




i
Niniejszy dokument jest objęty prawami autorskimi producenta DJI z zastrzeżeniem wszelkich praw. Jeżeli producent nie udzielił zgody, użytkownik nie jest uprawniony do używania lub zezwalania innym na korzystanie z tego dokumentu lub dowolnej jego części poprzez reprodukcję, przekazywanie lub sprzedaż dokumentu. Użytkownicy powinni odnosić się do tego dokumentu i jego treści wyłącznie jako instrukcji obsługi DJI. Dokument nie powinien być wykorzystywany do innych celów.
Q Wyszukiwanie słów kluczowych
Szukaj słów kluczowych, takich jak "akumulator" i "instalacja", aby znaleźć odpowiedni temat. Jeśli do czytania tego dokumentu używasz programu Adobe Acrobat Reader, naciśnij Ctrl+F w systemie Windows lub Command+F w systemie Mac, aby rozpocząć wyszukiwanie.
🖑 Nawigowanie do rozdziału
Naciśnij rozdział w spisie treści, aby natychmiast się tam przenieść.
Drukowanie
Dokument ten można drukować w wysokiej rozdzielczości.
Korzystanie z instrukcji
Legenda
🖉 Ostrzeżenie 🗥 Ważne 🔅 Wskazówki 🖽 Odniesienie
Przeczytaj przed pierwszym użytkowaniem
Przed rozpoczęciem użytkowania produktu DJI należy zapoznać się z poniższymi dokumentami:
- 1. Zawartość zestawu
- Instrukcja bezpieczeństwa
- 3. Instrukcja uruchomienia
- Instrukcja obsługi
Zaleca się obejrzenie wszystkich filmów instruktażowych na oficjalnej stronie DJI oraz przeczytanie wskazówek dotyczących bezpieczeństwa przed pierwszym użyciem. Przygotuj się do pierwszego lotu zapoznając się z instrukcją uruchomienia oraz niniejszą instrukcją obsługi, aby uzyskać więcej informacji.
Filmy instruktażowe
Przejdź do poniższego linku lub zeskanuj kod QR, aby obejrzeć filmy instruktażowe, które przedstawiają bezpieczne użytkowanie DJI MAVIC™ 3M:

https://ag.dji.com/mavic-3-m/video
Pobieranie programu DJI Assistant 2
Pobierz i zainstaluj program DJI ASSISTANT™ 2 (Enterprise) lub DJI Assistant 2 (MG Series) używajac poniższych linków:
https://www.dji.com/mavic-3-enterprise/downloads https://ag.dii.com/mavic-3-m/downloads
Temperatura robocza tego produktu wynosi od -10° do 40° C. Nie spełnia ona standardowych temperatur roboczych dla zastosowań wojskowych (-55° do 125° C), które wymagają większej odporności na zmienność środowiska. Należy obsługiwać produkt w odpowiedni sposób i wyłącznie w przypadku zastosowań spełniających wymagania dotyczące zakresu temperatur roboczych dla danej klasy.
Spis treści
| Korzystanie z instrukcji | 3 |
|---|---|
| Legenda | 3 |
| Przeczytaj przed pierwszym użytkowaniem | 3 |
| Filmy instruktażowe | 3 |
| Pobieranie programu DJI Assistant 2 | 3 |
| Opis produktu | 6 |
| Wprowadzenie | 6 |
| Najważniejsze funkcje | 6 |
| Pierwsze użytkowanie | 7 |
| Opis elementów | 10 |
| Aktywacja | 12 |
| Bezpieczeństwo podczas lotu | 13 |
| Wymagania dotyczące środowiska lotu | 13 |
| Wymagania dotyczące połączeń bezprzewodowych | 13 |
| Systemy wizyjne i system czujników podczerwieni | 14 |
| Procedura RTH (Return to Home) | 16 |
| Ograniczenia lotu | 23 |
| System DJI AirSense | 27 |
| System APAS 5.0 | 28 |
| Lista kontrolna przed lotem | 29 |
| Uruchamianie/zatrzymywanie silników | 30 |
| Test lotu | 31 |
| Dron | 32 |
| Tryby lotu | 32 |
| Wskaźnik statusu drona | 33 |
| Czujnik światła słonecznego i dodatkowe oświetlenie | 34 |
| Rejestrator lotów | 35 |
| Śmigła | 35 |
| Inteligentny akumulator | 36 |
| Gimbal | 42 |
| Kamera | 43 |
| Port PSDK | 44 |
| Aparatura sterująca | 47 |
|---|---|
| Interfejs systemu aparatury sterującej | 47 |
| Wskaźniki LED i alerty aparatury sterującej | 50 |
| Prawidłowa obsługa | 51 |
| Optymalna strefa transmisji | 55 |
| Łączenie drona z aparaturą sterującą | 55 |
| Zaawansowane funkcje | 56 |
| Aplikacja DJI Pilot 2 | 57 |
| Strona główna | 57 |
| Lista kontrolna przed lotem | 60 |
| Podgląd z kamery | 61 |
| Podgląd mapy | 67 |
| Zarządzanie powiadomieniami | 68 |
| Zadania w locie (Flight Tasks) | 72 |
| System zarządzania (HMS) | 87 |
| Załącznik | 88 |
| Specyfikacja produktu | 88 |
| Aktualizacja oprogramowania | 94 |
| Informacje o zgodności z FAR Remote ID | 95 |
Opis produktu
Wprowadzenie
DJI™ Mavic 3M posiada system czujników podczerwieni oraz wielokierunkowy układ systemów wizyjnych, co pozwala na zawis i lot zarówno wewnątrz pomieszczeń, jak i warunkach zewnętrznych. Produkt został wyposażony w funkcję Return to Home z możliwością omijania przeszkód z każdej strony. Dron osiąga maksymalna prędkość lotu 75,6 km/h, a maksymalny czas lotu wynosi do 43 minut.
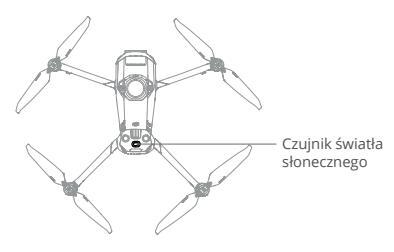
Wbudowany DJI AirSense wykrywa pobliskie obiekty w przestrzeni powietrznej w celu zapewnienia bezpieczeństwa. Czujnik światła słonecznego wykrywa promieniowanie słoneczne i zapisuje je w pliku obrazu. Dodatkowe oświetlenie dolne pomaga określić status drona podczas lotu. Dron jest również wyposażony w moduł RTK umieszczony na górnej części. Używając stacji mobilnej D-RTK 2 High Precision GNSS (sprzedawanej oddzielnie) lub usługi Network RTK, można uzyskać dokładniejsze dane dotyczące pozycjonowania.
Aparatura sterująca DJI RC Pro Enterprise posiada wbudowany 5,5-calowy ekran o wysokiej rozdzielczości 1920×1080 pikseli. Użytkownicy mogą łączyć się z siecią za pośrednictwem Wi-Fi, natomiast system operacyjny Android obsługuje funkcję Bluetooth oraz system GNSS. Aparatura DJI RC Pro Enterprise wyposażona jest w szeroki zakres elementów sterujących dronem i gimbalem, a także konfigurowalne przyciski, natomiast jej maksymalny czas pracy wynosi 3 godziny.
Najważniejsze funkcje
Gimbal i Kamera: DJI Mavic 3M posiada kamerę RGB i cztery kamery multispektralne. Kamera RGB z matrycą 4/3 CMOS, 20MP jest wyposażona w mechaniczną migawkę, która zapobiega rozmyciu ruchu i obsługuje krótkie, 0,7-sekundowe ujęcia interwałowe, gdy używana jest wyłącznie kamera RGB. Cztery kamery multispektralne 5MP (pasmo zielone, czerwone, krawędź czerwieni i pasmo bliskie podczerwieni), wraz z czujnikiem światła słonecznego pozwalają na uzyskanie dokładniejszych pomiarów, monitorowanie wzrostu upraw i badania zasobów naturalnych.
Transmisja obrazu: dzięki czterem antenom i opracowanej przez DJI technologii O3 Enterprise (OCUSYNCTM 3.0 Enterprise), DJI Mavic 3M oferuje maksymalny
zasięg transmisji 15 km i jakość wideo w rozdzielczości do 1080p 30fps z drona do aplikacji DJI Pilot 2. Aparatura pracuje zarówno na częstotliwości 2,4, jak i 5,8 GHz oraz może automatycznie wybrać optymalny kanał transmisji.
Inteligentne tryby lotu: użytkownik może skupić się na obsłudze drona, podczas gdy zaawansowany system APAS 5.0 ułatwia dronowi automatyczną zmianę trasy wokół przeszkód
Funkcia Real-Time Follow: DII Mavic 3M wykrywa teren podczas mapowania
obszarów ze zmianami wysokości poprzez używanie systemów wizyjnych w czasie rzeczywistym i dostosowuje wysokość lotu do zmian w terenie, a wszystko to bez konieczności importowania zewnętrznych danych dotyczących wysokości, co zwieksza wydainość manowania
Aplikacja DJI Pilot 2: Mapy indeksów roślinności, takie jak NDVI, GNDVI, lub NDRE można przeglądać w czasie rzeczywistym w aplikacji DJI Pilot 2, aby uzyskać informacje na temat zdrowia roślin, wzrostu roślin, warunków glebowych i innych.
Działanie w chmurze: DJI Mavic 3M może wykonywać zadania w czasie rzeczywistym, jednocześnie przesyłając zdjęcia do platformy DJI SmartFarm (www.djiag.com) w sytuacjach, takich jak wykrywanie pól rolniczych i badania terenowe.
Automatycznie stwórz zadanie wykrywania pola lub rekonstrukcji startu, które mogą zapewnić lepsze wyniki wykrywania w celu przeprowadzenia monitorowania wzrostu lub innych działań agronomicznych.
Aksymalny czas lotu został przetestowany w środowisku bezwietrznym podczas lotu ze stałą prędkością 32,4 km/h. Maksymalna prędkość lotu została przetestowana na wysokości poziomu morza w warunkach bezwietrznych. Należy pamiętać, że w Unii Europejskiej maksymalna prędkość lotu jest ograniczona do 68,4 km/h. Wartości te służa wyłacznie do celów referencyinych.
Aparatura osiąga swój maksymalny zasięg transmisji (FCC) w otwartym obszarze bez zakłóceń elektromagnetycznych na wysokości około 120 m. Maksymalna odległość transmisji odnosi się do maksymalnej odległości, na jaką dron może wysyłać i odbierać transmisje. Nie odnosi się do maksymalnej odległości, jaką dron może pokonać podczas jednego lotu. Maksymalny czas działania został przetestowany w środowisku laboratoryjnym. Wartość ta służy wyłącznie do celów referencyjnych.
Częstotliwość 5,8 GHz nie jest obsługiwana w niektórych regionach. Należy przestrzegać lokalnych praw i przepisów.
Pierwsze użvtkowanie
Dron DJI Mavic 3M jest fabrycznie złożony. Wykonaj poniższe kroki, aby uruchomić aparaturę i drona.
Przygotowanie drona
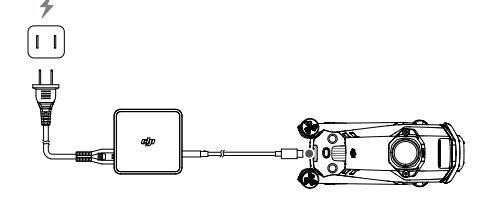
Inteligentny akumulator znajduje się w trybie hibernacji przed wysyłką, aby zapewnić bezpieczeństwo. Do pierwszego ładowania i aktywacji akumulatora należy używać dołączonej ładowarki. Pełne naładowanie inteligentnego akumulatora trwa około 1 godziny i 20 minut.
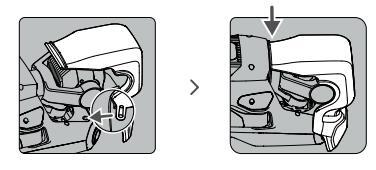
Rozłóż najpierw przednie ramiona, a następnie tylne ramiona.

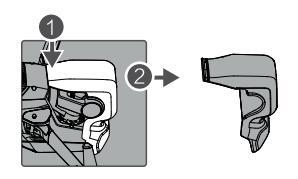
3. Zdejmij osłonę gimbala z kamery.
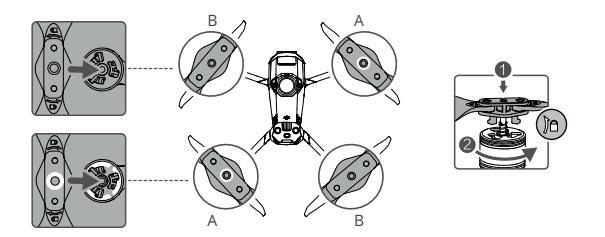
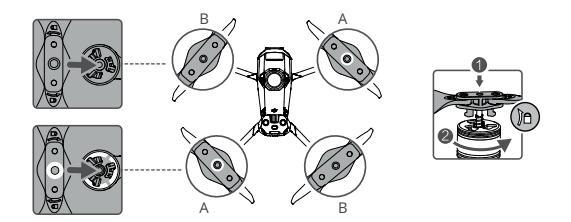
4. Zamocuj śmigła.
Śmigła z oznaczeniami i bez oznaczeń wskazują różne kierunki obrotów. Przymocuj oznaczone śmigła do silników z oznaczeniami, a śmigła bez oznaczeń do nieoznaczonych silników. Przytrzymaj silnik, wciśnij śmigło i obróć je w kierunku oznaczonym na śmigle, aby odpowiednio je zamontować i zablokować. Rozłóż śmigła.
-
▲ Upewnij się, że rozłożyłeś przednie ramiona przed rozłożeniem tylnych ramion. - Upewnij się, że osłona gimbala jest ściągnięta i wszystkie ramiona są rozłożone przed włączeniem zasilania drona. W przeciwnym razie może to wpłynąć na autodiagnostyke drona.
- Załóż osłonę gimbala, jeśli dron nie jest używany. Ustaw kamerę w pozycji poziomej, a następnie zabezpiecz system wizyjny osłoną gimbala. Uwaga: należy dopasować otwory montażowe, a następnie wcisnąć uchwyt, aby zakończyć montaż.
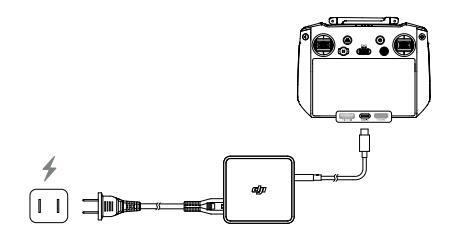
Przygotowywanie aparatury sterującej
Korzystając z dołączonej ładowarki, naładuj aparaturę przez port USB-C, aby uruchomić akumulator.
2. Wyjmij drążki sterujące ze schowka w aparaturze i wkręć je w odpowiednie miejsce.
3. Rozłóż anteny.

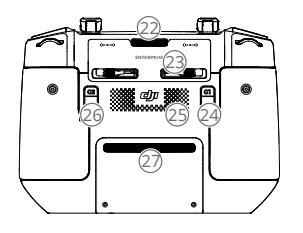
Opis elementów
Dron
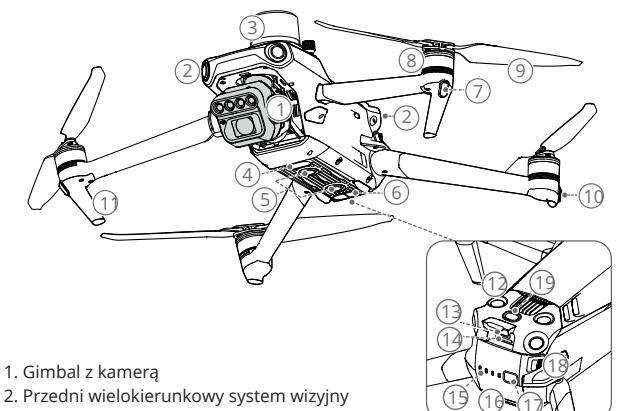
- 3. Moduł RTK (port PSDK)
- 4. Oświetlenie dodatkowe
- Dolny system wizyjny
- 6. System czujnikow podczerwieni
- 7. Przednie wskaźniki LED
- 8. Silniki
- 9. Śmigła
- 10. Wskaźniki statusu drona
- 11. Nóżki do lądowania (wbudowane anteny)
- 12. Górny system wizyjny
- 13. Port USB-C
- 14. Gniazdo karty microSD w kamerze
- 15. Wskaźnik poziomu naładowania akumulatora
- 16. Inteligentny akumulator
- 17. Przycisk zasilania
- 18. Uchwyty akumulatora
- 19. Czujnik światła słonecznego
Aparatura sterująca
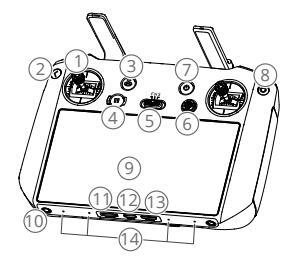
Drażki sterujące
Używaj drążków sterujących do sterowania lotem drona. Ustaw tryb sterowania lotem w aplikacji DI Pilot 2. Drążki sterujące można zdeimować i łatwo przechowwać.
Przycisk wstecz/funkcyjny
Naciśnij raz, aby powrócić do poprzedniego ekranu. Naciśnij dwa razy, aby powrócić do strony głównej. Użyj przycisku wstecz i innego przycisku, aby uruchomić kombinacje przycisków. Więcej informacji znajduje się w rozdziale "Kombinacie przycisków aparatury
sterującej".
3 Przycisk RTH
Naciśnij i przytrzymaj, aby uruchomić funkcję RTH. Naciśnij ponownie, aby anulować funkcie RTH.
4. Przycisk wstrzymania lotu
Naciśnij raz, aby dron wytracił prędkość i zawisł w miejscu (dotyczy wyłącznie sytuacji, gdy dostępne są systemy GNSS lub wizyjne).
5. Przełącznik trybu lotu
Służy do przełączania pomiędzy trzema trybami lotu: N (Normal), S (Sport) i F (Function) Tryb E możo być ustawiony po
tryb A (Attitude) lub tryb T (Tripod) w
арпкасл Бл Рпос 2
6. Przycisk 5D
Wyświetl domyślne funkcje przycisku 5D w aplikacji DJI Pilot 2.
Aby uzyskac więcej informacji, zapoznaj się z przewodnikiem na stronie głównej.
7 Przycisk zasilania
Naciśnij raz, aby sprawdzić aktualny poziom akumulatora. Naciśnij, a następnie naciśnii i przytrzymai. aby właczyć lub
wyłączyć zasilanie aparatury. Jeśli aparatura jest włączona, naciśnij raz, aby właczyć lub wyłaczyć ekran dotykowy.
8. Przycisk potwierdzenia
Naciśnij raz, aby potwierdzić wybór. Przycisk nie pełni funkcji podczas korzystania z aplikacji DII Pilot 2
9. Ekran dotykowy Naciśnii ekran, aby obsługiwać aparature
Należy pamiętać, że ekran dotykowy nie jest wodoodporny. Należy go obsługiwać z zachowaniem ostrożności.
10. Otwór na śrubę M4 11. Gniazdo karty microSD
12. Port USB-C Służy do ładowania urzadzenia
13. Port Mini HDMI Służy do przesyłania sygnału HDMI do
zewnętrznego monitora.
14 Mikrofon
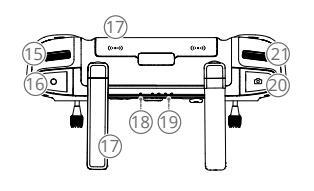
15. Pokrętło gimbala Umożliwia sterowanie pochyleniem
22. Kratka wentylacyina Służy do odprowadzania ciepła. Nie
25 Głośnik
27. Wlot powietrza
nia. Postępuj zgodnie z komunikatami wyświetlanymi na ekranie, aby dokonać aktywacii Unewnii sie że podczas aktywacii anaratura posiada dosten do sieci
Upewnij się, że dron jest zbindowany z aparatura przed aktywacia. Urzadzenia sa zbindowane domyślnie. Jeśli bindowanie jest konieczne, zapoznaj się z rozdziałem "Bindowanie drona z aparatura sterujaca", aby uzyskać wiecej szczegółów.
dostęp do sieci internetowej jest odpowiedni i spróbuj ponownie aktywować
Domyślnie używany do przełączania
Naciśnij do połowy przycisk, aby ustawić
Bezpieczeństwo podczas lotu
Upewnij się, że przed rozpoczęciem rzeczywistego lotu odbyłeś szkolenie i ćwiczenia. Wykonaj ćwiczenia z symulatorem w DJI Assistant 2 lub ćwicz loty pod nadzorem doświadczonych profesjonalistów. Wybierz odpowiedni obszar do latania zgodnie z poniższymi wymaganiami i ograniczeniami dotyczącymi lotu. Lataj dronem poniżej 120 m. Każda wysokość lotu wyższa niż wymieniona może naruszać lokalne prawa i przepisy. Przed rozpoczęciem lotu upewnij się, że rozumiesz i przestrzegasz lokalnych praw i przepisów. Przeczytaj uważnie wytyczne dotyczące bezpieczeństwa, aby zapoznać się ze wszystkimi środkami ostrożności przed lotem.
Wymagania dotyczące środowiska lotu
1. Nie należy obsługiwać drona w trudnych warunkach atmosferycznych, w tym przy wietrze o predkości przekraczającej 12 m/s. śniegu, deszczu i męle.
Należy latać wyłącznie na otwartych przestrzeniach. Wysokie budynki i duże konstrukcje metalowe moga wpływać na dokładność kompasu i systemu GNSS.
Zaleca się utrzymywanie drona w odległości co najmniej 5 m od zabudowań.
3. Unikaj przeszkód, tłumów, drzew i zbiorników wodnych (zalecana wysokość to co najmniej 3 m nad wodą).
4. Minimalizuj zakłócenia, unikając obszarów o wysokim poziomie promieniowania
elektromagnetycznego, takich jak miejsca w pobliżu linii energetycznych, stacji bazowych, podstacji elektrycznych i wież nadawczych.
5. Nie należy startować z wysokości większej niż 6000 m nad poziomem morza. Wydajność drona i jego akumulatora jest ograniczona podczas lotów na dużych
wysokościach. Należy latać z zachowaniem ostrożności.
System GNSS nie może być używany przez drona w regionach polarnych. W takich regionach należy korzystać z systemu wizyinego.
7. Nie należy startować z ruchomych obiektów, takich jak samochody i statki.
Upewnij się, że dodatkowe oświetlenie jest włączone w nocy w celu zapewnienia bezpieczeństwa lotu.
Aby uniknąć wpływu na żywotność silnika, Nie należy startować ani lądować dronem na terenach piaszczystych lub pylących. Upewnii sie, że pomiar wielospektralny jest wykonywany, gdy kat wzniesienia.
10. Upewnij się, że pomiar wielospektralny jest wykonywany, gdy kąt wzniesienia słońca jest większy niż 30°. Wskazane jest pozyskiwanie danych wielospektralnych w południe w warunkach słonecznych.
Wymagania dotyczące połączeń bezprzewodowych
Należy latać na rozległych, otwartych przestrzeniach. Wysokie budynki, stalowe konstrukcje, góry, skały lub wysokie drzewa mogą wpływać na dokładność systemu GNSS i blokować sygnał transmisji wideo.
Należy unikać zakłóceń między aparaturą a innymi urządzeniami bezprzewodowymi. Należy upewnić się, że podczas sterowania dronem za pomocą aparatury pobliskie urządzenia Wi-Fi i Bluetooth sa wyłączone.
Należy zachować szczególną ostrożność podczas lotów w pobliżu obszarów z zakłóceniami magnetycznymi lub radiowymi. Należy zwrócić szczególną uwagę na iakość transmisii obrazu i siłe sygnału w aplikacji DII Pilot 2.
Źródła zakłóceń elektromagnetycznych obejmują, ale nie ograniczają się do: linii wysokiego napięcia, stacji przesyłowych energii elektrycznej na dużą skalę lub stacji bazowych telefonii komórkowej oraz wież nadawczych. Dron może zachowywać się nieprawidłowo lub stracić równowagę podczas lotu w obszarach o zbyt dużych zakłóceniach. Wróć do punktu Home i wyląduj dronem, jeśli pojawi się odpowiedni komunikat w aplikacii DII Pilot 2.
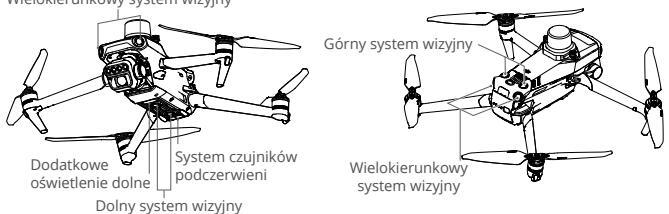
Systemy wizyjne i system czujników podczerwieni
DJI Mavic 3M wyposażony jest zarówno w system czujników podczerwieni, jak i wielokierunkowe systemy wizyjne.
Górne i dolne systemy wizyjne posiadają po dwie kamery, natomiast przednie, tylne i boczne systemy wizyjne składaja się łacznie z czterech kamer.
System czujników podczerwieni składa się z dwóch modułów podczerwieni 3D. Dolny system wizyjny i system czujników podczerwieni pomagaja dronowi
utrzymać aktualną pozycję, uzyskać bardziej precyzyjny zawis i latać w pomieszczeniach lub w innych środowiskach, gdzie sygnał GNSS jest niedostępny.
Dodatkowe oświetlenie dolne umieszczone na spodzie drona zwiększa widoczność dolnego systemu wizyjnego w warunkach ograniczonego oświetlenia.
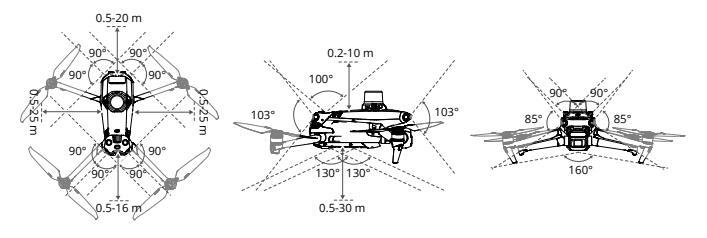
Wielokierunkowy system wizyjn
Zakres wykrywania
Przedni system wizyjny Zakres pomiarów precyzyjnych: 0,5-20 m; FOV: 90° (poziomo), 103° (pionowo) Tylny system wizyjny Zakres pomiarów precyzyjnych: 0,5-16 m; FOV: 90° (poziomo), 103° (pionowo) Boczny system wizyjny Precyzyjny zakres pomiarowy: 0,5-25 m; FOV: 90° (poziomo), 85° (pionowo) Górny system wizyjny Zakres pomiarów precyzyjnych: 0,2-10 m; FOV: 100° (przód i tył), 90° (lewo i prawo) Dolny system wizyjny Zakres pomiarów precyzyjnych: 0,3-18 m; FOV: 130° (przód i tył), 160° (lewo i prawo). Dolny system wizyjny działa optymalnie, gdy dron znajduje się na wysokości od 0,5 do 30 m.
Korzystanie z systemu wizyinego
Funkcja pozycjonowania dolnego systemu wizyjnego jest stosowana, gdy sygnały GNSS są niedostępne lub słabe. Jest ona automatycznie włączana w trybie Normal. Wielokierunkowy i górny system wizyjny uruchamiają się automatycznie po włączeniu zasilania, jeśli dron pracuje w trybie Normal, a funkcja unikania przeszkód (Obstacle Avoidance) została ustawiona na opcję Avoid (Unikaj) lub Brake (Zatrzymaj) w aplikacji DJI Pilot 2. Dron może automatycznie zatrzymywać się podczas wykrywania przeszkód, gdy używany jest wielokierunkowy i górny system wizyjny. Te systemy działają najlepiej przy odpowiednim oświetleniu lub przeszko-dach o wyraźnej teksturze. Ze względu na efekt inercji, użytkownicy muszą pamiętać o zatrzymaniu drona w odpowiedniej odległości.
▲ - Należy zwracać uwagę na warunki środowiska lotu. Systemy wizyjne i system czujników podczerwieni działają tylko w określonych sytuacjach i nie mogą zastępować kontroli i oceny sytuacji przez człowieka. Podczas lotu należy zawsze zwracać uwagę na otaczające środowisko i ostrzeżenia w aplikacji DJI Pilot 2, a także być odpowiedzialnym za drona i utrzymywać nad nim kontrolę przez cały czas. - Dolny system wizyiny działa nailepiei, gdy dron znaiduje sie na wysokości od 0.5 do.
30 m, jeśli nie ma dostępnego sygnału GNSS. Należy zachować szczególną ostrożność, jeśli wysokość drona przekracza 30 m, ponieważ może to mieć wpływ na wydajność
Dodatkowe oświetlenie dolne może zostać ustawione w aplikacji DJI Pilot 2. Jeśli jest ustawione na opcję Auto, jest ono automatycznie włączane, gdy oświetlenie otoczenia jest zbyt słabe. Uwaga: może to mieć wpływ na wydajność kamery systemu wizyjnego.
Dolny system wizyjny może nie działać prawidłowo, gdy dron leci nad wodą. Dlatego dron może nie być w stanie skutecznie unikać wody znajdującej się poniżej podczas
lądowania. Wskazane jest zachowanie kontroli nad lotem przez cały czas, dokonywanie przemyślanych decyzji na podstawie otaczającego środowiska i unikanie nadmiernego korzytacja z dolaczo systemu wiejnego.
System wizyjny nie działa prawidłowo nad powierzchniami bez wyraźnych zmian wzoru lub gd/ światło iest zbyt słabe lub zbyt silne. System wizyjny nie działa prawidło-
wzoru lub gdy światło jest zbyt słabe lub zbyt silne. System wizyjny nie działa prawidłowo w następujących sytuacjąch:
a. Lot nad powierzchniami monochromatycznymi (np. czysta czerń, biel, czerwień lub
b. Lot nad powierzchniami silnie odbijającymi światło.
e. Lot w obszarze o częstych i gwałtownych zmianach oświetlenia. f. Lot nad wyjątkowo ciemnymi (< 10 luksów) lub jasnymi (> 40 000 luksów)
g. Lot nad powierzchniami silnie odbijającymi lub pochłaniającymi fale podczerwieni (np. lustra)
h. Lot nad powierzchniami bez wyraźnych wzorów lub tekstury.
i. Lot nad powierzchniami o powtarzających się identycznych wzorach lub fakturach (np. płytki o tym samym wzorze).
i. Lot nad przeszkodami o małej powierzchni (np. gałezie drzew).
Należy zawsze utrzymywać czujniki w czystości. Nie należy dopuszczać do zarysowania czujników oraz nie należy ich modyfikować. Nie należy używać
drona w zapylonym lub wilgotnym środowisku. - Nie pależy wykonywać lotów gdy pada deszcz pojawia się smog lub.
Nie należy wykonywać lotów, gdy pada deszcz, pojawia się smog lub widoczność jest mniejsza niż 100 m.
- Za każdym razem przed startem należy sprawdzić następujące elementy:
a. Upewnij się, że osłony systemu wizyjnego i systemu czujników podczerwieni nie są zaklejone ani zablokowane w żaden inny sposób.
b. Używaj miękkiego materiału, jeśli na osłonach systemów wizyjnych i systemu czujników podczerwieni znajdują się zabrudzenia, kurz lub woda. Nie należy używać żadnych środków czyszczacych zawierajacych alkohol
c. Skontaktuj się z pomocą techniczną DJI, jeśli wystąpią uszkodzenia osłony systemów czujników podczerwieni i systemów wizvinych.
Nie należy zasłaniać systemu czujników podczerwieni.
Procedura RTH (Return to Home)
Procedura RTH sprowadza drona do ostatniego zarejestrowanego punktu Home, gdy system pozycjonowania działa prawidłowo. Wyróżnia się trzy rodzaje RTH: Smart RTH, Low Battery RTH i Failsafe RTH. Dron automatycznie wraca do punktu Home i ląduje, gdy uruchomiony zostanie tryb Smart RTH, tryb Low Battery RTH lub gdy sygnał pomiędzy aparaturą a dronem zostanie utracony podczas lotu.
| GNSS | Opis | |
|---|---|---|
|
Punkt
Home |
10 🐔 |
Pierwsza lokalizacja, w której dron odbierze silny lub
umiarkowanie silny sygnał GNSS (wskazany przez białą ikonę) zostanie zapisana jako domyślny punkt Home. Punkt Home może zostać zaktualizowany przed startem, o ile dron otrzyma kolejny silny lub umiarkowanie silny sygnał GNSS. Jeśli sygnał jest słaby, punkt Home nie zostanie zaktualizowany. DJI Pilot 2 wyda komunikat głosowy, gdy punkt Home zostanie ustawiony. |
Trvb Smart RTH
Przytrzymaj przycisk RTH na aparaturze, aby uruchomić tryb Smart RTH. Naciśnij przycisk RTH lub przycisk wstrzymania lotu, aby wyjść z trybu Smart RTH i odzyskać możliwość pełnego sterowania dronem.
Tryb Advanced RTH
Tryb Advanced RTH jest włączony, jeśli oświetlenie jest wystarczające, a otoczenie jest odpowiednie dla systemów wizyjnych, gdy Smart RTH jest uruchomiony. Dron automatycznie zaplanuje najlepszą trasę RTH, która zostanie wyświetlona w aplikacji DJI Pilot 2 i dostosuje się w zależności od otoczenia.
Ustawienia RTH
Ustawienia RTH są dostępne dla trybu Advanced RTH. Przejdź do podglądu kamery w aplikacji DJI Pilot 2, naciśnij •••-> %, a następnie RTH.
Preset: jeżeli dron znajduje się dalej niż 50 m od punktu Home w momencie rozpoczęcia RTH, dron zaplanuje trasę RTH, poleci na otwarty teren unikając przeszkód, wzniesie się na ustawioną wysokość RTH i wróci do punktu Home, używajac najlepszej trasy.
Jeżeli dron znajduje się w odległości od 5 do 50 m od punktu Home w momencie rozpoczecia RTH, dron nie wzniesie się na wysokość RTH i zamiast tego powróci do
punktu Home, używając najlepszej trasy na aktualnej wysokości. Gdy dron znajduje się w pobliżu punktu Home, będzie obniżał się, lecąc do przodu, jeżeli aktualna wysokość jest wyższa niż ustawiona wysokość RTH.
2. Optymalna trasa: niezależnie od ustawień wysokość RTH, dron automatycznie planuje optymalną trasą RTH i dostosowuje wysokość zgodnie z czynnikami środowiskowymi, takimi jak przeszkody i sygnały transmisji. Optymalna trasą RTH oznacza, że dron pokona najkrótszy możliwy dystans, zmniejszając ilość używanej mocy akumulatora i wydłużając czas lotu.
Procedura trybu Advanced RTH
1. Punkt Home zostanie zapisany automatycznie.
Zostanie uruchomiony tryb Advanced RTH.
3. Dron wytraci prędkość i zawiśnie nieruchomo.
Dron wyląduje natychmiast, jeżeli w momencie rozpoczęcia RTH znajdzie się w odległości mniejszej niż 5 m od punktu Home.
b. Jeśli dron znajdzie się dalej niż 5 m od punktu Home w momencie rozpoczęcia RTH, dron zaplanuje najlepszą trasę zgodnie z ustawieniami RTH i poleci do punktu Home, jednocześnie unikając przeszkód i stref GEO. Przód drona będzie zawsze
4. Dron będzie leciał automatycznie zgodnie z ustawieniami RTH, otoczeniem i svgnałem transmisii podrzas RTH
5. Dron wyląduje, a silniki zatrzymają się po dotarciu do Punktu Home.

