


ENGINEERING TOMORROW
Guia de Instalação
VLT® Parallel Drive Modules
250–1200 kW
vlt-drives.danfoss.com

Índice Guia de Instalação
Índice
1 Introdução
1.1 Objetivo do Manual
1.2 Recursos adicionais
1.3 Documento e versão de software
1.4 Aprovações e certicações
1.5 Descarte
2 Segurança
2.1 Símbolos de Segurança
2.2 Pessoal qualicado
2.3 Precauções de segurança
3 Visão Geral do Produto
3.1 Uso pretendido
3.2 Módulos de Drive
3.3 Prateleira de Controle
3.4 Fiação
3.5 Fusíveis CC
4
4
4
4
4
5
6
6
6
6
9
9
10
11
12
12
4 Instalação Mecânica
4.1 Recebendo e desembalando a unidade
4.1.1 Itens fornecidos 13
4.1.2 Elevando a unidade 14
4.1.3 Armazenagem 15
4.2 Requisitos
4.2.1 Ambiental 16
4.3 Instalando os módulos de drive
4.4 Instalando a prateleira de controle
5 Instalação Elétrica
5.1 Instruções de Segurança
5.2 Requisitos elétricos para certicações e aprovações
5.3 Diagrama da ação
5.4 Fusíveis
5.5 Instalação do Kit Elétrico
5.6 Instalação do Fusível do Barramento CC
5.7 Conexões do Motor
13
13
16
18
20
21
21
22
23
24
25
25
25
5.7.3 Conexões do terminal do motor 28
5.7.3.1 Cabo de Motor 28
5.7.3.2 Conexões do terminal do motor nos sistemas de módulo de 2 drives 28
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 1
Índice
VLT® Parallel Drive Modules
5.7.3.3 Conexões do terminal do motor nos sistemas de módulo de 4 drives 29
5.8 Conexões de rede
5.8.1 Conexões do Terminal da Rede Elétrica CA 29
5.8.1.1 Conexões do terminal de rede elétrica em sistemas de módulo de 2 conversores 29
5.8.1.2 Conexões do terminal de rede elétrica em sistemas de módulo de 4 drives 30
5.8.2 Conguração do disjuntor de 12 pulsos 30
5.8.3 Resistores de Descarga 31
5.9 Instalação da Prateleira de Controle
5.10 Conexões da ação de controle
5.10.1 Percurso dos Cabos de Controle 33
5.10.2 Fiação de Controle 34
5.10.2.1 Tipos de Terminal de Controle 35
5.10.2.2 Fiação para os Terminais de Controle 37
5.10.2.3 Ativando a operação do motor (Terminal 27) 37
5.10.2.4 Seleção de entrada de tensão/corrente (Interruptores) 37
5.10.2.5 Comunicação serial RS485 37
5.10.3 Safe Torque O (STO) 38
5.11 Saída do relé
29
32
33
38
5.12 Recomendações de EMC
6 Partida Inicial
6.1 Lista de Vericação de Pré-partida
6.2 Instruções de Segurança
6.3 Aplicando Potência
6.4 Congurando o Sistema de Drive
6.5 Testando a Operação do Motor
7 Especicações
7.1 Especicações dependente da potência.
7.2 Alimentação de Rede Elétrica para Módulo de Drive
7.3 Saída do Motor e dados do motor
7.4 Especicações de Transformador de 12 Pulsos
7.5 Condições Ambiente para Módulos de Conversor
7.6 Especicações de Cabo
7.7 Entrada/Saída de controle e dados de controle
7.8 Dimensões do Kit
38
43
43
44
44
45
46
47
47
61
61
61
61
62
62
66
7.9 Torques de Aperto do Prendedor
7.9.1 Torques de Aperto dos Terminais 68
8 Apêndice
8.1 Renúncia de responsabilidade
2 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
68
69
69

Índice Guia de Instalação
8.2 Símbolos, abreviações e convenções
8.3 Diagramas de Blocos
Índice
69
70
81
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 3

