

Fairchild Semiconductor ML4425 Datasheet
www.fairchildsemi.com
ML4425
Sensorless BLDC Motor Controller
Features
• Stand-alone operation
• Motor starts and stops with power to IC
• On-board start sequence: Align ♦ Ramp ♦ Set Speed
• Patented Back-EMF commutation technique provides
jitterless torque for minimum “spin-up” time
• Onboard speed control loop
• PLL used for commutation provides noise immunity from
PWM spikes, compared to noise sensitive zero crossing
technique
• PWM control for maximum efficiency
• Direct FET drive for 12V motors; drives high voltage
motors with IC buffers
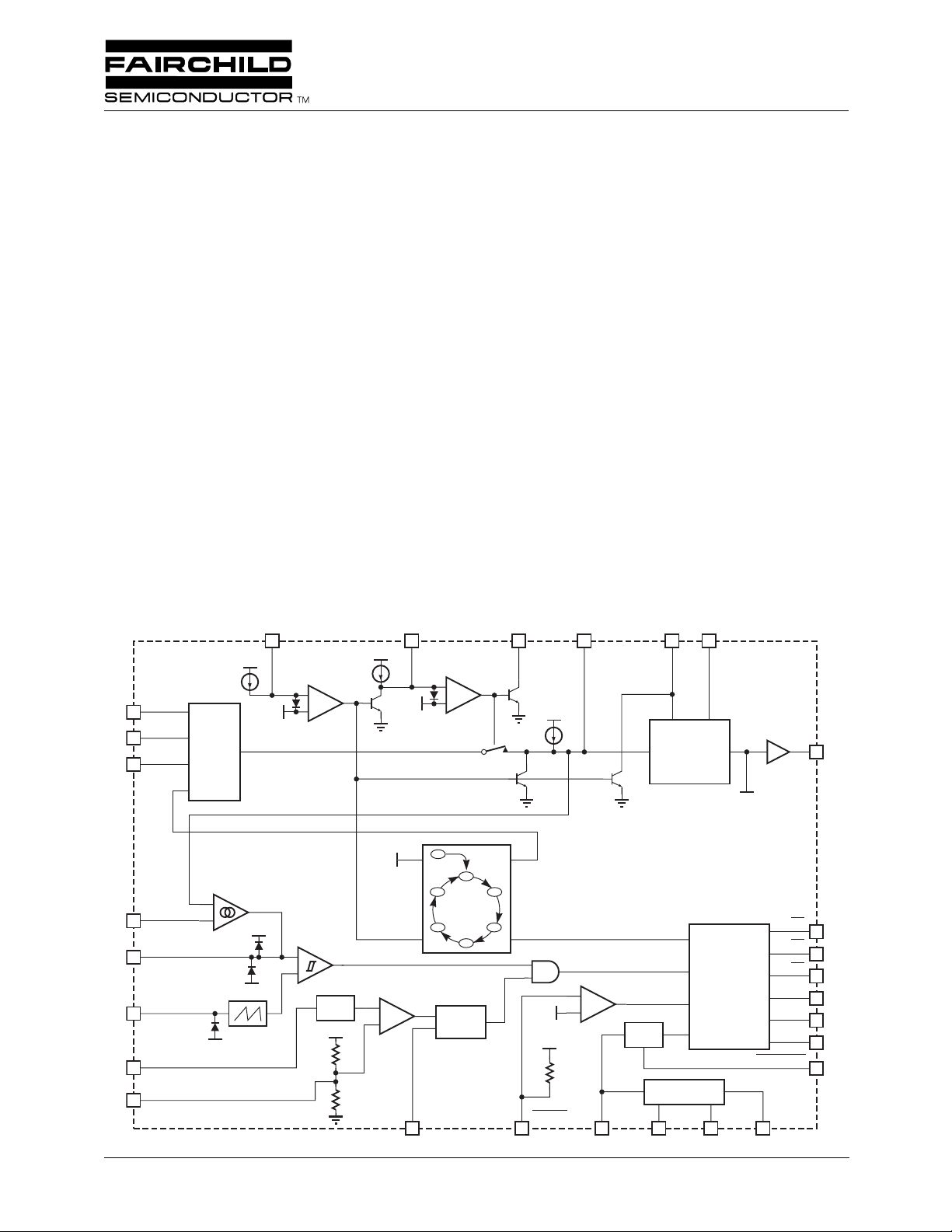
Block Diagram
17
C
DD
1.5V
AT
750nA
–
+
V
750nA
FB A
22
FB B
23
FB C
24
BACK
EMF
SAMPLER
19
V
DD
C
RT
–
1.5V
+
General Description
The ML4425 PWM motor controller provides all of the
functions necessary for starting and controlling the speed of
delta or wye wound Brushless DC (BLDC) motors without
Hall Effect sensors. Back EMF voltage is sensed from the
motor windings to determine the proper commutation phase
sequence using a PLL. This patented sensing technique will
commutate a wide range of 3-Phase BLDC motors and is
insensitive to PWM noise and motor snubbing circuitry.