Straight Line RTH (Trasa po linii prostei)
Dron rozpocznie trasę po linii prostej, gdy oświetlenie nie będzie wystarczające, a otoczenie nie bedzie odpowiednie dla trybu Advanced RTH.
Procedura Straight Line RTH:
- 1. Punkt Home zostanie zapisany.
- 2. Zostanie uruchomiona procedura Straight Line RTH.
3. Dron zahamuje i zawiśnie w miejscu.
a. Jeżeli w momencie rozpoczęcia RTH dron znajduje się dalej niż 50 m od Punktu Home, to najpierw wzniesie się na wysokość 20 m (ten krok zostanie pominięty, jeżeli aktualna wysokość jest większa niż 20 m), następnie dron dostosuje swoje
położenie i wzniesie się na ustawioną wysokość RTH oraz poleci do Punktu Home. Jeżeli aktualna wysokość jest wyższa niż wysokość RTH, dron poleci do Punktu
Home na aktualnej wysokości. b. leżeli dron znaiduje się w odległości 5 do 50 m od Punktu Home w momencie
rozpoczęcia RTH, dron dostosuje swoje położenie i poleci do Punktu Homena aktualnej wysokości. Jeżeli aktualna wysokość jest niższa niż 2 m w momencie rozpoczęcia RTH, dron wzniesie się na 2 m i wróci do Punktu Home.
c. Dron wyląduje natychmiast, jeżeli w momencie rozpoczęcia RTH znajduje się w odległości mniejszej niż 5 m od Punktu Home.
Dron wyląduje, a silniki zatrzymają się po dotarciu do Punktu Home.
| Â | - Podczas trybu Advanced RTH dron automatycznie dostosowuje prędkość lotu do |
|---|---|
| 4 | czynników środowiskowych, takich jak prędkość wiatru i przeszkody. |
| - Dron nie będzie mógł unikać małych lub drobnych obiektów, takich jak gałęzie | |
| drzew lub linie energetyczne. Przed rozpoczęciem trybu Smart RTH należy | |
| skierować dropa pa otwarty terep |
- Ustaw tryb Advanced RTH jako Preset, jeżeli na trasie RTH znajdują się linie energetyczne lub wieże, których dron nie może ominać i upewnii sie, że wysokość
RTH jest ustawiona wyżej niż wszystkie przeszkody.
Dron zatrzyma się i wróci do punktu Home według ostatnich ustawień, jeżeli ustawienia RTH zostaną zmienione podczas funkcji RTH.
- Jeżeli maksymalna wysokość jest ustawiona poniżej aktualnej wysokości podczas RTH, dron zejdzie do maksymalnej wysokości i wróci do punktu Home.
Wysokość RTH nie może być zmieniona podczas używania funkcji RTH
leśli istnieje duża różnica pomiędzy aktualną wysokością a wysokościa RTH, moc
używanego akumulatora nie może być dokładnie obliczona ze wzgledu na predkość
wiatru na różnych wysokościach. Należy zwrócić szczególną uwagę na komunikaty dotyczace mocy akumulatora i ostrzeżenia w aplikacii DII Pilot 2.
Tryb Advanced RTH nie będzie dostępny, jeśli warunki oświetlenia i otoczenia nie beda odpowiednie dla systemów wizyinych podczas startu lub RTH.
Podczas trybu Advanced RTH, dron uruchomi funkcje Straight Line RTH, jeśli warunki oświetleniowe i otoczenie nie będą odpowiednie dla systemów wizyjnych i dron nie będzie mógł uniknąć przeszkód. Przed wejściem w funkcję RTH należy ustawić odnowiednia wysokość RTH
Jeśli sygnał z aparatury jest prawidłowy podczas Advanced RTH, drążek sterujący może być używany do sterowania prędkością lotu, ale nie będzie możliwe sterowanie położeniem i wysokością, a dron nie będzie mógł lecieć w lewo lub w prawo. Przyspieszenie wymaga użycia większej mocy. Dron nie może unikać przeszkód, jeśli prędkość lotu przekracza rzeczywistą prędkość wykrywania. Dron wytraci prędkość i zawiśnie w miejscu oraz wyjdzie z RTH, jeżeli drążek sterujący zostanie maksymalnie wciśnięty. Po zwolnieniu drażka będzie można sterować dronem.
Jeśli sygnał z aparatury jest prawidłowy podczas Straight Line RTH, przy użyciu aparatury można sterować prędkością i wysokością lotu, ale nie można sterować położeniem drona i nie można lecieć w lewo lub w prawo. Dron nie może unikać przeszkód, jeżeli do przyspieszania używany jest drążek sterujący, a prędkość lotu przekracza rzeczywistą prędkość wykrywania. Jeżeli dron wznosi się lub leci do przodu, wciśnij drążek sterujący całkowicie w przeciwnym kierunku, aby wyjść z RTH. Zwolnij drążek sterujący, aby odzyskać sterowanie nad dronem.
- Jeżeli dron osiągnie maksymalną wysokość podczas wznoszenia w trakcie RTH, dron zatrzyma się i powróci do Puptru Homo pa aktualnej wysokości
Dron zawiśnie w miejscu, jeżeli osiągnie maksymalną wysokość podczas wznoszenia po wykrycju przed nim przeszkód.
Tryb low battery RTH
Jeśli poziom naładowania akumulatora jest zbyt niski i nie ma wystarczającej mocy, aby wrócić do punktu Home, wyląduj dronem tak szybko, jak to możliwe. Aby uniknąć niebezpieczeństwa spowodowanego niewystarczającą mocą, dron automatycznie obliczy, czy akumulator posiada wystarczająco dużo mocy, aby polecieć do punktu Home z bieżącej lokalizacji. W DJI Pilot 2 pojawi się komunikat ostrzegawczy, gdy poziom naładowania akumulatora będzie niski i dron będzie mógł obsługiwać tylko tryb Low Battery RTH. Dron poleci do punktu Home, jeśli nie zostanie podjęta żadna czynność po 10-sekundowym odliczaniu. Anuluj funkcję RTH naciskając przycisk RTH lub przycisk wstrzymania lotu na aparaturze.
Ostrzeżenie o niskim poziomie naładowania akumulatora zostanie wyświetlone tylko raz podczas lotu. Jeśli RTH zostanie anulowane po ostrzeżeniu, akumulator może nie mieć wystarczającej mocy, aby bezpiecznie wylądować, co może doprowadzić do rozbicia drona lub jego utraty. Dron wyląduje automatycznie, jeżeli aktualny poziom akumulatora może utrzymać drona tylko na czas, aby zejść z aktualnej wysokości. Automatycznego lądowania nie można anulować, ale za pomocą aparatury można zmieniać ruch poziomy i prędkość opadania drona podczas lądowania. Jeśli moc jest wystarczająca, można używać drążka przepustnicy, aby dron wznosił się z predkościa 1 m/s.
Podczas automatycznego lądowania należy poruszać dronem w poziomie, aby jak najszybciej znaleźć odpowiednie miejsce do lądowania. Dron spadnie, jeśli użytkownik będzie stale wciskał drążek przepustnicy do góry, aż do wyczerpania mocy akumulatora.
Wskaźnik poziomu naładowania akumulatora
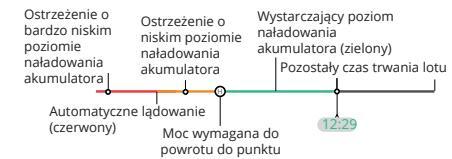

| Ostrzeżenie | Skutek | Lot |
|---|---|---|
| Low Battery RTH |
Pozostały poziom
akumulatora wystarczy tylko na bezpieczne dotarcie drona do punktu Home. |
Jeśli wybrano tryb RTH, dron poleci do punktu
Home automatycznie i uruchomi się zabezpieczenie podrzas lądowania. Użytkownicy mogą odzyskać kontrolę nad dronem i wylądować nim ręcznie podczas RTH. Ostrzeżenie nie pojawi się ponownie po M rezygnacji z funkcji RTH. Należy podjąć przemyślaną decyzje i zapewnić bezpieczeństwo podczas lotu. |
|
Automatyczne
lądowanie |
Pozostały poziom
akumulatora wystarczy jedynie na lądowanie drona z aktualnej wysokości. |
Dron wyląduje automatycznie, a
zabezpieczenie podczas lądowania zostanie włączone. |
|
Przewidywany
pozostały czas lotu |
Przewidywany
pozostały czas lotu drona jest oparty na jego aktualnym poziomie naładowania akumulatora. |
/ |
|
Ostrzeżenie o niskim
poziomie naładowania akumulatora |
Naciśnij •••-> 🕅 w
podglądzie kamery, aby ustawić wartość graniczną niskiego poziomu naładowania.* |
Aparatura będzie wydawać długie
sygnały dźwiękowe. Użytkownik nadał może sterować dronem. |
|
Ostrzeżenie o bardzo
niskim poziomie naładowania akumulatora |
Naciśnij •••-> 🕻 w
podglądzie kamery, aby ustawić wartość graniczną bardzo niskiego poziomu |
Aparatura będzie wydawać krótkie sygnały
dźwiękowe. Użytkownik może nadal sterować dronem. Dalszy lot dronem jest niebezpieczny. Należy natychmiast |
* Wartość graniczna jest inna niż w przypadku trybu Low Battery RTH lub automatycznego Jadowania
▲ Punkty oznaczone kolorami oraz szacowany pozostały czas lotu na wskaźniku poziomu naładowania akumulatora sa automatycznie dostosowywane do aktualnej
lokalizacii i statusu drona
Tryb Failsafe RTH
Działanie drona po utracie sygnału z aparatury może być ustawione na funkcję RTH, lądowanie lub zawis w aplikacji DJI Pilot 2. Jeśli punkt Home został pomyślnie zapisany i kompas działa prawidłowo, Failsafe RTH automatycznie uruchamia się po utracie sygnału z aparatury na dłużej niż sześć sekund.
Jeśli oświetlenie jest wystarczające, a systemy wizyjne działają prawidłowo, DJI Pilot 2 wyświetli trasę RTH, która została wygenerowana przez drona przed utratą sygnału z aparatury i powróci do punktu Home używając trybu Advanced RTH zgodnie z ustawieniami RTH. Dron pozostanie w RTH, nawet jeśli sygnał z aparatury zostanie przywrócony. DII Pilot 2 odpowiednio zaktualizuje trase RTH.
Jeśli oświetlenie nie jest wystarczające, a systemy wizyjne nie są dostępne, dron przeidzie do opcji Original Route RTH (nierwotna trasa RTH)
Procedura Original Route RTH:
1. Dron wytraci predkość i zawiśnie w miejscu.
2. a. ježeli dron znajduje się dalej niż 50 m od punktu Home, dron dostosuje swoje położenie i cofnie się o 50 m na swojej pierwotnej trasie lotu przed wejściem w funkcie Straight Ling PTH
b. Jeżeli dron znajduje się dalej niż 5 m, ale mniej niż 50 m od punktu Home, uruchomiona zostanie funkcia Strajeht Line RTH.
c. Dron wyląduje natychmiast, jeżeli w chwili rozpoczęcia RTH znajduje się w odległości mniejszej niż 5 m od Punktu Home.
3. Dron wyląduje, a silniki zatrzymają się po dotarciu do Punktu Home. Dron uruchomi lub pozostanie w funkcji Straight Line RTH, jeżeli podczas RTI
zostanie przywrócony sygnał z aparatury
Oron może nie być w stanie prawidłowo powrócić do punktu Home, jeżeli sygnał GNSS jest słaby lub niedostępny. Dron może wejść w tryb ATTI, jeżeli sygnał GNSS stanie sie słaby lub niedostępny po wprowadzeniu trybu Failsafe
RTH. Dron zawiśnie w miejscu na chwile przed ladowaniem.
Ważne jest, aby ustawić odpowiednią wysokość RTH przed każdym lotem. Uruchom DJI Pilot 2 i ustaw wysokość RTH. Domyślna wysokość RTH to 100 m.
Dron nie może unikać przeszkód podczas trybu Failsafe RTH, jeśli systemy wizvine sa wyłaczone.
Strefy GEO mogą mieć wpływ na procedurę RTH. Unikaj lotów w pobliżu stref GEO.
Dron może nie być w stanie wrócić do punktu Home, gdy prędkość wiatru jest zbyt duża. Należy latać z zachowaniem ostrożności.
Należy uważać na małe lub cienkie obiekty (takie jak gałęzie drzew lub linie energetyczne) oraz obiekty przezroczyste (takie jak woda lub szkło) podczas RTH. Wyjdź z procedury RTH i steruj dronem ręcznie w sytuacji awaryjnej.
Procedura RTH może nie być dostępna w niektórych środowiskach, nawet jeżeli systemy wizyjne działaja. W takich przypadkach dron wyjdzie z procedury
jeżeli systemy wizyjne działają. W takich przypadkach dron wyjdzie z procedury RTH.
Zabezpieczenie podczas ladowania
Zabezpieczenie podczas ladowania bedzie uruchamiane podczas trybu Smart RTH. Zabezpieczenie podczas lądowania włączy się, gdy dron zacznie lądować.
1 W trakcie zabezpieczenia podczas ladowania dron automatycznie wykryje i ostrożnie wyladuje na odpowiednim terenie
2 leśli teren zostanie uznany za niewłaściwy do ladowania, dron zawiśnie i bedzie
3. Jeśli zabezpieczenie podczas lądowania nie działa, aplikacja DJI Pilot 2 wyświetli
przycisk potwierdzenia lub wciśnij całkowicie drążek przepustnicy i przytrzymaj
-
A Zabezpierzenie podrzas ladowania nie bedzie działać w pastepujących sytuaciach:
b leżeli użytkownik obsługuje drażek sterujący nitch/roll/throttle (zabeznieczenie
c leśli system pozycionowania nie działa prawidłowo (np. błedy zwiazane z
d. leśli system wizyiny wymaga kalibracii. leśli oświetlenie jest zbyt ciemne, aby
e. Jeśli nie uzyskano ważnych danych obserwacyjnych i nie można wykryć warunków
Precvzvine ladowanie
poniższych cech terenu. Dron wyląduje, gdy aktualny teren będzie pasował do punktu Home. leśli dopasowanie terenu nie powiedzie sie, w aplikacji DII Pilot 2 noiawi sie komunikat.
-
Λ Zabezpieczenie podczas lądowania jest aktywowane podczas precvzvinego
- Wykonanie precyzyjnego ladowania podlega pastenującym warunkom
- W przeciwnym razie dron nie będzie zapisywał cech terenu punktu Home
- d. Cechy terenu punktu Home muszą być wystarczająco charakterystyczne. Teren
- e. Warunki oświetleniowe nie moga być zbyt jasne ani zbyt ciemne.
b. Przesunięcie drążka sterującego w dowolnym kierunku poza kierunkiem przepustnicy, aby zatrzymać precyzyine ladowanie. Dron bedzie opadał pionowo po
Ograniczenia lotu
System GEO (Geospatial Environment Online)
System GEO DJI to globalny system informacyjny, który w czasie rzeczywistym dostarcza informacje dotyczące bezpieczeństwa lotów i aktualizacji ograniczeń oraz zapobiega lotom UAV w ograniczonej przestrzeni powietrznej. W wyjątkowych okolicznościach, ograniczone obszary mogą zostać odblokowane, aby umożliwić loty. Przedtem jednak użytkownik musi złożyć wniosek o odblokowanie w oparciu o aktualny poziom ograniczeń w obszarze planowanego lotu. System GEO może nie spełniać wszystkich wymogów lokalnego prawa i przepisów. Użytkownicy ponoszą pełną odpowiedzialność za własne bezpieczeństwo lotu i przed złożeniem wniosku o odblokowanie lotu w obszarze objętym ograniczeniami muszą skonsultować się z lokalnymi władzami w sprawie odpowiednich wymogów prawnych i
Strefy GEO
System GEO DJI wyznacza bezpieczne obszary lotów, wskazuje poziomy ryzyka, powiadamia o bezpieczeństwie dla poszczególnych lotów oraz oferuje informacje o
ograniczonej przestrzeni powietrznej. Wszystkie obszary ograniczonego lotu są określane jako strefy GEO, które są dodatkowo podzielone na strefy ograniczone, strefy autoryzacji, strefy ostrzegawcze, rozszerzone strefy ostrzegawcze oraz strefy
wysokości. Użytkownicy mogą wyświetlać takie informacje w czasie rzeczywistym w aplikacji DJI Pilot 2. Strefy GEO to określone obszary lotów, w tym między innymi lotniska miejsca dużych imprez miejsca w których wystapiły sytuacje kryzysowe
(takie jak pożary lasów), elektrownie jądrowe, więzienia, nieruchomości rządowe i obiekty wojskowe.
Domyślnie system GEO ogranicza starty i loty w strefach, które mogą powodować problemy związane z bezpieczeństwem lub ochroną. Mapa stref GEO, która zawiera kompleksowe informacje na temat stref GEO na całym świecie jest dostępna na oficjalnej stronie internetowej DJI: https://www.dji.com/flysafe/geo--map.
Ograniczenia lotu w strefach GEO
| Strefa GEO | Ograniczenie lotu | Sytuacja |
|---|---|---|
|
Strefy
ograniczone (czerwone) |
Zabrania się lotów w
strefach ograniczo- |
Start: silniki drona nie mogą zostać
uruchomione w strefach ograniczonych. |
|
nych. Jeśli uzyskano
pozwolenie na lot w strefie ograniczonej, odwiedź stronę https://www.dji com/flysafe lub skontaktuj się z flysafe@dji.com, aby odblokować strefę. |
Podczas lotu: gdy dron wykona lot wewnątrz
strefy ograniczonej, w aplikacji DJI Pilot 2 rozpocznie się 100-sekundowe odliczanie. Po zakończeniu odliczania, dron natychmiast włączy tryb półautomatycznego lądowania i wyłączy silniki po wylądowaniu. |
|
|
Podczas lotu: jeśli dron zbliży się do granicy
strefy ograniczonej, dron automatycznie wytraci prędkość i zawiśnie. |
W poniższym rozdziale szczegółowo opisano ograniczenia lotu dla wyżej wymienionych stref GEO
|
Strefy
autoryzacji (niebieskie) |
Dron nie będzie
mógł wystartować w strefie autoryzacji, jeśli nie uzyska pozwolenia na lot w tej strefie. |
Start: silniki drona nie mogą zostać
uruchomione w strefach autoryzacji. Aby latać w strefie autoryzacji, użytkownik jest zobowiązany do złożenia wniosku o niestandardowe odblokowanie. Podczas lotu: jeśli dron wykona lot wewnątrz strefy autoryzacji, w aplikacji DJI Pilot 2 rozpocznie się 100-sekundowe odliczanie. Po zakończeniu odliczania, dron włączy tryb półautomatycznego lądowania i wyłączy swoje silniki po wylądowaniu. |
|---|---|---|
|
Strefy
ostrzegawcze (żółte) |
Ostrzeżenie zostanie
wyświetlone, gdy dron wykona lot wewnątrz strefy ostrzegania. |
Dron może latać w strefie, jednak użytkownik
jest zobowiązany do zapoznania się z ostrzeżeniem. |
|
Rozszerzone
strefy ostrzegawcze (pomarań- czowe) |
Jeśli dron wykonuje
lot w rozszerzonej strefie ostrzegawczej, zostanie wyświetlone ostrzeżenie z prośbą o potwierdzenie trasy lotu. |
Po potwierdzeniu ostrzeżenia dron może
kontynuować lot. |
|
Strefy
wysokości (szare) |
Wysokość drona
jest ograniczona podczas lotu wewnątrz strefy |
Jeśli sygnał GNSS jest silny, dron nie może
lecieć powyżej limitu wysokości. Podczas lotu: gdy sygnał GNSS zmieni się ze słabego na silny, w aplikacji DJI Pilot 2 rozpocznie się 100-sekundowe odliczanie, jeśli dron przekroczy limit wysokości. Po zakończeniu odliczania, dron zejdzie poniżej limitu wysokości i zawiśnie. |
| wysokosci. |
Jeśli dron zbliża się do granicy strefy
wysokości, a sygnał GNSS jest silny, dron automatycznie wytraci prędkość i zawiśnie, jeśli znajdzie się powyżej limitu wysokości. |
Ołłautomatyczne lądowanie: Wszystkie funkcje drążka oprócz funkcji drążka przepustnicy i przycisku RTH są dostępne podczas zniżania i lądowania. Silniki drona wyłączą się automatycznie po wylądowaniu. Wskazane jest, aby przed półautomatycznym lądowaniem skierować dron w bezpieczne miejsce.
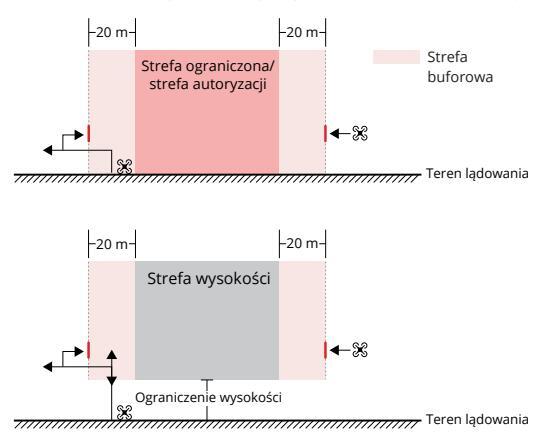
Strefa buforowa
Strefy buforowe dla stref ograniczonych/stref autoryzacji: aby zapobiec przypadkowemu wleceniu drona do strefy ograniczonej lub strefy autoryzacji, system GEO tworzy strefę buforową o szerokości około 20 metrów poza każdą strefą ograniczoną i strefą autoryzacji. Jak pokazano na poniższej ilustracji, dron może startować i lądować poza strefą ograniczeń lub autoryzacji tylko wtedy, gdy znajduje się wewnątrz strefy buforowej.
Dron nie może lecieć w kierunku strefy ograniczonej lub strefy autoryzacji, chyba że zatwierdzono wniosek o odblokowanie. Dron nie może wlecieć z powrotem do strefy buforowej po jej opuszczeniu.
Strefy bułorowe po jej opuszczeniu. Strefy bułorowe dla stref wysokości: poza każdą strefą wysokości ustalona jest strefa bułorowa o szerokości około 20 metrów. Jak pokazano na poniższej ilustracji, podczas zbliżania się do strefy bułorowej strefy wysokości w kierunku poziomym, dron stopniowo zmniejsza predkość lotu i zawisa poza strefa bułorowa. Podczas
uzlożania się do strefy buforowej od społu w kierunku pionowym, dron może wznosić się i opadać na określoną wysokość lub odlecieć od strefy wysokości. Dron nie może lecieć w kierunku strefy wysokości. Dron nie może wlecieć z powrotem do
strefy buforowej w kierunku poziomym po opuszczeniu strefy buforowej.
Odblokowanie stref GEO
Aby spełnić wymagania użytkowników, DJI zapewnia dwa tryby odblokowania: Odblokowanie w czasie rzeczywistym i Niestandardowe odblokowanie. Użytkowni-
cy mogą złożyć wniosek na stronie DJI Fly Safe albo za pośrednictwem urządzenia mobilnego.
Odblokowanie w czasie rzeczywistym jest przeznaczone do odblokowania stref autoryzacji. Aby wykonać takie odblokowanie, użytkownik musi złożyć wniosek o
autoryżacji. Aby wykonać takle odbiokowanie, użytkownik musi żrożyć wniosek o odbiokowanie za pośrednictwem strony internetowej DJI Fly Safe pod adresem https://www.dji.com/flysafe. Po zatwierdzeniu żądania odbiokowania, użytkownik
może zsynchronizować licencję na odblokowanie poprzez aplikację DJI Pilot 2. Aby odblokować strefę, opcjonalnie, użytkownik może uruchomić lub wlecieć dronem bezpośrednio do zatwierdzonej strefy autoryzacji i postępować zgodnie z komuni-
katami w aplikacji DJI Pilot 2, aby odblokować strefę. W przypadku odblokowania w czasie rzeczywistym, użytkownik może wyznaczyć okres odblokowania, podczas
którego można wykonywać wiele lotów. Opcjonalne odblokowanie jest ważne tylko dla jednego lotu. Jeśli dron zostanie ponownie uruchomiony, użytkownik będzie musiał ponownie odblokować strefe.
Niestandardowe odblokowanie jest przystosowane do użytkowników o określonych wymaganiach. Wyznacza zdefiniowane przez użytkownika niestandardowe obszary lotów i udostępnia dokumenty zezwoleń na loty dostosowane do potrzeb różnych użytkowników. Ta opcja odblokowania jest dostępna we wszystkich krajach i regionach oraz można ją uzyskać za pośrednictwem strony internetowej DJI FIV Safe pod adresem https://www.dii.com/fIvsafe.
Odblokowanie na urządzeniu mobilnym: uruchom aplikacie DII Pilot 2 i naciśnii
mapę stref GEO na ekranie głównym. Wyświetl listę licencji odblokowujących i naciśnij (1), aby wyświetlić ich szczegóły. Wyświetlony zostanie link do licencji
odblokowującej oraz kod QR. Używając urządzenia mobilnego zeskanuj kod QR i złóż wniosek o odblokowanie bezpośrednio z urządzenia mobilnego.
Aby uzyskać więcej informacji na temat odblokowania, odwiedź stronę https://www.dji.com/flysafe lub skontaktuj się z flysafe@dji.com.
Ograniczenia dotyczące maksymalnej wysokości i odległości
Maksymalna wysokość lotu ogranicza wysokość lotu drona, natomiast maksymalna odległość lotu ogranicza promień lotu drona wokół punktu Home. Ograniczenia można ustawić przy użyciu aplikacji DJI Pilot 2 w celu zwiększenia bezpieczeństwa lotu.
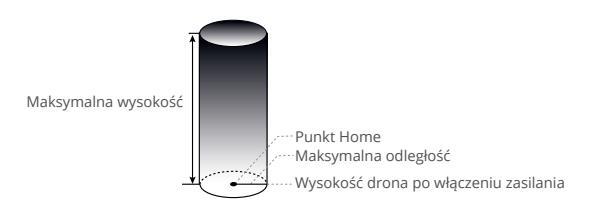
Punktu Home nie można manualnie aktualizować podczas lotu.
| Silny sygnał GNSS | |||
|---|---|---|---|
| Ograniczenia lotu | Komunikat w DJI Pilot 2 | ||
| Maks. wysokość |
Wysokość drona nie może przekroczyć
wartości ustawionej w aplikacji DJI Pilot 2. |
Dron zbliża się do maks. wyso-
kości lotu. Zachowaj ostrożność. |
|
| Maks. odległość |
Odległość w linii prostej od drona do
punktu Home nie może przekroczyć maksymalnej odległości lotu ustawionej w aplikacji DJI Pilot 2. |
Dron zbliża się do maksymalnej
odległości lotu. Zachowaj ostrożność. |
|
| Słaby sygnał GNSS | |||
|---|---|---|---|
| Ograniczenia lotu | Komunikat w DJI Pilot 2 | ||
|
Maksymalna
wysokość |
Jeśli sygnał GNSS jest słaby lub gdy ikona
GNSS jest żółta bądź czerwona, a światło otoczenia jest zbyt ciemne, maksymalna wysokość to wysokość względna mierzona przez czujnik podczerwieni. Jeśli sygnał GNSS jest słaby, ale światło otoczenia jest wystarczające, maksymalna wysokość wynosi 60 m. |
Dron zbliża się do maksymalnej
wysokości lotu. Zachowaj ostrożność. |
|
|
Maksymalna
odległość |
Bez ograniczeń | Nie dotyczy. | |
Jeżeli przy każdym włączeniu zasilania występuje silny sygnał GNSS, ograniczenie wysokości automatycznie zostaje anulowane.
- Jeśli dron przekroczy określony limit, użytkownik może nadal sterować dronem, ale nie może zbliżyć sie do ograniczonego obszaru.
- Ze względów bezpieczeństwa nie należy latać dronem w pobliżu lotnisk, autostrad, stacji kolejowych, linii kolejowych, centrów miast lub innych niebezpiecznych obszarów. Należy latać dronem tylko w zasięgu wzroku
System DJI AirSense
Drony z technologią ADS-B aktywnie wysyłają informacje o locie, w tym lokalizację, trasę lotu, predkość i wysokość.
Drony wyposażone w system DJI AirSense mogą odbierać informacje o locie wysyłane z nadajników ADS-B zgodnych ze standardami 1090ES lub UAT w promieniu 10 kilometrów. Na podstawie odebranych informacji o locie. DII AirSense może przepaga-
lizować i uzyskać lokalizację, wysokość, kierunek oraz prędkość otazających samolotów i porównać takie dane z dronem DJI, aby obliczyć w czasie rzeczywistym potencjalne ryzyko kolizji z otaczającymi obiektami. DJI AirSense wyświetli komunikat ostrzegawczy w ablikacii DII Pilot 2 w zależności od poziomu ryzyka.
DJI AirSense wydaje komunikaty ostrzegawcze o zbliżających się określonych samolotach tylko w specjalnych okolicznościach. Należy zawsze latać dronem w zasięgu linii wzroku i zachować ostrożność przez cały czas, aby zapewnić bezpieczeństwo podczas lotu. Należy pamiętać, że system DJI AirSense posiada następujące ograniczenia:
DJI AirSense może odbierać komunikaty wysyłane tylko przez obiekty wyposażone w sprzęt ADS-B Out, który jest zgodny ze standardami 1090ES (RTCA DO-260) lub UAT (RTCA Do-282). Urządzenia DJI nie mogą odbierać komunikatów wysyłanych z samolotów lub wyświetlać ostrzeżeń o samolotach niewyposażonych w prawidłowo
działające urządzenia ADS-B Out.
- Jeśli pomiędzy samolotem a dronem DJI znajduje się przeszkoda, DJI AirSense nie będzie mógł odbierać komunikatów ADS-B z samolotu ani wysyłać ostrzeżeń do użytkownika. Uważnie obserwuj swoje otoczenie i lataj z zachowaniem ostrożności.
- Komunikaty ostrzegawcze mogą być opóźnione, jeśli DJI AirSense doświadczy wszelkich zakłóceń z otoczenia. Dokładnie obserwuj swoje otoczenie i lataj z zachowaniem ostrożności.
- Komunikaty ostrzegawcze mogą nie zostać odebrane, jeśli dron DJI nie jest w stanie uzyskać informacii o swoiei lokalizacii.
- DJI AirSense nie może odbierać komunikatów ADS-B z samolotów lub wysyłać ostrzeżeń do użytkownika, gdy jest on wyłączony lub źle skonfigurowany.
Jeśli system DJI AirSense wykryje zagrożenie, w aplikacji DJI Pilot 2 pojawi się projekcja AR, intuicyjnie wskazując odległość między dronem DJI a obiektem, wydając alert ostrzegawczy. Użytkownicy powinni postepować zeodnie z wytycznymi w aplikacji DJI Pilot 2 po otrzymaniu alertu.
- 1. Uwaga: na mapie pojawi się niebieska ikona samolotu.
- Uwaga: aplikacja wyświetli komunikat: "Manned aircraft detected nearby. Fly with caution." (Wykryto w pobliżu obiekt. Leć z zachowaniem ostrożności). Na podglądzie z kamery pojawi się niewielka, pomarańczowa, kwadratowa ikona z informacją o odległości. a na podgladzie z maby pojawi się pomarańczowa ikona samolotu.
- 3. Ostrzeżenie: aplikacja wyświetli komunikat: "Collision risk. Descend or ascend immediately." (Ryzyko kolizji. Natychmiast zniż się lub wznieś się). Jeśli użytkownik nie wykona czynności, aplikacja wyświetli: "Collision risk. Fly with caution." (Ryzyko kolizji. Zachowaj ostrożność). Na podglądzie z kamery pojawi się niewielka, czerwona, kwadratowa ikona z informacją o odległości, a na podglądzie z mapy pojawi się czerwona ikona samolotu. Aparatura będzie wibrować, aby poinformować o ostrzeżeniu.
System APAS 5.0
System APAS 5.0 jest dostępny w trybie Normal i Tripod. Po włączeniu systemu APAS, dron będzie nadal reagował na polecenia użytkownika i planował swoją trasę według ruchów drążka sterującego oraz środowiska lotu. System APAS ułatwia unikanie przeszkód, uzyskanie stabilnego nagrania oraz zapewnia lepsze wrażenia podczas lotu.
Poruszaj drążkami sterującymi w dowolnym kierunku. Dron będzie omijał przeszkody lecąc nad, pod, w lewo lub prawo od przeszkody. Dron może również reagować na ruchy drążka sterującego podczas omijania przeszkód.
Kiedy system APAS jest włączony, można zatrzymać drona poprzez naciśnięcie przycisku wstrzymania lotu na aparaturze. Dron wytraci prędkość i zawiśnie na trzy sekundy oraz będzie oczekiwał na dalsze polecenia.
Aby włączyć system APAS, wejdź w podgląd kamery w aplikacji DJI Pilot 2, naciśnij ••••-> (a), następnie opcję Obstacle Avoidance (Unikanie przeszkód) i włącz APAS wybierając opcję Avoid (Unikanie).
Zabezpieczenie podczas ladowania
Zabezpieczenie podczas lądowania zostanie aktywowane, jeśli opcja Obstacle Avoidance (Unikanie przeszkód) jest ustawiona na Avoid (Unikanie) lub Brake (Zatrzymanie), a użytkownik przesunie drążek przepustnicy w dół, aby wylądować dronem. Zabezpieczenie podczas ladowania uruchamia sie. gdy dron zaczyna ladować.
- W trakcie zabezpieczenia podczas lądowania dron automatycznie wykryje i ostrożnie wyladuje na odpowiednim terenie.
- Jeśli teren zostanie określony jako nieodpowiedni do lądowania, dron zawiśnie po osiągnięciu wysokości 0,8 m nad powierzchnią terenu. Przesuń drążek przepustnicy w dół na dłużej niż pięć sekund, a dron wyłąduje bez funkcji unikania przeszkód.
- Upewnii sie, że korzystasz z systemu APAS, gdy systemy wizyine są właczone. Upewnii
się, że wzdłuż trasy lotu nie znajdują się ludzie, zwierzęta, obiekty o małej powierzchni (np. gałęzie drzew) lub obiekty przezroczyste (np. szkło lub woda).
- Upewnij się, że korzystasz z systemu APAS, gdy systemy wizyjne są włączone lub gdy sygnał GNSS jest silny. APAS może nie działać prawidłowo, gdy dron leci nad wodą lub terenem pokrytym śnieziem.
- Zachowaj szczególną ostrożność podczas latania w ekstremalnie ciemnym (<300 lux) lub jasnym (>10.000 lux) otoczeniu.
- Zwróć uwagę na aplikację DJI Pilot 2 i upewnij się, że APAS działa prawidłowo.
- System APAS może nie działać prawidłowo, gdy dron leci w pobliżu ograniczeń lotu lub w strefie GEO.
Lista kontrolna przed lotem
Upewnij się, że aparatura i akumulator są w pełni naładowane, oraz, że akumulator iest prawidłowo zamontowany.
Upewnij się, że śmigła są prawidłowo zamontowane i nie są uszkodzone lub zdeformowane, w silnikach lub śmigłach nie znajdują się żadne obce przedmioty, a śmigła i ramiona śmigieł są rozłożone.
Upewnij się, że powierzchnia systemów wizyjnych, kamer, czujników podczerwieni, dodatkowego oświetlenia i czujnika światła słonecznego jest czysta, nie posiada naklejek i nie jest w żaden sposób zablokowana.
Upewnij się, że przed włączeniem zasilania drona zdjąłeś osłonę gimbala.
Upewnij się, że osłona gniazda karty microSD została prawidłowo zamknięta, a moduł RTK iest stabilnie zamontowany na dronie.
6. Upewnii sie, że anteny aparatury sa ustawione w odpowiedniej pozycii.
7. Upewnij się, że aplikacja DJI Pilot 2 oraz oprogramowanie drona zostały zaktualizowane do najnowszej wersji.
Włącz zasilanie drona i aparatury sterującej. Upewnij się, że wskaźnik statusu na aparaturze oraz wskaźniki poziomu akumulatora drona świecą się na zielono. Oznacza to, że dron i aparatura sa połaczone, oraz, że aparatura umożliwia sterowanie dronem.
9. Upewnij się, że wybrany obszar lotu znajduje się poza wszelkimi strefami GEO, a warunki lotu są odpowiednie do wykonywania lotów. Ustaw drona na otwartym i płaskim
terenie. Upewnij się, że w pobliżu nie ma żadných przeszkod, budynkow ani drzew, a dron znajduje się w odległości 5 m od użytkownika. Dron powinien być skierowany tyłem do użytkownika.
- 10. Aby zapewnić bezpieczeństwo podczas lotu, wejdź w podgląd kamery w aplikacji DJI Pilot 2 i sprawdź parametry na liście kontrolnej przed lotem, takie jak ustawienia failsafe, tryb drążka sterującego, wysokość RTH i odległość od przeszkód. Wskazane jest ustawienie czynności związanej z utrata kontroli podczas procedury RTH.
- 11. Upewnij się, że aplikacja DJI Pilot 2 jest prawidłowo uruchomiona, aby wspomóc obsługę drona. BEZ DANYCH DOTYCZĄCYCH LOTU ZAREJESTROWANYCH PRZEZ APLIKACJĘ DJI PILOT 2, W PEWNYCH SYTUACJACH (W TYM W PRZYPADKU UTRATY DRONA), DJI MOŻE NIE ZAPEWNIĆ UŻYTKYCH U OSCU CI POSPOZEDAŻOWELU UB NIE PONIEŚĆ ODPOWIEDZIA NOĆCI.
- Wydziel obszar powietrzny do lotu, jeżeli wiele dronów wykonuje loty w tym samym czasie, aby uniknąć kolizji w powietrzu.
Uruchamianie/zatrzymywanie silników
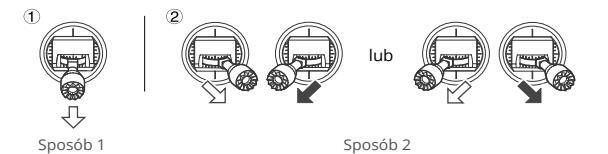
Uruchomienie silników
Do uruchomienia silników używa się polecenia Combination Stick Command (CSC). Naciśnij oba drążki do wewnętrznych lub zewnętrznych dolnych rogów, aby uruchomić silniki. Gdy silniki zaczną się kręcić, zwolnij oba drążki jednocześnie.

