

Page 1
CMOS 8-BIT SINGLE CHIP MICROCOMPUTER
S1C88650
Technical Manual
S1C88650 Technical Hardware
Page 2
NOTICE
No part of this material may be reproduced or duplicated in any form or by any means without the written permission of Seiko
Epson. Seiko Epson reserves the right to make changes to this material without notice. Seiko Epson does not assume any
liability of any kind arising out of any inaccuracies contained in this material or due to its application or use in any product or
circuit and, further, there is no representation that this material is applicable to products requiring high level reliability, such
as medical products. Moreover, no license to any intellectual property rights is granted by implication or otherwise, and there
is no representation or warranty that anything made in accordance with this material will be free from any patent or copyright
infringement of a third party. This material or portions thereof may contain technology or the subject relating to strategic
products under the control of the Foreign Exchange and Foreign Trade Law of Japan and may require an export license from
the Ministry of International Trade and Industry or other approval from another government agency.
© SEIKO EPSON CORPORA TION 2004, All rights reserved.
Page 3
Configuration of product number
Devices
S1 C 88104 F 0A01
00
Packing specifications
00 : Besides tape & reel
0A : TCP BL 2 directions
0B : Tape & reel BACK
0C: TCP BR 2 directions
0D: TCP BT 2 directions
0E : TCP BD 2 directions
0F : Tape & reel FRONT
0G: TCP BT 4 directions
0H: TCP BD 4 directions
0J : TCP SL 2 directions
0K : TCP SR 2 directions
0L : Tape & reel LEFT
0M: TCP ST 2 directions
0N: TCP SD 2 directions
0P : TCP ST 4 directions
0Q: TCP SD 4 directions
0R: Tape & reel RIGHT
99 : Specs not fixed
Specification
Package
D: die form; F: QFP
Model number
Model name
C: microcomputer, digital products
Product classification
S1: semiconductor
Development tools
S5U1 C 88348 D1 1
00
Packing specifications
00: standard packing
Version
1: Version 1
Tool type
Hx : ICE
Ex : EVA board
Px : Peripheral board
Wx: Flash ROM writer for the microcomputer
Xx : ROM writer peripheral board
Cx : C compiler package
Ax : Assembler package
Dx : Utility tool by the model
Qx : Soft simulator
Corresponding model number
88348: for S1C88348
Tool classification
C: microcomputer use
Product classification
S5U1: development tool for semiconductor products
Page 4

Page 5
CONTENTS
Contents
1 INTRODUCTION .............................................................................................. 1
1.1 Features .............................................................................................................................1
1.2 Block Diagram ...................................................................................................................2
1.3 Pins ....................................................................................................................................3
1.3.1 Pin layout diagram................................................................................................................... 3
1.3.2 Pin description .........................................................................................................................4
1.4 Mask Option.......................................................................................................................5
2 POWER SUPPLY............................................................................................... 7
2.1 Operating Voltage..............................................................................................................7
2.2 Internal Power Supply Circuit ...........................................................................................7
3 CPU AND BUS CONFIGURATION ................................................................ 8
3.1 CPU ...................................................................................................................................8
3.2 Internal Memory ................................................................................................................8
3.2.1 Program ROM.......................................................................................................................... 8
3.2.2 RAM.......................................................................................................................................... 8
3.2.3 I/O memory............................................................................................................................... 8
3.2.4 Display memory........................................................................................................................8
3.2.5 Kanji font ROM ........................................................................................................................8
3.3 Exception Processing Vectors ...........................................................................................9
3.4 CC (Customized Condition Flag) ......................................................................................9
3.5 Chip Mode..........................................................................................................................9
3.5.1 MCU mode and MPU mode .....................................................................................................9
3.5.2 Bus mode .................................................................................................................................10
3.5.3 CPU mode ...............................................................................................................................11
3.6 External Bus......................................................................................................................11
3.6.1 Data bus ..................................................................................................................................11
3.6.2 Address bus .............................................................................................................................12
3.6.3 Read (RD)/write (WR) signals.................................................................................................12
3.6.4 Chip enable (CE) signal ..........................................................................................................12
3.6.5 WAIT control ........................................................................................................................... 13
3.6.6 Bus authority release state ...................................................................................................... 14
4 INITIAL RESET ............................................................................................... 15
4.1 Initial Reset Factors..........................................................................................................15
4.1.1 RESET terminal....................................................................................................................... 15
4.1.2 Simultaneous LOW level input at input port terminals K00–K03........................................... 16
4.1.3 Initial reset sequence............................................................................................................... 16
4.2 Initial Settings After Initial Reset......................................................................................17
5 PERIPHERAL CIRCUITS AND THEIR OPERATION................................ 18
5.1 I/O Memory Map ..............................................................................................................18
5.2 System Controller and Bus Control ..................................................................................34
5.2.1 Bus mode and CPU mode settings ..........................................................................................34
5.2.2 Address decoder (CE output) settings .....................................................................................34
5.2.3 WAIT state settings.................................................................................................................. 35
5.2.4 Setting the bus authority release request signal......................................................................35
5.2.5 Stack page setting.................................................................................................................... 35
5.2.6 Control of system controller.................................................................................................... 36
5.2.7 Programming notes ................................................................................................................. 38
S1C88650 TECHNICAL MANUAL EPSON i
Page 6

CONTENTS
5.3 Watchdog Timer................................................................................................................39
5.3.1 Configuration of watchdog timer ............................................................................................ 39
5.3.2 Interrupt function ....................................................................................................................39
5.3.3 Control of watchdog timer ......................................................................................................40
5.3.4 Programming notes ................................................................................................................. 40
5.4 Oscillation Circuits...........................................................................................................41
5.4.1 Configuration of oscillation circuits .......................................................................................41
5.4.2 Mask option ............................................................................................................................. 41
5.4.3 OSC1 oscillation circuit .......................................................................................................... 41
5.4.4 OSC3 oscillation circuit .......................................................................................................... 42
5.4.5 Switching the CPU clocks .......................................................................................................42
5.4.6 Control of oscillation circuit ................................................................................................... 43
5.4.7 Programming notes ................................................................................................................. 43
5.5 Input Ports (K ports).........................................................................................................44
5.5.1 Configuration of input ports....................................................................................................44
5.5.2 Mask option ............................................................................................................................. 44
5.5.3 Pull-up control ........................................................................................................................45
5.5.4 Interrupt function and input comparison register................................................................... 45
5.5.5 Control of input ports .............................................................................................................. 47
5.5.6 Programming notes ................................................................................................................. 50
5.6 Output Ports (R ports) ......................................................................................................51
5.6.1 Configuration of output ports..................................................................................................51
5.6.2 High impedance control .......................................................................................................... 51
5.6.3 DC output ................................................................................................................................ 51
5.6.4 Control of output ports ............................................................................................................52
5.7 I/O Ports (P ports) ............................................................................................................54
5.7.1 Configuration of I/O ports.......................................................................................................54
5.7.2 Mask option ............................................................................................................................. 54
5.7.3 I/O control registers and I/O mode ......................................................................................... 54
5.7.4 Pull-up control ........................................................................................................................55
5.7.5 Special output ..........................................................................................................................55
5.7.6 Control of I/O ports................................................................................................................. 57
5.7.7 Programming notes ................................................................................................................. 60
5.8 Serial Interface .................................................................................................................61
5.8.1 Configuration of serial interface............................................................................................. 61
5.8.2 Switching of terminal functions............................................................................................... 61
5.8.3 Transfer modes ........................................................................................................................62
5.8.4 Clock source ............................................................................................................................63
5.8.5 Transmit-receive control ......................................................................................................... 64
5.8.6 Operation of clock synchronous transfer ................................................................................ 65
5.8.7 Operation of asynchronous transfer .......................................................................................69
5.8.8 Interrupt function ....................................................................................................................73
5.8.9 Control of serial interface ....................................................................................................... 75
5.8.10 Programming notes ............................................................................................................... 80
5.9 Clock Timer.......................................................................................................................81
5.9.1 Configuration of clock timer ...................................................................................................81
5.9.2 Interrupt function ....................................................................................................................81
5.9.3 Control of clock timer .............................................................................................................83
5.9.4 Programming notes ................................................................................................................. 85
5.10 Programmable Timer........................................................................................................86
5.10.1 Configuration of programmable timer.................................................................................. 86
5.10.2 Operation mode..................................................................................................................... 87
5.10.3 Setting of input clock ............................................................................................................. 89
5.10.4 Operation and control of timer .............................................................................................89
5.10.5 Interrupt function ..................................................................................................................91
5.10.6 Setting of TOUT output .........................................................................................................93
5.10.7 Transfer rate setting of serial interface.................................................................................94
ii EPSON S1C88650 TECHNICAL MANUAL
Page 7

CONTENTS
5.10.8 Setting frame frequency for LCD driver ...............................................................................94
5.10.9 Control of programmable timer ............................................................................................95
5.10.10 Programming notes ............................................................................................................ 107
5.11 LCD Driver ......................................................................................................................108
5.11.1 Configuration of LCD driver................................................................................................108
5.11.2 LCD power supply................................................................................................................ 108
5.11.3 Frame frequency .................................................................................................................. 109
5.11.4 Switching drive duty ............................................................................................................. 109
5.11.5 Display memory....................................................................................................................113
5.11.6 Display control ..................................................................................................................... 120
5.11.7 Control of LCD driver.......................................................................................................... 121
5.11.8 Programming notes .............................................................................................................. 123
5.12 Supply Voltage Detection (SVD) Circuit .........................................................................124
5.12.1 Configuration of SVD circuit ...............................................................................................124
5.12.2 SVD operation ...................................................................................................................... 124
5.12.3 Control of SVD circuit..........................................................................................................125
5.12.4 Programming notes .............................................................................................................. 125
5.13 Heavy Load Protection Function.....................................................................................126
5.13.1 Outline of heavy load protection function............................................................................ 126
5.13.2 Control of heavy load protection function ...........................................................................126
5.13.3 Programming note................................................................................................................126
5.14 Interrupt and Standby Status ...........................................................................................127
5.14.1 Interrupt generation conditions ...........................................................................................127
5.14.2 Interrupt factor flag.............................................................................................................. 129
5.14.3 Interrupt enable register ......................................................................................................130
5.14.4 Interrupt priority register and interrupt priority level......................................................... 131
5.14.5 Exception processing vectors ............................................................................................... 132
5.14.6 Control of interrupt ..............................................................................................................133
5.14.7 Programming notes .............................................................................................................. 135
6 SUMMARY OF NOTES .................................................................................. 136
6.1 Notes for Low Current Consumption...............................................................................136
6.2 Precautions on Mounting.................................................................................................137
7 BASIC EXTERNAL WIRING DIAGRAM..................................................... 139
8 ELECTRICAL CHARACTERISTICS............................................................ 140
8.1 Absolute Maximum Rating...............................................................................................140
8.2 Recommended Operating Conditions ..............................................................................140
8.3 DC Characteristics ..........................................................................................................141
8.4 Analog Circuit Characteristics ........................................................................................142
8.5 Power Current Consumption ...........................................................................................143
8.6 AC Characteristics...........................................................................................................144
8.7 Oscillation Characteristics ..............................................................................................149
8.8 Characteristics Curves (reference value) ........................................................................150
9 PACKAGE ........................................................................................................ 159
9.1 Plastic Package................................................................................................................159
9.2 Ceramic Package for Test Samples .................................................................................160
10 PAD LAYOUT .................................................................................................. 161
10.1 Diagram of Pad Layout ...................................................................................................161
10.2 Pad Coordinates ..............................................................................................................162
S1C88650 TECHNICAL MANUAL EPSON iii
Page 8

