

Page 1
GDC21D601
32-Bit RISC MCU
Ver 1.6
HDS-GDC21D601-9908 / 10
Page 2
GDC21D601
The information contained herein is subject to change without notice.
The information contained herein is presented only as a guide for the applications of our products. No
responsibility is assumed by Hyundai for any infringements of patents or other rights of the third parties
which may result from its use. No license is granted by implication or otherwise under any patent or
patent rights of Hyundai or others.
These Hyundai products are intended for usage in general electronic equipment (office equipment,
communication equipment, measuring equipment, domestic electrification, etc.).
Please make sure that you consult with us before you use these Hyundai products in equipment which
require high quality and / or reliability, and in equipment which could have major impact to the welfare of
human life (atomic energy control, airplane, spaceship, traffic signal, combustion control, all types of
safety devices, etc.). Hyundai cannot accept liability to any damage which may occur in case these
Hyundai products were used in the mentioned equipment without prior consultation with Hyundai.
Copyright 1999 Hyundai Micro Electronics Co.,Ltd.
All Rights Reserved
3
Page 3
GDC21D601
TABLE OF CONTENTS
Section 1. Overview.....................................................................................................................8
1. General Description..............................................................................................................8
2. Feature................................................................................................................................10
3. Package..............................................................................................................................12
4. Pin Assignment...................................................................................................................13
5. Pin Descriptions..................................................................................................................15
Section 2. System Architecture ................................................................................................20
1. Internal Bus Architecture.....................................................................................................20
2. Arbiter .................................................................................................................................20
3. System Decoder .................................................................................................................21
4. Memory Map.......................................................................................................................21
5. Memory Format...................................................................................................................22
6. Boot Mode...........................................................................................................................22
7. Multi-Function Pin ...............................................................................................................23
Section 3. ARM720T Core..........................................................................................................24
1. General Description............................................................................................................24
2. Feature................................................................................................................................24
3. Core Block Diagram............................................................................................................26
Section 4. DRAM Controller......................................................................................................27
1. General Description............................................................................................................27
2. Hardware Interface and Signal Description ........................................................................28
3. Functional Description ........................................................................................................31
4. Register Description............................................................................................................34
Section 5. On-Chip SRAM .........................................................................................................37
1. General Description............................................................................................................37
2. Signal Description...............................................................................................................37
3. Function Description...........................................................................................................37
Section 6. Static Memory Controller........................................................................................38
1. General Description............................................................................................................38
2. Signal Description...............................................................................................................39
3. Functional Description ........................................................................................................43
4. Programmer’ s Model..........................................................................................................45
4
Page 4

GDC21D601
Section 7. MCU Controller.........................................................................................................48
1. General Description............................................................................................................48
2. Signal Description...............................................................................................................48
3. Register Description............................................................................................................49
Section 8. Power Management Unit.........................................................................................54
1. General Description............................................................................................................54
2. Hardware Interface and Signal Description ........................................................................55
3. Operation Modes ................................................................................................................56
4. Register Description............................................................................................................58
5. Power Management Unit Register Map..............................................................................63
6. Test Mode Guide for MCU..................................................................................................64
7. Signal Timing Diagram........................................................................................................66
Section 9. Watchdog Timer.......................................................................................................68
1. General Description............................................................................................................68
2. Hardware Interface and Signal Description ........................................................................69
3. Watchdog Timer Introduction .............................................................................................71
4. Watchdog Timer Operation ................................................................................................72
5. Watchdog Timer Memory Map ...........................................................................................74
6. Watchdog Timer Register Descriptions..............................................................................75
7. Examples of Register Setting..............................................................................................77
Section 10. Interrupt Controller................................................................................................81
1. General Description............................................................................................................81
2. Hardware Interface and Signal Description ........................................................................82
3. Interrupt Controller..............................................................................................................84
4. Interrupt Controller Memory Map........................................................................................86
5. Interrupt Controller Register Descriptions...........................................................................87
Section 11. Real Time Clock .....................................................................................................91
1. General Description............................................................................................................91
2. Signal Description...............................................................................................................92
3. Hardware Interface .............................................................................................................93
4. Functional Description ........................................................................................................94
5. Real Time Clock Memory Map ...........................................................................................95
6. Real Time Clock Register Descriptions..............................................................................95
5
Page 5

GDC21D601
Section 12. General Purpose Timer Unit .................................................................................96
1. General Description............................................................................................................96
2. Hardware Interface and Signal Description ........................................................................97
3. General Purpose Timer Unit Introduction.........................................................................100
4. General Purpose Timer Unit Operation............................................................................101
5. General Purpose Timer Unit Memory Map.......................................................................102
6. General Purpose Timer Unit Register Descriptions..........................................................104
7. Examples of Register Setting............................................................................................108
Section 13. PIO.........................................................................................................................111
1. General Description..........................................................................................................111
2. Signal Description.............................................................................................................112
3. Hardware Interface ...........................................................................................................115
4. Functional Description ......................................................................................................116
5. Programmer’ s Model........................................................................................................117
Section 14. Synchronous Serial Peripheral Interface...........................................................118
1. General Description..........................................................................................................118
2. Signal Description.............................................................................................................119
3. Hardware Interface ...........................................................................................................120
4. Functional Description ......................................................................................................121
5. Register Memory Map.......................................................................................................123
6. SSPI Data Clock Timing Diagram.....................................................................................124
Section 15. UART.....................................................................................................................125
1. General Description..........................................................................................................125
2. Features............................................................................................................................125
3. Signal Description.............................................................................................................126
4. Internal Block Diagram......................................................................................................129
5. Registers Description........................................................................................................130
Section 16. Smart Card Interface............................................................................................142
1. General Description..........................................................................................................142
2. Signal Description.............................................................................................................143
3. Hardware Interface ...........................................................................................................144
4. Functional Description ......................................................................................................145
5. Programmer’ s Model........................................................................................................146
6
Page 6

GDC21D601
Section 17. I2C Controller........................................................................................................149
1. General Description..........................................................................................................149
2. I2C Controller Key Features..............................................................................................150
3. I2C Controller Clocking and Pin Functions........................................................................150
4. I2C Master Mode Transmit / Receive Process..................................................................150
5. I2C Restart Capability (Combined Mode)..........................................................................151
6. I2C Controller Programming Model...................................................................................152
7. I2C Module Signal Description ..........................................................................................154
8. Hardware Interface ...........................................................................................................155
9. Register Memory Map.......................................................................................................156
Section 18. Direct Memory Access Controller ......................................................................157
1. General Description..........................................................................................................157
2. Signal Description.............................................................................................................158
3. Programmer’ s Model........................................................................................................159
4. Address Modes.................................................................................................................163
Section 19. Debug and Test Interface....................................................................................167
1. General Description..........................................................................................................167
2. Software Development Debug and Test Interface............................................................167
3. Test Access Port and Boundary Scan..............................................................................167
Section 20. Electrical Ratings.................................................................................................169
1. Absolute Maximum Ratings..............................................................................................169
2. Thermal Characteristics....................................................................................................169
3. D.C Electrical Characteristics ...........................................................................................169
APENDIX A. Register Map.......................................................................................................170
7
Page 7
GDC21D601
GDC21D601
32-Bit RISC MCU
Section 1. Overview
1. General Description
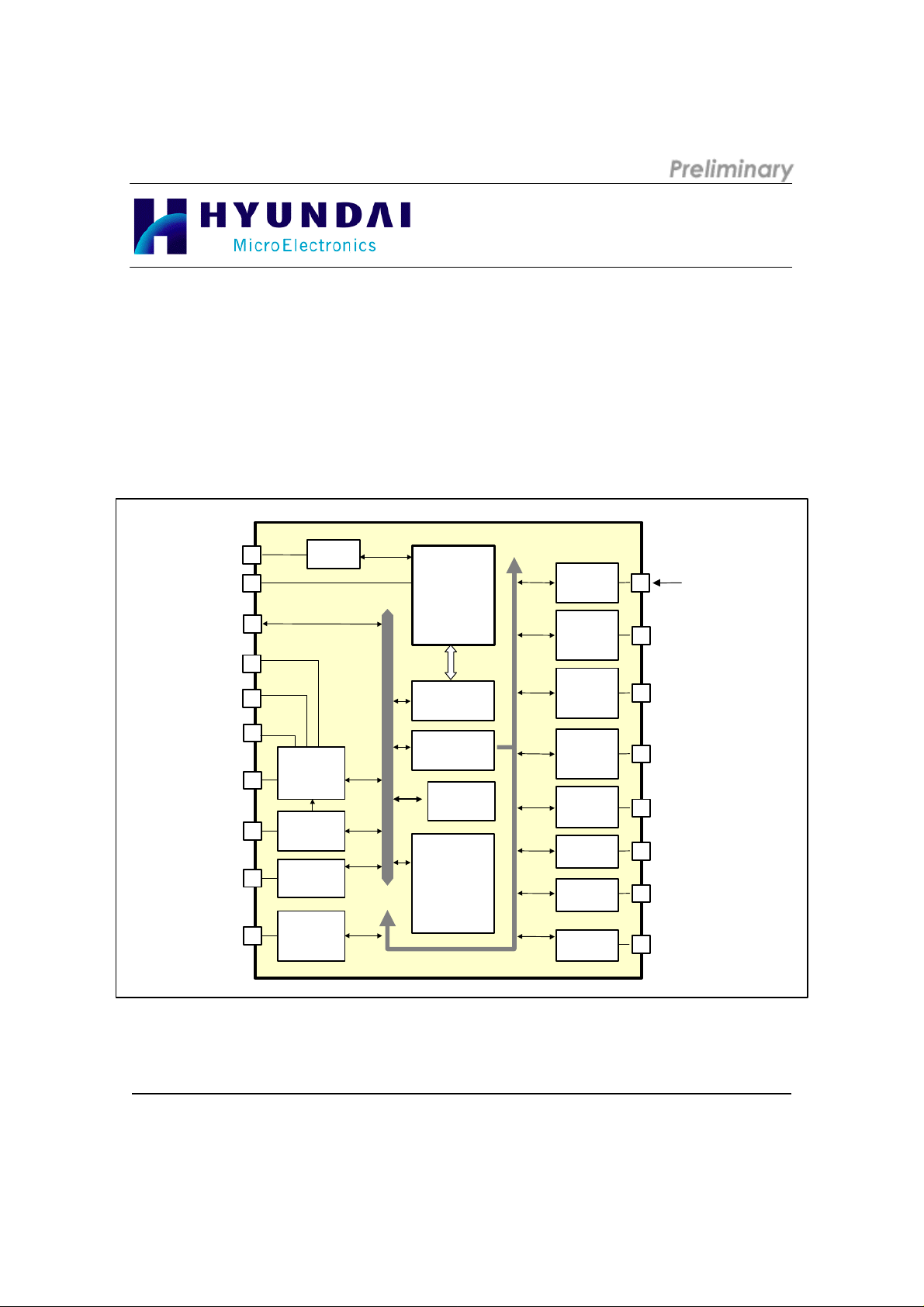
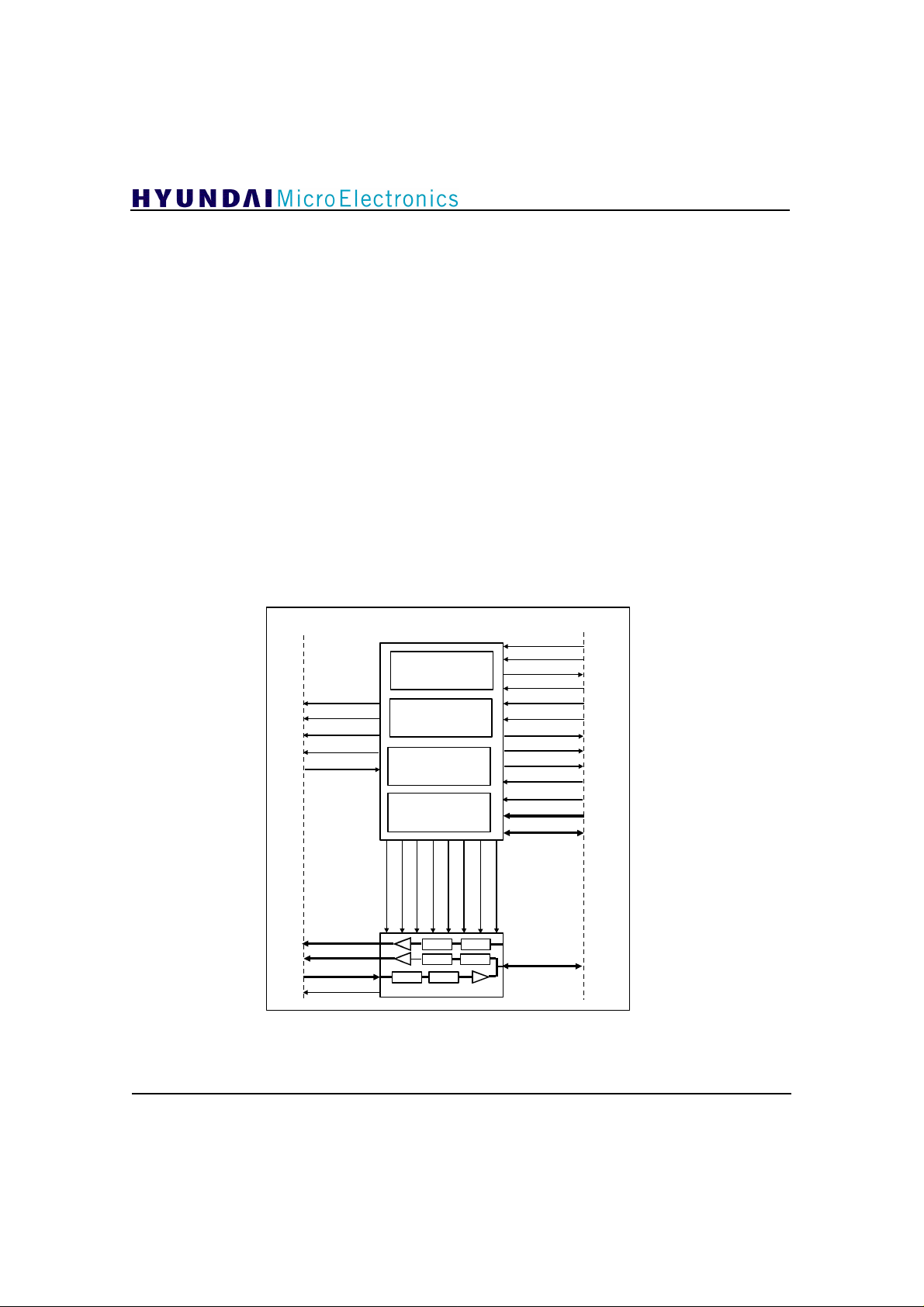
The GDC21D601 is the HME’s 32bit high performance microcontroller unit (MCU). The GDC21D601 contains
ARM720T, which is a general-purpose 32bit microprocessor, and extensive peripherals: 6 channel 16bit Timer,
Watch Dog Timer, 2 channel UART, 2 channel SSPI, 3 channel I2C, Programmable Priority Interrupt Controller,
10 port PIO, 2 channel DMA Controller, External Memory Controller and BUS Controller including chip select
logic.
ARM720T is a 32bit Microprocessor with the CPU of the ARM7TDMI, 8KB Cache, enlarged write buffer and
Memory Management Unit (MMU). The ARM720T is fully software compatible with the ARM processor family.
JTAG[0:4]
RESET
EXPRDY
EXPCLK
Mode[0:2]
DRAM OE, WE
WR[0:3], RD
RD&WR
BCLKOUT / PORT F[5]
BWAIT / PORT F[4]
A[0:31]
D[0:31]
nCS[4:7] / PORT H[4:7]
RAS[0:1] / PORT G[6:7]
CAS[0:3] / PORT G[0:3]
DREQ[0:1] / PORT G[2:3]
DACK[0:1] / PORT G[4:5]
IRQ[0:5] / PORT A[0:5]
nCS[0:3]
Bus
controller
DRAM
controller
DMA
controller
INT
controller
JTAG
ASB
APB
32-bit
ARM 720T
Core
AMBA Logic
APB Bridge
MCU
controller
Internal
SRAM
(8KB)
GDC21D601
RTC
Timer
UART
I2C
controller
SSPI
PIO
PMU
WDT
RTCin/Out (32.768kHz)
PORT B[0:7] / Timer TCIO / PWM
PORT C[0:3] / Timer TCIO / PWM
TCLK A,B,C / PORT C[4:6]
UART channel 0 , 1
SMART Card / UART channel 2
( PORT D[0:7] ,PORT E[0:4] )
I2C channel 0
I2C channel 1
I2C channel 2
SSPI 0, 1
( PORT E[5:7], PORT F[0:4] )
PORT I[0:7]
PORTJ[0:7]
NPDM
WDTOUT
Figure. 1 GDC21D601 Block Diagram
8
Page 8

GDC21D601
The general descriptions of the GDC21D601 like following :
• On-Chip Modular Architecture (using AMBA)
• Utilizes the ARM720T(“ARM7TDMI with 8Kbyte Cache and MMU”) 32bit RISC Family
• 8Kbyte internal SRAM
• support 8bit/16bit/32bit external Data bus width
• Eight Programmable Chip Select Outputs with EXPRDY
• Support Little and Big Endian memory format
• Low Power Consumption using Power Management Unit
• Fully static operation : Max. 80MHz
• Two 32bit DMA Controllers (External request only)
• Programmable Priority Interrupt Controller (6 external sources)
• Two DRAM Banks Support
• Six 16bit Multi Function Timers / Counters for General Purpose Applications
• One 8bit Watch Dog Timer (WDT)
• Real Time Clock : 32.768 KHz
• Three UARTs (Universal Asynchronous Receiver Transmitter) compatible with 16C550 UART, one
UART with Smart card interface
• Two SSPIs (Synchronous Serial Peripheral Interface) with FIFO
• Three I2C Master/Slave Controllers
• Programmable Input/Output (8bit 10 channel)
• 208 MQFP Package
9
Page 9

2. Feature
GDC21D601
• ARM720T Core
- This is an ARM7TDMI CPU core with
. 8KB cache
. enlarged write buffer
. MMU(Memory Management Unit)
. On-chip ICEbreaker debug support
. 32-bit x 8 hardware multiplier
. Thumb decompressor
. High-performance 32-bit RISC architecture
. High-density 16-bit insturction set
Enhanced ARM software toolkit
THUMB code is able to provide up to 65% of
the code size of ARM, and 160% of the
performance of an equivalent ARM processor
connected to a 16-bit memory system.
The MMU supports 4G bytes Virtual address.
The allocation of virtual addresses with
different task ID improves performance in task
switching operations with the cache enabled.
• DMA Controller
- Two Channels with identical function
- Four Gigabytes of address space
- 256 Kbytes transfers to the maximum
- Data Transfer unit : Byte, Half-word, Word
- Two kinds of Bus mode
. Burst mode
. Exception mode(Cycle steal)
- Two kinds of address mode
. Single address mode
. Dual address mode
- Two types of Transfer request source
. External I/O request
. Auto-request
- Two kind of fixed priority for channels
- Interrupted when the data transfers are
complete
• DRAM Controller
- DRAM access
- Support Word, Half-word, and Byte transaction
- CBR refresh in normal operation and self-refresh
in power-down mode
- Support programmable refresh rate
- Support various DRAM access time by setting
the wait count control register
• Static Memory Controller
- Chip Select up to 8 (Each Bank is 256 MByte)
- Exchangeable Chip Select Active High/Low
(CS6 and CS7 only)
- Little-Endian and Big-Endian Memory Support
- Programmable wait-state (up to 16 wait-state)
- Support External BUS Ready Strobe
- Support various type Bus Control timing
- Support Word, Half-word, and Byte transaction
• On-Chip SRAM
- 8k Bytes(2048x32)
- Asynchronous SRAM
- Can write 8/16/32bits data, and read 32bits data
• MCU Controller
- The Memory Map Structure Control signals
- DRAM Power-Down Request and Powr-Down
Ack signal
- Generate the Multi Function Pin control signals
- Device Code : $GDC601
• Power Management Unit
- Power On Reset, WD_OF Reset, and S/W Reset
- Status : RESET, Power Down, RUN_FAST,
RUN_SLOW
- Provide separated clock for each modules on
chip
- Provide BCLKOUT, WD_OF, Power-Down pins
for external devices
• Watch Dog Timer
- Watchdog timer mode & interval timer mode
- Eight counter clock sources
- Generate the Power Down reset or the Watch
Dog Overflow
• Interrupt Controller
- Asynchronous interrupt controller
- Six external interrupt
- Twenty internal interrupt
- Level or edge triggered
- Mask for each interrupt source
Request of IRQ, FIQ for each interrupt source
10
Page 10

