

Page 1
Guide d’installation
MFD8/12/BB soft v2.01 et supérieur
LISTE DES FOURNITURES STANDARDS ET OPTIONNELLES _____________ ⑧
MFD8 & MFD12____________________________________________________________________ ⑧
Fournitures standard (MFD8/12) _____________________________________________________ ⑧
Fournitures Optionnelles (MFD 8 / 12) ________________________________________________ ⑨
MFDBB___________________________________________________________________________ ⑪
Fournitures standard (MFDBB) ______________________________________________________ ⑪
Fournitures optionnelles (MFDBB) ___________________________________________________ ⑫
INSTALLATION____________________________________________________ ⑮
Fixation _______________________________________________________________________________ ⑮
Fixation MFD8/12___________________________________________________________________ ⑮
MFD 8/12 Montage encastré________________________________________________________ ⑯
MFD 8/12 Montage sur étrier _______________________________________________________ ⑱
Fixation du MFDBB _________________________________________________________________ ⑱
Montage MFDBB_________________________________________________________________ ⑱
MDBBB fixation du clavier _________________________________________________________ ⑳
Câblage _______________________________________________________________________________ 22
Connexion disponibles__________________________________________________________________ 22
Connexion MFD8/12_________________________________________________________________ 22
Connectique étanche :______________________________________________________________ 22
Connectique non étanche : __________________________________________________________ 23
Fixation des connexions non étanches_______________________________________________ 23
Utilisation Kit d’étanchéité _______________________________________________________ 24
Connexion MFDBB__________________________________________________________________ 26
Connectique étanche :______________________________________________________________ 26
Connectique non étanche : __________________________________________________________ 26
Alimentions ____________________________________________________________________________ 27
MFD8/12 ____________________________________________________________________________ 27
MFDBB _____________________________________________________________________________ 27
Interfaces ______________________________________________________________________________ 29
NMEA0183 Ports DATA 1, 2 & 3 ________________________________________________________ 29
Présentation________________________________________________________________________ 29
DATA 1 description _________________________________________________________________ 30
Data1 : Couleur et fonction des fils ___________________________________________________ 30
DATA 2 & 3 description______________________________________________________________ 31
Data2&3 : Couleur et fonction des fils ________________________________________________ 31
①
Page 2

Sortie Buzer externe Entrée évènement _____________________________________________________ 33
Connexion :________________________________________________________________________ 33
NMEA2000 Description and In fo rmation ___________________________________________________ 34
Rappel des règles de base du NMEA 2000 ________________________________________________ 34
NMEA2000 sur MFD ________________________________________________________________ 35
Alimentation NMEA2000 par le MFD_________________________________________________ 35
Un seul capteur sur le MFD _________________________________________________________ 37
Deux capteurs sur le MFD __________________________________________________________ 39
NMEA2000 des RDS (Radar) _______________________________________________________ 40
Conversion NMEA0183 to NMEA2000 _______________________________________________ 41
Radar connexion des DRS ________________________________________________________________ 42
Compatibilité Aériens:__________________________________________________________________ 42
Tableau Aériens & Câbles ____________________________________________________________ 42
Tableaux des alimentions PSU : ________________________________________________________ 43
Connexion du DRS et des MFD8/12 ______________________________________________________ 44
Installation simple poste ______________________________________________________________ 44
Installation Multi postes ______________________________________________________________ 44
Installation avec HUB101 et Alimentation PSU____________________________________________ 45
Installation avec HUB standard et alimentation PSU ________________________________________ 46
Connexion du DRS et du MFDBB ________________________________________________________ 47
Connexion Réseau_______________________________________________________________________ 48
Introduction __________________________________________________________________________ 48
MFD 8 & 12 _______________________________________________________________________ 48
MFDBB___________________________________________________________________________ 48
Clavier MCU001 (MFDBB) ___________________________________________________________ 48
Détails des câbles réseau Furuno: _______________________________________________________ 49
Câble fournis en standard : __________________________________________________________ 49
Câble et raccords en option: _________________________________________________________ 49
Câbles réseau 4 paires « croisés » : _________________________________________________ 49
Câbles réseau 4 paires « droit » :___________________________________________________ 50
Câbles réseau 2 paires « croisé » :__________________________________________________ 50
Raccords ________________________________________________________________________ 51
Jonction RJ47 4 paires __________________________________________________________ 51
Fonctions des broches sur les fiches RJ45____________________________________________ 51
Power Synchronisation___________________________________________________________________ 54
Description du fonctionnement NN3D______________________________________________________ 54
Mode Veille “Sleep Mode”: _________________________________________________________ 54
Pourquoi utiliser le HUB HUB101 Furuno:__________________________________________________ 55
Comment configurer les fonctions Power Synchronisation: _____________________________________ 55
HUB101: __________________________________________________________________________ 55
MFDBB: __________________________________________________________________________ 56
DFF1/DFF3: _______________________________________________________________________ 57
Connexion Vidéo________________________________________________________________________ 58
Entrée Vidéo__________________________________________________________________________ 58
Entrée Vidéo analogique______________________________________________________________ 59
MFD 8-12_______________________________________________________________________ 59
MFDBB ________________________________________________________________________ 59
Vidéo Cameras IP ___________________________________________________________________ 59
HUB POE ____________________________________________________________________ 59
②
Page 3

Adresse de caméras IP___________________________________________________________ 61
Configuration des caméras IP_____________________________________________________ 61
Moniteurs externes_____________________________________________________________________ 62
MFD8/12__________________________________________________________________________ 62
MFDBB___________________________________________________________________________ 62
Résolution_______________________________________________________________________ 62
Mode Clone _____________________________________________________________________ 63
Mode étendu_____________________________________________________________________ 63
USB and Audio Connexion________________________________________________________________ 64
USB Ports____________________________________________________________________________ 64
Raccourci clavier _________________________________________________________________ 64
Audio _______________________________________________________________________________ 65
CONFIGURATION__________________________________________________ 66
Introduction____________________________________________________________________________ 66
Comment configurer les fonctions Power Synchronisation: _____________________________________ 67
MFD8/MFD12______________________________________________________________________ 67
MFDBB: __________________________________________________________________________ 67
HUB101: __________________________________________________________________________ 67
DFF1/DFF3: _______________________________________________________________________ 68
Data Source Sélection __________________________________________________________________ 69
DHCP : Quel MFD doit être le maitre (DHCP)? ______________________________________________ 69
Configuration initiale et déclaration du Maitre _____________________________________________ 69
Description Installation Automatique (Wizard) Onglets ________________________________________ 72
Onglet “Own Setting” ________________________________________________________________ 72
Onglet “Global”_____________________________________________________________________ 72
Onglet “Sounder” ___________________________________________________________________ 72
Onglet “Radar” _____________________________________________________________________ 72
Installation Automatique « Own Settings » __________________________________________________ 74
Moniteur (MFDBB only)________________________________________________________________ 74
NMEA2000 Data Configuration __________________________________________________________ 75
Receive PGN List ___________________________________________________________________ 76
Transmit PGN List __________________________________________________________________ 76
Transmitted PGNs” __________________________________________________________________ 76
NMEA0183 1 ,2 & 3 ___________________________________________________________________ 77
Zone supérieure : _________________________________________________________________ 77
Zone centrale : ___________________________________________________________________ 78
Zone inférieure :__________________________________________________________________ 78
Vidéo Analogique _____________________________________________________________________ 80
Installation Automatique. « Global Settings » ________________________________________________ 81
Paramètres Navire (Taille, Moteur) ________________________________________________________ 81
Connexions Moteur (PGN) ______________________________________________________________ 82
Affectation Noms « Nicknames » _________________________________________________________ 83
Affectation des nom de caméras. _________________________________________________________ 83
Source de données « Data source » ________________________________________________________ 84
GPS Mode ___________________________________________________________________________ 86
Installation Automatique « Sondeur » ______________________________________________________ 88
③
Page 4

DFF1 and DFF3_____________________________________________________________________ 88
Transducer Setup:_________________________________________________________________ 88
Transducer Position:_______________________________________________________________ 89
Motion Sensor and Motion Sensor Antenna Position: _____________________________________ 89
Temperature Source (DFF3 only)_____________________________________________________ 90
FCV1150__________________________________________________________________________ 91
Installation Automatique « RADAR » ______________________________________________________ 92
DRS______________________________________________________________________________ 92
FAR21X7 _________________________________________________________________________ 93
Appairage clavier MFDBB “Keyboard/Processor Linking”_____________________________________ 94
ENREGISTREMENT DU PRODUIT ____________________________________ 95
IDescription du SID « System Identification »________________________________________________ 95
Document d’enregistrement « Registration Card » ____________________________________________ 95
VERIFICATION « CHECKLIST » ______________________________________ 96
Maitre « Master » _______________________________________________________________________ 96
Power Synchronization___________________________________________________________________ 96
Câble Réseau___________________________________________________________________________ 96
HUB101_____________________________________________________________________________ 96
MFDBB _____________________________________________________________________________ 97
DFF1/DFF3 __________________________________________________________________________ 97
Entrée Cap « Heading Input »_____________________________________________________________ 97
Mettre le PG500 en 38400bps _______________________________________________________ 97
Port NMEA2000 et NMEA0183____________________________________________________________ 98
MISE EN FONCTION________________________________________________ 99
Mise en marche « Power ON »_____________________________________________________________ 99
Arrêt « Power OFF » ____________________________________________________________________ 99
CARTOGRAPHIE _________________________________________________ 100
Catalogue des cartes (Data Catalog)_______________________________________________________ 100
SystemID ___________________________________________________________________________ 102
Emplacement mémoires (Memory Slots)___________________________________________________ 102
Liste des données (Data List)____________________________________________________________ 102
Référence_________________________________________________________________________ 102
Statut (Status) _____________________________________________________________________ 102
Version (Release Version)____________________________________________________________ 103
Installation des cartes___________________________________________________________________ 104
④
Page 5

Obtenir les fichiers de donnée cartographique :______________________________________________ 104
Pour installer une zone de cartographie :___________________________________________________ 107
Support des données___________________________________________________________________ 107
MFD12 / MFD8 :___________________________________________________________________ 107
Formater les cartes SD :______________________________________________________________ 107
MFDBB: _________________________________________________________________________ 107
Charger les données cartographiques______________________________________________________ 107
Ouverture des cartes._________________________________________________________________ 111
Obtenir le code de déblocage :___________________________________________________________ 111
Entrée du code de déblocage : ___________________________________________________________ 113
Gestion espace disque dur _______________________________________________________________ 114
Introduction _________________________________________________________________________ 114
Carte préchargées __________________________________________________________________ 114
Effacement des zones__________________________________________________________________ 115
MISE EN RESEAU AVEC MAXSEA___________________________________ 116
Mise en réseau_________________________________________________________________________ 116
Compatibilité des versions NN3D/MaxSeaT0________________________________________________ 116
Serveur de cartographie_________________________________________________________________ 117
Emplacements des fichiers Carto MaxSea__________________________________________________ 117
REMISE A ZERO DES MFD _________________________________________ 118
MFDBB ______________________________________________________________________________ 118
MFD8/12 _____________________________________________________________________________ 119
CONFIGURATION DES CAMERAS IP AXIS ____________________________ 120
Introduction: __________________________________________________________________________ 120
Réglage du PC de configuration__________________________________________________________ 120
Adresses IP du réseau NN3D____________________________________________________________ 123
Programation des camèras ______________________________________________________________ 123
Logiciel de configuration_____________________________________________________________ 123
Détection des caméras_______________________________________________________________ 124
Assignation des adresses IP___________________________________________________________ 125
Configuration des cameras ___________________________________________________________ 126
Désactivation mot de passe_________________________________________________________ 128
Date et heure____________________________________________________________________ 128
Format vidéo compressée__________________________________________________________ 128
Vue par defaut___________________________________________________________________ 128
Compatibilité MFD8 & MFD12_____________________________________________________ 129
MISE A JOUR DES SOFT___________________________________________ 130
Mise à jour MFD8 / MFD12 v 02.XX ______________________________________________________ 130
⑤
Page 6

Matériel nécessaire :___________________________________________________________________ 130
Préparation des soft MFD8 & MFD12 ____________________________________________________ 130
Procédure de mise a jour MDF8 MFD12___________________________________________________ 131
Mise à jour du MFDBB & Clavier MCU001________________________________________________ 133
Mise à jour MFD BB V02.XX___________________________________________________________ 133
Matériel nécessaire : ________________________________________________________________ 133
Préparation des soft du MFDBB_______________________________________________________ 133
Procédure de mise a jour du MFD BB___________________________________________________ 135
Mise à jour MCU-001 v 02.XX __________________________________________________________ 141
Préparation________________________________________________________________________ 141
Procédure_________________________________________________________________________ 141
Mise a jour du DRS_____________________________________________________________________ 143
1. Préparation________________________________________________________________________ 143
2. Procédure _________________________________________________________________________ 143
Mise à jour DFF1/3_____________________________________________________________________ 150
Préparation/Informations _______________________________________________________________ 150
Préparation des soft : __________________________________________________________________ 150
Configuration PC _____________________________________________________________________ 151
Changer adresse IP du PC ______________________________________________________________ 151
Pocédure____________________________________________________________________________ 154
EXEMPLE D’INSTALLATIONS ET DE CONFIGURATION._________________ 158
⑥
Page 7
⑦
Page 8
Liste des fournitures standards et
optionnelles
MFD8 & MFD12
Fournitures standard (MFD8/12)
Les MFD 8 & MFD12 sont fournis avec les câbles suivant :
Un câble d’alimentation 5m 000.157.995
Un câble data 2&3 à 18 plots 2m 000.164.608
Un câble réseau étanche 3m 000.164.609
Nom Type Code pièce Qty Remarques
MFD8 - Multi Fonction
Display
MFD12 -
Matériels
d’installation
Accessoires FP19-01101 001-023-060 1 jeu Outil de dépose de la façade
CP19-00900 000-011-780 Pour MFD8, CP19-00901*, câbles
CP19-01000 000-011-781
SP19-00701 001-028-020 Pour MFD8, fusibles Pièces détachées
SP19-00801 001-028-030
1 Selon commande.
1 jeu
alimentation, Câble data18 Pin)
(000.164.609 câble Ethernet
étanche)
Pour MFD12, CP19-01001*, câbles
alimentation, Câble data18 Pin
(000.164.609 câble Ethernet
étanche)
1 jeu
Pour MFD12, fusibles
*Détail a la fin des documents.
⑧
Page 9
Fournitures Optionnelles (MFD 8 / 12)
Name Types Code Commande Remarques
Câble Data
NMEA0183
Câble
DataNMEA2000
Micro-Câbles
MJ-A7SPF0007-050C 000-154-028 5 m, NMEA0183, /7 PF/Nu
Connexion Femelle (DATA1)
M12-05BM+05BF-010 000-167-962 φ6, 1 m, NMEA2000, Male
/Femelle Micro Droite
M12-05BM+05BF-020 000-167-963 φ6, 2 m, NMEA2000, Male
/Femelle Micro Droite
M12-05BM+05BF-060 000-167-964 φ6, 6 m, NMEA2000, Male
/Femelle Micro Droite
M12-05BFFM-010 000-167-965 φ6, 1 m, NMEA2000, Nu
/Femelle Micro Droite
M12-05BFFM-020 000-167-966 φ6, 2 m, NMEA2000,
Nu/Femelle Micro Droite
M12-05BFFM-060 000-167-967 φ6, 6 m, NMEA2000
Nu/Femelle Micro Droite
Câble Réseau
NMEA 2000
résistances de
terminaison
( terminator) et T de
connexion
MOD-Z072-020+ 000-167-175 LAN croisé, 4-paires, 2 m
MOD-Z072-050+ 000-167-176 LAN croisé, 4-paires, 5 m
MOD-Z072-100+ 000-167-177 LAN croisé, 4-paires, 10 m
MOD-Z073-030+ 000-167-171 LAN droit, 2-paires, 3 m
Pour PC
MJ-A6SPF0016-005C 000-159-689 Connexion FAX-30,
ETR6N/10N
LTWSS050505FMFTS001
LTWMC-05BMMTSL8001
LTWMC-05BFFT-SL8001 000-168-605 Resistance terminaison NMEA
000-168-603 Connecteur T NMEA 2000,
micro
000-168-604 Resistance terminaison NMEA
2000, male, micro
2000 femelle, micro
⑨
Page 10
In-line terminator 8.010.001 Resistance terminaison en ligne
DVI-D/D S-LINK 000-149-054 5 m, simple liaison. Câble DVI-D
DVI-D/D S-LINK CBL-DVI-10M 10 m, 5 m, simple liaison.
Buzzer Externe OP03-136 000-086-443 Type Radio-Shack 273-070 ou
équivalent
Boite jonction
NMEA2000
Hub HUB-101 - Hub avec fonction de “Power
Jonction RJ45 RJ45-to-RJ45 Straight
Capot connexion
étanche MFD8-12
Manuel d’utilisationl OME-4440 000-167-802
Interface NMEA
2000
FI-5002 Boite de jonction NMEA2000
avec terminaisons intégrées
synchronisation »
RJ4-5CN-STR
OP19-7 001-028-090 Capot de protection étanche
IF-NMEA2K1 - Interface évoluée MNMEA2000
000.167.140
Raccord/Jonction RJ45 blindée
(rallonge câbles Ethernet)
pour connexion MFD8-12
/ NMEA 183
⑩
Page 11
MFDBB
Fournitures standard (MFDBB)
Les MFDBB sont fournis avec le câble suivant :
Un câble data 2&3 à 18 plots 2m 000.164.608
Name Type Code No. Qty Remarques
Processor Unit MPU-001 - 1
Control Unit MCU-001 - 1
Display Control
Unit
Kit d’installation
DCU12 - 1
CP19-00600 000-011-664 1 jeu Pour MPU-001, Câble, CP19-
CP19-00700 000-011-663 Pour MCU-001,
CP19-00800 000-011-662
SP19-00501 001-023-090 1 jeu Pour MPU-001, fusibles Pièces rechanges
SP19-00601 001-023-040 1 jeu Pour DCU-001, fusibles
1 jeu
Selon commande
00601*
câble, CP1900701*
Pour DCU12,
câbles, CP1900801*
Selon
commande.
Accessoires
FP19-01201 001-033-760 Pour MCU-001, Outil de dépose
FP19-01101 001-023-060
1
de la façade
Pour DCU12, Outil de dépose de
la façade
* Détail a la fin des documents.
⑪
Page 12
Fournitures optionnelles (MFDBB)
Name Types Code No. Remarques
DVI-D/D SINGLELINK 000-149-054 5 m, simple liaison Câble DVI-D
DVI-D/D S-LINK CBL-DVI-10M 10 m, simple liaison
Buzzer Externe OP03-136 000-086-443
Hub HUB-101 - Hub avec fonction de
“Power synchronisation »
Jonction RJ45 RJ45-to-RJ45 Straight
RJ4-5CN-STR
Boite jonction
NMEA2000
Control Unit MCU-001 -
Display Control
Unit
Câble Réseau
FI-5002 000-010-765 Boite de jonction
DCU12 -
MJ-A7SPF0007-050C 000-154-028-10 5 m, NMEA0183, /7 PF/Nu
MJ-A6SPF0016-005C 000-159-689-11 Connexion FAX-30,
000.167.140 Raccord/Jonction RJ45
blindée (rallonge câbles
Ethernet)
NMEA2000 avec
terminaisons intégrées
Connexion Femelle
(DATA1)
ETR6N/10N
MOD-Z072-020+ 000-167-175-10 LAN croisé, 4-paires, 2 m
MOD-Z072-050+ 000-167-176-10 LAN croisé, 4-paires, 5 m
MOD-Z072-100+ 000-167-177-10 LAN croisé, 4-paires, 10 m
MOD-Z073-030+ 000-167-171-10 LAN droit, 2-paires, 3 m
Pour PC
⑫
Page 13
NMEA2000
M12-05BM+05BF-010 000-167-962-10 φ6, 1 m, NMEA2000, Male
/Femelle Micro Droite
M12-05BM+05BF-020 000-167-963-10 φ6, 2 m, NMEA2000, Male
/Femelle Micro Droite
M12-05BM+05BF-060 000-167-964-10 φ6, 6 m, NMEA2000, Male
/Femelle Micro Droite
M12-05BFFM-010 000-167-965-10 φ6, 1 m, NMEA2000, Nu
/Femelle Micro Droite
M12-05BFFM-020 000-167-966-10 φ6, 2 m, NMEA2000,
Nu/Femelle Micro Droite
M12-05BFFM-060 000-167-967-10 φ6, 6 m, NMEA2000
Nu/Femelle Micro Droite
Manuel
d’utilisation
Interface NMEA
2000
LTWSS-050505-FMFTS001
LTWMC-05BMMTSL8001
LTWMC-05BFFT-SL8001 000-168-605-10 Resistance terminaison
In-line terminator 8.010.001 Resistance terminaison en
OME-44460
IF-NMEA2K1 Interface évoluée
000-168-603-10 Connecteur T NMEA
2000, micro
000-168-604-10 Resistance terminaison
NMEA 2000, male, micro
NMEA 2000 femelle,
micro
ligne
MNMEA2000 / NMEA 183
⑬
Page 14