CONTENTS
APPENDIX A S5U1C88000P1&S5U1C88649P2 MANUAL
(Peripheral Circuit Board for S1C88650) ...................................... 163
A.1 Names and Functions of Each Part .................................................................................163
A.2 Precautions ......................................................................................................................165
A.2.1 Precaution for operation .......................................................................................................165
A.2.2 Differences from actual IC ....................................................................................................165
A.3 Connecting to the Target System .....................................................................................168
A.4 Product Specifications .....................................................................................................171
APPENDIX B USING KANJI FONT ..................................................................... 172
iv EPSON S1C88650 TECHNICAL MANUAL
Page 9
1 INTRODUCTION
1 INTRODUCTION
The S1C88650 is an 8-bit microcomputer for
portable equipment with an LCD display that has a
built-in LCD controller/driver and a character
generator (kanji) ROM. This microcomputer
features low-voltage (1.8 V) and high-speed (8.2
MHz) operations as well as low-current
consumption (2.5 µA during standby).
The LCD controller/driver contains an LCD drive
power supply circuit and can drive an maximum of
126 × 32-dot LCD panel in low-power consumption.
The S1C88650 has a built-in 11 × 12-dot kanji font
other characters and user-defined characters, this
makes it possible to display kanji characters
without any external kanji font ROM (refer to
Appendix B, "USING KANJI FONT"). This 8-bit
CPU has up to 16MB accessible address space
allowing easy implementation of a large data
processing application.
The S1C88650 is suitable for display modules,
portable CD/MD, solid audio players, PDA, data
bank and other applications that required an
exclusive LCD driver in conventional systems.
ROM that contains JIS level-1 and level-2 kanji sets,
1.1 Features
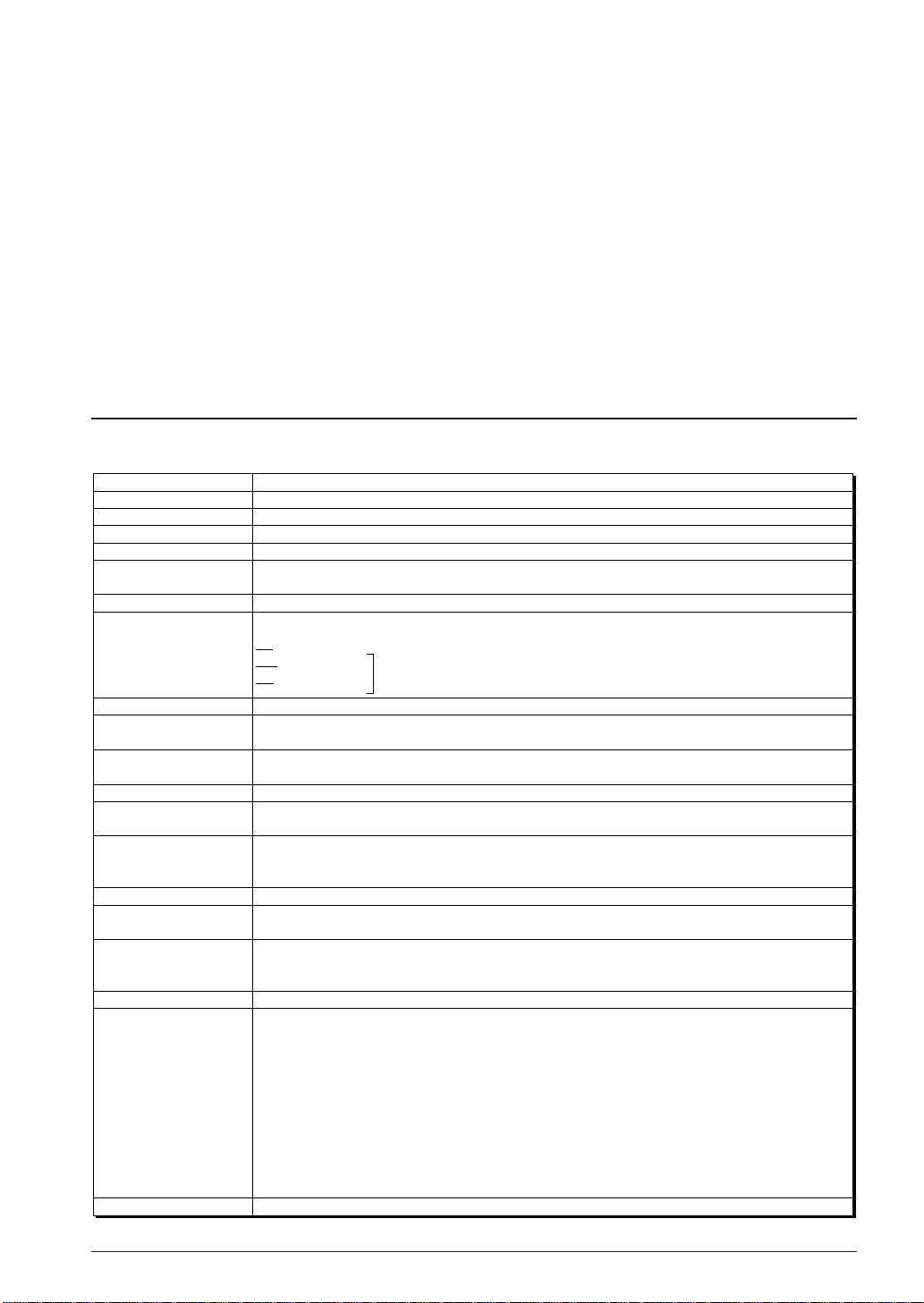
Table 1.1.1 lists the features of the S1C88650.
Table 1.1.1 Main features
Core CPU
Main
(OSC3)
Sub
Instruction set
Min. instruction execution time
Internal ROM capacity
Internal RAM capacity
Bus line
Input port
Output port
I/O port
Serial interface
Timer
LCD driver
Watchdog timer
Supply voltage detection
(SVD) circuit
Interrupt
Supply voltage
Current consumption
Supply form
S1C88650 TECHNICAL MANUAL EPSON 1
oscillation circuit
(OSC1)
oscillation circuit
∗ The current consumption with LCD ON listed above is the value under the conditions of LCDCx = "11 (all on)", LCx = "0FH" and
"No panel load". Current consumption increases according to the display contents and panel load.
S1C88 (MODEL3) CMOS 8-bit core CPU
Crystal oscillation circuit/ceramic oscillation circuit 8.2 MHz (Max.), or CR oscillation circuit 2.2 MHz (Max.)
Crystal oscillation circuit 32.768 kHz (Typ.), or CR oscillation circuit 200 kHz (Max.)
608 types (usable for multiplication and division instructions)
0.244 µsec/8.2 MHz (2 clock)
48K bytes/program ROM
896K bytes/kanji font ROM (can be used for a program and data ROM when no font data is stored.)
8K bytes/RAM 768 bytes/display memory
Address bus:
Data bus:
CE signal:
WR signal:
RD signal:
8 bits (4 bits can be used as the source clock inputs for PWM timers and 1 bit as a bus request signal input)
0–3 bits (when the external bus is used)
26 bits (when the external bus is not used)
8 bits (when the external bus is used)
16 bits (when the external bus is not used)
1 ch (optional clock synchronous system or asynchronous system)
Programmable timer:
Clock timer:
Dot matrix type (supports 16 × 16/5 × 8 or 12 × 12 dot font)
126 segments × 32, 16 or 8 commons (1/5 bias)
Built-in LCD power supply circuit (booster type, 5 potentials)
Built-in (1–8 second cycles)
13 value programmable (1.8–2.7 V)
External interrupt:
Internal interrupt:
1.8–3.6 V
SLEEP mode: 1 µA(Typ.)
HALT mode: 2.5 µA(Typ.) 32 kHz crystal, LCD OFF
Run state: 9 µA(Typ.) 32 kHz crystal, LCD OFF
QFP22-256pin or chip
20 bits (also usable as general output ports when not used for the bus)
8 bits (also usable as general I/O ports when not used for the bus)
3 bits
1 bit
(also usable as general output ports when not used for the bus)
1 bit
(1 bit can be configured for the bus acknowledge signal output)
(shard with serial interface, FOUT and TOUT terminals)
16 bits (8 bits × 2) 4 ch (with PWM function)
1 ch
Input interrupt
Timer interrupt
Serial interface interrupt
10 µA(Typ.) 32 kHz CR, LCD OFF
7.6 µA(Typ.) 32 kHz crystal, LCD ON*, V
15 µA(Typ.) 32 kHz CR, LCD OFF
1700 µA(Typ.) 8 MHz ceramic, LCD OFF
600 µA(Typ.) 2 MHz CR, LCD OFF
14 µA(Typ.) 32 kHz crystal, LCD ON*, V
19 µA(Typ.) 32 kHz crystal, LCD ON*, V
14 µA(Typ.) 32 kHz crystal, SVD ON
1 system (8 types)
2 systems (16 types)
1 system (3 types)
DD = 2.5–3.6 V
DD = 2.5–3.6 V
DD = 1.8–2.5 V, Power voltage booster ON
Page 10
1 INTRODUCTION
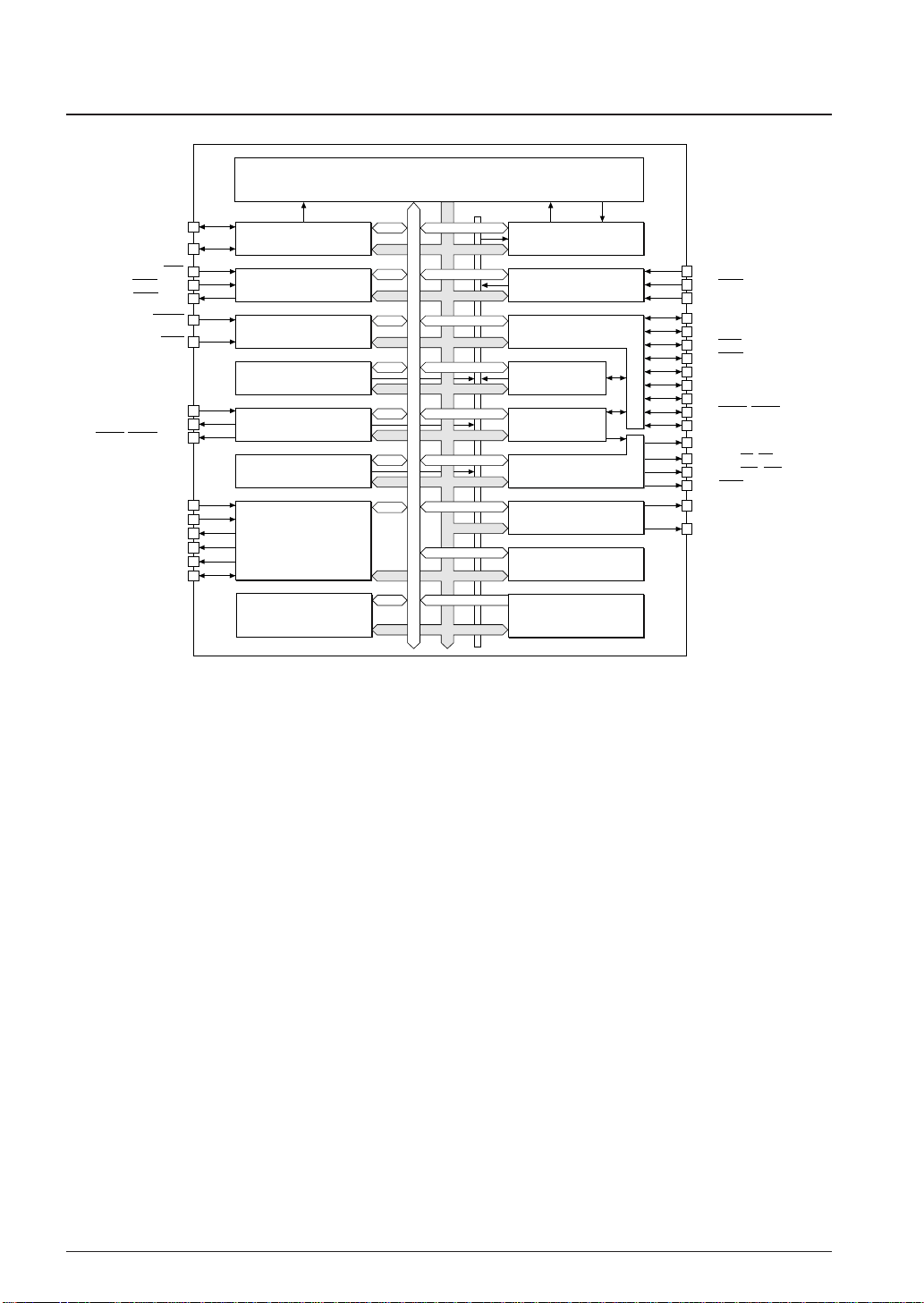
1.2 Block Diagram
Core CPU S1C88
OSC1, 2
OSC3, 4
MCU/MPU
BREQ (K03)
BACK (R33)
RESET
TEST
EXCL0–EXCL3 (K04–K07)
TOUT0–TOUT3 (P14, P15)
TOUT2/TOUT3 (P17)
V
V
V
V
VC1–V
CA–CG
Oscillator
System Controller Input Port
Reset/Test
Watchdog Timer
Programmable Timer
/Event Counter
Clock Timer
DD
SS
D1
D2
C5
Power Generator
RAM
8K bytes
Interrupt Controller
I/O Port
Serial Interface
External
Memory Interface
Output Port
LCD Driver
Supply Voltage Detector
ROM
48K bytes+896K bytes
K00–K02
K03 (BREQ)
K04–K07
P10 (SIN)
P11 (SOUT)
P12 (SCLK)
P13 (SRDY)
P14 (TOUT0/TOUT1)
P15 (TOUT2/TOUT3)
P16 (FOUT)
P17 (TOUT2/TOUT3)
P00–P07 (D0–D7)
R00–R07, R10–R17, R20–R23
(A0–A7, A8–A15, A16–A19)
R24, R25 (RD, WR)
R30–R32 (CE0–CE2)
R33 (BACK)
SEG0–SEG125
COM0–COM31
Fig. 1.2.1 S1C88650 block diagram
2 EPSON S1C88650 TECHNICAL MANUAL
Page 11
1 INTRODUCTION
1.3 Pins
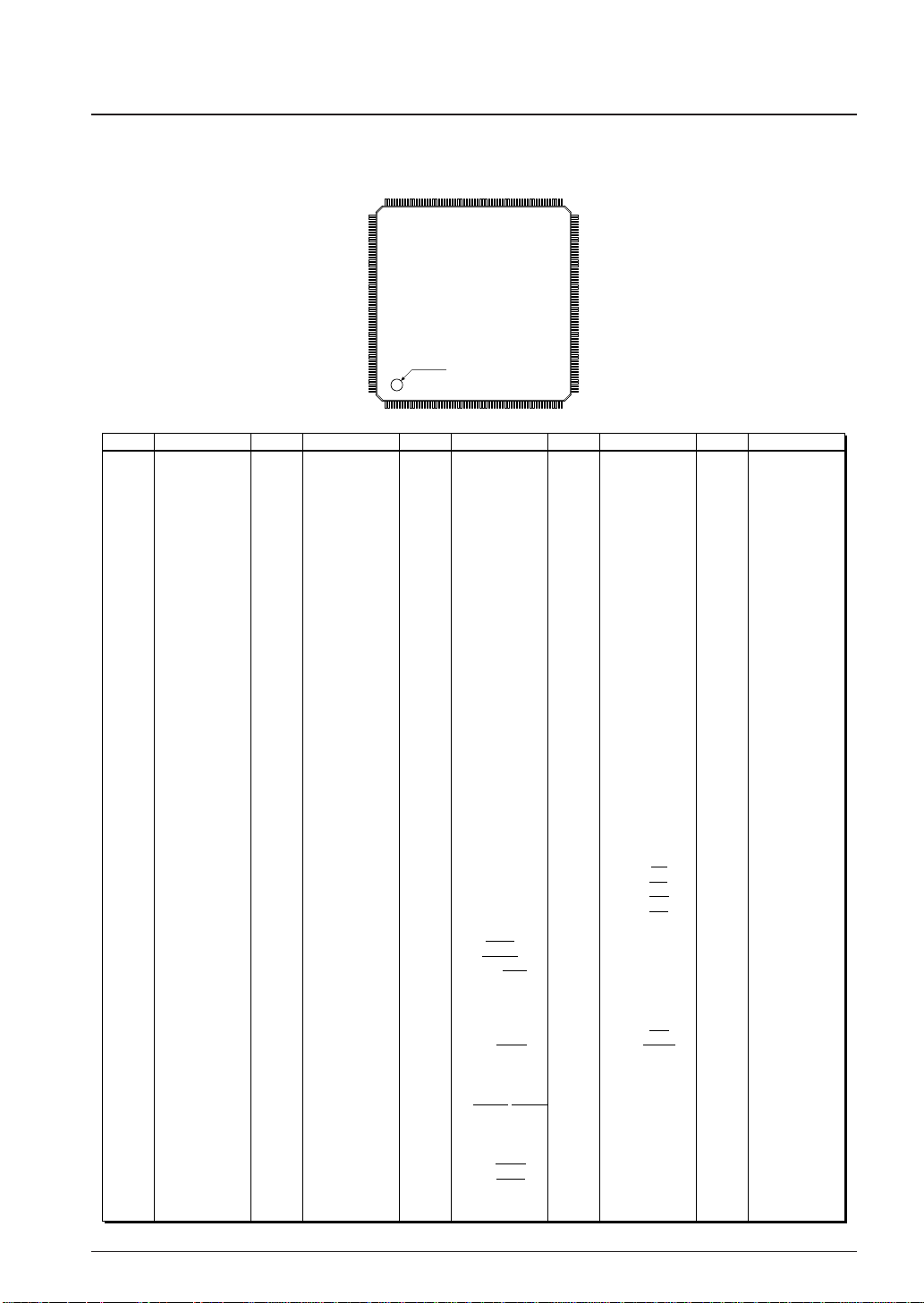
1.3.1 Pin layout diagram
QFP22-256pin
193
INDEX
256
Pin No. Pin name
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
N.C.
N.C.
TEST
SEG39
SEG40
SEG41
SEG42
SEG43
SEG44
SEG45
SEG46
SEG47
SEG48
SEG49
SEG50
SEG51
SEG52
SEG53
SEG54
SEG55
SEG56
SEG57
SEG58
SEG59
SEG60
SEG61
SEG62
SEG63
SEG64
SEG65
SEG66
SEG67
SEG68
SEG69
SEG70
SEG71
SEG72
SEG73
SEG74
SEG75
SEG76
SEG77
SEG78
SEG79
SEG80
SEG81
SEG82
SEG83
SEG84
SEG85
SEG86
SEG87
Pin No. Pin name
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
SEG88
SEG89
SEG90
SEG91
SEG92
SEG93
SEG94
SEG95
SEG96
N.C.
N.C.
N.C.
N.C.
N.C.
SS
V
SEG97
SEG98
SEG99
SEG100
SEG101
SEG102
SEG103
SEG104
SEG105
SEG106
SEG107
SEG108
SEG109
SEG110
SEG111
SEG112
SEG113
SEG114
SEG115
SEG116
SEG117
SEG118
SEG119
SEG120
SEG121
SEG122
SEG123
SEG124
SEG125
COM31
COM30
COM29
COM28
COM27
COM26
COM25
COM24
Pin No. Pin name
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
COM23
COM22
COM21
COM20
COM19
COM18
COM17
COM16
V
D2
CG
CF
CE
CD
CC
CB
CA
V
C5
V
C4
V
C3
V
C2
V
C1
N.C.
N.C.
N.C.
N.C.
N.C.
V
DD
OSC3
OSC4
V
SS
V
D1
OSC1
OSC2
TEST
RESET
MCU/MPU
K07/EXCL3
K06/EXCL2
K05/EXCL1
K04/EXCL0
K03/BREQ
K02
K01
K00
P17/TOUT2/TOUT3
P16/FOUT
P15/TOUT2/TOUT3
P14/TOUT0/TOUT1
P13/SRDY
P12/SCLK
P11/SOUT
P10/SIN
Fig. 1.3.1.1 S1C88650 pin layout
S1C88650 TECHNICAL MANUAL EPSON 3
129192
128
65
641
Pin No. Pin name
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
P07/D7
P06/D6
P05/D5
P04/D4
P03/D3
P02/D2
P01/D1
P00/D0
R00/A0
R01/A1
R02/A2
R03/A3
R04/A4
R05/A5
R06/A6
R07/A7
R10/A8
R11/A9
R12/A10
R13/A11
R14/A12
R15/A13
R16/A14
R17/A15
R20/A16
R21/A17
R22/A18
R23/A19
R24/RD
R25/WR
R30/CE0
R31/CE1
V
DD
N.C.
N.C.
N.C.
N.C.
N.C.
V
SS
R32/CE2
R33/BACK
COM0
COM1
COM2
COM3
COM4
COM5
COM6
COM7
COM8
COM9
COM10
Pin No. Pin name
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
–
–
–
–
COM11
COM12
COM13
COM14
COM15
SEG0
SEG1
SEG2
SEG3
SEG4
SEG5
SEG6
SEG7
SEG8
SEG9
SEG10
SEG11
SEG12
SEG13
SEG14
SEG15
SEG16
SEG17
SEG18
SEG19
SEG20
SEG21
SEG22
SEG23
SEG24
SEG25
SEG26
SEG27
SEG28
SEG29
SEG30
SEG31
SEG32
SEG33
SEG34
SEG35
SEG36
SEG37
SEG38
SS
V
N.C.
N.C.
N.C.
–
–
–
–
Page 12
1 INTRODUCTION
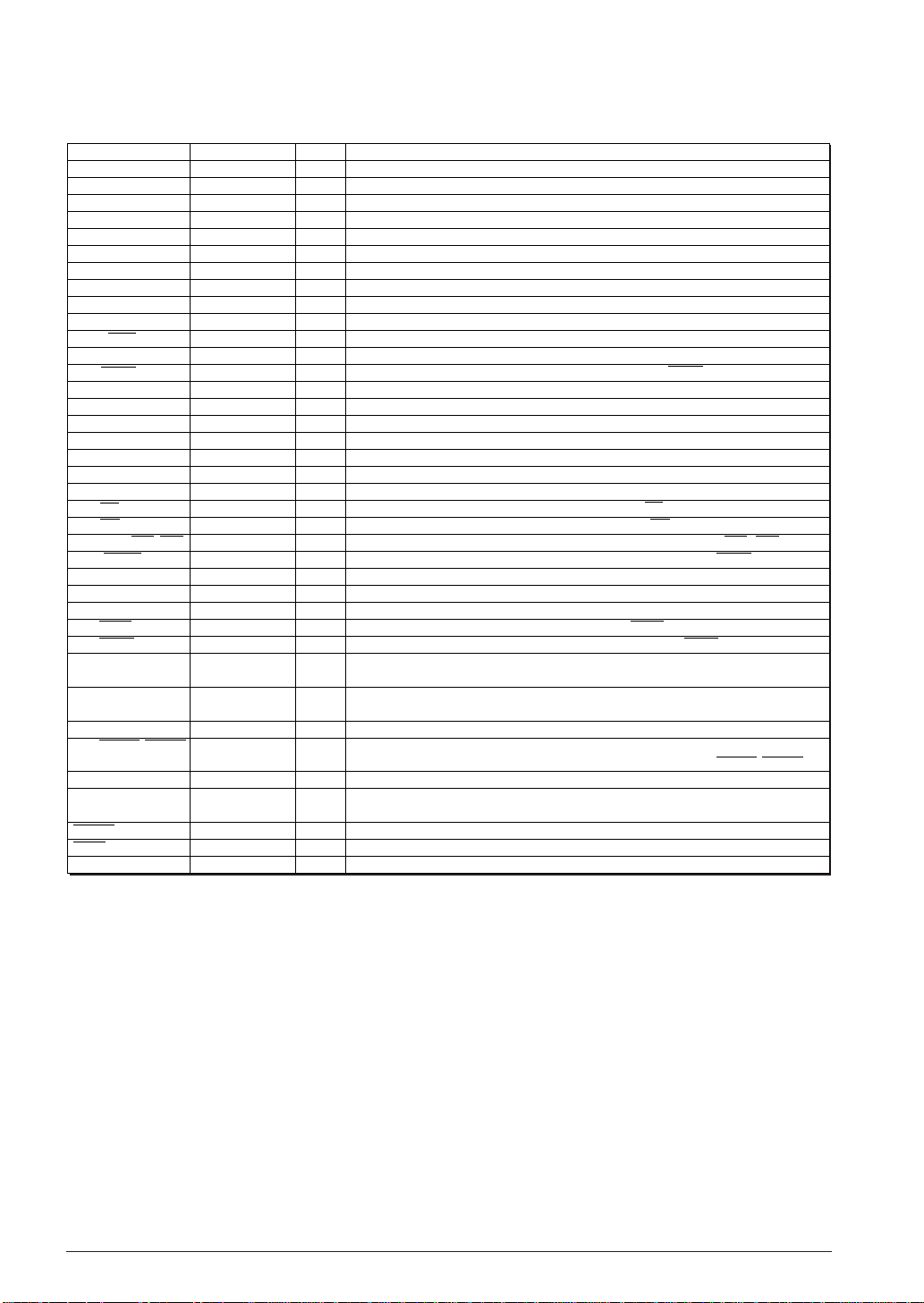
1.3.2 Pin description
Table 1.3.2.1 S1C88650 pin description
Pin name In/Out Function
V
DD
VSS
VD1
VD2
VC1–VC5
CA–CG
OSC1
OSC2
OSC3
OSC4
MCU/MPU
K00–K02
K03/BREQ
K04/EXCL0
K05/EXCL1
K06/EXCL2
K07/EXCL3
R00–R07/A0–A7
R10–R17/A8–A15
R20–R23/A16–A19
R24/RD
R25/WR
R30–R32/CE0–CE2
R33 (BACK)
P00–P07/D0–D7
P10/SIN
P11/SOUT
P12/SCLK
P13/SRDY
P14/TOUT0/TOUT1
P15/TOUT2/TOUT3
P16/FOUT
P17/TOUT2/TOUT3
COM0–COM31
SEG0–SEG125
RESET
TEST
TEST
Pin No.
131, 189
67, 134, 195, 253
135
113
125–121
120–114
136
137
132
133
140
148–146
145
144
143
142
141
165–172
173–180
181–184
185
186
187, 188, 196
197
164–157
156
155
154
153
152
151
150
149
198–213, 112–97
214–252, 4–61,
68–96
139
138
3
–
Power supply (+) terminal
–
Power supply (GND) terminal
–
Internal logic system and oscillation system voltage regulator output terminals
–
LCD circuit power voltage booster output terminal
–
LCD drive voltage output terminals
–
LCD and power voltage booster capacitor connection terminals
I
OSC1 oscillation input terminal (select crystal/CR oscillation by mask option)
O
OSC1 oscillation output terminal
I
OSC3 oscillation input terminal (select crystal/ceramic/CR oscillation by mask option)
O
OSC3 oscillation output terminal
I
MCU/MPU mode setup terminal
I
Input terminals (K00–K02)
I
Input terminal (K03) or bus request signal input terminal (BREQ)
I
Input terminal (K04) or programmable timer external clock input terminal (EXCL0)
I
Input terminal (K05) or programmable timer external clock input terminal (EXCL1)
I
Input terminal (K06) or programmable timer external clock input terminal (EXCL2)
I
Input terminal (K07) or programmable timer external clock input terminal (EXCL3)
O
Output terminals (R00–R07) or address bus (A0–A7)
O
Output terminals (R10–R17) or address bus (A8–A15)
O
Output terminals (R20–R23) or address bus (A16–A19)
O
Output terminal (R24) or read signal output terminal (RD)
O
Output terminal (R25) or write signal output terminal (WR)
O
Output terminals (R30–R32) or chip enable signal output terminals (CE0–CE2)
O
Output terminal (R33) or bus acknowledge signal output terminal (BACK)
I/O
I/O terminals (P00–P07) or data bus (D0–D7)
I/O
I/O terminal (P10) or serial I/F data input terminal (SIN)
I/O
I/O terminal (P11) or serial I/F data output terminal (SOUT)
I/O
I/O terminal (P12) or serial I/F clock I/O terminal (SCLK)
I/O
I/O terminal (P13) or serial I/F ready signal output terminal (SRDY)
I/O
I/O terminal (P14)
or programmable timer underflow signal output terminal (TOUT0/TOUT1)
I/O
I/O terminal (P15)
or programmable timer underflow signal output terminal (TOUT2/TOUT3)
I/O
I/O terminal (P16) or clock output terminal (FOUT)
I/O
I/O terminal (P17)
or programmable timer underflow inverted signal output terminal (TOUT2/TOUT3)
O
LCD common output terminals
O
LCD segment output terminals
I
Initial reset input terminal
I
Test input terminal
–
Test terminal (open during normal operation)
4 EPSON S1C88650 TECHNICAL MANUAL
Page 13
1 INTRODUCTION
1.4 Mask Option
Mask options shown below are provided for the
S1C88650.
Several hardware specifications are prepared in
each mask option, and one of them can be selected
according to the application. Multiple specifications
are available in each option item as indicated in the
Select the specifications that meet the target system
and check the appropriate box.
The option selection is done interactively on the
screen during function option generator winfog
execution, using this option list as reference. Mask
pattern of the IC is finally generated based on the
data created by the winfog. Refer to the
"S5U1C88000C Manual II" for details on the winfog.
Option List.
PERIPHERAL CIRCUIT BOARD option list
The following shows the options for configuring the Peripheral Circuit Board (S5U1C88000P1 with
S5U1C88649P2) installed in the ICE (S5U1C88000H5). The selections do not affect the IC's mask option.
A OSC1 SYSTEM CLOCK
■■ 1. Internal Clock
■■ 2. User Clock
B OSC3 SYSTEM CLOCK
■■ 1. Internal Clock
■■ 2. User Clock
When User Clock is selected, input a clock to the OSC1
terminal. When Internal Clock is selected, the clock
frequency is changed according to the oscillation circuit
selected by the IC's mask option.
When User Clock is selected, input a clock to the OSC3
terminal. When Internal Clock is selected, the clock
frequency is changed according to the oscillation circuit
selected by the IC's mask option.
S1C88650 mask option list
The following shows the option list for generating the IC's mask pattern. Note that the Peripheral Circuit
Board installed in the ICE does not support some options.
1 OSC1 SYSTEM CLOCK
■■ 1. Crystal
■■ 2. CR
2 OSC3 SYSTEM CLOCK
■■ 1. Crystal
■■ 2. Ceramic
■■ 3. CR
3 MULTIPLE KEY ENTRY RESET
• Combination ..■■ 1. Not Use
■■ 2. Use K00, K01
■■ 3. Use K00, K01, K02
■■ 4. Use K00, K01, K02, K03
4 INPUT PORT PULL UP RESISTOR
• K00...................■■ 1. With Resistor ■■ 2. Gate Direct
• K01...................■■ 1. With Resistor ■■ 2. Gate Direct
• K02...................■■ 1. With Resistor ■■ 2. Gate Direct
• K03...................■■ 1. With Resistor ■■ 2. Gate Direct
• K04...................■■ 1. With Resistor ■■ 2. Gate Direct
• K05...................■■ 1. With Resistor ■■ 2. Gate Direct
• K06...................■■ 1. With Resistor ■■ 2. Gate Direct
• K07...................■■ 1. With Resistor ■■ 2. Gate Direct
• MCU/MPU .... ■■ 1. With Resistor ■■ 2. Gate Direct
• RESET .............■■ 1. With Resistor ■■ 2. Gate Direct
______
________
The specification of the OSC1 oscillation circuit can be
selected from among two types: "Crystal oscillation" and
"CR oscillation". Refer to Section 5.4.3, "OSC1 oscillation
circuit", for details.
The specification of the OSC3 oscillation circuit can be
selected from among three types: "Crystal oscillation",
"Ceramic oscillation" and "CR oscillation". Refer to
Section 5.4.4, "OSC3 oscillation circuit", for details.
This mask option can select whether the multiple key
entry reset function is used or not. When the function is
used, a combination of the input ports (K00–K03), which
are connected to the keys, can be selected. Refer to
Section 4.1.2, "Simultaneous LOW level input at input
port terminals K00–K03", for details.
This mask option can select whether the pull-up resistor
for the input (K) port terminal is used or not. It is
possible to select for each bit of the input ports. Refer to
Section 5.5, "Input Ports (K ports)", for details.
Furthermore, a pull-up option is also provided for the
______ ________
MCU/MPU and RESET terminals.
S1C88650 TECHNICAL MANUAL EPSON 5
Page 14
1 INTRODUCTION
5 I/O PORT PULL UP RESISTOR
• P00 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P01 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P02 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P03 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P04 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P05 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P06 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P07 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P10 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P11 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P12 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P13 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P14 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P15 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P16 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
• P17 ......... ■■ 1. With Resistor ■■ 2. Gate Direct
6 INPUT PORT INPUT I/F LEVEL
• K00......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• K01......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• K02......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• K03......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• K04......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• K05......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• K06......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• K07......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
This mask option can select whether the pull-up resistor
for the I/O port terminal (it works during input mode) is
used or not. It is possible to select for each bit of the I/O
ports. Refer to Section 5.7, "I/O Ports (P ports)", for
details.
This mask option can select the interface level of the
input (K) port from either the CMOS level or CMOS
Schmitt level. It is possible to select for each bit of the
input ports. Refer to Section 5.5, "Input Ports (K ports)",
for details.
The input port on the ICE (with the Peripheral Circuit
Board installed) is fixed to the CMOS level interface
regardless of this option selection.
7 I/O PORT INPUT I/F LEVEL
• P10 ......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• P11 ......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• P12 ......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• P13 ......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• P14 ......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• P15 ......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• P16 ......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
• P17 ......... ■■ 1. CMOS Level ■■ 2. CMOS Schmitt
8
WATCHDOG TIMER NMI GENERATION CYCLE
■■ 1. 32768/fOSC1
■■ 2. 65536/fOSC1
■■ 3. 131072/fOSC1
■■ 4. 262144/fOSC1
______
(0.75–1-sec cycle when f
OSC1
= 32 kHz)
(1.5–2-sec cycle when fOSC1 = 32 kHz)
(3–4-sec cycle when fOSC1 = 32 kHz)
(6–8-sec cycle when fOSC1 = 32 kHz)
This mask option can select the interface level of the I/O
(P) port from either the CMOS level or CMOS Schmitt
level. It is possible to select for each bit of the I/O ports.
Refer to Section 5.7, "I/O Ports (P ports)", for details.
The input port on the ICE (with the Peripheral Circuit
Board installed) is fixed to the CMOS level interface
regardless of this option selection.
This mask option can select the NMI generation cycle of
______
the watchdog timer. Refer to Section 5.3.1, "Configuration
of watchdog timer", for details.
6 EPSON S1C88650 TECHNICAL MANUAL
Page 15
2POWER SUPPLY
In this section, we will explain the operating voltage and the configuration of the internal power
supply circuit of the S1C88650.
2 POWER SUPPLY
2.1 Operating V oltage
The S1C88650 operating power voltage is as
follows:
1.8 V to 3.6 V
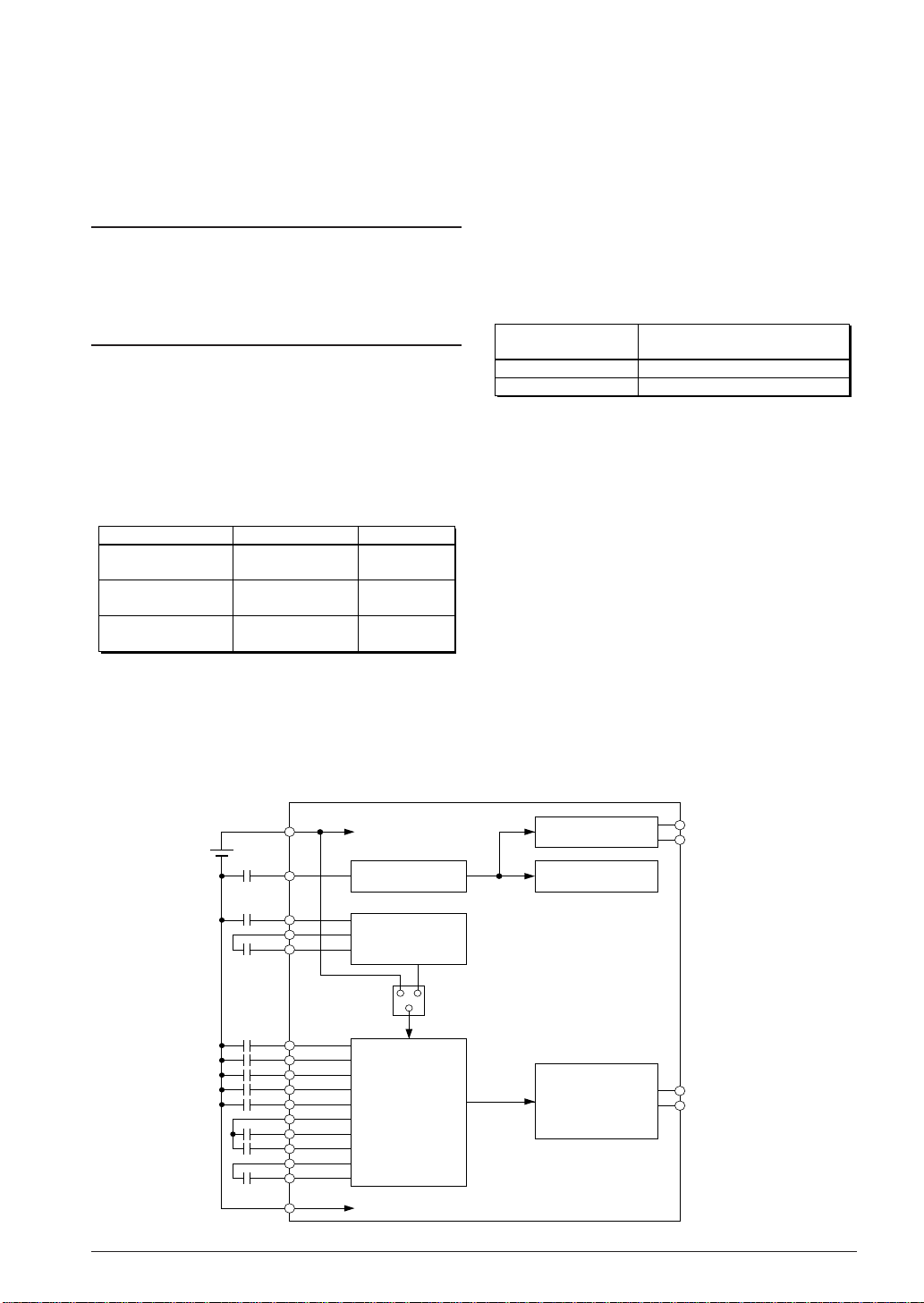
2.2 Internal Power Supply Circuit
The S1C88650 incorporates the power supply
circuit shown in Figure 2.2.1. When voltage within
the range described above is supplied to VDD (+)
and VSS (GND), all the voltages needed for the
internal circuit are generated internally in the IC.
Roughly speaking, the power supply circuit is
divided into three sections.
Table 2.2.1 Power supply circuit
Circuit
Oscillation circuits,
Internal circuits
LCD system voltage
regulator
LCD driver
The internal logic voltage regulator generates the
operating voltage <VD1> for driving the internal
logic circuits and the oscillation circuit.
The VD1 voltage value is fixed at 1.8 V (Typ.).
The power voltage booster generates the operating
voltage <V
D2> for the LCD system voltage
regulator.
External
power
supply
Power supply circuit
Internal logic
voltage regulator
Power voltage
booster
LCD system voltage
regulator
VDD
VD1
Output voltage
VD1
VDD or VD2
VC1–VC5
Internal logic
voltage regulator
Either <V
DD> or <VD2> can be selected as the
power source for the LCD system voltage regulator
according to the <VDD> power supply voltage
level.
Table 2.2.2 Power source for LCD system
voltage regulator
Supply voltage
VDD
1.8–2.5 V
2.5–3.6 V
Power source for
LCD system voltage regulator
VD2
VDD
The VD2 voltage is about double the VDD voltage
level. Refer to Chapter 8, "ELECTRICAL
CHARACTERISTICS", for details.
The LCD system voltage regulator generates the 1/
5-bias LCD drive voltages <VC1>, <VC2>, <VC3>,
<VC4> and <VC5>. See Chapter 8, "ELECTRICAL
CHARACTERISTICS" for the voltage values.
In the S1C88650, the LCD drive voltage is supplied
to the built-in LCD driver which drives the LCD
panel connected to the SEG and COM terminals.
Notes: • Under no circumstances should VD1,VD2,
VC1, VC2, VC3, VC4 and VC5, terminal
output be used to drive external circuit.
• If VDD is used as the power source for the
LCD system voltage regulator when VDD is
2.5 V or less, the VC1 to VC5 voltages
cannot be generated within specifications.
OSC1, OSC2
OSC3, OSC4
VD1
Oscillation circuit
Internal circuit
VD2
CG
V
VC2
VC3
VC4
VC5
CC
CD
V
CF
C1
CA
CB
CE
SS
Power
voltage
booster
VD2
LCD system
voltage regulator
VC1–VC5
LCD driver
COM0–COM31
SEG0–SEG125
Fig. 2.2.1 Configuration of power supply circuit
S1C88650 TECHNICAL MANUAL EPSON 7
Page 16
3 CPU AND BUS CONFIGURATION
3 CPU AND BUS CONFIGURATION
In this section, we will explain the CPU, operating mode and bus configuration.
3.1 CPU
The S1C88650 utilize the S1C88 8-bit core CPU
whose resistor configuration, command set, etc. are
virtually identical to other units in the family of
processors incorporating the S1C88.
See the "S1C88 Core CPU Manual" for the S1C88.
Specifically, the S1C88650 employ the Model 3
S1C88 CPU which has a maximum address space of
1M bytes × 3.
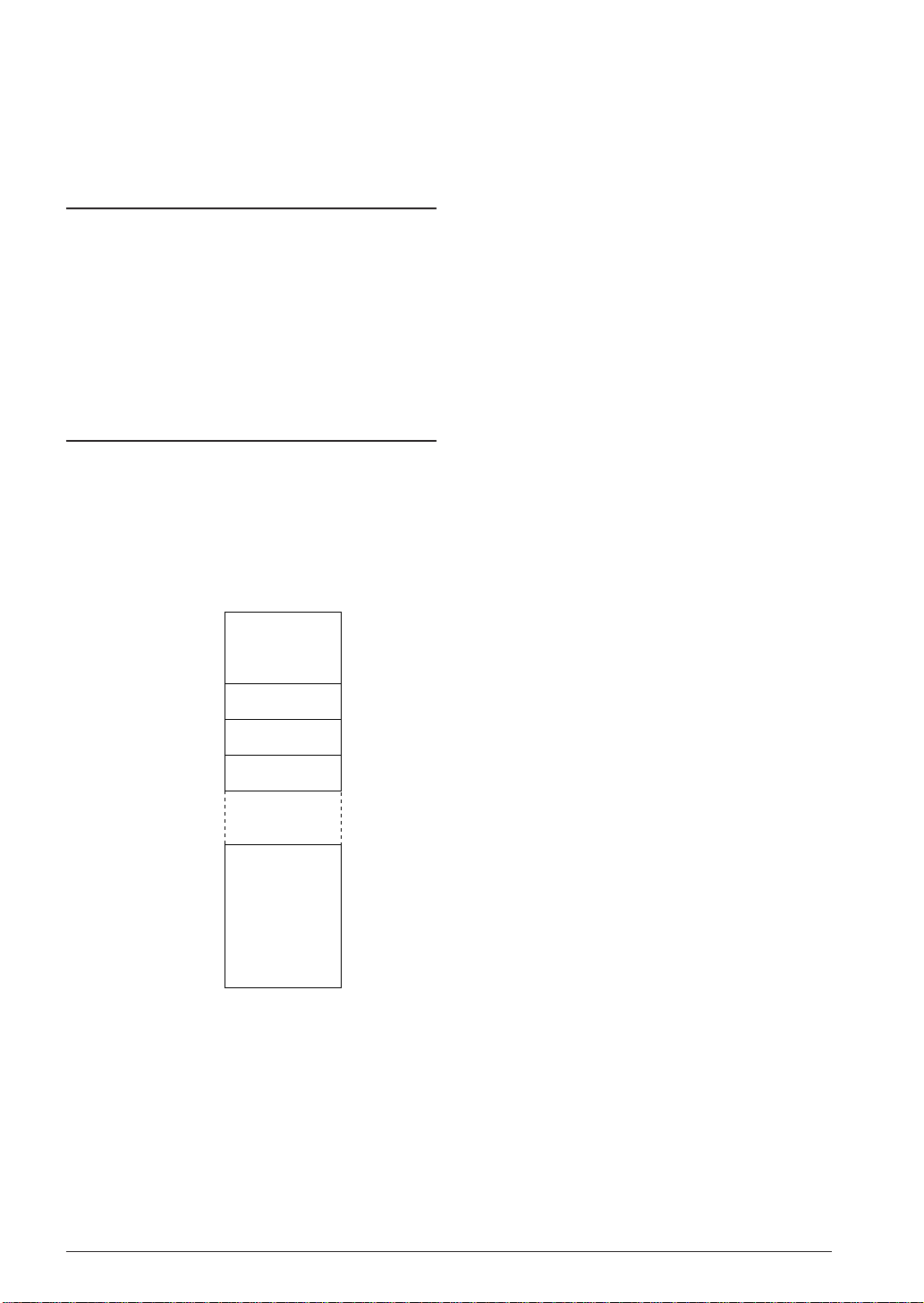
3.2 Internal Memory
The S1C88650 is equipped with internal ROM and
RAM as shown in Figure 3.2.1. Small scale applications can be handled by one chip. It is also possible
to utilize internal memory in combination with
external memory.
Furthermore, internal ROM can be disconnected
from the bus and the resulting space released for
external applications.
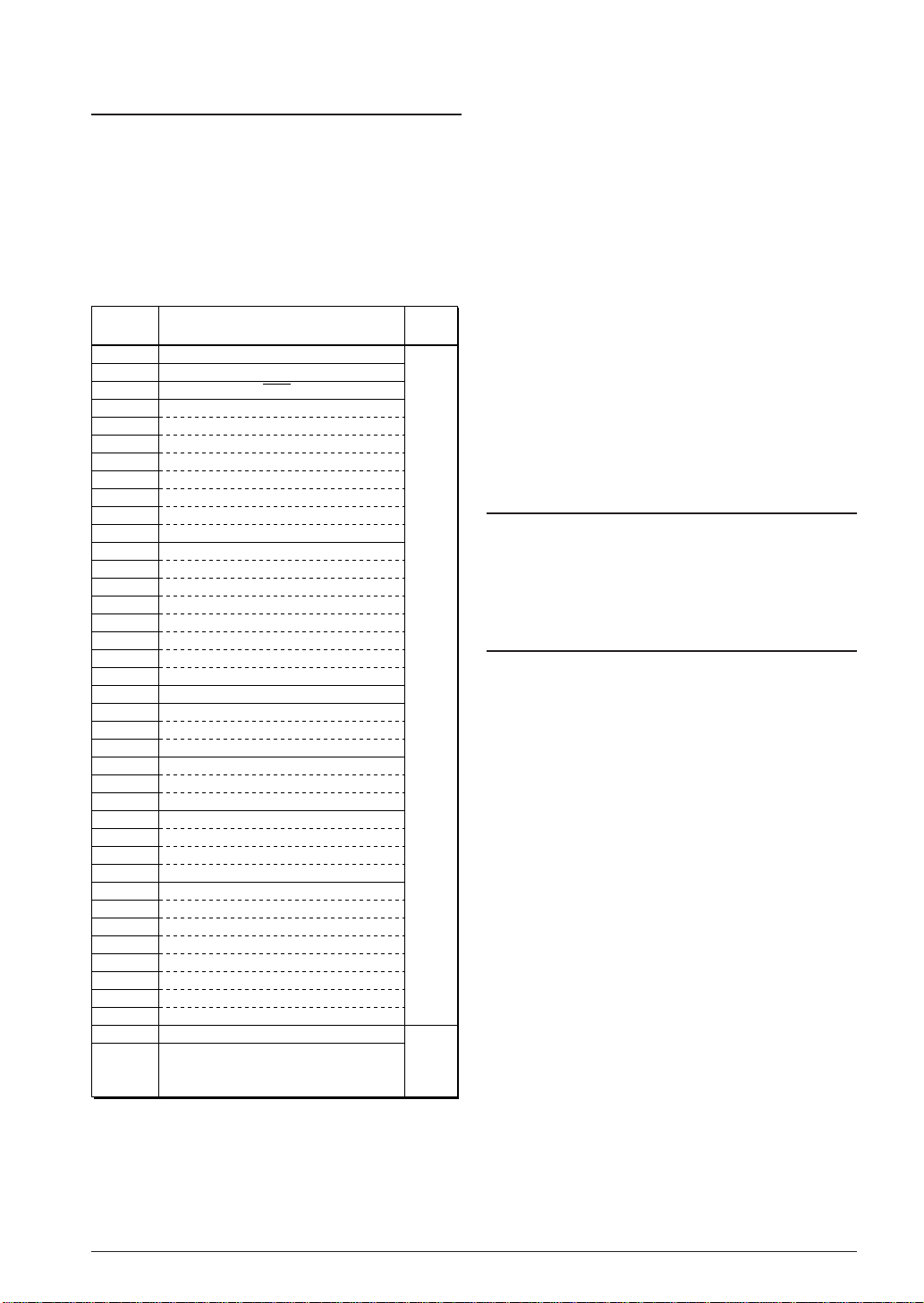
0EFFFFH
Kanji font ROM
010000H
00FFFFH
00FF00H
00FD7FH
00F800H
00F7FFH
00D800H
00D7FFH
:
00C000H
00BFFFH
000000H
Fig. 3.2.1 Internal memory map
3.2.1 Program ROM
The S1C88650 has a built-in 48K-byte program
ROM. The ROM is allocated to 000000H–00BFFFH.
This ROM areas shown above can be released to
external memory depending on the setting of the
_______
MCU/MPU terminal. (See "3.5 Chip Mode".)
(896K bytes)
I/O memory
Display memory
RAM (8K bytes)
Unused
area
ROM
(48K bytes)
3.2.2 RAM
The internal RAM capacity is 8K bytes and is
allocated to 00D800H–00F7FFH.
Even when external memory which overlaps the
internal RAM area is expanded, the RAM area is
not released to external memory. Access to this area
is via internal RAM.
3.2.3 I/O memory
A memory mapped I/O method is employed in the
S1C88650 for interfacing with internal peripheral
circuit. Peripheral circuit control bits and data
register are arranged in data memory space.
Control and data exchange are conducted via
normal memory access. I/O memory is arranged in
page 0: 00FF00H–00FFFFH area.
See Section 5.1, "I/O Memory Map", for details of
the I/O memory.
Even when external memory which overlaps the I/
O memory area is expanded, the I/O memory area
is not released to external memory. Access to this
area is via I/O memory.
3.2.4 Display memory
The S1C88650 is equipped with an internal display
memory which stores a display data for LCD
driver.
Display memory is arranged in page 0: 00Fx00H–
00Fx7FH (x = 8–DH) in the data memory area. See
Section 5.11, "LCD Driver", for details of the display
memory. Like the I/O memory, display memory
cannot be released to external memory.
3.2.5 Kanji font ROM
The S1C88650 has a built-in kanji font ROM that
can be used to store JIS level-1 and level-2 kanji
sets, alphanumeric characters and music shift-JIS
characters.
The kanji font ROM capacity is 896K bytes and is
allocated to 010000H–0EFFFFH.
When the kanji font is not used the remaining area
or the entire area can be used for a program and
data storage area (see the "S5U1C88xxxRx Manual"
for use of font data).
This ROM areas shown above can be released to
external memory depending on the setting of the
_______
MCU/MPU terminal. (See "3.5 Chip Mode".)
8 EPSON S1C88650 TECHNICAL MANUAL
Page 17
3 CPU AND BUS CONFIGURATION
3.3 Exception Processing Vectors
000000H–00004BH in the program area of the
S1C88650 is assigned as exception processing
vectors. Furthermore, from 00004EH to 0000FFH,
software interrupt vectors are assignable to any two
bytes which begin with an even address.
Table 3.3.1 lists the vector addresses and the
exception processing factors to which they correspond.
Table 3.3.1 Exception processing vector table
Vector
address
000000H
000002H
000004H
000006H
000008H
00000AH
00000CH
00000EH
000010H
000012H
000014H
000016H
000018H
00001AH
00001CH
00001EH
000020H
000022H
000024H
000026H
000028H
00002AH
00002CH
00002EH
000030H
000032H
000034H
000036H
000038H
00003AH
00003CH
00003EH
000040H
000042H
000044H
000046H
000048H
00004AH
00004CH
00004EH
:
0000FEH
Exception processing factor
Reset
Zero division
Watchdog timer (NMI)
K07 input interrupt
K06 input interrupt
K05 input interrupt
K04 input interrupt
K03 input interrupt
K02 input interrupt
K01 input interrupt
K00 input interrupt
PTM 0 underflow interrupt
PTM 0 compare match interrupt
PTM 1 underflow interrupt
PTM 1 compare match interrupt
PTM 2 underflow interrupt
PTM 2 compare match interrupt
PTM 3 underflow interrupt
PTM 3 compare match interrupt
System reserved (cannot be used)
Serial I/F error interrupt
Serial I/F receiving complete interrupt
Serial I/F transmitting complete interrupt
System reserved (cannot be used)
System reserved (cannot be used)
System reserved (cannot be used)
Clock timer 32 Hz interrupt
Clock timer 8 Hz interrupt
Clock timer 2 Hz interrupt
Clock timer 1 Hz interrupt
PTM 4 underflow interrupt
PTM 4 compare match interrupt
PTM 5 underflow interrupt
PTM 5 compare match interrupt
PTM 6 underflow interrupt
PTM 6 compare match interrupt
PTM 7 underflow interrupt
PTM 7 compare match interrupt
System reserved (cannot be used)
Software interrupt
For each vector address and the address after it, the
start address of the exception processing routine is
written into the subordinate and super ordinate
sequence. When an exception processing factor is
generated, the exception processing routine is
executed starting from the recorded address.
Priority
High
↑
↓
Low
No
priority
rating
When multiple exception processing factors are
generated at the same time, execution starts with
the highest priority item.
The priority sequence shown in Table 3.3.1 assumes
that the interrupt priority levels are all the same.
The interrupt priority levels can be set by software
in each system. (See Section 5.14, "Interrupt and
Standby Status".)
Note: For exception processing other than reset,
SC (system condition flag) and PC (program
counter) are evacuated to the stack and
branches to the exception processing
routines. Consequently, when returning to
the main routine from exception processing
routines, please use the RETE instruction.
See the "S1C88 Core CPU Manual" for information
on CPU operations when an exception processing
factor is generated.
3.4 CC (Customized Condition Flag)
The S1C88650 does not use the customized condition flag (CC) in the core CPU. Accordingly, it
cannot be used as a branching condition for the
conditional branching instruction (JRS, CARS).
3.5 Chip Mode
3.5.1 MCU mode and MPU mode
The chip operating mode can be set to one of two
settings using the MCU/MPU terminal.
■
MCU mode...Set the MCU/MPU terminal to HIGH
Switch to this setting when using internal ROM.
With respect to areas other than internal
memory, external memory can even be
expanded. See Section 3.5.2, "Bus mode", for the
memory map.
In the MCU mode, during initial reset, only
systems in internal memory are activated.
Internal program ROM is normally fixed as the
top portion of the program memory from the
common area (logical space 0000H–7FFFH).
Exception processing vectors are assigned in
internal program ROM. Furthermore, the
application initialization routines that start with
reset exception processing must likewise be
written to internal program ROM. Since bus and
other settings which correlate with external
expanded memory can be executed in software,
this processing is executed in the initialization
routine written to internal program ROM. Once
these bus mode settings are made, external
memory can be accessed.
_______
_______
S1C88650 TECHNICAL MANUAL EPSON 9
Page 18
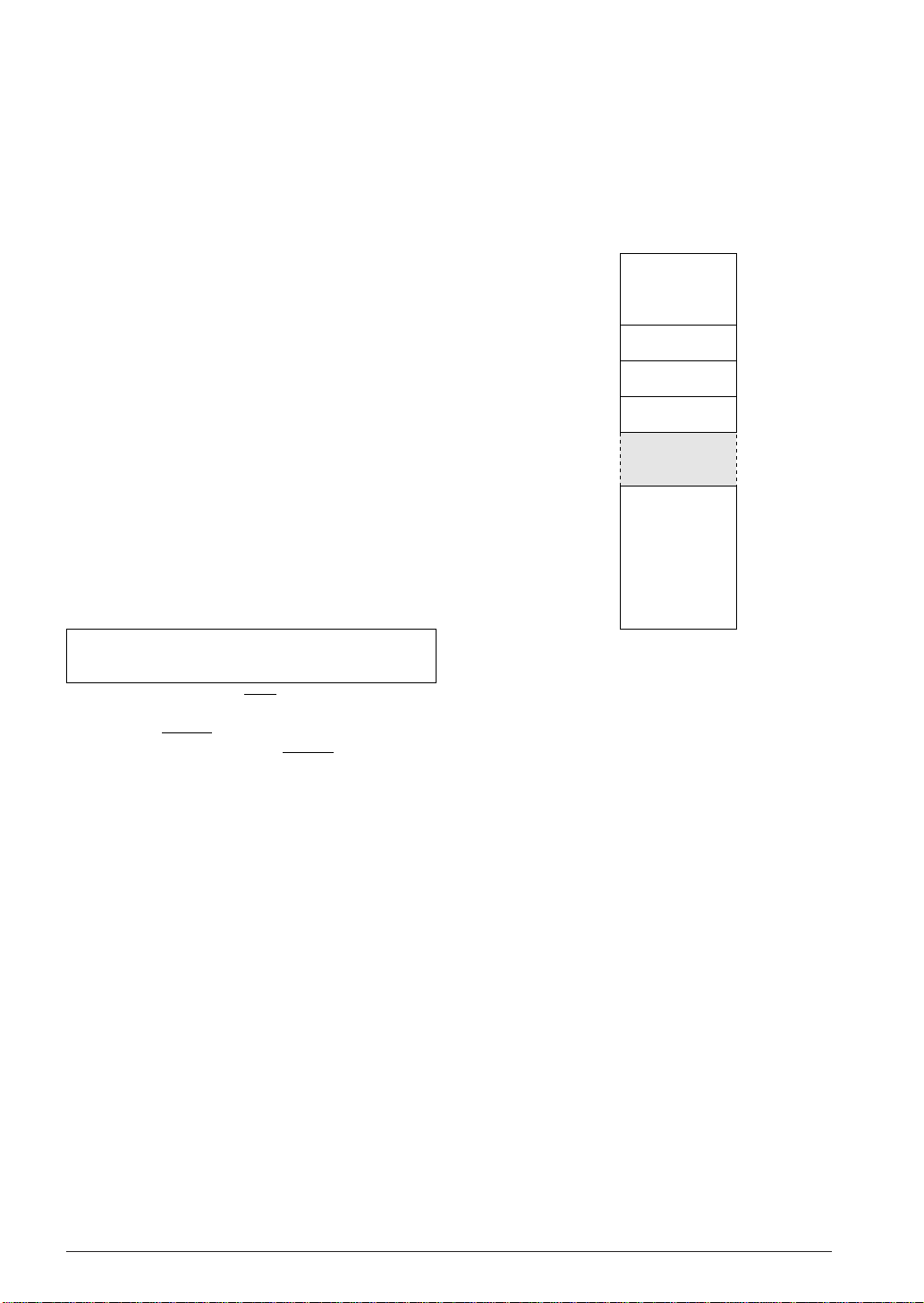
3 CPU AND BUS CONFIGURATION
0EFFFFH
010000H
00FFFFH
00FF00H
00FD7FH
00F800H
00F7FFH
00D800H
00D7FFH
:
00C000H
00BFFFH
000000H
- MCU mode -
Kanji font ROM
(896K bytes)
I/O memory
Display memory
Internal RAM
Unused area
Internal ROM
When accessing internal memory in this mode,
____ ____ _____
the chip enable (CE) and read (RD)/write (WR)
signals are not output to external memory, and
the data bus (D0–D7) goes into high impedance
status (or pull-up status).
Consequently, in cases where addresses overlap
in external and internal memory, the areas in
external memory will be unavailable.
■
MPU mode...Set the MCU/MPU terminal to LOW
_______
Internal ROM area is released to an external
device source. Internal ROM then becomes
unusable and when this area is accessed, chip
____ ____ _____
enable (CE) and read (RD)/write (WR) signals
are output to external memory and the data bus
(D0–D7) become active. These signals are not
output to an external source when other areas of
internal memory are accessed.
In the MPU mode, the system is activated by
external memory.
When employing this mode, the exception
processing vectors and initialization routine
must be assigned within the common area
(000000H–007FFFH).
You can select whether to use the built-in pull-up
_______
resistor of the MCU/MPU terminal by the mask
option.
3.5.2 Bus mode
In order to set bus specifications to match the
configuration of external expanded memory, two
different bus modes described below are selectable
in software.
■ Single chip mode
Iput port pull-up resistor
_______
MCU/MPU ..... ■■ With resistor ■■ Gate direct
Notes: •
Setting of MCU/MPU terminal is latched at
the rising edge of a reset signal input from
the RESET terminal. Therefore, if the setting
is to be changed, the RESET terminal must
be set to LOW level once again.
•
The data bus while the CPU accesses to the
internal memory can be select into highimpedance status or pulled up to high using
the pull-up control register and mask option.
See Section 5.7, "I/O Ports (P ports)", for
details.
Fig. 3.5.2.1 Memory map for the single chip mode
The single chip mode setting applies when the
S1C88650 is used as a single chip microcomputer without external expanded memory.
Since this mode employs internal ROM, the
system can only be operated in the MCU mode
discussed in Section 3.5.1.
In the MPU mode, the system cannot be set to
the single chip mode.
Since there is no need for an external bus line in
this mode, terminals normally set for bus use
can be used as general purpose output ports or
I/O ports.
■ Expansion mode
The expansion mode setting applies when the
S1C88650 is used with less than 1M bytes × 3 of
external expanded memory. This mode is
usable regardless of the MCU/MPU mode
setting.
Because internal ROM is being used in the MCU
mode, external memory in this model can be
assigned to the area from 100000H to 3FFFFFH.
Since the internal ROM area is released in the
MPU mode, external memory in this model can
be assigned to the area from 000000H to
2FFFFFH.
However, the area from 00C000H to 00FFFFH is
assigned to internal memory and cannot be
used to access an external device.
10 EPSON S1C88650 TECHNICAL MANUAL
Page 19
3 CPU AND BUS CONFIGURATION
- MCU mode -
3FFFFFH
External
:
memory area
100000H
0F0000H
0EFFFFH
010000H
00FFFFH
00D800H
00D7FFH
00C000H
00BFFFH
000000H
Unused area
Internal memory
:
Unused area
Internal memory
See Figure 3.2.1 for the internal memory
- MPU mode -
2FFFFFH
External
memory area
Internal memory
External
memory area
Fig. 3.5.2.2 Memory map for the expansion mode
There is an explanation on how all these settings
are actually made in "5.2 System Controller and Bus
Control" of this Manual.
3.5.3 CPU mode
The CPU allows software to select its operating
mode from two types shown below according to
the programming area size.
■ Minimum mode
The program area is configured within 64K
bytes in any one-bank. However, the bank to be
used must be specified in the CB register and
cannot be changed after an initialization. This
mode does not push the CB register contents
onto the stack when a subroutine is called. It
makes it possible to economize on stack area
usage. This mode is suitable for small- to midscale program memory and large-scale data
memory systems.
■ Maximum mode
The program area can be configured exceeding
64K bytes. However the CB register must be
setup when the program exceeds a bank
boundary every 64K bytes. This mode pushes
the CB register contents when a subroutine is
called. This mode is suitable for large-scale
program and data memory systems.
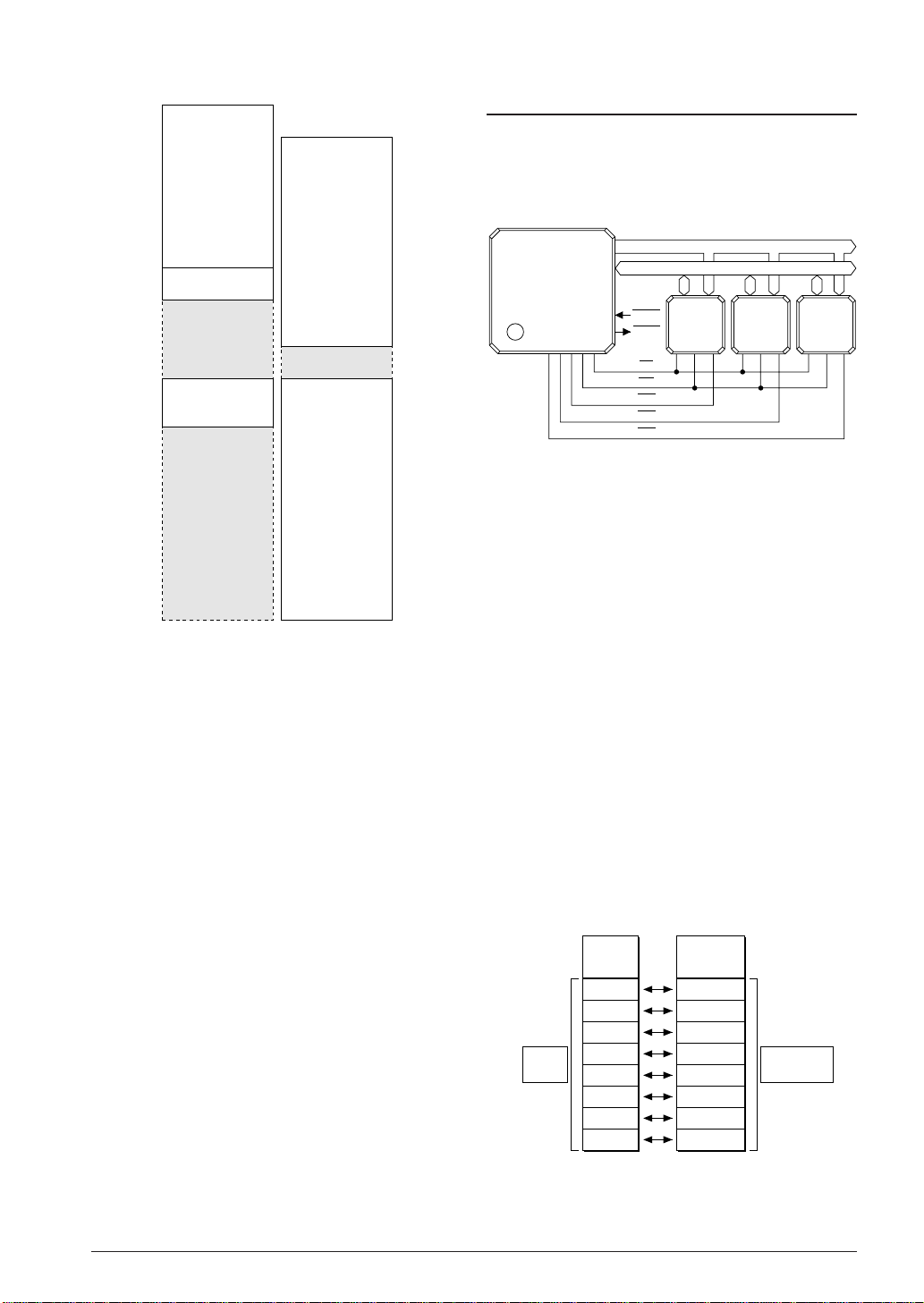
3.6 External Bus
The S1C88650 has bus terminals that can address a
maximum of 1M × 3 bytes and memory (and other)
devices can be externally expanded according to
the range of each bus mode described in the
previous section.
Address bus (A0–A19)
Data bus (D0–D7)
S1C88650
BREQ
External
device
BACK
RD
WR
CE0
CE1
CE2
Fig. 3.6.1 External bus lines
Below is an explanation of external bus terminals.
For information on control methods, see Section 5.2,
"System Controller and Bus Control".
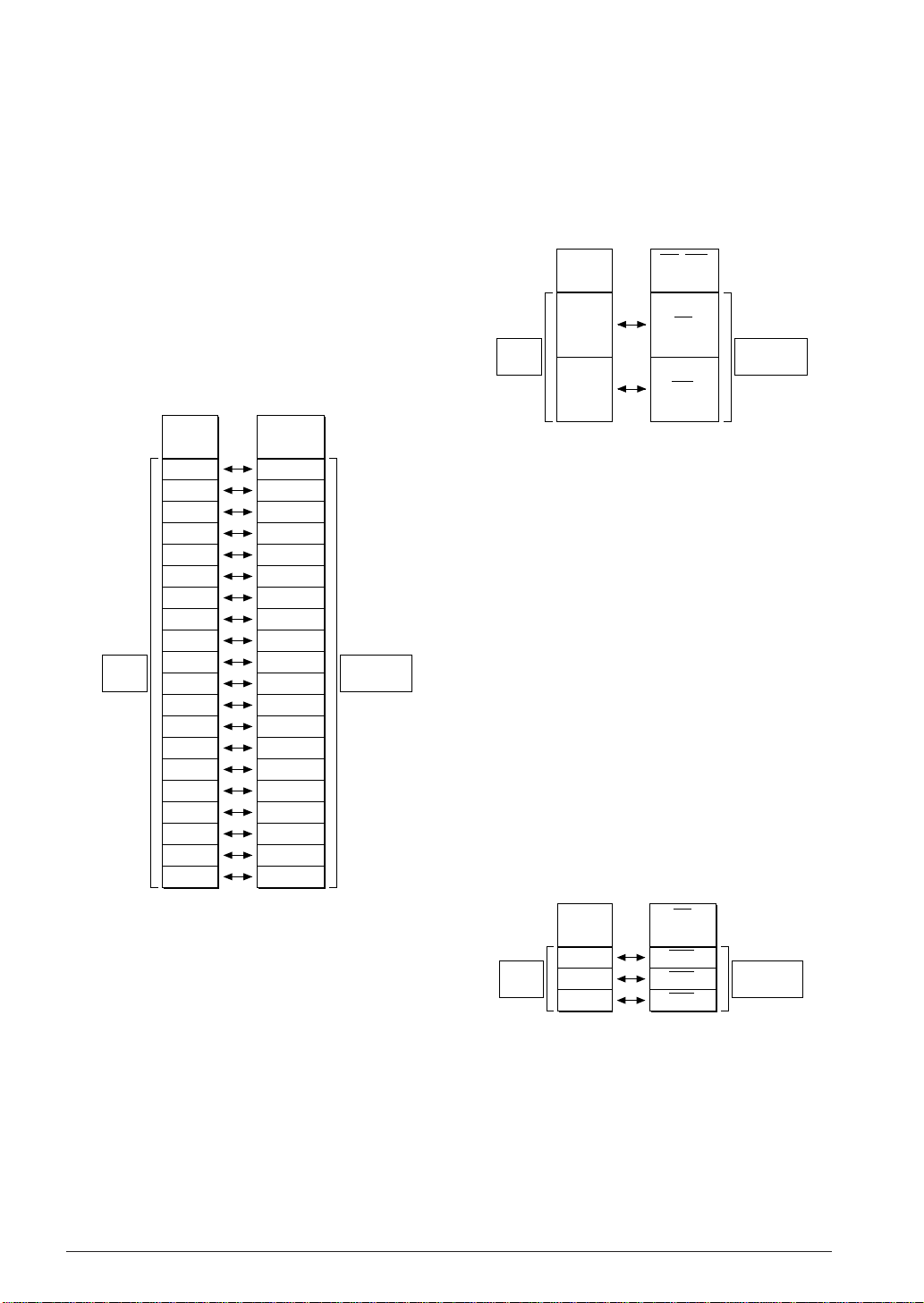
3.6.1 Data bus
The S1C88650 possesses an 8-bit external data bus
(D0–D7). The terminals and I/O circuits of data bus
D0–D7 are shared with I/O ports P00–P07, switching between these functions being determined by
the bus mode setting.
In the single chip mode, the 8-bit terminals are all
set as I/O ports P00–P07 and in the expansion
mode, they are set as data bus (D0–D7).
When set as data bus, the data register and I/O
control register of each I/O port are detached from
the I/O circuits and usable as a general purpose
data register with read/write capabilities.
The data bus can be pulled up to high during input
mode using the built-in pull-up resistor. This pullup resistor is enabled or disabled using the pull-up
control register and mask option. See "5.7 I/O
Ports" for details.
I/O
port
P00
P01
P02
Single
chip
Fig. 3.6.1.1 Correspondence between data bus
P03
P04
P05
P06
P07
and I/O ports
Data
bus
D0
D1
D2
D3
D4
D5
D6
D7
External
device
Bus modeBus mode
Expansion
External
device
S1C88650 TECHNICAL MANUAL EPSON 11
Page 20
3 CPU AND BUS CONFIGURATION
B
3.6.2 Address bus
The S1C88650 possesses a 20-bit external address
bus A0–A19. The terminals and output circuits of
address bus A0–A19 are shared with output ports
R00–R07 (=A0–A7), R10–R17 (=A8–A15) and R20–
R23 (=A16–A19), switching between these functions
being determined by the bus mode setting.
In the single chip mode, the 20-bit terminals are all
set as output ports R00–R07, R10–R17 and R20–R23.
In the expansion mode, all of the 20-bit terminals
are set as the address bus (A0–A19).
When set as an address bus, the data register and
high impedance control register of each output port
are detached from the output circuit and used as a
general purpose data register with read/write
capabilities.
Single
chip
Output
port
R00
R01
R02
R03
R04
R05
R06
R07
R10
R11
R12
R13
R14
R15
R16
R17
R20
R21
R22
R23
Address
bus
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
A17
A18
A19
Bus modeBus mode
Expansion
Fig. 3.6.2.1 Correspondence between address bus
and output ports
_____ ______
3.6.3 Read (RD)/write (WR) signals
The output terminals and output circuits for the
____ _____
read (RD)/write (WR) signals directed to external
devices are shared respectively with output ports
R24 and R25, switching between these functions
being determined by the bus mode setting.
In the single chip mode, both of these terminals are
set as output port terminals and in the expansion
mode, they are set as read (RD)/write (WR) signal
output terminals.
____ _____
When set as read (RD)/write (WR) signal output
____ _____
terminal, the data register and high impedance
control register for each output port (R24, R25) are
detached from the output circuit and is usable as a
general purpose data register with read/write
capabilities.
See Section 3.6.5, "WAIT control", for the output
timing of the signal.
Output
port
Bus mode
Single
chip
Fig. 3.6.3.1 Correspondence between read (RD)/
R24
R25
_____
RD/WR
signal
RD
WR
Bus mode
Expansion
____
write (WR) signal and output ports
_____
3.6.4 Chip enable (CE) signal
The S1C88650 is equipped with address decoders
which can output three different chip enable (CE)
signals.
Consequently, three devices equipped with a chip
_____ _____
enable (CE) or chip select (CS) terminal can be
directly connected without setting the address
decoder to an external device.
_____ _____
The three chip enable (CE0–CE2) signal output
terminals and output circuits are shared with
output ports R30–R32 and in the expansion mode,
____
either the chip enable (CE) output or general output
can be selected in software for each of the three bits.
____
When set for chip enable (CE) output, the data
register and high impedance control register for
each output port are detached from the output
circuit and is usable as general purpose data
register with read/write capabilities.
In the single chip mode, these terminals are set as
output ports R30–R32.
us mode
Single
chip
Output
port
R30
R31
R32
CE
signal
CE0
CE1
CE2
Bus mode
Expansion
Fig. 3.6.4.1 Correspondence between CE signals
and output ports
Table 3.6.4.1 shows the address ranges which are
____
assigned to the chip enable (CE) signal in the
expansion mode.
____
____
12 EPSON S1C88650 TECHNICAL MANUAL
Page 21
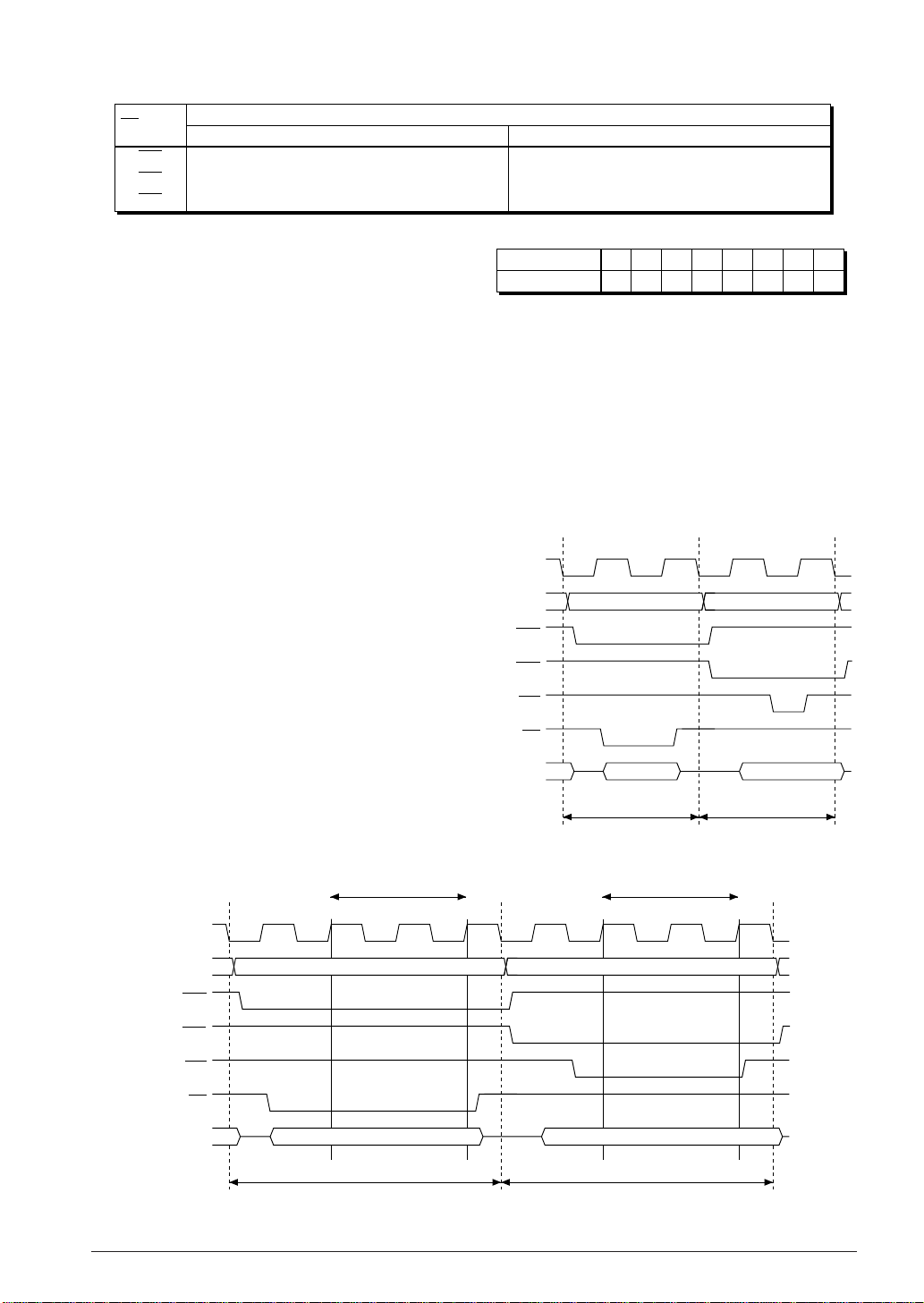
Table 3.6.4.1 CE0–CE2 address settings
_____ _____
CE signal
CE0
CE1
CE2
MCU mode MPU mode
300000H–3FFFFFH
100000H–1FFFFFH
200000H–2FFFFFH
Address range (expansion mode)
_____
When accessing the internal memory area, the CE
signal is not output. Care should be taken here
because the address range for these portions of
memory involves irregular settings.
The arrangement of memory space for external
devices does not necessarily have to be continuous
from a subordinate address and any of the chip
enable signals can be used to assign areas in
memory.
Note:
____
The CE signals will be inactive status when
the chip enters the standby mode (HALT
mode or SLEEP mode).
See Section 3.6.5, "WAIT control", for the output
timing of signal.
3.6.5 WAIT control
In order to insure accessing of external low speed
devices during high speed operations, the S1C88650
is equipped with a WAIT function which prolongs
access time. (See the "S1C88 Core CPU Manual" for
details of the WAIT function.)
The WAIT state numbers to be inserted can be
selected in software from a series of 8 as shown in
Table 3.6.5.1.
3 CPU AND BUS CONFIGURATION
000000H–00D7FFH, 010000H–0FFFFFH
100000H–1FFFFFH
200000H–2FFFFFH
Table 3.6.5.1 Selectable WAIT state numbers
Selection No.
Insert states1022344658610712814
* One state is a 1/2 cycle of the clock in length.
The WAIT states set in software are inserted
between bus cycle states T3–T4.
Note, however, that WAIT states cannot be inserted
when an internal register and internal memory are
being accessed and when operating with the OSC1
oscillation circuit (see "5.4 Oscillation Circuits").
Consequently, WAIT state settings are meaningless
in the single chip mode.
Figure 3.6.5.1 shows the memory read/write
timing charts.
T1
CLK
A0–A19
CE0
CE1
WR
RD
T2 T3 T4
Address
T1
T2 T3 T4
Address
D0–D7
Read data
Read cycle
Write data
Write cycle
(1) No WAIT
WAIT (4 states inserted) WAIT (4 states inserted)
T1
CLK
A0–A19
CE0
CE1
WR
RD
D0–D7
T2 T3 T4
Tw2 Tw2Tw1 Tw1 Tw2 Tw2Tw1 Tw1
Address
Read data
Read cycle
T1
T2 T3 T4
Address
Write data
Write cycle
(2) WAIT state insertion
Fig. 3.6.5.1 Memory read/write cycle
S1C88650 TECHNICAL MANUAL EPSON 13
Page 22
3 CPU AND BUS CONFIGURATION
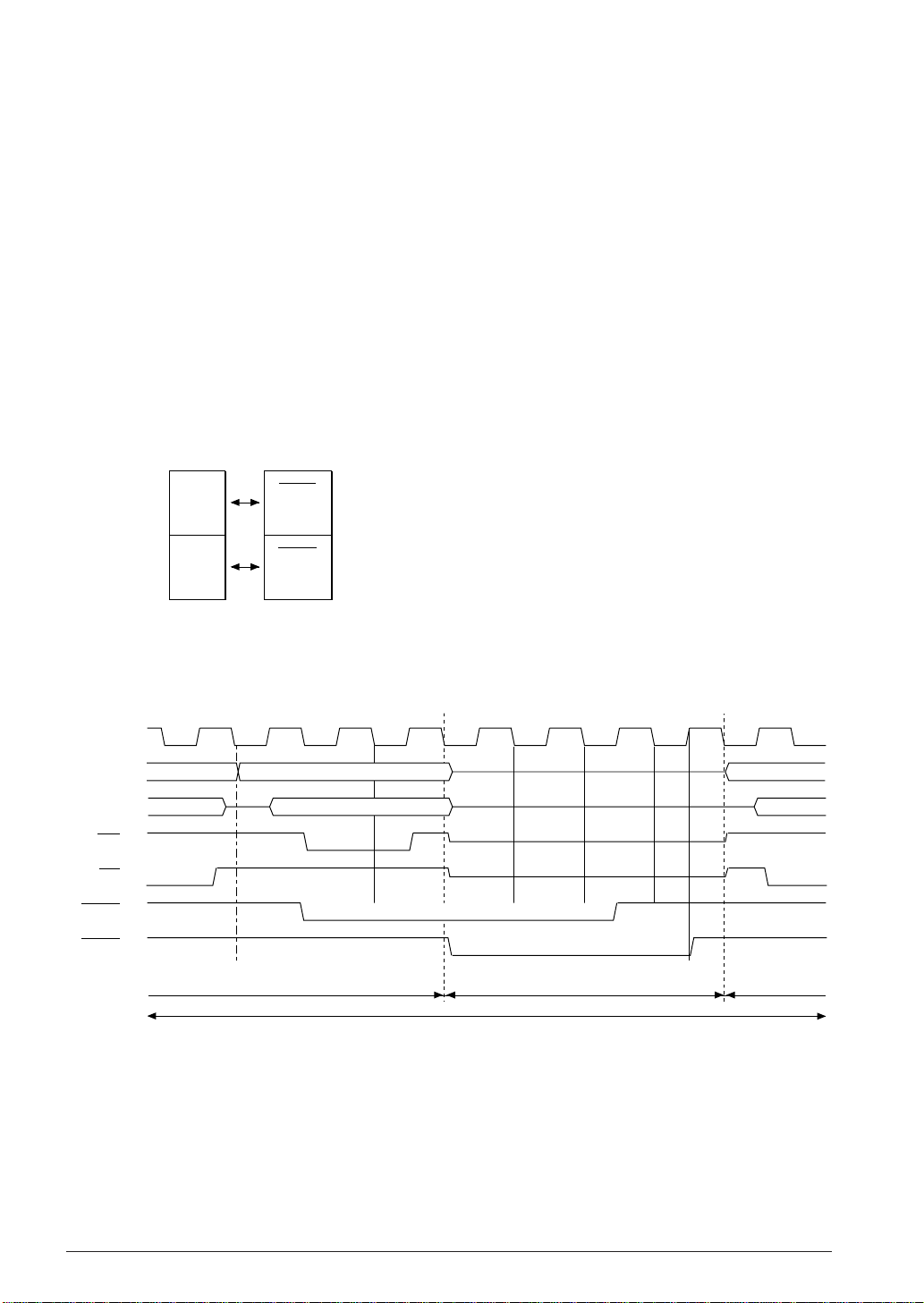
3.6.6 Bus authority release state
The S1C88650 is equipped with a bus authority
release function on request from an external device
so that DMA (Direct Memory Access) transfer can
be conducted between external devices. The
internal memory cannot be accessed by this
function.
There are two terminals used for this function: the
bus authority release request signal (BREQ) input
terminal and the bus authority release acknowledge
signal (BACK) output terminal.
The BREQ input terminal is shared with input port
________
________
________
terminal K03 and the BACK output terminal with
output port terminal R33, use with setting to
________ ________
BREQ/BACK terminals done in software. In the
single chip mode, or when using a system which
does not require bus authority release, set respective terminals as input and output ports.
________
When the bus authority release request (BREQ =
________
LOW) is received from an external device, the
S1C88650 switches the address bus, data bus, RD/
_____ ____
WR signal, and CE signal lines to a high impedance
________
____
state, outputs a LOW level from the BACK terminal
and releases bus authority.
________
As soon as a LOW level is output from the BACK
terminal, the external device can use the external
bus. When DMA is completed, the external device
________
returns the BREQ terminal to HIGH and releases
bus authority.
Figure 3.6.6.2 shows the bus authority release
sequence.
During bus authority release state, internal memory
cannot be accessed from the external device. In
cases where external memory has areas which
overlap areas in internal memory, the external
memory areas can be accessed accordance with the
____
CE signal output by the external device.
CLK
A0–A19
D0–D7
WR
RD
BREQ
BACK
Input
port
K03
Output
port
R33
_______
BREQ
input
BACK
output
_______
Fig. 3.6.6.1 BREQ/BACK terminals
Note: Be careful with the system, such that an
external device does not become the bus
master, other than during the bus release
status.
After setting the BREQ terminal to LOW
level, hold the BREQ terminal at LOW level
until the BACK terminal becomes LOW level.
_______
_______
If the BREQ terminal is returned to HIGH
_______
_______
_______
level, before the BACK terminal becomes
LOW level, the shift to the bus authorization
release status will become indefinite.
Tw2 T4 T1 T2 T3 Tw1 Tw2 T4 Tz1 Tz2 Tz1 Tz2 Tz1 Tz2 Tz1 Tz2 T1 T2 T3
IX
(IX)
Program exection status
(IX)
LLLLH
Bus authority release status
PCHL
ANY
Program
exection
status
LD [HL],[IX]
Fig. 3.6.6.2 Bus authority release sequence
14 EPSON S1C88650 TECHNICAL MANUAL
Page 23
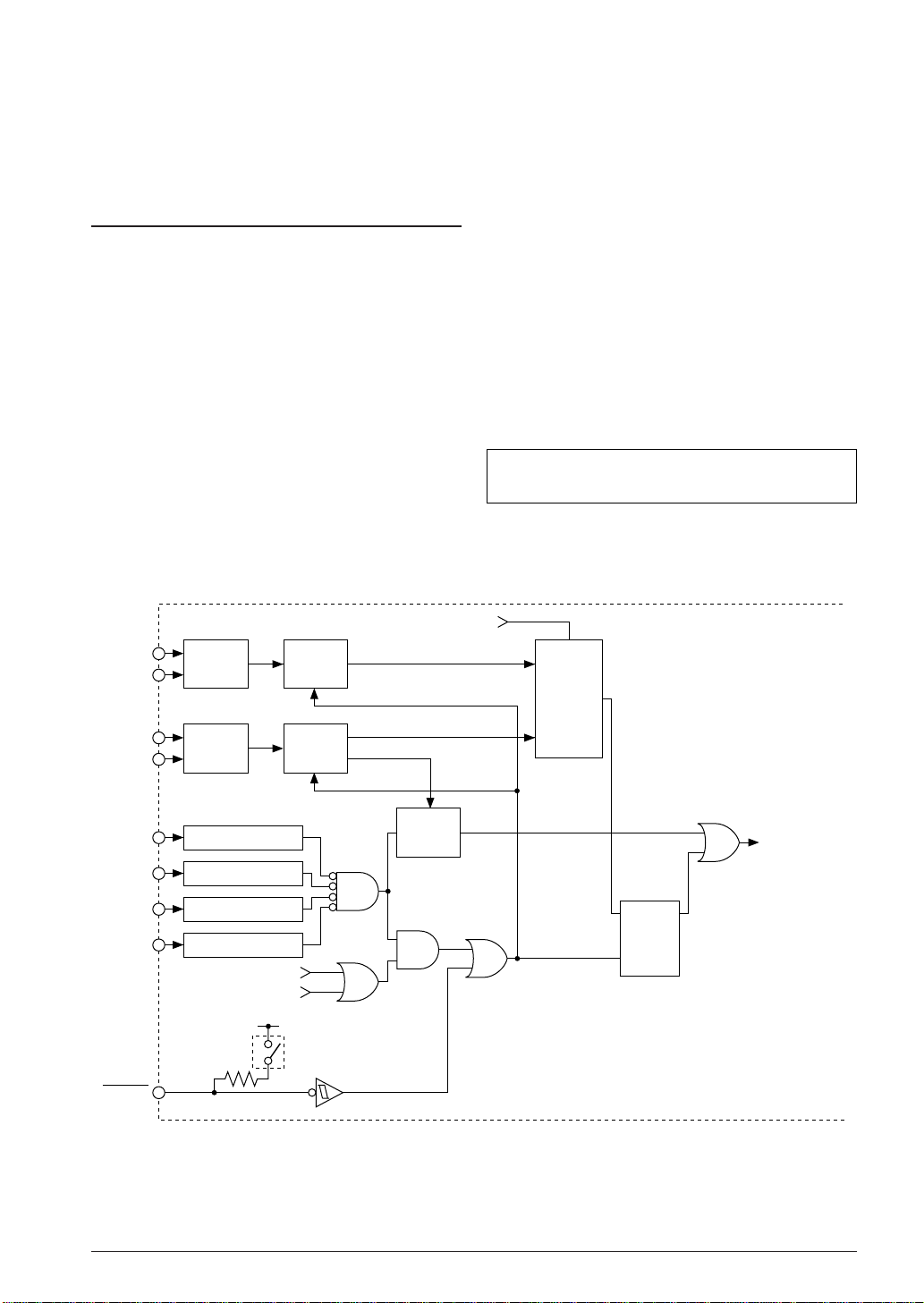
4 INITIAL RESET
Initial reset in the S1C88650 is required in order to initialize circuits. This section of the Manual
contains a description of initial reset factors and the initial settings for internal registers, etc.
____________
4.1 Initial Reset Factors
There are two initial reset factors for the S1C88650
as shown below.
External initial reset by the RESET terminal
(1)
(2) External initial reset by the simultaneous LOW
level input at input port terminals K00–K03
(mask option)
Figure 4.1.1 shows the configuration of the initial
reset circuit.
The CPU and peripheral circuits are initialized by
means of initial reset factors. When the factor is
canceled, the CPU commences reset exception
processing. (See the "S1C88 Core CPU Manual".)
When this occurs, the reset exception processing
vector, Bank 0, 000000H–000001H from program
memory is read out and the program (initialization
routine) which begins at the readout address is
executed.
_________
4.1.1 RESET terminal
Initial reset can be done by externally inputting a
LOW level to the RESET terminal.
Be sure to maintain the RESET terminal at LOW
level for the regulation time after the power on to
assure the initial reset. (See Section 8.6, "AC
Characteristics".)
In addition, be sure to use the RESET terminal for
the first initial reset after the power is turned on.
_________
The RESET terminal is equipped with a pull-up
resistor. You can select whether or not to use by
mask option.
Input port pull-up resistor
_________
RESET............■■ With resistor ■■ Gate direct
_________
_________
_________
4 INITIAL RESET
OSC3
OSC4
OSC1
OSC2
K00
K01
K02
K03
RESET
OSC3
oscillation
circuit
OSC1
oscillation
circuit
Input port K00
Input port K01
Input port K01
Input port K03
SLEEP status
Oscillation stability
waiting signal
V
Operating clock status
f
OSC3
Divider
Divider
DD
Mask
option
/1,024 Hz
OSC1
/256 Hz
f
Time
authorize
circuit
Reset signal
Fig. 4.1.1 Configuration of initial reset circuit
Selector
Reset release
clock
Internal initial
reset
RQ
S
S1C88650 TECHNICAL MANUAL EPSON 15
Page 24
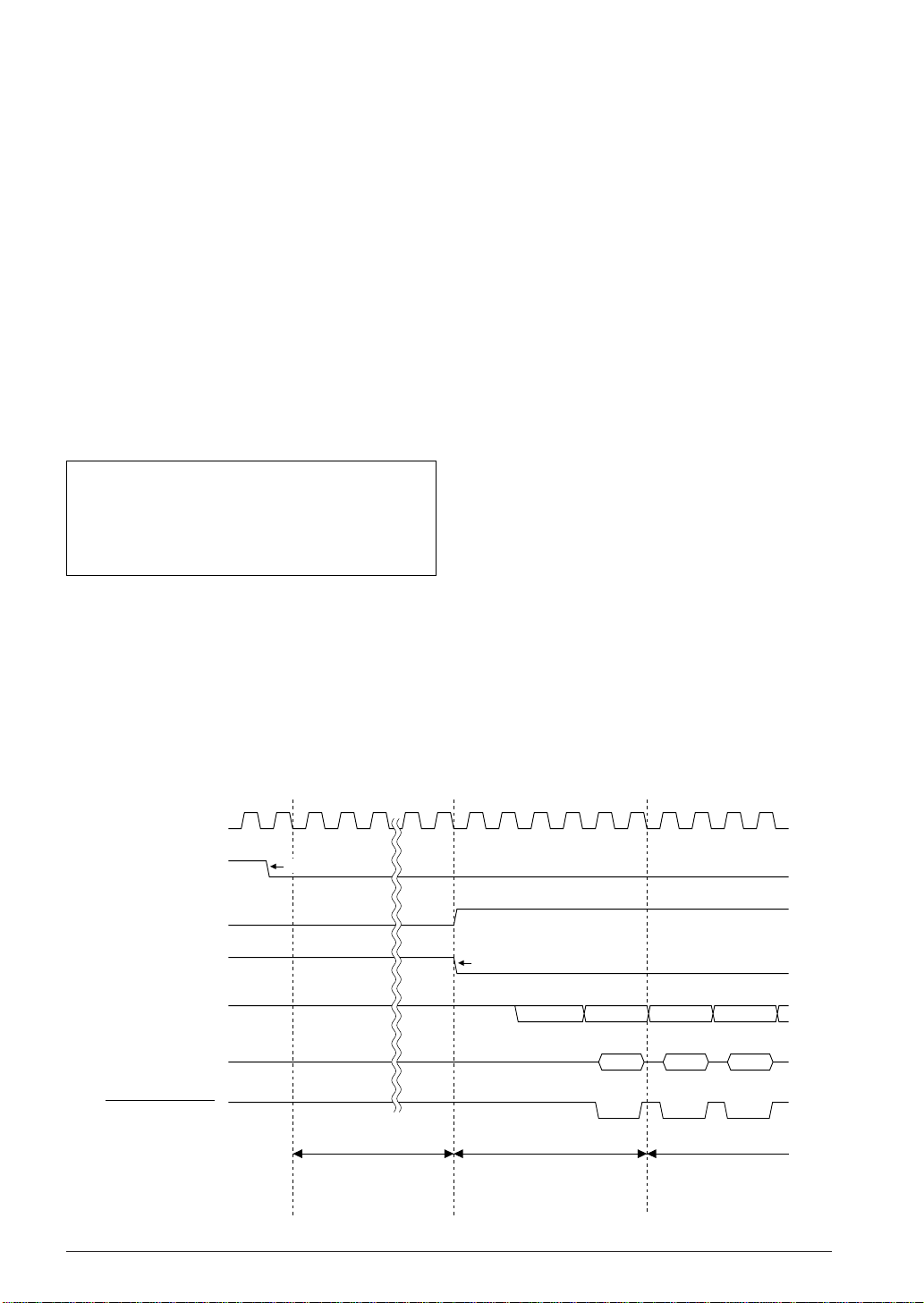
4 INITIAL RESET
4.1.2 Simultaneous LOW level input at
input port terminals K00–K03
Another way of executing initial reset externally is
to input a LOW level simultaneously to the input
ports (K00–K03) selected by mask option.
Since there is a built-in time authorize circuit, be
sure to maintain the designated input port terminal
at LOW level for 65536/fOSC1 seconds (two seconds
when the oscillation frequency is fOSC1 = 32.768
kHz) or more to perform the initial reset by means
of this function.
However, the time authorize circuit is bypassed
during the SLEEP (standby) status and oscillation
stabilization waiting period, and initial reset is
executed immediately after the simultaneous LOW
level input to the designated input ports.
The combination of input ports (K00–K03) that can
be selected by mask option are as follows:
Multiple key entry reset
■■ Not use
■■ K00 & K01
■■ K00 & K01 & K02
■■ K00 & K01 & K02 & K03
For instance, let's say that mask option "K00 & K01
& K02 & K03" is selected, when the input level at
input ports K00–K03 is simultaneously LOW, initial
reset will take place.
When using this function, make sure that the
designated input ports do not simultaneously
switch to LOW level while the system is in normal
operation.
4.1.3 Initial reset sequence
After cancellation of the LOW level input to the
_________
RESET terminal, when the power is turned on, the
start-up of the CPU is held back until the oscillation
stabilization waiting time (512/fOSC3 sec.) have
elapsed.
Figure 4.1.3.1 shows the operating sequence
following initial reset release.
The CPU starts operating in synchronization with
the OSC3 clock after reset status is released.
Also, when using the initial reset by simultaneous
LOW level input into the input port, you should be
careful of the following points.
(1) During SLEEP status, since the time authoriza-
tion circuit is bypassed, an initial reset is
triggered immediately after a LOW level
simultaneous input value. In this case, the CPU
starts after waiting the oscillation stabilization
time, following cancellation of the LOW level
simultaneous input.
(2) Other than during SLEEP status, an initial reset
will be triggered 65536/f
LOW level simultaneous input. In this case,
since a reset differential pulse (64/fOSC1
seconds) is generated within the S1C88650, the
CPU will start even if the LOW level
simultaneous input status is not canceled.
Note: The oscillation stabilization time described in
this section does not include oscillation start
time. Therefore the time interval until the
CPU starts executing instructions after
power is turned on or SLEEP status is
cancelled may be longer than that indicated
in the figure below.
OSC3 seconds after a
f
OSC3
Reset signal
Reset release clock
Internal initial reset
Internal address bus
Internal data bus
Internal read signal
Reset release
Internal initial reset release
PC PC PC 00-0000
Dummy Dummy
512/f
OSC3
[sec]
Oscillation stable waiting time Dummy cycle Reset exception processing
∗ Reset status is maintained
during this period.
VECL
Fig. 4.1.3.1 Initial reset sequence
16 EPSON S1C88650 TECHNICAL MANUAL
Page 25
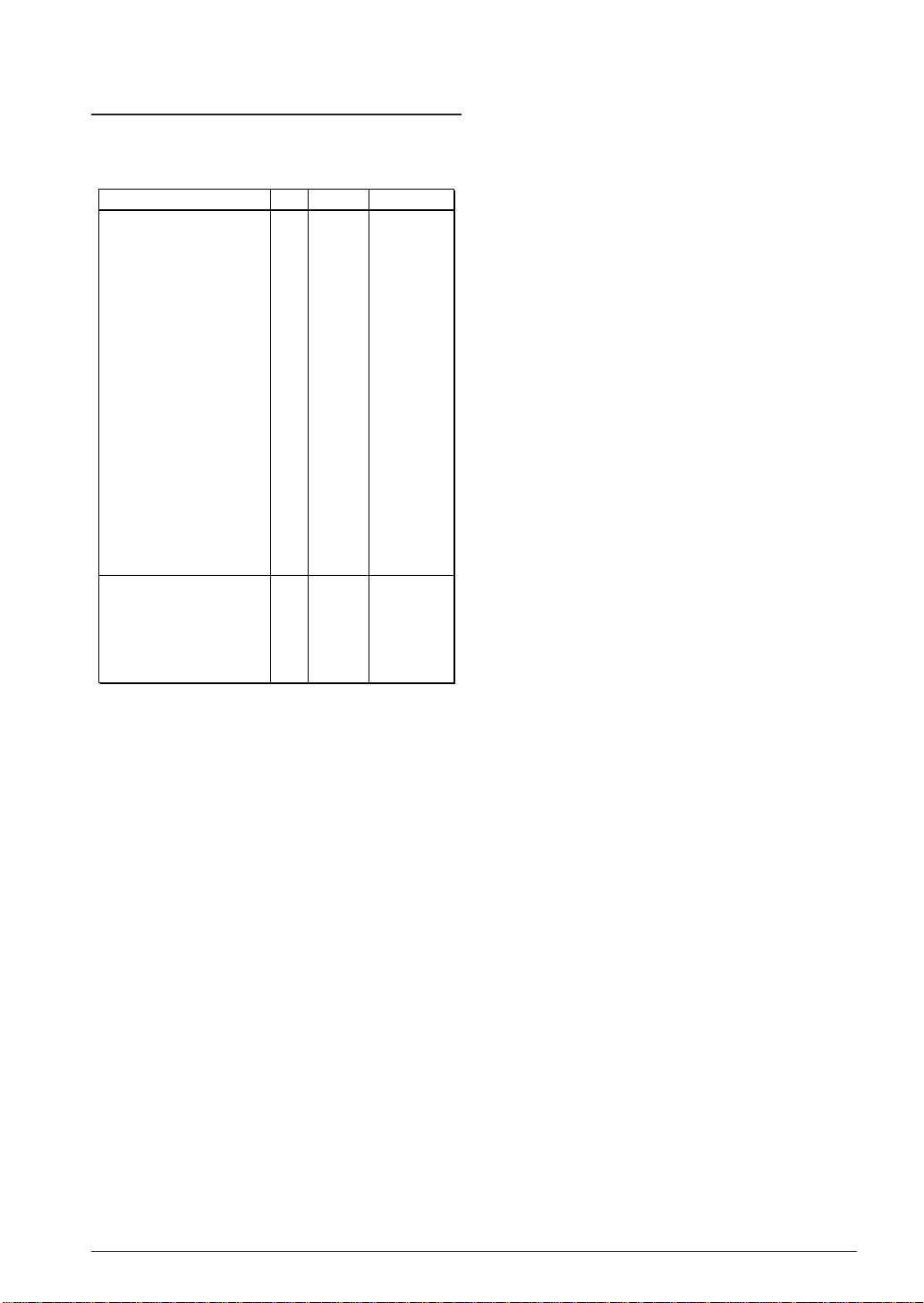
4.2
Initial Settings After Initial Reset
The CPU internal registers are initialized as follows
during initial reset.
Table 4.2.1 Initial settings
Register name
Data register A
Data register B
Index (data) register L
Index (data) register H
Index register IX
Index register IY
Program counter
Stack pointer
Base register
Zero flag
Carry flag
Overflow flag
Negative flag
Decimal flag
Unpack flag
Interrupt flag 0
Interrupt flag 1
New code bank register
Code bank register
Expand page register
Expand page register for IX
Expand page register for IY
Code Setting value
Bit length
A
B
L
H
IX
IY
PC
SP
BR
Z
C
V
N
D
U
I0
I1
NB
CB
EP
XP
YP
16
16
16
16
Undefined
8
Undefined
8
Undefined
8
Undefined
8
Undefined
Undefined
Undefined
Undefined
Undefined
8
1
1
1
1
1
1
1
1
8
8
8
8
8
0
0
0
0
0
0
1
1
01H
Undefined
00H
00H
00H
*
*
* Reset exception processing loads the preset
values stored in 0 bank, 0000H–0001H into the
PC. At the same time, 01H of the NB initial
value is loaded into CB.
Initialize the registers which are not initialized at
initial reset using software.
Since the internal RAM and display memory are
not initialized at initial reset, be sure to initialize
using software.
The respectively stipulated initializations are done
for internal peripheral circuits. If necessary, the
initialization should be done using software.
For initial value at initial reset, see the sections on
the I/O memory map and peripheral circuit
descriptions in the following chapter of this
manual.
4 INITIAL RESET
S1C88650 TECHNICAL MANUAL EPSON 17
Page 26
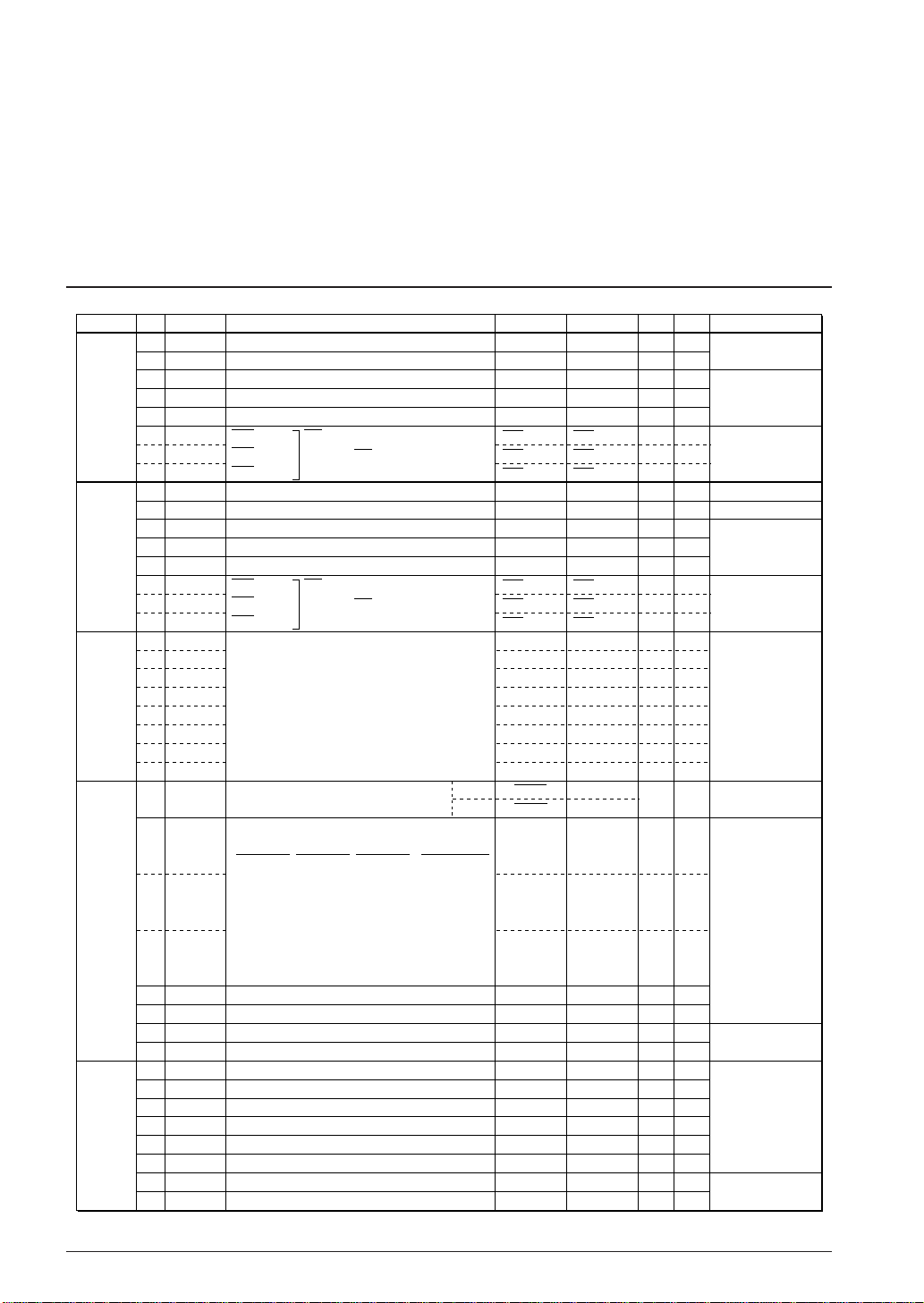
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
5 PERIPHERAL CIRCUITS AND
THEIR OPERATION
The peripheral circuits of the S1C88650 is interfaced with the CPU by means of the memory mapped
I/O method. For this reason, just as with other memory access operations, peripheral circuits can be
controlled by manipulating I/O memory. Below is a description of the operation and control method for
each individual peripheral circuit.
5.1 I/O Memory Map
Table 5.1.1(a) I/O Memory map (00FF00H–00FF03H)
SR R/W10Address Bit Name Function Comment
00FF00
(MCU)D7D6
D5
D4
D3
D2
D1
D0
00FF00
(MPU)D7D6
D5
D4
D3
D2
D1
D0
00FF01 D7
D6
D5
D4
D3
D2
D1
D0
00FF02 D7
D6
D5
D4
D3
D2
D1
D0
00FF03 D7
D6
D5
D4
D3
D2
D1
D0
Note:
All the interrupts including NMI are disabled, until you write the optional value into both the "00FF00H" and
BUSMOD
CPUMOD
–
–
–
CE2
CE1
CE0
BUSMOD
CPUMOD
–
–
–
CE2
CE1
CE0
SPP7
SPP6
SPP5
SPP4
SPP3
SPP2
SPP1
SPP0
EBR
WT2
WT1
WT0
CLKCHG
SOSC3
–
–
–
–
–
–
–
–
VDSEL
DBON
Bus mode
CPU mode
R/W register
R/W register
R/W register
CE2 (R32)
CE1 (R31)
CE0 (R30)
CE signal output Enable/Disable
CE signal output
Enable:
DC (R3x) output
Disable:
Bus mode
CPU mode
R/W register
R/W register
R/W register
CE2 (R32)
CE1 (R31)
CE0 (R30)
CE signal output Enable/Disable
Enable:
CE signal output
Disable:
DC (R3x) output
Stack pointer page address
< SP page allocatable address >
• Single chip mode:
• Expansion mode:
only 0 page
0–27H page
Bus release enable register
(K03 and R33 terminal specification)
Wait control register
WT2
WT1
1
1
1
1
0
0
0
0
1
1
0
0
1
1
0
0
WT0
Number
of state
1
0
1
0
14
12
10
1
0
1
0
No wait
CPU operating clock switch
OSC3 oscillation On/Off control
R/W register
R/W register
–
–
–
–
–
–
Power source select for LCD voltage regulator
Power voltage booster On/Off control
____
(MSB)
(LSB)
K03
R33
8
6
4
2
Expansion
Maximum
1
1
1
CE2 enable
CE1 enable
CE0 enable
Expansion
Maximum
1
1
1
CE2 enable
CE1 enable
CE0 enable
1
1
1
1
1
1
1
1
BREQ
BACK
OSC3
On
1
1
–
–
–
–
–
–
D2
V
On
Single chip
Minimum
CE2 disable
CE1 disable
CE0 disable
Minimum
CE2 disable
CE1 disable
CE0 disable
Input port
Output port
OSC1
Off
V
Off
"00FF01H" addresses.
18 EPSON S1C88650 TECHNICAL MANUAL
0
R/W
0
R/W
0
R/W
0
0
0
0
0
0
0
0
1
–
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
–
–
–
–
–
–
–
–
–
–
–
–
DD
00R/W
Reserved register
R/W
R/W
In Single chip mode,
R/W
these setting are fixed
R/W
at DC output.
R/W
R
Expansion mode only
R/W
Reserved register
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Reserved register
R/W
R/W
Constantly "0" when
being read
R/W
Page 27
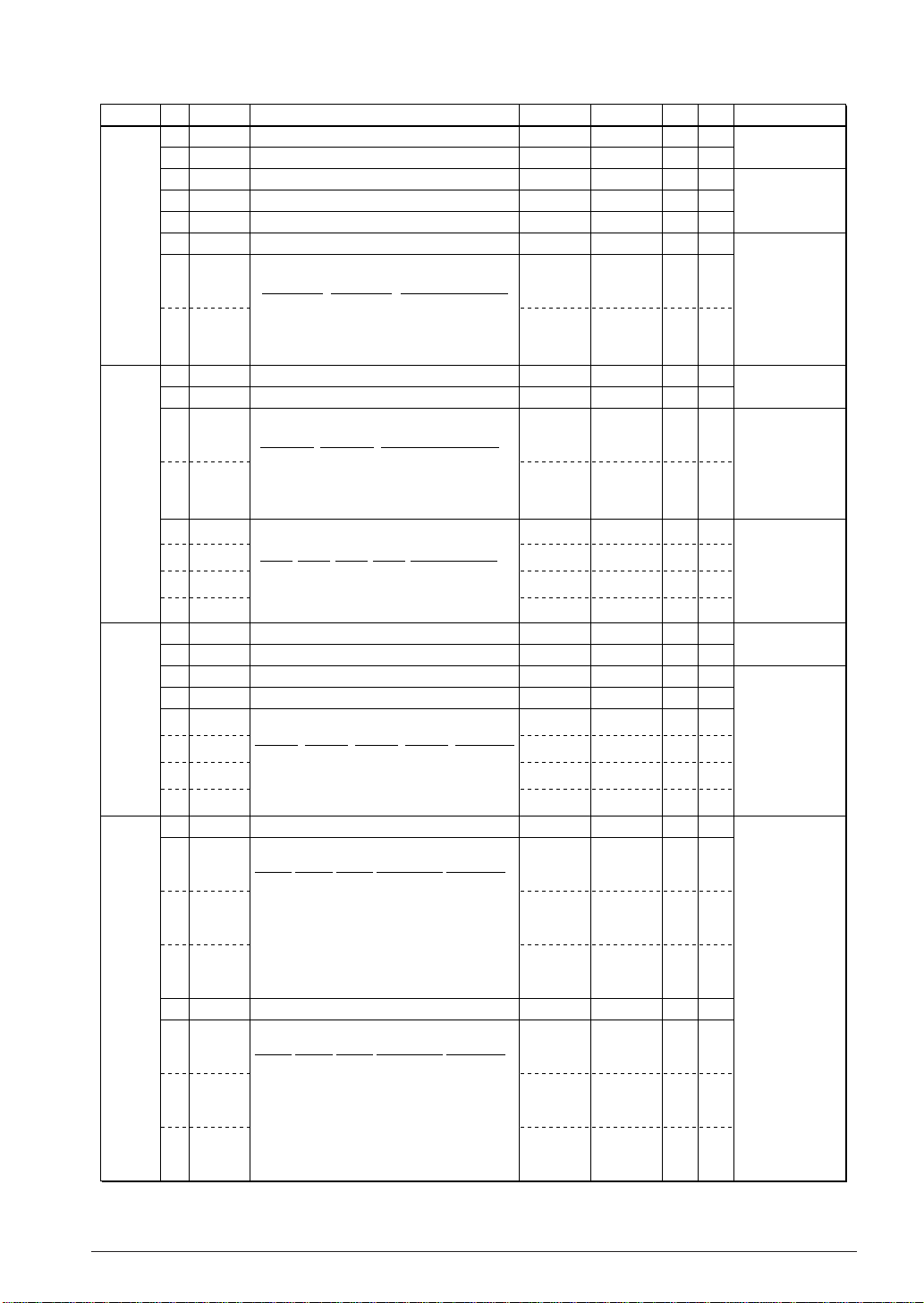
00FF10 D7
D6
D5
D4
D3
D2
D1
D0
00FF11 D7
D6
D5
D4
D3
D2
D1
D0
00FF12 D7
D6
D5
D4
D3
D2
D1
D0
00FF14 D7
D6
D5
D4
D3
D2
D1
D0
HLMOD
SEGREV
–
–
–
DTFNT
LDUTY1
LDUTY0
FRMCS
DSPAR
LCDC1
LCDC0
LC3
LC2
LC1
LC0
–
–
SVDDT
SVDON
SVDS3
SVDS2
SVDS1
SVDS0
PRPRT1
PST12
PST11
PST10
PRPRT0
PST02
PST01
PST00
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(b) I/O Memory map (00FF10H–00FF14H)
Heavy load protection mode
Reverse SEG assignment
R/W register
R/W register
R/W register
LCD dot font selection
LCD drive duty selection
LDUTY1
1
1
0
0
LDUTY0
1
0
1
0
Duty
Not allowed
1/16
1/32
1/8
LCD frame signal source clock selection
LCD display memory area selection
LCD display control
LCDC1
1
1
0
0
LCDC0
1
0
1
0
LCD display
All LCDs lit
All LCDs out
Normal display
Drive off
LCD contrast adjustment
LC3
LC2
LC1
1
LC0
1
1
:
0
1
1
1
:
:
0
0
Contrast
1
0
0
Dark
:
:
:
Light
–
–
SVD detection data
SVD circuit On/Off
SVD criteria voltage setting
SVDS3
SVDS2
SVDS1
SVDS0
1
1
1
1
:
0
1
1
1
1
0
:
:
0
1
Voltage (V)
1
0
1
:
1
Programmable timer 1 clock control
Programmable timer 1 division ratio
PST12
PST11
PST10
(OSC3)
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
OSC3
1
f
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
/ 4096
/ 1024
/ 256
/ 64
/ 32
/ 8
/ 2
/ 1
(OSC1)
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
/ 128
/ 64
/ 32
/ 16
/ 8
/ 4
/ 2
/ 1
Programmable timer 0 clock control
Programmable timer 0 division ratio
PST02
PST01
PST00
(OSC3)
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
OSC3
1
f
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
/ 4096
/ 1024
/ 256
/ 64
/ 32
/ 8
/ 2
/ 1
(OSC1)
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
/ 128
/ 64
/ 32
/ 16
/ 8
/ 4
/ 2
/ 1
2.7
2.6
2.5
:
1.8
On
Reverse
1
1
1
12×12
PTM f
Display area 1 Display area 0
–
–
Low
On
On
On
Off
Normal
0
0
0
16×16/5×8
OSC1
–
–
Normal
Off
Off
Off
SR R/WAddress Bit Name Function Comment10
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
–
–
0
0
0
0
0
0
0
0
0
0
0
0
0
0
R/W
R/W
R/W
Reserved register
R/W
R/W
R/W
R/W
R/W
R/W
R/W
These bits are reset
R/W
to (0, 0) when
SLP instruction
is executed.
R/W
R/W
R/W
R/W
R/W
Constantly "0" when
being read
R
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
S1C88650 TECHNICAL MANUAL EPSON 19
Page 28
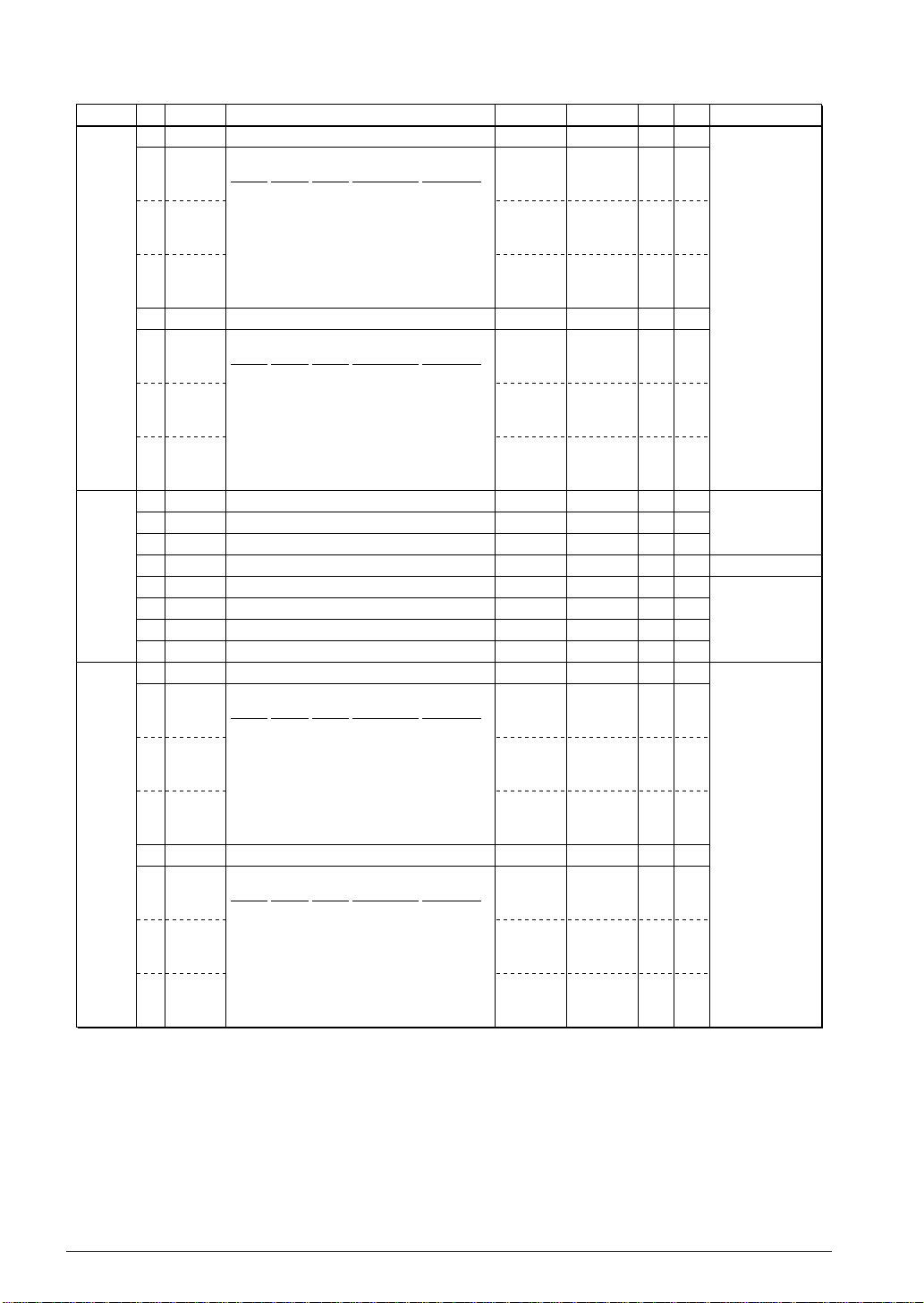
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(c) I/O Memory map (00FF15H–00FF18H)
00FF15 D7
00FF17 D7
00FF18 D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
PRPRT3
PST32
PST31
PST30
PRPRT2
PST22
PST21
PST20
–
–
–
–
PRTF3
PRTF2
PRTF1
PRTF0
PRPRT5
PST52
PST51
PST50
PRPRT4
PST42
PST41
PST40
Programmable timer 3 clock control
Programmable timer 3 division ratio
PST32
PST31
PST30
(OSC3)
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
OSC3
1
f
OSC3
f
0
OSC3
f
1
f
OSC3
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
/ 4096
/ 1024
/ 256
/ 64
/ 32
/ 8
/ 2
/ 1
(OSC1)
OSC1
f
OSC1
f
OSC1
f
f
OSC1
OSC1
f
OSC1
f
OSC1
f
OSC1
f
/ 128
/ 64
/ 32
/ 16
/ 8
/ 4
/ 2
/ 1
Programmable timer 2 clock control
Programmable timer 2 division ratio
PST22
PST21
PST20
(OSC3)
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
OSC3
1
f
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
/ 4096
/ 1024
/ 256
/ 64
/ 32
/ 8
/ 2
/ 1
(OSC1)
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
/ 128
/ 64
/ 32
/ 16
/ 8
/ 4
/ 2
/ 1
–
–
–
R/W register
Programmable timer 3 source clock selection
Programmable timer 2 source clock selection
Programmable timer 1 source clock selection
Programmable timer 0 source clock selection
Programmable timer 5 clock control
Programmable timer 5 division ratio
PST52
PST51
PST50
(OSC3)
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
OSC3
1
f
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
/ 4096
/ 1024
/ 256
/ 64
/ 32
/ 8
/ 2
/ 1
(OSC1)
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
/ 128
/ 64
/ 32
/ 16
/ 8
/ 4
/ 2
/ 1
Programmable timer 4 clock control
Programmable timer 4 division ratio
PST42
PST41
PST40
(OSC3)
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
OSC3
1
f
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
/ 4096
/ 1024
/ 256
/ 64
/ 32
/ 8
/ 2
/ 1
(OSC1)
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
OSC1
f
/ 128
/ 64
/ 32
/ 16
/ 8
/ 4
/ 2
/ 1
f
f
f
f
On
On
OSC1
OSC1
OSC1
OSC1
On
On
SR R/WAddress Bit Name Function Comment10
0
Off
Off
–
–
–
1
OSC3
f
f
OSC3
f
OSC3
f
OSC3
–
–
–
0
Off
Off
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
–
–
Constantly "0" when
being read
–
0
R/W
Reserved register
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
20 EPSON S1C88650 TECHNICAL MANUAL
Page 29
00FF19 D7
D6
D5
D4
D3
D2
D1
D0
00FF1B D7
D6
D5
D4
D3
D2
D1
D0
00FF20 D7
D6
D5
D4
D3
D2
D1
D0
00FF21 D7
D6
D5
D4
D3
D2
D1
D0
00FF22 D7
D6
D5
D4
D3
D2
D1
D0
PRPRT7
PST72
PST71
PST70
PRPRT6
PST62
PST61
PST60
–
–
–
–
PRTF7
PRTF6
PRTF5
PRTF4
PK01
PK00
PSIF1
PSIF0
–
–
PTM1
PTM0
–
–
PPT3
PPT2
PPT1
PPT0
–
–
–
–
–
–
ETM32
ETM8
ETM2
ETM1
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(d) I/O Memory map (00FF19H–00FF22H)
Programmable timer 7 clock control
Programmable timer 7 division ratio
PST72
PST71
PST70
(OSC3)
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
OSC3
1
f
OSC3
f
0
OSC3
f
1
OSC3
f
0
f
OSC3
1
OSC3
f
0
OSC3
f
1
f
OSC3
0
/ 4096
/ 1024
/ 256
/ 64
/ 32
/ 8
/ 2
/ 1
(OSC1)
OSC1
f
OSC1
f
OSC1
f
OSC1
f
f
OSC1
OSC1
f
OSC1
f
f
OSC1
/ 128
/ 64
/ 32
/ 16
/ 8
/ 4
/ 2
/ 1
Programmable timer 6 clock control
Programmable timer 6 division ratio
PST62
PST61
PST60
(OSC3)
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
OSC3
1
f
OSC3
f
0
f
OSC3
1
OSC3
f
0
OSC3
f
1
OSC3
f
0
OSC3
f
1
f
OSC3
0
/ 4096
/ 1024
/ 256
/ 64
/ 32
/ 8
/ 2
/ 1
(OSC1)
OSC1
f
OSC1
f
f
OSC1
OSC1
f
OSC1
f
OSC1
f
OSC1
f
f
OSC1
/ 128
/ 64
/ 32
/ 16
/ 8
/ 4
/ 2
/ 1
–
–
–
–
Programmable timer 7 source clock selection
Programmable timer 6 source clock selection
Programmable timer 5 source clock selection
Programmable timer 4 source clock selection
K00–K07 interrupt priority register
Serial interface interrupt priority register
–
–
Clock timer interrupt priority register
–
–
Programmable timer 3–2 interrupt
priority register
Programmable timer 1–0 interrupt
priority register
–
–
–
–
–
–
Clock timer 32 Hz interrupt enable register
Clock timer 8 Hz interrupt enable register
Clock timer 2 Hz interrupt enable register
Clock timer 1 Hz interrupt enable register
On
On
OSC1
f
f
OSC1
f
OSC1
f
OSC1
PK01
PSIF1
1
1
0
0
PTM1
1
1
0
0
PPT3
PPT1
1
1
0
0
Interrupt
enable
–
–
–
–
–
–
–
–
–
–
–
–
–
–
PK00
PSIF0
1
0
1
0
PTM0
1
0
1
0
PPT2
PPT0
1
0
1
0
Off
Off
–
–
–
–
OSC3
f
f
OSC3
f
OSC3
f
OSC3
Priority
level
Level 3
Level 2
Level 1
Level 0
–
–
Priority level
Level 3
Level 2
Level 1
Level 0
–
–
Priority
level
Level 3
Level 2
Level 1
–
Level 0
–
–
–
–
–
–
Interrupt
disable
SR R/WAddress Bit Name Function Comment10
0
0
0
0
0
0
0
0
–
–
–
–
0
0
0
0
0
0
–
–
0
–
–
00R/W
–
–
–
–
–
–
0 R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Constantly "0" when
being read
R/W
R/W
R/W
R/W
R/W
R/W
Constantly "0" when
being read
R/W
Constantly "0" when
being read
R/W
Constantly "0" when
being read
Constantly "0" when
being read
S1C88650 TECHNICAL MANUAL EPSON 21
Page 30
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(e) I/O Memory map (00FF23H–00FF28H)
Address Bit Name SR R/WFunction Comment10
00FF23 –
00FF24 EK07
00FF25 D7
00FF26 D7
00FF27 D7
00FF28 FK07
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
–
–
–
–
ESERR
ESREC
ESTRA
EK06
EK05
EK04
EK03
EK02
EK01
EK00
ETC3
ETU3
ETC2
ETU2
ETC1
ETU1
ETC0
ETU0
–
–
–
–
FTM32
FTM8
FTM2
FTM1
–
–
–
–
–
FSERR
FSREC
FSTRA
FK06
FK05
FK04
FK03
FK02
FK01
FK00
–
–
–
–
–
Serial I/F (error) interrupt enable register
Serial I/F (receiving) interrupt enable register
Serial I/F (transmitting) interrupt enable register
K07 interrupt enable
K06 interrupt enable
K05 interrupt enable
K04 interrupt enable
K03 interrupt enable
K02 interrupt enable
K01 interrupt enable
K00 interrupt enable
PTM3 compare match interrupt enable
PTM3 underflow interrupt enable
PTM2 compare match interrupt enable
PTM2 underflow interrupt enable
PTM1 compare match interrupt enable
PTM1 underflow interrupt enable
PTM0 compare match interrupt enable
PTM0 underflow interrupt enable
–
–
–
–
Clock timer 32 Hz interrupt factor flag
Clock timer 8 Hz interrupt factor flag
Clock timer 2 Hz interrupt factor flag
Clock timer 1 Hz interrupt factor flag
–
–
–
–
–
Serial I/F (error) interrupt factor flag
Serial I/F (receiving) interrupt factor flag
Serial I/F (transmitting) interrupt factor flag
K07 interrupt factor flag
K06 interrupt factor flag
K05 interrupt factor flag
K04 interrupt factor flag
K03 interrupt factor flag
K02 interrupt factor flag
K01 interrupt factor flag
K00 interrupt factor flag
–
–
–
–
–
Interrupt
enable
Interrupt
enable
Interrupt
enable
–
–
–
–
(R)
Generated
(W)
Reset
–
–
–
–
–
(R)
Generated
(W)
Reset
(R)
Interrupt
factor is
generated
(W)
Reset
–
–
–
–
–
Interrupt
disable
Interrupt
disable
Interrupt
disable
–
–
–
–
(R)
Not generated
(W)
No operation
–
–
–
–
–
(R)
Not generated
(W)
No operation
(R)
No interrupt
factor is
generated
(W)
No operation
–
–
–
–
–
0
R/W
0
R/W
0 R/W
–
–
–
–
0 R/W
–
–
–
–
–
0 R/W
0
R/W
Constantly "0" when
being read
Constantly "0" when
being read
Constantly "0" when
being read
22 EPSON S1C88650 TECHNICAL MANUAL
Page 31

