

Page 1

Artisan Technology Group is your source for quality
new and certied-used/pre-owned equipment
• FAST SHIPPING AND
DELIVERY
• TENS OF THOUSANDS OF
IN-STOCK ITEMS
• EQUIPMENT DEMOS
• HUNDREDS OF
MANUFACTURERS
SUPPORTED
• LEASING/MONTHLY
RENTALS
• ITAR CERTIFIED
SECURE ASSET SOLUTIONS
SERVICE CENTER REPAIRS
Experienced engineers and technicians on staff
at our full-service, in-house repair center
Instra
Remotely inspect equipment before purchasing with
our interactive website at www.instraview.com
Contact us: (888) 88-SOURCE | sales@artisantg.com | www.artisantg.com
SM
REMOTE INSPECTION
View
WE BUY USED EQUIPMENT
Sell your excess, underutilized, and idle used equipment
We also offer credit for buy-backs and trade-ins
www.artisantg.com/WeBuyEquipment
LOOKING FOR MORE INFORMATION?
Visit us on the web at www.artisantg.com for more
information on price quotations, drivers, technical
specications, manuals, and documentation
Page 2
^1 HARDWARE REFERENCE MANUAL
^2 PMAC2-PC & PMAC2-PC LITE
^3 Programmable Multi-Axis Controllers
^4 3xx-602598-xHxx
^5 January 28, 2003
Single Source Machine Control Power // Flexibility // Ease of Use
21314 Lassen Street Chatsworth, CA 91311 // Tel. (818) 998-2095 Fax. (818) 998-7807 // www.deltatau.com
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 3
Copyright Information
© 2003 Delta Tau Data Systems, Inc. All rights reserved.
This document is furnished for the customers of Delta Tau Data Systems, Inc. Other uses are
unauthorized without written permission of Delta Tau Data Systems, Inc. Information contained
in this manual may be updated from time-to-time due to product improvements, etc., and may not
conform in every respect to former issues.
To report errors or inconsistencies, call or email:
Delta Tau Data Systems, Inc. Technical Support
Phone: (818) 717-5656
Fax: (818) 998-7807
Email: support@deltatau.com
Website: http://www.deltatau.com
Operating Conditions
All Delta Tau Data Systems, Inc. motion controller products, accessories, and amplifiers contain
static sensitive components that can be damaged by incorrect handling. When installing or
handling Delta Tau Data Systems, Inc. products, avoid contact with highly insulated materials.
Only qualified personnel should be allowed to handle this equipment.
In the case of industrial applications, we expect our products to be protected from hazardous or
conductive materials and/or environments that could cause harm to the controller by damaging
components or causing electrical shorts. When our products are used in an industrial
environment, install them into an industrial electrical cabinet or industrial PC to protect them
from excessive or corrosive moisture, abnormal ambient temperatures, and conductive materials.
If Delta Tau Data Systems, Inc. products are exposed to hazardous or conductive materials and/or
environments, we cannot guarantee their operation.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 4

PMAC2-PC & Lite Hardware Reference
i
Contents
INTRODUCTION...................................................................................................................................................1
Overview...................................................................................................................................................................1
Features .....................................................................................................................................................................1
PMAC2 ASICs..........................................................................................................................................................1
DSPGATE1 Servo ASIC..............................................................................................................................1
DSPGATE2 I/O ASIC..................................................................................................................................2
PMAC2-PC Configuration..........................................................................................................................2
PMAC2-Lite Configuration.........................................................................................................................2
PMAC2-PC Board Configuration...............................................................................................................2
PMAC2-PC Setup........................................................................................................................................3
PMAC2 CPUs ...........................................................................................................................................................4
P/N 602398..................................................................................................................................................4
P/N 602405..................................................................................................................................................4
P/N 602705..................................................................................................................................................4
Related Technical Documentation.............................................................................................................................5
CONNECTORS AND JUMPERS..........................................................................................................................7
PMAC2-PC AND PMAC2-Lite Connector Summary..............................................................................................7
J1 (JANA) Analog Input Port Connector....................................................................................................8
J2 (JTHW) Multiplexer Port Connector......................................................................................................9
J3 (JI/O) General I/O Connector..............................................................................................................10
J4 (JMACRO) 26-Pin Connector..............................................................................................................11
J5 (JRS232) Serial Port Connector...........................................................................................................11
JRS422 (26-Pin Connector) ......................................................................................................................12
JRS422 (DB-15 Connector).......................................................................................................................12
J6 (JDISP) Display Connector..................................................................................................................13
J7 (JHW) Handwheel Encoder Connector................................................................................................13
J8 (JEQU) Position Compare Output Connector......................................................................................14
J9 (JMACH1) Connector Description.......................................................................................................14
J10 (JMACH2) Connector Description.....................................................................................................17
J11 (JMACH3) Connector Description.....................................................................................................20
J12 (JMACH4) Connector Description.....................................................................................................23
TB1 (2/4-Pin Terminal Block)...................................................................................................................26
TB2 (3-Pin Terminal Block)......................................................................................................................26
PMAC2-PC and PMAC2-Lite Jumper Summary....................................................................................................27
PMAC2-VME CPU Connector Summary...............................................................................................................29
J1...............................................................................................................................................................29
J2 (JEXP)..................................................................................................................................................29
J3...............................................................................................................................................................29
J4 (JEXP)..................................................................................................................................................29
J5 (JTAG/OnCE).......................................................................................................................................29
J6...............................................................................................................................................................29
J7...............................................................................................................................................................29
PMAC2-PC CPU Piggyback Board Jumpers ...........................................................................................31
Table of Contents
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 5

PMAC2-PC & Lite Hardware Reference
ii Table of Contents
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 6
PMAC2-PC & Lite Hardware Reference
INTRODUCTION
Overview
The PMAC2-PC and PMAC2-Lite provide state-of-the-art motion control for a wide variety of
applications, including machine tools, robotics, semiconductor manufacturing, packaging equipment, and
general-purpose automation. They utilize the latest developments in electronics, software, and modern
control theory to bring motion control capabilities to a whole new level.
The PMAC2-PC and PMAC2-Lite are designed as ISAbus expansion cards, but are capable of standalone
operation. The configurations are:
• PMAC2-PC: ISAbus-compatible, 1-1/2 slots, 4 or 8 machine interface channels.
• PMAC2-Lite: ISAbus-compatible, 1 slot, 4 machine interface channels.
Features
PMAC2-PC and PMAC2-Lite support a wide variety of servo and stepper interfaces:
• Analog +/-10V velocity command (requires ACC-8E or equivalent)
• Analog +/-10V torque command (requires ACC-8E or equivalent)
• Sinusoidal analog +/-10V phase current commands (requires ACC-8E or equivalent)
• Direct digital pulse-width modulated (PWM) phase voltage commands (requires ACC-8F, -8K or
equivalent)
• Pulse-and-direction commands (requires ACC-8S or equivalent)
• MACRO
TM
ring network commands (requires ACC-42)
PMAC2-PC and PMAC2-Lite also provide unparalleled speeds and resolutions:
• 40 MHz encoder count rate
• 18-bit analog outputs
• 18 microsecond per axis servo update time (60 MHz)
• 120 MHz PWM clock frequency (10-bit resolution at 120 kHz, 12-bit and 30 kHz, 14-bit at 7.5 kHz)
• 120 MHz MLDT (e.g. Temposonics
TM
) timer frequency (0.024mm, 0.9mil resolution)
• 10 MHz maximum pulse-and-direction output frequency
• 10 MHz maximum position-compare output update rate
• 125 Mbit/sec optical ring network data rate
PMAC2 ASICs
Delta Tau has designed its own custom application-specific integrated circuits (ASICs) for the PMAC2PC and PMAC2-Lite using the latest sub-micron gate-array technology. Each ASIC contains 45,000
active logic gates. These ASICs contain all of the digital interface circuitry to tie the DSP to the machine;
the rest of the circuitry on the board is buffer circuitry.
DSPGATE1 Servo ASIC
The “DSPGATE1” ASIC contains the digital servo interface circuitry for 4 channels, usually sufficient
for four axes of control. Each channel contains:
Three command output sets:
1. Top-and-bottom PWM or serial DAC data with clock
2. Top-and-bottom PWM or serial DAC data with strobe
3. Top-and-bottom PWM or PFM pulse-and-direction
• Encoder quadrature or pulse-and-direction decode and count
Introduction
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
1
Page 7

