

Page 1
^1 HARDWARE REFERENCE MANUAL
PMAC2A-PC/104 CPU
^3 PMAC2A-PC/104 CPU Hardware Reference
^4 4xx-603670-xAxx
^5 July 29, 2008
Single Source Machine Control Power // Flexibility // Ease of Use
21314 Lassen Street Chatsworth, CA 91311 // Tel. (818) 998-2095 Fax. (818) 998-7807 // www.deltatau.com
Page 2

Copyright Information
© 2008 Delta Tau Data Systems, Inc. All rights reserved.
This document is furnished for the customers of Delta Tau Data Systems, Inc. Other uses are
unauthorized without written permission of Delta Tau Data Systems, Inc. Information contained
in this manual may be updated from time-to-time due to product improvements, etc., and may not
conform in every respect to former issues.
To report errors or inconsistencies, call or email:
Delta Tau Data Systems, Inc. Technical Support
Phone: (818) 717-5656
Fax: (818) 998-7807
Email: support@deltatau.com
Website: http://www.deltatau.com
Operating Conditions
All Delta Tau Data Systems, Inc. motion controller products, accessories, and amplifiers contain
static sensitive components that can be damaged by incorrect handling. When installing or
handling Delta Tau Data Systems, Inc. products, avoid contact with highly insulated materials.
Only qualified personnel should be allowed to handle this equipment.
In the case of industrial applications, we expect our products to be protected from hazardous or
conductive materials and/or environments that could cause harm to the controller by damaging
components or causing electrical shorts. When our products are used in an industrial
environment, install them into an industrial electrical cabinet or industrial PC to protect them
from excessive or corrosive moisture, abnormal ambient temperatures, and conductive materials.
If Delta Tau Data Systems, Inc. products are exposed to hazardous or conductive materials and/or
environments, we cannot guarantee their operation.
Page 3
REV. DESCRIPTION DATE CHG APPVD
1 UPDATED JUMPER DESCRIPTIONS PGS. 6 & 30 05/17/06 CP S. MILICI
2 REVS: J4, E20-23, CONNECTOR PINOUTS,
& BOARD DIAGRAMS
3 CORRECTED TYPO IN I-VARIABLE SETTINGS, P. 17 01/22/08 CP S.MILICI
4 CORRECTED USER FLAGS FOR PINS 25 & 26, P.36 07/29/08 CP C.COKER
REVISION HISTORY
10/04/06 CP P. SHANTZ
Page 4

Page 5

PMAC2A PC104 Hardware Reference Manual
Table of Contents
INTRODUCTION .......................................................................................................................................................1
Board Configuration..................................................................................................................................................1
Base Version .........................................................................................................................................................1
Board Options ...........................................................................................................................................................1
Option 2A: PC/104 Bus Stack Interface ..............................................................................................................1
Option 5xF: CPU Speed Options.........................................................................................................................1
Option 6: Extended Firmware Algorithm............................................................................................................1
Option 6L: Multi-block Lookahead Firmware.....................................................................................................1
Option 10: Firmware Version Specification.........................................................................................................2
Option 12: Analog-to-Digital Converters.............................................................................................................2
Additional Accessories..............................................................................................................................................2
Acc-1P: Axis Expansion Piggyback Board...........................................................................................................2
Acc-2P: Communications Board .........................................................................................................................2
Acc-8TS Connections Board.................................................................................................................................3
Acc-8ES Four-Channel Dual-DAC Analog Stack Board......................................................................................3
Acc-8FS Four-Channel Direct PWM Stack Breakout Board................................................................................3
HARDWARE SETUP .................................................................................................................................................5
Clock Configuration Jumpers....................................................................................................................................5
Reset Jumpers............................................................................................................................................................5
CPU Configuration Jumpers .....................................................................................................................................6
Communication Jumpers...........................................................................................................................................6
ADC Configuration Jumpers.....................................................................................................................................6
Encoder Configuration Jumpers................................................................................................................................6
Single-Ended Encoders.........................................................................................................................................6
Differential Encoders............................................................................................................................................6
MACHINE CONNECTIONS.....................................................................................................................................9
Mounting ...................................................................................................................................................................9
Power Supplies..........................................................................................................................................................9
Digital Power Supply............................................................................................................................................9
DAC Outputs Power Supply .................................................................................................................................9
Flags Power Supply............................................................................................................................................10
Overtravel Limits and Home Switches....................................................................................................................10
Types of Overtravel Limits..................................................................................................................................10
Home Switches....................................................................................................................................................10
Motor Signals Connections .....................................................................................................................................10
Incremental Encoder Connection .......................................................................................................................10
DAC Output Signals ...........................................................................................................................................11
Pulse and Direction (Stepper) Drivers ...............................................................................................................11
Amplifier Enable Signal (AENAx/DIRn).............................................................................................................11
Amplifier Fault Signal (FAULT-) .......................................................................................................................12
Optional Analog Inputs ...........................................................................................................................................12
Compare Equal Outputs ..........................................................................................................................................12
Serial Port (JRS232 Port) ........................................................................................................................................12
Machine Connections Example: Using Analog ±10V Amplifier............................................................................13
Machine Connections Example: Using Pulse and Direction Drivers......................................................................14
SOFTWARE SETUP ................................................................................................................................................15
PMAC I-Variables...................................................................................................................................................15
Communications......................................................................................................................................................15
Operational Frequency and Baud Rate Setup ....................................................................................................15
Filtered DAC Output Configuration........................................................................................................................16
Parameters to Set up Global Hardware Signals.................................................................................................17
Parameters to Set Up Per-Channel Hardware Signals ......................................................................................18
Table of Contents i
Page 6

PMAC2A PC104 Hardware Reference Manual
Effects of Changing I900 on the System .............................................................................................................18
How does changing I900 effect other settings in PMAC ....................................................................................20
Effects of Output Resolution and Servo Interrupt Frequency on Servo Gains....................................................21
Using Flag I/O as General-Purpose I/O...................................................................................................................22
Analog Inputs Setup................................................................................................................................................22
CPU Analog Inputs.............................................................................................................................................22
HARDWARE REFERENCE SUMMARY .............................................................................................................23
Board Dimensions...................................................................................................................................................23
From v106 to 107................................................................................................................................................23
From v107 to 108................................................................................................................................................24
From v108 to 109................................................................................................................................................25
Board Layout...........................................................................................................................................................26
Connectors and Indicators.......................................................................................................................................27
J3 - Machine Connector (JMACH1 Port)...........................................................................................................27
J4 - Machine Connector (JMACH2 Port)...........................................................................................................27
J8 - Serial Port (JRS232 Port)............................................................................................................................27
TB1 – Power Supply Terminal Block (JPWR Connector) ..................................................................................27
LED Indicators ...................................................................................................................................................27
E-POINT JUMPER DESCRIPTIONS ....................................................................................................................29
E0: Forced Reset Control .......................................................................................................................................29
E1: Servo and Phase Clock Direction Control .......................................................................................................29
E2: CPU Frequency Select.....................................................................................................................................29
E3: Normal/Re-Initializing Power-Up/Reset..........................................................................................................29
E4: CPU Frequency Select.....................................................................................................................................30
E8: Phase Clock Lines Output Enable....................................................................................................................30
E9: Servo Clock Lines Output Enable....................................................................................................................30
E10 – E12: Power-Up State Jumpers .....................................................................................................................30
E13: Power-Up/Reset Load Source........................................................................................................................31
E14: Watchdog Disable Jumper.............................................................................................................................31
E15A, B, C: Flash Memory Bank Select................................................................................................................31
E16: ADC Inputs Enable.........................................................................................................................................31
E18 – E19: PC/104 Bus Address............................................................................................................................32
E20-E23: ENCODER SINGLE ENDED/DIFFERENTIAL SELECT (Note: v107 and above only) ..............32
CONNECTOR PINOUTS.........................................................................................................................................33
TB1 (JPWR): Power Supply ..................................................................................................................................33
J4 (JRS232) Serial Port Connector..........................................................................................................................33
J3 (JMACH1): Machine Port Connector.................................................................................................................34
J3 JMACH1 (50-Pin Header)..................................................................................................................................35
J4 (JMACH2): Machine Port CPU Connector ........................................................................................................36
SCHEMATICS ..........................................................................................................................................................38
ii Table of Contents
Page 7
PMAC2A PC104 Hardware Reference Manual
INTRODUCTION
The PMAC2A PC/104 motion controller is a compact, cost-effective version of Delta Tau’s PMAC2
family of controllers. The PMAC2A PC/104 can be composed of three boards in a stack configuration.
The CPU provides four channels of either DAC ±10V or pulse and direction command outputs. The
optional axis expansion board provides a set of four additional servo channels and I/O ports. The optional
communications board provides extra I/O ports and either the USB or Ethernet interface for faster
communications.
Board Configuration
Base Version
The base version of the PMAC2A PC/104 ordered with no options provides a 90mm x 95mm board with:
• 40 MHz DSP563xx CPU (80 MHz 560xx equivalent)
• 128k x 24 internal zero-wait-state SRAM
• 512k x 8 flash memory for user backup and firmware
• Latest released firmware version
• RS-232 serial interface
• Four channels axis interface circuitry, each including:
• 12-bit ±10V analog output
• Pulse-and-direction digital outputs
• 3-channel differential/single-ended encoder input
• Four input flags, two output flags
• Three PWM top-and-bottom pairs (unbuffered)
• 50-pin IDC header for amplifier/encoder interface
• 34-pin IDC header for flag interface
• PID/notch/feed forward servo algorithms
• 1-year warranty from date of shipment
• One CD-ROM per set of one to four PMACs in shipment (Cables, mounting plates, mating
connectors not included)
PMAC2A-PC/104 Base Board shown
Board Options
Option 2A: PC/104 Bus Stack Interface
Option 2A provides the PC/104 bus interface allowing bus communications between a PC/104 type
computer and the PMAC2A PC/104 motion controller.
Option 5xF: CPU Speed Options
• Option 5CF: 80 MHz DSP563xx CPU (160 MHz 56002 equivalent)
• Option 5EF: 160 MHz DSP563xx CPU (320 MHz 56002 equivalent)
Option 6: Extended Firmware Algorithm
Option 6 provides an Extended (Pole-Placement) Servo Algorithm firmware instead of the regular servo
algorithm firmware. This is required only in difficult-to-control systems (resonances, backlash, friction,
disturbances, changing dynamics).
Option 6L: Multi-block Lookahead Firmware
Option 6L provides a special lookahead firmware for sophisticated acceleration and cornering profiles
execution. With the lookahead firmware PMAC controls the speed along the path automatically (but
without changing the path) to ensure that axis limits are not violated.
Introduction 1
Page 8
PMAC2A PC104 Hardware Reference Manual
Option 10: Firmware Version Specification
Normally the PMAC2A PC/104 is provided with the newest released firmware version. A label on the
memory IC shows the firmware version loaded at the factory. Option 10 provides for a user-specified
firmware version.
Option 12: Analog-to-Digital Converters
Option 12 permits the installation of two channels of on-board analog-to-digital converters with ±10V
input range and 12-bits resolution. The key component installed with this option is U20.
Additional Accessories
Acc-1P: Axis Expansion Piggyback Board
Acc-1P provides four additional channels axis interface circuitry for a total of eight servo channels, each
including:
• 12-bit ±10V analog output
• Pulse-and-direction digital outputs
• 3-channel differential/single-ended encoder input
• Four input flags, two output flags
• Three PWM top-and-bottom pairs (unbuffered)
Acc-1P Option 1: I/O Ports
Option 1 provides the following ports on the Acc-1P axes expansion board for digital I/O connections.
• Multiplexer Port: This connector provides eight input lines and eight output lines at TTL levels.
When using the PMAC Acc-34x type boards these lines allow multiplexing large numbers of
inputs and outputs on the port. Up to 32 of the multiplexed I/O boards may be daisy-chained on
the port, in any combination.
• I/O Port: This port provides eight general-purpose digital inputs and eight general-purpose digital
outputs at 5 to 24Vdc levels. This 34-pin connector was designed for easy interface to OPTO-22
or equivalent optically isolated I/O modules when different voltage levels or opto-isolation to the
PMAC2A PC/104 is necessary.
• Handwheel port: this port provides two extra channels, each jumper selectable between encoder
input or pulse output.
Acc-1P Option 2: Analog-to-Digital Converters
Option 2 permits the installation on the Acc-1P of two channels of analog-to-digital converters with ±10V
input range and 12-bits resolution. The key component installed with this option is U20.
Acc-2P: Communications Board
Without any options, the PMAC2A PC/104 communicates through the RS-232 serial interface (using the
optional Acc-3L flat cable) or PC/104 bus. This board provides added communication and I/O features.
Acc-2P Option 1A: USB Interface
Option 1A it provides a 480 Mbit/sec USB 2.0 interface.
Acc-2P Option 1B: Ethernet Interface
Option 1B provides a 100 Mbit/sec Ethernet.
Acc-2P Option 2: DPRAM Circuitry
Option 2 provides an 8K x 16 dual-ported RAM used with USB, Ethernet or PC/104 bus applications. If
using for USB or Ethernet communications, Acc-2P-Opt-1A or Acc-2P-Opt-1B must be ordered. If used
2 Introduction
Page 9

PMAC2A PC104 Hardware Reference Manual
for PC/104-bus communications, PMAC2A PC/104 Option-2A must be ordered. The key component
installed with this option is U17. USB/Ethernet and PC/104 bus communications cannot be made
simultaneously it is jumper selectable.
Acc-2P Option 3: I/O Ports
Option 3 provides the following ports on the Acc-2P communications board for digital I/O connections.
• Multiplexer Port: this connector provides eight input lines and eight output lines at TTL levels.
When using the PMAC Acc-34x type boards these lines allow multiplexing large numbers of
inputs and outputs on the port. Up to 32 of the multiplexed I/O boards may be daisy-chained on
the port, in any combination.
• I/O Port: this port provides 16 general-purpose digital I/O lines at TTL levels and these can be
configured as all inputs, all outputs or eight inputs and eight outputs.
• Handwheel port: this port provides two extra channels, each jumper selectable between encoder
input or pulse output.
Acc-8TS Connections Board
Acc-8TS is a stack interface board to for the connection of either one or two Acc-28B A/D converter
boards. When a digital amplifier with current feedback is used, the analog inputs provided by the Acc28B cannot be used.
Acc-8ES Four-Channel Dual-DAC Analog Stack Board
Acc-8ES provides four channels of 18-bit dual-DAC with four DB-9 connectors. This accessory is
stacked to the PMAC2A PC/104 board and it is mostly used with amplifiers that require two ±10 V
command signals for sinusoidal commutation.
Acc-8FS Four-Channel Direct PWM Stack Breakout Board
Acc-8FS it is a 4-channel direct PWM stack breakout board for PMAC2A PC/104. This is used for
controlling digital amplifiers that require direct PWM control signals. When a digital amplifier with
current feedback is used, the analog inputs provided by the Option 12 of the PMAC2A PC/104 (the
Option 2 of the Acc-1P or the Acc-28B) could not be used.
Introduction 3
Page 10

