

Page 1

Naza-M (V2)
Quick Start Guide V 1.22
2013.10.11 Revision
For Firmware Version V4.02 or above
& Assistant Software Version V2.20 or above
Thank you for purchasing this DJI product. Please strictly follow these steps to mount and connect this system on
your aircraft, as well as to install the Assistant Software on your computer.
Please regularly check the web page of corresponding product* at our website www.dji.com, which is
updated regularly. Product information, technical updates and manual corrections will be available on this web
page. Due to unforeseen changes or product upgrades, the information contained in this manual is subject to
change without notice.
* Important: Naza-M, Naza-M V2 and PHANTOM control system are different in hardware parts, but their
configurations and functions are the same when using the same Assistant Software and Firmware Version, so they
use the same Guide. Unless stated, the following instruction is basic on Naza-M V2. If you use the Naza-M, please
make sure to read the “Instruction of V1 (also known as Naza-M)” section; if you use the PHANTOM, download the
other corresponding manuals on the PHANTOM web page.
This manual is only for basic assembly and configuration; you can obtain more details and advanced instructions
when using the assistant software. To assure you have the latest information, please visit our website and download
the latest manual and current software version.
If you have any problem that you cannot solve during usage, please contact your authorized dealer.
©2013 DJI Innovations. All Rights Reserved.
Page 2

Index
INDEX ........................................................................................................................................................................................................ 2
INSTRUCTION ........................................................................................................................................................................................ 3
DISCLAIMER & WARNING ................................................................................................................................................................................. 3
TRADEMARK ......................................................................................................................................................................................................... 4
CERTIFICATIONS ................................................................................................................................................................................................. 4
SYMBOL INSTRUCTION ...................................................................................................................................................................................... 4
ASSEMBLY & CONNECTION ............................................................................................................................................................ 5
STEP1 PORT DESCRIPTION ................................................................................................................................................................................ 5
STEP2 ASSEMBLY & CONNECTION ................................................................................................................................................................ 6
ASSISTANT SOFTWARE INSTALLATION AND CONFIGURATION ....................................................................................... 7
STEP1 SOFTWARE AND DRIVER INSTALLATION ON A PC ........................................................................................................................... 7
STEP2 CONFIGURATION BY ASSISTANT SOFTWARE ON A PC .................................................................................................................. 7
BASIC FLYING ........................................................................................................................................................................................9
CONTROL MODE KNOWLEDGE ...................................................................................................................................................................... 9
START & STOP MOTOR KNOWLEDGE ............................................................................................................................................................ 9
STEP1 COMPASS CALIBRATION ....................................................................................................................................................................... 11
STEP2 ASSEMBLY CHECKING LIST ................................................................................................................................................................. 12
STEP3 BEFORE FLIGHT..................................................................................................................................................................................... 12
STEP4 FLYING TEST .......................................................................................................................................................................................... 13
ADVANCED FUNCTIONS ................................................................................................................................................................. 15
A1 FAILSAFE ....................................................................................................................................................................................................... 15
A2 LOW-VOLTAGE ALERT .............................................................................................................................................................................. 16
A3 INTELLIGENT ORIENTATION CONTROL (IOC) FLIGHT (WITH GPS MODULE) ............................................................................... 17
A4 RECEIVER ADVANCED PROTECTION FUNCTION ............................................................................................................................... 20
A5 FLIGHT LIMITS.............................................................................................................................................................................................. 21
APPENDIX ............................................................................................................................................................................................. 22
SPECIFICATIONS ............................................................................................................................................................................................... 22
MC/PMU FIRMWARE UPGRADE .................................................................................................................................................................. 23
LED DESCRIPTION ........................................................................................................................................................................................... 24
INSTRUCTION OF V1 (ALSO KNOWN AS NAZA-M) ............................................................................................................... 25
V1 ASSEMBLY AND CONNECTION ................................................................................................................................................................. 25
V1 IS COMPATIBLE WITH THE PMU V2 (ACCESSORY OF NAZA-M V2) ................................................................................................ 25
V1 PORT DESCRIPTION .................................................................................................................................................................................... 26
V1 SPECIFICATION ............................................................................................................................................................................................ 27
FAQ ......................................................................................................................................................................................................... 28
ABNORMAL LED INDICATION LIST ............................................................................................................................................................... 28
FIX THE TBE (TOILET BOWL EFFECT) PROBLEM ...................................................................................................................................... 28
SHOULD YOU FIND THE MULTI-ROTOR DOES NOT TRACK STRAIGHT IN FORWARD FLIGHT. ............................................................... 29
MOTORS START FAILURE CAUSED BY TX STICK(S) MID POINT ERROR TOO BIG ................................................................................... 29
ATTITUDE CONTROLLABLE WHEN ONE MOTOR OUTPUT IS FAILED .................................................................................................. 30
WHEN USED WITH OTHER DJI PRODUCTS.................................................................................................................................................... 31
©2013 DJI Innovations. All Rights Reserved.
Page 3

