

Page 1
Benutzerhandbuch
2020.08
v1.0
Page 2
Stichwortsuche
Suchen Sie nach Stichwörtern wie „Akku“ oder „Installieren“, um das entsprechende Thema
zu nden. Wenn Sie dieses Dokument mithilfe des Adobe Acrobat Readers geöffnet haben,
drücken Sie die Tastenkombination Strg+F bei Windows oder Command+F bei Mac, um eine
Suche zu starten.
Themensuche
Das Inhaltsverzeichnis bietet eine Liste mit allen verfügbaren Themen. Klicken Sie auf ein
Thema, um diesen Abschnitt aufzurufen.
Ausdrucken dieses Dokuments
Dieses Dokument unterstützt Drucken mit hoher Auösung.
2020 DJI. Alle Rechte vorbehalten.
©
2
Page 3

Verwendung dieses Benutzerhandbuchs
Legenden
Warnung Wichtig Hinweise und Tipps Referenz
Vor der Verwendung
Die folgenden Tutorials und Bedienungsanleitungen wurden erstellt, um sicherzustellen, dass Sie
Ihren ROBOMASTERTM EP Core uneingeschränkt nutzen können.
1. Sicherheitsrichtlinien und Haftungsausschluss
2. Kurzanleitung
3. Benutzerhandbuch
Überprüfen Sie, ob alle Teile enthalten sind, und lesen Sie vor dem Zusammenbau die RoboMaster
EP Core-Kurzanleitung durch, um sich auf diese vorzubereiten. Weitere Informationen nden Sie
in diesem Benutzerhandbuch Sehen Sie sich alle Tutorial-Videos an und lesen Sie vor der ersten
Verwendung die Sicherheitsrichtlinien und den Haftungsausschluss für den RoboMaster EP Core
durch.
Ansehen der Video-Tutorials
Besuchen Sie die offizielle DJI-Website https://www.dji.com/robomaster-ep-core/video oder
wechseln Sie zur App und rufen Sie die Seite „Videos“ auf, um die Tutorial-Videos für den
Zusammenbau und die Verwendung anzusehen. Sie können den Roboter auch anhand der
Montageanleitung in der RoboMaster EP Core-Kurzanleitung zusammenbauen.
Über das RoboMaster EP Core-Programmierhandbuch
Das RoboMaster EP Core-Labor bietet Hunderte von Programmierblöcken, mit denen Sie auf
Funktionen wie die PID-Steuerung zugreifen können. Das RoboMaster EP Core-Programmierhandbuch
enthält Anweisungen und Beispiele, mit denen sich die Programmiertechniken zur Steuerung des
Roboters schnell erlernen lassen.
Das Handbuch kann auf der ofziellen DJI-Website unter https://www.dji.com/robomaster-ep-core/downloads
heruntergeladen werden.
Verwendung eines SDK
Der Roboter ist mit dem Open DJI SDK ausgestattet, das mehrere Steuerungsschnittstellen für
verschiedene integrierte und Erweiterungsmodule sowie mehrere Ausgabeschnittstellen für Videound Audiostreams bereitstellt. Der Roboter unterstützt USB-, Wi-Fi- und UART-Verbindungen, wobei
der Benutzer die Verbindungsart auf Basis des Plattformanschlusses frei wählen kann.
Das Open DJI SDK vergrößert die Erweiterbarkeit des Roboters erheblich und bietet die
Möglichkeit, benutzerdefinierte Funktionen zu kreieren. Weitere Informationen finden Sie unter
www.dji.com/robomaster-ep-core/downloads oder robomaster-dev.rtfd.io.
2020 DJI. Alle Rechte vorbehalten.
©
3
Page 4

Inhalt
Verwendung dieses Benutzerhandbuchs
Legenden 3
Vor der Verwendung 3
Ansehen der Video-Tutorials 3
Über das RoboMaster EP Core-Programmierhandbuch 3
Verwendung eines SDK 3
Inhalt
Produktbeschreibung
Einführung 6
Roboter-Diagramm 6
Übersicht 7
Vorbereitungen 7
Module und Funktionen
Verwenden der RoboMaster-App 16
Omnidirektionales Fahrgestell 20
Intelligenter Controller 23
Kamera 24
Lautsprecher 24
Intelligent Battery 25
Beschreibung der LED-Anzeigen des Roboters 28
Servo 29
Roboterarm und Greifer 30
Stromanschlussmodul 31
Infrarot-Abstandssensor (TOF) 34
Sensoradapter 39
Gerade Verbindungsstange 42
Vorderachsen-Erweiterungsplattform 43
Erweiterungsbaustein 43
Der Roboter und Drittanbieter-Plattformen 44
Gamepad (Nicht im Lieferumfang enthalten) 46
3
4
6
16
2020 DJI. Alle Rechte vorbehalten.
©
4
Page 5

