


MAKING MODERN LIVING POSSIBLE
Guida alla programmazione
VLT® Micro Drive

Sommario
Sommario
Guida alla Programmazione VLT® Micro Drive FC 51
1 Sicurezza
1.1.1 Pericolo: Alta tensione 3
1.1.2 Istruzioni di sicurezza 3
1.1.3 Versione software e approvazioni 3
1.1.4 Avvertenze generali 3
1.1.5 Rete IT 4
1.1.6 Evitare un avviamento involontario 4
1.1.8 Prima dell'esecuzione di lavori di riparazione 4
2 Introduzione
2.1.1 Identificazione FC 5
2.1.2 Codice identificativo 5
3 Programmazione
3.1 Programmazione
3.1.1 Programmazione con software di setup MCT-10 8
3.1.2 Programmazione con l'LCP 11 o LCP 12 8
3.2 Menu Stato
3
5
8
8
9
3.3 Menu rapido
3.4 Menu principale
4 Descrizione dei parametri
4.1 Gruppo di parametri 0: Funzionamento/visualizzazione
4.2 Gruppo di parametri 1: Carico/motore
4.3 Gruppo di parametri 2: Freni
4.4 Gruppo di parametri 3: Riferimento/rampe
4.5 Gruppo di parametri 4: Limiti /avvisi
4.6 Gruppo di parametri 5: I/O digitali
4.7 Gruppo di parametri 6: I/O analogici
4.7.3 6-1* Ingr. analog. 1 33
4.8 Gruppo di parametri 7: Regolatori
4.9 Gruppo di parametri 8: Comunicazione
4.9.6 8-8* Diagnosi comunicazione bus 40
4.10 Gruppo di parametri 13: Smart Logic
4.10.1 13-** Funzioni di programmazione 41
4.11 Gruppo di parametri 14: Funzioni speciali
9
10
11
11
14
20
22
26
29
33
37
38
41
46
4.12 Gruppo di parametri 15: Inform. conv. freq.
4.12.2 15-4* Identif. conv. freq. 48
4.13 Gruppo di parametri 16: Visualizzazione dati
MG02C606 - VLT® è un marchio brevettato Danfoss 1
48
49
Sommario
Guida alla Programmazione VLT® Micro Drive FC 51
5 Elenchi dei parametri
5.1.1 Indice di conversione 55
5.1.2 Cambio durante il funzionamento 55
5.1.3 2-Set-up 55
5.1.4 Tipo 55
5.1.5 0-** Funzionam./display 56
5.1.6 1-** Carico/Motore 57
5.1.7 2-** Freni 58
5.1.8 3-** Rif./rampe 59
5.1.9 4-** Limiti/Avvisi 60
5.1.10 5-** I/O digitali 61
5.1.11 6-** I/O analogici 62
5.1.12 7-** Regolatori 63
5.1.13 8-** Com. e opzioni 64
5.1.14 13-** Smart Logic 65
5.1.15 14-** Funzioni speciali 66
5.1.16 15-** Inform. conv. freq. 67
51
5.1.17 16-** Visualizz. dati 68
6 Ricerca ed eliminazione dei guasti
6.1.1 Allarme, avviso e parola di stato estesa 71
Indice
69
75
2 MG02C606 - VLT® è un marchio brevettato Danfoss
Sicurezza
Guida alla Programmazione VLT® Micro Drive FC 51
1 Sicurezza
1.1.1 Pericolo: Alta tensione
AVVISO
Il convertitore di frequenza, se collegato alla rete, è
soggetto a tensioni pericolose. L'errata installazione del
motore o del convertitore di frequenza può essere causa di
anomalie delle apparecchiature e di lesioni gravi o mortali
alle persone. Pertanto è necessario seguire scrupolosamente le istruzioni nel presente manuale e osservare le
norme di sicurezza locali e nazionali.
1.1.2 Istruzioni di sicurezza
ATTENZIONE
Prima di usare funzioni che influiscono in modo diretto o
indiretto sulla sicurezza personale (ad es. Arresto di
sicurezza, Fire Mode o altre funzioni o costringendo il
motore all'arresto oppure tentando di mantenerlo in
funzione) è necessario effettuare un'approfondita analisi
dei rischi e un test del sistema. I test del sistema devono
includere verifiche delle modalità di guasto per quanto
riguarda le segnalazioni di controllo (segnali analogici e
digitali e comunicazione seriale).
NOTA!
Prima di usare la Modalità incendio, contattare Danfoss
Accertarsi che il convertitore di frequenza sia
•
correttamente collegato a terra.
Non rimuovere i collegamenti alla rete, al motore
•
o qualsiasi altro collegamento sotto tensione
mentre il convertitore di frequenza è alimentato.
Proteggere gli utenti dalla tensione di alimen-
•
tazione.
Proteggere il motore da sovraccarichi in
•
conformità con le normative nazionali e locali.
La corrente di dispersione a terra supera 3,5 mA.
•
Il tasto [OFF] non è un interruttore di sicurezza.
•
Non disconnette il convertitore di frequenza dalla
rete elettrica.
Versione software e approvazioni
1.1.3
Versione software
Guida alla programmazione
VLT® Micro Drive
Serie FC 51
Questa Guida alla Programmazione può essere
utilizzata per tutti i convertitori di frequenza VLT
Micro Drive con versione software 2.7X.
Il numero della versione software può essere letto
in
15-43 Versione software.
Tabella 1.1
Avvertenze generali
1.1.4
®
AVVISO
PERICOLO SCOSSE ELETTRICHE
Toccare le parti elettriche può avere conseguenze letali,
anche dopo avere scollegato l'alimentazione di rete.
Verificare che siano stati scollegati anche gli altri ingressi di
tensione, (collegamento del circuito CC intermedio).
Possono persistere tensioni elevate nel bus CC anche dopo
lo spegnimento dei LED.
Prima di toccare qualsiasi parte sotto tensione del convertitore di frequenza, attendere almeno 4 min. per tutte le
taglie.
Un tempo più breve è consentito solo se indicato sulla
targhetta della specifica unità.
1 1
MG02C606 - VLT® è un marchio brevettato Danfoss 3
Sicurezza
Guida alla Programmazione VLT® Micro Drive FC 51
11
ATTENZIONE
Corrente di dispersione
La corrente di dispersione verso terra dal convertitore di
frequenza supera i 3,5 mA. In conformità con l'IEC
61800-5-1 deve essere garantito un collegamento di messa
a terra di protezione rinforzato tramite un conduttore di
rame da 10 mm² oppure un conduttore di terra aggiuntivo
con la stessa sezione del cablaggio di rete deve essere
terminato separatamente.
Dispositivo a corrente residua
Questo prodotto può causare una corrente CC nel
conduttore protettivo. Questo prodotto può indurre una
corrente CC nel conduttore di protezione. Laddove si
utilizzi un dispositivo corrente residua (RCD) per una
maggiore protezione, andrà utilizzato solo un RCD di Tipo
B (tempo ritardato) sulla parte di alimentazione di questo
prodotto. Vedere anche Danfoss Nota applicativa sull'RCD,
MN90GX.
La messa a terra di protezione del convertitore di
frequenza e l'impiego di RCD devono seguire sempre le
norme nazionali e locali.
1.1.7 Istruzioni di smaltimento
Tabella 1.2
1.1.8
ATTENZIONE
La protezione da sovraccarico motore è possibile
impostando il parametro 1-90 Protezione termica motore al
valore Scatto ETR. Per il mercato nordamericano: le
funzioni ETR forniscono una protezione da sovraccarico del
motore della classe 20, conformemente alle norme NEC.
Disinserire il convertitore di frequenza dalla rete
•
elettrica al fine di evitare un avviamento
involontario dei motori.
Per evitare un avviamento involontario, premere
•
sempre il tasto [Off] prima di procedere alla
modifica dei parametri.
Le attrezzature costituite da componenti elettrici
non devono essere smaltite con i rifiuti
domestici.
Devono essere raccolte a parte insieme ai rifiuti
elettrici ed elettronici in conformità alle leggi
locali vigenti.
Prima dell'esecuzione di lavori di
riparazione
1. Scollegare l'FC 51 dalla rete (e l'alimentazione CC
esterna se presente).
2. Attendere 4 minuti (M1, M2 e M3) e 15 minuti
(M4 e M5) per la scarica del bus CC.
3. Scollegare i morsetti del bus in CC e del freno (se
presente)
4. Scollegare il cavo motore
AVVISO
Installazione ad altitudini elevate:
Per altitudini superiori ai 2000 m, contattare Danfoss per
informazioni sulle caratteristiche PELV.
1.1.5 Rete IT
ATTENZIONE
Rete IT
Installazione su una rete di alimentazione con neutro
isolato, cioè una rete tipo IT.
Tensione di alimentazione massima consentita per il
collegamento alla rete: 440 V.
Come opzione, Danfoss offre filtri di linea opzionali per
migliorare le prestazioni per le armoniche.
1.1.6
Evitare un avviamento involontario
Mentre il convertitore di frequenza è collegato alla rete di
alimentazione, il motore può essere avviato/arrestato
mediante i comandi digitali, i comandi bus, i riferimenti
oppure tramite il Pannello di Controllo Locale.
4 MG02C606 - VLT® è un marchio brevettato Danfoss
Introduzione
2 Introduzione
Guida alla Programmazione VLT® Micro Drive FC 51
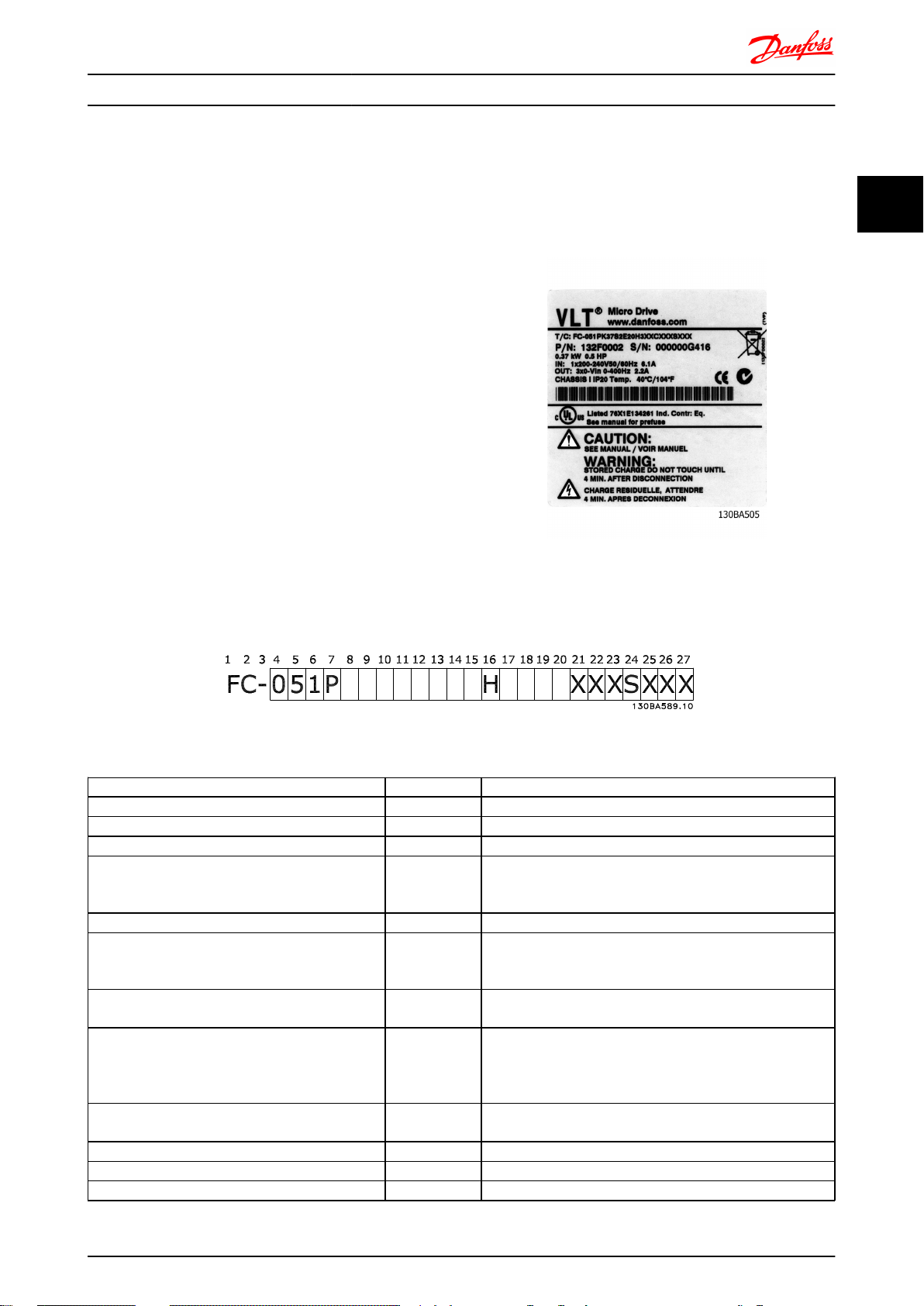
2.1.1 Identificazione FC
Questo adesivo della targhetta è situato sulla parte
superiore di ciascun convertitore di frequenza e mostra i
valori nominali, il numero di serie, il numero di catalogo
degli avvisi ed altri dati di rilievo per ciascuna unità.
Vedere Tabella 2.1 per dettagli su come leggere il codice
identificativo.
Codice identificativo
2.1.2
2 2
Disegno 2.1 Questo esempio mostra un'etichetta della targhetta
Disegno 2.2
Descrizione Pos. Scelta possibile
Gruppo prodotti 1-3 Convertitori di frequenza
Serie e tipo di prodotto 4-6 Micro Drive
Potenza 7-10 0,18-7,5 kW
Tensione di rete 11-12 S2: Monofase 200-240 V CA
T 2: Trifase 200-240 V CA
T 4: Trifase 380-480 V CA
Custodia 13-15 IP20/Chassis
Filtro RFI 16-17 HX: Senza filtro RFI
H1: Filtro RFI classe A1/B
H3:Filtro RFI A1/B (lunghezza cavo ridotta*)
Freno 18 B: Chopper di frenatura incluso (da 1,5 kW e superiore)
X: Senza chopper di frenatura
Display 19 X: Senza pannello di controllo locale
N: Pannello di Controllo Locale Numerico (LCP)
P: Pannello di Controllo Locale Numerico (LCP) con
potenziometro
Rivestimento circuito stampato 20 C: Circuito stampato rivestito
X. Circuito stampato senza rivestimento
Opzioni rete 21 X: Senza opzioni di rete
Adattamento A 22 X: Senza adattamento
Adattamento B 23 X: Senza adattamento
MG02C606 - VLT® è un marchio brevettato Danfoss 5

Introduzione
Descrizione Pos. Scelta possibile
Release software 24-27 SXXX: Ultima versione - software standard
Guida alla Programmazione VLT® Micro Drive FC 51
22
Tabella 2.1 Descrizione del codice identificativo
*Vedere la Guida alla progettazione VLT® Micro Drive, MG02K
6 MG02C606 - VLT® è un marchio brevettato Danfoss
Introduzione
2.1.3 Avvisi e certificazioni
Guida alla Programmazione VLT® Micro Drive FC 51
Simboli utilizzati nella Guida alla programmazione.
Simboli
Nel presente manuale vengono utilizzati i seguenti simboli.
ATTENZIONE
Indica una situazione potenzialmente rischiosa che, se non
evitata, può causare lesioni leggere o moderate. Potrebbe
essere utilizzata anche per avvisare di pratiche non sicure.
AVVISO
Indica una situazione potenzialmente rischiosa che, se non
evitata, potrebbe causare morte o lesioni gravi.
2.1.4 Abbreviazioni e standard
Abbreviazioni Termini
a Accelerazione
AWG American Wire Gauge
Auto Tune Adattamento automatico del motore
°C
I Corrente A Amp
I
LIM
Rete IT
Joule Energia J=N∙m ft-lb, Btu
°F
FC convertitore di frequenza
f Frequenza Hz Hz
kHz Kilohertz kHz kHz
LCP Pannello di controllo locale
mA Milliampere
ms Millisecondo
min Minuto
MCT Motion Control Tool
M-TYPE In funzione del tipo di motore
Nm Metri Newton in-lbs
I
M,N
f
M,N
P
M,N
U
M,N
PELV Tensione di protezione bassissima
Watt Potenza W Btu/h, hp
Pascal Pressione Pa = N/m² psi, psf, ft H2O
I
INV
Giri/min. Giri al minuto
s Secondo
SR In funzione della dimensione
T Temperatura C F
t Tempo s s,h
T
LIM
U Tensione V V
Celsius
Limite di corrente
Alimentazione di rete con neutro (centro stella) nel trasformatore
non collegato a massa
Fahrenheit
Corrente nominale del motore
Frequenza nominale motore
Potenza nominale motore
Tensione nominale motore
Corrente nominale di uscita dell'inverter
Limite di coppia
ATTENZIONE
Indica una situazione che potrebbe causare incidenti con
danni alle apparecchiature o a proprietà.
Sistema interna-
zionale
2
m/s
Sistema americano
2
ft/s
2 2
Tabella 2.2 Tavola di abbreviazioni e standard
MG02C606 - VLT® è un marchio brevettato Danfoss 7
3
Programmazione
Guida alla Programmazione VLT® Micro Drive FC 51
3 Programmazione
3.1 Programmazione
3.1.1 Programmazione con software di
setup MCT-10
È possibile programmare il convertitore di frequenza da PC
tramite la porta COM RS-485 installando il software di
setup MCT 10.
Il software è ordinabile con il codice 130B1000 oppure
scaricabile dal sito Web Danfoss: www.danfoss.com/Busines-
sAreas/DrivesSolutions/softwaredownload
Consultare il manuale per Motion Control Tool MG10R.
Il display
Sul display vengono visualizzate varie informazioni.
Numero setup mostra la programmazione attiva il setup di
modifica. Se lo stesso setup funge da setup attivo e di
modifica, viene visualizzato solo il numero di setup
(impostazione di fabbrica).
Se programmazione attiva e edit set-up sono diversi, sono
visualizzati entrambi i numeri a display (setup 12). Il
numero che lampeggia indica l'edit set-up.
Programmazione con l'LCP 11 o LCP
3.1.2
12
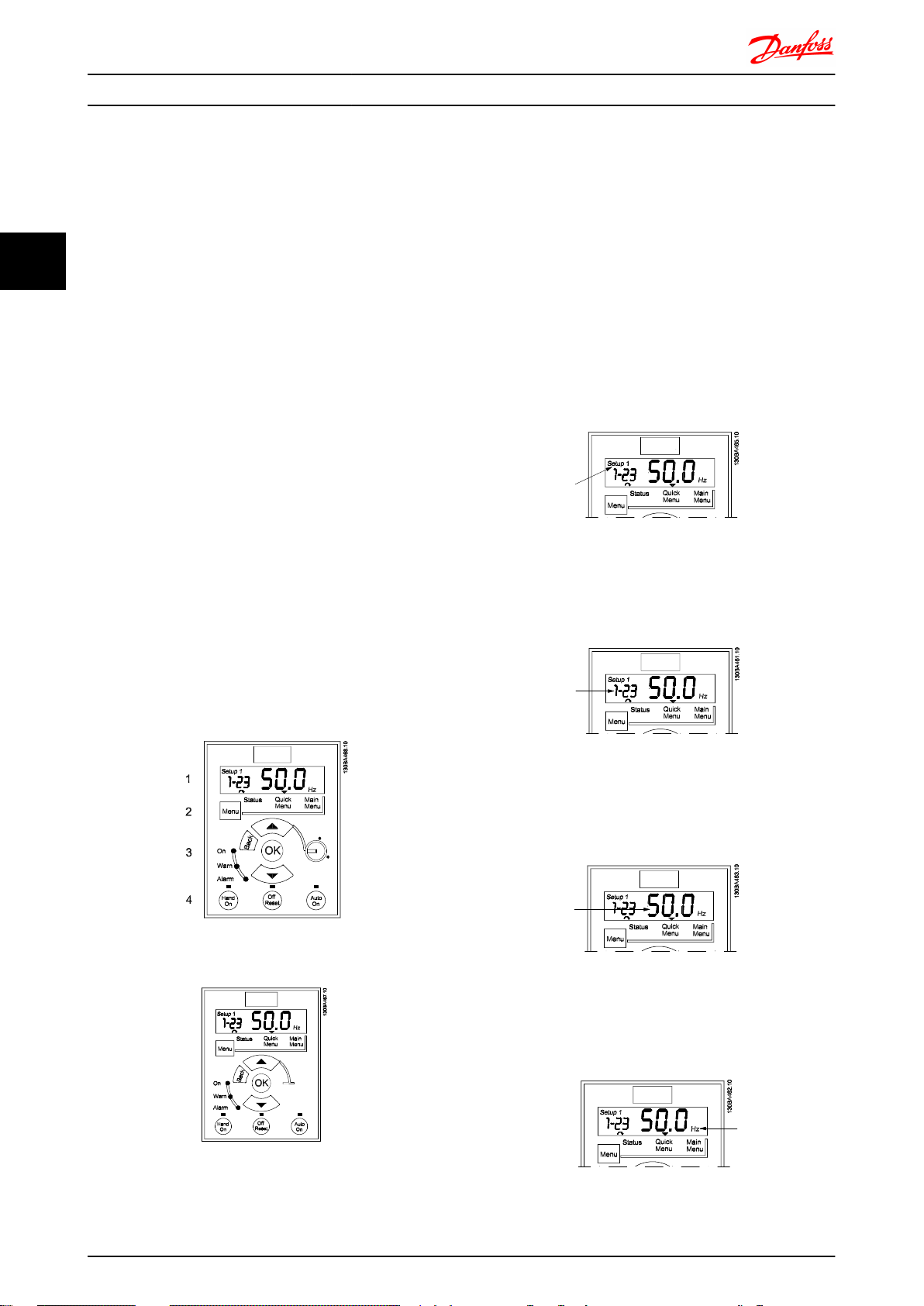
L'LCP è suddiviso in quattro gruppi funzionali:
1. Display numerico.
2. Tasto Menu.
3. Tasti di navigazione.
4. Tasti funzione e spie luminose (LED).
Disegno 3.1 LCP 12 con potenziometro
Disegno 3.3 Indicazione del setup
I caratteri piccoli a sinistra sono il numero parametroselezionato.
Disegno 3.4 Indicazione del numero di parametro selezionato.
I caratteri grandi al centro del display mostrano il valore
del parametro selezionato.
Disegno 3.5 Indicazione del valore del par. selezionato
La parte destra del display mostra l'unità del parametro
selezionato. Può essere Hz, A, V, kW, HP, %, s o giri/minuto.
Disegno 3.2 LCP 11 senza potenziometro
Disegno 3.6 Indicazione dell'unità del parametro selezionato
8 MG02C606 - VLT® è un marchio brevettato Danfoss
Programmazione
Guida alla Programmazione VLT® Micro Drive FC 51
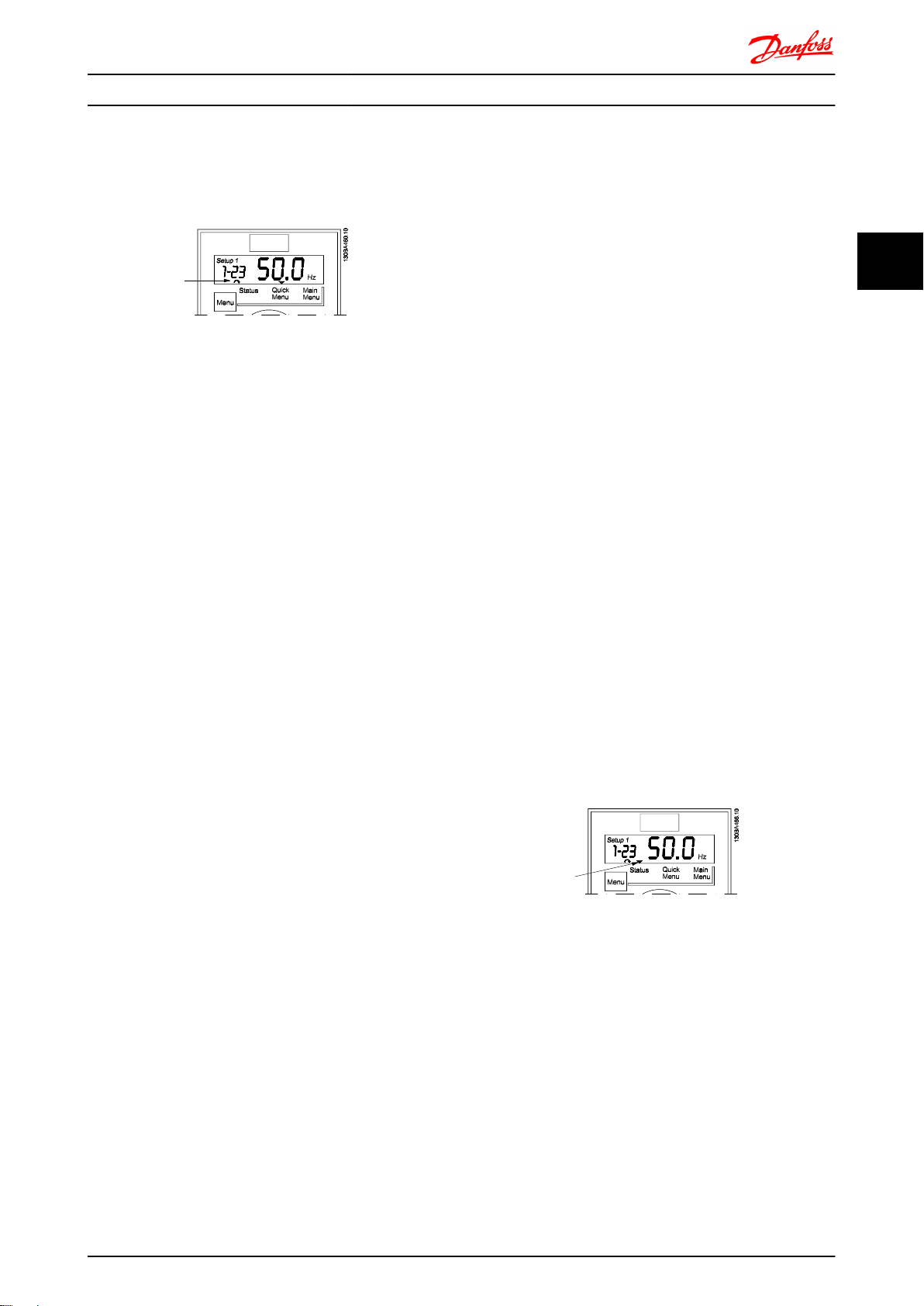
La direzione motore è mostrata nella parte bassa a sinistra
del display - segnalata da una piccola freccia rivolta in
senso orario o antiorario.
Disegno 3.7 Indicazione della direzione del motore
Utilizzare il tasto [Menu] per selezionare uno fra i menu
seguenti
Menu di stato
Il menu Stato può essere in Modalità visualizzazione
oppure Hand on. In Modalità visualizzazione il valore del
parametro di visualizzazione selezionato correntemente
viene visualizzato a display.
In Modalità Hand on viene visualizzato il riferimento locale
dell'LCP.
Menu rapido
Visualizza i parametri del Menu rapido e le relative
impostazioni. È possibile accedere e modificare i parametri
nel Menu rapido in questo punto. È possibile eseguire
quasi tutte le applicazioni impostando i parametri nel
Menu rapido.
Premere [▲] [▼] per modificare il valore. Premere [OK] per
cambiare rapidamente tra cifre.
Per uscire dalla modalità di 'Regolazione', premere
nuovamente [OK] per oltre 1 s con salvataggio delle
modifiche o premere [Back] senza salvare le modifiche.
Tasti di funzionamento
Una luce gialla sopra i tasti funzione segnala il tasto attivo.
[Hand On]: avvia il motore e abilita il controllo del convertitore di frequenza tramite LCP.
[Off/Reset]: il motore si arresta tranne in modalità allarme.
In questo caso, avviene il ripristino del motore.
[Auto On]: il convertitore di frequenza è controllato tramite
morsetti di controllo o comunicazione seriale.
[Potentiometer] (LCP 12): il potenziometro funziona in due
modi in base alla modalità di funzionamento del convertitore di frequenza.
In Modalità Autom. il potenziometro funziona come un
ingresso analogico programmabile aggiuntivo.
In Modalità Hand on il potenziometro comanda il
riferimento locale.
3.2 Menu Stato
All'accensione il menu Stato è attivo. Premere [MENU] per
selezionare alternativamente Stato, Menu rapido e Menu
principale.
[▲] e [▼] consente di commutare tra le voci di ogni menu.
3
3
Menu principale
Visualizza i parametri del Menu principale e le relative
impostazioni. È possibile accedere e modificare i parametri
in questo punto.
Spie luminose
LED verde: Il convertitore di frequenza è acceso.
•
LED giallo: indica un avviso. Vedere 6 Ricerca ed
•
eliminazione dei guasti.
LED rosso lampeggiante: indica un allarme.
•
Vedere 6 Ricerca ed eliminazione dei guasti.
Tasti di navigazione
[Back]: per spostarsi alla fase o al livello precedente nella
struttura di navigazione.
[▲] [▼]: per spostarsi tra gruppi di parametri, parametri e
all'interno dei parametri.
[OK]: per selezionare un parametro e accettare le modifiche
alle impostazioni del parametro.
Premendo [OK] per oltre 1 s, si accede alla modalita
'Regolazione'. In modalità 'Regolazione', è possibile
effettuare una regolazione rapida premendo [▲] [▼]
insieme a [OK].
Il display visualizza la modalità di stato con una piccola
freccia sopra "Stato".
Disegno 3.8 Segnala la modalità di stato
3.3 Menu rapido
Il Menu rapido consente di accedere rapidamente ai
parametri più utilizzati.
1. Per accedere al Menu rapido, premere il tasto
[Menu] fino a quando l'indicatore nel display si
trova posizionato sopra Menu rapido.
2.
Premere [▲] [▼] per selezionare QM1 o QM2 e
quindi premere [OK].
3.
Premere [▲] [▼] per spostarsi tra i parametri del
Menu rapido.
MG02C606 - VLT® è un marchio brevettato Danfoss 9
3
Programmazione
4. Premere [OK] per selezionare un parametro.
5.
Premere [▲] [▼] per modificare il valore di
un'impostazione parametri.
6. Premere [OK] per accettare la modifica.
7. Per uscire, premere due volte [Back] per accedere
a Stato o premere una volta [Menu] per accedere
al Menu principale.
Disegno 3.9 Segnala la modalità Menu rapido
Guida alla Programmazione VLT® Micro Drive FC 51
3.4 Menu principale
Il Menu principale consente di accedere a tutti i parametri.
1. Per accedere al Menu principale, premere il tasto
[Menu] fino a quando l'indicatore nel display si
trova sopra Menu principale.
2.
Premere [▲] [▼] per spostarsi tra i gruppi di
parametri.
3. Premere [OK] per selezionare un gruppo di
parametri.
4.
Premere [▲] [▼] per spostarsi tra i parametri di un
gruppo specifico.
5. Premere [OK] per selezionare il parametro.
6.
Premere [▲] [▼] per impostare/modificare il valore
del parametro.
7. Premere [OK] per accettare il valore.
8. Per uscire, premere due volte [Back] per accedere
al Menu rapido o premere una volta [Menu] per
accedere a Stato.
Disegno 3.10 Segnala la modalità Menu principale
10 MG02C606 - VLT® è un marchio brevettato Danfoss
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4 Descrizione dei parametri
4.1 Gruppo di parametri 0: Funzionamento/visualizzazione
0-03 Impostazioni locali
Option: Funzione:
Per soddisfare i requisiti di diverse
impostazioni predefinite in diverse località del
mondo, 0-03 Impostazioni locali è disponibile
nel convertitore di frequenza. L'impostazione
selezionata modifica l'impostazione predefinita
della frequenza nominale del motore.
[0 ] * Interna-
zionale
[1] Stati Uniti
Imposta il valore di default di 1-23 Frequen.
motore, a 50 Hz, visualizza 1-20 Potenza motore
in kW.
Imposta il val. di default di 1-23 Frequen.
motore su 60 Hz, visualizza 1-20 Potenza
motore in HP.
NOTA!
Non è possibile modificare questo
parametro a motore in funzione.
0-04 Stato di funz. all'accens. (modalità manuale)
Option: Funzione:
Questo parametro determina se il convertitore
di frequenza deve iniziare ad azionare il
motore in presenza di un'accensione che
segue uno spegnimento in modalità manuale.
NOTA!
Se è installato l'LCP con potenziometro, il
riferimento è impostato in base al valore
corrente del potenziometro.
[0] Prosegui Il convertitore di frequenza si avvia nella
stessa modalità manuale o nello stato Off
presente allo spegnimento.
Il riferimento locale è memorizzato e utilizzato
dopo l'accensione.
[1] * Arr. obbl.,
rif.=vecc.
[2] Arr. forz.,
rif=0
Il convertitore di frequenza si accende nello
stato Off il che significa che il motore è in
arresto dopo l'accensione.
Il riferimento locale è memorizzato e utilizzato
dopo l'accensione.
Il convertitore di frequenza si accende nello
stato Off il che significa che il motore è in
arresto dopo l'accensione.
Il riferimento locale è impostato su 0. Quindi il
motore non inizierà a girare prima di un
aumento del riferimento locale.
4.1.1 0-1* Operazioni di setup
Parametri definiti dall'utente e i vari ingressi esterni (vale a
dire bus, LCP, ingressi analogici/digitali, retroazione ecc.),
controllano il funzionamento del convertitore di frequenza.
Una serie completa con tutti i parametri che controllano il
convertitore di frequenza viene definita setup. Il convertitore di frequenza contiene 2 setup: setup 1 e setup 2.
Inoltre un gruppo fisso di impostazioni di fabbrica può
essere copiato in uno o più setup.
Seguono i vantaggi di disporre di più di un setup nel
convertitore di frequenza:
È possibile far funzionare il motore con un setup
•
(Setup attivo) mentre si aggiornano i parametri in
un altro setup (Edita setup)
Connettere più motori (uno alla volta) al conver-
•
titore di frequenza. I dati motore per i vari motori
possono essere inseriti in setup diversi.
È possibile modificare rapidamente le
•
impostazioni del convertitore di frequenza e/o del
motore a motore in funzione (ad es. tempo di
rampa o riferimenti preimpostati) tramite bus o
ingressi digitali.
Setup attivo può essere impostato come Multi setup dove il
Setup attivo è selezionato tramite ingresso su un morsetto
di ingresso digitale e/o tramite parola di controllo bus.
NOTA!
Il Setup di fabbrica è utilizzab. come Setup attivo.
0-10 Setup attivo
Option: Funzione:
Setup attivo controlla il motore.
Il passaggio fra setup può avvenire solo quando
il motore è in arresto a ruota libera
•
OPPURE
i setup tra cui avviene il passaggio
•
sono collegati tra loro (vedere 0-12
Setup collegati).
Se il passaggio avviene fra setup non collegati,
questo non sarà effettivo fino a quando il
motore è in arresto a ruota libera.
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 11
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
0-10 Setup attivo
Option: Funzione:
NOTA!
Il motore si considera arrestato quando è in
arresto a ruota libera.
[1 ] * Setup 1 È attivo il Setup 1.
[2] Setup 2 È attivo il Setup 2.
[9] Multi
44
setup
0-11 Setup di modifica
Selezionare il setup attivo tramite ingresso
digitale e/o bus, vedere l'opzione 5-1* Ingressi
digitali [23].
0-32 Scala max. della visual. definita dall'utente
Range: Funzione:
100,0* [0,00–
9999,00]
È possibile creare una visualizzazione
personalizzata collegata alla frequenza di
uscita dell'unità. Il valore immesso in 0-32
Scala max. della visual. definita dall'utente
verrà visualizzatoalla frequenza
programmata in 4-14 Limite alto vel. motore.
Il valore può essere letto nel display
dell'LCP quando si è nella modalità di stato
oppure può essere letto in 16-09 Visualiz-
zazione personalizzata
Option: Funzione:
Il setup di modifica serve ad aggiornare i
parametri nel convertitore di frequenza da LCP
o bus. Può essere identico o diverso da Setup
attivo.
È possibile modificare tutti i setup durante il
funzionamento indipendentemente dal setup
attivo.
[1 ] * Setup 1
[2] Setup 2
[9] Setup
attivo
Aggiorna i parametri nel Setup 1.
Aggiorna i parametri nel Setup 2.
Aggiorna i parametri nel setup selezionato
come Setup attivo (vedere 0-10 Setup attivo).
0-12 Collega setup
Option: Funzione:
Il collegamento assicura la sincronizzazione dei
valori di parametri “non modificabili durante il
funzionamento ” consentendo il passaggio da
un setup all'altro durante il funzionamento.
Se i setup non sono collegati non è possibile
modificarli a motore in funzione. Quindi la
modifica del setup non è attiva fino a quando
il motore è in arresto a ruota libera.
[0] Non
collegato
[1 ] * Collegati Copia i valori dei parametri "non modificabili
Lascia i parametri invariati in entrambi i setup
e non permette modifiche a motore in
funzione.
durante il funzionamento" nell'Edita setup
selezionato correntemente.
NOTA!
Non è possibile modificare questo
parametro a motore in funzione.
4.1.2 0-4* LCP
Il convertitore di frequenza può funzionare solo in uno dei
tre modi seguenti: Hand, Off e Auto.
Hand: Il convertitore di frequenza è comandato localmente
e non consente alcun tipo di controllo remoto. Attivando
la modalità Hand, viene fornito un segnale di Avviamento.
OFF: Il convertitore di frequenza si arresta tramite il
normale arresto a rampa. Selezionando Off, è possibile
avviare il convertitore di frequenza solo premendo Hand o
Auto sull'LCP.
Auto: In modalità Auto il convertitore di frequenza
permette il controllo remoto (bus o digitale).
0-40 Tasto [Hand On] sull'LCP
Option: Funzione:
[0] Disattivato Il tasto [Hand On] non ha alcuna funzione.
[1 ] * Attivato Il tasto [Hand On] è funzionante.
0-41 Tasto [Off/Reset] sull'LCP
Option: Funzione:
[0] Disattiva Off/Reset Il tasto [Off/Reset] non ha alcuna
funzione.
[1 ] * Abilita Off/Reset Segnale di arresto e ripristino di
tutti i guasti.
[2] Abilita solamente
Reset.
0-42 Tasto [Auto on] sull'LCP
Option: Funzione:
[0] Disattivato Il tasto [Auto On] non ha funzioni.
[1 ] * Attivato Il tasto [Auto On] funziona.
Solo reset. La funzione arresto (Off)
è disattivata.
0-31 Scala min. visualizzazione personalizzata
Range: Funzione:
0,00 * [0,00–
9999,00 ]
12 MG02C606 - VLT® è un marchio brevettato Danfoss
È possibile creare una visualizzazione
personalizzata collegata alla frequenza di
uscita dell'unità. Il valore immesso in 0-31
Scala min. della visual. definita dall'utente
verrà visualizzato a 0 Hz. Il valore può
essere letto nel display dell'LCP quando si
è nella modalità di stato oppure può
essere letto in 16-09 Visualizzazione
personalizzata