GDC21D601
• Real Time Clock
- 32bit counter clocked by a 32.768KHz clock.
- 32bit match register
• Programmable Input Output
- up to 80 pin (8bit 10channel)
- Each pin can be configurable as either input or
output
• Timer
- 6 channel 16-bit up-count
- 4-internal pre-scaleable , 4-external input clock
. 1 interrupt per 1 channel
. 2 inout pin per 1 channel for input capture or
output compare
- Basic function :
. Compare match waveform output
. Input capture
. Match clear
. Capture clear
- Synchronous mode
. Synch. clear at two or more channel
. Synch. write at two or more channel
- PWM waveform output mode
• Synchronous Serial Interface
- Supports full duplex communication
- Sends and receives data continuously, using 16 x
8 bit FIFOs
- Built-in baud rate generator capable of
generation 4 clock rate
- Selectable clock source : either built-in buad-rate
generator or external clock
- 4 independent interrupts : transmit-end, rx-full,
tx-empty and tx-full
• UART
- 2 channel : UART only
. Compatible with 16550
. 16 byte each FIFO for TX / RX
. Start, stop and parity bit can be added or
deleted from/to serial data
. MODEM control functions (CTS, RTS, DSR,
DTR, RI and DCD )
. Fully programmable serial-interface
characteristics
: 5-, 6-, 7- or 8-bit characters
: even, odd or no-parity bit generation and
detection
: 1-, 1.5- or 2-stop bit generation and
detection
• SmartCard Interface
- 1 channel : Support SmartCard Interface
. Supports only asynchronous operation
. Supports cards that have internal reset
capability
. Supports cards that have an active low reset
input
. Supports cards that use the internal clock
. Generate the clock for a card expecting the
external clock
. Use the serial in/out ports for I/O
. Use the PIO ports for other interface signals
like RST, DETECT, etc
• I2C
- 3 channels
- Master / Slave function
- Programmable clock speed
- 8bit data transfer
- Slave clock stretch support
- Maskable interrupt
- Support clock rates up to 1.84MHz Baud
11
Page 11
3. Package
9921
Rev. ES
12345678910111213141516171819202122232425262728293031323334353637383940414243
44
132
131
130
129
128
127
126
125
124
123
122
121
120
119
118
117
116
115
114
113
112
111
110
109
108
107
106
105
135
153
152
151
150
149
148
147
146
145
144
143
142
141
140
139
138
137
136
134
45464748495051
52
156
155
154
HME
32bit MCU
GDC21D601
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
ARM
GDC21D601R1
(Top View)
104
103
102
101
100
99
98
97
96
95
94
93
92
91
90
89
88
87
86
85
84
83
82
81
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
12
Figure 2. Package Outline
Page 12
GDC21D601
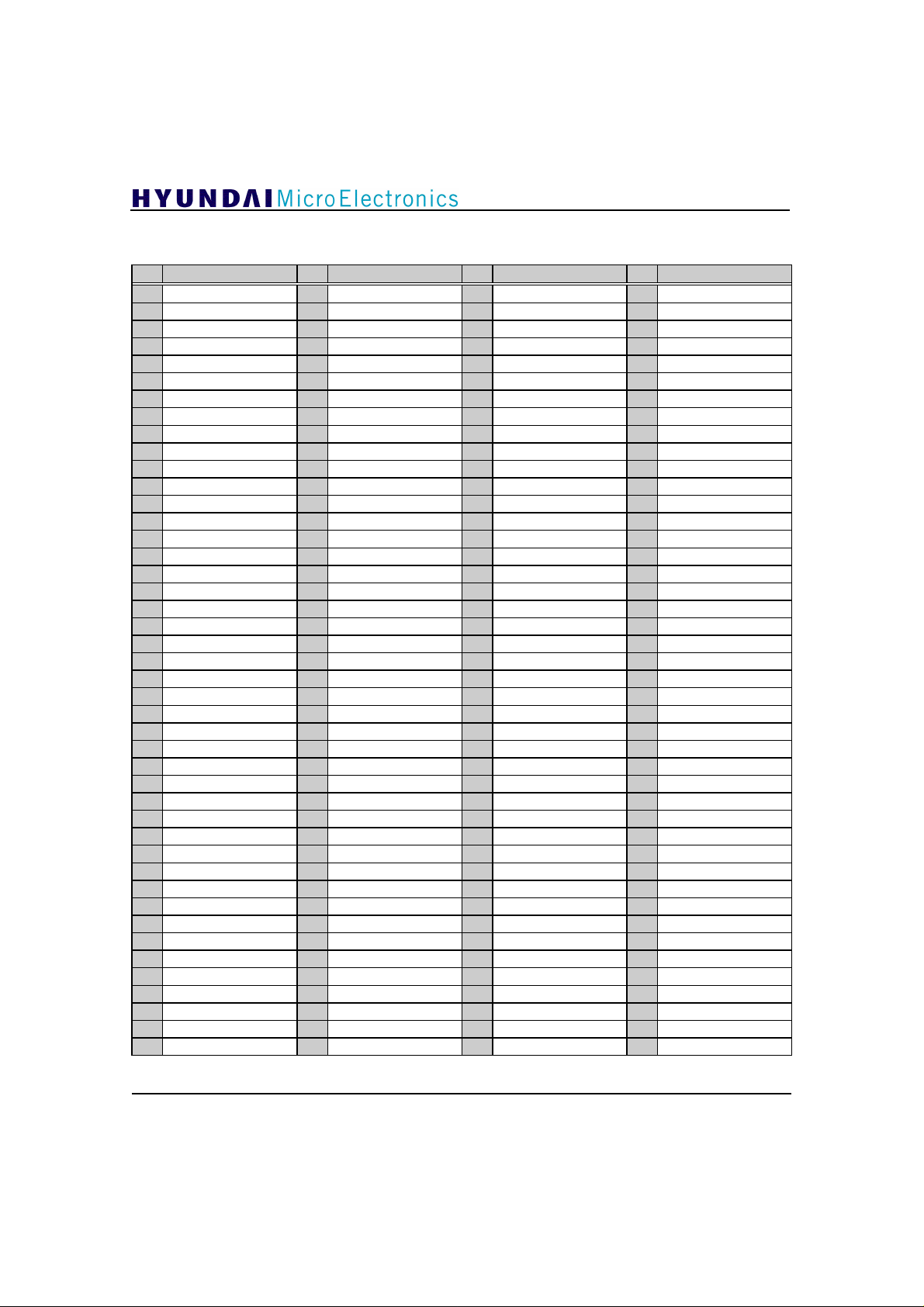
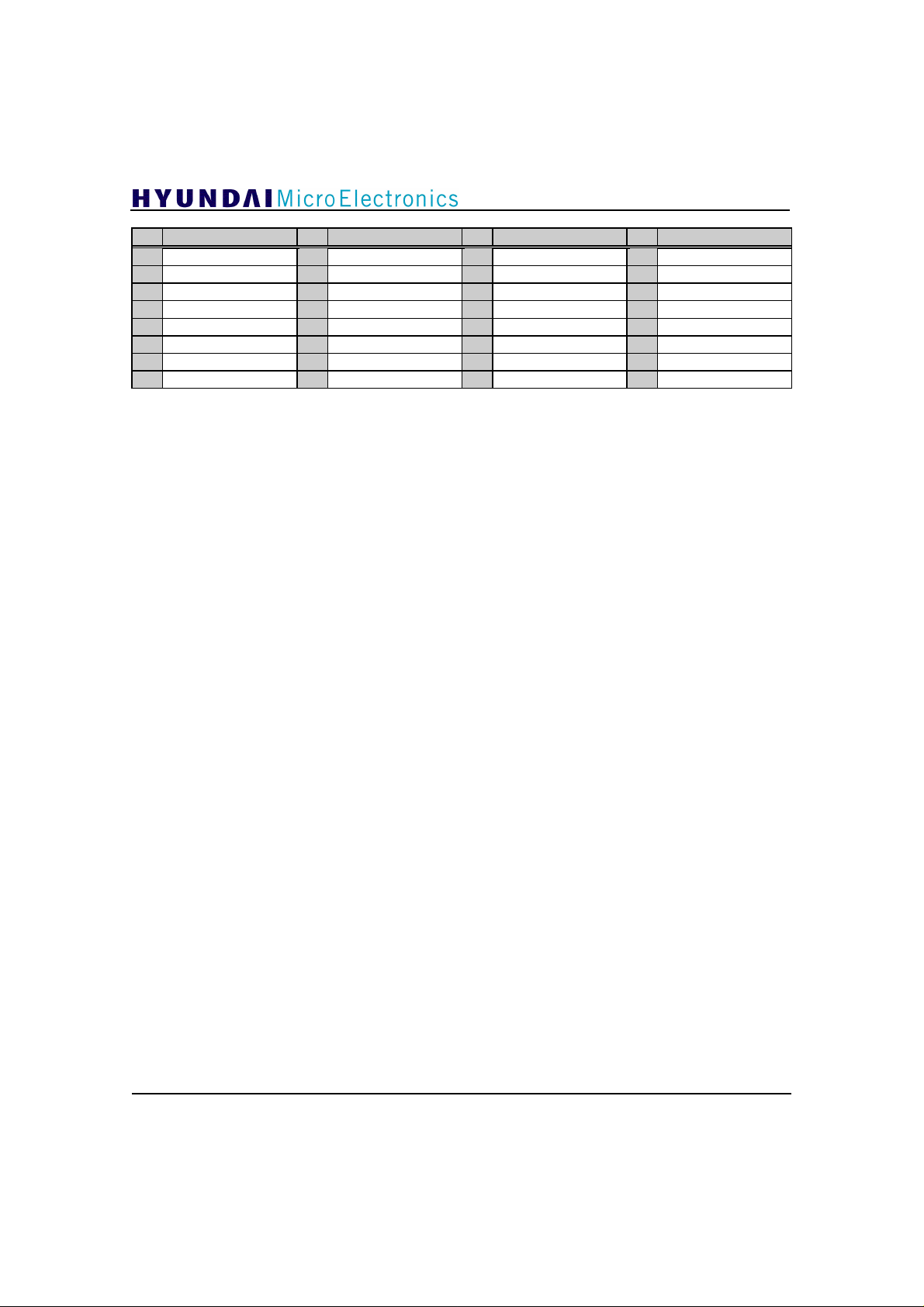
4. Pin Assignment
PIN NAME PIN NAME PIN NAME PIN NAME
1 A0 45 IRQ0/PA0 89 VDD 133 NRAS0/PG6
2 A1 46 VDD 90 SMDI/PE2 134 VSS
3 VDD 47 IRQ1/PA1 91 SMDO/PE3 135 NRAS1/PG7
4 A2 48 IRQ2/PA2 92 SMCLK/PE4 136 NCAS0/PH0
5 A3 49 IRQ3/PA3 93 VSS 137 NCAS1/PH1
6 A4 50 VSS 94 SIN0/ PE5 138 NCAS2/PH2
7 VSS 51 IRQ4/PA4 95
8 A5 52 IRQ5/PA5 96 SCLK0/PE7 140 VSS
9 A6 53 PA6 97 VDD 141 XOUT
10 A7 54 PA7 98
11 VDD 55 TCIOA0/PB0 99
12 A8 56 VDD 100
13 A9 57 TCIOB0/PB1 101 VSS 145 NDRAMWE
14 A10 58 TCIOA1/PB2 102
15 VSS 59 TCIOB1/PB3 103 SCS1/PF4 147 NWR0
16 A11 60 VSS 104 BCLKOUT/PF5 148 NWR1
17 A12 61 TCIOA2/PB4 105 NFIQOUT/PF6 149 NWR2
18 VDD 62 TCIOB2/PB5 106 NIRQOUT/PF7 150 VDD
19 A13 63 TCIOA3/PB6 107 VDD 151 NWR3
20 A14 64 VDD 108 I2CSDA0 152 NRD
21 A15 65 TCIOB3/PB7 109 I2CSCL0 153 RDNWR
22 VSS 66 PC0/TCIOA4 110 I2CSDA1 154 VSS
23 A16 67 PC1/TCIOB4 111 VSS 155 NEXPRDY
24 A17 68 VSS 112 I2CSCL1 156 EXPCLK
25 A18 69 PC2/TCIOA5 113 I2CSDA2 157 NCS0
26 VDD 70 PC3/TCIOB5 114 I2CSCL2 158 NCS1
27 A19 71 PC4/TCLKA 115 VDD 159 NCS2
28 A20 72 VDD 116 Mode0/TREQA 160 VDD
29 A21 73 PC5/TCLKB 117 Mode1/TREQB 161 NCS3
30 VSS 74 PC6/TCLKC 118 Mode2/TACK 162 NCS4/PH4
31 A22 75 PC7/TCLKD 119 VSS 163 NCS5/PH5
32 A23 76 RXD0/PD0 120 UCLKOUT 164 VSS
33 WDTOUT 77 VSS 121 UCLKIN 165 CS6/PH6
34 NPDN 78 TXD0/PD1 122 VDD 166 CS7/PH7
35 VSS 79 RXD1/ PD2 123 TEST 167 D31/PJ7
36 RTCOSCIN 80 TXD1/PD3 124 NEXTREQ/PG0 168 VDD
37 RTCOSCOUT 81 VDD 125 NRESET 169 D30/PJ6
38 VDD 82 NCTS/ PD4 126 VSS 170 D29/PJ5
39 NTRST 83 NDSR/ PD5 127 NEXTACK/PG1 171 D28/PJ4
40 TDI 84 NDCD/ PD6 128 NDREQ0/PG2 172 VSS
41 TCK 85 VSS 129 NDACK0/PG3 173 D27/PJ3
42 VSS 86 NRI/ PD7 130 VDD 174 D26/PJ2
43 TDO 87 NDTR/PE0 131 NDREQ1/PG4 175 D25/PJ1
44 TMS 88 NRTS/PE1 132 NDACK1/PG5 176 VDD
SOUT0/PE6
SCS0/PF0/MemByte0
SIN1/PF1/MemByte1
SOUT1/PF2
SCLK1/PF3
139 NCAS3/PH3
142 XIN
143 VDD
144 NDRAMOE
146 VSS
13
Page 13
GDC21D601
PIN NAME PIN NAME PIN NAME PIN NAME
177 D24/PJ0 185 VDD 193 VDD 201 VDD
178 D23/PI7 186 D17/PI1 194 D11 202 D5
179 D22/PI6 187 D16/PI0 195 D10 203 D4
180 D21/PI5 188 D15 196 D9 204 D3
181 VSS 189 VSS 197 VSS 205 VSS
182 D20/PI4 190 D14 198 D8 206 D2
183 D19/PI3 191 D13 199 D7 207 D1
184 D18/PI2 192 D12 200 D6 208 D0
14
Page 14
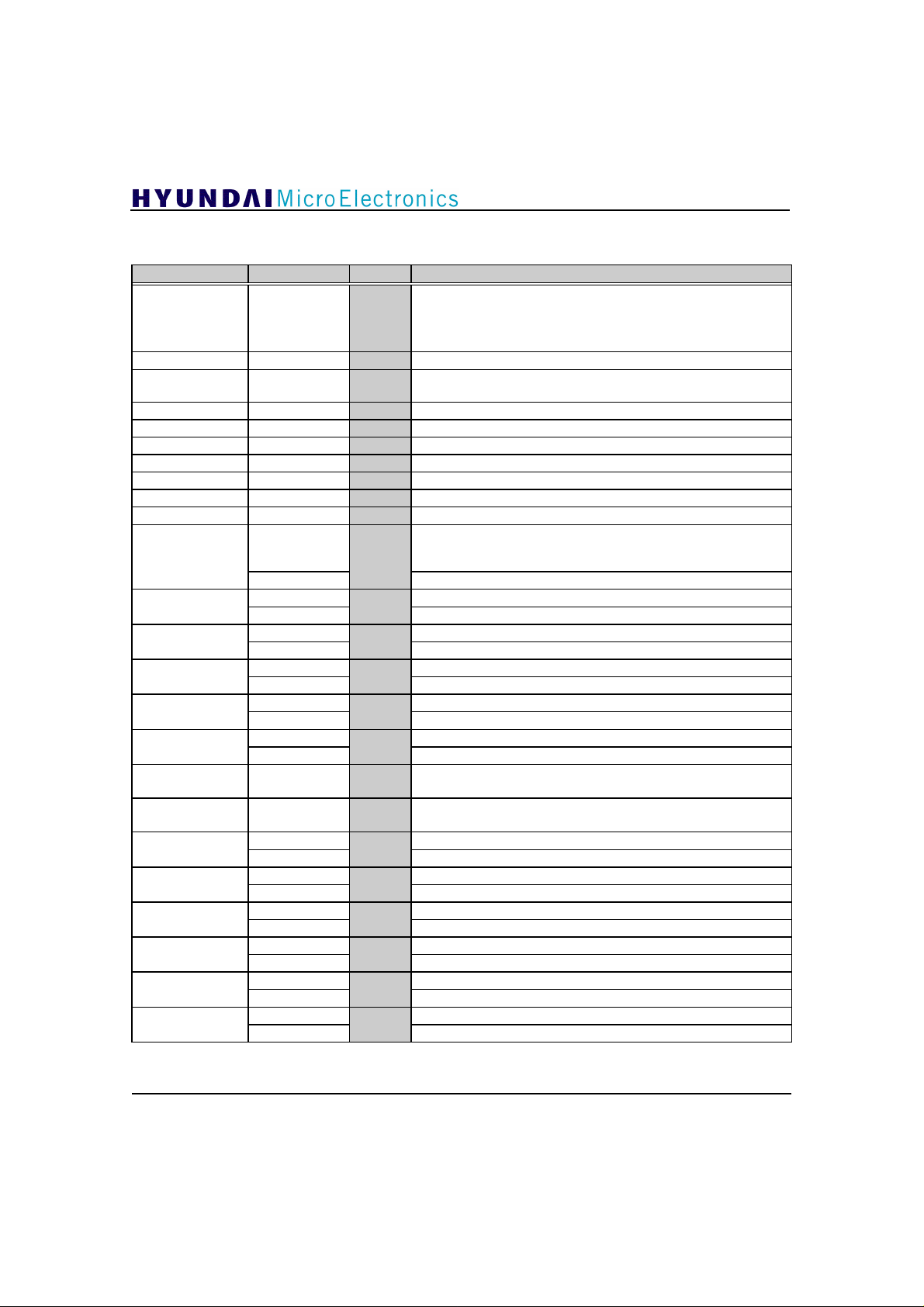
5. Pin Descriptions
PIN NUMBER PIN NAME TYPE DESCRIPTION
1~2, 4~6, 8~10,
12~14, 16~17,
19~21, 23~25,
27~29, 31~32
33 WDTOUT O Watch Dog Timer Overflow Output
34 NPDN O Power Down Signal from PMU block
37 RTCOSCIN I Real Time Clock Oscillator Input 32.768kHz
36 RTCOSCOUT O Real Time Clock Oscillator Output
39 NRST I JTAG Reset
40 TDI I JTAG Data Input
41 TCK I JTAG Clock Input
43 TDO O JTAG Data Output
44 TMS I JTAG Mode Signal
45
53 PA6 I/O PIO Port A[6]
54 PA7 I/O PIO Port A[7]
A[31:0] O Address Bus
Valid After RESET.
When it is LOW, MCU entered the power down mode. When HIGH, normal
IRQ0 External Interrupt Input 0, when PINMUX_PA[0] = 0
PA0
IRQ1 External Interrupt Input 1, when PINMUX_PA[1] = 047
PA1
IRQ2 External Interrupt Input 2, when PINMUX_PA[2] = 048
PA2
IRQ3 External Interrupt Input 3, when PINMUX_PA[3] = 049
PA3
IRQ4 External Interrupt Input 4, when PINMUX_PA[4] = 051
PA4
IRQ5 External Interrupt Input 5, when PINMUX_PA[5] = 052
PA5
TCIOA0 Timer Channel 0 Input Capture A, when PINMUX_PB[0] = 055
PB0
TCIOB0 Timer Channel 0 Input Capture B, when PINMUX_PB[1] = 057
PB1
TCIOA1 Timer Channel 1 Input Capture A, when PINMUX_PB[2] = 058
PB2
TCIOB1 Timer Channel 1 Input Capture B, when PINMUX_PB[3] = 059
PB3
TCIOA2 Timer Channel 2 Input Capture A, when PINMUX_PB[4] = 061
PB4
TCIOB2 Timer Channel 2 Input Capture B, when PINMUX_PB[5] = 062
PB5
I/O
Programmable I/O ports. Each pin can be mapped to specified
function pin name. (External IRQ0,IRQ1,…)
PIO Port A[0], when PINMUX_PA[0] = 1
I/O
PIO Port A[1], when PINMUX_PA[1] = 1
I/O
PIO Port A[2], when PINMUX_PA[2] = 1
I/O
PIO Port A[3], when PINMUX_PA[3] = 1
I/O
PIO Port A[4], when PINMUX_PA[4] =1
I/O
PIO Port A[5], when PINMUX_PA[5] = 1
Tbclk Clock Input for TIC test
Tfclk Clock Input for TIC test
I/O
PIO Port B[0], when PINMUX_PB[0] = 1
I/O
PIO Port B[1], when PINMUX_PB[1] = 1
I/O
PIO Port B[2], when PINMX_PB[2] = 1
I/O
PIO Port B[3], when PINMUX_PB[3] = 1
I/O
PIO Port B[4], when PINMUX_PB[4] = 1
I/O
PIO Port B[5], when PINMUX_PB[5] = 1
GDC21D601
15
Page 15
PIN NUMBER PIN NAME TYPE DESCRIPTION
TCIOA3 Timer Channel 3 Input Capture A, when PINMUX_PB[6] = 063
PB6
TCIOB3 Timer Channel 3 Input Capture B, when PINMUX_PB[7] = 065
PB7
PC0 PIO Port C[0], when PINMUX_PC[0] = 066
TCIOA4
PC1 PIO Port C[1], when PINMUX_PC[1] = 067
TCIOB4
PC2 PIO Port C[2], when PINMUX_PC[2] = 069
TCIOA5
PC3 PIO Port C[3], when PINMUX_PC[3] = 070
TCIOB5
PC4 PIO Port C[4], when PINMUX_PC[4] = 071
TCLKA
PC5 PIO Port C[5], when PINMUX_PC[5] = 073
TCLKB
PC6 PIO Port C[6], when PINMUX_PC[6] = 074
TCLKC
PC7 PIO Port C[7], when PINMUX_PC[7] = 075
TCLKD
RXD0 UART Channel 0 Receive Data, when PINMUX_PD[0] = 076
PD0
TXD0 UART Channel 0 Transmit Data, when PINMUX_PD[1] = 078
PD1
RXD1 UART Channel 1 Receive Data, when PINMUX_PD[2] = 079
PD2
TXD1 UART Ch 1 Transmit Data, when PINMUX_PD[3] = 080
PD3
NCTS UART Ch 1 Clear to Send, when PINMUX_PD[4] = 082
PD4
NDSR UART Ch 1 Data Set Ready, when PINMUX_PD[5] = 083
PD5
NDCD UART Ch 1 Data Carrier Detect, when PINMUX_PD[6] = 084
PD6
NRI UART Ch 1 Ring Indicator, when PINMUX_PD[7] = 086
PD7
NDTR UART C 1 Data Terminal Ready, when PINMUX_PE[0] = 087
PE0
NRTS UART Ch 1 Ready to Send Data, when PINMUX_PE[1] = 088
PE1
SMDI Smart Card Interface Data In, when PINMUX_PE[2] = 090
PE2
SMDO I/O Smart Card Interface Data Out, when PINMUX_PE[3] = 091
PE3 PIO Port E[3], when PINMUX_PE[3] =1
SMCLK I/O Smart Card Interface Clock Out, when PINMUX_PE[4] = 092
PE4 PIO Port E[4], when PINMUX_PE[4] = 1
I/O
PIO Port B[6], when PINMUX_PB[6] = 1
I/O
PIO Port B[7], when PINMUX_PB[7] = 1
I/O
Timer Channel 4 Input Capture A, when PINMUX_PC[0] = 1
I/O
Timer Channel 4 Input Capture B, when PINMUX_PC[1] = 1
I/O
Timer Channel 5 Input Capture A, when PINMUX_PC[2] = 1
I/O
Timer Channel 5 Input Capture B, when PINMUX_PC[3] = 1
I/O
External Timer Clock Source A, when PINMUX_PC[4] = 1
I/O
External Timer Clock Source B, when PINMUX_PC[5] = 1
I/O
External Timer Clock Source C, when PINMUX_PC[6] = 1
I/O
External Timer Clock Source D, when PINMUX_PC[7] = 1
I/O
PIO Port D[0], when PINMUX_PD[0] = 1
I/O
PIO Port D[1], when PINMUX_PD[1] =1
I/O
PIO Port D[2], when PINMUX_PD[2] = 1
I/O
PIO Port D[3], when PINMUX_PD[3] =1
I/O
PIO Port D[4], when PINMUX_PD[4] = 1
I/O
PIO Port D[5], when PINMUX_PD[5] = 1
I/O
PIO Port D[6], when PINMUX_PD[6] = 1
I/O
PIO Port D[7], when PINMUX_PD[7] =1
I/O
PIO Port E[0], when PINMUX_PE[0] = 1
I/O
PIO Port E[1], when PINMUX_PE[1] = 1
I/O
PIO Port E[2], when PINMUX_PE[2] = 1
GDC21D601
16
Page 16
PIN NUMBER PIN NAME TYPE DESCRIPTION
94
SIN0 SSI Channel 0 Data In, when PINMUX_PE[5] = 0
I/O
PE5 PIO Port E[5], when PINMUX_PE[5] =1
95
BPROT0
SOUT0 SSI Channel 0 Data Out, when PINMUX_PE[6] = 0
I/O
AMNA BPROT[0] Signal, when PINMUX_PE[8] = 1
PE6 PIO Port E[6], when PINMUX_PE[6] = 1
96
BPROT1
SCLK0 SSI Channel 0 Clock Out, when PINMUX_PE[7] = 0
I/O
AMBA BPROT[1] Signal, when PINMUX_PE[8] = 1
PE7 PIO Port E[7], when PINMUX_PE[7] =1
98
BLOK
SCS0 SSI Channel 0 Channel Control, when PINMUX_PF[0] = 0
I/O
AMBA BLOK Signal Out, when PINMUX_PE[8] = 1
PF0 PIO Port F[0], when PINMUX_PF[0] = 1
99
MemByte0
SIN1 SSI Channel 1 Data In, when PINMUX_PF[1] = 0
I/O
MemByte[0] Signal from EBI Block, when PINMUX_PF[8] = 1
PF1 PIO Port F[1], when PINMUX_PF[1] = 1
100
MemByte1
SOUT1 SSI Channel 1 Data Out, when PINMUX_PF[2] = 0
I/O
MemByte[1] Signal from EBI Block, when PINMUX_PF[8] = 1
PF2 PIO Port F[2], when PINMUX_PF[2] = 1
102
BTRANS0
SCLK1 SSI Channel 1 Clock Out, when PINMUX_PF[3] = 0
I/O
AMBA BTRANS[0] Signal, when PINMUX_PF[8] = 1
PF3 PIO Port F[3], when PINMUX_PF[3] = 1
103
BTRANS[1]
SCS1 SSI Channel 1 Channel Control, when PINMUX_PF[4] = 0
I/O
AMBA BTRANS[1] Signal, when PINMUX_PF[8] = 1
PF4 PIO Port F[4], when PINMUX_PF[4] =1
BWAIT
BCLKOUT AMBA BCLK Signal, when PINMUX_PF[5] = 0104
PF5
NFIQOUT AMBA NFIQ Signal, when PINMUX_PF[6] = 0105
PF6
NIRQOUT AMBA NIRQ Signal, when PINMUX_PF[7] = 0106
PF7
I/O
I/O
I/O
AMBA BWAIT Signal, when PINMUX_PF[8] = 1
PIO Port F[5], when PINMUX_PF[5] = 1
PIO Port F[6], when PINMUX_PF[6] =1
PIO Port F[7], when PINMUX_PF[7] = 1
108 I2CSDA0 I/O Data Signal for I2C Channel 0
Pins (108~110,112~114) are required to be pull-up externally.
When bus is free, this pin goes logical “HIGH”
After reset, SDA pins enter Idle state
109 I2CSCL0 I/O Clock Signal for I2C Channel 0
110 I2CSDA1 I/O Data Signal for I2C Channel 1
112 I2CSCL1 I/O Clock Signal for I2C Channel 1
113 I2CSDA2 I/O Data Signal for I2C Channel 2
114 I2CSCL2 I/O Clock Signal for I2C Channel 2
116
Mode0 Boot Mode0, when TEST pin = 0
I
By default, 32-bit access
( MCU can boot from 32- bit Memory)
TREQA
TREQA Signal for TIC Test,
when TEST pin = 1
Mode1 Boot Mode 1117
TREQB
I
TREQB Signal for TIC Test
Mode[0:1] = 00 32-bit
Mode[0:1] = 01 8-bit
Mode[0:1] = 10 16-bit
Mode[0:1] = 11 Reserved
GDC21D601
17
Page 17
GDC21D601
PIN NUMBER PIN NAME TYPE DESCRIPTION
118
120 UCLKIN I UART Clock Oscillator Clock Input
121 UCLKOUT O UART Clock Oscillator Clock Output
123 TEST I Test Input Pin, Select 116~118 pin as Boot Mode or TIC Signal
125 NRESET I System Power On Reset Input
142 XIN I System Clock Input (<80MHz)
141 XOUT O System Clock Oscillator Output
144 NDRAMOE O DRAM Output Enable
145 NDRAMWE O DRAM Write Enable
147 NWR0 O Write Enable 0 for Static Memory(Byte)
148 NWR1 O Write Enable 1 for Static Memory(Byte)
149 NWR2 O Write Enable 2 for Static Memory(Byte)
151 NWR3 O Write Enable 3 for Static Memory(Byte)
Mode 2 Boot Mode 2 (BigEndian Pin)
TACK
NEXTREQ External Master Request Bus Mastership, when PINMUX_PG[0] = 0124
PG0
NEXTACK Bus Granted Signal for External Master, when PINMUX_PG[1] = 0127
PG1
NDREQ0 DMA Channel 0 Request, when PINMUX_PG[2] = 0128
PG2
NDACK0 DMA Channel 0 Acknowledge, when PINMUX_PG[3] = 0129
PG3
NDREQ1 DMA Channel 1 Request, when PINMUX_PG[4] = 0131
PG4
NDACK1 DMA Channel 1 Acknowledge, when PINMUX_PG[5] = 0132
PG5
NRAS0 DRAM Bank #0 RAS Signal, when PINMUX_PG[6] = 0133
PG6
NRAS1 DRAM Bank #1 RAS Signal, when PINMUX_PG[7] = 0135
PG7
NCAS0 DRAM CAS0 Signal, when PINMUX_PH[0] = 0136
PH0
NCAS1 DRAM CAS1 Signal, when PINMUX_PH[1] = 0137
PH1
NCAS2 DRAM CAS2 Signal, when PINMUX_PH[2] = 0138
PH2
NCAS3 DRAM CAS3 Signal, when PINMUX_PH[3] = 0139
PH3
I/O
Big-endian Selection Pin, when this pin = 1(HIGH)
Note) When this pin is HIGH, External Data will be
transferred “Big-endian” format.
TACK Signal for TIC Test
UART block dedicated clock source supported.
(This clock source is used for UART and SMART Card Only)
I/O
PIO Port G[0], when PINMUX_PG[0] = 1
To ensure proper initialization after power is stable,
assert NRESET pin for at least 20µs
I/O
PIO Port G[1] = 1, when PINMUX_PG[1] = 1
I/O
PIO Port G[2], when PINMUX_PG[2] = 1
I/O
PIO Port G[3], when PINMUX_PG[3] = 1
I/O
PIO Port G[4], when PINMUX_PG[4] = 1
I/O
PIO Port G[5], when PINMUX_PG[5] = 1
I/O
PIO Port G[6], when PINMUX_PG[6] = 1
I/O
PIO Port G[7], when PINMUX_PG[7] = 1
I/O
PIO Port H[0], when PINMUX_PH[0] = 1
I/O
PIO Port H[1], when PINMUX_PH[1] = 1
I/O
PIO Port H[2], when PINMUX_PH[2] = 1
I/O
PIO Port H[3], when PINMUX_PH[3] = 1
External TTL oscillator input
18
Page 18
PIN NUMBER PIN NAME TYPE DESCRIPTION
152 NRD O Output Enable Signal for Static Memory
153 RDNWR O Read/Write Signal
155 EXPRDY I Ready Signal Input
When this pin is Low, current memory transfer extended.
156 EXPCLK O Clock Output Signal
Active only during external cycles.
Output is same phase and speed as the bus clock
157 NCS0 O Chip Select Signal for Bank #0
NCS pins are required to be Pull-up for proper operation.
All NCS pins are Active Low See Fig.1 memory Map(Section 2)
158 NCS1 O Chip Select Signal for Bank #1
159 NCS2 O Chip Select Signal for Bank #2
161 NCS3 O Chip Select Signal for Bank #3
162 NCS4 I/O Chip Select Signal for Bank #4, when PINMUX_PH[4] = 0
PH4 PIO Port H[4], when PINMUX_PH[4] = 1
165
166
167, 169~171,
NCS5 Chip Select Signal for Bank #5, when PINMUX_PH[5] = 0163
PH5
CS6 Chip Select Signal for Bank #6, when PINMUX_PH[6] = 0
PH6
CS7 Chip Select Signal for Bank #7, when PINMUX_PH[7] = 0
PH7
D[31:0] I/O Data Bus
I/O
PIO Port H[5], when PINMUX_PH[5] = 1
I/O
CS6 pin can be programmed active HIGH/LOW
PIO Port H[6], when PINMUX_PH[6] = 1
I/O
CS7 pin can be programmed active HIGH/LOW
PIO Port H[7], when PINMUX_PH[7] = 1
173~175, 177~180,
182~184, 186~188,
190~192, 194~196,
198~200, 202~204,
206~208
167, 169~171,
PJ[7:0] I/O PIO Port J[7:0], when PINMUX_PJ[7:0] = 1
173~175, 177
178~180, 182~184,
PI[7:0] I/O PIO Port I[7:0] , when PINMUX_PJ[7:0] = 1
186~187
3, 11, 18, 26, 38,
VDD I Power
46, 56, 64, 72, 81,
89, 97, 107, 115,
122, 130, 143, 150,
160, 168, 176, 185,
193, 201
7, 15, 22, 30, 35,
VSS I Ground
42, 50, 60, 68, 77,
85, 93, 101, 111,
119, 126, 134, 140,
146, 154, 164, 172,
181, 189, 197, 205
GDC21D601
19
Page 19

