

Page 1
Linear and angular
encoders
standard series
Page 2
Technology
An encoder measures the actual machine
position without the effect of any
mechanical inaccuracies. Machine errors
induced due to mechanical inaccuracies are
eliminated as the encoder is attached to the
machine guide ways and hence provides the
actual machine position to the controller.
Some of the potential sources of such errors
in a machine tool such as lead screw pitch,
certain amount of backlash and thermal
behavior can be minimized using these
encoders.
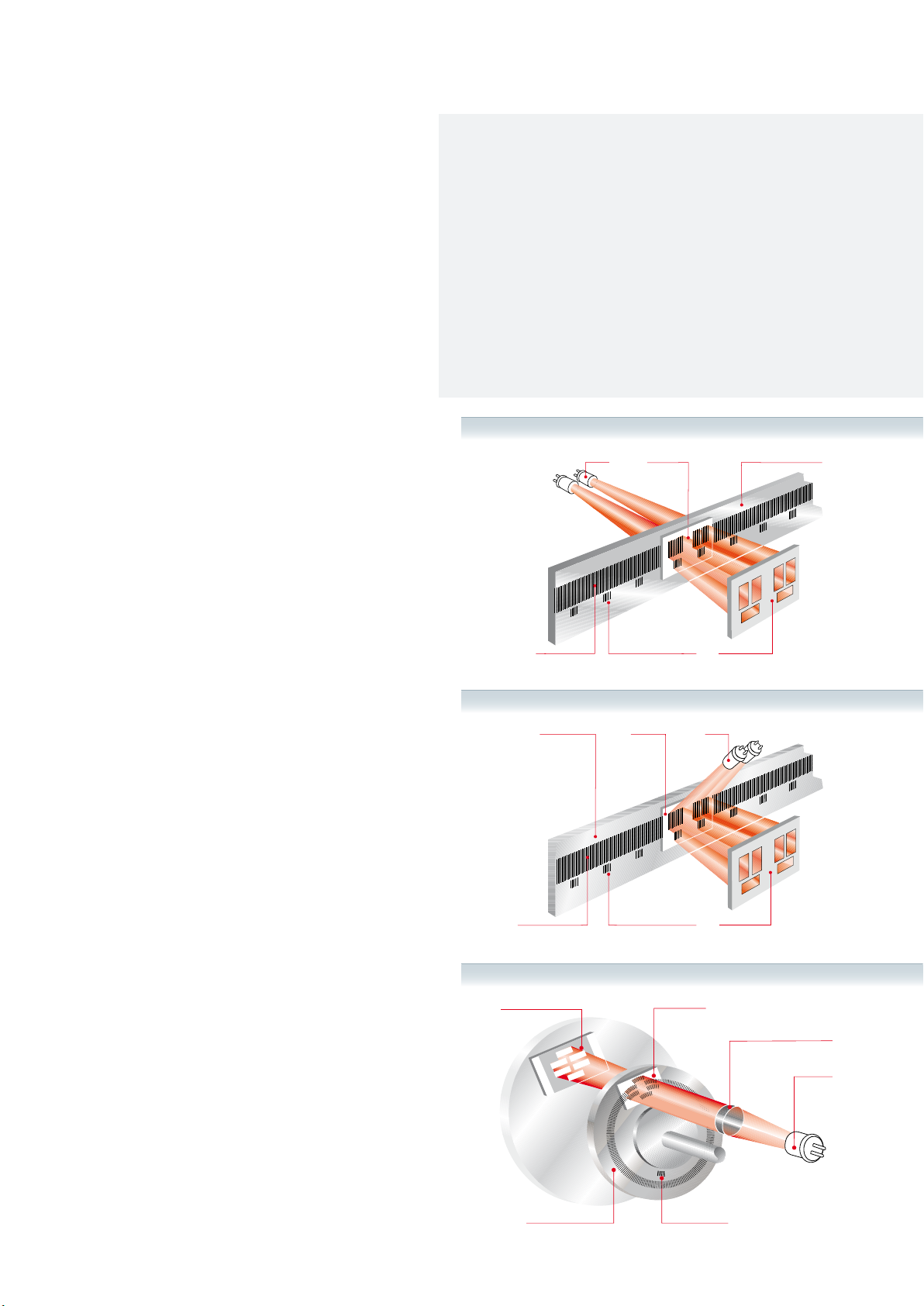
Measuring methods
Fagor uses two measuring methods in their incremental
encoders:
• Graduated glass: Linear encoders with a measuring
length of up to 3
light from the LED goes through an engraved glass and a
reticule before reaching the receiving photo diodes. The
period of the generated electrical signals is the same as the
graduation pitch.
• Graduated steel: Linear encoders with a measuring length
over 3
040 mm use auto imaging principle which uses
diffuse light reflected from the graduated steel tape. This
optical reading system consists of a LED as a light source,
a mesh that creates the image and a monolithic photo
detector element in the image plane, which is specially
designed and patented by Fagor.
040 mm use optical transmission. The
Types of incremental encoders
• Linear encoder: Suitable for applications on milling,
turning, boring mills, grinding machines for feedrates of up
to 120 m/min and vibration levels up to 10 g.
• Rotary encoder: Used as measurement device for rotary
axis, angular speed and also for linear movements for
mechanisms like lead screws etc. They are widely used
in machine tools, wood working equipment, robots and
material handlers etc.
Enclosed design
The graduated scale in a linear encoder is protected by the
enclosed aluminum profile. The highly durable sealing lips
protect the encoder from industrial contaminants and liquid
splashes as the reader head moves along the profile. The
reader head movement in complete synchronization captures
and transmits the position and movement of the machine.
The reader head moves along the graduated scale on linear
bearings minimizing the friction. For enhanced protection
against contamination both ends of the encoder and also the