⑭
Page 15

Installation
Fixation
Fixation MFD8/12
MFD8 MFD12
Pour choisir l’emplacement de l’appareil pensez aux éléments suivants:
• La température et l’humidité doivent être modéré et stable.
• Ne pas installer près des échappements ou des sorties de ventilation.
• L’emplacement choisi doit être très bien ventilé.
• Les vibrations et les chocs doivent être minima.
• Monter les appareils loin des sources de champs magnétique (Moteurs
Générateurs HP).
• Laisser suffisamment d’espace autour des appareils pour laisser de la place au
câbles. L’espace minimum nécessaire est consultable sur les schémas
d’encombrement en fin du manuel.
• Ne pas placer de compas magnétique près des appareils. Respecter les distances
de sécurités données dans les notices des compas.
Les MFD8/12 peuvent être installés encastrés ou sur étrier dans différentes
positions.
⑮
Page 16
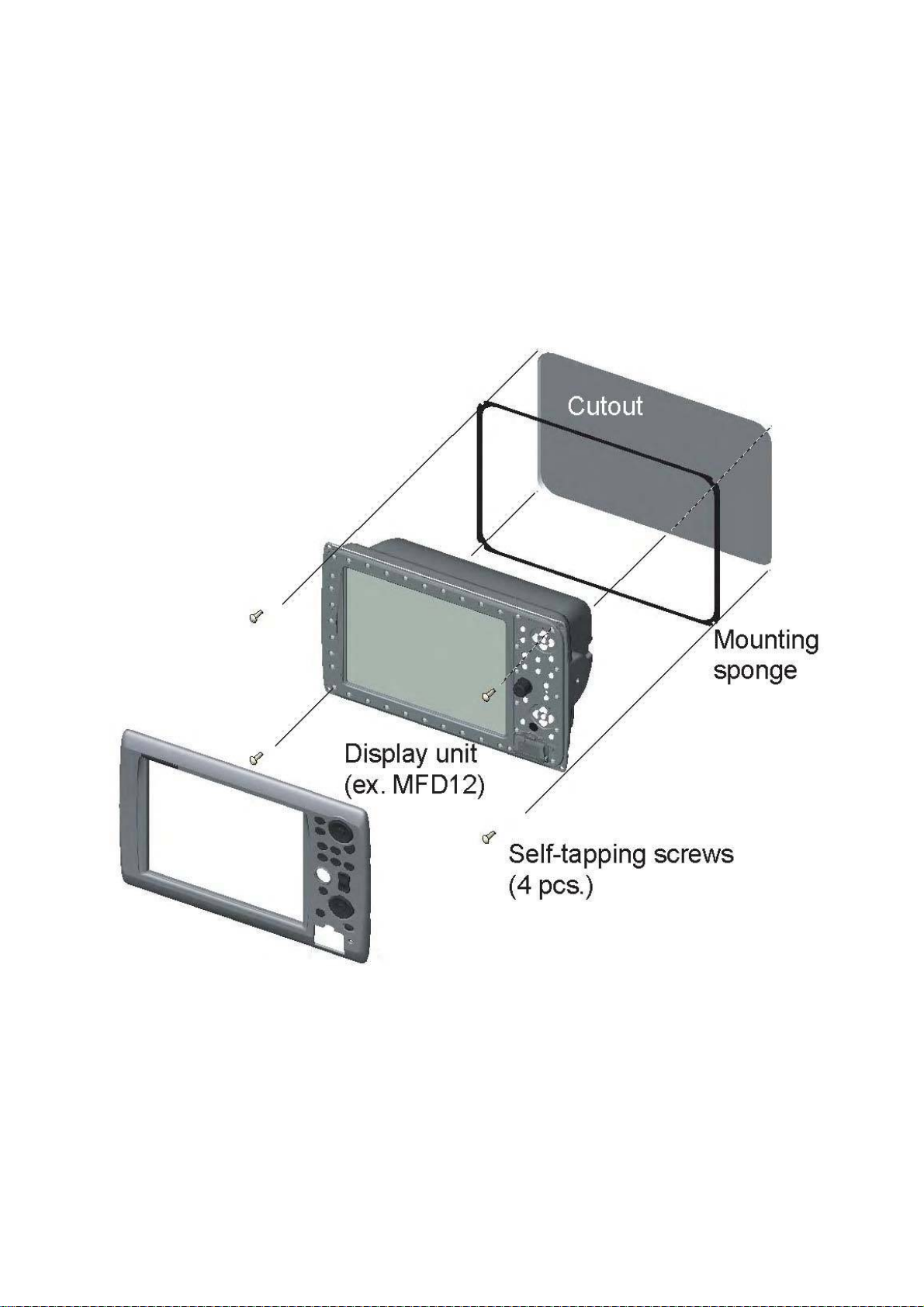
MFD 8/12 Montage encastré
Réaliser la découpe d’encastrement en utilisant le gabarit de perçage fourni avec le
MFD8 or 12.
Enlever la face avant de l’appareil en la dé-clipsant sur les cotés.
Placer le joint en mousse autour de l’afficheur.
Fixer l’appareil en utilisant les 4 vis auto taraudeuses fournies.
Reposer la face avant de l’appareil.
⑯
Page 17
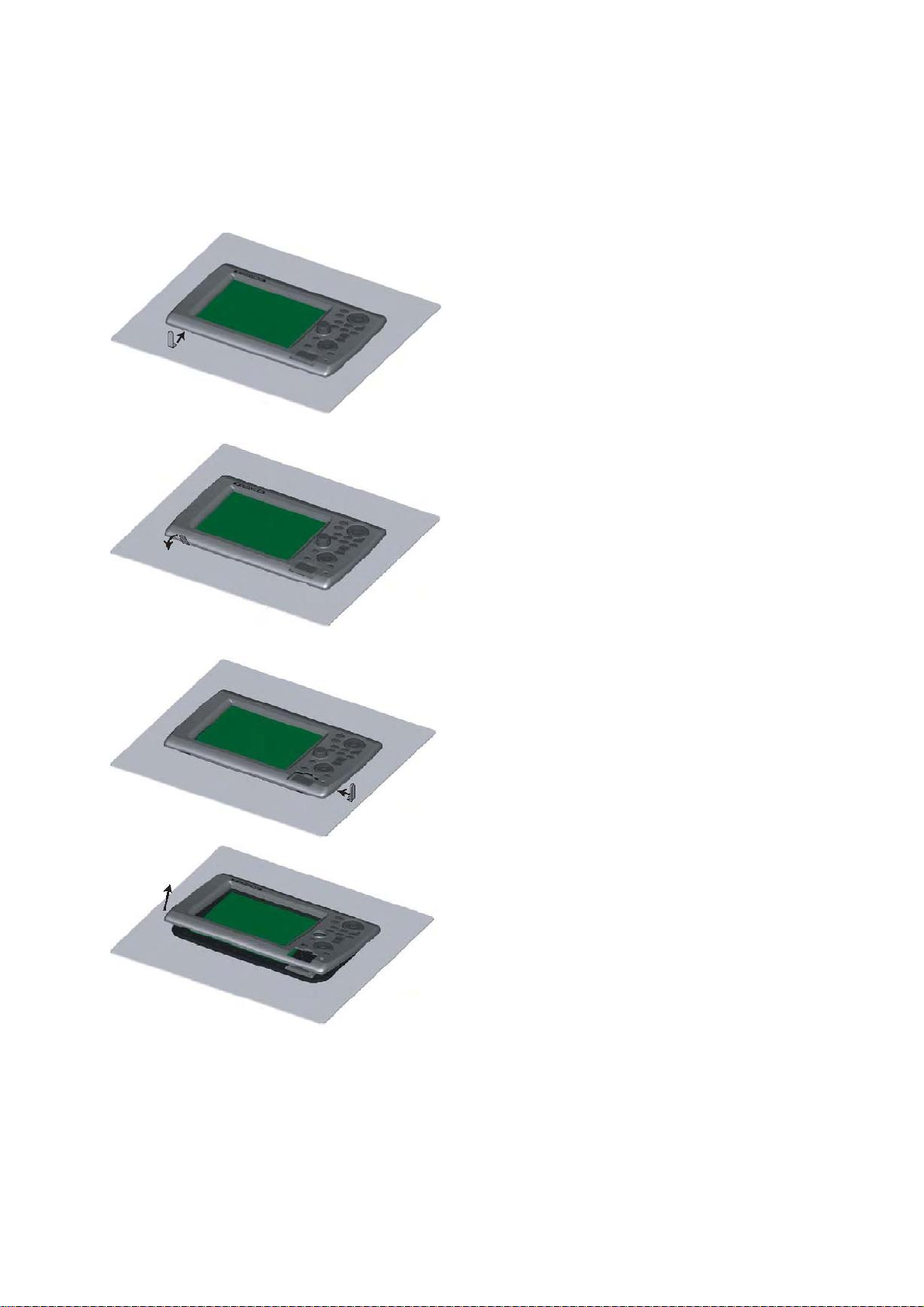
Dépose de la face avant en montage encastré.
Pour enlever la face avant utiliser l’outil de dépose (fourni) comme montré ci
dessous. ATTENTION: La face avant peut être endommagée si la méthode n’est pas
respectée!
Insérer l’outil dans l’encoche située au bas de la face avant.
Pousser l’outil pour soulever la façade doucement.
Répéter l’opération sur les autres encoches.
Soulever la façade avec la main pour la détacher.
⑰
Page 18

MFD 8/12 Montage sur étrier
Suivre la procdure ci- dessous pour installer les MFD8 or 12 sur étrier (à plat ou
suspendu). Pour le MFD12, placer les entretoises (liner) de chaque coté du MFD.
(Retourner les entretoises en cas de montage en plafond.)
Fixer l’étrier avec les vis auto taraudeuses (fournies).
Placer le MFD dans l’étrier et visser les molettes, régler l’inclinaison.
Fixation du MFDBB
Montage MFDBB
Le processeur peut être installé à plat ou sur une cloison. Faites bien attention a ce
que le processeur N’EST PAS ETANCHE !
Choisir l’emplacement en fonction des éléments ci-dessous :
Temperature et humidité doivent être faibles et stable.
Penser à la longueur des câbles de connexion.
Assurez-vous de la solidité du support (cloison). Le poids de l’appareil peut
développer des forces importantes sur un coup de mer.
Laisser de la place pour accéder a l’appareil notamment pour le service (connecteur
USB)
Ne pas placer l’appareil près d’un compas.
⑱
Page 19

