

Page 1
www.fairchildsemi.com
REV. 1.0.5 2/14/02
Features
• Internally synchronized PFC and PWM in one IC
• Low total harmonic distortion
• Low ripple current in the storage capacitor between the
PFC and PWM sections
• Average current, continuous boost, leading edge PFC
• High efficiency trailing edge PWM with dual totem-pole
outputs
• Average line voltage compensation with brown-out
control
• PFC overvoltage comparator eliminates output “runaway”
due to load removal
• Current-fed multiplier for improved noise immunity
• Overvoltage protection, UVLO, and soft start
General Description
The ML4826 is a high power controller for power factor
corrected, switched mode power supplies. PFC allows the
use of smaller, lower cost bulk capacitors, reduces power line
loading and stress on the switching FETs, and results in a
power supply that fully complies with IEC1000-3-2 specifications. The ML4826 includes circuits for the implementation of a leading edge, average current “boost” type power
factor correction and a trailing edge, pulse width modulator
(PWM) with dual totem-pole outputs.
An over-voltage comparator shuts down the PFC section in
the event of a sudden decrease in load. The PFC section also
includes peak current limiting and input voltage brown-out
protection. The PWM section can be operated in current or
voltage mode at up to 250kHz and includes a duty cycle limit
to prevent transformer saturation.
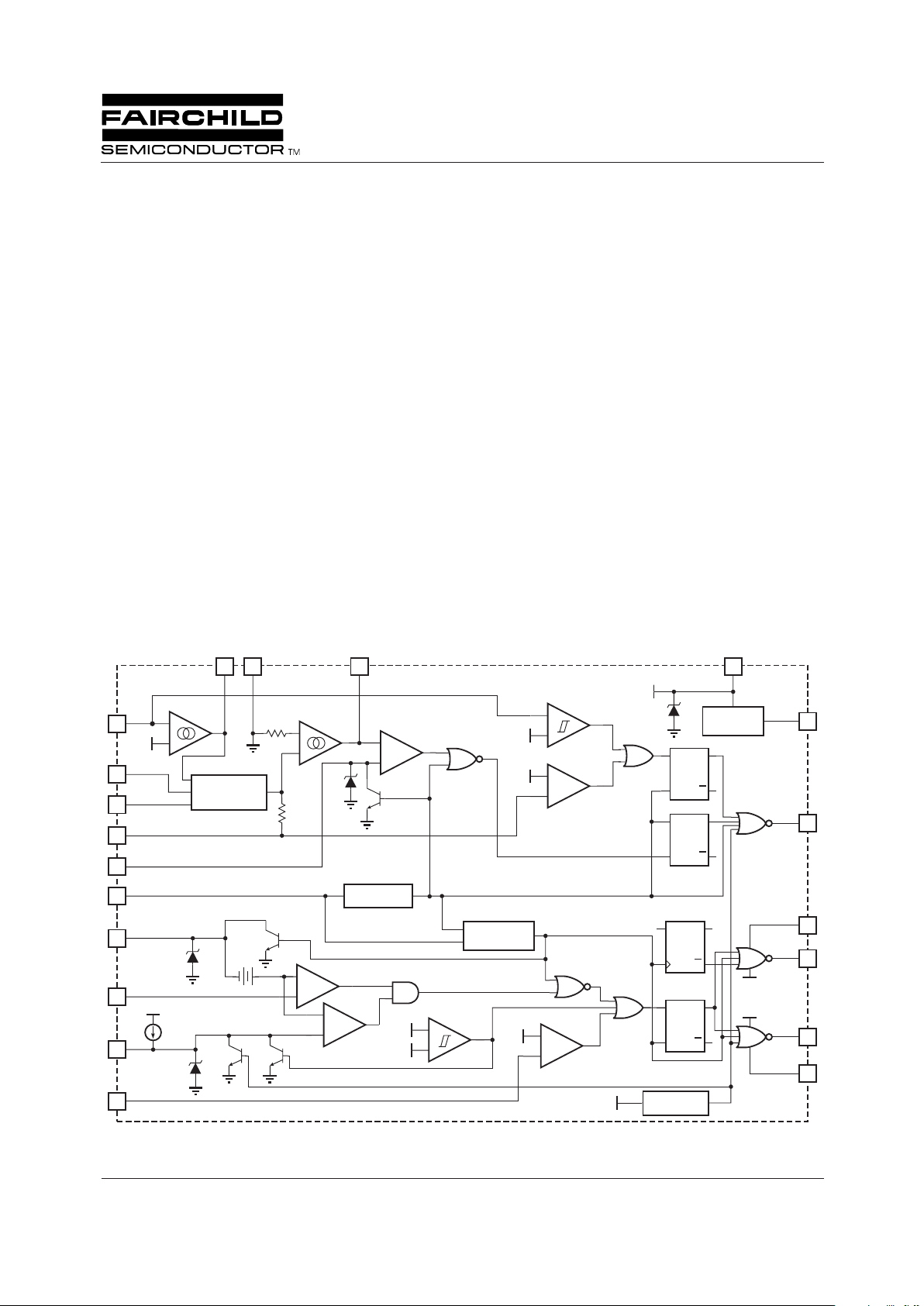
Block Diagram
V
CC2
19
VEAO
IEAO
V
FB
I
AC
V
RMS
I
SENSE
RTC
T
OSCILLATOR
OVP
PFC I
LIMIT
UVLO
V
REF
PULSE WIDTH MODULATOR
POWER FACTOR CORRECTOR
2.5V
+
-
-
+
20
2
4
3
7.5V
REFERENCE
18
V
CC
17
V
CCZ
VEA
7
-
+
IEA
1
+
+
-
PFC OUT
15
SRQ
Q
SRQ
Q
2.7V
-1V
RAMP 2
9
PWM 1
13
SRQ
Q
V
DC
6
SS
5
DC I
LIMIT
10
V
CC
DUTY CYCLE
LIMIT
-
+
1V
-
+
2.5V
V
FB
-
+
8V
8V
VIN OK
GAIN
MODULATOR
V
CCZ
3.5kΩ
3.5kΩ
