

Freescale Semiconductor MPC5604B, MPC5604C Reference Manual
Freescale Semiconductor
Rev. 8.2, 09/2013
MPC5604B/C Microcontroller
Reference Manual
This is the MPC5604B/C Reference Manual set consisting of the following files:
• MPC5604B/C Reference Manual Addendum (MPC5604B/CRMAD), Rev. 2
MPC5604BCRM
• MPC5604B/C Reference Manual (MPC5604B/CRM), Rev. 8
© Freescale Semiconductor, Inc., 2013. All rights reserved.
Freescale Semiconductor
MPC5604BRMAD
Reference Manual Addendum
MPC5604B/C Microcontroller
Reference Manual Addendum
Rev. 2, 09/2013
This addendum describes corrections to the
MPC5604B/C Microcontr oller Refer ence Manual, order
number MPC5604BCRM. For convenience, the addenda
items are grouped by revision. Please check our website
at http://www.freescale.com/powerarchitecture for the
latest updates.
The current version available of the MPC5604B/C
Microcontroller Reference Manual is Revision 8.1.
Table of Contents
1 Addendum List for Revision 8.1 . . . . . . . . . . . . . . 2
2 Addendum List for Revision 8. . . . . . . . . . . . . . . . 2
3 Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . 4
© Freescale Semiconductor, Inc., 2013. All rights reserved.
1 Addendum List for Revision 8.1
Table 1. MPC5604BCRM Rev 8.1 Addenda
Location Description
Chapter 27, “Flash Memory”
page 644
Add a note below Table 27-4, “CFlash TestFlash Structure”.
NOTE
Unique Device ID – Memory location. This device now includes a 128-bit Unique
Identification number (UID) which is programmed during device fabrication.
Start – Stop Address Size (Bytes) Content:
• 0x00403C10 0x00403C17 8 UID 1
• 0x00403C18 0x00403C1F 8 UID 2
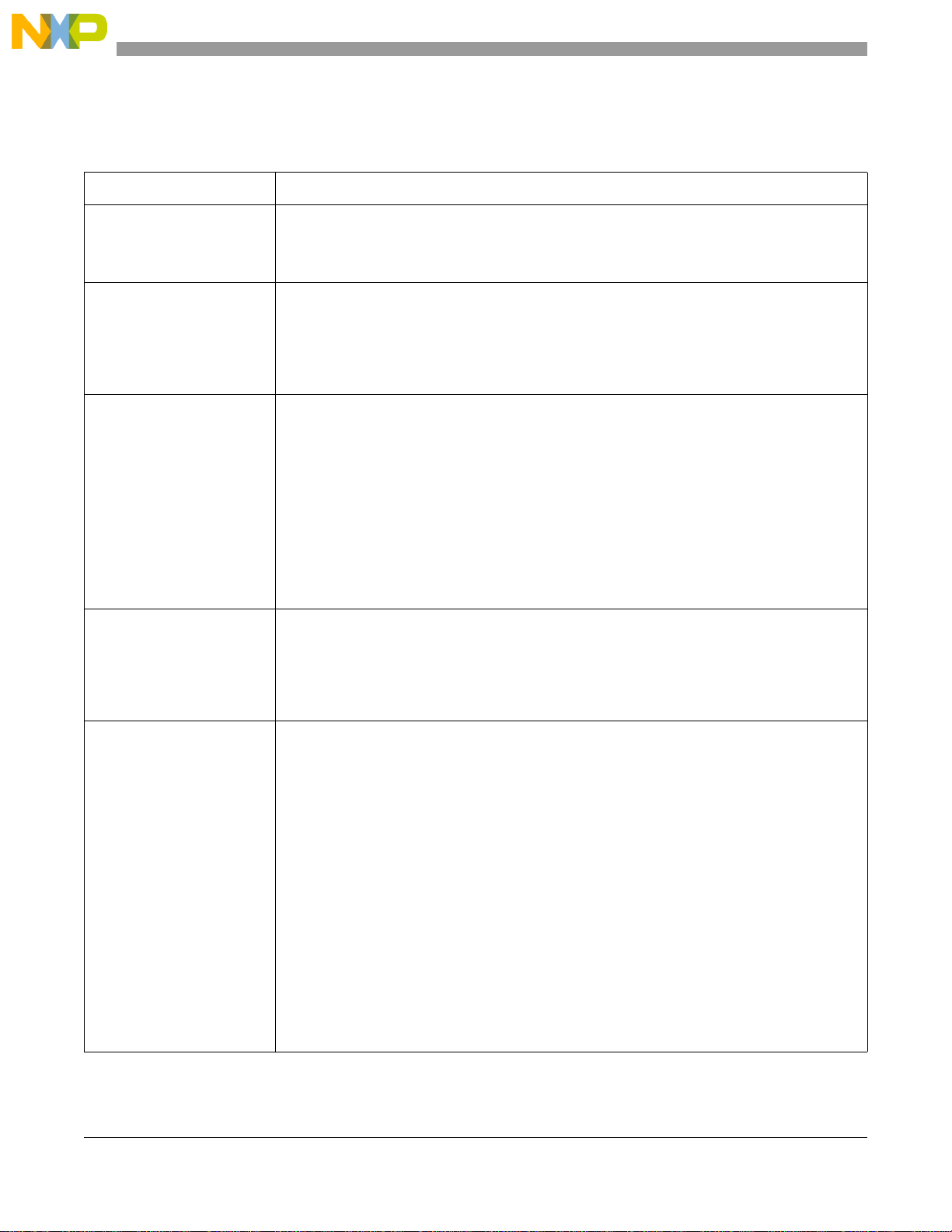
2 Addendum List for Revision 8
Table 2. MPC5604BCRM Rev 8 Addenda
Location Description
Chapter 4, Signal description,
page 60
Chapter 6, Clock Description,
page 113
Chapter 9, Reset Generation
Module (MC_RGM), page
209
In Table 4-3, Functional port pin descriptions, row PH[9], change the pin numbers for
MPC560xB 64 LQFP and MPC560xC 64 LQFP from “—” to 60.
In row PH[10], change the pin numbers for MPC560xB 64 LQFP and MPC560xC 64 LQFP
from “—” to 53.
Add Note: to Section 6.8.4.1, Crystal clock monitor:
Note: Functional FXOSC monitoring can only be guaranteed when the FXOSC frequency is
greater than (FIRC / 2
Add Note: to Section 6.8.4.2, FMPLL clock monitor:
Note: Functional FMPLL monitoring can only be guaranteed when the FMPLL frequency is
greater than (FIRC / 4) + 0.5 MHz.
Replace Section 9.4.7, Boot Mode Capturing, with the following:
The MC_RGM samples P A[9:8] whenev er RESET is asserted until five FIRC (16 MHz internal
RC oscillator) clock cycles before its deassertion edge. The result of the sampling is used at
the beginning of reset PHASE3 for boot mode selection and is retained after RESET has been
deasserted for subsequent boots after reset sequences during which RESET is not asserted.
RCDIV
)+0.5MHz.
Chapter 13, Real Time Clock /
Autonomous Periodic
Interrupt (RTC/API), page
262
Note: In order to ensure that the boot mode is correctly captured, the application needs to
apply the valid boot mode value the entire time that RESET is asserted.
RESET can be asserted as a consequence of the internal reset generation. This will force
re-sampling of the boot mode pins. (See Table 9-12 for details.)
In Table 13-3 (RTCC field descriptions), update Note in RTCC[APIVAL] field description:
Note: API functionality starts only when APIVAL is nonzero. The first API interrupt takes two
more cycles because of synchronization of APIVAL to the RTC cloc k, and APIVAL + 1 cycles
for subsequent occurrences. After that, interrupts are periodic in nature. Because of
synchronization issues, the minimum supported value of APIVAL is 4.
MPC5604BRMAD, Rev. 2
Freescale Semiconductor2
Table 2. MPC5604BCRM Rev 8 Addenda
Location Description
Chapter 21, LINFlex, p. 412 Insert the following section:
21.8.2.1.6 Overrun
Once the message buffer is full, the next valid message reception leads to an
overrun and a message is lost. The hardware sets the BOF bit in the LINSR to
signal the overrun condition. Which message is lost depends on the
configuration of the RX message buffer:
• If the buffer lock function is disabled (LINCR1[RBLM] = 0) the last
message stored in the buffer is overwritten by the new incoming
message. In this case the latest message is always available to the
application.
• If the buffer lock function is enabled (LINCR1[RBLM] = 0) the most
recent message is discarded and the previous message is available in the
buffer.
Chapter 22, FlexCAN,
throughout chapter
Chapter 22, FlexCAN, page
429
Chapter 22, FlexCAN, page
461
Chapter 22, FlexCAN, page
462
Chapter 22, FlexCAN, page
463
Chapter 25, Analog-to-Digital
Converter (ADC), page
Chapter 25, Analog-to-Digital
Converter (ADC), page 597
Remove references throughout the chapter to “low-cost MCUs.”
Add this Note in the RTR field description of Table 22-4 (Message Buffer Structure field
description):
Note: Do not configure the last Message Buffer to be the RTR frame.
In Section 22.4.9.4, Protocol timing, update the Note following Figure 22-16 (CAN engine
clocking scheme) to read: “This clock selection feature may not be available in all MCUs. A
particular MCU may not have a PLL, in which case it would have only the oscillator clock, or
it may use only the PLL clock feeding the FlexCAN module. In these cases, the CLK_SRC bit
in the CTRL Register has no effect on the module operation.”
Update the table title of Table 22-20 from “CAN Standard Compliant Bit Time Segment Settings”
to “Bosch CAN 2.0B standard compliant bit time segment settings.”
In Section 22.4.9.4, Protocol timing, update the Note following Table 22-20 to read: “Other
combinations of Time Segment 1 and Time Segment 2 can be valid. It is the user’s
responsibility to ensure the bit time settings are in compliance with the CAN standard. For bit
time calculations, use an IPT (Information Processing Time) of 2, which is the value
implemented in the FlexCAN module.”
In Section 28.3.5.2, Presampling channel enable signals, in Table 28-7, Presampling voltage
selection based on PREVALx fields, in the 01 row, change the “Presampling voltage” field to:
V1 = V
DD_HV_ADC0
In Section 25.3.2, Analog clock generator and conversion timings, remove the paragraph:
The direct clock should basically be used only in low power mode when the device is using
only the 16 MHz fast internal RC oscillator, but the conversion still requires a 16 MHz clock
(an 8 MHz clock is not fast enough). In all other cases, the ADC should use the clock divided
by two internally.
or V
DD_HV_ADC1
.
MPC5604BRMAD, Rev. 2
Freescale Semiconductor 3
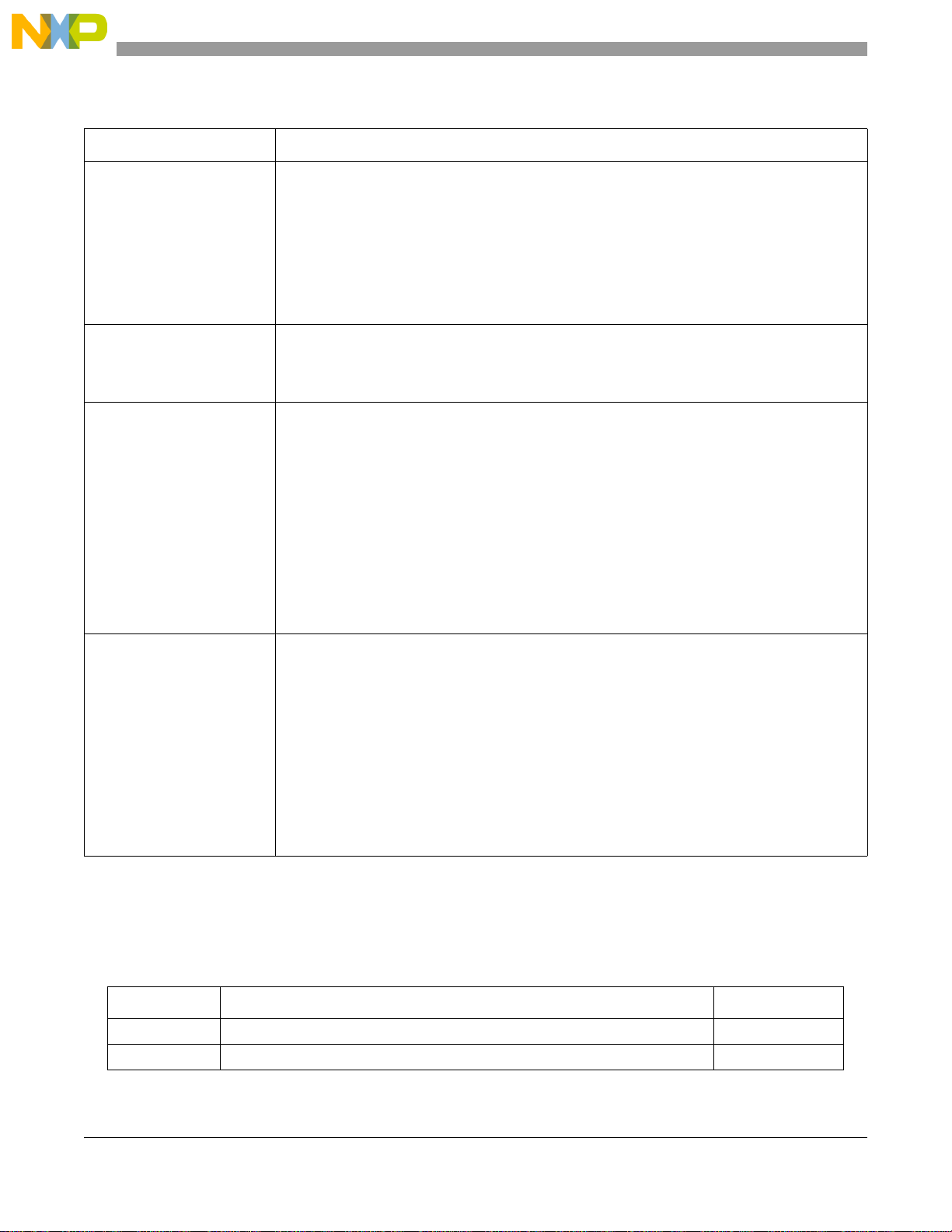
Table 2. MPC5604BCRM Rev 8 Addenda
Location Description
Chapter 25, Analog-to-Digital
Converter (ADC), p. 600
Chapter 25, Analog-to-Digital
Converter (ADC), page 603
Chapter 25, Analog-to-Digital
Converter (ADC), page 610
Chapter 26, Cross Triggering
Unit (CTU), page 633
In Section 25.3.4.2, CTU in trigger mode, replace the sentence:
If another CTU conversion is triggered before the end of the conversion, that request is
discarded.
with:
If another CTU conversion is triggered before the end of the conversion, that request is
discarded. However, if the CTU has triggered a conversion that is still ongoing on a channel,
it will buffer a second request fo r the channel and wait for the end of the first conv ersion before
requesting another conversion. Thus, two conversion requests close together will both be
serviced.
Add Note to Section 25.3.10, Auto-clock-off mode:
Note: The auto-clock-off feature cannot operate when the digital interface runs at the same
rate as the analog interface. This means that when MCR.ADCCLKSEL = 1, the analog clock
will not shut down in IDLE mode.
In Section 25.4.6.2, Main Status Register (MSR), replace the ADCST ATUS field description with
the following:
The value of this parameter depends on ADC status:
000 IDLE — The ADC is powered up but idle.
001 Power-down — The ADC is powered down.
010 Wait state — The ADC is waiting for an external multiplexer . This occurs only when the
DSDR register is nonzero.
011 Reserved
100 Sample — The ADC is sampling the analog signal.
101 Reserved
110 Conversion — The ADC is converting the sampled signal.
111 Reserved
At the end of Section 26.4.1, Event Configuration Registers (CTU_EVTCFGRx) (x = 0...63), add
the following Note:
NOTE
The CTU tracks issued conversion requests to the ADC. When the ADC
is being triggered by the CTU and there is a need to shut down the ADC,
the ADC must be allowed to complete conversions before being shut
down. This ensures that the CTU is notified of completion; if the ADC
is shut down while performing a CTU-triggered conversion, the CTU is
not notified and will not be able to trigger further conversions until the
device is reset.
3 Revision History
Table 3 provides a revision history for this reference manual addendum document.
Table 3. Revision History Table
Rev. Number Substantive Changes Date of Release
2.0 Add a note below Table 27-4, “CFlash TestFlash Structure” 09/2013
1.0 Initial release. 05/2012
MPC5604BRMAD, Rev. 2
Freescale Semiconductor4