Instruction
Disclaimer & Warning
Please read this disclaimer carefully before using the product. By using this product, you hereby
agree to this disclaimer and signify that you have read them fully. THIS PRODUCT IS NOT
SUITABLE FOR PEOPLE UNDER THE AGE OF 18.
This product is an autopilot system designed for serious multi-rotor enthusiasts providing excellent self-leveling and
altitude holding, which completely takes the stress out of flying RC multi-rotors for both professional and hobby
applications. Despite the system having a built-in autopilot system and our efforts in making the operation of the
controller as safe as possible when the main power battery is connected, we strongly recommend users to remove
all propellers when calibrating and setting parameters. Make sure all connections are good, and keep children and
animals away during firmware upgrade, system calibration and parameter setup. DJI Innovations accepts no liability
for damage(s) or injuries incurred directly or indirectly from the use of this product in the following conditions:
1. Damage(s) or injuries incurred when users are drunk, taking drugs, drug anesthesia, dizziness, fatigue, nausea
and any other conditions no matter physically or mentally that could impair your ability.
2. Damage(s) or injuries caused by subjective intentional operations. Any mental damage compensation caused
by accident.
3. Failure to follow the guidance of the manual to assemble or operate.
4. Malfunctions caused by refit or replacement with non-DJI accessories and parts.
5. Damage(s) or injuries caused by using third party products or fake DJI products.
6. Damage(s) or injuries caused by mis-operation or subjective mis-judgment.
7. Damage(s) or injuries caused by mechanical failures due to erosion, aging.
8. Damage(s) or injuries caused by continued flying after low voltage protection alarm is triggered.
9. Damage(s) or injuries caused by knowingly flying the aircraft in abnormal condition (such as water, oil, soil,
sand and other unknown material ingress into the aircraft or the assembly is not completed, the main
components have obvious faults, obvious defect or missing accessories).
10. Damage(s) or injuries caused by flying in the following situations such as the aircraft in magnetic interference
area, radio interference area, government regulated no-fly zones or the pilot is in backlight, blocked, fuzzy
sight, and poor eyesight is not suitable for operating and other conditions not suitable for operating.
11. Damage(s) or injuries caused by using in bad weather, such as a rainy day or windy (more than moderate
breeze), snow, hail, lightning, tornadoes, hurricanes etc.
12. Damage(s) or injuries caused when the aircraft is in the following situations: collision, fire, explosion, floods,
tsunamis, subsidence, ice trapped, avalanche, debris flow, landslide, earthquake, etc.
13. Damage(s) or injuries caused by infringement such as any data, audio or video material recorded by the use of
aircraft.
14. Damage(s) or injuries caused by the misuse of the battery, protection circuit, RC model and battery chargers.
15. Other losses that are not covered by the scope of DJI Innovations liability.
©2013 DJI Innovations. All Rights Reserved. 3 |
Page 4
Trademark
Forbidden(Important)
Cautions
Tip Reference
DJI and Naza-M are registered trademarks of DJI Innovations. Names of product, brand, etc., appearing in this
manual are trademarks or registered trademarks of their respective owner companies. This product and manual are
copyrighted by DJI Innovations with all rights reserved. No part of this product or manual shall be reproduced in
any form without the prior written consent or authorization of DJI Innovations. No patent liability is assumed with
respect to the use of the product or information contained herein.
Certifications
This product is approved with quality standards such as CE, FCC and RoHS.
Symbol Instruction
©2013 DJI Innovations. All Rights Reserved. 4 |
Page 5
Assembly & Connection
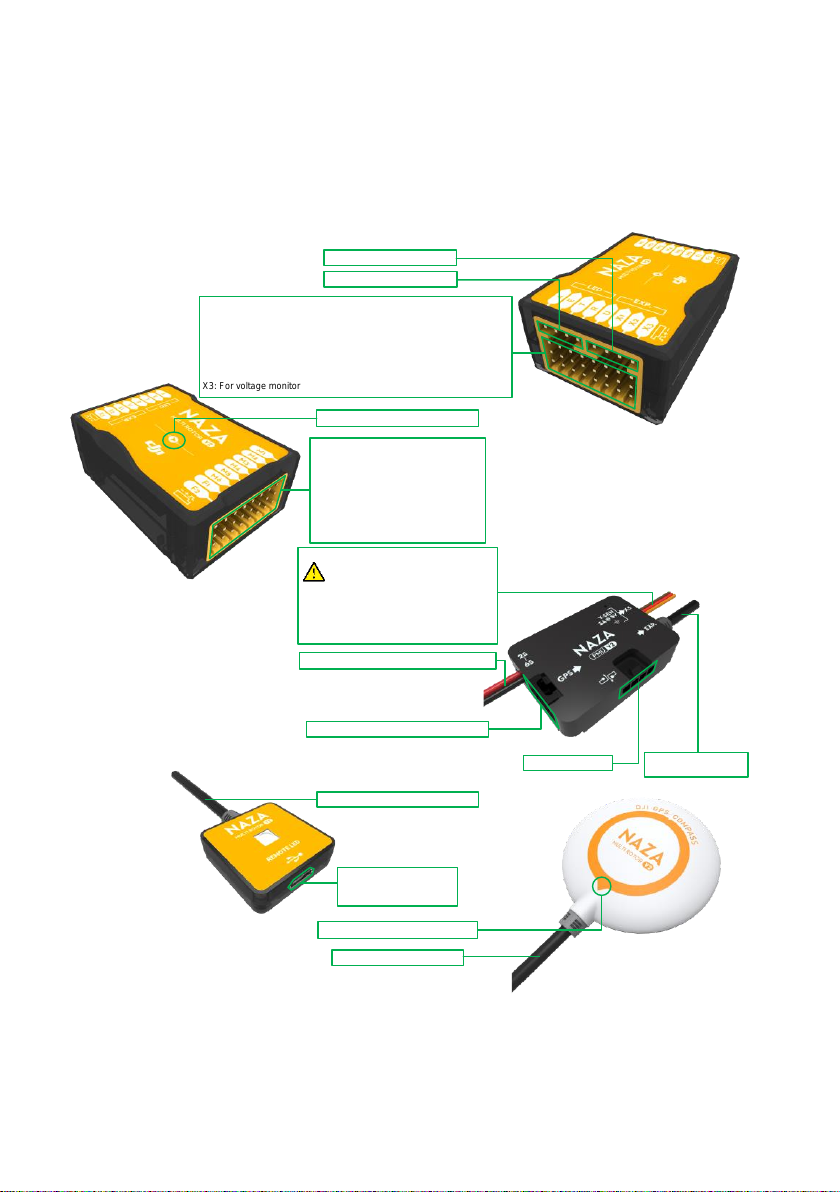
LED:Connect to LED module
EXP:Connect to PMU module
M1: To #1 ESC(*)
M2: To #2 ESC
M3: To #3 ESC
M4: To #4 ESC
M5: To #5 ESC
M6: To #6 ESC
F1: To gimbal roll servo or To #7 ESC
F2: To gimbal pitch servo or To #8 ESC
NAZA output is 400Hz refresh frequency
A: For roll control (left/right)
E: For pitch control (front/back)
T: For throttle control
R: For rudder control
U: For Control Model Switch
X1: For gimbal pitch control / For gain tuning
X2: For D-Bus(S-Bus/S-Bus2 compatible) / For gain tuning / For IOC switch
X3: For voltage monitor(Connect to PMU V-SEN port)
GPS: Connect to GPS/Compass module
Extended CAN port
2S~6S: Powered by 2S~6S LiPo(7.4V~26.0V)
EXP: Connect to Main
Controller EXP port
Connect to Main Controller LED port
Micro-USB: PC connection
for parameter configuration
and firmware upgrade
Connect to GPS port of PMU
Pointing to the aircraft nose direction
Main Controller
Main Controller
PMU
(Power Management Unit)
LED
GPS/Compass
Pointing to the aircraft nose direction
*ESC: Electronic Speed Controller
V-SEN: Connect to Main Controller X3Port
Important: the continuous output of the
PMU is 3A@5V, and the maximum
instant current is 7.5A. If PMU cannot afford
the working current for your servos, please
use an independent power supply; otherwise,
it may cause the PMU safeguard and lead to
the main controller reboot。
In the Box:
Main controller X1, PMU X1, GPS X1, GPS Bracket X1, LED X1, Servo Cable X8, Micro-USB Cable X1, 3M Adhesive
Tape.
Step1 Port Description
©2013 DJI Innovations. All Rights Reserved. 5 |
Page 6
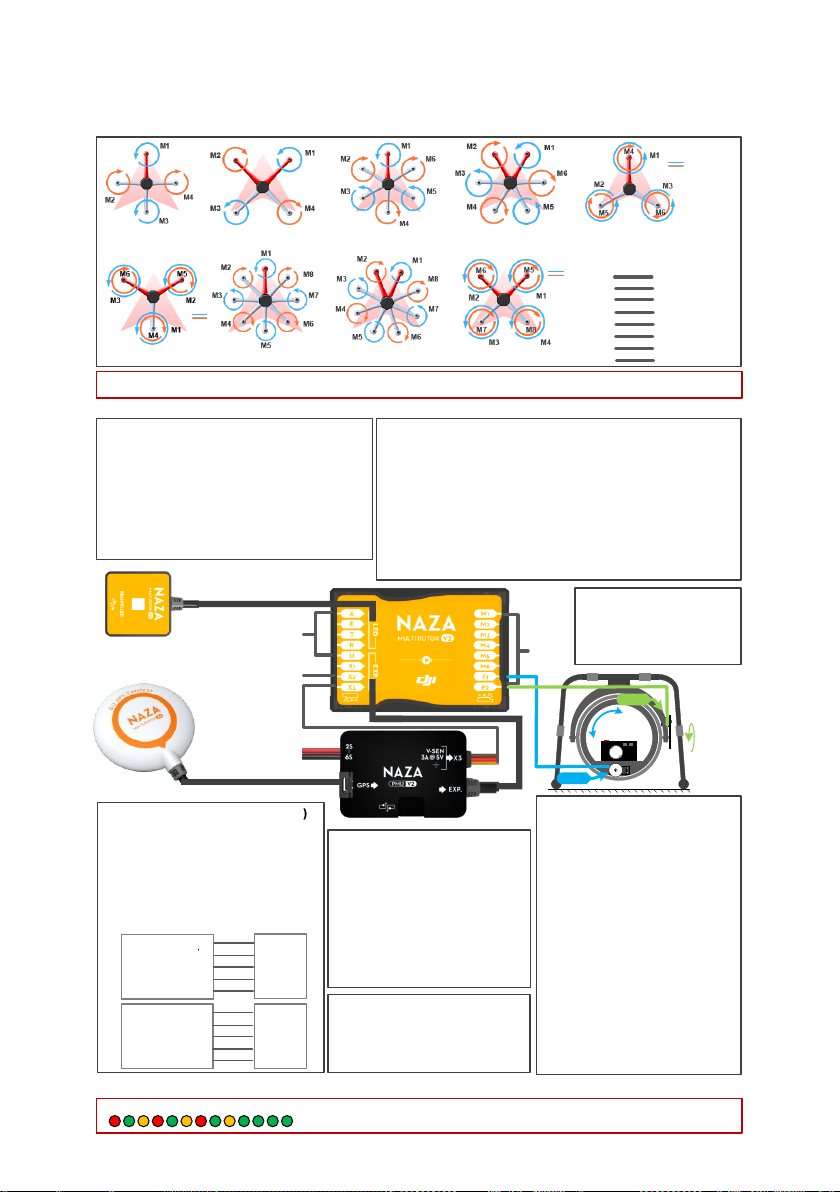
Step2 Assembly & Connection
Transmitter(TX) & Receiver(RX)
(1)Refer to you TX Manual, setup the
Ai leron, Elev a tor, Thrott le, Rudder
channels on your TX first, and choose a 3position switch as control mode switch.
(2)Attach the matched RX to aircraft, then
connect your RX to the right ports on MC.
The following diagram shows the
connection example for traditional RX.
ESCs
ESCs & Motors
Please use the ESCs and motors recommended by the manufacturer
of your aircraft. We recommend you use DJI motors and ESCs (Refer
to its manual for details). Connect all ESCs to MC by the motor
numbering method introduced in mixed types Supported .
Important:If you use 3rd party ESCs, make sure the ESCs travel
midpoint is at 1520us. DO NOT use 700us travel midpoint ESC, as it
may lead aircraft to fly away or cause injury and damage. After ESCs
connection , calibrate ESCs one by one through the receiver directly
before connect them to your MC, Make sure program all of them into
Governor off, Break off and Normal Start up to get best experience.
Quad-rotor X
Hexa-rotor I
Hexa-rotor V
Hexa-rotor Y
Important:To coaxial propellers: Blue propeller is at TOP; Red propeller is at Bottom. Otherwise all propellers are at top.
Quad-rotor I
Hexa-rotor IY
F1
F2
Roll
Pitch
Main Controller(MC)
Mount:(1)The DJI logo should face the sky, DO
NOT mount the MC upside-down. (2)The MC sides
should be parallel to the aircraft body. (3)The arrow
should point to the nose direction of aircraft. (4)he
MC is best positioned near the aircraft’s center of
gravity. Make sure all ports are accessible.
Ti p : It is recommended to fi x the MC until all
wirings and configurations are completed, using 3M
gummed paper provided to fix the MC.
(Optional)GPS/Compass
Mount:GPS/Compass is sensitive to
magnetic interference, should be far
away from any electronic devices. If
you use your own mounting rod,
make sure it is NOT magnetic!
Procedures:
(1)You should use epoxy resin AB
glue to assemble the GPS bracket
first. Mount the bracket on the center
plate of craft. Position the bracket at
least 10 cm from any propeller.
(2)The DJI logo marked on the GPS
sho u ld f ac e th e s ky , wi th t he
orientation arrow pointing directly
forward. then fix the GPS on the plate
of the bracket (by 3M glue provided).
Tip:The GPS/Compass is packaged
with a special indication line for
mounting for the first time.
Gimbal
Connect the gimbal servos to
the ports of F1 and F2 if a
gimbal is used, and use the
software for configurations.
PMU Module
Mount:DO NOT attach the PMU on
other device. Sufficient air flow over
the PMU is highly recommended.
Tip:If use with DJI multi-rotor, you
can solder the power cable to power
pads on frame bottom board. Please
refer to DJI multi-rotor manual for
details. If use with 3rd part aircraft,
you c a n m a ke a c o nn e cte r b y
yourself to connect PMU and battery.
LED Module
Mount:Make sure You can see the
light during the flight. Leave the USB
interface to be accessible. Use the
3M gummed paper provided to fix.
ESC & MC Connection
(JR)
RUDD
THRO
AILE
ELEV
3-position Switch
(Futaba
/Hitec)
4
3
1
2
Step1 Prepare an aircraft, supported the following Mixed Types.
Aircraft
M1
M2
M3
M4
M5
M6
M7
M8
Main Controller
M1
M2
M3
M4
M5
M6
F1
F2
The direction of the arrow in diagram indicates the rotation direction of the motor/propeller.
Octo-rotor I
Octo-rotor V Octo-rotor X
3-position Switch
Step2 Assembly and Connection
Step3 Double Check
In this step, turn on the transmitter, connect the battery to the PMU, and then watch the LED, if you can see the LED blinks
( ), the system is working.
A
E
T
R
U
MC
A
E
T
R
U
MC
Traditional Receiver
Power Supply
S-Bus/S-Bus2/PPM Receiver
Note: The NAZA-M V2 flight control system doesn't support Gimbal function when used on the Octo-rotor aircraft.
©2013 DJI Innovations. All Rights Reserved. 6 |
Page 7
Assistant Software Installation and Configuration
1. Please download the drive installer and the assistant software installer from DJI website “www.dji.com”,
by selecting the Download web page of corresponding product.
2. Switch on the transmitter first, and then power on the autopilot system.
3. Connect the autopilot system and the PC via a Micro-USB cable, and power on the autopilot system.
4. Run the driver installer, and follow the instructions strictly to finish installation.
5. Run the assistant software installer, and follow the instructions strictly to finish installation.
1. Power on the PC. Make sure your computer is connected to the Internet for the first time you use.
2. Switch on the transmitter first, and then power on the autopilot system. Connect the autopilot system to
the PC with a Micro-USB cable. DO NOT break the connection until setup is finished.
3. Run the Assistant Software.
4. Observe the indicators on the left bottom of the software. ( They are the connection indicator and
communication indicator in order.) If the communication indicator is blinking, that the software is ready,
please go to next step.
5. Select the “Info” option. Check the software firmware version. If the upgrade is available, you may update
the assistant software.
6. Select the “Upgrade” option. Check the Main Controller, GPS and IMU firmware version.
7. Select the “Basic” option. Please follow step-by-step for your first-time-configuration. Basic configuration
is necessary, including Mixer Type, Mounting, RC, and Gain settings.
8. You can click the “Advanced” option for more parameter settings. Advanced setting is optional. There are
settings of Motor, FailSafe, Intelligent Orientation Control (IOC), Gimbal, Low-Voltage Alert, and Flight
Limits. Read the instruction in the assistant software to obtain more details.
9. Select the “Viewer” option to check all parameters.
10. Then break the Micro-USB cable, power off the aircraft. Finished.
(1) You may be required to fill register information for your first-time-usage.
(2) If the communication indicator is blue on, please double check the connections.
(3) Basic configuration is necessary before you go to the “Basic Flying Test”.
(4) Users are required to install a Windows system, since the software can only run on Windows
system .
(1) If the firmware upgrade is available, please upgrade it by referring to the Firmware Upgrade
in the Appendix.
(2) This step is required to use together with the assistant software to obtain more details.
Step1 Software and Driver Installation on a PC
Step2 Configuration by Assistant Software on a PC
©2013 DJI Innovations. All Rights Reserved. 7 |
Page 8
Configuration Information
Basic Gain
Attitude Gain
Motor
ESC
Propeller
Battery
Weight
Pitch
Roll
Yaw
Vertical
Pitch
Roll
F330
DJI-2212
DJI-18A
DJI-8 Inch
3S-2200
790 g
140
140
100
110
140
140
F450
DJI-2212
DJI-30A
DJI-8 Inch
3S-2200
890 g
150
150
100
105
150
150
F550
DJI-2212
DJI-30A
DJI-8 Inch
4S-3300
1530 g
170
170
150
140
170
170
Recommended Parameters
Recommended Settings for using F330/F450/F550
©2013 DJI Innovations. All Rights Reserved. 8 |
Page 9
Basic Flying
GPS ATTI. Mode
(With GPS Module)
ATTI. Mode
Manual Mode
Rudder Angular
Velocity
Maximum rudder angular velocity is 150°/s
Command
Linearity
YES
Command Stick
Meaning
Multi attitude control; Stick center position for 0˚
attitude, its endpoint is 35˚.
Max-angular velocity is 150°/s.
No attitude angle limitation
and vertical velocity locking.
Altitude Lock
Maintain the altitude best above 1 meter from ground.
NO
Stick Released
Lock position if GPS signal
is adequate.
Only attitude stabilizing.
NOT Recommend
GPS Lost
When GPS signal has been
lost for 3s, system enters
ATTI. Mode automatically.
Only performing attitude
stabilizing without
position lock.
---
Safety
Attitude & speed mixture control ensures stability
Depends on experience.
Enhanced Fail-Safe(Position
lock when hovering)
Auto Level Fail-Safe
(Attitude stabilizing)
With GPS/Compass module and the failsafe requirements are satisfied, in each Control
Mode (including GPS Mode, ATTI. Mode, Manual Mode and IOC Mode), the aircraft will
enter the failsafe Mode.
Applications
AP work
Sports flying.
---
(1) Both Immediately Mode and Intelligent Mode are available in the Assistant Software:
Advanced->Motor->Stop Type.
(2) Stop Motor method is defaulted to Immediately Mode.
Control Mode Knowledge
Please read the Control Mode Knowledge clearly before usage, to know how to control the aircraft.
Different control modes will give you different flight performances. Please make sure you understand the features
and differences of the three control modes.
Start & Stop Motor Knowledge
Please get to know well about this section before flying.
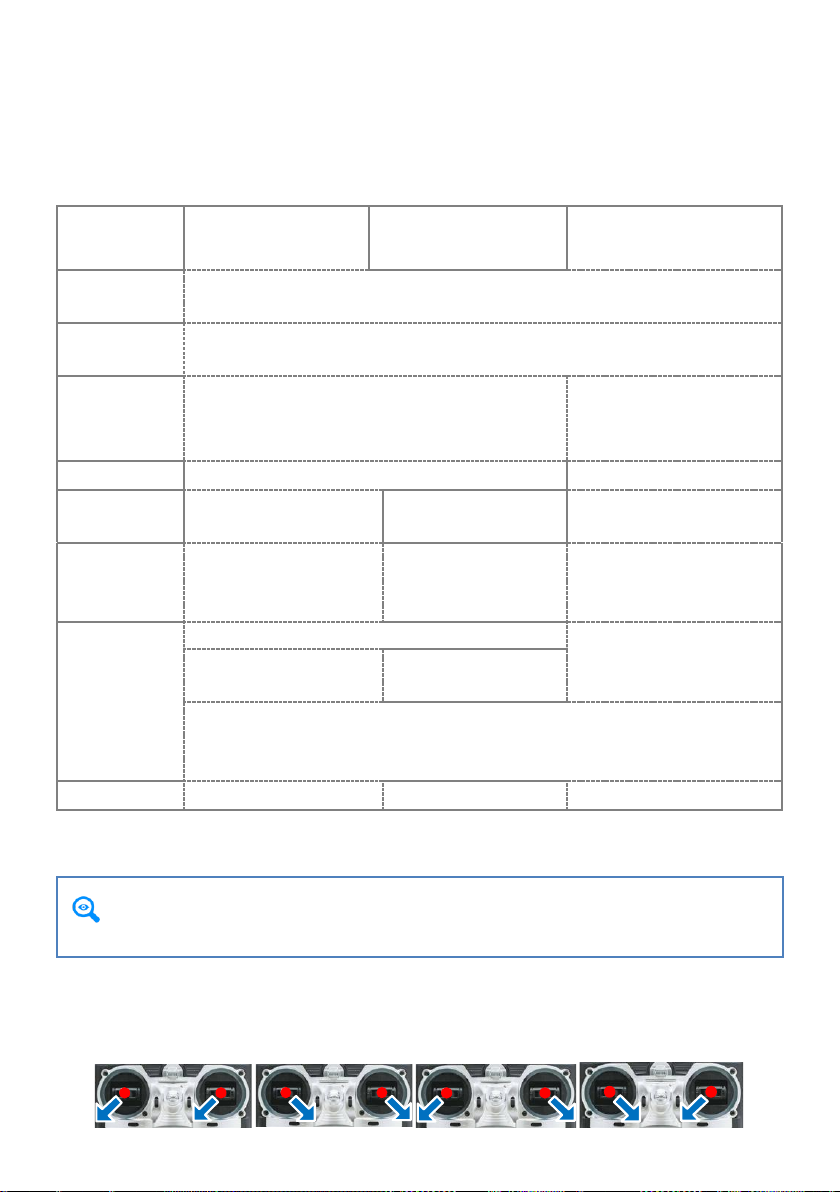
1 Start Motor: Pushing throttle stick before takeoff will not start the motors. You have to execute any one of
following four Combination Stick Commands (CSC) to start the motors:
©2013 DJI Innovations. All Rights Reserved. 9 |
Page 10
2 Stop Motor: We provide two options to stop motors in the assistant software: Immediately and Intelligent.
(1) In ATTI. / GPS ATTI. Mode, it has landing judgment, which will stop motors.
(2) Start motors in ATTI. / GPS ATTI. Mode, you have to execute CSC and then push throttle stick
over 10% in 3 seconds, otherwise motors will stop after 3 seconds.
(3) During normal flight, only pull throttle stick under 10% will not stop motors in any control mode.
(4) For safety reason, when the slope angle of multi-rotor is over 70° during the flight in ATTI. /
GPS ATTI. Mode (may be caused by collision, motor and ESC error or propeller broken down),
and throttle stick is under 10%, motors will stop automatically.
(1) If you choose the Immediately Mode, you should not pull throttle stick under 10% during flight,
because it will stop motors. If you do it accidentally, you should push the throttle stick over 10% in
5s to re-start motors.
(2) DO NOT execute the CSC during normal flight without any reason, or it will stop motors at once.
(1) If you choose the Intelligent mode, and the throttle stick is under 10%, this will trigger the landing
Procedure, in any control mode. In this judgment, pitch, roll and yaw controls are denied except
the throttle, but multi-rotor will still auto level.
(2) In any control mode, DO NOT pull throttle stick under 10% during normal flight without any
reason.
(1) Any of these two cut off types will only work properly if TX calibration is correct done.
(2) In failed-safe, CSC is denied by the main controller, motors will hold their state.
(1) Immediately Mode: If you select this mode, in any control mode, once motors start and throttle stick is
over 10%, motors will not stop immediately only when throttle stick is back under 10% the motors will
stop. In this case, if you push the throttle stick over 10% within 5 seconds after motors stop, motors
will re-start, CSC is not needed. If you don’t push throttle stick after motors start in three seconds,
motors will stop automatically.
(2) Intelligent Mode: By using this mode, different control mode has different way of stopping motors. In
Manual Mode, only executing CSC can stop motors. In ATTI. Mode or GPS ATTI. Mode, any one of
following four cases will stop motors:
a) You don’t push throttle stick after motors start within three seconds;
b) Executing CSC;
c) Throttle stick under 10%, and after landing for more than 3 seconds.
d) If the angle of multi-rotor is over 70°, and throttle stick under 10%.
Notes of Intelligent Mode
Notes of Intelligent Mode & Immediately Mode
©2013 DJI Innovations. All Rights Reserved. 10 |
Page 11