PMAC2-PC & Lite Hardware Reference
• Index channel input internally gated to 1 quadrature state wide
• 4 flags with capability to perform hardware latching of encoder position
• HOME, PLIM, MLIM, USER
• Double-sided position-compare output with auto-increment capability
• Amplifier enable output
• Amplifier fault input
• 4 supplementary flag inputs (T, U, V, W)
• 2 inputs from serial analog-to-digital converters (ADCs)
• ADC clock and strobe signal outputs
The DSPGATE1 ASIC also generates several clock frequencies necessary for hardware and software
operation, under the user’s software control:
• PWM output frequency
• DAC clock frequency
Phase interrupt clock frequency and Servo interrupt clock frequency are generated from the first
DSPGATE1 only.
• ADC clock frequency
• Encoder sample clock frequency
• Pulse-frequency modulation (PFM) clock frequency
• Phase interrupt clock frequency
• Servo interrupt clock frequency
DSPGATE2 I/O ASIC
There is also a “DSPGATE2” ASIC on PMAC2-PC and PMAC2-Lite, which is used for interface to other
I/O. The DSPGATE2 ASIC has 3 parts:
• General-purpose digital I/O: 56 I/O points for JIO, JTHW, and JDISP ports
• Servo interface circuitry for 2 supplemental channels with clock generation
• MACRO ring interface circuitry
The general-purpose I/O and the servo interface circuitry on the DSPGATE2 generally share pins, except
for two 2-channel encoder inputs and 2 PWM/PFM output sub-channels. The shared pins are almost
always used for general-purpose I/O instead of extra servo interface circuitry, but this is up to the
individual user.
PMAC2-PC Configuration
A PMAC2-PC can have 1 or 2 DSPGATE1 ASICs; the first one is standard, and the second one comes if
Option 1 is ordered. Each also has a DSPGATE2 ASIC supporting the non-servo I/O.
PMAC2-Lite Configuration
A PMAC2-Lite board (PC bus only) has a single DSPGATE1 ASIC on-board, supporting up to 4 axes of
servo interfaces. It also has a DSPGATE2 ASIC supporting the non-servo I/O. It cannot be expanded
on-board to add a second DSPGATE1 ASIC to support a full 8 axes.
PMAC2-PC Board Configuration
Jumpers on the PMAC2-PC determine the frequency at which the DSP on the PV CPU board will
operate. The 56002 DSP has a “phased-locked loop” (PLL) that allows it to multiply the crystal
frequency by a programmable integer value, permitting very high CPU frequencies with a moderate
crystal frequency. The crystal frequency on the PV CPU board is always 19.6608 MHz, commonly called
“20 MHz”.
2 Introduction
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 8
PMAC2-PC & Lite Hardware Reference
The component rating of the DSP IC specifies the highest frequency at which it safely can run, but it is
the multiplication factor typically set by jumpers that specifies the frequency at which it actually runs.
Usually this is a frequency at or near the maximum for the component.
It is safe to run a DSP at a frequency below the maximum. It may be possible to run a DSP at a frequency
higher than its maximum frequency, particularly at low ambient temperatures, but safe operation cannot
be guaranteed. Unpredictable and possibly dangerous operation may result.
On power-up/reset, the DSP, operating at the crystal frequency of 20 MHz, reads the frequency jumpers
(E2 and E4) and writes into its own PLL multiplier register at X:$FFFD. Bits 0-3 of this word contain a
value one less than the multiplier value (if the frequency is being multiplied by 3, these bits contain a
value of 2).
If you wish to check the value of your multiplier, you can use the on-line command RHX:$FFFD and
look at the last hexadecimal digit. The actual multiplier is one greater than the value in this last digit.
Alternately, you can define an M-variable such as M99->X:$FFFD,0,4 and then read from or write to
these bits with the M-variable.
PMAC2-PC Setup
On PMAC2-PC, jumpers E2 and E4 control the frequency of operation of the DSP according to Table 1-
2.
E2 E4 X:$FFFD; 0-3 True Multiplier DSP Frequency
OFF OFF 1 x2 40 MHz
ON OFF 2 x3 60 MHz
OFF ON 3 x4 80 MHz
On the PMAC2-PC, I54 is read at power-up to set the baud rate clock. Because this clock is derived from
the CPU clock frequency, the proper setting of I54 is dependent on the CPU clock frequency as set by E2
and E4. Table 1-3 shows the settings of I54 for 40, 60, and 80 MHz CPU operation.
I54 Baud Rate for
40 MHz CPU
0 600 DISABLED 1200
1 900* (-0.05%) 900 1800* (-0.1%)
2 1200 1200 2400
3 1800* (-0.1%) 1800 3600* (-0.19%)
4 2400 2400 4800
5 3600* (-0.19%) 3600 7200* (-0.38%)
6 4800 4800 9600
7 7200* (-0.38%) 7200 14,400*(-0.75%)
8 9600 9600 19,200
9 14,400*(-0.75%) 14,400 28,800*(-1.5%)
10 19,200 19,200 38,400
11 28,800*(-1.5%) 28,800 57,600*(-3.0%)
12 38,400 38,400 76,800
13 57,600*(-3.0%) 57,600 115,200*(-6.0%)
14 76,800 76,800 153,600
15 DISABLED 115,200 DISABLED
* Not an exact baud rate
Baud Rate for
60 MHz CPU
Baud Rate for
80 MHz CPU
Introduction
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
3
Page 9

PMAC2-PC & Lite Hardware Reference
PMAC2 CPUs
The PMAC2-PC CPU communicates with the axes through specially designed custom gate array ICs,
referred to as "DSPGATES". Each of these ICs can handle four analog output channels, four encoders as
input, and four analog-derived inputs from accessory boards. One PMAC2-PC can utilize from one to
four of these gate array ICs, so specifying the hardware configuration amounts to counting the numbers
and types of inputs and outputs. Up to 16 PMAC2-PCs may be ganged together with complete
synchronization, for a total of 128 axes. A PMAC2-PC may have one of three available CPU
configurations. These configurations are described in the following paragraphs.
Note:
The CPUs are only installed on the PMAC2-PC.
P/N 602398
This is the original standard CPU board for the PMAC2-PC. It has a 20MHz clock and a battery backup
RAM.
P/N 602405
This is a flash memory CPU board with no battery backup. This board provides either a 40MHz or
60MHz clock.
P/N 602705
The PMAC2-PC PV CPU piggyback board provides 80 MHz CPU operation and supplemental batterybacked RAM for the PMAC2-
The PV CPU board gets its name from the PV package style of the Motorola 56002 DSP IC on the board.
The board is also called the Universal CPU because it can support all speeds and configurations of the
CPU section.
The PV CPU has operational differences from earlier CPU configurations to support the new features.
The following paragraphs explain these differences and are only relevant if you have the 602705 CPU
piggyback board on your controller.
Configurations
The PV CPU board is configured at the factory to the customer’s specifications. The JEXP expansion port
is buffered, providing the capability to connect many boards on the expansion port.
The following table shows the configuration of the key components on the PV CPU board for the
PMAC2-PC.
Version Main Memory
Backup
Standard Flash Empty 32-pin RAM Flash ROM Empty
Opt 5B Flash Empty 32-pin RAM Flash ROM Empty
Opt 5C Flash Empty 32-pin RAM Flash ROM Empty
+Opt 16 Flash 28-pin RAM 32-pin RAM Flash ROM Battery
U6, U9, U15
Components
U7, U10, U16
Components
U5
Components
BT1
Component
Firmware
The PV CPU board does not support firmware versions before V1.16 of August 1996 without changes in
programming of the on-board logic (GALs). If the firmware must be changed between a version previous
to V1.16 and a version V1.16 or newer, the on-board logic must be re-programmed.
When loading new firmware into the flash configurations of the PV CPU, E4 on the CPU board must be
ON in addition to having the PMAC2-PC reinitialization jumper E3 ON.
4 Introduction
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 10
PMAC2-PC & Lite Hardware Reference
5
Option 16 Supplemental Memory
If the Option 16 supplemental battery-backed parameter memory is ordered, an extra bank of memory
with battery backup circuitry is provided. This option can only be ordered if the main memory is flash
backed (Option 4A, 5A, 5B, or 5C). This memory is for user parameter storage only. From PMAC
programs it can be accessed with M-variables only (L-variables also in compiled PLCs). The on-line
direct-memory read and write commands can be used from the host computer as well.
With M-variable access, arrays can be created with indirect addressing techniques by pointing a second
M-variable to the definition of a first M-variable that points into this memory area. For example, with the
M-variable definitions:
M0->L:$A000; 1st long word of Opt. 16 RAM; floating point
M10->Y:$BC000,0,16 ; Low 16 bits of M0 def., with pointer address
The following code segment could load a sine table into the first 360 words of the Option 16 RAM:
P1=0
WHILE (P1<360)
M10=$A000+P1 ; Sets address that M0 points to
M0=SIN(P1) ; Puts value in register that M0 points to
P1=P1+1
ENDWHILE
Note:
This technique is not possible with L-variables in compiled PLCs.
Physically, the Option 16 memory is a 16k x 24 bank of battery-backed static RAM. It maps into the
PMAC2-PC at addresses $A000 to $BFFF, on both the X and Y data buses, an 8k x 48 block of address
space. Addresses Y:$BC00 to Y:$BFFF are “double-mapped” with the main flash-backed RAM for the
M-variable definitions, and should not be used for user parameter storage.
Any value written into the Option 16 memory will automatically be retained through a power-down or
reset; no SAVE operation is required. The power draw on the battery is low enough that battery life will
typically be limited only by the quoted 10-year life of the battery.
Related Technical Documentation
Manual Number Manual Title
3A0-602413-363 PMAC2 User’s Manual
3A0-602XXX-363 PMAC User’s Software Reference
Introduction
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 11