PMAC2A PC104 Hardware Reference Manual
4 Introduction
Page 11
PMAC2A PC104 Hardware Reference Manual
HARDWARE SETUP
On the PMAC2 PC/104 CPU, there are a number of jumpers called E-points or W-points. That customize
the hardware features of the CPU for a given application and must be setup appropriately. The following
is an overview grouped in appropriate categories. For an itemized description of the jumper setup
configuration, refer to the E-Point Descriptions section.
Clock Configuration Jumpers
E1: Servo and Phase Clock Direction Control – Jumper E1 should be OFF if the board is to use its
own internally generated phase and servo clock signals. In this case, these signals are output on spare
pins on the J8 RS-232 serial-port connector, where they can be used by other PMAC controllers set up to
take external phase and servo clock signals.
Jumper E1 should be ON if the board is to use externally generated phase and servo clock signals brought
in on the J8 RS-232 serial port connector. In this case, typically the clock signals are generated by
another PMAC controller and output on its serial port connector.
If E1 is ON for external phase and clock signals, and these clock signals are not brought in on the serial
port connector, the watchdog timer will trip almost immediately and shut down the board.
E2 and E4: CPU Frequency Control Jumpers – When the PMAC I46 I- variable is set to zero jumpers
E2 and E4 on the base PMAC2A PC/104 board control the frequency at which the CPU will operate (or
attempt to operate). Generally, this will be the highest frequency at which the CPU is rated to operate.
Note that it is always possible to operate a CPU at a frequency lower than its maximum rating. While it
may be possible to operate an individual processor at a frequency higher than its maximum rating,
particularly at low ambient temperatures, performance cannot be guaranteed at such a setting, and this
operation is done completely at the user’s own risk.
• If jumpers E2 and E4 are both OFF, the CPU will operate at a 40 MHz frequency.
• If E2 is ON and E4 is OFF, the CPU will operate at a 60 MHz frequency.
• If E2 is OFF and E4 is ON, the CPU will operate at an 80 MHz frequency.
If I46 is set to a value greater than 0, the operational frequency is set to 10MHz * (I46 + 1), regardless of
the jumper setting. See the Software Setup section for details on this.
E8: Phase Clock Lines Output Enable – Jump pin 1 to 2 to enable the Phase clock line on the J8
connector. Remove jumper to disconnect the Phase clock line on the J8 connector.
E9: Servo Clock Lines Output Enable – Jump pin 1 to 2 to enable the Servo clock line on the J8
connector. Remove jumper to disconnect the Servo clock line on the J8 connector.
Reset Jumpers
E0: Forced Reset Control – Remove E0 for normal operation. Installing E0 forces PMAC to a reset
state, this configuration is for factory use only; the board will not operate with E0 installed.
E3: Re-Initialization on Reset Control – If E3 is OFF (default), PMAC executes a normal reset,
loading active memory from the last saved configuration in non-volatile flash memory. If E3 is ON,
PMAC re-initializes on reset, loading active memory with the factory default values.
E13: Firmware Load Jumper – If jumper E13 is ON during power-up/reset, the board comes up in
bootstrap mode which permits loading of firmware into the flash-memory IC. When the PMAC
Executive program tries to establish communications with a board in this mode, it will detect
automatically that the board is in bootstrap mode and ask what file to download as the new firmware.
Jumper E13 must be OFF during power-up/reset for the board to come up in normal operational mode.
Hardware Setup 5
Page 12

PMAC2A PC104 Hardware Reference Manual
6
CPU Configuration Jumpers
E15A-E15C: Flash Memory Bank Select Jumpers – The flash-memory IC in location U10 on the
PMAC2A PC/104 base board has the capacity for eight separate banks of firmware, only one of which
can be used at any given time. The eight combinations of settings for jumpers E15A, E15B, and E15C
select which bank of the flash memory is used. In the factory production process, firmware is loaded only
into Bank 0, which is selected by having all of these jumpers OFF.
E10-E12: Power-Up State Jumpers – Jumper E10 must be OFF, jumper E11 must be ON, and jumper
E12 must be ON, in order for the CPU to copy the firmware from flash memory into active RAM on powerup/reset. This is necessary for normal operation of the card. (Other settings are for factory use only.)
E14: Watchdog Timer Jumper – Jumper E14 must be OFF for the watchdog timer to operate. This is a
very important safety feature, so it is vital that this jumper be OFF for normal operation. E14 should only
be put ON to debug problems with the watchdog timer circuit.
W1: Flash chip select – Jumper W1 in position 1-2 selects a 28F320J3A part for the U10 flash chip.
Jumper W1 in position 2-3 selects a 28F320J5A part for the U10 flash chip. This jumper is installed in
the factory and must not be changed from its default state.
Communication Jumpers
E18-E19: PC/104 Bus Base Address Control – Jumpers E18 and E19 on the PMAC2A PC/104 CPU
determine the base address of the card in the I/O space of the host PC. Together, they specify four
consecutive addresses on the bus where the card can be found. The jumpers form the base address in the
following fashion:
E18 E19 Address (hex) Address (dec.)
OFF OFF $200 512
OFF ON $210 528
ON OFF $220 544
ON ON $230 560
The default base address is 528 ($210) formed with jumper E18 removed and E19 installed. This setting
is necessary when using the USB or Ethernet ports of the Acc-2P communications board.
ADC Configuration Jumpers
E16: ADC Enable Jumper – Install E16 to enable the analog-to-digital converter circuitry ordered
through Option-12. Remove this jumper to disable this option, which might be necessary to control
motor 1 through a digital amplifier with current feedback.
Encoder Configuration Jumpers
E20-E23: Encoder Single Ended/Differential Select – PMAC has differential line receivers for each
encoder channel, but can accept either single-ended (one signal line per channel) or differential (two
signal lines, main and complementary, per channel). A jumper for each encoder permits customized
configurations, as described below.
Single-Ended Encoders
With the jumper for an encoder set for single-ended, the differential input lines for that encoder are tied to
2.5V; the single signal line for each channel is then compared to this reference as it changes between 0
and 5V.
When using single-ended TTL-level digital encoders, the differential line input should be left open, not
grounded or tied high; this is required for The PMAC differential line receivers to work properly.
Differential Encoders
Differential encoder signals can enhance noise immunity by providing common-mode noise rejection.
Modern design standards virtually mandate their use for industrial systems, especially in the presence of
PWM power amplifiers, which generate a great deal of electromagnetic interference.
Hardware Setup
Page 13

PMAC2A PC104 Hardware Reference Manual
Connect pin 1 to 2 to tie differential line to +2.5V
• Tie to +2.5V when no connection
• Tie to +2.5V for single-ended encoders
Connect pin 2 to 3 to tie differential line to +5V
• Don’t care for differential line driver encoders
• Tie to +5V for complementary open-collector encoders (obsolete)
Hardware Setup 7
Page 14

PMAC2A PC104 Hardware Reference Manual
Hardware Setup
8
Page 15
PMAC2A PC104 Hardware Reference Manual
MACHINE CONNECTIONS
Typically, the user connections are made to terminal blocks that attach to the JMACH connectors by a
flat cable. The following are the terminal blocks recommended for connections:
• 34-Pin IDC header to terminal block breakouts (Phoenix part number 2281063) Delta Tau
part number 100-FLKM34-000
• 50-Pin IDC header to terminal block breakouts (Phoenix part number 2281089) Delta Tau
part number 100-FLKM50-000
Mounting
The PMAC2A PC/104 is typically installed using standoffs when stacked
to a PC/104 computer or as a stand-alone controller. At each of the four
corners of the PMAC2A PC/104 board, there are mounting holes that can
be used for this.
The PMAC2A PC/104 CPU is placed always at the bottom of the stack.
The order of the Acc-1P or Acc-2P with respect to the CPU does not
matter.
Power Supplies
Baseboard mounted at
the bottom of the stack
Digital Power Supply
3A @ +5V (±5%) (15 W) with a minimum 5 msec rise time
(Eight-channel configuration, with a typical load of encoders)
The PMAC2A PC/104, the Acc-1P and the Acc-2P each require a 1A @ 5VDC power supply for
operation. Therefore, a 3A @ 5VDC power supply is recommended for a PMAC2A PC/104 board
stack with Acc-1P and Acc-2P boards.
• The host computer provides the 5 Volts power when installed in the PC/104 bus and cannot
be disconnected. In this case, there must be no external +5V supply, or the two supplies will
"fight" each other, possibly causing damage. This voltage could be measured on the TB1
terminal block or the JMACH1 connector.
• In a stand-alone configuration, when PMAC is not plugged in a computer bus, it will need an
external 5V supply to power its digital circuits. The 5V power supply can be brought in
either from the TB1 terminal block or from the JMACH1 connector.
• When an ACC-2P is used, a minimum rise time of 5 msec is a requirement of the power
supply. In addition, the power supply ramp-down time should not exceed 20 msec. While
solutions to this issue can involve complex circuitry that minimizes power loss during normal
operation, the simplest method of quickly bringing down the power rail is to add a bleeddown resistor between VCC and GND. The resistor should be large enough that it does not
cause unnecessary power consumption, while still discharging the bulk capacitance as
quickly as possible. Specific resistor values will depend on the overall design of the system,
but in general the voltage drop-off time should not exceed 20 msec. A value that has been
found to work for some systems is 18k.
DAC Outputs Power Supply
0.3A @ +12 to +15V (4.5W)
0.25A @ -12 to -15V (3.8W)
(Eight-channel configuration)
• The host computer provides the ±12 Volts power supply in the case PMAC is installed in the
PC/104 bus. With the board stack into the bus, it will pull ±12V power from the bus
automatically and it cannot be disconnected. In this case, there must be no external ±12V
Machine Connections 9
Page 16

PMAC2A PC104 Hardware Reference Manual
0
supply, or the two supplies will fight each other, possibly causing damage. This voltage
could be measured on the TB1 terminal block.
• In a stand-alone configuration, when PMAC is not plugged in a computer bus, it will need an
external ±12V supply only when the digital-to-analog converter (DAC) outputs are used. The
±12V lines from the supply, including the ground reference, can be brought in either from the
TB1 terminal block or from the JMACH1 connector.
Flags Power Supply
Each channel of PMAC has five dedicated digital inputs on the machine connector: PLIMn, MLIMn
(overtravel limits), HOMEn (home flag), FAULTn (amplifier fault), and USERn. A power supply
from 5 to 24V must be used to power the circuits related to these inputs. This power supply can be
the same used to power PMAC and can be connected from the TB1 terminal block or the JMACH1
connector.
Overtravel Limits and Home Switches
When assigned for the dedicated uses, these signals provide important safety and accuracy functions.
PLIMn and MLIMn are direction-sensitive over-travel limits that must conduct current to permit
motion in that direction. If no over-travel switches will be connected to a particular motor, this
feature must be disabled in the software setup through the PMAC Ix25 variable.
Types of Overtravel Limits
PMAC expects a closed-to-ground connection for the limits to not be considered on fault. This
arrangement provides a failsafe condition. Usually, a passive normally close switch is used. If a
proximity switch is needed instead, use a 5 to 24V normally closed to ground NPN sinking type
sensor.
Home Switches
While normally closed-to-ground switches are required for the overtravel limits inputs, the home
switches could be either normally close or normally open types. The polarity is determined by
the home sequence setup, through the I-variables I9n2.
Motor Signals Connections
Incremental Encoder Connection
Each JMACH1 connector provides two +5V outputs and two logic grounds for powering encoders
and other devices. The +5V outputs are on pins 1 and 2; the grounds are on pins 3 and 4. The
encoder signal pins are grouped by number: all those numbered 1 (CHA1+, CHA1-, CHB1+, CHC1+,
etc.) belong to encoder #1. The encoder number does not have to match the motor number, but
usually does. Connect the A and B (quadrature) encoder channels to the appropriate terminal block
pins. For encoder 1, the CHA1+ is pin 5 and CHB1+ is pin 9. If there is a single-ended signal, leave
the complementary signal pins floating – do not ground them. However, if single-ended encoders are
used, check the setting of the resistor packs (see the Hardware Setup section for details). For a
differential encoder, connect the complementary signal lines – CHA1- is pin 7, and CHB1- is pin 11.
The third channel (index pulse) is optional; for encoder 1, CHC1+ is pin 13, and CHC1- is pin 15.
Machine Connections
1
Page 17

