

Emerson Fisher Level-Trol 2502R, Fisher Level-Trol 2502CR, Fisher Level-Trol 2502, Fisher Level-Trol 2502C, Fisher Level-Trol 2502F Instruction Manual
...Page 1
Instruction Manual
Form 1446
November 2006
2502 Series Controllers
2502 Series Level-TrolR Controller
Contents
Introduction 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Scope of Manual 1. . . . . . . . . . . . . . . . . . . . . . . . .
Description 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Specifications 2. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Educational Services 2. . . . . . . . . . . . . . . . . . . . . .
Installation 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
249 Series Sensors 4. . . . . . . . . . . . . . . . . . . . . . .
Uncrating 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controller Orientation 5. . . . . . . . . . . . . . . . . . . . .
Controller-Sensor Action 5. . . . . . . . . . . . . . . . . . .
Mounting Caged Sensors 6. . . . . . . . . . . . . . . . . .
Mounting Cageless Sensors 7. . . . . . . . . . . . . . .
Side-Mounted Sensor 8. . . . . . . . . . . . . . . . . . . .
Top-Mounted Sensor 8. . . . . . . . . . . . . . . . . . . .
Regulator Supply Pressure 9. . . . . . . . . . . . . . . .
Prestartup Checks 9. . . . . . . . . . . . . . . . . . . . . . . . .
Adjustments 11. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Level Set Adjustment 11. . . . . . . . . . . . . . . . . . .
Proportional Band Adjustment 11. . . . . . . . . . . .
Reset Adjustment 11. . . . . . . . . . . . . . . . . . . . . .
Differential Relief Adjustment 12. . . . . . . . . . . .
Calibration 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Precalibration Requirements 12. . . . . . . . . . . . . .
Wet Calibration 12. . . . . . . . . . . . . . . . . . . . . . . . .
Dry Calibration 12. . . . . . . . . . . . . . . . . . . . . . . . .
Controller and Torque Tube Arm
Disassembly 12. . . . . . . . . . . . . . . . . . . . . . . .
Determining Suspended Weight
for Calibration 13. . . . . . . . . . . . . . . . . . . . . . .
Calibration Procedure 14. . . . . . . . . . . . . . . . . . . .
Startup 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Principle of Operation 15. . . . . . . . . . . . . . . . . . . . .
Type 2502 Controller 15. . . . . . . . . . . . . . . . . . . . .
Type 2502F Controller with Reset
Relief Valve 17. . . . . . . . . . . . . . . . . . . . . . . . . .
Maintenance 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Troubleshooting 18. . . . . . . . . . . . . . . . . . . . . . . . .
Removing Controller from Sensor 18. . . . . . . . . .
Changing Mounting Method 20. . . . . . . . . . . . . . .
Installing Controller on Sensor 20. . . . . . . . . . . . .
Changing Proportional, Reset, or
Differential Relief Valve 21. . . . . . . . . . . . . . . . .
Testing Relay Dead Band 21. . . . . . . . . . . . . . . . .
Changing Relay 21. . . . . . . . . . . . . . . . . . . . . . . . .
Introduction
Scope of Manual
This instruction manual provides installation,
operating, calibration, and maintenance procedures
for 2502 Series pneumatic controllers (figure 1) used
in combination with 249 Series level sensors.
This manual does not include regulator or sensor
installation or maintenance procedures. For this
information, refer to the instruction manual for the
appropriate regulator and 249 Series level sensor.
W8334
Figure 1. Type 2502 Controller Mounted on
Type 249B Sensor
Replacing Bellows 22. . . . . . . . . . . . . . . . . . . . . . .
Reversing Action 22. . . . . . . . . . . . . . . . . . . . . . . .
Parts Ordering 23. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parts Kits 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parts List 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TYPE 2502
CONTROLLER
249B SERIES SENSOR
www.Fisher.com
D200126X012
Page 2