00FF29 D7
D6
D5
D4
D3
D2
D1
D0
00FF2A D7
D6
D5
D4
D3
D2
D1
D0
00FF2C
D7
D6
D5
D4
D3
D2
D1
D0
00FF2E D7
D6
D5
D4
D3
D2
D1
D0
00FF30
D7
D6
D5
D4
D3
D2
D1
D0
00FF31 D7
D6
D5
D4
D3
D2
D1
D0
FTC3
FTU3
FTC2
FTU2
FTC1
FTU1
FTC0
FTU0
–
–
–
–
PPT7
PPT6
PPT5
PPT4
ETC7
ETU7
ETC6
ETU6
ETC5
ETU5
ETC4
ETU4
FTC7
FTU7
FTC6
FTU6
FTC5
FTU5
FTC4
FTU4
MODE16_A
PTNREN_A
–
–
PTOUT0
PTRUN0
PSET0
CKSEL0
–
–
–
–
PTOUT1
PTRUN1
PSET1
CKSEL1
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(f) I/O Memory map (00FF29H–00FF31H)
PTM3 compare match interrupt factor flag
PTM3 underflow interrupt factor flag
PTM2 compare match interrupt factor flag
PTM2 underflow interrupt factor flag
PTM1 compare match interrupt factor flag
PTM1 underflow interrupt factor flag
PTM0 compare match interrupt factor flag
PTM0 underflow interrupt factor flag
–
–
–
–
Programmable timer 7–6 interrupt
priority register
Programmable timer 5–4 interrupt
priority register
PTM7 compare match interrupt enable
PTM7 underflow interrupt enable
PTM6 compare match interrupt enable
PTM6 underflow interrupt enable
PTM5 compare match interrupt enable
PTM5 underflow interrupt enable
PTM4 compare match interrupt enable
PTM4 underflow interrupt enable
PTM7 compare match interrupt factor flag
PTM7 underflow interrupt factor flag
PTM6 compare match interrupt factor flag
PTM6 underflow interrupt factor flag
PTM5 compare match interrupt factor flag
PTM5 underflow interrupt factor flag
PTM4 compare match interrupt factor flag
PTM4 underflow interrupt factor flag
PTM0–1 8/16-bit mode selection
External clock 0 noise rejecter selection
–
R/W register
PTM0 clock output control
PTM0 Run/Stop control
PTM0 preset
PTM0 input clock selection
–
–
–
R/W register
PTM1 clock output control
PTM1 Run/Stop control
PTM1 preset
PTM1 input clock selection
(R)
Interrupt
factor is
generated
(W)
Reset
–
–
–
–
PPT7
PPT5
1
1
0
0
Interrupt
enable
(R)
Interrupt
factor is
generated
(W)
Reset
16-bit x 1
Enable
–
1
On
Run
Preset
External clock
–
–
–
1
On
Run
Preset
External clock
No interrupt
No operation
PPT6
PPT4
1
0
1
0
No interrupt
No operation
No operation
Internal clock
No operation
Internal clock
(R)
factor is
generated
(W)
–
–
–
–
Priority
level
Level 3
Level 2
Level 1
Level 0
Interrupt
disable
(R)
factor is
generated
(W)
-bit x 2
8
Disable
–
0
Off
Stop
–
–
–
0
Off
Stop
SR R/WAddress Bit Name Function Comment10
0 R/W
–
–
–
–
00R/W
0 R/W
0 R/W
0
0
–
0
0
0
0
0
–
–
–
0
0
0
0
0
Constantly "0" when
being read
R/W
R/W
R/W
"0" when being read
R/W
Reserved register
R/W
R/W
W
"0" when being read
R/W
Constantly "0" when
being read
R/W
Reserved register
R/W
R/W
W
"0" when being read
R/W
S1C88650 TECHNICAL MANUAL EPSON 23
Page 32

