

Page 1
ELECTRONICS
Originele instructies
DENVER DBO-10000
R
www.facebook.dk/denver-electronics
Lees alle instructies voordat u dit voertuig in gebruik neemt, zodat u het veilig weet te monteren en bedienen.
Deze gebruikshandleiding helpt u de functies en het gebruik van de Balance scooter beter te gebruiken.
Voordat u deze scooter in gebruik neemt, maak uzelf a.u.b. bekend met alle bedieningen, zodat u het
voertuig in een optimale staat kunt houden.
Page 2

Page 3

Hoofdstuk 1 Algemene informatie
1.1. Risico’s tijdens het rijden
WAARSCHUWING!
- Leer veilig te rijden voordat u snel begint te tijden op de scooter.
- Vallen, controle verliezen, aanrijdingen en de regels in de gebruikshandleiding overtreden kunnen tot
letsel leiden.
- De snelheid en de rijafstand kunnen variëren op basis van het gewicht van de gebruiker, het terrein, de
temperatuur en uw rijstijl.
- Zorg ervoor een helm en beschermende kleding te dragen voordat u de scooter gebruikt.
- Zorg ervoor de handleiding zorgvuldig te lezen voordat u de scooter in gebruik neemt.
- Uitsluitend voor gebruik in droge weersomstandigheden.
- Wij raden af Balance scooters op openbare wegen te gebruiken.
- Zorg er a.u.b. voor uw nationale wetgeving te controleren voordat u dit product in gebruik neemt.
1.2. Voorbereiding voor gebruik
De accu dient voorafgaand aan gebruik volledig te worden opgeladen. Zie a.u.b. Hoofdstuk 6.
1.3. De gewichtlimiet van de gebruiker
De redenen voor de gewichtlimiet: 1. de veiligheid van de gebruiker garanderen; 2. beschadiging door
overbelasting reduceren.
Maximum belasting: 120kg.
Minimum belasting: 20kg.
Hoofdstuk 2 De Balance scooter gebruiken
2.1. Beschrijving en identificatie
Band
Pedaal
Indicator
Decoraeve verlichng
Beschermkap voor chassis
Spatbord
Voedings oort
2.2. Kalibreren
Als uw scooter naar links of rechts neigt te trekken, dient u mogelijk de sensoren ervan opnieuw te moeten
kalibreren. Ga hiervoor als volgt te werk:
Stap 1: Schakel de scooter uit en zet waterpas.
Stap 2: Houd de aan/uitknop minstens 10 seconden ingedrukt totdat u het lampje 5 keer ziet knipperen.
Stap 3: Schakel de scooter weer uit.
Stap 4: Schakel vervolgens opnieuw in om het kalibreren af te ronden.
Aan/uitschakelen
Page 4
2.3. Werkingsprincipe
- Balance scooters gebruiken een dynamisch evenwicht d.m.v. een interne gyroscoop en
versnellingssensoren. De status van de scooter wordt geregeld door het zwaartepunt. Het wordt
afgesteld door de motor, welke wordt bediend door het servobedieningssysteem. Het apparaat zal
waarnemen dat u naar voren leunt en vervolgens versnellen. Wanneer u een bocht wilt maken,
verminder vaart en beweeg uw voet naar voren of achteren. Hierdoor wordt het zwaartepunt van uw
lichaam naar links of rechts verplaatst, waardoor de scooter herkent of u een bocht naar links of rechts
wilt maken.
- Balance scooters zijn voorzien van een inert, dynamisch stabilisatiesysteem, waardoor het de balans
naar voren en achteren behoudt, maar niet de balans naar links en rechts kan garanderen. Wanneer u
een bocht maakt, dient u dus eerst vaart te verminderen om het risico op letsel te voorkomen.