Utiliser les vis de fixation
⑲
Page 20
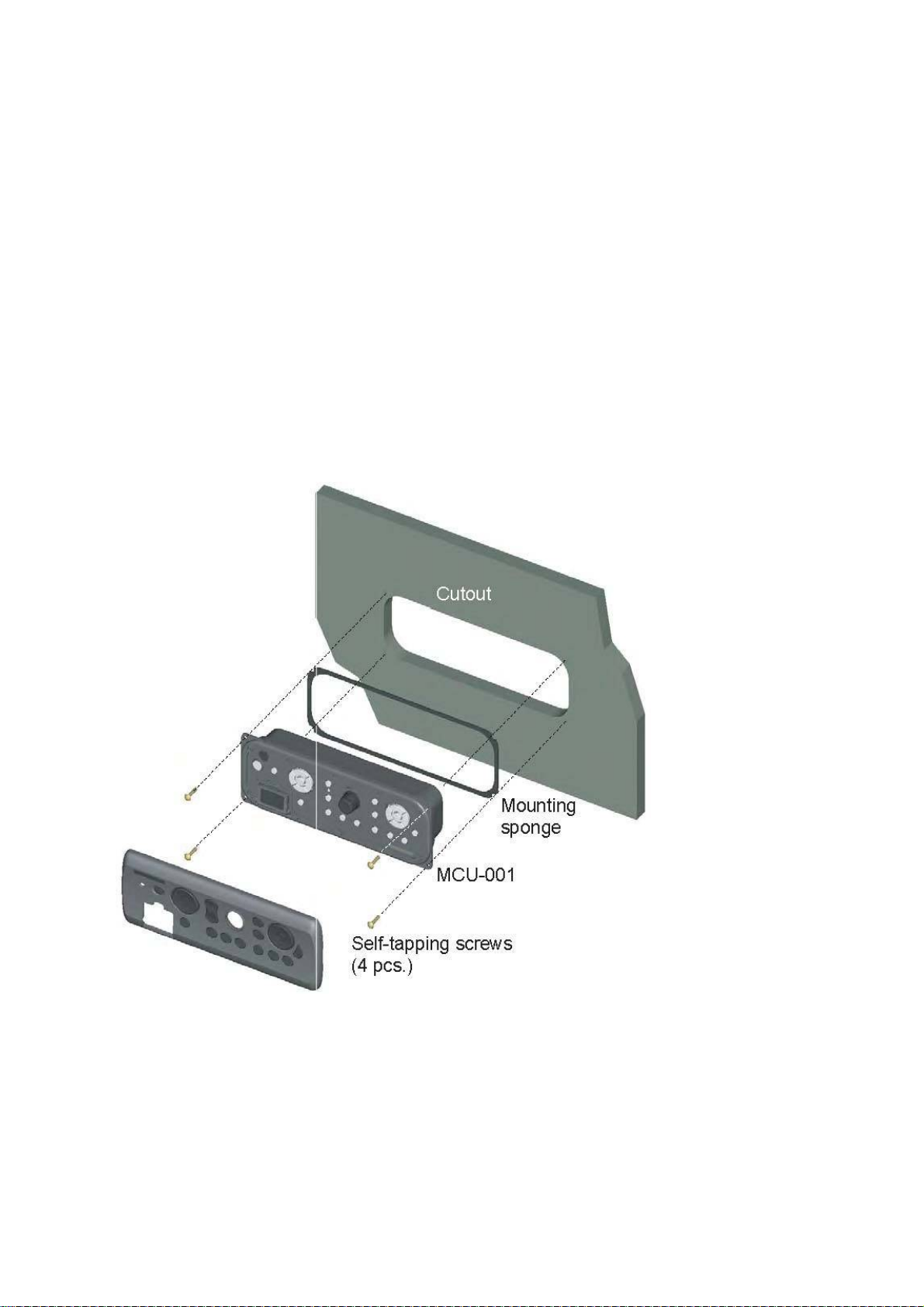
MDBBB fixation du clavier
Le clavier MCU-001) est prévu pour être installé encastré dans une console.
ATTENTION : Il faut un minimum d’inclinaison (40° minimum) à votre clavier pour
que l’eau puisse s’évacuer sous la trappe d’insertion des cartes. S’il est monté trop à
plat, l’eau de ruissellement ne pourra pas s’évacuer. Elle risque de monter au dessus
du seuil de la trappe. Si cette trappe est correctement fermée, il n’y a pas de
problème, mais si elle n’est pas fermée, l’eau pénétrera dans le clavier.
Préparer la découpe du MCU-001 en utilisant le gabarit fourni.
Enlever la façade du MCU-001en la de-clipsant.
Placer la bande de mousse isolante sur le rebord du MCU-001.
Fixer le clavier avec les 4 vis (fournies).
Repositionner la face avant du MCU001
Comment enlever la face avant du clavier en montage encastré.
Utiliser l’outil fourni avec le clavier pour détacher sa façade. Ne pas utiliser d’autre
moyens ou d’autres outils au risque de détériorer la façade.
Insérer l’outil au niveau des encoches.
⑳
Page 21

Soulever doucement en faisant levier.
Effectuer la même opération de l’autre coté.
Utiliser l’outil pour les encoches des extrémités
Faire le coté opposé.
Soulever la façade à la main
21
Page 22

Câblage
Connexion disponibles
Connexion MFD8/12
Câble d’alimentation : MJ-A3SPF0017-050ZC (MFD8)
MJ-A3SPF0018-050ZC (MFD12)
Connectique étanche :
-Data 1 : Entrée sortie NMEA avec alimentation12Volts 300mA. Supporte le GP320B
-Fiche DRS : Alimentation pour les aériens de radars
-Fiche réseau RJ45 : Connexion au réseau avec une fiche RJ45
-Fiche NMEA2000 : Connexion au bus NMEA2000
-Fiche Data 2 & 3 : Entrée sortie NMEA 183
22
Page 23

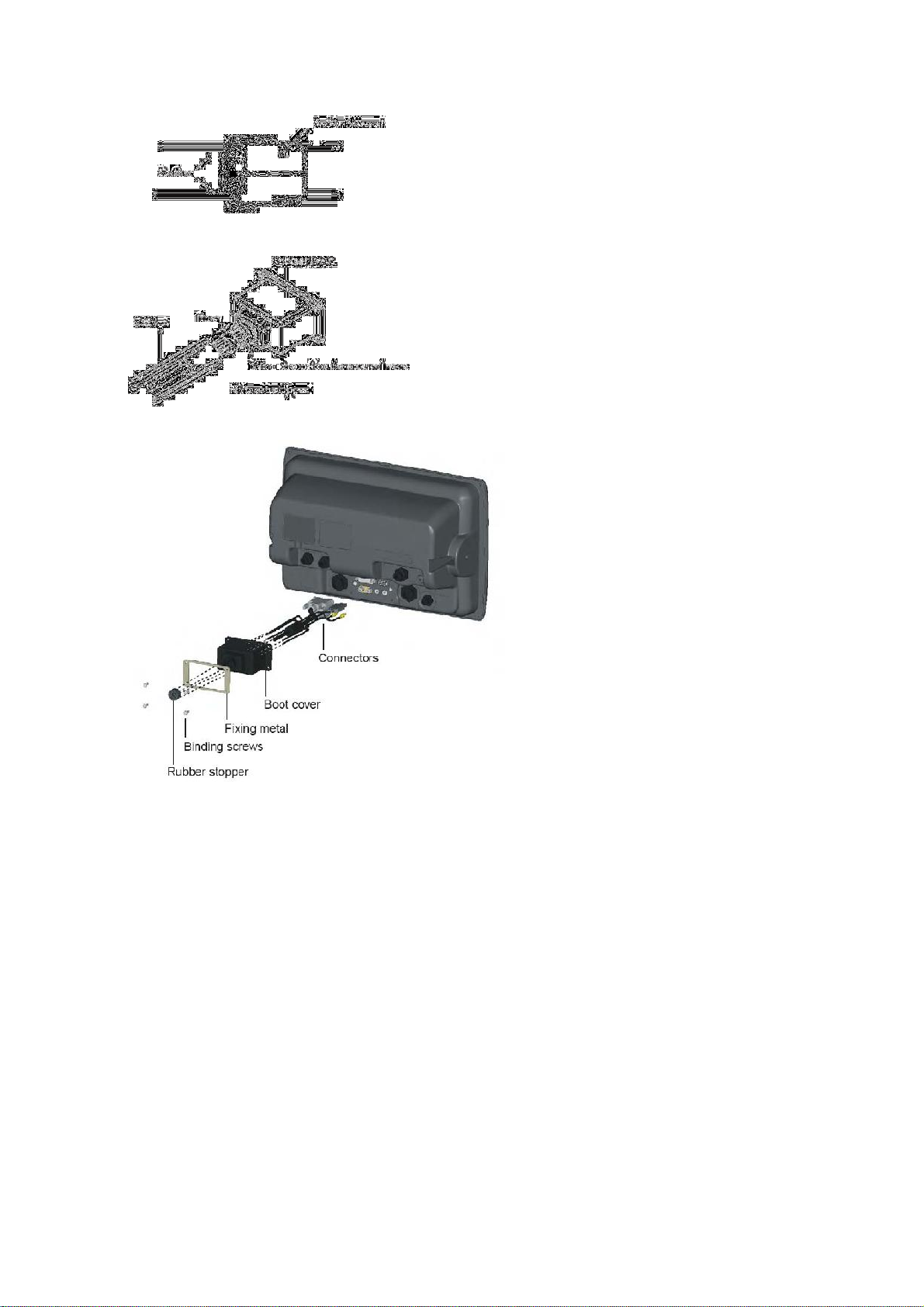
Connectique non étanche :
Un capot de protection est à enlever pour accéder à ces fiches :
- Connecteur USB
- Connecteur DVI-D (moniteur DVI en 800 X 640 ; SVGA analogique impossible)
- Deux entrées vidéo PAL /NTSC
- Entrée et sortie audio (lecteur MP3 intégré)
Fixation des connexions non étanches
Si vous n’avez pas besoin de connexions étanches, pensez à utiliser la plaque de
fixation des câbles (fournie en standard)
Déposer les 4 vis du capot de protection.
Mettre en place le support de câble fourni en standard. (M3x10),
Mettre en place les câbles dans leurs embases respectives..
Attacher les câbles au support de câble avec le collier fourni en standard.
23
Page 24
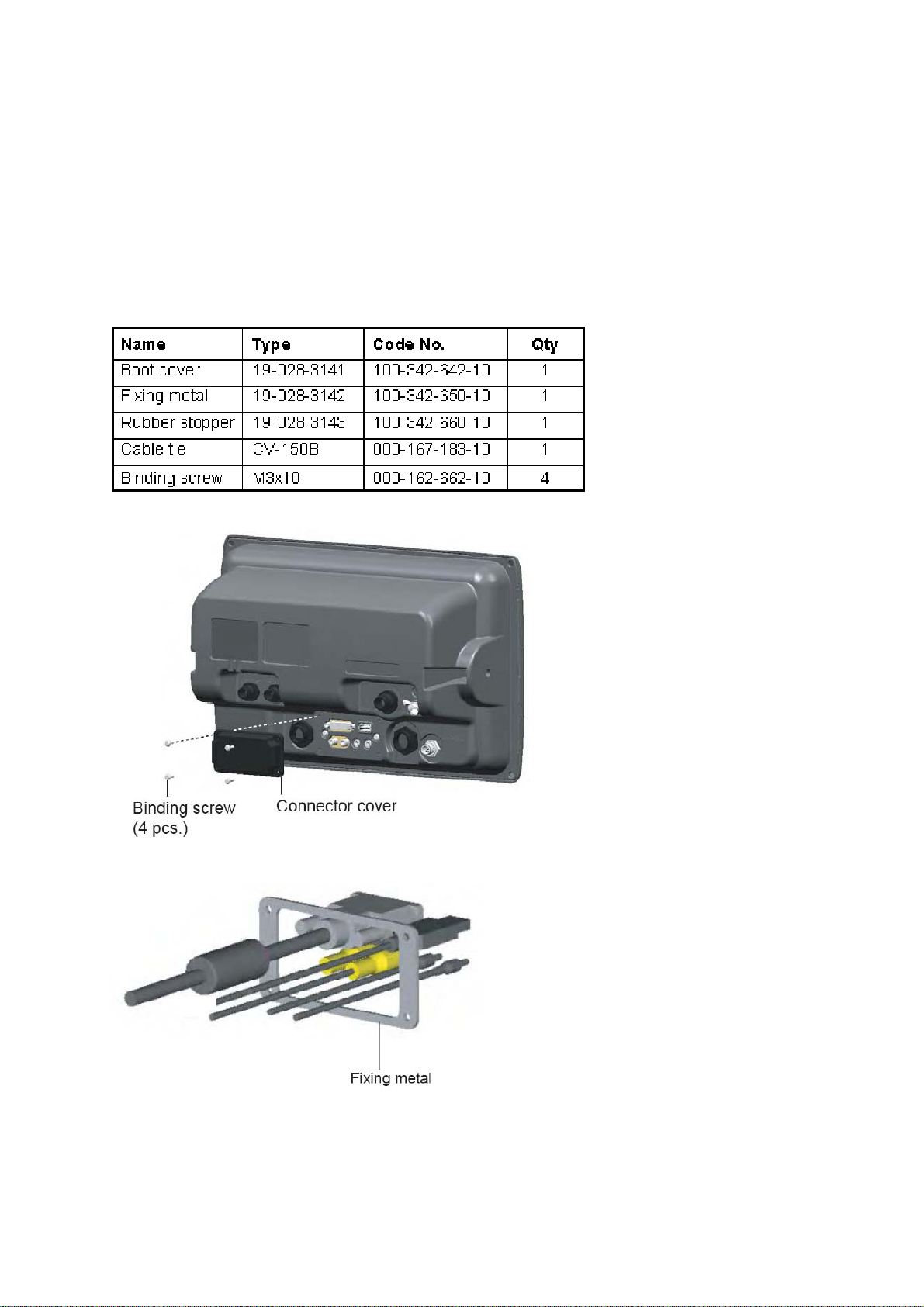
Utilisation Kit d’étanchéité
Cette connectique peut être rendu étanche avec un capot spécial.
Kit d’étanchéité de connexion
Un kit d’étanchéité pour les connexions DVI, USB, Vidéo et Audio est disponible
(Type: OP19-7, code : 001-028-090).
Contenu du Kit d’étanchéité
Déposer les 4 vis du capot de protection de connexions.
Passer les câbles DVI-D, VIDEO, AUDIO et ou USB dans la plaque fournie
Fixer chaque connecteur sur son embase respective..
Passer les câbles à travers le capot de protection.
Passer chaque câble dans le trou correspondant du joint conique, le plus gros est
pour le câble DVI
24
Page 25
Utiliser les 4 vis pour fixer le capot et la plaque à l’arrière du MFD.
Glisser le joint conique dans le capot et fixer solidement l’ensemble.
25
Page 26
Connexion MFDBB
Connectique étanche :
La connectique est étanche mais le MFDBB n’est pas étanche
- Data 1 : Entrée sortie NMEA avec alim 12Volts. Supporte le GP320B
- Fiche DRS : Alimentation pour les aériens de radars
- Fiche NMEA2000 : Connexion au bus NMEA2000
- Fiche Data 2 & 3 : Entrée sortie NMEA 183
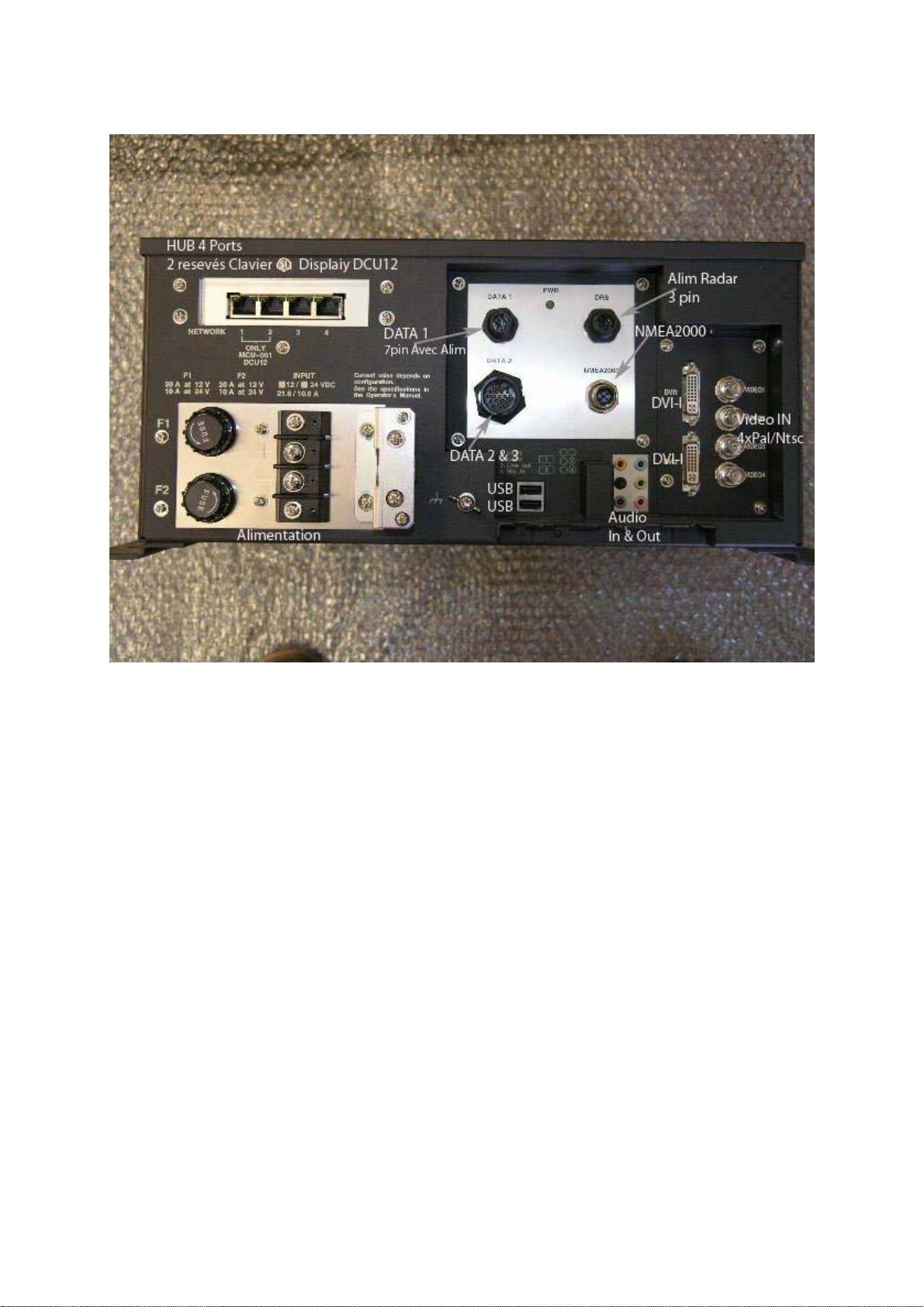
Connectique non étanche :
- 2 Connecteur USB
- 2 Connecteur DVI-I (moniteur DVI ou Analogique)
- 4 entrées vidéo PAL /NTSC
- Entrée et sortie audio (lecteur MP3 intégré)
- Hub 4 ports intégré : Attention deux ports sont réservés pour le clavier ou le DCU12
qui est un clavier avec un moniteur 12’, Ne pas confondre avec un MFD 12
26
Page 27
Alimentions
MFD8/12
Les MFD8/12 peuvent être alimentés en 12V ou 24V DC.
Utiliser le câble fourni dans le lot d’installation
MFDBB
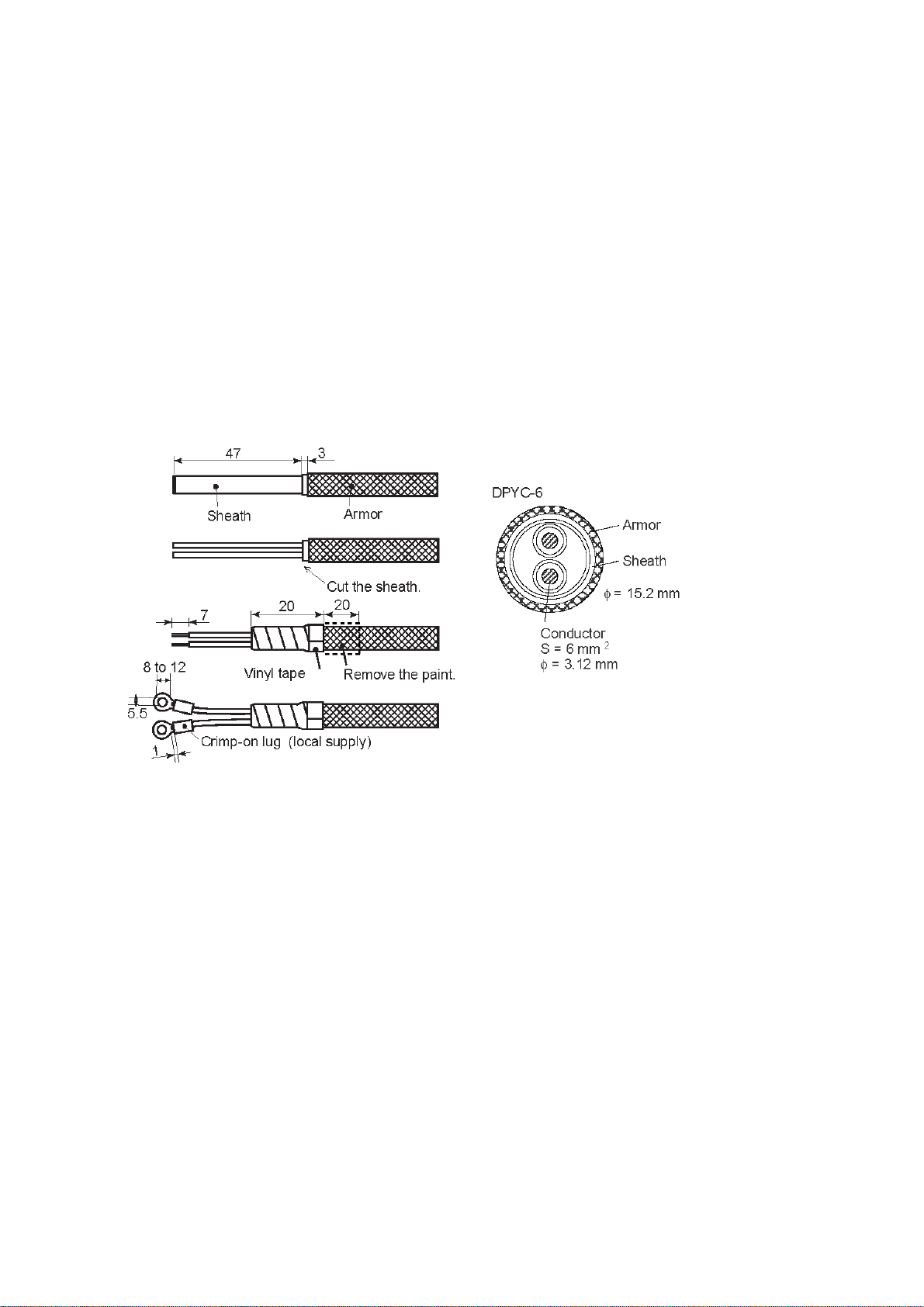
Le MFDBB s’alimente en 12V or 24V. Le clavier est alimenté par le câble Ethernet
Utiliser du câble de 6 mm² et assurez vous de la qualité des connexions en amont du
point d’alimentation.
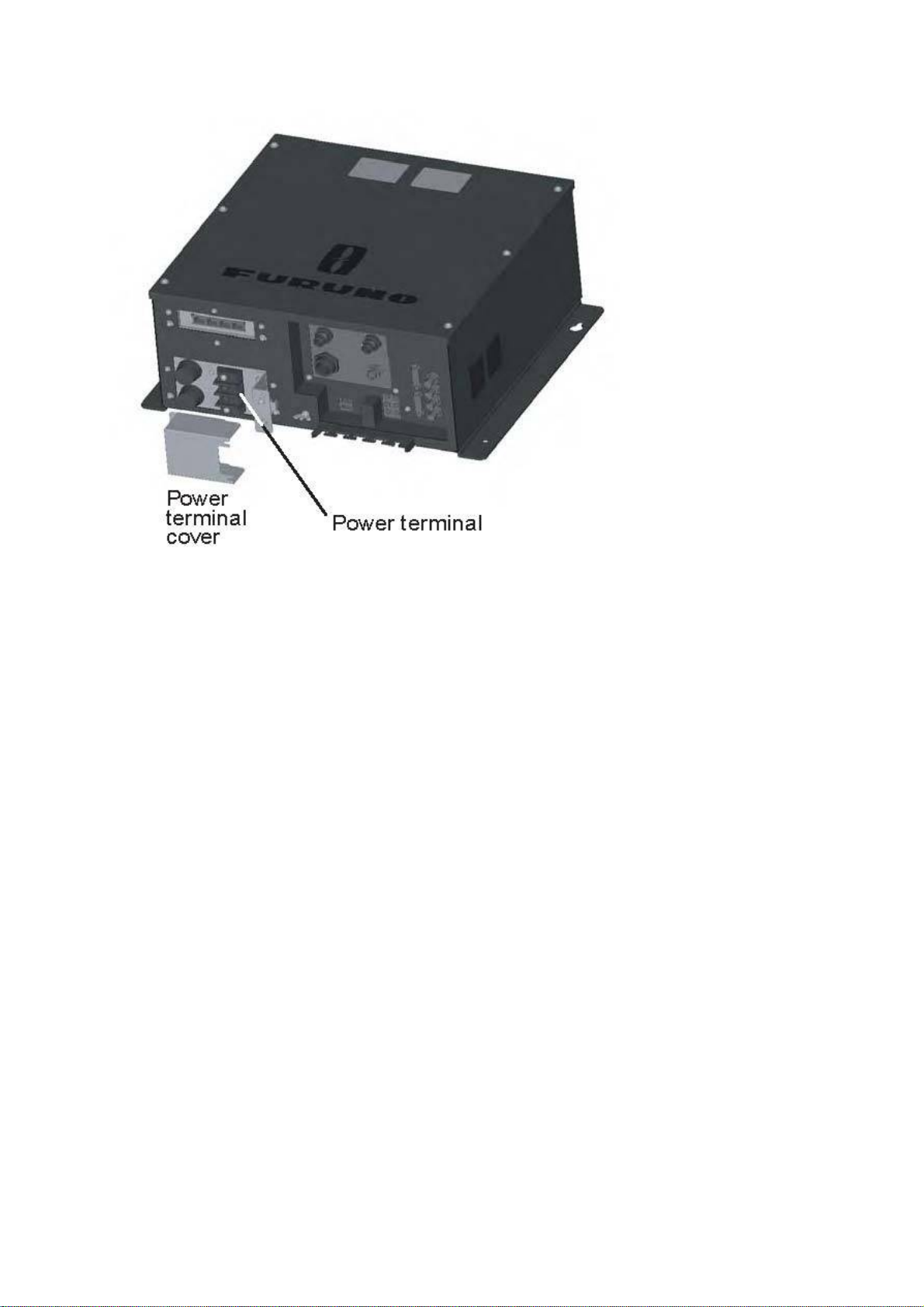
Déposer le cache des connecteurs d’alimentation en desserrant les vis et en glissant
le cache pour que les têtes de vis passent dans les trous.
Ne pas utiliser plus de 5 mètres de câble.
27
Page 28
28
Page 29

