

Page 1

33302 Sendermodul M-G2 HoTT SD mx-22/24/mc-24
INHALT:
1. Einführung..............................................................................................................01
2. Vorbereiten des Systems........................................................................................01
3. Einbau mx-Serie........................................................................................................02
4. Einbau mc-Serie........................................................................................................03
5. Bedienung..............................................................................................................05
5.1. Telemetriemenü Sender (TX Display)........................................................................05
5.2. Empfänger-Display.........................................................................................07
5.2.1. Empfänger Daten (RX DATAVIEW)............................................................................07
5.2.2. Servo Daten (RX SERVO)..........................................................................................08
5.2.3. Failsafe Einstellungen (RX FAILSAFE)....................................................................09
5.2.4. Mischer Einstellungen (RX FREE MIXER - WING MIXER)........................................11
5.2.5. Exponentialfunktion (RX CURVE)..............................................................................12
5.2.6. Servotest (RX SERVOTEST)....................................................................................13
6. Funktionen.....................................................................................................15
6.1. Binding.............................................................................................................15
6.1.1.Binding mehrerer Empfänger.....................................................................................15
6.2. Reichweitentest.........................................................................................................15
6.3. Fail Safe Funktion.......................................................................................................16
6.4. Ländereinstellung.......................................................................................................17
6.5. Unterspannungswarnung...........................................................................................17
6.6. Reichweitenwarnung..................................................................................................17
6.7. DATA Buchse..............................................................................................................17
6.8. Datenaufzeichnug......................................................................................................18
6.9. Kopfhöreranschluss....................................................................................................18
7. Firmware Updates....................................................................................................19
7.1. Updatevorgang.......................................................................................................19
8. Garantie....................................................................................................23
GRAUPNER GmbH & Co. KG – Postfach 1242 – 73230 Kirchheim/Teck – www.graupner.de
Page 2

Anleitung Modul M-G2
Best.-Nr. 33302
Diese Bedienungsanleitung ist Bestandteil dieses Produkts. Sie enthält wichtige Hinweise zum Betrieb
und Handling. Bewahren Sie die Bedienungsanleitung deshalb auf und geben sie bei Weitergabe des
Produkts an Dritte mit. Nichtbeachtung der Bedienungsanleitung und der Sicherheitshinweise führen
zum Erlöschen der Garantie.
Graupner arbeitet ständig an der Weiterentwicklung sämtlicher Produkte; Änderungen des Lieferumfangs in Form, Technik und Ausstattung müssen wir uns deshalb vorbehalten.
Bitte haben Sie Verständnis dafür, dass aus Angaben und Abbildungen dieser Bedienungsanleitung
keine Ansprüche abgeleitet werden können.
Bewahren Sie deshalb diese Bedienungsanleitung zum Nachlesen auf!
1. EINFÜHRUNG
Vielen Dank, dass Sie das Graupner HoTT 2.4 Modul M-G2 gekauft haben. Dieses Modul ist ein direkter
Ersatz für das Serien-HF-Modul Ihres mx-22, mx-24 und mc-18, mc-20, mc-24 Senders.
Bitte lesen Sie vorab die gesamte Anleitung bevor Sie versuchen, das System zu installieren bzw.
einzusetzen.
Voraussetzungen für den Einbau
Der Einbau des Moduls sollte in einer Graupner Servicestelle erfolgen. Ein gewisses handwerkliches
Geschick vorausgesetzt, kann der Umbau auch selbst durchgeführt werden, zur Integration der Telemetrieanzeige im Senderdisplay (nur mx-24 und mc-24) ist aber ein erstmaliges Firmware-Update des
Senders und das Telemetrie-PCB Best.-Nr. 33306 notwendig, das nur im Graupner-Service Deutschland durchgeführt werden kann. Beachten Sie bitte, dass wir beim Selbsteinbau keine Garantieansprüche übernehmen, die nachweislich durch Montagefehler verursacht wurden.
2. VORBEREITEN DES SYSTEMS
mx-Serie
Entfernen Sie zuerst Ihr bisheriges HF-Modul. Lesen Sie
1 6
5
4
2
3
Wenn Sie bisher bereits ein 2.4 GHz System
wie Graupner|iFs verwendet haben, müssen
Sie nur die vorhandene Antenne am Modul
ausstecken.
mc-Serie
Entfernen Sie zuerst Ihr bisheriges HF-Modul. Lesen Sie dazu das entsprechende Kapitel in der Bedienungsanleitung des Fernsteuersystems. Wenn Sie bisher ein 35 MHz-System verwendet haben,
müssen Sie außerdem die Teleskopantenne gegen eine Graupner HoTT 2.4 GHZ Antenne tauschen.
Verwenden Sie dazu Best.-Nr. 23049 Antennen Umrüstkit Pultsender und die Antenne Best.-Nr. 33801
- siehe dazu Abb. 5 bis 10.
Wenn Sie bisher bereits ein 2.4 GHz System wie Graupner|iFs verwendet haben, müssen Sie nur die
vorhandene Antenne am Modul ausstecken.
01
Bedienungsanleitung Modul M-G2 33302
1
6
dazu das entsprechende Kapitel in der Bedienungsanleitung des Fernsteuersystems. Wenn Sie bisher ein 35 MHz-
System verwendet haben, müssen Sie außerdem die Teleskopantenne gegen die beiliegende Graupner HoTT Antenne
tauschen.
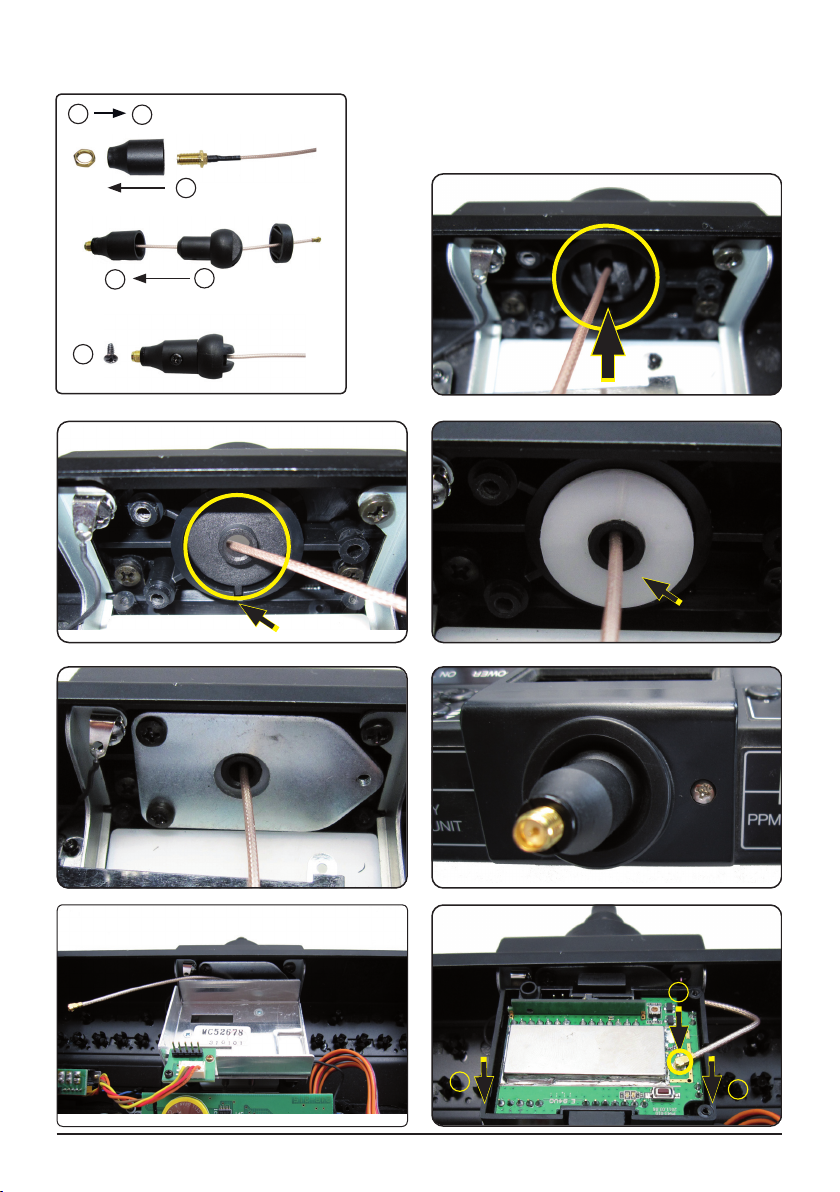
Um diese zu montieren, drehen Sie zuerst die Teleskopantenne aus dem Sender. Stecken Sie nun das Antennenkabel
der HoTT-Antenne von oben durch die Öffnung. Der Befestigungsadapter (1) besitzt auf einer Seite eine kleine Aussparung (Markierung), durch die das Antennenkabel geführt
wird. Diese muss auf die linke Seite (von vorne gesehen).
Stecken Sie den Adapter in die Öffnung, darauf kommt der
Zwischenring (2), und zwar so, dass die Bohrung für die Befestigungsschraube nach hinten zeigt. Drehen Sie nun die
goldene M4 Schraube (4) vollständig ein, um den Adapter zu
befestigen. Stecken Sie abschließend die Antenne auf und
sichern sie mit der schwarzen Schneidschraube.
Page 3

