

Page 1

SEIKI - SEICOS
å10/å18T/å21L
INSTRUCTION MANUAL
OPERATION
40 Edition 1.01 02-2001
NO-0000-1-0211-E-1-02
Hitachi Seiki Deutschland
Werkzeugmaschinen GmbH
Page 2

CONTENTS
1. OUTLINE ......................................................................................... 1 - 1
1-1 Items requiring attention when reading this manual. .........................................................1 - 1
2. SPECIFICATIONS .............................................................................. 2 - 1
3. OPERATION......................................................................................... 3 - 2
I. Basic Machine Operation......................................................................................................3 - 2
1. Manual Operation ..............................................................................................................3 - 3
1-1 Jog Feed.................................................................................................................... 3 - 3
1-2 Manual Reference Point Return................................................................................. 3 - 3
1-3 Rapid traverse ........................................................................................................... 3 - 4
1-4 Manual Handle Feed .................................................................................................. 3 - 5
2. Automatic Operation .........................................................................................................3 - 6
2-1 Automatic Mode......................................................................................................... 3 - 6
2-2 Selecting the Run Program ....................................................................................... 3 - 6
2-3 Stopping the Automatic Operation ............................................................................. 3 - 7
2-4 Dry Run ..................................................................................................................... 3 - 8
2-5 Single Block............................................................................................................... 3 - 8
2-6 Override.....................................................................................................................3 - 8
2-7 Per-program Machining T ime Display Function (Option)........................................... 3 - 9
2-8 Tape Operation (Simple DNC Operation) ................................................................ 3 - 10
2-9 DNC Operation (Optional) ....................................................................................... 3 - 10
2.10 Submemory ............................................................................................................. 3 - 14
3. Operation Related to Safety ............................................................................................3 - 19
3-1 Emergency stop ...................................................................................................... 3 - 19
3-2 Overtravel ................................................................................................................ 3 - 19
4. NC Operation keys.......................................................................................................... 3 - 20
5. Quick Tool Setter (Q Setter) ............................................................................................ 3 - 22
5-1 Outline ..................................................................................................................... 3 - 22
5-2 Operation Method .................................................................................................... 3 - 22
5-3 Tool Nose Point Interlock ......................................................................................... 3 - 25
5-4 Related Parameters ................................................................................................ 3 - 25
5-5 Related Alarms ........................................................................................................ 3 - 26
5-6 Compensation Input Checking................................................................................. 3 - 26
6. Q setter barrier................................................................................................................ 3 - 27
6-1 Outline ..................................................................................................................... 3 - 27
6-2 Description of the function ....................................................................................... 3 - 27
6-3 Precautions ............................................................................................................. 3 - 28
6-4 Related parameters ................................................................................................. 3 - 28
i
Page 3

7. Q Setter Repeat Function ............................................................................................... 3 - 29
7-1 Outline ..................................................................................................................... 3 - 29
7-2 Operation................................................................................................................. 3 - 29
7-3 Working ................................................................................................................... 3 - 30
7-4 Precaution .............................................................................................................. 3 - 33
7-5 Relevant Parameters............................................................................................... 3 - 33
7-6 Relevant Alarms....................................................................................................... 3 - 34
8. Simple Jaw Edge Forming Function ............................................................................... 3 - 34
8-1 Outline ..................................................................................................................... 3 - 34
8-2 Operation................................................................................................................. 3 - 34
8-3 Function Keys.......................................................................................................... 3 - 36
8-4 Jaw Configuration And Machining Conditions .......................................................... 3 - 36
8-5 Precaution ............................................................................................................... 3 - 37
8-6 Relevant Parameters............................................................................................... 3 - 37
8-7 Relevant Alarms....................................................................................................... 3 - 37
8-8 Set V alues for Standard Soft Jaws .......................................................................... 3 - 39
8-9 Operation Of Simple Soft Jaw Forming Function .................................................... 3 - 45
II. Screen Operation............................................................................................................ 3 - 49
1. Screen Layout and Basic Operation ............................................................................... 3 - 50
1-1 Main Display Area .................................................................................................... 3 - 50
1-2 Alarm Display Area .................................................................................................. 3 - 51
1-3 Program Number Display Area................................................................................ 3 - 51
1-4 Key Input Area.......................................................................................................... 3 - 52
1-5 Error Message ......................................................................................................... 3 - 52
1-6 Function Menu ......................................................................................................... 3 - 52
1-7 Tree Chart................................................................................................................ 3 - 53
2. Operation of Overall Screen............................................................................................3 - 55
2-1 Program................................................................................................................... 3 - 56
2-2 Tool Path Plot........................................................................................................... 3 - 57
2-3 Tool Data.................................................................................................................. 3 - 57
2-4 Spindle Dat a ............................................................................................................ 3 - 57
2-5 Feed Speed ............................................................................................................. 3 - 57
2-6 Rotary Tool Speed.................................................................................................... 3 - 57
2-7 Spindle Clamp Speed .............................................................................................. 3 - 57
2-8 Dwell........................................................................................................................ 3 - 57
2-9 Load Meter ............................................................................................................... 3 - 57
2-10 Positional Data ........................................................................................................ 3 - 57
2-11 G Codes .................................................................................................................. 3 - 58
2-12 M codes ................................................................................................................... 3 - 58
2-13 Time Measurement.................................................................................................. 3 - 58
2-14 Date And Time ......................................................................................................... 3 - 59
ii
Page 4

3. Position ...........................................................................................................................3 - 60
3-1 Reloading of Relative Coordinate System ............................................................... 3 - 61
3-2 Command Value Display ......................................................................................... 3 - 61
3-3 Restart (Option)....................................................................................................... 3 - 61
3-4 Floating reference.................................................................................................... 3 - 61
3-5 Set up ...................................................................................................................... 3 - 61
4. Work Coordinates (Offset).............................................................................................. 3 - 64
4-1 Removal Amount ..................................................................................................... 3 - 65
4-2 Machining Reference Point Shift.............................................................................. 3 - 65
4-3 Work Length ............................................................................................................ 3 - 65
4-4 External Work Zero Point Offset .............................................................................. 3 - 65
4-5 Setting of 2nd Reference Point................................................................................ 3 - 66
5. Set (Data)........................................................................................................................3 - 67
5-1 Display and Setting.................................................................................................. 3 - 67
5-2 Number Search ....................................................................................................... 3 - 68
5-3 Eco-eco ................................................................................................................... 3 - 71
6. Macro V ariable.................................................................................................................3 - 72
6-1 Macro V ariable and Dat a Display............................................................................. 3 - 72
6-2 Number Search ....................................................................................................... 3 - 72
7. Plot.................................................................................................................................. 3 - 74
8. Plotting Parameters ........................................................................................................3 - 76
9. Tool (offset) ..................................................................................................................... 3 - 80
9-1 Setting of Offset Value ............................................................................................. 3 - 81
9-2 Tool list..................................................................................................................... 3 - 81
9-3 Setting of T ype......................................................................................................... 3 - 82
9-4 Setting of Name ....................................................................................................... 3 - 83
9-5 Data Clear ............................................................................................................... 3 - 83
9-6 Tool life Management ............................................................................................... 3 - 84
9-7 Number Search ....................................................................................................... 3 - 84
9-8 Double Cutting (Option) ........................................................................................... 3 - 84
10. Alarm Diagnosis.............................................................................................................. 3 - 85
10-1 Alarm History ........................................................................................................... 3 - 86
11. System............................................................................................................................ 3 - 87
11-1 Parameter Setting.................................................................................................... 3 - 87
11-2 Diagnosis................................................................................................................. 3 - 89
11-3 Mechanical Compensation ...................................................................................... 3 - 91
11-4 Position Region ....................................................................................................... 3 - 92
11-5 Software V ersion......................................................................................................3 - 93
11-6 Date and Time ......................................................................................................... 3 - 94
11-7 SLBUS..................................................................................................................... 3 - 95
11-8 System Table........................................................................................................... 3 - 96
1 1-9 F Menu..................................................................................................................... 3 - 96
iii
Page 5

12. Program .........................................................................................................................3 -101
12-1 Operating Key Input Area On Screen...................................................................... 3 -102
12-2 Displaying Program ................................................................................................ 3 -102
12-3 Creating New Program ........................................................................................... 3 -102
12-4 Deleting Program.................................................................................................... 3 -103
12-5 Initialization Of Program Memory............................................................................ 3 -103
12-6 PROGRAM SEARCH ............................................................................................. 3 -103
12-7 Program Copy ........................................................................................................ 3 -104
12-8 Changing Program Number.................................................................................... 3 -104
12-9 Program Editing (Edit Mode or Background Editing) .............................................. 3 -104
12-10Word Search .......................................................................................................... 3 -105
12-11Background Edit (Program Screen Only) ............................................................... 3 -106
12-12Range Assignment Edit Operation (Program Screen Only) ................................... 3 -108
12-13Word Convert (Program Screen Only) ................................................................... 3 -110
12-14Macro Variables .......................................................................................................3 -111
13. Program List .................................................................................................................. 3 -1 1 2
13-1 Program List........................................................................................................... 3 -112
13-2 Program Search ..................................................................................................... 3 -114
13-3 Program Delete ...................................................................................................... 3 -114
13-4 Program Arrangement ............................................................................................ 3 -1 15
13-5 Program Merging .................................................................................................... 3 -115
13-6 Initialization Of Program Memory............................................................................ 3 -115
14. Input / Output.................................................................................................................. 3 -1 16
14-1 Program List........................................................................................................... 3 -117
14-2 Data Setting Table................................................................................................... 3 -118
14-3 Check ..................................................................................................................... 3 -120
14-4 Details Of Setting Data ........................................................................................... 3 -120
14-5 Call Select (Optional).............................................................................................. 3 -122
14-6 Don-Don FD I/O Screen ......................................................................................... 3 -123
15. Input/Output (With PC Card Used) ................................................................................3 -125
15-1 Available PC Cards................................................................................................. 3 -125
15-2 Initial Formatting of PC Card................................................................................... 3 -125
15-3 Starting PC Card Operation.................................................................................... 3 -125
15-4 Ending PC Card Operation..................................................................................... 3 -127
15-5 PC Card Input/Output ............................................................................................. 3 -128
15-6 Operating the PC Card Directory ........................................................................... 3 -131
15-7 Error Messages ...................................................................................................... 3 -136
4. INDIVIDUAL PROGRAMS .................................................................. 4 - 2
I . Tool Life Management .......................................................................................................4 - 2
1. Outline of tool life management ................................................................................. 4 - 2
2. Operation of tool life management function ............................................................... 4 - 2
3. Screen explanations .................................................................................................. 4 - 2
4. Alarm .........................................................................................................................4 - 3
iv
Page 6

5. Spare tool................................................................................................................... 4 - 3
6. Registering and deleting the spare tool...................................................................... 4 - 3
7. Selection order of spare tools .................................................................................... 4 - 4
8. Sample Program ....................................................................................................... 4 - 4
8-1 Details of Tool Life by Times ...................................................................................... 4 - 5
I I . Cutting Monitor ..................................................................................................................4 - 6
1. Outline of Cutting Monitor .......................................................................................... 4 - 6
2. Monitoring Function.................................................................................................... 4 - 6
3. Description of Monitoring Function ............................................................................ 4 - 6
4. Load Settings............................................................................................................. 4 - 8
5. Monitoring Operation.................................................................................................. 4 - 9
6. Load Graph.............................................................................................................. 4 - 10
7. Life Graph ................................................................................................................ 4 - 11
8. Alarms ..................................................................................................................... 4 - 11
9. Sample Program ..................................................................................................... 4 - 12
10. Parameters.............................................................................................................. 4 - 12
10-1 Selection of Monitored Data System (Parameter 8000) .......................................... 4 - 12
10-2 Selection of Initial Setting (Parameter 8001)............................................................ 4 - 12
10-3 Automatic Calculation Parameters (Parameters 8010-8029).................................. 4 - 13
10-4 Timer Parameters (8030-8044) ............................................................................... 4 - 13
10-5 Adaptive Parameters ............................................................................................... 4 - 14
III. Staf ..................................................................................................................................4 - 15
1. Periodic Check ........................................................................................................ 4 - 15
1-1 Periodic Check - Main Screen ................................................................................. 4 - 15
2. Status Display/OK Monitor....................................................................................... 4 - 17
3. Instruction Manual Information ................................................................................. 4 - 18
4. LSSOL diagram (Switch Status).............................................................................. 4 - 19
4-1 Layout Drawing........................................................................................................ 4 - 19
4-2 List........................................................................................................................... 4 - 20
IV. UUP Function.................................................................................................................. 4 - 21
1. General Description ................................................................................................. 4 - 21
1-1 Applicable CNC Models ........................................................................................... 4 - 21
2. Connection of UUP .................................................................................................. 4 - 21
2-1 UUP Specifications.................................................................................................. 4 - 21
2-2 Connecting between the PC and CNC Unit ............................................................. 4 - 21
2-3 Setting the TCP/IP addresses ................................................................................. 4 - 23
2-4 Setting/Referring to the IP Address on the CNC Side .............................................. 4 - 24
2-5 Connecting Materials ............................................................................................... 4 - 28
V. External Measuring Function........................................................................................... 4 - 29
1. Outline........................................................................................................................... 4 - 29
2. Tool Data....................................................................................................................... 4 - 30
3. External Measurement .................................................................................................. 4 - 31
4. Qualitative Compensation............................................................................................. 4 - 32
5. Wear Management ....................................................................................................... 4 - 33
v
Page 7

vi
Page 8

1. OUTLINE
SEICOS-∑10L, ∑16T, ∑18T and ∑21L are products that have integrated the latest device
technology and realized down-sizing with high reliability .
The machine is designed by giving consideration to users standpoint in the operating system as
the man-machine interface, thus offers a most easy-to-operate machine.
This manual contains explanation on the operating method of the following models. As for the
subject of programming, refer to “SEIKI-SEICOS
subjects on alarms and maintenance to “SEIKI-SEICOS
respectively.
Model Name Abbreviation
SEIKI-SEICOS ∑10L S-∑10L
SEIKI-SEICOS ∑16T S-∑16T
SEIKI-SEICOS ∑18T S-∑18T
SEIKI-SEICOS ∑21L S-∑21L
1-1 Items requiring attention when reading this manual.
∑10L/16T/18T/21L program part” and for
∑10/16/18/21 maintenance part”
(1) In this manual and the reference manual “program part”, explanations are made on all the
functions that are applicable to these NC machines, including optional functions. The option
function selected for adoption are different for each machine. Please confirm the
specification of the machine beforehand, as there may be some functions referred to in the
manual are not usable depending on the machine.
(2) In this manual, those functions not specifically remarked “able” should be understood as
“unable”.
(3) The contents of this manual may be changed without notice to meet a future machine
improvement.
Note) Programs, parameters, macro variables and tool compensation amounts, etc. are stored in
the memory of NC unit. Generally, these dat a are not lost by switching the power ON/
OFF.
Nevertheless, data could be lost inadvertently or by erroneous operation. Also a case
may occur when you are compelled to have valuable date in the memory cleared for
restoring the system from a trouble.
To cope with such an unexpected situation, we suggest that you take note of the important
data and keep them separately . It facilit ates quick restoration of working condition of the
machine by re-entering the data.
Note) When processing a work, do not start the operation suddenly . Make a trial warm-up run
first for fully confirming that the machine acts correctly , then proceed with subsequent
operating procedures.
1 - 1
Page 9