Zatrzymywanie silników
Silniki można zatrzymać na dwa sposoby:
Sposób 1: po wylądowaniu drona, przesuń drążek przepustnicy w dół i przytrzymaj. Silniki zatrzymaja sie po trzech sekundach.
Sposób 2: po wylądowaniu drona, przesuń drążek przepustnicy w dół i wykonaj to samo polecenie CSC, które jest używane do uruchomienia silników. Zwolnii oba drażki po zatrzymaniu silników.
Zatrzymanie silników w trakcie lotu
Zatrzymanie silników w trakcie lotu spowoduje rozbicie drona. Silniki powinny być zatrzymywane w trakcie lotu wyłącznie w sytuacjach awaryjnych, np. gdy dron uległ kolizji, silnik zatrzymał się, dron obraca się w powietrzu lub gdy dron utracił kontrolę i wznosi się lub opada bardzo szybko. Aby zatrzymać silniki w trakcie lotu, wykonaj to samo polecenie CSC, które było używane do uruchomienia silników. Domyślne ustawienie może być zmienione w aplikacji DJI Pilot 2.
Test lotu
- Umieść drona na otwartej, płaskiej powierzchni, z tylną częścią drona skierowaną w kierunku użytkownika.
- 2. Włącz zasilanie aparatury i drona.
- Uruchom aplikacie DII Pilot 2 i weidź w podglad kamery.
- Poczekaj na zakończenie autodiagnostyki drona. Jeśli aplikacja DJI Pilot 2 nie pokaże żadnego nieprawidłowego ostrzeżenia, możesz uruchomić silniki.
- Przesuń powoli drążek przepustnicy w górę, aby wystartować.
- Aby wylądować, zawiśnij nad równą powierzchnią i łagodnie przesuń drążek przepustnicy w dół, aby się zniżyć.
- Silniki zatrzymają się automatycznie po wylądowaniu.
- 8. Wyłącz zasilanie akumulatora drona przed wyłączeniem zasilania aparatury.
Przed startem należy umieścić drona na płaskiej i stabilnej powierzchni. Nie należy uruchamiać drona trzymajac go w dłoni.
Dron
DJI Mavic 3M jest wyposażony w kontroler lotu, system transmisji wideo, systemy wizyjne, system czujników podczerwieni, system napędowy oraz inteligentny akumulator.
Tryby lotu
DII Mavic 3M obsługuje następujące tryby lotu:
Tryb Normal:
Dron wykorzystuje system GNSS, wielokierunkowy system wizyjny, górny i dolny system wizyjny oraz system czujników podczerwieni do określenia swojej lokalizacji i stabilizacji. Gdy sygnał GNSS jest silny, dron używa go do lokalizacji i stabilizacji. Gdy sygnał GNSS jest słaby, ale oświetlenie i inne warunki środowiskowe są wystarczające, używane są systemy wizyjne. Gdy systemy wizyjne są włączone, a oświetlenie i inne warunki środowiskowe są wystarczające, maksymalny kąt nachylenia wynosi 30°, a maksymalna prędkość lotu wynosi 15 m/s.
Tryb Sport:
W trybie Sport dron używa systemu GNSS do pozycjonowania, a reakcje drona są zoptymalizowane pod kątem zwinności i prędkości, dzięki czemu lepiej reaguje na ruchy drążka sterującego. Uwaga: wykrywanie przeszkód jest wyłączone, a maksymalna prędkość lotu wynosi 21 m/s (19 m/s podczas lotów w UE).
Tryb Function:
Tryb Function można ustawić na tryb T (Tripod) lub A (Attitude) w aplikacji DJI Pilot 2. Tryb T jest oparty na trybie Normal. Prędkość lotu jest ograniczona, aby umożliwić łatwiejsze sterowanie dronem. Przy użyciu trybu Attitude należy zachować ostrożność.
Dron automatycznie przechodzi w tryb A, gdy systemy wizyjne są niedostępne lub wyłączone oraz gdy sygnał GNSS jest słaby lub kompas ulega zakłóceniom. W trybie A dron może łatwiej ulegać wpływom otoczenia. Czynniki środowiskowe, takie jak wiatr, mogą powodować przesunięcia w poziomie, co może stanowić zagrożenie, zwłaszcza podczas lotów w ograniczonych przestrzeniach.
- Nie należy przełączać się z trybu Normal na inne tryby, dopóki nie zapoznasz się wystarczającc z działaniem drona w każdym trybie lotu. Należy włączyć funkcję Multiple Flight Modes w aplikacj DJI Pilot 2 przed przełączeniem z trybu Normal na inne tryby.
-
W trybie Sport systemy wizyjne są wyłączone, co oznacza, że dron nie może automatycznie wykrywać przeszkód na swojej trasie. Użytkownik musi zachować czujność w stosunku do otoczenia i sterować dronem tak, aby omijać przeszkody.
- W trybie Sport znacznie wzrasta prędkość maksymalna i odległość zatrzymania drona. W warunkach bezwietrznych wymagana jest minimalna odległość zatrzymania 30 m.
- Podczas wznoszenia i obniżania się drona w trybie Sport lub w trybie Normal, w warunkach bezwietrznych wymagana jest minimalna odległość zatrzymania 10 m.
- W trybie Sport reakcja drona znacznie wzrasta, co oznacza, że mały ruch drążka sterującego na aparaturze przekłada się na dużą odległość poruszania się drona. Upewnij się, że zachowujesz odpowiednią przestrzeń manewrową podczas lotu.
- Po przełączeniu GNSS na system pozycjonowania satelitarnego BeiDou w aplikacji DJI Pilot 2, dron używa tylko jednego systemu pozycjonowania, a możliwości wyszukiwania satelitów ulegają osłabieniu. Należy latać z zachowaniem ostrożności.
Wskaźnik statusu drona
DII Mavic 3M posiada przednie wskaźniki LED oraz wskaźniki statusu drona
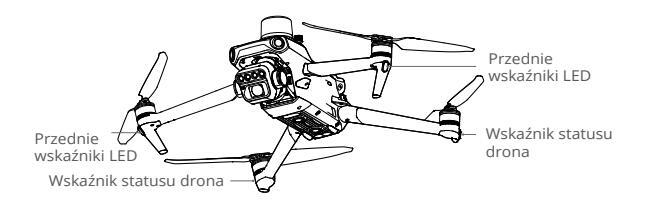
Gdy dron jest włączony, ale silniki nie pracują, przednie wskaźniki LED świecą się na czerwono, wskazujac kierunek lotu.
Gdy dron jest włączony, ale silniki nie pracują, wskażniki statusu drona wyświetlają aktualny stan systemu kontroli lotu. Więcej informacji na temat wskaźników statusu drona znajduje się w poniższej tabeli.
| Opisy ws | każni | kow s | tatusı | лc | irona |
|---|
| Prawidłowy status | |||
|---|---|---|---|
|
Miga na przemian na
czerwono, żółto i zielono |
Włączanie zasilania i wykonywanie testów
auto diagnostycznych |
||
| × 4 | Miga czterokrotnie na żółto | Nagrzewanie | |
| · • | Miga powoli na zielono | Włączenie systemu GNSS | |
| € ×2····· | Blinks green twice repeatedly | Włączenie systemów wizyjnych | |
| ن | Miga powoli na żółto |
Wyłączenie systemów GNSS i wizyjnych
(włączony tryb ATTI) |
|
| Nieprawidłowy | status | ||
| Miga szybko na żółto | Brak sygnału z aparatury | ||
| Miga powoli na czerwono | Nie można rozpocząć lotu* | ||
| Miga szybko na czerwono | Bardzo niski poziom naładowania akumulatora | ||
| —— | Stale świeci na czerwono | Kluczowy błąd | |
|
Miga na przemian na
czerwono i żółto |
Wymagana kalibracja kompasu | ||
Jeśli dron nie może wystartować, a wskaźniki statusu powoli migają na czerwono, połącz się z aparaturą, uruchom aplikację DJI Pilot 2 i zapoznaj się ze szczegółowymi informacjami.
Po uruchomieniu silnika przednie wskaźniki LED migają na przemian na czerwono i zielono, a wskaźniki statusu drona migają na zielono.
A Aby uzyskac lepsze materiały, przednie wskaźniki LED wyłączają się automatycznie podczas fotografowania, jeśli przednie wskaźniki LED są ustawione na tryb Auto w aplikacji DJI Pilot 2. Wymagania dotyczące oświetlenia różnią się w zależności od regionu. Przestrzegaj lokalnych praw i przepisów.
Czujnik światła słonecznego i dodatkowe oświetlenie
Czujnik światła słonecznego
Czujnik światła słonecznego przechwytuje promieniowanie słoneczne i zapisuje je w czasie rzeczywistym. W połączeniu z danymi obrazowania każdego pasma kamery multispektralnej, uzyskuje dokładniejsze odbicie pasma, co zwiększa zgodność danych zebranych w różnych regionach, warunkach pogodowych i czasie.
Dodatkowe oświetlenie
Dodatkowe oświetlenie znajdujące się w dolnej części drona automatycznie włączy się w słabych warunkach oświetleniowych, aby wspomóc dolny system wizyjny. Oświetlenie może być również ręcznie włączone lub wyłączone w aplikacji DJI Pilot 2.
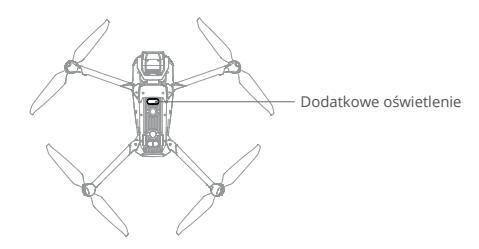
Dodatkowe oświetlenie włączy się automatycznie w warunkach słabego oświetlenia, gdy wysokość lotu wynosi poniżej 5 m. Należy pamiętać, że może to mieć wpływ na wydajność pozycjonowania systemów wizyjnych. Należy latać ostrożnie, jeśli sygnał GNSS jest słaby.
Rejestrator lotów
Dane dotyczące lotu, w tym telemetria lotu, informacje o statusie drona i inne parametry, są automatycznie zapisywane w wewnętrznym rejestratorze danych drona. Dostęp do danych można uzyskać używajac programu DII Assistant 2.
Śmigła
Wyróżnia się dwa rodzaje śmigieł DJI Mavic 3M typu Quick-Release zaprojektowanych do obracania się w różnych kierunkach. Oznaczenia wskazują, które śmigła powinny być przymocowane do jakich silników. Należy upewnić się, że śmigła i silnik są dopasowane zgodnie z instrukcia.
Montaż śmigieł
Przymocuj śmigła z oznaczeniami do silników z oznaczeniami, a śmigła bez oznaczeń do silników bez oznaczeń. Przytrzymaj silnik, wciśnij śmigło i obróć je w kierunku oznaczonym na śmigle, aby odpowiednio je zamontować i zablokować.
Demontaż śmigieł
Przytrzymaj silnik, wciśnij śmigło i obróć w kierunku przeciwnym do zaznaczonego na śmigle, aż wyskoczy.
-
Krawędzie śmigła są ostre. Należy obchodzić się z nimi ostrożnie.
- Używaj wyłacznie oryginalnych śmigieł DII. Nie należy mieszać rodzajów śmigieł.
- Śmigła są elementami podlegającymi zużyciu. W razie potrzeby należy zakupić dodatkowe śmigła.
- Przed każdym lotem należy upewnić się, że śmigła i silniki są prawidłowo zamontowane.
- Przed każdym lotem należy upewnić się, że wszystkie śmigła są w prawidłowym stanie. Nie należy używać zużytych, wyszczerbionych lub złamanych śmigieł.
- Aby uniknąć obrażeń, nie należy zbliżać się do obracających się śmigieł lub silników.
- Aby uniknąć uszkodzenia śmigieł, podczas transportu lub przechowywania ustaw drona w kierunku wskazanym w torbie transportowej. Nie należy ściskać ani zginać śmigieł. Jeśli śmigła zostana uszkodzone, wpłynie to na wydajność lotu.
- Należy upewnić się, że silniki są prawidłowo zamontowane i obracają się swobodnie. Natvchmiast wyladuj dronem, ieśli silnik zablokował sie i nie może sie swobodnie obracać.
-
Nie należy modyfikować konstrukcji silników.
- Nie należy dotykać ani dopuszczać do kontaktu rąk lub części ciała z silnikami po locie, ponieważ moga być nagrzane.
- Nie należy blokować żadnych otworów wentylacyjnych na silnikach ani na korpusie drona,
- Upewnii sie, że regulatory ESC brzmia prawidłowo po właczeniu zasilania.
Inteligentny akumulator
Inteligentny akumulator Mavic 3 to akumulator o napięciu 15,4 V i pojemności 5000 mAh z funkcją inteligentnego ładowania i rozładowywania.
Właściwości akumulatora
- Wskaźnik poziomu naładowania akumulatora: wskaźniki poziomu naładowania akumulatora wyświetlaja aktualny poziom naładowania akumulatora.
- 2. Automatyczne rozładowywanie: aby zapobiec puchnięciu, akumulator automatycznie rozładowuje się do 96% poziomu naładowania, gdy pozostaje nieużytkowany przez trzy dni i automatycznie rozładowuje się do 60% poziomu naładowania, gdy pozostaje nieużytkowany przez dziewięć dni (domyślnie jest to dziewięć dni, ale można ustawić na 4-9 dni w aplikacji). Normalnym zjawiskiem jest odczuwanie umiarkowanego ciepła emitowanego z akumulatora podczas procesu rozładowwania.
- Funkcja równomiernego ładowania: podczas ładowania napięcia ogniw akumulatora są automatycznie równoważone.
- Zabezpieczenie przed przeładowaniem: akumulator przestaje się automatycznie ładować po pełnym naładowaniu.
- Wykrywanie temperatury: aby zapobiec uszkodzeniom, akumulator ładuje się tylko wtedy, gdy temperatura wynosi od 5° do 40° C (41° do 104° F).
- Zabezpieczenie przed przeciążeniem prądowym: akumulator przestaje się ładować w przypadku wykrycia przeciążenia prądowego.
- Zabezpieczenie przed nadmiernym rozładowaniem: rozładowywanie zostaje zakończone automatycznie, aby zapobiec nadmiernemu rozładowaniu, gdy akumulator nie jest używany. Zabezpieczenie przed nadmiernym rozładowaniem nie jest włączone, gdy akumulator jest używany.
- Zabezpieczenie przed zwarciem: zasilanie jest automatycznie odcinane w przypadku wykrycia zwarcia.
- Ochrona przed uszkodzeniem ogniwa akumulatora: aplikacja wyświetli komunikat ostrzegawczy po wykryciu uszkodzonego ogniwa akumulatora.
- 10. Tryb hibernacji: akumulator wyłącza się po 20 minutach od ostatniej aktywności, aby zaoszczędzić moc. Jeśli poziom naładowania akumulatora wynosi mniej niż 5%, akumulator wejdzie w tryb hibernacji, aby zapobiec nadmiernemu rozładowaniu po okresie nieaktywności przez sześć godzin. W trybie hibernacji wskaźniki poziomu naładowania akumulatora nie świecą. Naładuj akumulator, aby wyprowadzić go z trybu hibernacji.
-
Przekazywanie informacji: informacje o napięciu, pojemności i prądzie akumulatora są przekazywane do drona.
- Przed rozpoczęciem użytkowania należy zapoznać się z wytycznymi dotyczącymi bezpieczeństwa oraz z naklejkami na akumulatorze. Użytkownicy ponoszą pełną odpowiedzialność za wszystkie czynności i użytkowanie.
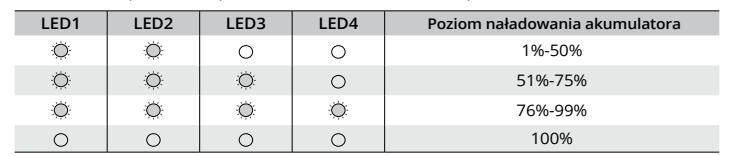
Sprawdzanie poziomu naładowania akumulatora
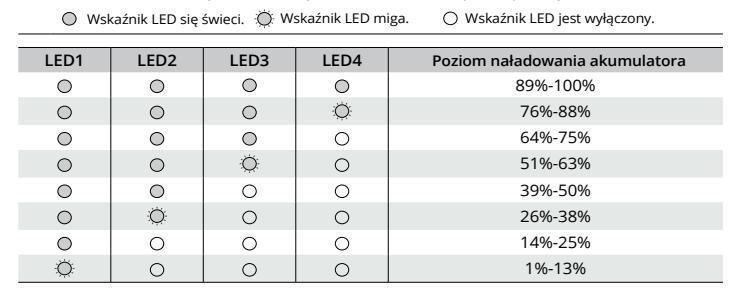
Naciśnij raz przycisk zasilania, aby sprawdzić poziom naładowania akumulatora.
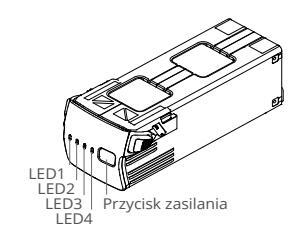
Wskaźniki poziomu naładowania akumulatora informują o poziomie mocy akumulatora podczas ładowania i rozładowywania. Statusy wskaźników LED sa opisane poniżej:
Właczanie/wyłaczanie zasilania
Naciśnij raz przycisk zasilania, a następnie naciśnij ponownie i przytrzymaj przez dwie sekundy, aby włączyć lub wyłączyć akumulator. Wskaźniki poziomu naładowania akumulatora wyświetlają poziom akumulatora, gdy dron jest włączony.
Powiadomienie o niskiej temperaturze
- Pojemność akumulatora ulega znacznemu zmniejszeniu podczas lotów w niskich temperaturach od -10° do 5° C (14° do 41° F). Wskazane jest zawieszenie drona w miejscu na pewien czas w celu ogrzania akumulatora. Należy pamiętać o pełnym naładowaniu akumulatora przed startem.
- Akumulatorów nie można używać w środowiskach o ekstremalnie niskich temperaturach niższych niż -10° C (14° F).
- Podczas przebywania w środowisku o niskiej temperaturze, należy zakończyć lot, gdy tylko aplikacja DJI Pilot 2 wyświetli ostrzeżenie o niskim poziomie naładowania akumulatora.
- Aby zapewnić optymalną wydajność, należy utrzymywać temperaturę akumulatora powyżej 20° C (68° F).
- Zmniejszona pojemność akumulatora w środowiskach o niskiej temperaturze zmniejsza wydajność drona w zakresie odporności na wiatr. Należy latać z zachowaniem ostrożności.
- 6. Należy zachować szczególna ostrożność podczas lotów na dużych wysokościach.
Ładowanie akumulatora
Przed każdym użyciem należy w pełni naładować akumulator. Do ładowania inteligentnego akumulatora należy używać wyłącznie oryginalnej ładowarki DJI.
Korzystanie z huba ładującego
Hub ładujący DJI Mavic 3 (100W) jest przeznaczony do użytku z inteligentnymi akumulatorami Mavic 3. Używany z ładowarką DJI USB-C (100W), może ładować do trzech inteligentnych akumulatorów w kolejności od wysokiego do niskiego poziomu mocy. Czas ładowania jednego akumulatora wynosi około 1 godziny i 10 minut.
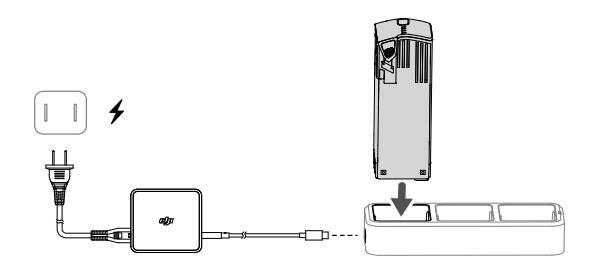
Prawidłowy sposób ładowania akumulatora
- Włóż akumulator do portu akumulatora. Podłącz hub ładujący do gniazda zasilania (100-240 V, 50-60 Hz) używajac ładowarki DII USB-C (100W).
- Akumulator o najwyższym poziomie mocy zostanie naładowany jako pierwszy, a następnie pozostałe będą ładowane w kolejności zgodnie z ich poziomami mocy. Więcej informacji na temat schematów migania wskaźnika statusu znajduje się w punkcie "Opisy wskaźników statusu"
- Po zakończeniu ładowania można odłączyć akumulator od huba ładującego.
Opisy wskaźników statusu
| Wzór migania | Opis |
|---|---|
| Stale świeci na żółto | Nie włożono akumulatora |
| Miga na zielono | W trakcie ładowania |
| Solid green | All batteries fully charged |
| Stale świeci na zielono | Wszystkie akumulatory są w pełni naładowane |
|
Stale świeci na
czerwono |
Błąd zasilania lub akumulatora (wyjmij i włóż ponownie akumulatory lub odłącz
i podłącz ładowarkę) |
-
Wskazane jest korzystanie z ładowarki DJI USB-C (100W), jeśli użytkownik korzysta z huba ładującego DJI Mavic 3 do ładowania inteligentowch akumulatorów Mavic 3
- Hub ładujący jest kompatybilny wyłącznie z inteligentnymi akumulatorami BWX260-5000--15.4. Nie należy próbować używać huba ładujacego z innymi modelami akumulatorów.
- Umieść hub ładujący na płaskiej i stabilnej powierzchni, gdy jest używany. Upewnij się, że urządzenie jest odpowiednio zabezpieczone, aby zapobiec zagrożeniu pożarowemu.
- Nie należy dotykać metalowych złączy na obudowie akumulatora.
- W przypadku pojawienia się widocznych zanieczyszczeń, należy wyczyścić metalowe złącza za pomocą czystej, suchej ściereczki.
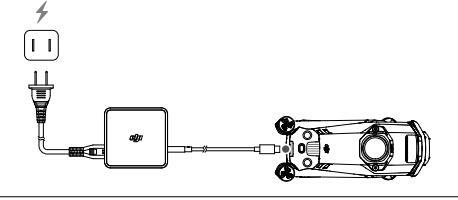
Korzystanie z ładowarki DII USB-C (100W)
- Podłącz ładowarkę do źródła zasilania AC (100-240 V, 50/60 Hz; w razie potrzeby użyj zasilacza).
- Podłącz drona do ładowarki z wyłączonym akumulatorem.
- Wskaźniki poziomu naładowania akumulatora wyświetlają aktualny poziom akumulatora podczas ładowania.
- Akumulator jest w pełni naładowany, gdy wszystkie wskażniki poziomu naładowania akumulatora są wyłączone. Odłącz ładowarkę, gdy akumulator jest w pełni naładowany.
-
Nie należy ładować akumulatora bezpośrednio po locie, ponieważ może on być zbyt gorący. Przed ponownym ładowaniem należy poczekać, aż akumulator ostygnie do temperatury robocrzei.
- Ładowarka zatrzymuje ładowanie akumulatora, jeśli temperatura ogniw akumulatora nie mieści się w zakresie roboczym od 5° do 40° C. Optymalna temperatura ładowania wynosi od 22° do 28° C.
- Aby zachować prawidłowe parametry akumulatora, należy ładować go całkowicie co najmniej raz na trzy miesiace.
- Producent DJI nie ponosi żadnej odpowiedzialności za uszkodzenia spowodowane przez nieorywinalne ładowarki.
W celu zapewnienia bezpieczeństwa należy utrzymywać niski poziom mocy akumulatorów podczas transportu. Można to wykonać latając dronem, aż do momentu uzyskania poziomu naładowania poniżej 30%.
Poniższa tabela przedstawia poziom naładowania akumulatora podczas ładowania
Zabezpieczenia akumulatora
Wskaźniki poziomu naładowania akumulatora mogą wyświetlać powiadomienia o zabezpieczeniach akumulatora uruchamiane przez nieprawidłowe warunki ładowania
| Zabez | Zabezpieczenia akumulatora | ||||
|---|---|---|---|---|---|
| LED1 | LED2 | LED3 | LED4 | Wzór migania | Status |
| 0 | Ó | 0 | 0 | LED2 miga dwa razy na sekundę | Wykryto nadmiar prądu |
| 0 | Ö | 0 | 0 | LED2 miga trzy razy na sekundę | Wykryto zwarcie w obwodzie |
| 0 | 0 | Ö | 0 | LED3 miga dwa razy na sekundę | Wykryto nadmierne obciążenie |
| 0 | 0 | Ö | 0 | LED3 miga trzy razy na sekundę |
Wykryto nadmierne napięcie
w ładowarce |
| 0 | 0 | 0 | ٥ | LED4 miga dwa razy na sekundę |
Zbyt niska temperatura
ładowania |
| 0 | 0 | 0 | Ô | LED4 miga trzy razy na sekundę |
Zbyt wysoka temperatura
ładowania |
Jeśli dowolne zabezpieczenie akumulatora zostanie uruchomione, odłącz ładowarkę i podłącz ją ponownie, aby wznowić ładowanie. Jeśli temperatura ładowania jest nieprawidłowa, należy poczekać na jej powrót do normy. Akumulator automatycznie wznowi ładowanie bez konieczności odłączania i ponownego podłączania ładowarki.
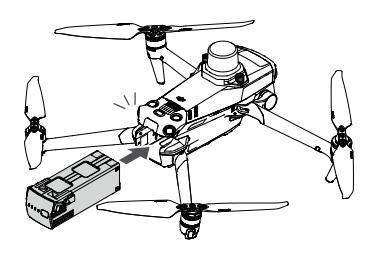
Montaż inteligentnego akumulatora
Włóż inteligentny akumulator do komory akumulatora w dronie. Upewnij się, że jest on prawidłowo zamontowany oraz, że uchwyty akumulatora są prawidłowo zamocowane.
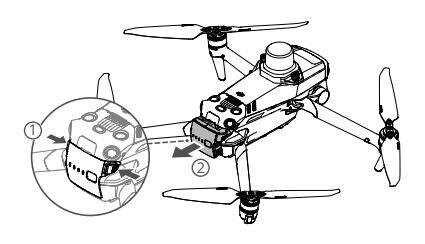
Demontaż inteligentnego akumulatora
Naciśnij wystającą część uchwytów po bokach akumulatora, aby wyjąć go z komory.
• Nie należy wkładać ani wyjmować akumulatora, gdy dron jest włączony.
Upewnij się, że akumulator jest prawidłowo zamontowany.
Gimbal
Opis gimbala
3-osiowy gimbal DJI Mavic 3M zapewnia stabilizację kamery, co umożliwia wykonywanie wyraźnych i stabilnych zdjęć oraz filmów przy dużej prędkości lotu. Zakres regulacji nachylenia wynosi od -90° do +35°.
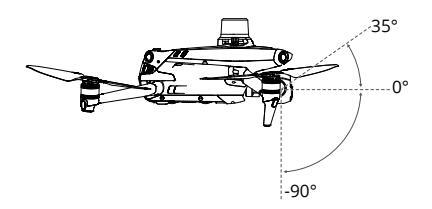
Użyj pokrętła gimbała na aparaturze, aby wyregulować nachylenie kamery. Opcjonalnie, wejdź w podgląd kamery w aplikacji DJI Pilot 2. Przytrzymaj ekran, aż pojawi się koło i przeciągnij je w góre i w dół, aby sterować nachyleniem kamery.
Tryb gimbala
Gimbal działa w trybie Follow: kąt nachylenia gimbala pozostaje stabilny względem płaszczyzny poziomej, co jest korzystne przy wykonywaniu wyraźnych zdjęć. Użytkownicy mogą regulować nachylenie gimbala.
| ⚠ | Nie należy obijać ani uderzać w gimbal po włączeniu zasilania drona. Startuj dronem z otwartego |
|---|---|
| i płaskiego terenu, aby chronić gimbal podczas startu. | |
|
|
|
|
|
|
|
|
|
|
|
Kamera
Opis kamery
DJI Mavic 3M posiada kamerę RGB i cztery kamery multispektralne, które mogą być używane do wykonywania zdieć i nagrywania filmów iednocześnie.
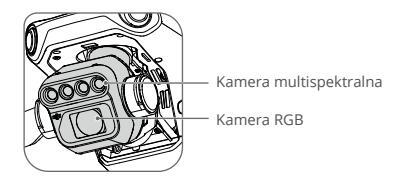
Kamera RGB z matrycą CMOS 4/3, 20MP, posiada mechaniczną migawkę zapobiegającą rozmyciu obrazu i umożliwia wykonywanie zdjęć z interwałem 0,7 sekundy, gdy używana jest tylko kamera RGB. Piksele 3,3 µm zapewniają wyraźnie podwyższoną jakość obrazu.
Kamery multispektralne posiadają cztery jednopasmowe przetworniki CMOS 1/2,8 cala, umożliwiające wykonywanie zdjęć o rozdzielczości SMP przy ekwiwalencie ogniskowej 25 mm i przysłonie f/2,0, dzięki czemu można uzyskać obrazy o następujących pasmach: zielone (G): 560±16 nm, czerwone (R): 650±16 nm, krawędź czerwieni (RE): 730±16 nm, pasmo bliskie podczerwieni (NIR): 860±26 nm.
-
Należy upewnić się, że temperatura i wilgotność są odpowiednie dla kamery podczas jej używania i przechowywania.
Aby uniknać uszkodzenia lub pogorszenia jakości obrazu, do czyszczenia obiektywu
- należy używać odpowiedniego preparatu.
- Nie należy zasłaniać żadnych otworów wentylacyjnych w kamerze, ponieważ wytwarzane ciepło może uszkodzić urządzenie i spowodować obrażenia użytkownika.
Zapisywanie zdjęć i filmów
Fabrycznie karta microSD jest umieszczona w gnieździe karty microSD. Dron obsługuje karty microSD o maksymalnej pojemności do 512 GB. Aby kamera mogła szybko odczytywać i zapisywać dane do nagrywania filmów HD, należy używać karty microSD o klasie prędkości UHS Speed Class 3 lub wyższej i prędkości zapisu powyżej 30 MB/s. Należy zapoznać sie z rekomendowanymi kartami microSD w rozdziale "Specyfikacia".
Należy ustalić, czy zdjęcia multispektralne mają być zapisywane, czy nie, w zależności od scenariusza zastosowania. Minimalny interwał wykonywania zdjęć RGB wynosi 0,7 s, a w przypadku jednoczesnego wykonywania zdjęć RGB i multispektralnych wynosi 2 s. Nagrywanie filmów tylko w trybie RGB obsługuje 4K/1080p@30fps. W przypadku jednoczesnego nagrywania w trybie RGB i wideo wielospektralnego obsługiwana jest rozdzielczość 1080n@30fps.
A - Podczas nagrywania nie należy wyjmować karty microSD z drona. W przeciwnym razie karta microSD może zostać uszkodzona
Aby zapewnić stabilność systemu kamer, pojedyncze nagrania wideo są ograniczone do 30 minut.
Przed rozpoczęciem używania sprawdź ustawienia kamery, aby upewnić się, że są one skonfigurowane prawidłowo.
Przed wykonaniem ważnych zdjęć lub filmów wideo należy wykonać kilka zdjęć, aby sprawdzić, czy kamera działa prawidłowo.
Zdjęcia i filmy nie mogą być przesyłane lub kopiowane z kamery, jeśli dron jest wdarzony,
Upewnij się, że zasilanie drona zostało prawidłowo wyłączone. W przeciwnym razie parametry kamery nie zostaną zapisane, a wszelkie nagrane filmy mogą zostać uszkodzone. Producent DJI nie ponosi odpowiedzialności za wszelkie straty spowodowane przez obraz lub film nagrany w sposób, który nie jest możliwy do odczytania komputerowo.
Port PSDK
DJI Mavic 3M posiada port PSDK służący do montażu dodatkowych kompatybilnych akcesoriów producenta DJI, które zostały wymienione poniżej: Głośnik: używany do transmisji na duże odległości, w czasie rzeczywistym lub odtwarzania dźwieku.
Moduł RTK (wcześniej zamontowany): namierza sygnały wielokierunkowe o podwójnej częstotliwości widocznych satelitów w warunkach kompleksowych, zapewnia większą dokładność i bardziej wiarygodne dane do pozycjonowania oraz ulepsza funkcję zapobiegania zakłóceniom w silnych środowiskach magnetycznych, co zapewnia niezawodne działanie i lot. Używając stacji D-RTK 2 High Precision GNSS lub niestandardowej sieci RTK, moźna uzyskać dokładniejsze dane pozycjonowania.
Uzytkowanie
Głośnik
Moduł RTK
Poniższy przykład przedstawia sposób montażu i użytkowania akcesoriów. Jako przykład zastosowano moduł RTK.
- 1. Zdejmij osłonę portu PSDK znajdującą się w górnej części drona przy wyłączonym zasilaniu.
- Zamontuj moduł RTK na porcie PSDK drona.
- Dokręć pokrętła po obu stronach, aby upewnić się, że moduł RTK jest dokładnie zamontowany na dronie.
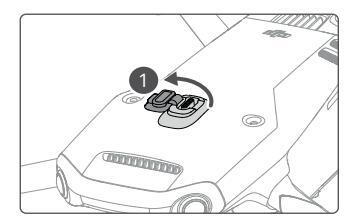
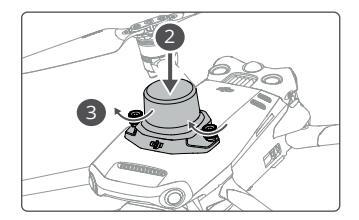
-
4. Włącz zasilanie drona i uruchom aplikację DJI Pilot 2, aby używać akcesorium.
-
Przed użyciem należy upewnić się, że akcesoria są prawidłowo i bezpiecznie zamontowane na dronie. W przeciwnym razie moga one spaźć z drona podczas lotu.
- Nie należy używać głośnika w pobliżu ludzi lub w obszarze miejskim, wrażliwym na hałas, popieważ głośność może spowodować wypadek lub obrażenia.
- Wskazane jest używanie aparatury DJI RC Pro Enterprise do odtwarzania dźwięku lub importowania źródła dźwięku w celu uzyskania najlepszego efektu odtwarzania. Nie należy odtwarzać dźwięków o jednej częstotliwości, takich jak alarm, aby uniknąć nieodwracalnego uszkodzenia głośnika.
- Moduł RTK nie obsługuje procedury hot swapping. Należy unikać blokowania modułu RTK, aby zapewnić dokładność pozycjonowania.
-
Przed użyciem należy upewnić się, że akcesoria są prawidłowo i bezpiecznie zamontowane na dronie. W przeciwnym razie moga one spaźć z drona podczas lotu.
Korzystanie z modułu RTK
Włączanie/wyłączanie RTK
Przed każdym użyciem należy upewnić się, że funkcja RTK jest włączona, a rodzaj usługi RTK jest prawidłowo ustawiony (Stacja mobilna D-RTK 2 lub sieć RTK). W przeciwnym razie nie będzie można użyć RTK do pozycjonowania. Przejdź do podglądu kamery w aplikacji DJI Pilot 2, naciśnij •••-> and , aby sprawdzić ustawienia. Upewnij się, że wyłączyłeś funkcję RTK, jeśli nie jest używana. W przeciwnym razie dron nie będzie mógł wystartować, jeśli nie pojawią się dane różnicowe.
-
Pozycjonowanie RTK może być włączone i wyłączone podczas lotu. Pamiętaj, aby najpierw wybrać rodzai usługi RTK.
- Po włączeniu RTK można używać trybu Maintain Positioning Accuracy (Utrzymanie dokładności pozycjonowania).
Stacja mobilna DJI D-RTK 2
- Zapoznaj się instrukcją obsługi stacji mobilnej D-RTK 2 High Precision GNSS ( dostępna na stronie https://www.dji.com/mavic-3-enterprise/downloads), aby skonfigurować stację mobilną D-RTK 2 i połączyć ją z dronem. Włącz zasilanie stacji D-RTK 2 i przełącz na tryb Broadcast dla Mavic 3 Enterprise
- 2. W ustawieniach RTK w aplikacji wybierz stację D-RTK 2 jako typ usługi RTK, połącz się ze stacją mobilną, postępując zgodnie z informacjami wyświetlanymi na ekranie, i poczekaj, aż system wyszuka satelitę. Gdy status pozycjonowania drona w tabeli statusu wyświetla FIX, oznacza to, że dron uzyskał i użwa danych różnicowych ze stacji mobilnej.
- Odległość komunikacji stacji mobilnej D-RTK 2; 12 km (NCC/FCC), 6 km (SRRC/CE/MIC).
Sieć niestandardowa RTK
Aby używać sieci niestandardowej RTK, upewnij się, że aparatura jest połączona z siecią Wi-Fi. Sieć niestandardowa RTK może być używana zamiast stacji mobilnej D-RTK 2. Połącz konto sieci niestandardowej RTK z wyznaczonym serwerem NTRIP, aby wysyłać i odbierać dane różnicowe. Podczas używania tej funkcji należy pamiętać, aby aparatura była włączona i połączona z siecią internetowa.
- Upewnij sie, że aparatura jest połaczona z dronem i siecja internetowa
- Przejdź do podglądu kamery w aplikacji DJI Pilot 2, naciśnij ····-> III wybierz Custom Network RTK (Sieć niestandardowa RTK) jako rodzaj usługi RTK i wypełnij wymagane informacie. Nastepnie naciśnij Save (Zapisz).
- Odczekaj na połączenie z serwerem NTRIP. W ustawieniach RTK, gdy status pozycjonowania drona w tabeli statusu wyświetla FIX, oznacza to, że dron uzyskał i używa danych różnicowych z sieci niestandardowej RTK.
Aparatura sterująca
Aparatura DJI RC Pro Enterprise wyposażona jest w technologie O3 Enterprise. Najnowsza wersja technologii transmisji obrazu OcuSync działa zarówno na częstotliwości 2,4 jak i 5,8 GHz oraz jest w stanie automatycznie wybrać najkorzystniejszy kanał transmisji. Umożliwia transmisję podglądu HD z kamery DJI na odległość do 15 km. Wbudowany 5,5-całowy ekran o poziomie jasności 1000 cd/m2 charakteryzuje się rozdzielczością 1920×1080 pikseli, a aparatura wyposażona jest w szeroki zakres elementów sterujących dronem i gimbalem oraz konfigurowalne przyciski. Użytkownicy mogą łączyć się z siecią internetową za pośrednictwem Wi-Fi, a system operacyjny Android 10 wyposażony jest w szereg funkcji, takich jak Bluetooth i GNSS (GPS+GLO-NASS+Galileo).
Dzięki wbudowanemu mikrofonowi i głośnikowi, aparatura obsługuje wideo w formacie H.264 4K/120fps i H.265 4K/120fps (rzeczywisty efekt wyświetlania zależy od rozdzielczości i liczby klatek na sekundę na ekranie), który umożliwia również przesyłanie wideo przez port Mini HDMI. Pamięć wewnętrzna aparatury wynosi 64 GB. Aparatura umożliwia obsługę karty microSD do zapisywania zdjęć i filmów.
Akumulator o pojemności 5000 mAh 36Wh zapewnia aparaturze maksymalny czas pracy wynoszący 3 godziny.
Interfejs systemu aparatury sterujące
Strona główna
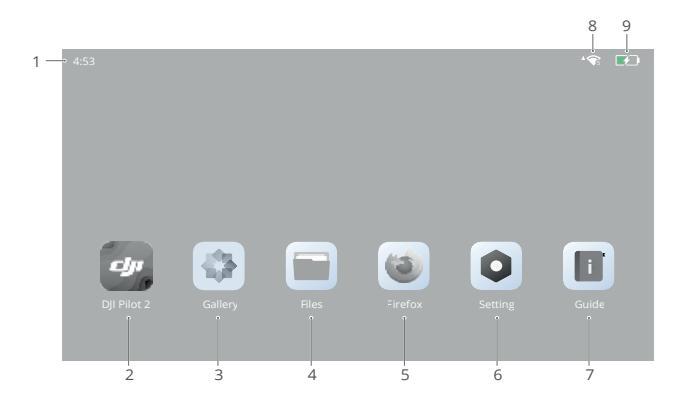
1. Czas
Nyświetla aktualny czas
2. Aplikacia DII Pilot 2
Naciśnij, aby wejść w aplikację DJI Pilot 2.
3. Galeria
Naciśnii, aby wyświetlić zapisane zdiecia i filmy.
4. Pliki
Naciśnii, aby wyświetlić zapisane pliki.
5. Przeglądarka
Naciśnii, aby otworzyć przegladarke
6. Ustawienia
Naciśnij, aby przejść do ustawień systemowych.
7. Przewodnik
Naciśnij, aby przeczytać przewodnik zawierający szczegółowe informacje na temat przycisków i wskaźników LED aparatury.
8. Sygnał Wi-Fi
Wyświetla siłę sygnału po połączeniu z siecią Wi-Fi. Sieć Wi-Fi można włączyć lub wyłączyć w ustawieniach skrótu, lub systemu.
9. Poziom naładowania akumulatora
Wyświetla poziom naładowania akumulatora wewnętrznego aparatury. Ikona 😥 wskazuje, że akumulator jest w trakcie ładowania.
Obsługa ekranu dotykowego
Przesuń palcem z lewej lub prawej strony na środek ekranu, aby powrócić do poprzedniego ekranu.
Przesuń palcem w górę od dołu ekranu, aby powrócić do strony głównej.
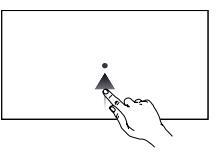
Przesuń palcem w górę od dołu ekranu i przytrzymaj, aby przejść do ostatnio otwartych aplikacji.
Ustawienia skrótów