PMAC2A PC104 Hardware Reference Manual
Example: differential quadrature encoder connected to channel #1:
DAC Output Signals
If PMAC is not performing the commutation for the motor, only one analog output channel is
required to command the motor. This output channel can be either single-ended or differential,
depending on what the amplifier is expecting. For a single-ended command using PMAC channel 1,
connect DAC1+ (pin 29) to the command input on the amplifier. Connect the amplifier’s command
signal return line to PMAC’s GND line (pin 48). In this setup, leave the DAC1- pin floating; do not
ground it.
For a differential command using PMAC channel 1, connect DAC1 (pin 29) to the plus-command
input on the amplifier. Connect DAC1- (pin 31) to the minus-command input on the amplifier.
PMAC’s GND should still be connected to the amplifier common.
Any analog output not used for dedicated servo purposes may be utilized as a general-purpose analog
output by defining an M-variable to the command register, then writing values to the M-variable. The
analog outputs are intended to drive high-impedance inputs with no significant current draw. The
220Ω output resistors will keep the current draw lower than 50 mA in all cases and prevent damage to
the output circuitry, but any current draw above 10 mA can result in noticeable signal distortion.
Example:
Pulse and Direction (Stepper) Drivers
The channels provided by the PMAC2A PC/104 board or the Acc-1P board can output pulse and
direction signals for controlling stepper drivers or hybrid amplifiers. These signals are at TTL levels.
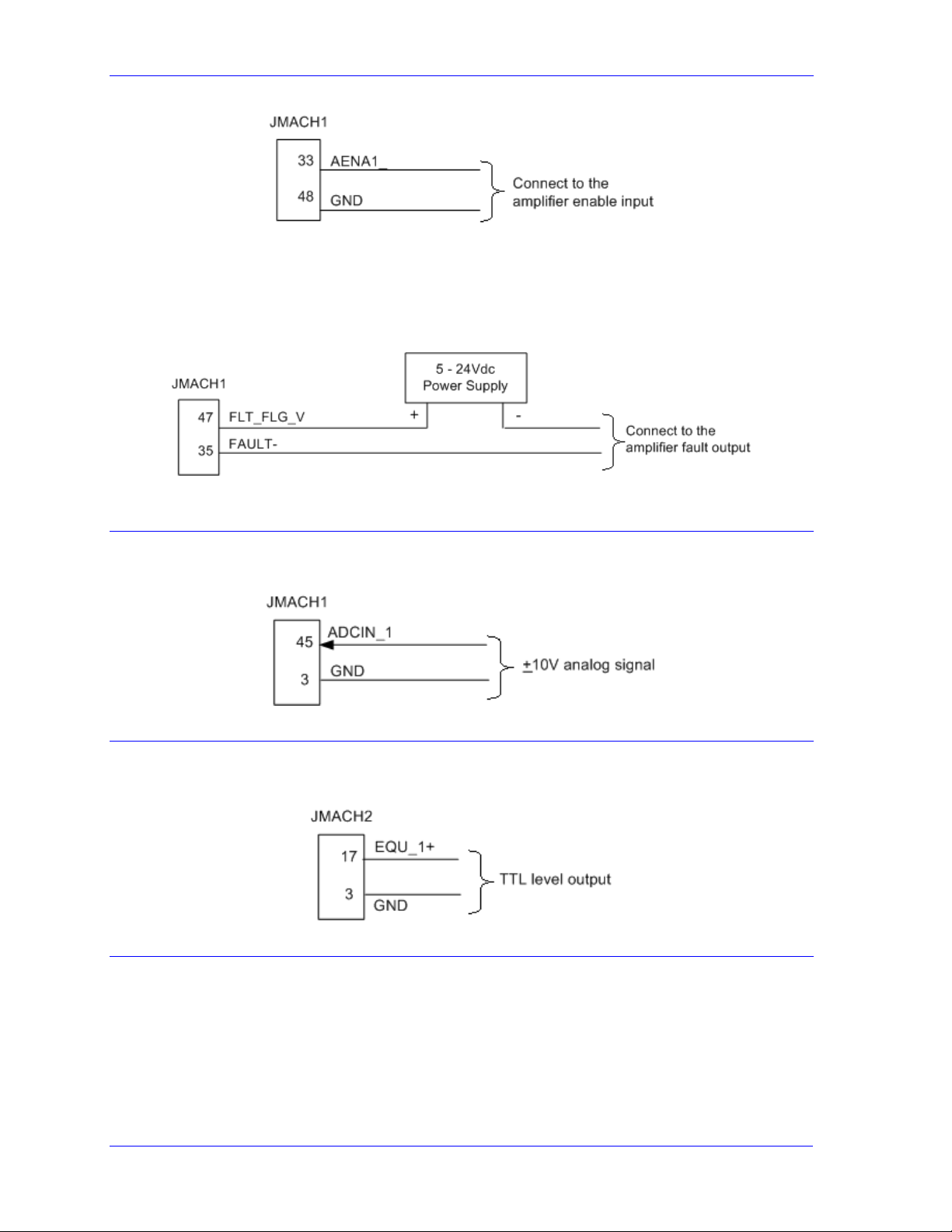
Amplifier Enable Signal (AENAx/DIRn)
Most amplifiers have an enable/disable input that permits complete shutdown of the amplifier
regardless of the voltage of the command signal. PMAC’s AENA line is meant for this purpose.
AENA1- is pin 33. This signal is an open-collector output and an external 3.3 kΩ pull-up resistor can
be used if necessary.
Machine Connections 11
Page 18
PMAC2A PC104 Hardware Reference Manual
Amplifier Fault Signal (FAULT-)
This input can take a signal from the amplifier so PMAC knows when the amplifier is having
problems, and can shut down action. The polarity is programmable with I-variable Ix25 (I125 for
motor 1) and the return signal is ground (GND). FAULT1- is pin 35. With the default setup, this
signal must actively be pulled low for a fault condition. In this setup, if nothing is wired into this
input, PMAC will consider the motor not to be in a fault condition.
Optional Analog Inputs
The optional analog-to-digital converter inputs are ordered either through Option-12 on the CPU or
Option-2 on the axes expansion board. Each option provides two 12-bit analog inputs analog inputs
with a ±10Vdc range.
Compare Equal Outputs
The compare-equals (EQU) outputs have a dedicated use of providing a signal edge when an encoder
position reaches a pre-loaded value. This is very useful for scanning and measurement applications.
Instructions for use of these outputs are covered in detail in the PMAC2 User Manual.
Serial Port (JRS232 Port)
For serial communications, use a serial cable to connect your PC's COM port to the J8 serial port
connector present on the PMAC2A PC/104 CPU. Delta Tau provides the Acc-3L cable for this
purpose that connects the PMAC to a DB-9 connector. Standard DB-9-to-DB-25 or DB-25-to-DB-9
adapters may be needed for your particular setup.
Machine Connections
12
Page 19

PMAC2A PC104 Hardware Reference Manual
If a cable needs to be made, the easiest approach is to use a flat cable prepared with flat-cable type
connectors as indicated in the following diagram:
PMAC (DB-9S) PC (DB-9)
1 (No connect) 1 (No connect)
DB-9 Female DB-9 Male
1 1
2 (TXD/) 2 (RXD)
3 (RXD/) 3 (TXD)
4 (DSR) 4 (DTR)
5 (Gnd) 5 (Gnd)
6 (DTR) 6 (DSR)
7 (CTS) 7 (RTS)
8 (RTS) 8 (CTS)
9 (No connect) 9 (No connect)
Machine Connections Example: Using Analog ±10V Amplifier
Machine Connections 13
Page 20

PMAC2A PC104 Hardware Reference Manual
4
Machine Connections Example: Using Pulse and Direction Drivers
Machine Connections
1
Page 21

PMAC2A PC104 Hardware Reference Manual
SOFTWARE SETUP
Note:
The PMAC2A PC/104 requires the use of V1.17 or newer firmware. There are
few differences between the previous V1.16H firmware and the V1.17 firmware
other than the addition of internal support for the Flex CPU design.
PMAC I-Variables
PMAC has a large set of Initialization parameters (I-variables) that determine the "personality" of the card
for a specific application. Many of these are used to configure a motor properly. Once set up, these
variables may be stored in non-volatile EAROM memory (using the SAVE command) so the card is
always configured properly (PMAC loads the EAROM I-variable values into RAM on power-up).
The programming features and configuration variables for the PMAC2A PC/104 are described fully in the
PMAC2 User and Software manuals.
Communications
Delta Tau provides software tools that allow communicating with of the PMAC2A PC/104 board by
either its standard RS-232 port or the optional USB or Ethernet ports. PEWIN is the most important in
the series of software accessories, and it allows configuring and programming the PMAC for any
particular application.
Operational Frequency and Baud Rate Setup
Note:
Older PMAC boards required a start-up PLC for setting the operational frequency
at 80 MHz. That method is not compatible with the PMAC2A PC/104 board and
will shutdown the board when used.
The operational frequency of the CPU can be set in software by the variable I46. If this variable is set to
0, PMAC firmware looks at the jumpers E2 and E4 to set the operational frequency for 40, 60, and 80
MHz operation. If I46 is set to a value greater than 0, the operational frequency is set to 10MHz * (I46 +
1), regardless of the jumper setting. If the desired operational frequency is higher than the maximum
rated frequency for that CPU, the operational frequency will be reduced to the rated maximum. It is
always possible to operate the Flex CPU board at a frequency below its rated maximum. I46 is used only
at power-up/reset, so to change the operational frequency, set a new value of I46, issue a SAVE command
to store this value in non-volatile flash memory, then issue a $$$ command to reset the controller.
To determine the frequency at which the CPU is actually operating, issue the TYPE command to the
PMAC. The PMAC will respond with five data items, the last of which is CLK Xn, where n is the
multiplication factor from the 20 MHz crystal frequency (not 10 MHz). n should be equivalent to
(I46+1)/2 if I46 is not requesting a frequency greater than the maximum rated for that CPU board. n will
be 2 for 40 MHz operation, 4 for 80 MHz operation, and 8 for 160 MHz operation.
Software Setup 15
Page 22

PMAC2A PC104 Hardware Reference Manual
If the CPU’s operational frequency has been determined by (a non-zero setting of) I46, the serial
communications baud rate is determined at power-up/reset by variable I54 alone according to the
following table:
I54 Baud Rate I54 Baud Rate
0 600 8 9600
1 900 9 14,400
2 1200 10 19,200
3 1800 11 28,800
4 2400 12 38,400
5 3600 13 57,600
6 4800 14 76,800
7 7200 15 115,200
For a saved value of 0 for I46, the serial baud rate is determined by the combination of I54 and the CPU
frequency as shown in the following table.
I54
0 600 Disabled 1200
1 900* (-0.05%) 900 1800* (-0.1%)
2 1200 1200 2400
3 1800* (-0.1%) 1800 3600* (-0.19%)
4 2400 2400 4800
5 3600* (-0.19%) 3600 7200* (-0.38%)
6 4800 4800 9600
7 7200* (-0.38%) 7200 14,400*(-0.75%)
8 9600 9600 19,200
9 14,400*(-0.75%) 14,400 28,800*(-1.5%)
10 19,200 19,200 38,400
11 28,800*(-1.5%) 28,800 57,600*(-3.0%)
12 38,400 38,400 76,800
13 57,600*(-3.0%) 57,600 115,200*(-6.0%)
14 76,800 76,800 153,600
15 Disabled 115,200 Disabled
* Not an exact baud rate
Baud Rate for
40 MHz CPU
Baud Rate for
60 MHz CPU
Baud Rate for
80 MHz CPU
Filtered DAC Output Configuration
The PMAC2 PC104 is a PMAC2 style board with default +/-10V outputs produced by filtering a PWM
signal. This technique has been used been for some time now by many of our competitors. Although this
technique does not contain the same levels of performance as a true Digital to Analog converter, for most
servo applications it is more than adequate. Many of our customers using this product have migrated over
from the PMAC1 style board with a true 16-bit DAC. This document is meant for explaining the
tradeoffs of PWM frequency vs. resolution in the PMAC2PC104 base configuration as well as a
comparison to the PMAC1 style 16 bit DACs.
Both the resolution and the frequency of the Filtered PWM outputs are configured in software on the
PMAC2PC104 through the variable I900. This I900 variable also effects the phase and servo interrupts.
Therefore as we change I900 we will also have to change I901 (phase clock divider), I902 (servo clock
divider), and I10 (servo interrupt time). These four variables are all related and must be understood
before adjusting parameters.
Software Setup
16
Page 23

PMAC2A PC104 Hardware Reference Manual
Since the PMAC2PC104 uses standard PMAC2 firmware the following I-variables must be set properly
to use the digital-to-analog (filtered DAC) outputs:
I900 = 1001 ; PWM frequency 29.4kHz, PWM 1-4
I901 = 5 ; Phase Clock 9.8059kHz
I902 = 3 ; Servo frequency 2.451kHz
I903 = 1746 ; ADC frequency
I906 = 1001 ; PWM frequency 29.4kHz, PWM 5-8
I907 = 1746 ; ADC frequency
I9n6 = 0 ; Output mode: PWM
Ix69 = 1001 ; DAC limit 10Vdc
I10 = 3421867 ; Servo interrupt time
n = channel number from 1 to 8
x = motor number from 1 to 8
Parameters to Set up Global Hardware Signals
I900
I900 determines the frequency of the MaxPhase clock signal from which the actual phase clock
signal is derived. It also determines the PWM cycle frequency for Channels 1 to 4. This variable
is set according to the equation:
I900 = INT[117,964.8/(4*PWMFreq(KHz)) - 1]
The PMAC2 PC/104 filtered PWM circuits were optimized for 30KHz. I900 should be set to
1088 (calculated as 27.06856KHz)
I901
I901 determines how the actual phase clock is generated from the MaxPhase clock, using the
equation:
PhaseFreq(kHz) = MaxPhaseFreq(kHz)/(I901+1)
I901 is an integer value with a range of 0 to 15, permitting a division range of 1 to 16. Typically,
the phase clock frequency is in the range of 8 kHz to 12 kHz. 9KHz is standard, set I901 = 5
(calculated as 9.02285 KHz).
I902
I902 determines how the servo clock is generated from the phase clock, using the equation:
ServoFreq(KHz) = PhaseFreq(KHz)/(I902+1)
I902 is an integer value with a range of 0 to 15, permitting a division range of 1 to 16. On the
servo update, which occurs once per servo clock cycle, PMAC2 updates commanded position
(interpolates) and closes the position/velocity servo loop for all active motors, whether or not
commutation and/or a digital current loop is closed by PMAC2. Typical servo clock frequencies
are 1 to 4 kHz. The PMAC standard is 2.26 KHz, set I902 = 3 (calculated as 2.25571 KHz).
I10 tells the PMAC2 interpolation routines how much time there is between servo clock cycles. It
must be changed any time I900, I901, or I902 is changed. I10 can be set according to the
formula:
I10 = (2*I900+3)(I901+1)(I902+1)*640/9
I10 should be set to 3718827.
Software Setup 17
Page 24