Interfaces
NMEA0183 Ports DATA 1, 2 & 3
Présentation
Tous les MFD disposent de trois ports d’entrée et sortie NMEA0183. Un des ports
disponibles en DATA 1 à un connecteur 7 broches males avec sortie d’alimentation
12 volts pour connecter des capteurs actifs. (GP320B, Sonde MNEA 183 Rowind ).
Le cordon 7 plots n’est pas fourni en standard. Deux autre ports sont disponibles sur
la fiche 18 plots (le cordon est fourni en standard). Ces ports NMEA peuvent recevoir
indifféremment n’importe quelle information (GPS, AIS, Smart Sensor, etc…) à 4800
bauds ou 38400 bauds.
Cap : l’information CAP permet à la NavNet 3D de travailler en mode RADRA
OVERLAY et dans différents mode stabilisés. (North Up, Course Up, etc.) . Elle est
indispensable pour faire fonctionner l’ARPA du radar et positionner correctement les
cibles AIS
IMPORTANT: Le taux de rafraichissement de l’info de CAP doit être de 100ms
(10fois par seconde) pour que la fonction ARPA soit valide. Si l’ARPA n’est pas
utilisé le taux de rafraichissement peut être 200ms (5 fois par seconde).
NavNet 3D n’acceptera pas d’information de cap si le taux de rafraichissement est de
1 à 2 fois par seconde!! Le cap en NMEA0183 sera accepté sur n’importe quelle des
entrées jusqu’à 38400 bauds. Notez que le changement de vitesse du port affecte la
réception et l’émission. Il faut donc que l’émetteur et le récepteur de données soit à
la même vitesse.
Voir l’installation type d’un pilote et d’un PG (à a ce sujet (page)
Note: Une information de cap lue sur le flux NMEA2000 aura toujours un taux de
rafraichissement correct pour l’ARPA.
29
Page 30
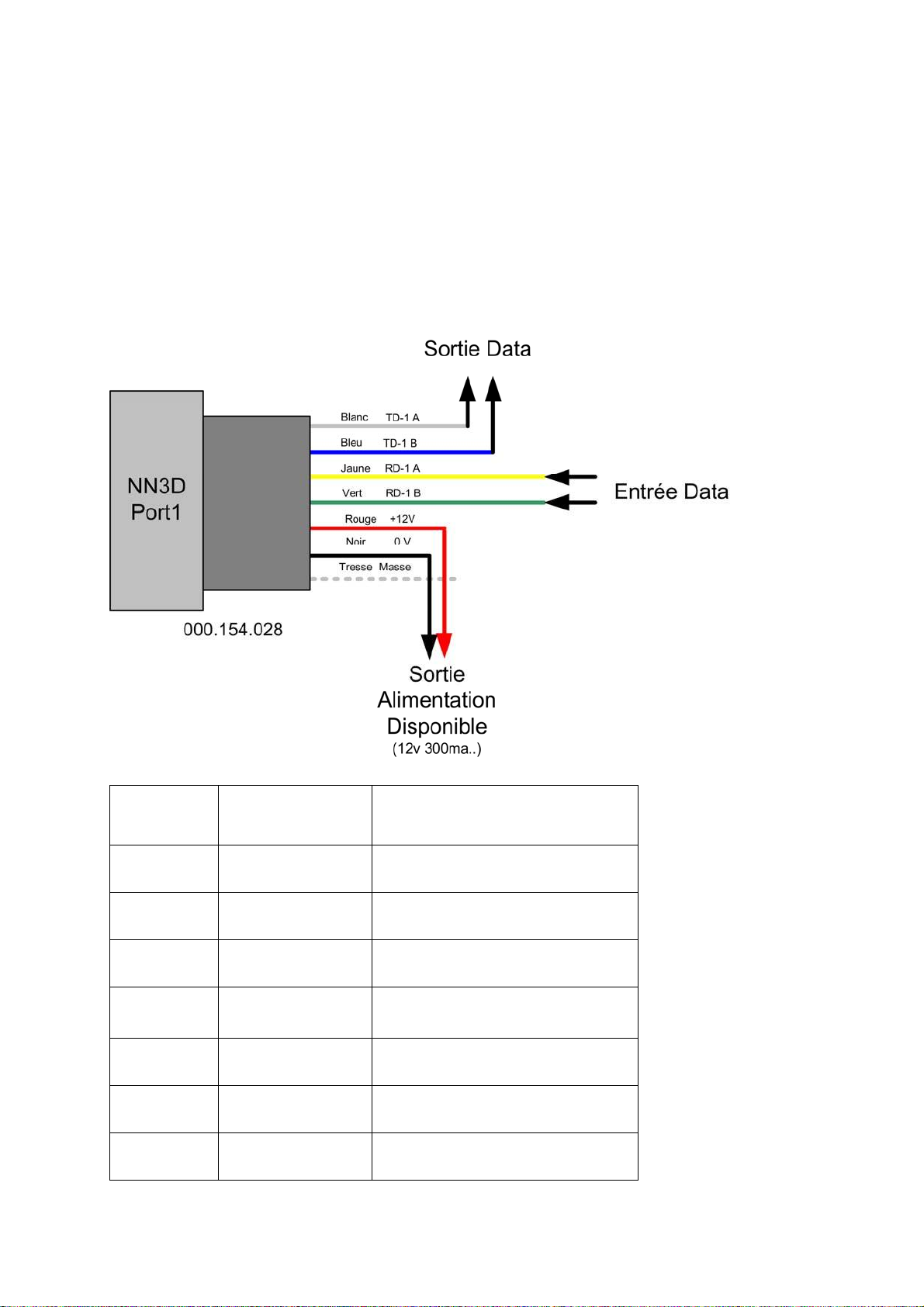
DATA 1 description
DATA1 utilise un connecteur à 7 broches. Dans la plus part des cas il sera utilise
pour connecter un capteur Furuno GPS GP320B (P/N BBWGPS).
D’autres équipements compatibles NMEA0183 (Compas, AIS, Sondeur, Smart
Sensor…) peuvent être connectés avec un câble 7 plots (000-154-028). Attention à
protéger la sortie 12 volts (Noir Rouge)
Data1 : Couleur et fonction des fils
Pin No. Couleur Fonction
7 Tresse Masse
6 Noir GND
5 Rouge 12V_OUT
4 Vert RD1-B [(-) NMEA1 entrée]
3 jaune RD1-A [(+) NMEA1 entrée]
2 Bleu TD1-B [(-) NMEA1 sortie]
1 Blanc TD1-A [(+) NMEA1 sortie]
30
Page 31

DATA 2 & 3 description
Les ports DATA2 & DATA3 sont utilisable pour connecter des équipements en
NMEA 183 avec le câble 18 plot (000-164-608) fourni en standard. Ce câble offre
d’autre possibilité de connexion (Buzer, Event …). Par exemple, entrée d’un MOB
avec un contact sec entre les PIN 15 and 11*.
Data2&3 : Couleur et fonction des fils
31
Page 32

A
Pin No. Couleur Fonction Remarque (Port No.)
18 Vert Pale NET-C IN (0V)
17 Rose NET-S IN (+12V IN)
16 Violet Masse Référence entrée
15 Blanc BUZZER or EVENT IN Sortie Buzer extérieur et
14 Gris SPEED-ALARM C
13 Jaune SPEED-ALARM H
12 Noir/Blanc +12V Alimentation buzer
limentation NMEA2000.
Le 12 volts doit être
appliqué ici en entrée. Il
se retrouve sur les lignes
Alim + et Alim- du bus
NMEA2000
(maximum 1 A)
Evènement
entrée évènement
Sortie alarme de vitesse
Peut déclencher une
alarme de vitesse au
dessus d’un certain seuil
programmable.
externe (100mA Max)
11 Noir GND Masse et référence 0v
10 Bleu/Blanc RD3-B [(-) NMEA3 entrée
9 Bleu RD3-A [(+) NMEA3 entrée]
8 Vert/Blanc TD3-B [(-) NMEA3 sortie]
7 Vert TD3-A [(+) NMEA3 sortie]
6 Orange/Blanc GND
5 Orange GND
4 Brun/Blanc RD2-B [(-) NMEA2 entrée]
3 Brun RD2-A [(+) NMEA2 entrée]
2 Rouge/Blanc TD2-B [(-) NMEA2 sortie]
1 Rouge TD2-A [(+) NMEA2 sortie]
Port 3
Port 2
32
Page 33