The ML4425 limits the motor current using a constant offtime PWM control loop. The velocity loop is controlled with
an onboard amplifier. The ML4425 has circuitry to ensure
that there is no shoot-through in directly driven external
power MOSFETs.
The timing of the start-up sequence is determined by the
selection of three timing capacitors. This allows optimization
for a wide range of motors and loads.
21
C
500nA
RR
20
SPEED
FB
V
DD
15 16
C
VCO
VOLTAGE
CONTROLLED
OSCILLATOR
R
VCO
VCO/TACH
13
8
SPEED SET
5
SPEED COMP
C
T
6
I
SENSE
1
I
LIMIT
12
1.7V
VCO
OUT
VCO
OUT
+
–
3.9V
–
+
1.7V
–
+
8kΩ
20kHz
16kΩ
V
× 5
REF
R
A
I
LIMIT
B
COMMUTATION
STATE MACHINE
C
D
GATING
LOGIC
&
OUTPUT
DRIVERS
REF
25
1.4V
V
DD
BRAKE
4kΩ
–
+
UVLO
REFERENCE
V
DD
14
GND27R
28
HA
HB
HC
LA
LB
LC
UV FAULT
V
REF
7
2
3
4
9
10
11
18
F
E
1-SHOT
C
IOS
26
REV. 1.0.2 7/2/01
ML4425 PRODUCT SPECIFICATION
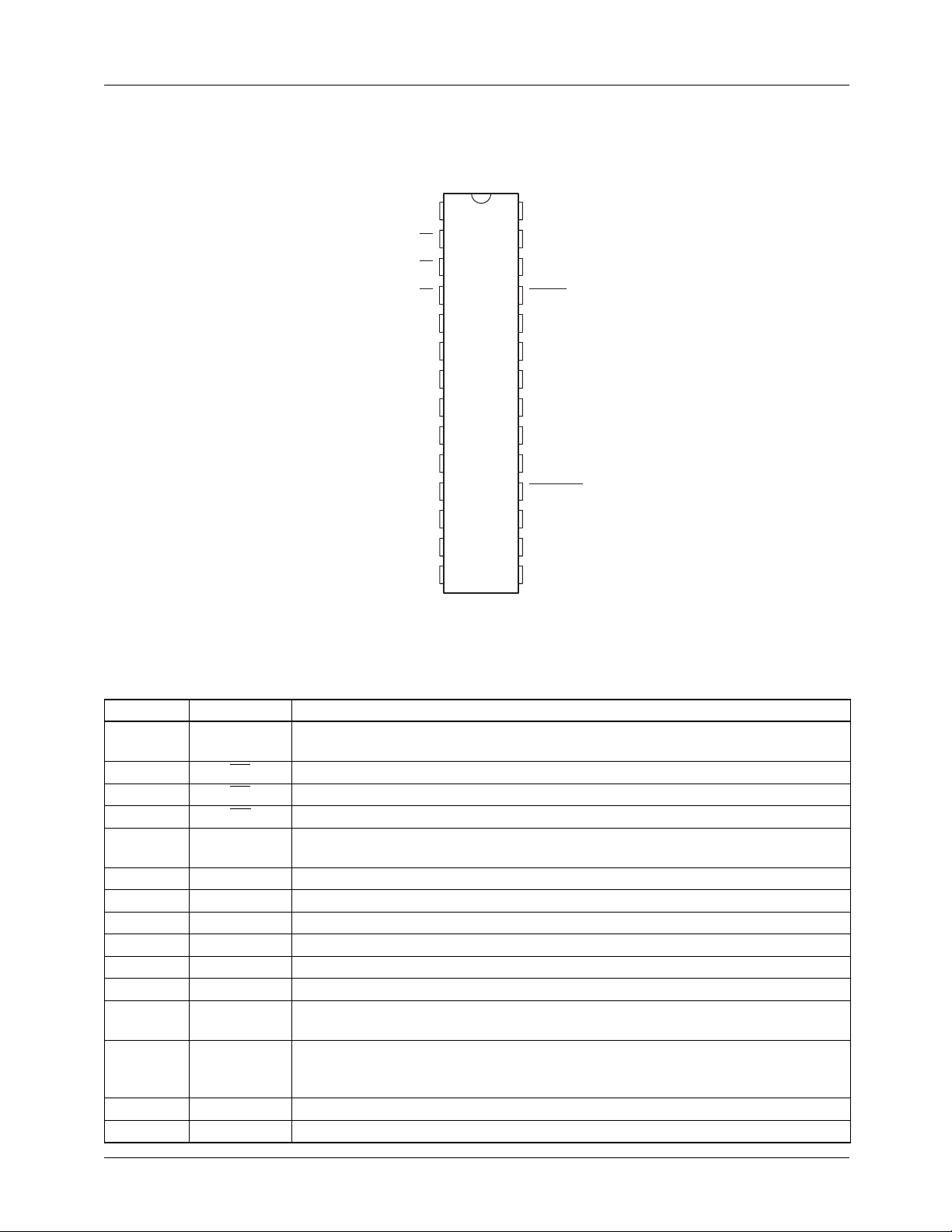
Pin Configuration
28-Pin Narrow PDIP (P28N)
I
SENSE
SPEED COMP
V
SPEED SET
I
LIMIT
VCO/TACH