ROBOMASTER EP Core Benutzerhandbuch
Bedienung Ihres Roboters
Überprüfung vor der Verwendung 48
Einschalten des Akkus 48
Bedienung des Roboters mittels eines Mobilgeräts 48
Gameplay
Bedienung des Roboters mittels eines Gamepads 51
Verwendung von RoboMaster mit einem Computer 52
Labor 53
Anhang
Technische Daten 57
Firmware-Aktualisierung 60
Kalibrierung des Roboters 61
Einstellen der PWM-Anschlüsse 61
Nutzung des S-Bus-Anschlusses 62
Programmierung der individualisierbareren Benutzeroberäche 64
48
51
57
2020 DJI. Alle Rechte vorbehalten.
©
5
Page 6
Produktbeschreibung
Einführung
Der RoboMaster S1 Education Expansion Set Core (EP Core) ist eine Komplettlösung für STEAMKlassenzimmer. Sie bietet ein ofzielles SDK, das mit leistungsstarken mechanischem Zubehör und
Schnittstellen zur Erweiterung der Hardwaremöglichkeiten verwendet werden kann. Zusammen
mit reichhaltigen Lehrmitteln und einer Datenbank, die kontinuierlich aktualisiert wird, liefert der EP
Core eine neue Klassenzimmererfahrung, um Bildung sowohl für Lehrkräfte als auch für Schüler
einfacher zu machen, wobei die Grenzen der Zukunft der Bildung erweitert werden.
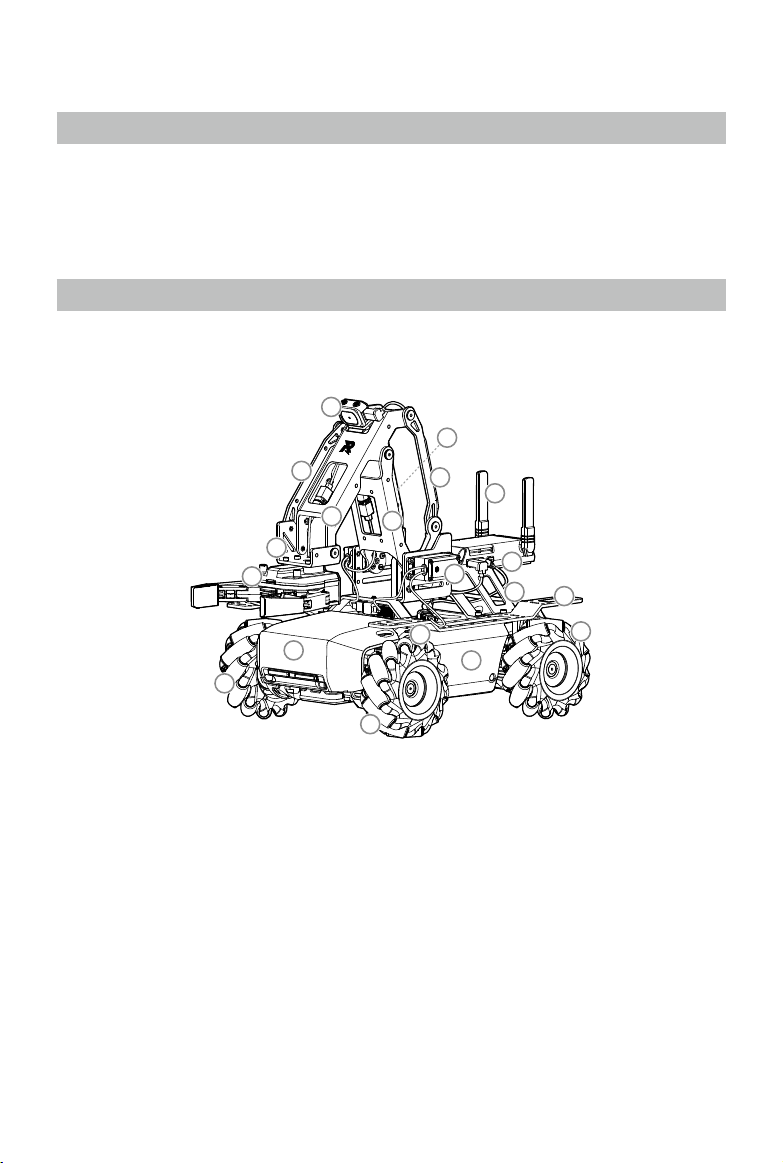
Roboter-Diagramm
15
10
9
12
13
14
11
17
8
16
7
18
6
3
2
1. Fahrgestell
2. Rechtsläuges Mecanum-Rad
3. Fahrgestellpanzerung (Vorne)
(eingebauter Treffersensor)
4. Linksläuges Mecanum-Rad
5. Fahrgestellpanzerung (Links) (eingebauter
Treffersensor)
6. Fahrgestell-Erweiterungsplattform
7. Servo
8. Roboterarm (1 von 2)
2020 DJI. Alle Rechte vorbehalten.
©
6
1
2
5
4
9. Roboterarm-Verbindungsstange Nr. 1
10. Roboterarm-Verbindungsstange Nr. 2
11. Roboterarm-Verbindungsstange Nr. 3
12. Roboterarm (2 von 2)
13. Roboterarm-Endpunkthalterung
14. Greifer
15. Kamera
16. Intelligent Controller
17. Antenne des intelligenten Controllers
18. Hintere Erweiterungsplattform
Page 7
ROBOMASTER EP Core Benutzerhandbuch
22
23
24
1
9
4
2
0
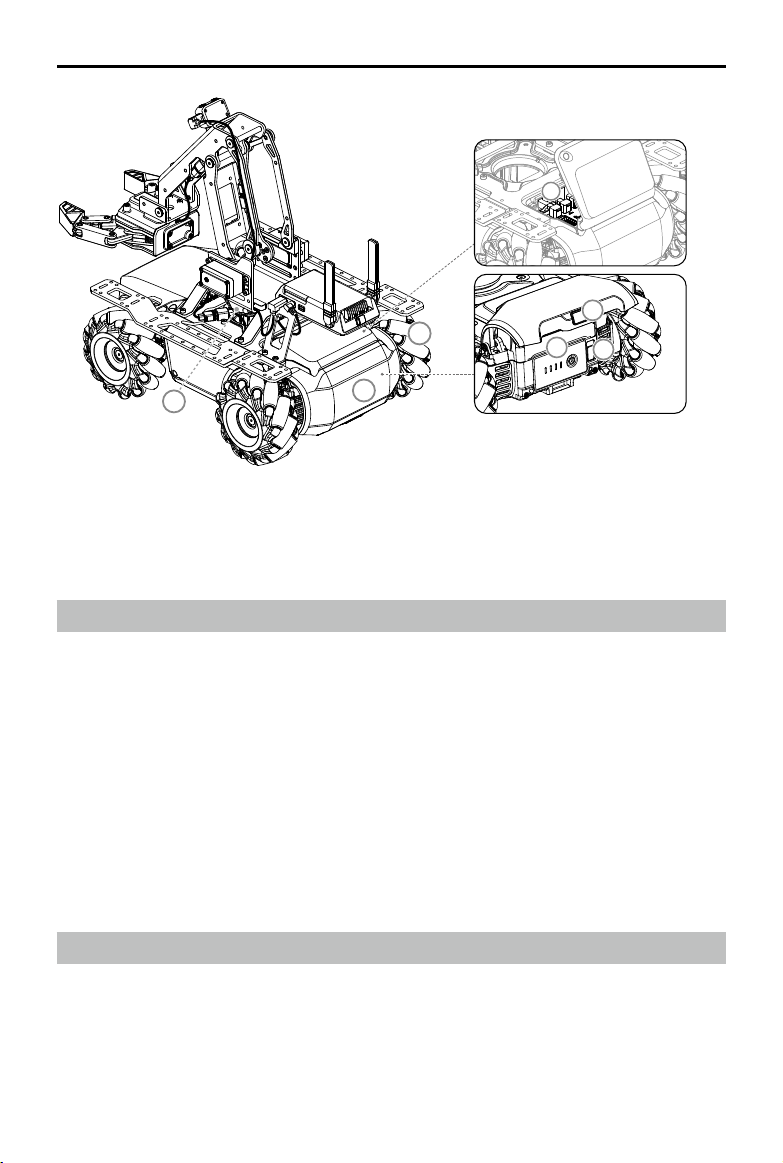
19. Bewegungssteuereinheit
20. Lautsprecher
21. Fahrgestellpanzerung (Hinten) (eingebauter
Treffersensor)
21
22. Entriegelungstaste für hintere Panzerung
23. Intelligent Battery
24. Akku-Auswurftaste
Übersicht
Der RoboMaster EP Core ist mit einem omnidirektionalen Fahrgestell und Mecanum-Rädern
ausgestattet. Der Roboter bietet umfassende Steuerungsmöglichkeiten und dank seines
omnidirektionalen Fahrgestells, der agilen Mecanum-Räder und der stabilen Bildübertragung mit
niedriger Latenz in der Egoperspektive (FPV) ein immersives Fahrerlebnis.
Der Roboter verfügt über einen Greifer und einen beweglichen Roboterarm zum Halten und
Bewegen von Objekten. Greifer und der Roboterarm werden von zwei Hochleistungsservos
angetrieben.
Eine individualisierbare Erweiterungsplattform ermöglicht es, den Roboter nach Belieben
umzubauen und zu erweitern. Zudem ist der Roboter mit Bausteinen von Drittanbietern kompatibel,
was noch mehr Möglichkeiten für Lernen und Spiel eröffnet.
Der Roboter ist mit dem Open DJI SDK ausgestattet, welches 39 programmierbare
Sensoranschlüsse unterstützt. Darüber hinaus ist es auch mit Hardware von Drittanbietern
kompatibel und bietet dem Benutzer grenzenlose kreative Möglichkeiten.
Vorbereitungen
Zusammenbau des Roboters
Siehe RoboMaster EP Core-Kurzanleitung.
Einschalten des Roboters
Führen Sie die folgenden Schritte aus, um den Roboter einzuschalten:
2020 DJI. Alle Rechte vorbehalten.
©
7
Page 8
ROBOMASTER EP Core Benutzerhandbuch
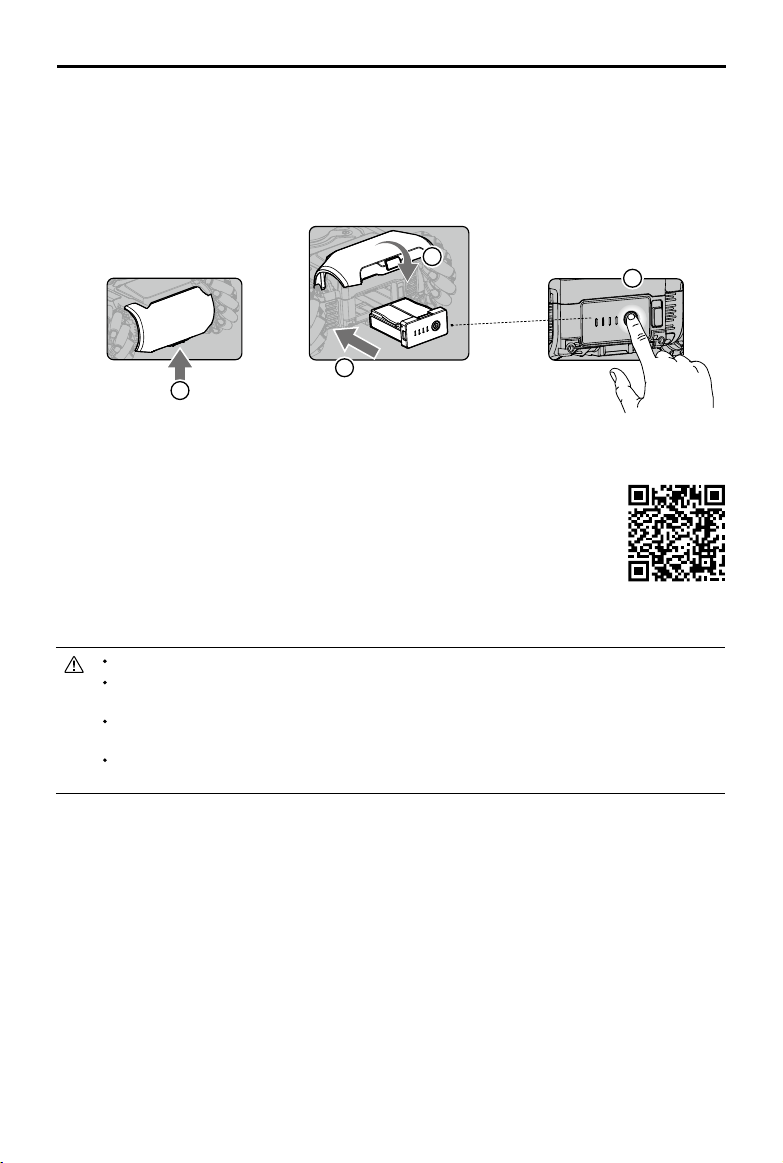
1. Drücken Sie die Entriegelungstaste für die hintere Panzerung, um die hintere Panzerung des
Fahrwerks zu öffnen.
2. Setzen Sie Intelligent Battery in das Akkufach ein.
3. Halten Sie die Netztaste gedrückt, um den Akku einzuschalten.
4. Schließen Sie die hintere Panzerung des Fahrwerks.
4
3
2
1
Herunterladen der RoboMaster-App
A. Suchen Sie im App Store oder auf Google Play nach der RoboMaster-
App oder scannen Sie den QR-Code, um die App auf Ihr Mobilgerät
herunterzuladen.
B. Die RoboMaster-Software für Windows und Mac kann auch von der ofziellen
DJI-Website heruntergeladen werden, um den Roboter per Tastatur und Maus
zu steuern.
Windows: https://www.dji.com/robomaster_app
Mac: https://www.dji.com/robomaster_app
Verwenden Sie Ihr DJI-Konto, um sich in der RoboMaster-App anzumelden.
Die RoboMaster App wird von iOS 10.0.2 (oder höher) sowie Android 5.0 (oder höher)
unterstützt.
Die RoboMaster-App wird von Windows 7 64Bit (oder höher) bzw. MacOS 10.13 (oder
höher) unterstützt.
Wenden Sie sich an Ihren Mobilfunkanbieter, um die neuesten Zugangsdaten zu erhalten,
bevor Sie die RoboMaster-App mit einer Mobilfunkdatenverbindung verwenden.
2020 DJI. Alle Rechte vorbehalten.
©
8
Page 9
ROBOMASTER EP Core Benutzerhandbuch
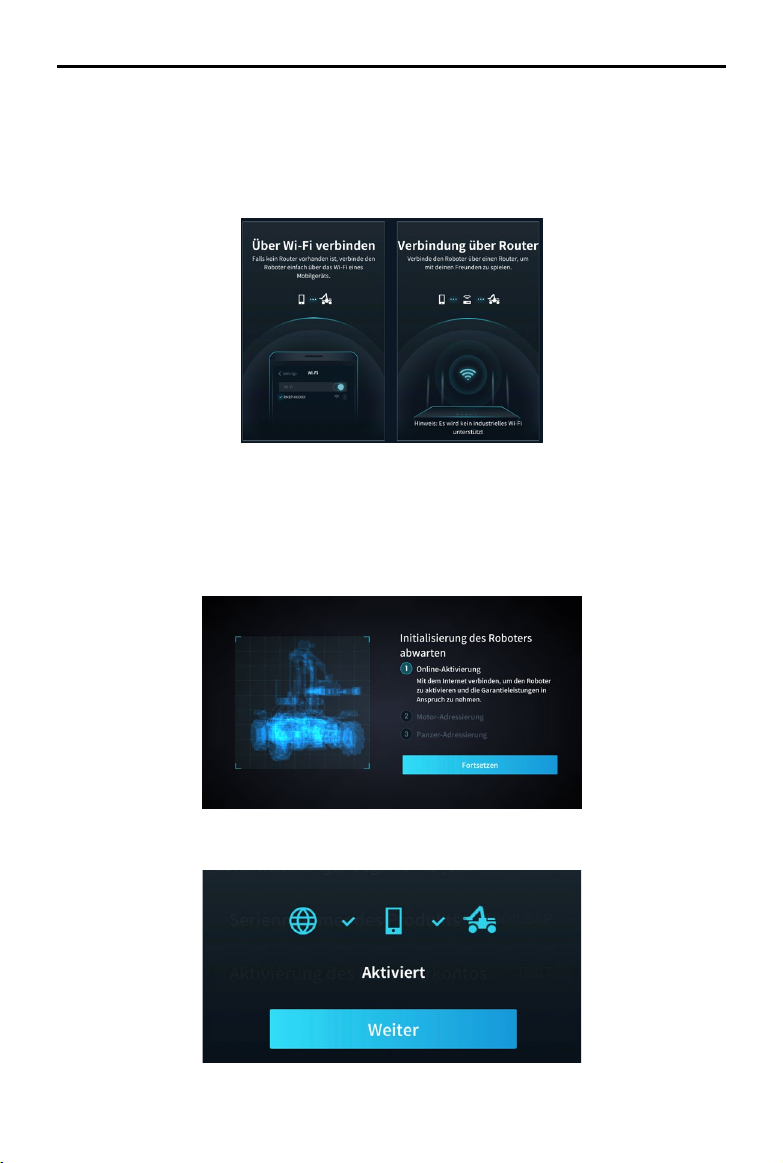
Verbinden des Roboters mit der RoboMaster-App
Der Roboter muss vor der Verwendung mit der RoboMaster-App verbunden werden. Auf der
Verbindungsmodus-Seite erfahren Sie, wie man über Wi-Fi oder Router eine Verbindung herstellt.
Befolgen Sie die Eingabeaufforderungen, um die Verbindung mit der App herzustellen. Eine
ausführliche Beschreibung nden Sie im Abschnitt „Herstellen der Verbindung“.
Initialisieren des Roboters mit der App
Aktivieren des Roboters
Verwenden Sie nach dem Verbinden Ihr DJI-Konto, um den Roboter in der RoboMaster-App zu
aktivieren. Für die Aktivierung wird eine Internetverbindung benötigt.
1. Starten Sie die Aktivierung.
2. Befolgen Sie die Eingabeaufforderungen, um die Aktivierung abzuschließen.
2020 DJI. Alle Rechte vorbehalten.
©
9
Page 10
ROBOMASTER EP Core Benutzerhandbuch
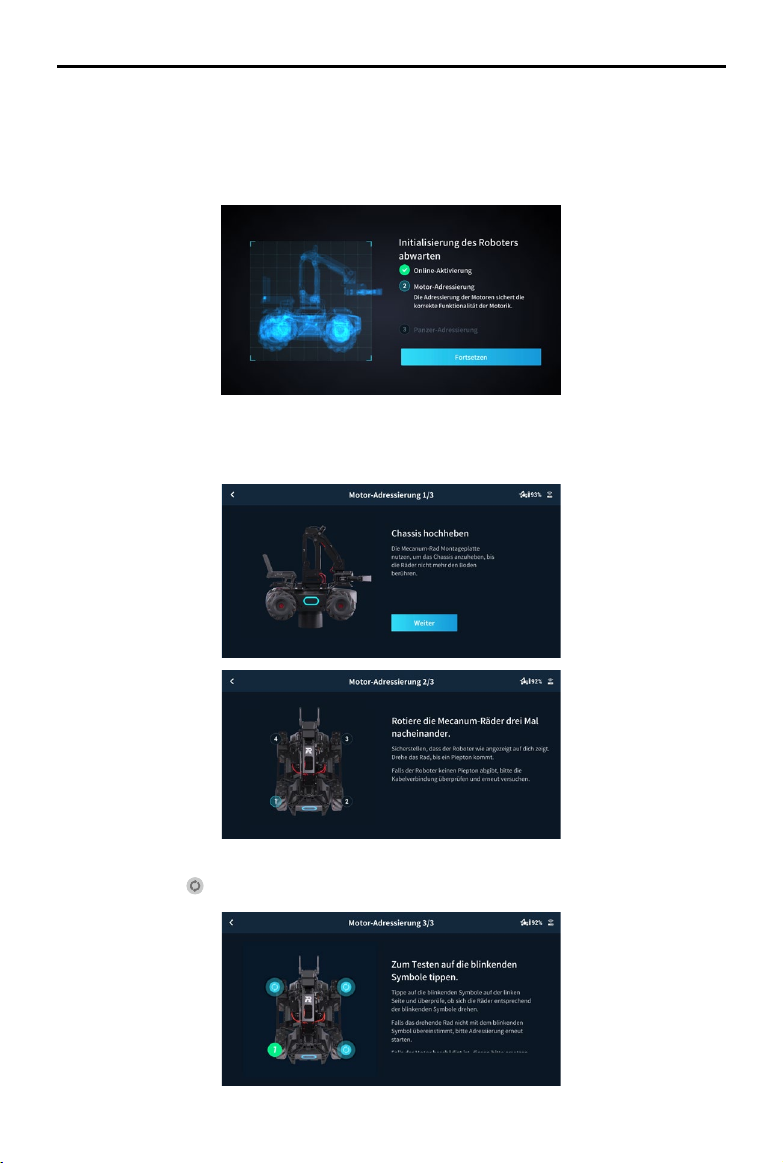
Adressierung des Motors
In der App ist vor der ersten Inbetriebnahme eine Adressierung des Motors erforderlich. Befolgen
Sie die Anweisungen, um die Adressierung des Motors durchzuführen.
1. Starten Sie die Adressierung des Motors.
2. Heben Sie das Fahrwerk an und befolgen Sie die Anweisungen, um die Mecanum-Räder in der
auf dem Bildschirm angezeigten Reihenfolge zu drehen, bis alle Räder gedreht wurden.
3. Tippen Sie hier
wurden.
2020 DJI. Alle Rechte vorbehalten.
©
10
, um die Mecanum-Räder nacheinander zu testen, bis alle Räder getestet
Page 11
ROBOMASTER EP Core Benutzerhandbuch
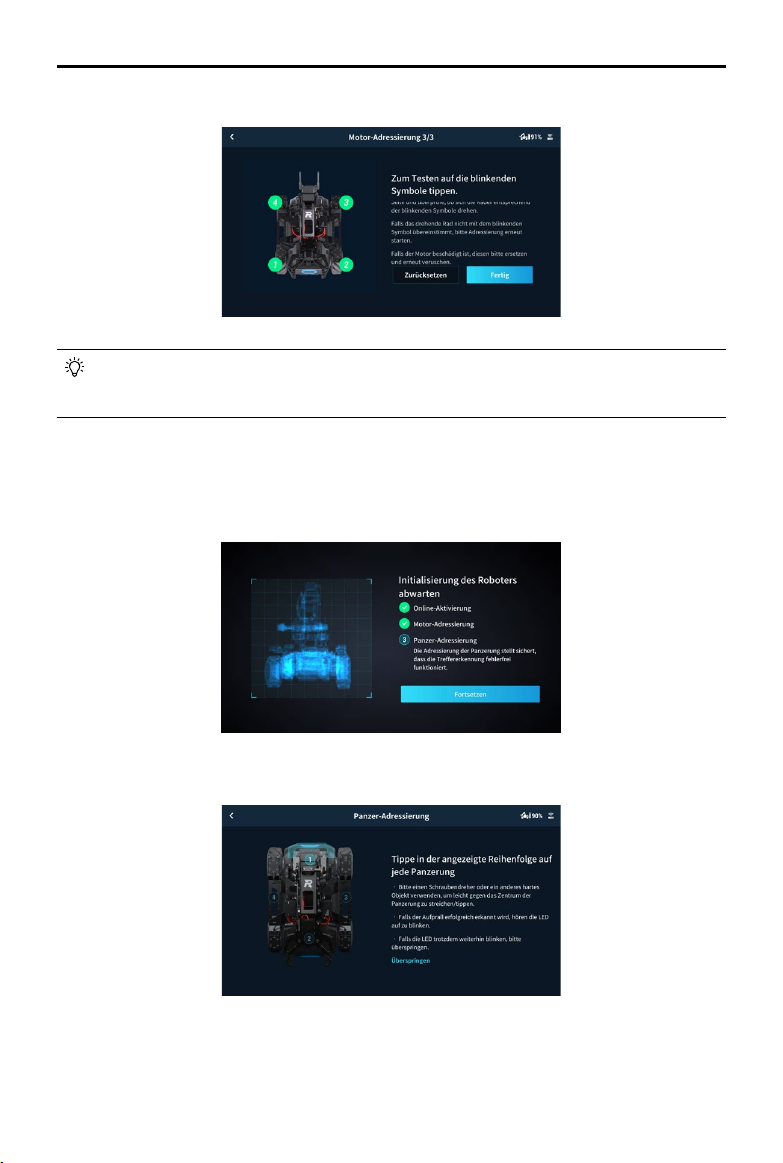
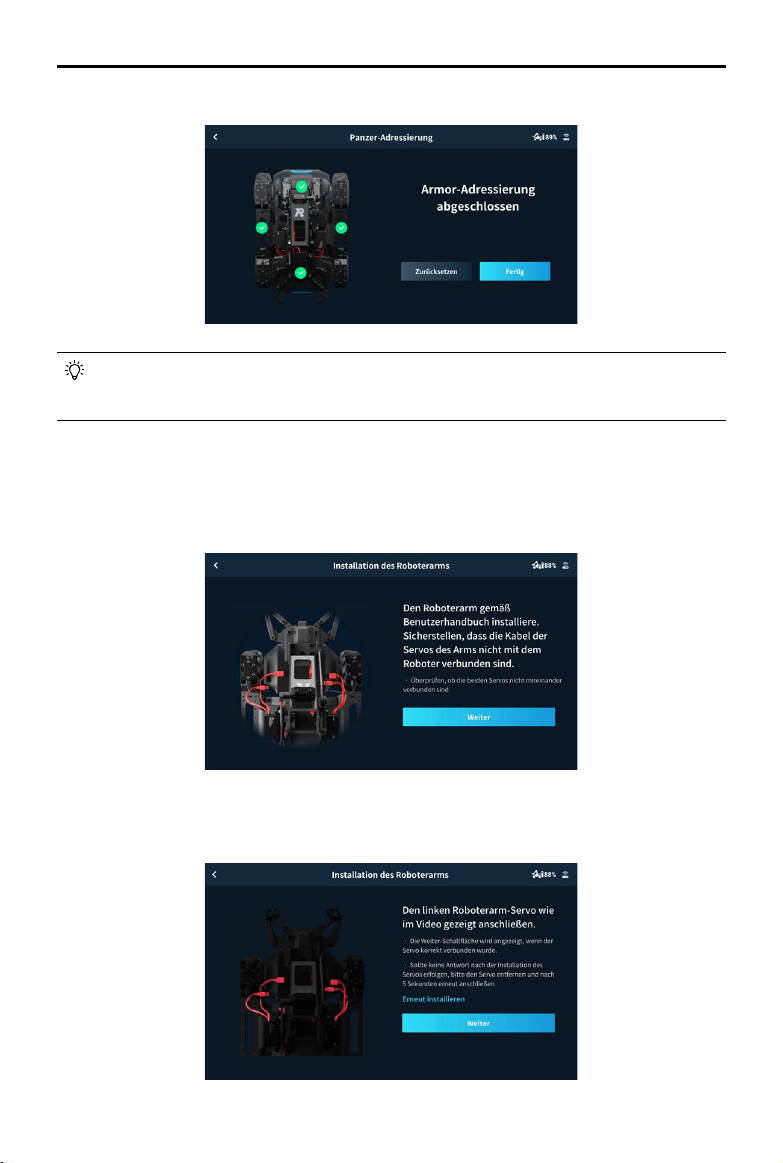
4. Die Adressierung des Motors ist abgeschlossen.
Die Adressierung des Motors ist erforderlich, wenn ein Motor ausgetauscht wird. Öffnen
Sie die RoboMaster-App, klicken Sie auf „Einstellungen“ dann auf „System“ und wählen Sie
„Motoradressierung“ aus.
Adressierung der Panzerung
Bei der ersten Verwendung des Roboters ist in der App eine Adressierung der Panzerung
erforderlich. Befolgen Sie die Anweisungen, um die Adressierung der Panzerung durchzuführen.
1. Starten Sie die Adressierung der Panzerung.
2. Befolgen Sie die Anweisungen, um auf die Panzerplatten in der auf dem Bildschirm angezeigten
Reihenfolge zu tippen.
2020 DJI. Alle Rechte vorbehalten.
©
11
Page 12
ROBOMASTER EP Core Benutzerhandbuch
3. Die Adressierung der Panzerung wird durchgeführt.
Die Adressierung der Panzerung ist erforderlich, wenn ein Panzermodul ausgetauscht wird.
Gehen Sie zur RoboMaster-App, klicken Sie auf „Einstellungen“ und dann auf „System“ und
wählen Sie „Adressierung der Panzerung“ aus.
Installation des Roboterarms
Der Roboterarm muss in der App installiert werden, bevor der Roboter zum ersten Mal verwendet
wird.
1. Starten Sie die Installation des Roboterarms.
2. Befolgen Sie die Eingabeaufforderungen, um nacheinander die Verbindung mit dem linken und
rechten Servo herzustellen.
2020 DJI. Alle Rechte vorbehalten.
©
12
Page 13
ROBOMASTER EP Core Benutzerhandbuch
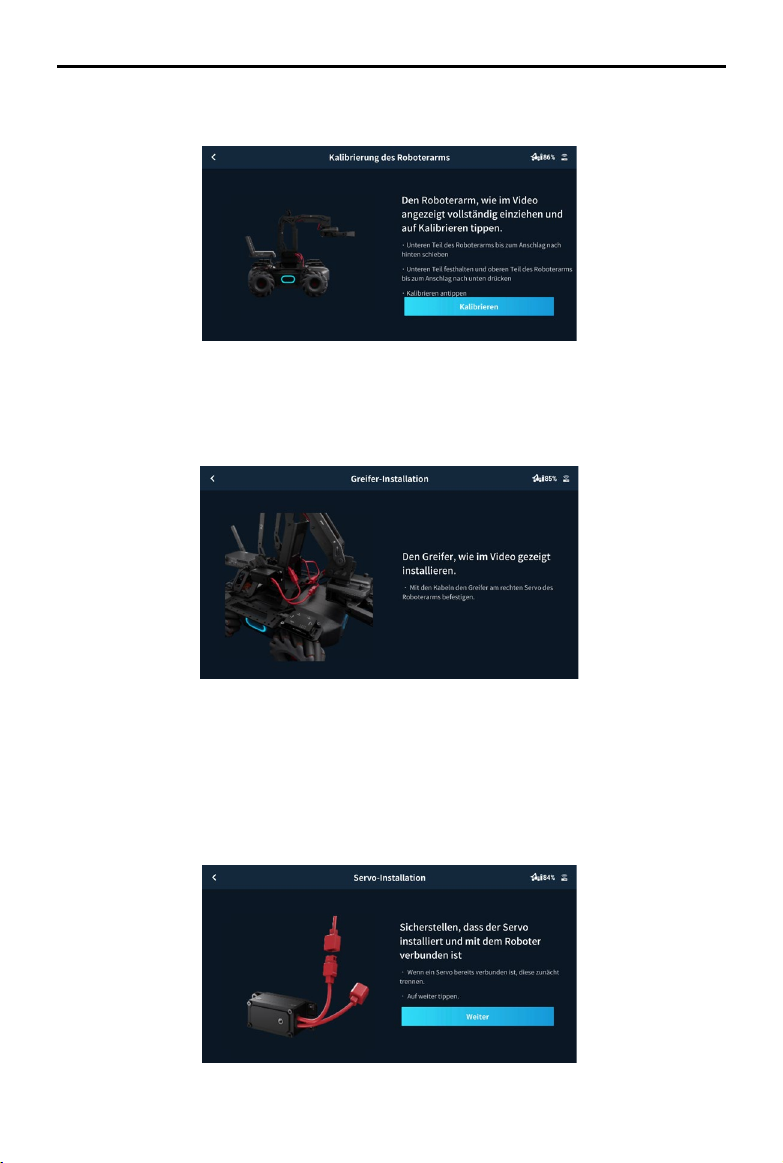
3. Kalibrieren Sie den Roboterarm.
Installation des Greifers
Der Greifer muss installiert werden, bevor der Roboter zum ersten Mal verwendet wird.
Servo-Installation
Vergewissern Sie sich, dass die am Roboter installierten Servos unterschiedliche IDs haben
und jede der IDs im Bereich von 1 bis 3 liegt. Ist dies nicht der Fall, muss die jeweilige ServoID geändert werden. Befolgen Sie die Eingabeaufforderungen, um die Servo-Installation
abzuschließen.
1. Starten Sie die Servo-Installation.
2020 DJI. Alle Rechte vorbehalten.
©
13
Page 14
ROBOMASTER EP Core Benutzerhandbuch
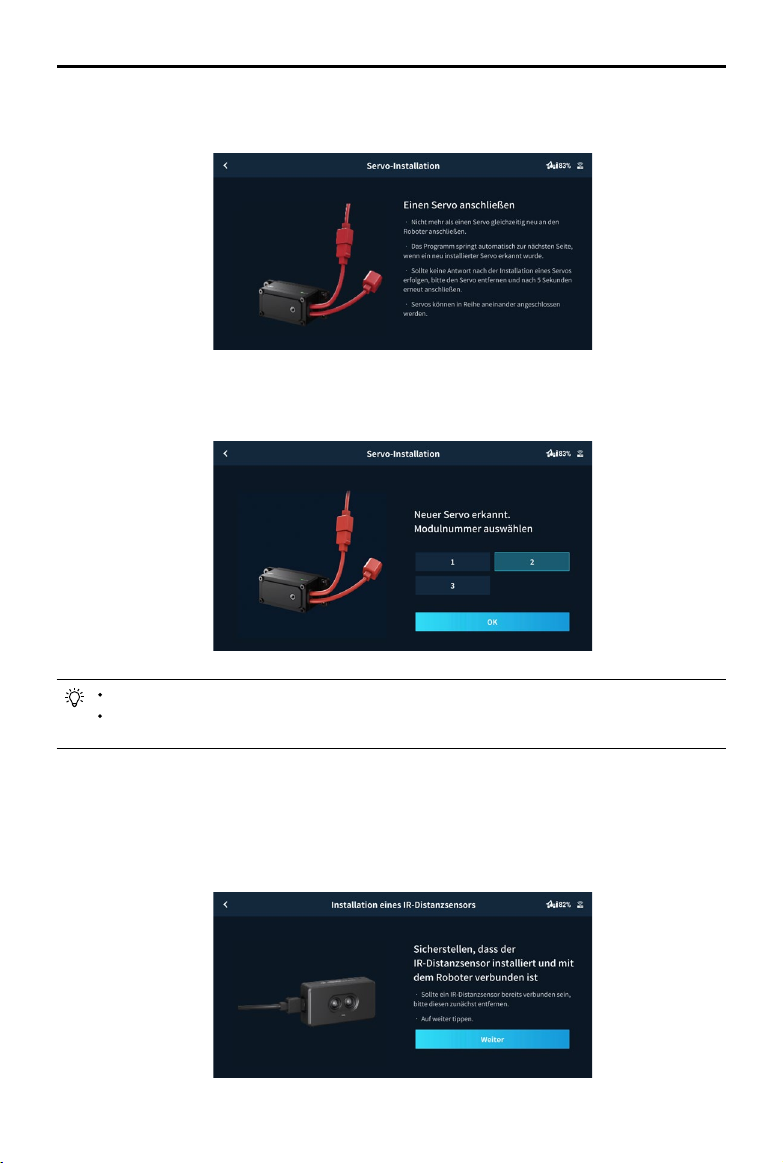
2. Befolgen Sie die Eingabeaufforderungen, um nacheinander die Verbindung mit den einzelnen
Servos herzustellen.
3. Befolgen Sie die Eingabeaufforderungen zur Auswahl der Modulnummern für die Servos, bis
allen davon eine eindeutige Nummer zugewiesen wurde.
Servos lassen sich in Reihe schalten.
Nach dem Abnehmen des Roboterarms lassen sich die beiden Servos des Arms separat
steuern.
Installation des Infrarot-Abstandssensors
Befolgen Sie die Eingabeaufforderungen, um die Installation des Infrarot-Abstandssensors
abzuschließen. Falls mehr als ein Infrarot-Abstandssensor am Roboter installiert ist, muss jedem
Sensor eine eigene ID zugewiesen werden.
1. Starten Sie die Installation des Infrarot-Abstandssensors.
2020 DJI. Alle Rechte vorbehalten.
©
14
Page 15