1 - 2
Page 10
2. SPECIFICA TIONS
1. CONTROLLED AXES
1-1 Controlled Axes
The 2 axes, X and Z, are controllable. Optionally , additional axes can be appended. The ∑10L
can control up to 6 axex, including 4 additonal axes, the 3rd through 6the axes. The
control up to 4 axes, including 2 additional axes, the 3rd and 4th axes.
1-2 Simultaneous Controllable Axes
The 2 axes, X and Z, can be controlled simultaneously regardless of rapid traverse or cutting
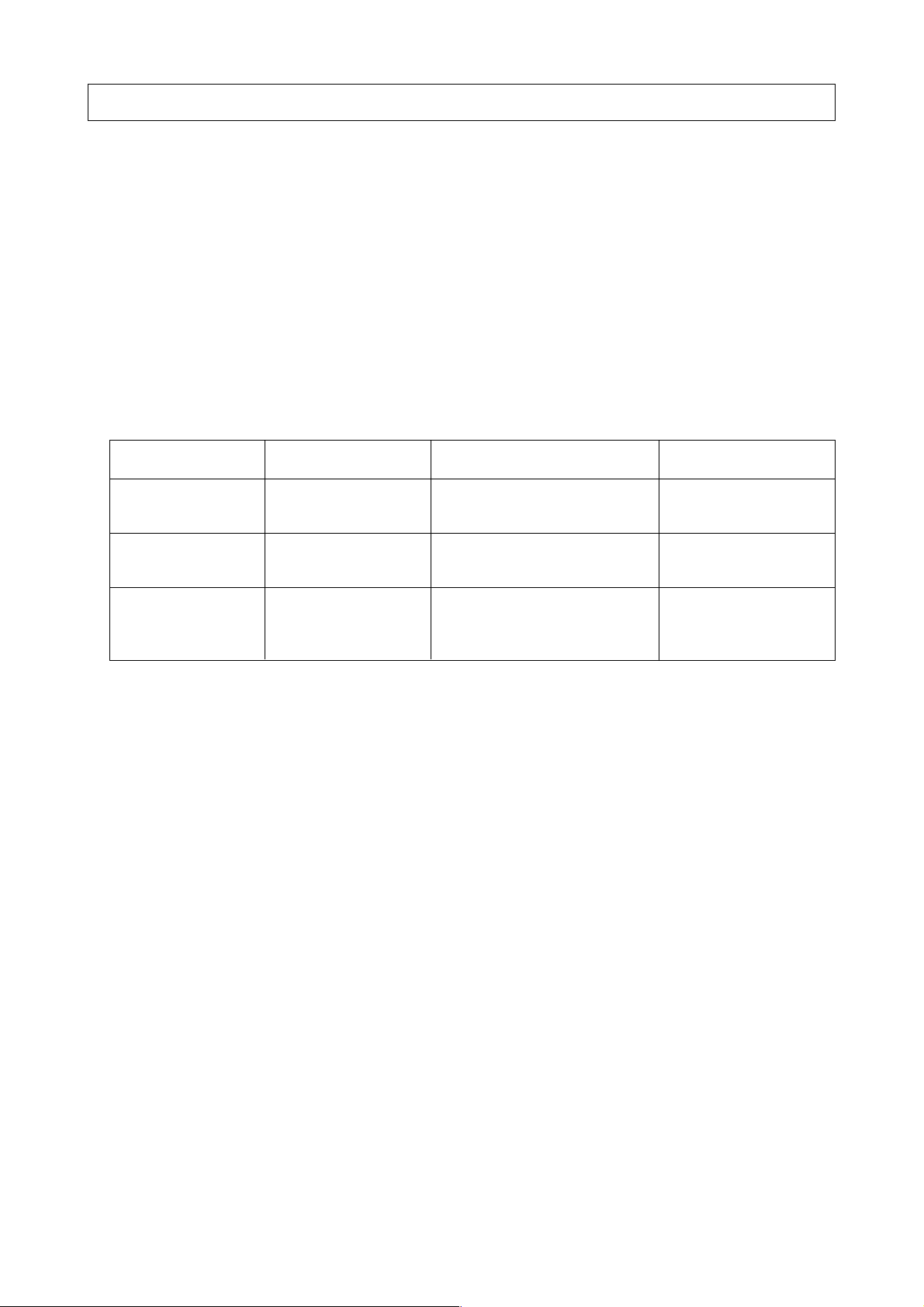
feed. Table 1-2 shows the configuration of the controlled axes.
Table 1-2
No. of Axes Axis Name Remarks
Standard 2 axes X, Z
controlled axes
Additional axes ∑10L: 4 axes Select out of Y,
control
∑21L: 2 axes A, B and C
∑21L can
Simultaneous Standard 2 axes + All the axes specified by
controllable axes additional axes the system
(up to 4 axes)
Note 1) The number of controlled axes, and relations between the axis name and axes can be
selected with parameters.
1-3 Increment System
There are two types of increment systems; IS-B and IS-C. You can select either of them by a
parameter. (IS-A is not available for the moment.) Millimeter/inch switching is set with a
parameter. For detailed description of parameters, refer to “Parameters”.
1-4 Maximum Commandable Value
Table 1-4 (next page) shows the increment systems and commandable values.
1-5 10-Time Minimum Setting Unit
The input increment can be made 10 times larger by parameter setting. Table 1-5 (next page)
shows the commandable values.
2 - 1
Page 11
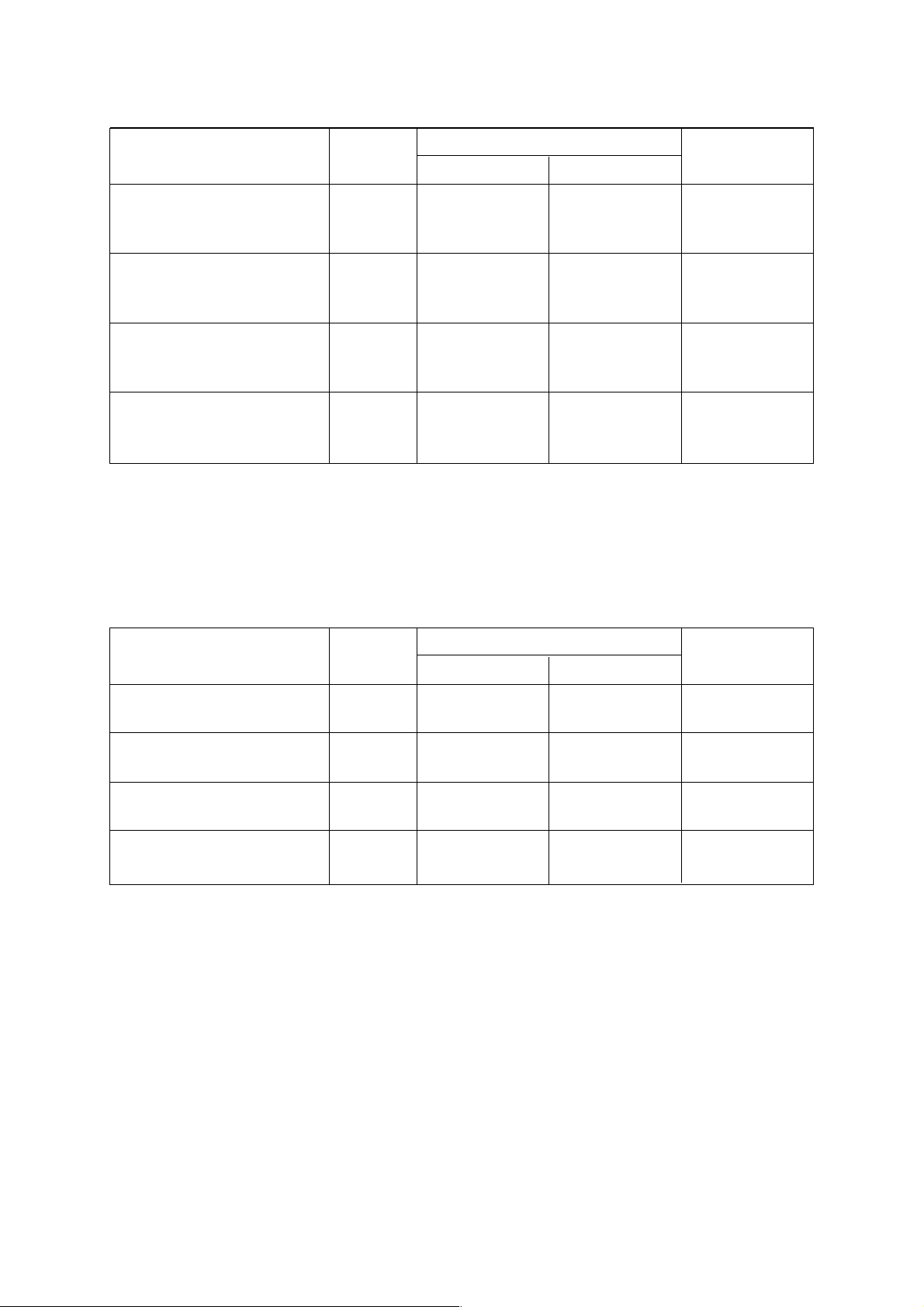
Table 1-4
Linear Axis
Unit Type
Minimum setting unit IS-A 0.01 0.001 0.01
IS-B 0.001 0.0001 0.001
IS-C 0.0001 0.00001 0.0001
Least command increment IS-A 0.01 0.001 0.01
IS-B 0.001 0.0001 0.001
IS-C 0.0001 0.00001 0.0001
Maximum stroke IS-A ±999999.99 ±99999.999 ±999999.99
IS-B ±99999.999 ±9999.9999 ±99999.999
IS-C ±9999.9999 ±999.99999 ±9999.9999
Maximum commandable IS-A ±999999.99 ±99999.999 ±999999.99
value IS-B ±99999.999 ±9999.9999 ±99999.999
IS-C ±9999.9999 ±999.99999 ±9999.9999
[10-Time Minimum setting unit]
For the Types IS-B and IS-C, the minimum setting unit can be made 10 times lartger by
parameter setting.
(mm) (inch)
Table 1-5
Rotary Axis
(deg.)
Linear Axis
Unit Type
Minimum setting unit IS-B 0.01 0.001 0.01
IS-C 0.001 0.0001 0.001
Least command increment IS-B 0.001 0.001 0.001
IS-C 0.0001 0.0001 0.0001
Maximum stroke IS-B ±99999.999 ±99999.999 ±99999.999
IS-C ±9999.9999 ±9999.9999 ±9999.9999
Maximum commandable IS- B ±999999.99 ±99999.999 ±999999.99
value IS-C ±99999.999 ±9999.9999 ±99999.999
Note 1) For the Type IS-A, nothing is changed even if you set the parameter for 10-time minimum
setting unit.
(mm) (inch)
Rotary Axis
(deg.)
1-6 Position Detector
The pulse encoder is provided as a standard position detector . Optionally, the pulse scale or the
Inductosyn detecting function can be selected. When the Inductosyn detecting function is
selected, however , you need a converter which serves as an interface equivalent to the pulse
scale.
Absolute encoder will be installed for adding the optional absolute position detection function.
2 - 2
Page 12

2. INTERPOLATING FUNCTIONS
2-1 Positioning (G00)
Each axis can be fed at a rapid traverse rate independently by specifying G00.
2-2 Linear Interpolation (G01)
Linear interpolation is performed at the feed rate specified by an F-code in a G01 command.
2-3 ANGLE DESIGNATION LINEAR INTERPORATION (G01)
With G01, an angle from Z axis is specified where linear interpolation is commanded.
2-4 Circular Interpolation (G02, G03)
Circular interpolation can be performed arbitrarily at 0 to 360° at the feed rate specified by an Fcode in a G02 or G03 command.
2-5 Radius Designation on Arc (G02, G03)
R can be directly specified as a circular arc radius value, assuming, I, J, and K to be a vector
amount from a start point to the center in circular interpolation.
2-6 Sine Curvilinear Interpolation <Virtual Axis Interpolation> (G07)
Not available with
By performing interpolation without moving one axis within a circular arc plane (hypothetical
axis) in a helical cutting command, sine curvilinear interpolation is performed between the
remaining two axes.
2-7 Helical Cutting......Not available with
Another axis is linearly interpolated synchronously with circular interpolation.
∑∑
∑21L.
∑∑
∑∑
∑21L.
∑∑
2-8 Polar Coordinate Interpolation
A command programmed in the orthogonal coordinate system is converted into a linear axis
move (tool) and rotary axis move (work rotation) to control a profile.
2-9 Cylindrical Interpolation
If a linear axis stroke and rotary axis angle are specified by a program command, the rotary axis
stroke internally specified in terms of angle is converted into a distance on the circumference.
As the distance on the circumference can be regarded a linear axis stroke on the
circumference, linear interpolation and circular interpolation can be performed in combination
with other linear axis.
2 - 3
Page 13
3. THREADING
3-1 THREADING (G32)
With F or E code, a thread lead is directly commanded. With E code, you can assign the
number of thread ridges per inch can be assigned by a parameter .
3-2 MULTIPLE THREADIGN (G32)
Use this to perform multiple thread cutting which has two or more thread ridges in a lead. With
Address Q, command a threading start shift angle. be performed.
3-3 VARIABLE LEAD THREADING
By commanding the increase or decrease amount in lead per one screw thread turning, you can
perform variable lead threading. With Address K, command a lead changing amount.
4. FEED FUNCTION
4-1 RAPID TRAVERSE RATE AND RAPID OVERRIDE
The maximum speed available in the axial direction is 240,000mm/min (IS-B). Further, override
can be applied to rapid traverse by rapid override.
4-2 CUTTING FEED RATE AND FEED OVERRIDE
The maximum feed rate range available for setting is 6~240,000mm/min (IS-B).
Override can be applied, by feed rate override, within a range of 0~200% by every 10%.
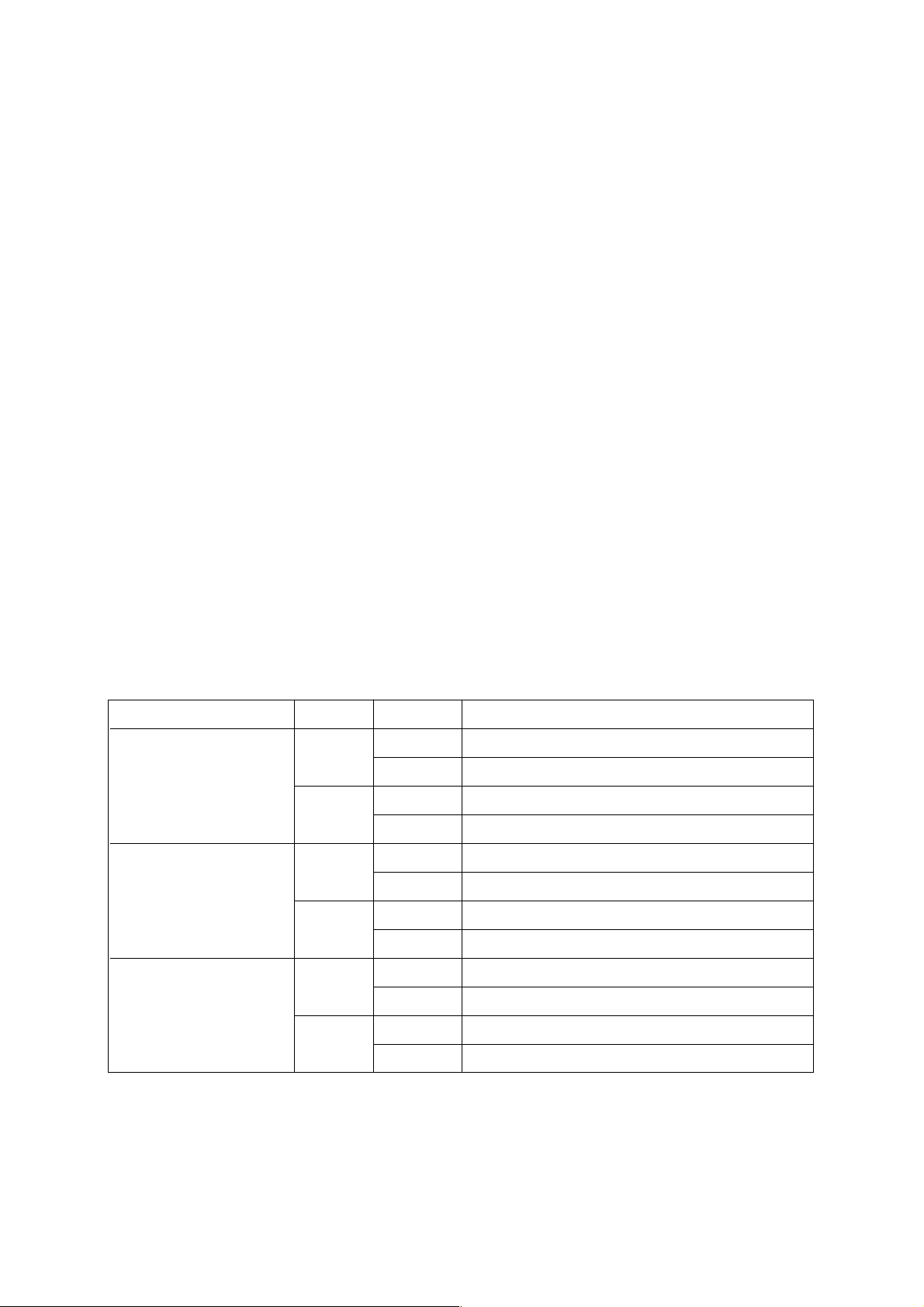
Table 4-2 shows the ranges of feed rate command values:
TYPE F COMMAND RANGE
mm
Feed per minute
(G98)
inch
mm
Feed per revolution
(G99)
inch
mm
Threading
(G32)
inch
F60 F1~F999999 (mm/min)
F61 F0.1~F999999.9 (mm/min)
F51 F0.1~F99999.9 (inch/min)
F52 F0.01~F99999.99 (inch/min)
F32 F0.01~F999.99 (mm/rev)
F33 F0.001~F999.999 (mm/rev)
F23 F0.0001~F99.999 (inch/rev)
F24 F0.001~F99.9999 (inch/rev)
F35 F0.00001~F999.99999 (mm/rev)
F26 F0.000001~F99.999999 (mm/rev)
F26 F0.000001~F99.999999 (inch/rev)
F17 F0.0000001~F9.9999999 (inch/rev)
Note 1) The above types are selected with parameters. (Parameter no. 3401)
Note 2) The maximum cutting feed rate is limited by the cutting feed clamp rate set with a parameter .
Note 3) Address E may be used as the feed rate, where the command value ranges for E and F
are the same.
2 - 4
Page 14

4-3 Override Cancel
A cutting feed override rate can be fixed at 100 % by a signal from the machine.
4-4 Automatic Acceleration/Deceleration
Linear acceleration/deceleration is performed in case of rapid traverse, and exponential function
type acceleration/deceleration is performed in case of cutting feed or jog feed.
4-5 Dwell (G04)
Migration to operation in the next program block can be delayed by a specified time by a G04
command. Use P, X, or U for an address.
4-6 Exact Stop Check (G09)
In the block where G09 is specified, an imposition check is made at the end of block execution.
4-7 Exact Stop Check Mode (G61)/Cutting Mode (G64)
Normally, the G64 mode is effected and the program proceeds to the next block immediately
after interpolation is completed. If G61 is specified, the program will proceed to the next block
after entering imposition at the end point of each block, in the subsequent move command. The
G61 mode is cancelled by specifying G64.
4-8 Automatic Corner Override (G62)...... Not available with
An override is applied automatically to a cutting feed rate at a corner during tool diameter
compensation.
∑∑
∑21L.
∑∑
5. REFERENCE POINT
5-1 Reference Point Return A (G27 to G29)
Reference point return A includes the following:
(1) Manual reference point return.
(2) Reference point return check (G27)
(3) Automatic reference point return (G28)
(4) Return from the reference point (G29)
5-2 Reference Point Return B (G30)
Second reference point return (G30) returns the axes to the position set in a parameter .
5-3 Third/Fourth Reference Point Return (G30)
The axes can be returned to the 3rd/4th reference point preset by a G30 command (P3, P4).
5-4 Floating Reference Point Return (G301) …… Not available with
The axes can be returned to the preset optional point of the machine.
2 - 5
∑∑
∑21L.
∑∑
Page 15

6. COORDINATE SYSTEM
6-1 Tool Nose Coordinate System
At the time of turret indexing or manual zero point return, the tool nose position assuming the
machining reference point to be zero (0) is automatically set in the coordinate system.
6-2 Coordinate System Setting (G50)
An axis command following G50 sets the coordinate system where a current tool coordinate
value will be a specified value.
6-3 Machine Coordinate System Selection (G53)
A tool moves to a position in the machine coordinate system by a G53 command.
6-4 Plane Designation (G17, G18, G19)
A G-code is used to specify the plane where you want to perform circular interpolation, tool
diameter compensation, and so on.
G17: X-Y plane, G18: Z-X plane, G19: Y-Z plane
7. COORDINATES AND DIMENSIONS
7-1 Absolute/Incremental Programming
Absolute/incremental programming is switched by a G-code.
Absolute : X Y Z B C
Incremental : U V W D H
7-2 Decimal Point Input
A decimal point can be input to the command data associated with a distance (angle), speed,
and dwell. A decimal point position is after the millimetric or inch units digit.
The addresses which can use decimal points are X, Y, Z, A, B, C, D, H, U, V, W, I, J, K, R, P, Q,
E, and F.
Depending on conditions applies, however, a decimal point may not be usable.
7-3 Inch/Metric Conversion (G20, G21)
You can select the inch system/metric system as units of input by specifying G20/G21.
• G20: Inch input
• G21: Metric input
2 - 6
Page 16

