


ENGINEERING TOMORROW
Guía de diseño
VLT® Parallel Drive Modules
250-1200 kW
vlt-drives.danfoss.com

Índice Guía de diseño
Índice
1 Introducción
1.1 Propósito de la Guía de diseño
1.2 Versión del documento y del software
1.3 Recursos adicionales
2 Seguridad
2.1 Símbolos de seguridad
2.2 Personal cualicado
2.3 Medidas de seguridad
3 Homologaciones y certicados
3.1 Marca CE
3.2 Directiva de tensión baja
3.3 Directiva CEM
3.4 Directiva de máquinas
3.5 Conformidad con UL
3.6 Marcado RCM de conformidad
3.7 Normativa de control de exportación
5
5
5
5
6
6
6
6
8
8
8
8
8
8
9
9
4 Vista general de producto
4.1 Hoja de datos del módulo de convertidor
4.2 Hoja de datos de un sistema de dos convertidores de frecuencia
4.3 Hoja de datos de un sistema de cuatro convertidores de frecuencia
4.4 Componentes internos del
4.5 Ejemplos de refrigeración mediante canal posterior
5 Funciones del producto
5.1 Funciones automatizadas
5.2 Funciones programables
5.3 Safe Torque O (STO)
5.4 Monitorización del sistema
6 Especicaciones
6.1 Dimensiones del módulo de convertidor de frecuencia
6.2 Dimensiones del cuadro de control
6.3 Dimensiones del sistema de dos convertidores de frecuencia
6.4 Dimensiones de sistema de cuatro convertidores de frecuencia
10
10
11
12
12
15
17
17
19
21
22
25
25
28
29
33
6.5 Especicaciones en función de la potencia
6.5.1 VLT® HVAC Drive FC 102 41
6.5.2 VLT® AQUA Drive FC 202 45
6.5.3 VLT® AutomationDrive FC 302 50
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 1
41
Índice
VLT® Parallel Drive Modules
6.6 Alimentación de red al módulo de convertidor
6.7 Salida del motor y datos del motor
6.8 Especicaciones de transformador de 12 pulsos
6.9 Condiciones ambientales para módulos de convertidor
6.10 Especicaciones del cable
6.11 Entrada/salida de control y datos de control
6.12 Especicaciones de reducción de potencia
7 Información de pedido
7.1 Formulario de pedido
7.2 Congurador de convertidores de frecuencia
7.3 Opciones y accesorios
7.3.1 General Purpose Input Output Module MCB 101 69
7.3.2 Aislamiento galvánico en el VLT® General Purpose I/O MCB 101 70
7.3.3 Entradas digitales - Terminal X30/1-4 71
7.3.4 Entradas analógicas - Terminal X30/11, 12 71
7.3.5 Salidas digitales - Terminal X30/6, 7 71
7.3.6 Salida analógica - Terminal X30/8 71
55
55
55
56
56
56
60
63
63
63
69
7.3.7 VLT® Encoder Input MCB 102 72
7.3.8 VLT® Resolver Input MCB 103 73
7.3.9 VLT® Relay Card MCB 105 75
7.3.10 VLT® 24 V DC Supply MCB 107 77
7.3.11 VLT® PTC Thermistor Card MCB 112 78
7.3.12 VLT® Extended Relay Card MCB 113 79
7.3.13 Resistencias de frenado 80
7.3.14 Filtros senoidales 80
7.3.15 Filtros dU/dt 81
7.3.16 Kit de montaje remoto para LCP 81
7.4 Lista de vericación del diseño del sistema
8 Consideraciones a tener en cuenta durante la instalación
8.1 Entorno de funcionamiento
8.2 Requisitos mínimos del sistema
8.3 Requisitos eléctricos para certicados y homologaciones
8.4 Fusibles y magnetotérmicos
82
84
84
85
87
88
9 CEM y armónicos
9.1 Aspectos generales de las emisiones CEM
9.2 Resultados de las pruebas de CEM
9.3 Requisitos en materia de emisiones
9.4 Requisitos de inmunidad
2 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
90
90
91
95
96
Índice Guía de diseño
9.5 Recomendaciones relativas a CEM
9.6 Aspectos generales de los armónicos
9.7 Análisis de armónicos
9.8 Efecto de los armónicos en un sistema de distribución de potencia
9.9 Normas y requisitos de limitación armónica
9.10 Conformidad en materia de armónicos de los módulos de convertidor de frecuencia en paralelo VLT
®
9.11 Aislamiento galvánico
10 Motor
10.1 Cables de motor
10.2 Aislamiento de las bobinas del motor
10.3 Corrientes en los cojinetes del motor
10.4 Protección térmica del motor
10.5 Conexiones del terminal del motor
10.6 Condiciones de funcionamiento extremas
10.7 Condiciones dU/dt
10.8 Conexión en paralelo de motores
97
100
100
101
102
102
102
104
104
104
105
105
107
111
113
113
11 Alimentación
11.1 Conguraciones de alimentación
11.2 Conexiones del terminal de alimentación
11.3 Conguración de desconector de doce pulsos
12 Cableado de control
12.1 Tendido de los cables de control
12.2 Terminales de control
12.3 Salida Relé [bin]
13 Frenado
13.1 Tipos de frenado
13.2 Resistencia de frenado
14 Controladores
14.1 Visión de conjunto de la velocidad y el control de par
14.2 Principio de control
14.3 Estructura de control en el control vectorial avanzado VVC
116
116
116
116
119
119
120
123
124
124
124
129
129
129
+
132
14.4 Estructura de control en control de ujo sin realimentación
14.5 Estructura de control en Flux con Realimentación del motor
14.6 Control de corriente interna en modo VVC
+
14.7 Control local y remoto
14.8 Controlador Smart Logic
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 3
133
133
134
134
135
Índice
VLT® Parallel Drive Modules
15 Manejo de referencias
15.1 Límites referencia
15.2 Escalado de las referencias internas
15.3 Escalado de referencias de pulsos y analógicas y realimentación
15.4 Banda muerta alrededor de cero
16 Controles de PID
16.1 Controles de PID de velocidad
16.2 Controles de PID de procesos
16.3 Optimización de los controles de PID
17 Ejemplos de aplicaciones
17.1 Adaptación automática del motor (AMA)
17.2 Referencia analógica de velocidad
17.3 Arranque/parada
17.4 Reinicio de alarma externa
17.5 Referencia de velocidad con un potenciómetro manual
17.6 Aceleración/desaceleración
138
139
140
140
141
145
145
148
152
154
154
154
155
156
156
157
17.7 Conexión de red RS485
17.8 Termistor motor
17.9 Ajuste de relé con Smart Logic Control
17.10 Control de freno mecánico
17.11 Conexión del encoder
17.12 Dirección de encoder
17.13 Sistema de convertidor de lazo cerrado
17.14 Programación de límite de par y parada
18 Anexo
18.1 Exención de responsabilidad
18.2 Convenciones
18.3 Glosario
Índice
157
157
158
159
159
160
160
160
162
162
162
162
166
4 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Introducción Guía de diseño
1 Introducción
1.1 Propósito de la Guía de diseño
La presente Guía de diseño ha sido confeccionada para
ingenieros de proyectos y sistemas, asesores de diseño y
especialistas en aplicaciones y productos. Se facilita
información técnica para entender la capacidad del
convertidor de frecuencia e integrarlo en los sistemas de
control y seguimiento del motor. Se ofrecen detalles sobre
el funcionamiento, los requisitos y las recomendaciones
para la integración en el sistema. Se facilita información
sobre las características de alimentación de entrada, de
salida para el control del motor y las condiciones
ambientales de funcionamiento del convertidor de
frecuencia.
También se incluyen las funciones de seguridad, el
seguimiento de averías, los informes de estado operativo,
la capacidad de comunicación serie y las opciones programables. Se facilitan, asimismo, los detalles del diseño,
como las necesidades de las instalaciones, los cables, los
fusibles, el cableado de control, el tamaño y el peso de las
unidades y otra información fundamental para
integración del sistema.
Revisar la información detallada del producto en la fase de
diseño permite el desarrollo de un sistema bien concebido,
con una funcionalidad y un rendimiento óptimos.
VLT® es una marca registrada.
Versión del documento y del software
1.2
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras. La Tabla 1.1
muestra las versiones de documento y software.
Edición Comentarios Versión de
MG37N2xx Especicaciones
actualizadas
Tabla 1.1 Versión del documento y del software
Recursos adicionales
1.3
Recursos disponibles para comprender la programación y
las funciones avanzadas del convertidor de frecuencia:
La Guía de instalación de los VLT® Parallel Drive
•
Modules de 250-1200 kW proporciona instrucciones para la instalación mecánica y eléctrica de
estos módulos de convertidor.
planicar la
software
7.5x
los procedimientos de arranque, programación
operativa básica y pruebas de funcionamiento. En
la información más detallada se describen la
interfaz de usuario, los ejemplos de aplicación, la
resolución de problemas y las especicaciones.
Consulte las guías de programación del VLT
•
HVAC Drive FC 102, del VLT® AQUA Drive FC 202
y del VLT® AutomationDrive FC 302, aplicables a
especíca de VLT® Parallel Drive Modules
la serie
utilizados para la creación del sistema de convertidores de frecuencia. La Guía de programación
proporciona información más detallada sobre
cómo trabajar con parámetros y aporta muchos
ejemplos de aplicación.
El Manual de mantenimiento de la serie de conver-
•
tidores VLT® con bastidor D contiene información
de mantenimiento detallada e incluye
información aplicable a los VLT® Parallel Drive
Modules.
El Manual de funcionamiento de Safe Torque O
•
para los convertidores de frecuencia VLT® contiene
instrucciones de seguridad y una descripción del
funcionamiento y las especicaciones de la
función Safe Torque O.
La Guía de diseño del VLT® Brake Resistor MCE 101
•
describe cómo seleccionar la resistencia de
frenado adecuada para cualquier aplicación.
La Guía de diseño del ltro de salida de la serie de
•
convertidores VLT® describe cómo seleccionar el
ltro de salida adecuado para cualquier
aplicación.
Las Instrucciones de instalación del kit de barra
•
conductora de los VLT® Parallel Drive Modules
contienen información detallada sobre la
instalación del kit opcional de barra conductora.
Las Instrucciones de instalación del kit de conduc-
•
ciones de los VLT® Parallel Drive Modules
contienen información detallada sobre la
instalación del kit opcional de conducciones.
Danfoss proporciona publicaciones y manuales complementarios. Consulte drives.danfoss.com/knowledge-center/
technical-documentation/ para ver un listado.
®
1 1
El Manual del usuario de los VLT® Parallel Drive
•
Modules de 250-1200 kW explica detalladamente
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 5
Seguridad
VLT® Parallel Drive Modules
2 Seguridad
22
2.1 Símbolos de seguridad
En este manual se utilizan los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
2.2 Personal cualicado
Se precisan un transporte, un almacenamiento y una
instalación correctos y ables para que los VLT® Parallel
Drive Modules funcionen de un modo seguro y sin ningún
tipo de problemas. Este equipo únicamente puede ser
instalado por personal cualicado.
ADVERTENCIA
TIEMPO DE DESCARGA
El módulo de convertidor contiene condensadores de
enlace de CC. Una vez que se haya aplicado alimentación
al convertidor, dichos condensadores podrán permanecer
cargados incluso aunque se desconecte la alimentación.
Puede haber tensión alta presente aunque las luces del
indicador de advertencia estén apagadas. Si, después de
desconectar la alimentación, no espera 20 minutos antes
de realizar cualquier trabajo de reparación o tarea de
mantenimiento, pueden producirse lesiones graves e
incluso mortales.
1. Pare el motor.
2. Desconecte la red de CA y las fuentes de
alimentación de enlace de CC remotas, entre las
que se incluyen baterías de emergencia, SAI y
conexiones de enlace de CC a otros convertidores de frecuencia.
3. Desconecte o bloquee el motor PM.
4. Espere al menos 20 minutos a que los condensadores se descarguen por completo antes de
efectuar trabajos de reparación o mantenimiento.
El personal cualicado es aquel personal formado que está
autorizado para realizar la instalación de equipos, sistemas
y circuitos conforme a la legislación y la regulación
vigentes. Asimismo, el personal debe estar familiarizado
con las instrucciones y medidas de seguridad descritas en
este manual.
Medidas de seguridad
2.3
ADVERTENCIA
TENSIÓN ALTA
El sistema de convertidores de frecuencia contiene
tensión alta cuando está conectado a la entrada de red
de CA. Si no se garantiza que la instalación del sistema
se restrinja al personal cualicado, pueden producirse
lesiones graves e incluso accidentes mortales.
El sistema de convertidores únicamente puede
•
ser instalado por personal cualicado.
6 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Seguridad Guía de diseño
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA (>3,5 mA)
Las corrientes de fuga superan los 3,5 mA. No realizar la
conexión toma a tierra adecuada del sistema de convertidores de frecuencia puede causar lesiones graves e
incluso mortales. Siga las normas locales y nacionales
sobre la conexión protectora a tierra del equipo con una
corriente de fuga >3,5 mA. La tecnología del convertidor
de frecuencia implica una conmutación de alta
frecuencia con alta potencia. Esta conmutación genera
una corriente de fuga en la conexión a tierra. En
ocasiones, una corriente de falta en los terminales de
potencia de salida del sistema de convertidores de
frecuencia puede contener un componente de CC, que
puede cargar los condensadores de ltro y provocar una
corriente a tierra transitoria. La corriente de fuga a tierra
depende de las diversas conguraciones del sistema,
incluidos el ltro RFI, los cables de motor apantallados y
la potencia del sistema de convertidores de frecuencia.
Si la corriente de fuga supera los 3,5 mA, la norma EN/
CEI 61800-5-1 (estándar de producto de sistemas Power
Drive) requerirá una atención especial.
La toma de tierra debe reforzarse de una de las
siguientes maneras:
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
Cable de conexión toma a tierra de al menos
•
10 mm2 (6 AWG).
Dos cables de conexión toma a tierra separados,
•
conformes con las normas de dimensionamiento.
Para obtener más información, consulte el apartado
543.7 de la norma EN 60364-5-54.
2 2
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 7

Homologaciones y certicad...
VLT® Parallel Drive Modules
3 Homologaciones y certicados
Los convertidores de frecuencia están diseñados conforme
a las directivas descritas en este apartado.
correctamente, se mantienen y se usan conforme a lo
previsto.
33
Un convertidor de frecuencia se puede utilizar como
dispositivo independiente o como parte de una instalación
más compleja. Los dispositivos que se utilizan independientemente o como parte de un sistema deben disponer
de la marca CE. Los sistemas no deben tener la marca CE
pero deben cumplir con los requisitos de protección
Tabla 3.1 Homologaciones
3.1 Marca CE
La marca CE (Comunidad Europea) indica que el fabricante
del producto cumple todas las directivas aplicables de la
UE. Las directivas de la UE aplicables al diseño y
fabricación de convertidores de frecuencia son la Directiva
de tensión baja, la Directiva CEM y la Directiva de
máquinas (para unidades con función de seguridad
integrada).
El propósito de la marca CE es el de eliminar las barreras
técnicas para el comercio libre entre los países de la CE y
la EFTA, dentro de la ECU. La marca CE no regula la calidad
del producto. Las especicaciones técnicas no pueden
deducirse de la marca CE.
Directiva de tensión baja
3.2
Los convertidores de frecuencia están clasicados como
componentes electrónicos y deben contar con la marca CE
conforme a la Directiva 2014/35/UE de tensión baja. Esta
directiva se aplica a todos los equipos eléctricos en el
rango de tensión de 50-1000 V CA y 75-1500 V CC.
La directiva exige que el diseño del equipo debe asegurar
que no se pongan en peligro la seguridad ni la salud de
las personas y del ganado y que el valor del material se
conserve hasta que el equipo esté instalado correctamente,
mantenido y se use conforme a lo previsto. Las marcas CE
de Danfoss cumplen con la Directiva de tensión baja y
ofrecen una declaración de conformidad si así se solicita.
Directiva CEM
3.3
básicos de la Directiva CEM.
3.4 Directiva de máquinas
Los convertidores de frecuencia se clasican como
componentes electrónicos sujetos a la Directiva de tensión
baja, aunque los convertidores de frecuencia con una
función de seguridad integrada deben cumplir con la
Directiva de máquinas 2006/42/CE. Los convertidores de
frecuencia sin función de seguridad no se incluyen en la
Directiva de máquinas. Si un convertidor de frecuencia está
integrado en un sistema de maquinaria, Danfoss
proporciona información sobre los aspectos de seguridad
relativos al convertidor.
La Directiva de máquinas 2006/42/CE se aplica a máquinas
que consten de un conjunto de componentes o
dispositivos interconectados de los cuales al menos uno
pueda realizar movimientos mecánicos. La directiva exige
que el diseño del equipo debe asegurar que no se pongan
en peligro la seguridad ni la salud de las personas y del
ganado y que el valor del material se conserve hasta que
el equipo esté instalado correctamente, mantenido y se
use conforme a lo previsto.
Cuando los convertidores de frecuencia se utilizan en
máquinas con al menos una parte móvil, el fabricante de la
máquina debe proporcionar una declaración de cumplimiento de todas las normas y medidas de seguridad
pertinentes. Las marcas CE de Danfoss cumplen con la
Directiva de máquinas para convertidores de frecuencia
con una función de seguridad integrada y ofrecen una
declaración de conformidad si así se solicita.
Conformidad con UL
3.5
La compatibilidad electromagnética (EMC) signica que las
interferencias electromagnéticas entre aparatos no afectan
a su rendimiento. Los requisitos de protección básicos de
la Directiva CEM 2014/30/UE indican que los dispositivos
que generan interferencias electromagnéticas (EMI) o los
dispositivos cuyo funcionamiento pueda verse afectado por
las EMI deben diseñarse para limitar la generación de
interferencias electromagnéticas y deben tener un grado
adecuado de inmunidad a las EMI cuando se instalan
8 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
Para garantizar que el convertidor de frecuencia cumpla los
requisitos de seguridad de las normas UL, consulte el
capétulo 8.3 Requisitos eléctricos para certicados y homologaciones.