3. EINBAU MX-SERIE
1. Öffnen Sie das Modul M-G2 mit den beiden
Schrauben auf der Rückseite. Entfernen Sie
den Deckel, indem Sie ihn nach unten aufklap pen.
2.
Entfernen Sie den hinteren Gehäusedeckel Ihres Senders durch Lösen der Gehäuseverschraubung.
Abb. 1
3. Bohren Sie nun ein Loch mit ca. 5 mm Durch messer in das Sendergehäuse, und zwar ge nau an der Stelle, an der sich die Aussparung
im Sendermodulgehäuse befi ndet (Abb. 2) und
entgraten es sorgfältig. Befestigen Sie die Ge häuserückseite wieder. Ziehen Sie anschlie ßend den Antennenstecker durch dieses Loch.
22 mm
Abb. 2
4. Stecken Sie das Modul in den Sender. Achten
Sie darauf, dass die Anschlusskontakte korrekt
positioniert sind, um sie beim Einstecken nicht
zu beschädigen. Wenden Sie keine Gewalt
an! Drücken Sie dann den Antennenstecker
mit leichtem Druck in die Buchse am Modul.
Vergewissern Sie sich, dass er korrekt einge rastet ist, damit er sich im späteren Betrieb
nicht lösen kann (Abb. 3).
Abb. 3
5. Nun müssen Sie nur noch den Moduldeckel
wieder anbringen. Hängen Sie ihn mit den zwei
Nasen an der unteren Seite im Modulgehäuse
ein und befestigen ihn mit den beiden Schrau ben. Achten Sie auf korrekten Sitz (Abb. 4).
FERTIG!
Abb. 4
Bedienungsanleitung Modul M-G2 33302 02
Page 4
4. EINBAU MC-SERIE:
1
2
1
Abb. 6
Abb. 7
Abb. 8
Abb. 9
Abb. 10
Abb. 11
Abb. 12
X
1
4
X
1
2
Abb. 5
Abb. 7
Benutzen Sie
die weiße
Beilagscheibe der
Teleskopantennenbefestigung
Abb. 6
Abb. 8
3
4
Abb. 9
1
Abb. 11
03 Bedienungsanleitung Modul M-G2 33302
Abb. 10
2
1
Abb. 12
Page 5
8
5
36
7
Ø 8
6
10
3
21
oben
Abb. 14
Abb. 13
Abb. 13
1. Öffnen Sie das Modul M-G2 mit den beiden Schrauben auf der Rückseite. Entfernen Sie den Deckel,
indem Sie ihn nach unten aufklappen.
2. Stecken Sie das Modul in den Sender. Achten Sie darauf, dass die Anschlusskontakte korrekt positi-
oniert sind, um sie beim Einstecken nicht zu beschädigen. Wenden Sie keine Gewalt an! (Abb. 12 -
1)
3. Drücken Sie dann den Antennenstecker mit leichtem Druck in die Buchse am Modul. Vergewissern
Sie sich, dass er korrekt eingerastet ist, damit er sich im späteren Betrieb nicht lösen kann (Abb. 12
- 2).
4. Nun müssen Sie nur noch den Moduldeckel wieder anbringen. Hängen Sie ihn mit den zwei Nasen
an der linken Seite im Modulgehäuse ein und befestigen ihn mit den beiden Schrauben. Achten Sie
auf korrekten Sitz (Abb. 13).
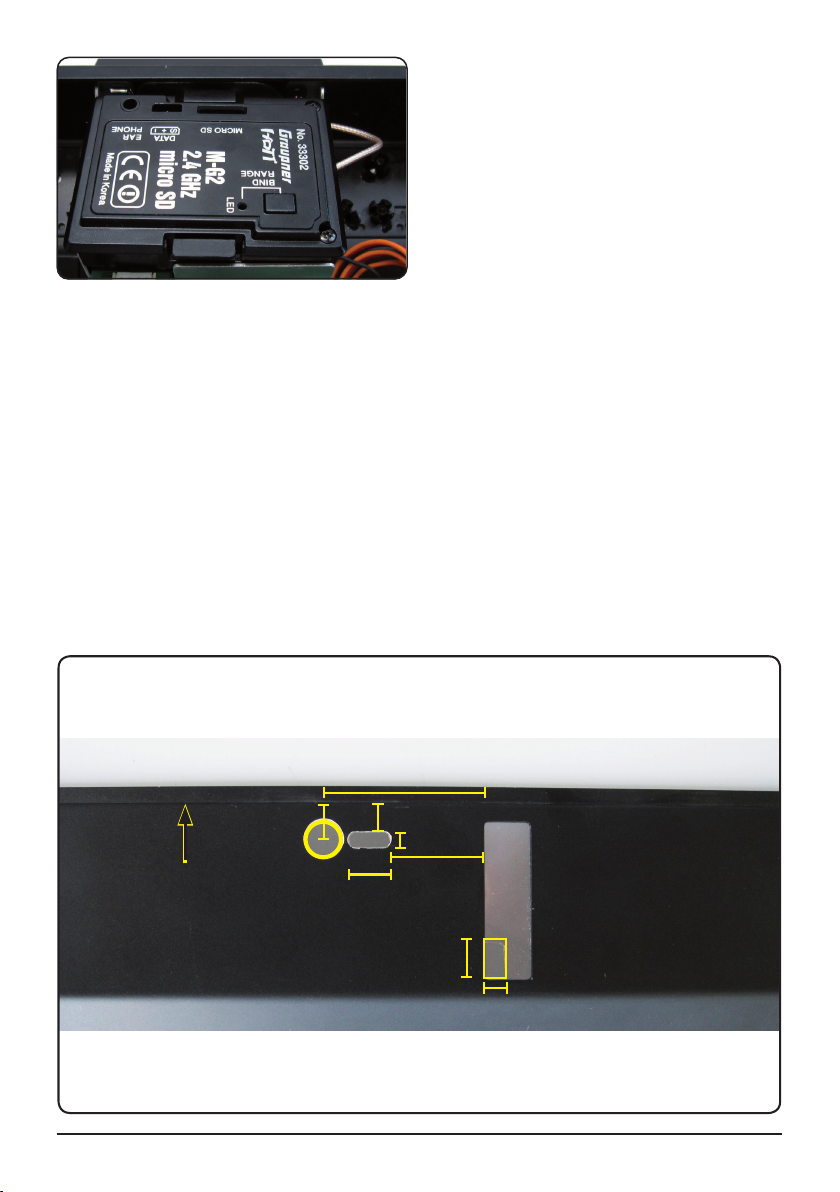
5. Wir empfehlen, Ausschnitte für die BIND/RANGE-Taste, Kopfhörer- und DATA-Buchse anzufertigen.
Diese Ausschnitte sind zumindest für den Kopfhöreranschluss notwendig, damit der Kopfhörer be quem eingesteckt werden kann (Abb. 14).
6. Befestigen Sie nun noch die Gehäuserückseite des Senders.
7. Nun muss der Sender noch im Menü „Grundeinstellungen Modell“ unter Modulation auf PPM 18
(für max. 9 Servos) oder PPM 24 (für max. 12 Servos) eingestellt werden. Auch bei Verwendung des
Channel Mapping mit mehr als 9 Kanälen ist PPM 24 zu wählen. FERTIG!
3
8
36
21
5
Abb. 14
7
Ø 8
oben
Bedienungsanleitung Modul M-G2 33302 04
6
10
alle Angaben in mm
Page 6
5. BEDIENUNG:
MULTIC 1 / 2
Multikanal 1 oder 2 (Nautic-Expert-Modul Best.-Nr.
4108)
Achten Sie beim Einschalten oder Einstellen der Fernsteuerung unbedingt darauf, dass die Senderantenne immer mindestens 15 cm von den Empfängerantennen entfernt ist! Befi nden Sie sich nämlich mit
der Senderantenne zu nahe an den Empfängerantennen, übersteuert der Empfänger und die rote LED
am Empfänger beginnt zu leuchten. Darauf reagiert der Sender mit einem etwa einmal pro Sekunde
ertönenden Piep sowie dem Erlöschen der roten LED. Die Fernsteuerung befi ndet sich infolgedessen
im Fail-Safe-Modus.
Vergrößern Sie in diesem Fall den Abstand solange, bis das akustische Warnsignal verstummt und die
rote Sender-LED wieder leuchtet und die rote LED am Empfänger erlischt.
Beachte: damit der Sender vollständig herunterfahren kann, müssen Sie nach dem Ausschalten
mindestens 5 Sekunden warten, bevor Sie den Sender erneut einschalten. Bei Nichtbeachtung
wird keine Verbindung zwischen Sender und Empfänger aufgebaut, erkennbar an einem etwa
einmal pro Sekunde ertönenden Piep sowie dem Erlöschen der roten LED am Sender und der rot
blinkenden LED des Empfängers.
5.1. Telemetriemenü Sender (TX-Display)
Die Telemetrie kann direkt mit allen HoTT Sendern programmiert werden, die das Telemetriemenü direkt
im Senderdisplay integriert haben (bei der mc/mx-24 nach Firmware-Update möglich). Ohne dieses
Update ist die Programmierung nur über die SMART-BOX möglich.
Bei den folgenden Sendern muss zur Programmierung die SMART-BOX Best.-Nr. 33700 verwendet werden: mx-22 Best.-Nr. 4801/4802, mc-19 Best.-Nr. 4821, mc-22 Best.-Nr. 4818 und mc-18 Best.-
Nr. 4835.
In der folgenden Anleitung wird die Bedienung via SMART-BOX beschrieben, die abweichende Bedienung im Telemetriemenü der verschiedenen Sendermodelle entnehmen Sie bitte der Tabelle:
SMART-BOX mx-12/16/20/32 HoTT mc-19/mc-22/mc-24/mx-24 HoTT
ENTER
ESC
INC
DEC
INC+DEC SET Rotary drücken
TX: SD-card log ON
A: 11.3 V M: 11.4V m: 11.2V
VARIO TONE: ON
RANGE TEST : OFF 90s
RX BIND : BIND
ALARM VOLT : 9.3V
COUNTRY :GENERAL
MULTIC1: 00 MULTIC2: 00
scrollen: Wert: scrollen: Rotary drücken + Wert: Rotary
scrollen: Wert: scrollen: Rotary drücken + Wert: Rotary
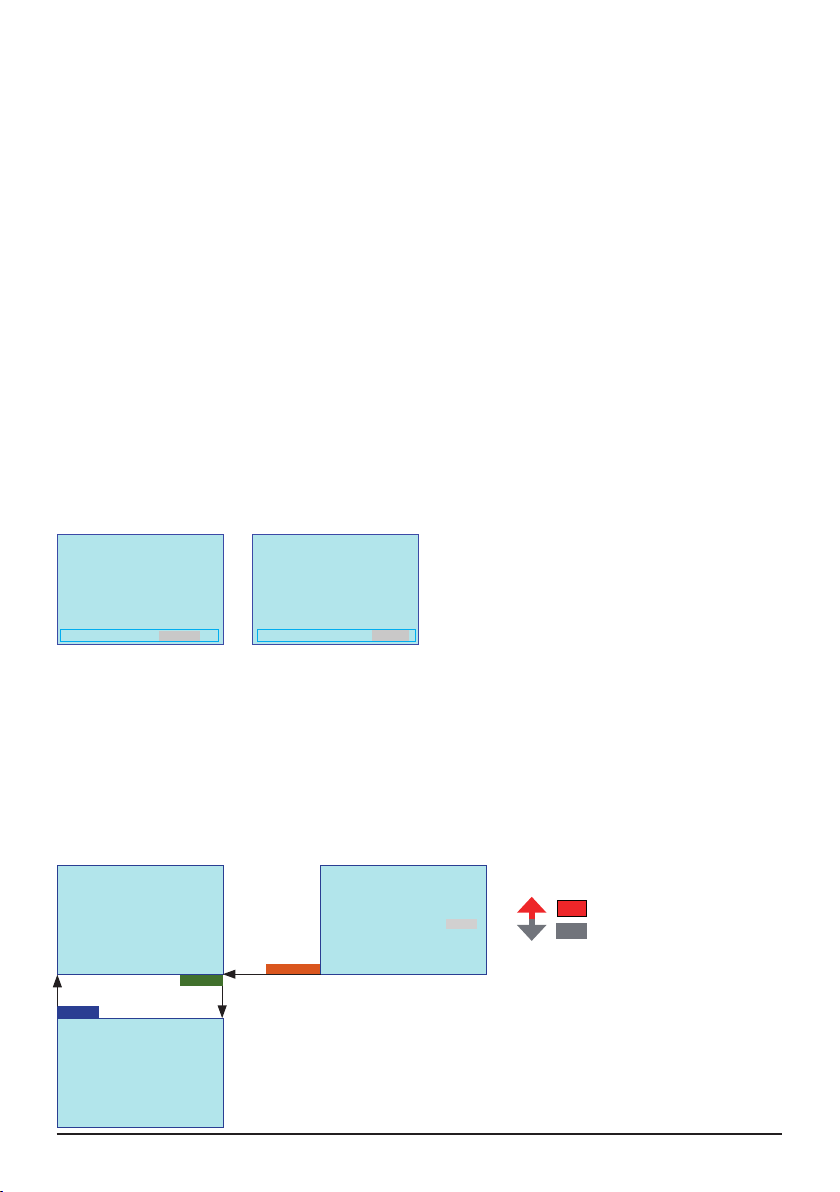
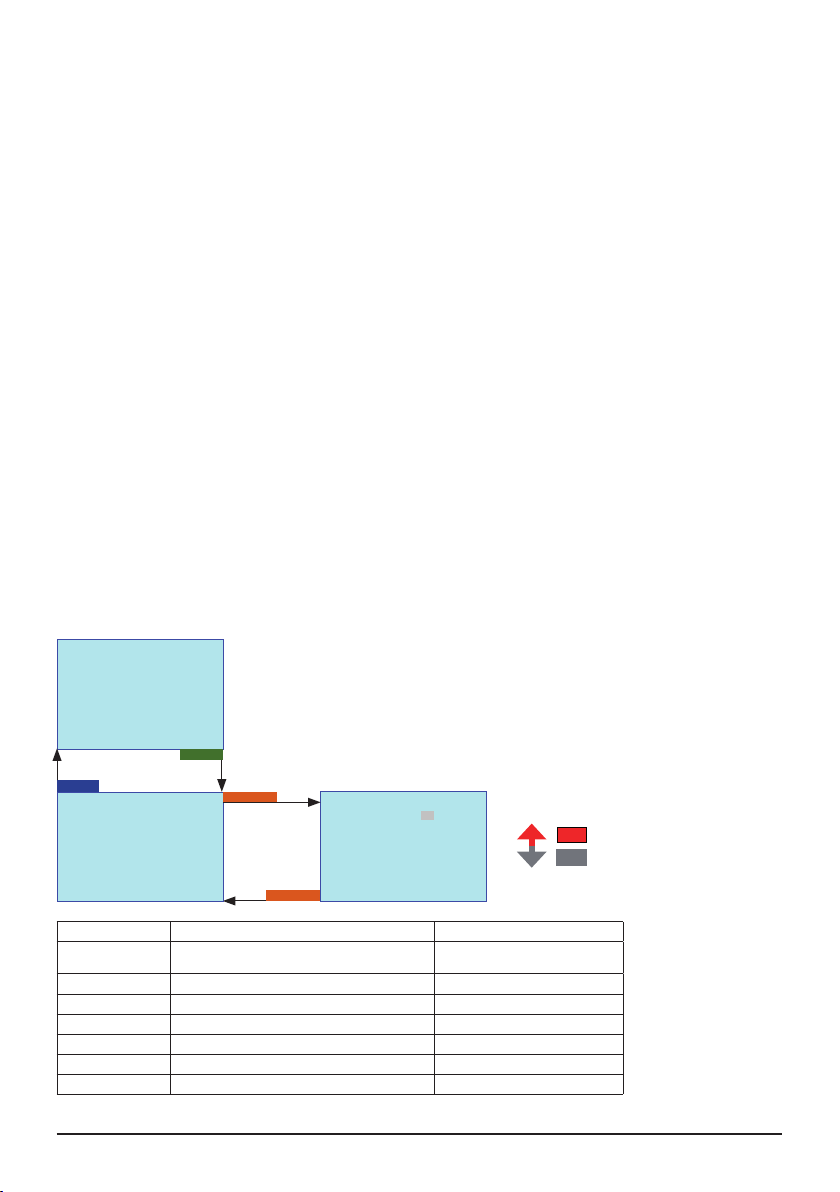
Das TX-Display erscheint, wenn Sie
- die SMART-BOX an die DATA-Buchse anschließen und die erste Zeile „SET TING AND DATAVIEW“ durch einen Druck auf die ENTER-Taste aktivieren
oder
- bei Sendern mit integrierter Telemetrie den Menüpunkt „Telemetrie“ durch
Drücken des Rotary aufrufen
ENTER
CLEAR
Display-Anzeige Erläuterung Einstellungen
SD-card log Zeigt den Speichervorgang auf der SD-Karte an ON /OFF automatisch
A = TX VOLT Aktuelle Betriebsspannung des Senders in Volt M = MAXIMUM
VOLT
m = MINIMUM
VOLT
RX BIND Binden des Empfängers BINDING
ALARM VOLT Spannung, bei der das Sender-Unterspannungs-
COUNTRY Ländereinstellung GENERAL / FRANCE
RANGE TEST zeigt an, ob der Reichweitentest läuft, außerdem
MULTIC 1 / 2
maximale Betriebsspannung seit dem letzten
Einschalten in Volt
minimale Betriebsspannung seit dem letzten
Einschalten in Volt
warnsignal ertönt
wird bei laufendem Test die Restzeit angezeigt
Multikanal 1 oder 2 (Nautic-Expert-Modul Best.-Nr.
4108)
-
-
4 – 15 V in 0.5 V Schritten
Werkseinstellung 9.3 V
OFF / ON
Kanaleinstellung 1-X
(+ PERIOD: 20 msec,
CH OUTPUT TYPE: SAME)
Unterspannungswarnung Sender (A bzw. TX VOLT): Sie können die Spannung, bei deren Unterschreitung der Alarm (Dauer Piepton) ausgelöst wird, zwischen 4 – 15 V einstellen.
05 Bedienungsanleitung Modul M-G2 33302
Page 7
Ist der Alarm aktiv, blinkt oben rechts im Sender Display der SMART-BOX „VOLT.E“, die Parameter TX
VOLT und ALARM VOLT werden invers dargestellt.
Beachte: die sendereigene Unterspannungswarnung im Menü „Allg. Einstellungen“ (Piepton) wird unabhängig von dem im TX-Display eingestellten Wert ausgelöst!
Binden eines Empfängers (RX BIND): lesen Sie dazu Punkt 6.1. Binding
SD-Karten Funktion (SD SAVE): lesen Sie dazu Punkt 6.8. Datenaufzeichnung
Ländereinstellung (COUNTRY): Die Ländereinstellung ist erforderlich, um den diversen Richtlinien der
einzelnen Länder gerecht zu werden.
Das Fernsteuer-System HoTT 2.4 verfügt über ein eingeschränktes Frequenzband für Frankreich. Wird
das Fernsteuer-System in Frankreich betrieben, muss zuerst die Ländereinstellung auf den Modus
„Frankreich (FRANCE)“ gestellt werden. Auf keinen Fall darf der „GENERAL (EUROPA)“-Modus verwendet werden!
Werkseinstellung ist GENERAL.
Siehe auch Punkt 6.4.
Reichweitentest (RANGE TEST): schaltet den Reichweitentest ein oder aus, die verbleibende Restzeit
wird im Display angezeigt. Die Anzeige funktioniert auch, wenn der Reichweitentest über den BIND/
RANGE-Taster am Sender gestartet wird. Siehe auch Punkt 6.2.
Multikanal 1/2 (MULTIC 1/2): Multichannelfunktion für die Verwendung des Nautic-Expert-Moduls
Best.-Nr. 4108. Es können bis zu 2 Multichannel-Kanäle verwendet werden, die entsprechenden Kanäle müssen im Display unter MULTIC eingestellt werden. Wird kein Nautic-Modul verwendet, MULTIC:
00 programmieren.
RX SERVO < >
OUTPUT CH: 01
REVERSE : ON
CENTER : 1500usec
TRIM : -000usec
TRAVEL- : 100%
TRAVEL+ : 100%
PERIOD : 20msec
RX SERVO TEST <
ALL-MAX : 2000usec
ALL-MIN : 1000usec
TEST : STOP
ALARM VOLT : 3.8V
ALARM TEMP+ : 70°C
ALARM TEMP- : 10°C
CH OUTPUT TYPE: SAME
Beachte: Die Zykluszeit (PERIOD) im Telemetriemenü RX SERVO muss auf 20 msec, die KanalReihenfolge (CH OUTPUT TYPE) im Telemetriemenü RX SERVO TEST auf SAME programmiert
werden, damit die Funktion aktiviert wird!
Parameter, die in der Tabelle unter Einstellungen verschiedene Optionen haben, können mit der SMARTBOX eingestellt werden. Fehlen diese Optionen, werden die Parameter-Daten nur angezeigt.
Um hier eine Einstellung vorzunehmen, müssen Sie mit dem INC- oder DEC Taster oberhalb des Displays
den gewünschten Parameter (z.B. ALARM VOLT) mit dem Pfeil-Cursor anwählen (INC bewegt den Cursor
nach unten, DEC nach oben). Drücken Sie nun die INC- und DEC Taster gleichzeitig, der zu verstellende
Parameter wird invers dargestellt um anzuzeigen, dass er programmiert werden kann. Durch Drücken der
INC-Taste wird der Wert erhöht, die DEC-Taste reduziert den Wert. Nach erfolgter Einstellung drücken Sie
die INC- und DEC Taster gleichzeitig, um die gewählte Einstellung zu speichern, als Bestätigung wird die
dunkle Hinterlegung wieder ausgeblendet.
Beachten Sie bitte: die Beschriftung der Pfeile der folgenden Displays entspricht den entsprechenden
Tasten der SMART-BOX.
TX: SD-card log ON
A: 11.3 VM: 11.4V m: 11.2V
VARIO TONE: ON
RANGE TEST : OFF 90s
RX BIND : BIND
ALARM VOLT : 9.3V
COUNTRY :GENERAL
MULTIC1: 00 MULTIC2: 00
ESC
ENTER
TX: SD-card log ON
A: 11.3 VM: 11.4V m: 11.2V
VARIO TONE: ON
RANGE TEST : OFF 90s
RX BIND : BIND
ALARM VOLT : 9.3V
COUNTRY :GENERAL
MULTIC1: 00 MULTIC2: 00
INC + DEC
INC
DEC
RX DISPLAY
Bedienungsanleitung Modul M-G2 33302 06
Page 8
5.2. EMPFÄNGER DISPLAY
5.2.1 Empfänger-Daten (RX DATAVIEW)
Um in das Empfänger-Daten Display zu wechseln, drücken Sie nun die ENTER-Taste, bis RX DATAVIEW im Display erscheint.
RX DATAVIEW >
S-QUA 100% S-dBm -49dBm
S-STR 065% R-TEM. +30°C
L PACK TIME 00005msec
R-VOLT : 05.9V
LR-VOLT : 05.8V
SENSOR1 : 00.0V 00°C
SENSOR2 : 00.0V 00°C
Beachten Sie bitte: die Menüs 5.2.1 bis 5.2.6 können nur bei eingeschaltetem
Empfänger angewählt werden! Es kann nach Einschalten des Empfängers einige Sekunden dauern, bis das Empfänger Display aktiv wird - > Symbol an
der rechten oberen Ecke des Sender-Display (TX) erscheint - und angewählt
werden kann.
Die Reaktion des Displays auf Eingaben mit den Tastern an der Oberseite
kann es etwas verzögert sein, da alle Einstellungen drahtlos direkt an den
Empfänger übertragen werden.
Im Empfänger-Daten Display können keine Einstellungen vorgenommen werden.
Display-Anzeige Erläuterung Einstellungen
S-QUA Signalqualität in % S-dBm Empfangsleistung in dBm S-STR Signalstärke in % R-TEM Empfängertemperatur in °C L PACK TIME zeigt die Zeit in msec an, in der das längste Datenpaket bei der
R-VOLT Aktuelle Betriebsspannung des Empfängers in Volt L.R-VOLT minimale Betriebsspannung des Empfängers seit dem letzten
Sensor 1 Zeigt die Werte des optionalen Telemetrie-Sensors 1 in Volt und
Sensor 2 Zeigt die Werte des optionalen Telemetrie-Sensors 2 in Volt und
Übertragung Sender > Empfänger verlorengegangen ist
Einschalten in Volt
°C an
°C an
-
-
-
-
Signalquallität (S-QUA): zeigt die Signalqualität in % an
Empfangsleistung (S-dBm): die Empfangsleistung wird über den Rückkanal des Empfängers „live“
an die SMART-BOX gesendet. Beachte: Die Empfangsleistung wird mit negativen Werten angezeigt,
d.h. ein Wert gegen Null ist der Maximalwert (= bester Empfang), je niedriger die Werte werden, desto
schlechter ist die Empfangsleistung.
Wichtig ist sie unter anderem beim Reichweitentest vor dem Betrieb.
Lesen Sie dazu auch das entsprechende Kapitel in der Fernsteuerungsanleitung!
Führen Sie den Reichweitentest vor jedem Flug durch und simulieren Sie dabei alle Servobewegungen,
die auch im Flug vorkommen. Die Reichweite muss bei aktiviertem Reichweitentest am Sender min.
50m am Boden betragen, im DATAVIEW Display darf unter S-dBm bei dieser Entfernung höchstens -80
dBm angezeigt werden, um einen sicheren Betrieb zu gewährleisten. Ist der Wert niedriger (z.B. -85
dBm), sollten Sie Ihr Modell auf keinen Fall trotzdem in Betrieb nehmen. Überprüfen Sie den Einbau des
Empfängers und die Stromversorgung Ihres Modells/Fernsteuerung.
Im Betrieb sollte dieser Wert nicht unter - 90 dBm fallen, ansonsten sollten Sie die Entfernung des
Modells verringern. Normalerweise wird aber vor Erreichen dieses Werts die akustische Reichweiten-
warnung (s. u.) ausgelöst, um einen sicheren Betrieb zu gewährleisten.
Signalstärke (S-STR): zeigt die Signalstärke in % an
Generell wird eine akustische Reichweitenwarnung (Dauer Piepton Intervall 1 sec.) ausgegeben,
sobald das Empfängersignal im Rückkanal zu schwach wird. Da der Sender aber eine wesentlich höhere Sendeleistung hat als der Empfänger, kann das Modell immer noch sicher betrieben werden, die
Modellentfernung sollte aber sicherheitshalber verringert werden bis der Warnton wieder verstummt.
Empfängertemperatur (R-TEMP): vergewissern Sie sich, unter allen Flugbedingungen im Rahmen
der erlaubten Temperaturen Ihres Empfängers zu bleiben (einzusehen in der Fernsteuerungsanleitung,
07 Bedienungsanleitung Modul M-G2 33302
Page 9
idealerweise zwischen 10 und 55°C).
Die Empfänger-Temperaturgrenzwerte, ab denen eine Warnung erfolgt, können im Display RX SERVO
TEST unter ALARM TEMP+ (50 – 80° C) und ALARM TEMP- (-20 – +10° C) eingestellt werden.
Bei Unter- oder Überschreitung erfolgt ein akustisches Signal (Dauer Piepton) und in allen EmpfängerDisplays der Smartbox blinkt oben rechts „TEMP.E“, im Display Empfänger-Daten (RX DATAVIEW) wird
außerdem der Parameter R-TEM invers dargestellt.
Datenpakete (L PACK TIME): zeigt die Zeit in msec an, in der das längste Datenpaket bei der Übertragung Sender > Empfänger verlorengegangen ist. In der Praxis ist das der längste Zeitraum, in dem das
Fernsteuersytem in den Failsafemodus gegangen ist.
Betriebsspannung (R-VOLT): kontrollieren Sie immer die Betriebsspannung des Empfängers, sollte
sie zu niedrig sein, dürfen Sie Ihr Modell auf keinen Fall weiter betreiben/überhaupt starten.
Die Empfänger-Unterspannungswarnung kann im Display RX SERVO TEST unter ALARM VOLT zwischen 3.0 und 6.0 Volt eingestellt werden. Bei Unterschreitung erfolgt ein akustisches Signal (Dauer
Piepton) und in allen Empfänger-Displays der Smartbox blinkt oben rechts „VOLT.E“, im Display Empfänger-Daten (RX DATAVIEW) wird außerdem der Parameter R-VOLT invers dargestellt.
Minimale Betriebsspannung (L.R-VOLT): zeigt die minimale Betriebsspannung des Empfängers seit
dem letzten Einschalten an. Sollte diese Spannung deutlich von der aktuellen Betriebsspannung RVOLT abweichen, wird der Empfängerakku durch die Servos möglicherweise zu stark belastet, Spannungseinbrüche sind die Folge. Verwenden Sie in diesem Fall einen größeren/stärkeren Empfängerakku, um die maximale Betriebssicherheit zu erreichen.
Telemetriesensor 1/2 (SENSOR 1 / SENSOR 2): sind diese optionalen Sensoren angeschlossen,
werden Ihre Daten (Spannung/Volt und Temperatur/ °C) live im Display angezeigt.
5.2.2
Servo-Daten (RX SERVO)
Um in das Servo-Daten Display zu wechseln, drücken Sie nun die ENTER-Taste, bis RX SERVO im
Display erscheint.
RX DATAVIEW >
S-QUA 100% S-dBm -49dBm
S-STR 065% R-TEM. +30°C
L PACK TIME 00005msec
R-VOLT : 05.9V
LR-VOLT : 05.8V
SENSOR1 : 00.0V 00°C
SENSOR2 : 00.0V 00°C
ESC
RX SERVO < >
OUTPUT CH: 01
REVERSE : ON
CENTER : 1500usec
TRIM : -000usec
TRAVEL- : 100%
TRAVEL+ : 100%
PERIOD : 20msec
ENTER
INC + DEC
RX SERVO < >
OUTPUT CH: 01
REVERSE : ON
CENTER : 1500usec
TRIM : -000usec
TRAVEL- : 100%
TRAVEL+ : 100%
PERIOD : 20msec
INC + DEC
INC
DEC
Display-Anzeige Erläuterung Einstellungen
OUTPUT CH Kanalauswahl 1 – X, abhängig vom ange-
REVERSE Servoreverse OFF / ON
CENTER Neutralpunkt in usec. TRIM Trimmposition in usec. -120 – 120 usec
TRAVEL- Servoweg negativ in % 30 – 150%
TRAVEL+ Servoweg positiv in % 30 – 150%
PERIOD Zykluszeit in msec. 10 oder 20 msec
schlossenen Empfänger
Bedienungsanleitung Modul M-G2 33302 08
Page 10