ROBOMASTER EP Core Benutzerhandbuch
2. Befolgen Sie die Eingabeaufforderungen, um nacheinander die Verbindung mit den einzelnen
Infrarot-Abstandssensoren herzustellen.
3. Befolgen Sie die Eingabeaufforderungen zur Auswahl der Modulnummern für die Infrarot-
Abstandssensoren, bis allen davon eine eindeutige Nummer zugewiesen wurde. Der Roboter
unterstützt die Installation mehrerer Infrarot-Abstandssensoren, wobei sich deren IDs
entsprechend auswählen lassen.
Installation des Sensoradapters
Die voreingestellte Nummer für jeden Sensoradapter ist 1. Achten Sie darauf, dass alle am
Roboter installierten Sensoradapter unterschiedliche IDs haben. Ist dies nicht der Fall, muss die
jeweilige Sensoradapter-ID geändert werden. Befolgen Sie die Eingabeaufforderungen, um die
Sensoradapter-Installation abzuschließen.
2020 DJI. Alle Rechte vorbehalten.
©
15
Page 16

Module und Funktionen
Verwenden der RoboMaster-App
Mit der speziellen RoboMaster-App können Benutzer auf umfangreiche Lernressourcen und
verschiedene Gameplay-Modi zugreifen. Die App kann mit einem Touchscreen oder einem
Gamepad verwendet werden und ist für iOS, Android, Windows und Mac verfügbar. Benutzer auf
verschiedenen Plattformen können sogar gleichzeitig miteinander spielen. Benutzer können mit
Leichtigkeit Programme schreiben und diese anwenden, oder die Programme sofort mit Freunden
über die RoboMaster-App teilen. In diesem Abschnitt wird die RoboMaster-App auf iOS als Beispiel
verwendet. Die jeweilige Benutzeroberäche kann je nach verwendetem Gerät variieren.
RoboMaster-App-Hauptseite
1 2 3 4 6 75
8 9 10
1. Konto
Tippen Sie hier, um sich bei Ihrem Konto an- und abzumelden, und um Ihren Avatar, Ihren Namen
und Ihr Geschlecht zu ändern. Für die Anmeldung ist eine Internetverbindung erforderlich.
Überprüfen Sie die Gesamtfahrstrecke, die Gesamtfahrzeit, den geschriebenen Code, die mit
Schreiben von Code verbrachte Zeit, die Anzahl der absolvierten Kurse in „Der Weg zum Meister“
sowie die höchste Punktzahl bei der Zielübung.
Tippen Sie auf Meister-Liste, um die 100 höchstplatzierten Benutzer für die Fahrtdistanz,
Gesamtfahrzeit, die insgesamt geschriebene Menge an Code, die mit Schreiben von Code
verbrachte Zeit sowie für die Zielübungspunktzahl anzuzeigen.
2. Medienbibliothek
Tippen Sie hier, um Fotos und Videos anzusehen.
3. Leitfaden
a.
Kundenservice: Tippen Sie hier, um die ofzielle Kundenservice-Seite für DJI-Produkte aufzurufen.
b. Wartungs-Support: Tippen Sie hier, um die ofzielle „DJI Repair Center“-Seite aufzurufen.
c. Benutzerhandbücher: Tippen Sie hier, um die offizielle Download-Seite für das DJI-
Benutzerhandbuch aufzurufen.
d. Sichtmarkierungen: Tippen Sie hier, um die offizielle Download-Seite für Sichtmarkierungen
aufzurufen.
e. Online-Support: Tippen Sie hier, um den ofziellen Online-Assistenzdienst der RoboMaster-Serie
zu kontaktieren.
2020 DJI. Alle Rechte vorbehalten.
©
16
Page 17

ROBOMASTER EP Core Benutzerhandbuch
f. Feedback: Tippen Sie hier, um das Feedback-Formular auszufüllen.
g. Videos: Tippen Sie hier, um die ofzielle DJI-Tutorial-Videoseite aufzurufen.
h. Forum: Tippen Sie hier, um die ofzielle DJI-Forumseite aufzurufen
4. Ankündigungen
Ankündigungen zu Themen wie RoboMaster-Produkte, Wettbewerbe und Entwicklerprogramme.
5. Verbinden
Der Roboter muss mit der App verbunden sein. Tippen Sie hier, um einen Leitfaden zum Herstellen
einer Verbindung über Wi-Fi oder Router anzuzeigen.
Verbindung über Wi-Fi
Benutzer können sowohl in den Solo-Modus als auch in den Kampfmodus wechseln, wenn sie eine
Wi-Fi-Verbindung herstellen.
Gehen Sie zur Herstellung der Verbindung wie folgt vor:
(1). Stellen Sie den Modusschalter des intelligenten Controllers auf
(2).
Starten Sie die RoboMaster-App, rufen Sie auf dem Mobilgerät die Wi-Fi-Einstellungen auf, wählen
Sie den Wi-Fi-Namen aus, der auf dem Aufkleber auf dem Gehäuse des Roboters angegeben ist
(RMEP-XXXXXX), und geben Sie das Passwort ein. Das Standardpasswort lautet 12341234.
und schalten Sie den Roboter ein.
(3). Warten Sie, bis der Roboter und die App miteinander verbunden sind. Der Roboter gibt
einen Ton ab, sobald die Verbindung hergestellt ist.
Zurücksetzen des Passworts
Stellen Sie sicher, dass der Modusschalter des intelligenten Controllers auf die Position
„Verbindung über Wi-Fi“ gestellt ist, und halten Sie die Koppelungstaste fünf Sekunden lang
gedrückt, um das Passwort zurückzusetzen.
2020 DJI. Alle Rechte vorbehalten.
©
17
Page 18
ROBOMASTER EP Core Benutzerhandbuch
Zurücksetzen des Passworts
Benutzer können sowohl in den Solo-Modus als auch in den Kampfmodus wechseln, wenn sie
eine Verbindung über Router herstellen.
Gehen Sie wie folgt vor, um die Verbindung herzustellen:
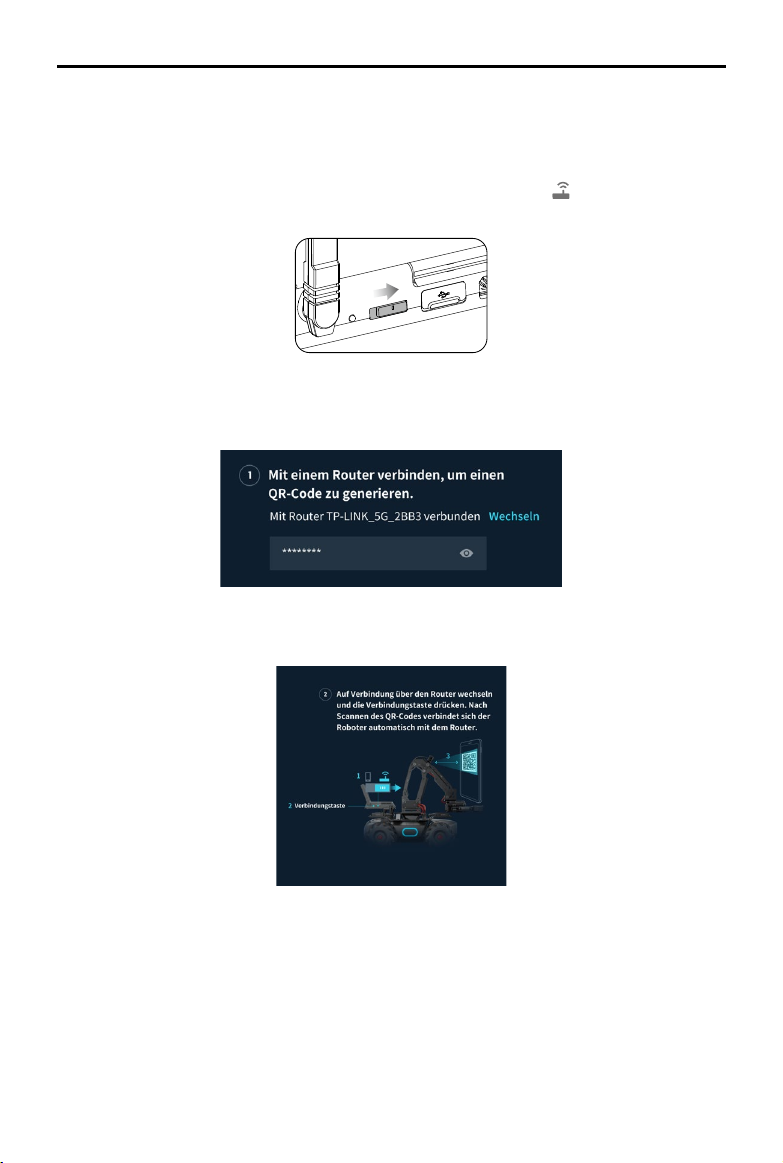
(1). Stellen Sie den Modusschalter des intelligenten Controllers auf
Roboter ein.
(2). Öffnen Sie die RoboMaster-App, rufen Sie die Wi-Fi-Einstellungen auf dem Mobilgerät auf,
stellen Sie eine Verbindung zu einem Router her und geben Sie das Wi-Fi-Passwort des
Routers ein, um einen QR-Code zu generieren.
(3). Drücken Sie die Koppelungstaste am intelligenten Controller und scannen Sie den QR-Code
mit der Kamera des Roboters. Der Roboter verbindet sich dann automatisch mit dem Router.
und schalten Sie den
6. Robotermodell-Auswahl
Wählen Sie RoboMaster S1 oder RoboMaster EP als Robotermodell aus.
7. Einstellungen
Auf der Einstellungsseite nden sie „Roboter“, „Verbinden“, „Display“, „Steuerung“ und „System“.
a. Roboter
Zur Statusabfrage jeder einzelnen Komponente des Roboters. Ist der Status einer
Komponente anormal, wird das entsprechende Teil in rot angezeigt, wobei auf der rechten
Seite des Bildschirms ausführlichere Informationen angezeigt werden.
2020 DJI. Alle Rechte vorbehalten.
©
18
Page 19