1 Powiadomienia
Naciśnij, aby wyświetlić powiadomienia systemowe lub z aplikacji.
2. Recent
Naciśnij 📹 , aby wyświetlić i przełączyć się do ostatnio otwieranych aplikacji.
3. Strona główna
Naciśnij 🏫, aby powrócić do strony głównej.
4. Ustawienia systemu
Naciśnii O , aby uzyskać dostep do ustawień systemowych.
Skróty
: naciśnij, aby włączyć lub wyłączyć sieć Wi-Fi. Przytrzymaj, aby wejść do ustawień i połączyć się z siecią Wi-Fi lub ją dodać.
- Inaciśnij, aby włączyć lub wyłączyć funkcję Bluetooth. Naciśnij i przytrzymaj, aby otworzyć ustawienia i połączyć się z pobliskimi urządzeniami Bluetooth.
- () : naciśnij, aby właczyć tryb Nie przeszkadzać. W tym trybie komunikaty systemowe będą wyłączone.
- inaciśnij, aby rozpocząć nagrywanie ekranu
- 🙀 : naciśnij, aby wykonać zrzut ekranu.
- N : dane komórkowe.
- : naciśnij, aby włączyć tryb samolotowy. Funkcje Wi-Fi, Bluetooth i dane komórkowe zostaną wyłaczone.
Regulacja jasności
Przesuń pasek, aby dostosować jasność. Naciśnij ikonę 🔅 , aby przejść do trybu automatycznej jasności. Naciśnij lub przesuń pasek, aby przełączyć się na manualny tryb jasności.
7. Regulacja głośności
Przesuń pasek, aby dostosować poziom głośności i naciśnij «× , aby wyciszyć. Należy pamiętać, że po wyciszeniu wszystkie dźwięki aparatury zostaną całkowicie wyłączone, w tym powiązane dźwięki alarmowe. Należy zachować ostrożność przy włączaniu funkcji wyciszenia
Wskaźniki LED i alerty aparatury sterującej
Wskaźniki LED aparatury sterującej
. Wskaźnik statusu
| Wzór migania | Opis |
|---|---|
|
Stale świeci na
czerwono |
Odłączenie aparatury od drona. |
| Miga na czerwono | Temperatura aparatury jest zbyt wysoka lub poziom naładowania akumulatora w dronie jest niski. |
|
Stale świeci na
zielono |
Aparatura jest połączona z dronem. |
| Miga na niebiesko | Aparatura łączy się z dronem. |
| Stale świeci na żółto | Aktualizacja oprogramowania się nie powiodła. |
| Miga na żółto | Poziom naładowania akumulatora w aparaturze jest niski. |
|
Miga w odcieniu
jasponiebieskim |
Drążki sterujące nie są wyśrodkowane. |
Wskaźniki poziomu naładowania akumulatora
| Wzór ı | Poziom naładowania akumulatora | ||
|---|---|---|---|
| 76%-100% | |||
| 0 | 51%-75% | ||
| • | 0 | 0 | 26%-50% |
| 0 | 0 | 0 | 1%-25% |
Alert aparatury sterującej
Aparatura wibruje lub wydaje dwa sygnały dźwiękowe, aby wskazać błąd lub ostrzeżenie. Należy zwrócić uwagę na komunikaty, które pojawiają się na ekranie dotykowym lub w aplikacji DJI Pilot 2. Przesuń palcem w dół od góry i wybierz opcie Mute (Wycisz), aby wyłaczyć alerty.
Prawidłowa obsługa
Właczanie/wyłaczanie zasilania
Naciśnij raz przycisk zasilania, aby sprawdzić aktualny poziom naładowania akumulatora. Naciśnij raz, a następnie naciśnij ponownie i przytrzymaj przez dwie sekundy, aby włączyć lub wyłączyć aparaturę.
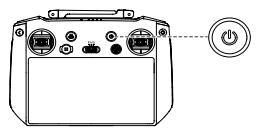
Ładowanie akumulatora
Użyj kabla USB-C, aby podłączyć ładowarkę do portu USB-C w aparaturze.
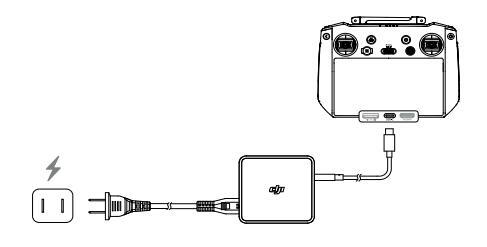
- Co trzy miesiące należy całkowicie rozładować i naładować aparaturę. W przypadku dłuższego przechowywania akumulator ulega rozładowaniu.
- Aparatura nie może być włączona przed uruchomieniem wewnętrznego akumulatora.
- Wskazane jest używanie dołączonego kabla USB-C do USB-C w celu optymalnego ładowania.
Sterowanie gimbalem i kamera
Przycisk ostrości/migawki: wciśnij do połowy, aby ustawić ostrość automatycznie i wciśnij do końca. aby zrobić zdiecie.
Przycisk nagrywania: naciśnii raz, aby rozpoczać lub zatrzymać nagrywanie.
Pokrętło sterowania kamera: służy do regulacji zoomu.
Pokrętło gimbala: służy do regulacji nachylenia gimbala.

Sterowanie dronem
Drążki sterujące mogą pracować w trybie 1, trybie 2 lub trybie 3, jak pokazano poniżej

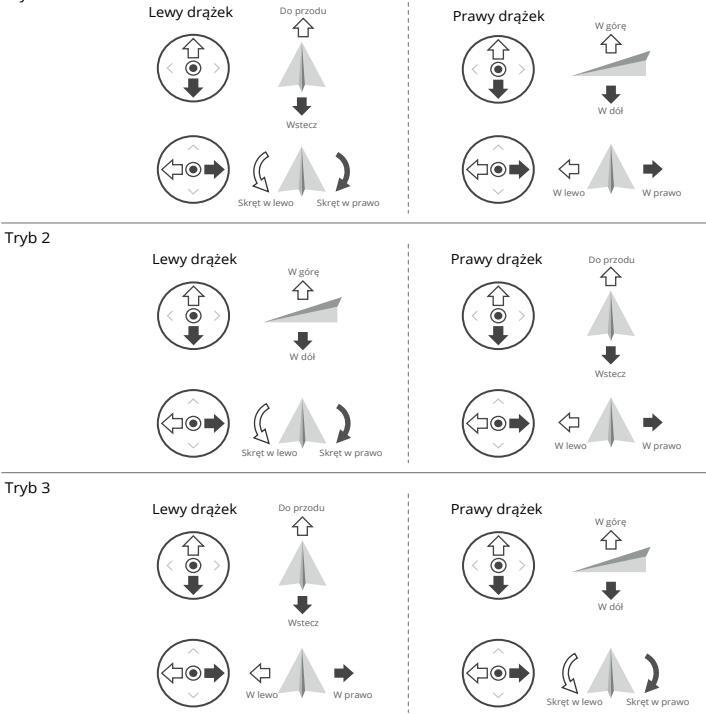
Domyślnym trybem sterowania aparatury jest tryb 2. W niniejszej instrukcji tryb 2 jest wykorzystywany jako przykład służacy do przedstawienia sposobu używania drażków sterujących
Punkt neutralny/punkt środkowy drążka sterującego: drążek sterujący znajduje się w środku Przesunięcie drążka sterującego: drążek sterujący jest przesuwany z pozycji środkowej.
| Image: Construction of the second |
Aparatura sterująca
(Tryb 2) |
Dron ( 🖛 Wskazuje kierunek
drona) |
Uwagi |
|---|---|---|---|
| Drążek Yaw: przesunięcie lewego drążka w lewo lub w prawo steruje kierunkiem loi drona. Przesuń drążek w lewo, aby obrócić drona w lewo, lub w prawo, aby obrócić drona w lewo, lub w prawo, aby obrócić drona w prawo. Dron unosi się w miejscu, jeśli drążek znajduje się w środku. Im bardziej drążek jest odsunięty od środł tym szybciej dron się obraca. Drążek pitch: przesunięcie prawego drążk w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę i w miejscu, jeśli drążek znajduje s na środku. Im bardziej drążek jest odsunięty od środł tym szybciej dron się porusza. |
Drążek przepustnicy (Throttle): przesunięcie
lewego drążka w górę lub w dół zmienia wysokość drona. Przesuń drążek w górę, aby się wznieść, lub w dół, aby się obniżyć. Dron zawisa w miejscu, jeśli drążek znajduje się na środku. Użyj lewego drążka do startu, gdy silniki obracają się z początkową prędkością. Im bardziej drążek jest odsunięty od środka, tym szybciej dron zmienia wysokość. Przesuń drążek łagodnie, aby zapobiće nagłym i niespodziewanym zmianom wysokości |
||
|
Drążek pitch: przesunięcie prawego drążk
w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę, aby lecieć do przodu, lub w dół, aby lecieć do tyłu. Dron unosi się w miejscu, jeśli drążek znajduje s na środku. Im bardziej drążek jest odsunięty od środł tym szybciej dron się porusza. |
Drążek Yaw: przesunięcie lewego drążka
w lewo lub w prawo steruje kierunkiem lotu drona. Przesuń drążek w lewo, aby obrócić drona w jewo, lub w prawo, aby obrócić drona w prawo. Dron unosi się w miejscu, jeśli drążek znajduje się w środku. Im bardziej drążek jest odsunięty od środka, tym szybciej dron się obraca. |
||
|
Drążek pitch: przesunięcie prawego drążka
w górę i w dół zmienia nachylenie drona. Przesuń drążek w górę, aby lecieć do przodu, lub w dół, aby lecieć do tyłu. Dron unosi się w miejscu, jeśli drążek znajduje się na środku. Im bardziej drążek jest odsunięty od środka, tym szybciej dron się porusza. |
|||
|
Drążek Roll: przesunięcie prawego drążka
w lewo lub w prawo zmienia przechylenie drona. Przesuń drążek w lewo, aby lecieć w lewo lub w prawo, aby lecieć w prawo. Dron unosi się w miejscu, jeśli drążek znajduje się na środku. Im bardziej drążek jest odsunięty od środi tym szybciej dron się porusza |
Drążek Roll: przesunięcie prawego drążka
w lewo lub w prawo zmienia przechylenie drona. Przesuń drążek w lewo, aby lecieć w lewo lub w prawo, aby lecieć w prawo. Dron unosi się w miejscu, jeśli drążek znajduje się na środku. Im bardziej drążek jest odsunięty od środka, tym szybciej dron się porusza |
Aby uniknąć zakłóceń magnetycznych, aparaturę należy przechowywać z dala od elementów magnetycznych, takich jak magnesy czy obudowy głośników.
Aby uniknąć uszkodzenia drążków sterujących, wskazane jest, aby podczas przenoszenia lub transportu aparatura była przechowywana w walizce transportowej.
Przełącznik trybu lotu
| Pozycja | Tryb lotu | |
|---|---|---|
| F | Tryb Function | |
| Ν | Tryb Normal | |
| S | Tryb Sport |
Przełącz przełącznik, aby wybrać odpowiedni tryb lotu
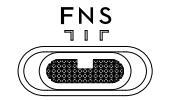
Tryb Function może być ustawiony na opcję T (tryb Tripod) lub A (tryb Attitude) w aplikacji DJI Pilot 2.
Przycisk RTH
Przytrzymaj przycisk RTH, aż aparatura wyda sygnał dźwiękowy, aby rozpocząć procedurę RTH. Dron poleci do ostatnio zaktualizowanego punktu Home. Wciśnij przycisk ponownie, aby anulować RTH i odzyskać kontrolę nad dronem. Więcej informacji o RTH znajduje się w rozdziale "Procedura RTH (Return to Home)".
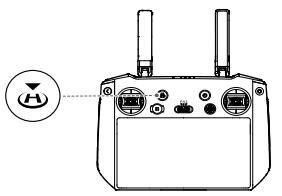
Przyciski konfigurowalne
Przyciski C1, C2 i 5D są konfigurowalne. Uruchom aplikację DJI Pilot 2 i wejdź w podgląd kamery. Naciśnij •••• -> 📩 , aby skonfigurować funkcje tych przycisków. Dodatkowo
można dostosować kombinacje przyciskow używająć przyciskow C1 i C2 z przyciskiem 5D.
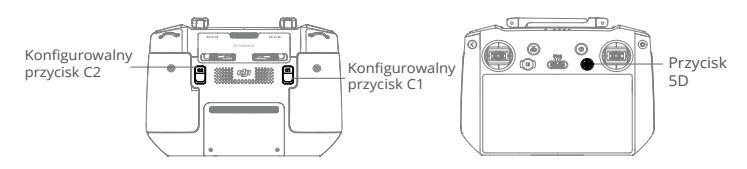
Przyciski kombinacji
Niektóre często używane funkcje można uruchomić używając przycisków kombinacji. Aby używać przycisków kombinacji, przytrzymaj przycisk wstecz i użyj innego przycisku w kombinacji. Podczas używania urządzenia należy wejść na stronę główną aparatury i nacisnąć opcję "Przewodnik", aby wyświetlić wszystkie dostępne przyciski kombinacji.
| Obsługa kombinacji | Funkcja |
|---|---|
| Przycisk wstecz + lewe pokrętło | Regulacja jasności |
| Przycisk wstecz + prawe pokrętło | Regulacja poziomu głośności |
| Przycisk wstecz + przycisk nagrywania | Ekran nagrywania |
| Przycisk wstecz + przycisk migawki | Zrzut ekranu |
| Przycisk wstecz + przycisk 5D |
Przesunięcie w górę - strona główna; Przesunięcie w dół -
ustawienia skrótów; Przesunięcie w lewo - ostatnio otwarte aplikacje. |
Optymalna strefa transmisji
Sygnał pomiędzy dronem a aparaturą sterującą jest najskuteczniejszy, gdy anteny są ustawione w kierunku do drona, jak przedstawiono na rysunku poniżej.
Optymalny zasięg transmisji występuje wtedy, gdy anteny są skierowane w stronę drona, a kąt pomiedzy antenami i tylna cześcia aparatury wynosi 180° lub 270°.
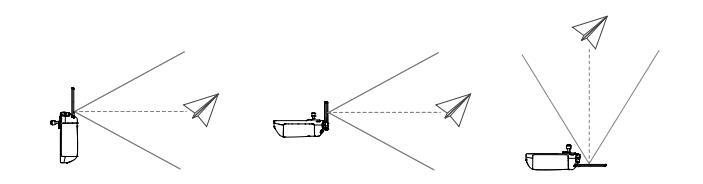
Bindowanie drona z aparatura sterująca
Aparatura jest fabrycznie połączona z dronem w przypadku zakupu zestawu combo. Jeśli dron i aparatura zostały zakupione osobno, należy wykonać poniższe kroki, aby połączyć je ze sobą po aktwacii.
Sposób 1: Używanie kombinacji przycisków
- 1. Włącz zasilanie drona i aparatury.
- Przytrzymaj jednocześnie przyciski C1, C2 i nagrywania, aż wskaźnik statusu zacznie migać na niebiesko, a aparatura wyda sygnał dźwiekowy.
- 3. Przytrzymaj przycisk zasilania drona przez ponad cztery sekundy. Po krótkim sygnale dźwiękowym dron wyda dwa sygnały dźwiękowe, a jego wskaźniki poziomu naładowania akumulatora będą kolejno migać, wskazując, że jest on gotowy do połączenia. Aparatura wyda dwa sygnały dźwiękowe, a jej wskaźnik statusu zaświeci się na zielono, sygnalizując pomyślne nawiązanie połączenia.
Sposób 2: Korzystanie z aplikacji DII Pilot 2.
- 1. Włącz zasilanie drona i aparatury.
- Uruchom aplikację DJI Pilot 2 i naciśnij "Link Remote Controller" (Połącz z aparaturą). Wskaźnik statusu aparatury będzie migał na niebiesko a aparatura wyda sygnał dźwiekowy.
- 3. Przytrzymaj przycisk zasilania drona przez ponad cztery sekundy. Po krótkim sygnale dźwiękowym dron wyda dwa sygnały dźwiękowe, a wskaźniki poziomu naładowania akumulatora będą kolejno migać, sygnalizując gotowość do nawiązania połączenia. Aparatura wyda dwa sygnały dźwiękowe, a jej wskaźnik statusu zaświeci się na zielono, sygnalizując pomyślne nawiązanie połączenia
Ö. Upewnij sie, że podczas łaczenia aparatura znajduje się w odległości 50 cm od drona.
Zaawansowane funkcie
Kalibracja kompasu
Po zakonczeniu uzytkowania aparatury w miejscach, w ktorych występują zakłocenia elektromagnetyczne, konieczna może być kalibracja kompasu. Jeśli kompas aparatury wymaga kalibracji,
zostanie wyświetlony komunikat ostrzegawczy. Naciśnij komunikat ostrzegawczy, aby rozpocząć kalibracje. W innych przypadkach wykonaj poniższe kroki, aby skalibrować aparature.
- 1. Włącz zasilanie aparatury i wejdź na stronę główną.
- Wybierz opcję "Settings" (Ustawienia), przesuń w dół i naciśnij opcję "Compass" (Kompas).
- Postępuj zgodnie z instrukcjami wyświetlanymi na ekranie, aby skalibrować kompas.
- 4. Po pomyślnym przeprowadzeniu kalibracji zostanie wyświetlony odpowiedni komunikat.
Ustawienia HDMI
Ekran dotykowy może być udostępniony ekranowi monitora za pomoca kabla HDMI.
Rozdzielczość można ustawić w opcji "Settings" (Ustawienia), "Display" (Wyświetlacz), a następnie "HDMI".
Aplikacja DJI Pilot 2
Aplikacja DJI Pilot 2 została opracowana specjalnie dla użytkowników przedsiębiorczych. Ręczny lot zawiera wiele profesjonalnych funkcji, które sprawiają, że latanie jest wyjątkowo intuicyjne. Funkcja Flight task (Zadania w locie) wspomaga planowanie lotu i autonomiczną obsługę drona, dzięki czemu organizacja pracy jest znacznie prostsza i skuteczniejsza.