Kanalauswahl (OUTPUT CH): hier wählen Sie den gewünschten Kanal aus, die folgenden Einstellungen in diesem Display betreffen nur den hier ausgewählten Kanal
Servoreverse (REVERSE): stellt die Drehrichtung des angeschlossenen Servos ein
Normal: REVERSE OFF
Reverse: REVERSE ON
Servomitte (CENTER): bei aktivem Wertefeld (inverse Darstellung) die aktuelle Impulszeit des in der
Zeile „OUTPUT CH“ gewählten Kanals in μs angezeigt. Der angezeigte Wert ist abhängig von der
aktuellen Stellung des diesen Kanal beeinfl ussenden Gebers und ggf. der Stellung von dessen Trim-
mung. Eine Kanalimpulszeit von 1500 μs entspricht der standardmäßigen Mittenposition und damit der
üblichen Servomitte. Um diesen Wert zu verändern, wählen Sie die Zeile „CENTER“ an und drücken
Sie die Tasten DEC + INC gleichzeitig. Nun bewegen Sie den entsprechenden Geber in die gewünschte
Position und speichern die aktuelle Geberpostion durch erneutes Drücken der Taste DEC + INC. Diese
Position wird als neue Neutralposition abgespeichert.
Trimmposition (TRIM): Funktion analog den Trimmhebeln am Sender
Feinfühliges Nachjustieren in 1-μs-Schritten der Neutralposition mittels der DEC- oder INC-Tasten: um
den hier eingestellten TRIM-Wert ist der Wert in der Zeile „CENTER“ im Bereich von ±120 μs anpassbar.
Servoweg (TRAVEL +/-): dient zur Einstellung des max. Servowegs (Ruderausschlag) des angeschlossenen Servos in beide Richtungen getrennt
Zykluszeit (PERIOD): hier kann eingestellt werden, wie schnell die Servos auf Bewegungen der Bedienelemente am Sender reagieren. Diese Einstellung wird für alle Kanäle übernommen.
Beachte: bei Verwendung von analogen Servos muss 20 msec eingestellt werden! Verwenden Sie
ausschließlich Digitalservos, sollte 10 msec gewählt werden.
5.2.3 Failsafe-Einstellungen (RX FAIL SAFE)
Um in das Failsafe-Display zu wechseln, drücken Sie nun die ENTER-Taste, bis RX FAIL SAFE im
Display erscheint.
ENTER
ESC
RX FAIL SAFE < >
OUTPUT CH: 01
INPUT CH : 01
MODE : FAI SAFE
F.S.Pos. : 1400usec
DELAY : 0.75sec
FAIL SAFE ALL : NO
POSITION : 1500usec
Display-Anzeige Erläuterung Einstellungen
OUTPUT CH Kanalauswahl Ausgang - Servoan-
INPUT CH Kanalauswahl Eingang - vom Sender
MODE Failsafe Modus Fail Safe / Hold / Off
F.S. Pos. Failsafe Position 1000 – 2000 usec
DELAY Failsafe Reaktionszeit 0.25, 0.50, 0.75, 1.00 sec
FAIL SAFE ALL Speichern der Fail-Safe-Positionen
POSITION Anzeige der gespeicherten Fail-Safe-
INC + DEC
INC + DEC
schluss des Empfängers
kommender Steuerkanal
aller Steuerkanäle
Position
RX FAIL SAFE < >
OUTPUT CH: 01
INPUT CH : 01
MODE : FAI SAFE
F.S.Pos. : 1400usec
DELAY : 0.75sec
FAIL SAFE ALL : NO
POSITION : 1500usec
1 – X, abhängig vom angeschlossenen
Empfänger
1 – 16
Werkseinstellung 0.75 sec.
NO / SAVE
zwischen ca. 1000 usec. und 2000usec.
INC
DEC
Kanalauswahl Ausgang (OUTPUT CH): hier wählen Sie den gewünschten Kanal aus, die folgenden
Failsafe-Einstellungen betreffen nur den hier ausgewählten Kanal
09 Bedienungsanleitung Modul M-G2 33302
Page 11