GDC21D601
Section 2. System Architecture
1. Internal Bus Architecture
The GDC21D601 take the advantage of the AMBA(Advanced Micro-controller Bus Architecture) as the internal
Bus Architecture. The AMBA specification defines an on-chip communication standard for designing highperformance embedded micocontrollers. Two distinct buses are defined within the AMBA:
- the Advanced System Bus (ASB)
- the Advanced Peripheral Bus (APB)
The AMBA ASB is for high-performance system modules. The modules connected to ASB are DRAM Controller,
Static Memory Controller, DMA Controller, On-Chip SRAM, ARM720T CPU Core, Arbiter, Decoder, APB
Bridge, and TIC.
The AMBA APB is for low-power peripherals. AMBA APB is optimized for minimal power consumption and
reduced interface complexity to support peripheral functions. The modules connected to APB are PIO, Interrupt
Controller, PMU, WDT, RTC, Timer, UART, SSPI, and I2C.
See also AMBA Specification Rev. D (ARM IHI 0001D), and AMBA Specification Rev. 2.0 (ARM IHI 0011A)
for detail.
2. Arbiter
The AMBA bus specification is a multi-master bus standard. As a result, a bus arbiter is needed to ensure that only
one bus master has an access to the bus at any particular point of time. Each bus master can request the bus; the
Arbiter decides which has the highest priority and issues a grant signal accordingly. The GDC21D601 can have the
four bus master: ARM720T CPU Core, DMA Controller, TIC, and External Bus Master.
Every system must have a default bus master which grants the use of bus during reset, when no other bus master
requires the bus. During Power On Reset, the arbiter will grant the use of bus to the default bus master and hold all
other grant signals inactive. The ARM720T Core, the default bus master will grant for the use of bus under the
following conditions: Reset, standby, power-down, and no other master requesting the bus
The arbiter processes the requests of the ownership of the ASB and grants one ASB master according to the
arbitration scheme. The arbitration scheme of this implementation is a simple priority encoded scheme where the
highest priority master requesting the ASB is granted. The priority order is as follows:
Case 1) Aripri = ‘0’
1. TIC
2. DMA
3. External BUS Master
4. ARM (default bus master)
Case 2) Aripri = ‘1’
1. TIC
2. External BUS Master
3. DMA
4. ARM (default bus master)
20
Page 20

GDC21D601
3. System Decoder
The decoder in an AMBA system is used to perform a centralized address decoding function, which gives two
main advantages:
- It improves the portability of peripherals, by making them independent of the system memory map.
- It simplifies the design of bus slaves, by centralizing the address decoding and bus control functions.
The decoder performs three main tasks:
- address decoder
- default transfer response
- protection unit
The decoder generates a select signal for each slave on the ASB bus and, under certain circumstances, will not
select any slaves and provide the transac-tion response itself.
The MCU System Memory Map is shown in Figure 1.
The decoder greatly simplifies the slave interface and removes the need for the slave to understand the different
types of transfer that may occur on the bus.
4. Memory Map
The system decoder controls the memory map of the system and generates a slave select signal for each memory
region.
The ReMap signal is used to provide a different memory map: ROM is required at address 0 when power on reset,
and RAM also may be used at address 0 during normal operation.
The ReMap signal is typically provided by a Power Management Unit (PMU) which drives ReMap to LOW at
reset. The signal is only driven to HIGH after a particular register in the PMU is accessed (See Section. 9 Power
Management Unot for detail). When ReMap is HIGH and isram signal is HIGH, then Memory Map Configuration
is MODE A which the internal SRAM is located at address 0x00. And When ReMap is HIGH and drambank0
signal is HIGH, then Memory Map Configuration is Mode B which the DRAM bank #0 is located at address 0x00.
The isram and drambank0 signal come from MCU Controller. See Section 8. MCU Controller for detail.
Figure 2. Memory map configuration shows both the Reset (MODE R) and the Normal (MODE B and MODE A)
memory map
Figure 1. shows the system memory map.
21
Page 21
GDC21D601
5. Memory Format
The ARM720T CPU Core supports both the Big-Endian and Little-Endian format. And the GDC21D601 can also
support the Big-Endian and Little-Endian memory format. The GDC21D601 can support the Little-Endian Format
by default. When using the GDC21D601 as Big-Endian format: 1) set Boot Mode 2 pin to VDD, and 2) set the
ARM720T as Big-Endian mode with using Coprocessor instruction. 3) set the Big-Endian flag of the compile
options when compile. The example of the coprocessor instruction is in the below. It is noted that CP15 register
(CPU control register) can only be accessed with MRC and MCR instructions in a Privileged mode. See the
ARM720T Data Sheet (ARM DDI 0087D) for detail. The ARM720T Data Sheet is downloadable from ARM
home page (http://www.arm.com).
For example :
MRC p15, 0, r3, c1, c1
ORR r3, r3, #0x80
MCR p15, 0, r3, c1, c1
Note : The GDC21D601 has a EBI (External Bus Interface) block which can copy the Byte or HalfWord of the lower position in data bus to higher data bus position, so you can use the GDC21D601 as
BigEnd mode by only set the Boot Mode 2 pin to VDD and in this case you may not set the ARM720T
as BigEnd Mode.
6. Boot Mode
The GDC21D601 can support 32/16/8 Bit Boot ROM. By default MCU can boot from 32 bit ROM. In this case
Boot Mode[1:0] (pin number 116 and 117) are “00”. If you want use 16 bit Boot ROM, then you must set Boot
Mode[1:0] are “10”. And in case of Booting from 8 bit ROM, you must set Boot Mode[1:0] are “01”. It is for
reserved in case that Boot Mode[1:0] are “11” . See the Table 1. The Description of the Mode Pin.
In all case of boot mode the wait cycle of Boot area is 3 cycles. If you want to know about boot mode for detail
you must see the Section 6. Static Memory Controller.
Table 1. The Description of the Mode Pin
Mode[1:0] Bus width of Booting ROM
00 32 Bit
01 8 Bit
10 16 Bit
11 Reserved
22
Page 22
GDC21D601
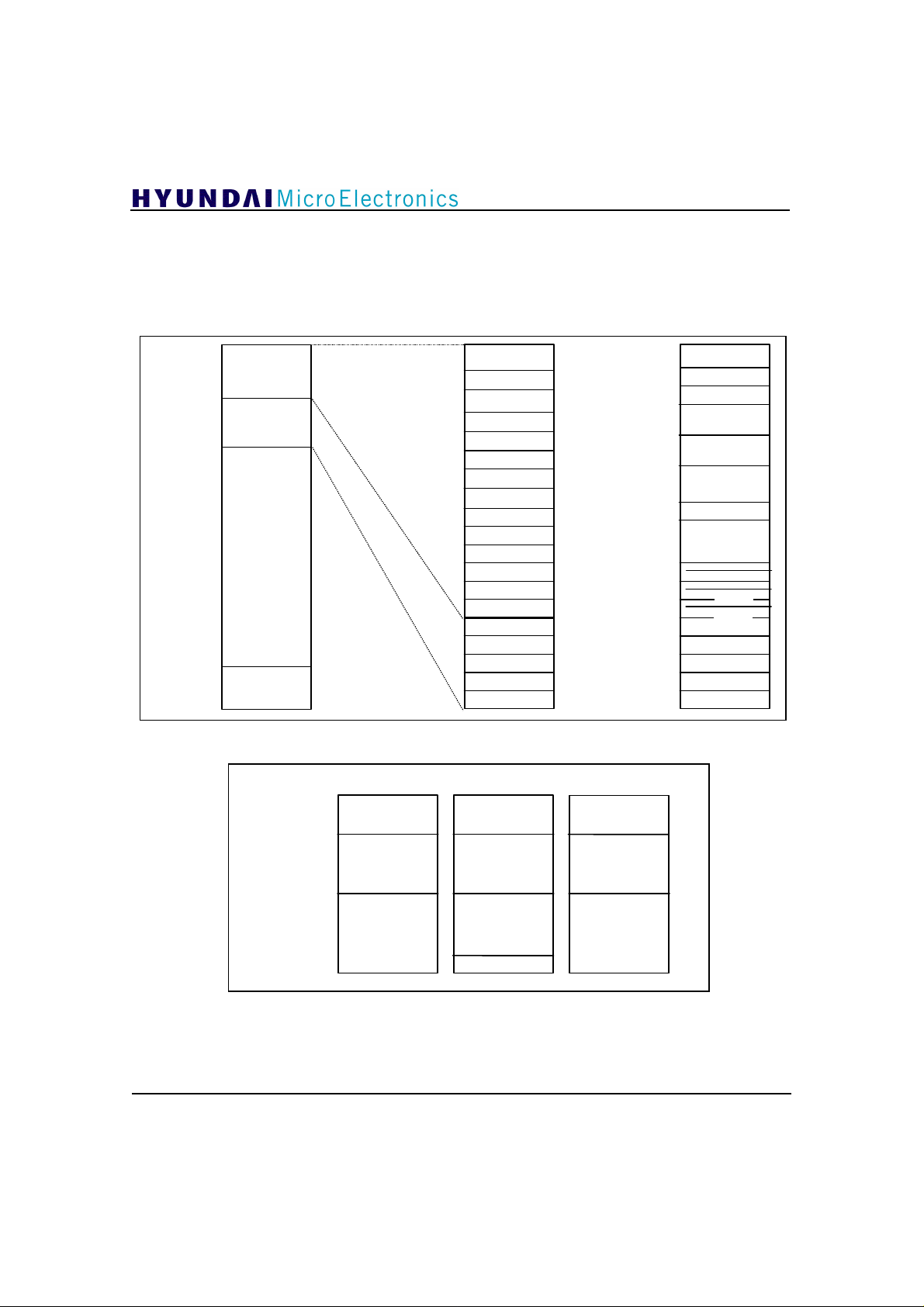
Address
0x00FFFFFF
0x00000FFF
0x00000000
MODE R
MODE A
MODE B
0x01FFFFFF
0x2FFFFFF
nCS0
nCS1
nCS2
On-Chip RAM
nCS0 or
DRAM #0
nCS1
nCS2
nCS2
nCS1
DRAM #0
7. Multi-Function Pin
The GDC21D601 has 80 Bit PIO pins with multiplexed by other functional pins. So you must use properly these
multi-function pins by setting the PINMUX control registers in MCU controller. (See Section 8. MCU Controller
for detail)
0XFFFF FFFF
0XFFFF F000
0XFFFF E000
0X0800 0000
0X0000 0000
APB Register
ASB Register
MEMORY AREA
Chip Select Area
0XFFFF FFFF
FD00
FC00
FB00
FA00
F900
F800
F700
F600
F500
F400
F300
F200
F100
F000
EF00
EE00
ED00
EC00
EB00
Reserved
PIO
I2C2
I2C1
I2C0
SSI
UART2/Smart
UART1
UART0
TIMER
RTC
INTC
WDT
PMU
DMAC
DRAMC
SMI
MCUC
Figure 1. System Memory Map
0XFFFF EAFF
0X6000 0000
0X5000 0000
0X4000 0000
0X3000 0000
0X2000 0000
0X1000 1000
0X1000 0000
0X0800 0000
0X0700 0000
0X0600 0000
0X0500 0000
0X0400 0000
0X0300 0000
0X0200 0000
0X0100 0000
0X0000 0000
Reserved
ARM7 TEST REG
Reserved
DRAM BANK #1
DRAM BANK #0
WINDOW AREA
ON-CHIP RAM
WINDOW AREA
nCS7
nCS6
nCS5
nCS4
nCS3
nCS2
nCS1
nCS0
1. MODE R : Reset Mode : default mode from power-on reset (ReMap is LOW)
2. MODE A : On-Chip SRAM in 0x0000 ~ 0x07FF range : ReMap is HIGH and isram is HIGH
3. MODE B : DRAM Bank #0 in 0x00000000 ~ 0x00FFFFFF range : Remap is HIGH and drambank0 is HIGH
Figure 2. Memory Map Configuration
23
Page 23

