

Page 1

^1 HARDWARE REFERENCE MANUAL
^2 Turbo PMAC2 Realtime Express Controller
^3 Programmable Multi-Axis Controller
^4 9xx-603862-1xx
^5 October 14, 2013
Single Source Machine Control Power // Flexibility // Ease of Use
21314 Lassen Street Chatsworth, CA 91311 // Tel. (818) 998-2095 Fax. (818) 998-7807 // www.deltatau.com
Page 2

Copyright Information
© 2013 Delta Tau Data Systems, Inc. All rights reserved.
This document is furnished for the customers of Delta Tau Data Systems, Inc. Other uses are
unauthorized without written permission of Delta Tau Data Systems, Inc. Information contained
in this manual may be updated from time-to-time due to product improvements, etc., and may not
conform in every respect to former issues.
To report errors or inconsistencies, call or email:
Delta Tau Data Systems, Inc. Technical Support
Phone: (818) 717-5656
Fax: (818) 998-7807
Email: support@deltatau.com
Website: http://www.deltatau.com
Operating Conditions
All Delta Tau Data Systems, Inc. motion controller products, accessories, and amplifiers contain
static sensitive components that can be damaged by incorrect handling. When installing or
handling Delta Tau Data Systems, Inc. products, avoid contact with highly insulated materials.
Only qualified personnel should be allowed to handle this equipment. In the case of industrial
applications, we expect our products to be protected from hazardous or conductive materials
and/or environments that could cause harm to the controller by damaging components or causing
electrical shorts. When our products are used in an industrial environment, install them into an
industrial electrical cabinet or industrial PC to protect them from excessive or corrosive moisture,
abnormal ambient temperatures, and conductive materials.
If Delta Tau Data Systems, Inc. products are exposed to hazardous or conductive materials and/or
environments, we cannot guarantee their operation.
Page 3
REVISION HISTORY
REV.
DESCRIPTION
DATE
CHG
APPVD
1
NEW MANUAL CREATION
04/03/07
CP
S. SATTARI
2
CLEARED FOR RELEASE
12/07/07
CP
S.SATTARI
3
REVISED GENERAL PURPOSE IO CONNECTOR
ADDED MULTIPLEXED IO PORT INFO
ADDED PANASONIC PROGRAM SETUP INFO
ADDED PARAMETER PASSING INFO ON REALTIME
EXPRESS NETWORK
01/29/09
CP
S.SATTARI
4
CORRECTION IN J5 PIN-OUT TABLE
UPDATED WIRING FOR HANDWHEEL PORT IMAGE
02/15/10
CP
S.SATTARI
5
ADDED SUPPORT FOR A5N NETWORK DRIVES
10/14/13
SS
S.SATTARI
Page 4

Page 5

Turbo PMAC2 Realtime Express Controller
i
Table of Contents
INTRODUCTION .................................................................................................................................. 1
Overview .............................................................................................................................................. 1
Compatibility ........................................................................................................................................ 1
Configuration ........................................................................................................................................ 2
Base Version ........................................................................................................................................ 2
Macro Ring Connector Options ............................................................................................................ 2
Option 1: Additional MACRO Interface ICs ......................................................................................... 2
Option 5: CPU and Memory Configurations ......................................................................................... 3
Option 10: Firmware Version Specification .......................................................................................... 3
Option 12: Analog-to-Digital and Digital-to-Analog Converters ............................................................ 3
Part Number Definition ......................................................................................................................... 4
HARDWARE SETUP ............................................................................................................................ 5
Receiving and Unpacking...................................................................................................................... 5
Mounting .............................................................................................................................................. 5
Mechanical Drawing ............................................................................................................................. 6
System Wiring ...................................................................................................................................... 7
Push-button Switches ............................................................................................................................ 8
FW LOAD switch ................................................................................................................................ 8
RE-INIT switch .................................................................................................................................... 8
Connections .......................................................................................................................................... 8
USB Connection, J1 ............................................................................................................................. 8
Ethernet / Modbus Connection, J2 ........................................................................................................ 9
Fieldbus Setup Connector, J3 .............................................................................................................. 10
Fieldbus Connection, J4 (Fieldbus option required) ............................................................................. 10
General Purpose I/O Connection, J5 ................................................................................................... 13
Auxiliary Connector, J8 ...................................................................................................................... 16
24 VDC Power Supply Input, J9 ......................................................................................................... 19
MACRO Connector ............................................................................................................................ 19
Realtime Express Connector ............................................................................................................... 21
Thumbwheel Multiplexer Port (JTHW Port), J10 ................................................................................ 22
SOFTWARE SETUP ............................................................................................................................ 24
Host Communications ......................................................................................................................... 24
Pewin32PRO2 Communication Setup ................................................................................................. 24
Realtime Express Network Specific Configuration Setup .................................................................... 27
Realtime Express Network Setup – Step by Step ................................................................................. 28
I-Variable Definitions ................................ ......................................................................................... 33
Using PMAC Motor Backlash Feature ................................................................................................ 42
Reading/Writing A4N/A5N Drive Parameters over the network .......................................................... 43
Accessing Returning Data from A4N/A5N Drives .............................................................................. 45
Using Absolute Feedback With A4N/A5N Drives ............................................................................... 47
Detecting Errors on A4N/A5N Network ............................................................................................. 47
Table of Contents
Page 6
Turbo PMAC2 Realtime Express Controller
1
INTRODUCTION
Overview
The Turbo PMAC2 Realtime Express Controller is a member of the Turbo PMAC family of
boards optimized for interface to the system through Panasonic’s Realtime Express Network. It
can command up to 32 axes through Realtime Express Network. This controller is also capable of
communicating and control of MACRO drives and IO modules if ordered with the MACRO
option.
The Turbo PMAC2 Realtime Express Controller is a stand-alone unit which can be
communicated with via RS-232, USB or Ethernet connections, with or without the optional dualported RAM.
This controller is also capable of Fieldbus communications when the appropriate option is
ordered. The form factor of this connection is dependent on which Fieldbus protocol is being
utilized and it supports the following protocols:
ProfiBus Master Opt-1
ProfiBus Slave Opt-2
DeviceNet Master Opt-3
DeviceNet Slave Opt-4
CANopen Master Opt-5
CANopen Slave Opt-6
CC-Link Slave Opt-11
The protocol is dependent upon which hardware and option are selected. The hardware cannot be
programmed for an alternate protocol including master/slave.
Compatibility
This controller can be used to control Panasonic A4N/A5N Drives over the Realtime Express
network. This network utilizes the Ethernet type CAT-5 cable as the communication medium, but
should not be connected to any other Ethernet network.
Note
Currently, the controller only supports single block slave nodes.
If ordered with the MACRO option, this controller can control MACRO drives and I/O devices
over either the fiber optic MACRO ring or copper MACRO ring.
Introduction
Page 7

Turbo PMAC2 Realtime Express Controller
2
Configuration
Base Version
The base version of the Turbo PMAC2 Realtime Express Controller provides:
80 MHz DSP56303 CPU
128k x 24 SRAM compiled/assembled program memory
128k x 24 SRAM user data memory
1M x 8 flash memory for user backup & firmware
32k x 16 bank of dual-ported RAM
Latest released firmware version
RS-232 serial interface, USB 2.0 & Ethernet Communication
(No on-board axis interface circuitry)
Two channels supplemental interface circuitry, each including:
o 2-channel differential/single-ended encoder input
o One output command signal set, configurable as pulse-and-direction or PWM
top-and-bottom pair
Direct I/O interface port
1-year warranty from date of shipment
(Cables not included)
Macro Ring Connector Options
If a MACRO interface is desired (which is the usual reason for use of the board), at least one of
the MACRO connector options must be selected.
• Option A provides the MACRO-ring fiber optic SC-style interface connector. The key
component on the board is U49.
• Option C provides the MACRO-ring RJ-45 electrical interface connectors. The key
components on the board are CN3 and CN4.
Option 1: Additional MACRO Interface ICs
• Option 1A provides the first additional MACRO interface IC (2 total) for 16 additional
MACRO nodes, eight additional servo nodes and eight additional I/O nodes (32 nodes total, 16
servo and 16 I/O). The key component on the board is U41.
• Option 1B provides the second additional MACRO interface IC (3 total) for 16 additional
MACRO nodes, eight additional servo nodes and eight additional I/O nodes (48 nodes total, 24
servo and 24 I/O). The key component on the board is U42. Option 1A is a pre-requisite.
• Option 1C provides the third additional MACRO interface IC (4 total) for 16 additional
MACRO nodes, eight additional servo nodes and 8 additional I/O nodes (64 nodes total, 32 servo
and 32 I/O). The key component on the board is U43. Options 1A and 1B are pre-requisites.
Introduction
Page 8