How to Reach Us:
Home Page:
www.freescale.com
Web Support:
http://www.freescale.com/support
USA/Europe or Locations Not Listed:
Freescale Semiconductor, Inc.
Technical Information Center, EL516
2100 East Elliot Road
Tempe, Arizona 85284
+1-800-521-6274 or +1-480-768-2130
www.freescale.com/support
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
www.freescale.com/support
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku,
Tokyo 153-0064
Japan
0120 191014 or +81 3 5437 9125
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor China Ltd.
Exchange Building 23F
No. 118 Jianguo Road
Chaoyang District
Beijing 100022
China
+86 10 5879 8000
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor Literature Distribution Center
1-800-441-2447 or 303-675-2140
Fax: 303-675-2150
LDCForFreescaleSemiconductor@hibbertgroup.com
Information in this document is provided solely to enable system and
software implementers to use F reescale S emiconductor prod ucts. There ar e
no express or implied copyright licenses granted hereunder to design or
fabricate any integrated circuits or integrated circuits based on the
information in this document.
Freescale Semiconducto r reserves the right to mak e changes without further
notice to any products herein. F reescale Se miconductor m akes no w arranty,
representation or guarantee regarding the suitability of its products for any
particular purpose, nor does Freescale Semiconductor assume any liability
arising out of the application or use of any produ ct or circuit, an d specific ally
disclaims any and all liability, including without limitation consequential or
incidental damages. “Typical” par ameter s that m a y be pro vided in Freescale
Semiconductor data sheets and/or speci fications can and do v ary in differ ent
applications and actual performance may vary over time. All operating
parameters, including “Typicals”, must be validated for each customer
application by customer’s technical experts. Freescale Semiconductor does
not convey any license under its patent rights nor the rights of others.
Freescale Semicondu ctor products are not de signed, intended, or authorized
for use as components in systems intended for surgical implant into the body ,
or other applications intended to support or sustain life, or for any other
application in which the failure of the Freescale Semiconductor product could
create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescal e Semiconductor products f or an y such unintended
or unauthorized application, B uyer sha ll indemnify and hold Freescale
Semiconductor and its officers, employees, subsidiaries, affiliates, and
distributors harmless against all claims, costs, damages, and expenses, and
reasonable attorney fees arising out of, directly or indirectly, any claim of
personal injury or death associated with such unintended or unauthorized
use, even if such claim alleges that Freescale Semiconductor was negligent
regarding the design or manufacture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale
Semiconductor, Inc. All other product or service names are the property
of their respective owners.© Freescale Semiconductor, Inc. 2013. All rights
reserved.
MPC5604BRMAD
Rev. 2
09/2013