ROBOMASTER EP Core Benutzerhandbuch
b. Erweiterungsmodul
In der Erweiterungsmodul-Anzeige lassen sich Roboterarm, Greifer, Servo, InfrarotAbstandssensor und Sensoradapter installieren. Zudem kann man hier den Installationsstatus
dieser Module überprüfen.
c. Verbinden
Zeigt den Verbindungsstatus des Roboters an. Wenn eine Verbindung besteht, können
Benutzer auch die Kanalanzeige, den Wi-Fi-Namen und das Wi-Fi-Kennwort überprüfen und
Wi-Fi-Informationen ändern.
d. Display (Anzeige)
Hier lassen sich LED-Anzeigefarbe, die FPV-Trefferpunktleiste, die FPV-Bildschirmanpassung,
die Videoauösung, die Flimmeranpassung und die 3D-Qualität einstellen.
e. Steuerung
Hier kann man Geschwindigkeit, Steuermodus, Steuerempndlichkeit, Gyro-Empndlichkeit
und Vibration einstellen.
f. System
In den Systemeinstellungen lassen sich folgende Aktionen ausführen:
Ausschalten des Roboters.
Aktivieren der Ruhemodus-Programmierung.
Überprüfen der App-Version und Einstellen der App-Sprache.
Einstellen der Sprachausgabe-Sprache und der Lautstärke des Roboters.
Durchführen eins Firmware-Updates, Versions-Überprüfung der heruntergeladenen Firmware
und Überprüfung der Firmware-Version.
Durchführung der Panzerungs- und Motoradressierung sowie der Fahrgestellkalibrierung.
Anleitung für Anfänger erneut abspielen.
Den verbleibenden Platz auf der SD-Karte prüfen und die SD-Karte formatieren.
Aktivieren der GPS-Daten, Überprüfen der Geräteinformationen und mehr über die
Nutzungsbedingungen sowie das DJI-Produktverbesserungsprogramm erfahren.
8. Solo
Tippen Sie hier, um in den Solo-Modus zu wechseln. Benutzer können entweder über Wi-Fi oder
Router eine Verbindung herstellen.
9. Kampf (Battle)
Tippen Sie hier, um in den Kampfmodus zu wechseln. Benutzer können entweder über Wi-Fi
oder Router eine Verbindung herstellen. Wenn mehrere Roboter verwendet werden, müssen die
Benutzer die Verbindungen über denselben Router herstellen.
10. Labor
Der Weg zum Meister: Der Weg zum Meister bietet projektbasierte Kurse mit unterschiedlichen
Projekten für Einsteiger und Pros, die das Verständnis der Benutzer für Programmiersprachen
von Roboteranwendungen bis hin zur KI-Technologie verbessern. (KI steht für „künstliche
Intelligenz“).
DIY-Programmieren: Für die Programmierung stehen sowohl Scratch als auch Python zur
Verfügung.
RoboAcademy: RoboAcademy bietet einen Lehrprogramm mit Videos und
Programmierleitfäden an. Umfangreiche Videos stellen Robotik auf einfache aber faszinierende
Art und Weise vor und vermitteln dem Benutzer relevante wissenschaftliches Kenntnisse. Das
2020 DJI. Alle Rechte vorbehalten.
©
19
Page 20
ROBOMASTER EP Core Benutzerhandbuch
RoboMaster EP Core-Programmierhandbuch bietet detaillierte Erläuterungen für verschiedene
Blöcke und Module, die es leichter machen, die Grundlagen der Programmierung des EP Core
zu verstehen.
EP Core kann im Solo-, Kampf- oder Labormodus weder den Blaster noch den Gimbal oder
die dazugehörigen Funktionen verwenden. Es wird empfohlen, zuerst den Blaster bzw. den
Gimbal anzuschließen.
Omnidirektionales Fahrgestell
Einführung
Das Fahrgestell ist eine omnidirektionale Bewegungsplattform, die auf Mecanum-Rädern aufbaut
und neben Bewegungen nach vorne oder hinten auch seitliche, diagonale oder drehende
Bewegungen ermöglicht. Auch gelichzeitige Kombinationen dieser Bewegungen sind möglich.
Vermeiden Sie Kollisionen mit Objekten bei hoher Geschwindigkeit.
Bewegungssteuereinheit
Übersicht
Die Bewegungssteuereinheit ist das Kernmodul für die Bewegungen des Fahrgestells. Sie bietet
eine umfangreiche externe Modulschnittstelle für die Videoübertragung und den Anschluss
von Akku, Panzerung und Motoren. Außerdem integriert die Bewegungssteuereinheit einen
omnidirektionalen Algorithmus zur Radbewegungssteuerung und Managementsysteme für die
Stromversorgung, Motoren und das Fahrwerk.
5 V
Übertragung
GND
S-BUS
UART
GND
1 1 1 1
9
1
0
2
3
3 3 34 4
S-Bus-Signal
Signal
7
5
8
6
5 V
GND
Empfang
1. CAN-Bus-Anschluss
CAN-Bus-Anschluss für den Anschluss des Panzermoduls.
2020 DJI. Alle Rechte vorbehalten.
©
20
Page 21

ROBOMASTER EP Core Benutzerhandbuch
2. Stromanschluss
Stromanschluss für den Anschluss von Intelligent Batteries. Beachten Sie, dass diese
Schnittstelle das Akkumanagementsystem enthält. Ziehen Sie den Netzstecker nicht aus dem
Stromanschluss, es sei denn, dies ist erforderlich.
3. M-BUS-Anschluss
Motoranschluss für den Anschluss des Motors.
4. CAN-BUS-Anschluss
Ein Anschluss für künftige Funktionen für den Anschluss von Panzerungsmodulen.
5. Micro-USB-Anschluss
Unterstützt Verbindung und Kommunikation in SDK USB RNDIS.
6. UART-Anschluss
Der UART-Anschluss ist ein Erweiterungsschnittstelle, die zur Programmierung verwendet wird
und den SDK-Anschluss unterstützt.
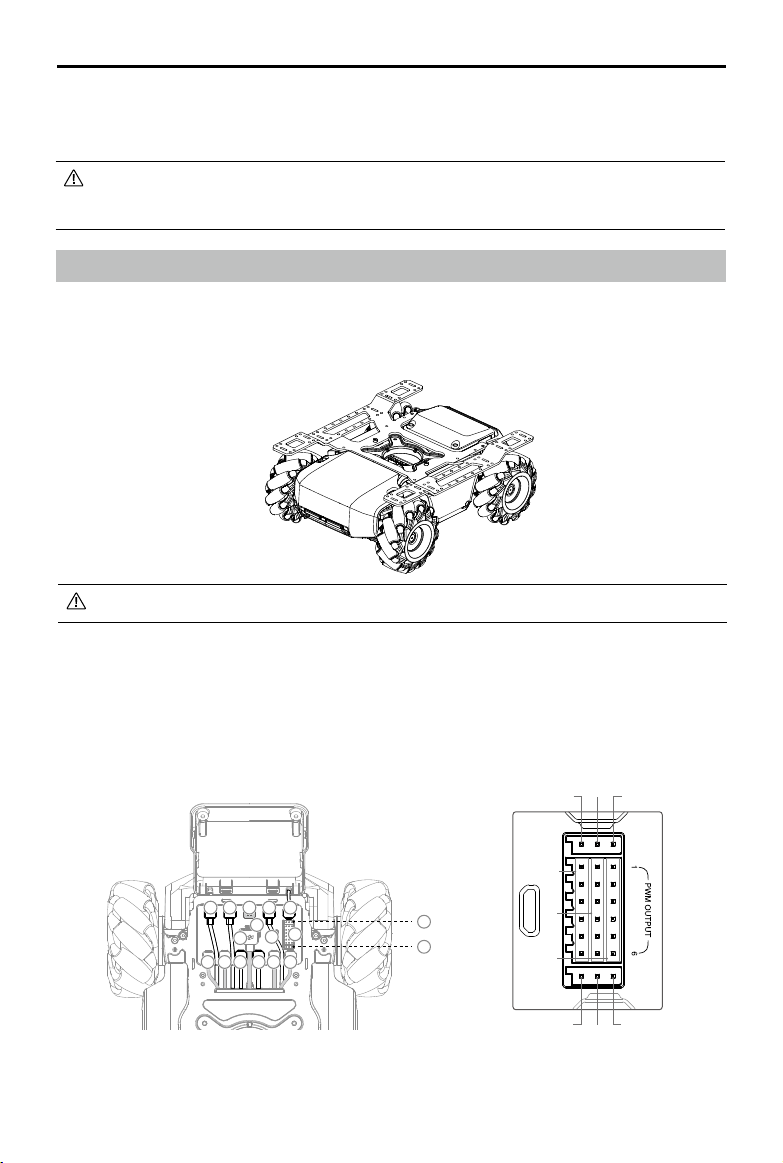
7. PWM-Ausgangsanschluss
Die Bewegungssteuereinheit ermöglicht das Einstellen des Betriebszyklus über das Scratch-
oder Python-Programm unter Verwendung des PWM-Ausgangs.
8. S-Bus-Anschluss
Steuert den Signalempfang und dient zum Anschluss eines Fernsteuerungsempfängers, der das
SBUS-Protokoll unterstützt.
9. M0-Anschluss
Dient als Servo- und Greiferanschluss.
10. LED-Anzeige
Dient zur Statusanzeige der Bewegungssteuereinheit.
LED-Anzeige Status der Bewegungssteuereinheit
Blinkt langsam blau
Blinkt langsam gelb
Blinkt schnell grün
Blinkt schnell rot
Leuchtet
durchgehend gelb
Leuchtet
durchgehend weiß
Blinkt abwechelnd rot,
grün und blau
Blinkt langsam rot
* Warnmeldungen für den Stopp-Modus werden in der App angezeigt. Gehen Sie zu
Einstellungen und dann zu System, um den entsprechenden Fehler zu ermitteln.
Normaler Betrieb
Eigenständiges Programm wird ausgeführt
IMU-Kalibrierung erfolgreich
IMU-Kalibrierung fehlgeschlagen
IMU wird kalibriert
Firmware wird aktualisiert
Kein Eingang von Lagedaten
Stopp-Modus*
Der Stopp-Modus kann in den folgenden Situationen
auftreten:
a. Die Bewegungssteuereinheit ist vom Motor getrennt
oder kann nicht mit dem Motor kommunizieren.
b. Der Roboter kann sich aufgrund einer Störung der
Motor-Hardware nicht bewegen.
c. Die Bewegungssteuereinheit kann nicht mit der
Fernsteuerung kommunizieren.
d. Anormale Einstellung der Bewegungssteuereinheit.
e. Die Bewegungssteuereinheit kann nicht mit dem
Akku kommunizieren.
2020 DJI. Alle Rechte vorbehalten.
©
21
Page 22

ROBOMASTER EP Core Benutzerhandbuch
Verbinden Sie die schwarzen, orangefarbenen und roten Kabel mit den Anschlüssen in
der entsprechenden Farbe.
Vergewissern Sie sich vor der Verwendung, dass die Bewegungssteuereinheit
ordnungsgemäß installiert und die Schrauben an der hinteren Fahrgestellabdeckung
verriegelt sind.
Kalibrieren Sie den Roboter nach jeder Neuinstallation der Bewegungssteuereinheit,
sobald Sie dazu in der RoboMaster-App aufgefordert werden. Weitere Informationen
nden Sie im Abschnitt „Kalibrieren des Roboters“.
Um zu vermeiden, dass sich die Bewegungssteuereinheit beim Entfernen der hinteren
Fahrgestellabdeckung löst, heben Sie die Abdeckung vorsichtig an, bevor Sie sie entfernen.
Mecanum-Rad
Das Mecanum-Rad ist eine häug verwendete Robotiklösung für ein Omnidirektionales Fahrgestell,
die in zwei Typen unterteilt ist: linksläuges Mecanum-Rad und rechtsläuges Mecanum-Rad. Für
das vierrädrige Fahrwerk sind zwei Paar Mecanum-Räder erforderlich.
Linksläuge
Markierung
Bei der Installation können Sie die linksläuge Markierung oder rechtsläuge Markierung an der
Unterseite des Fahrwerks überprüfen und das linksläufige oder rechtsläufige Mecanum-Rad
entsprechend installieren.
Linksläuges
Mecanum-Rad
Rechtsläuge
Markierung
Rechtsläuges
Mecanum-Rad
Motoren und ESCs
Der Roboter verfügt über einen bürstenlosen M3508I Motor und ESC mit einer maximalen Drehzahl
von 1000 U/min.
Achten Sie darauf, dass die Verbindungen zwischen allen Motoren und der
Bewegungssteuereinheit stabil sind.
Sollte sich der Motor nicht frei drehen, schalten Sie den Roboter sofort aus und überprüfen
Sie den Motor.
Berühren Sie kurz nach dem Ausschalten des Roboters NICHT die Motoren, die
Montageplatten der Motoren oder die Innenseite des Mecanum-Rads, weder mit den
Händen noch mit einem anderen Körperteil.
2020 DJI. Alle Rechte vorbehalten.
©
22
Page 23

ROBOMASTER EP Core Benutzerhandbuch
Panzermodule
Zum Schutz des Roboter-Innenlebens sind auf den vier Seiten des Fahrgestells insgesamt vier
Panzerungsmodule angebracht.
Jedes Trefferdetektormodul wird durch ein LED-Licht dargestellt und ist unter dem Panzermodul
sichtbar.
Intelligenter Controller
Die intelligente Steuerung ist in mehrere Systeme integriert, darunter ein Videoübertragungssystem,
ein Spielsystem und ein Scratch-Programmiersystem. Sie unterstützt sechs intelligente Module,
zur Erkennung von Linien, Sichtmarkierungen, Personen, Klatschgeräuschen, Gesten und anderen
Robotern.
5
8
7
1
3
1
4
2
1. microSD-Steckplatz
Kompatibel mit einer microSD-Karte, die schneller als 10 MB/s lesen und schreiben kann und bis
zu 64 GB unterstützt.
2. Kameraanschluss
Dient zum Anschluss an die Kamera.
3. Lautsprecheranschluss
Dient zum Anschluss an den Lautsprecher.
4. Eigenständige Programmtaste
Vom Benutzer geschriebene Scratch-Programme können als eigenständige Programme
eingestellt werden, die direkt auf den Roboter geladen werden. Drücken Sie die eigenständige
Programmtaste, um das Programm auszuführen.
5. Antennen
Für eine optimale Wi-Fi-Verbindung müssen die Antennen des intelligenten Controllers auf 90°
eingestellt werden.
6. Sekundärer Kameraanschluss
Ein Anschluss für künftige Funktionen, der zum Umschalten auf die zweite Kameraansicht dient.
7. CAN-Bus-Anschluss
Dient zum Anschluss der Bewegungssteuereinheit.
8. Micro-USB-Anschluss
Dient zum Anschluss an einen Computer.
9. Verbindungsmodus-Schalter
Dient zum Umschalten zwischen Verbindung über Wi-Fi oder Verbindung über Router.
0
6
9
2020 DJI. Alle Rechte vorbehalten.
©
23
Page 24

ROBOMASTER EP Core Benutzerhandbuch
10. Kopplungstaste
Die Verbindungstaste funktioniert bei der Verbindung über Wi-Fi anders als bei der Verbindung
über Router.
Wi-Fi-Verbindung: Wenn das Wi-Fi-Passwort vergessen wurde, halten Sie diese Taste fünf
Sekunden lang gedrückt, um das Wi-Fi-Passwort zurückzusetzen.
Verbindung mit dem Router: Wenn Sie mit dem Roboter den QR-Code zum Anschluss an ein
Netzwerk scannen, drücken Sie zuerst diese Taste.
Ziehen Sie NICHT an der Antenne.
Wenn die Antenne der intelligenten Steuerung beschädigt wird, beeinträchtigt dies die
Leistung des Roboters. Wenden Sie sich an DJI, falls die Antenne beschädigt wird.
Kamera
Die Kamera verfügt über einen 1/4-Zoll-Sensor mit 5 Millionen Pixeln und einem Sichtfeld (FOV) von
120°, mit dem der Benutzer den Roboter aus der Ich-Perspektive steuern kann.
Reinigen Sie das Objektiv regelmäßig, um Unschärfe oder Lichthöfe zu vermeiden. Verwenden
Sie einen speziellen Objektivreiniger, um sicherzustellen, dass sich nach der Reinigung keine
Fremdkörper auf dem Objektiv benden und das Objektiv nicht beschädigt wird.
1. Kameraobjektiv
2
1
3
2. Mikrofon
3. Kameraanschluss
Dient zum Anschluss der
Kamera an den intelligenten
Controller.
Die Kamera darf NICHT mit Flüssigkeiten in Berührung kommen oder in Wasser
eingetaucht werden.
Bewahren Sie die Kamera NICHT an einem feuchten Ort auf.
Berühren Sie NICHT das Objektiv.
Falls die Kamera nass wird, wischen Sie diese mit einem trockenen, weichen Tuch ab.
Lautsprecher
Der Lautsprecher mit einer Nennleistung von 2 W wird mittels eines 2,5-mm-Klinkenstecker am
intelligenten Controller angeschlossen.
Achten Sie darauf, dass der Lautsprecher ordnungsgemäß angebracht ist und die
Bewegungen des Gimbals nicht behindert.
2020 DJI. Alle Rechte vorbehalten.
©
24
Page 25

ROBOMASTER EP Core Benutzerhandbuch
Intelligent Battery
Die Intelligent Battery hat eine Kapazität von 2400 mAh, liefert eine Spannung von 10,8 V und
verfügt über mehrere Energiemanagement-Funktionen.
LED2 LED3
LED1
Funktionen von Intelligent Battery
1. Anzeige des Akkuladestands: Die LEDs zeigen den aktuellen Akkuladestand an.
2. Automatische Entladefunktion: Wenn der Akku 10 Tage lang außer Betrieb ist, wird er
automatisch auf unter 70 % seiner Gesamtkapazität entladen, damit er sich nicht aufbläht.
Drücken Sie die Akkuladestandstaste, um den Ruhezustand zu beenden und den Akkuladestand
zu prüfen. Das Entladen des Akkus auf 60 % dauert etwa einen Tag. Normalerweise gibt der
Akku beim Entladen spürbar etwas Wärme ab.
3. Ausgleichsfunktion: Beim Ladevorgang ndet ein automatischer Ausgleich der Spannungswerte
der einzelnen Akkuzellen statt.
4. Überladungsschutz: Der Ladevorgang wird automatisch beendet, sobald der Akku vollständig
geladen ist.
Temperaturschutz: Der Akku wird nur geladen, wenn die Temperatur zwischen 5 °C und 45 °C liegt.
5.
6. Überstromschutz: Bei hohen Stromstärken wird der Ladevorgang des Akkus unterbrochen.
7. Tiefentladungsschutz: Um schwere Schäden am Akku zu vermeiden, wird der Ausgangsstrom
unterbrochen, wenn die Akkuzelle auf 2,5 V entladen wird und nicht in Gebrauch ist. Um die
Betriebszeiten zu verlängern, wird der Überladungsschutz deaktiviert, wenn sich die Akkus
während der Nutzung entladen. In diesem Fall kann eine Akkuspannung von unter 1 V ein
Sicherheitsrisiko darstellen, wie z. B. Feuer beim Auaden. Um dies zu verhindern, kann der Akku
nicht geladen werden, wenn die Spannung einer einzelnen Akkuzelle unter 1 V liegt. Vermeiden
Sie die Verwendung von Akkus, bei denen dies der Fall ist. Zur Verhinderung von dauerhaften
Schäden am Akku, vermeiden Sie eine Tiefentladung.
8. Schutz vor Kurzschlüssen: Bei einer Kurzschlusserkennung wird die Stromversorgung
automatisch unterbrochen.
9. Schutz vor Schäden an Akkuzellen: Bei der Erkennung einer beschädigten Akkuzelle zeigt die
RoboMaster-App einen Warnhinweis an.
10. Ruhemodus: Das Gerät schaltet automatisch in den Ruhemodus, um Strom zu sparen, wenn
der Akku nicht in Gebrauch ist. Wird der Akku eingeschaltet, ohne mit dem Roboter verbunden
zu sein, schaltet sich dieser nach fünf Minuten wieder ab. Wenn die Akkuleistung weniger als
5 % beträgt, wechselt der Akku nach sechs Stunden automatisch in den Ruhemodus, um eine
Tiefentladung zu vermeiden. Drücken Sie in diesem Fall einmal auf die Netztaste des Akkus,
damit der Akku zum Auaden aufgeweckt wird.
11. Kommunikation: Spannung, Speicherkapazität, Stromstärke und andere wichtige Akkudaten
werden an den Roboter gesendet.
Lesen Sie vor der Verwendung die Bedienungsanleitung, den Haftungsausschluss und
die Beschreibungen am Akku. Der Benutzer übernimmt die alleinige Verantwortung für
Verwendung und Betrieb.
LED4
1
2
1. Netztaste
2. Akkuladestandsanzeige
2020 DJI. Alle Rechte vorbehalten.
©
25
Page 26