Kanalauswahl Eingang (INPUT CH): Channel-Mapping Funktion
die Steuerfunktionenen können beliebig auf mehrere Empfänger aufgeteilt werden oder aber auch mehrere Empfängerausgänge mit derselben Steuerfunktion belegt werden. Beispielsweise um je Querruderblatt zwei Servos anstatt nur einem einzelnen ansteuern zu können usw.
Sie können max. 16 Senderkanäle verwalten. Hier wird festgelegt, wie die Senderkanäle (INPUT) auf
die Empfängerkanäle (OUTPUT) der/des Empfängers aufgeteilt werden.
Werden mehrere Empfänger verwendet, ist der Empfänger, der zuletzt gebunden wurde, der MasterEmpfänger. An diesem sind auch ggf. im Modell eingebaute Telemetriesensoren anzuschließen, da nur
der Masterempfänger deren Daten über den Rückkanal sendet.
Failsafe-Modus (MODE): dient zur Auswahl des Failsafe-Modus für den angewählten Kanal. Sie können hier eine programmierte Failsafe-Position (Fail Safe), Halten der letzten Position (HOLD) oder AUS
(OFF) auswählen.
ACHTUNG bei Modus OFF: Analogservos und auch so manches Digitalservo setzen während des Ausfalls der Steuerimpulse dem nach wie vor vorhandenen Steuerdruck keinen Widerstand mehr entgegen
und werden infolgedessen mehr oder weniger schnell aus ihrer Position gedrückt.
Fail-Safe-Position (F.S. Pos.): Für jeden OUTPUT CH (Servoanschluss) stellen Sie in der Zeile
„F.S.POS.“ nach Aktivierung des Wertefeldes (inverse Darstellung) durch einen gleichzeitigen Druck auf
die INC+DEC Taster, mit den Tasten INC oder DEC diejenige Servoposition ein, die das Servo im Störfall im Modus „FAIL SAFE“ einnehmen soll. Die Einstellung erfolgt in 10-μs-Schritten. Werkseinstellung:
1500 μs (Servomitte).
Wichtiger Hinweis:
Die Funktion „F.S.POS.“ hat darüber hinaus in allen drei Modi „OFF“, „HOLD“ und „FAIL SAFE“ noch
eine besondere Bedeutung für den Fall, dass der Empfänger eingeschaltet wird, aber (noch) kein gültiges Signal erhält: Das Servo fährt sofort in die in der Zeile „Position“ voreingestellte Fail-Safe-Position.
Dadurch können Sie z. B. verhindern, dass beim versehentlichen Einschalten des Empfängers bei
ausgeschaltetem Sender ein Fahrwerk einfährt o. ä.. Im Flug dagegen verhält sich das entsprechende
Servo im Störungsfall gemäß dem eingestellten „MODE“.
Failsafe-Reaktionszeit (DELAY): dient zur Auswahl der Verzögerungszeit, ab der die Servos bei Signalunterbrechung in ihre gewählte Position laufen. Diese Einstellung wird für alle Kanäle übernommen.
FAIL SAFE ALL (Globale Failsafe-Einstellung): Dieses Untermenü gestattet auf ähnlich einfache
Weise wie das beschriebene Menü »Fail Safe«, die Fail-Safe-Positionen von Servos mit einem „Knopfdruck“ festzulegen:
Wechseln Sie zur Zeile „FAIL SAFE ALL“ und aktivieren Sie das Wertefeld durch einen Druck auf die
INC+DEC Taster. „NO“ wird invers dargestellt. Stellen Sie anschließend den Parameter mit einer der
Tasten INC oder DEC auf „SAVE“. Nun bewegen Sie mit den Gebern und Schalter des Senders alle
Servos, denen Sie in der Zeile „MODE“ „FAIL SAFE“ zugeordnet haben oder später zuordnen wollen,
in die gewünschte Fail-Safe-Position. In der untersten Zeile „Position“ wird die aktuelle Stellung des
Gebers für den gerade eingestellten Kanal angezeigt.
Nach einem erneuten auf die INC+DEC Tasten wechselt die Anzeige wieder von „SAVE“ nach „NO“.
Die Positionen aller von dieser Maßnahme betroffenen Servos wurden damit abgespeichert und parallel dazu, in die Zeile „F.S.Pos.“ übernommen und für den aktuellen OUTPUT CH (Servoanschluss) im
Display auch unmittelbar angezeigt.
Failsafe Position (POSITION): Anzeige der Failsafe-Position des bei OUTPUT CH eingestellten Kanals.
„Fail Safe“ in Kombination mit „Channel Mapping“
Um sicher zu stellen, dass auch im Störungsfall gemappte Servos, – also Servos, welche von einem
gemeinsamen Steuerkanal angesteuert werden – gleichartig reagieren, bestimmen die entsprechenden
Einstellungen des INPUT CH das Verhalten gemappter Servos!!!
Bedienungsanleitung Modul M-G2 33302 10
Page 12