Introdução
VLT® Parallel Drive Modules
11
1 Introdução
1.1 Objetivo do Manual
Este manual fornece requisitos para a instalação mecânica
e elétrica do kit básico VLT® Parallel Drive Modules.
Instruções de instalação separadas para componentes
opcionais - barramentos e resfriamento de canal traseiro são fornecidas com esses kits.
Este guia inclui informações sobre:
Fiação de rede elétrica e conexões do motor.
•
Fiação de controle e comunicação serial.
•
Funções do terminal de controle.
•
Testes detalhados que devem ser realizados antes
•
da inicialização.
Programação inicial para
•
namento correto do sistema de drive.
O guia de instalação destina-se a ser usado por pessoal
qualicado.
Para instalar os módulos do drive e o kit de ligação em
paralelo de forma segura e prossional, leia e siga o guia
de instalação. Tenha particular atenção às instruções de
segurança e advertências gerais. Sempre mantenha este
guia de instalação junto do painel que contém os
componentes do VLT® Parallel Drive Modules.
vericar o funcio-
como trabalhar com parâmetros e fornece
exemplos de aplicação.
O Manual de serviço de Chassi D da Série FC do
•
VLT® contém informações de serviço detalhadas,
incluindo informações aplicáveis ao VLT® Parallel
Drive Modules.
As Instruções de Instalação dos Fusíveis CC do VLT
•
Parallel Drive Modules contém informações
detalhadas sobre a instalação dos fusíveis CC.
As Instruções de instalação do Kit de Barramento
•
•
Consulte outras publicações e manuais complementares
disponíveis em Danfoss. Consulte drives.danfoss.com/
knowledge-center/technical-documentation/ para listagens.
®
Parallel Drive Modules contém
do VLT
informações detalhadas sobre a instalação do kit
do barramento.
As Instruções de instalação do Kit de Duto do VLT
Parallel Drive Modules contém informações
detalhadas sobre a instalação do kit de duto.
®
®
1.3 Documento e versão de software
Este manual é revisado e atualizado regularmente. Todas as
sugestões para melhorias são bem-vindas. Tabela 1.1
mostra a versão do documento com a respectiva versão de
software.
VLT® é uma marca registrada.
Recursos adicionais
1.2
Outros recursos estão disponíveis para entender as funções
e a programação do VLT® Parallel Drive Modules.
O VLT® Parallel Drive Modules Guia de Design
•
contém informações detalhadas sobre as
capacidades e a funcionalidade dos sistemas de
controle do motor utilizando esses módulos de
drive e fornece orientação para projetar esse tipo
de sistema.
O Guia do Usuário do VLT® Parallel Drive Modules
•
contém procedimentos detalhados de inicialização, programação operacional básica e teste
funcional. Informações complementares
descrevem a interface do usuário, exemplos de
aplicação, resolução de problemas e especi-
cações.
Consulte o Guia de Programação aplicável para a
•
série especíca do VLT® Parallel Drive Modules
utilizado na criação do sistema de drive. O guia
de programação descreve com maiores detalhes
Edição Observações Versão do
MG37K1xx Liberação inicial –
MG37K2xx Especicações atualizadas 7.5x
MG37K3xx Adicionou conteúdo da
fonte de alimentação
externa de 230 V
Tabela 1.1 Documento e versão de software
Aprovações e certicações
1.4
Tabela 1.2 Aprovações e certicações
software
FC 102 (5.0x),
FC 202 (3.0x),
FC 302 (7.6x)
4 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
Introdução Guia de Instalação
1.5 Descarte
1 1
Não descarte equipamento que contiver
componentes elétricos junto com o lixo
doméstico.
Colete-o separadamente em conformidade
com a legislação local atualmente em
vigor.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 5
Segurança
VLT® Parallel Drive Modules
2 Segurança
22
2.1 Símbolos de Segurança
Os seguintes símbolos são usados neste manual:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que pode
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que pode
resultar em ferimentos leves ou moderados. Também
podem ser usados para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, inclusive situações que
podem resultar em danos no equipamento ou na
propriedade.
2.2 Pessoal qualicado
Transporte correto e conável, armazenagem e instalação
são necessários para a operação segura e sem problemas
do VLT® Parallel Drive Modules. Somente pessoal
qualicado tem permissão de instalar este equipamento.
Pessoal
autorizado a instalar equipamento, sistemas e circuitos em
conformidade com as leis e normas pertinentes. Além
disso, o pessoal deve estar familiarizado com as instruções
e as medidas de segurança descritas neste manual.
2.3
qualicado é denido como pessoal treinado,
Precauções de segurança
CUIDADO
RISCO POTENCIAL NO CASO DE FALHA
INTERNA
Há risco de ferimentos pessoais quando os módulos do
drive não estiverem fechados corretamente.
Antes de aplicar potência, assegure que todas
•
as tampas de segurança estão no lugar e bem
presas.
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o sistema de drive estiver conectado à rede
elétrica CA, o motor pode dar partida a qualquer
momento. Partida acidental durante a programação,
serviço ou serviço de manutenção pode resultar em
morte, ferimentos graves ou danos à propriedade. O
motor pode ser iniciado através de um interruptor
externo, um comando de eldbus, um sinal de referência
de entrada do LCP, uma condição de falha resolvida ou
por operação remota utilizando Software de Setup MCT
10.
Para impedir a partida do motor:
Desconecte o sistema de drive da rede elétrica
•
CA.
Pressione [O/Reinicializar] no LCP, antes de
•
programar parâmetros.
O sistema de drive, o motor e qualquer
•
equipamento acionado deverão estar
totalmente conectados e montados quando o
drive for conectado à rede elétrica CA.
ADVERTÊNCIA
ALTA TENSÃO
O conversor de frequência possui alta tensão quando
conectado à rede elétrica CA. A falha em garantir que
apenas pessoal qualicado instale o sistema de
conversores pode resultar em morte ou lesões graves.
Somente pessoal qualicado tem permissão de
•
instalar o sistema de conversores.
6 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
Segurança Guia de Instalação
ADVERTÊNCIA
TEMPO DE DESCARGA
O módulo de conversor contém capacitores de
barramento CC. Após a aplicação da energia da rede
elétrica no conversor, esses capacitores podem
permanecer carregados mesmo após remover a energia.
Pode haver alta tensão presente mesmo quando as luzes
indicadoras de advertência estiverem apagadas. A falha
em aguardar 20 min após a energia ter sido removida
antes de executar serviço de manutenção ou reparo
poderá resultar em lesões graves ou morte.
1. Pare o motor.
2. Desconecte a rede elétrica CA e outras fontes
de alimentação do barramento CC, incluindo
bateria de backup, UPS e conexões do
barramento CC com outros conversores.
3. Desconecte ou bloqueie o motor PM.
4. Aguarde 20 minutos para os capacitores descarregarem completamente antes de realizar
qualquer serviço de manutenção.
ADVERTÊNCIA
ROTAÇÃO DO MOTOR ACIDENTAL
ROTAÇÃO LIVRE
A rotação acidental de motores de ímã permanente cria
tensão e pode carregar os capacitores do sistema de
drive, resultando em ferimentos graves, morte ou danos
ao equipamento.
Certique-se que os motores de ímã
•
permanente estão bloqueados para impedir
rotação acidental.
ADVERTÊNCIA
RISCO DE CORRENTE DE FUGA (>3,5 mA)
As correntes de fuga excedem 3,5 mA. Se o sistema de
conversores não for aterrado corretamente, o resultado
poderá ser morte ou lesões graves. Siga os códigos locais
e nacionais com relação ao ponto de aterramento de
proteção do equipamento com corrente de fuga > 3,5
mA. A tecnologia do conversor de frequência implica no
chaveamento de alta frequência em alta potência. Esse
chaveamento gera uma corrente de fuga na conexão do
terra. Uma falha de corrente no sistema de conversor nos
terminais de energia de saída pode conter um
componente CC que pode carregar os capacitores do
ltro e causar uma corrente de fuga transiente para o
terra. A corrente de fuga para o terra depende de várias
congurações do sistema, incluindo ltro de RFI, cabo de
motor blindado e potência do sistema de conversores.
Se a corrente de fuga exceder 3,5 mA, a EN/IEC
61800-5-1 (Norma de produto de sistema de conversor
de potência) exige cuidado especial.
O ponto de aterramento deve ser reforçado de uma
destas maneiras:
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
Fio terra de no mínimo 10 mm2 (6 AWG).
•
Dois os do ponto de aterramento separados,
•
ambos em conformidade com as regras de
dimensionamento.
Consulte EN 60364-5-54 § 543.7 para obter mais
informações.
ADVERTÊNCIA
EQUIPAMENTO PERIGOSO
O contato com eixos rotativos e equipamento elétrico
pode resultar em morte ou ferimentos graves.
Assegure que somente pessoal qualicado e
•
treinado realize a instalação.
Assegure que os serviços elétricos sejam
•
executados em conformidade com os regulamentos elétricos locais e nacionais.
Siga os procedimentos deste documento.
•
2 2
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 7
Segurança
VLT® Parallel Drive Modules
ADVERTÊNCIA
DESCONECTE A ENERGIA ANTES DA
22
MANUTENÇÃO
Algumas vezes durante a instalação, a energia da rede
elétrica CA é aplicada e, em seguida, deve ser
desconectada para mudar as conexões da linha. A falha
em seguir essas etapas pode resultar em morte ou lesões
graves.
Desconecte os conversores de frequência da
•
rede elétrica CA, da alimentação 230 V e das
linhas do motor.
Após as linhas serem desconectadas, aguarde
•
20 minutos para os capacitores descarregarem.
ADVERTÊNCIA
CARGA PESADA
Cargas desbalanceadas podem cair e cargas podem
tombar. A falha em adotar as precauções de elevação
adequadas aumenta o risco de morte, lesões graves ou
danos aos equipamentos.
Nunca ande sob cargas suspensas.
•
Para proteger contra lesões, use equipamento
•
de proteção pessoal como luvas, óculos de
segurança e calçados de segurança.
Certique-se de utilizar dispositivos de elevação
•
com características nominais de peso
adequadas. A barra de elevação deve ser capaz
de suportar o peso da carga.
O centro de gravidade da carga pode estar em
•
um local inesperado. A falha em localizar o
centro de gravidade corretamente e posicionar
a carga de acordo antes de elevar a carga pode
causar a queda ou inclinação inesperada da
unidade durante a elevação e o transporte.
O ângulo a partir do topo do módulo do drive
•
até os cabos de elevação inuencia a força de
carga máxima no cabo. Esse ângulo deve ser de
65º ou mais. Prenda e dimensione os cabos de
elevação corretamente.
8 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
Visão Geral do Produto Guia de Instalação
3 Visão Geral do Produto
3.1 Uso pretendido
Um conversor de frequência é um controlador eletrônico de motor que usa um ou mais módulos de conversor para
converter a entrada da rede elétrica CA em uma saída de forma de onda CA variável. A frequência e a tensão de saída são
reguladas para controlar o torque ou a velocidade do motor. O conversor de frequência varia a velocidade do motor com
base no feedback do sistema, como sensores de posição em uma correia transportadora. O conversor de frequência também
regula o motor em resposta a comandos remotos de controladores externos.
O kit básico do VLT® Parallel Drive Modules descrito neste guia está em conformidade com a UL 508 C. O kit é utilizado
para criar sistemas de conversor com 2 ou 4 módulos de conversor. Esses módulos de conversor são baseados no conversor
de frequência D4h e pode fornecer maior faixa de energia em um gabinete menor. O kit básico foi projetado para permitir a
exibilidade de solicitar componentes através da Danfoss ou fabricar componentes customizados.
O kit básico contém os seguintes itens:
Módulos Conversores
•
Prateleira de controle
•
Fiação
•
- Cabo em ta com conector de 44 pinos (nas duas extremidades do cabo)
- Cabo em ta com conector de 16 pinos (em uma extremidade do cabo)
- Cabo de microinterruptor de fusível CC com conectores de 2 pinos (em uma extremidade do cabo)
Fusíveis CC
•
Microinterruptores
•
3 3
Outros componentes, como kits de barramento e kits de duto de resfriamento de canal traseiro, estão disponíveis como
opcionais para customizar o sistema de conversor.
AVISO!
ALIMENTAÇÃO EXTERNA DE 230 V
É necessário uma alimentação externa de 230 V para alimentar o SMPS (fonte de alimentação do modo de
chaveamento) e todos os ventiladores do painel elétrico.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 9
130BE561.11
2
3
4
1
5
6
7
8
9
12
13
11
10
Visão Geral do Produto
VLT® Parallel Drive Modules
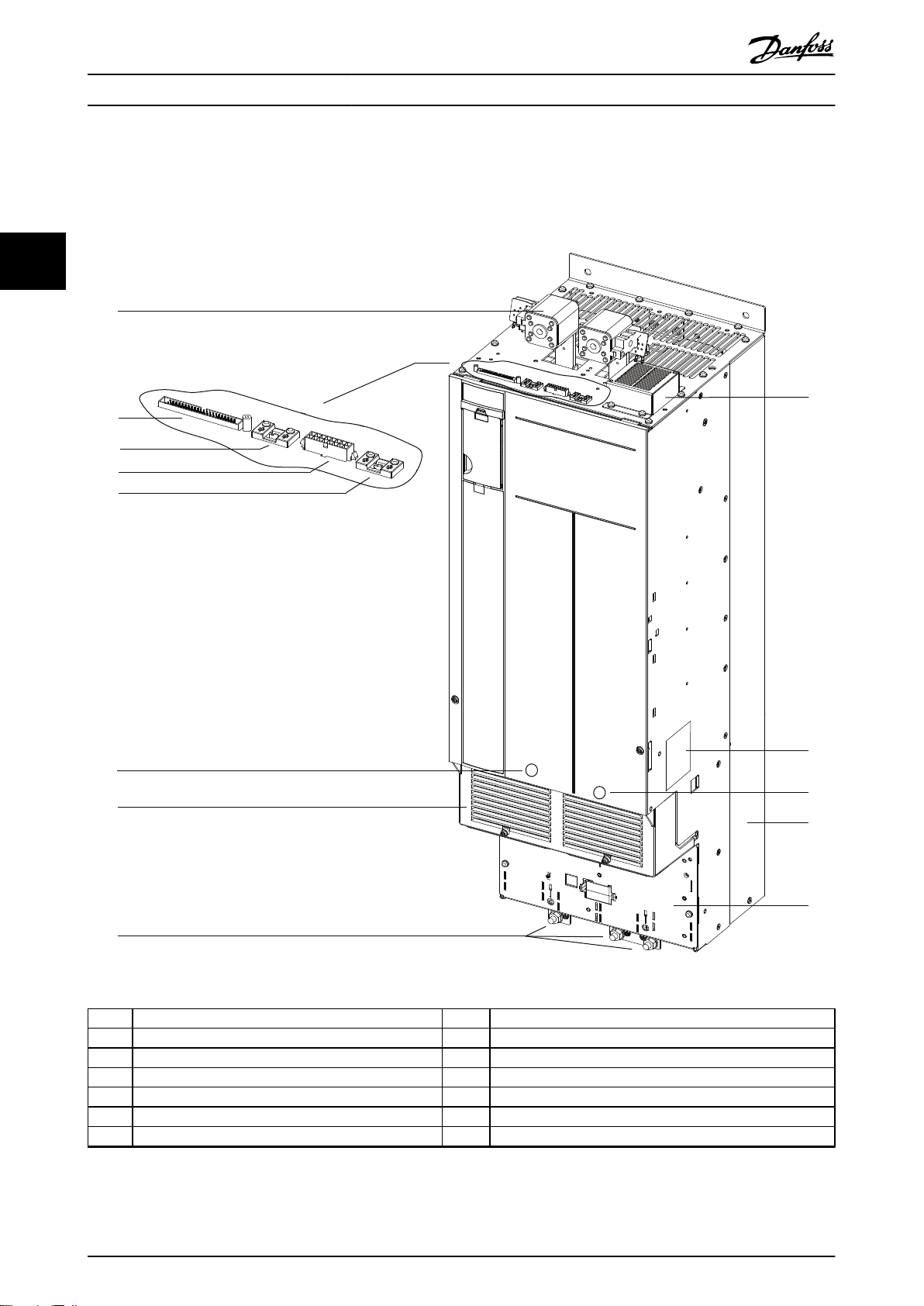
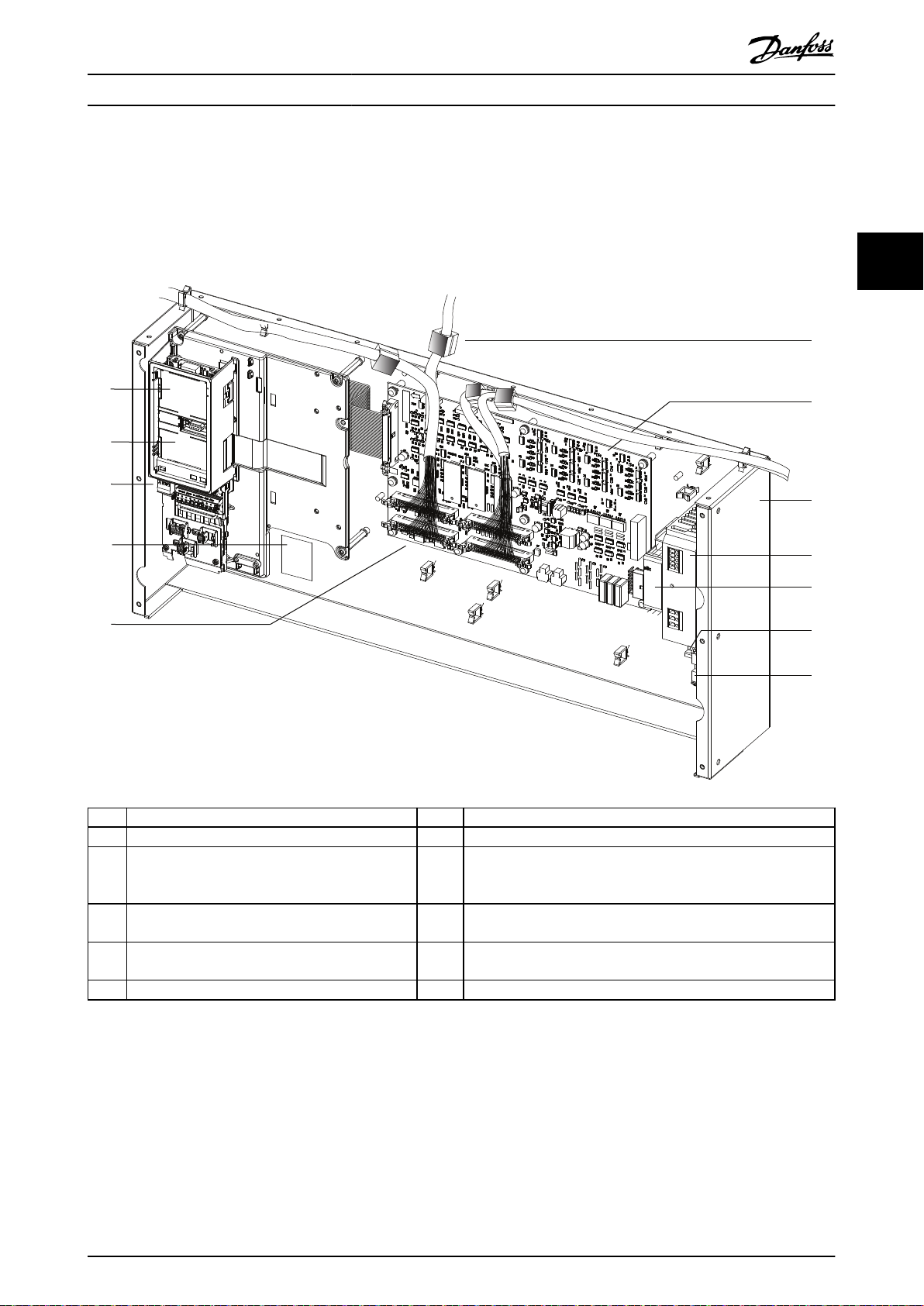
3.2 Módulos de Drive
Cada módulo do drive possui características nominais de proteção IP00. É possível conectar 2 ou 4 módulos de drive em
paralelo para criar um sistema de drive, com base nos requisitos de energia.
33
1 Terminal do barramento CC e fusível CC 8 Terminais do ponto de aterramento
2 Plugue MDCIC 9 Ventilador superior
3 Microinterruptor para fusível CC 10 Etiqueta do módulo do drive. Consulte Ilustração 4.2.
4 Relés 1 e 2 11 Terminais de saída do motor (dentro da unidade)
5 Jumper e conector de defeito do freio 12 Dissipador de calor e ventilador do dissipador de calor
6 Terminais de entrada rede elétrica (dentro da unidade) 13 Placa do ponto de aterramento
7 Tampa de terminal – –
Ilustração 3.1 Visão Geral do Módulo de Drive
10 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
130BE597.11
1
2
3
5
7
8
4
9
11
6
10
12
Visão Geral do Produto Guia de Instalação
3.3 Prateleira de Controle
A prateleira de controle contém o LCP, o MDCIC e o cartão de controle. O LCP fornece acesso aos parâmetros do sistema. O
MDCIC está conectado a cada um dos módulos de conversor através de um cabo em ta e comunica-se com o cartão de
controle. O cartão de controle controla a operação dos módulos de conversor.
3 3
1 Suporte do LCP 7 Cartão MDCIC
2 Cartão de controle (sob a tampa frontal) 8 Prateleira de controle
3 Blocos de terminal de controle 9 Fonte de alimentação do modo de chaveamento (SMPS) Observe
que é necessário uma alimentação externa de 230 V para alimentar
4 Etiqueta do sistema de conversor do nível superior.
Veja Ilustração 4.1.
5 Cabos de 44 pinos do painel MDCIC até os módulos
de conversor
6 Núcleo de ferrita 12 Bloco de terminais montado em trilho DIN
Ilustração 3.2 Prateleira de Controle
10 Relé Pilz
11 Trilho DIN
a SMPS.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 11
130BE750.10
1
2
Visão Geral do Produto
VLT® Parallel Drive Modules
3.4 Fiação
O kit básico do VLT® Parallel Drive Modules contém os seguintes chicotes elétricos:
Cabo em ta com conector de 44 pinos (nas duas extremidades do cabo)
•
Cabo em ta com conector de 16 pinos (em uma extremidade do cabo)
•
Cabo de microinterruptor de fusível CC com conectores de 2 pinos (em uma extremidade do cabo)
33
•
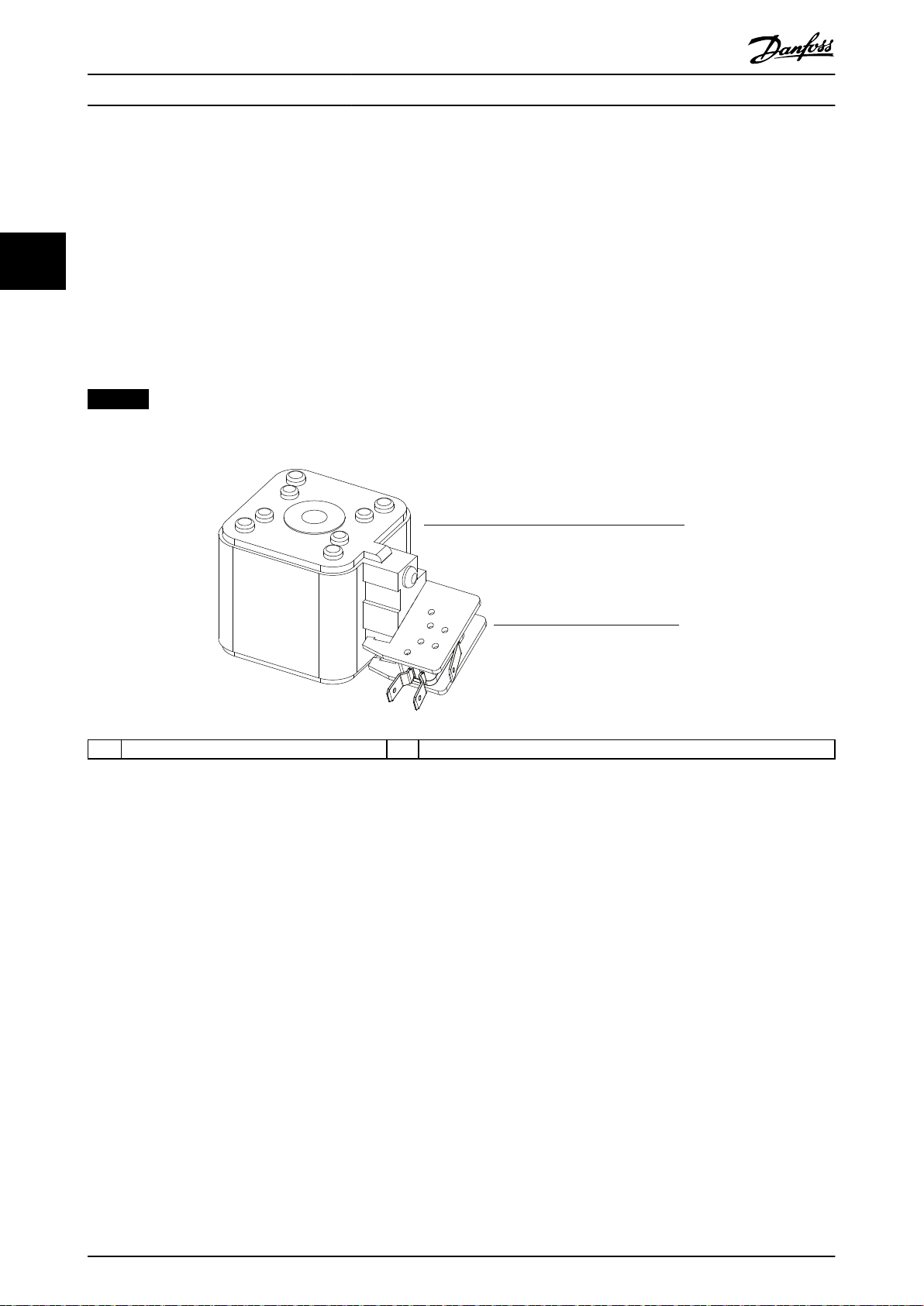
3.5 Fusíveis CC
O kit do VLT® Parallel Drive Modules contém dois fusíveis CC por módulo de drive. Esses fusíveis no lado da alimentação
garantem que qualquer dano será contido no interior dos módulos de drive.
AVISO!
O uso de fusíveis no lado de alimentação é obrigatório para instalações em conformidade com a IEC 60364 (CE).
1 Fusível CC 2 Conector do microinterruptor
Ilustração 3.3 Fusível CC e conector de microinterruptor
12 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
130BE710.12
OUT: 3x0-Vin 0-590Hz 1260/1160 A
IN: 3x380-500V 50/60Hz 1227/1129 A
710 kW / 1000 HP, H igh Overload
OUT: 3x0-Vin 0-590Hz 1460/1380 A
IN: 3x380-500V 50/60Hz 1422/1344 A
800 kW / 1200 HP, Nor mal Overload
VLT
T/C: FC-302N710T5E00P2BGC7XXSXXXXAXBXCXXXXDX
P/N: 134X4109 S/N:
R
AutomationDrive
www.danfoss.com
1
2
3
4
5
6
ASSEMBLED IN USA
CAUTION - ATTENTION:
Stored charge, wait 20 min.
Charge residuelle, attendez 20
See manual for special condition / prefuses
Voir manuel de conditions speciales / fusibles
WARNING - AVERTISSEMENT:
`
`
Tamb. 45
˚
C/113
˚
F at Full Output Current
CHASSIS (OPEN TYPE) / IP00
SCCR 100 kA at UL Voltage range 380-500 V
Listed 36U0 E70524 IND. CONT. EQ.
UL Voltage range 380-500 V
Max. Tamb. 55
˚
C/131
˚
F w/ Output Current Derating
123456H123
130BE711.14
Intended use - The Individual Base Drive
Modules are intended for use in Parallel Drive
Module system only. Specic electrical
ratings are not applicable. Name plate of
Parallel Drive Module system should
be referred for actual drive ratings.
VLT
ASSEMBLED IN USA
T/C: FC-BDMN250T5E00H2SXC7XXSXXXXAXBXCXXXXDX
P/N: 178N0025 S/N: 123456H123
CAUTION - ATTENTION:
Stored charge, wait 20 min.
Charge residuelle, attendez 20
See manual for special condition / prefuses
Voir manuel de conditions speciales / fusibles
WARNING - AVERTISSEMENT:
R
AutomationDrive
www.danfoss.com
`
`
CHASSIS (OPEN TYPE) / IP00
SCCR 100 kA at UL Voltage range 380-500 V
Listed 36U0 E70524 IND. CONT. EQ.
1
2
3
4
5
UL Voltage range 380-500 V
Instalação Mecânica Guia de Instalação
4 Instalação Mecânica
4.1 Recebendo e desembalando a unidade
4.1.1 Itens fornecidos
Certique-se de que os itens fornecidos e as
•
informações nas etiquetas correspondem ao
pedido.
- Sistema de drive de nível superior. Esta
etiqueta está localizada na prateleira de
controle, no lado inferior direito do LCP.
Consulte Ilustração 3.2.
- Módulo de drive. Esta etiqueta está
localizada dentro do gabinete do
módulo de drive, no painel do lado
direito. Consulte Ilustração 3.1.
Inspecione visualmente a embalagem e os VLT
•
Parallel Drive Modules componentes quanto a
danos causados por manuseio inadequado
durante o transporte. Preencha uma reivindicação
por danos com a transportadora. Guarde as peças
danicadas, se for necessário esclarecimento.
®
4 4
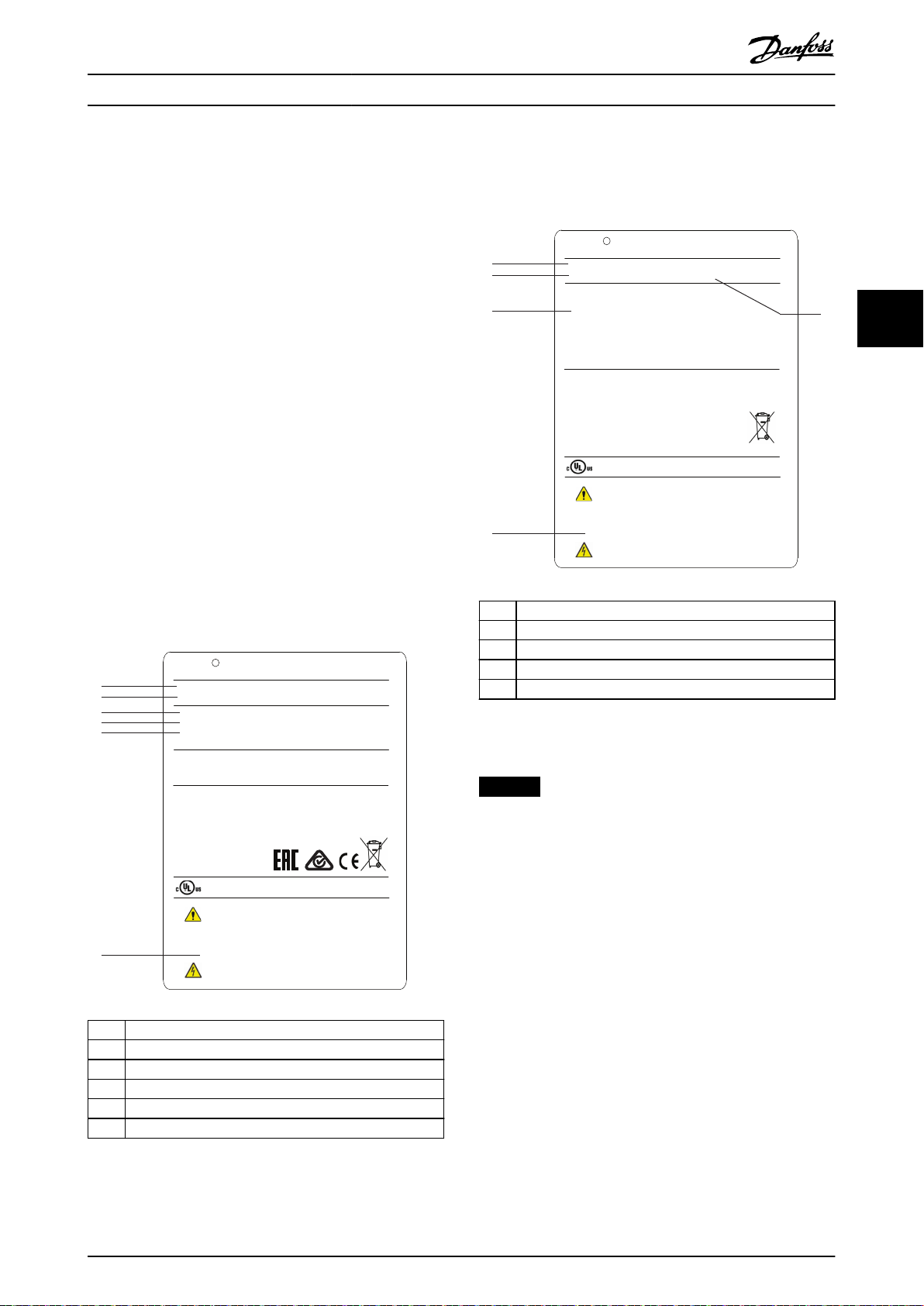
1 Código de tipo
2 Número do código
3 Renúncia de responsabilidade sobre uso destinado
4 Tempo de descarga
5 Número de série
Ilustração 4.2 Etiqueta do módulo de drive (exemplo)
AVISO!
PERDA DA GARANTIA
Remover as etiquetas do VLT® Parallel Drive Modules
pode resultar em perda da garantia.
Recebimento e descarga
Lanças I e ganchos classicados para elevar um
•
módulo de drive com peso de 125 kg (275 lb),
1 Código de tipo
2 Número do código
3 Valor nominal da potência
4 Tensão de entrada, frequência e corrente
5 Tensão de saída, frequência e corrente
6 Tempo de descarga
Instalação
Ilustração 4.1 Etiqueta do Sistema de Drive do nível superior
(exemplo)
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 13
com as margens de segurança necessárias.
Grua ou outro dispositivo de elevação classicado
•
para elevar o peso mínimo especicado na
embalagem da documentação fornecida com o
módulo de drive.
Pé de cabra para desmontar o contêiner de
•
transporte de madeira.
Furadeira com brocas de 10 ou 12 mm
•
Medidor de ta.
•
Chave de fenda.
•
Chave inglesa com soquetes métricos relevantes
•
(7-17 mm).
Instalação Mecânica
Extensões para chave inglesa.
•
Chave Torx T50.
•
Construção do gabinete
Adquira as ferramentas necessárias para montar o painel de acordo com os planos de design e práticas
estabelecidas.
VLT® Parallel Drive Modules
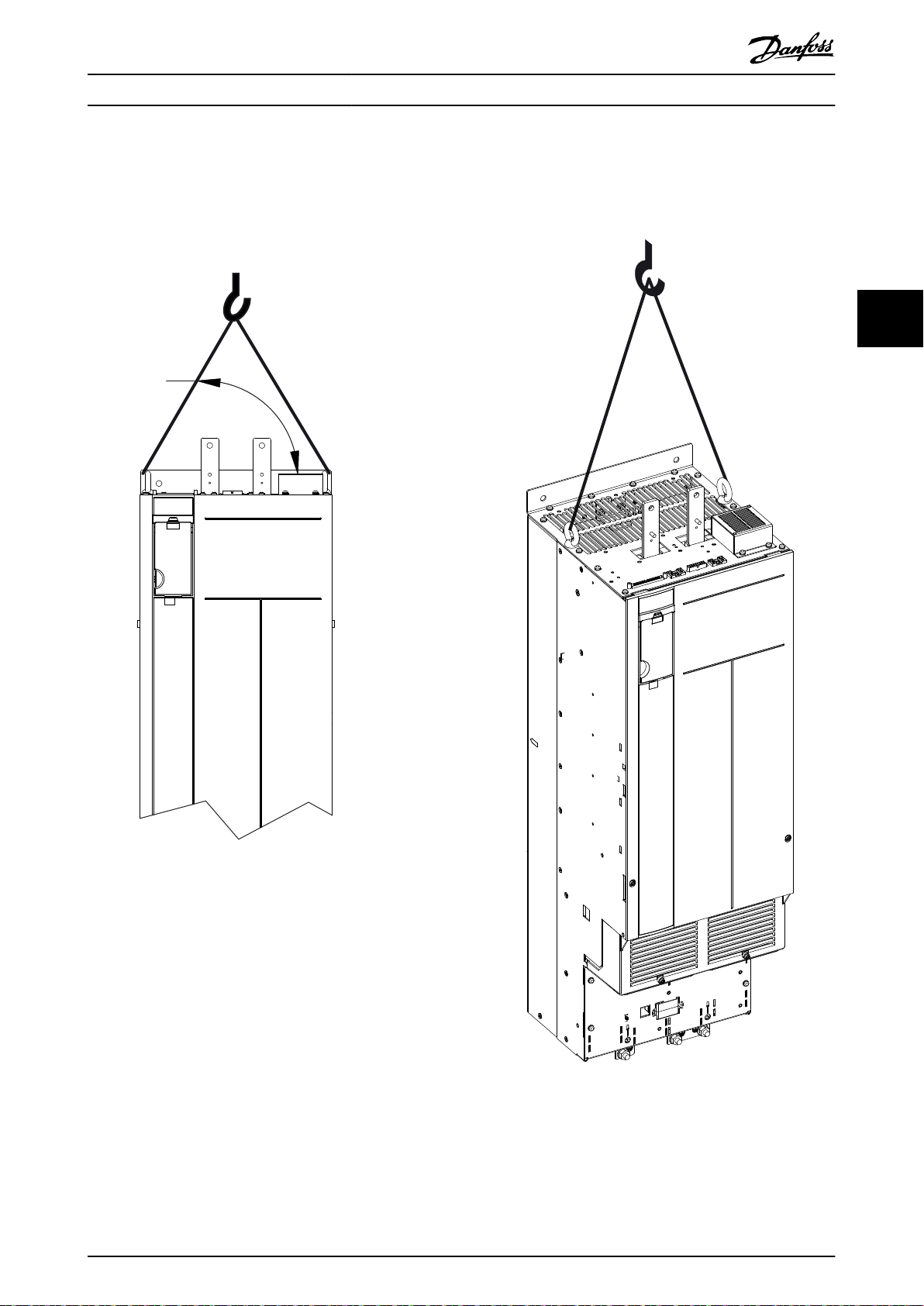
4.1.2 Elevando a unidade
44
Para obter as medições e centro de gravidade, consulte
capétulo 7.8 Dimensões do Kit.
Garanta que o dispositivo de elevação é
•
apropriado para a tarefa.
Mova a unidade usando um guincho, uma grua
•
ou empilhadeira com as características nominais
adequadas.
Sempre use os olhais de elevação dedicados. Veja
•
Ilustração 4.3.
CUIDADO
CARGA PESADA
Cargas desbalanceadas podem cair e cargas podem
tombar. A falha em adotar as precauções de elevação
adequadas aumenta o risco de morte, lesões graves ou
danos aos equipamentos.
Nunca ande sob cargas suspensas.
•
Para proteger contra lesões, use equipamento
•
de proteção pessoal como luvas, óculos de
segurança e calçados de segurança.
Certique-se de utilizar dispositivos de elevação
•
com características nominais de peso
adequadas. A barra de elevação deve ser capaz
de suportar o peso da carga.
O centro de gravidade da carga pode estar em
•
um local inesperado. A falha em localizar o
centro de gravidade corretamente e posicionar
a carga de acordo antes de elevar a carga pode
causar a queda ou inclinação inesperada da
unidade durante a elevação e o transporte.
O ângulo a partir do topo do módulo de
•
conversor até os cabos de elevação inuencia a
força de carga máxima no cabo. Esse ângulo
deve ser de 65º ou mais. Veja Ilustração 4.3.
Prenda e dimensione os cabos de elevação
corretamente.
14 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
130BE566.10
65° min
Instalação Mecânica Guia de Instalação
4.1.3 Armazenagem
Armazene o kit em um local seco. Mantenha o equipamento selado em sua embalagem até a instalação. Consulte
capétulo 7.5 Condições Ambiente para Módulos de Conversor para as condições ambientais recomendadas.
4 4
Ilustração 4.3 Elevando o módulo do drive
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 15
Instalação Mecânica
VLT® Parallel Drive Modules
4.2 Requisitos
Esta seção descreve requisitos mínimos recomendados
para a instalação mecânica. Para requisitos da UL e CE,
consulte capétulo 5.2 Requisitos elétricos para certicações e
aprovações.
4.2.1 Ambiental
44
Consulte para obter informações sobre a temperatura
operacional necessária, a umidade e outras condições
ambientais.
4.2.2 Gabinete
O kit consiste em 2 ou 4 módulos de conversor,
dependendo do valor nominal da potência. Os gabinetes
devem atender aos seguintes requisitos mínimos:
Largura [mm (pol)] 2 conversores: 800 (31,5), 4 conversores:
1600 (63)
Profundidade [mm
(pol)]
Altura [mm (pol)]
Capacidade de peso
[kg (lb)]
Aberturas de
ventilação
Tabela 4.1 Requisitos do gabinete
1) Necessário se o barramento ou os kits de resfriamento da Danfoss
forem usados.
600 (23,6)
2000 (78,7)
2 conversores: 450 (992), 4 conversores:
910 (2006)
Veja capétulo 4.2.5 Requisitos de
resfriamento e uxo de ar.
1)
AVISO!
ALIMENTAÇÃO EXTERNA DE 230 V
É necessário uma alimentação externa de 230 V para
alimentar o SMPS (fonte de alimentação do modo de
chaveamento). Danfoss recomenda o uso de um fusível
lento 6 A, 10 A ou 16 A ao instalar a alimentação
externa.
4.2.3 Barras condutoras
Se o kit do barramento Danfoss não for utilizado, consulte
Tabela 4.2 para obter as medições da seção transversal que
são necessárias ao criar barramentos customizados. Para
obter as dimensões terminais, consulte
capétulo 7.8.2 Dimensões de Terminal e
capétulo 7.8.3 Dimensões do Barramento CC.
Descrição Largura [mm (pol)] Espessura [mm (pol)]
Motor CA 143,6 (5,7) 6,4 (0,25)
rede elétrica
CA
Barramento
CC
Tabela 4.2 Medições da seção transversal para barramentos
customizados
143,6 (5,7) 6,4 (0,25)
76,2 (3,0) 12,7 (0,50)
AVISO!
Alinhe os barramentos verticalmente para fornecer
máximo uxo de ar.
4.2.4 Considerações térmicas
Para obter valores de dissipação de calor, consulte
capétulo 7.1 Especicações dependente da potência.. As
fontes de calor a seguir devem ser consideradas ao
determinar requisitos de resfriamento:
Temperatura ambiente fora do gabinete metálico.
•
Filtros (por exemplo, onda senoidal e RF).
•
Fusíveis.
•
Componentes de controle.
•
Para obter o ar de resfriamento necessário, consulte
capétulo 4.2.5 Requisitos de resfriamento e uxo de ar.
16 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
130BE569.10
Instalação Mecânica Guia de Instalação
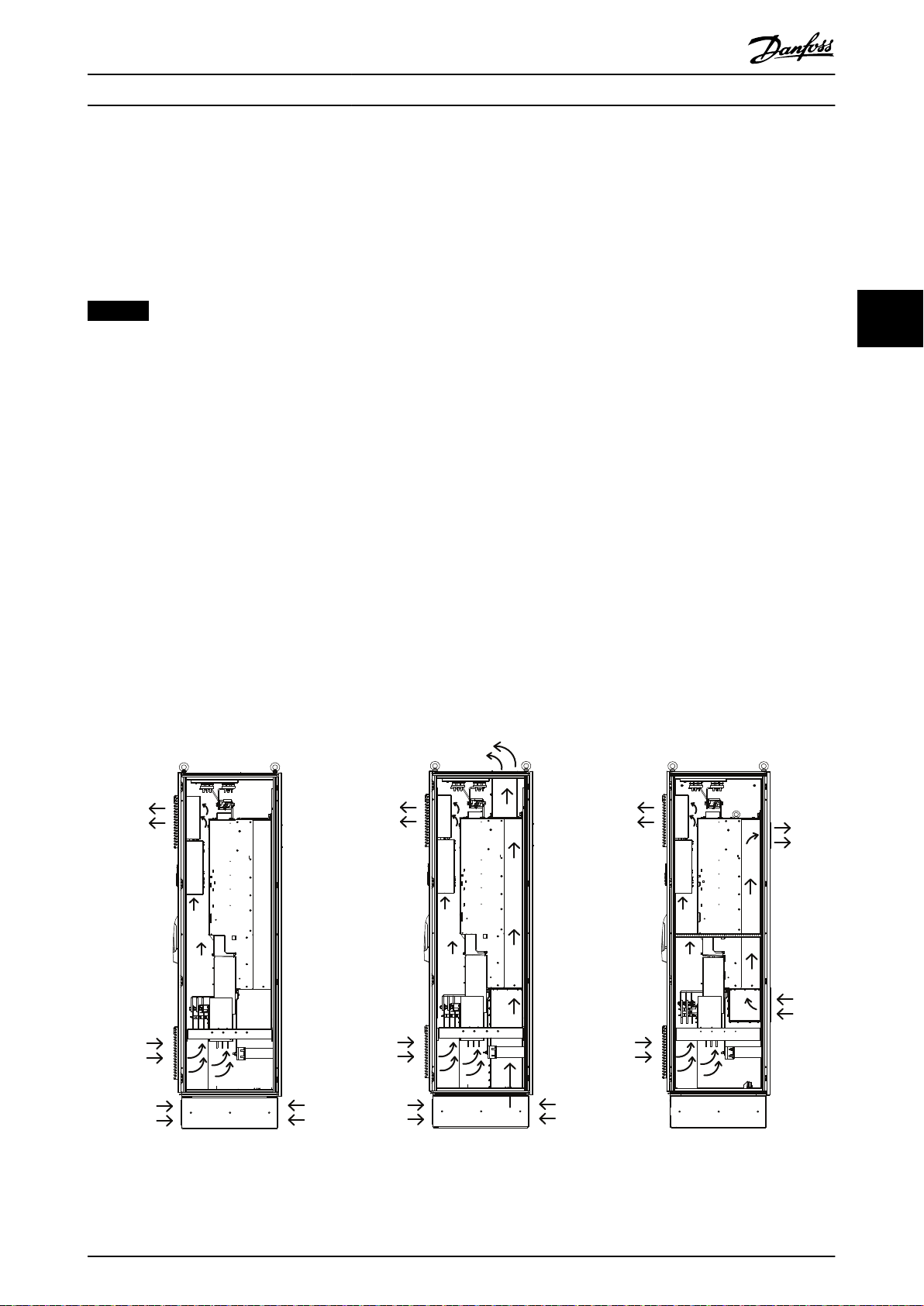
4.2.5 Requisitos de resfriamento e uxo de ar
As recomendações fornecidas nesta seção são necessárias para o resfriamento ecaz dos módulos de conversor dentro do
gabinete metálico do painel. Cada módulo de conversor contém um ventilador do dissipador de calor e um ventilador de
mistura. Designs típicos de gabinete metálico utilizam ventiladores de porta juntamente com os ventiladores de módulo de
conversor para remover calor do gabinete. Danfoss fornece diversos kits de resfriamento do canal traseiro como opcionais.
Esses kits removem 85% do calor do gabinete, reduzindo a necessidade de grandes ventiladores de porta.
AVISO!
Certique-se de que o uxo total dos ventiladores do gabinete atendem ao uxo de ar recomendado.
Ventiladores de resfriamento do módulo de conversor
O módulo de conversor é equipado com um ventilador do dissipador de calor, que fornece a taxa de uxo de ar necessária
de 840 m3/h (500 cfm) ao longo do dissipador de calor. Além disso, há um ventilador de resfriamento montado no topo da
unidade e um pequeno ventilador de mistura de 24 V CC montado sob a placa de entrada que é operado sempre que o
módulo de conversor estiver energizado.
Em cada módulo de conversor, o cartão de potência fornece tensão CC para energizar os ventiladores. O ventilador de
mistura é alimentado por 24 V CC da fonte de alimentação no modo de chaveamento principal. O ventilador do dissipador
de calor e o ventilador superior são alimentados por 48 V CC de uma fonte de alimentação em modo de chaveamento no
cartão de potência. Cada ventilador tem feedback de tacômetro para o cartão de controle para conrmar que o ventilador
está funcionando corretamente. O controle da velocidade e de liga/desliga dos ventiladores ajudam a reduzir ruído acústico
desnecessário e prolongar a vida útil dos ventiladores.
Ventiladores do gabinete
Quando o opcional de resfriamento do canal traseiro não for utilizado, os ventiladores montados no gabinete devem
remover todo o calor gerado dentro do gabinete.
Para cada gabinete contendo dois módulos de conversor, a recomendação de uxo do ventilador do gabinete é a seguinte:
Ao utilizar resfriamento do canal traseiro, é recomendável um
•
Quando resfriamento do canal traseiro não for utilizado, é recomendável um uxo de 4080 m3/h (2400 cfm).
•
uxo de 680 m3/h (400 cfm).
4 4
Ilustração 4.4 Fluxo de ar, Unidade standard (esquerda), Kit de resfriamento inferior/superior (meio) e Kit de resfriamento traseiro/
traseiro (direita)
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 17
130BE571.10
Instalação Mecânica
VLT® Parallel Drive Modules
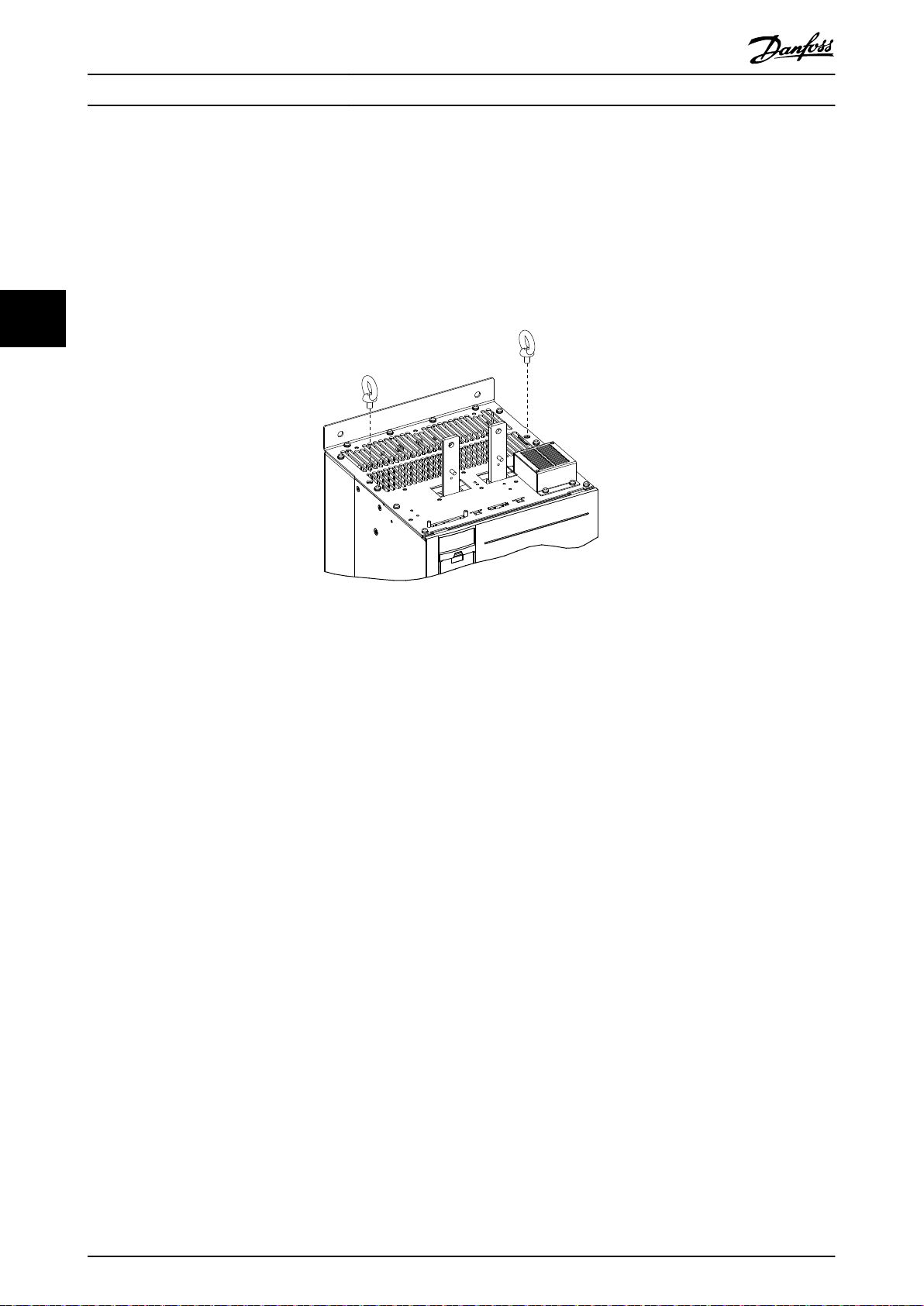
4.3 Instalando os módulos de drive
Instale os módulos de conversor no chassi do gabinete conforme descrito nas etapas a seguir.
1. Remova os módulos de conversor da embalagem. Veja capétulo 4.1 Recebendo e desembalando a unidade.
2. Instale dois olhais no topo do primeiro módulo de conversor. Prepare o módulo de conversor para elevação
utilizando um chicote de elevação adequado e um guincho aéreo ou uma grua com a capacidade de elevação
necessária. Veja capétulo 4.1.2 Elevando a unidade.
44
Ilustração 4.5 Instalação dos olhais
3. Instale os dois parafusos de montagem inferiores e gaxetas no painel de montagem.
4. Utilizando a grua ou o guincho, eleve o módulo de conversor e abaixe a unidade através do topo do chassi do
gabinete. Alinhe a furação de montagem inferior da unidade com os dois parafusos de montagem inferiores no
painel de montagem.
5. Verique se o módulo de conversor está corretamente alinhado no painel de montagem e xe a parte inferior da
unidade no painel de montagem com as duas porcas sextavadas. Veja Ilustração 4.6. Aperte as porcas sextavadas.
Veja capétulo 7.9 Torques de Aperto do Prendedor.
6. Fixe a parte superior da unidade no painel de montagem com parafusos M10x26 e aperte os parafusos.
7. Alinhe as ranhuras no microinterruptor com as bordas em cada fusível CC e pressione rmemente até o microinterruptor clicar no lugar.
8. Instale dois fusíveis CC com microinterruptores nas partes superiores dos terminais do barramento CC em cada
módulo de conversor. Os microinterruptores devem ser instalados no lado externo de cada terminal. Veja
Ilustração 3.1.
9. Fixe cada fusível com dois parafusos M10 e aperte os parafusos.
10. Instale o próximo módulo de conversor.
18 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
130BE572.11
Instalação Mecânica Guia de Instalação
4 4
Ilustração 4.6 Instalação dos parafusos de montagem inferiores
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 19
130BE713.11
1
2
Instalação Mecânica
VLT® Parallel Drive Modules
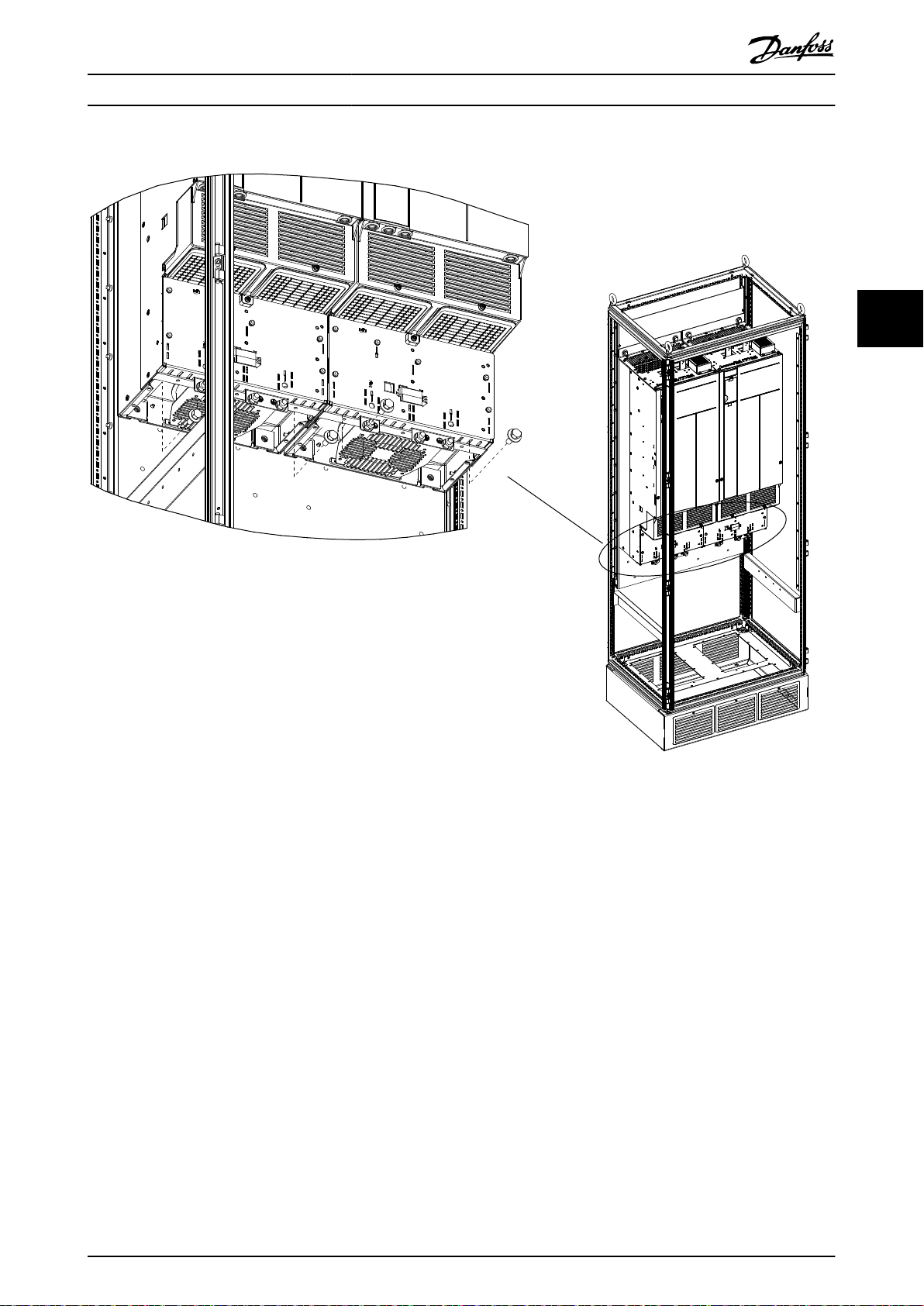
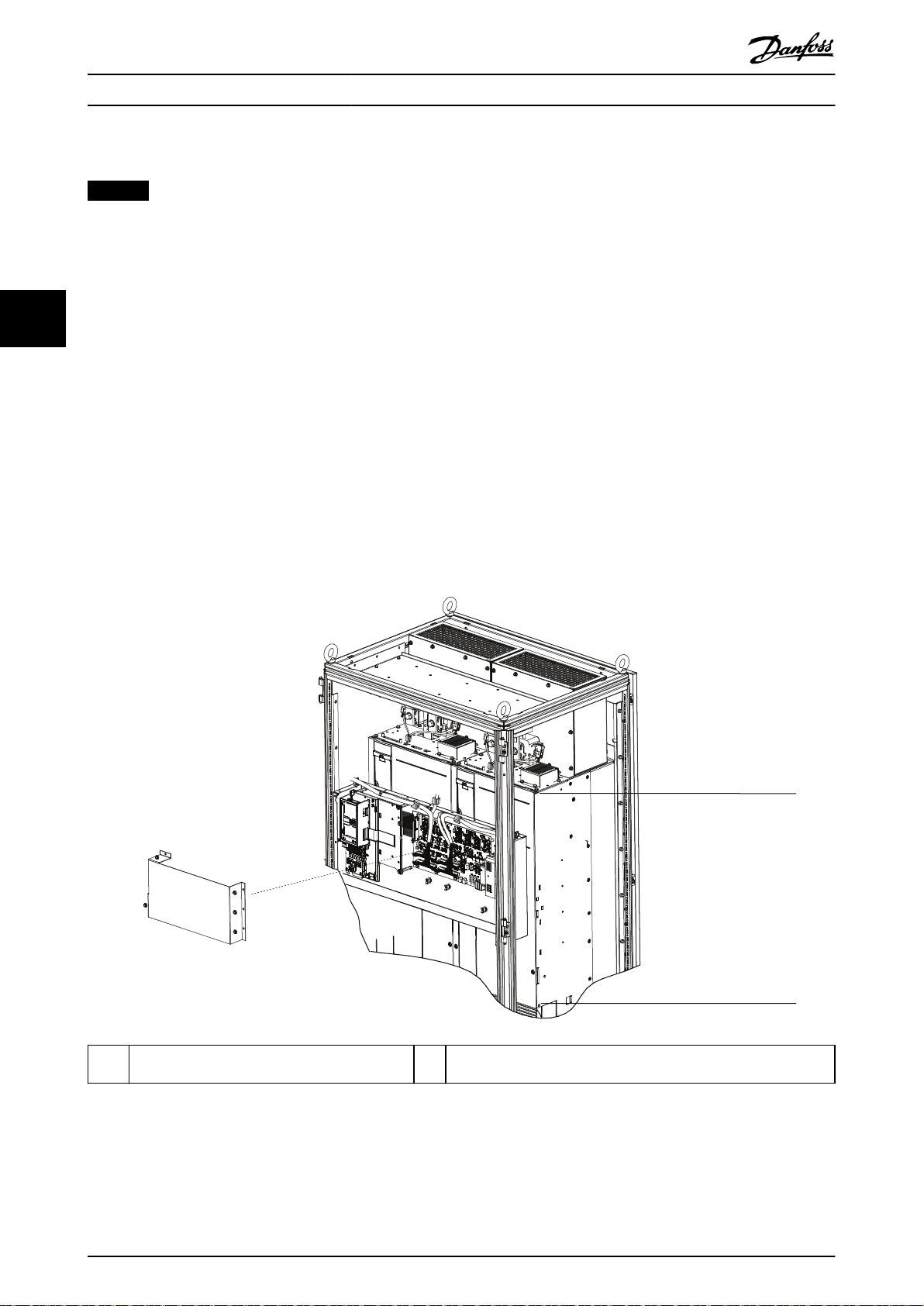
4.4 Instalando a prateleira de controle
AVISO!
Para evitar RFI, não passe a ação de controle junto com cabos de energia ou barramentos.
1. Remova o conjunto da prateleira de controle do seu pacote.
2. Remova o LCP da prateleira de controle.
3. Use algum tipo de suporte de montagem para instalar a prateleira de controle. A Danfoss não fornece o quadro de
44
montagem da prateleira de controle. Para instalação em conformidade com a EMC, consulte Ilustração 4.7.
4. Remova a cobertura do MDCIC do conjunto da prateleira de controle.
5. Conecte os cabos em ta de 44 pinos do cartão do MDCIC até o topo dos módulos de drive, seguindo os números
de sequência indicados próximo aos conectores no MDCIC.
6. Passe os cabos em ta de 44 pinos dentro do gabinete.
7. Conecte o chicote de ação de falha do freio externo entre os terminais do microinterruptor e o conector jumper
do freio no topo do módulo do drive.
8. Conecte a ação de relé entre os relés 1 e 2 na prateleira de controle e na bucha do relé correspondente no topo
do módulo de drive.
9. Conecte o microinterruptor no conector do microinterruptor fornecido no topo do módulo de drive. Consulte
Ilustração 3.1 e Ilustração 3.3.
1 A prateleira de controle deve car abaixo desse
ponto
Ilustração 4.7 Posicionando a prateleira de controle para instalação em conformidade com a EMC.
20 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
2 A prateleira de controle deve car acima desse ponto
Instalação Elétrica Guia de Instalação
5 Instalação Elétrica
5.1 Instruções de Segurança
Ver capétulo 2 Segurança para instruções de segurança
gerais.
ADVERTÊNCIA
TENSÃO INDUZIDA
Quando cabos de motor de saída de conversores de
frequência diferentes são estendidos juntos, a tensão
induzida pode carregar capacitores do equipamento
mesmo com o equipamento desligado e travado.
Para evitar morte ou lesões graves:
Estenda os cabos de motor separadamente ou
•
use cabos blindados.
Trave simultaneamente todos os conversores de
•
frequência.
CUIDADO
PERIGO DE CHOQUE
O sistema de drive pode causar uma corrente CC no
condutor do ponto de aterramento de proteção (PE).
Quando um dispositivo de proteção operado
•
por corrente residual (RCD) for usado para
proteção contra choque elétrico, somente um
RCD do Tipo B é permitido no lado da
alimentação.
Falhar em seguir essa recomendação pode impedir que o
RCD forneça a proteção pretendida.
AVISO!
PROTEÇÃO DE SOBRECARGA DO MOTOR
Os módulos de drive são fornecidos com proteção de
sobrecarga Classe 20 para aplicações com um único
motor.
Proteção de sobrecorrente
Equipamento de proteção adicional como
•
proteção contra curto-circuito ou proteção
térmica do motor entre os módulos de drive e os
motores é necessário para aplicações com
múltiplos motores.
O fusível de entrada correto é necessário para
•
obter aprovações e atender aos requisitos de
certicação e para fornecer proteção de
sobrecorrente e curto-circuito. Esses fusíveis não
são fornecidos de fábrica e devem ser fornecidos
pelo instalador. Consulte as características
nominais máximas dos fusíveis em
capétulo 7.1 Especicações dependente da
potência..
Tipos e características nominais dos os
Toda a ação deverá estar em conformidade com
•
as regulamentações locais e nacionais com
relação à seção transversal e aos requisitos de
temperatura ambiente.
Recomendação de o de conexão de energia: o
•
de cobre com classicação mínima para 75 °C.
Consulte capétulo 7.6 Especicações de Cabo para obter
tamanhos e tipos de o recomendados.
5 5
CUIDADO
DANOS À PROPRIEDADE
A proteção por Relé térmico eletrônico (ETR) contra
sobrecarga do motor não está incluída na conguração
padrão. Para programar o LCP para essa função, consulte
o VLT® Parallel Drive Modules Guia do usuário.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 21
Instalação Elétrica
VLT® Parallel Drive Modules
5.2 Requisitos elétricos para certicações e
aprovações
A conguração padrão fornecida neste guia (módulos de
conversor, prateleira de controle, chicotes de ação, fusíveis
e microinterruptores) possui certicação UL e CE. As
condições a seguir devem ser atendidas além da
conguração padrão para obter requisitos de aprovação
regulamentar UL e CE. Para obter uma lista de renúncias
de responsabilidade, consulte capétulo 8.1 Renúncia de
responsabilidade.
55
Utilize o conversor de frequência em um
•
ambiente interno, controlado e aquecido. O ar de
resfriamento deve ser limpo, livre de materiais
corrosivos e de poeira eletricamente condutiva.
Consulte para obter limites especícos.
A temperatura ambiente máxima do ar é 40 °C
•
(104 °F) com corrente nominal.
O sistema do conversor deve ser montado em ar
•
limpo, de acordo com a classicação do gabinete.
Para obter aprovações regulamentares de
certicação UL ou CE, os módulos de conversor
devem ser instalados de acordo com a
conguração padrão fornecida neste guia.
A tensão e a corrente máximas não devem
•
exceder os valores fornecidos em
capétulo 7.1 Especicações dependente da potência.
para a conguração do conversor especicada.
Os módulos de conversor são adequados para
•
utilização em um circuito capaz de fornecer não
mais do que 100 kA rms simétricos com tensão
nominal do conversor (máximo de 600 V para
unidades de 690 V) quando protegidos por
fusíveis com a conguração padrão. Veja
capétulo 5.4.1 Seleção de Fusível. As características
nominais de amperes é baseada em testes
realizados de acordo com a UL 508C.
Os cabos localizados dentro do circuito do motor
•
devem ser classicados para pelo menos 75 °C
(167 °F) em instalações em conformidade com o
UL. Os tamanhos do cabo foram fornecidos em
capétulo 7.1 Especicações dependente da potência.
para a conguração do conversor especicada.
O cabo de entrada deve ser protegido com
•
fusíveis. Os disjuntores não devem ser utilizados
sem fusíveis nos EUA. Fusíveis IEC adequados
(classe aR) ou fusíveis UL (classe L ou T) são
listados em capétulo 5.4.1 Seleção de Fusível. Além
disso, requisitos regulamentares especícos do
país devem ser seguidos.
Para instalação nos EUA, deve ser fornecida
•
proteção do circuito de derivação de acordo com
o Código Elétrico Nacional (NEC) e qualquer
código local aplicável. Para atender esse requisito,
utilize fusíveis classicados pela UL.
Para instalação no Canadá, deve ser fornecida
•
proteção do circuito de derivação de acordo com
o Código Elétrico Canadense e qualquer código
provincial aplicável. Para atender esse requisito,
utilize fusíveis classicados pela UL.
22 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
230 V AC
50/60 Hz
1
2
Brake Temp
(NC)
91 (L1)
L
N
230 V/24 V Power supply
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
20 (COM D IN)
15 mA
200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
0/4–20 mA
03
+10 V DC
0 V DC - 10 V DC
0/4-20 mA
24 V DC
02
01
05
04
06
240 V AC, 2A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24 V
0 V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0 V
24 V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
A53 U-I (S201)
ON
21
A54 U-I (S202)
ON=0–20 mA
OFF=0–10 V
95
400 V AC, 2A
P 5-00
(R+) 82
(R-) 81
+ - + -
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
RS485
RS485
21
ON
S801/Bus Term.
OFF-ON
3-phase
power
input
Switch mode
Power supply
Motor
Analog output
Interface
Relay1
Relay2
ON=Terminated
OFF=Open
Brake
resistor
(NPN) = Sink
(PNP) = Source
240 V AC, 2A
400 V AC, 2A
0 V DC - 10 V DC
10 V DC
37 (D IN) - option
130BE752.10
Regen
terminals
Instalação Elétrica Guia de Instalação
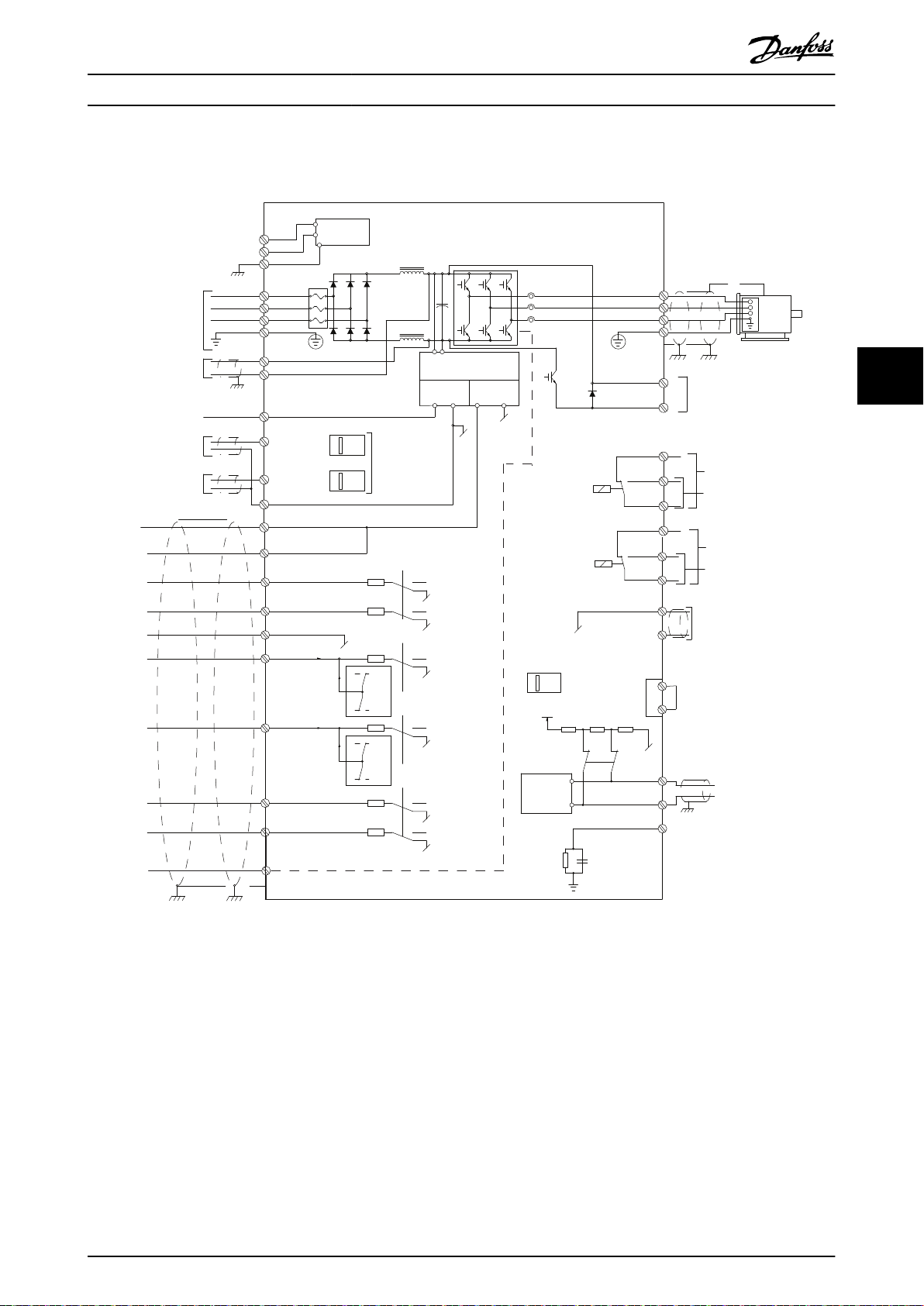
5.3 Diagrama da ação
5 5
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 23
Ilustração 5.1 Diagrama da ação
Instalação Elétrica
VLT® Parallel Drive Modules
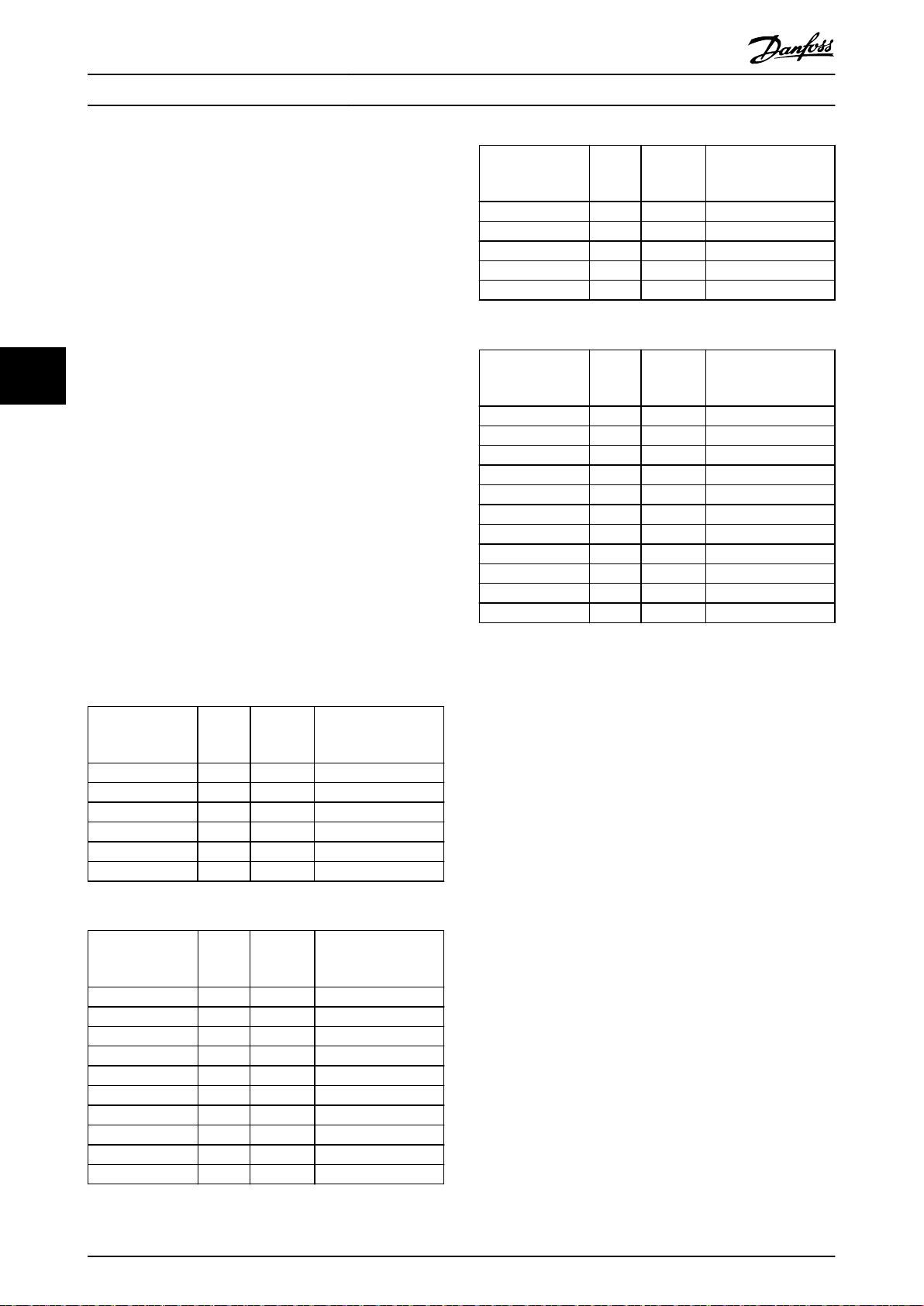
5.4 Fusíveis
5.4.1 Seleção de Fusível
Para proteger o sistema de conversor em caso de um ou
mais componentes internos falharem dentro de um
módulo de conversor, utilize fusíveis e/ou disjuntores no
lado da alimentação de rede elétrica.
5.4.1.1 Proteção do Circuito de Derivação
55
Para proteger a instalação contra risco de choques elétricos
e de incêndio, proteja todos os circuitos de derivação de
uma instalação contra curto-circuito e sobrecorrente de
acordo com as regulamentações nacionais e internacionais.
5.4.1.2 Proteção contra Curto-Circuito
A Danfoss recomenda os fusíveis listados em
capétulo 5.4.1.3 Fusíveis recomendáveis para conformidade
com CE e capétulo 5.4.1.4 Fusíveis recomendados para
conformidade com o UL para obter conformidade com o UL
ou CE na proteção de pessoal de serviço e de propriedade
contra as consequências da falha de componentes nos
módulos de conversores.
Número de
módulos de
conversor
4 N630 N710 aR-1600
4 N710 N800 aR-2000
4 N800 N900 aR-2500
4 N900 N1M0 aR-2500
4 N1M0 N1M2 aR-2500
Tabela 5.3 Sistemas de conversores de 6 pulsos (525–690 V CA)
Número de
módulos de
conversor
2 N250 N315 aR-550
2 N315 N355 aR-630
2 N355 N400 aR-630
2 N400 N500 aR-630
2 N500 N560 aR-630
2 N560 N630 aR-900
4 N630 N710 aR-900
4 N710 N800 aR-900
4 N800 N900 aR-900
4 N900 N1M0 aR-1600
4 N1M0 N1M2 aR-1600
FC 302 FC 102/
FC 202
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
Fusível recomendado
(máximo)
5.4.1.3 Fusíveis recomendáveis para
conformidade com CE
Número de
módulos de
conversor
2 N450 N500 aR-1600
4 N500 N560 aR-2000
4 N560 N630 aR-2000
4 N630 N710 aR-2500
4 N710 N800 aR-2500
4 N800 N1M0 aR-2500
Tabela 5.1 Sistemas de conversor de 6 pulsos (380–500 V CA)
Número de
módulos de
conversor
2 N250 N315 aR-630
2 N315 N355 aR-630
2 N355 N400 aR-630
2 N400 N450 aR-800
2 N450 N500 aR-800
4 N500 N560 aR-900
4 N560 N630 aR-900
4 N630 N710 aR-1600
4 N710 N800 aR-1600
4 N800 N1M0 aR-1600
FC 302 FC 102/
FC 202
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
Fusível recomendado
(máximo)
Tabela 5.4 Sistemas de conversor de 12 pulsos (525–690 V CA)
5.4.1.4 Fusíveis recomendados para
conformidade com o UL
Os módulos conversores são fornecidos com
•
fusíveis CA integrados. Os módulos foram
qualicados para características nominais da
corrente de curto-circuito (SCCR) de 100 kA para
as congurações de barramento padrão em todas
as tensões (380–690 V CA).
Se não houver opções de potência ou
•
barramentos adicionais conectados externamente,
o sistema de conversor é qualicado para 100 kA
SCCR com qualquer fusível classe L ou classe T
listado pela UL conectado nos terminais de
entrada dos módulos de conversor.
Não exceda as características nominais do fusível
•
indicadas em Tabela 5.6 a Tabela 5.7 com as
características nominais da corrente dos fusíveis
Classe L ou T.
Tabela 5.2 Sistemas de conversor de 12 pulsos (380–500 V CA)
24 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Instalação Elétrica Guia de Instalação
Número de
módulos de
conversor
2 N450 N500 1.600 A
4 N500 N560 2.000 A
4 N560 N630 2.000 A
4 N630 N710 2.500 A
4 N710 N800 2.500 A
4 N800 N1M0 2.500 A
Tabela 5.5 Sistemas de conversor de 6 pulsos (380–500 V CA)
Número de
módulos de
conversor
2 N250 N315 630 A
2 N315 N355 630 A
2 N355 N400 630 A
2 N400 N450 800 A
2 N450 N500 800 A
4 N500 N560 900 A
4 N560 N630 900 A
4 N630 N710 1.600 A
4 N710 N800 1.600 A
4 N800 N1M0 1.600 A
Tabela 5.6 Sistemas de conversor de 12 pulsos (380–500 V CA)
Fusíveis de no mínimo 500 V
para os sistemas de conversores de frequência de 380–500 V CA.
Número de
módulos de
conversor
4 N630 N710 1.600 A
4 N710 N800 2.000 A
4 N800 N900 2.500 A
4 N900 N1M0 2.500 A
4 N1M0 N1M2 2.500 A
FC 302 FC 102/
FC 202
FC 302 FC 102/
FC 202
certicados pelo UL podem ser usados
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
Fusível recomendado
(máximo)
Fusível recomendado
(máximo)
Instalação do Kit Elétrico
5.5
Esta seção descreve como o kit elétrico é usado para
conectar 2 ou 4 módulos de drive em paralelo – para
fornecer energia controlada para um motor CA. Um
diagrama é fornecido para cada uma das 4 congurações
que, se seguidas, atendem as especicações e aprovações
da agência especíca. Se projetar e desenvolver outras
congurações, procure aprovações ou certicações de
agência aparte do Danfoss.
Leia esta seção para obter orientações sobre a execução de
conexões elétricas ao montar os módulos de drive em um
painel.
5.6 Instalação do Fusível do Barramento CC
Os fusíveis CC são fornecidos no kit básico. Instale os
fusíveis CC nos terminais CC disponíveis nos módulos de
drive individuais usando os parafusos recomendados. Cada
fusível CC possui um acessório para montagem de microinterruptores, que são usados para detectar uma falha do
fusível. Consulte Ilustração 3.3. Instale o chicote fornecido
entre os terminais do microinterruptor e a porta do jumper
com defeito do freio na parte superior dos módulos do
drive. Se o jumper não for instalado adequadamente, a
unidade não recebe energização e o erro Falha do IGBT do
freio é mostrado. O microinterruptor possui 3 terminais: NA,
NF e COM. Conecte o chicote do o entre os terminais NF
e COM. Se estiver conectado entre quaisquer outros
terminais, a unidade não é energizada e é mostrado o erro
Falha do IGBT do freio.
AVISO!
O microinterruptor é um encaixe no fusível. Assegure
que o interruptor está adequadamente instalado nos
fusíveis.
5 5
Tabela 5.7 Sistemas de conversores de 6 pulsos (525–690 V CA)
Número de
módulos de
conversor
2 N250 N315 550 A
2 N315 N355 630 A
2 N355 N400 630 A
2 N400 N500 630 A
2 N500 N560 630 A
2 N560 N630 900 A
4 N630 N710 900 A
4 N710 N800 900 A
4 N800 N900 900 A
4 N900 N1M0 1.600 A
4 N1M0 N1M2 1.600 A
Tabela 5.8 Sistemas de conversor de 12 pulsos (525–690 V CA)
Fusíveis de no mínimo 700 V certicados pelo UL podem ser usados
para os sistemas de conversores de frequência de 525–690 V CA.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 25
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
5.7 Conexões do Motor
5.7.1 Cabos de Motor
Consulte capétulo 7.6 Especicações de Cabo para obter
mais informações dos tipos e tamanhos de os.
AVISO!
COMPRIMENTO DE CABO BLINDADO
Com um sistema de drive VLT® Parallel Drive Modules
padrão, os cabos blindados de até 150 m (492 ft) de
comprimento ou sem blindagem de até 300 m (984 ft)
fornecem tensão total ao motor. Se este comprimento de
cabo for excedido, use um ltro dU/dt. Para obter
informações sobre a seleção de um ltro dU/dt, consulte
®
o Guia de Design VLT
Parallel Drive Modules.