8. SPINDLE FUNCTIONS
8-1 Spindle Function (8-digit S-code)
By specifying an address S following by up to 8-digit numerical command, you can send out an
analog signal and gear signal corresponding to a binary code signal and spindle motor rpm.
8-2 Spindle Override
An override can be applied from 50 to 150 % in an increment of 10 % by an external signal.
8-3 Constant Surface Speed Control (G96, G97)
With a surface speed directly assigned with S code, this function serves to continuously control
the spindle motor rpm so that the circumferential speed is held constant to changes in tool
position. Command to make this function valid or invalid is performed with G code.
G96: Constant surface speed control is performed.
G97: Constant surface speed control is not performed.
9. TOOL FUNCTIONS
9-1 Tool Function (8-digit T-code)
An 8-digit BCD code signal is sent out by specifying an address T followed by up to 8-digit
numerical command.
When ATC is mounted, use T6 digits. When not, use T4 digits.
Use T code to perform A TC operation, tool rest indexing, setting of a work coordinate system (tip
coordinate system), combined compensation, etc..
9-2 Tool Life Management Function
The tools are sorted into several groups and when the cutting time or integrated cutting times of
a tool in each group reaches the specified life time or cutting times, this function selects the next
tool in the preset order .
Note) For the
∑21L, only a life count by M12 is allowed.
10. MISCELLANEOUS FUNCTIONS
10-1 Miscellaneous Function (8-digit M-code)
The machine can be turned on/off by specifying an address M followed by up to 8-digit numerical
value.
10-2 Second Miscellaneous Function (B-function)
An 8-digit BCD code signal is sent out by an address A, B, or C followed by up to 8-digit
numerical command, based on parameter setting.
10-3 Miscellaneous Function Lock
The M, S, T, and B-function commands are disabled. No signal is sent out to the machine.
2 - 7
Page 17
11. PROGRAM CONSTRUCTION
11-1 Command Tape
8-unit black paper tape (EIA RS-227, ISO 1 154, JIS C6246)
11-2 Tape Format
EIA/ISO (At input: Automatic recognition, At output: Selected by a parameter)
11-3 Input Format
A variable-block, word-address format with decimal point (EIA RS-274C, ISO R1056/R1058) is
used.
11-4 Command Tape Codes
Table 11-4
Address Description
A Additional axis coordinate value
B Additional axis coordinate value, 2nd miscellaneous function
C Additional axis coordinate value
D Incremental coordinate value of B axis
E Feed function (threading)
F Feed functions
G Preparatory functions
H Incremental coordinate value of C axis
I X-axis component of the circular arc center
J Y-axis component of the circular arc center
K Z-axis component of the circular arc center
L Canned cycle times designation, Repeat times in a subprogram call
M Miscellaneous function
N Sequence number
O Program number
P Dwell, Program number in a subprogram call
Q Fixed cycle, Multiple threading starting angle
R Radius command value for circular interpolation, Canned cycle
S Spindle functions
T T ool functions
U Incremental coordinate value of X axis, Dwell
V Incremental coordinate value of Y axis
W Incremental coordinate value of Z axis
X X-axis coordinate value, Dwell
Y Y-axis coordinate value
Z Z-axis coordinate value
2 - 8
Page 18
11-5 Command Words and Command Value Ranges
Table 11-5
Function Address Metric input. Inch Input.
Program number # O 1~99999999 1~99999999
Sequence number # N 1~99999999 1~99999999
Preparatory function G 0~999 0~999
Coordinate value X, Y, Z,
U, V, W, ±99999.999(mm) ±9999.9999(inch)
I, J, K,
Q, R , ±99999.999(deg) ±9999.9999(deg)
A, B, C,
Feed function F See the table 4-2. See the table 4-2.
Spindle function S 0~32767 0~32767
Tool function T
Miscellaneous function M 0~99999999 0~99999999
Dwell P, X, U 0~99999.999(sec) 0~99999.999(sec)
Call program number P 1~99999999 1~99999999
Repeat times L 1~99999999 1~99999999
11-6 Subprogram (M98, M99)
A subprogram can be called in the MEMORY mode. A called subprogram can further call
another subprogram. The subprogram can be called eightfold at maximum.
11-7 Programmable Mirror Image (G501, G511)
A mirror image can be applied to each axis by a program command.
11-8 DIRECT TAP (G842, G843)
You can perform highly accurate tapping at high speed in G842/G843 tap cycles, by fully
synchronizing a rotary tool rotation with the feed of X or Z axis.
11-9 Optional Block Skip
A program block containing a slash code, “/”, in its beginning is ignored by turning on the
OPTIONAL BLOCK SKIP switch provided on the p art of the machine. You can add “/2” through
“/9” (optional block skip 2 through 9) as an option.
11-10 Control-in/-out
“(”: Control-out
“)”: Control-in
This function is used when giving a program name to a program number or giving a comment
halfway a program. All the information between control-out and control-in is ignored within a
significant information section.
2 - 9
Page 19
1 1-11 Command Data Input Methods
(1) MDI (manual data input ) through the keyboard
(2) Inputting from an external input/output device via an RS-232C interface (Reading the NC
tape)
11-12 Internal Data Output Methods
(1) Displaying on the CRT
(2) Outputting to an external input/output device via an RS-232C interface (Punching out the NC
tape)
12. HOW TO FACILITATE PROGRAMMING
12-1 Canned Cycle for Drilling (G80~G89, G831, G841, G861)
Drilling, tapping, and boring cycles can be specified in one program block.
12-2 Fixed Cycle (G90, G92, G94)
The following 3 kinds of fixed cycles can be commanded:
(1) Cutting cycle A (G90) → outside/inside diameter cutting
(2) Threading cycle (G92)
(3) Cutting cycle B (G94) → end face cutting
12-3 Maltipul Fixed Cycle
Several kinds of fixed cycles are prepared beforehand to facilitate a program. With information
of the finished configuration alone being given, the tool passage for rough cutting to the end is
automatically fixed. A fixed cycle for threading is also available. They are divided roughly into the
following three:
Maltipul type fixed cycle A : G70, [(G71, G72) T ype 1], G76
Maltipul type fixed cycle B : A + G73, G74, G75
Maltipul type fixed cycle C : B + [(G71, G72) T ype 2]
12-4 Optional Angle Chamfering Corner R (, C/, R)
Optional angle chamfering or corner R can be inserted automatically by adding [,C] or [,R] to the
end of the program block where linear or circular interpolation is specified.
2 - 10
Page 20

13. TOOL OFFSET FUNCTIONS
13-1 Automatic Tip R Compensation and Cutter Compensation
(1) Automatic Nose R Compensation (G143)
It is normally held at G143 (Automatic Nose R Compensation Valid Mode). Therefore,
without G code not being commanded, tip R compensation is automatically executed.
Nose R is set to tool compensation R and virtual nose points (1~8) to T.
(2) Cutter Compensation (G145 : G40~G42)
With G145 command, Cutter Compensation mode is created.
With G40~G42 commands while in this mode, cutter compensation can be carried out.
A tool diameter is set to tool compensation R and a virtual nose point (9) to T.
13-2 Groove Width Compensation (G150 to G152)
When a grooving tool is used, one virtual tool nose (for example, 3) is used to run the program
to apply compensation. It is also necessary to compensate the other virtual tool nose (for
example, 4) side. When this is done, this function compensates the groove width by specifying
a G-code.
13-3 Addition of T ool Offset s
The number of tool offset pairs can be expanded up to 200.
Expansion of tool offset pairs: 64/99/200 (Up to 99 pairs for the
Note) The number of tool offset pairs, 200, is only allowed when the ATC is attached.
∑21L)
14. ACCURACY COMPENSATING FUNCTIONS
14-1 Backlash Compensation
This function is to compensate the lost motions which the mechanical system has.
A compensation amount can be set as a parameter in the least command increment for each
axis within a range of up to 9999 pulses.
14-2 Stored Pitch Error Compensation
This function is to compensate a pitch error for feed screws. Compensation data is set as a
parameter. The number of compensation positions is 128 for each axis.
2 - 11
Page 21

15. MEASURING FUNCTIONS
15-1 Skip Function
If a skip signal is input from an external device in the midst of an X-, Y-, or Z-command following
G31, the next block will be executed, canceling the rest of this command. A skip signal input
position can be read with a system macro variable.
15-2 Q SETTER
Through simple manual operation with the touch sensor, tool offset volume is automatically
written.
15-3 Q-setter Repeat Function
By measuring the tool with the Q-setter once, automatic measurement with the Q-setter is
activated by simple operation when changing tips.
16. CUSTOM MACRO
16-1 Custom Macro
A function peculiar to the user can be created. There are 100 common variables, but their
number can be optionally extended up to 600.
17. AXIS CONTROL
17-1 Follow-up Function
In case of emergency stop or servo alarm, a machine travel amount is reflected on an NC unit
internal position. For this reason, automatic operation is enabled after resetting the emergency
stop or servo alarm, even if you do not have to perform zero point return.
In case of speed feedback or position feedback alarm, however, an actual machine position and
the NC unit internal position do not match, because the follow-up function does not work
properly .
17-2 Mirror Image
This function can reverse the sign of the travel direction specified by a program command or
MDI command for the X-, Y-, Z-axis, or an additional axis. Make this setting in the Setting
screen.
2 - 12
Page 22
18. MANUAL OPERATION
18-1 Manual Continuous Feed
With the axial feed switch being pressed in Jog mode, manual continuous feed is performed.
Feed rates are as follows:
1 Jog feed
Jog feed rate can be changed over into 24 stages through use of the switch. Speed in 24
stages is set with parameters.
2 Manual rapid
When jog feed is executed as the rapid traverse button being pushed, manual rapid traverse
is available.
18-2 Manual Pulse Generator
The machine is capable of fine feed by means of the pulse generator on the machine operation
panel. One rotation of the pulse generator generates 100 pulses. You can select a scale factor
of x 1, x 10, or x M (M=1 to 100 set in a parameter) by a signal from the machine.
19. AUTOMATIC OPERATION
19-1 DNC Operation
With the optional board being added, DNC operation from the host CPU is made available.
19-2 Program Number Search
An 8-digit program number following O can be searched for from the data in the Program
screen.
19-3 Sequence Number Search
A sequence number can e searched for in the program currently selected from the data in the
Program screen.
19-4 Restart of Program
To restart a program, there are three ways; program restart, block restart, and machining break
point return.
1 Program restart is a function to restart from the block of a specified sequence number.
2 Machining break point return is a function to position a tool to a break point by jog feed.
19-5 Sequence Number Comparison and Stop
If you encounter the block of a preset sequence number during program execution, the machine
stops after executing that block.
19-6 Preread Buffer
In order to avoid discontinuation of the program blocks at the time of cutting due to the
processing time of the NC unit, the preread buffer generally prereads one program block in case
of automatic operation.
2 - 13
Page 23
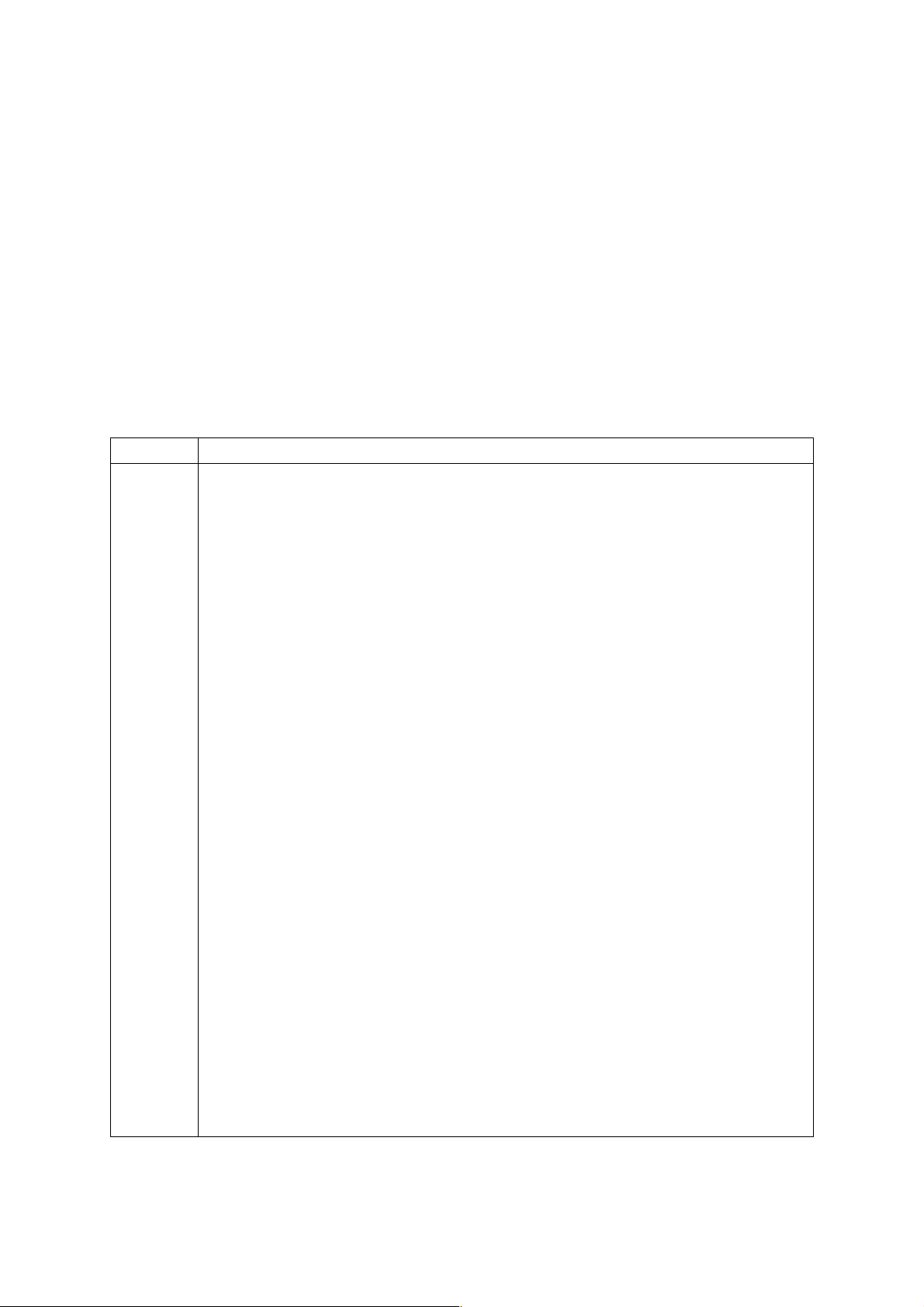
(1) The preread buffer prereads the different number of program blocks, depending on the
function.
Function No. of pre-reading blocks
Automatic tip R compensation 4 blocks
Multi buffer 12 blocks
Tool diameter compensation 2 to 4 blocks
Others 0 or 1 block
Note 1) In the tool diameter compensation mode, the preread buffer prereads up to 4 blocks if
they contain the blocks free from an axis move command.
Note 2) The following commands suppress the preread buffer.
Example: G28, G30, G31, G53,
G10, G20, G21,
M00, M01, M02, M30
T Command
Note 3) As the automatic tip R compensation is normally held valid (G143 mode), pre-reading of
4 blocks is carried out.
(2) When the SINGLE BLOCK switch is turned on
(State in which automatic tip R compensation is held invalid : G140, G145 mode)
When the SINGLE BLOCK switch is turned on and the program blocks are executed
sequentially by pressing the CYCLE START switch, the preread buffer does not exist.
Because, when the CYCLE START switch is pressed, one program block is taken into the
preread buffer and executed immediately. Therefore, the preread buffer does not exist
during and after execution.
Note 1) Pre-reading is performed when any of the following applies:
(a) In Multi Buffer mode (G251)
(b) Tool radius compensation mode (G41, G42)
(c) When optional angle chamfering corner R is specified (, C/, R)
(d) Thread cutting (G32)
(e) T apping mode (G63)
Note 2) When the SINGLE BLOCK switch is turned from OFF to ON during automatic operation
to stop it, the preread buffer exists.
19-7 Feedhold
All axes can be stopped temporarily. Pressing the CYCLE START button restarts feeding the
axes. Prior to restarting axis feed, you can allow intervention by manual operation in the manual
mode.
2 - 14
Page 24

19-8 External Reset and Reset Signal
The NC unit can be reset from the outside. A reset cancels all the commands and decelerates
the machine to a stop. A reset signal is output to the machine while the RESET button of the
MDI & CRT panel is being pressed, the machine is being reset by an external reset signal, or the
EMERGENCY STOP button is being pressed.
19-9 Data Server
A large-capacity program can be processed at a high speed by means of the Ethernet controller
and the hard disk of the auxiliary storage unit. (For details, see SEIKI-SEICOS
INSTRUCTION MANUAL, NT DOMAIN TYPE)
∑ DATA SERVER
19-10 Scheduler
The program number per work and the number of machining works are managed to operate
different types of works continuously, using the robot or the bar feeder.
(For details, see SCHEDULER AJC FUNCTION INSTRUCTION MANUAL (SEIKI-SEICOS∑))
20. PROGRAM TEST FUNCTIONS
20-1 Machine Lock
In the machine lock mode, the machine does not move, but the position display is updated as if
the machine were moving.
When the machine lock is turned ON→OFF in auto operation, Machine is shifted by the amount
moved by the machine lock.
20-2 Dry Run
If the DRY RUN switch is turned on, the machine operates at a jog feed rate instead of a
programmed cutting feed rate. This function can be also enabled in case of rapid traverse by
parameter setting.
20-3 Single Block
Program commands can be executed block by block.
20-4 Pre-Machining Plotting
In pre-machining plotting, as Machine performs synchronous plotting while in auto running in
machine lock and dry run state, format failures and erroneous coordinate commands, if any, in a
program can be easily detected. When, on start of pre-machining plotting, an interlock signal,
etc. to stop interpolation has been made effective, pre-machining plotting is stopped with the
corresponding command.
2 - 15
Page 25