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(g) I/O Memory map (00FF32H–00FF37H)
D7
00FF32
00FF33
00FF34
00FF35
00FF36
00FF37
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
RDR07
RDR06
RDR05
RDR04
RDR03
RDR02
RDR01
RDR00
RDR17
RDR16
RDR15
RDR14
RDR13
RDR12
RDR11
RDR10
CDR07
CDR06
CDR05
CDR04
CDR03
CDR02
CDR01
CDR00
CDR17
CDR16
CDR15
CDR14
CDR13
CDR12
CDR11
CDR10
PTM07
PTM06
PTM05
PTM04
PTM03
PTM02
PTM01
PTM00
PTM17
PTM16
PTM15
PTM14
PTM13
PTM12
PTM11
PTM10
PTM0 reload data D7 (MSB)
PTM0 reload data D6
PTM0 reload data D5
PTM0 reload data D4
PTM0 reload data D3
PTM0 reload data D2
PTM0 reload data D1
PTM0 reload data D0 (LSB)
PTM1 reload data D7 (MSB)
PTM1 reload data D6
PTM1 reload data D5
PTM1 reload data D4
PTM1 reload data D3
PTM1 reload data D2
PTM1 reload data D1
PTM1 reload data D0 (LSB)
PTM0 compare data D7 (MSB)
PTM0 compare data D6
PTM0 compare data D5
PTM0 compare data D4
PTM0 compare data D3
PTM0 compare data D2
PTM0 compare data D1
PTM0 compare data D0 (LSB)
PTM1 compare data D7 (MSB)
PTM1 compare data D6
PTM1 compare data D5
PTM1 compare data D4
PTM1 compare data D3
PTM1 compare data D2
PTM1 compare data D1
PTM1 compare data D0 (LSB)
PTM0 data D7 (MSB)
PTM0 data D6
PTM0 data D5
PTM0 data D4
PTM0 data D3
PTM0 data D2
PTM0 data D1
PTM0 data D0 (LSB)
PTM1 data D7 (MSB)
PTM1 data D6
PTM1 data D5
PTM1 data D4
PTM1 data D3
PTM1 data D2
PTM1 data D1
PTM1 data D0 (LSB)
High Low
High Low
High Low
High Low
High Low
High Low
SR R/WAddress Bit Name Function Comment10
1 R/W
1 R/W
0 R/W
0 R/W
1R
1R
24 EPSON S1C88650 TECHNICAL MANUAL
Page 33

00FF38
D7
D6
D5
D4
D3
D2
D1
D0
00FF39 D7
D6
D5
D4
D3
D2
D1
D0
00FF3A
D7
D6
D5
D4
D3
D2
D1
D0
00FF3B
D7
D6
D5
D4
D3
D2
D1
D0
00FF3C
D7
D6
D5
D4
D3
D2
D1
D0
00FF3D
D7
D6
D5
D4
D3
D2
D1
D0
MODE16_B
PTNREN_B
–
RPTOUT2
PTOUT2
PTRUN2
PSET2
CKSEL2
–
–
–
RPTOUT3
PTOUT3
PTRUN3
PSET3
CKSEL3
RDR27
RDR26
RDR25
RDR24
RDR23
RDR22
RDR21
RDR20
RDR37
RDR36
RDR35
RDR34
RDR33
RDR32
RDR31
RDR30
CDR27
CDR26
CDR25
CDR24
CDR23
CDR22
CDR21
CDR20
CDR37
CDR36
CDR35
CDR34
CDR33
CDR32
CDR31
CDR30
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(h) I/O Memory map (00FF38H–00FF3DH)
PTM2–3 8/16-bit mode selection
External clock 1 noise rejecter selection
–
PTM2 inverted clock output control
PTM2 clock output control
PTM2 Run/Stop control
PTM2 preset
PTM2 input clock selection
–
–
–
PTM3 inverted clock output control
PTM3 clock output control
PTM3 Run/Stop control
PTM3 preset
PTM3 input clock selection
PTM2 reload data D7 (MSB)
PTM2 reload data D6
PTM2 reload data D5
PTM2 reload data D4
PTM2 reload data D3
PTM2 reload data D2
PTM2 reload data D1
PTM2 reload data D0 (LSB)
PTM3 reload data D7 (MSB)
PTM3 reload data D6
PTM3 reload data D5
PTM3 reload data D4
PTM3 reload data D3
PTM3 reload data D2
PTM3 reload data D1
PTM3 reload data D0 (LSB)
PTM2 compare data D7 (MSB)
PTM2 compare data D6
PTM2 compare data D5
PTM2 compare data D4
PTM2 compare data D3
PTM2 compare data D2
PTM2 compare data D1
PTM2 compare data D0 (LSB)
PTM3 compare data D7 (MSB)
PTM3 compare data D6
PTM3 compare data D5
PTM3 compare data D4
PTM3 compare data D3
PTM3 compare data D2
PTM3 compare data D1
PTM3 compare data D0 (LSB)
16-bit x 1
Enable
–
On
On
Run
Preset
External clock
–
–
–
On
On
Run
Preset
External clock
High Low
High Low
High Low
High Low
-
bit x 2
8
Disable
–
Off
Off
Stop
No operation
Internal clock
–
–
–
Off
Off
Stop
No operation
Internal clock
SR R/WAddress Bit Name Function Comment10
0
0
–
0
0
0
0
0
–
–
–
0
0
0
0
0
1 R/W
1 R/W
0 R/W
0 R/W
R/W
R/W
"0" when being read
R/W
R/W
R/W
W
"0" when being read
R/W
Constantly "0" when
being read
R/W
R/W
R/W
W
"0" when being read
R/W
S1C88650 TECHNICAL MANUAL EPSON 25
Page 34

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(i) I/O Memory map (00FF3EH–00FF41H)
D7
00FF3E
D6
D5
D4
D3
D2
D1
D0
00FF3F
D7
D6
D5
D4
D3
D2
D1
D0
00FF40 D7
D6
D5
D4
D3
D2
D1
D0
00FF41 D7
D6
D5
D4
D3
D2
D1
D0
PTM27
PTM26
PTM25
PTM24
PTM23
PTM22
PTM21
PTM20
PTM37
PTM36
PTM35
PTM34
PTM33
PTM32
PTM31
PTM30
WDEN
FOUT2
FOUT1
FOUT0
FOUTON
WDRST
TMRST
TMRUN
TMD7
TMD6
TMD5
TMD4
TMD3
TMD2
TMD1
TMD0
PTM2 data D7 (MSB)
PTM2 data D6
PTM2 data D5
PTM2 data D4
PTM2 data D3
PTM2 data D2
PTM2 data D1
PTM2 data D0 (LSB)
PTM3 data D7 (MSB)
PTM3 data D6
PTM3 data D5
PTM3 data D4
PTM3 data D3
PTM3 data D2
PTM3 data D1
PTM3 data D0 (LSB)
Watchdog timer enable
FOUT frequency selection
FOUT2
FOUT1
FOUT0
1
1
1
1
1
0
1
0
1
1
0
0
0
1
1
0
1
0
0
0
1
0
0
0
FOUT output control
Watchdog timer reset
Clock timer reset
Clock timer Run/Stop control
Clock timer data
Clock timer data
Clock timer data
Clock timer data
Clock timer data
Clock timer data
Clock timer data
Clock timer data
1 Hz
2 Hz
4 Hz
8 Hz
16 Hz
32 Hz
64 Hz
128 Hz
Frequency
f
OSC3
/ 8
f
OSC3
/ 4
OSC3
/ 2
f
f
OSC3
/ 1
OSC1
/ 8
f
f
OSC1
/ 4
OSC1
/ 2
f
f
OSC1
/ 1
High Low
High Low
Enable Disable
On
Reset
Reset
Run
High Low
Off
No operation
No operation
Stop
SR R/WAddress Bit Name Function Comment10
1R
1R
1
R/W
0
R/W
0
R/W
0
R/W
0
R/W
–
W
–
W
0
R/W
0R
Constantly "0" when
being read
26 EPSON S1C88650 TECHNICAL MANUAL
Page 35

00FF48 D7
D6
D5
D4
D3
D2
D1
D0
00FF49 D7
D6
D5
D4
D3
D2
D1
D0
00FF4A D7
D6
D5
D4
D3
D2
D1
D0
00FF4B D7
D6
D5
D4
D3
D2
D1
D0
–
EPR
PMD
SCS1
SCS0
SMD1
SMD0
ESIF
–
FER
PER
OER
RXTRG
RXEN
TXTRG
TXEN
TRXD7
TRXD6
TRXD5
TRXD4
TRXD3
TRXD2
TRXD1
TRXD0
–
–
–
–
–
–
STPB
SDP
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(j) I/O Memory map (00FF48H–00FF4BH)
SR R/WAddress Bit Name Function Comment10
––
Parity enable register
Parity mode selection
Clock source selection
SCS1
SCS0
1
1
1
0
0
1
0
0
Clock source
Programmable timer
fOSC3 / 4
fOSC3 / 8
fOSC3 / 16
Serial I/F mode selection
SMD1
SMD0
1
1
Asynchronous 8-bit
1
0
Asynchronous 7-bit
0
1
Clock synchronous slave
0
0
Clock synchronous master
Mode
Serial I/F enable register
– "0" when being read
Serial I/F framing error flag
Serial I/F parity error flag
Serial I/F overrun error flag
Serial I/F receive trigger/status
Serial I/F receive enable
Serial I/F transmit trigger/status
Serial I/F transmit enable
Serial I/F transmit/Receive data D7 (MSB)
Serial I/F transmit/Receive data D6
Serial I/F transmit/Receive data D5
Serial I/F transmit/Receive data D4
Serial I/F transmit/Receive data D3
Serial I/F transmit/Receive data D2
Serial I/F transmit/Receive data D1
Serial I/F transmit/Receive data D0 (LSB)
–
–
–
–
–
–
Serial I/F stop bit selection
Serial I/F data input/output permutation selection
R
W
R
W
R
W
R
W
R
W
– –
With parity
Odd
Serial I/F
– –
Error
Reset (0)
Error
Reset (0)
Error
Reset (0)
Run
Trigger
Enable
Run
Trigger
Enable
–
–
–
–
–
–
2 bits
MSB first
Non parity
Even
I/O port
No error
No operation
No error
No operation
No error
No operation
Stop
No operation
Disable
Stop
No operation
Disable
–
–
–
–
–
–
1 bit
LSB first
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
–
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
X R/WHigh Low
–
–
–
–
–
–
00R/W
R/W
"0" when being read
Only for
asynchronous mode
In the clock synchronous slave mode,
external clock is
selected.
Only for
asynchronous mode
Constantly "0" when
being read
S1C88650 TECHNICAL MANUAL EPSON 27
Page 36

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(k) I/O Memory map (00FF52H–00FF60H)
00FF52 D7
00FF54 D7
00FF56 D7
00FF58 D7
00FF60 D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
KCP07
KCP06
KCP05
KCP04
KCP03
KCP02
KCP01
KCP00
K07D
K06D
K05D
K04D
K03D
K02D
K01D
K00D
PULK07
PULK06
PULK05
PULK04
PULK03
PULK02
PULK01
PULK00
–
CTK02H
CTK01H
CTK00H
–
CTK02L
CTK01L
CTK00L
IOC07
IOC06
IOC05
IOC04
IOC03
IOC02
IOC01
IOC00
K07 input comparison register
K06 input comparison register
K05 input comparison register
K04 input comparison register
K03 input comparison register
K02 input comparison register
K01 input comparison register
K00 input comparison register
K07 input port data
K06 input port data
K05 input port data
K04 input port data
K03 input port data
K02 input port data
K01 input port data
K00 input port data
K07 pull-up control register
K06 pull-up control register
K05 pull-up control register
K04 pull-up control register
K03 pull-up control register
K02 pull-up control register
K01 pull-up control register
K00 pull-up control register
–
K04–K07 port chattering-eliminate setup
(Input level check time)
CTK02H
1
1
1
1
0
0
0
0
CTK01H
1
1
0
0
1
1
0
0
CTK00H
1
0
1
0
1
0
1
0
Check time
[sec]
OSC3
4/f
2/f
OSC3
1/f
OSC3
4096/f
2048/f
512/f
OSC1
128/f
OSC1
None
–
K00–K03 port chattering-eliminate setup
(Input level check time)
CTK02L
1
1
1
1
0
0
0
0
CTK01L
1
1
0
0
1
1
0
0
CTK00L
1
0
1
0
1
0
1
0
Check time
[sec]
4/f
OSC3
2/f
OSC3
1/f
OSC3
4096/f
2048/f
512/f
OSC1
128/f
OSC1
None
P07 I/O control register
P06 I/O control register
P05 I/O control register
P04 I/O control register
P03 I/O control register
P02 I/O control register
P01 I/O control register
P00 I/O control register
Interrupt
generated
at falling
edge
High level
input
On Off
OSC1
OSC1
OSC1
OSC1
Output Input
SR R/WAddress Bit Name Function Comment10
Interrupt
generated
at rising
edge
Low level
input
1 R/W
–R
1 R/W
–
–
–
0
0
0
–
–
–
0
0
0
"0" when being read
R/W
R/W
R/W
"0" when being read
R/W
R/W
R/W
0 R/W
28 EPSON S1C88650 TECHNICAL MANUAL
Page 37

00FF61 D7
D6
D5
D4
D3
D2
D1
D0
00FF62 D7
D6
D5
D4
D3
D2
D1
D0
00FF63 D7
D6
D5
D4
D3
D2
D1
D0
00FF64 D7
D6
D5
D4
D3
D2
D1
D0
00FF65 D7
D6
D5
D4
D3
D2
D1
D0
00FF70 D7
D6
D5
D4
D3
D2
D1
D0
IOC17
IOC16
IOC15
IOC14
IOC13
IOC12
IOC11
IOC10
P07D
P06D
P05D
P04D
P03D
P02D
P01D
P00D
P17D
P16D
P15D
P14D
P13D
P12D
P11D
P10D
PULP07
PULP06
PULP05
PULP04
PULP03
PULP02
PULP01
PULP00
PULP17
PULP16
PULP15
PULP14
PULP13
PULP12
PULP11
PULP10
–
–
–
–
HZR1H
HZR1L
HZR0H
HZR0L
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(l) I/O Memory map (00FF61H–00FF70H)
P17 I/O control register
P16 I/O control register
P15 I/O control register
P14 I/O control register
P13 I/O control register
P12 I/O control register
P11 I/O control register
P10 I/O control register
P07 I/O port data
P06 I/O port data
P05 I/O port data
P04 I/O port data
P03 I/O port data
P02 I/O port data
P01 I/O port data
P00 I/O port data
P17 I/O port data
P16 I/O port data
P15 I/O port data
P14 I/O port data
P13 I/O port data
P12 I/O port data
P11 I/O port data
P10 I/O port data
P07 pull-up control register
P06 pull-up control register
P05 pull-up control register
P04 pull-up control register
P03 pull-up control register
P02 pull-up control register
P01 pull-up control register
P00 pull-up control register
P17 pull-up control register
P16 pull-up control register
P15 pull-up control register
P14 pull-up control register
P13 pull-up control register
P12 pull-up control register
P11 pull-up control register
P10 pull-up control register
R/W register
R/W register
R/W register
R/W register
R14–R17 high impedance control
R10–R13 high impedance control
R04–R07 high impedance control
R00–R03 high impedance control
Output Input
High Low
High Low
On Off
On Off
1
1
1
1
High
impedance
0
0
0
0
Complementary
SR R/WAddress Bit Name Function Comment10
0 R/W
1 R/W
1 R/W
1 R/W
1 R/W
0
0
0
0
0
Reserved register
R/W
R/W
R/W
R/W
R/W
S1C88650 TECHNICAL MANUAL EPSON 29
Page 38

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(m) I/O Memory map (00FF71H–00FF76H)
D6
D5
D4
D3
D2
D1
D0
00FF72 –
D7
D6
D5
D4
D3
D2
D1
D0
00FF73 D7
D6
D5
D4
D3
D2
D1
D0
00FF74 D7
D6
D5
D4
D3
D2
D1
D0
00FF75 D7
D6
D5
D4
D3
D2
D1
D0
00FF76 D7
D6
D5
D4
D3
D2
D1
D0
–
–
HZR25
HZR24
HZR23
HZR22
HZR21
HZR20
–
–
–
HZR33
HZR32
HZR31
HZR30
R07D
R06D
R05D
R04D
R03D
R02D
R01D
R00D
R17D
R16D
R15D
R14D
R13D
R12D
R11D
R10D
–
–
R25D
R24D
R23D
R22D
R21D
R20D
–
–
–
–
R33D
R32D
R31D
R30D
R/W register
R/W register
R25 high impedance control
R24 high impedance control
R23 high impedance control
R22 high impedance control
R21 high impedance control
R20 high impedance control
R/W register
R/W register
R/W register
R/W register
R33 high impedance control
R32 high impedance control
R31 high impedance control
R30 high impedance control
R07 output port data
R06 output port data
R05 output port data
R04 output port data
R03 output port data
R02 output port data
R01 output port data
R00 output port data
R17 output port data
R16 output port data
R15 output port data
R14 output port data
R13 output port data
R12 output port data
R11 output port data
R10 output port data
R/W register
R25 output port data
R24 output port data
R23 output port data
R22 output port data
R21 output port data
R20 output port data
R/W register
R/W register
R/W register
R/W register
R33 output port data
R32 output port data
R31 output port data
R30 output port data
High
impedance
High
impedance
High Low
High
High
SR R/WAddress Bit Name Function Comment10
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Reserved register00FF71 D7
Reserved register0
1
1
Comple-
mentary
1
1
1
1
Comple-
mentary
0
0
0
0
0
0
0
0
0
0
0
0
0
1 R/W
1 R/WHigh Low
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Reserved registerR/W register
Reserved register0
1
1
Low
1
1
1
1
Low
0
0
0
0
1
0
0
0
0
0
0
0
1
30 EPSON S1C88650 TECHNICAL MANUAL
Page 39

00FFB0
D7
D6
D5
D4
D3
D2
D1
D0
00FFB1 D7
D6
D5
D4
D3
D2
D1
D0
00FFB2
D7
D6
D5
D4
D3
D2
D1
D0
00FFB3
D7
D6
D5
D4
D3
D2
D1
D0
00FFB4
D7
D6
D5
D4
D3
D2
D1
D0
00FFB5
D7
D6
D5
D4
D3
D2
D1
D0
MODE16_C
PTNREN_C
–
–
–
PTRUN4
PSET4
CKSEL4
–
–
–
–
–
PTRUN5
PSET5
CKSEL5
RDR47
RDR46
RDR45
RDR44
RDR43
RDR42
RDR41
RDR40
RDR57
RDR56
RDR55
RDR54
RDR53
RDR52
RDR51
RDR50
CDR47
CDR46
CDR45
CDR44
CDR43
CDR42
CDR41
CDR40
CDR57
CDR56
CDR55
CDR54
CDR53
CDR52
CDR51
CDR50
PTM4–5 8/16-bit mode selection
External clock 2 noise rejecter selection
–
R/W register
R/W register
PTM4 Run/Stop control
PTM4 preset
PTM4 input clock selection
–
–
–
R/W register
R/W register
PTM5 Run/Stop control
PTM5 preset
PTM5 input clock selection
PTM4 reload data D7 (MSB)
PTM4 reload data D6
PTM4 reload data D5
PTM4 reload data D4
PTM4 reload data D3
PTM4 reload data D2
PTM4 reload data D1
PTM4 reload data D0 (LSB)
PTM5 reload data D7 (MSB)
PTM5 reload data D6
PTM5 reload data D5
PTM5 reload data D4
PTM5 reload data D3
PTM5 reload data D2
PTM5 reload data D1
PTM5 reload data D0 (LSB)
PTM4 compare data D7 (MSB)
PTM4 compare data D6
PTM4 compare data D5
PTM4 compare data D4
PTM4 compare data D3
PTM4 compare data D2
PTM4 compare data D1
PTM4 compare data D0 (LSB)
PTM5 compare data D7 (MSB)
PTM5 compare data D6
PTM5 compare data D5
PTM5 compare data D4
PTM5 compare data D3
PTM5 compare data D2
PTM5 compare data D1
PTM5 compare data D0 (LSB)
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(n) I/O Memory map (00FFB0H–00FFB5H)
16-bit x 1
Enable
–
1
1
Run
Preset
External clock
–
–
–
1
1
Run
Preset
External clock
High Low
High Low
High Low
High Low
-
bit x 2
8
Disable
–
0
0
Stop
No operation
Internal clock
–
–
–
0
0
Stop
No operation
Internal clock
SR R/WAddress Bit Name Function Comment10
0
0
–
0
0
0
0
0
–
–
–
0
0
0
0
0
1 R/W
1 R/W
0 R/W
0 R/W
R/W
R/W
"0" when being read
R/W
Reserved register
R/W
R/W
W
"0" when being read
R/W
Constantly "0" when
being read
R/W
Reserved register
R/W
R/W
W
"0" when being read
R/W
S1C88650 TECHNICAL MANUAL EPSON 31
Page 40

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(o) I/O Memory map (00FFB6H–00FFBBH)
D7
00FFB6
D6
D5
D4
D3
D2
D1
D0
00FFB7
D7
D6
D5
D4
D3
D2
D1
D0
00FFB8
D7
D6
D5
D4
D3
D2
D1
D0
00FFB9 D7
D6
D5
D4
D3
D2
D1
D0
00FFBA
D7
D6
D5
D4
D3
D2
D1
D0
00FFBB
D7
D6
D5
D4
D3
D2
D1
D0
PTM47
PTM46
PTM45
PTM44
PTM43
PTM42
PTM41
PTM40
PTM57
PTM56
PTM55
PTM54
PTM53
PTM52
PTM51
PTM50
MODE16_D
PTNREN_D
–
–
–
PTRUN6
PSET6
CKSEL6
–
–
–
–
–
PTRUN7
PSET7
CKSEL7
RDR67
RDR66
RDR65
RDR64
RDR63
RDR62
RDR61
RDR60
RDR77
RDR76
RDR75
RDR74
RDR73
RDR72
RDR71
RDR70
PTM4 data D7 (MSB)
PTM4 data D6
PTM4 data D5
PTM4 data D4
PTM4 data D3
PTM4 data D2
PTM4 data D1
PTM4 data D0 (LSB)
PTM5 data D7 (MSB)
PTM5 data D6
PTM5 data D5
PTM5 data D4
PTM5 data D3
PTM5 data D2
PTM5 data D1
PTM5 data D0 (LSB)
PTM6–7 8/16-bit mode selection
External clock 3 noise rejecter selection
–
R/W register
R/W register
PTM6 Run/Stop control
PTM6 preset
PTM6 input clock selection
–
–
–
R/W register
R/W register
PTM7 Run/Stop control
PTM7 preset
PTM7 input clock selection
PTM6 reload data D7 (MSB)
PTM6 reload data D6
PTM6 reload data D5
PTM6 reload data D4
PTM6 reload data D3
PTM6 reload data D2
PTM6 reload data D1
PTM6 reload data D0 (LSB)
PTM7 reload data D7 (MSB)
PTM7 reload data D6
PTM7 reload data D5
PTM7 reload data D4
PTM7 reload data D3
PTM7 reload data D2
PTM7 reload data D1
PTM7 reload data D0 (LSB)
High Low
High Low
16-bit x 1
Enable
Run
Preset
External clock
Run
Preset
External clock
High Low
High Low
–
1
1
–
–
–
1
1
-
bit x 2
8
Disable
–
0
0
Stop
No operation
Internal clock
–
–
–
0
0
Stop
No operation
Internal clock
SR R/WAddress Bit Name Function Comment10
1R
1R
0
R/W
0
R/W
–
0
R/W
0
R/W
0
R/W
0
W
0
R/W
–
–
–
0
R/W
0
R/W
0
R/W
0
W
0
R/W
1 R/W
1 R/W
"0" when being read
Reserved register
"0" when being read
Constantly "0" when
being read
Reserved register
"0" when being read
32 EPSON S1C88650 TECHNICAL MANUAL
Page 41