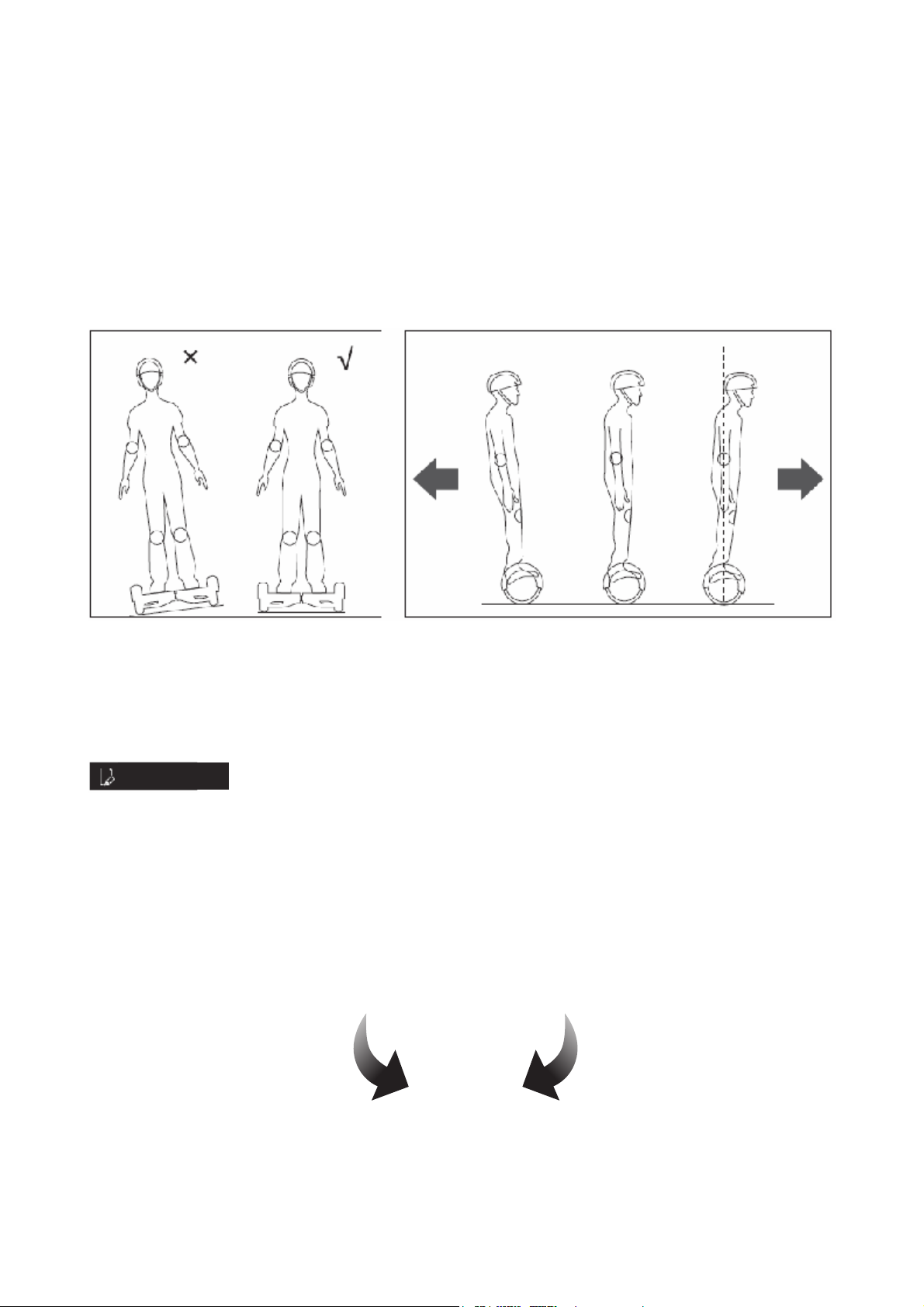
2.4. Leer hoe u de scooter dient te gebruiken
Stap 1: Druk op de aan/uitknop om de scooter in te schakelen.
Stap 2: Plaats de scooter op een vlakke ondergrond en zorg ervoor alle veiligheidsmaatregelen te treffen.
Plaats één voet op de plaat die de pedaalschakelaar activeert waardoor de bedrijfsindicator inschakelt.
Plaats uw andere voet op de plaat nadat het systeem de zelfbalancering heeft gestart.
Stap 3: Houd controle over de beweging vooruit en achteruit van de scooter, vergeet hierbij niet dat u uw
lichaam niet te plotseling dient te bewegen.
OPMERKING:
Als u niet in een gebalanceerde conditie bent wanneer u de voetschakelaar activeert, zal het alarm klinken
en schakelt het LED-waarschuwingslampje in. Het systeem voert de zelfbalans nu niet correct uit. U dient de
scooter niet te gebruiken zonder een gebalanceerde conditie. De sensoren dienen vervolgens te worden
gekalibreerd, zie hiervoor punt 2.2.