Sortie Buzer externe Entrée évènement
Connexion :
Connecter le Buzer entre le fil Noir/Blanc (+12 v) et le fil Blanc (Event / Buzer)
Le buzer doit consommer au maximum 100 mA sous 12 volts.
Connecter le bouton poussoir de l’entrée évènement entre le fil Blanc (Event/Buzer)
et le fil Violet (Masse).
Paramètre :
Dans le menu alarme, Valider :
Alarme Interne et externe ou externe seule, selon le besoin
Entrée évènement : MARQUE : pour faire une marque à la position actuelle
MOB : Entrée du MOB et verrouillage de la navigation vers ce
point
33
Page 34

NMEA2000 Description and Information
Rappel des règles de base du NMEA 2000
Un réseau NMEA 2000 est constitué d’un câble porteur « Backbone » (Violet) sur le
quel sont raccordés les câbles de services « Drop » (Bleu) vers les équipements
NMEA2000 (capteur ou indicateur).
Le câble porteur doit être fermé aux deux bouts par une résistance de terminaison.
L’impédance doit être de 50 à 60 Ohm (2 résistances de 120 Ohms)
La longueur d’un câble de service « Drop Câble » ne doit pas être supérieure à 6
mètres.
Il y a une règle qui limite la longueur totale des câbles (porteur + service) en fonction
de la charge du réseau (LEN). La LEN (lenght equivalent number) est liée à la
consommation du réseau
Chaque appareil a une charge spécifique :
MFD Len = 1
FI50X Len = 2
SC30 Len = 10
GP330 Len = 3
DST800 Len = 4
34
Page 35

NMEA2000 sur MFD
Tous les MFD disposent d’un port NMEA2000 avec un connecteur type Micro.
Ce port ne fournit pas d’alimentation aux éléments connectés sauf si une tension est
appliquée sur les plots 18 & 17 du connecteur 18 plots
IMPORTANT: Chaque MFD ainsi que chaque DRS (Radar) est conçu pour s’intégrer
dans un réseau NMEA2000 indépendant. Ils assurent eux même les passerelles
entre le NMEA 183, L’Ethernet et le NMEA2000. En conséquence il ne faut jamais
connecter entre eux ou sur un même réseau NMEA2000 les MFD et Les DRS
Deux exemples de connexion de capteur NMEA2000 aux MFD
Particularité des MFD
Les MFD n’ont pas de résistance de terminaisons intégrée.
Les connecteurs du MFD comme ceux des capteurs sont Mâles.
Les MFD ne fournissent pas d’alimentation sur le Bus Can du NMEA2000.
D’autre part le capteur Tri fonctions DST 800 contrairement a tous les autres
capteurs, n’a pas de résistance de terminaison intégré.
Alimentation NMEA2000 par le MFD
Le fiche NMEA2000 du MFD ne fournit pas d’alimentation au BUS Can NMEA2000.
Pour pouvoir alimenter un équipement MNEA2000 a partir du MFD il faut envoyer
une tension de 12 Volts sur le fils de la fiches 18 Plots.
Cette alimentation 12 volts peut être prise indépendante, dans ce cas, le MFD n’a
pas besoin d’être allumés pour que le réseau NMEA2000 fonctionne.
35
Page 36

Cette alimentation peut être aussi récupérée sur la fiche Data1 qui dispose d’une
sortie 12Volts 300 mA. Dans ce cas le réseau NMEA2000 sera automatiquement
alimenté quand le MFD sera en marche :
Attention : Ne pas alimenter un réseau important de cette façon à cause de la faible
sortance de l’alimentation Data1(300mA)
Exemple d’alimentation de réseau NMEA2000 par la fiche 18 plots et la fiche DATA1
36
Page 37

Un seul capteur sur le MFD
On utilise un T pour raccorder le capteur et placer une résistance de terminaison.
Le T n’est raccordable directement a l’arrière du MFD il faut donc un câble.
Le câble inter indicateur de FI50, de 30 cm (000.166.949), convient tout à fait.
On place une résistance de terminaison sur le T.
On alimente le Bus Can en 12 volts, entre les fils Rose (=) et Vert Clair(-) de la fiche
18 plots.
Le 12 v peut être fournis par la fiche DATA 1 ou par une alimentation extérieure.
On peut insérer des câbles de rallonge.
GP330 : On active la résistance de terminaison interne au GP330 (voir notice).
DST800 : Il faut placer une résistance de terminaison en ligne au bout du capteur.
37
Page 38

38
Page 39

Deux capteurs sur le MFD
On utilise deux T pour raccorder les capteurs.
Le T n’est raccordable directement à l’arrière du MFD il faut donc un câble.
Le câble inter indicateur de FI50, de 30 cm (000.166.949), convient tout à fait.
On place une résistance de terminaison sur le T.
On alimente le Bus Can en 12 volts, entre les fils Rose (=) et Vert Clair(-) de la fiche
18 plots.
Le 12 v est fourni par une alimentation extérieure.
On peut insérer des câbles de rallonge.
Une des extrémités du T n’est pas fermée.
GP330 : On active la résistance de terminaison interne au GP330 (voir notice).
DST800 : Il faut placer une résistance de terminaison en ligne au bout du capteur.
39
Page 40

NMEA2000 des RDS (Radar)
En plus des ports NMEA2000 de chaque MFD tous les DRS ont un processeur et un
port NMEA2000. Cela permet de connecter tous les capteurs “aériens” sur le radar et
ainsi minimiser les câblages. Le nombre de capteurs dépend de la consommation
des capteurs. Le DRS peut fournir 1 A sur l’alimentation du Bus NMEA2000. (LEN =
20).Notez que ce réseau sera indépendant des autres réseaux NMEA2000 et qu’il
doit être configuré comme un réseau NMEA 2000 (2 résistances de terminaison a
chaque extrémité, LEN à respecter et longueur des « drop » câbles inferieure à 6
mètres). Une résistance de 120 Ohm est fournie avec chaque DRS et la notice
explique sa méthode d’installation si le DRS est en terminaison du réseau
Le réseau est construit à partir du
DRS
Le DRS fournit l’alimentation
120
Résistance de terminaison dans le
scanner
T101, # 4 et #5
Résistance de terminaison dans les
radômes
J603, # 5 et #6
40
Page 41

Conversion NMEA0183 to NMEA2000
Les données NMEA0183 et les PGN (Paramètre group number) du NMEA2000,
utilisée par les MFD peuvent être transpose d’un système a l’autre. Noter cependant
qu’une seule information est transposée (une position, une profondeur un cap). En
cas de réception de plusieurs infos du même type, seule celle utilise par le système
sera convertie. (Un MFD qui reçoit deux GPS, ne transposera que la source déclarée
en source de position). Ces passerelles de la NN3D permettent d’utiliser des
anciens capteurs NMEA 183 avec des afficheurs NMEA2000 et inversement.
Il existe aussi une passerelle entre le NMEA2000 et l’Ethernet
Les PGN NMEA2000 sont transposes en paquets Ethernet dans le radar.
Ils sont de nouveau convertis en PGN par le MFD et sont disponibles pour d’autres
équipements, connectés en NMEA2000 sur le MFD.
Il ne faut surtout pas relier les deux réseaux NMEA2000
41
Page 42

Radar connexion des DRS
Compatibilité Aériens:
Tableau Aériens & Câbles
DRS2D
DRS4D
DRS4A
DRS6A
DRS12A
DRS25A
45cm
2.2kW
Câble10m 000.167.635 000.167.635
Câble15m 000.167.636 000.167.636 000.167.636 000.167.636 000.167.636
Câble20m 000.167.637 000.167.637 000.167.637 000.167.637 000.167.637
Câble30m :000.167.638 :000.167.638 :000.167.638 :000.167.638 :000.167.638
MFD8
PSU012
60 cm
4 kW
4ft
4kW
000.167.635
4ft
6kW
000.167.635
PSU012
4 ft ou 6 ft
12kW
000.167.635
PSU012
4 ft ou 6 ft
25kW
En dévelopment
PSU013
MFD12
MFDBB
PSU012
PSU013
Il est possible de connecter deux DRS dans un réseau
Les câbles sont communs aux différents modèles.
42
PSU013
Page 43

La longueur des câbles livrés en standard est de 20M pour les radôme et 15 mètres
pour les tournants.
Les DRS sont alimentés en 48 volts par le MFD.
Il est nécessaire de placer une alimentation relai optionnelle entre le MFD et le DRS
si le MFD n’est pas capable de fournir la puissance nécessaire au DRS
Tableaux des alimentions PSU :
DRS2D DRS4D DRS4A DRS6A DRS12A DRS25
A
MFD8 PSU-
012
MFD12 PSU-
MFDBB PSU-
Note: la PSU-013 est en fourniture standard dans le DRS25A
PSU012
PSU012
012
PSU013
PSU013
013
43
Page 44

Connexion du DRS et des MFD8/12
Installation simple poste
Connecter directement les deux câbles du radar a l’arrière du MFD8/12. Le câble
d’alimentation sur la fiche DRS et le câble réseau dans l’embase RJ45
Installation Multi postes
Dans ce cas il y a forcement un HUB dans l’installation. L’alimentation du DRS est
reliée au MFD maitre et le câble réseau est connecté sur le HUB. Il faut utiliser une
jonction RJ45 (RJ4-5CN-STR code 000.167.140) pour rallonger le câble si besoin.
Attention cette jonction n’est pas étanche.
Il est déconseillé de couper le câble pour des questions de qualité et de fiabilité des
fiches réalisées localement. Vous pouvez le faire si vous utilisez des fiches blindées
et une pince professionnelle, assurant un sertissage puissant. Les mauvaises
connexions de masse entrainent des pertes de signal.
44
Page 45

Installation avec HUB101 et Alimentation PSU
Connecter de la manière suivante :
PSU alimentée directement sur le MFD maitre
Liaison réseau entre la PSU et le HUB101
MFD relié au HUB101
IMPORTANT: Soyez certain que la fonction “Power synchronisation “ soit active sur
les ports du HUB101 reliés a u MFD et a la PSU
45
Page 46

Installation avec HUB standard et alimentation PSU
Dans ce cas il faut relier directement le MFD et la PSU. Le câble réseau du radar
sera relié au HUB pour distribution vers d’autres équipements.
Note: En cas d’installation avec plusieurs MFD connecter l’alimentation du radar sur
le MFD maitre
Câbles Ethernet utilisable pour rallonger la connexion réseau du radar
Câble 2 Mètres RJ45 to RJ45 Ethernet ( 000-167-175)
Câble 5 Mètres RJ45 to RJ45 Ethernet (000-167-176)
Câble 10 Metres RJ45 to RJ45 Ethernet (000-167-177)
46
Page 47

Connexion du DRS et du MFDBB
Le MFDBB possède un HUB qui permet la connexion du DRS et d’un HUB 101.
Note: les ports Ethernet 1 et 2 sont dédies a la connexion des claviers MCU001.
Connecter le DRS au Port 3 et le HUB 101 sur le port 4.
Le HUB du MFDBB a une fonction Power Synchronisation qui doit être gérée
47
Page 48

Connexion Réseau
Introduction
NavNet3D (comme NavNet1 et VX2) utilise les protocoles TCP/IP Ethernet standard
pour échanger et partager les informations. (Image radar sondeur données de
navigation etc..). Un réseau peut combiner 10 MFD. Chaque équipement dispose
d’un port Ethernet RJ45 sauf le MFDBB qui dispose de son propre Hub intégré.
Attention les équipements de première génération sondeurs ETR-6/10N et ETR-30N
ainsi que le FAX 30 ont une connectique 6 broches. Il faut utiliser un adaptateur 6
Broches RJ45 (000-144-463) pour les connecter.
AUTO MDI/X – Les équipements NN3D MFD, DRS ainsi que le HUB101 on une
fonction switch automatique qui permet indifféremment d’utiliser des câbles croisés
ou droit.
Néanmoins la pratique montre qu’il faut utiliser les câbles FURUNO prévus pour le
système.
MFD 8 & 12
Les MFD8/12 sont équipé d’une embase RJ45 étanche pour peut que l’on utilise le
câble réseau (000-164-609) fourni en standard avec les appareils. Ce câble ne fait
que 3 mètres, il faut utiliser une jonction RJ45 (000.167.140) pour le rallonger. Notez
que cette jonction n’est pas étanche.
Câble 3 mètres RJ45 <> RJ45 étanche (000.164.609)
MFDBB
Le MFDBB possède un HUB 4 ports intègre. Deux de ces ports sont exclusivement
réservés pour la connexion des claviers. Le clavier, fourni en standard avec la
MFDBB, doit être impérativement connecté sur ces ports, il ne peut pas être
connecté au HUB. Le clavier MCU001 est fourni en standard avec un câble de 5
mètres mais d’autres câbles peuvent être utilisés.
Câble 2 mètres RJ45 <> RJ45 Ethernet (000-167-175)
Câble 5 mètres RJ45 <>RJ45 Ethernet (000-167-176)
Câble 10 mètres RJ45 <> RJ45 Ethernet (000-167-177)
Clavier MCU001 (MFDBB)
Note: Le clavier utilise des câbles Ethernet pour ses données et son alimentation. Ne
rien connecter d’autre que les claviers dans les ports 1 &2 du HUB de la MFDBB.
Ces ports ne sont pas des ports POE (Power over Ethernet) et les équipements POE
ne peuvent pas être connectés à ces ports.
48
Page 49

Détails des câbles réseau Furuno:
Câble fournis en standard :
MFD 8 &12 000.164.609 3 mètres 4 paires droit RJ45 étanche <> RJ45
FA30 Pas de câble réseau
MFDBB Pas de câble réseau
FAX30 000.154.049 5 mètres 2 paires 6PF <> 6PF
DFF1 000.159.705 5 mètres 2 paires 6PF <> RJ45 Ne pas utiliser
remplacer par un câble 000.167.176 (sinon pas de Power synchro)
Note pour le raccordement des équipements avec connecteur 6 broches sur le HUB
(FAX30)
Utiliser la combinaison suivante :
Câble 6PF 6PF croisé Bleu
000.154.054 5 mètres + 000.144.463 0,5 mètres
OU
000.159.689 + 000.167.140 + 000.167.176
6PF <> RJ45 0,5 m Jonction Câble réseau
Ces combinaisons de câbles ne peuvent pas être utilisées avec des appareils
fonctionnant en « POWER SYNCHRONISATION », il n’y a que 4 conducteurs dans
l’adaptateur.
Câble et raccords en option:
Câbles réseau 4 paires « croisés » :
Schéma des câbles réseau NN3D 4 paires :
49
Page 50

000.167.175 2 mètres RJ45 <> RJ45
000.167.176 5 mètres RJ45 <> RJ45
000.167.177 10 mètres RJ45 <> RJ45
Câbles réseau 4 paires « droit » :
Schéma du câble réseau NN3D 4 paires fourni avec les MFD8 et MFD12
000.164.609 3 mètres RJ45 <> RJ45 connectique étanche
Câbles réseau 2 paires « croisé » :
Pas de power synchronisation possible
000.167.171 3 mètres RJ45 <> RJ45
50
Page 51

Raccords (Attention 2 paires)
000.159.689 0,5 mètres 2 paires Raccord 6PF <> RJ45 Hub
000.144.463 0,5 mètres 2 paires Raccord 6PM <> RJ45 Hub
Jonction RJ47 4 paires
000.167.140 Jonction RJ45 <> RJ45
Fonctions des broches sur les fiches RJ45
Pin Signal Name I/O Signal Remarks
1 E_TD_P O Ethernet TX Data (Hot)
2 E_TD_N O Ethernet TX Data (Cold)
3 E_RD_P I Ethernet RX Data (Hot)
Câblage
4 SW_P I/O Contact PWR Control signal (Hot)
5 SW_N I/O Contact PWR Control signal (Cold)
d’une fiche
réseau sur
un appareil
51
Page 52

6 E_RD_N I Ethernet RX Data (Cold)
7 N.C.
8 N.C.
Pin Signal Name I/O Signal Remarks
1 E_TD_P O Ethernet TX Data (Hot)
2 E_TD_N O Ethernet TX Data (Cold)
3 E_RD_P I Ethernet RX Data (Hot)
4 SW_P I/O Contact PWR Control signal (Hot)
5 SW_N I/O Contact PWR Control signal
(Cold)
6 E_RD_N I Ethernet RX Data (Cold)
7 PWR_SW_P I Contact Control Unit PWR SW
(Hot)
8 PWR_SW_N I Contact Control Unit PWR SW
(Cold)
MFD8
MFD12
J7/J8 sur
MFDBB
Câblage
d’une fiche
réseau
réservée au
clavier sur
MFDBB
Pas de
caméra
uniquement
clavier
(sortance
insuffisante.)
52
Page 53

