

Page 1

^1 HARDWARE REFERENCE MANUAL
^2 Turbo PMAC2 PCI
^3 Programmable Multi-Axis Controller
Single Source Machine Control Power // Flexibility // Ease of Use
21314 Lassen Street Chatsworth, CA 91311 // Tel. (818) 998-2095 Fax. (818) 998-7807 // www.deltatau.com
^4 4xx-603367-xHxx
^5 May 26, 2004
Page 2

Copyright Information
© 2003 Delta Tau Data Systems, Inc. All rights reserved.
This document is furnished for the customers of Delta Tau Data Systems, Inc. Other uses are
unauthorized without written permission of Delta Tau Data Systems, Inc. Information contained
in this manual may be updated from time-to-time due to product improvements, etc., and may not
conform in every respect to former issues.
To report errors or inconsistencies, call or email:
Delta Tau Data Systems, Inc. Technical Support
Phone: (818) 717-5656
Fax: (818) 998-7807
Email: support@deltatau.com
Website: http://www.deltatau.com
Operating Conditions
All Delta Tau Data Systems, Inc. motion controller products, accessories, and amplifiers contain
static sensitive components that can be damaged by incorrect handling. When installing or
handling Delta Tau Data Systems, Inc. products, avoid contact with highly insulated materials.
Only qualified personnel should be allowed to handle this equipment.
In the case of industrial applications, we expect our products to be protected from hazardous or
conductive materials and/or environments that could cause harm to the controller by damaging
components or causing electrical shorts. When our products are used in an industrial
environment, install them into an industrial electrical cabinet or industrial PC to protect them
from excessive or corrosive moisture, abnormal ambient temperatures, and conductive materials.
If Delta Tau Data Systems, Inc. products are exposed to hazardous or conductive materials and/or
environments, we cannot guarantee their operation.
Page 3

Turbo PMAC2 PCI Hardware Reference Manual
Table of Contents
INTRODUCTION.......................................................................................................................................................1
Board Configuration.................................................................................................................................................1
Base Version ........................................................................................................................................................1
Option 1: Additional Four Channels Axis Interface Circuitry............................................................................1
Option 2: Dual-Ported RAM...............................................................................................................................1
Option 5: CPU and Memory Configurations......................................................................................................2
Option 7: Plate Mounting ...................................................................................................................................2
Option 8: High-Accuracy Clock Crystal.............................................................................................................3
Option 9: Serial Port Configuration...................................................................................................................3
Option 10: Firmware Version Specification.......................................................................................................3
Option 12: Analog-to-Digital Converters...........................................................................................................3
Option 16: Battery-Backed Parameter Memory.................................................................................................3
Option 18: Identification Number and Real Time Clock/Calendar Module .......................................................3
HARDWARE SETUP.................................................................................................................................................5
Piggyback Turbo CPU Board Jumper Configuration...............................................................................................5
Watchdog Timer Jumper......................................................................................................................................5
Dual-Ported RAM Source Jumper.......................................................................................................................5
Power-Up State Jumpers......................................................................................................................................5
Firmware Load Jumper........................................................................................................................................5
Base Board Jumper Configuration............................................................................................................................5
Servo and Phase Clock Direction Control...........................................................................................................5
Re-Initialization Jumper.......................................................................................................................................6
Encoder Sample Clock Source Jumpers...............................................................................................................6
Serial Port Selection Jumper................................................................................................................................6
Output Disable State Jumpers..............................................................................................................................6
Resistor Pack Configuration.....................................................................................................................................6
Termination Resistors ..........................................................................................................................................6
Pull-Up/Pull-Down Resistors...............................................................................................................................7
Connections..............................................................................................................................................................7
Mounting..............................................................................................................................................................7
Power Supply Connection....................................................................................................................................8
Machine Port Connections...................................................................................................................................8
Display Port.........................................................................................................................................................8
Multiplexer Port...................................................................................................................................................8
I/O Port................................................................................................................................................................8
Serial Ports ..........................................................................................................................................................9
A/D-Converter Port..............................................................................................................................................9
Handwheel Port ...................................................................................................................................................9
COMMUNICATIONS SETUP................................................................................................................................11
CPU BOARD E-POINT DESCRIPTIONS.............................................................................................................13
E1: Watchdog Disable Jumper ...............................................................................................................................13
E2: DPRAM Location Configure ...........................................................................................................................13
E4 – E6: Power-Up/Reset Load Source..................................................................................................................13
E7: Firmware Reload Enable..................................................................................................... .............................13
BASE BOARD JUMPER DESCRIPTIONS...........................................................................................................15
E1: Servo and Phase Clock Direction Control.......................................................................................................15
E2: CPU Frequency Select ....................................................................................................................................15
E3: Normal/Re-Initializing Power-Up/Reset.........................................................................................................15
E4: CPU Frequency Select .....................................................................................................................................15
E5 – E6: (Reserved for Future Use).......................................................................................................................15
E13 - E14: Encoder Sample Clock Direction Control...........................................................................................16
Table of Contents i
Page 4

Turbo PMAC2 PCI Hardware Reference Manual
E17 - E18: Serial Port Type Selection...................................................................................................................16
E111-118: Command Output Disable State...........................................................................................................17
MATING CONNECTORS.......................................................................................................................................19
CPU Board Connectors...........................................................................................................................................19
J2 (JEXP)/Expansion.........................................................................................................................................19
J8 (JAUX232)/Auxiliary RS232 .........................................................................................................................19
Base Board Connectors...........................................................................................................................................19
J1 (JANA)/Analog (Option 12)...........................................................................................................................19
J2 (JTHW)/Multiplexer Port ..............................................................................................................................19
J3 (JIO)/Digital I/O............................................................................................................................................19
J5 (JRS232)/RS-232 Serial Communications.....................................................................................................19
J5A (JRS422)/RS-422 Serial Communications ..................................................................................................19
J6 (JDISP)/Display............................................................................................................................................19
J7 (JHW)/Auxiliary Channel..............................................................................................................................19
J8 (JEQU)/Position Compare............................................................................................................................20
J9 (JMACH1)/Machine Port 1...........................................................................................................................20
J10 (JMACH2)/Machine Port 2.........................................................................................................................20
J11 (JMACH3)/Machine Port 3.........................................................................................................................20
J12 (JMACH4)/Machine Port 4.........................................................................................................................20
CPU BOARD CONNECTOR PINOUTS................................................................................................................21
J8 (JAUX232)/Auxiliary Serial Port.......................................................................................................................21
BASEBOARD CONNECTOR PINOUTS...............................................................................................................23
J1 (JANA) Analog Input Port Connector................................................................................................................23
J2 (JTHW) Multiplexer Port Connector..................................................................................................................24
J3 (JI/O) General Input/Output Connector..............................................................................................................24
J5 (JRS232) Serial Port Connector.........................................................................................................................25
J5A: RS422 Serial Port Connector .........................................................................................................................26
J6 (JDISP) Display Connector................................................................................................................................26
J7 (JHW) Handwheel Encoder Connector..............................................................................................................27
J8 (JEQU) Position Compare Output Connector....................................................................................................27
J9 (JMACH1) Connector Description ....................................................................................................................28
J10 (JMACH2) Connector Description ..................................................................................................................31
J11 (JMACH3)........................................................................................................................................................34
J12 (JMACH4)........................................................................................................................................................37
TB1 (2/4-Pin Terminal Block)................................................................................................................................40
TB2 (3-Pin Terminal Block)................................................................................................................................... 40
BASE BOARD JUMPERS LAYOUT......................................................................................................................41
SCHEMATICS..........................................................................................................................................................43
ii Table of Contents
Page 5
Turbo PMAC2 PCI Hardware Reference Manual
INTRODUCTION
The Turbo PMAC2 PCI (part number 400-603367-TRx) is a member of the Turbo PMAC family of
boards optimized for interface to sinewave or direct-PWM servo drives and to pulse-and-direction stepper
drives. Its software is capable of 32 axes of control. It can have up to eight channels of on-board axis
interface circuitry. It can also support up to 32 channels of off-board axis interface circuitry through its
expansion port, connected to Acc-24P or Acc-24P2 ISA-format boards (Acc-24 boards in PCI format are
not yet available).
The Turbo PMAC2 PCI is a full-sized PCI-bus expansion card, with a small piggyback board containing
the CPU board. This piggyback board occupies part of the next slot, but ½-sized boards are permitted in
this next slot. While the Turbo PMAC2 PCI is capable of PCI bus communications, with or without the
optional on-board dual-ported RAM, it does not need to be inserted into a PCI expansion slot.
Communications can be done through the standard RS-232/RS-422 serial port; standalone operation is
possible.
Board Configuration
Base Version
The base version of the Turbo PMAC2 PCI provides a 1-1/2-slot board with:
• 80 MHz DSP56303 CPU (120 MHz PMAC equivalent)
• 128k x 24 SRAM compiled/assembled program memory (5C0)
• 128k x 24 SRAM user data memory (5C0)
• 1M x 8 flash memory for user backup and firmware (5C0)
• Latest released firmware version
• RS-232 serial interface, PCI (PC) bus interface
• One 16-node MACRO interface IC
• Four channels axis interface circuitry, each including:
• Three output command signal sets, configurable as either:
Two serial data streams to external DACs, one pulse-and-direction
Three PWM top-and-bottom pairs
• 3-channel differential/single-ended encoder input
• Nine input flags, two output flags
• Interface to two external serial ADCs, 8 to 18 bits
Two channels supplemental interface circuitry, each including:
•
• 2-channel differential/single-ended encoder input
• One output command signal set, configurable as pulse-&-direction or PWM top-and-bottom pair
• Display, MACRO, muxed I/O, direct I/O interface ports
• PID/notch/feedforward servo algorithms
• Extended pole-placement servo algorithms
• 1-year warranty from date of shipment
• One manual per set of one to four PMACs in shipment (Cables, mounting plates, mating connectors
not included)
Option 1: Additional Four Channels Axis Interface Circuitry
Option 1 provides an additional four channels of on-board axis interface circuitry, identical to the standard
first four channels. The key components are the DSPGATE1 IC at U7 and connectors J11 and J12.
Option 2: Dual-Ported RAM
Dual-ported RAM provides a high-speed communications path for bus communications with the host
computer through a bank of shared memory. DPRAM is advised if more than about 100 data items per
second are to be passed between the controller and the host computer in either direction.
Option 2 provides a 32k x 16 bank of dual-ported RAM. The key component on the board is U92.
Introduction 1
Page 6