00FFBC
00FFBD
00FFBE
00FFBF
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
CDR67
CDR66
CDR65
CDR64
CDR63
CDR62
CDR61
CDR60
CDR77
CDR76
CDR75
CDR74
CDR73
CDR72
CDR71
CDR70
PTM67
PTM66
PTM65
PTM64
PTM63
PTM62
PTM61
PTM60
PTM77
PTM76
PTM75
PTM74
PTM73
PTM72
PTM71
PTM70
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Memory Map)
Table 5.1.1(p) I/O Memory map (00FFBCH–00FFBFH)
PTM6 compare data D7 (MSB)
PTM6 compare data D6
PTM6 compare data D5
PTM6 compare data D4
PTM6 compare data D3
PTM6 compare data D2
PTM6 compare data D1
PTM6 compare data D0 (LSB)
PTM7 compare data D7 (MSB)
PTM7 compare data D6
PTM7 compare data D5
PTM7 compare data D4
PTM7 compare data D3
PTM7 compare data D2
PTM7 compare data D1
PTM7 compare data D0 (LSB)
PTM6 data D7 (MSB)
PTM6 data D6
PTM6 data D5
PTM6 data D4
PTM6 data D3
PTM6 data D2
PTM6 data D1
PTM6 data D0 (LSB)
PTM7 data D7 (MSB)
PTM7 data D6
PTM7 data D5
PTM7 data D4
PTM7 data D3
PTM7 data D2
PTM7 data D1
PTM7 data D0 (LSB)
SR R/WAddress Bit Name Function Comment10
0R/WHigh Low
0R/WHigh Low
1RHigh Low
1RHigh Low
S1C88650 TECHNICAL MANUAL EPSON 33
Page 42

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (System Controller and Bus Control)
5.2
System Controller and Bus Control
The system controller is a management unit which
sets such items as the bus mode in accordance with
memory system configuration factors.
For the purposes of controlling the system, the
following settings can be performed in software:
(1) Bus and CPU mode settings
(2)
Chip enable (CE) signal output settings
____
(3) WAIT state settings for external memory
(4) Page address setting of the stack pointer
Table 5.2.1.1 Bus and CPU mode settings
MCU/MPU
terminal
1 (MCU mode)
0 (MPU mode)
Setting value
BUSMOD
1
1
0
0
1
1
0
0
CPUMOD
1
0
1
0
1
0
1
0
Bus mode
Expansion
Single chip
Expansion
Table 5.2.1.2 I/O terminal settings
Terminal
R00
R01
R02
R03
R04
R05
R06
R07
R10
R11
R12
R13
R14
R15
R16
R17
R20
R21
R22
R23
R24
R25
P00
P01
P02
P03
P04
P05
P06
P07
Single chip
Output port R00
Output port R01
Output port R02
Output port R03
Output port R04
Output port R05
Output port R06
Output port R07
Output port R10
Output port R11
Output port R12
Output port R13
Output port R14
Output port R15
Output port R16
Output port R17
Output port R20
Output port R21
Output port R22
Output port R23
Output port R24
Output port R25
I/O port P00
I/O port P01
I/O port P02
I/O port P03
I/O port P04
I/O port P05
I/O port P06
I/O port P07
Bus mode
Expansion
Address bus A0
Address bus A1
Address bus A2
Address bus A3
Address bus A4
Address bus A5
Address bus A6
Address bus A7
Address bus A8
Address bus A9
Address bus A10
Address bus A11
Address bus A12
Address bus A13
Address bus A14
Address bus A15
Address bus A16
Address bus A17
Address bus A18
Address bus A19
RD signal
WR signal
Data bus D0
Data bus D1
Data bus D2
Data bus D3
Data bus D4
Data bus D5
Data bus D6
Data bus D7
Below is a description of the how these settings are
to be made.
5.2.1 Bus mode and CPU mode settings
The S1C88650 has two bus modes and two CPU
modes and the software must select appropriate
modes according to the external memory size
connected to the S1C88650.
As shown in Table 5.2.1.1, these modes are specified usng the registers BUSMOD and CPUMOD.
CPU mode
Maximum
Minimum
Maximum
Minimum
Maximum
Minimum
Maximum
Minimum
Configuration of external memory
ROM+RAM>64K bytes (Program≥64K bytes)
ROM+RAM>64K bytes (Program<64K bytes)
None (Program≥64K bytes)
None (Program<64K bytes)
ROM+RAM>64K bytes (Program≥64K bytes)
ROM+RAM>64K bytes (Program<64K bytes)
ROM+RAM>64K bytes (Program≥64K bytes)
ROM+RAM>64K bytes (Program<64K bytes)
The function of I/O terminals is set as shown in
Table 5.2.1.2 in accordance with mode selection.
At initial reset, the bus mode (CPU mode) is set as
explained below.
• In MCU mode:
At initial reset, the S1C88650 is set in single chip
mode (minimum).
Accordingly, in MCU mode, even if a memory
has been externally expanded, the system is
activated by the program written to internal
ROM.
In the system with externally expanded
memory, perform the applicable bus mode
settings during the initialization routine
originating in internal ROM.
• In MPU mode:
At initial reset, the S1C88650 is set in expansion
mode (minimum).
Therefore, the internal ROM will be disabled.
_____
5.2.2 Address decoder (CE output) settings
As explained in Section 3.6.4, the S1C88650 is
equipped with address decoders that can output a
maximum of three chip enable signals (CE0–CE2) to
external devices.
_____ _____
34 EPSON S1C88650 TECHNICAL MANUAL
Page 43

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (System Controller and Bus Control)
Table 5.2.2.1 Address settings of CE0–CE2
CE signal
CE0
CE1
CE2
The output terminals and output circuits for CE0–
_____
MCU mode MPU mode
300000H–3FFFFFH
100000H–1FFFFFH
200000H–2FFFFFH
Address range (expansion mode)
_____
CE2 are shared with output ports R30–R32. At
initial reset, they are set as output port terminals.
For this reason, when operating in expansion mode,
_____
the ports to be used as CE signal output terminals
must be set as such.
This setting is performed through software which
writes "1" to registers CE0–CE2 corresponding the
____
CE signals to be used.
Table 5.2.2.1 shows the address range assigned to
____
the three chip enable (CE) signals.
The arrangement of memory space for external
devices does not necessarily have to be continuous
from a subordinate address and any of the chip
enable signals can be used to assign areas in
memory. However, in the MPU mode, program
memory must be assigned to CE0.
____
_____
The CE signals are only output when the appointed
external memory area is accessed and are not
output when internal memory is accessed.
5.2.3 WAIT state settings
In order to insure accessing of external low speed
devices during high speed operations, the S1C88650
is equipped with a WAIT function which prolongs
access time.
The number of wait states inserted can be selected
from a choice of eight as shown in Table 5.2.3.1 by
means of registers WT0–WT2.
Table 5.2.3.1 Setting the number of WAIT states
WT2 Number of inserted states
* The length of one state is a 1/2 clock cycle.
WAIT states set in software are inserted between
bus cycle states T3–T4.
Note, however, that WAIT states cannot be inserted
when an internal register and internal memory are
being accessed and when operating with the OSC1
oscillation circuit (see "5.4 Oscillation Circuits").
WT1
1
1
1
1
0
0
0
0
WT0
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
14
12
10
8
6
4
2
No wait
_____ _____
000000H–00D7FFH, 010000H–0FFFFFH
100000H–1FFFFFH
200000H–2FFFFFH
Consequently, WAIT state settings in single chip
mode are meaningless.
With regard to WAIT insertion timing, see Section
3.6.5, "WAIT control".
5.2.4 Setting the bus authority release request signal
With systems performing DMA transfer, the bus
authority release request signal (BREQ) input
terminal and acknowledge signal (BACK) output
terminal have to be set.
________
The BREQ input terminal is shared with input port
________
terminal K03 and the BACK output terminal with
output port terminal R33. At initial reset, these
terminal facilities are set as input port terminal and
output port terminal, respectively. The terminals
can be altered to function as BREQ/BACK terminals by writing a "1" to register EBR.
For details on bus authority release, see "3.6.6 Bus
authority release state" and "S1C88 Core CPU
Manual".
________
________
________ ________
5.2.5 Stack page setting
Although the stack area used to evacuate registers
during subroutine calls can be arbitrarily moved to
any area in data RAM using the stack pointer SP, its
page address is set in registers SPP0–SPP7 in I/O
memory.
At initial reset, SPP0–SPP7 are set to "00H" (page 0).
Since the internal RAM is arranged on page 0
(00D800H–00F7FFH), the stack area in single chip
mode is inevitably located in page 0.
In order to place the stack area at the final address
in internal RAM, the stack pointer SP is placed at an
initial setting of "F800H". (SP is pre-decremented.)
In the expansion mode, to place the stack in
external expanded RAM, set a corresponding page
to SPP0–SPP7. The page addresses to which SPP0–
SPP7 can be set are 00H–27H and must be within a
RAM area.
* A page is each recurrent 64K division of data
memory beginning at address zero.
S1C88650 TECHNICAL MANUAL EPSON 35
Page 44

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (System Controller and Bus Control)
5.2.6 Control of system controller
Table 5.2.6.1 shows the control bits for the system controller.
Table 5.2.6.1 System controller control bits
SR R/W10Address Bit Name Function Comment
00FF00
(MCU)D7D6
D5
D4
D3
D2
D1
D0
00FF00
(MPU)D7D6
D5
D4
D3
D2
D1
D0
00FF01 D7
D6
D5
D4
D3
D2
D1
D0
00FF02 D7
D6
D5
D4
D3
D2
D1
D0
Note:
All the interrupts including NMI are disabled, until you write the optional value into both the "00FF00H" and
"00FF01H" addresses.
BUSMOD
CPUMOD
–
–
–
CE2
CE1
CE0
BUSMOD
CPUMOD
–
–
–
CE2
CE1
CE0
SPP7
SPP6
SPP5
SPP4
SPP3
SPP2
SPP1
SPP0
EBR
WT2
WT1
WT0
CLKCHG
SOSC3
–
–
Bus mode
CPU mode
R/W register
R/W register
R/W register
CE2 (R32)
CE1 (R31)
CE0 (R30)
CE signal output Enable/Disable
CE signal output
Enable:
DC (R3x) output
Disable:
Bus mode
CPU mode
R/W register
R/W register
R/W register
CE2 (R32)
CE1 (R31)
CE0 (R30)
CE signal output Enable/Disable
Enable:
CE signal output
Disable:
DC (R3x) output
Stack pointer page address
< SP page allocatable address >
• Single chip mode:
• Expansion mode:
only 0 page
0–27H page
Bus release enable register
(K03 and R33 terminal specification)
Wait control register
WT2
WT1
1
1
1
1
0
0
0
0
WT0
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
CPU operating clock switch
OSC3 oscillation On/Off control
R/W register
R/W register
____
(MSB)
(LSB)
K03
R33
Number
of state
14
12
10
8
6
4
2
No wait
Expansion
Maximum
1
1
1
CE2 enable
CE1 enable
CE0 enable
Expansion
Maximum
1
1
1
CE2 enable
CE1 enable
CE0 enable
1
1
1
1
1
1
1
1
BREQ
BACK
OSC3
On
1
1
Single chip
Minimum
CE2 disable
CE1 disable
CE0 disable
Minimum
CE2 disable
CE1 disable
CE0 disable
Input port
Output port
OSC1
Off
0
0
0
0
0
0
0
0
0
0
0
1
–
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
R/W
R/W
Reserved register
R/W
R/W
R/W
In Single chip mode,
R/W
these setting are fixed
R/W
at DC output.
R/W
R
Expansion mode only
R/W
R/W
Reserved register
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Reserved register
R/W
R/W
36 EPSON S1C88650 TECHNICAL MANUAL
Page 45

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (System Controller and Bus Control)
BUSMOD, CPUMOD: 00FF00H•D7, D6
Bus mode and CPU mode are set as shown in Table
5.2.6.2.
Table 5.2.6.2 Bus mode and CPU mode settings
Setting valueMCU/MPU
terminal
1 (MCU mode)
0 (MPU mode)
BUSMOD
1
1
0
0
1
1
0
0
CPUMOD
The single chip mode configuration is only possible
when this IC is used in the MCU mode. The single
chip mode setting is incompatible with the MPU
mode, since this mode does not utilize internal
ROM.
At initial reset, in the MCU mode the unit is set to
single chip (minimum) mode and in the MPU mode
the expansion (minimum) mode is used to select
the applicable mode.
CE0–CE2: 00FF00H•D0–D2
_____
Sets the CE output terminals being used.
When "1" is written:
When "0" is written:
Reading: Valid
____
CE output is enabled when a "1" is written to
registers CE0–CE2 which correspond to the CE
output being used. A "0" written to any of the
____
registers disables CE signal output from that
terminal and it reverts to its alternate function as an
output port terminal (R30–R32).
At initial reset, register CE0 is set to "0" in the MCU
mode and in the MPU mode, "1" is set in the
register. Registers CE1–CE2 are always set to "0"
regardless of the MCU/MPU mode setting.
Note: To avoid a malfunction from an interrupt
generated before the bus configuration is
initialized, all interrupts including NMI are
masked until you write an optional value into
address "00FF00H".
Bus mode
Expansion
1
0
Single
1
chip
0
Expansion
1
0
1
0
_____
CE output enable
_____
CPU mode
CE output disable
_____
Maximum
Minimum
Maximum
Minimum
Maximum
Minimum
Maximum
Minimum
____
Since a carry and borrow from/to the stack pointer
SP is not reflected in register SPP, the upper limit
on continuous use of the stack area is 64K bytes.
At initial reset, this register is set to "00H" (page 0).
Note: To avoid a malfunction from an interrupt
generated before the bus configuration is
_____
initialized, all interrupts including NMI are
disabled, until you write an optional value
into "00FF01H" address. Furthermore, to
avoid generating an interrupt while the stack
_____
area is being set, all interrupts including NMI
are disabled in one instruction execution
period after writing to address "00FF01H".
WT0–WT2: 00FF02H•D4–D6
How WAIT state settings are performed.
The number of WAIT states to be inserted based on
register settings is as shown in Table 5.2.6.3.
Table 5.2.6.3 Setting WAIT states
WT2 Number of inserted states
* The length of one state is a 1/2 clock cycle.
At initial reset, this register is set to "0" (no wait).
EBR: 00FF02H•D7
Sets the BREQ/BACK terminals function.
When "1" is written:
When "0" is written:
Reading: Valid
How BREQ and BACK terminal functions are set.
Writing "1" to EBR enables BREQ/BACK input/
output. Writing "0" sets the BREQ terminal as input
port terminal K03 and the BACK terminal as output
port terminal R33.
At initial reset, EBR is set to "0" (BREQ/BACK
disabled).
WT1
1
1
1
1
0
0
0
0
________ ________
1
1
0
0
1
1
0
0
________ ________
WT0
1
0
1
0
1
0
1
0
________ ________
BREQ/BACK enabled
________ ________
No wait
BREQ/BACK disabled
________ ________
________
________
________ ________
14
12
10
8
6
4
2
SPP0–SPP7: 00FF01H
Sets the page address of stack area.
In single chip mode, set page address to "00H". In
expansion mode, it can be set to any value within
the range "00H"–"27H".
S1C88650 TECHNICAL MANUAL EPSON 37
Page 46

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (System Controller and Bus Control)
5.2.7 Programming notes
(1)
All the interrupts including NMI are masked,
______
until you write the optional value into both the
"00FF00H" and "00FF01H" addresses. Consequently, even if you do not change the content
of this address (You use the initial value, as is.),
you should still be sure to perform the writing
operation using the initialization routine.
(2) When setting stack fields, including page
addresses as well, you should write them in the
order of the register SPP ("00FF01H") and the
stack pointer SP.
Example: When setting the "178000H" address
LD EP, #00H
LD HL, #0FF01H
LD [HL], #17H
LD SP, #8000H
During this period the
interrupts (including
_______
NMI) are masked.
38 EPSON S1C88650 TECHNICAL MANUAL
Page 47

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Watchdog Timer)
5.3 Watchdog Timer
5.3.1 Configuration of watchdog timer
The S1C88650 is equipped with a watchdog timer
driven by OSC1 as source oscillation. The watchdog
timer must be reset periodically by software, and if
reset does not take place within the selected period,
a non-maskable interrupt signal is generated and
output to the CPU. The watchdog timer starts
operating after initial reset, however, it can be
stopped by the software.
_______
The NMI generation cycle by the watchdog timer
can be selected by mask option.
Watchdog timer NMI generation cycle
■■ 32768/fOSC1
(0.75–1-sec cycle when fOSC1 = 32 kHz)
■■ 65536/fOSC1
(1.5–2-sec cycle when fOSC1 = 32 kHz)
■■ 131072/fOSC1
(3–4-sec cycle when fOSC1 = 32 kHz)
■■ 262144/fOSC1
(6–8-sec cycle when fOSC1 = 32 kHz)
Figure 5.3.1.1 is a block diagram of the watchdog
timer.
By running watchdog timer reset during the main
routine of the program, it is possible to detect
program runaway as if watchdog timer processing
had not been applied.
_____
Normally, this routine is integrated at points that
are regularly being processed.
The watchdog timer continues to operate during
HALT and when HALT state is continuous for
longer than the selected period, the CPU starts
exception processing.
During SLEEP, the watchdog timer is stopped.
Note: The NMI generation cycles in the watchdog
timer mask option list represent maximum
values. A maximum minus (<selected
optional cycle> / 4) seconds of error occurs
depending on the watchdog timer reset
timing. For example, when 131072/f
OSC1
is
selected by mask option, the actual NMI
generation cycle is within the range of
98304/f
OSC1
to 131072/f
OSC1
seconds.
5.3.2 Interrupt function
In cases where the watchdog timer is not periodically reset in software, the watchdog timer outputs
an interrupt signal to the CPU's NMI (level 4) input.
Unmaskable and taking priority over other interrupts, this interrupt triggers the generation of
exception processing. See the "S1C88 Core CPU
Manual" for more details on NMI exception
processing.
This exception processing vector is set at 000004H.
______
______
OSC1
oscillation
circuit
f
OSC1
WDEN
WDRST
Mask option
1/16384
Divider
1/32768
1/65536
1/131072
Watchdog timer
enable signal
Watchdog timer
reset signal
Fig. 5.3.1.1 Block diagram of watchdog timer
Watchdog timer
1/4
Non-maskable
interrupt (NMI)
S1C88650 TECHNICAL MANUAL EPSON 39
Page 48

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Watchdog Timer)
5.3.3 Control of watchdog timer
Table 5.3.3.1 shows the control bits for the watchdog timer.
Table 5.3.3.1 Watchdog timer control bits
00FF40 D7
D6
D5
D4
D3
D2
D1
D0
WDEN
FOUT2
FOUT1
FOUT0
FOUTON
WDRST
TMRST
TMRUN
Watchdog timer enable
FOUT frequency selection
FOUT2
FOUT1
FOUT0
1
1
1
1
1
0
1
0
1
1
0
0
0
1
1
0
1
0
0
0
1
0
0
0
FOUT output control
Watchdog timer reset
Clock timer reset
Clock timer Run/Stop control
Enable
Frequency
fOSC1 / 1
fOSC1 / 2
fOSC1 / 4
fOSC1 / 8
fOSC3 / 1
fOSC3 / 2
fOSC3 / 4
fOSC3 / 8
On
Reset
Reset
Run
Disable
Off
No operation
No operation
Stop
SR R/WAddress Bit Name Function Comment10
1
0
0
0
0
–
–
0
R/W
R/W
R/W
R/W
R/W
Constantly "0" when
W
W
being read
R/W
WDEN: 00FF40H•D7
Selects whether the watchdog timer is used
(enabled) or not (disabled).
When "1" is written: Enabled
When "0" is written: Disabled
Reading: Valid
When "1" is written to the WDEN register, the
watchdog timer starts count operation. When "0" is
written, the watchdog timer does not count and
______
does not generate the interrupt (NMI).
At initial reset, this register is set to "1".
WDRST: 00FF40H•D2
Resets the watchdog timer.
When "1" is written: Watchdog timer is reset
When "0" is written: No operation
Reading: Constantly "0"
By writing "1" to WDRST, the watchdog timer is
reset, after which it is immediately restarted.
Writing "0" will mean no operation.
Since WDRST is for writing only, it is constantly set
to "0" during readout.
5.3.4 Programming notes
(1) When the watchdog timer is being used, the
software must reset it within the cycles selected
by mask option.
(2) Do not execute the SLP instruction for 2 msec
(3) Because the watchdog timer is set in operation
(4)
______
after a NMI interrupt has occurred (when fOSC1
is 32.768 kHz).
state by initial reset, set the watchdog timer to
disabled state (not used) before generating an
interrupt (NMI) if it is not used.
______
______
The NMI generation cycles in the watchdog
timer mask option list represent maximum
values. A maximum minus (<selected optional
cycle> / 4) seconds of error occurs depending
on the watchdog timer reset timing. For
example, when 131072/fOSC1 is selected by
______
mask option, the actual NMI generation cycle is
within the range of 98304/fOSC1 to 131072/fOSC1
seconds.
40 EPSON S1C88650 TECHNICAL MANUAL
Page 49

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Oscillation Circuits)
5.4 Oscillation Circuits
5.4.1 Configuration of oscillation circuits
The S1C88650 is twin clock system with two
internal oscillation circuits (OSC1 and OSC3).
The OSC3 oscillation circuit generates the mainclock (Max. 8.2 MHz) to run the CPU and some
peripheral circuits in high speed, and the OSC1
oscillation circuit generates the sub-clock (Typ.
32.768 kHz) for low-power operation.
Figure 5.4.1.1 shows the configuration of the
oscillation circuit.
OSC1
oscillation circuit
OSC3
oscillation circuit
SLEEP
status
SOSC3
Fig. 5.4.1.1 Configuration of oscillation circuits
At initial reset, OSC3 oscillation circuit is selected
for the CPU operating clock. ON/OFF switching of
the OSC3 oscillation circuit and switching of the
system clock between OSC3 and OSC1 are controlled in software. OSC3 circuit is utilized when high
speed operation of the CPU and some peripheral
circuits become necessary. Otherwise, OSC1 should
be used to generate the operating clock and OSC3
circuit placed in a stopped state in order to reduce
current consumption.
5.4.2 Mask option
OSC1 oscillation circuit
■■ Crystal oscillation circuit
■■ CR oscillation circuit
OSC3 oscillation circuit
■■ Crystal oscillation circuit
■■ Ceramic oscillation circuit
■■ CR oscillation circuit
In terms of the oscillation circuit types for OSC1,
either crystal oscillation or CR oscillation can be
selected with the mask option.
In terms of the oscillation circuit types for OSC3,
either crystal oscillation, ceramic oscillation or CR
oscillation can be selected with the mask option, in
the same way as OSC1.
(f
OSC1
(f
OSC3
Oscillation circuit
control signal
)
Prescaler
Clock
switch
)
CLKCHG
To peripheral
circuit
To CPU (CLK)
To some peripheral
circuit
CPU clock
selection signal
5.4.3 OSC1 oscillation circuit
The OSC1 oscillation circuit generates the 32.768
kHz (Typ.) system clock which is utilized during
low speed operation (low power mode) of the CPU
and peripheral circuits. Furthermore, even when
OSC3 is utilized as the system clock, OSC1
continues to generate the source clock for the clock
timer and stopwatch timer.
This oscillation circuit stops when the SLP instruction is executed.
In terms of the oscillation circuit types, either
crystal oscillation or CR oscillation can be selected
with the mask option.
Figure 5.4.3.1 shows the configuration of the OSC1
oscillation circuit.
SLEEP status
OSC1
C
G1
X'tal1
OSC2
V
SS
(1) Crystal oscillation circuit
OSC1
RCR1
OSC2
(2) CR oscillation circuit
Fig. 5.4.3.1 OSC1 oscillation circuit
When crystal oscillation is selected, a crystal
oscillation circuit can be easily formed by connecting a crystal oscillator X'tal1 (Typ. 32.768 kHz)
between the OSC1 and OSC2 terminals along with
a trimmer capacitor CG1 (5–25 pF) between the
OSC1 terminal and VSS.
When CR oscillation is selected, the CR oscillation
circuit (Max. 200 kHz) is formed merely by
connecting a resistor (RCR1) between OSC1 and
OSC2 terminals.
f
OSC1
V
SS
SLEEP status
f
OSC1
Note: Do not select CR oscillation for the OSC1
oscillation circuit when crystal oscillation is
selected for the OSC3 oscillation circuit.
When such a selection is made, the OSC3
clock may be supplied to the internal circuits
even though the OSC3 oscillation has not
stabilized.
S1C88650 TECHNICAL MANUAL EPSON 41
Page 50

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Oscillation Circuits)
5.4.4 OSC3 oscillation circuit
The OSC3 oscillation circuit generates the system
clock when the CPU and some peripheral circuits
are in high speed operation.
This oscillation circuit stops when the SLP instruction is executed, or the SOSC3 register is set to "0".
In terms of oscillation circuit types, any one of
crystal oscillation, ceramic oscillation or CR
oscillation can be selected with the mask option.
Figure 5.4.4.1 shows the configuration of the OSC3
oscillation circuit.
C
G2
OSC3
f
ON
ON
OSC3
OSC3
Oscillation circuit
control signal
SLEEP status
fOSC3
Oscillation circuit
control signal
SLEEP status
Program Execution Status
RESET
CLKCHG=0
CLKCHG=1
Low speed operation
X'tal 2
OSC4
or
Ceramic
Rf
C
D2
V
SS
(1) Crystal/Ceramic oscillation circuit
OSC3
RCR3
OSC4
(2) CR oscillation circuit
Fig. 5.4.4.1 OSC3 oscillation circuit
When crystal or ceramic oscillation circuit is
selected, the crystal or ceramic oscillation circuit
(Max. 8.2 MHz) are formed by connecting either a
crystal oscillator (X'tal2) or a combination of
ceramic oscillator (Ceramic) and feedback resistor
(Rf) between OSC3 and OSC4 terminals and
connecting two capacitors (C
G2, CD2) between the
OSC3 terminal and VSS, and between the OSC4
terminal and VSS, respectively.
High speed operation
OSC1
OSC3
CPU clock
When CR oscillation is selected, the CR oscillation
circuit (Max. 2.2 MHz) is formed merely by
connecting a resistor (RCR3) between OSC3 and
OSC4 terminals.
5.4.5 Switching the CPU clocks
You can use either OSC1 or OSC3 as the system
clock for the CPU and you can switch over by
means of software.
You can save power by turning the OSC3 oscillation circuit off while the CPU is operating in OSC1.
When you must operate on OSC3, you can change
to high speed operation by turning the OSC3
oscillation circuit ON and switching over the
system clock.
In this case, since several msec to several tens of
msec are necessary for the oscillation to stabilize
after turning the OSC3 oscillation circuit ON, you
should switch over the clock after stabilization time
has elapsed.
When switching over from the OSC3 to the OSC1,
turn the OSC3 oscillation circuit OFF immediately
following the clock changeover.
When switching the system clock from OSC3 to
OSC1 immediately after the power is turned on, it
is necessary to wait for the OSC1 oscillation to
stabilize before the clock can be switched. The
OSC3 oscillation may take several tens of msec to
several seconds until it has completely stabilized.
(The oscillation start time will vary somewhat
depending on the oscillator and on the externally
attached parts. Refer to the oscillation start time
example indicated in Chapter 8, "ELECTRICAL
CHARACTERISTICS".)
Figure 5.4.5.1 indicates the status transition diagram for the clock changeover.
OSC1
OSC3
CPU clock
ON
ON
OSC1
SOSC3=0
SOSC3=1
Low speed and
low power operation
OSC1
OSC3
CPU clock
ON
OFF
OSC1
**
HALT status
OSC1
OSC3
CPU clock
HALT instruction SLP instructionInterrupt Interrupt
ON
ON or OFF
STOP
(Input interrupt)
SLEEP status
OSC1
OSC3
CPU clock
OFF
OFF
STOP
Standby Status
*
The return destination from the standby status becomes the program execution status prior to shifting to the standby status.
Fig. 5.4.5.1 Status transition diagram for the clock changeover
42 EPSON S1C88650 TECHNICAL MANUAL
Page 51

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Oscillation Circuits)
5.4.6 Control of oscillation circuit
Table 5.4.6.1 shows the control bits for the oscillation circuits.
Table 5.4.6.1 Oscillation circuit control bits
Address Bit Name SR R/WFunction Comment10
00FF02 D7
D6
D5
D4
D3
D2
D1
D0
EBR
WT2
WT1
WT0
CLKCHG
SOSC3
–
–
Bus release enable register
(K03 and R33 terminal specification)
Wait control register
WT2
CPU operating clock switch
OSC3 oscillation On/Off control
R/W register
R/W register
WT1
1
1
1
1
0
0
0
0
WT0
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
Number
of state
14
12
10
8
6
4
2
No wait
K03
R33
BREQ
BACK
OSC3
On
1
1
Input port
Output port
OSC1
Off
0
0
0
R/W
0
R/W
0
R/W
0
R/W
1
R/W
1
R/W
0
R/W
Reserved register
0
R/W
SOSC3: 00FF02H•D2
Controls the ON and OFF settings of the OSC3
oscillation circuit.
When "1" is written: OSC3 oscillation ON
When "0" is written: OSC3 oscillation OFF
Reading: Valid
When the CPU and some peripheral circuits are to
be operated at high speed, SOSC3 is to be set to "1".
At all other times, it should be set to "0" in order to
reduce current consumption.
At initial reset, SOSC3 is set to "1" (OSC3 oscillation
ON).
5.4.7 Programming notes
(1) When the high speed CPU operation is not
necessary, you should operate the peripheral
circuits according to the setting outline indicate
below.
• CPU operating clock OSC1
• OSC3 oscillation circuit OFF
(When the OSC3 clock is not necessary for
some peripheral circuits.)
(2) Since several msec to several tens of msec are
necessary for the oscillation to stabilize after
turning the OSC3 oscillation circuit ON.
Consequently, you should switch the CPU
CLKCHG: 00FF02H•D3
Selects the operating clock for the CPU.
When "1" is written: OSC3 clock
When "0" is written: OSC1 clock
Reading: Valid
When the operating clock for the CPU is switched
to OSC3, CLKCHG should be set to "1" and when
the clock is switched to OSC1, CLKCHG should be
set to "0".
At initial reset, CLKCHG is set to "1" (OSC3 clock).
operating clock (OSC1 → OSC3) after allowing
for a sufficient waiting time once the OSC3
oscillation goes ON. (The oscillation start time
will vary somewhat depending on the oscillator
and on the externally attached parts. Refer to the
oscillation start time example indicated in
Chapter 8, "ELECTRICAL CHARACTERISTICS".)
(3) When switching the clock from OSC3 to OSC1, be
sure to switch OSC3 oscillation OFF with
separate instructions. Using a single instruction
to process simultaneously can cause a malfunction of the CPU.
(4) When switching the system clock from OSC3 to
OSC1 immediately after the power is turned on,
it is necessary to wait the OSC1 oscillation to
stabilize before the clock can be switched. The
OSC3 oscillation takes several tens of msec to
several seconds until it has completely stabilized.
(The oscillation start time will vary somewhat
depending on the oscillator and on the externally
attached parts. Refer to the oscillation start time
example indicated in Chapter 8, "ELECTRICAL
CHARACTERISTICS".)
S1C88650 TECHNICAL MANUAL EPSON 43
Page 52

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Input Ports)
5.5 Input Ports (K ports)
5.5.1 Configuration of input ports
The S1C88650 is equipped with 8 input port bits
(K00–K07) all of which are usable as general purpose
input port terminals with interrupt function.
K04–K07 terminals doubles as the external clock
(EXCL0–EXCL3) input terminal of the
programmable timer (event counter) with input
port functions sharing the input signal as is. (See
"5.10 Programmable Timer")
Furthermore, it should be noted, however, that K03
terminal is shared with the bus authority release
request signal (BREQ) input terminal. Function
assignment of this terminal can be selected in
software. When this terminal is selected for BREQ
signal, K03 cannot be used as an input port. (See
"5.2 System Controller and Bus Control")
In the explanation below, it is assumed that K03 is
set as an input port.
Figure 5.5.1.1 shows the structure of the input port.
_________
_________
V
DD
Pull-up
control
register
5.5.2 Mask option
Input port pull-up resistors
K00 .... ■■ With resistor ■■ Gate direct
K01 .... ■■ With resistor ■■ Gate direct
K02 .... ■■ With resistor ■■ Gate direct
K03 .... ■■ With resistor ■■ Gate direct
K04 .... ■■ With resistor ■■ Gate direct
K05 .... ■■ With resistor ■■ Gate direct
K06 .... ■■ With resistor ■■ Gate direct
K07 .... ■■ With resistor ■■ Gate direct
Input port Input I/F level
K00 .... ■■ CMOS level ■■ CMOS schmitt
K01 .... ■■ CMOS level ■■ CMOS schmitt
K02 .... ■■ CMOS level ■■ CMOS schmitt
K03 .... ■■ CMOS level ■■ CMOS schmitt
K04 .... ■■ CMOS level ■■ CMOS schmitt
K05 .... ■■ CMOS level ■■ CMOS schmitt
K06 .... ■■ CMOS level ■■ CMOS schmitt
K07 .... ■■ CMOS level ■■ CMOS schmitt
Input ports K00–K07 are all equipped with pull-up
resistors. The mask option can be used to select
'With resistor' or 'Gate direct' for each port (bit).
Also the interface level, either CMOS level or
CMOS Schmitt level, can be selected for each port
(in a bit units).
Address
Mask option
Kxx
Mask option
VSS
KxxD
Address
Input
interrupt
circuit
Data bus
Fig. 5.5.1.1 Structure of input port
Each input port terminal is directly connected via a
three-state buffer to the data bus. Furthermore, the
input signal state at the instant of input port
readout is read in that form as data.
44 EPSON S1C88650 TECHNICAL MANUAL
Page 53

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Input Ports)
5.5.3 Pull-up control
When "With resistor" is selected by mask option,
the software can enable and disable the pull-up
resistor for each port (1-bit units).
The pull-up resistor becomes effective by writing
"1" to the pull-up control register PULK0x that
corresponds to each port, and the input line is
pulled up. When "0" has been written, no pull-up is
done.
When "Gate direct" is selected by mask option, the
corresponding pull-up control register is
disconnected from the input line, so it can be used
as a general-purpose register.
At initial reset, the pull-up control register is set to
"1" (pulled up).
The input port with a pull-up resistor suits input
from the push switch and key matrix.
When changing the input terminal from LOW level
to HIGH with the built-in pull-up resistor, a delay
in the waveform rise time will occur depending on
the time constant of the pull-up resistor and the
load capacitance of the terminal. It is necessary to
set an appropriate wait time for introduction of an
input port. In particular, special attention should be
paid to key scan for key matrix formation. Make
this wait time the amount of time or more calculated by the following expression.
Wait time = RIN x (CIN + load capacitance on the
board) x 1.6 [sec]
RIN: Pull up resistance Max. value
CIN: Terminal capacitance Max. value
The input port without a pull-up resistor is suits for
slide switch input and interfacing with other LSIs.
In this case, take care that a floating state does not
occur in input.
For unused ports, select "With resistor" and enable
pull-up using the pull-up control registers.
5.5.4 Interrupt function and input comparison register
All the input ports (K00–K07) provide the interrupt
functions. The conditions for issuing an interrupt
can be set by the software.
When the interrupt generation condition set for a
terminal is met, the interrupt factor flag FK00–FK07
corresponding to the terminal is set at "1" and an
interrupt is generated.
Interrupt can be prohibited by setting the interrupt
enable registers EK00–EK07 for the corresponding
interrupt factor flags.
Furthermore, the priority level for input interrupt
can be set at the desired level (0–3) using the
interrupt priority registers PK00–PK01.
For details on the interrupt control registers for the
above and on operations subsequent to interrupt
generation, see "5.14 Interrupt and Standby Status".
The exception processing vectors for each interrupt
factor are set as follows:
K07 input interrupt: 000006H
K06 input interrupt: 000008H
K05 input interrupt: 00000AH
K04 input interrupt: 00000CH
K03 input interrupt: 00000EH
K02 input interrupt: 000010H
K01 input interrupt: 000012H
K00 input interrupt: 000014H
Figure 5.5.4.1 shows the configuration of the input
interrupt circuit.
The input comparison register KCP selects whether
the interrupt for each input port will be generated
on the rising edge or the falling edge of input.
When the K0x input signal changes to the status set
by the input comparison register KCP0x, the
interrupt factor flag FK0x is set to "1" and an
interrupt occurs.
The input port has a chattering-eliminate circuit
that checks input level to avoid unnecessary
interrupt generation due to chattering. There are
two separate chattering-eliminate circuits for K00–
K03 and K04–K07 and they can be set up
individually. The CTK00x–CTK02x registers allow
selection of signal level check time as shown in
Table 5.5.4.1.
S1C88650 TECHNICAL MANUAL EPSON 45
Page 54

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Input Ports)
Table 5.5.4.1 Setting the input level check time
CTK02x
Data bus
1
1
1
1
0
0
0
0
K00
Input port
K00D
Input comparison
register KCP00
Address
K01
K02
K03
K04
CTK01x
CTK00x
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
Check time
4/f
OSC3
2/f
OSC3
OSC3
1/f
4096/f
OSC1
OSC1
2048/f
512/f
OSC1
128/f
OSC1
None –
∗: When OSC1 = 32 kHz, OSC3 = 2 MHz
Check time setup register
CTK00L–CTK02L
Chattering-eliminate
circuit
Check time setup register
CTK00H–CTK02H
(∗)
(2 µs)
(1 µs)
(0.5 µs)
(128 ms)
(64 ms)
(16 ms)
(4 ms)
Address
Address
Notes: • Be sure to disable interrupts before
Interrupt factor
flag FK00
Address
Interrupt enable
register
EK00
Address
changing the contents of the CTK0x
register. Unnecessary interrupts may
occur if the register is changed when the
corresponding input port interrupts have
been enabled by the interrupt enable
register EK0x.
• The chattering-eliminate check time
means the maximum pulse width that can
be eliminated. The valid interrupt input
needs a pulse width of the set check time
(minimum) to twice that of the check time
(maximum).
• The internal signal may oscillate if the rise /
fall time of the input signal is too long
because the input signal level transition to
the threshold level duration of time is too
long. This causes the input interrupt to
malfunction, therefore setup the input signal
so that the rise/fall time is 25 nsec or less.
f
OSC1
Divider
Divider
Interrupt
priority level
judgement
circuit
f
oscillation circuit
OSC3
oscillation circuit
OSC1
OSC3
Interrupt
request
Input port
K04D
Input comparison
register KCP04
Address
K05
K06
K07
Chattering-eliminate
circuit
Interrupt factor
flag FK04
Address
Interrupt enable
EK04
register
Address
Interrupt
priority
register
PK00, PK01
Address
Fig. 5.5.4.1 Configuration of input interrupt circuit
46 EPSON S1C88650 TECHNICAL MANUAL
Page 55

5.5.5 Control of input ports
Table 5.5.5.1 shows the input port control bits.
Table 5.5.5.1(a) Input port control bits
00FF52 D7
00FF54 D7
00FF56 D7
00FF58 D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
KCP07
KCP06
KCP05
KCP04
KCP03
KCP02
KCP01
KCP00
K07D
K06D
K05D
K04D
K03D
K02D
K01D
K00D
PULK07
PULK06
PULK05
PULK04
PULK03
PULK02
PULK01
PULK00
–
CTK02H
CTK01H
CTK00H
–
CTK02L
CTK01L
CTK00L
K07 input comparison register
K06 input comparison register
K05 input comparison register
K04 input comparison register
K03 input comparison register
K02 input comparison register
K01 input comparison register
K00 input comparison register
K07 input port data
K06 input port data
K05 input port data
K04 input port data
K03 input port data
K02 input port data
K01 input port data
K00 input port data
K07 pull-up control register
K06 pull-up control register
K05 pull-up control register
K04 pull-up control register
K03 pull-up control register
K02 pull-up control register
K01 pull-up control register
K00 pull-up control register
–
K04–K07 port chattering-eliminate setup
(Input level check time)
CTK02H
1
1
1
1
0
0
0
0
CTK01H
1
1
0
0
1
1
0
0
CTK00H
1
0
1
0
1
0
1
0
–
K00–K03 port chattering-eliminate setup
(Input level check time)
CTK02L
1
1
1
1
0
0
0
0
CTK01L
1
1
0
0
1
1
0
0
CTK00L
1
0
1
0
1
0
1
0
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Input Ports)
SR R/WAddress Bit Name Function Comment10
Check time
[sec]
OSC3
4/f
2/fOSC3
1/fOSC3
4096/fOSC1
2048/fOSC1
512/fOSC1
128/fOSC1
None
Check time
[sec]
4/fOSC3
2/fOSC3
1/fOSC3
4096/fOSC1
2048/fOSC1
512/fOSC1
128/fOSC1
None
Interrupt
generated
at falling
edge
High level
input
On Off
Interrupt
generated
at rising
edge
Low level
input
1 R/W
–R
1 R/W
–
–
–
0
0
0
–
–
–
0
0
0
"0" when being read
R/W
R/W
R/W
"0" when being read
R/W
R/W
R/W
S1C88650 TECHNICAL MANUAL EPSON 47
Page 56

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Input Ports)
Table 5.5.5.1(b) Input port control bits
00FF20 D7
00FF24 EK07
00FF28 FK07
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
PK01
PK00
PSIF1
PSIF0
–
–
PTM1
PTM0
EK06
EK05
EK04
EK03
EK02
EK01
EK00
FK06
FK05
FK04
FK03
FK02
FK01
FK00
K00–K07 interrupt priority register
Serial interface interrupt priority register
–
–
Clock timer interrupt priority register
K07 interrupt enable
K06 interrupt enable
K05 interrupt enable
K04 interrupt enable
K03 interrupt enable
K02 interrupt enable
K01 interrupt enable
K00 interrupt enable
K07 interrupt factor flag
K06 interrupt factor flag
K05 interrupt factor flag
K04 interrupt factor flag
K03 interrupt factor flag
K02 interrupt factor flag
K01 interrupt factor flag
K00 interrupt factor flag
PK01
PSIF1
1
1
0
0
–
–
PTM1
1
1
0
0
Interrupt
enable
(R)
Interrupt
factor is
generated
(W)
Reset
PK00
PSIF0
1
0
1
0
PTM0
1
0
1
0
Priority
level
Level 3
Level 2
Level 1
Level 0
–
–
Priority level
Level 3
Level 2
Level 1
Level 0
Interrupt
disable
(R)
No interrupt
factor is
generated
(W)
No operation
SR R/WAddress Bit Name Function Comment10
0
0
–
–
0
0
0
R/W
R/W
Constantly "0" when
being read
R/W
R/W
R/W
K00D–K07D: 00FF54H
Input data of input port terminal K0x can be read
out.
When "1" is read: HIGH level
When "0" is read: LOW level
Writing: Invalid
The terminal voltage of each of the input port K00–
K07 can be directly read out as either a "1" for
HIGH (V
This bit is exclusively for readout and are not
usable for write operations.
DD) level or a "0" for LOW (VSS) level.
PULK00–PULK07: 00FF56H
Controls the input pull-up resistor.
When "1" is written: Pull-up ON
When "0" is written: Pull-up OFF
Reading: Valid
PULK0x is the pull-up control register
corresponding to the input port K0x that turns the
pull-up resistor built into the input port ON and
OFF.
When "Gate direct" is selected by mask option, the
corresponding pull-up control register is
disconnected from the input line, so it can be used
as a general-purpose register.
When "1" is written to PULK0x, the corresponding
input port K0x is pulled up to high. When "0" is
written, the input port is not pulled up.
At initial reset, this register is set to "1" (Pull-up
ON).
48 EPSON S1C88650 TECHNICAL MANUAL
Page 57

