

Page 1
Руководство пользователя
2021.03
v1.0
Page 2
Поиск по ключевым словам
Выполняйте поиск по таким ключевым словам как «аккумулятор» и «установить» для
нахождения нужного пункта. Если вы используете Adobe Acrobat Reader для чтения этого
документа, нажмите Ctrl+F в Windows или Command+F в Mac, чтобы начать поиск.
Навигация по пунктам
Полный перечень пунктов документа приведен в оглавлении. Для перехода к нужному
пункту нажмите на него.
Печать документа
Этот документ поддерживает печать с высоким разрешением.
Page 3
3
© 2021 г. DJI Все права защищены.
Условные обозначения
Прочитать перед первым полетом
Видеоуроки
Загрузка приложения DJI Fly
Загрузка приложения DJI Virtual Flight
Загрузка DJI Assistant 2 (серия DJI FPV)
Использование руководства
Предупреждение Важно Рекомендации Справка
Перед использованием DJITM FPV ознакомьтесь со следующими документами.
1. Руководство пользователя
2. Краткое руководство по началу работы
3. Отказ от ответственности и правила техники безопасности
Перед первым использованием рекомендуется посмотреть все обучающие видеоролики на
официальном сайте DJI и прочитать отказ от ответственности и правила техники безопасности.
Подготовьтесь к первому полету, изучив краткое руководство, и обратитесь к этому руководству за
дополнительной информацией.
Перейдите по указанному ниже адресу или отсканируйте QR-код, чтобы посмотреть
обучающие видеоролики DJI FPV, в которых показано, как безопасно использовать DJI
FPV:
https://www.dji.com/dji-fpv/video
Отсканируйте QR-код справа, чтобы загрузить приложение DJI Fly.
Версия DJI Fly для Android совместима с Android v6.0 и более поздними версиями.
Версия DJI Fly для iOS совместима с iOS v11.0 и более поздними версиями.
* Для повышения уровня безопасности полет ограничен высотой 98,4 фута (30 м) и дальностью 164 фута
(50 м), если нет подключения, или приложение неактивно во время полета. Это применяется к DJI Fly и
всем приложениям, совместимым с квадрокоптером DJI.
Отсканируйте QR-код справа, чтобы загрузить приложение Virtual Flight.
Версия DJI Virtual Flight для iOS совместима с iOS v11.0 и более поздними версиями.
Скачайте DJI ASSISTANTTM 2 (серия DJI FPV) на сайте https://www.dji.com/dji-fpv/downloads.
Рабочая температура устройства — от 0° до 40° C. Это не соответствует требованиям к
стандартной рабочей температуре устройств военного применения (от -55° до 125° C),
Page 4

4
© 2021 г. DJI Все права защищены.
необходимой, чтобы выдержать большую изменчивость окружающей среды. Используйте это
устройство по назначению, в соответствии с требованиями к диапазону рабочих температур
его класса.
Содержание
Использование руководства 3
Условные обозначения 3
Прочитать перед первым полетом 3
Видеоуроки 3
Загрузка приложения DJI Fly 3
Загрузка приложения DJI Virtual Flight 3
Загрузка DJI Assistant 2 (серия DJI FPV) 3
Описание изделия 6
Введение 6
Подготовка квадрокоптера 7
Подготовка очков 8
Подготовка пульта дистанционного управления 10
Схема 10
Подключение 14
Активация 15
Квадрокоптер 16
Режимы полета 16
Индикатор состояния квадрокоптера 17
Возврат домой 18
Система обзора и инфракрасная система датчиков 20
Бортовой самописец 23
Пропеллеры 23
Интеллектуальный полетный аккумулятор 25
Подвес и камера 29
Очки 31
Питание 31
Эксплуатация 32
Главный экран 32
Панель меню 34
Пульт дистанционного управления 39
Эксплуатация 39
Оптимальная зона передачи 43
Page 5

5
© 2021 г. DJI Все права защищены.
Регулировка стиков 44
Приложение DJI Fly 45
Руководство пользователя DJI FPV
Режим полета 47
Требования к окружающей среде полета 47
Ограничения при полете и геозоны 47
Перечень проверок перед полетом 48
Пуск/остановка электромоторов 49
Летные испытания 50
Техническое обслуживание 51
Очки 51
Квадрокоптер 52
Приложение 61
Технические характеристики 61
Калибровка компаса 65
Обновление прошивки 66
Информация о послепродажном обслуживании 66
Page 6
6
© 2021 г. DJI Все права защищены.
Квадр
Очки
Пульт
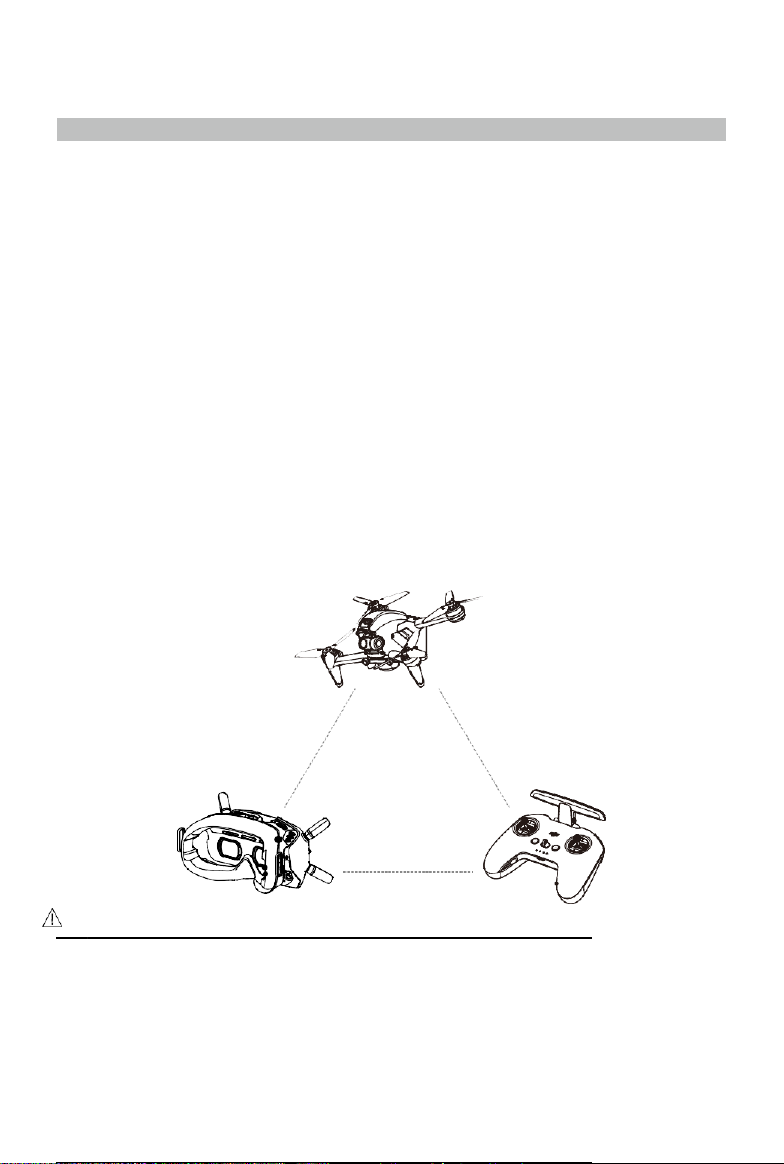
Описание изделия
Введение
DJI FPV состоит из квадрокоптера, очков и пульта дистанционного управления, оснащенных
технологией DJI O3, которая позволяет осуществлять передачу видео с максимальной дальностью
передачи 6 миль (10 км), скоростью до 50 мбит/с и минимальной задержкой в пределах 28 мс. DJI
FPV работает на частотах 2,4 ГГц и 5,8 ГГц и может автоматически выбирать лучший канал передачи.
Усовершенствованная система подавления помех значительно улучшает плавность и стабильность
передачи видео, обеспечивая целостный и захватывающий опыт полета.
Благодаря системе переднего обзора, системе обзора сверху вниз и системе инфракрасных датчиков,
квадрокоптер может зависать в воздухе и летать в помещении, а также на открытом воздухе и
автоматически начинать возврат домой. Оборудованный подвесом и 1/2.3-дюймовой матрицей,
квадрокоптер снимает 4К 60fps ultra-HD видео и фото в разрешении 4K. Устройство имеет
максимальную скорость полета 87 миль/ч (140 км/ч) и максимальную продолжительность полета
около 20 минут.
Очки DJI FPV V2 оснащены высокопроизводительным дисплеем формата 810p 120fps HD и
поддерживают передачу звука в реальном времени. Получая видео-сигнал от квадрокоптера,
пользователи могут насладиться полетом от первого лица в реальном времени. Максимальное время
работы очков составляет приблизительно 1 час 50 минут при использовании аккумулятора DJI FPV
Goggles, температуре окружающей среды 25° и яркости экрана 6.
Пульт дистанционного управления DJI FPV оснащен функциональными кнопками, с помощью которых
можно управлять квадрокоптером и камерой. Максимальное время работы пульта дистанционного
управления приблизительно 9 часов.
Пульт дистанционного управления достигает своей максимальной дальности передачи (FCC)
на открытой местности без электромагнитных помех на высоте около 400 футов (120 м). Под
максимальной дальностью передачи имеется в виду расстояние, на котором квадрокоптер
может получать и передавать сигналы. Эта величина не подразумевает максимальную
дистанцию, которую квадрокоптер может преодолеть за полет.
• Задержка сигнала представляет собой время передачи входного сигнала матрицы на
дисплей. DJI FPV достигает минимальной задержки в режиме низкой задержки (810p
120fps) на открытом пространстве без электромагнитных помех.
• Максимальная продолжительность полета была проверена в условиях отсутствия ветра при
Page 7
Руководство пользователя DJI FPV
7
© 2021 г. DJI Все права защищены.
Подготовка квадрокоптера
1 2
полете с постоянной скоростью 24,9 миль/ч (40 км/ч), а максимальная скорость полета
была проверена в ручном режиме на высоте уровня моря без ветра. Эти значения
приведены только для справки. Максимальная скорость полета квадрокоптера может
отличаться в зависимости от законов страны или региона.
5,8 ГГц не поддерживается в некоторых регионах. Этот диапазон частот будет
автоматически отключен, в случае если квадрокоптер активирован или подключен к DJI Fly
в таких регионах. Соблюдайте местные законы и правила.
Использование очков не удовлетворяет требованию о пределе зоны видимости. В
некоторых регионах может понадобиться наблюдатель, помогающий в слежении за
полетом. Убедитесь, что, используя очки, вы не нарушаете местные законы.
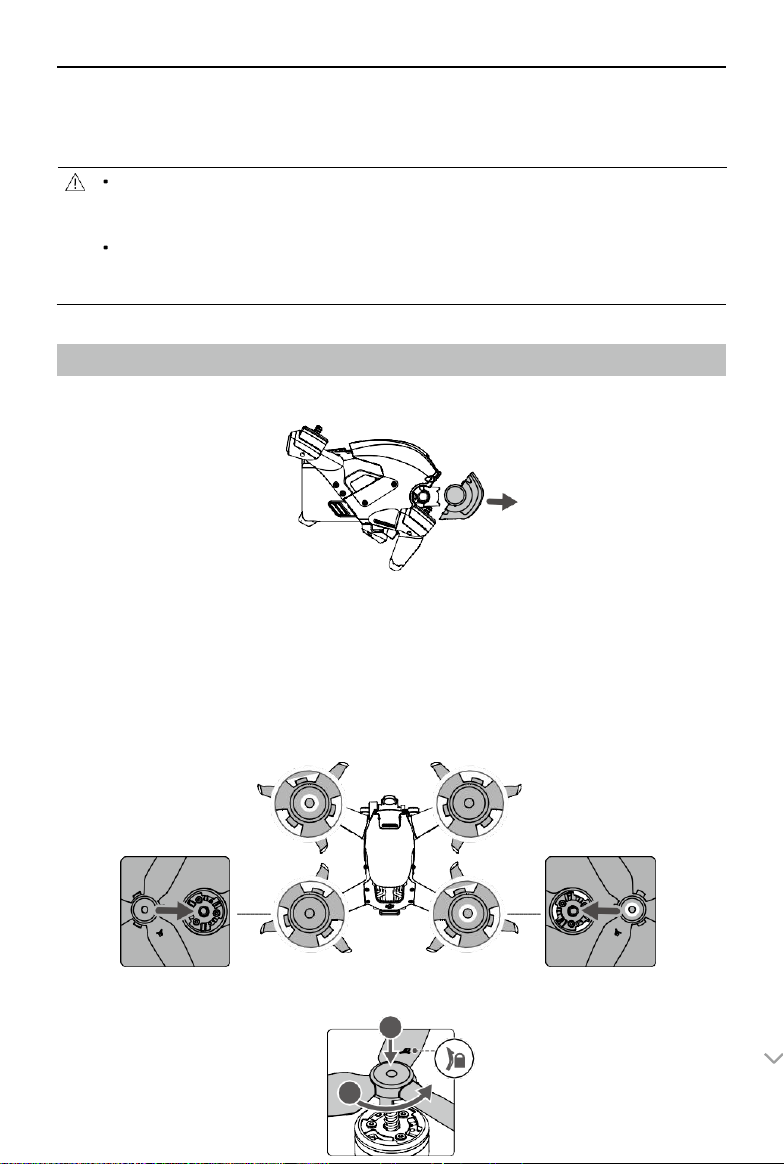
1. Снимите защиту подвеса с камеры.
2. Установите пропеллеры.
Пропеллеры с метками и без меток указывают на разное направление вращения. Прикрепите
пропеллеры с метками к электромоторам с метками, а пропеллеры без меток — к электромоторам
без меток. Удерживая электромотор, нажмите на пропеллер по направлению вниз и прокрутите в
направлении, указанном на моторе, до упора.
A B
B A
Page 8
Руководство пользователя DJI FPV
8
© 2021 г. DJI Все права защищены.
1
3
2
Подготовка очков
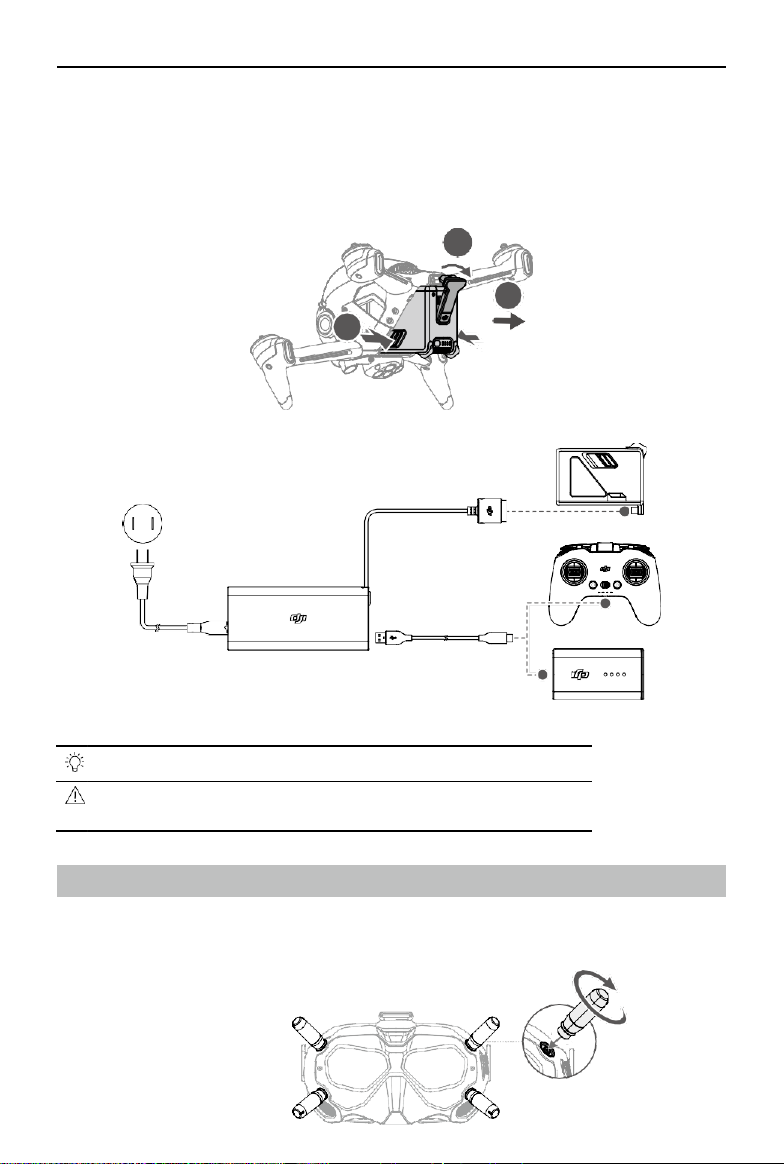
3. Все интеллектуальные полетные аккумуляторы находятся в режиме гибернации перед отгрузкой
для обеспечения безопасности. Перед первым использованием выньте интеллектуальный
полетный аккумулятор и используйте прилагаемое зарядное устройство для активации и зарядки
аккумулятора. Чтобы полностью зарядить аккумулятор, потребуется примерно 50 минут.
Рекомендуется устанавливать защиту подвеса, когда устройство не используется.
Обязательно снимите защиту подвеса перед включением питания квадрокоптера. Нарушение
этого требования может повлиять на выполнение квадрокоптером самодиагностики.
1. Установите четыре антенны в крепежные отверстия в передней части очков. Убедитесь, что
антенны надежно установлены.
Page 9
Руководство пользователя DJI FPV
9
© 2021 г. DJI Все права защищены.
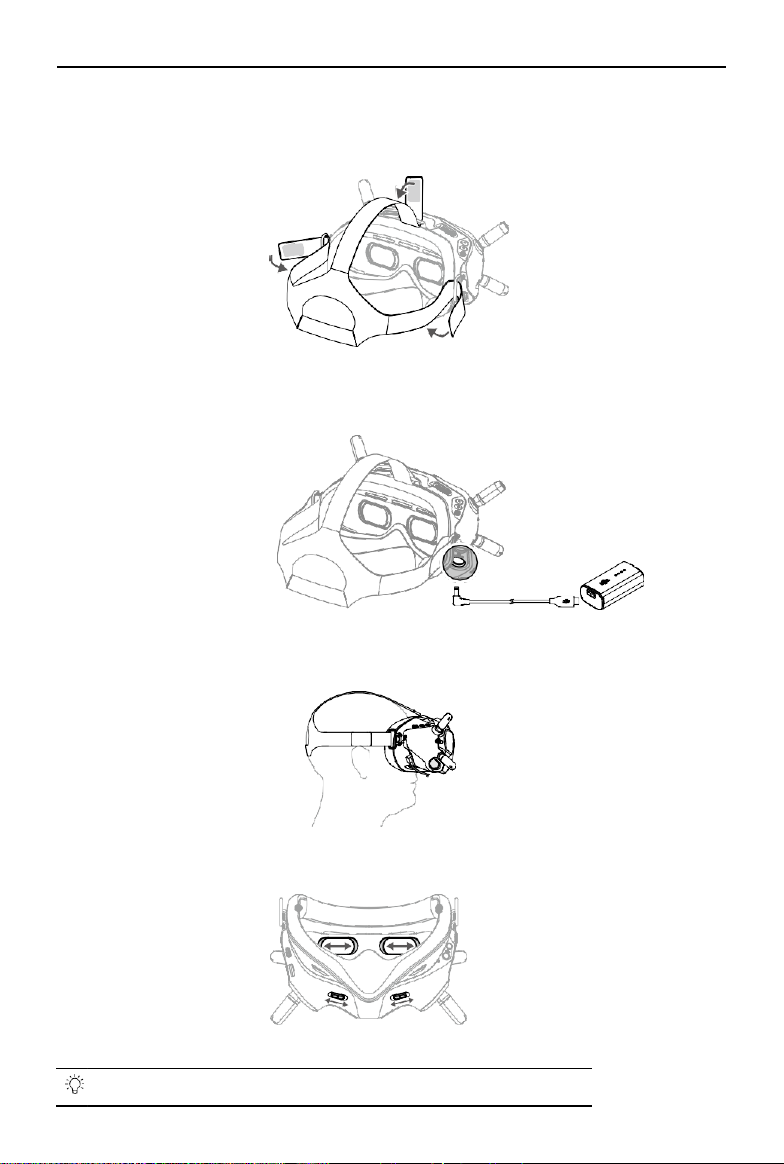
2. Присоедините ремешок к креплению для головного ремешка в верхней части и по сторонам очков.
3. Используйте кабель питания очков в комплекте, чтобы подключиться через разъем питания очков к
аккумулятору.
4. Выровняйте линзы и потяните наголовную ленту вниз. Отрегулируйте наголовную ленту, пока
очки не будут плотно и комфортно прилегать к голове и лицу.
5. Поверните ползунок межзрачкового расстояния, чтобы отрегулировать расстояние между линзами
до совмещения изображений.
58 – 70 мм
Очки можно надевать поверх обычных очков.
Page 10
Руководство пользователя DJI FPV
10
© 2021 г. DJI Все права защищены.
2
1
НЕ используйте аккумулятор очков для зарядки других устройств.
Подготовка пульта дистанционного управления
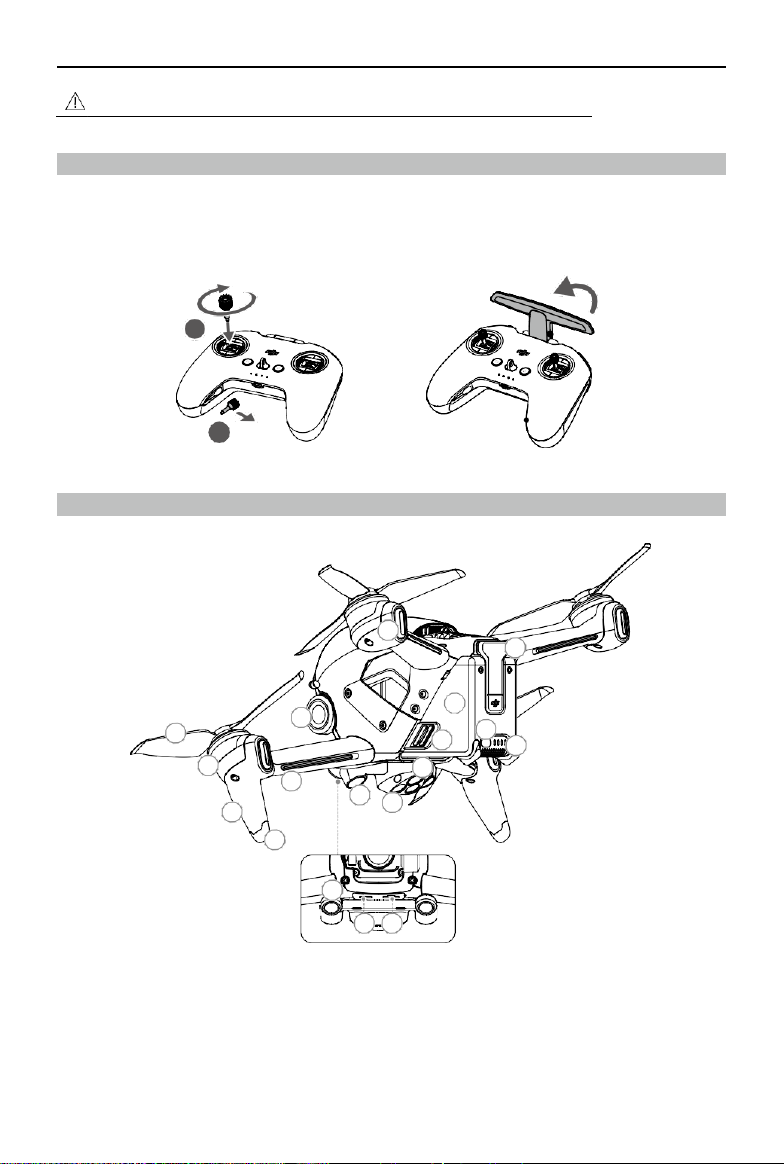
1. Выньте стики управления из гнезд для хранения на пульте дистанционного управления и
привинтите их на место.
2. Разверните антенны.
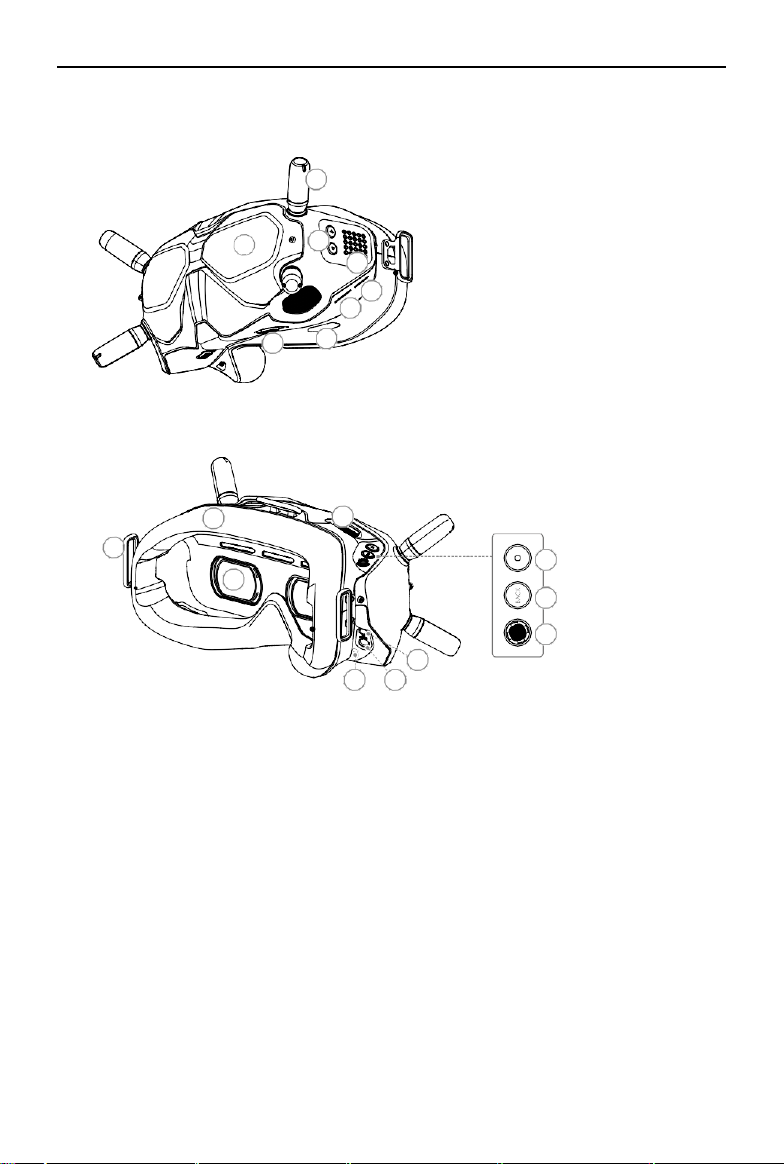
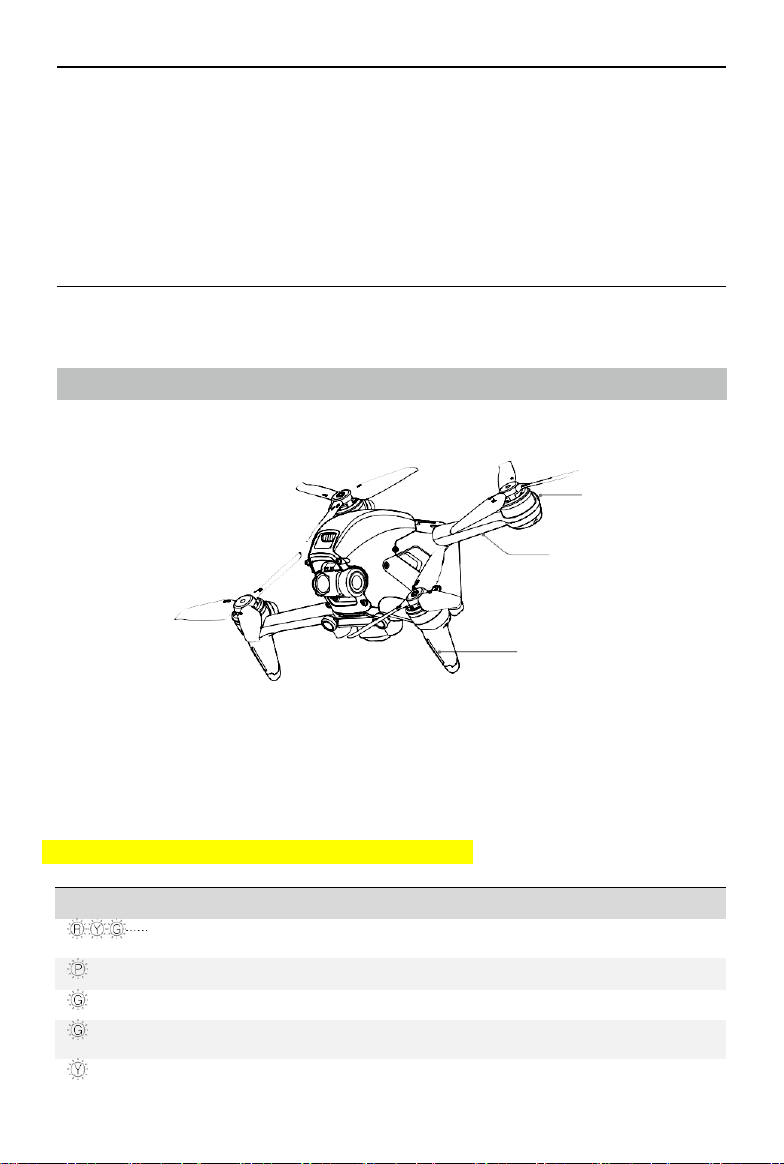
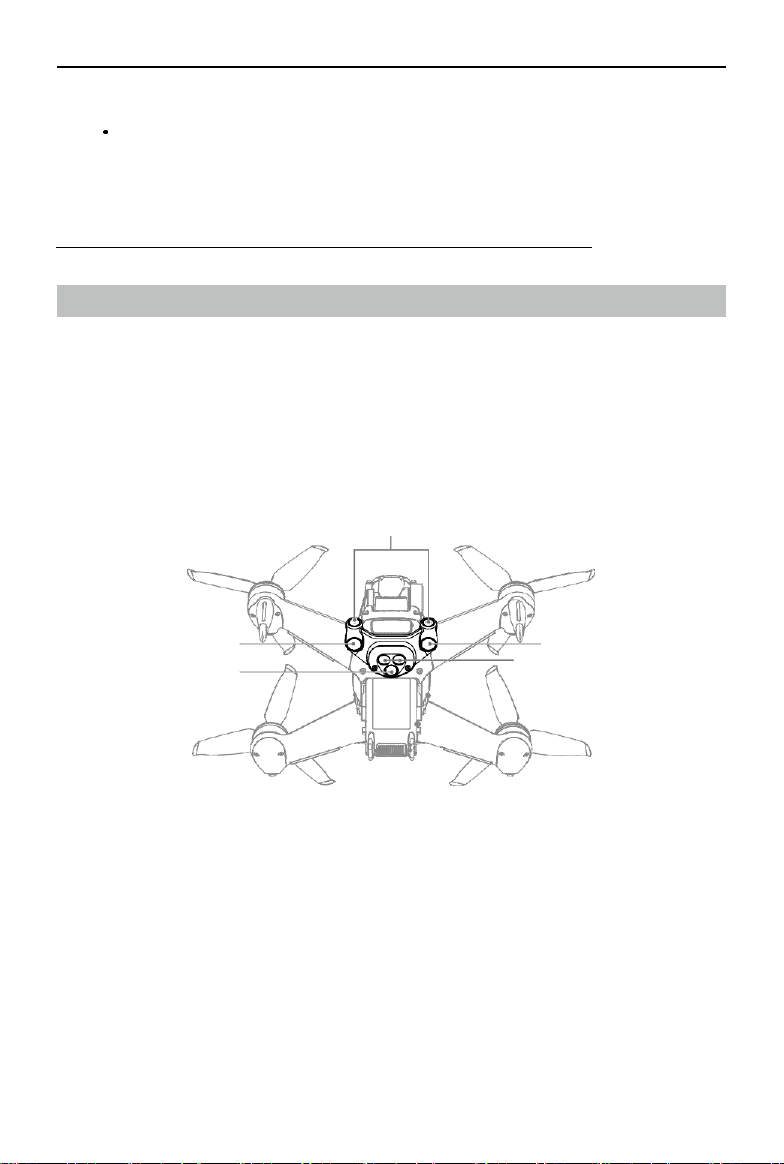
Схема
Квадрокоптер
1. Пропеллеры
2. Электромоторы
3. Передние светодиоды
4. Шасси (со встроенными
антеннами)
7. Индикатор состояния
квадрокоптера
8. Система обзора сверху
вниз
9. Инфракрасная система
датчиков
13. Кнопка включения
14. Светодиоды уровня
заряда аккумулятора
15. Разъем питания
16. Система переднего обзора
7
15 11 6 1 12 13
14
2 10 5 8 3
9
4
16
17 18
Page 11