Freescale Semiconductor
Rev. 8.1, 05/2012
MPC5604B/C Microcontroller
Reference Manual
by: Microcontroller Solutions Group
This is the MPC5604B/C Reference Manual set consisting of the following files:
MPC5604BCRM
• MPC5604B/C Reference Manual Addendum (MPC5604B/CRMAD), Rev. 1
• MPC5604B/C Reference Manual (MPC5604B/CRM), Rev. 8
© Freescale Semiconductor, Inc., 2012. All rights reserved.

Freescale Semiconductor
MPC5604BRMAD
Reference Manual Addendum
MPC5604B/C Microcontroller
Reference Manual Addendum
by: Microcontroller Solutions Group
Rev. 1, 05/2012
This addendum document describes corrections to the
MPC5604B/C Microcontr oller Refer ence Manual, order
number MPC5604BCRM. For convenience, the addenda
items are grouped by revision. Please check our website
at http://www.freescale.com/powerarchitecture for the
latest updates.
The current version available of the MPC5604B/C
Microcontroller Reference Manual is Revision 8.
Table of Contents
1 Addendum for Revision 8 . . . . . . . . . . . . . . . . . . . 2
2 Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . 4
© Freescale Semiconductor, Inc., 2012. All rights reserved.
Addendum List for Revision 8
1 Addendum List for Revision 8
Table 1. MPC5604BCRM Rev 8 Addenda
Location Description
Chapter 4, Signal description,
page 60
Chapter 6, Clock Description,
page 113
Chapter 9, Reset Generation
Module (MC_RGM), page
209
Chapter 13, Real Time Clock /
Autonomous Periodic
Interrupt (RTC/API), page
262
Chapter 21, LINFlex, p. 412 Insert the following section:
In Table 4-3, Functional port pin descriptions, row PH[9], change the pin numbers for
MPC560xB 64 LQFP and MPC560xC 64 LQFP from “—” to 60.
In row PH[10], change the pin numbers for MPC560xB 64 LQFP and MPC560xC 64 LQFP
from “—” to 53.
Add Note: to Section 6.8.4.1, Crystal clock monitor:
Note: Functional FXOSC monitoring can only be guaranteed when the FXOSC frequency is
greater than (FIRC / 2
Add Note: to Section 6.8.4.2, FMPLL clock monitor:
Note: Functional FMPLL monitoring can only be guaranteed when the FMPLL frequency is
greater than (FIRC / 4) + 0.5 MHz.
Replaced Section 9.4.7, Boot Mode Capturing, with the following:
The MC_RGM samples P A[9:8] whenev er RESET is asserted until five FIRC (16 MHz internal
RC oscillator) clock cycles before its deassertion edge. The result of the sampling is used at
the beginning of reset PHASE3 for boot mode selection and is retained after RESET has been
deasserted for subsequent boots after reset sequences during which RESET is not asserted.
Note: In order to ensure that the boot mode is correctly captured, the application needs to
apply the valid boot mode value the entire time that RESET is asserted.
RESET can be asserted as a consequence of the internal reset generation. This will force
re-sampling of the boot mode pins. (See Table 9-12 for details.)
In Table 13-3 (RTCC field descriptions), update Note in RTCC[APIVAL] field description:
Note: API functionality starts only when APIVAL is nonzero. The first API interrupt takes two
more cycles because of synchronization of APIVAL to the RTC cloc k, and APIVAL + 1 cycles
for subsequent occurrences. After that, interrupts are periodic in nature. Because of
synchronization issues, the minimum supported value of APIVAL is 4.
RCDIV
)+0.5MHz.
21.8.2.1.6 Overrun
Once the message buffer is full, the next valid message reception leads to an
overrun and a message is lost. The hardware sets the BOF bit in the LINSR to
signal the overrun condition. Which message is lost depends on the
configuration of the RX message buffer:
• If the buffer lock function is disabled (LINCR1[RBLM] = 0) the last
message stored in the buffer is overwritten by the new incoming
message. In this case the latest message is always available to the
application.
• If the buffer lock function is enabled (LINCR1[RBLM] = 0) the most
recent message is discarded and the previous message is available in the
buffer.
MPC5604B Reference Manual Errata, Rev. 1
Freescale Semiconductor2
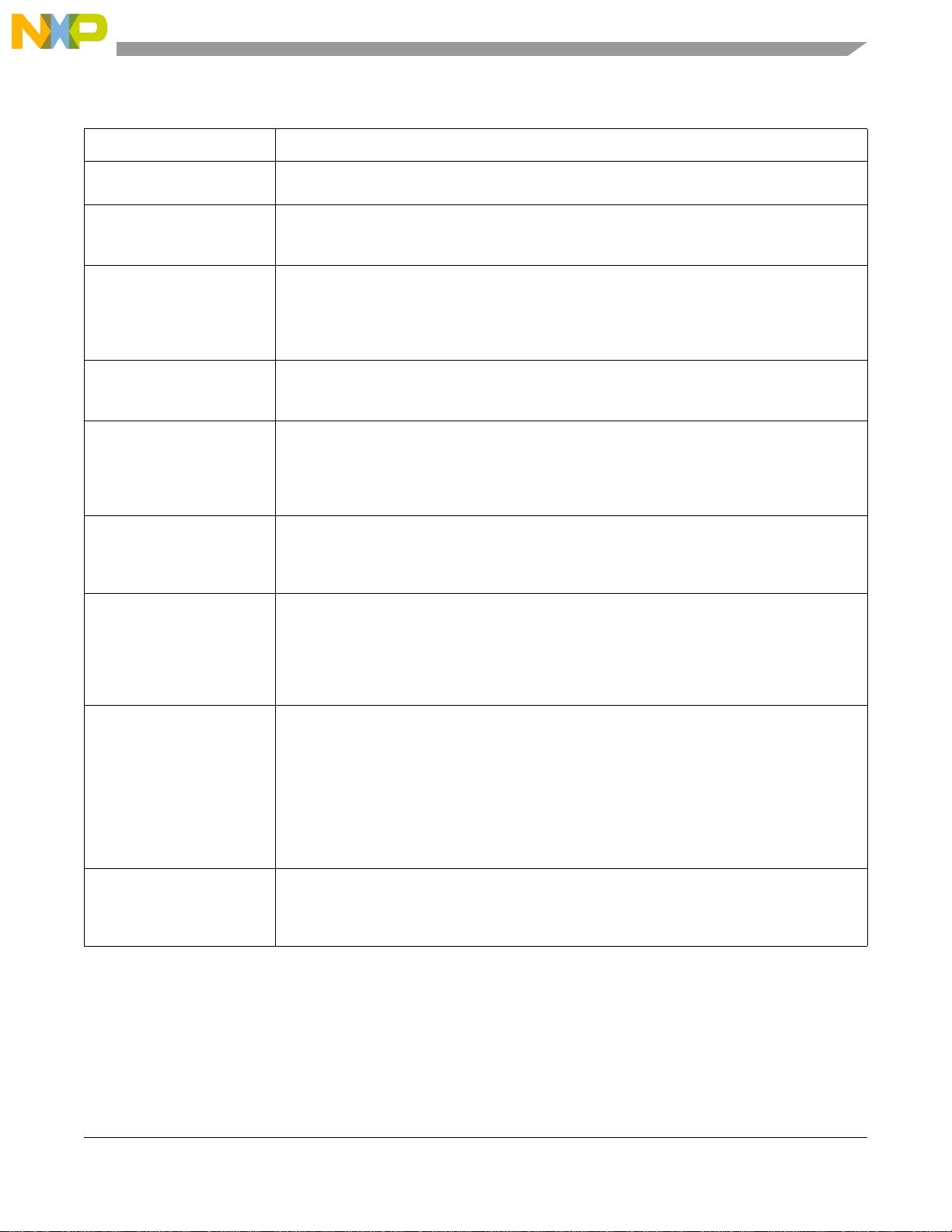
Table 1. MPC5604BCRM Rev 8 Addenda
Location Description
Addendum List for Revision 8
Chapter 22, FlexCAN,
throughout chapter
Chapter 22, FlexCAN, page
429
Chapter 22, FlexCAN, page
461
Chapter 22, FlexCAN, page
462
Chapter 22, FlexCAN, page
463
Chapter 25, Analog-to-Digital
Converter (ADC), page
Chapter 25, Analog-to-Digital
Converter (ADC), page 597
Remove references throughout the chapter to “low-cost MCUs.”
Added this Note in the RTR field description of Table 22-4 (Message Buffer Structure field
description):
Note: Do not configure the last Message Buffer to be the RTR frame.
In Section 22.4.9.4, Protocol timing, updated the Note following Figure 22-16 (CAN engine
clocking scheme) to read: “This clock selection feature may not be available in all MCUs. A
particular MCU may not have a PLL, in which case it would have only the oscillator clock, or
it may use only the PLL clock feeding the FlexCAN module. In these cases, the CLK_SRC bit
in the CTRL Register has no effect on the module operation.”
Updated the table title of Table 22-20 from “CAN Standard Compliant Bit Time Segment
Settings” to “Bosch CAN 2.0B standard compliant bit time segment settings.”
In Section 22.4.9.4, Protocol timing, updated the Note following Table 22-20 to read: “Other
combinations of Time Segment 1 and Time Segment 2 can be valid. It is the user’s
responsibility to ensure the bit time settings are in compliance with the CAN standard. For bit
time calculations, use an IPT (Information Processing Time) of 2, which is the value
implemented in the FlexCAN module.”
In Section 28.3.5.2, Presampling channel enable signals, in Table 28-7, Presampling voltage
selection based on PREVALx fields, in the 01 row, change the “Presampling voltage” field to:
V1 = V
DD_HV_ADC0
or V
DD_HV_ADC1
.
In Section 25.3.2, Analog clock generator and conversion timings, remove the paragraph:
The direct clock should basically be used only in low power mode when the device is using
only the 16 MHz fast internal RC oscillator, but the conversion still requires a 16 MHz clock
(an 8 MHz clock is not fast enough). In all other cases, the ADC should use the clock divided
by two internally.
Chapter 25, Analog-to-Digital
Converter (ADC), p. 600
In Section 25.3.4.2, CTU in trigger mode, replace the sentence:
If another CTU conversion is triggered before the end of the conversion, that request is
discarded.
with:
If another CTU conversion is triggered before the end of the conversion, that request is
discarded. However, if the CTU has triggered a conversion that is still ongoing on a channel,
it will buffer a second request fo r the channel and wait for the end of the first conv ersion before
requesting another conversion. Thus, two conversion requests close together will both be
serviced.
Chapter 25, Analog-to-Digital
Converter (ADC), page 603
Add Note to Section 25.3.10, Auto-clock-off mode:
Note: The auto-clock-off feature cannot operate when the digital interface runs at the same
rate as the analog interface. This means that when MCR.ADCCLKSEL = 1, the analog clock
will not shut down in IDLE mode.
MPC5604B Reference Manual Errata, Rev. 1
Freescale Semiconductor 3