ML4425
28-Pin SOIC (S28)
1
HA
2
HB
3
HC
4
5
C
6
T
7
REF
8
LA
9
LB
10
LC
11
12
13
V
14
DD
TOP VIEW
GND
28
R
27
REF
C
26
IOS
BRAKE
25
FB C
24
FB B
23
FB A
22
C
21
RR
SPEED FB
20
C
19
RT
UV FAULT
18
C
17
AT
R
16
VCO
C
15
VCO
Pin Description
Pin Name Function
1I
SENSE
2HA
3HBActive low output driver for the phase B high-side switch.
4HCActive low output driver for the phase C high-side switch.
5 SPEED
COMP
6C
V
T
REF
8 SPEED SET Speed loop input which ranges from 0 (stopped) to V
9 LA Active high output driver for the phase A low-side switch.
10 LB Active high output driver for the phase B low-side switch.
11 LC Active high output driver for the phase C low-side switch.
12 I
LIMIT
13 VCO/TACH This TTL level output corresponds to the signal used to clock the commutation state
14 V
15 C
DD
VCO
Motor current sense input. When I
LB, and LC are shut off for a fixed time determined by C
exceeds 0.2 ↔ I
SENSE
the output drivers LA,
LIMIT,
.
IOS
Active low output driver for the phase A high-side switch.