Stap 4: Laat de scooter naar links en rechts bewegen.
Stap 5: Voordat u afstapt, zorg ervoor dat de scooter nog steeds in balans is en gestopt, stap vervolgens
eerst met de ene en daarna met de andere voet af.
Rechter voet naar voren kantelen –
Linkse bocht
Linker voet naar voren kantelen –
Rechtse bocht
Page 5

WAARSCHUWING!
U dient nooit scherpe bochten te maken wanneer u snel rijdt.
U dient nooit zijwaarts te rijden of bochten te maken op een helling. U kunt hierdoor vallen en letsel
oplopen.
2.5. Reageer altijd op enigerlei alarmen
De scooter zal in de volgende gevallen niet werken:
• Als er tijdens gebruik een systeemstoring optreedt, zal de scooter u op verschillende manieren
waarschuwen; het rijden wordt geblokkeerd, de alarmindicator schakelt in, het zoemeralarm klinkt om
aan te geven dat het systeem de zelfbalans niet kan uitvoeren.
• Het apparaat zal niet werken wanneer u op de scooter stapt en het platform meer dan 10 graden naar
voren of achteren laat bewegen.
• De accuspanning is te laag.
• Tijdens het opladen.
• Als het platform tijdens gebruik ondersteboven raakt, zal de werking worden geblokkeerd.
• Te hoge snelheid.
• De accu is onvoldoende opgeladen.
• Als de banden geblokkeerd raken, zal de scooter na twee seconde n uitschakelen.
• Als de accuspanning lager is dan de beveiligingswaarde, zal de elektrische scooter na 15 seconden
uitschakelen.
• Continue zware stroomontlasting (zoals langdurig een steile helling op)
WAARSCHUWING!
Wanneer de scooter uitschakelt, zal het systeem de machine automatisch vergrendelen. Druk in dit
geval op de aan/uitknop om het apparaat te ontgrendelen. Wanneer de accu is uitgeput of wanneer
het systeem informatie uitgeeft over een veiligheiduitschakeling, dient u niet v erder te rijden met de
scooter. De scooter kan namelijk de balans verliezen door een tekort aan accucapaciteit. De
gebruiker loopt in dit geval een groot risico op letsel. Als de accucapaciteit minimaal is, zal de
levensduur van de accu worden aangetast door de scooter te blijven gebruiken.
• Het product dient uitsluitend te worden gebruikt binnen een temperatuurbereik van tussen -10°C en
+45°C.
2.6. Oefenen met rijden
Maak uzelf a.u.b. bekend met alle bedieningen en voorzorgsmaatregelen voordat u de scooter in gebruik
neemt. Oefen altijd met iemand anders die u vast houdt of kan opvangen.
• Draag vrijetijdskleding (maar geen losse kleding) en platte schoen en om uw lichaam flexibel te houden.
• Oefen het rijden in een open gebied totdat u gemakkelijk op en af kunt stappen.
• Zorg voor een vlakke ondergrond.
• Verminder vaart wanneer u op een ander terrein rijdt.
• Balance scooters zijn voertuigen ontworpen voor gebruik op een vlak wegdek. Verlaag uw snelheid
wanneer u de scooter op ruw terrein rijdt.
• Voorafgaand aan het rijden: Lees zorgvuldig hoofdstuk 4 over de maximale snelheid en hoofdstuk 5
over veilig rijden
Hoofdstuk 3 Pedaalsensor en indicatoren
3.1. Pedaalsensor
De Balance scooter is voorzien van 4 sensoren onder het pedaal. Zodra u op het pedaal stapt, zal de
scooter zichzelf automatisch balanceren. Zorg ervoor tijdens het rijden volledig op het pedaal te staan en
stap a.u.b. niet op de gedeeltes buiten het pedaal. Plaats geen voorwerpen op de pedalen om de scooter
zelf te laten werken en het risico op aanrijdingen, persoonlijk letsel en beschadiging van de scooter zelf te
vergroten.
Page 6

3.2. Accu en bedrijfsindicatoren
De indicator is in het midden van de scooter geplaatst en verstrekt de gebruiker met informatie.