Step1 Compass Calibration
(1) DO NOT calibrate your compass where there is magnetic interference, such as magnetite, car
park, and steel reinforcement under the ground.
(2) DO NOT carry ferromagnetic materials with you during calibration, such as keys or cell phones.
(3) Compass module CANNOT work in the polar circle.
(4) Compass Calibration is very important, otherwise the system will work abnormal.
1. Switch on the transmitter, and then power on autopilot system!
2. Quickly switch the control mode switch from
GPS Mode
to
Manual Mode
and back to
GPS Mode
(or
from
GPS Mode
to
ATTI. Mode
and back to
GPS Mode
) for more than 5 times, The LED indicator will
turn on constantly yellow so that the aircraft is ready for the calibration.
3. (Fig.1) Hold your Multi-rotor horizontal and rotate it around the gravitational force line (about 360
o
) until
the LED changes to constant green, and then go to the next step.
4. (Fig.2)Hold your Multi-rotor vertically and rotate it (its nose is downward) around the gravitational force
line (about 360o) until the LED turns off, meaning the calibration is finished.
Fig.1 Fig.2
5. If the calibration was successful, calibration mode will exit automatically. If the LED keeps flashing quickly
Red, the calibration has failed. Switch the control mode switch one time to cancel the calibration, and
then re-start from step 2.
1. When the GPS is abnormal, the Main controller will tell you by the LED blinking Red and Yellow
alternately ( ), disable the GPS Module, and automatically enter the aircraft into the
ATTI. Mode.
2. You don’t need to rotate your multi-rotor on a precise horizontal or vertical surface, but keep at
least 45° difference between horizontal and vertical calibration.
3. If you keep having calibration failure, it might suggest that there is very strong magnetic
interference around the GPS /Compass module, please avoid flying in this area.
4. When to do re-calibration
(1) The flight field is changed.
(2) When the multi-rotor mechanical setup has changed:
a) If the GPS/Compass module is re-positioned.
b) If electronic devices are added/removed/ re-positioned (Main Controller, servos, batteries, etc.).
c) When the mechanical structure of the multi-rotor is changed.
(3) If the flight direction appears to be shifting (meaning the multi-rotor doesn’t “fly straight”).
(4) The LED indicator often indicates abnormality blinking when the multi-rotor spins. (It is normal
for this to happen only occasionally)
Without GPS module, please skip this step. If you use with GPS module, follow step-by-step for calibration.
Calibration Procedures
©2013 DJI Innovations. All Rights Reserved. 11 |
Page 12