Руководство пользователя DJI FPV
11
© 2021 г. DJI Все права защищены.
5. Светодиоды на раме
6. Подвес и камера
10. Вспомогательное нижнее
освещение
11. Интеллектуальный
полетный аккумулятор
12. Фиксаторы аккумуляторов
17. Порт USB-C
18. Слот для карты microSD
Page 12
Руководство пользователя DJI FPV
12
© 2021 г. DJI Все права защищены.
10 12 9 13 11
14
15
16 18 17
Очки
1. Антенны
2. Передняя крышка
3. Кнопки настройки канала
4. Дисплей канала
5. Порт USB-C
6. Слот для карты microSD
7. Воздухозабор
8. Ползунок межзрачкового
расстояния (ПМЗ)
9. Крепление для головного ремешка
10. Вспененная подкладка
11. Оптика
12. Вентиляционные щели
13. Кнопка Затвор/Запись
Нажмите один раз, чтобы сделать фотографию, начать или остановить запись видео. Нажмите и
удерживайте, чтобы переключиться между режимами фото и видео.
14. Кнопка Назад
Нажмите для возврата в предыдущее меню или для выхода из действующего режима.
15. Кнопка 5D
Переключите кнопку для прокрутки меню. Нажмите кнопку для подтверждения.
На главном экране передвигайте переключатель вправо или влево, чтобы отрегулировать яркость
и вверх или вниз, чтобы отрегулировать звук. Нажмите кнопку, чтобы войтив меню.
16. Разъем Audio/AV-IM
17. Разъем питания (DC5,5x2,1)
1
2
3 4 5 6 8
7
Page 13
Руководство пользователя DJI FPV
13
© 2021 г. DJI Все права защищены.
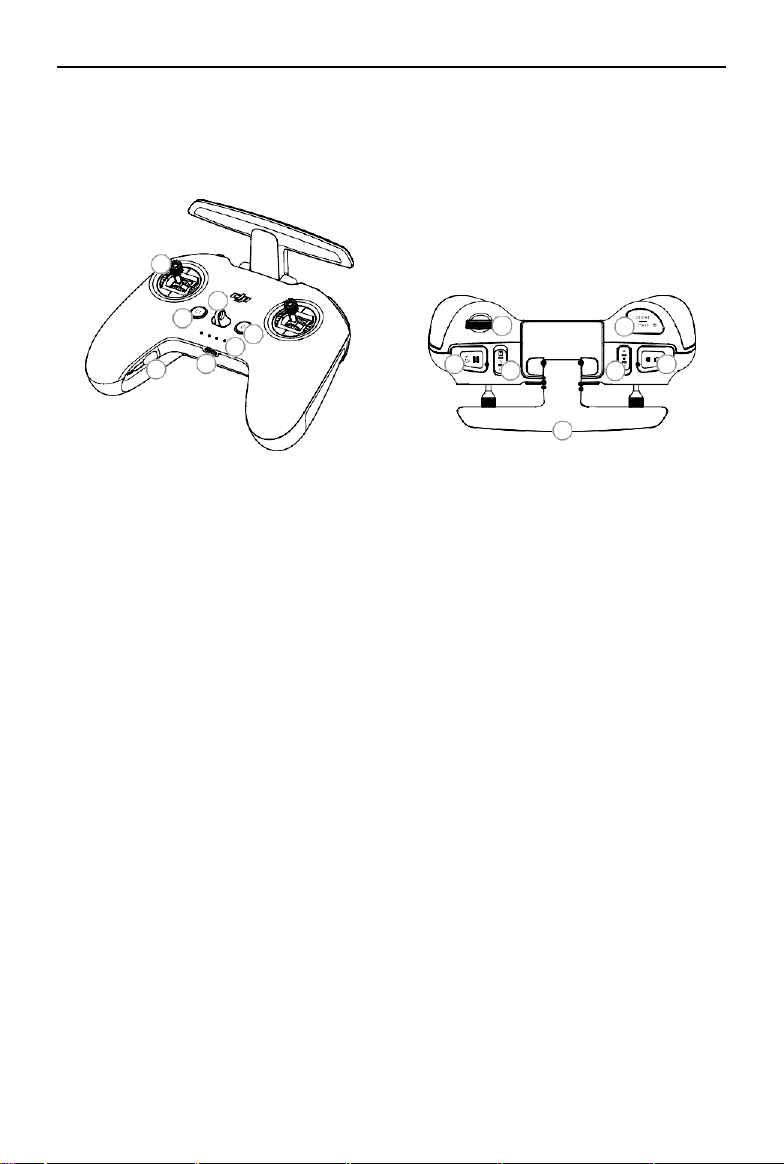
5 3 4 1 2 7 6 9 12 8
10 11
13 14
18. Кнопка связи
Пульт дистанционного управления
1. Кнопка включения
Нажмите один раз, чтобы проверить текущий уровень заряда аккумулятора. Нажмите один раз,
затем еще раз и удерживайте, чтобы включить или выключить пульт дистанционного управления.
2. Светодиоды уровня заряда аккумулятора
Отображение текущего уровня заряда аккумулятора пульта дистанционного управления.
3. Крепление для шнурка
4. Кнопка С1 (Настраиваемая)
Функция этой кнопки может быть настроена на очках. По умолчанию нажмите один раз, чтобы
отрегулировать или отключить скоординированный поворот (режим S). Нажмите два раза, чтобы
включить или отключить сигнал ESC.
5. Стики управления
Используются для контроля движения квадрокоптера. Режим стиков управления может быть
установлен на очках. Стики управления съемные, и их легко хранить.
6. Порт USB-C
Для зарядки и подключения пульта дистанционного управления к компьютеру.
7. Гнезда хранения стиков
управления
Для хранения стиков
управления.
8. Кнопка Приостановить полет/RTH
Нажмите один раз, чтобы квадрокоптер затормозил и завис на месте (только в случае, когда
доступны GPS или система обзора сверху вниз). Нажмите и удерживайте кнопку, чтобы начать
RTH. Квадрокоптер возвращается в последнюю зарегистрированную исходную точку. Нажмите
еще раз, чтобы отменить RTH.
9. Шкала подвеса
Управление наклоном камеры.
10. Переключатель режима полета
Page 14