• De batterij-indicator op de Balance Scooter zal groen blijven oplichten zolang er voldoende batterijstroom
is om te rijden.
• De batterij-indicator op de Balance Scooter zal rood oplichten als de batterijstroom laag is (er rest 15-20%),
dan stopt u best met rijden en laadt u de Balance Scooter op.
• De batterij-indicator op de Balance Scooter zal rood oplichten als de batterijstroom laag is (er rest 15-20%),
dan stopt u best met rijden en laadt u de Balance Scooter op. De batterij-indicator op de Balance Scooter
zal ROOD en een WAARSCHUWINGSSIGNAAL geven wanneer de batterij leeg is, dan moet u onmiddellijk
stoppen met rijden. De Balance Scooter zal zichzelf nu zonder verdere aankondiging automatisch
uitschakelen en evenwicht verliezen. U loopt het risico om gewond te raken indien u nog probeert te blijven
rijden.
• Bedrijfsindicator: Wanneer het pedaal wordt geactiveerd, zal de bedrijfsindicator oplichten en wordt het
systeem gestart; wanneer er een systeemstoring optreedt, zal de indicator op rood springen.
Hoofdstuk 4 Rijafstand en snelheid
4.1. Rijafstand per lading
De rijafstand per lading hangt af van veel factoren, bijvoorbeeld:
• Topografie: U kunt de scooter langer rijden op een even wegdek en korter op een oneven ondergrond.
• Gewicht: Het gewicht van
• Temperatuur: Extreme temperaturen zullen de beschikbare rijafstand verkorten.
• Onderhoud: U kunt de beschikbare rijafstand optimaal houden door de scooter correct op te laden en de
accu in goede staat te houden.
• Snelheid en rijstijl: De beschikbare rijafstand zal worden vergroot door een constante snelheid te
behouden. De afstand wordt echter verkort door vaak te starten, stoppen, versnellen en vaart te
verminderen.
4.2. Maximale snelheid
• De nominale maximale snelheid van de Balance scooter is 15 km/u, maar dit is echter afhankelijk van
de acculading, de condities/hoek van het terrein, de windrichting en het gewicht van de gebruiker. De
maximale snelheid kan 15 km/u overschrijden als de accu volledig is opgeladen, als het terrein zeer vlak
of gelijkmatig bergafwaarts loopt of bij een krachtige rugwind met een gebruiker die niet erg zwaar is.
is
• Als zijn maximale snelheid nadert, zal de Balance scooter een waarschuwing laten horen en dient u
vaart te verminderen.
• Wij raden u aan de Balance scooter op snelheden te rijden die voor u comfortabel zijn en de Balance
scooter niet te rijden op snelheden hoger dan 15km/u.
• De elektrische scooter kan zichzelf alleen balanceren binnen de toegestane snelheid.
de gebruiker heeft ook invloed op de beschikbare rijafstand.
Hoofdstuk 5 Veilig rijden
Dit hoofdstuk legt de focus op veiligheid, kennis en waarschuwingen. Voordat u dit voertuig in gebruik neemt,
lees a.u.b. alle instructies zodat u het apparaat veilig weet te monteren en gebruiken.
WAARSCHUWING!
• Voordat u aan de slag gaat, maak uzelf bekend met alle
conditie kunt houden.
• Zorg ervoor alle veiligheidsmaatregelen te treffen wanneer u de scooter bestuurt. U dient een helm,
kniebescherming, elboogbescherming and andere beschermende kleding te dragen.
• De gebruiker dient geen losse of hangende kleding te dragen, zoals veters, enz., die vast kan komen te
zitten in de wielen van de Balance scooter.
• Balance scooters zijn uitsluitend bestemd voor uw eigen amusement. Het is niet toegestaan op
openbare wegen te rijden.
• Balance scooters zijn niet toegestaan op rijstroken voor motorvoertuigen.
bedieningen zodat u de scooter in een optimale
Page 7

• Kinderen, bejaarden en zwangere vrouwen mogen deze scooter niet gebruiken.
• Personen met gereduceerde balanceercapaciteiten dienen de Balance scooter niet te gebruiken.
• Rijd de Balance scooter niet wanneer onder de invloed van alcohol of enigerlei andere substanties.
• Niets dragen tijdens het rijden.
