


33032.mc-32 HoTT.2.%3
mc-32
-ANUALDEPROGRAMACIØN
INDICE
2 3 4
7
17
18 18 18
19 20
20 20
22 22 23
23 23 24
30 30 31 31 32
32
32 33 36 36 36
42 43 46
50 52
56
66
70 70
71 72
Generalidades
Relación de contenidos ........................................
Consejos de protección medioambiental ..............
Consejos de seguridad .........................................
Consejos de seguridad y utilización de baterías
para baterías de Lítio-Ion (LiIo) y Lítio-Polímero
(LiPo) ....................................................................
Introducción........................................................... 10
Descripción del equipo RC.................................... 11
Datos técnicos ...................................................... 14
Consejos de utilización generales
Emisor ........................................................... 16
Apertura de la caja ................................... 16
Alimentación del emisor ...........................
Cargadores recomendados ......................
Tiempo de uso de la batería en la
pantalla .....................................................
Batería de Lítio CR 2032 ..........................
Ajuste de la altura del stick .......................
Inversión del freno del stick.......................
Soportes para la correa ............................
Instalación de controles adicionales,
interruptores, etc ......................................
Alineación de la antena ............................
Descripción del emisor.......................................... 20
Frontal del emisor ........................................... 21
Conectores en la parte superior
Conector de carga ....................................
DSC (Direct Servo Control).......................
Conexión Mini-USB...................................
Conexión DATA.........................................
Ubicación de la tarjeta de memoria ..........
Conexión de los auriculares......................
PPM externo ............................................. 25
SPI ............................................................ 25
Interior del emisor .......................................... 26
16
Display (Pantalla) y teclado............................. 28
Utilización del “Data Terminal”........................ 29
Acciones rápidas (Short Cuts).........................
Mensajes de alerta en la pantalla....................
Campos de funciones en la pantalla...............
Bloqueo...........................................................
Modo oculto ....................................................
Contraste de la pantalla ............................
Selección del idioma
Actualización de ficheros de voz ..............
Cambio del idioma de la pantalla .............
Actualización del firmware con una SD ...
Calibración de los sticks ...........................
Display de datos de telemetría .......................
Puesta en funcionamiento del emisor...................
Update del firmware vía PC ...........................
Puesta en funcionamiento del receptor ................
Alimentación del receptor .............................. 47
Avisos generales sobre la carga ................... 49
Update del firmware ......................................
Consejos de instalación ........................................
Definición de términos........................................... 54
Asignación de los interruptores y controles
del emisor..............................................................
Trims digitales....................................................... 58
Modelos de aviones .............................................. 60
Asignación de las salidas del RX.................... 61
Modelos de helicópteros........................................ 64
Asignación de las salidas del RX.................... 65
Descripción de los diferentes programas
Asignación de una nueva memoria ...................
“Selección de un modelo”..................................
“Copia / Borrado” ...............................................
Borrado de un modelo ...............................
Copia modelo modelo ..........................
Exportación a la tarjeta SD .......................
Importación de la tarjeta SD ......................
69
70
Copiar fases de vuelo ...............................
Cambios ....................................................
“Supresión códigos” ..........................................
“Supresión modelos” .........................................
“Ajustes básicos del modelo”
Modelos de aviones...................................
Binding del receptor ..............................
Prueba de distancia ..............................
Modelos de helicópteros ...........................
Binding del receptor ..............................
Prueba de distancia ..............................
“Tipo de modelo” ...............................................
“Tipo de helicóptero” .........................................
“Reglajes de los servos”....................................
“Modo de vuelo”
Modelos de aviones ..................................
Modelos de helicópteros ...........................
“Reglajes de los controles”
Modelos de aviones..................................
Modelos de helicópteros............................
Función Limite de gas ...........................
Ajustes básicos del relentí ....................
Limitador del gas en combinación con la
AR en el menú “Modo de vuelo” ............
“Dual Rate / Expo”
Modelos de aviones.……….................……
Modelos de helicópteros............................
“Curva del canal 1”
Modelos de aviones ...................................
Modelos de helicópteros ............................
“Pantalla de interruptores” ................................
“Controles como interruptores” .........................
“interruptores lógicos” .......................................
¿Cómo programar una fase de vuelo? .............
“Ajustes de las fases”
Modelos de aviones ..................................
Modelos de helicópteros ...........................
“Asignación de las fases” ..................................
“Trims de las fases” (modelos de aviones) .......
72
73
74
75
76
77
80
84
85
88
94
98
102
104
106
108
112
117
117
119
120
124
128
131
134
135
138
140
142
146
148
150
2
“Canales sin retardo” .........................................
“Cronos (general)” ............................................
“Cronos en las fases de vuelo” .........................
¿Qué es una mezcla?........................................ 159
“Mezclas en modelos de aviones”.....................
1 alerón ......................................................
1 alerón y 2 flaps ........................................
2 alerones ..................................................
2/4 alerones y 1/2/4 flaps ...........................
“Mezclas de los helicópteros”............................ 176
Ajuste de las curvas de gas y paso............. 187
Ajuste de la auto rotación............................ 190
Generalidades sobre las mezclas libres............
“Mezclas libres” .................................................
Mezclas lineales .........................................
Mezclas en curva .......................................
Ejemplos.....................................................
“MIX activos en fase” ........................................
“Canales sólo de mezcla” .................................
“Mezclas duales” ...............................................
“Mezclas del plato cíclico”..................................
“Fail-safe” ..........................................................
“Sistema trainer” ................................................
Esquemas de conexión ..............................
Sistema HoTT sin cables ...........................
“Asignación salidas TX” ....................................
“Profi Trim”
Modelos de aviones ....................................
Modelos de helicópteros .............................
“Memoria de los trims”
Modelos de aviones ....................................
Modelos de helicópteros .............................
“Telemetría” .......................................................
Ajustes / Pantalla de datos.......................... 229
Modo satélite con 2 receptores ..............
Sensor / sensores ..................................
Selección de sensores ............................... 240
Pantalla del modo HF.................................. 241
Selección de avisos....................................
“Secuencia de canales” ....................................
“Multicanales” ....................................................
151
152
156
160
163
164
166
168
192
193
197
199
201
204
205
206
208
208
210
213
214
218
220
222
224
226
228
238
239
242
244
246
“Limitador del stick” ..........................................
“MP3-Player” .....................................................
“Ajustes básicos” ...............................................
“Pantalla de los servos” ....................................
“Test de los servos” ...........................................
“Código de bloqueo” .........................................
“Pantalla de informaciones” ..............................
Ejemplos de programación
Introducción...................................................... 268
Modelos de aviones
Los primeros pasos.................................... 270
Conexión de una propulsión eléctrica........ 276
Conmutación con el stick del C1 entre
motor eléctrico y butterfly .....................
motor eléctrico y aerofrenos .................
Activación de los cronómetros ...................
Funcionamiento de servos en paralelo ...... 286
Utilización de las fases de vuelo
Ejemplo 1 ................................................
Ejemplo 2 ................................................
Alas con ocho superficies de mando ............
Modelos Delta y alas volantes...................... 301
Modelos F3A................................................. 304
Helicópteros......................................................... 308
Anexo
Información FCC .............................................. 318
Declaraciones de conformidad.......................... 319
Garantía............................................................. 320
250
254
256
262
263
264
266
279
282
284
288
292
298
Protección del medio ambiente
Este símbolo en el producto, en las instrucciones del
modo de empleo o en el embalaje nos informan que
este material no puede ser simplemente tirado a la
basura. Debe llevarse a un centro de reciclado para los
diferentes elementos eléctricos y electrónicos.
Conforme explican las rotulaciones, la mayor parte de
los materiales utilizados son reutilizables para otras
aplicaciones. Con esta acción participaremos
activamente en la protección de nuestro entorno.
Las pilas y los acumuladores deben tener un reciclaje
específico en los centros cualificados.
Preguntar en el ayuntamiento o en los servicios
competentes para conocer los diferentes centros de
recogida y reciclaje.
Este manual sirve sólo como fuente de información y
puede cambiarse sin aviso previo.
responsabilidades por los errores o inexactitudes que
pueda haber en la sección de informaciones de este
manual.
Graupner
no acepta
3
CONSEJOS DE SEGURIDAD
Leer esta sección cuidadosamente
A fin de aprovechar plenamente y disfrutar durante
largo tiempo de nuestro hobby, leer atentamente estas
instrucciones, y tener en cuenta todos los avisos de
seguridad. Para obtener continuamente por mail las
últimas informaciones sobre el producto se debe
inscribir en
http://www.graupner.de/fr/service/enregistrer_produit
Si se es principiante en el campo del modelismo radio
controlado de aviones, helicópteros, barcos o coches,
es mejor asesorarse por un modelista experimentado.
El manual hay que entregarlo a un nuevo usuario si le
vendemos este equipo.
Aplicaciones
La utilización de este equipo de RC está únicamente
destinado al uso descrito por el fabricante en este
manual, es decir, al control de modelos reducidos sin
transportar pasajeros. Está prohibido cualquier otro
uso.
Consejos de seguridad
SEGURIDAD SIGNIFICA NO ACCIDENTES
y
LOS MODELOS RC NO SON JUGUETES
... ya que incluso pequeños modelos pueden ser
particularmente peligrosos para la gente a nuestro
alrededor debido a un mal uso, pudiendo ocasionar
daños físicos graves y roturas en los materiales e
infraestructuras próximos.
Problemas técnicos en los sistemas eléctricos o
mecánicos pueden arrancar los motores
descontroladamente, a alta velocidad, produciendo
graves daños, no solamente a nosotros.
Hay que evitar cortocircuitos de cualquier tipo.
Los cortocircuitos pueden destruir partes del sistema
de radio control, pero más peligroso es el riesgo de
incendio de los acumuladores e incluso de explosión.
Cualquier motorización que mueva hélices de avión o
de barco, rotores de helicóptero o reductoras suponen
en cada instante un peligro real, y en ningún caso
deben tocarse con ninguna parte del cuerpo durante la
rotación. Hay que recordar que una hélice en
movimiento fácilmente puede cortar un dedo. Hay que
tener un especial cuidado con los objetos cercanos a la
hélice, para que no puedan estar a su alcance.
No colocarse nunca en la zona de peligro, es decir, en
el plano rotacional de la hélice u otras partes rotativas
cuando se conectan las baterías o el motor está en
marcha.
Durante la programación vigilar que el motor eléctrico o
térmico no pueda ponerse accidentalmente en marcha.
Si es necesario cortar la alimentación del combustible
presionando el tubo, o desconectar la batería en el
caso de motores eléctricos.
Proteger todo el conjunto del polvo, de la salinidad, de
la humedad y de todo elemento ajeno. No someter el
equipo a vibraciones, calor o frío excesivo. El equipo
RC debe usarse sólo en condiciones “normales”, es
decir, entre –15°C y +55°C.
Evitar los golpes y los accidentes diversos. Verificar
regularmente el estado general del equipo y las
conexiones. Los elementos estropeados o mojados no
han de usarse aunque hayan vuelto a secarse.
Solamente se pueden utilizar los elementos
recomendados. En caso de reparar un elemento
defectuoso, utilizar solamente productos originales
GRAUPNER
conexión y el mismo material.
Antes de usar el sistema, asegurarse que las
conexiones sean fiables, y que los cables no estén
tirantes o rotos. Las aristas vivas son un grave peligro
para los cables.
Para desconectar una conexión, nunca tirar de los
cables, utilizar los conectores.
compatibles entre ellos, con la misma
No se debe efectuar ninguna modificación en los
componentes del sistema RC, ya que esto invalida la
garantía. Evitar cualquier corto-circuito e inversión de
polaridad, ya que el equipo no tiene protección para
este tipo de errores.
Montaje del equipo de recepción
En un modelo de avión el receptor debe estar
protegido en el interior contra los golpes con un
recubrimiento de goma espuma, y fijado con gomas, y
contra las proyecciones de agua y polvo en los
modelos de coches y barcos.
El receptor no debe fijarse nunca directamente sobre el
fuselaje o el chasis del coche en ningún punto, a causa
de las vibraciones derivadas del motor o en el caso de
aterrizajes violentos.
En el caso de la colocación del receptor en un modelo
con motor térmico, proteger siempre el receptor de los
gases del escape y de las proyecciones de aceite.
Esto hay que tenerlo particularmente en cuenta en los
modelos en los que el interruptor ON/OFF está en el
exterior.
Colocar siempre el receptor de manera que la antena y
los cables de los servos no estén tensados. La antena
deberá colocarse siempre como mínimo a 5 cm de
cualquier pieza metálica y cualquier cableado que no
esté conectado directamente al receptor. Esto incluye
componentes de acero y fibra de carbono, motores
eléctricos, servos, bombas de gasolina, tomas de
corriente, etc.
La posición ideal del receptor es instalarlo lejos de
cualquier otro equipamiento en el modelo, pero en una
posición accesible. Bajo ninguna circunstancia los
cables de los servos deben estar cerca de la antena y
mucho menos enrollarlos alrededor de la misma.
Asegurarse de que los cables están correctamente
sujetos, y que no pueden moverse y acercarse a la
antena del receptor cuando el modelo está en vuelo.
4
Posición de la antena del receptor
El receptor y las antenas deben colocarse,
preferentemente, lo más lejos posible de cualquier
motorización. En el caso de los fuselajes de carbono
es imprescindible hacer salir los extremos de la antena
al exterior del fuselaje. La orientación de la antena no
es crítica, pero si la montamos de manera vertical en el
interior del modelo tendremos grandes ventajas. En el
caso de las antenas Diversity (dos antenas), la
segunda antena debe posicionarse a 90ª respecto a la
primera.
Montaje de los servos
Fijar siempre los servos con los silent-blocks
suministrados. Estas gomas antivibración evitan en
gran manera las vibraciones y son una protección
mecánica para los golpes.
Montaje de las transmisiones
Los mandos deben colocarse siempre de manera que
su movimiento sea suave y sin puntos de roce. El
importante que todos los palonieres de los servos
puedan moverse libremente en los dos sentidos, sin
estar bloqueados mecánicamente.
Es esencial poder parar el motor en cualquier
momento. Para poder parar un motor térmico es
necesario que el mando esté instalado de tal manera
que el carburador esté completamente cerrado cuando
el stick del gas y el trim estén al mínimo.
Asegurarse de que ninguna transmisión metálica frote
otra parte metálica, por ejemplo, cuando se mueven los
controles, o con la vibración del modelo. Los contactos
metal-metal causan “ruido” que puede producir
interferencias en el receptor.
Dirección de la antena del emisor.
El campo de emisión de una antena es mínimo en una
línea imaginaria extendida desde la antena del emisor.
Es por lo tanto absurdo pensar que apuntando al
modelo con la antena mejore la capacidad de emisión.
Cuando usamos nuestro equipo RC junto a otros
pilotos lo mejor es acercarse unos a los otros. Como
mayor es la distancia hay más peligro de
perturbaciones para los modelos de los otros pilotos y
el nuestro.
Cuando se reagrupan dos o más pilotos con radios de
2,4 GHz a una distancia inferior de 5m, es posible que
el canal de retorno de los datos quede perturbado, lo
que se traduce en un aviso de falta señal. En este caso
aumentar la distancia hasta que el aviso desaparezca.
Pruebas antes del vuelo
Antes de poner el receptor en marcha hay que
asegurarnos que el stick del gas se encuentra en el
mínimo.
Poner siempre primero en marcha el emisor y después
el receptor
Apagar siempre primero el receptor y después el
emisor
Si no se respeta este procedimiento, es decir, receptor
ON y emisor OFF, otros emisores usando la misma
frecuencia pueden tomar el control de nuestro modelo
y volverlo incontrolable pudiendo ocasionar daños
materiales y a las personas que se encuentren
cercanas.
En el caso particular de modelos equipados
giróscopo mecánico:
Antes de parar el receptor cortar la alimentación del
motor y asegurarse de que no puede ponerse en
marcha involuntariamente.
con un
Un giróscopo que acaba de apagarse puede generar
tal tensión que el receptor la puede reconocer como
una señal correcta para el gas, y poner en marcha el
motor involuntariamente
Test de distancia
Antes de
correctamente, y tiene un alcance adecuado.
Fijar correctamente el modelo y comprobar que nadie
se encuentra delante del modelo.
Comprobamos en el suelo todos los canales /
funciones, para descubrir eventuales errores de
programación u otros. Para ello seguir los consejos de
las páginas 62 y 71.
Cuando utilicemos el modelo, no usar el emisor sin la
antena colocada. Comprobar que esta esté firmemente
colocada.
Evolucionando con los modelos de aviones,
helicópteros, coches y barcos.
No sobrevolar jamás el público o los otros pilotos, y
tener cuidado en todo momento de no poner nunca en
peligro a la gente o los animales próximos. No volar
nunca cerca de las líneas de alta tensión. No hacer
navegar un barco cerca de las esclusas o en los
canales reservados al tráfico fluvial real. Evitar de
hacer evolucionar el coche en carreteras, autopistas,
caminos abiertos a la circulación de vehículos, etc.
Control de las baterías de emisión y recepción
En el caso del emisor cuando baja la tensión de la
batería aparece una alerta en la pantalla “battery needs
charging”, acompañada de una señal de alarma
sonora, es imprescindible parar de utilizar el sistema y
recargar las baterías correctamente antes de que estén
completamente descargadas. Comprobar regularmente
el estado de los acumuladores, especialmente el de
recepción. No esperar para recargarlo a ver que los
servos funcionan más lentamente, indicación de
batería baja. No hay que dudar en reemplazar la
batería a tiempo ante la posible falta de fiabilidad.
Respetar siempre los tiempos de carga así como los
valores de tensión de carga indicados por el fabricante.
No recargar nunca un acumulador sin vigilancia.
No probar nunca de cargar pilas secas, hay peligro de
explosión.
cada
vuelo verificar que el sistema funciona
5
Los acumuladores deben cargarse antes de cada uso.
Para evitar cortocircuitos, conectar primero las
bananas al cargador respetando la polaridad, y
solamente después el cable de carga a la batería.
Retirar sistemáticamente del modelo la batería si la
inutilización va a ser prolongada.
No usar nunca baterías defectuosas, estropeadas o
una combinación de diferentes tipos de baterías dentro
de un mismo pack. Tampoco se deben combinar
baterías nuevas o viejas o de diferentes fabricantes.
Capacidad y tiempo de utilización
Válido para todas las fuentes de energía eléctrica: la
capacidad de carga baja con cada nueva carga. Con
temperaturas bajas la resistencia interna aumenta y se
reduce la capacidad, por lo que la tensión de los
acumuladores baja muy rápidamente, lo que reduce el
tiempo de utilización en ambientes fríos.
Las cargas frecuentes o la utilización de cargadores
rápidos tienden a causar una reducción gradual de la
capacidad de la batería y deteriorar más rápidamente
su estado. Por esto es aconsejable verificar la
capacidad de todas nuestras baterías recargables al
menos cada 6 meses, y reemplazarlos en caso de que
las prestaciones caigan significativamente.
¡Utilizar solamente acumuladores originales
GRAUPNER
Antiparasitaje de los motores eléctricos
En mayor o menor medida todos los motores eléctricos
provocan chispas entre el colector y los carbones, que,
según el tipo de motor pueden perturbar más o menos
el funcionamiento del equipo de RC.
Para un funcionamiento correcto es indispensable
antiparasitar correctamente los motores, y en el caso
de los modelos motorizados eléctricamente es
imprescindible que cada motor sea eficazmente
antiparasitado. El hecho de montar antiparasitarios
disminuye sensiblemente el riesgo de interferencias, y
deben montarse siempre.
!
Respetar los consejos de utilización y de montaje del
motor suministrados por el fabricante.
Para más precisiones relativas al antiparasitaje del
motor ver el catálogo general
página web www.graupner.de
Ferritas para prolongadores
Ref. 1040
La utilización de ferritas (filtros) es necesaria para el
uso de largos cables entre el receptor y el servo, y
elimina el peligro de la desprogramación del receptor.
Las ferritas se colocan lo más cerca posible del
receptor. En casos extremos se puede instalar una
segunda ferrita, colocada esta vez cerca del servo.
Utilización de un variador electrónico
El variador electrónico debe escogerse en función del
tamaño del motor eléctrico que queremos controlar.
Siempre hay el peligro de que una sobrecarga pueda
estropear el variador, lo que podemos evitar
escogiendo un variador cuya capacidad debe ser como
mínimo la mitad del consumo en el momento de
blocaje del motor.
Hay que tener una atención especial con los motores
“Tuning”, ya que debido al bajo número de vueltas del
bobinado pueden absorber en caso de blocaje varias
veces su capacidad nominal y deteriorar el variador.
Encendidos electrónicos
Los encendidos electrónicos de los motores térmicos
también pueden provocar interferencias, que
provocarán un mal funcionamiento del equipo de radio
control.
Alimentar siempre el encendido con una batería
independiente de la del receptor.
Utilizar siempre bujías antiparasitadas y conectores y
cables blindados.
Colocar siempre el receptor lo más lejos posible del
encendido.
GRAUPNER
FS o la
Electricidad estática
Las funciones del emisor pueden perturbarse por
ondas magnéticas generadas por tormentas, aunque
se encuentren a kilómetros de distancia. Por esta
razón ...
... cesar toda actividad modelística si tenemos noticias
que se acerca una tormenta eléctrica. !La recepción de
electricidad estática a través de la antena puede
suponer un riesgo de muerte!
Precaución
Para poder cumplir con la reglamentación HF
FCC sobre las radiaciones producida por los
aparatos móviles de transmisión, la antena
del equipo debe estar al menos a 20 cm de
cualquier persona cuando se usa el equipo.
Por lo tanto no recomendamos usar el equipo
RC por debajo de esta distancia de 20 cm.
Asegurarnos que no hay otro transmisor más
cerca de 20 cm respecto a nuestro equipo,
para evitar perturbaciones en el sistema
eléctrico y radiaciones.
Antes de usar el equipo de radio control, el
emisor se debe programar correctamente
según el país en que lo utilicemos. Es
imprescindible para respetar las diversas
legislaciones y directivas en vigor, FCC,
ETSI, CE, etc. Ver las instrucciones
suministradas con el emisor y el receptor. El
receptor incluido en el equipo esta ajustado
de origen para usarlo en vario países
europeos.
Antes de cada vuelo, efectuar una
comprobación de alcance y del buen
funcionamiento de todos los mandos
haciendo una simulación de vuelo completa,
para detectar posibles errores de
programación u otros.
6
No hacer nunca programaciones en el emisor
ni en el receptor mientras estamos utilizando
el modelo.
Cuidados y mantenimiento
No limpiar jamás la caja del emisor, antena, etc. con
productos de la limpieza del hogar, gasolina o agua,
solamente con un paño seco y suave.
Componentes y accesorios
La sociedad GRAUPNER GMBH & Co.KG recomienda
como fabricante utilizar solamente componentes y
accesorios originales, chequeados y controlados, con
garantía del fabricante. Si se observa este
procedimiento GRAUPNER acepta la responsabilidad
de su producto.
La empresa GRAUPNER declina toda responsabilidad
en el caso de utilización de piezas no homologadas o
accesorios de otros fabricantes, y no puede juzgar en
cada caso si esto representa o no un riesgo.
Exclusión de responsabilidad
El respeto de las instrucciones de montaje y de
utilización, así como la instalación de los diferentes
elementos y el mantenimiento del equipo RC, no
pueden supervisarse por la sociedad
lo cual la sociedad
responsabilidad en caso de perdida, rotura u otros
costes resultantes de la utilización de componentes no
adecuados que puedan provocar un accidente.
Dentro del límite de la legislación legal, la
responsabilidad de la sociedad
limitada, sea cual sea la razón, al valor de compra de
la cantidad de productos
el incidente.
Este manual es básicamente informativo, y puede
cambiarse sin previo aviso. La sociedad GRAUPNER
declina toda responsabilidad en caso de errores o
inexactitudes que puedan aparecer como información
en este manual.
GRAUPNER
GRAUPNER
GRAUPNER
declina toda
GRAUPNER
involucrados en
está
, por
CONSEJOS DE SEGURIDAD Y
UTILIZACIÓN DE LAS BATERIAS de Litio-Ion
(LiIo) y Litio-Polímero (LiPo)
Consejos generales
Las baterías de LiIo / LiPo requieren de un
manejo muy particular. Esto debe aplicarse a
la carga, descarga y al almacenamiento y
manipulación. Es necesario tener en cuenta
los siguientes consejos de seguridad:
Un manejo incorrecto puede dar lugar a
explosiones, incendios o intoxicación por el
humo generado. Además, no hacer caso de
las advertencias puede provocar pérdidas de
rendimiento u otros problemas.
La capacidad del acumulador se reduce a
medida que se hacen cargas y descargas.
Incluso el almacenamiento puede contribuir a
una disminución de la capacidad. Almacenar
las baterías a temperaturas muy altas o muy
bajas produce una gradual perdida de la
capacidad. En funcionamiento, la capacidad
de la batería, después de unos 50 ciclos de
carga / descarga, puede caer hasta el 50 ...
80% respecto a una batería nueva – incluso
si se han seguido todas las normas en la
carga / descarga. Esto es debido en parte a
las altas corrientes de descarga y a las
corrientes inductivas causadas por los
motores.
Los packs de baterías sólo deben conectarse
en serie o en paralelo en casos
excepcionales, ya que la capacidad de las
células y el estado de carga puede variar
demasiado. Por eso ofrecemos siempre los
packs con los elementos seleccionados.
Consejos especiales para la carga de las baterías de
LiIo / LiPo de
La máxima intensidad de carga debe
Asegurarse de que los ajustes del número de
Otros consejos para la manipulación
Las baterías de LiIo / Lipo conectadas en
Graupner
Dado que la empresa Graupner GmbH &
Co. KG no puede supervisar la correcta
carga y descarga de las células, la garantía
no es válida en el caso de carga o descarga
inadecuada.
No dejar nunca los acumuladores en carga
sin vigilancia.
Solamente se pueden utilizar los cargadores
apropiados para la carga de LiIo / LiPo con
los cables de carga adecuados. Cualquier
manipulación de los cables a los cargadores
puede ocasionar serios daños.
limitarse a 1.05 veces la capacidad de carga
de la batería.
Ejemplo: Batería 700 mAh = 735 mAh de
máxima carga
Usar solamente el cargador incluido en el set
u otro cargador / descargador de Graupner
especialmente diseñado para baterías de LiIo
/ LiPo, ver la página 17 o www.graupner.de
células o del voltaje final de carga y descarga
sea correcto. Debemos observar siempre el
manual de instrucciones del cargador /
descargador.
Durante la carga, colocar los acumuladores
sobre una superficie resistente al calor, no
inflamable y no conductiva, lejos de cualquier
objeto inflamable. No dejar nunca los
acumuladores en carga sin vigilancia
serie dentro de un pack deben cargarse
como un grupo si el voltaje individual de las
células no difiere entre ellas de más de 0.05
V. Las baterías de LiIo incluidas en el set, ref.
núm. 33000.1 (se reserva el derecho a
.
7
cambios) están equipadas con un circuito
especial de seguridad para la
“compensación” de los voltajes de las
diferentes células, de manera que no es
necesario conectarles el típico balanceador.
Bajo estas condiciones las baterías de
Graupner
una corriente de carga máxima de 2C (el
valor de 1C corresponde a la capacidad de la
batería). A un voltaje máximo por célula de
4.2 V o superior, la carga debe continuar a
un voltaje constante de 4.2 V por célula hasta
que la corriente de carga cae a 0.1 ... 0.2 A.
Se debe evitar absolutamente cualquier
voltaje de carga superior a 4.20 V por célula
ya que de otra manera las células pueden
estropearse permanentemente y pueden
incendiarse. Para evitar el sobre
calentamiento individual de las células en un
pack se debe ajustar un voltaje de cut-off de
entre 4.1 V ... 4.15 V por célula.
No probar de cargar nunca las baterías con
la polaridad cambiada. Se producen
reacciones químicas anormales cuando las
baterías se cargan con la polaridad invertida
y esta se vuelve inservible. Esto puede
causar roturas, humo y llamas.
El rango de temperatura admisible para la
carga y el almacenado de baterías de LiIo /
LiPo es de 0 ... +50°C.
Almacenaje: las baterías de LiIo / LiPo deben
tener entre 10 ... 20% de su capacidad
cuando se almacenan. Si el voltaje de las
células cae por debajo de 3 V, entonces las
baterías de LiIo / LiPo deben recargarse
necesariamente a una capacidad del 10 ...
20% de la máxima capacidad. Si no, se
producirá durante el almacenaje una
descarga profunda y la batería quedará
inservible.
de LiIo / LiPo pueden cargarse con
Consejos especiales para la descarga de las baterías
de LiIo / LiPo de
Durante la descarga, la temperatura de la
Otros consejos para la manipulación
No cortocircuitar nunca la batería. Un
Graupner
Una corriente de descarga continua de
aproximadamente 1C no representa ningún
problema para las baterías de LiIo / LiPo de
Graupner
las especificaciones del catálogo. En
cualquier caso, observar la máxima corriente
de carga admitida por el conector del
sistema, ver la máxima corriente de descarga
de la batería.
Una descarga por debajo de los 2.5 V por
célula estropea las células para siempre y
debe evitarse absolutamente. El emisor
mc-32
cuando el voltaje de su batería de
alimentación cae por debajo del límite de 3.3
V. Se debe evitar absolutamente cualquier
situación que pueda producir un cortocircuito.
Un cortocircuito permanente produce la
destrucción de la batería, altas temperaturas
y quizás la auto ignición de la misma.
batería no debe elevarse en cualquier caso
por encima de +70°C. Si no, debe mejorarse
la refrigeración o descargar con una menor
intensidad. La temperatura puede
comprobarse fácilmente con un termómetro
de infrarrojos ref. núm. 1963. La batería
nunca debe descargarse a través del
conector de carga del emisor. Este conector
no está preparado para ello.
cortocircuito genera un flujo de alta corriente
que calienta las células. Esto permite la
perdida de electrolitos, la producción de
gases y quizás explosiones. Evitar
superficies conductoras de la electricidad
cerca de las baterías de LiIo / LiPo de
. Para corrientes superiores, seguir
HoTT se apaga automáticamente
Graupner
facilitar la creación de cortocircuitos.
Manipulación de los conectores:
Estos conectores no son robustos como en
otras baterías. Esto ocurre principalmente en
el polo positivo. Las conexiones pueden
romperse fácilmente. Debido a la
transferencia de calor, los terminales de los
conectores no pueden soldarse
directamente.
Conexión entre células:
No debe soldarse directamente en las células
de la batería. La temperatura al soldar
directamente sobre las células puede
estropear componentes de la batería, como
separadores o aislantes. Las conexiones de
la batería deben hacerse sólo con puntos de
soldadura industrial. En caso de rotura de los
cables la reparación debe hacerse de forma
profesional por el fabricante o el distribuidor.
Reemplazo de células:
La sustitución de células estropeadas
solamente debe hacerla el fabricante o un
distribuidor, nunca nosotros mismos.
Células estropeadas
Las células estropeadas no deben usarse
nunca ni devolverse al servicio.
Se consideran células estropeadas las que
tienen las siguientes características:
El envoltorio está dañado, la batería está
deformada, hay fugas de electrólisis. En
estos casos no está permitido continuar
usando la batería.
Las células dañadas o inútiles son residuos
peligrosos y deben eliminarse
adecuadamente.
Otros consejos de seguridad
Las baterías no deben nunca
sobrecalentarse ni tirarlas al fuego.
durante el transporte , que pueden
8

Las células de las baterías no deben
sumergirse el líquidos como agua, agua de
mar o bebidas. Se debe evitar cualquier
contacto con líquidos con líquidos de
cualquier naturaleza.
Los elementos sueltos y los acumuladores no
son juguetes, por lo tanto no hay que dejarlos
al alcance de los niños, o permitir que
jueguen con ellos.
Hay que alejar las baterías de los bebés y los
niños pequeños. Si se ingieren las baterías,
acudir inmediatamente al médico o un
servicio de urgencias.
Las baterías no pueden colocarse en un
horno microondas o bajo presión. El humo y
el fuego pueden tener fatales consecuencias.
No desmontar nunca baterías de LiIo / LiPo,
se pueden producir cortocircuitos internos, y
se puede producir gas o explosiones.
Los electrolitos que se escapan de un
elemento son corrosivos. Evitar todo contacto
con la piel o los ojos. En caso de problemas
limpiar abundantemente con agua y consultar
con un médico.
Los electrolitos y vapores que se escapan de
un elemento de LiIo / LiPo son perjudiciales.
Evitar absolutamente cualquier contacto
directo con los electrolitos Evitar todo
contacto con la piel o los ojos. En caso de
problemas limpiar abundantemente con agua
y consultar con un médico.
Retirar siempre los acumuladores de los
modelos o aparatos si no los utilizamos. Para
evitar cualquier descarga demasiado fuerte,
apagar siempre el aparato cuando no lo
utilizamos. Recargar los acumuladores con el
tiempo correcto. Durante la carga, colocar los
acumuladores sobre una superficie resistente
al calor, no inflamable y no conductiva, lejos
de cualquier objeto inflamable. ¡Las
descargas profundas de las baterías de LiIo /
LiPo son perjudiciales y no deben usarse!
Notas para el emisor mc-32 HoTT
Ref. núm. 32032
El emisor de este equipo de radio control está
equipado de origen con una batería de LiIo (salvo
cambios). Cuando se llega al voltaje mínimo ajustado
de fábrica de 3.60 V aparece un aviso en la pantalla.
Reciclado de las baterías usadas
Algunos países tienen leyes obligando a depositar las
baterías usadas en un centro de recolección
autorizado.
No se pueden tirar a la basura doméstica. Las
podemos dejar en un centro de reciclado de nuestro
ayuntamiento, en uno de nuestros puntos de venta, o
en cualquier comercio que venda productos de este
tipo. Igualmente nos pueden devolver las pilas o
acumuladores usados que nosotros hayamos vendido,
a portes pagados, a la dirección siguiente:
Graupner GmbH & Co. KG
Service: Gebrauchte Batterien
Henriettenstr. 94 – 96
D-7323 Kirchheim unter Teck
¡De esta manera colaboraremos eficazmente en la
protección del medio ambiente!
Atención:
¡Los acumuladores estropeados necesitan un embalaje
seguro, ya que pueden ser peligrosos!
9
mc-32 HOTT Una tecnología de
última generación
Los avances técnicos en todo el espectro del diseño de
los modelos es un desafío siempre constante para los
ingenieros. Por esto la introducción del nuevo sistema
de transmisión en tecnología de 2.4 GHz representa un
nuevo logro.
El HoTT (Hopping Telemetry Transmisión)
evolucionado por
la ingeniería y numerosas pruebas realizadas por todo
el mundo por pilotos profesionales.
En teoría el sistema
simultáneo de hasta 200 modelos. Pero en la práctica,
teniendo en cuenta las condiciones de homologación
para la utilización de emisores en la banda de 2,4 GHz
ISM. El número se ha reducido sensiblemente. No
obstante, siempre es posible utilizar más modelos
simultáneamente en la banda de 2,4 GHz que en las
frecuencias de 35/40 MHz usadas hasta ahora. Por lo
tanto el único factor limitador - como ha sido siempre –
es probable que sea el tamaño del espacio (aéreo)
disponible. Pero el solo hecho de no ser necesario el
procedimiento de control de frecuencias garantiza una
enorme ganancia de seguridad, especialmente en los
campos de vuelo amplios con grupos de pilotos
distribuidos en varios sitios, por ejemplo las laderas,
donde no es necesario el control.
La comunicación bi-direccional entre el emisor y el
receptor gracias a un canal de retorno de información
integrado en el receptor, permite el acceso a los datos
y la programación del receptor HoTT. Podemos por
ejemplo invertir las salidas del receptor, repartir las
funciones de mando sobre varios servos (mapping de
los canales) y ajustar los recorridos y sentido de
rotación de los servos. Podemos acceder a los datos
de telemetría, como por ejemplo el VARIO y el GPS a
través de los módulos opcionales disponibles.
Graupner
Graupner
es el resultado del estudio,
HoTT permite el uso
Basado en el sistema de radio control programable
GRAUPNER/JR
especialmente concebido para los pilotos expertos.
Con la mc-32 HoTT puede pilotarse cualquier
modelo reducido clásico, ya sean aviones,
planeadores, helicópteros, barcos o coches.
Las complejas mezclas en el ámbito de superficies
móviles en el caso de aviones o veleros, o del plato
cíclico en el caso de helicópteros son inevitables.
Gracias a esta nueva tecnología podemos, accionando
simplemente las teclas sensibles (CAP Touch), activar
uno u otro de los programas de mezcla, específicos de
un modelo. Dentro de las diferentes posibilidades de
programación de la mx-32 HoTT, escoger un tipo de
modelo, y el software activará automáticamente todos
los reglajes y mezclas necesarios para este tipo de
modelo. Esto significa que el emisor no requiere de
módulos adicionales, y no son necesarios los antiguos
mezcladores mecánicos en los modelos. Esto significa
por ejemplo que el emisor mc-32 HoTT
completamente equipado con software y hardware
permite hacer funcionar los conocidos módulos
NAUTIC en el receptor. Una nueva aplicación es el
“Secuenciador de canales”, que permite el
funcionamiento de hasta tres servos de forma
automática.
El emisor
seguridad y fiabilidad durante su uso. La mc-32
HoTT tiene 80 memorias de modelos, en cada una de
las cuales podemos memorizar diferentes fases de
vuelo, con sus parámetros y ajustes específicos. A
estas fases podemos acceder en vuelo simplemente
moviendo un interruptor o una tecla, por si los
necesitamos por ejemplo para un figura en concreto.
Podemos almacenar memorias adicionales en una
tarjeta SD, que se incluye de origen en el set. Incluso
se pueden memorizar los datos de la telemetría para
estudiarlos en el PC.
mc-24, el mc-32 HoTT está
mc-32
HoTT ofrece un altísimo nivel de
Como el
pantallas, la inferior está optimizada para que el
software sea comprensible y de fácil utilización. La
representación gráfica de las mezclas y otras funciones
es de gran utilidad. La pantalla superior permite ver los
datos de telemetría del receptor.
Gracias a la clara estructura de los menús, el
debutante se familiarizará rápidamente con las
diferentes funciones del emisor. Con las teclas
sensibles de cuatro funciones situadas a derecha e
izquierda de la pantalla rica en contrastes, el usuario
puede acceder a todos los reglajes y aprender
rápidamente todas las opciones posibles según su
experiencia en modelismo.
En estas instrucciones cada menú está descrito con
detalle. Numerosos consejos, recomendaciones y
ejemplos de programación completan estas
instrucciones, así como un glosario que explica los
términos específicos utilizados en modelismo, tales
como superficie de mando, Dual Rate, Butterfly, etc.
Hay que respetar las recomendaciones de seguridad y
las técnicas. Leer atentamente estas instrucciones y
probar las diferentes posibilidades que se explican en
el texto, simplemente colocando los servos al receptor
suministrado en el set. Seguir las instrucciones
indicadas en la página 68. Así aprenderemos
rápidamente como sacar provecho de las diferentes
opciones que ofrece el emisor mc-32 HoTT.
Hay que tener un comportamiento responsable con el
emisor y el modelo, para evitar situaciones de peligro.
Todo el equipo
buenos vuelos con su mc-32 HoTT de última
generación de equipos RC.
Kirchheim-Teck, Diciembre 2011
mc-32
GRAUPNER
HoTT está equipado con dos
le desea numerosos y
10