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
No person may install, operate, or maintain this
product without first D being fully trained and
qualified in valve, actuator, and accessory
installation, operation, and maintenance, and D
carefully reading and understanding the contents of
this manual. If you have any questions about these
instructions, contact your Emerson Process
Managementt sales office before proceeding.
Description
The Type 2502 Level-TrolR controller described in
this manual provides proportional-plus-reset and
proportional-plus-reset with differential relief valve
control. The controller output is a pneumatic signal
that operates a final control element. These
controllers are designed to control liquid level, the
level of interface between two liquids, or density
(specific gravity). Each unit consists of a 249 Series
liquid level sensor and a 2502 Series pneumatic
controller.
Refer to the Principle of Operation section for a more
comprehensive discussion of how the Type 2502
pneumatic controller operates.
Specifications
Table 1 gives general specifications for Type 2502
Series controllers.
Educational Services
Note
Neither Emerson, Emerson Process
Management, nor any of their affiliated
entities assumes responsibility for the
selection, use, and maintenance of any
product. Responsibility for the
selection, use, and maintenance of any
product remains with the purchaser
and end-user.
Installation
The 2502 Series controllers are used in combination
with 249 Series sensors, and unless ordered
separately, the controller will be attached to the
sensor.
WARNING
Wear protective eyewear, gloves and
clothing whenever possible when
performing any installation operations
to avoid personal injury.
Check with your process or safety
engineer for any additional measures
that must be taken to protect against
process media.
If installing into an existing
application, also refer to the WARNING
at the beginning of the Maintenance
section in this instruction manual.
For information on available courses for the Type
2502 Series Level-Trol Controller, as well as a
variety of other products, contact:
Emerson Process Management
Educational Services, Registration
P.O. Box 190; 301 S. 1st Ave.
Marshalltown, IA 50158−2823
Phone: 800−338−8155 or
Phone: 641−754−3771
Fax: 641−754−3431
e-mail: education@emersonprocess.com
2
WARNING
Personal injury or property damage
may result from fire or explosion if
natural gas is used as the supply
medium and preventative measures
are not taken. Preventative measures
may include: Re-evaluating the
hazardous area classification,
ensuring adequate ventilation, and the
removal of any ignition sources.
Page 3
Instruction Manual
Form 1446
November 2006
2502 Series Controllers
Table 1. Specifications
Available Configurations
Type 2502: A direct-acting controller which
provides proportional-plus-reset control
Type 2502C: A Type 2502 with a level indicator
assembly
Type 2502F: A Type 2502 with a differential relief
valve
These type numbered products are also
available with reverse action. For example,
Type 2502R, Type 2502CR, and 2502FR
Input Signal
(1)
Liquid Level or Liquid-to-Liquid Interface
Level: From 0 to 100 percent of displacer
length—standard lengths for all sensors are 356
mm (14 inches) or 813 mm (32 inches). Other
lengths available depending on sensor
construction
Liquid Density: From 0 to 100 percent of
displacement force change obtained with given
displacer volume—standard volumes are 980 cm
(60 inches3) for Types 249C and 249CP sensors,
or 1640 cm
3
(100 inches3) for most other 249
Series sensors; other volumes available
depending on construction
Output Signal
(1)
0.2 to 1.0 bar (3 to 15 psig) or 0.4 to 2.0 bar (6 to
30 psig)
Action: Field reversible between direct
(increasing liquid or interface level or specific
gravity increases output pressure) and reverse
(increasing liquid or interface level or specific
gravity decreases output pressure)
Area Ratio of Relay Diaphragms
3:1
Supply Medium
Air or Natural Gas
(2)
Supply Pressure Requirement
(3)
1.4 bar
output signal or 2.4 bar
(20 psig) for 0.2 to 1.0 bar (3 to 15 psig)
(3)
(35 psig) for 0.4 to 2.0
bar (6 to 30 psig) output signal
3
(continued)
Maximum Supply Pressure
(4)
3.4 bar (50 psig)
Supply Pressure Consumption
At 1.4 bar (20 Psig)
Minimum: 0.11 normal m
proportional band setting of 0 or 200 percent
Maximum: 0.72 normal m
(5)
3
/h (4.2 scfh) at
3
/h (27 scfh) at
proportional band setting of 100 percent
At 2.4 bar (35 psig)
Minimum: 0.2 normal m
band setting of 0 or 200 percent
Maximum: 1.1 normal m
3
/h (7 scfh) at proportional
3
/h (42 scfh) at
proportional band setting of 100 percent
Performance
Hysteresis: 0.6 percent of output pressure
change at 100 percent of proportional band
Repeatability
or displacement force change
Dead Band
(1)
: 0.2 percent of displacer length
(1)
: 0.05 percent of proportional band
or span
Typical Frequency Response
(1)
: 4 Hz and
90-degree phase shift at 100 percent of
proportional band with output piped to typical
instrument bellows using 6.1 meters (20 feet) of
6.4 mm (1/4 inch) tubing
Ambient Temperature Error: $1.5 percent of
output pressure change per 50_F (28_C) of
temperature change at 100 percent of
proportional band when using sensor with
standard-wall N05500 torque tube with 249 Series
sensors
(1)
Reset
: Adjustable from 0.01 to 74 minutes per
repeat (100 to 0.01 repeats per minute)
Differential Relief (Type 2502F and 2502FR
Controllers Only): Adjustable from 0.1 to 0.48
bar differential (2 to 7 psi) to relieve excessive
difference between proportional and reset
pressures. Differential relief can be switched
between rising output pressure and falling output
pressure.
Standard Tubing Connections
1/4-inch NPT female
Maximum Working Pressures (Sensors Only)
Consistent with applicable ASME
pressure/temperature ratings
3
Page 4
2502 Series Controllers
Instruction Manual
Form 1446
November 2006
Table 1. Specifications (continued)
Hazardous Area Classification
Declaration of SEP
2502 Series controllers comply with the
requirements of ATEX Group II Category 2 Gas
and Dust
Fisher Controls International LLC declares this
product to be in compliance with Article 3
paragraph 3 of the Pressure Equipment Directive
(PED) 97 / 23 / EC. It was designed and
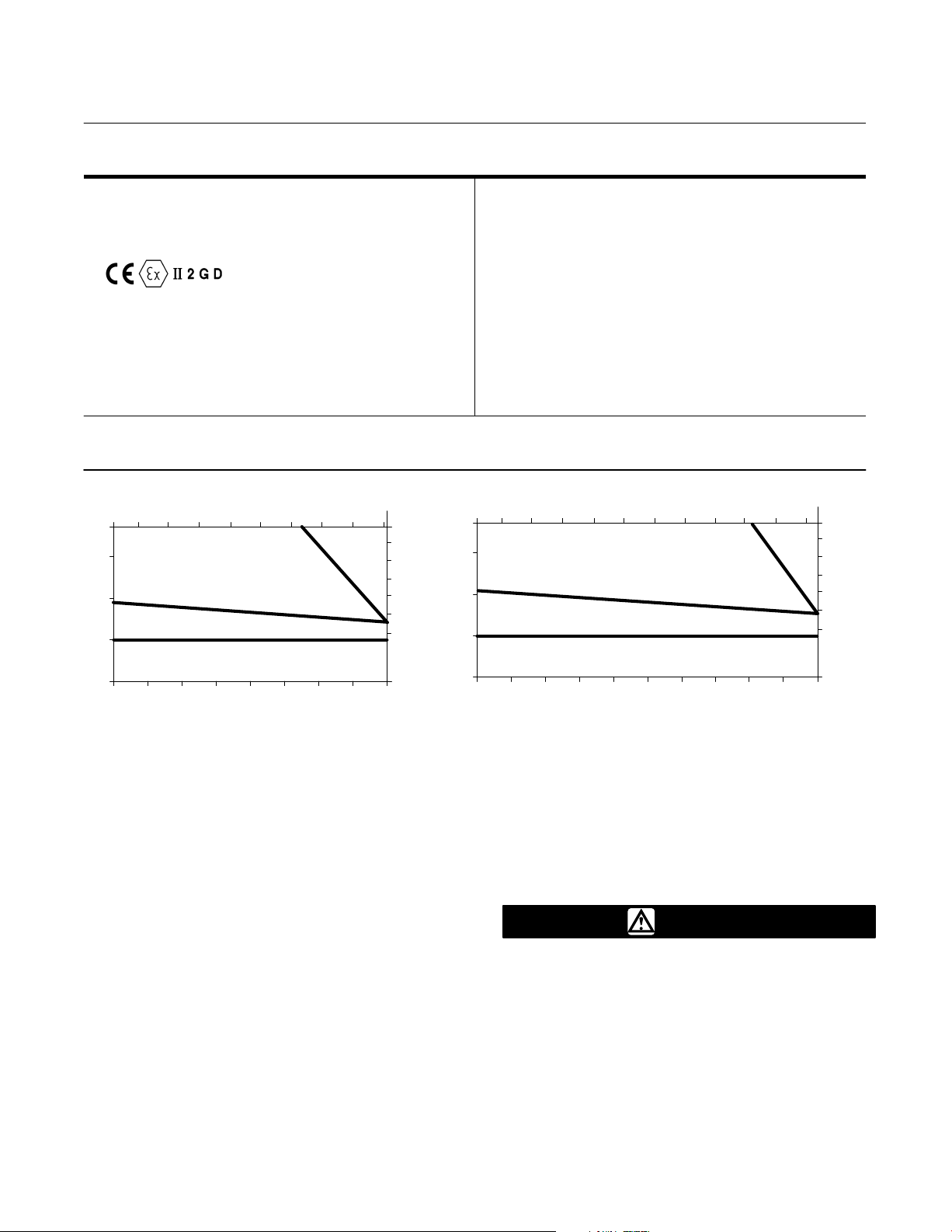
Operative Ambient Temperatures
(4)
Standard Construction: 40 to 71_C (*40 to
manufactured in accordance with Sound
Engineering Practice (SEP) and cannot bear the
CE marking related to PED compliance.
160_F*)
High Temperature Construction: *18 to 104_C
(0 to 220_F).
See figure 2.
1. Term defined in ISA Standard S51.1.
2. Natural gas should contain no more that 20 ppm of H2S.
3. Control and stability may be impaired if this pressure is exceeded.
4. The pressure/temperature limits in this document, and any applicable standard or code limitation should not be exceeded.
5. Normal cubic meters per hour (m
AMBIENT TEMPERATURE (_C)
−18 −10
1100
_
800
400
0
USE INSULATOR (CAUTION! IF AMBIENT DEWPOINT IS
ABOVE PROCESS TEMPERATURE, ICE FORMATION MAY
PROCESS TEMPERATURE ( F)
CAUSE INSTRUMENT MALFUNCTION AND REDUCE
INSULATOR EFFECTIVENESS.)
−20 −29
0 20 40 60 80 100 120 140 160
01020
HEAT INSULATOR
REQUIRED
NO INSULATOR NECESSARY
AMBIENT TEMPERATURE (_F)
STANDARD CONTROLLER OR TRANSMITTER
3
/hr) at 0_C and 1.01325 bar. Scfh=standard cubic feet per hour at 60_F and 14.7 psia .
30 40 50 60 70
TOO
HOT
71
593
500
_
400
300
200
100
0
−18 −10
1100
_
800
400
0
PROCESS TEMPERATURE ( F)
PROCESS TEMPERATURE ( C)
−20 −29
0 20 40 60 80 100 120 140 200
NOTE: FOR SERVICE BELOW −29_C (−20_F) CONTACT FACTORY.
B1413-1/IL
However, the product may bear the CE marking
to indicate compliance with other applicable EC
Directives.
01020
HEAT INSULATOR
REQUIRED
NO INSULATOR NECESSARY
USE INSULATOR (CAUTION! IF AMBIENT DEWPOINT IS
ABOVE PROCESS TEMPERATURE, ICE FORMATION MAY
CAUSE INSTRUMENT MALFUNCTION AND REDUCE
INSULATOR EFFECTIVENESS.)
HIGH-TEMPERATURE CONTROLLER OR TRANSMITTER
AMBIENT TEMPERATURE (_C)
30 40 50 60 70
AMBIENT TEMPERATURE (_F)
80 90
TOO
HOT
180160
93
593
500
400
300
200
100
0
Figure 2. Guidelines for Use of Optional Heat Insulator Assembly
249 Series Sensors
D The Type 249, 249B, 249C, 249K, and 249L
sensors side-mount on the vessel with the displacer
mounted inside a cage (caged) outside the vessel.
D The Type 249BP and 249CP sensors
top-mount on the vessel with the displacer hanging
down into the vessel (cageless).
D The Type 249V sensor side-mounts on the
vessel with the displacer hanging out into the vessel
(cageless).
D The Type 249W sensor top-mounts on the
vessel or on a customer supplied cage.
4
External sensors provide more stable operation than
do internal sensors for vessels with internal
obstructions or considerable internal turbulence.
WARNING
When replacing the sensor assembly,
the displacer may retain process liquid
or pressure. Personal injury or
property damage due to sudden
release of pressure, contact with
hazardous liquid, fire, or explosion can
be caused by puncturing, heating, or
repairing a displacer that is retaining
Page 5
Instruction Manual
Form 1446
November 2006
2502 Series Controllers
process pressure or liquid. This
danger may not be readily apparent
when disassembling the sensor or
removing the displacer. Before
disassembling the sensor or removing
the displacer, observe the more
specific warning provided in the
sensor instruction manual.
Uncrating
Unless ordered separately, the controller will be
attached to the sensor when shipped. Carefully
uncrate the assembly.
CAUTION
If the sensor has a thin-walled torque
tube, always support the displacer if
the travel stop must be removed. A
thin-walled torque tube has a T
stamped on the sensor end flange (not
visible unless the controller is
removed from the sensor).
Note
Caged sensors have a rod and block
installed on each end of the displacer
to protect the displacer in shipping.
Remove these parts before installing
the sensor to allow the displacer to
function properly.
Caged sensors will be shipped with the displacer
installed in the cage. If the sensor is ordered with a
tubular gauge glass, the gauge glass will be crated
separately and must be installed at the site. Be
certain that the cage equalizing connections are not
plugged with foreign material.
A caged sensor has a damping plate installed in the
lower screwed or flanged connection to provide
more stable operation. If the process liquid could
clog the plate opening with sediment, then remove
the damping plate. For screwed connections, use a
1/2-inch hexagon wrench to unscrew the damping
plate. For flanged connections, use a screwdriver to
pry the damping plate out of the flange.
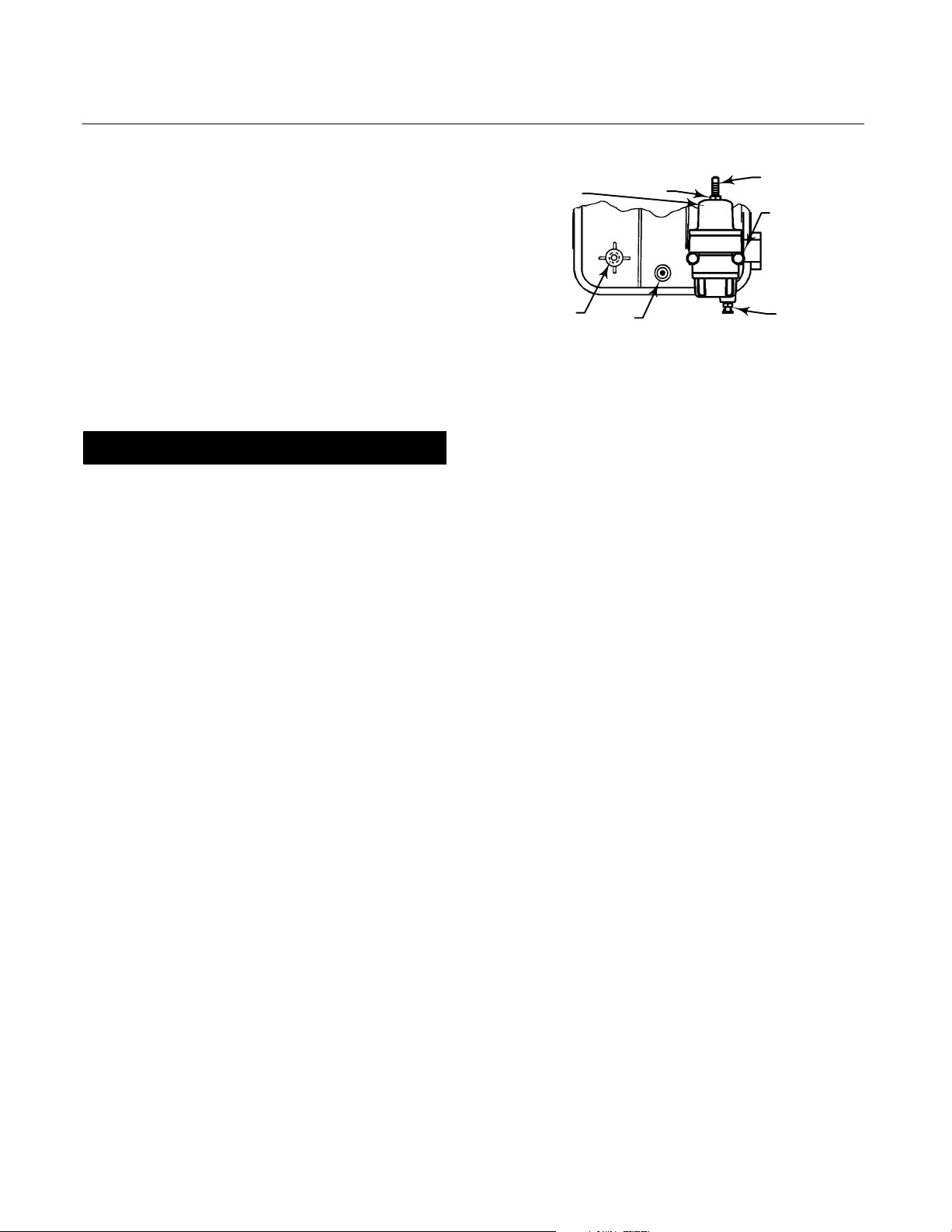
PRESSURE
REGULATOR
1/4”-18 NPT
OUTPUT
CONNECTION
LOCKNUT
VENT
Figure 3. Pressure Connections
ADJUSTING
SCREW
1/4”-18 NPT
SUPPLY
CONNECTION
DRAIN VALVE
not attached to the displacer rod. Inspect the
displacer and replace if it is dented. A dent may
reduce the pressure rating of the displacer.
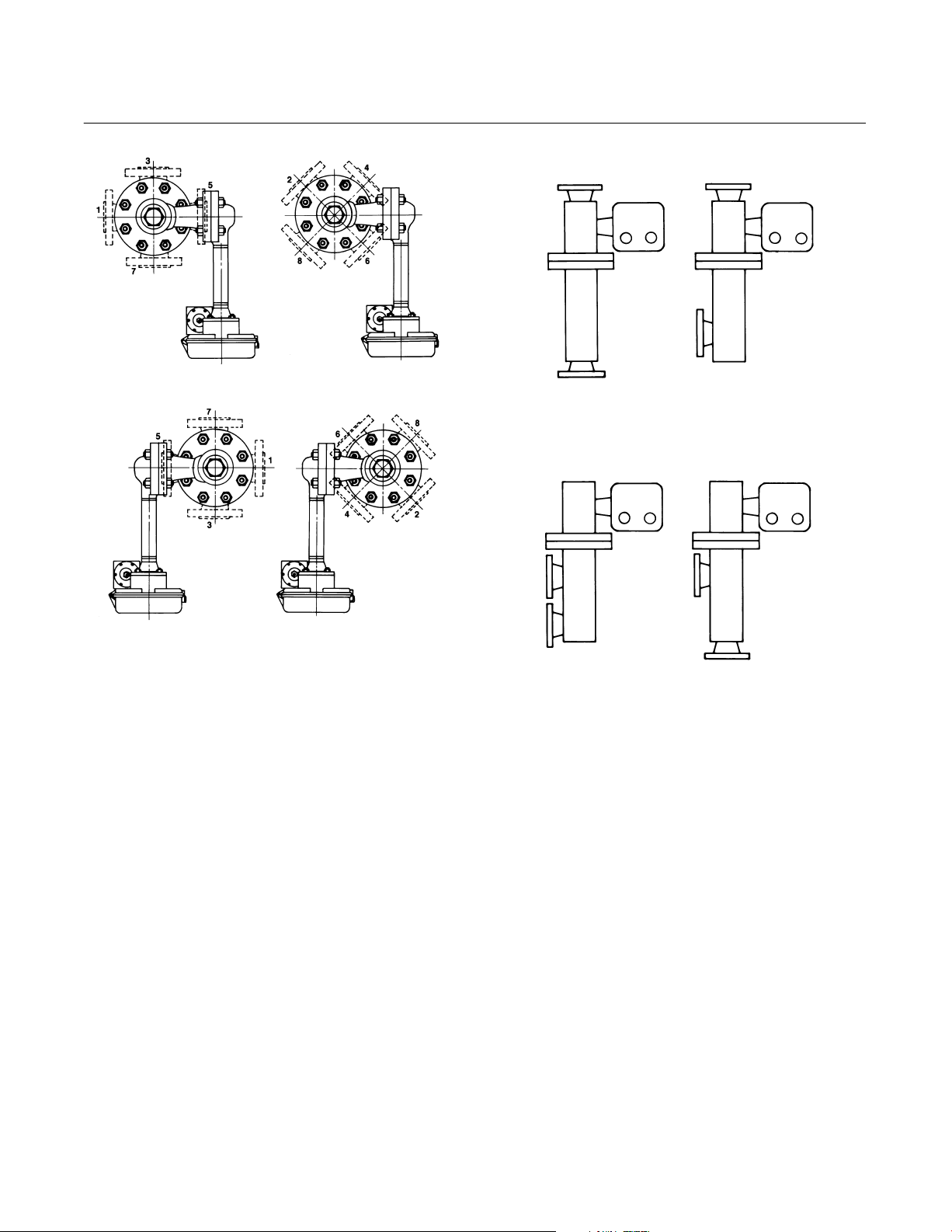
Controller Orientation
A controller is to be mounted with the vent opening
pointing downward as shown in figure 3. This
orientation is necessary to ensure draining of
accumulated moisture. The controller is attached to
the sensor in one or the other of the mounting
positions shown in figure 4: Right hand (with the
case to the right of the displacer when looking at the
front of the case) or left hand (with the case to the
left of the displacer). The mounting position can be
changed in the field if required; refer to the
appropriate sensor manual for instructions.
Changing this mounting position will change
controller action from direct to reverse, or vice versa.
All caged sensors have a rotatable head. That is, the
controller may be positioned at any of eight alternate
positions around the cage as indicated by the
numbers 1 through 8 in figure 4. To rotate the head,
remove the head flange bolts and nuts and position
the head as desired.
Controller-Sensor Action
The following controller description is for right-hand
mounting. Left-hand mounting produces an output
signal with the opposite action. Figure 4 shows cage
head mounting positions.
For right-hand mounting:
D Direct Action—Increasing liquid or interface
level, or density, increases the output signal.
A cageless sensor is shipped with the displacer
separated from the sensor assembly. A displacer
longer than 813 mm (32 inches) is crated separately.
A shorter displacer is crated with the sensor, but is
D Reverse Action—Decreasing liquid or interface
level, or density, increases the output signal. A
factory-supplied reverse-acting unit has the suffix
letter R added to the type number.
5
Page 6
2502 Series Controllers
Instruction Manual
Form 1446
November 2006
RIGHT-HAND MOUNTING
STYLE 1: TOP
AND BOTTOM
SCREWED: S1
FLANGED: F1
STYLE 2: UPPER
AND LOWER SIDE
STYLE 2: TOP
AND LOWER SIDE
SCREWED: S2
FLANGED: F2
STYLE 2: UPPER
SIDE AND BOTTOM
AH9150−A
A2613−2/IL
Figure 4. Cage Head Mounting Positions
LEFT-HAND MOUNTING
Mounting Caged Sensor
Note
The cage must be installed plumb so
that the displacer does not touch the
cage wall. Should the displacer touch
the cage wall, the unit will transmit an
erroneous output signal.
Note
If the controller is not mounted on the
sensor, refer to the Installing
Controller on Sensor section. This
section also provides instructions for
adding a heat insulator to a unit.
A1271−2/IL
SCREWED: S3
FLANGED: F3
Figure 5. Cage Connection Styles
SCREWED: S4
FLANGED: F5
Cage connections will normally be either 1-1/2 or
2-inch screwed or flanged. Figure 5 shows the
combinations. With flanged connections, use
standard gaskets or other flat-sheet gaskets
compatible with the process liquid. Spiral wound
gaskets without compression-controlling centering
rings cannot be used for flanged connections.
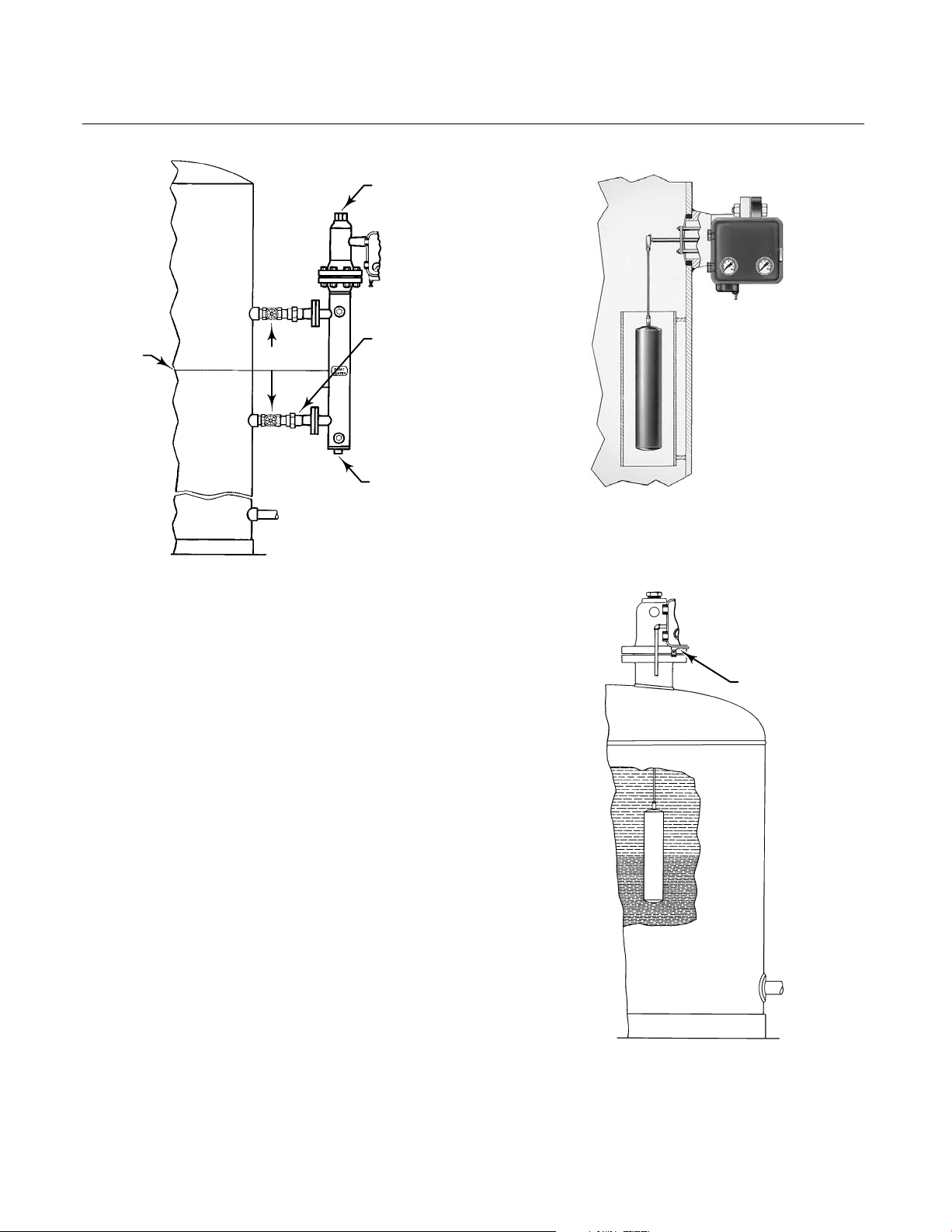
Mount the cage by running equalizing lines between
the cage connections and the vessel (figure 6). A
shutoff or hand valve with a 1-1/2 inch diameter or
larger port should be installed in each of the
equalizing lines. Also install a drain between the
cage and shutoff or hand valve whenever the bottom
cage line has a liquid-trapping low point.
On liquid or interface level applications, position the
sensor so that the line marked FLOAT CENTER on
the cage is located as close as possible to the center
of the liquid level or interface level range being
measured. Also consider installing a gauge glass
either on the vessel, or on the sensor cage (if the
cage is tapped for a gauge).
6
Page 7
Instruction Manual
Form 1446
November 2006
CENTER OF
LIQUID OR
INTERFACE
LEVEL
SHUTOFF
VALVES
VENT
EQUALIZING
LINE
2502 Series Controllers
DRAIN
DF5379-A
A6771/IL
Figure 6. Caged Sensor Mounting
Mounting Cageless Sensor
Note
If a stillwell is used, it must be
installed plumb so that the displacer
does not touch the wall of the stillwell.
Should the displacer touch the wall
while the unit is in service, the unit will
transmit an erroneous output signal.
Since the displacer hangs inside the vessel, provide
a stillwell around the displacer if the liquid is in a
state of continuous agitation to avoid excessive
turbulence around the displacer.
W0645-1
SIDE (SHOWING STILLWELL)
TOP
MOUNTED
Note
Displacers used in an interface level
application must be completely
submerged during operation. If
displacers aren’t completely
submerged they will not calibrate or
perform properly. To obtain the
desired controller sensitivity may
require using either a thin-wall torque
tube, an oversized displacer, or both.
CF5380-A
A3893/IL
TOP
Figure 7. Cageless Sensor Mounting
7
Page 8
2502 Series Controllers
Note
Instruction Manual
Form 1446
November 2006
If the controller is not mounted on the
sensor, refer to the Installing
Controller on Sensor section. This
section also provides instructions for
adding a heat insulator to a unit.
Attach a cageless sensor to a flanged connection on
the vessel as shown in figure 7. For interface or
liquid level applications, install a gauge glass on the
vessel.
CAUTION
If the displacer is to be inserted into
the vessel before being attached to the
displacer rod, provide a suitable
means of supporting the displacer to
prevent it from dropping into the
vessel and suffering damage.
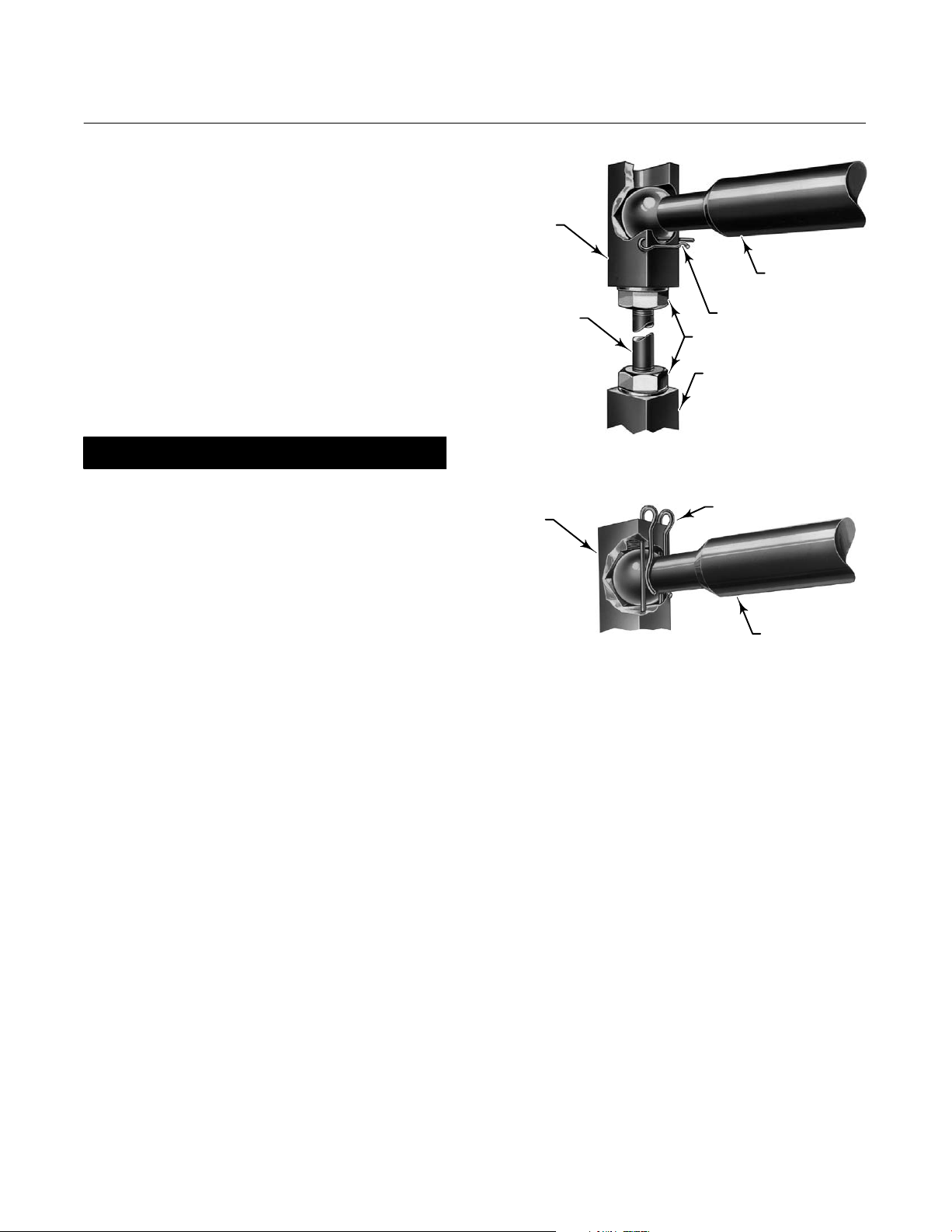
To help support a Type 249BP or 249CP displacer,
install the displacer stem and stem end piece, or a
threaded rod, into the 1/4 inch-28 UNF threaded
hole in the displacer spud or stem end piece (figure
8). On the Type 249BP with optional travel stop, the
stem end piece pins will secure the displacer as long
as the travel stop plate is installed and the sensor
head is in position.
Side-Mounted Sensor
DISPLACER
STEM
END PIECE
DISPLACER ROD
DISPLACER
STEM
EXTENSION
W0229-1A/IL
DISPLACER
SPUD
W0228-1A/IL
Figure 8. Displacer/Displacer Rod Connections
TYPE 249V
ALL OTHER TYPES
COTTER SPRING
LOCKING NUTS
DISPLACER SPUD
COTTER SPRING
DISPLACER ROD
If an extension is used between the displacer spud
and the displacer stem end piece, make sure the
nuts are tight at each end of the displacer stem
extension. Install and tighten suitable bolting or cap
screws in the flanged connection to complete the
installation.
If a stillwell is required (figure 7), the displacer must
be attached to the displacer rod from inside the
vessel. Connect the displacer as shown in figure 8,
locking the assembly with the cotter spring provided.
If a stillwell is not required, the displacer can be
attached to the displacer rod before mounting the
sensor to the vessel connection. The displacer may
then be swung out horizontally for insertion into the
vessel. However, once the sensor is installed and
the displacer drops to a vertical position, the
displacer may not be capable of being withdrawn for
servicing later. Be sure there is another access to
the displacer to permit swinging it to a horizontal
position or to permit disconnecting it from the
displacer rod.
8
Top-Mounted Sensor
Figure 7 shows the installation of a top-mounted
cageless sensor. The displacer may be attached to
the displacer rod before installing the sensor on the
vessel. Where the displacer diameter is small
enough, it may be desirable to install a long or
sectionalized displacer through the sensor head
access hole after the sensor is installed on the
vessel. Connect the displacer as shown in figure 8,
locking the assembly with the cotter springs
provided. If a stem is used between the displacer as
shown in figure 8, lock the assembly with the cotter
springs provided. If a stem is used between the
displacer spud and the stem end piece, make sure
Page 9
Instruction Manual
Form 1446
November 2006
2502 Series Controllers
the nuts are tight at each end of the stem. Install and
tighten suitable cap screws in the flanged connection
to complete the installation.
Regulator Supply Pressure
WARNING
Do not overpressurize any system
component. Personal injury or
property damage may occur due to
sudden pressure release or explosion.
To avoid damage, provide suitable
pressure-relieving or pressure limiting
devices if supply pressure can exceed
the maximum supply pressure listed in
table 1.
Personal injury or property damage
may occur from an uncontrolled
process if the supply medium is not
clean, dry, oil-free, or non-corrosive
gas. While use and regular
maintenance of a filter that removes
particles larger than 40 microns in
diameter will suffice in most
applications, check with an Emerson
Process Management field office and
industry instrument air quality
standards for used with corrosive gas
or if you are unsure about the proper
amount or method of air filtration or
filter maintenance.
Standard 2502 Series controllers come complete
with supply and output pressure gauges and an
integrally mounted Type 67CFR regulator to reduce
supply pressure from a maximum of 17.3 bar (250
psig) to the 1.4 or 2.4 bar (20 or 35 psig) required.
This regulator has built-in relief and a standard
40-micron to remove particles from the supply
source.
The output pressure connection is on the back of the
controller case (figure 3). Pipe the supply pressure
to the in connection of the regulator mounted to the
case back. Provide a clean, dry, and noncorrosive
air or gas supply to the controller as follows:
After pressure connections have been made, turn on
the supply pressure and check all connections for
leaks.
Prestartup Checks
WARNING
The following procedure requires
taking the controller out of service. To
avoid personal injury and property
damage caused by an uncontrolled
process, provide some temporary
means of control for the process
before taking the controller out of
service.
Adjustment locations are shown in figure 9 unless
otherwise indicted. When performing the checks
open loop conditions must exist. To obtain open-loop
conditions:
D make sure there is no process flow through the
final control element, or
D disconnect the controller output signal line and
plug the output connection.
During startup, it is necessary to change process
levels to position the displacer from its maximum to
its minimum range of operations. Provide a means to
change the process level or interface. If the process
variable cannot be varied sufficiently, follow the
instructions in the Calibration section to simulate the
process variable changes required for these checks.
Make sure that the RAISE LEVEL dial on the
controller is mounted with the correct side facing out.
The dial is printed on both sides with the arrow on
one side pointing to the left and the arrow on the
other side pointing to the right. Figure 9 shows the
dial arrow positioned for a sensor that is mounted to
the left of the controller; the arrow points to the left. If
the sensor is to the right of the controller, remove the
two mounting screws, turn the dial over so the arrow
points to the right, then reinstall the mounting
screws.
On a controller with optional level indicator assembly
the travel indicator plate is printed on both sides. If
the sensor is to the left of the controller (right-hand
mounting), use the side of the plate that has the
arrow pointing to the left. If displacer is to right of
controller (left-hand mounting), use the side of the
plate that has the arrow pointing to the right.
9
Page 10