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.1.3 0-5* Copia/Salva
0-50 Copia LCP
Option: Funzione:
L'LCP scollegabile del convertitore di
frequenza può essere utilizzato per
memorizzare setup e quindi per il trasferimento di dati quando si trasferiscono le
impostazioni dei parametri da un convertitore di frequenza a un altro.
NOTA!
Copia LCP può essere attivato
solamente da LCP e SOLO quando il
motore è in arresto a ruota libera.
[1] Tutto all'LCP Copia tutti i setup dal convertitore di
frequenza nell'LCP.
[2] Tutto dall'LCP Copia tutti i setup dall'LCP nel convertitore
di frequenza.
[3] Dimensioni
indipendenti
dall'LCP
0-51 Copia setup
Option: Funzione:
Copia i dati indip. dalla taglia del motore
dall'LCP al convertitore di frequenza.
Utilizzare questa funzione per copiare il
contenuto di un setup in Edita setup.
Per eseguire la copia di un setup assicurarsi
che
il motore è in arresto a ruota libera
•
0-10 Setu attivo, setup attivo, è
•
impostatosu [1] Setup 1 o [2] Setup
2
4.1.4 0-6* Password
0-60 Passw. menu princ.
Range: Funzione:
Utilizza la password per proteggere da modifiche
non intenzionali a parametri sensibili, vale a dire i
parametri del motore.
0 * [0-999] Immettere la password per accedere al Menu
principale tramite il tasto [Main Menu]. Seleziona il
numero che permette di modificare altri valori dei
parametri. 0 significa che non c'è password.
NOTA!
Una password ha effetto sull'LCP ma non sul bus di
comunicazione.
NOTA!
Premendo [Menu], [OK] e [▼] si sblocca la password. In
questo modo si entra automaticamente nello schermo di
modifica nel Menu rapido o nel Menu principale.
0-61 Accesso al menu principale/rapido senza password
Option: Funzione:
[0] * Accesso
completo
[1] LCP: Sola lettura
[2] LCP: Nessun
accesso
Selez. [0] Accesso pieno per disabilitare la
password in 0-60 Passw. menu princ.
Selezionare [1] Di sola lettura per
bloccare modifiche non autorizzate del
parametro del Menu principale/rapido.
Selezionare [2] Nessun accesso per
bloccare le modifiche e visualizzazioni
non autorizzate di parametri del Menu
principale/rapido.
4 4
[0 ] * Nessuna
copia
[1] Copia da
Setup 1
[2] Copia da
Setup 2
[9] Copia da
Setup di
fabbrica
NOTA!
Il database parametri/tastiera sono
bloccati mentre è in corso la Copia del
setup.
La funzione Copia non è attiva
Copia da Setup 1 al setup di modifica
selezionato in 0-11 Edita setup.
Copia da Setup 2 al setup di modifica
selezionato in 0-11 Edita setup.
Copia da Impostazioni di fabbrica al setup di
modifica selezionato in 0-11 Edita setup.
MG02C606 - VLT® è un marchio brevettato Danfoss 13
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.2 Gruppo di parametri 1: Carico/motore
1-05 Configurazione modalità manuale
Option: Funzione:
1-00 Modo configurazione
Option: Funzione:
Utilizzare questo parametro per selezionare il
principio di regolazione dell'applicazione da
utilizzare quando è attivo un Riferimento
remoto.
44
NOTA!
La modifica di questo parametro
[0] Anello
aperto vel.
provocherà il reset di 3-00 Intervallo di
riferimento, 3-02 Riferimento minimo e 3-03
Riferimento massimo ai loro valori di
[2]*Come la
configurazione in
1-00 Modo
configurazione.
[0 ] * Anello
aperto vel.
[3] Anello
chiuso vel.
default.
NOTA!
Questo parametro non può essere
regolato mentre il motore è in funzione.
Per il controllo normale di velocità (riferimenti).
Abilita il controllo di processo ad anello
chiuso. Vedere il gruppo di par. 7-3* Reg. di
proc. PI per ulteriori informazioni sul regolatore
PI.
del setpoint nel passaggio dalla modalità
Automatico a quella manuale sull'LCP.
In modalità manuale il convertitore di
frequenza funziona sempre nella configurazione ad anello aperto indipendentemente
dall'impostazione in 1-00 Modo configurazione.
Un potenziom. locale (se presente) o le frecce
Su/Giù determinano la frequenza di uscita
limitata da Limite alto/basso velocità motore
(4-14 Lim. alto vel. motore e 4-12 Lim. basso vel.
motore).
Se 1-00 Modo configurazione è impostato su [1]
Anello aperto, il funzionamento è quello
descritto in alto.
Se 1-00 Modo configurazione è impostato su [3]
Processo, anello chiuso il passaggio dalla
modalità Automatico a quella manuale
comporta una variazione del setpoint tramite il
potenziometro locale o le frecce Su/Giù. La
variazione è limitata da Riferimento
minimo/max (3-02 Riferimento minimo e 3-03
Riferimento massimo).
1-01 Principio controllo motore
Option: Funzione:
[0] U/f Utilizzato per motori collegati in parallelo e/o
applicazioni con motori speciali. Le impostazioni U/f
sono impostate in 1-55 Caratteristica U/f -U e 1-56
Caratteristica U/f -F.
NOTA!
Il controllo U/f non include le compensazioni
di scorrimento e del carico.
[1] * VVC+ Modalità di funzionamento normale che include le
compensazioni di scorrimento e del carico.
1-03 Caratteristiche di coppia
Option: Funzione:
Con più caratteristiche di coppia è
possibile attivare il consumo a bassa
energia e applicazioni a coppia elevata.
[0 ] * Coppia costante L'uscita dell'albero motore eroga una
coppia costante con controllo a velocità
variabile.
[2] Ottimizzazione
automatica
dell'energia
1-05 Configurazione modalità manuale
Option: Funzione:
Questa funzione ottimizza automaticamente il consumo di energia nelle
applicazioni con pompe centrifughe o
ventole. Vedere 14-41 Magnetizzazione
minima AEO.
Questo parametro è rilevante solo quando 1-00
Modo configurazione è impostato su [3]
Processo, anello chiuso. Il parametro è utilizzato
per determinare la gestione del riferimento o
4.2.1 1-2* Dati motore
Immettere i dati di targa corretti del motore (potenza,
tensione, frequenza, corrente e velocità).
Funzionamento AMT, vedere 1-29 Adattamento automatico
motore (AMT).
Le impostazioni di fabbrica per i dati motore avanz.,
gruppo par. 1-3* Dati motore avanz., sono calcolati automaticamente.
NOTA!
I parametri nel gruppo parametri 1-2* Dati motore non
possono essere modificati mentre il motore è in funzione.
1-20 Potenza motore [kW]/[HP] (P
Option: Funzione:
Impostare la potenza motore secondo i
dati di targa.
Due dimensioni in meno, una in più
rispetto ai valori nominali VLT.
[1] 0,09 kW/0,12 HP
[2] 0,12 kW/0,16 HP
[3] 0,18kW/0,25 HP
[4] 0,25 kW/0,33 HP
[5] 0,37kW/0,50 HP
[6] 0,55 kW/0,75 HP
[7] 0,75 kW/1,00 HP
[8] 1,10 kW/1,50 HP
[9] 1,50 kW/2,00 HP
[10] 2,20 kW/3,00 HP
m.n
)
14 MG02C606 - VLT® è un marchio brevettato Danfoss
130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
1-20 Potenza motore [kW]/[HP] (P
m.n
)
Option: Funzione:
[11] 3,00 kW/4,00 HP
[12] 3,70 kW/5,00 HP
[13] 4,00 kW/5,40 HP
[14] 5,50 kW/7,50 HP
[15] 7,50 kW/10,0 HP
[16] 11,00 kW/15,00 HP
[17] 15,00 kW/20,00 HP
[18] 18,50 kW/25,00 HP
[19] 22,00 kW/29,50 HP
[20] 30,00 kW/40,00 HP
NOTA!
La modifica di questo parametro influisce sui parametri
1-22 Tensione motore, 1-25 Frequenza motore, 1-30
Resistenza di statore, 1-33 Reatt. dispers. statore e 1-35
Reattanza principale.
1-22 Tensione motore (U_
Range: Funzione:
230/400 V [50-999 V] Immettere la tensione motore dai dati di
1-23 Frequenza motore (f_
Range: Funzione:
50 Hz* [20-400 Hz] Immettere la frequenza motore, vedere i
dati di targa.
1-24 Corrente motore (I_
Range: Funzione:
In funzione del tipo
di motore*
[0,01-100,00 A] Immettere la corrente
targa.
m.n
m.n
m.n
)
)
)
motore, vedere i dati di
targa.
1-29 Adattamento automatico motore (AMT)
Option: Funzione:
- Tramite LCP: Premere [Hand On]
- O in modalità remota: Inviare il
segnale di avviamento al morsetto 18
[0] * Off La funzione AMT è disabilitata.
[2] Abilita
AMT
La funzione AMT inizia l'esecuzione.
NOTA!
Per ottenere la migliore regolazione
possibile del convertitore di frequenza,
eseguire l'AMT su un motore freddo.
4.2.2 1-3* Dati motore avanz.
Regolare i dati motore avanzati utilizzando uno tra i
metodi seguenti:
1. Eseguire l'AMT a motore freddo. Il convertitore di
frequenza misura il valore dal motore.
2. Immettere il valore X1 manualmente. Il valore è
indicato dal fornitore del motore.
3. Utilizzare l'impostazione predefinita Rs, X1 e X2. Il
convertitore di frequenza determina l'impostazione in base ai dati di targa del motore.
NOTA!
Questi parametri non possono essere modificati mentre il
motore è in funzione.
4 4
1-25 Velocità nominale del motore (n_
m.n
)
Range: Funzione:
In funzione del
tipo di motore*
1-29 Adattamento automatico motore (AMT)
[100-9999 giri/
minuto]
Immettere la velocità
nominale del motore,
vedere i dati di targa.
Disegno 4.1
Option: Funzione:
Utilizzare l'AMT per ottimizzare le prestazioni del
motore.
NOTA!
Non è possibile modificare questo
parametro a motore in funzione.
1. Arrestare il convertitore di frequenza assicurarsi che il motore sia in arresto
2.
Scegliere [2] Abilita AMT
3. Inviare il segnale di avviamento
MG02C606 - VLT® è un marchio brevettato Danfoss 15
1-30 Resistenza di statore (Rs)
Range: Funzione:
In funzione dei dati
motore*
[Ohm] Imp. il val. della resistenza di
statore.
1-33 Reatt. dispers. statore (X1)
Range: Funzione:
In funzione dei dati
motore*
[Ohm] Imposta la reattanza di
dispersione dello statore del
motore.
Corrente di magn.
100%
Par. 1-50
Par. 1-51
Par. 1-52
Hz
RPM
130BD016.10
130BD017.10
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
1-35 Reattanza principale (X2)
Range: Funzione:
In funzione dei dati
motore*
[Ohm] Imposta la reattanza
principale del motore.
4.2.3 1-5* Impos.indip.carico
Questo gruppo di parametri serve a impostare i parametri
44
del motore indipendenti dal carico.
1-50 Magnetizz. motore a vel. nulla
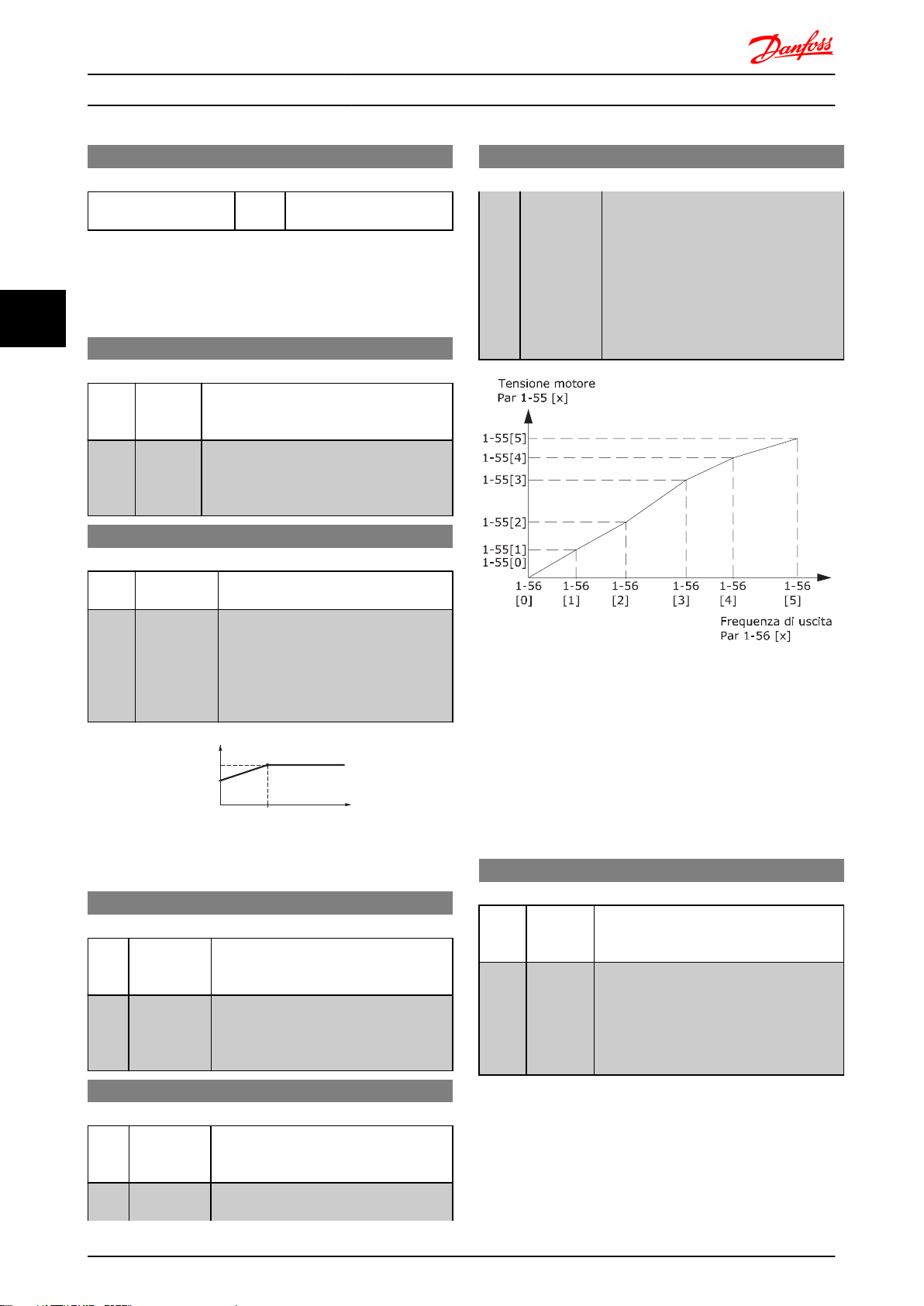
1-56 Caratteristica U/f - F
Range: Funzione:
al motore. La tensione in corrispondenza di
ogni punto è definita in 1-55 Caratteristica
U/f - U.
Per realizzare una caratteristica U/f basata
su 6 tensioni e frequenze definibili fare
riferimento a Disegno 4.3.
Semplificare le caratteristiche U/f unendo 2
o più punti (tensioni e frequenze), rispettivamente, impostati sullo stesso valore.
Range: Funzione:
Questo parametro consente un carico
termico diverso sul motore nel funzionamento a bassa velocità.
100 %* [ 0-300%] Immettere una percentuale di corrente
nominale di magnetizzazione. Se l'impostazione è troppo bassa, la coppia dell'albero
motore può essere ridotta.
1-52 Magnetizzazione normale a velocità min. [Hz]
Range: Funzione:
Utilizzare questo parametro insieme a
1-50, Magnetizz. motore a vel. nulla.
0,0 Hz* [0,0-10,0 Hz] Impostare la frequenza desiderata per la
corrente magnetizzante normale. Se la
frequenza è impostata a un livello
inferiore rispetto alla frequenza di
scorrimento del motore, 1-50 Magnetizz.
motore a vel. nulla non è attivo.
Disegno 4.3 Caratteristica U/f
NOTA!
Per 1-56 Caratteristiche U/f - F vale quanto segue
[0] ≦ [1] ≦ [2] ≦ [3] ≦ [4] ≦ [5]
4.2.4 1-6* Imp. dipend. dal car.
Disegno 4.2
1-55 Caratteristica U/f - U
Range: Funzione:
Questo è un parametro ad array [0-5] e
funziona solo se 1-01 Principio controllo
motore è impostato su [0] U/f.
0,0 V* [0,0-999,9 V] Imp. la tensione in ogni punto di freq. per
formare manual. una caratteristica U/f che
si adatta al motore. I punti di frequenza
sono definiti in 1-56 Caratteristica U/f - F.
1-56 Caratteristica U/f - F
Range: Funzione:
Questo è un parametro ad array [0-5] e
funziona solo se 1-01 Principio controllo
motore è impostato su [0] U/f.
0,0
[0,0-1000,0
Hz*
Hz]
16 MG02C606 - VLT® è un marchio brevettato Danfoss
Imp. i punti di frequenza per formare
manual. una caratteristica U/f che si adatta
Par. per regolare le impostaz del motore dip. dal carico.
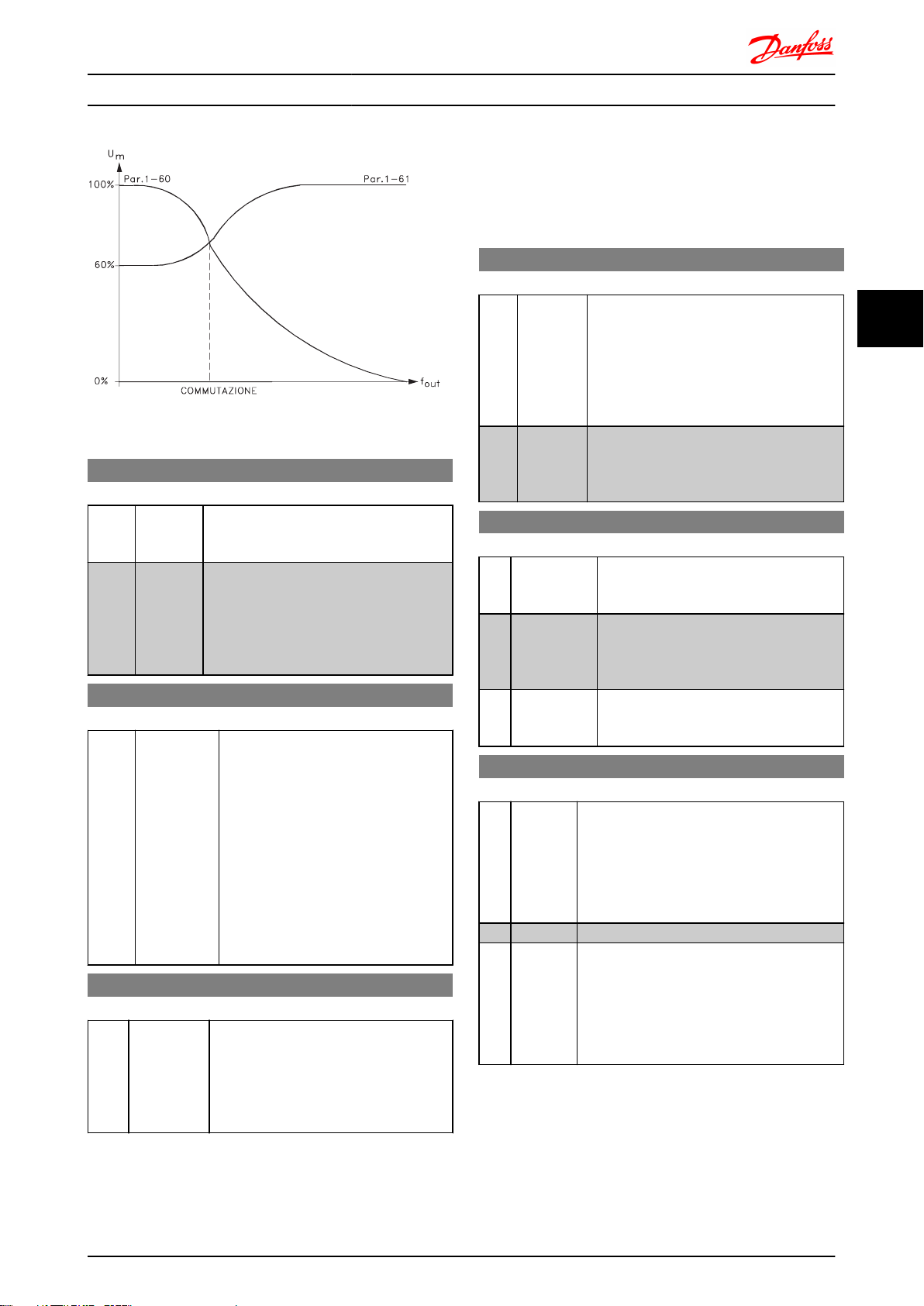
1-60 Compensaz. del carico a bassa vel.
Range: Funzione:
100 %* [0-199 %] Immettere il valore percentuale in base al
Utilizzare questo parametro per ottenere la
caratteristica U/f migliore nel funzionamento
a bassa velocità.
carico quando il motore gira a bassa
velocità.
I punti di commutazione sono calcolati
automaticamente in base alla taglia del
motore.
130BD018.10
Descrizione dei parametri
Disegno 4.4
Guida alla Programmazione VLT® Micro Drive FC 51
1-61 Compensaz. del carico ad alta vel.
Range: Funzione:
Utilizzare questo parametro per ottenere la
miglior compensazione di carico nel funzionamento ad alta velocità.
100 %* [0-199 %] Immettere il valore percentuale per
compensare in base al carico quando il
motore gira ad alta velocità.
I punti di commutazione sono calcolati
automaticamente in base alla taglia del
motore.
1-62 Compensazione dello scorrimento
Range: Funzione:
100 %* [-400-399%]Compensazione dello scorrimento motore
dipendente dal carico.
La compensazione dello scorrimento
viene calcolata automaticamente, sulla
base della velocità nominale del motore
n
.
M,N
NOTA!
Questa funzione è attiva solamente
quando 1-00 Modo configurazione è
impostato su [0] Anello aperto vel. e
quando 1-01 Principio controllo
motore è impostato su [1] VVC
1-63 Costante di tempo compens. scorrim.
Range: Funzione:
0,10 s [0,05-5,00 s] Imp. la vel. di reaz. nella compensaz. dello
scorrim. Un val. alto comporta una reaz.
lenta mentre un val. basso comporta una
reaz. veloce.
In caso di problemi di risonanza a bassa
freq., prolungare l'impostaz. del tempo.
plus
4.2.5 1-7* Regolaz. per avvio
In base ai requisiti di diverse funzioni di avviamento per
svariate applicazioni, è possibile selezionare varie funzioni
in questo gruppo di parametri.
1-71 Ritardo avv.
Range: Funzione:
Il ritardo all'avviamento definisce il tempo che
deve trascorrere dall'invio di un comando di
avviamento al momento in cui il motore
inizia ad accelerare.
L'impostazione di un ritardo all'avviamento di
0,0 s. disattiva 1-72 Funz. di avv. quando viene
inviato un comando di avviamento.
0,0s* [0,0-10,0s]Immettere il ritardo richiesto prima di avviare
l'accelerazione.
1-72 Funz. di avv. è attiva durante Tempo di
rit. all'avv.
1-72 Funz. di avv.
Option: Funzione:
[0] Corr. CC / t.
ritardo
[1] Freno CC/t.
ritardo
[2] * Ev. libera/t.
ritardo
Il motore è alimentato con una corrente di
mantenimento CC (2-00 Corr. CC di manten.)
nel tempo di ritardo all'avviamento.
Il motore viene alimentato con una
corrente di frenatura in CC (2-01 Corr. CC di
manten.) nel tempo di ritardo all'avviamento.
L'inverter è in evoluzione libera durante il
tempo di ritardo all'avviamento (inverter
off).
1-73 Riaggancio al volo
Option: Funzione:
Il parametro di riaggancio al volo viene usato
per agganciare un motore in rotazione ad
esempio dopo una perdita di alimentazione.
NOTA!
La funzione non è adatta nelle
applicazioni di sollevamento.
[0] * Disattivato Il riaggancio al volo non è richiesto.
[1] Attivato Il convertitore di frequenza è abilitato ad
agganciare il motore in rotazione.
NOTA!
Quando il riaggancio al volo è abilitato,
1-71 Ritardo avv. e 1-72 Funz. di avv. non
sono funzionanti.
4.2.6 1-8* Adattam. arresto
Per soddisfare i requisiti delle diverse funz. di arresto in
varie applicaz., questi par. offrono alcune funzioni di
arresto speciali per il motore.
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 17
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
1-80 Funzione all'arresto
Option: Funzione:
La funzione selezionata all'arresto è attiva nelle
seguenti situazioni:
Il comando di arresto è fornito e la
•
velocità di uscita viene decelerata a
rampa a Vel. min. per la funzione
all'arresto.
44
[0]*Ruota
libera
[1] Manten.CCIl motore viene alimentato con una corrente CC.
L'inverter è in evoluzione libera.
Vedere 2-00 Corr. CC di manten. per ulteriori
informazioni.
Il comando di Avviamento è tolto
•
(stdby) e la velocità di uscita viene
decelerata a rampa a Vel. min. per la
funzione all'arresto.
Il comando Freno CC è inviato, e il
•
tempo freno CC è trascorso.
Durante il funzionamento e mentre la
•
velocità di uscita calcolata è inferiore a
Vel.min. per funz.all'arresto.
1-82 Vel. min. per funz.all'arresto [Hz]
1-90 Protezione termica del motore
Option: Funzione:
della gamma di temperatura del motore
(vedere 1-93 Risorsa termistore).
[2] Scatto
termistore
[3] ETR avviso Se il limite superiore calcolato per la gamma
[4] Scatto ETR Se il 90% del limite superiore calcolato per
Un termistore collegato a un ingresso
digitale o analogico genera un allarme e fa
scattare il convertitore di frequenza in caso
di superamento del limite superiore della
gamma di temperatura del motore (vedere
1-93 Risorsa termistore).
di temperatura del motore è superato, viene
generato un avviso.
la gamma di temperatura del motore è
superato, viene generato un allarme e il
convertitore di frequenza scatta.
NOTA!
Quando la funzione ETR è stata selezionata, il convertitore
di frequenza memorizzerà la temperatura registrata in
occasione dello spegnimento e continuerà con questa
temperatura all'accensione, indipendentemente dal tempo
trascorso. Riportando 1-90 Protezione termica motore a [0]
Nessuna protezione, la temperatura registrata verrà
resettata.
Range: Funzione:
0,0 Hz* [0,0-20,0 Hz] Impostare la velocità alla quale attivare
1-80 Funzione all'arresto.
4.2.7 1-9* Temp. motore
Grazie al monitoraggio della temperatura motore stimata, il
convertitore di frequenza è in grado di stimare la
temperatura del motore senza la presenza di un termistore
installato. È quindi possibile ricevere un avviso o un
allarme se la temperatura del motore supera il limite
operativo superiore.
1-93 Risorsa termistore
Option: Funzione:
Selezionare il morsetto di ingresso del
termistore.
[0] * Nessuno Nessun termistore collegato.
[1] Ingr.
analog. 53
Collegare il termistore al morsetto dell'in-
gresso analogico 53.
NOTA!
L'ingresso analogico 53 non può essere
selezionato per altri scopi se selezionato
come risorsa termistore.
1-90 Protezione termica del motore
Option: Funzione:
Utilizzando l'ETR (relè terminale elettronico),
la temperatura del motore viene calcolata in
funzione di frequenza, velocità e tempo.
Danfoss consiglia di utilizzare la funzione
ETR in mancanza di un termistore.
NOTA!
[6] Ingresso
digitale 29
Collegare il termistore al morsetto dell'in-
gresso digitale 29.
Mentre questo ingresso agisce come ingresso
per il termistore, non risponde alla funzione
selezionata nel par. 5-13 Ingr. digitale morsetto
29. Il valore di 5-13 Ingresso digitale 29 rimane
comunque invariato nel database parametri
mentre la funzione non è attiva.
Il calcolo del sovraccarico elettronico si
basa sui dati del motore dal gruppo di
parametri 1-2* Dati motore.
[0] * Nessuna
protezione
[1] Avviso
termistore
Disabilita il monitoraggio della temperatura.
Un termistore collegato a un ingresso
digitale o analogico genera un allarme in
caso di superamento del limite superiore
18 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
1-93 Risorsa termistore
Option: Funzione:
Ingresso digitale/
Analogico
Digitale 10 V
Analogico 10 V
Tabella 4.1
Guida alla Programmazione VLT® Micro Drive FC 51
Tensione
alimentazione
di
Soglia valori di
disinserimento
<800 Ω ⇒ 2,9
kohm
<800 Ω ⇒ 2,9
kohm
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 19
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.3 Gruppo di parametri 2: Freni
NOTA!
Se il Freno CC è attivato come funzione di Avviamento, il
4.3.1 2-** Freni
Tempo di frenata CC è definito dal Tempo di ritardo all'av-
viamento.
4.3.2 2-0* Freno CC
Lo scopo della funzione freno CC è quello di frenare un
motore in rotazione applicando una corrente CC al motore.
44
2-00 Corrente CC di mantenimento
Range: Funzione:
Questo parametro serve a mantenere il motore
(coppia di mant.) o per il preriscald. del
motore.
Il parametro è attivo se viene selezionato
Manten. CC nel par 1-72 Funz. di avv. o nel par.
1-80 Funzione all'arresto.
50%* [0-100%] Immettere un valore della corr. di mantenim.
come percentuale della corrente motore
nominale imp. nel par 1-24 Corrente motore. Il
100% della corrente di mantenimento CC
corrisponde a I
M,N
.
NOTA!
Evitare il 100% di corrente per periodi troppo lunghi per
non surriscaldare il motore.
2-01 Corrente di frenatura CC
Range: Funzione:
50%* [0-150%] Imposta la corrente CC necessaria per frenare il
motore in rotazione.
Attiva il freno CC in una delle quattro modalità
seguenti:
1. Comando freno CC, vedere la scelta
5-1* Ingressi digitali [5]
2. Velocità inserimento frenatura CC,
vedere 2-04 Velocità inserimento
frenatura CC
3. Freno CC selezionato come funzione
di avviamento, vedere 1-72 Funz. di
avv.
4. Freno CC in vcombinazione con
Riaggancio al volo, 1-73 Riaggancio al
volo.
2-02 Tempo di frenata CC
Range: Funzione:
Il Tempo di frenata CC definisce il periodo in
cui la Corrente di frenatura CC è applicata al
motore.
10,0 s* [0,0-60 s] Imposta il tempo per cui la Corrente di
frenatura CC, impostata in 2-01 Corrente di
frenatura CC deve essere applicata.
2-04 Velocità inserimento frenatura CC
Range: Funzione:
0,0 Hz* [0,0-400,0 Hz] Imposta la Velocità inserimento
frenatura CC per attivare la corrente di
frenatura CC, imp. in 2-01 Corrente di
frenatura CC, durante la rampa di
discesa.
Se impostato su 0, la funzione è Off.
4.3.3 2-1* Funz. energia freno
Utilizzare i par. di questo gruppo per selezionare i par. di
frenatura dinamica.
2-10 Funzione freno
Option: Funzione:
Resistenza di frenatura:
La resistenza freno limita la tensione nel
circuito intermedio quando il motore funziona
da generatore. Senza resistenza freno, il
convertitore di frequenza può scattare.
La resistenza freno consuma l'eccesso di
energia prodotta dalla frenatura del motore.
Un convertitore di frequenza con freno è in
grado di arrestare un motore più velocemente
di uno senza freno che è utilizzato in molte
applicazioni. Richiede la connessione di una
resistenza freno esterna.
Un'alternativa alla resistenza freno è il freno
CA.
NOTA!
La resistenza freno funziona solo nei
convertitori di frequenza con freno
dinamico integrato. Deve essere collegata
una resistenza esterna.
Freno CA
Il freno CA consuma l'eccesso di energia
creando perdite di potenza nel motore.
È importante tenere presente che un aumento
della perdita di potenza fa aumentare la
temperatura del motore.
Off Nessuna funzione freno.
[0]
*
[1] Freno
resistenza
[2] Freno CA Il freno CA è attivo.
2-11 Resistenza freno (ohm)
Range: Funzione:
5 Ω* [5-5000 Ω] Imposta il valore della resistenza freno.
La resistenza freno è attiva.
20 MG02C606 - VLT® è un marchio brevettato Danfoss
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
2-16 Freno CA, corrente max
Range: Funzione:
100,0%* [0.0-150.0%] Immettere la massima corrente
ammissibile per la frenatura AC per
evitare il surriscaldamento del motore.
Il 100% è uguale alla corrente del
motore in 1-24 Corrente motore.
2-17 Controllo sovratensione
Option: Funzione:
Utilizzare il Controllo sovratensione (OVC)
per ridurre il rischio di scatto del convertitore di frequenza causato da una
sovratensione nel bus CC dovuta alla
potenza rigenerativa erogata dal carico.
Si verifica sovratensione, ad esempio, se il
tempo rampa di decelerazione è stato
impostato troppo breve rispetto all'inerzia
effettiva del carico.
[0] * Disattivato L'OVC non è attivo/richiesto.
[1] Abilitato (non
in stop)
[2] Attivato L'OVC è in funzione anche in presenza di un
L'OVC è in funzione se non è attivo un
segnale di Arresto.
segnale attivo di Arresto.
2-22 Attivazione freno meccanico
Range: Funzione:
Se il motore è stato arrestato a rampa, il freno
meccanico si attiva quando la velocità del
motore è inferiore alla Velocità di attivazione del
freno.
Il motore decelera a rampa fino all'arresto nelle
situazioni seguenti:
Viene tolto un comando di Avviamento
•
(standby)
Viene attivato un comando di arresto
•
Viene attivato l'Arresto rapido (viene
•
utilizzata la rampa ad arresto rapido)
0
Hz*
[0-400
Hz]
Seleziona la velocità del motore alla quale si
attiva il freno meccanico durante la decelerazione a rampa.
Il freno meccanico si attiva automaticamente se il
convertitore di frequenza scatta o genera un
allarme.
4 4
NOTA!
Se è stato selezionato Freno resistenza in 2-10 Funzione
freno, l'OVC non è attivo sebbene sia abilitato in questo
parametro.
4.3.4 2-2* Freno meccanico
Nelle applicazioni di sollevamento si richiede un freno
elettromagnetico. Il freno è comandato da un relè che
rilascia il freno quando è attivato.
Il freno si attiva se il convertitore di frequenza scatta o
viene fornito un comando di evoluzione libera. Inoltre si
attiva quando la velocità del motore viene decelerata a
rampa a un valore di veloc. inferiore risp. a quello
impostato in 2-22 Velocità di attivazione del freno.
2-20 Corrente rilascio freno
Range: Funzione:
0,00A* [0,00-100A]Seleziona la corrente motore alla quale
avviene il rilascio del freno.
ATTENZIONE
Se è trascorso il tempo di ritardo all'avviamento e la corrente motore è
inferiore a Corrente rilascio freno, il
convertitore di frequenza scatta.
MG02C606 - VLT® è un marchio brevettato Danfoss 21
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.4 Gruppo di parametri 3: Riferimento/
4.4.3 3-1* Riferimenti
rampe
Parametri per impostare le fonti di riferimento. Selezionare
4.4.1 3-** Rif./rampe
Par. per gestione riferimento, definiz. dei limiti e
configuraz. della reazione del conv. di freq. in presenza di
variazioni.
44
4.4.2 3-0* Limiti riferimento
Parametri per impostare unità di riferimento, limiti e
intervalli.
3-00 Intervallo di rif.
Option: Funzione:
Selez. il campo dei segn. di rif. e di retroazione.
[0] * Da min. a
max.
[1] Da -max.
a +max.
3-02 Riferimento minimo
Range: Funzione:
0,00* [-4999-4999] Immettere un valore per il riferimento
3-03 Riferimento massimo
Range: Funzione:
50,00* [-4999-4999] Immettere un valore per il Riferimento
Le gamme del setpoint di riferimento possono
avere solo valori positivi.
Selezionarlo se nella condizione di Processo ad
anello chiuso.
Le gamme possono avere valori sia positivi sia
negativi.
Se il potenziometro viene usato per regolare il
motore in entrambe le direzioni, impostare
l'intervallo di riferimento a Riferimento –max a
Riferimento max. tramite il par. =[1] Scegliere la
modalità manuale tramite l'LCP. Regolare il
potenziometro al minimo, il motore può
funzionare in senso antiorario con la massima
velocità. Quindi regolare il potenziometro al
massimo, il motore effettuerà una rampa di
discesa fino a 0 e marcerà in senso orario alla
massima velocità.
minimo.
La somma di tutti i riferimenti interni ed
esterni viene bloccata (limitata) al valore di
riferimento minimo, 3-02 Riferimento
minimo.
Il riferimento massimo è regolabile nella
gamma Riferimento minimo -4999.
massimo.
La somma di tutti i riferimenti interni ed
esterni viene bloccata (limitata) al valore
di riferimento massimo, 3-03 Riferimento
massimo.
i riferimenti preimpostati per gli ingressi digitali
corrispondenti nel gruppo di par. 5-1* Ingr. digitali.
3-10 Riferimento preimpostato
Option: Funzione:
Ogni setup di parametri contiene 8
riferimenti preimpostati selezionabili
tramite 3 ingressi digitali o tramite bus.
[18]
Bit 2
Tabella 4.2 Gruppo di parametri 5-1*
Opzione ingressi digitali [16], [17] e
[18]
[0,00]*-100.00-100.00% Immettere i vari riferimenti preimpostati
utilizzando la programmazione ad array.
Normalmente, 100% = valore imp. in
3-03 Riferimento max.
Tuttavia esistono eccezioni se 3-00
Intervallo di riferimento è impostato su
[0] Min. - Max.
Esempio 1:
3-02 Riferimento minimo è impostato su
20 e 3-03 Riferimento massimo è
impostato su 50. In questo caso 0%=0 e
100%=50.
Esempio 2:
3-02 Riferimento minimo è impostato su
-70 e 3-03 Riferimento massimo è
impostato su 50. In questo caso 0%=0 e
100%=70.
[17]
Bit 1
0 0 0 0
0 0 1 1
0 1 0 2
0 1 1 3
1 0 0 4
1 0 1 5
1 1 0 6
1 1 1 7
[16]
Bit 0
[16]
Bit 0
3-11 Velocità marcia jog [Hz]
Range: Funzione:
La velocità marcia jog è una velocità di
uscita fissa che esclude la velocità di
riferimento selezionata, vedere 5-1* Ingressi
digitali, opzione [14].
Se il motore viene arrestato durante la
modalità jog, il segnale jog agisce come
segnale di avviamento.
La rimozione del segnale di jog fa
funzionare il motore in base alla configurazione selezionata.
22 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
3-11 Velocità marcia jog [Hz]
Range: Funzione:
5,0Hz [0,0-400,0
Hz]
Selezionare la velocità che deve agire come
velocità di jog.
3-12 Valore di catch-up/slow down
Range: Funzione:
0%*
[0-100%]
La funzione Catch-up/Slowdown è attivata da un
comando in ingresso (vedere 5-1* Ingressi
digitali, opzione [28]/[29]). Se il comando è
attivo, il valore di Catch-up/Slowdown (in %) è
sommato alla funzione di riferimento come
segue:
Riferimento
×
Riferimento
×
=
Riferimento
Catchup Slowdown
100
=
Riferimento
Catchup Slowdown
100
+
Riferimento
−
Riferimento
Quando il comando in ingresso viene
disattivato, il riferimento torna al suo valore
originale Riferimento=Riferimento + 0.
3-14 Rif. relativo preimpostato
Range: Funzione:
0,00% [-100.00-100.00%] Definisce un valore fisso in % da
sommare al valore variabile definito
in 3-18 Risorsa rif. in scala relativa.
La somma dei valori fissi e variabili
(denominata Y nella figura in basso)
viene moltiplicata per il riferimento
effettivo (denominato X nella figura).
Il risultato viene sommato al
riferimento effettivo.
X
+ X ×
100
Y
Disegno 4.5
3-15 Risorsa di rif. 1
Option: Funzione:
3-15 Risorsa di rif. 1, 3-16 Risorsa di rif. 2 e
3-17 Risorsa di rif. 3 defininisce uno di tre
diversi segnali di riferimento. La somma di
questi segnali di riferimento definisce il
riferimento effettivo.
[0] Nessuna
funzione
[1] * Ingr. analog. 53 Utilizza i segnali dall'ingresso analogico 53
Non è definito alcun segnale di
riferimento.
come riferimento, vedere il gruppo di
parametri 6-1* Ingresso analogico 1.
3-15 Risorsa di rif. 1
Option: Funzione:
[2] Ingresso
analogico 60
[8] Ingr. impulsi 33 Utilizza i segnali dall'ingresso a impulsi
[11] Rif. bus locale Utilizza i segnali dal bus locale come
[21] Potenziom.
LCP.
Utilizza i segnali dall'ingresso analogico 60
come riferimento, vedere il gruppo di
parametri 6-2* Ingresso analogico 2.
come riferimento, vedere il gruppo
parametri 5-5* Ingr. impulsi.
riferimento, vedere il gruppo di parametri
8-9* Retroazione bus.
Utilizzare i segnali dal potenziometro LCP
come riferimento, gruppo di parametri
6-8* Potenziometro LCP.
3-16 Risorsa di riferimento 2
Option: Funzione:
Vedere 3-15 Fonte riferimento est. 1 per
una descrizione.
[0] Nessuna funzione Non è definito alcun segnale di
riferimento.
[1] Ingr. analog. 53 Utilizza i segnali dall'ingresso analogico
53 come riferimento.
[2] * Ingresso analogico60Utilizza i segnali dall'ingresso analogico
60 come riferimento.
[8] Ingr. impulsi 33 Utilizza i segnali dall'ingresso a impulsi
come riferimento, vedere il gruppo
parametri 5-5* Ingr. impulsi.
[11] Rif. bus locale Utilizza i segnali dal bus locale come
riferimento.
[21] Potenziom. LCP. Utilizza i segnali dal potenziometro LCP
come riferimento.
3-17 Risorsa di riferimento 3
Option: Funzione:
Vedere 3-15 Fonte riferimento est. 2 per
una descrizione.
[0] Nessuna funzione Non è definito alcun segnale di
riferimento.
[1] Ingr. analog. 53 Utilizza i segnali dall'ingresso
analogico 53 come riferimento.
[2] Ingresso
analogico 60
[8] Ingr. impulsi 33 Utilizza i segnali dall'ingresso a impulsi
[11] * Rif. bus locale Utilizza i segnali dal bus locale come
[21] Potenziom. LCP. Utilizza i segnali dal potenziometro
Utilizza i segnali dall'ingresso
analogico 60 come riferimento.
come riferimento, vedere il gruppo
parametri 5-5* Ingr. impulsi.
riferimento.
LCP come riferimento.
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 23