53
Page 54

Power Synchronisation
Pour pouvoir partager efficacement toutes les informations (radar, sondeur, données
de navigation) l’ensemble des équipements connectés doivent être opérationnels. Le
rôle de la « Power Synchronisation » est d’assurer la mise en route de tous les
équipements lorsque le système démarre. Si cette fonction n’est pas correctement
assurée, on ne pourra pas exploiter l’ensemble des ressources du système NN3D.
Description du fonctionnement NN3D
(Software Version 2.01et supérieur)
Le premier MFD que l’on allume (touche Power) envoie une commande de mise en
marche à tous les autres équipements. La séquence de démarrage s’exécute sur
tous les équipements. A la fin de cette séquence, tous les équipements du réseau
qui n’ont pas été allumés, passent en mode veille. Seul reste allumé l’équipement qui
a été démarré. Pour sortir les équipements du mode veille il suffit de presser la
touché Power. Pour le mettre de nouveau en veille il faut presser le Rotokey et
sélectionner “Veille » (Sleep).
Notez que cette commande ne sert que pour démarrer le système.
La commande d’extinction se fait par une commande logicielle.
IMPORTANT: La Power Synchronisation nécessite d’utiliser un Hub spécifique
Furuno le HUB101. Ce hub ainsi que le hub intégré de la MFDBB, ont la particularité
d’envoyer des commandes sur les paires non utilisées des câble 4 paires. Ce ne
sont pas des HUB POE. Il est impératif d’utiliser ce hub s’i il y a plusieurs MFD.
L’utilisation de hub générique peut être envisagée uniquement avec des installations
très simples non multiposte.
Attention : Bien gérer la fonction Power Synchronisation de chaque sortie et surtout
penser à la désactiver sur le port correspondant quand vous connectez un appareil
standard (PC, Hub Caméra,) sur ce HUB101. Il peut y avoir court circuit sur les
paires non utilisées ou envoi de tensions dans l’appareil connecté.
La méthode la plus sur consiste à utiliser un câble 2 paires pour connecter les
appareils standards.
Mode Veille “Sleep Mode”:
Les MFD dispose d’un mode VEILLE. Dans ce mode l’appareil travaille et échange
les informations avec le reste des équipements mais son interface utilisateur (Clavier
et écran est désactivée. Cèle minimise la consommation électrique de l’équipement
quand il n’est pas utilisé. L’équipement a 3 états possibles:
- ON: Tout est opérationnel (processeur entrée sortie, clavier, affichage).
Consommation nominale. Le témoin de fonctionnement est vert
- OFF: Tout est éteint pas de consommation. Le témoin de fonctionnement est éteint
- Sleep Mode: L’écran est éteint le clavier est inactive (sauf la touché Power
évidement) Les interface (MNEA2000 NMEA183 DRS) avec les équipements
54
Page 55

connectés travaillent. Le témoin de fonctionnement est orange.
Pourquoi utiliser le HUB HUB101 Furuno:
Pour assurer le fonctionnement du mode Power Synchronisation. Si les appareils ne
sont pas tous opérationnels il manquera des ressources sur le réseau. Les données
Route et Waypoint sont gérées en commun entre les différents MFD. Il y a un risque
de perte de données si un MFD n’est pas en fonction. Voici la liste des appareils qui
nécessitent les signaux de Power Synchronisation.
- Tous les MFD NN3D : MFD8, MFD12, MFDBB
- Toutes les alimentations relai de DRS : PSU012 and PSU013
- Les sondeurs: DFF1 and DFF3
- Le DCU12
- Le HUB101
Note: les DRS ne nécessite pas de signal de Power Synchronisation. Leur
alimentation est fournie directement du MFD ou de la PSU.
Voici la liste des équipements qui ne gèrent pas la Power Synchronisation Signal.
Les signaux sont ignorés.
- DRS (radar), seule les PSU ont besoin de la Power Synchronisation.
- BB Clavier (MCU001)
- AIS FA30 et FA50
-Récepteur FAX30
- Sondeurs ET6FN et ETR30
- PC, Caméra IP, Hub Standard
La Power Synchronisation utilise les PIN 4 et Pin 5) d’un câble 4 paires. Si on utilise
un Hub standard il faut utiliser des câbles Ethernet à 2 paires entre les MFD et le
Hub standard pour éviter tout risque de destruction électrique. Il existe un câble 2
paires de 3 mètres (000-167-171).
Comment configurer les fonctions Power Synchronisation:
HUB101:
Le HUB101 est munis d’interrupteur permettant d’activer ou de désactiver la fonction
Power Synchronisation de chaque port.
Connecter les appareils qui gèrent la Power synchronisation sur un port dont
l’interrupteur est sur ON.
55
Page 56

Connecter les appareils n’utilisant pas la Power synchronisation sur un port dont
l’interrupteur est sur OFF
Note: Pour éviter tout problème il est recommandé d’utiliser un câble a 2 paires pour
connecter un PC sur les HUB de la NN3D (000-167-171).
MFDBB:
Le Hub intègre au MFDBB possède lui aussi 4 interrupteur pour activer ou désactiver
la Power synchronisation.
Note: Les ports 1 & 2 étant réservés au clavier, qui n’utilise pas la Power
synchronisation, il faut laisser les interrupteurs sur OFF.
56
Page 57

DFF1/DFF3:
The DFF1 et DFF3 on des interrupteurs qui activent ou désactive la fonction Power
synchronisation.
DFF1: Tous sur OFF pour la power synchronisation. (OFF OFF OFF OFF)
Le DFF1 ne démarre que s’il reçoit une commande de mise en marche par le câble
réseau.
Attention : la fonction power synchronisation doit être activée sur les appareils
connectés au DFF1 (Hub101 ou MFD) et le câble doit être un câble à 4 paires.
Si vous utilisez un HUB standard (idem Navnet2) il faut désactiver le power
synchronisation. (Switch sur : ON OFF OFF ON)
Sinon le DFF1 ne s’allume pas.
Même concept pour le DFF3 seul la logique des interrupteurs change.
- HUB standard (pas de Power Synchro.) = DIP switch 1 et 2 sur ON
- HUB101 (Power Synch.) = DIP Switch 1 et 2 sur OFF
57
Page 58

Connexion Vidéo
Entrée Vidéo
NavNet3D peut utiliser deux type de cameras:
Caméra vidéo analogique (PAL or NTSC) connectée directement sur les entrées
vidéo des MFD.
Caméra vidéo en IP connectée en réseau avec les MFD.
Dans cette configuration, certaine cameras (PTZ) peuvent être commandée par le
MFD.
Dans cette configuration seules les cameras IP seront visibles de n’importe quel des
deux postes.
Les caméras analogiques ne seront visibles que sur les MFD auquel elles sont
connectées.
58
Page 59

Entrée Vidéo analogique
MFD 8-12
Les MFD8/12 ont deux entrées vidéo analogiques (PAL/NTSC) sur deux fiche RCA
situées à l’arrière de l’appareil.
MFDBB
Les MFDBB ont 4 entrées vidéo analogiques (PAL/NTSC) sur 4 fiches BNC (75
Ohms) situées sur le processeur.
Vidéo Cameras IP
Au moment de la rédaction de ce document seules les caméras AXIS peuvent être
exploitées sur le réseau NN3D.
Elles doivent être impérativement programmées pour travailler en MPEG4 et avoir
une adresse fixe assignée.
Les cameras IP Cameras se connectent directement sur le réseau via un HUB. Il
peut y avoir 4 caméras dans le réseau. Elles peuvent être protégées par mot de
passe.
HUB POE
Il n’est utile que si les cameras supporte ce mode, qui consiste à alimenter la camera
en utilisant les paires disponible d’un câble 4 paires.
Attention certaine fonctionnalité des caméras ne sont pas disponibles lorsqu’elles
sont alimentées en mode POE.
Par exemple sur les 225FD la fonction réchauffeur n’est pas active en alimentation
POE. Elle n’est disponible qu’en alimentation directe.
Pour info : Conso axis FD225 sur son alimentation : 290mA sous 13 Volts
59
Page 60

Sur un HUB POE on trouve des ports fournissant de l’alimentation sur les paires
disponible mais aussi des ports standard (non POE) il faut utiliser ce port standard
pour relier le HUB POE au HUB 101.
Certaines caméras (PTZ Pan-Tilt-Zoom) peuvent être commande en azimut et zoom
par le clavier des MFD
Lors de la connexion d’une caméra sur les HUB101 ou le Hub du MFDBB soyez
certain que le mode Power synchronisation n’est pas actif sur le port.
Il est recommandé d’utilisé un HUB POE pour connecter les cameras. Ce hub sera
relié sur le HUB101 ou sur le Hub du MFDBB par un port sans commande de power
synchronisation.
IMPORTANT: Ne jamais connecter de port POE sur le HUB101 Utiliser toujours le
port standard du HUB POE pour effectuer le lien avec le réseau NN3D
60
Page 61

Adresse de caméras IP
Voici les adresses sur lesquelles doivent travailler les caméras :
IP Camera numéro 1 = 172.031.200.003
IP Camera numéro 2 = 172.031.200.004
IP Camera numéro 3 = 172.031.200.005
IP Camera numéro 4 = 172.031.200.006
Configuration des caméras IP
Se référer au document de configuration des caméras pour :
Forcer les adresses IP
Forcer le mode MPEG4
Annuler le mot de passe par défaut
Il faut cocher le bouton “Aspect Ratio” pour certaine Camera IP (215 ou 233)
61
Page 62

Moniteurs externes
IMPORTANT: Ne jamais connecter ou déconnecter un moniteur DVI ou VGA lorsque
le MFD est en fonctionnement. Toujours arrêter les équipements avant de modifier
les connexions.
MFD8/12
Un moniteur DVI peut être connecté au MFD8/12 pour faire une répétition de
l’image. La fiche est du type DVI-D et ne supporte que format DVI. Le raccordement
d’un moniteur VGA n’est pas possible. La sortie est uniquement DVI-D
Le MFD8 a une résolution de 640x480 (VGA). Le MFD12 a une résolution de
800x600 (SVGA) DVI-D. Les câbles DVI suivants sont disponibles:
Câble DVI 5 Mètres (000-149-054)
Câble DVI 10 Mètres (000.150.200)
Note: La fréquence verticale de la sortie est de 56Hz sur le MFD 12 et 60Hz sur le
MFD8.Assurez vous que les moniteurs soient compatibles avec ces fréquences.
Se référer au paragraphe « connexion étanche » lorsqu’une connexion étanche est
nécessaire.
MFDBB
Résolution
Le MFDBB a deux sorties DVI-I couplées (résolution identique) dont la résolution
peut être choisie de 800x600 a 1280x1024. Elles disposent d’une détection
automatique et peuvent travailler en DVI ou en VGA en utilisant un adaptateur DVIVGA.
IMPORTANT: Utiliser des câbles DVI simple liaison éviter les doubles liaisons.
62
Page 63

Note: La fréquence verticale de la sortie DVI du MFDBB est de 60Hz.
Mode Clone
Le MDFBB peut travailler en mode CLONE, deux images identiques et deux
claviers. Cela permet de faire deux postes pour un seul utilisateur.
Mode étendu
Il peut aussi travailler en mode ETENDU, deux images différentes sur les écrans et
un seul clavier. Cela permet de faire un poste avec plus de possibilité d’affichage. En
mode ETENDU les écrans seront installés cote à cote. Il y aura un seul clavier et la
souris passera d’un écran à l’autre.
Note: Les écrans doivent pouvoir fonctionner à la même résolution car celle-ci est
unique pour les deux sorties. Il n’est pas possible d’avoir des écrans travaillant avec
des résolutions différentes.
63
Page 64

USB and Audio Connexion
USB Ports
Les MFD8/12 dispose d’un port USB Ver. 1.0 et les MFDBB ont deux ports USB
Ver. 2.0
Ces ports USB ports permettent la connexion d’un clavier et d’une souris.
L’utilisation d’une souris sans fil est possible mais comme on ne peut pas charger de
driver spécifique de souris, les souris connectable sont basiques. Il est important de
pouvoir disposer d’une souris avec une roulette et un click central pour avoir accès à
toutes les fonctions depuis la souris La roulette fait fonction de Rotokey.
Le clavier permet d’entrer facilement des noms et des valeurs numérique. Il est
fortement recommandé pour initialiser le système pendant l’installation.
Attention : Le décodage est basé sur un clavier QWERT et non AZERTY. Cela
demande une gymnastique neuronale.
Le port USB du MFDBB peut aussi permettre de charger des cartes et effectuer des
mises à jour de soft.
Ce n’est pas possible sur les MFD8 &12
Raccourci clavier
Le clavier peut aussi émuler les commandes du clavier voici la correspondance des
raccourci clavier:
USB Keyboard Action
ESC CANCEL
F2 SAVE/MOB
F3 DISP
F4 MENU
F5 GAIN/TX
F6 CTRL
F7 DATA/VOL
F8 GO TO/LIST
F9 POINTS/ROUTE
F10 RANGE OUT
F11 RANGE IN
F12 SHIP/3D
Arrows (up, down, left, right) SCROLLING PAD
Page Up RotoKey Counter Clockwise
Page Down RotoKey Clockwise
Enter Push on RotoKey
End Power/Brill
64
Page 65

Audio
Audio In et Audio sont réservés pour un développement futur.
Au moment de la rédaction de ce document aucune application n’est disponible pour
l’audio.
65
Page 66

Configuration
Introduction
NavNet3D (comme NavNetVX2) utilise l’Ethernet pour partager et diffuser les
informations entre les différents éléments de l’installation.
Un réseau peut comporter jusqu'à 10 MFD interconnectés Tous disposent d’une
interface Ethernet avec une fiche RJ45 pour cette connexion, sauf certain appareils
(ETR-6.10N F;ETR-30N ; FAX30) qui ont un fiche 6 broches. Dans ce cas un câble
d’adaptation 6 broches /RJ45 est nécessaire (code 000-144-463)
Ce chapitre explique comment configurer votre réseau NavNet 3D.
Cette configuration ce fait a partir de « l’installation Wizard » « Installation
Automatique » qui est démarrée automatiquement à la première mise en marche ou
qui peut être lancée à tous moment avec la séquence suivante :
[MENU] Æ Système Æ installation Automatique.
Avant toute chose soyez certain que l’installation physique est terminée, que tous les
appareils sont interconnectés correctement, et sous tension.
Il est vivement conseillé de n’avoir qu’une seule source d’alimentation pour tout le
système se façon à être certain que tous les équipements sont sous tension.
Pour configurer le MFD8 et 12 on utilisera le Pad curseur et le bouton central qui fait
fonction de click droit de la souris. Vous pouvez pour plus de confort connecter un
clavier et une souris sur l’un des ports USB situé sous le cache, à l’arrière de
l’appareil
Sur les MFDBB, il faut connecter une souris et un clavier sur les ports USB
Lisez attentivement ce chapitre pour bien configurer le système.
66
Page 67

Comment configurer les fonctions Power Synchronisation:
MFD8/MFD12
Les fonctions de Power Synchronisation sont automatiquement activées.
MFDBB:
Le Hub intègre au MFDBB possède 4 interrupteurs pour activer ou désactiver la
Power synchronisation.
Note: Les ports 1 & 2 étant réservés au clavier, qui n’utilise pas la Power
synchronisation, il faut laisser les interrupteurs sur OFF.
Elle doit être su ON si un DCU12 est connecté au port selectionné.
HUB101:
Le HUB101 est munis d’interrupteur permettant d’activer ou de désactiver la fonction
Power Synchronisation de chaque port.
Connecter les appareils qui gèrent la Power synchronisation sur un port dont
l’interrupteur est sur ON.
Connecter les appareils n’utilisant pas la Power synchronisation sur un port dont
l’interrupteur est sur OFF
Note: Pour éviter tout problème il est recommandé d’utiliser un câble a 2 paires pour
connecter un PC sur les HUB de la NN3D (000-167-171).
MFDBB:
67
Page 68

DFF1/DFF3:
The DFF1 et DFF3 on des interrupteurs qui activent ou désactive la fonction Power
synchronisation.
DFF1: Tous sur OFF pour la power synchronisation. (OFF OFF OFF OFF)
Le DFF1 ne démarre que s’il reçoit une commande de mise en marche par le câble
réseau.
Attention : la fonction power synchronisation doit être activée sur les appareils
connectés au DFF1 (Hub101 ou MFD) et le câble doit être un câble à 4 paires.
Si vous utilisez un HUB standard (idem Navnet2) il faut désactiver le power
synchronisation.
Sinon le DFF1 ne s’allume pas. (ON OFF OFF ON)
Même concept pour le DFF3 seul la logique des interrupteurs change.
- HUB standard (pas de Power Synchro.) = DIP switch 1 et 2 sur ON
- HUB101 (Power Synch.) = DIP Switch 1 et 2 sur OFF
68
Page 69

