

Page 1
AUTOPILOT
NAVpilot-500
Page 2
SAFETY INSTRUCTIONS
WARNING
Do not open the equipment
unless you are well familiar
with electrical circuits.
Only qualified personnel
ELECTRICAL
SHOCK
HAZARD
Do not set the course changing speed
too high.
The boat will be turned too sharply at the
course change, which could create a very
dangerous situation.
Do not use the autopilot in the
following situation:
Harbor entrance or narrow channel
Where vessels change course often,
such as a cape or small island
should work inside the
equipment.
WARNING
Do not use the ORBIT mode in rough
sea.
Because the boat turns a 360-degree circle
around the waypoint a large wave or strong
wind can cause the boat to capsize.
Confirm that no objection is in the
general vicinity of the waypoint.
The distance from the waypoint to the
turning point depends on boat's speed.
Do not use the SIMULATION mode on
the boat.
The rudder may move. This is specialpurpose mode for technicians.
CAUTION
Observe the following cautions when
using the autopilot:
Maintain a vigilant watch
Watch for drifting of vessel
In an emergency, manually steer the
vessel.
The autopilot cannot avoid vessels, etc.
automatically.
Do not use the SIMULATION mode on
the boat.
The rudder may move. This is specialpurpose mode for technicians.
In case of power failure turn off the
autopilot or manually steer the vessel.
Leaving the equipment in the AUTO or
NAV mode during power failure will cause
wear on the rudder mechanism.
Use the correct fuse.
Use of a wrong fuse can cause fire or
damage the equipment.
WARNING LABEL
A warning label is attached to the
processor unit. Do not remove the
label. If the label is missing or damaged,
contact your dealer about replacement.
To avoid electrical shock, do not
remove cover. No user-serviceable
parts inside.
WARNING
Name: Warning Label (1)
Type: 86-003-1011
Code No.: 100-236-231
i
Page 3

TABLE OF CONTENTS
FORWORD...........................................................................................................iv
SYSTEM CONFIGURATION.................................................................................v
1. PRINCIPLE OF THE AUTOPILOT................................................................1-1
Principle of Autopilot ..........................................................................................................1-1
Principle of Operation........................................................................................................1-2
2. BASIC OPERATION......................................................................................2-1
2.1 Operating Controls....................................................................................................2-1
2.2 Turning On/Off...........................................................................................................2-2
2.3 Adjusting Brilliance and Contrast...............................................................................2-3
2.4 Displays.....................................................................................................................2-3
2.4.1 Selecting the data shown on Normal and Data Displays................................... 2-4
2.4.2 Selecting the display on Graphic Display..........................................................2-7
2.4.3 Selecting data for analog indicator.................................................................... 2-8
3. STEERING MODES.......................................................................................3-1
3.1 STBY Mode............................................................................................................... 3-1
3.2 AUTO Mode .............................................................................................................. 3-2
3.2.1 Using the AUTO mode......................................................................................3-2
3.2.2 ADVANCED AUTO mode.................................................................................. 3-3
3.2.3 TURN mode (For AUTO mode).........................................................................3-4
3.3 NAV Mode.................................................................................................................3-5
3.3.1 Starting the NAV mode......................................................................................3-5
3.3.2 Selecting sailing method of NAV mode .............................................................3-6
3.3.3 Switching waypoint ........................................................................................... 3-7
3.3.4 Selecting boat’s movement at the destination (or last) waypoint.......................3-7
3.3.5 Navigating to TLL point (FISHING mode) ........................................................ 3-10
3.4 REMOTE Mode....................................................................................................... 3-11
3.5 DODGE Mode.........................................................................................................3-17
3.5.1 Dodging in STBY mode ..................................................................................3-17
3.5.2 Dodging in AUTO or NAV mode...................................................................... 3-18
4. MENU OPERATION ......................................................................................4-1
4.1 STBY Mode Menu ..................................................................................................... 4-1
4.1.1 Offsetting data..................................................................................................4-1
4.1.2 Setting parameters...........................................................................................4-3
4.1.3 Setting the units of measurements..................................................................4-10
4.1.4 Setting other menu items................................................................................ 4-12
ii
Page 4

5. ALARMS........................................................................................................5-1
5.1 ALARM Menu ............................................................................................................5-1
5.1.1 Selecting the alarm buzzer................................................................................5-2
5.1.2 Selecting the beep pattern.................................................................................5-2
5.1.3 Setting the watch alarm..................................................................................... 5-3
5.1.4 Setting the heading deviation alarm..................................................................5-3
5.1.5 Setting the cross-track error limit.......................................................................5-3
5.1.6 Setting the speed alarm ....................................................................................5-4
5.1.7 Setting the depth alarm.....................................................................................5-5
5.1.8 Setting the temperature alarm...........................................................................5-6
5.1.9 Setting the trip distance alarm........................................................................... 5-6
5.1.10 Clearing the trip distance.................................................................................5-7
5.2 Alarm Information.......................................................................................................5-7
6. MAINTENANCE & TROUBLESHOOTING ...................................................6-1
6.1 Preventive Maintenance.............................................................................................6-1
6.2 Replacement of Fuse.................................................................................................6-2
6.3 Diagnostics................................................................................................................6-2
6.4 Clearing Memories.....................................................................................................6-6
6.5 Error Messages..........................................................................................................6-7
MENU TREE...................................................................................................MN-1
SPECIFICATIONS
iii
Page 5

FOREWORD
A Word to the Owner of the NAVpilot-500
Congratulations on your choice of the FURUNO NAVpilot-500 AUTOPILOT.
For over 50 years FURUNO Electric Company has enjoyed an enviable reputation for
innovative and dependable marine electronics equipment. This dedication to excellence is
furthered by our extensive global network of agents and dealers.
Your autopilot is designed and constructed to meet the rigorous demands of the marine
environment. However, no machine can perform its intended function unless installed,
operated and maintained properly. Please carefully read and follow the recommended
procedures for operation and maintenance.
We would appreciate hearing from you, the end-user, about whether we are achieving our
purposes.
Thank you for considering and purchasing FURUNO equipment.
Features
• Self learning program to continuously improve the steering parameters for safe and
expeditious navigation
• Two steering modes – AUTO (Heading Control System) and NAV (Track Control System)
• Dodging from t he control unit or remote controller
• Available for solenoid drive and reversible hydraulic
• Max. six control units may be connected (using two ports of the processor unit)
• Menu operation for simplified control
• Display modes: Autopilot/Track control modes with rudder angle, L/L, Highway, Two
customized displays, compass rose
iv
Page 6
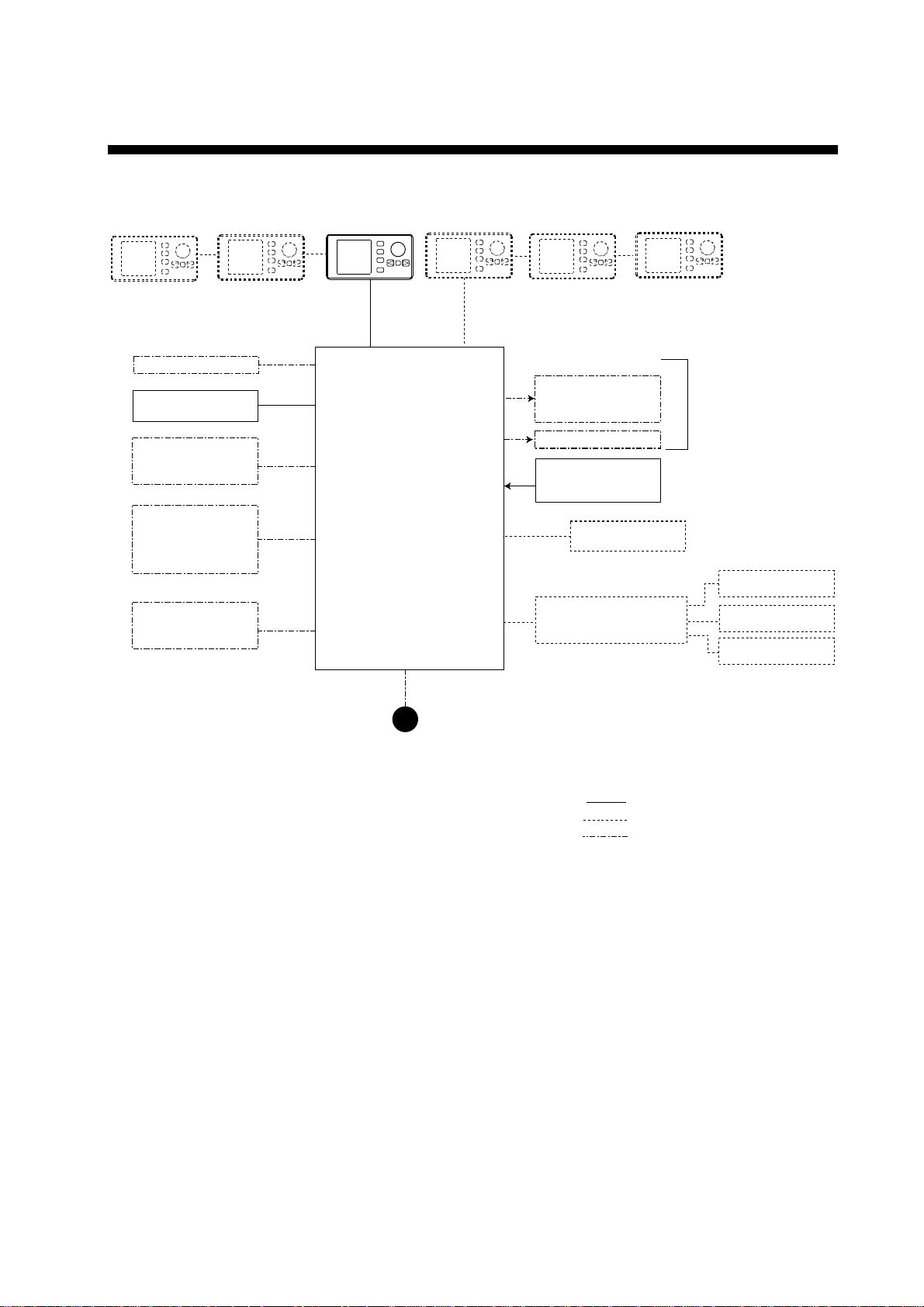
SYSTEM CONFIGURATION
Control Unit
FAP-5001 (Max. 6)
PC
Heading sensor
PG-500
External buzzer
GPS Navigator
(NMEA0183)
RD-30 (Max. 3)
(NMEA0183)
Processor Unit
FAP-5002
Ship’s mains
12-24 VDC
Reversible pump or
Electromagnetic valve unit
Clutch
Rudder Reference Unit
FAP-6111
Remote Controller
Distributor FAP-6800
Remote controler
Dial type: FAP-5551, FAP-5552
Button type: FAP6211, FAP-6212
Lever type: FAP-6221, 6222
Dodge type: FAP-6231, 6232
: Standard supply
: Option
: User supply
Ship’s steering system
Remote Controller
Remote Controller
Remote Controller
System configuration of NAVpilot-500
v
Page 7