Homologaciones y certicad... Guía de diseño
3.6 Marcado RCM de conformidad
El sello RCM indica el cumplimiento de los estándares
técnicos aplicables de compatibilidad electromagnética
(CEM). El sello RCM es necesario para la distribución de
dispositivos eléctricos y electrónicos en el mercado
australiano y en el neozelandés. Las disposiciones
normativas de la marca RCM solo conciernen a las
emisiones por conducción y radiación. En el caso de los
convertidores de frecuencia, se aplicarán los límites de
emisiones especicados en la norma EN/CEI 61800-3. Podrá
emitirse una declaración de conformidad si así se solicita.
3.7 Normativa de control de exportación
Los convertidores de frecuencia pueden estar sujetos a
normativas regionales y/o nacionales de control de
exportaciones.
Aquellos convertidores de frecuencia sujetos a normativas
de control de exportaciones se clasicarán con un código
ECCN.
3 3
El código ECCN se incluye en los documentos adjuntos al
convertidor de frecuencia.
En caso de reexportación, recaerá en el exportador la
responsabilidad de garantizar la conformidad con las
normativas pertinentes de control de exportaciones.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 9
130BF015.10
41
(1.6)
1122
(44.2)
1048
(41.3)
346 (13.6)
376 (14.8)
Vista general de producto
VLT® Parallel Drive Modules
4 Vista general de producto
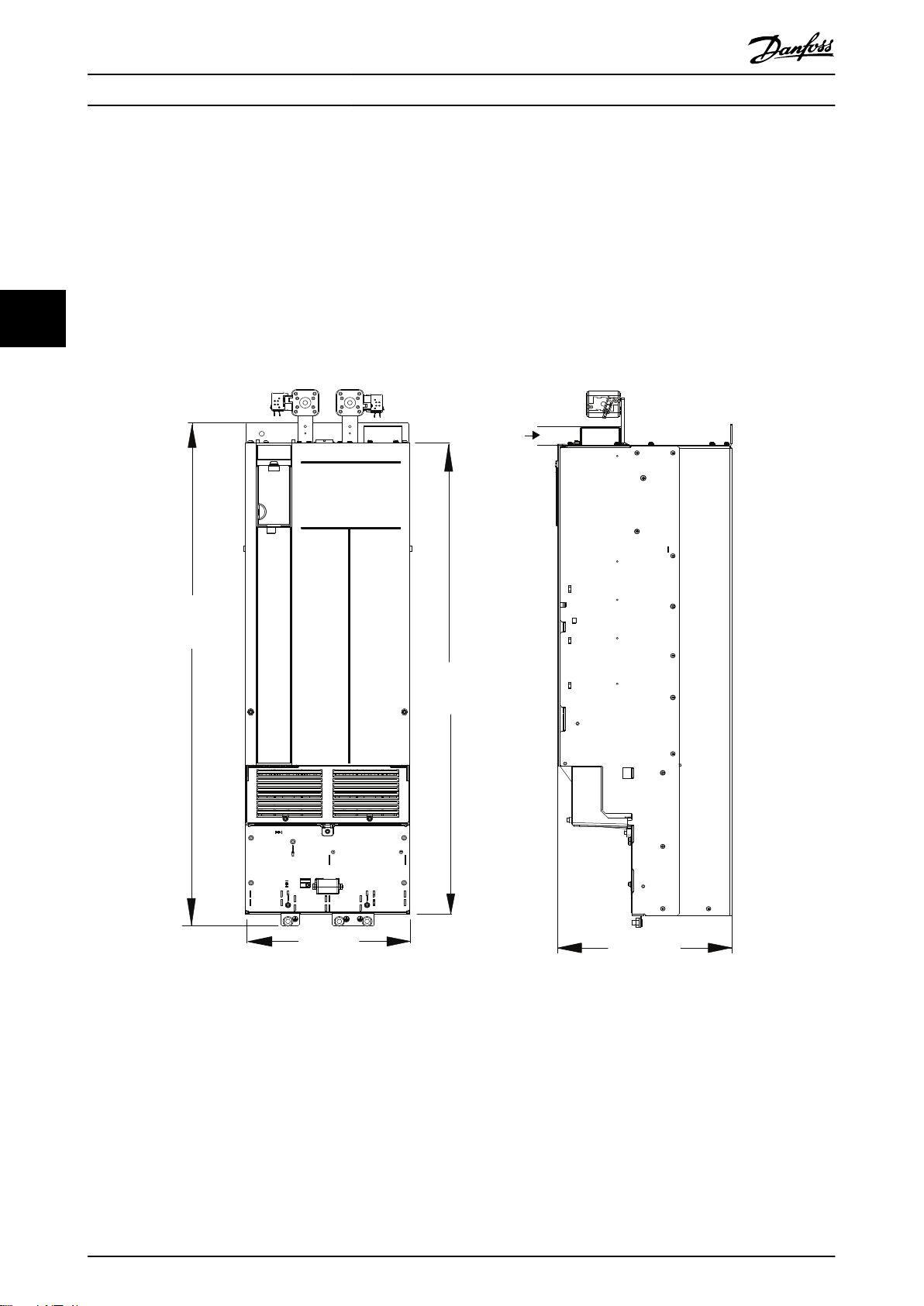
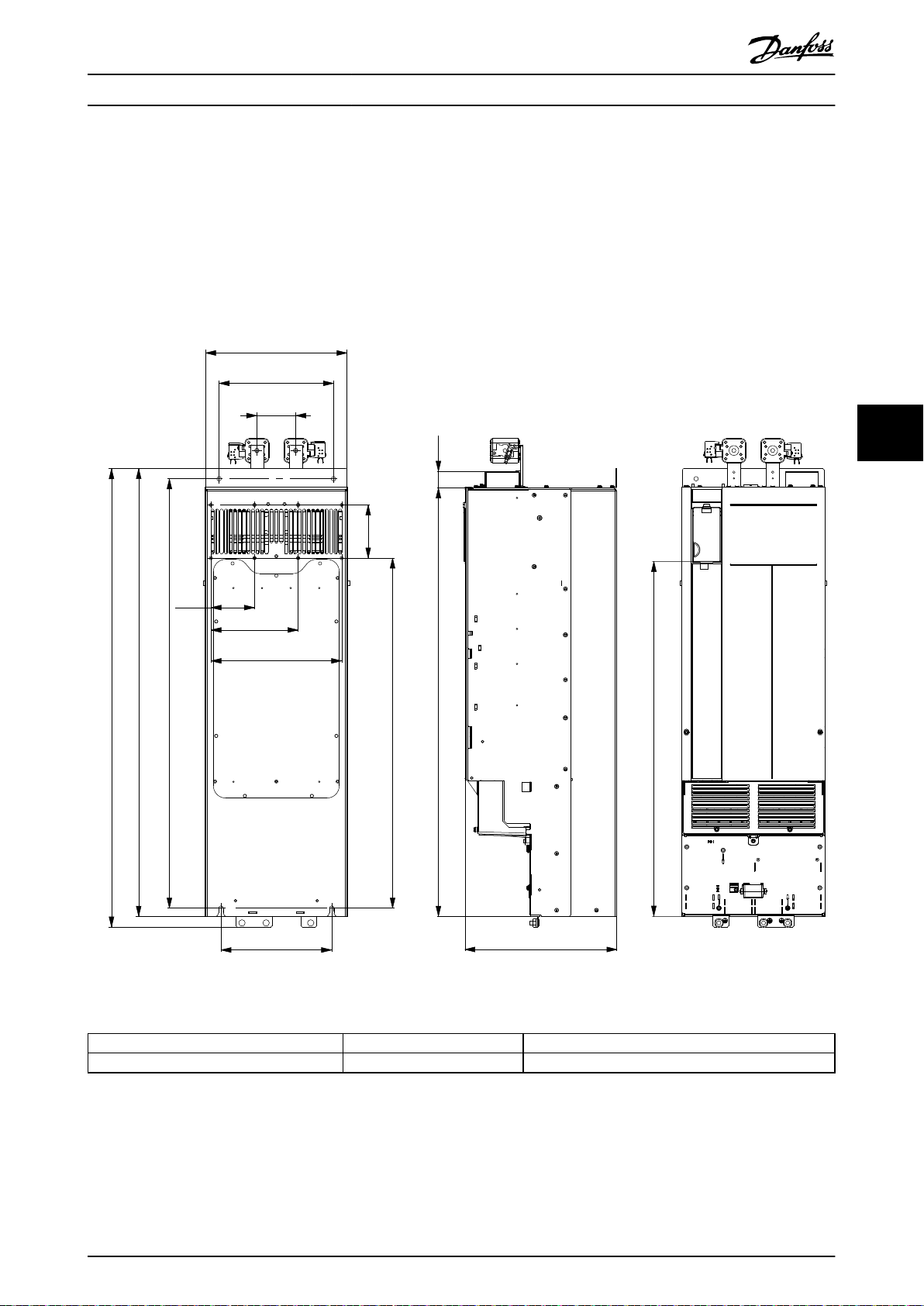
4.1 Hoja de datos del módulo de convertidor
Potencia de salida para 380-500 V
•
- HO: 160-250 kW (250-350 CV).
Potencia de salida para 525-690 V
44
•
- HO: 160-315 kW (200-450 CV).
Peso
•
- 125 kg (275 lb).
Clasicación de protección
•
- IP 00.
- NEMA tipo 00.
Ilustración 4.1 Dimensiones del módulo de convertidor de frecuencia
Opciones de Danfoss disponibles:
Sistema de módulos de dos convertidores de
•
frecuencia
Sistema de módulos de cuatro convertidores de
•
frecuencia
10 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
130BF016.10
2260
(89.0)
2201
(86.7)
808 (31.8) 636 (25.0)
59
(2.3)
Vista general de producto Guía de diseño
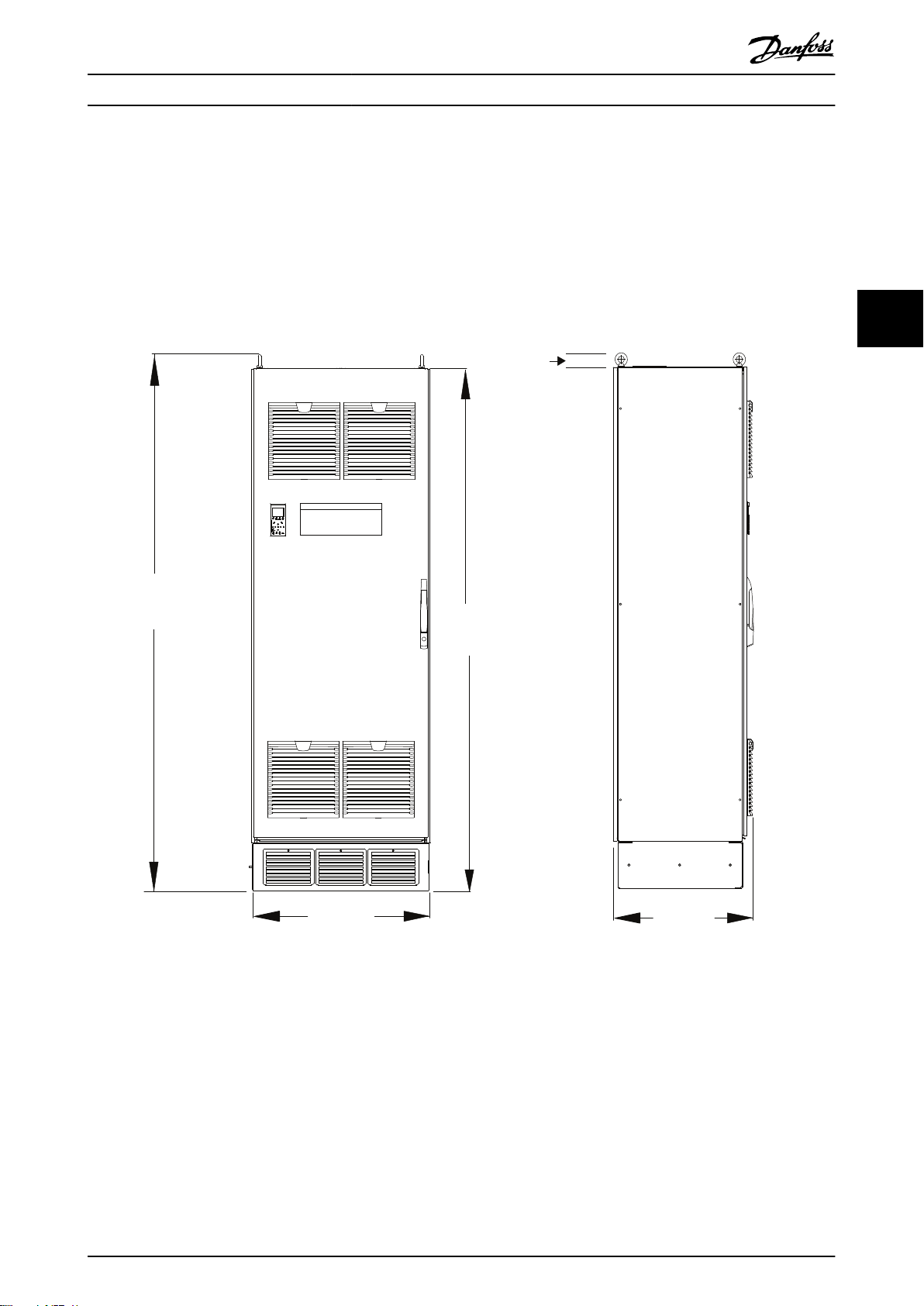
4.2 Hoja de datos de un sistema de dos convertidores de frecuencia
Potencia de salida para 380-500 V
•
- HO: 250-450 kW (350-600 CV).
- NO: 315-500 kW (450-600 CV).
Potencia de salida para 525-690 V
•
- HO: 250-560 kW (300-600 CV).
- NO: 315-630 kW (350-650 CV).
Peso
•
- 450 kg (992 lb).
Clasicación de protección
•
- IP54 (mostrado). Clasicación IP según
los requisitos del cliente.
- NEMA tipo 12 (mostrado).
4 4
Ilustración 4.2 Sistema de dos convertidores de frecuencia con dimensiones mínimas de alojamiento
Opciones de Danfoss disponibles:
Kit de barra conductora de 6 pulsos
•
Kit de barra conductora de 12 pulsos
•
Kit de refrigeración de entrada y salida posterior
•
Kit de refrigeración de entrada posterior y salida
•
superior
Kit de refrigeración de entrada inferior y salida
•
posterior
Kit de refrigeración de entrada inferior y salida
•
superior
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 11
130BF017.10
636 (25.0)
2201
(86.7)
805 (31.7)
749 (29.5)
1608 (63.3)
(2.3)
59
(2.0)
52
2254
(88.7)
Vista general de producto
VLT® Parallel Drive Modules
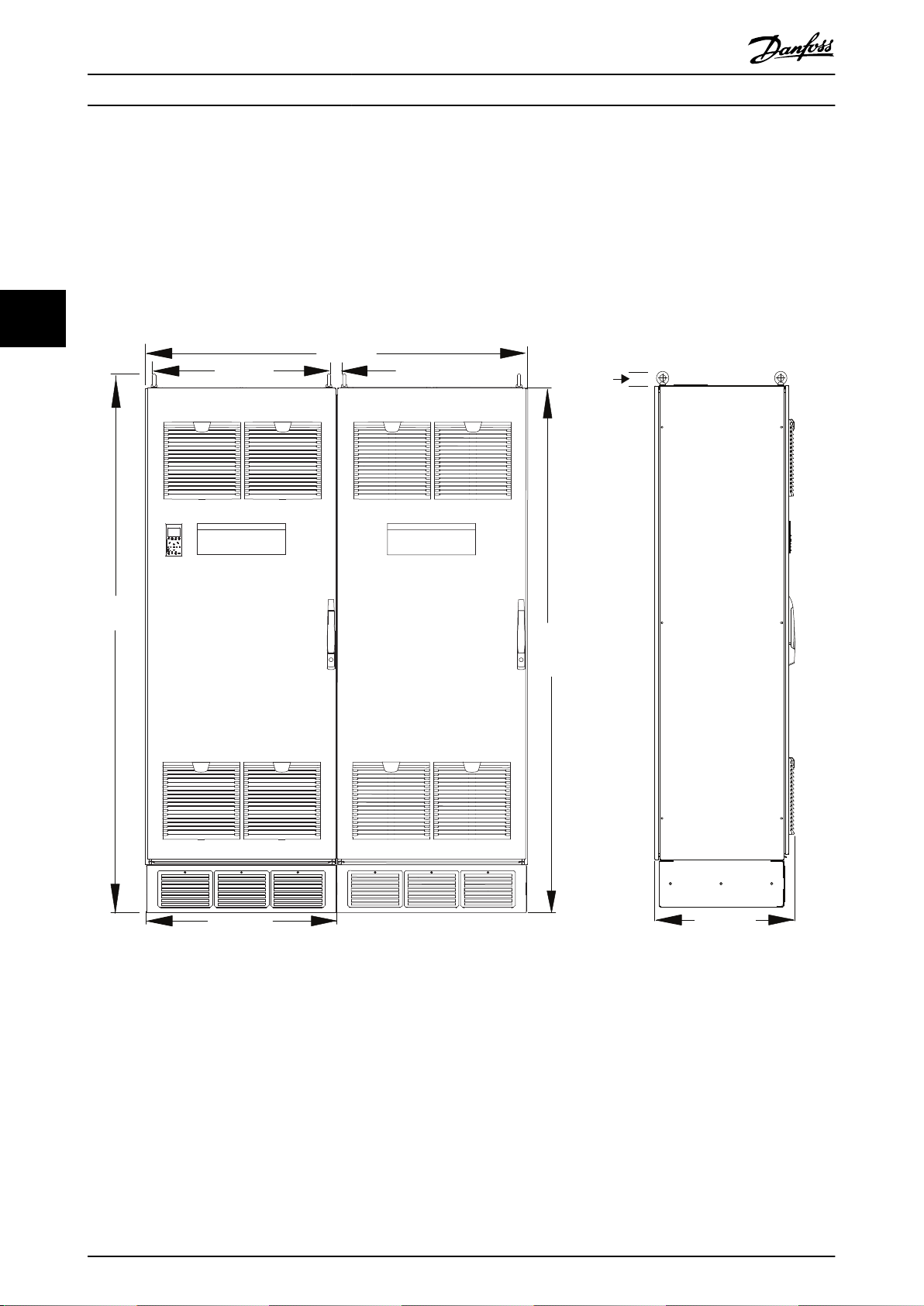
4.3 Hoja de datos de un sistema de cuatro convertidores de frecuencia
Potencia de salida para 380-500 V
•
- HO: 500-800 kW (650-1200 CV).
- NO: 560-1000 kW (750-1350 CV).
Potencia de salida para 525-690 V
•
- HO: 630-1000 kW (650-1150 CV).
44
- NO: 710-1200 kW (750-1350 CV).
Peso
•
- 910 kg (2000 lb).
Clasicación de protección
•
- IP54 (mostrado). Clasicación IP según
los requisitos del cliente.
- NEMA tipo 12 (mostrado).
Ilustración 4.3 Sistema de cuatro convertidores de frecuencia con dimensiones mínimas de alojamiento
Opciones de Danfoss disponibles:
Kit de barra conductora de 6 pulsos
•
Kit de barra conductora de 12 pulsos
•
Kit de refrigeración de entrada y salida posterior
•
Kit de refrigeración de entrada posterior y salida
•
superior
Kit de refrigeración de entrada inferior y salida
•
posterior
Kit de refrigeración de entrada inferior y salida
•
superior
4.4 Componentes internos del
El instalador diseña el sistema de convertidores para
cumplir unos requisitos especícos de potencia, utilizando
el kit básico de los VLT® Parallel Drive Modules y los kits
de las opciones seleccionadas. El kit básico está compuesto
por el hardware de conexión y 2 o 4 módulos de
convertidor conectados en paralelo.
12 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
130BE836.10
4
1
2
6
7
5
8
3
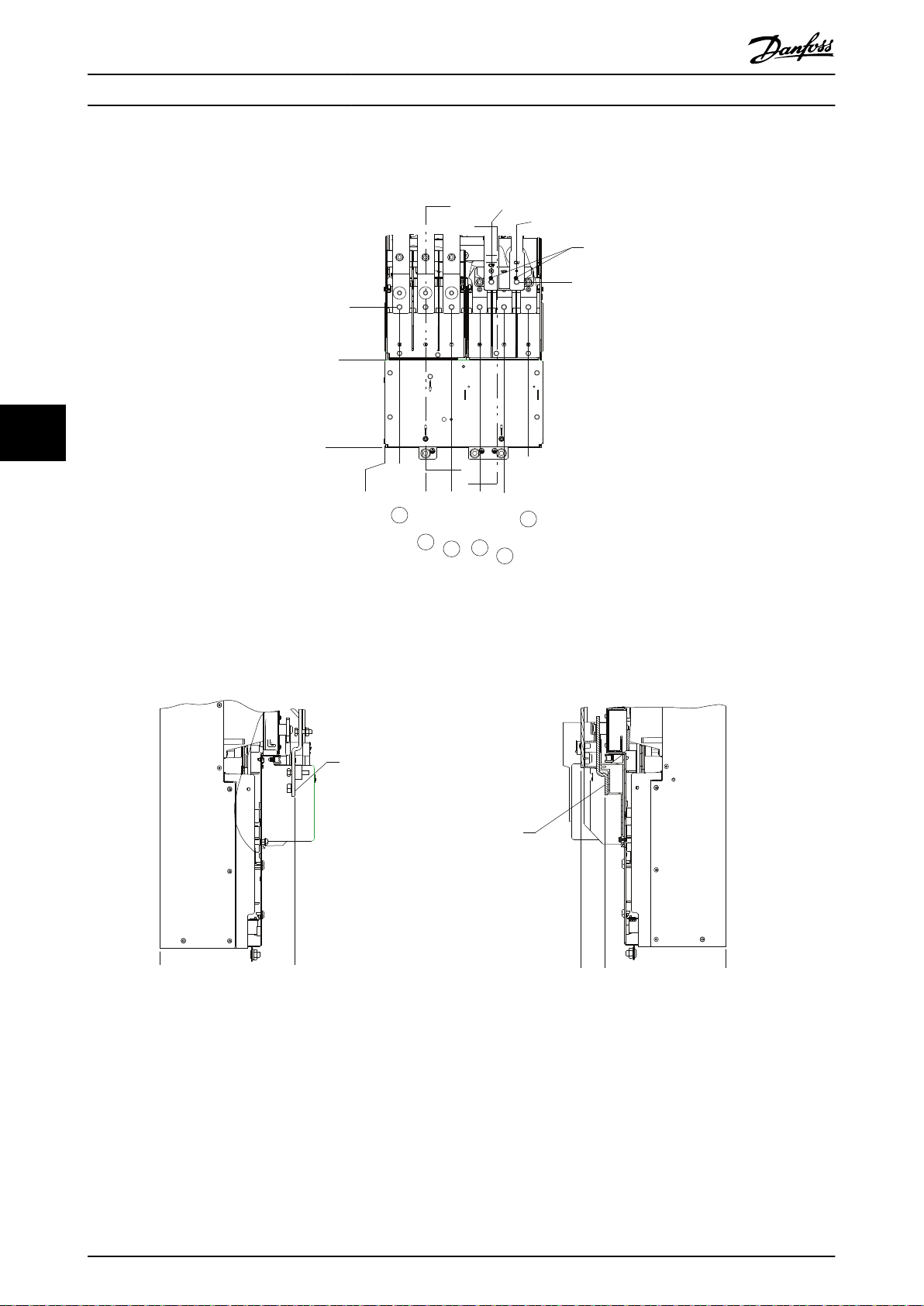
Vista general de producto Guía de diseño
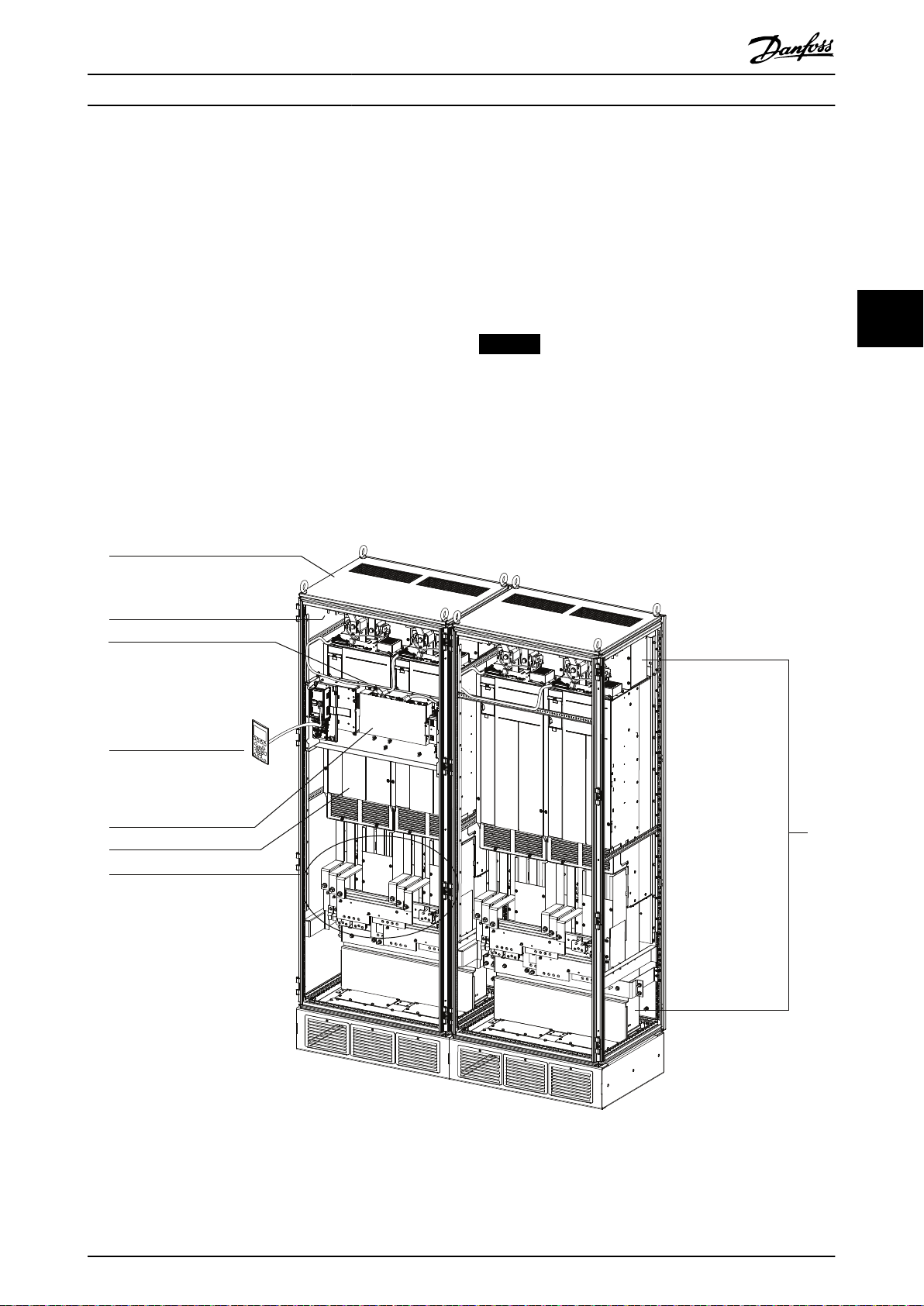
El kit básico contiene los siguientes componentes:
Módulos de convertidor de frecuencia
•
Cuadro de control
•
Mazos de cables
•
- Cable plano con terminal de 44 pines
(en ambos extremos del cable).
- Cable de relé con terminal de 16 pines
(en un extremo del cable).
- Cable microrruptor de fusible de CC con
terminales de dos pines (en un extremo
del cable).
Fusibles de CC
•
Microrruptores
•
Otros componentes, como los kits de barras conductoras y
los kits de conductos de refrigeración del canal posterior,
están disponibles como opciones para personalizar el
sistema de convertidores de frecuencia.
En la Ilustración 4.4 se muestra un sistema con cuatro
módulos de convertidor de frecuencia. Un sistema de dos
módulos de convertidor de frecuencia es parecido, salvo
en cuanto al hardware de conexión utilizado. En el sistema
de convertidores de frecuencia ilustrado se muestran el kit
de refrigeración y kit de opción de barra conductora. No
obstante, el instalador puede utilizar otros métodos de
conexión, como barras conductoras o cables eléctricos
fabricados a medida.
4 4
AVISO!
El instalador será responsable de los detalles de la
construcción del sistema de convertidores de frecuencia,
incluidas las conexiones. Asimismo, si el instalador no
utiliza el diseño recomendado por Danfoss, deberá
obtener las autorizaciones normativas por separado.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 13
Vista general de producto
Área Denominación Funciones
1 Alojamiento
(suministrado
por el
instalador)
2 Barras
conductoras
de CC (parte
de el kit
44
opcional de
barra
conductora)
3 Mazo de
cables
4 LCP Módulo de control local, que se muestra instalado en la puerta del alojamiento. Permite al operador controlar el
5 Cuadro de
control
6 Módulos de
convertidor de
frecuencia
7 Kit de barra
conductora
(opcional)
8 Refrigeración
de entrada
inferior y
salida
posterior
(opcional)
Utilizado para albergar los módulos de convertidor y otros componentes del sistema de convertidores de
frecuencia.
Se utilizan para conectar en paralelo los terminales de CC de los módulos de convertidor de frecuencia. El kit
puede encargarse a Danfoss o puede fabricarlo el cuadrista.
Se utiliza para conectar varios componentes al armario de control.
sistema y el motor.
Se compone de una MDCIC (tarjeta de interfaz de control de varias unidades), una tarjeta de control, un LCP, un
relé de seguridad y una SMPS (fuente de alimentación de modo conmutado). La MDCIC comunica el LCP y la
tarjeta de control con la tarjeta de potencia de cada módulo de convertidor.
Pueden instalarse dos o cuatro módulos de convertidor en paralelo para crear un sistema de convertidores de
frecuencia.
Se utiliza para conectar en paralelo los terminales de alimentación, del motor y de conexión toma a tierra de los
módulos de convertidor de frecuencia. Puede encargarse a Danfoss como kit opcional o puede fabricarlo el
cuadrista.
Se utiliza para introducir aire por la base del alojamiento, a través del canal posterior del módulo de convertidor de
frecuencia, y expulsarlo por la parte superior del alojamiento. Reduce en un 85 % el calor en el interior del
alojamiento. Puede solicitarse a Danfoss como kit opcional. Consulte la capétulo 4.5.1 Ejemplos de refrigeración
mediante canal posterior.
VLT® Parallel Drive Modules
Ilustración 4.4 Visión general de un sistema de cuatro convertidores de frecuencia sin pantallas EMI/CEM
14 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
130BF018.10
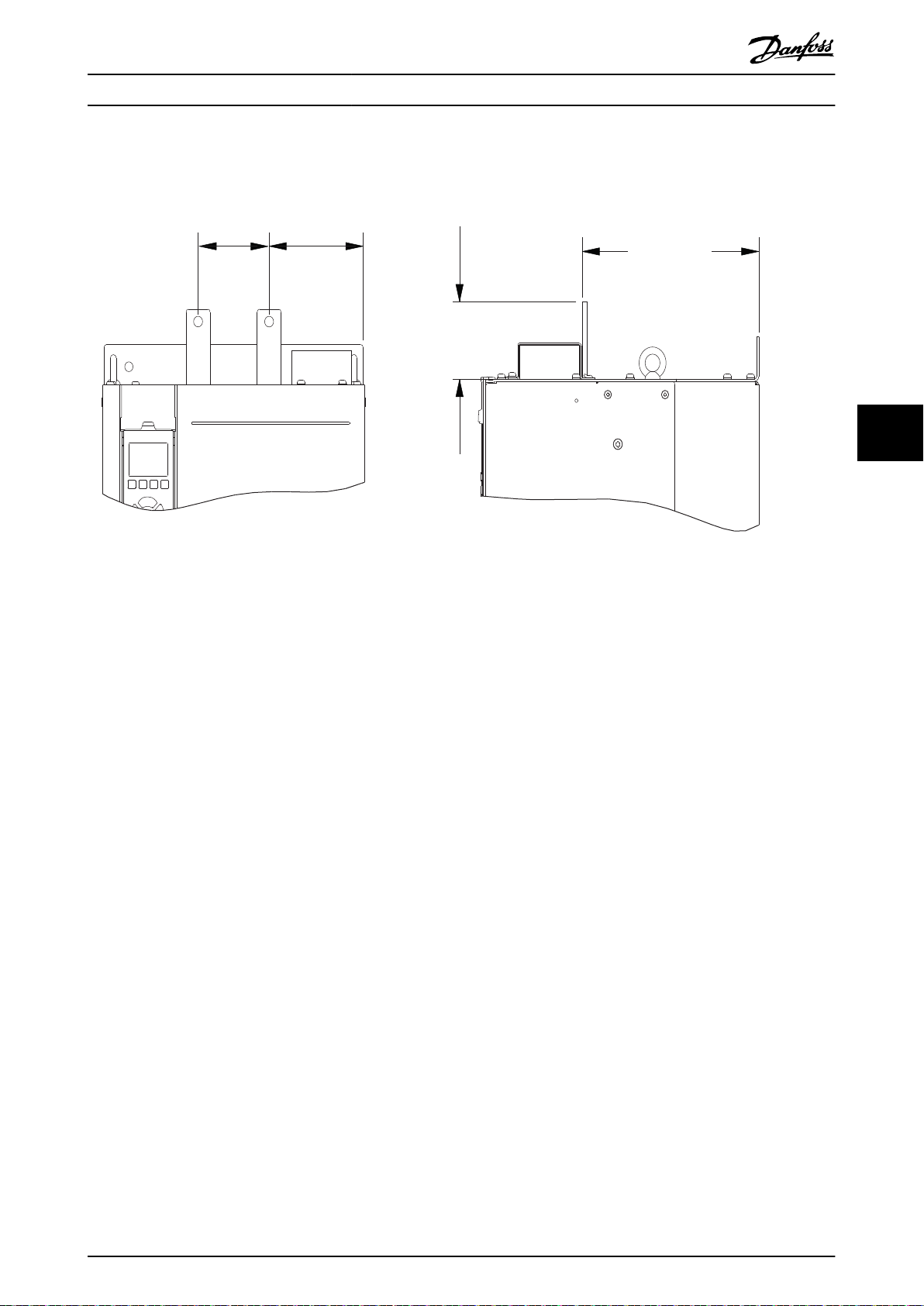
Vista general de producto Guía de diseño
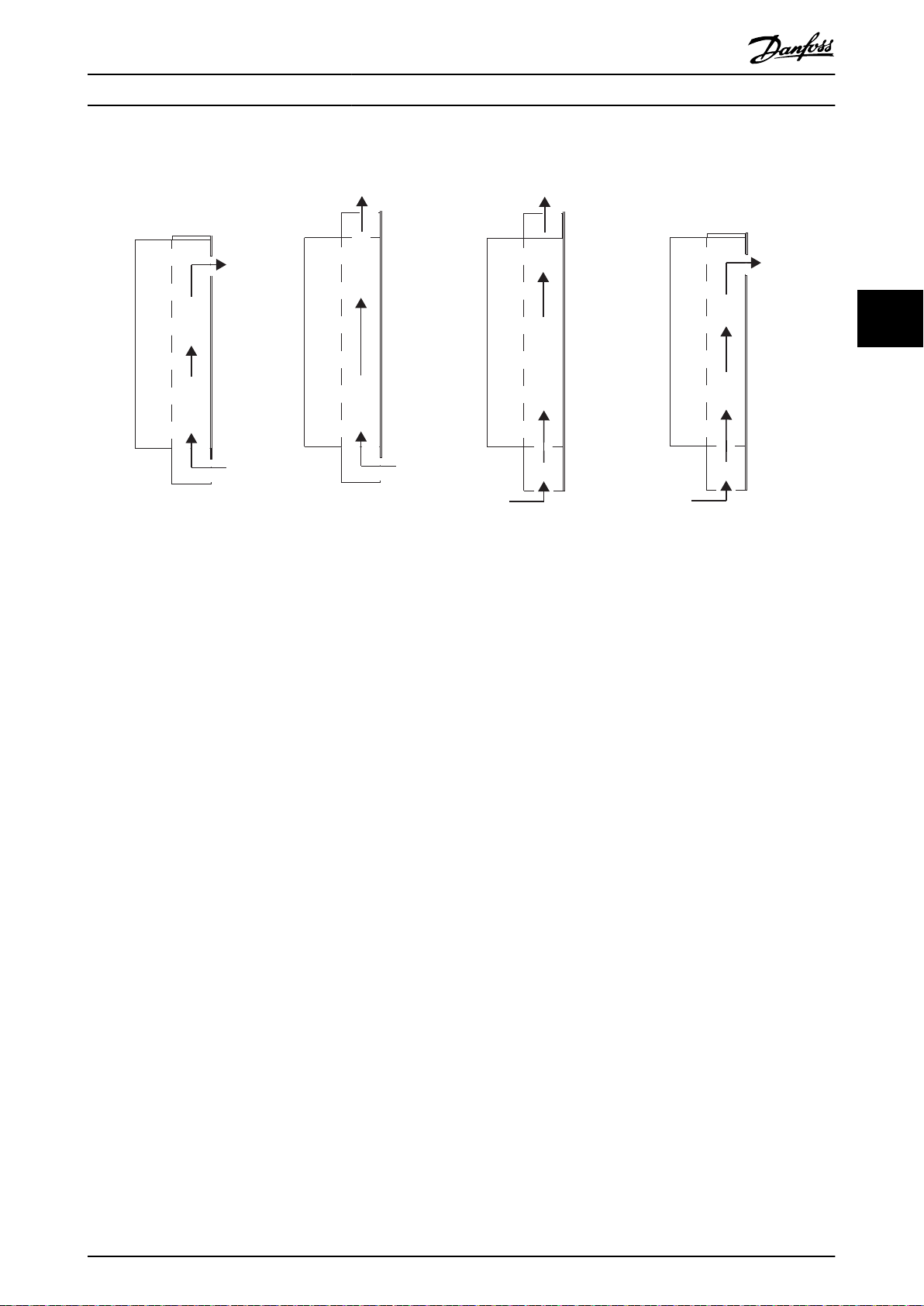
4.5 Ejemplos de refrigeración mediante canal posterior
Ilustración 4.5 Flujo de aire del kit de refrigeración (de izquierda a derecha), entrada/salida posterior, entrada posterior / salida
superior, entrada inferior / salida superior, entrada inferior / salida posterior.
4 4
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 15
130BF019.11
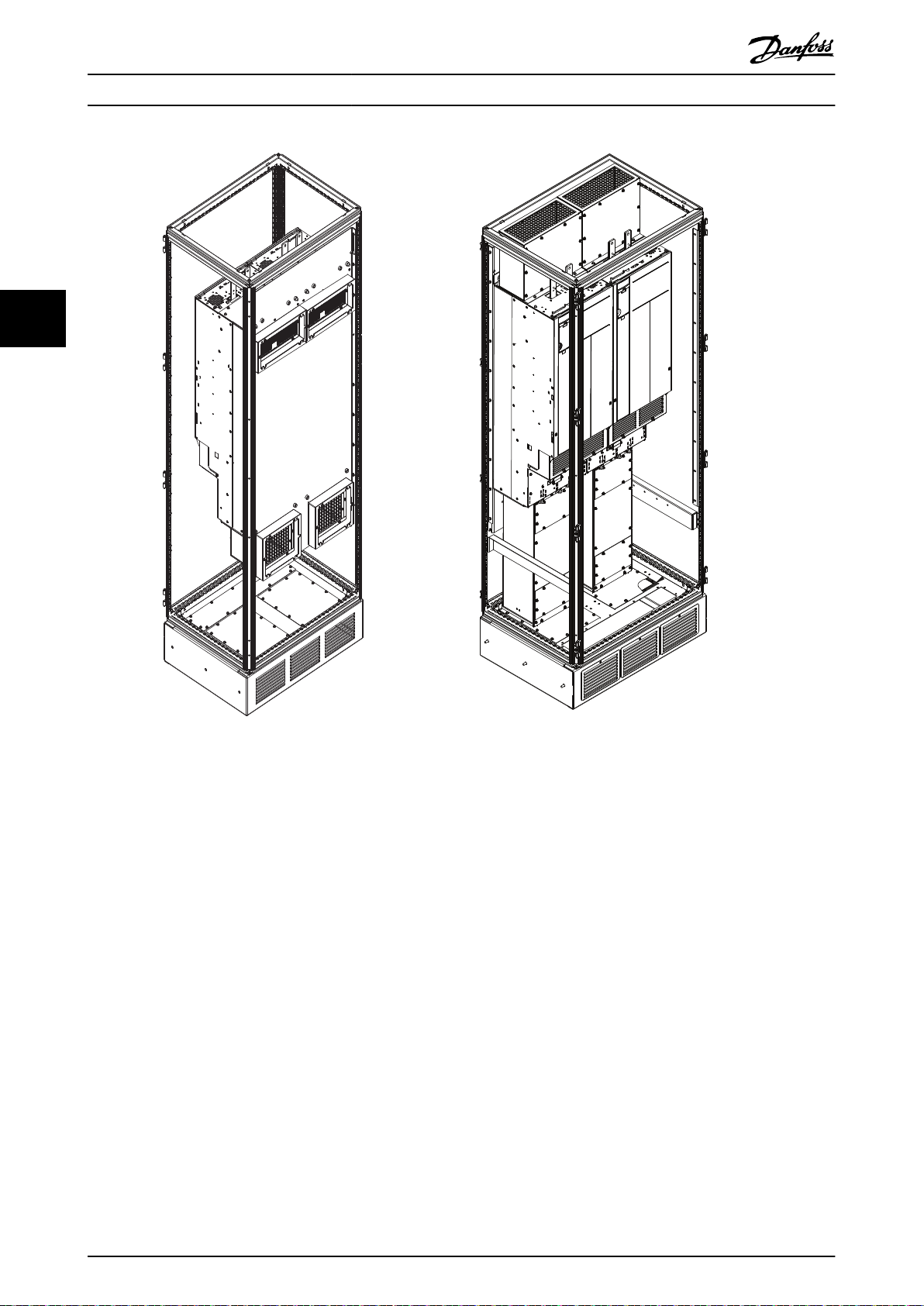
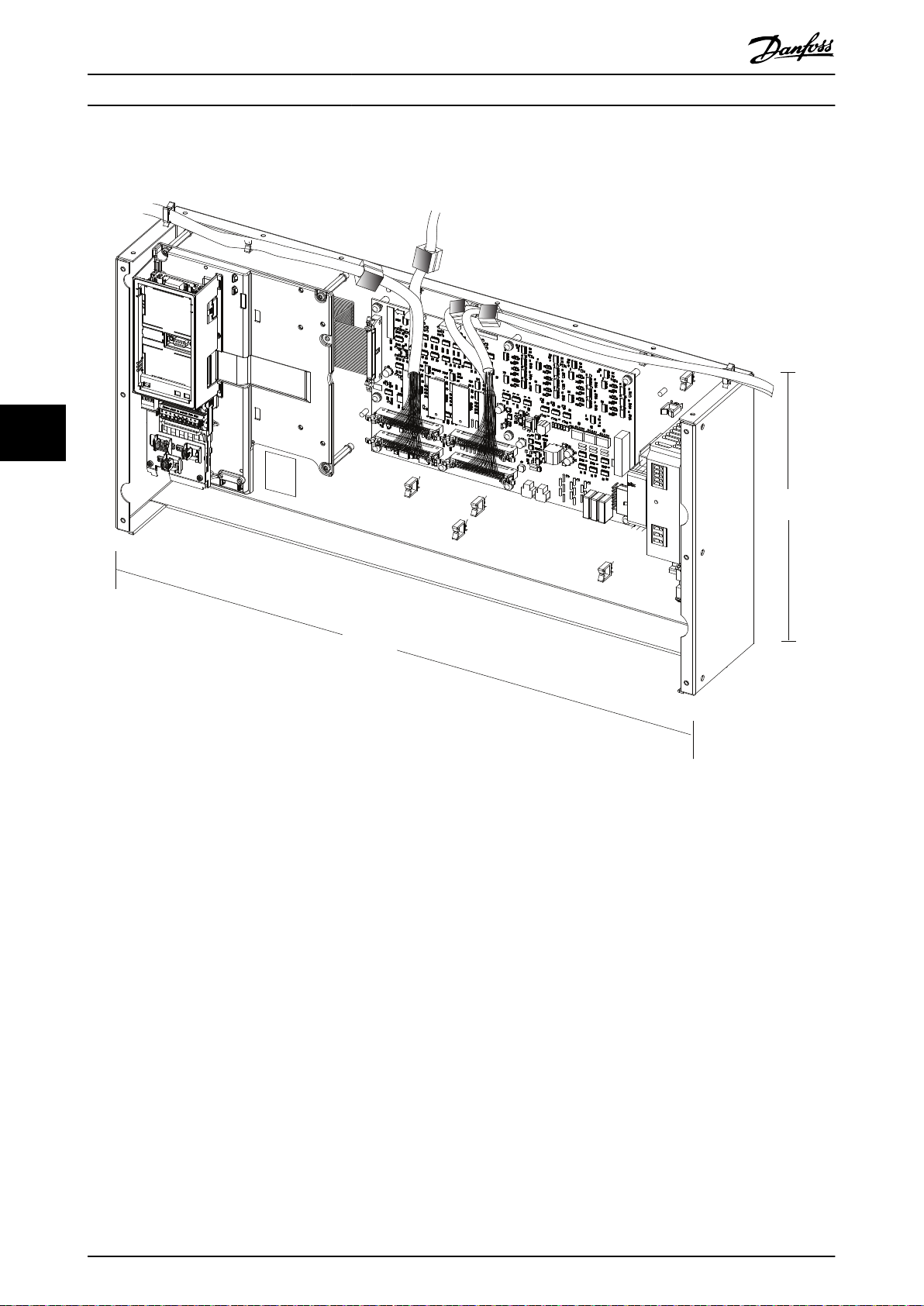
Vista general de producto
VLT® Parallel Drive Modules
44
Ilustración 4.6 Armario de dos convertidores de frecuencia con kit de refrigeración de entrada/salida posterior (izquierda) y kit de
refrigeración de entrada inferior / salida superior (derecha)
16 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
Funciones del producto Guía de diseño
5 Funciones del producto
5.1 Funciones automatizadas
Estas funciones automatizadas se dividen en tres
categorías:
Activadas por defecto, pero pueden desactivarse
•
en la programación.
Desactivadas por defecto, pero pueden activarse
•
en la programación.
Siempre activadas.
•
5.1.1 Optimización automática de la
energía
La optimización automática de energía (AEO) se utiliza en
aplicaciones de HVAC. Esta función dirige el convertidor de
frecuencia para que controle continuamente la carga del
motor y ajuste la tensión de salida para obtener la máxima
ecacia posible. Con una carga ligera, la tensión disminuye
y la intensidad del motor se reduce al mínimo. El motor
saca provecho porque aumenta la ecacia, se reduce el
calor y el funcionamiento es más silencioso. No es
necesario seleccionar una curva de V/Hz porque el
convertidor de frecuencia ajusta automáticamente la
tensión del motor.
5.1.2 Modulación automática de frecuencia
de conmutación
portadora baja (ritmo de pulsos lento) causa ruido en el
motor, de modo que es preferible una frecuencia
portadora más alta. Una frecuencia portadora alta, sin
embargo, genera calor en el convertidor de frecuencia, lo
que puede limitar la cantidad de corriente disponible en el
motor. El uso de transistores bipolares de puerta aislada
(IGBT) implica una conmutación a alta velocidad.
La modulación automática de frecuencia de conmutación
regula estas condiciones automáticamente para ofrecer la
frecuencia portadora más elevada sin sobrecalentar el
convertidor de frecuencia. Al ofrecer una frecuencia
portadora alta regulada, se silencia el ruido de funcionamiento del motor a velocidades bajas, cuando el ruido
audible es crítico, y se produce una plena potencia de
salida al motor cuando la demanda lo requiere.
5.1.3 Reducción de potencia automática
para una frecuencia portadora alta
El convertidor de frecuencia está diseñado para un funcionamiento continuo a plena carga a frecuencias portadoras
comprendidas entre las frecuencias mínima y máxima que
se indican en la Tabla 5.1. Si la frecuencia portadora es
superior a la frecuencia máxima, se reducirá automáticamente la potencia de la intensidad de salida del
convertidor de frecuencia.
5 5
El convertidor de frecuencia genera pulsos eléctricos cortos
para formar un patrón de onda de CA. La frecuencia
portadora es el ritmo de estos pulsos. Una frecuencia
Potencia
kW (CV)
250 (350) 3000 2000 8000 3000
315 (450) 2000 1500 6000 2000
355 (500) 2000 1500 6000 2000
400 (550) 2000 1500 6000 2000
450 (600) 2000 1500 6000 2000
500 (650) 2000 1500 6000 2000
560 (750) 2000 1500 6000 2000
630 (900) 2000 1500 6000 2000
710 (1000) 2000 1500 6000 2000
800 (1200) 2000 1500 6000 2000
Tabla 5.1 Intervalos de funcionamiento de frecuencia portadora para 380-500 V
Frecuencia de conmutación
Hz
Mínima
Hz
Máxima
Hz
Ajustes de fábrica
Hz
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 17
Funciones del producto
VLT® Parallel Drive Modules
Potencia
kW (CV)
250 (300) 3000 2000 8000 3000
315 (350) 2000 1500 6000 2000
355 (400) 2000 1500 6000 2000
400 (400) 2000 1500 6000 2000
500 (500) 2000 1500 6000 2000
560 (600) 2000 1500 6000 2000
630 (650) 2000 1500 6000 2000
710 (750) 2000 1500 6000 2000
800 (950) 2000 1500 6000 2000
55
900 (1050) 2000 1500 6000 2000
1000 (1150) 2000 1500 6000 2000
Tabla 5.2 Intervalos de funcionamiento de frecuencia portadora para 525-690 V
5.1.4 Reducción de potencia automática
Frecuencia de conmutación
Hz
Mínima
Hz
Máxima
Hz
Ajustes de fábrica
5.1.7 Protección ante cortocircuitos
Hz
por sobretemperatura
El convertidor de frecuencia proporciona una protección
Se aplica una reducción de potencia automática por
sobretemperatura para evitar la desconexión del
convertidor de frecuencia en caso de temperatura elevada.
Los sensores de temperatura interna miden las condiciones
existentes para evitar que se sobrecalienten los
componentes de alimentación. El convertidor de frecuencia
puede reducir automáticamente su frecuencia portadora
para mantener su temperatura de funcionamiento dentro
de límites seguros. Tras reducir la frecuencia portadora, el
convertidor de frecuencia también puede reducir la
corriente y la frecuencia de salida hasta en un 30 % para
evitar una desconexión por sobretemperatura.
5.1.5 Rampa automática
Un motor que intenta acelerar una carga demasiado
rápidamente para la intensidad disponible puede provocar
la desconexión del convertidor de frecuencia. Lo mismo
sucede en caso de una desaceleración demasiado rápida.
La rampa automática protege de esta posibilidad
aumentando la tasa de rampa del motor (aceleración o
desaceleración) para adaptarla a la corriente disponible.
inherente frente a cortocircuitos con un circuito de
desconexión por fallo que actúa rápidamente. Se mide la
corriente en cada una de las tres fases de salida. Transcu-
rridos 5-10 ms, si la corriente es superior al valor permitido,
se desconectarán todos los transistores del inversor. Este
circuito proporciona la detección de corriente más rápida
posible y la mayor protección contra molestas descone-
xiones. Un cortocircuito entre dos fases de salida puede
causar una desconexión por sobreintensidad.
5.1.8 Protección de fallo a tierra
Tras recibir realimentación desde los sensores de corriente,
los circuitos de control acumulan las corrientes trifásicas de
cada módulo de convertidor. Si la suma de las tres
corrientes de fase de salida es distinta de cero, esto indica
una corriente de fuga. Si la desviación desde cero supera
una cantidad predeterminada, el convertidor de frecuencia
emitirá un alarma de fallo a tierra.
5.1.9 Rendimiento de uctuación de
potencia
5.1.6 Control del límite de corriente
Si una carga supera la capacidad de corriente del
convertidor de frecuencia en funcionamiento normal (de
un convertidor o un motor demasiado pequeños), el límite
de intensidad reduce la frecuencia de salida para frenar el
motor y reducir la carga. Un temporizador ajustable está
disponible para limitar el funcionamiento en estas
condiciones a 60 s o menos. El límite predeterminado de
fábrica es el 110 % de la corriente nominal del motor, para
reducir al mínimo el estrés por sobreintensidad.
18 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
El convertidor de frecuencia soporta uctuaciones de red
como:
Transitorios.
•
Cortes momentáneos.
•
Caídas cortas de tensión.
•
Sobretensiones.
•
El convertidor de frecuencia compensa automáticamente
las tensiones de entrada de un ±10 % del valor nominal
para ofrecer un par y una tensión nominal del motor
completos. Con el reinicio automático seleccionado, el
convertidor de frecuencia se enciende automáticamente
tras una desconexión de tensión. Y con la función de
Funciones del producto Guía de diseño
motor en giro, el convertidor de frecuencia se sincroniza
con el giro del motor antes del arranque.
5.1.10 Arranque suave del motor
El convertidor de frecuencia suministra al motor la
cantidad correcta de intensidad para superar la inercia de
la carga y poner el motor a la velocidad correcta. Esta
acción evita que toda la tensión de red se aplique a un
motor parado o que gira lentamente, lo cual genera una
alta corriente y calor. Esta función inherente de arranque
suave reduce la carga térmica y el estrés mecánico, alarga
la vida del motor y genera un funcionamiento más
silencioso del sistema.
5.1.11 Amortiguación de resonancia
Los ruidos de resonancias del motor a alta frecuencia se
pueden eliminar mediante amortiguación de resonancia.
Está disponible la amortiguación de frecuencia automática
o seleccionada manualmente.
5.1.12 Ventiladores controlados por
temperatura
Los ventiladores de refrigeración interna se controlan por
temperatura mediante sensores que están dentro del
convertidor de frecuencia. El ventilador de refrigeración a
menudo no funciona durante el funcionamiento a baja
carga, cuando está en el modo reposo o en espera. Esta
función reduce el ruido, aumenta el rendimiento y alarga la
vida útil del ventilador.
5.1.13 Conformidad con CEM
5.2.1 Adaptación automática del motor
La adaptación automática del motor (AMA) es un procedimiento de prueba automatizado utilizado para medir las
características eléctricas del motor. El AMA proporciona un
modelo electrónico preciso del motor. Permite que el
convertidor de frecuencia calcule el rendimiento y la
ecacia óptimos con el motor. Llevar a cabo el procedimiento AMA también aumenta al máximo la función de
optimización automática de energía del convertidor de
frecuencia. El AMA se realiza sin que el motor esté girando
y sin desacoplar la carga del motor.
5 5
5.2.2 Protección térmica del motor
La protección térmica del motor se puede proporcionar de
dos maneras.
Uno de los métodos utiliza un termistor de motor. El
convertidor de frecuencia supervisa la temperatura del
motor a medida que varían la velocidad y la carga, a n de
detectar situaciones de sobrecalentamiento.
El otro método calcula la temperatura del motor midiendo
la corriente, la frecuencia y el tiempo de funcionamiento. El
convertidor de frecuencia muestra la carga térmica del
motor en forma de porcentaje y puede emitir una
advertencia cuando llega a un valor de consigna de
sobrecarga programable. Las opciones programables en la
sobrecarga permiten que el convertidor de frecuencia
detenga el motor, reduzca la salida o ignore la condición.
Incluso a velocidades bajas, el convertidor de frecuencia
cumple con las normas de sobrecarga electrónica del
motor I2t de clase 20.
Las interferencias electromagnéticas (EMI) o las interferencias de radiofrecuencia (RFI) son perturbaciones que
pueden afectar al circuito eléctrico a causa de la inducción
o radiación electromagnética de una fuente externa. El
convertidor de frecuencia está diseñado para cumplir con
la norma de producto CEI 61800-3 relativa a CEM. Para
obtener más información sobre el rendimiento de CEM,
consulte el capétulo 9.2 Resultados de las pruebas de CEM.
Funciones programables
5.2
Las siguientes funciones son las funciones más comunes
programadas para su uso en el convertidor de frecuencia a
n de obtener un rendimiento mejorado del sistema.
Requieren una programación o conguración mínimas.
Entender que estas funciones están disponibles puede
optimizar el diseño de un sistema y, posiblemente, evitar la
introducción de componentes o funciones duplicados.
Consulte la Guía de programación especíca del producto
para obtener instrucciones sobre la activación de estas
funciones.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 19
5.2.3 Controlador PID integrado
El controlador integrado proporcional, integral y derivativo
(PID) está disponible, lo que elimina la necesidad de
dispositivos de control auxiliares. El controlador PID
mantiene un control constante de los sistemas de lazo
cerrado en los que se deben mantener regulados la
presión, el ujo, la temperatura u otros requisitos del
sistema. El convertidor de frecuencia puede ofrecer control
autosuciente de la velocidad del motor en respuesta a las
señales de realimentación de los sensores remotos.
El convertidor de frecuencia acomoda dos señales de
realimentación de dos dispositivos diferentes. Esta función
permite regular un sistema con diferentes requisitos de
realimentación. El convertidor de frecuencia toma
decisiones de control comparando las dos señales para
optimizar el rendimiento del sistema.
Funciones del producto
VLT® Parallel Drive Modules
5.2.4 Rearranque automático
El convertidor de frecuencia puede programarse para
reiniciar el motor automáticamente tras una pequeña
desconexión, como una uctuación o pérdida de potencia
momentáneas. Esta característica elimina la necesidad de
reiniciar manualmente y mejorar el funcionamiento
automatizado para sistemas controlados remotamente. Se
pueden limitar tanto la cantidad de intentos de reinicio
como la duración entre intentos.
5.2.5 Motor en giro
55
La función de motor en giro permite que el convertidor de
frecuencia se sincronice con un motor en funcionamiento
girando hasta ir a máxima velocidad en cualquier dirección.
Esta función evita desconexiones causadas por sobreintensidad. Además, reduce al mínimo la tensión mecánica
del sistema, ya que el motor no sufre ningún cambio
abrupto de la velocidad cuando se inicia el convertidor de
frecuencia.
5.2.6 Modo reposo
calor y ruido del motor a una velocidad inferior a la
máxima.
5.2.9 Bypass de frecuencia
En algunas aplicaciones, el sistema puede tener
velocidades de funcionamiento que crean una resonancia
mecánica. Esto puede generar un ruido excesivo y puede
dañar los componentes mecánicos del sistema. El
convertidor de frecuencia dispone de cuatro anchos de
banda de frecuencia de bypass programables, que
permiten al motor evitar velocidades que generen
resonancia en el sistema.
5.2.10 Precalentador del motor
Para precalentar un motor en un entorno húmedo o frío,
puede suministrarse continuamente una pequeña cantidad
de corriente de CC en el motor para protegerlo de la
condensación y de un arranque en frío. Esta función puede
eliminar la necesidad de resistencia calefactora.
5.2.11 4 ajustes programables
El modo de reposo detiene automáticamente el motor
cuando la demanda es baja durante un periodo
determinado. Cuando la demanda del sistema aumenta, el
convertidor de frecuencia vuelve a reiniciar el motor. El
modo reposo genera ahorro energético y reduce el
desgaste del motor. A diferencia de lo que sucede con un
temporizador de retardo, el convertidor de frecuencia
siempre está listo para funcionar cuando se alcanza la
demanda de activación predeterminada.
5.2.7 Permiso de arranque
El convertidor de frecuencia puede esperar por una señal
remota que indique que el sistema está preparado para
arrancar. Cuando esta función está activada, el convertidor
de frecuencia permanece parado hasta recibir el permiso
para arrancar. El permiso de arranque garantiza que el
sistema o los equipos auxiliares estén en un estado
adecuado antes de que se permita al convertidor de
frecuencia arrancar el motor.
5.2.8 Par completo a velocidad reducida
El convertidor de frecuencia sigue una curva V/Hz variable
para ofrecer un par del motor completo incluso a
velocidades reducidas. El par de salida completo puede
coincidir con la velocidad de funcionamiento máxima
diseñada del motor. Esta curva de par variable se diferencia
de los convertidores de par variable que ofrecen un par
del motor reducido a velocidad baja y de los convertidores
de par constante que proporcionan un exceso de tensión,
El convertidor de frecuencia tiene cuatro ajustes que se
pueden programar independientemente. Utilizando un
ajuste múltiple, es posible alternar entre funciones
programadas independientemente activadas por entradas
digitales o una orden de serie. Los ajustes independientes
se utilizan, por ejemplo, para cambiar las referencias, para
el funcionamiento día/noche o verano/invierno o para
controlar varios motores. El ajuste activo se muestra en el
LCP.
Los datos de ajuste se pueden copiar de un convertidor de
frecuencia a otro descargando la información desde el LCP
extraíble.
5.2.12 Freno de CC
Algunas aplicaciones pueden requerir el frenado de un
motor hasta una velocidad baja o su parada. La aplicación
de corriente de CC frena el motor y puede eliminar la
necesidad de disponer de un freno de motor independiente. El freno de CC puede congurarse para su
activación a una frecuencia predeterminada o tras recibir
una señal. La tasa de frenado también se puede programar.
5.2.13 Par de arranque alto
Para las cargas de inercia elevada o de alta fricción, hay
par extra disponible para el arranque. La corriente de
arranque desde el 110 % hasta un máximo del 160 %
puede ajustarse a un periodo limitado.
20 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
Funciones del producto Guía de diseño
5.2.14 Bypass
Una opción disponible es un bypass automático o manual,
que permitirá al motor funcionar a plena velocidad cuando
el convertidor de frecuencia no esté en funcionamiento y
permite asimismo realizar el mantenimiento habitual o un
bypass de emergencia.
5.2.15 Funcionamiento ininterrumpido con
pérdida de potencia
Durante una pérdida de potencia, el convertidor de
frecuencia sigue haciendo rotar el motor hasta que la
tensión del enlace de CC desciende por debajo del nivel
mínimo de funcionamiento, que es un 15 % inferior a la
tensión nominal más baja del convertidor de frecuencia.
Los convertidores de frecuencia tienen una capacidad
nominal de funcionamiento de 380-460 V, 550-600 V y
algunos de 690 V. Tras la carga, el tiempo de funcionamiento ininterrumpido con pérdida de potencia dependerá
del convertidor de frecuencia y de la tensión de red
existente en el momento de la pérdida de potencia.
5.2.16 Sobrecarga
Cuando el par necesario para mantenerse o acelerar a una
frecuencia determinada supera el límite de intensidad, el
convertidor de frecuencia intenta seguir funcionando.
Automáticamente, reducirá la tasa de aceleración o la
frecuencia de salida. Si no se reduce lo suciente la
demanda de sobrecorriente, el convertidor de frecuencia se
apagará y emitirá un fallo en 1,5 s. El nivel del límite de
intensidad es programable. El retardo de desconexión por
sobrecorriente se utiliza para especicar el tiempo que
opera el convertidor de frecuencia al límite de intensidad
antes de apagarse. El nivel límite puede ajustarse entre 0 y
60 s o para funcionamiento innito, en función del
convertidor de frecuencia y de la protección térmica del
motor.
Safe Torque O (STO)
5.3
frecuencia en situaciones de parada de emergencia. En el
modo de funcionamiento normal, cuando no se necesite la
función de Safe Torque O, utilice la función de parada
normal. Si se utiliza el rearranque automático, deben
cumplirse los requisitos indicados en el párrafo 5.3.2.5 de
la norma ISO 12100-2.
La función de Safe Torque O del VLT® AutomationDrive
FC 302 puede utilizarse con motores síncronos, asíncronos
y de magnetización permanente. Pueden producirse dos
fallos en los semiconductores de potencia. Si esto sucede
al usar motores síncronos o de magnetización permanente,
puede generarse una rotación residual en el motor. La
rotación puede calcularse así: ángulo=360/(número de
polos). La aplicación que usa motores síncronos o de
magnetización permanente debe tener en cuenta esta
posibilidad y garantizar que no se trate de un problema
crítico de seguridad. Esta situación no es aplicable a
motores asíncronos.
5.3.1 Responsabilidad
El usuario es responsable de garantizar que el personal
sabe cómo instalar y hacer funcionar la función de Safe
Torque O porque:
Ha leído y comprendido las normas de seguridad
•
relativas a la salud, la seguridad y la prevención
de accidentes.
Ha entendido las indicaciones generales y de
•
seguridad incluidas en esta descripción y en la
descripción ampliada del Manual de funciona-
miento de Safe Torque O de los convertidores de
frecuencia VLT
Conoce a la perfección las normas generales y de
•
seguridad de la aplicación especíca.
El usuario se dene como integrador, operario y personal
de mantenimiento y reparación.
®
.
5.3.2 Información adicional
5 5
El VLT® AutomationDrive FC 302 se suministra de fábrica
con la función de Safe Torque O a través del terminal de
control 37. La función de STO también está disponible en
el VLT® HVAC Drive FC 102 y el VLT® AQUA Drive FC 202.
La STO desactiva la tensión de control de los semiconductores de potencia de la etapa de salida del convertidor
de frecuencia, lo que a su vez impide que genere la
tensión necesaria para que el motor gire. Cuando se activa
la Safe Torque O (T37), el convertidor de frecuencia emite
una alarma, desconecta la unidad y hace que el motor
entre en modo de inercia hasta que se detiene. Será
necesario un reinicio manual. La función de Safe Torque
O puede utilizarse para detener el convertidor de
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 21
Para obtener más información acerca de la función Safe
Torque O, incluidas su instalación y puesta en servicio,
consulte el Manual de funcionamiento de Safe Torque O de
los convertidores de frecuencia VLT®.
5.3.3 Instalación de dispositivo externo de
seguridad en combinación con la
VLT® PTC Thermistor Card MCB 112
Si se conecta el módulo de termistor de la MCB 112 con
certicación Ex, que utiliza el terminal 37 como su canal de
desconexión en relación con la seguridad, entonces debe
añadirse una Y entre la salida X44/12 de la MCB 112 y el
sensor relacionado con la seguridad (botón de parada de
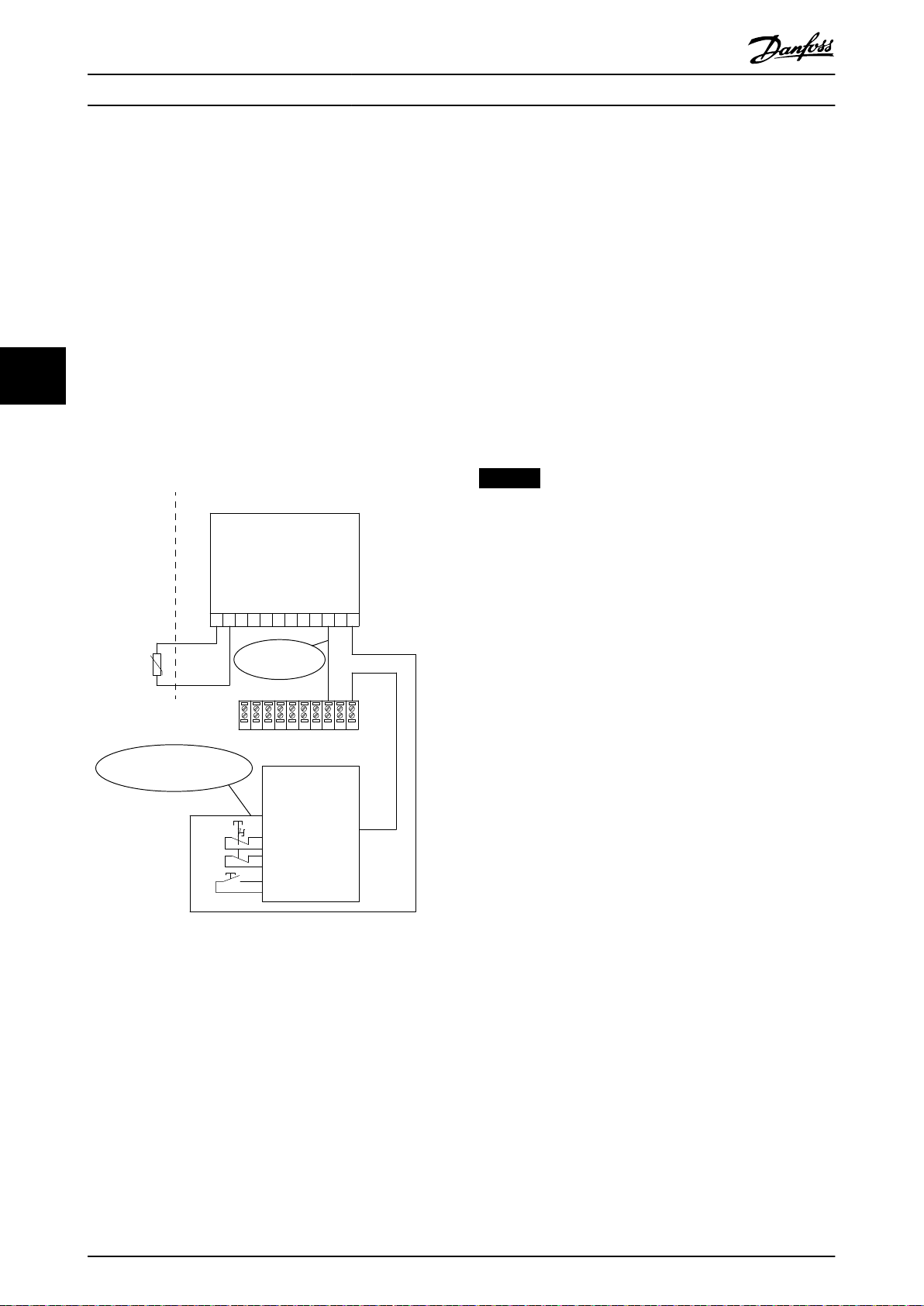
130BA967.12
Digital Input
PTC
Sensor
Non-Hazardous AreaHazardous
Area
X44/
PTC Thermistor Card
MCB 112
1 2 3 4 5 6 7 8 9 10 1112
Safety Device
Manual Restart
SIL 2
Safe AND Input
Safe Output
Safe Input
DI DI
Safe Stop
Par. 5-19
Terminal 37 Safe Stop
12 13 18 19 27 29 32 33 20 37
e.g. Par 5-15
Funciones del producto
VLT® Parallel Drive Modules
emergencia o conmutador de seguridad) que activa la
función de Safe Torque O. La salida al terminal 37 de Safe
Torque O será alta (24 V) solo si también son altas la
señal de la salida X44/12 de la MCB 112 y la señal del
sensor de seguridad. Si al menos una de las dos señales es
baja, la salida al terminal 37 también debe ser baja. El
dispositivo de seguridad y el propio Y lógico debe
realizarse en conformidad con CEI 61508, SIL 2. La
conexión desde la salida del dispositivo de seguridad con
Y lógico seguro al terminal 37, Safe Torque O, debe tener
protección contra cortocircuitos. En la Ilustración 5.1 se
muestra una entrada de reinicio para el dispositivo de
55
seguridad externo. En esta instalación, por ejemplo, ajuste
[7] PTC 1 y relé W o [8] PTC 1 y relé A/W en el
parámetro 5-19 Terminal 37 parada segura. Consulte el
Manual de funcionamiento de la VLT® PTC Thermistor Card
MCB 112 para obtener más información.
parada segura se selecciona por error [1]* Alarma parada
seg. o [3] Advert. parada seg. y se activa el MCB 112, el
convertidor de frecuencia reacciona con la alarma 72, Fallo
peligroso y pone el motor en inercia de manera segura, sin
necesidad de rearranque automático.
Las selecciones [4] Alarma PTC 1 y [5] Advertencia PTC 1 del
parámetro 5-19 Terminal 37 parada segura solo se
seleccionan cuando la MCB 112 utiliza la función de Safe
Torque O. Si se seleccionan por error [4] o [5] en el
parámetro 5-19 Terminal 37 parada segura y el dispositivo
externo de seguridad dispara la función de Safe Torque
O, el convertidor de frecuencia reacciona con una alarma
72, Fallo peligroso y pone el convertidor de frecuencia en
inercia de manera segura, sin rearranque automático.
Las selecciones [6] a [9] en el parámetro 5-19 Terminal 37
parada segura deben seleccionarse para la combinación de
un dispositivo de seguridad externo y la MCB 112.
AVISO!
[7] Las selecciones PTC 1 y relé W y [8] PTC 1 y relé A/W en
el parámetro 5-19 Terminal 37 parada segura activan el
rearranque automático cuando el dispositivo de
seguridad externo se desactiva de nuevo.
El rearranque automático solo está permitido en los
siguientes casos:
La prevención de reinicio no intencionado se
•
implementa mediante otras partes de la
instalación de la Safe Torque O.
Puede excluirse la presencia física de alguien en
•
la zona peligrosa cuando la Safe Torque O no
está activada. En particular, debe cumplirse el
parágrafo 5.3.2.5 de la norma ISO 12100-2 2003.
Para obtener información sobre la MCB 112, consulte el
capétulo 7.3.11 VLT® PTC Thermistor Card MCB 112 y el
Manual de funcionamiento de la VLT
MCB 112
®
PTC Thermistor Card
Ilustración 5.1 Ilustración de los aspectos esenciales para la
instalación de una combinación de una aplicación de Safe
Torque O y una aplicación MCB 112
Ajustes de parámetros para dispositivo externo de
seguridad
con la MCB 112
Si está conectada la MCB 112, las selecciones [4] a [9]
aparecen disponibles para el parámetro 5-19 Terminal 37
parada segura (terminal 37 Safe Torque O).
Las selecciones [1]* Alarma parada seg. y [3] Advert. parada
seg. del parámetro 5-19 Terminal 37 parada segura todavía
están disponibles, pero se utilizan únicamente para instalaciones sin MCB 112 u otro tipo de dispositivos de
seguridad externos. Si en el parámetro 5-19 Terminal 37
22 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
Monitorización del sistema
5.4
El convertidor de frecuencia supervisa muchos aspectos
del funcionamiento del sistema, entre los que se incluyen:
Condiciones de alimentación.
•
Carga y rendimiento del motor.
•
Estado del convertidor de frecuencia.
•
Una alarma o advertencia no indica necesariamente que
haya un problema en el propio convertidor de frecuencia.
Puede tratarse de una situación externa al convertidor de
frecuencia, que se supervisa para estudiar los límites de
rendimiento. El convertidor de frecuencia incluye diversas
respuestas preprogramadas ante fallos, advertencias y
alarmas. Pueden seleccionarse funciones adicionales de
alarma y advertencia para mejorar o modicar el
rendimiento del sistema.
Funciones del producto Guía de diseño
En este apartado se describen las funciones comunes de
alarma y advertencia. Entender que estas funciones están
disponibles puede optimizar el diseño de un sistema y,
posiblemente, evitar la introducción de componentes o
funciones duplicados.
5.4.1 Funcionamiento con temperatura
excesiva
De forma predeterminada, el convertidor de frecuencia
emite una alarma y se desconecta ante una temperatura
excesiva. Si se selecciona Reducción automática y
advertencia, el convertidor de frecuencia emitirá un aviso
de la situación pero continuará funcionando e intentará
enfriarse por sí mismo reduciendo su frecuencia portadora.
Después, si es necesario, reducirá la frecuencia de salida.
5.4.2 Advertencias de referencia alta o baja
En el modo de funcionamiento de lazo abierto, la señal de
referencia determina directamente la velocidad del
convertidor de frecuencia. La pantalla muestra una
advertencia parpadeante de referencia alta o baja cuando
se alcanza el máximo o el mínimo programado.
5.4.3 Advertencia de realimentación alta o
baja
desequilibrada puede ser deseable hasta que se corrija el
desequilibrio.
5.4.5 Advertencia de frecuencia alta
Útil en la conexión por etapas de equipos adicionales,
como bombas o ventiladores. El convertidor de frecuencia
puede emitir una advertencia cuando la velocidad del
motor sea elevada. Puede introducirse un ajuste especíco
de alta frecuencia en el convertidor de frecuencia. Cuando
la salida de la unidad sobrepasa el límite ajustado, la
unidad emite una advertencia de alta frecuencia. Una
salida digital del convertidor de frecuencia puede indicar la
conexión de dispositivos externos.
5.4.6 Advertencia de baja frecuencia
Es útil para desconectar equipos por etapas. El convertidor
de frecuencia podrá emitir una advertencia cuando la
velocidad del motor sea baja. Puede seleccionarse un
ajuste de frecuencia baja especíca para la advertencia y
para la desconexión de dispositivos externos. La unidad no
emitirá ninguna advertencia de baja frecuencia cuando se
detenga ni tras el arranque mientras no se haya alcanzado
la frecuencia de funcionamiento.
5.4.7 Advertencia de corriente alta
5 5
En el modo de funcionamiento de lazo cerrado, el
convertidor de frecuencia supervisa los valores
seleccionados de realimentación alta y baja. La pantalla
mostrará una advertencia parpadeante de valor alto o bajo
cuando corresponda. El convertidor de frecuencia también
puede monitorizar las señales de realimentación en el
modo de funcionamiento de lazo abierto. Mientras las
señales no afecten al funcionamiento del convertidor de
frecuencia en lazo abierto, pueden resultar útiles para
indicar el estado del sistema localmente o mediante
comunicación serie. El convertidor de frecuencia puede
trabajar con 39 unidades de medida diferentes.
5.4.4 Desequilibrio de tensión de
alimentación o
pérdida de fase
Una corriente de rizado excesiva en el bus de CC indica un
desequilibrio de red de tensión de alimentación o una
pérdida de fase. Cuando se pierde una fase de alimentación al convertidor de frecuencia, la acción
predeterminada es emitir una alarma y desconectar la
unidad para proteger los condensadores del bus de CC.
Otras opciones son emitir una advertencia y reducir la
intensidad de salida al 30 % de la corriente total o emitir
una advertencia y continuar con el funcionamiento normal.
Hacer funcionar una unidad conectada a una línea
Esta función es similar a la advertencia de alta frecuencia
(véase el capétulo 5.4.5 Advertencia de frecuencia alta), con
la excepción de que se utiliza un ajuste de corriente alta
para emitir una advertencia y conectar equipos adicionales.
La función no está activa cuando la unidad está parada ni
en el arranque mientras no se alcanza la intensidad de
funcionamiento congurada.
5.4.8 Advertencia de intensidad baja
Esta función es similar a la advertencia de baja frecuencia
(véase el capétulo 5.4.6 Advertencia de baja frecuencia), con
la excepción de que se utiliza un ajuste de intensidad baja
para emitir una advertencia y conectar equipos adicionales.
La función no está activa cuando la unidad está parada ni
en el arranque mientras no se alcanza la intensidad de
funcionamiento congurada.
5.4.9 Advertencia de correa rota / ausencia
de carga
Esta función puede usarse para supervisar una correa
trapezoidal. Una vez que se ha guardado en el convertidor
un límite de intensidad baja, si se detecta una pérdida de
carga, el convertidor de frecuencia puede programarse
para emitir una alarma y realizar una desconexión o para
continuar en funcionamiento y emitir una advertencia.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 23
Funciones del producto
VLT® Parallel Drive Modules
5.4.10 Interfaz serie perdida
El convertidor de frecuencia puede detectar una pérdida
de comunicación serie. Se puede seleccionar un retardo de
tiempo de hasta 18 000 s para evitar una respuesta debida
a interrupciones en el bus de comunicación serie. Cuando
se supere el retardo, las opciones disponibles serán:
Mantener la última velocidad.
•
Funcione a máxima velocidad.
•
Funcione a una velocidad predeterminada.
•
Se detenga y emita una advertencia.
•
55
24 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
346
(13.6)
868
[34.2]
856.6
(33.7)
1051
(41.4)
1096
(43.1)
1122
(44.2)
130
(5.1)
41
(1.6)
1048
(41.3)
280
(11.0)
107
(4.2)
213
(8.4)
320
(12.6)
271
(10.7)
95
(3.7)
130BE654.11
376
(14.8)
Especicaciones Guía de diseño
6 Especicaciones
6.1 Dimensiones del módulo de convertidor de frecuencia
6.1.1 Dimensiones exteriores
En la Ilustración 6.1 se muestran las dimensiones del módulo de convertidor con relación a su instalación.
6
6
Ilustración 6.1 Dimensiones de instalación de los VLT® Parallel Drive Modules
Descripción Peso del módulo [kg (lb)] Longitud × anchura × profundidad [mm (in)]
Módulo del convertidor de frecuencia 125 (275) 1121,7 × 346,2 × 375 (44,2 × 13,6 × 14,8)
Tabla 6.1 Peso y dimensiones del módulo de convertidor
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 25
A
A
B
B
R
S
T
U
V
W
130BE748.10
319 (12.6)
200 (7.9)
0 (0.0)
376 (14.8)
Brake terminals
236.8 (9.0)
293 (11.5)
0 (0.0)
33 (1.3)
91 (3.6)
149 (5.8)
211 (8.3)
319 (12.6)
265 (10.4)
130BE749.10
Section A-A
Mains Terminals
Section B-B
Motor and Brake Terminals
Brake terminal
Motor terminal
Mains terminal
284 (11.2)
0 (0.0)
0 (0.0)
306 (12.1)
255 (10.0)
6
Especicaciones
6.1.2 Dimensiones del terminal
VLT® Parallel Drive Modules
Ilustración 6.2 Dimensiones del terminal del módulo de convertidor de frecuencia (vista frontal)
Ilustración 6.3 Dimensiones del terminal del módulo de convertidor de frecuencia (vistas laterales)
26 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
130BE751.10
105.5
(4.15)
236
(9.3)
126
(4.9)
95
(3.7)
Especicaciones Guía de diseño
6.1.3 Dimensiones del bus de CC
6
6
Ilustración 6.4 Dimensiones del bus de CC (vistas frontal y lateral)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 27
130BF029.10
705
(27.8)
332
(13.1)
6
Especicaciones
VLT® Parallel Drive Modules
6.2 Dimensiones del cuadro de control
Ilustración 6.5 Dimensiones del cuadro de control
28 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BF026.10
405
(15.9)
808 (31.8)
796
(31.3)
1959
(77.1)
2261
(89.0)
636
(25.0)
338
(13.3)
636
(25.0)
105
2201
(86.7)
Especicaciones Guía de diseño
6.3 Dimensiones del sistema de dos convertidores de frecuencia
6
6
Ilustración 6.6 Dimensiones exteriores del sistema de dos convertidores de frecuencia (vista frontal, lateral y de apertura de puertas)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 29