ROBOMASTER EP Core Benutzerhandbuch
Laden der Intelligent Battery
Das Akkuladegerät ist zum Auaden der Akkus des Roboters konzipiert. Heben Sie die Abdeckung
des Akkuladegeräts an und setzen Sie die Intelligent Battery ein. Verbinden Sie das Akkuladegerät
mit einer Steckdose (100 bis 240 V, 50/60 Hz).
2
1
100 bis 240 V
50 bis 60 Hz
3
Ladezeit: Ca. 1 Stunde und 30 Minuten*
* Die Ladezeit wurde unter Laborbedingungen mit einer neuen Intelligent Battery getestet und dient lediglich als Richtwert.
Vor dem ersten Gebrauch muss der Akku aufgeladen werden, damit er sich aufwecken lässt.
Vergewissern Sie sich vor jedem Gebrauch, dass der Akku voll aufgeladen ist.
Wenn das Ladegerät nicht verwendet wird, lassen Sie es abgedeckt, um zu verhindern,
dass die Metallklemmen freiliegen.
Beschreibung der Status-LEDs
Akkuladestandsanzeigen beim Laden (Akku)
LED1 LED2 LED3 LED4 Akkuladestand
0 %~50 %
50 %~75 %
75 %~100 %
Vollständig geladen
Akkuladestandsanzeigen für den Schutz des Akkus
LED1 LED2 LED3 LED4 Blinkfolge Akkuschutzvorrichtung
LED2 blinkt zweimal pro Sekunde Überstrom erkannt
LED2 blinkt dreimal pro Sekunde Kurzschluss erkannt
LED3 blinkt zweimal pro Sekunde Überladung erkannt
LED3 blinkt dreimal pro Sekunde
LED4 blinkt zweimal pro Sekunde
LED4 blinkt dreimal pro Sekunde
Wenn die Störungen behoben sind, schaltet sich die Akkuladestandanzeige aus. Nehmen Sie
die Intelligent Battery aus dem Ladegerät und setzen Sie sie wieder ein, um den Ladevorgang
fortzusetzen. Beachten Sie, dass Sie bei Ladetemperaturfehlern das Ladegerät nicht ausstecken
und dann wieder einstecken müssen. Der Ladevorgang wird fortgesetzt, wenn die Temperatur
wieder innerhalb des normalen Bereichs liegt.
DJI haftet nicht für Schäden, die durch Ladegeräte von Drittanbietern verursacht werden.
2020 DJI. Alle Rechte vorbehalten.
©
26
Überspannung am Ladegerät
erkannt
Ladetemperatur ist zu niedrig
(<0 °C)
Ladetemperatur ist zu hoch
(>40 °C)
Page 27

ROBOMASTER EP Core Benutzerhandbuch
Befestigen der Intelligent Battery
Öffnen Sie bei Verwendung die hintere Panzerabdeckung und legen Sie den Akku in das Akkufach ein.
3
1
2
Vergewissern Sie sich, dass der Akku sicher eingesetzt ist. Andernfalls kann der Akku
herausfallen oder unzureichenden Kontakt haben, was zum Verlust der Akkudaten führen kann.
Drücken Sie zur Entnahme des Akkus die Akkuauswurftaste.
Achten Sie darauf, dass die hervorstehenden Metallkontakte des Akkufachs nicht
verbogen werden. Andernfalls wird es ggf. micht möglich, den Akku einzusetzen oder
herauszunehmen.
Verwenden der Intelligent Battery
Prüfen des Akkuladestands
Drücken Sie die Akkuladestandstaste einmal, um den Akkuladestand zu prüfen.
Auch beim Entladen zeigen die Akkuladestandanzeigen den aktuellen Akkuladestand. Die
Anzeigen sind wie folgt deniert:
LED leuchtet. LED blinkt.
LED ist ausgeschaltet.
Akkuladestand
LED1 LED2 LED3 LED4 Akkuladestand
88 %~100 %
75 %~88 %
63 %~75 %
50 %~63 %
38 %~50 %
25 %~38 %
13 %~25 %
0 %~13 %
2020 DJI. Alle Rechte vorbehalten.
©
27
Page 28

ROBOMASTER EP Core Benutzerhandbuch
Ein-/Ausschalten
Halten Sie die Netztaste länger als zwei Sekunden gedrückt, um das Gerät ein- oder auszuschalten.
Hinweis für niedrige Temperaturen
1. Die Leistung der Intelligent Battery verringert sich bei niedrigen Temperaturen unter 5 °C
erheblich. Vergewissern Sie sich vor der Verwendung, dass der Akku vollständig geladen ist und
die Zellenspannung 4,2 V beträgt.
2. Bei extrem kaltem Wetter ist die Temperatur des Akkus möglicherweise trotz erfolgter Erwärmung
nicht hoch genug. In diesen Fällen müssen Sie den Akku nach Bedarf isolieren.
3. Zur optimalen Leistung ist die Kerntemperatur der Intelligent Battery bei Verwendung über 20 °C
zu halten.
Beschreibung der LED-Anzeigen des Roboters
Der Roboter verfügt über LED-Anzeigen an den vier Panzerungsmodulen des Fahrgestells, die
dessen aktuellen Status anzeigen.
Fahrwerk-LED-Anzeige, eine für jede Panzerung.
Beschreibung der LED-Anzeigen
Roboter-Status Fahrwerk-LED-Anzeige
Akkustrom
Roboter einschalten Leuchtet durchgehend türkis
Roboter ausschalten
Verbinden
Roboter funktioniert normal, ist aber nicht mit der App
verbunden
Verbindung zwischen Roboter und App wird hergestellt Blinkt türkis
Roboter funktioniert normal und ist mit der App verbunden
Firmware-Aktualisierung
Firmware wird aktualisiert Leuchtet durchgehend weiß
Firmwareaktualisierung fehlgeschlagen Leuchtet kontinuierlich rot
Firmwareaktualisierung erfolgreich Leuchtet durchgehend türkis
* Die benutzerdenierte Farbe wird unter LED-Display-Farbe in den Display-Einstellungen der App
eingestellt.
Wenn Sie die benutzerdefinierte Farbe ändern, ändern sich die Farben der LEDs am
Fahrgestell.
2020 DJI. Alle Rechte vorbehalten.
©
28
Benutzerdenierte Farbe schaltet sich
aus
Pulsiert weiß
Leuchtet durchgehend in der
benutzerdenierten Farbe
Page 29

ROBOMASTER EP Core Benutzerhandbuch
Servo
Einführung
Als Antrieb des Roboters unterstützt der Servo individuelle Steuerungsmöglichkeiten über dessen
Programmierschnittstellen. Der Servo sorgt für minimales Getriebespiel, hohe Steuergenauigkeit
und großes Ausgangsdrehmoment. Andere Anwendungen sind der Antrieb des Roboterarms
und die Unterstützung des Betriebszyklus-Getriebemotor-Modus, mittels dem sich Hubstrukturen
konstruieren lassen.
Der Servo verwendet den RS485-Busmodus und ist mit dem PWMModus kompatibel. Wird der Servo zum Antrieb des Roboterarms
verwendet, schaltet das System automatisch in den RS485-Busmodus
um. Bei unabhängigem Betrieb lässt sich der Servo entweder im
RS485-Bus-Modus oder im PWM-Modus betreiben. Das System
schaltet dabei automatisch dem Eingangssignal entsprechend um.
Servo-PWM-Anschluss
Die Anschlusspins sind wie folgt belegt:
142
231
1 2 3
4
485A/PWM 485B VCC-12 V GND
3
4
Der Servo unterstützt zwei Steuerungsmodi: Winkel- und Ratenmodus. Das PWM-Signal hat eine
Frequenz von 50 Hz und einen Betriebszyklus von 2,5 % bis 12,5 %.
Steuerungsmodus Betriebszyklus Regelbereich
Winkelmodus 2,5 % bis 12,5 % 0 °C bis 360 °C
Ratenmodus
2,5 % bis 7,5 % 49 bis 0 U/min
7,5 % bis 12,5 % 0 bis -49 U/min
Beschreibung der Servo-LED-Anzeigen
Die LED-Anzeige gibt den Status des Servos an. Im Detail:
LED-Anzeige Servo-Status
Leuchtet kontinuierlich grün
Blinkt schnell rot
Blinkt abwechselnd grün und gelb
Blinkt abwechselnd rot und gelb
Blinkt schnell grün
* Der Servo führt beim Einschalten einen Selbsttest durch. Tritt beim Selbsttest ein Fehler auf, verbinden Sie den Servo
nochmals mit der Stromversorgung. Wenden Sie sich an den DJI Support, falls der Servo nach mehrmaligem Einschalten
immer noch nicht normal funktioniert.
** Der Servo stoppt die Drehmomenterzeugung nach 200 Millisekunden der Überlastung und nimmt sie drei Sekunden später
automatisch wieder auf.
*** Sollte der Servo blockiert sein, überprüfen Sie den aktuellen Vorgang und schließen Sie den Servo neu an die
Stromversorgung an.
Normaler Betrieb
Selbsttest-Fehler*
Überlastschutz**
Blockiert***
Der Servo ist in der RoboMaster-App
ausgewählt
2020 DJI. Alle Rechte vorbehalten.
©
29
Page 30

ROBOMASTER EP Core Benutzerhandbuch
Berühren Sie den Servo während des Betriebs NICHT, um Verletzungen zu vermeiden.
Schlagen Sie NICHT auf den Servo. Andernfalls kann die Lebensdauer des Servos
verkürzt werden oder es sogar zu dauerhaften Schäden kommen.
Wenn in der App mehrfach Warnmeldungen zu Servoüberlastung angezeigt werden,
stoppen Sie sofort den Betrieb und überprüfen Sie den Vorgang und den Zustand des
Roboterarms bzw. des Servos.
Wenn Sie den Servo am Roboterarm befestigen, verwenden Sie die
Programmierschnittstelle mit Vorsicht, um die Begrenzungsvorrichtung des Roboterarms
nicht zu beeinträchtigen.
Wenn sich der Servo im PWM-Modus bendet, lässt sich dessen Status nicht auf einem
Computer anzeigen. Der aktuelle Status des Servos kann an der LED-Anzeige abgelesen
werden.
Roboterarm und Greifer
Einführung
Der Roboterarm unterstützt eine präzise Steuerung aus der Ich-Perspektive (FPV) und lässt sich mit
dem Greifer verwenden. Greifen und bewegen Sie Objekte, indem Sie in der RoboMaster-App den
Roboterarm und den Greifer aus der Ich-Perspektive (FPV) steuern.
Benutzungshinweise
Üben Sie während des Betriebs KEINE äußerliche Kraft auf Roboterarm oder Greifer aus.
Der Bewegungsbereich des Roboterarms und der Greifabstand des Greifers lassen sich steuern.
Der horizontale Bewegungsumfang des Roboterarms beträgt 0 bis 0,22 m, der vertikale 0 bis
0,15 m. Der Greifabstand des Greifers beträgt 10 cm.
Um Verletzungen zu vermeiden, berühren Sie NICHT den Roboterarm oder den Greifer,
solange diese in Betrieb sind.
Schlagen oder beschädigen Sie NICHT den Roboterarm oder den Greifer. Andernfalls
kann die Leistung beeinträchtigt werden oder der Servo anormal arbeiten.
Entfernen Sie Fremdkörper wie etwa Tröpfchen rechtzeitig. Andernfalls kann es zur
Korrosion der Oberächenstruktur kommen.
Greifer-PWM-Anschluss
Die Anschlusspins sind wie folgt belegt:
142
3
2020 DJI. Alle Rechte vorbehalten.
©
30
1 2 3
485A/PWM 485B VCC-12 V GND
4
Page 31

ROBOMASTER EP Core Benutzerhandbuch
Der Greifer unterstützt den Drehmomentsteuerungsmodus. Das PWM-Signal hat eine Frequenz von
50 Hz und einen Betriebszyklus von 2,5 % bis 12,5 %, wobei 2,5 % bis 7,5 % der Schließkraft des
Greifers (Maximum bis 0) entspricht und 7,5 % bis 12,5 % seiner Öffnungskraft (0 bis Maximum).
Stromanschlussmodul
Einführung
Ein Stromanschlussmodul kann mit Hardware von Drittanbietern verbunden werden und diese mit
Strom versorgen. Es bietet mehrere Anschlüsse, um Hardware anzuschließen und benutzerdenierte
Programme und Anwendungen dafür zu erstellen.
5
1
2
3
4
6 2
1. 12-V-Eingangsstromanschluss
Die Eingangsspannung beträgt 9,6-12,6 V.
2. CAN-Bus-Anschluss
Mit CAN-Bus-Kabel verbinden.
3. 5 V / 2 A Ausggangsstromanschluss
Die Ausgangsspannung beträgt 5 V und
unterstützt eine Stromstärke von bis zu 2 A.
Sind beide 5-V-Ausgangsstromanschlüsse belegt, unterstützt das Modul eine
Ausgangsleistung von bis zu 4 A.
4. 5 V / 4 A Ausggangsstromanschluss
Die Ausgangsspannung beträgt 5 V und
unterstützt eine Stromstärke von bis zu 4 A.
5. LED-Anzeige
Zeigt den Status des Stromanschlussmoduls
an.
6. Durchgeschalteter
12-V-Ausgangsstromanschluss
Leitet den Strom zusammen mit dem
12 V-Eingangsstromanschluss.
Montage des Netzanschlussmoduls
1. Ziehen Sie das Stromversorgungskabel der Bewegungssteuereinheit ab.
2020 DJI. Alle Rechte vorbehalten.
©
31
Page 32

ROBOMASTER EP Core Benutzerhandbuch
2. Schließen Sie das Stromversorgungskabel und ein Y-Kabel an.
3. Nachdem Sie ein Y-Kabel wie unten dargestellt an die Bewegungssteuereinheit angeschlossen
haben, legen Sie das Stromversorgungskabel auf das Fahrgestell und ziehen Sie das XT30Stromversorgungskabel eines Y-Kabels durch den Fahrgestellmittelrahmen bis in die
Fahrgestellabdeckung.
4. Schließen Sie das A-Ende eines 12 cm langen Datenkabels wie unten dargestellt an die
Bewegungssteuereinheit an und ziehen Sie das B-Ende durch den Fahrgestellmittelrahmen bis in
die Fahrgestellabdeckung.
12 cm
2020 DJI. Alle Rechte vorbehalten.
©
32
Page 33

ROBOMASTER EP Core Benutzerhandbuch
5. Schließen Sie das XT30-Stromkabel in der Fahrgestellabdeckung wie unten gezeigt an
den 12V-Stromeingangsanschluss und das B-Ende des 12 cm-Datenkabels an den
CAN-Bus-Anschluss des Stromanschlussmoduls an. Befestigen Sie das Modul an der
Fahrgestellabdeckung.
Beschreibung der LED-Anzeigen des Stromanschlussmoduls
Die LED-Anzeige gibt den Status des Stromanschlussmoduls an. Im Detail:
LED-Anzeige Stromanschlussmodul-Status
Leuchtet
durchgehend
weiß
Leuchtet
kontinuierlich rot
Aus
Normale Stromaufnahme und 5V-Ausgabe
Normale Stromaufnahme, aber 5 V-Ausgang ist überlastet
oder kurzgeschlossen
Anormale Stromaufnahme
2020 DJI. Alle Rechte vorbehalten.
©
33
Page 34

