

Page 1
Page 2
HYDRAULIC LINEAR ACTUATOR
LA11
TABLE OF CONTENTS
1. GENERAL INFORMATION ............................................... p. 01
2. TECHNICAL SPECIFICATIONS and APPLICATION ........ p. 02
3. DESCRIPTION ................................................................. p. 03
3.1 General
3.2 Pump Unit (HRP11)
3.3 Reservoir/Bypass Assembly
3.4 Steering Cylinder
4. INSTALLATION ................................................................. p. 05
4.1 Mechanical
4.2 Hydraulic
4.3 Electrical
5. NOTES ............................................................................. p. 07
6. DRAWINGS ..................................................................... p. 08
6.1 LA11 — Assembly Schematic
6.2 LA11 — System Connection Schematic
i
Page 3
1. GENERAL INFORMATION
The Accu-Steer LA11 unit is a hydraulic linear actuator designed
to interface an autopilot system with a mechanical steering systems such as wire, cable or chain drives. A hydraulic linear actuator consists of a hydraulic drive unit (containing a pump unit,
bypass valve and reservoir assembly), a steering cylinder and the
interconnecting hoses.
One end of the cylinder is xed and the other end is connected to
a tiller arm or the mechanical quadrant, which is connected to a
rudder shaft. With this connection to a tiller arm the linear movement of the cylinder is changed to rotary movement, which turns
the rudder and steers the vessel.
During normal mechanical steering, the hydraulic steering cylinder
strokes to port and starboard as the vessel is steered manually.
The oil in both sides of the cylinder ows back and forth through
a normally open bypass valve located in the linear actuator drive
unit. The steering cylinder is connected to the drive assembly with
two hoses (port and starboard). When the autopilot is switched into
the operating mode, the bypass valve is electrically closed. The
autopilot then drives the reversing hydraulic pump which in turn
operates the steering cylinder. See section 3 of this manual for a
more in depth description.
When the autopilot is operating, the cylinder with be turning the
rudder. The mechanical steering will be back-driven during this
time. The vessel’s steering wheel will be turning as the autopilot
makes corrections.
The Accu-Steer HRP11 is the reversing pump unit used in the LA11
linear actuator. The output ow rate of the pumpset determines the
speed of the steering cylinder. The HRP11 pump outputs 1.0 cu
in/sec or 16.4 cc/sec.
The BA150 X 9 is a balanced steering cylinder, which means the
volume of oil on both sides of the cylinder is equal. The volume of
this steering cylinder is 13 cu in (215 cc) of oil.
p01
Page 4
2. TECHNICAL SPECIFICATIONS and APPLICATION
Model Number LA11-12 LA11-24
Voltage 12 VDC 24 VDC
Output/Sec 1 cu in/sec 1.0 cu in/sec
Average Motor Amp 3-6 2-4
Solenoid Valve Amp 1.5 AMPS .75 AMP
Weight 15 lbs (7 kgs) 15 lbs (7 kgs)
The output of the hydraulic reversing pump is 1.0 cu in/sec. The
volume of the steering cylinder is approximately 13.1 cu in (215 cubic centimeters). The rudder speed will be approximately 13 seconds hard over to hard over (HOH).
The rudder speed, hard over to hard over (HOH), is determined
by dividing the volume (cu in) of the cylinder by the output of the
pumpset (cu in/sec).
The steering cylinder is capable of approximately 785 lbs of thrust
based on an output of 500 psi from the pump. The force or torque
applied to the rudder through the rudder shaft is dependent of the
distance between the center of the rudder shaft and the position
of the tiller bolt.
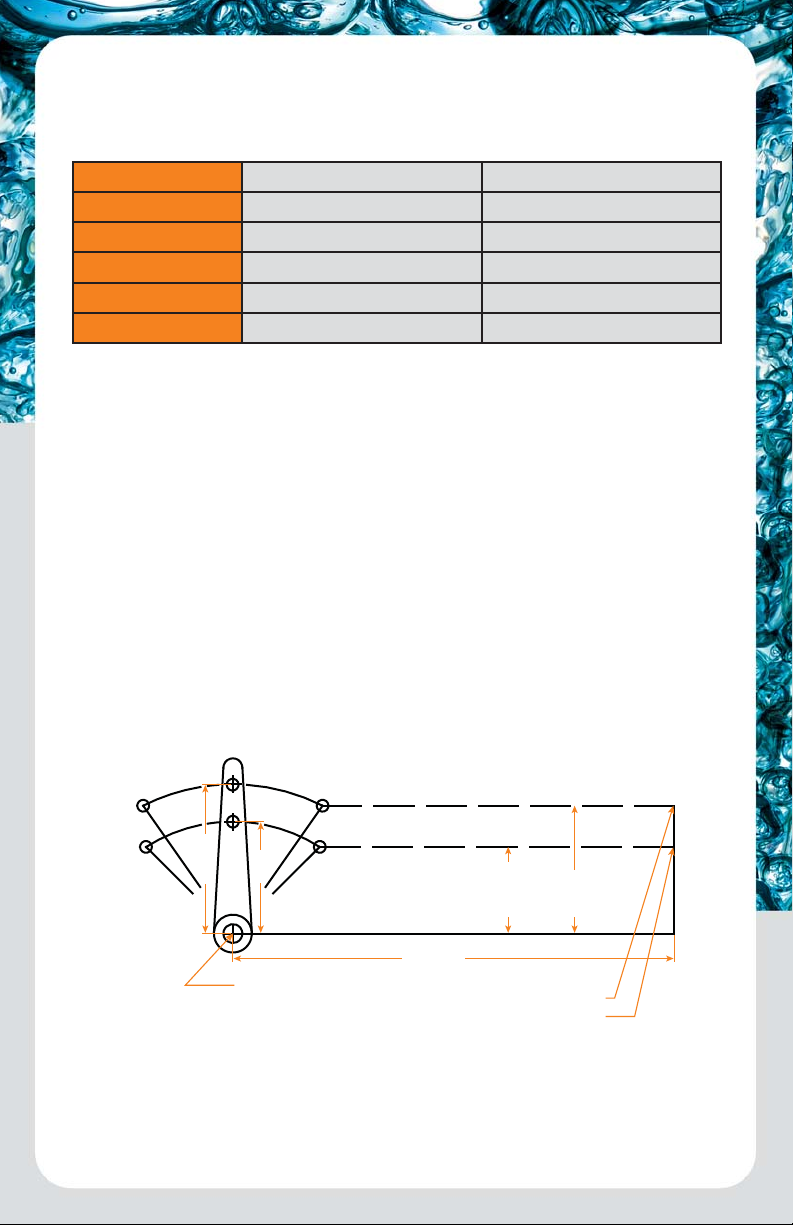
Figure 2 CYLINDER SCHEMATIC
35°
PORT
45°
PORT
7.875"
TILLER ARM
RUDDER SHAFT
6.0"
35°
PORT
45°
PORT
4.5625"
23.25"
35° TRUNNION CENTER
45° TRUNNION CENTER
6.75"
Distance (rudder shaft to tiller bolt): 6” = 4,710 in/lb; 7” = 5,495 in/lb;
8” = 6,280 in/lb; 9” = 7,065 in/lb. The torque required to turn the rudder
can be calculated or obtained from the vessel’s builder.
p02
Page 5