1.5V
50µA
-
+
13.5V
DC I
LIMIT
RAMP 1
8
PWM 2
14
STQ
Q
V
CC2
PGND
16
PGND
12
AGND
11
8V
ML4826
PFC and Dual Output PWM Controller Combo
Page 2
ML4826 PRODUCT SPECIFICATION
2
REV. 1.0.5 2/14/02
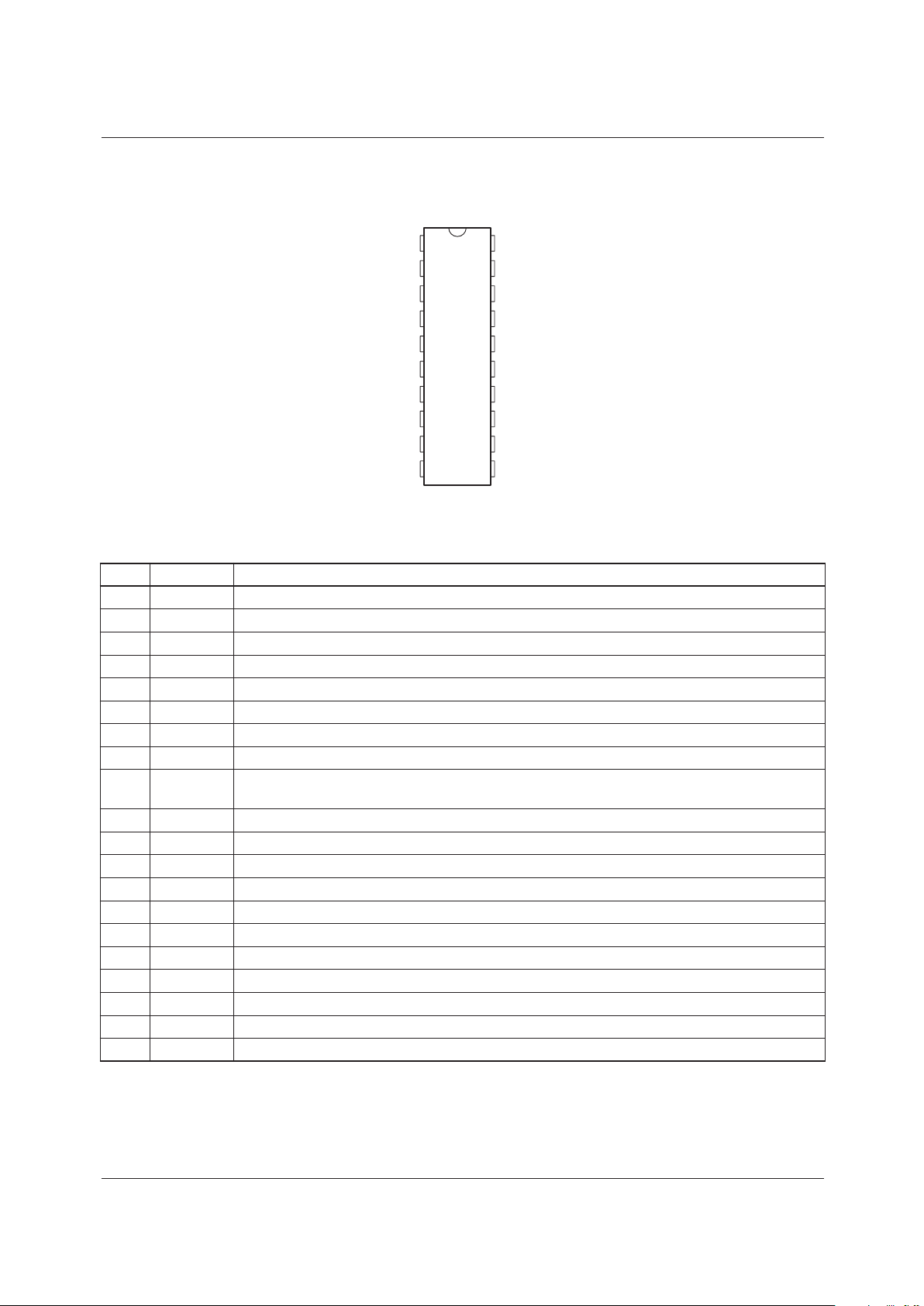
Pin Configuration
Pin Description
PIN NAME FUNCTION
1 IEAO PFC transconductance current error amplifier output
2I
AC
PFC gain control reference input
3I
SENSE
Current sense input to the PFC current limit comparator
4V
RMS
Input for PFC RMS line voltage compensation
5 SS Connection point for the PWM soft start capacitor
6V
DC
PWM voltage feedback input
7R
T
C
T
Connection for oscillator frequency setting components
8 RAMP 1 PFC ramp input
9 RAMP 2 When in current mode, this pin functions as the current sense input; when in voltage mode,
it is the PWM input from the PFC output (feedforward ramp)
10 DC I
LIMIT
PWM current limit comparator input
11 AGND Analog signal ground
12 PGND Return for the PWM totem-pole outputs
13 PWM 2 PWM driver 2 output
14 PWM 1 PWM drive 1 output
15 PFC OUT PFC driver output
16 V
CC2
Positive supply for the PWM drive outputs
17 V
CC1
Positive supply (connected to an internal shunt regulator).
18 V
REF
Buffered output for the internal 7.5V reference
19 V
FB
PFC transconductance voltage error amplifier input
20 VEAO PFC transconductance voltage error amplifier output
1
2
3
4
5
6
7
8
9
10
20
19
18
17
16
15
14
13
12
11
IEAO
I
AC
I
SENSE
V
RMS
SS
V
DC
RTC
T
RAMP 1
RAMP 2
DC I
LIMIT
VEAO
V
FB
V
REF
V
CC2
V
CC1
PFC OUT
PWM 1
PWM 2
PGND
AGND
TOP VIEW
ML4826
20-Pin PDIP (P20)
Page 3
PRODUCT SPECIFICATION ML4826
REV. 1.0.5 2/14/02
3
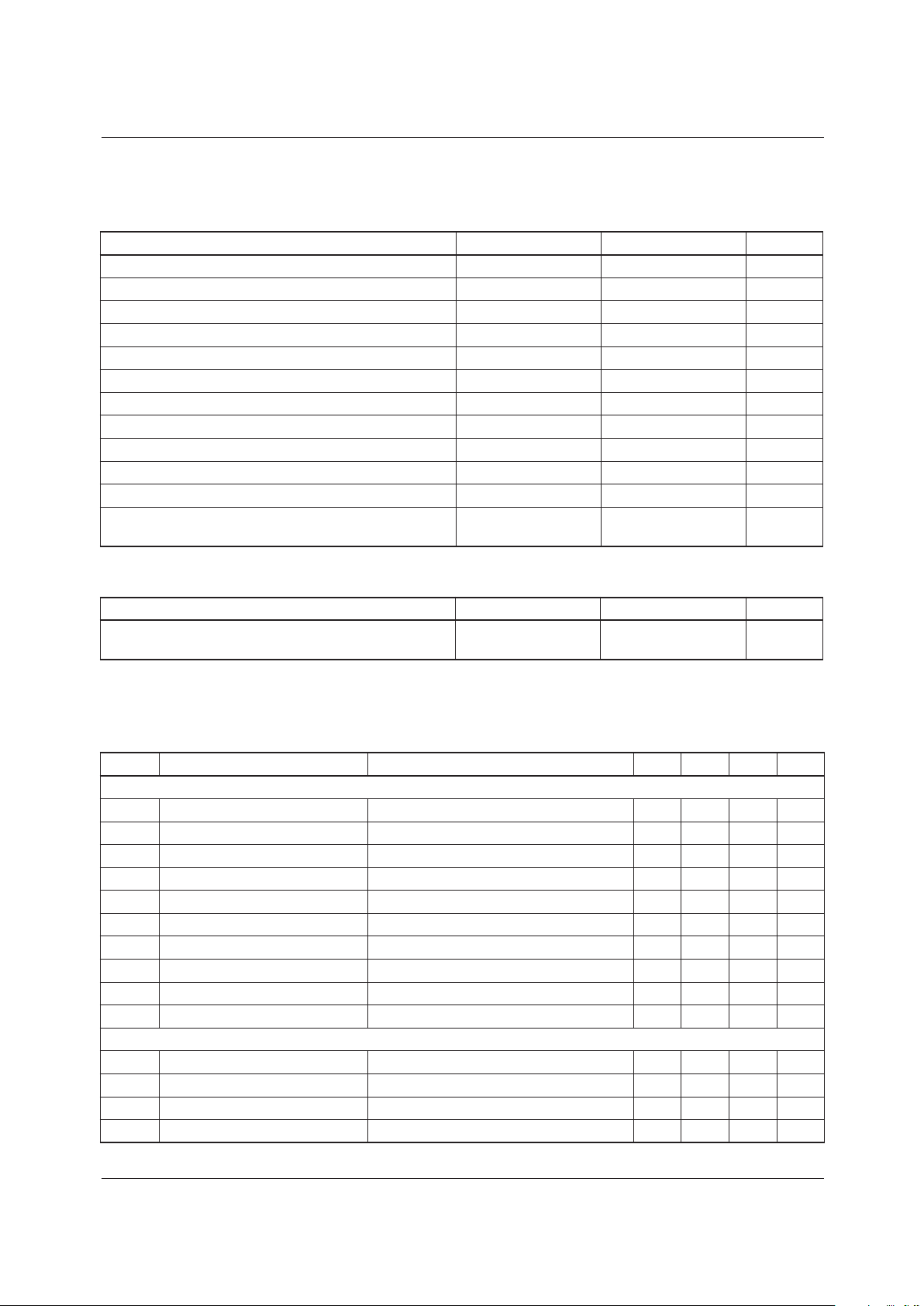
Absolute Maximum Ratings
Absolute maximum ratings are those values beyond which the device could be permanently damaged. Absolute maximum ratings are stress ratings only and functional device operation is not implied.