Turbo PMAC2 Realtime Express Controller
3
Option 5: CPU and Memory Configurations
Different versions of Option 5 provide different CPU speeds and main memory sizes. Only one
Option 5xx may be selected for the board. The CPU is a DSP563xx IC as component U1. The
CPU is available in two speed options: 80MHz CPU is a DSP56303 (Option 5C0), 240 MHz
CPU is a DSP56321 (Option 5F3). The Maximum frequency of operation is indicated with a
sticker on the CPU in U1.
The compiled/assembled-program memory SRAM ICs are located in U30, U31, and U32. These
ICs form the active memory for the firmware, compiled PLCs, and user-written phase/servo
algorithms. These can be 128k x 8 ICs (for a 128k x 24 bank), fitting in the smaller footprint, or
they can be the larger 512k x 8 ICs (for a 512k x 24 bank), fitting in the full footprint. The userdata memory SRAM ICs are located in U27, U28, and U29. These ICs form the active memory
for user motion programs, uncompiled PLC programs, and user tables and buffers. These can be
128k x 8 ICs (for a 128k x 24 bank), fitting in the smaller footprint, or they can be the larger 512k
x 8 ICs (for a 512k x 24 bank), fitting in the full footprint.
The flash memory IC is located in U26. This IC forms the non-volatile memory for the board’s
firmware, the user setup variables, and for user programs, tables, and buffers. It can be 1M x 8,
2M x 8, or 4M x 8 in capacity.
Option 5C0: Default CPU speed and memory configuration: 80MHz DSP56303 CPU
(8Kx24 internal memory), 128Kx24 SRAM compiled/assembled program memory,
128Kx24 SRAM user data memory, 1Mx8 flash memory.
Option 5C3: Default CPU speed and memory configuration: 80MHz DSP56303 CPU
(8Kx24 internal memory), expanded 512Kx24 SRAM compiled/assembled program
memory, expanded 512Kx24 SRAM user data memory, 4Mx8 flash memory.
Option 5F3: 240MHz DSP56321 CPU (192Kx24 internal memory), expanded 512Kx24
SRAM compiled/assembled program memory, expanded 512Kx24 SRAM user data
memory, 4Mx8 flash memory.
Option 10: Firmware Version Specification
Normally the Turbo PMAC2 Eth Ultralite is provided with the newest released firmware version.
The response to the VERSION query command shows which firmware revision is presently
installed. Option 10 provides for a user-specified firmware version.
Option 12: Analog-to-Digital and Digital-to-Analog Converters
Option 12 permits the installation of two channels of on-board analog-to-digital converters and
one channel of on-board digital-to-analog converter.
The analog inputs are not optically isolated, and each can have a +/- 10V input range, or a +/-5V
input range if differential signal is used, individually selectable with a 12-bit resolution.
The analog output is a 12-bit DAC have +/-10V output range.
Introduction
Page 9
Turbo PMAC2 Realtime Express Controller
4
9 - 3 8 6 2 - 2 - 0
Turbo PMAC2 Realtime Express
Communication Options
C F
A
F
H
H
C0 - Opt. 5C0 80MHz
DSP563xx CPU
256Kx24 SRAM
1Mx8 flash*
(Standard)
C3 - Opt. 5C3 80MHz
DSP563xx CPU
1024Kx24 SRAM
4Mx8 flash*
F3 - Opt. 5F3 240MHz
DSP563xx CPU
1024Kx24 SRAM
4Mx8 flash*
CPU / Memory / Firmware
Options
C
2 - PMAC2 (Standard)*
D
D
0 - No Option
3 - Opt. 18A
Electronic board
Identification
A B
B
LK
00 - No Additional* Options
xx - Factory assigned digits
for Additional* Options
K
L
Factory Assigned Options
* If Opt. 10xx (specific firmware version) or any other Additional Option is required,
contact factory for digits K and L (Factory Assigned digits).
If Opt. 10xx is not ordered the latest firmware is used.
4 - No Option
(Standard)
5 - Opt. 2B
Dual Port. RAM
6 - Opt. 15F
ModBus Comm.
7 - Opt. 2B & Opt. 15F
Dual Port. RAM
&
ModBus Comm.
JE
E
4 - Realtime Express
Only (Standard)
5 - Realtime Express
With Opt. A
MACRO-ring
fiber optic interface
6 - Realtime Express
With Opt. C
MACRO-ring
RJ-45 electrical interf.
If 5 & 6 then Must Select
Opt-1A, 1B, 1C or 1D For G
H
J
0 - No Options
1 - Opt. G1
Profibus Master
2 - Opt. G2
Profibus Slave
3 - Opt. G3
DeviceNet Master
4 - Opt. G4
DeviceNet Slave
5 - Opt. G5
CanOpen Master
6 - Opt. G6
CanOpen Slave
7 - Opt. GB
CC-Link Slave
0 - No Options
1 - Opt. 12
2-channels 12-bit
A/D converter &
1 12-bit D/A converter
Other Options
Axis / MACRO Node Options
0 - Realtime Express Only
No MACRO (Standard)
2 - Opt. 1A 8 servo, 6 I/O
and 2 communic. Nodes
3 - Opt. 1B 16 servo, 12 I/O
and 4 communic. Nodes
4 - Opt. 1C 24 servo, 18 I/O
and 6 communic. Nodes
5 - Opt. 1D 32 servo, 24 I/O
and 8 communic. nodes
If 2 - 5 then Must Select
Opt-A or Opt-C For E
G
G
Part Number Definition
Based on the different options of Turbo PMAC 2 Realtime Express Controller, there will be a
single line part number which is used for ordering and identification. The part number is assigned
based on the following chart:
For detailed information on any of these options, please refer to the previous section of this
manual.
Introduction
Page 10
Turbo PMAC2 Realtime Express Controller
5
HARDWARE SETUP
Receiving and Unpacking
Delta Tau products are thoroughly tested at the factory and carefully packaged for shipment.
When the Turbo PMAC2 Realtime Express Controller is received, do the following immediately.
1. Inspect the condition of the shipping container and report any damage immediately to the
commercial carrier that delivered the controller.
2. Remove the controller from the shipping container and remove all packing materials.
Check all shipping material for connector kits, documentation, diskettes, CD ROM, or
other small pieces of equipment. Be aware that some connector kits and other equipment
pieces may be quite small and can be accidentally discarded if care is not used when
unpacking the equipment. The container and packing materials may be retained for future
shipment.
3. Verify that the part number of the controller received is the same as the part number
listed on the purchase order.
4. Inspect the controller for external physical damage that may have been sustained during
shipment and report any damage immediately to the commercial carrier that delivered the
controller.
5. Electronic components in this controller are design-hardened to reduce static sensitivity.
However, use proper procedures when handling the equipment.
6. If the controller is to be stored for several weeks before use, be sure it is stored in a
location conforming to published storage humidity and temperature specifications stated
in this manual.
Mounting
The location of the control is important. Installation should be in an area that is protected from
direct sunlight, corrosives, harmful gases or liquids, dust, metallic particles, and other
contaminants. Exposure to these can reduce the operating life and degrade performance of the
control.
Several other factors should be evaluated carefully when selecting a location for installation:
For effective cooling and maintenance, the control should be mounted on a smooth, non-
flammable vertical surface.
At least 3 inches (76mm) top and bottom clearance must be provided for airflow. At least
0.4 inches (10mm) clearance is required between controls (each side).
Temperature, humidity and Vibration specifications should also be taken in account.
The Turbo PMAC2 Realtime Express Controller can be mounted with a traditional 2-hole panel
mount, one U-shape/notch on the bottom and one pear-shaped hole on top.
The controller is mounted to a back panel. The back panel should be unpainted and electrically
conductive to allow for reduced electrical noise interference. The back panel should be machined
to accept the mounting bolt pattern of the controller. Make sure that all metal chips are cleaned up
before the controller is mounted so there is no risk of getting metal chips inside the controller.
Hardware Setup
Page 11
Turbo PMAC2 Realtime Express Controller
6
The controller is mounted to the back panel with four M4 screws and internal-tooth lock washers.
It is important that the teeth break through any anodization on the controller’s mounting gears to
provide a good electrically conductive path in as many places as possible. Mount the controller on
the back panel so there is airflow at both the top and bottom areas of the controller (at least three
inches).
Caution:
Units must be installed in an enclosure that meets the environmental IP
rating of the end product (ventilation or cooling may be necessary to
prevent enclosure ambient from exceeding 45° C [113° F]).
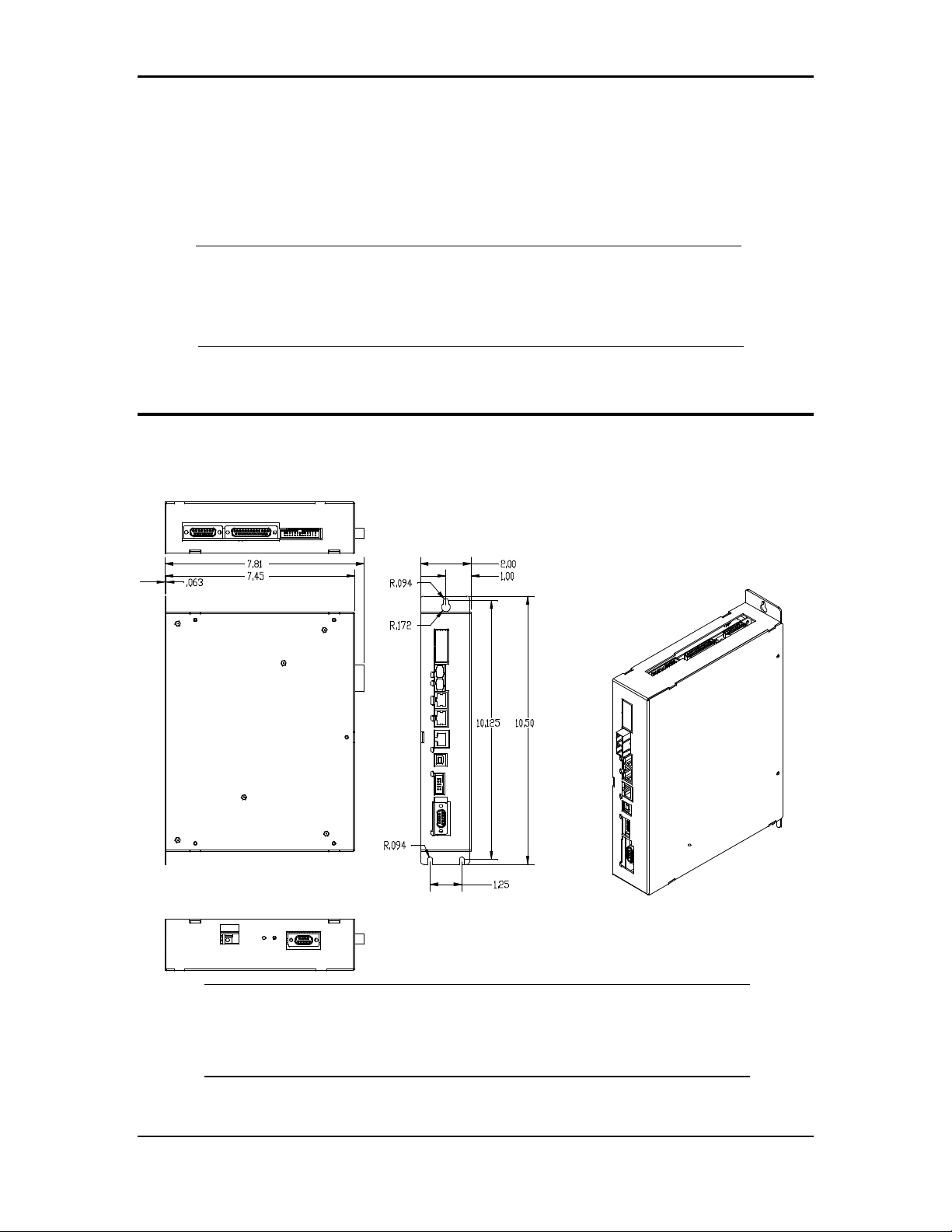
Mechanical Drawing
The figures below show the mounting dimensions of the controller.
Note:
For more detailed drawings (SolidWorks, eDrawings, DXF), visit our
website at http://www.deltatau.com.
Hardware Setup
Page 12
Turbo PMAC2 Realtime Express Controller
7
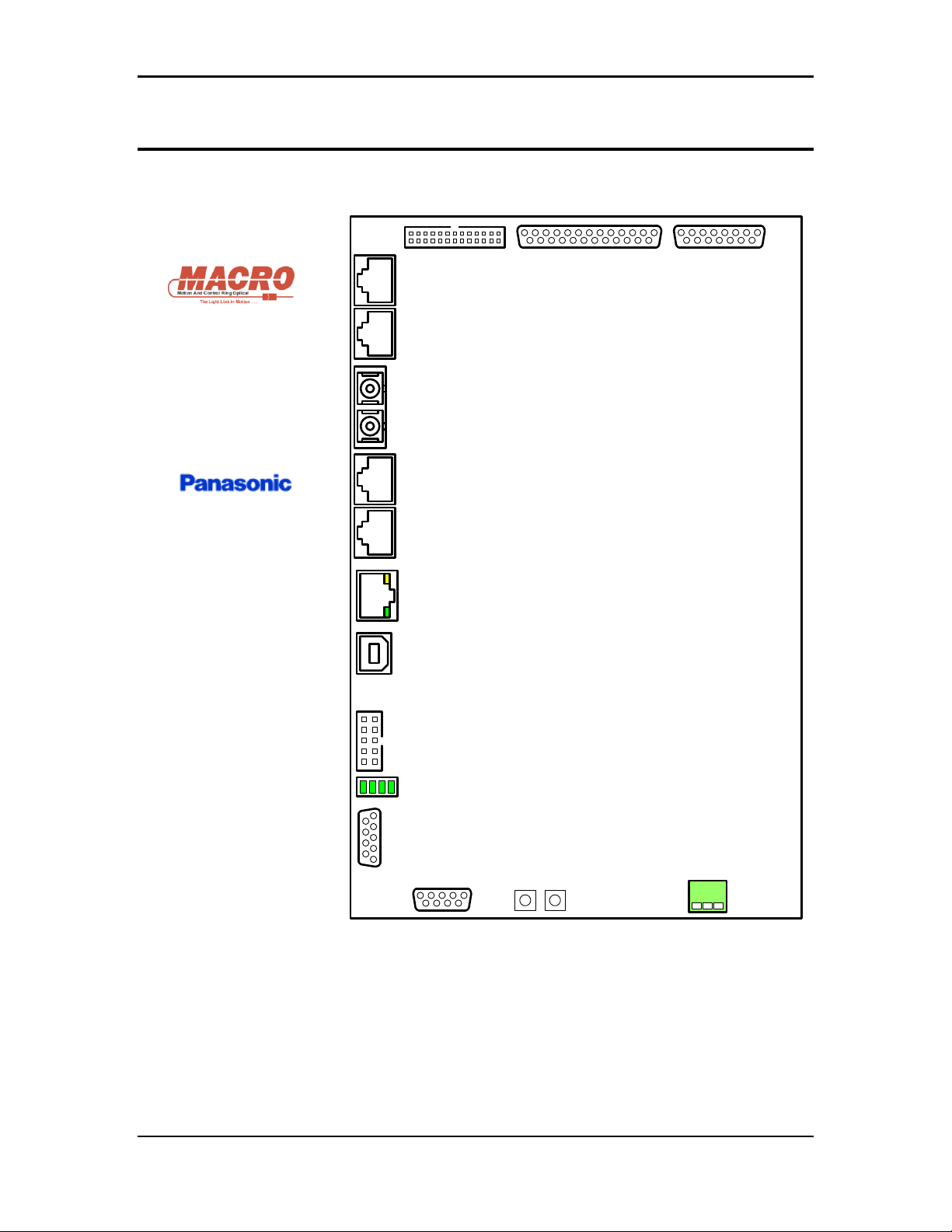
12345678
9101112131415
12345678910111213
141516171819202122232425
12345678910111213141516171819202122232425
26
1
2
3
4
5
6
7
8
9
10
12345
6789
12345
6789
Handwheel
DAC output
ADC Input
Pulse and Direction
J8 AUXJ5 General I/OJ10 JTHW
MACRO
RJ45
OUT
IN
MACRO
FIBER
OUT
IN
ETHERNET
USB
FIELDBUS
SETUP
FIELDBUS
RDY
RUN
ERR
STA/MOD
FIELDBUS
INTERFACE
RS-232
FW LOAD
RE-INIT
24VDC
INPUT
GND
+24VDC
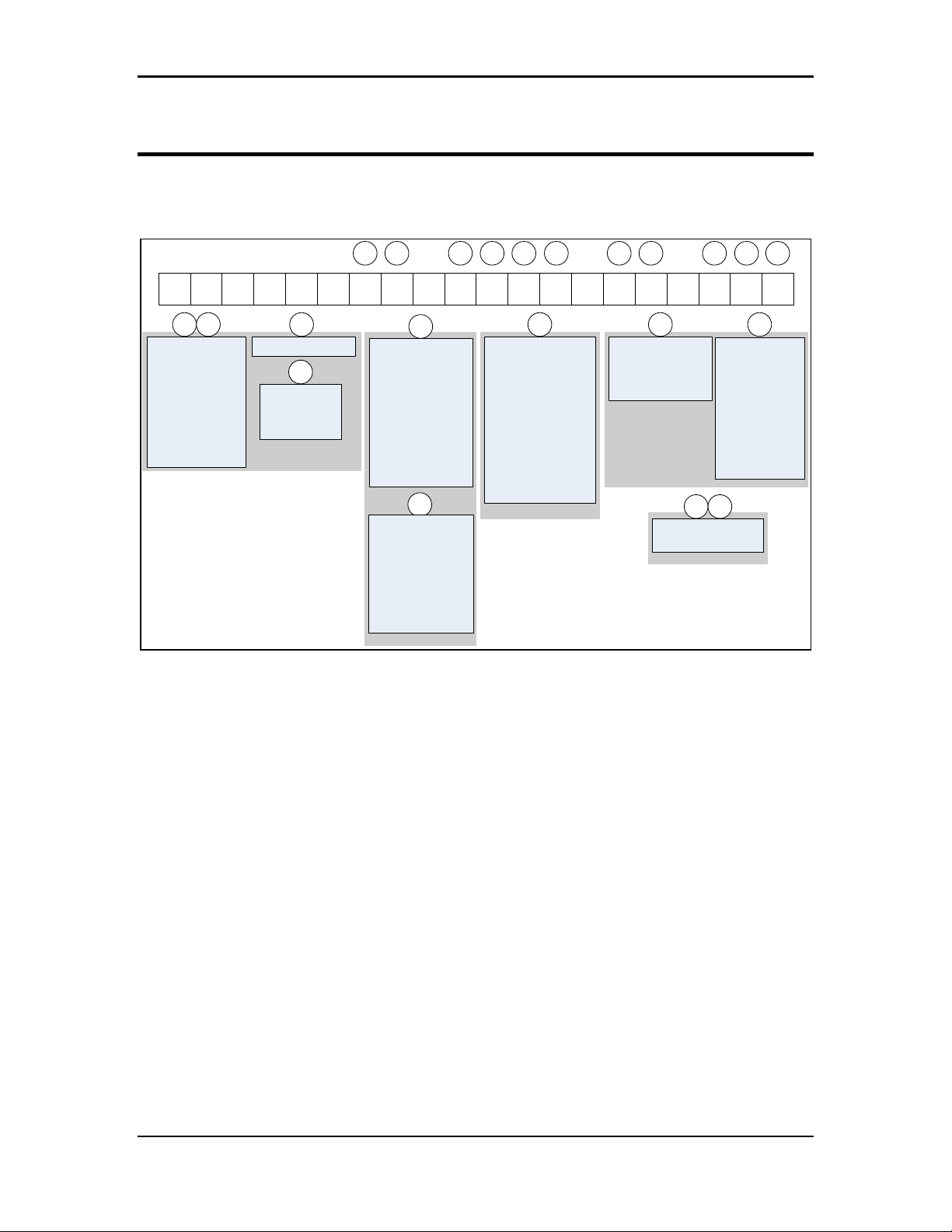
8 Sinking/Sourcing Digital Inputs
4 Sourcing/Sinking Digital Outputs
Watchdog relay contacts
1 Sinking/Sourcing Input
8 Inputs / 8 Outputs
TTL Level
(typically used to
create multiplexed I/O
with accessory boards)
The Macro Connector will be used to form a
ring between all the MACRO components of
the system.
For RJ-45 connector, standard CAT-5 or CAT-
6 cables with standard RJ-45 connection can
be used to form the ring.
For FIBER option, fiber cable with SC-style
connectors is used as communication medium
between the MACRO stations
Ethernet connection can be used either for
communication between the unit and a PC as
user interface or with MODBUS option it can
be configured as MODBUS MASTER or
SLAVE for expanding the control solution.
USB connection can be used either for
communication between the unit and a PC as
user interface.
FIELDBUS connector gets connected directly
to the Hilscher module inside the unit and the
SyCon software for setting up the module
The FIELDBUS connector is the main
connector between the Hilscher module and
the optional FieldBus network. Please check
the pin out configuration section carefully.
Serial Connection (RS-
232) can be used to talk to
the CPU directly. Since the
parser on this port can be
turned off, it can also be
used for communicating to
the 3rd party devices over
RS-232
By holding FW LOAD micro-switch while
power-up, you can place the card in
Bootstrap mode for loading firmware
By holding RE-INIT micro-switch while power-
up, the card will load the factory default
settings instead of saved settings on FLASH
24VDC
0.75 A continues
1.8 A start up
TX
RX
The TX and RX connectors get connected to
A4N/A5N Drives from Panasonic.
System Wiring
Hardware Setup
Page 13
Turbo PMAC2 Realtime Express Controller
8
Push-button Switches
There are two push-button switches located at the bottom of the unit next to the 24V power
supply input. These buttons are accessible for reinitializing the board back to factory default
settings and loading new firmware revisions.
FW LOAD switch
The FW LOAD switch is used to download new firmware to the controller. In order to use this
switch, you need to hold the switch pressed while powering up the system. This will cause the
system to go to bootstrap mode, after which you can use Delta Tau’s Executive software to
download the new firmware to the controller.
RE-INIT switch
The RE-INIT switch will cause the controller to reset to factory default settings. To use this
function, you need to hold down the switch while powering up the system. This will stop the
controller to load your settings from the EEPROM and load factory default settings instead.
Although your settings is not loaded once you power up holding the RE-INIT switch, your
settings are still available in the EEPROM, until you overwrite them with a SAVE command.
Caution:
Loading the factory default settings for this specific controller will stop the
normal functioning of the system over the MACRO and/or Realtime
Express Ring. To get the controller to communicate over the ring, you
need to download the backup settings file available from Delta Tau’s
website at http://www.deltatau.com.
Connections
USB Connection, J1
This connector is used in conjunction with USB A-B cable, which can be purchased from any
computer store. The A connector is connected to a PC or hub device and the B connector plugs
into the J1-USB port. USB drivers are always included in the latest software packages from Delta
Tau’s website at http://www.deltatau.com.
Note:
Since the USB connector will connect the ground on the
controller and computer together, make sure that computer and
the controller have the same voltage ground, i.e., that they are
connected to the same power line.
Hardware Setup
Page 14
Turbo PMAC2 Realtime Express Controller
9
Pin #
Symbol
Function
1
VCC
N.C.
2
D-
DATA-
3
D+
DATA+
4
GND
Ground
5
SHELL
Shield
6
SHELL
Shield
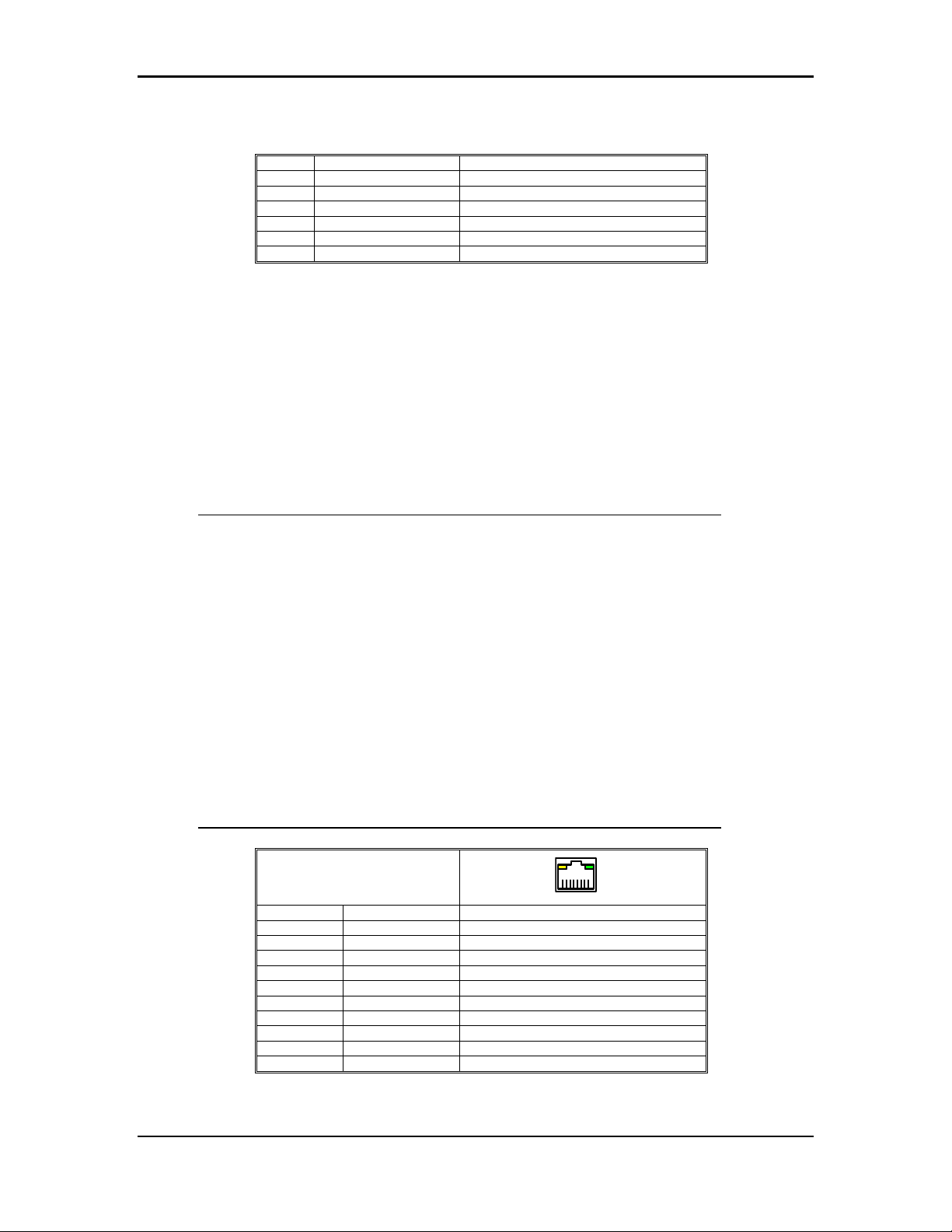
J2
RJ-45 Female Connector
1
Pin #
Symbol
Function
1
TX+
Transmit line
2
TX-
Transmit line
3
Unused
4
Unused
5
Unused
6
Unused
7
RX +
Receive line
8
RX -
Receive line
Amber LED
Activity
Blinking indicates transmit/receive activity
Green LED
Link
Solid Green indicates a valid connection
Ethernet / Modbus Connection, J2
This connector is used for Ethernet communications from the Turbo PMAC2 Eth Ultralite to a PC
or into an Ethernet network. The default IP address for all Delta Tau products with Ethernet
communication capability is 192.6.94.5 which can be changed later with the proper software
provided by Delta Tau.
This port can support Modbus communication and can act as either Server or Client on a Modbus
Network. There are four sockets available on this port and each of them can be configured as
Modbus Server/ Modbus Client / PMAC ASCII or PMAC INTR. If you want to use this port for
communication purposes with the controller, you need to set at least one of the sockets to PMAC
ASCII.
Note:
Delta Tau Systems strongly recommends the use of RJ45 CAT5e or better
shielded cable.
Newer network cards have the Auto-MDIX feature that eliminates the need
for crossover cabling by performing an internal crossover when a straight
cable is detected during the auto-negotiation process.
For older network cards, one end of the link must perform media dependent
interface (MDI) crossover (MDIX), so that the transmitter on one end of the
data link is connected to the receiver on the other end of the data link (a
crossover/patch cable is typically used). If an RJ45 hub is used, then a regular
straight cable must be implemented.
Maximum length for Ethernet cable should not exceed 100m (330ft).
Hardware Setup
Page 15
Turbo PMAC2 Realtime Express Controller
10
J3
10- pin Male Flat ribbon header
connector (IDC)
123456789
10
Pin #
Symbol
Function
1
N.A.
N.C.
2
HilDTR
Data terminal ready (DTR)
3
HilTxD-
Transmit Data (TXD)
4
HilCTS
Clear to Send (CTS)
5
HilRxD-
Receive Data (RXD)
6
HilRTS
Request to Send (RTS)
7
HilDSR
Data Set Ready (DSR)
8
N.A.
N.C.
9
GND
Signal Ground
10
+5V
+5 VDC output
Profibus
J4
DB9 Female
12345
6789
Pin #
Symbol
Function
1
N.C.
2
+5VDC
Positive Power Supply
3
RXD/TXD-P RS 485
Receive / Send Data –P
4
CNTR-P
Control Counter TTL
5
DGND*
Reference Ground *
6
+5VDC
Positive Power Supply
7
N.C.
8
RXD/TXD-N RS 485
Receive / Send Data -N
9
N.C.
* E8 jumper should be in 1-2 position
Fieldbus Setup Connector, J3
This connector is a 10-pin female flat cable connector that is directly connected to the Fieldbus
communication device installed in the system based on order options. Use SyCon program to set
up the communication module. SyCon is a universal Fieldbus configuration tool developed by
Hilscher Corporation used to configure the PMAC Gateway. Delta Tau has licensed SyConas part
of the PMAC Gateway product. The Hilscher license agreement, which will be presented during
the installation process, still applies.
Besides being able to configure Fieldbus systems like ProfiBus, DeviceNet, CANopen, and
ControlNET, SyCon can also configure Interbus, SDS, etc. The usefulness is that SyCon becomes
a common tool providing consistent user interface for all protocols for both masters and slaves.
SyCon checks the dependencies between the devices, checks for configuration conflicts and
warns of possible errors. Some protocols support standardized files containing information about
all features and limitations of the slave device. SyCon uses these files for the configuration.
After the configuration, switch SyCon into a diagnostic mode. In diagnostic mode, you can
monitor status information of all devices connected to the network. For example, the node list or
slave diagnostic information can be monitored. If a slave is not operating correctly, it will be
displayed in a different color, normally red. The base address for master modules is located at
memory location $6D000 and for slave modules at $6D700.
Fieldbus Connection, J4 (Fieldbus option required)
This Female DB-9 connector is connected to the Fieldbus module inside the board and the
communication to the network will be conducted through this port. This will have different pin
out descriptions based on the module installed in the controller.
Hardware Setup
Page 16