• Wees a.u.b. alert op alles vóór u, behoud altijd goed zicht om de scooter veilig te kunnen besturen.
• Relax uw benen tijdens het rijden met uw knieën ietwat gebogen, om beter balans te kunnen houden
wanneer u een oneven ondergrond tegemoet komt.
• Zorg ervoor uw voeten tijdens het rijden altijd op de pedalen te houden.
• De Balance scooter kan slechts één persoon dragen.
• Nooit plotseling starten of stoppen.
• Rijden op steile hellingen is afgeraden.
• Rijd de Balance scooter niet tegen vaste objecten aan (bijv. een muur of andere structuur) en
vervolgens proberen door te rijden.
• Rijd niet op slecht verlichte of donkere plekken.
• U gebruikt de Balance scooter op uw eigen risico, ons bedrijf kan niet aansprakelijk worden gesteld voor
enigerlei ongelukken of schade die u mogelijk veroorzaakt.
• Zorg ervoor een voertuigsnelheid te behouden die veilig is voor uzelf en anderen, en ben altijd gereed te
stoppen tijdens het rijden.
• Wanneer u de scooter bestuurt, behoud a.u.b. altijd een bepaalde afstand vanaf anderen om
aanrijdingen te voorkomen.
• U dient het zwaartepunt van uw lichaam te gebruiken om te sturen, plotselinge veranderingen in het
zwaartepunt kunnen tot beschadiging en vallen leiden.
• Rijd niet voor lange afstanden of op hoge snelheden achteruit, maak geen bochten op hoge snelden en
rijd niet te snel.
• Rijd niet in de regen en stel de scooter niet bloot aan andere natte omstandigheden. Alleen rijden in
droog weer.
• Rijd niet over obstakels en vermijd sneeuw, ijs en gladde oppervlaktes.
• Rijd niet over artikelen gemaakt van doek, kleine takken of stenen.
• Rijd niet in nauwe ruimtes of plekken met obstakels.
• Door van of op de scooter te springen, kunt en za
garantie. Risico op persoonlijk letsel. Persoonlijk letsel of misbruik verwant aan “trucjes rijden” wordt niet
gedekt door ons bedrijf en zal de garantie teniet verklaren.
• De aanbevolen bandendruk is 23 PSI (1,6 BAR), maar dit kan naar wens worden aangepast op basis van
het gewicht van de gebruiker.
• De maximale bandendruk van 35 PSI (2,4 BAR) mag echter niet worden overschreden!
• De maximale bandendruk overschrijden kan gevaarlijk zijn, de banden beschadigen en tot persoonlijk
letsel leiden.
l u schade veroorzaken die niet wordt gedekt door de
Hoofdstuk 6 De scooter opladen
Dit hoofdstuk beschrijft hoofdzakelijk de oplaadmethodes, hoe de accu wordt onderhouden,
veiligheidsinformatie waar u rekening mee dient te houden en de accuspecificaties. Voor de veiligheid van
uzelf en anderen, en om de levensduur en prestaties van de accu te optimaliseren, neem a.u.b. de volgende
aanwijzingen in acht.
6.1. Lage accucapaciteit
De accu-indicator zal rood knipperen wanneer de accu uitgeput raakt. Het is in dit geval raadzaam te
stoppen met rijden. Wanneer de capaciteit laag is, zal er onvoldoende energie zijn om normaal te kunnen
rijden. Het systeem zal vervolgens de basis van het platform automatisch kantelen waardoor u niet langer
kunt rijden. U kunt in dit geval gemakkelijk vallen als u blijft rijden en tevens de levensduur van de accu
aantasten.
• Gebruik de accu niet in de volgende gevallen.
• De accu geeft een vreemde lucht of teveel hitte af.
• Lekkage van enigerlei substanties.
• Het is verboden de accu te demonteren.
• Raak geen enkele substantie aan die uit de accu lekt.
• Laat kinderen en dieren de accu niet aanraken.
• Accu’s bevatten schadelijke stoffen. Het is verboden de accu te openen of voorwerpen in de accu te
steken.
• Gebruik uitsluitend de meegeleverde lader.
• Laat lithiumbatterijen nooit overbelast raken. Het accublok bestaat uit lithiumbatterijen.