Turbo PMAC2 PCI Hardware Reference Manual
Option 5: CPU and Memory Configurations
The various versions of Option 5 provide different CPU speeds and main memory sizes on the piggyback
CPU board. Only one Option 5xx may be selected for the board.
The CPU is a DSP5630x IC as component U1. It is currently available only as an 80 MHz device (with
computational power equivalent to a 120 MHz non-Turbo PMAC), but higher speed versions will be
available shortly.
The compiled/assembled-program memory SRAM ICs are located in U14, U15, and U16. These ICs
form the active memory for the firmware, compiled PLCs, and user-written phase/servo algorithms.
These can be 128k x 8 ICs (for a 128k x 24 bank), fitting in the smaller footprint, or they can be the larger
512k x 8 ICs (for a 512k x 24 bank), fitting in the full footprint.
The user-data memory SRAM ICs are located in U11, U12, and U13. These ICs form the active memory
for user motion programs, uncompiled PLC programs, and user tables and buffers. These can be 128k x 8
ICs (for a 128k x 24 bank), fitting in the smaller footprint, or they can be the larger 512k x 8 ICs (for a
512k x 24 bank), fitting in the full footprint.
The flash memory IC is located in U10. This IC forms the non-volatile memory for the board’s firmware,
the user setup variables, and for user programs, tables, and buffers. It can be 1M x 8, 2M x 8, or 4M x 8
in capacity.
Option 4C provides an 80 MHz DSP56309 CPU with expanded internal memory to improve
•
performance for large number of commutated axes.
• Option 5C0 is the standard CPU and memory configuration. It is provided automatically if no Option
5xx is specified. It provides an 80 MHz CPU (120 MHz PMAC equivalent), 128k x24 of
compiled/assembled program memory, 128k x 24 of user data memory; and a 1M x 8 flash memory.
• Option 5C1 provides an 80 MHz CPU (120 MHz PMAC equivalent), 128k x 24 of
compiled/assembled program memory, an expanded 512k x 24 of user data memory, and a 2M x 8
flash memor y.
• Option 5C2 provides an 80 MHz CPU (120 MHz PMAC equivalent), an expanded 512k x 24 of
compiled/assembled program memory, 128k x 24 of user data memory, and a 2M x 8 flash memory.
• Option 5C3 provides an 80 MHz CPU (120 MHz PMAC equivalent), an expanded 512k x 24 of
compiled/assembled program memory, an expanded 512k x 24 of user data memory, and a 4M x 8
flash memor y.
• Option 5D0 provides a 100 MHz CPU (120 MHz PMAC equivalent), 128k x24 of
compiled/assembled program memory, 128k x 24 of user data memory; and a 1M x 8 flash memory.
It is not compatible with Option-4C.
• Option 5D1 provides a 100 MHz CPU (120 MHz PMAC equivalent), 128k x 24 of
compiled/assembled program memory, an expanded 512k x 24 of user data memory, and a 2M x 8
flash memory. Check with the factory for availability.
• Option 5D2 provides a 100 MHz CPU (120 MHz PMAC equivalent), an expanded 512k x 24 of
compiled/assembled program memory, 128k x 24 of user data memory, and a 2M x 8 flash memory.
Check with the factory for availability.
• Option 5D3 provides a 100 MHz CPU (120 MHz PMAC equivalent), an expanded 512k x 24 of
compiled/assembled program memory, an expanded 512k x 24 of user data memory, and a 4M x 8
flash memory. Check with the factory for availability.
Option 7: Plate Mounting
Option 7 provides a mounting plate connected to the Turbo PMAC2 PCI with standoffs. It is used to
install the Turbo PMAC2 PCI in standalone applications.
2 Introduction
Page 7

Turbo PMAC2 PCI Hardware Reference Manual
Option 8: High-Accuracy Clock Crystal
The Turbo PMAC2 PCI has a clock crystal (component Y1) of nominal frequency 19.6608 MHz (~20
MHz). The standard crystal’s accuracy specification is +/-100 ppm.
• Option 8A provides a nominal 19.6608 MHz crystal with a +/-15 ppm accuracy specification.
Option 9: Serial Port Configuration
The Turbo PMAC2 PCI comes standard with a single serial port that can use either RS-232 or RS-422
transceivers. Optionally, a second independent serial port can be added.
Option 9T adds an auxiliary RS-232 port on the CPU piggyback board. The key components added
•
are IC U22 and connector J8 on the CPU board.
Option 10: Firmware Version Specification
Normally the Turbo PMAC2 PCI is provided with the newest released firmware version. A label on the
U10 flash memory IC on the CPU board shows the firmware version loaded at the factory.
• Option 10 provides for a user-specified firmware version.
Option 12: Analog-to-Digital Converters
Option 12 permits the installation of 8 or 16 channels of on-board multiplexed analog-to-digital
converters. One or two of these converters are read every phase interrupt. The analog inputs are not
optically isolated, and each can have a 0 – 5V input range, or a +/-2.5V input range, individually
selectable.
• Option 12 provides an 8-channel 12-bit A/D converter. The key components on the board are U28
and connector J1.
• Option 12A provides an additional 8-channel 12-bit A/D converter. The key component on the board
is U29.
Option 16: Battery-Backed Parameter Memory
The contents of the standard memory are not retained through a power-down or reset unless they have
been saved to flash memory first. Option 16 provides supplemental battery-backed RAM for real-time
parameter storage that is ideal for holding machine state parameters in case of an unexpected powerdown.
The battery is located at component BT1.
• Option 16A provides a 32k x 24 bank of battery-backed parameter RAM in components U17, U18,
and U19 on the CPU board, fitting in the smaller footprint for those locations.
• Option 16B provides a 128k x 24 bank of battery-backed parameter RAM in components U17, U18,
and U19 on the CPU board, filling the full footprint for those locations.
Option 18: Identification Number and Real Time Clock/Calendar Module
Option 18 provides a module at location U5 on the CPU board that contains an electronic identification
number, and possibly a real-time clock/calendar.
• Option 18A provides an electronic identification number module.
• Option 18B provides an electronic identification number module with a real-time clock and calendar.
The year representation in the calendar is a 4-digit value, so there are no Year 2000 problems.
Introduction 3
Page 8

Turbo PMAC2 PCI Hardware Reference Manual
4 Introduction
Page 9
Turbo PMAC2 PCI Hardware Reference Manual
HARDWARE SETUP
Piggyback Turbo CPU Board Jumper Configuration
Watchdog Timer Jumper
Jumper E1 on the Turbo CPU board must be OFF for the watchdog timer to operate. This is a very
important safety feature, so it is vital that this jumper be OFF in normal operation. E1 should only be put
ON to debug problems with the watchdog timer circuit.
Dual-Ported RAM Source Jumper
On Turbo CPU boards with revision suffixes – 10A and newer, jumper E2 must connect pins 1 and 2 to
access dual-ported RAM (addresses $06xxxx) from the baseboard. If using the Option 2 DPRAM on the
baseboard, jumper E2 must be in this setting.
Jumper E2 must connect pins 2 and 3 to access dual-ported RAM (addresses $06xxxx) through the JEXP
expansion port. If using the DPRAM on an external accessory board, jumper E2 must be in this setting.
On Turbo CPU boards with revision suffixes – 109 and older, there is no jumper for this purpose, and the
boards can access DPRAM from either source, but with less robust buffering.
Power-Up State Jumpers
Jumper E4 on the Turbo CPU board must be OFF, jumper E5 must be ON, and jumper E6 must be ON in
order for the CPU to copy the firmware from flash memory into active RAM on power-up/reset. This is
necessary for normal operation of the card. (Other settings are for factory use only.)
Firmware Load Jumper
If jumper E7 on the CPU board is ON during power-up/reset, the board comes up in bootstrap mode,
which permits the loading of new firmware into the flash-memory IC on the board. When the PMAC
Executive program tries to establish communications with a board in this mode, it will detect that the
board is in bootstrap mode automatically and ask what file to download as the new firmware.
Jumper E7 must be OFF during power-up/reset for the board to come up in normal operational mode.
Base Board Jumper Configuration
Servo and Phase Clock Direction Control
Jumper E1 should be OFF if the board is to use its own internally generated phase and servo clock
signals. In this case, these signals are output on spare pins on the J5A RS-422 serial-port connector,
where they can be used by other PMAC controllers set up to take external phase and servo clock signals.
Jumper E1 should be ON if the board is to use externally generated phase and servo clock signals brought
in on the J5A RS-422 serial port connector. In this case, the clock signals are generated by another
PMAC controller and output on its serial port connector. Commonly, serial communications are also
shared over a multi-drop RS-422 cable, with software addressing of the cards matching the I0 serial card
number for each controller. Alternately, the phase and servo clock signals can come from clock signals
involved in the process.
If E1 is ON for external phase and clock signals, and these clock signals are not brought in on the serial
port connector, the watchdog timer will trip almost immediately and shut down the board.
In order to change the state of the card between use of internal clock and use of external clock, the card
must be re-initialized – either powered up with jumper E3 ON, or given the $$$*** command – with
jumper E1 in the new state. Before the card is reset again, a SAVE command must be issued to store the
new internal settings.
Hardware Setup 5
Page 10

Turbo PMAC2 PCI Hardware Reference Manual
Re-Initialization Jumper
If E3 is OFF during power-up/reset, the controller will load its last saved set-up parameters from flash
memory into active memory. T his is the setting for normal operation. If E3 is ON during power-up/reset,
the controller will load its factory-default set-up parameters from firmware into active memory.
Generally this is only done if communications cannot be established with the card when in comes up in
normal operational mode.
Encoder Sample Clock Source Jumpers
Jumpers E13 and E14 control the source of the SCLK encoder-sampling clock for each servo IC. The
default setting of no jumper installed means that the SCLK signal comes from the servo IC and is output
on the JMACH connectors. This setting is suitable for all but a few very special applications.
Serial Port Selection Jumper
Jumpers E17 and E18 control which serial-port connector is used. If E17 and E18 connect their pins 1 and
2, the 10-pin RS-232 port connector J5 is used. If E17 and E18 connect their pins 2 and 3, the 26-pin RS422 port connector J5A is used. The RS-422 port must be used if several cards are to be daisy chained
together on a single multi-drop cable.
Output Disable State Jumpers
Jumpers E111 through E118 control the hardware state of the digital command output signals for each
channel when the amplifier enable signal for that channel is in the disable state (false). Jumper E11n (n =
1 to 8) controls the output signals for Channel n on the board.
If E11n is OFF (default), the command output signals for Channel n are still active when the amplifier
enable signal is in the disable state. The Turbo PMAC software should be commanding a net zero
command to be output on these signals and the amplifier-enable signal should be used by the amplifier so
that no command output will cause action if it is receiving a disable signal. This OFF setting should be
definitely be used when DAC output format is selected for the channel.
If E11n is ON, the command output signals for Channel n are tri-stated when the amplifier-enable signal
is in the disable state. Typically, this setting is only used with direct-PWM power-block amplifiers that
do not use amplifier enable to gate the PWM signals and in which the zero-command format of 50% top
on-time, and 50% bottom on-time cannot be tolerated in the disable state.
Resistor Pack Configuration
Termination Resistors
The PMAC2 PCI provides sockets for termination resistors on differential input pairs coming into the
board. As shipped, there are no resistor packs in these sockets. If these signals are brought long distances
into the PMAC2 PCI board and ringing at signal transitions is a problem, SIP resistor packs may be
mounted in these sockets to reduce or eliminate the ringing.
All termination resistor packs are the type that has independent resistors (no common connection) with
each resistor using two adjacent pins. The following table shows which packs are used to terminate each
input device:
Input Pack Pack Size Input Pack Pack Size
Encoder 1 RP46 6-pin ADC 1 and 2 RP60 8-pin
Encoder 2 RP50 6-pin ADC 3 and 4 RP61 8-pin
Encoder 3 RP47 6-pin ADC 5 and 6 RP121 8-pin
Encoder 4 RP51 6-pin ADC 7 and 8 RP122 8-pin
Encoder 5 RP107 6-pin Fault 1 and 2 RP63 6-pin
Encoder 6 RP111 6-pin Fault 3 and 4 RP64 6-pin
Encoder 7 RP108 6-pin Fault 5 and 6 RP124 6-pin
Encoder 8 RP112 6-pin Fault 7 and 8 RP125 6-pin
SCLK12 and 34 RP52 6-pin SCLK56 and 78 RP113 6-pin
6 Hardware Setup
Page 11

Turbo PMAC2 PCI Hardware Reference Manual
Pull-Up/Pull-Down Resistors
The differential input signal pairs to the PMAC2 PCI have user-configurable pull-up/pull-down resistor
networks to permit the acceptance of either single-ended or differential signals in one setting, or the
detection of lost differential signals in another setting.
The ‘+’ inputs of each differential pair each have a hard-wired 1 kohm pull-up resistor to +5V. This
cannot be changed.
The ‘-‘ inputs of each differential pair each have a hard-wired 2.2 kohm resistor to +5V; each also has
another 2.2 kohm resistor as part of a socketed resistor pack that can be configured as a pull-up resistor to
+5V, or a pull-down resistor to GND.
If this socketed resistor is configured as a pull-down resistor (the default configuration), the combination
of pull-up and pull-down resistors on this line acts as a voltage divider, holding the line at +2.5V in the
absence of an external signal. This configuration is required for single-ended inputs using the ‘+’ lines
alone; it is desirable for unconnected inputs to prevent the pick-up of spurious noise; it is permissible for
differential line-driver inputs.
If this socketed resistor is configured as a pull-up resistor (by reversing the SIP pack in the socket),
thetwo parallel 2.2 kohm resistors act as a single 1.1 kohm pull-up resistor, holding the line at +5V in the
absence of an external signal. This configuration is required if encoder-loss detection is desired; it is
required if complementary open-collector drivers are used; it is permissible for differential line-driver
inputs even without encoder loss detection.
If Pin 1 of the resistor pack, marked by a dot on the pack, matches Pin 1 of the socket, marked by a wide
white line on the front side of the board, and a square solder pin on the back side of the board, then the
pack is configured as a bank of pull-down resistors. If the pack is reversed in the socket, it is configured
as a bank of pull-up resistors.
The following table lists the pull-up/pull-down resistor pack for each input device:
Device Resistor Pack
Encoder 1 RP43 ADC/Fault1&2 RP58
Encoder 2 RP48 ADC/Fault3&4 RP59
Encoder 3 RP44 ADC/Fault5&6 RP119
Encoder 4 RP49 ADC/Fault7&8 RP120
Encoder 5 RP104 SCLK12&34 RP62
Encoder 6 RP109 SCLK56&78 RP123
Encoder 7 RP105
Encoder 8 RP110
Device Resistor Pack
Connections
Mounting
The Turbo PMAC2 PCI can be mounted in one of two ways: in the PCI bus, or using standoffs.
• PCI bus: To mount in the PCI bus, simply insert the P1 card-edge connector into PCI socket. If there
is a standard PC-style housing, a bracket at the end of the PMAC2 PCI board can be used to screw
into the housing to hold the board down firmly.
• Standoffs: At each of the four corners of the PMAC2 PCI board, there are mounting holes that can be
used to mount the board on standoffs.
Hardware Setup 7
Page 12