1
2
130BE747.10
PE
PEPE
PE
Instalação Elétrica
VLT® Parallel Drive Modules
5.7.1.1 Características Nominais de Tensão
Tensões de pico de até 2,8 vezes a tensão de rede do
sistema de drive VLT® Parallel Drive Modules podem
ocorrer no cabo de motor. Tensões de pico altas podem
estressar severamente o cabo de motor. Use cabos de
motor com especicação de tensão nominal de no mínimo
0,6/1 kV. Os cabos desta faixa fornecem boa resistência e
isolação a panes.
AVISO!
EXTREMIDADES DA BLINDAGEM TORCIDAS
Mantenha as conexões mais curtas o possível em
•
cada extremidade do cabo.
Faça a ponte de aberturas como terminais,
•
interruptores ou contatores usando conexões com
a impedância mais baixa possível e a maior área
de superfície possível.
(RABICHOS)
5.7.1.2 Dimensões
55
Siga os códigos locais para obter os dados de cabo de
corrente para cabos e condutores. Os códigos amplamente
usados incluem: NFPA 70, EN 60204-1, VDE 0113-1 e VDE
0298-4. O sobredimensionamento de harmônicas não é
necessário.
Extremidades da blindagem retorcidas aumentam a
impedância da blindagem em frequências mais altas, o
que reduz o efeito da blindagem e aumenta a corrente
de fuga. Para evitar extremidades da blindagem
retorcidas, use braçadeiras de blindagem integradas. Veja
Ilustração 5.2.
5.7.1.3 Comprimento
Mantenha os cabos mais curtos o possível. A queda de
tensão e a dissipação de calor depende da frequência e é
aproximadamente proporcional ao comprimento de cabo.
Consulte as especicações do fabricante do cabo em
relação ao comprimento e a queda de tensão esperada
quando estiver conectado ao sistema do drive. Consulte
capétulo 7.6 Especicações de Cabo.
1 Aterramento correto das extremidades blindadas
5.7.1.4 Blindagem
Os fatores a seguir são importantes para uma blindagem
ecaz:
Certique-se de que a quantidade da superfície
•
de cabo coberta pela blindagem seja no mínimo
80%.
Use uma blindagem de cobre trançado de
•
camada única. Assegure que a blindagem esteja
trançada para reduzir a área de superfície para
correntes de fuga.
Use cabos com blindagem dupla para melhorar a
•
atenuação de interferência adicional. Condutores
retorcidos reduzem os campos magnéticos.
Use cabos que sejam blindados em ambas as
•
extremidades entre o sistema de drive e o motor.
Para atender os limites de interferência de
•
radiofrequência, os cabos entre o sistema de
drive e o motor devem ser blindados em ambas
as extremidades.
Assegure que a blindagem circula totalmente o
•
cabo.
Coloque as buchas de cabo ou braçadeiras de
•
cabo diretamente no ponto de aterramento.
2 Aterramento incorreto usando extremidades de blindagem
retorcidas (rabichos)
Ilustração 5.2 Exemplo de extremidades da blindagem
5.7.2 Tipos de proteção térmica
5.7.2.1 Termistor PTC
Usando uma entrada digital e alimentação de 10 V
Ilustração 5.3 Conexão do termistor PTC - Entrada digital com
alimentação de 10 V
26 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