Step2 Assembly Checking List
Any of the following mistakes will lead to a dangerous accident, double check all these items:
(1) Rotation direction of motor is opposite
(2) Infirm connection between the motor and the ESC
(3) Wrong or infirm installation of Main controller
(4) Wrong or infirm connection between the main controller and ESC.
(5) Propeller installation mistake
(6) Magnetization of the compass
Make sure the following items are correct.
(1) Make sure you have assembled your multi-rotor correctly.
(2) Make sure you have done the configuration procedure correctly.
(3) Make sure all connections are in good condition.
(4) Make sure batteries are fully charged for your transmitter, autopilot system and all devices.
Control Mode LED Indicator
GPS Signal Status LED Indicator
Manual Mode: NO LED
ATTI. Mode: ( indicates that is stick(s) not at center)
GPS Mode: ( indicates that is stick(s) not at center)
Signal is best (GPS satellites > 6) : NO LED
Signal is well (GPS satellites = 6) :
Signal is bad(GPS satellites = 5) :
Signal is worst (GPS satellites< 5) :
Please check each item, to make sure for safety.
Step3 Before Flight
Carry out the following procedures (is based on Intelligent Mode of Motor Stop) to make sure all
configurations are correct. Refer to the Appendix->LED Description for more LED details.
1. Always switch on the transmitter first, then power on multi-rotor!
2. Keep the aircraft stationary until the system start and self-check has finished ( ).
After that, the LED may blink Yellow 4 times quickly ( ). Start motor is disable during LED blinking
Yellow 4 times quickly ( ), as the system is warming up.
3. After the 4 times Yellow LED disappears, toggle the control mode switch on your transmitter to make sure it
is working properly. For example, LED blinks ( ), which means the system is in ATTI. Mode and the
GPS signal is worst Check it with LED indicator to specify the current working mode for MC. See following
table for details about LED indicator;
(1) There are Manual Mode and ATTI. Mode without a GPS/Compass module, no GPS signal status LED
indicator.
(2) After connecting to the GPS/Compass module, GPS ATTI. Mode is available, and GPS signal status
LED indicator is available.
©2013 DJI Innovations. All Rights Reserved. 12 |
Page 13