Turbo PMAC2 PCI Hardware Reference Manual
Power Supply Connection
The standard PMAC2 PCI requires only 5V power: 3A in a 4-channel configuration, 4A in an 8-channel
configuration (with Option 1). If the Option 12 A/D converters are installed, a –12V supply is also
required. In this case, a +12V supply can be passed through the card and out to the analog devices feeding
the A/D converters.
The power can be provided in several ways:
• Bus connector: If the PMAC2 PCI is mounted in an electrically active PCI bus slot, it automatically
draws its 5V and +/-12V power from the bus.
• Terminal block: The TB1 2/4-point terminal block can be used to bring in 5V power, especially in
standalone applications. Point 1 is GND; Point 2 is +5V. Points 3 (+12V) and 4 (-12V) are needed
only if the Option 12 A/D converters are ordered.
• JMACH connectors: Up to 2A at 5V may be brought in through each 100-pin JMACH connector
from an Acc-8 board or its equivalent, provided the cable is 500 mm (20 in) or less in length.
Machine Port Connections
The Turbo PMAC2 PCI has a 100-pin high-density header for each pair of servo interface channels.
Through this connector pass all of the digital signals to and from the amplifier, encoder, and flags for the
two channels. Typically, this header is connected with a matching Delta Tau Acc-8 family 2-channel
breakout board or equivalent through a provided 100-pin flat cable.
The machine port connectors are:
• J9 (JMACH1) Board Channels 1 and 2
• J10 (JMACH2) Board Channels 3 and 4
• J11 (JMACH3) Board Channels 5 and 6 (Option 1 required)
• J12 (JMACH4) Board Channels 7 and 8 (Option 1 required)
Display Port
The J6 (JDISP) display port provides a 14-pin IDC header for connection to Delta Tau’s Acc-12 family of
displays. Flat cables are provided with each of the Acc-12 displays for direct connection between the
display and this port.
Multiplexer Port
The J2 (JTHW) multiplexer port provides eight TTL-compatible 5V CMOS inputs and eight TTLcompatible 5V CMOS outputs on a 26-pin IDC header. These can be used directly as general-purpose
digital I/O, or with PMAC2’s special M-variable support (TWB, TWD, TWR, and TWS formats) they
can be used to support hundreds, or even thousands of multiplexed I/O points on accessory boards.
Delta Tau provides the following accessory boards that can be connected to the multiplexer port. Each
comes with a flat cable for direct connection to the port.
• Acc-8D Option 7 Resolver-to-Digital Converter Board
• Acc-18 Thumbwheel Board
• Acc-34 family of Digital I/O boards
• Acc-35A and B Extender Board
I/O Port
The J3 (JIO) I/O port provides 32 TTL-compatible 5V CMOS I/O points on a 40-pin IDC header.
Direction is selectable by byte. These are intended for use as general-purpose digital I/O points.
8 Hardware Setup
Page 13

Turbo PMAC2 PCI Hardware Reference Manual
Serial Ports
The PMAC2 PCI has two serial-port connectors. Only one of these can be used in an application J5 is a
10-pin IDC header for RS-232 communications. It can be connected to a standard DB9 RS-232
connector on a host computer or terminal via a flat cable such as the Acc-3L. A commercially available
DB9-to-DB25 adapter can be added to such a flat cable if the host computer or terminal has a DB25 serial
connector. Jumpers E17 and E18 on the PMAC2 PCI must connect pins 1 and 2 to use this port.
J5A is 26-pin IDC header for RS-422 communications. It can be connected to a standard DB25 RS-422
connector on a host computer or terminal via a flat cable such as the Acc-3D. Jumpers E17 and E18 on
the PMAC2 PCI must connect pins 2 and 3 to use this port.
A/D-Converter Port
If the Option 12 A/D converters are ordered, the J1 (JANA) analog-input port is provided on the PMAC2
on a 20-pin IDC header. Option 12 provides eight analog inputs at 0 – 5V, or +/-2.5V levels. Option 12A
provides eight additional analog inputs at these levels. The +12V and –12V supplies can either be
brought in on this connector, or brought out on it for the external analog circuitry if they have been
brought in through TB1 or P1.
Handwheel Port
The J7 (JHW) handwheel port provides two limited supplemental channels, each with a 2-channel
encoder input, and a pulse-and-direction or PWM top-and-bottom pair output. All inputs and outputs are
digital 5V differential line-driver pairs.
Hardware Setup 9
Page 14

Turbo PMAC2 PCI Hardware Reference Manual
10 Hardware Setup
Page 15
Turbo PMAC2 PCI Hardware Reference Manual
p
COMMUNICATIONS SETUP
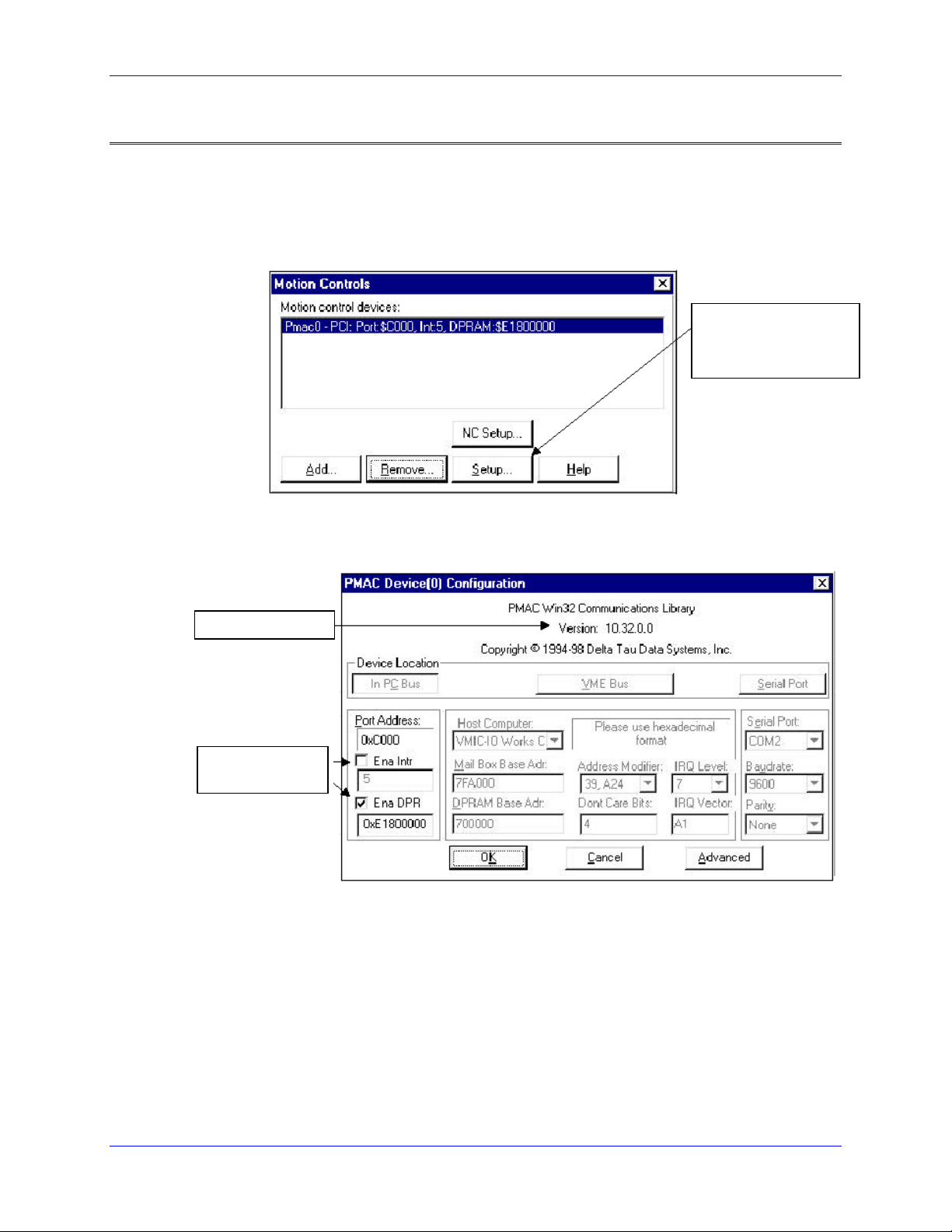
Delta Tau provides communication tools that take advantage of the PCI bus Plug and Play feature of 32bits Windows
Pewin 32 version 2.32 and newer, a PMAC2 PCI board plugged in a PCI bus slot will be recognized by
the operating system when the computer is boot up. The available PCI address, dual-ported RAM address
and Interrupt lines are set automatically by the operating system and can be checked (but not modified) in
the MOTIONEXE.EXE application.
The PMAC2 PCI board could have the optional on-board Dual Ported RAM circuitry, which is ordered
through Option 2. If the dual-ported RAM circuitry is not on-board, manually disable the automatically
assigned use through the setup page of MOTIONEXE:
©
based computers. Starting with MOTIONEXE.EXE version 10.32.00, which is included in
Open MOTIONEXE
and press Setup for
the PCI device
Disable
Interru
ts
The MOTIONEXE application will first look for PMAC PCI boards on the PCI bus and will sequentially
assign device numbers from Device0 to each PMAC PCI until all the PMAC PCI boards found have a
device number assigned. Then, manually add other devices for either ISA bus or Serial port
communications.
After each PMAC has a device number assigned to it, communications through the PCI bus are identical
to the ISA bus. Any application written for the ISA bus using the Delta Tau provided 32-bits
communication libraries will not require any further change and the process is transparent.
Communications Setup 11
Page 16
Turbo PMAC2 PCI Hardware Reference Manual
Note:
For example, if a Device0 for serial RS-232 communications was defined before a
PMAC PCI board was installed in the computer, its setup information will be
overwritten by the MOTIONEXE application when the PMAC2 PCI board is
found. Therefore, it is very important to take note of the all the devices and its
parameters defined in MOTIONEXE before installing a new PMAC board in the
computer.
12 Communications Setup
Page 17

Turbo PMAC2 PCI Hardware Reference Manual
CPU BOARD E-POINT DESCRIPTIONS
E1: Watchdog Disable Jumper
E Point and
Description Default
Physical Layout
E1
Jump pin 1 to 2 to disable Watchdog timer (for test
purposes only).
Remove jumper to enable Watchdog timer.
No jumper installed
E2: DPRAM Location Configure
E Point and
Physical Layout
E2
Note: Jumper E2 is present on –108 and newer boards only. Older versions could access DPRAM from either
source without a jumper configuration, but with less robust buffering.
Description Default
Jump pin 1 to 2 to access the dual-ported RAM on
baseboard.
Jump pin 2 to 3 to access the dual-ported RAM through
JEXP expansion port.
Jumper connects pins 1 and
2
E4 – E6: Power-Up/Reset Load Source
E Point and
Physical Layout
E4
Description Default
Remove jumper E4;
Jump E5 pin 1 to 2;
Jump E6 pin 1 to 2;
To read flash IC on power-up/reset.
Other combinations are for factory use only; the board will
not operate in any other configuration
No E4 jumper installed;
E5 and E6 jump pin 1 to 2.
E6
E7: Firmware Reload Enable
E Point and
Physical Layout
E7
CPU Board E-Point Descriptions 13
Description Default
Jump pin 1 to 2 to reload firmware through serial or bus
port.
Remove jumper for normal operation.
No jumper installed
Page 18