PMAC2-PC & Lite Hardware Reference
6 Introduction
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 12
PMAC2-PC & Lite Hardware Reference
7
CONNECTORS AND JUMPERS
PMAC2-PC AND PMAC2-Lite Connector Summary
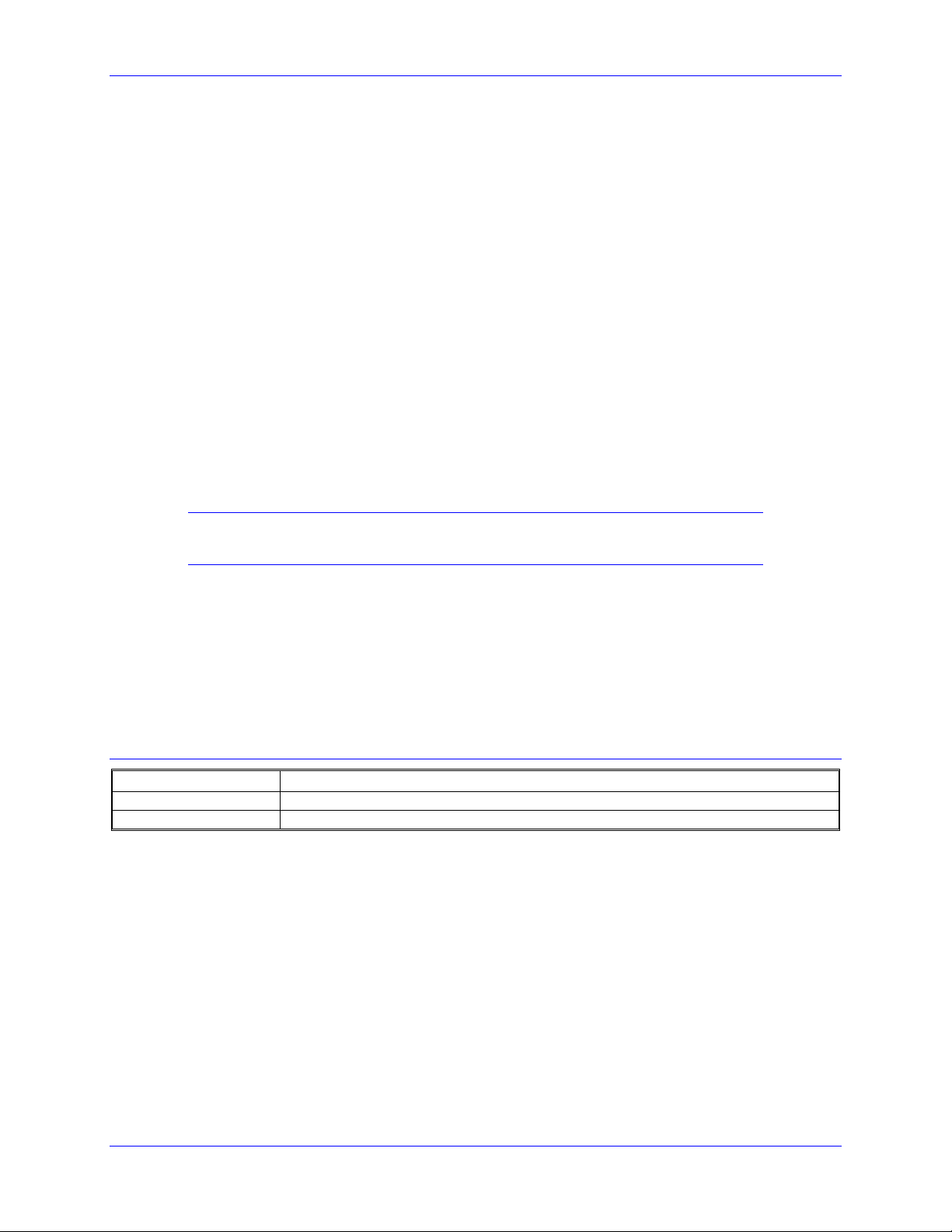
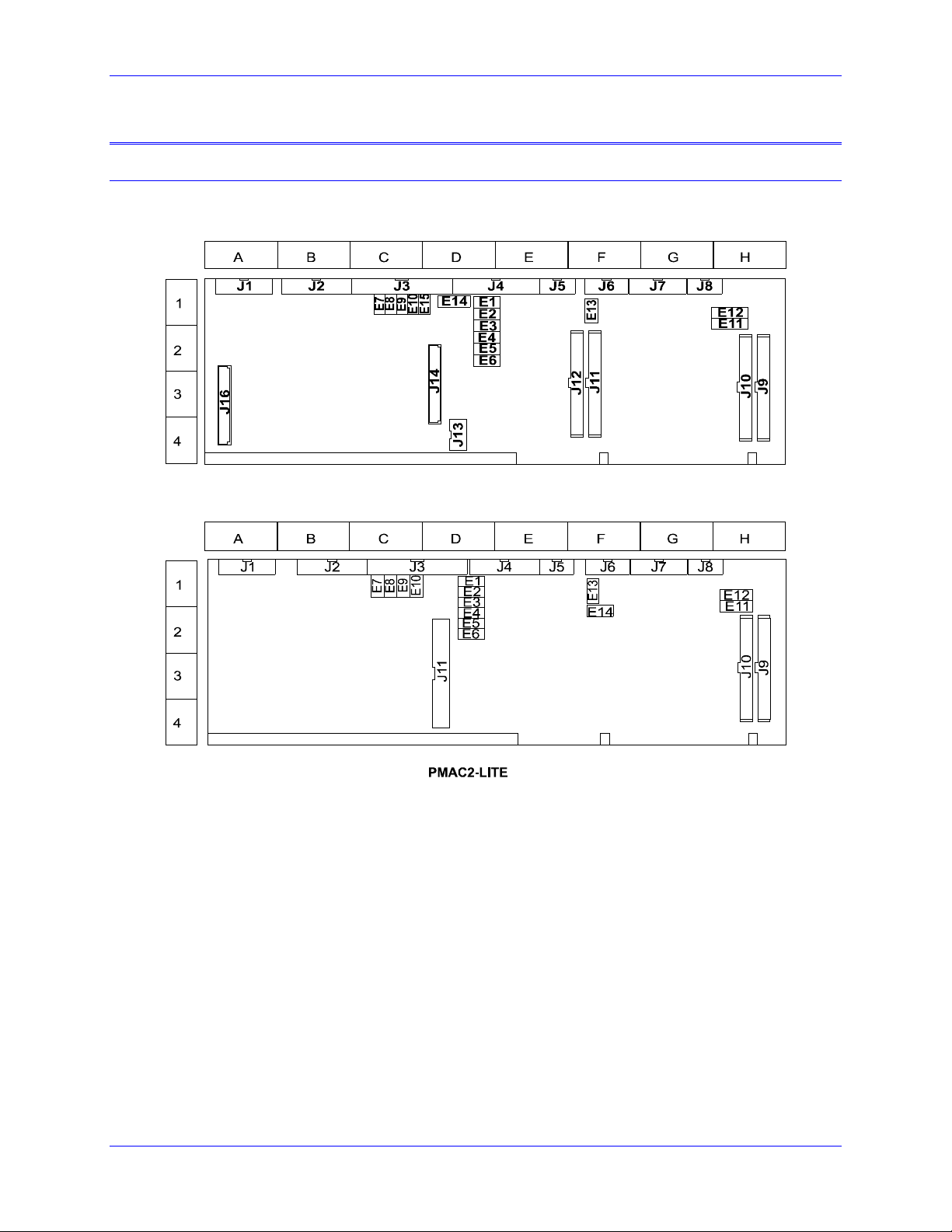
The following paragraphs provide a brief description of each connector on the PMAC2-PC and PMAC2Lite, its use, and individual pinout information (see Figure 2-1).
PMAC2-PC
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 13

PMAC2-PC & Lite Hardware Reference
J1 (JANA) Analog Input Port Connector
19
20
Front View
1
2
Pin # Symbol Function Description Notes
1 ANAI00 Input Analog Input 0 0-5V or +/-2.5V range
2 ANAI01 Input Analog Input 1 0-5V or +/-2.5V range
3 ANAI02 Input Analog Input 2 0-5V or +/-2.5V range
4 ANAI03 Input Analog Input 3 0-5V or +/-2.5V range
5 ANAI04 Input Analog Input 4 0-5V or +/-2.5V range
6 ANAI05 Input Analog Input 5 0-5V or +/-2.5V range
7 ANAI06 Input Analog Input 6 0-5V or +/-2.5V range
8 ANAI07 Input Analog Input 7 0-5V or +/-2.5V range
9 ANAI08 Input Analog Input 8 0-5V or +/-2.5V range
10 ANAI09 Input Analog Input 9 0-5V or +/-2.5V range
11 ANAI10 Input Analog Input 10 0-5V or +/-2.5V range
12 ANAI11 Input Analog Input 11 0-5V or +/-2.5V range
13 ANAI12 Input Analog Input 12 0-5V or +/-2.5V range
14 ANAI13 Input Analog Input 13 0-5V or +/-2.5V range
15 ANAI14 Input Analog Input 14 0-5V or +/-2.5V range
16 ANAI15 Input Analog Input 15 0-5V or +/-2.5V range
17 GND Common PMAC Common Not isolated from digital
18 +12V Output Positive Supply Voltag e To power external circuitry
19 GND Common PMAC Common Not isolated from digital
20 -12V Output Negative Supply Voltage To power external circuitry
The JANA connector provides the inputs for the 8 or 16 optional analog inputs on the PMAC2-PC and PMAC2Lite.
Note: This connector is only present if Option 12 is ordered.
8 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 14

PMAC2-PC & Lite Hardware Reference
J2 (JTHW) Multiplexer Port Connector
25
26
Front View
1
2
Pin # Symbol Function Description Notes
1 GND COMMON PMAC Common
2 GND COMMON PMAC Common
3 DAT0 INPUT Data-0 Input Data input from mux port
accessories
4 SEL0 OUTPUT Select-0 Output Address/data output for mux
port accessories
5 DAT1 INPUT Data -1 Input Data input from mux port
accessories
6 SEL1 OUTPUT Select-1 Output Address/data output for mux
port accessories
7 DAT2 INPUT Data -2 Input Data input from mux port
accessories
8 SEL2 OUTPUT Select-2 Output Address/data output for mux
port accessories
9 DAT3 INPUT Data-3 Input Data input from mux port
accessories
10 SEL3 OUTPUT Select-3 Output Address/data output for mux
port accessories
11 DAT4 INPUT Data-4 Input Data input from mux port
accessories
12 SEL4 OUTPUT Select-4 Output Address/data output for mux
port accessories
13 DAT5 INPUT Data-5 Input Data input from mux port
accessories
14 SEL5 OUTPUT Select-5 Output Address/data output for mux
port accessories
15 DAT6 INPUT Data-6 Input Data input from mux port
accessories
16 SEL6 OUTPUT Select-6 Output Address/data output for mux
port accessories
17 DAT7 INPUT Data-7 Input Data input from mux port
accessories
18 SEL7 OUTPUT Select-7 Output Address/data output for mux
port accessories
19 N.C. N.C. No Connection
20 GND COMMON PMAC Common
21 BRLD/ OUTPUT Buffer Request Low is "buffer req."
22 GND COMMON PMAC Common
23 IPLD/ OUTPUT In Position Low is "in position"
24 GND COMMON PMAC Common
25 +5V OUTPUT +5Vdc Supply Power supply out
26 INIT/ INPUT PMAC Reset Low is "reset"
The JTHW connector provides eight inputs and eight outputs at TTL levels that are dedicated to reading BCD
thumbwheel switches. Two thumbwheels may be read by direct connection to J3. More thumbwheels, up to 512
switches, may be read using Accessory 18 (ACC-18, Thumbwheel Multiplexer). J3 inputs and outputs may be
used as general purpose multiplexed TTL I/O if thumbwheels are not used.
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
9
Page 15