Data Source Sélection
Dans une installation plusieurs capteurs peuvent fournir un même type d’information.
(DFF1 et central de navigation peuvent fournir la profondeur)
Il est important de préciser au système quelle doit être sa source d’information
prioritaire.
Tous les équipements du réseau partageront alors la même information.
C’est cette information qui sera envoyée sur les port NMEA183 ou NMEA2000 quand
on activera la sortie du port.
Si la source prioritaire vient à défaillir le NN3D basculera automatiquement sur une
source de secours (si elle existe) après avoir affiché une alarme.
DHCP : Quel MFD doit être le maitre (DHCP)?
Dans une installation NN3D un et un seul des MFD doit être déclaré “Maitre”. S’il n’y
a qu’un appareil c’est obligatoirement le maitre. C’est ce MFD qui aura la charge de
gérer les adresses des éléments de votre réseau (fonction DHCP).
Note: La notion de maitre n’intervient qu’au moment de la configuration du système
elle est transparente au niveau de l’utilisation .Toutes les opérations peuvent être
effectuées de la même manière sur le maitre et les esclaves.
En choisissant le MFD maitre pensez que :
Le Maitre doit être le MFD qui sera allumé en premier et en priorité.
Il est recommandé mais pas obligatoire de connecter un maximum d’interfaces
(NMEA0183, NMEA2000) sur le maitre.
Si vous avez des MFD8/12 et des MFDBB, utilisez un des MFDBB en tant que
maitre et connecter le radar sur celui-ci. (Alimentation sur le MFDBB et aérien
connecté sur le Hub du MFDBB)
Configuration initiale et déclaration du Maitre
- Déconnecter le câble réseau reliant le MFD au reste de l’installation, pour éviter le
démarrage général de tous les équipements connecté. (Il n’y a pas encore de
DHCP)
69
Page 70

Allumer le MFD qui sera le maitre.
Si le système n’a jamais démarré le processus d’installation automatique est lancé.
Si ce n’est pas le cas il faut le lancer à partir du Menu
Note: Le démarrage sera plus rapide une fois le système configuré
-Si le système a toujours ces réglages par défaut il est en Anglais.
Utiliser le Pad curseur et le click central ou alors la souris USB, pour sélectionner
votre langue. Cliquer Next
Le système va scanner le réseau pour chercher les capteurs connectés. Le maitre
n’étant pas encore configuré, il ne va pas pouvoir détecter tous les éléments du
réseau, presser sur « Skip ».
Cette opération sera importante lors du deuxième démarrage pour vérifier que le
maitre détecte bien tous les éléments du réseau.
- Le fenêtre de sélection du Maitre apparait de suite ; Sélectionner Master = ON et
presser “Save and Exit”
Le MFD va s’éteindre
Note: Si une fenêtre indiquant qu’il n’y a pas de Maitre apparait cliquer sur “Install
Wizard” pour lancer l’installation automatique.
Note: Si le message de sélection du maitre n’apparait pas cela veut dire qu’il est déjà
configuré en maitre ou qu’il est encore connecté à un réseau sur lequel un appareil
est maitre.
Dans ce cas :
70
Page 71

- Vérifier qu’aucun des autres MFD du réseau ne soit pas programmé en maitre.
- Eteindre tous les MFD
-Rebrancher tous les câbles réseau et démarrer le MFD qui doit être maître.
-Vérifier immédiatement que les autres MFD démarrent, si ce n’est pas le cas
démarrer les en pressant POWER.
-Vérifier que les LED de trafic sur le Hub sont actives pour tous les équipements
connectés.
- Si elle ne se fait pas automatiquement lancer le processus d’installation
automatique sur tous les MFD.
Note: Si l’installation automatique ne se fait pas lancer la manuellement avec la
séquence suivante : [MENU] Æ Système Æ Installation Automatique.
Important: Si vous travaillez sur un MFDBB le clavier ne répondra pas tant qu’il ne
sera pas correctement adressé par le processeur.
Voir le paragraphe “Appairage clavier MFDBB “ à ce sujet.
71
Page 72

Description Installation Automatique (Wizard) Onglets
L’installation automatique comporte plusieurs onglets .Chaque onglet concerne un
domaine spécifique de votre installation.
Onglet “Own Setting”
Il concerne les ports d’entrée et sortie (Entrée /sortie NMEA0183, sortie NMEA2000)
du MFD en cours d’installation.
Il est spécifique à chaque appareil, et dépend des interfaces avec les équipements
connectés sur cet appareil.
Onglet “Global”
Cet onglet concerne les paramètres généraux de l’installation notamment les sources
de données et les noms affectés aux différents capteurs et éléments de l’installation
(Nickname).
Il est important de donner des noms aux éléments du réseau cela aide l’utilisateur
dans le choix des ses sources d’information (Caméra, radar sondeur etc.).
Cet onglet concerne aussi les caractéristiques du bateau (Taille Type de moteur
etc.).
Note: Il est recommandé d’effectuer cette configuration Globale sur le MFD maitre.
Les informations seront automatiquement reportées dans les autres MFD.
Onglet “Sounder”
Cet onglet apparait lorsqu’un sondeur réseau est connecté. Il permet la configuration
des sondes: Modèle, Puissance et Position relative par rapport au capteur de
mouvement s’il est installé.
Onglet “Radar”
Cet onglet apparait lorsqu’un radar est connecté. Il permet la configuration et le
réglage du radar : Ligne de foi, hauteur d’installation Main Bang suppression.
72
Page 73

73
Page 74

Installation Automatique « Own Settings »
Moniteur (MFDBB only)
Il est possible de choisir la résolution de la sortie vidéo (DVI ou VGA) du MFDBB.
Laisser le mode Auto si un moniteur FURUNO est connecté.
Si vous avez deux moniteur de connectés, Il faut choisir aussi le mode Clone ou
Etendu
Note: S’il n’y a qu’un seul moniteur laisser le mode “Clone”
Se référer au paragraphe concernant la connexion des moniteurs et les modes.
74
Page 75

NMEA2000 Data Configuration
Cet Onglet permet de configurer les données PGN (Paramètre Groupe Number du
NMEA2000) que le MFD va sortir sur le BUS CAN (NMEA2000).
Les informations disponibles dans le réseau NN3D, qui proviennent des capteurs
sélectionnés comme source de donnée (Data source), seront utilisées pour générer
les PGN.
Chaque MFD gère un BUS CAN (NMEA200) indépendant et ils doivent être gérés
individuellement.
Il ne faut pas relier les MFD entre eux avec un bus Can
Note: Cela concerne uniquement les sorties de donnéesNMEA2000. Les entrées de
chaque MFD sont automatiquement reconnues par le système et seront prise en
compte que si le capteur qui les fourni est déclaré comme source de donnée
prioritaire dans le paramétrage des sources de donnes ( DataSource)
Le bouton “Port Monitor” permet de contrôler les équipements NMEA2000 connectés
sur ce MFD.
La liste d’équipements apparaît ; Il faut sélectionner celui que l’on veut tester et
choisir les onglets en fonction des infos que l’on souhaite lire.
(Receive PGN List or Transmitted PGNs).
75
Page 76

Receive PGN List
Donne la liste des PGN que peut recevoir l’équipement
Transmit PGN List
Donne la liste des PGN que peut transmettre l’équipement
Transmitted PGNs”
Donne la liste des PGN que l’équipement est en train de transmettre.
Pour pouvoir lire un donnée d’un capteur pour vérifier qu’il fonctionne il faut
cliquer sur “Stop” et ensuite développer une des branches de l’information que vous
souhaitez vérifier.
Attention elle ne sont pas toujours lisible certaine sont codées mais on peut vérifier
que les données changent..
Cliquer sur “Next” pour continuer la configuration.
76
Page 77

NMEA0183 1 ,2 & 3
Il y a 3 onglets qui correspondent aux trios ports NMEA183 disponible sur chaque
MFD. Il est très important de bien gérer les entrées sortie NMEA183 pour éviter de
générer des conflits de données. Il n’y a pas de reconnaissance automatique de
données en NMEA183.
Chaque onglet comporte 3 zones qu’il faut gérer.
Zone supérieure :
-Nom identifiant l’équipement connecté. Il est important de remplir ce champs car ce
nom apparaitra ensuite dans les menus de sélection des données. Ex : Compas,
GPS Principal, Central Navigation, Etc.)
-Caractéristiques de la liaison série (Vitesse, version, format)
Note: “WPT ID Format” permet de choisir si on transmit vers le pilote le Nom du WPT
ou le N° du WPT dans la route.
La boite de dialogue “L/L format” permet de choisir le format des données Lat Long
transmises.
77
Page 78

Zone centrale :
Choix des données transmises vers les équipements connectés. Ne valider que les
données qui peuvent être lues par l’équipement connecté et surtout ne pas valider en
sortie une donnée reçue sur l’entrée (Ex renvoyer MWV le vent vers une centrale de
navigation qui génère cette donnée)
Zone inférieure :
Il faut déclarer ici les informations que le MFD va lire dans le flux de données du
capteur.
C’est ce capteur qui apparaitra dans la liste de choix de données (Data source).
Ex ; on choisit Vent si on veut prendre uniquement cet info de la centrale et ignorer
ses infos profondeur et vitesse qui seront fournies par un autre capteur.
Exemple: si unPB100 Capteur Vent et GPS est connecté, il faut cocher “Wind”.
(Girouette) “Position & SOG/COG” (GPS) et “Date & Time (GPS)
On peut après aller voir sur le port monitor si les informations sont correctement
envoyées.
78
Page 79

Pour la connexion d’un GP320B sur le port NMEA 1, un bouton de configuration
d’une deuxième page apparait automatiquement “Page 2”. Cliquer sur ce bouton
pour configurer la GP320B.
Name Description
Si la réception GPS n’est pas bonne la position va bouger. Ce réglage
permet de faire la moyenne de la position sur un temps ajustable.
POS.
Smoothing
SOG/COG
Smoothing
Disable
Satellite
INIT.
Position
ANT.
Position
ANT. Height Hauteur de l’antenne au dessus de l’eau.
Rx Mode Choix du positionnement : 2D (3 satellites), 2D/3D (3 ou 4 satellites).
WAAS Mode Mise en fonction du mode WAAS.
WAAS
Search
WAAS Alarm
IMPORTANT: Après configuration des entrées NMEA sur le MAITRE, il faut aussi le
faire sur les autres MFD. En effet, s’il y a d’autres capteurs sur les MFD, l
n’apparaitront pas dans la liste de sélection des sources de données globales du
système. Onglet “Data Source”.
-Cliquer “Next” pour continuer la configuration
Plus la valeur est élevée plus la plus on fait la moyenne. Si une valeur
trop importante est entrée le GPS ne verra pas immédiatement les
changements de position et le temps de réponse sera trop long. A
utiliser avec précaution sur les bateaux rapides.
La vitesse fond et la route fond sont calculés en fonction de l’évolution
de la position toutes les secondes. Si l’incertitude de position est
supérieure a l’évolution de la position du bateau, la vitesse et le route
fond seront instable. Ce paramètre permet de filtrer les variations.
Attention la aussi un réglage trop fort va diminuer la réactivité du
système aux changements de vitesse et de cap.
Les satellites GPS envoient des informations sur le fonctionnement
du système et notamment l’état des satellites. Si un satellite est
annoncé défectueux on peut ici le désactiver pour que le GPS ne le
prenne pas en compte pour le calcul. Jusqu'à 3 SAT peuvent être
désactivées.
Paramétrage de la Lat Long pour un démarrage initial.
Position relative de l’antenne à bord (en longueur et en
largeur).Permet d’affiner l’icône des grand bateaux.
WAAS peut être manuel ou automatique. Pour le mode manuel
entrer le numéro du satellite WAAS.
Quand il y a une perte de signal WAAS, une alarme est activée. On:
l’alarme sonne jusqu’a ce que le signal soit rétabli ou que l’on ait
acquitté l’alarme manuellement. Off: L’alarme sonne trios fois.
79
Page 80

Vidéo Analogique
Les cameras analogiques connectées au MFD peuvent être renommées ici.
L’intérêt est le même que pour les sources de données, à savoir offrir un choix clair
de la sélection des caméras pour l’utilisateur.
C’est ce nom qui apparaitra dans les menus de sélection des cameras.
Le MFDBB, supporte 4 caméras analogiques en PAL ou NTSC
Les MFD8/12 supportent 2 caméras analogiques en PAL ou NTSC.
La détection de format est automatique.
Note: Les images des cameras Vidéo Analogique ne sont visibles que sur l’appareil
ou les cameras sont connectées.
Elles ne sont pas partagées sur le réseau Ethernet comme les caméras IP.
80
Page 81

Installation Automatique. « Global Settings »
Normalement, le paramétrage Globale “Global Settings” est effectué sur le MFD
Maitre.
Le réglages seront automatiquement reportés sur les autres équipements.
Paramètres Navire (Taille, Moteur)
Choisir d’abord les unités des dimensions qui seront utilisées et ensuite renseigner
les différents champs.
S’il y a un moteur connecté sur le bus CAN, il faut donner le nombre de tours maxi
du moteur ainsi que les pressions d’huile et de turbo s’il existe pour calibrer les
indicateurs analogiques.
Note: Assurez-vous que l’interface du moteur fournisse les PGN qui sont exploitables
par les MFD
81
Page 82

Connexions Moteur (PGN)
Les PGN acceptés sont les suivants:
- Engine Parameters (PGN 127488)
Vitesse en tour minute
Pression Turbo
- Engine Parameters (PGN 127489)
Pression d’huile
Température moteur
Statut alarme température
Statut alarme moteur
Consommation
82
Page 83

Affectation Noms « Nicknames »
Vous pouvez assigner des noms aux différents capteurs connectés (NMEA2000,
NMEA183, Ethernet). Chaque équipement peut avoir un nom qui la rend facilement
identifiable (EX : GPS principal, Sonde Bâbord, etc...)
Ces noms apparaîtront dans le menu de sélection des sources de données.
Pour entrer ces noms il est préférable de connecter un clavier USB a la NavNet3D.
Après avoir modifié le nom de l’appareil dans la colonne de gauche n’oubliez pas de
presser le bouton « SET » pour valider.
Les changements seront répercutés sur l’ensemble des équipements connectés
Note: Si les sources de données NMEA 183 n’ont pas été renommées a partir des
appareils sur lesquels ils sont connectés cette page affichera “Port1 sensor”, “Port2
sensor” and “Port3 sensor ” de tous les MFD du réseau.
Affectation des nom de caméras.
Pour plus de facilité dans les menus de sélection des sources caméras, il est
possible ici de nommer les caméras.
Ce sont ces noms qui apparaiterons alors dans les menu de sélection de
l’utilisateur :
83
Page 84

Ex « Passerelle » « Machine » pour identifier les caméras qui couvre la zone de la
passerelle ou qui est installée dans le local machine
Vous devez assigner des noms aux cameras IP connectées.
(Ex: Caméra passerelle, camera machine, etc.)
Ces noms apparaitrons dans le menu de sélection des camera du Rotokey.
Note: Si la sélection des cameras n’est pas possible assurez vous que la camera a
un adresse IP valide (Voir la configuration des cameras)
Source de données « Data source »
IMPORTANT: Comme expliqué précédemment, si vous avez plusieurs capteurs
NMEA connecté sur les indicateurs, il faut configurer les interfaces ainsi que leurs
noms sur chaque MFD avant de pouvoir les utiliser comme source principale de
donnée.
Sélection des sources de données, onglet “Data Source”. Cet onglet permet de
choisir quelle sera la source de donnée partagée par l’ensemble des appareils NN3D
du réseau exploitant ce type de donnée.
84
Page 85

Il est important de noter que le capteur déclaré en tant que source de donnée enverra
ses informations sur tout les autres équipements connectés en réseau et que les
interfaces NMEA183 et NMEA2000 ( Bus Can) sortiront cette information.
Ceci est particulièrement important lorsqu’il y a plusieurs sondeurs dans le système.
L’information numérique de profondeur qui sera envoyée a l’ensemble des
équipements, sera celle calculée par le capteur déclaré en tant que source de
profondeur.
S’il a 2 DFF1 dans le réseau (un sondeur « Avent » et un sondeur « Arrière » par
exemple, la profondeur numérique affichée par les deux sondeurs sera celle qui est
issue du DFF1 déclaré en tant que source de profondeur.
85
Page 86

Name Description Exemple
Position &
SOG/COG
Heading Choix du capteur de Cap
Speed Through
Water
Water Depth Choix du capteur de
Water
Temperature
Wind Chois du capteur de vent FI-501/502, PB-150, WS-200,
Date & Time Choix de la source de
Roll and Pitch Choix du capteur de
AIS Choix de la source d’AIS FA-150, FA-30, FA-50, AIS Generic
Note: Si un capteur NMEA183, n’apparait pas dans les sources de donnés assurez
vous que le type de capteur a bien été configure sur le MFD ou ce capteur est
connecté.
Note: Une source de données NMEA2000 générique peut apparaitre pour n’importe
quelle source de donnée. Changer pour la bonne source ou laisser la valeur par
défaut si la donnée n’est pas disponible.
Ne pas utiliser le SC30 ou le FA50 en tant que source de position et SOG COG.
Leur sortie n’est pas filtrée et par conséquence les calculs d’heure estimée d’arrivée
et de temps de parcours sont extrêmement fluctuants.
.
Choix du capteur de
position et route fond
(compas)
Choix du capteur vitesse
surface
profondeur
Choix du capteur de
température.
date et heure
mouvement (roulis
tangage)
GP-320B, GP-330, GPS Generic
NMEA2000 .
(Ne pas utiliser SC30 ou FA50 pas de
filtrage des infos)
SC-30, SC-50 (@10Hz), PG-500
(@10Hz), Compas Generic
NMEA2000
Smart sensor (NMEA 0183 or N2K),
Transducer with Speed sensor
(DFF1/DFF3)
Smart sensor (NMEA 0183 or N2K),
DFF1, DFF3
Smart sensor (NMEA 0183 or N2K),
Transducer with Temp sensor
(DFF1/DFF3)
Girouette Generic NMEA2000
GP-320B, GP-330, SC30, GPS
Generic NMEA2000
SC-30, SC-50, SC110
NME183
GPS Mode
86
Page 87