Werden demnach beispielsweise die Servoanschlüsse 6, 7 und 8 miteinander gemappt, indem den
OUTPUT CH (Servoanschlüssen) 6, 7 und 8 als INPUT CH (Steuerkanal) „04“ zugewiesen wird, dann
bestimmt völlig unabhängig von den individuellen Einstellungen der jeweiligen OUTPUT CH der INPUT
CH 04 das Fail-Safe-Verhalten dieser drei miteinander verbundenen Servos.
Dies auch dann, wenn dieser seinerseits beispielsweise mit INPUT CH 01 gemappt ist. In diesem Fall
würde der Servoanschluss 04 wiederum entsprechend der Fail-Safe-Einstellungen von CH 01 reagieren. Die in der Zeile „DELAY“ eingestellte Reaktions- oder Haltezeit dagegen gilt immer einheitlich für
alle auf „FAIL SAFE“ gestellten Kanäle.
ACHTUNG: Sobald Sie die Fail-Safe-Funktion bei eingeschaltetem Empfänger wieder per BIND/RANGE-Taster am Sender aufrufen, gehen ggf. alle zuvor im Display FAIL SAFE vorgenommenen Einstellungen einschließlich der Kanalzuordnung (INPUT CH) verloren!
5.2.4 Mischer-Einstellungen (RX FREE MIXER / RX WING MIXER)
Um in das Mixer-Display zu wechseln, drücken Sie nun die ENTER-Taste, bis RX FREE MIXER im
Display erscheint.
ENTER
ESC
RX FREE MIXER < >
MODE : 1
MASTER CH : 08
SLAVE CH : 08
S-TRAVEL- : 100
S-TRAVEL+ : 100
RX WING MIXER
TAIL TYPE : NORMAL
Display-Anzeige Erläuterung Einstellungen
MODE Modus 1, 2, 3
MASTER CH Masterkanal 0, 1 – 8
SLAVE CH Zugemischter Kanal 0, 1 – 8
SLAVE TRAVEL- Servoweg negativ 0 – 150%
SLAVE TRAVEL+ Servoweg positiv 0 – 150%
RX WING MIXER
TAIL TYPE
INC + DEC
Leitwerkstyp Normal, V-Tail, Elevon
RX FREE MIXER < >
MODE : 1
MASTER CH : 08
SLAVE CH : 08
S-TRAVEL- : 100
S-TRAVEL+ : 100
RX WING MIXER
TAIL TYPE : NORMAL
INC + DEC
INC
DEC
RX FREE MIXER
Modus (MODE): es können insgesamt bis zu drei Mixer gleichzeitig benutzt werden, mit MODE kann
zur Einstellung zwischen Mischer 1, Mischer 2 und Mischer 3 umgeschaltet werden. Die folgenden
Einstellungen in diesem Display betreffen nur den hier ausgewählten Mischer.
Masterkanal (MASTER CH): hier wird der Hauptkanal (primäre Steuerfunktion) eingestellt, zu diesem
Kanal wird der Subkanal zugemischt
Subkanal (SLAVE CH): zum Hauptkanal gekoppelter Subkanal, der Subkanal wird je nach Einstellung
zum Hauptkanal zugemischt
Servoweg Subkanal (SLAVE TRAVEL +/-): dient zur Einstellung des max. Ruderausschlag des am
Subkanal angeschlossenen Servo in beide Richtungen getrennt (EPA)
RX WING MIXER
Leitwerkstyp (TAIL TYPE): hier können Sie bereits voreingestellte Mischerfunktionen für den entsprechenden Modelltyp auswählen
NORMAL: klassisches Flugzeugmodell - Seiten- und Höhenruder getrennt am Leitwerk – keine Mischfunktion aktiviert
V-TAIL (V-Leitwerk): Bei diesem Modelltyp werden die Steuerfunktionen Höhen- und Seitenruder so
miteinander verknüpft, dass jede der beiden Leitwerksklappen – durch je ein separates Servo angesteuert – sowohl die Höhen- als auch Seitenruderfunktion übernimmt.
11 Bedienungsanleitung Modul M-G2 33302
Page 13

ELEVON (Delta-/Nurfl ügelmodelle): Die an den Ausgängen 2 und 3 angeschlossenen Servos überneh-
men Quer- und Höhenruderfunktion.
5.2.5 Exponentialfunktion (RX CURVE)
Um in das Servokurven-Display zu wechseln, drücken Sie nun die ENTER-Taste, bis RX CURVE im
Display erscheint.
ENTER
ESC
RX CURVE < >
CURVE 1 CH : 01
TYPE : B
CURVE 2 CH : 02
TYPE : B
CURVE 3 CH : 03
TYPE: B
Display-Anzeige Erläuterung Einstellung
CURVE1 CH Kanalnummer Servokurve 1 1 – 8
CURVE1 TYPE Servokurve 1 Typ A, B, C
CURVE2 CH Kanalnummer Servokurve 2 1 – 8
CURVE2 TYPE Servokurve 2 Typ A, B, C
CURVE3 CH Kanalnummer Servokurve 3 1 – 8
CURVE3 TYPE Servokurve 3 Typ A, B, C
INC + DEC
RX CURVE < >
CURVE 1 CH : 01
TYPE : B
CURVE 2 CH : 02
TYPE : B
CURVE 3 CH : 03
TYPE: B
INC + DEC
INC
DEC
Mit der Funktion Servokurve können Sie die Exponentialfunktion für bis zu drei Servos verwalten.
CURVE1 CH: hier wählen Sie den gewünschten Kanal des
ersten Servos aus, die folgenden Einstellungen in CURVE
TYP A
Expo = –100%
TYP B
linear
TYP C
TYP C
Expo = +100%
Expo = +100%
1 TYPE betreffen nur den hier ausgewählten Kanal
CURVE1 TYPE: hier wählen Sie die Servokurve für den
Servoweg
unter CURVE 1 CH ausgewählten Kanal aus
A: EXPO- Einstellung, d.h. das Servo reagiert stark auf
Geberweg
Knüppelbewegungen um die Neutralstellung, mit zunehmendem Ruderausschlag verläuft die Kurve linearer
B: lineare Einstellung, das Servo folgt der Knüppelbewegung linear
C: EXPO+ Einstellung, d.h. das Servo reagiert schwach auf Knüppelbewegungen um die Neutralstel-
lung, mit zunehmendem Ruderausschlag verläuft die Kurve linearer
CURVE2 CH: hier wählen Sie den gewünschten Kanal des zweiten Servos aus, die folgenden Einstellungen in CURVE 2 TYPE betreffen nur den hier ausgewählten Kanal
CURVE2 TYPE: hier wählen Sie die Servokurve für den unter CURVE 2 CH ausgewählten Kanal aus
CURVE3 CH: hier wählen Sie den gewünschten Kanal des dritten Servos aus, die folgenden Einstellun-
gen in CURVE 3 TYPE betreffen nur den hier ausgewählten Kanal
CURVE3 TYPE: hier wählen Sie die Servokurve für den unter CURVE 3 CH ausgewählten Kanal aus
Bedienungsanleitung Modul M-G2 33302 12
Page 14

5.2.6 Servotest (RX SERVO TEST)
Um in das Servo-Test-Display zu wechseln, drücken Sie nun die ENTER-Taste, bis RX SERVO TEST
im Display erscheint.
ENTER
ESC
RX SERVO TEST <
ALL-MAX : 2000usec
ALL-MIN : 1000usec
TEST : STOP
ALARM VOLT : 3.8V
ALARM TEMP+ : 70°C
ALARM TEMP- : 10°C
CH OUTPUT TYPE: ONCE
Display-Anzeige Erläuterung Einstellungen
ALL MAX Maximale Ruderwegposition für alle Servos 1500 – 2000 usec
ALL Min Minimale Ruderwegposition für alle Servos 1000 – 1500 usec
TEST Testprozedur START / STOP
ALARM VOLT zeigt die eingestellte Spannung an, bei der das
ALARM TEMP+ zeigt den oberen Grenzwert an, bei der das Warnsi-
ALARM TEMP- zeigt den unteren Grenzwert an, bei der das Warn-
CH OUTPUT TYPE Kanal-Reihenfolge ONCE / SAME / SUMI
INC + DEC
Unterspannungswarnsignal ertönt
gnal ertönt
signal ertönt
RX SERVO TEST <
ALL-MAX : 2000usec
ALL-MIN : 1000usec
TEST : STOP
ALARM VOLT : 3.8V
ALARM TEMP+ : 70°C
ALARM TEMP- : 10°C
CH OUTPUT TYPE: ONCE
INC + DEC
INC
DEC
3.0 – 6.0 V
Werkseinstellung 3.8 V
50 – 80° C
Werkseinstellung 70°C
-20 – +10° C
Werkseinstellung -10°C
/ SUMO
Maximale Ruderwegposition (ALL MAX): hier wird der maximale Ruderauschlag für den Servotest
eingestellt
Minimale Ruderwegposition (ALL min): hier wird der minimale Ruderauschlag für den Servotest eingestellt
Testprozedur (TEST): START startet den Servotestlauf, STOP beendet ihn wieder. Der Test startet/
stoppt jeweils nach dem gleichzeitigen Drücken der INC-/DEC-Taste (dunkle Hinterlegung ausgeblendet)
Empfänger-Unterspannungswarnung (ALARM VOLT): überwacht die Empfängerspannung und
kann zwischen 3.0 und 6.0 Volt eingestellt werden. Bei Unterschreitung erfolgt ein akustisches Signal
(Dauer Piepton) und in allen Empfänger-Displays der Smartbox blinkt oben rechts „VOLT.E“, im Display
Empfänger-Daten (RX DATAVIEW) wird außerdem der Parameter R-VOLT invers dargestellt.
Empfänger-Temperaturüberwachung (ALARM TEMP +/-): überwacht die Empfängertemperatur, es
kann ein unterer Grenzwert ALARM TEMP- (-20 – +10°C) und ein oberer Grenzwert ALARM TEMP+
(50 – 80°C) programmiert werden. Bei Unter- oder Überschreitung erfolgt ein akustisches Signal (Dauer Piepton) und in allen Empfänger-Displays der Smartbox blinkt oben rechts „TEMP.E“, im Display
Empfänger-Daten (RX DATAVIEW) wird außerdem der Parameter R-TEM invers dargestellt.
Vergewissern Sie sich, unter allen Flugbedingungen im Rahmen der erlaubten Temperaturen Ihres
Empfängers zu bleiben (einzusehen in der Fernsteuerungsanleitung, idealerweise zwischen 10 und
55°C).
Bei Unter- oder Überschreitung erfolgt ein akustisches Signal (Dauer Piepton)
Kanal- (CH OUTPUT TYPE): hier wählen Sie aus, wie die Empfängerausgänge angesteuert werden.
ONCE: die Empfängerausgänge werden nacheinander angesteuert. Empfohlen für Analogservos. Bei
dieser Einstellung werden die Servos automatisch in einem Zyklus von 20 msec - beim 12 Kanal Empfänger (Best.-Nr. 33512) 30 msec -betrieben, egal was im Display RX SERVO unter dem Menüpunkt
‚PERIOD‘ eingestellt bzw. angezeigt wird!
13 Bedienungsanleitung Modul M-G2 33302
Page 15