Turbo PMAC2 Realtime Express Controller
11
Hardware Setup
Page 17

Turbo PMAC2 Realtime Express Controller
12
CANopen
J4
DB9 Female
12345
6789
Pin #
Symbol
Function
1
N.C.
2
CAN_L
CAN_L Bus line ISO 11898
3
CAN_GND
CAN Ground
4
N.C.
5
N.C.
6
N.C.
7
CAN_H
CAN_H Bus line ISO 11898
8
N.C.
9
N.C
DeviceNet
J4
DB9 Female
12345
6789
Pin #
Symbol
Function
1
V+
DeviceNet +24V Power Supply
2
CAN_H
CAN High Signal
3
V-
DeviceNet V- Reference Potential
4
N.C.
5
SHELL
Shield*
6
CAN_H
CAN High Signal
7
N.C.
8
N.C.
9
CAN_L
CAN Low Signal
* E8 jumper should be in 2-3 position
CC-Link
J4
DB9 Female
12345
6789
Pin #
Symbol
Function
1
SLD
CC-Link Shield
2
FG
CC-Link Function Ground
3
DATA A
CC-Link Data A
4
5
DG
CC-Link Data Ground*
6
FG
CC-Link Function Ground
7
8
9
DATA B
CC-Link Data B
* E8 jumper should be in 2-3 position
Hardware Setup
Page 18