0
500
1000
1500
2000
2500
3000
3500
4000
4500
-25 0 25 50 75 100 125 1 50
Temperature [°C]
Resistance [Ohm]
KTY type 1 KTY type 2 KTY type 3
130BB917.10
Instalação Elétrica Guia de Instalação
Usando uma entrada analógica e alimentação de 10 V
Ilustração 5.4 Conexão do Termistor PTC - Entrada analógica
com alimentação de 10 V
Usando uma entrada digital e 24 V como alimentação
5 5
Ilustração 5.6 Seleção do Tipo KTY
AVISO!
Ilustração 5.5 Conexão do Termistor PTC - Entrada digital com
alimentação de 24 V
Verique se a tensão de alimentação selecionada está de
acordo com a especicação do elemento termistor usado.
Entrada
digital/
analógica
Digital 10 >2,7
Analógica 10 >3,0
Digital 24 >10,8
Tabela 5.9 Parâmetros da Resistência do Termistor PTC
Tensão de
alimentação [V]
Resistência do
desarme kΩ
Resistência de
reset
<800 Ω
<3,0 kΩ
<6,6 kΩ
5.7.2.2 Sensor KTY
O conversor de frequência manipula 3 tipos de sensores
KTY:
Sensor KTY 1: 1 kΩ a 100 °C (212 °F). Philips KTY
•
84-1 é um exemplo.
Sensor KTY 2: 1 kΩ a 25 °C (77 °F). Philips KTY
•
83-1 é um exemplo.
Sensor KTY 3: 1 kΩ a 25 °C (77 °F). Philips KTY-10
•
é um exemplo.
CONFORMIDADE COM A PELV
Em caso de curto circuito entre enrolamentos do motor e
o sensor, a conformidade com a PELV não será alcançada
quando a temperatura do motor for monitorada através
de um termistor ou sensor KTY. Assegure que o sensor
está melhor isolado.
5.7.2.3 Instalação do Interruptor Térmico
do Resistor do Freio
Cada módulo de drive possui um jumper de falha do freio
na placa superior, utilizado para conectar o interruptor
térmico Klixon aos resistores do freio. Essa bucha possui
um jumper pré-instalado como mostrado em Ilustração 8.3.
O jumper de defeito do freio deve estar sempre no lugar
para garantir a operação adequada do módulo do drive.
Sem esta conexão do jumper, o modulo do drive não
permite que o inversor opere e é exibida uma falha do
IGBT do freio.
O interruptor térmico é um tipo normalmente fechado. Se
a temperatura do resistor do freio exceder os valores
recomendados, o interruptor térmico é aberto. Use o de
1 mm2 (18 AWG), reforçado e com duplo isolamento para a
conexão. Consulte Ilustração 8.5.
AVISO!
O Danfoss não é responsável pela falha de nenhum
interruptor térmico Klixon.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 27