Revision History
Location Description
Table 1. MPC5604BCRM Rev 8 Addenda
Chapter 25, Analog-to-Digital
Converter (ADC), page 610
Chapter 26, Cross Triggering
Unit (CTU), page 633
In Section 25.4.6.2, Main Status Register (MSR), replace the ADCSTATUS field description with
the following:
The value of this parameter depends on ADC status:
000 IDLE — The ADC is powered up but idle.
001 Power-down — The ADC is powered down.
010 Wait state — The ADC is waiting for an external multiplexer . This occurs only when the
DSDR register is nonzero.
011 Reserved
100 Sample — The ADC is sampling the analog signal.
101 Reserved
110 Conversion — The ADC is converting the sampled signal.
111 Reserved
At the end of Section 26.4.1, Event Configuration Registers (CTU_EVTCFGRx) (x = 0...63), add
the following Note:
NOTE
The CTU tracks issued conversion requests to the ADC. When the ADC
is being triggered by the CTU and there is a need to shut down the ADC,
the ADC must be allowed to complete conversions before being shut
down. This ensures that the CTU is notified of completion; if the ADC
is shut down while performing a CTU-triggered conversion, the CTU is
not notified and will not be able to trigger further conversions until the
device is reset.
2 Revision History
Table 2 provides a revision history for this reference manual addendum document.
Table 2. Revision History Table
Rev. Number Substantive Changes Date of Release
1.0 • Initial release. 05/2012
MPC5604B Reference Manual Errata, Rev. 1
Freescale Semiconductor4

MPC5604B/C Microcontroller
MPC5604BCRM
Rev. 8
5 May 2011
Reference Manual
Devices Supported:
MPC5602B
MPC5602C
MPC5603B
MPC5603C
MPC5604B
MPC5604C
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 1

MPC5604B/C Microcontroller Reference Manual, Rev. 8
2 Freescale Semiconductor

Chapter 1
Preface
1.1 Overview .........................................................................................................................................19
1.2 Audience ..........................................................................................................................................19
1.3 Guide to this reference manual ........................................................................................................19
1.4 Register description conventions ....................................................................................................22
1.5 References .......................................................................................................................................23
1.6 How to use the MPC5604B documents ..........................................................................................23
1.6.1 The MPC5604B document set ........................................................................................23
1.6.2 Reference manual content ..............................................................................................24
1.7 Using the MPC5604B .....................................................................................................................25
1.7.1 Hardware design .............................................................................................................25
1.7.2 Input/output pins .............................................................................................................26
1.7.3 Software design ..............................................................................................................27
1.7.4 Other features .................................................................................................................27
Chapter 2
Introduction
2.1 The MPC5604B microcontroller family .........................................................................................29
2.2 Features ...........................................................................................................................................29
2.2.1 MPC5604B family comparison ......................................................................................29
2.2.2 Block diagram ................................................................................................................32
2.2.3 Chip-level features ..........................................................................................................33
2.3 Packages ..........................................................................................................................................34
2.4 Developer support ...........................................................................................................................34
Chapter 3
Memory Map
Chapter 4
Signal description
4.1 Introduction .....................................................................................................................................39
4.2 Package pinouts ...............................................................................................................................39
4.3 Pad configuration during reset phases .............................................................................................42
4.4 Voltage supply pins .........................................................................................................................43
4.5 Pad types .........................................................................................................................................43
4.6 System pins .....................................................................................................................................44
4.7 Functional ports ...............................................................................................................................44
4.8 Nexus 2+ pins ..................................................................................................................................61
Chapter 5
Microcontroller Boot
5.1 Boot mechanism ..............................................................................................................................63
5.1.1 Flash memory boot .........................................................................................................64
5.1.2 Serial boot mode .............................................................................................................66
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 3