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Input Ports)
KCP00–KCP07: 00FF52H
Sets the interrupt generation condition (interrupt
generation timing) for input port terminals K00–
K07.
When "1" is written: Falling edge
When "0" is written: Rising edge
Reading: Valid
KCP0x is the input comparison register which
corresponds to the input port K0x. Interrupt in
those ports which have been set to "1" is generated
on the falling edge of the input and in those set to
"0" on the rising edge.
At initial reset, this register is set to "1" (falling
edge).
CTK00L–CTK02L: 00FF58H•D0–D2
Sets the input level check time of the chatteringeliminate circuit for the K00–K03 input port
interrupts as shown in Table 5.5.5.2.
Table 5.5.5.2 Setting the input level check time
CTK02L
CTK01L
1
1
1
1
0
0
0
0
CTK00L
1
1
0
0
1
1
0
0
Input level check time [sec]
4/f
2/f
1/f
4096/f
2048/f
512/f
128/f
None
OSC3
OSC3
OSC3
1
0
1
0
1
0
1
0
OSC1
OSC1
OSC1
OSC1
Be sure to disable interrupts before changing the
contents of this register. Unnecessary interrupts
may occur if the register is changed when the
corresponding input port interrupts have been
enabled by the interrupt enable register EK0x.
At initial reset, this register is set to "0" (None).
CTK00H–CTK02H: 00FF58H•D4–D6
Sets the input level check time of the chatteringeliminate circuit for the K04–K07 input port
interrupts as shown in Table 5.5.5.3.
Table 5.5.5.3 Setting the input level check time
CTK02H
Be sure to disable interrupts before changing the
contents of this register. Unnecessary interrupt may
occur if the register is changed when the
corresponding input port interrupts have been
enabled by the interrupt enable register EK0x.
At initial reset, this register is set to "0" (None).
1
1
1
1
0
0
0
0
CTK01H
1
1
0
0
1
1
0
0
CTK00H
1
0
1
0
1
0
1
0
Input level check time [sec]
4/f
2/f
1/f
4096/f
2048/f
512/f
128/f
None
OSC3
OSC3
OSC3
OSC1
OSC1
OSC1
OSC1
PK00, PK01: 00FF20H•D6, D7
Sets the input interrupt priority level. PK00 and
PK01 are the interrupt priority registers
corresponding to the input interrupts.
Table 5.5.5.4 shows the interrupt priority level
which can be set by this register.
Table 5.5.5.4 Interrupt priority level settings
PK01 PK00 Interrupt priority level
1
1
0
0
1
0
1
0
Level 3 (IRQ3)
Level 2 (IRQ2)
Level 1 (IRQ1)
Level 0 (None)
At initial reset, this register is set to "0" (level 0).
EK00–EK07: 00FF24H
How interrupt generation to the CPU is permitted
or prohibited.
When "1" is written: Interrupt permitted
When "0" is written: Interrupt prohibited
Reading: Valid
EK0x is the interrupt enable register which
correspond to the input port K0x.
Interrupt is permitted in those terminals set to "1"
and prohibited in those set to "0".
At initial reset, this register is set to "0" (interrupt
prohibited).
FK00–FK07: 00FF28H
Indicates the generation state for an input interrupt.
When "1" is read: Interrupt factor present
When "0" is read:
When "1" is written: Reset factor flag
When "0" is written: Invalid
The interrupt factor flag FK0x corresponds to K0x is
set to "1" by the occurrence of an interrupt
generation condition.
When set in this manner, if the corresponding
interrupt enable register is set to "1" and the
corresponding interrupt priority register is set to a
higher level than the setting of interrupt flags (I0
and I1), an interrupt will be generated to the CPU.
Regardless of the interrupt enable register and
interrupt priority register settings, the interrupt
factor flag will be set to "1" by the occurrence of an
interrupt generation condition.
To accept the subsequent interrupt after interrupt
generation, re-setting of the interrupt flags (set
interrupt flag to lower level than the level indicated
by the interrupt priority registers, or execute the
RETE instruction) and interrupt factor flag reset are
necessary. The interrupt factor flag is reset to "0" by
writing "1".
At initial reset, this flag is all reset to "0".
Interrupt factor not present
S1C88650 TECHNICAL MANUAL EPSON 49
Page 58

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Input Ports)
5.5.6 Programming notes
(1) When changing the input terminal from LOW
level to HIGH with the built-in pull-up resistor,
a delay in the waveform rise time will occur
depending on the time constant of the pull-up
resistor and the load capacitance of the
terminal. It is necessary to set an appropriate
wait time for introduction of an input port. In
particular, special attention should be paid to
key scan for key matrix formation. Make this
wait time the amount of time or more calculated
by the following expression.
Wait time = RIN x (CIN + load capacitance on the
board) x 1.6 [sec]
RIN: Pull up resistance Max. value
CIN: Terminal capacitance Max. value
(2) Be sure to disable interrupts before changing
the contents of the CTK0x register. Unnecessary
interrupts may occur if the register is changed
when the corresponding input port interrupts
have been enabled by the interrupt enable
register EK0x.
50 EPSON S1C88650 TECHNICAL MANUAL
Page 59

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Output Ports)
5.6 Output Ports (R ports)
5.6.1 Configuration of output ports
The S1C88650 is equipped with 26 bits of output
ports (R00–R07, R10–R17, R20–R25, R30–R33).
Depending on the bus mode setting, the configuration of the output ports may vary as shown in the
table below.
Table 5.6.1.1 Configuration of output ports
Terminal
R00
Output port R00
R01
Output port R01
R02
Output port R02
R03
Output port R03
R04
Output port R04
R05
Output port R05
R06
Output port R06
R07
Output port R07
R10
Output port R10
R11
Output port R11
R12
Output port R12
R13
Output port R13
R14
Output port R14
R15
Output port R15
R16
Output port R16
R17
Output port R17
R20
Output port R20
R21
Output port R21
R22
Output port R22
R23
Output port R23
R24
Output port R24
R25
Output port R25
R30
Output port R30
R31
Output port R31
R32
Output port R32
R33
Output port R33
Only the configuration of the output ports in single
chip mode will be discussed here. With respect to
bus control, see "5.2 System Controller and Bus
Control".
Figure 5.6.1.1 shows the basic structure of the
output ports.
Address
High impedance
control register
Data register
Data bus
Address
Bus mode
ExpansionSingle chip
Address A0
Address A1
Address A2
Address A3
Address A4
Address A5
Address A6
Address A7
Address A8
Address A9
Address A10
Address A11
Address A12
Address A13
Address A14
Address A15
Address A16
Address A17
Address A18
Address A19
RD signal
WR signal
Output port R30/CE0 signal
Output port R31/CE1 signal
Output port R32/CE2 signal
Output port R33/BACK signal
V
DD
Rxx
In expansion mode, the data registers and high
impedance control registers of the output ports
used for bus function can be used as general
purpose registers with read/write capabilities. This
will not in any way affect bus signal output.
The output specification of each output port is as
complementary output with high impedance
control in software possible.
5.6.2 High impedance control
The output port can be high impedance controlled
in software.
This makes it possible to share output signal lines
with an other external device.
A high impedance control register is set for each
series of output port terminals as shown below.
Either complementary output and high impedance
state can be selected with this register.
Table 5.6.2.1 High impedance control registers
Register Output port terminal
HZR0L
HZR0H
HZR1L
HZR1H
HZR20
HZR21
HZR22
HZR23
HZR24
HZR25
HZR30
HZR31
HZR32
HZR33
R00–R03
R04–R07
R10–R13
R14–R17
R20
R21
R22
R23
R24
R25
R30
R31
R32
R33
When a high impedance control register HZRxx is
set to "1", the corresponding output port terminal
becomes high impedance state and when set to "0",
it becomes complementary output.
5.6.3 DC output
As Figure 5.6.1.1 shows, when "1" is written to the
output port data register, the output terminal
switches to HIGH (VDD) level and when "0" is
written it switches to LOW (VSS) level. When
output is in a high impedance state, the data
written to the data register is output from the
terminal at the instant when output is switched to
complementary.
V
SS
Fig. 5.6.1.1 Structure of output ports
S1C88650 TECHNICAL MANUAL EPSON 51
Page 60

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Output Ports)
5.6.4 Control of output ports
Table 5.6.4.1 shows the output port control bits.
Table 5.6.4.1(a) Output port control bits
00FF70 D7
00FF71 D7
00FF72 –
00FF73 D7
00FF74 D7
00FF75 D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
–
–
–
–
HZR1H
HZR1L
HZR0H
HZR0L
–
–
HZR25
HZR24
HZR23
HZR22
HZR21
HZR20
–
–
–
HZR33
HZR32
HZR31
HZR30
R07D
R06D
R05D
R04D
R03D
R02D
R01D
R00D
R17D
R16D
R15D
R14D
R13D
R12D
R11D
R10D
–
–
R25D
R24D
R23D
R22D
R21D
R20D
R/W register
R/W register
R/W register
R/W register
R14–R17 high impedance control
R10–R13 high impedance control
R04–R07 high impedance control
R00–R03 high impedance control
R/W register
R/W register
R25 high impedance control
R24 high impedance control
R23 high impedance control
R22 high impedance control
R21 high impedance control
R20 high impedance control
R/W register
R/W register
R/W register
R/W register
R33 high impedance control
R32 high impedance control
R31 high impedance control
R30 high impedance control
R07 output port data
R06 output port data
R05 output port data
R04 output port data
R03 output port data
R02 output port data
R01 output port data
R00 output port data
R17 output port data
R16 output port data
R15 output port data
R14 output port data
R13 output port data
R12 output port data
R11 output port data
R10 output port data
R/W register
R/W register
R25 output port data
R24 output port data
R23 output port data
R22 output port data
R21 output port data
R20 output port data
1
1
1
1
High
impedance
1
1
High
impedance
1
1
1
1
High
impedance
High Low
High Low
1
1
High
0
0
0
0
Comple-
mentary
0
0
Comple-
mentary
0
0
0
0
Comple-
mentary
0
0
Low
SR R/WAddress Bit Name Function Comment10
0
0
0
0
0
0
0
0
0
0
0
0
0
1 R/W
1 R/W
0
0
1
Reserved register
R/W
R/W
R/W
R/W
R/W
Reserved register
R/W
R/W
R/W
Reserved register
R/W
R/W
R/W
R/W
R/W
Reserved register
R/W
R/W
R/W
52 EPSON S1C88650 TECHNICAL MANUAL
Page 61

00FF76 D7
D6
D5
D4
D3
D2
D1
D0
–
–
–
–
R33D
R32D
R31D
R30D
Table 5.6.4.1(b) Output port control bits
R/W register
R/W register
R/W register
R/W register
R33 output port data
R32 output port data
R31 output port data
R30 output port data
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Output Ports)
SR R/WAddress Bit Name Function Comment10
Reserved register0
1
1
1
1
High
0
0
0
0
Low
R/W
0
R/W
0
R/W
0
R/W
1
R/W
HZR0L, HZR0H: 00FF70H•D0, D1
HZR1L, HZR1H: 00FF70H•D2, D3
HZR20–HZR25: 00FF71H•D0–D5
HZR30–HZR33: 00FF72H•D0–D3
Sets the output terminals to a high impedance state.
When "1" is written: High impedance
When "0" is written: Complementary
Reading: Valid
HZRxx is the high impedance control register
which correspond as shown in Table 5.6.2.1 to the
various output port terminals.
When "1" is set to the HZRxx register, the corresponding output port terminal becomes high
impedance state and when "0" is set, it becomes
complementary output.
At initial reset, this register is set to "0"
(complementary).
R00D–R07D: 00FF73H
R10D–R17D: 00FF74H
R20D–R25D: 00FF75H•D0–D5
R30D–R33D: 00FF76H•D0–D3
Sets the data output from the output port terminal Rxx.
When "1" is written: HIGH level output
When "0" is written: LOW level output
Reading: Valid
RxxD is the data register for each output port.
When "1" is set, the corresponding output port
terminal switches to HIGH (V
"0" is set, it switches to LOW (VSS) level.
At initial reset, this register is set to "1" (HIGH level
output).
The output data registers set for bus signal output
can be used as general purpose registers with read/
write capabilities which do not affect the output
terminals.
DD) level, and when
S1C88650 TECHNICAL MANUAL EPSON 53
Page 62

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Ports)
5.7 I/O Ports (P ports)
5.7.1 Configuration of I/O ports
The S1C88650 is equipped with 16 bits of I/O ports
(P00–P07, P10–P17). The configuration of these I/O
ports will vary according to the bus mode as shown
below.
Table 5.7.1.1 Configuration of I/O ports
Terminal
P00
P01
P02
P03
P04
P05
P06
P07
P10
P11
P12
P13
P14
P15
P16
P17
I/O port P00
I/O port P01
I/O port P02
I/O port P03
I/O port P04
I/O port P05
I/O port P06
I/O port P07
With respect to the data bus, see "5.2 System
Controller and Bus Control".
Figure 5.7.1.1 shows the structure of an I/O port.
Pull-up control
register
I/O control
register
Data
Data bus
register
*1
Input
control
*2
*1:
*3
During output mode
*2:
During input mode
*3:
Schmitt input can be selected for P10–P17
by mask option.
Fig. 5.7.1.1 Structure of I/O port
I/O port can be set for input or output mode in one
bit unit. These settings are performed by writing
data to the I/O control registers.
I/O port terminals P10–P13 are shared with serial
interface input/output terminals and the function
of each terminal is switchable in software.
With respect to serial interface see "5.8 Serial
Interface".
Bus mode
ExpansionSingle chip
Data bus D0
Data bus D1
Data bus D2
Data bus D3
Data bus D4
Data bus D5
Data bus D6
Data bus D7
I/O port P10 (SIN)
I/O port P11 (SOUT)
I/O port P12 (SCLK)
I/O port P13 (SRDY)
I/O port P14 (TOUT0/TOUT1)
I/O port P15 (TOUT2/TOUT3)
I/O port P16 (FOUT)
I/O port P17 (TOUT2/TOUT3)
V
SS
V
DD
Mask
option
Pxx
The data registers and I/O control registers of I/O
ports set for data bus and serial interface output
terminals use are usable as general purpose
registers with read/write capabilities which do not
affect I/O activities of the terminal.
The same as above, the I/O control register of I/O
port set for serial interface input terminal use is
usable as general purpose register.
In addition to the general-purpose DC output,
special output can be selected for the I/O ports
P14–P17 with the software.
5.7.2 Mask option
I/O port pull-up resistors
P00 ............ ■■ With resistor ■■ Gate direct
P01 ............ ■■ With resistor ■■ Gate direct
P02 ............ ■■ With resistor ■■ Gate direct
P03 ............ ■■ With resistor ■■ Gate direct
P04 ............ ■■ With resistor ■■ Gate direct
P05 ............ ■■ With resistor ■■ Gate direct
P06 ............ ■■ With resistor ■■ Gate direct
P07 ............ ■■ With resistor ■■ Gate direct
P10 ............ ■■ With resistor ■■ Gate direct
P11 ............ ■■ With resistor ■■ Gate direct
P12 ............ ■■ With resistor ■■ Gate direct
P13 ............ ■■ With resistor ■■ Gate direct
P14 ............ ■■ With resistor ■■ Gate direct
P15 ............ ■■ With resistor ■■ Gate direct
P16 ............ ■■ With resistor ■■ Gate direct
P17 ............ ■■ With resistor ■■ Gate direct
I/O port input interface level
P10 ............ ■■ CMOS level ■■ CMOS Schmitt
P11 ............ ■■ CMOS level ■■ CMOS Schmitt
P12 ............ ■■ CMOS level ■■ CMOS Schmitt
P13 ............ ■■ CMOS level ■■ CMOS Schmitt
P14 ............ ■■ CMOS level ■■ CMOS Schmitt
P15 ............ ■■ CMOS level ■■ CMOS Schmitt
P16 ............ ■■ CMOS level ■■ CMOS Schmitt
P17 ............ ■■ CMOS level ■■ CMOS Schmitt
I/O ports P00–P07 and P10–P17 are equipped with
a pull-up resistor which goes ON in the input
mode. Whether this resistor is used or not can be
selected for each port (one bit unit). Furthermore,
the interface level for each port in P10–P17 can be
selected from CMOS level and CMOS Schmitt level.
5.7.3 I/O control registers and I/O mode
I/O ports P00–P07 and P10–P17 are set either to
input or output modes by writing data to the I/O
control registers IOC00–IOC07 and IOC10–IOC17
which correspond to each bit.
To set an I/O port to input mode, write "0" to the I/
O control register.
An I/O port which is set to input mode will shift to
a high impedance state and functions as an input
port.
54 EPSON S1C88650 TECHNICAL MANUAL
Page 63

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Ports)
Readout in input mode consists simply of a direct
readout of the input terminal state: the data being
"1" when the input terminal is at HIGH (VDD) level
and "0" when it is at LOW (VSS) level.
When the built-in pull-up resistor is enabled with
the software, the port terminal will be pulled-up to
high during input mode.
Even in input mode, data can be written to the data
registers without affecting the terminal state.
To set an I/O port to output mode, write "1" to the
I/O control register. An I/O port which is set to
output mode functions as an output port.
When port output data is "1", a HIGH (VDD) level is
output and when it is "0", a LOW (VSS) level is
output. Readout in output mode consists of the
contents of the data register.
At initial reset, I/O control registers are set to "0"
(I/O ports are set to input mode).
5.7.4 Pull-up control
When "With resistor" is selected by mask option,
the software can enable and disable the pull-up
resistor for each port (1-bit units).
The pull-up resistor becomes effective by writing
"1" to the pull-up control register PULPxx that
corresponds to each port, and the Pxx terminal is
pulled up during the input mode. When "0" has
been written, no pull-up is done. When "Gate
direct" is selected by mask option, the
corresponding pull-up control register is
disconnected from the input line, so it can be used
as a general-purpose register. When the port is set
in the output mode, the setting of the pull-up
control register becomes invalid (no pull-up is done
during output).
At initial reset, the pull-up control registers are set
to "1" (pulled up).
When changing the port terminal from LOW level
to HIGH with the built-in pull-up resistor, a delay
in the waveform rise time will occur depending on
the time constant of the pull-up resistor and the
load capacitance of the terminal. It is necessary to
set an appropriate wait time for introduction of an
I/O port. Make this wait time the amount of time
or more calculated by the following expression.
Wait time = RIN x (CIN + load capacitance on the
board) x 1.6 [sec]
RIN: Pull up resistance Max. value
CIN: Terminal capacitance Max. value
For unused ports, select "With resistor" and enable
pull-up using the pull-up control registers.
5.7.5 Special output
Besides general purpose DC input/output, I/O
ports P14–P17 can also be assigned special output
functions in software as shown in Table 5.7.5.1.
Table 5.7.5.1 Special output ports
Output port
P14
P15
P16
P17
When using P14–P17 as a special output port, write
"1" to the corresponding I/O control register
(IOC14–IOC17) to set the port to the output mode.
■ TOUT output (P14, P15)
In order for the S1C88650 to provide clock signal to
an external device, the terminals P14 and P15 can
be used to output a TOUTx signal (clock output by
the programmable timer).
The output control for the TOUTx signals (x = 0–3)
is done by the registers PTOUTx. When PTOUTx is
set to "1", the TOUTx signal is output from the
corresponding port terminal, when "0" is set, the
port is set for DC output. When PTOUTx is "1",
settings of the I/O control register IOC14/IOC15
and data register P14D/P15D become invalid.
The TOUT0–TOUT3 signals are generated from the
underflow and compare-match signals of the
programmable timers 0–3.
With respect to frequency control, see "5.10 Programmable Timer".
Since the TOUTx signals are generated asynchronously from the registers PTOUTx, when the
signals are turned ON or OFF by the register
settings, a hazard of a 1/2 cycle or less is generated.
Figure 5.7.5.1 shows the output waveform of the
TOUT signal.
PTOUTx
TOUTx output
(P14/15)
01
Fig. 5.7.5.1 Output waveform of TOUT signal
Note: If PTOUT0 and PTOUT1 are set to "1" at the
same time, PTOUT1 is effective. Similarly, if
PTOUT2 and PTOUT3 are set to "1",
PTOUT3 is effective.
Special output
TOUT0/TOUT1 output
TOUT2/TOUT3 output
FOUT output
TOUT2/TOUT3 output
S1C88650 TECHNICAL MANUAL EPSON 55
Page 64

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Ports)
■ FOUT output (P16)
In order for the S1C88650 to provide clock signal to
an external device, a FOUT signal (oscillation clock
fOSC1 or fOSC3 dividing clock) can be output from
the P16 port terminal.
The output control for the FOUT signal is done by
the register FOUTON. When FOUTON is set to "1",
the FOUT signal is output from the P16 port
terminal, when "0" is set, the port is set for DC
output. When FOUTON is "1", settings of the I/O
control register IOC16 and data register P16D
become invalid.
The frequency of the FOUT signal can be selected in
software by setting the registers FOUT0–FOUT2.
The frequency is selected any one from among
eight settings as shown in Table 5.7.5.2.
Table 5.7.5.2 FOUT frequency setting
FOUT2 FOUT frequency
FOUT1
1
1
1
1
0
0
0
0
FOUT0
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
fOSC1:
OSC1 oscillation frequency
f
OSC3:
OSC3 oscillation frequency
fOSC3 / 8
fOSC3 / 4
fOSC3 / 2
fOSC3 / 1
fOSC1 / 8
fOSC1 / 4
fOSC1 / 2
fOSC1 / 1
When the FOUT frequency is made "fOSC3/n", you
must turn on the OSC3 oscillation circuit before
outputting FOUT. A time interval of several msec
to several 10 msec, from the turning ON of the
OSC3 oscillation circuit to until the oscillation
stabilizes, is necessary, due to the oscillation
element that is used. Consequently, if an abnormality occurs as the result of an unstable FOUT signal
being output externally, you should allow an
adequate waiting time after turning ON of the
OSC3 oscillation, before turning outputting FOUT.
(The oscillation start time will vary somewhat
depending on the oscillator and on the externally
attached parts. Refer to the oscillation start time
example indicated in Chapter 8, "ELECTRICAL
CHARACTERISTICS".)
Since the FOUT signal is generated asynchronously
from the register FOUTON, when the signal is
turned ON or OFF by the register settings, a hazard
of a 1/2 cycle or less is generated.
Figure 5.7.5.2 shows the output waveform of the
FOUT signal.
■ Inverted TOUT output (P17)
The S1C88650 provides an output of the TOUT2 or
TOUT3 inverted signal (programmable timer
output clock) to supply a clock to external devices
or to drive a buzzer.
By using this output with the TOUT2 or TOUT3
output from the P15 terminal, the bias level to be
applied to the buzzer can be increased.
___________
The output control for the TOUTx signals (x = 2 or
3) is done by the registers RPTOUTx. When
___________
RPTOUTx is set to "1", the TOUTx signal is output
from the P17 port terminal, when "0" is set, the port
is set for DC output. When RPTOUTx is "1",
settings of the I/O control register IOC17 and data
register P17D become invalid.
___________ ___________
The TOUT2 and TOUT3 signals are generated from
the underflow and compare-match signals of the
programmable timers 2 and 3.
With respect to frequency control, see "5.10 Programmable Timer".
___________
Since the TOUTx signals are generated asynchronously from the registers RPTOUTx, when the
signals are turned ON or OFF by the register
settings, a hazard of a 1/2 cycle or less is generated.
Figure 5.7.5.3 shows the output waveform of the
_________
TOUT signal.
RPTOUTx
TOUTx output
(P17)
01
________
Fig. 5.7.5.3 Output waveform of TOUT signal
Note: If RPTOUT2 and RPTOUT3 are set to "1" at
the same time, RPTOUT3 is effective.
FOUTON
FOUT output
(P16)
01
Fig. 5.7.5.2 Output waveform of FOUT signal
56 EPSON S1C88650 TECHNICAL MANUAL
Page 65

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Ports)
5.7.6 Control of I/O ports
Table 5.7.6.1 shows the I/O port control bits.
Table 5.7.6.1(a) I/O port control bits
Address Bit Name SR R/WFunction Comment10
00FF60 D7
00FF61 D7
00FF62 D7
00FF63 D7
00FF64 D7
00FF65 D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
IOC07
IOC06
IOC05
IOC04
IOC03
IOC02
IOC01
IOC00
IOC17
IOC16
IOC15
IOC14
IOC13
IOC12
IOC11
IOC10
P07D
P06D
P05D
P04D
P03D
P02D
P01D
P00D
P17D
P16D
P15D
P14D
P13D
P12D
P11D
P10D
PULP07
PULP06
PULP05
PULP04
PULP03
PULP02
PULP01
PULP00
PULP17
PULP16
PULP15
PULP14
PULP13
PULP12
PULP11
PULP10
P07 I/O control register
P06 I/O control register
P05 I/O control register
P04 I/O control register
P03 I/O control register
P02 I/O control register
P01 I/O control register
P00 I/O control register
P17 I/O control register
P16 I/O control register
P15 I/O control register
P14 I/O control register
P13 I/O control register
P12 I/O control register
P11 I/O control register
P10 I/O control register
P07 I/O port data
P06 I/O port data
P05 I/O port data
P04 I/O port data
P03 I/O port data
P02 I/O port data
P01 I/O port data
P00 I/O port data
P17 I/O port data
P16 I/O port data
P15 I/O port data
P14 I/O port data
P13 I/O port data
P12 I/O port data
P11 I/O port data
P10 I/O port data
P07 pull-up control register
P06 pull-up control register
P05 pull-up control register
P04 pull-up control register
P03 pull-up control register
P02 pull-up control register
P01 pull-up control register
P00 pull-up control register
P17 pull-up control register
P16 pull-up control register
P15 pull-up control register
P14 pull-up control register
P13 pull-up control register
P12 pull-up control register
P11 pull-up control register
P10 pull-up control register
0 R/WOutput Input
0 R/WOutput Input
1 R/WHigh Low
1 R/WHigh Low
1 R/WOn Off
1 R/WOn Off
S1C88650 TECHNICAL MANUAL EPSON 57
Page 66

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Ports)
Table 5.7.6.1(b) I/O port control bits
00FF30
00FF31 D7
00FF38
00FF39 D7
00FF40 D7
D7
MODE16_A
D6
PTNREN_A
–
D5
–
D4
PTOUT0
D3
PTRUN0
D2
PSET0
D1
CKSEL0
D0
–
D6
–
D5
–
D4
–
D3
PTOUT1
D2
PTRUN1
D1
PSET1
D0
CKSEL1
D7
MODE16_B
D6
PTNREN_B
–
D5
RPTOUT2
D4
PTOUT2
D3
PTRUN2
D2
PSET2
D1
CKSEL2
D0
–
D6
–
D5
–
RPTOUT3
D4
PTOUT3
D3
PTRUN3
D2
PSET3
D1
CKSEL3
D0
WDEN
D6
FOUT2
D5
FOUT1
D4
FOUT0
FOUTON
D3
D2
WDRST
D1
TMRST
D0
TMRUN
PTM0–1 8/16-bit mode selection
External clock 0 noise rejecter selection
–
R/W register
PTM0 clock output control
PTM0 Run/Stop control
PTM0 preset
PTM0 input clock selection
–
–
–
R/W register
PTM1 clock output control
PTM1 Run/Stop control
PTM1 preset
PTM1 input clock selection
PTM2–3 8/16-bit mode selection
External clock 1 noise rejecter selection
–
PTM2 inverted clock output control
PTM2 clock output control
PTM2 Run/Stop control
PTM2 preset
PTM2 input clock selection
–
–
–
PTM3 inverted clock output control
PTM3 clock output control
PTM3 Run/Stop control
PTM3 preset
PTM3 input clock selection
Watchdog timer enable
FOUT frequency selection
FOUT2
FOUT1
FOUT0
1
1
1
1
1
0
1
0
0
1
0
1
0
0
0
0
Frequency
1
f
OSC3
/ 8
OSC3
f
OSC3
f
OSC3
f
OSC1
f
f
OSC1
OSC1
f
OSC1
f
/ 4
/ 2
/ 1
/ 8
/ 4
/ 2
/ 1
0
1
0
1
0
1
0
FOUT output control
Watchdog timer reset
Clock timer reset
Clock timer Run/Stop control
16-bit x 1
Enable
–
1
On
Run
Preset
No operation
External clock
External clock
16-bit x 1
Enable
External clock
External clock
Enable Disable
–
–
–
1
On
Run
Preset
–
On
On
Run
Preset
–
–
–
On
On
Run
Preset
On
Reset
Reset
Run
Internal clock
No operation
Internal clock
No operation
Internal clock
No operation
Internal clock
No operation
No operation
-
bit x 2
8
Disable
–
0
Off
Stop
–
–
–
0
Off
Stop
-
bit x 2
8
Disable
–
Off
Off
Stop
–
–
–
Off
Off
Stop
Off
Stop
SR R/WAddress Bit Name Function Comment10
0
0
–
0
0
0
0
0
–
–
–
0
0
0
0
0
0
0
–
0
0
0
0
0
–
–
–
0
0
0
0
0
1
0
0
0
0
–
–
0
R/W
R/W
"0" when being read
Reserved register
R/W
R/W
R/W
W
"0" when being read
R/W
Constantly "0" when
being read
R/W
Reserved register
R/W
R/W
W
"0" when being read
R/W
R/W
R/W
"0" when being read
R/W
R/W
R/W
"0" when being read
W
R/W
Constantly "0" when
being read
R/W
R/W
R/W
"0" when being read
W
R/W
R/W
R/W
R/W
R/W
R/W
Constantly "0" when
W
being read
W
R/W
58 EPSON S1C88650 TECHNICAL MANUAL
Page 67

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Ports)
■ DC output control
P00D–P07D: 00FF62H
P10D–P17D: 00FF63H
How I/O port terminal Pxx data readout and
output data settings are performed.
When writing data:
When "1" is written: HIGH level
When "0" is written: LOW level
When the I/O port is set to output mode, the data
written is output as is to the I/O port terminal. In
terms of port data, when "1" is written, the port
terminal goes to HIGH (V
written to a LOW (VSS) level.
Even when the port is in input mode, data can still
be written in.
When reading out data:
When "1" is read: HIGH level ("1")
When "0" is read: LOW level ("0")
When an I/O port is in input mode, the voltage
level being input to the port terminal is read out.
When terminal voltage is HIGH (V
a "1", and when it is LOW (VSS), it is read as a "0".
Furthermore, in output mode, the contents of the
data register are read out.
At initial reset, this register is set to "1" (HIGH
level).
DD) level and when "0" is
DD), it is read as
Note: The data registers of the ports that are
configured to the data bus, serial interface
outputs and special outputs can be used as
general purpose registers that do not affect
the terminal inputs/outputs.
IOC00–IOC07: 00FF60H
IOC10–IOC17: 00FF61H
Sets the I/O ports to input or output mode.
When "1" is written: Output mode
When "0" is written: Input mode
Reading: Valid
IOCxx is the I/O control register which correspond
to each I/O port in a bit unit.
Writing "1" to the IOCxx register will switch the
corresponding I/O port Pxx to output mode, and
writing "0" will switch it to input mode.
When the special output is used, "1" must always be
set for the I/O control registers (IOC14–IOC17) of
I/O ports which will become output terminals.
At initial reset, this register is set to "0" (input
mode).
Note: The I/O control registers of the ports that are
configured to the data bus, serial interface
inputs/outputs and special outputs can be
used as general purpose registers that do
not affect the terminal inputs/outputs.
PULP00–PULP07: 00FF64H
PULP10–PULP17: 00FF65H
The pull-up during the input mode are set with
these registers.
When "1" is written: Pull-up ON
When "0" is written: Pull-up OFF
Reading: Valid
PULPxx is the pull-up control register
corresponding to each I/O port (in bit units).
When "Gate direct" is selected by mask option, the
corresponding pull-up control register is
disconnected from the input line, so it can be used
as a general-purpose register.
By writing "1" to the PULPxx register, the
corresponding I/O ports are pulled up (during
input mode), while writing "0" turns the pull-up
function OFF.
At initial reset, these registers are all set to "1", so
the pull-up function is set to ON.
Note: The pull-up control registers of the ports that
are configured to the serial interface outputs
or special outputs can be used as general
purpose registers that do not affect the pullup control. The pull-up control registers of
the port that are configured to the serial
interface inputs function the same as the I/O
port.
■ Special output control
PTOUT0: 00FF30H•D3
PTOUT1: 00FF31H•D3
PTOUT2: 00FF38H•D3
PTOUT3: 00FF39H•D3
Controls the TOUT (programmable timer output
clock) signal output.
When "1" is written: TOUT signal output
When "0" is written: DC output
Reading: Valid
PTOUT0–PTOUT3 are the output control registers
for the TOUT0–TOUT3 signals. When PTOUT0 (or
PTOUT1) is set to "1", the TOUT0 (or TOUT1) signal
is output from the P14 port terminal. When
PTOUT2 (or PTOUT3) is set to "1", the TOUT2 (or
TOUT3) signal is output from the P15 port terminal.
When "0" is set, P14/P15 is set for DC output.
At this time, settings of the I/O control register
IOC14/IOC15 and data register P14D/P15D
become invalid.
At initial reset, PTOUT is set to "0" (DC output).
Note: If PTOUT0 and PTOUT1 are set to "1" at the
same time, PTOUT1 is effective. Similarly, if
PTOUT2 and PTOUT3 are set to "1",
PTOUT3 is effective. Furthermore, if the
programmable timer is set in 16-bit mode, the
TOUT0 and TOUT2 signals cannot be output.
S1C88650 TECHNICAL MANUAL EPSON 59
Page 68

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (I/O Ports)
RPTOUT2: 00FF38H•D4
RPTOUT3: 00FF39H•D4
Controls the TOUT2/TOUT3 (inverted TOUT2/
TOUT3) signal output.
When "1" is written:
When "0" is written: DC output
Reading: Valid
RPTOUT2 and RPTOUT3 are the output control
registers for the TOUT2 and TOUT3 signals,
respectively. When RPTOUT2 (or RPTOUT3) is set
to "1", the TOUT2 (or TOUT3) signal is output from
the P17 port terminal. When "0" is set, P17 is set for
DC output.
At this time, settings of the I/O control register
IOC17 and data register P17D become invalid.
At initial reset, RPTOUT is set to "0" (DC output).
Note: If RPTOUT2 and RPTOUT3 are set to "1" at
___________ ___________
_________
TOUT signal output
___________ ___________
___________ ___________
the same time, RPTOUT3 is effective.
Furthermore, if the programmable timer is set
________
in 16-bit mode, the TOUT2 signal cannot be
output.
FOUTON: 00FF40H•D3
Controls the FOUT (fOSC1/fOSC3 dividing clock)
signal output.
When "1" is written: FOUT signal output
When "0" is written: DC output
Reading: Valid
FOUTON is the output control register for FOUT
signal. When "1" is set, the FOUT signal is output
from the P16 port terminal and when "0" is set, P16
is set for DC output. At this time, settings of the I/
O control register IOC16 and data register P16D
become invalid.
At initial reset, FOUTON is set to "0" (DC output).
FOUT0–FOUT2: 00FF40H•D4–D6
FOUT signal frequency is set as shown in Table
5.7.6.2.
Table 5.7.6.2 FOUT frequency settings
FOUT2 FOUT frequency
At initial reset, this register is set to "0" (fOSC1/1).
FOUT1
1
1
1
1
0
0
0
0
FOUT0
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
fOSC1:
OSC1 oscillation frequency
f
OSC3:
OSC3 oscillation frequency
fOSC3 / 8
fOSC3 / 4
fOSC3 / 2
fOSC3 / 1
fOSC1 / 8
fOSC1 / 4
fOSC1 / 2
fOSC1 / 1
5.7.7 Programming notes
(1) When changing the port terminal in which the
pull-up resistor is enabled from LOW level to
HIGH, a delay in the waveform rise time will
occur depending on the time constant of the
pull-up resistor and the load capacitance of the
terminal. It is necessary to set an appropriate
wait time for introduction of an I/O port. Make
this wait time the amount of time or more
calculated by the following expression.
Wait time = RIN x (CIN + load capacitance on the
board) x 1.6 [sec]
RIN: Pull up resistance Max. value
CIN: Terminal capacitance Max. value
(2) Since the special output signals (TOUT0–3,
_______________ _ _____________________________
TOUT2–3, and FOUT) are generated
asynchronously from the output control
registers (PTOUT0–3, RPTOUT2–3, and
FOUTON), when the signals is turned ON or
OFF by the output control register settings, a
hazard of a 1/2 cycle or less is generated.
(3) When the FOUT frequency is made "f
you must turn on the OSC3 oscillation circuit
before outputting FOUT. A time interval of
several msec to several 10 msec, from the
turning ON of the OSC3 oscillation circuit to
until the oscillation stabilizes, is necessary, due
to the oscillation element that is used.
Consequently, if an abnormality occurs as the
result of an unstable FOUT signal being output
externally, you should allow an adequate
waiting time after turning ON of the OSC3
oscillation, before turning outputting FOUT.
(The oscillation start time will vary somewhat
depending on the oscillator and on the
externally attached parts. Refer to the oscillation
start time example indicated in Chapter 8,
"ELECTRICAL CHARACTERISTICS".)
(4) The SLP instruction has executed when the
special output signals (TOUT0–3, TOUT2–3,
and FOUT) are in the enable status, an unstable
clock is output for the special output at the time
of return from the SLEEP state. Consequently,
when shifting to the SLEEP state, you should set
the special output signal to the disable status
prior to executing the SLP instruction.
OSC3/n",
_______________ _ _____________________________
60 EPSON S1C88650 TECHNICAL MANUAL
Page 69

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
5.8 Serial Interface
5.8.1 Configuration of serial interface
The S1C88650 incorporates a full duplex serial
interface (when asynchronous system is selected)
that allows the user to select either clock synchronous system or asynchronous system.
The data transfer method can be selected in software.
When the clock synchronous system is selected, 8bit data transfer is possible.
When the asynchronous system is selected, either 7bit or 8-bit data transfer is possible, and a parity
check of received data and the addition of a parity
bit for transmitting data can automatically be done
by selecting in software.
Figure 5.8.1.1 shows the configuration of the serial
interface.
Data bus
5.8.2 Switching of terminal functions
Serial interface input/output terminals, SIN, SOUT,
_________ _________
SCLK and SRDY are shared with I/O ports P10–
P13. In order to utilize these terminals for the serial
interface input/output terminals, "1" must be
written to the ESIF register.
At initial reset, these terminals are set as I/O port
terminals.
The direction of I/O port terminals set for serial
interface input/output terminals are determined by
the signal and transfer mode for each terminal.
Furthermore, the settings for the corresponding I/
O control registers for the I/O ports become
invalid.
Table 5.8.2.1 Configuration of input/output terminals
Terminal When serial interface is selected
P10
P11
P12
P13
* The terminals used may vary depending on the transfer mode.
SIN
SOUT
SCLK
SRDY
SIN(P10)
SCLK(P12)
Serial I/O control
& status register
Serial input
control circuit
Start bit
detection circuit
Received
data buffer
Received data
shift register
Clock
control circuit
Error detection
circuit
Transmitting data
shift register
Programmable timer 1 underflow signal
Fig. 5.8.1.1 Configuration of serial interface
Interrupt
control circuit
Serial output
control circuit
READY output
control circuit
Interrupt
request
SOUT(P11)
SRDY(P13)
S1C88650 TECHNICAL MANUAL EPSON 61
Page 70

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
The serial interface terminals are configured
according to the transfer mode set using the
registers SMD0 and SMD1. SIN and SOUT are
serial data input and output terminals which
function identically in clock synchronous system
_________
and asynchronous system. SCLK is exclusively for
use with clock synchronous system and functions
as a synchronous clock input/output terminal.
_________
SRDY is exclusively for use in clock synchronous
slave mode and functions as a send-receive ready
signal output terminal.
When asynchronous system is selected, since SCLK
_________
_________
and SRDY are superfluous, the I/O port terminals
P12 and P13 can be used as I/O ports.
In the same way, when clock synchronous master
_________
mode is selected, since SRDY is superfluous, the
I/O port terminal P13 can be used as I/O port.
5.8.3 Transfer modes
There are four transfer modes for the serial interface and mode selection is made by setting the two
bits of the mode selection registers SMD0 and
SMD1 as shown in the table below.
Table 5.8.3.1 Transfer modes
SMD1 SMD0 Mode
1
1
0
0
Table 5.8.3.2 Terminal settings corresponding
Asynchronous 8-bit
Asynchronous 7-bit
Clock synchronous slave
Clock synchronous master
At initial reset, transfer mode is set to clock synchronous master mode.
■ Clock synchronous master mode
In this mode, the internal clock is utilized as a
synchronous clock for the built-in shift registers,
and clock synchronous 8-bit serial transfers can be
performed with this serial interface as the master.
The synchronous clock is also output from the
_________
SCLK terminal which enables control of the
external (slave side) serial I/O device. Since the
_________
SRDY terminal is not utilized in this mode, it can be
used as an I/O port.
Figure 5.8.3.1(a) shows the connection example of
input/output terminals in the clock synchronous
master mode.
1
0
1
0
Asynchronous 8-bit
Asynchronous 7-bit
Clock synchronous slave
Clock synchronous master
to each transfer mode
Mode SIN
Input
Input
Input
Input
SOUT SCLK SRDY
P13
Output
Output
Output
Output
P12
P12
Input
Output
P13
Output
P13
■ Clock synchronous slave mode
In this mode, a synchronous clock from the external
(master side) serial input/output device is utilized
and clock synchronous 8-bit serial transfers can be
performed with this serial interface as the slave.
_________
The synchronous clock is input to the SCLK
terminal and is utilized by this interface as the
synchronous clock.
_________
Furthermore, the SRDY signal indicating the
transmit-receive ready status is output from the
_________
SRDY terminal in accordance with the serial
interface operating status.
In the slave mode, the settings for registers SCS0
and SCS1 used to select the clock source are invalid.
Figure 5.8.3.1(b) shows the connection example of
input/output terminals in the clock synchronous
slave mode.
■ Asynchronous 7-bit mode
In this mode, asynchronous 7-bit transfer can be
performed. Parity check during data reception and
addition of parity bit (odd/even/none) during
transmitting can be specified and data processed in
7 bits with or without parity. Since this mode
employs the internal clock, the SCLK terminal is
_________
_________
not used. Furthermore, since the SRDY terminal is
not utilized either, both of these terminals can be
used as I/O ports.
Figure 5.8.3.1(c) shows the connection example of
input/output terminals in the asynchronous mode.
■ Asynchronous 8-bit mode
In this mode, asynchronous 8-bit transfer can be
performed. Parity check during data reception and
addition of parity bit (odd/even/none) during
transmitting can be specified and data processed in
8 bits with or without parity. Since this mode
employs the internal clock, the SCLK terminal is
_________
_________
not used. Furthermore, since the SRDY terminal is
not utilized either, both of these terminals can be
used as I/O ports.
Figure 5.8.3.1(c) shows the connection example of
input/output terminals in the asynchronous mode.
62 EPSON S1C88650 TECHNICAL MANUAL
Page 71