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
29A2834-C
RESET ADJUSTMENT
W5637/IL/A
TYPICAL RIGHT-HAND MOUNTED
2502 SERIES CONTROLLER
INSTRUCTION LABEL
RAISE LEVEL DIAL FOR
LEFT-HAND MOUNTING
MOUNTING
SCREWS
21A6447-A
A1903/IL
DIFFERENTIAL RELIEF VALVE
ON BACK OF TYPE 2502 CASE
30A8943-H
A1933/IL
ADJUSTING
SCREW
POINTER ASSEMBLY
TYPE 2502C LEVEL INDICATOR
WITH RIGHT-HAND MOUNTING
1E8731-C
1E8732-C
A1897-1/IL
TRAVEL INDICATOR PLATE
FOR LEFT HAND MOUNTING
Figure 9. Controller Adjustments
1. Turn on the supply pressure and check that the
controller supply gauge reads 1.4 bar (20 psig) for
a 0.2 to 1.0 bar (3 to 15 psig) output pressure range
or 2.4 bar (35 psig) for a 0.4 to 2.0 bar (6 to 30 psig)
output pressure range. If the pressure is incorrect,
loosen the locknut of the filter/regulator (figure 3);
turn the adjusting screw clockwise to increase or
10
counterclockwise to decrease pressure. Tighten the
locknut after setting the pressure.
2. Turn the reset control to .05 minutes per repeat.
3. Locate the process variable at its minimum value
(see table 2). Zero the proportional band and raise
level controls. Output pressure on direct-acting
controllers should be greater than zero but less
Page 11