Turbo PMAC2 Realtime Express Controller
13
J5 General Purpose I/O
25-pin Female D-Sub connector
12345678910111213
141516171819202122232425
Pin #
Symbol
Description
1
IN1
Input 1
2
IN3
Input 3
3
IN5
Input 5
4
IN7
Input 7
5
IN RET
Input return line
6
OUT1 COL
Sinking output 1
7
OUT2 COL
Sinking output 2
8
OUT3 COL
Sinking output 3
9
OUT4 COL
Sinking output 4
10
COM EMT
GND Connection for sinking outputs 2
11
WDO COM
Watchdog Common
12
WDO NO
Normally Open Contact
13
ESTOP-
E-Stop return line
14
IN2
Input 2
15
IN4
Input 4
16
IN6
Input 6
17
IN8
Input 8
18
COM COL
12-24 V input for sourcing outputs 1
19
OUT1 EMT
Sourcing output 1
20
OUT2 EMT
Sourcing output 2
21
OUT3 EMT
Sourcing output 3
22
OUT4 EMT
Sourcing output 4
23
N.C.
24
WDO NC
Normally Closed Contact
25
ESTOP+
+24 V input from Normally Closed E-Stop
Button
1
to use sourcing outputs connect the +12 to +24V to pin 18 and use pins 19,20,21 &
22 as your sourcing outputs
2
to use sinking outputs connect the GND to pin 10 and use pins 6,7,8 & 9as your
sinking outputs.
12345678910111213
141516171819202122232425
+12 ~ +24VDC
GND
Sourcing Input
N.C.
12345678910111213
141516171819202122232425
+12 ~ +24VDC
GND
Sinking Input
N.C.
General Purpose I/O Connection, J5
The 25 pin D-Sub connector located on top of the controller provides 8 optically isolated inputs, 4
optically isolated outputs, and a controller watchdog output with both normally closed and
normally open contacts. The connector also has an extra input which can be used as either sinking
or sourcing input regardless of the other inputs setup.
Emergency Stop Input
This input must be powered in order for the Panasonic Realtime Express to function. Any
disconnection of the power on this input will kill the servo on all A4N/A5N drives.
This input can be reached at Y:$70801,4.
Hardware Setup
Page 19

Turbo PMAC2 Realtime Express Controller
14
12345678910111213
141516171819202122232425
+12 ~ +24VDC
GND
Sourcing Input
IN 1
IN 2
IN 3
IN 4
IN 5
IN 6
IN 7
IN 8
12345678910111213
141516171819202122232425
+12 ~ +24VDC
GND
Sinking Inputs
IN 1
IN 2
IN 3
IN 4
IN 5
IN 6
IN 7
IN 8
12345678910111213
141516171819202122232425
+12 ~ +24VDC
GND
Sourcing Outputs
12345678910111213
141516171819202122232425
+12 ~ +24VDC
GND
Sinking Outputs
Inputs wiring
There are 8 inputs on the I/O connector, which can be used as sinking or sourcing inputs.
To read the inputs assign the following M variables,
M0->Y:$78401,0 ; Input 1, J5 Pin 1
M1->Y:$78401,1 ; Input 5, J5 Pin 14
M2->Y:$78401,2 ; Input 2, J5 Pin 2
M3->Y:$78401,3 ; Input 6, J5 Pin 15
M4->Y:$78401,4 ; Input 3, J5 Pin 3
M5->Y:$78401,5 ; Input 7, J5 Pin 16
M6->Y:$78401,6 ; Input 4, J5 Pin 4
M7->Y:$78401,7 ; Input 8, J5 Pin 17
M8->X:$78401,0,8 ; I/O Direction Control
M8=$0 ; Set them as inputs
M9->Y:$78405,0,8 ; I/O Data Type Control
M9=$FF ; Set them as I/O (Not necessary since they are
always set to one)
M10->X:$78405,0,8 ; I/O Inversion Control
M10=$FF ; $FF represents 1 for high and 0 for low input
Outputs wiring
There are 4 outputs on the I/O connector, which can be used in sinking or sourcing mode. Since
these outputs share some circuitary, you can only use one type (sinking or sourcing) at a time.
The maximum current that these outputs can supply is 900mA on each output.
Hardware Setup
Page 20

Turbo PMAC2 Realtime Express Controller
15
To write to the outputs you need to define these M variables:
M52->Y:$078402,2 ; DAT2 Line; J2 Pin 6 or 19
M53->Y:$078402,3 ; DAT3 Line; J2 Pin 7 or 20
M54->Y:$078402,4 ; DAT4 Line; J2 Pin 8 or 21
M55->Y:$078402,5 ; DAT5 Line; J2 Pin 9 or 22
M60->X:$078402,0,8 ; Direction control for DAT0 to DAT7
M61->Y:$078406,0,8 ; Data type control DAT0 to DAT7
M62->X:$078406,0,8 ; Data inversion control
M60=$FF ;Setting the Direction control to 1, meaning outputs
M61=$FF ;Setting data type to DATA on DAT0 to DAT7
M62=$0 ;Data inversion control for DAT0 to DAT7
Watchdog Relay wiring
In addition to the I/O points and the E-stop on General Purpose I/O connector, the user can
monitor the status of the controller by accessing the watchdog relay. As long as the controller is
powered up and the watchdog has not been tripped (indicating a functional controller), the relay is
energized. As soon as the watchdog trips, the relay will be de-energized. Both normally closed
and normally open contacts are available on pins 24 and 12 consequently with common contact
on pin 11.
Hardware Setup
Page 21

Turbo PMAC2 Realtime Express Controller
16
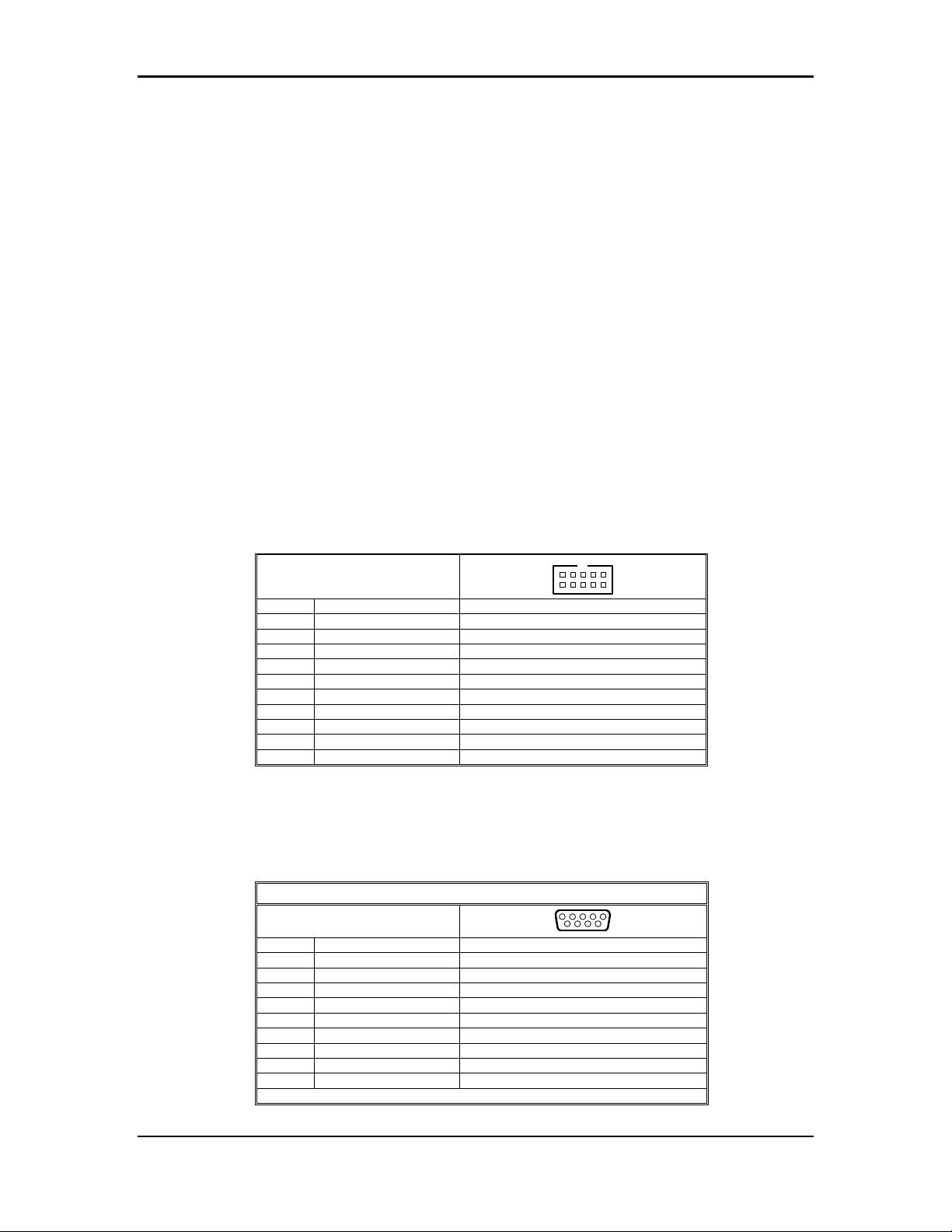
J8 AUX
DB15 Female
12345678
9101112131415
Pin #
Symbol
Function
1
ADC1-
Analog-to-Digital input, negative signal or DGND1
2
ADC2-
Analog-to-Digital input, negative signal or DGND1
3
DAC1-
±10VDC output, inverted
4
DIR1-
Direction output, inverted
5
PUL1-
Pulse output, inverted
6
HW1_CHA1-
Handwheel Quadrature input A/
7
HW1_CHB1-
Handwheel Quadrature input B/
8
DGND
Digital Ground
9
ADC1+
Analog-to-Digital input, positive signal
10
ADC2+
Analog-to-Digital input, positive signal
11
DAC1+
±10VDC output
12
DIR1+
Direction output
13
PUL1+
Pulse output
14
HW1_CHA1+
Handwheel Quadrature input A
15
HW1_CHB+
Handwheel Quadrature input B
1
to use the ADCs with single ended signal, connect the ADC1- and ADC2- to pin 8 DGND
12345678
9101112131415
Quadratue
Encoder
A/AB/
B
+5VDC
GND
Handwheel Wiring
Auxiliary Connector, J8
The 15-pin DB style female connector contains connections for handwheel quadrature input, two
ADC inputs, one DAC output and one pulse and direction output. Please check the software setup
and connector pin out sections for more information on how to use each of these features.
Handwheel Wiring
The handwheel wiring should be done as shown in the following figure. You can use differential
or single-ended signals from any quadrature encoder. Make sure that you tie the ground
connection of the encoder to the ground connection of the J8 if you’re planning to use singleended encoder. Since there is no power output pin available on J8, you need to power up the
encoder from a separate source (a.e. JTHW).
To read the handwheel counts, you need to implement these settings in Encoder Conversion
Table:
I8000=$78410
M1010->X:$3501,0,24,s
Hardware Setup
Page 22

Turbo PMAC2 Realtime Express Controller
17
Single-Ended Signal
+10VDC
-10VDC
GND on the analog
signal side
J8
12345678
9101112131415
Differential Signal
J8
Differential
Signal 2
Differential
Signal 1
12345678
9101112131415
J8
DAC-
DAC+
GND
Digital to Analog Output Wiring
12345678
9101112131415
You can access the position of the handwheel. You can also use the same address ($3501) as a
master address for any of the motors (Ixx05)
Analog-to-Digital Connections (Option 12 required)
There are two analog-to-digital circuits on J8 which can have 12-bit or 16-bit resolution based on
the requested options. The signal can be either differential or single-ended. In single-ended
configuration, the input range can be ±10VDC in contrast with ±5VDC in differential signal
setting.
To read the value of the ADCs, make sure that you have the correct strobe word written to the
ADCs. The ADC values can be read using M-variables with the following definitions:
Option 12 : 12 bit Analog to Digital option
I6806=$1FFFFF
M63->Y:$078406,8,8 ; Data type control SEL0 to SEL7
M63=$0;
M1001->Y:$78415,8,12,S
M1002->Y:$78416,8,12,S
Digital-to-Analog Connection
The digital-to-analog output has a range of ±10VDC and can source 20mA current. The output
signal is in differential mode and can be used as either differential or single-ended mode.
Hardware Setup
Page 23