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Instalação Elétrica
VLT® Parallel Drive Modules
5.7.3 Conexões do terminal do motor
ADVERTÊNCIA
TENSÃO INDUZIDA
Alterando a rotação do motor
Terminal U/T1/96 conectado à fase U
•
Terminal V/T2/97 conectado à fase V
•
Terminal V/T3/98 conectado à fase W
•
A tensão induzida dos cabos de motor de saída de
conversores de frequência diferentes em operação
conjunta pode carregar capacitores do equipamento
mesmo com o equipamento desligado e travado. Se os
cabos de motor de saída não forem estendidos separadamente ou não forem utilizados cabos blindados, o
resultado poderá ser morte ou lesões graves.
55
Estenda os cabos de motor de saída separa-
•
damente.
Ou
Use cabos blindados.
•
Trave simultaneamente todos os conversores de
•
frequência.
Atenda os códigos elétricos locais e nacionais
•
para tamanhos do cabo. Para saber os tamanhos
de cabo máximos, ver capétulo 7.1 Especicações
dependente da potência..
Atenda os requisitos de ação do fabricante do
•
motor.
Não conecte um dispositivo de partida ou de
•
troca de polo (por exemplo, motor Dahlander ou
motor de indução de anel de deslizamento) entre
o sistema de drive e o motor.
5.7.3.1 Cabo de Motor
Ilustração 5.7 Alteração da rotação do motor
Todos os tipos de motores trifásicos assíncronos padrão
podem ser usados com o sistema de drive.
Conecte o motor aos seguintes terminais:
A conguração de fábrica é para rotação no sentido
horário com a saída do sistema de drive conectado da
seguinte maneira:
Número do
terminal
96 Rede elétrica U/T1
97 V/T2
98 W/T3
99 Ponto de aterramento
Tabela 5.10 Terminais do Cabo de Motor
U/T1/96
•
V/T2/97
•
W/T3/98
•
Ponto de aterramento para terminal 99
•
Função
O sentido de rotação pode ser alterado invertendo duas
fases no cabo de motor ou alterando a conguração do
parâmetro 4-10 Sentido de Rotação do Motor.
Vericação da rotação do motor pode ser executada
usando o parâmetro 1-28 Vericação da Rotação do motor e
seguindo a sequência indicada no Ilustração 5.7.
5.7.3.2 Conexões do terminal do motor nos
sistemas de módulo de 2 drives
Ilustração 8.9 e Ilustração 8.10 mostram as conexões do
barramento para sistemas de 2 drives de 6 pulsos e 12
pulsos, respectivamente. Se um design de terminal comum
for utilizado, haverá 1 conjunto de terminais do motor.
28 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Instalação Elétrica Guia de Instalação
AVISO!
MÚLTIPLOS CABOS DE MOTOR
Ao conectar mais de 1 conjunto de terminais do motor,
use o mesmo número, tamanho, e comprimento de
cabos para cada conjunto de terminais. Por exemplo, não
use 1 cabo em um terminal de motor e 2 cabos em outro
terminal do motor.
Conexões de rede
5.8
Existem diversos tipos de sistemas de rede elétrica CA para
alimentação de energia a conversores de frequência. Cada
um afeta as características de EMC do sistema. Os sistemas
TN-S de cinco os são considerados os melhores para EMC,
enquanto o sistema de TI isolado é o menos
recomendável.
1. Meça entre os terminais comuns e o primeiro
ponto comum de uma fase, normalmente os
terminais do motor.
2. Descasque um pedaço do isolamento do cabo
externo.
3. Conecte o o do ponto de aterramento ao
terminal do ponto de aterramento de proteção
mais próximo.
4. Conecte a ação do motor trifásico nos terminais
U/96, V/97 e W/98 usando parafusos M10.
5. Aperte os terminais do motor. Consulte
capétulo 7.9.1 Torques de Aperto dos Terminais.
5.7.3.3 Conexões do terminal do motor nos
sistemas de módulo de 4 drives
Ilustração 8.11 mostra as conexões de barramento de um
sistema de 4 drives. Se um design de terminal comum for
utilizado, haverá 1 conjunto de terminais do motor em
cada gabinete.
AVISO!
MÚLTIPLOS CABOS DE MOTOR
Ao conectar mais de 1 conjunto de terminais do motor,
use o mesmo número, tamanho, e comprimento de
cabos para cada conjunto de terminais. Por exemplo, não
use 1 cabo em um terminal de motor e 2 cabos em outro
terminal do motor.
1. Meça entre os terminais comuns e o primeiro
ponto comum de uma fase, normalmente os
terminais do motor.
2. Descasque um pedaço do isolamento do cabo
externo.
3. Conecte o o do ponto de aterramento ao
terminal do ponto de aterramento de proteção
(ponto de aterramento) mais próximo.
4. Conecte a ação do motor trifásico nos terminais
U/96, V/97 e W/98 usando parafusos M10.
5. Aperte os terminais do motor. Consulte
capétulo 7.9.1 Torques de Aperto dos Terminais.
Tipo de
sistema
Sistemas de
rede elétrica
TN
TN-S Um sistema de cinco os com condutores neutro
TN-C Um sistema de quatro os com um condutor
Sistemas de
rede elétrica
TT
Sistema de
grade IT
Tabela 5.11 Sistemas de rede elétrica CA e características de
EMC
Descrição
Existem dois tipos de sistemas de distribuição de
rede elétrica TN: TN-S e TN-C.
(N) e ponto de aterramento de proteção (PE)
separados. Fornece as melhores propriedades de
EMC e evita a transmissão de interferência.
comum para neutro e ponto de aterramento de
proteção (PE) por todo o sistema. O condutor
neutro e de PE combinado resulta em características de EMC insatisfatórias.
Um sistema de quatro os com um condutor
neutro aterrado e aterramento individual do
sistema de conversor. Apresenta boas características de EMC quando aterrado corretamente.
Um sistema isolado de quatro os com condutor
neutro aterrado ou não através de uma
impedância.
5.8.1 Conexões do Terminal da Rede
Elétrica CA
Ao fazer conexão de rede, observe o seguinte:
Dimensione a ação com base na corrente de
•
entrada do conversor de frequência. Para saber os
tamanhos máximos dos os, consulte
capétulo 7.1 Especicações dependente da
potência..
Atenda os códigos elétricos locais e nacionais
•
para tamanhos do cabo.
5.8.1.1 Conexões do terminal de rede
elétrica em sistemas de módulo de
2 conversores
Ilustração 8.9 e Ilustração 8.10 mostram as conexões do
barramento para sistemas de 2 conversores de 6 pulsos e
12 pulsos, respectivamente.
5 5
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 29

Instalação Elétrica
Se um design de terminal comum for utilizado
•
com um sistema de 2 conversores de 6 pulsos,
haverá 1 conjunto de terminais da rede elétrica.
O design de terminal comum não pode ser
•
utilizado com conexão de rede de 12 pulsos em
sistemas com módulo de 2 conversores. Os cabos
de rede elétrica são conectados diretamente aos
terminais de entrada do conversor.
Há terminais de freio individuais disponíveis em
•
cada módulo de conversor. Conecte um número
igual de cabos recomendados aos terminais de
55
freio individuais.
AVISO!
MÚLTIPLOS CABOS DE REDE ELÉTRICA
Ao conectar mais de 1 conjunto de terminais da rede
elétrica, use o mesmo número, tamanho, e comprimento
de cabos para cada conjunto de terminais. Por exemplo,
não use 1 cabo em um terminal da rede elétrica e 2
cabos em outro terminal da rede elétrica.
1. Meça entre os terminais comuns e o primeiro
ponto comum de uma fase, normalmente os
terminais da rede elétrica.
2. Para módulos de conversor de 12 pulsos, o
conjunto de cabos do primeiro módulo de
conversor conecta ao enrolamento em estrela
secundário do transformador de 12 pulsos. O
conjunto do segundo módulo de conversor
conecta a ação secundária em delta do
transformador de 12 pulsos.
3. Descasque um pedaço do isolamento do cabo
externo.
4. Conecte o o do ponto de aterramento ao
terminal do ponto de aterramento mais próximo.
5. Conecte a ação de rede elétrica trifásica nos
terminais R/91, S/92 e T/93 usando parafusos
M10.
6. Aperte os terminais da rede elétrica. Veja
capétulo 7.9.1 Torques de Aperto dos Terminais.
VLT® Parallel Drive Modules
AVISO!
MÚLTIPLOS CABOS DE REDE ELÉTRICA
Ao conectar mais de 1 conjunto de terminais da rede
elétrica, use o mesmo número, tamanho, e comprimento
de cabos para cada conjunto de terminais. Por exemplo,
não use 1 cabo em um terminal da rede elétrica e 2
cabos em outro terminal da rede elétrica.
1. Meça entre os terminais comuns e o primeiro
ponto comum de uma fase.
1a Para módulos de 6 pulsos, normalmente
são os terminais de rede elétrica.
1b Para módulos do drive de 12 pulsos, o
conjunto de cabos do primeiro gabinete
conecta ao enrolamento secundário em
estrela do transformador de 12 pulsos. O
conjunto do segundo gabinete conecta
ao enrolamento secundário em delta do
transformador de 12 pulsos.
2. Descasque um pedaço do isolamento do cabo
externo.
3. Conecte o o do ponto de aterramento ao
terminal do ponto de aterramento mais próximo.
4. Conecte a ação de rede elétrica trifásica nos
terminais R/91, S/92 e T/93 usando parafusos
M10.
5. Aperte os terminais da rede elétrica. Consulte
capétulo 7.9.1 Torques de Aperto dos Terminais.
5.8.2 Conguração do disjuntor de 12
pulsos
Esta seção descreve como usar um disjuntor de um
sistema de drive de 12 pulsos. Ao usar disjuntores ou
contatores, certique-se de instalar um bloqueio. Quando
estiver instalado, os contatores ou disjuntores devem
fechar para evitar um conjunto de reticadores que não
está funcionando. Consulte Ilustração 8.1 para obter um
diagrama destas conexões.
5.8.1.2 Conexões do terminal de rede
elétrica em sistemas de módulo de
4 drives
Ilustração 8.11 mostra as conexões de barramento de um
sistema de 4 drives. Se um design de terminal comum for
utilizado, haverá 1 conjunto de terminais da rede elétrica
em cada gabinete.
Os contatores ou os disjuntores de rede elétrica
selecionados devem possuir contatos auxiliares NF
indicados como mostrado. Conecte o bloqueio em série
com o interruptor Klixon do freio. Se apenas um contator/
disjuntor fechou, o LCP mostra o erro Falha do IGBT do freio
e não permite que o sistema de drive energize o motor.
Ilustração 8.2 Mostra uma conexão BRF com um disjuntor
de 12 pulsos e bloqueio.
AVISO!
Se o opcional de freio não estiver selecionado, o
interruptor Klixon pode ser ignorado.
30 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Instalação Elétrica Guia de Instalação
AVISO!
O Danfoss não é responsável por qualquer falha ou mau funcionamento no disjuntor/interruptor do contator.
5.8.3 Resistores de Descarga
Há terminais CC comuns positivo e negativo em cada módulo de drive. Se for desejado um tempo mais curto para atingir a
funcionalidade de funcionamento reduzido, conecte o resistor de descarga externa para descarga mais rápida de tensão do
barramento CC. É possível conectar um resistor de descarga em um gabinete adicional através de um contator. O contator
de descarga deve possuir um bloqueio com os contatos NC auxiliares do contator/disjuntor de rede elétrica para evitar uma
descarga quando o sistema de drive for energizado. Ilustração 8.7 Mostra um sistema de 4 drives com conexões do resistor
de descarga.
Baseie a seleção de um resistor de descarga nos níveis de energia e potência fornecidos em Tabela 5.12 para diferentes
tamanhos de potência em ambos os sistemas de 12 e de 6 pulsos.
FC 102
FC 202
FC 302 N450 N500 N560 N630 N710 N800
Módulos de drive necessários
(características nominais HO)
Resistência necessária para reduzir a
tensão CC abaixo de 50 V dentro de
300 s (5 minutos), Ω
Valor nominal da potência do resistor
(W)
Energia dissipada pelo resistor (J) 7773 10365 12956 12956 15547 15547
Tabela 5.12 Resistores de descarga recomendados para os sistemas de drive com alimentação de rede elétrica CA de 380–480 V
FC 102
FC 202
FC 302 N560 N630 N710 N800 N900 N1M0
Módulos de drive necessários
(características nominais HO)
Resistência necessária para reduzir a
tensão CC abaixo de 50 V dentro de
300 s (5 minutos), Ω
Valor nominal da potência do resistor
(W)
Energia dissipada pelo resistor (J) 8819 13229 17638 17638 17638 17638
N500 N560 N630 N710 N800 N1M0
2xN250 4xN160 4xN200 4xN200 4xN250 4xN250
3036 2277 1822 1822 1518 1518
182 242 303 303 363 363
N630 N710 N800 N900 N1M0 N1M2
2xN315 4xN200 4xN250 4xN250 4xN315 4xN315
4571 3047 2285 2285 2285 2285
230 345 459 459 459 459
5 5
Tabela 5.13 Resistores de descarga recomendados para os sistemas de drive com alimentação de rede elétrica CA de 525–690 V
AVISO!
O Danfoss não é responsável por nenhuma falha ou mau funcionamento do resistor ou por nenhuma conexão incorreta
feita pelo instalador.
AVISO!
O o usado com o resistor do freio deve ser duplamente isolado ou ter isolamento reforçado.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 31

Instalação Elétrica
VLT® Parallel Drive Modules
5.9 Instalação da Prateleira de Controle
A prateleira de controle é pré-montada. No entanto, verique suas diversas conexões com relação ao diagrama de conexão.
Ilustração 8.6 mostra as diversas conexões da prateleira de controle.
AVISO!
ORDEM DE CONEXÃO INCORRETA
Se as conexões não forem feitas na ordem correta, os módulos de drive não irão funcionar.
Verique as seguintes conexões:
Conexão do cabo em ta de 44 pinos entre o MDCIC e o cartão de controle.
•
55
Quando usada, a conexão do jumper do Safe Torque O (STO) deve ser feita entre o 12º e o 27º pinos para
•
assegurar a operação adequada do STO.
Conecte o cabo em ta de 44 pinos aos conectores MDCIC na ordem correta.
•
- Para sistemas com 4 módulos de drive, conecte os cabos em ta ao inversor 1, inversor 2, inversor 3 e,
em seguida, ao inversor 4.
- Para sistemas com 2 módulos de drive, conecte os cabos em ta ao inversor 1 e, em seguida, ao inversor
2. Deixe os terminais do inversor 3 e do inversor 4 desconectados.
AVISO!
POSIÇÃO DO CARTÃO DE ESCALA
Se os cartões de escala não forem colocados na ordem correta, os módulos de drive não funcionam.
Coloque o cartão de escala de corrente correspondente em cada conector respectivo.
•
- Para sistemas com 4 módulos de drive, Inversor 1, Inversor 2, Inversor 3 e Inversor 4.
- Para sistemas com 2 módulos de drive, Inversor 1 e Inversor 2. Deixe os conectores Inversor 3 e Inversor 4
desconectados.
Não inverta o cartão de escala de corrente. Verique que o espaçador do PCB está xo na placa MDCIC.
•
Assegure a instalação correta do relé do STO e da fonte de alimentação do trilho DIN. Faça as conexões como
•
mostrado em Ilustração 8.6.
A alimentação externa (100–230 V) deve estar disponível nos terminais 1 e 2 no bloco do terminal.
•
Faça mais vericações para garantir que a ação dos microinterruptores do fusível e os jumpers BRF estão passadas
•
corretamente.
Verique se todos os parafusos nos PCB estão xados.
•
Para assegurar a proteção de EMC adequada, verique se a placa MDCIC está adequadamente anexada à
•
montagem da prateleira de controle.
32 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

130BE745.11
1
3
5
4
2
Instalação Elétrica Guia de Instalação
5.10 Conexões da ação de controle
Certique-se de usar a passagem de o fornecida quando passar os os de controle da parte inferior do gabinete do
sistema de drive para o terminal de controle.
5.10.1 Percurso dos Cabos de Controle
Disposição dos cabos
Passe o cabo dentro dos gabinetes do drive como mostrado em Ilustração 5.8. A passagem de cabos de uma conguração
de dois drives é idêntica, exceto pelo número de módulos de drive utilizados.
5 5
1 Cabo do microinterruptor 4 Cabo em ta de 44 pinos do MDCIC para o módulo de drive 4
2 Núcleo de ferrite 5 Suporte para suportar o cabo em ta
3 Cabo em ta de 44 pinos do MDCIC para módulos de drive
1 e 2
Ilustração 5.8 Percurso dos Cabos de Controle de um sistema de 4 drives
– –
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 33

Instalação Elétrica
VLT® Parallel Drive Modules
5.10.2 Fiação de Controle
Isole a ação de controle dos componentes de alta potência nos módulos do drive.
•
Quando o módulo do drive estiver conectado a um termistor, garanta que a ação de controle do termistor seja
•
blindada e tenha isolamento reforçado/duplo. É recomendável tensão de alimentação de 24 VCC. Consulte
Ilustração 5.9.
AVISO!
MINIMIZAR A INTERFERÊNCIA
Para minimizar a interferência, mantenha os os de controle o mais curto possível e separe-os dos cabos de energia
elevada.
55
Os terminais de controle estão na prateleira de controle, exatamente embaixo do LCP. Os cabos de controle são estendidos
na parte inferior do gabinete.
1. Siga percurso dos cabos de controle designados, como mostrado em capétulo 5.10.1 Percurso dos Cabos de Controle.
2. Fixe todos os os de controle.
3. Garanta a imunidade elétrica ideal conectando adequadamente as blindagens.
Conexão do
Para saber detalhes, consulte as instruções de eldbus relevantes.
1. Siga percurso dos cabos de controle designados, como mostrado em capétulo 5.10.1 Percurso dos Cabos de Controle.
2. Fixe todos os os de controle.
3. Conecte os opcionais relevantes no cartão de controle.
eldbus
34 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

130BE062.10
2
3
4
1
Instalação Elétrica Guia de Instalação
5.10.2.1 Tipos de Terminal de Controle
Ilustração 5.9 mostra os conectores do conversor de frequência removíveis. As funções de terminal e a conguração padrão
estão resumidas em Tabela 5.14. Consulte Ilustração 5.9 para saber a localização dos terminais de controle dentro da
unidade.
5 5
1 Os terminais (+)68 e (-)69 são para uma conexão de comunicação serial RS485.
2 Porta USB disponível para uso com o Software de Setup MCT 10.
3 Duas entradas analógicas, uma saída analógica, tensão de alimentação de 10 V CC e comuns para as entradas e a saída.
4 Quatro terminais de entrada digital programáveis, dois terminais digitais programáveis adicionais de entrada ou de saída, tensão de
alimentação do terminal de 24 V CC e um comum para a tensão opcional de 24 V CC opcional fornecida pelo cliente.
Ilustração 5.9 Locais do Terminal de Controle
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 35

Instalação Elétrica
VLT® Parallel Drive Modules
Terminal número Parâmetro Conguração
padrão
Entradas/saídas digitais
12, 13 – +24 V CC
18 Parâmetro 5-10 Terminal 18 Entrada Digital [8] Partida
19 Parâmetro 5-11 Terminal 19, Entrada
Digital
32 Parâmetro 5-14 Terminal 32, Entrada
Digital
33 Parâmetro 5-15 Terminal 33 Entrada Digital [0] Sem operação
27 Parâmetro 5-12 Terminal 27, Entrada
55
29 Parâmetro 5-13 Terminal 29, Entrada
20 – – Comum para entradas digitais e
37 – Safe Torque O (STO) Entrada segura (opcional). Usado
39 – – Comum para saída analógica Saída
42 Parâmetro 6-50 Terminal 42 Saída Velocidade 0 - limite superior
50 – +10 V CC
53 Grupo do parâmetro 6-1* Entrada
54 Grupo do parâmetro 6-2* Entrada
55 – – Comum para entrada analógica
61 – – Filtro de RC integrado para
68 (+) Grupo do parâmetro 8-3 Denições da
69 (-) Grupo do parâmetro 8-3 Denições da
01, 02, 03 Parâmetro 5-40 Função do Relé [0] [9] Alarme Saída do relé de forma C. Utilizável
04, 05, 06 Parâmetro 5-40 Função do Relé [1] [5] Em funcionamento
Digital
Digital
Entradas/saídas analógicas
analógica 1
Analógica 2
Comunicação serial
Porta do FC
Porta do FC
Relés
[10] Reversão
[0] Sem operação
[2] Parada por inércia inversa Selecionável para entrada ou saída
[14] Jog
Referência Entrada analógica. Selecionável
Feedback
– Interface RS485. Um interruptor do
–
Entradas digitais. Tensão de
alimentação de 24 V CC. A
corrente de saída máxima é 200
mA total, para todas as cargas de
24 V CC. Útil para entradas digitais
e transdutores externos.
digital. A conguração padrão é
entrada.
potencial de 0 V CC para
alimentação de 24 V CC.
para STO.
analógica programável. O sinal
analógico é 0–20 mA ou 4–20 mA
a um máximo de tensão de
alimentação analógica de 500 Ω
10 V CC. Máximo de 15 mA
normalmente usado para o
potenciômetro ou termistor.
para tensão ou corrente. Terminais
A53 e A54 selecione mA ou V.
blindagem do cabo. SOMENTE
para conectar a blindagem quando
surgirem problemas de EMC.
cartão de controle é fornecido
para resistência de terminação.
para tensão CC ou CA e carga
indutiva ou resistiva.
Descrição
Tabela 5.14 Descrição do Terminal
Terminais extras:
Duas saídas do relé de forma C. A localização das saídas depende da conguração do conversor de frequência.
•
Terminais no equipamento integrado opcional. Consulte o manual fornecido com o opcional do equipamento.
•
36 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

130BT306.10
130BE063.10
1
2
3
1
2
N O
Instalação Elétrica Guia de Instalação
5.10.2.2 Fiação para os Terminais de
Controle
Os plugues do terminal podem ser removidos para fácil
acesso.
Ilustração 5.10 Remoção dos Terminais de Controle
5.10.2.3 Ativando a operação do motor
(Terminal 27)
Um o de jumper pode ser necessário entre o terminal 12
(ou 13) e o terminal 27 para o conversor de frequência
operar quando usar valores de programação padrão de
fábrica.
O terminal de entrada digital 27 é projetado para
•
receber comando de bloqueio externo de 24 V
CC.
Quando não for usado um dispositivo de
•
bloqueio, instale um jumper entre o terminal de
controle 12 (recomendado) ou 13 e o terminal 27.
O jumper fornece um sinal interno de 24 V CC no
terminal 27.
Quando a linha de status na parte inferior do LCP
•
indicar PARADA POR INÉRCIA REMOTA
AUTOMÁTICA, indica que a unidade está pronta
para operar, mas há um sinal de entrada ausente
no terminal 27.
Quando um equipamento opcional instalado na
•
fábrica estiver conectado ao terminal 27, não
remova essa ação.
5.10.2.4 Seleção de entrada de tensão/
Os terminais de rede elétrica analógicos 53 e 54 permitem
a conguração do sinal de entrada de tensão (0-10 V CC)
ou de corrente (0/4-20 mA). Consulte Ilustração 5.9 para
saber a localização dos terminais de controle dentro do
sistema de drive.
corrente (Interruptores)
Programações padrão do parâmetro:
Terminal 53: sinal de referência de velocidade em
•
malha aberta (consulte parâmetro 16-61 Denição
do Terminal 53).
Terminal 54: sinal de feedback em malha fechada
•
(ver parâmetro 16-63 Denição do Terminal 54).
AVISO!
REMOVA A ENERGIA
Remova a energia do conversor de frequência antes de
alterar as posições do interruptor
1. Remova o LCP (consulte Ilustração 5.11).
2. Remova qualquer equipamento opcional que
esteja cobrindo os interruptores.
3. Congure os interruptores A53 e A54 para
selecionar o tipo de sinal. U seleciona tensão, I
seleciona corrente.
1 Interruptor de terminação do bus serial
2 Interruptor A54
3 Interruptor A53
Ilustração 5.11 Localizações dos interruptores de terminação
do bus serial e interruptores A53 e A54
5.10.2.5 Comunicação serial RS485
Um eldbus RS485 pode ser usado com o sistema de drive.
Até 32 nós podem ser conectados como barramento ou
por meio de queda de cabos de uma linha tronco comum
para 1 segmento de rede. Repetidores podem ser usados
para dividir segmentos de rede. Cada repetidor funciona
como um nó dentro do segmento em que está instalado.
Cada nó conectado, dentro de uma rede especíca, deve
5 5
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 37