Equipo computerizado mc-32 HoTT
Equipo de radio control de 16 canales con la tecnología
(Hopping Telemetry Transmision)
Graupner
HoTT
La tecnología Graupner HoTT tiene una gran fiabilidad y seguridad de funcionamiento, gracias a una comunicación
bidireccional entre emisor y receptor, con sistema de telemetría integrado, avisos acústicos a través de una salida para
auriculares y tiempos de reacción ultra-rápidos. Programación simple gracias a la técnica de programación con teclas
sensibles. Pantalla de alto contraste, de 8 líneas, con gráficos para la presentación de los ajustes. Retroiluminación azul.
Una segunda pantalla independiente muestra los datos de telemetría. Posibilidad de memorización de los datos
telemétricos en una tarjeta de memoria Micro SD.
Resolución de la señal de 12-Bit / 4096 pasos para una respuesta extremadamente fina. Conexión USB para consultar,
guardar una copia de seguridad de las memorias de los modelos y para las actualizaciones.
Sistema de transmisión
HoTT integrado.
Máxima prevención contra las interferencias
gracias al salto de frecuencia optimizado así
como una mayor difusión de los 75 canales.
Transmisión de datos inteligente con función
de corrección.
Pueden usarse simultáneamente más de 200
equipos.
La comunicación bi-direccional entre emisor
y receptor y la rápida velocidad de
transmisión (10 ms) asegura una reacción
extremadamente corta.
Elección entre 5 idiomas diferentes
actualizables a través del software (Alemán,
Inglés, Francés, Italiano y Español). Para la
disponibilidad de un determinado idioma ver
el área de los dowloads.
80 modelos en memoria con almacenamiento
de los programas específicos y ajustes de
cada modelo.
De origen incorpora 7 interruptores (2 de tres
posiciones, 3 de dos posiciones y 2
momentáneos) y 3 interruptores digitales
para usar como necesitemos.
Función Encoder con 2 teclas de 4 funciones
sensitivas (CAP Touch”) para una
programación simple y de ajustes precisos
Función Key-Lock (bloqueo) para evitar
cualquier manipulación malintencionada.
Ficheros de voz y si es necesario de MP3
audibles a través del altavoz de la emisora o
auriculares.
Binding muy rápido y fácil para cada modelo.
Re-binding super rápido, incluso a máxima
distancia.
Alcance: función de test y aviso de peligro.
Aviso de bajo voltaje.
Rango de voltaje de uso del receptor
extremadamente amplio, entre 3.6 V y 8.4 V
(funcional hasta 2.5 V)
Graupner
de 2,4 GHz
11
Fácil programación del Fail-safe, libre
asignación de los canales (channel mapping),
funciones de mezcla y ajustes de los servos.
Binding de cualquier número de receptores
para la expansión de canales (32 canales
máximo).
Hasta cuatro servos pueden controlarse
simultáneamente como un bloque en el
MISMO modo de funcionamiento con un ciclo
de tiempo para los servos de 10 ms
(solamente servos digitales).
Gracias al ciclo de tiempo reducido hasta 10
ms se consigue una extremadamente corta
respuesta.
La lectura de la telemetría en tiempo real
puede hacerse en la pantalla de la emisora, y
adicionalmente también se puede mostrar en
el SMART-BOX.
Características adicionales del HoTT en la
mc-32
Tiempo de respuesta super rápida gracias al
uso de un rápido procesador central para la
transmisión de datos.
Tarjeta micro-SD para el almacenamiento de
datos de telemetría y funciones adicionales.
Siempre actualizable a través de la interface
USB o la tarjeta micro-SD.
La batería de LiIo incluida (posibilidad de
cambio reservada) tiene una capacidad de
6000 mAh. Esto permite largos tiempos de
vuelo y reduce el número de cargas.
Se puede cambiar la modulación a través del
software, por ejemplo entre “EXT.PPM” (por
ejemplo Weatronic) a HoTT pulsando una
tecla.
Limitación del plato cíclico: esta función limita
la inclinación del plato cíclico para evitar la
posible colisión mecánica durante el uso de
un helicóptero 3D en los extremos del roll y el
nick.
Ring-limiter: función similar a la limitación del
plato cíclico usada para controlar hasta tres
motorizaciones Voith-Schneider en los
modelos de barcos.
Secuenciador de canales para el movimiento
automático de tres servos en secuencia, por
ejemplo para la apertura de las compuertas
de un tren retráctil y el tren en sí.
Función Multi-channel para hacer funcionar
los módulos NAUTIC.
Trims digitales sin final de carrera, sensación
“similar” al analógico, programable en cada
fase de vuelo.
Función de Auto-trim. Las posiciones
actuales de los sticks para trimar o
helicóptero se memorizan como trim con un
botón. (Compensar el modelo, activar el
interruptor y dejar los sticks. La corrección se
hará de manera suave al volver a tocar los
sticks)
Programación simple del canal 1 para
conmutar entre motor y frenos en los veleros
en las diferentes fases. El piloto determina la
posición del stick (adelante / atrás) en la cual
el motor está parado o los aerofrenos
cerrados.
Control sobre un máximo de 16 funciones.
Asignación simple de los mandos para
canales auxiliares, tales como interruptores y
elementos proporcionales para un mejor
confort de utilización.
Siempre actualizable gracias al procesador
de 32 bits con una moderna memoria flash
actualizable.
Pantalla de gráficos de alto contraste con
retroiluminación en azul para una
visualización en condiciones de luz
desfavorables.
12
Selector Mode Confort para pasar de un
modo de pilotaje a otro, modo 1 ... 4 (gas a
derecha / izquierda, etc.).
Dos mezcladores libres programables para
modelos de aviones o helicópteros, cada una
con el input y el output libremente
programable, cuatro mezcladores en curva
con una innovadora tecnología para curvas
de 8 puntos para un fácil ajuste del motor,
paso cola o otros ajustes no lineales. La
unidad aritmética de la CPU emplea un
ingenioso método para calcular
aproximaciones polinómicas realmente
redondeadas, ideal para mezclas en curva
MPC (multi-point curve).
Los puntos de cambio de las mezclas de las
curvas se pueden hacer en los dos ejes con
los pads de teclas.
Para cada modelo se pueden ajustar hasta
ocho fases de vuelo con un nombre propio.
El paso de una a otra se puede programar
independientemente.
Menú SUPER SERVO con una perfecta
visión sobre todos los ajustes de los servos y
corrección simple de los cuatro parámetros
básicos: dirección de rotación, punto medio,
recorrido por separado en cada lado y límite
del recorrido en cada lado, para los 16
servos, en total 96 opciones de ajuste.
Menú SUPER DUAL-RATE, EXPO y
EXPO/DUAL-RATE con 36 posibles ajustes
para las tres funciones de servos y seis fases
de vuelo.
Menú multifunción optimizado para aviones y
helicópteros. Entrar el número de servos de
alerones y flaps y se programarán
automáticamente las mezclas posibles en el
menú “Mezclas de las alas”. Diferencial de
alerones, Butterfly, dual-flap, ajuste
automático del gyro y otras funciones
especiales.
Menú helicóptero para mando del plato
cíclico de 1, 2, 3 o 4 puntos.
Ciclo de tiempo ajustable: 10 ms, 20 ms o 30
ms en función del receptor y el modo de
funcionamiento.
Menú de cronómetros optimizado con un
sistema de ocho cronómetros, alarmas,
cuenta atrás y contador de parciales. Se
pueden ver en caracteres grandes dos
cronómetros de tiempo de funcionamiento y
un contador de parciales al mismo tiempo.
Cronómetro con historial: Adicionalmente al
contador de parciales hay el “Time 1” que
captura el tiempo desde la puesta en marcha
y el “Time 2” que memoriza los tiempos de
ON y OFF por separado.
Channel mapping
El
libre distribución de las funciones de los
controles.
Los ajustes de recorrido y dirección de
rotación integrados en el receptor permiten,
por ejemplo, hacer coincidir los servos en el
mapping.
Las funciones de Fail-safe programables en
“Hold”, “Off” y “Move to present positions”
pueden ajustarse por separado para cada
canal de servo en el receptor.
Hay disponible una ranura para las tarjetas
SD y SDHC de formato FAT o FAT32 para el
registro de ficheros y modelos.
Programas de los modelos
Cronómetro de funcionamiento de tiempo del
emisor
Asignación de los interruptores de las fases:
seis interruptores, dos con función prioritaria.
Cada combinación de interruptores se puede
nombrar libremente. Esto permite que sea
en el receptor permite la
independiente el número de las fases de
vuelo del número de interruptores.
Tipo de cola normal, cola en V, Delta / Ala
volante y 2 PR Sv 3+8 (que permite utilizar
dos servos para la profundidad directamente
sin necesidad de tener que programar
mezcladores libres o en cruz).
Servos para flaps 4 AL / 4 FL: máximas
prestaciones para ocho servos de alas,
incluso sin usar mezcladores libres.
Anulación del tiempo de retraso entre fases:
El tiempo de retraso se puede cancelar
individualmente para los diferentes canales
en los ajustes básicos de las fases de vuelo
(por ejemplo para activar / desactivar el head
lock de un helicóptero o parar un motor
eléctrico).
Adicionalmente, podemos definir los nombres
de las fases de vuelo libremente, podemos
asignar hasta diez nombres de fases según
nuestras necesidades.
Menú de los controles del emisor mejorado:
opción de asignar los ajustes laterales para el
control del C1 + trim como control del emisor.
Un input simple puede asignarse a dos
interruptores para una función de 3
posiciones real.
Mezcladores para las alas: Nuevo concepto
para el menú multi-flap para simplificar los
ajustes de uno a ocho servos de las alas
específicos para cada fase basados de
manera que sea comprensible sin utilizar
mezcladores libres.
Sub-opción “Info” en el menú básico de
ajuste de los modelos. Cualquier tipo
información adicional se puede guardar aquí.
Esta información adicional aparece en el
nuevo diseño de selección de un modelo.
“Interruptores lógicos”: esta función permite
acoplar dos interruptores como “y” o “o” en
funciones lógicas. El resultado se puede
utilizar como un interruptor virtual.
Recorrido del servo ampliado a +
Fases de vuelo: 8 en aviones,7 + AR en hely.
Aviso de “gas demasiado alto” configurable
en el menú hely, aviso de emisor "on"
ajustable
Los tiempos parciales se pueden parar y por
lo tanto borrar (si el interruptor del crono está
en posición OFF) pulsando la tecla central
ESC
Trim de las fases en todos los ejes de los
modelos de aviones.
Hotkey para el display de los servos:
pulsando las flechas
izquierda accedemos a esta pantalla
prácticamente desde cualquier menú.
Mapping de las salidas del receptor.
Pads de teclas con código de bloqueo para
evitar operaciones accidentales.
Cambio del menú principal al de telemetría a
través de ESC
Numerosos displays de telemetría,
programación y evaluación de funciones
mostradas directamente en la pantalla.
Presentación gráfica de los iconos de los
modelos (aviones / helicópteros)
Conectores montados de origen para USB,
auriculares, SMART-BOX, módulo HF
exterior y sistema DSC. Preparado para la
función emisor / alumno.
Sistema profesor / alumno con o sin cable
para la transmisión completa de datos; todos
los ajustes se hacen en el emisor del
profesor.
Futuras opciones adicionales se podrán
implementar a través del update del software.
◄ ►
125%.
del pad de la
13
Equipo computerizado mc-32
HoTT
Equipo de radio control de 16 canales con la
tecnología
(Hopping Telemetry Transmision)
Contenido del set Ref. núm. 33032
Accesorios
Ref. núm Descripción
71.26 Correa Graupner HoTT
72.40 Correa Deluxe
Cable para emisor / alumno para
Piezas de recambio
Ref. núm Descripción
3080 Caja de aluminio HoTT, 400x300x150 mm
33000.1 Batería TX de LiIo 3,7V / 6000 mAh
33002.1 Tarjeta micro-SD 2 GB
33032.2 Ganchos metálicos mc-32
33032.3 Reposa manos
33801 Antena emisor HoTT
Graupner
Emisor
con batería de LiIo de un elemento / 6000
mAh / 3.7 V (el modelo puede variar).
Cargador (4.2 V, 500mA)
Receptor bi-direccional
HoTT (ref. núm. 33516) para conectar hasta
16 servos.
Adaptador / interface USB (ref. núm. 7186.6)
y cable USB para conectar al PC y cable
adaptador para actualizar los receptores.
Tarjeta micro-SD (2 GB) con adaptador para
la lectura de las tarjetas.
Maleta de aluminio con foam interior
precortado (ref. núm. 3080)
HoTT, ver la página 213
HoTT
mc-32
HoTT micro-computerizado
Graupner
mc-32
GR-32 Dual
(2 pcs)
mc-32
Características técnicas del emisor
Frecuencia 2,4 ... 2,4835 GHz
Modulación FHSS
Región EURO o FRANCE, ver la página
261
Controles 16 funciones, 4 con trim
Rango de
temperatura
Antena Plegable
Voltaje de
funcionamiento
Consumo
aproximado
Alcance Hasta aprox. 4000 m
Dimensiones
aproximadas
Peso aproximado 1685 g con la batería
Receptor GR-32 Dual HoTT
La tecnología Graupner HoTT 2.4 GHz da al receptor
dual un nuevo Hopping Telemetry Transmisión de alta
frecuencia con el estado de lso componentes y el
software. El receptor dual tiene dos receptores
completos y una antena diversity adicional. La
recepción se conmuta siempre sobre la antena con
mejor recepción, y para la transmisión se usa siempre
la última antena utilizada. Esto significa que los datos
transmitidos por el canal de retorno lo son por la
antena mejor posicionada. Los parámetros de batería
del receptor, temperatura del receptor y potencia de la
señal se transmiten sin sensores adicionales.
El receptor tiene un conector para los sensores de
telemetría y para la señal sum en input o output.
El receptor tiene seis entradas de batería para una
excelente alimentación para incluso ocho servos de
alta potencia.
-15 ... +55°C
3,2 ... 4,8 V
500 mA
252 x 252 x 60 mm
mc-32
HoTT
Características técnicas del receptor GR-32 Dual
HoTT Ref. núm. 33516
Voltaje de
funcionamiento
Consumo
aproximado
Frecuencia 2,4 ... 2,4835 GHz
Modulación FHSS
Antena 2 x 2 antenas Diversity, de
N° de salidas 16
N° de salidas para
sensores
Rango de
temperatura
Alcance Hasta aprox. 5000 m
Dimensiones
aproximadas
Longitud antenas 2 x 145 mm (30 mm activos)
Peso aproximado 24 g
* Los datos referentes a los voltajes permitidos son solamente
aplicables al receptor. Hay que tener en cuenta que el voltaje se
puede aplicar al receptor sin ningún regulador, pero que hay muchos
servos (incluidos controles de velocidad, gyros, etc.) que sólo
admiten de 4,8 a 6 V.
3,6 ... 8,4 V*
140 mA
aprox. 145 mm con funda en
115 mm y 30 mm activos
Hasta 4 sensores
-10 ... +55°C
63 x 30 x 14 mm
Los demás accesorios pueden encontrarse en Internet
en la página www.graupner.de
. También podemos
contactar con nuestro vendedor. Él nos proporcionará
la información necesaria.
14
15
Consejos generales de utilización
Abriendo la caja del emisor
Parar el emisor antes de abrirlo (interruptor general en
“OFF”). Deslizar los dos cierres de la base de la tapa
en dirección opuesta a las flechas marcadas, hacia el
interior, hasta el final. Ahora inclinamos el emisor por la
parte trasera hasta que podamos soltar la base de la
carcasa. Cerramos la caja de la emisora colocando
primero la parte inferior, encajamos el resto y
desplazamos los dos cierres en dirección a la flecha.
Cuando cerremos la base, debemos tener la
precaución de no pillar ningún cable.
Recomendaciones importantes:
No hacer ninguna modificación en los
circuitos, si no perderemos la garantía del
emisor y su homologación
No tocar ninguna parte del circuito con
elementos metálicos. No tocar la pletina ni
con los dedos.
Antes de hacer cualquier trabajo dentro del
emisor, desconectar la batería del emisor
(ver la siguiente página) para evitar un
posible cortocircuito en las placas.
Alimentación del emisor
De origen, el emisor
con una batería recargable de alta capacidad LiIo
1s6p/6000 3.7V TX (Ref. núm. 33000.1) (el modelo
puede variar). La batería se suministra sin carga.
La tensión del acumulador se muestra en la pantalla y
debe controlarse durante el uso del emisor.
Cuando la tensión desciende por debajo de un cierto
valor ajustado a través del apartado “Battery warning”
en el menú “Bassic Settings”, página 260, (por defecto
3.60 V) podemos oír una señal de aviso. Al mismo
tiempo aparece un mensaje en la pantalla
recordándonos que debemos recargar la emisora.
¡Es el momento de aterrizar, parar el emisor y recargar
la batería!
Atención:
Asegurarse de que se ha seleccionado el tipo correcto
de batería en el menú “Basic Settings” de la página
260.
De origen está ajustado en “Lith”.
mc-32
HoTT viene equipado
16
Carga de la batería del emisor con el cargador
suministrado
La batería del emisor de LiIo puede cargarse gracias a
la toma de carga situada debajo de la tapa del lado
izquierdo de la parte frontal del emisor – vista desde el
frente - con el cargador (Ref. 33032.4) suministrado
con el emisor.
En función del estado de la batería, el cargador
suministrado (4.2 V / 500 mA) necesitará hasta
aproximadamente 15 horas para la carga completa de
la batería.
No usar nunca cargadores de otros fabricantes o
adecuados para otro tipo de baterías. Usar cargadores
con un voltaje de salida demasiado alto o con la
polaridad cambiada, ver a continuación, puede causar
grandes daños. Recomendamos este cargador con el
cable apropiado.
Observar las noticias de seguridad de las páginas 4 ...
7.
Durante el proceso de carga el emisor debe estar
siempre en la posición “OFF”. No poner nunca el
emisor en marcha mientras esté conectado al
cargador. Una interrupción, por breve que sea, del
proceso de carga puede hacer aumentar la tensión de
carga hasta el punto de estropear inmediatamente el
emisor. Por esta razón hay que comprobar siempre el
correcto contacto de los conectores.
Carga con cargadores automáticos
Para conseguir una carga rápida de la batería de LiIo
se pueden utilizar cargadores automáticos de
Graupner. La siguiente tabla muestra una selección de
estos cargadores.
Cargadores recomendados (Accesorios)
Ref.
Descripción
6411 Ultramat 8 X X X X X
6463 Ultramat 12
plus Pocket
6464 Ultramat 14
Plus
6466 Ultra Trio
Plus 14
6468 Ultramat
16S
6469 Ultra Trio
Plus 16
6470 Ultramat 18 X X X X X X X
6475 Ultra Duo
Plus 45
6478 Ultra Duo
Plus 60
6480 Ultra Duo
Plus 80
Para la carga de la batería del emisor es necesario el cable ref. 3022,
y para la batería de receptor el cable ref. 3021, si no se especifica en
la tabla superior.
Encontraremos otros cargadores así como los detalles concernientes
a los cargadores mencionados arriba en el catálogo general
Graupner FS o en la página web www.graupner.de
Conexión a 220 V
Conexión a 12 V
NiCD
NiMH
LiPo
Plomo
Balanceador integrado
X X X X X X
X X X X X X X
X X X X X X X
X X X X X X X
X X X X X X
X X X X X X X
X X X X X X X
X X X X X X X
El conector de carga está equipado con un diodo de
protección para las inversiones de polaridad. Los
cargadores automáticos Graupner también detectan la
polaridad.
Seguir las indicaciones de configuración del cargador
usado.
Conectar primero las bananas al cargador, y después
el conector a la toma de la emisora. ¡No conectar
nunca cables sin bananas a la toma de carga del
emisor, o cables que se puedan tocar entre sí!.
Para evitar estropear el emisor, la corriente de carga
no debe nunca superar 1,5 A. Sí es necesario, limitar la
corriente de carga en el cargador.
Polaridad de la toma de carga de la mc-32 HoTT
Los cables de carga de otras marcas que podemos
encontrar en el comercio normalmente tienen
polaridades diferentes. Por esto recomendamos utilizar
solamente cables originales
3022.
GRAUPNER
con la ref.
17
Retirando la batería del emisor
Para retirar el acumulador es necesario primero
desbloquear la tapa de la ubicación del mismo, en la
parte trasera del emisor, y después sacarla.
Sacar la batería y desconectar con precaución el
conector del acumulador tirando suavemente y con
cuidado del cable.
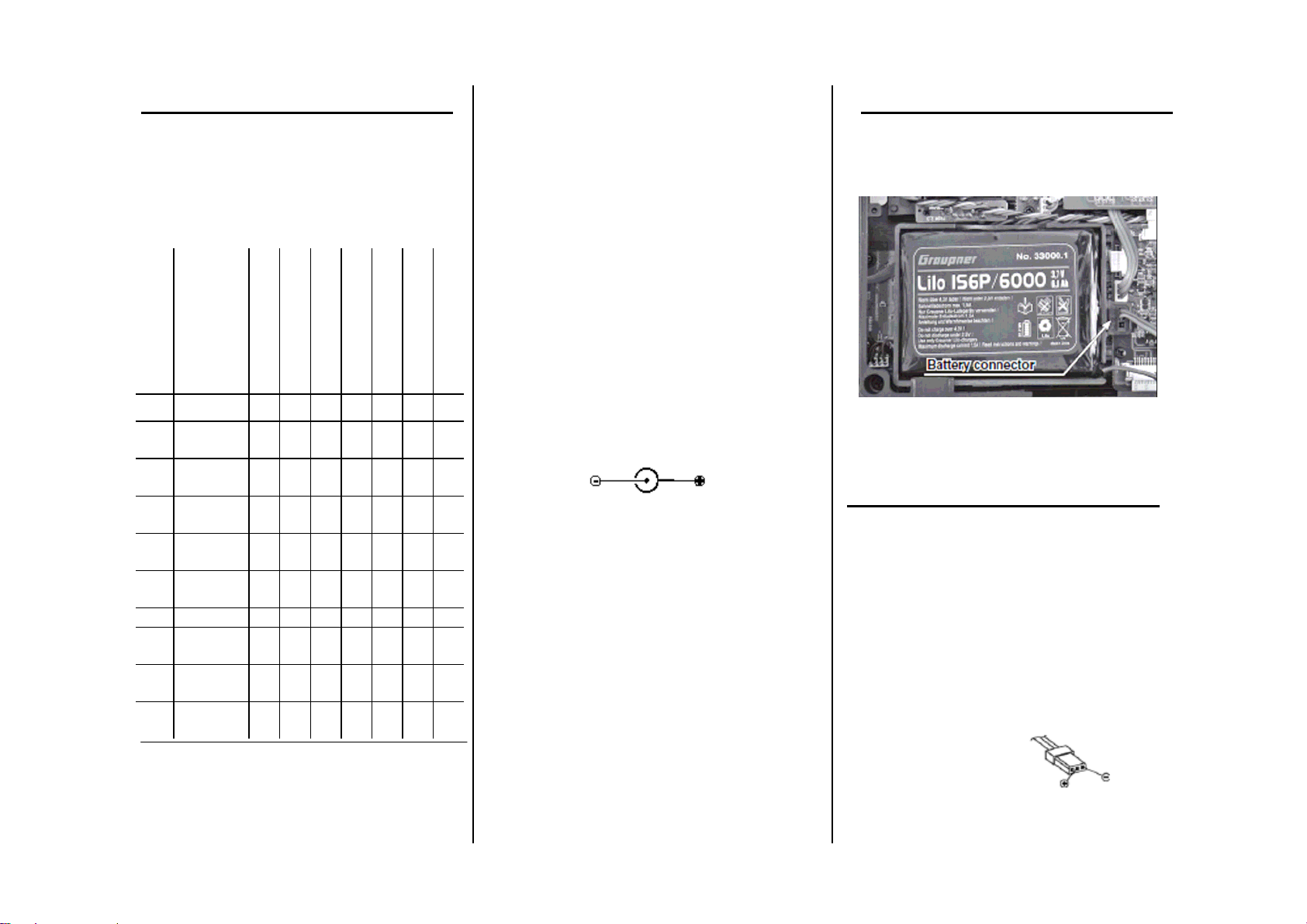
Colocación de la batería de emisión
Mantener el conector de la batería de emisor de
manera que el cable negro o marrón se encuentre en el
lado de la antena y que el pin libre de la conexión esté
dirigido hacia abajo, y empujar el conector hacia los
tres pins del interior del emisor, el conector de la
batería tiene dos aristas chanfleadas para evitar la
inversión de la polaridad (ver el dibujo)
Volver a colocar de nuevo la batería en su alojamiento
y cerrar la tapa.
Polaridad del conector:
Tiempo de utilización de la batería, mostrado en la
parte inferior izquierda de la pantalla
El cronómetro marca el tiempo de utilización (tiempo
total) del emisor después de la última carga de la
batería.
Este contador se vuelve a poner automáticamente a
“0:00” cuando ponemos el emisor en marcha y la
tensión de la batería es visiblemente superior a la
última vez, por ejemplo, después de una carga.
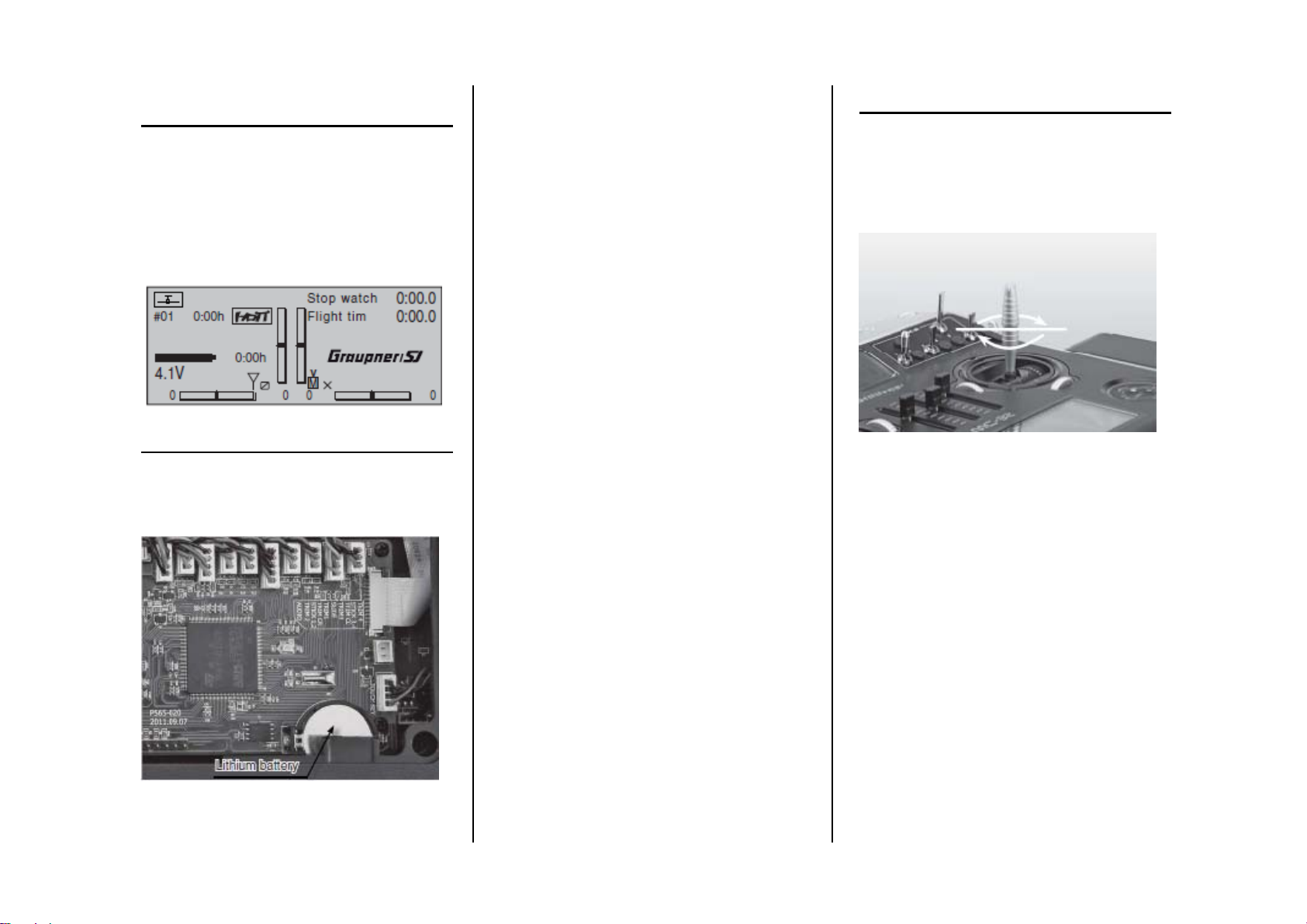
Pila de Litio CR 2032
En la pletina interior del emisor se encuentra el
alojamiento de la pila de Litio del tipo CR2032 que el
usuario puede remplazar por sí mismo.
Esta pila evita la pérdida de datos y de la hora cuando
se interrumpe la alimentación del emisor, por ejemplo,
al cambiar la batería.
Ajuste de la altura de los sticks
Los dos sticks pueden regularse en altura para
adaptarse a los gustos o necesidades personales y
permitir un pilotaje más fino y preciso.
Mantener sujeta la parte inferior dentada del stick, y
desbloquearlo girando la parte superior del mismo.
Ahora podemos aumentar o disminuir la altura del stick
girándolo. Una vez la altura ajustada, apretar de nuevo
las dos partes dentadas girándolas en sentido
contrario.
18
Conversiones de los sticks
Neutralización del muelle
El freno del mando del gas puede ponerse en stick de
la izquierda o de la derecha, según se quiera. Abrimos
la caja del emisor como se ha descrito anteriormente.
Para invertir el freno montado de origen, buscar el
tornillo estriado del stick cercado en blanco mostrado
aquí abajo
Nota:
El stick de la derecha está configurado de la misma
manera, pero a la inversa, de manera que el tornillo se
encuentra a la derecha por debajo del punto medio.
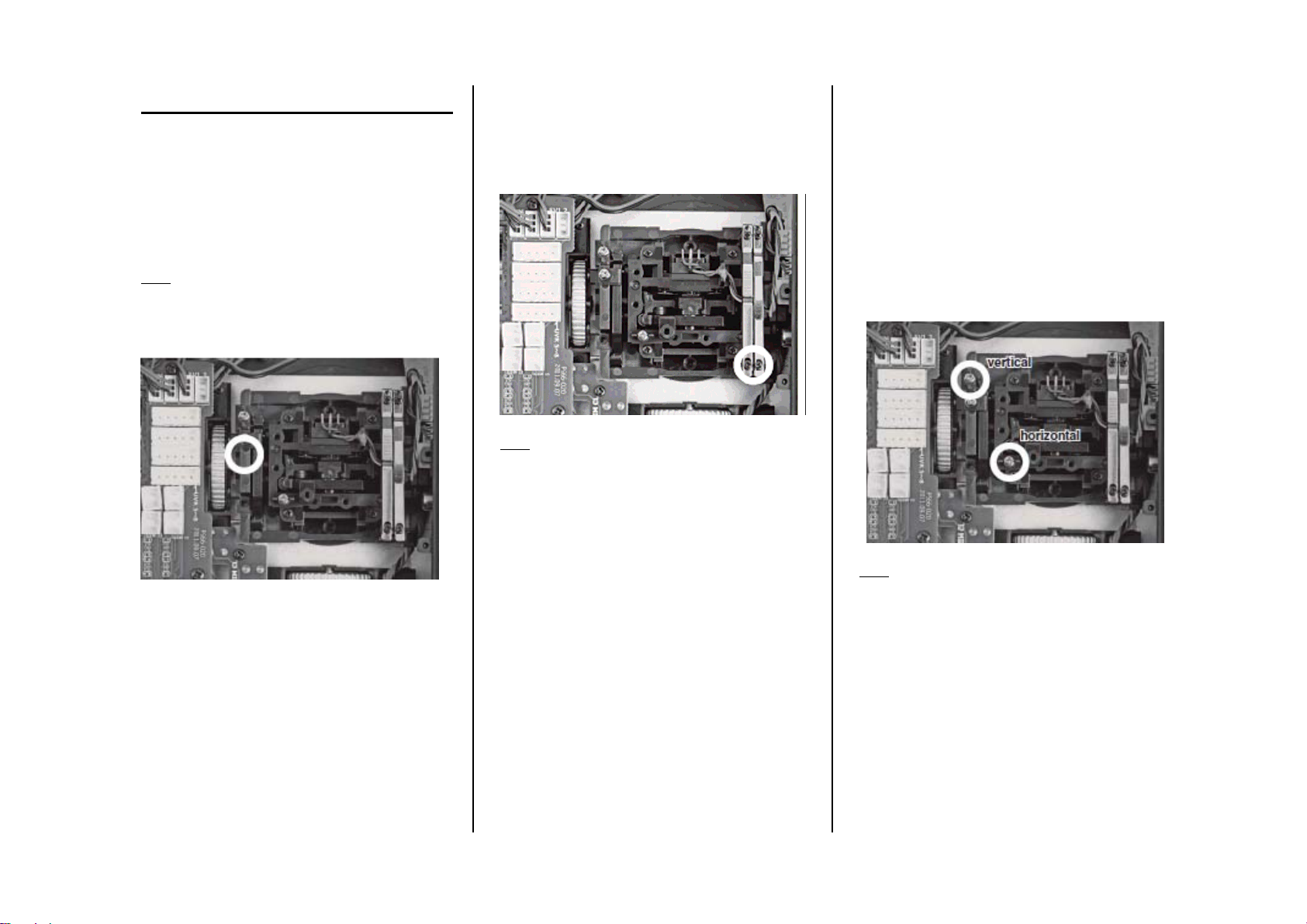
Muelle y lámina dentada
Con los dos tornillos exteriores señalados en la foto
inferior, podemos ajustar el esfuerzo del muelle, y con
el que está en la parte más interior el esfuerzo del
freno dentado, esto es posible en cada stick
Fuerza sobre el stick de mando
El esfuerzo que hay que generar sobre los sticks se
puede ajustar según el gusto del piloto. El sistema de
ajuste se encuentra al lado del muelle.
Son los tornillos marcados en la foto inferior. Girando el
tornillo, con un destornillador de cruz, podemos ajustar
el esfuerzo:
girando hacia la derecha = el esfuerzo será
mayor
girando hacia la izquierda = el esfuerzo será
menor
Ahora giramos el tronillo hasta que el respectivo stick
quede libre para moverse entre los extremos, o lo
giramos hasta que quede completamente bloqueado.
Nota:
El stick de la derecha está configurado de la misma
manera, pero a la inversa, de manera que el tornillo se
encuentra arriba a la izquierda.
Nota:
El stick de la derecha está configurado de la misma
manera, pero a la inversa, de manera que el tornillo se
encuentra a la derecha del punto medio.
19
Soporte de fijación para la correa
El emisor
unos soportes retráctiles para poder colgar la correa.
Para desplegar los soportes, primero pulsarlos
levemente hacia el interior cerca de donde están las
letras, y después girarlos 90°. Los soportes quedan
bloqueados en su posición.
Si tenemos una correa colocada con anillas en los
soportes, primeo presionamos ligeramente sobre el
brazo de la derecha para poder plegarlo hacia abajo, y
después hacemos lo mismo con el brazo de la
izquierda. Después los empujamos
SIMULTÁNEAMENTE hacia su alojamiento.
Las siguientes correas están disponibles como
accesorios:
Ref. núm. Descripción
71.26 Correa
72.40 Correa Deluxe
mc-32
HoTT está equipado de origen con
Graupner
HoTT
Instalación de interruptores, módulos interruptores y
módulos rotativos
Hay un total de 20 agujeros en la caja del emisor
disponibles para montar módulos de accesorios.
Por seguridad, desconectar siempre la batería del
emisor antes de una instalación para evitar
cortocircuitos. Debemos tener cuidado de que ningún
objeto metálico toque con los puntos de soldadura.
Los agujeros que no están ocupados están cerrados
con tapones ciegos. Pueden sacarse fácilmente hacia
el exterior con las uñas de las manos.
Los accesorios, interruptores, potenciómetros, etc.
quedan sujetados en su alojamiento roscando la tuerca
en el eje roscado que queda en la parte interior de la
caja utilizando la llave adecuada. Si el control es un
potenciómetro rotativo, se puede centrar una vez se
aprieta la tuerca por debajo. La llave para ajustar la
tuerca (ref. núm. 5733) es la más adecuada para
apretar por debajo.
La llave para ajustar la tuerca (ref.
núm. 5733) es la más adecuada
para apretar por debajo.
20
Alineación de la antena
La antena articulada extraíble se rosca en el conector
con rótula y la alineamos con la mano.
La antena tiene el campo de emisión muy limitado en
su extremo, por lo tanto no debemos apuntar nunca
directamente con ella al modelo.
Cuando rosquemos la antena, el pin central debe
quedar centrado y no chafado o presionado hacia la
parte inferior del zócalo.
Descripción del emisor
A
A
Frontal
Antena
Antena extraible con rótula para doblar
Base de conexiones
en la cara fron t al , prot egida por una tapa, ver el
inicio de la página 22
Controles de funciones
Cilíndricos: izda “DG5”, arriba “DG3”, dcha “DG1”
Controles de funciones
Rotativo (escamoteable): izda “DG4”, dcha “DG2”
Localizaciones opcionales
para equipar el emisor con interruptores o controles
rotativ os, de orig en hay 8 interrup to r es
Display LC
Indicaciones de telemetría: parámetros del receptor,
standar t. Otr a s indi caciones depe nden de los senso res
opcionales conectados.
(más de t alles disponibles en la página 28)
ltavoz
Interruptor ON/OFF (indicación led en el display)
Nota:
Siempre poner primero en marcha el emisor y
después el receptor. Al para el sistema e l proceso
ha de ser siempre a siempre a la inversa.
Indicadores LED
BATERIA: iluminados cuando el voltaje es suficiente
HF: ilum in ados durante la emisión
A VISO: parpadeo, por ejemplo, con “Gas demasiado
alto”, “sin señal”, “bajo voltaje de la batería
del emisor”, …
Controles de funciones
Palancas laterales izquierda “SD2”
derecha “SD1”
Controles de funciones
Tres deslizantes, “SR1”, “SR2”, “SR3”
Trims digitales
Para un aj uste fino de las p osiciones de
los servo s. Cuando los giramos , ca da click
produce u n in cr e m ento del ajuste (s e indi ca
la posición en el display). Pulsando la rueda
del trim se ha ce un reset de los aju stes.
Pad de la derec ha
= seleccionar / confirmar
pulsando aprox. 1s: cambio entre el menú
de telemetría y el display básico
= cambio en una de las cuatro direcciones con
cada tecla
Pulsando simultáneamente
= cambio entre el display bási co y
el ser vo dis play
Pulsando simultáneamente
de la izquierda + de la derecha
= cambio a las “opciones secretas”,
ver la página 32.
SET
Altavoz
LC Display (más detalles en la página 28)
juste del contraste: pulsar simultáneamente
+ “SET” del pad de la derecha = cambio
a las opciones secretas
Indicadores de peligro:
* cuando el voltaje de la batería baja excesivamente
* fallo en el sistema profesor / alumno
* gas demasiado alto al poner el emisor en marcha
* …
21
Stick
Dos sticks con un total de cuatro fun ciones
de control independientes. La longitud de los
sticks se puede ajust ar. La cor relación del
control de las funciones 1 … 4 se ajusta en el
tipo de mod el o, en los m enú s “Ajustes básico s
del modelo” y “Ajuste de los controles”, por
ejemplo, gas a la izquierda o la de r echa. Los
sticks pueden ajustar se con autocentrado o no.
Pads de teclas sensibles, derecha e izquierda
Pad de la izquier d a
= selección / confirmación
= cambio de los valores con cada tecla
en una de las cuatro direcciones
símbolos
Girando con el dedo alrededor de la circunferencia
= cambio de valores. Selección de valores
alternativos con el pad de la izda.
O
Simultáneamente
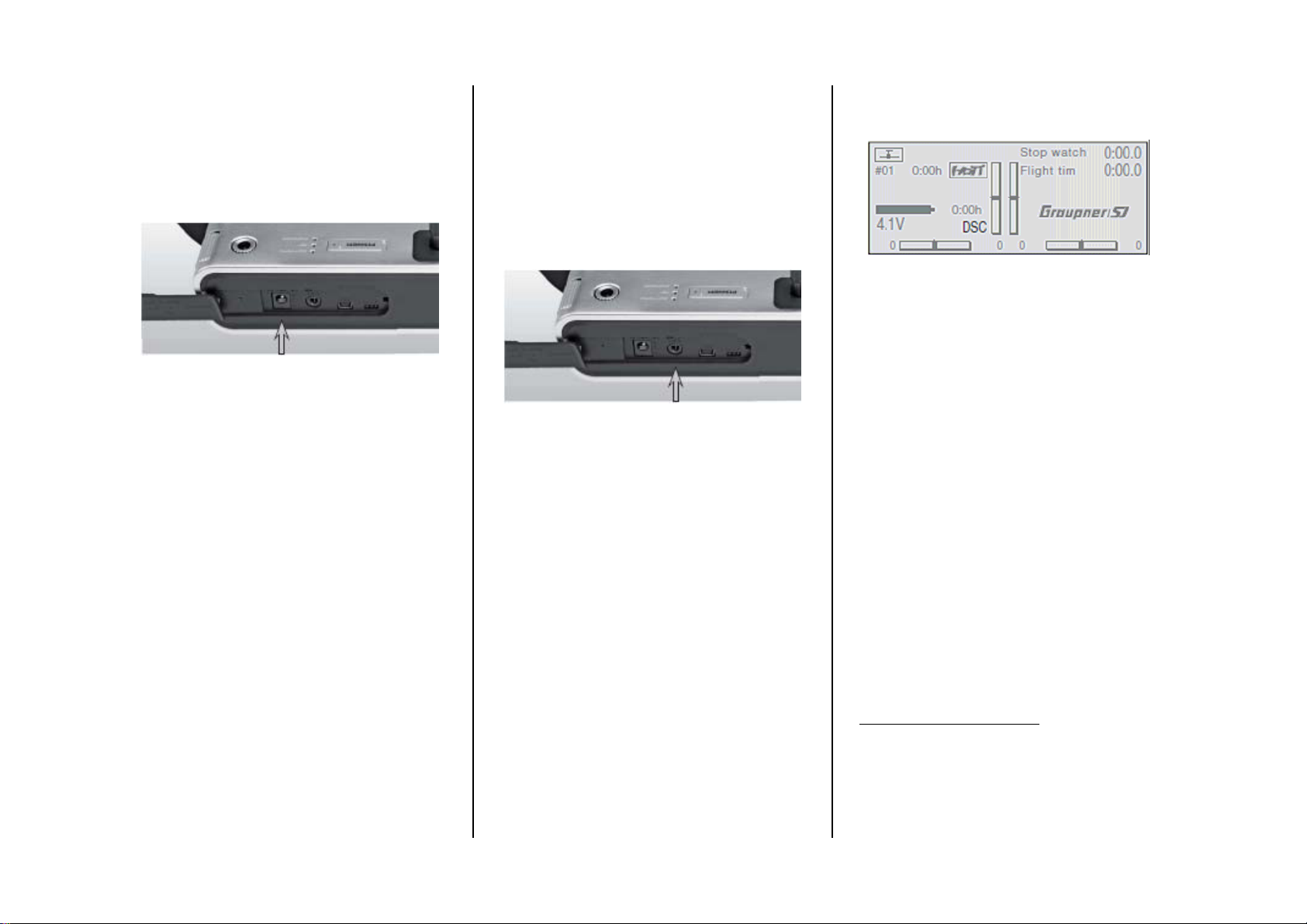
Conexiones en la parte frontal
Jack de carga
El jack de carga del emisor mc-32 HoTT queda
accesible girando la tapa de protección izquierda
delantera.
La batería del emisor de LiIo se puede cargar a través
del conector de carga localizado detrás de la tapa
izquierda de la parte frontal del emisor – visto desde el
frente – con el cargador incluido en el set (ref. núm.
32032.4).
Corriente de carga máxima admitida con los
cargadores Graupner automáticos: 1,5 A.
No usar nunca cargadores de otros fabricantes o
adecuados para otro tipo de baterías. Usar cargadores
con un voltaje de salida demasiado alto o con la
polaridad cambiada, ver a continuación, puede causar
grandes daños.
Se puede encontrar más información acerca de la
carga de la batería de los emisores en la página 16.
Observar las noticias de seguridad de las páginas 7 ...
9 respecto al manejo de las baterías de litio.
DSC / Direct Servo Control
Podemos adivinar fácilmente el significado de la
abreviación “DSC”, Direct Servo Control. No obstante,
por razones técnicas, un control directo sobre los
servos no es posible con el sistema HoTT usando el
cable de diagnosis.
Una vez hemos abierto la tapa izquierda delantera, el
conector DSC de la
El conector jack standart DSC de dos polos del emisor
mc-32 HoTT se usa también como conector para el
sistema profesor / alumno o como interface para los
simuladores de vuelo.
Para que la conexión DSC funcione correctamente:
1. Efectuar las modificaciones necesarias en los
menús. Para utilizar el emisor
HoTT en modo escuela ver a partir de la
página 210.
2. Si utilizamos el emisor mc-32 HoTT con
un simulador o como emisor de alumno en el
caso del modo Trainer, es necesario que el
interruptor del emisor esté SIEMPRE en la
posición “OFF”, ya que es solamente en esta
posición que, una vez conectado el cable
DSC, el módulo HF queda desactivado. El
consumo del emisor queda ligeramente
reducido. El LED “Battery” central
debe quedar en color rojo, y en el display
básico de la pantalla deben figurar las letras
“DSC”, a la izquierda justo debajo del crono
mc-32
HoTT queda accesible:
mc-32
del reloj. Paralelamente, desaparece el
símbolo de telemetría.
El display superior del emisor muestra el mensaje
“CANNOT RECEIVE DATA” durante este tiempo.
De esta manera el emisor queda listo para funcionar.
Por el contrario, si el emisor mc-32 HoTT está en el
modo profesor, debemos primero poner en marcha el
emisor antes de conectar el cable respectivo.
3. Conectar el otro extremo del cable al aparato
elegido, respetando las instrucciones de los
manuales correspondientes.
Importante:
Comprobar que las conexiones entre los
diferentes cables sean siempre correctas y fiables,
y usar solamente los conectores de 2 polos TRS
en el jack DSC.
4. En la línea “DSC Output” del “Basic settings
model”, página 81 o 88, o en la línea “Pre-set
DSC Output” en el “General basic settings”,
página 258, debemos ajustar uno de los
siguientes tipos de modo de emisión en
función del número de funciones transferidas:
PPM10, PPM16, PPM18 o PPM24. Ajuste
por defecto: PPM10.
Nota respecto a los simuladores:
Teniendo en cuenta la diversidad y el número de
simuladores en el mercado, es probable que la
conexión a nivel de la toma o módulo DSC no sea
correcta; y es necesario hacer la modificación
correspondiente en un servicio oficial Graupner.
22