PMAC2-PC & Lite Hardware Reference
J3 (JI/O) General I/O Connector
39
40
Front View
Pin # Symbol Function Description Notes
1 I/O00 IN/OUT Digital I/O 0 Software direction ctrl.
2 I/O01 IN/OUT Digital I/O 1 Software direction ctrl.
3 I/O02 IN/OUT Digital I/O 2 Software direction ctrl.
4 I/O03 IN/OUT Digital I/O 3 Software direction ctrl.
5 I/O04 IN/OUT Digital I/O 4 Software direction ctrl.
6 I/O05 IN/OUT Digital I/O 5 Software direction ctrl.
7 I/O06 IN/OUT Digital I/O 6 Software direction ctrl.
8 I/O07 IN/OUT Digital I/O 7 Software direction ctrl.
9 I/O08 IN/OUT Digital I/O 8 Software direction ctrl.
10 I/O09 IN/OUT Digital I/O 9 Software direction ctrl.
11 I/O10 IN/OUT Digital I/O 10 Software direction ctrl.
12 I/O11 IN/OUT Digital I/O 11 Software direction ctrl.
13 I/O12 IN/OUT Digital I/O 12 Software direction ctrl.
14 I/O13 IN/OUT Digital I/O 13 Software direction ctrl.
15 I/O14 IN/OUT Digital I/O 14 Software direction ctrl.
16 I/O15 IN/OUT Digital I/O 15 Software direction ctrl.
17 I/O16 IN/OUT Digital I/O 16 Software direction ctrl.
18 I/O17 IN/OUT Digital I/O 17 Software direction ctrl.
19 I/O18 IN/OUT Digital I/O 18 Software direction ctrl.
20 I/O19 IN/OUT Digital I/O 19 Software direction ctrl.
21 I/O20 IN/OUT Digital I/O 20 Software direction ctrl.
22 I/O21 IN/OUT Digital I/O 21 Software direction ctrl.
23 I/O22 IN/OUT Digital I/O 22 Software direction ctrl.
24 I/O23 IN/OUT Digital I/O 23 Software direction ctrl.
25 I/O24 IN/OUT Digital I/O 24 Software direction ctrl.
26 I/O25 IN/OUT Digital I/O 25 Software direction ctrl.
27 I/O26 IN/OUT Digital I/O 26 Software direction ctrl.
28 I/O27 IN/OUT Digital I/O 27 Software direction ctrl.
29 I/O28 IN/OUT Digital I/O 28 Software direction ctrl.
30 I/O29 IN/OUT Digital I/O 29 Software direction ctrl.
31 I/O30 IN/OUT Digital I/O 30 Software direction ctrl.
32 I/O31 IN/OUT Digital I/O 31 Software direction ctrl.
33 GND COMMON Reference Voltage
34 GND COMMON Reference Voltage
35 PHASE/ OUTPUT Phase Clock For latching data
36 SERVO/ OUTPUT Servo Clock For latching data
37 GND COMMON Reference Voltage
38 GND COMMON Reference Voltage
39 +5V OUTPUT Supply Voltage To power external circuitry
40 +5V OUTPUT Supply Voltage To power external circuitry
The JI/O connector provides 32 input/output pins at TTL levels. Direction can be controlled in byte-wide groups.
1
2
10 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 16

PMAC2-PC & Lite Hardware Reference
J4 (JMACRO) 26-Pin Connector
25
26
Front View
1
2
Pin # Symbol Function Description Notes
1 DOUT7 OUTPUT Ring Out Bit 7 Macro ring command
2 DOUT6 OUTPUT Ring Out Bit 6 Macro ring transmit
3 DOUT5 OUTPUT Ring Out Bit 5 Macro ring transmit
4 DOUT4 OUTPUT Ring Out Bit 4 Macro ring transmit
5 DOUT3 OUTPUT Ring Out Bit 3 Macro ring transmit
6 DOUT2 OUTPUT Ring Out Bit 2 Macro ring transmit
7 DOUT1 OUTPUT Ring Out Bit 1 Macro ring transmit
8 DOUT0 OUTPUT Ring Out Bit 0 Macro ring transmit
9 CMD_IN INPUT
10 DIN7 INPUT Ring In Bit 7 Macro rin g rec e i ve
11 DIN6 INPUT Ring In Bit 6 Macro rin g rec e i ve
12 DIN5 INPUT Ring In Bit 5 Macro rin g rec e i ve
13 DIN4 INPUT Ring In Bit 4 Macro rin g rec e i ve
14 DIN3 INPUT Ring In Bit 3 Macro rin g rec e i ve
15 DIN2 INPUT Ring In Bit 2 Macro rin g rec e i ve
16 DIN1 INPUT Ring In Bit 1 Macro rin g rec e i ve
17 DIN0 INPUT Ring In Bit 0 Macro rin g rec e i ve
18 CMD_OUT OUTPUT
19 TCLK OUTPUT Ring Clock 10 MHz
20 GND COMMON Reference Voltage
21 STB_OUT OUTPUT Byte Strobe
22 GND COMMON Reference Voltage
23 DAT_STB INPUT Data Byte Strobe
24 GND COMMON Reference Voltage
25 CMD_STB INPUT CMD Byte Strobe
26 VLTN INPUT Violation Flag Taxi chip receive error
The JMACRO Network Ring Interface Connector provides the interface to the MACRO driver/receiver accessory
board.
J5 (JRS232) Serial Port Connector
9
10
Front View
1
2
Pin # Symbol Function Description Notes
1 PHASE OUTPUT Phasing Clock
2 DTR BIDIRECT Data Term Rdy Tied to DSR
3 TXD/ INPUT Receive Data Host transmit data
4 CTS INPUT Clear To Send Host ready bit
5 RXD/ OUTPUT Send Data Host receive data
6 RTS OUTPUT Req. To Send PMAC ready bit
7 DSR BIDIRECT Data Set Ready Tied to DTR
8 SERVO OUTPUT Servo Clock
9 GND COMMON PMAC Common
10 +5V OUTPUT +5Vdc Supply Power supply out
This connector is present and operational on the standard PMAC2-PC or PMAC2-Lite. If the Option-9L RS-422
interface has been ordered, this connector is non-functional. The serial interface is made through one of the RS422 connectors on the Option-9L piggyback board.
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
11
Page 17

PMAC2-PC & Lite Hardware Reference
JRS422 (26-Pin Connector)
Front View
Pin # Symbol Function Description Notes
1 CHASSI COMMON PMAC Common
2 S+5V OUTPUT +5Vdc Supply Deactivated by "E8"
3 RD- INPUT Receive Data Diff I/O low true
4 RD+ INPUT Receive Data Diff I/O high true
5 SD- OUTPUT Send Data Diff I/O low true
6 SD+ OUTPUT Send Data Diff I/O high true
7 CS+ INPUT Clear To Send Diff I/O high true
8 CS- INPUT Clear To Send Diff I/O low true
9 RS+ OUTPUT Req. To Send Diff I/O high true
10 RS- OUTPUT Req. To Send Diff I/O low true
11 DTR BIDIRECT Data Term Read Tied to "DSR"
12 INIT/ INPUT PMAC Reset Low is "reset"
13 GND COMMON PMAC Common
14 DSR BIDIRECT Data Set Ready Tied to "DTR"
15 SDIO- BIDIRECT Special Data Diff I/O low true
16 SDIO+ BIDIRECT Special Data Diff I/O high true
17 SCIO- BIDIRECT Special Ctrl. Diff I/O low true
18 SCIO+ BIDIRECT Special Ctrl. Diff I/O high true
19 SCK- BIDIRECT Special Clock Diff I/O low true
20 SCK+ BIDIRECT Special Clock Diff I/O high true
21 SERVO- BIDIRECT Servo Clock Diff I/O low true
22 SERVO+ BIDIRECT Servo Clock Diff I/O high true
23 PHASE- BIDIRECT Phase Clock Diff I/O low true
24 PHASE+ BIDIRECT Phase Clock Diff I/O high true
25 GND COMMON PMAC Common
26 +5V OUTPUT +5Vdc Supply Power supply out
The JRS422 connector provides the PMAC with the ability to communicate both in RS422 and RS232. In
addition, this connector is used to daisy chain interconnect multiple PMACs for synchronized operation.
Note: This connector is only present if the Option 9L RS-422 interface has been ordered.
JRS422 (DB-15 Connector)
Pin # Symbol Function Description Notes
1 CHASSI COMMON PMAC Common
2 N.C. NONE No Connect
3 N.C. NONE No Connect
4 N.C. NONE No Connect
5 S+5V OUTPUT +5Vdc Supply Deactivated By "E8"
6 RS- OUTPUT Req. To Send Diff I/O low true
7 GND COMMON PMAC Common
8 CS+ INPUT Clear To Send Diff I/O high true
9 N.C. NONE No Connect
10 RD- INPUT Receive Data Diff I/O low true
11 RD+ INPUT Receive Data Diff I/O high true
12 SD- OUTPUT Send Data Diff I/O low true
13 SD+ OUTPUT Send Data Diff I/O high true
14 RS+ OUTPUT Req. To Send Diff I/O high true
15 CS- INPUT Clear To Send Diff I/O low true
This connector is only present if the Option-9L RS-422 interface has been ordered.
8
15
Front View
1
9
12 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 18

PMAC2-PC & Lite Hardware Reference
J6 (JDISP) Display Connector
13
14
1
2
Pin # Symbol Function Description Notes
1 Vdd OUTPUT +5V Power Power supply out
2 Vss COMMON PMAC Common
3 Rs OUTPUT Read Strobe TTL signal out
4 Vee OUTPUT Contrast Adjust. Vee 0 to +5 Vdc
5 E OUTPUT Display Enable High is enable
6 R/W OUTPUT Read Or Write TTL signal out
7 DB1 OUTPUT Display Data1
8 DB0 OUTPUT Display Data0
9 DB3 OUTPUT Display Data3
10 DB2 OUTPUT Display Data2
11 DB5 OUTPUT Display Data5
12 DB4 OUTPUT Display Data4
13 DB7 OUTPUT Display Data7
14 DB6 OUTPUT Display Data6
The JDISP connector is used to drive the 2 line x 24 character (ACC-12), 2 x 40 (ACC-12A) LCD, or the 2 x 40
vacuum fluorescent (ACC-12C) display unit. The DISPLAY command may be used to send messages and values
to the display.
J7 (JHW) Handwheel Encoder Connector
19
20
Front View
1
2
Pin # Symbol Function Description Notes
1 GND COMMON Reference Voltage
2 +5V OUT PU T Supply Voltage To power ext. Circuitry
3 HWA1+ INPUT HW Positive A Channel Also pulse input
4 HWA1- INPUT HW Negative A Channel Also pulse input
5 HWB1+ INPUT HW Positive B Channel Also direction input
6 HWB1- INPUT HW Negative B Channel Also direction input
7 HWA2+ INPUT HW Positive A Channel Also pulse input
8 HWA2- INPUT HW Negative A Channel Also pulse input
9 HWB2+ INPUT HW Positive B Channel Also direction input
10 HWB2- INPUT HW Negative B Channel Also direction input
11 PUL1+ OUTPUT PFM Positive Pulse Out Also PWM output
12 PUL1- OUTPUT PFM Negative Pulse Out Also PWM output
13 DIR1+ OUTPUT PFM Positive Direction Also PWM output
14 DIR1- OUTPUT PFM Negative Direction Also PWM output
15 PUL2+ OUTPUT PFM Positive Pulse Out Also PWM output
16 PUL2- OUTPUT PFM Negative Pulse Out Also PWM output
17 DIR2+ OUTPUT PFM Positive Direction Also PWM output
18 DIR2- OUTPUT PFM Negative Direction Also PWM output
19 GND COMMON Reference Voltage
20 +5V OUTPUT Supply Voltage To power external circuitry
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
13
Page 19