PMAC2A PC104 Hardware Reference Manual
I903
I903 determines the frequency of four hardware clock signals used for machine interface channels 1-4;
This can be left at the default value (I903=*). The four hardware clock signals are SCLK (encoder sample
clock), PFM_CLK (pulse frequency modulator clock), DAC_CLK (digital-to-analog converter clock),
and ADC_CLK (analog-to-digital converter clock).
Parameters to Set Up Per-Channel Hardware Signals
I9n6
I9n6 is the output mode; “n” is the output channel number (i.e. for channel 1 the variable to set would be
i916, i926 for channel 2 etc.). On Pmac1 there is only one output and one output mode, DAC output. On
PMAC2 boards, each channel has 3 outputs, and there are 4 output modes. Since this is board was
designed to output filtered PWM signals we want to configure at least the first output as PWM. Therefore
the default value of 0 is the choice. For information on this variable consult the PMAC1/PMAC2
software reference manual.
Ix69
Ix69 is the motor output command limit. The analog outputs on PMAC1 style boards and some PMAC2
accessories are 16-bit DACs, which map a numerical range of -32,768 to +32,767 into a voltage range of 10V to +10V relative to analog ground (AGND). For our purposes of a filtered PWM output this value
still represents the maximum voltage output; however the ratio is slightly different. With a true DAC,
Ix69=32767 allows a maximum voltage of 10V output. With the filtered PWM circuit, Ix69 is a function
of I900. A 10V signal in the output register is no longer 32767 as was in PMAC1, a 10V signal is
corresponds to a value equal to I900. Anything over I900 will just rail the Dac at 10V. For Example:
Desired Maximum Output Value = 6V
Ix69=6/10 * i900
Desired Maximum Output Value = 10V
Ix69= I900 + 10 ; add a little headroom to assure a full 10V
Effects of Changing I900 on the System
It should now be understood that a full 10 volts is output when the output register is equal to i900. The
output register is suggested m-variable Mx02 (I.e. M102-> Y:$C002,8,16,S ; OUT1A command value;
DAC or PWM). With default setting of I900, 10Volts is output when m102 is equal to i900, or 1001.
Since the output register is an integer value the smallest increment of change is about 10mV (1/1001 *
10V). Some users may want to calibrate their analog output using Ix29. Ix29 is an integer similar to
Mx02 except the value is added to the output register every servo cycle to apply a digital offset to the
output register. Therefore the resolution of our output signal affects how Ix29 should be set. As
mentioned earlier, with the default parameters, 1 bit change in the output register changes the analog
output by about 10mV. Therefore if there is an analog output offset less than 5mV, Ix29 cannot decrease
your offset. By increasing I900 you increase your resolution, so if you double i900, 1 bit change in the
output register corresponds to about 5mV. So with Ix29 you can only change the offset in increments of
5mV.
You can see above that by increasing I900 you increase the resolution of our command output register.
This sounds like a good thing, right? There are tradeoffs when you change I900 between resolution and
ripple.
Software Setup
18
Page 25

PMAC2A PC104 Hardware Reference Manual
By increasing I900 we are essentially decreasing our PWM Frequency. The two are related by the
following equation:
I900 = INT[117,964.8/(4*PWMFreq(KHz)) - 1]
Passing the PWM signal through a 10KHz low pass filter creates the +/-10V signal output. The duty
cycle of the PWM signal is what generates the magnitude the voltage output. The frequency of the PWM
signal determines the magnitude and frequency of ripple on that +/-10V signal. As you lower the PWM
frequency and subsequently increase your output resolution, you increase the magnitude of the ripple as
well as slow down the frequency of the ripple as well. Depending on the system, this ripple can affect
performance at different levels.
So what do we mean by ripple? Ripple is the small signal that will you will see on top of the +/-10V
signal if you put an oscilloscope on it. In other words if I command a 4V signal out of the PMAC2PC104
and scope it, I will see a small sinusoidal type wave centered on 4V. At the default PWM frequency and
output resolution this will have a magnitude of about 230mV and a frequency of about 33kHz. This is
typically faster than any of the control loops so the amplifier essentially filters it out of the system.
Say I wanted to double the resolution of my output signal, I would merely double my I900 value from
1001 to 2002. How does this affect the ripple? From a test I calculated the ripple magnitude to increase
from around 230mV to about 700mV. The frequency of the ripple decreased from about @30kHz to
@15kHz. Here are some measurements taken with a PMAC2PC104:
I900 Value Output
Resolution
Signed
1001 @11 bit 9.9mV 29.4177 KHz 230mV 30KHz
2002 @12 bit 4.99mV 14.72 Khz 700mV 15KHz
4004 @13bit 2.49mV 7.36 Khz 2V 7Khz
Voltage
Output Change
Per 1bit increment
In output register
PWM
Frequency
Approximate
Ripple
Magnitude
Approximate
Ripple
Frequency
How does the ripple affect servo performance? It really depends on the system. For most servo systems
the mechanics can’t respond anywhere near these frequencies. Some systems with linear amplifiers it will
effect the performance especially as you lower the PWM frequency and effectively the ripple frequency,
i.e. galvanometers, etc. In the overall majority of the servo world, these ripple frequencies will not show
in the system due to mechanical and electrical time constants of most systems. This will happen
regardless of the amplifier used.
So why is the recommended setup for 30KHz? A few reasons, the first is aesthetics. Nobody wants to
put a scope on an output signal and see 1 or 2V of hash. If you increase that frequency the hash is
minimized. The second reason is response of the output with respect to the servo filter. If you increase
the output resolution and thus lower the PWM frequency far enough you will notice some lag in the
system from the delays between the output register value actually being picked up by the slower PWM
frequency.
For high response systems we suggest using Acc8es and a true 18bit DAC. However the filtered PWM
technique will be more than adequate for most applications.
Software Setup 19
Page 26
PMAC2A PC104 Hardware Reference Manual
0
How does changing I900 effect other settings in PMAC
I900 is does not only set the PWM frequency for the PWM outputs but it also sets the Max Phase
Frequency.
MaxPhase Frequency = 117,964.8 kHz / [2*I900+3]
PWM Frequency = 117,964.8 kHz / [4*I900+6]
The Max Phase Frequency is then divided by I901 to generate the frequency for the phase interrupt and its
routines. If you change I900 you have to change I901 to keep the same phase interrupt.
PHASE Clock Frequency = MaxPhase Frequency / (I901+1)
The Phase Clock Frequency setting also effects the servo interrupt frequency. If you change the phase
interrupt frequency then you must change I902 to keep the same servo interrupt.
Servo Clock Frequency = PHASE Clock Frequency / (I902+1)
When you change the servo interrupt you must always change the servo interrupt time, i10, to match or all
of your timing will be off in PMAC.
I10=8388608/(Servo Frequency (KHz)) = 8388608 * ServoTime(msec)
If you decide to change I900 be sure to reset Ix69 to the proper safety setting per the following formula:
Ix69=MaxVolts/10 * I900
Examples:
Default Example:
I900=1001
I901=2
I902=3
Ix69=1024
I10=1710933
MaxPhase Frequency = 117,964.8 kHz / [2*1001+3] = 58.835KHz
PWM Frequency = 117,964.8 kHz / [4*1001+6] = 29.418KHz
PHASE Clock Frequency = MaxPhase Frequency / (2+1) = 19.61KHz
Servo Clock Frequency = PHASE Clock Frequency / (3+1) = 4.90KHz
I10=8388608/(4.902943) = 1710933
Ix69=10V/10 * I900 = 1001 add headroom to 1024
Now lets say I wanted to double my resolution:
I900=2002
MaxPhase Frequency = 117,964.8 kHz / [2*2002+3] = 29.44KHz
PWM Frequency = 117,964.8 kHz / [4*2002+6] = 14.72KHz
In order to save headroom on firmware routines that trigger off the phase and servo interrupts it is best to
keep those frequencies about the same as above. Some systems may want higher phase and servo
Software Setup
2
Page 27

PMAC2A PC104 Hardware Reference Manual
interrupt frequencies for better servo performance, but our default frequencies are typically more than fast
enough for many applications. We will discuss tuning parameter a bit later in this document.
I901= 29.44KHz/19.61KHz -1 = @0.5 set it at 1 or 14.72KHz
This is not exactly the same since I901 is an integer value but pretty close. Since we are doing any
commutation with a +/-10V signal it doesn’t make that much of a difference. The Servo Frequency we
will be able to get close though:
I902=14.72KHz/4.9 – 1 = 2.004 or 2 which is @4.9KHz
For a 10V max signal output:
Ix69=i900 + headroom = 2024
We must set I10 whenever we change the servo clock but since we kept it basically the same, I19 stays
pretty much the same. Without rounding it works out to the following:
I10 = 8388608/4.906613 = 1709653
For precise timing within your motion application it is important not to round off when calculating I10.
Effects of Output Resolution and Servo Interrupt Frequency on Servo Gains
When you change your output resolution and/or servo interrupt timing your tuning parameters will no
longer respond the same. The system will have to be tuned again in order to achieve the desired
performance. There is an approximate relation of output resolution to servo loop gains . If you were
switching an application from a PMAC style 16bit Dac to a PMAC2Pc104 with default resolution of
about 11bits you can expect a change of your gains in order to get similar response.
The max output value of the output command with a 16bit Dac is 32767. With the PMAC2Pc104 at its
default parameters the max output value is 1001. If you had equal servo interrupt frequencies the
proportional gain on the PC104 system would have a proportional gain 1001/32767 or about 1/32 smaller.
This is more a rule of thumb than an exact formula. It is always recommended to go through a full tuning
procedure when changing output resolution.
If you decide to change the Servo Interrupt Frequency, then you are also changing the dynamics of the
servo filter and thus the system. You will need to retune the system in order to get the desired
performance. If you increase the servo frequency you will need to lower the proportional gain in order to
achieve similar performance. The reason you increased the frequency in the first place was more likely to
achieve a higher performance so relations here are not very helpful.
If you desire to change servo interrupt frequency in order to have your foreground PLCs execute more
often you can also adjust Ix60 to keep your gains the same, see the Pmac1/2 Software Reference Manual
for a further description of this parameter.
Software Setup 21
Page 28

PMAC2A PC104 Hardware Reference Manual
Using Flag I/O as General-Purpose I/O
Either the user flags or other not assigned axes flag on the base board can be used as general-purpose I/O
for up to 20 inputs and 4 outputs at 5-24Vdc levels. The indicated suggested M-variables definitions,
which are defined in the PMAC2 Software reference, allows accessing each particular line according to
the following table:
Flag Type
HOME
PLIM
MLIM
USER
AENA
5-24 VDC Input M120 M220 M320 M420
5-24 VDC Input M121 M221 M321 M421
5-24 VDC Input M122 M222 M322 M422
5-24 VDC Input M115 M215 M315 M415
5-24 VDC Output M114 M214 M314 M414
#1 #2 #3 #4
Channel Number
Note:
When using these lines as regular I/O points the appropriate setting of the Ix25
variable must be used to enable or disable the safety flags feature.
Analog Inputs Setup
The optional analog-to-digital converter inputs are ordered either through Option-12 on the CPU or Option2 on the axes expansion board. Each option provides two 12-bit analog inputs with a ±10Vdc range. The
M-variables associated with these inputs provided a range of values between +2048 and –2048 for the
respective ±10Vdc input range. The following is the software procedure to setup and read these ports.
CPU Analog Inputs
I903 = 1746 ;Set ADC clock frequency at 4.9152 MHz
WX:$C014, $1FFFFF ;Clock strobe set for bipolar inputs
M105->X:$0710,12,12,S ;ADCIN_1 on JMACH1 connector pin 45
M205->X:$0711,12,12,S ;ADCIN_2 on JMACH1 connector pin 46
Software Setup
22
Page 29
PMAC2A PC104 Hardware Reference Manual
HARDWARE REFERENCE SUMMARY
The following information is based on the PMAC2A PC/104 board, part number 603670-100.
Board Dimensions
From v106 to 107
(E20-23 added and 15A is in a different location:
Hardware Reference Summary 23
Page 30

PMAC2A PC104 Hardware Reference Manual
4
From v107 to 108
W1 removed:
Hardware Reference Summary
2
Page 31
PMAC2A PC104 Hardware Reference Manual
From v108 to 109
E20 in same location but rotated 90 degrees:
Hardware Reference Summary 25
Page 32

PMAC2A PC104 Hardware Reference Manual
Board Layout
1
2
3
4
5
6
BACD E F
Feature Location Feature Location Feature Location
E0
E1
E2
E3
E4
E8
E9
E10
E11
E12
B3
B4
B4
C4
C4
B1
B1
E5
E5
E5
E13
E14
E15A
E15B
E15C
E16
E18
E19
W1
E5
B3
E4
E4
E4
D1
D4
D4
E6
RP30
RP31
RP36
RP37
D1
D2
TB1
JRS232
JMACH1
JMACH2
E2
E2
E3
E3
A2
A3
B6
A2
F3
A4
Hardware Reference Summary
26
Page 33

PMAC2A PC104 Hardware Reference Manual
Connectors and Indicators
J3 - Machine Connector (JMACH1 Port)
The primary machine interface connector is JMACH1, labeled J3 on the PMAC. It contains the pins for
four channels of machine I/O: analog outputs, incremental encoder inputs, amplifier fault and enable
signals and power-supply connections.
1. 50-pin female flat cable connector T&B Ansley P/N 609-5041
2. Standard flat cable stranded 50-wire T&B Ansley P/N 171-50
3. Phoenix varioface module type FLKM 50 (male pins) P/N 22 81 08 9
J4 - Machine Connector (JMACH2 Port)
This machine interface connector is labeled JMACH2 or J4 on the PMAC. It contains the pins for four
channels of machine I/O: end-of-travel input flags, home flag and pulse-and-direction output signals. In
addition, the B_WDO output allows monitoring the state of the Watchdog safety feature.
1. 34-pin female flat cable connector T&B Ansley P/N 609-3441
2. Standard flat cable stranded 34-wire T&B Ansley P/N 171-34
3. Phoenix varioface module type FLKM 34 (male pins) P/N 22 81 06 3
J8 - Serial Port (JRS232 Port)
This connector allows communicating with PMAC from a host computer through a RS-232 port. Delta
Tau provides the Accessory 3L cable that connects the PMAC to a DB-9 connector.
1. 10-pin female flat cable connector T&B Ansley P/N 609-1041
2. Standard flat cable stranded 10-wire T&B Ansley P/N 171-10
TB1 – Power Supply Terminal Block (JPWR Connector)
In almost in all cases the PMAC2A PC/104 will be powered from the PC/104 bus, when it is installed in a
host computer’s bus, or from the JMACH1 connector. This terminal block may be used as an alternative
power supply connector or to easily measure the voltages applied to the board.
1. 4-pin terminal block, 0.150 pitch
LED Indicators
D1: when this red LED is lit, it indicates that the watchdog timer has tripped and shut down the PMAC.
D2: when this green LED is lit, it indicates that power is applied to the +5V input.
Hardware Reference Summary 27
Page 34