Turbo PMAC2 Realtime Express Controller
18
12345678
9101112131415
DIRDIR+
Pulse Pulse +
GND
Pulse & Direction Wiring
To write into the DAC output:
I6816=0 ;set the channel output type to PWM output
M1005->Y:$78414,8,16,S
By changing the value of M1005 in a range of ±I6800, you can have ±10VDC output on your
DAC output.
Note:
Please note that the DAC output is a filtered PWM signal and is limited
by the max phase settings which cannot be changed because of
Realtime Express network requirements.
Pulse and Direction Output
This output can be connected to any stepper motor amplifier or can be used to generate pulses for
any other application. Since the phase and servo clock cycle times is preset at Realtime Express
network’s update rate, the maximum output frequency with default settings is 327kHz which can
be increased to 1.31 MHz by changing the PFM clock divider (I6803)
To output Pulse and Direction on the handwheel port :
I6826=3 ;set the channel output to PFM mode
M1006->Y:$7841C,0,24,s
By changing the value of m1006 you can select the direction and the frequency of the pulses.
Hardware Setup
Page 24

Turbo PMAC2 Realtime Express Controller
19
J9 24V DC Input
Phoenix PCB Edge Connector
Pin #
Symbol
Function 1 GND
Ground Connection from power supply
2
N.C.
3
+24V
+24VDC input from power supply
MACRO SC-Style Fiber
Connector
CN3 and CN4
Front View
OUT IN
Pin #
Symbol
Function
1
IN
MACRO Ring Receiver
2
OUT
MACRO Ring Transmitter
1. The fiber optic version of MACRO uses 62.5/125 multi-mode glass fiber optic cable terminated in an SC-style
connector. The optical wavelength is 1,300nm.
2. It is possible to "adapt" wire to fiber operation when using OPT B.
24 VDC Power Supply Input, J9
An external 24VDC power supply is required to power the Turbo PMAC2 Eth Ultralite. The 24V
is wired into connector J9. The polarity of this connection is extremely important. Carefully
follow the instructions in the wiring diagram. This connection can be made using 16 AWG wire
directly from a protected power supply. In situations where the power supply is shared with other
devices, it may be desirable to insert a filter in this connection.
The power supply providing this 24V must be capable of providing an instantaneous current of at
least 900 mA. In the case where multiple devices are driven from the same 24V supply, it is
recommended that each device be wired back to the power supply terminals independently
The connector for J9 is a Phoenix PCB Edge connector ZEC 1,5/ 3-ST-5,0 C2 R1,3 with Delta
Tau part number 014-188305-001 and Phoenix part number 18883051.
MACRO Connector
Based on the option that you have, either the MACRO fiber connector or the MACRO RJ45
connector will be installed on the controller.
• Option A provides the MACRO-ring fiber optic SC-style interface connector. The key
component on the board is U49.
Hardware Setup
Page 25

Turbo PMAC2 Realtime Express Controller
20
MACRO RJ45
Connector
CN3 and CN4
Front View
OUT IN
Pin #
Symbol
Function
1
DATA+
Differential MACRO Signal.
CN4: DATA+ input. CN3: DATA+ output.
2
DATA-
Differential MACRO Signal.
CN4: DATA- input. CN3: DATA- output.
3
Unused
Unused terminated pin. See schematic below.
4
Unused
Unused terminated pin. See schematic below.
5
Unused
Unused terminated pin. See schematic below.
6
Unused
Unused terminated pin. See schematic below.
7
Unused
Unused terminated pin. See schematic below.
8
Unused
Unused terminated pin. See schematic below.
• Option C provides the MACRO-ring RJ-45 electrical interface connectors. The key components
on the board are CN3 and CN4.
Hardware Setup
Page 26

Turbo PMAC2 Realtime Express Controller
21
Realtime Express RJ45
Connector
CN1 and CN2
Front View
TX RX
Pin #
Symbol
Function
1
CT
2
CT
3
TX- / RX-
4
CT
5
CT
6
TX+ /RX+
7
CT
8
CT
Realtime Express Connector
These connectors are used to establish the Realtime Express Ring between the controller and
Panasonic’s A4N/A5N drives.
Hardware Setup
Page 27

Turbo PMAC2 Realtime Express Controller
22
J10 Thumbwheel Port
26 Pin IDC Header Reciprocal
12345678910111213141516171819202122232425
26
Pin #
Symbol
Function
Description
Notes
1
GND
Common
PMAC Common
2 GND
Common
PMAC Common
3 DAT0
Input
Data-0 Input
Data input from multiplexed accessory
4
SEL0
Output
Select-0 Output
Multiplexer select output
5
DAT1
Input
Data-1 Input
Data input from multiplexed accessory
6
SEL1
Output
Select-1 Output
Multiplexer select output
7
DAT2
Input
Data-2 Input
Data input from multiplexed accessory
8
SEL2
Output
Select-2 Output
Multiplexer select output
9
DAT3
Input
Data-3 Input
Data input from multiplexed accessory
10
SEL3
Output
Select-3 Output
Multiplexer select output
11
DAT4
Input
Data-4 Input
Data input from multiplexed accessory
12
SEL4
Output
Select-4 Output
Multiplexer select output
13
DAT5
Input
Data-5 Input
Data input from multiplexed accessory
14
SEL5
Output
Select-5 Output
Multiplexer select output
15
DAT6
Input
Data-6 Input
Data input from multiplexed accessory
16
SEL6
Output
Select-6 Output
Multiplexer select output
17
DAT7
Input
Data-7 Input
Data input from multiplexed accessory
18
SEL7
Output
Select-7 Output
Multiplexer select output
19
N.C.
N.C.
No Connection
20
GND
Common
PMAC Common
21
N.C.
N.C.
No Connection
22
GND
Common
PMAC Common
23
N.C.
N.C.
No Connection
24
GND
Common
PMAC Common
25
+5V
Output
+5VDC Supply
Power Supply output
26
INIT-
Input
PMAC Reset
Low is Reset
The JTHW multiplexer port provides 8 inputs and 8 outputs at TTL levels. While these I/O can be used in
unmultiplexed form for 16 discrete I/O points, most users will utilize PMAC software and accessories to
use this port in multiplexed form to greatly multiply the number of I/O that can be accessed on this port. In
multiplexed form, some of the SELn outputs are used to select which of the multiplexed I/O are to be
accessed.
Thumbwheel Multiplexer Port (JTHW Port), J10
The Thumbwheel Multiplexer Port, or Multiplexer Port, on the JTHW connector has eight input
lines and eight output lines. The output lines can be used to multiplex large numbers of inputs and
outputs on the port, and Delta Tau provides accessory boards and software structures (special Mvariable definitions) to capitalize on this feature. Up to 32 of the multiplexed I/O boards may be
daisy-chained on the port, in any combination.
1. 26-pin female flat cable connector T&B Ansley P/N 609-2641
2. Standard flat cable stranded 26-wire T&B Ansley P/N 171.26
3. Phoenix varioface module type FLKM 26 (male pins) P/N 22 81 05 0
Hardware Setup
Page 28

Turbo PMAC2 Realtime Express Controller
23
How to use THW Port with Acc-34:
1. Set i29=$78400
2. save
3. $$$
4. Follow the setup for Acc-34
How to use THW Port as general purpose IO (8 Input and 8 Output):
1. WX:$78400, $FF00 ;IO Direction Control
2. WY:$78404, $FFFF ;IO Data Type Control
3. WX:$78404, 0 ;IO Inversion Control
M1000->Y:$78400,0,8 ;8 Inputs
M1001->Y:$78400,8,8 ;8 Outputs
Hardware Setup
Page 29

Turbo PMAC2 Realtime Express Controller
24
SOFTWARE SETUP
Host Communications
To communicate with Turbo PMAC2 Realtime Express Controller from your host computer, you
can use any of the provided communication ports. The choice only affects the speed at which you
will be talking to the controller. You can communicate with the controller over the Serial
communication or Ethernet ports without any special software. A standard communications
program such as HyperTerminal can be used on these ports, but the PMAC Executive PRO 2
Suite is still recommended for development.
For Serial RS-232 communications, please check the J7 pin outs for proper serial communication.
For Ethernet communication, the default IP address is 192.6.94.5. You can use any terminal
program to talk to the controller over these ports.
In order to get the most out of the controller, we recommend using Delta Tau’s PMAC Executive
Pro2 Suite for communication. The PMAC Executive Pro2 Suite is designed to communicate
with all Delta Tau products. Although the suite includes setup software programs for different
types of controllers, you will not be using all of them.
The PEWIN32PRO2 is the main program used to set up your system and is needed for your
application development and troubleshooting. You can also use the PMAC Plot Pro2 to use the
powerful functionality of gathering information on the controller.
Pewin32PRO2 Communication Setup
First, connect the controller to your PC. You don’t need any driver to get connected to the
controller using the Serial or Ethernet port. Once you plug in the USB port, the Windows Plug
and Play system will detect the controller and install the appropriate driver for communication. If
you install the PMAC Executive Pro2 Suite before connecting the USB connection, Windows
will detect the communication driver automatically.
Select the automatic installation of the drivers and click Next.
Software Setup
Page 30

Turbo PMAC2 Realtime Express Controller
25
A window will appear, stating it cannot verify the compatibility of the driver with Windows XP.
Click on Continue Anyway button and the driver will be installed on your computer. You should
then be able to see the device in the Windows Device Manager.
Once you have established the connection between the controller and the computer, start your
software by clicking on Pewin32PRO2 icon either from your desktop or from the Start menu.
From the Setup menu, select on Force All Windows to Device Number.
Software Setup
Page 31

Turbo PMAC2 Realtime Express Controller
26
Click Insert.
Select the communication port from the list. All the available Serial ports (COM1, COM2, …)
and Delta Tau USB products are present on this list.
When trying to communicate through an Ethernet port and the
IP address for the PMAC is not in the list, click New:
Select the Ethernet (Eth) option and click OK.
Enter the IP address of the controller. The Default IP address
for all Delta Tau Products is 192.6.94.5 . If you need to change
this default address, you can do so by using Configure
Ethernet 100BaseT software, which can be accessed from
PMAC Executive PRO 2 Suite / Delta Tau Common folder
under Start Menu.
After selecting the communication port with the controller, click OK.
The selected device is now added to the list, and it is referred as PMAC ##. You can have up to
32 PMAC devices defined on the software.
Software Setup
Page 32

Turbo PMAC2 Realtime Express Controller
27
To check the communications, click Test. If communication is established, you will see the
following confirmation window:
In case of Ethernet Communication, the Pcommserver will report the result of PING command to
the network driver chip on the controller before trying to communicate to the controller CPU.
Once the communication is established, you can use any of the windows and tools provided by
the Pewin32PRO2 software and accompanied tools.
Realtime Express Network Specific Configuration Setup
The Turbo PMAC2 Realtime Express Controller is a part of Turbo PMAC 2 family of controllers
which has been loaded with custom user-written phase and servo algorithms to communicate with
Panasonic drives.
The software consists of two parts. All you need to do is to change the download file
“panadwld.pmc” based on your particular Realtime Express network settings. The download file
will include a few other files in which you don’t need to change. This process is only necessary
the first time that you want to setup a network or if you have reset the card back to factory default
settings either by issuing a $$$*** command and saving it or after powering up while holding the
SW2 (Re-Init).
You can download these files from Delta Tau’s website www.deltatau.com
Once you open the PANADWLD.PMC file with PEWIN32Pro or Pro2 software and download it
to the controller, you need to issue a Save command. After the save command has been issued,
issue a command cycle power on the controller.
Software Setup
Page 33

Turbo PMAC2 Realtime Express Controller
28
#define PanasonicMtrs 4
#define MACRO
// #define MACRO
#define MAXPHASE 7368
#define MAXPHASE_TO_PHASE_DIV 3
#define PHASE_TO_SERVO_DIV 0
CLK_DIV_SAVE_M = 0
Realtime Express Network Setup – Step by Step
Although the software package needed for Realtime Express setup includes several files, you only
need to modify one file in order to set up the controller. The file to modify based upon the
settings of your network is called “PANADLWD.PMC”
First, establish communication with the controller through the PEWIN32PRO2 software. From
the File menu, then select Open File and open “PANADLWD.PMC”. Make sure that you have
unpacked all the files included in the package under the same folder and that you have read/write
access to that folder.
There is sufficient explanation included in the file in order for you to edit the file easily. Here are
the main changes needed for system setup.
1. Number of Panasonic Motors: (Line 45)
Define the number of Panasonic A4N/A5N drives on the Realtime Express network (the
number of Panasonic motors you have on the ring).
In this example we have 4 motors on the Realtime Express network.
2. MACRO option: (Line 50)
Define whether or not you have the MACRO ring option.
If you do not have the MACRO option, comment out this whole line.
3. Clock Settings: (Line 54)
It’s possible to have different clock settings on the Turbo PMAC2 Realtime Express
controller. However, here are the suggested values:
If you only have the Panasonic Realtime Express network, these settings will always
work for you and no changes are required.
If you have the MACRO option in addition to Realtime Express, and you want to have
higher PWM/Phase/Servo clock frequencies than the Panasonic Realtime Express default,
you can choose a setting from the following table:
Software Setup
Page 34