1. Profil
Naciśnij, aby wyświetlić rejestry lotów, pobrać mapy offline, zarządzać odblokowaniem Strefy GEO, zapoznać się z pomocnymi informacjami, wybrać język i wyświetlić informacje o aplikacji.
2. Dane i prywatność
Naciśnij, aby zarządzać trybami bezpieczeństwa sieci, ustawić kody bezpieczeństwa, zarządzać pamięcią podręczną aplikacji i wyczyścić logi urządzenia DJI.
3. Mapa Strefy GEO
Naciśnij, aby wyświetlić mapę stref GEO, sprawdzić offline, czy aktualny obszar działania znajduje się w strefie ograniczonej lub strefie autoryzacji, a także aktualną wysokość lotu.
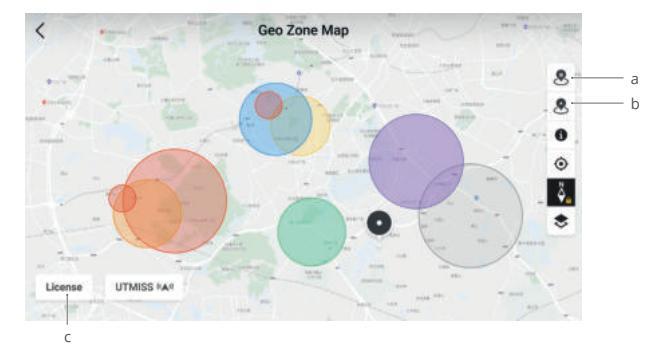
a. Naciśnij, aby zaktualizować bazę danych stref GEO w aparaturze, jeśli aktualizacia iest dosteona.
b. Naciśnij aby zaktualizować bazę danych stref GEO drona, jeśli dostępna jest aktualizacia
c. Naciśnii, aby wprowadzić certyfikat odblokowania i zarządzać nim. leśli dron
jest już połączony z aparaturą, użytkownicy mogą wybrać certyfikat odblokowujacy bezpośrednio, aby odblokować drona.
4. Usługa chmury
Naciśnij, aby przejść do strony usługi w chmurze, wyświetlić stan połączenia usługi w chmurze, wybrać rodzaj usługi lub przełączyć się z aktualnie wybranej usługi na inna usługe w chmurze.
Po uzyskaniu licencji DJI SmartFarm Platform, zdjęcia i filmy mogą być przesyłane do chmury w czasie rzeczywistym. DJI SmartFarm Platform zapewnia klientom rozwiązania w zakresie zarządzania gruntami rolnymi, zwalczania szkodników oraz integracji produkcji w celu zwiększenia wydajności i efektywności zarządzania procesami.
Jeśli usługa jest połączona, czcionka będzie wyświetlana w kolorze ciemnej czerni. Jeśli usługa się łączy, w prawym górnym rogu usługi chmury pojawi się komunikat o łączeniu. Jeśli usługa jest offline lub rozłączona, w prawym górnym rogu usługi chmury pojawi się pomaraćrzowa ikona oznaczająca nieprawidłowy alert
5. Trasa lotu
Naciśnij, aby wejść do biblioteki tras lotu. Użytkownicy mogą tworzyć i przeglądać wszystkie zadania w locie. Zadania mogą być importowane i eksportowane partiami do aparatury lub innego mobilnego urządzenia pamieci zewnetrznej.
6. Album
Naciśnij, aby wyświetlić swoje pliki w jednym miejscu. Zdjęcia lub filmy wideo można zapisać w aparaturze. Należy pamiętać, że zdjęć i filmów nie można caładać no rezbezpiu pazetuw z depomo
7. Academy
Naciśnij, aby wyświetlić samouczki produktów Enterprise, wskazówki dotyczące lotu i analizy poszczególnych przypadków, a także pobrać instrukcje obsługi na aparaturę sterująca.
8. System zarzadzania (HMS)
Wyświetla stan techniczny drona, aparatury sterującej oraz pozostałych akcesoriów.
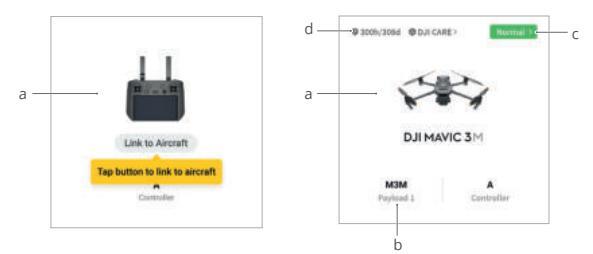
a. Jeśli aktualna aparatura nie jest połączona z dronem, pojawi się jej ilustracja. Naciśnij, aby połączyć aparaturę z dronem, a model i ilustracja drona zostaną wyświetlone po połączeniu.
b. Jeśli obciążenie jest nieprawidłowe, nazwa obciążenia zostanie wyświetlona w kolorze pomarańczowym lub czerwonym. Naciśnij, aby wyświetlić informacje o błędzie obciążenia.
Diętuże obciązenia: c. Naciśnij, aby wejść do systemu zarządzania. Wyświetlany jest tu stan techniczny drona i aparatury. Jeśli wyświetlany jest kolor zielony, dron działa prawidłowo i może wystartować. Jeśli jest pomarańczowy lub czerwony, dron wykazuje błąd, który musi zostać sprawdzony i usunięty przed startem. Przeczytaj punkt System zarzadzania (HMS). aby uzyskać wiecei szczegółów.
d. Tutaj wyświetlane są informacje o konserwacji bieżącego drona. Jeśli dron posiada DJI Care Enterprise, jego okres ważności również zostanie wyświetlony. Naciśnij, aby wyświetlić informacje o urządzeniu, w tym liczbę cykli, czas trwania lotu, historie lotu, czas aktywacji, przebieg lotu itp.
Skrót do aktualizacji oprogramowania
Jeśli wymagana jest aktualizacja, pojawi się komunikat informujący użytkownika, że dostępne jest nowe oprogramowanie lub konieczna jest aktualizacja oprogramowania dla drona i aparatury.
Niezgodne wersje oprogramowania wpływają na bezpieczeństwo lotu. Aplikacja będzie traktować priorytetowo aktualizacje zgodnego oprogramowania. Naciśnij komunikat, aby przejść do strony aktualizacji oprogramowania.
Zgodna aktualizacja jest wymagana, gdy wersje oprogramowania niektórych modułów drona są niezgodne z kompatybilną wersją systemu. W takiej sytuacji dron i aparatura zostaną zaktualizowane do najnowszej wersji, z wyjątkiem dodatkowych akumulatorów. Gdy akumulatory będą używane, pojawi się komunikat o konieczności przeprowadzenia zgodnej aktualizacji oprogramowania w celu zapewnienia bezpieczeństwa podczas lotu.
Wejście do podglądu kamery
Naciśnij, aby przejść do listy kontrolnej przed lotem i przełączać między różnymi trybami podglądu kamery. Więcej szczegółów znajduje się w rozdziale "Lista kontrolna przed lotem" i "Podelad z kamery".
Lista kontrolna przed lotem
Naciśnij opcję "Enter Camera View" (Wejście do podglądu z kamery) na stronie głównej aplikacji DJI Pilot 2, aby wejść do funkcji Preflight Check (Lista kontrolna przed lotem).
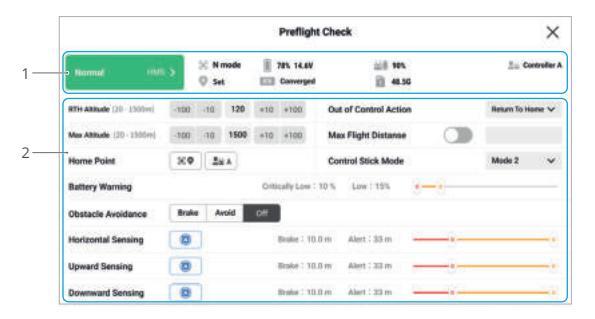
Wyświetl informacje o stanie technicznym drona, trybie lotu, poziomie naładowania inteligentnego akumulatora, poziomie naładowania akumulatora aparatury, statusie punktu Home, statusie RTK i karcie microSD kamery.
Dostosuj ustawienia na liście kontrolnej przed lotem, takie jak wysokość RTH i działanie po utracie kontroli, zaktualizuj punkt Home, a także ustaw niestandardowe ustawienia ostrzeżenia o akumulatorze i unikania przeszkód.
** - Wskazane jest, aby przed startem dokładnie przeprowadzić listę kontrolną przed lotem zgodnie ze scenariuszem działania i wymaganiami.
Przed otem zgodniem zadania w locie należy przeprowadzić listę kontrolną przed lotem i sprawdzić podstawowe parametry lotu. Szczegółowe informacje znaiduja się w punkcie Flight Tasks (Zadania w locie).
Podgląd z kamery
Wprowadzenie
Po naciśnięciu Enter Camera View (Wejście do podglądu z kamery) na ekranie głównym aplikacji DJI Pilot 2 i zakończeniu listy kontrolnej, użytkownicy zostaną skierowani do podglądu kamery. Poniższe worowadzenie dotyczy podglądu z kamery RGB.
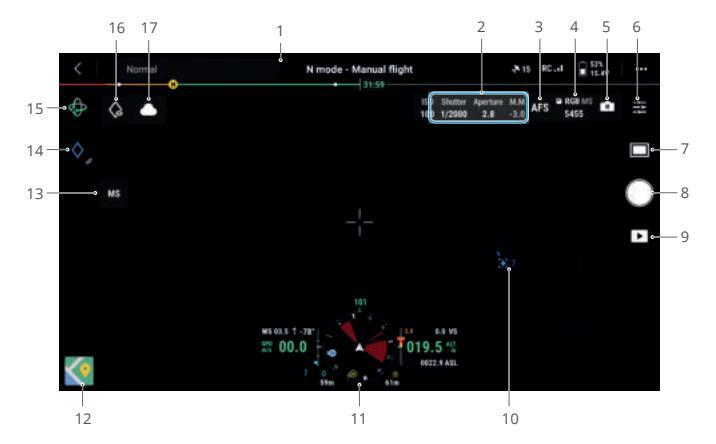
Górny pasek: wyświetla status drona, tryb lotu, jakość sygnału itp. Zapoznaj się z górnym paskiem, aby uzyskać więcej szczegółów.
Parametry kamery: wyświetla aktualne parametry fotografowania/nagrywania kamery. Tryb ostrości: naciśnij, aby przełączyć tryb ostrości kamery RGB, który obsługuje MF (ręczne ustawianie ostrości), AFC (ciągły autofokus) i AFS (pojedynczy autofokus).
4. Informacje o karcie pamięci: naciśnij, aby zapisać zdjęcia/filmy multispektralne (MS) lub nie. Wyświetla, czy na karcie microSD zapisane są zdjęcia/filmy RGB lub zarówno RGB, jak i multispektralne oraz informacje o pozostałej pamięci karty microSD. Pokazuje liczbę zdjęć, które można wykonać lub pozostały czas nagrywania.
5. Ustawienia ekspozycji: kamera RGB obsługuje tryby ekspozycji Auto, S, A i M, a kamera multispektralna obsługuje tryby ekspozycji Auto, S i M. ISO/Gain, migawka, EV, blokada AE i inne parametry moga być odpowiednio skonfigurowane w różnych trybach ekspozycii.
6. Menu ustawień kamery: naciśnij, aby wejść do menu ustawień kamery. Ustawienia mogą się różnić w zależności od rodzaju kamery. Przełączaj między różnymi rodzajami kamer, aby zobaczyć ustawienia.
7. Tryb foto/wideo: naciśnij, aby przełączyć się między trybami foto i wideo oraz wybrać różne opcje fotografowania.
Home w podglądzie kamery, aby uzyskać wiekszą kontrolę nad sytuacją podczas lotu.
12. Podgląd mapy: naciśnij, aby wyświetlić podgląd mapy na ekranie. Użytkownicy mogą
14. PinPoint: naciśnij, aby dodać bieżąca lokalizację drona jako PinPoint. Przytrzymaj, aby otworzyć menu ustawień PinPoint. Więcej szczegółów znajduje się w punkcie "PinPoint".
Górny pasek
| 1 2 | 3 4 | 5 6 | 7 | 8 |
|---|---|---|---|---|
| C B Stight West Velocity. He with Castler. | N mode-Manual flight |
РТК ВС
2
и
15 49-и |
1 1975
4.197 |
4. Pasek wskaźnika poziomu naładowania akumulatora: wyswietla poziom naładowania akumulatora i pozostały czas lotu akumulatora. Różne poziomy naładowania akumulatora są oznaczone różnymi kolorami. Jeśli poziom naładowania akumulatora jest niższy niż próg ostrzegawczy, ikona akumulatora zmienia kolor na czerwony, przypominając użytkownikowi o konieczności jak najszybszego wylądowania drona i wymiany akumulatorów.
5. Status pozycjonowania GNSS: wyświetla liczbę wyszukanych satelitów. RTK jest wyświetlane tylko po zainstalowaniu modułu RTK. Gdy usługa RTK nie jest włączona, ikona RTK jest szara. Gdy dane RTK są zgodne, ikona RTK zmieni kolor na biały. Naciśnij ikonę statusu pozycjonowania GNSS. aby wyświetlić informacie o trybie RTK i pozycjonowaniu GNSS.
6. Siła sygnału: obejmuje jakość sygnału wideo i transmisji. Trzy zielone kropki oznaczają silny sygnał, dwie żółte kropki - średnią jakość sygnału, a jedna czerwona kropka - słabą jakość sygnału. Jeśli sygnał zostanie utracony, wyświetlana jest ikona rozłączenia w kolorze czerwonym.
Poziom naładowania akumulatora: wyświetla poziom naładowania akumulatora w dronie. Naciśnij, aby wyświetlić poziom naładowania akumulatora, napięcie i temperaturę. Ustawienia: naciśnij, aby otworzyć menu Settings (Ustawienia) w celu ustawienia parametrów każdaca modułu.
- a. % Ustawienia systemu kontroli lotu: obejmuje przełącznik trybu lotu, punkt Home, wysokość RTH, wysokość maksymalną, limit odległości, status czujników, czynności po utracie kontroli, skoordynowany zwrot i system GNSS.
- b. (3) Ustawienia systemu wykrywania: obejmują przełącznik wykrywania przeszkód, przełącznik pozycjonowania wizji oraz przełącznik precyzyjnego lądowania.
- C. Ustawienia aparatury: obejmuje tryb drążka, ustawienia przycisków konfigurowalnych oraz kalibrację i łączenie z aparaturą.
- d. I Ustawienia transmisji wideo: obejmuje częstotliwość pracy, tryb kanału i rodzaj sygnału wyjściowego wideo.
- e. 🚶 Ustawienia akumulatora: obejmuje informacje o akumulatorze, Smart RTH, progi ostrzegawcze niskiego poziomu akumulatora oraz liczbe dni wymaganych do automatycznego rozładowania.
- f. Obejmują ustawienia gimbala: wyświetlane wyłącznie wtedy, gdy zamontowany jest moduł RTK Obejmują ustawienia nachylenia gimbala oraz automatyczną kalibrację gimbala.
- g. I Ustawienia RTK: obejmują funkcję pozycjonowania RTK, rodzaj usługi RTK oraz Obejmują ustawienia nachylenia gimbala oraz automatyczną kalibrację gimbala.
- h. ••• Ustawienia ogólne: obejmują wybór mapy, wyświetlanie trasy, ustawienia urządzeń i oświetlenia.
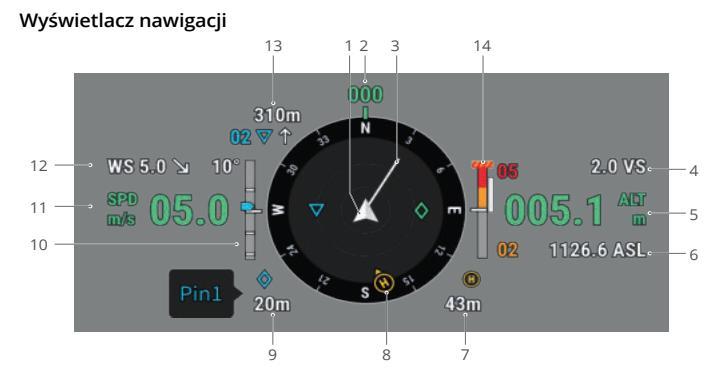
1. Dron: wskaźnik położenia będzie się obracał, gdy dron zmieni kierunek lotu.
2. Położenie drona: wyświetla aktualne położenie drona. Kompas obejmuje łącznie zakres 360°, a każdy kierunek jest oddzielony o 30°. Północ odpowiada 0 i 360°. Na przykład, gdy dron wskazuje na liczbę 24, oznacza to, że dron odchyla się o 240° w kierunku zeodnym z ruchem wskazówek zegara. zaczynajac od północy.
Wektor prędkości poziomej drona: biała linia wysuwająca się z ikony drona wskazuje kierunek lotu oraz prędkość, z jaką leci dron.
Prędkość pionowa (VS): wyświetla prędkość pionową drona podczas wznoszenia lub opadania
5. Wysokość (ALT): wyświetla wysokość drona względem punktu startu.
6. Rzeczywista wysokość (ASL): wyświetla wysokość drona względem poziomu morza.
Odległość od punktu Home: wyswietla poziomą odległość pomiędzy punktem Home a dronem.
8. Położenie punktu Home i aparatury sterującej:
a. Wyświetla położenie punktu Home względem lokalizacji drona. Jeśli odległość pozioma między dronem a punktem Home przekracza 16 m, ikona punktu Home bedzie nadal wyświetlana w rogu wyświetlacza nawigacyjnego.
b. Gdy względna odległość między punktem Home a aparaturą nie przekracza 5 m, wyświetlony zostanie tylko punkt Home. Gdy odległość względna jest większa niż 5 m, zostanie wyświetlona niebieska kropka wskazująca położenie aparatury. Gdy odległość pozioma między aparaturą a dronem przekracza 16 m, ikona aparatury będzie nadal wyświetlana na wyświetlaczu nawigacyjnym.
c. Niebieski kursor może być używany do wskazywania kierunku, w którym zwrócona jest aparatura, gdy kompas aparatury działa prawidłowo. Podczas lotu, jeśli sygnał jest słaby, użytkownik może dostosować położenie aparatury i spowodować, że niebieski kursor będzie skierowany w stronę drona, aby poprawić transmisję sygnału.
Informacje o punkcie PinPoint: wyświetla nazwę punktu PinPoint i poziomą odległość miedzy dronem a punktem PinPoint, gdy jest właczony.
10. Nachylenie gimbala.
11. Prędkość pozioma drona.
Prędkość i kierunek wiatru: kierunek wiatru jest względny w stosunku do drona. Informacja o punkcie Waypoint: wyświetla nazwę punktu trasy i odległość poziomą pomiędzy dronem a punktem trasy oraz wskazuje tendencję wznoszącą lub opadajaca bezpośredniej trasy lotu podczas zadania w locie.
14. Pionowy wskaźnik przeszkód (Vertical Obstacle Indicator): po wykryciu przeszkody w kierunku pionowym, pojawi się ikona paska przeszkód. Gdy dron osiągnie odległość ostrzegawczą, ikona będzie świecić na czerwono i pomarańczowo, a aparatura wyda długie sygnały dźwiękowe. Gdy dron osiągnie odległość zatrzymania przed przeszkodą, ikona będzie świecić na czerwono, a aparatura wyda krótkie sygnały dźwiękowe. Zarówno odległość zatrzymania przed przeszkodą, ikona będzie świecić na czerwono, a aparatura wyda krótkie sygnały dźwiękowe. Zarówno odległość zatrzymania przed przeszkodą, jak i odległość ostrzegawczą można ustawić w aplikacji DJI Pilot 2. Postępuj zgodnie z podpowiedziami w aplikacji, aby je ustawić. Biała linia przedstawia pozycję drona na dystansie trzech sekund. Im wyższa prędkość pionowa, tym dłuższa biała linia.
a. Jeśli przeszkoda znajduje się w odległości 16 m, ale nie osiągnęła odległości ostrzegawczej, przeszkoda zostanie wskazana przez zielone pole. Gdy przeszkoda znajduje się w odległości 16 m i osiąga odległość ostrzegawczą, pole zmienia kolor na pomarańczowy. Gdy przeszkoda zbliża się do granicy, pole zmienia kolor na czerwony.

b. Jeśli wykrywanie przeszkód jest wyłączone, zostanie wyświetlony napis "OFF". Gdy wykrywanie przeszkód jest włączone, ale systemy wizyjne i system czujników podczerwieni nie sa aktywne, zostanie wyświetlony napis "NA".

Podgląd z kamery multispektralnej
W tej części przedstawiono głównie różnice w stosunku do podglądu z kamery RGB. Więcej szczegółów można znaleźć we wprowadzeniu do rozdziału "Podgląd z kamery".
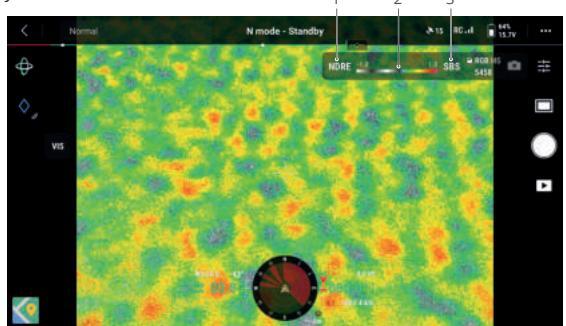
1. Wskaźnik roślinności i kamera multispektralna
Indeks roślinności (VI): wyświetla podgląd indeksu roślinności w czasie rzeczywistym. Obsługiwane są mapy indeksów NDVI, GNDVI i NDRE.
Stym. Obsługiwane są mapy moestow iso vijera strukture i strukture
2. Mapa kolorów: ustaw zakres wartości dla wyświetlanej skali kolorów indeksu roślinności. Kolor zbliżony do wartości 1 w mapie kolorów wskazuje na lepszy wzrost upraw. Domyślny zakres to [-1, 1]. Użytkownicy mogą ustawić wartości min i max odpowiednio w zakresie [-1, 1], zgodnie ze swoimi wymaganiami.
3. Tryb wyświetlania: na ekranie multispektralnym domyślnie wyświetlany jest sam podgląd multispektralny. Naciśnij, aby włączyć lub wyłączyć drugi podgląd. Po włączeniu, zarówno podgląd multispektralny, jak i RGB będą wyświetlane obok siebie.
Ustawienia mapy kolorów i trybu wyświetlania są obsługiwane tylko w podgladzie indeksu roślinności.
Proiekcia AR
Aplikacja DJI Pilot 2 obsługuje funkcję projekcji AR w następujących sytuacjach:
a. Punkt Home: gdy punkt Home jest poza zasięgiem aktualnego podglądu, nadal będzie wyświetlany na krawędzi podglądu. Dron może zostać obrócony w kierunku punktu Home, zgodnie z kierunkiem strzałki.
b. Punkty PinPoint: PinPoint wydaje się większy, gdy znajduje się w pobliżu drona, a mniejszy, gdy jest daleko. Pozwala to użytkownikom ocenić odległość pomiędzy punktem kontrolnym a dronem na podstawie wielkości punktu. Jeżeli wybrany PinPoint jest poza zasięgiem aktualnego podglądu, będzie on nadal wyświetlany na krawędzi podglądu. Dron może zostać obrócony w kierunku punktu PinPoint zgodnie z kierunkiem strzałki.
c. Punkty Waypoint: w zadaniu w locie, dwa punkty trasy, które dron ma zamiar minąć, zostaną wyświetlone na podglądzie kamery. Następny punkt trasy, który ma zostać osiągnięty, będzie wyświetlany jako pełny trójkąt oznaczony numerem seryjnym, natomiast kolejny punkt trasy będzie wyświetlany jako kropkowany trójkąt oznaczony numerem seryjnym.
d. Informacje ADS-B: gdy w pobliżu zostanie wykryty samolot, zostanie on wyświetlony na podglądzie kamery. Wznieś lub opuść drona tak szybko, jak to możliwe, aby uniknąć zderzenia z obiektem, postępując zgodnie z wyświetlanymi komunikatami
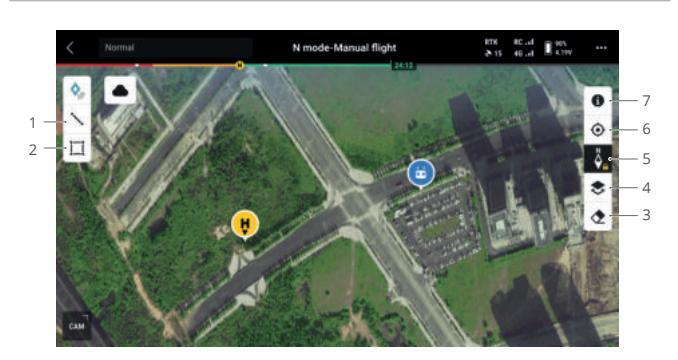
Podgląd z kamery
1 Naciśnii aby narysować linie na mapie
Naciśnii, aby narysować obszar na mapie.
Naciśnij, aby wyczyścić trasę lotu drona.
Wybór warstwy mapy: naciśnij, aby wybrać mapę satelitarną lub drogową (tryb standardowy) zgodnie z wymaganiami.
Blokada mapy: gdy jest włączona, mapy nie można obracać; gdy jest wyłączona, mape można swobodnie obracać.
6. Wyśrodkowanie podglądu: naciśnij, aby szybko wyśrodkować lokalizację aparatu-
ry w podglądzie.
7. Warstwy mapy strefy GEO: naciśnij, aby wyświetlić wszystkie warstwy strefy GEO i właczyć lub wyłaczyć wyświetlanie warstwy strefy GEO na mapie.
Zarządzanie powiadomieniami
PinPoint
W celu szybkiej obserwacji i synchronizacji informacji, punkt PinPoint może być używany do oznaczenia lokalizacji drona w podglądzie kamery lub punktu środkowego many w podglądzie many
Etapy tworzenia punktu PinPoint w podglądzie kamery: dostosuj lokalizację drona, naciśnij ikonę PinPoint po lewej stronie ekranu. Punkt PinPoint można ustawić na
podstawie bieżącej lokalizacji drona. Będzie on obejmować szerokość, długość i wysokość geograficzną drona.
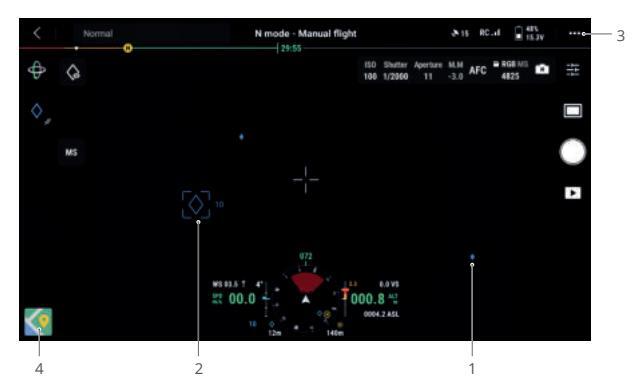
1. Dla punktu PinPoint w podgladzie kamery zostanie utworzona projekcja AR.
Rozmiar punktu będzie dostosowany do odległości między dronem a punktem (duży - gdy jest blisko, mały - gdy znajduje się daleko).
2. Wybrany punkt PinPoint:
a. Mała ramka pojawi się wokół punktu PinPoint, wskazując, że jest on wybrany.
b. W lewym dolnym rogu ekranu wyświetlacza nawigacji widnieje pozioma odległość punktu od drona oraz nazwa punktu. Na ekranie nawigacji wyświetlana icat ść wietlacza zwale droze
c. Jeżeli wybrany punkt znajduje się poza podglądem transmisji wideo, ikona
PinPoint pozostanie na krawędzi ekranu, wskazując orientację punktu względem środka podglądu.
d. Po wybraniu punktu PinPoint, użytkownik może edytować nazwę, kolor, szerokość, długość i wysokość punktu lub przeciagnać punkt na mape.
3. Naciśnij przycisk ••• -> 📩 , aby ustawić funkcje konfigurowalnych przycisków aparatury, takie jak dodanie punktu PinPoint, usuniecje wybranego punktu lub
wybór poprzedniego bądź następnego punktu. Użytkownicy mogą szybko dodawać i wybierać punkty PinPoint poprzez naciskanie przycisków.
4. Przełącz się do podglądu mapy:
a. Nazwany punkt PinPoint zostanie odpowiednio wyświetlony na mapie.
b. W podglądzie mapy możesz dodać PinPoint przeciągając punkt na krzyżyk pośrodku mapy. Wysokość jest aktualna wysokościa lotu drona.
c. Naciśnij, aby wybrać punkt PinPoint na mapie, aby wyświetlić twórcę punktu, odległość między punktem a dronem oraz wysokość, szerokość i długość geograficzną. Możesz ustawić punkt PinPoint jako punkt Home, edytować lub usunać punkt.
Pozycjonowanie punktu PinPoint jest ograniczone przez takie czynniki, jak dokładność pozycjonowania GNSS. Szerokość i długość geograficzna, odległość pozioma, wyświetlacz nawigacji oraz projekcja AR są podane wyłacznie w celach referencyjnych
Edycja punktów PinPoints
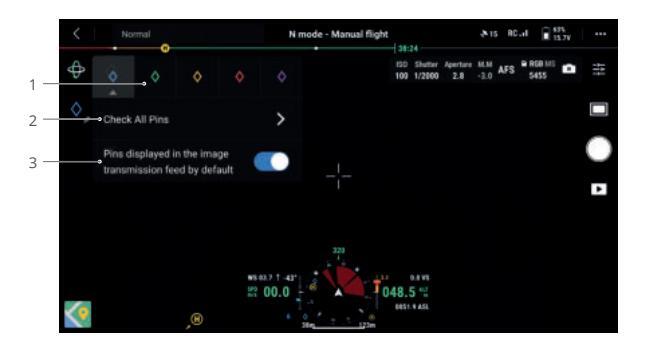
1. Przytrzymaj ikonę PinPoint na ekranie dotykowym, aby wyświetlić panel ustawień PinPoint. Dostępnych jest pięć opcji kolorów dla punktów PinPoint. Wskazane jest ustawienie koloru dla każdego typu punktu PinPoint odpowiednio do sytuacji działania
2. Naciśnij, aby rozwinąć listę punktów PinPoint, aby wyświetlić wszystkie punkty.
3. Ustaw, czy nowo utworzony punkt ma być wyświetlany w podglądzie transmisji wideo.
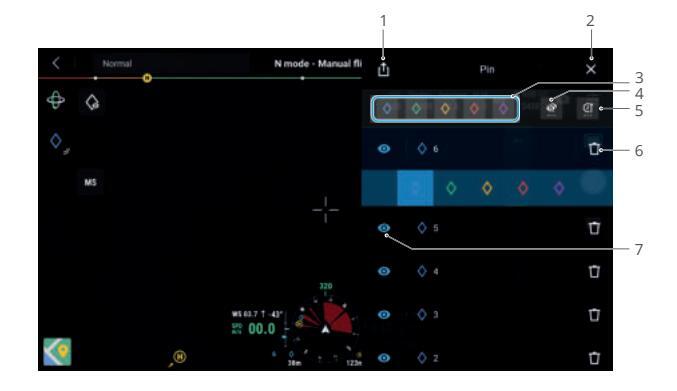
1. Naciśnij, aby wyeksportować wszystkie punkty PinPoint do lokalnego folderu aparatury.
2. Naciśnii, aby zamknać bieżacy panel.
Ustaw filtrowanie punktów PinPoint według koloru. Możesz wybrać wiele kolorów, a punkty beda filtrowane według wybranych kolorów.
4. Ustaw filtrowanie punktów PinPoint według ich widoczności w podglądzie transmisji wideo. Punkty mogą być filtrowane według jednego z trzech kryteriów: pokaż wszystkie punkty PinPoint na tej liście; pokaż tylko punkty PinPoint, które są widoczne w podglądzie transmisji wideo na tej liście; pokaż tylko punkty PinPoint, które nie są widoczne w podglądzie transmisji wideo na tej liście.
Naciśnij, aby uporządkować punkty PinPoint w kolejności chronologicznej lub alfabetycznej według ich nazw do przodu, lub do tyłu.
6. Naciśnij, aby usunąć punkt PinPoint.
Naciśnij, aby włączyć lub wyłączyć wyświetlanie projekcji AR dla punktu PinPoint w podeladzie transmisii wideo.
Zarzadzanie powiadomieniami o liniach i obszarach
Użytkownicy mogą rysować linie i obszary na mapie, aby zsynchroj najważniejsze informacje o drogach i terenje
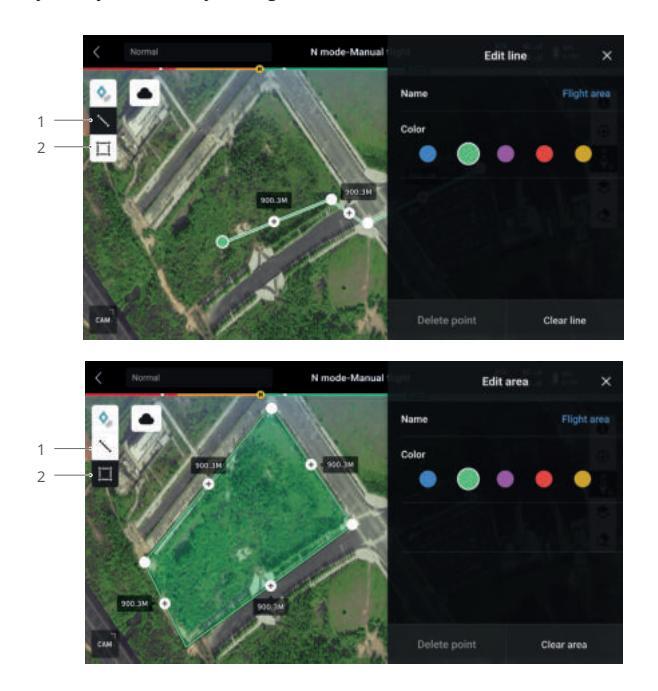
1. Naciśnij, aby wyświetlić podgląd edycji linii. 2. Naciśnii, aby wyświetlić podgląd edycji obszaru.
Zadania w locie (Flight Tasks)
Naciśnij na ekranie głównym aplikacji DJI Pilot 2, aby wejść do biblioteki tras lotu. Użytkownicy mogą przeglądać zadania lub tworzyć zadania typu punkty waypoint, mapowanie, skosy lub liniowe zadania w locie. Te cztery rodzaje zadań są generowane przez aplikację. Tymczasem zadania z punktem waypoint mogą być również tworzone poprzez funkcję Live Mission Recording (nagrywanie misji na żywo)