PMAC2A PC104 Hardware Reference Manual
Hardware Reference Summary
28
Page 35

PMAC2A PC104 Hardware Reference Manual
E-POINT JUMPER DESCRIPTIONS
E0: Forced Reset Control
E Point and
Physical Layout
E0
Location Description Default
B3 Factory use only; the board will not operate
with E0 installed.
E1: Servo and Phase Clock Direction Control
E Point and
Physical Layout
E1
If the E1 jumper is ON and the servo and phase clocks are not brought in on the J8
serial port, the watchdog timer will trip immediately.
Location Description Default
B4 Remove jumper for PMAC to use its
internally generated servo and phase clock
signals and to output these signals on the J8
serial port connector.
Jump pins 1 and 2 for PMAC to expect to
receive its servo and phase clock signals on
the J8 serial port connector.
Note:
E2: CPU Frequency Select
No jumper
No jumper installed
E Point and
Physical Layout
E2
Location Description Default
B4 Remove jumper for 40 MHz operation (E4
OFF also) or for 80 MHz operation (E4
ON).
Jump pin 1 to 2 for 60 MHz operation (E4
OFF).
E3: Normal/Re-Initializing Power-Up/Reset
E Point and Physical
Layout
E3
Location Description Default
C4 Jump pin 1 to 2 to re-initialize on power-
up/reset, loading factory default settings.
Remove jumper for normal power-up/reset,
loading user-saved settings.
No jumper installed
No jumper installed
E-Point Jumper Descriptions 29
Page 36

PMAC2A PC104 Hardware Reference Manual
E4: CPU Frequency Select
E Point and
Physical Layout
E4
Location Description Default
C4 Remove jumper for 40 MHz operation (E2
OFF also) or for 60 MHz operation (E4 ON).
Jump pin 1 to 2 for 80 MHz operation (E2
OFF).
E8: Phase Clock Lines Output Enable
E Point and
Physical Layout
E8
Location Description Default
B1 Jump pin 1 to 2 to enable the PHASE clock
line on the J8 connector, allowing
synchronization with another PMAC.
Remove jumper to disable the PHASE clock
line on the J8 connector.
E9: Servo Clock Lines Output Enable
E Point and
Physical Layout
E9
Location Description Default
Jump pin 1 to 2 to enable the SERVO clock
line on the J8 connector, allowing
B1
synchronization with another PMAC.
Remove jumper to disable the SERVO clock
line on the J8 connector.
No jumper installed
(standard or Option 5EF)
Jumper installed (Option
5CF)
No Jumper
No Jumper
E10 – E12: Power-Up State Jumpers
E Point and
Physical Layout
E10
E12
Location Description Default
E5 Remove jumper E10;
Jump E11;
Jump E12;
To read flash IC on power-up/reset
Other combinations are for factory use only;
the board will not operate in any other
configuration.
No E10 jumper installed;
Jump E11 and E12
E-Point Jumper Descriptions
30
Page 37

PMAC2A PC104 Hardware Reference Manual
E13: Power-Up/Reset Load Source
E Point and
Physical Layout
E13
Location Description Default
E5 Jump pin 1 to 2 to reload firmware through
serial or bus port.
Remove jumper for normal operation.
E14: Watchdog Disable Jumper
E Point and
Physical Layout
E14
Location Description Default
B3 Jump pin 1 to 2 to disable Watchdog timer
(for test purposes only).
Remove jumper to enable Watchdog timer.
E15A, B, C: Flash Memory Bank Select
E Point and
Physical Layout
E15A
Location Description Default
E4 Remove all 3 jumpers to select flash memory
bank with factory-installed firmware.
Use other configuration to select one of the 7
other flash memory banks.
No jumper
No jumper
No jumpers installed
E15C
E16: ADC Inputs Enable
E Point and
Physical Layout
E16
Location Description Default
D1 Jump pin 1 to 2 to enable the Option-12
No jumper
ADC inputs.
Remove jumper to disable the ADC inputs,
which might be necessary for reading
current feedback signals from digital
amplifiers.
E-Point Jumper Descriptions 31
Page 38

PMAC2A PC104 Hardware Reference Manual
E18 – E19: PC/104 Bus Address
E Point and Physical
Layout
E18
E19
Location Description
D4
Jumpers E18 and E19 select the PC/104 bus
address for communications according to
the following table:
E18 E19
OFF OFF $200 512
OFF ON $210 528
ON OFF $220 544
ON ON $230 560
Address
(Hex)
Address
(Dec)
No E18 jumper installed;
Jumper E19 installed
Default
Note:
Jumper E18 must be removed and jumper E19 must be installed for using either
the Ethernet or USB optional methods of communication.
E20-E23: ENCODER SINGLE ENDED/DIFFERENTIAL SELECT
(Note: v107 and above only)
E Point and
Physical Layout
E20
E21
E22
E23
Location Description Default
Jump pin 2 to 3 to obtain differential
1-2 Jumper installed
encoder input mode. This will bias
encoder negative inputs to VCC = 5V
Jump pin 1 to 2 to obtain non-differential
encoder input mode. This will bias
encoder negative inputs to 1/2 VCC =
2.5V
E-Point Jumper Descriptions
32
Page 39
PMAC2A PC104 Hardware Reference Manual
CONNECTOR PINOUTS
TB1 (JPWR): Power Supply
(4-Pin Terminal Block)
Top View
Pin# Symbol Function Description Notes
1 GND Common Digital Common
2 +5V Input Logic Voltage Supplies all PMAC digital circuits
3 +12V Input DAC Supply Voltage Ref to Digital GND
4 -12V Input DAC Supply Voltage Ref to Digital GND
This terminal block can be used to provide the input for the power supply for the circuits on the PMAC board
when it is not in a bus configuration. When the PMAC is in a bus configuration, these supplies automatically
come through the bus connector from the bus power supply; in this case, this terminal block should not be used.
J4 (JRS232) Serial Port Connector
(10-PIN CONNECTOR)
Front View
Pin# Symbol Function Description Notes
1 PHASE Output Phasing Clock
2 DTR Bidirect Data Terminal Ready Tied to "DSR"
3 TXD/ Input Receive Data Host transmit data
4 CTS Input Clear to Send Host ready bit
5 RXD/ Output Send Data Host receive data
6 RTS Output Request to Send PMAC ready bit
7 DSR Bidirect Data Set Ready Tied to "DTR"
8 SERVO Output Servo Clock
9 GND Common Digital Common
10 +5V Output +5Vdc Supply Power supply out
Connector Pinouts 33
Page 40

PMAC2A PC104 Hardware Reference Manual
J3 (JMACH1): Machine Port Connector
(50-Pin Header)
Top View
Pin# Symbol Function Description Notes
1 +5V Output +5V Power For encoders, 1
2 +5V Output +5V Power For encoders, 1
3 GND Common Digital Common For encoders, 1
4 GND Common Digital Common For encoders, 1
5 CHA1 Input Encoder A Channel Positive 2
6 CHA2 Input Encoder A Channel Positive 2
7 CHA1/ Input Encoder A Channel Negative 2,3
8 CHA2/ Input Encoder A Channel Negative 2,3
9 CHB1 Input Encoder B Channel Positive 2
10 CHB2 Input Encoder B Channel Positive 2
11 CHB1/ Input Encoder B Channel Negative 2,3
12 CHB2/ Input Encoder B Channel Negative 2,3
13 CHC1 Input Encoder C Channel Positive 2
14 CHC2 Input Encoder C Channel Positive 2
15 CHC1/ Input Encoder C Channel Negative 2,3
16 CHC2/ Input Encoder C Channel Negative 2,3
17 CHA3 Input Encoder A Channel Positive 2
18 CHA4 Input Encoder A Channel Positive 2
19 CHA3/ Input Encoder A Channel Negative 2,3
20 CHA4/ Input Encoder A Channel Negative 2,3
21 CHB3 Input Encoder B Channel Positive 2
22 CHB4 Input Encoder B Channel Positive 2
23 CHB3/ Input Encoder B Channel Negative 2,3
24 CHB4/ Input Encoder B Channel Negative 2,3
25 CHC3 Input Encoder C Channel Positive 2
26 CHC4 Input Encoder C Channel Positive 2
27 CHC3/ Input Encoder C Channel Negative 2,3
28 CHC4/ Input Encoder C Channel Negative 2,3
29 DAC1 Output Analog Output Positive 1 4
30 DAC2 Output Analog Output Positive 2 4
31 DAC1/ Output Analog Output Negative 1 4,5
32 DAC2/ Output Analog Output Negative 2 4,5
33 AENA1/ Output Amplifier-Enable 1
34 AENA2/ Output Amplifier -Enable 2
35 FAULT1/ Input Amplifier -Fault 1 6
36 FAULT2/ Input Amplifier -Fault 2 6
37 DAC3 Output Analog Output Positive 3 4
38 DAC4 Output Analog Output Positive 4 4
39 DAC3/ Output Analog Output Negative 3 4,5
34 Connector Pinouts
Page 41

PMAC2A PC104 Hardware Reference Manual
J3 JMACH1 (50-Pin Header)
(Continued)
Top View
Pin# Symbol Function Description Notes
40 DAC4/ Output Analog Output Negative 4 4,5
41 AENA3/ Output Amplifier -Enable 3
42 AENA4/ Output Amplifier -Enable 4
43 FAULT3/ Input Amplifier -Fault 3 6
44 FAULT4/ Input Amplifier -Fault 4 6
45 ADCIN_1 Input Analog Input 1 Option-12 required
46 ADCIN_2 Input Analog Input 2 Option-12 required
47 FLT_FLG_V Input Amplifier Fault pull-up V+
48 GND Common Digital Common
49 +12V Input DAC Supply Voltage 7
50 -12V Input DAC Supply Voltage 7
The J3 connector is used to connect PMAC to the first 4 channels (Channels 1, 2, 3, and 4) of servo amps
and encoders.
Note 1: In standalone applications, these lines can be used as +5V power supply inputs to power PMAC’s
digital circuitry.
Note 2: Referenced to digital common (GND). Maximum of ±12V permitted between this signal and its
complement.
Note 3: Leave this input floating if not used (i.e. digital single-ended encoders).
Note 4: ±10V, 10 mA max, referenced to common ground (GND).
Note 5: Leave floating if not used. Do not tie to GND.
Note 6: Functional polarity controlled by variable Ix25. Must be conducting to 0V (usually GND) to
produce a 0 in PMAC software. Automatic fault function can be disabled with Ix25.
Note 7: Can be used to provide input power when the PC/104 bus connector is not being used. When the
bus configuratio is used, these supply voltages automatically come through the bus connector
from the PC power supply.
Connector Pinouts 35
Page 42
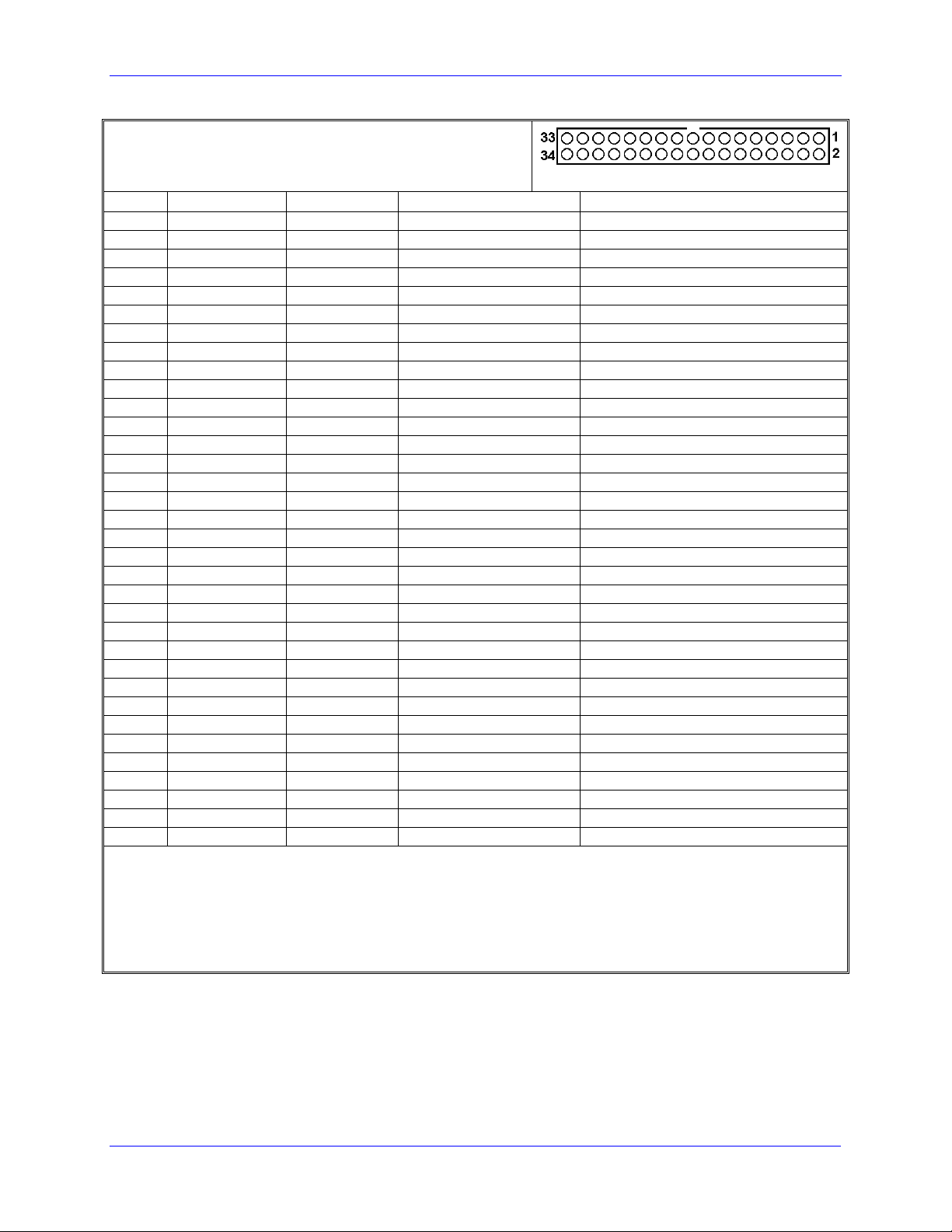
PMAC2A PC104 Hardware Reference Manual
J4 (JMACH2): Machine Port CPU
Connector
(34-Pin Header)
Pin# Symbol Function Description Notes
1 FLG_1_2_V Input Flags 1-2 Pull-Up
2 FLG_3_4_V Input Flags 3-4 Pull-Up
3 GND Common Digital Common
4 GND Common Digital Common
5 HOME1 Input Home-Flag 1 10
6 HOME2 Input Home-Flag 2 10
7 PLIM1 Input Positive End Limit 1 8,9
8 PLIM2 Input Positive End Limit 2 8,9
9 MLIM1 Input Negative End Limit 1 8,9
10 MLIM2 Input Negative End Limit 2 8,9
11 USER1 Input User Flag 1
12 USER2 Input User Flag 2
13 PUL_1 Output Pulse Output 1
14 PUL_2 Output Pulse Output 2
15 DIR_1 Output Direction Output 1
16 DIR_2 Output Direction Output 2
17 EQU1 Output Encoder Comp-Equal 1
18 EQU2 Output Encoder Comp-Equal 2
19 HOME3 Input Home-Flag 3 10
20 HOME4 Input Home-Flag 4 10
21 PLIM3 Input Positive End Limit 3 8,9
22 PLIM4 Input Positive End Limit 4 8,9
23 MLIM3 Input Negative End Limit 3 8,9
24 MLIM4 Input Negative End Limit 4 8,9
25 USER1 Input User Flag 3
26 USER2 Input User Flag 4
27 PUL_3 Output Pulse Output 3
28 PUL_4 Output Pulse Output 4
29 DIR_3 Output Direction Output 3
30 DIR_4 Output Direction Output 4
31 EQU3 Output Encoder Comp-Equal 3
32 EQU4 Output Encoder Comp-Equal 4
33 B_WDO Output Watchdog Out Indicator/driver
34 No Connect
Note 8: Pins marked PLIMn should be connected to switches at the positive end of travel. Pins marked MLIMn
should be connected to switches at the negative end of travel.
Note 9: Must be conducting to 0V (usually GND) for PMAC to consider itself not into this limit. Automatic limit
function can be disabled with Ix25.
Note 10: Functional polarity for homing or other trigger use of HOMEn controlled by Encoder/Flag Variable I9n2.
HMFLn selected for trigger by Encoder/Flag Variable I9n3. Must be conducting to 0V (usually GND) to
produce a 0 in PMAC software.
Front View
36 Connector Pinouts
Page 43