Operating Conditions
Parameter Min Max. Units
V
CC
Shunt Regulator Current 55 mA
I
SENSE
Voltage –3 5 V
Voltage on Any Other Pin GND – 0.3 V
CCZ
+ 0.3 V
I
REF
20 mA
I
AC
Input Current 10 mA
Peak PFC OUT Current, Source or Sink 500 mA
Peak PWM OUT Current, Source or Sink 500 mA
PFC OUT, PWM 1, PWM 2 Energy Per Cycle 1.5 mJ
Junction Temperature 150 °C
Storage Temperature Range –65 150 °C
Lead Temperature (Soldering, 10 sec) 260 °C
Thermal Resistance ( θ
JA
)
Plastic DIP 67 °C/W
Parameter Min. Max. Units
Temperature Range
ML4826CP2 0 70 °C
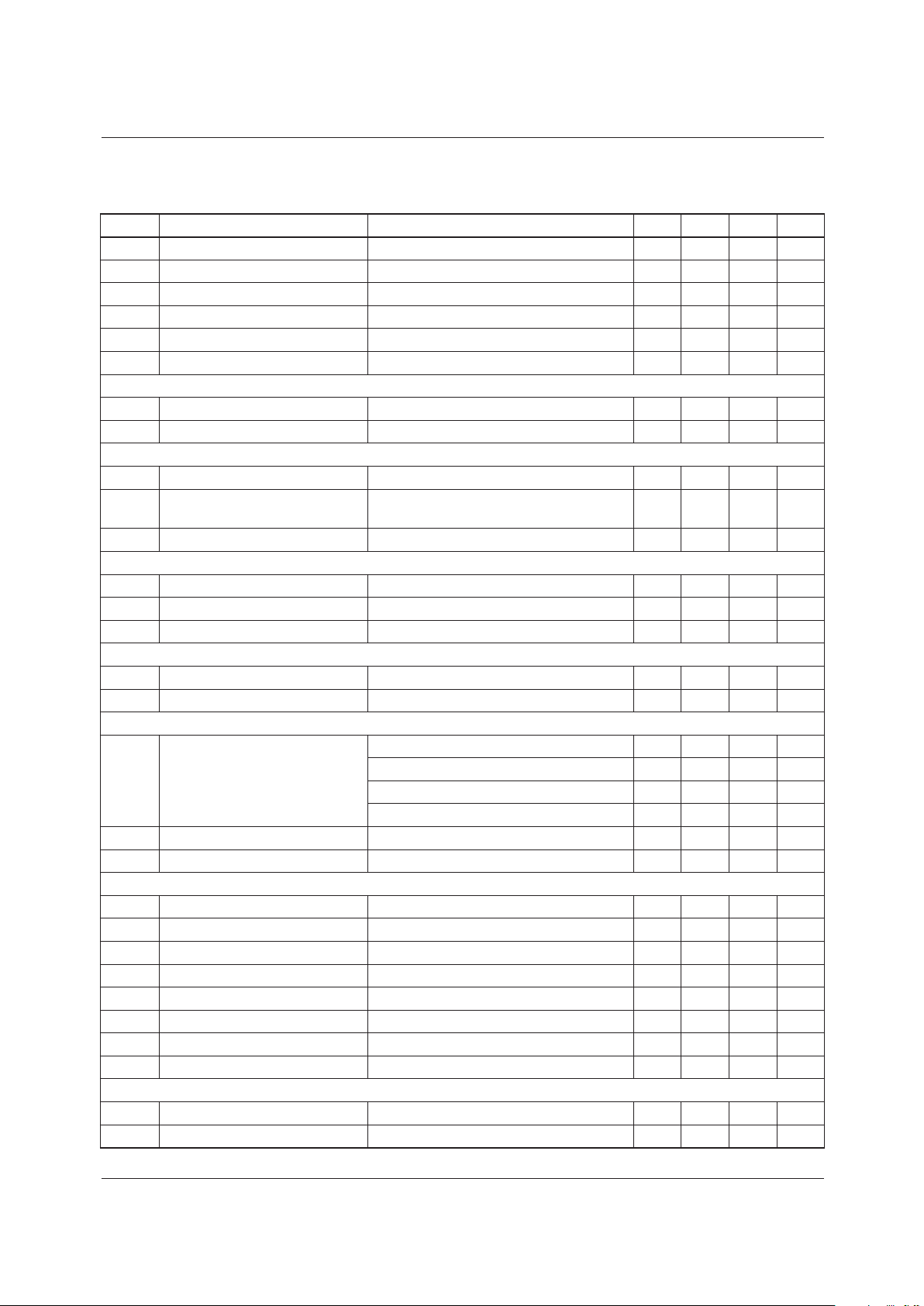
Electrical Characteristics
Unless otherwise specified, I
CC
= 25mA, R
RAMP 1
= R
T
= 52.3k Ω , C
RAMP1
= C
T
= 180 pF,
T
A
= Operating Temperature Range (Note 1)
Symbol Parameter Conditions Min. Typ. Max. Units
Voltage Error Amplifier
Input Voltage Range 0 7 V
Transconductance V
NON INV
= V
INV
, VEAO = 3.75V 50 85 120 µ Ω
Feedback Reference Voltage 2.4 2.5 2.6 V
Input Bias Current Note 2 –0.3 –1.0 µA
Output High Voltage 6.0 6.7 V
Output Low Voltage 0.6 1.0 V
Source Current
∆
V
IN
= ±0.5V, V
OUT
= 6V –40 –80 µA
Sink Current
∆
V
IN
= ±0.5V, V
OUT
= 1.5V 40 80 µA
Open Loop Gain 60 75 dB
Power Supply Rejection Ratio V
CCZ
– 3V < V
CC
< V
CCZ
– 0.5V 60 75 dB
Current Error Amplifier
Input Voltage Range -1.5 2 V
Transconductance V
NON INV
= V
INV
, VEAO = 3.75V 130 195 310 µ Ω
Input Offset Voltage ±3 ±15 mV
Input Bias Current –0.5 –1.0 µA
Ω
Ω
Page 4
ML4826 PRODUCT SPECIFICATION
4
REV. 1.0.5 2/14/02
Output High Voltage 6.0 6.7 V
Output Low Voltage 0.6 1.0 V
Source Current
∆
V
IN
= ±0.5V, V
OUT
= 6V –40 –90 µA
Sink Current
∆
V
IN
= ±0.5V, V
OUT
= 1.5V 40 90 µA
Open Loop Gain 60 75 dB
Power Supply Rejection Ratio V
CCZ
– 3V < V
CC
< V
CCZ
– 0.5V 60 75 dB
OVP Comparator
Threshold Voltage 2.6 2.7 2.8 V
Hysteresis 80 115 150 mV
PFC I
LIMIT
Comparator
Threshold Voltage –0.8 –1.0 –1.15 V
∆(
PFC I
LIMIT
- Gain Modulator
Output)
100 190 mV
Delay to Output 150 300 ns
DC I
LIMIT
comparator
Threshold Voltage 0.9 1.0 1.1 V
Input Bias Current ±0.3 ±1 µA
Delay to Output 150 300 ns
V
IN
OK Comparator
Threshold Voltage 2.4 2.5 2.6 V
Hysteresis 0.8 1.0 1.2 V
Gain Modulator
Gain (Note 3) I
AC
= 100µA, V
RMS
= V
FB
= 0V 0.36 0.55 0.66
I
AC
= 50µA, V
RMS
= 1.2V, V
FB
= 0V 1.20 1.80 2.24
I
AC
= 50µA, V
RMS
= 1.8V, V
FB
= 0V 0.55 0.80 1.01
I
AC
= 100µA, V
RMS
= 3.3V, V
FB
= 0V 0.14 0.20 0.26
Bandwidth IAC = 100µA 10 MHz
Output Voltage I
AC
= 250µA, V
RMS
= 1.15V, V
FB
= 0V 0.72 0.82 0.95 V
Oscillator
Initial Accuracy T
A
= 25°C 180 190 200 kHz
Voltage Stability V
CCZ
– 3V < V
CC
< V
CCZ
– 0.5V 1 %
Temperature Stability 2 %
Total Variation Line, Temp 170 210 kHz
Ramp Valley to Peak Voltage 2.5 V
Dead Time PFC Only 250 500 ns
C
T
Discharge Current V
RAMP 1
= 0V, V(R
T
C
T
) = 2.5V 4.5 7.5 9.5 mA
RAMP 1 Discharge Current 5 mA
Reference
Output Voltage T
A
= 25°C, I(V
REF
) = 1mA 7.4 7.5 7.6 V
Line Regulation V
CCZ
– 3V < V
CC
< V
CCZ