Instruction Manual
Form 1446
November 2006
2502 Series Controllers
than 0.2 bar (3 psig) for the 0.2 to 1.0 bar (3 to 15
psig) range or 0.4 bar (6 psig) for the 0.4 to 2.0 bar
(6 to 30 psig) range. For reverse-acting controllers,
the output pressure should be greater than 1.0 bar
(15 psig) and less than 1.4 bar (20 psig) for the 0.2
to 1.0 bar (3 to 15 psig) range or greater than 30
psig (2.0 bar) and less than 3.4 bar (35 psig) for
the 0.4 to 2.0 bar (6 to 30 psig) range. If these
conditions are not met recalibration may desired. On
a controller with indicator assembly, the pointer
should be over the low point on the indicator plate;
slight adjustment might be necessary by loosening
the hex nut (key 40, figure 14), shifting the pointer,
and retightening the nut.
4. Set the raise level control as desired. Determine
the dial setting by moving the nameplate slide until
the specific gravity on scale B is opposite the
displacer volume on scale A. Choose the percentage
of displacer length, as measured from the displacer
bottom, that you desire the liquid or interface level to
cover. Locate this percentage on scale D, and read
up from this percentage to find the RAISE LEVEL
dial setting on scale C. For example, with a liquid
level application, a specific gravity of one (water
service), and a 1.5 L (90-cubic-inch) displacer, move
the slide so that 1.0 on scale B is over 90 on scale
A. If it is desired to have water level cover 50 per
cent of the displacer length at the control point, read
up from 50 on scale D to find a 4.5 dial setting on
scale C.
5. Relocate the process variable to the control point
determined in step 4. See if output pressure
accurately reflects the process variable. If not, see if
another setting on the RAISE LEVEL dial brings the
output pressure into agreement with the process.
For example, with water level at 50 percent of the
height of the displacer, the output of a 0.2 to 1.0 bar
(3 to15 psig) unit should be approximately 50
percent of the way between 0.2 and 1.0 bar (3
and 15 psig) or 0.6 bar (9 psig). If the new setting is
more than one graduation away from the setting
determined in step 4, the unit would appear to be out
of calibration and recalibration may be desirable.
See the Calibration Procedure on page 14.
On a controller with level indicator, the pointer
should reflect the magnitude of the process variable;
for instance, with liquid or interface level covering 50
percent of the displacer, the pointer should be in the
middle of the high-low scale. Slight plate adjustment
might be necessary as described at the end of
step 3.
6. If all prestartup checks are satisfactory proceed
to the Startup section.
Adjustments
Controller adjustments are provided in this section.
Refer to figure 9 for adjustment locations.
Level Set Adjustment
To perform the level adjustment, open the controller
cover, loosen the knurled adjustment screw (see
figure 9), and rotate the adjustment lever around the
RAISE LEVEL dial. To raise the fluid or interface
level, or increase density, rotate this knob in the
direction of the arrows. To lower the level or
decrease density, rotate the knob in the opposite
direction. This procedure is the same for both direct
and reverse action controllers. Tighten the knurled
screw.
Note
The RAISE LEVEL dial does not reflect
actual fluid level in the tank or fluid
level position on the displacer.
Proportional Band Adjustment
Proportional band adjustment is made to change the
amount of displacement force change required to
obtain full output pressure change, by determining
the percentage of pressure fed back to the
proportional bellows. The adjustment is performed
by opening the controller cover and turning the
percent proportional band knob (just below the
RAISE LEVEL dial).
Reset Adjustment
To adjust reset action (figure 9) turn the knob
clockwise to decrease reset time (the minutes per
repeat). Turn the knob counterclockwise to increase
the minutes per repeat. Increasing the minutes per
repeat provides a slower reset action.
The reset rate adjustment dial is calibrated in
minutes per repeat. By definition, this is the time in
minutes required for the reset action to produce a
correction which is equal to the correction produced
by proportional control action. This is, in effect, the
time in minutes required for the controller to increase
(or decrease) its output pressure by an amount
equal to a proportional increase (or decrease)
caused by a change in control conditions.
11
Page 12