Turbo PMAC2 PCI Hardware Reference Manual
14 CPU Board E-Point Descriptions
Page 19

Turbo PMAC2 PCI Hardware Reference Manual
BASE BOARD JUMPER DESCRIPTIONS
E1: Servo and Phase Clock Direction Control
E Point and
Location Description Default
Physical Layout
E1
Note: If the E1 jumper is ON and the servo and phase clocks are not brought in on the J5A serial port, the watchdog
timer will trip immediately.
C2 Remove jumper for PMAC2 PCI to use its internally
generated servo and phase clock signals and to output
these signals on the J5A serial port connector.
Jump pins 1 and 2 for PMAC2 PCI to expect to receive
its servo and phase clock signals on the J5A serial port
connector.
No jumper installed
E2: CPU Frequency Select
E Point and
Physical Layout
E2
Location Description Default
C2 Remove jumper for 40 MHz operation (E4 OFF also) or
for 80 MHz operation (E4 ON).
Jump pin 1 to 2 for 60 MHz operation (E4 OFF).
No jumper installed
(standard or Option
5C)
Jumper installed
(Option 5B)
E3: Normal/Re-Initializing Power-Up/Reset
E Point and
Physical Layout
E3
Location Description Default
C2 Jump pin 1 to 2 to re-initialize on power-up/reset,
loading factory default settings.
Remove jumper for normal power up/reset, loading
user-saved settings.
No jumper installed
E4: CPU Frequency Select
E Point and
Physical Layout
E4
Location Description Default
C2 Remove jumper for 40MHz operation (E2 OFF also) or
for 60MHz operation (E4 ON).
Jump pin 1 to 2 for 80MHz operation (E2 OFF).
No jumper installed
(standard or Option
5B)
Jumper installed
(Option 5C)
E5 – E6: (Reserved for Future Use)
Baseboard Jumper Descriptions 15
Page 20

Turbo PMAC2 PCI Hardware Reference Manual
E13 - E14: Encoder Sample Clock Direction Control
E Point and
Location Description Default
Physical Layout
E13
E14
Note: E14 is installed only if Option 1 has been ordered.
D1 Remove jumper to output SCLK generated in first ASIC
on SCLK_12 and SCLK_34, or to control direction by
software.
Jump pins 1 to 2 to input SCLK signal for first ASIC on
SCLK_34 and output this signal on SCLK_12.
Jump pins 2 to 3 to input SCLK signal for first ASIC on
SCLK_12 and output this signal on SCLK_34.
D2 Remove jumper to output SCLK generated in second
ASIC on SCLK_56 and SCLK_78, or to control
direction by software.
Jump pins 1 to 2 to input SCLK signal for second ASIC
on SCLK_78 and output this signal on SCLK_56.
Jump pins 2 to 3 to input SCLK signal for second ASIC
on SCLK_56 and output this signal on SCLK_78
E17 - E18: Serial Port Type Selection
E Point and
Physical Layout
E17
Location Description Default
C1 Connect pins 1 and 2 to use the RS-232 port on the J5
connector.
Connect pins 2 and 3 to use the RS-422 port on the J5A
connector.
No jumper installed
No jumper installed
Jumper installed in 1-2
position.
E18
Serial Port Choice: Because both RS-232 and RS-422 ports are always provided, jumpers must be set correctly to
use the port of your choice. Jumpers E17 and E18 must connect pins 1 and 2 to use the RS- 232 port on the J5
connector; they must connect pins 2 and 3 to use the RS-422 port on the J5A connector.
C1
Connect pins 1 and 2 to use the RS-232 port on the J5
connector.
Connect pins 2 and 3 to use the RS-422 port on the J5A
connector.
Jumper installed in 1-2
position.
16 Baseboard Jumper Descriptions
Page 21

Turbo PMAC2 PCI Hardware Reference Manual
E111-118: Command Output Disable State
E Point and
Physical Layout
Location Description Default
C1 Jump pin 1 to 2 of E11n for digital servo command
output signals of Channel n to tri-state when amplifier
enable signal for Channel n is in disable state.
Remove jumper for digital servo command output
signals of Channel n to remain active (but typically with
zero command value) when amplifier enable signal for
Channel n is in disable state.
No jumper installed
Baseboard Jumper Descriptions 17
Page 22

Turbo PMAC2 PCI Hardware Reference Manual
18 Baseboard Jumper Descriptions
Page 23

Turbo PMAC2 PCI Hardware Reference Manual
MATING CONNECTORS
CPU Board Connectors
J2 (JEXP)/Expansion
1. Two 50-pin female flat cable connector Delta Tau P/N 014-R00F50-0K0 T&B Ansley P/N 609-5041
2. 171-50 T&B Ansley standard flat cable stranded 50-wire
3. Phoenix varioface module type FLKM 50 (male pins) P/N 22 81 08 9
J8 (JAUX232)/Auxiliary RS232
1. Two 10-pin female flat cable connector Delta Tau P/N 014-ROOF10-0K0 T&B Ansley P/N 609-1041
2. 171-10 T&B Ansley standard flat cable stranded 10-wire
3. Phoenix varioface module type FLKM 10 (male pins) P/N 22 81 01 8
Base Board Connectors
J1 (JANA)/Analog (Option 12)
1. Two 14-pin female flat cable connector Delta Tau P/N 014-R00F14-0K0 T&B Ansley P/N 609-1441
2. 171-14 T&B Ansley standard flat cable stranded 14-wire
3. Phoenix varioface modules type FLKM14 (male pins) P/N 22 81 02 1
J2 (JTHW)/Multiplexer Port
1. Two 26-pin female flat cable connector Delta Tau P/N 014-R00F26-0K0 T&B Ansley P/N 609-2641
2. 171-26 T&B Ansley standard flat cable stranded 26-wire
3. Phoenix varioface module type FLKM 26 (male pins) P/N 22 81 05 0
J3 (JIO)/Digital I/O
1. Two 40-pin female flat cable connector Delta Tau P/N 014-R00F40-0K0 T&B Ansley P/N 609-4041
2. 171-40 T&B Ansley standard flat cable stranded 40-wire
3. Phoenix varioface module type FLKM 40 (male pins)
J5 (JRS232)/RS-232 Serial Communications
1. Two 10-pin female flat cable connector Delta Tau P/N 014-ROOF10-0K0 T&B Ansley P/N 609-1041
2. 171-10 T&B Ansley standard flat cable stranded 10-wire
3. Phoenix varioface module type FLKM 10 (male pins) P/N 22 81 01 8
J5A (JRS422)/RS-422 Serial Communications
1. Two 26-pin female flat cable connector Delta Tau P/N 014-R00F26-0K0 T&B Ansley P/N 609-2641
2. 171-26 T&B Ansley standard flat cable stranded 26-wire
3. Phoenix varioface module type FLKM 26 (male pins) P/N 22 81 05 0
J6 (JDISP)/Display
1. Two 14-pin female flat cable connector Delta Tau P/N 014-R00F14-0K0 T&B Ansley P/N 609-1441
2. 171-14 T&B Ansley standard flat cable stranded 14-wire
3. Phoenix varioface modules type FLKM14 (male pins) P/N 22 81 02 1
J7 (JHW)/Auxiliary Channel
1. Two 20-pin female flat cable connector Delta Tau P/N 014-R00F20-0K0 T&B Ansley P/N 609-2041
2. 171-20 T&B Ansley standard flat cable stranded 20-wire
3. Phoenix varioface modules type FLKM20 (male pins)
Mating Connectors 19
Page 24

Turbo PMAC2 PCI Hardware Reference Manual
J8 (JEQU)/Position Compare
1. Two 10-pin female flat cable connector Delta Tau P/N 014-ROOF10-0K0 T&B Ansley P/N 609-1041
2. 171-10 T&B Ansley standard flat cable stranded 10-wire
3. Phoenix varioface module type FLKM 10 (male pins) P/N 22 81 01 8
J9 (JMACH1)/Machine Port 1
1. Two 100-pin high-density box header with center key, 0.050” pitch, AMP P/N 1-04068-7, Delta Tau
P/N 014-00010-FPB
2. High-density flat cable stranded 100-wire
J10 (JMACH2)/Machine Port 2
1. Two 100-pin high-density box header with center key, 0.050” pitch, AMP P/N 1-04068-7, Delta Tau
P/N 014- 00010-FPB
2. High-density flat cable stranded 100-wire
J11 (JMACH3)/Machine Port 3
1. Two 100-pin high-density box header with center key, 0.050” pitch, AMP P/N 1-04068-7, Delta Tau
P/N 014-00010-FPB
2. High-density flat cable stranded 100-wire
J12 (JMACH4)/Machine Port 4
1. Two 100-pin high-density box header with center key, 0.050” pitch, AMP P/N 1-04068-7, Delta Tau
P/N 014-00010-FPB
2. High-density flat cable stranded 100-wire
20 Mating Connectors
Page 25

Turbo PMAC2 PCI Hardware Reference Manual
CPU BOARD CONNECTOR PINOUTS
J8 (JAUX232)/Auxiliary Serial Port
Pin # Symbol Function Description Notes
1
2 DTR Bidirectional Data terminal ready Tied to DRR
3 TXD/ Input Receive data Host transmit data
4 CTS Input Clear to Send Host ready bit
5 RXD/ Output Send data Host receive data
6 RTS Output Request to Send PMAC ready bit
7 DSR Bidirectional Data set ready Tied to DTR
8
9 GND Common PMAC common
10 +5V Output 10 +5Vdc supply Power supply out
The J8 connector on the Turbo CPU piggyback board, present if Option-9T has been ordered,
provides a second independent port for serial communications at RS-232 levels.
No connect
No connect
CPU Board Connector Pinouts 21
Page 26