Loty z punktami Waypoint
Loty z punktami Waypoint mogą być planowane na dwa sposoby: Set Waypoints (Ustawianie punktów trasy) lub Live Mission Recording (Nagrywanie misji na żywo).
Użyj opcji Set Waypoints, aby utworzyć trasę poprzez dodanie i edycję punktów trasy na mapie. Użyj opcji Live Mission Recording, aby utworzyć trasę poprzez dodawanie punktów podczas robienia zdjeć wzdłuż trasy.

Lot z punktami trasy - Ustawianie punktów trasy
Naciśnij Create a Route (Utwórz trasę), Waypoint (Punkt trasy), a następnie Set Waypoints (Ustaw punkty trasy), aby utworzyć trasę lotu. Naciśnij na mapie, aby dodać punkty trasy, a następnie skonfiguruj ustawienia trasy i punktów trasy.

Interesujące miejsca (POI): naciśnij, aby włączyć funkcję POI, a na mapie zostanie wyświetlony punkt POI. Przeciągnij, aby dostosować jego położenie. Po dodaniu punktu POI można ustawić odchylenie drona w kierunku punktu POI, tak aby przód drona był zawsze zwrócony w kierunku punktu POI podczas wykonywania zadania. Naciśnij tę ikonę ponownie, aby wyłączyć funkcję POI.
Odwróć trasę lotu: naciśnij, aby odwrócić trasę lotu poprzez zamianę punktu początkowego i końcowego. S odnosi się do punktu początkowego.
Wyczyść punkty trasy: naciśnij, aby wyczyścić wszystkie dodane punkty trasy.
4. Usuń wybrane punkty trasy: naciśnij, aby usunąć wybrane punkty trasy.
5. Lista parametrów: edytuj nazwę trasy, zaawansowane ustawienia trasy lotu i tryb wysokości. Ustaw model drona jako Mavic 3M.
Wysokość, ostaw moste u obaj jednowa stawane do całej trasy, w tym bezpieczna wysokość startu, wznoszenie się do punktu początkowego, prędkość drona, wysokość drona, odchylenie drona, sterowanie gimbalem, typ punktu trasy i czynność zakończenia. Ustawienia te będą obowiązywać na wszystkich punktach trasy. Jeżeli użytkownicy chcą ustawić parametry pojedynczego punktu trasy, należy zapoznać sie z poniższym onisem.
7. Ustawianie poszczególnych punktów trasy: wybierz punkt trasy i ustaw jego parametry. Naciśnij "<" lub ">", aby przejść do poprzedniego lub następnego punktu trasy. Ustawienia obejmują prędkość drona, wysokość drona, tryb odchylania drona, typ punktu trasy, kierunek obrotu drona, tryb nachylenia gimbala, działania punktu trasy. długość i szerokość geograficzna.
8. Zapisanie: naciśnij, aby zapisać bieżące ustawienia i wygenerować trasę lotu.
Rozpoczęcie: naciśnij przycisk, a następnie sprawdź ustawienia i stan drona na liście kontrolnej przed lotem. Naciśnij, aby przesłać trasę lotu. Po zakończeniu przesyłania naciśnij przycisk Start, aby wykonać bieżące ządanie.
Informacje o trasie lotu: wyświetla długość lotu, szacowany czas lotu, punkt trasv i ilość zdieć.
Lot z punktami trasy - nagrywanie misji na żywo
Naciśnij przycisk Create a Route (Utwórz trasę), Waypoint (Punkt trasy), a następnie Live Mission Rec (Nagrywanie misji na żywo), aby nagrać szczegółowe informacje i lokalizację punktu trasy drona.
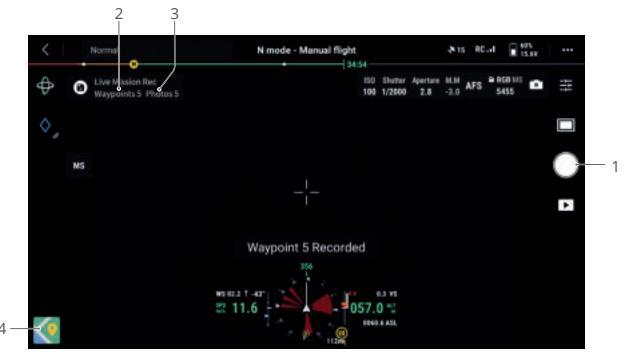
1. Użyj gimbala, ustaw skalę powiększenia i nakieruj na cel. Naciśnij, aby zrobić zdjęcia lub naciśnij przycisk C1 na aparaturze, aby dodać punkt trasy. Liczba punktów trasy i zdjęć zostanie odpowiednio dodana
2. Liczba zaplanowanych punktów trasy.
3. Liczba zaplanowanych zdjęć.
4. Naciśnij, aby przełączyć się do podglądu mapy w celu edycji lub wyświetlenia.
Edvcia zadań w locie
Wejdź do biblioteki tras lotów i wybierz utworzoną trasę lotu do edycji lub podgladu.