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
Differential Relief Adjustment
The differential relief valve protrudes from the back
of the controller case on a construction with an F in
the type number. Although normally factory-set to
relieve when the differential between the
proportional and reset bellows reaches 5 psi, the
differential may be reduced down to 2 psi by turning
the adjustment screw clockwise or increased up to 7
psi by turning the screw counterclockwise. The
minimum differential setting will yield the minimum
set point overshoot during startup.
Depending on the characteristics of the process, the
relief valve can be positioned so that the arrow cast
on the case points either to the letters RE (reset) or
to the letter P (proportional) on the back of the
manifold. To reposition the arrow, see figure 9.
Remove the mounting screws. Reposition the
differential relief valve to RE or P and reinstall the
mounting screws.
Calibration
displacer to an appropriate depth in a liquid having a
specific gravity equal to that of the process liquid.
If necessary, use water for wet calibration in the
shop. However, this procedure requires
compensation for the difference between the specific
gravity of the water and that of the process liquids.
For example, assume that the process liquid has a
specific gravity of 0.7 and that wet calibration with
water (specific gravity of 1.0) is desired. To simulate
a process level of 50 percent of the input span, a
water level of 35 percent is required (0.7/1.0 x 50
percent = 35 percent).
Dry Calibration
Remove the controller and torque tube arm, as a
single unit, from the cage or vessel. Then, wherever
the standard calibration instructions in this manual
require a specific process variable for input to the
sensor, simulate that variable by suspending the
proper weight (such as a can of sand) from the end
of the displacer rod. Complete the following
Controller and Torque Tube Arm Disassembly and
the Determining Suspended Weight for Calibration
sections before proceeding to the calibration
procedure.
Precalibration Requirements
Note
Calibration of a unit with a displacer
designed for interface or density
control must be conducted with the
displacer completely submerged in a
liquid of the specific gravity for which
the unit was designed.
To calibrate a controller, it is necessary to place the
device into operation. This may be done on the
vessel with the actual service liquid. It may also be
done in the shop, but other means of obtaining a
displacement force change must be provided. It
must be done in the shop if the process variable is
not available for calibration or if the process cannot
be varied for calibration. There are two methods of
adapting the calibration procedure to shop
calibration: wet and dry.
Wet Calibration
Remove the entire controller and sensor assembly
from the vessel. For caged sensors, pour the liquid
into the cage. For cageless sensors, suspend the
Controller and Torque Tube Arm Disassembly
WARNING
To avoid personal injury from contact
with the process liquid, lower the
vessel level below the sensor torque
tube arm, or shut off the cage
equalizing valves and drain the cage
before proceeding. For closed vessels,
release any pressure that may be in
the vessel before removing the sensor
assembly.
When removing the displacer from the displacer rod
or removing the controller and torque tube arm from
the cage or vessel, refer to the appropriate sensor
instruction manual for assistance. The method of
removing the displacer or torque tube arm and
attached controller will vary with the type of sensor.
For a caged sensor with top equalizing connection, it
may be appropriate to remove the entire cage from
the vessel before disassembling.
12
Page 13

Instruction Manual
Form 1446
November 2006
2502 Series Controllers
CAUTION
If the displacer is to be disconnected
from the displacer rod before the
sensor assembly is removed from the
cage or vessel, provide a means of
supporting the displacer to prevent it
from dropping and suffering damage.
The spuds or stem end pieces on all
displacers have holes suitable for
inserting rods or other supports.
Additionally, a threaded rod may be
installed into the 1/4-inch 28 UNF
threaded hole in the displacer spud or
stem end piece of top-mounted
cageless and all caged sensors. For
some top-mounted sensors with long
displacers, it may also be possible to
remove the sensor through the access
hole in the sensor head.
For Type 249BP sensor with the travel
stop, the stem end piece pins will
secure the displacer as long as the
travel stop plate is installed and the
sensor head is in position.
center of gravity of the substitute weight is
where it would be on the actual displacer.
Note
For liquid level control only, simulate
the lower range limit of the input span
by suspending the displacer from the
displacer rod. For other values of input
span, remove the displacer and
suspend the appropriate weight as
determined in the equation above.
= Weight of the displacer, in pounds
W
d
(determine by weighing displacer).
0.0361 = Weight of one cubic inch of water
(specific gravity = 1.0), in pounds.
V = Volume of the displacer in cubic inches, that
would be submerged at the level required by
the calibration procedure. Or,
V = π/4 (displacer diameter)
2
x (length of
displacer submerged)
SP GR = Specific gravity of the process liquid at
operating temperature.
Determining Suspended Weight for Calibration
CAUTION
To avoid overloading a torque tube
sized for interface or density
applications under dry conditions,
consult your Emerson Process
Management sales office for the
maximum allowable substitute weight
that can be used with your
W
s
particular construction.
To determine the total weight that must be
suspended from the displacer rod to simulate a
certain condition of liquid level or specific gravity,
solve the following equation:
W
= Wd - [(0.0361) (V) (SP GR)]
s
where:
= Total suspended weight in pounds (should
W
s
never be less than 0.5 pounds). For a unit
with a horizontal displacer, make sure the
For interface level measurement, the equation
becomes:
W
= Wd - [(0.0361) (V1) (SP GR1) +
s
(0.0361) (V
) (SP GRh)]
h
where:
V
= Volume of the displacer submerged by the
1
lighter liquid, in cubic inches.
Or,
V = π/4 (displacer diameter)
2
x (length of the
displacer submerged)
SP GR
= Specific gravity of the lighter liquid at
1
operating temperature.
= Volume of the displacer submerged by the
V
h
heavier liquid, in cubic inches.
Or,
2
V = π/4 (displacer diameter)
x (length of the
displacer submerged)
SP GR
= Specific gravity of the heavier liquid at
h
operating temperature.
13
Page 14

2502 Series Controllers
Table 2. Minimum and Maximum Limits for Setting Process Variables
Application Minimum Limit Maximum Limit
Liquid level Displacer must be completely out of liquid Displacer must be completely submerged in liquid
Interface
Density
Displacer must be completely submerged in the upper
of two process liquids
Displacer must be completely submerged in liquid having
highest specific gravity expected
Instruction Manual
Form 1446
November 2006
Displacer must be completely submerged in the lower
of two process liquids
Displacer must be completely submerged in liquid
having the lowest specific gravity expected
Calibration Procedure
WARNING
The following calibration procedure
requires taking the controller out of
service. To avoid personal injury and
property damage caused by an
uncontrolled process, provide some
temporary means of control for the
process before taking the controller
out of service.
Figure 9 shows adjustment locations for the
following steps, except as otherwise indicated. When
calibrating, open loop conditions must exist. One
way to obtain an open loop is to place the final
control element into manual control or bypass it. If
there is no provision for manual control, shut down
the process. It is recommended that a test pressure
gauge be installed in the controller output line for
subsequent calibration steps.
Several steps in these calibration procedures require
setting the process variable at its minimum and
maximum limits according to table 2. Reverse-acting
controllers produce the opposite response.
1. Connect a supply pressure source to the
controller and provide a supply pressure suitable for
the sensing element range: 1.4 bar (20 psig) for
a 0.2 to 1.0 bar (3 to 15 psig) output pressure range
or 2.4 bar (35 psig) for a 0.4 to 2.0 bar (6 to 30 psig)
output pressure range.
2. Rotate the reset knob to 0.01 minutes per repeat.
3. Rotate the proportional band knob to zero.
4. Set the liquid at the minimum limit (dry displacer).
5. Turn the RAISE LEVEL knob to zero.
6. Adjust the nozzle until output pressure is
between 0 and 0.2 bar for a 0.2 to 1.0 bar signal
range (0 and 3 psig for a 3 to 15 psig signal range)
or 0 and 0.4 bar for a 0.4 to 2.0 bar signal range (0
and 6 psig for a 6 to 30 psig signal range).
7. Set the liquid at the maximum limit (covered
displacer).
8. Turn the RAISE LEVEL knob until the output
pressure is 1.0 bar for a 0.2 to 1.0 bar signal range
(15 psig for a 3 to 15 psig signal range) or 2.0 bar for
a 0.4 to 2.0 bar signal range (30 psig for a 6 to 30 psig
signal range).
9. The controller is within its calibration accuracy if
the RAISE LEVEL knob is between the 9.0 and 10.0
positions.
10. If the controller is out of calibration, adjust the
calibration adjuster as follows:
Note
Loosen the two calibration adjuster
screws (key 45, figure 14), and slide
the calibration adjuster (key 100, figure
14) in the desired direction.
a. If output is below 1.0 bar for a 0.2 to 1.0 bar
signal range (15 psig for a 3 to 15 psig signal
range) or 2.0 bar for a 0.4 to 2.0 bar signal range
(30 psig for a 6 to 30 psig signal range), move the
adjustor a small distance away from the pivot to
increase span. Then repeat steps 4 through 9.
b. If output is above 1.0 bar for a 0.2 to 1.0 bar
signal range (15 psig for a 3 to 15 psig signal
range) or 2.0 bar for a 0.4 to 2.0 bar signal range
(30 psig for a 6 to 30 psig signal range), move the
adjustor a small distance toward the pivot to
decrease span. Then repeat steps 4 through 9.
Note
If the controller cannot be calibrated,
look for other problems as described
in the Troubleshooting section, such
as a nonperpendicular flapper-nozzle
condition, leaky connections, or a
binding displacer rod. If none of these
troubles is apparent, the displacer or
torque tube may be sized for a different
set of service conditions. Ensure that
the displacer is sized correctly for the
application.
14
Page 15