GDC21D601
Section 3. ARM720T Core
1. General Description
ARM720T is 32bit microprocessor of general purpose with 8KB cache, enlarged write buffer and Memory
Management Unit (MMU), which are combined in a single chip. The CPU within ARM720T is the ARM7TDMI.
The ARM720T is software compatible with the ARM processor family. The ARM7TDMI is a member of the ARM
family of general purpose 32bit microprocessors, which offers high performance for very low power consumption
and price. This processor employs a unique architectural strategy known as THUMB, which makes it ideally suited
to high volume applications with memory restrictions or applications where code density is an issue.
The key idea behind THUMB is a super reduced instruction set. Essentially, the ARM7TDMI has two instruction
sets, the standard 32bit ARM set and 16bit THUMB set. The THUMB set’s 16bit instruction length allows it to
approach twice the density of standard ARM code while retaining most of the ARM`s performance advantage over
a traditional 16bit processor by using 16bit registers. This is possible because THUMB code operates on the same
32bit register set as ARM code.
See also ARM720T Datasheet (ARM DDI 0087D) for detail.
2. Feature
• 32bit RISC architecture
• Low power consumption
• ARM7TDMI core with;
- On-chip ICEbreaker debug support
- 32bit x 8 hardware multiplier
- Thumb decompressor
• Utilizes the ARM7TDMI embedded processor
- High performance 32 bit RISC architecture
- High density 16 bit instruction set
• Fully static operation : 0 ~ 80MHz
• 3-stage pipeline architecture (Fetch, decode, and execution stage)
• Enhanced ARM software toolkit
• MMU, Write Buffer, 8KB I/D Cache
24
Page 24
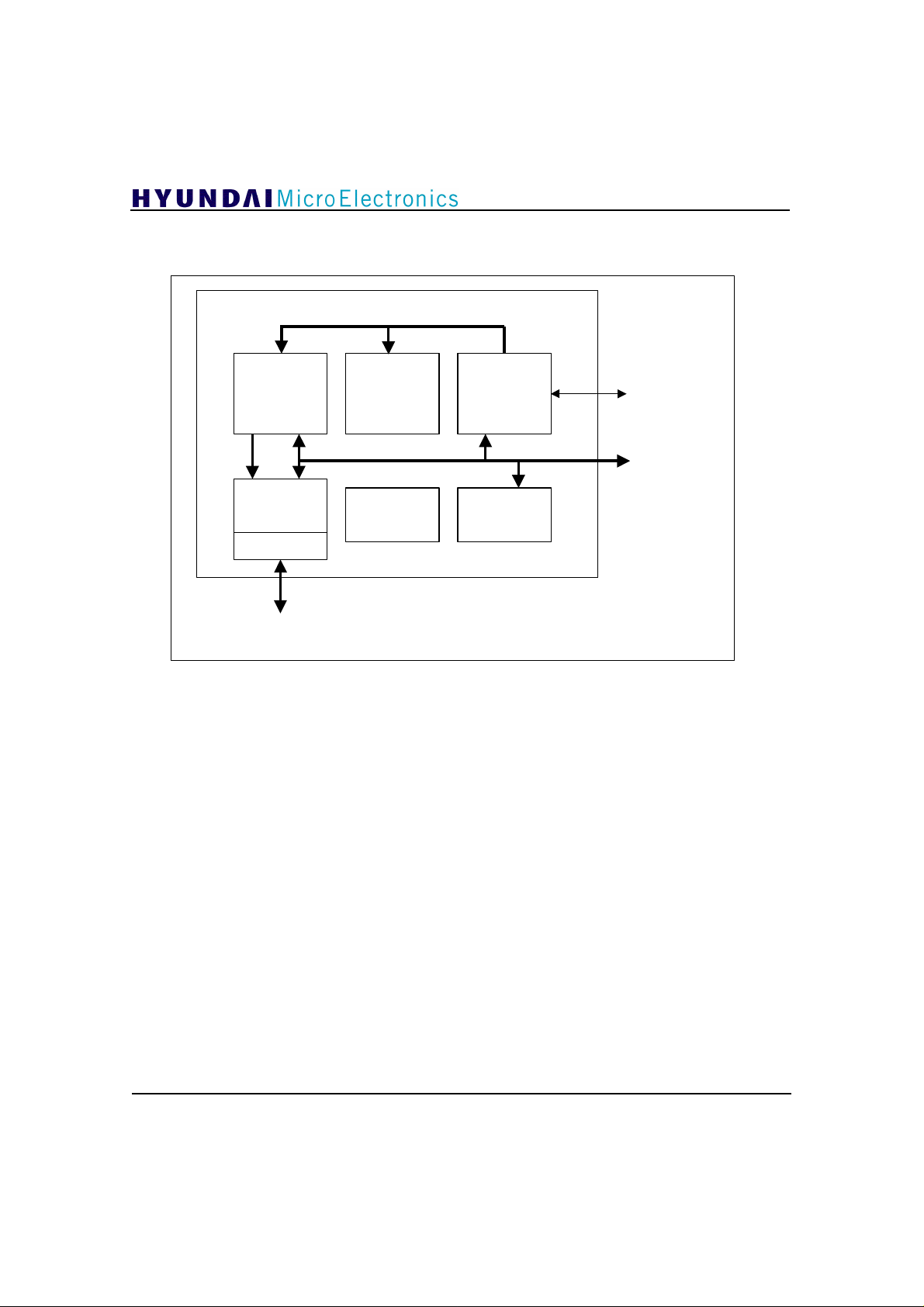
GDC21D601
THUMB code is able to provide up to 65% of the code size of ARM, and 160% of the performance of an
equivalent ARM processor connected to a 16-bit memory system.
Virtual Address Bus
MMU
Data and
Address
Buffers
AMBA Interface
AMBA Bus
Interface
8KB Cache
Internal Data Bus
Control and
Clocking
Logic
ARM7TDMI
CPU
System
Control
Coprocessor
Figure 1. ARM720T Block Diagram
JTAG
Debug
Interface
Coprocessor
Interface
25
Page 25
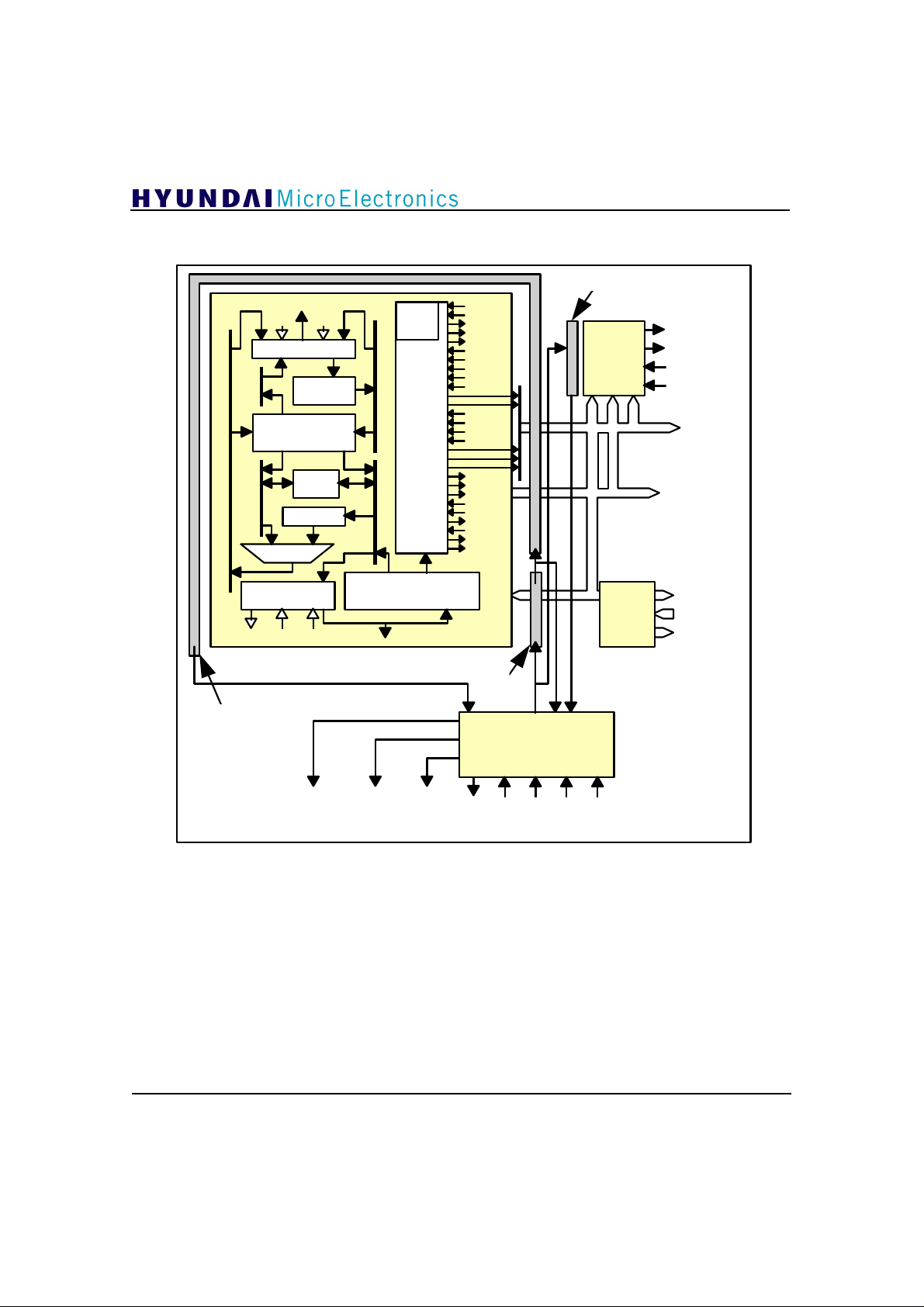
3. Core Block Diagram
A [31:0]
ALE ABE
Address Register
P
C
b
u
Incrementer
s
A
L
U
b
u
s
Register Bank
(31 x 32-bit registers)
(6 status registers)
A
Multiplier
b
u
s
Barrel Shifter
32-bit ALU
Write Data Register
nENOUT nENINDBE
32 x 8
m
Address
B
Instruction Pipeline
& Read Data Register
& Thumb Instruction Decoder
I
n
c
r
e
e
n
t
e
r
b
u
s
b
u
s
D [31:0]
Scan
Control
Instruction
Decoder
&
Control
Logic
DBGRQI
BREAKPTI
DBGACK
ECLK
nEXEC
ISYNC
BL [3:0]
APE
MCLK
nWAIT
nIRQ
nFIQ
nRESET
ABORT
SEQ
LOCK
nCPI
CPA
CPB
nM [4:0]
TBE
TBIT
HIGHZ
Core
ScanChain2
ICE
Breaker
Bus
Splitter
GDC21D601
RANGEOUT0
RANGEOUT1
ESTERN1
EXTERN0
nRW
MAS [1:0]
nTRANS
nMREQ
nOPC
A [0:31]
D [0:31]
DIN [0:31]
DOUT [0:31]
Scan
Chain 0
Scan
Chain 1
TAP Controller
TASPM [3:0]IR [3:0]SCREG [3:0]
Figure 2. ARM7TDMI Core Block Diagram
TCKTMSnTRSTTDITDO
26
Page 26
GDC21D601
Section 4. DRAM Controller
1. General Description
The DRAM controller interfaces the AMBA Advanced System Bus (ASB) to external DRAM memory banks. The
DRAM controller provides the following features:
• Up to two banks of DRAM support.
• Fast page-mode sequential access support.
• EDO DRAM support
• Word, Half-word and Byte transaction support.
• Little / Big Endian Format support.
• DRAM refresh controller using CAS-before-RAS (CBR) refresh mode.
• Programmable refresh rate.
• Power-down mode where all DRAM accesses (including self-refresh) are disabled.
• Programmable DRAM timing control.
• Row/column addresses multiplexes according to DRAM capacity.
Chip PAD
nDRAMWE
nDRAMOE
nRAS[1:0]
nCAS[3:0]
nCASFB[3:0]
Aout[23:0]
DataOut[31:0]
DataIn[31:0]
nOutEn[3:0]
DRAM Controller
Main State Machine
Address Generator
EBI Signal Control
nDRAMALatch
&
Control
Refresh
Timer & Controller
ASB Interface
&
nDRAMAMUX
nDRAMA[12:0]
nDRAMOutLEn
nDRAMInLEn[3:0]
nDRAMOutEn[3:0]
Lat
Lat
mux
Lat
nDRAMInEn
DRAMByte[1:0]
mux
mux
ASB Bus
BCLK
PDREQ
PDACK
DSELDRAM
DSELREG
BnRES
BLAST
BERROR
BWAIT
BWRITE
BSIZE[1:0]
BA[29:0]
BD[31:0]
BD[31:0]
Figure 1. DRAM Controller Module Block Diagram
27
Page 27
GDC21D601
2. Hardware Interface and Signal Description
The DRAM Controller module is connected to the ASB bus. Table 1. DRAM interface ASB signal descriptions
shows the internal bus interface signals to the DRAM controller.
Table 1. DRAM Interface ASB Signal Descriptions
NAME DESCRIPTION
BA [27:0] System address bus (excluding high order bits).
BCLK The ASB clock timing all bus transfers.
BD [7:0] Bidirectional system data bus.
BERROR Error slave response signal. It is driven to phase 1 if the DRAM controller is selected. This
signal will be asserted, when an access to the DRAM is attempted while the DRAM
controller is in its Power Down mode.
BLAST Last transfer of burst slave response signal. It can be driven to phase 1 if the DRAM
controller is selected. It is asserted in order to indicate a 256-word boundary to force a non-
sequential access.
BnRES These signals indicate the reset status of the ASB.
BSIZE [1:0] These signals indicate the size of the transfer that may be byte, half-word, or word.
BWAIT Wait slave response signal. It is driven to phase 1 when the DRAM controller is selected. It
is asserted while the DRAM transaction is uncompleted.
BWRITE When this signal is HIGH, it indicates a write transfer and when LOW a read.
DSELDRAM When this signal is HIGH, it indicates that the DRAM is selected.
DSELREG When this signal is HIGH, it indicates that the DRAM configuration register is selected.
Table 2. DRAM interface External DRAM signal descriptions describes the DRAM controller connections to
external devices of the system and to EBI (External Bus Interface) block .
Table 2. External DRAM Signal Descriptions
NAME DESCRIPTION
nRAS[1:0] Active LOW Row Address Strobes, one for each DRAM bank.
NCAS[3:0] Active LOW Column Address Strobes, one for each byte.
NDRAMOE Active LOW Output Enable.
NDRAMWE Active LOW Write Enable.
nCASFB[3:0] This is the nCAS[3:0] signal fed back from the output of the nCAS[3:0] pads.
PDREQ Power Down Request. This signal indicates that the DRAM controller should enter into its
low-power state, causing the DRAMs to enter into self-refresh state if refresh is enabled.
When it is deasserted, the DRAM controller will exit from low power state.
PDACK Power Down Acknowledge. This signal is asserted when the DRAM controller has
successfully entered into its low-power mode. At this point BCLK may be stopped safely. It
is deasserted when the DRAM controller has successfully exited from its low power state.
DRAMAMUX DRAM Address Multiplex Select. When this signal is HIGH, it indicates to the EBI that the
DRAMA[12:0] address should be used to generate DRAMA[12:0]. This signal provides the
support for a shared EBI, and may not be needed in a system where the DRAM controller
does not share the EBI with other memory controllers. DRAMAMUX is LOW when
DRAM accesses are not performed.
28
Page 28
GDC21D601
NAME DESCRIPTION
NDRAMALatch DRAM Address Latch. When this signal is LOW, it opens the EBI address latch. This
signal is HIGH when DRAM operations do not occur. This signal provides support for a
shared EBI and may not be needed in a system where the DRAM controller does not share
the EBI with other memory controllers.
DRAMA[12:0] These multiplexed address lines are connected to the DRAM Address.
NDRAMInEn DRAM Input Enable. When this signal is LOW, it enables the EBI drivers from latched XD
to BD. This signal is HIGH when DRAM read operations are not performed.
NDRAMInLEn[3:0] DRAM Input Latch Enable. When this signal is HIGH, it shuts the EBI latches on XD. This
signal is LOW when DRAM read operations are not performed.
NDRAMOutEn DRAM Output Enable. When this signal is HIGH, it disables the EBI drivers from latched
BD to XD. This signal is low when DRAM write operations are not performed.
NDRAMOutLen DRAM Output Latch Enable. When this signal is LOW, it opens the EBI latches on BD.
This signal is HIGH when DRAM write operations are not performed.
Accesses to the DRAM Controller module are generated as a result of the address decode put out on the ASB
address bus by the current bus master (which could be the ARM CPU or the DMA engine, for example).
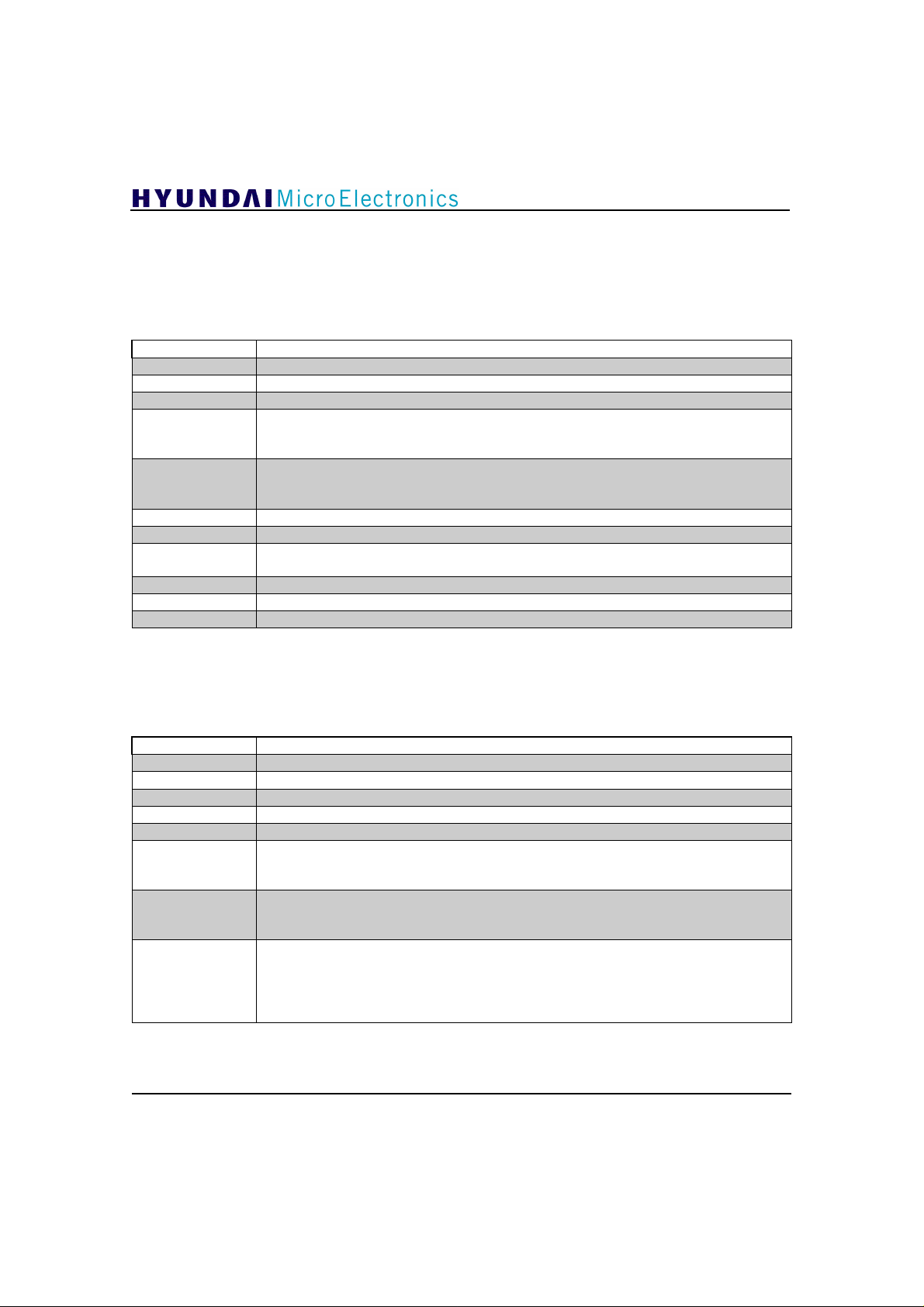
The following three diagrams show the timing of the external interface for read, write and refresh cycles
(Figure 2, 3, 4).
BCLK
DRAMA[12:0]
nRAS[1:0]
nCAS[1:0]
XData[31:0]
nOE
nWE
row
Figure 2. DRAM External Signal Timing: Read Cycles
col row col1 col2
col3
29
Page 29
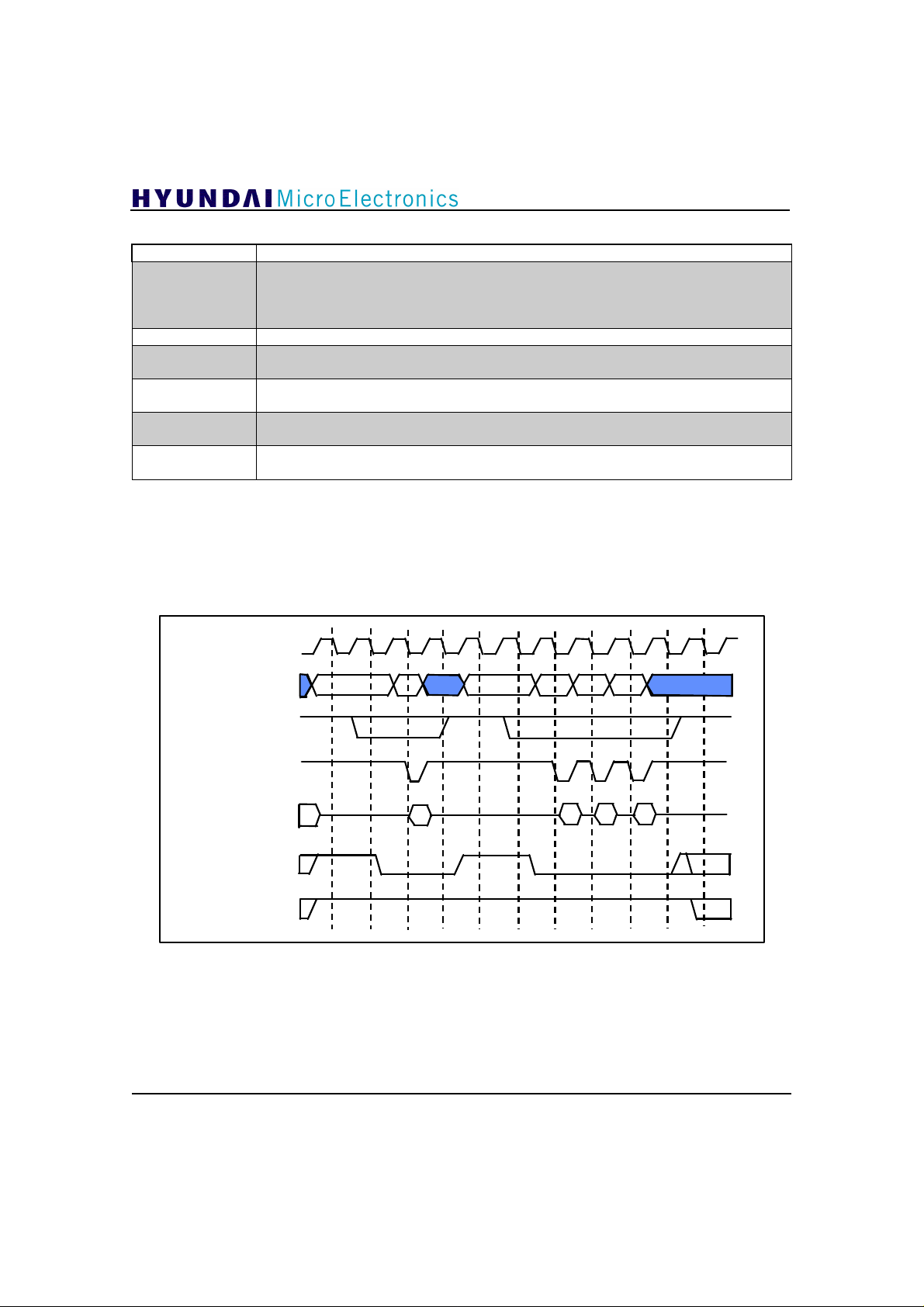
BCLK
GDC21D601
DRAMA[12:0]
nRAS[1:0]
nCAS[1:0]
XData[31:0]
nOE
nWE
BCLK
nRAS[1:0]
nCAS[1:0]
row
col row col1 col2
Data
Data1
col3
Data2 Data3
Figure 3. DRAM External Signal Timing: Write Cycles
30
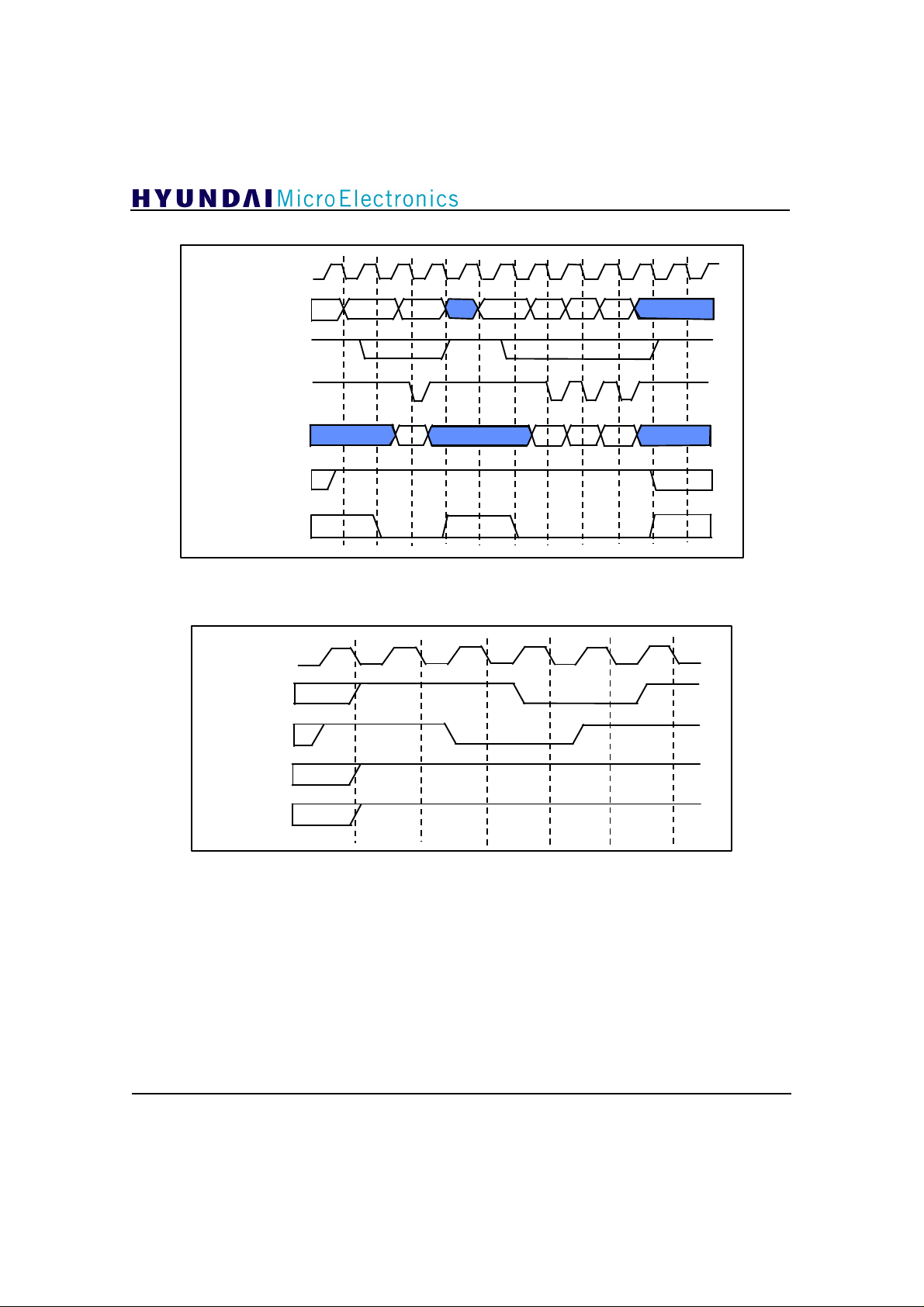
nOE
nWE
Figure 4. DRAM Controller Refresh Cycle
Page 30
GDC21D601
3. Functional Description
3.1 Introduction
The DRAM controller provides connections allowing a direct interface to up to two banks of DRAM. Each bank is
32/16/8 bits wide and up to 256MB in size. Two RAS lines are provided (one per bank) and four CAS lines (one
per byte line).
3.2 Functional BreakDown
The DRAM controller consists of four main blocks: the Main State Machine & Control Block, the EBI Signal
Control Block, the ASB Interface & Address Generation Block, and the Refresh Timer & Counter Block.
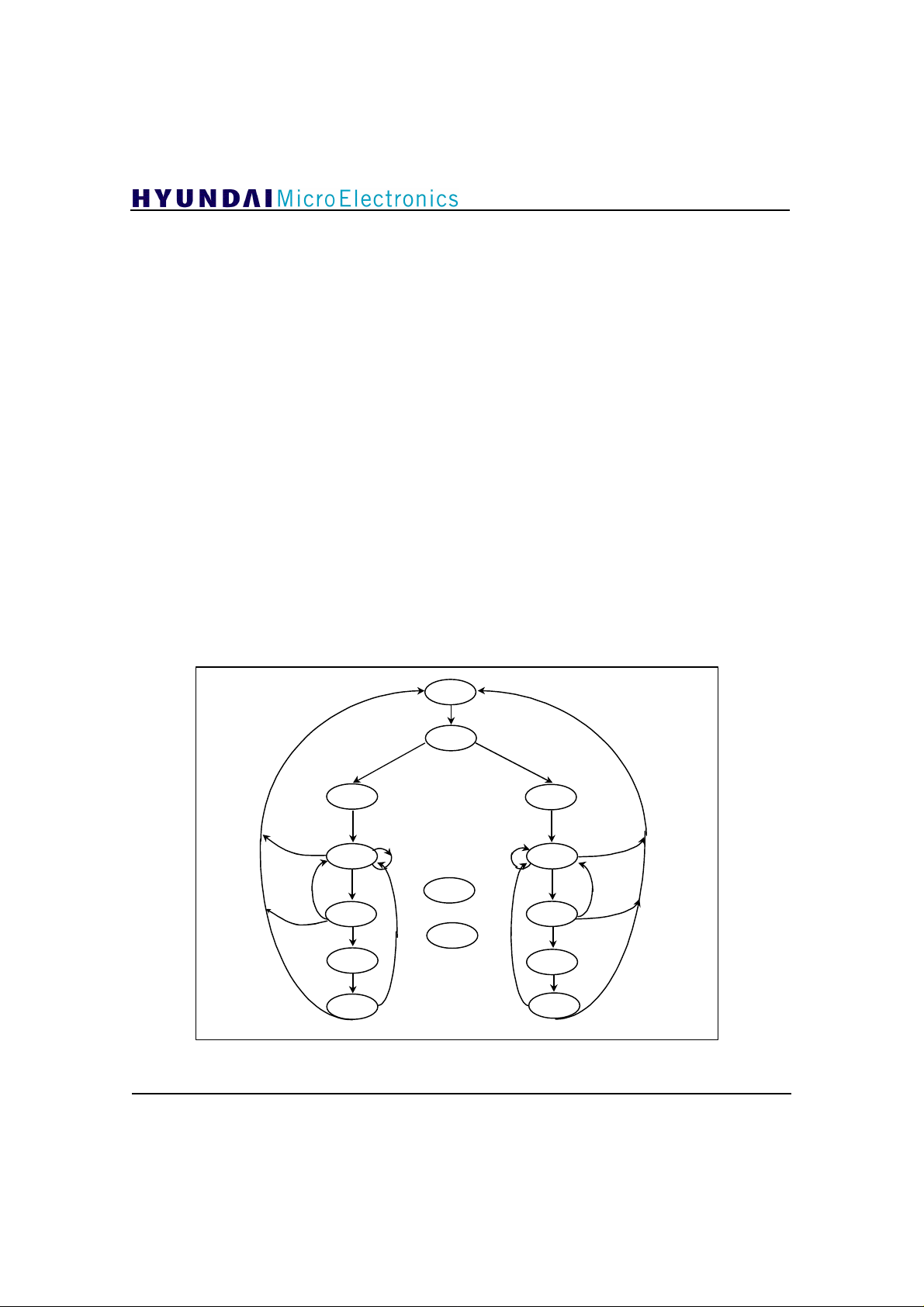
3.3 Main State Machine
This block contains the main DRAM timing control state machine and the decode for the external strobe signals
for the DRAM interface. The state machine generates the timing for the nCAS and nRAS strobes, and the
multiplexing of the DRAM row and column address lines for standard DRAM cycles and refresh cycles. The
nDRAMWE and nDRAMOE signals are asserted appropriately depending on the access type. Word, Half-word,
and Byte accesses are decoded from the lower bits of the BA address bus in order to assert the appropriate nCAS
line(s). For word accesses all four nCAS lines are asserted. Figure 5. Descibes the Main State Machine Diagram.
Local arbitration for refresh cycles is also carried out here as refresh requests are received from the refresh timer
block. The block also supports the self refresh DRAM; enter to and exit from this self refresh state are initiated by
the PDRREQ signal. This is illustrated in Figure 6. DRAM signal timing: power down mode.
RefReq or
!DSEL
r_IDLE
DSEL
r_RnR
CAS
r_RnC1
CAS
r_RnC2
r_RnC3
r_RnC4
!BWRITE
r_WAIT
RAS
r_CRWAIT
r_CWWAIT
BWRITE
r_WnR
r_WnC1
r_WnC2
r_WnC3
r_WnC4
Figure 5. Main State Machine Diagram
CAS
CAS
RefReq or
!DSELD1
31
Page 31