SAME: die Empfängerausgänge werden in Viererblöcken parallel angesteuert, d.h. Kanal 1 bis 4 und
Kanal 5 bis 8 bekommen das Sendersignal jeweils gleichzeitig. Empfohlen bei Digitalservos, wenn mehrere Servos für eine Funktion eingesetzt werden (z.B. Querruder), damit sie absolut syncron laufen.
Weiterhin ist es möglich, Analogservos anzuschließen, dann muss im Display RX SERVO unter dem
Menüpunkt ‚PERIOD‘ 20 msec eingestellt werden!
Beachte: achten Sie bei dieser Einstellung besonders auf eine ausreichende Dimensionierung der Empfängerstromversorgung, da immer bis zu vier Servos gleichzeitig anlaufen wird diese stärker belastet.
SUMO (Summensignal Ausgang):
Ein als SUMO konfi gurierter HoTT-Empfänger generiert permanent aus den Steuersignalen aller seiner
Steuerkanäle ein so genanntes Summensignal und stellt dieses beim standardmäßig am Servoanschluss 8 bereit. Die Empfängerausgänge werden nacheinander in einem Zyklus von 20 ms (beim Empfänger GR-24, Best.-Nr. 33512, 30 ms) angesteuert, auch wenn auf der Display-Seite »RX SERVO« in
der Zeile „PERIOD“ 10 ms voreingestellt ist.
In erster Linie für den nachfolgend beschriebenen „Satellitenbetrieb“ zweier HoTT-Empfänger gedacht,
kann das von einem als SUMO defi nierten Empfänger generierte Summensignal beispielsweise aber
auch zur Ansteuerung von Flybarless-Systemen oder über das Adapterkabel mit der Best.-Nr. 33310 zur
Ansteuerung von Flugsimulatoren genutzt werden.
Bsp: V-Stabi, Lehrer-Schüler Funktion, Microbeast, Flugsimulatoren und für Satellitenempfänger Ausgang
SUMI (Summensignal Eingang): Satellitenempfänger Eingang
Im Satellitenbtrieb werden zwei HoTT-Empfänger über ein 3-adriges Verbindungskabel (Best.-Nr.
33700.1 (300 mm) oder 33700.2 (100 mm)) am Servoanschluss mit der jeweils höchsten Nummer mit-
einander verbunden. Nähere Einzelheiten hierzu fi nden Sie im Internet unter www.graupner.de.
Über diese Verbindung werden alle Kanäle desjenigen HoTT-Empfängers, der als SUMO konfi guriert
wurde, und als Satellitenempfänger bezeichnet wird, permanent auf den zweiten HoTT-Empfänger,
den Hauptempfänger, welcher als SUMI zu programmieren ist, übertragen. Das Signal geht also immer
nur in Richtung SUMI. Der als SUMI defi nierte Empfänger wiederum nutzt bei Empfangsausfall jedoch
nur dann das vom SUMO kommende Summensignal, wenn mindestens 1 Kanal im SUMI auf Fail-Safe
programmiert ist. Hat der als Satellitenempfänger SUMO programmierte Empfänger einen Empfangsausfall, nehmen die an diesem Empfänger angeschlossenen Servos völlig unabhängig vom Hauptempfänger, die im Satellitenempfänger programmierten Fail-Safe-Positionen ein.
Kommt es dagegen bei beiden Empfängern gleichzeitig zu einem Empfangsausfall, dann greifen bei der
zum Zeitpunkt der Drucklegung dieser Anleitung aktuellen Empfängersoftware im Prinzip die Fail-SafeEinstellungen des SUMO‘s. Im Einzelfall sind jedoch Wechselwirkungen keinesfalls auszuschließen,
weshalb hier nur dringend empfohlen werden kann, VOR Inbetriebnahme eines Modells entsprechende
Tests durchzuführen.
Diese Empfänger-Konfi guration ist dann zu empfehlen, wenn z. B. einer der beiden Empfänger an emp-
fangstechnisch ungünstiger Stelle im Modell eingebaut ist oder infolge Düsen, Kohlefasermaterial oder
dergleichen die Gefahr besteht, dass das Empfangssignal fl uglagenabhängig abgeschwächt wird, so-
dass mit Einbrüchen der Reichweite zu rechnen ist. Schließen Sie daher die wichtigsten Steuerfunktionen unbedingt an den als SUMI programmierten Hauptempfänger an, damit das Modell im Störungsfall
auch dann steuerbar bleibt, sobald der Satellitenempfänger SUMO kein gültiges Signal mehr erhält.
Telemetrie-Daten wie z. B. die Spannung der Bordstromversorgung sendet dagegen nur der als SUMO
konfi gurierte Satellitenempfänger zum Sender. Telemetrie-Sensoren sind demzufolge an den Satelliten-
empfänger (SUMO) anzuschließen.
Jeder Empfänger sollte mit einer eigenen Zuleitung aus der gemeinsamen Spannungsversorgung angeschlossen werden. Bei hohen Strömen eventuell sogar in doppelter Ausführung. Soll dagegen jeder
der beiden Empfänger aus einer eigenen Spannungsquelle versorgt werden, dann ist unbedingt das
mittlere Kabel aus einem der beiden Stecker des Satellitenkabels zu entfernen.
Falls Sie weitere Programmierungen wie z. B. Fail-Safe-Einstellungen vornehmen möchten, trennen
Sie die dreipolige Satelliten-Verbindung zwischen den beiden Empfängern und schalten Sie nur den
betreffenden Empfänger ein. Ggf. müssen Sie auch die Bindungs-Reihenfolge ändern.
Bedienungsanleitung Modul M-G2 33302 14
Page 16

6. FUNKTIONEN
6.1. Binding (RX BIND)
Um eine Verbindung zu einem bestimmten Sender aufbauen zu können, muss zunächst der GraupnerHoTT 2.4-Empfänger mit „seinem“ Graupner-HoTT 2.4-HF-Modul (Sender) „verbunden“ werden. Diesen Vorgang bezeichnet man als „Binding“. Dieses „Binding“ ist allerdings nur einmal je Empfänger-/
HF-Modul-Kombination erforderlich. Führen Sie bei Bedarf folgende Schritte aus:
• Schalten Sie Sender und Empfänger ein.
• Ohne Smart-Box oder interne Telemetrie: Drücken Sie anschließend den BIND/RANGE-Taster auf
der Rückseite des Moduls und halten ihn weiterhin gedrückt, während Sie parallel dazu den SET Taster am Empfänger drücken und halten. Beide LEDs auf der Rückseite des Senders leuchten
nun konstant und am Empfänger blinkt die rote LED. Innerhalb von etwa 10 Sekunden sollte die rot
blinkende LED des Empfängers dauerhaft grün aufl euchten. Der Binding-Vorgang ist damit erfolg-
reich abgeschlossen.
• Mit Smart-Box oder interner Telemetrie: Gehen Sie im Telemetriemenü „TX“ zur Zeile RX BIND.
Drücken Sie nun gleichzeitig die INC+DEC Taster der SMART-BOX (oder Rotary drücken), die
Anzeige wechselt zu BINDING, invers dargestellt. Drücken Sie nun den SET-Taster am Empfänger
und halten ihn gedrückt. Innerhalb von etwa 10 Sekunden sollte die rot blinkende LED des Empfän gers dauerhaft grün aufl euchten. Der Binding-Vorgang ist damit erfolgreich abgeschlossen.
Die Anzeige „BINDING“ wechselt automatisch in „ BIND“, d.h., die Sender-/Empfänger-Kombination
ist nun betriebsbereit.
• Blinkt dagegen die rote LED am Empfänger länger als ca. 10 Sekunden, ist der Bindungsvorgang
fehlgeschlagen. Wiederholen Sie in diesem Fall die gesamte Prozedur.
6.1.1.Binding“ mehrerer Empfänger pro Modell
Bei Bedarf können auch mehrere Empfänger pro Modell gebunden werden. Binden Sie dazu die jeweiligen Empfänger zuerst einzeln wie vorstehend beschrieben.
Beim späteren Betrieb ist der Empfänger, der zuerst eingeschaltet wird und die Bindung zum Sender
zuerst fi ndet, der sogenannte „Master“-Empfänger. An diesem sind auch ggf. im Modell eingebaute
Telemetriesensoren anzuschließen, da nur der Master-Empfänger deren Daten über den Rückkanal
sendet. Der zweite und alle weiteren Empfänger laufen parallel zum Master-Empfänger im Slave-Mode
mit abgeschaltetem Rückkanal!
Mit der Channel-Mapping Funktion der HoTT Telemetrie können die Steuerfunktionen auch beliebig
auf mehrere Empfänger aufgeteilt werden oder aber auch mehrere Empfängerausgänge mit derselben
Steuerfunktion belegt werden. Beispielsweise um je Querruderblatt zwei Servos anstatt nur einem einzelnen ansteuern zu können usw.
6.2. Reichweitentest (RANGE TEST)
Führen Sie einen Reichweitetest des Graupner-HoTT 2.4-Systems entsprechend den nachfolgenden
Anweisungen durch. Lassen Sie sich ggf. von einem Helfer beim Reichweitetest unterstützen.
• Bauen Sie den vorzugsweise bereits an den Sender gebundenen Empfänger, wie vorgesehen im
Modell ein.
• Schalten Sie die Fernsteuerung ein und warten Sie, bis am Empfänger die grüne LED leuchtet. Nun
können die Servobewegungen beobachtet werden.
• Stellen Sie das Modell so auf ebenen Untergrund (Pfl aster, kurzer Rasen oder Erde), dass die
Empfängerantennen mindestens 15 cm über dem Erdboden liegen. Es ist deshalb ggf. nötig, das
Modell während des Tests entsprechend zu unterlegen.
• Halten Sie den Sender in Hüfthöhe und mit Abstand zum Körper. Zielen Sie aber mit der Antenne
nicht direkt auf das Modell, sondern drehen und/oder knicken Sie die Antennenspitze so, dass sie
während des Betriebs senkrecht ausgerichtet ist.
• Starten Sie den Reichweitetest-Modus im Menü Telemetrie, der Sender beginnt gleichmäßig zu piep-
sen und die rote und die grüne LED neben dem BIND/RANGE-Taster blinken abwechselnd.
• Bewegen Sie sich vom Modell weg und bewegen Sie währenddessen die Knüppel. Wenn Sie in-
nerhalb einer Entfernung von ca. 50 m zu irgendeinem Zeitpunkt eine Unterbrechung der Verbin dung feststellen, versuchen Sie diese zu reproduzieren.
• Gegebenenfalls einen vorhandenen Motor einschalten, um zusätzlich die Störsicherheit zu überprü-
fen.
15 Bedienungsanleitung Modul M-G2 33302
Page 17