Руководство пользователя DJI FPV
14
© 2021 г. DJI Все права защищены.
15 16
17 18
Переключение между обычным, спортивным и ручным режимом. По умолчанию ручной режим
отключен и должен быть включен на очках.
11. Переключатель C2 (Настраиваемый)
Функция этого переключателя может быть настроена на очках. По умолчанию передвиньте
переключатель, чтобы центрировать подвес и отрегулировать положение вверх/вниз.
12. Кнопка Старт/Стоп
При использовании спортивного режима нажмите один раз,
чтобы включить или выключить управление скоростью. При
использовании ручного режима нажмите дважды, чтобы
запустить или остановить электромотор.
При использовании обычного или спортивного режима нажмите один раз, чтобы отменить RTH по
низкому заряду аккумулятора, когда на очках появляется обратный отсчет.
13. Кнопка Затвор/Запись
Нажмите один раз, чтобы сделать фотографию, начать или остановить запись видео. Нажмите и
удерживайте, чтобы переключиться между режимами фото и видео.
14. Антенны
Передают беспроводные сигналы управления устройством.
15. Винт регулировки сопротивления правого стика F1 (вертикально)
Прокрутите винт по часовой стрелке, чтобы увеличить вертикальное сопротивление стика.
Ослабьте винт, чтобы уменьшить вертикальное сопротивление.
16. Винт регулировки центра правого стика F2 (вертикально)
Прокрутите винт по часовой стрелке, чтобы отключить вертикальное центрирование стика.
Ослабьте винт, чтобы задействовать вертикальное центрирование.
17. Винт регулировки сопротивления левого стика F1 (Вертикаль)
Прокрутите винт по часовой стрелке, чтобы увеличить вертикальное сопротивление стика.
Ослабьте винт, чтобы уменьшить вертикальное сопротивление.
18. Винт регулировки центра левого стика F2 (вертикально)
Прокрутите винт по часовой стрелке, чтобы отключить вертикальное центрирование стика.
Ослабьте винт, чтобы задействовать вертикальное центрирование.
Page 15

Руководство пользователя DJI FPV
15
© 2021 г. DJI Все права защищены.
Page 16
Руководство пользователя DJI FPV
16
© 2021 г. DJI Все права защищены.
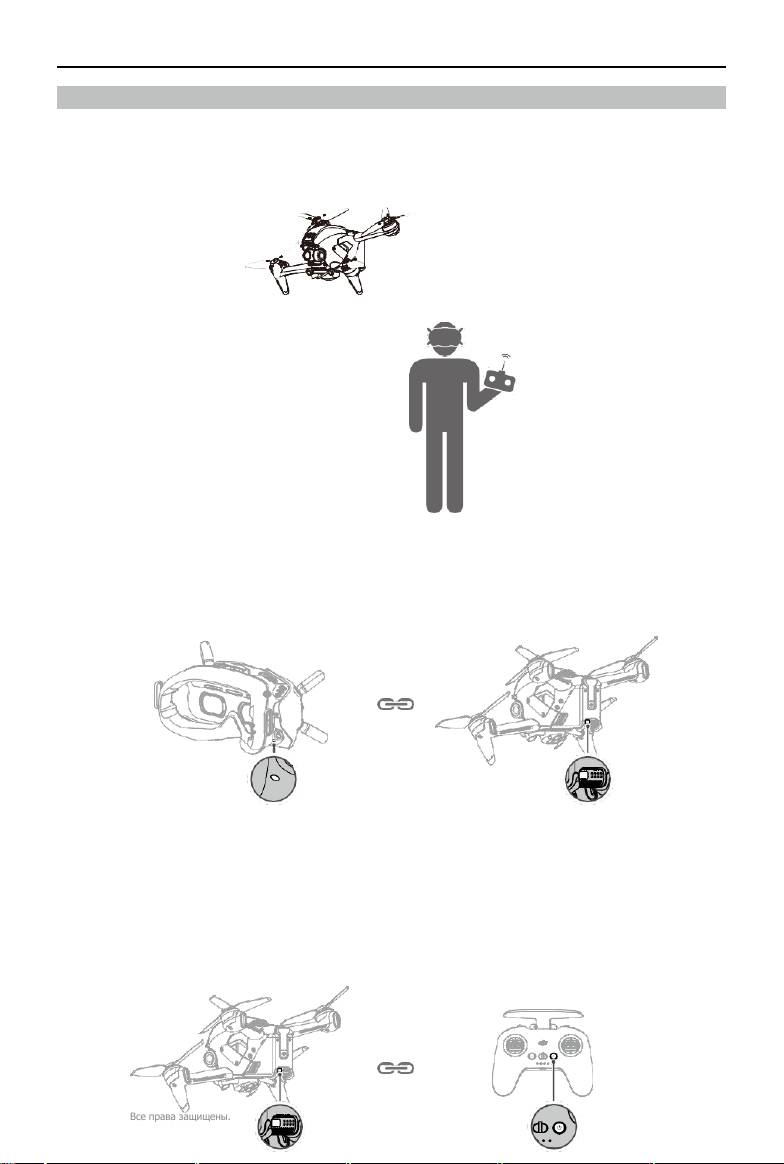
Подключение
Все устройства подключены перед отгрузкой. Подключение требуется только при первом
использовании нового устройства. Следуйте инструкциям ниже для подключения квадрокоптера, очков
и пульта дистанционного управления:
1. Включите питание квадрокоптера, очков и пульта дистанционного управления.
2. Нажмите кнопку связи на очках. Очки начнут непрерывно сигналить.
3. Нажмите и удерживайте кнопку питания устройства, пока светодиоды уровня заряда аккумулятора
не начнут последовательно мигать.
4. Светодиоды уровня заряда аккумулятора начнут гореть постоянно и покажут уровень заряда.
Очки перестанут издавать звуковые сигналы, когда подключение успешно завершено, и дисплей в
нормальном состоянии.
5. Нажмите и удерживайте кнопку питания устройства, пока светодиоды уровня заряда аккумулятора
не начнут последовательно мигать.
6. Нажмите и удерживайте кнопку питания пульта дистанционного управления, пока светодиоды
уровня заряда аккумулятора не начнут последовательно мигать.
Page 17
Руководство пользователя DJI FPV
17
© 2021 г. DJI Все права защищены.
Активация
Прило
жен
7. Оба индикатора уровня заряда аккумулятора горят и отображают уровень заряда аккумулятора,
пульт управления перестает подавать звуковой сигнал после успешного подключения.
Убедитесь, что очки и пульт находятся в пределах 0,5 м от квадрокоптера во время
подключения.
Квадрокоптер должен быть подключен к очкам до подключения к пульту дистанционного
управления.
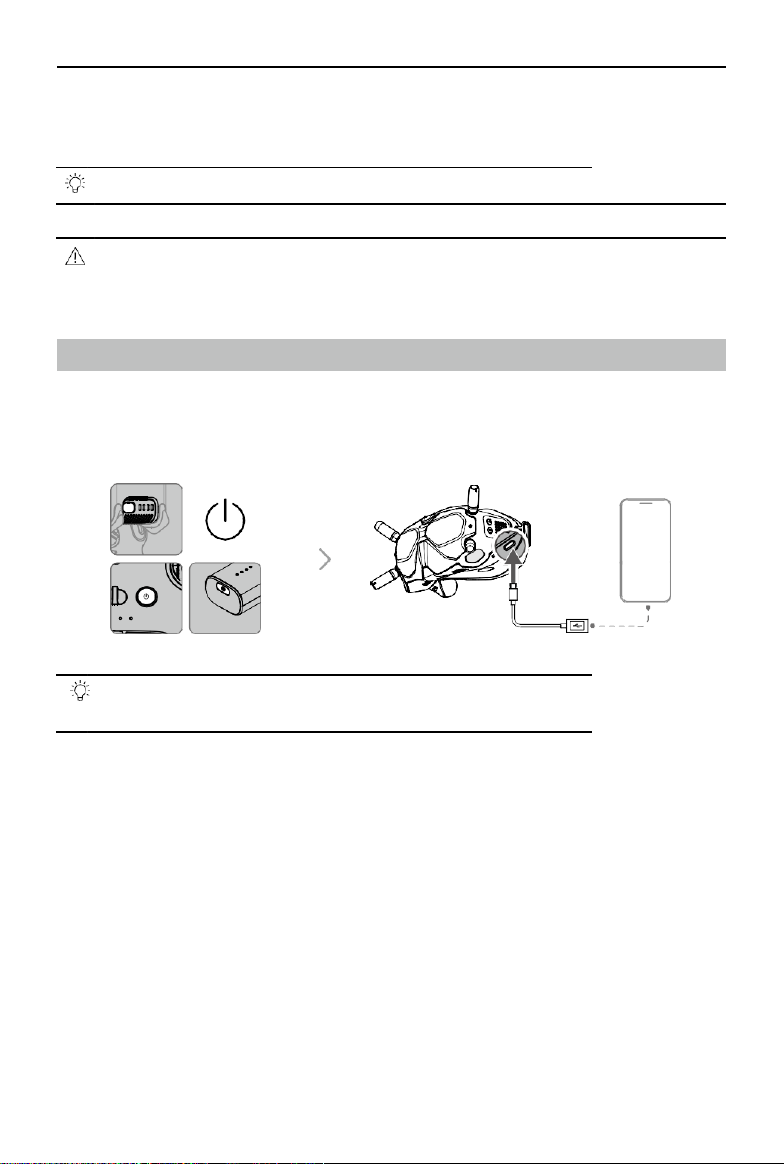
Перед первым использованием DJI FPV должен быть активирован. Убедитесь, что все устройства
подключены после включения питания квадрокоптера, очков и пульта дистанционного управления.
Подключите очки к мобильному устройству через порт USB-C, запустите DJI Fly и следуйте
подсказкам для активации. Для активации требуется подключение к интернету.
Зажмите, а затем зажмите и удерживайте, чтобы включить или выключить устройства.
Page 18
18
© 2021 г. DJI Все права защищены.
Квадрокоптер
DJI FPV содержит контроллер полета, подвес и камеру, систему нисходящего видео канала, систему
обзора, движительную систему и интеллектуальный полетный аккумулятор.
Режимы полета
DJI FPV имеет три режима полета, плюс четвертый режим полета, на который квадрокоптер
переключается в определенных ситуациях. Режимы полета могут контролироваться с помощью
переключателя режима полета на пульте дистанционного управления.
Обычный режим: В квадрокоптере используются GPS, систему переднего обзора и систему обзора
сверху вниз и инфракрасную систему датчиков для установки местоположения и стабилизации. При
наличии устойчивого сигнала квадрокоптер использует GPS для определения местоположения, а в
условиях достаточной освещенности — систему обзора сверху вниз. При включенной системе обзора
сверху вниз и достаточных условиях освещения максимальный угол высоты полета составляет 25°, а
максимальная скорость полета 15 м/с.
Спортивный режим: Квадрокоптер использует GPS и систему обзора сверху вниз для
позиционирования. В спортивном режиме реакции квадрокоптера оптимизированы для
маневренности и скорости, что делает его более отзывчивым к движениям стика управления.
Максимальная скорость полета составляет 27 м/с, максимальная скорость набора высоты — 15 м/с, а
максимальная скорость снижения — 10 м/с.
Ручной режим: Классический режим управления устройством с высокой маневренностью, который
можно использовать для состязаний в скорости и свободного полета. В ручном режиме отключены
все функции помощи в полете, к примеру, автоматическая стабилизация, поэтому для использования
режима необходимы продвинутые навыки управления устройством. В этом режиме можно
отрегулировать стик газа.
В обычном или спортивном режиме при выключенной или недоступной системе обзора сверху вниз,
а также при слабом сигнале GPS и помехах компаса квадрокоптер не способен автоматически
определять местоположение или тормозить, что увеличивает риск возникновения опасностей в
полете. В этот момент квадрокоптер может быть более сильно подвержен воздействию окружающей
среды. Такие факторы окружающей среды, как ветер, могут привести к горизонтальному смещению,
что может представлять опасность, особенно при полете в ограниченном пространстве.
При включенной ручном режиме двигайте стик дистанционного управления, чтобы
напрямую управлять газом и высотой устройства. Квадрокоптер не использует функции
помощи в полете такие, как функция автоматической стабилизации и может достичь любой
высоты. Ручной режим стоит использовать только опытным пользователям. Неудачное
управление устройством в этом режиме угрожает безопасности и может в том числе
привести к крушению квадрокоптера.
• Ручной режим отключен по умолчанию. Перед переходом на ручной режим убедитесь, что
переключатель очков установлен на ручной режим. Квадрокоптер останется в обычном или
спортивном режиме, если переключатель очков не установлен на ручной режим. Перейдите
в Настройки, Управление, Пульт дистанционного управления, Персонализация кнопок и
установите пользовательский режим на ручной режим.
• Перед использованием ручного режима рекомендуется отрегулировать винт за стиком газа,
чтобы стик не центрировался, и попрактиковать полет, используя DJI Virtual Flight.
• При первом использовании устройства в ручном режиме максимальная высота будет
ограничена. После ознакомления с полетом в ручном режиме ограничение будет отключено
на очках. Зайдите в Настройки, Управление, Дистанционное управление, Усиление & Эксп,
Page 19
Руководство пользователя DJI FPV
19
© 2021 г. DJI Все права защищены.
М, Ограничение высоты
• Максимальная скорость и тормозной путь квадрокоптера значительно увеличиваются в
спортивном режиме. В безветренных условиях требуется минимальный тормозной путь 30
м.
• Скорость снижения значительно увеличивается в спортивном режиме. В безветренных
условиях требуется минимальный тормозной путь 10 м.
• Чувствительность квадрокоптера значительно увеличивается в спортивном режиме, это
значит, что небольшое движение стика управления на пульте дистанционного управления
переводит квадрокоптер в движение на большое расстояние. Будьте осторожны и
сохраняйте достаточное пространство для маневрирования во время полета.
DJI FPV оснащен передними светодиодами, светодиодами рамы и индикатором состояния.
Индикатор состояния квадрокоптера
Светодиоды на раме
Передние светодиоды
Передние светодиоды показывают ориентацию устройства, а светодиоды на раме используются для
украшения. Светодиоды постоянно светятся синим, когда устройство включено. Цвета и режимы
освещения светодиодов можно настроить на очках.
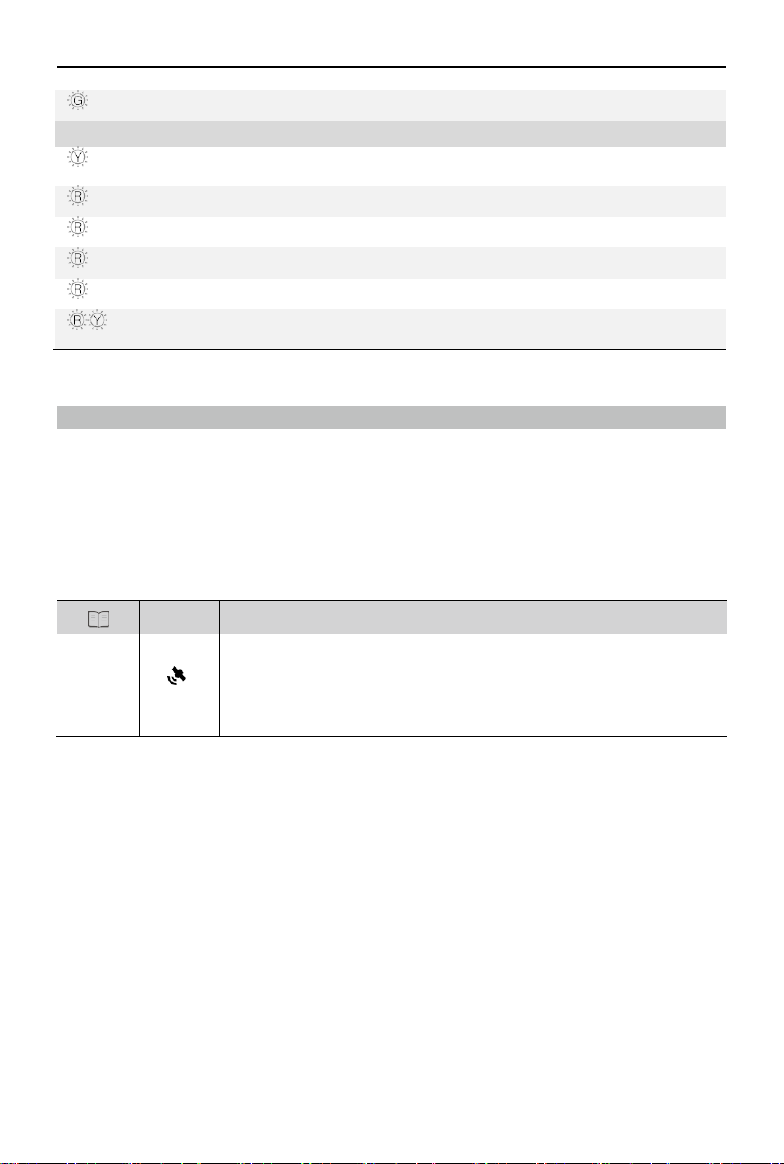
Индикатор состояние квадрокоптера сообщает о состоянии системы управления полетом.
Дополнительная информация об индикаторе состояния квадрокоптера при ведена в Таблице ниже.
Режимы индикатора состояния квадрокоптера
Нормальные режимы
Мигает красным, желтым и
зеленым поочередно
Включение питания выполнение
самодиагностики
....
Медленно мигает фиолетовым
Разогрев
....
Медленно мигает зеленым
Включен GPS
x2 .....
Дважды повторно мигает
зеленым
Системы переднего обзора и обзора сверху
вниз включены
....
Медленно мигает желтым
GPS, системы переднего обзора и обзора
сверху вниз отключены
Индикатор состояния квадрокоптера
Page 20
Руководство пользователя DJI FPV
20
© 2021 г. DJI Все права защищены.
...
Быстро мигает зеленым
Торможение
Режимы предупреждения
...
Быстро мигает желтым
Сигнал пульта дистанционного управления
потерян
....
Медленно мигает красным
Низкий заряд аккумулятора
...
Быстро мигает красным
Критично низкий заряд аккумулятора
......
Мигает красным
Ошибка IMU
—
Постоянно светится красным
Критическая ошибка
...
Мигает красным и желтым
поочередно
Требуется калибровка компаса
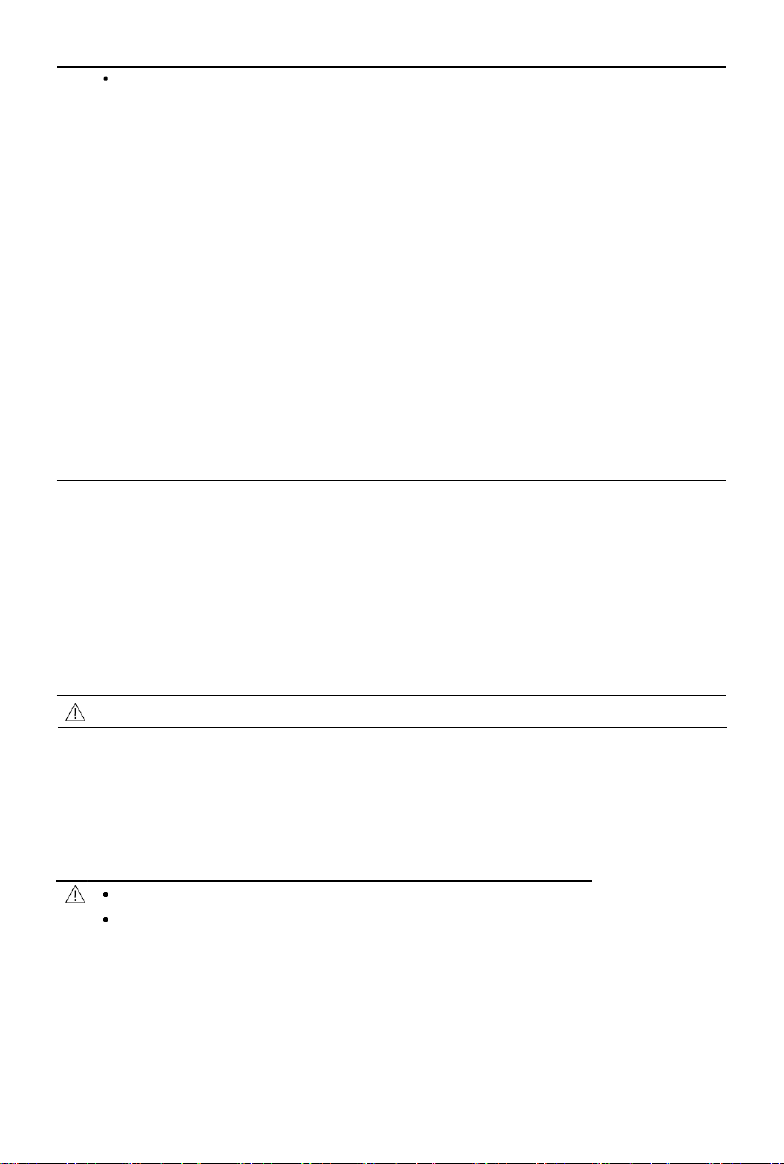
Возврат домой
Функция возврата домой (RTH) возвращает квадрокоптер в последнюю записанную исходную точку,
и устройство приземляется при наличии стабильного сигнала GPS. Существует три типа RTH:
Интеллектуальный RTH, RTH при низком заряде аккумулятора и безотказный RTH. При наличии
записанной исходной точки и стабильного сигнала GPS, RTH будет активирован при условии
включения Интеллектуального RTH, низкого заряда аккумулятора или потере сигнала пульта
дистанционного управления. RTH также сработает в аварийных ситуациях таких, как потеря видео
сигнала.
GPS
Описание
Исходная
точка
20
Исходная точка по умолчанию — это первая локация, где устройство
поймало стабильный или относительно стабильный сигнал GPS (когда
иконка была белой). Индикатор состояния квадрокоптера быстро мигает
зеленым, а на очках появляется запрос для подтверждения регистрации
исходной точки.
Интеллектуальный RTH
Если сигнал GPS достаточен, интеллектуальный RTH можно использовать для возвращения
квадрокоптера в исходную точку. Интеллектуальный RTH включается нажатием и удерживанием
кнопки RTH на пульте дистанционного управления. Для выхода из интеллектуального RTH нажмите
кнопку RTH.
RTH по низкому заряду аккумулятора
Когда заряд интеллектуального полетного аккумулятора опускается слишком низко, и его не хватает
для возврата домой, как можно скорее посадите устройство. В противном случае у квадрокоптера
кончится заряд, что повлечет за собой повреждение устройства или другие потенциальные риски.
Во избежание опасностей, связанных с недостаточным зарядом, DJI FPV самостоятельно определит,
достаточен ли заряд для возврата в исходную точку на основании текущей локации. RTH по низкому
заряду аккумулятора срабатывает, когда интеллектуальный полетный аккумулятор садится до такой
степени, что это может повлиять на безопасное возвращение квадрокоптера.
Пользователь может отменить RTH, нажав кнопку RTH на пульте дистанционного управления. Если
Page 21