GDC21D601
3.4 EBI Control Block
This also generates the control signals required by the EBI(External Bus Interface). The EBI control signals are
divided into three main groups; those related to the control of the Address path, the DataIn path, and the DataOut
path.
Address Path Control
There are three signazls related to the address path of the EBI:
nDRAMALATCH used to open the address latch of the EBI. This can be used to hold the external address XA
while internal accesses are performed. When this signal is asserted (active LOW) the EBI
address latch should be opened. When a DRAM access is not performed, the DRAM
controller will de-assert this signal. In a shared EBI scheme, other memory
controllers(Static Memory controller,...) must exhibit this behavior when they do not
perform memory accesses.
DRAMAMUX used to select the DRAMA[12:0] address as the address to be used on XA. This signal will
be asserted (active HIGH) when a DRAM access occurs, and will be de-asserted when the
transfer is completed.
DRAMA[12:0] the multiplexed row/column address used to access the DRAM.
DataIn and DataOut Path Control
There are four signals related to the data path of the EBI:
nDRAMOUTEN used to enable the EBIs data drivers onto XData. When this signal is de-asserted (HIGH),
the EBI should disable its drive onto XData. This signal is de-asserted during read cycles
and is asserted at other times. In a shared EBI scheme, other memory controllers must
exhibit this behavior when they do not perform memory accesses.
nDRAMOUTLEN used to latch the value of BD into the EBIs data output latches. When this signal is asserted
(active LOW), the EBI data output latch is opened. This signal will be asserted during
DRAM write transfers, and is de-asserted at other times.
nDRAMINEN used to enable the EBI data drivers onto BD. When this signal is asserted (active LOW), the
EBI should be driven onto BD. This signal is asserted during DRAM read transfers and is
de-asserted at other times.
nDRAMINLEN[3:0] used to latch the value of XData into the EBI data input latches. When this signal is de-
asserted (HIGH), the EBI data input latch is shut. Four signals are provided to enable
latching of byte / half-word data. nDRAMINLEN[0] is used to latch the data on M_D[7:0].
This signal is normally asserted and will be de-asserted during DRAM read transfers to latch
the current data on XData.
32
Page 32

GDC21D601
3.5 Refresh Control Block
The refresh timer is a 7-bit timer counter which counts down and generates a refresh request when it reaches zero,
at this point it is reloaded with the value in the refresh control register. This allows refresh frequencies from the
Refresh Control Register and BCLK input clock.
3.6 ASB Interface Block
The ASB interface provides the interaction with the main AMBA bus. The DRAM controller will initiate a DRAM
access when the DSELDRAM signal is asserted, or access the control registers when the DSELREG strobe is
asserted. The timing of the ASB transfers is described in detail in the AMBA Specification rev. D. At a 256-word
boundary, the BLAST signal will be asserted to indicate to the bus master that the burst sequence should be broken
within the page boundary.
This block also generates the row and column addresses. During burst mode accesses, the column address is
provided by a 10-bit column address incrementor to provide adequate column address timing.
BCLK
PDREQ
PDACK
nRAS[1:0]
nCAS[3:0]
nOE
nWE
Figure 6. DRAM Signal Timing : Power Down Mode
33
Page 33

GDC21D601
4. Register Description
4.1 Memory Map
The base address (=DRAM REG Base) of the DRAM controller register bank is 0xFFFFED00.
Table 5. Memory Map of the Dram Controller Peripheral
ADDRESS WRITE LOCATION READ LOCATION INITIAL
Base + 0x0 DRAM Refresh Control Register (RCR) N/A 16’h0000
Base + 0x4 DRAM Control Register for CPU DRAM Control Register for CPU 7’ b0000000
Base + 0x8 DRAM Control Register for DMA DRAM Control Register for DMA 6’b000000
Base + 0xC DRAM Test Control Register (TCR) N/A 4’b0000
4.2 DRAM Refresh Control Register(RCR)
The DRAM refresh period register is an 16-bit write register which enables the refresh and selects the refresh
period used by the DRAM controller for its periodic CAS-before-RAS refresh. The value in the DRAM refresh
period register is only cleared by a Power On Reset (BnRES = 0).
15 8 7 6 0
REFCNT
Figure 7. DRAM Controller Refresh Register
RFSHEN RFDIV
REFCNT DRAM Refresh Clock Divisor. Refresh Clock is setting by this bit field :
RefClock = BCLK/REFCNT
The REFCNT field should not be programmed with zero since this results in no initiated refresh
cycles.
RFSHEN DRAM refresh enable. Setting this bit enables periodic refresh cycles to be generated by the DRAM
controller at the rate set by the RFDIV field. Setting this bit also enables self-refresh mode when the
DRAM controller is in the power down state.
RFDIV This 7-bit field sets the DRAM refresh rate. The refresh period is deriven from internally generated
clock and is given by the following formula:
Frequency (KHz) = 2*[RefClock /(RFDIV + 1)]
or
RFDIV = ( RefClock / 0.5*Refresh frequency (KHz) ) - 1
The RFDIV field should not be programmed with zero since this results in no initiated refresh cycles.
34
Page 34

GDC21D601
4.3 DRAM Control Register for CPU (DRAMConCPU)
This Register controls the DRAM control signals when DRAM accessed by CPU. In normal condition, the
DRAM access time is changed by the bus master is CPU or DMA Controller. In case of bus master is DMA
Controller, the transfer timing should be properly set to the external I/O device and DRAM, so for the optimal
system performance the DRAM access by the CPU is set in this DRAM Control Register for CPU
(DRAMConCPU) and in case of the DRAM access by the DMA Controller DRAM control signals are controlled
by the DRAM Control Register for DMA (DRAMConDMA).
15 7 6 5 4 3 2 1 0
Reserved DMAEn TRP TCP WaitCnt BankSize
Figure 8. DRAM Control Register for CPU (DRAMConCPU)
DMAEn If DMA transfer, then the DRAM control signals are controlled by DRAM Control Register for DMA
(DRAMDonDMA) by this bit setting. When this bit is ‘0’ , then the DRAM control signals are
controlled by bit fields in this Control Register (DRAMConCPU) during DRAM access.
TRP Control the timing of difference between the RAS and CAS signal by this bit field setting. When this
bit is ‘0’ , then DRAM access are absolutely no wait, so DRAM access time is very short, but should
be considered the operating frequency of the MCU and DRAM access time.
TCP Control the timing of the Low phase of CAS signals. When this bit is ‘1’ , then the Low phase of the
CAS signals are enlarged to one cycle of BCLK. When this bit is ‘0’ , then the Low phase of the CAS
signals are half clock of BCLK.
WaitCnt This bit fields control the DRAM access time. The wait state is inserted in ASB BUS by the value of
these WaitCnt fields. (00=0-wait, 01=1-wait, 10=2-wait, 11=3-wait)
BankSize These bits indicate the data width of the DRAM Bank. The data width of the DRAM by BankSize are
shown Table 6.
Table 6. Data width of the DRAM by BankSize[1:0] fields
BankSize[1:0] Data Width of DRAM
00 Byte
01 Half Word
10 Word
11 Reserved
35
Page 35

GDC21D601
4.4 DRAM Control Register for DMA
This Register controls the DRAM control signals when DRAM accessed by DMA.
Setting the register is effective only when the DMAEn bit set by DRAMConCPU(DRAM Control register from
CPU).
15 6 5 4 3 2 1 0
Reserve TRP TCP WaitCnt BankSize
Figure 9. DRAM Control Register for DMA (DRAMConDMA)
4.5 DRAM Test Control(TCR)
The DRAM test control register is for test and should not be used during normal operation. It is a write-only
register with the following format.
15 4 3 2 1 0
Reserved TESTINC FORCEADV FORCESIZE
Figure 10. DRAM Test Control Register
TESTINC Test increment (TESTINC). This bit puts the column address increment into a test mode. In
this mode each nibble of the column address increment increments independently. Resets it to
0.
FORCEADV Force refresh advance (FORCEREFADV). This bit forces the refresh counter to advance every
BCLK. Resets it to 0.
FORCESIZE[1:0] Force access size. These bits force the size of accesses to the DRAM bank. When this is set to
10 (default), the ASB B_SIZE is used to determine the size of the access. When this is set to
00 or 01, a byte or half-word access is forced respectively. Resets it to 10.
36
Page 36

GDC21D601
Section 5. On-Chip SRAM
1. General Description
The GDC21D601 has 8-kbytes of on-chip RAM. The on-chip RAM is linked to the CPU and direct memory access
controller(DMAC) with 32-bit data bus. The CPU and DMA Controller can write data into the on-chip RAM in
byte, half-word, or word units.
2. Signal Description
Table 1. Signal Descriptions
NAME TYPE DESCRIPTION
BA[31:0] I System address bus.
BD[31:0] I/O Bi-directional system data bus.
BWAIT I/O LOW during phase one of BCLK.
BLAST I/O LOW during phase one of BCLK.
BERROR I/O LOW during phase one of BCLK.
BWRITE I When this signal is HIGH, it indicates a write transfer and when LOW a read.
DSELMEM I When this signal is HIGH, it indicates that on-chip RAM is selected.
BnRES I These signals indicate the reset status of the ASB.
3. Function Description
On-Chip SRAM can read data from SRAM and can write data into SRAM in a single clock cycle through ASB bus.
And SRAM is single module which have 32 bit data bus and control lines.
The data in the On-chip RAM can always be accessed in one cycle that make the RAM ideal for use as a program
area, stack area, or data area, which requires high-speed access. The contents of the on-chip RAM are held in both
standby and power-down modes.
Memory area 0x10000000 to 0x10001FFF is allocated to the on-chip RAM as default. When isram signal from
MCU Controller is set to HIGH, memory area 0x00000000 to 0x00001FFF can be allocated to the on-chip RAM.
37
Page 37

GDC21D601
Section 6. Static Memory Controller
1. General Description
The Static Memory Controller interfaces the AMBA Advanced System Bus (ASB) to the External Bus Interface
(EBI); controlling the external SRAM, ROM, Flash Memory or off-chip peripherals. Eight separate chip select
banks are provided by this block. Each bank is 256MB in size and can be programmed individually to support:
• 8-, 16- or 32-bit wide, Little-Endian and Big-Endian Memory Format
• variable wait states (up to 16 waits)
• exchangeable active low/high chip select signal (only for CS6 and CS7)
• various type control signal timing
• bus transfers can be extended using the EXPRDY input signal. EXPRDY signal can be used by
exchangeablely active HIGH or LOW in according to control register setting.
Chip PAD
EXPRDY
EXPCLK
MODE[1:0]
RnW
nWEN[3:0]
nSRAMOE
nCS[5:0]
CS[7:6]
nWEF[3:0]
Aout[23:0]
DataOut[31:0]
DataIn[31:0]
nOutEn[3:0]
Static Memory Controller
Main State Machine
Bank Config. Reg.
ASB Interface
&
Chip Select encode
EBI Signal Control
MemByte[1:0]
nSRAMA[1:0]
nSRAMALatch
nSRAMAMUX
Lat
Lat
mux
nSRAMInEn
nSRAMOutLEn
nSRAMInLEn[3:0]
nSRAMOutEn[3:0]
mux
mux
Lat
BA[26:24, 4:0]
ASB Bus
BCLK
BnRES
DSELSMI
DSELREG
BTRAN[1:0]
BWRITE
BSIZE[1:0]
BLAST
BERROR
BWAIT
BD[31:0]
BD[31:0]
Figure 1. Static Memory Controller Block Diagram
38
Page 38

GDC21D601
2. Signal Description
The Static Memory Controller module is connected to the ASB bus. In Table 1. Static Memory Controller ASB
signal descriptions show the internal bus interface signals(AMBA signals) to the Static Memory Controller
Table 1. Static Memory Controller ASB Signal Descriptions
NAME TYPE DESCRIPTION
BA[26:24, 4:0] I System address bus. The SRAM controller only requires seven bits of this bus
to do the necessary encoding/decoding.
BCLK I The ASB clock.
BD[31:0] I/O Bi-directional system data bus. The data bus is driven by this block during read
transfers from configuration registers only.
BERROR O LOW during phase one of BCLK when the Static Memory Controller is
selected.
BLAST O LOW during phase one of BCLK when the Static Memory Controller is
selected.
BWAIT O This slave response is driven during phase one of BCLK when the Static
Memory Controller is selected and is used to indicate if the memory has
completed its current transfer.
BnRES I The reset status of the ASB.
BSIZE[1:0] I The size of the transfer data which may be byte, half-word, or word.
BTRAN[1:0] I These signals are used to determine sequential and non-sequential accesses.
BWRITE I When this signal is HIGH, it indicates a write transfer and when LOW a read.
DSELSRAM I When this signal is HIGH, it indicates that the Static Memory Controller is
selected.
DSELREG I When HIGH, this signal indicates that one of the Bank Configuration registers
is selected.
39
Page 39

GDC21D601
Table 2. Static Memory Controller External Signal Descriptions
NAME TYPE DESCRIPTION
EXPRDY I Expansion channel ready. This signal is active LOW by default, When this
signal is LOW, it will force the current memory transfer to be extended. When
the RDON bit field in Configuration Register is set, then the polarity of the
EXPRDY signal is reversed to active HIGH.
EXPCLK O Expansion clock output. Clock output at the same phase and speed as the bus
clock. Active only during SRAM/ROM cycles.
nWEN[3:0] O These signals are active LOW write enables for each of the memory byte lanes
on the external bus. For example nWEN[0] controls the writes to D[7:0].
nWEF[3:0] I These optional connections use PADs feedback from the external side of the
nWEN[3:0] PADs. They are used to guarantee address and chip select hold
time when any write enable is LOW. If not used, they should be tied to HIGH.
NSRAMOE O This is the active LOW output enable for devices on the external bus. This is
LOW during reads from external memory and during the time that the selected
bank should drive the external data bus.
nCS[5:0] O Active LOW Chip Select
CS[7:6] O Active HIGH Chip Select
SRAMA [1:0] O These signals form the lower two bits of the external address bus. They are
used to control accesses to 16- or 8-bit memories when the AMBA bus
requests an access size larger than the memory (this is handled using multiple
external transfers).
nSRAMALatch O This signal is an active LOW transparent address latch enable. It is normally
HIGH to prevent power wasting transitions on the external address bus.
MemByteSeq[1:0] O These signals control the data path muxes which allow 16- or 8-bit memories to
read and write 32-bit values on the AMBA bus.
nSRAMOutLEn O Active LOW transparent latch enable for the data out path (writes).
nSRAMOutEn[1:0] O Active LOW byte lane data output driver enable.
nSRAMInLEn[1:0] O Active LOW transparent latch enable for the data in path (reads).
nSRAMInEn O Active LOW data input driver enable (to AMBA bus).
Mode[1:0] I Booting mode configuration input. If these signals are “00” during BnRES
LOW then the SRAM Controller will select bank zero (nCS[0]) as 32-bit
memory. If these signals are “10” then select bank zero as 16-bit memory. If
these signals are “01” then bank zero as 8-bit memory.
40
Page 40

GDC21D601
Accesses to the Static Memory Controller module can be two basic types; control register accesses and memory
area accesses. The following timing diagrams relate to the external pin timings for SRAM/ROM read and write
cycles in minimum wait states.
BCLK
BTRAN[1:0]
BA[23:0]
DSELSRAM
BWAIT
BD[31:0]
EXPCLK
nCS[5:0]
nSRAMOE
A[23:0]
N_TRAN S_TRAN S_TRAN S_TRAN S_TRAN
address n
address n
address n+4
address n+8
address n+4 address n+8
D[31:0]
EXPRDY
Deocde
Wait
Figure 2. ROM Read Timing
read
readread
41
Page 41

BCLK
GDC21D601
BTRAN[1:0]
BA[23:0]
DSELSRAM
BWAIT
BD[31:0]
EXPCLK
nWEN[3:0]
nCS[5:0]
XA[23:0]
N_TRAN S_TRAN S_TRAN S_TRAN
address n address n+4
address n
address n+4
XD[31:0]
EXPRDY
42
Deocde Wait
Figure 3. SRAM Write Timing
write data write data
write
write
write
Page 42

GDC21D601
3. Functional Description
The Static Memory Controller has following functions:
• memory bank select
• off-chip expansion clock driver
• wait states generation
• byte lane write control
• burst read access
• various type control signal generation
These are described below.
3.1 Memory Bank Select
The chip select signal generation is controlled by BA[26:24]. From Table 3 static memory bank select coding is
shown that these signals coded to CS[7:6] and nCS[5:0].
Table 3. Static Memory Bank Select Coding (MODE R)
DSEL BA[26:24] CS[7:6] nCS[5:0] MEMORY CONFIGURATION
1 000 00 111110 nCS0 configuration
1 001 00 111101 nCS0 configuration
1 010 00 111011 nCS2 configuration
1 011 00 110111 nCS3 configuration
1 100 00 101111 nCS4 configuration
1 101 00 011111 nCS5 configuration
1 110 01 111111 CS6 configuration
1 111 10 111111 CS7 configuration
3.2 Off-Chip Expansion Clock Driver
In the Static Memory Controller, the system clock input BCLK is passed directly to EXPCLK during memory
cycles if the expansion clock enable bit of the corresponding memory bank configuration is set.
3.3 Access Sequencing
Bank configuration also determines the width of the external memory devices. When the external memory bus is
narrower than the transfer initiated from the current master, the internal transfer will take several external bus
transfers to complete. For example, in case that bank zero is configured as 8-bit wide memory and a 32-bit read is
initiated, the ASB bus will stall while the SRAM Controller reads four consecutive bytes from the memory. During
these accesses the data path is controlled (using the MemByteSeq[1:0] signals) to de-multiplex these four bytes
into one 32-bit word on the ASB bus.
43
Page 43

GDC21D601
3.4 Wait State Generation
The Static Memory Controller supports wait states for read and write accesses. This is configurable between one
and 16 wait states for standard memory access and zero and 15 wait states for burst mode reads from ROMs.
Note
Wait state control refers to external transfer wait states. The number of cycles where an AMBA transfer completes
is controlled by two other factors; access width and external memory width. The Static Memory Controller also
allows transfers to be extended indefinitely, by asserting EXPRDY to LOW. To hold the current transfer EXPRDY
must be asserted on the falling edge of BCLK before the last cycle of the access. The transfer cannot be completed
until EXPRDY is HIGH for at least one cycle.
3.5 Burst Read Control
This supports sequential access burst reads of up to four consecutive locations in 8-, 16- or 32-bit memories. This
feature supports burst mode ROM devices and increases the bandwidth by using a reduced (configurable) access
time for three sequential reads following a quad-location boundary read. (Note that quad-location boundaries occur
when A[1:0]=00 for byte wide memories.)
3.6 Byte Lane Write Control
This controls nWEN[1:0] according to AMBA transfer width (indicated by BSIZE[1:0]), external memory width,
BA[1:0], and the access sequencing. The following table shows the basic coding assuming 32-bit external memory:
Table 4. nWEN Coding
BSIZE[1:0] BA[1:0] nWEN[3:0]
10 (word) XX 0000
01 (half-word) 1X 0011
01 (half-word) 0X 1100
00 (byte) 11 0111
00 (byte) 10 1011
00 (byte) 01 1101
00 (byte) 00 1110
44
Page 44

GDC21D601
4. Programmer’ s Model
4.1 Memory Map
The base address for the Static Memory Controller registers is 0xFFFFEC00
Table 5. Static Memory Controller Memory Map
ADDRESS DESCRIPTION INITIAL VALUE
SRAMRegBase + 00000 Memory Configuration Register 1 (MEMCFG1) 32’ h00000004
SRAMRegBase + 00004 Memory Configuration Register 2 (MEMCFG2) 32’ h00000000
SRAMRegBase + 00008 Memory Configuration Register 3 (MEMCFG3) 32’ h00000000
SRAMRegBase + 0000C Memory Configuration Register 4 (MEMCFG4) 32’ h00000000
4.2 Memory Configuration Registers
31 16 15 0
NCS[n+1] Configuration Register NCS[n] Configuration Register
Figure 4. Memory Configuration Register
Memory configuration register (MEMCFG1, 2, 3, 4) is a 32-bit read-write register which sets the configuration of
the two expansion and ROM selects. Each select is configured with a two-byte field.
31 30 29 28 27 26 25 24 23 22 20 19 16
Reserved RDON CSCNTL FlashON CLKEN Mem Width BUREN Burst Wait Normal Wait
15 14 13 12 11 10 9 8 7 6 4 3 0
Reserved RDON CSCNTL FlashON CLKEN Mem Width BUREN Burst Wait Normal Wait
Figure 5. Two-Byte Fields in the Memory Configuration Register for CS[5:0]
(Note : Gray areas are reserved for another feature.)
15 14 13 12 11 10 9 8 7 6 4 3 0
Rsv. CSON RDON CSCNTL FlashON CLKEN Mem Width BUREN Burst Wait Normal Wait
Figure 6. Two-Byte Fields in the Memory Configuration Register for CS[6]
31 30 29 28 27 26 25 24 23 22 21 16
LCDON CSON RDON CSCNTL FlashON CLKEN Mem Width Reserved LCD Wait
Figure 7. Two-Byte Fields in the Memory Configuration Register for CS[7]
45
Page 45