reader head can be connected to pressurized air.
Graduated glass linear encoder
LED’s Graduated glassGrid
Etching Receiving photo-diodes
Reference marks
Graduated steel linear encoder
Graduated steel Grid LED’s
2
Etching
Reference marks
Graduated glass rotary encoder
Receiving photo-diodes
Graduated glass disk
Receiving photo-diodes
Grid
Flat convex lens
LED
Reference marks
Page 3
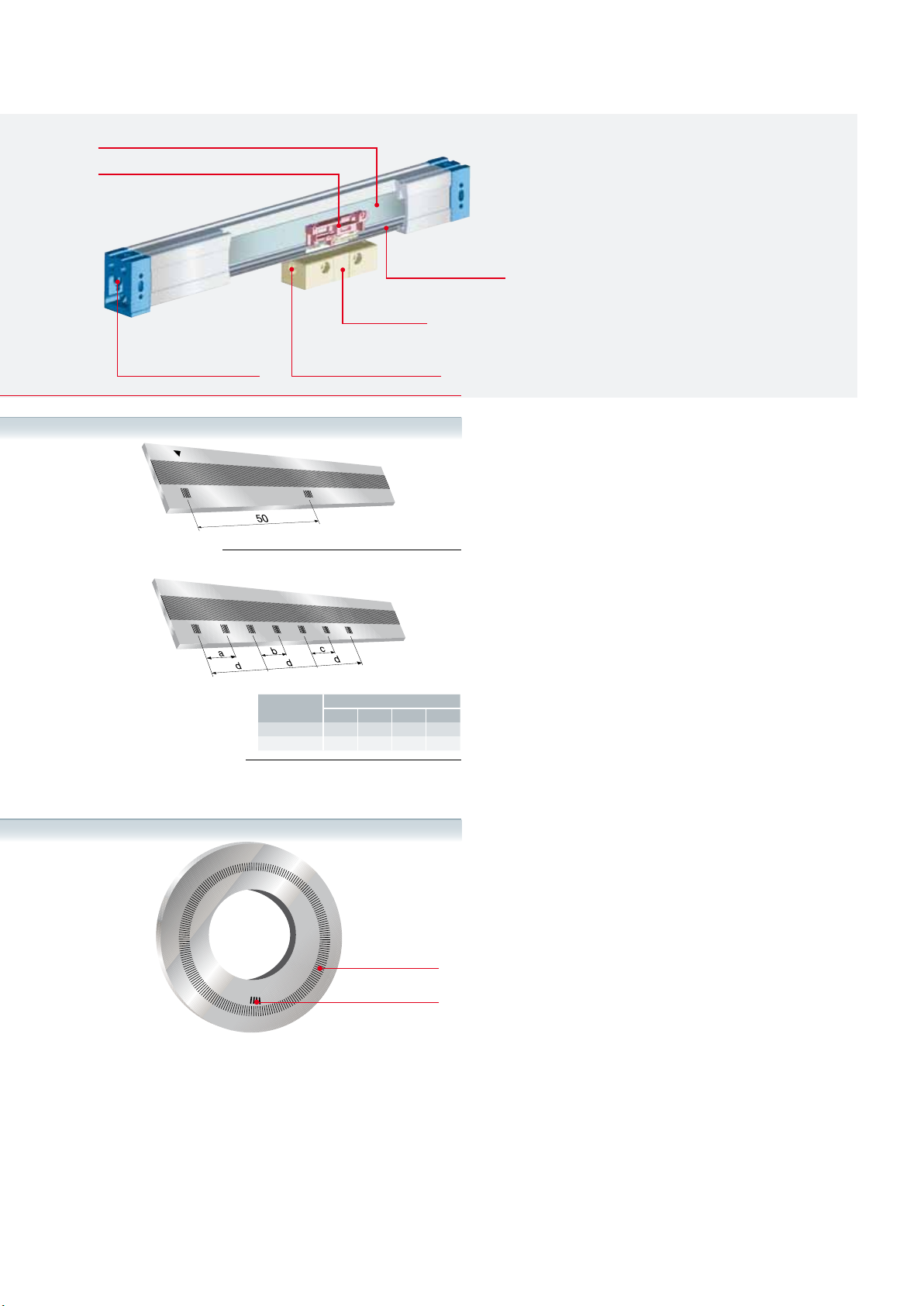
Graduated glass
Cursor
Sealing lips
Reader head
Air intake at both ends
Incremental
Distance-coded
Air intake on the reader head
Linear encoder
Series
F 50.1 50.2 50.3 100
C, M 10.02 10.04 10.06 20
Distances
a b c d
Reference signals (I0)
The reference signal is a specially etched mark along the
graduated glass, which when scanned generates a pulse
signal. They are used to set/recover the machine zero
position and avoid possible errors after powering up the DRO
or CNC system.
Fagor provides two different types of reference marks
• Incremental: The reference signal is synchronized with the
feedback pulses to ensure perfect measuring repeatability.
Linear: One every 50 mm of travel.
Rotary: One signal per turn.
• Distance-coded: Each distance coded reference signal
is separated from the next signal a different distance
according to predefined mathematical function. The actual
position value after power up is restored by moving through
two consecutive reference signals. This is very useful for
long travel axes as the movement needed to recover actual
position is minimum.
I
:
0
incremental
Rotary encoder
I
0
Pitch
Zero position
3
Page 4
E N C O D E R S
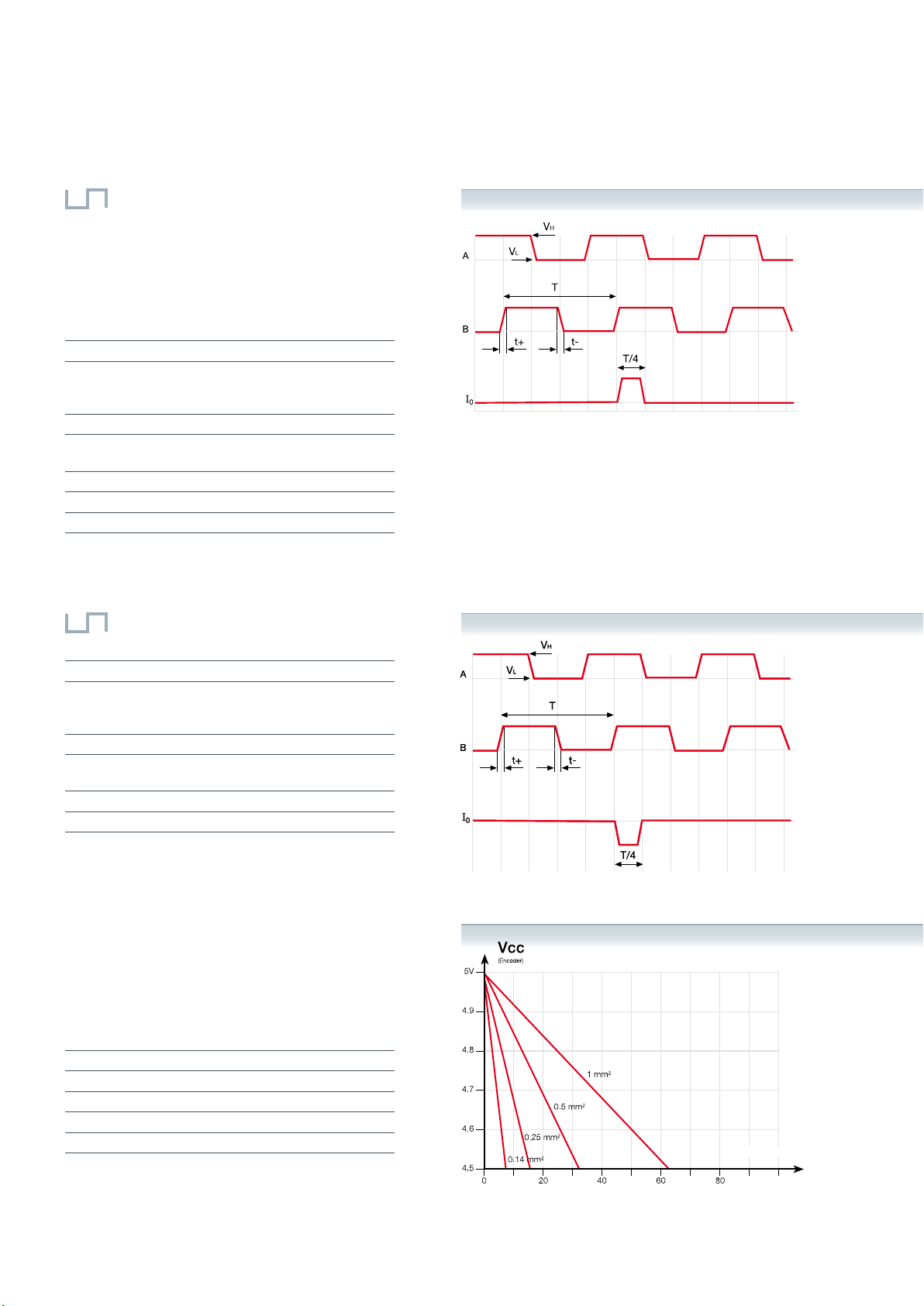
Electrical output signals
D i f fe re nt ia l T TL
These are complementary signals in compliance with the
EIA standard RS-422. This characteristic together with a
line termination of 120 Ω, twisted pair, and an overall shield
provide greater immunity to electromagnetic noise caused by
the surrounding environment.
Characteristics
I
Signals A, /A, B, /B,
Signal level VH ≥ 2.5V IH= 20 mA
VL ≤ 0.5V IL= 20 mA
With 1 m cable
90º reference signal (
I
) Synchronized with A and B
0
Switching time t+/t-< 30ns
With 1 m cable
T period according to model
Max. cable length 50 meters
Load impedance Z
o= 120 Ω between differential