Speed control loop compensation is set by a series resistor and capacitor from
SPEED COMP to GND.
A capacitor from C
to GND sets the PWM oscillator frequency.
T
6.9V reference voltage output.
(maximum speed).
REF
Voltage on this pin sets the I
threshold voltage at 0.2 ↔ I
SENSE
, leaving this pin
LIMIT
unconnected selects an internally set threshold.
machine. The output frequency is proportional to the motor speed when the backEMF sensing loop is locked onto the rotor position.
12V power supply input.
A capacitor to GND sets the voltage-to-frequency ratio of the VCO.
2
REV. 1.0.2 7/2/01
)
PRODUCT SPECIFICATION ML4425
Pin Description
(continued)
Pin Name Function
16 R
17 C
18 UV
FAULT This output goes low when V
VCO
AT
An resistor to GND sets up a current proportional to the input voltage of the VCO.
A capacitor to GND sets the time that the controller stays in the align mode.
drops below the UVLO threshold, and indicates that
DD
all output drivers have been disabled.
19 C
RT
A capacitor to GND sets the time that the controller stays in the ramp mode.
20 SPEED FB Output of the back-EMF sampling circuit and input to the VCO. An RC network
connected to SPEED FB sets the compensation for the PLL loop formed by the
back-EMF sampling circuit, the VCO, and the commutation state machine.
21 C
RR
A capacitor to between C
and SPEED FB sets the ramp rate (acceleration) of the
RR
motor when the controller is in ramp mode.
22 FB A The motor feedback voltage from phase A is monitored through a resistor divider for
back-EMF sensing at this pin.
23 FB B The motor feedback voltage from phase B is monitored through a resistor divider for
back-EMF sensing at this pin.
24 FB C The motor feedback voltage from phase C is monitored through a resistor divider for
back-EMF sensing at this pin.
25 BRAKE A logic low input activates motor braking by shutting off the high-side output drivers
and turning on the low-side output drivers.
26 C
27 R
IOS
REF
A capacitor to GND sets the time that the low-side output drivers remain off after
I
exceeds its threshold .
SENSE
An 137k Ω resistor to GND sets a current proportional to V