Instruction Manual
Form 1446
November 2006
2502 Series Controllers
Startup
Adjustment locations are shown in figure 9.
1. Set the RAISE LEVEL control to the desired
control point as determined in prestartup checks
step 4.
2. Set the percent proportional band control to 200.
3. Set the reset control to .05 minutes per repeat.
4. Slowly open the downstream and upstream
manual control valves in the pipeline and close the
manual bypass valve if one is used.
5. With the controller set at the desired control point,
narrow the proportional band until a cycling condition
exists. Then broaden the proportional band slightly
until stable control is obtained.
6. Adjust the reset control to obtain the highest reset
setting without introducing cycling.
7. To ensure that the optimum proportional band
and reset settings have been obtained, momentarily
create a load upset. If cycling occurs, broaden the
proportional band slightly and repeat the load upset
until stability is attained. In general, the narrowest
proportional band and the highest reset setting that
will not produce cycling will provide the best control.
applied to the controller, which uses a nozzle,
bellows, and pneumatic relay to convert the rotary
motion to a standard pneumatic output signal. The
output signal is sent to a final control element. In
conjunction with this control element, 2502-249
Series controller-sensors are capable of bringing the
controlled variable back to a specific control point all
the time.
The following descriptions show how the relay works
in conjunction with the standard
proportional-plus-reset controller, and how the
differential relief valve construction works.
Type 2502 Controller
As long as inflow and outflow of the vessel are
equal, the beam and flapper remain motionless and
allow supply pressure to bleed through the nozzle as
fast as it enters the relay through the fixed
restriction. A level or density change either raises or
lowers the displacer and pivots the beam and flapper
with respect to the nozzle.
An increase in level or density with direct action, or a
decrease with reverse action, moves the beam and
flapper closer to the nozzle and restricts the escape
of supply pressure. This builds up the loading
differential on the side of the large diaphragm and
opens the relay valve to supply pressure inflow.
Principle of Operation
All 2502 Series controllers use the same basic
pressure-balanced relay with a yoked
double-diaphragm assembly (figure 10). This relay is
connected so that supply pressure is fed to the inlet
side of the relay valve and to the fixed restriction.
From this restriction, the air pressure goes into the
relay chamber on the side of the large diaphragm,
and to the nozzle. As long as there is no pressure
change on either diaphragm, the relay valve remains
in equilibrium with both the inlet and exhaust ends
closed.
The area ratio of the large diaphragm to the small
diaphragm is 3 to 1. A 0.8 bar (12 psig) pressure
change on the small diaphragm need only be
balanced by a 0.3 bar (4 psig) change on the large
diaphragm.
A change in liquid level, interface level, or density
changes the buoyant force exerted on the sensor
displacer, which in turn imparts a rotary motion
through the torque tube shaft. The rotary motion is
On the other hand, a decrease in level or density
with direct action, or an increase with reverse action,
moves the beam and flapper away from the nozzle
and permits supply pressure to bleed through the
nozzle faster than it can enter through the fixed
restriction. This builds up the loading differential on
the side of the small diaphragm, and opens the relay
valve to exhaust loading pressure.
The three-way proportional valve can be opened and
adjusted to allow some or all of the output pressure
change to feed back to the proportional bellows in
order to change the proportional band of the
controller. This pushes the beam and flapper
opposite the way it is being pivoted by the torque
tube shaft, counteracting the pressure change in the
nozzle and again stabilizing the relay diaphragm
pressure differential. The relay valve shuts off and
maintains a new output pressure according to the
change in sensed displacer position.
A wide-open proportional valve permits feedback of
all the output change and produces 100 percent
proportional response. Closing of this valve
15
Page 16

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
SUPPLY PRESSURE
OUTPUT PRESSURE
NOZZLE PRESSURE
EXHAUST
PROPORTIONAL PRESSURE
RESET PRESSURE
PROPORTIONAL
BELLOWS
PIVOTING
CROSS
SPRINGS
FIXED
PIVOT
RESET BELLOWS
NOZZLE
VESSEL
INFLOW
TORQUE
TUBE SHAFT
DIRECT-ACTING
DIAPHRAGM
CONTROL VALVE
FIXED
PIVOT
BEAM AND
FLAPPER
FIXED RESTRICTION
MOVABLE
ARM
EXHAUST END
OF RELAY
VALV E
SUPPLY
PRESSURE
REGULATOR
INLET END
OF RELAY
VALV E
LEVEL SET
ADJUSTMENT
CAM
RESET
VALV E
PROPORTIONAL
VALV E
LARGE
DIAPHRAGM
OF ASSEMBLY
SMALL
DIAPHRAGM
OF ASSEMBLY
16
CD2114-A
CJ4081-A
C0313-1
Figure 10. Direct-Acting Right-Hand-Mounted 2502-249 Series Controller
Page 17

Instruction Manual
Form 1446
November 2006
2502 Series Controllers
CJ4081-A
CU7387-B
C0311-2
FIXED
PIVOT
NOZZLE
PIVOTING
CROSS
SPRINGS
RESET
BELLOWS
PROPORTIONAL
BELLOWS
INLET END
OF RELAY VALVE
MOVABLE ARM
BEAM AND
FLAPPER
FIXED RESTRICTION
LEVEL SET
ADJUSTMENT
EXHAUST END
OF RELAY VALVE
SMALL
DIAPHRAGM
OF ASSEMBLY
INNER CHAMBER
CAM
RESET
VALV E
OUTER
CHAMBER
PROPORTIONAL
VALV E
LARGE DIAPHRAGM
OF ASSEMBLY
RELIEF
VALV E
DIFFERENTIAL
RELIEF VALVE
RELIEF
DIAPHRAGM
SUPPLY PRESSURE
OUTPUT PRESSURE
NOZZLE PRESSURE
EXHAUST
PROPORTIONAL PRESSURE
RESET PRESSURE
DIAPHRAGM
ASSEMBLY
RESTRICTION
Figure 11. Type 2502F Controller with Differential Relief Valve
produces smaller proportional responses, since part
of the output change is vented through the valve
exhaust and only the remainder is available to
reposition the bellows.
The reset valve can be adjusted to channel some or
all of the proportional pressure into a reset bellows
that opposes proportional bellows action. This
automatically dampens the effect of any proportional
overcorrection by a set amount per time interval, as
long as there is a deviation from the control point.
Figure 10 illustrates these principles at work in a
direct-acting right-hand-mounted construction
controlling liquid inflow to a vessel, by means of a
direct-acting diaphragm-actuated control valve.
Nozzle positions and bellows connections would be
reversed for direct action with left-hand mounting or
reverse action with right-hand mounting.
Type 2502F Controller with Differential Relief Valve
This construction (figure 11) has a differential relief
valve used to prevent proportional pressure from
exceeding reset pressure by more than a set value,
a feature useful for intermittent control applications.
Proportional valve output registers in the outer
chamber of the relief valve as well as in the
proportional bellows.
A sudden increase in the output pressure will cause
a rapid pressure increase in the proportional bellows
and in the outer relief valve chamber. If the outer
17
Page 18

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
chamber pressure exceeds that in the inner relief
valve chamber by the amount of the relief pressure
setting, the relief diaphragm will move off the orifice
in the relief valve, and the pressure in the outer
chamber will bleed into the reset system. This action
provides quick relief of excessive proportional
pressure and reduces the time required by the
system to return to the control point.
Maintenance
The 2502 Series controllers are used in combination
with 249 Series sensors.
WARNING
Always wear protective eyewear,
gloves and clothing whenever
possible when performing
maintenance to avoid personal injury.
Personal injury or property damage
due to sudden release of pressure,
contact with hazardous liquid, fire, or
explosion can be caused by
puncturing, heating, or repairing a
displacer that is retaining process
pressure or liquid. This danger may
not be readily apparent when
disassembling the sensor or removing
the displacer. Before disassembling
the sensor or removing the displacer,
observe the more specific warning
provided in the sensor instruction
manual.
When disconnecting any of the
pneumatic connections, natural gas, if
used as the supply medium, will seep
from the unit and any connected
equipment into the surrounding
atmosphere. Personal injury or
property damage may result from fire
or explosion if preventative measures
are not taken, such as adequate
ventilation and the removal of any
ignition sources.
Check with your process or safety
engineer for any additional measures
that must be taken to protect against
process media.
Troubleshooting
When troubleshooting, open loop conditions must
exist unless otherwise stated. When monitoring the
process variable, use the most accurate level
indicting device readily available. The output signal
measuring device should have a corresponding
accuracy.
Table 3 lists some common operating faults, their
probable causes, and corrective action.
Removing Controller from Sensor
WARNING
To avoid personal injury in the
following steps, turn off the supply
pressure and carefully release any
pressure trapped in the controller
before breaking any pressure
connection. Provide a bypass for the
control device if continuous operation
is required during maintenance.
Refer to figure 14 for key number locations, unless
otherwise indicated.
1. Disconnect the supply and output pressure tubing
from the controller.
2. Loosen the hex nut (key 40) that secures the
operating arm base or pointer assembly (key 68
or 51) to the torque tube rotary shaft. Do not lose the
two link bearings (key 87, not shown).
CAUTION
If the hex nut has not been loosened
according to step 2, attempting to
remove the controller from the sensor
may bend the rotary shaft or operating
arm and linkage. Be careful that the
back of the controller case or the heat
insulator does not drop down and
bend the rotary shaft or shaft
extension.
18
Page 19