Conector Mini-USB
Esta conexión permite conectar el emisor a un PC
equipado con sistema operativo Windows XP, Vista o
7, y con un conector USB para poder actualizar el
software o cambiar datos.
Conector Data
El denominado “DATA-jack” se localiza a la derecha de
este grupo de conectores.
Slot tarjeta
Podremos acceder a la ranura del emisor
HoTT para las tarjetas micro-SD y micro-SDHC una
vez hemos retirado la tapa de la derecha de la parte
frontal del emisor.
micro SD y micro SDHC
mc-32
El cable USB, ref. núm. 32032, que está incluido en el
set, es el adecuado para conectar a este jack. El
procedimiento para cargar la actualización del software
a través del PC se describe en la página 43.
El software necesario para el PC, así como los drivers
para el USB se pueden encontrar en la página de
downloads de Graupner en www.graupner.de
Una vez los drivers necesarios y el software están
instalados en el PC, esta conexión USB se puede
utilizar para actualizar el emisor o para copiar los datos
del emisor y cronómetros.
Para transmitir los datos y cronómetros a través de
este jack, ver el menú “Info display”, al principio de la
página 266.
.
Se utiliza para la conexión opcional de la Smart-Box,
Ref. 33700.
Encontraremos informaciones más amplias sobre la
Smart-Box en el catálogo general
página web www.graupner.de
Graupner
FS y en la
Se pueden usar todas las tarjetas convencionales del
tipo micro SD de hasta 2 GB y micro SDHC de hasta
32 GB. No obstante, como fabricantes recomendamos
no usar tarjetas de memoria de más de 4 GB, lo que es
completamente adecuado para las situaciones
normales.
El tipo de tarjeta de memoria usadas en este emisor es
el mismo que conocemos para cámaras digitales y
teléfonos móviles. Introducirla en la ranura con los
contactos hacia arriba hasta que encaje, ver la foto
superior.
Una vez hemos insertado la tarjeta de memoria, la tapa
delantera puede cerrarse de nuevo.
Aparece un icono de la tarjeta de memoria en la
pantalla de ajustes básicos para indicar que tenemos
una tarjeta en el emisor.
23
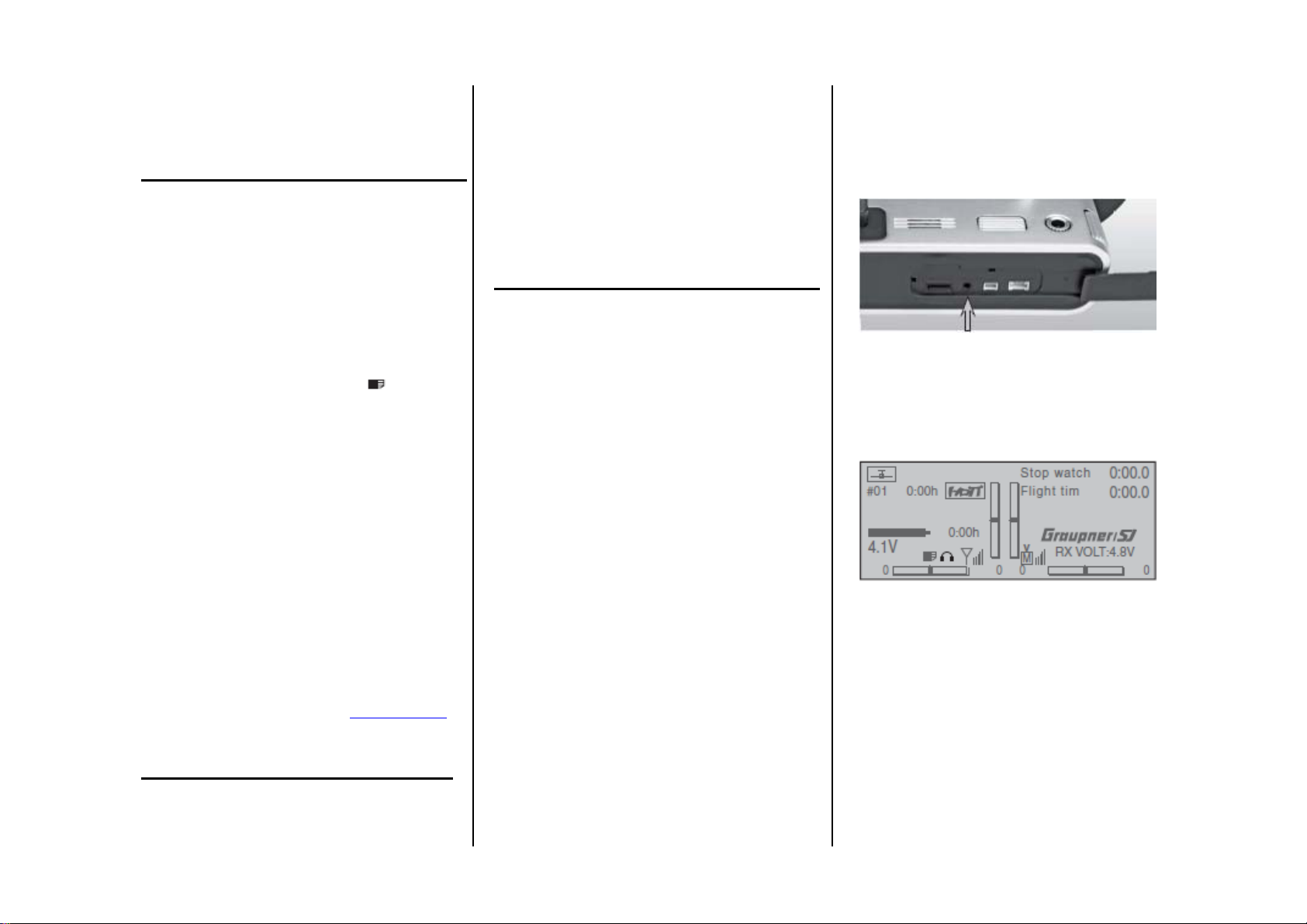
Sacando la tarjeta de memoria
Apretar la tarjeta de memoria un poco hacia el interior
hasta que se desbloquee, y entonces sacarla.
Grabación de datos / almacenamiento
La memorización de datos en la tarjeta micro SD está
relacionada con el tiempo de vuelo. Cuando este
cronómetro se dispara – y tenemos instalada la tarjeta
de memoria y existe la relación telemétrica con el
receptor – se activa al mismo tiempo la grabación de
datos. Cuando paramos el cronómetro se para también
la grabación. El cronómetro del tiempo de vuelo se
inicia y se para tal como se describe en la sección
“Timers (general)” en la página 153.
Mientras se está produciendo la grabación de datos, la
imagen de la tarjeta en a pantalla
lentamente e de forma contínua.
La cantidad de daos escritos en la tarjeta de memoria
se muestran en un gráfico como una barra negra que
crece de izquierda a derecha a medida que se va
llenando la tarjeta.
Una vez finalizada la grabación de datos, en la tarjeta
aparecerán las carpetas “Models” (vacía) y “LogData”.
Dentro de la carpeta “LogData” se crean las
subcarpetas que están designadas con nombres en el
formato 0001_año-mes-dia.bin, 0002_año-mes-dia.bin,
etc.
Si la carpeta de la memoria de los modelos todavía no
tiene nombre cuando sacamos la tarjeta de la emisora
y la ponemos en un lector de tarjetas de un PC o un
portátil, los respectivos archivos de registro se pueden
encontrar en una subcarpeta denominada “NoName”.
Con el programa compatible para PC que podemos
descargar de la página de Graupner www.graupner.de
podremos leer los datos memorizados.
Importación de ficheros de voz
Como se menciona en la sección “Auriculares” que hay
a la derecha, los avisos acústicos así como las señales
y avisos asociados al menú de telemetría se pueden
parpadea
escuchas a través de la salida para auriculares. Por
defecto estos avisos vienen en idioma alemán. Estos
avisos están resumidos en un pack de voz que está
guardado en la memoria interna de la emisora, pero
que pueden ser reemplazados por los packs de voz
con diferentes idiomas en cualquier momento.
Podemos encontrar más información acerca de esto en
la sección “MODO OCULTO” que empieza en la página
32.
Importando / exportando memorias de modelos
Cualquier memoria de modelo se puede guardar en la
tarjeta insertada en el emisor. Esta característica es
ideal para intercambiar datos entre emisoras iguales o
incluso para poder tener copias de seguridad.
Podemos encontrar más información respecto a esto
en la sección “Copia / borrado” que empieza en la
página 71.
Nota:
Algunos símbolos especiales que podemos usar en los
nombres de los modelos no son reconocidos por el
sistema de archivos FAT o FAT32 de las tarjetas de
memoria y serán cambiados durante el proceso de
copia por (~).
24
Conector para auriculares
Cuando movemos la tapa de la derecha de la parte
frontal nos queda accesible el conector para
auriculares del que dispone la
El jack es adecuado para conectar unos auriculares
convencionales a través de un conector TRS de 3.5
mm (no incluidos en el set). Aparece el símbolo
correspondiente a unos auriculares cuando en la
pantalla básica cuando los conectamos.
Los avisos acústicos así como las señales y avisos
asociados al menú de telemetría salen a través de esta
conexión. Por defecto estos avisos vienen en idioma
alemán. Podemos encontrar más información acerca
de esto en la sección “Voice output” del “MODO
OCULTO” que empieza en la página 32 y en la
“Telemetría” que empieza en la página 228.
El volumen de la salida hacia los auriculares de las
señales y voces se puede ajustar individualmente en
las la líneas “Voice volume”, “Vario volume” y “Touchbeeps vol.” Del menú “General basic settings”, página
259.
mc-32
HoTT:
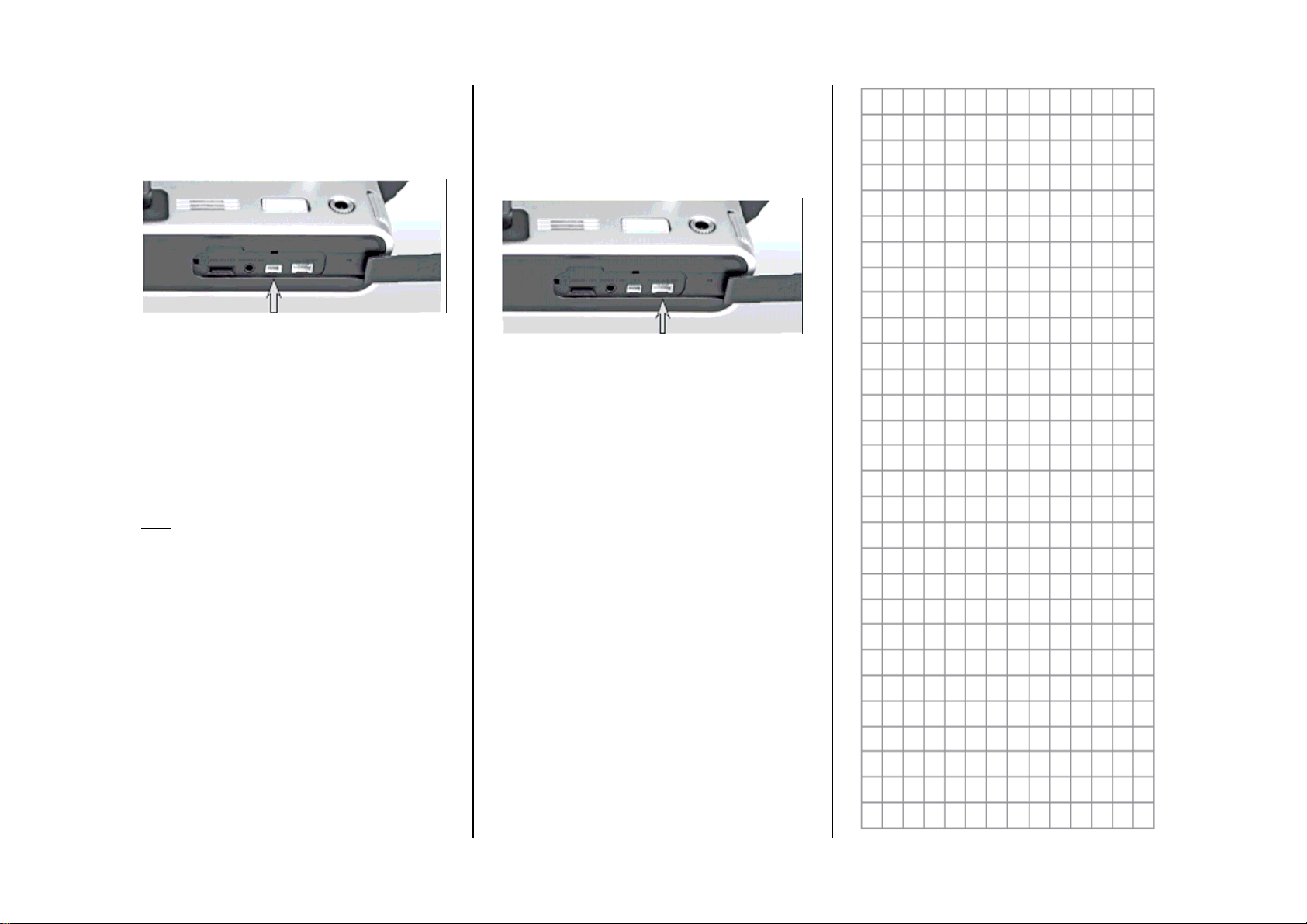
EXT.PPM
Se puede conectar un módulo exterior HF, por ejemplo
un WEATRONIC, a este jack, ver el dibujo inferior.
SPI
La designación “SPI” se utiliza para una interface para
futuras aplicaciones. Actualmente este zócalo no es
funcional y no se debe conectar.
Si conectamos un módulo HF externo debemos
conmutar entre el módulo interno HoTT y el módulo
externo a través de la línea “Module” del menú “Basic
settings model”, páginas 77 o 85, seleccionando entre
“HoTT” o “EXT.PPM”. Si es necesario, la señal
suministrada por esta conexión se puede invertir
seleccionando la opción apropiada en la línea “ext.
PPM signal” en este mismo menú, ver la página 83 o
92.
Nota:
El zócalo interior “INT PPM” localizado en el interior del
emisor también es adecuado para esta función. No
obstante, si utilizamos esta opción deberemos pasar un
cable del interior hacia el exterior a través de uno de
los orificios superiores destinados a los interruptores.
25
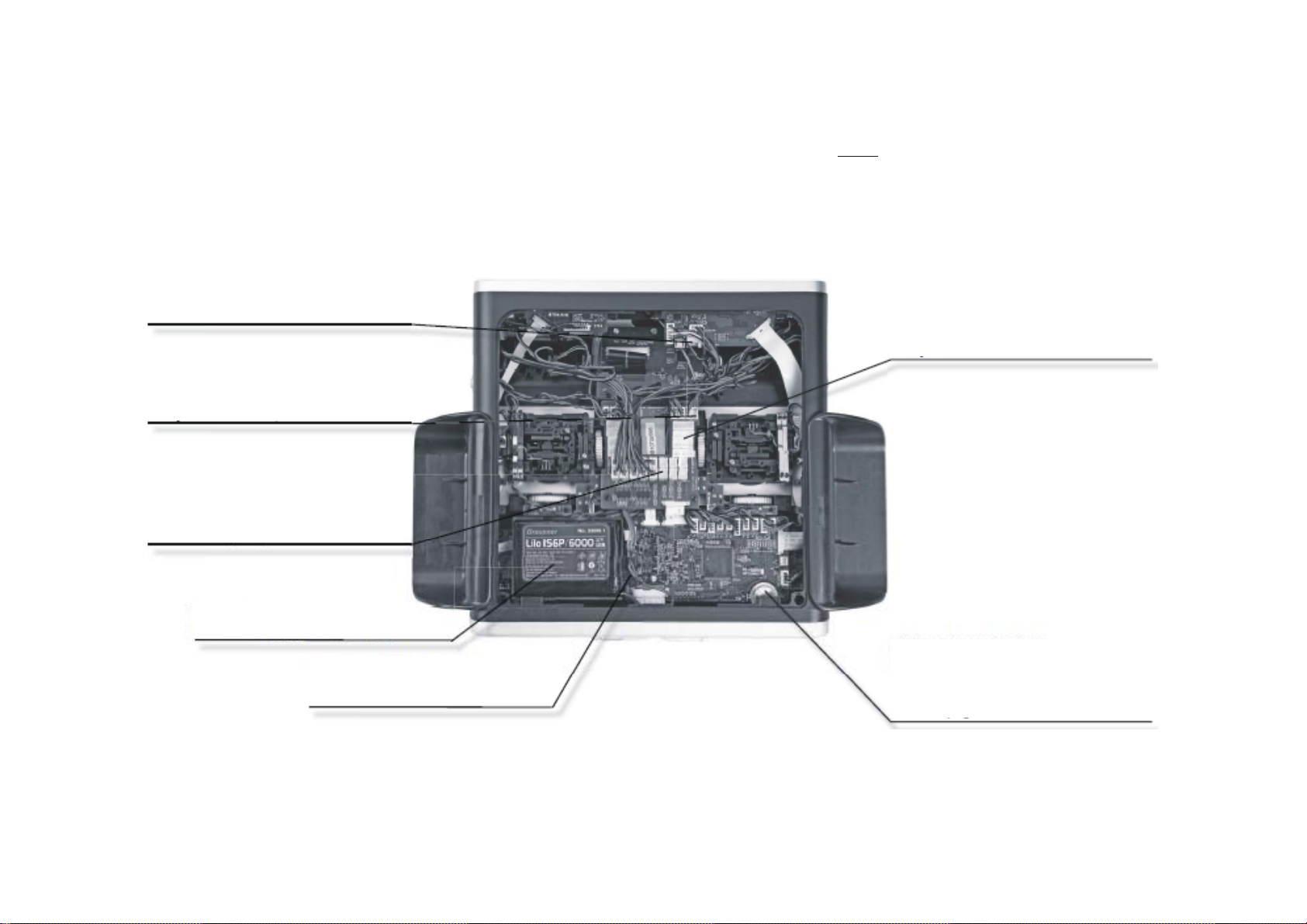
Interior de la parte posterior de la emisora
Conexiones INT PPM
Un conector libre para un modulo HF
interno adicional
Conexiones inter iores
Un conector libre para un control rotativo
proporcional ref. Núm.
Conexiones interiores
Seis conexiones libres para interruptores
adicionales , ver la página 21
Estas ubic aci ones se pueden
utilizar en cualquier secuencia
33001.11
Notas:
Desconectar las batería del emisor de su
conector cuando debamos hacer cualquier
trabajo dentro del emisor. Los puntos de
sold adu r a no d e ben nunca en trar en con t acto
con objetos que puedan crear cortocircuitos.
Todos los jacks y conectores no descritos aquí
deben permanecer sin conectar.
Conexiones inter iores (U VR, 5 po los)
Ocho conexiones libres para la instalación
de futuros controles rotativos
Batería del emisor
Observar las normas de carga, ve r la pági n a 16
Conector de la batería del emisor
Para cargar la batería con la lista de
cargadore s automáticos, ver l a pá gi na 17
Batería de Litio CR2032
(no recargable)
Mantenimiento de datos y cr onómetros
del emisor independiente, ver el menú
“Info di s play” de la página 266
26
27
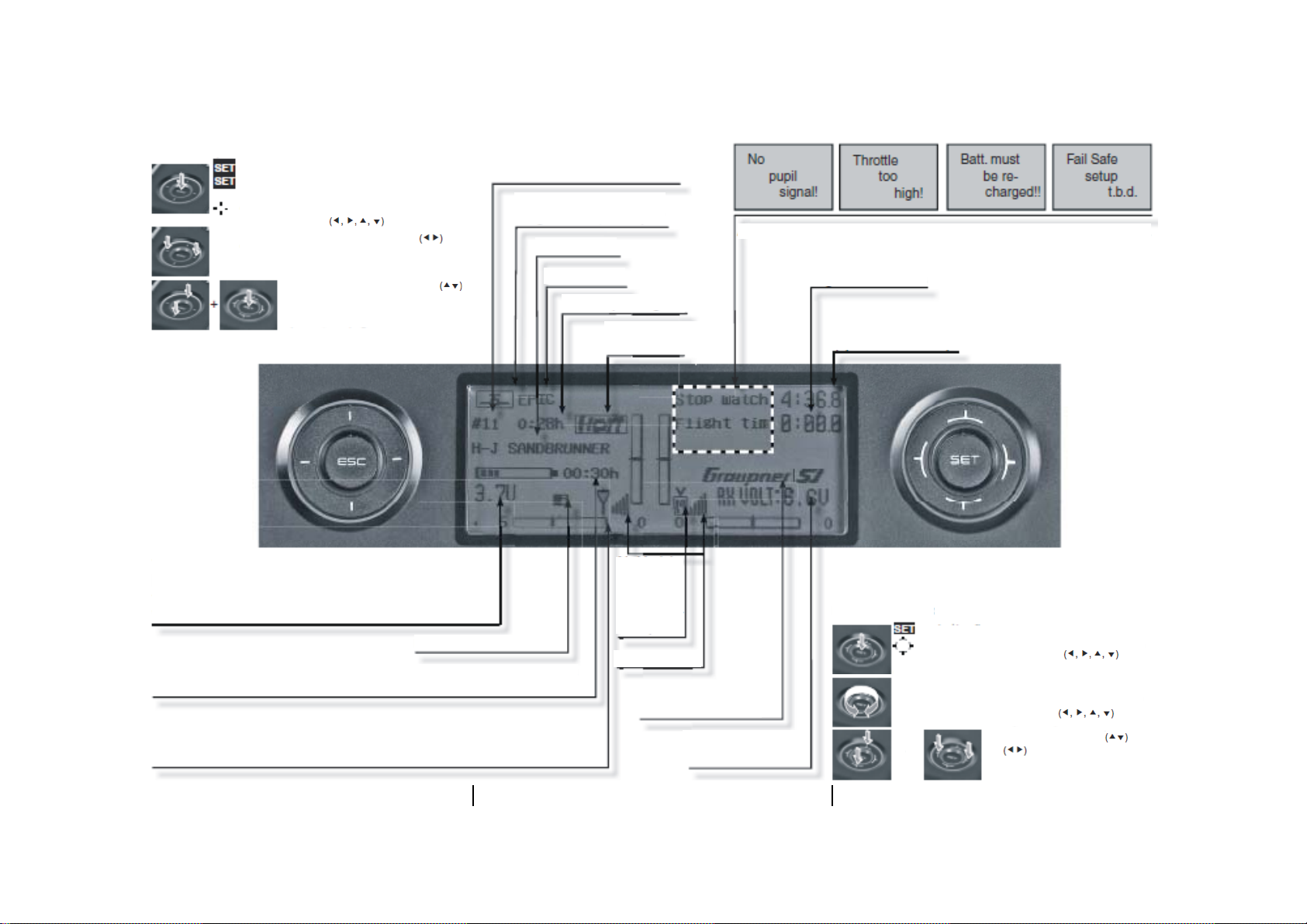
Display y teclado
Pad de la izqui erda
= selección / confirmación
pulsado durante 1 s: cambio entre el menú
de telemetría y el display básico
= cambiar hacia una de las cuatro direcciones
con cada tecla
Simultánamente las horizontales
= cambiar entre el display básico y el servo
display
Simultánamente las verticales
de la izquierda +” ” del pad de la
derecha = cambio a “modo oculto”,
ver la página 32.
SET
Memoria de modelo 1 … 80
Indicador del tipo de modelo
avión, he licóptero
Nombre del propietario
Nombre del modelo
Tiempo modelo
Funcionamiento
HoTT / PPM
Selección de algunos de los avisos de peligro. Ver la página 30
Tiem po de vuel o en min:s
Tiem po de vuelo e n min:s
(adelante / atrás)
Voltaje del emisor de la batería con indicador por barra
dinámico. Si el voltaje de la batería de lítio cae por debajo
de los 3.60 V (ajustable) entonces aparece un mensaje de
aviso y una señal acú stica (conmutación para N iMH)
T arjeta micro-SD insertada
Tiem po de funcionamient o del emisor. Est e vuelve aut omáticam ente
a cero despu és del proc es o de ca rga
Diagr ama para el nivel de los cuatro t r ims digitales con
indicad or num érico y de dirección
M = modo
operación
P = emisor
alumno
Pot. Señal
Logo o
Graupner/SJ
fase de vuelo
Voltaj e batería
receptor R X- SPG
Pad de la derecha
= selecci ón / confirmación
= cambio de valor con cada tecla en una
de las cuatro direcciones
Girando el dedo alrededor de la circumferencia
= desplazamiento / cambio valor. Selección
valores alternativos con
O
Simultáneamente con
O =
CLEAR
28
Utilización del “Terminal Data”
Teclas de función ESC y SET
Símbolos de la telemetría en la pantalla
La memoria de modelo activa todavía no tiene
comunicación con el receptor HoTT. Más
información acerca del proceso de “Binding”
en las páginas 69 o 75.
No parpadea: el módulo HF no está conectado
Si el símbolo de la antena parpadea:
El último receptor asignado al modelo activo
está desactivado o fuera de alcance
No hay recepción de señales de telemetría
Visualización de la potencia de la señal
Visualización de la potencia de la señal del
alumno en la pantalla del profesor
Teclas del pad de la izquierda
Tecla ESC
Una breve pulsación sobre la tecla ESC permite
volver, paso a paso a la selección de las
funciones, hasta la pantalla inicial. Un ajuste que
se haya hecho en un paso intermedio siempre
queda memorizado.
Si la pulsamos durante 1 segundo en la pantalla
principal accedemos o salimos del menú de
telemetría.
Teclas de dirección ◄ ► ▲▼
1. Pulsando sobre una de estas teclas,
podemos navegar, como con las flechas de
dirección, en las diferentes listas, tales como
la elección del modelo o la lista de
multifunciones, así como en el interior de los
menús, a través de las líneas del menú.
2. Pulsando simultáneamente sobre las teclas
◄ ►
accedemos, a partir de la pantalla inicial
del emisor, así como casi desde cualquier
pantalla, al menú “Servo display”
Teclas del pad de la derecha
Tecla SET
1. Partiendo de la pantalla principal después de
haber puesto en marcha el emisor y pulsando
brevemente la tecla SET accederemos a
los menús Multifunciones. Igualmente
accedemos al menú seleccionado con la
tecla SET.
2. En los menús donde se realizan ajustes,
activamos y desactivamos o confirmamos los
diferentes campos de programación con esta
tecla.
Teclas de dirección ◄ ► ▲▼
1. Nos permiten paginar en el menú
Multifunción y en las líneas de los menús de
ajuste, de manera similar a las flechas de
dirección de la parte izquierda.
2. Selección y / o ajuste de los parámetros de
los campos de programación activados
previamente por una breve pulsación sobre la
SET
tecla
teclas
función, por lo que no tiene importancia la
tecla que utilicemos.
3. Dentro de un campo de programación
activado, pulsando breve y simultáneamente
en las teclas
valor de origen (CLEAR).
Nota:
La acción no se activa en el momento que
pulsamos la tecla, si no en el momento que la
soltamos
Si las teclas están inactivas después de
cerrar y abrir rápidamente el emisor no es
una avería, parar de nuevo el emisor y
esperar algunos segundos antes de ponerlo
de nuevo en marcha
, hay que tener en cuenta que las
► ▲
◄ ▼
y las
▲▼ o ◄ ►
tienen la misma
volveremos al
29
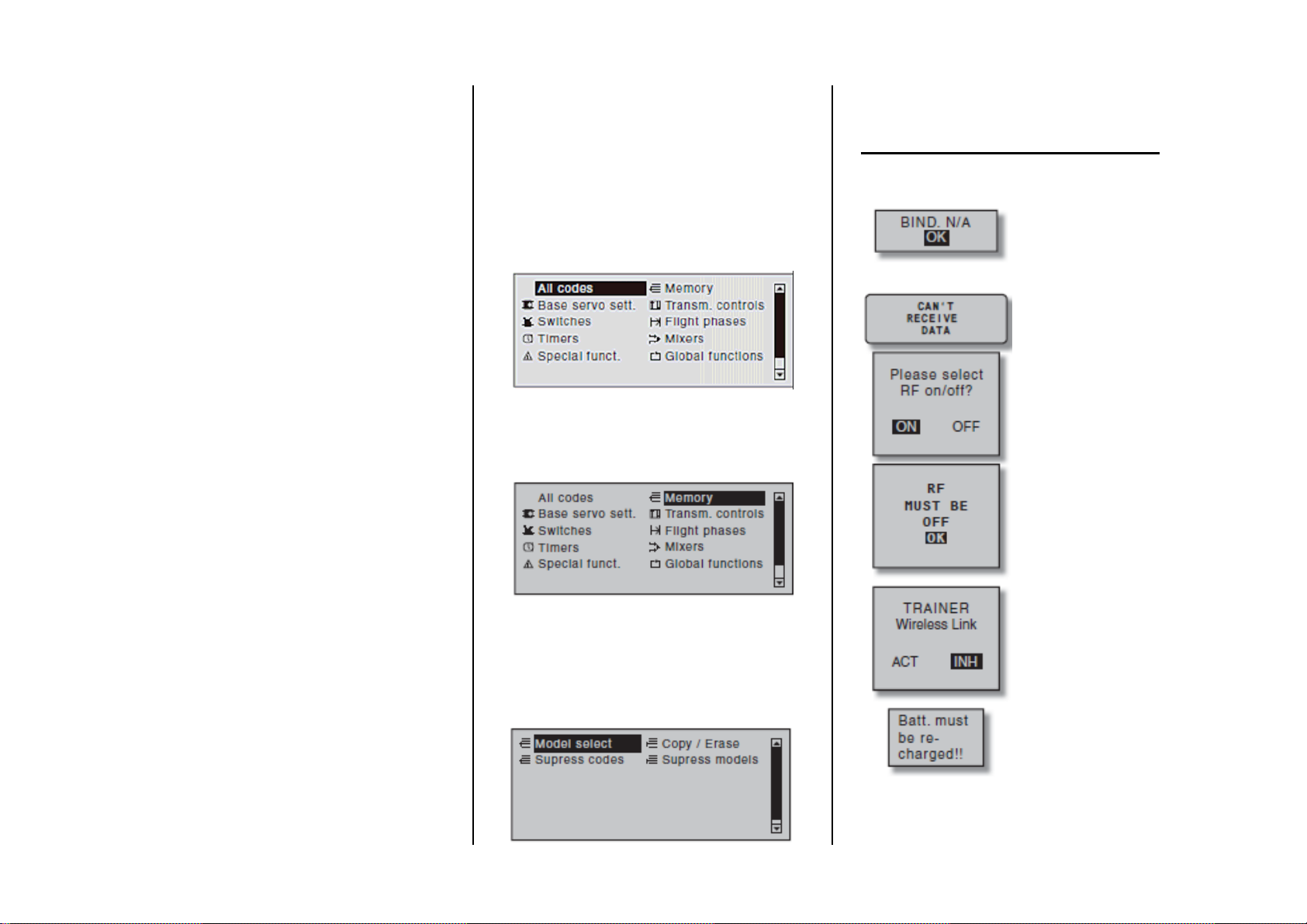
Accesos rápidos (Short-Cuts)
Con las siguientes combinaciones de teclas tendremos
un acceso directo a ciertos menús u opciones:
CLEAR
Pulsando simultáneamente sobre las teclas ▲▼ o
◄ ►
de las teclas de la derecha volvemos al valor
de origen del parámetro del campo activo y que
hayamos modificado
Servo display
Pulsando simultáneamente sobre las teclas ◄ ►
de las teclas de la izquierda pasamos de la
pantalla principal del emisor, y de casi todos los
menús, directamente al menú “Servo display”, ver
la página 262.
Telemetría
Accedemos directamente a la telemetría si desde
la pantalla principal del emisor pulsamos durante
1 segundo la tecla central ESC izquierda, ver las
explicaciones que empiezan en la página 228, o
volvemos a la pantalla principal.
Display gráfico o datos de telemetría
Pulsando brevemente una de las teclas de los
pads de la izquierda o la derecha pasamos
directamente de la pantalla básica de la emisora a
los datos de telemetría o podemos cambiar
adelante o atrás en las diferentes pantallas
gráficas.
Con una breve pulsación de las teclas ESC o
SET
podemos volver a la pantalla principal.
HIDDEN MODE
(Elección del idioma y el contraste)
Accedemos a él manteniendo pulsadas
simultáneamente las teclas ▲▼ de la izquierda y
pulsando momentáneamente la tecla
central de la derecha, ver la siguiente doble
página.
Bloqueo
SET
Para activarlo o desactivarlo pulsamos
simultáneamente durante aproximadamente 2
segundos las teclas ESC y SET
Selección rápida
Desde la lista del menú multifunción se puede
acceder a una breve estructura de los programas
pulsando simultáneamente las teclas
del pad de la derecha. Los menús se muestran
claramente por grupos en esta vista.
Ahora podemos seleccionar el grupo que necesitemos
con las teclas
indistintamente ...
... y pulsando brevemente la tecla central SET del
pad de la derecha. En el momento en que se suelta la
tecla solamente permanecen en lista los términos
genéricos correspondientes al menú seleccionado. Por
ejemplo:
▲▼
del pad de la derecha o la izquierda
▲▼ o ◄ ►
Mensajes de alerta en la pantalla
Avisos de peligro
“Binding no disponible”
El receptor todavía no
tiene binding con el
modelo de memoria
activo. Una breve
pulsación en SET lleva
a la opción adecuada
No hay receptor al
alcance
Sólo cuando el
receptor ya tiene
binding. Seleccionar
HF “on” o “off”
Debemos parar la
transmisión del HF
(Un receptor con
binding solamente se
puede sustituir por otro
con el HF “off”)
Indica que hacer con
la transmisión Wireless
entre profesor /
alumno activa la última
vez de uso (ACT =
continuar, INH = parar)
Voltaje del emisor
demasiado bajo
30