• Bewegen Sie sich weiter vom Modell weg, solange bis keine perfekte Kontrolle mehr möglich ist.
• Beenden Sie nun den Reichweite-Testmodus manuell. Die rote LED leuchtet daraufhin wieder per-
manent während die grüne LED je nach Ländereinstellung entweder konstant leuchtet oder perma nent blinkt. Das Modell sollte jetzt wieder reagieren. Falls dies nicht 100%-ig der Fall ist, benutzen
Sie das System nicht und kontaktieren Sie den zuständigen Service der Graupner GmbH & Co.
KG.
• Führen Sie den Reichweitentest vor jedem Flug durch und simulieren Sie dabei alle Servobewe-
gungen, die auch im Flug vorkommen. Die Reichweite muss dabei immer mindestens 50 m am Boden
betragen, um einen sicheren Modellbetrieb zu gewährleisten.
Hinweis
Der Reichweitetest-Modus endet automatisch nach ca. 90 Sekunden sofern dieser nicht innerhalb dieses Zeitrahmens manuell im Menü Telemetrie des Senders beendet wurde.
A C H T U N G
Während des normalen Modellbetriebs keinesfalls den Programmier-Taster am Sendermodul
drücken und/oder längere Zeit halten!
6.3. Fail-Safe-Funktion (RX Failsafe)
Standardmäßig behalten im Lieferzustand des Empfängers alle angeschlossenen Servos im Falle einer
Fail-Safe-Situation ihre zuletzt als gültig erkannte Position bei („Hold“-Modus). Im Fail-Safe-Fall leuchtet
die rote LED am Empfänger und am Sender erlischt die rote LED. Darüber hinaus piept dieser etwa
einmal pro Sekunde zur akustischen Warnung.
Nutzen Sie das Sicherheitspotenzial dieser Option, indem Sie für einen Fail-Safe-Fall wenigstens die
Motordrosselposition bei Verbrennermodellen auf Leerlauf bzw. die Motorfunktion bei Elektromodellen
auf „Stopp“ bzw. bei Heli-Modellen auf „Hold“ programmieren. Das Modell kann sich dann im Störungsfall nicht so leicht selbstständig machen und so Sach- oder gar Personenschäden hervorrufen.
Sie können die Failsafe-Funktionen entweder im Telemetrie-Menü unter „RX Failsafe“ (5.2.3) programmieren oder am Sendermodul: der gewünschte Fail-Safe-Modus (Fail-Safe ein/aus, Hold, oder Standard) wird durch jeweils einen kurzen Druck auf den BIND/RANGE-Taster auf dem Sendermodul im
Rotationsverfahren aufgerufen:
• Fail-Safe-Modus: Der Sender piept nach dem Druck auf den BIND/RANGE-Taster einmal. Die rote
und grüne LED auf der Senderrückseite leuchten dauerhaft.
Um die im Fail-Safe-Fall nach einer „Hold“-Zeit von den Servos einzunehmen den Positio nen zu programmieren, bringen Sie die betreffenden Steuerorgane Ihres Senders (Steuer knüppel, Drehgeber, INC/DEC-Taster usw.) GLEICHZEITIG in die gewünschte Fail-Safe-Position.
Drücken Sie anschließend den BIND/RANGE-Taster drei bis vier Sekunden. Nach dem Loslassen
des Tasters sollten sowohl die rote wie auch die grüne LED auf der Rückseite des Senders konstant
leuchten und das akustische Signal verstummt sein. Dieser befi ndet sich nun wieder im Steuermo-
dus. Anderenfalls wiederholen Sie die Prozedur.
• Hold-Modus (empfohlen für Helikoptermodelle!): Der Sender piept nach dem Druck auf den
BIND/RANGE-Taster zweimal, die rote LED auf der Rückseite des Senders leuchtet dauerhaft, die
grüne LED erlischt (Werkseinstellung).
Alle auf „halten“ programmierten Servos bleiben im Falle einer Übertragungsstörung so lange an
den vom Empfänger zuletzt noch als korrekt erkannten Positionen stehen, bis ein neues, korrektes
Steuersignal beim Empfänger eintrifft.
Zum Speichern dieser Wahl drücken Sie den BIND/RANGE-Taster drei bis vier Sekunden. Nach
dem Loslassen des Tasters sollten sowohl die rote wie auch die grüne LED auf der Rückseite des
Senders konstant leuchten und das akustische Signal verstummt sein. Dieser befi ndet sich nun
wieder im Steuermodus. Anderenfalls wiederholen Sie die Prozedur.
• Fail-Safe aus (OFF): Der Sender piept nach dem Druck auf den BIND/RANGE-Taster dreimal, die
grüne LED auf der Rückseite des Senders leuchtet dauerhaft, die rote LED erlischt.
Zum Speichern dieser Wahl drücken Sie den BIND/RANGE-Taster drei bis vier Sekunden. Nach
dem Loslassen des Tasters sollten sowohl die rote wie auch die grüne LED auf der Rückseite des
Senders konstant leuchten und das akustische Signal verstummt sein. Dieser befi ndet sich nun
wieder im Steuermodus. Anderenfalls wiederholen Sie die Prozedur.
• Standard-Modus (nur für Flächenmodelle geeignet!): Der Sender piept nach dem Druck auf den
BIND/RANGE-Taster viermal, beide LEDs auf der Rückseite des Senders sind aus.
Bedienungsanleitung Modul M-G2 33302 16
Page 18
Bei diesem Modus bewegt sich im Fail-Safe-Fall das Gasservo (Kanal 1) in die für diesen Fall vor
gegebene Fail-Safe-Position, alle anderen Kanäle bleiben auf „Hold“.
Bringen Sie also den Gas-Steuerknüppel in die gewünschte Position und drücken Sie dann zum
Speichern dieser Wahl den BIND/RANGE-Taster drei bis vier Sekunden. Nach dem Loslassen des
Tasters sollten sowohl die rote wie auch die grüne LED auf der Rückseite des Senders konstant
leuchten und das akustische Signal verstummt sein. Dieser befi ndet sich nun wieder im Steuermo-
dus. Anderenfalls wiederholen Sie die Prozedur.
6.4. Ländereinstellung (COUNTRY)
Die Ländereinstellung ist erforderlich, um diversen Richtlinien (FCC, ETSI, IC etc.) gerecht zu werden.
In Frankreich beispielsweise, ist der Betrieb einer Fernsteuerung nur in einem eingeschränktem Frequenzband zulässig. Deshalb MUSS die Ländereinstellung des Senders auf den Modus „Frankreich“
umgestellt werden, sobald dieser in Frankreich betrieben wird. Auf keinen Fall darf der GENERAL/
EUROPE-Modus verwendet werden! Diese Einstellung MÜSSEN Sie nach jeder per Programmiertaster vorgenommenen Fail-Safe-Programmierung wiederholen, falls Sie Ihren Sender zuvor auf „Frankreich“ umgestellt haben.
Sie können die Ländereinstellung entweder im Telemetrie-Menü unter „TX COUNTRY“ (5.1.) programmieren oder am Sendermodul: Um eine Ländereinstellung vornehmen zu können, stecken Sie den
(FRANCE/EUROPE) Programmierstecker in die DATA-Buchse auf der Rückseite des AUSGESCHALTETEN Senders. Anschließend schalten Sie den Sender ein: Durch jeweils einen kurzen Druck auf den
BIND/RANGE-Taster kann nun zwischen „GENERAL“ und „Frankreich“ im Rotationsverfahren gewechselt werden, beginnend mit der aktuellen Einstellung.
• GENERAL/EUROPE: Der Sender piept nach einem Druck auf den BIND/RANGE-Taster einmal, die
grüne LED auf der Rückseite des Senders leuchtet dauerhaft.
Werkseinstellung, zulässig in allen Länder außer Frankreich
• Frankreich: Der Sender piept nach einem Druck auf den BIND/RANGE-Taster zweimal, die grüne
LED auf der Rückseite des Senders blinkt permanent.
• Die gewählte Ländereinstellung übernehmen Sie in den Sender, indem Sie den BIND/RANGE-
Taster für ca. 3 Sekunden drücken. Nach dem Loslassen ertönt eine kurze Bestätigungsmelodie
und der Piepton verstummt.
• Schalten Sie den Sender aus und entfernen Sie anschließend den Programmierstecker. Benutzen
Sie keinesfalls die Fernsteuerung mit eingestecktem Programmierstecker!
• Um später im Betrieb zu überprüfen, mit welcher Ländereinstellung der Sender betrieben wird,
achten Sie auf die grüne LED auf der Rückseite des Senders
grüne LED leuchtet permanent = „GENERAL/EUROPE“,
grüne LED blinkt permanent = „Frankreich“
6.5. Unterspannungswarnung
Sinkt die Senderspannung unter 8,0 V (Spannung kann im Telemetriedisplay TX oder mit der SmartBox programmiert werden), erfolgt unabhängig von der Sendersoftware eine akustische Unterspannungswarnung durch das HF-Modul in Form eines gleichmäßigen Piepsens im Rhythmus von etwa 1
Sekunde.
6.6. Reichweitenwarnung
Generell wird eine akustische Reichweitenwarnung in Form eines ca. einmal pro Sekunde ertönenden
Pieptons ausgegeben, sobald das Empfängersignal im Rückkanal zu schwach wird. Da der Sender
jedoch über eine wesentlich höhere Sendeleistung verfügt als der Empfänger, kann das Modell immer
noch sicher betrieben werden. Sicherheitshalber sollten Sie aber die Modellentfernung verringern, bis
das Signal wieder verstummt.
Verstummt das akustische Warnsignal trotz gering(st)er Entfernung nicht, ist die Unterspannungs- oder
Temperaturwarnung des Senders oder Empfängers aktiv! In diesem Fall ist der Modellbetrieb sofort
einzustellen und der entsprechende Akku zu laden.
6.7. DATA-Buchse - Firmware Update oder SMART-BOX-Anschluß
Die Smart-Box wird an der DATA-Buchse auf der Rückseite des Senders angeschlossen. Firmware
Updates des Sender-HF-Moduls werden über die DATA bzw. Telemetrie-Schnittstelle mit Hilfe eines
17 Bedienungsanleitung Modul M-G2 33302
Page 19

PCs mit Windows XP, Vista oder 7 durchgeführt. Dazu benötigen Sie die separat erhältliche USBSchnittstelle Best.-Nr. 7168.6 und das Adapterkabel Best.-Nr. 7168.6A.
Die dazu benötigten Programme und Dateien fi nden Sie bei den entsprechenden Produkten jeweils
unter Download auf www.graupner.de.
Siehe dazu auch Punkt 7 Firmware-Updates.
6.8. Datenaufzeichnung
micro-SD und micro-SDHC
ben und verriegelt. Nun kann der Sender wieder eingeschaltet werden.
Datenerfassung/-speicherung
Die Datenspeicherung auf der SD-Karte beginnt automatisch nachdem eine Telemetrieverbindung zum
Empfänger besteht und sich eine geeignete Speicherkarte im Kartenschacht befi ndet - und stoppt auto-
matisch 2 Sek. nachdem der Empfänger ausgeschaltet wurde.
Beachte: Nach Einschalten des Empfängers ertönt nach ca. 2 s ein Piepton und die Anzeige „SD-card
log“ wechselt zu ON - die Datenaufzeichnung startet. Nach Ausschalten des Empfängers ertönt nach
ca. 2 s wiederrum der Piepton und die Anzeige wechselt zu OFF. Schalten Sie erst dann den Sender
aus, damit die Log-Daten gespeichert werden. Wenn Sie den Sender vor dem Piepton/Anzeige OFF
ausschalten, werden keine Log-Daten gespeichert!
Standardmäßig werden immer die Sender- und Empfängerdaten (bei integrierter Telemetrie) bzw. nur
Sender (ohne integrierte Telemetrie) aufgezeichnet. Um den angeschlossenen Empfänger bzw. Sensor
zu loggen, gehen Sie nach Start der Aufzeichnung in das Menü „MODEL SELECT“ der Smart-Box und
wählen den angeschlossenen Sensor an - bei Sendern mit integrierter Telemetrie drehen Sie den Rotary
aus der Grundanzeige nach rechts.
Nach dem Abschluss einer Datenspeicherung befi ndet sich ein Ordner „LogData“ auf der Speicherkarte.
In diesem Ordner werden die nach dem Schema 0001, 0002.bin usw. (= fortlaufende Nummerierung)
benannten Log-Dateien in einem Unterordner namens „No-Name“ abgelegt. Mit dem unter www.graupner.de auf der Download-Seite des Senders zu fi ndenden PC-Programmen können die Daten auf einem
kompatiblen PC ausgewertet werden.
Es können alle handelsüblichen micro-SD-Speicherkarten mit bis zu 2
GB und micro-SDHC-Karten mit bis zu 32 GB Speicherplatz verwendet
werden (nicht enthalten). Herstellerseitig empfohlen wird jedoch die Verwendung von Speicherkarten mit nur bis zu 4 GB, da dies im Normalfall
völlig ausreicht.
Die zur Verwendung im Sender vorgesehene Speicherkarte wird wie
beispielsweise von Digitalkameras oder Mobiltelefonen bekannt, mit den
Kontakten nach aussen zeigend, in den Schacht des Moduls eingescho-
6.9. Kopfhöreranschluss
Die Buchse „EARPHONE“ ist zum Anschluss eines handelsüblichen Ohr- oder Kopfhöhrers mit 3,5 mm
Klinkenstecker vorgesehen (nicht enthalten).
Über diesen Anschluss werden neben den akustischen Signalen des Senders auch die mit dem Telemetrie-Menü verbundenen Signale wie die akustische Vario-Ausgabe ausgegeben.
Die Variotöne werden wie folgt aktiviert:
- Die Vario-Signale können im Menü „TX“ unter dem Menüpunkt „VARIO TONE“ über den Sender ein-
oder ausgeschaltet werden - wählen Sie hier ON.
- gehen Sie in das Menü „MODEL SELECT“ der Smart-Box und wählen den angeschlossenen Sensor
an - bei Sendern mit integrierter Telemetrie drehen Sie den Rotary aus der Grundanzeige nach
rechts.
Bedienungsanleitung Modul M-G2 33302 18
Page 20