– 0.5V 2 10 mV
Electrical Characteristics
(continued)
Unless otherwise specified, I
CC
= 25mA, R
RAMP 1
= R
T
= 52.3k Ω , C
RAMP1
= C
T
= 180 pF,
T
A
= Operating Temperature Range (Note 1)
Symbol Parameter Conditions Min. Typ. Max. Units
Page 5
PRODUCT SPECIFICATION ML4826
REV. 1.0.5 2/14/02 5
Notes:
1. Limits are guaranteed by 100% testing, sampling, or correlation with worst-case test conditions.
2. Includes all bias currents to other circuits connected to the VFB pin.
3. Gain = K x 5.3V; K = (I
GAINMOD
- I
OFFSET
) x IAC x (VEAO - 1.5V)-1.
Load Regulation 1mA < I(V
REF
) < 20mA 7 20 mV
Total Variation Line, Load, Temp 7.25 7.65 V
Long Term Stability TJ = 125˚C, 1000 Hours 5 25 mV
PFC
Minimum Duty Cycle ML4826-2, V
IEAO
> 5.7V 0 %
Maximum Duty Cycle V
IEAO
< 1.2V 90 95 %
Output Low Voltage I
OUT
= –20mA 0.4 0.8 V
I
OUT
= –50mA 0.6 3.0 V
I
OUT
= 10mA, VCC = 8V 0.7 1.5 V
Output High Voltage I
OUT
= 20mA 9.5 10.5 V
I
OUT
= 50mA 9.0 10 V
Rise/Fall Time CL = 1000pF 50 ns
PWM
Duty Cycle Range 0-47 0-48 0-50 %
Output Low Voltage I
OUT
= –20mA 0.4 0.8 V
I
OUT
= –50mA 0.6 3.0 V
I
OUT
= 10mA, VCC = 8V 0.7 1.5 V
Output High Voltage I
OUT
= 20mA 9.5 10.5 V
I
OUT
= 50mA 9.0 10 V
Rise/Fall Time CL = 1000pF 50 ns
Supply
Shunt Regulator Voltage
(V
CCZ
)
12.8 13.5 14.2 V
V
CCZ
Load Regulation 25mA < ICC < 55mA ±150 ±300 mV
V
CCZ
Total Variation Load, temp 12.4 14.6 V
Start-up Current VCC = 11.2V, CL = 0 0.7 1.1 mA
Operating Current VCC < V
CCZ
– 0.5V, CL = 0 22 28 mA
Undervoltage Lockout
Threshold
12 13 14 V
Undervoltage Lockout
Hysteresis
2.65 3.0 3.35 V
Electrical Characteristics (continued)
Unless otherwise specified, I
CC
= 25mA, R
RAMP 1
= RT = 52.3kΩ, C
RAMP1
= CT = 180 pF,
TA = Operating Temperature Range (Note 1)
Symbol Parameter Conditions Min. Typ. Max. Units
Page 6

ML4826 PRODUCT SPECIFICATION
6 REV. 1.0.5 2/14/02
Typical Performance Characteristics
Figure 1. PFC Section Block Diagram.
250
200
150
100
50
0
Transconductance (µ )
VFB (V)
053
Ω
142
250
200
150
100
50
0
Transconductance (µ )
IEA Input Voltage (mV)
-500 5000
Ω
400
300
200
100
0
Variable Gain Block Constant - K
V
RMS
(mV)
053142
Voltage Error Amplifier (VEA) Transconductance (gm) Current Error Amplifier (IEA) Transconductance (gm)
Variable Gain Control Transfer Characteristic
19
VEAO
IEAO
V
FB
I
AC
V
RMS
I
SENSE
RAMP 1
OSCILLATOR
OVP
PFC I
LIMIT
V
REF
2.5V
+
-
-
+
20
2
4
3
7.5V
REFERENCE
18
V
CC
17
V
CCZ
VEA
8
-
+
IEA
1
+
+
-
PFC OUT
15
SRQ
Q
SRQ
Q
2.7V
-1V
RTC
T
7
GAIN
MODULATOR
x2
3.5kΩ
3.5kΩ
13.5V
8V
UVLO
V
CCZ
Page 7

ML4826 PRODUCT SPECIFICATION
7 REV. 1.0.5 2/14/02
Functional Description
The ML4826 consists of an average current controlled,
continuous boost Power Factor Corrector (PFC) front end
and a synchronized Pulse Width Modulator (PWM) back
end. The PWM can be used in either current or voltage
mode. In voltage mode, feedforward from the PFC output
buss can be used to improve the PWM’s line regulation.