4. Keep the aircraft stationary, and then push both sticks to the left bottom or right bottom (shown as the
1. Choose an open space without obstruction, tall buildings and crowds as flying filed. Place the aircraft 3
meters away from you and others, to avoid accidental injury.
2. If in GPS ATTI. Mode, place the aircraft in an open space without buildings or trees. Take off the aircraft
after 6 or more GPS satellites are found (Red LED blinks once or no blinking). If in Manual Mode or ATTI.
Mode, you can skip this step.
3. Start-up
(1) Switch on the transmitter first, then power on multi-rotor! Keep the aircraft stationary until the
system start and self-check has finished.
(2) Please wait for the system to warm up gradually with the LED blinks Yellow 4 times quickly
( ). You should not start the motors until the blinking disappears.
(3) Keep the aircraft stationary, and execute the CSC to start the motors.
(4) Release the yaw, roll and pitch sticks and keep them at the mid point, at the same time raise the
throttle stick from the bottom. The motors will stop if you do not push the throttle stick from the
bottom within 3 sec and you will need to re-start the motors.
(5) Keep raising the throttle stick until all the rotors are working, push the throttle stick to the mid point
and then take-off your multi-rotor gently, pay attention not to push the stick excessively.
(6) Pay attention to the aircraft movement at any time when flying, and use the sticks to adjust the
aircraft’s position. Keep the yaw, roll, pitch and throttle sticks at the mid point to hover the aircraft
at the desired height.
4. Lower the aircraft slowly. Pull the throttle stick to the bottom and then execute the CSC to stop the motors
after landing.
5. Please always power off the Multi-rotor first, and then switch off the transmitter after landing.
following chart, defined as Combination Stick Commands (CSC)), to start the motors.
5. Release the yaw, roll and pitch sticks and keep them at the mid point, and the throttle stick under the mid
point. Then check whether all propellers are rotating correctly.
6. Stop motors, power off the Multi-rotor.
7. Make sure all settings and configurations are correct and then you can take off you aircraft.
After power on, if abnormal LED Indicator occurs, please refer to the Abnormal LED instruction in the FAQ and
aids troubleshooting.
Step4 Flying Test
©2013 DJI Innovations. All Rights Reserved. 13 |
Page 14

(1) If the warm up waiting is longer than 2 minutes (the 4 times Yellow blink continues), please power
off for 10 minutes, cold start, and then connect the assistant software, enter the "Tools" - > IMU
calibration, carry out the Advanced calibration.
(2) If you enable the Immediately Mode of Motor Stop; you should not pull throttle stick under 10%
during flight, because it will stop motors. If you do it accidentally, you should push the throttle
stick over 10% in 5s to re-start motors.
(3) DO NOT execute the CSC during normal flight without any reason, or it will stop motors at once.
(4) Pay attention to the GPS satellite status LED indicator. Bad GPS signal may lead the aircraft to
drift when hovering.
(5) DO NOT fly near to ferromagnetic substances, to avoid strong magnetic interference with the
GPS.
(6) Please avoid using GPS ATTI. Mode in the areas, where GPS signal is most likely bad.
(7) If the LED flashes quickly Red then this indicates battery voltage is low, land ASAP.
(8) If the transmitter indicates low-battery alarm, please land ASAP. In this condition the transmitter
may cause the aircraft to go out of control or even crash.
(9) In GPS ATTI. Mode, make sure that the home point is recorded when the GPS signal is well;
otherwise the home point recording may be not so precise.
(1) In ATTI Mode, throttle stick center position is for 0m/s along the vertical direction. You should
keep the position of throttle stick higher than 10% from cut-throttle during the flight! In any
control mode, DO NOT pull throttle stick under 10% during normal flight without any reason.
(2) It is recommended to land the aircraft slowly, to prevent the aircraft from damage when landing.
(3) If Low-Voltage Alarm is set, the aircraft will act according to the configuration of the Assistant
Software once Low-Voltage Alarm is triggered. Make sure you remember what you have set
before.
(4) If Fail-Safe function is set, the aircraft will act according to the configuration of the Assistant
Software once Fail-Safe is triggered. Make sure you remember what you have set before.
FLYING NOTES(VERY IMPORTANT)!!!
©2013 DJI Innovations. All Rights Reserved. 14 |
Page 15

Advanced Functions
1
Record Home Point
Home Point
2
Tx
3
Tx
5
Tx
Signal lost
Tx
Multi-rotor
4
Tx
Signal lost >3s
Stay hover
Ready to Go-Home
Current location ≤ 20m
Current location > 20m
6
Ground
20m
Ascend
first
Hover 15s, then land
Go-Home
Go-Home
Note
1. Please make sure to record the home-point before takeoff, and clearly know where it is.
2. During go-home the nose direction of the aircraft is facing toward the home-point, the aircraft is
flying directly from the current position to the home-point.
3. You can regain the control during the aircraft is hovering 15 seconds.
The flowchart of failsafe and how to regain control
(2)Turn off the
TX (we assume
you want to
trigger failsafe)
(1) The aircraft
flies far away,
TX is on but the
signal is weak.
Attitude Mode: In Attitude Mode as
soon as you get signal you can
regain control.
GPS Mode: switch the TX mode
switch to ATTI, if the receiver is
connected, then you will regain
control.
Attitude Mode: (1) the aircraft will level its attitude
immediately (2) 3 seconds later, failsafe is triggered and
aircraft will start to go home. (3) If signal is regained during
(1) or (2), it will resume normal flight immediately.
GPS Mode: (1) the aircraft will slow down and hover. (2) if
the signal is restored within 3 seconds (TX and receiver
connected), the system will immediately return to normal
operation; does not enter failsafe. (3) if not reconnected
within 3sec, the system will enter failsafe, then even if the
signal is restored, the system will not exit failsafe.
We strongly recommend you DO NOT try this, because there are three
types of risk:
(1) You must be pretty clear whether the Home-point is OK for landing or
not. (You have to understand the definition of Home-point well and the
working process of failsafe)
(2) If there are tall buildings around, the aircraft may be obstructed on the
way.
(3) When GPS signal is bad or GPS is not working, failsafe will not work.
In this case, the behavior of the aircraft is the same as in
the above condition.
If you want the aircraft to Return Home, please do not turn
the TX back on within 3 seconds*, otherwise the aircraft
will exit failsafe mode immediately.
When you turn off the TX, use the following
method to regain control:
(1) Switch the TX switch to GPS.
(2) and then put throttle to the center
position(greater than 3sec after switching off,
important), you can now turn the TX back on.
(3) then you can switch the TX Control mode
switch to ATTI to regain control.
If you choose to turn off the TX,
you must be pretty sure that you
know how to regain control. Here
we offer a method, please read
carefully.
This section will demonstrate the working logic of failsafe and how to regain control.
The following description is effective only when:
1. The aircraft is in flight.
2. The GPS works normally and signal is good (≥6 satellite, the LED blinks a single
red light or no red light).
Note: if you start the motors, but do not push the throttle to take-off the aircraft, in this case it is very dangerous to turn
off the TX, because the aircraft will take off automatically, so do not try this.
The aircraft behavior
after failsafe
How to regain control
Precautions
What triggered failsafe
* If signal lost for more than 3 seconds failsafe will be triggered, if signal regained within 3 seconds it will exit failsafe immediately.
A1 FailSafe
An introduction of Go-Home and Landing.
Home-point: Before takeoff, current position of multi-rotor will be saved as home-point by MC automatically when
you start the motors for the first time after 6 or more GPS satellites are found (red light blinks once or no blinking)
for 10 seconds.
©2013 DJI Innovations. All Rights Reserved. 15 |
Page 16

A2 Low-Voltage Alert
(1) Configure the FailSafe function in the assistant software -> “Advanced” -> “F/S” and read the
instruction thoroughly and carefully.
(2) Configure the Low-Voltage Alert function in the assistant software -> “Advanced” -> “Voltage”
and read the instruction thoroughly and carefully.
In order to prevent your multi-rotor from a crash or other harmful consequences caused by low battery voltage,
there are two levels of low voltage protection available to use. You can choose to use or not to use them; however
we strongly recommend using the protections if available! Low-Voltage Alert is to indicate that the battery cannot
provide enough power for the aircraft, in order to warn you to land the aircraft ASAP. You can configure this
function in the assistant software, and please read the text in the software carefully before your flight. Make sure to
carry out the Current Voltage Calibration.
There are both first level and second level protections. The first level protection has LED warning. During second
level protection the aircraft will land automatically with LED warning. Meanwhile the center point of throttle stick
will move up slowly to 90% of endpoint, you should land ASAP to prevent your aircraft from crashing!
It is not for fun, you should land your aircraft ASAP to prevent your aircraft from crashing or other harmful
consequences!!!
©2013 DJI Innovations. All Rights Reserved. 16 |
Page 17

A3 Intelligent Orientation Control (IOC) Flight (with GPS module)
IOC Switch
IOC Function
OFF
Course Lock
Home Lock
The above table is for example. The function of the switch position may be reversed since the
normal/reversed setting of the switch channel. Toggle the switch and observe the slider position of
channel X2 on the assistant software screen, the corresponding area should turn blue.
Definition of Forward Direction:
Multi -rotor will fly along this direction when you push the elevator stick ( ).
Step1 Before You Start
Usually, the forward direction of a flying multi-rotor is the same as the nose direction. By using IOC, wherever the
nose points, the forward direction has nothing to do with nose direction. The red and blue arrows on the transmitter
are corresponding to pitch and roll operations in the following diagram.
In course lock flying, the forward direction is the same as a recorded nose direction. All the following
requirements are met: the autopilot system is in ATTI. Mode or GPS ATTI. Mode.
Normal flying Course Lock Flying
In home lock flying, the forward direction is the same as the direction from home point to multi-rotor. All the
following requirements are met: 6 or more GPS satellites are found, in GPS ATTI. Mode, and the aircraft is
further than 10m away from the home point.
Normal flying Home Lock Flying
Step2 IOC Switch Setting
Before using the IOC function, you have to choose a 3-position switch on your transmitter as the IOC switch, which
is also used for recording the orientation, home position in corresponding modes. Refer to the assistant software;
click the “Advanced” to find the “IOC”.
©2013 DJI Innovations. All Rights Reserved. 17 |
Page 18