3. DESCRIPTION OF OPERATION
3.1 GENERAL
The Accu-Steer LA11 is a complete linear actuator drive unit.
It consists of a reversing gerotor gear pump, hydraulic lock
valves, suction make-up check valves, a valve housing manifold, an electric permanent magnet motor, an electric solenoid
bypass valve and an oil reservoir.
Figure 3.1 HYDRAULIC SCHEMATIC
STARBOARD PORT
79
5
“A”
2
DC
MOTOR
10
8
43
1
6
“B”
During normal mechanical steering the cylinder is stroked both
ways as driven by the mechanical steering system. The oil in
the cylinder is bypass through the normally open (NO) solenoid
valve (10). When the autopilot becomes active it closes the
solenoid valve (clutch/bypass or switched power output). The
autopilot then drives the hydraulic reversing pump (2).
p03
Page 6

The HRP (Hydraulic Reversing Pumpset) operates as follows:
As the motor (1) rotates CCW, oil from the gear pump (2) is
pumped towards output “A”. This oil passes through the check
valve (5) and goes to the line output (7). The oil pushes the cylinder in the port direction. The pressure at output “A” ensures
the check valve (3) stays closed and manually opens check
valve (6). Opening check valve (6) allows the returning oil from
the steering cylinder to ow back to the pump. If the pressure
at the pump suction “B” is less than the weight of the oil in the
reservoir (8) then the oil in the reservoir will pass by the check
valve (4). This prevents cavitation due to any air that may be
in the steering line. When the pump stops turning all springloaded check valves return to the normally closed position.
When the motor (1) rotates (CW) the reverse movement of the
oil and valves takes place.
3.2 PUMP UNIT (HRP11)
The electric motor has the following features:
t Ignition protected (UL 1500 and SAE-1171)
t Ball bearing shaft supports both ends
t Cushioned foot mounts for quiet operation
t Opposite end shaft mount for tachometer/encoder
The valve block is an aluminum block, precision machined to
house the valves, direct the oil and serve as the endplate for
the gear pump. The output check valves are part of what is
called a lockvalve assembly.
The lockvalve assembly consists of two output check valves
and a lockvalve spool. In the non-running position the spring
operated check valves remain closed, isolating the pump from
the steering system. The spring action of the check valves
holds the lockvalve spool in the mid-closed position.
3.3 RESERVOIR/BYPASS ASSEMBLY
The reservoir unit is machined out of solid aluminum and pro-
vides approximately 11.5 cu in of oil for oil make-up. The solenoid bypass valve is located in the same aluminum housing.
It is a normally open valve and switches to the closed position
when energized by the autopilot. The valve returns to the normally open position when the autopilot is switched into the
standby mode or if there was a loss of power to the autopilot.
p04
Page 7