Руководство пользователя DJI FPV
21
© 2021 г. DJI Все права защищены.
RTH отменяется после предупреждения о низком уровне заряда аккумулятора, интеллектуальный
аккумулятор может не иметь достаточной мощности для безопасной посадки квадрокоптера, что
может привести к крушению или потере квадрокоптера.
Квадрокоптер приземлится автоматически, если текущий уровень заряда может поддерживать
квадрокоптер достаточно долго только, чтобы спуститься с его текущей высоты. Пользователь не
может отменить автоматическую посадку, но может использовать пульт дистанционного управления
для изменения направления квадрокоптера во время процесса посадки.
Безотказный RTH
Если исходная точка была успешно записана и компас работает нормально, безотказный RTH
автоматически активируется после отсутствия сигнала пульта дистанционного управления в течение
более 3,5 секунд.
Квадрокоптер пролетит 50 м в обратном направлении по изначальному маршруту полета и
активирует режим возврата по кратчайшему пути. Устройство входит в режим возврата по
кратчайшему пути, если восстановлен сигнал пульта дистанционного управления во время
безотказного RTH.
Реакцию устройства при потере беспроводного сигнала можно изменить на очках. Устройство не
запустит безотказный RTH, если в настройках было выбрано приземление или зависание.
Другие сценарии RTH
Если сигнал передачи видео потерян во время полета, на очках появится запрос, и начнется RTH,
однако пульт дистанционного управления все еще может быть использован, чтобы управлять
устройством.
RTH (Возврат домой по кратчайшему пути)
1. Исходная точка (ИТ) записана.
2. RTH запущен.
3. Если квадрокоптер находится менее чем в 5 м от исходной точки, когда начинается процедура RTH,
он немедленно приземляется.
Если квадрокоптер находится больше, чем в 5, но меньше, чем в 50 м от исходной точки, когда
начинается процедура RTH, устройство вернется домой на текущей высоте при максимальной
скорости 3 м/с.
Если квадрокоптер находится на расстоянии более 50 м от исходной точки, когда начинается
процедура RTH, он поднимается на заданную высоту RTH и летит к исходной точке со скоростью
13,5 м/с. Если высота RTH меньше текущей высоты, квадрокоптер летит в исходную точку на
текущей высоте.
4. После достижения исходной точки квадрокоптер приземляется, и электромоторы ост анавливаются.
Избегание препятствий во время RTH
1. Устройство тормозит, если распознает препятствие впереди и поднимается на безопасную высоту.
Поднявшись на 5 м, устройство продолжит полет вперед.
2. Устройство тормозит, когда распознает препятствие внизу и увеличивает высоту, пока
препятствие не пропадает из диапазона распознавания, после чего движется вперед.
Во время RTH устройство не способно распознать препятствия по бокам, сзади или сверху.
Page 22
Руководство пользователя DJI FPV
22
© 2021 г. DJI Все права защищены.
• Квадрокоптер не способен избежать препятствий, в случае если системы переднего обзора
и обзора сверху вниз недоступны.
• Квадрокоптер не может вернуться в исходную точку, если сигнал GPS слаб или недоступен.
Если сигнал GPS станет слабым или недоступным после срабатывания RTH, квадрокоптер
некоторое время будет висеть на месте, а затем начнет посадку.
• Перед каждым полетом необходимо войти в Настройки очков и установить подходящую
высоту RTH.
• Если во время RTH устройство движется вперед, и сигнал пульта дистанционного
управления стабильный, пульт может использоваться для контроля скорости устройства, но
не для контроля ориентации или полета вправо или влево. Ориентацией и горизонтальной
позицией устройства можно управлять во время спуска квадрокоптера. Подвиньте стик
управления в обратном направлении во время подъема или движения вперед, чтобы выйти
из RTH.
• На RTH будут влиять геозоны. Если устройство попадает в геозону во время RTH, оно либо
начнет спуск, пока не выйдет из геозоны, и продолжит полет к исходной точке, либо
зависнет на месте из-за ограничений высоты.
• Квадрокоптер может быть не в состоянии вернуться в исходную точку, когда скорость ветра
слишком высока. Выполняйте полет с осторожностью.
Защита посадки
Защита посадки активируется во время интеллектуального RTH.
1. Во время защиты посадки квадрокоптер автоматически обнаружит и мягко приземлится на
подходящую площадку.
2. Если поверхность определяется, как неподходящая для посадки, устройство зависнет и будет
ожидать подтверждения пользователя.
3. Если защита посадки не работает, очки отобразят запрос на посадку, когда устройство опустится
на 0,3 м. Чтобы приземлиться, потяните вниз стик газа.
Системы обзора отключены во время посадки. Сажайте устройство с осторожностью.
Точная посадка
Устройство автоматически сканирует и ищет подходящий рельеф во время RTH. Квадрокоптер
осуществит посадку, если рельеф совпадет с рельефом исходной точки. Если подходящего рельефа
не обнаружится, на очках возникнет запрос.
Во время точной посадки активируется защита посадки.
Успех точной посадки зависит от выполнения следующих условий:
a)
Исходная точка должна быть записана при взлете и не должна меняться во время
полета. В противном случае квадрокоптер не сохранит информацию о характеристиках
рельефа исходной точки.
b)
Во время взлета необходимо, чтобы устройство поднялось на 7 м вертикально и только
после этого начало двигаться горизонтально.
c)
Рельеф местности исходной точки должен после записи в основном оставаться
неизменным.
d)
Рельеф местности в исходной точке должен быть достаточно характерным.
Page 23
Руководство пользователя DJI FPV
23
© 2021 г. DJI Все права защищены.
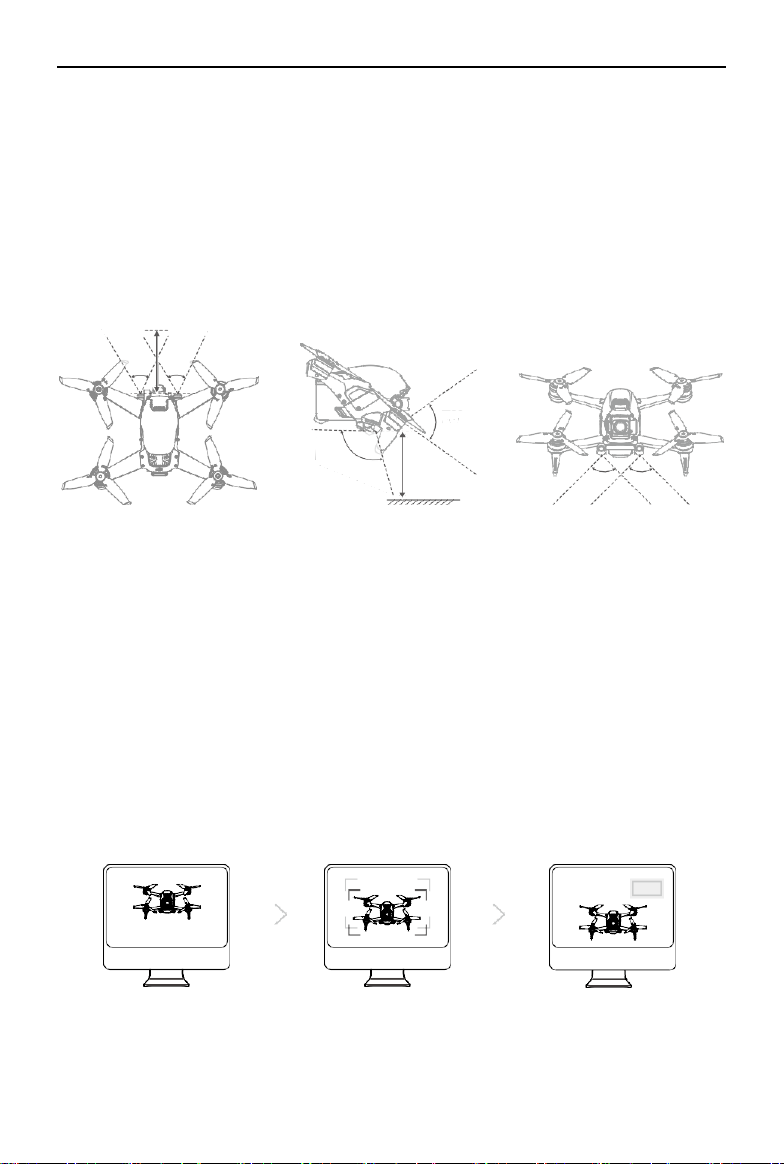
Система обзора и инфракрасная система датчиков
e)
Уровень освещенности не должен быть слишком высоким или
слишком низким.
Во время точной посадки доступны следующие действия:
a)
Потяните стик газа вниз, чтобы ускорить посадку.
b)
Потяните стик газа вперед или измените положение другого стика, чтобы остановить
точную посадку. Защита посадки остается активной во время вертикального снижения.
DJI FPV оснащен как инфракрасной системой датчиков, так и системами переднего обзора и обзора
сверху вниз.
Системы переднего обзора и обзора сверху вниз состоят из двух камер каждая, а инфракрасная
система датчиков состоит из двух 3D инфракрасных модулей.
Система обзора сверху вниз и инфракрасная система датчиков помогают квадрокоптеру свое текущее
положение, более точно зависнуть на месте и летать в помещении или в других окружающих
условиях, где GPS недоступен. Кроме того, нижняя подсветка, расположенная под устройством,
улучшает видимость для системы обзора сверху вниз в условиях плохой освещенности.
Система переднего обзора
Система обзора сверху вниз Система обзора сверху вниз
Инфракрасная система датчиков
Вспомогательное нижнее освещение
Page 24
Руководство пользователя DJI FPV
24
© 2021 г. DJI Все права защищены.
Диапазон распознавания
Система переднего обзора
Система переднего обзора имеет диапазон распознавания от 0,5 до 18 м, с углом обзора 56° по
горизонтали и 71° по вертикали.
Система обзора сверху вниз
Система обзора сверху вниз лучше всего работает, когда квадрокоптер находится на высоте от 0,5 до
15 м, а его рабочий диапазон составляет от 0,5 до 30 м. Угол обзора спереди и сзади составляет 106°
и 90° вправо и влево.
0,5-18 м
Калибровка камер систем обзора
Автоматическая калибровка
Камеры систем обзора, установленные на устройстве, откалиброваны до поставки. В случае
обнаружения какой-либо неисправности камеры систем обзора, устройство автоматически выполнит
калибровку, и на очках появится запрос. Каких-либо дальнейших действий со стороны пользователя
не требуется.
Расширенная калибровка
Если неисправность сохранится после автоматической калибровки, на очках появится
предупреждение о необходимости расширенной калибровки. Расширенная калибровка может быть
проведена только, используя DJI Assistant 2 (серия DJI FPV). Выполните следующие шаги для
калибровки камер переднего обзора и повторите их для калибровки других камер.
1 2 3
Направьте устройство на экран.
Выровняйте
рамки.
Поверните и
наклоните
устройство.
90° 90°
71° 106° 0,5-30 м
56° 56°
Page 25