El Fail safe no está activado
Stick del gas o limitador
demasiado alto
Se ha interrumpido la señal
entre alumno y profesor
No hay tarjeta de memoria
SD o SHCD en la ranura o
la tarjeta no es legible
No hemos utilizado el emisor dentro del
periodo de tiempo establecido en la línea
“Stick warning” del menú “General basic
settings”, ver la página 260. Aparecerá el
mensaje ...
... el led de aviso
cerca del interruptor on / off parpadeará y se oirá un
aviso acústico. Si no se opera con el emisor dentro del
siguiente minuto, el emisor se parará por sí solo.
Si el voltaje de la batería es demasiado bajo,
el cambio de modelo no es posible por
razones de seguridad. Aparece en la pantalla
el siguiente mensaje:
“warning”
a la derecha
Campos de funciones en la pantalla
SEL, STO, SYM, ASY,
En función del menú seleccionado, pueden aparecer
algunos campos de funciones en la línea inferior de la
pantalla.
La función marcada se activa con una pulsación sobre
la tecla SET
Campos de funciones
• CLR (clear) Borrado
• SEL (select) Selección
• SET (set) “set” o ajustar un valor
• STO (guardar) Grabar (por ejemplo la posición de
un control)
• SYM Ajuste valores simétricamente
• ASY Ajuste valores asimétricamente
•
•
Dentro de un menú, cambiar a la
Interruptor
(asignación de todos los tipos de
interruptores)
siguiente página
Bloqueo
Se puede establecer un bloqueo de las teclas para que
si las pulsamos sin querer no podamos variar ajustes.
Este bloqueo se activa pulsando y manteniendo
pulsadas las teclas ESC y SET durante
aproximadamente 2 segundos mientras la
HoTT está en el display básico.
Esta condición de bloqueo se indica con el símbolo de
una llave localizado en el punto de intersección de las
barras de los trims, y se muestra en sombreado.
El bloqueo es defectivo inmediatamente pero los
controles permanecen operativos.
El bloqueo se puede desactivar de nuevo manteniendo
pulsadas las teclas ESC y SET durante
aproximadamente dos segundos. El bloqueo queda
también anulado cuando se pone de nuevo en marcha
la emisora.
mc-32
31

MODO OCULTO
Selección del idioma y contraste de la pantalla
Accedemos a este menú de la
Alemán “VERSTECKTER MODUS”) prácticamente
desde cualquier menú, con el emisor en marcha y
pulsando sobre las teclas ▲▼ de la izquierda y la tecla
SET de la derecha simultáneamente durante 1
segundo hasta que aparezca la siguiente pantalla:
CONTRASTE LCD SUPERIOR / INFERIOR
mc-32
HoTT (en
Pulsando sobre la tecla central SET de la derecha
accedemos a las líneas “... CONTRAST” donde
podemos ajustar el contraste de las pantallas según
nuestras preferencias personales, como se describe
con más detalle en la página 259. Pulsando de nuevo
SET o ESC volvemos a la línea de selección.
Accedemos a la línea ...
IDIOMA
Como se ha mencionado en la sección “Auriculares” de
la página 24, los aviso acústicos y los avisos asociados
al menú de telemetría que suministra la emisora
pueden oírse a través de la conexión de auriculares.
Por defecto estos avisos vienen en idioma alemán.
Estos avisos están resumidos en un pack de voz que
está guardado en la memoria interna de la emisora,
pero que pueden ser
voz con diferentes idiomas en cualquier momento.
reemplazados por los packs de
En el momento de editar este manual, la tarjeta SD
incluida en el set se suministra con los siguientes
idiomas incluidos:
Alemán
Inglés
Francés
Italiano
Español
El paquete de idioma activo puede cambiarse en
cualquier momento a través del programa para PC que
se puede descargar del apartado de downloads de la
página de la emisora en www.graupner.de
de la tarjeta SD, tal como se describe a continuación.
Si todavía no lo hemos hecho, insertamos la tarjeta SD
o SHCD en el emisor tal como se ha descrito en la
página 23. Una vez tenemos la tarjeta en el emisor,
ponemos el emisor en marcha
Cambio del idioma
Usar las teclas de los pads de la izquierda o la derecha
para seleccionar la línea “VOICE UPDATE”.
Usar la tecla central SET del pad de la derecha para
conmutar a la página de selección de la línea “VOICE
UPDATE”.
con el HF sin emitir
o a través
.
Ahora usamos las teclas ▲▼ de la izquierda o la
derecha para escoger el idioma deseado, por ejemplo:
Confirmamos la selección pulsando sobre la tecla
central SET del pad de la derecha. El idioma
seleccionado se carga en la memoria del emisor.
El proceso finaliza cuando desaparece la barra
indicadora de progreso del ángulo inferior izquierdo de
la pantalla.
32

Los updates apropiados y la información se pueden
encontrar en la página del emisor de la mc-32
HoTT en el link de download en www.graupner.de
Cuando el proceso ha acabado, paramos el emisor.
Todos los ajustes realizados en el emisor se mantienen
después de un cambio de idioma.
Notas:
Si aparece el mensaje de aviso ...
... el módulo de emisión HF todavía está activo. Ir
al menú “Base setup model”, seleccionar la línea
HF transmit”, seleccionar la opción “OFF” y repetir
el procedimiento.
Si aparece el mensaje de aviso ...
... nos indica que no hay tarjeta de memoria en el
emisor, o que por algún motivo no se puede leer.
Si la ventana de selección está vacía ...
... el emisor no encuentra ningún fichero de
idioma compatible en la tarjeta de memoria. Comprobar
el contenido de la tarjeta SD en el directorio “VoiceFile”
en un PC o portátil.
UPDATE DEL FIRMWARE
Cambio del idioma de la pantalla
Ahora usamos las flechas
o la derecha para seleccionar el idioma, por ejemplo:
▲▼
del pad de la izquierda
Nota importante:
Asegurarse del estado de la carga de la batería del
emisor, o cargarla si es necesario antes de cada
actualización. Es recomendable antes de cualquier
actualización hacer una copia de seguridad de todas
las memorias utilizadas, para recuperarlas en caso
necesario.
De la misma manera como se ha descrito más arriba
en la sección “VOICE UPDATE”, este menú se puede
usar para el update o cambio del firmware del emisor,
incluyendo el display de la pantalla. En el momento de
la impresión de este manual, la tarjeta SD suministrada
con el equipo incluye los siguientes idiomas:
Alemán
Inglés
Las versiones en Francés, Italiano y Español se
incorporarán más adelante.
Confirmamos la selección con otra pulsación sobre la
tecla central SET del pad de la derecha. La carga del
firmware en la memoria del emisor empieza y aparecen
los dos siguientes displays, visibles sólo brevemente,
que hacen solamente referencia al update del firmware
...
33

Notas:
Si aparece el mensaje de aviso ...
... nos indica que no hay tarjeta de memoria en el
emisor, o que por algún motivo no se puede leer.
Si la ventana de selección está vacía ...
cambio provisional en el ajuste de los trims o cambios
en cualquier otro ajuste).
Si todavía tenemos los cuatro sticks con los sistemas
de retorno por muelle colocados, el siguiente display
nos muestra cual es la configuración ideal que nos
debe aparecer.
... el mensaje:
... aparecerá en el display. En el momento en que el
contador a la izquierda del símbolo “/” llega al valor
mostrado a la derecha, el volumen está cargado,
entonces aparece el mensaje ...
... que desaparece después de algunos segundos y el
emisor se reinicia automáticamente. El emisor queda
de nuevo operativo.
... el emisor no encuentra ningún fichero de
idioma compatible en la tarjeta de memoria. Comprobar
el contenido de la tarjeta SD en el directorio “VoiceFile”
en un PC o portátil.
CALIBRACION DE LOS STICKS
Si no es así, las barras de los gráficos mostrarán el
porcentaje de los sticks a los que les hemos quitado el
muelle – típicamente para el “C1”, motor / frenos o
motor / paso.
Si por ejemplo el stick del motor / freno está en la
posición de un cuarto del recorrido, el display se
mostrará de la siguiente manera:
Si notamos que la posición neutra de los sticks
(controles 1 ... 4) después de su auto-calibración no
está exactamente al 0% de su recorrido, entonces
debemos comprobarlas, y si es necesario corregirlas
de la manera siguiente:
Colocarse en el menú “Model select” y abrir una
memoria libre como se describe en la página 69.
El hecho de que el modelo que inicialicemos sea un
avión o un helicóptero es irrelevante.
Esperamos que aparezcan los avisos correspondientes
en la base de la pantalla después de hacer un cambio
de modelo y accedemos al menú “Servo display”, por
ejemplo pulsando simultáneamente las teclas ◄ ►
del pad de teclas de la izquierda (SIN hacer ningún
Uno después de otro, colocar los dos sticks en sus
cuatro posibles posiciones límite
final del recorrido. En cada una de estas ocho
posiciones límite, la indicación debe ser exactamente
de –100% o +100%, en función de la dirección.
Por ejemplo, si colocamos el Control 2 en el límite del
recorrido, y mantenemos los otros tres sticks en la
posición intermedia, el display del emisor debe mostrar
entonces la siguiente pantalla.
sin
ejercer fuerza al
34

Independientemente del número de sticks con retorno
que tengamos en el emisor, si estas comprobaciones
nos dan un resultado de cuatro 0% en los centros y
ocho 100% en los extremos, entonces los sticks de
nuestra emisora están óptimamente calibrados.
Podemos dar por finalizado el proceso borrando la
memoria que hemos creado.
De lo contrario nos movemos al menú (tal como se ha
descrito al comienzo de la doble página anterior) a la
línea “Stick cali.” en el menú “MODO OCULTO” y
pulsar brevemente la tecla central SET en el pad de
la derecha.
Las flechas ◄ ► del pad de la derecha nos permitirán
seleccionar cíclicamente los cuatro planos de
calibración de los sticks, por ejemplo, el plano izquierda
/ derecha del stick de la derecha.
Ahora posicionamos el stick
fuerza extra en el extremo – hasta el límite izquierdo
correspondiente con la flecha parpadeante a la
izquierda ...
... y pulsamos brevemente la tecla central SET del
pad de teclas de la derecha. Esto concluye el ejemplo
de calibración del límite izquierdo del stick de la
derecha. Ahora parpadea el punto del medio de la
figura del stick como confirmación de la calibración.
Ahora soltamos el stick con muelle de retorno para que
vuelva a su posición central y pulsamos de nuevo la
tecla central SET para calibrar la posición central del
stick. Después empezará a parpadear la flecha que
marca el extremo derecho.
derecho –
sin ejercer una
35
Repetimos el proceso de calibración para el límite de la
derecha
Los otros sticks se calibran de manera análoga.
El procedimiento es similar para calibrar los tres
deslizantes montados en el medio de la consola y los
dos controles proporcionales rotativos de los laterales.
Accedemos a la calibración de estos cinco controles
proporcionales con las flechas de selección
pad de la derecha, por ejemplo ...
del stick de la derecha.
◄ ►
del
Notas:
Corregir cualquier calibración errónea
repitiendo el correspondiente proceso.
Dentro de los sticks para un modelo de avión,
cada una de las tres posiciones de
calibración se pueden seleccionar
▲▼
directamente con las flechas
de los
pads de la derecha o la izquierda.
Pulsamos brevemente la tecla central
la izquierda para terminar el proceso y volver al
submenú “Stick calibation”.
ESC
del pad de

Pantalla de los datos de la telemetría
El emisor
independientes: un display grande para el
funcionamiento del emisor y un display pequeño justo
debajo de la antena para los datos de telemetría. El
display de la telemetría se activa automáticamente en
el momento en que el emisor recibe datos de
telemetría del receptor a través del canal de retorno.
mc-32
HoTT tiene dos displays
Cuando exista la conexión de telemetría, el display
superior presentará automáticamente la pantalla del
“Receptor” ...
Solamente se mostrarán los sensores activados en el
submenú “SETTING & DATAVIEW” del menú
“Telemetry”, que se inicia en la página 229.
Para cambiar entre las pantallas de los diferentes
sensores activados en el submenú “SENSOR
SELECT” del menú “Telemetry” pulsar brevemente en
una de las flechas
izquierda ...
▲ ▼
del pad de la derecha o la
No obstante, si en la parte baja del display solamente
se muestra “X” – como se muestra en la figura superior
– en las dos localizaciones en lugar de “
display de la telemetría mostrará el siguiente aviso ...
... que será sustituido poco después por otra pantalla
con el logo
... para indicar que no hay ningún receptor enviando
telemetría dentro del rango de acción. Poner en
marcha el receptor del modelo o hacer un binding con
la memoria de modelo activa, como se describe en
detalle en las páginas 77 y 85.
Graupner / SJ
y el nombre del emisor ...
” entonces el
... que se describe con más detalle en la sección con el
mismo nombre de la página siguiente.
Sensor select
Se pueden conectar hasta cuatro sensores, con
cualquier combinación, en los captadores de telemetría
del receptor. Tal como se describe en la página 240 en
el contexto del submenú “SENSOR SELECT” del menú
“Telemetry” ...
... las salidas de los sensores adjuntas al receptor se
pueden procesar y activar para la representación
gráfica en la pantalla. Se muestran entonces de la
forma apropiada con indicadores gráficos tal como se
describe a continuación.
36
... y después, una vez la pantalla seleccionada se
muestra, usar una de las dos teclas
seleccionar la línea con el sensor deseado. Si no hay
ningún sensor activado, todas las líneas de los
sensores descritos en la siguiente columna, excepto la
línea “RECEIVER”, están ocultos en la lista de
selección del display:
La selección se confirma con la tecla central SET del
pad de la derecha, o simplemente esperar que tras una
breve pausa el display básico del sensor seleccionado
aparezca automáticamente.
▲ ▼
para
Nota:
La secuencia con la que se muestran las diferentes
pantallas corresponden al avanzar las páginas con la
tecla .

Se pueden encontrar más detalles acerca de los
módulos que aparecen a continuación en el apéndice y
en la página web www.graupner.de
RECEPTOR
Esta pantalla presenta el “RX DATAVIEW” del menú de
la telemetría “SETTING & DATA VIEW”, ver la página
229, con los datos procesados y mostrados en la
pantalla con gráficos.
Los datos mostrados en el display son los siguientes:
Término Significado
RX-S QUA calidad de la señal en %
RX-S ST fuerza de la señal en %
RX-dBm potencia de la recepción en dBm
TX-dBm potencia de emisión en dBm
V PACK indica el tiempo más largo en ms durante
el cual no ha habido transmisión de
packs de datos del emisor hacia el
receptor.
RX-VOLT voltaje actual de la batería del receptor
en volts
M-RX V voltaje más bajo de la batería desde la
puesta en marcha, en volts
TMP el termómetro muestra la temperatura de
funcionamiento del receptor
MODULO GENERAL
Esta página permite visualizar los datos de un receptor
conectado a un módulo General-engine, ref. núm.
33610, o a un módulo General-Air, ref. núm. 33611.
Encontraremos más información de estos módulos en
el anexo y en la página web www.graupner.de
En función del número de captadores conectados a
estos módulos, en esta página de la pantalla podremos
consultar los siguientes datos:
La tensión actual de un máximo de 2 acumuladores
(BAT1 y BAT2); el resultado de las mediciones de
como máximo 2 sondas de temperatura (T1 y T2) así
como el nivel del combustible.
En el lado derecho se muestran alternativamente una
lista de las tensiones actuales de los elementos de
baterías de LiPo de 1 a 6 elementos, o la altitud
respecto del suelo, la velocidad de ascensión y de
caída en m/1s y m/3s, la intensidad actual en amperios
así como la tensión actual del acumulador que está
conectado al captador.
.
Los significados son los siguientes:
Término Significado
BAT1 / BAT2 Batería 1 o 2
CARB Nivel de combustible
V / P Vacío / Lleno
T1 /T2 Temperatura de la sonda 1 / 2
ELEM.V Tensión por elemento de 1... 6
elementos máximo
ALT Altitud actual
0m1 Velocidad de ascenso / descenso en
m/1s
0m3 Velocidad de ascenso / descenso en
m/3s
A Intensidad actual en Amperios
V Voltaje actual del acumulador de
propulsión
Indicadores de carga de las baterías
Este display muestra el voltaje actual, el consumo de
corriente actual y, si está conectado, la capacidad de la
“Batt 1” conectada a un módulo General-Engine (ref.
núm. 33610) o General-Air (ref. núm. 33611) así como
el combustible consumido en ml.
37

SENSOR 1
Si está conectado este display muestra el actual voltaje
y temperatura del sensor de temperatura y voltaje
“T(EMP) 1”, ref. 33612 o 33613 para el módulo
General-engine (ref. 33610), General-Air (ref. 33611) o
Eectric-Air (ref. 33620).
SENSOR 2
Si está conectado este display muestra el actual voltaje
y temperatura del sensor de temperatura y voltaje
“T(EMP) 2”, ref. 33612 o 33613 para el módulo
General-engine (ref. 33610), General-Air (ref. 33611) o
Electric-Air (ref. 33620).
Sensor de velocidad de las palas
Si está conectado, este display muestra la velocidad de
rotación de las palas medida por el sensor, ref. 33615 o
33616 para el módulo General-engine (ref. 33610),
General-Air (ref. 33611) o Electric-Air (ref. 33620).
Nota:
El número apropiado de palas se debe ajustar primero
en el módulo de telemetría para que el sensor pueda
medir la velocidad correctamente.
Vario
Si está conectado este display muestra la altitud
relativa respecto a la ubicación del piloto o el punto de
salida (en m) así como la velocidad ascendente o
descendente (en m/s) a través de los datos medidos
por el módulo GPS-Vario (ref. 33600) o el módulo Vario
(ref. 33601) conectados a la salida de telemetría del
receptor.
ELECTRIC AIR MODULO
38
Esta página permite visualizar los datos de un receptor
conectado a un módulo Electric-Air, ref. núm. 33620.
Encontraremos más información de estos módulos en
el anexo y en la página web www.graupner.de
En función del número de captadores conectados a
estos módulos, en esta página de la pantalla podremos
consultar permanentemente los datos especificados en
la siguiente tabla.
La tensión actual de un máximo de 2 acumuladores
(BAT1 y BAT2); el resultado de las mediciones de
cómo máximo 2 sondas de temperatura (T1 y T2) así
como la velocidad de ascensión y de caída en m/1s y
m/3s en la parte media de la pantalla, y la intensidad
consumida por las baterías de propulsión.
En el lado derecho se muestran alternativamente una
lista de las tensiones actuales de los elementos de un
pack de LiPo de 7 elementos máximo conectado a la
toma de balanceo 1 (L) o 2 (H).
Los datos que se muestran en la pantalla son los
siguientes:
Término Significado
V Tensión actual del acumulador
A Intensidad actual en amperios
BAT1 / BAT2 Batería 1 / Batería 2
ALT Altitud actual
m/1s Velocidad de ascenso en m/1s
m/3s Velocidad de ascenso en m/3s
T1 / T2 Temperatura de la sonda 1 / 2
ELEM.V Tensión por elemento de 1... 14
elementos máximo
L Conector de balanceo 1
H Conector de balanceo 2
.

BATERIA 1
Esta pantalla muestra el voltaje actual, el consumo
actual y si se ha programado, la capacidad de la “Batt.
1” conectada al módulo Electric-Air (ref. Núm. 33620).
SENSOR 1
Esta pantalla muestra el voltaje actual y la temperatura
de un sensor de temperatura / voltaje (ref. 33612 o
33613) conectado a “T1” en un módulo Electric-Air (ref.
Núm. 33620).
SENSOR 2
Esta pantalla muestra el voltaje actual y la temperatura
de un sensor de temperatura / voltaje (ref. 33612 o
33613) conectado a “T1” en un módulo Electric-Air (ref.
Núm. 33620).
Vario
Si está conectado este display muestra la altitud
relativa respecto a la ubicación del piloto o el punto de
salida (en m) así como la velocidad ascendente o
descendente (en m/s) a través de los datos medidos
por el Vario integrado en el módulo Electric-Air (ref.
núm. 33620).
VARIO
Esta página permite visualizar los datos de un receptor
conectado a un módulo Vario, ref. núm. 33601.
Los datos mostrados en la pantalla son los siguientes:
Término Significado
ALT Altitud actual
RXSQ Potencia de la señal que llega al receptor
en %, ver la página 209.
MAX Altitud límite preajustada respecto al
suelo, que activa una alarma en caso de
sobrepasarse
MIN Altitud mínima respecto del suelo
preajustada, si se sobrepasa se activa una
alarma
m/1s velocidad ascendente / descendente
m/3s velocidad ascendente / descendente
m/10s velocidad ascendente / descendente
Vario
Si está conectado este display muestra la altitud
relativa respecto a la ubicación del piloto o el punto de
salida (en m) así como la velocidad ascendente o
descendente (en m/s) a través de los datos medidos
por el módulo Vario (ref. núm. 33601)
39

GPS
GPS
Si está conectado al receptor, este display muestra los
datos suministrados por el módulo GPS con Vario
integrado, ref. núm. 33600.
Además de la posición actual del modelo y de la
velocidad, la sección central de esta pantalla muestra
también la altitud actual respecto al punto de salida así
como la velocidad ascendente / descendente en m/1s,
m/3s y m/10s, la calidad actual de la señal de
recepción y la distancia del modelo respecto al punto
de salida.
Los datos mostrados en la pantalla son los siguientes:
Término Significado
W / N / E / S oeste / norte / este / sur
Km/h velocidad
RXSQ potencia de la señal del canal de
retorno
DIS distancia
ALT altitud actual respecto al punto de
salida
M/1 s velocidad ascendente / descendente
M/3 s velocidad ascendente / descendente
M/10s velocidad ascendente / descendente
Si está conectado al receptor, este display muestra los
datos suministrados por el módulo GPS con Vario
integrado, ref. núm. 33600
Los datos mostrados en la pantalla son los siguientes:
Término Significado
Km/h velocidad
DIS distancia horizontal en m
M/s valor ascensión / descenso en m/s
ALT altitud relativa respecto a la salida en m
Vario
Si está conectado este display muestra la altitud
relativa respecto a la ubicación del piloto o el punto de
salida (en m) así como la velocidad ascendente o
descendente (en m/s) a través de los datos medidos
por el Vario integrado en el módulo GPS / vario (ref.
núm. 33600).
40

41

Utilización del emisor
Generalidades relativas al emisor mc-32
HoTT
Notas preliminares
En teoría el sistema
simultáneo de hasta 200 modelos. Pero en la práctica,
teniendo en cuenta las condiciones de homologación
para la utilización de emisores en la banda ISM de 2,4
GHz, el número se reduce sensiblemente. No obstante,
siempre es posible utilizar más modelos
simultáneamente en la banda de 2,4 GHz que en las
frecuencias de 35/40 MHz usadas hasta ahora. Por lo
tanto el único factor limitador - como ha sido siempre –
es probable que sea el tamaño del espacio (aéreo)
disponible. El hecho de no ser necesario el
procedimiento de control de frecuencias garantiza una
enorme ganancia en seguridad, especialmente en los
campos de vuelo amplios con grupos de pilotos
distribuidos en varios sitios, como por ejemplo las
laderas, donde no es necesario el control.
¿Está la batería cargada?
Cuando adquirimos el equipo RC, la batería del
transmisor está descargada, por lo que debemos
cargarla tal como se ha descrito en la página 16. Si no
lo hacemos, veremos como la tensión baja
rápidamente, y al llegar a un cierto voltaje, preajustado
en la línea “Batterie warning” del menú “General basic
settings”, suena una
alarma acústica de aviso
de carga baja. Este valor
puede ajustarse tal como
se describe en la página
260.
Graupner
HoTT permite el uso
Poniendo el emisor en marcha
Cuando ponemos el emisor en marcha, aparece en el
centro de la pantalla el siguiente aviso durante
aproximadamente 2 segundos
Durante este lapso de tiempo podemos cortar la
emisión del módulo HF, desplazando con las teclas ▲
►
o
de la derecha el campo sombreado hacia la
derecha, de manera que ON aparece normal y el
campo OFF en fondo negro:
Paramos el módulo HF pulsando sobre la tecla central
SET de la derecha.
El display de telemetría de debajo de la antena
muestra brevemente este mensaje ...
... y la pantalla principal de la emisora aparecerá de la
siguiente manera:
42
El símbolo asociado
actualmente activa ciertamente está asignada a un
receptor
establecida ninguna conexión (En este ejemplo hemos
apagado la emisión del HF)
Si por el contrario tenemos el emisor en marcha, sin
haber cortado la emisión de HF, el símbolo de la
antena en la pantalla parpadea. Mientras que no se
establece la conexión entre el receptor y el emisor se
oye una señal de alerta. En el momento en que se
establece la conexión la “x” del lado de la antena se
cambia por un icono de potencia de señal, quedando
desaparecen.
Si se establece una relación telemétrica, en la misma
línea a la derecha aparece un icono similar que
representa la potencia de la señal telemétrica que sale
del receptor
alimentación del receptor.
Si por el contrario el símbolo que aparece en la
pantalla es
recepción de datos” esto significa que la memoria
actualmente activa no está asignada a ningún receptor.
Aviso en caso de voltaje demasiado bajo
Cuando la tensión de la batería del emisor desciende
por debajo de un cierto nivel, que se puede ajustar en
el menú “General basic Settings” (página 260), y que
de origen está ajustado a 4,7 V, aparece un mensaje
de alerta en la pantalla y suena un aviso acústico.
Graupner
, y el mensaje de aviso y la señal acústica
, y el display muestra el mensaje “Sin
significa que la memoria
HoTT, pero que actualmente no hay
así como la tensión actual de la
Notas importantes:
El emisor suministrado en el set está
ajustado de origen de tal manera que puede

ser utilizado en la mayor parte de los países
europeos (a excepción de Francia). Si debe
utilizarse en este país ES IMPRESCINDIBLE
poner el emisor en modo “FRANCE”, ver la
página 261. ¡NO SE PUEDE UTILIZAR EL
MODO UNIVERSAL / EUROPA EN
FRANCIA!
Con el emisor
mc-32
HoTT y el receptor
suministrado de origen (con los ajustes que
vienen preestablecidos) podemos mandar
hasta 16 servos. Por razones de flexibilidad,
y también para evitar errores de
manipulación, los canales 5 ... 16 no están
asignados por defecto a ningún control. Esto
significa que los servos conectados a estos
canales permanecerán en las posiciones
centrales hasta que se asignen los controles.
Por las mismas razones prácticamente todos
los mezcladores están inactivos.
Encontraremos informaciones más amplias
respecto a esto en la página 108 (modelos
de aviones) y 112 (helicópteros)
El procedimiento básico para programar un
nuevo modelo de memoria se puede
encontrar en la página 60, y en los ejemplos
de programación que empiezan en la página
268.
Cuando ponemos en marcha el emisor, o
cuando hacemos el Binding, o durante los
ajustes, debemos tener siempre en cuenta
que la antena del emisor esté
hasta que se recibe una nueva señal válida..
Si se da el caso, aumentar la distancia entre
las antenas hasta que los iconos aparezcan
“normales”.
Actualizaciones del emisor (Update)
Las actualizaciones del firmware del emisor se hacen
tal como se ha descrito en la página 33 en la sección
“FIRMWARE UPDATE / Change display language” del
menú “Modo oculto”, con la ayuda de un PC con
sistema operativo Windows XP, Vista o 7. Las
actualizaciones del emisor se hacen bajo nuestra
responsabilidad a través de la conexión mini USB de 5
polos que se encuentra en la parte frontal del emisor.
Las actualizaciones e informaciones disponibles se
encuentran y se pueden descargar de nuestra web
www.graupner.de
artículo.
Nota:
Después de haber registrado el emisor en
http://www.graupner.de/de/service/produktregistrierung
seremos informados por mail automáticamente de las
últimas actualizaciones disponibles
La mencionada “página de actualización” es fácilmente
accesible entrando en www.graupner.de
PC.
desde el link de descargas del propio
.
desde nuestro
En la página principal de la web de Graupner clicamos
en una de las banderas para seleccionar el idioma que
queramos utilizar, después de esto vamos al campo
“Search”.
Colocar el cursor en este campo con un clic del ratón y
escribimos el número de referencia del artículo,
localizado en la parte posterior del emisor.
Pulsamos sobre la tecla ENTER del PC que nos abre
la siguiente página:
suficientemente alejada de las antenas del
receptor. Si estamos demasiado cerca el
receptor se satura y el Led rojo del receptor
se ilumina. En ese momento el canal de
retorno de la información no es funcional, y el
indicador de potencia de la pantalla cambia a
una “x”, y la tensión del receptor aparece
como 0,0 V. El emisor entra entonces en el
modo Fail-Safe, ver la página 208, es decir,
cuando no hay señal en el receptor los
servos permanecen en la posición actual
43