5.1.3 Censorship ......................................................................................................................66
5.2 Boot Assist Module (BAM) ............................................................................................................71
5.2.1 BAM software flow ........................................................................................................71
5.2.2 LINFlex (RS232) boot ....................................................................................................79
5.2.3 FlexCAN boot ................................................................................................................80
5.3 System Status and Configuration Module (SSCM) ........................................................................82
5.3.1 Introduction ....................................................................................................................82
5.3.2 Features ...........................................................................................................................82
5.3.3 Modes of operation .........................................................................................................83
5.3.4 Memory map and register description ............................................................................83
Chapter 6
Clock Description
6.1 Clock architecture ...........................................................................................................................93
6.2 Clock gating ....................................................................................................................................94
6.3 Fast external crystal oscillator (FXOSC) digital interface ..............................................................95
6.3.1 Main features ..................................................................................................................95
6.3.2 Functional description ....................................................................................................95
6.3.3 Register description ........................................................................................................96
6.4 Slow external crystal oscillator (SXOSC) digital interface ............................................................97
6.4.1 Introduction ....................................................................................................................97
6.4.2 Main features ..................................................................................................................97
6.4.3 Functional description ....................................................................................................97
6.4.4 Register description ........................................................................................................98
6.5 Slow internal RC oscillator (SIRC) digital interface ......................................................................99
6.5.1 Introduction ....................................................................................................................99
6.5.2 Functional description ....................................................................................................99
6.5.3 Register description ......................................................................................................100
6.6 Fast internal RC oscillator (FIRC) digital interface ......................................................................101
6.6.1 Introduction ..................................................................................................................101
6.6.2 Functional description ..................................................................................................101
6.6.3 Register description ......................................................................................................102
6.7 Frequency-modulated phase-locked loop (FMPLL) .....................................................................102
6.7.1 Introduction ..................................................................................................................102
6.7.2 Overview ......................................................................................................................102
6.7.3 Features .........................................................................................................................103
6.7.4 Memory map ................................................................................................................103
6.7.5 Register description ......................................................................................................104
6.7.6 Functional description ..................................................................................................107
6.7.7 Recommendations ........................................................................................................110
6.8 Clock monitor unit (CMU) ............................................................................................................110
6.8.1 Introduction ..................................................................................................................110
6.8.2 Main features ................................................................................................................111
6.8.3 Block diagram ..............................................................................................................111
6.8.4 Functional description ..................................................................................................112
MPC5604B/C Microcontroller Reference Manual, Rev. 8
4 Freescale Semiconductor

6.8.5 Memory map and register description ..........................................................................114
Chapter 7
Clock Generation Module (MC_CGM)
7.1 Overview .......................................................................................................................................119
7.2 Features .........................................................................................................................................120
7.3 Modes of Operation .......................................................................................................................121
7.3.1 Normal and Reset Modes of Operation ........................................................................121
7.4 External Signal Description ..........................................................................................................121
7.5 Memory Map and Register Definition ..........................................................................................121
7.5.1 Register Descriptions ....................................................................................................125
7.6 Functional Description ..................................................................................................................129
7.6.1 System Clock Generation .............................................................................................129
7.6.2 Output Clock Multiplexing ...........................................................................................130
7.6.3 Output Clock Division Selection ..................................................................................131
Chapter 8
Mode Entry Module (MC_ME)
8.1 Introduction ...................................................................................................................................133
8.1.1 Overview ......................................................................................................................133
8.1.2 Features .........................................................................................................................135
8.1.3 Modes of Operation ......................................................................................................135
8.2 External Signal Description ..........................................................................................................136
8.3 Memory Map and Register Definition ..........................................................................................136
8.3.1 Register Description .....................................................................................................144
8.4 Functional Description ..................................................................................................................166
8.4.1 Mode Transition Request ..............................................................................................166
8.4.2 Modes Details ...............................................................................................................167
8.4.3 Mode Transition Process ..............................................................................................172
8.4.4 Protection of Mode Configuration Registers ................................................................182
8.4.5 Mode Transition Interrupts ...........................................................................................182
8.4.6 Peripheral Clock Gating ...............................................................................................184
8.4.7 Application Example ....................................................................................................185
Chapter 9
Reset Generation Module (MC_RGM)
9.1 Introduction ...................................................................................................................................187
9.1.1 Overview ......................................................................................................................187
9.1.2 Features .........................................................................................................................188
9.1.3 Modes of operation .......................................................................................................189
9.2 External signal description ............................................................................................................190
9.3 Memory map and register definition .............................................................................................190
9.3.1 Register descriptions ....................................................................................................192
9.4 Functional Description ..................................................................................................................203
9.4.1 Reset State Machine .....................................................................................................203
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 5

9.4.2 Destructive Resets ........................................................................................................207
9.4.3 External Reset ...............................................................................................................207
9.4.4 Functional Resets ..........................................................................................................208
9.4.5 STANDBY Entry Sequence .........................................................................................208
9.4.6 Alternate Event Generation ..........................................................................................208
9.4.7 Boot Mode Capturing ...................................................................................................209
Chapter 10
Power Control Unit (MC_PCU)
10.1 Introduction ...................................................................................................................................211
10.1.1 Overview ......................................................................................................................211
10.1.2 Features .........................................................................................................................212
10.1.3 Modes of Operation ......................................................................................................212
10.2 External Signal Description ..........................................................................................................213
10.3 Memory Map and Register Definition ..........................................................................................213
10.3.1 Register Descriptions ....................................................................................................214
10.4 Functional Description ..................................................................................................................218
10.4.1 General .........................................................................................................................218
10.4.2 Reset / Power-On Reset ................................................................................................218
10.4.3 MC_PCU Configuration ...............................................................................................218
10.4.4 Mode Transitions ..........................................................................................................218
10.5 Initialization Information ..............................................................................................................221
10.6 Application Information ................................................................................................................221
10.6.1 STANDBY Mode Considerations ................................................................................221
Chapter 11
Voltage Regulators and Power Supplies
11.1 Voltage regulators ..........................................................................................................................223
11.1.1 High power regulator (HPREG) ...................................................................................223
11.1.2 Low power regulator (LPREG) ....................................................................................223
11.1.3 Ultra low power regulator (ULPREG) .........................................................................224
11.1.4 LVDs and POR .............................................................................................................224
11.1.5 VREG digital interface .................................................................................................224
11.1.6 Register description ......................................................................................................225
11.2 Power supply strategy ...................................................................................................................225
11.3 Power domain organization ...........................................................................................................226
Chapter 12
Wakeup Unit (WKPU)
12.1 Overview .......................................................................................................................................229
12.2 Features .........................................................................................................................................231
12.3 External signal description ............................................................................................................231
12.4 Memory map and register description ...........................................................................................231
12.4.1 Memory map ................................................................................................................231
12.4.2 NMI Status Flag Register (NSR) ..................................................................................232
MPC5604B/C Microcontroller Reference Manual, Rev. 8
6 Freescale Semiconductor

12.4.3 NMI Configuration Register (NCR) .............................................................................233
12.4.4 Wakeup/Interrupt Status Flag Register (WISR) ...........................................................234
12.4.5 Interrupt Request Enable Register (IRER) ...................................................................235
12.4.6 Wakeup Request Enable Register (WRER) ..................................................................235
12.4.7 Wakeup/Interrupt Rising-Edge Event Enable Register (WIREER) .............................236
12.4.8 Wakeup/Interrupt Falling-Edge Event Enable Register (WIFEER) .............................236
12.4.9 Wakeup/Interrupt Filter Enable Register (WIFER) ......................................................237
12.4.10 Wakeup/Interrupt Pullup Enable Register (WIPUER) .................................................237
12.5 Functional description ...................................................................................................................238
12.5.1 General .........................................................................................................................238
12.5.2 Non-maskable interrupts ..............................................................................................238
12.5.3 External wakeups/interrupts .........................................................................................240
12.5.4 On-chip wakeups ..........................................................................................................241
Chapter 13
Real Time Clock / Autonomous Periodic Interrupt (RTC/API)
13.1 Overview .......................................................................................................................................243
13.2 Features .........................................................................................................................................243
13.3 Device-specific information ..........................................................................................................245
13.4 Modes of operation ........................................................................................................................245
13.4.1 Functional mode ...........................................................................................................245
13.4.2 Debug mode ..................................................................................................................246
13.5 Register descriptions .....................................................................................................................246
13.5.1 RTC Supervisor Control Register (RTCSUPV) ...........................................................246
13.5.2 RTC Control Register (RTCC) .....................................................................................247
13.5.3 RTC Status Register (RTCS) ........................................................................................249
13.5.4 RTC Counter Register (RTCCNT) ...............................................................................250
13.6 RTC functional description ...........................................................................................................250
13.7 API functional description ............................................................................................................251
Chapter 14
CAN Sampler
14.1 Introduction ...................................................................................................................................253
14.2 Main features .................................................................................................................................253
14.3 Register description .......................................................................................................................254
14.3.1 Control Register (CR) ...................................................................................................254
14.3.2 Sample register n (n = 0..11) ........................................................................................255
14.4 Functional description ...................................................................................................................256
14.4.1 Enabling/Disabling the CAN sampler ..........................................................................256
14.4.2 Baud rate generation .....................................................................................................257
Chapter 15
e200z0h Core
15.1 Overview .......................................................................................................................................261
15.2 Microarchitecture summary ..........................................................................................................261
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 7