that is used to set all
REF
the internal bias currents except for the VCO.
28 GND Signal and power ground.
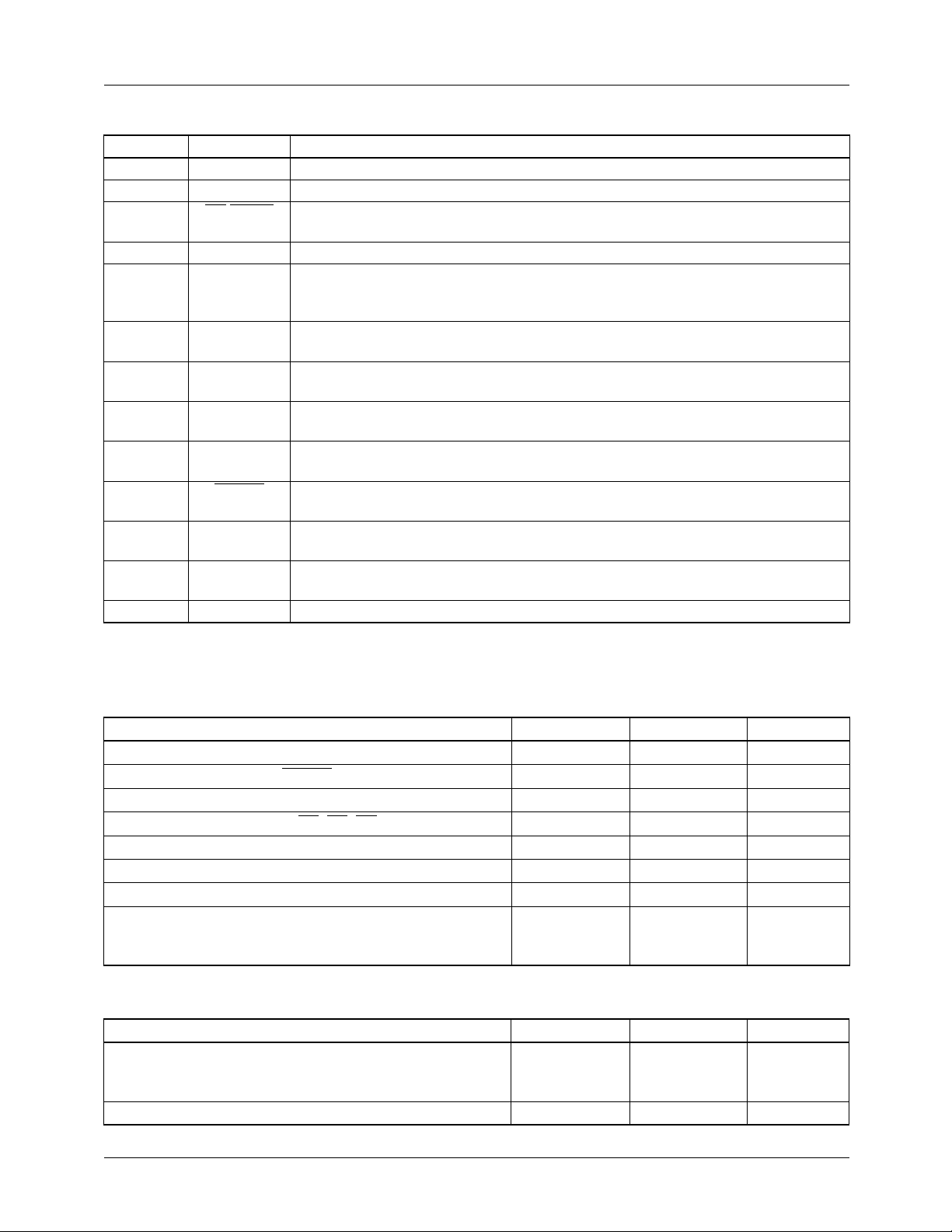
Absolute Maximum Ratings
Absolute maximum ratings are those values beyond which the device could be permanently damaged. Absolute maximum
ratings are stress ratings only and functional device operation is not implied.
Parameter Min. Max. Units
V
DD
14 V
Logic Inputs (SPEED FB, BRAKE) GND – 0.3 7 V
All Other Inputs and Outputs GND – 0.3 V
Output Current (LA, LB, LC, HA
, HB, HC
+ 0.3 V
DD
±50 mA
Junction Temperature 150 °C
Storage Temperature Range -65 150 °C
Lead Temperature (Soldering 10 sec.) 260 °C
Thermal Resistance ( θ
28-Pin Narrow PDIP
28-Pin SOIC
JA
)
48
75
°C/W
°C/W
Operating Conditions
Parameter Min. Max. Units
Temperature Range
ML4425CX
ML4425IX
V
DD
0
–40
70
85
°C
°C
10.8 13.2 V
REV. 1.0.2 7/2/01
3
) ≤
ML4425 PRODUCT SPECIFICATION
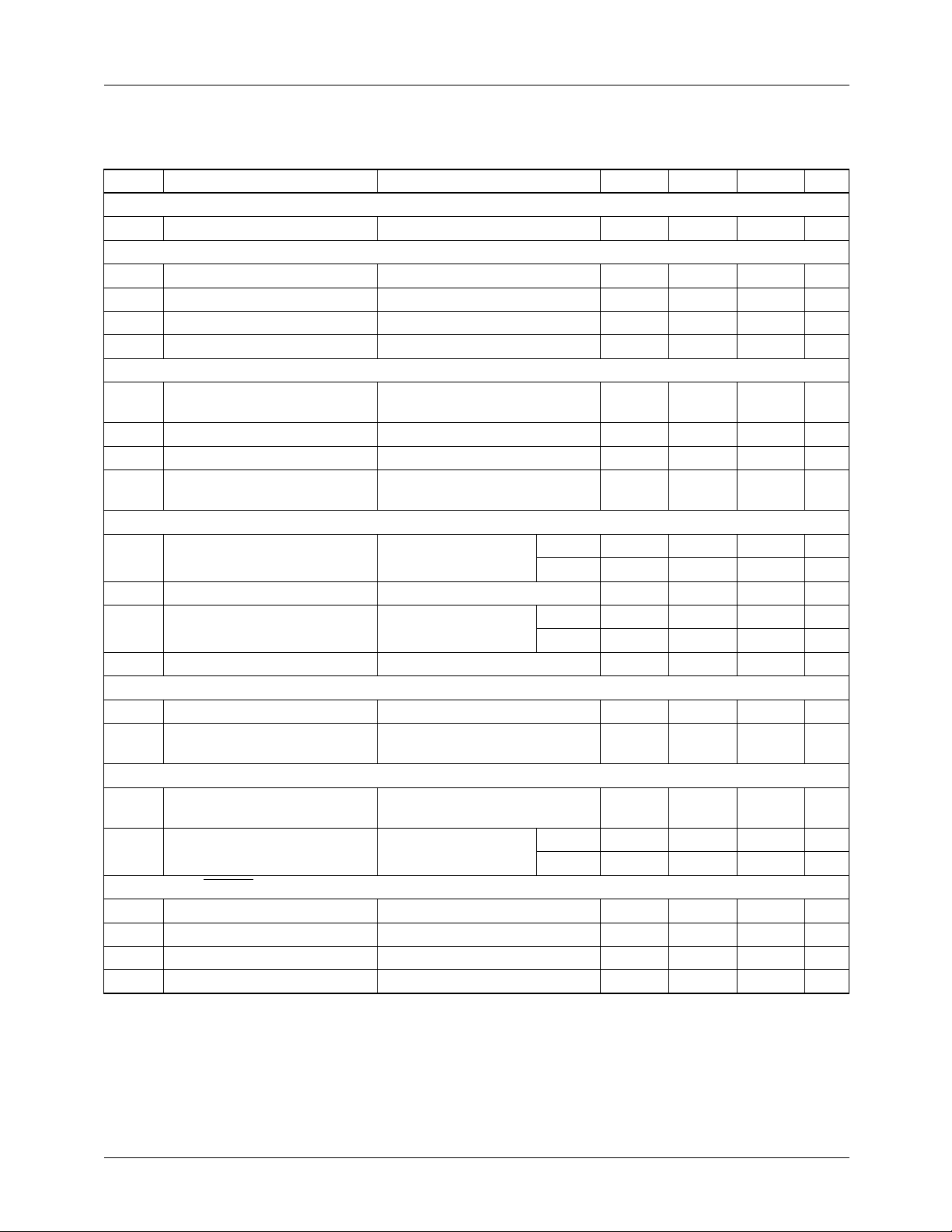
Electrical Characteristics
Unless otherwise specified, V
T
= Operating Temperature Range (Notes 1, 2) .