659
(76.0)
556
(21.9)
1
2
0
3
4
522
(20.6)
491
(19.3)
460
(18.1)
363
(14.3)
0
101
(4.0)
113
(4.5)
185
(7.3)
218
(8.6)
0
401
(15.8)
130BF027.10
6
Especicaciones
VLT® Parallel Drive Modules
1 Barras conductoras de puente de alimentación (módulo 1) 3 Barras conductoras de puente de alimentación (módulo 2)
2 Terminales de freno 4 Terminales de red
Ilustración 6.7 Terminales de alimentación del sistema de dos convertidores de frecuencia (vista lateral y frontal)
30 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BF028.10
1
2
465 (18.3)
516 (20.3)
669 (27.5)
4
B
5
3
A
A
B
262 (10.3)0317 (12.5)
348 (13.7)
380 (15.0)
467 (18.4)
564 (22.2)
276 (10.9)
593 (23.4)
669 (26.3)
677 (26.7)
131 (12.3)
381 (15.0)
465 (18.3)
465 (18.3)
465 (18.3)
465 (18.3)
0
M8
M8
Especicaciones Guía de diseño
6
6
1 Barras conductoras de puente de motor (módulo 1) 4 Barras conductoras de puente de motor (módulo 2)
2 Terminales del motor 5 Terminales de freno
3 Terminales de conexión toma a tierra – –
Ilustración 6.8 Terminales de conexión toma a tierra y de motor en sistema de dos convertidores de frecuencia (vistas frontales y
laterales)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 31