15.3 Block diagram ...............................................................................................................................263
15.4 Features .........................................................................................................................................263
15.4.1 Instruction unit features ................................................................................................264
15.4.2 Integer unit features ......................................................................................................264
15.4.3 Load/Store unit features ...............................................................................................265
15.4.4 e200z0h system bus features ........................................................................................265
15.4.5 Nexus 2+ features .........................................................................................................265
15.5 Core registers and programmer’s model .......................................................................................266
Chapter 16
Interrupt Controller (INTC)
16.1 Introduction ...................................................................................................................................269
16.2 Features .........................................................................................................................................269
16.3 Block diagram ...............................................................................................................................270
16.4 Modes of operation ........................................................................................................................271
16.4.1 Normal mode ................................................................................................................271
16.5 Memory map and register description ...........................................................................................272
16.5.1 Module memory map ...................................................................................................272
16.5.2 Register description ......................................................................................................273
16.6 Functional description ...................................................................................................................280
16.6.1 Interrupt request sources ...............................................................................................289
16.6.2 Priority management ....................................................................................................289
16.6.3 Handshaking with processor .........................................................................................291
16.7 Initialization/application information ............................................................................................293
16.7.1 Initialization flow .........................................................................................................293
16.7.2 Interrupt exception handler ...........................................................................................293
16.7.3 ISR, RTOS, and task hierarchy .....................................................................................295
16.7.4 Order of execution ........................................................................................................296
16.7.5 Priority ceiling protocol ................................................................................................297
16.7.6 Selecting priorities according to request rates and deadlines .......................................297
16.7.7 Software configurable interrupt requests ......................................................................298
16.7.8 Lowering priority within an ISR ..................................................................................299
16.7.9 Negating an interrupt request outside of its ISR ..........................................................299
16.7.10 Examining LIFO contents ............................................................................................300
Chapter 17
Crossbar Switch (XBAR)
17.1 Introduction ...................................................................................................................................301
17.2 Block diagram ...............................................................................................................................301
17.3 Overview .......................................................................................................................................302
17.4 Features .........................................................................................................................................302
17.5 Modes of operation ........................................................................................................................302
17.5.1 Normal mode ................................................................................................................302
17.5.2 Debug mode ..................................................................................................................302
17.6 Functional description ...................................................................................................................302
MPC5604B/C Microcontroller Reference Manual, Rev. 8
8 Freescale Semiconductor

17.6.1 Overview ......................................................................................................................302
17.6.2 General operation .........................................................................................................303
17.6.3 Master ports ..................................................................................................................303
17.6.4 Slave ports ....................................................................................................................304
17.6.5 Priority assignment .......................................................................................................304
17.6.6 Arbitration ....................................................................................................................304
Chapter 18
Memory Protection Unit (MPU)
18.1 Introduction ...................................................................................................................................307
18.2 Features .........................................................................................................................................308
18.3 Modes of operation ........................................................................................................................309
18.4 External signal description ............................................................................................................309
18.5 Memory map and register description ...........................................................................................309
18.5.1 Memory map ................................................................................................................309
18.5.2 Register description ......................................................................................................310
18.6 Functional description ...................................................................................................................322
18.6.1 Access evaluation macro ..............................................................................................322
18.6.2 Putting it all together and AHB error terminations ......................................................324
18.7 Initialization information ...............................................................................................................324
18.8 Application information ................................................................................................................324
Chapter 19
System Integration Unit Lite (SIUL)
19.1 Introduction ...................................................................................................................................327
19.2 Overview .......................................................................................................................................327
19.3 Features .........................................................................................................................................329
19.4 External signal description ............................................................................................................329
19.4.1 Detailed signal descriptions ..........................................................................................330
19.5 Memory map and register description ...........................................................................................331
19.5.1 SIUL memory map .......................................................................................................331
19.5.2 Register protection ........................................................................................................332
19.5.3 Register descriptions ....................................................................................................333
19.6 Functional description ...................................................................................................................350
19.6.1 Pad control ....................................................................................................................350
19.6.2 General purpose input and output pads (GPIO) ...........................................................350
19.6.3 External interrupts ........................................................................................................351
19.7 Pin muxing ....................................................................................................................................352
Chapter 20
2
Inter-Integrated Circuit Bus Controller Module (I
20.1 Introduction ...................................................................................................................................355
20.1.1 Overview ......................................................................................................................355
20.1.2 Features .........................................................................................................................355
20.1.3 Block diagram ..............................................................................................................356
C)
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 9

20.2 External signal description ............................................................................................................356
20.2.1 SCL ...............................................................................................................................356
20.2.2 SDA ..............................................................................................................................356
20.3 Memory map and register description ...........................................................................................356
20.3.1 Module memory map ...................................................................................................356
20.3.2 I2C Bus Address Register (IBAD) ...............................................................................357
20.3.3 I2C Bus Frequency Divider Register (IBFD) ...............................................................358
20.3.4 I2C Bus Control Register (IBCR) .................................................................................364
20.3.5 I2C Bus Status Register (IBSR) ....................................................................................365
20.3.6 I2C Bus Data I/O Register (IBDR) ...............................................................................366
20.3.7 I2C Bus Interrupt Config Register (IBIC) ....................................................................367
20.4 Functional description ...................................................................................................................367
20.4.1 I-Bus protocol ...............................................................................................................367
20.4.2 Interrupts .......................................................................................................................371
20.5 Initialization/application information ............................................................................................372
20.5.1 I2C programming examples ..........................................................................................372
Chapter 21
LIN Controller (LINFlex)
21.1 Introduction ...................................................................................................................................377
21.2 Main features .................................................................................................................................377
21.2.1 LIN mode features ........................................................................................................377
21.2.2 UART mode features ....................................................................................................377
21.2.3 Features common to LIN and UART ...........................................................................377
21.3 General description .......................................................................................................................378
21.4 Fractional baud rate generation .....................................................................................................379
21.5 Operating modes ...........................................................................................................................381
21.5.1 Initialization mode ........................................................................................................382
21.5.2 Normal mode ................................................................................................................382
21.5.3 Low power mode (Sleep) .............................................................................................382
21.6 Test modes .....................................................................................................................................382
21.6.1 Loop Back mode ...........................................................................................................382
21.6.2 Self Test mode ..............................................................................................................383
21.7 Memory map and registers description .........................................................................................383
21.7.1 Memory map ................................................................................................................383
21.8 Functional description ...................................................................................................................409
21.8.1 UART mode ..................................................................................................................409
21.8.2 LIN mode ......................................................................................................................411
21.8.3 8-bit timeout counter ....................................................................................................419
21.8.4 Interrupts .......................................................................................................................421
Chapter 22
FlexCAN
22.1 Introduction ...................................................................................................................................423
22.1.1 Overview ......................................................................................................................423
MPC5604B/C Microcontroller Reference Manual, Rev. 8
10 Freescale Semiconductor

22.1.2 FlexCAN module features ............................................................................................424
22.1.3 Modes of operation .......................................................................................................425
22.2 External signal description ............................................................................................................425
22.2.1 Overview ......................................................................................................................425
22.2.2 Signal descriptions ........................................................................................................426
22.3 Memory map and register description ...........................................................................................426
22.3.1 FlexCAN memory mapping .........................................................................................426
22.3.2 Message buffer structure ..............................................................................................428
22.3.3 Rx FIFO structure .........................................................................................................431
22.3.4 Register description ......................................................................................................433
22.4 Functional description ...................................................................................................................451
22.4.1 Overview ......................................................................................................................451
22.4.2 Local priority transmission ...........................................................................................452
22.4.3 Transmit process ...........................................................................................................452
22.4.4 Arbitration process .......................................................................................................453
22.4.5 Receive process ............................................................................................................454
22.4.6 Matching process ..........................................................................................................455
22.4.7 Data coherence .............................................................................................................456
22.4.8 Rx FIFO ........................................................................................................................459
22.4.9 CAN protocol related features ......................................................................................460
22.4.10 Modes of operation details ...........................................................................................464
22.4.11 Interrupts .......................................................................................................................465
22.4.12 Bus interface .................................................................................................................465
22.5 Initialization/Application information ...........................................................................................466
22.5.1 FlexCAN initialization sequence ..................................................................................466
22.5.2 FlexCAN addressing and SRAM size configurations ..................................................467
Chapter 23
Deserial Serial Peripheral Interface (DSPI)
23.1 Introduction ...................................................................................................................................469
23.2 Features .........................................................................................................................................470
23.3 Modes of operation ........................................................................................................................471
23.3.1 Master mode .................................................................................................................471
23.3.2 Slave mode ...................................................................................................................471
23.3.3 Module Disable mode ...................................................................................................471
23.3.4 Debug mode ..................................................................................................................472
23.4 External signal description ............................................................................................................472
23.4.1 Signal overview ............................................................................................................472
23.4.2 Signal names and descriptions ......................................................................................472
23.5 Memory map and register description ...........................................................................................474
23.5.1 Memory map ................................................................................................................474
23.5.2 DSPI Module Configuration Register (DSPIx_MCR) .................................................475
23.5.3 DSPI Transfer Count Register (DSPIx_TCR) ..............................................................478
23.5.4 DSPI Clock and Transfer Attributes Registers 0–5 (DSPIx_CTARn) .........................478
23.5.5 DSPI Status Register (DSPIx_SR) ...............................................................................486
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 11