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
3-18 Origine rif. in scala relativa
Option: Funzione:
Seleziona la fonte per un valore
variabile da sommare al valore fisso
definito in 3-14, Rif. relativo preimpostato.
[0] * Nessuna funzione La funzione è disattivata
[1] Ingr. analog. 53 Seleziona l'ingresso analogico 53 come
fonte di riferimento in scala relativa.
44
[2] Ingresso
analogico 60
[8] Ingr. impulsi 33 Seleziona l'ingresso impulsi 33 come
[11] Rif. bus locale Seleziona il riferimento bus locale come
[21] Potenziom. LCP. Seleziona il potenziometro LCP come
Seleziona l'ingresso analogico 60 come
fonte di riferimento in scala relativa.
fonte di riferimento in scala relativa.
fonte del riferimento in scala relativa.
fonte del riferimento in scala relativa.
4.4.4 3-4* Rampa 1
Una rampa lineare è caratterizzata da un aumento a rampa
a velocità costante fino al raggiungimento della velocità
desiderata per il motore. È possibile il verificarsi di sovraelongazioni al raggiungimento della velocità. Queste
possono causare discontinuità per un breve intervallo
prima di stabilizzarsi.
Una rampa S accelera in modo più graduale compensando
eventuali discontinuità al raggiungimento della velocità.
Fare riferimento a Disegno 4.6 per un confronto fra i due
tipi di rampa.
frequenza raggiunge Lim. di coppia in modo motore
Limite di coppia in modo motore).
Un tempo rampa di discesa troppo breve può generare un
avviso per Limite di coppia (W12) e/o di Sovratensione CC
(W7). La rampa è arrestata quando il convertitore di
frequenza raggiunge Lim. di coppia in modo generatore
(4-17 Limite di coppia in modo generatore) e/o il limite di
sovratensione CC interno.
3-40 Rampa tipo 1
Option: Funzione:
[0] * Lineare Accelerazione/decelerazione costante.
[2] Rampa S Accelerazione/decelerazione graduale con
compensazione jerk.
3-41 Rampa 1 tempo rampa di salita
Range: Funzione:
In funzione
della
dimensione*
[0,05-3600,00s]Immettere il tempo rampa di
salita da 0 Hz alla frequenza
nominale del motore (f
impostata in 1-23 Frequenza
motore.
Scegliere un tempo rampa di
salita tale per cui non venga
superato il limite di coppia,
vedere 4-16 Lim. di coppia in
modo motore.
3-42 Rampa 1 tempo rampa di discesa
Range: Funzione:
In funzione
della
dimensione*
[0,05-3600,00s]Impostare il tempo rampa di
discesa dalla frequenza
nominale del motore (f
1-23 Frequenza motore a 0 Hz.
Scegliere un tempo rampa di
discesa che non generi
sovratensione nell'inverter in
seguito al funzionamento
rigenerativo del motore. Inoltre,
la coppia rigenerativa non deve
superare il limite impostato nel
par. 4-17 Lim. di coppia in modo
generatore.
(4-16
M,N
M,N
)
) in
Disegno 4.6
Tempi di rampa
Rampa di salita: Il tempo di accelerazione da 0 alla
3-5* Rampa 2
4.4.5
Vedere il gruppo di parametri 3-4* Rampa 1 per una
descrizione di tipi di rampa.
frequenza nominale del motore (1-23 Frequenza motore).
Il tempo di decelerazione dalla frequenza nominale del
motore (1-23 Frequenza motore) a 0.
NOTA!
Rampa 2 - tempi di rampa alternativi:
il passaggio da Rampa 1 a Rampa 2 avviene tramite
Limitazione
ingresso digitale. Vedere 5-1* Ingressi digitali, opzione [34].
Un tempo rampa di salita troppo breve può generare un
avviso per Limite di coppia (W12) e/o di Sovratensione CC
(W7). La rampa è arrestata quando il convertitore di
24 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
3-50 Rampa tipo 2
Option: Funzione:
[0] * Lineare Accelerazione/decelerazione costante.
[2] Rampa S Accelerazione/decelerazione graduale con
compensazione jerk.
3-51 Rampa 2 tempo di accel.
Range: Funzione:
In funzione
della
dimensione*
[0,05-3600,00s]Immettere il tempo rampa di
salita da 0 Hz alla frequenza
nominale del motore (f
impostata in 1-23 Frequenza
motore.
Scegliere un tempo rampa di
salita tale per cui non venga
superato il limite di coppia,
vedere 4-16 Lim. di coppia in
modo motore.
3-52 Rampa 2 tempo rampa di discesa
Range: Funzione:
In funzione
della
dimensione
[0,05-3600,00s]Impostare il tempo rampa di
discesa dalla frequenza
nominale del motore (f
1-23 Frequenza motore a 0 Hz.
Scegliere un tempo rampa di
discesa che non generi
sovratensione nell'inverter in
seguito al funzionamento
rigenerativo del motore. Inoltre,
la coppia rigenerativa non deve
superare il limite impostato nel
par. 4-17 Lim. di coppia in modo
generatore.
M,N
M,N
) in
3-80 Tempo di rampa jog
Range: Funzione:
selezionato o la porta di
comunicazione seriale.
3-81 Tempo rampa arr. rapido
Range: Funzione:
In funzione della
dimensione*
)
[0,05-3600,00 s] Una rampa lineare
applicabile quando è
attivo l'Arresto rapido.
Vedere il gruppo di
parametri 5-1*Ingressi
digitali, opzione [4].
4 4
3-8* Altre rampe
4.4.6
Questa sezione riporta i parametri per le rampe jog e ad
arresto rapido.
Con la rampa jog è possibile accelerare o decelerare
mentre con la rampa Arresto rapido è possibile solo
decelerare.
3-80 Tempo di rampa jog
Range: Funzione:
In funzione
della
dimensione*
[0,05-3600,00s]Una rampa lineare applicabile
se Marcia jog è attivata.
Vedere il gruppo di parametri
5-1*Ingressi digitali, opzione
[14].
Tempo rampa di salita =
Tempo rampa di discesa.
Il tempo di rampa jog inizia
all'attivazione di un segnale
jog tramite l'ingresso digitale
MG02C606 - VLT® è un marchio brevettato Danfoss 25