Step3 Method of Forward Direction and Home Point Recording
Course Lock
Home Lock
Automatically
30 seconds after you power on the
autopilot system.
Before takeoff, the current position of the aircraft
will be saved as home point when you start the
motors for the first time after 6 or more GPS
satellites have been found for 10 seconds.
Manually
30 seconds after you power on the
autopilot system. Toggle the IOC switch
from Off to Course Lock, and back to Off
quickly 3 to 5 times.
After 6 or more GPS satellites have been found.
And the aircraft can be hovering. Toggle the IOC
switch from Course Lock to Home Lock, and back
to Course Lock quickly 3 to 5 times.
DO NOT toggle the switch between Off to Home Lock, since it may change the recording of the
Forward Direction of Course Lock.
During the
same flight
STEP1: Record
STEP2: ON
STEP3: OFF
STEP4: ON again
Course Lock
Switch Setting
Record the
Forward
Direction
Set Control Mode switch at
GPS or ATTI. position,
Toggle IOC switch from OFF
to Course Lock position
Toggle IOC switch
to OFF position
Toggle IOC switch
from OFF to Course
Lock position
Home Lock
Switch Setting
Record the
Home Point
Set Control Mode switch at
GPS position,
Toggle IOC switch from OFF
to Home Lock position
Toggle IOC switch
to OFF position
Toggle IOC switch
from OFF to Home
Lock position
If you use the IOC function, please be aware of the Forward Direction of Course Lock Flying, and the home point of
Home Lock Flying. There are two ways to record the forward direction and the home point: Manually and
Automatically. You may choose any one record method. The LED will blink Green quickly if successfully recorded.
Step4 IOC Flying Test
Then you can do Course Lock and Home Lock flying test.
Carry out an IOC flight by the following procedure. The Control Mode LED will blink Yellow and Green
alternatively ( ) to indicate the IOC mode only when the main controller is really to fly in Course Lock, Home
Lock modes.
Aircraft moving direction when pull pitch stick Aircraft moving direction when pull roll stick
Home point Aircraft(the arrow is pointing to the direction of the aircraft nose)
©2013 DJI Innovations. All Rights Reserved. 18 |
Page 19

IOC FLYING NOTES!!!
(1) When Multi-rotor is flying by home lock far away from you and the home point, please DO NOT
toggle the IOC switch many times quickly so as to avoid the change of home point without your
attention.
(1) Home lock flying requires that 6 or more GPS satellites are found and the aircraft is further than
10m away from the home point.
(2) If the IOC flying requirement is not satisfied, the autopilot system will quit IOC control mode.
Please be aware of the LED indicator, to know the current control mode of the autopilot system.
(1) Blinking indications of IOC are:
a) Before motors start: blink, all sticks (except throttle stick) return to center;
blink, stick(s) (except throttle stick) not at center.
b) After motors start and throttle stick is over 10% in 3 seconds: blink, all sticks
return to center; blink, stick(s) not at center.
(2) Before you do the home lock flight, you have to fly the aircraft out of the 10m range around
home point, and then flip the IOC switch to Home Lock position to fly in home lock when all the
requirements are met. If you have already toggled the IOC switch to Home Lock position when
the aircraft is still in 10m range around home point, and this is the first time you are going to fly
in home lock during the current flight, then if all the requirements are met, the main controller
will change into home lock automatically when Multi-rotor flies out the 10m range around home
point.
(1) When flying in Home Lock mode, if any of the following situations happen, then the
system will quit Home Lock flying and automatically enter Course Lock flying. The aircraft
will fly in Course Lock using the earlier forward direction.
a) The aircraft fly’s within 10m range of the home point.
b) You toggle the control mode switch to the ATTI. Mode.
c) The GPS signal becomes bad (The GPS signal LED is blinking Red twice or three
times).
(2) We suggest that you should know clearly which flight lock method you are going to fly,
and you know the locked forward direction or home point, before you switch on IOC
mode during the flight.
©2013 DJI Innovations. All Rights Reserved. 19 |
Page 20

A4 Receiver Advanced Protection Function
You are asked to enable this function by connecting to the Assistant Software, please set it at the section of
Basic->R/C-> Receiver Advanced Protection.
If you choose enable it, the FailSafe will be triggered if the following situations occur during flight.
According to the difference of the aircraft height, there are two situations.
a) Lower than 100m, the A/E/R channel is not at the mid point.
b) Higher than 100m, the A/E/R channel is not at the mid point or the throttle stick is above the mid point.
In the GPS Mode or ATTI. Mode, if the requirement a) or b) is satisfied, and the output data of four channels
A/E/R/T have not changed for 20 seconds, then the aircraft will hover automatically. After that, if the output data
of four channels A/E/R/T still do not any changes and last for 10 seconds, the autopilot system will think that the
data from receiver is abnormal, and then enter the FailSafe Mode.
Brief introduction of how to quit the FailSafe Mode
If there is any command change from the receiver, the autopilot system thinks that the receiver is regained. In ATTI.
Mode and Manual Mode, it will quit the FailSafe Mode automatically. In GPS Mode, please toggle the control mode
switch to the ATTI. Mode and Manual Mode position to regain the control. Refer to the FailSafe section for more
details.
©2013 DJI Innovations. All Rights Reserved. 20 |
Page 21

A5 Flight Limits
(1) Height Limit works when the control mode is GPS or ATTI. Mode. Radius Limit works when the
control mode is GPS and the satellite number ≥6.
(2) If the aircraft flies out of the limits, it's still controllable except flying further away.
(3) If the control mode is changed to GPS when the aircraft is out of Max Radius, the aircraft will fly
back within the entered range.
(4) The Failsafe and the Ground Station operations are not restricted to the Flight Limits.
The flight limits function is default enabled in the NAZA-M Flight control system, it’s aimed to restrict the flying
height and distance of the aircraft. The Max Height restricts the vertical distance between the aircraft and the
Home point, the Max Radius restricts the horizontal distance between the aircraft and the Home point.
The default Max Height is 2000m and Max Radius is 2000m. Users can write the values of the Max Height and Max
Radius in the Assistant software, the range of the Max Height is 10m-100000m, the range of the Max Radius is the
same. So that the aircraft will fly in the entered range, which is a cylinder space above the Home point.
©2013 DJI Innovations. All Rights Reserved. 21 |
Page 22

Appendix
General
Built-In Functions
(1) Three Modes of Autopilot
(2) Enhanced Fail Safe
(3)Low Voltage Protection
(4)S-Bus/S-Bus2 Receiver Support
(5)PPM Receiver Support
(6)2-axle Gimbal Support
Peripheral
Supported Multi-rotor
Quad-rotor I4, X4;
Hexa-rotor I 6, X6, IY6, Y6.
Octo- rotor I8, V8, X8
Supported ESC output
400Hz refresh frequency.
Recommended Transmitter
PCM or 2.4GHz with a minimum 4 channels.
Assistant Software System Requirement
Windows XP SP3; Windows 7; Windows 8
Electrical & Mechanical
Working Voltage Range
MC: 4.8V ~ 5.5 V
PMU Input: 7.4V ~ 26.0 V (recommend 2S ~ 6S LiPo)
Output(V-SEN port red wire): 3A@5V
Output(V-SEN port red wire)burst current:7.5A
Power Consumption
MAX: 1.5W(0.3A@5V)
Normal: 0.6W(0.12A@5V)
Operating Temperature
-10°C ~ 50°C (14F ~122F)
Weight
MC: 27g
GPS/Compass: 27g
PMU: 28g
LED: 13g
Dimensions
MC: 45.5mm × 32.5mm × 18.5mm
GPS/Compass: 46mm (diameter) x 10mm
PMU:39.5mm × 27.5mm × 10.0mm
LED:25mm × 25mm × 7.0mm
Flight Performance (can be effected by mechanical performance and payloads)
Hovering Accuracy (GPS Mode)
Vertical: ±± 0.8m
Horizontal: ±±2.5m
Max Yaw Angular Velocity
200°/s
Max Tilt Angle
35°
Max Ascent / Descent Speed
±Ascent : 6m/s, Descent: 4.5 m/s
Specifications
©2013 DJI Innovations. All Rights Reserved. 22 |
Page 23

MC/PMU Firmware Upgrade
1. Make sure your computer is connected to the Internet.
2. Please close all the other applications during the firmware upgrade, including anti-virus software and
firewall.
3. Make sure the power supply is securely connected. DO NOT un-plug the power supply until firmware
upgrade has finished.
4. Connect system to PC with Micro-USB cable, DO NOT break connection until firmware upgrade is
finished.
5. Run Software and wait for connection.
6. Select Upgrade optionCheck the MC and PMU Firmware Version.
7. DJI server will check your current firmware version, and get the latest firmware prepared for the unit.
8. If there is a firmware version more up-to-date than your current version, you will be able to click to
update them.
9. Wait until Assistant software shows “finished”.
10. Click OK and power cycle the unit after at least 5 seconds.
11. Your unit is now up-to-date.
(1) After firmware upgrade, please re-configure the system using Assistant software.
(2) If firmware upgrade failed, the system will enter waiting for firmware upgrade status
automatically, please try again with the above procedures.
(3) Select Upgrade optionCheck the GPS Firmware Version, online upgrade is disable.
Please follow the procedure for software and firmware upgrade; otherwise the system might not work properly. For
SAFETY REASONS, DO NOT use power battery during firmware upgrade.
©2013 DJI Innovations. All Rights Reserved. 23 |
Page 24