Turbo PMAC2 PCI Hardware Reference Manual
22 CPU Board Connector Pinouts
Page 27
Turbo PMAC2 PCI Hardware Reference Manual
BASEBOARD CONNECTOR PINOUTS
J1 (JANA) Analog Input Port Connector
(Present only if Option 12 ordered)
Pin # Symbol Function Description Notes
1 ANAI00 Input Analog Input 0 0-5V or +/-2.5V range
2 ANAI01 Input Analog Input 1 0-5V or +/-2.5V range
3 ANAI02 Input Analog Input 2 0-5V or +/-2.5V range
4 ANAI03 Input Analog Input 3 0-5V or +/-2.5V range
5 ANAI04 Input Analog Input 4 0-5V or +/-2.5V range
6 ANAI05 Input Analog Input 5 0-5V or +/-2.5V range
7 ANAI06 Input Analog Input 6 0-5V or +/-2.5V range
8 ANAI07 Input Analog Input 7 0-5V or +/-2.5V range
9 ANAI08 Input Analog Input 8 0-5V or +/-2.5V range*
10 ANAI09 Input Analog Input 9 0-5V or +/-2.5V range*
11 ANAI10 Input Analog Input 10 0-5V or +/-2.5V range*
12 ANAI11 Input Analog Input 11 0-5V or +/-2.5V range*
13 ANAI12 Input Analog Input 12 0-5V or +/-2.5V range*
14 ANAI13 Input Analog Input 13 0-5V or +/-2.5V range*
15 ANAI14 Input Analog Input 14 0-5V or +/-2.5V range*
16 ANAI15 Input Analog Input 15 0-5V or +/-2.5V range*
17 GND Common PMAC common Not isolated from digital
18 +12V Output Positiv e supply voltage To power external circuitry
19 GND Common PMAC common Not isolated from digital
20 -12V Output Negative supply voltage To power external circuitry
The JANA connector provides the inputs for the 8 or 16 optional analog inputs on the PMAC2. * Only
present if Option-12A ordered
Baseboard Connector Pinouts 23
Page 28
Turbo PMAC2 PCI Hardware Reference Manual
J2 (JTHW) Multiplexer Port Connector
Pin # Symbol Function Description Notes
1 GND Common PMAC common
2 GND Common PMAC common
3 DAT0 Input Data-0 input Data input from MUX port accessories
4 SEL0 Output Select-0 output Address/Data output for MUX port accessories
5 DAT1 Input Data-1 input Data input from MUX port accessories
6 SEL1 Output Select-1 output Address/Data output for MUX port accessories
7 DAT2 Input Data-2 input Data input from MUX port accessories
8 SEL2 Output Select-2 output Address/Data output for MUX port accessories
9 DAT3 Input Data-3 input Data input from MUX port accessories
10 SEL3 Output Select-3 output Address/Data output for MUX port accessories
11 DAT4 Input Data-4 input Data input from MUX port accessories
12 SEL4 Output Select-4 output Address/Data output for MUX port accessories
13 DAT5 Input Data-5 input Data input from MUX port accessories
14 SEL5 Output Select-5 output Address/Data output for MUX port accessories
15 DAT6 Input Data-6 input Data input from MUX port accessories
16 SEL6 Output Select-6 output Address/Data output for MUX port accessories
17 DAT7 Input Data-7 input Data input from MUX port accessories
18 SEL7 Output Select-7 output Address/Data output for MUX port accessories
19 NC NC NC
20 GND Common PMAC common
21 BRLD/ Output Buffer request Low is buffer required
22 GND Common PMAC common
23 IPLD/ Output In Position Low is in position
24 GND Common PMAC common
25 +5V Output +5Vdc supply Power supply out
26 INIT/ Input PMAC reset Low is reset
J3 (JI/O) General Input/Output Connector
Pin # Symbol Function Description Notes
1 I/O00 In/Out Digital I/O 0 Software direction control
2 I/O01 In/Out Digital I/O 1 Software direction control
3 I/O02 In/Out Digital I/O 2 Software direction control
4 I/O03 In/Out Digital I/O 3 Software direction control
5 I/O04 In/Out Digital I/O 4 Software direction control
6 I/O05 In/Out Digital I/O 5 Software direction control
7 I/O06 In/Out Digital I/O 6 Software direction control
8 I/O07 In/Out Digital I/O 7 Software direction control
9 I/O08 In/Out Digital I/O 8 Software direction control
10 I/O09 In/Out Digital I/O 9 Software direction control
11 I/O20 In/Out Digital I/O 10 Software direction control
12 I/O11 In/Out Digital I/O 11 Software direction control
13 I/O12 In/Out Digital I/O 12 Software direction control
14 I/O13 In/Out Digital I/O 13 Software direction control
15 I/O14 In/Out Digital I/O 14 Software direction control
16 I/O15 In/Out Digital I/O 15 Software direction control
17 I/O16 In/Out Digital I/O 16 Software direction control
18 I/O17 In/Out Digital I/O 17 Software direction control
19 I/O18 In/Out Digital I/O 18 Software direction control
24 Baseboard Connector Pinouts
Page 29

Turbo PMAC2 PCI Hardware Reference Manual
J3 (JI/O) General Input/Output Connector (Continued)
Pin # Symbol Function Description Notes
20 I/O19 In/Out Digital I/O 19 Software direction control
21 I/O20 In/Out Digital I/O 20 Software direction control
22 I/O21 In/Out Digital I/O 21 Software direction control
23 I/O22 In/Out Digital I/O 22 Software direction control
24 I/O23 In/Out Digital I/O 23 Software direction control
25 I/O24 In/Out Digital I/O 24 Software direction control
26 I/O25 In/Out Digital I/O 25 Software direction control
27 I/O26 In/Out Digital I/O 26 Software direction control
28 I/O27 In/Out Digital I/O 27 Software direction control
29 I/O28 In/Out Digital I/O 28 Software direction control
30 I/O29 In/Out Digital I/O 29 Software direction control
31 I/O30 In/Out Digital I/O 30 Software direction control
32 I/O31 In/Out Digital I/O 31 Software direction control
33 GND Common Reference voltage
34 GND Common Reference voltage
35 Phase/ Output Phase clock For latching data
36 Servo/ Output Servo clock For latching data
37 GND Common Reference voltage
38 GND Common Reference voltage To power external circuitry
39 +5V Output Supply voltage To power external circuitry
40 +5V Output Supply voltage
The JI/O connector provides 32 input/output pins at TTL levels. Direction can be controlled in byte-wide
groups.
J5 (JRS232) Serial Port Connector
Pin # Symbol Function Description Notes
1 PHASE Output Phasing clock
2 DTR Bidirectional Data terminal ready Tied to DSR
3 TXD/ Input Receive data Host transmit data
4 DTS Input Clear to send Host ready bit
5 RXD/ Output Send data Host receive data
6 RTS Output Request to send PMAC ready bit
7 DSR Bidirectional Data set ready Tied to DTR
8 SERVO Output Servo clock
9 GND Common PMAC common
10 +5V Output +5Vdc supply Power supply out
The JRS232 connector provides the PMAC2-PC with the ability to communicate serially with an RS232 port.
This connector cannot be used for daisy chain interconnection of multiple PMACs. The J5A RS-422 port must
be used for daisy chaining. E17 and E18 must connect pins 1 and 2 to use the RS-232 port for serial
communications.
Baseboard Connector Pinouts 25
Page 30

Turbo PMAC2 PCI Hardware Reference Manual
J5A: RS422 Serial Port Connector
JRS422 (26-Pin Connector)
Pin # Symbol Function Description Notes
1 CHASSI Common PMAC common
2 S+5V Output +5Vdc supply
3 RD- Input Receive data Diff. I/O low true
4 RD+ Input Receive data Diff. I/O high true
5 SD- Output Send data Diff. I/O low true
6 SD+ Output Send data Diff. I/O high true
7 CS+ Input Clear to send Diff. I/ O high true
8 CS- Input Clear to send Diff. I/O low true
9 RS+ Output Request to send Diff. I/O high true
10 RS- Output Request to send Diff. I/O low true
11 DTR Bidirectional Data terminal ready Tied to DSR
12 INIT/ Input PMAC reset Low is reset
13 GND Common PMAC common
14 DSR Bidirectional Data set ready Tied to DDTR
15 SDIO- Bidirectional Special data Diff. I/O low true
16 SDI0+ Bidirectional Special data Diff. I/O high true
17 SCIO- Bidirectional Special control Diff. I/O low true
18 SCIO+ Bidirectional Special control Diff. I/O high true
19 SCK- Bidirectional Special clock Diff. I/O low true
20 SCK+ Bidirectional Special clock Diff. I/O high true
21 SERVO- Bidirectional Servo clock Diff. I/O low true
22 SERVO+ Bidirectional Servo clock Diff. I/O high true
23 PHASE- Bidirectional Phase clock Diff. I/O low true
24 PHASE+ Bidirectional Phase clock Diff. I/O high true
25 GND Common PMAC common
26 +5V Output +5Vdc supply Power supply out
E17 and E18 must connect pins 2 and 3 to use the RS-422 port for serial communications. This connector
could also be used to daisy chain interconnect multiple PMACs for synchronized operation.
J6 (JDISP) Display Connector
Pin # Symbol Function Description Notes
1 VDD Output +5V power Power supply out
2 VSS Common PMAC common
3 RS Output Read strobe TTL signal out
4 VEE Output Contrast adjustment VEE 0 to +5Vdc*
5 E Output Display enable High is enable
6 R/W Output Read or write TTL signal out
7 DB1 Output Display Data1
8 DB0 Output Display Data0
9 DB3 Output Display Data3
10 DB2 Output Display Data2
11 DB5 Output Display Data5
12 DB4 Output Display Data4
13 DB7 Output Display Data7
14 DB6 Output Display Data6
The JDISP connector is used to drive the 2 lines x 24 character (Acc-12), 2 x 40 (Acc-12A) LCD, or the 2 x 40
vacuum fluorescent (Acc 12C) display unit. The Display command may be used to send messages and values
to the display.
26 Baseboard Connector Pinouts
Page 31

Turbo PMAC2 PCI Hardware Reference Manual
J7 (JHW) Handwheel Encoder Connector
Pin # Symbol Function Description Notes
1 GND Common Reference voltage
2 +5V Output Supply voltage To power external circuitry
3 HWAL+ Input HW positive A Channel Also pulse input
4 HWAL- Input HW negative A Channel Also pulse input
5 HWBL+ Input HW negative B Channel Also direction input
6 HWBL- Input HW negative B Channel Also direction input
7 HWA2+ Input HW positive A Channel Also pulse input
8 HWA2- Input HW negative A Channel Also pulse input
9 HWB2+ Input HW positive B Channel Also direction input
10 HWB2- Output HW negative B Channel Also direction input
11 PUL1+ Output PFM negative pulse Also PWM bottom output
12 PUL1- Output PFM negative pulse Also PWM bottom output
13 DIR1+ Output PFM positive direction out Also PWM top output
14 DIR1- Output PFM negative direction out Also PWM top output
15 PUL2+ Output PFM positive pulse Also PWM bottom output
16 PUL2- Output PFM negative pulse Also PWM bottom output
17 DIR2+ Output PFM positive direction out Also PWM top output
18 DIR2- Output PFM negative direction out Also PWM top output
19 GND Common Reference voltage
20 +5V Output Supply voltage To power external circuitry
J8 (JEQU) Position Compare Output Connector
Pin # Symbol Function Description Notes
1 EQU1/ Output Encoder 1 Comp - EQ Programmed polarity
2 EQU2/ Output Encoder 2 Comp – EQ Programmed polarity
3 EQU3/ Output Encoder 3 Comp – EQ Programmed polarity
4 EQU4/ Output Encoder 4 Comp – EQ Programmed polarity
5 EQU5/ Output Encoder 5 Comp – EQ Programmed polarity
6 EQU6/ Output Encoder 6 Comp – EQ Programmed polarity
7 EQU7/ Output Encoder 7 Comp – EQ Programmed polarity
8 EQU8/ Output Encoder 8 Comp – EQ Programmed polarity
9 +V Supply Positive supply +5V
10 GND Common Digital ground
This connector provides the position-compare outputs for the eight encoder ch annels.
Baseboard Connector Pinouts 27
Page 32

Turbo PMAC2 PCI Hardware Reference Manual
J9 (JMACH1) Connector Description
J9 (JMACH1)
Connector Description
Pin # Symbol Function Description Notes
1 +5V Output/Input +5V power For external circuit or from
external supply
2 +5V Output/Input +5V power For external circuit or from
external supply
3 GND Common Reference voltage
4 GND Common Reference voltage
5 CHA1+ Input Encoder 1 positive A channel Also pulse input
6 CHA1- Input Encoder 1 negative A channel Also pulse input
7 CHB1+ Input Encoder 1 positive B channel Also direction input
8 CHB1- Input Encoder 1 negative B channel Also direction input
9 CHC1+ Input Encoder 1 positive C channel Index channe l
10 CHC1- Input Encoder 1 negative C channel Index channel
11 CHU1 Input Channel 1 U flag Hall effect, fault code, or sub-
count
12 CHV1 Input Channel 1 V flag Hall effect, fault code, or sub-
count
13 CHW1 Input Channel 1 W flag Hall effect, fault code, or sub-
count
14 CHT1 Input Channel 1 T flag Fault code or sub-count
15 USER1 Input General purpose user flag Hardware capture flag or sub-
count
16 PLIM1 Input Positive overtravel limit Hardware capture flag
17 MLIM1 Input Negative overtravel limit Hardware capture flag
18 HOME1 Input Home switch input Hardware capture flag
19 ACCFLT1 Input Accessory fault flag For loss of ACC supply voltage
20 WD0/ Output Watchdog output Low is PMAC watchdog fault
21 SCLK12+ Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
22 SCLK12- Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
23 ADC_CLK1+ Output A/D converter clock Programmable frequency
24 ADC_CLK1- Output A/D converter clock Programmable frequency
25 ADC_STB1+ Output A/D converter strobe Programmable sequence
26 ADC_STB1- Output A/D converter strobe Programmable sequence
27 ADC_DAA1+ Input Channel A ADC serial data MSB first
28 ADC_DAA1- Input Channel A ADC serial data MSB first
29 ADC_DAB1+ Input Channel B ADC serial data MSB first
30 ADC_DAB1- Input Channel B ADC serial data MSB first
31 AENA1+ Output Amplifier enable High is enable
32 AENA1- Output Amplifier enable Low is enable
33 FAULT1+ Input Amplifier fault Programmable parity
34 FAULT1- Input Amplifier fault Programmable parity
28 Baseboard Connector Pinouts
Page 33