Ahora desplazamos la página un poco hacia abajo
hasta que llegamos a los enlaces “Characteristics”,
“Spare parts”, “Accessoires” y “Downloads”.
Ahora buscamos los ficheros necesarios e iniciamos la
descarga con un doble clic en la línea “Download”.
Guardamos los ficheros en nuestro ordenador en el
directorio que elijamos.
Update del software del
Se puede utilizar cualquier cable USB de uso corriente,
con conector USB por un lado y mini USB por el otro,
como el que por ejemplo se suministra en el set con la
ref. 7186.6. Este cable se conecta directamente en el
conector de 5 polos mini-USB de la parte posterior del
emisor.
mc-32
HoTT
4. Actualización del software del emisor del
HoTT
Iniciar el programa “Firmware_Upgrade_grStudio_VerX.X” desde la carpeta correspondiente.
Nota:
Asegurarse del estado de la carga de la batería del
emisor, o cargarla si es necesario antes de cada
actualización. Es recomendable antes de cualquier
actualización hacer una copia de seguridad de todas
las memorias utilizadas, para recuperarlas en caso
necesario.
1. Instalación de los drivers
Tenemos que instalar el software del driver necesario,
incluido en la carpeta “USB Drivers” dentro del paquete
del programa, en nuestro PC o portátil para que el
ordenador pueda manejar la interface USB integrada
en el emisor.
Iniciamos la instalación de los drivers haciendo un
doble clic en el fichero correspondiente, y seguir las
instrucciones de la pantalla. Una vez el software está
correctamente instalado, se debe reiniciar el
ordenador. Los drivers solamente deben instalarse una
vez.
2. Instalación del software up-loader
Descomprimir el fichero
“Firmware_Upgrade_grStudio_IVerXX.zip” en el
directorio que queramos y ejecutar el fichero del
programa
Firmware_Upgrade_grStudio_Install_VerXX.exe” con
un doble clic, y seguir las instrucciones del wizard.
3. Estableciendo la conexión entre emisor y PC
Con el emisor parado, conectar el cable USB a través
del conector de 5 polos del mini USB en la parte
delantera del emisor.
Seguimos la secuencia “Menu” “Port Setup” o abrimos
el “Controller Menu” y clicamos en “Port select”.
Ahora seleccionamos en la ventana “Port select”
seleccionamos el puerto COM conectado al USB de la
interface. El puerto correcto se reconocerá por la
designación “Silicon Labs CP210xUSB to UART
Bridge” en la columna “Device name”. En el siguiente
ejemplo es el puerto “COM 3”.
Ahora pulsamos la opción “Firmware Upgrade” del
“Menu” o abrimos el “Controller menu” y clicamos en
“Firmware Upgrade”.
44
mc-32

Clicamos en el botón marcado como “File Browse” y
seleccionamos el fichero de update del firmware que
necesitemos con la extensión “.bin”, de la ventana
“Open file”.
Los ficheros de firmware tienen un código de
producción propio, es decir, si accidentalmente
seleccionamos un fichero que no corresponde al
producto (por ejemplo un fichero de update de receptor
en lugar de un fichero de update de emisor) aparece
una ventana “Product code error” y el bloc de inicio del
procedimiento de update.
Ahora ponemos en marcha el emisor e iniciamos el
proceso de actualización clicando en la tecla
“Download Start”.
Después de un breve periodo aparece un aviso
indicando que se debe interrumpir la emisión del HF, y
debido a ello cualquier receptor en funcionamiento
también debe pararse. Paramos el receptor si lo
tenemos en marcha y clicamos en “Yes”.
Esto inicia el proceso de actualización. Se muestra una
barra del progreso de la operación por encima de las
líneas de texto que describen los sucesivos procesos.
El proceso de update no termina hasta que la barra de
progreso ha llegado a su extremo derecho y aparece el
mensaje “Firmware Dowload Success”.
Clicamos en “OK”. A continuación paramos el emisor y
desconectamos el cable USB entre el emisor y el PC o
portátil.
Si la barra de progreso se bloquea sin continuar con su
evolución, cerramos el programa y repetimos el
proceso de update. Es importante comprobar cualquier
mensaje de error que pueda aparecer.
45

Utilización del receptor
Generalidades relativas al receptor GR-32
DUAL
Sistema de recepción
El set de radio control de la mc-32 HoTT incluye un
receptor bidireccional en 2,4 GHz del tipo GR-32
DUAL, con capacidad para conectar hasta 16 servos.
Cuando ponemos el receptor en marcha, si el emisor
está parado o fuera de alcance, el LED rojo se ilumina
durante aproximadamente 1 segundo, y después
empieza a parpadear lentamente. Esto significa que no
hay conexión (por el momento) con el emisor
HoTT. En cuanto se establece la comunicación el LED
verde se ilumina y el rojo se apaga.
Para poder crear una conexión, primero debemos “unir”
el receptor a “su” emisor
procedimiento es conocido como “Binding”. No
obstante, el binding solamente es necesario la primera
vez que se “une” un receptor a la memoria del emisor,
ver las páginas 77 o 85, deberemos por tanto hacerlo si
cambiamos de memoria en la emisora. De origen en el
equipo suministrado el binding ya viene hecho de
fábrica para la memoria de modelo n°1, y por lo tanto
solamente deberemos hacerlo para nuevos receptores
o si es necesario hacer cambios en la memoria.
Visualización de la tensión del receptor
Si se establece la relación telemétrica entre el emisor y
el receptor el voltaje del acumulador del receptor se
muestra a la derecha de la pantalla del emisor.
Alarma de temperatura
Si la temperatura baja por debajo de un cierto valor (de
origen –10°C) o si sobrepasa un valor también
programado (de origen +55°C), se activa una alarma
sonora en el emisor en forma de Bip a intervalos de un
segundo. Estos valores límite se memorizan y ajustan
en el receptor.
Graupner
Graupner
HoTT, este
Conexión de los servos y polaridad
Las tomas para servos de los receptores Graupner
HoTT están numeradas. Los conectores tienen
chaflanes, de manera que no se pueden montar al
revés y la polaridad queda protegida. Fijarse siempre
en estos pequeños perfilados a la hora de montarlos.
No forzarlos nunca. Las cuatro salidas del receptor
marcadas como “B + -“ están destinadas a la conexión
de baterías.
¡No conectar nunca estas tomas con la polaridad
cambiada! La inversión puede destruir el receptor y los
elementos que están conectados a él.
La batería de alimentación se puede conectar a través
cualquiera de las tomas numeradas. La función de
cada canal por separado se determina por el emisor
que estemos usando, no por el receptor. Por ejemplo:
la toma del servo del motor se define por el equipo de
radio control, y puede variar en función del tipo y
fabricante. En el caso de los equipos de radio control
Graupner
canales 1 para aviones o 6 para helicópteros.
la función de motor está asignada a los
Notas finales:
La gran mayor resolución que se obtiene con
el sistema HoTT para el control de los servos
se convierte en una respuesta mucho más
directa que con antiguas tecnologías. Hay
que tomar un cierto tiempo para
acostumbrarse a esta velocidad.
Si queremos usar un variador de velocidad
con el sistema BEC* integrado en paralelo
con una batería de receptor independiente,
en muchos casos (dependiendo del variador
de velocidad) el terminal positivo (cable rojo)
debe sacarse del conector de tres polos.
Asegurarse de leer correctamente las notas
suministradas por el fabricante del variador
antes de hacer
nada.
Levantar
cuidadosamente la
pestaña central (1),
46
y tirar del cable rojo (2). Aislar el conector
con cinta aislante para evitar los
cortocircuitos (3).
Respetar las notas para la instalación de los servos,
receptor y antena que encuentran en la página 52.
Reset
Para efectuar un Reset del receptor, mantenemos
pulsada la tecla SET del receptor mientras lo
ponemos en marcha.
Si se ha hecho el reset con el emisor parado o en un
receptor sin Binding, el LED del receptor parpadeará
durante 2 o 3 segundos en rojo lentamente. Ahora
soltamos el botón, y será posible desde el emisor
efectuar un Binding inmediatamente después.
Si el Reset se ha hecho en un receptor con Binding, y
si la memoria correspondiente está activada cuando se
pone el emisor en marcha, el LED se pone en verde
poco tiempo después para indicar que el conjunto
emisor / receptor está de nuevo operativo. Ahora
soltamos el botón.
Atención:
Después de un Reset, TODOS los ajustes del receptor
vuelven a los de fábrica, e excepción de los datos
específicos del procedimiento Binding.
Si hacemos un RESET sin querer, deberemos volver a
entrar todos los ajustes que se hayan hecho con el
menú de telemetría.
No obstante, es muy aconsejable hacer un RESET
cuando colocamos el receptor en otro modelo. De esta
manera evitaremos encontrarnos ajustes que no
corresponden a este nuevo modelo.
*
Battery Elimination Circuit

Alimentación del receptor
Alimentación del receptor
La utilización del modelo sólo puede hacerse con una
alimentación correcta y fiable. Si a pesar de los
reenvíos sin puntos duros, una batería cargada, cables
de la batería de sección suficiente, una resistencia
mínima a nivel de las tomas, etc., la tensión del
receptor mostrada en la pantalla del emisor desciende
sin parar, hasta llegar a un nivel demasiado bajo,
seguir las siguientes indicaciones.
En primer lugar, asegurarnos que las baterías están
bien cargadas cada vez que ponemos el modelo en
marcha. Utilizar contactos e interruptores de resistencia
interna mínima. Si es necesario medir la caída de
tensión en el cable bajo tensión, ya que incluso los
nuevos interruptores de alta intensidad pueden
provocar caídas de tensión del orden de 0,2 V. En
función del envejecimiento y de la oxidación a nivel de
los contactos, este valor puede multiplicarse varias
veces. Las pequeñas vibraciones constantes a las
cuales son sometidos los contactos pueden igualmente
provocar un lento aumento de la resistencia.
Los servos pueden crear problemas a la alimentación.
Incluso pequeños servos del tipo
pueden llegar a consumir hasta 0,75 A cuando se
bloquean. Cuatro servos de este tipo en un avión de
porex por ejemplo, pueden “pesar” demasiado para la
alimentación embarcada, llegando a consumir hasta 3
amperios ...
Por lo tanto es importante escoger una alimentación
que no se venga abajo con fuertes consumos y que
sea capaz en todo momento de suministrar la tensión
suficiente. Para el cálculo de la capacidad necesaria
del acumulador, es recomendable partir del principio
que son necesarios al menos 350 mAh para cada
servo analógico y al menos 500 mAh para cada servo
digital.
Según este principio, un acumulador de 1400 mAh será
el mínimo imprescindible para un receptor con 4 servos
analógicos.
Graupner/JR
DS-281
En el cálculo debemos tener igualmente en cuenta el
consumo del receptor, que, debido a su función bidireccional, consume aproximadamente 70 mA.
En cualquier caso, es aconsejable alimentar el receptor
con más de una de las salidas designadas como “- +/B.
(Estas conexiones son las UNICAS adecuadas para
alimentar el receptor).
Si es posible conectar las baterías a las salidas más
cercanas donde están colocados los servos. Si
solamente tenemos conectados servos de alta
potencia, es necesario usar todas las conexiones para
batería del receptor así como tres fuentes de
alimentación para el receptor PRX (dependiendo de la
potencia de la batería. Incluso si utilizamos solamente
dos baterías a través de 1 PRX es preferible utilizar las
conexiones cercanas a los servos que tienen el mayor
consumo.
La figura inferior muestra un ejemplo de un receptor
con una fuente de alimentación estabilizada (PRX-5 A,
ref. núm. 4136) para conectar dos baterías. Como
solución alternativa, se puede intercalar un interruptor
entre la fuente de alimentación y las conexiones en el
receptor. La doble conexión no solamente reduce el
riesgo asociado a la rotura de un cable, si no también
permite una mayor uniformidad en la entrega de la
potencia a los servos conectados.
Si conectamos las baterías por separado a cada
conexión del receptor, debemos estar completamente
seguros de que estas baterías tienen el mismo voltaje y
ratio de potencia. No conectar nunca baterías de
diferentes tipos o baterías con importantes diferencias
de carga en el receptor, el efecto producido puede ser
parecido al de las condiciones de un cortocircuito. En
casos de este tipo, insertar estabilizadores de voltaje,
como el PRX-5 A, entre las baterías y el receptor.
47
Por razones de seguridad no usar cajas de baterías o
pilas secas.
El voltaje de las baterías de alimentación del receptor
se mostrará en la parte inferior derecha de la pantalla
del emisor cuando el modelo está en funcionamiento.
Cuando se supera el punto de activación del ajuste del
aviso de voltaje bajo (por defecto 3.60 V), que
podemos programar en el menú Telemetría, ver la
página 260, se mostrará un aviso visual y se oirá uno
acústico.
A pesar de tener esta posibilidad, asegurarse de
comprobar las condiciones de las baterías a intervalos
regulares. No esperar a que se nos active el aviso para
recargar la batería.
Nota:
Encontraremos una visión general de los cargadores,
fuentes de alimentación y instrumentos de medición en
el catálogo general Graupner RC o en internet en
www.graupner.de
. En la página 17 hay una lista de los
cargadores disponibles.

Acumuladores NiMH de 4 elementos
Con los packs de 4 elementos tradicionales podemos
alimentar sin peligro nuestro conjunto de recepción
Graupner
condiciones descritas anteriormente, es decir, que
tengan una capacidad y tensión suficientes.
Acumuladores NiMH de 5 elementos
Los packs de 5 elementos tienen un rango de
aplicación más amplio. Hay que tener en cuenta que
algunos servos del mercado no soportan la tensión
continua de un pack de 5 elementos, sobre todo
cuando está recién cargado. Notaremos rápidamente
que estos servos no funcionan correctamente por el
típico “ronroneo”.
Por ello debemos consultar las especificaciones de los
servos utilizados, antes de escoger la opción de un
pack de 5 elementos.
Acumuladores LiFe de 6,6 V de 2 elementos
En estos momentos, estos nuevos elementos son
seguramente la mejor opción.
Estas baterías también están disponibles con un
envoltorio de plástico duro, para protegerlas de roturas
debido a fuerzas mecánicas. Estos elementos, al igual
que los de LiPo, son capaces de absorber carga rápida
con un cargador apropiado, pero son mucho más
resistentes.
Además, el número de ciclos de carga / descarga de
estos elementos es netamente superior a los de los
acumuladores de LiPo.
La tensión nominal de 6.6 V de un pack de
acumuladores de Nano-fosfato de 2 elementos no
supone ningún problema para los receptores
HoTT, ni para los servos, variadores, giróscopos, etc.
en los que está expresamente especificado que
pueden funcionar en rangos de tensión elevados. Hay
que tener siempre en cuenta que todos los servos,
variadores, giróscopos, etc. antiguos sólo admiten una
tensión de 4,8 a 6 Volts. Su conexión al receptor
necesita por tanto forzosamente de la utilización de un
regulador de tensión, estabilizado, por ejemplo el PRX
HoTT, a condición de respetar las
Graupner
ref. 4136, ver anexo. Si no, el riesgo de deteriorar
rápidamente los elementos conectados es muy grande.
Acumuladores LiPo de 2 elementos
Con la misma capacidad, los packs de LiPo son
netamente más ligeros que los tipos de acumuladores
citados hasta ahora, por ejemplo los de NiMH. También
están disponibles con protectores de plástico duro
para protegerlos de los esfuerzos mecánicos y de los
golpes.
La tensión nominal de 7.4 V de un pack de
acumuladores de LiPo de 2 elementos no supone
ningún problema para los receptores
ni para los servos, variadores, giróscopos, etc. en los
que está expresamente especificado que pueden
funcionar en rangos de tensión elevados. Hay que
tener siempre en cuenta que todos los servos,
variadores, giróscopos, etc. antiguos sólo admiten una
tensión de 4,8 a 6 Volts. Su conexión al receptor
necesita por tanto forzosamente de la utilización de un
regulador de tensión, estabilizado, por ejemplo el PRX
ref. 4136, ver anexo. Si no, el riesgo de deteriorar
rápidamente los elementos conectados es muy grande.
Graupner
HoTT,
Carga de la batería del receptor
El cable de carga ref. núm. 3021 se puede conectar
directamente a las baterías del receptor para la carga
de las mismas. Si las baterías del modelo están
conectadas a través de los cables ref. núm. 3046,
3934, 3934.1 o 3934.3, entonces la carga se hace a
través del cable de carga o el conector de carga
incluido en el interruptor. El interruptor ha de estar en la
posición “OFF” durante la carga.
Polaridad de la conexión
de la batería del receptor
48

Noticias generales sobre la carga
Se deben observar las instrucciones de uso
del fabricante del cargador y las baterías.
Hay que respetar la máxima corriente de
carga permitida por el fabricante. Para evitar
dañar el emisor, la corriente de carga no
debe exceder nunca 1 A. Si es necesario,
limitar la corriente del cargador.
Si la batería del emisor no obstante debe
cargarse con una corriente superior a 1 A, es
imprescindible hacerlo fuera del emisor. Si
no, corremos el riesgo de estropear el circuito
impreso de carga del emisor por una
sobrecarga, y / o sobrecalentar la batería.
Si para la carga se utiliza un cargador
automático, realizar varias pruebas de carga
para asegurarnos del correcto
funcionamiento del sistema del cutt-off.
Particularmente debemos hacerlo si
queremos cargar baterías de NiMH con un
cargador para baterías de NiCd. Comprobar
si el cargador tiene la opción de shutt-off para
este tipo de baterías.
No realizar procesos de descarga o
mantenimiento de la batería a través del jack
de carga, ya que no está preparado para esta
utilidad.
Siempre conectar primero el cable de carga
al cargador y después la batería del emisor o
el receptor. Esto evita la posibilidad de crear
un cortocircuito con las bananas del cable.
Si la batería se calienta significativamente,
comprobar el estado de las baterías,
reemplazarla o reducir la corriente de carga.
No dejar nunca una batería en carga sin
vigilancia.
Seguir los avisos para la seguridad y
manipulación de la página 7.
49

Actualizaciones del receptor (Update)
Las actualizaciones del receptor se hacen por la
conexión de telemetría del receptor con la ayuda de un
PC equipado de un sistema operativo Windows XP,
Vista o 7. Para ello es necesario el cable interface USB
ref. 7168.6 y el cable adaptador 7168.6A
Los programas, las actualizaciones y ficheros e
informaciones disponibles para este producto se
encuentran y se pueden descargar de nuestra web
www.graupner.de
producto en particular.
Nota:
Después de haber registrado el receptor en
http://www.graupner.de/de/service/produktregistrierung
seremos informados por mail automáticamente de las
últimas actualizaciones disponibles
Update del firmware del receptor
Nota:
Asegurarse del estado de la carga de la batería del
emisor, o cargarla si es necesario antes de cada
actualización.
1. Instalación de los drivers
Si todavía no lo hemos hecho, instalar el necesario
software de los drivers de la interface del USB, ref.
núm. 7168.6, tal como se describe en la página 43.
2. Estableciendo la conexión entre receptor y PC
Conectar el cable interface del USB, ref. núm. 7168.6 a
través del cable adaptador ref. núm. 7168.6A en el
conector “- + T” del receptor. Estos conectores están
protegidos contra las inversiones de polaridad, por lo
que hay que respetar los pequeños perfilados en los
laterales. No usar la fuerza, los conectores deben
entrar fácilmente.
desde los downloads de cada
.
Cable adaptador
Ref. Núm. 7168.6A
Si lo hay sacar el
cable cental rojo
Atención:
Si el cable adaptador ref. núm. 7168.6A tiene todavía
los tres cables, cortar el cable rojo intermedio y aislarlo.
Después, hacer la conexión entre el PC o portátil y el
receptor a través del cable USB (PC USB / mini-USB).
Si el cable se ha conectado correctamente, el LED rojo
del inteface se iluminará durante unos segundos.
Si todavía no lo hemos hecho, ahora debemos apagar
el receptor.
3. Programa de utilidades para update el firmware
En el PC, arrancar el programa “Graupner_
Firmware_Update_Utility_VerX.XX.exe con un doble
clic. Este programa se encuentra entre los ficheros
almacenados en la carpeta “Firmware-Updater”. (En el
momento de imprimir este manual, la versión actual del
programa es la 1.18 y puede iniciarse sin estar
instalado primero).
Dentro del grupo de ventanas denominada “COM Port
Setup”, seleccionar el puerto COM al cual está
conectado la interface USB. Si no estamos seguros de
50
si nuestra selección es correcta, pulsar el control
“Search”, seleccionar la conexión denominada “Silicon
Labs CP210x USB to UART Bridge” de la ventana que
aparece y pulsamos “OK”. El “Baud Rate” ajustado ha
de ser “19200”.
Después, clicamos en el botón “Signal 2:Vcc3:gnd” en
el grupo de ventanas denominado “Interface Type”.
Ahora clicamos en el control denominado “Browse” que
está localizado en la esquina derecha superior de la
ventana. En la ventana que aparece “Open file”
seleccionamos el firmware para actualizar adecuado a
nuestro receptor.
La extensión de estos ficheros es siempre “.bin”.
Típicamente estos ficheros los podemos encontrar en
la carpeta cuyo nombre lleva delante el número de
referencia del receptor que tenemos que actualizar.
Esta carpeta siempre contiene un fichero ZIP que
debemos descargar y descomprimir. El nombre de este
fichero también empieza por el número de la referencia
del receptor que tenemos que actualizar. Para el
receptor estándar GR-32 DUAL incluido en este set, la
carpeta está denominada como “33516_16CH-RX”. El
nombre del fichero aparecerá en la ventana
correspondiente.

Los ficheros de firmware tienen un código de
producción propio, es decir, si accidentalmente
seleccionamos un fichero que no corresponde al
producto (por ejemplo un fichero para actualizar un
emisor en lugar del receptor) aparecerá la ventana
“Product code error” y el block de inicio del
procedimiento de update.
Activar el control denominado “Program”. Esperar el
progreso de la barra. Dependiendo de la velocidad del
ordenador que estemos utilizando, este proceso puede
tardar algunos segundos.
Ahora ponemos en marcha el receptor mientras
mantenemos pulsada la tecla SET. Después de
algunos segundos el mensaje “Found target device ...”
aparecerá en el display de estado. Ahora podemos
soltar la tecla del receptor. La actualización del
firmware actual se inicia automáticamente después de
la aparición de este mensaje.
No obstante, si no se ha detectado el receptor
aparecerá la ventana con el aviso “Target device ID not
found”.
Si el proceso termina antes de llegar al 100% de la
marca, desconectar el receptor de la fuente de
alimentación y probar de iniciar la actualización de
nuevo. Para ello realizar de nuevo los pasos anteriores.
El display de estado y la barra de progreso nos
muestran el progreso de la actualización del firmware.
La actualización finaliza cuando el text “Complete ...
100%” o “Complete!!” aparecen en la última línea del
display de estado de la operación.
Los dos LEDS del receptor se iluminan durante el
proceso de actualización. Después de que el proceso
de actualización haya concluido correctamente, el LED
verde se apaga y el LED rojo empieza a parpadear.
Parar el receptor, desconectar el cable interface y
repetir el proceso para cualquier otro receptor que
necesitemos actualizar.
4. Inicialización del receptor
Una vez concluido con éxito el proceso de
actualización DEBEMOS llevar a cabo el proceso de
inicialización antes de usar el receptor de nuevo. Esto
es necesario por razones de seguridad.
Para ello pulsamos y mantenemos pulsada la tecla
SET del receptor mientras ponemos el receptor en
marcha. Después soltamos el botón SET de nuevo.
Cuando ponemos en marcha de nuevo el receptor, el
LED verde del mismo se ilumina de forma contínua
durante 2 o 3 segundos. A excepción de la información
memorizada del binding, todos los otros ajustes que
hayamos programado en el receptor volverán a los
valores por defecto de origen, y deberemos volver a
entrarlos si los necesitamos.
51

Consejos para el montaje
Instalación del receptor
Independientemente del sistema de recepción
Graupner
montarlo es siempre el mismo:
Las antenas del receptor siempre deben montarse al
menos a 5 cm de cualquier parte metálica y cables que
no estén conectados directamente al receptor. Esto
incluye no solamente piezas metálicas o de fibra de
carbono, si no también servos, motores eléctricos,
bombas de combustible, cables de cualquier tipo, etc...
Lo ideal es que el receptor se instale en un lugar del
modelo que sea fácilmente accesible, lejos de los otros
componentes instalados. En ningún caso enrollar los
cables de los servos a la antena del receptor, o
hacerlos pasar cerca de él.
Asegurarse de que todos los cables están
correctamente sujetos y no pueden acercarse a la
antena durante el vuelo. El movimiento de conexiones
o cables en vuelo puede causar interferencias al
sistema.
Los tests han demostrado que una instalación vertical
de la antena da los mejores resultados a grandes
distancias. En el modo Diversity (dos antenas), la
segunda antena debe posicionarse de manera que
forme un ángulo de 90° respecto a la primera.
Las salidas para las conexiones en el receptor GR-32
DUAL HoTT
asignadas a la conexión de las baterías. La
alimentación al receptor se puede hacer por cualquiera
de las 16 salidas de conexión. No obstante, debido al
voltaje asociado al paso por los conectores, es mejor
no usar las salidas 13 a 16 para la conexión de las
baterías.
La función de cada canal viene determinada por el
emisor que estemos usando, y no por el receptor. La
atribución de los canales puede modificarse a nivel del
receptor por una programación en el menú de
telemetría.
que estemos usando, el procedimiento de
Graupner
designadas como “B + -” están
No obstante es más recomendable hacerlo en el
emisor, con la opción “Transmitter output”, ver la
página 218.
La siguiente sección contiene notas e ideas de ayuda
de cómo instalar los componentes del equipo de radio
control en el modelo.
1. Embalar el receptor con una mousse antiestática de
un mínimo de 6mm de espesor. Fijar la mousse con
gomas elásticas alrededor del receptor para protegerlo
de las vibraciones, los aterrizajes un poco violentos y
los golpes.
2. Los interruptores deben protegerse de las
vibraciones y de los gases del escape. La palanca
debe poder desplazarse libremente en toda su carrera.
3. Montar siempre los servos con las anillas de goma y
los casquillos de latón, para amortiguar las vibraciones
fuertes y ofrecer un cierto grado de protección a la
parte mecánica. No apretar los tornillos demasiado
fuerte, si no se aplastarán las anillas de goma y no
harán su efecto de amortiguador. Solamente si los
tornillos se aprietan correctamente los servos se
protegerán eficazmente contra las vibraciones. El
dibujo inferior muestra como fijar correctamente un
servo. Los casquillos de latón se montan por debajo,
dentro de los anillos de goma.
Pata de fijación
Tornillo
Anillo de goma
Casquillo
de latón
4. Los palonieres de los servos deben poder moverse
libremente en todo su arco. Comprobar que no haya
ningún obstáculo que bloquee el recorrido.
El orden en la cual los servos se conectan al receptor
viene determinado por el tipo de modelo.
Ver la asignación de las salidas de los servos en las
páginas 61 y 65.
Asegurarse de leer atentamente las notas de seguridad
de las páginas 4 ... 9.
Si se pone el receptor en marcha cuando el emisor
todavía está parado los servos pueden empezar a
moverse incontroladamente. Esto lo podemos evitar
poniendo el sistema en marcha en el siguiente orden:
poner primero en marcha el emisor
y después el receptor
Cuando el vuelo ha terminado
parar primero el receptor
y después el emisor
Durante la programación del emisor, comprobar que
los motores eléctricos no pueden arrancar por
descuido, o si tenemos un motor de explosión con
arranque eléctrico que este no se pueda poner en
marcha solo. Como medida de seguridad, desconectar
primero el acumulador de propulsión y cortar la
alimentación del combustible si se trata de un motor
térmico.
52

53

Definiciones de los términos
Funciones de mando, controles del emisor,
señal de entrada (input), canales, mezclas,
interruptores, controles como interruptores.
Interruptores fijos
Para facilitar la utilización de las instrucciones de la
mc-32
definiciones de diferentes expresiones que se utilizarán
a lo largo de ellas.
Funciones de mando / Canales
Entendemos como funciones de mando -
independientemente del tratamiento de la señal en el
emisor - la señal emitida para mandar una función en
concreto, y que debe controlarse. En los modelos de
avión representan estas funciones por ejemplo el
motor, la dirección y los alerones, en los helicópteros el
paso colectivo, el roll y el nick.
La señal de una función de mando puede transmitirse
directamente o por una mezcla a uno o más canales.
Una ejemplo típico es la utilización de dos servos
separados para el mando de los alerones, o de dos
servos para el nick o el roll en el caso de un
helicóptero. La función de mando tiene influencia
directa en el recorrido mecánico del servo
correspondiente. Esto no solamente puede hacerse a
través del software, si no que también podemos
cambiar el recorrido entre lineal o extremadamente
exponencial.
Controles del emisor
Entendemos por controles del emisor los elementos
mecánicos del emisor que son operados por el piloto
para que los servos, variadores, conectados al
receptor, puedan funcionar. Los controles incluyen:
HoTT se explican a continuación las
Los dos sticks para los canales 1 a 4.; tanto
en los modos de avión como en el de
helicóptero las cuatro funciones pueden
intercambiarse, es decir, tener el mando de
motor a la derecha o a la izquierda. Al stick
para el motor (o aerofrenos) nos referiremos
normalmente como Ch1 (Canal 1).
Los dos controles proporcionales localizados
en los laterales de la emisora, que tienen por
ejemplo las designaciones SD1 (rotativo del
lado derecho) y SD2 (rotativo del lado
izquierdo) en el menú “Control adjust”,
páginas 108 y 112.
Los tres deslizantes proporcionales de la
parte central de la consola designados por
ejemplo como SR1 ... 3, como se muestra en
el menú “Control adjust”, páginas 108 y 112.
Los cinco controles proporcionales
localizados en el frontal de la emisora, que
tienen por ejemplo las designaciones DR1 ...
5 en el menú “Control adjust”, páginas 108 y
112.
Los interruptores colocados, si están
asignados a un canal en el menú “Control
adjust”.
En el caso de los elementos de mando proporcionales
el desplazamiento de los servos es proporcional al
desplazamiento de los elementos de mando, en el caso
de un interruptor de dos o tres posiciones, el servo
solamente se desplazará a esas dos o tres posiciones.
Los interruptores y los controles que actúan sobre los
servos 5 ... 16 (máx.) son libremente programables.
Nota importante:
Los inputs 5 ... 15 para helicópteros y 5 ... 16 para
aviones generalmente están “libres”, es decir, no
asignadas, en la programación básica del emisor.
Señales de entrada (input)
Se trata de un punto imaginario en la ruta de emisión
de las señales que en ningún caso debe considerarse
el punto de conexión de los elementos de mando en el
circuito interior. Los menús “Stick mode” y “Transmitter
control setting” afectan la carrera de la señal “después”
de este punto, y es posible (y probable) que haya
54
diferencias entre el número del control del emisor y el
número del canal correspondiente.
Canales
Este es el punto en la ruta de la señal a partir del cual
la señal contiene todas las informaciones para un servo
determinado – ya sea generada directamente a través
de un control del emisor o a través de una mezcla - y
llamaremos a está señal canal. Esta señal que
solamente puede ser modificada desde el menú “Servo
settings” y desde el menú “Transmitter output” sale del
emisor por el módulo HF.
Una vez llega al receptor esta señal todavía puede
modificarse por los ajustes en el menú de telemetría,
para finalmente mover el servo correspondiente.
Mezclas
El software del emisor incluye un variado número de
mezclas. Están destinadas a permitir que una función
de mando afecte a uno o múltiples servos. Para más
información se describen numerosas funciones de
mezcla a partir de la página 159 del manual.
Interruptores
Los cuatro interruptores de dos posiciones, los dos
interruptores de tres posiciones y los interruptores
pulsadores también pueden integrarse en la
programación de los controles del emisor. Pero
también está previsto que puedan utilizarse para
funciones como pasar de una opción de programación
a otra, por ejemplo para el arranque y paro de un
cronómetro, activación o desactivación de mezclas,
sistema de Trainer, etc. Se pueden asignar libremente
tantas funciones como se quiera a cada interruptor
físico.
A lo largo de las instrucciones veremos diferentes
ejemplos.
Controles del emisor como interruptores
Como a menudo es muy práctico poder activar o
desactivar algunas funciones (por ejemplo los
cronómetros para medir el tiempo de funcionamiento

de un motor, o salida automática de los aerofrenos)
cuando un control está en una determinada posición, el
software de la
controles con posibilidad de usarlos para este fin.
Estos interruptores a través del software, designados
como “C1 ... C8” se activan en un punto determinado
del recorrido del control físico. Este punto de activación
se define simplemente con la presión sobre un control.
A través del software podemos definir el sentido del
interruptor respecto al control mecánico.
Obviamente estos interruptores se pueden combinar
libremente con los ya mencionados interruptores físicos
para solucionar los problemas complejos que se nos
puedan aparecer.
Este manual incluye una variada muestra de ejemplos
instructivos que facilitan en gran parte la programación.
Por esta razón consultar los ejemplos de programación
a partir de la página 268.
Interruptores lógicos
Esta función permite que dos interruptores,
interruptores de control y / o interruptores lógicos o
cualquier combinación de estos se puede combinar con
otro para crear una función lógica “AND” o “OR”. Se
pueden programar un total de 8 interruptores lógicos
“L1 ... L8”, ver la página 138.
Interruptores Fijos FXI y FX\
Este tipo de interruptores activa una función
permanentemente en ON, por ejemplo cronómetros, o
OFF, o puede suministrar un input de señal fija para un
control interruptor, por ejemplo FXI = +100% y FX\ = 100%.
Por ejemplo, en la programación de las fases de vuelo,
estos interruptores fijos se pueden usar para conmutar
un servo o variador de velocidad entre dos ajustes.
mc-32
HoTT incluye un total de 8
55