0
, / I
0
N o di ff er en t i a l TT L
Characteristics
Signals A, B, /
Signal level A, B, I
90º reference signal (
0
I
) Synchronized with A and B
0
Switching time t+/t-< 30ns
T period according to model
Max. cable length 20 meters
Voltage drop across cable
The voltage requirements for a TTL encoder are 5V ±5%.
A simple formula described below, may be used to calculate
the maximum cable length depending on the cross section
diameter of the supply cable:
L
max = (VCC-4,5)* 500 / (ZCABLE/Km* IMAX)
Example
V
cc = 5V, IMAX = 0.2 Amp (with 120 Ω load)
2
Z (1 mm
Z (0.5 mm
Z (0.25 mm
Z (0.14 mm
) = 16.6 Ω/Km (Lmax= 75 m)
2
) = 32 Ω/Km (Lmax= 39 m)
2
) = 66 Ω/Km (Lmax= 19 m)
2
) = 132 Ω/Km (Lmax= 9 m)
I
0
VH ≥ 3.5 V IH = 4 mA
VL ≤ 0.4 V IL = 4 mA
with 1 m cable
with 1 m cable
Cable length
4
meters
Page 5
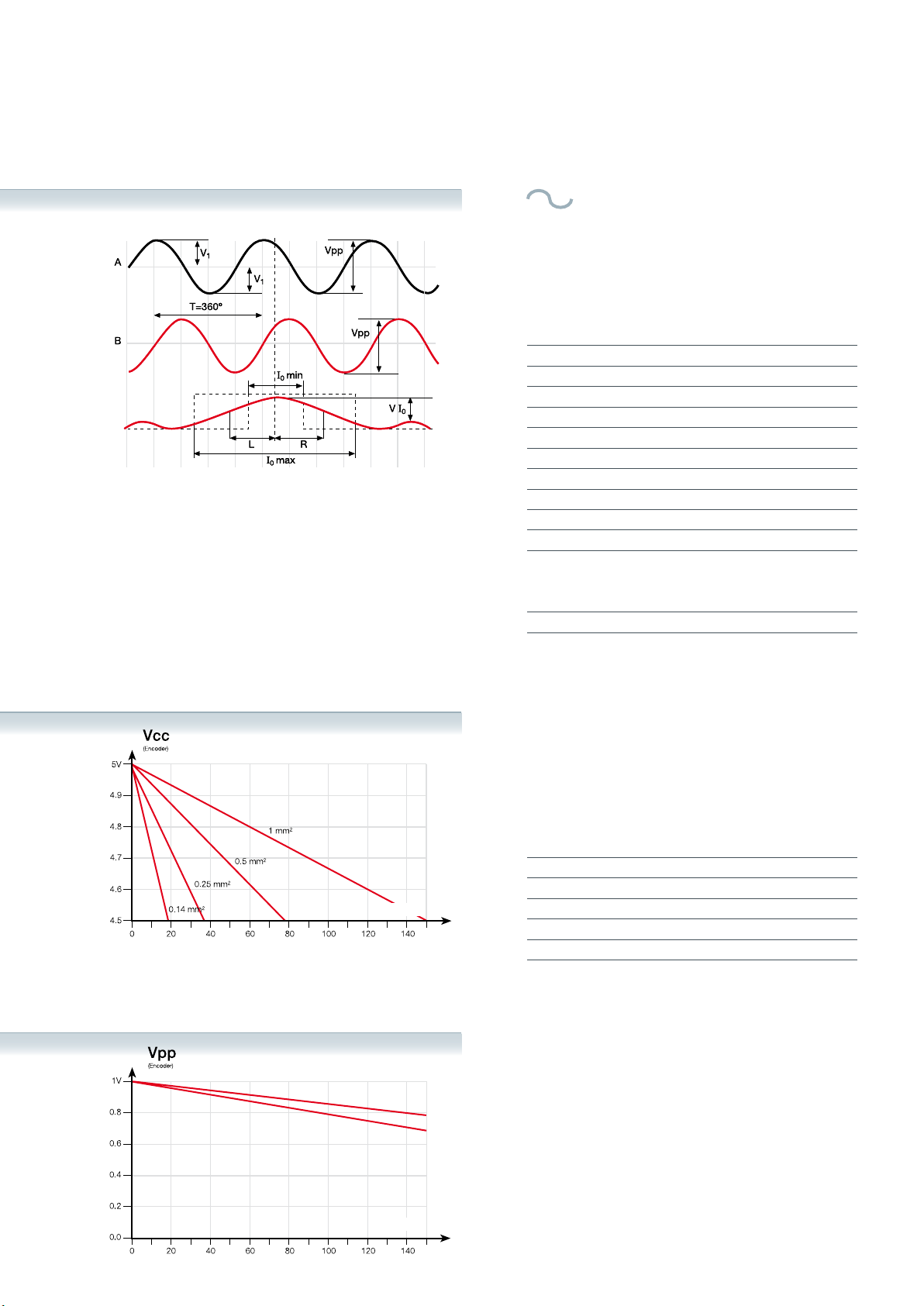
D i f fe re nt ia l 1 V pp
They are complementary sinusoidal signals whose differential
value is 1 Vpp centered on V
with a line termination of 120 Ω, twisted pair, and an overall
shield provide greater immunity against electromagnetic noise
caused by their surrounding environment.
Characteristics
Signals A, /A, B, /B,
VApp 1 V +20%, -40%
V
Bpp 1 V +20%, -40%
DC offset 2.5 V ±
Signal period according to model
Max. cable length 150 meters
A, B centered: |V
A&B relationship V
1-V2| / 2 Vpp ≤
App / VBpp 0.8
A&B phase shift: 90°
I
amplitude: VI0 0.2 ÷ 0.8 V
0
I
width: L + R I0_min: 180°
0
I
synchronism: L, R 180º ± 90º
0
cc/2. This characteristic together
I
0, / I0
0.5 V
0.065
÷
1.25
±
10°
I
_typ: 360°
0
I
_max: 540°
0
Cable length
meters
0.14 mm
0.09 mm
Voltage drop across cable
The voltage requirements for a 1 Vpp encoder are 5V ±10%.
A simple formula may be used to calculate the maximum
cable length depending on the cross section diameter of the
supply cables.
L
max = (VCC-4,5)* 500 / (ZCABLE/Km* IMAX)
Example
V
cc = 5V, IMAX= 0.1 Amp
2
Z (1 mm
Z (0.5 mm
Z (0.25 mm
Z (0.14 mm
) = 16.6 Ω/Km (Lmax= 150 m)
2
) = 32 Ω/Km (Lmax= 78 m)
2
) = 66 Ω/Km (Lmax= 37 m)
2
) = 132 Ω/ Km (Lmax= 18 m)
1 Vpp signal damping due to the cable
section
2
2
Besides attenuation due to signal frequency, there is another
signal attenuation caused by the section of the cable
connected to the encoder.
Cable length
meters
5
Page 6