This page is intentionally left blank.
vi
Page 8

1. PRINCIPLE OF THE AUTOPILOT
Principle of Autopilot
Autopilot is an automatic device for steering a vessel maintaining its heading in
an intended direction. Anyone can appreciate the advantages of the autopilot –
being free to carry out navigational checks, trim adjustments or simply to relax
and enjoy.
The autopilot utilizes a proportional rat e system to steer the boat. The
proportional rate system is similar to the highly accurate and reliable system
used on aircraft, missiles and space vehicles. The proportional rate autopilot
provides the necessary course correction to the steering gears in propo r tion to
the speed and amount the boat m oves off course.
With the removal of the dead band, the aut opilot no longer wanders within a
dead band but now steers a prescribed course, taking action within the presence
of even a minute course error. The amount of action depends on the course
error detected; that is, when the course error rate is small a very low helm
correction rate is applied.
Because the wandering is eliminated, the proportional rate autopilot has the
advantages of low power consumption and low wear and tear on the autopilot
and the steering system. Off-course correction is smooth, not jerking back and
forth at full speed.
1-1
Page 9
1. PRINCIPLE OF THE AUTOPILOT
Principle of Operation
In the AUTO modes, the heading information from an associated sensor is
continuously compared with the set course (in the NAV mode, the course to the
waypoint set on the plotter connected). With the boat on course, the two signals
are equal.
If the boat goes off course, the difference between the primary heading and the
set course will change proportionally and there will be an imbalance at the
comparator, whose output will move up or down depending on whether the
course error is to the left or right of the set course.
The rudder continues to move until a balanc ed condition is obtained at the
comparator, at which point the drive switches off.
To set the rudder when the boat is off-course, the rudder signal is generated at
the rudder reference unit, then deliver ed the processor unit.
1-2
Page 10
2. BASIC OPERATION
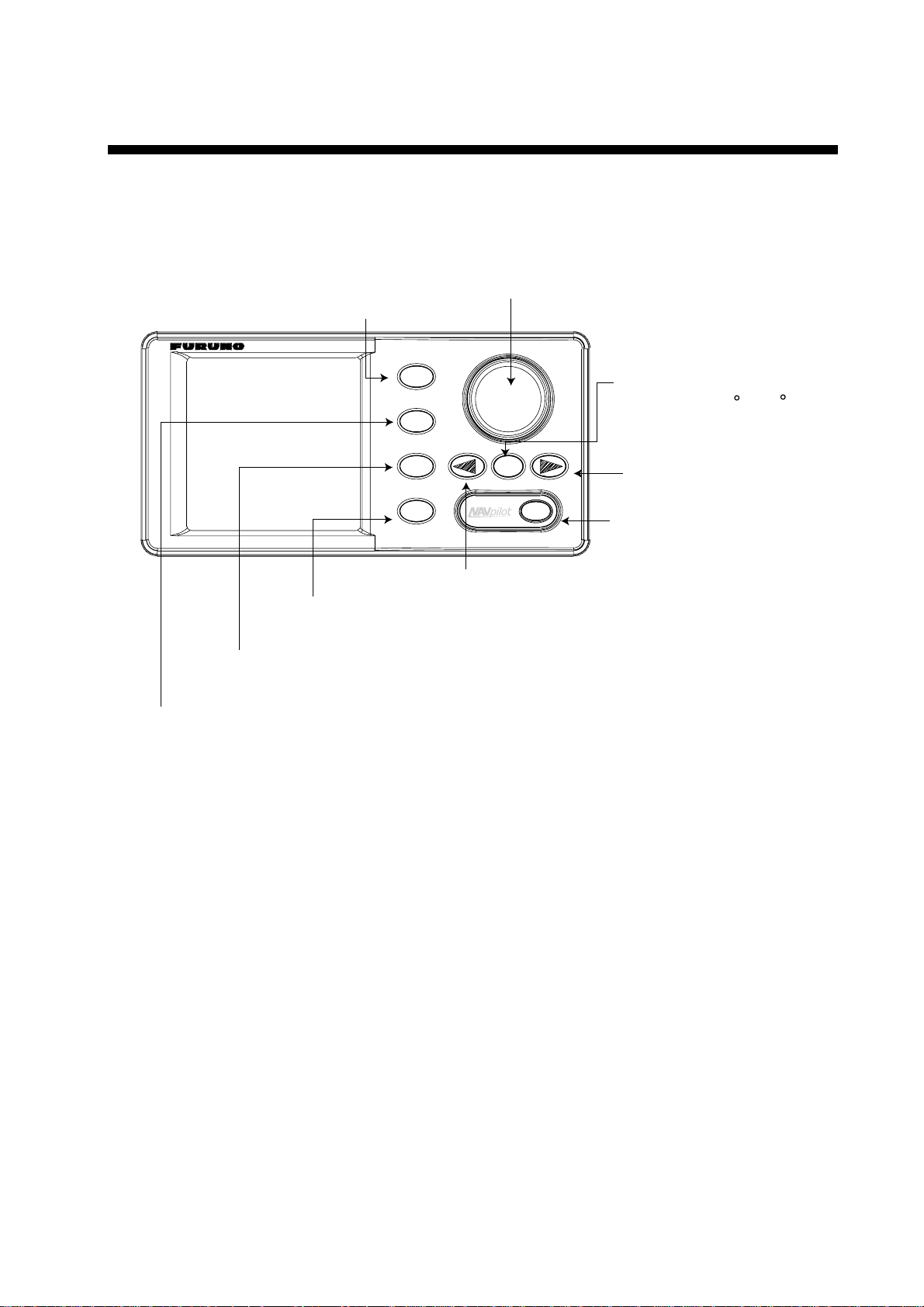
2.1 Operating Controls
Enter knob
Rotate: Selects menu items and options.
STBY key
Selects the STBY (manual) mode.
Push: Sets the course on Auto or Nav mode.
MENU key
Opens the mode menus.
NAV key
Selects the NAV mode.
AUTO key
Selects the AUTO mode.
STBY
AUTO
NAV
MENU
Port key
Steers the boat to port.
TURN
Control unit, front view
Turn key
Turns the boat 180 or 360 .
Starboard key
Steers the rudder to boat.
POWER/BRILL key
Long press: Turns power off.
Mormentary press: Turns power on;
opens the display for adjustment of
brilliance and contrast.
2-1
Page 11
2. BASIC OPERATION
2.2 Turning On/Off
Press the [POWER/BRILL] key to turn the unit on before leaving the port,
because several minutes are necessary to allow for stabilization of the heading
data from the heading sensor. (For PG-500, see Note 2 shown below.) A beep
sounds and the equipment proceeds in the sequence shown below, displaying
product information and startup test results. The startup test checks the ROM,
RAM, backed up data and communication between the control unit and
processor unit for proper operation. Also it checks the inputs of heading signal
and rudder angle signal for the processor unit. If NG appears an appropriate
message appears on the screen. For any NG, try to press any key to go to the
next screen. However, the equipment may not work properly. Contact your
dealer for advice.
AUTO PILOT
NAVPILOT-500
FURUNO ELECTRIC CO., LTD
START UP TEST
ROM
PROCESSOR OK 6454002-**.**
CONTROL OK 6454001-**.**
RAM
PROCESSOR UNIT OK
CONTROL UNIT OK
BACK UP DATA
PROCESSOR UNIT OK
CONTROL UNIT OK
HEADING DATA OK 359.9
6454101-**.**
RRU OK P12.3
CONTROLLER ID 1
**.** : Program version no.
Startup sequence
After the startup test is completed, “STBY” appears on the screen. This means
the equipment may now be operated manually.
Note 1: The first time you turn on the power, you are asked if you want to start
the simulation mode, which provides simulated operation of the
equipment. Push the [ENTER] knob to start the simulation mode, or any
key to escape. If you pressed a key except the [ENTER] knob, you are
asked if you want to set the installation menu. Press the [ENTER] knob
to go to the installation menu, or any key to go to STBY. For details
about the installation menu, contact your dealer.
Note 2: When the Integrated Heading Sensor PG-500 is connected, press the
[POWER/BRILL] key four minutes before leaving the port to use the
AUTO mode which needs stabilized bearing data.
Turning the power off
2-2
Press and hold down the [POWER/BRILL] key until the screen goes blank. The
time remaining until the power is turned off is shown on the screen.
Page 12
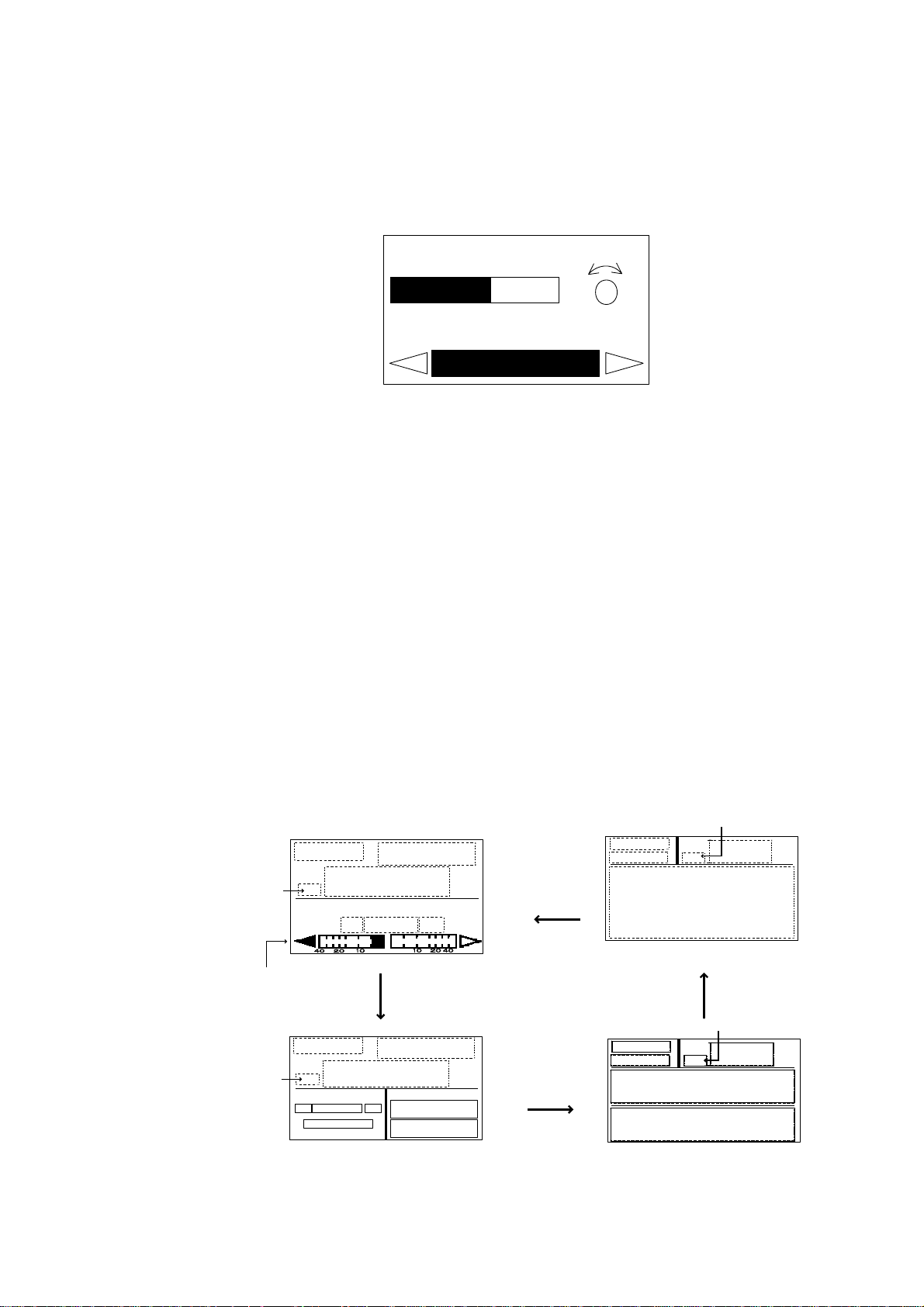
2.3 Adjusting Brilliance and Contrast
The brilliance and contrast can be adjusted as below:
1. Momentarily press the [POWER/BRILL] key. The CONTRAST and BRILL
window appears.
2. BASIC OPERATION
2. Rotate the [ENTER] knob to adjust display contrast; clockwise to raise the
contrast and counter-clockwise to lower it. (16 levels are available.)
The contrast can also be adjusted by pressing the [POWER/BRILL] key.
3. Press the [PORT] or [STBD] key to adjust display brilliance, [PORT] to lower
the brilliance and [STBD] to raise it. (Eight levels are available.)
To close the CONTRAST and BRILL window, press any key except the
[POWER/BRILL], [STBD] or [PORT] key.
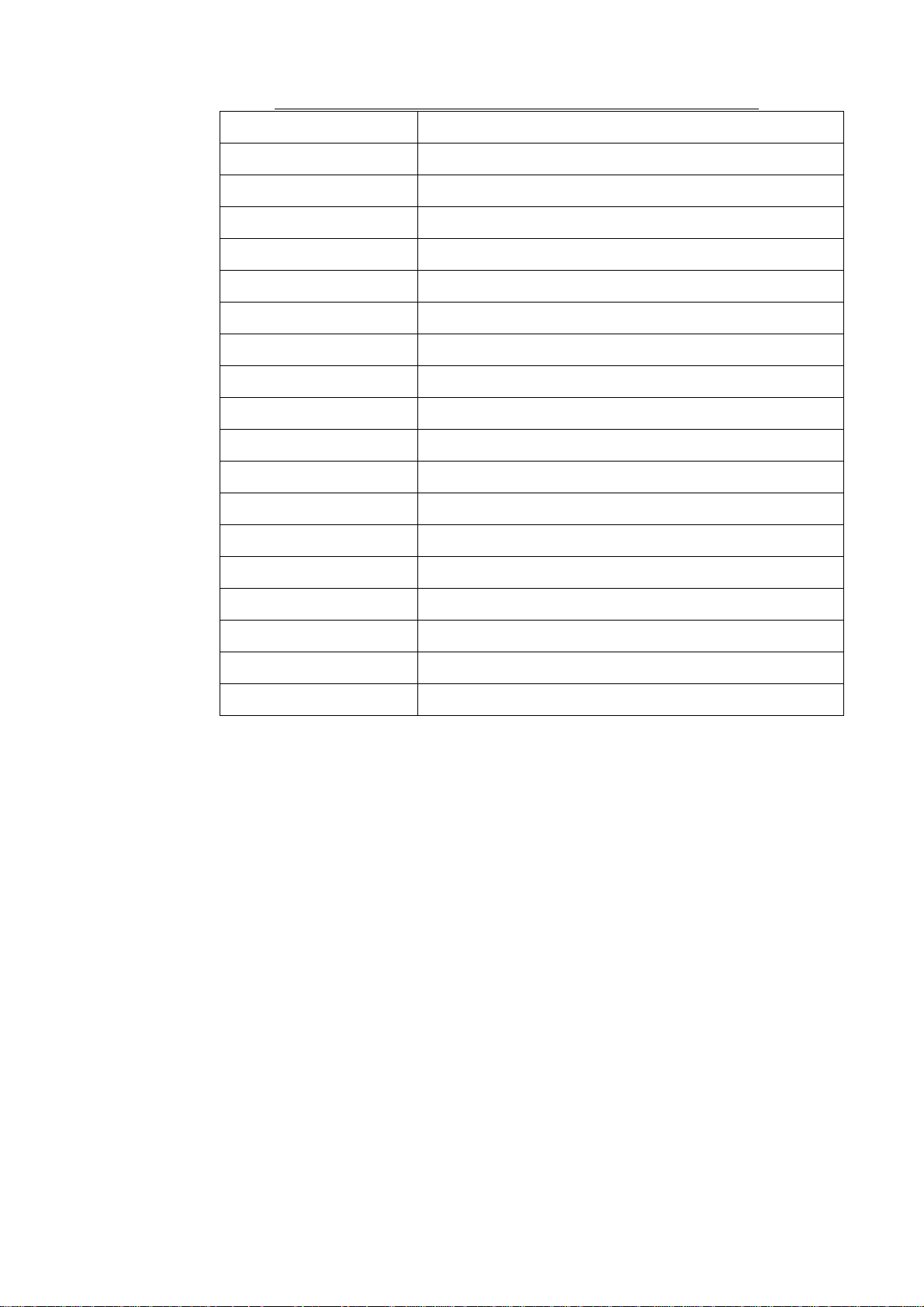
2.4 Displays
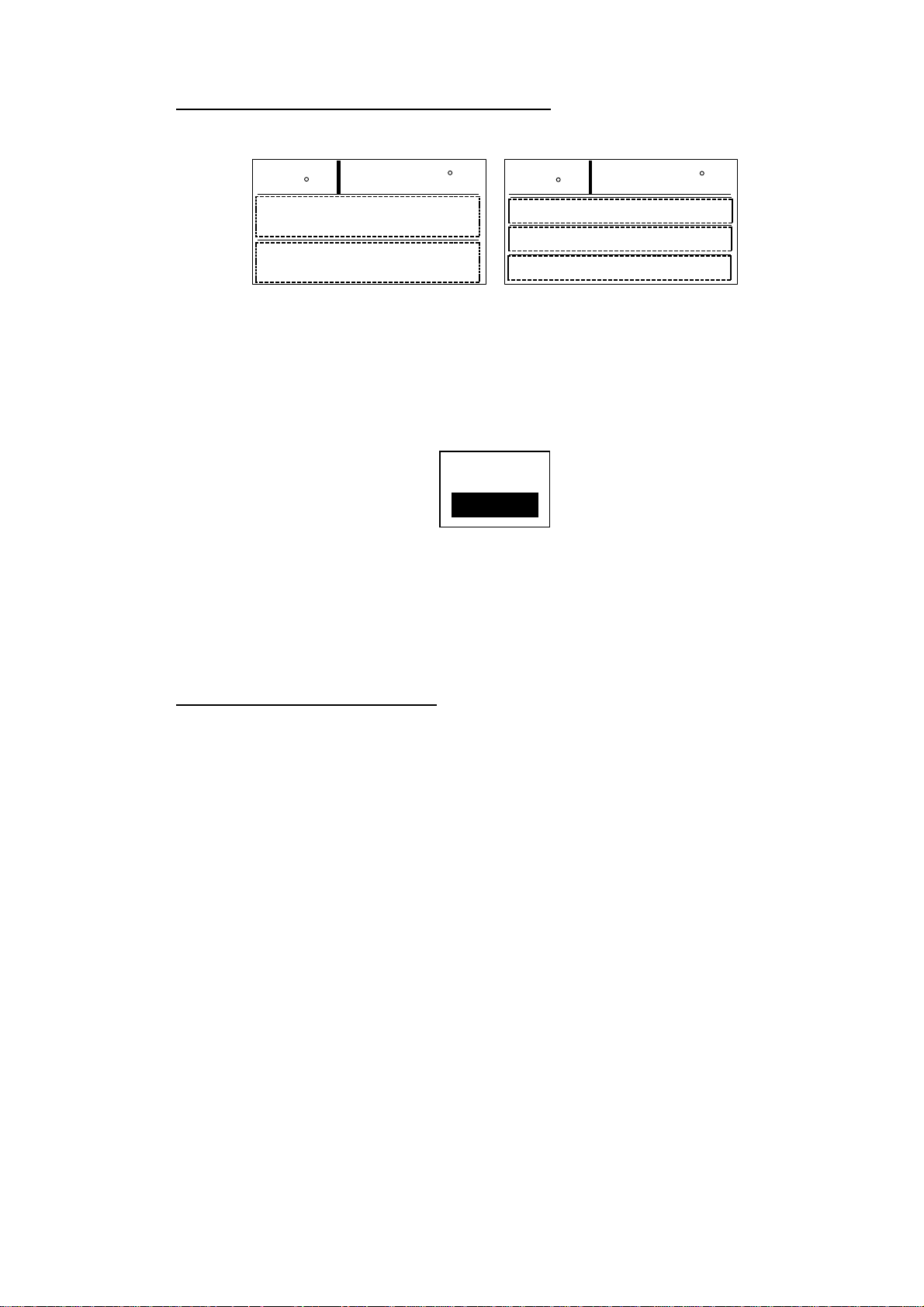
There are four types of displays: Normal display 1, Normal display 2, Graphic
display and Data display.
To choose a display mode, press a mode key (AUTO, NAV, STBY). Each time a
mode key is pressed the display changes in the sequence shown below.
(Mode)
HDG
Heading mode
P
CONTRAST
BRILL
PORT
10
8
Contrast, brilliance window
(Course)
(Heading)
(Data)
S
STBD
(Mode)
(Course)
Heading mode
HDG
(Graphic)
(Graphic display)
(Mode)
(Course)
(Data display)
Heading mode
HDG
(Data1)
(Data 2)
(Heading)
Analog indicator
Heading mode
(Mode)
HDG
(Data)
P
(Normal display 2)
(Normal display 1)
(Course)
(Heading)
S
(Data1)
(Data 2)
Displays
2-3
Page 13