130BF034.10
139 (5.5)
71.5 (2.8)
84 (3.3)
103 (4.0)
627 (24.7)
671 (26.4)
711 (28.0)
274 (10.8)
97 (3.8)
181 (7.1)
532 (21.0)
534 (21.0)
137 (5.4)
179 (7.1)
0
89 (3.5)
188 (7.4)
344 (13.5)
323 (12.8)
165 (6.5)
373 (14.7)0311 (12.3)
286 (11.3)
416 (16.4)
291 (11.5)
0
568 (22.4)
556 (21.9)
456 (18.0)
436 (17.2)
416 (16.4)
96
(3.8)
6
Especicaciones
VLT® Parallel Drive Modules
Ilustración 6.9 Relés y bus de CC en sistema de dos convertidores de frecuencia (vista frontal y lateral)
32 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BF033.10
796
(31.3)
105
800
(31.5)
1600
(63.0)
631
(24.8)
631
(24.8)
1970
(77.6)
2200
(86.6)
2254
(88.7)
1800
(71.0)
Especicaciones Guía de diseño
6.4 Dimensiones de sistema de cuatro convertidores de frecuencia
6
6
Ilustración 6.10 Dimensiones exteriores de sistema de cuatro convertidores de frecuencia (vista frontal, lateral y de apertura de
puertas)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 33

130BF030.10
485
(19.1)
445
(17.5)
0
456
(18.0)
416
(16.4)
331
(13.0)
291
(11.5)
222
(8.7)
0
2089
(82.2)
791
(31.1)
827
(32.5)
0
671
(26.4)
711
(28.0)
897
(35.3)
937
(36.9)
6
Especicaciones
VLT® Parallel Drive Modules
Ilustración 6.11 Conexiones de puente para cuatro convertidores de frecuencia (vista frontal y lateral)
34 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BF031.10
659 (26.0)
96 (3.8)
110 (4.3)
180 (7.1))
215 (8.4)
398 (15.7)
0
1
2
3
4
5
6
7
8
791 (31.1)
909 (35.8)
980 (38.6)
1014 (39.9)
1197 (47.1)
556 (21.9)
465 (18.3)
445 (17.5)
0
896 (35.3)
Especicaciones Guía de diseño
6
6
1 Barras conductoras de puente de alimentación (módulos 1 y2)5 Barras conductoras de puente de alimentación (módulos 3 y
4)
2 Terminales de alimentación (módulos 1 y 2) 6 Terminales de alimentación (módulos 3 y 4)
3 Terminales de freno (módulos 1 y 2) 7 Terminales de conexión toma a tierra (módulos 3 y 4)
4 Terminales de conexión toma a tierra (módulos 1 y 2) 8 Conexión del terminal de tierra (véase la Ilustración 6.13)
Ilustración 6.12 Terminales de conexión toma a tierra y de alimentación en sistema de cuatro convertidores de frecuencia (vista
frontal)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 35

130BF067.10
35
(1.4)
522 (20.6)
491 (19.3)
460 (18.3)
363 (14.3)
262 (10.3)
222 (8.7)
0
40
(1.6)
6
Especicaciones
VLT® Parallel Drive Modules
Ilustración 6.13 Terminales de conexión toma a tierra y de alimentación en sistemas de cuatro convertidores de frecuencia (vista
lateral, izquierda y vista del terminal de conexión toma a tierra, derecha)
36 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BF032.10
272 (10.7)
377 (14.8)
560 (22.1)
589 (23.2)
673 (26.5)
0
1072 (42.2)
1360 (53.5)
1389 (54.7)
1473 (58.0)
1177(46.3)
4x 697 (27.4)
6x 514 (20.2)
1
2
4
5
3
6
7
8
Especicaciones Guía de diseño
6
6
1 Barras conductoras de puente del motor (módulos 1 y 2) 5 Terminales de freno (módulos 3 y 4)
2 Terminales de freno (módulos 1 y 2) 6 Detalle del terminal de freno (véase la Ilustración 6.15)
3 Terminales del motor (módulos 1 y 2) 7 Terminales del motor (módulos 3 y 4)
4 Barras conductoras de puente del motor (módulos 3 y 4) 8 Detalle del terminal del motor (véase la Ilustración 6.15)
Ilustración 6.14 Terminales de freno y de motor en sistema de cuatro convertidores de frecuencia (vista frontal)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 37

130BF068.10
18
(0.7)
317 (12.5)
348 (13.7)
380 (18.3)
467(18.4)
0
5
(0.2)
3x 25
(1.0)
36
(1.4)
6
Especicaciones
VLT® Parallel Drive Modules
Ilustración 6.15 Terminales de freno y del motor en sistema de cuatro convertidores de frecuencia (vista lateral, izquierda, terminales
del motor, arriba a la derecha, y terminales de freno, abajo a la derecha)
38 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

1
2
130BF035.10
72 (2.8)
84 (3.3)
103 (4.0)
140 (5.5)
0
97 (3.8)
180 (7.1)
180 (7.1)
532 (21.0)
534 (21.0)
671 (26.4)
711 (28.0)
897 (35.3)
937 (36.9)
980 (38.6)
1074 (42.3)
1332 (52.5)
1332 (52.5)
1471 (57.9)
1511 (59.5)
344 (13.6)
323 (12.7)
166 (6.5)
135 (5.3)
0
4x 88 (3.5)
188 (7.4)
175 (6.9)
137 (5.4)
274 (10.8)
627 (24.7)
980 (38.6)
1427 (56.2)
4x 96 (3.8)
Especicaciones Guía de diseño
6
6
1 Barras conductoras de puente de conexión toma a tierra
(módulo 1)
2 Pantalla de conexión toma a tierra (módulo 1)
Ilustración 6.16 Pantalla de conexión a tierra y bus de CC / relés en sistema de cuatro convertidores de frecuencia (vista frontal)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 39

130BF069.10
0
568 (22.4)
556 (22.0)
458 (18.0)
427 (16.8)
456 (18.0)
291 (11.5)
286 (11.3)
311 (12.3)
331 (13.0)
436 (17.2)
416 (16.4)
373 (14.7)
6
Especicaciones
VLT® Parallel Drive Modules
Ilustración 6.17 Relés y bus de CC en sistema de cuatro convertidores de frecuencia (vista lateral)
40 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Especicaciones Guía de diseño
6.5 Especicaciones en función de la potencia
6.5.1
VLT® HVAC Drive FC 102
Intervalo de potencia N315 N355 N400 N450 N500
Módulos de convertidor de frecuencia 2 2 2 2 2
Conguración del recticador
Carga alta/normal NO NO NO NO NO
Eje de salida típico a 400 V [kW] 315 355 400 450 500
Eje de salida típico a 460 V [CV] 450 500 600 600 700/650
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del
disipador [°C (°F)]
Desconexión por ambiente de la tarjeta de
potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 380-440 V) 588 658 745 800 880
Intermitente (60 s sobrecarga) a 400 V 647 724 820 880 968
Continua (a 460/500 V) 535 590 678 730 780
Intermitente (60 s sobrecarga) a 460/500 V 588 649 746 803 858
Continua (a 400 V) [kVA] 407 456 516 554 610
Continua (a 460 V) [kVA] 426 470 540 582 621
Continua (a 500 V) [kVA] 463 511 587 632 675
Intensidad de entrada [A]
Continua (a 400 V) 567 647 733 787 875
Continua (a 460/500 V) 516 580 667 718 759
Pérdidas de potencia [W]
Módulos de convertidor a 400 V 5825 6110 7069 7538 8468
Módulos de convertidor a 460 V 4998 5964 6175 6609 7140
Barras conductoras de CA a 400 V 550 555 561 565 575
Barras conductoras de CA a 460 V 548 551 556 560 563
Barras conductoras de CC durante la regeneración
Dimensión máxima del cable [mm2 (mcm)]
1)
Red
Motor 4 × 120 (250) 4 × 150 (300)
Freno 4 × 70 (2/0) 4 × 95 (3/0)
Terminales de regeneración 4 × 120 (250) 4 × 150 (300) 6 × 120 (250)
Fusibles de red externos máximos
conguración de seis pulsos – – – – 600 V, 1600 A
conguración de doce pulsos 700 A, 600 V –
93 95 98 101 105
Doce pulsos Seis pulsos /
doce pulsos
110 (230)
80 (176)
4 × 120 (250) 4 × 150 (300)
6
6
Tabla 6.2 FC 102, alimentación de red de 380-480 V CA (sistema de dos convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 41

6
Especicaciones
Intervalo de potencia N560 N630 N710 N800 N1M0
Módulos de convertidor de frecuencia 4 4 4 4 4
Conguración del recticador Seis pulsos / doce pulsos
Carga alta/normal NO NO NO NO NO
Eje de salida típico a 400 V [kW] 560 630 710 800 1000
Eje de salida típico a 460 V [CV] 750 900 1000 1200 1350
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del disipador [°C (°F)]
Desconexión por ambiente de la tarjeta de potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 380-440 V) 990 1120 1260 1460 1720
Intermitente (60 s sobrecarga) a 400 V 1089 1232 1386 1606 1892
Continua (a 460/500 V) 890 1050 1160 1380 1530
Intermitente (60 s sobrecarga) a 460/500 V 979 1155 1276 1518 1683
Continua (a 400 V) [kVA] 686 776 873 1012 1192
Continua (a 460 V) [kVA] 709 837 924 1100 1219
Continua (a 500 V) [kVA] 771 909 1005 1195 1325
Intensidad de entrada [A]
Continua (a 400 V) 964 1090 1227 1422 1675
Continua (a 460/500 V) 867 1022 1129 1344 1490
Pérdidas de potencia [W]
Módulos de convertidor a 400 V 8810 10199 11632 13253 16463
Módulos de convertidor a 460 V 7628 9324 10375 12391 13958
Barras conductoras de CA a 400 V 665 680 695 722 762
Barras conductoras de CA a 460 V 656 671 683 710 732
Barras conductoras de CC durante la regeneración 218 232 250 276 318
Dimensión máxima del cable [mm2 (mcm)]
1)
Red
Motor 4 × 185 (350) 8 × 120 (250)
Freno 8 × 70 (2/0) 8 × 95 (3/0)
Terminales de regeneración 6 × 120 (250) 8 × 120 (250) 8 × 150
Fusibles de red externos máximos
conguración de seis pulsos 600 V,
conguración de doce pulsos 600 V, 700 A 600 V, 900 A 600 V,
VLT® Parallel Drive Modules
4 × 185 (350) 8 × 120 (250)
1600 A
110 (230)
80 (176)
10 × 150
(300)
600 V, 2000 A 600 V, 2500 A
1500 A
(300)
Tabla 6.3 FC 102, alimentación de red de 380-480 V CA (sistema de cuatro convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
42 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
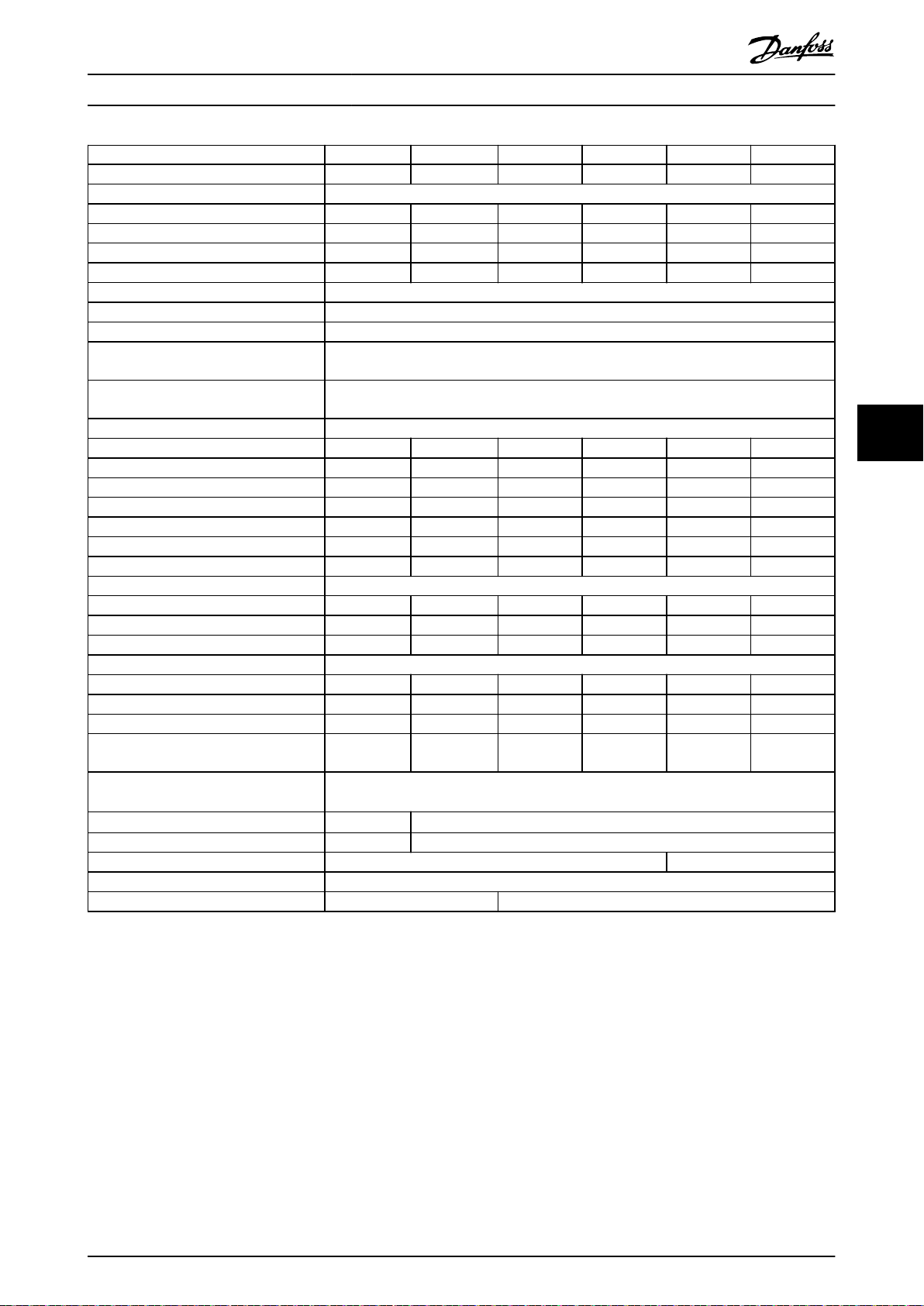
Especicaciones Guía de diseño
Intervalo de potencia N315 N400 N450 N500 N560 N630
Módulos de convertidor de frecuencia 2 2 2 2 2 2
Conguración del recticador Doce pulsos
Carga alta/normal NO NO NO NO NO NO
Eje de salida típico a 525-550 V [kW] 250 315 355 400 450 500
Eje de salida típico a 575 V [CV] 350 400 450 500 600 650
Eje de salida típico a 690 V [kW] 315 400 450 500 560 630
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del
disipador [°C (°F)]
Desconexión por ambiente de la tarjeta de
potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 550 V) 360 418 470 523 596 630
Intermitente (60 s sobrecarga) a 550 V 396 360 517 575 656 693
Continua (a 575/690 V) 344 400 450 500 570 630
Intermitente (60 s sobrecarga) a 575/690 V 378 440 495 550 627 693
Continua (a 550 V), kVA 343 398 448 498 568 600
Continua (a 575 V), kVA 343 398 448 498 568 627
Continua (a 690 V), kVA 411 478 538 598 681 753
Intensidad de entrada [A]
Continua (a 550 V) 355 408 453 504 574 607
Continua (a 575 V) 339 490 434 482 549 607
Continua (a 690 V) 352 400 434 482 549 607
Pérdidas de potencia [W]
Módulos de convertidor a 575 V 4401 4789 5457 6076 6995 7431
Módulos de convertidor a 690 V 4352 4709 5354 5951 6831 7638
Barras conductoras de CA a 575 V 540 541 544 546 550 553
Barras conductoras de CC durante la
regeneración
Dimensión máxima del cable [mm
(mcm)]
1)
Red
Motor 2 × 120 (250) 4 × 120 (250)
Freno 4 × 70 (2/0) 4 × 95 (3/0)
Terminales de regeneración 4 × 120 (250)
Fusibles de red externos máximos 700 V, 550 A 700 V, 630 A
2
88 88,5 90 91 186 191
2 × 120 (250) 4 × 120 (250)
110 (230)
80 (176)
6
6
Tabla 6.4 FC 102, alimentación de red de 525-690 V CA (sistema de dos convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 43
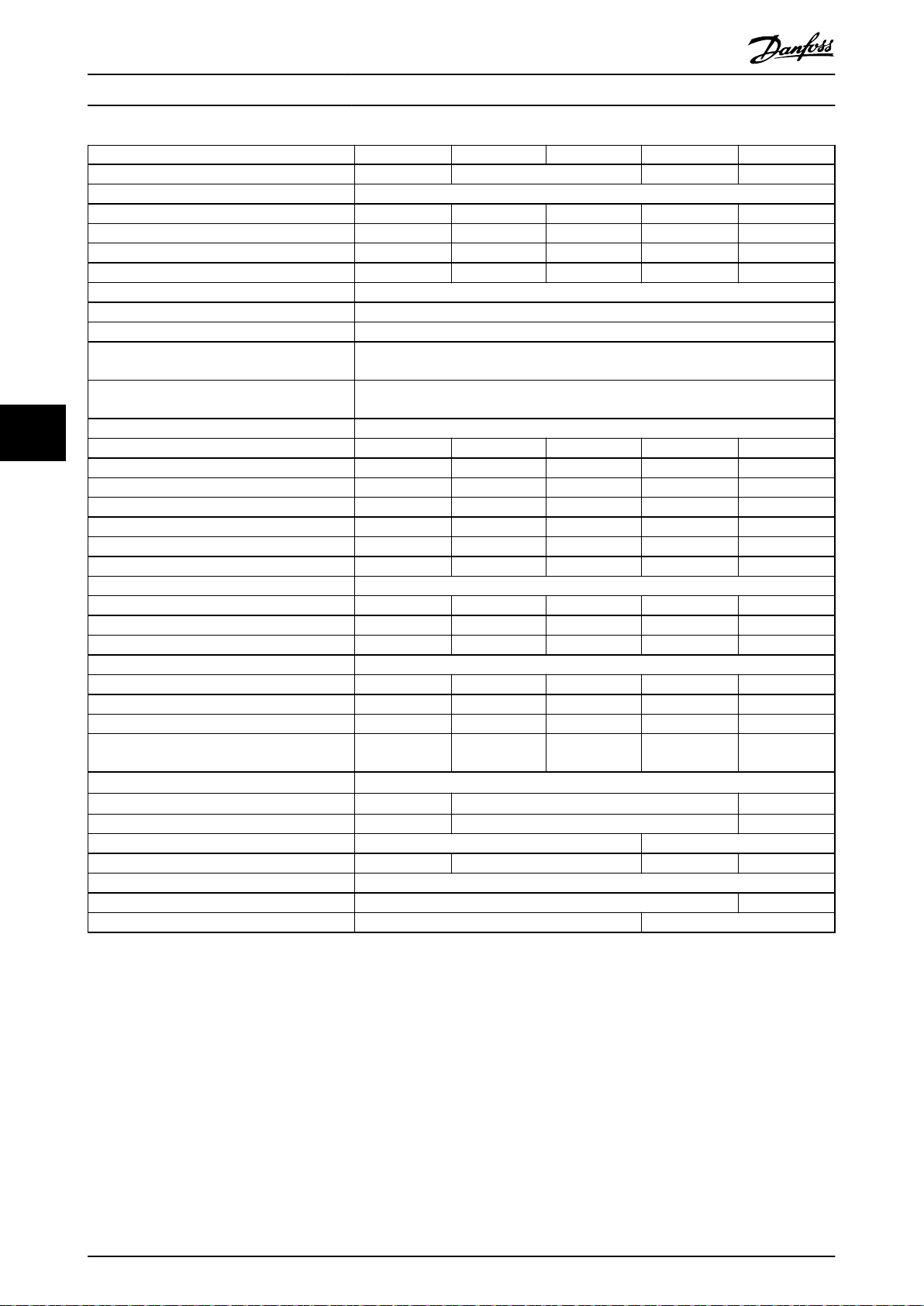
6
Especicaciones
Intervalo de potencia N710 N800 N900 N1M0 N1M2
Módulos de convertidor de frecuencia 4 4 4 4
Conguración del recticador Seis pulsos / doce pulsos
Carga alta/normal NO NO NO NO NO
Eje de salida típico a 525-550 V [kW] 560 670 750 850 1000
Eje de salida típico a 575 V [CV] 750 950 1050 1150 1350
Eje de salida típico a 690 V [kW] 710 800 900 1000 1200
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del
disipador [°C (°F)]
Desconexión por ambiente de la tarjeta de
potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 550 V) 763 889 988 1108 1317
Intermitente (60 s sobrecarga) a 550 V 839 978 1087 1219 1449
Continua (a 575/690 V) 730 850 945 1060 1260
Intermitente (60 s sobrecarga) a 575/690 V 803 935 1040 1166 1590
Continua (a 550 V) 727 847 941 1056 1056
Continua (a 575 V) 727 847 941 1056 1056
Continua (a 690 V) 872 1016 1129 1267 1506
Intensidad de entrada [A]
Continua (a 550 V) 743 866 962 1079 1282
Continua (a 575 V) 711 828 920 1032 1227
Continua (a 690 V) 711 828 920 1032 1227
Pérdidas de potencia [W]
Módulos de convertidor a 575 V 8683 10166 11406 12852 15762
Módulos de convertidor a 690 V 8559 9996 11188 12580 15358
Barras conductoras de CA a 575 V 644 653 661 672 695
Barras conductoras de CC durante la regeneración
Dimensión máxima del cable [mm2 (mcm)]
1)
Red
Motor 4 × 120 (250) 6 × 120 (250) 8 × 120 (250)
Freno 8 × 70 (2/0) 8 × 95 (3/0)
Terminales de regeneración 4 × 150 (300) 6 × 120 (250) 6 × 150 (300) 8 × 120 (250)
Fusibles de red externos máximos
conguración de seis pulsos 700 V, 1600 A 700 V, 2000 A
conguración de doce pulsos 700 V, 900 A 700 V, 1500 A
VLT® Parallel Drive Modules
110 (230)
80 (176)
198 208 218 231 256
4 × 120 (250) 6 × 120 (250) 8 × 120 (250)
Tabla 6.5 FC 102, alimentación de red de 525-690 V CA (sistema de cuatro convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
44 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Especicaciones Guía de diseño
6.5.2
VLT® AQUA Drive FC 202
Intervalo de potencia N315 N355 N400 N450 N500
Módulos de convertidor de
frecuencia
Conguración del recticador
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Eje de salida típico a 400 V [kW] 250 315 315 355 355 400 400 450 450 500
Eje de salida típico a 460 V [CV] 350 450 450 500 500 600 550 600 600 650
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura
del disipador
[°C (°F)]
Desconexión por ambiente de la
tarjeta de potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 400 V) 480 588 600 658 658 745 695 800 810 880
Intermitente (60 s sobrecarga) a 400V720 647 900 724 987 820 1043 880 1215 968
2 2 2 2 2
Doce pulsos Seis pulsos / doce
pulsos
110 (230)
80 (176)
6
6
Continua (a 460/500 V) 443 535 540 590 590 678 678 730 730 780
Intermitente (60 s sobrecarga) a
460/500 V
Continua (a 400 V) [kVA] 333 407 416 456 456 516 482 554 554 610
Continua (a 460 V) [kVA] 353 426 430 470 470 540 540 582 582 621
Continua (a 500 V) [kVA] 384 463 468 511 511 587 587 632 632 675
Intensidad de entrada [A]
Continua (a 400 V) 463 567 590 647 647 733 684 787 779 857
Continua (a 460/500 V) 427 516 531 580 580 667 667 718 711 759
Pérdidas de potencia [W]
Módulos de convertidor a 400 V 4505 5825 5502 6110 6110 7069 6375 7538 7526 8468
Módulos de convertidor a 460 V 4063 4998 5384 5964 5271 6175 6070 6609 6604 7140
Barras conductoras de CA a 400 V 545 550 551 555 555 561 557 565 566 575
Barras conductoras de CA a 460 V 543 548 548 551 551 556 556 560 560 563
Barras conductoras de CC durante la
regeneración
Dimensión máxima del cable [mm
(mcm)]
1)
Red
Motor 4 × 120 (250) 4 × 150 (300)
Freno 4 × 70 (2/0) 4 × 95 (3/0)
Terminales de regeneración 4 × 120 (250) 6 × 120 (250) 6 × 120 (250)
Fusibles de red externos máximos
conguración de seis pulsos – – – – 600 V, 1600 A
conguración de doce pulsos 600 V, 700 A 600 V, 900 A
665 588 810 649 885 746 1017 803 1095 858
93 93 95 95 98 98 101 101 105 105
2
4 × 120 (250)
4 × 150 (300)
Tabla 6.6 FC 202, alimentación de red de 380-480 V CA (sistema de dos convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 45