I N C R E M E N T A L
F series
L I N E A R
Gene ral s pecif icati on
Measurement By means of stainless steel linear encoder
Steel tape accuracy ± 5 µm
Maximum speed 120 m/min.
Maximum vibration 10 g
Moving thrust < 5 N
Operating
temperature
Storage temperature -20 ºC...70 ºC
Weight 1.50 kg + 4 kg/m
Relative humidity 20...80%
Protection
Reader head With detachable cable connector
with 100 μm etching pitch
0 ºC...50 ºC
IP 53 (standard)
IP 64 (DIN 40050) using pressurized air in
linear encoders at 0.8 ± 0.2 bar
Especially designed for machines with longer travels and
they are available up to 30 m in length. In the incremental
model the reference marks are 50 mm apart and distance
coded model is also available. Both models come with a
detachable cable connectors in the reader head. The steel
tape graduation pitch is 100 μm. For measuring lengths over
4040 mm the encoder is supplied in multiple sections and is
assembled together at the time of installation.
Measuring lengths in millimeters
• Measuring lengths from 440 mm to 30 m in 200 mm
increments. Contact Fagor Automation for custom length
scales over 30 m.
Spec ific chara cteri stics
FT
FOT
Resolution 5 µm 1 µm Up to 0.1 µm
Reference marks (
Output signals
T period of output
signals
Limit frequency 100 kHz 500 kHz 20 kHz
Maximum cable length 20 m 50 m 150 m
Supply voltage 5 V ±5% ,100 mA (without load)
I
)
0
FOT, FOX, FOP: Distance-coded
TTL
20 µm 4 µm 100 µm
6
FX
FOX
FT, FX, FP: every 50 mm
TTL differential
5 V ± 10%, < 100 mA
(without load)
FP
FOP
I
0
1 Vpp
Page 7