2. BASIC OPERATION
2.4.1 Selecting the data shown on Normal and Data Displays
Some display modes may be set up to suit your operating needs, on the
SCREEN SETUP menu.
Selecting data for Normal Display 2 screen
You can select the data to show on the upper and lower half of the Normal
Display 2.
STBY
HDG
P
(Data)
S
20.5
145.9
(Data1)
(Data 2)
Upper half
Lower half
Normal Display 2
1. Press the [STBY] and [MENU] key in order to show the STBY menu.
2. Rotate the [ENTER] knob to select the SCREEN SETUP, and then press the
[ENTER] knob to show the SCREEN SETUP menu.
SCREEN2 UPPER DATA:
SCREEN2 LOWER DATA:
SCREEN3 PATTERN: 3 DATA
DATA1: POS
DATA2: COG
DATA3: SOG
GRAPHIC:
HIGHWAY
POS
2-4
Screen setup menu
3. Rotate the [ENTER] knob to select “SCREEN 2 DATA UPPER” or “SCREEN
3 DATA LOWER” from the SCREEN SETUP menu.
4. Press the [ENTER] knob to show the options window.
5. Rotate the [ENTER] knob to select the data which you want to show on the
upper or lower half of the Normal Display 2.
Page 14
2. BASIC OPERATION
Data available for display in SCREEN 2 UPPER and LOWER
Menu option Displayed data
POS Own ship’s position (L/L)
COG Course over ground
SOG Speed over ground
STW Speed through water
TMP Water temperature
DPT Depth
BRG Bearing to waypoint
RNG Range to waypoint
WPT POS Waypoint position (L/L)
XTE Cross-track error
TTG Time-to-Go to Destination
ETA Estimated Time of Arrival
DATE Date
TIME Time
WIND T* Wind direction and speed (True)
WIND R** Wind direction and speed (Relative)
VOLT Input/output power voltage to the processor unit
TRIP Trip distance
*True: The speed and direction (in relation to ship’s bow) of the wind felt
or measured when stationary.
**Relative: The direction (in relation to ship’s bow) and speed of the wind as it
appears to those on board, relative to the speed and direction of
the boat; combination of the true wind and the wind caused by the
boat’s movement.
6. Press the [ENTER] knob.
7. Press the [MENU] key to close the menu.
2-5
Page 15
2. BASIC OPERATION
Selecting the display layout for Data Displa y
You can show two or three data on the Data Display.
STBY
20.4
HDG
(Data1)
(Data 2)
Data display, two data
116.5
STBY
20.4
HDG
(Data1)
(Data 2)
(Data 3)
Data display, three data
116.5
Data Displays
1. Open the SCREEN SETUP menu referring to page 2-4.
2. Rotate the [ENTER] knob to select “SCREEN 3 PATTERN.
3. Press the [ENTER] knob to show the screen 3 options window.
2 DATA
3 DATA
Screen 3 pattern options window
4. Rotate the [ENTER] knob to select 2 DATA or 3 DATA as appropriate.
5. Press the [ENTER] knob.
6. Press the [ENTER] knob to close the menu.
Selecting data for Data Display
You may choose which data to show on the Data Display. Data 3 is available
only when you select 3DATA at “SCREEN 3 PATTERN” shown above.
1. Open the SCREEN SETUP menu referring to the page 2-5.
2. Rotate the [ENTER] knob to select “DATA 1”, “DATA 2” or “DATA 3”.
3. Press the [ENTER] knob show the option window.
The contents are same as the table shown on the previous page.
4. Rotate the [ENTER] knob to select data.
5. Press the [ENTER] knob.
6. Press the [MENU] key to close the menu.
2-6
Page 16
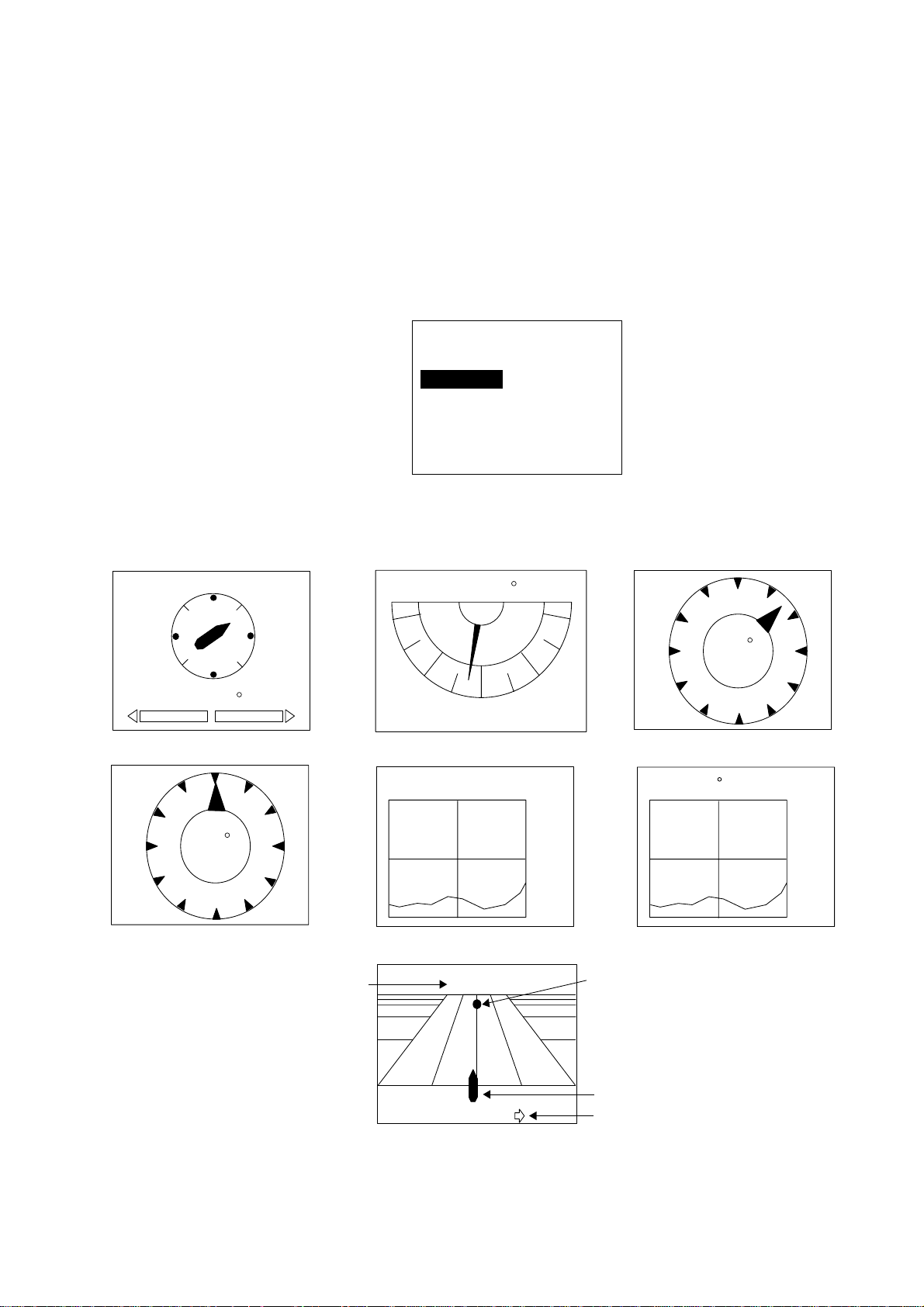
2.4.2 Selecting the display on Graphic Display
COMPASS, RUDDER ANGLE, HIGHWAY, WIND TRUE INDICATOR, WIND
RELATIVE INDICATOR, DEPTH GRAPH or TEMP GRAPH can be shown on
the Graphic Display. Note that the appropriate sensors are necessary to display
data.
1. Open the SCREEN SETUP menu referring to page 2-4.
2. Rotate the [ENTER] knob to select “GRAPHIC”.
3. Press the [ENTER] knob to show the graphic options window.
COMPASS
RUDDER ANGLE
HIGHWAY
WIND TRUE INDICA T OR
WIND RELATIVE INDICATOR
DEPTH GRAPH
TEMP GRAPH
2. BASIC OPERATION
4. Rotate the [ENTER] knob to select the graphic type.
N
W
RUDDER
WINDWIND
RELATIVE WIND INDICATOR
S
P 2.5
COMPASS
45
12 kt
E
RELATIVE
Graphic options window
RUDDER ANGLE
PORT
DEPTH 260ft
P 5.1
RUDDER ANGLE
DEPTH GRAPH
STBD
200
300
WINDWIND
45
12 kt
TRUE WIND INDICATOR
TEMP 32.0 F
TEMP GRAPH
TRUE
40
30
Waypoint ID
001WPT
P0.01 nm
HIGHWAY
Waypoint mark
Own ship symbol
Direction to steer
Graphic displays
5. Press the [ENTER] knob and [MENU] key in order to close the menu.
2-7
Page 17
2. BASIC OPERATION
2.4.3 Selecting data for analog indicator
Choose what to display on the analog indicator display on Normal Display 1 and
2.
(Mode)
HDG
(Course)
(Heading)
P
(Data)
S
(Normal display 1)
(Mode)
HDG
P
(Course)
(Heading)
(Data)
S
(Normal display 2)
(Data1)
(Data 2)
Analog indicator
Normal Display 1 and 2
1. Press the [STBY] and [MENU] key in order to show the STBY menu.
2. Rotate the [ENTER] knob to select “DISPLAY SETUP”.
3. Press the [ENTER] knob to show the DISPLAY SETUP menu.
SPEED UNIT:
RANGE UNIT: nm
WIND SPEED UNIT: kt
DEPTH UNIT: ft
WATER TEMP UNIT: F
POSITION FORMAT
NEXT PAGE
kt
DD MM. MMM"
Page 1
PREVIOUS PAGE
HEADING READOUT: MAGNETIC
SPEED READOUT: SOG
ANALOG INDICATOR BAR:
RUDDER ANGLE
DATE FORMAT: MMM. DD. YYYY
TIME FORMAT: 24HOUR
Page 2
Display setup menu
To change pages, select “▼NEXT PAGE” or “▲PREVIOUS PAGE” and press
the [ENTER] knob.
2-8
Page 18
2. BASIC OPERATION
4. Rotate the [ENTER] knob to select “ANALOG INDIACATOR BAR” on the
second page.
5. Press the [ENTER] knob to show the bar indicator options window.
RUDDER ANGLE
DEVIATION
RUDDER/XTE
DEVIATION/XTE
Analog indicator bar options window
6. Rotate the [ENTER] knob to select option you desired to show.
Note the following.
RUDDER/XTE: Rudder in STBY and AUTO mode, XTE in NAV mode.
DEVIATION/XTE: Deviation in STBY and AUTO mode, XTE in NAV mode.
7. Press the [ENTER] knob.
8. Press the [MENU] key to close the menu.
2-9
Page 19