Руководство пользователя DJI FPV
25
© 2021 г. DJI Все права защищены.
Использование системы обзора
Система обзора сверху вниз доступна, если поверхность обладает четкой текстурой и достаточно
освещенности. Система обзора сверху вниз лучше всего работает, когда квадрокоптер находится на
высоте от 0,5 до 15 м. Если высота квадрокоптера превышает 15 м, это может повлиять на систему
обзора. Потребуется дополнительная осторожность.
Выполните шаги, описанные ниже, для использования системы обзора сверху
вниз.
1. Убедитесь, что квадрокоптер находится в обычном режиме. Включите квадрокоптер.
2. Квадрокоптер зависает на месте после взлета. Индикатор состояния квадрокоптера на задней
раме дважды мигает зеленым цветом, что указывает на работу системы обзора сверху вниз.
Если устройство находится в обычном режиме, и включена система замедления при препятствиях,
система переднего обзора будет активирована автоматически при включении. Благодаря системе
переднего обзора квадрокоптер способен начинать активное замедление при обнаружении
препятствий. Система переднего обзора лучше всего функционируют при достаточной освещенности,
и если препятствия имеют четко выраженные внешние особенности. Из-за инерции пользователям
необходимо управлять торможением устройства на разумном расстоянии.
Обращайте внимание на среду полета. Системы переднего обзора и обзора сверху вниз и
инфракрасная система датчиков работают только в определенных ситуациях и не заменяют
контроль и суждения пользователей. Во время полета обращайте внимание на
окружающею среду и предупреждения на очках. Оставайтесь ответственным и сохраняйте
контроль за устройством на протяжении всего полета.
• Максимальная высота зависания устройства составляет 30 м при использовании системы
обзора на открытой плоской поверхности. Наилучший диапазон высоты позиционирования
системы обзора составляет от 0,5 до 15 м. При полете за пределы этого диапазона успех
позиционирования может снижаться. Выполняйте полет с осторожностью.
• Вспомогательное нижнее освещение на очках может быть установлено на режим вкл.,
выкл. или авто. В авто-режиме вспомогательное нижнее освещение автоматически
активируется при недостатке естественного освещения. В течение этого времени
эффективность позиционирования будет снижена. Будьте осторожны в полете при
нестабильном GPS сигнале.
• Система обзора сверху вниз может не работать должным образом, когда квадрокоптер
летит над водой. Поэтому устройство может не иметь возможности активно избегать воды
при посадке. Рекомендуется постоянно поддерживать управление полетом, совершать
Page 26

Руководство пользователя DJI FPV
26
© 2021 г. DJI Все права защищены.
Бортовой самописец
Пропеллеры
разумные суждения, основанные на состоянии окружающей среды, и не полагаться на
систему обзора сверху вниз.
• Обратите внимание, что системы обзора и инфракрасная система датчиков могут не
работать должным образом, когда квадрокоптер летит слишком быстро.
• Система обзора сверху вниз не может работать должным образом на поверхностях,
которые не имеют четких вариаций рельефа или при плохой освещенности. Система обзора
не может работать должным образом ни в одной из следующих ситуаций. Управляйте
квадрокоптером с осторожностью.
a)
Полет над монохромными поверхностями (например, чистый черный, чистый белый,
чистый зеленый цвет).
b)
Полет над поверхностями с сильным отражением.
c)
Полет над водой или прозрачными поверхностями.
d)
Полет над движущимися поверхностями или объектами.
e) Полет в зоне, где освещение меняется часто или резко.
f)
Полет над чрезвычайно темными (<10 люкс) или яркими (>40 000 люкс) поверхностями.
g)
Полет над поверхностями, которые сильно отражают или поглощают инфракрасные волны
(например, зеркала).
h)
Полет над поверхностями без четкого рельефа или текстуры (например, столбы линии
электропередачи).
i)
Полет над поверхностями с повторяющимися идентичным рельефом или текстурами
(например, плитки с одинаковым рисунком).
j)
Полет над препятствиями с небольшой площадью поверхности (например, ветви
деревьев).
• Всегда держите датчики в чистоте. Вмешиваться в конструкцию датчиков ЗАПРЕЩЕНО.
Использование устройства во влажных или пыльных местах ЗАПРЕЩЕНО. Закрывать
датчики инфракрасной системы ЗАПРЕЩЕНО.
• Если квадрокоптер столкнулся с препятствием, требуется выполнить калибровку
камеры. Выполните калибровку камер, если этого требуют очки.
• НЕ совершайте полеты в дождливые и туманные дни или в условиях плохой видимости.
• Каждый раз перед взлетом проверяйте следующее:
a)
Убедитесь, что нет наклеек или каких-либо других препятствий на инфракрасной системе
датчиков и системах обзора.
b)
При наличии грязи, пыли или воды на инфракрасной системе датчиков и системе
обзора очистите ее мягкой тканью. НЕ используйте моющее средство, содержащее
спирт.
c)
При повреждении оптики инфракрасной системы датчиков и системы обзора обратитесь в
Службу поддержки DJI.
Системы.
Полетные данные, включая телеметрию полета, информацию о состоянии квадрокоптера, и другие
параметры, автоматически сохраняются во внутреннем регистраторе данных квадрокоптера. Доступ к
данным можно получить с помощью DJI Assistant 2 (серия DJI FPV).
Page 27

Руководство пользователя DJI FPV
27
© 2021 г. DJI Все права защищены.
1
2
Существует два типа малошумных быстросъемных пропеллеров DJI FPV, которые предназначены для
вращения в разных направлениях. Для указания, какие пропеллеры должны быть прикреплены к
каким электромоторам, используются метки. Убедитесь согласно инструкциям, что тип пропеллера
соответствует типу мотора.
Крепление пропеллеров
Прикрепите пропеллеры с метками к электромоторам с метками, а пропеллеры без меток — к
электромоторам без меток. Удерживая электромотор, нажмите на пропеллер по направлению вниз и
прокрутите в направлении, указанном на моторе, до упора.
A
B
B
A
Снятие пропеллеров
Удерживая электромотор, нажмите на пропеллер по направлению вниз и прокрутите в обратном
Пропелле
С метками
Без меток
Действие
Монтажное
Установите на моторы с
Установите на моторы без
Page 28

Руководство пользователя DJI FPV
28
© 2021 г. DJI Все права защищены.
направлении, указанном на моторе, до упора.
Лопасти пропеллера острые. Обращаться с осторожностью.
• Используйте только оригинальные пропеллеры DJI. Не
смешивайте пропеллеры разных типов.
• При необходимости приобретайте пропеллеры отдельно.
• Перед каждым полетом проверяйте надежность крепления пропеллеров.
• Перед каждым полетом убедитесь, что все пропеллеры находятся в надлежащем состоянии.
Использовать пропеллеры со следами старения, сколами, сломанные пропеллеры
ЗАПРЕЩЕНО.
• Во избежание травм не приближайтесь к вращающимся пропеллерам и двигателям.
• Отсоедините пропеллеры при хранении. Исключайте сжатие и сгибание пропеллеров во
время транспортировки или хранения.
• Убедитесь, что электромоторы установлены надежно и плавно вращаются. Немедленно
посадите квадрокоптер, если электромотор заело, и он не может свободно вращаться.
• Изменять конструкцию электромоторов ЗАПРЕЩЕНО.
• Не прикасайтесь и не допускайте соприкосновения рук или тела с электромоторами после
полета, так как они могут быть горячими.
• Не закрывайте вентиляционные отверстия на электромоторах или корпусе квадрокоптера.
• Убедитесь, что звук электронного регулятора хода нормальный при включении.
Интеллектуальный полетный аккумулятор — это аккумуляторная батарея 22,2 В, 2000 мА-ч с
интеллектуальными функциями зарядки и разрядки.
Характеристики аккумулятора
1.
Отображение уровня заряда аккумулятора: светодиоды уровня заряда аккумулятора будут
отображать текущий уровень заряда.
2.
Функция авторазрядки: во избежание возможной деформации аккумулятор автоматически
разряжается до уровня заряда 97%, если он не используется один день, и до уровня заряда 60%,
если он не используется пять дней. Во время разрядки аккумулятор может слегка нагреваться.
3.
Сбалансированная зарядка: во время зарядки напряжения элементов аккумулятора автоматически
балансируются.
4.
Защита от избыточного заряда: Зарядка автоматически останавливается при достижении уровня
полного заряда аккумулятора.
5.
Определение температуры: система защиты позволяет выполнять зарядку аккумулятора только
при температуре окружающей среды 41° и 104° F (от 5 до 40°C). Зарядка прекращается
автоматически, если температура аккумулятора превышает 122° F (50° C) во время процесса
зарядки.
6.
Защита от сверхтоков: при обнаружении чрезмерного тока аккумулятор прекращает зарядку.
7.
Защита от глубокого разряда: разрядка прекращается автоматически, чтобы предотвратить
чрезмерную разрядку, когда аккумулятор не используется. Защита от глубокого разряда не
включается, когда аккумулятор используется.
8.
Защита от короткого замыкания: подача питания автоматически прекращается при обнаружении
короткого замыкания.
Интеллектуальный полетный аккумулятор
Page 29

Руководство пользователя DJI FPV
29
© 2021 г. DJI Все права защищены.
Светодио
Светодиод
Светодио
9.
Защита от повреждения ячеек аккумулятора: очки отображают предупреждение при обнаружении
поврежденной ячейки аккумулятора.
10.
Режим гибернации: для экономии энергии аккумулятор отключается после 20 минут бездействия.
Если уровень заряда аккумулятора меньше 10%, он переходит в режим гибернации после шести
часов бездействия, чтобы предотвратить глубокую разрядку. В режиме гибернации индикаторы
уровня заряда аккумулятора не загораются. Зарядите аккумулятор, чтобы вывести его из
режима гибернации.
11.
Сообщение: информация о напряжении, емкости и силе тока аккумулятора передается
квадрокоптеру.
Перед использованием ознакомьтесь с заявлением об отказе от ответственности и
руководством по технике безопасности DJI FPV, а также с информацией на наклейке
аккумулятора. Пользователи несут полную ответственность за нарушение требований
безопасности.
Использование аккумулятора
Проверка уровня заряда
Нажмите кнопку питания один раз, чтобы проверить уровень заряда.
Кнопка питания Светодиоды уровня заряда
аккумулятора
LED1
LED2
LED3
LED4
Светодиодные индикаторы уровня заряда аккумулятора отображают уровень заряда
аккумулятора во время зарядки и разрядки. Статусы индикаторов разъясняются ниже:
LED1
LED2
LED3
LED4
Уровень заряда
Уровень заряда > 88%
75% < Уровень заряда ≤
88%
63% < Уровень заряда ≤
75%
50% < Уровень заряда ≤
63%
38% < Уровень заряда ≤
50%
Page 30

Руководство пользователя DJI FPV
30
© 2021 г. DJI Все права защищены.
25% < Уровень заряда ≤
38%
13% < Уровень заряда ≤
25%
0% < Уровень заряда ≤
13%
Включение/выключение
Нажмите кнопку питания один раз, затем нажмите еще раз и удерживайте ее в течение двух секунд,
чтобы включить или выключить аккумулятор. Светодиоды уровня заряда аккумулятора отображают
уровень заряда при включении питания квадрокоптера.
Уведомление о низкой температуре
1.
Емкость аккумулятора значительно снижается при полете в условиях низких температур от 14° до
41° F (от -10° до 5° C). Рекомендуется временно зависать квадрокоптер на месте для прогрева
аккумулятора. Перед взлетом убедитесь, что аккумулятор полностью заряжен.
2.
Не следует использовать аккумулятор при крайне низких температурах, ниже 14° F (−10 °C).
3.
При эксплуатации при низких температурах завершайте полет, как только на очках появится
предупреждение о низком уровне заряда аккумулятора.
4.
Для обеспечения оптимальной производительности аккумулятора держите его температуру выше
68° F (20° C).
5.
Уменьшенная емкость аккумулятора в условиях низкой температуры снижает характеристики
сопротивления скорости ветра квадрокоптера. Выполняйте полет с осторожностью.
6.
Летайте осторожно на большой высоте над уровнем моря.
В холодных условиях вставьте аккумулятор в аккумуляторный отсек и включите
квадрокоптер, чтобы прогреть аккумулятор перед взлетом.
Зарядка аккумулятора
Используйте приложенное зарядное устройство DJI для полной зарядки интеллектуального полетного
аккумулятора перед каждым полетом.
1.
Подключите адаптер питания переменного тока к сети переменного тока (100–240 В, 50/60 Гц).
2.
При выключенном питании подключите интеллектуальный полетный аккумулятор к адаптеру
питания переменного тока, используя кабель зарядки аккумулятора.
3.
Светодиоды уровня заряда аккумулятора будут отображать текущий уровень заряда во время
зарядки.
4.
Интеллектуальный полетный аккумулятор полностью заряжен, когда все светодиоды уровня
заряда аккумулятора не горят. Отсоедините зарядное устройство USB, когда аккумулятор
полностью заряжен.
Page 31

Руководство пользователя DJI FPV
31
© 2021 г. DJI Все права защищены.
Время зарядки приблизительно 50 минут.
Рекомендуется разрядить интеллектуальные полетные аккумуляторы до 30% или ниже. Это
можно сделать путем выполнения полета квадрокоптера на открытом воздухе, пока не
останется менее 30% заряда.
НЕ заряжайте интеллектуальный полетный аккумулятор сразу после полета, так как
температура может быть слишком высокой. Подождите, пока он остынет до комнатной
температуры, прежде чем снова заряжать.
Зарядное устройство прекращает зарядку аккумулятора, если температура элемента
питания не находится в рабочем диапазоне от 41° до 104° F (от 5° до 40° C). Идеальная
температура зарядки составляет от 71,6° до 82,4° F (от 22° до 28° C).
Концентратор зарядки аккумулятора (не входит в комплект) может заряжать до трех
аккумуляторов. Для получения дополнительной информации о концентраторе зарядки
аккумулятора посетите официальный сайт DJI.
Полностью заряжайте аккумулятор не реже одного раза в три месяца для поддержания
работоспособности аккумулятора.
DJI не несет ответственности за ущерб, причиненный сторонним зарядным устройством.
В таблице ниже показан уровень заряда аккумулятора во время зарядки.
LED1
LED2
LED3
LED4
Уровень заряда
0% < Уровень заряда ≤ 50%
50% < Уровень заряда ≤ 75%
75% < Уровень заряда < 100%
Полностью заряжен
Механизмы защиты аккумулятора
Светодиодный индикатор аккумулятора может отображать уведомления защиты, которые выдаются в
ответ на нештатные условия зарядки.
Механизмы защиты аккумулятора
LED1
LED2
LED3
LED4
Вариант мигания
Состояние
LED2 мигает дважды в секунду
Обнаружена перегрузка по току
LED2 мигает три раза в секунду
Обнаружено короткое замыкание
LED3 мигает дважды в секунду
Обнаружена чрезмерная зарядка
LED3 мигает три раза в секунду
Обнаружено перенапряжение
зарядного устройства
LED4 мигает дважды в секунду
Температура зарядки слишком
низкая
LED4 мигает три раза в секунду
Температура зарядки слишком
высока
Если активируются механизмы защиты аккумулятора, то для возобновления зарядки необходимо
отсоединить аккумулятор от зарядного устройства, а затем снова подключить его. Если температура
зарядки ненормальна, подождите, пока температура зарядки вернется в нормальное состояние, и
аккумулятор автоматически возобновит зарядку без необходимости снова отключать и подключать
Page 32

Руководство пользователя DJI FPV
32
© 2021 г. DJI Все права защищены.
2
Щел
1
1 3 2
зарядное устройство.
Установка/Извлечение аккумулятора
Вставьте аккумулятор в устройство перед использованием. Вставьте аккумулятор в аккумуляторный
отсек квадрокоптера. Убедитесь, что он надежно установлен и защелки аккумулятора
зафиксировались до подключения в разъем питания.
Отсоедините аккумулятор от разъема питания, нажмите на защелки аккумулятора по бокам
аккумулятора, чтобы извлечь его из отсека
НЕ отсоединяйте аккумулятор при включенном квадрокоптере.
Убедитесь, что аккумулятор установлен надежно.
Page 33

Руководство пользователя DJI FPV
33
© 2021 г. DJI Все права защищены.
Описание подвеса
Подвес DJI FPV обеспечивает стабилизацию камеры и позволяет снимать четкие фотографии и видео
даже при полете на высоких скоростях благодаря электронной стабилизации RockSteady. Диапазон
наклона составляет -50° to +58°. Используйте шкалу подвеса на пульте дистанционного управления
для управления наклоном камеры.
58°
0°
-50°
Режимы подвеса
Режим подвеса автоматически включится в соответствии с режимом полета.
Обычный/Спортивный режим: подвес в режиме стабилизации высоты. Угол наклона подвеса к
горизонтальной поверхности остается постоянным, что обеспечивает четкие снимки.
Ручной режим: подвес в режиме FPV. Угол наклона подвеса к телу устройства остается постоянным,
что обеспечивает вид полета «от первого лица».
Когда квадрокоптер включен, не нажимайте и не стучите по подвесу. Чтобы защитить подвес
во время взлета, выполняйте взлет с открытых, плоских поверхностей.
Прецизионные элементы в подвесе могут быть повреждены при столкновении или ударе,
что может привести к неправильному функционированию подвеса.
Избегайте попадания пыли или песка на подвес, особенно попадания в электромоторы
подвеса.
Срабатывание режима ошибки подвеса может произойти, если квадрокоптер был помещен
на неровную поверхность, или движению подвеса что-то мешает, или подвес испытывает
чрезмерную внешнюю силу, как к примеру при столкновении.
Не прикладывайте внешнюю силу к подвесу после включения подвеса. Не добавляйте
дополнительную нагрузку на подвес, так как это может привести к неправильной работе
подвеса или даже к необратимому повреждению электромотора.
Обязательно снимите защиту подвеса перед включением питания квадрокоптера. Кроме
того, не забудьте установить защиту подвеса, когда квадрокоптер не используется.
Полет в густом тумане или облаках может сделать подвес влажным, что приведет к
временному сбою. Подвес восстанавливает все функции, как только он высохнет.
Описание камеры
DJI FPV оснащен 1/2.3-дюймовой матрицей CMOS с разрешением до 12 миллионов пикселей
Диафрагма объектива составляет F2.8, диапазон фокусировки — от 0,6 м до бесконечности, а угол
Подвес и камера
Page 34

Руководство пользователя DJI FPV
34
© 2021 г. DJI Все права защищены.
обзора объектива может достигать 150°.
Камера позволяет снимать видео разрешением до 4K 60 кадров/с и фото разрешением 4К.
4K видео могут быть записаны только, если установлено высокое качество передачи.
Убедитесь, что температура и влажность подходят для камеры во время использования
и хранения. Используйте средство для чистки линз, чтобы избежать повреждений.
НЕ закрывайте вентиляционные отверстия на камере, так как выделяющееся тепло может
повредить устройство и причинить вред пользователю.
Хранение фотографий и видео
DJI FPV поддерживает использование карты microSD для хранения фотографий и видео. Требуется
карта microSD UHS-I класса скорости 3 или выше из-за высоких скоростей чтения и записи,
необходимых для видео данных с высоким разрешением. Дополнительная информация о
рекомендованных картах microSD приведена в пункте Технические характеристики.
НЕ извлекайте карту microSD или интеллектуальный полетный аккумулятор из
квадрокоптера, когда устройство включено. В противном случае карта microSD может быть
повреждена.
Для обеспечения стабильности работы системы видеокамер отдельные видеозаписи
ограничиваются 30 минутами, после чего запись автоматически прекратится.
Чтобы убедиться в том, что установлены верные конфигурации, проверьте настройки камеры
перед использованием.
Перед съемкой важных фотографий или видеороликов сделайте несколько снимков, чтобы
проверить правильность работы камеры.
Фотографии или видео нельзя скопировать с карты microSD в квадрокоптере DJI Fly, если
устройство выключено.
Убедитесь, что питание квадрокоптера выключено правильно. В противном случае
параметры камеры не будут сохранены, а любые записанные видео могут пострадать. DJI
не несет ответственности за любой сбой изображения или видео, которые должны быть
записаны или были записаны способом, который не является машиночитаемым.
Page 35