6
Especicaciones
Intervalo de potencia N560 N630 N710 N800 N1M0
Módulos de convertidor de
frecuencia
Conguración del recticador Seis pulsos / doce pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Eje de salida típico a 400 V [kW] 500 560 560 630 630 710 710 800 800 1000
Eje de salida típico a 460 V [CV] 650 750 750 900 900 1000 1000 1200 1200 1350
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura
del disipador
[°C (°F)]
Desconexión por ambiente de la
tarjeta de potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 400 V) 880 990 990 1120 1120 1260 1260 1460 1460 1720
Intermitente (60 s sobrecarga) a 400V1320 1089 1485 1232 1680 1386 1890 1606 2190 1892
Continua (a 460/500 V) 780 890 890 1050 1050 1160 1160 1380 1380 1530
Intermitente (60 s sobrecarga) a
460/500 V
Continua (a 400 V) [kVA] 610 686 686 776 776 873 873 1012 1012 1192
Continua (a 460 V) [kVA] 621 709 709 837 837 924 924 1100 1100 1219
Continua (a 500 V) [kVA] 675 771 771 909 909 1005 1005 1195 1195 1325
Intensidad de entrada [A]
Continua (a 400 V) 857 964 964 1090 1090 1227 1127 1422 1422 1675
Continua (a 460 V) 759 867 867 1022 1022 1129 1129 1344 1344 1490
Pérdidas de potencia [W]
Módulos de convertidor a 400 V 7713 8810 8918 10199 10181 11632 11390 13253 13479 16463
Módulos de convertidor a 460 V 6641 7628 7855 9324 9316 10375 12391 12391 12376 13958
Barras conductoras de CA a 400 V 655 665 665 680 680 695 695 722 722 762
Barras conductoras de CA a 460 V 647 656 656 671 671 683 683 710 710 732
Barras conductoras de CC durante la
regeneración
2
Dimensión máxima del cable [mm
(mcm)]
1)
Red
Motor 4 × 185 (350) 8 × 125 (250)
Freno 8 × 70 (2/0) 8 × 95 (3/0)
Terminales de regeneración 6 × 125 (250) 8 × 125 (250) 8 × 150 (300) 10 × 150 (300)
Fusibles de red externos máximos
conguración de seis pulsos 600 V, 1600 A 600 V, 2000 A 600 V, 2500 A
conguración de doce pulsos 600 V, 900 A 600 V, 1500 A
VLT® Parallel Drive Modules
4 4 4 4 4
110 (230)
80 (176)
1170 979 1335 1155 1575 1276 1740 1518 2070 1683
218 218 232 232 250 250 276 276 318 318
4 × 185 (350)
8 × 125 (250)
Tabla 6.7 FC 202, alimentación de red de 380-480 V CA (sistema de cuatro convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
46 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Especicaciones Guía de diseño
Intervalo de potencia N315 N400 N450
Módulos de convertidor de frecuencia 2 2 2
Conguración del recticador Doce pulsos
Carga alta/normal HO NO HO NO HO NO
Eje de salida típico a 525-550 V [kW] 200 250 250 315 315 355
Eje de salida típico a 575 V [CV] 300 350 350 400 400 450
Eje de salida típico a 690 V [kW] 250 315 315 400 355 450
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del disipador [°C
(°F)]
Desconexión por ambiente de la tarjeta de potencia
[°C (°F)]
Intensidad de salida [A]
Continua (a 550 V) 303 360 360 418 395 470
Intermitente (60 s sobrecarga) a 550 V 455 396 560 460 593 517
Continua (a 575/690 V) 290 344 344 400 380 450
Intermitente (60 s sobrecarga) a 575/690 V 435 378 516 440 570 495
Continua (a 550 V) 289 343 343 398 376 448
Continua (a 575 V) 289 343 343 398 378 448
Continua (a 690 V) 347 411 411 478 454 538
Intensidad de entrada [A]
Continua (a 550 V) 299 355 355 408 381 453
Continua (a 575 V) 286 339 339 490 366 434
Continua (a 690 V) 296 352 352 400 366 434
Pérdidas de potencia [W]
Módulos de convertidor a 575 V 3688 4401 4081 4789 4502 5457
Módulos de convertidor a 690 V 3669 4352 4020 4709 4447 5354
Barras conductoras de CA a 575 V 538 540 540 541 540 544
Barras conductoras de CC durante la regeneración 88 88 89 89 90 90
Dimensión máxima del cable [mm2 (mcm)]
1)
Red
Motor 2 × 120 (250) 4 × 120 (250)
Freno 4 × 70 (2/0)
Terminales de regeneración 4 × 120 (250)
Fusibles de red externos máximos 700 V, 550 A
2 × 120 (250)
110 (230)
80 (176)
4 × 120 (250)
6
6
Tabla 6.8 FC 202, alimentación de red de 525-690 V CA (sistema de dos convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 47

6
Especicaciones
Intervalo de potencia N500 N560 N630
Módulos de convertidor de frecuencia 2 2 2
Conguración del recticador Doce pulsos
Carga alta/normal HO NO HO NO HO NO
Eje de salida típico a 525-550 V [kW] 315 400 400 450 450 500
Eje de salida típico a 575 V [CV] 400 500 500 600 600 650
Eje de salida típico a 690 V [kW] 400 500 500 560 560 630
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del disipador [°C
(°F)]
Desconexión por ambiente de la tarjeta de potencia
[°C (°F)]
Intensidad de salida [A]
Continua (a 550 V) 429 523 523 596 596 630
Intermitente (60 s sobrecarga) a 550 V 644 575 785 656 894 693
Continua (a 575/690 V) 410 500 500 570 570 630
Intermitente (60 s sobrecarga) a 575/690 V 615 550 750 627 627 693
Continua (a 550 V) [kVA] 409 498 498 568 568 600
Continua (a 575 V) [kVA] 408 498 598 568 568 627
Continua (a 690 V) [kVA] 490 598 598 681 681 753
Intensidad de entrada [A]
Continua (a 550 V) 413 504 504 574 574 607
Continua (a 575 V) 395 482 482 549 549 607
Continua (a 690 V) 395 482 482 549 549 607
Pérdidas de potencia [W]
Módulos de convertidor a 575 V 4892 6076 6016 6995 6941 7431
Módulos de convertidor a 690 V 4797 5951 5886 6831 6766 7638
Barras conductoras de CA a 575 V 542 546 546 550 550 553
Barras conductoras de CC durante la regeneración 91 91 186 186 191 191
Dimensión máxima del cable [mm2 (mcm)]
1)
Red
Motor 4 × 120 (250)
Freno 4 × 70 (2/0) 4 × 95 (3/0)
Terminales de regeneración 4 × 120 (250)
Fusibles de red externos máximos 700 V, 630 A
VLT® Parallel Drive Modules
110 (230)
80 (176)
4 × 120 (250)
Tabla 6.9 FC 202, alimentación de red de 525-690 V CA (sistema de dos convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
48 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Especicaciones Guía de diseño
Intervalo de potencia N710 N800 N900 N1M0 N1M2
Módulos de convertidor de
frecuencia
Conguración del recticador Seis pulsos / doce pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Eje de salida típico a 525-550 V [kW] 500 560 560 670 670 750 750 850 850 1000
Eje de salida típico a 575 V [CV] 650 750 750 950 950 1050 1050 1150 1150 1350
Eje de salida típico a 690 V [kW] 630 710 710 800 800 900 900 1000 1000 1200
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura
del disipador
[°C (°F)]
Desconexión por ambiente de la
tarjeta de potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 550 V) 659 763 763 889 889 988 988 1108 1108 1317
Intermitente (60 s sobrecarga) a 550V989 839 1145 978 1334 1087 1482 1219 1662 1449
4 4 4 4 4
110 (230)
80 (176)
6
6
Continua (a 575/690 V) 630 730 730 850 850 945 945 1060 1060 1260
Intermitente (60 s sobrecarga) a
575/690 V
Continua (a 550 V) [kVA] 628 727 727 847 847 941 941 1056 1056 1255
Continua (a 575 V) [kVA] 627 727 727 847 847 941 941 1056 1056 1255
Continua (a 690 V) [kVA] 753 872 872 1016 1016 1129 1129 1267 1267 1506
Intensidad de entrada [A]
Continua (a 550 V) 642 743 743 866 866 962 1079 1079 1079 1282
Continua (a 575 V) 613 711 711 828 828 920 1032 1032 1032 1227
Continua (a 690 V) 613 711 711 828 828 920 1032 1032 1032 1227
Pérdidas de potencia [W]
Módulos de convertidor a 575 V 7469 8683 8668 10166 10163 11406 11292 12852 12835 15762
Módulos de convertidor a 690 V 7381 8559 8555 9996 9987 11188 11077 12580 12551 15358
Barras conductoras de CA a 575 V 637 644 644 653 653 661 661 672 672 695
Barras conductoras de CC durante la
regeneración
Dimensión máxima del cable [mm
(mcm)]
1)
Red
Motor 4 × 120 (250) 6 × 120 (250) 8 × 120 (250)
Freno 8 × 70 (2/0) 8 × 95 (3/0)
Terminales de regeneración 4 × 150 (300) 6 × 120 (250) 6 × 150 (300) 8 × 120 (250)
Fusibles de red externos máximos
conguración de seis pulsos 700 V, 1600 A 700 V, 2000 A
conguración de doce pulsos
945 803 1095 935 1275 1040 1418 1166 1590 1590
198 198 208 208 218 218 231 231 256 256
2
4 × 120 (250)
700 V, 900 A
6 × 120 (250) 8 × 120 (250)
700 V, 1500 A
Tabla 6.10 FC 202, alimentación de red de 525-690 V CA (sistema de cuatro convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 49

6
Especicaciones
6.5.3
VLT® AutomationDrive FC 302
Intervalo de potencia N250 N315 N355 N400 N450
Módulos de convertidor de frecuencia 2 2 2 2 2
Conguración del recticador
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Eje de salida típico a 400 V [kW] 250 315 315 355 355 400 400 450 450 500
Eje de salida típico a 460 V [CV] 350 450 450 500 500 600 550 600 600 650
Salida típica de eje a 500 V [kW] 315 355 355 400 400 500 500 530 530 560
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura
del disipador
[°C (°F)]
Desconexión por ambiente de la
tarjeta de potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 380-440 V) 480 588 600 658 658 745 695 800 810 880
Intermitente (60 s sobrecarga) a 400 V 720 647 900 724 987 820 1043 880 1215 968
Continua (a 460/500 V) 443 535 540 590 590 678 678 730 730 780
Intermitente (60 s sobrecarga) a
460/500 V
Continua (a 400 V) [kVA] 333 407 416 456 456 516 482 554 554 610
Continua (a 460 V) [kVA] 353 426 430 470 470 540 540 582 582 621
Continua (a 500 V) [kVA] 384 463 468 511 511 587 587 632 632 675
Intensidad de entrada [A]
Continua (a 400 V) 463 567 590 647 647 733 684 787 779 857
Continua (a 460/500 V) 427 516 531 580 580 667 667 718 711 759
Pérdidas de potencia [W]
Módulos de convertidor a 400 V 4505 5825 5502 6110 6110 7069 6375 7538 7526 8468
Módulos de convertidor a 460 V 4063 4998 5384 5964 5721 6175 6070 6609 6604 7140
Barras conductoras de CA a 400 V 545 550 551 555 555 561 557 565 566 575
Barras conductoras de CA a 460 V 543 548 548 551 556 556 556 560 560 563
2
Dimensión máxima del cable [mm
(mcm)]
1)
Red
Motor 4 × 120 (250) 4 × 150 (300)
Freno 4 × 70 (2/0) 4 × 95 (3/0)
Terminales de regeneración 4 × 120 (250) 4 × 150 (300) 6 × 120 (250)
Fusibles de red externos máximos
conguración de seis pulsos – – – – 600 V, 1600 A
conguración de doce pulsos 600 V, 700 A 600 V, 900 A
VLT® Parallel Drive Modules
Doce pulsos Seis pulsos / doce
pulsos
110 (230)
80 (176)
665 588 810 649 885 746 1017 803 1095 858
4 × 120 (250) 4 × 150 (300)
Tabla 6.11 FC 302, alimentación de red de 380-500 V CA (sistema de dos convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
50 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Especicaciones Guía de diseño
Intervalo de potencia N500 N560 N630 N710 N800
Módulos de convertidor de frecuencia 4 4 4 4 4
Conguración del recticador Seis pulsos / doce pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Eje de salida típico a 400 V [kW] 500 560 560 630 630 710 710 800 800 1000
Eje de salida típico a 460 V [CV] 650 750 750 900 900 1000 1000 1200 1200 1350
Salida típica de eje a 500 V [kW] 560 630 630 710 710 800 800 1000 1000 1100
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del
disipador [°C (°F)]
Desconexión por ambiente de la tarjeta de
potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 380-440 V) 880 990 990 1120 1120 1260 1260 1460 1460 1720
Intermitente (60 s sobrecarga) a 400 V 1320 1089 1485 1232 1680 1386 1890 1606 2190 1892
Continua (a 460/500 V) 780 890 890 1050 1050 1160 1160 1380 1380 1530
Intermitente (60 s sobrecarga) a 460/500 V 1170 979 1335 1155 1575 1276 1740 1518 2070 1683
Continua (a 400 V) [kVA] 610 686 686 776 776 873 873 1012 1012 1192
Continua (a 460 V) [kVA] 621 709 709 837 837 924 924 1100 1100 1219
Continua (a 500 V) [kVA] 675 771 771 909 909 1005 1005 1195 1195 1325
Intensidad de entrada [A]
Continua (a 400 V) 857 964 964 1090 1090 1227 1227 1422 1422 1675
Continua (a 460/500 V) 759 867 867 1022 1022 1129 1129 1344 1344 1490
Pérdidas de potencia [W]
Módulos de convertidor a 400 V 7713 8810 8918 10199 10181 11632 11390 13253 13479 16463
Módulos de convertidor a 460 V 6641 7628 7855 9324 9316 10375 12391 12391 12376 13958
Barras conductoras de CA a 400 V 655 665 665 680 680 695 695 722 722 762
Barras conductoras de CA a 460 V 647 656 656 671 671 683 683 710 710 732
Barras conductoras de CC durante la regeneración
Dimensión máxima del cable [mm2 (mcm)]
1)
Red
Motor 4 × 185 (350) 8 × 120 (250)
Freno 8 × 70 (2/0) 8 × 95 (3/0)
Terminales de regeneración 6 × 125 (250) 8 × 125 (250) 8 × 150 (300) 10 × 150 (300)
Fusibles de red externos máximos
conguración de seis pulsos 600 V, 1600 A 600 V, 2000 A 600 V, 2500 A
conguración de doce pulsos 600 V, 900 A 600 V, 1500 A
218 218 232 232 250 276 276 276 318 318
4 × 185 (350) 8 × 120 (250)
110 (230)
80 (176)
6
6
Tabla 6.12 FC 302, alimentación de red de 380-500 V CA (sistema de cuatro convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 51

6
Especicaciones
Intervalo de potencia N250 N315 N355 N400
Módulos de convertidor de frecuencia 2 2 2 2
Conguración del recticador Doce pulsos
Carga alta/normal HO NO HO NO HO NO HO NO
Eje de salida típico a 525-550 V [kW] 200 250 250 315 315 355 315 400
Eje de salida típico a 575 V [CV] 300 350 350 400 400 450 400 500
Eje de salida típico a 690 V [kW] 250 315 315 400 355 450 400 500
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del
disipador [°C (°F)]
Desconexión por ambiente de la tarjeta
de potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 550 V) 303 360 360 418 395 470 429 523
Intermitente (60 s sobrecarga) a 550 V 455 396 560 360 593 517 644 575
Continua (a 575/690 V) 290 344 344 400 380 450 410 500
Intermitente (60 s sobrecarga) a 575/690
V
Continua (a 550 V) [kVA] 289 343 343 398 376 448 409 498
Continua (a 575 V) [kVA] 289 343 343 398 378 448 408 498
Continua (a 690 V) [kVA] 347 411 411 478 454 538 490 598
Intensidad de entrada [A]
Continua (a 550 V) 299 355 355 408 381 453 413 504
Continua (a 575 V) 286 339 339 490 366 434 395 482
Continua (a 690 V) 296 352 352 400 366 434 395 482
Pérdidas de potencia [W]
Módulos de convertidor a 600 V 3688 4401 4081 4789 4502 5457 4892 6076
Módulos de convertidor a 690 V 3669 4352 4020 4709 4447 5354 4797 5951
Barras conductoras de CA a 575 V 538 540 540 541 540 544 542 546
Barras conductoras de CC durante la
regeneración
Dimensión máxima del cable [mm
(mcm)]
1)
Red
Motor 2 × 120 (250) 4 × 120 (250)
Freno 4 × 70 (2/0)
Terminales de regeneración 4 × 120 (250)
Fusibles de red externos máximos 700 V, 550 A
2
VLT® Parallel Drive Modules
110 (230)
80 (176)
435 378 516 440 570 495 615 550
88 88 89 89 90 90 91 91
2 × 120 (250) 4 × 120 (250)
Tabla 6.13 FC 302, alimentación de red de 525-690 V CA (sistema de dos convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
52 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Especicaciones Guía de diseño
Intervalo de potencia N500 N560
Módulos de convertidor de frecuencia 2 2
Conguración del recticador Doce pulsos
Carga alta/normal HO NO HO NO
Eje de salida típico a 525-550 V [kW] 400 450 450 500
Eje de salida típico a 575 V [CV] 500 600 600 650
Eje de salida típico a 690 V [kW] 500 560 560 630
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del disipador [°C (°F)]
Desconexión por ambiente de la tarjeta de potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 550 V) 523 596 596 630
Intermitente (60 s sobrecarga) a 550 V 785 656 894 693
Continua (a 575/690 V) 500 570 570 630
Intermitente (60 s sobrecarga) a 575/690 V 750 627 627 693
Continua (a 550 V) [kVA] 498 568 568 600
Continua (a 575 V) [kVA] 498 568 568 627
Continua (a 690 V) [kVA] 598 681 681 753
Intensidad de entrada [A]
Continua (a 550 V) 504 574 574 607
Continua (a 575 V) 482 549 549 607
Continua (a 690 V) 482 549 549 607
Pérdidas de potencia [W]
Módulos de convertidor a 600 V 6016 6995 6941 7431
Módulos de convertidor a 690 V 5886 6831 6766 7638
Barras conductoras de CA a 575 V 546 550 550 553
Barras conductoras de CC durante la regeneración 186 186 191 191
Dimensión máxima del cable [mm2 (mcm)]
1)
Red
Motor 4 × 120 (250)
Freno 4 × 95 (3/0)
Terminales de regeneración 4 × 120 (250)
Fusibles de red externos máximos 700 V, 630 A
110 (230)
80 (176)
4 × 120 (250)
6
6
Tabla 6.14 FC 302, alimentación de red de 525-690 V CA (sistema de dos convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 53

6
Especicaciones
Intervalo de potencia N630 N710 N800 N900 N1M0
Módulos de convertidor de frecuencia 4 4 4 4 4
Conguración del recticador Seis pulsos / doce pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Eje de salida típico a 525-550 V [kW] 500 560 560 670 670 750 750 850 850 1000
Eje de salida típico a 575 V [CV] 650 750 750 950 950 1050 1050 1150 1150 1350
Eje de salida típico a 690 V [kW] 630 710 710 800 800 900 900 1000 1000 1200
Clasicación de protección IP00
Rendimiento 0,98
Frecuencia de salida [Hz] 0–590
Desconexión por sobretemperatura del
disipador [°C (°F)]
Desconexión por ambiente de la tarjeta
de potencia [°C (°F)]
Intensidad de salida [A]
Continua (a 550 V) 659 763 763 889 889 988 988 1108 1108 1317
Intermitente (60 s sobrecarga) a 550 V 989 839 1145 978 1334 1087 1482 1219 1662 1449
Continua (a 575/690 V) 630 730 730 850 850 945 945 1060 1060 1260
Intermitente (60 s sobrecarga) a
575/690 V
Continua (a 550 V) [kVA] 628 727 727 847 847 941 941 1056 1056 1255
Continua (a 575 V) [kVA] 627 727 727 847 847 941 941 1056 1056 1255
Continua (a 690 V) [kVA] 753 872 872 1016 1016 1129 1129 1267 1267 1506
Intensidad de entrada [A]
Continua (a 550 V) 642 743 743 866 866 962 1079 1079 1079 1282
Continua (a 575 V) 613 711 711 828 828 920 1032 1032 1032 1227
Continua (a 690 V) 613 711 711 828 828 920 1032 1032 1032 1227
Pérdidas de potencia [W]
Módulos de convertidor a 600 V 7469 8683 8668 10166 10163 11406 11292 12852 12835 15762
Módulos de convertidor a 690 V 7381 8559 8555 9996 9987 11188 11077 12580 12551 15358
Barras conductoras de CA a 575 V 637 644 644 653 653 661 661 672 672 695
Barras conductoras de CC durante la
regeneración
Dimensión máxima del cable [mm
(mcm)]
1)
Red
Motor 4 × 120 (250) 6 × 120 (250) 8 × 120 (250)
Freno 8 × 70 (2/0) 8 × 95 (3/0)
Terminales de regeneración 4 × 150 (300) 6 × 120 (250) 6 × 150 (300) 8 × 120 (250)
Fusibles de red externos máximos
conguración de seis pulsos 700 V, 1600 A 700 V, 2000 A
conguración de doce pulsos 700 V, 900 A 700 V, 1500 A
2
VLT® Parallel Drive Modules
110 (230)
80 (176)
945 803 1095 935 1275 1040 1418 1166 1590 1590
198 198 208 208 218 218 231 231 256 256
4 × 120 (250) 6 × 120 (250) 8 × 120 (250)
Tabla 6.15 FC 302, alimentación de red de 525-690 V CA (sistema de cuatro convertidores)
1) En las unidades de 12 pulsos, los cables entre los terminales en estrella y en triángulo deben ser idénticos en número y longitud.
54 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Especicaciones Guía de diseño
6.6 Alimentación de red al módulo de convertidor
Alimentación de red
Terminales de la fuente de alimentación R/91, S/92, T/93
Tensión de alimentación
Frecuencia de alimentación 50/60 Hz ±5 %
Máximo desequilibrio temporal entre fases de red 3,0 % de la tensión de alimentación nominal
Factor de potencia real (λ) ≥0,98 nominal con carga nominal
Factor de potencia de desplazamiento (cos φ) (Aproximadamente 1)
Conmutación en la alimentación de entrada L1, L2 y L3 Una vez cada dos minutos, como máximo
Ambiente conforme a la norma EN 60664-1 Categoría de sobretensión III / grado de contaminación 2
1) La unidad es adecuada para su uso en un circuito capaz de proporcionar no más de 85 000 amperios simétricos RMS, 480/600
V.
2) Tensión de red baja / corte de tensión de red:
durante un episodio de tensión de red baja, el módulo de convertidor sigue funcionando hasta que la tensión del enlace de CC
desciende por debajo del nivel de parada mínimo, que generalmente es un 15 % inferior a la tensión de alimentación nominal
más baja. No se puede esperar un arranque y un par completo con una tensión de red inferior al 10 % por debajo de la tensión
de alimentación nominal más baja. El módulo de convertidor se desconecta al detectar un corte de red.
1)
2)
380-480, 500 V 690 V, ±10 %, 525-690 V ±10 %
6.7 Salida del motor y datos del motor
Salida del motor
Terminales del motor U/96, V/97, W/98
Tensión de salida 0-100 % de la tensión de alimentación
Frecuencia de salida 0-590 Hz
Conmutador en la salida Ilimitada
Tiempos de rampa 1-3600 s
6
6
Características de par
Par de sobrecarga (par constante) Máximo del 150 % durante 60 s
Par de arranque Máximo del 180 % hasta 0,5 s
Par de sobrecarga (par variable) Máximo del 110 % durante 1 s
Par de arranque (par variable) Máximo del 135 % durante 1 s
1) Porcentaje relativo al par nominal.
Rendimiento
Rendimiento
1) Rendimiento medido en intensidad nominal. Para conocer la clase de rendimiento energético, consulte el
capétulo 6.9 Condiciones ambientales para módulos de convertidor. Para conocer las pérdidas a carga parcial, consulte
www.danfoss.com/vltenergyeciency.
98%
6.8 Especicaciones de transformador de 12 pulsos
Conexión Dy11 d0 o Dyn 11d0
Cambio de fase entre secundarios 30°
Diferencia de tensión entre secundarios <0,5 %
Impedancia de cortocircuito de secundarios >5%
Diferencia de impedancia de cortocircuito entre secundarios <5 % de impedancia de cortocircuito
Otros No está permitida la conexión a tierra de los secundarios. Se recomienda una pantalla estática
1)
1)
1)
1)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 55

6
Especicaciones
VLT® Parallel Drive Modules
6.9 Condiciones ambientales para módulos de convertidor
Ambiente
Clasicación IP IP00
Ruido acústico 84 dB (en funcionamiento a plena carga)
Prueba de vibración 1,0 g
Vibración y golpes (CEI 60721-33-3) Clase 3M3
Humedad relativa máxima 5-95 % (CEI 721-3-3; clase 3K3 [sin condensación]) durante el funcionamiento
Entorno agresivo (CEI 60068-2-43) prueba H2S Clase Kd
Gases agresivos (CEI 60721-3-3) Clase 3C3
Temperatura ambiente
Temperatura ambiente mínima durante el funcionamiento a escala completa 0 °C (32 °F)
Temperatura ambiente mínima con rendimiento reducido –10 °C (14 °F)
Temperatura durante el almacenamiento/transporte De –25 a 65 °C (de –13 a 149 °F)
Altitud máxima sobre el nivel del mar sin reducción de potencia
Normas CEM, emisión EN 61800-3
Normas CEM, inmunidad EN 61800-4-2, EN 61800-4-3, EN 61800-4-4, EN 61800-4-5 y EN 61800-4-6
Clase de rendimiento energético
1) Consulte el capétulo 6.12 Especicaciones de reducción de potencia para informarse sobre la reducción de potencia para una
temperatura ambiente elevada y para grandes altitudes.
2) Determinada conforme a la norma EN 50598-2 en:
Carga nominal.
•
90 % de la frecuencia nominal.
•
Ajustes de fábrica de la frecuencia de conmutación.
•
Ajustes de fábrica del patrón de conmutación.
•
1)
2)
Máximo 45 °C (113 °F) (por promedio de 24 horas, máximo 40 °C [104 °F])
1)
1000 m (3281 ft)
IE2
Especicaciones del cable
6.10
Longitudes de cable y secciones transversales para cables de control
Longitud máxima del cable de motor, apantallado 150 m (492 ft)
Longitud máxima del cable de motor, sin apantallar 300 m (984 ft)
Sección transversal máxima a los terminales de control, cable rígido o exible sin manguitos en los
extremos 1,5 mm2 / 16 AWG
Sección transversal máxima a los terminales de control, cable exible con manguitos en los extremos 1 mm2/18 AWG
Sección transversal máxima a los terminales de control, cable exible con manguitos en los extremos y
abrazadera 0,5 mm2 / 20 AWG
Sección transversal mínima para los terminales de control 0,25 mm2 / 24 AWG
Sección transversal máxima para terminales de 230 V 2,5 mm2/14 AWG
Sección transversal mínima para terminales de 230 V 0,25 mm2 / 24 AWG
1) Para obtener información sobre los cables de alimentación, consulte las tablas de datos eléctricos del capétulo 6.5 Especicaciones en función de la potencia.
1)
6.11 Entrada/salida de control y datos de control
Entradas digitales
Entradas digitales programables
Número de terminal 18, 19, 271), 291), 32, 33
Lógica PNP o NPN
Nivel de tensión 0-24 V CC
Nivel de tensión, 0 lógico PNP <5 V CC
Nivel de tensión, 1 lógico PNP >10 V CC
Nivel de tensión, «0» lógico NPN
Nivel de tensión, «1» lógico NPN
Tensión máxima de entrada 28 V CC
2)
2)
4 (6)
>19 V CC
<14 V CC
1)
56 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Especicaciones Guía de diseño
Rango de frecuencia de pulsos 0-110 kHz
(Ciclo de trabajo) anchura de pulsos mínima 4,5 ms
Resistencia de entrada, R
Todas las entradas digitales están galvánicamente aisladas de la tensión de alimentación (PELV) y de otros terminales de tensión
alta.
1) Los terminales 27 y 29 también pueden programarse como salidas.
2) Excepto el terminal de entrada 37 de Safe Torque O.
i
Aproximadamente 4 kΩ
Safe Torque O (STO) Terminal 37
Nivel de tensión 0-24 V CC
Nivel de tensión, 0 lógico PNP <4 V CC
Nivel de tensión, 1 lógico PNP >20 V CC
Tensión máxima de entrada 28 V CC
Intensidad de entrada típica a 24 V 50 mA
Intensidad de entrada típica a 20 V 60 mA
Capacitancia de entrada 400 nF
Todas las entradas digitales están galvánicamente aisladas de la tensión de alimentación (PELV) y de otros terminales de tensión
alta.
1) Consulte el Manual de funcionamiento de Safe Torque O para los convertidores de frecuencia VLT® para obtener más
información sobre el terminal 37 y Safe Torque O.
2) Al usar un contactor con una bobina de CC con la STO, cree siempre un camino de retorno para la intensidad desde la bobina
al desconectarlo. Esto puede conseguirse con un diodo de rueda libre a lo largo de la bobina. Como alternativa, también puede
utilizar un MOV de 30 o 50 V para obtener un tiempo de respuesta más rápido. Pueden comprarse contactores típicos con este
diodo.
Entradas analógicas
N.º de entradas analógicas 2
Número de terminal 53, 54
Modos Tensión o corriente
Selección de modo Conmutador S201 y conmutador S202
Modo tensión Conmutador S201 / conmutador S202 = OFF (U)
Nivel de tensión De –10 V a 10 V (escalable)
Resistencia de entrada, R
Tensión máxima ±20 V
Modo de corriente Conmutador S201 / conmutador S202 = ON (I)
Nivel de corriente 0/4-20 mA (escalable)
Resistencia de entrada, R
Corriente máxima 30 mA
Resolución de entradas analógicas 10 bit (signo +)
Precisión de las entradas analógicas Error máximo del 0,5 % de la escala total
Ancho de banda 20 Hz/100 Hz
Las entradas analógicas están galvánicamente aisladas de la tensión de alimentación (PELV) y de los demás terminales de
tensión alta.
i
i
1), 2)
(El terminal 37 es de lógica PNP ja)
rms
rms
Aproximadamente 10 kΩ
Aproximadamente 200 Ω
6
6
Ilustración 6.18 Aislamiento PELV
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 57