ROBOMASTER EP Core Benutzerhandbuch
Infrarot-Abstandssensor (TOF)
Einführung
Der Infrarot-Abstandssensor berechnet den Abstand zu einem Objekt, indem er die Zeit misst,
die Infrarotstrahl benötigt, um das Objekt zu erreichen und zum Sensor zurückzukehren. Der
Infrarot-Abstandssensor besteht aus einem Strahler, einem optischen Empfänger und einem
Signalverarbeitungssystem. Der Strahler gibt moduliertes Nah-Infrarot-Licht ab. Wird der Lichtstrahl
von einem Objekt reektiert, wird der reektierte Strahl durch den optischen Empfänger geleitet und
in ein elektrisches Signal umgewandelt. Der Empfänger überträgt das erzeugte elektrische Signal
dann an das Signalverarbeitungssystem zur Demodulation und Abstandsberechnung.
Der Infrarot-Abstandssensor hat ein Sichtfeld (FOV) von 20° und misst den Abstand von Objekten
innerhalb des Sichtfelds. Wenn sich mehrere Objekte in unterschiedlichen Entfernungen im Sichtfeld
(FOV) benden, liegt die gemessene Entfernung im Bereich zwischen dem nächstgelegenen und
dem entferntesten Objekt. Die tatsächlichen Messwerte hängen vom Größenverhältnis und dem
Reexionsvermögen des Objekts ab. Mit etwas Übungen kann man als Benutzer mehr über den
Infrarot-Abstandssensor lernen.
Im Messbereich von 0,1 bis 10 m misst der Infrarot-Abstandssensor mit einer Fehlertoleranz von
5 %. Das Hinzufügen von programmierbaren Modulen in Scratch liefert ebenfalls zuverlässige
Entfernungsdaten. Dadurch kann der Roboter seine Umgebung erfassen und Hindernissen ausweichen,
wodurch das Verständnis des Benutzers für fortgeschrittene autonome Fahrprinzipien vertieft wird.
1 2
1. CAN-Bus-Anschluss
Schließen Sie den Roboter über ein CAN-Bus-Kabel an.
2. Serielle Schnittstelle
a) Das serielle Signal unterstützt eine Spannungspegel von 3,3 V.
b) Die Eingangsspannung beträgt 5 bis 12,6 V.
Montage des Infrarot-Abstandssensors
Der Infrarot-Abstandssensor lässt sich mithilfe der TOF-Montagehalterung auf der ChassisErweiterungsplattform montieren. Bei Montage an der Vorderseite der Erweiterungsplattform muss
die Halterung zunächst an der geraden Verbindungsstange befestigt werden.
Wenn der Infrarot-Abstandssensor an der Rückseite des Roboters montiert werden soll, muss der Benutzer
eigene Teile konstruieren und die Position des intelligenten Controllers und des Infrarot-Abstandssensors
neu anordnen, ohne dabei die Installation oder den Anschluss anderer Teile zu beeinträchtigen.
1. Um ein TOF-Modul zu montieren, verwenden Sie eine M3-C-Schraube, um den InfrarotAbstandssensor an der TOF-Montagehalterung zu befestigen.
2020 DJI. Alle Rechte vorbehalten.
©
34
Page 35

ROBOMASTER EP Core Benutzerhandbuch
Linke Seite:
2. Befestigen Sie das TOF-Modul mit zwei M3-D-Schrauben an der linken Seite der
Erweiterungsplattform, die sich über der linken Panzerung des Fahrgestells bendet.
3. Verbinden Sie das TOF-Modul wie unten dargestellt mit einem 14 cm langen Datenkabel mit dem
Stromanschlussmodul.
14 cm
Rechte Seite:
4. Befestigen Sie das TOF-Modul mit zwei M3-D-Schrauben an der rechten Seite der
Erweiterungsplattform, die sich über der rechten Fahrgestellpanzerung bendet.
2020 DJI. Alle Rechte vorbehalten.
©
35
Page 36

ROBOMASTER EP Core Benutzerhandbuch
5. Nachdem Sie die Schrauben der rechten Panzerung entfernt haben, verbinden Sie das TOFModul mit der rechten Panzerung mittels eines 12 cm langen Datenkabels.
12 cm
Panzerungs-
Datenkabel
InfrarotAbstandssensor-
Datenkabel
6. Ordnen Sie das Datenkabel wie unten abgebildet an und bringen Sie die rechte Panzerung
wieder an.
Vorderseite:
7. Verwenden Sie zwei M3-D-Schrauben, um das TOF-Modul an der geraden Verbindungsstange
zu befestigen.
2020 DJI. Alle Rechte vorbehalten.
©
36
Page 37

ROBOMASTER EP Core Benutzerhandbuch
8. Verwenden Sie zwei M3-C-Schrauben, um die gerade Verbindungsstange an der Vorderseite der
Erweiterungsplattform zu befestigen.
9. Verbinden Sie das TOF-Modul wie unten dargestellt mit einem 14 cm langen Datenkabel mit dem
Stromanschlussmodul.
14 cm
Anleitung zum seriellen Protokoll
Der Infrarot-Abstandssensor unterstützt CAN-Bus-Kommunikation und das serielle Klartextprotokoll,
wodurch sich der Sensor auch auf einer Plattform eines Drittanbieters einsetzten lässt. Nachfolgend
sind die Kongurationsparameter für den Anschluss aufgeführt:
Eigenschaft Parameter
Baudrate 115200
Datenbits 8
Stoppbit 1
Prüfbit /
2020 DJI. Alle Rechte vorbehalten.
©
37
Page 38

ROBOMASTER EP Core Benutzerhandbuch
Kommunizieren Sie mit dem Infrarot-Abstandssensor, indem Sie einen Klartextstring über
die serielle Schnittstelle senden. Unten sind die Steuerbefehle aufgeführt, die der InfrarotAbstandssensor unterstützt:
Beschreibung Steuerbefehl
Infrarot-Abstandssensor einschalten „ir_distance_sensor measure on“
Infrarot-Abstandssensor ausschalten „ir_distance_sensor measure off“
Nach dem Einschalten des Infrarot-Abstandssensors werden die zurückgesendeten Daten im folgenden Format angezeigt:
„ir distance: 100“ (IR-Abstand), 100 (Einheit: mm) ist ein Datensatz der vom Sensor erzeugten Messdaten.
Beschreibung der LED-Anzeigen für den Infrarot-Abstandssensor
Die LED-Anzeige gibt den Status des Infrarot-Abstandssensors an. Im Detail:
LED-Anzeige Status des Infrarot-Abstandssensors
Leuchtet
durchgehend türkis
Blinkt schnell
türkisfarben
Normaler Betrieb
Der Infrarot-Abstandssensor ist in der RoboMaster-App
ausgewählt
Verwendung des Infrarot-Abstandssensors
Der Infrarot-Abstandssensor sollte nicht manipuliert oder verdeckt werden und die Linse sollte
während des Betriebs sauber und fleckenfrei sein. Es wird nicht empfohlen, den Sensor in den
unten aufgeführten Szenarien zu verwenden. Andernfalls könnte die Messgenauigkeit beeinträchtigt
oder der Sensor sogar funktionsunfähig sein.
a. An Spiegeln oder transparenten Objekten.
b. An Material mit einem hohen Absorptionsgrad wie z. B. mit mattschwarzer Farbe.
c. Bei Regen oder Nebel.
d. An einem starken Reektor wie z. B. einem Verkehrsschild oder Reektorstreifen.
e. Im direkten Sonnenlicht.
f. An kleinen oder niedrigen Hindernissen.
Wenn das TOF-Modul auf der Erweiterungsplattform des Fahrgestells montiert wird, ist es
um 10° nach oben geneigt und kann den Boden nicht erfassen.
2020 DJI. Alle Rechte vorbehalten.
©
38
Page 39

ROBOMASTER EP Core Benutzerhandbuch
Sensoradapter
Einführung
Der Roboter ist mit vier Sensoradaptern ausgestattet, deren IDs standardmäßig auf 1 gesetzt sind.
Jeder der Sensoradapter verfügt über zwei Sensoranschlüsse und eine Stromversorgung, sodass
Sensoren von Drittanbietern, die Eingaben wie Temperatur, Druck und Entfernung messen, bequem
angeschlossen und mit Strom versorgt werden können. Sensordaten können sogar in Scratch
verwendet werden, wodurch sich endlose Programmiermöglichkeiten eröffnen.
3
2
1. CAN-Bus-Anschluss
Mit CAN-Bus-Kabel verbinden.
2. LED-Anzeige
Zeigt den Status des Sensoradapters an.
3. Adressierungstaste
Stellt die ID des Sensoradapters ein.
4. Sensoranschluss
Unterstützt die Aufzeichnung von Schalt- und Analogsignalen und hat einen
Eingangsspannungsbereich von 0 bis 3,3 V.
1
4
Montage des Sensoradapters
1. Verwenden Sie acht M3-C-Schrauben, um zwei Sensoradapter wie unten dargestellt an den
spezischen Positionen der Hinterseite der Erweiterungsplattform zu befestigen.
2020 DJI. Alle Rechte vorbehalten.
©
39
Page 40

ROBOMASTER EP Core Benutzerhandbuch
2. Nachdem Sie die Schrauben der linken und rechten Panzerung entfernt haben, verbinden Sie die
jeweiligen Sensoradapter über zwei 12 cm lange Datenkabel mit den Panzerungen.
12 cm
Sensoradapter-
Datenkabel
Panzerungs-
Datenkabel
Panzerungs-
Datenkabel
Sensoradapter-
Datenkabel
3. Ordnen Sie die Datenkabel wie unten abgebildet an und bringen Sie die Panzerung wieder an.
4. Verwenden Sie acht M3-C-Schrauben, um zwei Sensoradapter wie unten dargestellt an den
spezischen Positionen der Vorderseite der Erweiterungsplattform zu befestigen.
2020 DJI. Alle Rechte vorbehalten.
©
40
Page 41

ROBOMASTER EP Core Benutzerhandbuch
5. Verbinden Sie den Sensoradapter wie unten dargestellt mit zwei 14 cm langen Datenkabeln mit
dem Stromanschlussmodul.
14 cm
LED-Anzeige für Sensoradapter
Die LED-Anzeige gibt den Status des Sensoradapters an. Im Detail:
LED-Anzeige Sensoradapter-Status
Leuchtet
durchgehend weiß
Blinkt schnell weiß
Normaler Betrieb
Der Sensoradapter wird gerade adressiert oder ist in
der RoboMaster-App ausgewählt
2020 DJI. Alle Rechte vorbehalten.
©
41
Page 42

ROBOMASTER EP Core Benutzerhandbuch
Gerade Verbindungsstange
Die gerade Verbindungsstange kann an der Erweiterungsplattform des Fahrgestells befestigt
werden, damit sich ein Infrarot-Abstandssensor oder eine Kamera installieren lässt. Unten ist das
Installationsverfahren für die Kamera dargestellt.
1. Verwenden Sie zwei M3-C-Schrauben, um die Kamera wie unten dargestellt an der vorgesehenen
Position der geraden Verbindungsstange zu befestigen.
2. Befestigen Sie die gerade Verbindungsstange wie unten abgebildet mit zwei M3-C-Schrauben
an der Vorderseite des Fahrgestells.
3. Verbinden Sie die Kamera über ein Kamera-Verlängerungskabel mit dem intelligenten Controller.
2020 DJI. Alle Rechte vorbehalten.
©
42
Page 43

ROBOMASTER EP Core Benutzerhandbuch
Vorderachsen-Erweiterungsplattform
Die Vorderachsen-Erweiterungsplattform lässt sich an der Vorderseite des Fahrgestells befestigen,
damit ein Greifer oder Sensor installiert werden kann. Unten ist das Installationsverfahren für den
Greifer dargestellt.
1. Verwenden Sie vier M3-C-Schrauben, um den Greifer wie unten dargestellt an der vorgesehenen
Position auf der Vorderachsen-Erweiterungsplattform zu montieren.
2. Befestigen Sie die Vorderachsen-Erweiterungsplattform wie unten abgebildet mit vier M3-CSchrauben an der Vorderseite des Fahrgestells.
Erweiterungsbaustein
Der Roboter ist mit Bausteinen von Drittanbietern kompatibel. Nachfolgend finden Sie eine
Einleitung zum Anbringen von Baustangen am Roboter.
Verwenden Sie, wie unten gezeigt, vier M3-B-Schrauben, um die Baustangen an der
Erweiterungsplattform des Fahrgestells zu befestigen. Anschließend können weitere Bausteine zum
Roboter hinzugefügt werden.
2020 DJI. Alle Rechte vorbehalten.
©
43
Page 44

ROBOMASTER EP Core Benutzerhandbuch
Der Roboter und Drittanbieter-Plattformen
Der Roboter ist mit Drittanbieter-Plattformen kompatibel. Drittanbieter-Plattformen werden über
das Stromanschlussmodul gespeist und kommunizieren über das SDK-Protokoll mit dem Roboter.
Weitere Informationen nden Sie unter robomaster-dev.rtfd.io.
Es gibt zwei Möglichkeiten, den Roboter mit Drittanbieter-Plattformen zu verbinden:
a) UART-Verbindung
Die Drittanbieter-Plattform Arduino
kommuniziert mit dem Roboter über den UART-Anschluss der Bewegungssteuereinheit, wie
unten gezeigt:
TM
wird mit dem Stromanschlussmodul verbunden und
TM
Die Drittanbieter-Plattform Micro:bit
wird mit dem Stromanschlussmodul verbunden und
kommuniziert mit dem Roboter über den UART-Anschluss der Bewegungssteuereinheit, wie
unten gezeigt:
0 1 2 3V CND
2020 DJI. Alle Rechte vorbehalten.
©
44
Page 45

ROBOMASTER EP Core Benutzerhandbuch
(b) USB-Verbindung
Die Drittanbieter-Plattform Raspberry Pi
TM
wird mit dem Stromanschlussmodul verbunden und
kommuniziert mit dem Roboter über den USB-Anschluss des intelligenten Controller, wie unten
gezeigt:
TM
Die Drittanbieter-Plattform Jetson Nano
wird mit dem Stromanschlussmodul verbunden und
kommuniziert mit dem Roboter über den USB-Anschluss des intelligenten Controllers, wie unten
gezeigt:
Dieses Produkt ist von den oben genannten Marken weder autorisiert noch anderweitig
genehmigt und wird auch nicht von ihnen gesponsert. Die Verbindung zwischen diesem
Produkt und den oben genannten Marken ist nur als Referenz zu verstehen.
2020 DJI. Alle Rechte vorbehalten.
©
45
Page 46

ROBOMASTER EP Core Benutzerhandbuch
Gamepad (Nicht im Lieferumfang enthalten)
Einführung
Durch die Verbindung mit einem mobilen Gerät, auf dem die RoboMaster-App läuft, kann man den
Roboter steuern und verschiedene Aufgaben mittels Gamepad oder App ausführen. Zur präziseren
Steuerung des Roboters lässt sich zusätzlich eine Maus an das Gamepad anschließen.
1. Taste für benutzerdenierte
Fertigkeiten
2. Steuerknüppel
3. Mobilgeräteklammer
4. Cooldown-Taste (Abklingzeit-Taste)
5. Starttaste
6. Netztaste
7. Ladeanschluss (Micro-USB)
8. Mobilgeräte-Anschluss (USB)
9. Mausanschluss (USB)
10. Status-LED
11. Gamepad-Ständer
12. Mystery-Bonus-Taste
Beachten Sie, dass das Gamepad über zwei USB-Anschlüsse verfügt. Der Anschluss für
Mobilgeräte kann nicht als Mausanschluss verwendet werden und umgekehrt.
Auaden des Gamepads
Es wird empfohlen, das Gamepad vor der ersten Verwendung vollständig aufzuladen.
110 bis 220 V
Es dauert etwa zwei Stunden, um ein Gamepad vollständig aufzuladen. Das USB-Ladegerät ist
nicht im Lieferumfang enthalten.
2020 DJI. Alle Rechte vorbehalten.
©
46
Page 47

ROBOMASTER EP Core Benutzerhandbuch
Firmware-Aktualisierung
Die Firmware des Gamepads kann über die RoboMaster-App aktualisiert werden. Wenn eine
Firmware-Aktualisierung verfügbar ist, sendet die RoboMaster-App eine Eingabeaufforderung,
nachdem das Gamepad angeschlossen wurde. Folgen Sie den Anweisungen, um die FirmwareAktualisierung durchzuführen.
Stellen Sie sicher, dass beim Herunterladen der Firmware eine Internetverbindung besteht.
Internet
Beschreibung der Status-LED
Die Status-LED zeigt den Betriebsstatus und den aktuellen Akkuladestand des Gamepads an.
Status-LED Beschreibung
Blinkt langsam grün Das Gamepad wird aufgeladen
Blinkt schnell rot Der Akkuladestand des Gamepads beträgt 0 %
Leuchtet kontinuierlich rot
Leuchtet durchgehend gelb
Leuchtet durchgehend grün
Der Akkuladestand des Gamepads liegt zwischen 1 %
und 29 %
Der Akkuladestand des Gamepads liegt zwischen 30 %
und 69 %
Der Akkuladestand des Gamepads liegt zwischen 70 %
und 100 %
Leuchtet durchgehend blau Das Gamepad wird initialisiert
Technische Daten
Modell GD0MA
Typ des integrierten Akkus 3,6 V, 2.600 mAh, 1S1P
Laufzeit* Ca. 2 Stunden
USB-Anschluss 500 mA / 5 V
Betriebstemperatur -10 °C bis +45 °C
Ladetemperaturbereich 0 °C bis 45 °C
Ladezeit* Ca. 2 Stunden
* Die Laufzeit wurde mit einem Android-Gerät und die Ladezeit mit einem 10-W-USB-Ladegerät
bei einer Temperatur von 25 °C getestet. Sowohl die Lauf- als auch die Ladezeit wurde in einer
Laborumgebung getestet und sollte nur als Referenz verwendet werden.
2020 DJI. Alle Rechte vorbehalten.
©
47
Page 48