GDC21D601
LCDON LCD enable. When the Bank 7 is connected to LCD panel for text display, setting this bit
enables LCD wait to access directly LCD device. LCD wait bit is 6 bits therefore wait cycle
is from 1 to 64.
CSON nCS enable. Setting this bit is enables the CS6 and CS7 to be active low signal from active
high signal that supports various devices.
RDON select the polarity of EXPRDY. When this bit is set to 0, EXPRDY signal act as positive
active signal. When this bit is set to 1, EXPRDY signal act as negative active signal.
CSCNTL Make the control signals (Address, Data, CS, RnW, etc.) of external device to be similar
Motorolar type CPU.
FlashON Flash memory enable. When this bit is set to 1, memory control signals, nCS, nWEN[1:0],
and nSRAMOE, are adjusted to flash memory control signal timing.
CLKEN Expansion clock enable. Setting this bit enables the EXPCLK to be active during accesses to
the specified bank. This provides a timing reference for devices that need to extend bus
cycles using the EXPRDY input. Back to back sequential accesses result in a continuous
clock.
BUREN Burst enable. Setting this bit enables burst reads to take advantage of faster access time from
ROM devices that support burst mode.
Note
Banks using EXPCLK and EXPRDY for off-chip peripheral control should not enable burst mode, and
should be designed and set up to use a specific number of wait states in each access. The peripheral
should time the access by counting EXPCLK cycles (there is no explicit indication of access start or
end) and determine the access direction and width by using nWEN[3:0].
Table 6. Values of the Mem Width Field Define the Bus Width Field.
Table 6. Values of the Mem Width Field
MEM WIDTH FIELD EXPANSION TRANSFER MODE
00 32-bit wide bus access
01 16-bit wide bus access
10 8-bit wide bus access
11 Reserved
46
Page 46

GDC21D601
Table 7. The values of the Normal Wait field define the values of the normal access wait state field. And the values
of the LCD Wait define likely as Table 7.
Table 7. Values of the Normal Access Wait State Field.
VALUE NUMBER OF WAIT STATES
0000 1
0001 2
0010 3
0011 4
0100 5
0101 6
0110 7
0111 8
1000 9
1001 10
1010 11
1011 12
1100 13
1101 14
1110 15
1111 16
Table 8. Values of the Burst Wait field define the values of the burst read wait state field.
Table 8. Values of the Burst Read Wait State Field
VALUE NUMBER OF WAIT STATES
000 0
001 1
010 2
011 3
100 4
101 5
110 6
111 7
47
Page 47

GDC21D601
Section 7. MCU Controller
1. General Description
Designing the Microcontroller unit (MCU), some control signals needed by any functional block, but not drive any
other block, must be generated. So these control signals are generated in MCU Controller. The MCU Controller
(MCUC) is composed of registers which are for selecting the function of multi-function pins, for defining the
memory map structure, arbiter priority, MCU device code, and DRAM Power Down Req/Ack signals.
2. Signal Description
Table 1. Signal Descriptions
NAME TYPE DESCRIPTION
BCLK I System bus clock.
BnRES I the reset status of the ASB
BA[31:0] I System address bus
BD[31:0] I/O Bi-directional system data bus.
BWAIT O Low during phase one of BCLK
BLAST O Low during phase one of BCLK
BERROR O Low during phase one of BCLK
BWRITE I When this signal is HIGH, it indicates a write transfer and when LOW a read.
DSEL I When this signal is HIGH, it indicates that MCU Controller is selected.
PwrDwnAck I This signal indicates that DRAM is entered into self-refresh mode
PwrDwnReq O The request of entering the self-refresh node of DRAM
Ari_pri O Determine Arbiter Priority. See Section.2 System Architecture for detail
Isram O Allocate On-Chip SRAM address area at 0x00000000
Drambank0 O Allocate DRAM address area at 0x00000000
PINMUX_sigs O These signals are for Multi-function pin
48
Page 48

3. Register Description
3.1 Register Memory Map
The base address of MCU control Register is 0xFFFFEB00.
Table 2. MCU Controller Memory Map
GDC21D601
ADDRESS R/W
MCURegBase + 0x0000 R/W 0x00 MCU Control Register
MCURegBase + 0x0004 R/W 0x00 PINMUX_PA Register, Multi-function pin MUX Control
MCURegBase + 0x0008 R/W 0x00 PINMUX_PB Register, Multi-function pin MUX Control
MCURegBase + 0x000C R/W 0x00 PINMUX_PC Register, Multi-function pin MUX Control
MCURegBase + 0x00010 R/W 0x00 PINMUX_PD Register, Multi-function pin MUX Control
MCURegBase + 0x00014 R/W 0x00 PINMUX_PE Register, Multi-function pin MUX Control
MCURegBase + 0x00018 R/W 0x00 PINMUX_PF Register, Multi-function pin MUX Control
MCURegBase +0x0001C R/W 0x00 PINMUX_PG Register, Multi-function pin MUX Control
MCURegBase + 0x00020 R/W 0x00 PINMUX_PH Register, Multi-function pin MUX Control
MCURegBase + 0x00024 R/W 0x00 PINMUX_PI Register, Multi-function pin MUX Control
MCURegBase + 0x00028 R/W 0x00 PINMUX_PJ Register, Multi-function pin MUX Control
MCURegBase +0x0002C R $LG601 MCU Device Code Register
MCURegBase + 0x00030 R 0x0 DRAM Power Down Ack
MCURegBase + 0x00034 W 0x0 DRAM Power Down Req
INITIAL
VALUE
DESCRIPTION
signals for Port A[5:0]
signals for Port B[7:0]
signals for Port C[7:0]
signals for Port D[7:0]
signals for Port E[8:0]
signals for Port F[8:0]
signals for Port G[7:0]
signals for Port H[7:0]
signals for Port I[7:0]
signals for Port J[7:0]
3.2 MCUC_CON Register
31 2 1 0
Reserved Ari_Pri Isram Drambank0
drambank0 When this register is HIGH, DRAM memory address bank #0 area is located at 0.
Isram When this register is HIGH, On-Chip SRAM address area is located at 0
Ari_pri Arbiter Priority control signal. See also Section 2 System Architecture for details.
Figure 1. MCU Controller Register
49
Page 49

3.3 PINMUX Register
GDC21D601
Table 3. PINMUX_PA Register
BIT NO. SIGNAL NAME
PINMUX_PA[0] IRQ0 PA0 45
0
PINMUX_PA[1] IRQ1 PA1 47
1
PINMUX_PA[2] IRQ2 PA2 48
2
PINMUX_PA[3] IRQ3 PA3 49
3
PINMUX_PA[4] IRQ4 PA4 51
4
PINMUX_PA[5] IRQ5 PA5 52
5
BIT NO. SIGNAL NAME
PINMUX_PB[0] TCIOA0 PB0 55
0
PINMUX_PB[1] TCIOB0 PB1 57
1
PINMUX_PB[2] TCIOA1 PB2 58
2
PINMUX_PB[3] TCIOB1 PB3 59
3
PINMUX_PB[4] TCIOA2 PB4 61
4
PINMUX_PB[5] TCIOB2 PB5 62
5
PINMUX_PB[6] TCIOA3 PB6 63
6
PINMUX_PB[7] TCIOB3 PB7 65
7
BIT NO. SIGNAL NAME
PINMUX_PC[0] PC0 TCIOA4 66
0
PINMUX_PC[1] PC1 TCIOB4 67
1
PINMUX_PC[2] PC2 TCIOA5 69
2
PINMUX_PC[3] PC3 TCIOB5 70
3
PINMUX_PC[4] PC4 TCLKA 71
4
PINMUX_PC[5] PC5 TCLKB 73
5
PINMUX_PC[6] PC6 TCLKC 74
6
PINMUX_PC[7] PC7 TCLKD 75
7
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
Table 4. PINMUX_PB Register
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
Table 5. PINMUX_PC Register
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
50
Page 50

Table 6. PINMUX_PD Register
GDC21D601
BIT NO. SIGNAL NAME
PINMUX_PD[0] RXD0 PD0 76
0
PINMUX_PD[1] TXD0 PD1 78
1
PINMUX_PD[2] RXD1 PD2 79
2
PINMUX_PD[3] TXD1 PD3 80
3
PINMUX_PD[4] NCTS PD4 82
4
PINMUX_PD[5] NDSR PD5 83
5
PINMUX_PD[6] NDCD PD6 84
6
PINMUX_PD[7] NRI PD7 86
7
BIT NO. SIGNAL NAME
PINMUX_PE[0] NDTR PE0 87
0
PINMUX_PE[1] NRTS PE1 88
1
PINMUX_PE[2] SMDI PE2 90
2
PINMUX_PE[3] SMDO PE3 91
3
PINMUX_PE[4] SMCLK PE4 92
4
PINMUX_PE[5] SIN0 PE5 94
5
PINMUX_PE[6] SOUT0 PE6 95
6
PINMUX_PE[7] SCLK0 PE7 96
7
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
Table 7. PINMUX_PE Register
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
Table 8. PINMUX_PF Register
BIT NO. SIGNAL NAME
PINMUX_PF[0] SCS0 PF0 98
0
PINMUX_PF[1] SIN1 PF1 99
1
PINMUX_PF[2] SOUT1 PF2 100
2
PINMUX_PF[3] SCLK1 PF3 102
3
PINMUX_PF[4] SCS1 PF4 103
4
PINMUX_PF[5] BCLKOUT PF5 104
5
PINMUX_PF[6] NFIQOUT PF6 105
6
PINMUX_PF[7] NIRQOUT PF7 106
7
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
51
Page 51

Table 9. PINMUX_PG Register
GDC21D601
BIT NO. SIGNAL NAME
PINMUX_PG[0] EXTREQ PG0 124
0
PINMUX_PG[1] EXTACK PG1 127
1
PINMUX_PG[2] DREQ0 PG2 128
2
PINMUX_PG[3] DACK0 PG3 129
3
PINMUX_PG[4] DREQ1 PG4 131
4
PINMUX_PG[5] DACK1 PG5 132
5
PINMUX_PG[6] RAS0 PG6 133
6
PINMUX_PG[7] RAS1 PG7 135
7
BIT NO. SIGNAL NAME
PINMUX_PH[0] CAS0 PH0 136
0
PINMUX_PH[1] CAS1 PH1 137
1
PINMUX_PH[2] CAS2 PH2 138
2
PINMUX_PH[3] CAS3 PH3 139
3
PINMUX_PH[4] CS4 PH4 161
4
PINMUX_PH[5] CS5 PH5 162
5
PINMUX_PH[6] CS6 PH6 165
6
PINMUX_PH[7] CS7 PH7 166
7
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
Table 10. PINMUX_PH Register
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
Table 11. PINMUX_PI Register
BIT NO. SIGNAL NAME
PINMUX_PI[0] D16 PI0 187
0
PINMUX_PI[1] D17 PI1 186
1
PINMUX_PI[2] D18 PI2 184
2
PINMUX_PI[3] D19 PI3 183
3
PINMUX_PI[4] D20 PI4 182
4
PINMUX_PI[5] D21 PI5 180
5
PINMUX_PI[6] D22 PI6 179
6
PINMUX_PI[7] D23 PI7 178
7
52
PIN FUNCTION DESCRIPTION
When 0 When 1 PIN No.
Page 52

Table 12. PINMUX_PJ Register
GDC21D601
BIT NO. SIGNAL NAME
PINMUX_PJ[0] D24 PJ0 177
0
PINMUX_PJ[1] D25 PJ1 175
1
PINMUX_PJ[2] D26 PJ2 174
2
PINMUX_PJ[3] D27 PJ3 173
3
PINMUX_PJ[4] D28 PJ4 171
4
PINMUX_PJ[5] D29 PJ5 170
5
PINMUX_PJ[6] D30 PJ6 169
6
PINMUX_PJ[7] D31 PJ7 167
7
When 0 When 1 PIN No.
3.5 MCU Device Code Register
This Register is read only.
Device Code Value is ‘$LG601’
Binary Value : 0000 0100 1100 0100 0111 0110 0000 0001
3.6 DRAM Power Down Acknowledge Register
This Register is 1 bit read only register.
This register is set when DRAM is entered to power down mode.
3.7 DRAM Power Down Request Register
PIN FUNCTION DESCRIPTION
This Register is 1 bit read/write register.
When this register bit is HIGH, request to DRAM Controller to enter into power down mode of the DRAM.
53
Page 53

Section 8. Power Management Unit
1. General Description
The PMU block provides:
• Clock distribution of all over system
• Reset, RUN and Power down modes control
Figure 1. shows the PMU Block Diagram.
GDC21D601
nPOR
WD_OF_IN
MAN_RESET_IN
P_A[7:0]
P_D[15:0]
P_SEL
P_STB
P_WRITE
INT_REQ_IN
tfclk
tbclk
SCLK_IN
PCLK_IN
SPCLK
Reset
Debounce
Digital Filter
PMU
Registers
BCLK
Freq.
Control
PCLK
Freq.
Control
Figure 1. PMU Block Diagram
Reset
Control
PMU
Control
FCLK, BCLK
Distribution
Control
PCLK
Distribution
Control
B_RESETn_OUT
P_RESETn0_OUT
P_RESETn1_OUT
RESETn_EXT
WD_OF_OUT
nPDM
FASTBUS
REMAP
FCLK
BCLK_XXX for ASB block
BCLK_XXX for Peripherals
PCLK_XXXX for Peripherals
54
Page 54

GDC21D601
2. Hardware Interface and Signal Description
The PMU block is connected to the APB bus. Table 1. describes the APB signals and clock signals used and
produced.
Table 1. PMU Signal Descriptions
NAME TYPE DESCRIPTION
nPOR I External reset input.
INT_REQ_IN I Interrupt request signal from the interrupt controller.
WD_OF_IN I Watch dog timer overflow signal.
MAN_RST_IN I S/W manual reset pin from watch dog timer.
P_D[15:0] I/O
P_A[7:0] I
P_WRITE I
P_STB I
P_SEL I
SCLK_IN I System clock input . This is the clock input from external clock circuit .
PCLK_IN I UART clock. This is the clock input from external UART clock module.
Tfclk I
Tbclk I
BCLK_XXX O
PCLK_XXX O APB Peripheral Bus Clocks. All APB blocks are operated by the clocks.
FCLK O FCLK pin for ARM720T. It is used in standard mode, when FASTBUS is LOW.
FASTBUS O
NPDM O
REMAP O Indicates that the reset memory map is in operation.
WD_OF_OUT O Watch dog overflow output signal for external devices.
B_RESETn O Reset signal for ASB devices
P_RESETn0 O Reset signal for APB devices
P_RESETn1 O Same as P_RESETn0, but in manual reset mode this is not asserted.
RESETn_OUT O Reset signal for external devices.
This is the bi-directional peripheral data bus. This block drives the data bus
during read cycle, when P_WRITE is LOW.
This is the peripheral address bus, which uses individual peripheral for decoding
register accesses to that peripheral. The addresses become valid before PSTB goes
to HIGH and remain valid after PSTB goes to LOW.
This signal indicates a write to a peripheral when it is HIGH and a read from a
peripheral when LOW.
It has the same timing as the peripheral address bus.
This strobe signal is used to time all accesses on the peripheral bus. The falling
edge of PSTB is coincident with the falling edge of BCLK
When HIGH, this signal indicates that module has been selected by the APB
bridge.
When it is in TIC test mode, this s the FCLK clock input signal. When TSTCR[1]
is set to 1(HIGH) for entering TIC test mode.
When it is in TIC test mode, BCLK clocks signal. First set the TSTCR[1] to 1 for
entering TIC test mode.
System Bus clock is generated from SCLK_IN. All ASB block and some APB
blocks are operated by this clock.
ARM720T bus mode control signal. When it is LOW, it is in standard bus mode.
When HIGH, fast bus mode.
Indicates the PDM mode of PMU. When it is LOW, MCU entered in power down
mode. When HIGH, normal operation mode.
55
Page 55

3. Operation Modes
3.1 Introduction
GDC21D601
The reset protocol guarantees that the multi-master
system starts up with at most one bus driver enabled
on each shared signal on the bus, and also permits a
protocol reset mechanism for time-out or
‘watchdog’ reset support.
To improve power management, support for a
power-saving mode where bus clocks may be
disabled (or dropped to lower clock) is included.
3.2 Reset and Operation Modes
A set of four useful states or modes is defined as
follows:
RESET
When it is power-on, watchdog timer overflow,
watchdog timer manual reset or S/W reset, the MCU
is initialized
Rower on Reset
The most severe form of reset which ensures that no
more than one tri-state driver is enabled on each bus
and initializes all system states to ensure that the
power supply can in fact rise to normal operating
voltage.
The reset and power-down mechanism provides:
• Stable power-up sequence
• Hard Initialization (Power On Reset)
• Soft Initialization (S/W Manual Restart)
Additionally a system bus, once operational,
benefits from well-defined modes of operation:
• RUN in the Standard BUS mode
• RUN in the FAST BUS mode
• Power-down mode
Manual Reset / Software Reset
The manual reset, which may need to apply to allow
all soft resetting of the bus for a number of clock
cycles. In this reset states the PMU block initializes
all the ASB blocks, Bus controller, DRAM
Controller, DMA Controller, ARM CPU core, and
Arbiter, Decode. However some APB blocks are all
valid in warm reset.
Watchdog Timer Overflow and Manual Reset
The watchdog timer can generate reset signal, when
timer overflows or sets the register value. Detailed
information are in the watchdog timer manual,
please refer to it.
This state should be forced by any on-chip poweron-reset cell or external power-on signal and
maintained until bus clock is safe and stable.
The POR is forced to be in an asynchronous start-up
condition and must be recognized by all master and
slave devices to disable output drives (and wait for a
valid clock)
56
RUN - ARM720T Standard Mode.
The ARM720T works using the FCLK and BCLK.
The FCLK is used for CPU operation clock, and the
B_CLK is used for internal bus access, i.e. AMBA
BUS. So CPU can operate very high frequency. This
mode can control the clock of ASB and APB
devices, so user can disable the clocks of unused
devices or peripherals. It is possible to control the
BCLK or PCLK mask register.
Page 56

GDC21D601
RUN -ARM720T Fast-bus Extension Mode.
The ARM720T works using only the BCLK. The
CPU operation clock and AMBA bus access clock
are the same. This mode can control the clock of
ASB and APB devices, so user can disable the clock
of devices or peripherals that are not using now. It is
possible to control the BCLK mask register or
PCLK mask register.
PDN – Power-Down Mode
When MCU system is in the PDN State, PMU block
S/W Control
Man_reset
disables all of the blocks in the ASB and APB, so
the power consumption of system is dramatically low.
Although MCU is in the power down mode, user can
set some blocks are working in the power down
mode. It is possible control the BCLK or PCLK
mask register for power-down.
Wake-up from the PDN Mode.
The Wake-up is a temporal state for wake-up from
power down state through the interruption. After
wake-up state, next state becomes RUN state
automatically.
nPORWD_OF
RESET
Wake-up
by nPOR
RUN
(use FCLK)
S/W
Control
S/W Control
Man_reset
S/W
Control
RUN
(use B_CLK only)
Figure 2. Reset and Power Management State Machine.
Power Down
S/W
Control
Wake-up
by Interrupt
57
Page 57

GDC21D601
4. Register Description
The PMU supplies the clock to all of the blocks in the MCU.
4.1 PMU Control Register
This register controls the operation mode of PMU. When power on reset states, register value is initialized by Run
State (00). The address of register is PMU_BASE(=0xFFFF F000) + 0x00h.
Table 2. PMUCR Bit Functions
BIT INITIAL NAME FUNCTION
7~0 0x0 PMUCR 0x0 - Clear PMU Status Register.
0x03 – Entering the PD(Power down) Mode
the other values - None effect.
4.2 PMU Status Register
This register holds the previous status and reset state of PMU. The address of register is PMU_BASE + 0x00h.
Table 3. PMUSR Bit Functions
BIT INITIAL NAME FUNCTION
5, 4 00 PMUST[5:4]
Previous Reset
Status bits
3, 2 00 PMUST[3:2]
Current Status bits
1, 0 00 PMUST[1:0]
Previous Status
bits
00 - The Power-On reset state (nPOR).
01 - S/W Reset state using PMU.
10 - S/W Manual reset state using WDT.
11 - WD overflow reset state using WDT.
00 - Running (FAST, SLOW) after nPOR.
01 - Running (FAST, SLOW) after WD_OF.
10 - Running (FAST, SLOW) after Man_reset
00 - Start (FAST, SLOW) after nPOR.
01 - Start (FAST, SLOW) after WD_OF.
10 - Start (FAST, SLOW) after Man_reset
11 - Start (FAST, SLOW) after PD Mode.
4.3 REMAP Register
The REMAP register controls re-mapping operation when the reset (POR or MAN_RST) signal is asserted or S/W
is reset by RSTCR. The address is PMU_BASE + 0x10h.
Table 4. REMAP Bit Functions
BIT INITIAL NAME FUNCTION
0 0 REMAP 0 – Reset operation mode map
1 – Normal operation mode map
58
Page 58

GDC21D601
4.4 BCLK and FCLK Control Register and BCLK Frequency Control Register
This register controls BCLK of ASB and FCLK of ARM720T. User can save the power by reduce of the clock
speed. At any moment, user can change the BCLK speed but it may push the system into unstable stage, so user
must change the clock speed only in BUS IDLE; this means there is no interaction between the devices used by
BCLK and any other devices used by PCLK. User can control the bus mode that are standard-bus mode and fastbus mode. The BCLK is only used in the fast-bus mode and ARM720T uses the both clock FCLK and BCLK in
the fast bus mode. The address is PMU_BASE + 0x04h.
Table 5. CLKCR Bit Functions
BIT INITIAL NAME FUNCTION
2 - 0 000 BCLKCR[2:0] Control register for BCLK selection
000 - BCLK is divided SYS_CLK by 2
001 - BCLK is divided SYS_CLK by 4
010 - BCLK is divided SYS_CLK by 8
011 - BCLK is divided SYS_CLK by 16
100 - BCLK is divided SYS_CLK by 32
101 - BCLK is divided SYS_CLK by 64
110 - BCLK is divided SYS_CLK by 128
111 - BCLK is SYS_CLK.
Table 6. CLKCR Bit Functions
BIT INITIAL NAME FUNCTION
3 1 BCLKCR[3] Control register to use in FCLK mode
1 – Fast-bus mode (not use the FCLK)
0 – Standard-bus mode
use the FCLK that same the SYS_CLK
4.5 BCLK Mask Register for the RUN & PD Mode.
This register is used for masking BCLK of ASB devices in the RUN and PD mode. When each control bits are
written to “1 or 0”, each clock of devices is controlled by enabled or disabled clock in the RUN and PD mode. The
address of the mask control register are as follows.; BCLKMSK_RUN is PMU_BASE + 0x08h, BCLKMSK_PD
is PMU_BASE + 0x0Ch. When this is 1, it is enable clock. When 0, disable clock.
Table 7. BCLKMSK Bit Functions for RUN Mode
BIT INITIAL NAME FUNCTION
15-13 1 BCLKMSK_RUN Reserved bit
12 1 APB Bridge clock mask bit
11 1 BUS Controller clock mask bit
10 1 DRAM Controller clock mask bit
9 1 DMA Controller clock mask bit
8 1 TEST Controller clock mask bit
7 1 SRAM clock mask bit
6 - 1 111111 Reserved bit
0 1 B_CLK Out mask bit
59
Page 59