Especicaciones
Entrada de pulsos
Pulso programable 2/1
Número de terminal de pulso 291), 32/33
Frecuencia máxima en los terminales 29 y 33 110 kHz (en contrafase)
Frecuencia máxima en los terminales 29 y 33 5 kHz (colector abierto)
Frecuencia mínima en los terminales 29 y 33 4 Hz
Nivel de tensión 0-24 V CC
Tensión máxima de entrada 28 V CC
Resistencia de entrada, R
Precisión de la entrada de pulsos (0,1-1 kHz) Error máximo: un 0,1 % de la escala completa
Precisión de la entrada de encoder (1-11 kHz) Error máximo: 0,05 % de la escala completa
Las entradas de pulsos y encoder (terminales 29, 32 y 33) se encuentran galvánicamente aisladas de la tensión de alimentación
(PELV) y demás terminales de tensión alta.
1) Las entradas de pulsos son la 29 y la 33.
i
VLT® Parallel Drive Modules
Aproximadamente 4 kΩ
6
Salida analógica
Número de salidas analógicas programables 1
Número de terminal 42
Rango de intensidad en la salida analógica 0/4-20 mA
Carga máxima entre conexión a tierra y salida analógica 500 Ω
Precisión en la salida analógica Error máximo: un 0,5 % de la escala completa
Resolución en la salida analógica 12 bits
La salida analógica está galvánicamente aislada de la tensión de alimentación (PELV) y de los demás terminales de tensión alta.
Tarjeta de control, comunicación serie RS485
Número de terminal 68 (P, TX+, RX+), 69 (N, TX-, RX-)
N.º de terminal 61 Común para los terminales 68 y 69
El circuito de comunicación serie RS485 se encuentra separado funcionalmente de otros circuitos centrales y galvánicamente
aislado de la tensión de alimentación (PELV).
Salidas digitales
Salidas digitales / de pulsos programables 2
Número de terminal 27, 29
Nivel de tensión en la salida digital / salida de frecuencia 0–24 V
Intensidad de salida máxima (disipador o fuente) 40 mA
Carga máxima en salida de frecuencia 1 kΩ
Carga capacitiva máxima en salida de frecuencia 10 nF
Frecuencia de salida mínima en salida de frecuencia 0 Hz
Frecuencia de salida máxima en salida de frecuencia 32 kHz
Precisión de salida de frecuencia Error máximo: un 0,1 % de la escala completa
Resolución de salidas de frecuencia 12 bits
1) Los terminales 27 y 29 también pueden programarse como entradas.
La salida digital está galvánicamente aislada de la tensión de alimentación (PELV) y de los demás terminales de tensión alta.
1)
Tarjeta de control, salida de 24 V CC
Número de terminal 12, 13
Tensión de salida 24 V +1, –3 V
Carga máxima 200 mA
El suministro externo de 24 V CC está galvánicamente aislado de la tensión de alimentación (PELV), aunque tiene el mismo
potencial que las entradas y salidas analógicas y digitales.
Salidas de relé
Salidas de relé programables 2
N.º de terminal del relé 01 1-3 (desconexión), 1-2 (conexión)
Máxima carga del terminal (CA-1)1) en 1-3 (NC), 1-2 (NO) (carga resistiva) 240 V CA, 2 A
Máxima carga del terminal (CA-15)1) (carga inductiva a cosφ 0,4) 240 V CA, 0,2 A
58 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
Especicaciones Guía de diseño
Máxima carga del terminal (CC-1)1) en 1-2 (NO), 1-3 (NC) (carga resistiva) 60 V CC, 1 A
Máxima carga del terminal (CC-13)1) (carga inductiva) 24 V CC, 0,1 A
N.º de terminal del relé 02 (solo VLT® AutomationDrive FC 302) 4-6 (desconexión), 4-5 (conexión)
Máxima carga del terminal (CA-1)1) en 4-5 (NO) (carga resistiva)
Máxima carga del terminal (CA-15)1) en 4-5 (NO) (carga inductiva a cosφ 0,4) 240 V CA, 0,2 A
Máxima carga del terminal (CC-1)1) en 4-5 (NO) (carga resistiva) 80 V CC, 2 A
Máxima carga del terminal (CC-13)1) en 4-5 (NO) (carga inductiva) 24 V CC, 0,1 A
Máxima carga del terminal (CA-1)1) en 4-6 (NC) (carga resistiva) 240 V CA, 2 A
Máxima carga del terminal (CA-15)1) en 4-6 (NC) (carga inductiva a cosφ 0,4) 240 V CA, 0,2 A
Máxima carga del terminal (CC-1)1) en 4-6 (NC) (carga resistiva) 50 V CC, 2 A
Máxima carga del terminal (CC-13)1) en 4-6 (NC) (carga inductiva) 24 V CC, 0,1 A
Mínima carga del terminal en 1-3 (NC), 1-2 (NO), 4-6 (NC), 4-5 (NO) 24 V CC 10 mA, 24 V CA 20 mA
Ambiente conforme a la norma EN 60664-1 Categoría de sobretensión III / grado de contaminación 2
1) CEI 60947 partes 4 y 5.
Los contactos del relé están galvánicamente aislados con respecto al resto del circuito con un aislamiento reforzado (PELV).
2) Categoría de sobretensión II.
3) Aplicaciones UL 300 V CA 2 A
Tarjeta de control, salida de 10 V CC
Número de terminal 50
Tensión de salida 10,5 V ±0,5 V
Carga máxima 25 mA
El suministro de 10 V CC está galvánicamente aislado de la tensión de alimentación (PELV) y de los demás terminales de tensión
alta.
2)3)
Sobretensión cat. II 400 V CA, 2 A
6
6
Características de control
Resolución de frecuencia de salida a 0-590 Hz ±0,003 Hz
Precisión repetida del arranque / de la parada precisos (terminales 18 y 19) ≤±0,1 ms
Tiempo de respuesta del sistema (terminales 18, 19, 27, 29, 32 y 33) ≤10 ms
Rango de control de velocidad (lazo abierto) 1:100 de velocidad síncrona
Intervalo de control de velocidad (lazo cerrado) 1:1000 de velocidad síncrona
Precisión de velocidad (lazo abierto) 30-4000 r/min: error ±8 r/min
Precisión de la velocidad (lazo cerrado), en función de la resolución del dispositivo de
realimentación 0-6000 r/min: Error ±0,15 r/min
Todas las características de control se basan en un motor asíncrono de 4 polos
Rendimiento de la tarjeta de control
®
Intervalo de exploración (VLT
VLT® AQUA Drive FC 202)
Intervalo de exploración (FC 302) 1 ms
Tarjeta de control, comunicación serie USB
USB estándar 1,1 (velocidad máxima)
Conector USB Conector de dispositivos USB tipo B
La conexión al PC se realiza por medio de un cable USB de dispositivo o host estándar.
La conexión USB se encuentra galvánicamente aislada de la tensión de alimentación (PELV) y del resto de los terminales de
tensión alta.
La conexión a tierra USB no se encuentra galvánicamente aislada de la conexión a tierra de protección. Utilice únicamente un
ordenador portátil aislado como conexión entre el PC y el terminal USB del convertidor de frecuencia.
HVAC Drive FC 102, VLT® Refrigeration Drive FC 103,
5 ms (VLT® AutomationDrive FC
302)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 59

Max.I
out
(%)
at T
AMB, MAX
D, E and F enclosures
Altitude (km)
HO
NO
T
at 100% I
out
100%
96%
92%
0 K
-3 K
-6 K
1 km 2 km 3 km
-5 K
-8 K
-11 K
130BC015.10
AMB, MAX
6
Especicaciones
VLT® Parallel Drive Modules
6.12 Especicaciones de reducción de potencia
Tenga en cuenta la reducción de potencia cuando se cumplan alguna de las condiciones siguientes:
Presión atmosférica baja en funcionamiento por encima de los 1000 m (3281 ft).
•
Temperatura ambiente alta.
•
Frecuencia de conmutación alta.
•
Funcionamiento a baja velocidad.
•
Cables de motor largos.
•
Cables con una gran sección transversal.
•
Si se dan estas condiciones, Danfoss recomienda subir al siguiente nivel de potencia.
6.12.1 Reducción de potencia por altitud y por temperatura ambiente
La capacidad de refrigeración del aire disminuye al disminuir la presión atmosférica.
A una altitud igual o inferior a 1000 m (3281 ft) no es necesario reducir la potencia.
Por encima de los 1000 m (3281 ft), debe reducirse la temperatura ambiente (T
Consulte la Ilustración 6.19.
) o la intensidad de salida máxima (I
AMB.
MÁX.
).
Ilustración 6.19 Reducción de potencia de la intensidad de salida en función de la altitud a T
Ilustración 6.19 muestra que a una temperatura de 41,7 °C (107 °F), está disponible el 100 % de la corriente nominal de
La
salida. A una temperatura de 45 °C (113 °F) (T
AMB, MÁX.
-3 K), está disponible el 91 % de la corriente nominal de salida.
AMB, MÁX.
6.12.2 Reducción de potencia en función de la frecuencia de conmutación y la temperatura
ambiente
AVISO!
REDUCCIÓN DE POTENCIA DE FÁBRICA
En los VLT® Parallel Drive Modules la potencia ya está reducida para la temperatura de funcionamiento (55 °C (131 °F)
T
Los siguientes grácos indican si debe reducirse la potencia de la intensidad de salida en función de la frecuencia de
conmutación y de la temperatura ambiente. Al hacer referencia a los grácos, I
de salida y fsw indica la frecuencia de conmutación.
y 50 °C (122 °F) T
AMB,MÁX
).
AMB,AVG
indica el porcentaje de la corriente nominal
sal
60 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BX473.11
Iout [%]
fsw [kHz]
70
80
90
1
60
100
110
2 3 4 5 6 7 8
9
0
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX474.11
70
80
90
1
60
100
110
2 3 4 5 6 7 8 90
50
Iout [%]
fsw
[kHz]
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX475.11
Iout [%]
fsw
[kHz]
70
80
90
60
100
110
2 4 60
31 5
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX476.11
Iout [%]
fsw
[kHz]
70
80
90
60
100
110
2 4
60
50
1
3
5
40 ˚C (104 ˚F)
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX477.11
70
80
90
1
60
100
110
2 3 4 5 6 70
Iout [%]
fsw
[kHz]
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX478.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 5 6 70
50
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
50 ˚C (131 ˚F)
130BX479.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 50
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX480.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 50
50
40 ˚C (104 ˚F)
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
Especicaciones Guía de diseño
Intervalo
de tensión
Patrón de
conmutación
Sobrecarga alta HO, 150 % Sobrecarga normal NO, 110 %
60 AVM
380-500 V
SFAVM
Tabla 6.16 Reducción de potencia en función de la frecuencia de conmutación, 250 kW a 400 V CA (350 CV a 460 V CA)
Intervalo
de tensión
Patrón de
conmutación
Sobrecarga alta HO, 150 % Sobrecarga normal NO, 110 %
60 AVM
6
6
525-690 V
Tabla 6.17 Reducción de potencia en función de la frecuencia de conmutación, 250 kW a 690 V CA (300 CV a 575 V CA)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 61
SFAVM

130BX481.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 54 50
6 7
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX482.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 54 50 6 7
50
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX483.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 50
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX484.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 50
50
40 ˚C (104 ˚F)
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX489.11
Iout [%]
fsw
[kHz]
70
80
90
0.5
60
100
110
2.00.0 1.0 1.5 2.5 4.03.0 3.5
5.54.5 5.0
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX490.11
Iout [%]
fsw
[kHz]
70
80
90
0.5
60
100
110
2.00.0 1.0 1.5 2.5 4.03.0 3.5 5.54.5 5.0
50
55 ˚C (131 ˚F)
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
130BX491.11
Iout [%]
fsw
[kHz]
70
80
90
0.5
60
100
110
2.00.0 1.0 1.5 2.5 4.03.0 3.5
55 ˚C (131 ˚F)
50 ˚C (122 ˚F)
45 ˚C (113 ˚F)
130BX492.11
70
80
90
0.5
Iout [%]
60
100
110
2.0
fsw
[kHz]
0.0 1.0 1.5 2.5 4.03.0 3.5
50
55 ˚C (131 ˚F)
50 ˚C (122 ˚F)
45 ˚C (113 ˚F)
40 ˚C (104 ˚F)
Especicaciones
VLT® Parallel Drive Modules
6
Intervalo
de tensión
Patrón de
conmutación
Sobrecarga alta HO, 150 % Sobrecarga normal NO, 110 %
60 AVM
380-500 V
SFAVM
Tabla 6.18 Reducción de potencia en función de la frecuencia de conmutación, 315-800 kW a 400 V CA (450-1200 CV a 460 V CA)
Intervalo
de tensión
Patrón de
conmutación
Sobrecarga alta HO, 150 % Sobrecarga normal NO, 110 %
60 AVM
525-690 V
SFAVM
Tabla 6.19 Reducción de potencia en función de la frecuencia de conmutación, 315-1000 kW a 400 V CA (350-1150 CV a 575 V CA)
62 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

F C - T
130BC530.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X D
Información de pedido Guía de diseño
7 Información de pedido
7.1 Formulario de pedido
Tabla 7.1 Código descriptivo
Grupos de productos
Serie de convertidores de frecuencia
Generación de código
Potencia de salida
Fases
Tensión de red
Protección
Tamaño de la protección
Clase de protección
Tensión de alimentación de control
Conguración de hardware
Filtro RFI / convertidor de frecuencia
de bajos armónicos / 12 pulsos
Freno
Pantalla (LCP)
PCB barnizada
Opción de red
Adaptación A
Adaptación B
Versión de software
Idioma del software
Opciones A
Opciones B
Opciones C0, MCO
Opciones C1
Software de opción C
Opciones D
1–3
4–6
7
8–10
11
12
13–15
16–23
16–17
18
19
20
21
22
23
24–27
28
29–30
31–32
33–34
35
36–37
38–39
Tabla 7.2 Ejemplo de código descriptivo para encargar un
convertidor de frecuencia
No todas las opciones están disponibles para cada modelo.
Para comprobar si está disponible la versión apropiada,
consulte en Internet el congurador de convertidores de
frecuencia.
7.2 Congurador de convertidores de
frecuencia
Es posible diseñar un convertidor de frecuencia de acuerdo
a las necesidades de la aplicación, mediante el uso del
sistema de números de pedido que se muestra en la
Tabla 7.1 y la Tabla 7.2.
Puede encargar convertidores estándar y convertidores con
opciones integradas enviando una cadena de código
descriptivo que describa el producto a la ocina local de
ventas de Danfoss; por ejemplo:
FC-302N800T5E00P2BGC7XXSXXXXAXBXCXXXXDX
El
signicado de los caracteres de la cadena puede
encontrarse en la Tabla 7.3 y la Tabla 7.4.
Encuentre el convertidor de frecuencia adecuado para cada
aplicación mediante el congurador de convertidores de
frecuencia. El congurador de convertidores de frecuencia
genera automáticamente un número de ventas de ocho
dígitos que se debe enviar a la ocina de ventas local.
También puede establecer una lista de proyectos con
varios productos y enviársela a un representante de ventas
de Danfoss.
congurador de convertidores de frecuencia puede
El
encontrarse en el sitio de Internet: www.danfoss.com/Spain.
Los convertidores de frecuencia se suministran automáticamente con un paquete de idioma correspondiente a la
región desde la que se realiza el pedido. Cuatro paquetes
regionales de idioma cubren los siguientes idiomas:
Paquete de idioma 1
Inglés, alemán, francés, danés, holandés, español, sueco,
italiano y nlandés.
Paquete de idioma 2
Inglés, alemán, chino, coreano, japonés, tailandés, chino
tradicional e indonesio bahasa.
7 7
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 63

Información de pedido
VLT® Parallel Drive Modules
Paquete de idioma 3
Inglés, alemán, esloveno, búlgaro, serbio, rumano, húngaro,
checo y ruso.
Para realizar el pedido de convertidores de frecuencia con
un paquete de idioma diferente, póngase en contacto con
su ocina local de ventas de Danfoss.
Paquete de idioma 4
Inglés, alemán, español, inglés americano, griego,
portugués brasileño, turco y polaco.
Descripción Pos. Opción posible
Grupo de productos 1–6 102: FC 102
202: FC 202
302: FC 302
Generación de código 7 N
Potencia de salida 8–10 250 kW
315 kW
355 kW
400 kW
450 kW
500 kW
77
Fases 11 Trifásicos (T)
Tensión de red 11–12 T 4: 380-480 V CA
Protección 13–15 E00: IP00
Filtro RFI, hardware 16–17 P2: Convertidor de frecuencia paralelo con ltro RFI, clase A2 (de 6 pulsos)
Freno 18 X: Sin IGBT del freno
Pantalla 19 G: Panel gráco de control local (LCP)
PCB barnizada 20 C: PCB barnizada
Opción de red 21 J: Magnetotérmico y fusibles
Adaptación 22 X: Entradas de cables estándar
Adaptación 23 X: sin adaptación
Versión de software 24–27 S067: Control de movimiento integrado
Idioma del software 28 X: Paquete de idioma estándar
560 kW
630 kW
710 kW
800 kW
900 kW
1M0 kW
1M2 kW
T 5: 380-500 V CA
T 7: 525-690 V CA
C00: IP00 con canal trasero de acero inoxidable
P4: Convertidor de frecuencia paralelo con ltro RFI, clase A1 (de 6 pulsos)
P6: Convertidor de frecuencia paralelo con ltro RFI, clase A2 (de 12 pulsos)
P8: Convertidor de frecuencia paralelo con ltro RFI, clase A1 (de 12 pulsos)
B: IGBT del freno montado
R: Terminales de regeneración
S: Freno y regeneración
T: Safe Torque O (STO)
U: Safe Torque O con freno
Q: panel de acceso a disipador
Tabla 7.3 Código descriptivo de pedido de los VLT® Parallel Drive Modules
64 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Información de pedido Guía de diseño
Descripción Pos. Opción posible
Opciones A 29-
30
Opciones B 31-
32
Opciones C0/ E0 33-
34
Opciones C1 / A/B en adaptador
de opción C
Software de opción C /
opciones E1
Opciones D 38-
35 X: sin opción
3637
39
AX: sin opción A
A0: VLT® PROFIBUS DP MCA 101
A4: VLT® DeviceNet MCA 104
A6: VLT® CANopen MCA 105
A8: VLT® EtherCAT MCA 124
AG: VLT® LonWorks MCA 108
AJ: VLT® BACnet MCA 109
AT: VLT® PROFIBUS Converter MCA 113
AU: VLT® PROFIBUS Converter MCA 114
AL: VLT® PROFINET MCA 120
AN: VLT® EtherNet/IP MCA 121
AQ: VLT® Modbus TCP MCA 122
AY: VLT® EtherNet/IP MCA 121
BX: sin opción
BK: VLT® General Purpose I/O MCB 101
BR: VLT® Encoder Input MCB 102
BU: VLT® Resolver Input MCB 103
BP: VLT® Relay Card MCB 105
BY: VLT® Extended Cascade Controller MCO 101
BZ: VLT® Safe PLC I/O MCB 108
B0: VLT® Analog I/O MCB 109
B2: VLT® PTC Thermistor Card MCB 112
B4: VLT® Sensor Input MCB-114
B6: VLT® Safety Option MCB 150
B7: VLT® Safety Options MCB 151
CX: sin opción
C4: VLT® Motion Control Option MCO 305
R: VLT® Extended Relay Card MCB 113
S: VLT® Advanced Cascade Controller MCO 102
XX: controlador estándar
10: VLT® Synchronizing Controller MCO 350
11: VLT® Position Controller MCO 351
12: VLT® Center Winder MCO 352
DX: sin opción
D0: VLT® 24 V DC Supply MCB 107
7 7
Tabla 7.4 Opciones de pedido
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 65

Información de pedido
VLT® Parallel Drive Modules
7.2.1 Filtros de salida
La conmutación de alta velocidad del convertidor produce algunos efectos secundarios que inuyen en el motor y en el
entorno circundante. Están disponibles dos tipos de ltros diferentes, el ltro dU/dt y el ltro senoidal, para corregir estos
efectos secundarios. Para obtener más detalles, consulte la Guía de diseño del ltro de salida de los convertidores VLT
380-500 V Común Individual
400 V, 50 Hz 460 V, 60 Hz 500 V, 50 Hz FsW
kW A CV A kW A kHz IP00 IP23 IP00 IP23
250 480 350 443 315 443 3 130B2849 130B2850 130B2844 130B2845
315 600 450 540 355 540 2 130B2851 130B2852 130B2844 130B2845
355 658 500 590 400 590 2 130B2851 130B2852 130B2844 130B2845
400 745 600 678 500 678 2 130B2853 130B2854 130B2844 130B2845
450 800 600 730 530 730 2 130B2853 130B2854 130B2847 130B2848
500 880 650 780 560 780 2 130B2853 130B2854 130B2847 130B2848
560 990 750 890 630 890 2 2×130B2849 2×130B2850 130B2847 130B2848
630 1120 900 1050 710 1050 2 3×130B2849 2×130B2850 130B2847 130B2848
77
710 1260 1000 1160 800 1160 2 3×130B2849 2×130B2850 130B2847 130B2848
800 1460 1200 1380 1000 1380 2 3×130B2851 3×130B2852 130B2849 130B2850
®
Tabla 7.5 Filtros dU/dt disponibles, 380-500 V
525-690 V Común Individual
525 V, 50 Hz 575 V, 60 Hz 690 V, 50 Hz FsW
kW A CV A kW A kHz IP00 IP23 IP00 IP23
250 360 350 344 315 344 2 130B2851 130B2852 130B2841 130B2842
300 395 400 410 355 380 1,5 130B2851 130B2852 130B2841 130B2842
315 429 450 450 400 410 1,5 130B2851 130B2852 130B2841 130B2842
400 523 500 500 500 500 1,5 130B2853 130B2854 130B2844 130B2845
450 596 600 570 560 570 1,5 130B2853 130B2854 130B2844 130B2845
500 630 650 630 630 630 1,5 130B2853 130B2854 130B2844 130B2845
560 763 750 730 710 730 1,5 130B2853 130B2854 130B2847 130B2848
670 889 950 850 800 850 1,5 130B2853 130B2854 130B2847 130B2848
750 988 1050 945 – – – 3×130B2849 3×130B2850 130B2847 130B2848
850 1108 1150 1060 1000 1060 1,5 3×130B2849 3×130B2850 130B2847 130B2848
1000 1317 1350 1260 1200 1260 1,5 3×130B2851 3×130B2852 130B2849 130B2850
Tabla 7.6 Filtros dU/dt disponibles, 525-690 V
380-500 V Común Individual
400 V, 50 Hz 460 V, 60 Hz 500 V, 50 Hz FsW
kW A CV A kW A kHz IP00 IP23 IP00 IP23
250 480 350 443 315 443 3 130B3188 130B3189 130B3186 130B3187
315 600 450 540 355 540 2 130B3191 130B3192 130B3186 130B3187
355 658 500 590 400 590 2 130B3191 130B3192 130B3186 130B3187
400 745 600 678 500 678 2 130B3193 130B3194 130B3188 130B3189
450 800 600 730 530 730 2 2×130B3188 2×130B3189 130B3188 130B3189
500 880 650 780 560 780 2 2×130B3188 2×130B3189 130B3186 130B3187
560 990 750 890 630 890 2 2×130B3191 2×130B3192 130B3186 130B3187
630 1120 900 1050 710 1050 2 2×130B3191 2×130B3192 130B3186 130B3187
710 1260 1000 1160 800 1160 2 3×130B3188 2×130B3189 130B3188 130B3189
800 1460 1200 1380 1000 1380 2 3×130B3188 2×130B3189 130B3188 130B3189
Tabla 7.7 Filtros senoidales disponibles, 380-500 V
66 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

U V W U V W U V W U V W
130BF038.10
1
2
Información de pedido Guía de diseño
525-690 V Común Individual
kW A CV A kW A kHz IP00 IP23 IP00 IP23
525 V, 50 Hz 575 V, 60 Hz 690 V, 50 Hz FsW
250 360 350 344 315 344 2 130B4129 130B4151 130B4125 130B4126
300 395 400 410 355 380 1,5 130B4129 130B4151 130B4125 130B4126
315 429 450 450 400 410 1,5 130B4152 130B4153 130B4125 130B4126
400 523 500 500 500 500 1,5 130B4154 130B4153 130B4129 130B4151
450 596 600 570 560 570 1,5 130B4156 130B4157 – –
500 630 650 630 630 630 1,5 130B4156 130B4157 130B4129 130B4151
560 763 750 730 710 730 1,5 2×130B4142 2×130B4143 130B4129 130B4151
670 889 950 850 800 850 1,5 2×130B4142 2×130B4143 130B4125 130B4126
750 988 1050 945 – – – 2×130B4142 2×130B4143 130B4129 130B4151
850 1108 1150 1060 1000 1060 1,5 3×130B4154 3×130B4155 130B4129 130B4151
1000 1317 1350 1260 1200 1260 1,5 3×130B4154 3×130B4155 130B4129 130B4151
Tabla 7.8 Filtros senoidales disponibles, 525-690 V
7 7
1 Módulo del convertidor de frecuencia 2 Filtro
Ilustración 7.1 Conguración de ltro sin barras conductoras comunes (individual)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 67
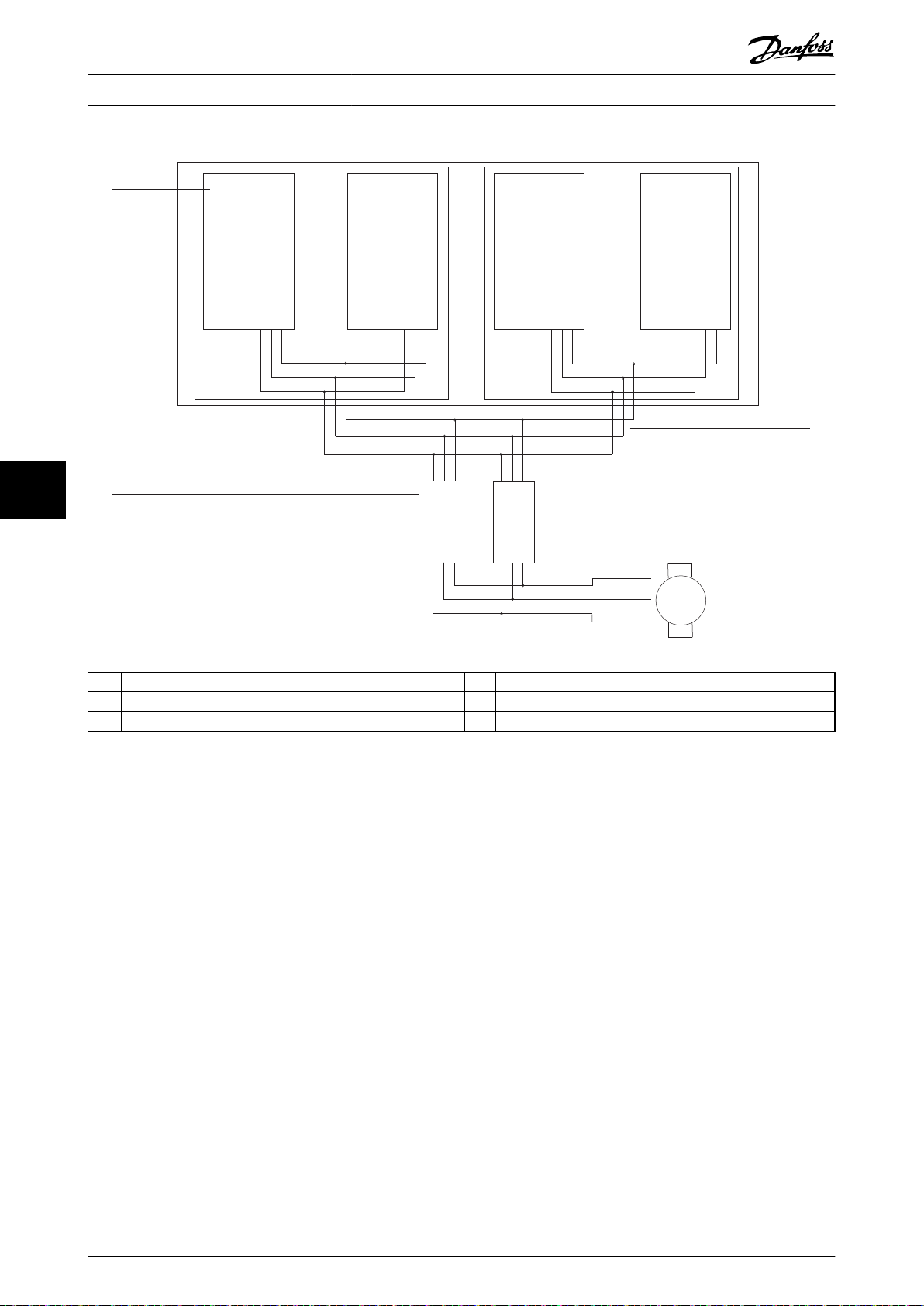
U V W U V W U V W U V W
130BF039.11
1
3
2 4
5
Información de pedido
VLT® Parallel Drive Modules
77
1 Módulo del convertidor de frecuencia 4 Armario 2
2 Armario 1 5 Cables
3 Filtro – –
Ilustración 7.2 Conguración de ltro con barras conductoras comunes (común)
68 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BC528.10
1
2
3
Información de pedido Guía de diseño
7.3 Opciones y accesorios
Danfoss ofrece una amplia gama de opciones y accesorios para el VLT® AutomationDrive FC 302, el VLT® HVAC Basic Drive
FC 102 y el VLT® AQUA Drive FC 202. Las siguientes opciones están instaladas en la tarjeta de control, en la ranura A, B o C.
Consulte la Ilustración 7.3. Para obtener información más detallada, consulte las instrucciones que acompañan al equipo
opcional.
7 7
1 Ranura A
2 ranura B
3 Ranura C
Ilustración 7.3 Opciones de ranura en la tarjeta de control
7.3.1 General Purpose Input Output
Module MCB 101
El VLT® General Purpose I/O MCB 101 se utiliza para la
extensión de las entradas y salidas digitales y analógicas
del FC 102, del FC 103, del FC 202, del FC 301 y del FC
302. El MCB 101 debe encajarse en la ranura B del
convertidor de frecuencia.
Contenido:
•
•
•
Módulo de opción MCB 101.
Dispositivo ampliado para el LCP.
Tapa de terminal.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 69
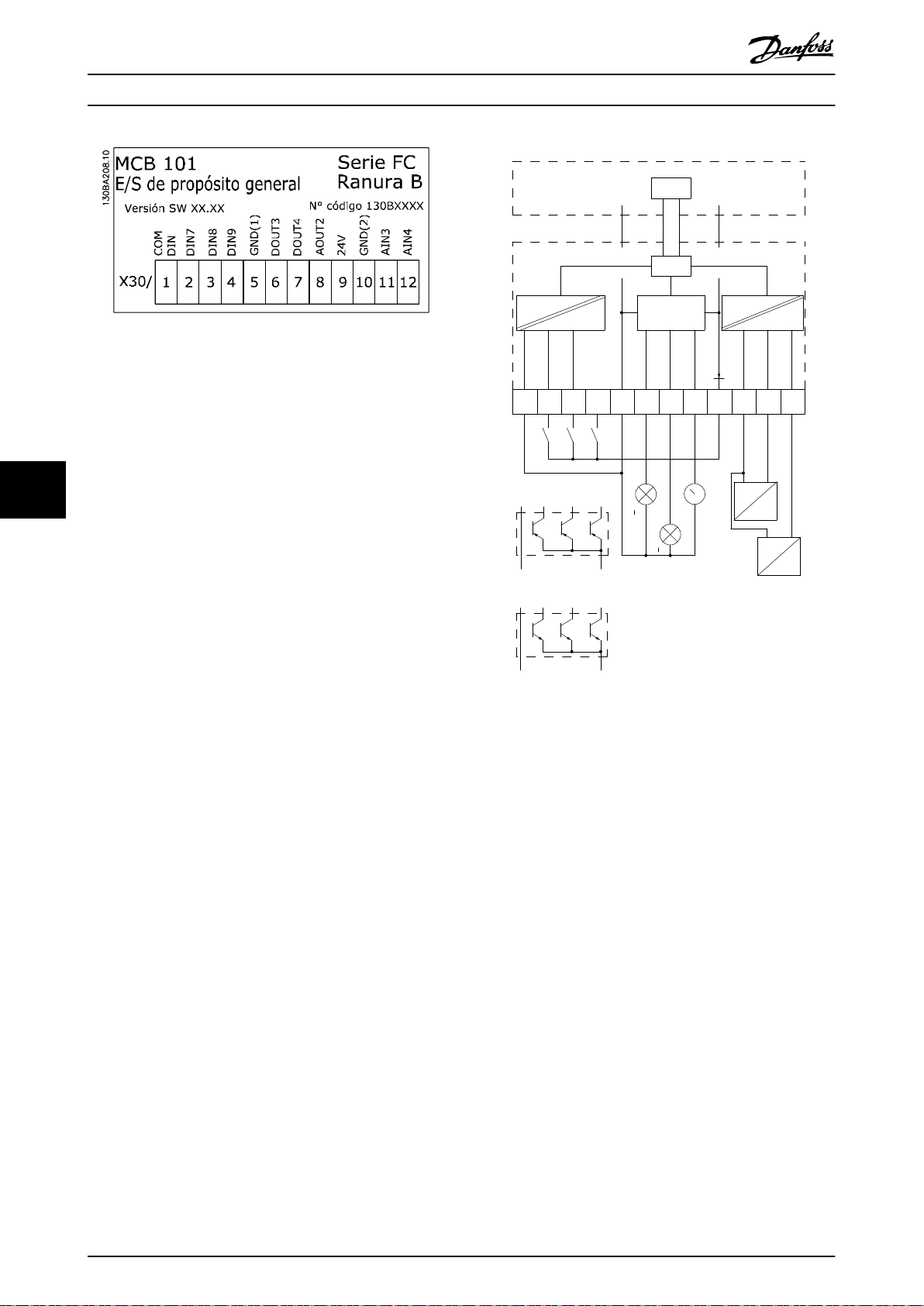
130BC526.11
1
2 3
4 5
6
7
8
9 10
11
12
COM DIN
DIN7
DIN8
DIN9
GND(1)
DOUT3
0/24 V DC
DOUT4
0/24 V DC
AOUT2
0/4-20 mA
24 V
GND(2)
AIN3
AIN4
RIN=
5k Ω
RIN=
10k Ω
-0 to +10
VDC
-0 to +10
VDC
0 V 24 V
0 V 24 V
24 V DC0 V
0 V24 V DC
<500 Ω
>600 Ω
>600 Ω
X30/
DIG IN
DIG &
ANALOG
OUT
ANALOG
IN
CPU
CAN BUS
CPU
Control card (FC 100/200/300)
General Purpose
I/O option MCB 101
PLC
(PNP)
PLC
(NPN)
Información de pedido
Ilustración 7.4 Módulo de opción MCB 101
VLT® Parallel Drive Modules
7.3.2
Aislamiento galvánico en el VLT
General Purpose I/O MCB 101
Las entradas digitales/analógicas están aisladas galvánicamente del resto de las entradas/salidas en el MCB 101 y
77
en la tarjeta de control del convertidor de frecuencia.
Las salidas digitales/analógicas del MCB 101 están aisladas
galvánicamente del resto de las entradas/salidas del MCB
101, pero no de las de la tarjeta de control del convertidor
de frecuencia.
Conecte los terminales 1 y 5 si las entradas digitales 7, 8 o
9 deben conmutarse mediante la fuente de alimentación
interna de 24 V (terminal 9). Consulte el Ilustración 7.5.
®
Ilustración 7.5 Diagrama básico
70 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Información de pedido Guía de diseño
7.3.3 Entradas digitales - Terminal X30/1-4
Entrada digital
Número de entradas digitales 4 (6)
Número de terminal 18, 19, 27, 29, 32, 33
Lógica PNP o NPN
Nivel de tensión 0-24 V CC
Nivel de tensión, '0' lógico PNP (Tierra = 0 V) <5 V CC
Nivel de tensión, '1' lógico PNP (Tierra = 0 V) >10 V CC
Nivel de tensión, '0' lógico NPN (Tierra = 24 V) <14 V CC
Nivel de tensión, '1' lógico NPN (Tierra = 24 V) >19 V CC
Tensión máxima de entrada 28 V continuo
Rango de frecuencia de pulsos 0-110 kHz
Ciclo de trabajo, anchura de pulsos mínima 4,5 ms
Impedancia de entrada >2 kΩ
7.3.4 Entradas analógicas - Terminal X30/11, 12
Entrada analógica
N.º de entradas analógicas 2
Número de terminal 53, 54, X30.11, X30.12
Modos Tensión
Nivel de tensión De –10 V a 10 V
Impedancia de entrada >10 kΩ
Tensión máxima 20 V
Resolución de entradas analógicas 10 bit (signo +)
Precisión de las entradas analógicas Error máximo del 0,5 % de la escala total
Ancho de banda 100 Hz
7.3.5 Salidas digitales - Terminal X30/6, 7
Salidas digitales
Número de salidas digitales 2
Número de terminal X30,6, X30,7
Nivel de tensión en la salida digital / salida de frecuencia 0–24 V
Intensidad de salida máxima 40 mA
Carga máxima ≥600 Ω
Carga capacitiva máxima <10 nF
Frecuencia de salida mínima 0 Hz
Frecuencia de salida máxima ≤32 kHz
Precisión de salida de frecuencia Error máximo: un 0,1 % de la escala completa
7 7
7.3.6 Salida analógica - Terminal X30/8
Salida analógica
Número de salidas analógicas 1
Número de terminal 42
Rango de intensidad en la salida analógica 0-20 mA
Carga máxima entre conexión a tierra y salida analógica 500 Ω
Precisión en la salida analógica Error máximo: un 0,5 % de la escala completa
Resolución en la salida analógica 12 bits
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 71