PMAC2A PC104 Hardware Reference Manual
Connector Pinouts 37
Page 44

PMAC2A PC104 Hardware Reference Manual
SCHEMATICS
38 Connector Pinouts
Page 45

PMAC2A PC104 Hardware Reference Manual
THIS DOCUMENT IS THE CONFIDENTIAL PROPERTY OF DELTA TAU
THIS DOCUMENT IS THE CONFIDENTIAL PROPERTY OF DELTA TAU
DATA SYSTEMS INC. AND IS LOANED SUBJECT TO RETURN UPON
DATA SYSTEMS INC. AND IS LOANED SUBJECT TO RETURN UPON
DEMAND. TITLE TO THIS DOCUMENT IS NEVER SOLD OR
DEMAND. TITLE TO THIS DOCUMENT IS NEVER SOLD OR
TRANSFERRED FOR ANY REASON. THIS DOCUMENT IS TO BE USED
TRANSFERRED FOR ANY REASON. THIS DOCUMENT IS TO BE USED
ONLY PURSUANT TO WRITTEN LICENSE OR WRITTEN INSTRUCTIONS
ONLY PURSUANT TO WRITTEN LICENSE OR WRITTEN INSTRUCTIONS
OF DELTA TAU DATA SYSTEMS INC. ALL RIGHTS TO DESIGNS AND
OF DELTA TAU DATA SYSTEMS INC. ALL RIGHTS TO DESIGNS AND
INVENTIONS ARE RESERVED BY DELTA TAU DATA SYSTEMS INC.
INVENTIONS ARE RESERVED BY DELTA TAU DATA SYSTEMS INC.
POSSESSION OF THIS DOCUMENT INDICATES ACCEPTANCE OF THE
POSSESSION OF THIS DOCUMENT INDICATES ACCEPTANCE OF THE
ABOVE AGREEMENT.
ABOVE AGREEMENT.
GND
PC/104/HEADER_A32
GND
GND
+5V
(KEY)
+12V
-12V
-5V
+5V
GND
PC/104/HEADER_B32
GND
(KEY)
PC/104/HEADER/D20
GND
+5V
GND
GND
PC/104/HEADER/D20
+3.3V
TDO
TDI
BSCAN-
TMS
GND
TCK
HSIP8NO5
GND
J9
(jisp)
CE1
.1UF
CE2
.1UF
CE3
.1UF
CE4
.1UF
J1A
32
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
J1B
32
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
J2C
0
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
J2D
0
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
J9
1
2
3
4
6
7
8
SA00
SA01
SA02
SA03
SA04
SA05
SA06
SA07
SA08
SA09
SA10
SA11
SA12
SA13
SA14
SA15
SA16
SA17
SA18
SA19
AEN
IOCHRDY
SD00
SD01
SD02
SD03
SD04
SD05
SD06
SD07
IOCHCHK-
OSC
BALE
TC
DACK2IRQ3
IRQ4
IRQ5
IRQ6
IRQ7
SYSCLK
REFRESHDRQ1
DACK1DRQ3
DACK3-
SIORSIOW-
SMEMRSMEMW(KEY)
ENDXFR-
DRQ2
IRQ9
RESTDRV
(KEY)
SBHELA23
LA22
LA21
LA20
LA19
LA18
LA17
MEMRMEMWSD08
SD09
SD10
SD11
SD12
SD13
SD14
SD15
(KEY)
MEMCS16IOCS16IRQ10
IRQ11
IRQ12
IRQ15
IRQ14
DACK0DRQ0
DACK5DRQ5
DACK6DRQ6
DACK7DRQ7
MASTER-
+3P3V
GND
M1
HOLE
M2
HOLE
M3
HOLE
M4
HOLE
GND
+5V
+12V
-12V
.01UF
C21
GND
GND
GND
+5V
GND
+12V
-12V
-5V
+5V
GND
GND
GND
GND
+5V
GND
GND
RP1
19.6608Mhz
19.6608Mhz
GUARD BAND
KEY
12
3.3KSIP10C
3456789 10
TDI_U1
TDO_U1
TCK_U1
RESETTRSTTDO_U6
TDI_U6
BSCAN-
TMS_U6
TCK_U6
D5
1SMC5.0AT3
D6
1SMC18AT3
D7
1SMC18AT3
BA06_A
BA07_A
BA08_A
BA09_A
BA10_A
BA11_A
BX/Y_A
+5V
BRXD
BCTSSER_A
PHA_A
TAMODD/IRQD-
T/RRESET
TP1
GND
U33
1
T/R1
2
B0
3
B1
4
GND
5
B2
6
B3
7
VCCB
8
B4
9
B5
10
GND
11
B6
12
B7
13
B8
14
B9
15
GND
16
B10
17
B11
18
VCCB
19
B12
20
B13
21
GND
22
B14
23
B15
24 25
T/R2
IDT74FCT164245TPA
(TSSOP48)
GND
+3P3V
12
3456789 10
+5V
VCC
+12V
-12V
GND
OEL
SD00
SD01
SD02
SD03
SD04
SD05
SD06
SD07
BA06_A
BA07_A
BA08_A
BA09_A
BA10_A
BA11_A
BX/Y_A
R1
C87
10
.1UF
C96
+
22UF
35V
C97
+
22UF
35V
C98
+
22UF
35V
VCCA
VCCA
E8
U35B
3 4
74ACT14
(SO14)
U35E
11 10
74ACT14
(SO14)
BTA
RESET
RESET-
WDO-
PWDO-
WDO
D1
LED
RED
WD
R5
1K
TRST-
BD01_A
BD02_A
BD03_A
BD04_A
BD05_A
BD06_A
BD07_A
CS00CS0-
CS1CS4-
DPRCSVMECS-
BWDO_ABRST_A-
+5V
J8
(JRS232)
J8
PHASE
1
DTR
2
TXD-
3
CTS
4
RXD-
5
RTS
6
DSR
7
SERVO
8
GND
9
+5V
10
HEADER 10
(BOX)
E9
2 1
2 1
PHASE
SERVO
PHA
PHA
SER
SER
+5V
C20
.1UF
GND
RESET
RESET-
WDO-
WDO
12Monday, July 02, 2001
B
of
OR
(SOT-223)
OR
(SOT-223)
LM1117MPX-1.8
MC33269ST-1.8
3
IN
NOTE2:
LM1117MPX-3.3
MC33269ST-3.3
3
IN
3.3KSIP10C
RXD
CTSSER
PHA
BTA
IRQB-
VR2
1
VR1
1
VCCQL
2
OUT
GND
C18
10UF
16V
(TANT)
2
OUT
GND
C16
GND
+3P3V
GND
+
+
(TANT)
+3P3V
10UF
16V
GND
NOTE1:
*
NOTE2:
RP3
1 2
10KSIP10C
RP4
1 2
10KSIP10C
INSTALL `F2' ONLY
FOR `DSP56303PW80'
DO NOT INSTALL
`VR2,C17,C18'
FOR `DSP56303PW80'
INSTALL
`VR2,C17,C18'
FOR `DSP56309PW80'
AND `DSP56311GC150'
DO NOT INSTALL `F2'
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
INIT-
WDTC
A10
A11
A12
A13
A14
A15
A16
A17
X/Y
WRRD-
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
D16
D17
D18
D19
D20
D21
D22
D23
SC02
3
BHACK-
4
BHREQ-
5
DE-
6
SRD0
7
STD0
8
SCK0
910
BB-
BRTS-
3
TMS_U1
4
BG-
5
T/RBSTD1
6
7
BSRD1
8
BSCK1
BSC12
910
+5V
1
2 3
MHR13FAJ19.6608
GND
.1UF
Y1
N.C.
GND CLK
(4 PIN SMT)
C33
4
VCC
CPUCLK
GUARD BAND
NC7SZ08M5
(SOT23-5)
GUARD BAND
1
2
BD00_A
FLASHCS-
+3P3V
53
U2
GND
PA16
PA17
PA18
PA19
PA20
PA21
C22
.1UF
4
BRCLK
CPUCLK
BSCANRESETTDI_U6
A0
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
RDWRTMS_U6
TDO_U6
BD00_A
PA16
PA17
PA18
PA19
PA20
PA21
WDTC
FLASHCS-
EXTAL
GUARD BAND
+5V
U6
1
VCC10
2
GND
3
S6
4
S7
5
S8
6
S9
7
S10
8
S11
9
BRCLK
10
N.C.
11
CPUCLK
12
VCC
13
GND
14
BSCAN-
15
RESET-
16
TDI
17
A0
18
A3
19
A4
20
A5
21
A6
22
A7
23
A8
24
VCCIO
25
GND
26
N.C.
27
N.C.
28
A9
29
A10
30
A11
31
A12
32
A13
33
A14
34
A15
35
RD-
36
WR-
37
TMS
38
GND
39
TDO
40
DB0
41
PA16
42
PA17
43
PA18
44
PA19
45
PA20
46
PA21
47
WDTC
48
PROMCS-
49
N.C.
50 51
N.C. GND
ISPLSI2064E-100LT100-PC104
C44
C45
.1UF
.1UF
MODA/IRQAMODB/IRQBMODC/IRQCBOOTENSC01
BTXD
BSC11
+3P3V
100
N.C.
99
N.C.
S5
S4
SA11
SA10
SA9
SA8
SA7
SA6
SA5
N.C.
GND
GOE1
SA4
SA3
SA2
SA1
SA0
IOWIOR-
LBEN-
OEL
N.C.
N.C.
VCCIO
GND
I/O38
HRW
HDS-
HA2
HA1
HA0
INRDGOE0
SYSCLK
VCC
GND
Y2
N.C.
TCK
VMECSDPRCS-
CS0CS1CS4-
CS00IOCS-
VCCIO
C46
C47
.1UF
.1UF
GND
DSW05
98
97
DSW04
SA11
96
SA10
95
SA09
94
SA08
93
SA07
92
SA06
91
SA05
90
89
88
87
SA04
86
SA03
85
SA02
84
SA01
83
82
SA00
SIOW-
81
SIOR-
80
LBEN-
79
OEL
78
77
76
75
74
73
BHR/W
72
BHDS-
71
BHA2
70
BHA1
69
BHA0
68
67
INRD-
66
SYSCLK
65
64
63
62
61
TCK_U6
60
VM_ECS-
59
58
DP_RCSCS_0-
57
CS_1-
56
CS_4-
55
CS_00-
54
IOCS-
53
52
IOCS-
2 1
2 1
E19
E18
E10
E11
E12
E13
RP2
3
4
5
6
7
8
9 10
3.3KSIP10C
GND
E10
2 1
E11
2 1
E12
2 1
E13
2 1
+3P3V
12
TO LOAD `isp' PART
GND
JUMP `E0'
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
A17
X/Y
WRRD-
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
D16
D17
D18
D19
D20
D21
D22
D23
R2
1 2
10K
C1
.1UF
GND
C35
.01UF
56
RP5C
1KSIP6I
MMBT3906LT1
(SOT23)
21
21
E0
E0
E14
R3
100K
E14
E1
E2
E3
E4
GND
U4A
74ACT14
(SO14)
1
Q1
21
21
21
21
PHASE
SERVO
GND
1 2
1KSIP6I
23
C34
+
1UF
35V
tant
BTXD
RXD
BRTS-
CTS-
PHASE
SERVO
PHA
SER
CARD0
C23
.1UF
RP5A
RP50
+5V
U4B
3 4
74ACT14
3 4
1KSIP6I
U3
1
N.C.
2
IN
3
N.C.
4
MODE
5
N.C.
6
TOL
7
N.C.
8
GND
DS1231S
(SOL16)
1 3
MMBD301LT1
+5V
12
3.3KSIP10C
3456789 10
C38
.1UF
C39
.1UF
C40
.1UF
U8
1
1OE
2
1A
4
2OE
5
2A
10
3OE
9
3A
13
4OE
12
4A
7
VSS
74HC126C
(SO14)
U35C
5 6
74ACT14
GND
(SO14)
(SO14)
2N7002
(SOT23)
RP5B
D3
1 3
MMBD301LT1
16
N.C.
15
VCC
14
N.C.
13
NMI
12
N.C.
11
RST
10
N.C.
9
RST
.1UF
D4
INRDXIN_0
CARD0
XIN_1
40/60
XIN_2
E_51
XIN_3
XIN_4
TBD_0
XIN_5
TBD_1
TBD_2
XIN_6
TBD_3
XIN_7
CS_00CS_0-
CS_1CS_4-
DP_RCSVM_ECS- VMECS-
PWDORESET-
U7
3
+V
2
C1+
4
C1-
12
TXD
13
RXD
11
RTS
10
CTS
1 18
RXEN TXEN
LTC1384CS
(SOL18)
C19
.1UF
VDD
1Y
2Y
3Y
4Y
12
Q2
3
SOT23
+5V
C2
C36
.1UF
17
VCC
C2+
C2-
TXD
RXD
RTS
CTS
VSS
16
+5V
14
3
6
8
11
12
SHEET2
670-0SH2
|Link
|670-0SH2.sch
7
V-
5
6
15
14
8
9
WAIT-
Q3
3
2N7002
SOT23
(SOT23)
3
SOT23
U36
48
OE1
47
A0
46
A1
45
GND
44
A2
43
A3
42
VCC
41
A4
40
A5
39
GND
38
A6
37
A7
36
A8
35
A9
34
GND
33
A10
32
A11
31
VCC
30
A12
29
A13
28
GND
27
A14
26
A15
OE2
PI74FCT16245ATA
(TSSOP48)
C42
.1UF
C41
.1UF
BSC11
U9
1
8
GND
A
2
7
C
GND
3
6
GND
B
4 5
D GND
SN75240PW
RP8
1 2
3 4
5 6
7 8
220SIP4X2
U35A
1 2
74ACT14
(SO14)
U35F
13 12
74ACT14
(SO14)
WAIT-
5 6
11 10
13 12
12
GND
+5V
GND
U35D
9 8
74ACT14
(SO14)
U4C
(SO14)
74ACT14
U4D
9 8
(SO14)
74ACT14
U4E
(SO14)
74ACT14
U4F
(SO14)
74ACT14
Q4
2N7002
(SOT23)
1
T/R1
2
B0
3
B1
4
GND
5
B2
6
B3
7
VCC
8
B4
9
B5
10
GND
11
B6
12
B7
13
B8
14
B9
15
GND
16
B10
17
B11
18
VCC
19
B12
20
B13
21
GND
22
B14
23
B15
2425
T/R2
Title
Size Document Number Rev
D
Date: Sheet
D2
LED
GRN
PWR
R4
1K
BD01_A
BD02_A
BD03_A
BD04_A
BD05_A
BD06_A
BD07_A
CS00CS0-
CS1CS4-
DPRCS-
BWDO_ABRST_A-
C37
.1UF
Delta Tau Data Systems, Inc.
PMAC-PC104, DSP56311 CPU & PC104 I/O SECTION
603670-320
+5V
C17
+
10UF
16V
+3P3V
LBEN-
48
OE1
A0
A1
GND
A2
A3
A4
A5
GND
A6
A7
A8
A9
GND
A10
A11
A12
A13
GND
A14
A15
OE2
RP6
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
3.3KSIP10C
2
3
4
5
6
7
8
9
1
19
BH0
BH1
BH2
BH3
BH4
BH5
BH6
BH7
A6
A7
A8
A9
A10
A11
X/Y
EXTAL
C88
.1UF
U34
A0
A1
A2
A3
A4
A5
A6
A7
T/R
OE
74LCX245
(TSSOP20)
(TANT)
GND
+5V
C15
+
10UF
16V
(TANT)
GND
GUARD BAND
+5V
12
RP7
3456789 10
18
B0
17
B1
16
B2
15
B3
14
B4
13
B5
12
B6
11
B7
20
VCC
10
GND
C43
.1UF
GND
Connector Pinouts 39
Page 46