Bedienung Ihres Roboters
Überprüfung vor der Verwendung
Überprüfen Sie vor jeder Verwendung des Roboters Folgendes:
1. Stellen Sie sicher, dass die Bewegungssteuereinheit ordnungsgemäß installiert, alle Kabel
angeschlossen und die Schrauben an der hinteren Fahrgestellabdeckung festgezogen sind.
2. Vergewissern Sie sich, dass der intelligente Controller, die Kamera und der Lautsprecher
angeschlossen sind.
3. Vergewissern Sie sich, dass die microSD-Karte eingesetzt ist.
4. Stellen Sie sicher, dass die Intelligent Battery vollständig aufgeladen und richtig eingelegt ist.
5. Für eine optimale Wi-Fi-Verbindung müssen die Antennen des intelligenten Controllers auf 90°
eingestellt werden.
Einschalten des Akkus
Halten Sie die Netztaste länger als zwei Sekunden gedrückt, um das Gerät ein- oder auszuschalten.
Bedienung des Roboters mittels eines Mobilgeräts
Verbindung zur App
Der Roboter muss mit der RoboMaster-App verbunden sein, damit man ihn verwenden kann.
Auswählen eines Standorts
Es wird empfohlen, den Roboter auf ebenen Flächen wie z. B. Holzböden und Teppichen zu
verwenden. Unebene Oberflächen wie z. B. Sand oder Steine können die Räder oder Motoren
beschädigen.
Verwendung des Solo-Modus
Aktivieren Sie den Solo-Modus, um die folgende Seite anzuzeigen.
2020 DJI. Alle Rechte vorbehalten.
©
48
Page 49

ROBOMASTER EP Core Benutzerhandbuch
1 2 3 4
17
5
6
7
16
12
1011131415
8
9
1. Zurücktaste: Tippen Sie hier, um zur Startseite zurückzukehren.
2. Taste für Solo-Modus-Spiele: Tippen Sie hier, um „Target Practice“ (Zieltraining) oder „Target
Race“ (Zielrennen) aufzurufen.
3. Verbindungsstatus-Taste: Tippen Sie hier, um zu erfahren, wie sich Roboter und App miteinander
verbinden lassen.
4. Einstellungen-Taste: Tippen Sie hier, um die Einstellungen aufzurufen.
5. Schieberegler zur Steuerung des Roboterarms: Zum Anheben und Absenken des Roboterarms.
6. Interkom-Taste: Zur Audioaufnahme und -wiedergabe.
7. Roboterarm-Taste: Zum Wechsel der FPV-Ansicht.
8. Schieberegler zur Steuerung des Greifers: Zur Steuerung des Greifabstands des Greifers.
9. Zoomtaste: Tippen Sie hier, um das Bild 4x zu vergrößern oder zu verkleinern.
10. Folgemodus: Tippen Sie hier, um den Folgemodus aufzurufen. Hinweis: EP Core unterstützt
diese Funktion nicht.
Beachten Sie, dass der Folgemodus in den folgenden Situationen beeinträchtigt wird:
a. Die verfolgte Person ist teilweise oder vollständig verdeckt.
b. Die verfolgte Person ändert ihre Bewegung plötzlich abrupt.
c. Die Umgebung wechselt plötzlich von hell zu dunkel oder umgekehrt.
d. Farbe oder Muster der verfolgten Person ähneln der Umgebung.
11. Benutzerdenierte Fertigkeiten-Taste: Tippen Sie hier, um vorprogrammierte benutzerdenierte
Fertigkeiten auszuführen.
12. Sicht: Dient zum Zielen auf Targets.
13. Stummschalttaste: Tippen Sie hier, um die Stummschaltung auf dem Mobilgerät zu aktivieren
oder aufzuheben.
14. Fototaste: Zum Aufnehmen von Fotos.
15. Videoaufnahmetaste: Zur Videoaufnahme.
16. Taste zur Steuerung des Fahrgestells: Tippen Sie hier, um das Fahrwerk zu bewegen.
17. Schieberegler zur Steuerung des Roboterarms: Zum Ein- und Ausfalten des Roboterarms.
2020 DJI. Alle Rechte vorbehalten.
©
49
Page 50

ROBOMASTER EP Core Benutzerhandbuch
前
Bedienung des Roboters
Die Kameraansicht wird hauptsächlich zur Steuerung des Fahrgestells, des Roboterarms und des
Greifers des Roboters verwendet.
Steuern des Fahrgestells
Tippen Sie auf die Fahrgestell-Steuertaste, um den Roboter vorwärts, rückwärts oder seitwärts zu
bewegen.
Vorwärts
Links Rechts
Rückwärts
右左
Steuerung des Roboterarms
Tippen Sie auf die Roboterarm-Taste, um zur Roboter-FPV-Ansicht zu wechseln. Die Schieberegler
zur Steuerung des Roboterarms dienen zum Heben oder Senken und zum Ein- oder Ausfalten des
Roboterarms.
Steuerung des Greifers
Tippen Sie auf die Roboterarm-Taste, um zur Roboter-FPV-Ansicht zu wechseln. Verwenden Sie
den Schieberegler für die Greifersteuerung rechts unten, um den Greifabstand des Greifers zu
steuern.
2020 DJI. Alle Rechte vorbehalten.
©
50
Page 51

右左
前
右左
前
右左
Gameplay
Bedienung des Roboters mittels eines Gamepads
Einführung
Man kann das Gamepad auch an ein mobiles Gerät anschließen, um den Roboter wie folgt zu steuern:
1. Verwenden Sie das an ein Mobilgerät angeschlossene Gamepad.
2. Verwenden Sie das an ein Mobilgerät angeschlossene Gamepad mit einer angeschlossenen Maus.
3. Verwenden Sie das an ein Mobilgerät angeschlossene Gamepad mit einer angeschlossenen
Maus und Tastatur.
Anschließen des Gamepads
Schließen Sie das Mobilgerät mit einem Micro-USB-Kabel (nicht im Lieferumfang enthalten) an
den Mobilgeräteanschluss am Gamepad an.
Stellen Sie die Mobilgeräteklammer ein, um diese am Gamepad zu befestigen. Vergewissern Sie
sich, dass das Mobilgerät so angeschlossen ist, dass das Kabel zum Steuerknüppel zeigt, wie in
der Abbildung unten gezeigt.
Halten Sie die Netztaste gedrückt, um den Gamepad einzuschalten. Halten Sie die Netztaste
gedrückt, um den Gimbal auszuschalten.
Grundlegende Bedienung des Gamepads
Wenn das Gamepad mit einem Mobilgerät verbunden ist, verwendet man den Steuerknüppel am
Gamepad, um den Roboter vorwärts, rückwärts und seitwärts zu bewegen. Die App kann nicht
zur Steuerung des Fahrwerks verwendet werden.
Die Tasten auf dem Gamepad lassen sich zur Durchführung von Aktionen am Roboter
verwenden. Man kann aber auch die App verwenden, um diese Aktionen auszuführen.
Verwenden des Gamepads
Der Steuerknüppel auf dem Gamepad dient zur Steuerung des Fahrwerks. Andere Funktionen
werden mit der App ausgeführt. Wenn das Gamepad angeschlossen ist, kann das Fahrwerk nicht
mit der App bewegt werden.
Bewegung des
Steuerknüppels
Bewegung des
Roboters
Vorwärts
Bewegung des
Steuerknüppels
Bewegung des
Roboters
Rückwärts
Links Rechts
Der Steuerknüppel auf dem Gamepad dient dazu, den Roboter
vorwärts, rückwärts und seitwärts zu bewegen.
Verwenden von Gamepad und Maus
Nachdem das Gamepad mit einem Mobilgerät verbunden wurde, kann auch eine Computermaus
an das Gamepad angeschlossen werden. Der Steuerknüppel auf dem Gamepad dient zur
Steuerung des Fahrwerks. Unten sind die Mausaktionen aufgelistet, die sich auch über die App
ausführen lassen, wobei jedoch die Maus die primäre Steuereinheit ist.
Mausaktion Roboteraktion
Rechter Mausklick Zoomt heran
Bewegen der Maus
2020 DJI. Alle Rechte vorbehalten.
©
Steuert das Fahrge-
stell
右左
51
Page 52

ROBOMASTER EP Core Benutzerhandbuch
Verwenden von Gamepad, Maus und Tastatur
Dazu sind eine kabellose Maus und Tastatur erforderlich. Nachdem das Gamepad mit einem
Mobilgerät verbunden wurde, schließen Sie den kabellosen Anschluss von Maus und Tastatur an
das Gamepad an. Der Steuerknüppel auf dem Gamepad und die Tastatur dienen zur Steuerung
des Fahrwerks. Unten sind die Mausaktionen aufgelistet, die sich auch über die App ausführen
lassen, wobei jedoch die Maus die primäre Steuereinheit ist.
Die Tasten A, W, S und D dienen zur Steuerung des Fahrwerks. Die Aktionen, die mit der Maus
ausgeführt werden können, sind nachfolgend aufgeführt.
W
SA D
Shift
Tastaturtasten Roboteraktion
W Vorwärts
A Links
S Rückwärts
Mausaktion Roboteraktion
Rechter Mausklick Zoomt heran
Bewegen der Maus
Steuert das
Fahrgestell
D Rechts
Umschalt- /
Leertaste
Beschleunigen
Die meisten Tastaturen und Mäuse von Logitech und Rapoo werden unterstützt. Es wird die
Verwendung der folgenden Modelle empfohlen:
Rapoo: 8200P, 9300P, 1800, 8100M
Logitech: M310t, MK850
Verwendung von RoboMaster mit einem Computer
Installieren Sie die Windows- oder Mac-Version der RoboMaster-Software auf einem Computer und
steuern Sie den Roboter direkt mithilfe von Maus und Tastatur.
Installation der RoboMaster-Software für Windows bzw. Mac
1. Die RoboMaster-Software für Windows oder Mac kann von der ofziellen DJI-Website auf einen
Computer heruntergeladen werden, um den Roboter per Tastatur und Maus zu steuern.
Windows: https://www.dji.com/robomaster_app
Mac: https://www.dji.com/robomaster_app
2. Starten Sie das Installationsprogramm und befolgen Sie die Anweisungen, um die Installation der
RoboMaster-Software abzuschließen.
3. Starten Sie die RoboMaster-App, um die Startseite aufzurufen. Die Windows- und Mac-Versionen
der RoboMaster-Software ähneln den Versionen für iOS und Android.
Verwendung einer Maus und einer Tastatur zur Steuerung des Roboters
Wenn Sie RoboMaster für Windows oder Mac verwenden, wird der Roboter über Maus und Tastatur
gesteuert. Die entsprechenden Aktionen sind nachfolgend dargestellt.
2020 DJI. Alle Rechte vorbehalten.
©
52
Page 53

ROBOMASTER EP Core Benutzerhandbuch
Halten Sie die Leertaste auf der Tastatur gedrückt und verwenden Sie die Tasten A, W, S und D, um
den Roboterarm und den Greifer zu steuern.
Labor
Das Labor in der RoboMaster-App bietet Hunderte von Programmierblöcken, mit
denen Sie auf Funktionen wie die PID-Steuerung zugreifen können. Das RoboMaster
EP Core-Programmierhandbuch enthält Anweisungen und Beispiele, mit denen sich die
Programmiertechniken zur Steuerung des Roboters schnell erlernen lassen.
Benutzer können projektbasierte Kurse im Weg zum Meister belegen, um ihr Verständnis von
Programmiersprachen zu verbessern – von Roboteranwendungen bis hin zu KI-Technologie, mit
verschiedenen Projekten für Anfänger und Experten.
Scratch-Programmierung
Gehen Sie im Labor zur Scratch-Seite und dann zum DIY-Programmieren, um Programme zu
schreiben.
Im Laborbereich der RoboMaster-App wurden neue Scratch-Programmierblöcke hinzugefügt, die
dem Anwender helfen sollen, sensorische Daten zu erfassen und zu nutzen. Mit diesen Blöcken
kann man schnell auf Sensoradapter, Roboterarm, Greifer, Infrarot-Abstandssensor und OpenSource-Hardware von Drittanbietern zugreifen und diese steuern.
Auf der Scratch-Seite kann man eigene Python-Programme schreiben, die als eigenständige Programme
oder benutzerdenierte Fertigkeiten deniert und auf dem Roboter ausgeführt werden können.
Weitere Informationen nden Sie im RoboMaster EP Core-Programmierhandbuch.
1 2 3 4
5
8
6
7
1. Scratch-Seite: Antippen, um Scratch-Programme anzuzeigen.
2. Python-Seite: Antippen, um Python-Programme anzuzeigen.
3. DSP-Datei importieren: Diese Funktion ist auf Android-, Windows- und Mac-Geräten verfügbar.
2020 DJI. Alle Rechte vorbehalten.
©
53
Page 54

ROBOMASTER EP Core Benutzerhandbuch
DSP-Dateien können mithilfe von AirDrop auf iOS-Geräte importiert werden.
4. Cloud-Bereich: Antippen, um Programme im Cloud-Bereich anzuzeigen.
5. Programmname: Zeigt den Namen des Programms an.
6. Ist das Programm als allgemeines Programm eingestellt, wird der Programmtyp nicht angezeigt.
Der Programmtyp wird nur angezeigt, wenn er als benutzerdefinierte Fertigkeit oder als
eigenständiges Programm eingestellt ist.
7. Programmeinstellungen: Tippen Sie hier, um den Programmtyp auszuwählen, das Programm
als benutzerdefinierte Fertigkeit einzustellen, das Programm als eigenständiges Programm
einzustellen, einen Backup auf der Cloud durchzuführen, mit anderen Benutzern zu teilen und
das Programm umzubenennen oder zu löschen.
8. Tippen Sie auf
, um ein neues Programm zu erstellen.
A. Programmiermodule-Taste: Tippen Sie auf das entsprechende Symbol, um System, LED-
Effekte, Fahrgestell, Smart, Panzerung, Mobilgerät, Medien, Befehle, Operatoren und
Datenobjekte zu programmieren.
B. Programmierfenster-Taste: Ziehen Sie Programmierblöcke in das Fenster, um ein Programm
zu erstellen.
C. Anzeigetaste: Zum Ein- und Ausschalten der FPV-Ansicht.
D. Umschaltertaste: Tippen Sie hier, um umzuschalten und den Programmierblock als Python-
Code anzuzeigen.
E. Ausführungstaste: Tippen Sie hier, um das Programm auszuführen.
F. FPV-Fenster: Zeigt die aktuelle FPV-Ansicht.
G. Statusinformationen: Zeigt die aktuellen Statusdaten des Roboters an.
H. FPV-Taste: Zum Aktivieren des FPV-Vollbildmodus
A B C D E F HG
Der EP Core kann keine Programme mit Bezug auf Blaster oder Gimbal ausführen. Es wird
empfohlen, zuerst den Blaster bzw. den Gimbal anzuschließen.
2020 DJI. Alle Rechte vorbehalten.
©
54
Page 55

ROBOMASTER EP Core Benutzerhandbuch
2
1
2
KI-Module
Es gibt sechs KI-Module, die man programmieren kann, indem man zuerst „Labor“, dann „DIYProgrammieren“ und dann „Scratch“ aufruft. Weitere Programmierbeispiele nden Sie im Abschnitt
„Smart“ des RoboMaster EP Core-Programmierhandbuchs.
Beachten Sie, dass sich die folgenden Situationen auf das KI-Modul auswirken:
a. Das Objekt ist teilweise oder vollständig verdeckt.
b. Die Umgebung ist dunkel (weniger als 300 Lux) oder sehr hell (mehr als 10.000 Lux).
c. Die Umgebung wechselt plötzlich von hell zu dunkel oder umgekehrt.
d. Farbe oder Muster des Objekts ähnelt der Umgebung.
Erkennung von Personen
Der Roboter ist in der Lage, eine beliebige in seinem Sichtfeld (FOV) ausgewählte Person zu
identizieren und zu verfolgen.
Linienerkennung
Im Modus „Target Race“ (Zielrennen) kann der Benutzer den Roboter so programmieren, dass er
automatisch einer Linie auf dem Boden folgt. Die Linienerkennung funktioniert mit roten, grünen und
blauen Linien. Der Roboter kann keine andersfarbigen Linien erkennen.
Erkennung von Gesten
Man kann den Roboter so programmieren, dass er bei der Erkennung körperlicher Gesten
bestimmte Aktionen ausführt.
Erkennung von Klatschgeräuschen
Man kann den Roboter so programmieren, dass er als Reaktion auf Klatschen bestimmte Aktionen
ausführt. Es kann nur ein Klatschen innerhalb einer effektiven Entfernung von 2 Metern identifiziert
werden. Identizierte Klatschsequenzen umfassen zwei und drei aufeinanderfolgende Klatschgeräusche.
Robotererkennung
Man kann den Roboter so programmieren, dass er bestimmte Aktionen ausführt, wenn andere
Roboter erkannt werden.
Erkennung von Sichtmarkierungen
Man kann den Roboter so programmieren, dass er bei der Erkennung von Sichtmarkierungen
bestimmte Antworten ausgibt, darunter Zahlen, Buchstaben und Sonderzeichen. Die
Sichtmarkierungen müssen sich in einem wirksamen Abstand von drei Metern befinden, und es
können nur ofzielle Sichtmarkierungen erkannt werden. Weitere Informationen nden Sie in den
Anweisungen auf der Verpackung der Sichtmarkierungen.
1 2 3 4
Verdecken Sie NICHT Farbbereiche wie Rot und Blau. Andernfalls wird die Erkennung
beeinträchtigt.
2020 DJI. Alle Rechte vorbehalten.
©
55
Page 56