Información de pedido
VLT® Parallel Drive Modules
7.3.7
VLT® Encoder Input MCB 102
Encoder EnDat: absoluto y seno-coseno
•
(Heidenhain), compatible con la versión 2.1.
El módulo VLT® Encoder Input MCB 102 se puede utilizar
como fuente de realimentación para control de ujo en
lazo cerrado (parámetro 1-02 Realimentación encoder motor
Flux), y para control de velocidad en lazo cerrado
(parámetro 7-00 Fuente de realim. PID de veloc.). Congure la
opción de encoder en el grupo de parámetros 17-**
Opcs.realim. motor.
AVISO!
Los indicadores LED solamente son visibles cuando se
retira el LCP. La reacción en caso de error en el encoder
se puede seleccionar en el parámetro 17-61 Control de
señal de realimentación: [0] Desactivado, [1] Advertencia o
Encoder SSI: absoluto.
•
[2] Desconexión.
El MCB 102 se utiliza para:
Lazo cerrado VVC+.
•
Control de velocidad del vector de
•
Control de par del vector de ujo.
•
Motor de magnetización permanente.
•
ujo.
Tipos de encoder admitidos:
Codicador incremental: tipo 5 V TTL, RS422,
77
•
máxima frecuencia: 410 kHz.
Codicador incremental: 1 Vpp, seno-coseno.
•
Encoder HIPERFACE®: absoluto y seno-coseno
•
El kit de opción de encoder, cuando se encarga por
separado, incluye lo siguiente:
VLT® Encoder Input MCB 102.
•
Montaje de sujeción LCP ampliado y tapa de
•
terminales ampliada.
La opción de encoder no es compatible con los convertidores de frecuencia VLT® AutomationDrive FC 302
fabricados antes de la semana 50 de 2004.
Versión de software mínima: 2.03 (parámetro 15-43 Versión
de software)
(Stegmann/SICK).
Designación
de terminales
X31
1 NC
2 NC 8 V CC Salida de 8 V (7-12 V, I
3 5 VCC 5 VCC
4 GND (tierra) GND (tierra) GND (tierra) GND (tierra)
5 Entrada A +COS +COS Entrada A
6 Entrada A
7 Entrada B +SIN +SIN Entrada B
8 Entrada B
9 Entrada Z +Datos RS485 Salida de reloj Salida de reloj Entrada Z, O BIEN, +Datos RS485
10 Entrada Z
11 NC NC Entrada de
12 NC NC Entrada de
Máx. 5 V en X31,5-12
Codicador
incremental
(consulte la
Ilustración 7.6)
invertida
invertida
invertida
Encoder SinCos
HIPERFACE
(consulte la
Ilustración 7.7)
REFCOS REFCOS Entrada A invertida
REFSIN REFSIN Entrada B invertida
-Datos RS485 Salida de reloj
Encoder EnDat Encoder SSI Descripción
®
1)
24 V
1)
5 V
Salida de reloj
inv.
datos
datos inv.
inv.
Entrada de
datos
Entrada de
datos inv.
Salida de 24 V (21-25 V, I
Salida de 5 V (5 V ± 5 %, I
Entrada Z, O BIEN, -Datos RS485
Uso futuro
Uso futuro
máx
: 200 mA)
máx
máx.
125 mA)
: 200 mA)
Tabla 7.9 Descripciones de terminal de opción del encoder MCB 102 para tipos de encoder admitidos
1) Fuente de alimentación para encoder: consulte los datos en el encoder.
72 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

1
2 3 12
130BA163.11
754 6 8 9 10 11
24 V
8 V 5 V GND A A B B Z Z D D
Us 7-12V (red)
GND (blue)
+COS (pink)
REFCOS (black)
+SIN (white)
REFSIN (brown)
Data +RS 485 (gray)
Data -RS 485 (green)
1 2 3 12754 6 8 9 10 11
130BA164.10
130BA119.10
B
A
A
B
A
B
B
A
Información de pedido Guía de diseño
Ilustración 7.8 Dirección de rotación
Ilustración 7.6 Codicador incremental
Longitud máxima de cable 150 m (492 ft).
Ilustración 7.7 Encoder seno-coseno HIPERFACE
7.3.8
VLT® Resolver Input MCB 103
La opción de resolver VLT® MCB 103 se utiliza como
interfaz de la realimentación del motor del resolver al VLT
AutomationDrive FC 301/FC 302. Los resolvers se utilizan
como dispositivos de realimentación del motor para
motores síncronos sin escobillas y magnetización
permanente.
Cuando se encarga por separado, el kit de opción de
resolver incluye lo siguiente:
Opción de resolver VLT® MCB 103.
•
Montaje de sujeción LCP ampliado y tapa de
•
terminales ampliada.
Selección de parámetros: 17-5 * Interfaz resolver.
El MCB 103 es compatible con varios tipos de resolver de
rotor.
Polos del resolver Parámetro 17-50 Polos: 2 × 2
Tensión de entrada
del resolver
Frecuencia de
entrada del resolver
Relación de transformación
Tensión de entrada
secundaria
Carga secundaria
Parámetro 17-51 Tensión de entrada:
2,0-8,0
Parámetro 17-52 Frecuencia de entrada::
2-15 kHz
× 10,0 kHz
Parámetro 17-53 Proporción de transformación: 0,1-1,1 × 0,5
Máxima 4 V
Aproximadamente 10 kΩ
Vrms
× 7,0
rms
Vrms
7 7
®
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 73
Tabla 7.10 Especicaciones del resolver

130BT102.10
Información de pedido
VLT® Parallel Drive Modules
El LED 2 está encendido cuando la señal de coseno es
correcta desde el resolver.
El LED 3 está encendido cuando la señal de seno es
correcta desde el resolver.
77
Ilustración 7.9 Resolver Input MCB 103 se utiliza con un motor
de magnetización permanente
AVISO!
El MCB 103 puede utilizarse con tipos de resolver
alimentados solamente por rotor. No es posible utilizar
ningún tipo de resolver alimentado por estátor.
Indicadores LED
Los LED están activos cuando parámetro 17-61 Control de
señal de realimentación está ajustado en [1] Advertencia o
[2] Desconexión.
El LED 1 está encendido cuando la señal de referencia es
correcta hacia el resolver
Ilustración 7.10 Motor de magnetización permanente (PM) con
un resolver como realimentación de velocidad
Ejemplo de ajuste
En la Ilustración 7.9, se utiliza un motor de magnetización
permanente (PM) con un resolver como realimentación de
velocidad. Un motor PM debería funcionar en modo de
ujo.
Cableado
La máxima longitud del cable es 150 m (492 ft) cuando se
utiliza un tipo de cable de par trenzado.
AVISO!
Utilice únicamente cables apantallados para el motor y el
chopper de frenado. Los cables del resolver deben estar
apantallados y separados de los del motor. La pantalla
del cable del resolver debe conectarse correctamente a
la placa de desacoplamiento y al chasis (tierra) del lado
del motor.
74 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Relé 7
NC NCNC
Relé 9Relé 8
1 2 3 12
130BA162.10
754 6 8 9 10 11
Información de pedido Guía de diseño
Parámetro 1-00 Modo Conguración [1] Veloc. Lazo Cerrado
Parámetro 1-01 Principio control motor [3] Lazo Cerrado Flux
Parámetro 1-10 Construcción del motor [1] PM, non-salient SPM
Parámetro 1-24 Intensidad motor Placa de características
Parámetro 1-25 Veloc. nominal motor Placa de características
Parámetro 1-26 Par nominal continuo Placa de características
El AMA no es posible en motores de PM
Parámetro 1-30 Resistencia estator (Rs) Hoja de datos del motor
Parámetro 30-80 Inductancia eje d (Ld) Hoja de datos del motor (mH)
Parámetro 1-39 Polos motor Hoja de datos del motor
Parámetro 1-40 fcem a 1000 RPM Hoja de datos del motor
Parámetro 1-41 Ángulo despalzamiento motor (Oset) Hoja de datos del motor (normalmente cero)
Parámetro 17-50 Polos Hoja de datos del resolver
Parámetro 17-51 Tensión de entrada Hoja de datos del resolver
Parámetro 17-52 Frecuencia de entrada: Hoja de datos del resolver
Parámetro 17-53 Proporción de transformación Hoja de datos del resolver
Parámetro 17-59 Interfaz de resolver [1] Activado
Tabla 7.11 Parámetros para ajustar
7.3.9
VLT® Relay Card MCB 105
7 7
La VLT® Relay Card MCB 105 incluye 3 piezas de contactos SPDT y debe colocarse en la ranura de opción B.
Datos eléctricos
Máxima carga del terminal (CA-1)1) (carga resistiva) 240 V CA 2 A
Máxima carga del terminal (CA-15)1) (carga inductiva a cosφ 0,4) 240 V CA 0,2 A
Máxima carga del terminal (CC-1)1) (carga resistiva) 24 V CC 1 A
Máxima carga del terminal (CC-13)1) (carga inductiva) 24 V CC 0,1 A
Carga del terminal mínima (CC) 5 V 10 mA
Frecuencia de conmutación máxima en carga nominal / carga mínima 6 min
1) CEI 947 partes 4 y 5
El kit opcional de relé, cuando se encarga por separado,
incluye lo siguiente:
VLT® Relay Card MCB 105.
•
Montaje de sujeción LCP ampliado y tapa de
•
terminales ampliada.
Etiqueta para cubrir el acceso a los conmutadores
•
S201 (A53), S202 (A54) y S8011).
Cintas de cable para sujetar los cables al modulo
•
de relé.
1) IMPORTANTE La etiqueta DEBE estar en el bastidor del
LCP para cumplir la aprobación UL.
Ilustración 7.11 Desconexión de los terminales de relé
-1
/ 20
-1
ADVERTENCIA
Advertencia sobre alimentación doble. No combine
sistemas de 24/48 V con sistemas de alta tensión.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 75

130BA177.10
8-9mm
2mm
1 1 1
1 102 3 4 5 6 7 8 9 1211
2 2 3
1 1 1
1 102 3 4 5 6 7 8 9 1211
3 3 3
1 1 1
1 102 3 4 5 6 7 8 9 1211
2 2
2
130BA176.11
Información de pedido
VLT® Parallel Drive Modules
Ilustración 7.12 Longitud correcta del cable pelado
77
Ilustración 7.13 Método correcto para instalar partes activas y
señales de control
76 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BF022.10
Información de pedido Guía de diseño
7.3.10
Puede instalarse un suministro externo de 24 V CC como un suministro de baja tensión para la tarjeta de control y para
cualquier otra tarjeta de opciones instalada, que permite el funcionamiento completo del LCP sin conexión a la red.
Especicación del suministro externo de 24 V CC
Intervalo de tensión de entrada 24 V CC ±15 % (máximo 37 V en 10 s)
Intensidad de entrada máxima 2,2 A
Intensidad de entrada media para 0,9 A
Longitud máxima de cable 75 m (246 ft)
Carga de capacitancia de entrada 10 uF
Retardo de arranque 0,6 s
Las entradas están protegidas.
Números de terminales:
Cuando el suministro externo de 24 V CC VLT® MCB 107 alimenta el circuito de control, la fuente de alimentación interna de
24 V se desconecta automáticamente. Para obtener información más detallada sobre instalación, consulte las instrucciones
independientes que se suministran con el equipo opcional.
VLT® 24 V DC Supply MCB 107
Terminal 35: suministro externo de –24 V CC.
•
Terminal 36: suministro externo de 24 V CC.
•
7 7
Ilustración 7.14 Conexión del suministro externo de 24 V CC
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 77

MS 220 DA
11
10
20-28 VDC 10 mA
12
20-28 VDC
60 mA
com
ZIEHL
X44
12 13 18 19 27 29 32 33 20 37
3
NC
4NC5NC6NC7NC8NC9NC10 11NC121
T1
2
T2
T
P
T
P
PTC
M3~
130BA638.10
DO
Motor protection
MCB 112 PTC Thermistor Card
Option B
Reference for 10, 12
DO FOR SAFE
STOP T37
Code No.130B1137
Control Terminals of FC302
Información de pedido
VLT® Parallel Drive Modules
7.3.11
La opción de VLT® PTC Thermistor Card MCB 112 hace
posible controlar la temperatura de un motor eléctrico
mediante una entrada de termistor PTC galvánicamente
aislada. Se trata de una opción B para el VLT® HVAC Drive
FC 102, el VLT® AQUA Drive FC 202 y el VLT
AutomationDrive FC 302 con Safe Torque O (STO).
VLT® PTC Thermistor Card MCB 112
®
Certicación ATEX con las series de convertidores
102/202/302
La VLT® PTC Thermistor Card MCB 112 ha sido certicada
para ATEX, lo que signica que las series de convertidores
102/202/302 junto con la MCB 112 pueden utilizarse ahora
con motores en atmósferas potencialmente explosivas.
Consulte la tarjeta del termistor para obtener más
Para obtener información más detallada sobre el montaje e
información.
instalación de esta opción, consulte las instrucciones que
se suministran con ella. Para ver distintas posibilidades de
aplicación, consulte el capétulo 17 Ejemplos de aplicaciones.
X44/1 y X44/2 son las entradas del termistor. X44/12 activa
la Safe Torque
los valores del termistor lo hacen necesario, y X44/10
77
informa al convertidor de frecuencia de que la petición de
Safe Torque O proviene de la MCB 112, para asegurar así
O del convertidor de frecuencia (T-37) si
Ilustración 7.16 Símbolo de atmósfera explosiva (ATEX)
una gestión adecuada de la alarma. Para utilizar la
información de X44/10, una de las entradas digitales del
convertidor de frecuencia (o una entrada digital de una
opción instalada) debe ajustarse como Tarjeta PTC 1 [80]. El
Parámetro 5-19 Terminal 37 parada segura debe
congurarse con la función de Safe Torque O deseada. El
ajuste predeterminado es [1] Alarma parada seg.
Ilustración 7.15 Instalación del MCB 112
Datos eléctricos
Conexión de resistencia
PTC conforme con las normas DIN 44081 y DIN 44082
Número 1-6 resistencias en serie
Valor de desconexión 3,3 Ω-3,65 Ω-3,85 Ω
Valor de reinicio 1,7 Ω-1,8 Ω-1,95 Ω
78 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BA965.10
121110987654321
4321 12111098765432121 13 14
+-+-+-+-+-+-+-+-+
-
+
-
A03
A03
Ext. 24 VDC
DI1
DI2
DI3
DI4
DI5
DI6
DI7
X45/ X48/ X46/
X47/
Relay 3 Relay 4 Relay 5 Relay 6
Información de pedido Guía de diseño
Tolerancia de disparo ± 6 °C (10,8 °F)
Resistencia total del lazo sensor <1,65 Ω
Tensión del terminal ≤2,5 V para R ≤3,65 Ω, ≤9 V para R = ∞
Intensidad de sensor ≤1 mA
Cortocircuito 20 Ω≤R ≤40 Ω
Consumo de energía 60 mA
Condiciones de prueba
EN 60 947-8
Medida de resistencia a los transitorios de sobretensión 6000 V
Categoría de sobretensión III
Grado de contaminación 2
Medida de tensión de aislamiento Vbis 690 V
Aislamiento galvánico hasta Vi 500 V
–20 °C (–4 °F)-+60 °C (140 °F)
Temperatura ambiente permanente
Calor seco EN 60068-2-1
Humedad 5-95 %, condensación no permitida
Resistencia EMC EN 61000-6-2
Emisiones CEM EN 61000-6-4
Resistencia a la vibración 10-1000 Hz 1,14 g
Resistencia al impacto 50 g
7 7
Valores de sistema de seguridad
EN 61508 para Tu = 75 °C (167 °F) continuados
2 para ciclo de mantenimiento de 2 años
SIL
1 para ciclo de mantenimiento de 3 años
HFT 0
PDF (para test funcional anual) 4,10 × 10
SFF 78%
λs + λ
λ
DU
DD
8494 FIT
934 FIT
Número de pedido 130B1137
7.3.12
VLT® Extended Relay Card MCB 113
La VLT® Extended Relay Card MCB 113 añade 7 entradas
digitales, 2 salidas analógicas y 4 relés SPDT a la E/S
estándar del convertidor de frecuencia, siempre que se
aumente la exibilidad y se cumplan con las recomendaciones alemanas NAMUR NE37.
La MCB 113 es una opción C1 estándar de los conver-
tidores Danfoss VLT® HVAC Drive FC 102, VLT® Refrigeration
Drive FC 103, VLT® AQUA Drive FC 202, VLT
®
Ilustración 7.17 Conexiones eléctricas del MCB 113
AutomationDrive FC 301 y VLT® AutomationDrive FC 302, y
se detecta automáticamente tras el montaje.
Para garantizar el aislamiento galvánico entre el
convertidor de frecuencia y la tarjeta de opción, conecte la
MCB 113 a una fuente externa de 24 V en X58/. Si no se
necesita aislamiento galvánico, la tarjeta de opción puede
alimentarse a 24 V internamente desde el convertidor.
-3
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 79

Información de pedido
VLT® Parallel Drive Modules
AVISO!
Es aceptable combinar señales de 24 V con señales de
alta tensión en los relés, siempre y cuando exista un relé
no utilizado entre medias.
Para congurar la MCB 113, use los grupos de parámetros
5-1* Entradas digitales, 6-7* Salida analógica 3, 6-8* Salida
Datos eléctricos
Relés
Números 4 SPDT
Carga a 250 V CA/30 V CC 8 A
Carga a 250 V CA / 30 V CC con cosφ = 0,4 3,5 A
Categoría de sobretensión (contacto-toma de tierra) III
Categoría de sobretensión (contacto-contacto) II
Combinación de señales de 250 V y 24 V Posible con un relé intermedio no utilizado
77
Máximo retardo de respuesta
Entradas digitales
Números 7
Rango 0/24 V
Modo PNP/NPN
Impedancia de entrada 4 kW
Nivel bajo disparo 6,4 V
Nivel alto disparo 17 V
Máximo retardo de respuesta 10 ms
Aislado de la tierra / del chasis para uso en sistemas de redes informáticas.
analógica 4, 14-8* Opciones, 5-4* Relés y 16-6* Entradas y
salidas.
AVISO!
En el grupo de parámetros 5-4* Relés, la matriz [2] es el
relé 3, la matriz [3] es el relé 4, la matriz [4] es el relé 5 y
la matriz [5] es el relé 6.
10 ms
Salidas analógicas
Números 2
Rango 0/4-20 mA
Resolución 11 bits
Linealidad <0,2 %
CEM
Normas CEI 61000-6-2 y CEI 61800-3 en relación con la inmunidad ante ráfagas, descargas electrostáticas,
CEM
7.3.13 Resistencias de frenado
Se utilizan resistencias de frenado para disipar el exceso de
energía del frenado regenerativo. La resistencia se
selecciona conforme a su valor en ohmios, su velocidad de
disipación de potencia y su tamaño físico. Danfoss ofrece
una amplia variedad de resistencias diferentes
especialmente diseñadas para nuestros convertidores de
frecuencia. Para obtener más información, consulte el
capétulo 13.2.1 Selección de resistencia de frenado. Asimismo,
consulte la Guía de diseño de la VLT® Brake Resistor MCE
101.
7.3.14 Filtros senoidales
Cuando un convertidor de frecuencia controla un motor, se
oyen ruidos de resonancias procedentes del motor. Este
ruido, resultado del diseño del motor, aparece cada vez
que se activa uno de los conmutadores del inversor en el
convertidor de frecuencia. En este aspecto, la frecuencia
del ruido de resonancia corresponde a la frecuencia de
conmutación del convertidor de frecuencia.
Para el convertidor de frecuencia, Danfoss puede
suministrar un
acústico del motor. El ltro reduce el tiempo de
aceleración de la tensión, la tensión pico de carga U
la corriente de rizado ΔI al motor. El
resultado que la corriente y la tensión se vuelva casi
senoidal, lo que reduce el ruido acústico del motor.
sobretensión e inmunidad conducida
ltro senoidal para amortiguar el ruido
ltro tiene como
PICO
y
80 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Max R2(0.08)
Déconexión
del
Panel
Min 72(2.8)
130BA139.13
129.5± 0.5 mm
64.5± 0.5 mm
(2.54± 0.04 in)
(5.1± 0.04 in)
130BA138.11
130BA200.10
Información de pedido Guía de diseño
La corriente de rizado en las bobinas del ltro senoidal
también produce algo de ruido. El problema puede
solucionarse integrando el ltro en un armario o
protección similar.
Para obtener referencias de ltros senoidales especícos,
consulte el capétulo 7.2.1 Filtros de salida.
7.3.15 Filtros dU/dt
La combinación de tensión rápida y un aumento de la
corriente acentúa el aislamiento del motor. Estas uctua-
ciones rápidas de energía pueden reejarse en la línea de
CC del inversor y puede producirse una parada. El ltro
dU/dt está diseñado para reducir el tiempo de incremento
de tensión y el cambio rápido de energía del motor. Esta
intervención evita el desgaste prematuro y las descargas
disruptivas en el aislamiento del motor.
Los ltros dU/dt tienen una inuencia positiva en la
radiación de ruido magnético en el cable que conecta el
convertidor de frecuencia al motor. La forma de la onda de
tensión sigue teniendo forma de pulsos, pero la velocidad
de variación dU/dt se reduce en comparación con la
instalación sin ltro.
Ilustración 7.18 Dimensiones
7 7
7.3.16 Kit de montaje remoto para LCP
El LCP se puede llevar al frontal de un armario utilizando el
kit de montaje remoto. También está disponible un kit LCP
sin LCP. Para unidades IP66, el número de pedido es
130B1117. Utilice el número de pedido 130B1129 para
unidades IP55.
Protección IP54 frontal
Longitud máxima del cable entre el LCP y la
unidad 3 m (9 ft 10 in)
Comunicación serie RS485
Tabla 7.12 Datos técnicos para el montaje de un LCP en un IP66
Protección
Ilustración 7.19 Número de pedido 130B1113, kit LCP con LCP
gráco, sujeciones, cable y junta
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 81
Ilustración 7.20 Número de pedido 130B1114, kit LCP con LCP
numérico, sujeciones y junta

Información de pedido
VLT® Parallel Drive Modules
7.4 Lista de vericación del diseño del sistema
Tabla 7.13 proporciona una lista de vericación para integrar un convertidor de frecuencia en un sistema de control de
motor. La función de la lista es servir de recordatorio de las categorías generales y las opciones necesarias para especicar
los requisitos del sistema.
Categoría Detalles Notas
Modelo de
convertidor de
frecuencia
Potencia
Voltios
Corriente
Características físicas
Dimensiones
Peso
Condiciones ambientales de funcionamiento
77
Temperatura
Altitud
Humedad
Calidad del aire/polvo
Requisitos de reducción de
Tamaño de la
protección
Entrada
Cables
Tipo
Longitud
Fusibles
Tipo
Tamaño
Clasicación
Opciones
Terminales
Contactos
Filtros
Salida
Cables
Tipo
Longitud
Fusibles
Tipo
Tamaño
Clasicación
Opciones
Filtros
Control
Cableado
Tipo
Longitud
Conexiones de terminal
Comunicación
Protocolo
potencia
☑
82 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Información de pedido Guía de diseño
Categoría Detalles Notas
Conexión
Cableado
Opciones
Terminales
Contactos
Filtros
Motor
Tipo
Clasicación
Tensión
Opciones
Equipo y herramientas especiales
Movimiento y almacenamiento
Montaje
Conexión de la red de alimen-
tación
Tabla 7.13 Lista de vericación del diseño del sistema
☑
7 7
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 83