PMAC2-PC & Lite Hardware Reference
2
J8 (JEQU) Position Compare Output Connector
9
10
Front View
1
2
Pin # Symbol Function Description Notes
1 EQU1/ OUTPUT Encoder 1 COMP-EQ Low is true
2 EQU2/ OUTPUT Encoder 2 COMP-EQ Low is true
3 EQU3/ OUTPUT Encoder 3 COMP-EQ Low is true
4 EQU4/ OUTPUT Encoder 4 COMP-EQ Low is true
5 EQU5/ OUTPUT Encoder 5 COMP-EQ Low is true
6 EQU6/ OUTPUT Encoder 6 COMP-EQ Low is true
7 EQU7/ OUTPUT Encoder 7 COMP-EQ Low is true
8 EQU8/ OUTPUT Encoder 8 COMP-EQ Low is true
9 +V SUPPLY Positive Supply +5V to +24V
10 GND COMMON Digital Ground
This connector provides the position-compare outputs for the eight encoder channels.
J9 (JMACH1) Connector Description
99
00
Front View
1
Pin# Symbol Function Description Notes
1 +5V OUTPUT /
INPUT
2 +5V OUTPUT /
INPUT
3 GND COMMON Reference Voltage
4 GND COMMON Reference Voltage
5 CHA1+ INPUT Encoder 1 Positive A Channel Also pulse input
6 CHA1- INPUT Encoder 1 Negative A Channel Also pulse input
7 CHB1+ INPUT Encoder 1 Positive B Channel Also direction input
8 CHB1- INPUT Encoder 1 Negative B Channel Also direction input
9 CHC1+ INPUT Encoder 1 Positive C Channel Index channel
10 CHC1- INPUT Encoder 1 Negative C Channel Index channel
11 CHU1 INPUT Channel 1 U Flag Hall effect, fault code, or sub-
12 CHV1 INPUT Channel 1 V Flag Hall effect, fault code, or sub-
13 CHW1 INPUT Channel 1 W Flag Hall effect, fault code, or sub-
14 CHT1 INPUT Channel 1 T Flag Fault code, or sub-count
15 USER1 INPUT General Purpose
16 PLIM1 INPUT Positive Overtravel Limit Hardware capture flag
17 MLIM1 INPUT Negative Overtravel Limit Hardware capture flag
18 HOME1 INPUT Home Switch Input Hardware capture flag
19 ACCFLT1 INPUT Accessory Fault Flag For loss OF ACC supply voltage
20 WD0/ OUTPUT Watchdog Output Low is PMAC watchdog fault
21 SCLK12+ INPUT /
OUTPUT
22 SCLK12- INPUT /
OUTPUT
23 ADC_CLK1+ OUTPUT A/D Converter Clock Programmable frequency
24 ADC_CLK1- OUTPUT A/D Converter Clock Programmable frequency
25 ADC_STB1+ OUTPUT A/D Converter Strobe Programmable sequence
26 ADC_STB1- OUTPUT A/D Converter Strobe Programmable sequence
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
count
count
count
Hardware capture flag, or sub-
User Flag
count
Encoder Sample Clock Direction controlled by PMAC2
jumper
Encoder Sample Clock Direction controlled by PMAC2
jumper
14 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 20

PMAC2-PC & Lite Hardware Reference
5
27 ADC_DAA1+ INPUT Channel A ADC Serial Data MSB first
28 ADC_DAA1- INPUT Channel A ADC Serial Data MSB first
29 ADC_DAB1+ INPUT Channel B ADC Serial Data MSB first
30 ADC_DAB1- INPUT Channel B ADC Serial Data MSB first
31 AENA1+ OUTPUT Amplifier Enable High is enable
32 AENA1- OUTPUT Amplifier Enable Low is enable
33 FAULT1+ INPUT Amplifier Fault Programmable polarity
34 FAULT1- INPUT Amplifier Fault Programmable polarity
35 PWMATOP1+
DAC_CLK1+
36 PWMATOP1-
DAC_CLK1-
37 PWMABOT1+
DAC1A+
38 PWMABOT1-
DAC1A-
39 PWMBTOP1+
DAC_STB1+
40 PWMBTOP1-
DAC_STB1-
41 PWMBBOT1+
DAC1B+
42 PWMBBOT1-
DAC1B-
43 PWMCTOP1+
DIR1+
44 PWMCTOP1-
DIR1-
45 PWMCBOT1+
PULSE1+
46 PWMCBOT1-
PULSE1-
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase B TOP CMD or DAC
Strobe
OUTPUT Phase B TOP CMD or DAC
Strobe
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B TOP CMD or PFM
Direction
OUTPUT Phase B TOP CMD or PFM
Direction
OUTPUT Phase B Bottom CMD or PFM
Pulse
OUTPUT Phase B Bottom CMD or PFM
Pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
47 GND COMMON Reference Voltage
48 GND COMMON Reference Voltage
49 +5V OUTPUT /
INPUT
50 +5V OUTPUT /
INPUT
51 +5V OUTPUT /
INPUT
52 +5V OUTPUT /
INPUT
53 GND COMMON Reference Voltage
54 GND COMMON Reference Voltage
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
55 CHA2+ INPUT Encoder 2 Positive A Channel Also pulse input
56 CHA2- INPUT Encoder 2 Negative A Channel Also pulse input
57 CHB2+ INPUT Encoder 2 Positive B Channel Also direction input
58 CHB2- INPUT Encoder 2 Negative B Channel Also direction input
59 CHC2+ INPUT Encoder 2 Positive C Channel Index channel
60 CHC2- INPUT Encoder 2 Negative C Channel Index channel
61 CHU2 INPUT Channel 2 U Flag Hall effect, fault code, or sub-
count
62 CHV2 INPUT Channel 2 V Flag Hall effect, fault code, or sub-
count
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
1
Page 21

PMAC2-PC & Lite Hardware Reference
63 CHW2 INPUT Channel 2 W Flag Hall effect, fault code, or sub-
count
64 CHT2 INPUT Channel 2 T Flag Fault code, or sub-count
65 USER2 INPUT General Purpose
User Flag
Hardware capture flag, or sub-
count
66 PLIM2 INPUT Positive Overtravel Limit Hardware capture flag
67 MLIM2 INPUT Negative Overtravel Limit Hardware capture flag
68 HOME2 INPUT Home Switch Input Hardware capture flag
69 ACCFLT2 INPUT Accessory Fault Flag For loss of ACC supply voltage
70 WD0/ OUTPUT Watchdog Output Low is PMAC watchdog fault
71 SCLK12+ INPUT /
OUTPUT
72 SCLK12- INPUT /
OUTPUT
Encoder Sample Clock Direction controlled by PMAC2
jumper
Encoder Sample Clock Direction controlled by PMAC2
jumper
73 ADC_CLK2+ OUTPUT A/D Converter Clock Programmable frequency
74 ADC_CLK2- OUTPUT A/D Converter Clock Programmable frequency
75 ADC_STB2+ OUTPUT A/D Converter Strobe Programmable sequence
76 ADC_STB2- OUTPUT A/D Converter Strobe Programmable sequence
77 ADC_DAA2+ INPUT Channel A ADC Serial Data MSB First
78 ADC_DAA2- INPUT Channel A ADC Serial Data MSB First
79 ADC_DAB2+ INPUT Channel B ADC Serial Data MSB First
80 ADC_DAB2- INPUT Channel B ADC Serial Data MSB First
81 AENA2+ OUTPUT Amplifier Enable High is enable
82 AENA2- OUTPUT Amplifier Enable Low is enable
83 FAULT2+ INPUT Amplifier Fault Programmable polarity
84 FAULT2- INPUT Amplifier Fault Programmable polarity
85 PWMATOP2+
DAC_CLK2+
86 PWMATOP2-
DAC_CLK2-
87 PWMABOT2+
DAC2A+
88 PWMABOT2-
DAC2A-
89 PWMBTOP2+
DAC_STB2+
90 PWMBTOP2-
DAC_STB2-
91 PWMBBOT2+
DAC2B+
92 PWMBBOT2-
DAC2B-
93 PWMCTOP2+
DIR2+
94 PWMCTOP2-
DIR2-
95 PWMCBOT2+
PULSE2+
96 PWMCBOT2-
PULSE2-
97 GND COMMON Reference Voltage
98 GND COMMON Reference Voltage
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Bottom CMD or PFM
Pulse
OUTPUT Phase B Bottom CMD or PFM
Pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
16 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 22

PMAC2-PC & Lite Hardware Reference
7
1299
1
99 +5V OUTPUT /
INPUT
100 +5V OUTPUT /
INPUT
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
The JMACH1 connector provides the interface pins for channels 1 and 2. It is usually connected to a breakout
board, such as one of the ACC-8 (Series) family of boards, or an application-specific interface board.
Note: 100-pin male box header with cent er key , 00 5 0" pit c h. AMP pa rt # 1-04 06 8- 7. Del t a Tau part # 014 00010-FPB.
J10 (JMACH2) Connector Description
00
Front View
Pin# Symbol Function Description Notes
1 +5V OUTPUT /
INPUT
2 +5V OUTPUT /
INPUT
3 GND COMMON Reference Voltage
4 GND COMMON Reference Voltage
5 CHA3+ INPUT Encoder 3 Positive A Channel Also pulse input
6 CHA3- INPUT Encoder 3 Negative A Channel Also pulse input
7 CHB3+ INPUT Encoder 3 Positive B Channel Also direction input
8 CHB3- INPUT Encoder 3 Negative B Channel Also direction input
9 CHC3+ INPUT Encoder 3 Positive C Channel Index channel
10 CHC3- INPUT Encoder 3 Negative C Channel Index channel
11 CHU3 INPUT Channel 3 U Flag Hall effect, fault code, or sub-
12 CHV3 INPUT Channel 3 V Flag Hall effect, fault code, or sub-
13 CHW3 INPUT Channel 3 W Flag Hall effect, fault code, or sub-
14 CHT3 INPUT Channel 3 T Flag Fault code, or sub-count
15 USER3 INPUT General Purpose User Flag Hardware capture flag, or sub-
16 PLIM3 INPUT Positive Overtravel Limit Hardware capture flag
17 MLIM3 INPUT Negative Overtravel Limit Hardware capture flag
18 HOME3 INPUT Home Switch Input Hardware capture flag
19 ACCFLT3 INPUT Accessory Fault Flag For loss of acc supply voltage
20 WD0/ OUTPUT Watchdog Output Low is PMAC watchdog fault
21 SCLK34+ INPUT /
OUTPUT
22 SCLK34- INPUT /
OUTPUT
23 ADC_CLK3+ OUTPUT A/D Converter Clock Programmable frequency
24 ADC_CLK3- OUTPUT A/D Converter Clock Programmable frequency
25 ADC_STB3+ OUTPUT A/D Converter Strobe Programmable frequency
26 ADC_STB3- OUTPUT A/D Converter Strobe Programmable frequency
27 ADC_DAA3+ INPUT Channel A ADC Serial Data MSB first
28 ADC_DAA3- INPUT Channel A ADC Serial Data MSB first
29 ADC_DAB3+ INPUT Channel B ADC Serial Data MSB first
30 ADC_DAB3- INPUT Channel B ADC Serial Data MSB first
31 AENA3+ OUTPUT Amplifier Enable High is enable
32 AENA3- OUTPUT Amplifier Enable Low is enable
33 FAULT3+ INPUT Amplifier Fault Programmable polarity
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
count
count
count
count
Encoder Sample Clock Direction controlled by PMAC2
jumper
Encoder Sample Clock Direction controlled by PMAC2
jumper
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
1
Page 23