21. DISPLAY AND SETTING
21-1 Machining End Notice
Input a scheduled program end time. When the machining time reaches the scheduled end
time, a signal is output to an external device.
21-2 Run Hour Display
Machine run hours are displayed in the format of hours:minutes:seconds. Display is made by
each of the functions including the expected ending, working time, cutting time, lap T, and date/
time.
21-3 Work Count Function
The number of machined workpieces can be counted by the M12 command. By setting the
number of workpieces beforehand, a signal is output to the machine when reaching the
prescribed number of workpieces.
22. PART PROGRAM STORAGE & EDITING
22-1 Part Program Storage & Editing
The contents of the NC tape can be stored and edited. Relevant operations include deletion,
alteration, and insertion. Range editing is allowed by expanded part program editing. Use of
backgrounding allows you to edit another program during automatic operation.
Tape storage length : 80, 160, 320, 500 or 1,000 m
Registered programs : 100, 200, 400, 800, or 1,000 programs
Note) For the
320 m and 400 programs, respectively.
∑21L, the maximum part program storage length and registered programs are
22-2 Part Program Comparison
The program registered in the memory is compared with the one in the tape.
23. DIAGNOSTIC FUNCTIONS
23-1 Self Diagnostic Function
This function makes various checks.
The signals exchanged between the machine and NC unit can be confirmed on the screen.
• G contact : From PMC to CNC
• RG contact: From PMC to CNC
• F contact : From CNC to PMC
• RF contact : From CNC to PMC
• X contact : From machine to PMC
• Y contact : From PMC to machine
2 - 16
Page 26

23-2 Alarm Diagnosis
If the CNC has any error, it displays its corresponding alarm number and message.
23-3 Cutting Monitoring Function
This function monitors the cutting load of the spindle and feed axes to prevent abnormal cutting
or defective cutting.
24. DATA INPUT AND OUTPUT
24-1 Input/Output Interface (RS-232C)
This function allows you to output the programs, tool offset amounts, parameters, etc.
memorized in the memory to an external device, and input the data from the external device. A
device equipped with the RS-232C interface is available as an external device.
25. SAFETY FUNCTIONS
25-1 Emergency Stop
An emergency stop cancels all the commands and stops the machine instantaneously.
25-2 Overtravel
When the machine reaches a stroke end, a relevant signal is received, the axies are stopped
instantaneously, and an overtravel alarm is indicated.
25-3 Interlock
There are three kinds of axis interlocks; all axes interlock, individual axis interlock, and axis
directional interlock.
If the interlock is applied while moving the axis, the machine will be decelerated to stop. If an
interlock signal is canceled, the machine will be accelerated to resume operation.
25-4 Stored Stroke Limit 1
Stored stroke limit 1 assumes the out side of the area set by a prameter to be a prohibited area.
25-5 Stored Stroke Limit 2 and 3 (G22, G23)
Use this function when you want to ensure that a tool will not enter a non-cutting area.
Set stored stroke limit-2 with a parameter whether the inside or outside of the set area should be
prohibited. Stored stroke limit-3 assumes the inside of the set area to be a prohibited area.
Use a G-code to enable/disable stored stroke limit-2.
· G22: Enable
· G23: Disable
(Stored stroke limit-3 is enabled regardless of the G-code)
25-6 Stroke Check Before Move …… Not available with
This function checks whether or not specified end point coordinates enter a stored stroke limit
area before a move command in the program block.
2 - 17
∑∑
∑21L.
∑∑
Page 27
26. STATUS OUTPUT
26-1 NC Ready Signal
When the NC unit is turned on and becomes ready to control, this signal is output to the
machine, and when the NC unit is turned off, a signal output to the machine is called off.
26-2 Automatic Operation Running Signal
This is a signal to be output while automatic operation is under way.
26-3 Automatic Operation Stopping Signal
This is a signal to be output while the program is stopping due to feedhold.
26-4 Distribution Complete Signal
This is a signal to be output upon completion of distribution so that the M-, S-, T-, or B-function
can be executed after completing a move command in the block where there were specified.
27. EXTERNAL DATA INPUT
27-1 External Data Input
The data are sent from a machine’s external device to the NC unit to carry out required
operation.
1 External O- or N-number search
2 External tool offset data read
2 - 18
Page 28

3. OPERA TION
I. Basic Machine Operation
II. Screen Operation
3 - 1
Page 29

3. OPERA TION
I. Basic Machine Operation
1. Manual Operation
2. Automatic Operation
3. Operation Related to Safety
4. NC Operation keys
5. Quick Tool Setter (Q Setter)
6. Q Setter Barrier
7. Q Setter Repeat Function
8. Simple Jaw Edge Forming Function
3 - 2
Page 30

1. Manual Operation
The machine can be manually operated by using the switches on the machine operation panel.
1-1 Jog Feed
The machine can be operated continuously by manual operation.
(1) Select the mode selector switch “JOG”.
JOG
(2) Select the jog feed rate.
(3) Select the axis you want to move.
The machine moves in the direction of the selected axis.
Note 1) When multiple axes are selected, those axes move all simult aneously.
Note 2) When the axis has been selected before selecting the JOG mode, the machine does not
move even if the mode is changed to JOG. Select the axis newly.
1-2 Manual Reference Point Return
The machine can be returned to the reference point by manual operation.
(1) Select the mode selector switch “JOG”.
JOG
(2) Select the rapid traverse rate.
3 - 3
Page 31

(3) Select “ZERO RETURN”.
ZERO RETURN
The machine moves at the rapid traverse rate toward the reference point for each axis.
(4) When the machine returns to the reference point, the reference point return lamp gets
illuminated.
Note 1) Once reference point return is completed and the reference point return lamp gets
illuminated, manual reference point return operation cannot be performed again until the
reference point return lamp is turned off.
Note 2) The reference point return lamp goes off in the following cases.
(1) When the machine moved from the reference point.
(2) When an emergency stop resulted and the machine moved.
Note 3) When performing low-speed manual reference point return, do so from the position a
little distant from the reference point.
1-3 Rapid traverse
The machine can be rapid traversed continuously by manual operation.
(1) Select the mode selector switch “JOG”.
JOG
(2) Select an appropriate rapid traverse override.
(3) Select the axis you want to move, and “RAPID” simultaneously. The machine moves in the
direction of the selected axis at the rapid traverse rate.
Note 1) Same as Notes for Jog Feed
3 - 4
Page 32

1-4 Manual Handle Feed
The machine can be finely fed by turning the manual pulse generator .
(1) Select the mode selector switch “HANDLE”.
HANDLE
(2) Select the handle axis.
X Y Z
(3) Select a handle magnification.
1/1 10/1 100/1
(4) Turn the handle.
Clockwise: “+” direction
Counterclockwise: “-“ direction
Note 1) Do not turn the manual pulse generator so quickly. If so done, the machine may not stop
immediately after turning the handle, or the scale and the travel amount may not coincide
with each other.
Note 2) If the magnification “x 100” is selected and the handle is turned very quickly, the machine
moves at a rate close to the rapid traverse rate. If you then stop the machine suddenly,
it may be shocked.
Note 3) In some cases, the mode selector switch “HANDLE” of (1) many not be provided, where
Handle mode is selected by handle axis selection of (2).
3 - 5
Page 33

2. Automatic Operation
2-1 Automatic Mode
(1) Memory operation
(a) Store the program in the memory in advance.
(b) Select the program you want to run.
(c) Select the mode selector switch “AUTO”.
AUTO
(d) Press the CYCLE START button.
CYCLE START Lamp
CYCLE START
Pressing this button stars automatic operation and turns on the CYCLE START lamp.
(2) MDI operation
(a) Select the mode selector switch “MDI”.
MDI
(b) Input the program into the MDI operation buffer memory. The commands for multiple
blocks can be input into the MDI operation buffer memory from the CRT/MDI panel.
The program can be edited in the same manner as editing that stored in the memory.
(c) Press the CYCLE START button. Automatic operation starts and the CYCLE START
lamp gets illuminated.
2-2 Selecting the Run Program
(1) Program No./Sequence No. search
(a) Select the mode selector switch “AUTO”.
(b) Display the Overall screen. (The Program screen will also do.) When any other screen
than the Overall screen is displayed, press the RETURN key several times to display
the Overall screen.
(c) Press the O key in case of program number search, and press the N key in case of the
sequence number search.
(d) Then, enter the program number or sequence number you want to search for, and
press the cursor move key.
(e) A program or sequence number search is executed.
3 - 6
Page 34

(2) Rewind
(a) Select the mode selector switch “EIDT”.
(b) Display the Overall screen. (The Program screen will do.)
(c) Press the RESET key of the NC unit.
(d) Select the mode selector switch “AUTO”.
Part Program Storage Length Registered Programs
80 m 100 programs
160 m 100 or 200 programs
320 m 100, 200 or 400 programs
500 m 100, 200, or 400 programs
1000 m 100, 200, 800, or 1,000 programs
(3) Part program storage length and registered programs
Note) For the ∑21L, the maximum part program storage length and registered programs are
320 m and 400 programs, respectively.
2-3 Stopping the Automatic Operation
There are two methods to stop automatic operation; one is to insert a stop instruction (M00, M01,
M02, or M30) in the program in advance at which you want it to stop, and the other is to press the
button (FEEDHOLD or RESET) on the operation panel.
(1) Program stop (M00)
If the block where M00 has been specified is executed, automatic operation stops and
execution does not proceed to the next block. (The CYCLE START lamp remains turned on)
The model information so far is all saved.
Pressing the PROGRAM CYCLE START button restarts automatic operation.
(2) Optional stop (M01)
If the block where M01 has been specified is executed, automatic operation stops and
execution does not proceed to the next block. (The CYCLE START lamp remains turned on)
However, this is true only when the OPTIONAL STOP switch on the machine operation panel
in turned on.
(3) Program end (M02, M30)
(a) Indicates the end of the main program.
(b) Stops automatic operation and places the machine in the reset mode.
(c) Normally, M02 moves the cursor to the next block, and M30 returns the program to its
beginning.
3 - 7
Page 35

2-4 Dry Run
This function enables a dry run speed, ignoring the feed rate specified with the program.
DRY RUN
Normally , dry run is ef fective only during cutting feed.
To make it effective during rapid traverse as well, set “1” in the bit 6 (RDR) of the parameter
1401.
2-5 Single Block
The single block function stops the machine after executing one block. T urn on the SINGLE
BLOCK switch.
ON
OFF
This causes the machine to stop after executing one block. Pressing the PROGRAM CYCLE
ST AR T button stops the machine af ter executing the next block.
Note 1) Even at the middle point of the G28/G29/G30
command, the mach ine stops after executing
one block.
Note 2) The single block stop points in the canned cycle
for drilling are 1 , 2 , and 6 shown in the figure
below.
2-6 Override
For details related to the override function, refer to the instruction manual for the machine.
(1) Feed rate override
With the switch on the machine operation panel, an override of 0 % to 254 % (in an increment
of 1 %) can be applied to feed per minute (G98) and feed per revolution (G99).
(2) Rapid traverse override
The override selected with the switch on the machine operation panel can be applied to the
rapid traverse rate.
(3) Feed rate override cancel
With a signal from the machine side, the feed rate override and automatic rapid traverse
override can be fixed at 100 %.
3 - 8
Page 36

2-7 Per-program Machining Time Display Function (Option)
When you run the program, the programmed machining time is displayed on the machining time
display screen.
Up to 10 main program numbers and machining times can be displayed. If you run more than 10
programs, the oldest programs will be discarded sequentially . However, the machining time of the
same program number will be updated.
The time from the start of reset condition to the next reset condition in the memory operation
mode will be counted. The reset condition at this stage is the condition obtained by pressing the
reset key , external reset signal, M02, M30, etc.
The time counted will be only the time automatic operation is executed, therefore, the machining
time will not be counted during hold and during single block stoppage.
Calculation and display of machining time
1 Select the automatic (memory) operation mode and press the reset key.
2 Select the overall (program) screen and search for the program that calculates the
machining time.
3 Run the program and execute machining.
4 If the reset key is pressed or M02, M30 is executed, the count for machining time will be
terminated.
5 Select the program screen, press F7/Program list and then press F5/Machinig time. The
machining time screen will be displayed.
6 If you repeat the procedures from 1 to 5 the program number and time will be sequentially
displayed on the machining time screen.
3 - 9
Page 37

The maximum number of programs for which the machining time can be displayed is 10. If the
number of programs exceeds 10, the oldest programs will be discarded sequentially. However,
the machining time of the same program number will be updated.
2-8 Tape Operation (Simple DNC Operation)
The machine is directly operated by the program from the paper tape or external device without
using the internal memory of the NC unit. From the tape operation program, you can also call a
subprogram stored in the internal memory of the NC unit.
Note) Be sure to diable DNC operation during tape operation.
1 Select an input device and baud rate in the I/O screen.
(When using the RS-232C of the operation panel, select the RS-232C.)
2 Select the mode selector switch, TAPE.
3 Make setting on the part of the input device to make the system ready.
(Set the paper tape when the reader is used, and make the connected device ready for output
when the RS-232C is used.
4 Press the PROGRAM START button.
→ This reads one block worth of the program from the external device and start tape
operation.
Note) Since an internal processing buffer is provided, the buffer worth of the data are pre-read.
2-9 DNC Operation (Optional)
This, by receiving NC command data from the host CPU, continuously performs machining for
long hours.
NC Unit
3 - 10
Page 38

(1) Interface Between Host CPU and NC Unit
RS232C Interface
Transmittal mode Serial voltage interface (start/stop system)
Baud rate 1200 to 19200 (For details, see Parameters.)
Max. cable length 15 m
Noise resistance Inferior
Start/stop system
As in the following drawing, the start signal and the stop signal come preceding and
following respectively in relation to the information bits.
JD5C (∑10L)/JD28A (∑21L)
(PCR-EV20MDT)
12345678910
12345678910
RD OV DR OV CS OV CD OV +24
RD OV DR OV CS OV CD OV +24
11 12 13 14 15 16 17 18 19 20
11 12 13 14 15 16 17 18 19 20
SD OV ER OV RS OV +24
SD OV ER OV RS OV +24
When no using CS, short-circuit it with RS.
When using DR, short-circuit it with ER.
Be sure to short-circuit CD with ER.
(2) parameter Setting
1 No.0180 I/O channel when a remote buffer is used
Be sure to set 3.
2 No.0181 The specification No. of the I/O unit when a remote buffer is used
Set V alue I/O unit
0 Control code (DC1 to DC4) is used.
4 Control code (DC1 to DC4) is not used.
3 - 11
Page 39

3 No.0182 Baud rates when a remote buffer is used.
Set V alue Baud Rate
The set values 13 to 15 are only useable for RS422.
(3) Operation
1
Push F5/Set to enter Setting screen for other selections.
(bps) (bps)
150
2 100
3110
4 150
5 200
6 300
7 600
8 1200
Set V alue Baud Rate
9 2400
10 4800
1 1 9600
12 19200
13 38400
14 76800
15 86400
2 Set DNC Operation Mode Selection to “YES”.
3
Pushing RETURN to enter Overall screen, select Memory mode.
4 Start the host CPU.
5 Pushing START , start running.
Program transfer into the DNC operation memory is started and, in a few seconds,
running starts.
* Note) Steps 4 and 5 get reversed depending on the transfer conditions of the host
CPU.
3 - 12
Page 40

<Starting Following Sequence No. Search>
You can start operation with the sequence No. having been assigned in the DNC
program.
1 Execute 1 to 4 of the above item.
2
Input, following “ N ”, a sequence No. where operation is to be started.
Push “ ↓ ” key.
3
Program transfer starts into DNC operation memory and searching is started. On
completion of searching, the sequence No. having been found is displayed on the
screen at its beginning. When it has not been found, an alarm takes place.
4 Push START for running. Operation starts with the sequence No. thus having been
found.
3 - 13
Page 41

2.10 Submemory
(Unavailable for
ΣΣ
Σ10)
ΣΣ
2.10.1 Outline
The submemory is a feature to increase the capacity of the program memory by using a storage
*1
medium newly added into the NC unit(normally an ATA flash card
The ATA flash card is called the submemory and the conventional memory(battery backup RAM)
the main memory, respectively. Up to 10 directories can be created in the submemory and one
of them is selected for operation as required.
*1 When a hard disk data server is attached, the submemory also uses a hard disk.
(1) Program storage length
You can select 1,000, 2,000, 4,000, or 10,000 m on the part of the submemory.
The total program storage length equals this length plus the capacity of the main memory.
(Example) When the main memory is 80 m long and the submemory 2,000 m long,
respectively, the total program storage length is 2,080 m long.
(2) Number of programs
Up to 1,000 programs held in one directory plus the main memory
Up to 2,000 programs held in all the directories in the submemory
(Example 1) When no directories are created in the submemory;
The maximum number of programs is 1,000.
(Example 2) When the directories D1 and D2 are created in the submemory;
The following three conditions must be all satisfied:
• Number of programs in the main memory + Number of programs in D1
1,000
<
=
• Number of programs in the main memory + Number of programs in D2
1,000
<
=
• Number of programs in D1 + Number of programs in D2 2,000
(3) Directories in the submemory
Up to 10 directories can be created in the submemory.
(When the directories are not created at all, only one basic directory is to be used.)
Program operation and program editing apply to the programs in the main memory and those
in the directory currently selected(to be referred to as a current directory hereinafter) in the
submemory. The programs in the non-current directories in the submemory can be neither
run nor edited.
The current directory is treated fully differently from the others in the submemory. You may
create the program with the same program number in a different directory.
(Example 1) When no directories are created in the submemory;
All the programs are to be run/edited.
(Example 2) When the directories D1 and D2 are created in the submemory;
• When the current directory is D1;
→ The programs in the main memory + D1 are to be run/edited.
• When the current directory is D2;
→ The programs in the main memory + D2 are to be run/edited.
To create, alter, or delete the directories in the submemory , use the Directory Setting screen.
→ See “2.10.4 Submemory Directory Operation”
) as the program memory.
<
=
3 - 14
Page 42