Oil passages are machined as large as possible to minimize
any restrictions which may effect manual steering.
3.4 STEERING CYLINDER
The brass steering cylinder is engineered and manufactured
for heavy duty marine usage and is suitable for commercial
and pleasure boat applications. The cylinder has a 1-1/2” bore
and a 9” stroke. The trunnion mount (xed end) and the ball
joint allow for about 10 degrees of articulation. The cylinder is
shipped full of oil and is also equipped with bleed ttings.
4. INSTALLATION
4.1 MECHANICAL
The linear actuator drive unit must be mounted on a horizontal
shelf or bracket with a solid foundation. The unit can be bolted
or screwed down with the motor feet and the foot bracket.
The mounting brackets are tted with anti-vibration mounts
to maintain the quiet operation of the pumpset. The drive unit
should be mounted above the steering cylinder if possible to
assist in the system bleeding.
Proper cylinder installation is the key to the successful op-
eration of the linear actuator. An incorrectly installed cylinder
is subject to rapid seal and bearing wear and non-repairable
damage. Minimum side loading of the cylinder rod and maximum cylinder performance can be achieved as follows.
An imaginary line drawn through the tiller arm hole at both hard
over positions will create the cylinder center line, see Figure
4.1. The distance between X and Y must be less than 9” so
that the cylinder doesn’t act as an end stop for the rudder.
Figure 4.1 CYLINDER SCHEMATIC
CENTER LINE FOR CYLINDER MOUNT
XY
TILLER ARM SHOWN IN THE HARD
OVER AND MIDSHIP POSITIONS
p05
Page 8

In a new installation, mechanical stops can be installed after
the cylinder. For retro-t applications, use Figure 4.1 as a reference to ensure the ends of the cylinder travel are outside the
stops. Mount cylinder with the ttings in the up direction.
4.2 HYDRAULIC
The unit is shipped full of oil with a sealed plug in the top of the
reservoir cover. A vented breather cap is supplied with the unit.
The vented cap must be installed in place of the plug after the
drive unit has been mounted. The oil in the LA11 is standard
hydraulic oil (ISO-32).
If the hydraulic lines are removed during installation, be sure to
cap them to minimize the loss of oil. Located on the top of the
valve/reservoir block is a small bleed tting. This tting can be
used add oil to the port and starboard lines or bleed air from
the system. If the cylinder is mounted properly, the cylinder
can be manually stroked and the air will collect at the bleed
tting. Be sure to re-install this plug before using the LA11 as
it is part of the steering line.
The oil reservoir should be maintained at least 3/4 full. During
bleeding and lling this level should be maintained.
It is not critical to identify which of the steering lines is port
or starboard as most new autopilots will determine the pump
direction and program the drive outputs to suit. For older autopilots the motor leads can be reversed to change the pumps
direction.
4.3 ELECTRICAL
The motor is a permanent magnet style motor, ignition pro-
tected, built to conform to UL-1500 and SAE-1171 standards.
Two leads connect to the autopilot pump driver junction box
(processor), the direction of the pumpset can be reversed by
simply reversing the polarity of these two leads.
The solenoid valve is connected to the autopilot junction box.
It is usually referred to as clutch/bypass or switched power.
The polarity of the solenoid valve does not matter.
To test the operation of the LA11 pumpset, touch the two leads
from the motor to the supply voltage (12 VDC or 24 VDC) to jog
the motor in one direction and then reverse the leads to jog the
pumpset in the other direction. Do not to perform this opera-
tion where any combustible fumes exist.
p06
Page 9

5. NOTES
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
....................................................................................................................
p07
Page 10

6. DRAWINGS
6.1 LA11 ASSEMBLY SCHEMATIC
FILLER
CAP
6.375”
5.25”
MOTOR
LEADS
BYPASS VALVE
SOLENOID LEADS
SIDE VIEW
VALVE
BYPASS
8”
3.5”
MOTOR
LEADS
FILLER
CAP
BYPASS VALVE
SOLENOID LEADS
TOP VIEW
BYPASS
VALVE
p08
Page 11

6.2 LA11 SYSTEM CONNECTION SCHEMATIC
INTERCONNECT HOSES (3 FEET)
BA150 X 9
STEERING CYLINDER
RUDDER SHAFT
p09
TOP
VIEW
FILLER
CAP
MOTOR
LEADS
BYPASS
VALVE
SOLENOID LEADS
BYPASS VALVE
Page 12

 Loading...
Loading...