2. BASIC OPERATION
This page is intentionally left blank.
2-10
Page 20
3. STEERING MODES
The NAVpilot-500 syste m is capable of five primary steering modes: STBY
(manual), AUTO, NAV, REMOTE (FU and NF U) and DODG E.
In case of emergency, for example, collision avoidance, turn the helm quickly to
control the boat manually. The alarm sounds and “STBY” flashes on the display.
To ret urn to the normal mode, press the [STBY], [AUTO] or [NAV] mode.
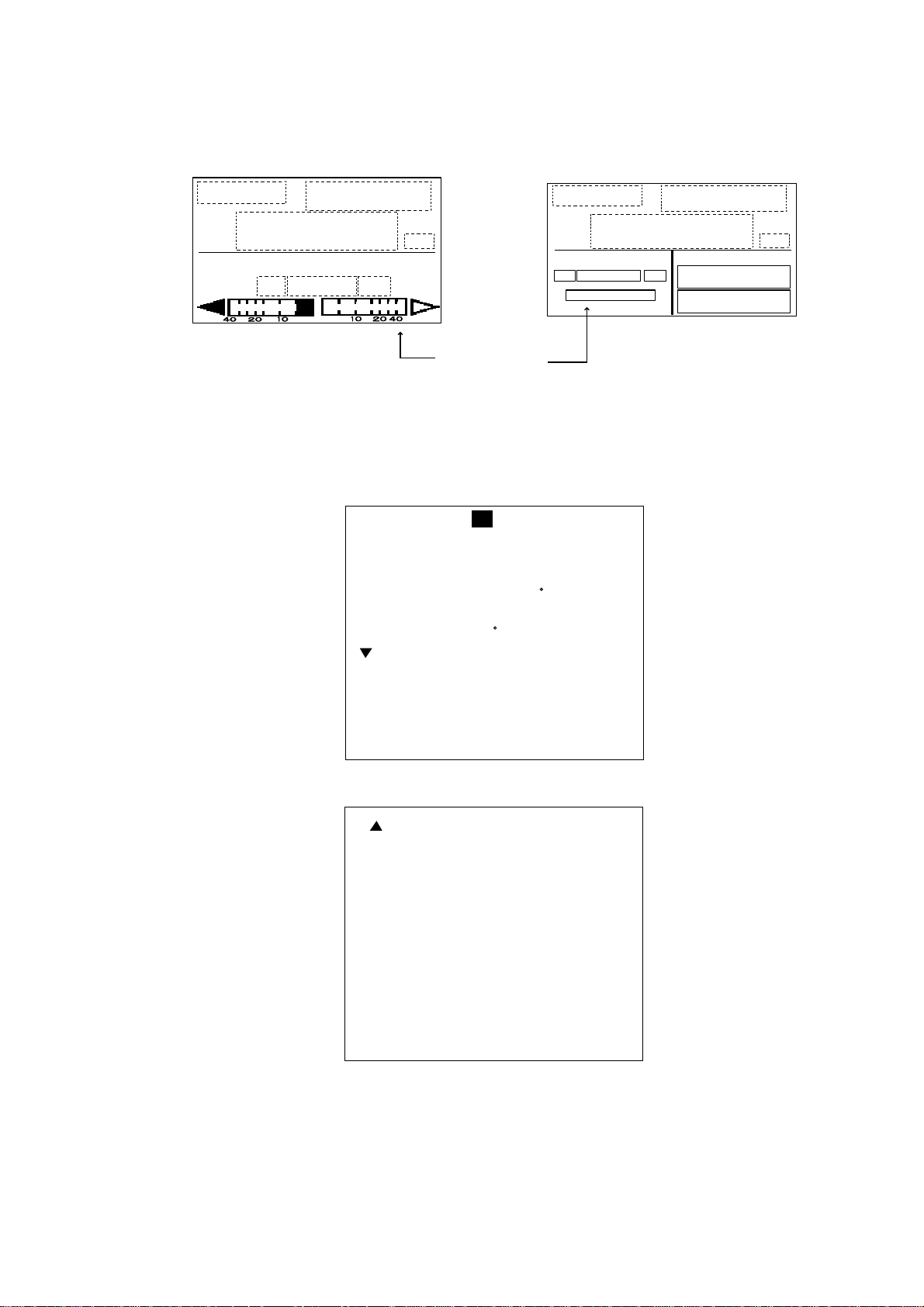
3.1 STBY Mode
After turning on the power, the equipment goes to the STBY mode.
This is a manual steering mode. When sailing out of a harbor, steer the vessel in
the STBY mode.
Press the [STBY] key.
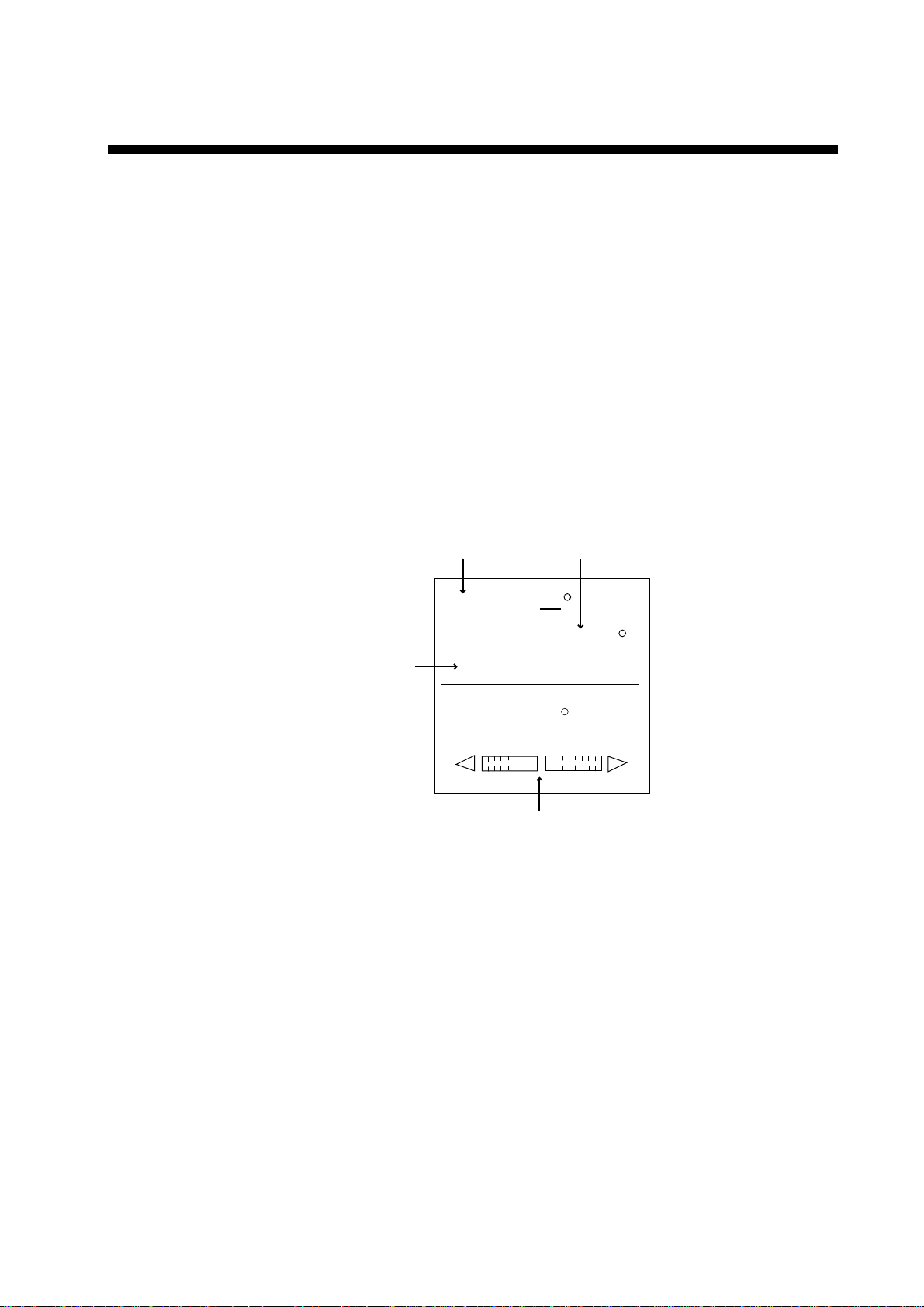
STBY mode
(manual steering mode)
Heading mode
M: Magnetic
T: True
Heading from heading sensor
STBY
HDG
M
359.9
RUDDER
0
20
40
10
Rudder angle (or Deviation)
STBY mode display
40
10
20
3-1
Page 21
3. STEERING MODES
3.2 AUTO Mode
3.2.1 Using the AUTO mode
The AUTO mode makes the NAVpilot-500 steer the boat automatically on a set
course.
Note: The AUTO mode will not bring your boat t o the destination when wind or
tide prevails. Use this mode for a short straight voyage. O therwise switch to the
NAV mode shown on page 3-5.
1. Direct the boat to the intended course desired.
The course in this mode is a line connecting between the origin and the
destination.
2. Press t he [AUTO] key to access the Auto mode.
Your boat will automatically be steered toward the course at the moment the
[AUTO] key is pressed.
Whenever the heading deviates from the set course, the NAVpilot-500
automatically adjusts the rudder to return the boat to the set course.
3. To change or readjust the course setting in the AUTO mode, simply rotate t he
[ENTER] knob to set the desired course.
4. Press the [STBY] key to leave AUTO steering in an emergency. You can
steer your boat by the helm.
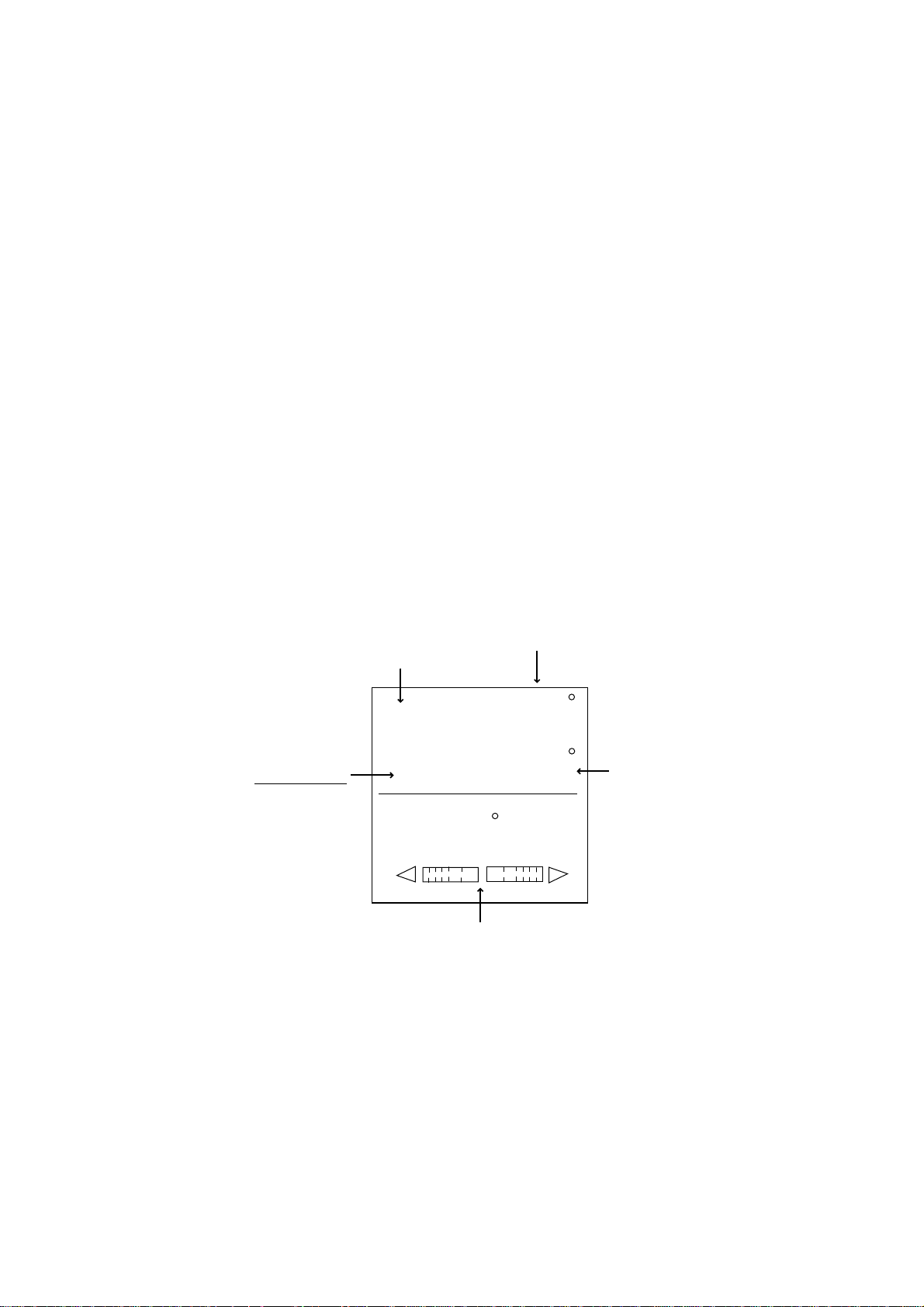
Heading control mode
Heading mode
M: Magnetic
T: True
(AUTO mode)
AUTO
Course selected by the [ENTER] knob
359
HDG
M
RUDDER
359.9
0
20
40
Rudder angle (or Deviation)
AUTO mode display
10
10
20
Heading from
heading sensor
40
3-2
Page 22
3.2.2 ADVANCED AUTO mode
AUTO mode maintains set course but the track may be shifted by current or
wind. ADVANCED AUTO mode maintains set course without deviating from the
track. This mode can be enabled by connecting a navaid which can out put own
ship’s position data (L/L) in NMEA0183 format to the NAVpilot-500.
After connecting to a navaid which outputs position data, press the [ A UTO] key.
The NAVpilot-500 calculates the course based on the present position and
heading. In this mode, “AUTO
” appears on the display.
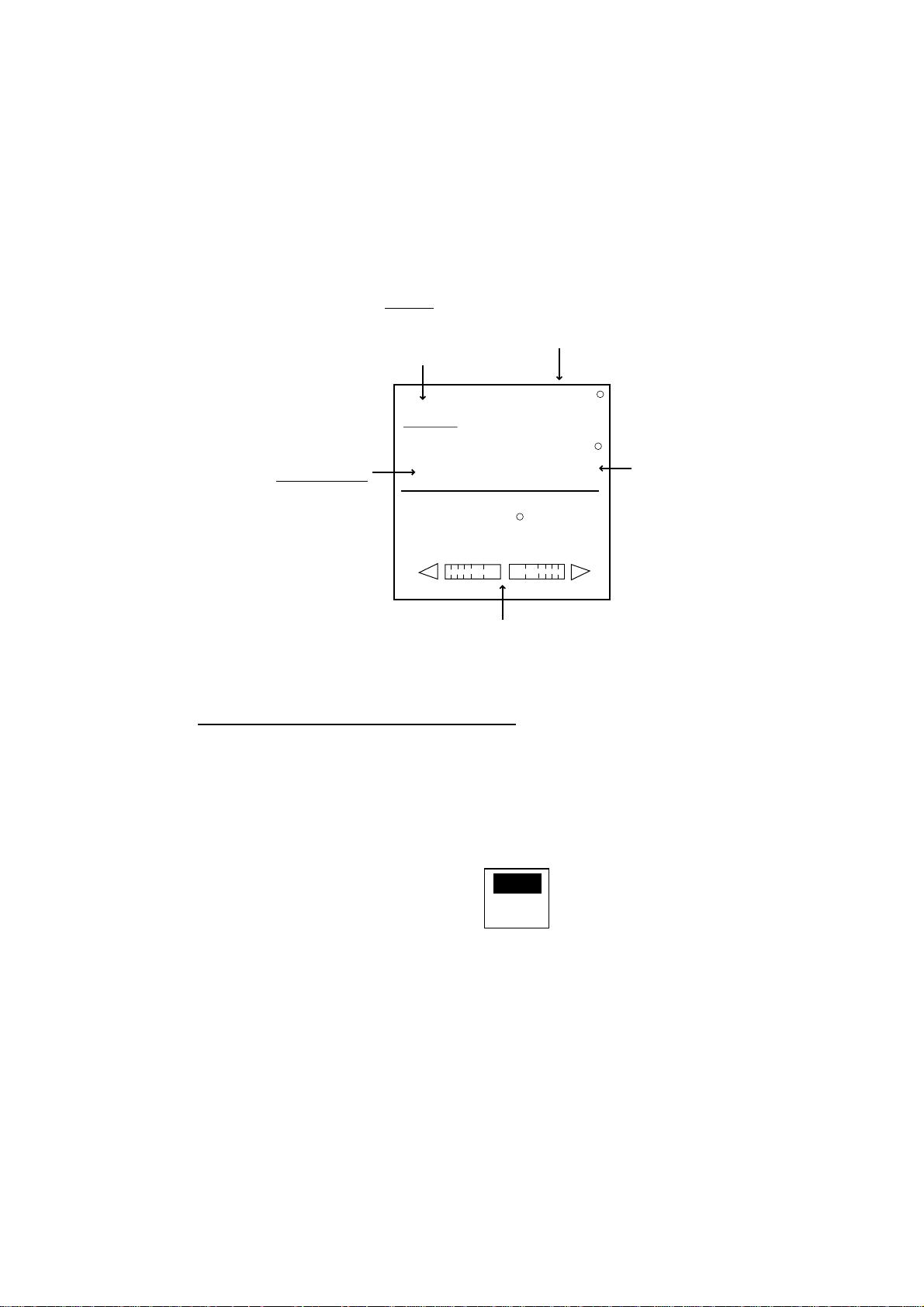
3. STEERING MODE
ADVANCED AUTO
(Indicated with underline)
AUTO
Course selected by the [ENTER] knob
359
HDG
Heading mode
M: Magnetic
T: True
M
RUDDER
359.9
Heading from
heading sensor
0
20
40
Rudder angle ( or XTE)
ADVANCED AUTO mode display
Enabling the ADVANCED AUTO mode
You can select whether to use the ADVANCED AUTO mode or not as follows.
1. In the AUTO mode, press the [MENU] key to show the AUTO mode menu.
2. Rotate the [ENTER] knob to select “ADVANCED AUTO”, and then press the
[ENTER] knob to show the advanced auto options window.
10
10
20
40
OFF
ON
Advanced auto options window
3. Rotate the [ENTER] knob to select “ON”.
When you want to finish the ADVANCED AUTO mode, select “OFF”.
4. Press t he [ENTER] knob, [MENU] key in order close the menu.
3-3
Page 23

3. STEERING MODES
3.2.3 TURN mode (For AUTO mode)
The [TURN] key provides a turn feature when in the AUTO mode.
This function changes the current set course to be 180° or 360°.
This is useful when you want to back to the position where a fish school appears
on the echo sounder.
180° turn
180° turn changes the current set course 180° in the opposite direction (
).
1. In the AUTO mode, press the [ TURN] key to show the setting window.
PUSH TO TURN 180
PORT STBD
180° turn setting window
2. Press the [PORT] or [STBD] key depending on the direction you want to turn.
The alarm sounds to notify you that the boat is turning.
The indication “180T” replaces “AUTO (or AUTO)” on the display.
3. When the message “TURN COMPLETED” appears after the boat has turned
180°, press the [ENTER] knob to silence the alarm.
Control is returned to AUTO mode automatically, and the indication “180T” is
replaced with “AUTO (or AUTO
).”
360° turn
360° turn provides a continuous turn feature with a constant rate of turn in a
circle (
).
1. In the AUTO mode, press the [ TURN] key to show the setting window twice.
3-4
PUSH TO TURN 360
PORT STBD
360° turn setting window
2. Press the [PORT] or [STBD] key depending on the direction you want to turn.
The alarm sounds to notify you that the boat is turning.
The indication “360T” replaces “AUTO (AUTO)” on the display.
3. When the message “TURN COMPLETED” appears after the boat has turned
360°, press the [ENTER] knob to silence the alarm.
Control is returned to AUTO mode automatically, and the indication “360T” is
replaced with “AUTO (or AUTO).”
Page 24

3.3 NAV Mode
3.3.1 Starting the NAV mode
The plotter connected to the autopilot kno ws the present position and location to
a destination waypoint. The NAVpilot-500, while receiving this information,
adjusts the course direction automatically and guides the boat to the destination
waypoint as determined by the associated p lotter.
1. Set the destination waypoint (or route) on the plotter.
2. Direct the boat’s heading to the waypoint.
3. Press the [NAV] key.
Course to the destination waypoint
Track control mode (NAV)
3. STEERING MODE
NAV
359
HDG
Heading mode
M: Magnetic
T: True
M
RUDDER
359.9
Heading from
heading sensor
0
20
40
Rudder angle (or XTE)
NAV mode display
The course is automatically set so that the boat sails on the intended course line.
When the [NAV] key is pressed, the course changes automatically in order to
follow the intended course line. The course reading on the NAVpilot- 500 is not
always equal to the waypoint direction which is presented on the plotter.
When you intend to navigate following a route, the boat goes to the second
waypoint in the route. Select the nearest or desired waypoint before going into
the NAV mode.
4. Press t he [STBY] or [AUTO] key to terminate the NAV mode.
10
10
20
40
3-5
Page 25

3. STEERING MODES
3.3.2 Selecting sailing method of NAV mode
The NAV mode has two sailing m ethods, COURSE and XTE. When the ship
goes out from the course between starting point (previ ous waypoint for route)
and destination waypoint because of tide, wind etc, each method functions as
below.
COURSE line
Original course
XTE line
NAV mode, COURSE and XTE
Waypoint
A sailing method can be selected from the menu.
1. In the NAV mode, press the [MENU] key to show the NAV mode menu.
2. Rotate the [ENTER] knob to select “NAV MODE”, and then press the
[ENTER] knob to show the nav mode options window.
XTE
COURSE
Nav mode options window
3. Rotate the [ENTER] knob to select XTE or COURSE as appropriate.
XTE: The boat sails along the course between the starting point and waypoint.
COURSE: The boat goes directly to the waypoint when the boat is off course.
4. Press t he [ENTER] knob, [MENU] key in order to close the menu.
3-6
Page 26

3. STEERING MODE
3.3.3 Switching waypoint
When you arrive at a waypoint on a route in the NAV mode, you can switch to
the next waypoint automatically or manually. AUTO switches the TO waypoint
when your boat is within the arrival alarm area (set on the plotter). MANUAL
requires operator confirmation bef ore switching the TO waypoint, when the boat
arrives at a waypoint, notified by sounding the buzzer.
1. In the NAV mode, press the [ENTER] knob to show the NAV mode menu.
2. Rotate the [ENTER] knob to select “WAYPOINT SWITCHING”.
3. Press the [ENTER] knob to show the waypoint switching window.
AUTO
MANUAL
Waypoint switching options window
3. Rotate the [ENTER] knob to select AUTO or MANUAL as appropriate.
4. Press t he [ENTER] knob, [MENU] key in order to close the menu.
3.3.4 Selecting boat’s movement at the destination (or last)
waypoint
You can select how to go to the destination waypoint (last waypoint in route
navigation). For NAV mode, own ship’s position L/L data and waypoint L/L data
are required.
1. In the NAV mode, press the [MENU] key to show the NAV mode menu.
ALARM MENU
SEA STATE FULL-AUTO
MANUAL PARAMETER
AUT O TRIM OFF
WAYPOINT SWITCHING
AUTO
NAV MODE XTE
FISHING MODE OFF
SPEED READOUT SOG
RADIUS OF ORBIT 0.10 nm
SYSTEM DATA
NAV mode menu
2. Rotate the [ENTER] knob to select “FISHING MODE”, and then press the
[ENTER] knob to show the fishing options window.
3-7
Page 27