LED Description
System Status
LED Flashing
System start and self-check
IMU abnormal data or need advanced
calibration*
Warm up after power on
The aircraft is moved or bias of sensors too big
Compass error too big, need recalibration.
Transmitter (TX) signal lost, enter the FailSafe.
TX stick(s) mid point error too big
Low voltage alert or other abnormal alert*
(e.g. Configuration error, TX data error, Enable
low voltage protection without PMU, SN error
or Compass abnormal work.)
Record forward direction or home point
Control Mode Indictor
Manual Mode: None
ATTI. Mode: ( stick(s) not at center )
GPS Mode: ( stick(s) not at center )
IOC Mode: ( stick(s) not at center )
GPS Signal State Indicator
(GPS/Compass Module is necessary)
GPS Signal is Best(GPS Satellite number > 6): None
GPS Signal is Well(GPS Satellite number = 6):
GPS Signal is Bad (GPS Satellite number = 5) :
GPS Signal is Worst (GPS Satellite number < 5):
Compass Calibration
LED Flashing
Begin horizontal calibration
Begin vertical calibration
Calibration or others error
*You can figure out the error by connecting the autopilot system to the assistant software.
©2013 DJI Innovations. All Rights Reserved. 24 |
Page 25

Instruction of V1 (also known as NAZA-M)
接电调
接云台
R/C Receiver
(JR)
RUDD
THRO
AILE
ELEV
3-position switch channel
R/C Receiver
(Futaba / Hitec)
1
2
3
4
Futaba S-Bus
/S-Bus2
S-Bus
F1
F2
Aircraft Nose
PPM
PPM
ESC
M1
M2
M3
M4
M5
M6
R/C System
These are example connections.
Please setup Aileron, Ele vator,
Throttle, Rudder channels on your
TX f i r s t , a nd choose o n e 3 positions switch/channel as control
mode switch, then connect your
receiver to the right ports on MC.
VU
· Do not mount it on any other electronic devices. Make sure You
can see the LED light during the flight.
· If use with DJI multi-rotor, you can solder the VU power cable to
power pads on frame bottom board. Please refer to DJI multi-rotor
manual for details.
· If use with 3rd part multi-rotor, you can make a connecter by
yourself to connect VU, ESCs and battery.
· Sufficient air flow over the VU is highly recommended.
ESCs, Motors
· Motors and ESCs in DJI multi-rotor kit are recommended.
· P l eas e ma ke s ure you are us i ng the ESC s an d mo tors
recommended by the manufacturer of your multi rotor first. NAZA
output is 400Hz refresh frequency.
· If you use 3rd party ESCs, please make sure the ESCs travel
midpoint is at 1520us. DO NOT use 700us travel midpoint ESC,
as it may lead aircraft to fly away or cause injury and damage.
After connect ESCs to motors, calibrate all your ESCs one by one
through the receiver directly before connect them to your MC,
Make sure program all of them into Governor off, Break off and
Normal Start up to get best experience.
Pitch
Roll
MC
· Please use 3M gummed paper provided To mount MC, and mount
MC parallel to the aircraft horizon.
· The output ports of MC (the right side in figure) should point to
the front of multi-rotor. You’d better put MC at the gravity
center of multi-rotor. Please make sure all ports are accessible
when installing the MC so as to facilitate wiring and software
configuration.
· In three-pin ports, pins near the nicks are signal pins.
· After choosing a location to mount the MC, it is
· recommended that you DO NOT mount the MC
· until all wirings and software configurations are completed.
(Optional) GPS/COMPASS
· GPS/Compass is sensitive to magnetic interference, should be far away from any electronic devices.
· You s hould us e epoxy resin AB glue to assem ble the GPS brac ket firs t as the figure showed i n
previous page.
· Mount the brac ket on the center plate of craft first, then fix the GPS on the pl ate of the bracke t (by
3M glue provided) . The GPS is sensitive to vibration interference, so position the bracket at least 10
cm from any rotor.
· The DJI logo marked on the GPS should face the sky, with the orientation arrow pointing directly
forward. The GPS/Compass is packaged with a special indication line for mounting for the first time.
· If you are uncertain whether materials near the GPS/Compass module are magnetic or not, you can
use a compass or magnet to check it. If yo u use your own moun ting rod, make sure it is NOT
magnetic!
3-position switch channel
TO Battery
Important: the continuous
output of the VU is 3A@5V, and
the maximum instant current is 7.5A. If
the V U cannot afford the working
current for your servos, please use an
independent power supply; otherwise,
it may cause the VU safeguard and
lead to the main controller reboot.
take positive power supply
Disconnection
T
ake
negative
power supply
V1 (also known as NAZA-M) system is different from V2 system, if you are V1 system user, please read the following
text carefully, and refer to the other text in this Guide for usage details (including Assistant Software Configuration,
Basic flying, Advanced Function Appendix and FAQ, etc.) .
V1 Assembly and Connection
Connect the V1 system according to the following chart.
V1 is compatible with the PMU V2 (Accessory of Naza-M V2)
V1 system is compatible with the PMU V2 of V2 system; please carry out the following connection. The other
modules connection is the same as before.
Important: You are asked to upgrade your Firmware version of V1 MC to V3.10 or above, as the PUM V2 can only
work with the MC of version 3.10 or above.
©2013 DJI Innovations. All Rights Reserved. 25 |
Page 26

V1 Port Description
Main Controller
A
For roll control (left/right)
E
For pitch control (front/back)
T
For throttle control
R
For rudder control
U
For Control Mode Switch
X1
For gimbal pitch control
Or for gain tuning
X2
For D-Bus (S-Bus/ S-Bus2 compatible)
Or for gain tuning
Or for IOC switch
X3
For voltage monitor (Connect with VU V-SEN port)
M1
To #1 rotor
M2
To #2 rotor
M3
To #3 rotor
M4
To #4 rotor
M5
To #5 rotor
M6
To #6 rotor
F1
To gimbal roll servo
Or to #7 rotor (Upgrade the MC Firmware to V3.10 or above)
F2
To gimbal pitch servo
Or to #8 rotor (Upgrade the MC Firmware to V3.10 or above)
LED
LED port, for LED wire connection from Versatile Unit
EXP.
GPS port, for GPS module wire connection.
(In three-pin ports, pins near the nicks are signal pins.)
Versatile Unit
V-SEN
V-SEN port: To the X3 port of the main controller, for monitoring battery voltage and supplying
power
Orange wire (signal wire) output: ±±3.3V
Red wire (power wire) output: 3A@5V
LED
LED wire, to LED port of the main controller.
USB port: PC connection for configuration and firmware upgrades.
Optional GPS & Compass
Connect to the EXP. port.
Please remember the function of each port, which may help you to use the Naza-M efficiently.
©2013 DJI Innovations. All Rights Reserved. 26 |
Page 27

V1 Specification
General
Built-In Functions
Three Modes of Autopilot
Enhanced Fail Safe
Low Voltage Protection
S-Bus/ S-Bus2 Receiver Support
PPM Receiver Support
2-axle Gimbal Support
Peripheral
Supported Multi-rotor
Quad-rotor I4, X4;
Hexa-rotor I 6, X6, IY6, Y6.
Octo-rotor I8, V8, X8 (Upgrade the MC Firmware to
V3.10 or above)
Supported ESC output
400Hz refresh frequency.
Recommended Transmitter
PCM or 2.4GHz with a minimum 4 channels.
Assistant Software System Requirement
Windows XP SP3; Windows 7
Electrical & Mechanical
Working Voltage Range
MC: 4.8V ~ 5.5 V
VU Input: 7.2V ~ 26.0 V (recommend 2S ~ 6S LiPo)
Output(V-SEN port red wire): 3A@5V
Output(V-SEN port red wire)burst current:7.5A
Power Consumption
MAX: 1.5W(0.3A@5V)
Normal: 0.6W(0.12A@5V)
Operating Temperature
-10°C ~ 50°C(14F ~122F)
Weight
MC: 25g
GPS: 21.3g
VU: 20g
Dimensions
MC: 45.5mm × 31.5mm × 18.5mm
GPS & Compass: 46mm (diameter) x 9mm
VU: 32.2mm × 21.1mm × 7.7mm
Flight Performance (can be effected by mechanical performance and payloads)
Hovering Accuracy (GPS Mode)
Vertical: ±± 0.8m
Horizontal: ±± 2.5m
Max Yaw Angular Velocity
200°/s
Max Tilt Angle
45°
Max Ascent / Descent Speed
±6m/s
©2013 DJI Innovations. All Rights Reserved. 27 |
Page 28