130BC554.12
Relay 1
Relay 2
03
02
240 V AC, 2 A
01
06
05
04
240 V AC, 2 A
400 V AC, 2 A
400 V AC, 2 A
Instalação Elétrica
VLT® Parallel Drive Modules
ter um endereço do nó único ao longo de todos os
segmentos.
Conecte a ação de comunicação serial RS485 aos
•
terminais (+)68 e (-)69.
Faça a terminação de cada segmento nas duas
•
extremidades usando o interruptor de eliminação
(terminação de barramento liga/desliga, consulte
Ilustração 5.11) no módulo de drive ou um
resistor de terminação de rede polarizada.
Conecte uma grande superfície da blindagem ao
•
ponto de aterramento, por exemplo, com uma
55
Cabo Par trançado blindado (STP)
Impedância
Comprimento de cabo máximo
De estação a estação
[m (pé)]
Total incluindo linhas
de queda [m (pé)]
braçadeira de cabo ou uma bucha de cabo
condutiva.
Mantenha o mesmo potencial do ponto de
•
aterramento em toda a rede aplicando cabos de
equalização de potencial.
Impeça incompatibilidade de impedância usando
•
o mesmo tipo de cabo na rede inteira.
120 Ω
500 (1640)
1200 (3937)
O Relé 1 e o relé 2 são programados nos
parâmetro 5-40 Função do Relé, parâmetro 5-41 Atraso de
Ativação do Relé e parâmetro 5-42 Atraso de Desativação do
Relé.
Use o módulo opcional VLT® Placa de relé MCB 105 para
obter saídas de relé adicionais.
Terminal 06: 240 V CA normalmente fechado
•
Tabela 5.15 Informações do cabo
5.10.3 Safe Torque O (STO)
Para executar STO é necessário ação extra para o sistema
de conversor. Consulte VLT® Frequency Converters Safe
Torque O Operating Instructions para obter mais
informações..
Saída do relé
5.11
O terminal de relé está na placa superior do módulo de
drive. Consulte Ilustração 3.1. Use um chicote da ação
estendido para conectar o terminal de relé do módulo de
drive 1 (o módulo de drive na extrema esquerda) aos
blocos de terminal na prateleira de controle.
AVISO!
Para referência, os módulos de drive são numerados da
esquerda para a direita.
Relé 1
•
•
•
Relé 2
•
•
Terminal 01: Comum
Terminal 02: 400 V CA normalmente aberto
Terminal 03: 240 V CA normalmente fechado
Terminal 04: Comum
Terminal 05: 400 V CA normalmente aberto
Ilustração 5.12 Saídas do Relé Adicionais
Recomendações de EMC
5.12
A seguir encontra-se uma orientação de boas práticas de
engenharia para a instalação de conversores de frequência.
Siga estas diretrizes em conformidade com EN/IEC 61800-3
Ambiente inicial. Se a instalação estiver em EN/IEC 61800-3
Segundo ambiente, redes industriais ou em uma instalação
com seu próprio transformador, desviar-se destas diretrizes
é permitido, mas não recomendável.
Siga as boas práticas de engenharia para garantir
instalação elétrica em conformidade com a EMC.
Use somente cabos de motor blindados/
•
trançados e cabos de controle blindados/
trançados. A blindagem fornece uma cobertura
mínima de 80%. O material de blindagem deve
ser metálico, normalmente de cobre, alumínio,
aço ou chumbo, mas também de outros
38 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Instalação Elétrica Guia de Instalação
materiais. Não há requisitos especiais para os
cabos de rede elétrica.
As instalações que usam conduítes metálicos
•
rígidos não precisam usar cabo blindado, mas o
cabo de motor deve ser instalado em conduíte
separado dos cabos de rede elétrica e de
controle. É necessário haver conexão total do
conduíte do conversor de frequência ao motor. O
desempenho de EMC dos conduítes exíveis varia
muito e é necessário obter informações do
fabricante a esse respeito.
Conecte o conduíte de blindagem ao ponto de
•
aterramento nas duas extremidades dos cabos de
motor e dos cabos de controle. Às vezes não é
possível conectar a blindagem nas duas
extremidades. Nesses casos, conecte a blindagem
ao conversor de frequência. Consulte também a
capétulo 5.12.2 Aterramento de Cabos de Controle
Blindados.
Evite terminação da blindagem com extremidades
•
torcidas (rabichos). Isso aumenta a impedância de
alta frequência da blindagem, o que reduz sua
ecácia em altas frequências. Ao invés disso, use
braçadeiras de cabos de baixa impedância ou
buchas de cabo próprias para EMC.
Sempre que possível, evite usar cabos de controle
•
ou cabo de motor sem blindagem dentro de
gabinetes que abrigam o conversor de
frequência.
Deixe a blindagem tão próxima das buchas quanto
possível.
Ilustração 5.13 mostra um exemplo de uma instalação
elétrica em conformidade com a EMC de um conversor de
frequência IP20. O conversor de frequência está instalado
em um gabinete de instalação, com um contator de saída,
e conectado a um PLC que, neste exemplo, está instalado
em um gabinete separado. Outras maneiras de fazer a
instalação podem proporcionar desempenho de EMC tão
bom quanto este, desde que sejam seguidas as orientações
para as práticas de engenharia.
Se a instalação não for executada de acordo com as
orientações e se forem usados cabos e
sem blindagem, alguns requisitos de emissão não serão
atendidos, embora os requisitos de imunidade sejam
atendidos.
os de controle
5 5
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 39

Instalação Elétrica
VLT® Parallel Drive Modules
55
Ilustração 5.13 Instalação elétrica em conformidade com a EMC de um conversor de frequência em gabinete
40 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Instalação Elétrica Guia de Instalação
5.12.1 Uso dos Cabos de Controle de Aterramento
A Danfoss recomenda cabo blindado/encapado metalicamente trançado para otimizar a imunidade EMC dos cabos de
controle e a Emissão EMC dos cabos de motor.
A capacidade de um cabo reduzir a radiação de entrada e de saída do ruído elétrico depende da impedância de transferência (ZT). A blindagem de um cabo normalmente é projetada para reduzir a transferência do ruído elétrico. entretanto,
uma blindagem com valor de impedância de transferência (ZT) mais baixa é mais ecaz que uma blindagem com
impedância de transferência (ZT) mais alta.
A impedância de transferência (ZT) raramente é informada pelos fabricantes de cabos, mas geralmente é possível estimar a
impedância de transferência (ZT) avaliando o projeto físico do cabo, como:
A condutibilidade do material de blindagem.
•
A resistência de contato entre os condutores de blindagem individuais.
•
A cobertura da blindagem, que é a área física do cabo coberta pela blindagem, geralmente indicada como uma
•
porcentagem.
Tipo de blindagem, que é padrão trançado ou entrelaçado.
•
5 5
a Cobertura de alumínio com o de cobre.
b Cabo de o de cobre trançado ou de o de aço blindado.
c Fio de cobre trançado de camada única com cobertura de malha de porcentagem variável (esse tipo de cabo é o cabo de
referência típico da Danfoss).
d Camada dupla de o de cobre trançado.
e Camada dupla de o de cobre trançado com camada intermediária magnética blindada/encapada metalicamente.
f Cabo embutido em tubo de cobre ou aço.
g Cabo de chumbo com espessura de parede de 1,1 mm (0,04 pol).
Ilustração 5.14 Desempenho da blindagem do cabo
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 41

1
2
PE
FC
PE
PLC
130BB922.12
PE PE
<10 mm
100nF
FC
PE
PE
PLC
<10 mm
130BB609.12
PE
FC
PE
FC
130BB923.12
PE PE
69
68
61
69
68
61
1
2
<10 mm
PE
FC
PE
FC
130BB924.12
PE PE
69
69
68
68
1
2
<10 mm
Instalação Elétrica
VLT® Parallel Drive Modules
5.12.2 Aterramento de Cabos de Controle
Blindados
Como alternativa, a conexão com o terminal 61 pode ser
omitida:
Blindagem correta
O método preferido na maioria dos casos é prender os
cabos de controle e de comunicação serial com
braçadeiras de blindagem fornecidas nas duas
extremidades para garantir o melhor contato possível dos
cabos de alta frequência. Se o potencial do ponto de
aterramento entre o conversor de frequência e o PLC for
1
Mínimo 16 mm2 (4 AWG)
2 Cabo de equalização
diferente, pode ocorrer ruído elétrico que perturba todo o
sistema. Esse problema pode ser resolvido instalando um
55
cabo de equalização junto ao cabos de controle. Mínima
Ilustração 5.18 Blindagem sem usar Terminal 61
seção transversal do cabo: 16 mm2 (4 AWG).
1
Mínimo 16 mm2 (4 AWG)
Ilustração 5.15 Blindagem correta
2 Cabo de equalização
Malhas de aterramento de 50/60 Hz
Com cabos de controle longos, poderão ocorrer malhas de
aterramento. Para eliminar malhas de aterramento, conecte
uma extremidade da blindagem ao ponto de aterramento
com um capacitor de 100 nF (mantendo os cabos curtos).
Ilustração 5.16 Evitando malha de aterramento
Evite ruído de EMC na comunicação serial
Esse terminal está conectado ao ponto de aterramento por
meio de um link RC interno. Para reduzir a interferência
entre condutores, utilize cabos de par trançado.
1
Mínimo 16 mm2 (4 AWG)
2 Cabo de equalização
Ilustração 5.17 Método recomendado para evitar ruído de EMC
42 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Partida Inicial Guia de Instalação
6 Partida Inicial
6.1 Lista de Vericação de Pré-partida
Antes de concluir a instalação da unidade, inspecione a instalação por completo, como está detalhado na Tabela 6.1. Marque
os itens na lista de vericação quando estiverem concluídos.
Inspecionar Descrição
Equipamento
auxiliar
Disposição dos
cabos
Fiação de controle
Espaço para
ventilação
Condições ambiente•Verique se os requisitos para as condições ambiente foram atendidos.
Fusíveis e
disjuntores
Aterramento
Fiação da energia
de entrada e de
saída
Interior do painel
Chaves
Vibração
Procure equipamento auxiliar, interruptores, desconexões, ou fusíveis/disjuntores de entrada que possam
•
estar no lado da entrada de energia do sistema de conversor ou no lado da saída do motor. Certique-se
de que estão prontos para operação em velocidade total.
Verique a função e a instalação dos sensores usados para feedback ao sistema de conversor.
•
Remova os capacitores de correção do fator de potência do(s) motor(es).
•
Ajuste os capacitores de correção do fator de potência no lado da rede elétrica e assegure que estejam
•
amortecidos.
Assegure que a ação do motor e a ação de controle estejam separadas ou blindadas ou em três
•
conduítes metálicos separados para isolamento de interferência de alta frequência
Verique se há os partidos ou danicados e conexões soltas.
•
Verique se a ação de controle está isolada da ação do motor e de potência para imunidade de ruído.
•
Verique a fonte de tensão dos sinais, caso necessário.
•
Recomenda-se o uso de cabo blindado ou de par trançado. Garanta que a blindagem esteja com
•
terminação correta.
Verique se o fusível do barramento CC e os dispositivos de microinterruptor estão corretos. Verique o
•
cabeamento do microinterruptor e os conectores na parte superior do módulo de conversor.
Verique se há 225 mm (9 pol) de espaço livre para resfriamento adequado.
•
Verique se os fusíveis e os disjuntores estão corretos.
•
Verique se todos os fusíveis estão rmemente encaixados e em condição operacional e se todos os
•
disjuntores estão na posição aberta.
Verique se as conexões do terra estão apertadas e sem oxidação.
•
Ponto de aterramento em conduíte ou montagem do painel traseiro em uma superfície metálica não é
•
ponto de aterramento adequado.
Verique se há conexões soltas.
•
Verique se o motor e a rede elétrica estão em conduítes separados ou em cabos blindados separados.
•
Verique se as blindagens estão aterradas corretamente.
•
Verique se as conexões do barramento CC estão feitas corretamente.
•
Inspecione se o interior da unidade está isento de sujeira, lascas metálicas, umidade e corrosão.
•
Verique se a unidade está montada em uma superfície metálica não pintada.
•
Garanta que todas as chaves e congurações de desconexão estão nas posições corretas.
•
Verique se a unidade está montada de maneira sólida e se estão sendo usadas montagens de choque, se
•
necessário.
Verique se há volume incomum de vibração.
•
☑
6
6
Tabela 6.1 Lista de Vericação de Instalação
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 43

6
Partida Inicial
VLT® Parallel Drive Modules
CUIDADO
RISCO POTENCIAL NO CASO DE FALHA
INTERNA
Há risco de ferimentos pessoais quando os módulos de
conversor não estiverem fechados corretamente.
Antes de aplicar potência, assegure que todas
•
as tampas de segurança estão no lugar e bem
presas.
6.2 Instruções de Segurança
Ver capétulo 2 Segurança para obter instruções gerais de
segurança.
ADVERTÊNCIA
ALTA TENSÃO
O sistema de conversores contém alta tensão quando
conectado à energia de entrada de rede elétrica CA,
alimentação CC ou Load Sharing. Deixar de realizar a
instalação, inicialização e manutenção por pessoal
qualicado pode resultar em morte ou lesões graves.
Antes de aplicar potência:
1. Assegure que a potência de entrada da unidade
esteja OFF (desligada) e bloqueada. Não cone
nas chaves de desconexão do sistema de
conversores para isolamento da energia de
entrada.
2. Verique se não há tensão nos terminais de rede
elétrica L1 (91), L2 (92) e L3 (93), de fase para
fase e de fase para o ponto de aterramento.
3. Verique se não há tensão nos terminais do
motor 96 (U), 97 (V) e 98 (W), de fase para fase e
de fase para o ponto de aterramento.
4. Conrme a continuidade do motor medindo os
valores de resistência em U–V (96–97), V–W (97–
98) e W–U (98–96).
5. Verique o aterramento correto do sistema de
conversores e do motor.
6. Verique se há conexões soltas nos terminais do
sistema de conversores.
7. Conrme se a tensão de alimentação corresponde
à tensão do sistema de conversores e do motor.
Aplicando Potência
6.3
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o sistema de conversores estiver conectado à
rede elétrica CA, o motor pode dar partida a qualquer
momento. Partida acidental durante a programação,
serviço ou serviço de manutenção pode resultar em
morte, ferimentos graves ou danos à propriedade. O
motor pode ser acionado por uma das seguintes
maneiras:
Uma chave externa.
•
Um comando da eldbus.
•
Um sinal de referência de entrada do LCP
•
Uma condição de falha eliminada.
•
Operação remota utilizando Software de Setup
•
MCT 10.
Para impedir a partida do motor:
Desconecte o conversor de frequência da rede
•
elétrica CA.
Pressione [O/Reset] no LCP, antes de
•
programar parâmetros.
O sistema do conversor de frequência, o motor
•
e qualquer equipamento acionado deverão
estar totalmente conectados e montados
quando o conversor for conectado à rede
elétrica CA.
Aplique energia ao sistema de conversores, de acordo com
as seguintes etapas:
1. Conrme se a tensão de entrada está balanceada
dentro de 3%. Se não estiver, corrija o desbalanceamento da tensão de entrada antes de
continuar. Repita este procedimento após a
correção da tensão.
2. Certique-se de que a ação do equipamento
opcional corresponde à aplicação da instalação.
3. Certique-se de que todos os dispositivos do
operador estão na posição OFF (desligado).
4. Feche todas as portas do painel e aperte bem
todas as tampas.
5. Aplique energia ao sistema de conversores. NÃO
dê partida no sistema de conversores agora. Para
unidades com chave de desconexão, vire a chave
para a posição Ligado para aplicar energia no
sistema de conversores.
44 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

130BE712.10
Auto
on
Reset
Hand
on
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
On
Alarm
Warn.
1
3
2
Partida Inicial Guia de Instalação
6.4 Congurando o Sistema de Drive
Antes de o sistema de conversor car totalmente funcional
é necessário congurar a unidade no painel de controle
local (LCP). A etiqueta do sistema de conversor do nível
superior é necessária para as etapas a seguir. Veja
Ilustração 4.1.
1. Aplique energia. Na energização, o display do LCP
mostra alarme 250, Peça de reposição nova.
2. Pressione [Main Menu] (Menu Principal) duas
vezes no LCP. Veja Ilustração 6.1.
3. Pressione as teclas de navegação e a tecla [OK]
para navegar até o grupo do parâmetro 14-**
Funções especiais. Em seguida, role para
parâmetro 14-23 Progr CódigoTipo.
6
6
4. Role pelo submenu para corresponder os 39
caracteres no código de tipo para 20 índices do
grupo. Veja Tabela 6.2. Pressione [OK] para inserir
o valor.
5. No número de índice 20, selecione Salvar na
EEPROM e pressione [OK]. Quando o sistema
terminar gravar os dados na EEPROM, o display
mostra Sem função.
6. Remova a energia para o sistema de conversor e,
em seguida, ligue a energia novamente. Pressione
[RESET] para limpar o alarme.
1 Display do LCP
2 Tecla [Main Menu]
3 Luz indicadora de energia Ligada
AVISO!
CÓDIGO DO TIPO INCORRETO INSERIDO
Se o código do tipo errado for inserido, role até
parâmetro 14-29 Código de Service e insira 00006100.
Desta etapa permite acesso a parâmetro 14-23 Progr
CódigoTipo para inserir novamente o código do tipo.
Ilustração 6.1 Painel de Controle Local (LCP)
Índice Descrição Unidades de código do tipo
[0] Grupo de produto 1–3
[1] Série 4–6
[2] Potência 7–10
[3] Tensão 11–12
[4] Gabinete metálico 13–15
[5] Filtro de RFI 16–17
[6] Freio e parada 18
[7] Display. 19
[8] Revestimento 20
[9] Opções de rede elétrica 21
[10] Adaptação A 22
[11] Adaptação B 23
[12] Software 24–27
[13] Idioma 28
[14] Opcionais A 29–30
[15] Opcionais B 31–32
[16] Opcionais C0 33–34
[17] Opcionais C1 35
[18] Opcionais C 36–37
[19] Opcionais D 38–39
Tabela 6.2 Índice de código do tipo
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 45

6
Partida Inicial
VLT® Parallel Drive Modules
6.5 Testando a Operação do Motor
1. Pressione [Main Menu] (Menu Principal) duas
vezes no LCP.
2. Pressione as teclas de navegação e a tecla [OK]
para navegar até o grupo do parâmetro 1-** Carga
e Motor e pressione [OK].
3. Navegue para parâmetro 1-23 Freqüência do Motor
e insira a frequência da plaqueta de identicação
do motor.
4. Navegue para parâmetro 1-23 Freqüência do Motor
e insira a corrente da plaqueta de identicação
do motor.
5. Navegue para parâmetro 1-25 Velocidade nominal
do motor e insira a velocidade da plaqueta de
identicação do motor.
6. Pressione [Status] para retornar ao display
operacional.
7. Pressione [Hand On].
8.
Pressione [▲] para acelerar o motor.
9.
Pressione [▼] para desacelerar o motor.
10. Pressione [O] (Desligar).
46 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
7 Especicações
7.1 Especicações dependente da potência.
7.1.1
Drive HVAC VLT® FC 102
Faixa de potência N315 N355 N400 N450 N500
Módulos de drive 2 2 2 2 2
Conguração do reticador
Carga alta/normal NO NO NO NO NO
Corrente de saída [A]
Contínua (a 380-440 V) 588 658 745 800 880
Intermitente ( 60 s sobrecarga) a 400 V 647 724 820 880 968
Contínua (a 460/500 V) 535 590 678 730 780
Intermitente ( 60 s sobrecarga) a 460/500 V 588 649 746 803 858
Corrente de entrada [A]
Contínua (a 400 V) 567 647 733 787 875
Contínua (a 460/500 V) 516 580 667 718 759
Perdas de energia [W]
Módulos de drive a 400 V 5825 6110 7069 7538 8468
Módulos de drive a 460 V 4998 5964 6175 6609 7140
Barramentos CA a 400 V 550 555 561 565 575
Barramentos CA a 460 V 548 551 556 560 563
Barramentos CC durante a regeneração 93 95 98 101 105
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica 4x120 (250) 4x150 (300)
Motor 4x120 (250) 4x150 (300)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos máximos
Conguração de 6 pulsos – – – – 600 V, 1600 A
Conguração de 12 pulsos 700 A, 600 V –
1)
4x120 (250)
12 pulsos 6 pulsos/12
pulsos
4x150 (300)
6x120 (250)
7 7
Tabela 7.1 FC 102, alimentação de rede elétrica CA de 380–480 V (sistema de 2 drives)
1) Se o kit de barramento Danfoss for utilizado.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 47

Especicações
Faixa de potência N560 N630 N710 N800 N1M0
Módulos de drive 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal NO NO NO NO NO
Corrente de saída [A]
Contínua (a 380-440 V) 990 1120 1260 1460 1720
Intermitente ( 60 s sobrecarga) a 400 V 1089 1232 1386 1606 1892
Contínua (a 460/500 V) 890 1050 1160 1380 1530
Intermitente ( 60 s sobrecarga) a 460/500 V 979 1155 1276 1518 1683
Corrente de entrada [A]
Contínua (a 400 V) 964 1090 1227 1422 1675
Contínua (a 460/500 V) 867 1022 1129 1344 1490
Perdas de energia [W]
Módulos de drive a 400 V 8810 10199 11632 13253 16463
Módulos de drive a 460 V 7628 9324 10375 12391 13958
Barramentos CA a 400 V 665 680 695 722 762
Barramentos CA a 460 V 656 671 683 710 732
77
Barramentos CC durante a regeneração 218 232 250 276 318
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica 4x185 (350) 8x120 (250)
Motor 4x185 (350) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos máximos
Conguração de 6 pulsos 600 V,
Conguração de 12 pulsos 600 V, 700 A 600 V, 900 A 600 V,
1)
VLT® Parallel Drive Modules
6x120 (250) 8x120 (250) 8x150 (300) 10x150 (300)
600 V, 2000 A 600 V, 2500 A
1600 A
1500 A
Tabela 7.2 FC 102, alimentação de rede elétrica CA de 380–480 V (sistema de 4 drives)
1) Se o kit de barramento Danfoss for utilizado.
48 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
Faixa de potência N315 N400 N450 N500 N560 N630
Módulos de drive 2 2 2 2 2 2
Conguração do reticador 12 pulsos
Carga alta/normal NO NO NO NO NO NO
Corrente de saída [A]
Contínua (a 550 V) 360 418 470 523 596 630
Intermitente (60 s sobrecarga) a 550 V 396 360 517 575 656 693
Contínua (a 575/690 V) 344 400 450 500 570 630
Intermitente (60 s sobrecarga) a 575/690 V 378 440 495 550 627 693
Corrente de entrada [A]
Contínua (a 550 V) 355 408 453 504 574 607
Contínua (a 575 V) 339 490 434 482 549 607
Contínua (a 690 V) 352 400 434 482 549 607
Perdas de energia [W]
Módulos de drive a 575 V 4401 4789 5457 6076 6995 7431
Módulos de drive a 690 V 4352 4709 5354 5951 6831 7638
Barramentos CA a 575 V 540 541 544 546 550 553
Barramentos CC durante a regeneração 88 88,5 90 91 186 191
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica 2x120 (250) 4x120 (250)
Motor 2x120 (250) 4x120 (250)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos
máximos
1)
4x120 (250)
700 V, 550 A 700 V, 630 A
7 7
Tabela 7.3 FC 102, alimentação de rede elétrica CA de 525–690 V (sistema de 2 drives)
1) Se o kit de barramento Danfoss for utilizado.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 49