Руководство пользователя DJI FPV
35
© 2021 г. DJI Все права защищены.
Очки
С помощью очков DJI FPV V2 пользователю доступен вид от первого лица в поле обзора камеры для
аэросъёмки с передачей видео и аудио в режиме реального времени. Кроме того, очки можно
использовать для проигрывания записанных видео, а также для установки параметров передачи
данных, управления и камеры.
Очки DJI FPV V2 также можно использовать с летательным аппаратом DJI FPV.
Дополнительная информация приведена в системном руководстве пользователя DJI Digital
FPV по ссылке https://www.dji.com/fpv/info#downloads.
Питание
Используйте кабель питания очков в комплекте (USB-C), чтобы подключиться через разъем питания
очков к аккумулятору.
Нажмите кнопку питания один раз, чтобы проверить уровень заряда АБ.
Нажмите кнопку один раз, затем зажмите ее, чтобы включить или выключить питание очков.
Зарядите аккумулятор очков, если уровень заряда АБ низок. Чтобы полностью зарядить аккумулятор,
потребуется примерно 2 часа и 30 минут.
Если вам нужны другие аккумуляторы, используйте внешний источник питания с входным
Page 36

Руководство пользователя DJI FPV
36
© 2021 г. DJI Все права защищены.
Главный экран
напряжением 11,1-25,2 В. Кабель питания очков DJI FPV (XT60) (не входит в комплект)
может быть использован для зарядки очков от внешнего источника питания. Для
получения дополнительной информации о кабеле питания очков DJI FPV (XT60) посетите
официальный онлайн-магазин DJI.
Кнопка 5D
Переключите кнопку для прокрутки меню. Нажмите кнопку для подтверждения.
Нажмите кнопку на главном экране, чтобы войти в меню. Переключите влево или вправо,
чтобы отрегулировать яркость экрана. Переключите вверх или вниз, чтобы отрегулировать
уровень громкости.
Кнопка Затвор/Запись
Нажмите один раз, чтобы сделать фотографию, начать или остановить запись видео.
Нажмите и удерживайте, чтобы переключиться между режимами фото и видео.
Кнопка Назад
Нажмите для возврата в предыдущее меню или для выхода из действующего режима.
Кнопки регулировки канала и дисплей канала доступны только при использовании с
летательным аппаратом DJI FPV.
1. Состояние обнаружения преград
Эксплуатация
Page 37

Руководство пользователя DJI FPV
37
© 2021 г. DJI Все права защищены.
Определяет расстояние от квадрокоптера до преград, а также общее направление
преград. Красные, оранжевые и серые полосы указывают на относительное расстояние в
диапазоне от «близко» до «далеко». Красные полосы отображаются, когда преграды находятся
близко к квадрокоптеру, оранжевые полосы отображаются, когда преграды находятся в
диапазоне обнаружения. Серые полосы указывают на отсутствие преград в диапазоне
обнаружения.
2. Информация о карте microSD
Отображает, установлена ли карта microSD в квадрокоптер или очки, а также указывает на объем
свободного пространства на карте. При съемке отображается мигающий значок.
3. Ползунок подвеса
Отображает угол наклона подвеса при переключении шкалы подвеса.
4. Подсказки
Отображают информацию о переключении режимов, низком уровне заряда АБ и прочие
предупреждения.
5. Уровень заряда АБ очков
Отображает уровень заряда АБ очков. При низком уровне заряда АБ очки издают сигнал. При
использовании стороннего аккумулятора также отображается напряжение.
6. Состояние GPS
Отображает текущую мощность сигнала GPS.
7. Мощность сигнала пульта дистанционного управления и нисходящего канала видео
Отображает мощность сигнала пульта дистанционного управления между квадрокоптером и
пультом дистанционного управления и мощность сигнала нисходящего канала видео между
квадрокоптером и очками.
8. Состояние системы переднего обзора
Отображает состояние системы переднего обзора. Значок становится белым, когда система
переднего обзора работает нормально. Красный значок указывает на то, что система переднего
обзора не включена или работает неправильно, и квадрокоптер не может автоматически
замедлиться при столкновении с преградами.
9. Оставшаяся продолжительность полета
Отображает оставшуюся продолжительность полета квадрокоптера после пуска электромоторов.
10. Уровень заряда АБ квадрокоптера
Отображает текущий уровень заряда интеллектуального полетного аккумулятора квадрокоптера.
11. Расстояние до земли
Отображает текущую информацию о высоте полета квадрокоптера относительно земли, когда
устройство находится менее чем в 10 м над землей.
12. Телеметрия полета
Расстояние 1000 м, Высота 100 м, 9 м/с, 6 м/с: отображает расстояние между квадрокоптером и
исходной точкой, высоту над исходной точкой, горизонтальную скорость квадрокоптера и
вертикальную скорость квадрокоптера.
13. Режимы полета
Отображает текущий режим полета.
14. Исходная точка
Отображает местоположение исходной точки.
Page 38

Руководство пользователя DJI FPV
38
© 2021 г. DJI Все права защищены.
Если очки не используются в течение длительного времени или отключены от
квадрокоптера, отобразится экранная заставка. Нажмите любую кнопку на очках или
заново подключите их к квадрокоптеру, чтобы возобновить работу дисплея передачи
видео.
Если устройства не используются в течение длительного времени, поиск сигнала GPS
может занять дольше обычного. Если у сигнала нет препятствий, поиск сигнала GPS
занимает примерно 20 секунд при включении и выключении за короткий период времени.
Если вести запись одновременно с помощью квадрокоптера и очков, информация о картах
microSD и квадрокоптера, и очков будет отображаться на главном экране. Если вести
запись только с одного устройства, квадрокоптера или очков, будет отображаться только
информация о карте microSD соответствующего устройства.
Page 39

Руководство пользователя DJI FPV
39
© 2021 г. DJI Все права защищены.
Нажмите кнопку 5D на очках, чтобы зайти в панель меню.
Состояние
Отображает подробную информацию о предупреждающих подсказках о текущем состоянии. При
состоянии IMU или неполадках компаса необходима калибровка.
Альбом
Отображает фотографии или видео, хранимые на карте microSD очков. Выберите файл и нажмите
подтвердить, чтобы начать предпросмотр.
Можно предварительно просмотреть фотографии и видео, записанные квадрокоптером.
Установите карту microSD квадрокоптера в слот для карты microSD очков.
Нажмите кнопку 5D во время воспроизведения видео, чтобы поставить паузу или продолжить
воспроизведение. Переключите кнопку 5D влево или вправо, чтобы переместиться по
временной шкале видео. Переключите кнопку 5D вверх или вниз, чтобы настроить уровень
Панель меню
Page 40

Руководство пользователя DJI FPV
40
© 2021 г. DJI Все права защищены.
громкости.
Передача данных
В настройках пилота можно настроить передачу видео текущего устройства. Ближайшие устройства
передачи видео и мощность их сигнала можно просмотреть в режиме зрителей. Выберите канал, чтобы
просмотреть обзор камеры.
1
2
3
4
5
6
1. Режим передачи
Включите или выключите режим передачи. Номер устройства отображается при включенном
режиме передачи, чтобы другие устройства могли обнаружить его и войти на канал для
просмотра обзора камеры.
2. Формат изображения
Формат изображения экрана передачи видео можно отрегулировать.
3. Режим фокусировки
Установите режим фокусировки: вкл, выкл или авто. Если режим фокусировки включен, центр
экрана будет четче, а края размыты.
4. Режим канала
Можно установить ручной или автоматический режим канала. Рекомендуется устанавливать
автоматический режим, чтобы передача видео разумно переключалась между диапазонами
частот 2,4 и 5,8 ГГц и выбирала лучший сигнал.
5. Частота
Вы можете выбрать диапазон частот 2,4 или 5,8 ГГц в ручном режиме канала.
6. Пропускная способность
Установите пропускную способность передачи видео. Число доступных каналов зависит от
пропускной способности. Можно вручную выбрать канал с лучшей мощностью сигнала.
Чем выше пропускная способность, тем больше радиочастотных ресурсов доступно, что
обеспечивает высокую скорость передачи видео и четкость изображения. Однако вместе с тем
повышается шанс беспроводных помех и сокращается число поддерживаемого оборудования.
Чтобы избежать помех во время многопользовательского соревнования, рекомендуется вручную
Page 41

Руководство пользователя DJI FPV
41
© 2021 г. DJI Все права защищены.
выбирать фиксированную пропускную способность и канал.
Настройка
Безопасность
Установите такие конфигурации безопасности, как макс высота полета, макс дальность полета и
высота RTH. Пользователи также могут обновлять исходную точку, включать или выключать
замедление при преградах, а также просматривать и калибровать состояние IMU и компаса.
Функция «найти мой беспилотник» помогает найти расположение квадрокоптера на земле с
использованием видео, записанного очками.
Продвинутые настройки безопасности включают действия при потере сигнала квадрокоптера,
состояние вспомогательного нижнего светодиода, включение или выключение AirSense и аварийный
останов пропеллера. Можно установить, чтобы квадрокоптер зависал, приземлялся или использовал
RTH в случае потери сигнала пульта дистанционного управления. Если включен аварийный останов
пропеллера, электромоторы во время полета можно остановить только командой комбинации стиков
(CSC) при таких аварийных ситуациях, как столкновение, останов электромотора, крен квадрокоптера
в воздухе или выход квадрокоптера из-под управления (быстрый подъем или спуск). Останов
электромоторов в середине полета приведет к крушению квадрокоптера.
Управление
Установите такие параметры управления квадрокоптера, как цвет и тип освещения светодиодов
передней лицевой стороны и консоли рамы, скорость тангажа подвеса или скоординированный
поворот (спортивный режим). Пользователи также могут откалибровать подвес.
Page 42

Руководство пользователя DJI FPV
42
© 2021 г. DJI Все права защищены.
Функции некоторых кнопок пульта дистанционного управления можно настроить в пункте Пульт
дистанционного управления. Туда входят кнопка C1, переключатель C2 и пользовательский режим
переключателя режима полета. В ручном режиме можно отрегулировать режим стика и
показательную функцию. Пользователи также могут откалибровать пульт дистанционного
управления.
Камера
Можно отрегулировать такие параметры камеры, как ISO, затвор, EV, насыщенность и WB. Кроме
того, можно установить ручной или автоматический режим камеры. Затвор и ISO можно настроить в
ручном режиме, в то время как EV устанавливается только в автоматическом режиме.
Пользователи могут устанавливать качество передачи данных, качество видео, формат видео, линии
сетки, включать или выключать центральную точку экрана, а также формат карты microSD. Обратите
внимание, что восстановить данные после форматирования нельзя. Действуйте с осторожностью.
В Продвинутых настройках камеры пользователи могут выбрать записывающее устройство, формат
кодирования видео, цвет, анти-мерцание, а также включать или выключать запись аудио
квадрокоптером, коррекцию искажений, коррекцию крена изображений и EIS (электронную
стабилизацию изображений).
Page 43

Руководство пользователя DJI FPV
43
© 2021 г. DJI Все права защищены.
Выберите Сбросить параметры камеры (Reset Camera Parameters), чтобы восстановить все настройки
камеры по умолчанию.
Если число кадров качества видео равно 50/60fps, аудио и видео хранятся вместе в одном
файле. Если число кадров качества видео равно 100/120fps, аудио хранится отдельно в виде
аудиофайла. Видео будет замедлено в четыре раза, в то время как аудио останется
неизменным.
Экран
Отрегулируйте яркость экрана и приближение, а также выберете, отобразить или скрыть исходную
точку.
Информация
Вы можете узнать такую информацию об устройстве, как серийный номер, встроенное ПО очков и
подключенных устройств.
Переключитесь на цифровую систему DJI FPV в меню, чтобы использовать летательный аппарат DJI
FPV. Включите очки еще раз после переключения.
Выберите Сбросить все, чтобы сбросить параметры очков и подключенных устройств и установить
Page 44

Руководство пользователя DJI FPV
44
© 2021 г. DJI Все права защищены.
настройки по умолчанию.
Page 45

45
© 2021 г. DJI Все права защищены.
Пульт дистанционного управления
В пульт дистанционного управления DJI FPV 2 встроена функция передачи данных DJI O3,
обеспечивающая максимальную дальность передачи данных 6 миль (10 км). Управление
квадрокоптером и камерой не требует усилий благодаря кнопкам, а за счет съемных стиков
управления пульт дистанционного управления легко хранить.
Встроенный аккумулятор обладает емкостью 5200 мА-ч и максимальным временем работы 9 часов.
Эксплуатация
Включение/выключение
Нажмите кнопку питания один раз, чтобы проверить уровень заряда АБ. Если уровень заряда АБ
слишком низкий, зарядите АБ перед использованием. Нажмите один раз, затем еще раз и удерживайте,
чтобы включить или выключить пульт дистанционного управления.
Зарядка АБ
Используйте кабель USB-C, чтобы подключить пульт дистанционного управления к сетевому адаптеру
переменного тока через порт USB-C. Чтобы полностью зарядить пульт дистанционного управления,
потребуется примерно 2,5 часа.
Управление подвесом и камерой
1.
Кнопка Затвор/Запись: нажмите один раз, чтобы сделать фотографию, начать или остановить
запись видео. Нажмите и удерживайте, чтобы переключиться между режимами фото и видео.
2.
Шкала подвеса: используйте, чтобы управлять наклоном подвеса.
Шкала подвеса
Кнопка Затвор/Запись
Page 46

Руководство пользователя DJI FPV
46
© 2021 г. DJI Все права защищены.
Управление квадрокоптером
С помощью стиков управления можно управлять ориентацией (панорамирование), движением вперед
или назад (тангаж), высотой (газ) и движением влево и вправо (крен) квадрокоптера. Режим стиков
управления определяет функцию каждого движения стика управления.
Режим
1
Режим
2
Левый
стик
Левый
стик
Поворот
влево
Вперед
Назад
Поворот
вправо
ВВЕРХ
Вниз
Правый
стик
Правый
стик
ВВЕРХ
Вниз
Вперед
Назад
Вправо
Поворот влево Поворот
вправо
Вправо
Режим
3
Левый
стик
Вперед
Назад
Вправ
о
Правый
стик
Поворот
влево
ВВЕ
РХ
Вниз
Поворот вправо
Существует три запрограммированных режима: Режим 1, Режим 2 и Режим 3. Режим 2 выбран по
умолчанию. Пользователи могут создавать пользовательские режимы на очках. На рисунке ниже
Влево
Влево
Влево
Page 47

Руководство пользователя DJI FPV
47
© 2021 г. DJI Все права защищены.
показано, как использовать каждый режим стика управления, используя Режим 2 в качестве примера.
Нейтральная/центральная точка стика: Стики управления находятся в центре.
Передвижение стиков управления: Переместите стик управления в сторону от центра или
переместите стик газа в сторону от низшей точки при использовании ручного режима.
Пульт
дистанционного
управления
(Режим 2)
Квадрокоптер
( указывает
направление носовой
части)
Примечания
Стик газа: перемещение левого стика вверх или
вниз изменяет высоту квадрокоптера.
Нажмите на стик вверх, чтобы подняться и вниз,
чтобы спуститься. Нажимайте на стик аккуратно,
чтобы предотвратить внезапные и неожиданные
изменения высоты.
Обычный/спортивный режим:
Квадрокоптер висит на месте, если стик
находится в центре. Используйте левый стик,
чтобы взлететь, когда электромоторы будут на
холостом ходу. Чем дальше переместить стик
от центра, тем быстрее квадрокоптер
меняет высоту.
Ручной режим:
У стика газа нет центра. Перед полетом
отрегулируйте стик газа, чтобы он не попал
снова в центр.
Стик рыскания: переместите левый стик влево
или вправо, чтобы управлять ориентацией
квадрокоптера.
Нажмите стик влево, чтобы повернуть
квадрокоптер против часовой стрелки и вправо,
чтобы повернуть квадрокоптер по часовой
стрелке. Квадрокоптер висит на месте, если
стик находится в центре.
Чем дальше стик отодвигается от центра, тем
быстрее квадрокоптер будет вращаться.
Стик тангажа: перемещение правого стика вверх
или вниз изменяет тангаж квадрокоптера.
Нажмите на стик вверх, чтобы лететь вперед, и
назад, чтобы лететь назад. Квадрокоптер висит
на месте, если стик находится в центре.
Чем дальше стик отодвигается от центра, тем
быстрее квадрокоптер будет двигаться.
Page 48

Руководство пользователя DJI FPV
48
© 2021 г. DJI Все права защищены.
Положение Режим полета
Стик крена: перемещение правого стика влево
или вправо изменяет крен квадрокоптера.
Нажмите на стик влево, чтобы лететь влево и
вправо, чтобы лететь вправо. Квадрокоптер
висит на месте, если стик находится в центре.
Чем дальше стик отодвигается от центра, тем
быстрее квадрокоптер будет двигаться.
Переключатель режима полета
Используйте переключатель, чтобы выбрать желаемый режим полета.
M
Ручной режим
N
Обычный режим
Ручной режим отключен по умолчанию. Перед переходом на ручной режим убедитесь, что
переключатель на очках установлен на ручной режим. Квадрокоптер останется в обычном или
спортивном режиме, если переключатель на очках не установлен на ручной режим. Перейдите в
Настройки, Управление, Пульт дистанционного управления, Персонализация кнопок и установите
пользовательский режим на ручной режим.
Перед использованием ручного режима рекомендуется затянуть винт F2 на задней части стика газа,
чтобы стик не переместился в центр, а также отрегулировать винт F1, чтобы убедиться в
достаточном сопротивлении стика.
При использовании ручного режима квадрокоптер не использует функции помощи в
полете, например, функцию автоматической стабилизации. Перед использованием ручного
режима потренируйтесь с помощью приложения DJI Virtual Flight, чтобы убедиться, что ваш
полет в ручном режиме будет безопасным.
Регулируйте стик газа только до взлета квадрокоптера. НЕ ПЕРЕМЕЩАЙТЕ стик во время
полета.
Кнопка Приостановить полет/RTH
При использовании спортивного режима нажмите один раз, чтобы включить или выключить
управление скоростью. Когда управление скоростью включено, квадрокоптер сохраняет текущую
скорость полета и двигается вперед.
При использовании ручного режима нажмите дважды, чтобы запустить или остановить электромотор.
При использовании обычного или спортивного режима нажмите один раз, чтобы отменить RTH по
низкому заряду аккумулятора, когда на очках появляется обратный отсчет.
Старт
Остановка
Управление скоростью доступно только в спортивном режиме.
S Спортивный режим
Page 49