In either mode, the PWM stage uses conventional trailingedge duty cycle modulation, while the PFC uses leadingedge modulation. This patented leading/trailing edge
modulation technique results in a higher useable PFC error
amplifier bandwidth, and can significantly reduce the size of
the PFC DC buss capacitor.
The synchronization of the PWM with the PFC simplifies the
PWM compensation due to the controlled ripple on the PFC
output capacitor (the PWM input capacitor). The PWM
section of the ML4826 runs at twice the frequency of the
PFC, which allows the use of small PWM output magnetics
and filter capacitors while holding down the losses in the
PFC stage power components.
In addition to power factor correction, a number of protection features have been built into the ML4826. These include
soft-start, PFC over-voltage protection, peak current limiting, brown-out protection, duty cycle limit, and undervoltage lockout.
Power Factor Correction
Power factor correction makes a non-linear load look like a
resistive load to the AC line. For a resistor, the current drawn
from the line is in phase with, and proportional to, the line
voltage, so the power factor is unity (one). A common class
of non-linear load is the input of a most power supplies,
which use a bridge rectifier and capacitive input filter fed
from the line. The peak-charging effect which occurs on the
input filter capacitor in such a supply causes brief highamplitude pulses of current to flow from the power line,
rather than a sinusoidal current in phase with the line
voltage. Such a supply presents a power factor to the line of
less than one (another way to state this is that it causes
significant current harmonics to appear at its input). If the
input current drawn by such a supply (or any other nonlinear load) can be made to follow the input voltage in
instantaneous amplitude, it will appear resistive to the AC
line and a unity power factor will be achieved.
To hold the input current draw of a device drawing power
from the AC line in phase with, and proportional to, the input
voltage, a way must be found to prevent that device from
loading the line except in proportion to the instantaneous line
voltage. The PFC section of the ML4826 uses a boost-mode
DC-DC converter to accomplish this. The input to the converter is the full wave rectified AC line voltage. No filtering
is applied following the bridge rectifier, so the input voltage
to the boost converter ranges, at twice line frequency, from
zero volts to the peak value of the AC input and back to zero.
By forcing the boost converter to meet two simultaneous
conditions, it is possible to ensure that the current which the
converter draws from the power line agrees with the instanta-
neous line voltage. One of these conditions is that the output
voltage of the boost converter must be set higher than the
peak value of the line voltage. A commonly used value is
385VDC, to allow for a high line of 270VAC
rms
. The other
condition is that the current which the converter is allowed to
draw from the line at any given instant must be proportional
to the line voltage. The first of these requirements is satisfied
by establishing a suitable voltage control loop for the
converter, which in turn drives a current error amplifier and
switching output driver. The second requirement is met by
using the rectified AC line voltage to modulate the output of
the voltage control loop. Such modulation causes the current
error amplifier to command a power stage current which
varies directly with the input voltage. In order to prevent
ripple which will necessarily appear at the output of the
boost circuit (typically about 10VAC on a 385V DC level)
from introducing distortion back through the voltage error
amplifier, the bandwidth of the voltage loop is deliberately
kept low. A final refinement is to adjust the overall gain of
the PFC such to be proportional to 1/V
IN
2
, which linearizes
the transfer function of the system as the AC input voltage
varies.
Since the boost converter topology in the ML4826 PFC is of
the current-averaging type, no slope compensation is
required.
PFC Section
Gain Modulator
Figure 1 shows a block diagram of the PFC section of the
ML4826. The gain modulator is the heart of the PFC, as it is
this circuit block which controls the response of the current
loop to line voltage waveform and frequency, rms line voltage, and PFC output voltage. There are three inputs to the
gain modulator. These are:
1. A current representing the instantaneous input voltage
(amplitude and waveshape) to the PFC. The rectified
AC input sine wave is converted to a proportional
current via a resistor and is then fed into the gain
modulator at IAC. Sampling current in this way
minimizes ground noise, as is required in high power
switching power conversion environments. The gain
modulator responds linearly to this current.
2. A voltage proportional to the long-term rms AC line
voltage, derived from the rectified line voltage after
scaling and filtering. This signal is presented to the gain
modulator at V
RMS
. The gain modulator’s output is
inversely proportional to V
RMS
2
(except at unusually
low values of V
RMS
where special gain contouring
takes over to limit power dissipation of the circuit components under heavy brown-out conditions). The relationship between V
RMS
and gain is designated as K,
and is illustrated in the Typical Performance Characteristics.
3. The output of the voltage error amplifier, VEAO. The
gain modulator responds linearly to variations in this
voltage.
Page 8

ML4826 PRODUCT SPECIFICATION
8 REV. 1.0.5 2/14/02
The output of the gain modulator is a current signal, in the
form of a full wave rectified sinusoid at twice the line
frequency. This current is applied to the virtual-ground
(negative) input of the current error amplifier. In this way
the gain modulator forms the reference for the current error
loop, and ultimately controls the instantaneous current draw
of the PFC from the power line. The general form for the
output of the gain modulator is:
More exactly, the output current of the gain modulator is
given by:
where K is in units of V
-1
.
Note that the output current of the gain modulator is limited
to ≅ 200µA.
Current Error Amplifier
The current error amplifier’s output controls the PFC duty
cycle to keep the current through the boost inductor a linear
function of the line voltage. At the inverting input to the
current error amplifier, the output current of the gain
modulator is summed with a current which results from a
negative voltage being impressed upon the I
SENSE
pin
(current into I
SENSE
≅ V
SENSE
/3.5kΩ). The negative volt-
age on I
SENSE
represents the sum of all currents flowing in
the PFC circuit, and is typically derived from a current sense
resistor in series with the negative terminal of the input
bridge rectifier. In higher power applications, two current
transformers are sometimes used, one to monitor the ID of
the boost MOSFET(s) and one to monitor the IF of the boost
diode. As stated above, the inverting input of the current
error amplifier is a virtual ground. Given this fact, and the
arrangement of the duty cycle modulator polarities internal
to the PFC, an increase in positive current from the gain
modulator will cause the output stage to increase its duty
cycle until the voltage on I
SENSE
is adequately negative to
cancel this increased current. Similarly, if the gain modulator’s output decreases, the output duty cycle will decrease, to
achieve a less negative voltage on the I
SENSE
pin.
There is a modest degree of gain contouring applied to the
transfer characteristic of the current error amplifier, to
increase its speed of response to current-loop perturbations.
However, the boost inductor will usually be the dominant
factor in overall current loop response. Therefore, this
contouring is significantly less marked than that of the
voltage error amplifier. This is illustrated in the Typical
Performance Characteristics.