(4) Using the main memory and submemory properly
Whether the program is to be stored in the main memory or sumemory depends on its
program number. Use a parameter to set which range of program numbers are to be
assigned to the main memory side. Typical setting assigns O8000 to O9999 to the main
memory and the rest to the submemory.
This is to treat the programs O8000 to O9999 as the subprograms which can be commonly
used for any directory in the submemory. Thus, the macro programs provided by the
machine manufacturer are made available no matter which directory in the submemory is
selected.
(5) When the programs in the submemory are not available
The programs in the submemory are not available on the part of the lathe related NC unit’s
2nd system(loader control), simple 2nd system(feeder control), and loader control only
machine(R21 version). Use and run only the programs in the main memory.
2.10.2 Program Editing
The program editing functions(back editing, extended editing, etc.) are available for both main
memory and submemory the same as before.
Since the submemory uses the ATA flash card as a storage medium as described above, editing
should be operated file by file like editing the files in the hard disk through a personal computer .
As a result, you have to read the file before editing operation and save it after editing operation,
causing entire editing operation to take more time than direct editing(directly altering part of the
file) of the RAM-based main memory.
When editing the program on the part of the submemory, save it at the time of the following:
• When the screen is switched.
• When the mode is changed.
• When other program is called.
• When the machine is reset despite the STANDBY switch has been turned on.
(Note) If the power is turned on without saving the program after editing it, you will be returned to
the conditions existing before editing when the power is turned on again.
If the power is turned off while saving the program, it may be corrupted. If the program
has any errors, initialize the program memory.
2.10.3 Program Operation
The programs in the main memory and the current directory in the submemory can be run the
same as before. For the programs in the submemory, however, there are the following
restrictions to the number of programs which can be run simultaneously.
• When the data server is attached: Up to 5 programs
• When the data server is not attached: Up to 4 programs (Additional one program for the data
server)
3 - 15
Page 43

Specifically, multiplicity of subprogram(macro program) call to the programs in the submemory
is limited by the above-mentioned numbers. There are no restrictions to the programs in the
main memory.
The following describes this, using a specific example. The program on the part of the main
memory is represented by Mn, that on the part of the submemory by Sn(n = 1, 2, 3, ...), and
program call by →, respectively.
(Example 1) For the conventional specifications(without the submemory)
The following is allowed:
M1 → M2 → M3 → M4 → M5 → M6 → M7 → M8 → M9.
(Example 2) When the submemory is provided, but not data server; In the following state;
S1 → M1 → S2 → S3 → S4 → S5
Since five programs are used on the part of the submemory, it is possible to call
only the main memory program after S5.
S1 → M1 → S2 → S3 → S4 → S5 → M2 Allowed
S1 → M1 → S2 → S3 → S4 → S5 → S6 Disallowed
(Example 3) When both submemory and data server are provided; In the following state;
M1 → S1 → S2 → S3 → S4
Since four programs are used on the part of the submemory, it is possible to call
the main memory program or data server program after S4.
M1 → S1 → S2 → S3 → S4 → M2 Allowed
M1 → S1 → S2 → S3 → S4 → Data server Allowed
M1 → S1 → S2 → S3 → S4 → S5 Disallowed
(Note) It is possible to cancel by parameter setting the above-mentioned “uniform restriction on
the number of programs on the part of the submemory, which can be simultaneously
run.”
Whether this cancellation of restriction allows a program call beyond the limit, however,
depends on the then running submemory program(generally program length).
This is briefly described below.
On the part of the submemory, up to five program read ports(called the channels) are
available for operation. One channel is required to read one program; up to 5 programs
can be run simultaneously.
Upon calling the program, however , if the program to be called has been read into the NC
unit(about 10 m worth of read buffer) to the end, that channel can be closed and used to
run other program.
Whether the program to be called can be read into the NC unit to the end upon calling it
depends on he conditions such as the run time from the beginning to a call command,
program length from the call command to the end, and so on.
Basically, the number of simultaneously run submemory programs should be used
within the above-mentioned limit.
3 - 16
Page 44

2.10.4 Submemory Directory Operation
The program number can be used up to 8 digits, but you may want to use the same O-number
to perform different machining in many cases. In such cases, it is very troublesome to replace
the O-numbers included in the NC unit by means of input/output.
To avoid this trouble, the programs can be easily replaced by preparing several O-number
storage areas(directories) and altering them. This is called directory setting.
Submemory directory operation(creation, alteration, deletion) is performed in the Directory
Setting screen.
The Directory Setting screen is displayed by operating the following keys in the Overall screen.
F2/PROGRAM → F7/PROGRAM LIST → F4/DIR SET
This screen allows you to view the directory names and the program numbers registered in the
respective directories. It also allows you to create new directories and delete unnecessary
ones.
(Note) Directory related operation takes several to scores of seconds depending on the number
of registered programs.
(1) Creating the directory
The following describes the procedure to create a directory.
① Input the up to 8-character name of the new directory you want to create into the key
input area.
② Press F1/MAKE .
③ You are prompted, “O.K. ? Y-YES N-NO.”
④ Press Y to create or N to cancel.
3 - 17
Page 45

(Note 1) In creating the directory, you simply name a storage area, but not change it. When
using the created directory, execute the setting.
(Note 2) Up to ten directories are allowed.
(Note 3) The directory name is up to 8 characters.
(Note 4) Another directory cannot be created under one directory.
(Note 5) It is not allowed to give the directory name consisting of only numbers such as 1, 2,
3, 4.Its initial character must be an alphabet such as A1234. No decimal point(.)
is available.
(2) Deleting the directory
The following describes the procedure to delete an unnecessary directory and the rograms
contained in it.
① Move the cursor to the directory you want to delete.
②
Press F2/DELETE .
③ You are prompted, “DO YOU WANT TO DELETE ? Y-YES N-NO.”
④ Press Y to delete or N to cancel.
If the directory being set is deleted, USER will be automatically set.
(Note 1) The deleted program or directory cannot be restored.
(Note 2) The USER directory is indispensable and cannot be deleted.
(3) Setting the directory
The following describes the procedure to alter the directory.
① Move the cursor to the directory you want to set.
Press INPUT .
②
③ You are asked, “O.K. ? Y-YES N-NO.”
④ Press Y to set or N to cancel.
⑤ After the procedure is finished, you will be returned to the Programs List screen.
2.10.5 Associated Parameters
No. 3152 Minimum value of the program number to be stored in the main memory
(St andard value = 0)
No. 3153 Maximum value of the program number to be stored in the main memory
(St andard value = 0)
Regardless of this setting, O8000 to O9999 are stored in the main memory.
If this set value is altered, it is necessary to initialize the program memory(main memory/
submemory).
No. 8906, #0 = 0 Does not display the submemory access status.
=1 Display the submemory access status in the center of the first line in the
screen.
No. 6002, #0 =0 Up to 5 submemory programs can be run simultaneously.
(Up to 4 when the data server is attached)
=1 Up to 9 submemory programs can be run simultaneously depending on the
condition. (See Note in 2-10-3)
3 - 18
Page 46

3. Operation Related to Safety
3-1 Emergency stop
Pressing the EMERGENCY STOP button on the machine operation panel can stop the machine
immediately.
EMERGENCY STOP
This switch is locked by pressing and released by turning.
Note 1) Emergency stop shuts off a current to the motor.
Note 2) The NC unit is reset to warn you of an emergency stop.
Note 3) Before releasing the EMERGENCY STOP switch, it is necessary to eliminate a trouble
cause.
3-2 Overtravel
When the tool moves over the stroke end set by the limit switch of the machine or enters the
disabled area of the set stored stroke limit, an alarm is displayed and the moving axis is
decelerated to a stop.
In this case, move the tool manually in a safe direction, press the reset key, and cancel the
alarm.
3 - 19
Page 47

4. NC Operation keys
No. Name Description
1 POWER ON/OFF button
2 RESEDT key
3 Function keys
4 OPER/MAINTE key
5 RETURN key
6 AUX. key
7 HELP key
8 Address and Numerical keys
9 SHIFT key
10 INPUT key
1 1 CAN key
12 ORIGIN key
13 DELET, ALTER and INSERT keys
14 Cursor move key
15 Page key
16 OPERA TION GUIDE
Used to turn on/off the power for the CNC unit.
Press this key when resetting the CNC unit in order to
reset an alarm, and so on.
When the function menu is displayed at the bottom of
the CRT, there are the keys to select the menu. When
the menu is not displayed, they serves as the keys to
select the PosDition, Program, Tool, Work
Coordinate, Setting, Plot and I/O screens. Press the
F9/SELECT/FUNK key when displayed the function
menu at the bottom of the CRT.
Press this key when displaying the PC, Alarm or
Maintenance screen. Pressing it once displays the
function menu at the bottom oDf the CRT, and
pressing it again erases the menu.
Press this key when you want to return to the Overall
screen.
Used to input the alphabet, numbers, etc.
There are some address keys which have 2
characters marked on them. If you press the address
key after the SHIFT key, upper left character is input.
If the address or numerical key is pressed, it is input
into the key input buffer once, and then, displayed on
the CRT. Press the INPUT key when actually setting
the data input into the key input buffer.
Press this key when deleting the characters or
symbols input into the key input buffer .
This key is used to clear the Plot screen.
Used to perform deletion, alteration and insertion in
editing the program.
There are 4 keys which are used to move the cursor
up/down and right/left.
There are 2 keys which are used to page in the
forward and backward directions.
Press this key when you want to display in the
Operation Guide screen.
3 - 20
Page 48

OPER/
MAINTE
Fig. 4-1 NC Operation Panel
3 - 21
Page 49

5. Quick Tool Setter (Q Setter)
5-1 Outline
A tool offset amount can be automatically written by simply bringing the tool nose into contact with
the touch sensor manually .
5-2 Operation Method
(1) Set the quick tool setter.
(a) Set the tool setter . (Fig. 5-2)
(b) Select the MANUAL mode.
(c) A screen display is automatically switched to the Tool (Offset) screen; “Q SETTER” is
displayed to inform you that the system is ready. (Fig. 5-1) When initial reference point
return has not been completed, setting the tool setter results in an alarm.
(2) Call the tool for which you want tool offset.
(3) Select and confirm the tool offset number.
The tool offset number is consistent with the called tool number, and the cursor moves
automatically. When the cursor is moved with the key, the cursor-indicated tool offset
number is selected.
(4) Bring the tool nose closer to the tool setter.
(a) When bringing it closer by jog feed, select the JOG mode and presa the X- or Z-axis
direction selector switch.
(b) When bringing it closer by handle feed, select the HANDLE mode, and then, the X or Z
axis. Next, set a handle magnification to 100/1 and turn the handle.
(5) Position the tool nose to the center of the sensor by handle feed. (Fig. 5-3)
(6) Apply the tool tip to the touch sensor in jog feed.
The jog feed rate is held at the constant rate set with a parameter. Maintain the tool tip in
continuous jog feed by not bringing it close to or keeping it away from the touch sensor.
(7) Bringing the tool nose into contact with the touch sensor inputs a tool offset amount
automatically. When the tool nose comes into contact with the sensor, the axis stops,
emitting a “beep” sound. (Fig. 5-4)
(8) Put away the tool nose from the touch sensor by more than a retouch return amount
(parameter), and bring it into contact again. Repeating this, confirm the tool offset amount
shown on the screed. (Fig. 5-5)
(9) Put away the tool nose to a safety position from the touch sensor. (Fig. 5-6)
(10) Put away the tool nose to the position where the tool can be called.
(1 1) Obtain the tool offset amount of the next tool.
Repeating the above steps (2) through (10), obtain the tool offset amount of each tool
sequentially .
(12)
House, the tool setter. (Fig. 5-7) The display of Q SETTER disappears.
While in axis shifting, do not store the tool setter .
3 - 22
Page 50

Fig. 5-1
3 - 23
Page 51

Fig. 5-2
Fig. 5-3
Fig. 5-4
Fig. 5-7 Fig. 5-6
Fig. 5-5
3 - 24
Page 52

5-3 Tool Nose Point Interlock
Bringing the tool into contact with the sensor stops the axis and checks the tool nose point.
When the contact directions and tool nose point conditions shown in the table below are not
met, an interlock is applied to an input of tool offset amount to disable a write.
The tool nose point for tool nose point interlock is that for the offset number currently selected.
Tool Nose Point
123 45 678 9 0
Contact Direction
+ X ×× ×××
- X ××× ××
The contact
and move
+ Z × ××× ×
- Z ×× ×××
: Write enabled
× : Write disabled
Note) To enable this interlock, it is necessary to set “1” in the bit 0 (QTL) of the parameter
No.6244.
5-4 Related Parameters
(1) Parameters for the tool (offset) memory
With signed parameters, set the distances from the reference tool nose position to the
respective contact surfaces at the machine origin.
No.6281 Q setter contact surface amount on the “+” side (inside)
No.6282 Q setter contact surface amount on the “-“ side (outside)
Note 1) Axis type parameters provided for each axis
Note 2) For the diameter designated axis, set a diameter.
No.6281
No.6282
No.6282
No.6281
Fig. 5-8
3 - 25
Page 53

Calculate the tool offset amount by the following formula.
Tool offset amount = Skipped machine coordinate value – Q-setter contact surface amount
parameter (6281 or 6282)
(2) Tool nose point interlock
No.6244 bit 0 (QTL)
QTL Tool nose point interlock
0: Disabled, 1: Enabled
(3) Retouch return amount
No.6256 Retouch return amount of the Q, Z, and B setters
5-5 Related Alarms
No.712 The Q setter mode was selected without performing manual zero point return.
No.713 Measurement is being made with the Q setter, using 2 or more simultaneous
axes
No.714 A tool nose point interlock is being applied with the Q setter.
5-6 Compensation Input Checking
When rewriting compensation in Q setter and Q setter repeat, you can perform the following
checking:
1 When the difference between previous tool compensation volume and measured
compensation volume does not fall within the set range (parameter), an alarm takes place.
The compensation volume, however , is going to be written. Therefore, an alarm takes place,
also, when compensation volume is newly taken in Q setter or when erroneous
compensation volume is taken as proper data.
When this takes place, ignore it.
2 When a tool No. does not correspond to the cursor No., an alarm takes place. The
compensation volume, however, is going to be written. “Enabled/ Disabled” is switched for
both 1 and 2 through parameter setting.
(1) Related Parameters
No.6244, #6 = 0 Checking of Q setter compensation number Disabled
= 1 Enabled
No.6244, #7 = 0 Checking of Q setter compensation volume Disabled
= 1 Enabled
No.6264 Clamp value for Q setter compensation input checking
(2) Related Alarms
No. 709 Data measured in Q setter is abnormal.
No. 719 Q setter carries an abnormal number.
3 - 26
Page 54

6. Q setter barrier
6-1 Outline
After measuring the tool compensation amount using the quick tool setter function, if the tool is
made to escape in the direction of the reference point, it may touch the touch sensor, depending
on the tool diameter .
For instance, if the tool shape is an shown in Fig. 6-1, after measuring the tool compensation
amount by means of the sensor in the X+ direction, if the tool is immediately returned to the
reference point from this position, the tool nose may touch the touch sensor.
To prevent such occurrences, there is a function that sets up a barrier area near the touch
sensor and prohibits motions such as return to the reference point when the nose position has
entered this area. Thus, this function prevents damage to the touch sensor.
Fig. 6-1
6-2 Description of the function
(1) When the tool setter arm descends and enters the Q setter mode, the control equipment
checks whether the tool is within the Q setter barrier area by performing the calculations
given below.
X value of machine coordinate system Parameter 6283 (X) +Tool compensation amount X
AND
Z value of machine coordinate system Parameter 6283 (Z) +Tool compensation amount Z
when the above equations are satisfied, the control equipment judges the tool to be within the
barrier area. (Fig. 6-2)
The tool compensation amount is calculated as the sum of the shape of compensation
number currently selected and the wear.
<
=
<
=
3 - 27
Page 55

(2) When the tool is in the barrier area, the signal given below is output to the PMC.
PMC address
Q setter barrier area in-signal QBRI (RF24, #1)
Using this signal, process the reference point return interlock and message display with in the
barrier area.
Return the arm of the tool setter. When the Q setter mode is terminated, this signal becomes
“0” even if the tool is within the barrier area.
No.6283
No.6283
Fig. 6-2
6-3 Precautions
(1) Positions above the barrier line is taken as positions within the barrier area.
(2) After tool replacement, check will be performed using the previous tool compensation
amount, until the new tool compensation amount is written.
6-4 Related parameters
(1) Q setter barrier value
No. 6283 Q setter barrier value (per axis)
(2) Q setter barrier check
Bit 1 of No. 6244 (QBR)
Q setter barrier check is an given below.
0: Ineffective
1: Effective
3 - 28
Page 56

7. Q Setter Repeat Function
7-1 Outline
Through a simple operation, you can repeatedly perform measurement on tip changing of a tool
which has already been subject to measurement in Q setter.
7-2 Operation
(1) Push F6/Q SETTER REPEAT on Tool (Compensation) page, Window page for Q setter
repeat is displayed.
(2) Set Feed mode.
(3) Changing a tip, perform indexing of the turret to a measurement position. At this time both
the cursor inside Turret State on the left side of the page and the compensation data at the
top right-hand corner of the page change as linking to the turret face.
(4) Bring out the Q setter arm.
Push F4/REPEAT START .
(5)
If the tool has been already subject to measurement in Q setter (with the data already existing
in the measurement position on the page), measurement by Q setter repeat is started. When
the tool touches the sensor, a measured value is written in compensation data. The touch
mark is displayed on the picture indicating a measurement position.
If measurement has not yet been performed in Q setter, alarm takes place.
3 - 29
Page 57

7-2-1 Function Key
F4/ Repeat Measurement St art :
F5/ Repeat Measurement Halt : Measurement operation is stopped.
F6/ Function Return : Screen display returns to Tool Compensation.
F7/ Data Delete : On appearance of a window, select either “One Meas. Spot”
“OK? Y- Yes N- No” message appears. With Y ,
measurement starts.
or “Whole Meas. Spot” and push ENTER . “OK? Y- Yes,
N- No” message appears. With Y , the measurement
spots are deleted.
7-3 Working
The working patterns, as shown in Fig. 3, can be divided into 8 kinds according to the virtual
nose points.
When Virtual Point 1, 2, 3, or 4 being assigned, both X and Z axes are subject to measurement.
The order for measurement, in that case, is always Z to X axis.
When Virtual Point 0, 5, 6, 7, 8, or 9 being assigned, X or Z axis alone is subject to
measurement. In this case, for compensation of the axis not being measured, compensation
needs to be input manually beforehand. As for virtual nose points of tools, see Drawing 1.
Drawing 1 Virtual Nose Points of Tools
3 - 30
Page 58