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.5 Gruppo di parametri 4: Limiti /avvisi
4.5.1 4-* Limiti motore
Gruppo di parametri per configurare i limiti e gli avvisi.
4.5.2 4-1* Limiti motore
4-14 Limite alto velocità motore
Range: Funzione:
NOTA!
Poiché la frequenza di uscita
massima è un valore assoluto, non
sono consentite deviazioni.
4-16 Lim. di coppia in modo motore
44
di velocità, coppia e corrente per il motore.
4-10 Direz. velocità motore
Option: Funzione:
Utilizzare questi parametri per definire il campo operativo
Se i morsetti 96, 97 e 98 sono collegati rispettivamente a U, V e W, il motore visto di fronte
gira in senso orario.
NOTA!
Questo parametro non può essere
regolato mentre il motore è in funzione
[0] * Senso
orario
[1] Senso
antiorario
[2] * Entrambe
le direzioni
L'albero motore ruota in senso orario. Questa
impostazione impedisce al motore la rotazione
in senso antiorario. Se 1-00 Modo configu-
razione è impostato su controllo ad anello
chiuso, 4-10 Direzione velocità motore verranno
automaticamente impostati su senso orario.
L'albero motore ruota in senso antiorario.
Questa impostazione impedisce la rotazione
del motore in senso orario.
Con questa impostazione il motore può
ruotare in entrambe le direzioni. Comunque la
frequenza di uscita è limitata nell'intervallo:
Limite basso velocità motore (4-12 Limite
basso vel. mot.) a Limite alto velocità motore
(4-14 Limite alto vel. mot.). Se 1-00 Modo
configurazione è impostato su controllo ad
anello aperto, 4-10 Direzione velocità motore
verrà impostato automaticamente su
entrambe le direzioni.
4-12 Limite basso velocità motore
Range: Funzione:
0,0 Hz* [0,0-400,0 Hz]
Impostare il Limite minimo velocità
motore corrispondente alla frequenza di
uscita minima dell'albero motore.
NOTA!
Poiché la frequenza di uscita
minima è un valore assoluto non
sono consentite deviazioni.
4-14 Limite alto velocità motore
Range: Funzione:
65,0 Hz* [0,0-400,0 Hz]
Impostare la Velocità motore massima
corrispondente alla frequenza di uscita
massima dell'albero motore.
Range: Funzione:
150 %* [0-400%] Imposta il limite di coppia per il funzio-
namento come motore.
L'impostaz. non è ripristinata automaticam. al
valore predef. quando si cambiano le
impostaz. in 1-00 Modo configurazione fino a
1-25 Carico e Motore.
4-17 Lim. di coppia in modo generatore
Range: Funzione:
100 %* [0-400%] Imposta il limite di coppia per il funzio-
namento rigenerativo.
L'impostaz. non è ripristinata automaticam. al
valore predef. quando si cambiano le
impostaz. in 1-00 Modo configurazione fino a
1-25 Carico e Motore.
4.5.3 4-4* Adattam. avvisi 2
4-40 Avviso frequenza bassa
Range: Funzione:
0,00
[0,0Hz-
Hz*
Dipende dal
valore di 4-41
Avviso
frequenza alta]
4-41 Avviso frequenza alta
Range: Funzione:
400,0
Hz*
[Depende dal
valore di 4-40
Avviso
frequenza
bassa -
400,0Hz]
Utilizzare questo parametro per
impostare il limite inferiore per
l'intervallo di frequenza.
Quando la velocità del motore è al di
sotto del limite, il display indica VEL.
BASSA. Il bit di avviso 10 viene
impostato in 16-94 Parola di stato estesa.
Il relè di uscita può essere configurato
per indicare questo avviso. La spia di
avvertimento dell'LCP non si accende
quando è raggiunto il limite impostato di
questo parametro.
Utilizzare questo parametro per
impostare un limite superiore per
l'intervallo di frequenza.
Quando la velocità del motore supera il
limite, il display indica VELOCITÀ ALTA.
Il bit di avviso 9 viene impostato in
16-94 Parola di stato estesa. Il relè di
uscita può essere configurato per
indicare questo avviso. La spia di
avvertimento dell'LCP non si accende
quando è raggiunto il limite impostato
di questo parametro.
26 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.5.4 4-5* Adattam. avvisi
Gruppo di parametri contente i limiti regolabili di avviso
per corrente, velocità, riferimento e retroazione.
Gli avvisi sono visuali. sul display, sull'uscita programmata
o sul bus seriale.
4-50 Avviso corrente bassa
Range: Funzione:
Utilizzare questo parametro per impostare
il limite inferiore della gamma di corrente.
Se la corrente scende al di sotto del limite
impostato, il bit di avviso 8 viene
impostato in 16-94 Parola di stato estesa.
Il relè di uscita può essere configurato per
indicare questo avviso. La spia di
avvertimento dell'LCP non si accende
quando è raggiunto il limite impostato di
questo parametro.
0,00A* [0,00-26,00A]Imposta il valore per il limite basso di
corrente.
4-51 Avviso corrente alta
Range: Funzione:
Utilizzare questo parametro per
impostare il limite superiore per la
gamma di corrente.
Se la corrente supera il limite
impostato,viene impostato il bit di avviso
7 in 16-94 Parola di stato estesa.
Il relè di uscita può essere configurato
per indicare questo avviso. La spia di
avvertimento dell'LCP non si accende
quando è raggiunto il limite impostato di
questo parametro.
26,00A* [0,00-26,00A]Imposta il limite di corrente superiore.
4-54 Avviso rif. basso
Range: Funzione:
-4999,000* [-4999,000Dipende dal
valore di 4-55
Avviso
riferimento
alto]
Utilizzare questo parametro per
impostare il limite inferiore dell'intervallo di riferimento.
Se il rif. effettivo è al di sotto di
questo limite, il display mostra Rif.
basso. Il bit di avviso 20 viene
impostato in 16-94 Parola di stato
estesa. Il relè di uscita può essere
configurato per indicare questo
avviso. La spia di avvertimento
dell'LCP non si accende quando è
raggiunto il limite impostato di
questo parametro.
4-55 Avviso riferimento alto
Range: Funzione:
4999,000* [Dipende dal
valore di 4-54
Avviso rif.
basso -
4999,000]
Utilizzare questo parametro per
impostare il limite superiore per
l'intervallo di riferimento.
Se il riferimento effettivo supera
questo limite, il display mostra Rif.
alto. Il bit di avviso 19 viene
impostato in 16-94 Parola di stato
estesa. Il relè di uscita può essere
configurato per indicare questo
avviso, la spia di avvertimento non si
accende quando è raggiunto il limite
impostato di questo parametro.
4-56 Avviso retroazione bassa
Range: Funzione:
-4999,000* [-4999,000Dipende dal
valore di 4-57
Avviso
retroazione
alta]
Utilizzare questo parametro per
impostare il limite inferiore dell'intervallo di retroazione.
Se la retroazione è al di sotto di
questo limite, il display mostra
Retroaz. bassa. Il bit di avviso 6
viene impostato in 16-94 Parola di
stato estesa. Il relè di uscita può
essere configurato per indicare
questo avviso. La spia di
avvertimento dell'LCP non si
accende quando è raggiunto il
limite impostato di questo
parametro.
4-57 Avviso retroazione alta
Range: Funzione:
4999,000* [Dipende dal
valore di 4-56
Avviso
retroazione
bassa
-4999,000]
Utilizzare questo parametro per
impostare il limite superiore per
l'intervallo di retroazione.
Se la retroazione supera questo
limite, il display mostra Retroaz. alta.
Il bit di avviso 5 viene impostato in
16-94 Parola di stato estesa. Il relè di
uscita può essere configurato per
indicare questo avviso. La spia di
avvertimento dell'LCP non si
accende quando è raggiunto il limite
impostato di questo parametro.
4-58 Funzione fase motore mancante
Option: Funzione:
Una fase del motore mancante fa diminuire la coppia
del motore. Questo monitoraggio può essere disabilitato per scopi speciali (motori di taglia ridotta che
funzionano in modalità U/f pura) ma sussiste il rischio
di surriscaldamento del motore. Danfoss consiglia
quindi di mantenere attiva questa funzione.
Una fase del motore mancante fa scattare il convertitore di frequenza e viene generato un allarme.
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 27

Descrizione dei parametri
4-58 Funzione fase motore mancante
Option: Funzione:
NOTA!
Non è possibile modificare questo parametro a
motore in funzione.
[0] Off La funzione è disattivata.
[1] * On La funzione è attivata.
Guida alla Programmazione VLT® Micro Drive FC 51
44
4.5.5 4-6* Bypass di velocità
In alcune applicazioni può verificarsi risonanza meccanica.
Evitare i punti di risonanza creando un bypass. Il convertitore di frequenza passa a rampa attraverso le aree di
bypass e quindi supera velocemente i punti di risonanza
meccanica.
4-61 Bypass velocità da [Hz]
Array [2]
Range: Funzione:
0,0 Hz* [0,0-400,0 Hz] Immettere il limite inferiore o superiore
delle velocità da evitare.
Non importa se Bypass da o Bypass a è
il limite superiore o inferiore, comunque
la funzione Bypass velocità è disabilitata
se i due parametri sono impostati allo
stesso valore.
4-63 Bypass velocità a [Hz]
Array [2]
Range: Funzione:
0,0 Hz* [0,0-400,0 Hz] Immettere il limite inferiore o superiore
dell'intervallo di velocità da evitare.
Assicurarsi di immettere il limite
opposto a quello nel par. 4-61 Bypass
velocità da [Hz].
28 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.6 Gruppo di parametri 5: I/O digitali
4.6.1 5-** I/O digitali
Di seguito sono riportate le descrizioni di tutte le funzioni
di comando degli ingressi digitali e dei segnali.
4.6.2 5-1* Ingr. digitali
Parametri per configurare le funzioni per i morsetti di
ingresso.
Gli ingressi digitali vengono utilizzati per selezionare varie
funzioni nel convertitore di frequenza. Tutti gli ingressi
digitali possono essere impostati su:
[0] Nessuna
funzione
[1] Ripristino Ripristina il convertitore di frequenza dopo
[2 ] Evol. libera neg. Arresto a ruota libera, ingresso negato
[3] Ruota lib. e ripr.
inv.
[4] Arr. rapido
(negato)
[5] Freno CC neg. Ingresso negato per frenatura CC (NC).
[6] Stop (negato) Funzione Stop negato. Genera una
[8] Avviamento Selezionare avviam. per un comando di
[9] Avviamento su
impulso
[10] Inversione Cambia il senso di rotazione dell'albero
Il convertitore di frequenza non reagisce ai
segnali inviati al morsetto.
uno Scatto/Allarme; Non tutti gli allarmi
possono essere ripristinati.
(NC). Il convertitore di frequenza lascia il
motore in evoluzione libera.
Ripristino e arresto a ruota libera, ingresso
negato (NC). Il convertitore di frequenza
ripristina e lascia il motore in evoluzione
libera.
Ingresso negato (NC). Produce un arresto
in base al tempo di rampa di arresto
rapido imp. in 3-81 Tempo rampa arr.
rapido. Quando il motore si arresta,
l'albero è in evoluzione libera.
Arresta il motore alimentandolo con una
corrente CC per un determinato tempo,
vedere 2-01 Corrente di frenatura CC. La
funzione è solo attiva quando il valore in
2-02 Tempo di frenatura CC è diverso da 0.
funzione di arresto quando il morsetto
selezionato passa dal livello logico '1' a '0'.
L'arresto viene eseguito in base al tempo
di rampa selezionato.
avviamento/arresto.
1 = Avviamento, 0 = Arresto.
Il motore si avvia se viene fornito un
impulso per almeno 2 ms. Il motore si
arresta se viene attivato Stop (negato).
motore. Il segnale di inversione cambia
solo il senso di rotazione, non attiva la
funzione di avviamento. Selezionare [2]
Entrambe le direzioni in 4.10 Direz. velocità
motore.
0 = normale, 1 = inversione.
[11] Avv. inversione Utilizzato per l’avviamento/arresto e per
l'inversione contemporanei. Non sono
ammessi segnali su [8] Avviam. contemporanei.
0 = Arresto, 1 = Avv. inversione.
[12] Abilitaz.
+avviam.
[13] Abilitaz.
+inversione
[14] Marcia jog Utilizzare per attivare la velocità jog.
[16] Bit di
riferimento
preimp. 0
[17] Bit di
riferimento
preimp. 1
[18] Bit di
riferimento
preimp. 2
[19] Riferimento
congelato
[20] Blocco uscita Blocca la frequenza del motore effettiva
Viene utilizzato se l'albero motore all'avviamento deve ruotare in senso orario.
Utilizzato se l'albero motore deve ruotare
in senso antiorario all'avviamento.
Vedere 3-11 Velocità di jog.
Il bit di rif. preimp. 0, 1 e 2 consente di
scegliere uno degli otto riferimenti
preimpostati in base a quanto riportato in
basso.
Uguale al bit di riferimento preimpostato
0 [16], vedere 3-10 Riferimento
preimpostato.
Uguale al bit di riferimento preimpostato
0 [16].
Blocca il riferimento effettivo. Il riferimento
bloccato è ora il punto che abilita/
condiziona l’utilizzo di accelerazione e
decelerazione. Se vengono utilizzati Speed
up/down , la variazione di velocità segue
sempre la rampa 2 (3-51 Rampa2 tempo
rampa di salita e 3-52 Rampa 2 tempo
rampa di discesa) nell'intervallo 3-02
Riferimento minimo - 3-03 Riferimento max..
(Hz). La frequenza motore bloccata è ora il
punto che abilita/condiziona l’utilizzo di
accelerazione e decelerazione. Se vengono
utilizzati Speed up/down, la variazione di
velocità segue sempre la rampa 2 nell'intervallo 4-12 Limite basso velocità motore 4-14 Limite alto velocità motore.
NOTA!
Se è attivo Blocco uscita, non è
possibile arrestare il convertitore di
frequenza mediante un segnale di [8]
Avviam. basso. Arrestare il convertitore di frequenza tramite un
morsetto programmato per [2] Evol.
libera neg. o [3] Ruota lib. e ripr. inv.
[21] Accelerazione Selezionare Speed up e Speed down se si
desidera il controllo digitale di accelerazione e decelerazione (potenziometro
motore). Attivare questa funzione
selezionando Riferimento congelato o
Uscita congelata. Se Speed up è attivato
per un tempo inferiore a 400 ms il riferim.
risultante sarà aumentato dello 0,1%. Se
Speed up è attivato per oltre 400 ms, il
riferimento risultante seguirà la rampa 2 in
3-51 Rampa 2 tempo rampa di salita.
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 29

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
[22] Speed down Stessa funzione di Speed up [21].
[23] Selez. setup bit
0
[26] Stop prec.
(negato) (solo
morsetto 33)
[27] Avviamento,
44
arresto di
precisione (solo
morsetto 33)
[28] Catch up Selezionare Catch up/Slow down per
[29] Slow down Stessa funzione di [28] Catch up
[32] Ingr. impulsi
(solo morsetto
33).
[34] Rampa bit 0 Logica 0=Rampa1, vedere il gruppo di
[60] Cont. A
(increm.)
[61] Cont. A
(decrem.)
[62] Ripristino cont.AIngresso per il ripristino del contatore A.
Impostare 0-10 Setup attivo su Multi
setup.
0 logico = setup 1, 1 logico = setup 2.
Prolunga il segnale di arresto per fornire
un arresto preciso indipendente dal tempo
di scansione. La funzione è disponibile
solamente dal morsetto 33.
Come [26], includendo Avviam.
aumentare o ridurre il valore del
riferimento risultante della percentuale
impostata in 3-12 Valore di catch-up/slow
down.
Selezionare Ingr. impulsi se si utilizza una
sequenza di impulsi come riferimento o
retroazione. La messa in scala viene
effettuata nel gruppo parametri 5-5* Ingr.
impulsi
parametri 3-4* Rampa 1
Logica 1=Rampa2, vedere il gruppo di
parametri 3-5* Rampa 2.
Ingresso per il contatore A.
Ingresso per il contatore A.
5-12 Ingr. digitale morsetto 27
Option: Funzione:
[1] * Ripristino Selez. la funz. dal gruppo di ingr. digitali
disponibili.
Vedere il gruppo di parametri 5-1* Ingressi
digitali per le scelte.
5-13 Ingr. digitale morsetto 29
Option: Funzione:
[14] * Marcia jog Selez. la funz. dal gruppo di ingr. digitali
disponibili.
Vedere il gruppo di parametri 5-1* Ingressi
digitali per le opzioni.
5-15 Ingr. digitale morsetto 33
Option: Funzione:
[16] * Bit preimp. 0 Selez. la funz. dal gruppo di ingr. digitali
disponibili.
Vedere il gruppo di parametri 5-1* Ingressi
digitali per le opzioni.
4.6.3 5-3* Uscite digitali
5-34 Ritardo attivazione, uscita dig. morsetto 42
Range: Funzione:
0,01 s* [0,00-600,00 s]
5-35 Ritardo disatt., uscita digitale morsetto 42
Range: Funzione:
0,01 s* [0,00-600,00 s]
4.6.4 5-4* Relè
[63] Cont. B
(increm.)
[64] Cont. B
(decrem.)
[65] Ripristino cont.BIngresso per il ripristino del contatore B.
5-10 Ingr. digitale morsetto 18
Option: Funzione:
[8] * Avviamento Selez. la funz. dal gruppo di ingr. digitali
5-11 Ingr. digitale morsetto 19
Option: Funzione:
[10] * Inversione Selez. la funz. dal gruppo di ingr. digitali
Ingresso per il contatore B.
Ingresso per il contatore B.
disponibili.
Vedere il gruppo di parametri 5-1* Ingressi
digitali per le opzioni.
disponibili.
Vedere il gruppo di parametri 5-1* Ingressi
digitali per le opzioni.
Gruppo di parametri per configurare la temporizzazione e
le funzioni di uscita per i relè.
Nessuna funzione Default per tutte le uscite digitali e le
[0]
uscite a relè.
[1] Comando pronto La scheda di controllo riceve la tensione
di alimentazione.
[2] Conv. freq. pronto Il convertitore di frequenza è pronto per
il funzionamento e alimenta la scheda
di controllo.
[3] Conv. freq. pr. /
rem.
[4] Abilita/n.avviso Il convertitore di frequenza è pronto per
[5] Marcia conv. Motore in marcia.
[6] In marcia/no
avviso
[7] Mar.in rang/n. avv. Il motore funziona negli intervalli di
Il convertitore di frequenza è pronto per
il funzionamento in modalità Auto On.
funzionare. Non è stato trasmesso alcun
comando di avviamento o di arresto.
Non sono presenti avvisi.
Il motore è in marcia e non sono
presenti avvisi.
corrente programmati, vedere 4-50
30 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
Avviso corrente bassa e 4-51 Avviso
corrente alta. Non sono presenti avvisi.
[8] Mar.in rang/n. avv. Il motore gira alla velocità di
riferimento.
[9] Allarme L'uscita è attivata da un allarme.
[10] Allarme o avviso L'uscita è attivata da un allarme o da un
avviso.
[12] Fuori interv.di
corr.
[13] Sotto corrente,
bassa
[14] Sopra corrente,
alta
[16] Sotto rif., basso La velocità del motore è inferiore a
[17] Sopra velocità,
alta
[19] Sotto retroaz.
bassa
[20] Sopra retroaz. alta La retroazione è superiore all'impo-
[21] Termica Avviso È attivo l'avviso termico se è stato
[22] Pronto, n. avv.
term.
[23] Rem., pronto, n.
ter.
[24] Pronto, tens. OK Il convertitore di frequenza è pronto per
[25] Inversione Il motore gira/è pronto alla marcia in
[26] Bus OK Comunicazione attiva (nessun timeout)
[28] Freno, ness. avv. Il freno è attivo e non ci sono avvisi.
[29] Fr.pronto, no gu. Il freno è pronto per funzionare e non
[30] Guasto freno
(IGBT)
La corrente del motore è al di fuori
dell'intervallo impostato in 4-50 Avviso
corrente bassa e 4-51 Avviso corrente
alta.
La corrente motore è inferiore a quella
impostata in 4-50 Avviso corrente bassa.
La corrente motore è superiore a quella
impostata in 4-51 Avviso corrente alta.
quella impostata in 4-40 Avviso
frequenza bassa.
La velocità del motore è superiore a
quella impostata in 4-41 Avviso
frequenza alta.
La retroazione è inferiore all'impo-
stazione in 4-56 Avviso retroazione bassa.
stazione in 4-57 Avviso retroazione alta.
superato il limite di temperatura nel
motore, nel convertitore di frequenza,
nella resistenza freno o nel termistore.
Il convertitore di frequenza è pronto per
il funzionamento e non sono presenti
avvisi di sovratemperatura.
Il convertitore di frequenza è pronto per
il funzionamento in modalità
Automatico e non sono presenti avvisi
di sovratemperatura.
il funzionamento e la tensione di rete
rientra nell'intervallo di tensione
specificato.
senso orario se è presente 0 logico e
antiorario in caso di 1 logico. L'uscita
cambia non appena viene applicato il
segnale di inversione.
mediante la porta di comunicazione
seriale.
ci sono guasti.
Protegge il convertitore di frequenza in
caso di guasti nei moduli dei freni.
Utilizzare il relè per scollegare la
tensione di rete dal convertitore di
frequenza.
[32] Retroaz. freno
mecc.
[36] Bit 11 par. di
contr.
[41] Sotto rif., basso Il riferimento è inferiore a quanto
[42] Sopra riferimento,
alto
[51] Rif. locale attivo
[52] Rif. remoto attivo
[53] Nessun allarme
[54] Com. di avv.
attivo
[55] Inversione attiva
[56] Conv. freq. in
mod. man.
[57] Conv. freq. in
mod. Automatico
[60] Comparatore 0
[61] Comparatore 1
[62] Comparatore 2
[63] Comparatore 3
[70] Regola logica 0
[71] Regola logica 1
[72] Regola logica 2
[73] Regola logica 3
[81] Uscita digitale SL
B
Consente di controllare un freno
meccanico esterno; vedere il gruppo di
parametri 2-2* Freno meccanico.
Il bit 11 nella parola di controllo
controlla il relè
impostato in 4-54 Avviso rif. basso.
Il riferimento è superiore a quanto
impostato in 4-55r Avviso rif. alto.
Vedere il gruppo di parametri 13-1*
Comparatori. Se il Comparatore 0 viene
valutato come TRUE, l'uscita aumenta.
Altrimenti sarà bassa.
Vedere il gruppo di parametri 13-1*
Comparatori. Se il Comparatore 1 viene
valutato come TRUE, l'uscita aumenta.
Altrimenti sarà bassa.
Vedere il gruppo di parametri 13-1*
Comparatori. Se il Comparatore 2 viene
valutato come TRUE, l'uscita aumenta.
Altrimenti sarà bassa.
Vedere il gruppo di parametri 13-1*
Comparatori. Se il Comparatore 3 viene
valutato come TRUE, l'uscita aumenta.
Altrimenti sarà bassa.
Vedi gruppo di parametri 13-4*Regole
logiche. Se la Regola logica 1 viene
valutata come TRUE, l'uscita aumenta.
Altrimenti sarà bassa.
Vedi gruppo di parametri 13-4*Regole
logiche. Se la Regola logica 2 viene
valutata come TRUE, l'uscita aumenta.
Altrimenti sarà bassa.
Vedi gruppo di parametri 13-4*Regole
logiche. Se la Regola logica 3 viene
valutata come TRUE, l'uscita aumenta.
Altrimenti sarà bassa.
Vedi gruppo di parametri 13-4*Regole
logiche. Se la Regola logica 3 viene
valutata come TRUE, l'uscita aumenta.
Altrimenti sarà bassa.
Vedere 13-52 Azione regol. SL. Quando
viene eseguita l'azione Smart Logic [39]
Imp. usc. dig. A alta, l'ingresso aumenta.
Quando viene eseguita l'azione Smart
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 31

