f (t) = Sin(a*t), a arbitrary
•
f(t) = Cos(a*t), a arbitrary
•
g(t)
=f(t)*ea , a
arbitrary
•
g(t)=f(t)*u(t-a),a>0
•
g(t) = f(t)*u(t-a)*ebt,
a>0 b arbitrary
•
h(t)=g(t)*t
•
Linear combinations
of
theese
functions
Interface:
RAD
{HOME}
PRG
F(s)=L(f(t))
:t
s: t s
:f(t):t^2*u(t-l)
The
example calculates
the
Laplace transform
of
=
t~2*u(t-l).
3.
Laplace transforms
37
Page 41

.
,/f
CALCULUS cannot
find the
Lapla-
ce
transform
an
error
message
is
given (the
transform
does
not
exist
or its not
implemen-
ted)
Inverse
Laplace transform:
The
inverse transform
is
calculated.
The
types
of
functions
which
can be
inverted
are the
transforms
of the
functions lis-
ted on
page
37.
Interface:
n
RAD
{HOME
}
PRG
f(t)=InvL(F(s))
:s
t: s t
The
example
calculates
the
inverse
transform
of
3.
Laplace transforms
38
Page 42

Inverse L Partial fractions
If
the
denominator
of
F(s)
is of
second degree
and may be
factorized
in
first
degree
factors,
or of a
higher degree than
2,
the
denominator
has to be
split into partial fractions.
Intermediate results (Partial Answers)
is
possible
to
show
the
splitting
into partial
fractions.
Rem.
If
the
transformation
does
not
exist
the
error
message
"does
not
exist"
is
given.
If
the
expressionis
too
complicatedthemessage
"not
rational"
may
appear.
The
expression
may
then
be
split
up.
3.
Laplace transforms
39
Page 43

Interface:
fet
RAD
{HOME
}
: t s
:PartAns
n i ?"*
*""*"'<
F(s)=P(s)/Q(s)
InvL(F(s))=f(t)
: t s
Y/N:Y
V*
J« I %
*
PRG
•^
^
RAD
{HOME}
Input cont
:Numerator
P:
:Exp(-ir*s)'
:Denominator
Q:
's ^ 2-1'
PRG
v^
*•
In the
example F(s) = &"***/(s
-1) is
split into partial fractions
and
then
transformed.
The
shift
e"778
will
be
taken care
of
be-
fore
the
splitting into partial fractions.
3.
Laplace transforms
40
5
S£"-c
S
Jjjp-C
IB
e*
Page 44

Differential
equations (initial value problem)
Laplace transforms
are
suitable
for
solving initial value pro-
blems,
in
particular when
the
"right hand side function"
is
discontinous.
The
answer
is
given
in the
form
Y(s)
=P(s)/Q(s)/R(s)
which
has
to be
transformed into
P(s)/((Q(s)*R(s)))
before
the ro-
utine
for
partial fractions
is
used
to
solve
the
problem.
Interface:
RAD
{HOME
}
PRG
ay"
+ by' +
cy = f(t)
y(0)=yOy'(0)=DyO
:abcyODyO
:
13201
:
f(t)
t:
'SIN(t)'
t
The
equation
y" + 3y'4-2y = Sin(t)
with initial conditions
y(0)
= 0 and
y'
(0) = 1 is
transformed.
3.
Laplace transforms
41
Page 45

Probability
In
this chapter
of
probabihty
theory
we
will look
at
unlike
di-
screte
probability distributions
in
addition
to the
normal dis-
tribution which
is
continous.
For the
discrete distributions
both
the
cummulative
probability
and the
point probability
may
be
calculated.
For the
discrete
distributions
and in
connection with
pure
combinatorial calculations,
we
have
distinquished
between
with
and
without replacement.
e=
B:
5:
^
3
Rem.
Probabilities
must
be
less
then
or
equal
to
1 and
greater
than
or
equal
to 0.
•UT
L
4.
Probability
42
WBT
't_
Page 46

Without
replacement
Without
replacemnet
means that
we
dont
put the
drawn ele-
ment back again.
Combinations,
not
ordered
This routine calculates
the
number
of
possibilities
to
draw
k
elements
of
total n without replacement
and
without regard
to
order.
Interface:
RAD
{HOME
}
N
:n
k:
PRG
Draw
k of n
F = n!/((n-k)!*k!)
15
3
^_^_^
.
^
The
example calculates
the
number
og
possibilities
to
draw
3
elements
form
total
15
elements without regard
to
order.
4.
Probability
43
Page 47