PMAC2-PC & Lite Hardware Reference
34 FAULT3- INPUT Amplifier Fault Programmable polarity
35 PWMATOP3+
DAC_CLK3+
36 PWMATOP3-
DAC_CLK3-
37 PWMABOT3+
DAC3A+
38 PWMABOT3-
DAC3A-
39 PWMBTOP3+
DAC_STB3+
40 PWMBTOP3-
DAC_STB3-
41 PWMBBOT3+
DAC3B+
42 PWMBBOT3-
DAC3B-
43 PWMCTOP3+
DIR3+
44 PWMCTOP3-
DIR3-
45 PWMCBOT3+
PULSE3+
46 PWMCBOT3-
PULSE3-
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Bottom CMD or PFM
Pulse
OUTPUT Phase B Bottom CMD or PFM
Pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
47 GND COMMON Reference Voltage
48 GND COMMON Reference Voltage
49 +5V OUTPUT /
INPUT
50 +5V OUTPUT /
INPUT
51 +5V OUTPUT /
INPUT
52 +5V OUTPUT /
INPUT
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
53 GND COMMON Reference Voltage
54 GND COMMON Reference Voltage
55 CHA4+ INPUT Encoder 4 Positive A Channel Also pulse input
56 CHA4- INPUT Encoder 4 Negative A Channel Also pulse input
57 CHB4+ INPUT Encoder 4 Positive B Channel Also direction input
58 CHB4- INPUT Encoder 4 Negative B Channel Also direction input
59 CHC4+ INPUT Encoder 4 Positive C Channel Index channel
60 CHC4- INPUT Encoder 4 Negative C Channel Index channel
61 CHU4 INPUT Channel 4 U Flag Hall effect, fault code, or sub-
count
62 CHV4 INPUT Channel 4 V Flag Hall effect, fault code, or sub-
count
63 CHW4 INPUT Channel 4 W Flag Hall effect, fault code, or sub-
count
64 CHT4 INPUT Channel 4 T Flag Fault code, or sub-count
65 USER4 INPUT General Purpose
User Flag
Hardware capture flag, or sub-
count
66 PLIM4 INPUT Positive Overtravel Limit Hardware capture flag
67 MLIM4 INPUT Negative Overtravel Limit Hardware capture flag
18 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 24

PMAC2-PC & Lite Hardware Reference
68 HOME4 INPUT Home Switch Input Hardware capture flag
69 ACCFLT4 INPUT Accessory Fault Flag For loss of ACC supply voltage
70 WD0/ OUTPUT Watchdog Output Low is PMAC watchdog fault
71 SCLK34+ INPUT /
OUTPUT
72 SCLK34- INPUT /
OUTPUT
Encoder Sample Clock Direction controlled by PMAC2
jumper
Encoder Sample Clock Direction controlled by PMAC2
jumper
73 ADC_CLK4+ OUTPUT A/D Converter Clock Programmable frequency
74 ADC_CLK4- OUTPUT A/D Converter Clock Programmable frequency
75 ADC_STB4+ OUTPUT A/D Converter Strobe Programmable sequence
76 ADC_STB4- OUTPUT A/D Converter Strobe Programmable sequence
77 ADC_DAA4+ INPUT Channel A ADC Serial Data MSB First
78 ADC_DAA4- INPUT Channel A ADC Serial Data MSB First
79 ADC_DAB4+ INPUT Channel B ADC Serial Data MSB First
80 ADC_DAB4- INPUT Channel B ADC Serial Data MSB First
81 AENA4+ OUTPUT Amplifier Enable High is enable
82 AENA4- OUTPUT Amplifier Enable Low is enable
83 FAULT4+ INPUT Amplifier Fault Programmable polarity
84 FAULT4- INPUT Amplifier Fault Programmable polarity
85 PWMATOP4+
DAC_CLK4+
86 PWMATOP4-
DAC_CLK4-
87 PWMABOT4+
DAC4A+
88 PWMABOT4-
DAC4A-
89 PWMBTOP4+
DAC_STB4+
90 PWMBTOP4-
DAC_STB4-
91 PWMBBOT4+
DAC4B+
92 PWMBBOT4-
DAC4B-
93 PWMCTOP4+
DIR4+
94 PWMCTOP4-
DIR4-
95 PWMCBOT4+
PULSE4+
96 PWMCBOT4-
PULSE4-
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Bottom CMD or PFM
Pulse
OUTPUT Phase B Bottom CMD or PFM
Pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
97 GND COMMON Reference Voltage
98 GND COMMON Reference Voltage
99 +5V OUTPUT /
INPUT
100 +5V OUTPUT /
INPUT
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
The JMACH2 connector provides the interface pins for channels 3 and 4. It is usually connected to a breakout
board, such as one of the ACC-8(Series) family of boards, or an application- specific interface board.
Note: 100-pin male box header with center key, 050" pitch. AMP part # 1-04068-7. Delta Tau part # 014 -00010FPB.
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
19
Page 25

PMAC2-PC & Lite Hardware Reference
2991
J11 (JMACH3) Connector Description
00
1
Pin# Symbol Function Description Notes
1 +5V OUTPUT /
INPUT
2 +5V OUTPUT /
INPUT
3 GND COMMON Reference Voltage
4 GND COMMON Reference Voltage
5 CHA5+ INPUT Encoder 5 Positive A Channel Also pulse input
6 CHA5- INPUT Encoder 5 Negative A Channel Also pulse input
7 CHB5+ INPUT Encoder 5 Positive B Channel Also direction input
8 CHB5- INPUT Encoder 5 Negative B Channel Also direction input
9 CHC5+ INPUT Encoder 5 Positive C Channel Index channel
10 CHC5- INPUT Encoder 5 Negative C Channel Index channel
11 CHU5 INPUT Channel 5 U Flag Hall effect, fault code, or sub-
12 CHV5 INPUT Channel 5 V Flag Hall effect, fault code, or sub-
13 CHW5 INPUT Channel 5 W Flag Hall effect, fault code, or sub-
14 CHT5 INPUT Channel 5 T Flag Fault code, or sub-count
15 USER5 INPUT General Purpose User Flag Hardware capture flag, or sub-
16 PLIM5 INPUT Positive Overtravel Limit Hard ware capture flag
17 MLIM5 INPUT Negative Overtravel Limit Hardware capture flag
18 HOME5 INPUT Home Switch Input Hardware capture flag
19 ACCFLT5 INPUT Accessory Fault Flag For loss of ACC supply voltage
20 WD0/ OUTPUT Watchdog Output Low is PMAC watchdog fault
21 SCLK56+ INPUT /
OUTPUT
22 SCLK56- INPUT /
OUTPUT
23 ADC_CLK5+ OUTPUT A/D Converter Clock Programmable frequency
24 ADC_CLK5- OUTPUT A/D Converter Clock Programmable frequency
25 ADC_STB5+ OUTPUT A/D Converter Strobe Programmable sequence
26 ADC_STB5- OUTPUT A/D Converter Strobe Programmable sequence
27 ADC_DAA5+ INPUT Channel A ADC Serial Data MSB First
28 ADC_DAA5- INPUT Channel A ADC Serial Data MSB First
29 ADC_DAB5+ INPUT Channel B ADC Serial Data MSB First
30 ADC_DAB5- INPUT Channel B ADC Serial Data MSB First
31 AENA5+ OUTPUT Amplifier Enable High is enable
32 AENA5- OUTPUT Amplifier Enable Low is enable
33 FAULT5+ INPUT Amplifier Fault Programmable polarity
34 FAULT5- INPUT Amplifier Fault Programmable polarity
35 PWMATOP5+
OUTPUT Phase A Top CMD or DAC
DAC_CLK5+
36 PWMATOP5-
OUTPUT Phase A Top CMD or DAC
DAC_CLK5-
37 PWMABOT5+
OUTPUT Phase A Bottom CMD or DAC A
DAC5A+
38 PWMABOT5-
OUTPUT Phase A Bottom CMD or DAC A
DAC5A-
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
count
count
count
count
Encoder Sample Clock Direction controlled by PMAC2
jumper
Encoder Sample Clock Direction controlled by PMAC2
jumper
Programmable function control
Clock
Programmable function control
Clock
Programmable function control
Serial Data
Programmable function control
Serial Data
20 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 26