Asignación de los controles,
interruptores y controles como
interruptor
Procedimiento general
MC-32
El
cuando tenemos la necesidad de asignar los elementos
de control a funciones específicas.
Como la asignación de los interruptores es idéntica en
todos los menús concernientes, es útil explicar
claramente ahora el procedimiento y después nos
podernos centrar en la lectura detallada de lo esencial
de los menús.
Asignación de los controles físicos e interruptores
La tercera columna del menú “Control adjust” se puede
usar para asignar los inputs del emisor 5 ... 16 para
mover los servos, en cualquier dirección de los sticks
(C1 ... C4) así como para asignar cualquier otro control
físico o interruptor. Pulsamos brevemente la tecla
SET de la derecha. En la pantalla aparece el
siguiente mensaje:
HoTT nos permite la máxima flexibilidad
A diferencia, si queremos asignar el control en el menú
“Control switch”, página 135, aparecerá el mensaje
“activate desired control”
Nota importante:
Los controles que asignemos DEBEN preasignarse en
el menú “Control adjust” a uno de los inputs 5 a 16.
Asignación de los interruptores
En un programa, cuando un interruptor puede
asignarse, el símbolo interruptor aparece en la pantalla:
Con las teclas de dirección de la izquierda o la derecha
vamos a la columna correspondiente.
Como asignar un interruptor
1. Pulsar brevemente la tecla SET en el pad de la
derecha. El siguiente mensaje aparece en la pantalla.
activamos de nuevo la asignación de interruptores, y
asignamos de nuevo la función, esta vez en el sentido
correcto de funcionamiento.
Anulación de un interruptor
Una vez está activada la atribución de interruptores,
como se describe en el punto 1, pulsamos
simultáneamente las teclas ▲▼ o ◄ ► del pad de la
derecha (CLEAR)
Asignación desde la lista de “external switch”
En los menús en los cuales aparezca el mensaje ...
... podemos asignar los denominados “interruptores
externos”.
Para hacerlo confirmamos el mensaje de texto con la
tecla SET. Aparece una nueva ventana con una lista
de ocho interruptores de control “C1 ... C8” seguidos de
dos interruptores fijos denominados “FX” y los ocho
interruptores invertidos “L1 ... L8”
Ahora simplemente activamos el control que queremos
usar.
Nota:
Los controles solamente se reconocerán a partir de un
cierto recorrido. Por lo tanto los debemos mover en las
dos direcciones hasta que la asignación se muestre
correctamente en la pantalla. Si el recorrido es
insuficiente activar el control en la otra dirección.
2. Ahora solamente es necesario poner el interruptor
que necesitemos en la posición “ON” o, tal como se ha
descrito a la derecha en la “Asignación de interruptores
externos”, seleccionar el interruptor de la lista de
“Interruptores externos”. Esto concluye la asignación.
El símbolo de interruptor a la derecha del número del
interruptor indica la posición actual del interruptor en
concreto.
Inversión del sentido del interruptor
Si el funcionamiento se hace en sentido contrario,
volvemos a poner el interruptor en la posición “Off”,
56
Usar las flechas de la izquierda o la derecha para
seleccionar el interruptor y asignarlo con una breve
pulsación sobre la tecla central
derecha.
SET
en el pad de la
Notas:
En algunos casos algunas funciones
especiales es mejor activarlas desde alguna
posición de un control libremente
programable que con un interruptor normal.
Con este fin, hay un total de 8 interruptores
denominados como “Interruptores de control”

“C1 ... C8”, en los cuales se puede establecer
la dirección de activación, e incluso invertirlos
en el menú “Control switch”, página 135.
Dos interruptores y / o interruptores de
control se pueden combinar con otro para
formar funciones lógicas “AND” o “OR” a
través del menú “Logical switch”, ver la
página 138. Hay disponibles un total de 8
interruptores lógicos “L1 ... L8” (así como 8
interruptores lógicos invertidos o con
dirección cambiada). El resultado de una
función de interruptor lógica se puede usar
como input de otra función de interruptor
lógica. Para más información ver el menú
correspondiente.
Los dos interruptores FX activan una función
on “FXI” o off “FX\” permanentemente.
Los otros interruptores mencionados pueden
tener múltiples asignaciones. Tenemos que
tener cuidado de no asignar SIN QUERER
funciones recíprocas que puedan generar un
conflicto en un solo interruptor. Si es
necesario, ver las siguientes funciones de los
interruptores.
Ejemplo de aplicación:
Activar o desactivar un sistema de
calentamiento de la bujía embarcado en el
avión cuando el stick del canal 1 está en la
posición de relentí programada. El interruptor
para la puesta en marcha del sistema de
ignición se hace a través de una mezcla en la
emisora.
Arranque y paro automático de un
cronómetro para medir el tiempo de vuelo de
un helicóptero con el interruptor del limitador
de gas.
Desactivación automática de la mezcla
“AL DI” (alerones dirección) cuando
sacamos los aerofrenos, para poder
mantener las alas paralelas al suelo cuando
aterrizamos en laderas, sin influencias del
timón de dirección.
Salida automática de los aerofrenos con
compensación de la profundidad en la
aproximación de los aterrizajes cuando el
stick del gas sobrepasa un cierto punto.
Arranque y paro de un cronómetro para
medir el tiempo de funcionamiento de un
motor eléctrico.
57

Trims digitales
Descripción de esta función y del trim de corte
del Canal 1
Trim digital con visualización de la posición en la
pantalla y señal acústica
Los dos sticks dobles están equipados con trims
digitales. Por defecto, girando las ruedas de trim
cambiaremos el offset de la posición neutra del stick en
4 incrementos (es posible llegar hasta 100 pasos en
cada lado). También se nos avisa del offset
acústicamente. Una breve presión sobre la rueda del
trim hace un reset del offset del trim a “0”. Cualquier
otro “punto cero” se puede especificar con la ayuda del
menú “Trim memory”. Si se han creado fases de vuelo
y cada una tiene asignada un nombre a través de los
menús “Phase settings” y “Phase assignment”, estos
nombres aparecerán en la parte inferior izquierda del
menú “Trim memory” y los valores de los trim se
memorizarán en los ajustes básicos de las fases de
vuelo.
El ajuste por defecto del rango de incremento de 4
pasos por clic que queda ajustado en cada nueva
memoria de un modelo inicializada, se puede cambiar
en cualquier momento en el menú “Stick mode”, página
104 o 106, por separado para cada eje del stick, en un
rango de 1 ... 10 para modelos de aviones y de 0 ... 10
para modelos de helicópteros. (La función de trim se
puede desactivar seleccionando “0” pasos, lo que
puede ser ventajoso en helicópteros con cierto tipo de
sistema de giro.
Las posiciones de los trim son memorizadas
automáticamente cuando cambiamos de memoria de
modelo. Los trims se memorizan separadamente para
cada fase de vuelo dentro de una memoria, a
excepción del trim del stick del Ch1 (motor /
aerofrenos), que es el trim del motor / aerofrenos en
los modelos de aviones.
Esta selección se hace por separado para cada eje del
stick, en la segunda columna del menú “Stick mode",
páginas 104 o 106.
Notas:
Es fácil encontrar la posición media del trim
durante el vuelo y se puede hacer sin mirar el
display. Con una breve presión de la rueda
del trim hacemos un reset del trim a “0”, o en
el menú “Trim memory” hacemos un reset a
los valores de los trims específicos de las
fases de vuelo memorizadas.
La función del “cut-off trim”, conocida de
otros equipos de radio control Graupner de
las series mc y mx, y descrita en esta
sección, se puede hacer con la ayuda de la
opción “Thr. CutOff” del menú “Basic settings
model”, páginas 81 y 90.
58

59

Modelos de aviones
Para los modelos clásicos de aviones podemos montar
sin problemas hasta cuatro servos para los alerones y
cuatro servos de flaps, y para modelos con cola en V y
modelos Deltas / Alas volantes dos servos de alerones
/ profundidad y dos servos de flaps.
No obstante la mayor parte de los modelos de aviones
o de planeadores tienen colas “clásicas”, con un servo
para la profundidad, un servo para la dirección, un
servo para los alerones y un servo para el mando del
gas o de un variador (aerofrenos en el caso de un
planeador). Por otro lado, el tipo de empenaje “2 PR Sv
3+8” permite la conexión de dos servos de profundidad
a los canales 3 y 8 en paralelo.
Si el modelo está equipado de una cola en V en lugar
del empenaje clásico, en el menú “Model type” es
necesario seleccionar la función “V-tail”, que mezcla las
funciones de la profundidad y dirección entre ellas
automáticamente, estando cada superficie de mando
gobernada por un servo, y que pueden ser mandados
ya sea por la función Profundidad o por la función
Dirección.
En los modelos Delta y las alas volantes la función de
mando de los alerones y la profundidad se hace con
una misma superficie de mando a cada lado del ala. El
programa incluye la mezcla necesaria para los dos
servos.
En el caso del mando de alerones o de los flaps con
dos servos, el ángulo de movimiento de las superficies
de control puede regularse independientemente hacia
arriba o hacia abajo en el menú “Wing mixers”, es
decir, el recorrido hacia arriba o hacia abajo se puede
ajustar independientemente. Finalmente, la posición de
los flaps también puede controlarse con cualquier de
los tres elementos de mando proporcionales
deslizantes o los siete controles rotativos.
Para los flaps, alerones y profundidad existe la
posibilidad de ajustar un trim específico para cada fase
de vuelo en el menú “Phase trim”.
Podemos grabar y memorizar hasta 8 fases de vuelo
en cada una de las 80 memorias.
Las posiciones del trim digital quedan memorizadas
separadamente para cada fase de vuelo, a excepción
del trim C1. El trim C1 dispone de un sistema para
reencontrar fácilmente el ajuste del relentí.
Siempre hay dos cronómetros a nuestra disposición
durante el vuelo. Igualmente se muestra en la pantalla
el tiempo de uso del emisor desde la última carga.
Todos los interruptores así como los controles pueden
asignarse libremente en el menú “Control adjust” a
cualquiera de los inputs 5 ... 16, prácticamente sin
restricciones.
El “Dual Rate” y el “Exponencial” para alerones,
dirección y profundidad puede programarse por
separado, y podemos conmutar siempre entre dos
tipos de ajuste y en una fase de vuelo específica.
Además de las 8 mezclas lineales y 4 mezclas en
curva libres (menú “Free mixers”) y de las 4 mezclas en
cruz (menú “Dual mixers”), tenemos también curvas de
8 puntos para el control del canal 1 en función de la
fase de vuelo (motor / freno) (menú “Curva canal 1”).
En función de la cantidad de servos de las alas,
tendremos acceso en el menú “Wing mixer” a
diferentes mezclas completamente definidas.
Menú Multi-flap: control de los flaps como
alerones, influencia del trim en los flaps,
diferencial de flaps, amplitud de la función de
flaps para flaps y alerones, control de
alerones como flaps, mezcla profundidad
flaps
Ajuste de los frenos: butterfly, reducción del
diferencial, curvas de la profundidad
Mezcla alerones dirección
Mezcla flaps profundidad
60

Consejos para la instalación
Los servos DEBEN siempre colocarse en el orden que
se muestra a continuación en el receptor.
Las salidas que no se utilizan simplemente quedan
desocupadas. Asegurarse de seguir los consejos de
las siguientes páginas.
Avión con o sin motor, con hasta un máximo de 2
servos de alerones y 4 servos de flaps ...
... y tipo de cola “normal” o “2 elevator servos”
Conexión SUMO / SU MI
Libre o función auxiliar
Libre o función auxiliar
Alimentación del receptor
Libre o Al2 decha o función auxiliar
Libre o Al2 izda o función auxiliar
Libre o Flap2 decha o función auxiliar
Alimentación del receptor
Libre o Flap2 izda o función auxiliar
Libre o Profundidad 2 o función auxiliar
Flap derecho o libre o función auxiliar
Alimentación del receptor
Conexión de teleme tría
Libre o función auxiliar
Libre o función auxiliar
Alimentación del receptor
Flap o Flap izquierdo
Alerón derecho o función auxiliar
Dirección
Alimentación del receptor
Profundidad o Profundidad 1
Alerón o Alerón izquierdo
Aerofrenos o servo motor
o variador de velocidad (motor elec.)
Alimentación del receptor
... y tipo de cola “V tail unit”
Conexión SUMO / SUMI
Libre o función auxiliar
Libre o función auxiliar
Alimentación del receptor
Libre o Al2 decha o función auxiliar
Libre o Al2 izda o función auxiliar
Libre o Flap2 decha o función auxiliar
Alimentación del receptor
Libre o Flap2 izda o función auxiliar
Libre o Profundidad 2 o función auxiliar
Flap derecho o libre o función auxiliar
Alimentación del receptor
Conexión de tele me tría
Libre o función auxiliar
Libre o función auxiliar
Alimentación del receptor
Flap o Flap izquie rd o
Alerón derecho o función auxiliar
Dirección / Profundidad derecha
Alimentación del receptor
Dirección / Pro fundidad iz quier da
Alerón o Alerón izquierdo
Aerofrenos o servo motor
o variador de velocidad (motor elec.)
Alimentación del receptor
Avión Delta / Ala volante con o sin motor, con hasta un
máximo de 2 servos de alerones / profundidad y hasta
2 servos de flaps / profundidad
Conexión SUMO / SUMI
Libre o función auxiliar
Libre o función auxiliar
Alimentación del receptor
Libre o Al2 / EL decha o función auxiliar
Libre o Al2 / EL izda o función auxiliar
Libre o Flap2 / EL decha o función auxiliar
Alimentación del receptor
Libre o Flap2 / EL izda o función auxiliar
Libre o función auxiliar
Flap / EL derecha o libre
Alimentación del receptor
Conexión de telemetría
Libre o función auxiliar
Libre o función auxiliar
Alimenta ción del receptor
Libre o Flap / EL izquierda
Libre o función auxiliar
Libre o Dirección
Alimentación del receptor
AL / Profundidad derecha
AL / Profundidad izquierda
Aerofrenos o servo motor
o variador de velocidad (motor elec.)
Alimenta ción del receptor
61

Dado que hay muchas posibilidades de montaje de los
servos y los reenvíos, es posible que sea necesario
invertir el sentido de rotación de los servos. La tabla
inferior contiene algunos consejos prácticos:
Tipo Servos que giran al
Solución
revés
Cola en V
Delta
Ala volante
Dirección y profundidad
invertidas
Dirección correcta,
Profundidad invertida
Profundidad correcta,
Dirección invertida
Alerones y profundidad
invertidas
Profundidad correcta,
Alerones invertidos
Alerones correctos,
Profundidad invertida
Invertir los servos 3
& 4 en el menú
“Servo adjustment”
Intercambiar la
conexión de los
servos 3 & 4 en el
receptor
Invertir los servos 3
& 4 en el receptor y
además invertir el
sentido de rotación
en el menú “Servo
adjustment.”
Invertir los servos 2
& 3 en el menú
“Servo adjustmen”
Intercambiar la
conexión de los
servos 2 & 3 en el
receptor y además
invertir el sentido de
rotación en el menú
“Servo adjustment”
Intercambiar la
conexión de los
servos 2 & 3
Los principales menús de los modelos de aviones se
señalan en las descripciones de los programas con el
símbolo...
... de tal manera que sólo debemos fijarnos en estos
menús para la programación de un modelo de avión.
62

63

Modelos de helicópteros
La permanente evolución de los helicópteros así como
la de los diferentes componentes, tales como
giróscopos, variadores, palas de rotor, etc. permiten
ajustar perfectamente un helicóptero, incluso en vuelo
3D. Para el debutante son solamente necesarios pocos
reglajes para iniciarse en el vuelo estacionario, y
después poco a poco, según el progreso, aprender a
utilizar todas las diferentes opciones de la mc-32
HoTT.
Con la programación de la mc-32 HoTT podemos
pilotar todos los helicópteros equipados de 1 ... 4
servos en el paso.
En una misma memoria de un modelo disponemos de
hasta siete fases de vuelo programables libremente
más la fase de la auto rotación, ver los menús “Control
adjust”, “Phase settings” y “Phase assignment”.
Al igual que en los modelos de aviones aquí también
además de los dos cronómetros básicos que aparecen
en la pantalla tenemos dos cronómetros adicionales así
como un contador parcial que pueden asignarse a las
fases de vuelo, todo ello ajustable (menús “Timers
(general)” y “Fl. phase timers”).
Excepto para el trim del paso / motor, los trims digitales
se pueden memorizar como “globales” para todas las
fases, o como “específicos para cada fase”. El trim del
C1 permite la fácil localización de un ajuste del relentí.
La asignación de los controles para los inputs 5 ... 16
pueden ser comunes a todas las fases de vuelo o
independientes para cada una de ellas (menú “Control
adjust”).
La función de copia de las fases de vuelo es útil
durante las pruebas de vuelo (menú “Copia / Borrado”).
Las funciones “Dual Rate” y “Exponencial” se pueden
aplicar sobre el roll, nick y rotor de cola, y programar
dos valores en cada fase de vuelo.
Hay 8 mezcladores lineales libremente asignables.
También hay 4 mezcladores en curva que pueden
programarse, y también activarse o desactivarse, en el
menú “Mix active / Phase”. Además de esto hay
también 4 mezcladores duales disponibles.
También hay disponibles en el “Helicopter mixer”
curvas de 8 puntos dependientes de las fases para las
mezclas no lineales de paso, motor y rotor de cola, así
como dos mezcladores independientes para roll y nick.
Independientemente de esto, la curva del control del
canal 1 puede definirse hasta con 8 puntos en cada
fase de vuelo. El principiante inicialmente solamente
debe adaptar el punto de estacionario en la parte
central del recorrido del control para las curvas no
lineales.
Los mezcladores pre-programados del menú
“Helicopter mixer” son los siguientes:
1. Curva del paso (curva de 8 puntos)
2. Canal 1 Motor (curva de 8 puntos)
3. Canal 1 Rotor de cola (curva de 8 puntos)
4. Rotor de cola Motor
5. Roll Motor
6. Roll Rotor de cola
7. Nick Motor
8. Nick Rotor de cola
9. Eliminación del giro
10. Rotación del plato
11. Límite del plato
64
La función throttle limit (limitación del gas, input TI16 en
el menú “Control adjust”) permite tener un método
efectivo para el arranque del motor en cualquier fase
de vuelo. Por defecto está asignada a este input “TI16”
el control proporcional rotativo del lado derecho. Esta
función determina la posición máxima del servo del
mando del gas. Por ello, el trim puede controlar el
motor alrededor del punto del relentí.
Solamente cuando el control rotativo se gira en la
dirección del máximo gas las curvas programadas del
motor son efectivas.

Nota para los poseedores de radios GRAUPNER más
A
A
A
antiguas:
Comparando la secuencia las salidas del receptor con
versiones anteriores, las conexiones del Servo 1 (servo
del mando del paso) y el del Servo 6 (servo del mando
del gas) están intercambiadas.
Los servos DEBEN estar conectados a las salidas del
receptor tal como se indica en el siguiente esquema.
Las salidas que no se utilizan simplemente quedan
libres.
Hay informaciones más amplias relativas a los
diferentes tipos de cabezas de rotor en la página 98 en
la descripción del menú “Helicopter type.”
´
Consejos de instalación
Los servos DEBEN conectarse siempre en el orden
que se muestra en el gráfico posterior.
Las salidas no utilizadas quedarán simplemente no
ocupadas.
Respetar la información adicional de las páginas
siguientes.
Nota:
Podemos conectar un regulador de velocidad a la
salida “6” del receptor para poder tener las máximas
ventajas del limitador del motor y sus medidas extras
de seguridad, ver el texto que empieza en la página
117. Ver también la página 181.
Salidas del receptor en los modelos de helicóptero con
1 a 3 servos en el plato cíclico
Conexión SUMO / SUMI
Libre o función auxiliar
Libre o función auxiliar
Alimenta ción del receptor
Libre o función auxiliar
Libre o función auxiliar
Libre o función auxiliar
Alimenta ción del receptor
Libre o función auxiliar
Libre o controlador rpm o función auxiliar
Ganancia del gyro
Alimentación del receptor
Conexión de telemetría
Libre o función auxiliar
Libre o función auxiliar
Alimentación del receptor
Servo motor o variador de velocidad
Libre o función auxiliar
Servo rotor de cola
Alimentación del receptor
Nick servo 1
Roll servo 1
Paso colectivo o Roll 2
o Nick 2
Alimentación del receptor
65
Salidas del receptor en los modelos de helicóptero con
4 servos en el plato cíclico
Conexión SUMO / SUMI
Libre o función auxiliar
Libre o función auxiliar
limentación del rece ptor
Libre o función auxiliar
Libre o función auxiliar
Libre o función auxiliar
limentación del rece ptor
Libre o función auxiliar
Libre o controlador rpm o función auxiliar
Ganancia del gyro
limentación del receptor
Conexión de telemetría
Libre o función auxiliar
Libre o función auxiliar
Alimentación del receptor
Servo motor o variador de velocidad
Nick servo 2
Servo rotor de cola
Alimentación del receptor
Nick servo 1
Roll servo 1
Roll 2
Alimentación del receptor
Los principales menús de los modelos de helicóptero
se señalan en las descripciones de los programas con
el símbolo...
... de tal manera que sólo debemos fijarnos en estos
menús para la programación de un modelo de
helicóptero.

Descripción detallada de los
programas
Memorización de un nuevo modelo
Los que hayan leído el manual hasta este punto seguro
que ya han probado alguna de las programaciones
sencillas. Por lo tanto a partir de ahora es importante
detallar cada menú.
En esta sección empezamos asignando una memoria
“libre” para poder programar un nuevo modelo:
Pulsamos de nuevo la tecla central SET de la
derecha para acceder al submenú:
... y después pulsamos la tecla central
derecha para la confirmación de la elección.
Estamos obligados ahora a escoger un tipo de modelo
de base, es decir, escoger entre un modelo de avión o
uno de helicóptero:
SET
de la
A partir de la pantalla inicial, con la tecla central SET
de la derecha accedemos a la lista multifunción. (Con
la tecla ESC de la izquierda volvemos de nuevo a la
pantalla principal). Generalmente, después de poner el
emisor en marcha y el primer acceso a la selección
Multifunción, la línea del menú Model select aparece
sombreada, es decir, activada. Si no, la seleccionamos
con las teclas ▲▼ o ◄ ► de la derecha o la
izquierda, en los dos dibujos siguientes vemos en el
primero la pantalla con la lista para un modelo de
avión, y en el segundo la lista para un modelo de
helicóptero.
En la configuración por defecto del emisor la primera
memoria para modelo siempre se inicializa para un
modelo de avión, y el receptor suministrado ya está
asignado a ella. En la esquina superior se muestra el
tiempo que lleva operativo el modelo de la memoria
seleccionada.
Las memorias marcadas como
libres y no asignadas (no se ha efectuado un
procedimiento de Binding). Si queremos memorizar un
modelo de avión, podemos empezar la programación
inmediatamente, después de salir del submenú “Model
select” pulsando la tecla ESC de la izquierda cada
vez ... o podemos seleccionar una de las memorias
libres con las teclas ▲ o
izquierda...
free están
▼
de la derecha o la
▲ o ▼
de la
Seleccionamos con las teclas ◄ o ► de la izquierda o
la derecha el tipo de modelo básico, y después
pulsamos la tecla central SET de la derecha. La
memoria seleccionada se inicializa con el tipo de
modelo escogido, y la pantalla vuelve al estado inicial.
El lugar de esta memoria está ahora “ocupado” para
nuestro modelo.
No obstante, si queremos empezar con un helicóptero,
entonces seleccionamos una de las memorias
marcadas como
de la izquierda o la derecha, y confirmamos la elección
pulsando la tecla central de la derecha SET. Ahora
debemos definir el tipo de modelo básico, es decir,
“avión” o “helicóptero”. Con las teclas ◄ o
derecha o la izquierda seleccionamos el símbolo
correspondiente, y pulsar la tecla central SET de la
derecha para confirmar. Esto inicializa la memoria con
el tipo de modelo seleccionado, y podemos empezar la
programación en esta memoria.
free con las teclas
►
66

Solamente podremos cambiar esta memoria por otra si
primero la borramos (menú “Copy / Erase”, pág. 64).
Nota:
Si queremos borrar una memoria que está
actualmente activa en el display básico,
debemos definir uno de los dos tipos de
modelos “avión” o “helicóptero”
inmediatamente después de completar el
proceso de borrado. No podemos hacer este
proceso simplemente apagando la emisora.
Si queremos borrar una memoria que hemos
ocupado por error, simplemente la borramos
desde una memoria diferente. No obstante, si
queremos borrar una memoria que no está
activa en estos momentos, después
del
procedimiento esta aparecerá como
free
dentro de “Model Select”.
Después de la inicialización de la memoria
seleccionada con el tipo de modelo escogido,
la nueva memoria se muestra en pantalla. En
la misma pantalla aparece durante algunos
segundos el siguiente mensaje ...
para recordarnos que no hay todavía
...
ninguna relación (Binding) con el receptor.
Pulsando la tecla central
SET
de la derecha
accederemos directamente a la opción
correspondiente.
Encontraremos más información sobre el
proceso del Binding de un receptor en las
páginas 77 o 85.
Después del mensaje de alerta “Bind N/A
OK” y por encima de él aparece igualmente
durante alguno segundos el mensaje ...
... para recordarnos que no hay todavía
ningún ajuste del Fail-Safe. Encontraremos
informaciones más amplias respecto a esto en la
página 208.
Si el aviso...
... aparece en la pantalla, mover el stick, en el
caso de un helicóptero es el Limiter asignado de
manera estándar al rotativo SD1, hasta la
posición del relentí.
Este aviso solamente aparece en función de los
ajustes que hemos entrado en las secciones
“Motor at Ch1” o “Collective pitch min” del menú
“Model type”, página 94, o “Helicopter type”,
página 98. Si estamos ajustado un modelo de
avión sin motor, entramos “none” en este punto;
esto desactiva el aviso de motor demasiado alto.
Si las memorias del emisor ya están
ocupadas, el pictograma del tipo de modelo
seleccionado aparece en la apropiada
memoria de modelo, seguido por una línea
en blanco, o el nombre del modelo (y de una
eventual relación del receptor si ya se ha
efectuado) si lo hemos entrado en el menú
“Basic setings” (páginas 76 y 84). En la parte
67
derecha se muestra el tiempo de uso del
modelo, y si la hay, la “info” del modelo.
Si el voltaje de la batería es demasiado bajo,
el software no permite cambiar entre modelos
por razones de seguridad. En este caso la
pantalla muestra el siguiente mensaje:
En principio tenemos cuatro diferentes posibilidades
para asignar a los dos sticks las cuatro funciones
principales, alerones, profundidad, dirección y motor /
aerofrenos en el caso de los aviones, y roll, nick, rotor
de cola y motor / paso colectivo en el caso de los
helicópteros. Cual de ellas adoptaremos dependerá de
nuestras preferencias personales según el tipo de
vuelo. Esta función se ajusta en la línea “Stick mode”
de la memoria actualmente activa en el menú “Basic
settings” (páginas 76 o 84):
El valor de este ajuste se puede utilizar por defecto
para futuros modelos en el menú general “General
Basic settings”, página 258.

Como se ha mencionado al principio, para una máxima
flexibilidad y para evitar errores de programación, los
controles del emisor 5 ... 16 por defecto no están
asignados a ningún canal, para los dos tipos de
modelo.
Esto significa que como norma general en el estado en
el cual se suministra el equipo solamente estos cuatro
servos 1 ... 4 se pueden controlar con los dos sticks,
mientras que los servos 5 ... max. 16 permanecen en
su posición neutra, sin poderse actuar sobre ellos. Si
ajustamos un nuevo modelo de helicóptero, en función
de la posición del CTRL. 6, el servo 6 también
responde en cierta manera a los controles. En ambos
tipos de modelos esta situación solamente cambia una
vez hemos llevado a cabo las apropiadas asignaciones
en el menú “Control adjust”.
Si una memoria con asignaciones nuevas debe
utilizarse, es NECESARIO que primero se relacione
con un receptor antes de poder desplazar los servos
que están conectados. Hay más información sobre esto
en el parágrafo Binding de las páginas 77 o 85.
Podemos encontrar una descripción de los pasos
básicos de programación para los modelos de aviones
en los ejemplos de programación que empiezan en la
página 268, para los modelos de helicópteros la
sección equivalente empieza en la página 308.
Las descripciones de los menús que siguen se hacen
en el orden cronológico de aparición en la lista
multifunción.
68

Selección de un modelo
Acceder al modelo 1 ... 80
Ya hemos explicado en las páginas 28 y 29 como
utilizar las teclas, y en la doble página anterior como
acceder a la lista Multifunción y como memorizar un
nuevo modelo.
Empezaremos por la descripción “normal” de los
diferentes puntos de los menús, en el orden definido
por el emisor. Por esta razón comenzaremos con el
menú ...
Model select
El emisor puede memorizar hasta 80 modelos
diferentes, incluyendo el ajuste de los cuatro trims
digitales. Los reglajes de los trims se memorizan
automáticamente de manera que los ajustes no se
pierden si entre tanto cambiamos de modelo. A la
derecha del nombre del modelo, cada línea con una
memoria ocupada muestra en el display un icono del
tipo de modelo seleccionado y el nombre del modelo
memorizado en el menú “Basic settings Model”
(páginas 76 o 84). El código, si lo hay, del receptor con
el binging hecho para esta memoria, aparece después
del nombre del modelo.
Con las flechas de dirección de la tecla izquierda o
derecha seleccionamos el menú “Model select”, y
pulsamos brevemente la tecla SET del pad de la
derecha.
Si aparece este mensaje, tenemos una conexión de
telemetría y el receptor está operativo. Debemos parar
el receptor.
Con las teclas ▲▼ de la izquierda o la derecha
seleccionamos de la lista la memoria que queramos, y
lo confirmamos con la tecla SET. Pulsando la tecla
ESC volveremos al menú precedente, sin cambiar de
modelo.
Notas:
Si, después de un cambio de modelo
aparece el aviso de gas demasiado alto,
(“Throttle too high”) el stick de mando del gas
C1 / paso o el limite del gas está demasiado
acelerado y hay que ponerlo al relentí.
Si al cambiar el modelo aparece el mensaje
...
... debemos comprobar los ajustes del
binding
Si al cambiar el modelo aparece el mensaje
...
... debemos comprobar los ajustes del
failsafe
Cuando la tensión de la batería de emisión
es demasiado baja no se permite un cambio
de modelo por razones de seguridad. En la
pantalla aparecerá el aviso siguiente:
69

Copia / Borrado
Borrado o copia de un modelo modelo
Copia de o a tarjeta SD
Copia de las fases de vuelo
Memorizar / cancelar cambios
Con las teclas ▲▼ de la izquierda o de la derecha
seleccionamos el submenú “Copy / Erase” ...
Seleccionamos el submenú “Erase model” con las
flechas
▲▼ de la derecha o la izquierda y pulsamos
brevemente la tecla
Seleccionamos el modelo que queremos suprimir con
las flechas
SET
.
▲▼
de la izquierda o de la derecha ...
No obstante, si se borra una memoria no activa, esta
aparecerá en el menú “Model select” como
free
.
Copia de un modelo modelo
Con las teclas ▲▼ de la izquierda o de la derecha
seleccionamos el submenú “Copy model model”, y
después pulsamos la tecla SET.
... y después pulsamos la tecla SET del pad de la
derecha.
Borrado de un modelo
... y pulsar SET. Por razones de seguridad en la
pantalla aparece el mensaje siguiente ...
Seleccionando NO interrumpimos el procedimiento y
volvemos a la pantalla anterior. Si seleccionamos YES
con la tecla ► de la derecha o la izquierda, y
confirmamos la selección con la tecla
queda borrado definitivamente.
SET
, el modelo
Si aparece este mensaje mostrado arriba, el módulo
HF todavía está activo. Paramos el módulo tal como se
describe en la página 80, y después, si el receptor
todavía está en marcha, también lo paramos. Debemos
hacer esto por razones de seguridad.
Escogemos el modelo a copiar con las teclas ▲▼ de la
izquierda o de la derecha ...
Atención:
SET
.
Este procedimiento es irreversible. Todos los datos de
esta memoria quedan definitivamente suprimidos.
Nota:
Si deseamos borrar el modelo que está en la pantalla
principal, inmediatamente después de la eliminación
debemos definir un nuevo tipo de modelo, avión o
helicóptero.
... y después pulsamos otra vez SET de la derecha
en la ventana “Copy to model”, para seleccionar la
memoria de destino con las teclas ▲▼ de la derecha o
de la izquierda, y lo confirmamos con
Alternativamente podemos interrumpir el procedimiento
ESC
con
contiene un modelo.
. Es posible sobrescribir una memoria que ya
70

Después de la confirmación con la tecla SET aparece
por razones de seguridad el siguiente mensaje:
Si seleccionamos NO interrumpiremos el procedimiento
y volveremos a la pantalla anterior. Si seleccionamos
YES con la tecla de la derecha o de la izquierda y
confirmamos la selección con la tecla SET el modelo
se copiará en la memoria escogida.
Nota:
Cuando copiamos un modelo, junto con los datos del
modelo se copian igualmente los datos del
procedimiento Binding, de manera que el conjunto de
recepción unido a una memoria en el modelo original,
pueda igualmente ser utilizado con la copia, sin tener
que efectuar un nuevo procedimiento de Binding.
Exportación a la SD
Con las teclas ▲▼ de la izquierda o la derecha
seleccionamos el submenú “Export to SD”, y después
pulsamos la tecla SET
Si aparece este mensaje mostrado arriba, el módulo
HF todavía está activo. Paramos el módulo tal como se
describe en la página 80, y después, si el receptor
todavía está en marcha, también lo paramos. Debemos
hacer esto por razones de seguridad.
Seleccionamos el modelo a exportar con las teclas ▲▼
de la izquierda o de la derecha ...
Después de haber confirmado la selección pulsando la
SET
tecla
seguridad:
, aparece la pantalla con el aviso de
71
Si seleccionamos NO interrumpiremos el procedimiento
y volveremos a la pantalla anterior. Si seleccionamos
YES con la tecla ► y confirmamos la selección con la
tecla SET el modelo se copiará en la tarjeta SD.
Notas:
Si aparece el mensaje ...
... en la pantalla en lugar de la selección del
modelo nos indica que no hay ninguna tarjeta SD
insertada, ver la página 23.
Cuando copiamos un modelo, junto con los
datos del modelo se copian igualmente los
datos del procedimiento Binding, de manera
que el conjunto de recepción unido a una
memoria en el modelo original, pueda
igualmente ser utilizado con la copia en el
MISMO emisor sin tener que efectuar un
nuevo procedimiento de Binding.
Un modelo exportado queda memorizado en
la tarjeta en la carpeta \\Models\mc-32
con la
extensión “a nombre del modelo.mdl” en el
caso de los aviones y “h nombre del
modelo.mdl” en el caso de un helicóptero. Si
exportamos un modelo sin nombre,
encontraremos los datos con la extensión “a
ó h NoName.mdl”
Si ya hay un fichero con el mismo nombre del
que queremos exportar, el primero será
automáticamente sobrescrito.
Hay algunos caracteres especiales utilizados
en el nombre del modelo que eventualmente
no podrán ser copiados en la tarjeta, que se
basa en sistemas de ficheros FAT o FAT 32,
y en la copia serán reemplazados por el
signo (~)

Importación desde la SD
Con las teclas ▲▼ de la izquierda o la derecha,
seleccionamos en el submenú “Import from SD”, y
pulsamos la tecla SET.
Si aparece este mensaje mostrado arriba, el módulo
HF todavía está activo. Paramos el módulo tal como se
describe en la página 80, y después, si el receptor
todavía está en marcha, también lo paramos. Debemos
hacer esto por razones de seguridad.
Seleccionamos el modelo a importar desde la tarjeta de
memoria SD con las teclas ▲▼ de la izquierda o la
derecha:
Nota:
La fecha de la exportación mostrada a la derecha de la
pantalla en cada línea de un modelo se muestra en el
formato “año / mes / día”
Después de pulsar de nuevo la tecla SET de la
derecha, se abre una nueva ventana “Import from SDCARD”, con las teclas ▲▼ de la izquierda o la derecha
seleccionamos la memoria de destino y la confirmamos
con la tecla SET, o interrumpimos el procedimiento
con la tecla ESC. Podemos sobrescribir una memoria
que ya está ocupada.
que el conjunto de recepción unido a una
memoria en el modelo original, pueda
igualmente ser utilizado con la copia en el
MISMO emisor sin tener que efectuar un
nuevo procedimiento de Binding.
Copia de una fase
Seleccionamos el submenú “Copy flight fase” con las
▲▼
Después de haber confirmado la selección pulsando la
tecla SET, aparece la pantalla con la pregunta de
seguridad:
Si seleccionamos NO interrumpiremos el procedimiento
y volveremos a la pantalla anterior. Si seleccionamos
YES y confirmamos la selección con la tecla
modelo se copiará en la memoria seleccionada.
SET
el
Notas:
Si aparece el mensaje ...
... en la pantalla en lugar de la selección del
modelo nos indica que no hay ninguna tarjeta SD
insertada, ver la página 23.
Cuando copiamos un modelo, junto con los
datos del modelo se copian igualmente los
datos del procedimiento Binding, de manera
flechas
pulsamos la tecla SET.
En el submenú “Copy flight phase” ...
... la fase de vuelo que queremos copiar (1 ... 8 para
aviones o 1 ... 7 para helicópteros) se selecciona con
las flechas del pad de la derecha o la izquierda y se
confirma con una breve pulsación de la tecla SET del
pad de la derecha La siguiente ventana que aparece es
...
del pad de la izquierda o la derecha y
72