Combinations, ordered
If
the
order
is
important
you
will have
to use
this routine.
The
same elements
in
different
orders will
then
be to
separate
events.
Interface:
RAD
{HOME
}
:n
k:
Draw
k of n
ordered
N =
n!/(n-k)!
15
3
*.J*%*^**;*i
JJ'X^-tWw!''^«^J
•&.*
•S^^'!'
•••*
W*^**^*1
*
if
i1
/.,*>»».
^
l*« K si
PRG
^-")
-i-
-X
•***•
I"
e
&
&
e
The
example calculates
the
number
of
combinations when
drawing 3 elements
from
15
with regard
to
order.
Hypergeometric
distribution
Here
the
probability
of
drawing exactly k X'es
from a popu-
lation
of n
when a elements
are
drawn
at a
time without
re-
placement
is
calculated.
The
probability
for
the X to b e
drawn
is
p.
3
Ew-c
gw-
E:
4.
Probability
44
Page 48

Interface:
RAD
{HOME
}
: n a:
:pk:
—
::i
PRG
kX'es
ofn
drawaP(X)=p
20
8
0.6
3
VT;*:.'
Vi
~:x:
:.}&::
The
probability that 3 elements have
the
mark X when dra-
wing 8 elements
of
total
20 is
calculated.
The
probability
of
X
to
occur
is
0.6.
If k > a or p > 1 the
probability
is 0.
The
example
may be
"drawing" individuals
from a population
of
20
where
12 is
women
(p =
12/20 = 0.6).
The
probability
that
of 8
"drawn"
individuals
3 is
women
is
calculated.
Hypergeometric
distribution
function
The
cummulativeprobability
is
calculated, i.e.
the
probability
that maximum k elements
are
drawn. This
is the sum of the
probabilities
of k =
0,k = l,k = 2 and k = 3.
4.
Probability
45
Page 49

Interface:
RAD
{HOME
}
:
n a:
:pk:
maxkX'es
of n
drawaP(X)=p
20
8
0.6
3
PRG
11
- .
The
example calculates
the
probability that 3 elements
is
drawn
with
the
mark
X (p =
0.6)
from a total
of 20 by
drawing
4
at a
time
or 1 by 1
without replacement.
With
replacement
Here
the
elements
are
replaced
by
drawing
so
that
the
prob-
ability
is the
same every time
an
element
is
drawn (uncondi-
tional drawing).
Combinations,
unordered
This routine calculates
the
number
of
combinations
of
dra-
wing k elements
from n without replacement, without regard
to
order.
4.
Probability
46
Page 50

Interface:
RAD
{HOME}
PRG
Draw
k of n
:n k:
15
3
Here
the
probability
of
drawing 3 elements
of
total
15 is
cal-
culated.
Order
is
indifferent.
Combinations,
ordered
If
the
order
is
critical, this routine
has to be
used.
The
same
elements
in
different
orders
are two
separate events.
Interface:
RAD
{HOME}
PRG
:n k:
Draw
k of n
ordered N = n ^
k
15
3
4.
Probability
47
Page 51

The
example calculates
the
number
of
possibilities with
the
same figures
as in the
previous example,
but now
with regard
to
order.
Binomial
distribution
The
routine calculates
the
probability
of
drawing exactly
k
elements with
the
mark
X of
total
n,
where
the
probability
of
X
itself
is p.
Independent trials (with replacement).
Interface:
RAD
{HOME
}
:np:
: k:
ofrrsf*
PRG
kX'es
of n
P(X)=p
10 0.6
3
The
probability
of
drawing 3 elements with
the
mark X when
X
has the
probability
of 0.6 is
calculated.
The
number
of in-
dependent trials
is 10. p > 1
gives
an
error message.
The
example
may be the
production
of
glasses where
the
probability
of
first
assortment
is
0.6.
If 20
glasses
are
produ-
4.
Probability
48
Page 52

ced,
the
example calculates
the
probability that 3 glasses
are
first
assortment.
Binomial
distribution function
The
cummulative
probability
is
calculated,
i.e.
the sum
of
the
probabilities
for k =
0,
k=l, k = 2 andk=3
if k = 3.
Interface:
RAD
{HOME
}
PRG
maxkX'es
of n
P(X)=p
10
0.6
3
-.
The
example calculates
the
probability that maximum 3 ele-
ments
have
the
mark
X (p =
0.6)
in 10
independent trials.
Negative
binomial distribution
This distribution gives
the
probability
of k
failures
before
the
rth
success
in a
series
of
independent trials each
of
which
the
probability
of
success
is p.
4.
Probability
49
Page 53