ROBOMASTER EP Core Benutzerhandbuch
Wenn Sie mehr Sichtmarkierungen benötigen, tippen Sie auf in der App, um die Leitfadenseite
aufzurufen. Wählen Sie die Sichtmarkierungen aus, die Sie herunterladen und drucken möchten.
Die Funktion „Erkennung von Sichtmarkierungen“ unterstützt nur rote und blaue
Markierungen. Der Roboter kann keine andersfarbigen Sichtmarkierungen erkennen.
Eigenständiges Programm
Ein Programm kann als eigenständiges Programm definiert und unabhängig auf dem Roboter
ausgeführt werden.
1. Wenn der Roboter nicht mit der App verbunden ist, lässt sich das Programm durch Drücken der
Taste „Eigenständiges Programm“ auf dem intelligenten Controller starten. Drücken Sie die Taste
erneut, um das Programm zu stoppen.
2. Ist der Roboter mit der App verbunden, lässt sich das eigenständige Programm nur an folgenden
Orten starten:
(1) App-Startseite
(2) Labor
Im folgenden Szenario kann das autonome Programm nicht gestartet werden:
(1) Wenn sich die Einstellungsseite öffnet
Benutzerdenierte Fertigkeiten
Ein Programm kann als eine benutzerdenierte Fertigkeit eingestellt werden, die im FPV sowohl im
Solo-Modus als auch im Kampfmodus verwendet werden kann. Tippen Sie auf
eine benutzerdenierte Fertigkeit zu verwenden.
in der FPV, um
Python-Programmierung
Gehen Sie im Labor zur Python-Seite und dann zum DIY-Programmieren, um Programme zu
schreiben.
Auf der Python-Seite lassen sich eigene Python-Programme schreiben, die als eigenständige
Programme oder als benutzerdenierte Fertigkeit deniert und auf dem Roboter ausgeführt werden
können.
Man kann zudem Scratch-Programme in Python-Code konvertieren und die Quellcode-Anzeige
verwenden, um mit der Programmierung in Python zu beginnen. Weitere Informationen nden Sie
im RoboMaster EP Core-Programmierhandbuch.
Dank eines Mehrmaschinen-Kommunikationsanschlusses ermöglicht es die Python-Programmierung,
dass mehrere Roboter in Echtzeit miteinander kommunizieren und interagieren können. Der Roboter
unterstützt eine individualisierbare Benutzeroberäche. Benutzer können virtuelle Widgets mit Python
programmieren, um eigene Benutzeroberächen und vieles mehr zu entwerfen.
2020 DJI. Alle Rechte vorbehalten.
©
56
Page 57

Anhang
Technische Daten
RoboMaster EP Core
Abmessungen (L × B × H) 390 × 245 × 330 mm
Gewicht ca. 3,3 kg
Geschwindigkeitsbereich des
Fahrwerks
Max. Drehzahl des Fahrwerks 600°/s
Bürstenloser M3508I-Motor
Max. Drehzahl 1000 RPM
Max. Drehmoment 0,25 N·m
Max. Ausgangsleistung 19 W
Betriebstemperatur -10 °C bis +40 °C
Treiber Vektorgeregelt (FOC)
Kontrollmethode Drehzahlregelung
Schutz
Intelligent Controller
[1]
Latenz
Qualität der Liveübertragung 720p / 30fps
Max. Bitrate-Liveübertragung 6 MBit/s
Betriebsfrequenz
[2]
Strahlungsleistung (EIRP)
Betriebsmodus Verbindung über Wi-Fi, Verbindung über Router
Max. Übertragungsreichweite
Übertragungsstandard IEEE802.11a/b/g/n
0,8 m/s
Überspannungsschutz
Überhitzungsschutz
Soft-Starter
Schutz vor Kurzschlüssen
Erkennung von Anomalien (Abweichungen) an Chip und
Sensor
Verbindung direkt über Wi-Fi: 80 bis 100 ms
Verbindung über Router: 100 bis 120 ms (nicht blockiert,
störungsfrei)
2,4 GHz, 5,1 GHz, 5,8 GHz
2,400 bis
2,4835 GHz
FCC: ≤30 dBm
SRRC: ≤20 dBm
CE: ≤19 dBm
MIC: ≤20 dBm
5,150 – 5,250 GHz
FCC: ≤30 dBm
SRRC: ≤23 dBm
CE: ≤20 dBm
Verbindung über Wi-Fi:
FCC, 2,4 GHz 140 m, 5,8 GHz 90 m
CE, 2,4 GHz 130 m, 5,8 GHz 70 m
SRRC, 2,4 GHz 130 m, 5,8 GHz 130 m
MIC, 2,4 GHz 130 m
[3]
Verbindung über Router:
FCC, 2,4 GHz 190 m, 5,8 GHz 300 m
CE, 2,4 GHz 180 m, 5,1 GHz 70 m
SRRC, 2,4 GHz 180 m, 5,8 GHz 300m
MIC, 2,4 GHz 180 m
MIC: ≤23 dBm
5,725-5,850 GHz
FCC: ≤30 dBm
SRRC: ≤30 dBm
CE: ≤14 dBm
2020 DJI. Alle Rechte vorbehalten.
©
57
Page 58

ROBOMASTER EP Core Benutzerhandbuch
Kamera
Sensor CMOS 1/4 Zoll; Effektive Pixel: 5 Megapixel
Sichtfeld (FOV) 120°
Max. Standbildauösung 2560 × 1440 Pixel
Max. Videoauösung
Full HD: 1080p / 30fps
HD: 720p/30fps
Max. Videodatenrate 16 MBit/s
Dateiformate JPEG
Videoformat MP4
Unterstützte SD-Speicherkarten
Unterstützte microSD-Karten mit einer Kapazität von bis zu
64 GB
Betriebstemperatur -10 °C bis +40 °C
Intelligent Battery
Speicherkapazität 2.400 mAh
Max. Ladespannung 12,6 V
Nominale Ladespannung 10,8 V
Akkutyp LiPo 3S
Energie 25,92 Wh
Akkulaufzeit (in Betrieb)
Akkulaufzeit (in Standby) Ca. 100 Minuten
85 Minuten (gemessen bei einer konstanten Geschwindigkeit
von 0,8 m/s auf ebener Fläche)
[5]
Gewicht 169 g
Betriebstemperatur -10 °C bis +40 °C
Ladetemperaturbereich 5 °C bis 40 °C
Max. Ladestrom 29 W
Ladegerät
Eingang 100 bis 240 V, 50 bis 60 Hz, 1 A
Ausgang Anschluss: 12,6 V=0,8 A oder 12,6 V=2,2 A
Spannung 12,6 V
Nennspannung 28 W
App
iOS iOS 10.0.2 oder höher
Android Android 5.0 oder höher
Sonstige
Empfohlene Router
Empfohlene OutdoorStromversorgung für Router
TP-Link TL-WDR8600; TP-Link TL-WDR5640 (China)
TP-Link Archer C7; NETGEAR X6S (International)
Tragbares Laptop-Ladegerät (mit der gleichen
Eingangsleistung wie der Router)
2020 DJI. Alle Rechte vorbehalten.
©
58
Page 59

ROBOMASTER EP Core Benutzerhandbuch
Roboterarm
Bewegungsbereich 0 bis 0,22 m (horizontal), 0 bis 0,15 m (vertikal)
Achsnummer 2
Greifer
Greifabstand Ca. 10 cm
Servo
Gewicht Ca. 70 g
Abmessungen des Hauptkörpers
(L×B×H)
44,2 × 22,6 × 28,6 mm
Übertragungsverhältnis 512
Nenndrehmoment 1,2 N*m
Nenndrehzahl 40±2 U/min
Betriebsmodus Winkel-, Ratenmodus
Infrarot-Abstandssensor
Erfassungsbereich 0,1 bis 10 m
Sichtfeld-Erkennung (FOV) 20°
Messgenauigkeit 5 %
[6]
Stromanschlussmodul
Kommunikationsanschluss CAN-Bus × 5
Eingang TX30-Anschluss: 12 V
USB-Anschluss Typ C: 5 V , 2 A
Ausgang
Stiftleisten-Anschluss: 5 V, 4 A
TX30-Anschluss: 12 V, 5 A
Sensoradapter
Anschlussart IO-Eingang, AD-Ausgang
Anschlussnummer 2
[1] Gemessen in einer störungsfreien Umgebung ohne Hindernisse mit einer Entfernung von etwa einem Meter zwischen
Mobilgerät, Router und Roboter. Das verwendete iOS-Gerät war ein iPhone X. Die Testergebnisse mit verschiedenen
Android-Geräten können unter Umständen davon abweichen.
[2] Die Verwendung der Frequenzbänder 5,1 GHz und 5,8 GHz außerhalb von Gebäuden ist in einigen geographischen
Regionen verboten. Halten Sie sich stets an die geltenden Gesetzen und Bestimmungen in Ihrem Land oder in Ihrer
Region.
[3] Gemessen in einer störungsfreien Umgebung ohne Hindernisse.
Für die Verbindung über Wi-Fi wurde ein iPad der sechsten Generation (ab 2018 im Handel) verwendet. Für die
Verbindung über Router wurden mit mehreren Routermodellen Tests durchgeführt. FCC: TP-Link Archer C9; SRRC: TP-
Link WDR8600; CE: TP-Link Archer C7; MIC: WSR-1160DHP3.
[4] Die Verwendung der Infraroteinheiten wird möglicherweise vom Umgebungslicht oder einer Umgebung mit viel
Infrarotstrahlung beeinträchtigt.
[5] Getestet in einer Laborumgebung mit einer neuen Intelligent Battery, dient nur als Richtwert.
[6] Angewandt auf eine Objektoberäche, deren Reexionsgrad zwischen 10 und 90 % liegt.
2020 DJI. Alle Rechte vorbehalten.
©
59
Page 60

ROBOMASTER EP Core Benutzerhandbuch
Firmware-Aktualisierung
Überprüfen Sie die Firmware-Version des Roboters unter „Einstellungen“ dann „System“ und dann
„Firmware-Update“ (Firmware-Aktualisierung). Wenn eine neue Firmware-Version verfügbar ist,
verwenden Sie die RoboMaster-App, um die Firmware des Roboters zu aktualisieren.
1. Achten Sie darauf, dass alle Teile angeschlossen sind, schalten Sie dann den Roboter ein und
prüfen Sie, ob der Akkuladestand über 50 % liegt.
2. Tippen Sie auf „App“, dann auf „System“ und dann auf „Firmware-Update“. Folgen Sie den
Anweisungen auf dem Bildschirm, um die Firmware zu aktualisieren. Stellen Sie sicher, dass
beim Herunterladen der Firmware eine Internetverbindung besteht.
3. Der Roboter zeigt den Fortschritt der Aktualisierung mittels Tonsignalen an. Warten Sie, bis die
Aktualisierung abgeschlossen ist.
Die Akku-Firmware ist in der Roboter-Firmware enthalten. Stellen Sie sicher, dass Sie die
Firmware aller Akkus aktualisieren, wenn Sie mehrere davon haben.
Starten Sie eine Firmware-Aktualisierung nur, wenn der Akkuladestand über 50 % liegt.
Beachten Sie, dass während der Aktualisierung der Firmware die Statusanzeigen oft
unregelmäßig blinken und der Roboter möglicherweise neu startet.
Die Verbindung zwischen Roboter und App wird unter Umständen nach der Aktualisierung
unterbrochen. In diesem Fall müssen Sie die Verbindung erneut herstellen.
Wenn Sie einen Hinweis erhalten, dass die neuere Firmware-Version nicht mehr aktuell ist,
aktualisieren Sie sie und versuchen Sie es erneut.
Achten Sie im Kampfmodus darauf, dass alle Roboter dieselbe Firmware-Version
verwenden.
2020 DJI. Alle Rechte vorbehalten.
©
60
Page 61

ROBOMASTER EP Core Benutzerhandbuch
Kalibrierung des Roboters
Wenn eines der folgenden Szenarien eintritt, kalibrieren Sie den Roboter in der RoboMaster-App neu:
a. Der Roboter bewegt sich beim Drehen ungewollt.
b. Das Fahrgestell lässt sich nicht steuern, wenn Warnmeldungen in der App erscheinen.
c. Die Bewegungssteuereinheit wurde installiert oder erneut installiert.
Die konkreten Kalibrierungsschritte sind wie folgt:
1. Öffnen Sie die RoboMaster-App, tippen Sie auf „Einstellungen“, dann auf „System“ und wählen
Sie dann „Kalibrierung“ aus.
2. Folgen Sie den Schritten in der App, um die Kalibrierung durchzuführen.
Einstellen der PWM-Anschlüsse
Die Pulsbreitemodulation (Pulse Width Modulation, PWM) regelt die Dauer eines hohen
Ausgangspegels während eines bestimmten Zeitraums und wird allgemein zur Steuerung von LEDs,
Navigationsgetrieben usw. verwendet. Der PWM-Anschluss hat einen Standard-Betriebszyklus von
7,5 % und eine Grundfrequenz von 50 Hz.
Bei LEDs reicht die PWM-Ausgangsrate von 0 % bis 100 %, wobei 0 % der niedrigsten Helligkeit
einer LED und 100 % der höchsten Helligkeit einer LED entsprechen. Bei Navigationsgetrieben
reicht die PWM-Ausgangsrate von 2,5 % bis 12,5 %.
Sie können den PWM-Ausgangsprozentsatz des Navigationsgetriebes basierend auf den
Drehwinkeln einstellen, die Sie steuern möchten.
Pulsbreite Servo-Winkel
º
0.5ms
1ms
1.5ms
2ms
2.5ms
-90
-45
-0
45
90
º
º
º
º
Jedes Mal, wenn das benutzerdenierte oder Python-Programm ausgeführt wird, wird das
Ausgangssignal des PWM-Anschlusses auf die Standardeinstellung zurückgesetzt, die 50
Hz beträgt, wobei die Einschaltdauer 7,5 % ist.
2020 DJI. Alle Rechte vorbehalten.
©
61
Page 62

ROBOMASTER EP Core Benutzerhandbuch
Nutzung des S-Bus-Anschlusses
Eine Fernsteuerung, die das S-Bus-Protokoll unterstützt, kann zur Steuerung des
Roboters verwendet werden, indem eine Verbindung zum S-Bus-Anschluss von dessen
Bewegungssteuereinheit hergestellt wird. Benutzer müssen dazu ihren eigenen Empfänger und
ihre eigene Fernsteuerung einrichten. Es wird empfohlen, einen Futaba R6303SB-Empfänger zu
verwenden.
Komponenten verbinden
Verbinden Sie den S-Bus-Anschluss der Bewegungssteuereinheit mittels eines 3-poligen
Servokabels mit dem S-Bus-Anschluss des Empfängers.
S-BUS
S-BUS
UART
2020 DJI. Alle Rechte vorbehalten.
©
62
Page 63

ROBOMASTER EP Core Benutzerhandbuch
前
上升
RechtsLinks
Rechts
drehen
Benutzung
Überprüfen Sie vor der Benutzung, dass die Fernsteuerung mit dem Empfänger verbunden ist.
Weitere Informationen zu Verbindungsmethoden finden Sie in den Produktinformationen zum
Empfänger.
Die Zuweisung der Steuerkanäle des S-Bus-Anschlusses der Bewegungssteuereinheit ist unten
dargestellt. Lesen Sie die Produktinformationen zur Fernsteuerung, um die Kanalzuordnung für
Empfänger und Fernsteuerung abzuschließen.
S-Bus-Port-
Steuerungs-
kanäle
Freier Modus
Fernsteuerungs-
kanal
Empfohlener Fernsteuerungskanal
Versatz Status
Kanal 1 Bewegt das Chassis seitwärts
Kanal 2
Bewegt das Chassis vorwärts
und rückwärts
Kanal 4 Steuert das Gieren des Chassis
Steuert die
Bewegungsgeschwindigkeit
Kanal 5
des Chassis. Es gibt drei
Geschwindigkeitsoptionen:
Schnell
Mittel
Langsam
Kanal 6 Freier Modus
Steuert die Freigabe des Chassis.
Es stehen zwei verschiedene
Status zur Auswahl:
Kanal 7
Das Chassis wird
eingestellt, wenn es ein
Ausgangsdrehmoment erzeugt
Das Chassis wird
freigegeben, wenn es kein
Ausgangsdrehmoment erzeugt
Steuerknüppel-Kanal
+672
1024
-672
3-Stufen Kippschalterkanal
+100
0
-100
Schaltkanal
-100
2-Stufen Kippschalterkanal
+100
-100
Vorwärts
Rückwärts
Links
drehen
Schnell
Mittel
Langsam
Freier Modus
Einstellen
Freigabe
RechtsLinks
2020 DJI. Alle Rechte vorbehalten.
©
63
Page 64

ROBOMASTER EP Core Benutzerhandbuch
Programmierung der individualisierbareren Benutzeroberäche
Das individualisierbarere Benutzeroberflächensystem erweitert die Eingabe- und Ausgabemodi
eines Programms. Der Benutzer kann UI-Widgets erstellen, die zur Darstellung der Ein- und
Ausgabeverarbeitungsdaten eines Programms verwendet werden.
Um ein Python-Programm zu schreiben, rufen Sie die entsprechenden Schnittstellen auf, um ein
Benutzeroberflächen-Widget zu erstellen, und binden Sie dieses dann Widget mit einem EventCallback ein. Nach dem Programmieren und Debuggen im Laborbereich der RoboMaster App
lassen sich Programme als individualisierbare Fertigkeiten speichern und im Solo- oder Kampfmodus
verwenden. Weitere Informationen nden Sie unter www.dji.com/robomaster-ep-core/downloads oder
robomaster-dev.rtfd.io.
Arduino ist ein Warenzeichen von Arduino LLC.
Micro:bit ist ein Warenzeichen der Micro:bit Educational Foundation.
Raspberry Pi ist ein Warenzeichen der Raspberry Pi Foundation.
Jetson Nano ist ein Warenzeichen und/oder eingetragenes Warenzeichen der Nvidia Corporation in den USA und/oder
anderen Ländern.
2020 DJI. Alle Rechte vorbehalten.
©
64
Page 65

DJI Support
https://www.dji.com/support
Änderungen vorbehalten.
Die aktuelle Fassung nden Sie unter
www.dji.com/robomaster-ep-core/downloads
Bei Fragen zu diesem Dokument wenden Sie sich bitte per E-Mail an DJI
DocSupport@dji.com
unter
Copyright © 2020 DJI. Alle Rechte vorbehalten.
.
 Loading...
Loading...