3. STEERING MODES
3. Rotate the [ENTER] knob to select option desired.
OFF: The NAV mode changes to the AUTO mode when the boat
ORBIT CW: The boat runs around the (last) waypoint clockwise.
ORBIT CCW: The boat runs around the (last) waypoint counterclockwise.
CLOVER LEAF: When passing the (last) waypoint over the distance “d” as
OFF
ORBIT CW
ORBIT CCW
CLOVER LEAF
Fishing mode options window
arrives to the (last) waypoint, and the boat keeps the course
at the moment of arriving the waypoint.
shown below, the boat repeats to return to the waypoint
automatically. The distance “d” is set on menu. (See next
page.)
Radius of orbit
(set on menu)
Virtual waypoint
(clockwise)
Waypoint
Virtual waypoint
Course A
When the arrival radius (set on the plotter) is
larger than the radius of orbit, the boat runs to the
"virtual waypoint" and then make the circle
(Course A).
If smaller, the boat passes through the waypoint
once, and then runs in a circle (Course B).
(counterclockwise)
Course B
d
Waypoint
Clover leaf mode
3-8
Orbit mode (ex. clockwise)
4. Press the [ENTER] knob and [MENU] key in order to close the menu.
Note: Modes, ORBIT CW, ORBIT CCW and CLOVER LEAF may be changed
to other while a mode activates, but it effects the next time you use the
mode.
Page 28

3. STEERING MODE
ORBIT mode
When selecting the ORBIT CW or ORBIT CCW, operate the autopilot as shown
below.
WARNING
Do not use the ORBIT mode in rough sea.
Because the boat turns a 360-degree circle
around the waypoint a large wave or strong
wind can cause the boat to capsize.
1. Set the arrival alarm range on at the plott er connected.
2. In the NAV mode, press the [MENU] key to show the NAV mode menu.
3. Rotate the [ENTER] knob to select “RADIUS OF ORBIT ” , and then press the
[ENTER] knob.
The current value is circumscribed with a double rectangle.
4. Rotate the [ENTER] knob to set the radius for orbit.
(Setting range: 0.05 to 9.99 nm).
The radius of orbit may be changed while the orbit mode activates.
5. Press the [ENTER] knob and [MENU] key in order to close the menu.
6. Start the waypoint (or route) navigation.
When the boat arrives in the arrival alarm range for the destination waypoint (or
the last waypoint in route navigation), the message “TOO FAST TO ORBIT.
PLEASE SLOW DOWN LESS THAN 10 kt.” appears.
7. Reduce boat’s speed less than 10 kt.
When speed becomes less than 10 kt, the message “START TO TURN BY
ORBIT MODE” appears and then, the boat starts the orbital running.
Note: The ORBIT mode cannot function if ship’s speed is more than 10 kt.
Reduce boat speed exactly.
To quit the ORBIT mode before it is actuated, that is, the message in step 6
appears, press any key. The steering mode changes to the AUTO.
8. To escape from the ORBIT mode while it is in use, press [STBY] or [AUTO]
key to change to the appropriate mode.
3-9
Page 29

3. STEERING MODES
CLOVER LEAF
For the CLOVER REAF mode, set the distance “d” shown in the figure on page
3-8 for orbit at the NAV mode menu, referring to steps 2 through 5 in the above.
Note: Reduce boat’s speed less than 10 kt to activate this funct ion.
WARNING
Confirm that no objection is in the general
vicinity of the waypoint.
The distance from the waypoint to the turning
point may be changed depending on boat's
speed.
3.3.5 Navigating to TLL point (FISHING mode)
When TLL (Target Latitude and Longitud e) data is input from a radar or echo
sounder connected in the STBY, AUTO or NAV mode, the “FI S HING MODE”
window appears. Then, you may choose how to progress towards that posit ion,
from ORBIT (clockwise, counterclockwise) or CLOVER LEAF. (You may also
continue current steering mode, by choosing OFF.) For this mode, own ship’s
position L/L data and waypoint L/L data are required. For details, see pages 3-6
and 3-7.
OFF
ORBIT CW
ORBIT CCW
CLOVER LEAF
Fishing mode window
ORBIT
The boat makes circles around the TLL point. The orbital radius is set on the
menu. “ORBT” appears on the display when usi ng the ORBIT mode.
CLOVER LEAF
The boat automatically returns to the TLL position when it goes more than a
distance (set on menu) away from the TLL position. The indication “CLVR”
appears on the display when the CLOVER LEAF mode is in use.
3-10
Page 30

Orbit around the TLL
(clockwise)
3. STEERING MODE
TLL
TLL
Distance set
on menu
Orbit mode (ex. clockwise)
3.4 REMOTE Mode
Four types of optional remote controllers may be connected to the NAVpilot-500.
These are useful to operate this equipment from a remote location.
Dial type remote controller (FAP-5551, 5552)
This remote controller can only be used when in the AUTO or NAV mode.
1. Turn on the remote controller switch to show “FU” (Follow-Up) on the control
unit. If the remote controller switch is turned on when in the STBY mode, a
beep sounds to alert you that remote mode is available.
Heading mode
M: Magnetic
T: True
FU mode
(Follow-Up)
FU
HDG
M
RUDDER
Clover leaf mode
Course set
359
359.9
0
Heading from
heading sensor
20
40
Turning power on FU (Follow-Up) mode display
(dial type) (dial remote controller)
Rudder angle
10
10
20
40
3-11
Page 31

3. STEERING MODES
FU is one of manual steering modes, which outputs an absolute value
determined with the [ENTER] knob to drive the rudder, thus changing the ship’s
course at a given rate of change towards a set point. One click of button
changes the course by a definite step.
2. Rotate the dial on the remote controller t o steer the rudder.
The angle must be more than 10°, otherwise no steering occurs.
3. When you terminate the REMOTE mode, turn off the remote controller.
Rotating dial
Turning power off (dial type)
The control is returned to the control unit and the previously used mode (AUTO
or NAV) is restored. For the NAV mode, the boat will go to the destination
waypoint set using a sailing method (COURSE or XTE) depending on your menu
selection.
3-12
Page 32

Button (FAP-6211, 6212), Lever (FAP-6221, FAP-6222),
3. STEERING MODE
Dodge (FAP-6231, 6232) type remote controller
These controllers may be used in the STBY, AUTO and NAV modes.
1. For button and lever type remote controllers, turn on the remote controller
power.
The dodge type remote controller doesn’t have the power switch, it can be
operated by simply pressing the direction keys.
Turning power on, button and lever ty pe remote controllers
The indication “NFU” (No Follow-Up) appears on the control unit. (For dodge
type, NFU appears while a direction key on it is pressed.)
NFU mode
(Non Follow-Up)
NFU
Course set
359
HDG
Heading mode
M: Magnetic
T: True
M
RUDDER
359.9
Heading from
heading sensor
0
20
40
Rudder angle
NFU (No Follow-Up) mode display
Non-Follow up (NFU) is one of manual steering modes where the rudder
changes so long as the button or lever is operated, normally, while the lever or
push button is kept pressed at local or remote place.
10
10
20
40
3-13
Page 33

3. STEERING MODES
2. For button and dodge remote cont rollers, press the [PORT] or [STBD] key on
the remote controller. For the lever type, position the lever for the direction.
3. For the button and lever type remote controllers, turn off the remote controller
when terminating the REMOTE mode. (For dodge type remote controller,
simply release a key.) Control is returned to the cont rol unit and the
previously used mode (STBY, AUTO or NAV) is restored.
Operating remote controller (ex. button and lever t ypes)
Turning power off, button and lever type remote controllers
3-14
Page 34

3. STEERING MODE
Selecting course after the REMOTE mode is off
After the remote controller is turned off in the AUTO mode, t he course m ode can
be chosen to follow as below.
1. In the STBY mode, press the [MENU] knob to show the STBY mode menu.
ALARM MENU
DATA CALIBRATION
PARAMETER SETUP
DISPLAY SETUP
SCREEN SETUP
SYSTEM SETUP
TEST
SYSTEM DATA
Stby mode menu
2. Rotate the [ENTER] knob to select “SYSTEM SETUP”, and then press the
[ENTER] knob to show the SYSTEM SETUP menu.
To switch page 1 and 2, select “NEXT PAGE” or “PREVIOUS PAGE” and press
the [ENTER] knob.
KEY BEEP:
LOCK: UNLOCK
LANGUAGE: ENGLISH
PANNEL DIMMER: 8
REMOTE CONTROLLER 1: NFU
REMOTE CONTROLLER 2: NFU
CSE AFTER REMOTE:
NEXT PAGE
PREVIOUS PAGE
PORT 1 FORMAT: NMEA0183 V1.5
PORT 1 SENTENCE
PORT 2 FORMAT: NMEA0183 V1.5
PORT 2 SENTENCE
SIMULATION MODE: OFF
MEMORY CLEAR: ALL CLEAR
OFF
PRESENT COURSE
Page 1
Page 2
System setup menu
3-15
Page 35

3. STEERING MODES
3. Rotate the [ENTER] knob to select “CSE AFTER REMOTE”, and then press
the [ENTER] knob to show the cse (course) after remote options window.
PREVIOUS COURSE: The previous course before using the remote controller.
PRESENT COURSE: The heading at the moment the remote controller is turned
PREVIOUS COURSE
PRESENT COURSE
Cse (course) after remote options window
off.
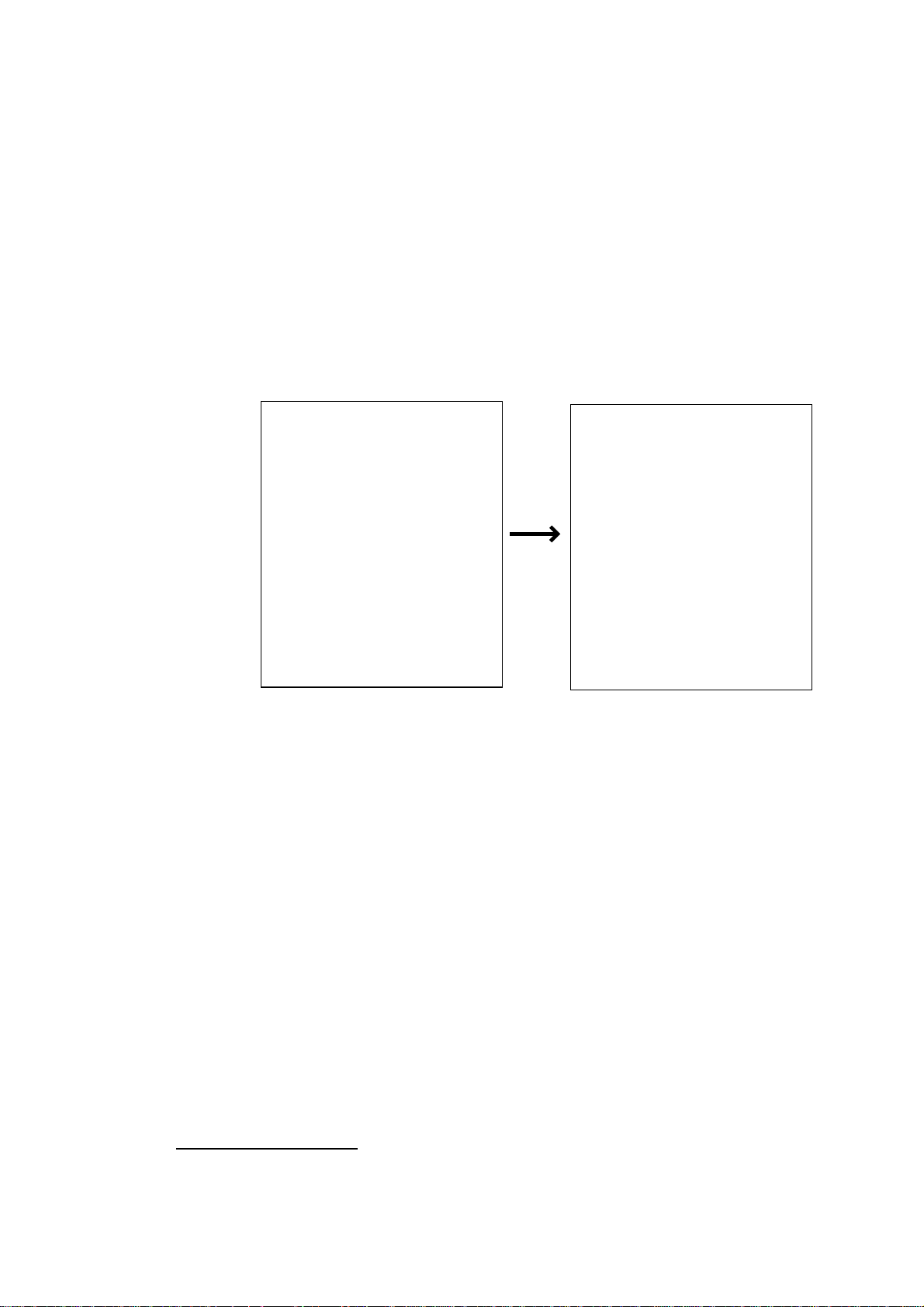
Previous course
New course
Remote
controller: OFF
PRESENT COURSE mode
Remote
controller: ON
Previous course
Remote
controller: OFF
Remote
controller: ON
PREVIOUS COURSE mode
Course after remote controller is turned off
4. Rotate the [ENTER] knob to select PRESENT COURSE or PREVIOUS
COURSE as appropriate.
5. Press the [ENTER] knob and [MENU] key in order to close the menu.
3-16
Page 36

3.5 DODGE Mode
The DODGE mode is useful in situations where you need to quickly take control
of the helm to avoid an obstruction.
3.5.1 Dodging in STBY mode
1. Press the [PORT] or [STBD] key down to steer appropriately until the boat
finishes the turning.
The equipment goes into the DODGE mode while pressing the [PORT] or
[STBD] key. In this mode, steering can not be done from other control units or
remote controllers. Further the audible alarm sounds when one of the above
keys is operated, to alert you to dodge operation. Note also that “DODG”
appears on the display.
DODGE mode
DODG
3. STEERING MODE
HDG
Heading mode
M: Magnetic
T: True
M
RUDDER
359.9
Heading from
heading sensor
0
20
40
Rudder angle
Dodge mode display 1
Note: To move the rudder t o 0° point, press the [PORT] and [STBD] keys at the
same time.
2. Release the [PORT] or [STBD] key to leave from the DODGE mode.
10
10
20
40
3-17
Page 37

3. STEERING MODES
3.5.2 Dodging in AUTO or NAV mode
1. Press the [PORT] or [STBD] key down to change the course until the boat
finishes to avoid the obstruction.
The equipment goes into the DODGE mode and the audible alarm sounds when
one of the above keys is operated, to alert you to dodge operation. Note also
that “DODG” appears on the display.
Note: Press the [PORT] and [STBD] keys together to fix the course sett ing
value.
DODGE mode
Course set
Heading mode
M: Magnetic
T: True
DODG
HDG
M
RUDDER
359
359.9
Heading from
heading sensor
0
20
40
Rudder angle
Dodge mode display 2
2. Release the key pressed to return to the previous mode (AUTO or NAV).
You can operate the autopilot with the status before the DODGE mode.
10
10
20
40
3-18
Page 38

4. MENU OPERATION
Most settings are carried out on the menus. The items shown depend on the mode in use.
For the STBY mode the complete menu is shown. In case of the AUTO or NAV mode the
items most often adjusted in the corresponding mode are shown.
The ALARM menu description is shown on Chapter 5.
4.1 STBY Mode Menu
On the STBY mode, press the [MENU] key to show the STBY mode menu. This menu has
the complete menu items.
ALARM MENU
DATA CALIBRATION
PARAMETER SETUP
DISPLAY SETUP
SCREEN SETUP
SYSTEM SETUP
TEST
SYSTEM DATA
STBY mode menu
4.1.1 Offsetting data
The DATA CALIBRATION menu permits calibrating heading, magnetic deviation, speed,
temperature and depth data to further refine accuracy.
Rotate the [ENTER] knob to select DATA CALIBRATION and press the [ENTER] knob to
show the DATA CALIBRATION menu.
COMPASS OFFSET: E 0.0
MAGNETIC V ARIATION: A UT O
E 7.6
STW: 0 %
TEMP: 0 F
DEPTH: 0 ft
Data calibration menu
4-1
Page 39