En esta pantalla seleccionamos la destinación y la
confirmamos. Como se ha descrito anteriormente,
aparecerá una nueva pantalla de confirmación.
Memorización permanente de los cambios
Anulación de los cambios
Estos dos submenús permiten programar que los
cambios tengan copias de seguridad inmediatas o
anularlos (reset), y volver al estado en que estaban los
ajustes del modelo antes de hacer los cambios.
Si por el contrario, los cambios llevados a cabo con la
última copia o cambio de modelo han de cancelarse,
entonces seleccionamos la línea “Undo change”.
Después de una breve pulsación sobre la tecla central
SET del pad de la derecha, la pantalla de
confirmación aparece a continuación:
Si seleccionamos NO interrumpiremos el procedimiento
y volveremos a la pantalla anterior. Si seleccionamos
YES y confirmamos la selección con la tecla
modelo se copiará en la memoria seleccionada.
SET
el
Si aparece este mensaje mostrado arriba, el módulo
HF todavía está activo. Paramos el módulo tal como se
describe en la página 80, y después, si el receptor
todavía está en marcha, también lo paramos. Debemos
hacer esto por razones de seguridad.
Los datos sólo se guardan permanentemente con la
opción “Store change” o cambiando de un modelo a
otro en el menú “Model select”. Parando o poniendo en
marcha el emisor los cambios
permanentemente. Seleccionamos la línea apropiada y
pulsamos brevemente la tecla central SET del pad de
la derecha. La pregunta de seguridad para la
confirmación aparece con la siguiente pantalla:
Si seleccionamos NO interrumpiremos el procedimiento
y volveremos a la pantalla anterior. Si seleccionamos
YES y confirmamos la selección con la tecla SET el
modelo guardará los cambios permanentemente.
no
se memorizan
Si seleccionamos NO interrumpiremos el procedimiento
y volveremos a la pantalla anterior. Si seleccionamos
YES y confirmamos la selección con la tecla SET se
borrarán los últimos cambios.
Nota:
Cuando paramos el emisor, cualquier cambio que
hayamos hecho no se pierde, pero no se memoriza
permanentemente. Esto significa que si cancelamos los
cambios, hacemos un reset de la memoria al estado de
la última memorización permanente (o cambio de
modelo).
73

Supresión de menús
Eliminación de menús en la lista multifunción
Seleccionamos el menú “Suppress codes” con las
flechas ▲▼ del pad de la izquierda o la derecha ...
En el menú que aparece, podemos bloquear los
submenús que no necesitemos, o que no tengamos
que cambiar, para que no aparezcan en la lista
multifunción.
La función que queremos bloquear o anular la
seleccionamos con el pad de las flechas de la izquierda
o la derecha y cambiamos su estado con la tecla
central SET del pad de la derecha.
... y pulsamos brevemente la tecla SET del pad de
la derecha.
Esto reduce la apariencia de la lista multifunción
considerablemente, en algunos casos a solamente
pocos menús, lo que facilita la claridad de la selección
en la lista multifunción. Las funciones no están
desactivadas aunque estén ocultas. Simplemente no
aparecen en la lista. Lo que se bloquea es el acceso
directo a estas funciones.
Nota:
Si queremos renunciar al acceso-bloqueo de la lista
multifunción completa, eliminamos el menú “Code lock”
de la lista multifunción de forma que desaparece este
menú de precaución.
74

Supresión de modelos
Eliminación de ubicaciones de las memorias
Seleccionamos el menú “Suppress models” con las
fleclas ▲▼ del pad de la izquierda o la derecha ...
... y pulsamos brevemente la tecla
la derecha.
Los modelos en memoria que raramente utilizamos o
que queremos bloquear por otras razones se pueden
eliminar de la lista de la selección de modelos.
Seleccionamos los modelos con las flechas de la
izquierda o la derecha y cambiamos su estado
pulsando la tecla central SET del pad de la derecha.
La memoria del modelo que queda “rayada” no
aparecerá más en el menú “Model select”.
SET
del pad de
75

Ajustes básicos
Ajustes básicos para modelos de aviones
Antes de empezar la programación de los parámetros
propiamente dichos, hay algunos reglajes de base
concernientes a la memoria que acabamos de activar
que hay que efectuar. Con las flechas de dirección de
la izquierda o la derecha seleccionamos el menú “Base
setup model” ...
... y después pulsar SET del pad de la derecha.
Nombre del modelo
Modo de pilotaje
Seleccionamos el carácter que queramos con las
teclas de dirección de la izquierda. Pulsando la tecla
►
del pad de la derecha o la tecla central SET
pasamos al carácter siguiente que queremos utilizar. Si
pulsamos simultáneamente ▲▼ o ◄ ► del pad de la
derecha (CLEAR) podemos colocar un espacio
entre dos caracteres.
Podemos movernos a la posición de cualquier carácter
dentro del campo con las teclas
Pulsando la tecla central
volvemos a la anterior página del menú.
El nombre memorizado aparece en el display básico
del menú “Model select” y en los submenús del menú
“Copy / Erase”.
Info
◄ ►
de la derecha.
ESC
de la izquierda
Hay cuatro modos diferentes de atribuir a los dos sticks
las funciones de mando de los alerones, de la
profundidad, de la dirección así como del motor /
aerofrenos de un modelo de avión. El modo a utilizar
depende solo de las preferencias del piloto.
Con las teclas ▲▼ de la izquierda o de la derecha
seleccionamos la línea “Stick mode”. El campo
seleccionado queda encuadrado:
Pasamos a la siguiente pantalla pulsando la tecla
SET del pad de la derecha. Esto abre la pantalla
donde podemos seleccionar los caracteres para
configurar el nombre del modelo. Podemos entrar
hasta un máximo de 13 caracteres para el nombre.
Cada modelo puede tener una nota de información
suplementaria de hasta 12 caracteres (máximo). Para
entrar esta nota utilizamos el mismo procedimiento
descrito para crear el nombre del modelo. Esta nota de
información aparece suplementariamente en el display
básico del menú “Model select” y en los submenús del
menú “Copy / Erase”.
76
Pulsamos brevemente la tecla SET. El modo
escogido aparece entonces sombreado. Con las teclas
de la derecha podemos escoger entre los modos 1 a 4.
Si pulsamos simultáneamente ▲▼ o ◄ ► de la
derecha (CLEAR) volvemos al modo de pilotaje “1”
Una nueva presión de la tecla SET desactiva de
nuevo el campo de selección, de manera que podamos
pasar a otra línea.

Módulo
El emisor
origen. Adicionalmente al módulo original, hay un
conector para un módulo HF externo bajo las tapas
frontales del emisor (ver la página 25) y la conmutación
a este módulo externo ha de hacerse a través del
software. Para ello usamos las teclas del pad de la
derecha o la izquierda para desplazar la casilla
encuadrada hasta el campo de selección del “Module”
que se encuentra encima del campo “SEL”.
HoTT
Los receptores
exclusivamente a un modelo (memoria) de un emisor
Graupner
procedimiento se llama “Binding”, y solamente hay que
hacerlo una vez para todo nuevo conjunto receptor /
modelo.
mc-32
HoTT para poder comunicarse. Este
equipa un módulo HoTT HF de
Graupner
HoTT deben estar asignados,
Nota importante:
Durante el procedimiento Binding hay que
comprobar siempre que la antena del emisor
esté suficientemente alejada de las antenas
del receptor. A 1 metro de distancia no hay
ningún riesgo de tener problemas. Si
estamos demasiado cerca, el canal de
retorno de las informaciones corre el peligro
de saturarse con las consecuentes
disfunciones.
Cuando hacemos el binding a receptores
posteriores, cualquier receptor en marcha y
que ya tenga el binding hecho con el emisor,
entrará en el modo de Fail-Safe durante el
periodo de “binding”.
Asignación (Binding) de varios receptores por modelo
En caso de necesidad podemos asignar varios
receptores a un solo y mismo modelo. Los programas
mc-32
de la
manejar hasta un máximo de cuatro receptores
directamente y de dividir los 16 canales de control
entre estos cuatro receptores. Encontraremos más
detalles más adelante en esta sección. El
procedimiento de asignar los receptores se inicia
haciendo el binding individual tal como de escribe a
continuación.
Durante la utilización solamente uno de los receptores
será el que enviará datos de telemetría al emisor, es el
que está activado en la línea “TELEMETRY RCV” del
menú “Telemetry”. Por ejemplo:
Será sobre este receptor que tendremos que conectar
los sensores y captadores telemétricos del modelo,
dado que solo el receptor asignado en esta línea es
capaz de transmitir los datos de telemetría por el canal
de retorno. El segundo receptor, y los otros, funcionan
en paralelo respecto al último asignado al emisor, de
manera independiente, en modo esclavo, con el canal
de retorno cortado.
HoTT tienen la posibilidad potencial de
Binding entre emisor - receptor
Con las flechas de dirección ▲▼ de los pads de la
izquierda o la derecha vamos a la línea “Module”. El
recuadro se posicionará por defecto en la columna del
siguiente canal de binding libre. Por ejemplo tal como
se muestra en la siguiente figura, escogemos “BD2”, ya
que el canal designado como “BD1” en la línea inferior
de la pantalla ya está usado por defecto para el
receptor que viene de origen con el set.
Ahora alimentamos el receptor. El LED rojo del
receptor parpadea.
Pulsamos y mantenemos pulsada la tecla
receptor hasta que el LED, que continuará
parpadeando en rojo durante aprox. 3 segundos,
después se pondrá a parpadear durante también
aproximadamente 3 segundos en rojo / verde. Ahora
podemos soltar la tecla SET. Mientras el receptor
parpadee en rojo / verde se encuentra en modo de
Binding.
Durante estos 3 segundos lanzamos el procedimiento
de binding propiamente dicho del receptor a la
memoria del modelo actual pulsando brevemente la
tecla SET de la derecha. En ese momento aparece
en la pantalla la palabra “BINDING”, que indica la
duración del proceso de binding.
SE T
del
77

Si al cabo de 10 segundos, el LED del receptor, que
mientras tanto ha pasado de nuevo a rojo parpadeante,
se apaga y se ilumina de nuevo en verde, el
procedimiento de Binding se ha desarrollado
correctamente. Nuestro conjunto modelo / receptor
está actualmente operativo. A partir de ahora la
pantalla muestra “bind” (binding) en lugar de “n/a” (sin
binding).
Si por el contrario, el Led rojo del receptor parpadea
más de 10 segundos, el procedimiento de Binding ha
fallado. En este caso la pantalla continua mostrando el
estado de “n/a”. Si esto ocurre, probar de cambiar la
posición de las antenas y repetir el proceso completo.
Binding de nuevos receptores
Supongamos que el canal de binding que hemos
escogido ya tiene asignado un receptor (esto se indica
porque en el status pone “bind”).
Después de inicializar el proceso de RF bind, la
pantalla en lugar de mostrar la notificación “BINDING”,
muestra el siguiente mensaje:
Paramos el módulo HF tal como se describe en la
sección “RF module”. Después volvemos de nuevo a la
línea “RF BIND” y reiniciamos el proceso para hacer el
binding tal como se ha descrito en la página anterior.
Alternativamente podemos parar brevemente el emisor,
y después de volver a ponerlo en marcha de nuevo,
responder a la ventana de aviso que aparece ...
... con “OFF” ...
... y confirmamos la selección pulsando brevemente la
tecla central SET del pad de la derecha. Desde la
pantalla principal volvemos de nuevo a la línea
“Module” del menú “Basic settings, model” y
reiniciamos el proceso del binding.
78
Disolviendo un binding
Procedemos tal como se ha descrito arriba para iniciar
el proceso de binding pero SIN primero poner el
receptor en disposición de binding.
EXT.PPM
Nota importante:
Con la activación del valor del campo que
describiremos a continuación, cualquier relación de
Binding que se haya efectuado en la memoria activa se
perderá.
Activamos el primer valor del campo en la línea
“Module” pulsando la tecla central SET del pad de la
derecha, y usamos las teclas de selección para
seleccionar “EXT.PPM” en lugar de “HoTT”.
Paralelamente a la selección de “EXT.PPM”, se deben
reemplazar los valores de otros cuatro campos por el
tipo de modulación pre-seleccionada en la línea “DSC
Output”, ver la página 81.
Este cambio también suprime las líneas de las
opciones (descritas más abajo): “HoTT”, “Rcv Ch Map”,
“RF module” y “RF range test” y, en el display básico
aparecerá “PPM” en lugar de “HoTT”.

Cambio del mapping del receptor
Como hemos mencionado en la introducción de la
sección de binding de los receptores, la
HoTT nos ofrece la posibilidad de dividir libremente los
controles del emisor
los 16 controles de los canales entre
A esta redistribución se la conoce como “mapping” o
“channel mapping” (correlación de canales).
Seleccionamos el receptor que tenemos que “mapear”
con las flechas de los pads de la derecha o la izquierda
y pulsamos brevemente la tecla central SET del pad
de la derecha.
Channrel mapping dentro del receptor
La función análoga la encontramos en el menú de
“Telemetry” de la página 232, descrita como “Channel
mapping”, es muy simple usar este menú para distribuir
libremente los controles de los canales (inputs) sobre
los outputs (conexiones de los servos) en el receptor
que ya tiene hecho el binding especificado en la
columna BD1.
Después de seleccionar el
flechas del pad de la derecha o la izquierda, el
correspondiente campo de input quedará encuadrado.
dentro de un receptor
cuatro receptores
output
deseado con las
mc-32
y distribuir
.
Pulsar brevemente la tecla central SET del pad de la
derecha. El ajuste actual se muestra en sombreado.
Ahora seleccionamos el deseado input de canal (=
transmitter output, ver la página 218) con las teclas del
pad de la izquierda o la derecha.
Nota:
El número de líneas disponible en la lista (outputs)
corresponde al máximo número de servos que se
pueden conectar al receptor que estamos usando.
PERO ATENCIÓN: Si, por ejemplo, hemos
especificado “2AL” en la línea “Aile/flaps” del menú
“Model type”, el emisor ha colocado la
control 2 (alerones)
izquierdo en
inputs (en el receptor) en este caso serán los canales 2
y 5 y se asignarán en consecuencia, ver el ejemplo
siguiente.
para los alerones derecho e
los canales 2 y 5.
Los correspondientes
función de
Ejemplos:
Quizás necesitemos controlar cada alerón de
un modelo grande con dos o más servos.
Asignamos cada uno de los outputs
apropiados (conexiones de los servos) al
mismo input (control del canal). En este caso
tenemos que dar los inputs correctos para los
alerones de la izquierda o la derecha (2 y 5).
Quizás necesitemos controlar la dirección de
un modelo grande con dos o más servos.
Asignamos cada una de los outputs
apropiados (conexiones de los servos) al
mismo input (control del canal). En este caso,
por defecto el canal de la dirección (4), ver la
figura inferior de la izquierda.
Nota importante:
También podemos usar la opción de la
mc-32
HoTT
“Tx.output swap” para hacer el mapping de los 16
controles del emisor libremente, de manera similar a la
anterior para signar las funciones de los controles.
79
Para evitar confusiones, recomendamos
encarecidamente que solamente se utilice uno de los
dos sistemas.
Asignación de canales en otros receptores
Como ya se ha mencionado, la opción del “Receiver
channel mapping” se puede usar para distribuir
libremente los 16 canales de la
cuatro receptores,
las salidas (conexiones servo), así como el número
máximo de líneas disponibles (salidas) se
corresponderá con el número máximo de conexiones
de los servos disponibles en el receptor dado.
mediante el cual la numeración de
mc-32
HoTT entre
output
Después de la selección del
las flechas del pad de la izquierda o la derecha, el
campo correspondiente queda encuadrado. Pulsar la
tecla central SET del pad de la derecha. El ajuste
actual se muestra en sombreado. Ahora
seleccionamos el input del canal que queramos con las
flechas del pad de la derecha. Podemos ver el
siguiente ejemplo.
que queramos con

Nota:
El número de líneas disponibles (outputs) corresponde
al máximo número de servos que podemos conectar al
receptor.
Módulo HF
En esta línea del menú podemos, eventualmente,
mientras el emisor esté en marcha, cortar y reactivar
manualmente la emisión de HF, para, por ejemplo,
consumir menos, durante la demostración de
programación de un modelo.
Si paramos el emisor con la emisión de HF parada, al
volver a poner en marcha el emisor esta se pondrá
también activa.
Con las teclas ▲▼ de la izquierda o la derecha,
vamos a la línea “RF transmit” y activamos la ventana
pulsando sobre la tecla SET de la derecha:
Con las teclas de la derecha podemos selecciona OFF
o ON. Una nueva presión sobre la tecla central
de la derecha permite finalizar el ajuste.
Prueba de distancia
La prueba de distancia integrada en el programa
reduce la potencia de emisión de tal manera que
podemos efectuar una prueba de distancia en menos
de 100 metros.
Efectuar la prueba de distancia del sistema
HoTT según las instrucciones siguientes. Para esta
prueba necesitaremos que un compañero nos ayude.
Graupner
SET
1. Montar el receptor, que ha estado asignado
al emisor, en el modelo, según las
instrucciones de montaje.
2. Poner en marcha el emisor y esperar que el
LED verde del receptor se encienda. Ahora
podremos observar el desplazamiento de los
servos.
3. Poner el modelo en el suelo sobre un sitio
plano (cemento, hierba corta o tierra) de
manera que las antenas del receptor estén al
menos a 15 cm por encima del suelo. A lo
mejor para esta prueba será necesario elevar
el modelo.
4. Mantener el emisor a la altura de las caderas,
sin tenerla pegada al cuerpo. No apuntar
directamente al modelo con la antena, pero
ponerla de manera que esté en la vertical del
modelo durante la utilización.
5. Con las teclas ▲▼ del pad de la izquierda o
la derecha vamos a la línea “RF Range test”
y empezar el modo de prueba de distancia
pulsando la tecla central SET de la
derecha:
El hecho de iniciar la prueba de distancia reduce
la potencia de emisión del emisor de manera
significativa y el LED a la derecha del interruptor
de puesta en marcha del emisor, marcado como
RF se pone a parpadear. Al mismo tiempo, la
cuenta atrás se activa en la pantalla, y se emite
una señal acústica de doble tono cada 5
segundos.
Cinco segundos antes del fin de la prueba, se
emite un triple tono cada segundo. Al final de los
99 segundos que dura la prueba de distancia el
emisor retoma su plena potencia de emisión y el
Led de la derecha del interruptor de puesta en
marcha queda iluminado permanentemente.
6. Durante este lapso de tiempo alejarse del
modelo desplazando los sticks. Si
constatamos una interrupción de la señal,
dentro del límite de los 50 metros, probar de
reproducirlo.
7. Hay que hacer una verificación
suplementaria: si el modelo está equipado de
motor, poner en marcha el motor, para
asegurarnos que no crea interferencias.
8. Continuamos alejándonos del modelo hasta
que ya no sea posible un control perfecto.
9. En este punto, esperar a que acabe el tiempo
de prueba, siempre con el modelo listo. Una
vez el tiempo ha acabado, el modelo debe
obedecer de nuevo nuestras ordenes. Si no
es el caso en el 100%, hay que contactar con
un servicio de asistencia Graupner.
10. Antes de cada vuelo hacer esta prueba de
distancia y simular todos los desplazamientos
de los servos susceptibles de intervenir en
vuelo. Para una evolución segura del modelo,
la prueba debe hacerse al menos a 50
metros.
¡Atención!
No hacer nunca una prueba de distancia en vuelo
Salida DSC
Si es necesario, usar las flechas ▲▼ del pad de la
izquierda o la derecha para colocarnos en la línea
“DSC output” del menú y la activamos pulsando la tecla
central SET del pad de la derecha.
80

Ahora podemos usar las flechas de la derecha para
escoger entre cuatro tipos de modulación “PPM10”,
“PPM16”, “PPM18” y “PPM24”. Completamos la
entrada pulsando la tecla central SET de la derecha.
Esta elección tiene influencia directa en el máximo
número de controles que podemos utilizar con el DSC
(Direct control servo), y que también podemos utilizar
para un simulador o para el sistema trainer. Con el
“PPM10” seleccionado podemos controlar los canales
1 ...5, con el “PPM16” los canales 1 ... 8, con el
“PPM18” los canales 1 ... 9, y con el “PPM24” los
canales 1 ...12.
Motor cuttoff (Thr. CutOff)
Nota:
Esta línea del menú queda suprimida si hemos
seleccionado en la línea “Motor on C1” “None” o
“None/inv”.
En función de la elección efectuada en la línea “Motor
on C1”, con el relentí hacia delante o hacia atrás, en el
menú “Model type” podemos asignar a esta línea la
posición de un interruptor para parar el motor o poner
al mínimo un variador de velocidad. Esta opción no
solamente reemplaza la función del “Cut-off trim”
conocida en los otros emisores Graupner mc y mx, si
no que además al mismo tiempo sirve como una
función OFF de emergencia, cosa que no era posible
con la función “Cut-off trim”.
La posición OFF del motor (o relentí) se puede
preseleccionar directamente en la columna de la
izquierda a través del campo “SEL”. El valor más
apropiado para este campo se establece a través de
pruebas.
El variador de velocidad o el servo del motor solamente
irán a la posición seleccionada cuando está por debajo
de la posición normal y el interruptor está activado.
Esto se hace ajustando la posición deseada del servo
(valor del umbral) en la columna del medio,
directamente encima del campo “STO” y seleccionando
el interruptor ON/OFF apropiado en la columna de la
derecha.
Si el porcentaje del valor especificado en la
columna del medio es
actual del servo, es decir, la posición actual
del servo está por
cambio se produce en el momento en que el
interruptor se coloca en la posición ON.
Si el porcentaje del valor especificado en la
columna del medio es
actual del servo, es decir, la posición actual
del servo está por
inicialmente el variador de velocidad reduce
la velocidad del motor o el servo cierra el
carburador del motor sólo en la medida
determinada por el valor en la columna de la
izquierda tan pronto como la posición del
servo sobrepasa el umbral (max. 150%),
después que el interruptor ha cambiado por
encima de la posición ON. El variador de
velocidad o el servo del motor permanece en
esta posición de cut-off solamente hasta que
el interruptor seleccionado cambia de nuevo
por encima con un movimiento por encima
del umbral del servo o el variador de
velocidad con el stick.
De origen, los ajustes son de –100% en la columna de
la izquierda para la posición de cut-off del servo del
motor, y +150% para la posición del stick del motor
ajustada en la columna del centro.
superior
debajo
del umbral, el
inferior
a la posición
encima
del umbral,
a la posición
Procedimiento de Programación
Para cambiar la posición preseleccionada de la
posición del “cut-off” del servo del motor pulsamos la
tecla central
actual queda sombreado. Ahora ajustamos un valor
con las flechas de la derecha, en el cual el motor se
parará de manera fiable sin poner en riesgo de rotura
el servo del control del motor. Un valor bastante común
es de –125%.
El valor elevado prerregistrado de la columna del
medio permite asegurar que el motor, en la carrera
máxima del stick de mando, pueda pararse de manera
segura con un interruptor que tenemos que asignar en
la columna de la derecha.
No obstante, si queremos fijar un valor más bajo, con el
cual el servo del motor o el variador de velocidad con el
interruptor cerrado cambie a la posición cut-off, reducir
el recorrido del servo de +150% colocando el servo del
motor o variador de velocidad en la posición que
queramos con el stick del motor / paso en la posición
que queramos fijar, y pulsamos la tecla central SET
del pad de la derecha:
SET
del pad de la derecha. El ajuste
81

Finalmente, usamos la columna de la derecha para
especificar el interruptor con el cual podamos parar el
motor directamente (en caso de emergencia), o
activarlo después del umbral.
Notas:
Asegurarse de que no se pueda romper la
mecánica del servo cuando se activa el cutoff
Podemos conseguir un punto de
conmutación de más de +100% aumentando
momentáneamente la carrera del servo 1
más allá del 100% en el menú “Servo
adjustment”, y después de memorizarlo,
volver al valor de origen.
Power-on warning
Cuando asignamos en esta línea un interruptor,
interruptor de control o interruptor lógico, tal como se
ha descrito en la sección “Asignación de los
interruptores y controles del emisor” de la página 56, se
avisará sobre la posición del respectivo interruptor o
control y aparecerá el correspondiente aviso en el
display básico bajo algunas condiciones. En
combinación con interruptores lógicos, prácticamente
cualquier interruptor ajustado puede mostrarse al poner
en marcha el emisor.
Auto trim
La opción “Auto trim” hace posible trimar el modelo
rápidamente y sin complicaciones, por ejemplo en el
contexto del primer vuelo, o después de una gran
reparación, etc.
Por lo general cuando ponemos el modelo en vuelo
durante el primer test, debemos corregirlo con los
sticks hasta alcanzar la estabilidad de vuelo. Esto
implica trabajar con los trims durante el vuelo para
poder volver a “liberar” los sticks. Para esto
precisamente podemos utilizar la función del “Auto
trim”.
Una vez hemos alcanzado la altitud de vuelo deseada
a través de las funciones de control 2 ... 4 (alerones,
82
profundidad y dirección), el interruptor asignado al
“Auto trim” – preferentemente uno de los interruptores
momentáneos montado de origen en el panel de
interruptores – lo movemos UNA vez. Una vez se
activa el interruptor, los puntos offset de los puntos
neutros de los sticks se adoptan como valores de trim.
No obstante los valores no se memorizan al instante,
tardan aproximadamente 1 segundo.
Durante este periodo después de que el interruptor se
haya activado, las posiciones de los sticks se deben
volver a la posición normal.
Notas:
Debido a la complexa interacción inherente a
los modelos multi flaps, la función de
Autotrim para los alerones queda
desactivada si se selecciona “2AL 2FL” y
“2AL 4FL” o “4AL 2FL” y “4AL 4FL” en la
línea “Aileron / flpas” del menú “Model type”.
Asegurarse de que durante la asignación del
interruptor, los sticks de alerones,
profundidad y dirección están en posición
neutra, ya que si no los offsets del punto
neutro se adoptarán como valores de trim en
la memoria del trim.
Dado que CADA activación del interruptor del
Auto trim tiene un efecto acumulativo,
después de concluir el proceso, es mejor
desactivar el interruptor utilizado por razones
de seguridad. Si no hay el riesgo de poder
activar la función del auto trim
accidentalmente.
Señal Ext. PPM

Algunos módulos HF que pueden conectarse al emisor
a través de los conectores externos (página 25) o
internos (página 26) requieren de una señal de input
invertida. Asegurarse de seguir las instrucciones de
instalación.
La elección de “inverted” en lugar de la que viene por
defecto “normal” permite la adecuada adaptación de la
señal PPM suministrada.
Si pulsamos simultáneamente
la derecha (CLEAR) volvemos al valor de origen
“normal”.
Auto timer reset
▲▼ o ◄ ►
del pad de
El ajuste “si / no” en esta línea determina si todos los
cronómetros del emisor (excepto el “Model time” y
“Transmitter operating time”) se colocan
automáticamente a los valores de origen cuando
ponemos en marcha el emisor.
Si pulsamos simultáneamente
la derecha (
CLEAR
) volvemos al valor de origen “si”.
▲▼ o ◄ ►
del pad de
83

Ajustes básicos
Ajustes básicos para modelos de helicópteros
Antes de empezar la programación de los parámetros
propiamente dichos, hay algunos reglajes de base
concernientes a la memoria que acabamos de activar
que hay que efectuar. Con las flechas de dirección de
la izquierda o la derecha seleccionamos el menú “Base
setup model” ...
y después pulsar SET del pad de la derecha.
Nombre del modelo
Modo de pilotaje
Seleccionamos el carácter que queramos con las
teclas de dirección de la izquierda. Pulsando la tecla
► del pad de la derecha o la tecla central SET
pasamos al carácter siguiente que queremos utilizar. Si
pulsamos simultáneamente
derecha (
entre dos caracteres.
Podemos movernos a la posición de cualquier carácter
dentro del campo con las teclas
Pulsando la tecla central ESC de la izquierda
volvemos a la anterior página del menú.
El nombre memorizado aparece en el display básico
del menú “Model select” y en los submenús del menú
“Copy / Erase”.
Info
CLEAR
▲▼ o ◄ ►
) podemos colocar un espacio
del pad de la
◄ ►
de la derecha.
Hay cuatro modos diferentes de atribuir a los dos sticks
las funciones de mando del roll, nick, rotor de cola y
motor / paso colectivo de un modelo de helicóptero. El
modo a utilizar depende sólo de las preferencias del
piloto.
Con las teclas
seleccionamos la línea “Stick mode”. El campo
seleccionado queda encuadrado:
▲▼
de la derecha o de la izquierda
Pasamos a la siguiente pantalla pulsando la tecla
SET del pad de la derecha. Esto abre la pantalla
donde podemos seleccionar los caracteres para
configurar el nombre del modelo. Podemos entrar
hasta un máximo de 13 caracteres.
Cada modelo puede tener una nota de información
suplementaria de hasta 12 caracteres (máximo). Para
entrar esta nota utilizamos el mismo procedimiento
descrito para crear el nombre del modelo. Esta nota de
información aparece suplementariamente en el display
básico del menú “Model select” y en los submenús del
menú “Copy / Erase”.
Pulsar brevemente la tecla SET, y el modo escogido
aparece entonces sombreado. Usar ahora las teclas de
la derecha para escoger entre los modos 1 a 4.
Pulsando simultáneamente sobre ▲▼ o ◄► de la
derecha (CLEAR) podemos volver al modo de stick
“1”.
Una nueva presión sobre la tecla SET desactiva de
nuevo el campo de selección, para poder pasar a otra
línea.
84

Módulo
El emisor mc-32 equipa un módulo HoTT HF de
origen. Adicionalmente al módulo original, hay un
conector para un módulo HF externo bajo las tapas
frontales del emisor (ver la página 25) y la conmutación
a este módulo externo ha de hacerse a través del
software. Para ello usamos las teclas del pad de la
derecha o la izquierda para desplazar la casilla
encuadrada hasta el campo de selección del “Module”
que se encuentra encima del campo “SEL”.
HoTT
Los receptores
exclusivamente a un modelo (memoria) de un emisor
Graupner
procedimiento se llama Binding, y solamente hay que
hacerlo una sola vez para todo nuevo conjunto receptor
/ modelo.
Graupner
HoTT para poder comunicarse. Este
HoTT deben estar asignados,
Nota importante:
Durante el procedimiento Binding hay que
comprobar siempre que la antena del emisor
esté suficientemente alejada de las antenas
del receptor. A 1 metro de distancia no hay
ningún riesgo de tener problemas. Si
estamos demasiado cerca, el canal de
retorno de las informaciones corre el peligro
de saturarse con las consecuentes
disfunciones.
Cuando hacemos el binding a receptores
posteriores, cualquier receptor en marcha y
que ya tenga el binding hecho con el emisor,
entrará en el modo de Fail-Safe durante el
periodo de “binding”.
Asignación (Binding) de varios receptores por modelo
En caso de necesidad podemos asignar varios
receptores a un solo y mismo modelo. Los programas
mc-32
de la
manejar hasta un máximo de cuatro receptores
directamente y de dividir los 16 canales de control
entre estos cuatro receptores. Encontraremos más
detalles más adelante en esta sección. El
procedimiento de asignar los receptores se inicia
haciendo el binding individual tal como de escribe a
continuación.
Durante la utilización solamente uno de los receptores
será el que enviará datos de telemetría al emisor, es el
que está activado en la línea “TELEMETRY RCV” del
menú “Telemetry”. Por ejemplo:
Será sobre este receptor que tendremos que conectar
los sensores y captadores telemétricos del modelo
dado que sólo el receptor asignado en esta línea es
capaz de transmitir los datos de telemetría por el canal
de retorno. El segundo receptor, y los otros funcionan
en paralelo respecto al último asignado al emisor, de
manera independiente, en modo esclavo, con el canal
de retorno cortado.
HoTT tienen la posibilidad potencial de
Binding entre emisor - receptor
Con las flechas de dirección ▲▼ de los pads de la
izquierda o la derecha vamos a la línea “Module”. El
recuadro se posicionará por defecto en la columna del
siguiente canal de binding libre. Por ejemplo tal como
se muestra en la siguiente figura, escogemos “BD2” ya
que el canal designado como “BD1” en la línea inferior
de la pantalla ya está usado por defecto para el
receptor que viene de origen con el set.
Ahora alimentamos el receptor. El LED rojo del
receptor parpadea.
Pulsamos y mantenemos pulsada la tecla SET del
receptor hasta que el LED, que continuará
parpadeando en rojo durante aprox. 3 segundos, se
ponga a parpadear durante también aproximadamente
3 segundos en rojo / verde. Ahora podemos soltar la
tecla SE T. Mientras el receptor parpadee en rojo /
verde se encuentra en modo de Binding.
Durante estos 3 segundos lanzamos el procedimiento
de binding propiamente dicho del receptor a la
memoria del modelo actual pulsando brevemente la
tecla SET de la derecha. En ese momento aparece
en la pantalla la palabra “BINDING”, que indica la
duración del proceso de binding.
Si al cabo de 10 segundos, el LED del receptor, que
mientras tanto ha pasado de nuevo a rojo parpadeante,
se apaga y se ilumina de nuevo en verde, el
procedimiento de Binding se ha desarrollado
85

correctamente. Nuestro conjunto modelo / receptor
está actualmente operativo. A partir de ahora la
pantalla muestra “bind” (binding) en lugar de “n/a” (sin
binding).
Si por el contrario, el Led rojo del receptor parpadea
más de 10 segundos, el procedimiento de Binding ha
fallado. En este caso la pantalla continua mostrando el
estado de “n/a”. Si esto ocurre, probar de cambiar la
posición de las antenas y repetir el proceso completo.
Binding de nuevos receptores
Supongamos que el canal de binding que hemos
escogido ya tiene asignado un receptor (esto se indica
porque en el status pone “bind”).
Después de inicializar el proceso de RF bind, la
pantalla en lugar de mostrar la notificación “BINDING”,
muestra el siguiente mensaje:
Paramos el módulo HF tal como se describe en la
sección “RF module”. Después volvemos de nuevo a la
línea “RF BIND” y reiniciamos el proceso para hacer el
binding tal como se ha descrito en la página anterior.
Alternativamente podemos parar brevemente el emisor,
y después de volver a ponerlo en marcha de nuevo,
responder a la ventana de aviso que aparece ...
... con “OFF” ...
... y confirmamos la selección pulsando brevemente la
tecla central SET del pad de la derecha. Desde la
pantalla principal volvemos de nuevo a la línea
“Module” del menú “Basic settings, model” y
reiniciamos el proceso del binding.
Disolviendo un binding
Procedemos tal como se ha descrito arriba para iniciar
el proceso de binding pero SIN primero poner el
receptor en disposición de binding.
EXT.PPM
Nota importante:
Con la activación del valor del campo que
describiremos a continuación, cualquier relación de
Binding que se haya efectuado en la memoria activa se
perderá.
Activamos el primer valor del campo en la línea
“Module” pulsando la tecla central SET del pad de la
derecha, y usamos las teclas de selección para
seleccionar “EXT.PPM” en lugar de “HoTT”.
Paralelamente a la selección de “EXT.PPM”, se deben
reemplazar los valores de cuatro otros campos por el
tipo de modulación pre-seleccionada en la línea “DSC
Output”, ver la página 88.
Este cambio también suprime las líneas de las
opciones (descritas más abajo): “HoTT”, “Rcv Ch Map”,
“RF module” y “RF range test” y, en el display básico
aparecerá “PPM” en lugar de “HoTT”.
Cambio del mapping del receptor
Como hemos mencionado en la introducción de la
sección de binding de los receptores, la mc-32
HoTT nos ofrece la posibilidad de dividir libremente los
controles del emisor
los 12 controles de los canales entre
A esta redistribución se la conoce como “mapping” o
“channel mapping” (correlación de canales).
Seleccionamos el receptor que tenemos que “mapear”
con las flechas de los pads de la derecha o la izquierda
dentro de un receptor
dos receptores
y distribuir
.
86

y pulsamos brevemente la tecla central SET del pad
de la derecha.
Channrel mapping dentro del receptor
La función análoga la encontramos en el menú de
“Telemetry” de la página 212, descrita como “Channel
mapping”, es muy simple usar este menú para distribuir
libremente los 12 controles de los canales (inputs)
sobre los outputs (conexiones de los servos) en el
receptor que ya tiene hecho el binding especificado en
la columna BD1.
Después de seleccionar el output deseado con las
flechas del pad de la derecha o la izquierda, el
correspondiente campo de input quedará encuadrado.
Pulsar brevemente la tecla central SET del pad de la
derecha. El ajuste actual se muestra en sombreado.
Ahora seleccionamos el deseado input de canal (=
transmitter output, ver la página 218) con las teclas del
pad de la izquierda o la derecha.
Nota:
El número de líneas disponible en la lista (outputs)
corresponde al máximo número de servos que se
pueden conectar al receptor que estamos usando.
PERO ATENCIÓN: Si queremos hacer funcionar dos
servos con un solo control, por ejemplo, el control 2 del
emisor (roll) dividido en dos canales 1 & 2 para los
servos del roll de la izquierda y la derecha,
seleccionamos “3Sv(2Roll)” en el menú “Heli Type” y
haciendo el maping correspondiente en los outputs del
emisor 1 & 2 (= inputs del receptor).
Nota importante:
También podemos usar la opción de la mc-32 HoTT
“Tx.output swap” para hacer el mapping de los 16
controles del emisor libremente, de manera similar a la
anterior para signar las funciones de los controles.
Para evitar confusiones, recomendamos
encarecidamente que solamente se utilice uno de los
dos sistemas.
Asignación de canales en otros receptores
Como ya se ha mencionado, la opción del “Receiver
channel mapping” se puede usar para distribuir
libremente los 16 canales de la
cuatro receptores,
las salidas (conexiones servo), así como el número
máximo de líneas disponibles (salidas) se
corresponderá con el número máximo de conexiones
de los servos disponibles en el receptor dado.
mediante el cual la numeración de
mc-32
HoTT entre
output
Después de la selección del
las flechas del pad de la izquierda o la derecha, el
campo correspondiente queda encuadrado. Pulsar la
tecla central SET del pad de la derecha. El ajuste
actual se muestra en sombreado. Ahora
seleccionamos el input del canal que queramos con las
flechas del pad de la derecha. Podemos ver el
siguiente ejemplo.
que queramos con
87
Nota:
El número de líneas disponibles (outputs) corresponde
al máximo número de servos que podemos conectar al
receptor.
Módulo HF
En esta línea del menú podemos eventualmente,
mientras el emisor esté en marcha, cortar y reactivar
manualmente la emisión de HF, para, por ejemplo,
consumir menos, durante la demostración de
programación de un modelo.
Si paramos el emisor con la emisión de HF parada, al
volver a poner en marcha el emisor esta se pondrá
también activa.
Con las teclas ▲▼ del pad de la izquierda o la
derecha, vamos a la línea “RF transmit” y activamos la
ventana pulsando sobre la tecla SET de la derecha:
Con las teclas de la derecha podemos selecciona OFF
o ON. Una nueva presión sobre la tecla central SET
de la derecha permite finalizar el ajuste.