23.5.6 DSPI Interrupt Request Enable Register (DSPIx_RSER) ............................................488
23.5.7 DSPI PUSH TX FIFO Register (DSPIx_PUSHR) .......................................................490
23.5.8 DSPI POP RX FIFO Register (DSPIx_POPR) ............................................................492
23.5.9 DSPI Transmit FIFO Registers 0–3 (DSPIx_TXFRn) .................................................493
23.6 Functional description ...................................................................................................................494
23.6.1 Modes of operation .......................................................................................................495
23.6.2 Start and stop of DSPI transfers ...................................................................................496
23.6.3 Serial peripheral interface (SPI) configuration .............................................................497
23.6.4 DSPI baud rate and clock delay generation ..................................................................500
23.6.5 Transfer formats ...........................................................................................................503
23.6.6 Continuous serial communications clock .....................................................................511
23.6.7 Interrupt requests ..........................................................................................................514
23.6.8 Power saving features ...................................................................................................515
23.7 Initialization and application information .....................................................................................516
23.7.1 How to change queues ..................................................................................................516
23.7.2 Baud rate settings .........................................................................................................516
23.7.3 Delay settings ...............................................................................................................518
23.7.4 Calculation of FIFO pointer addresses .........................................................................518
Chapter 24
Timers
24.1 Introduction ...................................................................................................................................523
24.2 Technical overview ........................................................................................................................523
24.2.1 Overview of the STM ...................................................................................................525
24.2.2 Overview of the eMIOS ...............................................................................................525
24.2.3 Overview of the PIT .....................................................................................................527
24.3 System Timer Module (STM) .......................................................................................................527
24.3.1 Introduction ..................................................................................................................527
24.3.2 External signal description ...........................................................................................528
24.3.3 Memory map and register definition ............................................................................528
24.3.4 Functional description ..................................................................................................532
24.4 Enhanced Modular IO Subsystem (eMIOS) .................................................................................532
24.4.1 Introduction ..................................................................................................................532
24.4.2 External signal description ...........................................................................................535
24.4.3 Memory map and register description ..........................................................................535
24.4.4 Functional description ..................................................................................................547
24.4.5 Initialization/Application information ..........................................................................577
24.5 Periodic Interrupt Timer (PIT) ......................................................................................................580
24.5.1 Introduction ..................................................................................................................580
24.5.2 Features .........................................................................................................................581
24.5.3 Signal description .........................................................................................................581
24.5.4 Memory map and register description ..........................................................................581
24.5.5 Functional description ..................................................................................................586
24.5.6 Initialization and application information ....................................................................587
MPC5604B/C Microcontroller Reference Manual, Rev. 8
12 Freescale Semiconductor

Chapter 25
Analog-to-Digital Converter (ADC)
25.1 Overview .......................................................................................................................................591
25.1.1 Device-specific features ...............................................................................................591
25.1.2 Device-specific implementation ...................................................................................592
25.2 Introduction ...................................................................................................................................592
25.3 Functional description ...................................................................................................................593
25.3.1 Analog channel conversion ..........................................................................................593
25.3.2 Analog clock generator and conversion timings ..........................................................597
25.3.3 ADC sampling and conversion timing .........................................................................597
25.3.4 ADC CTU (Cross Triggering Unit) ..............................................................................599
25.3.5 Presampling ..................................................................................................................600
25.3.6 Programmable analog watchdog ..................................................................................601
25.3.7 Interrupts .......................................................................................................................602
25.3.8 External decode signals delay ......................................................................................603
25.3.9 Power-down mode ........................................................................................................603
25.3.10 Auto-clock-off mode ....................................................................................................603
25.4 Register descriptions .....................................................................................................................604
25.4.1 Introduction ..................................................................................................................604
25.4.2 Control logic registers ..................................................................................................607
25.4.3 Interrupt registers ..........................................................................................................611
25.4.4 Threshold registers .......................................................................................................618
25.4.5 Presampling registers ....................................................................................................619
25.4.6 Conversion timing registers CTR[0..2] ........................................................................622
25.4.7 Mask registers ...............................................................................................................622
25.4.8 Delay registers ..............................................................................................................627
25.4.9 Data registers ................................................................................................................628
Chapter 26
Cross Triggering Unit (CTU)
26.1 Introduction ...................................................................................................................................631
26.2 Main features .................................................................................................................................631
26.3 Block diagram ...............................................................................................................................631
26.4 Memory map and register descriptions .........................................................................................631
26.4.1 Event Configuration Registers (CTU_EVTCFGRx) (x = 0...63) .................................632
26.5 Functional description ...................................................................................................................633
26.5.1 Channel value ...............................................................................................................635
Chapter 27
Flash Memory
27.1 Introduction ...................................................................................................................................639
27.2 Main features .................................................................................................................................640
27.3 Block diagram ...............................................................................................................................640
27.4 Functional description ...................................................................................................................641
27.4.1 Module structure ...........................................................................................................641
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 13

27.4.2 Flash memory module sectorization .............................................................................642
27.4.3 TestFlash block .............................................................................................................643
27.4.4 Shadow sector ...............................................................................................................645
27.4.5 User mode operation .....................................................................................................645
27.4.6 Reset .............................................................................................................................646
27.4.7 Power-down mode ........................................................................................................647
27.4.8 Low power mode ..........................................................................................................647
27.5 Register description .......................................................................................................................648
27.5.1 CFlash register description ...........................................................................................649
27.5.2 DFlash register description ...........................................................................................680
27.6 Programming considerations .........................................................................................................703
27.6.1 Modify operation ..........................................................................................................703
27.6.2 Double word program ...................................................................................................704
27.6.3 Sector erase ...................................................................................................................706
27.7 Platform flash memory controller .................................................................................................714
27.7.1 Introduction ..................................................................................................................714
27.7.2 Memory map and register description ..........................................................................717
27.8 Functional description ...................................................................................................................726
27.8.1 Access protections ........................................................................................................727
27.8.2 Read cycles – Buffer miss ............................................................................................727
27.8.3 Read cycles – Buffer hit ...............................................................................................727
27.8.4 Write cycles ..................................................................................................................727
27.8.5 Error termination ..........................................................................................................727
27.8.6 Access pipelining ..........................................................................................................728
27.8.7 Flash error response operation ......................................................................................728
27.8.8 Bank0 page read buffers and prefetch operation ..........................................................728
27.8.9 Bank1 Temporary Holding Register .............................................................................730
27.8.10 Read-while-write functionality ..................................................................................... 731
27.8.11 Wait-state emulation .....................................................................................................732
Chapter 28
Static RAM (SRAM)
28.1 Introduction ...................................................................................................................................735
28.2 Low power configuration ..............................................................................................................735
28.3 Register memory map ...................................................................................................................735
28.4 SRAM ECC mechanism ................................................................................................................735
28.4.1 Access timing ...............................................................................................................736
28.4.2 Reset effects on SRAM accesses ..................................................................................737
28.5 Functional description ...................................................................................................................737
28.6 Initialization and application information .....................................................................................737
Chapter 29
Register Protection
29.1 Introduction ...................................................................................................................................741
29.2 Features .........................................................................................................................................741
MPC5604B/C Microcontroller Reference Manual, Rev. 8
14 Freescale Semiconductor

29.3 Modes of operation ........................................................................................................................742
29.4 External signal description ............................................................................................................742
29.5 Memory map and register description ...........................................................................................742
29.5.1 Memory map ................................................................................................................743
29.5.2 Register description ......................................................................................................744
29.6 Functional description ...................................................................................................................746
29.6.1 General .........................................................................................................................746
29.6.2 Change lock settings .....................................................................................................746
29.6.3 Access errors ................................................................................................................750
29.7 Reset ..............................................................................................................................................750
29.8 Protected registers .........................................................................................................................750
Chapter 30
Software Watchdog Timer (SWT)
30.1 Overview .......................................................................................................................................755
30.2 Features .........................................................................................................................................755
30.3 Modes of operation ........................................................................................................................755
30.4 External signal description ............................................................................................................756
30.5 Memory map and register description ...........................................................................................756
30.5.1 Memory map ................................................................................................................756
30.5.2 Register description ......................................................................................................757
30.6 Functional description ...................................................................................................................761
Chapter 31
Error Correction Status Module (ECSM)
31.1 Introduction ...................................................................................................................................763
31.2 Overview .......................................................................................................................................763
31.3 Features .........................................................................................................................................763
31.4 Memory map and register description ...........................................................................................763
31.4.1 Memory map ................................................................................................................763
31.4.2 Register description ......................................................................................................764
31.4.3 Register protection ........................................................................................................783
Chapter 32
IEEE 1149.1 Test Access Port Controller (JTAGC)
32.1 Introduction ...................................................................................................................................787
32.2 Block diagram ...............................................................................................................................787
32.3 Overview .......................................................................................................................................787
32.4 Features .........................................................................................................................................788
32.5 Modes of operation ........................................................................................................................788
32.5.1 Reset .............................................................................................................................788
32.5.2 IEEE 1149.1-2001 defined test modes .........................................................................788
32.6 External signal description ............................................................................................................789
32.7 Memory map and register description ...........................................................................................790
32.7.1 Instruction Register ......................................................................................................790
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 15