7. Firmware Update Graupner-HoTT Modul M-G2
Firmware Updates des Graupner-HoTT 2.4 Moduls M-G2 werden über die DATA-Buchse mit der separat
erhältlichen USB Schnittstelle Best.-Nr. 7168.6 und dem Adapterkabel Best.-Nr. 7168.6A durchgeführt.
Die dazu benötigten Programme und Dateien fi nden Sie bei www.graupner.de bei den entsprechenden
Produkten unter Download.
Installieren Sie das Graupner Firmware Update Utility und den USB-Treiber auf Ihrem Computer. Beachten Sie die Systemvoraussetzungen!
Bitte trennen Sie zuerst die mittlere rote Litze des Adapter-Kabels Best.Nr. 7168.6A durch. Verbinden Sie das Kabel anschließend mit der USB
Schnittstelle Best.-Nr. 7168.6. Das Stecksystem ist verpolungssicher,
achten Sie auf die kleinen seitlichen Nasen. Wenden Sie auf keinen Fall
Gewalt an, der Stecker sollte leicht einrasten.
Stecken Sie das Adapter-Kabel wie in der Abb. gezeigt in die DATA-Buchse auf der Rückseite des Moduls. Achten Sie auf die korrekte Polung!
7.1. Updatevorgang
Vergewissern Sie sich, dass das Adapter-Kabel wie in den Abbildungen gezeigt konfi guriert und am
Modul eingesteckt ist.
Starten Sie das Graupner Firmware Update Utility.
d.h. sollten Sie aus Versehen eine nicht zum Produkt passende Datei auswählen (z.B. SenderupdateDatei anstatt Moduldatei) erscheint das Popup-Fenster „Product code error“ und der Update-Vorgang
lässt sich nicht starten.
Drücken Sie in der Software den Button „Program“. Warten Sie kurz, bis der Balken in der ProgressLeiste anläuft. Dies kann je nach Computer mehrere Sekunden dauern.
Sender: BIND/RANGE-Taster drücken und während Sie in gedrückt halten den Sender einschalten.
Nach ein paar Sekunden erscheint im Status Display „Found target device…“, nun können Sie den
jeweiligen Taster loslassen und das Firmware Update startet.
Wählen Sie unter [COM Port Setup] den korrekten
COM-Port aus, an dem das USB-Kabel angeschlossen ist. Wenn Sie nicht sicher sind, drücken Sie
den Button „Search“ und wählen im Popup-Fenster
den Anschluss „Silicon Labs CP210x USB to UART
Bridge“ und drücken „OK“. Baud Rate: 19200.
Klicken Sie anschließend unter [Interface Typ] Signal
2:Vcc3:Gnd an.
Abschließend wählen Sie mit dem Button „Browse“
das Verzeichnis mit der zuvor herunter geladenen
Firmware-Datei mit der Endung *.bin aus, ist alles
korrekt, erscheint die Datei im zugehörigen Fenster.
Die Firmware-Dateien sind produktspezifi sch codiert,
19 Bedienungsanleitung Modul M-G2 33302
Page 21

Wird das Gerät nicht hingegen erkannt, erscheint das PopupFenster „Target device ID not found“, oder bricht der Prozess
vor Erreichen der 100% ab, müssen Sie das Update neu starten. Führen Sie dazu die obigen Schritte erneut aus.
Im Status Display und der Progress-Leiste sehen Sie den Fortschritt des Firmware Updates. Das Update ist abgeschlossen,
wenn in den Anzeigen „Complete…100%“ bzw. „Complete!!“
erscheint.
Während des Update-Vorgangs leuchten am Sender beide
LED’s dauerhaft, nach erfolgreichem Abschluss geht die rote
LED aus und eine kurze Bestätigungsmelodie ertönt.
Schalten Sie Ihren Sender aus und entfernen das Adapterkabel.
Achtung: Nach erfolgreichem Update-Vorgang müssen
Sie vor der Benutzung des entsprechenden Geräts eine
Initialisierung bzw. Zurücksetzen auf Werkseinstellungen
durchführen.
Initialisierung:
Um eine Initialisierung bzw. ein Zurücksetzen auf die Werkseinstellungen durchzuführen, drücken und
halten Sie den BIND/RANGE-Taster des Moduls, während Sie den Sender einschalten. Lassen Sie
anschließend den BIND/RANGE-Taster wieder los.
Beachten Sie bitte:
Nach dem Abschluss der Initialisierung befi ndet sich der Sender im Fail-Safe-Einstellungsmodus. Sie
können deshalb sofort mit dem Programmieren Ihrer Fail-Safe-Einstellungen weitermachen.
Falls Sie Ihren Sender in der Ländereinstellung auf den Modus „Frankreich“ umgestellt haben, müssen
Sie auch die Ländereinstellung wiederholen.
Bedienungsanleitung Modul M-G2 33302 20
Page 22

Konformitätserklärung gemäß dem Gesetz über Funkanlagen und
Telekomunikationsendeinrichtungen (FTEG) und der Richtlinie 1999/5/EG (R&TTE)
Declaration of Conformity in accordiance with the Radio and Telecomunikations Terminal Equipment
Act (FTEG) and Directive 1999/5/EG (R&TTE)
Graupner GmbH & Co. KG
Henriettenstraße 94-96
D-73230 Kirchheim/Teck
erklärt, dass das Produkt:
declares that the product
Module M-G1 HoTT - No. 33300
Module mx-16 HoTT - No. 33301
Module M-G2 HoTT - No. 33302
Geräteklasse: 2
Equipment class
den grundlegenden Anforderungen des § 3 und den übrigen einschlägigen Bestimmungen des
FTEG (Artikel 3 der R&TTE) entspricht.
complies with the essential requirements of § 3 and the other relevant provisions of the FTEG (Article 3 of the
R&TTE Directive).
Angewendete harmonisierte Normen:
Harmonised standards applied
EN 60950:2006
EN 301 489-1 V1.7.1
Health and safety requirements pursuant to § 3 (1) 1. (Article 3 (1) a))
EN 301 489-3 V1.4.1
Protection requirement concernig electromagnetic compatibility
§ 3 (1) 2, Artikel 3 (1) b))
EN 300 328 V1.7.1
Measures for the efficient use of the radio frequency spectrum
§ 3 (2) (Article 3 (2))
Gesundheit und Sicherheit gemäß § 3 (1) 1. (Artikel 3 (1)a))
Schutzanforderungen in Bezug auf elektromagnetische
Verträglichkeit § 3 (1) 2, Artikel 3 (1) b))
Maßnahmen zur effizienten Nutzung des Frequenzspektrums
§ 3 (2) (Artikel 3 (2))
Kirchheim, 06. Juni 2011
Stefan Graupner, Geschäftsführer
Stefan Graupner, Managing Director
Graupner GmbH & Co. KG Henriettenstraße 94-96 D-73230 Kirchheim/Teck Germany
Tel: 07021/722-0 EMail: info@graupner.deFax: 07021/722-188
21 Bedienungsanleitung Modul M-G2 33302
Page 23

Hinweise zum Umweltschutz
Das Symbol auf dem Produkt, der Gebrauchsanleitung oder der Verpackung weist darauf
hin, dass dieses Produkt am Ende seiner Lebensdauer nicht über den normalen Haushaltsabfall entsorgt werden darf. Es muss an einem Sammelpunkt für das Recycling von
elektrischen und elektronischen Geräten abgegeben werden.
Die Werkstoffe sind gemäß ihrer Kennzeichnung wieder verwertbar. Mit der Wiederverwendung, der stoffl ichen Verwertung oder anderen Formen der Verwertung von Altgeräten
leisten Sie einen wichtigen Beitrag zum Umweltschutz.
Batterien und Akkus müssen aus dem Gerät entfernt werden und bei einer entsprechenden Sammelstelle getrennt entsorgt werden.
Bei RC-Modellen müssen Elektronikteile, wie z.B. Servos, Empfänger oder Fahrtenregler aus dem
Produkt ausgebaut und getrennt bei einer entsprechenden Sammelstelle als Elektro-Schrott entsorgt
werden.
Bitte erkundigen Sie sich bei der Gemeindeverwaltung die zuständige Entsorgungsstelle.
Bedienungsanleitung Modul M-G2 33302 22
Page 24

Wir gewähren auf dieses Erzeugnis eine /
This product is /
Sur ce produit nous accordons une
Garantie von
warrantied for
garantie de
Die Fa. Graupner GmbH & Co. KG, Henriettenstraße 94-96,
73230 Kirchheim/Teck gewährt ab dem Kaufdatum auf
dieses Produkt eine Garantie von 24 Monaten. Die Garantie gilt nur für die bereits beim Kauf des Produktes vorhandenen Material- oder Funktionsmängel. Schäden, die auf
Abnützung, Überlastung, falsches Zubehör oder unsachgemäße Behandlung zurückzuführen sind, sind von der
Garantie ausgeschlossen. Die gesetzlichen Rechte und
Gewährleistunsansprüche des Verbrauchers werden durch
diese Garantie nicht berührt. Bitte überprüfen Sie vor einer Reklamation oder Rücksendung das Produkt genau
auf Mängel, da wir Ihnen bei Mängelfreiheit die entstandenen Unkosten in Rechnung stellen müssen.
Graupner GmbH & Co. KG, Henriettenstraße 94-96, 73230
Kirchheim/Teck, Germany guarantees this product for a period of 24 months from date of purchase. The guarantee
applies only to such material or operational defects witch
are present at the time of purchase of the product. Damage due to wear, overloading, incompetent handling or the
use of incorrect accessories is not covered by the guarantee. The user´s legal rights and claims under garantee are
not affected by this guarantee. Please check the product
carefully for defects before you are make a claim or send
the item to us, since we are obliged to make a charge for
our cost if the product is found to be free of faults.
La société Graupner GmbH & Co. KG, Henriettenstraße
94-96, 73230 Kirchheim/Teck, Allemagne, accorde sur ce
produit une garantie de 24 mois à partir de la date d´achat.
La garantie prend effet uniquement sur les vices de fonction-nement et de matériel du produit acheté. Les dommages dûs à de l´usure, à de la surcharge, à de mauvais
accessoires ou à d´une application inadaptée, sont exclus de la garantie. Cette garantie ne remet pas en cause les droits et prétentions légaux du consommateur.
Avant toute réclamation et tout retour du prouit, veuillez
s.v.p. cotrôler et noter exactement les défauts ou vices.
Monaten
months
24
mois
Servicestellen / Service / Service après-vente
Graupner-Zentralservice
Graupner GmbH & Co. KG
Henriettenstrasse 94-96
D-73230 Kirchheim / Teck
Belgie/Nederland
Jan van Mouwerik
Slot de Houvelaan 30
NL 3155 Maasland VT
(+31)10 59 13 59 4
Republika
RC Service Z. Hnizdil
Letecka 666/22
CZ-16100 Praha 6 - Ruzyne
(+42) 2 33 31 30 95
Anguera Hobbies
C/Terrassa 14
E 43206 Reus (Tarragona)
(+34) 97 77 55 32 0
France UK
Graupner Service France
Gérard Altmayer
86, rue St. Antoine
F 57601 Forbach-Oeting
(+33) 3 87 85 62 12
Italia
GiMax
Via Manzoni, no. 8
I 25064 Gussago
(+39) 30 25 22 73 2
Servicehotline
(+49) 01805 47 28 76
Montag - Freitag 7:30 -11:45
und 12:30 -16:00 Uhr
Luxembourg
Kit Flammang
129, route d’Arlon
L 8009 Strassen
(+35) 23 12 23 2
SchweizCeská Republika/Slovenská
Graupner Service Schweiz
CD-Electronics GmbH
Kirchweg 18
CH-5614 Sarmenstorf
(+41) 56 66 71 49 1
SverigeEspana
Baltechno Electronics
P.O. Box 5307
S 40227 Göteborg
(+46) 31 70 73 00 0
Graupner Service UK
Brunel Drive
GB, NEWARK, Nottinghamshire
NG242EG
(+44) 16 36 61 05 39
Garantie-Urkunde
Warranty certifi cate / Certifi cate de garantie
33302 Modul M-G2
Übergabedatum
Date of purchase/delivery
Date de remise
Name des Käufers
Owner´s name
Nom de I`achateur
Firmenstempel und Unterschrift
Straße, Wohnort
Complete adress
Domicie et rue
des Einzelhändlers
Stamp and signature of dealer
Cachet de la fi rme et signature
du detailant
23 Bedienungsanleitung Modul M-G2 33302
Page 25

____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
Bedienungsanleitung Modul M-G2 33302 24
Page 26

____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
25 Bedienungsanleitung Modul M-G2 33302
Page 27

____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
Bedienungsanleitung Modul M-G2 33302 26
Page 28

Graupner GmbH & Co. KG
Henriettenstraße 94 – 96
D-73230 Kirchheim/Teck
Germany
www.graupner.de
Änderungen sowie Liefermöglichkeiten vorbehalten. Lieferung durch den Fachhandel. Bezugsquellen
werden nachgewiesen. Für Druckfehler kann keine Haftung übernommen werden.
Specifi cations and availability subject to change. Supplied through specialist model shops only. We will
gladly inform you of your nearest supplier. We accept no liability for printing errors.
Sous réserve de modifi cations et de possibilité de livraison. Livraison uniquement au travers de maga-
sins spécialisés en modélisme. Nous pourrons vous communiquer l’adresse de votre revendeur le plus
proche. Nous ne sommes pas responsables d’éventuelles erreurs d’impression.
Con riserva di variazione delle specifi che e disponibilità del prodotto. Fornitura attraverso rivenditori
specializzati.Saremmo lieti di potervi indicare il punto vendita più vicino a voi. Si declina qualsiasi responsabilità per errori di stampa.
33302 / Juni 2011 - DE V1.0
 Loading...
Loading...