Interface:
RAD
{HOME}
PRG
k not
X'es before
XrthtimeP(X)=p
r p: 10
0.25
k:
15
f
^-
•% „ %
•*s~*5«*
z-"^
r*
The
probability
of 15
failures before
the
10th success when
the
probability
of
success
is
0.25
is
calculated.
The
example
may be the
drawing
of
cards
and the
calculation
of
the
probability
of
drawing
15
cards that
are not
clubs
be-
fore
the
10th club.
S
Negative
binomial distribution function
This routine calculates
probability
of
maximum k failures
be-
fore
the
rth
success.
4.
Probability
50
Page 54

Interface:
RAD
{HOME
}
PRG
max
k not
X'es before
X
rth
time
P(X)=p
: r p: 5 0.4
: k: 4
The
probability
of
maximum 4 failures
before
the 5th
success
is
calculated. Probability
of
success
is
0.4.
The
example
may be the
drawing
of
balls
from a hat
that con-
tains
40%
white balls.
The
probability
of
finding
5 not
white
balls before drawing maximum 4 white balls
is
calculated.
Pascal
distribution
The
probability
of the rth
success
in kth
trial
in a
series
of
in-
dependent trials
is
calculated.
4.
Probability
51
Page 55

Interface:
L
RAD
{HOME}
PRG
r
p:
k:
X
rth
time
kth
trial
P(X)=p
5 0.5
8
The
probability
of
finding
the
mark
X 5th
time
in the 8th
tri-
al
is
calculated.
_
L
Rem.
The
geometric
distribution
is a
special
case
with
r=l.
a
fee
Pascal distribution function
The
probability
of the rth
success
in
maximum k trials
is
cal-
culated.
The
probability
of
success
is p.
4.
Probability
52
Page 56

Interface:
RAD
{HOME}
PRG
: r p:
: k:
X
rth
time
max k
trials
P(X)=p
5 0.5
8
The
example calculates
the
probability
of
finding
the
mark
X
the 5th
time
in
maximum 8 trials (Tossing a fair
coin
we
find
the
probability
of
finding
the 5th
head
in
maximum 8 trials).
Normal distribution
This
is a
continous distribution
and
only
cummulative
prob-
abilities
are
calculated.
4.
Probability
53
Page 57

Interface:
RAD
{HOME}
PRG
Normal distribution
param. ^ and
o-
gives
P(X<x)
JLCT:
0 1
x:
1
The
probability that a random variable
is
less than
or
equal
to
1 is
calculated.
The
mean
and the
standard deviation
is 0
and
1.
Rem.
P(a<x<b)=P(x<b)-P(x<a)
and
P(x>a)=l-P(x<a)
Poisson
distribution
£
The
Poisson distribution
is
used
as a
model when
we are in-
terested
in
events within intervals
of
time
or
other variables.
3
"T
4.
Probability
54
Page 58

Interface:
RAD
{HOME}
PRG
Poisson distr.
mean
p,
and P(X = k)
:ak:
4 5
The
example calculates
the
probability that a random
varia-
ble X is
exactly 5 when
the
mean
is 4.
Poisson distribution function
Interface:
RAD
{HOME
}
PRG
Poisson distr.
meanjx
and
P(X<k)
:
45
4.
Probability
55
Page 59

The
probability that
X is
less
then
or
equal
to 5 is
calculated,
the
mean
is 4.
Info
Here
information about probability
and
some distributions
is
given.
Binomial
coefficients
Binomial
coefficients
Bnk = n!/((n-k)!*k!)
are
calculated
from k = 0 to k =
n and put in a
list.
Interface:
RAD
{HOME
}
PRO
Binomial
coeff.
=
n!/((n-k)!*k!)
k = 0...n
The
example calculates {BnO
Bnl
Bn2
Bn3
Bn4
Bn5}.
4.
Probability
56
Page 60