The following example describes the case when the virtual nose point is 1: (See Drawing 2.)
(1) Shifted in rapid traverse from St art Point (P0) to Point 1 (P1).
(2) Shifted in rapid traverse from P1 to P2.
(3) Shifted in rapid traverse from P2 to P3.
(4) Shifted in jog feed speed from P3 to the end position (P4) to be touched.
(5) Shifted in jog feed speed from the point where touching and stopping have taken place.
(6) Shifted from P5 to P6 in rapid traverse.
(7) Shifted from P6 to P7 I rapid traverse.
(8) Shifted in jog feed speed from P7 to the end position (P8) to be touched.
(9) Shifted in jog feed speed from the touch-and-stop position to P9.
(10) Shifted from P9 to P10 in rapid traverse.
(1 1) Shifted from P10 to the start point (P11) in rapid traverse.
Drawing 2 Working with Virtual Nose Point 1
3 - 31
Page 59

Drawing 3 Working Patterns
3 - 32
Page 60

7-4 Precaution
(1) When a tool has been changed, be sure to manually apply it to Q setter.
(2) Apply it to Q setter only once.
(3) Approaching, in rapid traverse, from the sensor to the place just before the clearance
amount on approach (PRA6266), touch the sensor in the jog feed rate.
(4) Single block is held valid while in measurement operation.
(Re-started with F4/REPEAT START .)
(5) Machine lock, when having occurred in Q setter mode, produces an alarm.
(6) When a compensation no. having been selected in Q Setter mode has been shifted with the
cursor and the page key, measurement is carried out with the compensation no. data.
(7) When the measurement start point can touch the sensor, alarm takes place.
(8) When the sensor has not been touched in measurement, alarm takes place after operation
is over.
(9) Threading tools, tip changing type drills, end mills, and other tools which are similar to these
cannot be subject to measurement.
(10) The measurement start point is any one position free from danger or touching the sensor.
(11) When, in some operation patterns, an interference exists with a work, remove the work
from the chuck.
(12) When a large difference exists between the Q setter measurement and the work
measurement dimension, adjust Q setter position on Maintenance page.
(13) When the machine is provided with the Y-axis, it must be in the following conditions when
starting Q-setter repeat.
• The Y-axis is at the origin. (The ORIGIN lamp is ON)
• The tool offset amount for the Y-axis is 0. (Both shape and Wear are 0)
(14) The measuring spots are deleted in the following cases:
• When Data Delete on the screen is effectuated.
• When shape data for tool compensation volume and nose T have been input.
7-5 Relevant Parameters
(Reference V alue)
No.6244, #3 = 0 : Does not make a door close check. (0)
= 1 : Makes a door close check.
No.6244, #4 = 0 : Does not operate with the tool nose radius compensation amount taken into
account. (1)
= 1 : Operates with the tool nose radius compensation amount taken into
account.
No.6244, #5 = 0 : Cannot measure the rotary tool. (Alarm) (0)
= 1 : Can measure the rotary tool
No.6265 Distance from touch position to end position for Q setter repeat (1.500mm)
No.6266 Clearance amount on approaching for Q setter repeat (3.000mm)
No.6267 Clearance amount for right-handed machine tool for Q setter repeat (5.000mm)
No.6268 Clearance amount for left-handed machine tool for Q setter repeat (50.000mm)
3 - 33
Page 61

7-6 Relevant Alarms
No.715 Machine lock has been used in measurement.
No.724 No measurement has been performed in Q setter.
No.738 Touch signals of Q setter repeat is abnormal.
No.739 Measurement start point of Q setter repeat is not correct.
No.749 Cannot measure the rotary tool with Q-setter repeat.
8. Simple Jaw Edge Forming Function
8-1 Outline
With “Edge shape” “Working Conditions” being input according to the guidance on the page and
the start button being pushed, raw edge machining starts.
8-2 Operation
(1) Index the tool used for raw edge forming to the machining position.
(2)
Pushing F6/SOFT JAW on the p age of the work coordinate system
(General → F4/WORK COORDINATE ), display Window page for raw edge forming.
(3)
Select either outer jaw or inner jaw forming by using F4/OUTER JAW or F5/INNER JAW .
(4) Prepare the section where a core bar is fitted and mount it properly.
(5) Input an edge configuration and working conditions.
(6) Turning the spindle in Manual mode, shift the tool to the edge position.
With F3/JAW END SURFACE pushed, “Jaw end surface position setting? Y-Yes/N-No” is
displayed. With Y , set the jaw end position.
Pushing F9/CUT PATH CHECK in MDI mode, check the locus of a working program. If
(7)
not in MDI mode, “Set MDI mode” message is displayed. While in locus checking, Dry-Run
and Machine Lock ON state are held effective. The operation panel lamp s, however, do not lit
up. Also, no MST code is output.
The coordinate system (tip position) is brought to presetting on completion of locus checking
or by resetting while in checking.
(8) Perform zero returning as paying attention not to cause interference.
(9) Pushing the start button in MDI mode, execute a working program of raw edge forming.
3 - 34
Page 62

3 - 35
Page 63

8-3 Function Keys
F1/ZOOM IN GRAPH. : A cut part of an edge is displayed magnified.
F2/SET UP : The Setup window appears and allows you to specify the spindle
speed and turret indexing.
F3/JAW END SURFAC : “Jaw End Surface Position Setting? Y-Yes/N-No” message is
displayed. Set with Y .
The Z coordinate value of the (soft jaw) tool nose position is
cleared to 0. (The Z coordinate value for the relative coordinate
system.)
F4/OUTER JAW : Outer Jaw Forming page is selected.
F5/INNER JAW : Inner Jaw Forming page is selected.
F6/EXIT : Work Coordinate System page is returned.
F7/DA TA CLEAR : “Edge Configuration and Working Condition Erased? Y-Yes/N-No”
message appears. Select Y to clear.
F8/RESET : Soft jaw forming is ended. Push this to return to normal work. The
jaw end surface setting position is cleared.
F9/CUT PATH CHECK : A locus of a working program is drawn.
8-4 Jaw Configuration And Machining Conditions
(1) JAW CONFIGURA TION
The symbols of jaw configurations indicate the following:
A : Inner diameter for 1st stage
B : Depth for 1st stage
C : Core metal diameter
D : Inner diameter for 2nd stage
E : Depth for 2nd stage (With 0 setting, one-stage jaw is obtained.)
T : Grip part taper amount
F : Necking depth
G : Max. V alue of stock allowance
H : Setting of chamfering amount
I : Setting of necking width (clearance)
J : Bolt position 1
K : Jaw extrusion from chuck outer face is input in +/-. (Chuck outer diameter taken as
reference)
(2) MACHINING CONDITIONS
Cutting speed Rough: Cutting speed for rough cutting (m/min)
Cutting speed Finish: Cutting speed for finishing (m/min)
Number of revolution Rough: Number of revolution for rough cutting (rpm)
(Automatically calculated from cutting speed.)
Number of revolution Finish: Number or revolution for finishing (rpm)
(Automatically calculated from cutting speed.)
Feed speed Rough: Feed speed for rough cutting (mm/rev)
Feed speed Finish: Feed speed for finishing (mm/rev)
3 - 36
Page 64

Cut depth Rough: Depth of cut for rough cutting (mm)
(With 0 setting, finishing alone is performed.)
Finishing Allowance Finish: finishing allowance for finishing (mm)
(With 0 setting, finishing alone is performed.)
8-5 Precaution
(1) Before executing soft jaw forming, set a jaw end surface position. When locus checking or
soft jaw forming is executed without a edge position being set, warning takes place.
(2) Clamp max. spindle rpm is Soft Jaw Forming mode to the parameter set value (No. 5160).
(3) When E value is 0, it gets 1-stage edge.
(4) When a locus is not clearly displayed, reduce speed with the feed speed switch.
(5) In order to perform necking, pay attention to the tip shape.
(6) When the machine is provided with the Y-axis, it must be in the following conditions when
starting soft jaw forming.
• The Y-axis is at the origin. (The ORIGIN lamp is ON)
• The Y-axis tool offset amount for the Y-axis is 0. (Both shape and Wear are 0)
8-6 Relevant Parameters
(Reference Values)
No.5130 Feed rate magnification in unload cutting of soft faw forming
No.5160 Max. spindle rpm of soft jaw forming (1000rpm)
No.5155 Approach amount on finishing in soft jaw forming (10.000mm)
No.5156 Soft jaw forming clearance (2.000mm)
8-7 Relevant Alarms
No.270 Soft jaw error
The following display appears:
[270] (#001) Soft jaw error
↑
Numerals following “#” tells details of the alarm as follows:
3 - 37
Page 65

>
=
<
=
>
=
<
=
>
=
<
=
>
=
data.
<
=
<
=
<
=
<
=
<
=
>
=
<
=
>
=
<
=
>
=
<
=
>
=
<
=
<
=
<
=
<
=
#001 A 0 (A: 1st stage inner dia./outer dia.)
#002 B 0 (B: 1st stage depth)
#003 C 0 (C: Core bar dia.)
#004 D 0 (D: 2nd stage inner dia./outer dia.)
#005 E 0 (E: 2nd stage depth)
#006 T < 0 (T: Grip part t aper amount)
#007 F < 0 (F: Necking depth)
#008 G < 0 (G: Max. value of stock allowance)
#009 H < 0 (H: Chamfering amount)
# 00A I < 0 (I: Necking width)
#010 C A (Core bar dia. 1st stage inner dia.)
#011 C A (Core bar dia. 1st stage outer dia.)
#012 D A (2nd stage 1st stage inner dia.)
#013 D A (2nd stage 1st stage outer dia.)
#014 C D (Core bar dia. 2nd stage inner dia.)
#015 C D (Core bar dia. 2nd stage outer dia.)
#016 B E (1st stage 2nd stage depth)
#017 Chamfering is too large.
#018 Necking width is too large.
#019 Bolt interference has occurred.
#020 cutting rate (rough) 0
#021 cutting rate (finish) 0
#022 Feed rate (rough) 0
#023 Feed rate (finish) 0
#024 Depth of cut
#030 Outer 1-stage edge configuration 1
#031 Outer 1-stage edge configuration 2
#032 Outer 1-stage edge configuration 3
#040 Inner 1-stage edge configuration 1
#041 Inner 1-stage edge configuration 2
#042 Inner 1-stage edge configuration 3
#050 Outer 2-stage edge configuration 1
#051 Outer 2-stage edge configuration 2
#052 Outer 2-stage edge configuration 3
#053 Outer 2-stage edge configuration 4
#054 Outer 2-stage edge configuration 5
#060 Inner 2-stage edge configuration 1
#061 Inner 2-stage edge configuration 2
#062 Inner 2-stage edge configuration 3
#063 Inner 2-stage edge configuration 4
#064 Inner 2-stage edge configuration 5
#070 Combined undercut error
#071 Combined cut depth error
#072 Combined above-cut error
#073 Error in increase to combined peak
#074 A block exists where no calculation is available when nose R is applied to configuration
#0F0 Configuration can not be specified.
#0F1 Intersecting point calculation has entered infinite loop.
#0FF Soft Jaw Forming page has not been displayed.
No.729 Jaw end surface position setting not completed (Warning)
3 - 38
Page 66

8-8 Set Values for Standard Soft Jaws
8-8-1 Metric Specifications
(1) TS15 ........................................................................................................... Model A
NR20 , HT20R , CA20 ......................................................................Model B
NR23 , HT23R , TG25, HT25G, TF25, CA23 ...................................Model C
III III
III III
II
II
Model
Item
Jaw A
Configuration B
C
D
E
T
F
G
H
I
J
K
Cutting Speed Rough
Finish
RPM Rough
Finish
Feed Speed Rough
Working conditions
Depth of Cut Rough
Stock Allowance Finish
Soft Jaw Outer Dia.
Finish
Inner Dia.
Height
Model A
Outer Jaw
80.0 mm
10.0 mm
15.0 mm
50.0 mm
20.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
13.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
165.0 mm
15.0 mm
30.0 mm
Inner Jaw
80.0 mm
10.0 mm
165.0 mm
160.0 mm
20.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
13.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
165.0 mm
15.0 mm
30.0 mm
Model B Model C
Outer Jaw
130.0 mm
10.0 mm
52.0 mm
90.0 mm
20.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
12.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
210.0 mm
52.0 mm
40.0 mm
Inner Jaw
130.0 mm
10.0 mm
210.0 mm
205.0 mm
20.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
12.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
210.0 mm
52.0 mm
40.0 mm
Outer Jaw
150.0 mm
10.0 mm
48.0 mm
100.0 mm
20.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
18.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
254.0 mm
48.0 mm
48.0 mm
Inner Jaw
150.0 mm
10.0 mm
254.0 mm
240.0 mm
20.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
18.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
254.0 mm
48.0 mm
48.0 mm
Jaw Bolt Hole Pitch PRM5163
Bolt Center Pos.
from Jaw Surface PRM5164
Bolt Spot Facing Dia. PRM5165
25.0 mm
12.0 mm
14.5 mm
3 - 39
25.0 mm
15.0 mm
19.0 mm
32.0 mm
21.0 mm
20.0 mm
Page 67

(2) TG30, HT30G, CA30 .................................................................................Model D
TG40, HT40G, CA40 .................................................................................Model E
II
II
TG50, HT50G .............................................................................................. Model F
Model
Item
Jaw A
Configuration B
C
D
E
T
F
G
H
I
J
K
Cutting Speed Rough
Finish
RPM Rough
Finish
Feed Speed Rough
Working conditions
Depth of Cut Rough
Stock Allowance Finish
Soft Jaw Outer Dia.
Finish
Inner Dia.
Height
Model D
Outer Jaw
160.0 mm
15.0 mm
25.0 mm
100.0 mm
30.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
18.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
305.0 mm
25.0 mm
60.0 mm
Inner Jaw
160.0 mm
15.0 mm
305.0 mm
260.0 mm
30.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
18.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
305.0 mm
25.0 mm
60.0 mm
Model E Model F
Outer Jaw
220.0 mm
15.0 mm
81.0 mm
150.0 mm
30.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
22.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
381.0 mm
81.0 mm
61.0 mm
Inner Jaw
220.0 mm
15.0 mm
381.0 mm
360.0 mm
30.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
22.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
381.0 mm
81.0 mm
61.0 mm
Outer Jaw
300.0 mm
15.0 mm
157.0 mm
200.0 mm
30.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
22.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
457.0 mm
157.0 mm
61.0 mm
Inner Jaw
300.0 mm
15.0 mm
457.0 mm
440.0 mm
30.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
22.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
457.0 mm
157.0 mm
61.0 mm
Jaw Bolt Hole Pitch PRM5163
Bolt Center Pos.
from Jaw Surface PRM5164
Bolt Spot Facing Dia. PRM5165
32.0 mm
40.0 mm
23.5 mm
3 - 40
50.0 mm
30.0 mm
32.0 mm
50.0 mm
30.0 mm
32.0 mm
Page 68

(3) CS20 ........................................................................................................... Model G
Model
Item
Jaw A
Configuration B
C
D
E
T
F
G
H
I
J
K
Cutting Speed Rough
Finish
RPM Rough
Finish
Feed Speed Rough
Working conditions
Depth of Cut Rough
Stock Allowance Finish
Soft Jaw Outer Dia.
Finish
Inner Dia.
Height
Model G
Outer Jaw
130.0 mm
10.0 mm
21.0 mm
90.0 mm
20.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
11.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
210.0 mm
21.0 mm
38.0 mm
Inner Jaw
130.0 mm
10.0 mm
210.0 mm
205.0 mm
20.0 mm
0.03mm
0.5 mm
0.0 mm
1.0 mm
1.5 mm
11.0 mm
100m/min
120m/min
Automatically
Calculated.
Automatically
Calculated.
0.15mm/rev
0.10mm/rev
2.0 mm
0.2 mm
210.0 mm
21.0 mm
38.0 mm
Outer Jaw
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
m/min
m/min
mm/rev
mm/rev
mm
mm
mm
mm
mm
Model Model
Inner Jaw
m/min
m/min
mm/rev
mm/rev
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
Outer Jaw
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
m/min
m/min
mm/rev
mm/rev
mm
mm
mm
mm
mm
Inner Jaw
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
m/min
m/min
mm/rev
mm/rev
mm
mm
mm
mm
mm
Jaw Bolt Hole Pitch PRM5163
Bolt Center Pos.
from Jaw Surface PRM5164
Bolt Spot Facing Dia. PRM5165
25.0 mm
24.0 mm
19.0 mm
3 - 41
mm
mm
mm
mm
mm
mm
Page 69

8-8-2 Inch Specifications
(1) S15.............................................................................................................. Model A
HT20R , CA20 , CS20 ......................................................................... Model B
HT23R , HT25G, TF25, CA23 ..............................................................Model A
III
III
II
II
Model
Item
Jaw A
Configuration B
C
D
E
T
F
G
H
I
J
K
Cutting Speed Rough
Finish
RPM Rough
Finish
Feed Speed Rough
Working conditions
Depth of Cut Rough
Stock Allowance Finish
Soft Jaw Outer Dia.
Finish
Inner Dia.
Height
Model A
Outer Jaw
3.00 inch
0.40 inch
0.60 inch
2.00 inch
0.80 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.51 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
6.50 inch
0.60 inch
1.20 inch
Inner Jaw
3.00 inch
0.40 inch
0.60 inch
2.00 inch
0.80 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.51 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
6.50 inch
0.60 inch
1.20 inch
Model B Model C
Outer Jaw
5.00 inch
0.40 inch
2.00 inch
3.50 inch
0.80 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.47 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
8.25 inch
2.00 inch
1.60 inch
Inner Jaw
5.00 inch
0.40 inch
8.25 inch
8.00 inch
0.80 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.47 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
8.25 inch
2.00 inch
1.60 inch
Outer Jaw
6.00 inch
0.40 inch
1.90 inch
4.00 inch
0.80 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.71 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
10.00 inch
1.90 inch
1.90 inch
Inner Jaw
6.00 inch
0.40 inch
10.00 inch
9.50 inch
0.80 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.71 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
10.00 inch
1.90 inch
1.90 inch
Jaw Bolt Hole Pitch PRM5163
Bolt Center Pos.
from Jaw Surface PRM5164
Bolt Spot Facing Dia. PRM5165
1.00 inch
0.47 inch
0.57 inch
3 - 42
1.00 inch
0.60 inch
0.75 inch
1.26 inch
0.82 inch
0.80 inch
Page 70