4. MENU OPERATION
Offsetting the heading data
Offset the heading data received from the heading sensor if the heading data shown on the
control unit differs from the indication of the ship’s compass. This offset is applied to the
heading sensor data. When the control unit shows 125° though the ship’s compass reading
is 120°, for example, enter “5”.
1. Rotate the [ENTER] knob to select “COMPASS OFFSET” from the DATA CALIBRATION
menu.
2. Press the [ENTER] knob and the current value is circumscribed with a double rectangle.
3. Rotate the [ENTER] knob to set the offset value (W180.0° to E180.0°).
4. Press the [ENTER] knob to finish.
Selecting the selecting method of magnetic variation
When connecting with a magnetic heading sensor (PG-500 etc.), the magnetic variation is
necessary to use true heading data. The Furuno plotter or navigation outputs magnetic
variations for all areas of the earth. You may choose to use the preprogrammed variations
or enter variations manually, in case of no plotter or you prefer to enter them manually.
1. Rotate the [ENTER] knob to select “MAGNETIC VARIATION” from the DATA
CALIBRATION menu.
2. Press the [ENTER] knob to show the magnetic variation options window.
AUTO
MANUAL
Magnetic variation options window
3. Rotate the [ENTER] knob to select AUTO or MANUAL.
4. Press the [ENTER] knob.
5. When selecting MANUAL, rotate the [ENTER] knob to select next line, and then set the
variation value, consulting a nautical chart, by using the [ENTER] knob. (W99.9° to
E99.9°)
6. Press the [ENTER] knob to finish.
Ship’s speed, temperature, depth calibrati on
Refer to the Installation manual.
4-2
Page 40

4. MENU OPERATION
4.1.2 Setting parameters
The PARAMETER SETUP menu sets various parameters for the control of the
NAVpilot-500.
1. On the STBY mode, press the [MENU] key to open the STBY mode menu.
2. Rotate the [ENTER] knob to select “PARAMETER SETUP”.
3. Press the [ENTER] knob to show the PARAMETER SETUP menu.
SEA STATE:
DEVIATION LEVEL: AUTO
MANUAL PARAMETER
AUT O TRIM: OFF
ADVANCED AUTO: NO
NET TOWING AUT O: NO
NAV MODE: XTE
RADIUS OF ORBIT: 1.00 nm
FISHING MODE: OFF
WAYPOINT SWITCHING: AUTO
FULL-AUTO
Parameter setup menu
4. To close the PARAMETER SETUP menu, press the [MENU] key.
Selecting the method of enteri ng the parameter
The NAVpilot-500 has an automatic adjustment feature which sets up the equipment
according to ship’s characteristics and sea state for optimum performance in the AUTO and
NAV modes. Further, a self-learning algorithm is incorporated: Parameters for rudder ratio,
counter rudder and auto trim gains, input at the sea trial after the installation and
experiences of your boat, are stored in memory for navigation in the future.
Note that the default settings for FULL-AUTO have been detected based on the BOAT
TYPE and BOAT LENGTH on installing.
You may set sea state as follows:
1. Rotate the [ENTER] knob to select “SEA STATE” from the PARAMETER SETUP menu.
2. Press the [ENTER] knob to show the sea state options window.
FULL-AUTO
SEMI-AUTO
MANUAL-CALM
MANUAL-MODERATE
MANUAL-ROUGH
Sea state options window
4-3
Page 41

4. MENU OPERATION
3. Rotate the [ENTER] knob to select FULL-AUTO, SEMI-AUTO, MANUAL-CALM,
MANUAL-MODERATE or MANUAL-ROUGH as appropriate, and then press the
[ENTER] knob.
FULL-AUTO: Auto adjustment and self-learning are on.
SEMI-AUTO: Auto adjustment is on, self-learning is off.
MANUAL-CALM: Self-learning is off, using the parameter selected for calm sea.
MANUAL-MODERATE: Self-learning is off, using the parameter selected for normal sea
state.
MANUAL-ROUGH: Self-learning is off, using the parameter selected for rough sea.
When you want to use the NAVpilot-500 with the experience-related parameters, choose the
SEMI-AUTO option.
However, note that the course keeping quality may be decreased if the sea state is different
from that in the experience-related parameters.
In that case we recommend that you set the autopilot in the FULL-AUTO option.
For MANUAL-CALM, MODERATE or ROUGH, set MANUAL PARAMETER shown on next
page.
4. When selecting “FULL-AUTO” at step 3, set DEVIATION LEVEL as follows:
a) Rotate the [ENTER] knob to select “DEVIATION LEVEL”.
b) Press the [ENTER] knob to show the deviation level options window.
AUTO
LEVEL
Deviation level options window
c) Rotate the [ENTER] knob to select “AUTO” or “LEVEL” as appropriate. For LEVEL, you
may set a value between 1 and 9. A lower number keeps the course more exactly, but the
rudder may be turned more often. In a higher number, the rudder is fixed, but the course
may be changed frequently.
d) Press the [ENTER] knob to close the window.
5. Press the [ENTER] knob to finish.
4-4
Page 42

4. MENU OPERATION
Setting parameters manually
When MANUAL-CALM, MODERATE or ROUGH is selected at the previous paragraph, set
MANUAL PARAMETER as below.
You can set three parameters for MANUAL function: Weather, Rudder gain and Counter
rudder.
The default manual parameters provide for comfortable steering of a boat 35 feet in length
at the speed of 10 kt. When speed is increased to 20 kt, the manual parameters are
automatically reduced 66%.
Parameter setting
100%
66%
10 kt
20 kt
Ship's speeed
1. Rotate the [ENTER] knob to select MANUAL PARAMATER from the PARAMETER
SETUP menu.
2. Press the [ENTER] knob to show the following table.
Example of Manual parameter
SEA STATE
C M R
WEATHER 1° 2° 3°
RUDDER GAIN 0.4 0.5 0.6
COUNT RUDDER 0.2 0.3 0.4
If the length of your boat is longer or shorter than 35 feet, set the manual parameters as
follows:
Boat longer than 35 feet: Set parameters smaller than default parameters.
Boat shorter than 35 feet: Set parameters larger than default parameters.
C: CALM, M: MODERATE, R: ROUGH
3. Rotate the [ENTER] knob to choose WEATHER-C (calm) setting, and then press the
[ENTER] knob.
4. Rotate the [ENTER] knob to set value (Setting range: 1° to 10° for weather).
5. Press the [ENTER] knob.
6. Set WEATHER-M (moderate), WEATHER-R (rough) and RUDDER GAIN and COUNT
RUDDER similarly (Setting range: 0.1 to 2.0 for rudder gain, 0.1 to 4.0 for counter
rudder).
7. Press the [MENU] key to close the table.
4-5
Page 43

4. MENU OPERATION
WEATHER
When the sea is rough, the boat’s heading fluctuates to port and starboard. If the rudder is
driven very often to maintain the set course, the helm mechanism may wear out. To prevent
this, the weather adjustment makes the NAVpilot-500 insensitive to minute course
deviations. You may choose a degree between 1° to 10°. Until the course deviation exceeds
the selected setting, steering to correct the heading will not be initiated.
The illustration below shows boat’s track lines with weather setting 3° and 7°. When 7° is
set, for example, the rudder is not driven until the course deviation exceeds 7°. Increasing
the setting reduces activation of the steering gear, however the boat tends to zigzag. When
the sea is calm, set a smaller value.
7
3
Weather = 3 Weather = 7
Track line and weather sett ing value
RUDDER GAIN
When the boat’s heading deviates from the set course, the NAVpilot-500 adjusts the rudder
to correct it. The rudder angle (number of degrees) which is steered against every degree of
course deviation is known as the rudder gain.
The following illustrations show how many degrees the NAVpilot-500 steers the rudder in
order to nullify 10 degrees of course deviation with various settings of the rudder gain.
Rudder gain = 0.1
10
Rudder gain = 0.3
10
Rudder gain = 0.8
10
Rudder angle = 10 x 0.1=1
4-6
Rudder angle = 10 x 0.3= 3
Rudder angle = 10 x 0.8= 8
Rudder angle and rudder gain setting
Page 44

4. MENU OPERATION
Set rudder gain so that the boat does not make frequent yaw. The figure shown below
provides general guidelines for setting rudder gain.
fast
calm
light
low
Boat's Speed
Sea State
Load Condition
RUDDER GAIN
slow
rough
heavy
high
General guidelines for setting rudder gain
COUNTER RUDDER
If the boat is heavily loaded, the heading will turn excessively by inertia, passing the new
course. Then, the NAVpilot-500 will steer the rudder to the opposite side and the heading
will turn in that direction excessively again. In an extreme case the heading oscillates
several times until it finally settles in the new course. An adjustment known as “counter
rudder” prevents this kind of oscillation.
Counter rudder is usually not required for small boats. When your boat zigzags a lot before
settling in the new course, increase the setting.
Large course error
Counter rudder:
small setting
Counter rudder:
proper setting
The counter rudder feature functions to smoothly
return ship's heading toward intended course.
slow
light
low
Boat's Speed
Load Condition
COUNTER RUDDER
fast
heavy
high
General guidelines for setting counter rudder g ain
Intended
course
4-7
Page 45

4. MENU OPERATION
Adjusting the sensitivity in mon itoring the boat’s trim
The NAVpilot-500 continually monitors the boat’s trim in order to keep the trim sensitivity
optimum. A lower setting is common because boat’s trim usually does not change quickly. A
large number changes the trim compensation value more frequently. Too high a setting may
result in the following problems.
• Trim sensitivity is over-affected, resulting that a trim appears in both port and starboard
directions alternately.
• Trim compensation mechanism responds to the yawing, resulting in more serious
oscillation of ship’s heading.
To set the auto trim sensitivity:
1. Rotate the [ENTER] knob to select AUTO TRIM from the PARAMETER SETUP menu.
2. Press the [ENTER] knob to show the auto trim options window.
OFF
ON
Auto trim options window
3. Rotate the [ENTER] knob to select “ON”.
4. Press the [ENTER] knob.
5. Rotate the [ENTER] knob to select current value.
6. Press the [ENTER] key and the current value is circumscribed with a double rectangle.
7. Rotate the [ENTER] knob to set value (Setting range: 1 to 100, the default setting is
calculated automatically depending on the ship’s length entered on the DOCK SIDE
SETUP menu.)
8. Press the [ENTER] knob to finish.
4-8
Page 46

4. MENU OPERATION
When towing the net
When a boat is in tow of the fishing gear, its stern is “dragged” by the net. This causes the
boat to stray from its intended course. To keep the boat on course, you need to adjust the
trim manually, which can be bothersome. If you do not want to be bothered with trim
adjustments, you can enable the automatic towing function to have the trim automatically
adjusted. It is indispensable for trawlers and purse seiners.
1. Rotate the [ENTER] knob to select “AUTO NET TOWING” from the PARAMETER
SETUP menu.
2. Press the [ENTER] knob to show the net towing options window.
OFF
ON
Auto net towing options window
3. Rotate the [ENTER] knob to select ON or OFF as appropriate.
4. Press the [ENTER] knob to finish.
4-9
Page 47

4. MENU OPERATION
4.1.3 Setting the units of measurements
The DISPLAY SETUP menu allows you to choose units of measurement.
1. Press the [STBY] and [MENU] key in order to open the STBY mode menu.
2. Rotate the [ENTER] knob to select “DISPLAY SETUP”.
3. Press the [ENTER] knob to show the display setup menu.
SPEED UNIT:
RANGE UNIT: nm
WIND SPEED UNIT: kt
DEPTH UNIT: ft
WATER TEMP UNIT: F
POSITION FORMAT
NEXT PAGE
kt
DD MM. MMM"
Page 1
PREVIOUS PAGE
HEADING READOUT: MAGNETIC
SPEED READOUT: SOG
ANALOG INDICATOR BAR:
RUDDER
DATE FORMAT: MMM. DD. YYYY
TIME FORMAT: 24HOUR
Page 2
Display setup menu
To change pages, select “▼NEXT PAGE” or “▲PREVIOUS PAGE” and press the [ENTER]
knob.
4. Rotate the [ENTER] knob to select the item desired.
5. Press the [ENTER] knob to show the speed unit options window. The example below
shows the speed unit options.
4-10
kt
km/h
MPH
Speed unit options window, for example
Page 48

4. MENU OPERATION
6. Rotate the [ENTER] knob to select option. See the table shown below detailed
information.
7. Select other units of measurement as appropriate, referring to the table shown below.
8. Press the [ENTER] knob to finish.
Item Description Settings
Speed Unit Choose unit of ship’s speed measurement. kt, km/h, MPH
Range Unit Choose unit of range measurement. nm, km, sm, nm & yd,
nm & m, km & m, sm &
yd
Wind Speed Unit Choose unit of wind speed measurement. kt, km/h, m/s, MPH
Depth Unit Choose unit of depth measurement. ft, m, FA, P/B
(P/B=Passi/Braza)
Water Temp Unit Choose unit of water temperature measurement. °F, °C
Position Format Choose how many digits (or seconds) to display after
decimal point in latitude and longitude position.
Next Page
Previous PAGE
Heading
Readout
Speed Readout Choose speed format to display. When selecting
Analog
Indicator Bar
Choose heading display format. Magnetic, True
Manual, enter the speed manually.
Choose what to display on the bar indicator display on
Normal display 1 and 2.
DD°MM.MM’,
DD°MM.MMM’,
DD°MM.MMMM’,
DD°MM. SS.S”
SOG (Speed over
ground), STW (Speed
through water), Manual
Rudder angle, Deviation,
Rudder/XTE (Rudder in
STBY and AUTO mode,
XTE in NAV mode),
Deviation/XTE
(Deviation in STBY and
AUTO mode, XTE in
NAV mode)
Date Format Choose the date display format. DD. MMM. YYYY,
YYYY. MM. DD,
MMM. DD. YYYY
Time Format Choose the time display format. 12 HOUR, 24 HOUR
4-11
Page 49

4. MENU OPERATION
4.1.4 Setting other menu items
The SYSTEM SETUP menu allows you to set various item according to your operating
needs.
1. Open the STBY mode menu.
2. Rotate the [ENTER] knob to select “SYSTEM SETUP”.
3. Press the [ENTER] knob to show the SYSTEM SETUP menu.
KEY BEEP:
LOCK: UNLOCK
LANGUAGE: ENGLISH
PANNEL DIMMER: 8
REMOTE CONTROLLER 1: NFU
REMOTE CONTROLLER 2: NFU
CSE AFTER REMOTE:
NEXT PAGE
PREVIOUS PAGE
PORT 1 FORMAT: NMEA0183 V1.5
PORT 1 SENTENCE
PORT 2 FORMAT: NMEA0183 V1.5
PORT 2 SENTENCE
SIMULATION MODE: OFF
MEMORY CLEAR: ALL CLEAR
OFF
PRESENT COURSE
Page 1
Page 2
System setup menu
To change pages, select “▼NEXT PAGE” or “▲PREVIOUS PAGE” and press the [ENTER]
knob.
Activating key beep
Turn the key beep on or off.
1. Rotate the [ENTER] knob to select “KEY BEEP” on the SYSTEM SETUP menu.
1. Press the [ENTER] knob to show the key beep options window.
OFF
ON
Key beep options window
3. Rotate the [ENTER] knob to select ON or OFF as appropriate.
4. Press the [ENTER] knob.
4-12
Page 50

4. MENU OPERATION
Locking the control unit
The LOCK feature renders the following commands inoperative from the control unit at
which the LOCK feature has been actuated.
• Menu operation
• Changing the steering mode
• Course setting
• Waypoint switching
1. Rotate the [ENTER] knob to select “LOCK” from the SYSTEM SETUP menu.
2. Press the [ENTER] knob to show the lock options window.
UNLOCK
LOCK
Lock options window
3. Rotate the [ENTER] knob to select “LOCK” or “UNLOCK” as appropriate.
4. Press the [ENTER] knob.
To unlock, press the [STBD] (►) key while holding the [MENU] key down.
Selecting language
Select the language to use, from between English and some European languages.
1. Rotate the [ENTER] knob to select “LANGUAGE” from the SYSTEM SETUP menu.
2. Press the [ENTER] knob to show the language options window.
3. Rotate the [ENTER] knob to select the language desired.
4. Press the [ENTER] knob.
Setting the panel dimmer
You can adjust the control panel dimmer as follows.
1. Rotate the [ENTER] knob to select “PANEL DIMMER” from the SYSTEM SETUP menu.
2. Press the [ENTER] knob and the current value is circumscribed with a double rectangle.
3. Rotate the [ENTER] knob to set value (Setting range: 1 to 8). The higher the number the
greater the illumination.
4. Press the [ENTER] knob.
4-13
Page 51