GDC21D601
Table 8. BCLKMSK Bit Functions for PD Mode
BIT INITIAL NAME FUNCTION
15 0 BCLKMSK_PD ARM7TDMI core clock mask bit
14 0 AMBA Arbiter clock mask bit
13 0 AMBA Decoder clock mask bit
12 0 APB Bridge clock mask bit
11 0 BUS Controller clock mask bit
10 0 DRAM Controller clock mask bit
9 0 DMA Controller clock mask bit
8 0 TEST Controller clock mask bit
7 0 SRAM clock mask bit
6 - 1 000000 Reserved bit
0 0 B_CLK Out mask bit
4.6 PCLK Mask Register
These registers are used for masking PCLK or BCLK of APB devices in the RUN or PD mode. The default values
are all the clocks of the APB devices enabled in the RUN mode, and the clocks of the APB devices disabled in the
PD mode. WDT and TIMER are APB devices but they uses the BCLK for their operation. The address of the mask
control register in RUN mode is PMU_BASE + 0x18h, and that of the power-down mask control register is
PMU_BASE + 0x1Ch. When this is 1, it enables clock. When 0, disables clock.
Table 9. PCLKMSK Bit Functions in the RUN Mode
BIT INITIAL NAME FUNCTION
9 1 PCLKMSK_RUN Watch dog timer clock mask bit
8 1 I2 C 2 clock mask bit
7 1 I2 C 1 clock mask bit
6 1 I2 C 0 clock mask bit
5 1 SSPI 1 clock mask bit
4 1 SSPI 0 clock mask bit
3 1 UART 2 / SMART card I/F clock mask bit
2 1 UART 1 clock mask bit
1 1 UART 0 clock mask bit
0 1 Timer clock mask bit
Table 10. PCLKMSK Bit Functions in the PD Mode
BIT INITIAL NAME FUNCTION
9 0 PCLKMSK_PD Watch dog timer clock mask bit
8 0 I2 C 2 clock mask bit
7 0 I2 C 1 clock mask bit
6 0 I2 C 0 clock mask bit
5 0 SSPI 1 clock mask bit
4 0 SSPI 0 clock mask bit
3 0 UART 2 / SMART card I/F clock mask bit
2 0 UART 1 clock mask bit
1 0 UART 0 clock mask bit
0 0 Timer clock mask bit
60
Page 60

GDC21D601
4.7 PCLK Frequency Control Register
This register is used to selecting the frequency of PCLK in the APB at RUN mode. Default value is 0000. The
address of access the register is PMU_BASE + 0x14h
Table 11. CLKMODE Bit Functions
BIT INITIAL NAME FUNCTION
2 - 0 000 PCLKCR Select the PCLK source
000 – PCLK is external PCLK source
001 – PCLK is the SCLK divided by 2
010 – PCLK is the SCLK divided by 4
011 – PCLK is the SCLK divided by 8
100 – PCLK is the SCLK divided by 16
101 – PCLK is the SCLK divided by 32
110 – PCLK is the SCLK divided by 64
111 – PCLK is the SCLK divided by 128
4.8 Reset Control Register
This register is used for generating the S/W reset operation. The MCU is entered in reset state, when this register is
set to high, it is cleared automatically at the end of manual reset procedure. The address is PMU_BASE + 0x30h.
Table 12. RSTCR Bit Functions
BIT INITIAL NAME FUNCTION
0 0 RSTCR Manual reset control bits
0 - Normal , 1 - manual reset
4.9 Test Control Register
TSTCR controls the normal mode, PMU test mode or the TIC test mode. The address is PMU_BASE + 0x40h.
Table 13. TSTCR Bit Functions
BIT INITIAL NAME FUNCTION
1 0 TSTCR 0 – Normal operation mode
1 – TIC Test mode
0 0 0 – Normal operation mode
1 – PMU test mode
61
Page 61

GDC21D601
4.10 Test Register
This register is used to store some controls and data values for test mode. The TSTR0 is readable/writable register
and the TSTR1 is a read only register. The address of TSTR0 is PMU_BASE + 0x48h and that of TSTR1 is
PMU_BASE + 0x4Ch.
Table 14. TSTR0 Bit Functions
BIT INITIAL NAME FUNCTION
2 0 TSTR0 Test bit for INT_REQ_IN input
1 0 Test bit for WD_OF_IN input
0 0 Test bit for MAN_RESET_IN input
Table 15. TSTR1 Bit Functions
BIT INITIAL NAME FUNCTION
15 0 TSTR1 Test bit for BCLK_WDT
14 0 Test bit for PCLK_I2C2
13 0 Test bit for PCLK_I2C1
12 0 Test bit for PCLK_I2C0
11 0 Test bit for PCLK_SSPI 1
10 0 Test bit for PCLK_SSPI 0
9 0 Test bit for PCLK_UART 2, SMART Card
8 0 Test bit for PCLK_UART 1
7 0 Test bit for PCLK_UART 0
6 0 Test bit for BCLK_TIMER
5 0 Test bit for B_RESETn
4 0 Test bit for P_RESETn0
3 0 Test bit for P_RESETn1
2 0 Test bit for P_RESETn
1 0 Test bit for WD_OF_OUT
0 0 Test bit for REMAP
62
Page 62

GDC21D601
5. Power Management Unit Register Map
The base address of the PMU(Power Management Unit) is 0xFFFF F000. May be different for any particular
system implementation. However, the offset address of registers is fixed.
Table 16. Register Map of the PMU
Address Name Description
PMU Base + 0x00 PMUCR / PMUSR In write operation, PMU operation mode controls register. In read
operation, PMU status register shows the just previous PMU state.
PMU Base + 0x04 BCLKCR BCLK frequency selection and BUS mode control(Standard / Fast
BUS mode)
PMU Base + 0x08 BCLKMSK_RUN BCLK Masking controls register in the RUN mode.
PMU Base + 0x0C BCLKMSK_PD BCLK Masking controls register in the PD mode.
PMU Base + 0x10 REMAP REMAP register
PMU Base + 0x14 PCLKCR PCLK control register
PMU Base + 0x18 PCLKMSK_RUN PCLK masking controls register for the RUN mode.
PMU Base + 0x1C PCLKMSK_PD PCLK masking controls register for the PD mode.
PMU Base + 0x20 Reserved Reserved.
PMU Base + 0x30 RSTCR Reset control register
PMU Base + 0x40 TSTCR TIC test mode and PMU test control register
PMU Base + 0x44 - Reserved
PMU Base + 0x48 TSTR0 Test write register for external input signals
PMU Base + 0x4C TSTR1 Test read register for clocks of ASB devices and reset signals
63
Page 63

GDC21D601
6. Test Mode Guide for MCU
6.1 TIC Test Mode
Step 1. Set-up TIC test environment, connect the TCLK to tbclk(=XPA[6]) pin and FCLK of fclkgen to
tfclk (=XPA[7]) pin. Until the mode of the PMU is changed to the TIC test mode, sys_clk has to
feed same TCLK to the clock.
Step 2. Reset the MCU using pin nPOR low.
Step 3. Then TIC becomes the bus master
Step 4. Change the mode of PMU by setting the TSTCR to “10” and set TSTCR[1] to high.
Step 5. Start TIC test using tbclk and tfclk pins.
Figure 3. shows TIC Test Environment of Internal Blocks.
TREQA
APB
TIC
TREQB
TACK
TIC BOX
ASB
BCLK
ARM720T
FCLK
EBI
SYS_CLK
PCLK
BCLK
SCLK_IN
PCLK_IN
tbclk
PMU
tfclk
nPOR
Figure 3. Internal Blocks TIC Test Environment
FCLK
TBUS TCLK
FCLKGEN
Reset GEN
64
Page 64

GDC21D601
6.2. TIC Test for PMU Block
Step 1. Set-up TIC test environment, connect the TCLK to tbclk and FCLK of fclkgen to tfclk pin. Until the
mode of the PMU is changed to the TIC test mode, sys_clk has to feed the clock. It is easier to test the
sys_clk and the tbclk separately.
Step 2. Reset the MCU using pin nPOR low.
Step 3. Then TIC becomes the bus master
Step 4. Change the mode of PMU by setting the TSTCR[1:0] to “11”.
Step 5. Set value to TSTR0 for test vector, and read output value in the TSTR1 of the PMU and compare it with
desired test vector.
Figure 4. shows PMU TIC Test Environment
TREQA
APB
TIC
TREQB
TACK
TIC BOX
ASB
BCLK
ARM720T
FCLK
EBI
SYS_CLK
PCLK
BCLK
SCLK_IN
PCLK_IN
tbclk
PMU
tfclk
nPOR
Figure 4. TIC Test Environment
FCLK
TBUS TCLK
TESTCLK
GEN
FCLKGEN
Reset GEN
65
Page 65

7. Signal Timing Diagram
The PMU signal timing is as shown below.
7.1 Power on Reset
S_CLK
RESETn_IN
B_RESETn
P_RESETn0/1
RESETn_OUT
Figure 5. Power on Reset Timing Diagram
7.2 Watch Dog Timer Overflow
GDC21D601
B_CLK
WD_OF_IN
WD_OF_OUT
B_RESETn
P_RESETn0/1
256 B_CLK
512 B_CLK
Figure 6. Watch Dog Timer Overflow Timing Diagram
7.3 Manual Reset
There are two manual reset cases. The first reset operation is switched by MAN_RST signal from WDT. Another
case is called S/W reset.
66
Page 66

B_CLK
MAN_RST
GDC21D601
B_RESETn
512 B_CLK
P_RESETn0
P_RESETn1
High
Figure 7. Manual Reset (from WDT) Timing Diagram
B_CLK
RSTCR
B_RESETn
512 B_CLK
P_RESETn0
P_RESETn1
High
Figure 8. S/W Reset Timing Diagram
67
Page 67

Section 9. Watchdog Timer
TCNT : Timer Counter (8bit)
TRCR : Timer/Reset Control Register (8bit)
System clock
Module data bus
RSTSR
Clock
Generation
Clock
Selection
Internal
data bus
TCNT
TRCR
Overflow
Reset
Control
Interrupt
Control
Control
logic
clock
MNRST
Bus Interface
1. General Description
The watchdog timer has:
• watchdog timer mode and interval timer mode
• interrupt signal INT_WDT to interrupt controller in the watchdog timer mode & interval timer mode
• output signal PORESET and MNRESET to PMU(Power Management Unit)
• eight counter clock sources
• selection whether to reset the chip internally or not
• two types of reset signal : power-on reset and manual reset
INT_WDT
GDC21D601
PORST
RSTSR : Reset Status Register (2bit)
Figure 1. Watchdog Timer Module Block Diagram
68
Page 68

2. Hardware Interface and Signal Description
The Watchdog Timer module is connected to the APB bus.
Table 1. APB Signal Descriptions
GDC21D601
NAME Type
B_CLK I Clock controller System (bus) clock. This clock times all bus transfers. The clock has
P_A[4:2] I APB Bridge This is the peripheral address bus used by an individual peripheral for
P_D[7:0] I/O APB Peripherals,
P_STB I APB Bridge This strobe signal is used to time all accesses on the peripheral bus.
P_WRITE I APB Bridge When this signal is HIGH, it indicates a write to a peripheral. When
P_SEL I APB Bridge When this signal is HIGH, it indicates that this module has been
nB_RES I Power
INT_WDT O Interrupt
MNRST O Power
PORST O Power
SOURCE/
DESTINATION
B_D bus
Management Unit
Controller
Management Unit
Management Unit
DESCRIPTION
two distinct phases - phase 1 when B_CLK is LOW, and phase 2
when B_CLK is HIGH.
decoding register accesses to that peripheral.
The addresses become valid before P_STB goes to HIGH and remain
valid after P_STB goes to LOW.
This is the bi-directional peripheral data bus. The data bus is driven
by this block during read cycles (when P_WRITE is LOW).
The falling edge of P_STB is coincident with the falling edge of
B_CLK.
LOW, it indicates a read from a peripheral.
This signal has the same timing as the peripheral address bus. It
becomes valid before P_STB goes to HIGH and remains valid after
P_STB goes to LOW.
selected by the APB bridge. This selection is a decode of the system
address bus (ASB). See AMBA Peripheral Bus Controller for more
details.
Reset signal generated from the APB Bridge
When this signal is HIGH, it indicates that a system becomes
uncontrolled, and the timer counter overflows without being rewritten
correctly by the CPU or it overflows in the interval timer mode.
When this signal is HIGH, this signal indicates that the manual reset
signal has selected as the internal reset signal, and the timer counter
overflows without being rewritten correctly by the CPU or it
overflows in the interval timer mode..
When this signal is HIGH, this signal indicates that the power-on
reset signal has selected as the internal reset signal.
Writes to the Watchdog Timer module are generated from the Peripheral Bus Controller module. Figure 2.
Watchdog timer module APB write cycle summarizes this description.
69
Page 69

B_CLK
P_SEL
P_WRITE
P_STB
GDC21D601
P_D
P_A
Register
B_CLK
P_SEL
P_WRITE
P_STB
P_D
P_A
Register
Data
Address
Data
Figure 2. Watchdog Timer Module APB Write Cycle
Data
Address
Data
70
Figure 3. Watchdog Timer Module APB Read Cycle
Page 70

GDC21D601
3. Watchdog Timer Introduction
The GDC21D601 has a one-channel watchdog timer(WDT) for monitoring system operations. If a system becomes
uncontrolled and the timer counter overflows without being rewritten correctly by the CPU, an reset signal is
output to PMU.
When this watchdog function is not needed, the WDT can be used as an interval timer. In the interval timer
operation, an interval timer interrupt is generated at each counter overflow.
The WDT has a clock generator which products eight counter clock sources. The clock signals are obtained by
dividing the frequency of the system clock(B_CLK). Users can select one of eight internal clock sources for input
to the TCNT by CKS2 - CKS0 in the TRCR.
Table 2. Internal Counter Clock Sources
BIT 2 - 0
(CKS2-CKS0)
000 The system clock is divided by 2 12.8 us
001 The system clock is divided by 8 51.2 us
010 The system clock is divided by 32 204.8 us
011 The system clock is divided by 64 409.6 us
100 The system clock is divided by 256 1.64 ms
101 The system clock is divided by 512 3.28 ms
110 The system clock is divided by 2048 13.11 ms
111 The system clock is divided by 8192 52.43 ms
CLOCK SOURCE
(SYSTEM CLOCK = 40 MHz)
OVERFLOW INTERVAL
71
Page 71

GDC21D601
4. Watchdog Timer Operation
The Watchdog Timer Mode
To use the WDT as a watchdog timer, set the WT/nIT and TMEN bits of the TRCR to 1. Software must prevent
TCNT overflow by rewriting the TCNT value(normally by writing 0x00) before overflow occurs. If the TCNT fails
to be rewritten and overflow due to a system crash or the like, INT_WDT signal and PORESET/MNRESET signal
are output. The INT_WDT signal is not output if INTEN is disabled (INTEN = 0).
TCNT
value
OxFF
WT/nIT = 1
Ox00
TMEN = 1
0x00 written in
TCNT
WTOVF = 1
FAULT and internal reset generated
time
Figure 4. Operation in the Watchdog Timer Mode
If the RSTEN bit in the TRCR is set to 1, a signal to reset the chip will be generated internally when TCNT
overflows. Either a power-on reset or a manual reset can be selected by the RSTSEL bit.
72
Page 72

GDC21D601
The Interval Timer Mode
To use the WDT as an interval timer, clear WT/nIT to 0 and set TMEN to 1. A watchdog timer interrupt
(INT_WDT) is generated each time the timer counter overflows. This function can be used to generate interval
timer interrupts at regular intervals.
TCNT
value
OxFF
WT/nIT = 0
Ox00
TMEN = 1
ITOVF = 1
WDTINT generated
Figure 5. Operation in the Interval Timer Mode
time
4.1 Timing of Setting and Clearing the Overflow Flag
Timing of setting the overflow flag
In the interval timer mode when the TCNT overflows, the ITOVF flag is set to 1 and an watchdog timer interrupt
(INT_WDT) is requested.
In the watchdog timer mode when the TCNT overflows, the WTOVF bit of the SR is set to 1 and a WDTOUT
signal is output. When RSTEN bit is set to 1, TCNT overflow enables an internal reset signal to be generated for
the entire chip.
Timing of clearing the overflow flag
When the Reset Status Register (RSTSR) is read, the overflow flag is cleared.
73
Page 73

GDC21D601
5. Watchdog Timer Memory Map
The WDT has five registers. They are used to select the internal clock source, switch to the WDT mode, control the
reset signal, and test it. The base address of the watchdog timer is fixed to 0xFFFF F100 and the offset of any
particular register from the base address is fixed.
Table 3. Memory Map of the Watchdog Timer APB Peripheral
ADDRESS READ LOCATION WRITE LOCATION
WdtBase + 0x00 Timer/Reset Control Timer/Reset Control
WdtBase + 0x04 Reset Status
WdtBase + 0x08 Timer Counter Timer Counter
WdtBase + 0x10 Test Input
WdtBase + 0x14 Test Output
74
Page 74

GDC21D601
6. Watchdog Timer Register Descriptions
The following registers are provided for watchdog timer:
Timer Counter (TCNT)
8-bit readable and writable upcounter. When the timer is enabled, the timer counter starts counting pulse of the
selected clock source. When the value of the TCNT changes from 0xFF-0x00(overflows), a watchdog timer
overflow signal is generated in the both timer modes. The TCNT is initialized to 0x00 by a power-reset(nB_RES).
Timer/Reset Control Register (TRCR)
8-bit readable and writable register. The following functions are provided :
Selecting the timer mode
Selecting the internal clock source
Selecting the reset mode
Setting the timer enable bit
Being enable interrupt request
Being enable reset signal occurrence
The clock signals are obtained by dividing the frequency of the system clock.
Table 4. TRCR Bit Description
BIT
0 (clock select : CKS0) 0 000 = /2 select one of eight internal clock
1 (clock select : CKS1) 0 001 = /8
2 (clock select : CKS2) 0 010 = /32
3 (reset select : RSTSEL) 0 0 = poser-on reset
4 (reset enable : RSTEN) 0 0 = disable
5 (timer enable : TMEN) 0 0 = disable
6 (timer mode select : WT/nIT) 0 0 = interval timer mode
7 (Interrupt enable : INTEN) 0 0 = disable
INITIAL
VALUE
011 = /64
100 = / 256
101 = /512
110 = /2048
111 = /8192
1 = manual reset
1 = enable
1 = enable
1 = watchdog timer mode
1 = enable
FUNCTION
sources for input to the TCNT.
select the type of generated internal
reset if the TCNT overflows in the
watchdog timer mode.
select whether to reset the chip
internally or not if the TCNT overflows
in the watchdog timer mode.
enable or disable the timer
select whether to use the WDT as a
watchdog timer or interval timer
enable or disable the interrupt request
75
Page 75

GDC21D601
Reset Status Register (RSTSR)
Two-bit read only register. The RSTSR indicates whether TCNT is overflowed or not. The RSTSR is initialized to
0x0 by the reset signal, nB_RES.
Bit 0 (WTOVF) indicates that the TCNT has overflowed in the watchdog timer mode. Bit 1 (ITOVF) indicates that
the TCNT has overflowed in the interval timer mode.
Table 5. SR Bit Description
BIT
0 (watchdog timer overflow flag : WTOVF) 0 indicate that the TCNT has overflowed in the
1 (interval timer overflow flag : ITOVF) 0 indicate that the TCNT has overflowed in the
INITIAL
VALUE
FUNCTION
watchdog timer mode.
interval timer mode
76
Page 76

7. Examples of Register Setting
7.1 Interval Timer Mode
TCNT = 0x00
TRCR = 0xA0
B_CLK
MAIN_CLOCK
P_SEL
P_WRITE
P_STB
B_RES[0]
B_RES[1]
P_A
P_D
TCNT
TCSR
RSTCSR
WDTINT
FAULT
PORESET
MNRESET
OVERFLOW
FD FE
00111000 10111000 00111000
FF
GDC21D601
00
B8
00
01
10
11
12
13 14
Figure 6. Interrupt Clear in the Interval Timer Mode
77
Page 77

7.2 Watchdog Timer Mode with Internal Reset Disable
¡-
¡-
TCNT = 0x00 (normally)
TRCR = 0xE0
GDC21D601
B_CLK
MAIN_CLOCK
P_SEL
P_WRITE
P_STB
B_RES[0]
B_RES[1]
P_A
P_D
TCNT
RSTCSR
TCSR
WDTINT
FAULT
PORESET
MNRESET
OVERFLOW
¡-
¡¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
00
¡-
¡-
78
¡-
FD FE
00011111 10011111 00011111
Figure 7. Interrupt Clear in the Watchdog Timer Mode with Reset Disable
FF
00
01111000 01111000
01
¡¡-
¡¡-
¡¡¡-
¡-
10
¡¡-
¡¡-
¡¡¡-
11
12
13 14
78
Page 78

7.3 Watchdog Timer Mode with Power-on Reset
¡-
¡-
TCNT = 0x00
TRCR = 0xF0
GDC21D601
B_CLK
MAIN_CLOCK
P_SEL
P_WRITE
P_STB
B_RES[0]
B_RES[1]
P_A
P_D
TCNT
RSTCSR
TCSR
WDTINT
FAULT
PORESET
MNRESET
OVERFLOW
¡-
¡¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
00
¡-
¡-
78
¡-
FD FE
01011111 11011111
Figure 8. Interrupt Clear in the Watchdog Timer Mode with Power-on Reset
FF
00
01111000 00011000
01
¡¡-
¡-
¡¡¡¡-
¡-
10
¡¡-
¡-
¡¡¡¡-
11
11011111
01111000
12
00
00011111
79
Page 79

7.4 Watchdog Timer Mode with Manual Reset
¡-
¡-
TCNT = 0x00
TRCR = 0xF8
GDC21D601
B_CLK
MAIN_CLOCK
P_SEL
P_WRITE
P_STB
B_RES[0]
B_RES[1]
P_A
P_D
TCNT
RSTCSR
TCSR
WDTINT
FAULT
PORESET
MNRESET
OVERFLOW
¡-
¡¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
¡-
FD FE
01111111 11111111 01111111
Figure 9. Interrupt Clear in the Watchdog Timer Mode with Manual Reset
FF
00
01111000 01111000
01
¡¡-
¡-
¡¡¡¡-
¡-
10
¡¡-
¡¡-
¡¡¡-
11
12
13 14
80
Page 80

Section 10. Interrupt Controller
1. General Description
The interrupt controller has the following features :
• Asynchronous interrupt controller
• Six external interrupts
• Nineteen internal interrupts
• Low interrupt latency
• Selection of the active modes of all interrupt source inputs (Level or Edge trigger)
• Maskable for each interrupt source and output signal
• Selection of the output paths (IRQ or FIQ for each interrupt source)
GDC21D601
IRQ [25:0]
Control Block
0
1
2
3
4
5
6
7
8
Mask Register
Trigger Mode Register
Trigger Polarity Register
Direction Register
FIQ status Register
IRQ status Register
FIQ Mask Register
IRQ Mask Register
Status clear Register
Bus
Interface
Figure 1. Interrupt Controller Module Block Diagram
nIRQ
nFIQ
Internal
Data Bus
81
Page 81

2. Hardware Interface and Signal Description
The Interrupt Controller module is connected to the APB bus.
Table 1. APB Signal Descriptions
GDC21D601
NAME TYPE
P_A[5:2] I APB Bridge This is the peripheral address bus, which is used by an individual
P_D[26:0] I/O APB Peripherals,
P_STB I APB Bridge This strobe signal is used to time all accesses on the peripheral
P_WRITE I APB Bridge When this signal is HIGH, it indicates a write to a peripheral.
P_SEL I APB Bridge When this signal is HIGH, it indicates that this module has been
INTESource[25:0] I APB peripherals/
NFIQ O ARM CORE NFIQ interrupt input to the ARM core.
NIRQ O ARM CORE NIRQ interrupt input to the ARM core.
BnRES I PMU Reset signal generated from the Power Management Unit.
SOURCE/
DESTINATION
B_D bus
external world
DESCRIPTION
peripheral for decoding register accesses to that peripheral.
The addresses become valid before P_STB goes to HIGH and
remain valid after P_STB goes to LOW.
This is the bidirectional peripheral data bus. The data bus is driven
by this block during read cycles (when P_WRITE is LOW).
bus. The falling edge of P_STB is coincident with the falling edge
of B_CLK.
When this signal is LOW, it indicates a read from a peripheral.
This signal has the same timing as the peripheral address bus. It
becomes valid before P_STB goes to HIGH and remains valid after
P_STB goes to LOW.
selected by the APB bridge. This selection is a decode of the
system address bus (ASB). See AMBA Peripheral Bus Controller
(ARM DDI - 0044) for more details.
FIQ/IRQ interrupt signals into the Interrupt module. These active
HIGH signals indicate that interrupt requests have been generated
(IRQESource[25] is internally generated in the Interrupt Controller
module and used to provide a software triggered IRQ).
82
Page 82