Especicações
Faixa de potência N710 N800 N900 N1M0 N1M2
Módulos de drive 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal NO NO NO NO NO
Corrente de saída [A]
Contínua (a 550 V) 763 889 988 1108 1317
Intermitente (60 s sobrecarga) a 550 V 839 978 1087 1219 1449
Contínua (a 575/690 V) 730 850 945 1060 1260
Intermitente (60 s sobrecarga) a 575/690 V 803 935 1040 1166 1590
Corrente de entrada [A]
Contínua (a 550 V) 743 866 962 1079 1282
Contínua (a 575 V) 711 828 920 1032 1227
Contínua (a 690 V) 711 828 920 1032 1227
Perdas de energia [W]
Módulos de drive a 575 V 8683 10166 11406 12852 15762
Módulos de drive a 690 V 8559 9996 11188 12580 15358
Barramentos CA a 575 V 644 653 661 672 695
77
Barramentos CC durante a regeneração 198 208 218 231 256
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica 4x120 (250) 6x120 (250) 8x120 (250)
Motor 4x120 (250) 6x120 (250) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos máximos
Conguração de 6 pulsos 700 V, 1600 A 700 V, 2000 A
Conguração de 12 pulsos 700 V, 900 A 700 V, 1500 A
1)
VLT® Parallel Drive Modules
4x150 (300) 6x120 (250) 6x150 (300) 8x120 (250)
Tabela 7.4 FC 102, alimentação de rede elétrica CA de 525–690 V (sistema de 4 drives)
1) Se o kit de barramento Danfoss for utilizado.
50 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
7.1.2
VLT® AQUA Drive FC 202
Faixa de potência N315 N355 N400 N450 N500
Módulos de drive 2 2 2 2 2
Conguração do reticador 12 pulsos 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 400 V) 480 588 600 658 658 745 695 800 810 880
Intermitente ( 60 s sobrecarga) a 400V720 647 900 724 987 820 1043 880 1215 968
Contínua (a 460/500 V) 443 535 540 590 590 678 678 730 730 780
Intermitente ( 60 s sobrecarga) a
460/500 V
Corrente de entrada [A]
Contínua (a 400 V) 463 567 590 647 647 733 684 787 779 857
Contínua (a 460/500 V) 427 516 531 580 580 667 667 718 711 759
Perdas de energia [W]
Módulos de drive a 400 V 4505 5825 5502 6110 6110 7069 6375 7538 7526 8468
Módulos de drive a 460 V 4063 4998 5384 5964 5271 6175 6070 6609 6604 7140
Barramentos CA a 400 V 545 550 551 555 555 561 557 565 566 575
Barramentos CA a 460 V 543 548 548 551 551 556 556 560 560 563
Barramentos CC durante a
regeneração
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica 4x120 (250) 4x150 (300)
Motor 4x120 (250) 4x150 (300)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos – – – – 600 V, 1600 A
Conguração de 12 pulsos 600 V, 700 A 600 V, 900 A
2
1)
665 588 810 649 885 746 1017 803 1095 858
93 93 95 95 98 98 101 101 105 105
4x120 (250)
6x120 (250) 6x120 (250)
7 7
Tabela 7.5 FC 202, alimentação de rede elétrica CA de 380–480 V (sistema de 2 drives)
1) Se o kit de barramento Danfoss for utilizado.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 51

Especicações
Faixa de potência N560 N630 N710 N800 N1M0
Módulos de drive 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 400 V) 880 990 990 1120 1120 1260 1260 1460 1460 1720
Intermitente ( 60 s sobrecarga) a 400V1320 1089 1485 1232 1680 1386 1890 1606 2190 1892
Contínua (a 460/500 V) 780 890 890 1050 1050 1160 1160 1380 1380 1530
Intermitente ( 60 s sobrecarga) a
460/500 V
Corrente de entrada [A]
Contínua (a 400 V) 857 964 964 1090 1090 1227 1127 1422 1422 1675
Contínua (a 460 V) 759 867 867 1022 1022 1129 1129 1344 1344 1490
Perdas de energia [W]
Módulos de drive a 400 V 7713 8810 8918 10199 10181 11632 11390 13253 13479 16463
Módulos de drive a 460 V 6641 7628 7855 9324 9316 10375 12391 12391 12376 13958
77
Barramentos CA a 400 V 655 665 665 680 680 695 695 722 722 762
Barramentos CA a 460 V 647 656 656 671 671 683 683 710 710 732
Barramentos CC durante a
regeneração
2
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica 4x185 (350) 8x125 (250)
Motor 4x185 (350) 8x125 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos 600 V, 1600 A 600 V, 2000 A 600 V, 2500 A
Conguração de 12 pulsos 600 V, 900 A 600 V, 1500 A
1)
VLT® Parallel Drive Modules
1170 979 1335 1155 1575 1276 1740 1518 2070 1683
218 218 232 232 250 250 276 276 318 318
6x125 (250)
8x125 (250) 8x150 (300) 10x150 (300)
Tabela 7.6 FC 202, alimentação de rede elétrica CA de 380–480 V (sistema de 4 drives)
1) Se o kit de barramento Danfoss for utilizado.
52 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
Faixa de potência N315 N400 N450
Módulos de drive 2 2 2
Conguração do reticador 12 pulsos
Carga alta/normal HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 550 V) 303 360 360 418 395 470
Intermitente (60 s sobrecarga) a 550 V 455 396 560 460 593 517
Contínua (a 575/690 V) 290 344 344 400 380 450
Intermitente (60 s sobrecarga) a 575/690 V 435 378 516 440 570 495
Corrente de entrada [A]
Contínua (a 550 V) 299 355 355 408 381 453
Contínua (a 575 V) 286 339 339 490 366 434
Contínua (a 690 V) 296 352 352 400 366 434
Perdas de energia [W]
Módulos de drive a 575 V 3688 4401 4081 4789 4502 5457
Módulos de drive a 690 V 3669 4352 4020 4709 4447 5354
Barramentos CA a 575 V 538 540 540 541 540 544
Barramentos CC durante a regeneração 88 88 89 89 90 90
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica 2x120 (250) 4x120 (250)
Motor 2x120 (250) 4x120 (250)
Freio 4x70 (2/0)
Terminais de regeneração
Fusíveis da rede elétrica externos máximos 700 V, 550 A
1)
4x120 (250)
7 7
Tabela 7.7 FC 202, alimentação de rede elétrica CA de 525–690 V (sistema de 2 drives)
1) Se o kit de barramento Danfoss for utilizado.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 53

Especicações
Faixa de potência N500 N560 N630
Módulos de drive 2 2 2
Conguração do reticador 12 pulsos
Carga alta/normal HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 550 V) 429 523 523 596 596 630
Intermitente (60 s sobrecarga) a 550 V 644 575 785 656 894 693
Contínua (a 575/690 V) 410 500 500 570 570 630
Intermitente (60 s sobrecarga) a 575/690 V 615 550 750 627 627 693
Corrente de entrada [A]
Contínua (a 550 V) 413 504 504 574 574 607
Contínua (a 575 V) 395 482 482 549 549 607
Contínua (a 690 V) 395 482 482 549 549 607
Perdas de energia [W]
Módulos de drive a 575 V 4892 6076 6016 6995 6941 7431
Módulos de drive a 690 V 4797 5951 5886 6831 6766 7638
Barramentos CA a 575 V 542 546 546 550 550 553
77
Barramentos CC durante a regeneração 91 91 186 186 191 191
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica 4x120 (250)
Motor 4x120 (250)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos máximos 700 V, 630 A
1)
VLT® Parallel Drive Modules
4x120 (250)
Tabela 7.8 FC 202, alimentação de rede elétrica CA de 525–690 V (sistema de 2 drives)
1) Se o kit de barramento Danfoss for utilizado.
54 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
Faixa de potência N710 N800 N900 N1M0 N1M2
Módulos de drive 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 550 V) 659 763 763 889 889 988 988 1108 1108 1317
Intermitente (60 s sobrecarga) a 550V989 839 1145 978 1334 1087 1482 1219 1662 1449
Contínua (a 575/690 V) 630 730 730 850 850 945 945 1060 1060 1260
Intermitente (60 s sobrecarga) a
575/690 V
Corrente de entrada [A]
Contínua (a 550 V) 642 743 743 866 866 962 1079 1079 1079 1282
Contínua (a 575 V) 613 711 711 828 828 920 1032 1032 1032 1227
Contínua (a 690 V) 613 711 711 828 828 920 1032 1032 1032 1227
Perdas de energia [W]
Módulos de drive a 575 V 7469 8683 8668 10166 10163 11406 11292 12852 12835 15762
Módulos de drive a 690 V 7381 8559 8555 9996 9987 11188 11077 12580 12551 15358
Barramentos CA a 575 V 637 644 644 653 653 661 661 672 672 695
Barramentos CC durante a
regeneração
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica 4x120 (250) 6x120 (250) 8x120 (250)
Motor 4x120 (250) 6x120 (250) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos 700 V, 1600 A 700 V, 2000 A
Conguração de 12 pulsos 700 V, 900 A 700 V, 1500 A
2
1)
945 803 1095 935 1275 1040 1418 1166 1590 1590
198 198 208 208 218 218 231 231 256 256
4x150 (300)
6x120 (250) 6x150 (300) 8x120 (250)
7 7
Tabela 7.9 FC 202, alimentação de rede elétrica CA de 525–690 V (sistema de 4 drives)
1) Se o kit de barramento Danfoss for utilizado.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 55

Especicações
7.1.3
VLT® AutomationDrive FC 302
Faixa de potência N250 N315 N355 N400 N450
Módulos de drive 2 2 2 2 2
Conguração do reticador
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 380-440 V) 480 588 600 658 658 745 695 800 810 880
Intermitente ( 60 s sobrecarga) a 400
V
Contínua (a 460/500 V) 443 535 540 590 590 678 678 730 730 780
Intermitente ( 60 s sobrecarga) a
460/500 V
Corrente de entrada [A]
Contínua (a 400 V) 463 567 590 647 647 733 684 787 779 857
Contínua (a 460/500 V) 427 516 531 580 580 667 667 718 711 759
77
Perdas de energia [W]
Módulos de drive a 400 V 4505 5825 5502 6110 6110 7069 6375 7538 7526 8468
Módulos de drive a 460 V 4063 4998 5384 5964 5721 6175 6070 6609 6604 7140
Barramentos CA a 400 V 545 550 551 555 555 561 557 565 566 575
Barramentos CA a 460 V 543 548 548 551 556 556 556 560 560 563
2
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica 4x120 (250) 4x150 (300)
Motor 4x120 (250) 4x150 (300)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos – – – – 600 V, 1600 A
Conguração de 12 pulsos 600 V, 700 A 600 V, 900 A
1)
VLT® Parallel Drive Modules
12 pulsos 6 pulsos/12
pulsos
720 647 900 724 987 820 1043 880 1215 968
665 588 810 649 885 746 1017 803 1095 858
4x120 (250) 4x150 (300) 6x120 (250)
Tabela 7.10 FC 302, alimentação de rede elétrica CA 380–500 V (sistema de 2 drives)
1) Se o kit de barramento Danfoss for utilizado.
56 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
Faixa de potência N500 N560 N630 N710 N800
Módulos de drive 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 380-440 V) 880 990 990 1120 1120 1260 1260 1460 1460 1720
Intermitente ( 60 s sobrecarga) a 400 V 1320 1089 1485 1232 1680 1386 1890 1606 2190 1892
Contínua (a 460/500 V) 780 890 890 1050 1050 1160 1160 1380 1380 1530
Intermitente ( 60 s sobrecarga) a 460/500 V 1170 979 1335 1155 1575 1276 1740 1518 2070 1683
Corrente de entrada [A]
Contínua (a 400 V) 857 964 964 1090 1090 1227 1227 1422 1422 1675
Contínua (a 460/500 V) 759 867 867 1022 1022 1129 1129 1344 1344 1490
Perdas de energia [W]
Módulos de drive a 400 V 7713 8810 8918 10199 10181 11632 11390 13253 13479 16463
Módulos de drive a 460 V 6641 7628 7855 9324 9316 10375 12391 12391 12376 13958
Barramentos CA a 400 V 655 665 665 680 680 695 695 722 722 762
Barramentos CA a 460 V 647 656 656 671 671 683 683 710 710 732
Barramentos CC durante a regeneração 218 218 232 232 250 276 276 276 318 318
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica 4x185 (350) 8x120 (250)
Motor 4x185 (350) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos máximos
Conguração de 6 pulsos 600 V, 1600 A 600 V, 2000 A 600 V, 2500 A
Conguração de 12 pulsos 600 V, 900 A 600 V, 1500 A
1)
6x125 (250) 8x125 (250) 8x150 (300) 10x150 (300)
7 7
Tabela 7.11 FC 302, alimentação de rede elétrica CA 380–500 V (sistema de 4 drives)
1) Se o kit de barramento Danfoss for utilizado.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 57

Especicações
Faixa de potência N250 N315 N355 N400
Módulos de drive 2 2 2 2
Conguração do reticador 12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 550 V) 303 360 360 418 395 470 429 523
Intermitente (60 s sobrecarga) a 550 V 455 396 560 360 593 517 644 575
Contínua (a 575/690 V) 290 344 344 400 380 450 410 500
Intermitente (60 s sobrecarga) a 575/690
V
Corrente de entrada [A]
Contínua (a 550 V) 299 355 355 408 381 453 413 504
Contínua (a 575 V) 286 339 339 490 366 434 395 482
Contínua (a 690 V) 296 352 352 400 366 434 395 482
Perdas de energia [W]
Módulos de drive a 600 V 3688 4401 4081 4789 4502 5457 4892 6076
Módulos de drive a 690 V 3669 4352 4020 4709 4447 5354 4797 5951
77
Barramentos CA a 575 V 538 540 540 541 540 544 542 546
Barramentos CC durante a regeneração 88 88 89 89 90 90 91 91
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica 2x120 (250) 4x120 (250)
Motor 2x120 (250) 4x120 (250)
Freio 4x70 (2/0)
Terminais de regeneração
Fusíveis da rede elétrica externos
máximos
2
1)
VLT® Parallel Drive Modules
435 378 516 440 570 495 615 550
4x120 (250)
700 V, 550 A
Tabela 7.12 FC 302, alimentação de rede elétrica CA de 525–690 V (sistema de 2 drives)
1) Se o kit de barramento Danfoss for utilizado.
58 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
Faixa de potência N500 N560
Módulos de drive 2 2
Conguração do reticador 12 pulsos
Carga alta/normal HO NO HO NO
Corrente de saída [A]
Contínua (a 550 V) 523 596 596 630
Intermitente (60 s sobrecarga) a 550 V 785 656 894 693
Contínua (a 575/690 V) 500 570 570 630
Intermitente (60 s sobrecarga) a 575/690 V 750 627 627 693
Corrente de entrada [A]
Contínua (a 550 V) 504 574 574 607
Contínua (a 575 V) 482 549 549 607
Contínua (a 690 V) 482 549 549 607
Perdas de energia [W]
Módulos de drive a 600 V 6016 6995 6941 7431
Módulos de drive a 690 V 5886 6831 6766 7638
Barramentos CA a 575 V 546 550 550 553
Barramentos CC durante a regeneração 186 186 191 191
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica 4x120 (250)
Motor 4x120 (250)
Freio 4x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos máximos 700 V, 630 A
1)
4x120 (250)
7 7
Tabela 7.13 FC 302, alimentação de rede elétrica CA de 525–690 V (sistema de 2 drives)
1) Se o kit de barramento Danfoss for utilizado.
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 59

Especicações
Faixa de potência N630 N710 N800 N900 N1M0
Módulos de drive 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Corrente de saída [A]
Contínua (a 550 V) 659 763 763 889 889 988 988 1108 1108 1317
Intermitente (60 s sobrecarga) a 550 V 989 839 1145 978 1334 1087 1482 1219 1662 1449
Contínua (a 575/690 V) 630 730 730 850 850 945 945 1060 1060 1260
Intermitente (60 s sobrecarga) a
575/690 V
Corrente de entrada [A]
Contínua (a 550 V) 642 743 743 866 866 962 1079 1079 1079 1282
Contínua (a 575 V) 613 711 711 828 828 920 1032 1032 1032 1227
Contínua (a 690 V) 613 711 711 828 828 920 1032 1032 1032 1227
Perdas de energia [W]
Módulos de drive a 600 V 7469 8683 8668 10166 10163 11406 11292 12852 12835 15762
Módulos de drive a 690 V 7381 8559 8555 9996 9987 11188 11077 12580 12551 15358
77
Barramentos CA a 575 V 637 644 644 653 653 661 661 672 672 695
Barramentos CC durante a regeneração 198 198 208 208 218 218 231 231 256 256
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica 4x120 (250) 6x120 (250) 8x120 (250)
Motor 4x120 (250) 6x120 (250) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos 700 V, 1600 A 700 V, 2000 A
Conguração de 12 pulsos 700 V, 900 A 700 V, 1500 A
2
1)
VLT® Parallel Drive Modules
945 803 1095 935 1275 1040 1418 1166 1590 1590
4x150 (300) 6x120 (250)
6x150 (300)
8x120 (250)
Tabela 7.14 FC 302, alimentação de rede elétrica CA de 525–690 V (sistema de 4 drives)
1) Se o kit de barramento Danfoss for utilizado.
60 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
7.2 Alimentação de Rede Elétrica para Módulo de Drive
Alimentação de rede elétrica
Terminais de alimentação R/91, S/92, T/93
Tensão de alimentação
Frequência de alimentação 50/60 Hz ±5%
Desbalanceamento máximo temporário entre fases de rede elétrica 3,0% da tensão de alimentação nominal
Fator de potência real (λ) ≥0,98 nominal com carga nominal
Fator de potência de deslocamento (cos φ) (Aproximadamente 1)
Chaveamento na alimentação de entrada L1, L2, L3 Máximo 1 vez cada 2 minutos
Ambiente de acordo com EN 60664-1 Categoria de sobretensão III/grau de poluição 2
1) A unidade é adequada para uso em um circuito capaz de fornecer não mais que 85.000 Amperes RMS simétricos, 480/600 V.
2) Tensão de rede baixa/queda da tensão de rede:
Durante tensão de rede baixa, o módulo de conversor continua até a tensão no barramento CC cair abaixo do nível mínimo de
parada, que normalmente corresponde a 15% abaixo da tensão de alimentação nominal mais baixa. Energização e torque total
não podem ser esperados em tensão de rede inferior a 10% abaixo da tensão de alimentação nominal mais baixa. O módulo de
conversor desarma para uma queda da rede elétrica detectada.
1)
2)
380–480, 500 V 690 V, ±10%, 525–690 V ±10%
7.3 Saída do Motor e dados do motor
Saída do motor
Terminais do motor U/96, V/97, W/98
Tensão de saída 0–100% da tensão de alimentação
Frequência de saída 0–590 Hz
Chaveamento na saída Ilimitado
Tempos de rampa 1–3.600 s
7 7
Características do torque
Torque de sobrecarga (torque constante) Máximo 150% durante 60 s
Torque de partida Máximo 180% até 0,5 s
Torque de sobrecarga (torque variável) Máximo 110% durante s
Torque de partida (torque variável) Máximo 135% durante s
1) A porcentagem está relacionada ao torque nominal.
Eciência
Eciência
1) Eciência medida com corrente nominal. Para saber a classe de eciência energética, consulte . Para saber as perdas de carga
parcial, consulte www.danfoss.com/vltenergyeciency.
98%
7.4 Especicações de Transformador de 12 Pulsos
Conexão Dy11 d0 ou Dyn 11d0
Alternação de fases entre secundários 30°
Diferença de tensão entre secundários <0,5%
Impedância de curto circuito de secundários >5%
Diferença de impedância de curto circuito entre secundários <5% de impedância de curto circuito
Outros Sem aterramento dos secundários permitidos. Filtro estático recomendado
7.5 Condições Ambiente para Módulos de Conversor
1)
1)
1)
1)
Ambiente
Características nominais de IP IP00
Ruído Acústico 84 dB (funcionando em carga total)
Teste de vibração 1,0 g
Vibração e choque (IEC 60721-33-3) Classe 3M3
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 61

Especicações
Máxima umidade relativa 5–95% (IEC 721-3-3; Classe 3K3 (não condensante) durante operação
Ambiente agressivo (IEC 60068-2-43) teste com H2S Classe Kd
Gases agressivos (IEC 60721-3-3) Classe 3C3
Temperatura ambiente
Temperatura ambiente mínima, durante operação plena 0 °C (32 °F)
Temperatura ambiente mínima em desempenho reduzido -10 °C (14 °F)
Temperatura durante a armazenagem/transporte -25 a +65 °C (-13 a 149 °F)
Altitude máxima acima do nível do mar, sem derating
Normas de EMC, Emissão EN 61800-3
Normas de EMC, Imunidade EN 61800-4-2, EN 61800-4-3, EN 61800-4-4, EN 61800-4-5 e EN 61800-4-6
Classe de eciência energética
1) Consulte o Guia de Design do VLT® Parallel Drive Modules para efetuar derating para temperatura ambiente elevada e
derating para alta altitude.
2) Determinada de acordo com EN50598-2 em:
Carga nominal.
•
90% frequência nominal.
•
Conguração de fábrica da frequência de chaveamento.
77
•
Conguração de fábrica do padrão de chaveamento.
•
1)
2)
VLT® Parallel Drive Modules
Máximo 45 °C (113 °F) (média de 24 horas máxima de 40 °C (104 °F))
1)
1000 m (3281 ft)
IE2
7.6 Especicações de Cabo
Comprimentos de cabo e seções transversais de cabos de controle
Comprimento de cabo de motor máximo, blindado 150 m (492 pés)
Comprimento de cabo de motor máximo, não blindado 300 m (984 pés)
Seção transversal máxima para terminais de controle, o exível ou rígido sem buchas de terminal do
cabo 1,5 mm2/16 AWG
Seção transversal máxima para terminais de controle, o exível com buchas de terminal do cabo 1 mm2/18 AWG
Seção transversal máxima para terminal de controle, o exível com buchas de terminal do cabo com
colar 0,5 mm2/20 AWG
Seção transversal mínima para terminais de controle 0,25 mm2/24 AWG
Seção transversal máxima para terminais de 230 V 2,5 mm2/14 AWG
Seção transversal mínima para terminais de 230 V 0,25 mm2/24 AWG
1) Para cabos de energia, consulte as tabelas de dados elétricos em capétulo 7.1 Especicações dependente da potência..
1)
7.7 Entrada/Saída de controle e dados de controle
Entradas digitais
Entradas digitais programáveis
Número do terminal 18, 19, 271), 291), 32, 33
Lógica PNP ou NPN
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP <5 V CC
Nível de tensão, lógica 1 PNP >10 V CC
Nível de tensão, 0 lógico NPN
Nível de tensão, 1 lógico NPN
Tensão máxima na entrada 28 V CC
Faixa de frequência de pulso 0–110 kHz
Largura de pulso mínima (ciclo útil) 4,5 ms
Resistência de entrada, R
Todas as entradas digitais são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
1) Os terminais 27 e 29 também podem ser programados como saídas.
2) Exceto terminal de entrada 37 de Safe Torque O.
2)
2)
i
Aproximadamente 4 kΩ
4 (6)
>19 V CC
<14 V CC
1)
62 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
Safe Torque O (STO) Terminal 37
1), 2)
(Terminal 37 está xo na lógica PNP)
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP < 4 V CC
Nível de tensão, lógica 1 PNP >20 V CC
Tensão máxima na entrada 28 V CC
Corrente de entrada típica a 24 V 50 mA
Corrente de entrada típica a 20 V 60 mA
rms
rms
Capacitância de entrada 400 nF
Todas as entradas digitais são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
®
1) Consulte o Guia de Operação dos Conversores de Frequência VLT
- Safe Torque O para obter mais informações sobre o
terminal 37 e Safe Torque O.
2) Ao usar um contator com uma bobina CC com STO, sempre faça um caminho de retorno para a corrente da bobina ao
desligar. O caminho de retorno pode ser feito usando um diodo de roda livre através da bobina. Como alternativa, use um MOV
de 30 V ou 50 V para obter tempo de resposta mais rápido. Os contatores típicos podem ser adquiridos com esse diodo.
Entradas Analógicas
Número de entradas analógicas 2
Número do terminal 53, 54
Modos Tensão ou corrente
Seleção do modo Chaves S201 e S202
Modo de tensão Chave S201/chave S202 = OFF (U)
Nível de tensão -10 V a +10 V (escalável)
Resistência de entrada, R
i
Aproximadamente 10 kΩ
Tensão máxima ±20 V
Modo de corrente Chave S201/chave S202 = ON (I)
Nível de corrente 0/4–20 mA (escalável)
Resistência de entrada, R
i
Aproximadamente 200 Ω
Corrente máxima 30 mA
Resolução das entradas analógicas 10 bits (+ sinal)
Precisão das entradas analógicas Erro máx. 0,5% da escala total
Largura de banda 20 Hz/100 Hz
As entradas analógicas são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
7 7
Ilustração 7.1 Isolamento PELV
Entrada de pulso
Pulso programável 2/1
Número do terminal do pulso 291), 32/33
Frequência máxima no terminais 29, 33 110 kHz (acionado por Push-pull)
Frequência máxima no terminais 29, 33 5 kHz (coletor aberto)
Frequência mínima nos terminais 29, 33 4 Hz
Nível de tensão 0–24 V CC
Tensão máxima na entrada 28 V CC
Resistência de entrada, R
i
Aproximadamente 4 kΩ
Precisão da entrada de pulso (0,1–1 kHz) Erro máximo: 0,1% do fundo de escala
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 63