4. MENU OPERATION
Running simulation program
The simulation mode, for use by service technicians for demonstration purposes, provides
simulated operation to help acquaint users with the many features of the NAVpiloy-500. It
allows you to view and control a simulated autopilot without position-fixing equipment. Most
controls are operative, thus you may practice how to use the Navpilot-500. You may turn the
simulation mode on or off as follows:
WARNING
Do not use the SIMULATION mode on
the boat.
The rudder may move. This is specialpurpose mode for technicians.
Available steering mode AUTO, NAV, DODGE mode
Available operation
1. Rotate the [ENTER] knob to select “SIMULATION MODE” from the SYSTEM SETTING
menu.
2. Press the [ENTER] knob to show the simulation mode options window.
3. Rotate the [ENTER] knob to select ON or OFF as appropriate.
4. For “ON”, enter the course value manually using the [ENTER] knob.
5. Press the [ENTER] knob.
In the simulation mode, the message “SIM” blinks on any display.
Heading, Rudder angle, Alarms, Waypoint switch,
Wind data, Depth, Speed, Time
OFF
ON
Simulation mode options window
4-14
Page 52

5. ALARMS
5.1 ALARM Menu
The NAVpilot-500 has seven conditions which generate both audio and visual
alarms: watch alarm, deviation alarm. XTE (cross-track error) alarm, speed
alarm, depth alarm, temp alarm and log trip alarm. You may set up the alarms on
the ALARM menu.
1. Press the [MENU] key to show the mode menu.
2. Rotate the [ENTER] knob to select “ALARM MENU”.
3. Press the [ENTER] knob to show the ALARM menu.
Page 1
AUDIO ALARM:
INTERNAL BUZZER
ALARM INTERVAL: SHORT
WATCH ALARM: OFF
DEVIATION ALARM: 30
XTE ALARM: OFF
NEXT PAGE
ALARM MESSAGE 1 NOT CONFIRMED
EXCEED XTE LIMIT
Page 2
PREVIOUS PAGE
SPEED ALARM: OFF
DEPTH ALARM: OFF
TEMP ALARM: OFF
TRIP LOG: OFF
CLEAR TRIP LOG: NO
ALARM MESSAGE 1 NOT CONFIRMED
EXCEED XTE LIMIT
Alarm menu
4. To reach page 2, select “▼ NEXT PAGE” and then press the [ENTER] knob.
5. Press the [MENU] key to close the ALARM menu.
5-1
Page 53

5. ALARMS
5.1.1 Selecting the alarm buzzer
You may choose the buzzer from which to output the audio alarm as follows.
1. Rotate the [ENTER] knob to select “AUDIO ALARM” from the ALARM menu.
2. Press the [ENTER] knob to show the audio alarm options window.
INTERNAL BUZZER
INTERNAL +EXTERNAL BUZZER
Audio alarm options window
3. Rotate the [ENTER] knob to select INTERNAL BUZZER or
INTERNAL+EXTERNAL BUZZER as appropriate.
INTERNAL BUZZER: Sounds the buzzer in the control unit.
INTERNAL+EXTERNAL BUZZER: Sounds the control unit buzzer and external
buzzer if connected.
4. Press the [ENTER] knob.
5.1.2 Selecting the beep pattern
The sound pattern of the audio alarm can be selected as follows.
1. Rotate the [ENTER] knob to select “ALARM INTERVAL” from the ALARM
menu.
2. Press the [ENTER] knob to show the alarm interval options window.
SHORT
LONG
CONTINUE
Alarm interval options window
3. Rotate the [ENTER] knob to select SHORT, LONG or CONTINUE as
appropriate.
200 ms
SHORT pattern
800 ms
400 ms
LONG pattern
800 ms
CONTINUE: Beep sounds continuously.
4. Press the [ENTER] knob.
5-2
Page 54

5.1.3 Setting the watch alarm
The watch alarm periodically warns the helmsman to check the autopilot when in
the AUTO or NAV mode.
1. Rotate the [ENTER] knob to select “WATCH ALARM” from the ALARM menu.
2. Press the [ENTER] key to show the watch alarm options window.
OFF
ON
Watch alarm options window
3. Rotate the [ENTER] knob to select “ON” or “OFF” as appropriate.
When selecting “ON”, you can set the time interval (1 to 10 min) at which to be
alerted. If the set time passes without operation, the alarm sounds. Further, if
three minutes elapse after the watch alarm has sounded, the message “TOUCH
ME” appears. Press any key to clear the alarm.
4. Press the [ENTER] knob.
5.1.4 Setting the heading deviation alarm
5. ALARMS
The deviation alarm sounds when the heading deviates more than a limit set
than the current heading in the AUTO or NAV mode.
1. Rotate the [ENTER] knob to select “DEVIATION ALARM” from the ALARM
menu.
2. Press the [ENTER] knob and the current value is circumscribed with a double
rectangle.
3. Rotate the [ENTER] knob to set the degree of deviation (Setting range: 1 to
90°).
4. Press the [ENTER] knob.
5.1.5 Setting the cross-track error limit
The XTE alarm sounds, in the NAV mode, when the course error has exceeded
or within the range set.
1. Rotate the [ENTER] knob to select “XTE ALARM” from the ALARM menu.
2. Press the [ENTER] knob to show the XTE alarm options window.
OFF
OUT
INTO
XTE alarm options window
5-3
Page 55

5. ALARMS
3. Rotate the [ENTER] knob to select “OFF”, “OUT” or “INTO” as appropriate.
OFF: Turn the XTE alarm off.
OUT: The alarm is released when exceeding the XTE range is exceeded.
INTO: The alarm is released when the course error is within the XTE range.
For OUT or INTO, set the range (0.001 to 9.999 nm/km/sm) using the [ENTER]
knob.
4. Press the [ENTER] knob.
How to use XTE alarm (INTO mode)
When your boat is cruising parallel to an object or area you want to avoid, for
example, a reef, sandbar, etc., use the XTE alarm (INTO) to alert you when your
boat is within a certain distance to the object or area.
1. On the FURUNO plotter, create a route which runs parallel to the area you
wish to avoid.
2. Set the XTE alarm (INTO) range such that it is the distance to the edge of the
area plus some allowance.
When your boat nears the area by the distance set above the XTE alarm sounds
to alert you.
Application of XTE alarm
5.1.6 Setting the speed alarm
The speed alarm warns when your boat’s speed is within, outside, over or under
the speed range set.
1. Rotate the [ENTER] knob to select “SPEED ALARM” from the ALARM menu.
2. Press the [ENTER] knob to show the speed alarm options window.
XTE alarm range
Own boat
Route made at the plotter
OFF
UNDER
OVER
INSIDE
OUT OF RANGE
Speed alarm options window
5-4
Page 56

3. Rotate the [ENTER] knob to select speed alarm condition.
OFF: Turn the speed alarm off.
OVER: The alarm is released when the ship’s speed is over the set value.
UNDER: The alarm is released when ship’s speed is under the set value.
INSIDE: The alarm released when ship’s speed is within the range set.
OUT OF RANGE: The alarm is released when ship’s speed is outside the range
set.
When selecting INSIDE or OUT OF RANGE, set the upper and lower limits,
using three digits. For OVER and UNDER, set value (Setting range: 0.0 to 999.9
kt, km/h or mph).
4. Press the [ENTER] knob.
5.1.7 Setting the depth alarm
The depth alarm sounds when the bottom is shallower, deeper, within or outside
the range set. To activate the depth alarm, the depth data is necessary.
1. Rotate the [ENTER] knob to select “DEPTH ALARM” from the ALARM menu.
2. Press the [ENTER] knob to show the depth alarm options window.
5. ALARMS
OFF
SHALLOW
DEEP
INSIDE
OUT OF RANGE
Depth alarm options window
3. Rotate the [ENTER] knob to select the condition.
OFF: Turn the depth alarm off.
SHALLOW: The alarm is released when the bottom is shallower than the value
set.
DEEP: The alarm is released when the bottom is deeper than the value set.
INSIDE: The alarm is released when the bottom is within the range set.
OUT OF RANGE: The alarm released when the bottom is outside the range set.
When selecting INSIDE or OUT OF RANGE, set upper and lower limits, using
three digits. For SHALLOW or DEEP, set a value (Setting range: 0 to 999.9
ft/m/FA/PB).
4. Press the [ENTER] knob.
5-5
Page 57

5. ALARMS
5.1.8 Setting th e temperature alarm
There are five types of water temperature alarms: UNDER, OVER, INSIDE, OUT
OF RANGE and CURRENT RIP. The UNDER and OVER alarms sound when
the water temperature is lower or higher than the value set, the INSIDE and
OUTSIDE alarms sound when the water temperature is within or outside the
range set. For CURRENT RIP, the alarm sounds when the temperature changes
over the value set within a minute.
1. Rotate the [ENTER] knob to select TEMP ALARM from the ALARM menu.
2. Press the [ENTER] knob to show the temp alarm options window.
OFF
UNDER
OVER
INSIDE
OUT OF RANGE
CURRENT RIP
Temp alarm options window
3. Rotate the [ENTER] knob to select the water temperature condition.
When selecting the INSIDE, OUT OF RANGE or CURRENT RIP, set the number
for upper and lower limits, using three digits. For UNDER or OVER, set a value
(Setting range: 0 to 120°F or –20 to 50°C).
4. Press the [ENTER] knob.
5.1.9 Setting the trip distance alarm
The log trip alarm alerts you a defined distance has been reached.
1. Rotate the [ENTER] knob to select TRIP LOG from the ALARM menu.
2. Press the [ENTER] knob to show the log trip options window.
OFF
ON
Log trip options window
3. Rotate the [ENTER] knob to select “ON” or “OFF” as appropriate.
When selecting ON, set appropriate value (Setting range: 0 to 9999 nm/km/sm).
4. Press the [ENTER] knob.
5-6
Page 58

5.1.10 Clearing the trip distance
You can reset the trip distance to zero as follows.
1. Rotate the [ENTER] knob to select CLEAR TRIP LOG from the ALARM
menu.
2. Press the [ENTER] knob to show the log trip clear options window.
Log trip clear options window
3. Rotate the [ENTER] knob to select “YES” to reset the trip distance.
4. Press the [ENTER] knob.
5.2 Alarm Information
When an alarm setting has violated, the buzzer sounds and the speaker icon
appears. Press any key to silence alarm. You can see which alarm has been
violated on the ALARM menu. In the example below the arrival alarm has been
violated.
1. Press the [MENU] key to show the mode menu.
2. Rotate the [ENTER] knob to select ALARM MENU, and then press the
[ENTER] knob to show the ALARM menu.
5. ALARMS
NO
YES
AUDIO ALARM:
INTERNAL BUZZER
ALARM INTERVAL: SHORT
WATCH ALARM: OFF
DEVIATION ALARM: 30
XTE ALARM: OFF
NEXT PAGE
ALARM MESSAGE 1 NOT CONFIRMED
DEVIATION ALARM
Alarm information window
CONTINUE
Alarm menu (page 1)
3. Press the [TURN] key to acknowledge the alarm (and silence the buzzer if it
was not done with any key). The message “NOT CONFIRMED” changes to
“CONFIRMED.” This is erased when the alarm is eliminated. When two or
more alarms have been violated, "CONTINUE" and left and (or) right arrows
appear at the bottom of the ALARM menu. The arrows indicate which key to
press to display next alarm message. Press the [STBD] key to show
messages of highest priority; the [PORT] key to display messages of lower
priority.
4. Press the [MENU] key twice to finish.
5-7
Page 59

5. ALARMS
DEVIATION ALARM Deviation alarm is violated. 1
Alarm messages
The table below shows the alarm messages, their meanings and priorities.
Alarm messages, their meanings and priorities
Message Meaning Priority
EXCEEDED XTE LIMIT
PROCEEDED XTE ALARM
SPEED IS OVER LIMIT
SPEED IS UNDER LIMIT
SPEED IS PROCEEDED BETWEEN LIMITS
SPEED IS OUTSIDE OF LIMIT
DEPTH IS OVER LIMIT
DEPTH IS UNDER LIMIT
EXCEEDED WATER TEMP. LIMIT
PROCEEDED WATER TEMP. LIMIT
LOG TRIP ALARM Log alarm is violated. 6
XTE alarm is violated. 2
Speed alarm is violated. 3
Depth alarm is violated. 4
Temperature alarm is
violated.
5
5-8
Page 60

6. MAINTENANCE &
TROUBLESHOOTING
This chapter provides information necessary f or keeping your unit in good
working order and remedying simple problem s.
WARNING
Do not open the equipment.
Hazardous voltage which can
cause electrical shock exists
inside the equipment. Only
qualified personnel should
work inside the equipment.
6.1 Preventive Maintenance
Regular maintenance is important for optimum performance. A maintenance
schedule should be established and should at l east include the items below.
Maintenance program
Item Check point Remedy
Control unit connector Check for tight connection. Tighten loosened connectors.
LCD The LCD will, in time, accumulate
a coating of dust which tends to
dim the picture.
Wipe the LCD carefully to prevent
scratching, using tissue paper
and an LCD cleaner. To remove
dirt or salt deposits, use an LCD
cleaner, wiping slowly with tissue
paper so as to dissolve the dirt or
salt. Change paper frequently so
the salt or dirt will not scratch the
LCD. Do not use solvents such
as thinner, acetone or benzene
for cleaning.
Ground terminal Check for tight connection and
corrosion.
Clean or replace ground wire as
necessary.
6-1
Page 61

6. MAINTENANCE & TROUBLESHOOTING
6.2 Replacement of Fuse
The fuse in the processor unit protects the equipment from reverse polarity of
the ship’s mains and equipment fault. If the fuse blows, the power cannot be
turned on.
Contact your dealer about replacement of t he fuse.
CAUTION
Use the proper fuse.
Use of a wrong fuse can cause fire or
damage the equipment.
Parts Name Type Code No. Remarks
Fuse FGMB 4A AC125V 000-119-976 Suppli ed as spare parts
6.3 Diagnostics
The NAVpilot-500 has a diagnostic function which checks the Processor unit,
Control unit, Heading sensor, Keyboard, LCD and Rudder for proper operation.
To access a diagnost ic f unction, do the following procedure:
1. Press the [MENU] key to show the menu.
2. Rotate the [ENTER] knob to select “TEST”.
3. Press the [ENTER] knob to show the test options window.
4. Rotate the [ENTER] knob to select an option.
5. Press t he [ENTER] knob.
6. Rotate the [ENTER] knob to display “NO” next to the test item.
7. Press t he [ENTER] knob and then rotate the [ENTER] knob to select “YES”.
8. Press t he [ENTER] knob to start the diagnostic test.
9. Press t he [MENU] key to finish.
OFF
PROCESSOR UNIT
CONTROLLER UNIT
HEADING SENSOR
KEYBOARD TEST
SCREEN TEST
RUDDER TEST
Test options window
6-2
Page 62

PROCESSOR UNIT TEST
PROCESSOR UNIT
ROM OK
No. 6454002-**.**
RAM OK
EEPROM OK
RUDDER ANGLE OK
CLUTCH/BYPASS OK
REMOTECONTROLLER1 ON 1
REMOTECONTROLLER2 NOT USED
INPUT VOLTA GE 24.8 V
HEADING SENSOR - PORT1 - PORT2 - RS232 - -
6.MAINTENANCE & TROUBLESHOOTING
For factory setting
**.**: Program version no.
CONTROLLER UNIT TEST
CONTROLLER UNIT
ROM OK
No. 6454001-**.**
RAM OK
COMUNICATION OK
EEPROM OK
CONTROLLER ID
**.**: Program version no.
HEADING SENSOR TEST
This test should be done while turning the connected sensor (PG-500) in a circle
with 3°/sec. or more. If the sensor is not rotate, this test terminates after one
minute with NG result.
HEADING SENSOR
ROM OK
No. 6454101-**.**
RAM OK
EEPROM OK
SENSOR OK
RATE SENSOR OK
**.**: Program vrsion no.
6-3
Page 63

6. MAINTENANCE & TROUBLESHOOTING
KEYBOARD TEST
KEYBOARD TEST
001
Operate each control on the control unit one b y one. A key is functioning
properly if its on-screen location lights in black when the key is pressed. For the
[ENTER] knob, rotate it to show X-Y position; push it to confirm function.
To escape from the KEYBOARD TEST, press the [POW ER/BRILL] key three
times.
SCREEN TEST
Each press of the [ENTER] knob changes the screen pattern in t he sequence
shown below.
(Flashing)
To escape from the SCREEN TEST, press any key except the [ENTER] knob.
6-4
Page 64