Consideraciones a tener en ...
VLT® Parallel Drive Modules
8 Consideraciones a tener en cuenta durante la instalación
8.1 Entorno de funcionamiento
Para obtener especicaciones sobre las condiciones
ambientales, consulte el capétulo 6.9 Condiciones
ambientales para módulos de convertidor.
Los sistemas que funcionan en entornos potencialmente
explosivos deben cumplir condiciones especiales. La
directiva 94/9/CE de la UE (ATEX 95) clasica el funcionamiento de los dispositivos electrónicos en entornos
potencialmente explosivos.
AVISO!
La clase «d» determina que, en caso de
CONDENSACIÓN
La humedad puede condensarse en los componentes
electrónicos y provocar cortocircuitos. Evite la instalación
en áreas con escarcha. Instale un calefactor de armario
cuando la unidad esté más fría que el aire ambiental. El
funcionamiento en modo de espera reducirá el riesgo de
condensación mientras la disipación de potencia
mantenga los circuitos sin humedad.
Los gases agresivos, como el sulfuro de hidrógeno, el cloro
88
o el amoníaco, pueden dañar los componentes mecánicos
y eléctricos. Los VLT® Parallel Drive Modules utilizan placas
de circuitos con barnizado protector para reducir los
efectos de los gases agresivos. Para conocer las especica-
ciones y clasicaciones de los barnizados de protección,
consulte el capétulo 6.9 Condiciones ambientales para
módulos de convertidor.
Al instalar la unidad en entornos con mucho polvo, tenga
en cuenta lo siguiente:
•
producirse una chispa, esta se contendrá en una
zona protegida.
La clase «e» prohíbe que se genere cualquier tipo
•
de chispa.
Motores con protección de clase «d»
No requieren aprobación. Son necesarios un cableado y
una contención especiales.
Motores con protección de clase «e»
Cuando se combina con un dispositivo de control PTC
homologado por ATEX, como la VLT® PTC Thermistor Card
MCB 112, la instalación no necesita la aprobación
individual de una organización homologada.
Motores con protección de clase «d/e»
El propio motor tiene una clase de protección de ignición
«e», mientras que el cable de motor y el entorno de
conexión cumplen con la clasicación «d». Para atenuar la
tensión pico elevada, utilice un ltro senoidal en la salida
de los VLT® Parallel Drive Modules.
Mantenimiento periódico
Cuando el polvo se acumula en los componentes
electrónicos, este actúa como una capa aislante. Dicha
capa reduce la capacidad de refrigeración de los
componentes y su temperatura aumenta. Ese entorno más
caliente reduce la vida útil de los componentes
electrónicos.
Evite que se acumule polvo en el disipador y los
ventiladores. Para obtener más información de servicio y
mantenimiento, consulte el Manual de servicio de los VLT
Parallel Drive Modules.
Ventiladores de refrigeración
Los ventiladores proporcionan un ujo de aire para
refrigerar la unidad. En presencia de mucho polvo, este
puede dañar los cojinetes del ventilador y producir una
avería prematura del mismo.
®
ADVERTENCIA
ATMÓSFERA EXPLOSIVA
No instale el convertidor de frecuencia en un entorno
potencialmente explosivo. Si lo hace, aumentará el riesgo
de muerte o de sufrir lesiones graves.
Instale la unidad en un armario situado fuera de
•
dicha área.
Al utilizar los VLT® Parallel Drive Modules en una
atmósfera potencialmente explosiva, recurra a lo
siguiente:
Motores con protección de ignición de clase «d»
•
o «e».
Sensor de temperatura PTC para supervisar la
•
temperatura del motor.
Cables de motor cortos.
•
Filtros de salida senoidales cuando no se utilicen
•
cables de motor apantallados.
AVISO!
SUPERVISIÓN DEL SENSOR DEL TERMISTOR
DEL MOTOR
Las unidades VLT® AutomationDrive con la opción MCB
112 tienen capacidad PTB certicada para entornos
potencialmente explosivos.
Un convertidor de frecuencia contiene muchos
componentes mecánicos y electrónicos, muchos de los
cuales son vulnerables a los efectos ambientales.
84 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Consideraciones a tener en ... Guía de diseño
PRECAUCIÓN
El convertidor de frecuencia no se debe instalar en
lugares en los que haya líquidos transmitidos por el aire,
partículas o gases en suspensión capaces de afectar y
dañar los componentes electrónicos. Si no se toman las
medidas de protección necesarias, aumentará el riesgo
de paradas y se reducirá la vida del convertidor de
frecuencia.
Grado de protección según la norma CEI 60529
Para evitar fallos cruzados y cortocircuitos entre terminales,
terminales, pistas y circuitos relacionados con la seguridad,
que pudieran ser provocados por objetos extraños, la
función de Safe Torque O (STO) debe instalarse y
funcionar en un armario de control IP54 o superior (o en
un entorno equivalente).
Los líquidos pueden ser transportados por el aire y
condensarse en el convertidor de frecuencia, provocando
la corrosión de los componentes y las piezas metálicas. El
vapor, la grasa y el agua salada pueden ocasionar la
corrosión de componentes y de piezas metálicas. En tales
entornos, utilice equipos con
IP54/55. Como protección adicional, se puede pedir
opcionalmente el barnizado de las placas de circuito
impreso.
Las partículas transmitidas por el aire, como el polvo,
pueden provocar fallos mecánicos, eléctricos o térmicos en
el convertidor de frecuencia. Un indicador habitual de los
niveles excesivos de partículas transmitidas por el aire son
las partículas de polvo alrededor del ventilador del
convertidor de frecuencia. En entornos con mucho polvo,
utilice equipos con clasicación de protección IP54/55.
En ambientes con altos niveles de temperatura y humedad,
los gases corrosivos, como los compuestos de azufre,
nitrógeno y cloro, originan reacciones químicas en los
componentes del convertidor de frecuencia.
Dichas reacciones químicas afectan a los componentes
electrónicos y los dañarán con rapidez. En esos ambientes,
monte el equipo en un armario con ventilación de aire
fresco, manteniendo los gases agresivos alejados del
convertidor de frecuencia.
Las PCB con barnizado opcional también ofrecen
protección en estos entornos.
AVISO!
La instalación de los convertidores de frecuencia en
entornos agresivos aumentará el riesgo de parada del
sistema y reducirá considerablemente la vida útil del
convertidor de frecuencia.
Antes de instalar el convertidor de frecuencia, compruebe
la presencia de líquidos, partículas y gases en el aire
observando las instalaciones existentes en el entorno.
Signos habituales de líquidos dañinos transmitidos por el
clasicación de protección
aire son la existencia de agua o aceite en las piezas
metálicas o su corrosión.
Los niveles excesivos de partículas de polvo suelen
encontrarse en los armarios de instalación y en las instalaciones eléctricas existentes. Un indicador de la presencia
de gases corrosivos transmitidos por el aire es el ennegrecimiento de los conductos de cobre y los extremos de los
cables.
8.2 Requisitos mínimos del sistema
8.2.1 Alojamiento
El kit está compuesto por dos o cuatro módulos de
convertidor, en función de la potencia de salida. Los
alojamientos deben cumplir los siguientes requisitos
mínimos:
Anchura [mm (in)] Dos convertidores: 800 (31,5), cuatro
convertidores: 1600 (63)
Profundidad [mm (in)] 600 (23,6)
Altura [mm (in)]
Capacidad de carga
[kg (lb)]
Aberturas de
ventilación
Tabla 8.1 Requisitos del alojamiento
1) Necesario cuando se utilicen kits de barras conductoras o de
refrigeración de Danfoss.
2000 (78,7)
Dos convertidores: 450 (992), cuatro
convertidores: 910 (2006)
Consulte el capétulo 8.2.4 Requisitos de
refrigeración y de ujo de aire.
1)
8.2.2 Barras conductoras
Si no se utiliza el kit de barras conductoras de Danfoss,
consulte en la Tabla 8.2 las medidas de sección transversal
requeridas a la hora de crear barras conductoras personalizadas. Para obtener las dimensiones de los terminales,
consulte el capétulo 6.1.2 Dimensiones del terminal y el
capétulo 6.1.3 Dimensiones del bus de CC.
Descripción Anchura [mm (in)] Grosor [mm (in)]
Motor de CA 143,6 (5,7) 6,4 (0,25)
Red de CA 143,6 (5,7) 6,4 (0,25)
Bus de CC 76,2 (3,0) 12,7 (0,50)
Tabla 8.2 Medidas de sección transversal para barras
conductoras personalizadas
AVISO!
Coloque las barras conductoras alineadas en posición
vertical para maximizar el caudal de aire.
8 8
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 85

Consideraciones a tener en ...
VLT® Parallel Drive Modules
8.2.3 Consideraciones térmicas
Para obtener los valores de disipación de calor, consulte el
capétulo 6.5 Especicaciones en función de la potencia. Las
siguientes fuentes de calor deben tenerse en cuenta a la
hora de determinar los requisitos de refrigeración:
La temperatura ambiente en el exterior del
•
alojamiento.
Los ltros (por ejemplo, ltros senoidales y RF).
•
Para conocer los requisitos de aire de refrigeración,
consulte el capétulo 8.2.4 Requisitos de refrigeración y de
ujo de aire.
Fusibles.
•
Componentes de control.
•
8.2.4 Requisitos de refrigeración y de ujo de aire
Las recomendaciones incluidas en este apartado son necesarias para una ecaz refrigeración de los módulos de convertidor
en el interior del alojamiento. Cada módulo de convertidor contiene un ventilador de disipador y un ventilador mezclador.
Los diseños de alojamiento habituales utilizan ventiladores de puerta junto a los ventiladores de los módulos de convertidor
para extraer el calor residual del alojamiento.
Danfoss suministra una serie de kits de refrigeración de canal posterior opcionales. Estos kits extraen el 85 % del calor
residual del alojamiento, reduciendo así la necesidad de recurrir a grandes ventiladores de puerta.
AVISO!
88
Asegúrese de que el caudal total de los ventiladores del alojamiento se ajuste al caudal de aire recomendado.
Ventiladores de refrigeración del módulo de convertidor de frecuencia
El módulo de convertidor está equipado con un ventilador de disipador que suministra el caudal requerido de 840 m3/h
(500 cfm) a través del disipador. Asimismo, hay un ventilador de refrigeración montado en la parte superior de la unidad y
un pequeño ventilador mezclador de 24 V CC montado bajo la placa de entrada, que funciona siempre que el módulo de
convertidor recibe alimentación.
En cada módulo de convertidor, la tarjeta de potencia suministra la tensión de CC que necesitan los ventiladores. El
ventilador mezclador está alimentado por 24 V CC a través del modo del conmutador principal de la fuente de alimentación.
El ventilador del disipador y el ventilador superior reciben 48 V CC de una fuente de alimentación conmutada especíca
situada en la tarjeta de potencia. Cada ventilador dispone de realimentación de velocidad a la tarjeta de control para
conrmar que el ventilador funciona correctamente. El control de encendido y apagado y el control de velocidad de los
ventiladores ayudan a reducir el ruido acústico y aumentan la vida útil de los ventiladores.
Ventiladores del alojamiento
Cuando no se utiliza la opción del canal posterior, los ventiladores montados en el alojamiento deben extraer todo el calor
generado en su interior.
Para cada alojamiento que albergue dos módulos de convertidor de frecuencia, se recomienda la siguiente capacidad de
ventilación:
Cuando se utiliza refrigeración de canal posterior, se recomienda un caudal de 680 m3/h (400 cfm).
•
Cuando no se utiliza refrigeración de canal posterior, se recomienda un caudal de 4080 m3/h (2400 cfm).
•
86 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

130BE569.10
Consideraciones a tener en ... Guía de diseño
Ilustración 8.1 Flujo de aire: unidad estándar (izquierda), kit de refrigeración de abajo a arriba (medio) y kit de refrigeración posterior
(derecha)
Requisitos eléctricos para certicados y
8.3
homologaciones
La conguración estándar incluida en esta guía (módulos
de convertidor, armario de control, mazos de cables,
fusibles y microrruptores) dispone de certicación UL y CE.
Más allá de la conguración estándar, deberán cumplirse
las siguientes condiciones para satisfacer los requisitos de
homologación de las normas UL y CE. Puede consultar la
lista de avisos legales en el capétulo 18.1 Exención de
responsabilidad.
Utilice el convertidor de frecuencia en un entorno
•
interior controlado y climatizado. El aire de
refrigeración debe ser limpio, sin materiales
corrosivos ni polvo eléctricamente conductor.
Consulte los límites especícos en el
capétulo 6.9 Condiciones ambientales para módulos
de convertidor.
La temperatura ambiente máxima es de 40 °C
•
(104 °F) para la corriente nominal.
El sistema de convertidores deberá montarse en
•
un ambiente de aire limpio, conforme a la clasicación del alojamiento. Para satisfacer los
requisitos de homologación de las normas UL o
CE, los módulos de convertidor deberán instalarse
conforme a la conguración estándar indicada en
esta guía.
La tensión y la corriente máximas no deberán
•
exceder los valores indicados en el
capétulo 6.5 Especicaciones en función de la
potencia para cada conguración de convertidor
de frecuencia.
Los módulos de convertidor son adecuados para
•
su uso en un circuito capaz de suministrar no
más de 100 kA rms simétricos a la tensión
nominal del convertidor (600 V como máximo
para unidades de 690 V) y que esté protegido
mediante fusibles con la conguración estándar.
Consulte la capétulo 8.4.1 Selección de fusibles. La
clasicación de amperios se basa en pruebas
realizadas conforme a la norma UL 508C.
Los cables ubicados en el circuito del motor
•
deben tener una capacidad nominal de al menos
75 °C (167 °F) en instalaciones conformes a las
normas UL. Las dimensiones de los cables están
indicadas en el capétulo 6.5 Especicaciones en
función de la potencia para cada conguración de
convertidor de frecuencia.
El cable de entrada debe protegerse con fusibles.
•
No deben utilizarse magnetotérmicos sin fusibles
en EE. UU. En el capétulo 8.4.1 Selección de fusibles
se enumeran una serie de fusibles compatibles
con las normas CEI (clase R) y las normas UL
(clase L o T). Asimismo, deberán respetarse los
requisitos normativos especícos de cada país.
Para la instalación en EE. UU., deberá suminis-
•
trarse protección de circuito derivado conforme al
Código Nacional de Seguridad Eléctrica (NEC) y a
cualquier normativa local vigente. Para cumplir
8 8
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 87

Consideraciones a tener en ...
VLT® Parallel Drive Modules
este requisito, utilice fusibles conformes a las
normas UL.
Para la instalación en Canadá, deberá suminis-
•
trarse protección de circuito derivado conforme al
Código Canadiense de Seguridad Eléctrica y a
cualquier normativa provincial vigente. Para
cumplir este requisito, utilice fusibles conformes a
las normas UL.
8.4 Fusibles y magnetotérmicos
8.4.1 Selección de fusibles
Para proteger el sistema de convertidores de frecuencia, en
caso de que se averíen uno o más de los componentes
internos de un módulo de convertidor, utilice fusibles y/o
magnetotérmicos en el lado de alimentación de red.
8.4.1.1 Protección de circuito derivado
Para proteger la instalación frente a peligros eléctricos e
88
incendios, proteja todos los circuitos derivados de una
instalación contra cortocircuitos y sobreintensidad según
las normativas nacionales e internacionales.
Número de
módulos de
convertidor
2 N250 N315 aR-630
2 N315 N355 aR-630
2 N355 N400 aR-630
2 N400 N450 aR-800
2 N450 N500 aR-800
4 N500 N560 aR-900
4 N560 N630 aR-900
4 N630 N710 aR-1600
4 N710 N800 aR-1600
4 N800 N1M0 aR-1600
Tabla 8.4 Sistemas de convertidores de doce pulsos
(380-500 V CA)
Número de
módulos de
convertidor
4 N630 N710 aR-1600
4 N710 N800 aR-2000
4 N800 N900 aR-2500
4 N900 N1M0 aR-2500
4 N1M0 N1M2 aR-2500
FC 302 FC 102/
FC 202
FC 302 FC 102/
FC 202
Fusible recomendado
(máximo)
Fusible recomendado
(máximo)
8.4.1.2 Protección ante cortocircuitos
Tabla 8.5 Sistemas de convertidores de seis pulsos
Danfoss recomienda los fusibles que se indican en el
capétulo 8.4.1.3 Fusibles recomendados para el cumplimiento
de la normativa CE y el capétulo 8.4.1.4 Fusibles
recomendados para el cumplimiento de la normativa UL para
obtener la conformidad con UL o la marca CE en la
protección del personal de servicio y los bienes frente a las
consecuencias de averías en los componentes de los
módulos de convertidor de frecuencia.
8.4.1.3 Fusibles recomendados para el
cumplimiento de la normativa CE
Número de
módulos de
convertidor
2 N450 N500 aR-1600
4 N500 N560 aR-2000
4 N560 N630 aR-2000
4 N630 N710 aR-2500
4 N710 N800 aR-2500
4 N800 N1M0 aR-2500
Tabla 8.3 Sistemas de convertidores de seis pulsos
(380-500 V CA)
FC 302 FC 102/
FC 202
Fusible recomendado
(máximo)
(525-690 V CA)
Número de
módulos de
convertidor
2 N250 N315 aR-550
2 N315 N355 aR-630
2 N355 N400 aR-630
2 N400 N500 aR-630
2 N500 N560 aR-630
2 N560 N630 aR-900
4 N630 N710 aR-900
4 N710 N800 aR-900
4 N800 N900 aR-900
4 N900 N1M0 aR-1600
4 N1M0 N1M2 aR-1600
Tabla 8.6 Sistemas de convertidores de doce pulsos
(525-690 V CA)
FC 302 FC 102/
FC 202
Fusible recomendado
(máximo)
8.4.1.4 Fusibles recomendados para el
cumplimiento de la normativa UL
Los módulos de convertidor se suministran con
•
fusibles de CA integrados. Los módulos son aptos
para una intensidad nominal de cortocircuito de
100 kA (SCCR) para las conguraciones de barra
88 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Consideraciones a tener en ... Guía de diseño
conductora estándar a todas las tensiones
(380-690 V CA).
Si no hay opciones de alimentación ni barras
•
conductoras adicionales conectadas de forma
externa, el sistema de convertidores de frecuencia
es apto para 100 kA SCCR con cualquier fusible
listado como UL de clase L o clase T conectado
en los terminales de entrada de los módulos de
convertidor.
No supere la intensidad nominal indicada en la
•
Tabla 8.8 y la Tabla 8.9 con la intensidad nominal
de los fusibles de clase L o clase T.
Número de
módulos de
convertidor
2 N450 N500 1600 A
4 N500 N560 2000 A
4 N560 N630 2000 A
4 N630 N710 2500 A
4 N710 N800 2500 A
4 N800 N1M0 2500 A
Tabla 8.7 Sistemas de convertidores de seis pulsos
(380-500 V CA)
FC 302 FC 102/
FC 202
Fusible recomendado
(máximo)
Número de
módulos de
convertidor
2 N250 N315 550 A
2 N315 N355 630 A
2 N355 N400 630 A
2 N400 N500 630 A
2 N500 N560 630 A
2 N560 N630 900 A
4 N630 N710 900 A
4 N710 N800 900 A
4 N800 N900 900 A
4 N900 N1M0 1600 A
4 N1M0 N1M2 1600 A
Tabla 8.10 Sistemas de convertidores de doce pulsos
(525-690 V CA)
En los sistemas de convertidores de frecuencia de 525-690 V CA,
puede utilizarse cualquier fusible listado como UL de al menos 700 V.
FC 302 FC 102/
FC 202
Fusible recomendado
(máximo)
8 8
Número de
módulos de
convertidor
2 N250 N315 630 A
2 N315 N355 630 A
2 N355 N400 630 A
2 N400 N450 800 A
2 N450 N500 800 A
4 N500 N560 900 A
4 N560 N630 900 A
4 N630 N710 1600 A
4 N710 N800 1600 A
4 N800 N1M0 1600 A
Tabla 8.8 Sistemas de convertidores de doce pulsos
(380-500 V CA)
En los sistemas de convertidores de frecuencia de 380-500 V CA,
puede utilizarse cualquier fusible listado como UL de al menos 500 V.
Número de
módulos de
convertidor
4 N630 N710 1600 A
4 N710 N800 2000 A
4 N800 N900 2500 A
4 N900 N1M0 2500 A
4 N1M0 N1M2 2500 A
FC 302 FC 102/
FC 202
FC 302 FC 102/
FC 202
Fusible recomendado
(máximo)
Fusible recomendado
(máximo)
Tabla 8.9 Sistemas de convertidores de seis pulsos
(525-690 V CA)
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 89

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
CEM y armónicos
VLT® Parallel Drive Modules
9 CEM y armónicos
9.1 Aspectos generales de las emisiones CEM
El transitorio de ráfagas suele encontrarse a frecuencias comprendidas en el intervalo de 150 kHz a 30 MHz. Las interferencias generadas por el convertidor de frecuencia y transmitidas por el aire, con frecuencias en el rango de 30 MHz a 1
GHz, tienen su origen en el inversor, el cable de motor y el motor.
Las intensidades capacitivas en el cable del motor, junto con una alta dU/dt de la tensión del motor, generan corrientes de
fuga.
La utilización de un cable de motor apantallado aumenta la corriente de fuga (consulte la Ilustración 9.1), porque los cables
apantallados tienen una mayor capacitancia a tierra que los cables no apantallados. Si la corriente de fuga no se ltra,
provoca una mayor interferencia en la alimentación de red, en el intervalo de radiofrecuencia inferior a 5 MHz. Puesto que
la corriente de fuga (I1) se reconduce a la unidad a través del apantallamiento (I3), solo habrá un pequeño campo electromagnético (I4) desde el cable apantallado del motor.
Aunque el apantallamiento reduce la interferencia radiada, también incrementa la interferencia de baja frecuencia en la red
eléctrica. Conecte el apantallamiento de cables de motor al alojamiento del convertidor de frecuencia y al alojamiento del
motor. Para conectar la pantalla, utilice bridas de pantalla integradas a
extremos de pantalla retorcidos en espiral aumentan la impedancia de la pantalla a las frecuencias superiores, lo que reduce
el efecto de pantalla y aumenta la corriente de fuga (I4).
Si se emplea un cable apantallado para el
eldbus, el relé, el cable de control, la interfaz de señales o el freno, conecte la
pantalla al alojamiento en ambos extremos. En algunas situaciones, sin embargo, es necesario romper el apantallamiento
99
para evitar lazos de intensidad.
n de evitar extremos de pantalla retorcidos. Los
1 Cable de conexión toma a tierra
2 Pantalla
3 Fuente de alimentación de red de CA
4 Convertidor de frecuencia
5 Cable de motor apantallado
6 Motor
Ilustración 9.1 Corrientes de fuga
Ilustración 9.1 muestra un ejemplo de convertidor de frecuencia de seis pulsos, pero podría aplicarse también a uno de doce
pulsos.
Si coloca la pantalla en una placa de montaje, utilice una placa metálica, ya que las intensidades de pantalla deben
conducirse de regreso a la unidad. Asegúrese de que la placa de montaje y el chasis del convertidor de frecuencia hacen
90 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

CEM y armónicos Guía de diseño
buen contacto eléctrico a través de los tornillos de montaje. Al utilizar cables no apantallados, no se cumplirán algunos
requisitos sobre emisión, aunque sí los de inmunidad.
Para reducir el nivel de interferencia del sistema completo (convertidor de frecuencia e instalación), haga que los cables de
motor y de freno sean lo más cortos posibles. Los cables con un nivel de señal sensible no deben colocarse junto a los
cables de motor y de freno. La radiointerferencia superior a 50 MHz (transmitida por el aire) procede de los elementos
electrónicos de control. Para obtener más información sobre CEM, consulte el capétulo 9.5 Recomendaciones relativas a CEM.
9.2 Resultados de las pruebas de CEM
Los siguientes resultados de las pruebas se obtuvieron utilizando un convertidor de frecuencia (con opciones, si era el caso),
un cable de control apantallado, un cuadro de control con potenciómetro, cables de motor apantallados y un motor.
Tipo de ltro RFI Emisión conducida Emisión irradiada
1)
Normas y requisitos
P2, P4 (FC 302) No 150 m No Sí
P6, P8 (FC 302) 150 m (492 ft) 150 m (492 ft) Sí Sí
Tabla 9.1 Resultados de las pruebas de CEM (emisión e inmunidad)
1) Se necesita un
ltro RFI externo para cumplir con la categoría C2.
EN/CEI 61800-3 Categoría C2 Categoría C3 Categoría C2 Categoría C3
AVISO!
Este tipo de sistema Power Drive no está previsto para utilizarse en una red pública de baja tensión que alimenta
instalaciones domésticas. Son muy probables interferencias de radiofrecuencias si se usa en ese tipo de red, y puede
que sean necesarias medidas de mitigación adicionales.
El convertidor de frecuencia cumple los requisitos de emisiones de la categoría C3, con 150 m (492 ft) de cable apantallado.
Para cumplir los requisitos de la categoría C2, se necesita un ltro RFI externo.
La Ilustración 9.2 muestra el diagrama eléctrico del
caso, el ltro RFI está aislado de tierra y el relé RFI se desactiva mediante el parámetro 14-50 Filtro RFI.
El factor de atenuación del ltro RFI se incluye en la Ilustración 9.3.
ltro RFI que se utilizó para clasicar el convertidor de frecuencia. En este
9 9
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 91

L1 L1
L2
L3
L2
L3
130BF078.10
1
2
101-1 30
0
-20
-40
-60
-80
-100
-120
dBm
130BF079.10
CEM y armónicos
VLT® Parallel Drive Modules
1 Línea 2 Carga
Ilustración 9.2 Diagrama eléctrico del ltro RFI
99
Ilustración 9.3 Requisitos de atenuación de un ltro externo
92 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

Start 150.0 kHz Stop 30.0 MHz
1 MHz
TF
A_QP
A_AVG
130BF080.10
90 dBµV
80 dBµV
70 dBµV
60 dBµV
50 dBµV
40 dBµV
30 dBµV
20 dBµV
10 dBµV
83.9 dBµV
202 kHz
M1[1]
0.000 s
CEM y armónicos Guía de diseño
Ilustración 9.4 Emisión conducida en la red de alimentación, en conguración P4/P8 sin ltro RFI externo
9 9
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 93

90 dBµV
80 dBµV
70 dBµV
60 dBµV
50 dBµV
40 dBµV
30 dBµV
20 dBµV
10 dBµV
Start 150.0 kHz Stop 30.0 MHz
1 MHz
87.31 dBµV
202 kHz
M1[1]
0.000 s
TF
A_QP
A_AVG
130BF064.10
CEM y armónicos
VLT® Parallel Drive Modules
99
Ilustración 9.5 Emisión conducida en la red de alimentación, en conguración P4/P8 sin ltro RFI externo
94 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

90 dBµV
80 dBµV
70 dBµV
60 dBµV
50 dBµV
40 dBµV
30 dBµV
20 dBµV
10 dBµV
Start 150.0 kHz Stop 30.0 MHz
1 MHz
79.81 dBµV
202 kHz
M1[1]
0.000 s
A_QP
A_AVG
130BF065.10
TF
CEM y armónicos Guía de diseño
Ilustración 9.6 Emisión conducida en la red de alimentación, en conguración P4/P8 sin ltro RFI externo
Requisitos en materia de emisiones
9.3
De acuerdo con la norma de productos CEM para convertidores de frecuencia EN/CEI 61800-3, los requisitos de CEM
dependen del entorno en el que está instalado el convertidor de frecuencia. Estos entornos junto con los requisitos de
tensión de red están denidos en Tabla 9.2.
Requisito en materia de emisiones
Categoría Denición
C1 Convertidores de frecuencia instalados en ambientes domésticos o de ocina con
una tensión de alimentación inferior a 1000 V.
C2 Convertidores de frecuencia instalados en ambientes domésticos y de ocina, con
C3 Convertidores de frecuencia instalados en entornos industriales, con una tensión de
C4 Convertidores de frecuencia instalados en entronos industriales con una tensión de
una tensión de alimentación inferior a 1000 V. Estos convertidores de frecuencia no
son ni enchufables ni desplazables y están previstos para su instalación y puesta en
servicio por profesionales.
alimentación inferior a 1000 V.
alimentación igual o superior a 1000 V y una intensidad nominal igual o superior a
400 A o prevista para su uso en sistemas complejos.
conducidas realizado conforme a los
límites de la norma EN 55011.
Clase B
Clase A, grupo 1
Clase A, grupo 2
Sin límite.
Realice un plan EMC
9 9
Tabla 9.2 Requisitos en materia de emisiones
Cuando se utilizan normas de emisiones generales, los convertidores de frecuencia deben ser conformes con la Tabla 9.3.
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 95

CEM y armónicos
Ambiente Estándar general
Primer ambiente
(hogar y ocina)
Segundo ambiente
(entorno industrial)
Tabla 9.3 Límites de emisión estándar generales
Norma de emisiones para entornos residenciales, comerciales e
industria ligera EN/CEI 61000-6-3.
Norma de emisiones para entornos industriales EN/CEI 61000-6-4. Clase A, grupo 1
VLT® Parallel Drive Modules
Requisito en materia de emisiones
conducidas realizado conforme a los
límites de la norma EN 55011.
Clase B
9.4 Requisitos de inmunidad
Los requisitos de inmunidad para convertidores de frecuencia dependen del entorno en el que estén instalados. Los
requisitos para el entorno industrial son más exigentes que los del entorno doméstico y de ocina. Todos los convertidores
de frecuencia de Danfoss cumplen con los requisitos para el entorno industrial y el entorno doméstico y de ocina.
Para documentar la inmunidad a transitorios de ráfagas, se han realizado las siguientes pruebas de inmunidad con un
convertidor de frecuencia (con opciones, en su caso), un cable de control apantallado y un panel de control con
potenciómetro, cable de motor y motor.
Las pruebas se realizaron de acuerdo con las siguientes normas básicas. Para obtener más detalles, consulte el Tabla 9.4.
EN/CEI 61000-4-2: descargas electrostáticas (ESD): simulación de descargas electrostáticas de seres humanos.
•
EN/CEI 61000-4-3: Radiación del campo electromagnético entrante, simulación modulada en amplitud de los
99
•
efectos de equipos de radar y de comunicación por radio, así como las comunicaciones móviles.
EN/CEI 61000-4-4: Transitorios de conexión/desconexión: Simulación de la interferencia introducida por el acopla-
•
miento de un contactor, relés o dispositivos similares.
EN/CEI 61000-4-5: Transitorios de sobretensión: Simulación de transitorios introducidos al caer rayos cerca de las
•
instalaciones.
EN/CEI 61000-4-6: RF modo común: simulación del efecto del equipo transmisor de radio conectado a cables de
•
conexión.
96 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205

CEM y armónicos Guía de diseño
Norma básica Ráfaga
CEI 61000-4-4
Criterios de aceptación B B B A A
Línea
4 kV CM
Motor
Freno 4 kV CM
Carga compartida 4 kV CM
Cables de control
Bus estándar 2 kV CM
Cables de relé 2 kV CM
Opciones de bus de campo
y de aplicación
Cable del LCP
24 V CC externa
Protección
Tabla 9.4 Tabla sobre inmunidad EMC, intervalo de tensión: 380-500 V, 525-600 V, 525-690 V
1) Inyección en pantalla del cable.
AD: descarga por el aire; CD: descarga por contacto; CM: modo común; DM: modo diferencial.
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
– –
Sobretensión
CEI 61000-4-5
2 kV/2 Ω DM
(modo diferencial,
MD)
4 kV/12 Ω CM
1)
4 kV/2 Ω
1)
4 kV/2 Ω
1)
4 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
ESD
CEI
61000-4-2
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
8 kV AD
6 kV CC
Campo electromagnético
radiado
CEI 61000-4-3
10 V/m –
Tensión de RF
modo común
CEI 61000-4-6
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
9 9
Recomendaciones relativas a CEM
9.5
Lo que sigue es una guía para la instalación de convertidores de frecuencia siguiendo lo que se denomina buena
práctica de ingeniería. Siga estas directrices de
conformidad con el primer ambiente de la norma EN/
CEI 61800-3. Si la instalación corresponde al segundo
ambiente de la norma EN/CEI 61800-3, redes industriales, o
se trata de una instalación con su propio transformador, se
permite desviarse de estas directrices, aunque no es
recomendable.
Buena práctica de ingeniería para asegurar una correcta
instalación eléctrica en cuanto a CEM:
Utilice únicamente cables de motor trenzados
•
blindados o apantallados y cables de control
trenzados apantallados. La pantalla proporciona
una cobertura mínima del 80 %. El material de la
pantalla debe ser metálico, normalmente de
cobre, aluminio, acero o plomo, aunque se
admiten otros metales. No hay requisitos
especiales en cuanto al cable de red.
En instalaciones que utilizan conductos metálicos
•
rígidos no es necesario utilizar cable apantallado,
pero el cable del motor se debe instalar en un
conducto separado de los cables de control y de
red. Es necesario conectar completamente el
conducto desde el convertidor de frecuencia al
motor. El rendimiento de CEM de los conductos
exibles varía considerablemente y es preciso
obtener información del fabricante.
Conecte el conducto apantallado a tierra en
•
ambos extremos para los cables del motor y de
control. En algunos casos, no es posible conectar
la pantalla en ambos extremos. En estos casos,
conecte la pantalla al convertidor de frecuencia.
Consulte también el capétulo 9.5.2 Conexión a
tierra de cables de control apantallados.
Evite terminar la pantalla con extremos trenzados
•
(cables de pantalla retorcidos y embornados). Eso
aumenta la impedancia de alta frecuencia de la
pantalla, lo cual reduce su ecacia a altas
frecuencias. Utilice en su lugar abrazaderas de
cable o prensacables EMC de baja impedancia.
Siempre que sea posible, evite utilizar cables de
•
motor o de control no apantallados en el interior
de los armarios que albergan los convertidores de
frecuencia.
Deje la pantalla lo más cerca posible de los terminales.
La Ilustración 9.7 muestra un ejemplo de correcta
instalación eléctrica en cuanto a CEM de un convertidor de
frecuencia IP20. El convertidor de frecuencia está colocado
en un armario de instalación con un contactor de salida, y
se ha conectado a un PLC que está instalado en un
armario aparte. Otras formas de instalación podrán ofrecer
un rendimiento de CEM igualmente bueno, siempre y
MG37N205 Danfoss A/S © 11/2016 Reservados todos los derechos. 97

CEM y armónicos
VLT® Parallel Drive Modules
cuando se sigan las anteriores directrices de práctica de
ingeniería.
Si la instalación no se lleva a cabo según las directrices y si
se utilizan cableados y cables de control no apantallados,
es posible que no se cumplan algunos requisitos relativos
a emisiones aunque sí se cumplan los relacionados con
inmunidad.
99
Ilustración 9.7 Correcta instalación eléctrica en cuanto a CEM de un convertidor de frecuencia en el alojamiento
98 Danfoss A/S © 11/2016 Reservados todos los derechos. MG37N205
 Loading...
Loading...