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
Logic[33] Imp. usc. dig. A bassa,
l'ingresso diminuisce.
5-40 Funzione relè
Option: Funzione:
[0] * Nessuna funzione Selez. la funz. dal gruppo di usc. relè
disponibili.
5-58 Rif. alto/val. retroaz. morsetto 33
Range: Funzione:
50,000* [-4999-4999] Imposta il valore di riferimento/
retroazione corrispondente al valore di
frequenza impulsi alto imp. in 5-56
Frequenza alta morsetto 33.
5-41 Ritardo attiv., relè
44
Option: Funzione:
[0,01 s] * [0,00-600,00 s] Imp. il ritardo per il tempo di
attivazione dei relè. Se la condiz.
dell'Evento selez. cambia prima del
timer Ritardo attivazione, l'usc. relè non
viene modif. Per la funzione per
controllare il relè, vedere 5-40 Relè
funzione.
5-42 Ritardo disatt., relè
Option: Funzione:
[0,01 s] * [0,00-600,00 s] Imp. il ritardo del tempo di disatt. dei
relè. Se la condizione dell'Evento
selezionato cambia prima che il timer
di ritardo di disattivazione scada,
l'uscita relè non viene effettuata. Per la
funzione per controllare il relè, vedere
5-40 Relè funzione.
4.6.5 5-5* Ingr. impulsi
Impostare 5-15 Ingr. digitale morsetto 33 sull'opzione [32]
Ingr. impulsi. Ora il morsetto 33 gestisce un ingresso
impulsi nell'intervallo da Frequenza bassa, 5-55 Frequenza
bassa morsetto 33, a 5-56 Frequenza alta morsetto 33.
Mettere in scala l'ingresso frequenza 5-57 Rif. basso/val.
retroaz. morsetto 33 e 5-58 Rif. alto/val. retroaz. morsetto 53.
5-55 Frequenza bassa morsetto 33
Range: Funzione:
20 Hz* [20-4999 Hz] Impostare la bassa frequenza corrisp. alla
vel. bassa dell'albero mot. (cioè al val. di
rif. basso) in 5-57 Rif.basso/val.retroaz.
morsetto 33.
5-56 Frequenza alta mors. 33
Range: Funzione:
5000 Hz* [21-5000 Hz] Impostare l'alta frequenza corrisp. al
valore alto della velocità all'albero
motore (cioè il valore di rif. alto) in 5-58
Rif. alto/val. retroaz. morsetto 33.
5-57 Rif. basso/val. retroaz. morsetto 33
Range: Funzione:
0,000* [-4999-4999] Imposta il valore di riferimento/retroazione
corrispondente al valore di frequenza
impulsi basso imp. in 5-55 Frequenza bassa
morsetto 29.
32 MG02C606 - VLT® è un marchio brevettato Danfoss

Rif./Retroazione
[RPM]
Ingresso analogico
Valore rif./
retroazione alto'
Valore rif./
retroazione basso'
'Bassa tensione' o
'Corrente bassa'
'Alta tensione' o
'Corrente alta'
130BA038.13
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.7 Gruppo di parametri 6: I/O analogici
4.7.1 6-** I/O analogici
Gruppo di parametri per configurare gli ingressi e le uscite
analogici.
4.7.2 6-0* Mod. I/O analogici
Gruppo di par. per imp. la conf. di I/O anal.
6-00 Tempo timeout tensione zero
Range: Funzione:
La funzione Tensione zero è utilizzata per
monitorare il segnale sull'ingresso analogico. Se
il segnale non è più presente, viene generato un
avviso Tensione zero.
10 s* [1-99s]Imposta il tempo di ritardo prima dell'appli-
cazione della Funz. temporizz. tensione zero (6-01
Tempo timeout tensione zero).
Se il segnale è di nuovo presente durante il
ritardo impostato, il timer viene ripristinato.
In caso di rilevamento Tensione zero, il convertitore di frequenza blocca la frequenza di uscita
e avvia il timer Timeout tensione zero.
NOTA!
Microinterruttore 4 in posizione U:
6-10 Tens. bassa morsetto 53 e 6-11 Tensione alta morsetto
53 sono attivi.
Microinterruttore 4 in posizione I:
6-12 Corr. bassa morsetto 53 e 6-13 Corrente alta morsetto
53 sono attivi.
4 4
Disegno 4.7
6-01 Funz. temporizz. tensione zero
Option: Funzione:
[0] * Off La funzione è disattivata.
[1] Blocco
[2] Arresto Il convertitore di frequenza decelera a rampa a
[3] Marcia Jog Il convertitore di frequenza si porta a rampa
[4] Vel. max. Il convertitore di frequenza raggiunge a rampa
[5] Stop e
4.7.3 6-1* Ingr. analog. 1
I parametri per configurare la scala e i limiti per l’ingresso
analogico 1 (morsetto 53).
uscita
scatto
La funzione viene attivata se il segnale di
ingresso è inferiore al 50% del valore impostato
in 6-10 Tens. bassa morsetto 53, 6-12 Corr. bassa
morsetto 53 o 6-22 Corr. bassa morsetto 60.
La frequenza di uscita conserva il valore che
aveva al momento del rilevamento della
tensione zero.
0 Hz. Rimuovere la condizione di errore da
tensione zero prima di riavviare il convertitore
di frequenza.
alla velocità di jog, vedere il par. 3-11 Velocità
jog.
il Limite alto velocità motore, vedere 4-14
Limite alto velocità motore.
Il convertitore di frequenza decelera a rampa a
0 Hz e quindi scatta. Rimuovere la condizione
di Tensione zero e attivare il Ripristino prima di
riavviare il convertitore di frequenza.
MG02C606 - VLT® è un marchio brevettato Danfoss 33
Disegno 4.8
6-10 Tens. bassa morsetto 53
Range: Funzione:
Questo valore di conversione in scala
dovrebbe corrispondere al valore di
riferimento minimo impostato in 6-14
Rif.basso/val.retroaz. morsetto 53. Vedere
anche 4.4 Gruppo di parametri 3:
Riferimento/rampe.
0,07 V* [0.00-9,90 V] Immettere il valore di tensione basso.
ATTENZIONE
Il val. deve essere impostato ad almeno 1 V per attivare la
funzione di temporizzazione tensione zero in 6-01 Funz.
temporizz. tensione zero.

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
6-11 Tensione alta morsetto 53
Range: Funzione:
Questo valore di conversione in scala
dovrebbe corrispondere al valore di
riferimento massimo impostato in 6-15
Rif. alto/valore retroaz. morsetto 53.
10,0 V* [0,10-10,00 V] Immettere il valore di tensione alto.
6-12 Corr. bassa morsetto 53
44
Range: Funzione:
Questo segnale di riferimento
dovrebbe corrispondere al valore di
riferimento minimo impostato in
6-14 Rif.basso/val.retroaz. morsetto
53.
0,14 mA* [0,00-19,90 mA] Immettere il valore di corrente
bassa.
6-16 Tempo cost. filtro morsetto 53
Range: Funzione:
La cost. di tempo del filtro passa-basso
digit. di primo ordine per sopprimere il
rumore elettrico sul mors. 53. Un valore
elevato della cost. di tempo migliora lo
smorzamento ma aumenta anche il
ritardo nel filtro.
0,01 s* [0,01-10,00 s] Immettere la costante di tempo.
6-19 Mod. morsetto 53
Option: Funzione:
Selezionare l'ingresso che deve essere
presente sul morsetto 53.
ATTENZIONE
6-19 Mod. morsetto 53 DEVE essere
impostato secondo l'impostazione del
ATTENZIONE
Il valore deve essere impostato ad almeno 2 mA per
attivare la funzione di tensione zero in 6-01 Funz.
temporizz. tensione zero.
[0] * Modo
tensione
[1] Modo
corrente
microinterruttore 4.
6-13 Corrente alta morsetto 53
Range: Funzione:
Questo segnale di riferimento
dovrebbe corrispondere al valore di
riferimento massimo impostato in
6-15. Rif. alto/valore retroaz.
morsetto 53.
20,00 mA* [0,10-20,00
mA]
Immettere il valore di corrente alta.
6-14 Rif.basso/val.retroaz morsetto 53
Range: Funzione:
Il valore di conversione in scala
corrispondente alla tensione bassa/
corrente bassa impostata in 6-10 Tens.
bassa morsetto 53 e 6-12 Corr. bassa
morsetto 53.
0,000* [-4999-4999] Immettere il valore di conversione in scala
dell'ingresso analogico.
4.7.4 6-2* Ingr. analog. 2
I parametri per configurare la scala e i limiti per l’ingresso
analogico 2, morsetto 60.
6-22 Corr. bassa morsetto 60
Range: Funzione:
Questo segnale di riferimento
dovrebbe corrispondere al valore di
riferimento minimo impostato in
6-24 Rif.basso/val.retroaz. morsetto
60.
0,14 mA* [0,00-19,90 mA] Immettere il valore di corrente
bassa.
ATTENZIONE
Il valore deve essere impostato ad almeno 2 mA in modo
da attivare la Funz. temporizz. tensione zero in 6-01 Tempo
timeout tensione zero.
6-15 Rif. alto/valore retroaz. morsetto 53
Range: Funzione:
Il valore di conversione in scala
che corrisponde all'alta tensione/
corrente alta impostata in 6-11
Tensione alta morsetto 53 e 6-13
Corrente alta morsetto 53.
50,000* [-4999.000-4999.000] Immettere il valore di
conversione in scala dell'ingresso
analogico.
6-23 Corrente alta morsetto 60
Range: Funzione:
Questo segnale di riferimento
dovrebbe corrispondere al valore di
corrente alta impostato in 6-25 Rif.
alto/valore retroaz. morsetto 60.
20,00 mA* [0,10-20,00
mA]
Immettere il valore di corrente alta.
34 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
6-24 Rif.basso/val.retroaz. morsetto 60
Range: Funzione:
Il valore di conversione in scala
corrispondente alla corrente bassa
impostata in 6-22 Corr. bassa morsetto 60.
0,000* [-4999-4999] Immettere il valore di conversione in scala
dell'ingresso analogico.
6-25 Rif. alto/valore retroaz. morsetto 60
Range: Funzione:
Il valore di conversione in scala che
corrisponde all'alta corrente impostata in
6-23 Corr. bassa morsetto 60.
50,00* [-4999-4999] Immettere il valore di conversione in scala
dell'ingresso analogico.
6-26 Costante di tempo filtro del morsetto 60
Range: Funzione:
La cost. di tempo del filtro passa-basso
digit. di primo ordine per sopprimere il
rumore elettrico sul mors. 60. Un valore
elevato della cost. di tempo migliora lo
smorzamento ma aumenta anche il
ritardo nel filtro.
NOTA!
Non è possibile modificare questo
parametro a motore in funzione.
0,01 s* [0,01-10,00 s] Immettere la costante di tempo.
4.7.5 6-8* Potenziom. LCP
Il potenziometro LCP può essere selezionato come Risorsa
riferimento o Risorsa riferimento relativo.
NOTA!
In modalità manuale il potenziometro dell'LCP funziona
come riferimento locale.
6-80 Abilitazione potenziometro LCP
Option: Funzione:
Se il potenziometro LCP è disattivato, con [▲]
[▼] si regola il riferimento locale e il valore del
potenziometro non dà alcun riferimento nella
modalità Auto/Manuale.
[0] Disattivato
[1] * Abilitato
6-81 Valore di riferimento basso LCP
Range: Funzione:
Il valore di conversione in scala
corrisponde a 0.
0,000* [-4999-4999] Immettere il valore di riferimento basso.
Il valore di riferimento corrispondente al
potenziometro fatto ruotare completamente in senso antiorario (0 gradi).
6-82 Val. di rif. alto potenziometro LCP
Range: Funzione:
Il valore di conversione in scala
corrispondente al valore di retroazione del
riferimento massimo impostato in 3-03
Riferimento massimo.
50,00* [-4999-4999] Immettere il valore di riferimento alto.
Il valore di riferimento corrispondente al
potenziometro fatto ruotare completamente in senso orario (200 gradi).
4.7.6 6-9* Uscita analogica
Questi parametri servono a configurare le uscite
analogiche del convertitore di frequenza.
6-90 Mod. morsetto 42
Option: Funzione:
[0] * 0-20 mA L'intervallo delle uscite analogiche è 0-20
mA
[1] 4-20 mA L'intervallo delle uscite analogiche è 4-20
mA
[2] Uscita digitale Funziona come uscita digitale a risposta
lenta. Impostare il valore su 0 mA (off) o 20
mA (on), vedere 6-92 Uscita dig. morsetto 42.
6-91 Uscita analogica morsetto 42
Option: Funzione:
Selez. la funz. del morsetto 42
come uscita analogica.
[0] * Nessuna funzione
[10] Frequenza di uscita
[0-100Hz]
[11] Riferimento (RIF min-max)
[12] Retroazione (FB min-max)
[13] Corrente motore (0-I
[16] Potenza (0-P
[19] Tensione bus CC (0-1000 V)
[20] Riferimento bus [0,0% -
100,0%]
nom
max
)
6-92 Uscita dig. morsetto 42
Option: Funzione:
Vedere il gruppo di parametri 5-4* Relè
per scelte e descrizioni.
[0] * Nessuna
funzione
[80] Uscita digitale
SL A
Vedere 13-52 Azione regol. SL. Quando
viene eseguita l'azione [38] Imp. usc. dig. A
alta, l'ingresso aumenta. Quando viene
eseguita l'azione [32] Imp. usc. dig. A
bassa, l'ingresso diminuisce.
3-02 Riferimento minimo a 3-03
Riferimento minimo.
)
16-37 Corrente max. inv. è I
1-20 Potenza motore è P
(motore).
L'uscita analogica seguirà il
valore di riferimento
impostato sul bus RS-485.
nom
max
4 4
.
MG02C606 - VLT® è un marchio brevettato Danfoss 35

130BD020.11
(mA)
0%
20
0/4
100%
Corrente
Uscita
analogica Scala
min.
par. 6-51
Variabile per
uscita
esempio:Velocità
(giri/min.)
Uscita
analogica Scala
max
par. 6-52
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
6-93 Mors. 42, usc. scala min.
Range: Funzione:
0,00% [0.00-200.0%] Conversione in scala dell'uscita minima
del segnale analogico selez. sul mors. 42
come percentuale del val. di segnale
massimo. Ad es. se si desidera 0 mA (o 0
Hz) al 25% del valore di uscita massimo,
programmare 25%. I valori di conversione
44
Disegno 4.9
in scala fino al 100% non possono mai
essere superiori all’impostazione
corrispondente in 6-94 Mors. 42, usc. scala
min.
6-94 Mors. 42, usc. scala max.
Range: Funzione:
100,00%*
[0.00-200.00%]
Conversione in scala dell'uscita max
del segnale analogico selez. sul mors.
42. Imposta il valore massimo
dell’uscita del segnale di corrente.
Converte in scala l’uscita per fornire
una corrente inferiore a 20 mA a scala
intera; o 20 mA a un'uscita al di sotto
del 100% del valore del segnale
massimo.
Se la corrente di uscita desiderata è di
20 mA ad un valore compreso tra lo 0
e il 100% dell’uscita a scala intera,
programmare il valore percentuale nel
parametro, vale a dire 50% = 20 mA.
Se si desidera una corrente compresa
tra 4 e 20 mA all’uscita massima
(100%), calcolare il valore percentuale
come segue:
corrente massima desiderata
cioè
10 mA =
20
mA
20
× 100 = 200 %
10
× 100 %
36 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.8 Gruppo di parametri 7: Regolatori
4.8.1 7-** Regolatori
Gruppo di par. per configurare i controlli dell’applicaz.
4.8.2 7-2* Retroaz. reg. processo
Seleziona le risorse di retroazione e la gestione del
regolatore di processo PI.
NOTA!
Impostare 3-15 Risorsa di rif. 1 a [0] Nessuna funzione al fine
di usare l'ingresso analogico come un segnale di
retroazione.
Al fine di usare l'ingresso analogico come una risorsa di
riferimento, non usare la stessa risorsa come risorsa di
riferimento in 3-15, 3-16 e 3-17.
7-20 Risorsa retroazione CL processo
Option: Funzione:
Seleziona l'ingresso che deve agire
come segnale di retroazione.
[0] * Nessuna funzione
[1] Ingresso analogico 53
[2] Ingresso analogico 60
[8] Ingr. impulsi 33
[11] Rif. bus locale
4.8.3 7-3* Reg. PI di proc.
7-30 PI proc., contr. n./inv.
Option: Funzione:
[0] * Normale Una retroazione maggiore del setpoint comporta
una riduzione di velocità.
Una retroazione minore del setpoint comporta un
aumento di velocità.
[1] Inverso Una retroazione maggiore del setpoint comporta
un aumento di velocità.
Una retroazione minore del setpoint comporta
una riduzione di velocità.
7-31 Anti saturazione regolatore PI
Option: Funzione:
[0] Disabilitato La regolazione di un dato errore continuerà
anche quando non sarà più possibile
aumentare/diminuire la frequenza di uscita.
[1] * Abilitato Il regolatore PI cessa la regolazione di un
determinato errore quando non è più possibile
aumentare/diminuire la frequenza di uscita.
7-32 PI di processo, veloc. avviam.
Range: Funzione:
0,0 Hz* [0,0-200,0 Hz] Fino al raggiungimento della velocità
motore impostata, il convertitore di
frequenza funziona in modalità anello
aperto.
7-33 Guadagno proporzionale PI di processo
Option: Funzione:
[0,01] * 0.00-10.00 Immettere il valore del guadagno propor-
zionale P, vale a dire il fattore moltiplicativo
dell'errore tra il setpoint e il segnale di
retroazione.
NOTA!
0,00 = Off.
7-34 Tempo d'integrazione PI di processo
Range: Funzione:
9999,00 s* [0,10-9999,00 s] L'integratore fornisce un guadagno
crescente in caso di variaz.
costante fra il punto di regolaz. e il
segnale di retroaz. Il tempo di
integrazione è il tempo necess.
all’integratore per raggiungere un
valore uguale al guad. proporz.
7-38 Fattore feed forward di processo
Range: Funzione:
0%* [0-400%] Il fattore FF invia una parte del segnale di
riferimento al regolatore PI che quindi modifica
solo una parte del segnale di controllo.
L'attivazione del fattore FF consente di ottenere
sovraelongazioni inferiori e dinamiche elevate
alla variazione del setpoint.
Questo parametro è sempre attivo quando 1-00
Modo configurazione è impostato su [3] Processo.
7-39 Larghezza di banda di riferimento
Range: Funzione:
5% [0-200% ] Immettere il valore della larghezza di banda a
riferimento.
L'errore del regolatore PI è la differenza tra
setpoint e retroazione. Quando l'errore è inf. al
valore imp. in questo par. è attivo il Riferimento.
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 37

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.9 Gruppo di parametri 8: Comunicazione
4.9.1 8-** Comunicazione
Gruppo di parametri per configurare la comunicazione.
4.9.2 8-0* Impost.gener.
44
Utilizzare questo gruppo di parametri per configurare le
impostazioni generali di comunicazione.
8-06 Riprist. tempor. parola di contr.
Option: Funzione:
Il ripristino del timeout della parola di
controllo rimuove tutte le funzioni di
timeout.
[0] * Nessuna
funzione
[1] Riprist. Il timeout della parola di controllo viene
Il timeout della parola di controllo non
viene ripristinato.
ripristinato e il parametro passa allo stato
[0] Nessuna funzione.
8-01 Sito di comando
Option: Funzione:
[0] * Parola digitale e
di controllo
[1] Solo digitale Utilizza l'ingresso digitale come
[2] Solo parola di
com.
Utilizza sia l'ingresso digitale sia la
parola di com. come controllo.
controllo.
Utilizza solo la parola di comando come
controllo.
NOTA!
L'impostazione in questo parametro
esclude le impostazioni in 8-50
4.9.3 8-3* Impostaz. porta FC
Parametri per configurare la porta FC.
8-30 Protocollo
Option: Funzione:
Seleziona il protocollo da utilizzare. Il cambio
di protocollo non sarà effettivo se non dopo
lo spegnimento del convertitore di frequenza.
[0] * FC
[2] Modbus RTU
Evoluzione libera a 8-56 Selezione rif.
preimpostato.
8-02 Fonte parola di controllo
Option: Funzione:
[0] Nessuno La funzione non è attiva.
[1] * FC RS-485 Il monitoraggio della sorgente della parola di
com. è realizzato mediante la porta di comunicazione seriale RS-485.
8-03 Tempo di temporizzazione parola di controllo
Range: Funzione:
1,0 s* [0,1-6500 s] Immettere il tempo che deve trascorrere
prima di eseguire la Funzione temporizz.
parola di controllo (8-04 Funzione temporizz.
parola di controllo).
8-04 Funzione temporizz. parola di controllo
Option: Funzione:
Seleziona l'azione da eseguire in caso di
timeout.
[0] * Off Nessuna funz.
[1] Blocco uscita Blocca l'uscita fino alla ripresa della comuni-
cazione.
[2] Arresto Arresto con riavviamento automatico quando
la comunicazione riprende.
[3] Marcia Jog Il motore funziona alla frequenza di jog fino
a quando la comunicazione riprende.
[4] Vel. max. Il motore funziona a frequenza massima fino
a che la comunicazione riprende
[5] Stop e scatto Arresta il motore e quindi ripristina il conver-
titore di frequenza per riavviarlo mediante
LCP o ingresso digitale:
8-31 Indirizzo
Range: Funzione:
Selezionare l'indirizzo per il bus.
1* [1 - L'intervallo bus] L'intervallo del bus FC è 1-126.
L'intervallo Modbus è 1-247.
8-32 Baud rate porta FC
Option: Funzione:
Selez. il baud rate per la porta FC.
NOTA!
Il cambio del baud rate sarà effettivo
dopo la risposta a tutte le richieste bus in
corso.
[0] 2400 Baud
[1] 4800 Baud
[2] * 9600 Baud Quando si sceglie FC bus in 8-30
[3] * 19200 Baud Quando si sceglie Modbus in 8-30
[4] 38400 Baud
8-33 Parità porta FC
Option: Funzione:
Questo parametro riguarda
solo il Modbus perché il bus
FC ha sempre parità pari.
[0] * Parità pari (1 bit di stop)
[1] Parità dispari
[2] Nessuna parità (1 bit di
stop)
[3] Nessuna parità (2 bit di
stop)
Selezionare questo per
Modbus RTU
38 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
8-35 Ritardo minimo risposta
Range: Funzione:
0,010 s* [0,001-0,500 s] Specifica un tempo di ritardo minimo
tra la ricez. di una richiesta e la trasm.
di una risposta.
8-36 Ritardo max. risposta
Range: Funzione:
5,000 s* [0,010-10,00 s] Specifica il tempo di ritardo max
ammiss. tra la trasmissione di una
richiesta e la ricez. di una risposta. Il
superamento di questo ritardo provoca
il timeout della parola di controllo.
4.9.4 8-4* Imp. prot. FC MC
8-43 Config. lettura PCD porta FC
Array [16]
Option: Funzione:
[0] * Nessuno
[1] 1500 Ore di funzionamento
[2] 1501 Ore esercizio
[3] 1502 Contatore kWh
[4] 1600 Parola di controllo
[5] 1601 Riferimento [Unit]
[6] 1602 Riferimento %
[7] 1603 Par. di stato
[8] 1605 Val. reale princ. [%]
[9] 1609 Visual. personaliz.
[10] 1610 Potenza [kW]
[11] 1611 Potenza [hp]
[12] 1612 Tensione motore
[13] 1613 Frequenza
[14] 1614 Corrente motore
[15] 1615 Frequenza [%]
[16] 1618 Term. motore
[17] 1630 Tensione bus CC
[18] 1634 Temp. dissip.
[19] 1635 Termico inverter
[20] 1638 Condiz. regol. SL
[21] 1650 Riferimento esterno
[22] 1651 Rif. impulsi
[23] 1652 Retroazione [Unit]
[24] 1660 Ingr. digitale 18,19,27,33
[25] 1661 Ingr. digitale 29
[26] 1662 Ingresso analogico 53(V)
[27] 1663 Ingresso analogico 53(mA)
[28] 1664 Ingr. analog. 60
[29] 1665 Uscita analog. 42 [mA]
[30] 1668 Ingr. freq. 33 [Hz]
[31] 1671 Uscita relè [bin]
[32] 1672 Contatore A
[33] 1673 Contatore B
[34] 1690 Parola d'allarme
8-43 Config. lettura PCD porta FC
Array [16]
Option: Funzione:
[35] 1692 Parola di avviso
[36] 1694 Parola di stato estesa
Selezionare i parametri da
assegnare ai telegrammi
del PCD. Il numero di PCD
disponibili dipende dal
tipo di telegramma.
Questa tabella non è per
[0] array e [1] array. Per
questi due array, l'indice 1
è fissato a [7] e l'indice 2
è fissato a [8]. Questi due
array non possono essere
cambiati dall'utente.
8-5* Digitale/Bus
4.9.5
Par. per configurare la combinaz. di parola di controllo
digitale/bus.
NOTA!
I parametri sono attivi solo se 8-01 Sito di comando è
impostato su [0] Par. dig. e di com.
8-50 Selezione ruota libera
Option: Funzione:
Selez. il controllo della funzione ruota libera
tramite ingr. digitale e/o bus.
[0] Ingr. digitale Attivazione tramite ingresso digitale.
[1] Bus Attivazione tramite porta di comunicazione
seriale.
[2] LogicaAnd Attivazione tramite porta di comunicazione
seriale e un ingresso digitale.
[3] * LogicaOr Attivazione tramite porta di comunicazione
seriale o ingresso digitale.
8-51 Selez. arresto rapido
Option: Funzione:
Scegliere se controll. la funz. arresto rapido
mediante ingr. digitale e/o bus
[0] Ingr. digitale Attivazione tramite ingresso digitale.
[1] Bus Attivazione tramite porta di comunicazione
seriale.
[2] Logica E Attivazione tramite porta di comunicazione
seriale e un ingresso digitale.
[3] * Logica O Attivazione tramite porta di comunicazione
seriale o ingresso digitale.
4 4
MG02C606 - VLT® è un marchio brevettato Danfoss 39

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
8-52 Selez. freno CC
Option: Funzione:
Selez. se controllare il freno CC tramite ingr.
digitale e/o mediante bus.
[0] Ingr. digitale Attivazione tramite ingresso digitale.
[1] Bus Attivazione tramite porta di comunicazione
seriale.
[2] Logica E Attivazione tramite porta di comunicazione
44
[3] * Logica O Attivazione tramite porta di comunicazione
seriale e un ingresso digitale.
seriale o ingresso digitale.
8-53 Selez. avvio
Option: Funzione:
Selez. il controllo della funzione di
avviamento tramite ingr. digitale e/o bus.
[0] Ingr. digitale Attivazione tramite ingresso digitale.
[1] Bus Attivazione tramite porta di comunicazione
seriale.
[2] Logica E Attivazione tramite porta di comunicazione
seriale e un ingresso digitale.
[3] * Logica O Attivazione tramite porta di comunicazione
seriale o ingresso digitale.
8-54 Selez. inversione
Option: Funzione:
Selez. un controllo della funzione di
inversione tramite ingr. digitale e/o bus.
[0] Ingr. digitale Attivazione tramite ingresso digitale.
[1] Bus Attivazione tramite porta di comunicazione
seriale.
[2] Logica E Attivazione tramite porta di comunicazione
seriale e un ingresso digitale.
[3] * Logica O Attivazione tramite porta di comunicazione
seriale o ingresso digitale.
8-55 Selez. setup
Option: Funzione:
Selez. il contr. della selez. del setup mediante
ingresso digitale e/o bus.
[0] Ingr. digitale Attivazione tramite ingresso digitale.
[1] Bus Attivazione tramite porta di comunicazione
seriale.
[2] Logica E Attivazione tramite porta di comunicazione
seriale e un ingresso digitale.
[3] * Logica O Attivazione tramite porta di comunicazione
seriale o ingresso digitale.
8-56 Selezione rif. preimpostato
Option: Funzione:
[2] LogicaAnd Attivazione tramite porta di comunicazione
seriale e un ingresso digitale.
[3] * LogicaOr Attivazione tramite porta di comunicazione
seriale o ingresso digitale.
4.9.6 8-8* Diagnosi comunicazione bus
Questi parametri vengono usati per monitorare la comunicazione del Bus tramite la porta.
8-80 Conteggio messaggi bus
Range: Funzione:
0 N/A* [0-0 N/A] Questo parametro mostra il numero di
telegrammi validi rilevati sul bus.
8-81 Conteggio errori bus
Range: Funzione:
0 N/A* [0-0 N/A] Questo parametro mostra il numero di
telegrammi con errori (ad es. guasto CRC),
rilevati sul bus.
8-82 Conteggio messaggi slave
Range: Funzione:
0 N/A* [0-0 N/A] Questo parametro mostra il numero di
telegrammi validi indirizzati allo slave e
inviati dal convertitore di frequenza.
8-83 Conteggio errori slave
Range: Funzione:
0 N/A* [0-0 N/A] Questo parametro mostra il numero di
telegrammi di errore che il convertitore di
frequenza ha potuto eseguire.
4.9.7 8-9* Bus retroazione
Parametro per configurare la retroazione bus.
8-94 Retroazione bus 1
Range: Funzione:
0* [0x8000-0x7FFF] La retroazione bus è fornita mediante FC o
Modbus scrivendo il valore della
retroazione in questo parametro.
8-56 Selezione rif. preimpostato
Option: Funzione:
Selez. il controllo della selez. del Riferimento
preimpostato tramite ingr. dig. e/o bus.
[0] Ingr. digitale Attivazione tramite ingresso digitale.
[1] Bus Attivazione tramite la porta di comunicazione
seriale.
40 MG02C606 - VLT® è un marchio brevettato Danfoss