Cycle-By-Cycle Current Limiter
The I
SENSE
pin, as well as being a part of the current feedback loop, is a direct input to the cycle-by-cycle current
limiter for the PFC section. Should the input voltage at this
pin ever be more negative than -1V, the output of the PFC
will be disabled until the protection flip-flop is reset by the
clock pulse at the start of the next PFC power cycle.
Overvoltage Protection
The OVP comparator serves to protect the power circuit
from being subjected to excessive voltages if the load should
suddenly change. A resistor divider from the high voltage
DC output of the PFC is fed to VFB. When the voltage on
VFB exceeds 2.7V, the PFC output driver is shut down. The
PWM section will continue to operate. The OVP comparator
has 125mV of hysteresis, and the PFC will not restart until
the voltage at V
FB
drops below 2.58V. The VFB should be
set at a level where the active and passive external power
components and the ML4826 are within their safe operating
voltages, but not so low as to interfere with the boost voltage
regulation loop.
Figure 2. Compensation Network Connections for the
Voltage and Current Error Amplifiers
Error Amplifier Compensation
The PWM loading of the PFC can be modeled as a negative
resistor; an increase in input voltage to the PWM causes a
decrease in the input current. This response dictates the
proper compensation of the two transconductance error
amplifiers. Figure 3 shows the types of compensation networks most commonly used for the voltage and current error
amplifiers, along with their respective return points. The
current loop compensation is returned to V
REF
to produce a
soft-start characteristic on the PFC: as the reference voltage
comes up from zero volts, it creates a differentiated voltage
on IEAO which prevents the PFC from immediately
demanding a full duty cycle on its boost converter.
There are two major concerns when compensating the
voltage loop error amplifier; stability and transient response.
Optimizing interaction between transient response and
stability requires that the error amplifier’s open-loop
crossover frequency should be 1/2 that of the line frequency,
or 23Hz for a 47Hz line (lowest anticipated international
power frequency). The gain vs. input voltage of the
ML4826’s voltage error amplifier has a specially shaped
I
GAINMOD
IACVEAO×
V
RMS
2
--------------------------------
1V×≅
I
GAINMOD
K VEAO 1.5V–()× IAC×≅
(1)
19
VEAO
IEAO
V
FB
I
AC
V
RMS
I
SENSE
2.5V
-
+
20
2
4
3
VEA
-
+
IEA
+
-
V
REF
1
AGND
11
PFC
OUTPUT
GAIN
MODULATOR
Page 9

PRODUCT SPECIFICATION ML4826
REV. 1.0.5 2/14/02 9
nonlinearity such that under steady-state operating conditions the transconductance of the error amplifier is at a local
minimum. Rapid perturbations in line or load conditions will
cause the input to the voltage error amplifier (V
FB
) to deviate from its 2.5V (nominal) value. If this happens, the
transconductance of the voltage error amplifier will increase
significantly, as shown in the Typical Performance Characteristics. This increases the gain-bandwidth product of the
voltage loop, resulting in a much more rapid voltage loop
response to such perturbations than would occur with a conventional linear gain characteristic.
The current amplifier compensation is similar to that of the
voltage error amplifier with the exception of the choice of
crossover frequency. The crossover frequency of the current
amplifier should be at least 10 times that of the voltage
amplifier, to prevent interaction with the voltage loop. It
should also be limited to less than 1/6th that of the switching
frequency, e.g. 16.7kHz for a 100kHz switching frequency.
For more information on compensating the current and
voltage control loops, see Application Notes 33 and 34.
Application Note 16 also contains valuable information for
the design of this class of PFC.
Main Oscillator (R
TCT
)
The oscillator frequency is determined by the values of RT
and CT, which determine the ramp and off-time of the
oscillator output clock:
The deadtime of the oscillator is derived from the following
equation:
at V
REF
= 7.5V:
The ramp of the oscillator may be determined using:
The deadtime is so small (t
RAMP
>> t
DEADTIME
) that the
operating frequency can typically be approximated by:
For proper reset of internal circuits during dead time, values
of 1000pF or greater are suggested for CT.
EXAMPLE:
For the application circuit shown in the data sheet, with the
oscillator running at:
Solving for R
T
x CT yields 2 x 10-4. Selecting standard com-
ponents values, C
T
= 1000pF, and RT = 8.63kΩ.
The deadtime of the oscillator adds to the Maximum PWM
Duty Cycle (it is an input to the Duty Cycle Limiter). With
zero oscillator deadtime, the Maximum PWM Duty Cycle is
typically 45%. In many applications, care should be taken
that C
T
not be made so large as to extend the Maximum
Duty Cycle beyond 50%.
PFC RAMP (RAMP1)
The intersection of RAMP1 and the boost current error
amplifier output controls the PFC pulse width. RAMP1 can
be generated in a similar fashion to the R
TCT
ramp.
The current error amplifier maximum output voltage has a
minimum of 6V. The peak value of RAMP1 should not
exceed that voltage. Assuming a maximum voltage of 5V for
RAMP1, Equation 6 describes the RAMP1 time. With a
100kHz PFC frequency, the resistor tied to V
REF
, and a
150pF capacitor, Equation 7 solves for the RAMP1 resistor.
Figure 3.
PMW SECTION
Pulse Width Modulator
The PWM section of the ML4826 is straightforward, but
there are several points which should be noted. Foremost
among these is its inherent synchronization to the PFC
section of the device, from which it also derives its basic
timing (at twice the PFC frequency in the ML4826-2). The
PWM is capable of current-mode or voltage mode operation.
In current-mode applications, the PWM ramp (RAMP2) is
usually derived directly from a current sensing resistor or
f
OSC
1
t
RAMPtDEADTIME
+
---------------------------------------------------=
(2)
t
DEADTIME
2.5V
5.1mA
------------------
C
T
× 490 CT×==
(3)
f
OSC
200kHz
1
t
RAMP
----------------==
t
RAMPCTRT
× In
V
REF
1.25–
V
REF
3.75–
-------------------------------
×=
(4)
f
OSC
1
t
RAMP
----------------=
(5)
t
RAMP1CRAMP1RRAMP1
× In
V
REF
V
REF
5V–
---------------------------
×=
1.1 R
RAMP1
× C
RAMP1
×=
t
RAMPCTRT
× 0.51× 110
5–
×==
t
RAMP1CRAMP1RRAMP1
× In
V
REF
V
REF
5V–
---------------------------
×=
(6)
1.1 R
RAMP1
× C
RAMP1
×=
R
RAMP1
t
RAMP1
1.1 C
RAMP1
×
------------------------------------
10µs
1.1 150p F×
-------------------------------- 60kΩ===
(7)
V
REF
ML4826
RAMP1
150pF
60kΩ
Page 10

ML4826 PRODUCT SPECIFICATION
10 REV. 1.0.5 2/14/02
current transformer in the primary of the output stage, and is
thereby representative of the current flowing in the converter’s output stage. DC I
LIMIT
, which provides cycle-bycycle current limiting, is typically connected to RAMP 2 in
such applications. For voltage-mode operation or certain
specialized applications, RAMP2 can be connected to a separate RC timing network to generate a voltage ramp against
which VDC will be compared. Under these conditions, the
use of voltage feedforward from the PFC buss can assist in
line regulation accuracy and response. As in current mode
operation, the DC I
LIMIT
input would be used for output
stage overcurrent protection.