Page 8

OPMERKING:
De accu-indicator zal rood knipperen wanneer de accu uitgeput raakt. Het is raadzaam in dit geval te
stoppen met rijden en de scooter op te laden. Wanneer de accucapaciteit laag is, is er onvoldoende stroom
om normaal te kunnen rijden. Het bedrijfssysteem van de scooter zal het platform automatisch naar voren
kantelen om het gebruik ervan te verbieden. De gebruiker kan hierdoor van de scooter vallen en letsel
oplopen.
OPGELET:
• Gebruik de Balance Scooter niet tijdens het opladen!
• Het LED-lampje van de acculader zal tijdens het opladen rood branden.
• Het LED-lampje van de acculader zal op groen springen zodra het opladen is voltooid.
• Wanneer het opladen is voltooid, koppel de acculader a.u.b. los van het stopcontact en van de Balance
Scooter.
6.2. Oplaadmethode
• Zorg ervoor de Balance scooter, de lader en de voedingsingang op de scooter droog te houden.
• Opmerking: Gebruik voor deze balance scooter UITSLUITEND de meegeleverde lader gemarkeerd
XMS-42V0200 met de volgende uitgangsspanning: 42V – 2,0A.
• Gebruik van een andere lader kan het product beschadigen of tot andere mogelijke risico’s leiden.
• Steek de stroomadapter in de voedingspoort op de achterzijde van de scooter en in een standaard
stopcontact. Controleer of de groene indicator op de adapter oplicht.
• Wanneer de rode indicator op de lader brandt, wordt de scooter correct opgeladen. Zo niet, controleer
of de kabel goed is aangesloten.
• Wanneer het indicatielampje op de lader van rood op groen springt, betekent dit dat de accu volledig is
opgeladen.
• Stop in dit geval a.u.b. met opladen, want te lang opladen zal de levensduur van de accu aantasten.
• Het opladen kan tot op 3 uur duren. Laad de accu nooit langer dan 3 uur op. Koppel de lader na 3 uur
los van de scooter en voedingsbron. Overmatig opladen zal de levensduur van de accu verkorten.
• Het product dient nooit voor lange periodes te worden opgeladen.
• Laad het product nooit onbeheerd op.
• Het product dient uitsluitend te worden opgeladen binnen een temperatuurbereik van tussen 0°C en
+45°C.
• Als u het product oplaadt in lagere of hogere temperaturen, bestaat er het risico op een verlaagde
batterijprestatie, beschadiging van het product en persoonlijk letsel.
• Het product a.u.b. opladen en opbergen in een open en droge ruimte, uit de buurt van ontvlambare
materialen (d.w.z. materialen die in brand kunnen vliegen).
• Nooit opladen in zonlicht of nabij open vlammen.
• Het product niet opladen onmiddellijk na gebruik. Laat het product één uur afkoelen voordat u deze
oplaadt.
• Als u het product aan anderen geeft, bijvoorbeeld als een cadeau, dient deze gedeeltelijk te zijn
opgeladen (tussen 20 en 50% opgeladen). Niet volledig opgeladen.
• Haal het product niet uit de verpakking om op te laden en vervolgens terug in de verpakking te stoppen.
• Wanneer geleverd vanuit de fabriek, komt het product meestal al gedeeltelijk opgeladen. Houd het
product in een gedeeltelijk opgeladen status totdat u deze in gebruik neemt.
Hoofdstuk 7 Het onderhoud van de elektrische scooter
Deze Balance scooter moet goed worden onderhouden. Dit hoofdstuk beschrijft hoofdzakelijk de relevante
stappen en belangrijke gebruiksaanwijzingen voor onderhoud. Zorg er a.u.b. voor de voeding en laadspoel
uit te schakelen voordat u de volgende handelingen uitvoert. U dient de scooter niet te gebruiken wanneer
de accu wordt opgeladen.
7.1. Reiniging
Page 9

• Zorg er a.u.b. voor de voeding en laadspoel uit te schakelen.
• Veeg de behuizing van de elektrische scooter af met een zacht doekje.
WAARSCHUWING!
• Zorg ervoor dat er geen water of andere vloeistoffen in de interne onderdelen van de Balance scooter
terechtkomen, omdat dit de elektronica/accu van de scooter permanent kan beschadigen. Er bestaat
een risico op persoonlijk letsel.