6.MAINTENANCE & TROUBLESHOOTING
RUDDER SETUP AND AUTO TEST
The rudder test checks the following, and then shows the result of the check.
• Drive type
• The presence or absence of bypass/clutch circuit
• Rudder deadband
• Rudder speed
This test should be executed when the boat does not run because of moving the
rudder.
When the rudder test is finished, a beep sounds and the message “RUDDER
TEST COMPLETED” and the results are shown.
RUDDER SETUP AND AUTO TEST
DRIVE TYPE: _
BYPASS/CLUTCH: _
RUDDER DB : _. _
RUDDER SPEED: _ _. _ /s
_ _
40 20 10 5
Rudder test
DRIVE TYPE: REVERSIBLE or SOLENOID
BYPASS/CLUTCH: EXIST or NON
RUDDER: Shows the rudder deadband
RUDDER SPEED: Rudder speed
5 10 20 40
6-5
Page 65

6. MAINTENANCE & TROUBLESHOOTING
SYSTEM DATA
You can confirm the current equipment and drive system status.
1. Press the [MENU] key to show the mode menu.
2. Rotate the [ENTER] knob to select “SYSTEM DATA”.
3. Press the [ENTER] knob to show the system data screen.
INPUT VOLT AGE: 24.4 V
CONTROLLER ID: 1
DRIVE TYPE: SOLENOID
BYPASS/CLUTCH: NON
CONTROLLER TEMP: 43.4 F
FET TEMP.: 24.6 F
MOTOR DRIVE CUR.: 0.0 A
BYPASS/CLUTCH CUR.: 0.0 A
SYSTEM DATA
System data screen
6.4 Clearing Memories
Memories can be cleared to restore to default settings.
1. Press the [MENU] key to show the menu.
2. Rotate the [ENTER] knob to select “SYSTEM SETUP”.
3. Press the [ENTER] knob to show the System setup menu.
4. Rotate the [ENTER] knob to select MEMORY CLEAR at the bottom of the
second page.
5. Press the [ENTER] knob to show the memory clear options window.
ALL CLEAR
DISPLAY CLEAR
Memory clear options window
6. Rotate the [ENTER] knob to select ALL CLEAR or DISPLAY CLEAR as
appropriate.
ALL CLEAR: Restores all default settings.
DISPLAY CLEAR: Restores settings other than the installation settings, ship’s
moving feature and compensation for the sensor connected.
6-6
Note: If you select ALL CLEAR, the all memories and sett ings st ored in the
equipment are erased.
7. Press the [ENTER] knob. You are asked if you are sure to clear memory
selected
8. Press the [ENTER] knob to clear, or press any key to escape.
When the [ENTER] knob is pressed, the equipment restarts automatically.
Page 66

6.MAINTENANCE & TROUBLESHOOTING
6.5 Error Messages
In addition to alarm messages your equipment displays error messages to alert
you to probable equipment trouble
.
Error messages
Error message Meaning Remedy
Communication between the control
COMMUNICATION ERROR
INSTANT POWER FAIL IS
OCCURRED
RUDDER ANGLE ERROR
RUDDER DRIVE ERROR
DRIVE UNIT ERROR. PLEASE
TURN OFF AND CHECK DRIVE
CIRCUIT.
DRIVE UNIT IS OVERLOADED.
PLEASE TURN OFF AND
CHECK DRIVE CIRCUIT.
DRIVE UNIT IS OVERHEATED. 80°C temperature in drive unit was
BYPASS/CLUTCH IS
OVERLOADED.
DISCONNECT B/C
FU REMOTE CONTROLLER
ERROR
MISSING HEADING DATA
HEADING DATA ERROR
MISSING NAV DATA
DEGRADATION OF NAV DATA
QUALITY
PARAMETER ERROR OF NAV
MODE
unit and the processor unit is
interrupted for more than two
seconds.
Power supply was interrupted for
more than two seconds.
The rudder angle sent from the
rudder reference unit exceeded 55°.
The rudder did not move more than
1.5° over five seconds after rudder
command.
Current of more than 1.5 A was
detected on the drive circuit without
rudder command.
Overcurrent was detected. Check the drive circuit.
detected.
Current of more than 1.6 A was
detected on the bypass/clutch
circuit.
No current on the bypass/clutch
circuit.
Command from the FU remote
controller exceeded 55°.
The heading data from the heading
sensor is missing for 600 ms.
Heading data with error flag was
detected three times continuously.
The navigational data has been
interrupted for more than 15
seconds.
The navigation data was
incomplete.
The navigation data included an
error flag.
Check the interconnection
cable between control unit
and processor unit.
Press any key on the contr ol
unit.
Check the drive motor,
bypass val ve/clutch.
Check the control unit and
processor unit connections..
Check the bypass circuit.
Check the drive unit system.
Check the bypass/clutch
circuit.
Check the remote controller
connection.
Check the heading sensor
and interconnection cable..
Check the heading sensor.
Check the navigator.
Check the navigator settings.
Continued on next page
6-7
Page 67

6. MAINTENANCE & TROUBLESHOOTING
Error messages (con’t)
INPUT VOLTAGE IS OVER
(UNDER) LIMIT
MAGNETIC SENSOR ERROR
RATE SENSOR ERROR
MAGNETIC DISTORTION
ERROR
NO CALIBRATION Calibration not yet executed.
The input power source fluctuated
beyond tolerance.
The heading data from the heading
sensor was wrong.
Check ship’s mains.
Check the heading sensor.
Ask your dealer to do the
calibration.
6-8
Page 68

MENU TREE
STBY mode menu
[MENU] key
ALARM MENU
DATA CALIBRATION
PARAMETER SETUP
AUDIO ALARM (
ALARM INTERVAL (
WATCH ALARM (OFF, ON)
DEVIATION ALARM (1 to 90 ,
XTE ALARM (
SPEED ALARM (
DEPTH ALARM (
TEMP ALARM (
TRIP LOG (
CLEAR TRIP LOG (
COMPASS OFFSET (180.0 E to 180.0 W,
MAGNETIC V ARIATION (
STW (-50 to + 50 %,
TEMP (-10 to +10 for Celsius,
DEPTH (-30 to 100 ft,
SEA STATE (
MANUAL PARAMETERS
AUT O TRIM (OFF,
ADVANCED AUTO (
AUT O NET TOWING (
NAV MODE (
RADIUS OF ORBIT (0.05 to 9.99 nm,
FISHING MODE (
WAYPOINT SWITCHING (
INTERNAL BUZZER
SHORT
OFF
OFF
OFF
OFF
OFF
NO
, YES)
-18 to +18 for Fahrenheit,
FULL-AUTO,
MANUAL-MODERATE, MANUAL ROUGH)
, INTERNAL +EXTERNAL BUZZER)
, LONG, CONTINUE)
30
)
, OUT, INTO)
, UNDER, OVER, INSIDE, OUT OF RANGE)
, SHALLOW, DEEP, INSIDE, OUT OF RANGE)
, UNDER, OVER, INSIDE, OUT OF RANGE, CURRENT RIP)
, ON)
AUTO
, MANUAL)
0 %
)
0 F
)
0 ft
)
SEMI-AUTO, MANUAL-CALM,
ON
, 1-100,
40
OFF
, ON)
OFF
, ON)
XTE
, COURSE)
0.10 nm
OFF
, ORBIT CW, ORBIT CCW,
CLOVER LEAF)
AUTO
, MANUAL)
0.0 E
)
)
)
DISPLAY SETUP
Go to next page.
SPEED UNIT (
RANGE UNIT (
WIND SPEED UNIT (
DEPTH UNIT (
WATER TEMP UNIT (
POSITION FORMAT (DD MM.MM',
HEADING READOUT(
SPEED READOUT (
ANALOG INDICATOR BAR (
DATA FORMAT (DD. MMM. YYYY, YYYY. MM. DD,
TIME FORMAT (12 HOUR,
kt
, km/h, MPH)
nm
, km, sm, nm & yd, nm & m, km & m, sm & yd)
kt
, km/h, m/s, MPH)
ft
, m, FA, P/B)
F
, C)
DD MM. MMM'
DD MM. MMMM', DD MM.SS.S")
MAGNTIC
SOG
, TRUE)
, STW, MANUAL)
RUDDER ANGLE
RUDDER/XTE, DEVIATION/XTE)
MMM. DD. YYYY
)
24 HOUR
)
,
, DEVIATION,
MN-1
Page 69

MENU TREE
STBY mode menu (con't)
From the previous page
SCREEN SETUP
SYSTEM SETUP
SCREEN2 UPPER DATA*
SCREEN2 LOWER DATA*
SCREEN3 PATTERN (2DATA,
DATA1*
DATA2*
DATA3*
GRAPHIC (
KEY BEEP (OFF, ON)
LOCK (
LANGUAGE (
PANEL DIMMER (1 to 8,
REMOTE CONTROLLER 1 (
REMOTE CONTROLLER 2 (
CSE AFTER REMOTE
(
PREVIOUS COURSE
PORT 1 FORMAT (NMEA0183 V1.5,
PORT 1 SENTENCE
PORT 2 FORMAT(NMEA0183 V1.5,
PORT 2 SENTENCE
SIMULATION MODE (
MEMORY CLEAR (
COMPASS
WIND TRUE INDICATOR,
WIND RELATIVE INDICATOR,
DEPTH GRAPH, TEMP GRAPH)
ULOCK
, LOCK)
ENGLISH
NMEA 38400 BPS, FI-30 FORMAT)
NMEA 38400 BPS, FI-30 FORMAT)
ALL CLEAR
3DATA
, RUDDER ANGLE, HIGHWAY,
, others)
8
)
NFU
, FU, DODGE, DISABLE)
NFU
, FU, DODGE, DISABLE)
, PRESENT COURSE)
OFF
, ON)
, DISPLAY CLEAR)
*(POS, COG, SOG,
STW, TMP, DPT ,
BRG, RNG, WPT POS,
)
XTE, TTG, ETA, DATE,
TIME, WIND T,
WIND R, VOL T, TRIP)
2.0
, 3.0,
2.0
, 3.0,
MN-2
TEST (
OFF
, PROCESSOR UNIT, CONTROL UNIT, HEADING SENSOR,
KEYBOARD TEST, SCREEN TEST , RUDDER TEST)
SYSTEM DATA
Page 70

AUTO mode menu
MENU TREE
[MENU] key
ALARM MENU See page MN-1.
NAV mode menu
SEA STATE (
MANUAL PARAMETERS
AUT O TRIM (OFF,
ADVANCED AUTO (
AUTO NET TOWING (
SPEED READOUT (
RADIUS OF ORBIT (0.05 to 9.99 nm,
SYSTEM DATA
[MENU] key
ALARM MENU See page MN-1.
SEA STATE (
MANUAL PARAMETER
AUT O TRIM (OFF,
WAYPOINT SWITCHING (
NAV MODE (
FISHING MODE (
SPEED READOUT (
RADIUS OF ORBIT (0.05 to 9.99 nm,
SYSTEM DATA
FULL-AUTO,
MANUAL-MODERATE, MANUAL ROUGH)
FULL-AUTO,
MANUAL-MODERATE, MANUAL ROUGH)
SEMI-AUTO, MANUAL-CALM,
ON
, 1-100, 40)
OFF
, ON)
OFF
, ON)
SOG
, STW, MANUAL)
0.10 nm
SEMI-AUTO, MANUAL-CALM,
ON
, 1-100, 40)
AUTO
, MANUAL)
XTE
, COURSE)
OFF
, ORBIT CW, ORBIT CCW, CLOVER LEAF)
SOG
, STW, MANUAL)
0.10 nm
)
)
MN-3
Page 71

SPECIFICATIONS OF AUTOPILOT
NAVpilot -500
1 CONTROL UNIT
1.1 Display Monochrome LCD, 83 (W) x 83 (H) mm, 160x160 dots
1.2 Backlight Adjustable in 8 steps
1.3 Contrast 16 steps
1.4 Useable Set 6 sets
2 PROCESSOR UNIT
2.1 Rudder Mode Manual, Auto, Dodge, Remote, Advanced Auto*, Navigation*
2.2 Weather Adjustment AUTO/SEMI-AUTO/CALM/MODERATE/ROUGH
2.3 Rudder Angle Ratio AUTO/0-9
2.4 Rudder Angle Equivalent AUTO/0-9
2.5 Rudder Angle Settings 45° max.
2.6 Alarm Bearing deviation, Out of course*, Watch, Ship’s speed*,
Water temperature*
*: Navigation data required
3 INTERFACE
3.1 Ports Navigation data in/out (NMEA): 1, Output (NMEA): 1
Input (NMEA): 1, I/O for Heading Sensor (NMEA): 1
3.2 Input Sentences IEC 61162-2,
NMEA 0183 1.5/2.0/3.0
Command Bearing APA, APB, BOD/XTE, RMB
Ship’s Location (L/L) GGA, RMC, RMA, GLL, GNS
Ship’s Location (LOP) GLC, GTD, RMA
SOG/COG VTG, RMC, RMA
STW VHW
Heading (HDG) HDT, HDG, HDM
Destination RMB, WPL
Bearing/distance RMB, BWC, BWR
Time RMC, ZDA
Arrival Alarm AAM, RMB
Cross Track Error APB, XTE, RMB
Water Depth DPT, DBT
Water Temperature MTW
Wind Speed/Bearing VPW, MWD, MWV
3.3 Output Sentences IEC 61162-2, NMEA 0183 1.5/2.0/3.0
AAM, ALR, ASD, BWC, BWR, DBT, DPT, GGA, GLC, GLL, GTD,
GNS, HDG, HDT, HSC, MTW, MWV, RMA, RMB, RMC, RSA, VBW,
VHW, VTG, WPL, XTE, ZDA
SP - 1 E7250S01A
Page 72

3.4 I/O Control RS-232C (NMEA)
5 POWER SUPPLY
3.1 Processor Unit 12-24 VDC: 3-2 A (Control Unit: 6 sets)
6 ENVIRONMENTAL CONDITIO NS
4.1 Ambient Temperature -10°C to +55°C
4.2 Relative Humidity 95% at 40°C
6.3 Waterproof
Processor unit: IPX2
Control unit/ Remote controller/ Rudder reference unit: IPX5
6.4 Vibration IEC 60945
7 COLOR
5.1 Processor Unit N3.0
5.2 Control Unit N3.0
5.3 Remote Controller N3.0 (FAP-5552/6232), N1.5 (FAP-6212/6222)
5.4 Rudder Reference Unit N1.0
5.5 Junction Box N3.0
SP - 2 E7250S01A
Page 73

INDEX
A
ADDVANCED AUTO mode..................... 3-3
ALARM INTERV AL................................. 5-2
AUDIO ALARM ....................................... 5-2
AUTO mode............................................ 3-2
AUTO TRIM ............................................ 4-8
ANALOG INDICATOR BAR........... 2-8, 4-11
B
Brilliance ................................................. 2-3
C
CLOVER LEAF..............................3-8, 3-10
COMPASS OFFSET............................... 4-2
Contrast .................................................. 2-3
COUNTER RUDDER..............................4-7
COURSE AFTER REMOTE ................. 3-15
D
Data Display............................................ 2-7
DATE FORMAT......................................4-11
DEVIATION LEVEL.................................4-4
DEPTH UNIT .........................................4-11
Deviation alarm....................................... 5-3
DISPLAY SETUP menu........................4-10
Distance alarm........................................ 5-6
DODGE mode.......................................3-17
E
ENTER knob...........................................2-1
G
Graphic Display....................................... 2-7
H
HEADING READOUT............................4-11
K
KEY BEEP ............................................ 4-12
L
LANGUAGE.......................................... 4-13
LOCK .................................................... 4-13
M
MAGNETIC VARIATION-........................ 4-2
N
NAV mode............................................... 3-5
NET TOWING.........................................4-9
Normal Display........................................ 2-4
O
ORBIT............................................3-9, 3-10
P
PANEL DIMMER................................... 4-13
Parameter ...............................................4-3
POSITION FORMAT............................. 4-11
R
Range unit............................................. 4-11
REMOTE mode..................................... 3-11
RUDDER GAIN.......................................4-6
S
Sailing method ........................................3-6
SEA STATE.............................................4-3
SIMULATION MODE............................4-14
Speed alarm............................................ 5-4
SPEED UNIT......................................... 4-11
SPEED READOUT ............................... 4-11
STBY mode.............................................3-1
SYSTEM SETUP menu........................4-12
T
Temperature alarm..................................5-6
Tests........................................................6-2
TIME FORMAT......................................4-11
TLL........................................................3-10
W
Waypoint........................... 3-5, 3-6, 3-7, 3-8
WA TCH ALARM...................................... 5-3
WA TER TEMP UNIT............................. 4-1 1
WEATHER..............................................4-6
WIND SPPED UNIT.............................. 4-11
X
XTE alarm...............................................5-3
IN-1
 Loading...
Loading...