Naciśnij, aby wykonać bieżące zadanie. Naciśnij, aby wejść do edycji trasy lotu. Po zapisaniu zmiany zostaną uwzględnione w oryginalnej trasie. Naciśnii, aby przejść do strony Set Waypoints (Ustawianie punktów trasy).
Zadanie mapowania
Używając zadania mapowania, dron może automatycznie zakończyć pozyskiwanie danych do fotogrametrii lotniczej zaplanowanego obszaru wzdłuż trasy w kształcie litery s, zgodnie z parametrami trasy.
Funkcje Smart Oblique i Terrain Follow mogą być włączone w zadaniu mapowania.
Funkcja Smart Obligue
Funkcja Smart Oblique to innowacyjne rozwiązanie do wykonywania zdjęć pod kątem, które można włączyć w ustawieniach zadania mapowania. Automatycznie steruj gimbalem, aby uchwycić zdjęcia w różnych wymaganych położeniach. Dron musi pokonać tylko dwie wzajemnie prostopadłe trasy w kształcie litery s, aby uzyskać zdjęcia ortofotograficzne i pod kątem wymagane do rekonstrukcji 3D, co znacznie poprawia wydajność pracy. Dron będzie wykonywał zdjęcia niezbędne do rekonstrukcji tylko na obrzeżach obszaru mapowania, co zmniejsza liczbę wykonywanych zdjęć i znacznie poprawia efektywność obróbki.
;; Funkcja Smart Oblique jest obsługiwana wyłącznie w przypadku używania kamery RGB.
Nachylenie gimbala do przechwytywania zdjęć może się różnić na poszczególnych odcinkach trasy lotu. Wszystkie wykonane zdjęcia zależą od obszaru mapowania.
a. Nachylenie gimbala może się różnić w zależności od segmentów trasy lotu. Podczas lotu z funkcją Smart oblique, dron będzie leciał dwiema wzajemnie prostopadłymi trasami w kształcie litery s. Obie trasy będą kolejno fotografować obszar mapowania pod różnymi kątami.
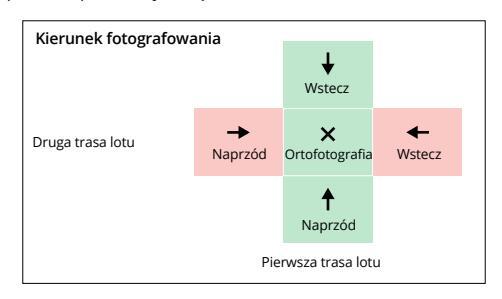
b. Dron automatycznie dostosuje prędkość lotu w zależności od liczby wymaganych zdjęć, aby zapewnić wydajność pracy.
| Nr. zdjęcia | 1 | 2 | 3 |
|---|---|---|---|
| Prędkość lotu | Wysoka | Średnia | Niska |
c. Obszar lotu będzie się zmieniał w zależności od obszaru mapowania, wysokości lotu i nachylenia gimbala. Obszar lotu będzie się również zmieniał, gdy obszar mapowania jest taki sam, ale wysokość lotu lub nachylenie gimbala są różne.
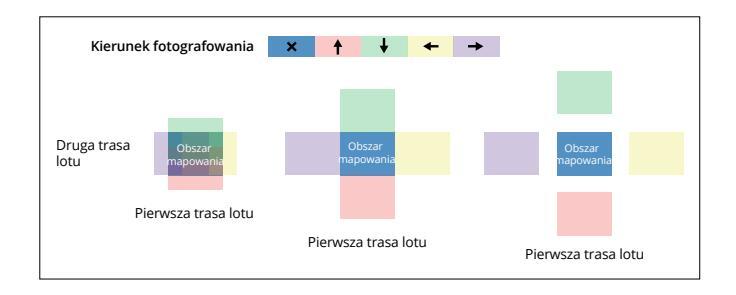
Funkcja Terrain Follow
Podczas zbierania danych w obszarach o dużych różnicach wysokości, takich jak obszary górskie, funkcja Terrain Follow pozwala dronowi dostosować wysokość lotu do zmian w terenie. Funkcja Terrain Follow zapewnia, że wysokość względna drona i terenu pod nim pozostaje bez zmian, dzięki czemu odległość pomiarowa GSD (Ground Sampling Distance) zdjęć zebranych w każdym obszarze jest zgodna, co zwiększa dokładność danych mapowych przy jednoczesnym zapewnieniu bezpieczeństwa lotu.
Funkcja Real-Time Follow
Funkcja Real-Time Follow (w czasie rzeczywistym) nie wymaga plików DSM. System wizyjny drona wykrywa w czasie rzeczywistym podczas lotu wahania terenu 200 m przed nim. Wskazane jest używanie tej funkcji w miejscach, gdzie nachylenie terenu jest mniejsze niż 75°, a warunki oświetleniowe i środowisko są odpowiednie dla systemu wizyjnego.
Podczas wykonywania zadania mapowania, jeśli włączona jest funkcja Real-Time Follow, wysokość drona nad poziomem gruntu (AGL) oraz kierunek terenu (150 m przed dronem) będą wyświetlane w prawym dolnym rogu podglądu kamery.
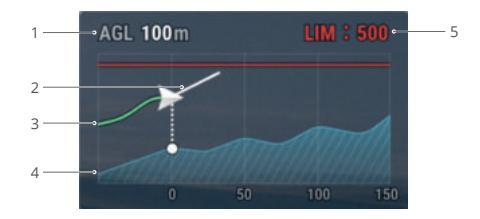
Poziom wysokości nad poziomem gruntu (AGL): wyświetla wysokość, na jakiej znajduje się dron w stosunku do terenu pod nim.
Zierunek prędkości drona: wyświetla kierunek wektora prędkości ruchu drona. Trasa lotu: wyświetla trase lotu. która przebył dron.
Linia ukształtowania terenu: wyświetla linię ukształtowania terenu w obszarze, w którym aktualnie znaiduje sie dron.
5. Ograniczenie wysokości: wyświetla maksymalną wysokość lotu drona.
- Zasięg wykrywania z dużej odległości przez system wizyjny wynosi 80-200 m.
(24) Podczas lotu poza ten zasięg nie można wykonywać funkcji Real-Time Follow. Zachowaj ostrożność. Funkcja Real-Time Follow nie działa w miejscach, w których występuja klify, strome zbocza, linie energetyczne i wieże.
System wizyjny nie może działać prawidłowo w warunkach słabego oświetlenia. Funkcja Real-Time Follow nie może być prawidłowo używana w deszczowym, śnieżnym i melistym otoczeniu.
System wizyjny może nie działać prawidłowo nad wodą. W związku z tym dron może nie wykryć poprawnie odległości od wody podczas funkcji Real-time follow. Nie należy używać funkcji w okolicy dużych obszarach wody i fal morskich.
należy używać turikcji w okolicy dużych obszarach wody nai morskich.
system wizyny nie działa prawidowo nad powierzchniam bez wyraznych zman wzoru lub tam, gdzie światło jest zbyt słabe lub zbyt silne. System wizyjny nie działa prawidłowo w następujących sytuacjach:
a. Lot nad powierzchniami monochromatycznymi (np. czysto czarnymi, białymi, czerwonymi lub zielonymi).
b. Lot nad powierzchniami silnie odbijającymi światło (np. lód. szkło).
c. Lot nad wodą lub powierzchniami przezroczystymi.
Lot nad ruchomymi powierzchniami lub obiektami.
e. Lot w obszarze o częstych i drastycznych zmianach oświetlenia.
f. Lot nad ekstremalnie ciemnymi (< 10 luksów) lub jasnymi (> 40 000 luksów) powierzchniami.
h. Lot nad powierzchniami bez wyraźnych wzorów lub faktur.
i. Lot nad powierzchniami o powtarzających się identycznych wzorach lub fakturach (np. płytki o tym samym wzorze)
Lot nad przeszkodami o małej powierzchni (np. gałęzie drzew).
Należy zawsze utrzymywać czujniki w czystości. Nie należy modyfikować czujników. Nie należy używać drona w zabylonym lub wilgotnym środowisku.
Funkcia DSM Follow
Importując plik DSM, aplikacja wygeneruje lot ze zmianami wysokości. Pliki DSM obszaru mapowania można uzyskać korzystając z dwóch następujących sposobów:
1. Import pliku lokalnego
a. Zbierz dane 2D obszaru mapowania i wykonaj rekonstrukcję 2D używając programu DJI Terra wybierając tryb Fruit Tree. Zostanie wygenerowany plik .tif, który można zaimportować na kartę microSD aparatury.
b. Pobierz dane mapowania terenu z geobrowser i zaimportuj je na kartę microSD aparatury.
2. Pobieranie z sieci internetowei
Pliki DSM można uzyskać bezpośrednio pobierając dane z otwartego źródła bazy geoid ASTER GDEM V3.
- Upewnij się, że plik DSM jest plikiem geograficznego układu współrzędnych, a nie plikiem zaprojektowanego układu współrzędnych. W przeciwnym razie importowany plik może nie zostać rozpoznany. Wskazane jest, aby rozdzielczość importowanego pliku nie była większa niż 10 m. Upewnii sie, że obszar maoowania znaiduje sie w zasiegu pliku DSM.
- Baza danych geoidy z otwartym źródłem może zawierać błędy. Producent DJI nie ponosi odpowiedzialności za dokładność, autentyczność lub istotność danych. Zwróć uwagę na środowisko lotu i zachowaj ostrożność podczas lotu.
Funkcja Obligue Task
Funkcja Oblique generuje pięć tras w kształcie litery s w obszarze mapowania, przy odpowiednio sterowanym gimbalu, aby zebrać zdjęcia ortofotograficzne i pod kątem w 5 różnych kierunkach, które mogą być używane do tworzenia modeli 3D.
Po utworzeniu obszaru mapowania, zostanie wygenerowanych pięć tras: pierwsza trasa służy do zbierania zdjęć ortofotograficznych, a pozostałe cztery trasy służą do zbierania zdjęć pod kątem.
Funkcja Linear Task
Funkcja Linear Task jest używana do pozyskiwania zdjęć ortofotograficznych dla obszarów w kształcie pasów, takich jak rzeki, rurociągi i drogi. Obszar mapowania może być wygenerowany przez wybranie linii środkowej pasa i rozszerzenie na zewnątrz wzdłuż tej linii.
Najpierw ustaw funkcję Flight Band, wybierając punkty na mapie, aby wygenerować obszar mapowania w kształcie pasa i potwierdź linię środkową oraz zakres obszaru mapowania. Przełącz na opcję Flight Route, aby wygenerować odpowiednią trasę w kształcie litery "s" i dostosuj parametry trasy, aby zakończyć ustawienia.
Linia środkowa może zostać wygenerowana przez naciśnięcie na mapę lub import pliku liniowego KML. Uwaga: po wygenerowaniu obszaru w kształcie pasma sprawdź wzdłuż ścieżki, czy nie ma dużego odchylenia od oryginalnego obszaru mapowania. Jeśli występuje odchylenie, zwiększ niektóre punkty, aby całkowicie pokryć obszar lub zwiększ długość lewego i prawego przedłużenia, aby całkowicie pokryć obszar mapowania.
Pozyskiwanie danych fotogrametrycznych
Pozyskiwanie danych fotogrametrycznych może być realizowane przy użyciu trzech zadań lotu: Mapping (Mapowanie), Oblique i Linear. Poniżej przedstawiono zadanie mapowania jako przykład dla konkretnych poleceń.
Przed rozpoczęciem pozyskiwania danych fotogrametrycznych należy wejść do ustawień drona, aby włączyć RTK, oraz upewnić się, że sieć RTK jest połączona i wyświetla się status FIX.
1. Przejdź w aplikacji DJI Pilot 2 do biblioteki tras lotu, wybierz Create a Route (Utwórz trasę) lub Import Route (KMZ/KML) (Importuj trasę) i wybierz ≧, aby utworzyć zadanie mapowania. Naciśnij na podgląd mapy i przeciągnij punkt graniczny, aby dostosować zasięg obszaru mapowania. Naciśnij + pośrodku punkt granicznego, aby dodać punkt graniczny, a następnie dostosuj długość i szerokość geograficzną punktu w ustawieniach parametrów po prawej stronie. Naciśnij ⊗, aby usunąć wybrany punkt graniczny, a następnie kliknij 🗑 , aby usunąć wszystkie punkty graniczne.
| KIY | Normal | all the | N | node - Standby | L | a n 15 | RC.4I | 15.4V | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 8 | • | 351.2m | S |
Mappi
Mapp |
ng
ing1 |
0 | ||||
| 51 | R | DJI Ma | ivic 3M RGB | +MS | ||||||
| 1 | GSD | m/pixel | ||||||||
| - | - | P-1/ | Terrain | Follow | ||||||
| ~ N=h | R | ASL/A | ||||||||
| 353.2m | 1 | Relative | o Takeof | lf Point (/ | 4(T) | Ý | ||||
| - | - | V | 1 C | Flight | Route Altitur | fe | ||||
| Distance | Estimated Time | Maypoints | Phetis | Mapping Area | -100 | -10 -1 | 100 | •1 | +10 | +100 |
Po ustawieniu nazwy zadania i wybraniu kamery do pozyskiwania danych fotogrametrycznych, ustaw kolejno następujące parametry trasy lotu;
a. Ustaw tryb wysokościowy (ASL/ALT), wysokość trasy lotu, prędkość startową, prędkość trasy lotu, kąt nachylenia trasy, czynność po zakończeniu oraz włącz optymalizacie wysokości.
b. W sekcji Advanced Settings (Ustawienia zaawansowane) ustaw stosunek pokrycia bocznego, stosunek pokrycia czołowego, margines i tryb fotografowania.
Naciśnij a , aby zapisać zadanie i naciśnij ● , aby przesłać i wykonać zadanie lotu. Wyłącz zasilanie drona po wykonaniu zadania. Wyjmij kartę microSD z drona i podłacz ia do komputera. aby sprawdzić wykonane zdiecia i wygenerowane pliki.
Podczas korzystania z zadań mapping, oblique i linear, domyślnym trybem ostrości kamery jest MF infinity, a korekcja zniekształceń jest wyłączona. Podczas wykonywania ortofotografii wskazane jest ustawienie prędkości trasy lotu na wartość maksymalną oraz włączenie optymalizacji wysokości.
Parametry trasy opisane są następująco:
| Parametry | Opis |
|---|---|
|
Tryb wysokości
(ASL/ALT) |
|
|
Bezpieczna wysokość
początkowa |
Po starcie dron wzniesie się na bezpieczną wysokość początkową (względem punktu startu), a następnie poleci do punktu startu trasy lotu. |
| Prędkość początkowa |
Po starcie drona i osiągnięciu wysokości trasy lotu, prędkość lotu przed
wejściem na trasę lotu. Prędkość ta nie jest prędkością pionowego startu drona. Wskazane jest ustawienie jej na maksimum, aby poprawić wydajność operacyjną. |
| Prędkość | Prędkość operacyjna drona po wejściu na trasę lotu. Prędkość ta jest związana z GSD i stosunkiem pokrycia czołowego. |
|
Kąt nachylenia
trasy |
Można dostosować kąt trasy, a pozycje początkowe i końcowe trasy
zostaną odpowiednio dostosowane. Uwaga: szacowany czas wykonania zadania jest różny dla różnych kątów trasy. Dostosowując kąt trasy, można zaplanować zadanie o najkrótszym szacowanym czasie, aby zwiększyć wydajność pracy. |
| Tryb fotograficzny |
Tryb fotografowania w kamerze. Domyślnym wyborem jest Timed
Interval Shot (zdjęcia z interwałem czasowym). |
|---|---|
| Margines |
Odległość obszaru lotu poza obszarem mapowania. Celem ustawienia
marginesu jest zapewnienie dokładności brzegowej obszaru mapowania poprzez rejestrowanie obrazów poza obszarem mapowania. Funkcja Smart Oblique nie obsługuje ustawiania marginesu; automatycznie rozszerzy margines zgodnie z zakresem obszaru mapowania i nachyleniem gimbala. |
|
Stosunek pokrycia
bocznego/ Stosunek pokrycia czołowego |
|
| Zakończenie pracy |
Czynność lotu wykonywana przez drona po zakończeniu pracy.
Domyślnym wyborem jest RTH. |
|
Optymalizacja
wysokości |
Po włączeniu tej opcji dron będzie leciał do środka obszaru mapowania,
aby wykonać serię zdjęć pod kątem w celu optymalizacji dokładności wysokościowej. Wskazane jest włączenie tej opcji dla wykonywania zdjęć ortofotograficznych, które wymagają dużej dokładności wysokościowej. ¿: Ta funkcja nie jest obsługiwana w przypadku zadań Smart Oblique i Oblique. |
| Parametry | Opis |
|---|---|
|
Nachylenie
gimbala (Oblique) |
Umożliwia regulację kąta nachylenia kamery podczas wykonywania zdjęć
pod kątem. Kąt domyślny wynosi -45°. Gdy różnica wysokości budynków w obszarze mapowania wzrasta, wskazane jest zwiększenie kąta, aby uchwycić więcej ujęć wyższych pięter budynków. Jeśli budynki w obszarze mapowania są gęste, wskazane jest odpowiednie zmniejszenie kąta, aby uchwycić więcej ujęć pomiędzy budynkami. |
|
*Ö: Podczas wykonywania zdjęć za pomocą funkcji Smart Oblique
pojawia się opcja Gimbal Angle (Kąt gimbala), a domyślny kąt to 45°. |
| GSD to odległość pomiaru terenu dla ortofotografii wykonanych na pierwszej trasie. | |
|---|---|
| GSD/Oblique GSD |
Oblique GSD to odległość pomiaru terenu dla zdjęć wykonanych
pod kątem na pozostałych czterech trasach. |
Funkcja Linear task obsługuje następujące parametry techniczne:
| Parametry | Opis |
|---|---|
| Pojedyncza trasa |
Jeśli włączona jest opcja Single Route (Pojedyncza trasa), zostanie
wygenerowana trasa w środku obszaru mapowania. Ta funkcja jest przeznaczona do sytuacji, w których należy sfotografować tylko środek obszaru mapowania, np. inspekcja rurociągu naftowego. |
|
Lewa/prawa długość
przedłużenia |
Zaplanuj zakres pasma lotu, dostosowując odległość, o jaką trasa
rozszerza się od środka na lewą i prawą stronę. Po włączeniu funkcji Equal Left/Right Extensions (Równe rozszerze- nie w lewo/prawo) zasięg pasma lotu pozostaje symetryczny względem środka trasy. |
|
Odległość cięcia
pasma lotu |
Regulacja odległości cięcia pasma lotu może podzielić obszar
pasma na kilka małych obszarów do pracy. Zakres transmisji łączności z dronem powinien być głównie uwzględniony dla zakresu podziału, co spowoduje, że dron nie straci kontroli na małym obszarze. |
|
Uwzględnienie
linii środkowej |
Jeśli opcja ta jest włączona, trasy lotów są tworzone na zewnątrz
wzdłuż linii środkowej. Trasa ta spowoduje uwzględnienie linii środkowej obszaru mapowania w kształcie pasma. |
|
Optymalizacja
brzegowa |
Dodaj nowe trasy lotu poza bieżącym planowanym obszarem lotu,
aby wykonać więcej zdjęć brzegów obszaru mapowania. Włącz opcję dla obiektów, które rejestrują głównie obszary brzegowe, takie jak kanały rzeczne. |
Przechowywanie danych
Plik zdjęciowy
Zapoznaj się z ta lista, aby sprawdzić informacje dotyczące plików zdjęciowych.
| Dane | Opis |
|---|---|
| Data edycji | Czas edycji zdjęcia |
| Data utworzenia | Czas wykonania zdjęcia |
| Twórca | Właściciel |
| Model | Model produktu |
| Format | Format zdjęć |
| Wersja | Wersja XMP |
| Źródło obrazu | Rodzaj kamery |
| Status GPS | Status GPS |
| Rodzaj wysokości | Rodzaj elewacji |
|
Szerokość
geograficzna GPS |
Szerokość geograficzna GPS, na której zostało wykonane zdjęcie |
| Długość geograficzna GPS | Długość geograficzna GPS w momencie wykonania zdjęcia |
|---|---|
| Wysokość bezwzględna | Wysokość geodezyjna, na której wykonano zdjęcie |
| Wysokość względna | Wysokość względna (w stosunku do wysokości punktu startu), na której zostało wykonane zdjęcie |
| Kąt obrotu gimbala | Kąt obrotu gimbala podczas wykonywania zdjęcia (układ współrzędnych NED, kolejność obrotów to ZYX) |
| Kąt odchylenia gimbala |
Kąt odchylenia gimbala w momencie wykonania zdjęcia
(układ współrzędnych NED, kolejność obrotów to ZYX) |
| Kąt nachylenia gimbala |
Kąt nachylenia gimbala w momencie wykonania zdjęcia
(układ współrzędnych NED, kolejność obrotów to ZYX) |
| Kąt obrotu w locie | Kąt obrotu drona w momencie wykonania zdjęcia (układ współrzędnych NED, kolejność obrotów to ZYX) |
| Kąt odchylenia w locie |
Kąt odchylenia drona w momencie wykonania zdjęcia
(układ współrzędnych NED, kolejność obrotów to ZYX) |
| Kąt nachylenia w locie |
Kąt nachylenia drona w momencie wykonania zdjęcia
(układ współrzędnych NED, kolejność obrotów to ZYX) |
| Prędkość lotu X | Prędkość lotu w kier. północnym w momencie wykonania zdjęcia |
| Prędkość lotu Y | Prędkość lotu w kier. wschodnim w momencie wykonywania zdjęcia |
| Prędkość lotu Z | Prędkość lotu w kier. wznoszenia w momencie wykonania zdjęcia |
| Odwrócenie kamery | Informacja o odwróceniu kamery |
| Odwrócenie gimbala | Informacja o odwróceniu gimbala |
| Dane wewnętrzne | Dane dostosowane do wymagań użytkownika |
| RtkFlag |
Status RTK:
0 - Niepowodzenie w pozycjonowaniu 16 - Pozycjonowanie jednopunktowe (dokładność na poziomie metra) 32-49 - Pozycjonowanie z wykorzystaniem rozwiązania zmienno-punktowego (dokładność od decymetrów do metrów) 50 - Pozycjonowanie z ustalonym rozwiązaniem (dokładność na poziomie centymetrów) |
| RtkStdLon | Standardowe odchylenie dł. geograficznej dla pozycjonowania RTK |
| RtkStdLat | Standardowe odchylenie szer. geograficznej dla pozycjonowania RTK |
| RtkStdHgt | Standardowe odchylenie wysokości w pozycjonowaniu RTK |
| RtkDiffAge | Czas różnicy RTK (korekta) |
| NTRIPMountPoint | Punkt montażu sieci RTK |
| NTRIPPort | Port sieciowy RTK |
| NTRIPHost | Adres IP lub nazwa domeny sieci RTK |
| Tryb pomiaru |
Informacja o przydatności zdjęcia do mapowania:
0 - Nie zalecane, ze względu na brak możliwości zapewnienia dokładności. 1 - Zalecane, gwarantowany większy stopień dokładności. Informacja dotycząca parametrów kamery, czy zastosowano funkcję Dewarp: 0 - Niezastosowano 1 - Zastosowano |
| Funkcja Dewarp |
Informacja dotycząca parametrów kamery, czy zastosowano
funkcję Dewarp: 0 - Nie zastosowano 1 - Zastosowano |
| Dane dotyczące | Parametry kamery dla funkcji dewarping (plik kalibracyjny musi |
|---|---|
| funkcji Dewarp | zostać zaimportowany i skalibrowany w oprogramowaniu DJI Terra, |
| aby dane mogły zostać wygenerowane): | |
| Sekwencja parametrów - fx, fy, cx, cy, k1, k2, p1, p2, k3 | |
| fx, fy - skalibrowana ogniskowa (jednostka: piksel) | |
| cx, cy - skalibrowane położenie środka optycznego (jednostka: | |
| piksel, punkt początkowy: środek zdjęcia) | |
| k1, k2, p1, p2, k3 - Parametry zniekształceń radialnych i stycznych | |
| Skalibrowana ogniskowa | Długość ogniskowej objektywu, jednostka: piksele |
| Skalibrowany punkt opt. X | Współrzędna X położenia środka optycznego, jednostka: piksele |
| Skalibrowany punkt opt. Y | Współrzędna Y położenia środka optycznego, jednostka: piksele |
| UTC przy ekspozycji | Dane UTC podczas naświetlania kamery |
| Rodzaj migawki | Rodzaj migawki |
| Ilość migawki | llość użytej migawki |
| Numer seryjny kamery | Numer seryjny kamery |
| Numer seryjny obiektywu | Numer seryjny obiektywu |
| Model drona | Model drona |
| Numer seryjny drona | Numer seryjny drona |
| Identyfikator (UUID) | UUID V4 |
| Pasmo częstotliwości |
Długość fali wąskiego pasma: centralna długość fali/FWHM
560(±16)nm, 650(±16)nm, 730(±16)nm, 860(±26)nm |
| Nazwa pasma |
Nazwa pasma
Zielony/Czerwony/Krawędź czerwieni/Pasmo bliskie podczerwieni |
| Czułość pasma | Czułość pasma |
| llość bitów na próbkę | llość bitów na próbkę: 16 |
| Czarny strumień | Czarny strumień: 3200 |
| Środkowa długość fali | Środkowa długość fali wąskiego pasma: 560, 650, 730, 860 |
| Data GPS Stamp | Data GPS, w której wykonano zdjęcie |
| Znacznik czasu GPS | Czas GPS, w którym zostało wykonane zdjęcie |
| Współczynnik irradiancji | Wartość irradiancji po kompensacji przez wbudowany algorytm |
| Czas ekspozycji na irradiancję | Czas ekspozycji czujnika światła słonecznego, jednostka: sekunda |
| Wzrost irradiancji | Współczynnik wzrostu czujnika światła słonecznego: stały 64 |
| Punkt główny | cx, cy, jednostka: mm |
| Dane pierwotne |
Nieprzetworzone dane dotyczące natężenia napromieniowania
słonecznego dla czterech pasm, gdy nie są kompensowane |
| Wzrost czujnika | Współczynnik wzrostu czujnika obrazu multispektralnego: zmienny |
| Regulacja wzrostu czujnika | Współczynnik kompensacji wzrostu w stosunku do modułu NIR |
| Wskaźnik czujnika | Zielony: 1, Czerwony: 2, RE: 3, NIR: 4 |
| Czujnik światła | Wartość irradiancji przed kompensacją przez wbudowany algorytm |
| Czas ekspozycji czujnika | Czas ekspozycji czujnika światła słonecznego, jednostka: sekunda |
| Czujnik światła Yaw | Kąt odchylenia czujnika światła słonecznego podczas wykonania zdjęcia |
| Czujnik światła Pitch |
Kąt pochylenia czujnika światła słonecznego w momencie wykonywa-
nia zdjęcia |
| Czujnik światła Roll | Kąt obrotu czujnika światła słonecznego podczas wykonywania zdjęcia |
| Winieta | Pozycja środkowa winietowania |
| Dane dotyczące | Współczynniki kompensacji winietowania |
| winietowania | (k[0], k[1], k[2], k[3], k[4], k[5]) |
| Flaga winietowania | Flaga kompensacji winietowania, stała 0 |
|---|---|
|
Wielomian
winietowania |
Współczynniki kompensacji winietowania
(k[0], k[1], k[2], k[3], k[4], k[5]) |
|
Długość fali FWHM
(szerokość pasma) |
Wąskie pasmo, pełna szerokość przy połowie maksimum |
Reiestr obrazów
Otwórz rejestr obrazów z rozszerzeniem .MRK. aby wyświetlić poniższe dane.
1. Numer serii zdjęć: numer serii rejestru obrazów zapisanych w tym folderze. 2. Wskaźnik GPS TOW: informuje, kiedy zdjęcie zostało wykonane w GPS TOW.
3. Wskaźnik GPS Week: informuje, kiedy zdjęcie zostało wykonane w GPS Week.
- Wartość kompensacji w kierunku północnym: jednostką jest mm, a kierunek północny jest reprezentowany przez wartość dodatnia.
- Wartość kompensacji w kierunku wschodnim: jednostką jest mm, a kierunek wschodni jest reprezentowany przez wartość dodatnia.
- Wartość kompensacji w kierunku elewacji: jednostką jest mm, a kierunek w dół reprezentowany jest przez wartość dodatnia.
- 7. Długość geograficzna po kompensacii.
- 8. Szerokość geograficzna po kompensacji.
- 9. Wysokość elipsoidy.
- 10. Standardowe odchylenie pozycjonowania w kierunku północnym.
- 11. Standardowe odchylenie pozycjonowania w kierunku wschodnim.
- 12. Standardowe odchylenie położenia w kierunku elewacji.
- 13. Status pozycjonowania.
Plik z danymi obserwacyjnymi GNSS
Plik z danymi obserwacyjnymi GNSS z rozszerzeniem .bin zawiera dane obserwacyjne czterech dwupasmowych (L1+L2) systemów GNNS (GPS, GLONASS, Galileo, BeiDou) odbierane przez moduł pozycjonowania podczas lotu. Dane są przechowywane w systemie kamer w formacie RTCM3.2 z częstotliwością 5 Hz. Dane zawierają oryginalne informacje o przebiegu obserwacji i efemerydy czterech systemów GNSS.
System zarządzania (HMS)
System HMS obejmuje: Program DJI Maintenance, DJI Care Enterprise, aktualizację oprogramowania, zarzadzanie rejestrami błedów oraz diagnostyke błedów.
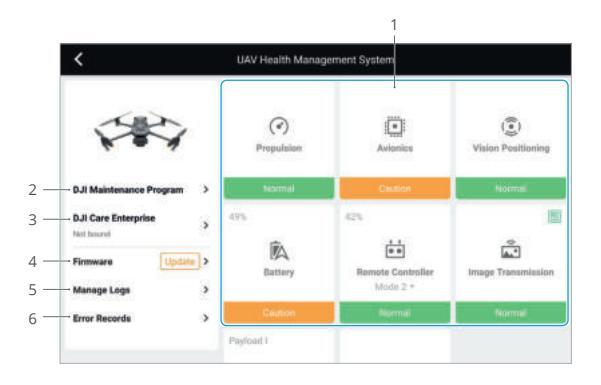
Diagnostyka błędów: służy do sprawdzania aktualnego stanu każdego modułu drona. Użytkownicy mogą rozwiązywać problemy, postępując zgodnie z odpowiednimi poleceniami.
| Kolor | Status |
|---|---|
| Zielony | Prawidłowy |
| Pomarańczowy | Ostrzeżenie |
| Czerwony | Alarm |
Program DJI Maintenance: użytkownicy mogą przeglądać historię lotów i odnieść sie do poradnika konserwacji, aby określić, czy wymagana jest konserwacja.
3. DJI Care: istotne informacje można wyświetlić, jeśli urządzenie jest przypisane do DJI Care.
Aktualizacja oprogramowania: naciśnij, aby wejść na stronę aktualizacji oprogramowania.
5. Zarządzanie rejestrami: wyświetla dane rejestrów aparatury i drona z ostatnich lotów. Użytkownicy mogą wspomóc działanie, eksportując i zapisując odpowiednie rejestry lokalnie lub przesyłając je bezpośrednio do chmury DJI Support, aby ułatwić obsłudze technicznej DJI rozwiązywanie problemów.
6. Rejestr błędów: rejestruje problemy z dronem, aby określić, czy podczas użytkowania wystąpił jakiś poważny problem. Pomaga to użytkownikom ocenić stabilność drona i wspomóc dział obsługi technicznej DJI w prowadzeniu późniejszych działań.
Załącznik Specyfikacja produktu
| Dron | |
|---|---|
|
Waga (ze śmigłami,
bez akcesoriów) [1] |
951 g |
| Maks. masa startowa | 1050 g |
| Wymiary |
Złożony (bez śmigieł): 223×96.3×122.2 mm
Rozłożony (bez śmigieł): 347.5×283×139.6 mm |
| Odległość po przekątnej | 380.1 mm |
|
Maks. prędkość
wznoszenia |
6 m/s (Tryb Normal)
8 m/s (Tryb Sport) |
|
Maks. prędkość
opadania |
6 m/s (Tryb Normal)
6 m/s (Tryb Sport) |
|
Maks. prędkość
lotu |
15 m/s (Tryb Normal) 21 m/s (Tryb Sport), 19 m/s (Tryb Sport, EU) (na poziomie morza, bez wiatru) |
|
Maks. odporność
na wiatr |
12 m/s |
|
Maks. pułap
(bez obciążenia użytkowego) |
6000 m n.p.m |
|
Maks. czas lotu
(bez wiatru) |
Ok. 43 min |
|
Maks. czas zawisu
(bez wiatru) |
Ok. 37 min |
| Maks. odległość lotu | 32 km |
| Maks. kąt nachylenia |
30° (Tryb Normal)
35° (Tryb Sport) |
| Maks. prędkość kątowa | 200°/s |
| System GNSS | GPS + Galileo + BeiDou + GLONASS (GLONASS jest obsługiwany tylko, gdy włączony jest moduł RTK) |
| Dokładność zawisu |
W pionie: ±0,1 m (z systemem wizyjnym); ±0,5 m (z GNSS);
±0,1 m (z RTK) W poziomie: ±0,3 m (z systemem wizyjnym); ±0,5 m (z systemem pozycjonowania); ±0,1 m (z RTK) |
|
Zakres temperatury
roboczej |
-10° - 40° C (14° - 104° F) |
| Pamięć wewnętrzna | Nie dotyczy |
| Model silnika | 2008 |
| Model śmigieł | 9453F Enterprise |
| Czujnik światła słonecznego | Wbudowany w drona |
| Gimbal | |
| Stabilizacia | 2 ociowa (tilt roll pap) |
| Zakres mechaniczny |
Tilt: -135° - 45°
Roll: -45° - 45° Pan: -27° - 27° |
|---|---|
| Zakres pracy |
Tilt: -90° - 35°
Pan: brak możliwości sterowania |
| Maks. prędkość (tilt) | 100°/s |
| Zakres drgań kątowych | ±0.007° |
| Kamera RGB | |
| Sensor | 4/3" CMOS, rozdzielczość: 20 MP |
| Obiektyw |
FOV: 84°
Ekviwalent formatu: 24 mm Przysłona: f/2.8-f/11 Ostrość: od 1 m do ∞ (z autofokusem) |
| Zakres ISO | 100-6400 |
| Czas otwarcia migawki |
Elektroniczna migawka: 8-1/8000 s
Mechaniczna migawka: 8-1/2000 s |
| Maks. format obrazu | 5280×3956 |
| Tryby fotografowania |
Pojedyncze zdjęcia: 20 MP
Czasowe zdjęcia: 20 MP JPEG: 0.7/1/2/3/5/7/10/15/20/30/60 s JPEG + RAW: 3/5/7/10/15/20/30/60 s Panorama: 20 MP (przed edycją) |
| Rozdzielczość wideo |
H.264
4K: 3840×2160@30fps FHD: 1920×1080@30fps |
|
Maks. szybkość
transmisji |
4K: 130Mbps
FHD: 70Mbps |
| Format zdjęć | JPEG/DNG (RAW) |
| Format wideo | MP4 (MPEG-4 AVC/H.264) |
| Obsługiwane formaty | exFAT |
| Kamera multispektralna | |
| Sensor | 1/2.8" CMOS; rozdzielczość: 5 MP |
| Obiektyw |
FOV: 73.91°
Ekwiwalent formatu: 25 mm Przysłona: f/2.0 Ostrość: nie dotyczy |
|
Filtr o wąskim
paśmie przenoszenia |
Zielony (G): 560±16 nm, Czerwony (R): 650±16 nm, Krawędź czerwieni (RE): 730±16 nm, Pasmo bliskie podczerwieni (NIR): 860±26 nm |
| Zakres wzrostu | 1x-32x |
| Czas otwarcia migawki | Elektroniczna migawka: 1/30-1/12800 s |
| Maks. format obrazu | 2592×1944 |
| Tryby fotografowania |
Pojedyncze zdjęcie: 5 MP
Czasowe zdjęcie: 5 MP TIFF: 2/3/5/7/10/15/20/30/60 s |
| Rozdzielczość wideo |
H.264
FHD: 1920×1080@30fps Wideo: NDVI/GNDVI/NDRE |
| Maks. szybkość transmisji | Strumień: 60Mbps |
| Format obrazu | TIFF |
| Obsługiwane formaty | MP4 (MPEG-4 AVC/H.264) |
| Czujniki | |
| Rodzaj |
Wielokierunkowy system wizyjny dwusensorowy, z czujnikiem
podczerwieni w dolnej części drona. |
| Czujniki przednie |
Zakres precyzyjnego pomiaru: 0,5 - 20 m
Zasięg detekcji: 0,5 m do 200 m Efektywna prędkość wykrywania: ≤15 m/s Pole widzenia: Poziomo: 90, Pionowo: 103° |
| Czujniki tylne |
Zakres precyzyjnego pomiaru: 0,5 - 16 m
Efektywna prędkość wykrywania: ≤12m/s Pole widzenia: Poziomo: 90, Pionowo:103° |
| Czujniki boczne |
Zakres precyzyjnego pomiaru: 0.5-25 m
Efektywna prędkość wykrywania: ≤15 m/s Pole widzenia: Poziomo 90°, Pionowy 85° |
| Czujniki górne |
Zakres precyzyjnego pomiaru: 0.2-10 m
Efektywna prędkość wykrywania: ≤6 m/s Pole widzenia: Przód i tył 100°, lewo i prawo 90° |
| Czujniki dolne |
Zakres precyzyjnego pomiaru: 0.3-18 m
Efektywna prędkość wykrywania: ≤6 m/s Pole widzenia: Przód i tył 130°, lewo i prawo 160° |
| Środowisko robocze |
Przednie, tylne, boczne i górne: powierzchnia z wyraźnym
wzorem i odpowiednim oświetleniem (luksy >15) Dolne: powierzchnia odbijająca o rozproszonym współczynniku odbicia>20% (np. ściany, drzewa, ludzie) i oświetlenie (luksy >15) |
| Transmisja wideo | |
|
System transmisji
wideo |
DJI O3 Enterprise Transmission |
| Jakość transmisji | Aparatura sterująca: 1080p/30fps |
| Częstotliwość robocza [2] | 2.400-2.4835 GHz, 5.725-5.850 GHz |
| Moc nadajnika (EIRP) |
2.4 GHz: <33 dBm (FCC), <20 dBm (CE/SRRC/MIC)
5.8 GHz: <33 dBm (FCC), <14 dBm (CE), <30 dBm (SRRC) |
|
Maks. odległość transmis
(bez przeszkód, bez zakłóceń) [3] |
ji
15 km (FCC), 8 km (CE/SRRC/MIC) |
|
Maks. odległość
transmisji (z zakłóceniami) [4] |
Silne zakłócenia (gęsta zabudowa, obszary mieszkalne itp.):
1.5-3 km (FCC/CE/SRRC/MIC) Średnie zakłócenia (tereny podmiejskie, parki miejskie itp.): 3-9 km (FCC), 3-6 km (CE/SRRC/MIC) Niskie zakłócenia (otwarte przestrzenie, odległe obszary, itp.): 9-15 km (FCC), 6-8 km (CE/SRRC/MIC) |
| Predkość pobierania [5] | Maks. 15 MB/s (z DJI RC Pro Enterprise) |
|
Opóźnienie (w zależności
od warunków otoczenia i urządzenia mobilnego) |
Ok. 200 ms |
|---|---|
| Anteny | 4 Anteny, 2T4R |
| Aparatura sterująca | |
| Rozdzielczość ekranu | 1920×1080 |
| Wymiary ekranu | 5.5″ |
| Odświeżanie ekranu | 60fps |
| Jasność ekranu | 1000 nit |
| Sterowanie dotykowe | 10-punktowy multi-touch |
| Akumulator | Li-ion (5000 mAh @ 7.2 V) |
| Rodzaj ładowania |
Rekomendowane ładowanie za pomocą dołączonej ładowarki DJI
USB-C (100W) lub ładowarki USB o napięciu 12 V lub 15 V |
| Czas ładowania |
Ok. 1 godziny 30 minut (z dołączoną ładowarką DJI USB-C 100W)
wyłącznie ładując aparaturę lub ładowarką USB o napięciu 15 V). Ok. 2 godzin (z ładowarką USB o napięciu 12 V) |
| Czas roboczy | Ok. 3 godziny |
| Moc znamionowa | 12 W |
| Pojemność pamięci |
Pamięć wewnętrzna (ROM): 64 GB
Obsługa kart microSD w celu zwiększenia pojemności |
| Port wyjściowy wideo | Port Mini HDMI |
|
Zakres temperatury
roboczej |
-10° - 40° C (14° - 104° F) |
|
Temperatura
przechowywania |
-30° - 60° C (-22° - 140° F) (w ciągu miesiąca)
-30° - 45° C (-22° - 113° F) (od 1 do 3 miesięcy) -30° - 35° C (-22° - 95° F) (od 3 do 6 miesięcy) -30° - 25° C (-22° - 77° F) (ponad 6 miesięcy) |
| Temperatura ładowania | 5° - 40° C (41° - 104° F) |
| System GNSS | GPS + Galileo + GLONASS |
| Wymiary |
Anteny złożone, drążki sterujące odmontowane:
183.27×137.41×47.6 mm Anteny rozłożone, drążki sterujące zamontowane: 183.27×203.35×59.84 mm |
| Waga | Ok. 680 g |
| Model | RM510B |
|
System transmisji
wideo |
DJI O3 Enterprise Transmission |
|
Maks. odległość transmis
(bez przeszkód, bez zakłóceń) [3] |
ji
15 km (FCC), 8 km (CE/SRRC/MIC) |
| Częstotliwość robocza [2] | 2.400-2.4835 GHz, 5.725-5.850 GHz |
| Moc nadajnika (EIRP) | 2.4 GHz: <33 dBm (FCC), <20 dBm (CE/SRRC/MIC) |
| Anteny | 4 Anteny, 2T4R |
|---|---|
| Wi-Fi | |
| Protokół |
802.11 a/b/g/n/ac/ax
Obsługa sieci 2×2 MIMO Wi-Fi |
| Częstotliwość robocza [2] | 2.400-2.4835 GHz, 5.150-5.250 GHz, 5.725-5.850 GHz |
| Moc nadajnika (EIRP) |
2.4 GHz: <26 dBm (FCC), <20 dBm (CE/SRRC/MIC)
5.1 GHz: <26 dBm (FCC), <23 dBm (CE/SRRC/MIC) 5.8 GHz: <26 dBm (FCC/SRRC), <14 dBm (CE) |
| Bluetooth | |
| Protokół | Bluetooth 5.1 |
| Częstotliwość robocza | 2.400-2.4835 GHz |
| Moc nadajnika (EIRP) | <10 dBm |
| Przechowywanie | |
|
Obsługiwane karty
pamięci |
Dron: U3/Klasa10/V30 lub wyższa klasa jest wymagana.
Lista rekomendowanych kart microSD znajduje się poniżej. |
|
Rekomendowane
karty microSD |
Aparatura sterująca:
SanDisk Extreme PRO 64GB V30 A2 microSDXC SanDisk High Endurance 64GB V30 M2rroSDXC SanDisk Extreme 128GB V30 A2 microSDXC SanDisk Extreme 512GB V30 A2 microSDXC Lexar 667x 64GB V30 A2 microSDXC Lexar High-Endurance 64GB V30 microSDXC Lexar High-Endurance 64GB V30 microSDXC Lexar 667x 256GB V30 A2 microSDXC Lexar 667x 256GB V30 A2 microSDXC Lexar 667x 256GB V30 A2 microSDXC Lexar 667x 256GB V30 A2 microSDXC Lexar 667x 256GB V30 A2 microSDXC Lexar 667x 256GB V30 A2 microSDXC Samsung EVO Plus 128GB V30 microSDXC Samsung EVO Plus 512GB V30 microSDXC Samsung EVO Plus 512GB V30 microSDXC Kingston Canvas Gol Plus 128GB V30 A2 microSDXC Kingston Canvas React Plus 128GB V90 A1 microSDXC |
|
Dron:
Sandisk Extreme 32GB V30 A1 microSDHC Sandisk Extreme PRO 32GB V30 A1 microSDHC SanDisk Extreme 512GB V30 A2 microSDXC Lexar 1066x 64GB V30 A2 microSDXC Kingston Canvas Gol Plus 64GB V30 A2 microSDXC Kingston Canvas Reat Plus 54GB V30 A1 microSDXC Kingston Canvas Reat Plus 128GB V90 A1 microSDXC Kingston Canvas Reat Plus 128GB V90 A1 microSDXC Kingston Canvas Reat Plus 256GB V90 A2 microSDXC Samsung PRO Plus 256GB V30 A2 microSDXC |
|
| Inteligentny akumulator | |
| Pojemność | 5000 mAh |
Standardowe napięcie 15.4 V
| Maks. napięcie ładowania | 17.6 V |
| Rodzaj | LiPo 4S |
| Układ chemiczny | LiCoO2 |
| Мос | 77 Wh |
| Waga | 335.5 g |
| Temperatura ładowania | 5° - 40° C (41° - 104° F) |
| Ładowarka | |
| Port wejściowy | 100-240 V AC, 50-60 Hz, 2.5 A |
| Moc wyjściowa | 100 W |
| Port wyjściowy | Maks. 100 W (łącznie) |
Standardowa waga drona (zawierająca akumulator, śmigła i kartę microSD). Rzeczywista waga produktu może się różnić ze względu na różnice w materiałach partii i czynnikach zewnętrznych.
[2] W niektórych krajach i regionach częstotliwości 5,8 i 5,1 GHz są zabronione lub częstotliwość 5,1 GHz jest dozwolona wyłącznie do użytku w pomieszczeniach. Sprawdź lokalne prawa i przepisy, aby uzyskać wiecej informacji.
[3] Zmierzono w niezakłóconym środowisku wolnym od zakłóceń. Powyższe dane przedstawiają najdłuższy zasięg komunikacji dla lotów w jedną stronę, bez powrotu (bez obciążenia użytkowego) w ramach każdego standardu. Podczas lotu należy zwracać uwagę na komunikaty RTH w aplikacji DJI Pilot 2.
[4] Dane przetestowane w ramach różnych standardów w niezakłóconych środowiskach z charakterystycznymi zakłóceniami. Stosowane wyłącznie w celach referencyjnych, nie stanowia gwarancji co do rzeczywistej odległości lotu.
[5] Zmierzone w środowisku laboratoryjnym z niewielkimi zakłóceniami w krajach/regionach obsługujących częstotliwości zarówno 2,4 GHz, jak i 5,8 GHz. Z materiałem filmowym zapisanym na rekomendowanych kartach microSD. Prędkości pobierania mogą się różnić w zależności od rzeczywistych warunków.
Użvi aplikacji DII Pilot 2 lub DII Assistant 2. aby zaktualizować aparature, drona oraz
Korzystanie z aplikacii DII Pilot 2
1. Włacz zasilanie aparatury sterującej i droną. Upewnij się że dron jest połaczony z aparatura, a poziom naładowania akumulatorów jest wyższy niż 25%. Należy upewnić się, że aparatura jest połączona z internetem. 2. Uruchom DII Pilot 2. Na stronie głównej pojawi się komunikat o dostępności
nowego oprogramowania. Naciśnij, aby wejść do podglądu aktualizacji.
4 Dron i anaratura automatycznie uruchomia się ponownie po zakończeniu aktualizacii oprogramowania.
-
tora w aparaturze wynosi ponad 25%. Aktualizacja trwa około 15 minut (w zależności
Aktualizacia offline
Pakiet oprogramowania w trybie offline można pobrać z oficialnej strony DII na zewnętrzne urządzenie pamięci zewnętrznej, takie jak karta microSD lub dysk U. Uruchom DII Pilot 2 naciśnii HMS a nastepnie Firmware Undate (Aktualizacia oprogramowania). Naciśnii Offline Update (Aktualizacja offline), aby wybrać pakiet oprogramowania drona lub aparatury z zewnętrznego urządzenia pamięci i naciśnij
Korzystanie z DJI Assistant 2
1. Podłacz aparature lub drona do komputera osobno, ponieważ oprogramowanie wspomagające nie obsługuje aktualizacji wielu urządzeń DII w tym samym czasie. iest właczone oraz poziom naładowania akumulatora jest wyższy niż 25%
3. Uruchom DJI Assistant 2 i zaloguj się za pomocą konta DJI
5. Wybierz wersję oprogramowania i naciśnij, aby zaktualizować. Oprogramowanie
6. Gdy pojawi się komunikat "Update successful" (aktualizacja zakończona
-
A Aktualizacja oprogramowania akumulatora jest uwzględniona w oprogramowaniu drona. Pamiętaj, aby zaktualizować wszystkie akumulatory.
- Przed aktualizacją upewnij się, że poziom naładowania akumulatora w dronie i aparaturze jest wyższy niż 25%.
- Upewnij się, że wszystkie urządzenia DJI są prawidłowo podłączone do komputera podczas aktualizacii.
- Podczas procesu aktualizacji, normalnym zjawiskiem jest zawieszenie się gimbala, miganie wskaźników statusu drona oraz ponowne uruchomienie drona. Poczekaj cierpliwie na zakończenie aktualizacji.
- Upewnij się, że podczas aktualizacji oprogramowania, kalibracji systemu lub konfiguracji parametrów, dron będzie przechowywany z daleka od ludzi i zwierzat.
- W celu zapewnienia bezpieczeństwa upewnij się, że używasz najnowszej wersii oprogramowania.
- Po zakończeniu aktualizacji oprogramowania, aparatura i dron mogą zostać rozłączone. W razie potrzeby połącz je ponownie.
Informacje o zgodności z FAR Remote ID
Dron spełnia wymagania określone w 14 CFR cześć 89:
Dron automatycznie uruchamia przed startem autotest (PFST) systemu Remote ID i nie może wystartować, jeśli nie przejdzie testu PFST [1]. Wyniki PFST systemu Remote ID moga być wyświetlane w aplikacji DII, jak np. DII Pilot.
Dron monitoruje funkcjonalność systemu Remote ID od lotu wstępnego do wyłączenia. Jeśli system Remote ID działa nieprawidłowo lub ulegnie awarii, zostanie wyświetlony alarm w aplikacii DIL.
- Użytkownik powinien zachować aplikację DJI uruchomioną na pierwszym planie i zawsze umożliwiać jej uzyskanie informacji o lokalizacji aparatury.
Programiści, którzy tworzą aplikacje oparte na DJI Mobile SDK, powinni uzyskać i wyświetlić wyniki PFST oraz status awarii systemu Remote ID podczas pracy, wywołując określone interfejsy API [2].
Przypisy
[1] Kryterium zaliczenia dla PFST stanowi prawidłowe działanie sprzętu i oprogramowania wymaganego źródła danych Remote ID oraz nadajnika radiowego w systemie Remote ID.
[2] Szczegółowe informacje o API można znaleźć na stronie https://developer.dji.com/mobile-sdk/