Statistics
We
will
focus
on
some statistical methods
and
description
of
samples. Within description
of
samples
we
will
use
discrete
tables
and
class
tables (discrete
and
class statistics).
You can
convert
from
class statistics
to
discrete statistics
by
using
the
mean value
of the
intervals
as the
discrete value.
Statistical methods
are
represented
by
confidence intervals
and
hypothesis testing
for
distributions.
The
"best"
fit for the
normal distribution uses
the
method
of
least squares.
The
normal distribution,
kjisquare
distribution
and
student-t distribution
are
included
and its
possible
to find
both
the
probability
and the
value
of the
random variable
for
given
probability.
5.
Statistics
57
Page 61

Distributions
Normal
distribution
The
normal distribution gives
p(X<x)
for
given
x-value.
The
mean
\L
and
standard deviation
o-
have
to be
known.
Interface:
RAD
{HOME}
PRO
Normal
distribution
pararn. ^ and
o-
gives
P(X<x)
:^cr:
0 1
'
: x: 1
^ 3 ^
*"
'""'
*1 ^ *'"*'
*
V*
f**"^1**"11
^
'
>*
*%
A.
j. ^ i
P(X<
1) for n = 0 and
o-
= 1 is
calculated.
Inverse
normal distribution
The
routine
finds
the
value
of the
random variable x with
gi-
ven
probability
p, ^ and
o-
are
known.
5.
Statistics
58
Page 62

Interface:
RAD
{HOME}
PRG
Normal
distribution
JLO-gives
x,P(X<x)=p
:^a:
0 1
: p: 0.6
>*v' > '«**'
•" < 5 " ''%.('<&•''
r*%***•*«
i
X1
f
'*•
S
The
value
of x
with
P(X
<x) = 0.6,
jj,
= 0 and a =
1 is
calcula-
ted.
Kjisquare
distribution
The
kjisquare
distribution
is
used
to find
confidence intervals
and
in
connection with
fitting a
distribution
to a
sample.
Interface:
RAD
{HOME
}
PRG
Kjisquare
distr.
degrees
of
freed.
KP(X<x)
: K x: 3 5.6
5.
Statistics
59
Page 63

The
example calculates
P(X < 5.6) where
X is
kjisquaredistri-
buted with 3 degrees
of
freedom.
Inverse
kjisquare
The
value
of x for
given probability
is
calculated.
Interface:
*f
RAD
{HOME}
PRG
Kjisquare
distr.
degrees
of
freed.
KP(X<x)
=p
: K p: 3
0.85
3
The
example
calculates
the
value
of X so
that
P(X
<x) = 0.85
with 3 degrees
of
freedom.
Studen-t
distribution
This distribution
is
used
to find
confidence intervals
in
CAL-
CULUS.
"T
5.
Statistics
60
Page 64

Interface:
RAD
{HOME
}
PRG
Student-t
distr.
degrees
of
freed.
KP(X<x)
: K x: 3 7.5
P(X<7.5)
with 3 degrees
of
freedom
is
calculated.
Inverse
student-t
This routine calculates
the
value
of the
random variable
x.
Interface:
RAD
{HOME}
PRG
Student-t distr.
degrees
of
freed.
KP(X<x)
=p
: K p: 3
0.85
The
value
of x is
calculated
so
that
P(X<x) = 0.85 with
3 de-
grees
of
freedom.
5;
Statistics
61
Page 65

Confidence
intervals
Confidence
intervals
in
connection with
the
normal distribu-
tion
are
calculated
for the
mean , and
variance
o-
.
Rent.
Mean value
and
standard
deviation
for
a
sample
may be
calculated
under
this
menu.
Theese
values
may be
used
as
point
estimates
for
the
parameters
in the
distribution
function.
Confidence
interval
for the
mean
(x,
given value
of a.
For
known
a we may use the
normal
dsirribution
to
find
the
value
c so
that F(c) = P(x<
c) =
l/2(-/ + T)
with confidence
le-
vel
-/.
The
interval
is
given
in the
form
[a<
|x<b].
The
interval
is
calculated
from a sample