Sing le F model
Dimensions in mm
Non-distance
coded
Distance-coded
Modu lar F mode l
Measuring length
Machine way
Non-distance
coded
Distance-coded
Orde r ide ntifi catio n
Example for an incremental encoder : FX - 36
F X 36
Type of profile:
F: for long distances
Type of reference mark
• Blank space: Incremental, one mark
every 50 mm
• O: Distance-coded marks
I
:
0
Type of signal:
• T: 5 μm resolution TTL
• X: 1 μm resolution differential TTL
• P: 1 Vpp sinusoidal
Measuring length
Machine way
Number of
intermediate modules
Ordering length code:
In the example (36) = 3640 mm
7
Page 8

I N C R E M E N T A L
C series
L I N E A R
Gene ral s pecif icati on
Measurement By means of graduated glass scale,
Maximum speed 60 m/min.
Maximum vibration 3 g
Moving thrust < 5 N
Operating
temperature
Storage temperature -20 ºC...70 ºC
Weight 1.2 kg + 2.5 kg/m
Relative humidity 20...80%
Protection
Reader head With detachable cable connector
with 20 μm etching pitch
0 ºC...50 ºC
IP 53 (standard)
IP 64 (DIN 40050) using pressurized air in
linear encoders at 0.8 ± 0.2 bar
Designed for applications on standard machines with travels
up to 3040 mm. With reference marks every 50 mm or
distance-coded and detachable cable connector built into the
reader head.
Measuring lengths in millimeters
220 • 270 • 320 • 370 • 420 • 470 • 520 • 620 • 720 • 770
820 • 920 • 1020 • 1140 • 1240 • 1340 • 1440 • 1540
1640 • 1740 • 1840 • 1940 • 2040 • 2240 • 2440 • 2640
2840 • 3040
Spec ific chara cteri stics
CT
COT
Accuracy ± 10 μm ± 5 μm
Resolution 5 μm 1 μm Up to 0.1 µm
I
Reference marks (
Output signals
T period of output
signals
Limit frequency 50 kHz 250 kHz 50 kHz
Maximum cable length 20 m 50 m 150 m
Supply voltage 5 V ± 5%,100 mA (without load)
)
0
COT, COX, COP: Distance-coded
TTL
20 µm 4 µm 20 µm
8
CX
COX
CT, CX, CP: every 50 mm
TTL differential
5 V ± 10%, < 100 mA
(without load)
CP
COP
I
0
1 Vpp
Page 9