Instruction Manual
Form 1446
November 2006
Fault Possible Cause Check Correction
1. Process wanders or cycles
around setpoint.
2. Controller controlling off setpoint
or switching point.
3. Controller cannot attain full
output range.
4. Controller remains at full or zero
output pressure.
2502 Series Controllers
Table 3. Troubleshooting Chart for 2502 Series Controllers
1.1 Proportional band or specific
gravity adjustment incorrect or
improperly tuned control loop.
1.2 Supply pressure varying or
incorrect supply pressure setting.
1.3 Sensor not plumb and is in
contact with sidewall or leak in
displacer.
1.4 Relay malfunction. 1.4 Check for relay malfunction by
2.1 Supply pressure not set
correctly.
2.2 Leak in the controller loop. 2.2 Use soap and water to check
2.3 Leaking displacer. 2.3 Insure the displacer is not filling
2.4 Flapper adjustment. 2.4 Insure the flapper is not loose
2.5 Process variable changed. 2.5 Insure the process variable has
3.1 Supply pressure not set
correctly.
3.2 Flapper adjustment. 3.2 Insure the flapper is not loose
3.3 Process variable changed. 3.3 Insure the process variable has
3.4 Relay malfunction. 3.4 Check for relay malfunction by
3.5 Leaking controller loop. 3.5 Use soap and water to check
4.1 Supply or output pressure
gauge malfunction
4.2 Flapper adjustment. 4.2 Insure the flapper is not loose
1.1 Insure the prestartup
procedures are completed
correctly. Tune control loop.
1.2 Use input pressure gauge to
monitor stability. Make sure
regulator IN supply pressure is
within limits.
1.3 Check cage vessel and stillwell
installation, or for leaking displacer.
using the testing relay deadband
procedure
2.1 Make sure regulator supply
pressure is set correctly. Make sure
regulator IN supply pressure is
within limits.
for internal and external leaks.
with process fluid.
on the torque tube shaft and is
centered on the nozzle.
not changed from original
calibration settings or, displacer not
design specific gravity of process.
3.1 Make sure supply pressure is
set correctly. Make sure regulator
IN supply pressure is within limits.
on the torque tube shaft and is
centered on the nozzle.
not changed from original
calibration settings or, from
displacer design specific gravity.
using the testing relay deadband
procedure.
for internal and external leaks.
4.1 Insure the pressure gauges are
registering correctly.
on the torque tube shaft. Insure the
flapper is centered on the nozzle.
1.1 If stable control cannot be
attained and all other elements are
functionally correct, examine other
possible causes related to the
controller/transmitter.
1.2 Apply correct supply pressure.
It is recommended to use one
regulator per instrument.
1.3 Make sure the displacer and
displacer rod hangs freely. Make
sure linkage is tight. Replace
displacer if leaking.
1.4 Depress plunger to clean out
the fixed restriction. Replace or
repair relay using the procedure in
the Maintenance section.
2.1 Reset the supply regulator
pressure. If the condition occurs
again, rebuild or replace regulator.
Provide a regulator input pressure
within regulator limits.
2.2 Replace or repair leaking parts
as necessary.
2.3 Refer to sensor maintenance
procedures in the appropriate
sensor instruction manual.
2.4 Replace or tighten flapper
assembly as necessary and/or
center flapper on nozzle.
2.5 Change process variable back
to original specification or
recalibrate. If necessary, provide
replacement displacer of correct
size and recalibrate.
3.1 Reset the regulator pressure. If
problem reoccurs, replace or
rebuild the regulator. Insure
regulator IN supply pressure is
within limits at all operating levels.
3.2 Replace or tighten flapper
assembly as necessary and/or
center flapper on nozzle.
3.3 Change process variable back
to original specification or
recalibrate. If necessary, provide
replacement displacer of correct
size and recalibrate.
3.4 Depress plunger to clean out
the fixed restriction. Replace relay
using the procedure in the
Maintenance section.
3.5 Replace or repair leaking parts
as necessary.
4.1 Replace pressure gauges. Use
corrective action given in section 3
of this table.
4.2 Replace or tighten flapper
assembly as necessary and/or
center flapper on nozzle.
19
Page 20

2502 Series Controllers
3. Remove any insulating tape from the joint
between the controller case and the torque tube
arm. Remove the four cap screws (key 39, figure 12)
that hold the controller or heat insulator to the torque
tube arm. Pull the case straight out from the torque
tube arm, easing it over the shaft coupling (key 36,
figure 12) if one is installed.
4. If the controller has a heat insulator, remove the
button head cap screws (key 40). Remove four
washers (key 53) and the insulator assembly
(key 35).
Changing Mounting Method
WARNING
To avoid personal injury from contact
with the process liquid, lower the
vessel level below the torque-tube arm
before proceeding. For closed vessels,
release any pressure that may be
above the liquid. Also, be careful to
avoid overloading a thin-wall torque
tube and/or oversized displacer.
Refer to figure 14 for key number locations.
1. Remove the controller as described previously.
Instruction Manual
Form 1446
November 2006
20A7423-C/DOC
Figure 12. Heat Insulator Shown Installed on 249 Series
2. A controller is attached to the sensor in one or
the other of the mounting positions shown in
figure 4. Right hand mount is with the case to the
right of the displacer when looking at the front of the
case. Left hand mount is with the case to the left of
the displacer. For a 249 Series sensor, remove the
torque tube arm from the sensor or vessel and
reinstall the torque tube arm in the opposite position
according to the appropriate instruction manual.
3. Check the desired control action to determine if it
is also necessary to reverse the controller action.
The nozzle block and bellows tubing should be
arranged in the proper position as shown in
figure 13.
4. Remove the RAISE LEVEL dial, turn it over, and
install it in the desired position. The arrow on it under
the word FLOAT should point toward the displacer.
On a controller with indicator assembly, remove two
screws (key 41, figure 14), turn the front plate
(key 54, figure 14) to the side that will have the float
arrow pointing toward the displacer, and secure the
plate with the screws.
5. Install the controller according to the next section.
Installing Controller on Sensor
Note
If the installation is in a location that is
not readily accessible and shop
calibration is required, remove the
torque tube arm from the cage or
vessel before mating the controller to
the sensor. Install the controller on the
torque tube arm in the shop; then
calibrate and return the controller and
torque tube arm assembly to the
installation.
Perform step 1 only if adding a heat insulator to
a unit that does not have one. Key numbers in
this step are shown in figure 12, unless
otherwise indicated.
1. To install the heat insulator, secure the shaft
extension (key 37) to the torque tube assembly
rotary shaft with the shaft coupling (key 36). Tighten
both set screws (key 38), with the coupling centered
20
Page 21

Instruction Manual
Form 1446
November 2006
2502 Series Controllers
as shown in the figure. Then mount the insulator
assembly (key 35) on the controller case with four
washers (key 53) and button-head cap screws
(key 40). Tighten the screws.
CAUTION
In the following step, avoid bending
the torque tube rotary shaft of the
torque tube assembly. Bending or side
loading of this shaft could cause
erroneous readings. Additionally,
make sure the ball bearing assembly
(key 12, figure 14) is removed from the
case (key 1, figure 14) to provide
clearance when installing the case on
the sensor.
2. Remove the bearing assembly (key 12) from the
case (key 1).
3. Carefully slide the controller case straight in,
guiding the bearing assembly (key 12), operating
arm base or pointer assembly (key 68 or 51,
figure 14) over the rotary shaft and easing an
attached heat insulator over the shaft coupling
(key 36) if necessary. Secure the case or
insulator to the torque tube arm with the four cap
screws (key 39).
Note
If a heat insulator is used, do not
insulate its exterior.
4. On a unit without a heat insulator, tape the joint
between the case and torque tube arm to minimize
the entrance of atmospheric moisture around the
torque tube rotary shaft.
5. Install and tighten the bearing assembly (key 12,
figure 14) in the case (key 1, figure 14). Secure the
operating arm base or pointer assembly to the rotary
shaft by tightening the hex nut (key 40, figure 14).
Connect the supply and output pressure tubing and
perform the calibration procedure.
Changing Proportional, Reset, or Differential Relief Valve
1. Remove the proportional band valve assembly
(key 36, figure 14) by unscrewing it from the relay
base (key 23, figure 14). Install the desired
replacement assembly, or a 1/8-inch NPT pipe plug
into the proportional band tapping if testing relay
dead band.
2. To change the reset restriction valve assembly
(key 91), remove the two mounting screws (key 182)
located on the back side of case. Install the
replacement valve assembly, and reconnect the
tubing connections.
3. Remove the differential relief valve assembly
(key 186, figure 14) by removing the two mounting
screws (figure 9) that anchor the valve to the
manifold (key 184, figure 14). Install the valve with
the arrow pointing to the same letter(s) as before
removal, unless it is desired to change the relief
action.
Testing Relay Dead Band
1. Replace the proportional band adjustment
assembly with a 1/8-inch NPT pipe plug according to
the Changing Proportional, Reset, or Differential
Relief Valve section.
2. Turn on the supply pressure and set it to1.4
or 2.4 bar (20 or 35 psig).
3. By changing the process variable and adjusting
the RAISE LEVEL control, set the output pressure to
1.0 or 2.0 bar (15 or 30 psig). While monitoring the
output pressure, slowly change the process until an
output pressure change can just be detected, and
record the value of the process variable at the
detection point.
4. Change the process variable in the opposite
direction until another output pressure change can
be detected, and again record the value of the
process variable. If the difference between the two
recorded values (the dead band) is more than 0.2
percent of the maximum displacer length, the relay
will have to be replaced or repaired according to the
Changing Relay and the Disassembling Relay
sections.
5. Turn off the supply pressure, remove the pipe
plug, and install the proportional band adjustment
assembly.
Changing Relay
The relay may be removed for cleaning or
replacement, and must be taken off to remove the
lower bellows.
1. On a controller with indicator assembly, loosen the
two lower screws of the relay case and slide out the
indicator base plate (key 53, figure 14).
2. Disconnect the tubing (key 11, figure 14) from the
relay.
3. Remove both mounting screws, the relay, and the
relay gasket (keys 43, 34, and 22, figure 14).
21
Page 22

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
SEAL
SCREW
FLAPPER
HOOK
SEAL
SCREW
PROPORTIONAL
TUBING
RESET
TUBING
TO RELAY
SEAL
SCREW
RINGS
DIRECT ACTING—RIGHT HAND MOUNTING
REVERSE ACTING—LEFT HAND MOUNTING
RESET
VALV E
TO
PROPORTIONAL
VALV E
4. Install a new gasket, the replacement relay if
necessary, and both mounting screws. Reconnect
the tubing. On a controller with indicator assembly,
slide the base plate under the two lower screws of
the relay case, align the plate so that the pointer will
read properly, and tighten the screws.
Replacing Bellows
Key numbers are shown in figure 14.
1. To gain access to the lower bellows, remove the
relay according to the Changing Relay section.
2. Remove the upper and lower bellows frame
screws (key 96) that hold both bellows assemblies to
the bellows frame. Unscrew each bellows from the
spacer (key 98), being careful not to lose the O-ring
(key 57, not shown) from the spacer end of the
bellows.
3. Inspect each bellows and O-ring and replace if
necessary, using an unpainted bellows for a 0.2
to 1.0 bar (3 to 15 psig) range and a red bellows for
a 0.4 to 2.0 bar (6 to 30 psig) range. Be sure to
install the O-ring at the spacer end of the bellows.
SEAL
SCREW
RING
FLAPPER
HOOK
SEAL
SCREW
RING
RESET
TUBING
PROPORTIONAL
TUBING
TO RELAY
AV2323-A
AV2322-A
B0995-2/IL
REVERSE ACTING—RIGHT HAND MOUNTING
DIRECT ACTING—LEFT HAND MOUNTING
SEAL
SCREWS
Figure 13. Nozzle, Flapper, and Tubing Arrangements
for Various Actions and Mountings
RESET
VALV E
TO
PROPORTIONAL
VALV E
4. Install each bellows by screwing it down over the
stud (key 97, not shown) protruding from each end
of the spacer. Secure with a bellows frame screw,
and install the relay according to the Changing Relay
section.
5. Perform the calibration procedure and any other
necessary part of the calibration sequence.
Reversing Action
Note
The following procedure will be
necessary to restore previous action if
the mounting method has been
changed. Key numbers are shown in
figure 14.
1. Remove two screws (keys 63 and 64), two seal
rings (key 55), and the nozzle block (key 101).
Check seal ring condition and replace rings as
necessary.
2. Install the nozzle block, seal rings, and screws on
the opposite side of the beam as shown in figure 13.
Disconnect the proportional band tubing (key 76)
and one of the two pieces of reset tubing (key 75)
from the bellows frame (key 94) and reconnect them
in the proper orientation as shown in figure 13.
22
Page 23