No voltage error amplifier is included in the PWM stage of
the ML4826, as this function is generally performed on the
output side of the PWM’s isolation boundary. To facilitate
the design of optocoupler feedback circuitry, an offset has
been built into the PWM’s RAMP2 input which allows V
DC
to command a zero percent duty cycle for input voltages
below 1.5V.
PWM Current Limit
The DC I
LIMIT
pin is a direct input to the cycle-by-cycle
current limiter for the PWM section. Should the input voltage at this pin ever exceed 1V, the output of the PWM will be
disabled until the output flip-flop is reset by the clock pulse
at the start of the next PWM power cycle.
VIN OK Comparator
The V
IN
OK comparator monitors the DC output of the PFC
and inhibits the PWM if this voltage on VFB is less than its
nominal 2.5V. Once this voltage reaches 2.5V, which corresponds to the PFC output capacitor being charged to its
rated boost voltage, the soft-start commences.
RAMP2
The RAMP2 input is compared to the feedback voltage
(VDC) to set the PWM pulse width. In voltage mode it can
be generated using the same method used for the RTCT
input. In current mode the primary current sense and slope
compensation are fed into the RAMP2 input.
Peak current mode control with duty cycles greater than 50%
requires slope compensation for stability. Figure 4 displays
the method used for the required slope compensation. The
example shown adds the slope compensation signal to the
current sense signal. Alternatively, the slope compensation
signal can also be subtracted form the feedback signal
(VDC).
In setting up the slope compensation first determine the
down slope in the output inductor current. To determine the
actual signal required at the RAMP2 input, reflect 1/2 of the
inductor downslope through the main transformer, current
sense transformer to the ramp input.
Internal to the IC is a 1.5V offset in series with the RAMP2
input. In the example show the positive input to the PWM
comparator is developed from V
REF
(7.5V), this limits the
RAMP2 input (current sense and slope compensation) to 6
Volts peak. The composite waveform feeding the RAMP2
pin for the PWM consists of the reflected output current
signal along with the transformer magnetizing current and
the slope compensation signal.
Equation 8 describes the composite signal feeding RAMP2,
consisting of the primary current of the main transformer and
the slope compensation. Equation 9 solves for the required
slope compensation peak voltage.
Soft Start
Start-up of the PWM is controlled by the selection of the
external capacitor at SS. A current source of 50µA supplies
the charging current for the capacitor, and start-up of the
PWM begins at 1.5V. Start-up delay can be programmed by
the following equation:
where CSS is the required soft start capacitance, and t
DELAY
is the desired start-up delay.
It is important that the time constant of the PWM soft-start
allow the PFC time to generate sufficient output power for
the PWM section. The PWM start-up delay should be at least
5ms.
Solving for the minimum value of CSS:
Caution should be exercised when using this minimum soft
start capacitance value because premature charging of the SS
capacitor and activation of the PWM section can result if
V
FB
is in the hysteresis band of the VIN OK comparator at
start-up. The magnitude of VFB at start-up is related both to
line voltage and nominal PFC output voltage. Typically, a
1.0µF soft start capacitor will allow time for VFB and PFC
out to reach their nominal values prior to activation of the
PWM section at line voltages between 90Vrms and
265Vrms.
V
CC
The ML4826 is a current-fed part. It has an internal shunt
voltage regulator, which is designed to regulate the voltage
internal to the part at 13.5V. This allows a low power dissipation while at the same time delivering 10V of gate drive at
the PWM OUT and PFC OUT outputs. It is important to
limit the current through the part to avoid overheating or
destroying the part.
V
RAMP2IPRI
1
2
---
V
OUT
L
--------------
×
N
S
N
S
-------
× T
S
×+
1
n
CT
----------
V
FB
1.5–≤× V=
(8
)
V
SC
1
2
---
V
OUT
L
-----------------
×
N
S
N
P
--------
× TS×
R
SENSE
n
CT
--------------------------
×
1
2
---
48V
20µ H
---------------
14
90
------
× 5µ
471Ω
200
---------------
sec×× 2.2V===
(9
)
C
SStDELAY
50µA
1.5V
--------------
×=
(10
)
C
SS
5ms
50µA
1.5V
--------------
× 167nF==
(11)
Page 11

PRODUCT SPECIFICATION ML4826
REV. 1.0.5 2/14/02 11
Figure 4. Slope Compensation and Current Sense
–
+
–
+
V
CC
V
REF
PWM CMP
DC I
LIMIT
1V
1.5V
R
TCT
R40
47.0kΩ
R38
10.0kΩ
R13
2.2kΩ
RAMP2
AGND
DC I
LIMIT
V
DC
U2
R21
8.63kΩ
Q14
PN2222
D1
R16
471Ω
C11
1000pF
C26
220pF
T3
200:1
I
SENSE
x Former
4 x IN4148
6
10
11
9
7
18
17
There are a number of different ways to supply VCC to the
ML4826. The method suggested in Figure 5, is one which
keeps the ML4826 ICC current to a minimum, and allows for
a loosely regulated bootstrap winding. By feeding external
gate drive components from the base of Q1, the constant current source does not have to account for variations in the gate
drive current. This helps to keep the maximum ICC of the
ML4826 to a minimum. Also, the current available to charge
the bootstrap capacitor from the bootstrap winding is not
limited by the constant current source. The circuit guarantees
that the maximum operating current is available at all times
and minimizes the worst case power dissipation in the IC.
Other methods such as a simple series resistor are possible,
but can very easily lead to excessive ICC current in the
ML4826. Figures 6 and 7 show other possible methods for
feeding VCC.
Leading/Trailing Modulation
Conventional Pulse Width Modulation (PWM) techniques
employ trailing edge modulation in which the switch will
turn on right after the trailing edge of the system clock. The
error amplifier output voltage is then compared with the
modulating ramp. When the modulating ramp reaches the
level of the error amplifier output voltage, the switch will be
turned OFF. When the switch is ON, the inductor current will
ramp up. The effective duty cycle of the trailing edge modulation is determined during the ON time of the switch. Figure
8 shows a typical trailing edge control scheme.
In the case of leading edge modulation, the switch is turned
OFF right at the leading edge of the system clock. When the
modulating ramp reaches the level of the error amplifier
output voltage, the switch will be turned ON. The effective
duty-cycle of the leading edge modulation is determined
during the OFF time of the switch. Figure 9 shows a leading
edge control scheme.
One of the advantages of this control technique is that it
requires only one system clock. Switch 1 (SW1) turns off
and switch 2 (SW2) turns on at the same instant to minimize
the momentary “no-load” period, thus lowering ripple voltage generated by the switching action. With such synchronized switching, the ripple voltage of the first stage is
reduced. Calculation and evaluation have shown that the
120Hz component of the PFC’s output ripple voltage can be
reduced by as much as 30% using this method.
Page 12

ML4826 PRODUCT SPECIFICATION
12 REV. 1.0.5 2/14/02
Figure 5. VCC Bias Circuitry
Figure 6.
Figure 7.