PMAC2-PC & Lite Hardware Reference
39 PWMBTOP5+
DAC_STB5+
40 PWMBTOP5-
DAC_STB5-
41 PWMBBOT5+
DAC5B+
42 PWMBBOT5-
DAC5B-
43 PWMCTOP5+
DIR5+
44 PWMCTOP5-
DIR5-
45 PWMCBOT5+
PULSE5+
46 PWMCBOT5-
PULSE5-
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Bottom CMD or PFM
Pulse
OUTPUT Phase B Bottom CMD or PFM
Pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
47 GND COMMON Reference Voltage
48 GND COMMON Reference Voltage
49 +5V OUTPUT /
INPUT
50 +5V OUTPUT /
INPUT
51 +5V OUTPUT /
INPUT
52 +5V OUTPUT /
INPUT
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
53 GND COMMON Reference Voltage
54 GND COMMON Reference Voltage
55 CHA6+ INPUT Encoder 6 Positive A Channel Also pulse input
56 CHA6- INPUT Encoder 6 Negative A Channel Also pulse input
57 CHB6+ INPUT Encoder 6 Positive B Channel Also direction input
58 CHB6- INPUT Encoder 6 Negative B Channel Also direction input
59 CHC6+ INPUT Encoder 6 Positive C Channel Index channel
60 CHC6- INPUT Encoder 6 Negative C Channel Index channel
61 CHU6 INPUT Channel 6 U Flag Hall effect, fault code, or sub-
count
62 CHV6 INPUT Channel 6 V Flag Hall effect, fault code, or sub-
count
63 CHW6 INPUT Channel 6 W Flag Hall effect, fault code, or sub-
count
64 CHT6 INPUT Channel 6 T Flag Fault code, or sub-count
65 USER6 INPUT General Purpose User Flag Hardware capture flag, or sub-
count
66 PLIM6 INPUT Positive Overtravel Limit Hardware capture flag
67 MLIM6 INPUT Negative Overtravel Limit Hardware capture flag
68 HOME6 INPUT Home Switch Input Hardware capture flag
69 ACCFLT6 INPUT Accessory Fault Flag For loss of ACC supply voltage
70 WD0/ OUTPUT Watchdog Output Low is PMAC watchdog fault
71 SCLK56+ INPUT /
OUTPUT
72 SCLK56- INPUT /
OUTPUT
Encoder Sample Clock Direction controlled by PMAC 2
jumper
Encoder Sample Clock Direction controlled by PMAC 2
jumper
73 ADC_CLK6+ OUTPUT A/D Converter Clock Programmable frequency
74 ADC_CLK6- OUTPUT A/D Converter Clock Programmable frequency
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
21
Page 27

PMAC2-PC & Lite Hardware Reference
75 ADC_STB6+ OUTPUT A/D Converter Strobe Programmable sequence
76 ADC_STB6- OUTPUT A/D Converter Strobe Programmable sequence
77 ADC_DAA6+ INPUT Channel A ADC Serial Data MSB first
78 ADC_DAA6- INPUT Channel A ADC Serial Data MSB first
79 ADC_DAB6+ INPUT Channel B ADC Serial Data MSB first
80 ADC_DAB6- INPUT Channel B ADC Serial Data MSB first
81 AENA6+ OUTPUT Amplifier Enable High is enable
82 AENA6- OUTPUT Amplifier Enable Low is enable
83 FAULT6+ INPUT Amplifier Fault Programmable polarity
84 FAULT6- INPUT Amplifier Fault Programmable polarity
85 PWMATOP6+
DAC_CLK6+
86 PWMATOP6-
DAC_CLK6-
87 PWMABOT6+
DAC6A+
88 PWMABOT6-
DAC6A-
89 PWMBTOP6+
DAC_STB6+
90 PWMBTOP6-
DAC_STB6-
91 PWMBBOT6+
DAC6B+
92 PWMBBOT6-
DAC6B-
93 PWMCTOP6+
DIR6+
94 PWMCTOP6-
DIR6-
95 PWMCBOT6+
PULSE6+
96 PWMCBOT6-
PULSE6-
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Bottom CMD or PFM
PULSE
OUTPUT Phase B Bottom CMD or PFM
PULSE
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
97 GND COMMON Reference Voltage
98 GND COMMON Reference Voltage
99 +5V OUTPUT /
INPUT
100 +5V OUTPUT /
INPUT
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
The JMACH3 connector (not present on PMAC2-Lite) provides the interface pins for channels 5 and 6. It is
usually connected to a breakout board, such as one of the ACC-8(Series) family of boards, or an applicationspecific interface board.
Note: 100-pin male box header with center key, 00 5 0" pi t ch. AMP part # 1-04068-7. Delta Tau part # 01400010-FPB.
22 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 28

PMAC2-PC & Lite Hardware Reference
2991
J12 (JMACH4) Connector Description
00
1
Pin# Symbol Function Description Notes
1 +5V OUTPUT /
INPUT
2 +5V OUTPUT /
INPUT
3 GND COMMON Reference Voltage
4 GND COMMON Reference Voltage
5 CHA7+ INPUT Encoder 7 Positive A Channel Also pulse input
6 CHA7- INPUT Encoder 7 Negative A Channel Also pulse input
7 CHB7+ INPUT Encoder 7 Positive B Channel Also direction input
8 CHB7- INPUT Encoder 7 Negative B Channel Also direction input
9 CHC7+ INPUT Encoder 7 Positive C Channel Index channel
10 CHC7- INPUT Encoder 7 Negative C Channel Index channel
11 CHU7 INPUT Channel 7 U Flag Hall effect, fault code, or sub-
12 CHV7 INPUT Channel 7 V Flag Hall effect, fault code, or sub-
13 CHW7 INPUT Channel 7 W Flag Hall effect, fault code, or sub-
14 CHT7 INPUT Channel 7 T Flag Fault code, or sub-count
15 USER7 INPUT General Purpose User Flag Hardware capture flag, or sub-
16 PLIM7 INPUT Positive Overtravel Limit Hardware capture flag
17 MLIM7 INPUT Negative Overtravel Limit Hardware capture flag
18 HOME7 INPUT Home Switch Input Hardware capture flag
19 ACCFLT7 INPUT Accessory Fault Flag For loss of ACC supply voltage
20 WD0/ OUTPUT Watchdog Output Low is PMAC watchdog fault
21 SCLK78+ INPUT /
OUTPUT
22 SCLK78- INPUT /
OUTPUT
23 ADC_CLK7+ OUTPUT A/D Converter Clock Programmable frequency
24 ADC_CLK7- OUTPUT A/D Converter Clock Programmable frequency
25 ADC_STB7+ OUTPUT A/D Converter Strobe Programmable sequence
26 ADC_STB7- OUTPUT A/D Converter Strobe Programmable sequence
27 ADC_DAA7+ INPUT Channel A ADC Serial Data MSB first
28 ADC_DAA7- INPUT Channel A ADC Serial Data MSB first
29 ADC_DAB7+ INPUT Channel B ADC Serial Data MSB first
30 ADC_DAB7- INPUT Channel B ADC Serial Data MSB first
31 AENA7+ OUTPUT Amplifier Enable High is enable
32 AENA7- OUTPUT Amplifier Enable Low is enable
33 FAULT7+ INPUT Amplifier Fault Programmable polarity
34 FAULT7- INPUT Amplifier Fault Programmable polarity
35 PWMATOP7+
OUTPUT Phase A Top CMD or DAC
DAC_CLK7+
36 PWMATOP7-
OUTPUT Phase A Top CMD or DAC
DAC_CLK7-
37 PWMABOT7+
OUTPUT Phase A Bottom CMD or DAC A
DAC7A+
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
count
count
count
count
Encoder Sample Clock Direction controlled by PMAC2
jumper
Encoder Sample Clock Direction controlled by PMAC2
jumper
Programmable function control
Clock
Programmable function control
Clock
Programmable function control
Serial Data
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
23
Page 29

PMAC2-PC & Lite Hardware Reference
38 PWMABOT7-
DAC7A-
39 PWMBTOP7+
DAC_STB7+
40 PWMBTOP3-
DAC_STB7-
41 PWMBBOT7+
DAC7B+
42 PWMBBOT7-
DAC7B-
43 PWMCTOP7+
DIR7+
44 PWMCTOP7-
DIR7-
45 PWMCBOT7+
PULSE7+
46 PWMCBOT7-
PULSE7-
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Bottom CMD or PFM
Pulse
OUTPUT Phase B Bottom CMD or PFM
Pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
47 GND COMMON Reference Voltage
48 GND COMMON Reference Voltage
49 +5V OUTPUT /
INPUT
50 +5V OUTPUT /
INPUT
51 +5V OUTPUT /
INPUT
52 +5V OUTPUT /
INPUT
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
53 GND COMMON Reference Voltage
54 GND COMMON Reference Voltage
55 CHA8+ INPUT Encoder 8 Positive A Channel Also pulse input
56 CHA8- INPUT Encoder 8 Negative A Channel Also pulse input
57 CHB8+ INPUT Encoder 8 Positive B Channel Also direction input
58 CHB8- INPUT Encoder 8 Negative B Channel Also direction input
59 CHC8+ INPUT Encoder 8 Positive C Channel Index channel
60 CHC8- INPUT Encoder 8 Negative C Channel Index channel
61 CHU8 INPUT Channel 8 U Flag Hall effect, fault code, or sub-
count
62 CHV8 INPUT Channel 8 V Flag Hall effect, fault code, or sub-
count
63 CHW8 INPUT Channel 8 W Flag Hall effect, fault code, or sub-
count
64 CHT8 INPUT Channel 8 T Flag Fault code, or sub-count
65 USER8 INPUT General Purpose User Flag Hardware capture flag, or sub-
count
66 PLIM8 INPUT Positive Overtravel Limit Hardware capture flag
67 MLIM8 INPUT Negative Overtravel Limit Hardware capture flag
68 HOME8 INPUT Home Switch Input Hardware capture flag
69 ACCFLT8 INPUT Accessory Fault Flag For loss of ACC supply voltage
70 WD0/ OUTPUT Watchdog Output Low is PMAC watchdog fault
71 SCLK78+ INPUT /
OUTPUT
72 SCLK78- INPUT /
OUTPUT
Encoder Sample Clock Direction controlled by PMAC2
jumper
Encoder Sample Clock Direction controlled by PMAC2
jumper
24 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 30