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
S1C88650
SIN(P10)
SOUT(P11)
SCLK(P12)
Input port(Kxx)
External
serial device
Data input
Data output
CLOCK input
READY output
(a) Clock synchronous master mode
S1C88650
SIN(P10)
SOUT(P11)
SCLK(P12)
SRDY(P13)
External
serial device
Data input
Data output
CLOCK output
READY input
(b) Clock synchronous slave mode
S1C88650
SIN(P10)
SOUT(P11)
External
serial device
Data input
Data output
(c) Asynchronous 7-bit/8-bit mode
Fig. 5.8.3.1 Connection examples of serial interface I/O terminals
This register setting is invalid in clock synchronous
slave mode and the external clock input from the
_________
SCLK terminal is used.
When the "programmable timer" is selected, the
programmable timer 1 underflow signal is divided
by 2 and this signal is used as the clock source.
With respect to the transfer rate setting, see "5.10
Programmable Timer".
At initial reset, the synchronous clock is set to
"f
OSC3
/16".
Whichever clock is selected, the signal is further
divided by 16 and then used as the synchronous
clock.
Furthermore, external clock input is used as is for
_________
SCLK in clock synchronous slave mode.
Table 5.8.4.2 shows an examples of transfer rates and
OSC3 oscillation frequencies when the clock source
is set to programmable timer.
When the demultiplied signal of the OSC3 oscillation circuit is made the clock source, it is necessary
to turn the OSC3 oscillation ON, prior to using the
serial interface.
A time interval of several msec to several 10 msec,
from the turning ON of the OSC3 oscillation circuit
to until the oscillation stabilizes, is necessary, due to
the oscillation element that is used. Consequently,
5.8.4 Clock source
There are four clock sources and selection is made
by setting the two bits of the clock source selection
register SCS0 and SCS1 as shown in table below.
Table 5.8.4.1 Clock source
SCS1
1
1
0
0
Division of the synchronous clock
SCS0
1
0
1
0
Clock source
Programmable timer
f
Fig. 5.8.4.1
OSC3 / 4
f
fOSC3 / 8
OSC3 / 16
OSC3
oscillation
circuit
Programmable timer 1
underflow signal
you should allow an adequate waiting time after
turning ON of the OSC3 oscillation, before starting
transmitting/receiving of serial interface. (The
oscillation start time will vary somewhat depending
on the oscillator and on the externally attached parts.
Refer to the oscillation start time example indicated
in Chapter 8, "ELECTRICAL CHARACTERISTICS".)
At initial reset, the OSC3 oscillation circuit is set to
ON status.
f
OSC3
SCLK
1/4
1/8
Divider Selector Selector
1/16
1/16
1/2
(Clock synchronous slave mode)
Synchronous clock
Table 5.8.4.2 OSC3 oscillation frequencies and transfer rates
Transfer rate
(bps)
19,200
9,600
4,800
2,400
1,200
600
300
150
OSC3 oscillation frequency / Programmable timer settings
f
OSC3
= 2.4756 MHz f
PST1X
00H
00H
00H
00H
00H
00H
02H
02H
RDR1X
03H
07H
0FH
1FH
3FH
7FH
1FH
3FH
OSC3
= 3.0720 MHz f
PST1X
00H
00H
00H
00H
00H
00H
03H
03H
RDR1X
04H
09H
13H
27H
4FH
9FH
09H
13H
OSC3
= 3.6864 MHz
PST1X
00H
00H
00H
00H
00H
00H
01H
02H
RDR1X
05H
0BH
17H
2FH
5FH
BFH
BFH
5FH
∗ Since the underflow signal only is used as the clock source, the
CDR1X register value does not affect the transfer rates.
S1C88650 TECHNICAL MANUAL EPSON 63
Page 72

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
5.8.5 Transmit-receive control
Below is a description of the registers which handle
transmit-receive control. With respect to transmitreceive control procedures and operations, please
refer to the following sections in which these are
discussed on a mode by mode basis.
■ Shift register and received data buffer
Exclusive shift registers for transmitting and
receiving are installed in this serial interface.
Consequently, duplex communication simultaneous transmit and receive is possible when the
asynchronous system is selected.
Data being transmitted are written to TRXD0–
TRXD7 and converted to serial through the shift
register and is output from the SOUT terminal.
In the reception section, a received data buffer is
installed separate from the shift register.
Data being received are input to the SIN terminal
and is converted to parallel through the shift
register and written to the received data buffer.
Since the received data buffer can be read even
during serial input operation, the continuous data
is received efficiently.
However, since buffer functions are not used in
clock synchronous mode, be sure to read out data
before the next data reception begins.
■ Transmit enable register and transmit
control bit
For transmitting control, use the transmit enable
register TXEN and transmit control bit TXTRG.
The transmit enable register TXEN is used to set the
transmitting enable/disable status. When "1" is
written to this register to set the transmitting enable
status, clock input to the shift register is enabled
and the system is ready to transmit data. In the
clock synchronous mode, synchronous clock input/
output from the SCLK terminal is also enabled.
The transmit control bit TXTRG is used as the
trigger to start transmitting data.
Data to be transmitted is written to the transmit
data shift register, and when transmitting preparations a recomplete, "1" is written to TXTRG whereupon data transmitting begins.
When interrupt has been enabled, an interrupt is
generated when the transmission is completed. If
there is subsequent data to be transmitted it can be
sent using this interrupt.
_________
In addition, TXTRG can be read as the status. When
set to "1", it indicates transmitting operation, and
"0" indicates transmitting stop.
For details on timing, see the timing chart which
gives the timing for each mode.
When not transmitting, set TXEN to "0" to disable
transmitting status.
■ Receive enable register, receive control bit
For receiving control, use the receive enable register
RXEN and receive control bit RXTRG.
Receive enable register RXEN is used to set receiving enable/disable status. When "1" is written into
this register to set the receiving enable status, clock
input to the shift register is enabled and the system
is ready to receive data. In the clock synchronous
mode, synchronous clock input/output from the
_________
SCLK terminal is also enabled.
With the above setting, receiving begins and serial
data input from the SIN terminal goes to the shift
register.
The operation of the receive control bit RXTRG is
slightly different depending on whether a clock
synchronous system or an asynchronous system is
being used.
In the clock synchronous system, the receive
control bit RXTRG is used as the trigger to start
receiving data.
When received data has been read and the preparation for next data receiving is completed, write "1"
into RXTRG to start receiving. (When "1" is written
_________
to RXTRG in slave mode, SRDY switches to "0".)
In an asynchronous system, RXTRG is used to
prepare for next data receiving. After reading the
received data from the received data buffer, write
"1" into RXTRG to signify that the received data
buffer is empty. If "1" is not written into RXTRG,
the overrun error flag OER will be set to "1" when
the next receiving operation is completed. (An
overrun error will be generated when receiving is
completed between reading the received data and
the writing of "1" to RXTRG.)
In addition, RXTRG can be read as the status. In
either clock synchronous mode or asynchronous
mode, when RXTRG is set to "1", it indicates
receiving operation and when set to "0", it indicates
that receiving has stopped.
For details on timing, see the timing chart which
gives the timing for each mode.
When you do not receive, set RXEN to "0" to disable
receiving status.
64 EPSON S1C88650 TECHNICAL MANUAL
Page 73

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
5.8.6 Operation of clock synchronous transfer
Clock synchronous transfer involves the transfer of
8-bit data by synchronizing it to eight clocks. The
same synchronous clock is used by both the
transmitting and receiving sides.
When the serial interface is used in the master
mode, the clock signal selected using SCS0 and
SCS1 is further divided by 1/16 and employed as
the synchronous clock. This signal is then sent via
_________
the SCLK terminal to the slave side (external serial
I/O device).
When used in the slave mode, the clock input to the
_________
SCLK terminal from the master side (external serial
input/output device) is used as the synchronous
clock.
In the clock synchronous mode, since one clock line
_________
(SCLK) is shared for both transmitting and receiving, transmitting and receiving cannot be performed simultaneously. (Half duplex only is
possible in clock synchronous mode.)
The transfer data length is fixed at 8 bits. Data can
be switched using a register whether it is
transmitted/received from LSB (bit 0) or MSB (bit
7).
LSB first
SCLK
Data D0 D1 D2 D3 D4 D5 D6 D7
MSB first
SCLK
Data D7 D6 D5 D4 D3 D2 D1 D0
Fig. 5.8.6.1 Transfer data configuration using
Below is a description of initialization when
performing clock synchronous transfer, transmitreceive control procedures and operations.
With respect to serial interface interrupt, see "5.8.8
Interrupt function".
LSB MSB
MSB LSB
clock synchronous mode
(2) Port selection
Because serial interface input/output ports SIN,
_________ _________
SOUT, SCLK and SRDY are set as I/O port
terminals P10–P13 at initial reset, "1" must be
written to the serial interface enable register
ESIF in order to set these terminals for serial
interface use.
(3) Setting of transfer mode
Select the clock synchronous mode by writing
the data as indicated below to the two bits of the
mode selection registers SMD0 and SMD1.
Master mode: SMD0 = "0", SMD1 = "0"
Slave mode: SMD0 = "1", SMD1 = "0"
(4) Clock source selection
In the master mode, select the synchronous
clock source by writing data to the two bits of
the clock source selection registers SCS0 and
SCS1. (See Table 5.8.4.1.)
This selection is not necessary in the slave
mode.
Since all the registers mentioned in (2)–(4) are
assigned to the same address, it's possible to set
them all with one instruction. The parity enable
register EPR is also assigned to this address,
however, since parity is not necessary in the
clock synchronous mode, parity check will not
take place regardless of how they are set.
(5) Clock source control
When the master mode is selected and programmable timer for the clock source is selected, set transfer rate on the programmable
timer side. (See "5.10 Programmable Timer".)
When the divided signal of OSC3 oscillation
circuit is selected for the clock source, be sure
that the OSC3 oscillation circuit is turned ON
prior to commencing data transfer. (See "5.4
Oscillation Circuits".)
(6) Serial data input/output permutation
The S1C88650 provides the data input/output
permutation select register SDP to select
whether the serial data bits are transfered from
the LSB or MSB. The SDP register should be set
before writing data to TRXD0–TRXD7.
■ Initialization of serial interface
When performing clock synchronous transfer, the
following initial settings must be made.
(1) Setting of transmitting/receiving disable
To set the serial interface into a status in which
both transmitting and receiving are disabled, "0"
must be written to both the transmit enable
register TXEN and the receive enable register
RXEN. Fix these two registers to a disable status
until data transfer actually begins.
S1C88650 TECHNICAL MANUAL EPSON 65
Page 74

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
■ Data transmit procedure
The control procedure and operation during
transmitting is as follows.
(1) Write "0" in the transmit enable register TXEN
and the receive enable register RXEN to reset
the serial interface.
(2) Write "1" in the transmit enable register TXEN
to set into the transmitting enable status.
(3) Write the transmitting data into TRXD0–
TRXD7.
(4) In case of the master mode, confirm the receive
ready status on the slave side (external serial
input/output device), if necessary. Wait until it
reaches the receive ready status.
(5) Write "1" in the transmit control bit TXTRG and
start transmitting.
In the master mode, this control causes the
synchronous clock to change to enable and to be
provided to the shift register for transmitting
_________
and output from the SCLK terminal.
In the slave mode, it waits for the synchronous
_________
clock to be input from the SCLK terminal.
The transmitting data of the shift register shifts
one bit at a time at each falling edge of the
synchronous clock and is output from the SOUT
terminal. When the final bit (MSB when "LSB
first" is selected, or LSB when "MSB first" is
selected) is output, the SOUTx terminal is
maintained at that level, until the next
transmitting begins.
The transmitting complete interrupt factor flag
FSTRA is set to "1" at the point where the data
transmitting of the shift register is completed.
When interrupt has been enabled, a transmit-
Fig. 5.8.6.2 Transmit procedure in clock synchronous mode
ting complete interrupt is generated at this
point.
Set the following transmitting data using this
interrupt.
(6) Repeat steps (3) to (5) for the number of bytes of
transmitting data, and then set the transmit
disable status by writing "0" to the transmit
enable register TXEN, when the transmitting is
completed.
Data transmitting
TXEN ← 0, RXEN ← 0
TXEN ← 1
Set transmitting data
to TRXD0–TRXD7
Receiver ready ?
TXTRG ← 1
FSTRA = 1 ?
No
Transmit complete ?
TXEN ← 0
End
No
In case of master mode
Yes
No
Yes
Yes
66 EPSON S1C88650 TECHNICAL MANUAL
Page 75

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
■ Data receive procedure
The control procedure and operation during
receiving is as follows.
(1) Write "0" in the receive enable register RXEN
and transmit enable register TXEN to reset the
serial interface.
(2) Write "1" in the receive enable register RXEN to
set into the receiving enable status.
(3) In case of the master mode, confirm the transmit
ready status on the slave side (external serial
input/output device), if necessary. Wait until it
reaches the transmit ready status.
(4) Write "1" in the receive control bit RXTRG and
start receiving.
In the master mode, this control causes the
synchronous clock to change to enable and is
provided to the shift register for receiving and
_________
output from the SCLK terminal.
In the slave mode, it waits for the synchronous
_________
clock to be input from the SCLK terminal. The
received data input from the SIN terminal is
successively incorporated into the shift register
in synchronization with the rising edge of the
synchronous clock.
At the point where the data of the 8th bit has
been incorporated at the final (8th) rising edge
of the synchronous clock, the content of the shift
register is sent to the received data buffer and
the receiving complete interrupt factor flag
FSREC is set to "1". When interrupt has been
enabled, a receiving complete interrupt is
generated at this point.
(5) Read the received data from TRXD0–TRXD7
using receiving complete interrupt.
(6) Repeat steps (3) to (5) for the number of bytes of
receiving data, and then set the receive disable
status by writing "0" to the receive enable
register RXEN, when the receiving is completed.
Data receiving
RXEN ← 0, TXEN ← 0
RXEN ← 1
Transmitter ready ?
RXTRG ← 1
FSREC = 1 ?
Received data reading
from TRXD0–TRXD7
No
Receiving complete ?
RXEN ← 0
Yes
Yes
Yes
No
In case of master mode
No
End
Fig. 5.8.6.3 Receiving procedure in clock synchronous mode
S1C88650 TECHNICAL MANUAL EPSON 67
Page 76

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
■
Transmit/receive ready (SRDY) signal
_________
When this serial interface is used in the clock
synchronous slave mode (external clock input), an
_________
SRDY signal is output to indicate whether or not
this serial interface can transmit/receive to the
master side (external serial input/output device).
_________
This signal is output from the SRDY terminal and
when this interface enters the transmit or receive
enable (READY) status, it becomes "0" (LOW level)
and becomes "1" (HIGH level) when there is a
BUSY status, such as during transmit/receive
operation.
TXEN
TXTRG (RD)
TXTRG (WR)
SCLK
SOUT D0 D1 D2 D3 D4 D5 D6 D7
Interrupt
(a) Transmit timing for master mode
_________
The SRDY signal changes the "1" to "0," immediately after writing "1" into the transmit control bit
TXTRG or the receive control bit RXTRG and
returns from "0" to "1", at the point where the first
synchronous clock has been input (falling edge).
When you have set in the master mode, control the
transfer by inputting the same signal from the slave
side using the input port or I/O port. At this time,
_________
since the SRDY terminal is not set and instead P13
functions as the I/O port, you can apply this port
for said control.
■ Timing chart
The timing chart for the clock synchronous system
transmission is shown in Figure 5.8.6.4.
RXEN
RXTRG (RD)
RXTRG (WR)
SCLK
SIN D0 D1 D2 D3 D4 D5 D6 D7
TRXD 7F 1st data
Interrupt
(c) Receive timing for master mode
TXEN
TXTRG (RD)
TXTRG (WR)
SCLK
SOUT D0 D1 D2 D3 D4 D5 D6 D7
SRDY
Interrupt
(b) Transmit timing for slave mode
Fig. 5.8.6.4 Timing chart (clock synchronous system transmission, LSB first)
RXEN
RXTRG (RD)
RXTRG (WR)
SCLK
SIN D0 D1D2D3D4D5D6D7
TRXD 7F 1st data
SRDY
Interrupt
(d) Receive timing for slave mode
7F
68 EPSON S1C88650 TECHNICAL MANUAL
Page 77

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
5.8.7 Operation of asynchronous transfer
Asynchronous transfer is a mode that transfers by
adding a start bit and a stop bit to the front and the
back of each piece of serial converted data. In this
mode, there is no need to use a clock that is fully
synchronized clock on the transmit side and the
receive side, but rather transmission is done while
adopting the synchronization at the start/stop bits
that have attached before and after each piece of
data. The RS-232C interface functions can be easily
realized by selecting this transfer mode.
This interface has separate transmit and receive
shift registers and is designed to permit full duplex
transmission to be done simultaneously for transmitting and receiving.
For transfer data in the asynchronous 7-bit mode,
either 7 bits data (no parity) or 7 bits data + parity
bit can be selected. In the asynchronous 8-bit mode,
either 8 bits data (no parity) or 8 bits data + parity
bit can be selected.
Parity can be even or odd, and parity checking of
received data and adding a party bit to transmitting
data will be done automatically. Thereafter, it is not
necessary to be conscious of parity itself in the
program.
The start bit length is fixed at 1 bit. For the stop bit
length, either 1 bit or 2 bits can be selected using
the stop bit select register STPB. Whether data is
transmitted/received from LSB (bit 0) or MSB (bit
7) it can be switched using the data input/output
permutation select register SDP.
LSB first
Sampling
clock
7bit data D0
7bit data
+parity
8bit data D0 D1 D2 D3 D4 D5 D6 D7s1 s2
8bit data
+parity
MSB first
Sampling
clock
7bit data D6
7bit data
+parity
8bit data D7
8bit data
+parity
s1
: Start bit (Low level, 1 bit)
s2
: Stop bit (High level, 1 bit or 2 bits)
p
: Parity bit
Fig. 5.8.7.1 Transfer data configuration
Here following, we will explain the control sequence and operation for initialization and transmitting /receiving in case of asynchronous data
transfer. See "5.8.8 Interrupt function" for the serial
interface interrupts.
D1 D2 D3 D4 D5 D6s1 s2
D0
D1 D2 D3 D4 D5 D6 ps1 s2
D1 D2 D3 D4 D5 D6 D7s1 p s2
D0
D5 D4 D3 D2 D1 D0s1 s2
D5 D4 D3 D2 D1 D0 ps1 s2
D6
D6 D5 D4 D3 D2 D1 D0s1 s2
D7 D6 D5 D4 D3 D2 D1 D0s1 p s2
for asynchronous system
■ Initialization of serial interface
The below initialization must be done in cases of
asynchronous system transfer.
(1) Setting of transmitting/receiving disable
To set the serial interface into a status in which
both transmitting and receiving are disabled, "0"
must be written to both the transmit enable
register TXEN and the receive enable register
RXEN. Fix these two registers to a disable status
until data transfer actually begins.
(2) Port selection
Because serial interface input/output terminals
SIN and SOUT are set as I/O port terminals P10
and P11 at initial reset, "1" must be written to
the serial interface enable register ESIF in order
to set these terminals for serial interface use.
_________ _________
SCLK and SRDY terminals set in the clock
synchronous mode are not used in the asynchronous mode. These terminals function as I/O
port terminals P12 and P13.
(3) Setting of transfer mode
Select the asynchronous mode by writing the
data as indicated below to the two bits of the
mode selection registers SMD0 and SMD1.
7-bit mode: SMD0 = "0", SMD1 = "1"
8-bit mode: SMD0 = "1", SMD1 = "1"
(4) Parity bit selection
When checking and adding parity bits, write "1"
into the parity enable register EPR to set to "with
parity check". As a result of this setting, in the
asynchronous 7-bit mode, it has a 7 bits data +
parity bit configuration and in the asynchronous
8-bit mode it has an 8 bits data + parity bit
configuration.In this case, parity checking for
receiving and adding a party bit for transmitting
is done automatically in hardware. Moreover,
when "with parity check" has been selected,
"odd" or "even" parity must be further selected in
the parity mode selection register PMD.
When "0" is written to the PMD register to select
"without parity check" in the asynchronous 7-bit
mode, data configuration is set to 7 bits data (no
parity) and in the asynchronous 8-bit mode (no
parity) it is set to 8 bits data (no parity) and parity
checking and parity bit adding will not be done.
(5) Clock source selection
Select the clock source by writing data to the
two bits of the clock source selection registers
SCS0 and SCS1. (See Table 5.8.4.1.)
Since all the registers mentioned in (2)–(5) are
assigned to the same address, it's possible to set
them all with one instruction.
S1C88650 TECHNICAL MANUAL EPSON 69
Page 78

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
(6) Clock source control
When the programmable timer is selected for
the clock source, set transfer rate on the programmable timer side. (See "5.10 Programmable
Timer".)
When the divided signal of OSC3 oscillation
circuit is selected for the clock source, be sure
that the OSC3 oscillation circuit is turned ON
prior to commencing data transfer. (See "5.4
Oscillation Circuits".)
(7) Stop bit length selection
The stop bit length can be configured to 1 bit or
2 bits using the stop bit select register STPB.
Table 5.8.7.1 Stop bit and parity bit settings
STPB
1
0
EPR
1
0
1
0
PMD
1
0
–
1
0
–
Stop bit
2 bits
2 bits
2 bits
1 bit
1 bit
1 bit
Settings
Parity bit
Odd
Even
Non parity
Odd
Even
Non parity
(8) Serial data input/output permutation
The S1C88650 provides the data input/output
permutation select register SDP to select
whether the serial data bits are transfered from
the LSB or MSB. The SDP register should be set
before writing data to TRXD0–TRXD7.
■ Data transmit procedure
The control procedure and operation during
transmitting is as follows.
(1) Write "0" in the transmit enable register TXEN
to reset the serial interface.
(2) Write "1" in the transmit enable register TXEN
to set into the transmitting enable status.
Write the transmitting data into TRXD0–TRXD7.
(3)
Also, when 7-bit data is selected, the TRXD7
data becomes invalid.
(4) Write "1" in the transmit control bit TXTRG and
start transmitting.
This control causes the shift clock to change to
enable and a start bit (LOW) is output to the
SOUT terminal in synchronize to its rising edge.
The transmitting data set to the shift register is
shifted one bit at a time at each rising edge of
the clock thereafter and is output from the
SOUT terminal. After the data output, it outputs
a stop bit (HIGH) and HIGH level is maintained
until the next start bit is output.
The transmitting complete interrupt factor flag
FSTRA is set to "1" at the point where the data
transmitting is completed. When interrupt has
been enabled, a transmitting complete interrupt
is generated at this point.
Set the following transmitting data using this
interrupt.
(5) Repeat steps (3) to (4) for the number of bytes of
transmitting data, and then set the transmit
disable status by writing "0" to the transmit
enable register TXEN, when the transmitting is
completed.
Data transmitting
TXEN ← 0
TXEN ← 1
Set transmitting data
to TRXD0–TRXD7
TXTRG ← 1
FSTRA = 1 ?
No
Transmit complete ?
Yes
Yes
TXEN ← 0
No
End
Fig. 5.8.7.2 Transmit procedure in asynchronous mode
70 EPSON S1C88650 TECHNICAL MANUAL
Page 79

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
■ Data receive procedure
The control procedure and operation during
receiving is as follows.
Write "0" in the receive enable register RXEN to
(1)
set the receiving disable status and to reset the
respective PER, OER, FER flags that indicate
parity, overrun and framing errors.
(2)
Write "1" in the receive enable register RXEN to
set into the receiving enable status.
(3)
The shift clock will change to enable from the
point where the start bit (LOW) has been input
from the SIN terminal and the receive data will
be synchronized to the rising edge following the
second clock, and will thus be successively
incorporated into the shift register.
After data bits have been incorporated, the stop bit
is checked and, if it is not HIGH, it becomes a
framing error and the error interrupt factor flag
FSERR is set to "1". When interrupt has been
enabled, an error interrupt is generated at this point.
When receiving is completed, data in the shift
register is transferred to the received data buffer
and the receiving complete interrupt flag FSREC
is set to "1". When interrupt has been enabled, a
receiving complete interrupt is generated at this
point. (When an overrun error is generated, the
interrupt factor flag FSREC is not set to "1" and a
receiving complete interrupt is not generated.)
If "with parity check" has been selected, a parity
check is executed when data is transferred into
the received data buffer from the shift register
and if a parity error is detected, the error interrupt factor flag is set to "1". When the interrupt
has been enabled, an error interrupt is generated
at this point just as in the framing error mentioned above.
(4)
Read the received data from TRXD0–TRXD7
using receiving complete interrupt.
Write "1" to the receive control bit RXTRG to
(5)
inform that the receive data has been read out.
When the following data is received prior to
writing "1" to RXTRG, it is recognized as an
overrun error and the error interrupt factor flag is
set to "1". When the interrupt has been enabled,
an error interrupt is generated at this point just as
in the framing error and parity error mentioned
above.
(6)
Repeat steps (3) to (5) for the number of bytes of
receiving data, and then set the receive disable
status by writing "0" to the receive enable register
RXEN, when the receiving is completed.
Data receiving
RXEN ← 0
Resets error flags
PER, OER and FER
RXEN ← 1
Error generated ?
No
Receiving interrupt ?
Received data reading
from TRXD0–TRXD7
RXTRG ← 1
No
Receiving complete ?
RXEN ← 0
No
Yes
Yes
End
Yes
Error processing
Fig. 5.8.7.3 Receiving procedure in asynchronous mode
S1C88650 TECHNICAL MANUAL EPSON 71
Page 80

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
■ Receive error
During receiving the following three types of errors
can be detected by an interrupt.
(1) Parity error
When writing "1" to the EPR register to select
"with parity check", a parity check (vertical
parity check) is executed during receiving. After
each data bit is sent a parity check bit is sent.
The parity check bit is a "0" or a "1". Even parity
checking will cause the sum of the parity bit
and the other bits to be even. Odd parity causes
the sum to be odd. This is checked on the
receiving side.
The parity check is performed when data
received in the shift register is transferred to the
received data buffer. It checks whether the
parity check bit is a "1" or a "0" (the sum of the
bits including the parity bit) and the parity set
in the PMD register match. When it does not
match, it is recognized as an parity error and the
parity error flag PER and the error interrupt
factor flag FSERR are set to "1".
When interrupt has been enabled, an error
interrupt is generated at this point.
The PER flag is reset to "0" by writing "1".
Even when this error has been generated, the
received data corresponding to the error is
transferred in the received data buffer and the
receive operation also continues.
The received data at this point cannot assured
because of the parity error.
(2) Framing error
In asynchronous transfer, synchronization is
adopted for each character at the start bit ("0")
and the stop bit ("1"). When receiving has been
done with the stop bit set at "0", the serial
interface judges the synchronization to be off
and a framing error is generated. When this
error is generated, the framing error flag FER
and the error interrupt factor flag FSERR are set
to "1". When interrupt has been enabled, an
error interrupt is generated at this point.
The FER flag is reset to "0" by writing "1".
Even when this error has been generated, the
received data for it is loaded into the receive
data buffer and the receive operation also
continues. However, even when it does not
become a framing error with the following data
receipt, such data cannot be assured.
Even when this error has been generated, the
received data corresponding to the error is
transferred in the received data buffer and the
receive operation also continues. However, even
when it does not become a framing error with
the following data receiving, such data cannot
be assured.
(3) Overrun error
When the next data is received before "1" is
written to RXTRG, an overrun error will be
generated, because the previous receive data
will be overwritten. When this error is generated, the overrun error flag OER and the error
interrupt factor flag FSERR are set to "1". When
interrupt has been enabled, an error interrupt is
generated at this point. The OER flag is reset to
"0" by writing "1" into it.
Even when this error has been generated, the
received data corresponding to the error is
transferred in the received data buffer and the
receive operation also continues.
Furthermore, when the timing for writing "1" to
RXTRG and the timing for the received data
transfer to the received data buffer overlap, it
will be recognized as an overrun error.
■ Timing chart
Figure 5.8.7.4 show the asynchronous transfer
timing chart.
72 EPSON S1C88650 TECHNICAL MANUAL
Page 81

RXEN
RXTRG(RD)
RXTRG(WR)
Sumpling
clock
SIN
(In 8-bit mode/Non parity)
TRXD
OER control signal
D0 D1 D2 D3 D4 D5 D6 D7 D0 D1 D6 D7 D0 D1 D2 D3 D4 D5 D6 D7D2 D3 D4 D5
5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
TXEN
TXTRG(RD)
TXTRG(WR)
Sumpling
clock
SOUT
(In 8-bit mode/Non parity)
Interrupt
(a) Transmit timing
D0 D1 D2 D3 D4 D5 D6 D7
1st data 2st data
OER
Interrupt
(b) Receive timing
Fig. 5.8.7.4 Timing chart (asynchronous transfer, LSB first, stop bit = 1 bit)
5.8.8 Interrupt function
This serial interface includes a function that
generates the below indicated three types of
interrupts.
• Transmitting complete interrupt
• Receiving complete interrupt
• Error interrupt
The interrupt factor flag FSxxx and the interrupt
enable register ESxxx for the respective interrupt
factors are provided and then the interrupt enable/
disable can be selected by the software. In addition,
a priority level of the serial interface interrupt for
the CPU can be optionally set at levels 0 to 3 by the
interrupt priority registers PSIF0 and PSIF1.
For details on the above mentioned interrupt
control register and the operation following
generation of an interrupt, see "5.14 Interrupt and
Standby Status".
Figure 5.8.8.1 shows the configuration of the serial
interface interrupt circuit.
■ Transmitting complete interrupt
This interrupt factor is generated at the point where
the sending of the data written into the shift
register has been completed and sets the interrupt
factor flag FSTRA to "1". When set in this manner, if
the corresponding interrupt enable register ESTRA
is set to "1" and the corresponding interrupt priority
registers PSIF0 and PSIF1 are set to a higher level
than the setting of interrupt flags (I0 and I1), an
interrupt will be generated to the CPU.
When "0" has been written into the interrupt enable
register ESTRA and interrupt has been disabled, an
interrupt is not generated to the CPU. Even in this
case, the interrupt factor flag FSTRA is set to "1".
The interrupt factor flag FSTRA is reset to "0" by
writing "1".
The following transmitting data can be set and the
transmitting start (writing "1" to TXTRG) can be
controlled by generation of this interrupt factor.
The exception processing vector address is set as
follows:
Transmitting complete interrupt: 00002CH
S1C88650 TECHNICAL MANUAL EPSON 73
Page 82

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
Interrupt priority
Address
register PSIF0, PSIF1
Error generation
Receive completion
Data bus
Transmit completion
Address
Address
Address
Address
Address
Address
Interrupt factor
flag FSERR
Interrupt enable
register ESERR
Interrupt factor
flag FSREC
Interrupt enable
register ESREC
Interrupt factor
flag FSTRA
Interrupt enable
register ESTRA
Fig. 5.8.8.1 Configuration of serial interface interrupt circuit
■ Receiving complete interrupt
This interrupt factor is generated at the point where
receiving has been completed and the receive data
incorporated into the shift register has been transferred into the received data buffer and it sets the
interrupt factor flag FSREC to "1". When set in this
manner, if the corresponding interrupt enable
register ESREC is set to "1" and the corresponding
interrupt priority registers PSIF0 and PSIF1 are set to
a higher level than the setting of interrupt flags (I0
and I1), an interrupt will be generated to the CPU.
When "0" has been written into the interrupt enable
register ESREC and interrupt has been disabled, an
interrupt is not generated to the CPU. Even in this
case, the interrupt factor flag FSREC is set to "1".
The interrupt factor flag FSREC is reset to "0" by
writing "1".
The generation of this interrupt factor permits the
received data to be read.
Also, the interrupt factor flag is set to "1" when a
parity error or framing error is generated.
The exception processing vector address is set as
follows:
Receiving complete interrupt: 00002AH.
Interrupt priority
level judgement
circuit
Interrupt
request
■ Error interrupt
This interrupt factor is generated at the point where
a parity error, framing error or overrun error is
detected during receiving and it sets the interrupt
factor flag FSERR to "1". When set in this manner, if
the corresponding interrupt enable register ESERR
is set to "1" and the corresponding interrupt priority
registers PSIF0 and PSIF1 are set to a higher level
than the setting of interrupt flags (I0 and I1), an
interrupt will be generated to the CPU.
When "0" has been written in the interrupt enable
register ESERR and interrupt has been disabled, an
interrupt is not generated to the CPU. Even in this
case, the interrupt factor flag FSERR is set to "1".
The interrupt factor flag FSERR is reset to "0" by
writing "1".
Since all three types of errors result in the same
interrupt factor, you should identify the error that
has been generated by the error flags PER (parity
error), OER (overrun error) and FER (framing
error).
The exception processing vector address is set as
follows:
Receive error interrupt: 000028H.
74 EPSON S1C88650 TECHNICAL MANUAL
Page 83

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
5.8.9 Control of serial interface
Table 5.8.9.1 show the serial interface control bits.
Table 5.8.9.1(a) Serial interface control bits
Address Bit Name SR R/WFunction Comment10
00FF48 D7
00FF49 D7
00FF4A D7
00FF4B D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
–
EPR
PMD
SCS1
SCS0
SMD1
SMD0
ESIF
–
FER
PER
OER
RXTRG
RXEN
TXTRG
TXEN
TRXD7
TRXD6
TRXD5
TRXD4
TRXD3
TRXD2
TRXD1
TRXD0
–
–
–
–
–
–
STPB
SDP
–
Parity enable register
Parity mode selection
Clock source selection
SCS1
SCS0
1
1
1
0
0
1
0
0
Clock source
Programmable timer
fOSC3 / 4
fOSC3 / 8
fOSC3 / 16
Serial I/F mode selection
SMD1
SMD0
1
1
Asynchronous 8-bit
1
0
Asynchronous 7-bit
0
1
Clock synchronous slave
0
0
Clock synchronous master
Mode
Serial I/F enable register
–
Serial I/F framing error flag
R
W
Serial I/F parity error flag
R
W
Serial I/F overrun error flag
R
W
Serial I/F receive trigger/status
R
W
Serial I/F receive enable
Serial I/F transmit trigger/status
R
W
Serial I/F transmit enable
Serial I/F transmit/Receive data D7 (MSB)
Serial I/F transmit/Receive data D6
Serial I/F transmit/Receive data D5
Serial I/F transmit/Receive data D4
Serial I/F transmit/Receive data D3
Serial I/F transmit/Receive data D2
Serial I/F transmit/Receive data D1
Serial I/F transmit/Receive data D0 (LSB)
–
–
–
–
–
–
Serial I/F stop bit selection
Serial I/F data input/output permutation selection
–
With parity
Odd
Serial I/F
–
Error
Reset (0)
Error
Reset (0)
Error
Reset (0)
Run
Trigger
Enable
Run
Trigger
Enable
–
–
–
–
–
–
2 bits
MSB first
–
Non parity
Even
I/O port
–
No error
No operation
No error
No operation
No error
No operation
Stop
No operation
Disable
Stop
No operation
Disable
–
–
–
–
–
–
1 bit
LSB first
–
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
–
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
X R/WHigh Low
–
–
–
–
–
–
00R/W
R/W
"0" when being read
Only for
asynchronous mode
In the clock synchronous slave mode,
external clock is
selected.
"0" when being read
Only for
asynchronous mode
Constantly "0" when
being read
S1C88650 TECHNICAL MANUAL EPSON 75
Page 84

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
Table 5.8.9.1(b) Serial interface control bits
Address Bit Name SR R/WFunction Comment10
00FF20 D7
00FF23 –
00FF27 D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D6
D5
D4
D3
D2
D1
D0
PK01
PK00
PSIF1
PSIF0
–
–
PTM1
PTM0
–
–
–
–
ESERR
ESREC
ESTRA
–
–
–
–
–
FSERR
FSREC
FSTRA
K00–K07 interrupt priority register
Serial interface interrupt priority register
–
–
Clock timer interrupt priority register
–
–
–
–
–
Serial I/F (error) interrupt enable register
Serial I/F (receiving) interrupt enable register
Serial I/F (transmitting) interrupt enable register
–
–
–
–
–
Serial I/F (error) interrupt factor flag
Serial I/F (receiving) interrupt factor flag
Serial I/F (transmitting) interrupt factor flag
PK01
PSIF1
1
1
0
0
–
–
PTM1
1
1
0
0
–
–
–
–
–
Interrupt
enable
–
–
–
–
–
(R)
Generated
(W)
Reset
PK00
PSIF0
1
0
1
0
PTM0
1
0
1
0
Priority
level
Level 3
Level 2
Level 1
Level 0
–
–
Priority level
Level 3
Level 2
Level 1
Level 0
–
–
–
–
–
Interrupt
disable
–
–
–
–
–
(R)
No generated
(W)
No operation
0
R/W
0
R/W
–
–
0
R/W
–
–
–
–
–
0
R/W
–
–
–
–
–
0 R/W
Constantly "0" when
being read
Constantly "0" when
being read
Constantly "0" when
being read
ESIF: 00FF48H•D0
Sets the serial interface terminals (P10–P13).
When "1" is written:
When "0" is written: I/O port terminal
Reading: Valid
The ESIF is the serial interface enable register and
P10–P13 terminals become serial input/output
terminals (SIN, SOUT, SCLK, SRDY) when "1" is
written, and they become I/O port terminals when
"0" is written.
Also, see Table 5.8.3.2 for the terminal settings
according to the transfer modes.
At initial reset, ESIF is set to "0" (I/O port).
Serial input/output terminal
_________ _________
SMD0, SMD1: 00FF48H•D1, D2
Set the transfer modes according to Table 5.8.9.2.
Table 5.8.9.2 Transfer mode settings
SMD1 SMD0 Mode
1
1
0
0
SMD0 and SMD1 can also read out.
At initial reset, this register is set to "0" (clock
synchronous master mode).
1
0
1
0
Asynchronous 8-bit
Asynchronous 7-bit
Clock synchronous slave
Clock synchronous master
76 EPSON S1C88650 TECHNICAL MANUAL
Page 85

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
SCS0, SCS1: 00FF48H•D3, D4
Select the clock source according to Table 5.8.9.3.
Table 5.8.9.3 Clock source selection
SCS1
1
1
0
0
SCS0
1
0
1
0
Clock source
Programmable timer
OSC3 / 4
f
fOSC3 / 8
OSC3 / 16
f
SCS0 and SCS1 can also be read out.
In the clock synchronous slave mode, setting of this
register is invalid.
At initial reset, this register is set to "0" (fOSC3/16).
SDP: 00FF4BH•D0
Selects the serial data input/output permutation.
When "1" is written: MSB first
When "0" is written: LSB first
Reading: Valid
Select whether the data input/output permutation
will be MSB first or LSB first.
At initial reset, SDP is set to "0" (LSB first).
STPB: 00FF4BH•D1
Selects the stop bit length for asynchronous data
transfer.
When "1" is written: 2 bits
When "0" is written: 1 bit
Reading: Valid
STPB is the stop bit select register that is effective in
asynchronous mode. When "1" is written to STPB,
the stop bit length is set to 2 bits, and when "0" is
written, it is set to 1 bit.
In clock synchronous mode, no start/stop bits can
be added to transfer data. Therefore, setting STPB
becomes invalid.
At initial reset, STPB is set to "0" (1 bit).
EPR: 00FF48H•D6
Selects the parity function.
When "1" is written: With parity
When "0" is written: Non parity
Reading: Valid
Selects whether or not to check parity of the
received data and to add a parity bit to the transmitting data. When "1" is written to EPR, the most
significant bit of the received data is considered to
be the parity bit and a parity check is executed. A
parity bit is added to the transmitting data. When
"0" is written, neither checking is done nor is a
parity bit added.
Parity is valid only in asynchronous mode and the
EPR setting becomes invalid in the clock synchronous mode.
At initial reset, EPR is set to "0" (non parity).
PMD: 00FF48H•D5
Selects odd parity/even parity.
When "1" is written: Odd parity
When "0" is written: Even parity
Reading: Valid
When "1" is written to PMD, odd parity is selected
and even parity is selected when "0" is written. The
parity check and addition of a parity bit is only
valid when "1" has been written to EPR. When "0"
has been written to EPR, the parity setting by PMD
becomes invalid.
At initial reset, PMD is set to "0" (even parity).
TXEN: 00FF49H•D0
Sets the serial interface to the transmitting enable
status.
When "1" is written: Transmitting enable
When "0" is written: Transmitting disable
Reading: Valid
When "1" is written to TXEN, the serial interface
shifts to the transmitting enable status and shifts to
the transmitting disable status when "0" is written.
Set TXEN to "0" when making the initial settings of
the serial interface and similar operations.
At initial reset, TXEN is set to "0" (transmitting
disable).
TXTRG: 00FF49H•D1
Functions as the transmitting start trigger and the
operation status indicator (transmitting/stop
status).
When "1" is read: During transmitting
When "0" is read: During stop
When "1" is written: Transmitting start
When "0" is written: Invalid
Starts the transmitting when "1" is written to
TXTRG after writing the transmitting data.
TXTRG can be read as the status. When set to "1", it
indicates transmitting operation, and "0" indicates
transmitting stop.
At initial reset, TXTRG is set to "0" (during stop).
RXEN: 00FF49H•D2
Sets the serial interface to the receiving enable status.
When "1" is written: Receiving enable
When "0" is written: Receiving disable
Reading: Valid
When "1" is written to RXEN, the serial interface
shifts to the receiving enable status and shifts to the
receiving disable status when "0" is written.
Set RXEN to "0" when making the initial settings of
the serial interface and similar operations.
At initial reset, RXEN is set to "0" (receiving disable).
S1C88650 TECHNICAL MANUAL EPSON 77
Page 86