ML4826
V
CC
RTN
RECTIFIED
V
AC
20V
1µF
1500µF
39kΩ
18Ω
GATE
DRIVE
22kΩ
T1
Q2
MJE200
Q1
PN2222
ML4826
V
CC
RTN
V
BIAS
1µF
ML4826
V
CC
RTN
V
BIAS
Page 13

PRODUCT SPECIFICATION ML4826
REV. 1.0.5 2/14/02 13
Figure 8. Typical Trailing Edge Control Scheme.
Figure 9. Typical Leading Edge Control Scheme.
RAMP
VEAO
TIME
VSW1
TIME
REF
EA
–
+
–
+
OSC
DFF
R
D
Q
Q
CLK
U1
RAMP
CLK
U4
U3
C1
RL
I4
SW2
SW1
+
DC
I1
I2
I3
VIN
L1
U2
REF
EA
–
+
–
+
OSC
DFF
R
D
Q
Q
CLK
U1
RAMP
CLK
U4
U3
C1
RL
I4
SW2
SW1
+
DC
I1
I2
I3
VIN
L1
VEAO
CMP
U2
RAMP
VEAO
TIME
VSW1
TIME
Page 14

ML4826 PRODUCT SPECIFICATION
14 REV. 1.0.5 2/14/02
Figure 10. 48V 300W Power Factor Corrected Power Supply
AC INPUT
85 TO 265VAC
C2
470nF
X
F1
8A
GBU6J
6A, 600V
R7
470kΩ
R2
470kΩ
L1
420µH
Q7
FQP9N50
Q8
FQP9N50
R1
10kΩ
D1
1N4747
R10
10kΩ
CR4
1N4747
D5
MUR860
R12
381kΩ
R110
2.37kΩ
C21
47nF
Y
C1
330µF
48VDC
L3
100nH
C14
820µF
C11
1µF
RTN
D21A
MBR20100CT-ND
R35
43.2kΩ
R32
2.37kΩ
R25
10Ω
TL431
R22
3.3kΩ
C6
100nF
T1
C19
100nF
C20
100nF
C12
1µF
NC
OUT A
VSOUT B
NC
IN A
V
S
RTN
IN B
FERRITE
BEAD
R6
10Ω
D9
1N5818
R8
10Ω
D8
1N5818
R116
10kΩ
R113
47kΩ
Q1
FQP9N50
R38
10kΩ
D17A
1N4747
D20
1N5818
R41
10Ω
D19
1N5819
D25
EGP20J
R44
200Ω
Q2
FQP9N50
R43
10kΩ
D23A
1N4747
D23B
1N4747
D22
1N5818
R42
10Ω
D18
1N5819
D24
EGP20J
R37
200Ω
Q11
PN2907
Q8
FQP9N50
R26
10kΩ
D10
1N4747
D16
1N5818
R29
10Ω
D12
1N5819
D25
EGP20J
R46
200Ω
Q7
FQP9N50
D27
1N5818
R30
10Ω
D11
1N5819
D15
EGP20J
R24
200Ω
Q9
PN2907
Q6
PN2907
T2
T1 T1
IEAO
IACI
SENSE
V
RMS
SS
VDCR
T
C
T
RAMP 1
RAMP 2
DC I
LIMIT
VEAO
V
FB
V
REF
V
CC
V
CC2
PFC OUT
PWM 1
PWM 2
P GND
A GND
T2
TC4427
C109
1nF
R11
10Ω
C3
1µF
C114
220pF
R112
471Ω
R23
2.2kΩ
R3
18Ω
Q1
MJE200
Q12
PN2222
C5
100µF
Q10
PN2907
D14
1N4747
R33
10kΩ
R45
20kΩ
2W
C13
820µF
R27
1kΩ
C10
10nF
L2
20µH
R36
10Ω
D26
1N5818
D13
20V
C7
1nF
R28
330Ω
C15
4.7µF
D21B
C17
470pF
R40
220Ω
C18
470pF
R39
220Ω
C104
1nF
R104
2.2kΩ
R21
200Ω
D105
1N5818
R20
200Ω
D104
1N5818
T2
C9
1µF
C8
1nF
R31
150Ω
R16
500kΩ
R17
500kΩ
R103
100Ω
Q2
PN2222
R34
10Ω
Q3
PN2222
Q4
2N2907
Q5
PN2907
C16
1µF
R14A
39kΩ
2W
R14B
39kΩ
2W
C4
3300µF
R105
10kΩ
C106
3.3nF
C105
100pF
T1
T1
C110
1µF
T3
200:1
BR2
4x1N4148
C102
100nF
R19
453kΩ
R18
453kΩ
C103
2.2nF
R102
100kΩ
C101
470nF
R101
10.2kΩ
C108
680nF
R106
225kΩ
C107
66nF
C116
1.0µF
1N4148
Q104
PN2222
R115
8.63kΩ
C112
1nF
R114
52.3kΩ
C113
150pF
R15
100mΩ
5W
FERRITE
BEAD
D17B
1N4747
C111
1µF
Page 15

PRODUCT SPECIFICATION ML4826
REV. 1.0.5 2/14/02 15
Mechanical Dimensions inches (millimeters)
SEATING PLANE
0.240 - 0.260
(6.09 - 6.61)
PIN 1 ID
0.295 - 0.325
(7.49 - 8.26)
1.010 - 1.035
(25.65 - 26.29)
0.016 - 0.022
(0.40 - 0.56)
0.100 BSC
(2.54 BSC)
0.008 - 0.012
(0.20 - 0.31)
0.015 MIN
(0.38 MIN)
20
0º - 15º
1
0.055 - 0.065
(1.40 - 1.65)
0.170 MAX
(4.32 MAX)
0.125 MIN
(3.18 MIN)
0.060 MIN
(1.52 MIN)
(4 PLACES)
Package: P20
20-Pin PDIP
Page 16

ML4826 PRODUCT SPECIFICATION
LIFE SUPPORT POLICY
FAIRCHILD’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES
OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF FAIRCHILD SEMICONDUCTOR
CORPORATION. As used herein:
1. Life support devices or systems are devices or systems
which, (a) are intended for surgical implant into the body,
or (b) support or sustain life, and (c) whose failure to
perform when properly used in accordance with
instructions for use provided in the labeling, can be
reasonably expected to result in a significant injury of the
user.
2. A critical component in any component of a life support
device or system whose failure to perform can be
reasonably expected to cause the failure of the life support
device or system, or to affect its safety or effectiveness.
www.fairchildsemi.com
DISCLAIMER
FAIRCHILD SEMICONDUCTOR RESERVES THE RIGHT TO MAKE CHANGES WITHOUT FURTHER NOTICE TO
ANY PRODUCTS HEREIN TO IMPROVE RELIABILITY, FUNCTION OR DESIGN. FAIRCHILD DOES NOT ASSUME
ANY LIABILITY ARISING OUT OF THE APPLICATION OR USE OF ANY PRODUCT OR CIRCUIT DESCRIBED HEREIN;
NEITHER DOES IT CONVEY ANY LICENSE UNDER ITS PATENT RIGHTS, NOR THE RIGHTS OF OTHERS.
2/14/02 0.0m 003
Stock#DS30004826
© 2001 Fairchild Semiconductor Corporation
Ordering Information
Part Number PWM Frequency Temperature Range Package
ML4826CP2 2 x PFC 0°C to 70°C 20-Pin PDIP
 Loading...
Loading...