PMAC2A PC104 Hardware Reference Manual
(JEXP_A)
RP13A
1 2
47KSIP8I
RP13B
3 4
47KSIP8I
RP13C
5 6
47KSIP8I
RP13D
7 8
47KSIP8I
RP19A
1 2
47KSIP8I
RP19B
3 4
47KSIP8I
RP19C
5 6
47KSIP8I
RP19D
7 8
47KSIP8I
FLAG_A1
FLAG_B1
FLAG_C1
FLAG_D1
FLAG_A2
FLAG_B2
FLAG_C2
FLAG_D2
FLAG_B3
FLAG_C3
FLAG_D3
FLAG_A4
FLAG_B4
FLAG_C4
FLAG_D4
WDO
PWM_A_T1
PWM_A_B1
PWM_A_T2
PWM_A_B2
PWM_A_T3
PWM_A_B3
PWM_A_T4
PWM_A_B4
PWM_C_T1
PWM_C_T1
PWM_C_B1
PWM_C_B1
PWM_C_T2
PWM_C_T2
PWM_C_B2
PWM_C_B2
PWM_C_T3
PWM_C_T3
PWM_C_B3
PWM_C_B3
PWM_C_T4
PWM_C_T4
PWM_C_B4
PWM_C_B4
WDO
WDO
J11
12
34
56
78
910
11 12
13 14
15 16
17 18
19 20
21 22
23 24
25 26
27 28
29 30
31 32
33 34
35 36
37 38
39 40
HEADER 20X2(FEM)
CLS120LDDV
C100
.1UF
C101
.1UF
C102
.1UF
C103
.1UF
C104
.1UF
C105
.1UF
C106
.1UF
C107
.1UF
GND
BD00_A
BD00_A
BD02_A
BD02_A
BD04_A
BD04_A
BD06_A
BD06_A
BD08_A
BD08_A
BD10_A
BD10_A
BD12_A
BD12_A
BD14_A
BD14_A
BD16_A
BD18_A
BD20_A
BD22_A
BA00_A
BA00_A
BA02_A
BA02_A
BA04_A
BA04_A
BA06_A
BA06_A
BA08_A
BA08_A
BA10_A
BA10_A
BA12_A
BA12_A
BX/Y_A
SSM-120-L-DV-LC
(JEXPB)
HEADER 25X2(FEM)
ADC_A1
3
ADC_A2
ADC_A3
4
ADC_A4
5
6
ADC_B1
ADC_B2
7
8
ADC_B3
910
ADC_B4
R35
WAIT-
3.3K
R36
PRDY
3.3K
R37
SCLK_DIR
3.3K
GUARD BANDING REQ'D
+5V
3
5
J6
12
34
56
78
910
11 12
13 14
15 16
17 18
19 20
21 22
23 24
25 26
27 28
29 30
31 32
33 34
35 36
37 38
39 40
41 42
43 44
45 46
47 48
49 50
CLS125LDDV
FLT_FLG_V
GND
HOME1+
PLIM1+
MLIM1+
USER1+
PUL_1+
DIR_1+
EQU_1+
HOME3+
PLIM3+
MLIM3+
USER3+
PUL_3+
DIR_3+
EQU_3+
B_WDO
GND
CHA1+
CHA1CHB1+
CHB1CHC1+
CHC1CHA3+
CHA3CHB3+
CHB3CHC3+
CHC3DAC1+
DAC1AENA1FALT1DAC3+
DAC3AENA3FALT3ADCIN_1
Flag_1_2_V
+5V
+12V
PWM_B_T1
PWM_B_B1
PWM_B_T2
PWM_B_B2
PWM_B_T3
PWM_B_B3
PWM_B_T4
PWM_B_B4
ADC_A1
ADC_A2
ADC_A3
ADC_A4
ADC_B1
ADC_B2
ADC_B3
ADC_B4
ADC_STR
FAULT~1
FAULT~2
FAULT~3
FAULT~4
BA07_A
BA09_A
BA11_A
WAIT-
HEADER 17X2
HEADER 25X2
(JMACH2)
J4
12
34
56
78
910
11 12
13 14
15 16
17 18
19 20
21 22
23 24
25 26
27 28
29 30
31 32
33 34
(JMACH1)
J3
12
34
56
78
910
11 12
13 14
15 16
17 18
19 20
21 22
23 24
25 26
27 28
29 30
31 32
33 34
35 36
37 38
39 40
41 42
43 44
45 46
47 48
49 50
WAIT-
Flag_3_4_V
PWM_A_T1
PWM_A_B1
PWM_A_T2
PWM_A_B2
PWM_A_T3
PWM_A_B3
PWM_A_T4
PWM_A_B4
PWM_C_T1
PWM_C_B1
PWM_C_T2
PWM_C_B2
PWM_C_T3
PWM_C_B3
PWM_C_T4
PWM_C_B4
ADC_CLK
AENA_1
AENA_2
AENA_3
AENA_4
BA06_A
BA08_A
BA10_A
DPRCS-
DPRCS-
SSM-125-L-DV-LC
+5V
RP10
1 2
3.3KSIP10C
GND
"E15" FLASH BANK SELECT
FLASHCS-
FLASHCS-
PA21
PA21
PA20
PA20
PA19
PA19
PA18
PA18
PA17
PA17
PA16
PA16
A15
A15
A14
A14
A13
A13
A12
A12
RESET-
RESET-
A11
A11
A10
A10
A9
A9
A8
A8
A7
A7
A6
A6
A5
A4
A3
A2 FLAG_A3
W1
SOLDER
JUMPER
1
3
+3P3V
+3P3V
+3P3V
+3P3V
A1
2
W1
C60
.1UF
IOCS-
IOCS-
D0
D0
D1
D1
D2
D2
D3
D3
D4
D4
D5
D5
D6
D6
D7
D7
D8
D8
D9
D9
D10
D10
D11
D11
D12
D12
D13
D13
D14
D14
D15
D15
D16
D16
D17
D17
D18
D18
D19
D19
D20
D20
D21
D21
D22
D22
D23
D23
A0
A0
A1
A1
A2
A2
A3
A3
A4
A4
A5
A5
WR-
WR-
RD-
RD-
+3P3V
+5V
`W1'= 1 TO 2 FOR 28F320J3A
`W1'= 2 TO 3 FOR 28F320J5A
C64
.1UF
C65
.1UF
C68
.1UF
C69
.1UF
40 Connector Pinouts
GND
E15A
E15B
E15C
U10
1
A22
2
CE1-
3
A21
4
A20
5
A19
6
A18
7
A17
8
A16
9
VCC
10
A15
11
A14
12
A13
13
A12
14
CE0
15
VPEN
16
RP-
17
A11
18
A10
19
A09
20
A08
21
GND
22
A07
23
A06
24
A05
25
A04
26
A03
27
A02
28 29
A01 CE2
E28F320J3A
(TSOP56)
C61
GND
.1UF
U12
48
OE1
47
A0
46
A1
45
GND
44
A2
43
A3
42
VCCA
41
A4
40
A5
39
GND
38
A6
37
A7
36
A8
35
A9
34
GND
33
A10
32
A11
31
VCCA
30
A12
29
A13
28
GND
27
A14
26
A15
OE2
IDT74FCT164245TPA
(TSSOP48)
U13
48
OE1
47
A0
46
A1
45
GND
44
A2
43
A3
42
VCCA
41
A4
40
A5
39
GND
38
A6
37
A7
36
A8
35
A9
34
GND
33
A10
32
A11
31
VCCA
30
A12
29
A13
28
GND
27
A14
26
A15
OE2
IDT74FCT164245TPA
(TSSOP48)
21
21
21
A24_WP
VCCQ
BYTE-
T/R1
GND
VCCB
GND
GND
B10
B11
VCCB
B12
B13
GND
B14
B15
T/R2
T/R1
GND
VCCB
GND
GND
B10
B11
VCCB
B12
B13
GND
B14
B15
T/R2
56
55
WE-
54
OE-
53
STS
52
DQ15
51
DQ7
50
DQ14
49
DQ6
48
GND
47
DQ13
46
DQ5
45
DQ12
44
DQ4
43
42
GND
41
DQ11
40
DQ3
39
DQ10
38
DQ2
37
VCC
36
DQ9
35
DQ1
34
DQ8
33
DQ0
32
A00
31
30
A23
C62
.1UF
1
BD00_A
2
B0
BD01_A
3
B1
4
BD02_A
5
B2
BD03_A
6
B3
7
BD04_A
8
B4
9
BD05_A
B5
10
BD06_A
11
B6
BD07_A
12
B7
BD08_A
13
B8
14
BD09_A
B9
15
BD10_A
16
BD11_A
17
18
BD12_A
19
BD13_A
20
21
22
BD14_A
BD15_A
23
2425
1
BD16_A
2
B0
3
BD17_A
B1
4
BD18_A
5
B2
BD19_A
6
B3
7
BD20_A
8
B4
BD21_A
9
B5
10
BD22_A
11
B6
BD23_A
12
B7
BA00_A
13
B8
BA01_A
14
B9
15
BA02_A
16
BA03_A
17
18
BA04_A
19
BA05_A
20
21
22
BWR_A-
23
BRD_A-
2425
R30 3.3K
R31 3.3K
R32 3.3K
WRRDPRDY
D7
D6
D5
D4
D3
D2
D1
D0
A0
+5V
+5V
+5V
+5V
+5V
+3p3V
C63
GND
.1UF
U14A
1
(SO8)
2
DS75451M
WDO
WDO
C67
.1UF
C66
.1UF
C71
.1UF
C70
.1UF
GND
6
7
(SOCKET)
U14B
(SO8)
DS75451M
(SOCKET)
BX/Y_A
RP12A
PWM~A~T1
PWM~A~B1
PWM~A~T2
PWM~A~B2
PWM~A~T3
PWM~A~B3
PWM~A~T4
PWM~A~B4
HOME2+
PLIM2+
MLIM2+
USER2+
PUL_2+
DIR_2+
EQU_2+
HOME4+
PLIM4+
MLIM4+
USER4+
PUL_4+
DIR_4+
EQU_4+
+5V
CHA2+
CHA2CHB2+
CHB2CHC2+
CHC2CHA4+
CHA4CHB4+
CHB4CHC4+
CHC4DAC2+
DAC2AENA2FALT2DAC4+
DAC4AENA4FALT4ADCIN_2
-12V
1 2
100KSIP8I
RP12B
3 4
100KSIP8I
RP12C
5 6
100KSIP8I
RP12D
7 8
100KSIP8I
RP18A
1 2
100KSIP8I
RP18B
3 4
100KSIP8I
RP18C
5 6
100KSIP8I
RP18D
7 8
100KSIP8I
GND
GND
GND
411
LF347M
3
+
U15A
2
-
(SO14)
411
LF347M
3
+
U16A
2
-
(SO14)
411
LF347M
3
+
U17A
2
-
(SO14)
411
LF347M
3
+
U18A
2
-
(SO14)
C72
.1UF
GND
C74
.1UF
GND
BD01_A
BD01_A
BD03_A
BD03_A
BD05_A
BD05_A
BD07_A
BD07_A
BD09_A
BD09_A
BD11_A
BD11_A
BD13_A
BD13_A
BD15_A
BD15_A
BD17_A
BD19_A
BD21_A
BD23_A
BA01_A
BA01_A
BA03_A
BA03_A
BA05_A
BA05_A
BA07_A
BA07_A
BA09_A
BA09_A
BA11_A
BA11_A
BA13_A
BA13_A
+12V
RP14A
1
1 2
47KSIP8I
RP14B
47KSIP8I
-12V
+12V
RP15A
1 2
1
47KSIP8I
RP15B
47KSIP8I
-12V
+12V
RP20A
1
1 2
47KSIP8I
RP20B
47KSIP8I
-12V
+12V
RP21A
1 2
1
47KSIP8I
RP21B
47KSIP8I
-12V
+5V
U21
1
OE1
T/R1
2
B0
A0
3
B1
A1
4
GND
GND
5
B2
A2
6
B3
A3
7
VCC
VCC
8
B4
A4
9
B5
A5
10
GND
GND
11
B6
A6
12
B7
A7
13
B8
A8
14
A9
B9
15
GND
GND
16
A10
B10
17
A11
B11
18
VCC
VCC
19
A12
B12
20
A13
B13
21
GND
GND
22
A14
B14
23
A15
B15
24 25
OE2
T/R2
74ACA6245
(dgg)
+5V
U22
48
OE1
T/R1
47
A0
B0
46
B1
A1
45
GND
GND
44
B2
A2
43
B3
A3
42
VCC
VCC
41
B4
A4
40
B5
A5
39
GND
GND
38
B6
A6
37
B7
A7
36
B8