C mo del
Dimensions in mm
I
every 50 mm
0
Air intake at both ends (M5)
Machine way
Distance-coded
Measuring length
Measu ring lengt hs (C M)
For CM ending in 20 A= 10
For CM ending in 40 A= 20
For CM ending in 70 A= 35
Orde r ide ntifi catio n
Example for an incremental encoder : COP - 425
C O P 42 5
Type of profile:
C for wide
spaces
I
Type of reference mark
• Blank space: Incremental, one
mark every 50 mm
• O: Distance-coded marks
:
0
Type of signal:
• T: 5 μm Resolution TTL
• X: 1 μm Resolution differential TTL
• P: 1 Vpp sinusoidal
Measuring length
in cm:
In the example
(42) = 42 cm = 420 mm
Accuracy of the linear
encoder:
• 5: ± 5 μm
• Blank space: ± 10 μm
9
Page 10

I N C R E M E N T A L
M series
L I N E A R
Gene ral s pecif icati on
Measurement By means of graduated glass scale,
Maximum speed 60 m/min
Maximum vibration 3 g
Moving thrust < 5 N
Operating
temperature
Storage temperature -20 ºC...70 ºC
Weight 0.58 kg + 0.6 kg/m
Relative humidity 20...80%
Protection
Reader head
with 20 μm etching pitch
0 ºC...50 ºC
IP 53 (standard)
IP 64 (DIN 40050) using pressurized air in
linear encoders at 0.8 ± 0.2 bar
With detachable cable connector
(except MKT and MKX)
Spec ific chara cteri stics
MT
MOT
MTD M KT
Designed for applications on standard machines with travels
up to 1540 mm. With reference marks every 50 mm or
distance-coded and detachable cable connector built into
the reader head (except the MK series where the reader head
comes standard with a 3-meter attached cable).
Measuring lengths in millimeters
40 (*) • 70 • 120 • 140 • 170 • 220 • 270 • 320 • 370
420 • 470 • 520 • 620 • 720 • 770 • 820 • 920 • 1020
1140 • 1240 • 1340 • 1440 • 1540
(*) On MT and MX models.
MX
MOX
MKX
MP
MOP
Accuracy ± 10 μm ± 5 μm ± 10 μm ± 5 μm
Resolution 5 μm 1 μm Up to 0.1 µm
I
MKT and MKX:
I
Reference marks (
Output signals
T period of output signals 20 µm 4 µm 20 µm
Limit frequency 50 kHz 250 kHz 50 kHz
Maximum cable length 20 m 50 m 20 m 50 m 150 m
Supply voltage 5 V ±5% ,100 mA (without load)
)
0
TTL TTL differential 1 Vpp
MT, MTD, MX and MP:
MOT, MOX and MOP: Distance-coded
every 50 mm
0
I
every 50 mm
0
I
0
5 V ± 10%, < 100 mA
(without load)
10
Page 11

M mo del
Dimensions in mm
I
every 50 mm
0
Distance-coded
MK m odel
I
every 50 mm
0
Air intake at both ends (M5)
Centered point for Ø3 dowel pin
Machine way
Measuring length
Air intake at both
ends (M5)
Centered point for Ø
dowel pin
Machine way
Measuring length
3
Measu ring
lengt hs (C M)
For CM ending in 20 A= 10
For CM ending in 40 A= 20
For CM ending in 70 A= 35
Orde r ide ntifi catio n
Example for an incremental encoder : MOP - 425
M O P 42 5
Type of profile:
M: for limited
spaces
I
Type of reference mark
• Blank space: Incremental, one
mark every 50 mm
• O: Absolute distance-coded
marks
:
0
Type of signal:
• T: 5 μm resolution TTL
• TD: 5 μm resolution differential TTL
• X: 1 μm resolution differential TTL
• P: 1 Vpp sinusoidal
Measuring lengths
in cm:
In the example
(42) = 42 cm = 420 mm
Accuracy of the linear
encoder:
• 5: ± 5 μm
• Blank space: ± 10 μm
11
Page 12

I N C R E M E N T A L
MM series
L I N E A R
Gene ral s pecif icati on
Measurement By means of graduated glass scale,
Maximum speed 60 m/min.
Maximum vibration 3 g
Moving thrust < 5 N
Operating
temperature
Storage temperature -20 ºC...70 ºC
Weight 0.58 kg + 0.5 kg/m
Relative humidity 20...80%
Protection IP 53 (standard)
Reader head
with 20 μm etching pitch
0 ºC...50 ºC
IP64 (DIN 40050) using pressurized air in
linear encoders at 0.8 ± 0.2 bar
With detachable cable connector
(except MMKT and MMKX)
Designed for applications on standard machines with travels
up to 520 mm. With reference marks every 50 mm and
detachable cable connector built into the reader head (except
the MMK series where the reader head comes standard with
a 3-meter attached cable). With very small profile, 5 mm less
than the M series they are ideal for tight spaces.
Measuring lengths in millimeters
40 (*) • 70 (*) • 120 • 140 • 170 • 220 • 270 • 320 • 370
420 • 470 • 520
(*) On MMT and MMX models.
Spec ific chara cteri stics
MMT M MK T MM X M MK X M MP
Accuracy ± 10 μm ± 5 μm ± 10 μm ± 5 μm
Resolution 5 μm 1 μm 0.1 μm
I
Reference marks
Output signals
T period of output signals 20 µm 4 µm 20 µm
Limit frequency 50 kHz 250 kHz 50 kHz
Maximum cable length 20 m 50 m 150 m
Supply voltage 5 V ± 5%,100 mA (without load)
I
0
TTL TTL differential 1 Vpp
12
every 50 mm
0
5 V ± 10%, < 100 mA
(without load)
Page 13