Руководство пользователя DJI FPV
49
© 2021 г. DJI Все права защищены.
Когда управление скоростью включено, квадрокоптер сохраняет текущую
горизонтальную скорость полета по направлению вперед. Отображаемая на очках
горизонтальная скорость меняется в соответствии с перемещением стиков управления
или при полете квадрокоптера в ветренной рабочей среде.
Кнопка Приостановить полет/RTH
Нажмите один раз, чтобы квадрокоптер затормозил и завис на месте. Если квадрокоптер выполняет
RTH или автоматическую посадку, нажмите один раз, чтобы выйти из режима RTH до торможения.
Нажмите на кнопку в ручном режиме квадрокоптера, чтобы устройство затормозило и зависло на
месте. Высота квадрокоптера вернется на прежний уровень, а режим полета автоматически
переключится на обычный режим.
Нажмите и удерживайте кнопку RTH, пока пульт дистанционного управления не издаст сигнал,
обозначающий старт RTH. Нажмите кнопку еще раз, чтобы отменить RTH и восстановить управление
квадрокоптером. Больше информации о RTH приведено в пункте Возврат домой.
Настраиваемая кнопка
Функции персонализируемых кнопок можно установить на очках в настройках пульта дистанционного
управления, в том числе и кнопки C1, переключателя C2 и пользовательского режима.
Кнопку C1 и переключатель C2 можно использовать как горячие клавиши для таких функций, как
подъем, снижение, центрирование подвеса, включение или выключение сигнала ESC или
вспомогательного нижнего освещения.
Пользовательский режим можно установить на ручной или спортивный режим.
Пользовательский режим
Переключатель C2
Предупреждение пульта дистанционного управления
Пульт дистанционного управления издает предупреждающий сигнал во время RTH. Предупреждение
нельзя отключить. Пульт дистанционного управления издает предупреждающий сигнал, когда
уровень заряда АБ составляет от 6% до 10%. Предупреждение низкого уровня заряда АБ можно
отключить, нажав на кнопку питания. Когда уровень заряда АБ менее 5%, издается предупреждение
критического уровня заряда АБ, которое нельзя отключить.
Кнопка C1
Page 50

Руководство пользователя DJI FPV
50
© 2021 г. DJI Все права защищены.
Оптимальная зона передачи
Сигнал между квадрокоптером и пультом дистанционного управления является наиболее надежным,
когда антенны расположены по отношению к квадрокоптеру, как показано ниже.
Слабый Сильный
Оптимальная зона передачи
НЕ используйте другие беспроводные устройства тех же диапазонов частоты, чтобы избежать
помех пульта дистанционного управления.
Регулировка стиков
При использовании ручного режима отрегулируйте стик газа в соответствии с вашим режимом стика
для вашего удобства.
1. Переверните пульт дистанционного управления и поднимите заднюю прорезиненную вставку за
внутреннюю часть выемки.
Выемка
2. Винты под вставкой могут отрегулировать соответствующие стики на передней лицевой стороне
пульта дистанционного управления. Используйте шестигранный ключ H1.5, чтобы настроить
Page 51

Руководство пользователя DJI FPV
51
© 2021 г. DJI Все права защищены.
1 2 3 4
сопротивление стика и центрировать стик в вертикальном положении. Сопротивление
управлению растет, есть затянуть винт F1, и снижается, когда винт F1 ослаблен. Центрирование
отключено, если винт F2 затянут, и включено, если ослабить винт F2.
Винт регулировки
сопротивления правого стика F1
(вертикально)
Винт регулировки сопротивления
левого стика F1 (вертикально)
Винт регулировки центра
правого стика F2 (вертикально)
Винт регулировки центра левого
стика F2 (вертикально)
3. Прикрепите прорезиненную вставку обратно, как только завершите регулировку.
1
2 3 4
Page 52

52
© 2021 г. DJI Все права защищены.
Приложение DJI Fly
Подключите очки к мобильному устройству, запустите DJI Fly и войдите на главный экран. Чтобы
поделиться обзором камеры FPV и отобразить передачу видео, нажмите НАЧАТЬ ПОЛЕТ.
Точки полета
Просматривайте или делитесь ближайшими местами для полетов и съемок, узнайте больше о
геозонах, а также предварительно просматривайте аэрофотоснимки разных мест, сделанные другими
пользователями.
Академия
Нажмите на значок в правом верхнем углу, чтобы войти в Академию и ознакомиться с руководствами
для продуктов, подсказками для полета, безопасности полета и руководствами.
Альбом
Просматривайте фотографии и видео с квадрокоптера и мобильного устройства. Пункт Создать (Create)
содержит Шаблоны (Templates) и Pro. Шаблоны автоматически обрабатывают импортированный
отснятый материал. Pro позволяет пользователям редактировать отснятый материал вручную.
SkyPixel
Войдите в SkyPixel для просмотра видео и фотографий, которыми делятся пользователи.
Профиль
Просматривайте информацию об учетной записи, записи полетов, форум DJI, интернет-магазин,
функцию «найти мой беспилотник» (Find My Drone) и другие настройки.
Для некоторых стран и регионов требуется предоставление информации о
местоположении квадрокоптера в реальном времени во время полета. Поэтому необходимо
подключать очки к мобильному устройству и запускать DJI Fly. Убедитесь, что вы
ознакомились с местными правилами и соблюдайте их.
Page 53

Руководство пользователя DJI FPV
53
© 2021 г. DJI Все права защищены.
Зарядите свое мобильное устройство полностью перед запуском DJI Fly.
Мобильные сотовые данные необходимы при использовании DJI Fly. Обратитесь к оператору
беспроводной связи для получения тарифов на передачу данных.
НЕ принимайте телефонные звонки и не используйте функции текстовых сообщений во
время полета, если вы используете мобильный телефон в качестве устройства
отображения.
Внимательно прочитайте все советы по технике безопасности, предупреждающие
сообщения и заявления об отказе от ответственности. Ознакомьтесь с соответствующими
правилами в вашем регионе. Вы несете полную ответственность за знание всех
соответствующих правил и выполнение полетов в соответствии с ними.
Используйте учебник в приложении, чтобы практиковать свои навыки полета, если вы
никогда не управляли квадрокоптером, или если у вас нет достаточного опыта, чтобы
управлять квадрокоптером с уверенностью.
Приложение предназначено, чтобы помочь при выполнении вами операций.
Руководствуйтесь здравым смыслом, НЕ полагайтесь на приложение для управления
квадрокоптером. Использование приложения регулируется условиями использования DJI
Fly и политикой конфиденциальности DJI. Внимательно прочитайте их в приложении.
Page 54

54
© 2021 г. DJI Все права защищены.
Режим полета
После завершения предполетной подготовки рекомендуется оттачивать свои летные навыки и
практиковаться в безопасном полете. Убедитесь, что все полеты выполняются на открытой
местности. Высота полета ограничивается 500 м. НЕ превышайте эту высоту. Строго соблюдайте
местное законодательство и правила во время полета. Убедитесь, что вы прочитали Отказ от
ответственности и правила техники безопасности DJI FPV, чтобы в полной мере понимать правила
безопасности перед полетом.
Требования к окружающей среде полета
1.
НЕ используйте квадрокоптер в сложных погодных условиях, включая скорость ветра более 13,8
м/с, снег, дождь и туман.
2.
Выполняйте полеты только на открытой местности. Высотные сооружения и крупные
металлические конструкции могут повлиять на точность бортового компаса и системы GPS.
Рекомендуется держать квадрокоптер на расстоянии как минимум 5 м от строений.
3.
Избегайте препятствий, скоплений людей, высоковольтных линий электропередач, деревьев и
водоемов. Рекомендуется держать квадрокоптер на расстоянии как минимум 3 м над водой.
4.
Сводите к минимуму помехи, избегая участков с высоким уровнем электромагнетизма, таких как
места вблизи линий электропередач, базовых станций, электрических подстанций и
радиовещательных вышек.
5.
Характеристики квадрокоптера и аккумулятора зависят от таких факторов окружающей среды,
как плотность и температура воздуха. Будьте осторожны во время полетов в 19,685 футах (6,000
м) или выше над уровнем моря. Иначе характеристики квадрокоптера и аккумулятора могут
пострадать.
6.
Квадрокоптер не может использовать GPS в приполярных регионах. При выполнении полета в
таких местах используйте система обзора сверху вниз.
7.
Выполняйте полеты с осторожностью, если взлетаете с движущихся поверхностей, например, с
лодки или транспортного средства в движении.
Ограничения при полете и геозоны
Операторы беспилотных летательных аппаратов (БПЛА) должны соблюдать правила
саморегулируемых организаций, таких как Международная организация гражданской авиации,
Федеральное управление гражданской авиации и местные авиационные власти. По соображениям
безопасности, ограничения на полеты включены по умолчанию, чтобы помочь пользователям
управлять этим квадрокоптером безопасно и законно. Пользователи могут устанавливать
ограничения полета по высоте и расстоянию.
Ограничения высоты, расстояния и геозоны функционируют одновременно для управления
безопасностью полетов при наличии GPS. Если GPS недоступен, может быть ограничена только
высота.
Ограничения по высоте полета и расстоянию
Пользователи могут изменять на очках ограничения максимальной высоты и радиуса. По завершении
полет квадрокоптера ограничивается цилиндрической областью, определенной этими настройками. В
таблице ниже указана подробная информация об ограничениях.
Page 55

Руководство пользователя DJI FPV
55
© 2021 г. DJI Все права защищены.
Макс высота полета
Макс радиус
Исходная точка
Высота
квадрокоптера при
включении
При наличии GPS
Ограничения полета
Очки
Индикатор состояния
квадрокоптера
Макс
высота
Высота полета квадрокоптера
не может превышать заданного
значения
Предупреждение: Достигнут
предел высоты
Мигает зеленым и
красным
поочередно
Макс
радиус
Расстояние полета должно
быть в пределах
максимального радиуса
Предупреждение: Достигнут
предел расстояния
При слабом сигнале GPS
Ограничения полета
Очки
Индикатор состояния
квадрокоптера
Макс
высота
Высота ограничена до 98
футов (30 м), когда сигнал
GPS слаб.
Предупреждение: достигнут
предел высоты.
Мигает красным и
зеленым
поочередно
Макс
радиус
Ограничения на радиус сняты, а предупреждающие подсказки на очках нельзя
получить.
Если сигнал GPS станет слабым во время полета, ограничений высоты не будет, пока
отображение сигнала GPS будет белым или желтым при включенном квадрокоптере.
Если квадрокоптер находится в геозоне, а сигнал GPS слабый или он отсутствует, индикатор
состояния квадрокоптера будет светиться красным цветом в течение пяти секунд каждые
двенадцать секунд.
Квадрокоптером по-прежнему можно управлять по достижении предела высоты или радиуса,
но устройство не может лететь дальше.
По соображениям безопасности не летайте близко к аэропортам, автомагистралям,
железнодорожным станциям, железнодорожным путям, городским центрам или другим
ответственным участкам. Летайте на Квадрокоптере только в пределах зоны видимости.
Геозоны
Все геозоны перечислены на официальном сайте DJI по адресу: https://www.dji.com/flysafe. Геозоны
делятся на различные категории и включают в себя такие места, как аэропорты, летные поля, где
пилотируемые самолеты работают на малых высотах, государственные границы и ответственные
участки, такие как электростанции.
Page 56

Руководство пользователя DJI FPV
56
© 2021 г. DJI Все права защищены.
На очках появится подсказка, если квадрокоптер будет приближаться к геозоне, где устройству
запрещено летать.
Перечень проверок перед полетом
1. Убедитесь, что аккумулятор очков, пульт дистанционного управления, интеллектуальный полетный
аккумулятор и мобильное устройство полностью заряжены.
2. Убедитесь, что пропеллеры установлены правильно и надежно.
3. Убедитесь, что интеллектуальный полетный аккумулятор и аккумулятор очков надежно
установлены надлежащим образом.
4. Убедитесь, что подвес и камера работают нормально.
5. Убедитесь, что электромоторам ничто не препятствует, и они работают нормально.
6. Убедитесь, что очки работают нормально и отображают передачу видео.
7. Убедитесь, что защита подвеса убрана, а объектив камеры и сенсор системы обзора чистые.
8. Убедитесь, что антенны очков надежно установлены, а антенна пульта дистанционного управления
поднята.
9. Используйте только оригинальные детали DJI или детали, сертифицированные DJI.
Неутвержденные детали или детали от изготовителей, не сертифицированных DJI, могут создать
неисправности системы и создать угрозу безопасности.
Пуск/остановка электромоторов
Пуск электромоторов
Обычный/спортивный режим
Для запуска электромоторов используется CSC. Для пуска электромоторов переместите оба стика во
внутренний или наружный нижний угол. Как только электромоторы начнут вращаться, отпустите оба
стика одновременно.
ИЛИ
Ручной режим
Убедитесь, что стик газа находится в самом низком положении и нажмите кнопку старт/стоп дважды,
чтобы запустить электромоторы.
Старт
Остановка
+
Стик газа
Page 57

Руководство пользователя DJI FPV
57
© 2021 г. DJI Все права защищены.
Останов электромоторов
Обычный/спортивный режим
Есть два способа остановить электромоторы.
Способ 1: Когда квадрокоптер приземлился, нажмите и удерживайте стик газа вниз. Электромоторы
остановятся через три секунды.
Способ 2: Когда квадрокоптер приземлился, нажмите стик газа вниз и выполните ту же CSC, что
использовалась для пуска электромоторов. Отпустите оба стика, как только электромоторы
остановились.
ИЛИ
Способ 1 Способ 2
Ручной режим:
Нажмите кнопку старт/стоп дважды, чтобы остановить электромоторы, когда квадрокоптер
приземлился.
Старт
Останов
Чтобы полет был безопасным, рекомендуется переключиться на обычный режим перед
посадкой.
Останов электромоторов в середине полета
При использовании обычного или спортивного режима электромоторы можно остановить в середине
полета только с помощью CSC в аварийной ситуации, например, если электромотор встал, произошло
столкновение, квадрокоптер дал крен в воздухе, выходит из-под контроля или очень быстро
поднимается или опускается. Настройки по умолчанию можно изменить на очках.
При использовании ручного режима нажмите кнопку старт/стоп дважды, чтобы в любой момент
остановить электромоторы.
Останов электромоторов в середине полета приведет к крушению квадрокоптера.
Page 58

Руководство пользователя DJI FPV
58
© 2021 г. DJI Все права защищены.
Летные испытания
Процедуры взлета/посадки
1.
Поместите квадрокоптер на открытой плоской площадке с индикатором состояния квадрокоптера,
обращенным к вам.
2.
Включите питание очков, пульта дистанционного управления и квадрокоптера.
3.
Подождите, пока индикатор состояния квадрокоптера не начнет медленно мигать зеленым,
указывая на то, что исходная точка была записана, а затем наденьте очки.
4.
Запустите электромоторы.
5.
Аккуратно нажмите стик газа вверх, чтобы взлететь.
6.
Потяните стик газа вниз, чтобы посадить квадрокоптер.
7.
Остановите электромоторы после посадки.
8.
Выключите питание квадрокоптера, очков и пульта дистанционного управления.
Видео предложения и советы
1.
Перечень проверок перед полетом предназначен, чтобы помочь вам безопасно выполнять полеты
и гарантировать, что вы можете записывать видео во время полета. Пройдите полный перечень
проверок перед полетом список перед каждым полетом.
2.
Режимы работы подвеса
3.
Рекомендуется использовать обычный режим для снятия фотографий и записи видео.
4.
Выполнять полеты в плохих погодных условиях, таких как дождь или ветер, ЗАПРЕЩЕНО.
5.
Выберите настройки камеры, которые наилучшим образом соответствуют вашим потребностям.
6.
Выполните летные испытания, чтобы установить маршруты полета и просмотреть места съемки.
7.
Аккуратно нажимайте на стики управления, чтобы поддерживать плавное и устойчивое движение
квадрокоптера.
8.
При использовании ручного режима летайте в открытой, широкой и малозаселенной рабочей среде,
чтобы обеспечить безопасность полета.
Важно понимать основные правила полета для вашей собственной безопасности и
безопасности окружающих.
ОБЯЗАТЕЛЬНО прочитайте отказ от ответственности и правила техники безопасности.
Техническое обслуживание
Очки
Очистка
Перед очисткой убедитесь, чтобы очки отключены от розетки электропитания, а также отключены
все кабели.
Очистите поверхность очков мягкой сухой чистой тканью. Для очистки вспененной подкладки
намочите ткань чистой водой и протрите вспененную подкладку.
Замена вспененной подкладки
Вспененная подкладка прикреплена к очкам с помощью текстильной застежки Velcro. При замене
вспененной подкладки постепенно отделите ее, начиная с правой или левой стороны. Надежно
прикрепите новую вспененную подкладку по контуру очков и прижмите ее к очкам.
Page 59

Руководство пользователя DJI FPV
59
© 2021 г. DJI Все права защищены.
Техническое обслуживание очков
Используйте салфетку для уборки, чтобы аккуратно протереть линзы.
1. Намочите салфетку для уборки спиртом или очистителем для линз.
2. Протирайте круговыми движениями от центра к периферии линз.
НЕ чистите вспененную подкладку спиртом.
Линзы хрупки. Чистите их с осторожностью. НЕ поцарапайте линзы, так как это может
испортить ваши впечатления от просмотра.
Храните очки в сухом помещении при комнатной температуре, чтобы избежать повреждений
от высоких температур и влажности.
Page 60

Руководство пользователя DJI FPV
60
© 2021 г. DJI Все права защищены.
Квадрокоптер
Следуйте указаниям ниже при замене компонентов квадрокоптера, например, верхнего корпуса,
подвеса, камеры или шасси.
Подвес и камера (включая верхний корпус)
Снятие
1. Открутите четыре винта M1.6 на передней лицевой стороне и снимите защитный корпус.
2. Открутите четыре винта M2 с обеих сторон.
Page 61