Turbo PMAC2 PCI Hardware Reference Manual
J9 (JMACH1) Connector Description (Continued)
Pin # Symbol Function Description Notes
35 PWMATOP1+
DAC_CLK1+
36 PWMATOP1-
DAC_CLK1-
37 PWMABOT1+
DAC1A+
38 PWMABOT1-
DAC1A-
39 PWMBTOP1+
DAC_STB1+
40 PWMBTOP1-
DAC_STB1-
41 PWMBBOT1+
DAC1B+
42 PWMBBOT1-
DAC1B-
43 PWMCTOP1+
DIR1+
44 PWMCTOP1-
DIR1-
45 PWMCBOT1+
PULSE1+
46 PWMCBOT1-
PULSE147 GND Common Reference voltage
48 GND Common Reference voltage
49 +5V Output/Input +5V Power For external circuit or from external
50 +5V Output/Input +5V Power For external circuit or from external
51 +5V Output/Input +5V Power For external circuit or from external
52 +5V Output/Input +5V Power For external circuit or from external
53 GND Common Reference voltage
54 GND Common Reference voltage
55 CHA2+ Input Encoder 2 positive A Channel Also pulse input
56 CHA2- Input Encoder 2 negative A Channel Also pulse input
57 CHB2+ Input Encoder 2 positive B Channel Also direction input
58 CHB2- Input Encoder 2 negative B Channe l Also direction input
59 CHC2+ Input Encoder 2 positive C Channel Index channel
60 CHC2 Input Encoder 2 negative C Channel Index channel
61 CHU2 Input Channel 2 U flag Hall effect, fault code or sub-count
62 CHV2 Input Channel 2 V flag Hall effect, fault code or sub-count
63 CHW2 Input Channel 2 W flag Hall effect, fault code or sub-count
64 CHT2 Input Channel 2 T flag Hall effect, fault code or sub-count
65 USER2 Input General purpose user flag Hardware capture flag, or sub-count
Output Phase A top CMD or DAC
clock
Output Phase A top CMD or DAC
clock
Output Phase A bottom CMD or DAC
A serial Data
Output Phase A bottom CMD or DAC
A serial Data
Output Phase B top CMD or DAC
strobe
Output Phase B top CMD or DAC
strobe
Output Phase B bottom CMD or DAC
B serial data
Output Phase B bottom CMD or DAC
B serial data
Output Phase B top CMD or PFM
direction
Output Phase B top CMD or PFM
direction
Output Phase B bottom CMD or PFM
pulse
Output Phase B bottom CMD or PFM
pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
supply
supply
supply
supply
Baseboard Connector Pinouts 29
Page 34

Turbo PMAC2 PCI Hardware Reference Manual
J9 (JMACH1) Connector Description (Continued)
Pin # Symbol Function Description Notes
66 PLIM2 Inpu t Positive overtravel limit Hardware capture flag
67 MLIM2 Input Negative overtravel limit Hardware capture flag
68 HOME2 Input Home switch input Hardware capture flag
69 ACCFLT2 Input Accessory fault flag For loss of ACC supply voltage
70 WD0/ Output Watchdog output Low is PMAC watchdog fault
71 SCLK12+ Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
72 SCLK12- Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
73 ADC_CLK2+ Output A/D converter clock Programmable frequency
74 ADC_CLK2- Output A/D converter clock Programmable frequency
75 ADC_STB2+ Output A/D converter strobe Programmable sequence
76 ADC_STB2- Output A/D converter strobe Programmable sequence
77 ADC_DAA2+ Input Channel A ADC serial data MSB first
78 ADC_DAA2- Input Channel A ADC serial data MSB first
79 ADC_DAB2+ Input Channel B ADC serial data MSB first
80 ADC_DAB2- Input Channel B ADC serial data MSB first
81 AENA2+ Output Amplifier enable High is enable
82 AENA2- Output Amplifier enable Low is enable
83 FAULT2+ Input Amplifier fault Programmable polarity
84 FAULT2- Input Amplifier fault Programmable polarity
85 PWMATOP2+
DAC_CLK2+
86 PWMATOP2-
DAC_CLK2-
87 PWMABOT2+
DAC2A+
88 PWMABOT2-
DAC2A-
89 PWMBTOP2+
DAC_STB2+
90 PWMBTOP2-
DAC_STB2-
91 PWMBBOT2+
DAC2B+
92 PWMBBOT2-
DAC2B-
93 PWMCTOP2+
DIR2+
94 PWMCTOP2-
DIR2-
95 PWMCBOT2+
PULSE2+
96 PWMCBOT2-
PULSE2-
97 GND Common Reference voltage
Output Phase A top CMD. or DAC
clock
Output Phase A top CMD. or DAC
clock
Output Phase A bottom CMD or DAC
A serial data
Output Phase A bottom CMD or DAC
A serial data
Output Phase B top CMD or DAC
strobe
Output Phase B top CMD or DAC
strobe
Output Phase B bottom CMD or DAC
B serial data
Output Phase B bottom CMD or DAC
B serial data
Output Phase B top CMD or PFM
direction
Output Phase B top CMD or PFM
direction
Output Phase B bottom CMD or PFM
pulse
Output Phase B bottom CMD or PFM
pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
30 Baseboard Connector Pinouts
Page 35

Turbo PMAC2 PCI Hardware Reference Manual
J9 (JMACH1) Connector Description (Continued)
Pin # Symbol Function Description Notes
98 GND Common Reference voltage
99 +5V Output/Input +5V power For external circuit or from
external supply
100 +5V Output/Input +5V power For external circuit or from
external supply
The JMACH1 connector provides the interface pins for channels 1 and 2. Usually, it is connected to a breakout
board, such as one of the Acc-8x family of boards, or an application-specific interface board.
Connector: 100-pin male box header with center key, 0050" pitch. AMP part # 1-04068-7
Delta Tau part # 014-00010-FPB.
J10 (JMACH2) Connector Description
J10 (JMACH2)
Pin # Symbol Function Description Notes
1 +5V Output/Input +5V power For external circuit or from external
supply
2 +5V Output/Input +5V power For external circuit or from external
supply
3 GND Common Reference voltage
4 GND Common Reference voltage
5 CHA3+ Input Encoder 3 positive A channel Also pulse input
6 CHA3- Input Encoder 3 negative A channel Also pulse input
7 CHB3+ Input Encoder 3 positive B channel Also direction input
8 CHB3- Input Encoder 3 negative B channel Also direction input
9 CHC3+ Input Encoder 3 positive C channel Index channel
10 CHC3- Input Encoder 3 negative C channel Index channel
11 CHU3 Input Channel 3 U flag Hall effect, fault code, or sub-count
12 CHV3 Input Channel 3 V flag Hall effect, fault code, or sub-count
13 CHW3 Input Channel 3 W flag Hall effect, fault code, or sub-count
14 CHT3 Input Channel 3 T flag Fault code or sub-count
15 USER3 Input General purpose user flag Hardware capture flag or sub-count
16 PLIM3 Input Positive overtravel limit Hardware capture flag
17 MLIM3 Input Negative overtravel limit Hardware capture flag
18 HOME3 Input Home switch input Hardware capture flag
19 ACCFLT3 Input Accessory fault flag For loss of ACC supply voltage
20 WD0/ Output Watchdog output Low is PMAC watchdog fault
21 SCLK34+ Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
22 SCLK34- Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
23 ADC_CLK3+ Output A/D converter clock Programmable frequency
24 ADC_CLK3- Output A/D converter clock Programmable frequency
25 ADC_STB3+ Output A/D converter strobe Programmable sequence
26 ADC_STB3- Output A/D converter strobe Programmable sequence
27 ADC_DAA3+ Input Channel A ADC serial data MSB first
Baseboard Connector Pinouts 31
Page 36

Turbo PMAC2 PCI Hardware Reference Manual
J10 (JMACH2) (Continued)
Pin # Symbol Function Description Notes
28 ADC_DAA3- Input Channel A ADC serial data MSB first
29 ADC_DAB3+ Input Channel B ADC serial data MSB first
30 ADC_DAB3- Input Channel B ADC serial data MSB first
31 AENA3+ Output Amplifier enable High is enable
32 AENA3- Output Amplifier enable Low is enable
33 FAULT3+ Input Amplifier fault Programmable parity
34 FAULT3- Input Amplifier fault Programmable parity
35 PWMATOP3+
DAC_CLK3+
36 PWMATOP3-
DAC_CLK3-
37 PWMABOT3+
DAC3A+
38 PWMABOT3-
DAC3A-
39 PWMBTOP3+
DAC_STB3+
40 PWMBTOP3-
DAC_STB3-
41 PWMBBOT3+
DAC3B+
42 PWMBBOT3-
DAC3B-
43 PWMCTOP3+
DIR3+
44 PWMCTOP3-
DIR3-
45 PWMCBOT3+
PULSE3+
46 PWMCBOT3-
PULSE347 GND Common Reference voltage
48 GND Common Reference voltage
49 +5V Output/Input +5V power For external circuit or from external
50 +5V Output/Input +5V power For external circuit or from external
51 +5V Output/Input +5V power For external circuit or from external
52 +5V Output/Input +5V power For external circuit or from external
53 GND Common Reference voltage
54 GND Common Reference voltage
55 CHA4+ Input Encoder 4 positive A Channel Also pulse input
56 CHA4- Input Encoder 4 negative A Channel Also pulse input
57 CHB4+ Input Encoder 4 positive B Channel Also direction input
58 CHB4- Input Encoder 4 negative B Channel Also direction input
59 CHC4+ Input Encoder 4 positive C Channel Index channel
60 CHC4- Input Encoder 4 negative C Channel Index channel
Output Phase A top CMD or DAC
clock
Output Phase A top CMD or DAC
clock
Output Phase A bottom CMD or DAC
A serial data
Output Phase A bottom CMD or DAC
A serial data
Output Phase B top CMD or DAC
strobe
Output Phase B top CMD or DAC
strobe
Output Phase B bottom CMD or DAC
B serial data
Output Phase B bottom CMD or DAC
B serial data
Output Phase B top CMD or PFM
direction
Output Phase B top CMD. or PFM
direction
Output Phase B bottom CMD or PFM
pulse
Output Phase B bottom CMD or PFM
pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
supply
supply
supply
supply
32 Baseboard Connector Pinouts
Page 37

Turbo PMAC2 PCI Hardware Reference Manual
J10 (JMACH2) (Continued)
Pin # Symbol Function Description Notes
61 CHU4 Input Channel 4 U flag Hall effect, fault code or sub-count
62 CHV4 Input Channel 4 V flag Hall effect, fault code or sub-count
63 CHW4 Input Channe l 4 W flag Hall effect, fault code or sub-co unt
64 CHT4 Input Channel 4 T flag Fault code or sub-count
65 USER4 Input General purpose user flag Hardware capture flag, or sub-count
66 PLIM4 Input Positive overtravel limit Hardware capture flag
67 MLIM4 Input Negative overtravel limit Hardware capture flag
68 HOME4 Input Home switch input Hardware capture flag
69 ACCFLT4 Input Accessory fault flag For loss of ACC supply voltage
70 WD0/ Output Watchdog output Low is PMAC watchdog fault
71 SCLK34+ Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
72 -SCLK34 Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
73 ADC_CLK4+ Output A/D converter clock Programmable frequency
74 ADC_CLK4- Output A/D converter clock Programmable frequency
75 ADC_STB4+ Output A/D converter strobe Programmable sequence
76 ADC_STB4- Output A/D converter strobe Programmable sequence
77 ADC_DAA4+ Input Channel A ADC serial data MSB first
78 ADC_DAA4- Input Channel A ADC serial data MSB first
79 ADC_DAB4+ Input Channel B ADC serial data MSB first
80 ADC_DAB4- Input Channel B ADC serial data MSB first
81 AENA4+ Output Amplifier enable High is enable
82 AENA4- Output Amplifier enable Low is enable
83 FAULT4+ Input Amplifier fault 83 Programmable polarity
84 FAULT4- Input Amplifier fault Programmable polarity
85 PWMATOP4+
DAC_CLK4+
86 PWMATOP4-
DAC_CLK4-
87 PWMABOT4+
DAC4A+
88 PWMABOT4-
DAC4A-
89 PWMBTOP4+
DAC_STB4+
90 PWMBTOP4-
DAC_STB4-
91 PWMBBOT4+
DAC4B+
92 PWMBBOT4-
DAC4B-
93 PWMCTOP4+
DIR4+
94 PWMCTOP4-
DIR4-
Output Phase A top CMD. or DAC
clock
Output Phase A top CMD. or DAC
clock
Output Phase A bottom CMD or DAC
A serial data
Output Phase A bottom CMD or DAC
A serial data
Output Phase B top CMD or DAC
strobe
Output Phase B top CMD or DAC
strobe
Output Phase B bottom CMD or DAC
B serial data
Output Phase B bottom CMD or DAC
B serial data
Output Phase B top CMD or PFM
direction
Output Phase B top CMD or PFM
direction
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Baseboard Connector Pinouts 33
Page 38