(2) HT30G, CA30 .............................................................................................Model D
HT40G, CA40 .............................................................................................Model E
II
II
HT50G......................................................................................................... Model D
Model
Item
Jaw A
Configuration B
C
D
E
T
F
G
H
I
J
K
Cutting Speed Rough
Finish
RPM Rough
Finish
Feed Speed Rough
Working conditions
Depth of Cut Rough
Stock Allowance Finish
Soft Jaw Outer Dia.
Finish
Inner Dia.
Height
Model D
Outer Jaw
6.30 inch
0.60 inch
1.00 inch
4.00 inch
1.20 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.71 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
12.00 inch
1.00 inch
2.35 inch
Inner Jaw
6.30 inch
0.60 inch
12.00 inch
10.20 inch
1.20 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.71 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
12.00 inch
1.00 inch
2.35 inch
Model E Model F
Outer Jaw
8.70 inch
0.60 inch
3.20 inch
6.00 inch
1.20 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.87 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
15.00 inch
3.20 inch
2.40 inch
Inner Jaw
8.70 inch
0.60 inch
15.00 inch
14.20 inch
1.20 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.87 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
15.00 inch
3.20 inch
2.40 inch
Outer Jaw
11.80 inch
0.60 inch
6.20 inch
7.90 inch
1.20 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.87 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
18.00 inch
6.20 inch
2.40 inch
Inner Jaw
11.80 inch
0.60 inch
18.00 inch
17.30 inch
1.20 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.87 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
18.00 inch
6.20 inch
2.40 inch
Jaw Bolt Hole Pitch PRM5163
Bolt Center Pos.
from Jaw Surface PRM5164
Bolt Spot Facing Dia. PRM5165
1.26 inch
1.60 inch
0.92 inch
3 - 43
2.00 inch
1.20 inch
1.26 inch
2.00 inch
1.20 inch
1.26 inch
Page 71

(3) CS20 ........................................................................................................... Model G
Model
Item
Jaw A
Configuration B
C
D
E
T
F
G
H
I
J
K
Cutting Speed Rough
Finish
RPM Rough
Finish
Feed Speed Rough
Working conditions
Depth of Cut Rough
Stock Allowance Finish
Soft Jaw Outer Dia.
Finish
Inner Dia.
Height
Model G
Outer Jaw
5.00 inch
0.40 inch
2.00 inch
3.50 inch
0.80 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.43 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
8.25 inch
0.80 inch
1.50 inch
Inner Jaw
5.00 inch
0.40 inch
8.25 inch
8.00 inch
0.80 inch
0.001 inch
0.02 inch
0.00 inch
0.04 inch
0.06 inch
0.43 inch
300ft/min
400ft/min
Automatically
Calculated.
Automatically
Calculated.
0.006in/rev
0.004in/rev
0.08 inch
0.008 inch
8.25 inch
0.80 inch
1.50 inch
Outer Jaw
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
ft/min
ft/min
Automatically
Calculated.
Automatically
Calculated.
in/rev
in/rev
inch
inch
inch
inch
inch
Model Model
Inner Jaw
ft/min
ft/min
Automatically
Calculated.
Automatically
Calculated.
in/rev
in/rev
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
Outer Jaw
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
ft/min
ft/min
Automatically
Calculated.
Automatically
Calculated.
in/rev
in/rev
inch
inch
inch
inch
inch
Inner Jaw
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
inch
ft/min
ft/min
Automatically
Calculated.
Automatically
Calculated.
in/rev
in/rev
inch
inch
inch
inch
inch
Jaw Bolt Hole Pitch PRM5163
Bolt Center Pos.
from Jaw Surface PRM5164
Bolt Spot Facing Dia. PRM5165
1.00 inch
0.95 inch
0.75 inch
3 - 44
inch
inch
inch
inch
inch
inch
Page 72

8-9 Operation Of Simple Soft Jaw Forming Function
(1) OUTER JAW
Process Command Description
1 G99 Fxx Every revolution, feed speed for roughing
2 G96 Sxx Constant surface speed, cutting speed for roughing
3 G50 Sxx Spindle rpm clamp, soft jaw forming spindle max. rpm
4 M03 Spindle forward rotation
5 G00 Xxx Zxx Approach to the point immediately before jaw end surface (parameter No.5155)
6 G01 Zxx Machining start position (Jaw end surface)
7 See the attached table. Soft jaw forming rough cutting
8 G00 Xxx Zxx Approach to the point immediately before jaw end surface (parameter No.5155)
9 G99 Fxx Every revoluti on, feed spe e d for f i nishing
10 G96 Sxx Constant surface speed, cutting speed for finishing
11 G01 Xxx Fxx X start point of 1st stage chamfering, unload cutting feed speed
12 G99 G01 Zxx Fxx Z start point of 1st stage chamfering, finishing feed speed
13 G01 Xxx Zxx 1st stage chamfering end point
14 G01 Xxx Zxx 1st stage necking start point
15 G96 G01 Xxx Sxx 1st stage necking X cut depth, rough cutting speed
16 G01 Zxx 1st stage necking Z cut depth
17 G96 G01 Xxx Sxx Clearance (Parameter No.5156), finishing cutting speed
18 G01 Xxx Fxx X (1st stage inner dia. – Parameter No.5156), unload cutting feed speed cutting
19 G01 Zxx 1st stage necking Z end point
20 G99 G01 Xxx Fxx X (1st stage inner dia.), finishing feed speed
21 G01 Xxx 1st stage necking X cut depth
22 G96 G01 Xxx Zxx Sxx Clearance (Parameter No.5156), finishing cutting speed
23 G01 Xxx Fxx 2nd stage chamfering X start point, unload cutting feed speed
24 G99 G01 Zxx Fxx 2nd stage chamfering Z start point, finishing feed speed
25 G01 Xxx Zxx 2nd stage chamfering end point
26 G01 Xxx Zxx 2nd stage necking start point
27 G96 G01 Xxx Sxx 2nd stage necking X cut depth, rough cutting speed
28 G01 Zxx 2nd stage necking Z cut depth
29 G96 G01 Xxx Zxx Sxx Clearance (Parameter No.5156), finishing cutting speed
30 G01 Xxx Fxx X (2nd stage inner dia. – Parameter No.5156), unload cutting feed speed
31 G01 Zxx 2nd stage necking Z end point
32 G99 G01 Xxx Fxx X (2nd stage inner dia.), finishing feed speed
33 G01 Xxx 2nd stage necking X cut depth
34 G96 G01 Xxx Zxx Sxx Clearance (Parameter No.5156), finishing cutting speed
35 G00 Xxx Zxx Machining start position (jaw end surface)
36 G00 Xxx Zxx Starting point
37 M05 Spindle stop
38 G97 Constant surface speed cancelled
39 M30 Soft jaw forming ended
3 - 45
Page 73

(2) INNER JAW
Process Command Description
1 G99 Fxx Every revolution, feed speed for roughing
2 G96 Sxx Constant surface speed, cutting speed for roughing
3 G50 Sxx Spindle rpm clamped, soft jaw forming spindle max. rpm
4 M03 Spindle forward rotation
5 G23 Stroke limit check 2/3 OFF
6 G00 Xxx Zxx Approach to the point immediately before jaw end surface (parameter No.5155)
7 G01 Zxx Machining start position (Jaw end surface)
8 See the attached table. Soft jaw forming rough cutting
9 G00 Xxx Zxx Approach to the point immediately before jaw end surface (parameter No.5155)
10 G99 Fxx Every revolution, finishing feed speed
11 G96 Sxx Constant surface speed, finishing cutting speed
12 G01 Xxx Fxx 1st stage chamfering X start point, unload cutting feed speed
13 G99 G01 Zxx Fxx 1st stage chamfering Z start point, finishing feed speed
14 G01 Xxx Zxx 1st stage chamfering end point
15 G01 Xxx Zxx 1st stage necking start point
16 G96 G01 Xxx Zxx 1st stage necking X cut depth, rough cutting speed
17 G01 Zxx 1st stage necking Z cut depth
18 G96 G01 Xxx Zxx Sxx Clearance (Parameter No.5156), finishing cutting speed
19 G01 Xxx Fxx X (1st stage inner dia. – Parameter No.5156), unload cutting feed speed cutting
20 G01 Zxx 1st stage necking Z end point
21 G99 G01 Xxx Fxx X (1st stage inner dia.), finishing feed speed
22 G01 Xxx 1st stage necking X cut depth
23 G96 G01 Xxx Zxx Sxx Clearance (Parameter No.5156), finishing cutting speed
24 G01 Xxx Fxx 2nd stage chamfering X start point, unload cutting feed speed
25 G99 G01 Zxx Fxx 2nd stage chamfering Z start point, finishing feed speed
26 G01 Xxx Zxx 2nd stage chamfering end point
27 G01 Xxx Zxx 2nd stage necking start point
28 G96 G01 Xxx Sxx 2nd stage necking X cut depth, rough cutting speed
29 G01 Zxx 2nd stage necking Z cut depth
30 G96 G01 Xxx Zxx Sxx Clearance (Parameter No.5156), finishing cutting speed
31 G01 Xxx Fxx X (2nd stage inner dia. + Parameter No.5156), unload cutting feedspeed
32 G01 Zxx 2nd stage necking Z end point
33 G99 G01 Xxx Fxx X (2nd stage inner dia.), finishing feed speed
34 G01 Xxx 2nd stage necking X cut depth
35 G96 G01 Xxx Zxx Sxx Clearance (Parameter No.5156), finishing cutting speed
36 G00 Xxx Zxx Machining start position (jaw end surface)
37 G00 Xxx Zxx Start point
38 G22 Stroke limit check 2/3 ON
39 M05 Spindle stop
40 G97 Constant surface speed cancelled
41 M30 Soft jaw forming ended
3 - 46
Page 74

(3) PERFORMANCE CHART (OUTER JAW)
(4) PERFORMANCE CHART (INNER JA W)
3 - 47
Page 75

(5) ROUGH CUTTING OF SOFT JAW FORMING
Process Command Description
1 G00 Xxx Zxx X is shifted by the amount of finishing allowance and Z by 3mm.
2 G01 Xxx Cut depth in X direction is increased by the amount of one time.
3 G01 Zxx Fxx Feeding takes place to the point 3mm before the stroke allowance. (feed
4 G01 Zxx Fxx Roughing in Z direction (feed speed for roughing)
5 G01 Xxx Returning takes place in X direction by the amount of one time of cut depth.
6 G01 Xxx Shifting takes place in X direction. (Parameter No.5156)
7 G00 Zxx Returning takes place to the point which is 3mm from the jaw end.
8 G01 Xxx Fxx X is shifted to the cutting place of the preceding time.
9 G01 Xxx To the point which has been shifted by the amount of the stock
10 G00 Zxx To Z start position
11 G00 Xxx To X start position
speed for unloaded cutting)
(feed speed for unloaded cutting)
allowance from the starting position.
When the handle is not provided with a taper, the path becomes as above. When the handle
is provided with taper or in order to know details of the path, refer to G71 Type 2 of Combined
Canned Cycle of “Program” version of the instruction manual.
3 - 48
Page 76

II. Screen Operation
1. Screen Layout and Basic Operation
2. Operation of Overall Screen
3. Position
4. Work Coordinate (Offset)
5. Set (Data)
6. Macro Variable
7. Plot
8. Plot Parameters
9. Tool (Offset)
10. Alarm Diagnosis
11. System
12. Program
13. Program List
14. Input/Output
15. Input/Output (With PC Card Used)
Note) There are two types of display screen – color and monochrome. If color is specified, the
item in the brackets “( )” after the color name, shows the condition during monochrome
display, as color (monochrome).
3 - 49
Page 77

1. Screen Layout and Basic Operation
One screen fundamentally consists of the following (See Fig. 1-0):
1 Main display area
2 Alarm display area
3 Program No. display area (No. O, No. N)
4 Key input area
5 Error message display area
6 Function menu display area
2 Alarm display area
1 Main display area
4 Key input area 5 Error message display area
6 Function menu display area
3 Program number display area
Fig. 1-0 Configuration of basic screen
In the overall screen, the tool data and command data are summarized.
On certain screens, windows (small screens) may be overlapped and displayed, when a
function menu key is pressed.
(As a rule, if the same key is pressed again, the window disappears.)
By setting the time to transition to the Good Night screen, the screen can be blanked
(darkened) if you do not operate any keys within that time.
1-1 Main Display Area
Although the design differs from one screen to another, the following describes a basic operating
method.
↑ / ↓ (Cursor move keys)
Used to move the cursor up/down by one position. When the cursor is located at the top or
bottom of the screen, the screen is scrolled by pressing them. The double-spread page such
as parameters is not scrolled. They are also used to perform a search.
3 - 50
Page 78

→ / ← (Cursor move keys)
Used to move the cursor to the right/left by one position.
/ page keys)
Used to change pages when one page is not enough to display all. Here, the cursor refers
to the character displayed in reverse video. Normally, it is surrounded by a yellow-frame
guide line. The guide line is to indicate data connection; some screens do not have this.
When the pages are changed, the cursor is moved to the beginning of the page. In addition,
the following key combinations are available for special operations.
SHIFT + ↑ / SHIFT + ↓
Only the screen is scrolled without moving the cursor.
SHIFT +
Moves the page and cursor to the beginning of that screen.
SHIFT +
Moves the page and cursor to the end of that screen.
SHIFT + → /SHIFT + ←
Moves the cursor character by character in editing the program. This allows you to edit
finely , not word by word.
1-2 Alarm Display Area
When an alarm occurs during execution of the program, a number and a simple message are
displayed in one line. When multiple alarms occur simultaneously , only the first one is displayed.
For more details, refer to the alarm diagnostic screen.
When an alarm is displayed in white on the red ground (red blinking), it indicates a serious alarm.
In that case, the machine stops and the Alarm Maintenance screen is forced to appear. (When
you do not want switching of the screen, set “1” in the bit 1 of the parameter 7000.)
When displayed in blue on the yellow ground, it is an alarm to awaken the operator. The machine
does not stop and the screen is not switched.
1-3 Program Number Display Area
Displayed in this area are the program number and sequence number being currently executed,
and multiplicity and repeat frequency at subprogram call time. The program number is 0000 in
case of MDI.
Example) O1000 → O2000 → O3000
L = 10 N1234
O3000, N1234 is being executed.
O3000 repests another 10 times.
O3000 returns to O2000.
O2000 returns to O1000.
3 - 51
Page 79

1-4 Key Input Area
The entered characters are buffered in here once, and then, input.
Example) P: Absolute value = 1.234 (1.234 is entered)
Also, absolute/incremental value programming can be switched over and a number’ search can
be performed by switching over the mode. To switch over the mode, press the following character
keys when nothing has been buffered.
P (P: Absolute value =)
Absolute value programming. The entered numerical value is input as it is.
I (I: Incremental value =)
Incremental value programming. The entered numerical value is added and input.
N (N: Number =)
Number search. The cursor is moved to the entered number . However, the cursor key is
used for execution (not the INPUT key). In addition, the following functions are provided for
input.
CAN
Deletes the character one before the cursor in the key input area.
SHIFT + CAN
Deletes the entire key input area.
1-5 Error Message
Different from the alarm, a message is displayed which notifies you of an operational mistake, etc.
Message are listed.
1-6 Function Menu
On the overall (program) screen, a screen is normally selected by a function key on which the
name of the screen is inscribed. On other screens, the lower part of the screen in blue (light
color) is the function menu. This menu differs depending on the screen. For details, refer to
descriptions of individual screens.
OPER/MAINTE key
Pressing this key displays a green (black) menu.
The function of this menu allows you to select some screens. Generally , the screen with the
function keys is called a operation menu and this one a maintenance menu, respectively .
3 - 52
Page 80

1-7 Tree Chart
F1.POS. F1. F2.REST ART POS.
F2.PRGRM F1.CHANGE WINDOW F5.RANGE STORE[
F3.TOOL F1.TOOL NAME F8.EXIT
OVERALL Screen (RUN)
F4.WORK F1.ABSOL. VALUE F5.ST ATE
F2. F5.EXIT
F3.SETUP F7.REST ART CLR
F4.COMMAND F9.SEARCH
F5.REST ART F1.U ZERO
F6.FLOA TING REF . F2.V ZERO F1.CHANGE WINDOW
F7.ZERO SET F3.W ZERO F2.BACK GRD EDIT
F7.EXIT F3.EXIT
F9.ALL AX. SET F4.RANGE SET
F2.BACK GRD EDIT F6.STORE INSERT
→
F3.RANGE EDIT F7.RANGE DELETE
F4.PROGRAM COPY F8.DELETE INSERT
→
F5.WORD CONVT . F5.EXIT
F6.CANNED CYCLE G71
~
F7.PROGRAM LIST F1.CONDENCE
F8.MACRO V AL. F2.MERGE
F5.CUTTING TIME
F6.LIST CHANGE
F7.EXIT
F2.TYPE
F3.NAME
F4.DOUBLE CUTTING
F6.Q-SETTER REPEA T F1.TOOL NAME
F7.DATA CLEAR F2.TYPE
F9.LIFT SP ARE F3.NAME
F4.UNIT
(INPUT OF STOCK ALLOWANCE)
F2. F6.
F3. F7.DA T A CLEAR
F4. F8.REAL SET
F5.2ND REF . PNT F9.(OFFSET)
F6.JAW
F5.SET F7.Eco eco
F1.GRAPHIC
F7.GRAPH. F1.GRAPHIC PARAM. F2.RANGE
F4.SCALE ON F3.PLANE
F7.ZERO SET F1.GRAPHIC P ARAM.
F9.PREVIEW F2.AUTO RANGE
F8.IN/OUT F1.INPUT F3.PREVIEW START
F2.OUTPUT F4.SCALE ON
F9.SEL/FUNK F1.DAT A SER VER F3.VERIFY F7.ZERO SET
F2. F4.STOP F9.PREVIEW EXIT
F5.OPERA TION STA TUS F5.CALL SELECT
F6.WORK MEAS F6.SETTING F6.PROGRAM LIST
F7.MEAS. OFFSET F7.DET AIL LIST
F8.CHECK ON/OFF
F9.DON
For details, see the instruction manual of
SEIKIDON.
3 - 53
Page 81