Evento avviamento
13-01
Evento arresto
13-02
Evento arresto
13-02
Evento arresto
13-02
Stato 1
Evento 1/
Azione 1
Stato 4
Evento 4/
Azione 4
Stato 2
Evento 2/
Azione 2
Stato 3
Evento 3/
Azione 3
130BD021.10
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.10 Gruppo di parametri 13: Smart Logic
4.10.1 13-** Funzioni di programmazione
Smart Logic Control (SLC) è una sequenza di azioni definite
dall'utente (13-52 Azione regol. SL [X]) le quali vengono
eseguite dall'SLC quando l'evento associato definito
dall'utente (13-51 Evento regol. SL [X]) è impostato su True.
Gli eventi e le azioni sono collegate a coppie, vale a dire
che quando un evento è vero, l'azione associata viene
eseguita. In seguito l'evento successivo viene valutato e
verrà eseguita l'azione associata e cosi via. Verrà valutato
un solo evento alla volta.
Se un evento viene valutato come False, durante
l'intervallo di scansione non succede nulla (nell'SLC) e non
vengono valutati altri eventi.
È possibile programmare da 1 a 20 eventi e azioni.
Una volta eseguito l'ultimo evento/azione, la sequenza
inizia da capo dall'evento/azione [0].
Disegno 4.10 Esempio con tre eventi/azioni
Avvio e arresto dell'SLC
Avviare l'SLC selezionando [1] On in 13-00 Modo regol. SL
L'SLC inizia a valutare l'Evento 0, e se ciò è valutato come
TRUE, l'SLC continua il proprio ciclo.
L'SLC si arresta quando l'Evento arresto, 13-02 Evento
arresto, è TRUE. È possibile arrestare l'SLC anche
selezionando [0] Off in 13-00 Modo regol. SL.
Per ripristinare tutti i parametri SLC selezionare [1]
Ripristinare SLC in 13-03 Reset Smart Logic Control e iniziare
la programmazione da zero.
4.10.2
13-0* Impostazioni SLC
Le imp. SLC sono utilizzate per attivare, disatt. e ripristinare
lo Smart Logic Control.
MG02C606 - VLT® è un marchio brevettato Danfoss 41
13-00 Modo regol. SL
Option: Funzione:
[0] * Off La funzione è disattivata.
[1] On SLC attivo.
13-01 Evento avviamento
Option: Funzione:
Selezionare l'ingresso di attivazione
Smart Logic Control.
[0] False
[1] True
[2] In funzione
[3] Nel campo
[4] Riferimento on
[7] Fuori interv.di corr.
[8] Sotto I, bassa
[9] Sopra I, alta
[16] Termica Avviso
[17] Tens.rete f. campo La tensione di alimentazione non
[18] Inversione
[19] Avviso Un avviso è attivo.
[20] Allarme (scatto) È attivo un allarme (scatto).
[21] All.(scatto blocc.) È attivo un allarme (scatto bloccato).
[22] Comparatore 0 Utilizzare il risultato del comparatore
[23] Comparatore 1 Utilizzare il risultato del comparatore
[24] Comparatore 2 Utilizzare il risultato del comparatore
[25] Comparatore 3 Utilizzare il risultato del comparatore
[26] Reg. log. 0 Utilizzare il risultato della regola
[27] Reg. log. 1 Utilizzare il risultato della regola
[28] Reg. log. 2 Utilizzare il risultato della regola
[29] Reg. log. 3 Utilizzare il risultato della regola
[33] Ingr. digitale_18 Utilizzare il valore di DI 18 nella
[34] Ingr. digitale_19 Utilizzare il valore di DI 19 nella
[35] Ingr. digitale_27 Utilizzare il valore di DI 27 nella
Inserisce False nella regola logica.
Inserisce True nella regola logica.
Selez. l'ingresso booleano 5-4* Relè [5]
per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [7] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [8] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [12] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [13] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [14] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [21] per una descrizione.
rientra nel campo di tensione
specificato.
Vedere il gruppo di parametri 5-4*
Relè [25] per una descrizione.
0 nella regola logica.
1 nella regola logica.
2 nella regola logica.
3 nella regola logica.
logica 0 nella regola logica.
logica 1 nella regola logica.
logica 2 nella regola logica.
logica 3 nella regola logica.
regola logica.
regola logica.
regola logica.
4 4

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BD022.10
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
[36] Ingr. digitale_29 Utilizzare il valore di DI 29 nella
[38] Ingr. digitale_33
[39] * Comando
44
[40] Conv. di freq. arr.
[0] False
[1] True
[2] In funzione
[3] Nel campo
[4] Riferimento on
[7] Fuori interv.di corr.
[8] Sotto I, bassa
[9] Sopra I, alta
[16] Termica Avviso
[17] Tens.rete f. campo La tensione di alimentazione non
[18] Inversione
[19] Avviso Un avviso è attivo.
[20] Allarme (scatto) È attivo un allarme (scatto).
[21] All.(scatto blocc.) È attivo un allarme (scatto bloccato).
[22] Comparatore 0 Utilizzare il risultato del comparatore
[23] Comparatore 1 Utilizzare il risultato del comparatore
[24] Comparatore 2 Utilizzare il risultato del comparatore
[25] Comparatore 3 Utilizzare il risultato del comparatore
[26] Reg. log. 0 Utilizzare il risultato della regola
[27] Reg. log. 1 Utilizzare il risultato della regola
42 MG02C606 - VLT® è un marchio brevettato Danfoss
13-01 Evento avviamento
Option: Funzione:
regola logica.
Questo evento è True se il conver-
avviamento
titore di frequenza viene avviato in
qualsiasi modo (ingresso digitale o
altro).
Questo evento è True se il convertitore di frequenza viene arrestato o
lasciato in evoluzione libera in
qualsiasi modo (ingresso digitale o
altro).
13-02 Evento arresto
Option: Funzione:
Selezionare l'ingresso di attivazione
Smart Logic Control.
Inserisce False nella regola logica.
Inserisce True nella regola logica.
Selez. l'ingresso booleano 5-4* Relè [5]
per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [7] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [8] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [12] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [13] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [14] per una descrizione.
Vedere il gruppo di parametri 5-4*
Relè [21] per una descrizione.
rientra nel campo di tensione
specificato.
Vedere il gruppo di parametri 5-4*
Relè [25] per una descrizione.
0 nella regola logica.
1 nella regola logica.
2 nella regola logica.
3 nella regola logica.
logica 0 nella regola logica.
logica 1 nella regola logica.
13-02 Evento arresto
Option: Funzione:
[28] Reg. log. 2 Utilizzare il risultato della regola
logica 2 nella regola logica.
[29] Reg. log. 3 Utilizzare il risultato della regola
logica 3 nella regola logica.
[30] Timeout SL 0 Utilizzare il risultato del timer 0 nella
regola logica.
[31] Timeout SL 1 Utilizzare il risultato del timer 1 nella
regola logica.
[32] Timeout SL 2 Utilizzare il risultato del timer 2 nella
regola logica.
[33] Ingr. digitale_18 Utilizzare il valore di DI 18 nella
regola logica.
[34] Ingr. digitale_19 Utilizzare il valore di DI 19 nella
regola logica.
[35] Ingr. digitale_27 Utilizzare il valore di DI 27 nella
regola logica.
[36] Ingr. digitale_29 Utilizzare il valore di DI 29 nella
regola logica.
[38] Ingr. digitale_33
[39] Comando
avviamento
[40] * Conv. di freq. arr.
Questo evento è True se il conver-
titore di frequenza viene avviato in
qualsiasi modo (ingresso digitale o
altro).
Questo evento è True se il conver-
titore di frequenza viene arrestato o
lasciato in evoluzione libera in
qualsiasi modo (ingresso digitale o
altro).
13-03 Ripristinare SLC
Option: Funzione:
[0] * Nessun reset Mantiene tutte le impostaz. programmate
nel gruppo di parametri 13.
[1] Ripristinare SLC Ripristinare tutti i parametri del gruppo 13
alle impostazioni predefinite.
4.10.3 13-04 Comparatori
I comparatori vengono utilizzati per confrontare variabili
continue (ad es. frequenza di uscita, corrente di uscita,
ingresso analogico ecc.) con valori fissi preimpostati.
Disegno 4.11

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BD023.10
Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
Inoltre vi sono dei valori digitali che saranno confrontati
con valori tempo fissi. Vedere la spiegazione in
13-10 Comparatore di operandi. I comparatori vengono
valutati ad ogni intervallo di scansione. Utilizzare
direttamente il risultato (TRUE o FALSE). Tutti i parametri in
questo gruppo di parametri sono parametri array con
l'indice da 0 a 5. Selez. l'indice 0 per programmare il
Comparatore 0, l'indice 1 per programmatore il
Comparatore 1 e così via.
13-10 Operando comparatore
Array [4]
Option: Funzione:
Selez. la variabile da monitorare con il
comparatore.
[0] * Disattivato Il comparatore è disattivato.
[1] Riferimento Il riferimento remoto derivante (non
locale) espresso in percentuale.
[2] Retroazione Retroazione in [Hz].
[3] Vel. motore Velocità motore in Hz.
[4] Corrente motore Corrente motore in [A].
[6] Potenza motore Potenza motore in [kW] o [hp].
[7] Tensione motore Tensione motore in [V].
[8] Tensione bus CC Tensione bus CC in [V].
[12] Ingr. anal. 53 Espresso come valore reale
[13] Ingr. anal. 60 Espresso come valore reale
[18] Ingr. impulsi 33 Espresso come valore reale
[20] Numero allarme Visualizza il numero dell'allarme.
[30] Contatore A Numero di impulsi.
[31] Contatore B Numero di impulsi.
4.10.4 13-2* Timer
Utilizzare i risultati del timer per definire un evento (13-51
Azione regol. SL) o un ingresso booleano in una regola
logica (13-40 Regola logica Booleana 1, 13-42 Regola logica
Booleana 2 o 13-44 Regola logica Booleana 3).
Trascorso il valore del timer, il timer passa dallo stato False
allo stato True.
4 4
13-20 Timer regolatore SLC
Array [3]
Range: Funzione:
0,0 s* [0,0-3600 s] Immettere il valore per def. la durata
dell'uscita False dal timer programmato. Un
timer è False solo se viene avviato da
un'azione e fino allo scadere del valore
impostato per il timer.
4.10.5 13-4* Regole logiche
Si possono combinare fino a tre ingr. booleani (ingressi
TRUE / FALSE) di timer, comparatori, ingr. digitali, bit di
stato ed eventi utilizzando gli operatori logici AND, OR e
NOT. Selezionare ingressi booleani per il calcolo in
13-40 Regola logica Booleana 1, 13-42 Regola logica
Booleana 2 e 13-44 Regola logica Booleana 3. Definire gli
operatori per combinare logicamente gli ingressi
selezionati in 13-41 Operatore regola logica 1 e
13-43 Operatore regola logica 2.
13-11 Operatore comparatore
Array [4]
Option: Funzione:
Selez. l'operatore da utilizzare nel
confronto.
[0] Minore di <
[1] * All'incirca
uguale a ≈
[2] Maggiore di > Logica inversa dell'opzione [0].
Il risultato della valutazione è True, se la
variabile selezionata in 13-10 Comparatore
di operandi è inferiore al valore fisso in
13-12 Valore comparatore. Il risultato è
False, se la variabile selezionata in 13-10
Comparatore di operandi è superiore al
valore fisso nel par. 13-12 Valore
comparatore.
Il risultato della valutazione è True, se la
variabile selezionata in 13-10 Comparatore
di operandi è pressoché uguale al valore
fisso in 13-12 Valore comparatore.
13-12 Valore comparatore
Array [4]
Range: Funzione:
0,0* [-9999-9999] Selezionare il 'livello di attivazione' per la
variabile monitorata da questo comparatore.
MG02C606 - VLT® è un marchio brevettato Danfoss 43
Disegno 4.12
Priorità di calcolo
I risultati di 13-40 Regola logica Booleana 1, 13-41 Operatore
regola logica 1 e 13-42 Regola logica Booleana 2 vengono
calcolati per primi. Il risultato (TRUE/FALSE) di questo
calcolo viene combinato con le impostazioni di
13-43 Operatore regola logica 2 e 13-44 Regola logica
Booleana 3, portando al risultato finale (TRUE/FALSE) dell'o-
perazione logica.
13-40 Regola logica Booleana 1
Array [4]
Option: Funzione:
Selez. il primo ingr. booleano per la
regola logica selezionata.

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
13-40 Regola logica Booleana 1
Array [4]
Option: Funzione:
[0] * False
[1] True
[2] In funzione
[3] Nel campo
44
[4] Riferimento on
[7] Fuori interv.di corr.
[8] Sotto I, bassa
[9] Sopra I, alta
[16] Termica Avviso
[17] Tens.rete f. campo La tensione di alimentazione non
[18] Inversione
[19] Avviso Un avviso è attivo.
[20] Allarme (scatto) È attivo un allarme (scatto).
[21] All.(scatto blocc.) È attivo un allarme (scatto bloccato).
[22] Comparatore 0 Utilizzare il risultato del comparatore 0
[23] Comparatore 1 Utilizzare il risultato del comparatore 1
[24] Comparatore 2 Utilizzare il risultato del comparatore 2
[25] Comparatore 3 Utilizzare il risultato del comparatore 3
[26] Reg. log. 0 Utilizzare il risultato della regola logica
[27] Reg. log. 1 Utilizzare il risultato della regola logica
[28] Reg. log. 2 Utilizzare il risultato della regola logica
[29] Reg. log. 3 Utilizzare il risultato della regola logica
[30] Timeout SL 0 Utilizzare il risultato del timer 0 nella
[31] Timeout SL 1 Utilizzare il risultato del timer 1 nella
[32] Timeout SL 2 Utilizzare il risultato del timer 2 nella
[33] Ingr. digitale_18 Utilizzare il valore di DI 18 nella regola
[34] Ingr. digitale_19 Utilizzare il valore di DI 19 nella regola
[35] Ingr. digitale_27 Utilizzare il valore di DI 27 nella regola
Inserisce False nella regola logica.
Inserisce True nella regola logica.
Selez. l'ingresso booleano 5-4* Relè [5]
per una descrizione.
Vedere il gruppo di parametri 5-4* Relè
[7] per una descrizione.
Vedere il gruppo di parametri 5-4* Relè
[8] per una descrizione.
Vedere il gruppo di parametri 5-4* Relè
[12] per una descrizione.
Vedere il gruppo di parametri 5-4* Relè
[13] per una descrizione.
Vedere il gruppo di parametri 5-4* Relè
[14] per una descrizione.
Vedere il gruppo di parametri 5-4* Relè
[21] per una descrizione.
rientra nel campo di tensione
specificato.
Vedere il gruppo di parametri 5-4* Relè
[25] per una descrizione.
nella regola logica.
nella regola logica.
nella regola logica.
nella regola logica.
0 nella regola logica.
1 nella regola logica.
2 nella regola logica.
3 nella regola logica.
regola logica.
regola logica.
regola logica.
logica.
logica.
logica.
13-40 Regola logica Booleana 1
Array [4]
Option: Funzione:
[36] Ingr. digitale_29 Utilizzare il valore di DI 29 nella regola
logica.
[38] Ingr. digitale_33 Utilizzare il valore di DI 33 nella regola
logica
[39] Comando
avviamento
[40] Conv. di freq. arr.
Questo evento è True se il convertitore
di frequenza viene avviato in qualsiasi
modo (ingresso digitale o altro).
Questo evento è True se il convertitore
di frequenza viene arrestato o lasciato
in evoluzione libera in qualsiasi modo
(ingresso digitale o altro).
13-41 Operatore regola logica 1
Array [4]
Option: Funzione:
Selez. il primo oper. logico da utilizzare negli
ingressi booleani dei par. 13-40 Regola logica
Booleana 1 e 13-42 Regola logica Booleana 2.
[0] * Disattivato
[1] And Valuta l'espressione [13-40] AND [13-42] .
[2] Or Valuta l'espressione [13-40] OR [13-42] .
[3] And not Valuta l'espressione [13-40] AND NOT [13-42] .
[4] Or not Valuta l'espressione [13-40] OR NOT [13-42].
[5] Not and Valuta l'espressione NOT [13-40] AND [13-42].
[6] Not or Valuta l'espressione NOT [13-40] OR [13-42].
[7] Not and not Valuta l'espressione NOT [13-40] AND NOT
[8] Not or not Valuta l'espressione NOT [13-40] OR NOT
Ignora 13-42 Regola logica Booleana 2, 13-43
Operatore regola logica 2 e 13-44 Regola logica
Booleana 3.
[13-42].
[13-42].
13-42 Regola logica Booleana 2
Array [4]
Option: Funzione:
Selez. il secondo ingr. booleano per la reg. logica
selezionata.
Vedere 13-40 Regola logica Booleana 1 per opzioni e
descrizioni.
13-43 Operatore regola logica 2
Array [4]
Option: Funzione:
Selezionare il secondo operatore logico da
usare su ingressi booleani calcolati in 13-40
Regola logica Booleana 1, 13-41 Operatore
regola logica 1, e 13-42 Regola logica Booleana
2 e l'ingresso booleano da 13-42 Regola logica
Booleana 2.
[0] * Disattivato
[1] And Valuta l'espressione [13-40/13-42] AND
Ignora 13-44 Regola logica Booleana 3.
[13-44].
44 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
13-43 Operatore regola logica 2
Array [4]
Option: Funzione:
[2] Or Valuta l'espressione [13-40/13-42] OR [13-44].
[3] And not Valuta l'espressione [13-40/13-42] AND NOT
[13-44].
[4] Or not Valuta l'espressione [13-40/13-42] OR NOT
[13-44].
[5] Not and Valuta l'espressione NOT [13-40/13-42] and
[13-44].
[6] Not or Valuta l'espressione NOT [13-40/13-42] OR
[13-44].
[7] Not and not Valuta l'espressione NOT [13-40/13-42] AND
NOT [13-44].
[8] Not or not Valuta l'espressione NOT [13-40/13-42] OR
NOT [13-44].
13-44 Regola logica Booleana 3
Array [4]
Option: Funzione:
Selez. il terzo ingr. booleano per la reg. logica
selezionata.
Vedere 13-40 Regola logica Booleana 1 per opzioni e
descrizioni.
4.10.6 13-5* Stati
13-51 Evento regol. SL
Array [20]
Option: Funzione:
Selez. l'ingresso booleano per def. l'evento controllore
logico.
Vedere 13-40 Regola logica Booleana 1 per opzioni e
descrizioni.
13-52 Azione regolatore SL
Array [20]
Option: Funzione:
[18] Selez. rampa 1 Seleziona la rampa 1
[19] Selez. rampa 2 Seleziona la rampa 2
[22] Funzionamento Invia un comando di avvio al conver-
titore di frequenza.
[23] Mar.in se.antior. Invia un comando di avvio marcia in
senso antiorario (inversa) al convertitore
di frequenza.
[24] Arresto Invia un comando di arresto al conver-
titore di frequenza.
[25] Arr. rapido Invia un comando di arresto rapido al
convertitore di frequenza.
[26] Dcstop Invia un comando di DC stop al conver-
titore di frequenza.
[27] Ruota libera Il convertitore di frequenza va immedia-
tamente in evoluzione libera. Tutti i
comandi di arresto, incluso il comando
di evoluzione libera, arrestano l'SLC.
[28] Blocco uscita Blocca la frequenza in uscita.
[29] StartTimer0 Avvia il timer 0.
[30] StartTimer1 Avvia il timer 1.
[31] StartTimer2 Avvia il timer 2.
[32] SetDO42Low Imp. usc.digit. 42 bassa.
[33] SetRelayLow Imposta il relè basso.
[38] SetDO42High Imposta l'uscita digitale 42 alta.
[39] SetRelayHigh Imposta il relè alto.
[60] ResetCounterA Azzera il contatore A.
[61] ResetCounterB Azzera il contatore B.
4 4
13-52 Azione regolatore SL
Array [20]
Option: Funzione:
Selez. l'azione corrispondente all'evento
SLC. Le azioni vengono eseguite se
l'evento corrispondente (13-51 Evento
regol. SL) è valutato come True.
[0] * Disattivato La funzione è disattivata.
[1] Nessun'azione Non viene eseguita alcuna azione.
[2] Selez. setup 1 Cambia il setup attivo al setup 1.
[3] Selez. setup 2 Cambia il setup attivo in Setup 2.
[10] Selez. rif. preimp.0 Seleziona il riferimento preimpostato 0
[11] Selez. rif. preimp.1 Seleziona il riferimento preimpostato 1.
[12] Selez. rif. preimp.2 Seleziona il riferimento preimpostato 2.
[13] Selez. rif. preimp.3 Seleziona il riferimento preimpostato 3.
[14] Selez. rif. preimp.4 Seleziona il riferimento preimpostato 4.
[15] Selez. rif. preimp.5 Seleziona il riferimento preimpostato 5.
[16] Selez. rif. preimp.6 Seleziona il riferimento preimpostato 6.
[17] Selez. rif. preimp.7 Seleziona il riferimento preimpostato 7.
MG02C606 - VLT® è un marchio brevettato Danfoss 45

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.11 Gruppo di parametri 14: Funzioni
speciali
4.11.1 14-** Funzioni speciali
Gruppo di parametri per la configurazione delle funzioni
speciali del convertitore di frequenza
44
4.11.2 14-0* Commut.inverter
14-01 Frequenza di commutazione
Option: Funzione:
Selezionare la frequenza di commutazione per
minimizzare il rumore acustico e la perdita di
potenza oppure per massimizzare il rendimento.
[0] 2 KHz
[1] * 4 KHz
[2] 8 KHz
[4] 16 KHz
NOTA!
Per convertitori di frequenza da 18,5 kW e 22 kW, l'opzione
[4] non è disponibile.
14-03 Sovramodulazione
Option: Funzione:
Questa funzione consente un controllo di velocità più
accurato in corrispondenza e oltre la velocità nominale
(50/60 Hz). Un altro vantaggio della sovramodulazione
è la capacità di mantenere una velocità costante anche
in caso di perdita di alimentazione.
[0] Off Disabilita la funzione di sovramodulazione per evitare
l'ondulazione di coppia nell'albero motore.
[1] * On Connette la funzione di sovramodulazione per ottenere
una tensione di uscita fino al 15% in più della tensione
di alimentazione.
14-20 Modo ripristino
Option: Funzione:
Seleziona la funzione di ripristino dopo lo
scatto. Dopo il ripristino, è possibile riavviare
il convertitore di frequenza.
[0] * Ripristino
manuale
[1] AutoReset 1 Esegue un ripristino automatico dopo lo
[2] AutoReset 2 Esegue due ripristini automatici dopo lo
[3] AutoReset 3 Esegue tre ripristini automatici dopo lo
[4] AutoReset 4 Esegue quattro ripristini automatici dopo lo
[5] AutoReset 5 Esegue cinque ripristini automatici dopo lo
[6] AutoReset 6 Esegue sei ripristini automatici dopo lo
[7] AutoReset 7 Esegue sette ripristini automatici dopo lo
[8] AutoReset 8 Esegue otto ripristini automatici dopo lo
[9] AutoReset 9 Esegue nove ripristini automatici dopo lo
[10] AutoReset10Esegue dieci ripristini automatici dopo lo
[11] AutoReset15Esegue quindici ripristini automatici dopo lo
[12] AutoReset20Esegue venti ripristini automatici dopo lo
[13] Ripr. autom.
infin.
[14] Ripristino
all'accens.
Eseguire il riprist. mediante [Reset] o ingressi
digitali.
scatto.
scatto.
scatto.
scatto.
scatto.
scatto.
scatto.
scatto.
scatto.
scatto.
scatto.
scatto.
Esegue un numero infinito di ripristini
automatici dopo lo scatto.
L'allarme scatto bloccato può essere
ripristinato all'accensione.
ATTENZIONE
Il motore può avviarsi senza avvisi.
4.11.3 14-1* Monitoraggio rete
14-21 Tempo di riavv. autom.
Questo gruppo di parametri fornisce le funzioni per gestire
lo sbilanciamento di rete.
14-12 Funz. durante sbilanciamento di rete
Option: Funzione:
Il funzion. in cond. di grave squilibrio di rete
riduce la durata del convertitore di frequenza.
Selezionare la funzione da utilizzare in caso di
grave sbilanciamento di rete.
[0] * Scatto Il convertitore di frequenza scatta.
[1] Avviso Il convertitore di frequenza emette un avviso.
[2] Disattivato Nessuna azione.
Parametri per configurare la gestione del ripristino
automatico, la gestione speciale degli scatti e l'autotest o
l'inizializzazione della scheda di controllo.
Range: Funzione:
10 s* [0-600 s] Impost. l'intervallo di tempo tra lo scatto e
l'avvio della funz. autom. di ripristino. Questo
parametro è attivo solo quando 14-20 Modo
ripristino è impost. su [1] - [13] Riprist. autom.
14-22 Modo di funzionamento
Option: Funzione:
Utilizzare questo parametro per specificare
il funzionamento normale o per inizializzare
tutti i parametri, ad eccezione dei par.
15-03 Accensioni, 15-04 Sovratemp. e 15-05
Sovratens.
[0] * Funzion.norm. Il convertitore di frequenza è in funzio-
namento normale.
46 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
14-22 Modo di funzionamento
Option: Funzione:
[2] Inizializzazione Ripristina tutti i parametri alle impostazioni
predefinite ad eccezione di 15-03
Accensioni, 15-04 Sovratemp. e 15-05
Sovratens. Il convertitore di frequenza
effettua un reset durante la successiva
accensione.
Anche 14-22 Modo di funzionamento
ripristina l'impostazione di fabbrica [0]
Funzion.norm.
14-26 Azione al guasto inverter
Option: Funzione:
[0] Scatto Se il convertitore di frequenza rileva una
sovratensione, scatterà immediatamente.
Guida alla Programmazione VLT® Micro Drive FC 51
NOTA!
Si raccomanda di non utilizzare [0] Scatto
nelle applicazioni di sollevamento.
[1] * Avviso Se il convertitore di frequenza rileva una
sovratensione, emetterà immediatamente un avviso.
Dopo il filtro di protezione, scatterà.
NOTA!
Si raccomanda di disattivare la modalità di
protezione nelle applicazioni di sollevamento.
4 4
14-41 Magnetizzazione minima AEO
Range: Funzione:
66%* [40-75%] Immettere la magnetizzazione minima
consentita per AEO. La selez. di un val. basso
riduce le perdite di energia nel motore ma
riduce anche la resist. alle variaz. improvvise
del carico.
MG02C606 - VLT® è un marchio brevettato Danfoss 47

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.12 Gruppo di parametri 15: Inform. conv.
4.12.1 15-3* Log guasti
freq.
Questo gruppo di parametri contiene un log guasti che
Gruppo di parametri che contiene informazioni su dati di
funzionamento, configurazione hardware, versione
software ecc.
15-00 Tempo di funzionam.
Range: Funzione:
44
0 giorni* [0-65535
giorni]
Visual. il numero di giorni in cui il
convertitore di frequenza è stato in
funzione.
Il valore viene salvato a ogni
spegnimento e non può essere
ripristinato.
15-01 Ore di esercizio
Range: Funzione:
0* [0- 2147483647] Visualizza le ore di esercizio del motore.
Il valore viene salvato allo spegnimento e
può essere ripristinato in 15-07 Ripristino
contatore ore di esercizio.
15-02 Contatore kWh
Range: Funzione:
0 [0-65535] Indica il consumo energetico in kWh come valore
medio in un'ora.
Ripristino del contatore in 15-06 Riprist. contat.
kWh.
15-03 Accensioni
Range: Funzione:
0 [0-2147483647] Visualizza il numero di accensioni del
convertitore di frequenza.
Non è possibile azzerare il contatore.
15-04 Sovratemp.
Range: Funzione:
0 [0-65535] Visualizza il numero di volte in cui il convertitore
di frequenza è scattato per sovratemperatura.
Non è possibile azzerare il contatore.
15-05 Sovratensioni
Range: Funzione:
0* [0-65535] Visualizza il numero di volte in cui il convertitore
di frequenza è scattato per sovratensione.
Non è possibile azzerare il contatore.
15-06 Riprist. contat. kWh
Option: Funzione:
[0] * Nessun reset Il contatore non viene ripristinato.
[1] Riprist. cont. Il contatore viene ripristinato.
mostra le cause degli ultimi dieci scatti.
15-30 Log guasti: Codice errore
Range: Funzione:
0 [0-255]
Visual. del codice errore e ricerca nella Guida alla
Progettazione VLT Micro MG02B.
4.12.2 15-4* Identif. conv. freq.
Parametri che contengono informazioni di sola lettura sulla
configurazione hardware e software del convertitore di
frequenza.
15-40 Tipo FC
Option: Funzione:
Visual. il tipo FC.
15-41 Sezione potenza
Option: Funzione:
Visualizza la sezione di potenza del convertitore di
frequenza.
15-42 Tensione
Option: Funzione:
Visualizza la tensione del convertitore di frequenza.
15-43 Versione software
Option: Funzione:
Visualizza la versione software del convertitore di
frequenza.
15-46 N. d’ordine convertitore di frequenza
Option: Funzione:
Visualizza il numero d'ordine per riordinare il convertitore di frequenza nella sua configurazione originale.
15-48 N. ID LCP
Option: Funzione:
Visual. il numero ID dell'LCP.
15-51 Numero seriale conv. di freq.
Option: Funzione:
Visualizza il numero seriale del convertitore di
frequenza.
15-07 Ripristino contatore ore di esercizio
Option: Funzione:
[0] * Nessun reset Il contatore non viene ripristinato.
[1] Riprist. cont. Il contatore viene ripristinato.
48 MG02C606 - VLT® è un marchio brevettato Danfoss