Instruction Manual
Form 1446
November 2006
2502 Series Controllers
Note
Beam overtravel can jam the flapper
against the nozzle if the following step
is not performed.
3. Remove the flapper screw (key 93), lockwasher
(key 84), and flapper (key 60). Invert the flapper so
that the flapper hook is on the opposite side of the
beam from the nozzle (key 58), and secure with the
lockwasher and screw.
4. Perform the calibration procedure and any other
necessary part of the calibration sequence.
Parts Ordering
Whenever corresponding with your Emerson
Process Management sales office about this
equipment, always mention the controller type
number and the serial number found on the unit
nameplate (figure 9). When ordering replacement
parts, also state the complete 11-character part
number of each required part as found in the
following parts list.
remains with the purchaser and
end-user.
Parts Kits
Description Part Number
Controller Parts Kit
Contains keys 12, 15, 21, 24, 38, 55, 57, 58, 60, 62, 63, 64,
77, 79, 84, 86, 87, 93, 101, and 187
Standard Temperature R2502X00L52
High Temperature R2502X00H52
Relay Replacement Kit
Contains keys 22, 43, and the relay assembly
Standard Temperature RRELAYX0L22
High Temperature RRELAYX0H22
Heat Insulator Parts Kit
Contains keys 35, 36, 37, 38, 39, 40, and 53 R2500XH0012
Parts List
Key Description Part Number
WARNING
Use only genuine FisherR replacement
parts. Components that are not
supplied by Emerson Process
Management should not, under any
circumstances, be used in any Fisher
instrument. Use of components not
supplied by Emerson Process
Management will void your warranty,
might adversely affect your the
performance of the instrument, and
might jeopardize worker and
workplace safety.
Note
Neither Emerson, Emerson Process
Management, Fisher, nor any of their
affiliated entities assumes
responsibility for the selection, use
and maintenance for any product.
Responsibility for the selection, use,
and maintenance of any product
Heat Insulator (figure 12)
35 Heat Insulator Assembly, stainless steel 22A0033X012
36 Shaft Coupling, stainless steel 1A577935032
37 Shaft Extension, N05500 1B681540022
38 Set Screw, stainless steel (2 req’d) 1E6234X0022
39 Cap Screw, steel, pl (4 req’d) 1A381624052
40 Cap Screw, steel, pl (4 req’d) 1V239528982
53 Washer, carbon steel, pl (4 req’d) 1B865928982
Controller Common Parts (figure 14)
1 Pilot Case Back, zinc
Types 2502 and 2502C 1J415744012
Type 2502F 23A2073X012
2 Pilot Case Cover, aluminum 50B9454X012
3 Door Handle, steel, pl 1C897225082
4 Door Handle Shaft (not shown),
stainless steel 1C898414012
5 Machine Screw, stainless steel 1C8958X0022
6 Washer Spring, stainless steel 1C897036032
7 Door Hook, steel, pl 1C897125082
8 Elastic Stop Nut, steel, pl 1C8959X0012
9 Drive Pin, (2 req’d) 1C8991X0022
11 Relay Tubing, stainless steel 17A9100X022
12* Ball Bearing Ass’y, brass, pl 1C8983000A2
13 Retaining Ring, steel, pl (2 req’d) 1A465828992
14* Gauge Glass, glass, (2 req’d) 0T019206042
15* Gauge Glass Gasket, chloroprene (2 req’d) 0T019104082
*Recommended spare parts
23
Page 24

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
30A8942-H/DOC
43A2366-H/DOC
30A8943-H/DOC
Figure 14. 2502 Series Controller Constructions
24
Page 25

Instruction Manual
Form 1446
November 2006
2502 Series Controllers
Key Description Part Number
19* Pressure Gauge (2 req’d)
Triple Scale
Brass
0-30 psig/0-0.2MPa/0-2.0 bar 11B8577X012
0-60 psig/0-0.4MPa/0-4.0 bar 11B8577X022
Stainless steel
0-30 psig/0-0.2MPa/0-2.0 bar 11B8583X012
0-60 psig/0-0.4MPa/0-4.0 bar 11B8583X022
Dual Scale
Brass
0-30 psig/ 0 to 2 kg/cm
0-60 psig/ 0 to 4 kg/cm
Stainless steel
0-30 psig / 0 to 2 kg/cm
21* Cover Gasket, nitrile 1C919806432
22* Relay Gasket
Standard, chloroprene 1C897403012
High-temperature, silicone 1N873804142
23 Relay Base, aluminum 47A0950X012
24* Relay Base Gasket (not shown)
Standard, chloroprene 1C897303012
High-temperature, silicone 1N873904142
29 Drive-lok Pin, stainless steel 1C8989X0012
31 Shaft Clamp Screw, stainless steel 1B451435172
34 Pilot Relay
Standard 22B0463X012
High-temperature 22B0462X012
35 Level Adjustment Ass’y 10A8939X0A2
36 Proportional Valve Ass’y 10A9122X042
37 Pressure Regulator (Type 67CFR)
38A* Filter Gasket (not shown)
Standard, chloroprene 1C898603012
High-temperature, silicone 1N874004142
38B Spacer (not shown) T21043T0012
38C* O-Ring
Standard, nitrile 1E591406992
High-temperature, fluorocarbon 1E5914X0062
39 Cap Screw (not shown), steel, pl (2 req’d) 1C197024052
40 Hex Nut, stainless steel 1L286338992
41 Screw, steel, pl, Type 2502C
and 2502FC (2 req’d) 16A6938X022
42 Machine Screw, stainless steel, (8 req’d) 1V7435X0022
43 Machine Screw, stainless steel (2 req’d) 1A3776X0012
44 Machine Screw, steel, pl (4 req’d) 1A5733X0012
45 Machine Screw, stainless steel (2 req’d) 1A5733X0012
47 Spring (not shown), stainless steel 1J423437022
49 Machine Screw, stainless steel (13 req’d) 1B7839X0012
50 Screen, stainless steel 0L078343062
51 Pointer Ass’y, Type 2502C and 2502FC,
stainless steel/brass, pl 1R2425X0012
53 Base Plate, aluminum
Type 2502C and 2502FC 1E873111992
54 Front Plate, aluminum
Type 2502C and 2502FC 1E873211992
55* O-Ring, (3 req’d)
Standard, nitrile 1D687506992
High-temperature, fluorocarbon 1N430406382
57* O-Ring (not shown)
Standard, nitrile 1E222606992
High-temperature, fluorocarbon 1N838706382
2
2
2
11B8577X042
11B8577X052
11B8583X032
Key Description Part Number
58* Nozzle, stainless steel 1U639135132
59 Beam, steel, pl 1K873825072
60 Flapper, K93600 alloy 1J416241132
61 Flapper Base, stainless steel 1J416335032
62* Connecting Link, N04400 1L379641012
63 Sealing Screw, stainless steel 14A5721X012
64 Screw, stainless steel 24A5720X012
65* Bellows Ass’y, brass (2 req’d)
0.2 to 1.0 bar (3 to 15 psig) 14A5726X012
0.4 to 2.0 bar (6 to 30 psig) 14A5726X032
66 Level Set Arm, steel, pl 1J416425072
67 Operating Arm, steel, pl 1J416525072
68 Operating Arm Base, brass, pl
Types 2502 and 2502F 1J416614022
69 Level Set Pivot Pin, stainless steel 1J416735162
70 Pivot Base, steel, pl 19A9689X012
71 Spring Washer, stainless steel 1H885128982
72 Washer, stainless steel
Type 2502 (2 req’d) 1E8730X0012
Type 2502C and 2502FC (4 req’d) 1E8730X0012
74 Washer, stainless steel, (6 req’d) 61000580X12
75 Reset Tubing Ass’y, stainless steel (2 req’d) 19A1887X012
76 Proportional Band Tubing Ass’y, stainless steel 1J4170X0012
77* Bellows Frame Gasket (not shown)
Standard, chloroprene 1H265403012
High-temperature, silicone 1N873504142
78 Spacer (not shown), brass 1J619815122
79* Bellows Gasket (2 req’d)
Standard, chloroprene 1D397003012
High-temperature, silicone 1N873604142
80 Machine Screw, stainless steel, (4 req’d) 1V7435X0022
81 Machine Screw (not shown)
stainless steel, (2 req’d) 1P4373X0012
82 Machine Screw, stainless steel, (4 req’d) 1B2752X0022
83 Lock Washer, stainless steel (2 req’d) 61000810X12
84 Lock Washer, stainless steel 1C3162X0012
85 Cap Screw, stainless steel, not shown (4 req’d) 1A3816K0012
86 Machine Screw, stainless steel (2 req’d) 19A7151X022
87* Link Bearing (not shown)
stainless steel (2 req’d) 1L379546202
88 Machine Screw (not shown),
stainless steel, (4 req’d) 1J4159X0012
89 Machine Screw, stainless steel, (2 req’d) 1H8162X0012
91 RESET Restriction Valve Ass’y
Type 2502 and 2502C 19A4357X012
Type 2502F and 2502FC 19A4359X012
93 Machine Screw, stainless steel 1B8776X0012
94 Bellows Frame, aluminum 2H265308012
95 Bellows Frame Base (not shown), steel, pl 1J416025142
96 Bellows Screw, brass, pl (2 req’d) 1D3976X0012
97 Bellows Stud (not shown), brass 1H265814012
98 Spacer, zinc 1H265944012
99 Cross Spring, stainless steel (2 req’d) 1H266037032
100 Calibration Adjuster, zinc 2H266244012
101 Reversing Block, zinc 26A0975X012
180 Pipe Nipple (not shown) Type 2502F
and 2502FC, steel 1C559926232
181 Relief Tubing Ass’y, Type 2502F and
2502FC, stainless steel 13A2077X022
*Recommended spare parts
25
Page 26

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
Key Description Part Number
182 Machine Screw, stainless steel, (2 req’d)
Types 2502 and 2502C (not shown) 1B7839X0012
Type 2502F and 2502FC 1C8969X0012
183* O-Ring (2 req’d), Type 2502F and
2502FC 1D6875X0132
184 Manifold, aluminum, Type 2502F and
2502FC 23A2072X012
185 Manifold Nipple, aluminum, Type 2502F
and 2502FC 13A2074X012
Key Description Part Number
186 Differential Relief Valve Ass’y, Types 2502F
and 2502FC
Standard 21A6447X0A2
High temperature 21A6447X012
187 Sleeve, plastic 16A0976X012
188* 0-Ring, Types 2502F and 2502FC 1C8538X0132
215 Nameplate, metal
Pipe Plug, Types 2502 and 2502C 1D754828982
26
*Recommended spare parts
Page 27

Instruction Manual
Form 1446
November 2006
2502 Series Controllers
27
Page 28

2502 Series Controllers
Instruction Manual
Form 1446
November 2006
Level-Trol and Fisher are marks owned by Fisher Controls International LLC, a member of the Emerson Process Management business division of
Emerson Electric Co. Emerson Process Management, Emerson, and the Emerson logo are trademarks and service marks of Emerson Electric Co.
All other marks are the property of their respective owners.
The contents of this publication are presented for informational purposes only, and while every effort has been made to ensure their accuracy, they are
not to be construed as warranties or guarantees, express or implied, regarding the products or services described herein or their use or applicability.
We reserve the right to modify or improve the designs or specifications of such products at any time without notice.
Neither Emerson, Emerson Process Management, nor any of their affiliated entities assumes responsibility for the selection, use and maintenance of
any product. Responsibility for the selection, use and maintenance of any product remains with the purchaser and end-user.
Emerson Process Management
Marshalltown, Iowa 50158 USA
Cernay 68700 France
Sao Paulo 05424 Brazil
Singapore 128461
www.Fisher.com
28
EFisher Controls International LLC 1977, 2006; All Rights Reserved Printed in USA
 Loading...
Loading...