Turbo PMAC2 PCI Hardware Reference Manual
J10 (JMACH2) (Continued)
Pin # Symbol Function Description Notes
95 PWMCBOT4+
PULSE4+
96 PWMCBOT4-
PULSE497 GND Common Reference voltage
98 GND Common Reference voltage
99 +5V Output/Input +5V power For external circuit or from external
100 +5V Output/Input +5V power For external circuit or from external
The JMACH1 connector provides the interface pins for channels 3 and 4. Usually, it is connected to a breakout
board, such as one of the Acc-8x family of boards, or an application-specific interface board.
Connector: 100-pin male box header with center key, 0050" pitch. AMP part # 1-04068-7
Delta Tau part # 014-00010-FPB.
Output Phase B bottom CMD or PFM
pulse
Output Phase B bottom CMD or PFM
pulse
Programmable function control
Programmable function control
supply
supply
J11 (JMACH3)
This connector is present only if Option 1 was ordered.
J11 (JMACH3)
Pin # Symbol Function Description Notes
1 +5V Output/Input +5V power For external circuit or from external
supply
2 +5V Output/Input +5V power For external circuit or from external
supply
3 GND Common Reference voltage
4 GND Common Reference voltage
5 CHA5+ Input Encoder 5 positive A channel Also pulse input
6 CHA5- Input Encoder 5 negative A channel Also pulse input
7 CHB5+ Input Encoder 5 positive B channel Also direction input
8 CHB5- Input Encoder 5 negative B channel Also direction input
9 CHC5+ Input Encoder 5 positive C channel Index channel
10 CHC5- Input Encoder 5 negative C channel Index channel
11 CHU5 Input Channel 5 U flag Hall effect, fault code, or sub-count
12 CHV5 Input Channel 5 V flag Hall effect, fault code, or sub-count
13 CHW5 Input Channel 5 W flag Hall effect, fault code, or sub-count
14 CHT5 Input Channel 5 T flag Fault code or sub-count
15 USER5 Input General purpose user flag Hardware capture flag or sub-count
16 PLIM5 Input Positive overtravel limit Hardware capture flag
17 MLIM5 Input Negative overtravel limit Hardware capture flag
18 HOME5 Input Home switch input Hardware capture flag
19 ACCFLT5 Input Accessory fault flag For loss of ACC supply voltage
20 WD0/ Output Watchdog output Low is PMAC watchdog fault
21 SCLK56+ Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
22 SCLK56- Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
34 Baseboard Connector Pinouts
Page 39

Turbo PMAC2 PCI Hardware Reference Manual
J11 (JMACH3) Connector Description (Continued)
Pin # Symbol Function Description Notes
23 ADC_CLK5+ Output A/D converter clock Programmable frequency
24 ADC_CLK5- Output A/D converter clock Programmable frequency
25 ADC_STB5+ Output A/D converter strobe Programmable sequence
26 ADC_STB5- Output A/D converter strobe Programmable sequence
27 ADC_DAA5+ Input Channel A ADC serial data MSB first
28 ADC_DAA5- Input Channel A ADC serial data MSB first
29 ADC_DAB5+ Input Channel B ADC serial data MSB first
30 ADC_DAB5- Input Channel B ADC serial data MSB first
31 AENA5+ Output Amplifier enable High is enable
32 AENA5- Output Amplifier enable Low is enable
33 FAULT5+ Input Amplifier fault Programmable parity
34 FAULT5- Input Amplifier fault Programmable parity
35 PWMATOP5+
DAC_CLK5+
36 PWMATOP5-
DAC_CLK5-
37 PWMABOT5+
DAC5A+
38 PWMABOT5-
DAC5A-
39 PWMBTOP5+
DAC_STB5+
40 PWMBTOP5-
DAC_STB5-
41 PWMBBOT5+
DAC5B+
42 PWMBBOT5-
DAC5B-
43 PWMCTOP5+
DIR5+
44 PWMCTOP5-
DIR5-
45 PWMCBOT5+
PULSE5+
46 PWMCBOT5-
PULSE547 GND Common Reference voltage
48 GND Common Reference voltage
49 +5V Output/Input +5V power For external circuit or from external
50 +5V Output/Input +5V power For external circuit or from external
51 +5V Output/Input +5V power For external circuit or from external
52 +5V Output/Input +5V power For external circuit or from external
53 GND Common Reference voltage
54 GND Common Reference voltage
55 CHA6+ Input Encoder 6 positive A Channel Also pulse input
56 CHA6- Input Encoder 6 negative A Channel Also pulse input
57 CHB6+ Input Encoder 6 positive B Channel Also direction input
Output Phase A top CMD or DAC
clock
Output Phase A top CMD or DAC
clock
Output Phase A bottom CMD or DAC
A serial data
Output Phase A bottom CMD or DAC
A serial data
Output Phase B top CMD or DAC
strobe
Output Phase B top CMD or DAC
strobe
Output Phase B bottom CMD or DAC
B serial data
Output Phase B bottom CMD or DAC
B serial data
Output Phase B top CMD or PFM
direction
Output Phase B top CMD. or PFM
direction
Output Phase B bottom CMD or PFM
pulse
Output Phase B bottom CMD or PFM
pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
supply
supply
supply
supply
Baseboard Connector Pinouts 35
Page 40

Turbo PMAC2 PCI Hardware Reference Manual
J11 (JMACH3) (Continued)
Pin # Symbol Function Description Notes
58 CHB6- Input Encoder 6 negative B Channel Also direction input
59 CHC6+ Input Encoder 6 positive C Channel Index channel
60 CHC6- Input Encoder 6 negative C Channel Index channel
61 CHU6 Input Channel 6 U flag Hall effect, fault code or sub-count
62 CHV6 Input Channel 6 V flag Hall effect, fault code or sub-count
63 CHW6 Input Channe l 6 W flag Hall effect, fault code or sub-count
64 CHT6 Input Channel 6 T flag Fault code or sub-count
65 USER6 Input General purpose user flag Hardware capture flag, or sub-count
66 PLIM6 Input Positive overtravel limit Hardware capture flag
67 MLIM6 Input Negative overtravel limit Hardware capture flag
68 HOME6 Input Home switch input Hardware capture flag
69 ACCFLT6 Input Accessory fault flag For loss of ACC supply voltage
70 WD0/ Output Watchdog output Low is PMAC watchdog fault
71 SCLK56+ Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
72 SCLK56- Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
73 ADC_CLK6+ Output A/D converter clock Programmable frequency
74 ADC_CLK6- Output A/D converter clock Programmable frequency
75 ADC_STB6+ Output A/D converter strobe Programmable sequence
76 ADC_STB6- Output A/D converter strobe Programmable sequence
77 ADC_DAA6+ Input Channel A ADC serial data MSB first
78 ADC_DAA6- Input Channel A ADC serial data MSB first
79 ADC_DAB6+ Input Channel B ADC serial data MSB first
80 ADC_DAB6- Input Channel B ADC serial data MSB first
81 AENA6+ Output Amplifier enable High is enable
82 AENA6- Output Amplifier enable Low is enable
83 FAULT6+ Input Amplifier fault Programmable polarity
84 FAULT6- Input Amplifier fault Programmable polarity
85 PWMATOP6+
DAC_CLK6+
86 PWMATOP6-
DAC_CLK6-
87 PWMABOT6+
DAC6A+
88 PWMABOT6-
DAC6A-
89 PWMBTOP6+
DAC_STB6+
90 PWMBTOP6-
DAC_STB6-
91 PWMBBOT6+
DAC6B+
92 PWMBBOT6-
DAC6B-
93 PWMCTOP6+
DIR6+
94 PWMCTOP6-
DIR6-
95 PWMCBOT6+
PULSE6+
Output Phase A top CMD. or DAC
clock
Output Phase A top CMD. or DAC
clock
Output Phase A bottom CMD or DAC
A serial data
Output Phase A bottom CMD or DAC
A serial data
Output Phase B top CMD or DAC
strobe
Output Phase B top CMD or DAC
strobe
Output Phase B bottom CMD or DAC
B serial data
Output Phase B bottom CMD or DAC
B serial data
Output Phase B top CMD or PFM
direction
Output Phase B top CMD or PFM
direction
Output Phase B bottom CMD or PFM
pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
36 Baseboard Connector Pinouts
Page 41

Turbo PMAC2 PCI Hardware Reference Manual
J11 (JMACH3) (Continued)
Pin # Symbol Function Description Notes
96 PWMCBOT6-
PULSE697 GND Common Reference voltage
98 GND Common Reference voltage
99 +5V Output/Input +5V power For external circuit or from external
100 +5V Output/Input +5V power For external circuit or from external
The JMACH1 connector provides the interface pins for channels 5 and 6. Usually, it is connected to a breakout
board, such as one of the Acc-8x family of boards, or an application-specific interface board.
Connector: 100-pin male box header with center key, 0050" pitch. AMP part # 1-04068-7
Delta Tau part # 014-00010-FPB.
Output Phase B bottom CMD or PFM
pulse
Programmable function control
supply
supply
J12 (JMACH4)
(Only present if Option 1 ordered)
J12 (JMACH4)
Pin # Symbol Function Description Notes
1 +5V Output/Input +5V power For external circuit or from external
supply
2 +5V Output/Input +5V power For external circuit or from external
supply
3 GND Common Reference voltage
4 GND Common Reference voltage
5 CHA7+ Input Encoder 7 positive A channel Also pulse input
6 CHA7- Input Encoder 7 negative A channel Also pulse input
7 CHB7+ Input Encoder 7 positive B channel Also direction input
8 CHB7- Input Encoder 7 negative B channel Also direction input
9 CHC7+ Input Encoder 7 positive C channel Index channel
10 CHC7- Input Encoder 7 negative C channel Index channel
11 CHU7 Input Channel 7 U flag Hall effect, fault code, or sub-count
12 CHV7 Input Channel 7 V flag Hall effect, fault code, or sub-count
13 CHW7 Input Channel 7 W flag Hall effect, fault code, or sub-count
14 CHT7 Input Channel 7 T flag Fault code or sub-count
15 USER7 Input General purpose user flag Hardware capture flag or sub-count
16 PLIM7 Input Positive overtravel limit Hardware capture flag
17 MLIM7 Input Negative overtravel limit Hardware capture flag
18 HOME7 Input Home switch input Hardware capture flag
19 ACCFLT7 Input Accessory fault flag For loss of ACC supply voltage
20 WD0/ Output Watchdog output Low is PMAC watchdog fault
21 SCLK78+ Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
22 SCLK78- Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
23 ADC_CLK7+ Output A/D converter clock Programmable frequency
24 ADC_CLK7- Output A/D converter clock Programmable frequency
25 ADC_STB7+ Output A/D converter strobe Programmable sequence
26 ADC_STB7- Output A/D converter strobe Programmable sequence
27 ADC_DAA7+ Input Channel A ADC serial data MSB first
Baseboard Connector Pinouts 37
Page 42