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
4.13 Gruppo di parametri 16:
Visualizzazione dati
16-00 Parola di controllo
Range: Funzione:
0* [0-65535] Indica l'ultima parola di controllo valida inviata
tramite la porta di comunicazione seriale al
convertitore di frequenza.
16-01 Riferimento [Unit]
Range: Funzione:
0,000* [-4999.000-4999.000] Visualizza il riferimento remoto
totale. Il riferimento totale è la
somma del riferimento impulsi,
analogico, preimpostato,
potenziometro LCP, bus locale e
riferimento congelato.
16-02 Riferimento %
Range: Funzione:
0,0* [-200.0-200.0%] Visualizza il riferimento remoto totale in
percentuale. Il riferimento totale è la
somma del riferimento impulsi, analogico,
preimpostato, potenziometro LCP, bus
locale e riferimento congelato.
16-03 Parola di stato
Range: Funzione:
0* [0-65535] Indica la parola di stato inviata tramite la porta di
comunicazione seriale al convertitore di
frequenza.
16-05 Val. reale princ %
Range: Funzione:
0,00* [-100.00-100.00%] Visual. la parola di due byte inviata
insieme alla par. di stato al bus master
che segnala il valore effettivo
principale.
16-09 Visual. personaliz.
Range: Funzione:
0,00* [0.00-9999.00%]
Visualizzazione personalizzata basata
sulle impostazioni di 0-31 Scala min.
della visual. definita dall'utente, 0-32 Scala
max. della visual. definita dall'utente e
4-14 Limite alto vel. motore
16-11 Potenza [hp]
Range: Funzione:
0 hp [0-99 hp ] Visualizza la potenza di uscita in hp.
16-12 Tensione motore
Range: Funzione:
0,0* [0,0-999,9 V] Visualizza la tensione della fase del motore.
16-13 Frequenza
Range: Funzione:
0,0 Hz* [0,0-400,0 Hz] Visualizza la frequenza di uscita in Hz.
16-14 Corrente motore
Range: Funzione:
0,00 A* [0,00-655 A] Visualizza la corrente della fase del
motore.
16-15 Frequenza [%]
Range: Funzione:
0,00* [-100.00-100.00%] Visual. una parola di due byte che
rappresenta la freq. effettiva del
motore come percentuale di 4-14 Lim.
alto vel. motore
16-18 Term. motore
Range: Funzione:
0%* [0-100%] Visual. il val. calcolato del carico termico sul
motore come percentuale del carico termico del
motore stimato.
4.13.2 16-3* Stato conv. freq.
16-30 Tensione bus CC
Range: Funzione:
0 V* [0-10000 V] Visualizza la tensione del bus CC.
16-34 Temp. dissip.
Range: Funzione:
0*
[0-255°C]
16-35 Termico inverter
Range: Funzione:
0%* [0-100%] Visualizza il carico termico calcolato sul conver-
Visualizza la temperatura del dissipatore del
convertitore di frequenza.
titore di frequenza in relazione al carico termico
stimato sul convertitore di frequenza.
4 4
4.13.1 16-1* Stato motore
16-10 Potenza [kW]
Range: Funzione:
0 kW* [0-99 kW] Visualizza la potenza di uscita in kW.
MG02C606 - VLT® è un marchio brevettato Danfoss 49
16-36 Corrente nom. inverter
Range: Funzione:
0,00 A* [0.01-655A] Mostra la corrente continuativa nominale
dell'inverter.
16-37 Corrente max inv.
Range: Funzione:
0,00 A* [0.1-655A] Mostra la corrente intermittente massima
dell'inverter (150%).

Descrizione dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
16-38 Condiz. regol. SL
Range: Funzione:
0* [0-255] Visualizza il numero di stati SLC attivi.
4.13.3 16-5* Rif. e retroaz.
16-50 Riferimento esterno
16-68 Ingr. impulsi
Range: Funzione:
20 Hz* [20-5000 Hz] Visualizza la frequenza di ingresso sul
morsetto dell'ingresso a impulsi.
16-71 Uscita relè [bin]
Range: Funzione:
0* [0-1] Visualizza l'impostazione del relè.
Range: Funzione:
44
0,0%* [-200.0-200.0%] Visualizza la somma percentuale di tutti
i riferimenti esterni.
16-51 Rif. impulsi
Range: Funzione:
0,0 %* [-200.0-200.0%] Visualizza l'ingresso impulsi effettivo
convertito in un riferimento
percentuale.
16-52 Retroazione
16-72 Contatore A
Range: Funzione:
0* [-32768-32767] Visual. il valore corrente del contatore A.
16-73 Contatore B
Range: Funzione:
0* [-32768-32767] Visual. il valore corrente del Contatore B.
4.13.5 16-8* Porta FC
Range: Funzione:
0,000* [-4999.000-4999.000] Visualizza la retroazione analogica
o impulsi in Hz.
Parametro per visualizzare i riferimenti dalla porta FC.
16-86 RIF 1 porta FC
Range: Funzione:
4.13.4 16-6* Ingressi e uscite
0* [0x8000-0x7FFF] Visualizza il riferimento corrente ricevuto
dalla porta FC.
16-60 Ingresso digitale 18, 19, 27, 33
Range: Funzione:
0* [0-1111] Visualizza gli stati del segnale dagli ingr. digitali
attivi.
16-61 Ingr. digitale 29
Range: Funzione:
0* [0-1] Visualizza lo stato del segnale sull'ingresso digitale 29.
16-62 Ingr. analog. 53 (V)
Range: Funzione:
0,00* [0,00-10,00 V] Visualizza la tensione di ingresso sul
morsetto dell'ingresso analogico.
16-63 Ingr. analog. 53 (A)
Range: Funzione:
0,00* [0,00-20,00 mA] Visualizza la corrente di ingresso sul
morsetto di ingresso analogico.
4.13.6 16-9* Visualizz. diagn.
16-90 Parola d'allarme
Range: Funzione:
0* [0-0xFFFFFFFF] Visual. la par. di all. inviata tramite porta di
comunicaz. seriale in codice esad.
16-92 Parola di avviso
Range: Funzione:
0* [0-0xFFFFFFFF] Visual. la parola di avviso inviata tramite
porta di comunicaz. ser. in codice esad.
16-94 Parola di stato estesa
Range: Funzione:
0* [0-0xFFFFFFFF] Visual. la parola di avviso estesa inviata
tramite porta di comunicaz. ser. in codice
esad.
16-64 Ingresso analogico 60
Range: Funzione:
0,00* [0,00-20,00 mA] Visual. il valore effettivo sull'ingresso 60
come riferimento o valore limite.
16-65 Uscita analogica 42 [mA]
Range: Funzione:
0,00 mA* [0,00-20,00 mA] Visualizza la corrente di uscita
sull'uscita analogica 42.
50 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
5 Elenchi dei parametri
0-** Funzionam./display
0-0/ Impost. di base
0-03 Impostazioni locali
*[0] Internazionale
[1] US
0-04 Stato di funz. all'accens.
(manuale)
[0] Prosegui
[1] Arr. obbl., rif.=vecc.
[2] Arresto forzato, re=0
0-1* Gestione del setup
0-10 Setup attivo
*[1] Setup 1
[2] Setup 2
[9] Multi setup
0-11 Setup di modifica
*[1] Setup 1
[2] Setup 2
[9] Setup attivo
0-12 Collega setup
[0] Non collegato
*[20] Collegato
0-31 Scala min. della visual.
definita dall'utente
0,00 – 9999,00
*0,00
0-32 Scala max. della visual.
definita dall'utente
0,00–9999,00
*100,0
0-4* Tastierino LCP
0-40 Tasto [Hand on] sull'LCP
[0] Disattivato
*[1] Attivato
0-41 Tasto [Off / Reset] sull'LCP
[0] Disabilita tutti
*[1] Abilita tutti
[2] Abilita solo reset
0-42 Tasto [Auto on] sull'LCP
[0] Disattivato
*[1] Abilitato
0-5* Copia/Salva
0-50 Copia LCP
*[0] Nessuna copia
[1] Tutto all'LCP
[2] Tutto dall'LCP
[3] Dimens. indip. da LCP
0-51 Copia setup
*[0] Nessuna copia
[1] Copia dal setup 1
[2] Copia dal setup 2
[9] Copia dal setup di fabbrica
0-6* Password
0-60 Passw. menu princ.
0-999 *0
0-61 Accesso menu principale/
rapido senza password
*[0] Accesso completo
[1] LCP: Sola lettura
[2] LCP: Nessun accesso
1-** Carico/Motore
1-0* Impostazioni generali
1-00 Modalità di configurazione
*[0] Anello aperto vel.
[3] Processo
1-01 Principio controllo motore
[0] U/f
*[1] VVC
1-03 Caratteristica della coppia
*[0] Coppia costante
[2] Ottim. automatica dell'energia
1-05 Configurazione modo locale
[0] Anello aperto vel.
*[2] Come config. nel par. 1-00
1-2* Dati motore
1-20 Potenza del motore [kW]
[HP]
[1] 0,09 kW/0,12 HP
[2] 0,12 kW/0,16 HP
[3] 0,18 kW/0,25 HP
[4] 0,25 kW/0,33 HP
[5] 0,37 kW/0,50 HP
[6] 0,55 kW/0,75 HP
[7] 0,75 kW/1,00 HP
[8] 1,10 kW/1,50 HP
[9] 1,50 kW/2,00 HP
[10] 2,20 kW/3,00 HP
[11] 3,00 kW/4,00 HP
[12] 3,70 kW/5,00 HP
[13] 4,00 kW/5,40 HP
[14] 5,50 kW/7,50 HP
[15] 7,50 kW/10,00 HP
[16] 11,00 kW/15,00 HP
[17] 15,00 kW/20,00 HP
[18] 18,50 kW/25,00 HP
[19] 22,00 kW/29,50 HP
[20] 30,00 kW/40,00 HP
1-22 Tensione motore
50-999 V * 230-400 V
Guida alla Programmazione VLT® Micro Drive FC 51
Prospetto dei parametri
1-23 Frequenza motore
20-400 Hz *50 Hz
1-24 Corrente motore
0,01-100,00 A *In funz. del tipo di
motore
1-25 Vel. nominale motore
100-9999 giri/minuto * In funz.
del tipo di motore
1-29 Adattamento automatico
motore (AMT)
*[0] Off
[2] Abilita AMT
1-3* Dati motore avanz.
1-30 Resist. statore (Rs)
[Ohm] * in funz. dei dati motore
1-33 Reatt. dispers. statore (X1)
[Ohm] * in funz. dei dati motore
plus
1-35 Reattanza principale (Xh)
[Ohm] * in funz. dei dati motore
1-5* Impos.indip. carico
1-50 Magnetizz. motore a vel.
nulla
0-300% *100%
1-52 Vel. minima magnetizz.
norm. [Hz]
0,0 - 10,0 Hz * 0,0 Hz
1-55 Caratteristica U/f - U
0 - 999,9 V
1-56 Caratteristica U/f - F
0-400 Hz
1-6* Imp. dipend. dal car.
1-60 Compensaz. del carico a
bassa vel.
0 - 199% Compensaz. del carico
ad alta vel. *100%
1-61 Compensaz. del carico ad
alta vel.
0-199% *100%
1-62 Compens. scorrimento
-400-399% *100%
1-63 Costante di tempo compens.
scorrim.
0,05-5,00 s *0.10 s
1-7* Regolaz. per avvio
1-71 Ritardo all'avviamento
0,0-10,0 s * 0,0 s
1-72 Funzione di avviamento
[0] Corr. CC / t. ritardo
[1] Fren. CC/t. ritardo
*[2] Ev. libera/t. ritardo
1-73 Riaggancio al volo
*[0] Disattivato
[1] Attivato
1-8* Adattam. arresto
1-80 Funzione all'arresto
*[0] Ruota libera
[1] Manten. CC
1-82 V. min. funz. all'arr. [Hz]
0,0-20,0 Hz *0,0 Hz
1-9* Temperatura motore
1-90 Protezione termica del
motore
*[0] Nessuna protezione
[1] Avviso termistore
[2] Scatto termistore
[3] Avviso ETR
[4] Scatto ETR
1-93 Risorsa termistore
*[0] Nessuno
[1] Ingr. analog. 53
[6] Ingr. digitale 29
2-** Freni
2-0* Freno CC
2-00 Corr. di mantenim. CC
0-150% *50%
2-01 Corrente di frenatura CC
0-150% *50%
2-02 Tempo di frenatura CC
0,0-60,0 s *10,0 s
2-04 Velocità inserimento
frenatura CC
0,0-400,0 Hz * 0,0 Hz
2-1* Funz. energia freno
2-10 Funzione freno
*[0] Off
[1] Freno reostatico
[2] Freno CA
2-11 Resistenza di frenatura
(ohm)
5-5000 *5
2-16 Freno CA, corrente max.
0-150% *100%
2-17 Controllo sovratensione
*[0] Disattivato
[1] Abilitato (non in stop)
[2] Abilitato
2-2* Freno meccanico
2-20 Corrente rilascio freno
0,00-100,0 A *0,00 A
5 5
Tabella 5.1
MG02C606 - VLT® è un marchio brevettato Danfoss 51

Elenchi dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
2-22 Velocità di attivazione del
freno [Hz]
0,0-400,0 Hz * 0,0 Hz
3-** Riferimenti / Rampe
3-0* Limiti di riferimento
3-00 Intervallo di rif.
*[0] Da min. a max.
[1] Da -Max a +Max
3-02 Riferimento minimo
-4999-4999 *0,000
3-03 Riferimento massimo
-4999-4999 *50,00
55
3-1* Riferimenti
3-10 Riferim. preimp.
-100,0-100,0% *0,00%
3-11 Velocità jog [Hz]
0,0-400,0 Hz *5,0 Hz
3-12 Valore di catch up/slow
down
0,00-100,0% *0,00%
3-14 Rif. relativo preimpostato
-100,0-100,0% *0,00%
3-15 Risorsa di rif. 1
[0] Nessuna funz.
*[1] Ingr. analog. 53
[2] Ingr. analog. 60
[8] Ingr. impulsi 33
[11] Rif. bus locale
[21] Potenziometro LCP
3-16 Risorsa riferimento 2
[0] Nessuna funz.
[1] Ingr. analog. 53
*[2] Ingr. analog. 60
[8] Ingr. impulsi 33
*[11] Rif. bus locale
[21] Potenziometro LCP
3-17 Risorsa di riferimento 3
[0] Nessuna funz.
[1] Ingr. analog. 53
[2] Ingr. analog. 60
[8] Ingr. impulsi 33
*[11] Rif. bus locale
[21] Potenziometro LCP
3-18 Fonte del rif. in scala
relativa
*[0] Nessuna funz.
[1] Ingr. analog. 53
[2] Ingr. analog. 60
[8] Ingr. impulsi 33
[11] Rif. bus locale
[21] Potenziometro LCP
3-4* Rampa 1
1)
Solo M4 e M5
3-40 Rampa tipo 1
*[0] Lineare [2] Rampa Sine2
3-41 Rampa 1 tempo di accel.
0,05-3600 s *3,00 s (10,00 s1))
3-42 Rampa 1 tempo di decel.
0,05-3600 s *3,00 s (10,00 s 1))
3-5* Rampa 2
3-50 Rampa tipo 2
*[0] Lineare
[2] Rampa Sine2
3-51 Rampa 2 tempo di accel.
0,05-3600 s *3,00 s (10,00 s 1))
3-52 Rampa 2 Tempo rampa di
decel.
0,05-3600 s *3,00 s (10,00 s1))
3-8* Altre rampe
3-80 Tempo di rampa jog
0,05-3600 s *3,00 s (10,00 s1))
3-81 Tempo rampa arr. rapido
0,05-3600 s *3,00 s(10,00 s1))
4-** Limiti/Avvisi
4-1* Limiti motore
4-10 Direzione velocità motore
[0] Senso orario se il par. 1-00 è
impostato su [3]
[1] Senso antiorario
*[2] Entrambi se il par. 1-00 è
impostato su [0]
4-12 Lim. basso vel. motore [Hz]
0,0-400,0 Hz * 0,0 Hz
4-14 Limite alto velocità motore
[Hz]
0,1-400,0 Hz *65,0 Hz
4-16 Lim. di coppia in modo
motore
0-400% *150%
4-17 Lim. di coppia in modo
generatore
0-400% *100%
4-4* Adattam. avvisi 2
4-40 Avviso frequenza bassa
0,00-valore di 4-41 Hz *0,0 Hz
4-41 Avviso frequenza alta
Valore di 4-40-400,0 Hz *400,0 Hz
4-5* Adattam. avvisi
4-50 Avviso corrente bassa
0,00-100,00 A *0,00 A
4-51 Avviso corrente alta
0,00-100,00 A *100,00 A
4-54 Avviso rif. basso
-4999,000-Valore di 4-55
*-4999,000
4-55 Avviso riferimento alto
Valore di 4-54-4999,000
*4999,000
4-56 Avviso retroazione bassa
-4999.000-Valore di 4-57
*-4999,000
4-57 Avviso retroazione alta
Valore di 4-56-4999,000
*4999,000
4-58 Funzione fase motore
mancante
[0] Off
*[1] On
4-6* Bypass velocità
4-61 Bypass velocità da [Hz]
0,0-400,0 Hz * 0,0 Hz
4-63 Bypass velocità a [Hz]
0,0-400,0 Hz * 0.0 Hz
5-1* Ingressi digitali
5-10 Ingr. digitale morsetto 18
[0] Nessuna funz.
[1] Ripristino
[2] Evol. libera neg.
[3] Ruota lib. e ripr. inv.
[4] Arr. rapido (negato)
[5] Freno CC neg.
[6] Stop (negato)
*[8] Avviamento
[9] Avviamento su impulso
[10] Inversione
[11] Avv. inversione
[12] Abilitaz.+avviam.
[13] Abilitaz.+inversione
[14] Jog
[16-18] Rif. preimp. bit 0-2
[19] Riferimento congelato
[20] Blocco uscita
[21] Accelerazione
[22] Speed down
[23] Selez. setup bit 0
[28] Catch up
[29] Slow down
[34] Rampa bit 0
[60] Cont. A (increm.)
[61] Cont. A (decrem.)
[62] Ripristino cont. A
[63] Cont. B (increm.)
[64] Cont. B (decrem.)
[65] Contatore ripristino B
5-11 Ingr. digitale morsetto 19
Vedere il par. 5-10. * [10]
Inversione
5-12 Ingr. digitale morsetto 27
Vedere il par. 5-10. * [1]
Ripristino
5-13 Ingr. digitale morsetto 29
Vedere il par. 5-10. * [14] Jog
5-15 Ingr. digitale morsetto 33
Vedere il par. 5-10 * [16] Rif.
preimp. bit 0
[26] Arresto di precisione
[27] Start, Stop prec.
[32] Ingresso digitale
5-3* Uscite digitali
5-34 Ritardo att., uscita digitale
morsetto 42
0,00-600,00 s *0,01 s
5-35 Ritardo disatt., uscita
digitale morsetto 42
0,00-600,00 s *0,01 s
5-4* Relè
5-40 Funzione relè
*[0] N. funzione
[1] Contr. pronto
[2] Conv. freq. pronto
[3] Conv. freq. pr. / rem.
[4] Pronto/n.avviso
[5] Marcia conv.
[6] In marcia/no avviso
[7] Mar.in range/n. avv.
[8] Mar.in rang/n. avv.
[9] Allarme
[10] Allarme o avviso
[12] Fuori interv.di corr.
[13] Sotto corrente, bassa
[14] Sopra corrente, alta
[16] Sotto freq., basso
[17] Sopra frequenza, alta
[19] Sotto retroaz. bassa
[20] Sopra retroaz. alta
[21] Avviso termico
[22] Pronto, n. avv. term.
[23] Rem. pronto, n. avviso
termico
[24] Pronto, tens. OK
[25] Inversione
[26] Bus ok
[28] Freno, ness. avv.
[29] Fr.pronto/no gu.
[30] Guasto freno (IGBT)
[32] Controllo freno mecc.
[36] Bit 11 par. di contr.
[41] Sotto rif., basso
[42] Sopra riferimento, alto
[51] Rif. locale attivo
[52] Rif. remoto attivo
[53] Nessun allarme
Tabella 5.2
52 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
[54] Com. di avv. attivo
[55] Inversione attiva
[56] Conv.freq.modal. man.
[57] Funzionamento in modalità
Automatico [60-63] Comparatore
0-3
[70-73] Regola logica 0-3
[81] Uscita digitale SL B
5-41 Ritardo attiv., relè
0,00-600,00 s *0,01 s
5-42 Ritardo disatt., relè
0,00-600,00 s *0,01 s
5-5* Ingr. impulsi
5-55 Frequenza bassa morsetto
33
20-4999 Hz * 20 Hz
5-56 Frequenza alta mors. 33
21-5000 Hz *5000 Hz
5-57 Valore rif./retroaz. basso
morsetto 33
-4999-4999 *0,000
5-58 Valore rif./retroaz. alto
morsetto 33
-4999-4999 *50,000
6-** I/O analogici
6-0* Mod. I/O analogici
6-00 Tempo timeout tensione
zero
1-99 s *10 s
6-01 Funz. temporizz. tensione
zero
*[0] Off
[1] Blocco uscita
[2] Arresto
[3] Marcia Jog
[4] Vel. max.
[5] Arresto e scatto
6-1* Ingresso analogico 1
6-10 Tens. barra morsetto 53
0,00-9,99 V *0,07 V
6-11 Tensione alta morsetto 53
0,01-10,00 V *10,00 V
6-12 Corrente bassa morsetto 53
0,00-19,99 mA *0,14 mA
6-13 Corrente alta morsetto 53
0,01-20,00 mA *20,00 mA
6-14 Valore rif./retroaz. basso
morsetto 53
-4999-4999 *0,000
6-15 Valore rif./retroaz. alto
morsetto 53
-4999-4999 *50,000
6-16 Tempo cost. filtro morsetto
53
0,01-10,00 s *0,01 s
6-19 Modalità morsetto 53
*[0] Modo tensione
[1] Modo corrente
6-2* Ingr. analog. 2
6-22 Corrente bassa mors. 60
0,00-19,99 mA *0,14 mA
6-23 Corr. alta morsetto 60
0,01-20,00 mA *20,00 mA
6-24 Valore rif./retroaz. basso
morsetto 60
-4999-4999 *0.000
6-25 Valore rif./retroaz. alto
morsetto 60
-4999-4999 *50,00
6-26 Tempo cost. filtro morsetto
60
0,01-10,00 s *0,01 s
6-8* Potenziometro LCP
6-80 Abilitazione potenziom. LCP
[0] Disattivato
[1] * Abilita
6-81 Potenziom. LCP riferimento
basso
-4999-4999 *0,000
6-82 Potenziom. LCP riferimento
alto
-4999-4999 *50,00
6-9* Uscita analogica xx
6-90 Mod. morsetto 42
*[0] 0-20 mA
[1] 4-20 mA
[2] Uscita digitale
6-91 Uscita analogica morsetto
42
*[0] N. funzione
[10] Frequenza di uscita
[11] Riferimento
[12] Retroazione
[13] Corrente motore
[16] Potenza
[20] Riferimento bus
6-92 Uscita digitale morsetto 42
Vedere il par. 5-40
*[0] Nessuna funzione
[80] Uscita digitale SL A
6-93 Mors. 42, usc. scala min.
0,00-200,0%
*0,00%
6-94 Mors. 42 usc. scala max.
0,00-200,0% *100,0%
7-** Controllori
7-2* Retroaz. reg. processo
7-20 Risorsa retroazione 1 CL
processo
*[0] Nessuna funzione
[1] Ingr. analog. 53
[2] Ingr. analog. 60
[8] Ingr. impulsi 33
[11] Rif. bus locale
7-3* PI di processo
Contr. 7-30 PI proc., contr. n./inv.
*[0] Coppia
[1] Inverso
7-31 Anti saturazione regolatore
PI
[0] Disabilita
*[1] Abilita
7-32 Process PI Start Speed
0,0-200,0 Hz *0,0 Hz
7-33 Guadagno proporzionale PI
di processo
0,00-10, 00 *0,01
7-34 Tempo d'integrazione PI di
processo
0,10-9999 s *9999 s
7-38 Fattore di feed forward PI di
processo
0-400% *0%
7-39 Ampiezza di banda
riferimento On
0-200% *5%
8-** Com. e opzioni
8-0* Impostazioni generali
8-01 Sito di comando
*[0] Morsett.&par.com.
[1] Solo digitale
[2] Solo parola di com.
8-02 Fonte parola di controllo
[0] Nessuno
*[1] FC RS485
8-03 Temporizzazione parola di
controllo
0,1-6500 s *1,0 s
8-04 Funzione temporizz. parola
di controllo
*[0] Off
[1] Blocco uscita
[2] Arresto
[3] Marcia Jog
[4] Vel. Velocità
[5] Arresto e scatto
8-06 Riprist. tempor. parola di
contr.
*[0] Nessuna funzione
[1] Riprist.
8-3* Impostaz. porta FC
8-30 Protocollo
*[0] FC
[2] Modbus
8-31 Indirizzo
1-247 *1
8-32 Baud rate porta FC
[0] 2400 Baud
[1] 4800 Baud
*[2] 9600 baud quando si sceglie
FC bus in 8-30
* [3] 19200 baud quando si
sceglie FC bus in 8-30
*[4] 38400 baud
8-33 Parità porta FC
*[0] Par. pari, 1 bit di stop
[1] Par. disp., 1 bit di stop
[2] N. par., 1 bit di stop
[3] Nessuna parità, 2 bit di stop
8-35 Ritardo minimo risposta
0,001-0,5 *0,010 s
8-36 Ritardo max. risposta
0,100-10,00 s *5,000 s
8-4* Set protocollo MC FC
8-43 Config. lettura PCD porta FC
*[0] Nessun limite di espressione
[1] [1500] Ore di funzionamento
[2] [1501] Ore esercizio
[3] [1502] Contatore kWh
[4] [1600] Parola di controllo
[5] [1601] Riferimento [Unit]
[6] [1602] Riferimento %
[7] [1603] Par. di stato
[8] [1605] Val. reale princ. [%]
[9] [1609] Visual. personaliz.
[10] [1610] Potenza [kW]
[11] [1611] Potenza [hp]
[12] [1612] Tensione motore
[13] [1613] Frequenza
[14] [1614] Corrente motore
[15] [1615] Frequenza [%]
[16] [1618] Term. motore
[17] [1630] Tensione bus CC
[18] [1634] Temp. dissip.
[19] [1635] Termico inverter
[20] [1638] Condiz. regol. SL
[21] [1650] Riferimento esterno
[22] [1651] Rif. impulsi
[23] [1652] Retroazione [Unit]
[24] [1660] Ingr. digitale
18,19,27,33
[25] [1661] Ingr. digitale 29
[26] [1662] Ingresso analogico
53(V)
[27] [1663] Ingresso analogico
53(mA)
[28] [1664] Ingr. analog. 60
[29] [1665] Uscita analog. 42
[mA]
[30] [1668] Ingr. freq. 33 [Hz]
[31] [1671] Uscita relè [bin]
[32] [1672] Contatore A
[33] [1673] Contatore[34] [1690]
Parola di allarme
[34] [1690] Parola di allarme
[35] [1692] Parola di avviso
5 5
Tabella 5.3
MG02C606 - VLT® è un marchio brevettato Danfoss 53