L’onglet “GPS Mode” apparait quand un GP330B ou un WS200 (capteur
NMEA2000) sont connectés. Cet onglet permet le réglage du mode WAAS.
87
Page 88

Installation Automatique « Sondeur »
Il est possible connecter jusqu’a deux sondeurs dans le réseau.
Attention dans ce cas a bien choisir la source de donnée profondeur de l’onglet
« DATA SOURCE » (voir le paragraphe a ce sujet).
NavNet3D est compatible avec les DFF1, DFF3, FCV1150 (opération limitée), ETR
30.
Se référer aux notices des appareils pour le fonctionnement en Power
synchronisation et pour la programmation des puissances de sortie en fonction des
sondes (TAP Setting)
DFF1 and DFF3
Sélectionner l’onglet DFF1 or DFF3 et sélectionner la sondeur source:
Transducer Setup:
Si le transducer est un modèle a identification automatique “TD-ID” apparaitra dans
la boite de sélection (Puissance et fréquence seront automatiquement paramétrés.
88
Page 89

Si ce n’est pas le cas choisir avec le Modèle de sonde (Sonde FURUNO
uniquement) ou choisir manuel et entrer manuellement les caractéristiques de la
sonde.).
Transducer Position:
Pour une utilisation future (développement en cours).
Il faut entrer ici la position relative des sondes par rapport l’axe avant-arrière et a
l’axe tribord-bâbord
Motion Sensor and Motion Sensor Antenna Position:
Si un compas satellitaire SC-30 ou SC-50/110 est connecté, donner la distance
entre le capteur et les sondes (HF et BF)
Note: Si c’est une sonde by fréquence les deux valeurs sont les mêmes.
Pour entrer une valeur, le point de référence est l’antenne SC30 ou le processeur
(SC50/110).
Bow-stern: la distance est compte positive si la sonde est en avant de l’antenne, elle
est négative si elle est en arrière de l’antenne.
Up-down: Hauteur de l’antenne par rapport à la sonde, cette valeur est toujours
positive.
Port-starboard: la distance est compte positive si la sonde est a tribord de l’antenne,
elle est negative si elle est a bâbord de l’antenne.
Exemple:
89
Page 90

Temperature Source (DFF3 only)
SI le the DFF3 est raccordé à un capteur de température externe ou intègre à la
sonde sélectionnez le mode dans le menu déroulant concerné
MJ (Connexion NMEA0183), Haute fréquence ou Basse fréquence.
IMPORTANT NOTE: Les MFD8 et MFD12 n’acceptent pas le point décimal dans le
champ fréquence. Il faut donc entrer un multiple de 10 (201,5 sera entré 2015)
Note: Pour le DFF3, il faut faire les réglages de puissance (TAP) après avoir
paramétrés tous le MFD .Voir installation du DFF3.
ETR 30/60
Choisir avec le Modèle de sonde (Sonde FURUNO uniquement) ou choisir manuel et
entrer manuellement les caractéristiques de la sonde.).
90
Page 91

FCV1150
Le FVC1150 doit avoir une version de soft 3.01 ou supérieure pour travailler dans le
réseau NN3D
NavNet3D permet de commander le FCV1150. Il faut que le FCV1150 soit en mode
“NavNet Mode” (démarrer le the FCV1150 en pressant la touche MENU pour entrer
dans le mode configuration et choisir le mode NavNet). Connecter ensuite le
FCV1150 sur le réseau NavNet, Il apparaitra comme source de sondeur dans les
menus d’installation.
Les paramétrages du sondeur seront effectués à partir du menu du FCV1150.
Transducer Position:
Pour une utilisation future (développement en cours).
Note: NavNet 3D permet un contrôle limité des fonctionsFCV1150. Il est possible de
contrôler l:
Echelle
Décalage d’échelle
Mode Auto (Route, Pêche, Manuel)
Echelle Auto
91
Page 92

Installation Automatique « RADAR »
Au maximum deux DRS (ou un DRS et un FAR21X7) peuvent être connectés sur
un réseau NavNet3D.
DRS
-Choisir le type d’antenne radar connecté s’il y en a plusieurs
- Donner la hauteur d’installation de l’antenne (moins de 3m 10ft, 3 a 10m 10ft-30ft
ou plus de 10 m 30ft)
- Cliquer sur le bouton TX et régler le radar pour obtenir une image claire.
Réglage recommandes pour les tests:
- Range (Echelle) = 1
- Gain (Gain) = AUTO
- Sea (Etat mer)= Auto
- Rain (Anti pluie) = 0
- Cliquer sur “Radar Optimization” et attendre environ 30 sec.
Le radar va s’ajuster seul et mémoriser les valeurs d’accord des différentes échelles.
-Régler la ligne d foi de la manière suivante:
- Suivre une route en direction d’une cible parfaitement identifiable. (Bouée).
-Ajuster l’échelle du radar choisir un courte distance pour être plus précis.
- Tourner le RotoKey ou déplacer le curseur de réglage de ligne de foi pour que la
cible apparaisse exactement sur la ligne de foi quand le bateau se dirige exactement
sur la cible.
.
92
Page 93

- Régler le Main Bang de la manière suivante:
Le main bang est le disque de bruit qui apparait au centre de l’image en très petite
échelle. Il correspond à l’amortissement de la fin de la période d’émission du
magnétron. Sélectionner “MBS Adjustment” et tourner le RotoKey pour supprimer le
main bang. Après ajustement presser le RotoKey pour valider. Attention un réglage
trop fort peut supprimer les échos proches
- Presser sur STBY (pour arrêter la rotation d’antenne)
Soyez sur que le Radar est en STBY sinon le bouton or the bouton Exit ne sera pas
disponible.
- Si il y a un autre DRS, changer de source radar et répéter l’opération de réglage
sur cet autre radar
FAR21X7
Aucun réglage n’est nécessaire (les réglages sont fait sur le 21X7)
Cliquer sur “Exit” (Soyez sur que le Radar est en STBY sinon le bouton Exit ne
sera pas disponible).
Important: Si vous utilisez une MFDBB, le clavier risque de ne pas fonctionner s’il
n’est pas correctement apparié au processeur. Voir le paragraphe suivant.
93
Page 94

Appairage clavier MFDBB “Keyboard/Processor
Linking”
Les claviers de MFDBB sont des éléments du réseau NavNet. Ces claviers doivent
recevoir une adresse du DHCP pour être correctement intégrés sur le réseau. S’il y a
plusieurs MFDBB sur le réseau, chaque clavier doit être apparié avec son MFDBB.
Une séquence de touche particulière permet cet appairage des claviers avec leur
MFDBB respective.
Un seul MFDBB sur le réseau:
Presser en même temps les touches “Scrolling gauche” “Curseur droite” et le
Rotokey.
Attendre que le clavier émette deux “beep”, relâcher les touches. Le clavier contrôle
maintenant le MFDBB.
Note: Si cela ne fonctionne pas assurez-vous que le MFDBB est bien déclaré en
maitre sur le réseau. Déconnecter et reconnecter le câble du clavier (sans éteindre
tout le système) et recommencer.
Plusieurs MFDBB sur le réseau:
Assurez-vous que tous les MFDBB sont allumés. Effectuer la procédure décrite cidessus.
Vérifier quel est le MFDBB qui est commandé par le clavier. Si ce n’est pas le bon,
c'est-à-dire si le clavier commande un autre MFDBB, recommencer la procédure.
Répéter la procédure sur les autres claviers pour qui soient correctement apparié à
leur MFDBB
94
Page 95

Enregistrement du produit
IDescription du SID « System Identification »
Chaque MFD NavNet3D reçoit un numéro d’identification (System ID) unique lors de
sa fabrication.
Ce System ID est utilisé pour identifier le client et pour valider les options de
cartographie que celui-ci achète.
Quand plusieurs MFD sont en réseau, le System ID du maitre prend la priorité sur les
System ID des postes secondaires. De ce fait tous les MFD ont le même SI, c’est ce
qui permet d’ouvrir les cartes sur tous le MFD du réseau puisse qu’une carte est
ouverte pour un SI particulier.
Si on ajoute ou si on change un MFD secondaire le SI ne change pas.
Il est important de noter ce SI car il sert pour ouvrir les options cartographiques.
Pour lire le SI, presser sur la touche [MENU], tourner le RotoKey pour sélectionner
« MA NAVNET ». Le system ID est la suite de 20 caractères qui apparaît en bas de
la page. Il est composé de chiffres et de lettres et commence par SI (ex : SI 34A0
BC3E 654F 2342 B5)
Il est vivement recommande de noter ce SI sur vos document et sur le document
d’enregistrement de la garantie (Furuno Registration Card.)
Document d’enregistrement « Registration Card »
Un document d’enregistrement de la garantie (registration Card) est donné avec
chaque MFD. Ce document donne le N° de série de l’appareil et son N° d’
enregistrement de garantie. Ces deux N° sont nécessaire pour enregistre en ligne
tous les équipements installés à bord sur le site www.navnet.com.
Cet enregistrement est important pour le suivi des produits du client par le réseau et
pour la commande de nouvelle carte.
Il est important de spécifier aussi le System ID du réseau lors de cet enregistrement
en ligne.
95
Page 96

Vérification « Checklist »
Maitre « Master »
Assurez-vous qu’il y a un et un seul MFD déclaré en tant que maitre sur le réseau.
Presser sur la touche [MENU], tourner le RotoKey pour sélectionner « MA
NAVNET ».
MFD Type apparaît dans la fenêtre (Maitre ou Esclave)
Power Synchronization
Le système de Power synchronisation doit être analysé comme une chaine.
Si un des connexions réseau ne permet son fonctionnement.
Un Hub mal réglé (dip switch) ou câble non adapté (2 paires)), et les équipements
qui seront en aval de ce point ne fonctionneront pas en power synchronisation.
Note: Attention la commande de power synchronisation est une commande de mise
en marche.
Les commandes d’extinction sont des commandes par logiciel.
Ne tester la power synchronisation que sur des séquences d’allumage.
Le fait que les appareils s’éteignent simultanément ne veut pas dire que la power
synchronisation fonctionne....
Vérifier les points suivants:
Câble Réseau
Utiliser des câbles Ethernet 4-paires pour relier les appareils compatibles avec le
mode Power synchronisation soit :
TOUS les MFD (MFD8, MFD12 et MFDBB)
DFF1 and DFF3
DCU12
Radar PSU012 et PSU013
HUB101
Assurez-vous que le signal de « Power synchronisation » est bien envoyé par le
HUB.
Pour cela les DIP Switches correspondent au port du HUB doit être sur ON.
Pour connecter un appareil qui ne gère pas la « Power synchronisation » mettre le
Switch sur OFF ou utiliser un câble 2 paires.
96
Page 97

MFDBB
Chaque MFDBB (NN3D BlackBox) intègre un “mini” HUB101 avec ses DIP
switches.
Il faut que celui-ci soit ON sur le port qui gère la « Power synchronisation ».
Attention les Port 1 et Port 2 sont réservés aux connexions clavier.
Seuls les ports 3 et 4 peuvent être utilise pour les connexions avec les autres
équipements (DRS, HUB101, DFF1, autre MFD).
Sur les ports 1 et 2 (réserves aux claviers), laisser les DIP switches sur OFF, le
clavier (MCU001) n’a pas besoin de « Power synchronisation ».
DFF1/DFF3
Les DFFx ont des DIP switches qui doivent être ajustés différemment selon
l’installation sur la quelle ils sont connectés.
Pour le DFF1:
- HUB standard Navnet Vx2 (Sans Power Synch.) = “ON-OFF-OFF-ON”
- HUB101 NN3D (Power Synch.)= DIP switches tous sur OFF (en haut)
Pour le DFF3:
- HUB standard Navnet Vx2 (Sans Power Synch.) = DIP switch 1 et 2 sur ON
- HUB101 (Power Synch.)= DIP Switch 1 et 2 sur OFF
Entrée Cap « Heading Input »
L’information de cap qui arrive en MNEA183 doit être rafraichie au minimum 10 fois
par secondes. (10Hz).Vérifiez bien ce point car l’ARPA du radar ne fonctionnera pas
correctement si le rafraichissement est plus lent.
La vitesse peut être vérifiée en comptant le temps nécessaire à remplir la fenêtre
d’affichage du « port monitor » correspondant au port sur lequel est connecté le
compas.
Si vous avez un PG500 n’oubliez pas de le mettre en 38400 bauds pour améliorer la
vitesse de communication
Mettre le PG500 en 38400bps
1 Déconnecter le câble d’alimentation
2 Tenir le bouton [AUTO] et rebrancher le câble.
3 De suite, presser le nombre de fois nécessaires pour allumer toutes le LED (4) du
PG500.
4 Attendre son re-démarrage.
Note : S’il est connecté avec un pilote pensez à modifier la déclaration du type de
compas dans le pilote
97
Page 98

Port NMEA2000 et NMEA0183
Attention à la gestion des ports.
Il est impensable de gérer une installation complexe sans faire une analyse des flux
de données.
Sur la NN3D, on gère les sorties de données mais il faut aussi indiquer à NN3D quel
est le type d’information qui est reçu sur ce port.
Ne pas confondre ce qui entre et ce qui sort
Soyez certain de ne pas générer de bouclage de donnée :
Si une donnée entre sur un port en provenance d’un équipement elle ne doit
pas être renvoyée vers cet équipement.
Envoyer les données qui sont strictement nécessaire à l’équipement connecté.
Si rien n’est connecté sur les ports de sortie désactiver toutes les données de sortie
de ce port.
98
Page 99

Mise en fonction
Mise en marche « Power ON »
Comme la fonction “Power Synchronisation” doit allumer tous les équipements, il est
recommandé d’allumer l’équipement désigné comme master en premier
Arrêt « Power OFF »
Le système peut être éteint à partir de n’importe quel MFD.
Pour arrêter le système correctement, il faut presser le bouton Power et relâcher ce
bouton juste quand le décompte est terminé (Affichage décompte a Zéro).
Si on maintient le bouton pressé au delà de ce temps, le MFD sera complètement
arrêté et il ne redémarrera pas en power synchronisation au prochain lancement.
Comprenez bien que si vous éteignez profondément le MASTER en pressant le
bouton plus de 5 secondes et que vous redémarrez un MFD esclave, le master ne
démarrera pas par la power synchronisation.
Un message d’absence de maitre sur le réseau va apparaître sur les esclaves. “No
Master Warning”.
99
Page 100

Cartographie
Généralité
Pour installer une zone de cartographie il faut récupérer les données des fichiers
cartographiques et les installer dans le disque dur du MFD.
Pour exploiter ces données il vous faut obtenir un code de déblocage, qui sera entré
à la fin du processus d’installation de la carte.
S’il y a plusieurs MFD dans le réseau, les cartes doivent être installées et
débloquées dans chaque MFD.
Pour visualiser le contenu de votre MFD il faut regarder dans le catalogue des
cartes.
Les fichiers « Photo satellites » occupent beaucoup de place mémoire.
Si vous exploitez un MaxSeaT0 conjointement avec NavNet3D, nous conseillons de
n’installer dans les MFD que les fichiers cartographiques Raster ou Vecteur ainsi que
la bathymétrie associée.
L’ utilisation MaxSeaT0 en tant que serveur de cartographie permettera de
récupérer les photos sat sur tous les appareil du réseau, sans pour autant utiliser de
place sur le disque dur des MFD.
Catalogue des cartes du MFD (Data Catalog)
Toutes les données (Cartes, Photos Satellites, données 3D) doivent être installées
sur le disque dur du MFD pour pouvoir être exploitées, sauf si vous exploitez un
MaxSeaT0 en serveur de cartographie (voir 4.2 Serveur Cartographie).
Tourner le RotoKey pour choisir “Carte” (Chart). Presser le RotoKey et tourner le
RotoKey dans le sens horaire pour aller sur l’onglet « Catalogue carte » (Data
Catalog).
Presser et tourner le RotoKey pour accéder aux différents choix ou utiliser le pad
curseur et les boutons souris ou, mieux, connecter une souris sur le port USB.
100
 Loading...
Loading...