Turbo PMAC2 Realtime Express Controller
29
Update
Period
(ms)
Com.
Period
(ms)
Servo
Freq.
(kHz)
Phase
Freq.
(kHz)
MAXPHASE
MAXPHASE_TO_PHASE_DIV
PHASE_TO_SERVO_DIV
CLK_DIV_SAVE_M
1.000
1.000
1.000
1.000
58982 0 1
0
1.000
0.500
1.000
2.000
29491 0 2
0
0.500
0.500
2.000
2.000
29491 0 1
0
0.167
0.167
6.000
6.000
9830 0 1
0
0.167
0.083
6.000
12.000
4915 0 2
0
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
8 0 0 0 0 0
Gate Type:
0: PMAC1
1: PMAC2
0: Use amplifier enable function
1: Don’t use amplifier enable function
0: Enable hardware position limits
1: Disable hardware position limits
0: Enable amplifier fault input
1: Disable amplifier fault input
00: Kill all PMAC motors on fault or following error
01: Kill only motors in the same coordinate system of this motor on it’s fault or following error
10 or 11: Kill this motor only on this motor on it’s fault or following error
0: Low true amplifier fault input
1: High true amplifier fault input
Hex
Bin
Choose the best fitted PWM/Phase clock for your system and set the MAXPHASE,
MAXPHASE_TO_PHASE_DIV, PHASE_TO_SERVO_DIV and CLK_DIV_SAVE_M
based upon the table.
The MAXPHASE parameter will be controlling the frequency of Max Phase clock of
the PMAC which other clocks are divider from (I6800).
MAXPHASE_TO_PHASE_DIV specifies the divider from Max Phase clock to Phase
clock, and PHASE_TO_SERVO_DIV will determine the divider which generates the
Servo clock from the Phase clock.
As shown in the table, the CLK_DIV_SAVE_M variable defines an additional divider
from Phase clock to Realtime Express clock. Because of the architecture of the
Panasonic’s Realtime Express, this clock needs to be set at 2 kHz, the update rate of the
data from PMAC to Panasonic.
Please note that since the Servo clock in some cases might be faster than what Panasonic
drives accept, we should adjust the Servo calculation frequency of Panasonic motors by
changing their Ixx60 value. The proper value for Ixx60 is provided in the table. Please
note that changing of Ixx60 is only needed for Panasonic motors on the Realtime Express
network and not on any other motor on the MACRO ring.
4. Flag Mode Control: (Line 97)
Please refer to the Turbo PMAC Software Reference Manual for detailed information on
setting this parameter. Remember that the Panasonic’s A4N/A5N drives have high true
amplifier fault signal, so the default value will be: $800000
Here is a quick guide on setting Ixx24 of the motors:
Software Setup
Page 35

Turbo PMAC2 Realtime Express Controller
30
I124,PanasonicMtrs,100=$800000
I110 = $1C05
I210 = $1C0D
I310 = $1C15
I410 = $1C1D
/*
I510 = $1C25
I610 = $1C2D
I125=$A4
I225=$124
I325=$1A4
I425=$224
/*
I525=$2A4
I625=$324
I103=$A6
I104=$A6
I203=$126
I204=$126
I303=$1A6
I304=$1A6
I403=$226
I404=$226
/*
I503=$2A6
I504=$2A6
5. Absolute Position Capture: (Starting at line 102)
By default, these variables read the absolute position of the motor from the A4N/A5N
drives. If you don’t have an absolute encoder, it’s still acceptable to keep these values
since they will return a zero on power up.
The user has to comment out the I-variables for motors which are not on the Realtime
Express network. In this example, only the first four motors are being used.
Note that you have to place the /* sign one line after the last motor number used for the
Panasonic network.
6. Flag Status Word: (Starting at line 148)
The user has to comment out the I-variables for motors which are not on the Realtime
Express network. In this example, only the first four motors are being used.
Note that you have to place the /* sign one line after the last motor number used for the
Panasonic network.
7. Position and Velocity Feedback: (Starting at line 186)
The user has to comment out the I-variables for motors which are not on the Realtime
Express network. In this example, only the first four motors are being used.
Software Setup
Page 36

Turbo PMAC2 Realtime Express Controller
31
I603=$326
I604=$326
I130=0
I131=0
I230=1
I231=1
I330=2
I331=2
I430=3
I431=3
/*
I530=4
I531=4
I630=5
I631=5
I133,PanasonicMtrs,100=$11
I133=$11 ;home on C channel
I233=$12 ;home on rising edge of the home flag
I333=$13 ;home on falling edge of the home flag
I433=$11 ;home of C channel
Note that you have to place the /* sign one line after the last motor number used for the
Panasonic network.
8. Panasonic TX Block and MacID Number of motor xx: (Starting at line 267)
Ixx30 and Ixx31 must match the order block number and MacID of the ring even though
the node might be an I/O node. Slave I/O nodes should be put in the Ixx30 and Ixx31
variables after the Servo nodes. There can be no GAPS in the Ixx30/31 variables. For
example, you cannot use Motor 5's I530/531 variables if you only have four nodes. Also,
this code only supports one block slave nodes.
The user has to comment out the I-variables for motors which are not on the Realtime
Express network. In this example, only the first four motors are only being used. It is
assumed that the first A4N/A5N drive on the downstream of the TP2RTEX is connected
to Motor 1 and the MacID of it is set to 0. The second drive is connected to Motor 2 and
MacID is set to 1 and so on.
Note that you have to place the /* sign one line after the last motor number used for the
Panasonic network.
9. Panasonic Homing Type Code: (Starting at line 365)
The Ixx33 variable will determine the homing routine of motor xx. In the default
download file, all the motors are set to home, based upon index high.
If you want to have different homing routines for different motors, you have to replace
Software Setup
the Ixx33 definition with individual setting for each motor. As an example:
Page 37

Turbo PMAC2 Realtime Express Controller
32
I111,PanasonicMtrs,100=0
I112,PanasonicMtrs,100=0
I132,PanasonicMtrs,100=0
I135,PanasonicMtrs,100=0
10. Fatal Following Error Limit: (Starting at line 378)
Although the PMAC can monitor and take action based upon the following error of each
motor, Panasonic suggests that the drive will determine the fatal following error and this
feature is not to be used in PMAC, hence the value is set to zero. However, if the user
decides to use the PMAC’s following error monitor, this I-variable can be used.
11. Warning Following Error Limit: (Starting at line 379)
Although the PMAC can monitor and take action based upon the following error of each
motor, Panasonic suggests that the drive will determine the following error and this
feature not to be used in PMAC, hence the value is set to zero. However, if the user
decides to use the PMAC’s following error monitor, this I-variable can be used.
12. Ixx11's saved value during Homing: (Starting at line 386)
If the user chooses to use Ixx11 by setting it to a value other than zero, the same value
should be assigned to Ixx32.
13. Ixx12's saved value during Homing: (Starting at line 391)
If the user chooses to use Ixx12 by setting it to a value other than zero, the same value
should be assigned to Ixx35.
14. MACRO Settings: (Starting at line 402)
If the user has MACRO communication option enabled, the most common settings are
pointed out after this section of the file. For more detailed information on MACRO setup,
refer to the Delta Tau MACRO Software Reference Manual and the MACRO hardware
specific manual.
15. Save the file:
Save the modified file under the original name.
16. Reset the controller:
Software Setup
Page 38

Turbo PMAC2 Realtime Express Controller
33
SAVE
$$$
M8123=8
Reset the controller by issuing a $$$*** command in the terminal window.
17. Download the configuration file.
18. Save the configuration to the PMAC:
Save the configuration to the PMAC by issuing a “SAVE” command in the terminal
window of PEWIN32PRO2.
19. Reset the controller:
Reset the controller by issuing a “$$$” command in the terminal window.
20. Clear and Reset the Realtime Express network:
Reset and clear the errors on the Realtime Express network by setting M8123=8.
21. Download any other user configuration files and/or programs, PLCs, etc.
I-Variable Definitions
As described in the PANADWLD.PMC file, there are certain I-variables that you need to set for
your ring setup. Also there are a certain number of resources and functions that have been limited
to the user, which are listed below. If a specific I-variable is not listed here, you may assume that
it has the same usage described in Delta Tau’s Turbo Software Reference Manual.
Software Setup
Page 39

Turbo PMAC2 Realtime Express Controller
34
RESERVED M & P VARIABLE FOR PANASONIC IMPLEMENTATION
M8100 - M8191
P8191
Since these variables have been used in user-written servo, phase and PLCC1, writing into these
variables or changing their definition can cause unexpected behavior in the system.
UNAVAILABLE PMAC COMMANDS FOR PANASONIC IMPLEMENTATION
Certain PMAC commands are not available on the Realtime Express Controller. These
commands can stop the controller by stopping the network from:
HMZ
HM1..32 (home search command from any motion program)
$$$ (To reset power cycle, or command M8123 = 8 in terminal window)
$$$*** but then must reload Panasonic, SAVE and power cycle
$ (To recover set M8123 = 5)
Ctrl-D (To recover, power cycle)
Any move until trigger
Programming DISPLAY commands
RESERVED PMAC I-VARIABLES FOR PANASONIC IMPLEMENTATION
General Global Setup I-Variables
These I-variables should not be changed. They are specifically set for Realtime Express Network.
I5 PLC Program Control
Default: 3
Range: 1 or 3
I7 Phase Cycle Extension
Default: 0
I10 Servo Interrupt Time (Set for Panasonic rate)
Default: 8388607
Motor Setup I-Variables
Ixx00 Motor Activation Control
Must be set to 1 for each active motor.
Software Setup
Page 40

Turbo PMAC2 Realtime Express Controller
35
I Variable
Value
I Variable
Value
I Variable
Value
I Variable
Value
I103
$A6
I903
$4A6
I1703
$8A6
I2503
$CA6
I203
$126
I1003
$526
I1803
$926
I2603
$D26
I303
$1A6
I1103
$5A6
I1903
$9A6
I2703
$DA6
I403
$226
I1203
$626
I2003
$A26
I2803
$E26
I503
$2A6
I1303
$6A6
I2103
$AA6
I2903
$EA6
I603
$326
I1403
$726
I2203
$B26
I3003
$F26
I703
$3A6
I1503
$7A6
I2303
$BA6
I3103
$FA6
I803
$426
I1603
$826
I2403
$C26
I3203
$1026
I Variable
Value
I Variable
Value
I Variable
Value
I Variable
Value
I104
$A6
I904
$4A6
I1704
$8A6
I2504
$CA6
I204
$126
I1004
$526
I1804
$926
I2604
$D26
I304
$1A6
I1104
$5A6
I1904
$9A6
I2704
$DA6
I404
$226
I1204
$626
I2004
$A26
I2804
$E26
I504
$2A6
I1304
$6A6
I2104
$AA6
I2904
$EA6
I604
$326
I1404
$726
I2204
$B26
I3004
$F26
I704
$3A6
I1504
$7A6
I2304
$BA6
I3104
$FA6
I804
$426
I1604
$826
I2404
$C26
I3204
$1026
I100 Motor 1 Activation Control should always be equal to 1. Meaning at least 1
drive/motor should be connected to the controller. This setting is done in the
PANADWLD.PMC file.
Ixx01 Motor xx Commutation Enable
This should be 0 for all the motors except motor #1 for which the default value is 1 and
should not be changed.
I101 Motor 1 Commutation Enable should always be 1
Ixx03 Motor xx Position Loop Feedback Address
Ixx04 Motor xx Velocity Loop Feedback Address
Ixx08 Motor xx Position Scale Factor
Should be set to 8
Ixx09 Motor xx Velocity-Loop Scale Factor
Should be set to 8
Ixx10 Motor xx Power-On Servo Position Address
If you have absolute feedback and the value is being sent over the RX buffer in the same memory
location of Actual position, you can set up the power-on position address Ixx10 based on the
following values:
Software Setup
Page 41

Turbo PMAC2 Realtime Express Controller
36
I Variable
Value
I Variable
Value
I Variable
Value
I Variable
Value
I110
$1D05
I910
$1D45
I1710
$1D85
I2510
$1DC5
I210
$1D0D
I1010
$1D4D
I1810
$1D8D
I2610
$1DCD
I310
$1D15
I1110
$1D55
I1910
$1D95
I2710
$1DD5
I410
$1D1D
I1210
$1D5D
I2010
$1D9D
I2810
$1DDD
I510
$1D25
I1310
$1D65
I2110
$1DA5
I2910
$1DE5
I610
$1D2D
I1410
$1D6D
I2210
$1DAD
I3010
$1DED
I710
$1D35
I1510
$1D75
I2310
$1DB5
I3110
$1DF5
I810
$1D3D
I1610
$1D7D
I2410
$1DBD
I3210
$1DFD
Motor Safety I-Variables
Ixx11 Motor xx Fatal Following Error Limit
By default, the controller will not check for following error and the drive will monitor for any
following errors. The reason is that the following error reported back to PMAC includes a delay
because of the network update rate, which can translate into unrealistic following errors at higher
speeds.
You can always turn this feature on by setting it to any number greater than zero. Make sure that
the fatal following error is less than the following error set on the drive, or the over current
protection will stop the drive with error 16 (Over-Current).
Note
When setting the Ixx11, make sure that you store the
same value in Ixx32 as the default value of your
following error. Ixx11 would be changed to a different
value while homing procedure and the value in Ixx32
would be written back once the homing is complete.
Ixx12 Motor xx Warning Following Error Limit
By default, the controller will not check for warning following error. The reason is that the
following error reported back to PMAC includes a delay because of the network update rate,
which can translate into unrealistic following errors at higher speeds.
Note
When setting the Ixx12, make sure that you store the
same value in Ixx35 as the default value of your
following error. Ixx12 would be changed to a different
value while homing procedure and the value in Ixx35
would be written back once the homing is complete.
Software Setup
Page 42