Turbo PMAC2 PCI Hardware Reference Manual
J12 (JMACH4) Connector Description (Continued)
Pin # Symbol Function Description Notes
28 ADC_DAA7- Input Channel A ADC serial data MSB first
29 ADC_DAB7+ Input Channel B ADC serial data MSB first
30 ADC_DAB7- Input Channel B ADC serial data MSB first
31 AENA7+ Output Amplifier enable High is enable
32 AENA7- Output Amplifier enable Low is enable
33 FAULT7+ Input Amplifier fault Programmable parity
34 FAULT7- Input Amplifier fault Programmable parity
35 PWMATOP7+
DAC_CLK7+
36 PWMATOP7-
DAC_CLK7-
37 PWMABOT7+
DAC7A+
38 PWMABOT7-
DAC7A-
39 PWMBTOP7+
DAC_STB7+
40 PWMBTOP7-
DAC_STB7-
41 PWMBBOT7+
DAC7B+
42 PWMBBOT7-
DAC7B-
43 PWMCTOP7+
DIR7+
44 PWMCTOP7-
DIR7-
45 PWMCBOT7+
PULSE7+
46 PWMCBOT7-
PULSE747 GND Common Reference voltage
48 GND Common Reference voltage
49 +5V Output/Input +5V Power For external circuit or from external
50 +5V Output/Input +5V Power For external circuit or from external
51 +5V Output/Input +5V Power For external circuit or from external
52 +5V Output/Input +5V Power For external circuit or from external
53 GND Common Reference voltage
54 GND Common Reference voltage
55 CHA8+ Input Encoder 8 positive A Channel Also pulse input
56 CHA8- Input Encoder 8 negative A Channel Also pulse input
57 CHB8+ Input Encoder 8 positive B Channel Also direction input
58 CHB8- Input Encoder 8 negative B Channel Also direction input
59 CHC8+ Input Encoder 8 positive C Channel Index channel
60 CHC8 Input Encoder 8 negative C Channel Index channel
61 CHU8 Input Channel 8 U flag Hall effect, fault code or sub-count
Output Phase A top CMD or DAC
clock
Output Phase A top CMD or DAC
clock
Output Phase A bottom CMD or DAC
A serial data
Output Phase A bottom CMD or DAC
A serial data
Output Phase B top CMD or DAC
strobe
Output Phase B top CMD or DAC
strobe
Output Phase B bottom CMD or DAC
B serial data
Output Phase B bottom CMD or DAC
B serial data
Output Phase B top CMD or PFM
direction
Output Phase B top CMD. or PFM
direction
Output Phase B bottom CMD or PFM
pulse
Output Phase B bottom CMD or PFM
pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
supply
supply
supply
supply
38 Baseboard Connector Pinouts
Page 43

Turbo PMAC2 PCI Hardware Reference Manual
J12 (JMACH4) Connector Description (Continued)
Pin # Symbol Function Description Notes
62 CHV8 Input Channel 8 V flag Hall effect, fault code or sub-count
63 CHW8 Input Channel 8 W flag Hall effect, fault code or sub-count
64 CHT8 Input Channel 8 T flag Fault code or sub-count
65 USER8 Input General purpose user flag Hardware capture flag, or sub-count
66 PLIM8 Input Positive overtravel limit Hardware capture flag
67 MLIM8 Input Negative overtravel limit Hardware capture flag
68 HOME8 Input Home switch input Hardware capture flag
69 ACCFLT8 Input Accessory fault flag For loss of ACC supply voltage
70 WD0/ Output Watchdog output Low is PMAC watchdog fault
71 SCLK78+ Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
72 SCLK78- Input/Output Encoder sample clock Direction controlled by PMAC2
jumper
73 ADC_CLK8+ Output A/D converter clock Programmable frequency
74 ADC_CLK8- Output A/D converter clock Programmable frequency
75 ADC_STB8+ Output A/D converter strobe Programmable sequence
76 ADC_STB8- Output A/D converter strobe Programmable sequence
77 ADC_DAA8+ Input Channel A ADC serial data MSB first
78 ADC_DAA8- Input Channel A ADC serial data MSB first
79 ADC_DAB8+ Input Channel B ADC serial data MSB first
80 ADC_DAB8- Input Channel B ADC serial data MSB first
81 AENA8+ Output Amplifier enable High is enable
82 AENA8- Output Amplifier enable Low is enable
83 FAULT8+ Input Amplifier fault Programmable polarity
84 FAULT8- Input Amplifier fault Programmable polarity
85 PWMATOP8+
DAC_CLK8+
86 PWMATOP8-
DAC_CLK8-
87 PWMABOT8+
DAC8A+
88 PWMABOT8-
DAC8A-
89 PWMBTOP8+
DAC_STB8+
90 PWMBTOP8-
DAC_STB8-
91 PWMBBOT8+
DAC8B+
92 PWMBBOT8-
DAC8B-
93 PWMCTOP8+
DIR8+
94 PWMCTOP8-
DIR8-
95 PWMCBOT8+
PULSE8+
Output Phase A top CMD. or DAC
clock
Output Phase A top CMD. or DAC
clock
Output Phase A bottom CMD or DAC
A serial data
Output Phase A bottom CMD or DAC
A serial data
Output Phase B top CMD or DAC
strobe
Output Phase B top CMD or DAC
strobe
Output Phase B bottom CMD or DAC
B serial data
Output Phase B bottom CMD or DAC
B serial data
Output Phase B top CMD or PFM
direction
Output Phase B top CMD or PFM
direction
Output Phase B bottom CMD or PFM
pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Baseboard Connector Pinouts 39
Page 44
Turbo PMAC2 PCI Hardware Reference Manual
J12 (JMACH4) Connector Description (Continued)
Pin # Symbol Function Description Notes
96 PWMCBOT8-
PULSE897 GND Common Reference voltage
98 GND Common Reference voltage
99 +5V Output/Input +5V power For external circuit or from external
100 +5V Output/Input +5V power For external circuit or from external
The JMACH1 connector provides the interface pins for channels 3 and 4. Usually, it is connected to a breakout
board, such as one of the Acc-8x family of boards, or an application-specific interface board.
Output Phase B bottom CMD or PFM
pulse
Programmable function control
supply
supply
TB1 (2/4-Pin Terminal Block)
This terminal block can be used to provide the input for the power supply for the circuits on the PMAC2
board when it is not in a bus configuration. When the PMAC2 is in a bus configuration, these supplies
automatically come through the bus connector from the bus power supply; in this case, this terminal block
should not be used.
Pin#
Symbol Function Description Notes
1 GND Common Reference voltage
2 +5V Input Positive supply voltage Supplies all PMAC digital circuits
3 +12V Input Positive supply voltage +12V to +15V; not required
onboard; used on J1 to supply
analog inputs
4 -12V Input Negative supply voltage -12V to -15V; required for Opt-12
ADCs; used on J1 to supply analog
inputs
Note: Unless Option 12 (Analog-to-Digital Converters) is included on the board, only pins 1 and 2 will be
provided on this terminal block.
TB2 (3-Pin Terminal Block)
This terminal block provides the output for PMAC2's watchdog timer relay, both normally open and
normally closed contacts.
Pin#
Symbol Function Description Notes
1 WD_NC Output Watchdog relay out Normally closed
2 COM Input Watchdog return +V or 0V
3 WD_ No Output Watchdog relay out Normally open
Note: The normally closed relay contact is open while PMAC2 is operating properly – it has power and the
watchdog timer is not tripped – and closed when the PMAC2 is not operating properly – either it has lost power or
the watchdog timer has tripped. The normally open relay contact is closed while PMAC2 is operating properly
and open when PMAC2 is not operating properly.
40 Baseboard Connector Pinouts
Page 45

Turbo PMAC2 PCI Hardware Reference Manual
BASE BOARD JUMPERS LAYOUT
Baseboard Jumpers Layout 41
Page 46

Turbo PMAC2 PCI Hardware Reference Manual
42 Baseboard Jumpers Layout
Page 47

Turbo PMAC2 PCI Hardware Reference Manual
SCHEMATICS
Schematics 43
Page 48

Turbo PMAC2 PCI Hardware Reference Manual
44 Schematics
Page 49

Turbo PMAC2 PCI Hardware Reference Manual
Schematics 45
Page 50
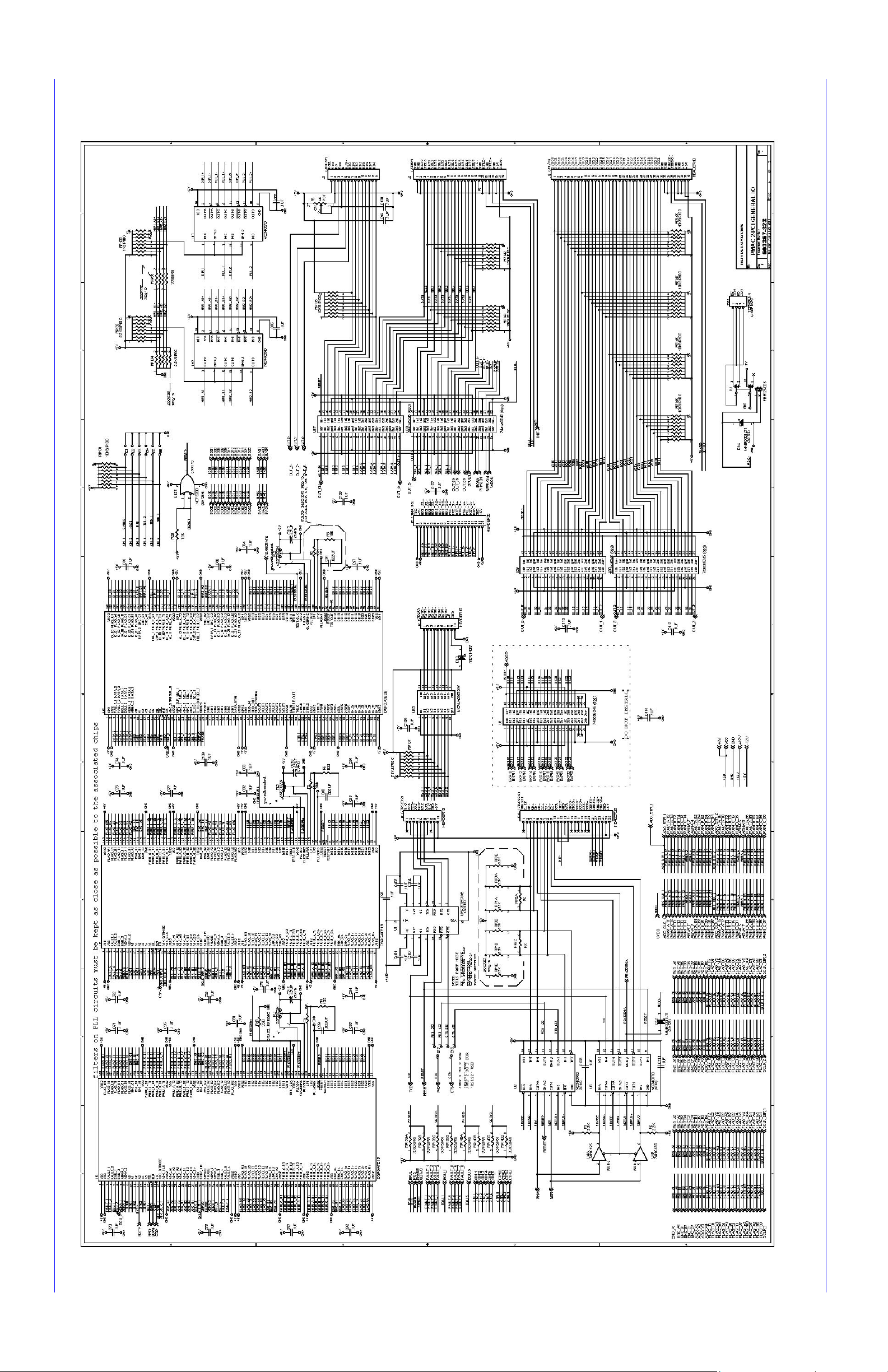
Turbo PMAC2 PCI Hardware Reference Manual
46 Schematics
Page 51

Turbo PMAC2 PCI Hardware Reference Manual
Schematics 47
 Loading...
Loading...