F1.SCHEDULER
F2.PERIODIC F1.DETAIL F1.INFORMA TION
CHECK F5.ONE-LINE CLEAR F2. PERIODIC CHECK RETURN
F7.CHECK TIME SET
F8.CHECK DA Y SET
F1.DIAGNOSTIC RESUL T F2.LAYOUT
F3.ALARM F2.SW STA TUS DISPLAY F3.LIST
DIAGNOSE F4.ALARM RECORD F2.ALARM DETAIL
F6.DEBUG (ALARM) F7.RECORD CLEAR
1.COMMUNICATION (RS232C)
F4.SYSTEM 1.PARAM SET
~
28.SYSTEM 2
2.DIAGNOSE 1.I/O SIGNAL F3.F CONTACT
3.
SETTING MECHANICAL COMPENSA TION 1.STORED PITCH F4.RF CONT ACT
4.POSITION REGION ERROR F6.X CONTACT
7.SOFT VERSION COMPENSATION F7.Y CONTACT
8.ST ATUS/OK
22.DA TE/TIME SETTING
24.SLBUS F1.SLBUS ST A TUS
F7.SLBUS ERROR
F9.CHANGE
25.SYSTEM TABLE F1.BASIC RAM CAP
F2.EXTENDED RAM CAP
F3.T ABLE
F4.SYSTEM CLEAR
26.THERMAL DISPLACEMENT F1.MAINTENANCE SCREEN
OVERALL Screen (MAINTENANCE)
27.PMC DA T A SETTING F2.TIMER - F1.P ARAMETER F2.COMPENSA TION
28.WHEEL LA THE (EDIT SCREEN) F3.REFERENCE
29.YU-YU CARD F4.ALL CLEAR
30.F MENU 1.F_PMC F5.MAINTENANCE 2
2.F_SYSTEM F6.REFERENCE
3.F_SETTING TEMPERATURE SYSTEM
4.F_MESSAGE F1.EDIT
F2.DELETE
F8.FLANGE THICKNESS
F5.INSTR MANU INFO F1.G CODE LIST F9.WHEEL DIAMETER
F2.M CODE LIST LIMIT V ALUE
F3.MAINT M CODE LIST F1.DIR OPERA TION
F6. F2.OUTPUT SA VE
F7. F3.INPUT LOAD
F8.MAINTE F1.Q SETTER (or) F4.COMPARE
F9.GOOD BYE F1.AUTO PRESETTER F5.DELETE
F6.A TTRIBUTE ON/OFF
F7.A TTRIBUTE ALL ON
F8.A TTRIBUTE ALL OFF
(Note) denotes an option
F1.G CONT ACT
F2. RG CONTACT
3 - 54
Page 82

2. Operation of Overall Screen
When the power is turned on or the RETURN key is pressed, the Overall screen (Fig. 2-0) is
selected. It is very convenient because it displays many data required for operation. The data
includes;
Program
Tool data (tool number, tool compensation, nose radius, tool width, nose point)
Spindle data (rpm command/surface speed command, actual rpm)
Feed rate (feed per minute command/feed per revolution command)
Rotary tool rpm
Spindle clamp rpm
Dwell remainder in seconds
Axis load meters
Operation state (Operating time, Running time, Cutting time, No. of set units, No. of
works, Total no. of works)
Nose position, remaining shift
G code of the following groups
00 (non-mode), 01 (positioning/linear or circular interpolation), 02 (plane specification), 05
(feed per minute/feed per revolution) 07 (tool diameter compensation), 09 (canned cycle
for drillling), 10 (return point of canned cycle for drilling), 17 (constant surface speed
control).
M codes of five group
Scheduled end time, machining time, tool lapping time
Date and time
3 - 55
Page 83

Fig. 2-0 Overall Screen
Also, the following is enabled this screen.
Program search
Program editing
2-1 Program
This is located data the upper left part of the screen. It displays and edits the program. MDI input
is also done here. However, exp anded editing or background editing are not allowed. When
running the program, the display color changes as follows.
When running the program, the display. Color (For monochrome)
Already executed block : Green
Block being executed or to be executed : Yellow reverse V ideo
(light-colored reverse video with frame)
Pre-read block : Y ellow (light-colored reverse video)
Previous block : White
Block to be executed next or part to be edited : White reverse video (reverse video)
The conditions for editing the program are given below.
• Write key has been pressed.
• In the edit mode and not in the automatic operation mode.
For details of program operation, refer to section 12. Program.
Here, one-fourth the program screen will be displayed in principle.
3 - 56
Page 84

2-2 Tool Path Plot
This is located at the upper part of the screen and plots the tool path of the program being run.
This is a miniature version of the plot screen. Therefore, the plotting parameters are the same
as those for the plot screen. The plot screen can be erased with the ORIGIN key.
2-3 Tool Data
Indication appears at the bottom left-hand corner of the page, displaying tool data (no., type,
name, compensation, nose R, tip width, and tip point) of cut section of the tool rest.
2-4 Spindle Data
On the right side of the tool data, the spindle command rpm S and actual rpm of the spindle are
displayed. While in constant circumferential speed control, “Rpm S” is indicated as
“Circumferential Speed V”.
Further, while in Back mode, dat a for the back spindle are displayed.
2-5 Feed Speed
Feed speed F is displayed under the spindle data.
It is indicated in “F per minute” for feeding per minuet, and in “Rotation F” in feeding per rotation.
2-6 Rotary Tool Speed
Rotary tool rpm is indicated under the feed speed.
With a rotary tool being fitted, “Tool S” is indicated.
2-7 Spindle Clamp Speed
Spindle clamp rpm is displayed under the rotary tool.
When the spindle clamp rpm indication is valid, “Clamp S” is indicated.
Further, while in Back mode, clamp rpm of the back spindle is displayed.
2-8 Dwell
While in dwell execution, dwell remainder is displayed in seconds.
When it reaches zero, the display disappears.
2-9 Load Meter
State of load of each axis is indicated in a bar graph under the tool data.
2-10 Positional Data
The tip position and the remainder shift volume are indicated at the bottom right-hand corner of
the page concerning 4 coordinates including T ip, relative, Machine, Remainder Shif t Volume.
3 - 57
Page 85

2-11 G Codes
On the right side of the positional data, 8 G codes are displayed horizontally from the top left in
the order below:
* 00 Group (Non-model)
04, 09, 27~31, 70~76, etc.
* 01 Group (Positioning, Linear interpolation, Circular interpolation, Threading, Single
type fixed cycle)
00, 01, 02, 03, 32, 90, 92, 94
* 02 Group (Plane assignment)
17, 18, 19
* 05 Group (Per-minute feed /Per-rotation feed)
98, 99
* 07 Group (Tool diameter compensation)
40, 41, 42
* 09 Group (Canned cycle for drilling)
80, 81, 82, 83, 84, etc.
* 10 Group (Return point of canned cycle for drilling)
198, 199
* 17 Group (Constant surface speed control)
96, 97
2-12 M codes
M codes blonging to 5 groups are displayed horizontally from the top left in the order elow:
* 01 Group (Sprindle)
03, 04, 05, 13, 14, 15
* 02 Group (Coolant)
08, 09
* 03 Group (Program stop)
00, 01, 02, 30
* 04 Group (Spindle gear)
40, 41, 42, 43
* 05 Group (Others)
Maximum 5 newest M codes other than those of 01~04 Groups are
displayed.
2-13 Time Measurement
At the bottom right-hand corner of the page, 3 kinds of time measurement appear . Measurement
is carried out within a scope not exceeding 10000 hours. To make input here, push
F9/ SEL/ FUNC and, further , F5 / OPERATION STATUS to display the operation status page
(Fig. 2-13). Shift the cursor to the appropriate place.
EX . (hour/minute/second)=0 (It is set to 0.)
(hour/minute/second)=1 (1 : 00 : 00 is input.)
(hour/minute/second)=1/2 (1 : 02 : 00 is input.)
(hour/minute/second)=1/2/3 (1 : 02 : 03 is input.)
3 - 58
Page 86

(1) Scheduled ending
Notice of ending is made effective when End Notice on the page is held “valid”.
The scheduled ending time is equal to time length from the auto operation start to the ending
notice.
With a scheduled ending time of a program having been input by an operator, call light
functions when working time has reached the scheduled ending time.
(2) Working time
Time for working is summed up. (time during which the st art lamp is held ON.)
(3) Lap T
Lap time among tools is measured. This is automatically set to 0 on tool changing. No
measurement is conducted while NC is held in standby state.
(4) Work Count
NC, against M12 command, counts up the number of cutting and the total number of works
cut. NC, when the set number is not equal to 0 and the number of cutting has exceeded the
set number, output s the work count correspondence signal into PC.
2-14 Date And Time
Fig. 2-13 OPERA TION STATUS
Date (in A.D.) and time (13:00 for 1 p.m.) are displayed based on the built-in clock.
Avoid changing it unnecessarily as it is used for periodic checking, etc. Should it become
incorrect due to any reason, be sure to reset properly. To display Date/T ime Set screen, push
OPER/MAINTE , F4/ SYSTEM , 2 , 2 , and INPUT . Move the cursor to Date or Time and
perform setting.
3 - 59
Page 87

3. Position
If you press the F1/Position key, the position screen (Fig. 3-1) will be displayed.
Items related to position are displayed and these items can be re-written when this screen is
displayed.
Display of nose position, remaining shift amount, relative coordinate system, and
machine coordinate system
Rewriting of relative coordinate system
Display of tool data
Display of spindle data
Display of feed rate
The tool data, spindle data, and feed rate are the same as the overall screen. The left half of the
screen is a view of the four coordinate systems on the right that has been expanded for better
understanding. The page keys
can be used for arbitrary selection.
Fig. 3-1 Position Screen
3 - 60
Page 88

3-1 Reloading of Relative Coordinate System
Among the 4 coordinate systems, only the relative coordinate system is reloadable.
For 0 setting, first push (F7/Zero Set) to change over the function.
When the function for the axis for zero setting being pushed, the value of the axis gets 0.
To zero-set all axes, push (F9/All Axes Zero Set).
To end zero setting, push (F7/Functin Return).
To input numerals, push the key for the address to be input an display the input area.
Input, then, numerals and push (Input). Absolute value/increment value input is available.
EX P: absolute value X = 1.234 (Input) (1.234 is placed in X)
I : increment value Z = 10. (Input) (10.0 is added and placed in Z)
3-2 Command Value Display
Pressing the Menu 4 (Command Value) displays the data specified by the program or MDI
operation (Fig. 3-2).
3-3 Restart (Option)
Pressing F5/RESTART displays the screen (Fig. 3-3) required for restarting the program.
3-4 Floating reference
If you press F6 / Floating reference, the following message is displayed: “Set floating reference
point? Y-Yes, N-No”
To set the floating reference point, press the Y key otherwise press the N key.
(See Fig. 3-4)
3-5 Set up
Pressing F3/SET UP allows you to input the data on the Setup side. (Fig. 3-5)
Use the cursor keys ↑ and ↓ to select the spindle speed and turret indexing, and input the
data. You cannot input multiple data at one time. To execute the input data, select the MDI
mode, input the data, and press INPUT . You will be inquired, “OK ? Y-YES N-NO.” Pressing
Y executes the input data. Pressing F3/SET UP returns the cursor to the Position side.
3 - 61
Page 89

Fig. 3-2 Command Value Screen
Fig. 3-3 Restart
3 - 62
Page 90

Fig. 3-4 Floating reference
Fig. 3-5 Set up
3 - 63
Page 91

4. Work Coordinates (Offset)
Pressing the F4 (WORK COORD) key displays the Work Coordinates screen (Fig. 4-0). This
screen operation is used to shift the machining origin.
Fig. 4.0 Work Coordinates (Machining Reference Point Shift)
As described in the instruction manual (PROGRAMMING), Section 7-2 “Tool Nose Coordinate
System”, the position of the tool nose serves as the reference position of the coordinate system.
Shifting of the machining origin, there are three methods – machining reference point shift,
machining allowance, and work length.
Pressing the F1 key alternately changes the input mode as follows. In each input mode, F1
and the key input area look as follows.
<Display of Key input Area> <display of F1>
• Removal amount input mode → “COOD.P Z=” F1/ABS. WRITE
↕
• Absolute value input mode → “P: ABS. Z=” F1/COOD.P
Note) When this screen is displayed, the removal amount input mode takes effect.
3 - 64
Page 92

4-1 Removal Amount
Machining allowance = Length from the chuck jaw face to work end face – work length.
First cut the work end face within the limits of cutting allowance, so that the black layer on the
end face is removed and escape in the same condition in the direction of the positive X axis. (Do
not move the Z axis.)
Next, stop the rotation of the spindle. Measure the overall length of the work and find the cutting
allowance. Enter this measured value as the machining allowance.
(If the cut is excessive, the value becomes negative.)
4-2 Machining Reference Point Shift
The machining reference point is located at a length between the end faces of the chuck jaws
(work shift amount) from the machine zero point. Press F1/ABS. WRITE to display
“P:ABSOL. VALUE Z=” in the key input area, and press the curs or key ↑ or ↓ to adjust the
cursor to the axis you want to change. Then, input a machining reference point shift amount.
An X-axis shift amount cannot be changed.
4-3 Work Length
The work length is the length between the end face of the chuck jaw and the machining zero
point. Press F1/ABS. WRITE to display “P: ABSOL. VALUE Z =” in the key input area, and
press the cursor key ↑ or ↓ to adjust the cursor to Work Length. Then, input the work
length.
4-4 External Work Zero Point Offset
When an external work zero point offset value is set, the entire work coordinate system can be
shifted by the set value.
However, the external work zero point offset is not enabled unless the coordinates are set (Tcommand, manual Turret indexing, etc.).
Pressing F4/EXT. OFFSET opens the window
shown in the right figure.
Select the axis you want to select, and input an offset
value.
Note) When Equipment is equipped with heat
displacement correction function, external work
zero point offset is not useable.
EZTERNAL OFFSET
X 0.000
X 0.000
Z 0.000
3 - 65
Page 93

4-5 Setting of 2nd Reference Point
With F5/2ND REF. PNT pushed, 2nd Reference Point Set page (Fig. 4-1) appears. Use this
page to set X and Z axes of the 2nd reference point (G30). When the machine X/Z axes have
been positioned to the 2nd reference point and with F2/ENTER having been pushed, “Is this
OK? Y-Yes, N-No” appears for confirmation. For OK, push Y key.
With F5/EXIT , the original page is recovered.
Fig. 4-1 2nd Reference Point
3 - 66
Page 94

5. Set (Data)
If you press the F5/Set key, the setting (data) screen (see Fig. 5-0) is displayed. This screen is
arranged so that frequently used parameters can be set according to item and application. If
there are no optional items, none will be displayed.
The screen runs over several pages, therefore, scroll by using the page keys
the desired screen by pressing the alphabet key corresponding to the screens on the menu at
the left side of the screen. Number search is also possible.
or by select
Fig. 5-0 Set (Data) Screen
5-1 Display and Setting
For a selection such as “Yes/No”, the selected one is marked with . When you want to alter,
set the cursor with the cursor key ( → or ← and press the INPUT key. When the cursor key
( ↑ or ↓ ) is pressed, the one marked with works for your safety. For your information,
the HIT ACHI SEIKI’s standard is the left one.
Set the numeric value data from the key input area, start from the key input area.
Naturally, calculation and absolute/incremental programming are also enabled.
Different from the Parameter screen, the Set (Data) screen does not have input limitations such
as WRITE key. The operator should be fully careful to make alteration.
3 - 67
Page 95

5-2 Number Search
All the pages are numbered serially. The page and cursor can be moved all at once by
searching for that number. A search is Performed by pressing the cursor key ( ↑ , ↓ ,
→ , ← ) after inputting N, followed by a numerical value.
Example)
N:number = 12 ↓ (Moves to No.12)
Fig. 5-0 (a) Set (Data) Screen
Fig. 5-0 (b) Set (Data) Screen
3 - 68
Page 96

Fig. 5-0 (c) Set (Data) Screen
Fig. 5-0 (d) Set (Data) Screen
3 - 69
Page 97

Fig. 5-0 (e) Set (Data) Screen
Fig. 5-0 (f) Set (Data) Screen
3 - 70
Page 98

5-3 Eco-eco
Pressing [F7/Eco eco] displays the Eco·eco screen (Fig. 5-3). In this screen, you set the auto
sleeping screen, auto work light OFF, and chip conveyor auto OFF times (minutes)
Fig. 5-3 Eco·eco
3 - 71
Page 99

6. Macro Variable
Press [F8/MACRO V ARIABLE] in the PROGRAM screen (F2/PROGRAM). The MACRO
VARIABLE screen appears (Fig. 6-2 (a)).
6-1 Macro Variable and Data Display
The macro variable data is classified into the following:
1 1-33 Local variables (correspond to call multiplicity)
2 100-499 Common variables (turned to “null” at power-off time)
3 500 or above Common variables (with name, remembered if the power is turned off)
They are changed over with the page keys, respectively. (Fig. 6-2 and Fig. 6-3)
The number of significant digits of data is 8 (±99999999 to ±0.0000001). When the numerical
value exceeding this limit has been input, the message “OVER FLOW” is output. Nothing is
displayed in case of the “null” data (empty, not 0). The name can be input up to 12 characters,
but it is given to the common variables 500 or above.
(1) Data deletion
Since the data of No. 500 or above is remembered even if the power is turned off, a new
function is provided, which can delete all. If the function menu is displayed on Page No. 500
or above, the Menu 7 (DATA CLEAR) appears. Pressing this menu displays the question at
the center of the screen whether to erase with 0 or “null”. Select either of them with the
cursor key ( ↑ or ↓ ) and press the INPUT key. Finally, the message “OK?” appears in
the key input area for safety confirmation. Press the Y key.
(2) “Null” input
If you press the CAN key when the key input area contains nothing, the “null” characters are
displayed. Then, pressing the INPUT key turns the data at the cursor position to “null”.
(3) Deleting the name
Set the cursor to the name you want to delete (common variable 500 or above), press
[SP ACE], followed by [INPUT].
6-2 Number Search
The page and cursor can be moved at one time by searching the macro variable No. A search
can be performed by pressing the cursor key ( ↑ , ↓ ,
subsequent numerical value.
Example) N: No. = 12 ↓ (Moves to No. 12)
3 - 72
→ , ←
) after inputting N and a
Page 100

Fig. 6-2 (a) Local V ariable
Fig. 6-2 (b) Common Variable
3 - 73
 Loading...
Loading...