MM m odel
Dimensions in mm
Machine way
Measuring length
MMK model
Machine way
Measuring length
Orde r ide ntifi catio n
Example for an incremental encoder : MMT-27
MM T 2 7
Type of profile:
MM: for very limited space
Type of signal:
• T: 5 μm resolution TTL
• X: 1 μm resolution differential TTL
• P: 1 Vpp sinusoidal
Measuring lengths in cm:
In the example
(27) = 27 cm = 270 mm
13
Page 14

I N C R E M E N T A L
MTD-P-2R series
L I N E A R
Gene ral s pecif icati on
Measurement By means of graduated glass scale,
Maximum speed 60 m/min.
Maximum vibration 3 g
Moving thrust < 5 N
Operating
temperature
Storage temperature -20 ºC...70 ºC
Weight 0.58 kg + 2.43 kg/m
Relative humidity 20...80%
Protection IP 53 (standard)
Reader head With detachable cable connector
with 20 μm etching pitch
0 ºC...50 ºC
IP64 (DIN 40050) using pressurized air in
linear encoders at 0.8 ± 0.2 bar
Designed for applications on press brakes with strokes up
to 1540 mm. The linear encoder comes with a universal joint
for reader head movement and an aluminum support that is
mounted directly on the machine.
Measuring lengths in millimeters
40 • 70 • 120 • 140 • 170 • 220 • 270 • 320 • 370 • 420
470 • 520 • 620 • 720 • 770 • 820 • 920 • 1020 • 1140
1240 • 1340 • 1440 • 1540
Spec ific chara cteri stics
MTD -P -2 R
Accuracy ± 10 μm
Resolution 5 μm
I
at the ends
Reference marks (
Output signals
T period of output signals 20 µm
Limit frequency 50 kHz
Maximum cable length 50 m
Supply voltage 5 V ±5% ,100 mA (without load)
I
)
0
14
Two
0
TTL differential
Page 15

MTD- P-2R model
Dimensions in mm
Machine way
Measuring length
Measu ring lengt hs (C M)
For CM ending in 20 A= 10
For CM ending in 70 A= 35
Orde r ide ntifi catio n
Example for an incremental encoder: MTD-77 P-2R
M TD 77 P2R
Type of profile:
M: for limited space
Type of signal:
TD: 5 µm resolution differential
TTL
Measuring lengths in cm:
In the example
(77) = 77 cm = 770 mm
Reference mark
I
at both ends
Two
0
I
:
0
15
Page 16

I N C R E M E N T A L
H, S series
R O T A R Y
Gene ral s pecif icati on
S SP H / H A HP
Measurement With graduated disk
Accuracy ± 1/10 of the pitch
Maximum speed 12000 rpm
Vibration 100 m/s
Shock 300 m/s
Inertia 16 gr/cm
Turning torque
Type of shaft Solid shaft Hollow shaft
Maximum load on the shaft
Axial: 10 N
Radial: 20 N
Weight 0.3 kg
Ambient characteristics:
Running temperature 0 °C…+70 °C
Storage temperature -30 °C…+80 °C
Relative humidity 98% non-condensing
Protection IP 64 (DIN 40050). On S and SP models: Optional IP 66
Light source IRED (InfraRed Emitting Diode)
Maximum frequency 200 kHz
Reference signal
Supply voltage
I
0
5% (TTL)
±
One reference signal per encoder turn
5 V
± 10% (1 Vpp)
Consumption 70 mA typical, 100 mA max. (without load)
TTL
Output signals
differential
Maximum cable length 50 m 150 m 50 m 150 m
2
(10 ÷ 2000 Hz)
2
(11 m/s)
2
0.003 Nm (30 gr/cm)
max. at 20 °C
5 V
5 V
± 5% (TTL)
1 Vpp
TTL
differential
–
5 V
± 10% (1 Vpp)
1 Vpp
Number of pulses/turn
S S P H HA HP
50 – 50 – –
100 – 100 – –
200 – 200 – –
250 – 250 – –
400 – 400 – –
500 – 500 – –
600 – 600 – –
635 – 635 – –
1
000 1 000 1 000 – 1 000
1
024 1 024 1 024 1 024 1 024
1
250 1 250 1 250 1 800 1 250
1
270 1 270 1 270 2 000 1 270
1
500 1 500 1 500 2 048 1 500
2
000 2 000 2 000 2 500 2 000
2
500 2 500 2 500 3 000 2 500
3
000 3 000 3 000 3 600 3 000
– 3
600 – 4 000 –
– 4
320 – 4 096 –
5
000 5 000 – 5 000 –
– – – 10
000 –
16
Page 17