WARUNKI GWARANCJI PRODUKTOW MARKI DJI
Gwarant: SZ DJI BaiWang Technology Co, Building No.1.2.7.9, Baiwang Creative Factory, No.1051, Songbai Road, Nanshan Xili District. Shenzhen, China
Dystrybutor: Firma INNPRO Robert Błędowski, - Dystrybutor produktów DJI na terenie Polski oraz Rekomendowany Serwis Produktów Marki DJI
1 Okres Gwarancii wynosi
- a) 24 miesiące od daty sprzedaży (zgodnie z datą na dowodzie zakupu). Zasięg terytorialny ochrony gwarancyjnej dotyczy całego terytorium Polski
- b) 12 miesięcy od daty sprzedaży na części oraz akcesoria podlegające zużyciu takie jak: akumulatory, kable, obudowy, śmiata
obudowy, smigra. 2. Dystrybutor jest jednocześnie pośrednikiem w realizacji zgłoszeń gwarancyjnych między nabywcą a Gwarantem
3. Warunkiem przyjęcia produktu do naprawy gwarancyjnej jest dostarczenie przez nabywce urządzenia pochodzącego z dystrybucji INNPRO do siedziby sprzedawcy wraz z widocznym numerem seryjnym oraz ważnym dowodem zakupu (paragon, rachunek uproszczony, faktura VAT). Serwis gwarancyjny może odmówić wykonania naprawy gwarancyjnej w przypadku stwierdzenia niezgodności danych zawartych w powyższych dokumentach.
4. Gwarant zapewnia, że każdy zakupiony produkt marki DJI będzie wolny od wad materiałowych i wad produkcyjnych podczas normalnego użytkowania w okresie gwarancyjnym, zgodnego z opublikowanymi materiałami dotyczącymi produktu. Materiały opublikowane przez DJI obejmują między innymi podręcznik użytkownika, instrukcję obsługi, wskazówki bezpieczeństwa, specyfikacje, powiadomienia w aplikacji i komunikaty serwisowe.
Gwarancją objęte są wyłącznie wady spowodowane wadami tkwiącymi w sprzedanym produkcie.
Gwarancja nie obejmuje:
Jakiejkolwiek wady powstałej w wyniku niewłaściwego użytkowania produktu, w szczególności, niezgodnego z instrukcją obsługi bądź przepisami bezpieczeństwa.
Mechanicznego uszkodzenia produktu i wywołanej w nim wady
Jakiejkolwiek wady powstałej w wyniku napraw wykonanych przez podmioty nieupoważnione (w tym przez nabowce)
- Uszkodzenia lub wadliwego działania spowodowanego niewłaściwą instalacją urządzeń, współpracujących z produktem
- Uszkodzenia w skutek Katastrofy lub obrażeń od ognia spowodowanych czynnikami nieprodukcyjnymi, w tym ale nie wytacznie błedami operatora.
- Uszkodzeń spowodowanych nieautoryzowanymi modyfikacjami, demontażem lub otwieraniem obudowy, niezgodnie z oficialnymi instrukciami użytkowania.
- Uszkodzeń spowodowanych nieprawidłową instalacją, nieprawidłowym użytkowaniem lub działaniem niezeodnym z oficialnymi instrukciami użytkowania.
- Uszkodzeń spowodowanych przez nieautoryzowanego dostawcę usług.
- Uszkodzeń spowodowanych nieautoryzowanymi modyfikacjami obwodów i niedopasowaniem lub niewłaściwym użyciem akumulatora i ładowarki.
- Uszkodzeń spowodowanych lotami, w których nie zastosowano się do zaleceń w oficjalnych instrukcjach użytkowania.
- Uszkodzeń spowodowanych użytkowaniem produktu w złej pogodzie (np. przy silnych wiatrach, deszczu lub burzach piaskowych itp.)
Uszkodzeń spowodowanych użytkowaniem produktu w środowisku, w którym występuja
zakłocenia elektromagnetyczne (tj. na obszarach wydobywczych lub w poblizu wież transmisji radiowej, przewodów wysokiego napięcia, stacji energetycznych itp.)
Uszkodzeń spowodowanych użytkowaniem produktu w środowisku, w którym występują zakłócenia z innych urządzeń bezprzewodowych (tj. aparatur, bezprzewodowego sygnału wideo, sygnału Wi-Fi itp.)
Uszkodzeń spowodowanych użytkowaniem produktu przy masie większej niż bezpieczna masa startowa, która określono w instrukcji użytkowania.
Uszkodzeń spowodowanych przez wymuszony lot, gdy elementy są zużyte lub uszkodzone. Uszkodzeń spowodowanych przez problemy z piezawodnościa lub kompatybilopścia podczec korzystania.
Uszkodzeń spowodowanych przez problemy z niezawodnością lub kompatybilnością podczas korzystania z niezatowanych przeź problemy z niezawodnością lub kompatybilnością podczas korzystania
Uszkodzeń spowodowanych działaniem urządzenia przy słabo naładowanym lub uszkodzonym akumu-
Nieprzerwanego lub wolnego od błędów użytkowania produktu.
Utraty lub uszkodzenia danych przez produkt.
Wszystkich programów, dostarczonych wraz z produktem lub zainstalowanych później,
Awarii lub uszkodzeń spowodowanych przez produkty stron trzecich, w tym te, które DJI może dostarczyć lub zintegrować z produktem DII pa żadanie
Uszkodzeń warnikających z pomocy technicznej innej niż
Produktów lub części ze zmienioną etykietą identyfikacyjną lub, z których usunięto etykietę identyfikacvina
Części i akcesoriów podlegających normalnemu zużyciu w czasie eksploatacji, w szczególności zarysowań, trudno do usuniecia zabrudzeń, wytarcja napisów, akumulatorów, itp.
Czypności wymienionych w instrukcji obsługi, przeznaczonych do wykonania przez użytkownika,
• Uszkodzeń powstałych w przypadku zdarzeń losowych, takich jak pożar, powódź, przepięcia sieci ener-
wnętrznych, powodujących np. korozję czy plamy.
/. Gwarancja obejmuje bezpłatna wymianę części zamiennych potrzebnych do naprawy oraz robocznę w okresie gwarancji. Usterki ujawnione w okresie gwarancji mogą być usuwane tylko przez autoryzowany lub oficjalny serwis Gwaranta w możliwie jak najkrótszym terminie, nie dłuższym nie 60 dni roboczych.
8. Czas trwania naprawy gwarancyjnej uwarunkowany jest rodzajem oraz zakresem usterek, a także dostępnością części serwisowych. Do czasu trwania usługi serwisowej nie wlicza się okresu, kiedy Gwarant nie może podjąć się realizacji usługi serwisowej z przyczyn leżących po stronie kupującego lub po stronie oficialnego serwisu marki DJI.
W ramach napraw gwarancyjnych, Gwarant realizuje naprawy sprzętu DJI posiadającego gwarancję DJI samodzielnie lub za pośrednictwem oficjalnego serwisu DJI na terenie UE.
10. Klient zobowiązany jest do dostarczenia sprzętu w pełni zabezpieczonego przed uszkodzeniami podczas transportu, jeśli zachodzi konieczność dostarczenia sprzętu do sprzedawcy. W innym przypadku ryzyko uszkodzenia sprzętu podczas transportu ponosi klient.
W przypadku stwierdzenia usterki klient powinien zgłosić usterkę w miejscu zakupu.
12. Jeżeli wysytka produku z Serwisu do hadywycy jest realizowała za posrednictwem inny kurierskiej, na paływca zobowiązany jest do sprawdzenia stanu sprzętu w obecności przedstawiciela firmy kurierskiej, na prośbę nabywcy. Sporządzi protokół szkody, stanowiązy wyłączną podstawę do dochodzenia ewentualnych roszczeń reklamacyjnych. Jeżeli radjaszający z jakichkolwie przyczyn odmówi odbioru przesykli (z wyłącznej nie przesykli i związeniem przesyłek uskodzonych w transporcje z ważnym protokolem szkody), przesykla zostanie zwrócona do serwiej na pracegowana ustraliw przesłudyt i przesłud i przesłud i przesłyka zostanie zwrócona do serwiej na pracegowana ustraliw przesłudyt i przesłud i zwrócona do ser-
13. Nabywcy przysługuje prawo do wymiany sprzętu na nowy jeżeli producent stwierdzi na piśmie iż usunięcie wady jest niemożliwe. Sprzęt podlegający wymianie musi być kompletny. W razie dostarczenia zdekomnetrowanego rostawu kosztu bakwiasego wupocażenia ponosi nabwora.
14. Jeżeli zostanie ujawniona usterka w elemencie zestawu, należy dostarczyć do serwisu urządzenie jak i dowód zakupu całego zestawu
Podczas świadczenia usług gwarancyjnych, Gwarant odpowiada za utratę lub uszkodzenie produktu tylko gdy jest on w jego posjadanju.
16. Jeśli urządzenie ujawni wady w ciągu (7) dni od daty zakupu i zostaną one potwierdzone przez Serwis, Gwarant dołoży wszelkich starań aby produkt został wymieniony na nowy, wolny od wad w czasie 14 dni roboczych w ramach gwarancji DOA. Gwarant zastrzega sobie prawo do odmowy realizacji wymiany DOA w przypadku braków magazynowych.
Usługa gwarancji DOA nie zostanie zrealizowana jeśli:
Produkt został dostarczony do Gwaranta po ponad (7) dniach kalendarzowych od jego zakupu.
- Dowód zakupu, paragony lub faktury nie zostały dostarczone razem z urządzeniem lub istnieje podejrzenie, że zostały sfałszowane lub przerobione.
- Produkt dostarczany do Gwaranta w celu wymiany nie obejmuje wszystkich oryginalnych akcesoriów, dodatków i opakowań lub zawiera przedmioty uszkodzone z winy użytkownika.
- Po przeprowadzeniu wszystkich odpowiednich testów przez Gwaranta, produkt nie będzie zawierał żadnych wad.
- Jakikolwiek błędy lub uszkodzenie produktu spowodowane będzie przez nieautoryzowane użycie lub modyfikację produktu, takich jak ekspozycja na wilgoć, wprowadzanie ciał obcych (wody, oleju, piasku, itd.) lub niewłaściwego montzia lub eksploatacji.
- Etykiety produktów, numery servine, znaki wodne itp, wykazuja oznaki sabotażu lub zmiany.
- Uszkodzenia są spowodowane przez niekontrolowane czynniki zewnętrzne, w tym pożary, powodzie, silne wiatry lub uderzenia nioruna
- Gwarant nie ponosi odpowiedzialności za
Utratę lub ujawnienie jakichkolwiek danych w tym informacji poufnych, informacji zastrzeżonych lub informacji osobistych zawartych w produkcje
Obrażenia ciała (w tym śmierć), szkody majątkowe, osobiste lub materialne spowodowane użyciem produktu niezgodnie z instrukcja obsługi
Skutki prawne i inne następstwa wywołane niedostosowaniem użytkownika do przepisów prawa na terenie Polski i innych kraiów
19. Gwarancja nie wyłacza, nie ogranicza ani nie zawiesza uprawnień kunującego wynikających z przenisów
o rękojmi za wady rzeczy sprzedanej w przypadku kiedy nabywca jest konsumentem. Jeśli kupujący jest przedsiebiorca, rekojmia zostaje wykluczona Zgodnie z art. 558 § 1 Kodeksu Cywilnego.

ul. Rudzka 65c
Ochrona środowiska
Y Zużyty sprzęt elektroniczny oznakowany zgodnie z dyrektywą Unii Europejskiej, nie może być umieszczany łącznie z innymi odpadami komunalnymi. Podlega on selektywnej zbiórce i recyklingowi w wyznaczonych punktach. Żapewniając jego prawidłowe usuwanie, zapobiegasz
potencjalnym, negatywnym konsekwencjom dla środowiska naturalnego i zdrowia ludzkiego. System zbierania zużytego sprzętu zgodny jest z lokalnie obowiązującymi przepisami ochrony środowiska dotyczącymi usuwania odpadów. Szczegółowe informacje na ten temat można uzyskać w urzędzie miejskim, zakładzie oczyszczania lub sklepie, w którym produkt został zakupiony.
Produkt spełnia wymagania dyrektyw tzw. Nowego Podejścia Unii Europejskiej (UE), dotyczących zagadnień związanych z bezpieczeństwem użytkowania, ochroną zdrowia i ochroną środowiska, określających zagrożenia, które powinny zostać wykryte i wyeliminowane.
Urządzenie wyposażone jest w akumulator, który z uwagi na swoją fizyczną i chemiczną budowę starzeje się z biegiem czasu i użytkowania. Producent określa maksymalny czas pracy urządzenia w warunkach laboratoryjnych, gdzie występują optymalne warunki pracy dla urządzenia, a sam akumulator jest nowy i w pełni naładowany. Czas pracy w rzeczywistości może sie róźnić od deklarowanego w ofercie i nie lest to wada urządzenia, a cecha produktu.
Uproszczona deklaracja zgodności
Producent: SZ DJI TECHNOLOGY CO., LTD.
Adres: 14th floor, West Wing, Skyworth Semiconductor Design Building NO.18 Gaoxin South 4th Ave, Nanshan District, Shenzhen, Guangdong, China
Produkt: DJI Mavic 3M Model: M3M
Częstotliwość radiowa: 2.400-2.4835 GHz Maks. moc czestotliwości radiowei: <10 dBm
Wyrób jest zgodny z dyrektywą Parlamentu Europejskiego i Rady 2014/53/UE z dnia 16 kwietnia 2014 r. w sprawie harmonizacji ustawodawstw państw członkowskich dotyczących udostępniania na rynku urządzeń radiowych i uchylającą dyrektywe 1999/5/WE.
Deklaracja zgodności dostępna na stronie internetowej: https://files.innpro.pl/Dll









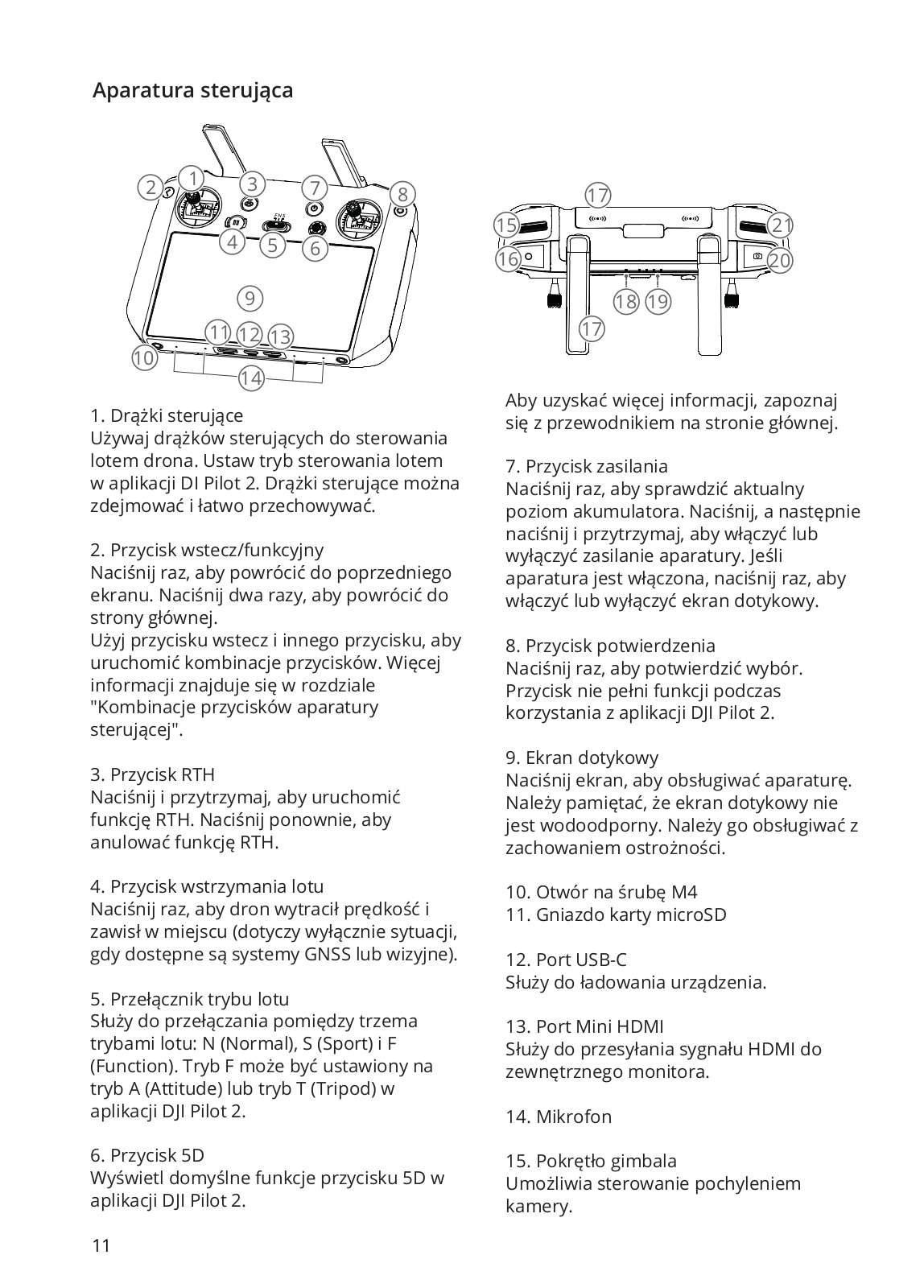





















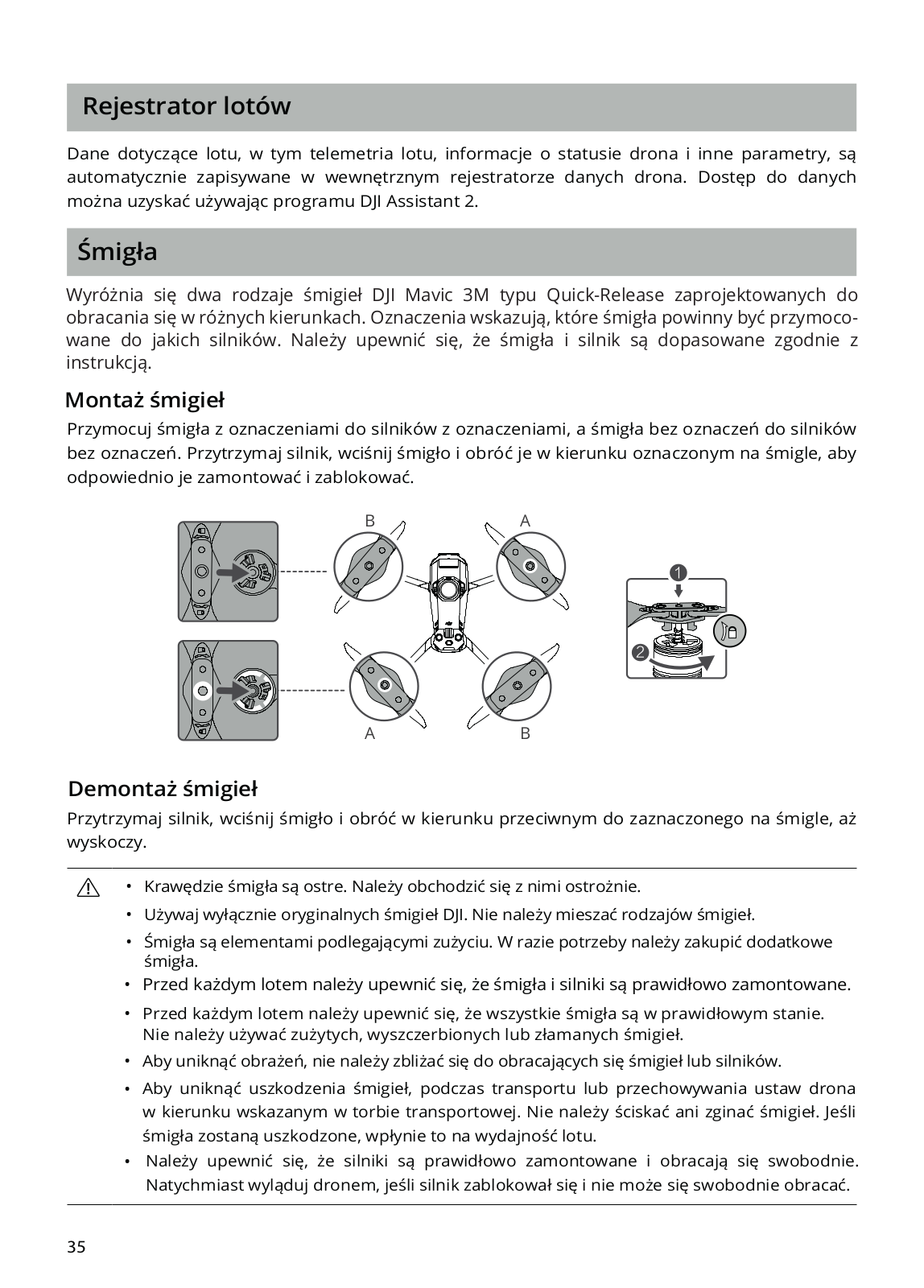























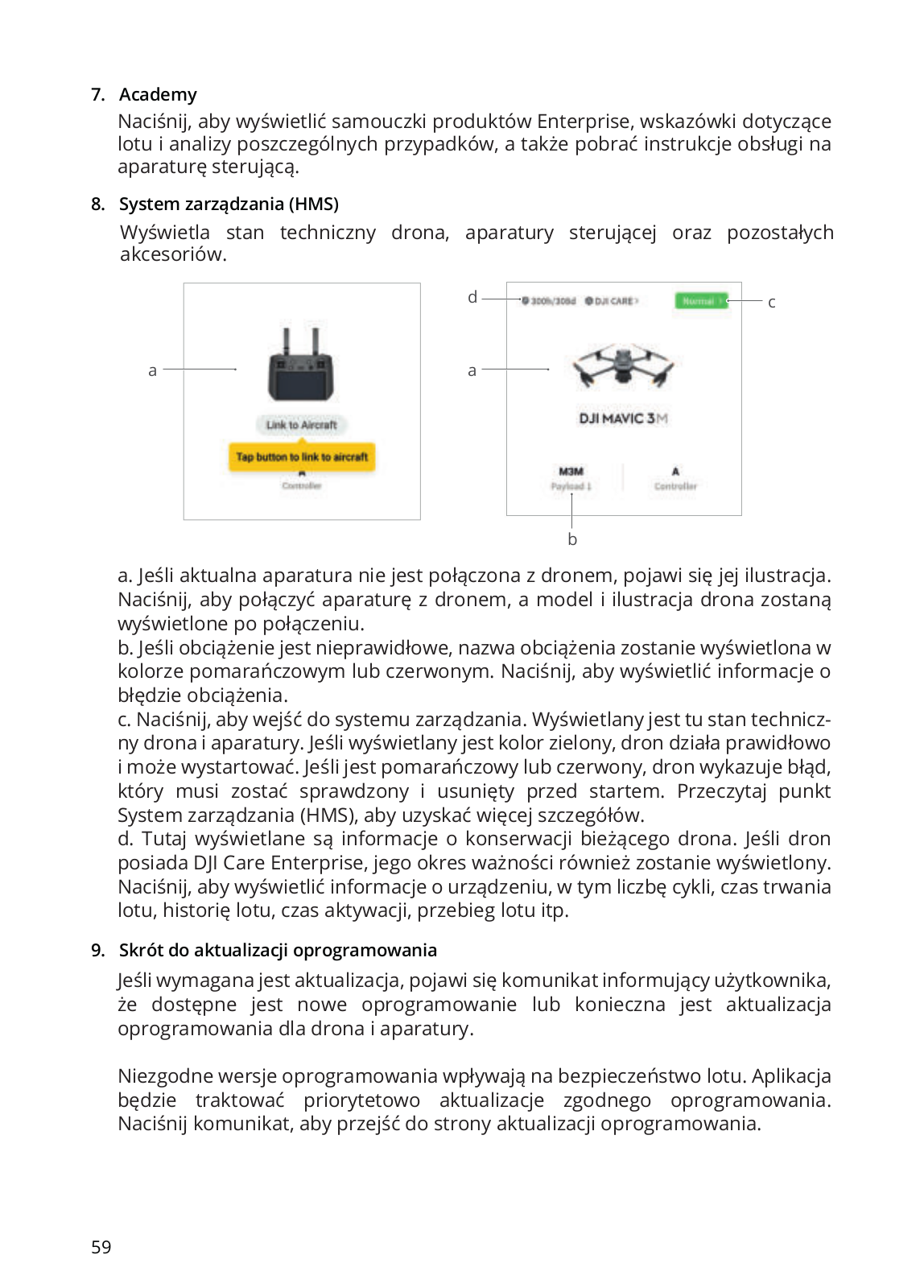




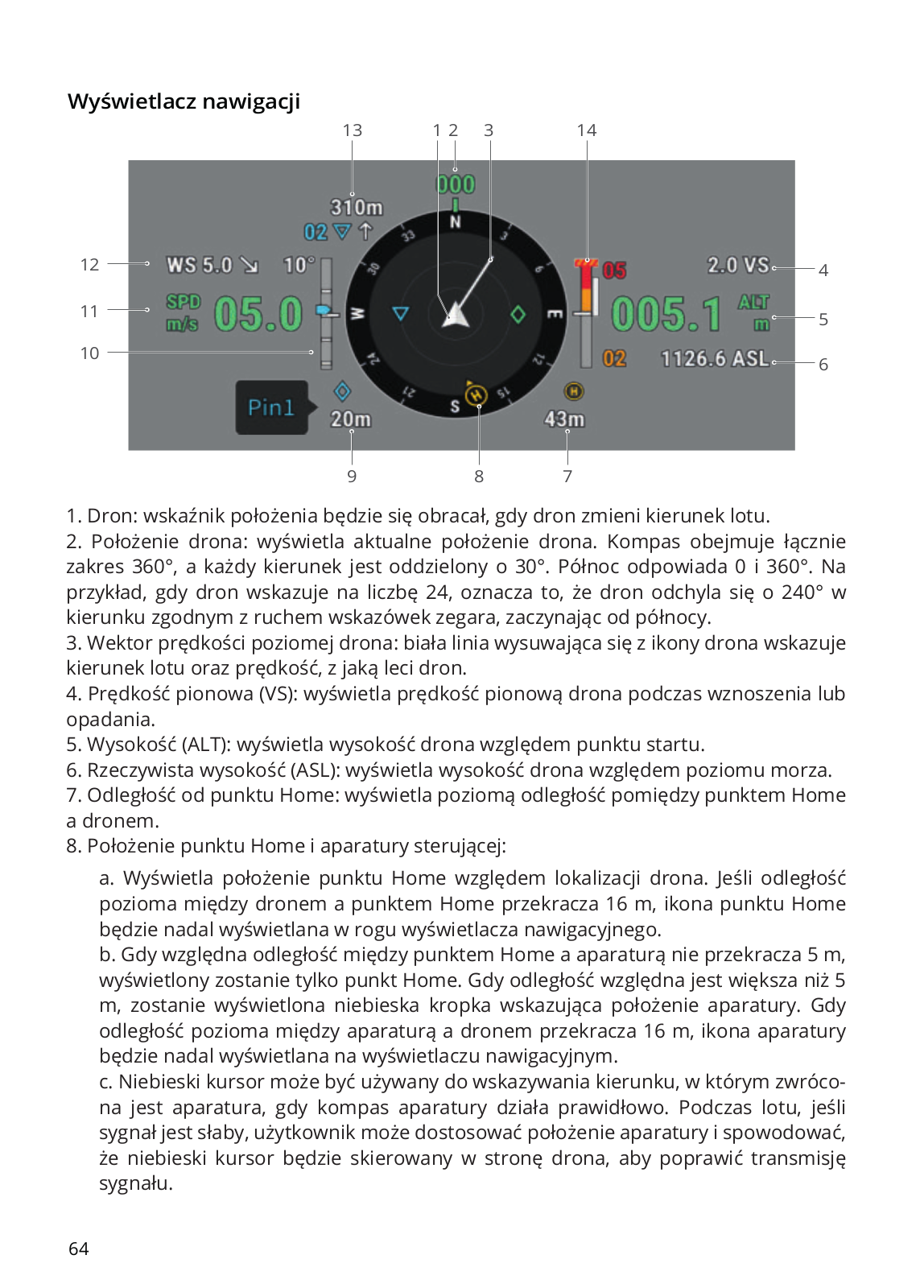



















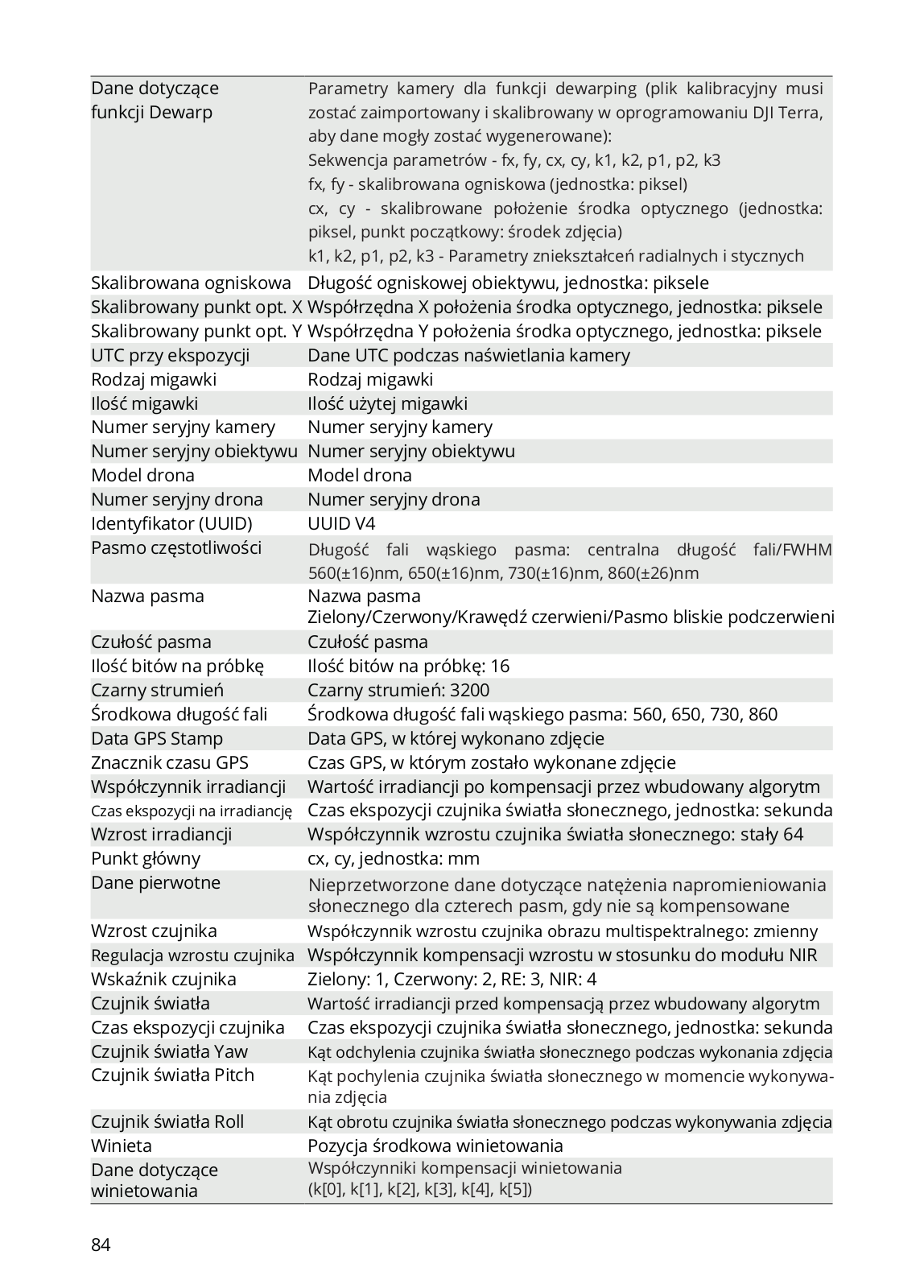





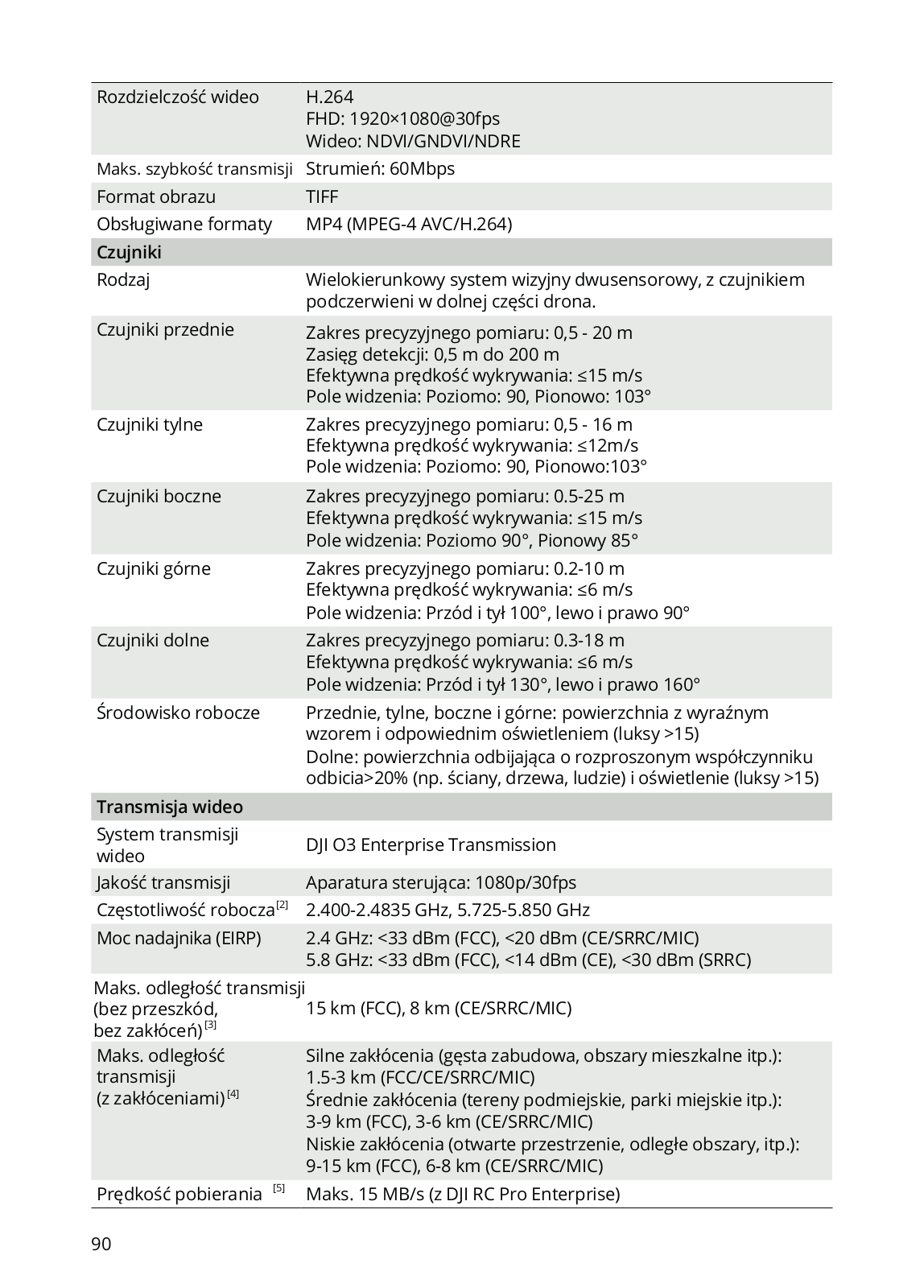









 Loading...
Loading...