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
RXTRG: 00FF49H•D3
Functions as the receiving start trigger or preparation for the following data receiving and the operation status indicator (during receiving/during stop).
When "1" is read: During receiving
When "0" is read: During stop
When "1" is written: Receiving start/following
data receiving preparation
When "0" is written: Invalid
RXTRG has a slightly different operation in the clock
synchronous system and the asynchronous system.
The RXTRG in the clock synchronous system, is
used as the trigger for the receiving start.
Writes "1" into RXTRG to start receiving at the
point where the receive data has been read and the
following receive preparation has been done. (In
_________
the slave mode, SRDY becomes "0" at the point
where "1" has been written into into the RXTRG.)
RXTRG is used in the asynchronous system for
preparation of the following data receiving. Reads
the received data located in the received data buffer
and writes "1" into RXTRG to inform that the
received data buffer has shifted to empty. When "1"
has not been written to RXTRG, the overrun error
flag OER is set to "1" at the point where the following receiving has been completed. (When the
receiving has been completed between the operation to read the received data and the operation to
write "1" into RXTRG, an overrun error occurs.)
In addition, RXTRG can be read as the status. In
either clock synchronous mode or asynchronous
mode, when RXTRG is set to "1", it indicates
receiving operation and when set to "0", it indicates
that receiving has stopped.
At initial reset, RXTRG is set to "0" (during stop).
TRXD0–TRXD7: 00FF4AH
During transmitting
Write the transmitting data into the transmit shift
register.
When "1" is written: HIGH level
When "0" is written: LOW level
Write the transmitting data prior to starting
transmitting.
In the case of continuous transmitting, wait for the
transmitting complete interrupt, then write the data.
The TRXD7 becomes invalid for the asynchronous
7-bit mode.
Converted serial data for which the bits set at "1" as
HIGH (VDD) level and for which the bits set at "0"
as LOW (VSS) level are output from the SOUT
terminal.
During receiving
Read the received data.
When "1" is read: HIGH level
When "0" is read: LOW level
The data from the received data buffer can be read out.
Since the sift register is provided separately from
this buffer, reading can be done during the receive
operation in the asynchronous mode. (The buffer
function is not used in the clock synchronous mode.)
Read the data after waiting for the receiving
complete interrupt.
When performing parity check in the asynchronous
7-bit mode, "0" is loaded into the 8th bit (TRXD7)
that corresponds to the parity bit.
The serial data input from the SIN terminal is level
converted, making the HIGH (VDD) level bit "1" and
the LOW (VSS) level bit "0" and is then loaded into
this buffer.
At initial reset, the buffer content is undefined.
OER: 00FF49H•D4
Indicates the generation of an overrun error.
When "1" is read: Error
When "0" is read: No error
When "1" is written: Reset to "0"
When "0" is written: Invalid
OER is an error flag that indicates the generation of
an overrun error and becomes "1" when an error
has been generated.
An overrun error is generated when the receiving
of data has been completed prior to the writing of
"1" to RXTRG in the asynchronous mode.
OER is reset to "0" by writing "1".
At initial reset and when RXEN is "0", OER is set to
"0" (no error).
PER: 00FF49H•D5
Indicates the generation of a parity error.
When "1" is read: Error
When "0" is read: No error
When "1" is written: Reset to "0"
When "0" is written: Invalid
PER is an error flag that indicates the generation of
a parity error and becomes "1" when an error has
been generated.
When a parity check is performed in the asynchronous mode, if data that does not match the parity is
received, a parity error is generated.
PER is reset to "0" by writing "1".
At initial reset and when RXEN is "0", PER is set to
"0" (no error).
78 EPSON S1C88650 TECHNICAL MANUAL
Page 87

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
FER: 00FF49H•D6
Indicates the generation of a framing error.
When "1" is read: Error
When "0" is read: No error
When "1" is written: Reset to "0"
When "0" is written: Invalid
FER is an error flag that indicates the generation of
a framing error and becomes "1" when an error has
been generated.
When the stop bit for the receiving of the asynchronous mode has become "0", a framing error is
generated.
FER is reset to "0" by writing "1".
At initial reset and when RXEN is "0", FER is set to
"0" (no error).
PSIF0, PSIF1: 00FF20H•D4, D5
Sets the priority level of the serial interface interrupt.
The two bits PSIF0 and PSIF1 are the interrupt
priority register corresponding to the serial interface interrupt. Table 5.8.9.4 shows the interrupt
priority level which can be set by this register.
Table 5.8.9.4 Interrupt priority level settings
PSIF1 PSIF0 Interrupt priority level
1
1
0
0
1
0
1
0
Level 3 (IRQ3)
Level 2 (IRQ2)
Level 1 (IRQ1)
Level 0 (None)
At initial reset, this register is set to "0" (level 0).
ESTRA, ESREC, ESERR: 00FF23H•D0, D1, D2
Enables or disables the generation of an interrupt
for the CPU.
When "1" is written: Interrupt enabled
When "0" is written: Interrupt disabled
Reading: Valid
ESTRA, ESREC and ESERR are interrupt enable
registers that respectively correspond to the interrupt factors for transmitting complete, receiving
complete and receiving error. Interrupts set to "1"
are enabled and interrupts set to "0" are disabled.
At initial reset, this register is set to "0" (interrupt
disabled).
FSTRA, FSREC, FSERR: 00FF27H•D0, D1, D2
Indicates the serial interface interrupt generation status.
When "1" is read: Interrupt factor present
When "0" is read:
When "1" is written: Resets factor flag
When "0" is written: Invalid
FSTRA, FSREC and FSERR are interrupt factor flags
that respectively correspond to the interrupts for
transmitting complete, receiving complete and
receiving error and are set to "1" by generation of
each factor.
Transmitting complete interrupt factor is generated
at the point where the data transmitting of the shift
register has been completed.
Receiving complete interrupt factor is generated at
the point where the received data has been transferred into the received data buffer.
Receive error interrupt factor is generated when a
parity error, framing error or overrun error has been
detected during data receiving.
When set in this manner, if the corresponding
interrupt enable register is set to "1" and the corresponding interrupt priority register is set to a higher
level than the setting of interrupt flags (I0 and I1), an
interrupt will be generated to the CPU.
Regardless of the interrupt enable register and
interrupt priority register settings, the interrupt
factor flag will be set to "1" by the occurrence of an
interrupt generation condition.
To accept the subsequent interrupt after interrupt
generation, re-setting of the interrupt flags (set
interrupt flag to lower level than the level indicated
by the interrupt priority registers, or execute the
RETE instruction) and interrupt factor flag reset are
necessary. The interrupt factor flag is reset to "0" by
writing "1".
At initial reset, this flag is reset to "0".
Interrupt factor not present
S1C88650 TECHNICAL MANUAL EPSON 79
Page 88

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Serial Interface)
5.8.10 Programming notes
(1)
Be sure to initialize the serial interface mode in
the transmitting/receiving disable status (TXEN
= RXEN = "0").
(2)
Do not perform double trigger (writing "1") to
TXTRG (RXTRG) when the serial interface is in the
transmitting (receiving) operation. Furthermore, do
not execute the SLP instruction. (When executing
the SLP instruction, set TXEN = RXEN = "0".)
(3) In the clock synchronous mode, since one clock
(4)
_________
line (SCLK) is shared for both transmitting and
receiving, transmitting and receiving cannot be
performed simultaneously. (Half duplex only is
possible in clock synchronous mode.)
Consequently, be sure not to write "1" to
RXTRG (TXTRG) when TXTRG (RXTRG) is "1".
When a parity error or flaming error is generated
during receiving in the asynchronous mode, the
receiving error interrupt factor flag FSERR is set
to "1" prior to the receiving complete interrupt
factor flag FSREC for the time indicated in Table
5.8.10.1.
Consequently, when an error is generated,
you should reset the receiving complete interrupt
factor flag FSREC to "0" by providing a wait time in
error processing routines and similar routines.
When an overrun error is generated, the receiving
complete interrupt factor flag FSREC is not set to "1"
and a receiving complete interrupt is not generated.
Table 5.8.10.1 Time difference between FSERR
and FSREC on error generation
Clock source Time difference
fOSC3 / n
Programmable timer
1/2 cycles of fOSC3 / n
1 cycle of timer 1 underflow
(5)
When the demultiplied signal of the OSC3
oscillation circuit is made the clock source, it is
necessary to turn the OSC3 oscillation ON, prior to
using the serial interface.
A time interval of several msec to several 10 msec,
from the turning ON of the OSC3 oscillation
circuit to until the oscillation stabilizes, is necessary, due to the oscillation element that is used.
Consequently, you should allow an adequate
waiting time after turning ON of the OSC3
oscillation, before starting transmitting/receiving
of serial interface. (The oscillation start time will
vary somewhat depending on the oscillator and on
the externally attached parts. Refer to the
oscillation start time example indicated in Chapter
8, "ELECTRICAL CHARACTERISTICS".)
At initial reset, the OSC3 oscillation circuit is set to
ON status.
80 EPSON S1C88650 TECHNICAL MANUAL
Page 89

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Clock Timer)
5.9 Clock Timer
5.9.1 Configuration of clock timer
The S1C88650 has built in a clock timer that uses
the OSC1 oscillation circuit as clock source. The
clock timer is composed of an 8-bit binary counter
that uses the 256 Hz signal dividing fOSC1 as its
input clock and can read the data of each bit (128–1
Hz) by software.
Normally, this clock timer is used for various
timing functions such as clocks.
The configuration of the clock timer is shown in
Figure 5.9.1.1.
5.9.2 Interrupt function
The clock timer can generate an interrupt by each of
the 32 Hz, 8 Hz, 2 Hz and 1 Hz signals.
The configuration of the clock timer interrupt
circuit is shown in Figure 5.9.2.1.
Interrupts are generated by respectively setting the
corresponding interrupt factor flags FTM32, FTM8,
FTM2 and FTM1 at the falling edge of the 32 Hz, 8
Hz, 2 Hz and 1 Hz signals to "1". Interrupt can be
prohibited by the setting the interrupt enable
registers ETM32, ETM8, ETM2 and ETM1 corresponding to each interrupt factor flag.
In addition, a priority level of the clock timer
interrupt for the CPU can be optionally set at levels
0 to 3 by the interrupt priority registers PTM0 and
PTM1.
For details on the above mentioned interrupt
control register and the operation following
generation of an interrupt, see "5.14 Interrupt and
Standby Status".
The exception processing vector addresses for each
interrupt factor are respectively set as shown
below.
32 Hz interrupt: 000034H
8 Hz interrupt: 000036H
2 Hz interrupt: 000038H
1 Hz interrupt: 00003AH
Figure 5.9.2.2 shows the timing chart for the clock
timer.
OSC1
oscillation
circuit
fOSC1 256 Hz
Divider
TMRST
TMRUN
Clock timer reset
Clock timer Run/Stop
Data bus
Clock timer
64Hz32Hz16Hz8Hz4Hz2Hz1
128
Hz
Interrupt control circuit
TMD0–TMD7
Fig. 5.9.1.1 Configuration of clock timer
Hz
Interrupt
request
S1C88650 TECHNICAL MANUAL EPSON 81
Page 90

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Clock Timer)
Interrupt priority
Address
register PTM0, PTM1
32 Hz falling edge
8 Hz falling edge
Data bus
2 Hz falling edge
1 Hz falling edge
Address
Address
Address
Address
Address
Address
Address
Address
Interrupt factor
flag FTM32
Interrupt enable
register ETM32
Interrupt factor
flag FTM8
Interrupt enable
register ETM8
Interrupt factor
flag FTM2
Interrupt enable
register ETM2
Interrupt factor
flag FTM1
Interrupt enable
register ETM1
Interrupt priority
level judgement
circuit
Interrupt
request
OSC1/128
TMD0
TMD1
TMD2
TMD3
TMD4
TMD5
TMD6
TMD7
32 Hz interrupt
8 Hz interrupt
2 Hz interrupt
1 Hz interrupt
Fig. 5.9.2.1 Configuration of clock timer interrupt circuit
256 Hz
128 Hz
64 Hz
32 Hz
16 Hz
8 Hz
4 Hz
2 Hz
1 Hz
Fig. 5.9.2.2 Timing chart of clock timer
82 EPSON S1C88650 TECHNICAL MANUAL
Page 91

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Clock Timer)
5.9.3 Control of clock timer
Table 5.9.3.1 shows the clock timer control bits.
Table 5.9.3.1 Clock timer control bits
Address Bit Name SR R/WFunction Comment10
D7
00FF40
D6
D5
D4
D3
D2
D1
D0
00FF41 D7
D6
D5
D4
D3
D2
D1
D0
00FF20 D7
D6
D5
D4
D3
D2
D1
D0
00FF22 D7
D6
D5
D4
D3
D2
D1
D0
00FF26 D7
D6
D5
D4
D3
D2
D1
D0
WDEN
FOUT2
FOUT1
FOUT0
FOUTON
WDRST
TMRST
TMRUN
TMD7
TMD6
TMD5
TMD4
TMD3
TMD2
TMD1
TMD0
PK01
PK00
PSIF1
PSIF0
–
–
PTM1
PTM0
–
–
–
–
ETM32
ETM8
ETM2
ETM1
–
–
–
–
FTM32
FTM8
FTM2
FTM1
Watchdog timer enable
FOUT frequency selection
FOUT2
FOUT1
0
0
0
0
1
1
1
1
FOUT0
0
0
1
1
0
0
1
1
Frequency
0
1
0
1
0
1
0
1
f
OSC1
OSC1
f
f
OSC1
OSC1
f
OSC3
f
OSC3
f
OSC3
f
f
OSC3
/ 1
/ 2
/ 4
/ 8
/ 1
/ 2
/ 4
/ 8
FOUT output control
Watchdog timer reset
Clock timer reset
Clock timer Run/Stop control
Clock timer data
Clock timer data
Clock timer data
Clock timer data
Clock timer data
Clock timer data
Clock timer data
Clock timer data
1 Hz
2 Hz
4 Hz
8 Hz
16 Hz
32 Hz
64 Hz
128 Hz
K00–K07 interrupt priority register
Serial interface interrupt priority register
–
–
Clock timer interrupt priority register
–
–
–
–
Clock timer 32 Hz interrupt enable register
Clock timer 8 Hz interrupt enable register
Clock timer 2 Hz interrupt enable register
Clock timer 1 Hz interrupt enable register
–
–
–
–
Clock timer 32 Hz interrupt factor flag
Clock timer 8 Hz interrupt factor flag
Clock timer 2 Hz interrupt factor flag
Clock timer 1 Hz interrupt factor flag
Enable
On
Reset
Reset
Run
High Low
PK01
PK00
PSIF1
PSIF0
1
1
1
0
0
1
0
0
–
–
PTM1
PTM0
1
1
1
0
0
1
0
0
–
–
–
–
Interrupt
enable
–
–
–
–
(R)
Generated
(W)
Reset
Disable
Off
No operation
No operation
Stop
Priority
level
Level 3
Level 2
Level 1
Level 0
–
–
Priority level
Level 3
Level 2
Level 1
Level 0
–
–
–
–
Interrupt
disable
–
–
–
–
(R)
Not generated
(W)
No operation
1
R/W
0
R/W
0
R/W
0
R/W
0
R/W
–
W
–
W
0
R/W
0R
0
R/W
0
R/W
–
–
0
R/W
–
–
–
–
0 R/W
–
–
–
–
0 R/W
Constantly "0" when
being read
Constantly "0" when
being read
Constantly "0" when
being read
Constantly "0" when
being read
S1C88650 TECHNICAL MANUAL EPSON 83
Page 92

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Clock Timer)
TMD0–TMD7: 00FF41H
The clock timer data can be read out.
Each bit of TMD0–TMD7 and frequency correspondence are as follows:
TMD0: 128 Hz TMD4: 8 Hz
TMD1: 64 Hz TMD5: 4 Hz
TMD2: 32 Hz TMD6: 2 Hz
TMD3: 16 Hz TMD7: 1 Hz
Since the TMD0–TMD7 is exclusively for reading,
the write operation is invalid.
At initial reset, the timer data is set to "00H".
TMRST: 00FF40H•D1
Resets the clock timer.
When "1" is written: Clock timer reset
When "0" is written: No operation
Reading: Always "0"
The clock timer is reset by writing "1" to the
TMRST.
When the clock timer is reset in the RUN status, it
restarts immediately after resetting. In the case of
the STOP status, the reset data "00H" is maintained.
No operation results when "0" is written to the
TMRST.
Since the TMRST is exclusively for writing, it
always becomes "0" during reading.
TMRUN: 00FF40H•D0
Controls RUN/STOP of the clock timer.
When "1" is written: RUN
When "0" is written: STOP
Reading: Valid
The clock timer starts up-counting by writing "1" to
the TMRUN and stops by writing "0".
In the STOP status, the count data is maintained
until it is reset or set in the next RUN status. Also,
when the STOP status changes to the RUN status,
the data that was maintained can be used for
resuming the count.
At initial reset, the TMRUN is set to "0" (STOP).
PTM0, PTM1: 00FF20H•D0, D1
Sets the priority level of the clock timer interrupt.
The two bits PTM0 and PTM1 are the interrupt
priority register corresponding to the clock timer
interrupt. Table 5.9.3.2 shows the interrupt priority
level which can be set by this register.
Table 5.9.3.2 Interrupt priority level settings
PTM1 PTM0 Interrupt priority level
1
1
0
0
1
0
1
0
Level 3 (IRQ3)
Level 2 (IRQ2)
Level 1 (IRQ1)
Level 0 (None)
ETM1, ETM2, ETM8, ETM32: 00FF22H•D0–D3
Enables or disables the generation of an interrupt
for the CPU.
When "1" is written: Interrupt enabled
When "0" is written: Interrupt disabled
Reading: Valid
The ETM1, ETM2, ETM8 and ETM32 are interrupt
enable registers that respectively correspond to the
interrupt factors for 1 Hz, 2 Hz, 8 Hz and 32 Hz.
Interrupts set to "1" are enabled and interrupts set
to "0" are disabled.
At initial reset, this register is set to "0" (interrupt
disabled).
FTM1, FTM2, FTM8, FTM32: 00FF26H•D0–D3
Indicates the clock timer interrupt generation status.
When "1" is read: Interrupt factor present
When "0" is read:
When "1" is written: Resets factor flag
When "0" is written: Invalid
The FTM1, FTM2, FTM8 and FTM32 are interrupt
factor flags that respectively correspond to the
interrupts for 1 Hz, 2 Hz, 8 Hz and 32 Hz and are
set to "1" at the falling edge of each signal.
When set in this manner, if the corresponding
interrupt enable register is set to "1" and the
corresponding interrupt priority register is set to a
higher level than the setting of interrupt flags (I0
and I1), an interrupt will be generated to the CPU.
Regardless of the interrupt enable register and
interrupt priority register settings, the interrupt
factor flag will be set to "1" by the occurrence of an
interrupt generation condition.
To accept the subsequent interrupt after interrupt
generation, re-setting of the interrupt flags (set
interrupt flag to lower level than the level indicated
by the interrupt priority registers, or execute the
RETE instruction) and interrupt factor flag reset are
necessary. The interrupt factor flag is reset to "0" by
writing "1".
At initial reset, this flag is reset to "0".
Interrupt factor not present
At initial reset, this register is set to "0" (level 0).
84 EPSON S1C88650 TECHNICAL MANUAL
Page 93

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Clock Timer)
5.9.4 Programming notes
(1) The clock timer is actually made to RUN/STOP
in synchronization with the falling edge of the
256 Hz signal after writing to the TMRUN
register. Consequently, when "0" is written to
the TMRUN, the timer shifts to STOP status
when the counter is incremented "1". The
TMRUN maintains "1" for reading until the
timer actually shifts to STOP status.
Figure 5.9.4.1 shows the timing chart of the
RUN/STOP control.
256 Hz
TMRUN(RD)
TMRUN(WR)
TMDX 57H 58H 59H 5AH 5BH 5CH
Fig. 5.9.4.1 Timing chart of RUN/STOP control
(2) The SLP instruction is executed when the clock
timer is in the RUN status (TMRUN = "1"). The
clock timer operation will become unstable
when returning from SLEEP status. Therefore,
when shifting to SLEEP status, set the clock
timer to STOP status (TMRUN = "0") prior to
executing the SLP instruction.
S1C88650 TECHNICAL MANUAL EPSON 85
Page 94

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Programmable Timer)
5.10 Programmable Timer
5.10.1 Configuration of programmable timer
The S1C88650 has four built-in 16-bit programmable timer systems. Each system timer consists of
a 16-bit presettable down counter, and can be used
as 16-bit × 1 channel or 8-bit × 2 channels of
programmable timer. Furthermore, they function
as event counters using the input port terminal.
Figures 5.10.1.1 and 5.10.1.2 shows the configuration of the 16-bit programmable timers.
fOSC3/fOSC1
Input port (K04)
Clock output
Underflow
interrupt
Compare match
interrupt
fOSC3/fOSC1
Input port (K04)
Clock output
To serial I/F
Underflow
interrupt
Compare match
interrupt
Prescaler/clock
control circuit
Clock output circuit
Interrupt circuit
Prescaler/clock
control circuit
Clock output circuit
Interrupt circuit
INCL0
EXCL0
TOUT0
INCL1
EXCL0
TOUT1
Clock selection
circuit
Control circuit
Underflow signal
Clock selection
circuit
Control circuit
Two 8-bit down counters, the reload data register
and compare data register corresponding to each
down counter are arranged in the 16-bit programmable timer.
The reload data register is used to set an initial
value to the down counter.
The compare data register stores data for
comparison with the content of the down counter.
By setting these registers, a PWM waveform is
generated and it can be output to external devices
as the TOUT0, 1, 2 or 3 signal. Furthermore, the
serial interface clock is generated from the Timer 1
underflow signal. The Timer 5 underflow signal can
be used to set the frame frequency for the LCD
driver.
Timer 0
8-bit reload data register (RDR0)
Underflow
Compare match
Underflow
Compare match
8-bit down counter (PTM0)
Comparator
8-bit compare data register (CDR0)
Timer 0 control registers
Timer 1
8-bit reload data register (RDR1)
8-bit down counter (PTM1)
Comparator
8-bit compare data register (CDR1)
Timer 1 control registers
fOSC3/fOSC1
Input port (K05)
Clock output
Underflow
interrupt
Compare match
interrupt
fOSC3/fOSC1
Input port (K05)
Clock output
Underflow
interrupt
Compare match
interrupt
Prescaler/clock
control circuit
Clock output circuit
Interrupt circuit
Prescaler/clock
control circuit
Clock output circuit
Interrupt circuit
INCL2
EXCL1
TOUT2
TOUT2
INCL3
EXCL1
TOUT3
TOUT3
Clock selection
circuit
Control circuit
Underflow signal
Clock selection
circuit
Control circuit
Underflow
Compare match
Underflow
Compare match
Timer 2
8-bit reload data register (RDR2)
8-bit down counter (PTM2)
Comparator
8-bit compare data register (CDR2)
Timer 2 control registers
Timer 3
8-bit reload data register (RDR3)
8-bit down counter (PTM3)
Comparator
8-bit compare data register (CDR3)
Timer 3 control registers
Data bus
Fig. 5.10.1.1 Configuration of 16-bit programmable timer (Timers 1–3)
86 EPSON S1C88650 TECHNICAL MANUAL
Page 95

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Programmable Timer)
f
OSC3/fOSC1
Input port (K06)
Underflow
interrupt
Compare match
interrupt
f
OSC3/fOSC1
Input port (K06)
To LCD driver
Underflow
interrupt
Compare match
interrupt
f
OSC3/fOSC1
Input port (K07)
Underflow
interrupt
Compare match
interrupt
Prescaler/clock
control circuit
Interrupt circuit
Prescaler/clock
control circuit
Interrupt circuit
Prescaler/clock
control circuit
Interrupt circuit
INCL4
EXCL2
INCL5
EXCL2
INCL6
EXCL3
Clock selection
circuit
Control circuit
Underflow signal
Clock selection
circuit
Control circuit
Clock selection
circuit
Control circuit
Underflow
Compare match
Underflow
Compare match
Underflow
Compare match
Timer 4
8-bit reload data register (RDR4)
8-bit down counter (PTM4)
Comparator
8-bit compare data register (CDR4)
Timer 4 control registers
Timer 5
8-bit reload data register (RDR5)
8-bit down counter (PTM5)
Comparator
8-bit compare data register (CDR5)
Timer 5 control registers
Timer 6
8-bit reload data register (RDR6)
8-bit down counter (PTM6)
Comparator
8-bit compare data register (CDR6)
Data bus
Underflow signal
f
OSC3/fOSC1
Input port (K07)
Underflow
interrupt
Compare match
interrupt
Prescaler/clock
control circuit
Interrupt circuit
INCL7
EXCL3
Clock selection
circuit
Control circuit
Fig. 5.10.1.2 Configuration of 16-bit programmable timer (Timers 4–7)
5.10.2 Operation mode
Timers 0 and 1, Timers 2 and 3, Timers 4 and 5, or
Timers 6 and 7 can be used as two channels of 8-bit
timers or one channel of 16-bit timer. Two kinds of
operation modes are provided corresponding to
this configuration, and it can be selected by the 8/
16-bit mode selection registers MODE16_A (for
Timer 0–1) through MODE16_D (for Timer 6–7).
When "0" is set to the MODE16_A register, Timers 0
and 1 enter the 8-bit mode (8-bit × 2 channels) and
when "1" is set, they enter the 16-bit mode (16-bit ×
1 channel).
Timer 6 control registers
Timer 7
8-bit reload data register (RDR7)
Underflow
Compare match
8-bit down counter (PTM7)
Comparator
8-bit compare data register (CDR7)
Timer 7 control registers
In the 8-bit mode, Timers 0 and 1 can be controlled
individually.
In the 16-bit mode, the underflow signal of Timer 0
is used as the input clock of Timer 1 so that the
down counters operate as a 16-bit counter.
The timer in the 16-bit mode is controlled with the
control registers for Timer 0 except for the clock
output.
MODE16_B through MODE16_D have the same
function.
Figure 5.10.2.1 shows the timer configuration
depending on the operation mode and Table
5.10.2.1 shows the configuration of the control
registers.
S1C88650 TECHNICAL MANUAL EPSON 87
Page 96

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Programmable Timer)
Timer 0
input clock
Timer 1
input clock
D7
00FF30
D6
D5
D4
D3
D2
D1
D0
00FF31 D7
D6
D5
D4
D3
D2
D1
D0
[8-bit mode]
8-bit data
Timer 0
Timer 1
Interrupt request
TOUT output
Interrupt request
TOUT output
Timer 0
input clock
Timer 0
underflow
signal
[16-bit mode]
Low-order 8-bit data
Timer 0
Timer 1
Interrupt request
TOUT output
8-bit data High-order 8-bit data
Fig. 5.10.2.1 Counter configuration in 8- and 16-bit mode (example of Timers 0 and 1)
Table 5.10.2.1(a) Control registers in 8-bit mode (example of Timers 0 and 1)
SR R/WAddress Bit Name Function Comment10
MODE16_A
PTNREN_A
–
–
PTOUT0
PTRUN0
PSET0
CKSEL0
–
–
–
–
PTOUT1
PTRUN1
PSET1
CKSEL1
PTM0–1 8/16-bit mode selection
External clock 0 noise rejecter selection
–
R/W register
PTM0 clock output control
PTM0 Run/Stop control
PTM0 preset
PTM0 input clock selection
–
–
–
R/W register
PTM1 clock output control
PTM1 Run/Stop control
PTM1 preset
PTM1 input clock selection
16-bit x 1
Enable
–
1
On
Run
Preset
External clock
–
–
–
1
On
Run
Preset
External clock
-
bit x 2
8
Disable
Stop
No operation
Internal clock
Stop
No operation
Internal clock
Off
Off
0
R/W
0
R/W
–
–
0
0
0
0
0
0
–
–
–
–
–
–
0
0
0
0
0
0
"0" when being read
R/W
Reserved register
R/W
R/W
W
"0" when being read
R/W
Constantly "0" when
being read
R/W
Reserved register
R/W
R/W
W
"0" when being read
R/W
Table 5.10.2.1(b) Control registers in 16-bit mode (example of Timers 0 and 1)
SR R/WAddress Bit Name Function Comment10
D7
00FF30
00FF31 D7
MODE16_A
D6
PTNREN_A
D5
–
D4
–
D3
PTOUT0
D2
PTRUN0
D1
PSET0
D0
CKSEL0
–
D6
–
D5
–
D4
–
D3
PTOUT1
D2
PTRUN1
D1
PSET1
D0
CKSEL1
PTM0–1 8/16-bit mode selection
External clock 0 noise rejecter selection
–
R/W register
Invalid (fixed at "0")
PTM0 Run/Stop control
PTM0 preset
PTM0 input clock selection
–
–
–
R/W register
PTM1 clock output control
Invalid (fixed at "0")
Invalid (fixed at "0")
Invalid (fixed at "0")
16-bit x 1
Enable
–
1
Invalid
Run
Preset
External clock
–
–
–
1
On
Invalid
Invalid
Invalid
-
bit x 2
8
Disable
–
0
Fixed at "0"
Stop
No operation
Internal clock
–
–
–
0
Off
Fixed at "0"
Fixed at "0"
Fixed at "0"
0
R/W
0
R/W
–
0
0
0
0
0
–
–
"0" when being read
R/W
Reserved register
R/W
R/W
W
"0" when being read
R/W
Constantly "0" when
being read
–
0
R/W
Reserved register
0
R/W
0
R/W
0
W
"0" when being read
0
R/W
Note: The register names contain a timer number (0–7) to identify the timer to which the register belongs.
The following explanation uses "x" instead of the timer number except when it is required. For
example, PTRUNx represents PTRUN0 through PTRUN7. Furthermore, a pair of timers are
described as Timer(L) and Timer(H) in explanations for 16-bit mode.
Timer(L) = Timer 0, Timer 2, Timer 4 or Timer 6
Timer(H) = Timer 1, Timer 3, Timer 5 or Timer 7
This is used for register names.
88 EPSON S1C88650 TECHNICAL MANUAL
Page 97

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Programmable Timer)
5.10.3 Setting of input clock
The clock to be input to the counter can be selected
from either the internal clock or external clock by
the input clock selection register (CKSEL) provided for each timer. The internal clock is an
output of the prescaler. The external clock is used
for the event counter function. A signal from the
input port is used as the count clock.
Table 5.10.3.1 shows the input clock selection
register and input clock of each timer.
Table 5.10.3.1 Input clock selection
Timer
Timer 0
Timer 1
Timer 2
Timer 3
Timer 4
Timer 5
Timer 6
Timer 7
When the external clock is selected, a signal from
the input port is input to the programmable timer.
An noise rejecter is incorporated in the external
clock input circuit and it can be enabled/disabled
using the external clock noise rejecter select
registers PTNREN_A through PTNREN_D corresponding to the EXCL0 through EXCL3 inputs.
Writing "1" to PTNREN_A (–D) enables the noise
rejecter for the external clock EXCL0 (–3). The
noise rejecter regards pulses less than a 16/fOSC1
seconds in width as noise and rejects them (an
external clock must have a pulse width at least
double the rejected width). When PTNREN_A (–D)
is "0", the external clock bypasses the noise rejecter.
When the internal clock is used, select a source
clock and a division ratio of the prescaler to set the
clock frequency for each timer.
The source clock is specified using the source clock
selection register PRTFx provided for each timer.
When "1" is written to PRTFx, the OSC1 clock is
selected as the source clock for Timer x. When "0"
is written, the OSC3 clock is selected. The OSC3
oscillation circuit must be on before the OSC3 can
be used. See "5.4 Oscillation Circuits" for the
controlling of the OSC3 oscillation circuit.
The prescaler provides the division ratio selection
register PSTx0–PSTx2 for each timer. Note that the
division ratio varies depending on the selected
source clock.
Register setting
CKSEL0 = "0"
CKSEL0 = "1"
CKSEL1 = "0"
CKSEL1 = "1"
CKSEL2 = "0"
CKSEL2 = "1"
CKSEL3 = "0"
CKSEL3 = "1"
CKSEL4 = "0"
CKSEL4 = "1"
CKSEL5 = "0"
CKSEL5 = "1"
CKSEL6 = "0"
CKSEL6 = "1"
CKSEL7 = "0"
CKSEL7 = "1"
Input clock
INCL0 (Prescaler)
EXCL0 (K04 input)
INCL1 (Prescaler)
EXCL0 (K04 input)
INCL2 (Prescaler)
EXCL1 (K05 input)
INCL3 (Prescaler)
EXCL1 (K05 input)
INCL4 (Prescaler)
EXCL2 (K06 input)
INCL5 (Prescaler)
EXCL2 (K06 input)
INCL6 (Prescaler)
EXCL3 (K07 input)
INCL7 (Prescaler)
EXCL3 (K07 input)
Table 5.10.3.2 Division ratio and control registers
Register Dividing ratio
/4096
/1024
/256
/64
/32
/8
/2
/1
(OSC1)
f
OSC1
OSC1
f
f
OSC1
OSC1
f
f
OSC1
f
OSC1
OSC1
f
f
OSC1
/128
/64
/32
/16
/8
/4
/2
/1
PSTx2
1
1
1
1
0
0
0
0
PSTx1
1
1
0
0
1
1
0
0
PSTx0
1
0
1
0
1
0
1
0
(OSC3)
f
OSC3
OSC3
f
f
OSC3
OSC3
f
f
OSC3
f
OSC3
OSC3
f
f
OSC3
The set clock is output to Timer x by writing "1" to
the clock control register PRPRTx.
When the 16-bit mode is selected, the programmable timer operates with the clock input to
Timer(L), and Timer(H) inputs the Timer(L)
underflow signal as the clock. Therefore, the
setting of Timer(H) input clock is invalid.
5.10.4 Operation and control of timer
Reload data register and setting
of initial value
The reload data register (RDRx) is used to set an
initial value of the down counter.
In the 8-bit mode, RDRx is used as an 8-bit register
separated for each timer.
In the 16-bit mode, the RDR(L) register is handled
as low-order 8 bits of reload data, and the RDR(H)
register is as high-order 8 bits.
The reload data register can be read and written,
and all the registers are set to FFH at initial reset.
Data written in this register is loaded into the
down counter, and a down counting starts from
the value.
The down counter is preset, in the following two
cases:
1) When software presets
The software preset can be done using the
preset control bits PSETx corresponding to
Timer x. When the preset control bit is set to
"1", the content of the reload data register is
loaded into the down counter at that point.
In the 16-bit mode, a 16-bit reload data is
loaded all at one time by setting PSET(L). In
this case, writing to PSET(H) is invalid.
2) When down counter has underflowed during a count
Since the down counter presets the reload data
by the underflow, the underflow period is
decided according to the value set in the reload
data register. This underflow generates an
interrupt, and controls the clock (TOUTx
signal) output.
S1C88650 TECHNICAL MANUAL EPSON 89
Page 98

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Programmable Timer)
Compare data register
The programmable timer has a built-in data
comparator so that count data can be compared
with an optional value. The compare data register
(CDRx) is used to set the value to be compared.
In the 8-bit mode, CDRx is used as an 8-bit register
separated for each timer.
In the 16-bit mode, the CDR(L) register is handled
as low-order 8 bits of compare data, and the
CDR(H) register is as high-order 8 bits.
The compare data register can be read and written,
and all the registers are set to 00H at initial reset.
The programmable timer compares count data
with the compare data register (CDRx), and
generates a compare match signal when they
become the same value. This compare match signal
generates an interrupt, and controls the clock
(TOUTx signal) output.
Timer operation
Timer is equipped with PTRUNx register which
controls the RUN/STOP of the timer. Timer x
starts down counting by writing "1" to the
PTRUNx register. However, it is necessary to
control the input clock and to preset the reload
data before starting a count.
When "0" is written to PTRUNx register, clock
input is prohibited, and the count stops.
This RUN/STOP control does not affect data in the
counter. The data in the counter is maintained
during count deactivation, so it is possible to
resume counting from the data.
In the 8-bit mode, the timers can be controlled
individually by the PTRUNx register.
In the 16-bit mode, the PTRUN(L) register controls
a pair of timers as a 16-bit timer. In this case,
control of the PTRUN(H) register is invalid.
The buffers PTMx is attached to the counter, and
reading is possible in optional timing.
When the counter agrees with the data set in the
compare data register during down counting, the
timer generates a compare match interrupt.
And, when the counter underflows, an underflow
interrupt is generated, and the initial value set in
the reload data register is loaded to the counter.
The interrupt generated does not stop the down
counting.
After an underflow interrupt is generated, the
counter continues counting from the initial value
reloaded.
PTRUNx
PSETx
RDRx
CDRx
Input clock
PTMx7
PTMx6
PTMx5
PTMx4
PTMx3
PTMx2
PTMx1
PTMx0
A6H
58H
Preset Underflow interrupt
A6H
58H 58H
Compare match
interrupt generation
generation
F3H
∗1
Reload
Fig. 5.10.4.1 Basic operation timing of counter (an example of 8-bit mode)
Note: The programmable timer counts down at the falling edge of the input clock and at the same time it
generates an interrupt if the counter underflows. Then it starts loading the reload data to the counter
and the counter data is determined at the next rising edge of the input clock (period shown in as ∗1
in the figure).
To avoid improper reloading, do not rewrite the reload data after an interrupt occurs until the counter
data is determined including the reloading period ∗1. Be especially careful when using the OSC1
(low-speed clock) as the clock source of the programmable timer and the CPU is operating with the
OSC3 (high-speed clock).
90 EPSON S1C88650 TECHNICAL MANUAL
Page 99

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Programmable Timer)
5.10.5 Interrupt function
The 16-bit programmable timer can generate an
interrupt with the compare match signal and
underflow signal of each timer.
Figure 5.10.5.1 shows the configuration of the 16bit programmable timer interrupt circuit.
The compare match signal and underflow signal of
each timer set the corresponding interrupt factor
flag to "1". At that point, the interrupt is generated.
The interrupt can also be prohibited by setting the
interrupt enable register to correspond with the
interrupt factor flag.
Furthermore, the priority level of the interrupt for
the CPU can be set to an optional level (0–3) using
the interrupt priority register.
Table 5.10.5.1 shows the interrupt factor flags,
interrupt enable registers and interrupt priority
registers corresponding to the interrupt factors.
In the 8-bit mode, the compare match interrupt
factor flag and underflow interrupt factor flag are
individually set to "1" by the timers.
Table 5.10.5.1 Interrupt control registers
Interrupt factor flag
Name
FTU0
FTC0
FTU1
FTC1
FTU2
FTC2
FTU3
FTC3
FTU4
FTC4
FTU5
FTC5
FTU6
FTC6
FTU7
FTC7
Timer 0
Timer 1
Timer 2
Timer 3
Timer 4
Timer 5
Timer 6
Timer 7
Interrupt factor
Counter underflow
Compare match
Counter underflow
Compare match
Counter underflow
Compare match
Counter underflow
Compare match
Counter underflow
Compare match
Counter underflow
Compare match
Counter underflow
Compare match
Counter underflow
Compare match
In the 16-bit mode, the interrupt factor flags of
Timer(H) are set to "1" by the compare match and
underflow in 16 bits.
Refer to Section 5.14, "Interrupt and Standby
Status", for details of the interrupt control registers
and operations subsequent to interrupt generation.
The exception processing vector addresses for the 16bit programmable timer interrupt are set as follows:
Timer 0 underflow interrupt: 000016H
Timer 0 compare match interrupt: 000018H
Timer 1 underflow interrupt: 00001AH
Timer 1 compare match interrupt: 00001CH
Timer 2 underflow interrupt: 00001EH
Timer 2 compare match interrupt: 000020H
Timer 3 underflow interrupt: 000022H
Timer 3 compare match interrupt: 000024H
Timer 4 underflow interrupt: 00003CH
Timer 4 compare match interrupt: 00003EH
Timer 5 underflow interrupt: 000040H
Timer 5 compare match interrupt: 000042H
Timer 6 underflow interrupt: 000044H
Timer 6 compare match interrupt: 000046H
Timer 7 underflow interrupt: 000048H
Timer 7 compare match interrupt: 00004AH
Address·Dx
00FF29H·D0
00FF29H·D1
00FF29H·D2
00FF29H·D3
00FF29H·D4
00FF29H·D5
00FF29H·D6
00FF29H·D7
00FF2EH·D0
00FF2EH·D1
00FF2EH·D2
00FF2EH·D3
00FF2EH·D4
00FF2EH·D5
00FF2EH·D6
00FF2EH·D7
Interrupt enable register
Name
ETU0
ETC0
ETU1
ETC1
ETU2
ETC2
ETU3
ETC3
ETU4
ETC4
ETU5
ETC5
ETU6
ETC6
ETU7
ETC7
Address·Dx
00FF25H·D0
00FF25H·D1
00FF25H·D2
00FF25H·D3
00FF25H·D4
00FF25H·D5
00FF25H·D6
00FF25H·D7
00FF2CH·D0
00FF2CH·D1
00FF2CH·D2
00FF2CH·D3
00FF2CH·D4
00FF2CH·D5
00FF2CH·D6
00FF2CH·D7
Interrupt priority register
Name
PPT0
PPT1
PPT2
PPT3
PPT4
PPT5
PPT6
PPT7
Address·Dx
00FF21H·D2
00FF21H·D3
00FF21H·D4
00FF21H·D5
00FF2AH·D0
00FF2AH·D1
00FF2AH·D2
00FF2AH·D3
S1C88650 TECHNICAL MANUAL EPSON 91
Page 100

5 PERIPHERAL CIRCUITS AND THEIR OPERATION (Programmable Timer)
Compare match
Compare match
Data bus
Compare match
Compare match
Address
Underflow
Address
Address
Address
Address
Address
Underflow
Address
Address
Address
Address
Address
Underflow
Address
Address
Address
Address
Address
Underflow
Address
Address
Address
Address
Interrupt priority register
PPT0, PPT1
Interrupt factor flag
FTU0
Interrupt enable
register ETU0
Interrupt factor flag
FTC0
Interrupt enable
register ETC0
Interrupt priority register
PPT2, PPT3
Interrupt factor flag
FTU2
Interrupt enable
register ETU2
Interrupt factor flag
FTC2
Interrupt enable
register ETC2
Interrupt priority register
PPT4, PPT5
Interrupt factor flag
FTU4
Interrupt enable
register ETU4
Interrupt factor flag
FTC4
Interrupt enable
register ETC4
Interrupt priority register
PPT6, PPT7
Interrupt factor flag
FTU6
Interrupt enable
register ETU6
Interrupt factor flag
FTC6
Interrupt enable
register ETC6
Interrupt priority
level judgment
circuit
Timer 0
Timer 1
Interrupt priority
level judgment
circuit
Timer 2
Timer 3
Interrupt priority
level judgment
circuit
Timer 4
Timer 5
Interrupt priority
level judgment
circuit
Timer 6
Timer 7
Fig. 5.10.5.1 Configuration of 16-bit programmable timer interrupt circuit
Timer 0
interrupt request
Timer 1
interrupt request
Timer 2
interrupt request
Timer 3
interrupt request
Timer 4
interrupt request
Timer 5
interrupt request
Timer 6
interrupt request
Timer 7
interrupt request
92 EPSON S1C88650 TECHNICAL MANUAL
 Loading...
Loading...