Prueba de distancia
La prueba de distancia integrada en el programa
reduce la potencia de emisión de tal manera que
podemos efectuar una prueba de distancia en menos
de 50 metros.
Efectuar la prueba de distancia del sistema
HoTT según las instrucciones siguientes. Para esta
prueba necesitaremos que un compañero nos ayude.
1. Montar el receptor, que ha estado asignado
al emisor, en el modelo, según las
instrucciones de montaje.
2. Poner en marcha el emisor y esperar que el
LED verde del receptor se encienda. Ahora
podremos observar el desplazamiento de los
servos.
3. Poner el modelo en el suelo sobre un sitio
plano (cemento, hierba corta o tierra) de
manera que las antenas del receptor estén al
menos a 15 cm por encima del suelo. A lo
mejor para esta prueba será necesario elevar
el modelo.
4. Mantener el emisor a la altura de las caderas,
sin tenerlo pegado al cuerpo. No apuntar
directamente al modelo con la antena, pero
ponerla de manera que esté en la vertical del
modelo durante la utilización.
5. Con las teclas ▲▼ del pad de la izquierda o
la derecha vamos a la línea “RF Range Test”
y empezar el modo de prueba de distancia
pulsando la tecla central SET del pad de la
derecha:
Graupner
El hecho de iniciar la prueba de distancia reduce
la potencia de emisión del emisor de manera
significativa y el LED a la derecha del interruptor
de puesta en marcha del emisor, marcado como
RF se pone a parpadear. Al mismo tiempo, la
cuenta atrás se activa en la pantalla, y se emite
una señal acústica de doble tono cada 5
segundos.
Cinco segundos antes del fin de la prueba, se
emite un triple tono cada segundo. Al final de los
99 segundos que dura la prueba de distancia el
emisor retoma su plena potencia de emisión y el
Led de la derecha del interruptor de puesta en
marcha queda iluminado permanentemente.
6. Durante este lapso de tiempo alejarse del
modelo desplazando los sticks. Si
constatamos una interrupción de la señal,
dentro del límite de los 50 metros, probar de
reproducirlo.
7. Hay que hacer una verificación
suplementaria: si el modelo está equipado de
motor, poner en marcha el motor, para
asegurarnos que no crea interferencias.
8. Continuamos alejándonos del modelo hasta
que ya no sea posible un control perfecto.
9. En este punto, esperar a que acabe el tiempo
de prueba, siempre con el modelo listo. Una
vez el tiempo ha acabado, el modelo debe
obedecer de nuevo nuestras ordenes. Si no
es el caso en el 100%, hay que contactar con
un servicio de asistencia Graupner.
10. Antes de cada vuelo hacer esta prueba de
distancia y simular todos los desplazamientos
de los servos susceptibles de intervenir en
vuelo. Para una evolución segura del modelo,
la prueba debe hacerse al menos a 50
metros.
¡Atención!
No hacer nunca una prueba de distancia en vuelo
Salida DSC
Si es necesario, usar las flechas ▲▼ del pad de la
izquierda o la derecha para colocarnos en la línea
“DSC output” del menú y la activamos pulsando la tecla
central SET del pad de la derecha.
Ahora podemos usar las flechas de la derecha para
escoger entre cuatro tipos de modulación “PPM10”,
“PPM16”, “PPM18” y “PPM24”. Completamos la
entrada pulsando la tecla central SET de la derecha.
Esta elección tiene influencia directa en el máximo
número de controles que podemos utilizar con el DSC
(Direct control servo), y que también podemos utilizar
para un simulador o para el sistema trainer. Con el
“PPM10” seleccionado podemos controlar los canales
1 ...5, con el “PPM16” los canales 1 ... 8, con el
“PPM18” los canales 1 ... 9, y con el “PPM24” los
canales 1 ...12.
Autorrotación
La autorrotación es el estado del vuelo en descenso en
el cual el paso de las palas del rotor principal se ajusta
según la fuerza natural del aire que pasa a través las
mismas, con un efecto parecido al de los molinos de
viento. Esta energía se “reconvierte” para frenar el
descenso con el apropiado paso de las palas.
La autorrotación es el procedimiento que permite a los
helicópteros reales y a los modelos tomar tierra
suavemente en situaciones de emergencia, por
ejemplo, en el caso de un fallo de motor. No obstante,
es importante que el piloto tenga experiencia volando
88

el helicóptero en estas condiciones. Es necesario tener
reacciones rápidas y buenas percepciones porque la
inercia que tiene el rotor solamente puede usarse una
vez.
Cuando esta técnica se utiliza en competición el motor
debe pararse para la autorrotación. Durante los
entrenamientos es mejor poner el motor en un relentí
estable.
Cuando activamos la autorrotación a través de la fase
de autorrotación los controles del “motor” y el “paso” se
separan, y todos los mezcladores que tienen un efecto
sobre el servo del motor se desactivan.
Los ajustes de los concernientes parámetros se hacen
en el menú “Helicopter mixer” (ver la página 176),
también debemos leer atentamente el apartado
siguiente referido a la posición del C1 en la
autorrotación.
El nombre de “Autorrotación” está permanentemente
asignado a la Fase 1 y aparece en todas las pantallas
de los menús de las fases de vuelo. Este nombre NO
puede cambiarse. Solamente podemos asignarle un
interruptor a esta opción, como se ha descrito en la
página 56. Si se asigna un interruptor, este tiene
absoluta prioridad sobre los interruptores de las otras
fases de vuelo.
Podemos encontrar más información sobre la
programación de las fases de vuelo en el apartado que
empieza en la página 176 en la sección “Helicopter
mixer”
Autorot.C1 Pos. (Posición del C1 en la autorrotación)
Alternativamente, la fase de vuelo de la autorración se
puede activar en un determinado punto del stick del
motor / paso colectivo. Para ajustar este punto, usar las
flechas ▲▼ del pad de la derecha o la izquierda para
ir a la línea “Autorot.C1-Pos”.
Tan pronto como seleccionamos esta línea, el valor del
campo de la columna que está directamente encima de
STO en la línea inferior de la pantalla queda
encuadrado.
Mover el stick del C1 hasta la posición que queramos
para la activación, y pulsamos la tecla central SET
del pad de la derecha. Se muestra el valor
seleccionado de la siguiente manera:
Después de hacer esto usamos las teclas para
movernos a la columna que hay encima del símbolo de
interruptor y asignamos el interruptor en este campo,
tal como se ha descrito en la página 56 en la sección
“Interruptores, controles y controles como interruptor”.
Preferiblemente utilizaremos uno de los dos
interruptores con auto-retorno.
89
Una vez activamos el interruptor, cuando lleguemos a
este punto el programa cambiará a “Autorrotation” y
permanecerá independientemente de la posición del
C1 en esta fase de vuelo hasta que el interruptor
activado, en este ejemplo el 4, se ponga de nuevo en
“OFF”.
“Autorot. C1-Pos.” tiene preferencia sobre todos los
otros interruptores de las fases.
Los ajustes para los parámetros correspondientes a ...
servos del paso
servo del motor
servo del rotor de cola
rotación del plato cíclico, y si está disponible
ajuste del gyro
.. se hace en el menú “Helicopter mixer”, página 176.
Cut off
Dentro de los ajustes de la Autorrotación del programa
de helicóptero del emisor
posibilidad de programar, para casos de urgencia, un
Cut off del motor para el servo del gas o para el
variador, ver el ejemplo de programación de la página
314. Pero si en la línea “Thr setting AR” del menú
“Helicopter mixer” ajustamos una posición de relentí de
motor en lugar de la posición de paro de emergencia
del motor para, por ejemplo, evitar arrancar el motor
después de cada tentativa de autorrotación, esta
posibilidad desaparece.
Esta opción no solamente reemplaza la función del
“Cut-off trim” conocida en los otros emisores Graupner
mc y mx, si no que además al mismo tiempo sirve
mc-32
HoTT, existe la

como una función OFF de emergencia, cosa que no
era posible con la función “Cut-off trim”.
En función de la elección efectuada en la línea “Pitch
min” (forward / back) del menú “Helicopter Type”,
podremos asignar en esta línea a la posición Cut off (o
relentí) un interruptor para poner el servo del
carburador en esta posición o parar un variador de
velocidad.
La posición OFF del motor (o relentí) se puede
preseleccionar directamente en la columna de la
izquierda a través del campo “SEL”. El valor más
apropiado para este campo se establece a través de
pruebas.
El variador de velocidad o el servo del motor solamente
irán a la posición seleccionada cuando está por debajo
de la posición normal y el interruptor está activado.
Esto se hace ajustando la posición deseada del servo
(valor del umbral) en la columna del medio,
directamente encima del campo “STO” y seleccionando
el interruptor ON/OFF apropiado en la columna de la
derecha.
Si el porcentaje del valor especificado en la
columna del medio es
actual del servo, es decir, la posición actual
del servo está por
cambio se produce en el momento en que el
interruptor se coloca en la posición ON.
Si el porcentaje del valor especificado en la
columna del medio es
actual del servo, es decir, la posición actual
del servo está por
inicialmente el variador de velocidad reduce
la velocidad del motor o el servo cierra el
carburador del motor solo en la medida
determinada por el valor en la columna de la
izquierda tan pronto como la posición del
servo sobrepasa el umbral (max. 150%)
después que el interruptor ha cambiado por
encima de la posición ON. El variador de
velocidad o el servo del motor permanece en
esta posición de cut-off solamente hasta que
superior
debajo
del umbral, el
inferior
a la posición
encima
del umbral,
a la posición
el interruptor seleccionado cambia de nuevo
por encima con un movimiento por encima
del umbral del servo o el variador de
velocidad con el stick.
De origen, los ajustes son de –100% en la columna de
la izquierda para la posición de cut-off del servo del
motor, y +150% para la posición del stick del motor
ajustada en la columna del centro.
Procedimiento de Programación
Para cambiar la posición preseleccionada de la
posición del “cut-off” del servo del motor pulsamos la
tecla central SET del pad de la derecha. El ajuste
actual queda sombreado. Ahora ajustamos un valor
con las flechas de la derecha, en el cual el motor se
parará de manera fiable sin poner en riesgo de rotura
el servo del control del motor. Un valor bastante común
es de –125%.
El valor elevado prerregistrado de la columna del
medio permite asegurar que el motor, en la carrera
máxima del stick de mando, pueda pararse de manera
segura con un interruptor que tenemos que asignar en
la columna de la derecha.
90
No obstante, si queremos fijar un valor más bajo, con el
cual el servo del motor o el variador de velocidad con el
interruptor cerrado cambie a la posición cut-off, con el
interruptor cerrado – por defecto el rotativo
proporcional de la derecha - colocamos el servo del
motor o variador de velocidad en la posición que
queramos con el stick del motor / paso en la posición
que queramos fijar y pulsamos la tecla central SET
del pad de la derecha.
Finalmente, usamos la columna de la derecha para
especificar el interruptor con el cual podamos parar el
motor directamente (en caso de emergencia), o
activarlo después del umbral.
Notas:
Asegurarse de que no se pueda romper la
mecánica del servo cuando se activa el cutoff
Podemos conseguir un punto de
conmutación de más de +100% aumentando
momentáneamente la carrera del servo 1
más allá del 100% en el menú “Servo
adjustment”, y después de memorizarlo,
volver al valor de origen.

Marcado
Cuando está activada, “Marker key” colocará una
marca en la curva “Pitch”, así como en las curvas de
las mezclas “Canal 1 Motor” y “Canal 1 Rotor de
cola” del menú “Helicopter mixer”, para marcar la
posición actual del stick del paso, y se muestra en
forma de una línea vertical discontinua. Esta marca
sirve de ayuda para ajustar los puntos de la curva en la
posición correcta durante las pruebas de vuelo, por
ejemplo, el punto de estacionario.
El interruptor que asignaremos preferentemente será
uno de los dos momentáneos del panel de
interruptores.
Ejemplo:
El punto de estacionario se coloca en el punto medio
del stick del motor / paso en la fase de vuelo de
estacionario, pero vemos en las pruebas de vuelo que
todavía se encuentra colocado por encima del punto
medio. Pulsamos el interruptor en esta posición, y,
después del aterrizaje, examinamos por ejemplo la
curva del paso en el menú “Helicopter mixer”, página
176.
La línea vertical muestra la posición actual del stick. En
este ejemplo esta posición se encuentra a –30% (=
input) del recorrido del control y, debido a su (todavía)
control de la curva lineal, se produce una señal de
salida que es también de –30% (= output).
Por otro lado, la línea representa la posición del stick
en la cual hemos pulsado el marcador.
Movemos el stick hasta esta línea de marca para leer
los valores del input y el output para el punto de
estacionario encontrado. Los puntos de marca de las
otras dos curvas de mezcla se leen de la misma
manera. Alternativamente ahora podemos modificar
estas tres curvas si es necesario para poder corregir el
punto de estacionario. El punto “1” de la curva en este
ejemplo puede llevarse hasta el punto medio de la
curva al valor de output que ha sido determinado para
ser el punto de estacionario en el gráfico del paso.
Power-on warning
Cuando asignamos en esta línea un interruptor,
interruptor de control o interruptor lógico, tal como se
ha descrito en la sección “Asignación de los
interruptores y controles del emisor” de la página 56, se
avisará sobre la posición del respectivo interruptor o
control y aparecerá el correspondiente aviso en el
display básico bajo algunas condiciones. En
combinación con interruptores lógicos, prácticamente
cualquier interruptor ajustado puede mostrarse al poner
en marcha el emisor.
91
Auto trim
La opción “Auto trim” hace posible trimar el modelo
rápidamente y sin complicaciones, por ejemplo en el
contexto del primer vuelo, o después de una gran
reparación, etc.
Por lo general cuando ponemos el modelo en vuelo
durante el primer test, debemos corregirlo con los
sticks hasta alcanzar la estabilidad de vuelo. Esto
implica trabajar con los trims durante el vuelo para
poder volver a “liberar” los sticks. Para esto
precisamente podemos utilizar la función del “Auto
trim”.
Una vez hemos alcanzado la altitud de vuelo deseada
a través de las funciones de control 2 ... 4 (alerones,
profundidad y dirección), el interruptor asignado al
“Auto trim” – preferentemente uno de los interruptores
momentáneos montado de origen en el panel de
interruptores – lo movemos UNA vez. Una vez se
activa el interruptor, los puntos offset de los puntos
neutros de los sticks se adoptan como valores de trim.
No obstante los valores no se memorizan al instante,
tardan aproximadamente 1 segundo.
Durante este periodo después de que el interruptor se
haya activado, las posiciones de los sticks se deben
volver a la posición normal.

Notas:
Asegurarse de que durante la asignación del
interruptor, los sticks de alerones,
profundidad y dirección están en posición
neutra, ya que si no los offsets del punto
neutro se adoptarán como valores de trim en
la memoria del trim.
Dado que CADA activación del interruptor del
Auto trim tiene un efecto acumulativo,
después de concluir el proceso, es mejor
desactivar el interruptor utilizado por razones
de seguridad. Si no hay el riesgo de poder
activar la función del auto trim
accidentalmente.
Señal Ext. PPM
Algunos módulos HF que pueden conectarse al emisor
a través de los conectores externos (página 25) o
internos (página 26) requieren de una señal de input
invertida. Asegurarse de seguir las instrucciones de
instalación.
La elección de “inverted” en lugar de la que viene por
defecto “normal” permite la adecuada adaptación de la
señal PPM suministrada.
Si pulsamos simultáneamente
la derecha (CLEAR) volvemos al valor de origen
“normal”.
▲▼ o ◄ ►
del pad de
Auto timer reset
El ajuste “si / no” en esta línea determina si todos los
cronómetros del emisor (excepto el “Model time” y
“Transmitter operating time”) se colocan
automáticamente a los valores de origen cuando
ponemos en marcha el emisor.
Si pulsamos simultáneamente ▲▼ o ◄ ► del pad de
la derecha (CLEAR) volvemos al valor de origen “si”.
92

93

Model type
Selección del tipo de modelo avión
El menú “Model type” se usa para establecer el tipo de
modelo que queremos programar. Esto activa todas las
características propias de los mezcladores, funciones
acopladas, etc., para poder programar el tipo de
modelo que hemos escogido.
Pulsar brevemente la tecla central
derecha.
Motor en el C1
Después de seleccionar la línea “Motor on C1” con las
teclas ▲▼ del pad de la derecha o de la izquierda, el
campo correspondiente aparece encuadrado.
Pulsar la tecla SET del pad de la derecha, y el reglaje
actual escogido aparece sombreado. Con las teclas de
la derecha podemos escoger entre cuatro posibles
opciones:
SET
del pad de la
“none”: para modelos sin propulsión. El mensaje de
aviso “Throttle too high”, ver la página 30,
desactivado
“Wing mixers” está disponble sin ninguna restricción.
“Thr.min.rear”: La posición de relentí del stick del motor
/ aerofrenos (C1) se encuentra en la parte inferior del
recorrido, es decir, hacia el piloto.
El mensaje de aviso “Throttle too high”, ver la página
30, y la opción “Thr.CuttOff” en el menú “Basic
settings, model”, ver la página 81,
submenú “Brake settings” del menú “Wing mixers”, que
empieza en la página 172, está disponible si la entrada
en la columna “Motor” en el menú “Phase settings”,
página 142, para la fase de vuelo activa, se encuentra
en “none”.
“Thr.min.fwd.”: La posición relentí del stick del motor /
aerofrenos (C1) se encuentra en la parte superior del
recorrido, es decir, del piloto hacia delante.
El mensaje de aviso “Throttle too high”, ver la página
30, y la opción “Thr.CuttOff” en el menú “Basic
settings, model”, ver la página 90,
submenú “Brake settings” del menú “Wing mixers”, que
empieza en la página 172, está disponible si la entrada
en la columna “Motor” en el menú “Phase settings”,
página 142, para la fase de vuelo activa, se encuentra
en “none”.
y el submenú “Brake settings” del menú
están activadas,
están activadas,
está
y el
y el
Notas:
Durante la programación, hay que tener
siempre presente que el motor eléctrico o
térmico no pueda ponerse
intempestivamente en marcha. Si es
necesario cortamos la alimentación del
carburante, pinzando el tubo de alimentación,
y en el caso de un motor eléctrico
desconectando la batería de propulsión.
Dependiendo de nuestra elección en este
menú, el trim del Ch1 funcionará
“normalmente” (sobre todo el recorrido del
stick del gas), o únicamente en la zona del
94
relentí, en la parte superior o inferior del
recorrido según la elección.
Tipo de cola
Cuando seleccionamos la línea “Tail type” con las
teclas ▲▼ del pad de la derecha o la izquierda, el
campo de selección queda encuadrado.
Pulsar brevemente la tecla central SET del pad de la
derecha. La elección actual aparece entonces en
sombreado. Con las teclas de la derecha escogemos el
tipo de cola que corresponde a nuestro modelo:
“normal”: El ajuste para todos aquellos modelos en que
la profundidad y la dirección son comandadas
respectivamente por un solo servo.
“V tail”: El mando de la dirección y de la profundidad se
hacen por dos superficies dispuestas en V. La función
de mezcla para la dirección y la profundidad está
integrada automáticamente en el programa.
Opcionalmente podemos modificar la carrera del
mando de dirección y de la profundidad con el menú
“Dual Rate / Expo”, ver la página 120, y la relación
entre la dirección y la profundidad en el menú “Servo
adjustment” de la página 102. Si queremos diferenciar
entre las dos superficies entonces debemos controlar
la cola en V a través del menú “Dual mixer”, página
206. En este caso el tipo de cola ajustado ha de ser
“normal”.
“ELEVON”: El mando de los alerones y de la
profundidad se efectúa por medio de uno o dos servos

para cada semi-ala. El trim del mando de profundidad
queda siempre funcional sólo para los servos 2+3
aunque hayamos escogido “2AIL 2FL” (2 servos para
los alerones y 2 servos para los flaps)
“2HRSv3+8” : Esta opción está concebida para los
modelos en los cuales el mando de profundidad esta
gobernado por dos servos. Cuando movemos el stick
del mando de profundidad, el servo conectado a la
salida 8 se desplazará de manera idéntica al servo de
la 3. El trim de la profundidad es funcional sobre los
dos servos.
Nota para el “2HRSv3+8”
Si escogemos este tipo cualquier elemento de control
que en el menú “Control adjust” haya estado asignado
al canal 8 por razones de seguridad queda
automáticamente desasociado del canal 8, es decir, no
es funcional.
Alerones / Flaps
Después de seleccionar la línea “Aileron / camber
flaps” con las flechas
izquierda, el campo correspondiente queda
enmarcado.
Pulsar brevemente la tecla central SET del pad de la
derecha. El ajuste correspondiente se mostrará en
sombreado. Ahora usamos las flechas del pad de la
derecha para seleccionar el número de servos en las
alas para programar el modelo.
▲▼
del pad de la derecha o la
Disponible Canales usados
1 AL 2
1 AL 1FL 2 | 6
2 AL 2 & 5
2 AL 1FL 2 & 5 | 6
2 AL 2FL 2 & 5 | 6 & 7
2 AL 4 FL 2 & 5 | 6 & 7 / 9 & 10
4 FL 2 FL 2 & 5 / 11 & 12 | 6 & 7
4 AL 4 FL 2 & 5 / 11 & 12 | 6 & 7 / 9 &10
Dependiendo de la opción seleccionada aquí, los
mezcladores que se necesitan y los ajustes se activan
en el “Wing mixers”, menú que empieza en la página
172.
Notas:
Los ajustes para todas las parejas de flaps
(AL y AL2, FL y FL2) se pueden trimar a
través de las fases de vuelo en los menús
“Phase trim” y “Wing mixers”, página 172.
Para la funcionalidad para todas las parejas
de flaps (AL y AL2, FL y FL2) también se
puede utilizar a través del stick “Motor/frenoflaps” si este stick no está asignado a otro
uso, por ejemplo, para algunos ajustes de
frenos, ver el menú “Wing mixers”, página
172. Para configurar esto solamente es
necesario asignar el “Control 1” al input 6 en
el menú “Control adjust”, página 108. (Si
preferimos hacer funcionar los flaps con
interruptores, los más adecuados son uno de
dos o tres posiciones de los que posee la
emisora).
95
Brake offset
Esta función (punto de inicio del freno) no solamente es
una opción potencial para los veleros y los modelos
eléctricos, si no también para aviones con motores de
combustión y flaps.
Los mezcladores descritos en la línea “Brake settings”
del menú “Wing mixers” se pueden operar a través del
stick del C1 (“input 1”) o con otros elementos de control
que hayan sido asignados a los inputs 7, 8 o 9 en el
menú “Control adjust”. En este último caso, conservar
el ajuste por defecto “GL” en la columna “Type” en el
menú “Control adjust” para que el control seleccionado
pueda funcionar independientemente en cada fase de
vuelo.
En la mayoría de los casos el ajuste por defecto para el
“input 1” permanece como está y el freno se opera a
través del stick sin muelle C1.
No obstante, usando los inputs 7, 8 o 9 es posible
operar los frenos de manera alternativa, incluso a
través de un control suplementario, si el stick del canal
C1 está siendo usado para alguna otra cosa.
El punto neutro (offset) se puede ajustar cualquier
posición que queramos. Esto se hace colocando el
control para el input 1, 7, 8 o 9 en la posición en la cual
los flaps para el aterrizaje estén en la posición neutra, y
fijamos este punto de “Offset” con STO.
La selección de este punto de offset en este contexto
determina no solamente la posición del control en la
cual el sistema de freno queda escondido, es decir,
cerrado, si no también la dirección de activación del
stick del C1 para extender el sistema de frenado.
Los valores del offset del freno con el prefijo
“+” hacen que los flaps afectados por la
opción “Brake settings” del menú “Wing
mixers” se extenderán cuando el stick C1 se
mueve
de arriba a abajo
piloto.
Los valores del offset del freno con el prefijo
“-” hacen que los flaps afectados por la
opción “Brake settings” del menú “Wing
mixers” se extenderán cuando el stick C1 se
, en dirección al

mueve
contraria al piloto.
Si el punto de offset no está en el punto final del
recorrido del elemento de control, el recorrido restante
hasta el final queda como “recorrido libre”, es decir,
este “recorrido libre” no tiene influencia en ningún
mezclador disponible en los “Brake settings” del menú
“Wing mixers”. Este recorrido libre asegura que,
incluso si el control de los frenos no esté posicionado el
final del recorrido, se desactivarán todos los ajustes de
los frenos en el “neutro”. Al mismo tiempo, el recorrido
de control efectivo se utiliza automáticamente al 100%.
de abajo a arriba
, en dirección
Nota:
Preferiblemente, los servos utilizados para hacer
funcionar los aerofrenos que pueda haber en un
modelo deben conectarse a las salidas del receptor
asignadas a los inputs de los frenos, por ejemplo,
conectar el servo de los aerofrenos en la salida (libre)
del receptor 8, dado que el input 8 está seleccionada
para “frenos”, etc. Lo más conveniente para utilizar el
segundo servo de frenos es usar un mezclador libre.
96

97

Tipo de helicóptero
Estableciendo el tipo de modelo
Este menú “Model type” se usa para establecer el tipo
de modelo que programaremos. Esto también activa
los mezcladores característicos, funciones acopladas,
etc., para poder preparar convenientemente el
programa específico de cada modelo.
Pulsar brevemente la tecla central
derecha.
Tipos de platos cíclicos
En función del número de servos del mando del paso
colectivo será necesario utilizar una mezcla adecuada.
Al mismo tiempo esta selección queda también
influenciada por el tipo de control ejercido sobre los
servos del plato cíclico. Dado que el sistema Flybar
generalmente no necesita mezclas del emisor, cuando
dicho sistema está en uso, generalmente queda
seleccionado como tipo de plato cíclico “1 Servo”,
independientemente del número de servos presentes
en el plato cíclico. En este contexto, asegurarse que el
sistema Flybar está ajustado según las instrucciones
del fabricante, ya que de otra manera hay riesgo de
que el helicóptero no vuele.
Seleccionar la línea “swashplate” con las teclas ▲▼
de la derecha o de la izquierda, y el campo
correspondiente queda encuadrado.
SET
del pad de la
Pulsar brevemente la tecla central SET del pad de la
derecha. El número actual de servos utilizados en el
paso se muestra en la pantalla en sombreado. Con las
teclas del pad de la derecha seleccionamos la opción
adecuada:
- “1 servo”: Se usa un sistema Flybar o el plato cíclico
está gobernado por un servo de roll (lateral) y un servo
de nick (longitudinal). El mando del paso se hace por
un servo por separado. Si utilizamos esta opción no
tenemos acceso a la mezcla “Swashplate mixer”. Esto
es debido a que los helicópteros que utilizan un solo
servo para el paso, y que por tanto montan 3 servos
para el mando del paso cíclico o usan un sistema
Flybar se utilizan sin mezcla por parte del emisor.
Podemos ocultar este menú en la lista multifunción.
- “2 servos”: Para el mando del paso el plato cíclico se
desplaza axialmente por los dos servos de roll, el
mando del nick se hace por un sistema de
compensación mecánica.
- “3Sv (2roll): Mando del plato cíclico a través de 3
puntos simétricos, repartidos a 120° de manera que un
servo de nick se sitúa en el punto delantero o posterior,
y los dos servos del roll están mezclados. Para el
mando del paso los tres servos desplazan el plato
cíclico en sentido axial.
- “3Sv(140°): Mando asimétrico a 3 puntos en los
cuales se fija un servo para el longitudinal (parte
posterior) y dos servos para el lateral (en la parte
delantera, a izquierda y derecha), que están mezclados
entre ellos. Para el mando del paso, los tres servos
desplazan el plato cíclico en el sentido axial.
98
- “3Sv (2nick)”: Mando por 3 puntos como el caso
anterior pero a 90°, con un servo de mando del roll en
el lateral y dos servos de mando del nick delante y
detrás.
- “4Sv (90°)”: Mando del plato cíclico por 4 puntos, con
dos servos de nick y dos servos de roll.
Pulsando simultáneamente ▲▼ o ◄► de la
derecha (CLEAR) podemos volver a la configuración
inicial de “1 servo”.
Tipo d e pl ato cíclico: 1 servo
Tipo d e plato cíclico: 2 servos
Tipo de plato cíclico: 3 servos (2 roll)
Tipo d e plato cíc li co: 3 servo s (140º)

Tipo de plato cíclico: 3 servos (2 roll)
Tipo de plato cíclico: 4 servos (90º) 2 roll, 2 nick
Nota:
Excepto para la elección de “1 Servo”, los porcentajes
de las mezclas del plato cíclico se deben ajustar en el
menú “Swashplate mixer”, página 208.
Linearización del plato cíclico
Después de seleccionar la línea “Linearis swashpl.” con
las flechas
▲▼
del pad de la derecha o de la
izquierda, el correspondiente campo de entrada se
muestra encuadrado.
Si lo activamos con “yes” anulamos los indeseados
efectos laterales en el cambio del paso debido a
función de roll o la tensión en las transmisiones del
plato cíclico.
Estos tipos de tensiones pueden surgir cuando los
servos afectados por las diferentes posiciones según
los desplazamientos del recorrido pueden desviarse
unos respecto a otros.
La linearización requiere una cierta familiarización por
parte del piloto dado que, para linearizar por completo
la rotación del recorrido del horn del servo, el recorrido
debe reducirse adecuadamente para los pequeños
recorridos – de forma similar al ajuste de un
exponencial -.
Sentido de giro del rotor principal
Después de seleccionar la línea “Rotor direction” con
las flechas ▲▼ del pad de la derecha o de la
izquierda, el correspondiente campo de entrada se
muestra encuadrado.
Rotación a
derechas
Rotación a
izquierdas
Este ajuste es imprescindible para que las mezclas
encargadas de compensar el efecto giroscópico y las
variaciones de potencia del motor puedan funcionar
correctamente en el menú “Helicopter mixer”:
Paso
Canal 1 Motor
Canal 1 Rotor de cola
Rotor de cola Motor
Una vez hemos seleccionado el sentido de rotación del
rotor principal con las flechas, pulsando la tecla central
SET de la derecha lo memorizamos.
- “right”: Visto por encima, el rotor gira en el sentido de
las agujas del reloj.
- “left”: Visto por encima, el rotor gira en sentido inverso
a las agujas del reloj.
Pulsando simultáneamente las teclas
▲▼ o ◄►
del
Roll Motor
Roll Rotor de cola
Paso Motor
Nick Motor
Nick Rotor de cola
Paso (colectivo) mínimo
Después de seleccionar la línea “Pitch min” con las
flechas ▲▼ del pad de la derecha o de la izquierda,
el correspondiente campo de entrada se muestra
encuadrado.
pad de la derecha (CLEAR) siempre volvemos a
“right”.
99

En la línea “pitch min” escogemos el sentido de
funcionamiento del stick del mando del motor / paso,
según nuestras preferencias personales. De esta
elección depende el funcionamiento correcto de todas
las otras opciones del programa de helicóptero
relativas a las funciones de motor y paso colectivo, por
ejemplo la curva del gas, el trim del relentí, la mezcla
del rotor de cola, etc ...
Pulsamos la tecla central SET de la derecha. El
sentido de funcionamiento del stick del mando del Gas
/ Paso queda sombreado. Con las teclas del pad de la
derecha ahora seleccionamos la variante necesaria:
El significado es el siguiente:
- “fwrd.”: El paso está en el mínimo cuando el stick del
C1 está hacia delante, es decir, cuando se aleja del
piloto.
- “rear”: El paso está en el mínimo cuando el stick del
C1 está hacia atrás, es decir, cerca del piloto.
Pulsando simultáneamente las teclas ▲▼ o ◄►
(CLEAR) siempre volvemos a la configuración
“rear”.
Notas:
El trim del C1 solamente actúa sobre el servo
del gas.
Por defecto lo que es conocido como “throttle
limiter” (la limitación del gas) está activada
(ver la página 117), este limita el recorrido del
servo del motor en la dirección de máximo
gas, actúa separadamente de los servos del
paso colectivo. Este punto se puede
programar usando el input “Gl 16” en el menú
“Control adjust”.
Dado que en general nuestros modelos
siempre funcionarán con el mismo sentido
del paso mínimo, esta especificación se
puede preseleccionar en el menú de las
características del emisor “General basic
settings”, página 259. Esta característica se
adoptará automáticamente cuando se cree
un nuevo modelo en memoria en el menú
“Helicopter type”, si se desea, se puede
adoptar como característica básica del
modelo, tal como se ha descrito.
Expo throttle limit
Después de seleccionar la línea “Expo thro lim.” con las
▲▼
flechas
el correspondiente campo de entrada se muestra
encuadrado
del pad de la derecha o de la izquierda,
La función “Throttle limit”, descrita en el texto del menú
“Control adjust” de la página 117, permite asignar una
curva de característica exponencial.
El valor para la respuesta progresiva del paso puede
oscilar entre –100% y +100%, y se ajusta con las
flechas.
Por ejemplo, este valor es significativo cuando el
throttle limiter se ajusta en paralelo con el relentí – por
100
defecto con el control proporcional rotativo de la
derecha -. Se pueden encontrar más detalles acerca
del throttle limiter en el texto del menú “Control adjust”
en la página 112.
Ejemplo de dos límites de
curva para el 100% del
recorrido.
Línea contínua: valores
exponenciales negativos
Línea discontinua: valores
exponenciales positivos
Aviso límite de motor
Si el carburador está demasiado abierto cuando el
emisor se pone en marcha, aparece un aviso en la
pantalla y se dispara un aviso acústico.
La opción “Thr. Limit warning” permite el ajuste de la
variable para la posición crítica del servo del motor
entre 0% y –100%, por encima de la cual se activará la
alarma. El punto de referencia para esta opción es la
posición del stick
 Loading...
Loading...