PMAC2-PC & Lite Hardware Reference
5
73 ADC_CLK8+ OUTPUT A/D Converter Clock Programmable frequency
74 ADC_CLK8- OUTPUT A/D Converter Clock Programmable frequency
75 ADC_STB8+ OUTPUT A/D Converter Strobe Programmable sequence
76 ADC_STB8- OUTPUT A/D Converter Strobe Programmable sequence
77 ADC_DAA8+ INPUT Channel A ADC Serial Data MSB first
78 ADC_DAA8- INPUT Channel A ADC Serial Data MSB first
79 ADC_DAB8+ INPUT Channel B ADC Serial Data MSB first
80 ADC_DAB8- INPUT Channel B ADC Serial Data MSB first
81 AENA8+ OUTPUT Amplifier Enable High is enable
82 AENA8- OUTPUT Amplifier Enable Low is enable
83 FAULT8+ INPUT Amplifier Fault Programmable polarity
84 FAULT8- INPUT Amplifier Fault Programmable polarity
85 PWMATOP8+
DAC_CLK8+
86 PWMATOP8-
DAC_CLK8-
87 PWMABOT8+
DAC8A+
88 PWMABOT8-
DAC8A-
89 PWMBTOP8+
DAC_STB8+
90 PWMBTOP8-
DAC_STB8-
91 PWMBBOT8+
DAC8B+
92 PWMBBOT8-
DAC8B-
93 PWMCTOP8+
DIR8+
94 PWMCTOP8-
DIR8-
95 PWMCBOT8+
PULSE8+
96 PWMCBOT8-
PULSE8-
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Top CMD or DAC
Clock
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase A Bottom CMD or DAC A
Serial Data
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Top CMD or DAC
Strobe
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Bottom CMD or DAC B
Serial Data
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Top CMD or PFM
Direction
OUTPUT Phase B Bottom CMD or PFM
Pulse
OUTPUT Phase B Bottom CMD or PFM
Pulse
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
Programmable function control
97 GND COMMON Reference Voltage
98 GND COMMON Reference Voltage
99 +5V OUTPUT /
INPUT
100 +5V OUTPUT /
INPUT
+5V Power For external circuit or from
external supply
+5V Power For external circuit or from
external supply
Note: 100-pin male box header with center key, 00 5 0" pi t ch. AMP part # 1-04068-7. Delta Tau part # 01400010-FPB.
The JMACH4 connector (Not present on PMAC2-Lite) provides the interface pins for channels 7 and 8. It is
usually connected to a breakout board, such as one of the ACC-8(Series) family of boards, or an applicationspecific interface board.
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
2
Page 31

PMAC2-PC & Lite Hardware Reference
TB1 (2/4-Pin Terminal Block)
Front View
Pin# Symbol Function Description Notes
1 GND COMMON Reference Voltage
2 +5V INPUT Positive Supply Voltage Supplies all PMAC digital
circuits
3 +12V INPUT Positive Supply Voltage +12V to +15V; not required on-
board; used on J1 to supply
analog inputs
4 -12V INPUT Negative Supply Voltage -12V to -15V; required for OPT-
12 ADCS; used on J1 to supply
analog inputs
Note: Unless Option 12 (Analog-to-Digital Converters) is included on the board, only pins 1 and 2 will be
provided on this terminal block.
This terminal block can be used to provide the input for the power supply for the circuits on the PMAC2 board
when it is not in a bus configuration. When the PMAC2 is in a bus configuration, these supplies automatically
come through the bus connector from the bus power supply. In this case, this terminal block should not be used.
TB2 (3-Pin Terminal Block)
Front View
Pin# Symbol Function Description Notes
1 WD_NC OUTPUT Watchdog Relay Out Normally closed
2 COM INPUT Watchdog Return +V or 0V
3 WD_NO OUTPUT Watchdog Relay Out Normally open
This terminal block provides the output for the PMAC2 watchdog timer relay, both normally open and normally
closed contacts. The normally closed relay contact is open while PMAC2 is operating properly -- it has power and
the watchdog timer is not tripped -- and closed when the PMAC2 is not operating properly -- either it has lost
power or the watchdog timer has tripped.
26 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 32

PMAC2-PC & Lite Hardware Reference
7
PMAC2-PC and PMAC2-Lite Jumper Summary
Refer to the PMAC2-PC and PMAC2-Lite layout diagram (see Figure 2-1) for jumper locations.
E Point & Physical
Layout
E1
E2
E3
E4
E5 and E6
Location Description Default
D1
D1
D1
D1
D1
Card 0 Jumper:
Remove jumper to specify that this PMAC
is Card 0, which generates its own phase
and servo clock (default).
Jump pins 1 to 2 to specify that this
PMAC is not Card 0, but Card 1 to F (15),
which requires external phase and servo
clock signals from the serial port to
operate.
40/60 MHz Jumper:
Remove jumper to specify 40 MHz
operation of the PMAC CPU (2 x crystal
frequency). Default setting for standard
(40 MHz) CPU.
Jump pins 1 to 2 to specify 60 MHz
operation of the PMAC CPU (3 x crystal
frequency). Default setting for Option 5B
(60 MHz) CPU.
Re-initialize Jumper:
Remove jumper for normal reset mode
(default)
Jump pins 1 to 2 for re-initialization on
reset
80MHz Jumper:
Remove jumper for 40/60 MHz operation
(ref Jumper E2)
Install jumper for 80MHz operation.
Reserved for future use No Jumper
No Jumper
No Jumper
No Jumper
No Jumper
E7 thru E10
E11
Connectors and Jumpers
C1
H2
Interrupt Select:
Jump E7 pins 1 to 2 to interrupt PC on
IRQ10
Jump E8 pins 1 to 2 to interrupt PC on
IRQ11
Jump E9 pins 1 to 2 to interrupt PC on
IRQ12
Jump E10 pins 1 to 2 to interrupt PC on
IRQ15
JEQU Port Configuration:
Jump pins 1 to 2 for sinking driver
(ULN2803A) on port (default
configuration)
Jump pins 2 to 3 for sourcing driver
(UDN2981A) on port (alternate
configuration)
No Jumper
Note: Only 1 jumper of
E7 thru E10 should be
on at one time.
1 - 2 Jumpered
2
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 33

PMAC2-PC & Lite Hardware Reference
E Point & Physical
Layout
E12
E13
1
2
3
E14
12
PMAC2-PC
PMAC2-Lite
3
E14
12
Location Description Default
H2
F1
D1
F2
JEQU Port Configuration:
Jump pins 1 to 2 for sinking driver
(ULN2803A) on JEQU port (default
configuration) Jump pins 2 to 3 for
sourcing driver (UDN2981A) on JEQU
port (alternate configuration)
Encoder Sample Clock Direction:
Remove jumper to output SCLK generated
in first ASIC on SCLK_12 and SCLK_34,
or to control direction by software.
Jump pins 1 to 2 to input SCLK signal for
first ASIC on SCLK_34 and output this
signal on SCLK_12.
Jump pins 2 to 3 to input SCLK signal for
first ASIC on SCLK_12 and output this
signal on SCLK_34.
Encoder Sample Clock Direction:
Remove jumper to output SCLK generated
in second ASIC on SCLK_56 and
SCLK_78, or to control direction by
software.
Jump pins 1 to 2 to input SCLK signal for
second ASIC on SCLK_78 and output this
signal on SCLK_56.
Jump pins 2 to 3 to input SCLK signal for
second ASIC on SCLK_56 and output this
signal on SCLK_78
Watchdog Timer Control:
Remove jumper to enable watchdog timer
operation.
Jump pins 1 to 2 to disable watchdog timer
operation (for test purposes only).
1 - 2 Jumpered
No Jumper
No Jumper
No Jumper
28 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 34

PMAC2-PC & Lite Hardware Reference
PMAC2-VME CPU Connector Summary
The following paragraphs provide a brief description of each connector on the PMAC2-PC CPUs (see
Figure 2-2).
J1
35
36
Front View
36-pin header on backside for connection to main PMAC/PMAC2 board.
J2 (JEXP)
49
50
Front View
50-pin IDC header for connection to expansion port accessory boards.
J3
35
36
Front View
36-pin header on backside for connection to main PMAC/PMAC2 board.
J4 (JEXP)
9
10
Front View
1
2
10-pin IDC header for connection to DPRAM on accessory board (PMAC-PC) or main PMAC board
(PMAC-VME, PMAC2-PC, PMAC2-VME).
J5 (JTAG/OnCE)
9
10
Front View
1
2
1
`
2
1
2
1
`
2
10-pin header for factory use only.
J6
8-pin SIP header for factory use only.
J7
8-pin SIP header for factory use only.
Front View
Front View
18
18
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
29
Page 35

PMAC2-PC & Lite Hardware Reference
P/N 602405
P/N 602705
J3
(O T H E R SID E )
30 Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Page 36

PMAC2-PC & Lite Hardware Reference
PMAC2-PC CPU Piggyback Board Jumpers
E Point & Physical
Layout
E1
E2
E3
E4
E5
1
2
3
Location Description Default
D1 (602398)
A1 (602405)
B1 (602705)
A2 (602398)
D5 (602705)
C1 (602398)
D4 (602705)
A5 (602398)
B1 (602705)
B3 (602705) Battery-backed RAM Size Select -
Remove jumper to enable watchdog timer
operation.
Jump pins 1 to 2 to disable watchdog timer
operation (for test purposes only).
Remove jumper to disable extended
channel addressing (Channels 9-16).
Jump pins 1 to 2 to enable extended
channel addressing (Channels 9-16)
Remove jumper (or no jumper present) to
disable extended channel addressing
(Channels 9-16).
Jump pins 1 to 2 to enable extended
channel addressing (Channels 9-16)
Boot Enable Jumper.
Remove jumper for normal use.
Jump pins 1 and 2 for external firmware
load (with MAIN board E3 on).
Jump pins 2 and 3 for supple-mental
battery-backed memory (Option 16 only).
No Jumper if no battery-backed memory
No Jumper
No Jumper
No Jumper
No Jumper
No Jumper
Connectors and Jumpers
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
31
Page 37

Artisan Technology Group is your source for quality
new and certied-used/pre-owned equipment
• FAST SHIPPING AND
DELIVERY
• TENS OF THOUSANDS OF
IN-STOCK ITEMS
• EQUIPMENT DEMOS
• HUNDREDS OF
MANUFACTURERS
SUPPORTED
• LEASING/MONTHLY
RENTALS
• ITAR CERTIFIED
SECURE ASSET SOLUTIONS
SERVICE CENTER REPAIRS
Experienced engineers and technicians on staff
at our full-service, in-house repair center
Instra
Remotely inspect equipment before purchasing with
our interactive website at www.instraview.com
Contact us: (888) 88-SOURCE | sales@artisantg.com | www.artisantg.com
SM
REMOTE INSPECTION
View
WE BUY USED EQUIPMENT
Sell your excess, underutilized, and idle used equipment
We also offer credit for buy-backs and trade-ins
www.artisantg.com/WeBuyEquipment
LOOKING FOR MORE INFORMATION?
Visit us on the web at www.artisantg.com for more
information on price quotations, drivers, technical
specications, manuals, and documentation
 Loading...
Loading...