A
Symbol Parameter Conditions Min. Typ. Max. Units
Reference
V
Total Variation Line, Temp 6.5 6.9 7.5 V
REF
PWM Oscillator
Total Variation C
Ramp Peak 3.9 V
Ramp Valley 1.7 V
Ramp Charging Current µA
Speed Control Loop
SPEED SET Input Voltage
Range
SPEED FB Input Voltage Range 0 V
SPEED COMP Output Current ±5 ±20 µA
SPEED SET Error Amp
Transconductance
Start-up
C
Charging Current C Suffix 0.68 0.98 µA
AT
C
Threshold Voltage 1.4 1.7 V
AT
C
Charging Current C Suffix 0.68 0.98 µA
RT
C
Threshold Voltage 1.4 1.7 V
RT
Voltage Controlled Oscillator
Frequency Range R
Frequency vs. SPEED FB R
Current Limit
I
Gain V(I
SENSE
= 12V ± 10%, R
DD
= 1 Ω , C
SENSE
= 1nF 28 kHz
T
V
SPEED SET
V
SPEED FB
= xV,
= yV
VCO
= 10nF, C
= 100pF, R
IOS
= 137k Ω ,
REF
0V
REF
REF
144 µ
I Suffix 0.5 1.1 µA
I Suffix 0.5 1.1 µA
= 5V, SPEED FB = 6V 1.5 1.85 2.2 kHz
VCO
= 5V, 0.5V ≤ SPEED FB ≤
VCO
300 Hz/V
7V
2.5V 4.5 5.0 5.5 V/V
LIMIT
V
V
Ω
One Shot OFF-Time C
Logic Inputs (BRAKE) (Note 3)
V
V
Input High Voltage 2 V
IH
Input Low Voltage 0.8 V
IL
Input High Current V
I
IH
I
Input Low Current V
IL
4
= 100pF C Suffix 9 18 µs
IOS
I Suffix 9 20 µs
= 2.4V 2.4 mA
IH
= 0.4V 2.9 mA
IL
REV. 1.0.2 7/2/01
PRODUCT SPECIFICATION ML4425
Electrical Characteristics (continued)
Unless otherwise specified, V
TA = Operating Temperature Range (Notes 1, 2).
Symbol Parameter Conditions Min. Typ. Max. Units
Logic Outputs (VCO/TACH, UV FAULT) (Note 3)
VCO/TACH Output High Voltage I
VCO/TACH Output Low Voltage I
UV FAULT Output High Voltage I
UV
FAULT Output Low Voltage I
Back-EMF Sampler
SPEED FB Align Mode Voltage 125 250 mV
SPEED FB Ramp Mode Current C Suffix 500 720 nA
SPEED FB Run Mode Current State A, C
Output Drivers
High Side Driver Output Low
Current
High Side Driver Output High
Voltage
Low Side Driver Output Low
Voltage
Low Side Driver Output High
Voltage
Phase C Cross-conduction
Lockout Threshold
Supply
I
DD
VDD Current 32 50 mA
UVLO Threshold C Suffix 8.8 9.5 10.2 V
UVLO Hysteresis 150 mV
Notes:
1. Limits are guaranteed by 100% testing, sampling, or correlation with worst case test conditions.
2. For explanation of states, see Figure 4 and Table 1.
3. The BRAKE and UV FAULT pins each have an internal 4k Ω resistor to the internal reference.
= 12V ± 10%, R
DD
= 1Ω, C
SENSE
= –100µA 2.2 V
OUT
= 400µA 0.6 V
OUT
= –10µA C Suffix 3.4 4.5 5.4 V
OUT
VCO
= 10nF, C
= 100pF, R
IOS
= 137kΩ,
REF
I Suffix 3.2 5.6 V
= 400µA 0.6 V
OUT
I Suffix 500 750 nA
= 5V,
V
PHB
State A, C
State A, C
V
PHB
V
HX
I
HX
I
LX
V(I
RT
= V
/3
DD
= 5V, V
RT
= 5V,
RT
= 2 ↔ V
DD
/3
= 2 V 0.5 1.2 mA
= –10µ AV
= 1mA 0.2 0.7 V
) = 0V C Suffix VDD – 2.2 V
SENSE
C Suffix 30 90 µA
I Suffix 27 90 µA
= V
PHB
/2 –15 15 µA
DD
C Suffix –90 –30 µA
I Suffix –90 –27 µA
– 1.3 V
CC
I Suffix V
– 2.9 V
DD
V
– 3.0 V
DD
I Suffix 8.6 10.3 V
REV. 1.0.2 7/2/01
5
 Loading...
Loading...