32.7.2 Bypass Register ............................................................................................................790
32.7.3 Device Identification Register ......................................................................................790
32.7.4 Boundary Scan Register ...............................................................................................791
32.8 Functional Description ..................................................................................................................791
32.8.1 JTAGC Reset Configuration ......................................................................................... 791
32.8.2 IEEE 1149.1-2001 (JTAG) Test Access Port ................................................................791
32.8.3 TAP controller state machine .......................................................................................792
32.8.4 JTAGC instructions ......................................................................................................794
32.8.5 Boundary Scan ..............................................................................................................796
32.9 e200z0 OnCE controller ................................................................................................................796
32.9.1 e200z0 OnCE Controller Block Diagram .....................................................................796
32.9.2 e200z0 OnCE Controller Functional Description ........................................................797
32.9.3 e200z0 OnCE Controller Register Description ............................................................797
32.10Initialization/application information ............................................................................................799
Chapter 33
Nexus Development Interface (NDI)
33.1 Introduction ...................................................................................................................................801
33.2 Block diagram ...............................................................................................................................801
33.3 Features .........................................................................................................................................802
33.4 Modes of Operation .......................................................................................................................803
33.4.1 Nexus Reset ..................................................................................................................803
33.4.2 Operating Mode ............................................................................................................804
33.5 External Signal Description ..........................................................................................................804
33.5.1 Nexus Signal Reset States ............................................................................................804
33.6 Memory Map and Register Description ........................................................................................804
33.6.1 Nexus Debug Interface Registers .................................................................................805
33.6.2 Register Description .....................................................................................................806
33.7 Functional description ...................................................................................................................815
33.7.1 NPC_HNDSHK module ...............................................................................................815
33.7.2 Enabling Nexus Clients for TAP Access ......................................................................816
33.7.3 Configuring the NDI for Nexus Messaging .................................................................817
33.7.4 Programmable MCKO Frequency ................................................................................817
33.7.5 Nexus Messaging ..........................................................................................................817
33.7.6 EVTO Sharing ..............................................................................................................817
33.7.7 Debug Mode Control ....................................................................................................818
33.7.8 Ownership Trace ...........................................................................................................818
Appendix A
Register Map
Appendix B
Revision History
B.1 Changes between revisions 7 and 8 ...........................................................................................903
MPC5604B/C Microcontroller Reference Manual, Rev. 8
16 Freescale Semiconductor

B.2 Changes between revisions 5 and 7 ...........................................................................................908
B.3 Changes between revisions 4 and 5 ............................................................................................910
B.4 Changes between revisions 2 and 4 ............................................................................................911
B.5 Changes between revisions 1 and 2 ............................................................................................920
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 17

MPC5604B/C Microcontroller Reference Manual, Rev. 8
18 Freescale Semiconductor
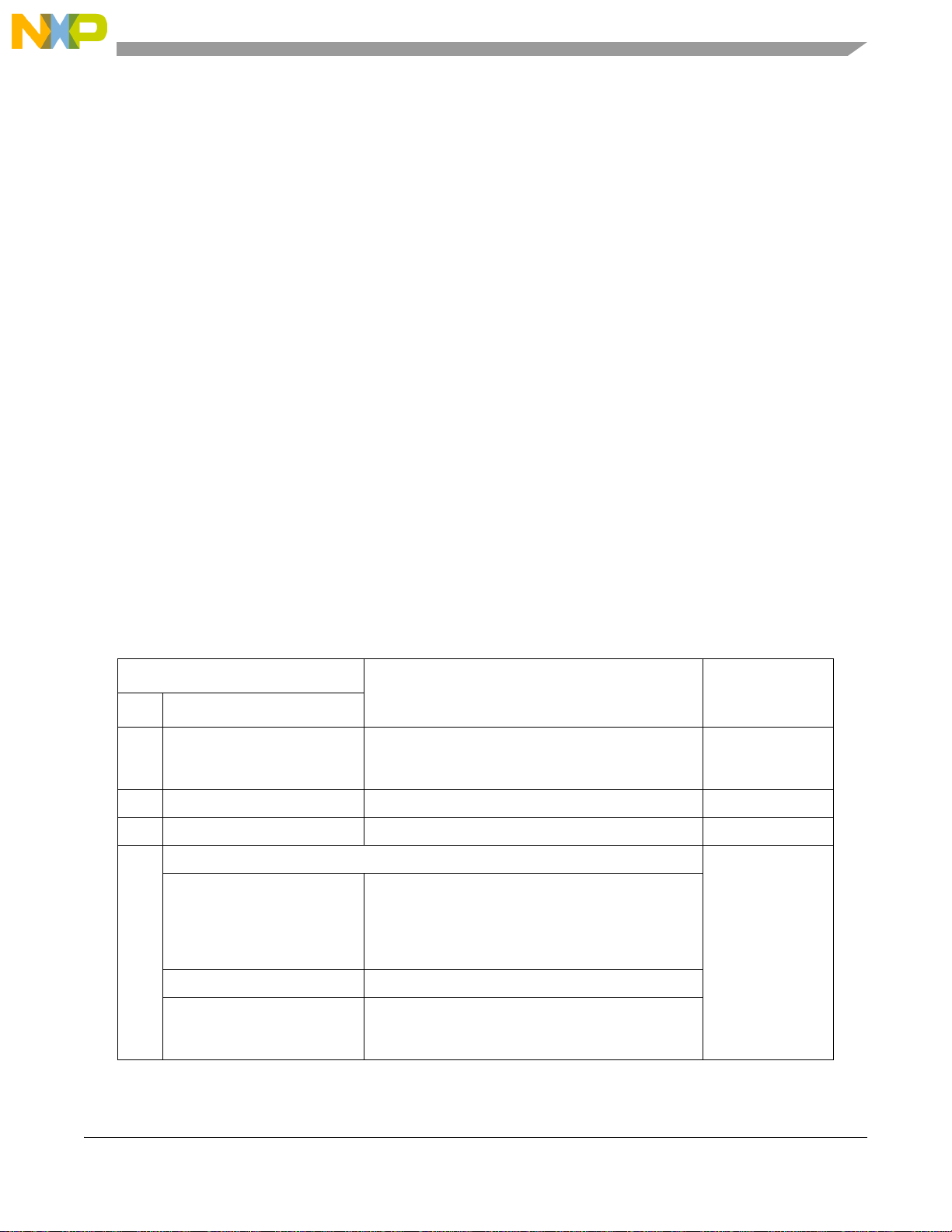
Chapter 1 Preface
1.1 Overview
The primary objective of this document is to define the functionality of the MPC5604B microcontroller
for use by software and hardware developers. The MPC5604B is built on Power Architecture® technology
and integrates technologies that are important for today’s automotive vehicle body applications.
The information in this book is subject to change without notice, as described in the disclaimers on the title
page. As with any technical documentation, it is the reader’s responsibility to be sure he or she is using the
most recent version of the documentation.
To locate any published errata or updates for this document, visit the Freescale Web site at
http://www.freescale.com/.
1.2 Audience
This manual is intended for system software and hardware developers and applications programmers who
want to develop products with the MPC5604B device. It is assumed that the reader understands operating
systems, microprocessor system design, basic principles of software and hardware, and basic details of the
Power Architecture.
1.3 Guide to this reference manual
Table 1-1. Guide to this reference manual
Chapter
#Title
2 Introduction General overview, family description, feature list and
information on how to use the reference manual in
conjunction with other available documents.
3 Memory Map Memory map of all peripherals and memory. Memory map
4 Signal description Pinout diagrams and descriptions of all pads. Signals
5 Microcontroller Boot Boot
• Boot mechanism • Describes what configuration is required by the
user and what processes are involved when the
microcontroller boots from flash memory or serial
boot modes.
• Describes censorship.
• Boot Assist Module (BAM) Features of BAM code and when it's used.
• System Status and
Configuration Module
(SSCM)
Reports information about current state and
configuration of the microcontroller.
Description Functional group
Introductory
material
MPC5604B/C Microcontroller Reference Manual, Rev. 8
Freescale Semiconductor 19
 Loading...
Loading...