FAQ
(1) “System initializing and self-checking LED flashes” are not correct ( Red LED
appears in the last four green flashes). The autopilot system works abnormally. Please contact your
dealer.
(2) LED blinks Yellow 4 times quickly ( ). The system is warming up. You cannot start the motors until
the 4 rapid yellow flashes disappear. If the warm up waiting is longer than 2 minutes, please power off for
5 minutes, cold start, and then connect the assistant software, enter the "Tools" - > IMU calibration, carry
out the Advanced calibration.
(3) After the system start and self-checking has finished, if the LED blinks Red, Green and Yellow ( )
continually. Sensor error is too big. Please connect the assistant software, enter the "Tools" - > IMU
calibration, carry out calibration.
(4) At the first motors start, the system will check the sensors Bias and you are asked to keep the aircraft
stationary (no need of horizontal level). If you cannot start the motors and the LED blinks Green 6 times
quickly ( ), it means that the sensor error is too big. Please connect the assistant software,
enter the "Tools" - > IMU calibration, carry out basic calibration.
Note: after the first successful motors start, this checking will be disabled and it is no need any more to
keep the aircraft stationary during starting motors.
(5) The system blinks Red LED quickly during flying. Low-voltage protection is triggered. Please land the
aircraft ASAP.
(6) The system blinks Yellow LED quickly during flying. FailSafe Mode is triggered. Pay attention that there is
no tall buildings and trees to block your aircraft during go-home.
(7) The LED blinks Red and Yellow alternately ( ). Compass error is too big.
a) There may be a ferromagnetic substance close to the Phantom. Lift the aircraft up about 1m from
the ground, if there is no Red and Yellow flashing, then it will not affect the flight.
b) Otherwise, re-calibrate the compass.
c) If re-calibration does not work, please connect to the Assistant Software, select the “Tools” and
follow the tips to carry out the required operation.
Abnormal LED Indication List
During the Checking Procedure, if abnormal LED Indicator occurs or even the system cannot work normally, please
refer to the following list and aids troubleshooting.
Fix the TBE (Toilet Bowl Effect) Problem
When flying in GPS ATTI. Mode and the compass calibration has been done correctly, should you find the aircraft
rotating (Toilet bowl effect), or drifting when hovering. Please check the GPS module mounting orientation and then
©2013 DJI Innovations. All Rights Reserved. 28 |
Page 29

re-do the compass calibration. Carry out the following procedure to re-mount the GPS module.
Clockwise rotating
GPS re-mounting
Counter Clockwise rotating
GPS re-mounting
θ
θ
In the following diagram (view from the top), the aircraft can appear to be rotating in both clockwise and
counter-clockwise direction, please re-mount the GPS module correspondingly.
is the rotating direction of aircraft, is the nose direction of aircraft,
is the arrow direction on the GPS module, θ is the offset angle for GPS re-mounting(about 10~30o)
Should you find the multi-rotor does not track straight in forward flight.
Please carry out several more courses, the system will fix it automatically.
Motors Start failure caused by TX stick(s) mid point error too big
If the TX stick(s) mid point error is too big, Motors Start will fail when you execute the Combination Stick
Commands (CSC) and lead to the aircraft will not takeoff.. And the LED will blink Red four times per second
continually to warn you.
TX stick(s) mid point error too big can be caused by the following reasons:
(1) There is TX stick (except the throttle stick) not at center when power on the autopilot system.
(2) The TX sticks has been trimmed, which leads to the large deviation of mid point. For example, the
SUB-TRIM has been adjusted for Futaba transmitter.
(3) The TX stick(s) travel has larger asymmetry.
For the reason (1), please put all TX sticks at the mid point, and then power cycle the autopilot system to
re-record the mid point. If the problem continues, that can be caused by the reason (2) or reason (3), yo
u need to adjust the output range of your TX, and then use the Assistant Software to redo the TX cali
bration. Please carry out the following procedures.
(1) Connect to the Assistant software, click Basic-> R/C-> Command Sticks Calibration, and push all TX
sticks throughout their complete travel range to see if any stick cannot reach its largest position.
(2) Adjust the largest travel of TX stick until the cursor on the Assistant software can reach both end
©2013 DJI Innovations. All Rights Reserved. 29 |
positions, according to your TX manual.
(3) Power cycle the autopilot system, note that power cycle is required.
(4) Redo the TX calibration according to the Assistant software.
Page 30

Attitude Controllable When One Motor Output is Failed
For Hexa-rotor, including Hexa-rotor I, Hexa-rotor V, Hexa-rotor IY and Hexa-rotor Y, aircraft is attitude controllable
when one motor output is failed.
The NAZA-M can still control the attitude of the Hexa-rotor for a safe landing when one motor output of the
Hexa-rotor has failed, for example, one motor is stopped or one propeller is broken, etc.
The control mode of NAZA-M should be in Atti. Mode or GPS Atti. Mode. The aircraft will rotate, due to an
imbalance of torque; however, it can still be controlled by the Transmitter.
Select Course lock or home lock mode for flying the aircraft into a safe area to land when the aircraft is far away or
the attitude can’t be recognized. Even when the multi rotor is rotating, using Course lock or home lock mode will
allow you to move the multi rotor in the corresponding Transmitter stick direction.
©2013 DJI Innovations. All Rights Reserved. 30 |
Page 31

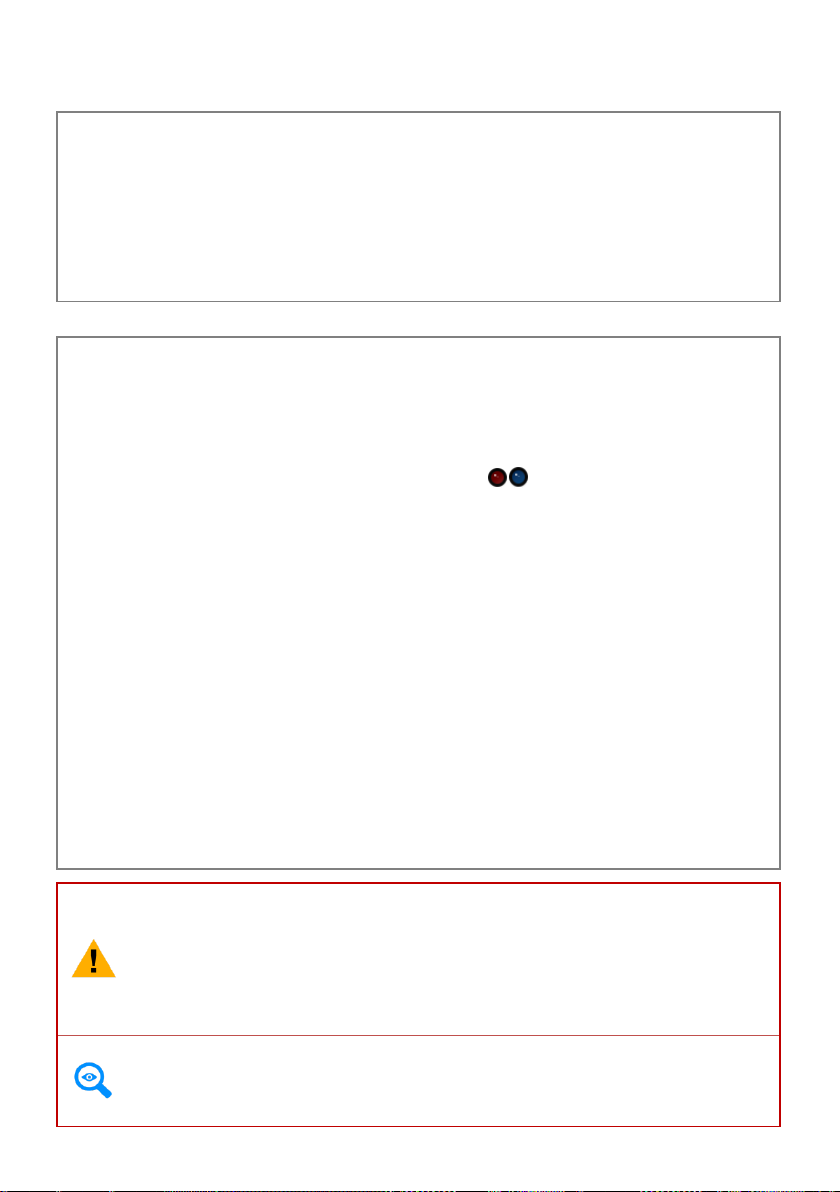
When used with other DJI products
The NAZA-M system communicates with other DJI products (e.g. H3-2D gimbal, BTU module, iOSD mini and iOSD
Mark II) via the CAN-Bus port ( ) of the NAZA PMU V2. You can plug new DJI products into any spare CAN-Bus
port, since CAN-Bus ports on NAZA-M, CAN HUB, GCU, iOSD mini, iOSD Mark II and 2.4G Bluetooth Datalink are
the same for the communications.
When there are not enough CAN-Bus ports for additional DJI products, then a DJI CAN HUB module is
recommended. The following diagram is for your connection reference.
©2013 DJI Innovations. All Rights Reserved. 31 |
Fig.1 Used with iOSD Mark II
Fig.2 Used with CAN HUB
Page 32

(1) Users can use the NM Assistant on the mobile device when a BTU module is connecting with the
Ground end of the2.4G Bluetooth Datalink (No need to connect another BTU module to the
Flight control system).
Fig.3 Use a CAN HUB to connect the 2.4G Bluetooth Datalink
©2013 DJI Innovations. All Rights Reserved. 32 |
 Loading...
Loading...