Руководство пользователя DJI FPV
61
© 2021 г. DJI Все права защищены.
3. Приподнимите угол верхнего корпуса с нижней стороны квадрокоптера.
4. Лицом к квадрокоптеру возьмитесь за консоль передней рамы и нажмите на нее в показанном
направлении, чтобы снять верхний корпус.
5. Открутите четыре винта M2 на передней лицевой стороне.
Page 62

Руководство пользователя DJI FPV
62
© 2021 г. DJI Все права защищены.
6. Открутите сбоку два винта M1.6, прежде чем снимать металлическую часть.
7. Используйте подходящий инструмент, чтобы поднять и снять соединитель FPC на подвесе и камере.
8. Отклейте один уголок фиксирующей ленты, чтобы снять подвес и камеру.
Page 63

Руководство пользователя DJI FPV
63
© 2021 г. DJI Все права защищены.
Установка
1.
Подготовьте новый подвес и камеру, установите соединительный кабель в верное положение и
закрепите с помощью фиксирующей ленты.
2.
Выравняйте соединитель FPC подвеса и камеры и прижмите его, чтобы убедиться, что части
надежно соединены.
3.
Присоедините металлическую пластину на правую сторону и закрутите два винта M1.6.
Page 64

Руководство пользователя DJI FPV
64
© 2021 г. DJI Все права защищены.
1 1 2 2
4.
Установите подвес и камеру и закрутите четыре винта M2.
5.
Подготовьте новый верхний корпус для установки.
6.
Нажмите поочередно на указанные точки, чтобы убедиться, что верхний корпус надежно
прикреплен.
Page 65

Руководство пользователя DJI FPV
65
© 2021 г. DJI Все права защищены.
1 1 2 2
7.
Немного согните боковую часть верхнего корпуса, чтобы пристегнуться к слоту квадрокоптера, а
затем закрутите четыре винта M2 с двух сторон.
8.
Установите защитный корпус сверху и убедитесь, что слоты находятся в правильном положении.
Закрутите четыре винта M2 на передней лицевой стороне, чтобы завершить установку.
Калибровка подвеса и камеры
После замены подвеса и камеры скачайте файл для калибровки камеры, чтобы откалибровать подвес и
камеру.
1. Включите питание квадрокоптера, очков и пульта дистанционного управления. Убедитесь, что все
устройства подключены.
2. Подключите очки к мобильному устройству через порт USB-C, запустите DJI Fly и следуйте
инструкциям на экране, чтобы скачать файл для калибровки камеры на квадрокоптер. Для
скачивания требуется подключение к интернету.
Page 66

Руководство пользователя DJI FPV
66
© 2021 г. DJI Все права защищены.
Шасси
Снятие
1. Открутите два винта M1.6 на нижней части левого шасси.
2. Снимите шасси, как показано на рисунке.
3. Снимите осветительный щит антенны шасси.
Page 67

Руководство пользователя DJI FPV
67
© 2021 г. DJI Все права защищены.
L
1 2
4. Снимите соединитель антенны и коннекторы проводов малого сечения контактов 3 и 4 на обеих
сторонах щита.
Установка
1.
Проверьте отметку на внутренней части шасси и снимите осветительный щит антенны с шасси с
отметкой L. Подключите коннекторы проводов малого сечения контактов 3 и 4 и соединитель
антенны на нижней части левого переднего электромотора и убедитесь в их надежности.
2.
Вставьте щит между двумя зажимами на основании электромотора.
Page 68

Руководство пользователя DJI FPV
68
© 2021 г. DJI Все права защищены.
3.
Убедитесь, что шасси в правильном положении установлены в паз на основании мотора.
4.
Закрутите два винта M1.6, чтобы завершить установку.
5.
Повторите вышеуказанные шаги, чтобы установить шасси на правой стороне. На этом шасси стоит
отметка R.
Page 69

Руководство пользователя DJI FPV
69
© 2021 г. DJI Все права защищены.
Page 70

Руководство пользователя DJI FPV
70
© 2021 г. DJI Все права защищены.
Технические характеристики
Приложение
Квадрокоптер
Взлетная масса
Прибл. 795 г
Размеры
178x232x127 мм (без пропеллеров)
255x312x127 мм (с пропеллерами)
Расстояние по диагонали
245 мм
Макс скорость набора высоты
8 м/с (Обычный режим)
15 м/с (Спортивный режим)
Без ограничений (Ручной режим)
5 м/с (Обычный режим)
Макс скорость снижения
10 м/с (Спортивный режим)
Без ограничений (Ручной режим)
Максимальная скорость
(около уровня моря, без
ветра)
5 м/с (Обычный режим)
27 м/с (Спортивный режим)
39 м/с (Ручной режим)
Макс горизонтальное
ускорение (около уровня
моря, без ветра)
0-100 км/ч: 2 с (Ручной режим)
Макс практический потолок
над уровнем моря
6000 м
Макс продолжительность
полета
Прибл. 20 минут (измеряется при полете на скорости 40 км/ч в безветренных
условиях)
Макс время парения
Прибл. 16 минут (измеряется в безветренных условиях)
Макс расстояние полета
16,8 км (измеряется в безветренных условиях)
Макс сопротивление скорости
ветра
13,8 м/с
Диапазон рабочей
температуры
от 14° до 104° F (от -10° до 40° C)
ГНСС
GPS+ГЛОНАСС+Галилео
Рабочая частота
2,400-2,4835 ГГц; 5,725-5,850 ГГц
Мощность передатчика (EIRP)
2,4 ГГц: ≤31,5 дБм (FCC), ≤20 дБм (CE/SRRC/MIC)
5,8 ГГц: ≤31,5 дБм (FCC), ≤25,5 дБм (SRRC), ≤14 дБм (CE)
Диапазон точности зависания
По вертикали: ±0,1 м (с визуальным позиционированием), ±0,5 м (с
позиционированием по GPS) По горизонтали: ±0,3 м (с визуальным
позиционированием), ±1,5 м (с позиционированием по GPS)
Подвес
Механический диапазон
Наклон: от -65° до +70°
Контролируемый диапазон
Наклон: от -50° до +58°
Стабилизированная система
Одна ось (наклон), электронная ось крена
Макс скорость контроля
60°/с
Диапазон угловой вибрации
±0,01 м/с (Обычный режим)
Page 71

Руководство пользователя DJI FPV
71
© 2021 г. DJI Все права защищены.
Электронная ось крена
Доступная (до угла 10°)
Система датчиков
Вперед
Диапазон точности измерений: 0,5-18 м
Определение преград: Доступно только в обычном режиме
Поле обзора: 56° (горизонтально), 71° (вертикально)
По направлению вниз
Диапазон измерений инфракрасного датчика: 10 м
Диапазон парения: 0,5-15 м
Диапазон датчика обзора при парении: 0,5-30 м
Вспомогательное нижнее
освещение
Один светодиод
Условия эксплуатации
Неотражающие, различимые поверхности с диффузной отражательной
способностью >20%; Достаточное освещение >15 люкс
Камера
Датчик
CMOS 1/2,3", число эффективных пикселей: 12 MP
Поле обзора: 150°
Эквивалент формата 35 мм: 14,66 мм
Оптика
Апертура: f/2,8
Режим фокусировки: Фиксированный фокус
Диапазон фокусировки: от 0.6 м до ∞
Диапазон ISO
100-12800
Скорость электронного
затвора
1/50-1/8000 с
Режимы фотографирования
Одиночная съемка
Макс размер изображения
3840x2160
Формат фото
JPEG
Разрешение видео
4K: 3840x2160 50/60 p
FHD: 1920x1080 50/60/100/120 p
Формат видео
MP4/MOV (MPEG-4 AVC/H.264, HEVC/H.265)
Макс битрейт видео
120 Мб/с
Цветовые профили
Стандартный, D-Cinelike
RockSteady EIS
Доступно
Коррекция искажений
Доступно
Поддерживаемые форматы
файлов
exFAT (рекомендовано)
FAT32
Интеллектуальный полетный
аккумулятор
Емкость
2000 мА-ч
Напряжение
22,2 В (стандарт)
Ограничение напряжения
зарядки
25,2 В
Тип АБ
LiPo 6S
Энергия
44.4 Вт⋅ ч@0.5C
Скорость разряда
10C (стандартно)
Page 72

Руководство пользователя DJI FPV
72
© 2021 г. DJI Все права защищены.
Масса
Прибл. 295 г
Диапазон температуры зарядки
от 41° до 104° F (от 5° до 40° C)
Макс мощность зарядки
90 Вт
Очки
Масса
Прибл. 420 г (включая ремешки и антенны)
Размеры
184x122x110 мм (без антенн)
202x126x110 мм (включая антенны)
Размер ячейки экрана
2 дюймаx2
Разрешение экрана (один
экран)
1440x810
Частота обновления экрана
144 Гц
Поле обзора
от 30° до 54°; размер изображения: 50-100%
Диапазон межзрачкового
расстояния
58-70 мм
Рабочая частота
2,400-2,4835 ГГц; 5,725-5,850 ГГц
Мощность передатчика (EIRP)
2,4 ГГц: ≤28,5 дБм (FCC), ≤20 дБм (CE/SRRC/MIC) 5.8 ГГц: ≤31,5 дБм (FCC), ≤19
дБм (SRRC), ≤14 дБм (CE)
Пропускная способность связи
Макс 40 МГц
Режим просмотра в реальном
времени
Режим с низким значением задержки (810p 100fps/120fps), задержка < 28 мс
Режим с высоким качеством (810p 50fps/60fps), задержка < 40 мс
Макс битрейт видео
50 Мб/с
Диапазон передачи данных
10 км (FCC); 6 км (CE/SRRC/MIC)
Передача аудио
Доступно
Поддерживаемый формат
видеозаписи
MP4 (Формат видео: H.264)
Поддерживаемый формат
воспроизведения видео
MP4, MOV, MKV
(Формат видео: H.264; формат аудио: AAC-LC, AAC-HE, AC-3, MP3)
Диапазон рабочей температуры
от 0° до 40° C (от 32° до 104° F)
Электропитание
Рекомендуется: Аккумулятор очков DJI FPV
Сторонние аккумуляторы: 11,1-25,2 В
Аккумулятор очков
Емкость
1800 мА-ч
Напряжение
Макс 9 В
Тип АБ
LiPo 2S
Энергия
18 Вт-ч
Диапазон температуры зарядки
от 0° до 45° C (от 32° до 113° F)
Макс мощность зарядки
10 Вт
Page 73

Руководство пользователя DJI FPV
73
© 2021 г. DJI Все права защищены.
Время работы
Прибл. 1 час и 50 минут (температура окружающей среды: 25°C, яркость
экрана: 6)
Пульт дистанционного управления
Масса
346 г
Размеры
190x140x51 мм
Рабочая частота
2,400-2,4835 ГГц; 5,725-5,850 ГГц
Макс расстояние передачи
(без препятствий и помех)
10 км (FCC); 6 км (CE/SRRC/MIC)
Мощность передатчика (EIRP)
2,4 ГГц: ≤28,5 дБм (FCC), ≤20 дБм (CE/SRRC/MIC)
5,8 ГГц: ≤31,5 дБм (FCC), ≤19 дБм (SRRC), ≤14 дБм (CE)
Диапазон рабочей
температуры
от -10° до 40° C (от 14° до 104° F)
Зарядное устройство
аккумулятора
Входное напряжение адаптера
100-240 В, 50/60 Гц, 1.8 А
Выходное напряжение
адаптера
Главное: 25,2±0,15 В, 3,57±0,1 А or 1±0,2 А
USB: 5 В/2 А x 2
Номинальная мощность
86 Вт
Диапазон температуры
зарядки
от 5° до 40° C (от 41° до 104° F)
Время зарядки
Интеллектуальный полетный аккумулятор: прибл. 50 минут
Пульт дистанционного управления: прибл. 2 часа 30 минут
Аккумулятор очков: прибл. 2 часа 30 минут
SD-карты
Поддерживаемые SD-карты
Карта microSD
Макс 256 ГБ, UHS-I класса скорости 3
SanDisk High Endurance U3 V30 64GB microSDXC
SanDisk Extreme PRO U3 V30 A2 64GB microSDXC
SanDisk Extreme U3 V30 A2 64GB microSDXC
SanDisk Extreme U3 V30 A2 128GB microSDXC
Рекомендуемые карты
microSD
SanDisk Extreme U3 V30 A2 256GB microSDXC
Lexar 667x V30 128GB microSDXC
Lexar High Endurance 128G U3 V30 microSDXC
Samsung EVO U3 (Yellow) 64GB microSDXC
Samsung EVO Plus U3 (Red) 64GB microSDXC
Samsung EVO Plus U3 256GB microSDXC
Netac 256GB U3 A1 microSDXC
Взлетная масса квадрокоптера включает АБ, пропеллеры и карту microSD.
Page 74

Руководство пользователя DJI FPV
74
© 2021 г. DJI Все права защищены.
Поле обзора составляет 150° при съемке на 50 или 100 fps. При других частотах кадров поле
обзора составляет 142°.
Устройства будут заряжаться дольше, если интеллектуальный полетный аккумулятор и пульт
дистанционного управления или аккумулятор очков будут одновременно заряжаться.
Данные технические характеристики были определены с помощью испытаний со встроенным
ПО последней версии. Обновления встроенного ПО могут повысить рабочие характеристики.
Настоятельно рекомендуется обновлять встроенное ПО до последней версии.
Page 75

Руководство пользователя DJI FPV
75
© 2021 г. DJI Все права защищены.
Рекомендуется калибровать компас в любой из следующих ситуаций при полете на открытом воздухе:
1.
Полет на расстоянии более 31 мили (50 км) от места последнего полета квадрокоптера.
2.
Квадрокоптер не выполнял полетов более 30 дней.
3.
На очках появляется предупреждение о помехах компаса и/или индикатор состояния
квадрокоптера мигает красным и желтым поочередно.
Компас ЗАПРЕЩЕНО калибровать в местах, где могут возникать магнитные помехи,
например, вблизи залежей магнетита или крупных металлических сооружений, таких как
автостоянки, железобетонные основания, мосты, автомобили или строительные леса.
НЕ носите предметы, содержащие ферромагнитные материалы (например, мобильные
телефоны), рядом с квадрокоптером во время калибровки.
При выполнении полетов в помещении калибровать компас не нужно.
Процедура калибровки
Выберите открытое пространство, чтобы выполнить следующую процедуру.
1.
Выберите Настройки, Безопасность и Калибровка компаса на очках. Индикатор состояния
квадрокоптера станет желтым, что означает начало калибровки.
2.
Держите квадрокоптер горизонтально и поворачивайте его на 360°. Индикатор состояния
квадрокоптера будет станет зеленым.
3.
Держите квадрокоптер горизонтально и поворачивайте его на 360° вокруг своей оси.
4.
Индикатор состояния квадрокоптера мигает красным цветом, указывая на невыполнение
калибровки. Измените свое местоположение и попробуйте снова.
Если индикатор состояния квадрокоптера мигает красным и желтым поочередно после
завершения калибровки, это указывает на то, что текущее местоположение не подходит
для полета квадрокоптера из-за уровня магнитных помех. Выберите другое место.
На очках появится подсказка, если перед взлетом требуется калибровка компаса.
Квадрокоптер может взлететь сразу же после завершения калибровки. Если вы будете
ждать более трех минут, чтобы взлететь после калибровки, вам может потребоваться
повторить калибровку.
Калибровка компаса
Page 76

Руководство пользователя DJI FPV
76
© 2021 г. DJI Все права защищены.
Информация о послепродажном обслуживании
Используйте DJI Fly или DJI Assistant 2 (серия DJI FPV) для обновления встроенного ПО квадрокоптера
и пульта дистанционного управления.
Использование DJI Fly
После включения питания квадрокоптера, очков и пульта дистанционного управления убедитесь, что
все устройства подключены. Подключите очки к мобильному устройству через порт USB -C, запустите
DJI Fly и следуйте подсказкам для обновления. Требуется подключение к интернету.
Использование DJI Assistant 2 (серия DJI FPV)
Используйте DJI Assistant 2 (серия DJI FPV) для обновления квадрокоптера, очков или пульта
дистанционного управления по отдельности.
1.
Включите питание устройства и подключите его к компьютеру с помощью кабеля USB-C.
2.
Запустите DJI Assistant 2 (серия DJI FPV) и войдите в учетную запись DJI.
3.
Выберите устройство и нажмите на Обновление встроенного ПО с левой стороны.
4.
Выберите требуемую версию встроенного ПО.
5.
DJI Assistant 2 (серия DJI FPV) скачает и обновит встроенное ПО автоматически.
6.
После завершения обновления встроенного ПО устройство перезапустится автоматически.
Убедитесь, что вы выполнили все шаги для обновления встроенного ПО. В противном случае
обновление может быть не выполнено.
• Обновление встроенного ПО займет примерно 11 минут. При обновлении встроенного ПО
подвес может опускаться, а квадрокоптер перезапускаться. Дождитесь завершения
обновления.
• Убедитесь, что компьютер подключен к интернету.
• Убедитесь, что у устройства достаточно питания перед обновлением встроенного ПО.
Перед выполнением обновления убедитесь, что интеллектуальный полетный аккумулятор
заряжен как минимум на 43%, а пульт дистанционного управления имеет заряд АБ не
менее 30%.
• Не отключайте кабель USB-C во время обновления.
• Если у вас есть дополнительный аккумулятор, который необходимо обновить, по
завершении обновления вставьте его в квадрокоптер и включите его. На очках появится
подсказка об обновлении аккумулятора. Перед взлетом убедитесь, что аккумулятор
обновлен.
• Обратите внимание, что обновление может сбросить различные параметры полета, такие
как высота RTH и максимальная дальность полета. Перед обновлением запишите свои
предпочтительные настройки и повторно установите их после обновления.
Обновление встроенного ПО
Page 77

Руководство пользователя DJI FPV
77
© 2021 г. DJI Все права защищены.
Чтобы узнать больше о политике послепродажного обслуживания, ремонтных услугах и поддержке
перейдите по адресу: https://www.dji.com/support.
Page 78

Поддержка DJI
http://www.dji.com/support
Содержание данного документа может быть изменено.
Скачайте последнюю версию по
ссылке
https://www.dji.com/dji-fpv
Если у вас возникли какие-либо вопросы об этом
документе, свяжитесь
с DJI по электронному адресу DocSupport@dji.com.
Авторское право © 2021 г. DJI Все права защищены.
 Loading...
Loading...