7.2. Opslag
• Als de opslagtemperatuur lager is dan 0°C, laad de scooter a.u.b. niet op. U kunt de scooter in een
warme omgeving plaatsen (5-30°C) om op te laden.
• U kunt de scooter afdekken om stofophoping te voorkomen.
• Berg de scooter binnenshuis op, in een droge en geschikte omgeving.
• Wanneer gebruikt in lagere of hogere temperaturen, bestaat er het risico op een verlaagde
batterijprestatie, beschadiging van het product en persoonlijk letsel.
• Berg het product op binnen een temperatuurbereik van tussen 5°C en 30°C (de optimale
opslagtemperatuur is 25°C).
• Het product a.u.b. opladen en opbergen in een open en droge ruimte, uit de buurt van ontvlambare
materialen (d.w.z. materialen die in brand kunnen vliegen).
• Berg het product niet op in zonlicht of in de buurt van open vuur.
• Als u het product aan anderen geeft, bijvoorbeeld als een cadeau, dient deze gedeeltelijk te zijn
opgeladen (tussen 20 en 50% opgeladen). Niet volledig opgeladen.
• Haal het product niet uit de verpakking om op te laden en vervolgens terug in de verpakking te stoppen.
• Wanneer geleverd vanuit de fabriek, komt het product meestal al gedeeltelijk opgeladen. Houd het
product in een gedeeltelijk opgeladen status totdat u deze in gebruik neemt.
WAARSCHUWING!
• Om de gebruiksveiligheid te waarborgen, mogen gebruikers d e scooter niet openen, hierdoor geeft u
ook uw garantierechten op.
Page 10

ALLE RECHTEN VOORBEHOUDEN, AUTEURSRECHT DENVER ELECTRONICS A/S
Elektrische en elektronische apparatuur en de inbegrepen batterijen bevatten materialen, componenten en
stoffen die schadelijk kunnen zijn voor uw gezondheid en het milieu, indien de afvalproducten (afgedankte
elektrische en elektronische apparatuur en batterijen) niet correct worden verwerkt.
Elektrische en elektronische apparatuur en batterijen zijn gemarkeerd met een doorgekruist kliko-symbool ,
zoals hieronder afgebeeld. Dit symbool is bestemd de gebruiker er op te wijzen d at elektrische en
elektronische apparatuur en batterijen dient als normaal huishoudelijk afval afgedankt dienen te worden,
maar gescheiden moeten worden ingezameld.
Als eindgebruiker is het belangrijk dat u uw verbruikte batterijen inlevert bij een geschikte en speciaal
daarvoor bestemde faciliteit. Op deze manier is het gegarandeerd dat de batterijen worden hergebruikt in
overeenstemming met de wetgeving en het milieu niet aantasten.
Alle steden hebben specifieke inzamelpunten, waar elektrische of elektronische apparatuur e n batterijen
kosteloos ingeleverd kunnen worden op recyclestatio ns of andere inzamellocaties. In bepaalde gevallen kan
het afval ook aan huis worden opgehaald. Vraag om meer informatie bij uw plaatselijke autoriteiten.
Importeur:
DENVER ELECTRONICS A/S
Stavneagervej 22
DK-8250 Egaa
Denemarken
www.facebook.com/denverelectronics
Page 11

EC Declaraon of Conformity (Machine Direcve)
The undersigned
Company Name:
Adress:
cerfy that the design and manufacturing of this product
Product Brand Name:
Product Model No.:
conforms to the following direcves:
Machine direcve 2006/42/EC
MD Standards: Annex 1 of 2006/42/EC, EN ISO 12100:2010, EN 60335-1:2012+A11:2014
DENVER ELECTRONICS A/S
Stavneagervej 22, 8250 Egaa, Denmark
DENVER
DBO-10000
and therefore complies with the essenal requirements of the Machine Direcve.
Relevant EU accredited laboratory cerficates and test reports:
Issued by EU accredited laboratory:
Standards:
SGS-CSTC Standards Technical Services Co., Ltd.
Guangzhou Branch
Annex 1 of 2006/42/EC, EN ISO 12100:2010,
EN 60335-1:2012+A11:2014
Signature:
Full Name:
Posion: Director
Company:
Date:
Torben Ulrich
DENVER ELECTRONICS A/S
6th April 2016
Page 12

 Loading...
Loading...