A8
35
A9
B9
34
GND
GND
33
A10
B10
32
A11
B11
31
VCC
VCC
30
A12
B12
29
A13
B13
28
GND
GND
27
A14
B14
26
A15
B15
OE2
T/R2
74ACA6245
(dgg)
THIS DOCUMENT IS THE CONFIDENTIAL PROPERTY OF DELTA TAU
THIS DOCUMENT IS THE CONFIDENTIAL PROPERTY OF DELTA TAU
DATA SYSTEMS INC. AND IS LOANED SUBJECT TO RETURN UPON
DATA SYSTEMS INC. AND IS LOANED SUBJECT TO RETURN UPON
DEMAND. TITLE TO THIS DOCUMENT IS NEVER SOLD OR
DEMAND. TITLE TO THIS DOCUMENT IS NEVER SOLD OR
TRANSFERRED FOR ANY REASON. THIS DOCUMENT IS TO BE USED
TRANSFERRED FOR ANY REASON. THIS DOCUMENT IS TO BE USED
ONLY PURSUANT TO WRITTEN LICENSE OR WRITTEN INSTRUCTIONS
ONLY PURSUANT TO WRITTEN LICENSE OR WRITTEN INSTRUCTIONS
OF DELTA TAU DATA SYSTEMS INC. ALL RIGHTS TO DESIGNS AND
OF DELTA TAU DATA SYSTEMS INC. ALL RIGHTS TO DESIGNS AND
INVENTIONS ARE RESERVED BY DELTA TAU DATA SYSTEMS INC.
INVENTIONS ARE RESERVED BY DELTA TAU DATA SYSTEMS INC.
POSSESSION OF THIS DOCUMENT INDICATES ACCEPTANCE OF THE
POSSESSION OF THIS DOCUMENT INDICATES ACCEPTANCE OF THE
ABOVE AGREEMENT.
ABOVE AGREEMENT.
+5V
GND
BX/Y_A
CS1-
CS00-
GND
+12V
WDO-
+5V
C126
+
C127
10UF/10V
.1UF
GND
670-0SH2.sch
(JEXPA)
J5
12
BD00_A
BD02_A
BD04_A
BD06_A
BD08_A BD09_A
BD10_A
BD12_A
BD14_A
BD16_A
BD18_A
BD20_A
BD22_A
BA00_A
BA02_A
BA04_A
BX/Y_A
CS1CS00BWR_ASERVO
19.6608Mhz
SSM-125-L-DV-LC
AENA_1
AENA_2
WDO-
AENA_3
AENA_4
Title
Size Document Number Rev
D
Date: Sheet
34
56
78
910
11 12
13 14
15 16
17 18
19 20
21 22
23 24
25 26
27 28
29 30
31 32
33 34
35 36
37 38
39 40
41 42
43 44
45 46
47 48
49 50
HEADER 25X2(FEM)
CLS125LDDV
+5V
.1UF
U26A
1
(DIP8)
(SOCKET)
2
DS75452N
U26B
6
(DIP8)
7
(SOCKET)
DS75452N
U27A
1
(DIP8)
(SOCKET)
2
DS75452N
U27B
6
(DIP8)
(SOCKET)
7
DS75452N
+5V
+5V
RP45
1 2
3.3KSIP10C
RP46
1 2
3.3KSIP10C
Delta Tau Data Systems, Inc.
PMAC-PC104, MACHINE I/O & "JEXP" SECTION
603670-320
C79
.1UF
BD01_A
BD03_A
BD05_A
BD07_A
BD11_A
BD13_A
BD15_A
BD17_A
BD19_A
BD21_A
BD23_A
BA01_A
BA03_A
BA05_A
VMECSCS4BWDO_ABRD_APHASE
BRST_A-
C80
3
4
5
6
7
8
910
3
4
5
6
7
8
910
FLAG_T1
FLAG_U1
FLAG_V1
FLAG_W1
FLAG_T2
FLAG_U2
FLAG_V2
FLAG_W2
FLAG_T3
FLAG_U3
FLAG_V3
FLAG_W3
FLAG_T4
FLAG_U4
FLAG_V4
FLAG_W4
+5V
GND
VMECSCS4BWDO_A-
BRST_A-
GND
-12V
GND
3
AENA1-
5
AENA2-
3
AENA3-
AENA4-
5
GND
22Monday, July 02, 2001
of
B
20.0K/1%
20.0K/1%
20.0K/1%
20.0K/1%
R20
LM6132AIM
R22
R24
LM6132AIM
R26
A1
A2
A3
A4
A5
A6
A7
A8
G1
G2
U23
3 2
OUT-A IN-A
4
EN-A,C
5
OUT-C
13
OUT-B
12
EN-B,D
11
OUT-D
ST34C86CF16
(SO16)
U24
3 2
OUT-A IN-A
4
EN-A,C
5
OUT-C
13
OUT-B
12
EN-B,D
11
OUT-D
ST34C86CF16
(SO16)
U25
3 2
OUT-A IN-A
4
EN-A,C
5
OUT-C
13
OUT-B
12
EN-B,D
11
OUT-D
ST34C86CF16
(SO16)
5
+
U19B
6
-
C124
.1UF
3
+
U19A
2
-
FAULT~1
2
FAULT~2
3
FAULT~3
4
FAULT~4
5
6
7
8
9
1
19
SIP SOCKET
GND
C116
220PF
R10
RP21D
RP24
RP14D
RP15D
RP20D
78
78
78
78
Flag_3_4_V
SIP SOCKET
1
2.2KSIP6C
1
2.2KSIP6C
GND
200.0K
1%
-
9
U15C
+
10
RP16A
1 2
47KSIP8I
R11
24K
C117
220PF
R12
200.0K
1%
-
9
U16C
+
10
RP16C
5 6
47KSIP8I
R13
24K
C118
220PF
R14
200.0K
1%
-
9
U17C
+
10
RP22A
1 2
47KSIP8I
R15
24K
C119
220PF
R16
200.0K
1%
-
9
U18C
+
10
RP22C
5 6
47KSIP8I
R17
24K
12
3456789 10
RP30
RP31
LF347M
(SO14)
LF347M
(SO14)
LF347M
(SO14)
LF347M
(SO14)
RP27
6
5
4
3
2
6
5
4
3
2
+5V
8
8
8
8
3.3KSIP10C
12
3456789 10
RP16B
3 4
47KSIP8I
-
13
U15D
+
12
RP16D
7 8
47KSIP8I
-
13
U16D
+
12
RP22B
3 4
47KSIP8I
-
13
U17D
+
12
RP22D
7 8
47KSIP8I
-
13
U18D
+
12
HOME1+
PLIM1+
MLIM1+
USER1+
HOME2+
PLIM2+
MLIM2+
USER2+
HOME3+
PLIM3+
MLIM3+
USER3+
HOME4+
PLIM4+
MLIM4+
USER4+
LF347M
(SO14)
LF347M
(SO14)
LF347M
(SO14)
LF347M
(SO14)
14
14
14
14
RP32
2.2KSIP10C
CHA1CHB1CHC1-
CHA2CHB2CHC2-
RP17A
1 2
220SIP8I
RP17B
3 4
220SIP8I
RP17C
5 6
220SIP8I
RP17D
7 8
220SIP8I
RP23A
1 2
220SIP8I
RP23B
3 4
220SIP8I
RP23C
5 6
220SIP8I
RP23D
7 8
220SIP8I
DAC1-
DAC1+
DAC2-
DAC2+
DAC3-
DAC3+
DAC4-
DAC4+
FAULT_1
FAULT_2
FAULT_3
FAULT_4
EQU_1+
EQU_2+
EQU_3+
EQU_4+
12
3456789 10
.1UF
RP33
1KSIP10C
C108
34
47PF
C109
470PF
C110
34
47PF
C111
470PF
C112
34
47PF
C113
470PF
C114
34
47PF
C115
470PF
C73
.1UF
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
GND
C75
.1UF
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
2425
GND
6
5
6
5
6
5
6
5
1 2
3 4
5 6
7 8
1 2
3 4
5 6
7 8
1 2
3 4
5 6
7 8
1 2
3 4
5 6
7 8
PWM~A~T1
PWM~A~B1
PWM~A~T2
PWM~A~B2
PWM~A~T3
PWM~A~B3
PWM~A~T4
PWM~A~B4
DIR_1+
PUL_1+
DIR_2+
PUL_2+
DIR_3+
PUL_3+
DIR_4+
PUL_4+
LF347M
-
U15B
+
(SO14)
LF347M
-
U16B
+
(SO14)
LF347M
-
U17B
+
(SO14)
LF347M
-
U18B
+
(SO14)
3.3KSIP10C
RP25
10KSIP8I
RP26
10KSIP8I
RP28
10KSIP8I
RP29
10KSIP8I
7
7
7
7
Flag_1_2_V
RP14C
5 6
47KSIP8I
47KSIP8I
RP15C
5 6
47KSIP8I
47KSIP8I
RP20C
5 6
47KSIP8I
47KSIP8I
RP21C
5 6
47KSIP8I
47KSIP8I
12
3456789 10
C85
CHA1+
CHB1+
CHC1+
CHA2+
CHB2+
CHC2+
ADCIN_2
ADCIN_1
GND
ENC_A1
ENC_A2
ENC_A3
ENC_A4
ENC_B1
ENC_B2
ENC_B3
ENC_B4
ENC_C1
ENC_C2
ENC_C3
ENC_C4
+5V
U32
18
Y1
17
Y2
16
Y3
15
Y4
14
Y5
13
Y6
12
Y7
11
Y8
20
VCC
10
GND
74AC541
(SOL20)
(SO8)
+5V
84
(SO8)
1
2.2KSIP6C
1
2.2KSIP6C
VCC
IN-A
IN-C
IN-C
IN-B
IN-B
IN-D
IN-D
GND
VCC
IN-A
IN-C
IN-C
IN-B
IN-B
IN-D
IN-D
GND
VCC
IN-A
IN-C
IN-C
IN-B
IN-B
IN-D
IN-D
GND
GND
C120 100PF
R21
4.99K/1%
7
R23
4.99K/1%
C121 100PF
C122 100PF
R25
4.99K/1%
1
R27
4.99K/1%
C123 100PF
1 2
3 4
5 6
7 8
JUMP E16 TO ENABLE ATD
+5V
RP36
6
5
4
3
2
RP37
6
5
4
3
2
16
1
7
6
14
15
9
10
8
C76
.1UF
16
1
7
6
14
15
9
10
8
C77
.1UF
16
1
7
6
14
15
9
10
8
C78
.1UF
4.7KSIP10C
+5V
C125
.1UF
RP42
10KSIP8I
12
3456789 10
FLT_FLG_V
E16
CHA1+
CHA1-
CHA2-
CHA2+
CHA3+
CHA3-
CHA4-
CHA4+
CHB1+
CHB1-
CHB2-
CHB2+
CHB3+
CHB3-
CHB4-
CHB4+
CHC1+
CHC1-
CHC2-
CHC2+
CHC3+
CHC3-
CHC4-
CHC4+
U20
1
DGND
2
CH_B1+
3
CH_B1-
4
CH_B0+
5
CH_B0-
6
CH_A1+
7
CH_A1-
8
CH_A0+
9
CH_A0-
10
REF_IN
11
REF_OUT
12 13
AGND +VA
ADS7861E
(SSOP24)
RP43
RP38
2.2KSIP10C
CHA3CHB3CHC3-
CHA4CHB4CHC4-
+5V
12
12
3456789 10
21
guard band
+VD
SDO_A
SDO_B
BUSY
CLOCK
CS-
RD
CONVST
A0
M0
M1
RP44
3456789 10
12
3456789 10
24
23
22
21
20
19
18
17
16
15
14
3.3KSIP10C
FALT1FALT2FALT3FALT4EQU_1
EQU_2
EQU_3
EQU_4
SERVO
PHASE
SCLK
ADC_CS-
RP39
1KSIP10C
CHA3+
CHB3+
CHC3+
CHA4+
CHB4+
CHC4+
ADC_A1
ADC_A2
ADC_CLK
ADC_CS-
ADC_STR
 Loading...
Loading...