S, S P mod el
H, H P mod el
Dimensions in mm
Roller bearings
L: Min. 9 mm, max. 16 mm
HA m odel
ØD g 7
mm
3
4
6
6.35
7
8
9.53
10
Shaft
Orde r ide ntifi catio n - m odels H, H P, S and SP
Example for a Rotary Encoder: SP-1024-C5-R-12-IP 66
S P 10 24 C5 R 12 IP 66
Model:
• S: Solid shaft
• H: Hollow shaft
Type of signal:
• Blank space:
square signal
(TTL or HTL)
• P: 1 Vpp
sinusoidal signal
Number of
pulses/turn:
(See table
page 16)
Type of connector:
• Blank space: 1 m cable
without connector
• C: Flange socket
CONNEI 12
• C5: 1 m cable with
CONNEI 12 connector
Cable exit:
• R: Radial
• A: Axial
space: Axial
Blank
Voltage:
• Blank space:
Standard 5 V supply
• 12: Optional 12 V
supply (only for
HTL signal)
Protection:
• Blank space:
Standard
protection (IP 64)
• IP 66: Protection
IP 66
Orde r ide ntifi catio n - H A mod el
Example for a Rotary Encoder: HA - 22132 - 2500
HA 2 2 1 3 2 2 500
In all
cases
Type of clamp:
• 1: Rear clamp
• 2: Front clamp
Size of the
hollow shaft
(ØA):
• 1: 10 mm
• 2: 12 mm
Output signals:
I
• 1: A, B,
inverted
plus their
0
Type of connection:
• 1: Radial cable (2 m)
• 2: CONNEI 12 radial
connector built into it
• 3: Radial cable (1 m) with
CONNEI 12 connector
Supply voltage:
• 1: Push-Pull
(11-30 V)
• 2: RS-422 (5 V)
Number of pulses/
turn:
(See table page 16)
17
Page 18

accessories
Connection cables
Connection to FAGOR
EC…T-D
Lengths: 1, 3, 6, 9 and 12 meters
SUB D 15 HD connector (male Pin )
Pin Signal Color
1 A Green
3 B Brown
5
9 +5 V Yellow
11 0 V White
15 Ground Shield
Housing Ground Shield
I
0
Grey
EC…P-D
Lengths: 1, 3, 6, 9 and 12 meters
SUB D 15 HD connector (male Pin )
Pin Signal Color
1 A Green
2 /A Yellow
3 B Blue
4 /B Red
5
6
9 +5 V Brown
11 0 V White
15 Ground Shield
Housing Ground Shield
I
0
I
0
Grey
Pink
Coupling for rotary encoders
For solid shaft encoders
40
Ø 6
Ø 20
Ø 25
AF model AC model A L model
Spec ific chara cteri stics
Maximum radial misalignment permitted
Maximum angular misalignment permitted
Maximum axial misalignment permitted
25,4
Ø 6
AF AC A L
2 mm 1 mm 0.2 mm
8º 5º 4º
± 1.5 mm
Ø 19,2
Ø 6
–
19,6
± 0.2 mm
AH coupli ng s
Couplings for hollow shaft encoders
The hollow shaft encoders are
accompanied by a standard
6 mm cap diameter (Ø
6).
Can also be supplied in the following
diameters:
Ø 3, Ø
4, Ø 6, Ø 7, Ø 8 and Ø 10 mm, 1/4”
and 3/8”.
AD washer
Washer for mounting rotary encoder
models H, HP, S, SP.
Maximum torque that may be transmitted
Torsion rigidity
Maximum rotating speed
18
2 Nm 1.7 Nm 0.9 Nm
1.7 Nm/rad. 50 Nm/rad. 150 Nm/rad.
000 rpm
12
Page 19

Fagor Automation shall not be held responsible for any printing or transcribing errors in the catalog and reserves the right to make any changes to the characteristics of its products
without prior notice. You must always compare the data with that appearing in the manual that comes with the product.
19
Page 20

ER-073/1994
Fagor Automation holds the ISO 9001
Quality System Certificate and the
Certificate for all products manufactured.
subs i d i a r y d i s trib u t o r
america
BOGOTÁ
BUENOS AIRES
CHICAGO
DALLAS
EL SALVADOR D.F.
LIMA
LOS ANGELES
MEXICO D.F.
MONTERREY N.L.
MONTEVIDEO
MONTREAL
NEW JERSEY
SANTIAGO
SAO PAULO
TAMPA
TORONTO
USURBIL
ESKORIATZA
BEIJING
europe
HeadquartersPlants
MONDRAGÓN
africa
JOHANNESBURG
BARCELONA
BJERRING BRO
BUCHAREST
BUDAPEST
CLERMONT FERRAND
GOMEL
GÖPPINGEN
GÖTEBORG
ISTANBUL
IZEGEM
KAPELLEN
KOTLIN
LANGENTHAL
LOG PRI BREZOVICI
MILANO
MOSKVA
NEUCHATEL
NORTHAMPTON
PORTO
PRAHA
ROOSENDAAL
THESSALONIKI
TOIJALA
UTRECHT
WIEN
asia
BANGALORE
BANGKOK
CHENGDU
DELHI
GUANGZHOU
HO CHI MINH CITY
HONG KONG
JAKARTA
KUALA LUMPUR
MANILA
NANJING
PUNE
RAJKOT
SHANGHAI
SEOUL
SINGAPORE
TAICHUNG
TEL-AVIV
TOKYO
EPS - CAP STD. EN 0513
oceania
AUCKLAND
DUNEDIN
MELBOURNE
SYDNEY
worldwide automation
 Loading...
Loading...