GDC21D601
Writes to the Interrupt Controller module are generated from the Peripheral Bus Controller module. Figure 2.
Interrupt control module APB write cycle summarizes this.
B_CLK
P_SEL
P_WRITE
P_STB
P_D
Data
P_A
Register
Address
Data
Figure 2. Interrupt Control Module APB Write Cycle
83
Page 83

GDC21D601
3. Interrupt Controller
3.1 Introduction
The interrupt controller provides a interface between multiple interrupt source and the processor. The interrupt
controller supports internal and external interrupt sources. Internally there are 19 peripheral interrupt sources.
Externally there are 6 interrupt sources. Therefore certain interrupt bits can be defined for the basic functionality
required in any system, while the remaining bits are available for use by other devices in any particular
implementation.
Table 2. Interrupt Controller Default Setting Value
INT # INTERRUPT SOURCE
INT 0 EXTERNAL INT0
INT 1 EXTERNAL INT1
INT 2 EXTERNAL INT2
INT 3 EXTERNAL INT3
INT 4 EXTERNAL INT4
INT 5 EXTERNAL INT5
INT 6 COM TX
INT 7 COM RX
INT 8 DMA
INT 9 RTC
INT 10 WDT
INT 11 I2C0
INT 12 I2C1
INT 13 I2C2
INT 14 UART0
INT 15 UART1
INT 16 Smart Card Interface
INT 17 SSI CHA
INT 18 SSI CHB
INT 19 TIMER CHA
INT 20 TIMER CHB
INT 21 TIMER CHC
INT 22 TIMER CHD
INT 23 TIMER CHE
INT 24 TIMER CHF
INT 25 Software Interrupt
The Users can set the active mode of all interrupt source inputs. The default mode is the falling-edge trigger mode.
Any inversion or latching required to provide edge sensitivity must be provided at the generating source of the
interrupt.
No hardware priority scheme or any form of interrupt vectoring is provided, but the priority can be determined
using FIQ mask register and IRQ mask register under software control.
FIQ mask register and IRQ mask register are also provided to generate an interrupt under software control.
Typically these registers may be used to determine either a FIQ interrupt or an IRQ interrupt.
84
Page 84

GDC21D601
3.2 Interrupt Control
The interrupt controller provides interrupt source status and interrupt request status. The interrupt mask registers
are used to determine whether an active interrupt source should generate an interrupt request to the processor or
not. A logic HIGH in the interrupt mask register indicates that the interrupt source is masked and then doesn’t
generate a request.
FIQ mask register and IRQ mask register indicate whether the interrupt source causes a processor interrupt or not.
The interrupt mode is configured by interrupt trigger mode register and interrupt trigger polarity register. And
Interrupt direction register indicates whether each interrupt source drives IRQ or FIQ.
The FIQ and IRQ status register is used to reflect the status of all channels set to produce an FIQ interrupt or IRQ
interrupt. And the status registers are cleared by writing ‘1’ to the status clear register at the edge trigger mode
only.
IRQ source0
IRQ source1
IRQ source2
IRQ source3
IRQ source4
IRQ source5
:
:
:
:
:
:
IRQ source20
IRQ source21
IRQ source22
IRQ source23
IRQ source24
IRQ source25
Source Mask
Control
Mask
Control
26 26 26
Trigger Mode
Control
Edge/
Level
Control
Figure 3. Interrupt Control Flow Diagram
Polarity
Control
High/
Low,
Rising/
Falling
Control
Clear Control
Direction
Control
FIQ
or
IRQ
26
Status
Control
FIQ
IRQ
26
26
Request
Control
FIQ
Mask
IRQ
Mask
nFIQ
nIRQ
TIC registers are used only for the production test. TIC input register is used to drive interrupt request sources by
the CPU. When this register bit 26 is set, other bits of TIC input register are regarded as interrupt sources. This bit
is cleared by system reset and should be cleared in normal operation.
Bit 25 is used as a software interrupt source. When source mask control register bit 25 is HIGH, an interrupt
request occurs. To disable the software interrupt, Source Mask Control Register bit 25 should be Low. Software
interrupt source input is fixed active HIGH and level sensitive.
85
Page 85

GDC21D601
4. Interrupt Controller Memory Map
The base address of the interrupt controller is 0xFFFF F200. The offset of any particular register from the base
address is fixed.
Table 3. Memory Map of the Interrupt Controller APB Peripheral
ADDRESS READ LOCATION WRITE LOCATION
IntBase + 0x000 Mask Register Mask Register
IntBase + 0x004 Trigger Mode Register Trigger Mode Register
IntBase + 0x008 Trigger Polarity Register Trigger Polarity Register
IntBase + 0x00C Direction Register Direction Register
IntBase + 0x010 FIQ Status Register (Read-only)
IntBase + 0x014 IRQ Status Register (Read-only)
IntBase + 0x018 FIQ Mask Register FIQ Mask Register
IntBase + 0x01C IRQ Mask Register IRQ Mask Register
IntBase + 0x020 Status Clear Register (Write-only)
IntBase + 0x024 TicInput Register
IntBase + 0x028 TicOutputRegister
86
Page 86

GDC21D601
5. Interrupt Controller Register Descriptions
The following registers are provided for both FIQ and IRQ interrupt controllers:
(1) Mask Register
Readable and Writable. The interrupt mask register is used to mask the interrupt input sources and defines which
active sources will generate an interrupt request to the processor. If certain bits within the interrupt controller are
not implemented, the corresponding bits in the interrupt mask register must be masked. A bit value 0 indicates that
the interrupt is unmasked and will allow an interrupt request to reach the processor. A bit value 1 indicates that the
interrupt is masked. Once a bit is masked, the corresponding bit in the status register is cleared. On reset, all
interrupt input sources are masked.
‘1’ : Mask
‘0’ : Unmask
Initial value : 0x3FFFFFF
25 0
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
(2) Trigger Mode Register
Readable and Writable. The interrupt trigger mode register is used to configure the interrupts with the interrupt
trigger polarity register. Each interrupt can be configured to level or edge triggered. A bit value 0 indicates that the
interrupt is configured to edge triggered and a bit value 1 indicates that the interrupt is configured to level
triggered. On reset, all interrupt input sources are configured to edge triggered.
‘1’ : Level Trigger Mode
‘0’ : Edge Trigger Mode
Initial value : 0x2000000
25 0
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
87
Page 87

GDC21D601
(3) Trigger Polarity Register
Readable and Writable. The interrupt trigger polarity register is used to configure the interrupts with the interrupt
trigger mode register. Each interrupt can be configured to rising/high or falling/low active. A bit value 0 indicates
that the interrupt is configured to falling active for edge trigger mode and to low active for level trigger mode. A
bit value 1 indicates that the interrupt is configured to rising active for edge trigger mode and to high active for
level trigger mode. On reset, all interrupt input sources are configured to falling/low active.
‘1’ : Rising or High
‘0’ : Falling or Low
Initial value : 0x2000000
25 0
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Table 4. Interrupt Source Trigger Mode of the Interrupt Controller
TRIGGER MODE REGISTER TRIGGER POLARITY REGISTER DESCRIPTION
0 0 Falling-Edge (Default)
0 1 Rising-Edge
1 0 Low-Level
1 1 High-Level
(4) Direction Register
Readable and Writable. The interrupt direction register is used to determine whether each interrupt source drives
IRQ or FIQ. A bit value 0 indicates that the interrupt is driven to IRQ and a bit value 1 indicates that the interrupt
is driven to FIQ. On reset, all interrupt input sources drive IRQ.
‘1’ : Request FIQ
‘0’ : Request IRQ
Initial value : 0x0000000
25 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
88
Page 88

GDC21D601
(5) FIQ Status Register
Read-only. The FIQ status register is used to reflect the status of all channels set to produce an FIQ interrupt
(IDR(i) = 1). When an interrupt is set for an FIQ occurring, the corresponding bit is set in FIQ status register. The
interrupt handler will examine this register to determine the channel(s) that caused the FIQ interrupt. When the
status clear register is written to ‘1’ , the corresponding bit is cleared if that channel is configured to edge trigger
mode. A HIGH bit indicates that the interrupt is active and will generate an interrupt to the processor.
‘1’ : Interrupt Event Occur
‘0’ : No Interrupt Event
Initial value : 0x0000000
25 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
(6) IRQ Status Register
Read-only. The IRQ status register is used to reflect the status of all channels set to produce an IRQ interrupt
(IDR(i) = 0). When an interrupt is set for an IRQ occurring, the corresponding bit is set in IRQ status register. The
interrupt handler will examine this register to determine the channel(s) that caused the IRQ interrupt. When the
status clear register is written to ‘1’ , the corresponding bit is cleared if that channel is configured to edge trigger
mode. A HIGH bit indicates that the interrupt is active and will generate an interrupt to the processor.
‘1’ : Interrupt Event Occur
‘0’ : No Interrupt Event
Initial value : 0x0000000
25 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
(7) FIQ Mask Register
Readable and Writable. The FIQ request mask register is used to mask the request to generate an interrupt to a
processor. If certain bits within the interrupt controller are not implemented, the corresponding bits in the FIQ
request mask register must be masked. A bit value 0 indicates that the interrupt is unmasked and will allow an
interrupt request to reach the processor. A bit value 1 indicates that the interrupt is masked. On reset, all FIQ
requests are unmasked.
‘1’ : Request Mask
‘0’ : Request Unmask
Initial value : 0x0000000
25 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
89
Page 89

GDC21D601
(8) IRQ Mask Register
Readable and Writable. The IRQ request mask register is used to mask the request to generate an interrupt to a
processor. If certain bits within the interrupt controller are not implemented, the corresponding bits in the IRQ
request mask register must be masked. A bit value 0 indicates that the interrupt is unmasked and will allow an
interrupt request to reach the processor. A bit value 1 indicates that the interrupt is masked. On reset, all IRQ
requests are unmasked.
‘1’ : Request Mask
‘0’ : Request Unmask
Initial value : 0x0000000
25 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
(9) Status Clear Register
Write-only. The status clear register is used to clear bits in the status register configured to the edge trigger mode.
If the channels are configured to the level trigger mode, the corresponding bits in the FIQ status register and the
IRQ status register have no effect. This register is cleared when the signal, P_STB, is LOW after this register is
written to ‘1’ . When writing to this register, each data bit that is HIGH causes the corresponding bit in the status
register to be cleared. Data bits that are LOW have no effect on the corresponding bit in the status register. Note
that the status clear register has an effect on the status register in the edge trigger mode.
‘1’ : Clear the status register
‘0’ : Not clear
Initial value : 0x0000000
25 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
90
Page 90

GDC21D601
Section 11. Real Time Clock
1. General Description
This module is a 32-bit counter clocked by a 32.768KHz clock. This clock needs to be provided by the system,
since there is no oscillator inside the block. The clock is divided in the RTC core to provide a 1Hz clock used to
drive a 32-bit counter which forms the Real Time Clock (RTC). It also contains a 32-bit match register which can
be programmed to generate an interrupt signal when the time in the RTC matches the specific value written to this
register (alarm function - RTC event). The RTC has one event output which is synchronized with PCLK. RTCIRQ
is to be connected to the system interrupt controller.
from/to
APB
from
xtal
oscillator
BnRES
PCLK
PSELRTC
PSTB
PWRITE
PA[4:2]
PD[31:0]
CLK32K
APB
INTERFACE
RTC
CORE
(COUNTER +
REGISTERS)
Figure 1. Real Time Clock Connections Diagram
RTCIRQ
synchronized
event output
to
interrupt
controller
91
Page 91

GDC21D601
2. Signal Description
The RTC module is connected to the APB bus. Table 1. APB signal descriptions describes the APB signals used
and produced.
Table 1. APB Signal Descriptions
NAME TYPE
PCLK I Power
P_A[4:2] I APB Bridge This is the peripheral address bus, which is used by an individual
P_D[31:0] I/O APB
P_STB I APB Bridge This strobe signal is used to time all accesses on the peripheral bus.
P_WRITE I APB Bridge When this signal is HIGH, it indicates a write to a peripheral. When
P_SEL I APB Bridge When this signal is HIGH, it indicates that this module has been
BnRES I Power
RTCIRQ O Interrupt
SOURCE/
DESTINATION
Management
Unit
Peripherals,
B_D bus
Management
Unit
Controller
DESCRIPTION
The slow APB clock used to re-synchronize data is transferred
between the 32.768KHz clock and the APB.
peripheral for decoding register accesses to this peripheral.
The addresses become valid before P_STB goes to HIGH and remain
valid after P_STB goes to LOW.
This is the bi-directional peripheral data bus. The data bus is driven
by this block during read cycles (when P_WRITE is LOW).
The falling edge of P_STB is coincident with the falling edge of
B_CLK.
this signal is LOW, it indicates a read from a peripheral.
This signal has the same timing as the peripheral address bus. It
becomes valid before P_STB goes to HIGH and remains valid after
P_STB goes to LOW.
selected by the APB bridge. This selection is a decode of the system
address bus (ASB). See AMBA Peripheral Bus Controller for more
details.
Reset signal generated from the PMU
Interrupt signal to the Interrupt module. When this signal is HIGH, it
indicates a valid comparison between the counter value and the match
register. It also indicates 1Hz interval with enable bit in control
register.
92
Page 92

GDC21D601
3. Hardware Interface
The APB interface is fully APB-compliant. The APB is a non-pipelined low-power interface designed to provide a
simple interface to slave peripherals.
B_CLK
P_SEL
P_WRITE
P_STB
P_D
P_A
Register
B_CLK
P_SEL
P_WRITE
P_STB
P_D
P_A
Register
Data
Address
Data
Figure 2. RTC Module APB Write Cycle
Data
Address
Data
Figure 3. RTC Module APB Read Cycle
93
Page 93

GDC21D601
4. Functional Description
The counter is loaded by writing it to the RTC data register. The counter will count up on each rising edge of the
clock and loops back with 0 when the maximum value (0xFFFFFFFF) is reached. At any moment the counter
value can be obtained by reading the RTC data register.
The value of the match register can also be read at any time, and the read does not affect the counter value. The
status of the interrupt signal is available in the status register. The status bit is set if a comparator match event has
occurred or 1 second has elapsed. Reading from the status register will clear the status register.
Data In
A
P
B
B
u
s
Data Out
Interface to APB
PCLK
RTC
APB
registers
Match
register
Sync
Control
1Hz
RTC
Counter
Counter
Module core
RTCIRQ
32-bit
comparator
Ripple
CLK32K
Figure 4. RTC Block Diagram
94
Page 94

GDC21D601
5. Real Time Clock Memory Map
The base address of the RTC is fixed as 0xFFFF F300 and the offset of any particular register from the base
address is fixed.
Table 2. RTC Memory Map
ADDRESS READ LOCATION WRITE LOCATION
RTC Base + 0x00 RTC data register (RTCDR) RTC data register (RTCDR)
RTC Base + 0x04 RTC match register (RTCMR) RTC match register (RTCMR)
RTC Base + 0x08 RTC status (RTCS)
RTC Base + 0x0C RTC clock divider (RTCDV) RTC clock divider (RTCDV)
RTC Base + 0x10 RTC control register (RTCCR) RTC control register (RTCCR)
RTC Base + 0x14 RTC Tic selection register (RTCTS)
RTC Base + 0x18 TicCLK32K
RTC Base + 0x1C TicCLKPCLK
Note The RTC clock divider register may only be written to when in test mode.
6. Real Time Clock Register Descriptions
The following user registers are provided :
RTC Data Register (RTCDR)
Read/Write. Writing to this 32-bit register will load the counter. A read will give the current value of the
counter.
RTC Match Register (RTCMR)
Read/Write. Writing to this 32-bit register will load the match register. This value can also be read back.
RTC Status Register (RTCS)
Read-only. When performing a read from this location the interrupt flag will be cleared. If a match event occurs,
bit[1] will be set. For a second event, bit[0] will be set. This register is affected by the control register.
RTC Clock Divider (RTCDV)
Read/Write. The reads to the register will return only four bits of the clock divider output. Bits [3:0] will return
bits (14, 11, 7, 3) of the divider output. Writing zero to bit[0] clears this divider.
RTC Control Register (RTCCR)
Read/Write. This register enables the interrupt. Bit[1] enables the match event interrupt (default disable = 0).
Bit[0] enables second event interrupt (default disable = 0).
RTC Tic Selection (RTCTS)
Write-only. This register is for production test purposes. Bit[0] enables TicCLK32K for 32kHz clock
replacement. Bit[1] enables TicCLKPCLK for PCLK clock replacement.
TicCLK32K
Write-only. This generates 32kHz clock for production test purposes.
TicCLKPCLK
Write-only. This generates PCLK clock for production test purposes.
95
Page 95

Section 12. General Purpose Timer Unit
16-bit timer channel1
16-bit timer channel0
16-bit timer channel2
16-bit timer channel3
16-bit timer channel4
Bus Interface
1. General Description
The general-purpose timer unit has:
• Six channels with 16bit counter
• 12 different pulse outputs and 12 different pulse inputs
• Independent function with 12 general registers
• Compare match waveform output function
• Input capture function
• Counter-clearing function at compare match or input capture mode
• Synchronizing mode
• PWM mode
• 18 interrupt sources
• Selectable 4 internal clock sources and 4 external clock sources
EXT_CLK1- EXT_CLK4
Clock
pclk
Generation
Selection
Clock
GDC21D601
TINT0 - TINT5
96
TCIO0A - TCIO5A
TCIO0B - TCIO5B
Figure 1. General-purpose Timer Unit Module Block Diagram
Control
Module data bus
TSTARTR
TSYNR
TPWMR
Internal
data bus
Page 96

2. Hardware Interface and Signal Description
The General-purpose Timer Unit module is connected to the APB bus.
Table 1. APB Signal Descriptions
GDC21D601
NAME TYPE
PCLK I PMU Peripheral clock. This clock times all bus transfers.
BnRES I PMU Reset signal generated from the PMU
PA[7:2] I APB Bridge This is the peripheral address bus, which is used by an individual
PD[31:0] I/O APB Peripherals,
PSTB I APB Bridge This strobe signal is used to time all accesses on the peripheral bus.
PWRITE I APB Bridge When this signal is HIGH, it indicates a write to a peripheral. When
PSEL I APB Bridge When this signal is HIGH, it indicates that the APB bridge has
EXT_CLK1 I External External clock1 input. This signal is selected independently from
EXT_CLK2 I External External clock2 input. This signal is selected independently from
EXT_CLK3 I External External clock3 input. This signal is selected independently from
EXT_CLK4 I External External clock4 input. This signal is selected independently from
TCIO0A I/O External This signal is used as GRA0 input in input capture mode, GRA0
TCIO0B I/O External This signal is used as GRB0 input in input capture mode, GRB0
TCIO1A I/O External This signal is used as GRA1 input in input capture mode, GRA1
TCIO1B I/O External This signal is used as GRB1 input in input capture mode, GRB1
TCIO2A I/O External This signal is used as GRA2 input in input capture mode, GRA2
TCIO2B I/O External This signal is used as GRB2 input in input capture mode, GRB2
SOURCE/
DESTINATION
B_D bus
DESCRIPTION
peripheral for decoding register accesses to that peripheral.
The addresses become valid before PSTB goes to HIGH and remain
valid after PSTB goes to LOW.
This is the bi-directional peripheral data bus. This block drives the
data bus during read cycles (when PWRITE is LOW).
The falling edge of PSTB is coincident with the falling edge of
PCLK.
this signal is LOW, it indicates a read from a peripheral.
This signal has the same timing as the peripheral address bus. It
becomes valid before PSTB goes to HIGH and remains valid after
PSTB goes to LOW.
selected this module. This selection is a decode result of the system
address bus (ASB). See AMBA Peripheral Bus Controller for more
details.
EXT_CLK2, EXT_CLK3, and EXT_CLK4.
EXT_CLK1, EXT_CLK3, and EXT_CLK4.
EXT_CLK1, EXT_CLK2, and EXT_CLK4
EXT_CLK1, EXT_CLK2, and EXT_CLK3.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
97
Page 97

GDC21D601
NAME TYPE
TCIO3A I/O External This signal is used as GRA3 input in input capture mode, GRA3
TCIO3B I/O External This signal is used as GRB3 input in input capture mode, GRB3
TCIO4A I/O External This signal is used as GRA4 input in input capture mode, GRA4
TCIO4B I/O External This signal is used as GRB4 input in input capture mode, GRB4
TCIO5A I/O External This signal is used as GRA5 input in input capture mode, GRA5
TCIO5B I/O External This signal is used as GRB5 input in input capture mode, GRB5
TINT0 O Interrupt
TINT1 O Interrupt
TINT2 O Interrupt
TINT3 O Interrupt
TINT4 O Interrupt
TINT5 O Interrupt
SOURCE/
DESTINATION
Controller
Controller
Controller
Controller
Controller
Controller
DESCRIPTION
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
output in output compare mode, and PWM output in PWM mode.
Interrupt signal to the Interrupt Controller module. This signal
indicates that an interrupt has been generated in channel0.
Interrupt signal to the Interrupt Controller module. This signal
indicates that an interrupt has been generated in channel1.
Interrupt signal to the Interrupt Controller module. This signal
indicates that an interrupt has been generated in channel2.
Interrupt signal to the Interrupt Controller module. This signal
indicates that an interrupt has been generated in channel3.
Interrupt signal to the Interrupt Controller module. This signal
indicates that an interrupt has been generated in channel4.
Interrupt signal to the Interrupt Controller module. This signal
indicates that an interrupt has been generated in channel5.
98
Page 98

GDC21D601
PCLK
PSEL
PWRITE
PSTB
PDPARegister
Address
Data
Data
The writes to the General-purpose Timer Unit module are generated from the Peripheral Bus Controller module.
Figure 2. General-purpose timer unit module APB write cycle summarizes this.
B_CLK
P_SEL
P_WRITE
P_STB
P_D
P_A
Register
Figure 2. General-Purpose Timer Unit Module APB Read Cycle
Data
Address
Data
Figure 3. General-Purpose Timer Unit Module APB Write Cycle
99
Page 99

GDC21D601
3. General Purpose Timer Unit Introduction
The GDC21D601 has a general-purpose timer unit (GPTU) with six channels of 16-bit timer. There are two
counter operation modes: a free running mode and a periodic mode. And each channel has independent operating
modes. There are common functions for each channel: counter operation, input capture, compare match, PWM,
and synchronized clear and write.
It is possible to select one of eight counter clock sources for all channels.
• Internal clock : counting at falling edge
BCLK / 2
BCLK / 4
BCLK / 16
BCLK / 64
• External clock: counting at rising, falling, or both edge that are user-selectable.
There are four kinds of counter clear sources which can be selected by user’s setting.
• None : never clear until overflow for free running mode
• GRA match or TPA input capture
• GRB match or TPB input capture
• Synchronous clear
100
Page 100

GDC21D601
4. General Purpose Timer Unit Operation
The operation modes are described below.
Free Running Mode
Each channel can run from 0 to FFFF repeatedly. When it reaches FFFF, the interrupt signal is generated as user's
setting.
Compare Match Mode
Each channel has 2 general registers and user can read or write from/to the registers. If user wrote some values to
general register, and the counter reached that value, the channel generates interrupt and external output by user's
setting. The output value can be '1', '0', or toggle value. The counter can be cleared by user's setting when the
match with general register is detected.
Input Capture Mode
When set to input capture mode and rising any event at TPA or TPB, the counter value is transferred to GRA or
GRB respectively. The interrupt can be generated and the external event may be rising edge, falling edge or any
edge by user's setting. The counter can be cleared by user's setting when the event at TPA or TPB is detected.
Synchronized Clear & Write Mode
When some channels are set to synchronization mode, and one of them is cleared by compare match or input
capture, the other channels can be cleared simultaneously by user's setting. When some channels are set to
synchronization mode and user would write any value to one of them, the other channels can be written with same
value simultaneously by user's setting.
PWM Mode
When a channel is set to PWM mode, the channel operates like a compare match mode and the output on compare
match event is generated only at TPA. The TPA value is '1' when it is the match with GRA, and '0' when it is the
match with GRB.
101
 Loading...
Loading...