Turbo PMAC2 Realtime Express Controller
37
I-Variable
Value
I-Variable
Value
I-Variable
Value
I-Variable
Value
I125
$A4
I925
$4A4
I1725
$8A4
I2525
$CA4
I225
$124
I1025
$524
I1825
$924
I2625
$D24
I352
$1A4
I1125
$5A4
I1925
$9A4
I2725
$DA4
I425
$224
I1225
$624
I2025
$A24
I2825
$E24
I525
$2A4
I1325
$6A4
I2125
$AA4
I2925
$EA4
I625
$324
I1425
$724
I2225
$B24
I3025
$F24
I725
$3A4
I1525
$7A4
I2325
$BA4
I3125
$FA4
I825
$424
I1625
$824
I2425
$C24
I3225
$1024
Motor Motion I-Variables
Ixx24 Motor xx Flag Mode Control (Is a PMAC 1 Type)
Since the amp-fault is a low true on the Panasonic drives, you need to have bit 23 set to 1.
($800000)
Ixx25 Motor xx Flag Address
Motor xx PID Servo Setup I-Variables
Ixx30 Motor xx PID Proportional Gain
(USED FOR A DIFFERENT PURPOSE WITH PANASONIC)
Panasonic TX Block Number
Ixx30 is the Panasonic TX Block number for the xx Motor. Needs completion for number
of Panasonic motors.
Ixx31 Motor xx PID Derivative Gain
(USED FOR A DIFFERENT PURPOSE WITH PANASONIC)
Panasonic Mac ID Number
Ixx31 is the Panasonic Mac ID number for the xx Motor. Needs completion for number
of Panasonic motors.
NOTE
Ixx30 and Ixx31 must match the order block number and Mac
ID of the Ring even though the node might be an I/O node.
Slave I/O nodes should be put in the Ixx30 & 31 variables after
the Servo nodes. There can be no GAPS in the Ixx30/31
variables. For example, you cannot use Motor 5's I530/531
variables if you only have 4 Nodes.
Important:
Current Panasonic setup code only supports 1 block slave nodes.
Software Setup
Page 43

Turbo PMAC2 Realtime Express Controller
38
Value
Homing Mode
$11
C Channel
$12
Rising edge of drive Home input
$13
Falling edge of drive Home input
$14
Rising edge of drive CCWL input
$15
Falling edge of drive CCWL input
$16
Rising edge of drive CWL input
$17
Falling edge of drive CWL input
$21
Actual Position Set
$31
Multi-turn date clear in absolute encoder
I-Variable
Value
I-Variable
Value
I-Variable
Value
I-Variable
Value
I159
3
I959
1
I1759
1
I2559
1
I259
1
I1059
1
I1859
1
I2659
1
I352
1
I1159
1
I1959
1
I2759
1
I459
1
I1259
1
I2059
1
I2859
1
I559
1
I1359
1
I2159
1
I2959
1
I659
1
I1459
1
I2259
1
I3059
1
I759
1
I1559
1
I2359
1
I3159
1
I859
1
I1659
1
I2459
1
I3259
1
Ixx32 Motor xx PID Velocity Feed forward Gain
(USED FOR A DIFFERENT PURPOSE WITH PANASONIC)
Fatal Following Error Limit Default Value
When setting the Ixx11, make sure that you store the same value in Ixx32 as the default
value of your following error. Ixx11 would be changed to a different value while homing
procedure and the value in Ixx32 would be written back once the homing is complete
Ixx33 Motor xx PID Integral Gain
(USED FOR A DIFFERENT PURPOSE WITH PANASONIC)
Panasonic Homing Type Code
Ixx35 Motor xx PID Acceleration Feed forward Gain
(USED FOR A DIFFERENT PURPOSE WITH PANASONIC)
Warning Following Error Limit Default Value
When setting the Ixx12, make sure that you store the same value in Ixx35 as the default
value of your following error. Ixx12 would be changed to a different value while homing
procedure and the value in Ixx35 would be written back once the homing is complete
Motor Servo and Commutation Modifiers
Ixx59 Motor xx User-Written Servo/Phase Enable
(USED FOR A DIFFERENT PURPOSE WITH PANASONIC)
Software Setup
Page 44

Turbo PMAC2 Realtime Express Controller
39
Supplemental Motor Setup I-Variables
I6800/I6850/I6900/I6950 MACRO IC MaxPhase/PWM Frequency Control
(USED WITH SPECIFIC VALUE FOR PANASONIC)
I6800= 7371
I6801/I6851/I6901/I6951 MACRO IC Phase Clock Frequency Control230
(USED WITH SPECIFIC VALUE FOR PANASONIC)
I6801 = 3
I6802/I6852/I6902/I6952 MACRO IC Servo Clock Frequency Control230
(USED WITH SPECIFIC VALUE FOR PANASONIC)
I6802 = 1
UNUSABLE PMAC I-VARIABLES FOR PANASONIC IMPLEMENTATION
Ixx02 Motor xx Command Output Address
(NOT USED FOR PANASONIC)
Ixx26 Motor xx Home Offset
This value is not used and does not affect the home offset.
Ixx29 Motor xx Output/First Phase Offset..153
(NOT USED FOR PANASONIC)
Ixx34 Motor xx PID Integration Mode
(NOT USED FOR PANASONIC)
Ixx36 Motor xx PID Notch Filter Coefficient N1
(NOT USED FOR PANASONIC)
Ixx37 Motor xx PID Notch Filter Coefficient N2 .156
(NOT USED FOR PANASONIC)
Ixx38 Motor xx PID Notch Filter Coefficient D1
(NOT USED FOR PANASONIC)
Ixx39 Motor xx PID Notch Filter Coefficient D2
(NOT USED FOR PANASONIC)
Ixx40 Motor xx Net Desired Position Filter Gain
(NOT USED FOR PANASONIC)
Ixx41 Motor xx Desired Position Limit Band
(NOT USED FOR PANASONIC)
Software Setup
Page 45

Turbo PMAC2 Realtime Express Controller
40
Ixx42 Motor xx Amplifier Flag Address
(NOT USED FOR PANASONIC)
Ixx43 Motor xx Overtravel-Limit Flag Address
(NOT USED FOR PANASONIC)
Ixx55 Motor xx Commutation Table Address Offset
(NOT USED FOR PANASONIC)
Ixx56 Motor xx Commutation Delay Compensation
(NOT USED FOR PANASONIC)
Ixx57 Motor xx Continuous Current Limit
(NOT USED FOR PANASONIC)
Ixx58 Motor xx Integrated Current Limit
(NOT USED FOR PANASONIC)
Ixx60 Motor xx Servo Cycle Period Extension Period
(NOT USED FOR PANASONIC)
Ixx61 Motor xx Current-Loop Integral Gain
(NOT USED FOR PANASONIC)
Ixx62 Motor xx Current-Loop Forward-Path Proportional Gain
(NOT USED FOR PANASONIC)
Ixx63 Motor xx Integration Limit
(NOT USED FOR PANASONIC)
Ixx64 Motor xx Deadband Gain Factor
(NOT USED FOR PANASONIC)
Ixx65 Motor xx Deadband Size
(NOT USED FOR PANASONIC)
Ixx66 Motor xx PWM Scale Factor
(NOT USED FOR PANASONIC)
Ixx67 Motor xx Position Error Limit
(NOT USED FOR PANASONIC)
Ixx68 Motor xx Friction Feed forward
(NOT USED FOR PANASONIC)
Ixx69 Motor xx Output Command Limit
(NOT USED FOR PANASONIC)
Software Setup
Page 46

Turbo PMAC2 Realtime Express Controller
41
Motor Commutation Setup I-Variables
Ixx70 Motor xx Number of Commutation Cycles (N)
(NOT USED FOR PANASONIC)
Ixx71 Motor xx Counts per N Commutation Cycles
(NOT USED FOR PANASONIC)
Ixx72 Motor xx Commutation Phase Angle
(NOT USED FOR PANASONIC)
Ixx73 Motor xx Phase Finding Output Value
(NOT USED FOR PANASONIC)
Ixx74 Motor xx Phase Finding Time
(NOT USED FOR PANASONIC)
Ixx75 Motor xx Phase Position Offset
(NOT USED FOR PANASONIC)
Ixx76 Motor xx Current-Loop Back-Path Proportional Gain
(NOT USED FOR PANASONIC)
Ixx77 Motor xx Magnetization Current
(NOT USED FOR PANASONIC)
Ixx78 Motor xx Slip Gain
(NOT USED FOR PANASONIC)
Ixx79 Motor xx Second Phase Offset
(NOT USED FOR PANASONIC)
Ixx80 Motor xx Power-Up Mode
(NOT USED FOR PANASONIC)
Ixx81 Motor xx Power-On Phase Position Address
(NOT USED FOR PANASONIC)
Ixx82 Motor xx Current-Loop Feedback Address
(NOT USED FOR PANASONIC)
Ixx83 Motor xx Commutation Position Address
(NOT USED FOR PANASONIC)
Ixx84 Motor xx Current-Loop Feedback Mask Word
(NOT USED FOR PANASONIC)
Software Setup
Page 47

Turbo PMAC2 Realtime Express Controller
42
Motor# 1 2 3 4 5 6 7 8
Address
Y:$0000E1
Y:$000161
Y:$0001E1
Y:$000261
Y:$0002E1
Y:$000361
Y:$0003E1
Y:$000461
Motor# 9 10
11
12
13
14
15
16
Address
Y:$0004E1
Y:$000561
Y:$0005E1
Y:$000661
Y:$0006E1
Y:$000761
Y:$0007E1
Y:$000861
Motor#
17
18
19
20
21
22
23
24
Address
Y:$0008E1
Y:$000961
Y:$0009E1
Y:$000A61
Y:$000AE1
Y:$000B61
Y:$000BE1
Y:$000C61
Motor#
25
26
27
28
29
30
31
32
Address
Y:$000CE1
Y:$000D61
Y:$000DE1
Y:$000E61
Y:$000EE1
Y:$000F61
Y:$000FE1
Y:$001061
Further Motor I-Variables
Ixx91 Motor xx Power-On Phase Position Format
(NOT USED FOR PANASONIC)
Ixx97 Motor xx Position Capture & Trigger Mode....197
(NOT USED FOR PANASONIC)
I3300 to I4899 should not be used.
Conversion Table I-Variables
I8000 - I8191 Conversion Table Setup Lines
Encoder conversion table is not being used by default settings. If the user needs to use it
for any purpose, it is usable and will not cause any conflicts.
Using PMAC Motor Backlash Feature
Unlike a pure PMAC controller which calculates the trajectory and position of each motor and the
servo control of each axis, in Turbo PMAC2 Realtime Express controller, the Panasonic drives
are closing the position loop. This changes the way that PMAC introduces the backlash
calculations to each motor.
In practice, the backlash take up and the backlash calculations should be completely invisible to
the end user. Since the commanded position of the Panasonic motors are actually changing
because of the backlash size, it takes some special care to use backlash compensation of the
PMAC on Panasonic motors.
Before Activating the Backlash Feature
Each time you want to activate the backlash feature, you should follow these steps:
1. Make sure motor present backlash is zero. If not, you have to set it to zero while the
motor is killed. Also make sure that the backlash direction bit in motor status word is
zero – if not, write a zero to it.
2. Home the motor or establish the reference for the motor position.
3. Set motor backlash take-up rate (Ixx85), motor backlash size (Ixx86) and motor
backlash hysteresis to desired values.
4. Command the axis as normal.
Software Setup
Page 48

Turbo PMAC2 Realtime Express Controller
43
Motor# 1 2 3 4 5 6 7 8
Address
Y:$C0,4
Y:$140,4
Y:$1C0,4
Y:$240,4
Y:$2C0,4
Y:$340,4
Y:$3C0,4
Y:$440,4
Motor# 9 10
11
12
13
14
15
16
Address
Y:$4C0,4
Y:$540,4
Y:$5C0,4
Y:$640,4
Y:$6C0,4
Y:$740,4
Y:$7C0,4
Y:$840,4
Motor#
17
18
19
20
21
22
23
24
Address
Y:$8C0,4
Y:$940,4
Y:$9C0,4
Y:$A40,4
Y:$AC0,4
Y:$B40,4
Y:$BC0,4
Y:$C40,4
Motor#
25
26
27
28
29
30
31
32
Address
Y:$CC0,4
Y:$D40,4
Y:$DC0,4
Y:$E40,4
Y:$EC0,4
Y:$F40,4
Y:$FC0,4
Y:$1040,4
M8179=0
M8180=1
PARAM_REQ
Name
Description
$000
Parameter reading
Use this to read out the parameter value from the servo
drive.
$001
Parameter writing
Use this to write the parameter value to the servo drive.
$101
EEPROM writing
Save the parameter value to EEPROM in the servo drive.
Make sure to set the PARAM_NUM (M8182) and
PARAM_DATA (M8183) equal to zero.
M8181=$001
Before Deactivating the Backlash Feature:
1. Make sure motor present backlash is zero. If not, set it to zero by changing the motor
backlash size (Ixx86) to zero.
2. Wait until motor present backlash becomes zero.
3. Set motor backlash take-up rate (Ixx85) and motor backlash hysteresis (Ixx87) equal
to zero.
4. Check the direction of the backlash by looking at bit 4 of the motor status word. If it is
equal to 1, write a zero to it.
Reading/Writing A4N/A5N Drive Parameters over the network
Although each drive can be accessed and setup through the RS-232 connector of the drive, Delta
Tau’s Turbo PMAC2 Realtime Express Controller allows the user to read / write / save all the
parameters to any drive on the ring.
In order to read/change/save any of these parameters, you have to follow the following steps. As
an example, we will disable the emergency stop input of motor #1.
1. Set CMD_TYPE (M8179) variable to 0.
2. Set PARAM_MTR_NUM (M8180) to desired motor number. Please note that this is the
motor number and not necessarily the MacID of the drive.
3. Set PARAM_REQ (M8181) equal to a value representing read / write / save.
Software Setup
Page 49