Especicações
Precisão da entrada do encoder (1-11 kHz) Erro máximo: 0,05% do fundo de escala
As entradas do encoder e de pulso (terminais 29, 32, 33) são isoladas galvanicamente da tensão de alimentação (PELV) e de
outros terminais de alta tensão.
1) As entradas de pulso são 29 e 33.
Saída analógica
Número de saídas analógicas programáveis 1
Número do terminal 42
Faixa atual na saída analógica 0/4–20 mA
Carga máxima de GND - saída analógica 500 Ω
Precisão na saída analógica Erro máximo: 0,5% do fundo de escala
Resolução na saída analógica 12 bit
A saída analógica está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, comunicação serial RS485
Número do terminal 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Terminal número 61 Ponto comum dos terminais 68 e 69
77
O circuito de comunicação serial RS485 está funcionalmente separado de outros circuitos centrais e isolado galvanicamente da
tensão de alimentação (PELV).
Saída digital
Saída digital/pulso programável 2
Número do terminal 27, 29
Nível de tensão na saída de frequência/digital 0–24 V
Corrente de saída máxima (dissipador ou fonte) 40 mA
Carga máxima na saída de frequência 1 kΩ
Carga capacitiva máxima na saída de frequência 10 nF
Frequência de saída mínima na saída de frequência 0 Hz
Frequência de saída máxima na saída de frequência 32 kHz
Precisão da saída de frequência Erro máximo: 0,1% do fundo de escala
Resolução das saídas de frequência 12 bit
1) Os terminais 27 e 29 podem também ser programados como entrada.
A saída digital está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
VLT® Parallel Drive Modules
1)
Cartão de controle, saída 24 VCC
Número do terminal 12, 13
Tensão de saída 24 V +1, -3 V
Carga máxima 200 mA
A alimentação de 24 VCC está isolada galvanicamente da tensão de alimentação (PELV), mas tem o mesmo potencial das
entradas e saídas digitais e analógicas.
Saídas do relé
Saídas do relé programáveis 2
Número do terminal do Relé 01 1–3 (desabilitado), 1–2 (ativado)
Carga do terminal máxima (CA-1)1) em 1-3 (NC), 1-2 (NO) (carga resistiva) 240 V CA, 2 A
Carga do terminal máxima (CA-15)1) (carga indutiva @ cosφ 0,4) 240 V CA 0,2 A
Carga do terminal máxima (CC-1)1) em 1-2 (NO), 1-3 (NC) (carga resistiva) 60 V CC, 1 A
Carga do terminal máxima (CC-13)1) (carga indutiva) 24 V CC, 0,1 A
Número do terminal do Relé 02 (somente VLT® AutomationDrive FC 302) 4-6 (desabilitado), 4-5 (ativado)
Carga do terminal máxima (CA-1)1) em 4-5 (NO) (carga resistiva)
Carga do terminal máxima (CA-15)1) em 4-5 (NO) (carga indutiva @ cosφ 0,4) 240 V CA 0,2 A
Carga do terminal máxima (CC-1)1) em 4-5 (NO) (carga resistiva) 80 V CC, 2 A
Carga do terminal máxima (CC-13)1) em 4-5 (NO) (carga indutiva) 24 V CC, 0,1 A
Carga do terminal máxima (CA-1)1) em 4-6 (NC) (carga resistiva) 240 V CA, 2 A
Carga do terminal máxima (CA-15)1) em 4-6 (NC) (carga indutiva @ cosφ 0,4 240 V CA 0,2 A
Carga do terminal máxima (CC-1)1) em 4-6 (NC) (carga resistiva) 50 V CC, 2 A
2)3)
sobretensão categoria II 400 V CA, 2 A
64 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Especicações Guia de Instalação
Carga do terminal máxima (CC-13)1) em 4-6 (NC) (carga indutiva) 24 V CC, 0,1 A
Carga do terminal mínima em 1–3 (NF), 1–2 (NA), 4–6 (NF), 4–5 (NA) 24 V CC 10 mA, 24 V CA 20 mA
Ambiente de acordo com EN 60664-1 Categoria de sobretensão III/grau de poluição 2
1) IEC 60947 partes 4 e 5.
Os contatos do relé são isolados galvanicamente do resto do circuito por isolação reforçada (PELV).
2) Categoria de sobretensão II.
3) Aplicações UL 300 V CA 2 A.
Cartão de controle, saída 10 V CC
Número do terminal 50
Tensão de saída 10,5 V ±0,5 V
Carga máxima 25 mA
A alimentação de 10 V CC está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Características de controle
Resolução da frequência de saída em 0-590 Hz ±0,003 Hz
Repetir a precisão da partida/parada precisa (terminais 18, 19) ≤±0,1 ms
Tempo de resposta do sistema (terminais 18, 19, 27, 29, 32, 33) ≤10 ms
Faixa de controle da velocidade (malha aberta) 1:100 da velocidade síncrona
Faixa de controle da velocidade (malha fechada) 1:1.000 da velocidade síncrona
Precisão da velocidade (malha aberta) 30–4000 rpm: Erro ±8 rpm
Precisão de velocidade (malha fechada), dependendo da resolução do dispositivo de
feedback 0–6000 rpm: Error ±0,15 rpm
Todas as características de controle são baseadas em um motor assíncrono de 4 polos
7 7
Desempenho do cartão de controle
®
Intervalo de varredura (VLT
AQUA Drive FC 202)
Intervalo de varredura (FC 302) 1 ms
Cartão de controle, comunicação serial USB
Padrão USB 1,1 (velocidade total)
Plugue USB Plugue de dispositivo USB tipo B
A conexão ao PC é realizada por meio de um cabo de USB host/dispositivo.
A conexão USB está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
A conexão do terra do USB NÃO está isolada galvanicamente do ponto de aterramento de proteção. Utilize somente laptop
isolado para ligar-se ao conector USB do conversor de frequência.
HVAC Drive FC 102, VLT® Refrigeration Drive FC 103, VLT
®
5 ms (VLT® AutomationDrive FC
302)
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 65

346
(13.6)
868
[34.2]
856.6
(33.7)
1051
(41.4)
1096
(43.1)
1122
(44.2)
130
(5.1)
41
(1.6)
1048
(41.3)
280
(11.0)
107
(4.2)
213
(8.4)
320
(12.6)
271
(10.7)
95
(3.7)
130BE654.11
376
(14.8)
Especicações
VLT® Parallel Drive Modules
7.8 Dimensões do Kit
7.8.1 Dimensões Externas
Ilustração 7.2 mostra as dimensões do módulo de conversor relacionadas à sua instalação.
77
Ilustração 7.2 VLT® Parallel Drive Modules Dimensões da instalação
Descrição Peso do módulo [kg (lbs.)] Comprimento X largura x profundidade [mm (pol)]
Módulo conversor 125 (275) 1121,7 x 346,2 x 375 (44,2 x 13,6 x 14,8)
Tabela 7.15 Peso e Dimensões do Módulo de Conversor
66 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

A
A
B
B
R
S
T
U
V
W
130BE748.10
319 (12.6)
200 (7.9)
0 (0.0)
376 (14.8)
Brake terminals
236.8 (9.0)
293 (11.5)
0 (0.0)
33 (1.3)
91 (3.6)
149 (5.8)
211 (8.3)
319 (12.6)
265 (10.4)
130BE749.10
Section A-A
Mains Terminals
Section B-B
Motor and Brake Terminals
Brake terminal
Motor terminal
Mains terminal
284 (11.2)
0 (0.0)
0 (0.0)
306 (12.1)
255 (10.0)
Especicações Guia de Instalação
7.8.2 Dimensões de Terminal
7 7
Ilustração 7.3 Dimensões do Terminal do Módulo de Conversor (vista frontal)
Ilustração 7.4 Dimensões do Terminal do Módulo de Conversor (vista lateral)
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 67

130BE751.10
105.5
(4.15)
236
(9.3)
126
(4.9)
95
(3.7)
Especicações
VLT® Parallel Drive Modules
7.8.3 Dimensões do Barramento CC
77
Ilustração 7.5 Dimensões do barramento CC (visões frontal e lateral)
7.9 Torques de Aperto do Prendedor
Para as ferragens de xação descritas neste manual, são usados os valores de torque em Tabela 7.16. Esses valores de torque
não são destinados para apertar IGBTs. Consulte as instruções que acompanham as peças de reposição para saber os valores
de torque corretos.
Tamanho do eixo Tamanho da Chave Torx/sext Torque (N · m) Torque (pol-lb)
M4 T20 Torx/7 mm sext 1,0 9
M5 T25 Torx/8 mm sext 2,3 20
M6 T30 Torx/10 mm sext 4,0 35
M8 T40 Torx/13 mm sext 9,6 85
M10 T50 Torx/17 mm sext 19,1 169
M12 (somente parafusos sext) 18 mm ou 19 mm sext 19,1 169
Tabela 7.16 Torques de Aperto Gerais dos Prendedores
7.9.1 Torques de Aperto dos Terminais
Para apertar os terminais, use os valores de torque em
Tabela 7.17.
Tamanho do
parafuso
Torque [N · m
(pol-lb)]
Tabela 7.17 Aperto dos Terminais
68 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328
Rede elétrica Motor Regenerativo Load Sharing
M10 M10 M10 M10 M8 M8
19–40 (168–354) 19–40 (168–354) 19–40 (168–354) 19–40 (168–354)
Ponto de
aterramento
8,5–20,5
(75–181)
Freio
8,5–20,5 (75–181)

Apêndice Guia de Instalação
8 Apêndice
8.1 Renúncia de responsabilidade
Danfoss não terá qualquer obrigação com relação a
qualquer produto que
não estiver instalado de acordo com a
•
conguração padrão conforme especicado no
guia de instalação.
estiver incorretamente reparado ou alterado.
•
estiver sujeito a má utilização, negligência e
•
instalação inadequada onde as diretrizes não
foram seguidas.
for utilizado de maneira contraditória com as
•
instruções fornecidas.
for resultado de desgaste por uso normal.
•
8.2 Símbolos, abreviações e convenções
Graus Celsius
°C
Graus Fahrenheit
°F
CA Corrente alternada
AWG American wire gauge
CC Corrente contínua
EMC Compatibilidade eletromagnética
ETR Relé térmico eletrônico
FC Conversor de frequência
IP Proteção de entrada
LCP Painel de controle local
MCT Motion Control Tool
MDCI
Interface de controle de múltiplos drives
C
PCB Placa de circuito Impresso
PELV Tensão extra baixa protetiva
Motor
Motor de ímã permanente
PM
RCD Dispositivo de proteção operado por corrente residual
Regen
erativoTerminais regenerativos
Convenções
Listas numeradas indicam os procedimentos.
Listas de itens indicam outras informações e a descrição
das ilustrações.
O texto em itálico indica:
Referências cruzadas.
•
Links.
•
Nomes dos parâmetros.
•
Todas as medições são dadas em unidades métricas e
unidades imperiais. As unidades imperiais estão em ( ).
8 8
RFI Interferência de radiofrequência
RPM Rotações por minuto
Tabela 8.1 Símbolos e abreviações
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 69

130BE734.10
1
2
3
5
6
7
4
8
9
10
Apêndice
VLT® Parallel Drive Modules
8.3 Diagramas de Blocos
8.3.1 Conexão de disjuntor/bloqueio de 12 pulsos
88
1 Módulo de drive 1 6 Disjuntor 1
2 Módulo de drive 2 7 Defeito do freio
3 Fusíveis suplementares 8 Módulo de drive 3
4 Barramentos de entrada de rede elétrica 9 Módulo de drive 4
5 Defeito do freio 10 Disjuntor 2
Ilustração 8.1 Conexão de disjuntor/bloqueio de 12 pulsos
70 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

1
2
1 2 1 28 7 6 11 10 9
2
11
2
44
43
DC+ DC-MK102
130BE735.10
1
2
3
4
Apêndice Guia de Instalação
8.3.2 Conexão BRF com disjuntor/bloqueio de 12 pulsos
1 Contato auxiliar do disjuntor 1 3 Interruptor Klixon
2 Contato auxiliar do disjuntor 2 4 Conector BRF
8 8
Ilustração 8.2 Conexão BRF com disjuntor/bloqueio de 12 pulsos
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 71

1
2
1 2 1 28 7 6 11 10 9
2
11
2
44
43
DC+ DC-MK102
130BE736.10
1
2
Apêndice
8.3.3 Conexão do Jumper BRF
VLT® Parallel Drive Modules
88
1 Jumper BRF (pré-instalado) 2 Conector BRF
Ilustração 8.3 Conexão do Jumper BRF
72 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

2
1
130BE737.11
1
2
3
R/91S/92T/93U/96V/97W/98R+R -R/91S/92T/93U/96V/97W/98R+R
-
R/91S/92T/93U/96V/97W/98R+R -R/91S/92T/93U/96V/97W/98R+R
-
Apêndice Guia de Instalação
8.3.4 Conexão do Resistor do Freio Comum
8 8
1 Módulo de drive 3 Resistor do freio comum
2 Terminais do freio – –
Ilustração 8.4 Conexão do Resistor do Freio Comum
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 73

130BE738.10
1
2
1 2 1 28 7 6 11 10 9
2
11
2
44
43
DC+ DC-MK102
1
2
3
Apêndice
VLT® Parallel Drive Modules
8.3.5 Conexão do Interruptor Klixon
88
1 Interruptor Klixon 3 Núcleo de ferrite
2 Conector BRF – –
Ilustração 8.5 Conexão do Interruptor Klixon
74 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

130BE739.10
FC–X02
1
1
1
1
1
1 2 3 4 5 6 7 8 910
2
2
3455 6
6
1
2
5
6
123456
2
2
2
43 44
4344
43
44
1
2
43
44
1
2
43
44
1
2
43
44
FK100
MK100
MK115
MK106
MK111
MK112 MK114
MK113
MK107
MK108
MK109
MK110
FK101
INV1 INV2 INV3 INV4
L
AC
DC
N
230V
12
9
10
11
13
14
1
2
5
3
4
6
7
8
Apêndice Guia de Instalação
8.3.6 Conexões da Prateleira de Controle
1 Suporte do LCP 8 Bloco de terminais
10 Terminais de E/S analógicos
11 Terminais de entrada digital
2 Cabo em ta do LCP para MDCIC 9 Cabo para LCP de montagem remota
3 Cabo de 44 pinos para o módulo de drive 1 (em MK
111)
4 Cabo de 44 pinos para o módulo de drive 3 (em MK
5 Cartão de escala da corrente 12 Cabo de 44 pinos para o módulo de drive 2 (em MK 112)
113)
6 Conector STO 13 Cabo de 44 pinos para o módulo de drive 4 (em MK 114)
7 Relé STO 14 Núcleos de ferrite
8 8
Ilustração 8.6 Conexões da Prateleira de Controle
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 75

130BE740.10
R S T U V W R+ R- R S T U V W R+ R- R S T U V W R+ R- R S T U V W R+ R-
BASE
DRIVE
BASE
DRIVE
BASE
DRIVE
BASE
DRIVE
3
4
1
2
Apêndice
VLT® Parallel Drive Modules
8.3.7 Conexões do Resistor de Descarga
88
1 Barramentos de entrada de rede elétrica 3 Resistor de descarga
2 Contator de rede elétrica/contatos auxiliares do
disjuntor
Ilustração 8.7 Conexões do Resistor de Descarga
4 Contator de descarga
76 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

21 21 21 21
1
2
3
R/91S/92T/93U/96V/97W/98R+R -R/91S/92T/93U/96V/97W/98R+R
-
R/91S/92T/93U/96V/97W/98R+R -R/91S/92T/93U/96V/97W/98R+R
-
130BE741.11
Apêndice Guia de Instalação
8.3.8 Conexão do Resistor do Freio Individuais para Cada Módulo de Drive
8 8
1 Módulo de drive 3 Resistores do freio Individuais
2 Terminais do freio – –
Ilustração 8.8 Conexão do Resistor do Freio Individuais para Cada Módulo de Drive
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 77

e30be742.11
R/91S/92T/
93
U/96V/97W/98R+R
-
R/91S/92T/93U/96V/97W/98R+R
-
5
6
7
8
1
2
3
4
9
Apêndice
VLT® Parallel Drive Modules
8.3.9 Conexões no Sistema de Módulo de 2 Conversores de 6 Pulsos
88
1 Fusíveis CC 6 Terminais CC
2 Módulo conversor 7 Conexão ao freio
3 Barras de bus de entrada de rede elétrica conectando
4 Ligação à rede elétrica 9 Conexão à saída do motor
5 Barras de bus do barramento CC conectando ambos
ambos os módulos de conversor
os módulos de conversor
8 Barras de bus de saída do motor conectando ambos os
módulos de conversor
– –
Ilustração 8.9 Conexões no Sistema de Módulo de 2 Conversores de 6 Pulsos
78 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

e30be743.11
1
2
3
4
5
6
7
8
R/91S/92T/
93
U/96V/97W/98R+R
-
R/91S/92T/
93
U/96V/97W/98R+R
-
Apêndice Guia de Instalação
8.3.10 Conexões no Sistema de Módulo de 2 Conversores de 12 Pulsos
8 8
1 Fusíveis CC 5 Barras de bus do barramento CC conectando ambos os
2 Módulo conversor 6 Terminais CC
3 Barras de bus de saída do motor conectando ambos
4 Conexão à entrada da rede elétrica 8 Conexão à saída do motor
os módulos de conversor
módulos de conversor
7 Conexão ao freio
Ilustração 8.10 Conexões no Sistema de Módulo de 2 Conversores de 12 Pulsos
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 79

e30be744.11
R/91S/92T/93U/96V/97W/98R+R -R/91S/92T/93U/96V/97W/98R+R -R/91S/92T/93U/96V/97W/98R+R -R/91S/92T/93U/96V/97W/98R+R
-
1
2
3
4
5
6
7
8
9
Apêndice
VLT® Parallel Drive Modules
8.3.11 Conexões no Sistema de Módulo de 4 Conversores
88
1 Fusíveis CC 6 Terminais CC
2 Módulo conversor 7 Conexão ao freio
3 Barras de bus de entrada de rede elétrica conectando
2 módulos de conversor
4 Conexão à entrada da rede elétrica 9 Conexão à saída do motor
5 Barras de bus do barramento CC conectando todos
os 4 módulos de conversor
Ilustração 8.11 Conexões no Sistema de Módulo de 4 Conversores
8 Barras de bus de saída do motor conectando 2 módulos de
conversor
– –
AVISO!
FIAÇÃO DO MÓDULO DE DRIVE
O instalador deve instalar um número igual de os para cada conjunto de módulos de conversor.
80 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Índice Guia de Instalação
Índice
A
Abreviações............................................................................................ 69
Alta tensão..................................................................................... 6, 8, 44
Aperto, geral........................................................................................... 68
Aperto, terminais.................................................................................. 68
Aprovações................................................................................................ 4
Aterramento...................................................................... 29, 30, 43, 44
Aterramento, cabos de controle blindados................................ 42
B
Barras condutoras................................................................................. 16
C
Cabo
Blindado................................................................................ 41, 42, 43
Braçadeira........................................................................................... 38
Controle................................................................................. 38, 41, 42
Equalização........................................................................................ 42
Estendendo........................................................................................ 43
Motor............................................................................................. 28, 38
Cartão do Termistor do PTC.............................................................. 26
Certicações.............................................................................................. 4
Chave........................................................................................................ 37
Chave de desconexão......................................................................... 44
Classe de eciência energética........................................................ 61
Comandos remotos................................................................................ 9
Comunicação serial........................................................... 9, 35, 36, 42
Conduíte.................................................................................................. 43
Conexão de energia............................................................................. 21
Conexões do terra................................................................................ 43
Conguração
Rede elétrica...................................................................................... 29
Conformidade com a CE.................................................................... 24
Controladores externos........................................................................ 9
Controle
Cartão de controle, comunicação serial USB......................... 65
Convenções............................................................................................ 69
Corrente de fuga (>3,5 mA)................................................................. 7
Curto-circuito
Proteção contra curto-circuito.................................................... 24
Elevando a unidade............................................................................. 14
Em conformidade com o UL............................................................. 24
EMC
Diretrizes de instalação elétrica.................................................. 38
EMC....................................................................................................... 42
Precauções......................................................................................... 38
Entrada
Analógica..................................................................................... 35, 36
Current................................................................................................. 29
Digital..................................................................................... 35, 36, 37
Potência........................................................................................ 43, 44
Sinal....................................................................................................... 37
Tensão.................................................................................................. 44
Terminal número....................................................................... 37, 44
Equipamento opcional................................................................ 37, 44
Espaço para ventilação....................................................................... 43
ETR............................................................................................................. 21
F
Fator de potência.................................................................................. 43
Feedback........................................................................................... 37, 43
Feedback do sistema............................................................................. 9
Fiação
Controle............................................................................................... 43
Motor.................................................................................................... 43
Terminal de controle....................................................................... 37
Fiação de controle................................................................................ 43
Fiação de controle do termistor...................................................... 34
Forma de onda CA.................................................................................. 9
Fusíveis.............................................................................................. 21, 43
G
Garantia.................................................................................................... 13
I
Instalação................................................................................................ 43
Interruptor A53...................................................................................... 37
Interruptor A54...................................................................................... 37
Interruptor de terminação do bus serial...................................... 37
Isolação de interferência.................................................................... 43
Itens fornecidos..................................................................................... 13
J
Jumper...................................................................................................... 37
D
Descarte..................................................................................................... 5
Disjuntores.............................................................................................. 43
E
Eciência energética........................................................................... 61
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 81
M
Malha aberta.......................................................................................... 37
Malha de aterramento........................................................................ 42
Malha fechada....................................................................................... 37
Montagem.............................................................................................. 43

Índice
VLT® Parallel Drive Modules
Motor
Cabo........................................................................................ 21, 28, 38
Fiação................................................................................................... 43
Saída..................................................................................................... 61
Utilizado com conversor de frequência..................................... 9
Múltiplos conversores de frequência............................................ 21
N
Nível de tensão...................................................................................... 62
P
Par trançado blindado (STP)............................................................. 38
Partida acidental.............................................................................. 6, 44
Peso.................................................................................................... 16, 66
Pessoal qualicado................................................................................. 6
Plaqueta de identicação.................................................................. 13
Precauções.............................................................................................. 38
Programação.......................................................................................... 37
Proteção................................................................................................... 24
Proteção de sobrecorrente................................................................ 21
Terminais
Dimensões do módulo de conversor........................................ 67
Terminais, aperto.................................................................................. 68
Terminal 53............................................................................................. 37
Terminal 54............................................................................................. 37
Terminal da rede elétrica................................................................... 37
Terminal de controle........................................................................... 37
Termistor........................................................................................... 26, 34
Tipos de terminal de controle.......................................................... 35
Transformadores usados com 12 pulsos...................................... 61
V
Ventiladores............................................................................................ 17
R
Reciclagem................................................................................................ 5
Rede elétrica
Alimentação....................................................................................... 61
Rede elétrica CA............................................................................... 9, 29
Referência de velocidade................................................................... 37
Relé..................................................................................................... 36, 64
Relé térmico eletrônico...................................................................... 21
RS485........................................................................................................ 38
S
Safe Torque O...................................................................................... 38
Saída
Analógica..................................................................................... 35, 36
Relé.......................................................................................... 35, 38, 64
Terminal número.............................................................................. 44
Segurança........................................................................................... 6, 44
Sensor KTY.............................................................................................. 27
Símbolos.................................................................................................. 69
Sistema de controle............................................................................... 9
Software de Setup MCT 10................................................................ 35
STO............................................................................................................. 38
T
Tamanhos de o............................................................................. 21, 28
Tempo de descarga................................................................................ 7
Tensão de alimentação.................................................. 34, 35, 36, 44
82 Danfoss A/S © 08/2017 Todos os direitos reservados. MG37K328

Índice Guia de Instalação
MG37K328 Danfoss A/S © 08/2017 Todos os direitos reservados. 83

A Danfoss não aceita qualquer responsabilidade por possíveis erros constantes de catálogos, brochuras ou outros materiais impressos. A Danfoss reserva-se o direito de alterar os seus produtos sem
aviso prévio. Esta determinação aplica-se também a produtos já encomendados, desde que tais modicações não impliquem em mudanças nas especicações acordadas. Todas as marcas
registradas constantes deste material são propriedade das respectivas empresas. Danfoss e o logotipo Danfoss são marcas registradas da Danfoss A/S. Todos os direitos reservados.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
130R0657 MG37K328 08/2017
*MG37K328*
 Loading...
Loading...