Turbo PMAC2 Realtime Express Controller
44
No.
Parameter Name
Default
No.
Parameter Name
Default
$0
For manufacturer use
1 $40
External Servo-ON enable
0
$1
LED display
0 $41
Emergency stop enable
1
$2
Control mode
0 $42
Home input logic
1
$3
Torque limit selection
1 $43
Direction of motion
1
$4
Over travel input inhibit
1 $44
Numerator of output pulse ratio
2500
$5
For manufacturer use
0 $45
Denominator of output pulse ratio
0
$6
Address indicated time at power up
0 $46
Pulse output logic inversion
0
$7
Speed monitor (SP) selection
3 $47
Z-phase of external scale setup
0
$8
Torque monitor (IM) selection
0 $48
For manufacturer use
10000
$9
Unit of velocity
0 $49
For manufacturer use
0
$0A
Inhibit parameter change via network
0 $4A
For manufacturer use
0
$0B
Absolute encoder set up
1 $4B
For manufacturer use
10000
$0C
Baud rate of RS232
2 $4C
Smoothing filter
1
$0D
Warning setup of cumulative COM error
0 $4D
FIR filter setup
0
$0E
Warning setup of continuous COM error
0 $4E
For manufacturer use
0
$0F
Update counter warning setup
0 $4F
For manufacturer use
0
$10
1st position loop gain
(63/32)
$50
For manufacturer use
500
$11
1st velocity loop gain
(35/18)
$51
For manufacturer use
1
$12
1st velocity loop integration time constant
(16/31)
$52
For manufacturer use
0
$13
1st speed detection filter
0 $53
For manufacturer use
0
$14
1st torque filter time constant
(65/126)
$54
For manufacturer use
0
$15
Velocity feed forward
-300 $55
For manufacturer use
0
$16
Feed forward filter time constant
-50 $56
For manufacturer use
0
$17
For manufacturer use
0 $57
For manufacturer use
0
$18
2nd position loop gain
(73/38)
$58
For manufacturer use
0
$19
2nd velocity loop gain
(35/18)
$59
For manufacturer use
0
$1A
2nd velocity loop integration time constant
-1000 $5A
For manufacturer use
0
$1B
2nd speed detection filter
0 $5B
For manufacturer use
0
$1C
2nd torque filter time constant
(65/126)
$5C
For manufacturer use
30
$1D
1st notch frequency
1500 $5D
For manufacturer use
0
$1E
1st notch width selection
2 $5E
1st torque limit
500
$1F
For manufacturer use
0 $5F
2nd torque limit
500
$20
Inertia ratio
-250 $60
In-position range
131
$21
Real time auto tuning set up
1 $61
Zero speed
50
$22
Machine stiffness at auto tuning
1-Apr $62
For manufacturer use
0
$23
Adaptive filter mode
1 $63
In-position output setup
0
$24
Vibration suppression filter selection
0 $64
CT-offset re-calibration at servo-on
0
$25
Normal auto tuning motion setup
0 $65
Undervoltage error response at main power-off
1
$26
Software limit set up
10 $66
Error response at over travel limit
0
$27
Velocity observer
0 $67
Error response at main power-off
0
$28
2nd notch frequency
150 $68
Error response action
0
$29
2nd notch width selection
2 $69
Sequence at Servo-OFF
0
$2A
2nd notch depth selection
0 $6A
Mechanical brake delay at motor standstill
0
$2B
1st vibration suppression frequency
0 $6B
Mechanical brake delay at motor in motion
0
$2C
1st vibration suppression filter
0 $6C
External regenerative resistor setup (*2)
Mar-00
$2D
2nd vibration suppression frequency
0 $6D
Main power-off detection time
35
$2E
2nd vibration suppression filter
0 $6E
Emergency stop torque setup
0
$2F
Adaptive filter frequency
0 $6F
For manufacturer use
0
$30
2nd gain action setup
-1 $70
Position deviation error level
25000
$31
Gain switching mode
-10 $71
For manufacturer use
0
$32
Gain switching delay time
-30 $72
Overload level
0
$33
Gain switching level
-50 $73
Over speed level
0
$34
Gain switching hysteresis
-33 $74
Command update period
2
$35
Position loop gain switching time
-20 $75
For manufacturer use
0
$36
For manufacturer use
0 $76
For manufacturer use
0
$37
For manufacturer use
0 $77
For manufacturer use
0
$38
For manufacturer use
0 $78
Numerator of external scale ratio
0
$39
For manufacturer use
0 $79
Multiplier of numerator of external scale ratio
0
$3A
For manufacturer use
0 $7A
Denominator of external scale ratio
10000
$3B
For manufacturer use
0 $7B
Hybrid deviation error level
100
$3C
For manufacturer use
0 $7C
External scale direction
0
$3D
JOG speed
300 $7D
Absolute external scale setup
0
$3E
For manufacturer use
0 $7E
For manufacturer use
0
$3F
For manufacturer use
0 $7F
For manufacturer use
0
M8182=$41
4. If reading or writing to a parameter, set PARAM_NUM (M8182) equal to the parameter
number based on following table. If saving the values to EEPROM of the drive, set
PARAM_NUM equal to zero.
Software Setup
In this example, we will write to the emergency stop enable parameter:
Page 50

Turbo PMAC2 Realtime Express Controller
45
M8183=$0
M8123=6
Byte 0
Y-MemoryX-Memory
Byte 0Byte 1Byte 2Byte 3
Byte 0
Byte 4Byte 5Byte 6Byte 7
Byte 0
Byte 8Byte 9Byte 10Byte 11
Byte 0
Byte 12Byte 13Byte 14Byte 15
$680XX
$680XX+1
$680XX+2
$680XX+3
Block No. 0 1 2 3 4 5 6 7
Memory
Address
$68080
$68084
$68088
$6808C
$68090
$68094
$68098
$6809C
Block No. 8 9
10
11
12
13
14
15
Memory
Address
$680A0
$680A4
$680A8
$680AC
$680B0
$680B4
$680B8
$680BC
Block No.
16
17
18
19
20
21
22
23
Memory
Address
$680C0
$680C4
$680C8
$680CC
$680D0
$680D4
$680D8
$680DC
Block No.
24
25
26
27
28
29
30
31
Memory
Address
$680E0
$680E4
$680E8
$680EC
$680F0
$680F4
$680F8
$680FC
5. If writing to a parameter, set PARAM_DATA (M8183) equal to the desired value, but if
you are reading from drive or saving the values to EEPROM of the drive set
PARAM_NUM equal to zero.
6. Set the PMC_STATE (M8123) equal to 6 (Parameter Read Mode).
7. Wait until PMC_STATE (M8123) changes to 4 (Running Mode).
8. If you are reading a parameter, you can get the value from PARAM_DATA (M8183).
Otherwise, the writing or saving is done.
Accessing Returning Data from A4N/A5N Drives
The communication to each drive is taking place using two buffers, the TX buffer and RX buffer.
These buffers are accessible to the user and some useful information can be retrieved from these
buffers. Although reading these buffers is harmless to the performance and functionality of the
Realtime Express network and controller, we would strongly discourage writing to these
locations.
The received data from each drive consists of 16 bytes. These 16 bytes are transferred to PMAC
through Dual-Ported RAM style memory mapping, meaning lower 16 bits of X and Y memory
locations.
The $680XX represents the memory location for different RX block numbers. The block number
of each motor is defined by the user by setting the Ixx30 of each motor. If the default values in
the PANADWLD.PMC file are used, the block 0 represents motor 1, block 1 represent motor 2
and so on.
Software Setup
Page 51

Turbo PMAC2 Realtime Express Controller
46
Address
Bits
Name
Description
Y:$680XX
0~4
Actual MAC-ID
Returns the node address of the servo drive.
This is not echo-back, but actual value that is the setup of the RSW at power-up.
5~6
Update Counter
Returns the echo-back value of Update Counter.
Use this to check whether the drive has received properly.
7
C/R
C/R bit distinguish Command and Response.
Returns 1 as a response.
Y:$680XX
8~14
Command Code
Echo
Returns the echo-back value of Command Code.
15
CMD Error
Returns 1 at the command error.
X:$680XX
0
In Position
Returns 1 at Positioning operation completed (In-position status)
Set up the condition by Pr.63 “In-position output set up”.
2
Homing Complete
Returns 1 at Homing operation completed and holds 1 after that.
Clears to 0 at reception of Homing command.
Returns 1 from the power-up when you use the absolute encoder in absolute
mode at Position control mode or when you use the absolute external scale in
absolute mode at Full-closed control mode.
3
Torque Limited
Returns 1 at torque limited.
4
Warning
Returns 1 at warning occurrence.
5
Alarm
Returns 1 at alarm occurrence.
6
Servo Ready
Returns 1 at Servo-Ready (Transition-able to Servo-ON) state.
Becomes 1 when all of the 3 conditions are satisfied, “Main power established”,
“No alarm occurrence” and “Synchronization between the servo and the
communication established”
(Note) The servo drive might not become Servo-Ready state if the Update
Counter is not counted up properly.
7
Servo Active
Returns 1 at Servo-ON state.
X:$680XX
8,9,10
Home,
CCWL/CWL,
CWL/CCWL
Returns 1 when the sensor signal is active.
CCWL/CWL,
CWL/CCWL
Active when Input photo-coupler is OFF
(Note) Returns the signal status even if Pr.04 “Over-travel
input inhibit” is 1 (inhibit).
HOME
Depends on Pr.42 “Home input logic”.
The bit1/bit0 allocation for CCWL and CWL depend on the value of Pr.43
“Direction of motion”.
Pr.43
Byte3 at Response
Bit1
Bit 0
0, 1
CCWL
CWL
2, 3
CWL
CCWL
11
EX-IN1
Returns 1 (at bit corresponding to each input) when External input is ON (Input
photo-coupler ON).
You can use EX-IN4 as EX-SON (External Servo-ON input) when Pr.40
“External servo-on enable” is 1.
12
EX-IN2
13
EX-IN3
14
EX-IN4/EX-SON
15
EMG-STP
Returns 1 when Emergency-Stop input (EMG-STP) is ON (Input photo-coupler
OFF).
Returns the signal status even if Pr.41 "Emergency stop enable” is 0 (disable).
The first four bytes of data for each RX block includes various status bits:
Software Setup
Page 52

Turbo PMAC2 Realtime Express Controller
47
M8180=1 // motor #1
M8181=$1 // write to parameter
M8182=$0B // parameter number
M8183=$0 // value
M8123=6 // execute the parameter read/write
M8180=1 // motor #1
M8181=$101 // write to EEPROM
M8182=$0 // parameter number must be 0 for writing to EEPROM
M8183=$0 // value must be 0 for writing to EEPROM
M8123=6 // execute the parameter read/write
I133=$31 // Multi-turn data clear in absolute encoder (homing mode)
I124=$120000 // set bit 20 to high in order to ignore the error 40 or else the next
// command will be ignored
#1hm
I124=$820000 // set bit 20 back to zero and bit 23 to 1 indicating A4N/A5N
// drives high true amp-fault
M8123=5
#1$*
Bits
Partial Element
[3:0]
STATE_RING_CONFIG
[7:4]
STATE_READY
[11:8]
STATE_START
[15:12]
STATE_RUNNING
[20:16]
Source Motor Number for Error
Using Absolute Feedback With A4N/A5N Drives
If you have Panasonic motors with absolute feedback, you need to set up the drive in order to use
this feature. Here are the steps that you need to follow:
As an example, we will assume motor 1 has the absolute encoder. By default, the drives are set to
incremental mode. So we need to change the mode to absolute encoders by changing the drive’s
parameter $0B to a value of $0.
Once the parameter is changed, save the data in the EEPROM of the device:
Once you have made this change on the drive, cycle the power off and on for the drive. For safety
reasons, the Panasonic drive will show error 40 representing absolute encoder system down error.
In order to clear this fault, first we have to clear the absolute encoder’s multi-turn data.
Now that the multi-turn data is cleared, we can clear the fault from the drive.
Since Ixx10 and Ixx95 are set up properly in the original PANADWLD.PMC file, the absolute
information will be read automatically on power-up or $$$ command. If you want to command an
absolute data read manually, you can use the $* command.
Detecting Errors on A4N/A5N Network
PMC_ERROR_FLAG (M8130) holds the detected errors on the network in the following format:
Software Setup
Page 53

Turbo PMAC2 Realtime Express Controller
48
Error Code
Error Description
0
No Error
1
ERR_TIMEOUT
2
ERR_NODE_SUM
4
ERR_NODE_BLK
8
ERR_MACID
9
ERR_FLAG2
A
ERR_I59
B
ERR_CRC_PER
C
ERR_E_STOP
M8123=5
The following error codes are possible in each of the elements above
To clear the fault from the drive/network, M8123=5 command can be used.
Software Setup
 Loading...
Loading...