Elenchi dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
[36] [1694] Parola di stato est.
8-5* Digitale/Bus
8-50 Selezione rotazione libera
[0] Ingr. digitale
[1] Bus
[2] LogicaAnd
*[3] Logica Or
8-51 Selez. arresto rapido
Vedere il par. 8-50 * [3] Logica Or
8-52 Selez. freno CC
Vedere il par. 8-50 * [3] Logica Or
8-53 Selez. avvio
55
Vedere il par. 8-50 * [3] Logica Or
8-54 Selez. inversione
Vedere il par. 8-50 * [3] Logica Or
8-55 Selez. setup
Vedere il par. 8-50 * [3] Logica Or
8-56 Selezione rif. preimpostato
Vedere par. 8-50 * [3] Logica Or
8-8X Diagnostica comunicazione
bus
8-80 Conteggio messaggi bus
0-0 N/A *0 N/A
8-81 Conteggio errori bus
0-0 N/A *0 N/A
8-82 Conteggio messaggi slave
0-0 N/A *0 N/A
8-83 Conteggio errori slave
0-0 N/A *0 N/A
8-9* Bus Jog / Retroazione
8-94 Bus retroazione 1
0x8000-0x7FFF *0
13-** Smart Logic
13-0* Impostazioni SLC
13-00 Modo regol. SL
*[0] Off
[1] On
13-01 Evento avviamento
[0] False
[1] True
[2] In funzione
[3] Nel campo
[4] Riferimento on
[7] Fuori dall'interv. di corrente
[8] Sotto I, bassa
[9] Sopra I, alta
[16] Termica Avviso
[17] Tens.rete f. campo
[18] Inversione
[19] Avviso
[20] Allarme (scatto)
[21] Alarm_TripLock
[22-25] Comparatore 0-3
[26-29] Regola logica 0-3
[33] Ingr. digitale_18
[34] Ingr. digitale_19
[35] Ingr. digitale_27
[36] Ingr. digitale_29
[38] Ingr. digitale_33
*[39] Comando avviamento
[40] Conv. di freq. arrestato
13-02 Evento arresto
See par. 13-01 * [40] Conv. di
freq. arrestato
13-03 Ripristino SLC
*[0] Nessun ripristino
[1] Ripristino SLC
13-1* Comparatori
13-10 Comparatore di operandi
*[0] Disattivato
[1] Riferimento
[2] Retroazione
[3] Vel. motore
[4] Corrente motore
[6] Potenza motore
[7] Tensione motore
[8] Tensione bus CC
[12] Ingr. anal. 53
[13] Ingr. anal. 60
[18] Ingr. impulsi 33
[20] Numero allarme
[30] Contatore A
[31] Contatore B
13-11 Comparatore di operandi
[0] Minore di
*[1] All'incirca uguale a
[2] Maggiore di
13-12 Valore comparatore
-9999-9999 *0,0
13-2* Timer
13-20 Timer regolatore SL
0,0-3600 s *0,0 s
13-4* Regole logiche
13-40 Regola logica Booleana 1
Ved. il par. 13-01 * [0] Falso
[30]-[32] Temporizzazione SL 0-2
13-41 Operatore regola logica 1
*[0] Disattivato
[1] And
[2] Or
[3] And not
[4] Or not
[5] Not and
[6] Not or
[7] Not and not
[8] Not or not
13-42 Regola logica Booleana 2
Vedere il par. 13-40
13-43 Operatore regola logica 2
Vedere il par. 13-41 * [0] Disabilitato
13-44 Regola logica Booleana 3
Vedere par. 13-40
13-5* Stati
13-51 Evento regol. SL
Vedere il par. 13-40
13-52 Azione regol. SL
*[0] Disattivato
[1] Nessun'azione
[2] Selez. setup 1
[3] Selez. setup 2
[10-17] Selez. rif. preselez. 0-7
[18] Selez. rampa 1
[19] Selez. rampa 2
[22] Funzionamento
[23] Mar.in se.antior.
[24] Arresto
[25] Arr. rapido
[26] Dcstop
[27] Ruota libera
[28] Blocco uscita
[29] StartTimer0
[30] StartTimer1
[31] Avvio timer 2
Imp. usc. dig. B alta
[32] Imp. usc. dig. A bassa
[33] Imp. usc. dig. B bassa
[38] Imp. usc. dig. A alta
[39] Imp. usc. dig. B alta
[60] ResetCounterA
[61] ResetCounterB
14-** Funzioni speciali
14-0*Commutazione dell'inverter
14-01 Frequenza di
commutazione
[0] 2 kHz
*[1] 4 kHz
[2] 8 kHz
[4] 16 kHz non disponibile per
M5
14-03 Sovramodulazione
[0] Off
*[1] On
14-1* Monitoraggio di rete
14-12 Funz. durante sbilanciamento di rete
*[0] Scatto
[1] Avviso
[2] Disabilitato
14-2* Ripristino scatto
14-20 Modalità di ripristino
*[0] Ripristino manuale
[1-9] AutoReset 1-9
[10] AutoReset 10
[11] AutoReset 15
[12] AutoReset 20
[13] Ripr. autom. infin.
[14] Ripristino all'accensione
14-21 Tempo di riavv. autom.
0-600 s * 10 s
14-22 Modo di funzionamento
* [0] Funzion.norm.
[2] Inizializzazione
14-26 Azione al guasto inverter
*[0] Scatto
[1] Avviso
14-4* Ottimizzazione dell'energia
14-41 Magnetizzazione minima
AEO
40-75% *66%
15-** Inform. conv. freq. 15-0*
Dati di funzionam.
15-00 Giorni di funzionam.
15-01 Ore di funzionam.
15-02 Contatore kWh
15-03 Accensioni
15-04 Sovratemp.
15-05 Sovratensioni
15-06 Riprist. contat. kWh
*[0] Nessun ripristino
[1] Ripristino contatore
15-07 Ripristino contatore ore di
esercizio
*[0] Nessun ripristino
[1] Ripristino cont.
15-3* Log guasti
15-30 Log guasti: Codice errore
15-4* Identificazione del conv. di
freq.
15-40 Tipo FC
15-41 Sezione di potenza
15-42 Tensione
15-43 Versione software
15-46 N. d'ordine convertitore di
frequenza
15-48 N. ID LCP
Tabella 5.4
54 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
Guida alla Programmazione VLT® Micro Drive FC 51
15-51 N. di serie convertitore di
frequenza
16-** Visualizz. dati
16-0* Stato generale
16-00 Parola di controllo
0-0XFFFF
16-01 Riferimento [Unit]
-4999-4999
16-02 Riferimento %
-200,0-200,0 %
16-03 Par. di stato
0-0XFFFF
16-05 Val. reale princ. [%]
-200,0-200,0 %
16-09 Visual. personaliz.
In funz. del par. 0-31, 0-32 e 4-14
Tabella 5.5
Indice di conversione
5.1.1
16-1* Stato motore
16-10 Potenza [kW]
16-11 Potenza [hp]
16-12 Tensione motore [V]
16-13 Frequenza [Hz]
16-14 Corrente motore [A]
16-15 Frequenza [%]
16-18 Term. motore [%]
16-3* Stato conv. freq.
16-30 Tensione bus CC
16-34 Temp. dissip.
16-35 Termico inverter
16-36 Corrente nom. inv.
16-37 Corrente max. inv.
16-38 Condiz. regol. SL
16-5* Rif. / retroaz.
I vari attributi di ciascun parametro sono visualizzati nella
sezione Impostazioni di fabbrica. I valori parametrici
vengono trasferiti solo come numeri interi. Pertanto i
fattori di conversione sono utilizzati per trasmettere i
codici decimali secondo Tabella 5.6.
16-50 Riferimento esterno
16-51 Rif. impulsi
16-52 Retroazione [Unit]
16-6* Ingressi/uscite
16-60 Ingresso digitale
18,19,27,33
0-1111
16-61 Ingresso digitale 29
0 - 1
16-62 Ingr. analog. 53 (volt)
16-63 Ingr. analog. 53 (corrente)
16-64 Ingr. analog. 60
16-65 Uscita analog. 42
[mA]16-68 Ingr. impulsi [Hz]
16-71 Uscita relè [bin]
16-72 Contatore A
16-73 Contatore B
Cambio durante il funzionamento
5.1.2
16-8* Fieldbus / porta FC 16-86
RIF 1 porta FC0x8000-0x7FFFF
16-9* Visualizz. diagn.
16-90 Parola di allarme
0-0XFFFFFFFF
16-92 Parola di avviso
0-0XFFFFFFFF
16-94 Parola di stato estesa
0-0XFFFFFFFF
18-** Dati motore estesi
18-8* Resistori motore
18-80 Resist. statore (alta
risoluzione)
0.000-99,990 ohm *0.000 ohm
18-81 Reatt. dispers. statore (alra
risoluzione)
0.000-99,990 ohm *0.000 ohm
”TRUE” significa che il parametro può essere modificato
mentre il convertitore di frequenza è in funzione, mentre
"FALSE" significa che il convertitore di frequenza deve
essere arrestato prima che possa essere effettuata una
modifica.
5 5
Esempio:
1-24 Corrente motore possiede un indice di conversione di
-2 (cioè un fattore di conversione di 0,01 secondo
Tabella 5.6). Per impostare il parametro a 2,25 A, trasferire
il valore 225 tramite Modbus. Il fattore di conversione di
0,01 significa che il valore trasmesso è moltiplicato per 0,1
nel convertitore di frequenza. Il valore 225 trasferito sul
bus viene quindi percepito come 2,25 A nel convertitore di
frequenza.
Indice di conversione Fattore di conversione
2 10
1 100
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Tabella 5.6 Tabella di conversione
5.1.3 2-Set-up
“All set-up”: è possibile impostare il parametro indivi-
dualmente in ciascuno dei due setup, vale a dire che un
singolo parametro può avere due diversi valori dei dati.
”1 set-up”: il valore dei dati sarà uguale in entrambi i
setup.
Tipo
5.1.4
Tipo di dati Descrizione Tipo
2 Numero intero 8 Int8
3 Numero intero 16 Int16
4 Numero intero 32 Int32
5 Senza segno 8 Uint8
6 Senza segno 16 Uint16
7 Senza segno 32 Uint32
9 Stringa visibile Stringa visibile
Tabella 5.7
MG02C606 - VLT® è un marchio brevettato Danfoss 55

Elenchi dei parametri
5.1.5 0-** Funzionam./display
Guida alla Programmazione VLT® Micro Drive FC 51
Parametro
Numero
0-03 Impostazioni locali [0] Internazionale 1 set-up FALSE - Uint8
0-04
0-10 Setup attivo [1] Setup 1 1 set-up TRUE - Uint8
0-11 Modifica setup [1] Setup 1 1 set-up TRUE - Uint8
0-12 Collega setup [20] Collegati All set-ups FALSE - Uint8
55
0-31
0-32
0-40 Tasto [Hand on] sull'LCP [1] Attivato All set-ups TRUE - Uint8
0-41 Tasto [Off / Reset] Key sull'LCP [1] Abilita tutti All set-ups TRUE - Uint8
0-42 Tasto [Auto on] sull'LCP [1] Attivato All set-ups TRUE - Uint8
0-50 Copia LCP [0] Nessuna copia 1 set-up FALSE - Uint8
0-51 Copia setup [0] Nessuna copia 1 set-up FALSE - Uint8
0-60 Passw. menu princ. 0 1 set-up TRUE 0 Uint16
0-61
Tabella 5.8
Descrizione dei parametri Valore di default 2 Setup
Stato di funz. all'accens.
(manuale) [1] Arr. obbl. rif.=vecc. All set-ups TRUE - Uint8
Scala min. della visual. definita
dall'utente 0 1 set-up TRUE -2 Int32
Scala max. della visual. definita
dall'utente 0 1 set-up TRUE -2 Int32
Accesso al menu principale/
rapido senza password 0 1 set-up TRUE - Uint8
Cambio durante
Funzionamento
Indice di
conversi
one
Tipo
56 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
5.1.6 1-** Carico/Motore
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
1-00 Modo configurazione [0] Anello aperto vel. All set-ups TRUE - Uint8
1-01 Principio controllo motore [1] VVC+ All set-ups FALSE - Uint8
1-03 Caratteristiche della coppia [0] Coppia costante All set-ups TRUE - Uint8
1-05
1-20 Potenza motore All set-ups FALSE - Uint8
1-22 Tensione motore All set-ups FALSE 0 Uint16
1-23 Frequen. motore All set-ups FALSE 0 Uint16
1-24 Corrente motore All set-ups FALSE -2 Uint16
1-25 Vel. nominale motore All set-ups FALSE 0 Uint16
1-29
1-30 Resistenza di statore (Rs) All set-ups FALSE -2 Uint16
1-33 Reatt. dispers. statore (X1) All set-ups FALSE -2 Uint32
1-35 Reattanza principale (Xh) All set-ups FALSE -2 Uint32
1-50 Magnetizz. motore a vel. nulla 100% All set-ups TRUE 0 Uint16
1-52
1-55 Caratteristica U/f - U All set-ups TRUE 0 Uint16
1-56 Caratteristica U/f - F All set-ups TRUE 0 Uint16
1-60
1-61
1-62 Compens. scorrim. 100% All set-ups TRUE 0 Int16
1-63
1-71 Ritardo avv. 0 s All set-ups TRUE -1 Uint8
1-72 Funz. di avv. [2] Ev. libera/t. ritardo All set-ups TRUE - Uint8
1-73 Riaggancio al volo [0] Disattivato All set-ups FALSE - Uint8
1-80 Funzione all'arresto [0] Ruota libera All set-ups TRUE - Uint8
1-82 Vel.min. per funz.all'arresto [Hz] 0 Hz All set-ups TRUE -1 Uint16
1-90 Protezione termica del motore [0] Nessuna protezione All set-ups TRUE - Uint8
1-93 Risorsa termistore [0] Nessuno All set-ups FALSE - Uint8
Descrizione dei parametri Valore di default 2 Setup
Configurazione modalità
manuale
Adattamento automatico
motore (AMT) [0] Off 1 set-up FALSE - Uint8
Velocità min. magnetizz.
normale [Hz] 0 Hz All set-ups TRUE -1 Uint16
Compensaz. del carico a bassa
vel. 100% All set-ups TRUE 0 Uint16
Compensaz. del carico ad alta
vel. 100% All set-ups TRUE 0 Uint16
Costante di tempo compens.
scorrim. 0,1 s All set-ups TRUE -2 Uint16
[2] Come il modo 1-00 Modo
configurazione
All set-ups TRUE - Uint8
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
5 5
Tabella 5.9
MG02C606 - VLT® è un marchio brevettato Danfoss 57

Elenchi dei parametri
5.1.7 2-** Freni
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
2-00 Corrente di mantenimento CC 50% All set-ups TRUE 0 Uint16
2-01 Corrente di frenatura CC 50% All set-ups TRUE 0 Uint16
2-02 Tempo di frenata CC 10 s All set-ups TRUE -1 Uint16
2-04
2-10 Funzione freno [0] Off All set-ups TRUE - Uint8
55
2-11 Resistenza freno (Ω) All set-ups TRUE 0 Uint16
2-16 Freno CAm, corrente max 100% All set-ups TRUE 0 Uint16
2-17 Controllo sovratensione OVC [0] Disattivato All set-ups TRUE - Uint8
2-20 Corrente rilascio freno 0 A All set-ups TRUE -2 Uint32
2-22
Tabella 5.10
Descrizione dei parametri Valore di default 2 Setup
Velocità inserimento frenatura
CC 0 Hz All set-ups TRUE -1 Uint16
Velocità di attivazione del freno
[Hz] 0 Hz All set-ups TRUE -1 Uint16
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
58 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
5.1.8 3-** Rif./rampe
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
3-00 Intervallo di rif. [0] Da Min a Max All set-ups TRUE - Uint8
3-02 Riferimento minimo 0 All set-ups TRUE -3 Int32
3-03 Riferimento massimo 50 All set-ups TRUE -3 Int32
3-10 Riferimento preimpostato 0% All set-ups TRUE -2 Int16
3-11 Velocità marcia jog [Hz] 5 Hz All set-ups TRUE -1 Uint16
3-12 Valore catch-up/slow-down 0% All set-ups TRUE -2 Int16
3-14 Rif. relativo preimpostato 0% All set-ups TRUE -2 Int16
3-15 Risorsa di riferimento 1 [1] Ingr. analog. 53 All set-ups TRUE - Uint8
3-16 Risorsa di riferimento 2 [2] Ingr. analog. 60 All set-ups TRUE - Uint8
3-17 Risorsa di riferimento 3 [11] Rif. bus locale All set-ups TRUE - Uint8
3-18 Risorsa rif. in scala relativa [0] Nessuna funz. All set-ups TRUE - Uint8
3-40 Rampa tipo 1 [0] Lineare All set-ups TRUE - Uint8
3-41 Rampa 1 tempo di accel. 3 s All set-ups TRUE -2 Uint32
3-42 Rampa 1 tempo di decel. 3 s All set-ups TRUE -2 Uint32
3-50 Rampa tipo 2 [0] Lineare All set-ups TRUE - Uint8
3-51 Rampa 2 tempo rampa di salita 3 s All set-ups TRUE -2 Uint32
3-52
3-80 Tempo di rampa jog 3 s All set-ups TRUE -2 Uint32
3-81 Tempo rampa arr. rapido 3 s 1 set-up TRUE -2 Uint32
Descrizione dei parametri Valore di default 2 Setup
Rampa 2 tempo rampa di
discesa 3 s All set-ups TRUE -2 Uint32
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
5 5
Tabella 5.11
MG02C606 - VLT® è un marchio brevettato Danfoss 59

Elenchi dei parametri
5.1.9 4-** Limiti/Avvisi
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
4-10 Direz. velocità motore [2] Entrambe le direzioni All set-ups FALSE - Uint8
4-12
4-14 Limite alto velocità motore [Hz] 65 Hz All set-ups FALSE -1 Uint16
4-16 Lim. di coppia in modo motore 150% All set-ups TRUE 0 Uint16
55
4-17
4-40 Avviso frequenza bassa 0Hz All set-ups TRUE -1 Uint16
4-41 Avviso frequenza alta 400Hz All set-ups TRUE -1 Uint16
4-50 Avviso corrente bassa 0 A All set-ups TRUE -2 Uint32
4-51 Avviso corrente alta 26 A All set-ups TRUE -2 Uint32
4-54 Avviso rif. basso -4999 All set-ups TRUE -3 Int32
4-55 Avviso riferimento alto 4999 All set-ups TRUE -3 Int32
4-56 Avviso retroazione bassa -4999 All set-ups TRUE -3 Int32
4-57 Avviso retroazione alta 4999 All set-ups TRUE -3 Int32
4-58 Funzione fase motore mancante [1] On All set-ups FALSE - Uint8
4-61 Bypass velocità da [Hz] 0 Hz All set-ups TRUE -1 Uint16
4-63 Bypass velocità a [Hz] 0 Hz All set-ups TRUE -1 Uint16
Tabella 5.12
Descrizione dei parametri Valore di default 2 Setup
Limite basso velocità motore
[Hz] 0 Hz All set-ups FALSE -1 Uint16
Lim. di coppia in modo
generatore 100% All set-ups TRUE 0 Uint16
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
60 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
5.1.10 5-** I/O digitali
Guida alla Programmazione VLT® Micro Drive FC 51
Numero
del
parametro
5-10 Ingr. digitale morsetto 18 [8] decelerazione All set-ups TRUE - Uint8
5-11 Ingr. digitale morsetto 19 [10] Inversione All set-ups TRUE - Uint8
5-12 Ingr. digitale morsetto 27 [1] Ripristino All set-ups TRUE - Uint8
5-13 Ingr. digitale morsetto 29 [14] Marcia jog All set-ups TRUE - Uint8
5-15 Ingr. digitale morsetto 33 [16] Rif. preimp. bit 0 All set-ups TRUE - Uint8
5-34
5-35
5-40 Funzione relè [0] N. funzione All set-ups TRUE - Uint8
5-41 Ritardo attiv., relè 0,01s All set-ups TRUE -2 Uint16
5-42 Ritardo disatt., relè 0,01s All set-ups TRUE -2 Uint16
5-55 Frequenza bassa morsetto 33 20 Hz All set-ups TRUE 0 Uint16
5-56 Frequenza alta mors. 33 5000 Hz All set-ups TRUE 0 Uint16
5-57 Rif. basso/val. retroaz. mors. 33 0 All set-ups TRUE -3 Int32
5-58 Rif. alto/val. retroaz. mors. 33 50 All set-ups TRUE -3 Int32
Tabella 5.13
Descrizione dei parametri Valore di default 2 Setup
Ritardo attivazione, uscita dig.
morsetto 42 0,01s All set-ups TRUE -2- Uint16
Ritardo disatt., uscita digitale morsetto
42 0,01s All set-ups TRUE -2 Uint16
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
5 5
MG02C606 - VLT® è un marchio brevettato Danfoss 61

Elenchi dei parametri
5.1.11 6-** I/O analogici
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
6-00 Tempo timeout tensione zero 10 s All set-ups TRUE 0 Uint8
6-01 Funz. temporizz. tensione zero [0] Off All set-ups TRUE - Uint8
6-10 Tens. bassa morsetto 53 0,07 V All set-ups TRUE -2 Uint16
6-11 Tensione alta morsetto 53 10 V All set-ups TRUE -2 Uint16
6-12 Corr. bassa morsetto 53 0,14 mA All set-ups TRUE -2 Uint16
6-13 Corrente alta morsetto 53 20 mA All set-ups TRUE -2 Uint16
55
6-14 Rif.basso/val.retroaz mors. 53 0 All set-ups TRUE -3 Int32
6-15 Rif. alto/valore retroaz. mors. 53 50 All set-ups TRUE -3 Int32
6-16 Tempo cost. filtro morsetto 53 0,01 s All set-ups TRUE -2 Uint16
6-19 Mod. morsetto 53 [0] Modo tensione 1 set-up TRUE - Uint8
6-22 Corr. bassa morsetto 60 0,14 mA All set-ups TRUE -2 Uint16
6-23 Corrente alta morsetto 60 20 mA All set-ups TRUE -2 Uint16
6-24 Rif.basso/val.retroaz. mors. 60 0 All set-ups TRUE -3 Int32
6-25 Rif. alto/valore retroaz. mors. 60 50 All set-ups TRUE -3 Int32
6-26
6-80 Abilitazione potenziometro LCP 1 1 set-up FALSE - Uint8
6-81 Basso rif. potenziom. LCP 0 All set-ups TRUE -3 Int32
6-82 Rif. alto potenziom. LCP 50 All set-ups TRUE -3 Int32
6-90 Mod. morsetto 42 [0] 0-20 mA All set-ups TRUE - Uint8
6-91 Uscita analogica morsetto 42 [0] N. funzione All set-ups TRUE - Uint8
6-92 Uscita dig. morsetto 42 [0] N. funzione All set-ups TRUE - Uint8
6-93 Mors. 42, usc. scala min. 0% All set-ups TRUE -2 Uint16
6-94 Mors. 42, usc. scala max. 100% All set-ups TRUE -2 Uint16
Descrizione dei parametri Valore di default 2 Setup
Costante di tempo filtro del
morsetto 60 0,01 s All set-ups TRUE -2 Uint16
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
Tabella 5.14
62 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
5.1.12 7-** Regolatori
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
7-20
7-30 PI proc., contr. n./inv. [0] Normale All set-ups TRUE - Uint8
7-31 Anti saturazione regolatore PI [1] Attivato All set-ups TRUE - Uint8
7-32 PI di processo, veloc. avviam. 0 Hz All set-ups TRUE -1 Uint16
7-33
7-34
7-38 Fattore canale alim. del regol. PI 0% All set-ups TRUE 0 Uint16
7-39
Tabella 5.15
Descrizione dei parametri Valore di default 2 Setup
Risorsa retroazione 1 processo
CL [0] Nessuna funz. All set-ups TRUE - Uint8
Guadagno proporzionale PI di
processo 0,01 All set-ups TRUE -2 Uint16
Tempo di integrazione PI di
processo 9999 s All set-ups TRUE -2 Uint32
Larghezza di banda di
riferimento 5% All set-ups TRUE 0 Uint8
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
5 5
MG02C606 - VLT® è un marchio brevettato Danfoss 63

Elenchi dei parametri
5.1.13 8-** Com. e opzioni
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
8-01 Sito di comando [0] Digitale e par. com. All set-ups TRUE - Uint8
8-02 Fonte parola di controllo [1] RS 485 FC All set-ups TRUE - Uint8
8-03
8-04
55
8-06 Riprist. tempor. parola di contr. [0] Nessuna funz. 1 set-up TRUE - Uint8
8-30 Protocollo [0] FC 1 set-up TRUE 0 Uint8
8-31 Indirizzo 1 1 set-up TRUE 0 Uint8
8-32 Baud rate porta FC [2] 9600 Baud 1 set-up TRUE - Uint8
8-33 Parità porta FC [0] Par. pari, 1 bit di stop 1 set-up TRUE - Uint8
8-35 Ritardo minimo risposta 0,01 s 1 set-up TRUE -3 Uint16
8-36 Ritardo max. risposta 5 s 1 set-up TRUE -3 Uint16
8-43 Config. lettura PCD porta FC 0 1 set-up TRUE - Uint8
8-50 Selezione ruota libera [3] Logica OR All set-ups TRUE - Uint8
8-51 Selez. arresto rapido [3] Logica OR All set-ups TRUE - Uint8
8-52 Selez. freno CC [3] Logica OR All set-ups TRUE - Uint8
8-53 Selez. avvio [3] Logica OR All set-ups TRUE - Uint8
8-54 Selez. inversione [3] Logica OR All set-ups TRUE - Uint8
8-55 Selez. setup [3] Logica OR All set-ups TRUE - Uint8
8-56 Selezione rif. preimpostato [3] Logica OR All set-ups TRUE - Uint8
8-94 Bus retroazione 1 0 All set-ups TRUE 0 Int16
Descrizione dei parametri Valore di default 2 Setup
Tempo timeout parola di
controllo 1 s 1 set-up TRUE -1 Uint16
Funzione temporizz. parola di
controllo [0] Off 1 set-up TRUE - Uint8
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
Tabella 5.16
64 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
5.1.14 13-** Smart Logic
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
13-00 Modo regolatore SL [0] Off 1 set-up TRUE - Uint8
13-01 Evento avviamento [39] Comando avviamento 1 set-up TRUE - Uint8
13-02 Evento arresto [40] Conv. di freq. arr. 1 set-up TRUE - Uint8
13-03 Ripristinare SLC [0] Nessun reset 1 set-up TRUE - Uint8
13-10 Operando comparatore [0] Disattivato 1 set-up TRUE - Uint8
13-11 Operatore comparatore [1] Pressoché uguale 1 set-up TRUE - Uint8
13-12 Valore comparatore 0 1 set-up TRUE -1 Int32
13-20 Timer regolatore SL 0 s 1 set-up TRUE -1 Uint32
13-40 Regola logica Booleana 1 [0] False 1 set-up TRUE - Uint8
13-41 Operatore regola logica 1 [0] Disattivato 1 set-up TRUE - Uint8
13-42 Regola logica Booleana 2 [0] False 1 set-up TRUE - Uint8
13-43 Operatore regola logica 2 [0] Disattivato 1 set-up TRUE - Uint8
13-44 Regola logica Booleana 3 [0] False 1 set-up TRUE - Uint8
13-51 Evento regol. SL [0] False 1 set-up TRUE - Uint8
13-52 Azione regolatore SL [0] Disattivato 1 set-up TRUE - Uint8
Tabella 5.17
Descrizione dei parametri Valore di default 2 Setup
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
5 5
MG02C606 - VLT® è un marchio brevettato Danfoss 65

Elenchi dei parametri
5.1.15 14-** Funzioni speciali
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
14-01 Frequenza di commutazione [1] 4,0 kHz All set-ups TRUE - Uint8
14-03 Sovramodulazione [1] On All set-ups FALSE - Uint8
14-12
14-20 Modo ripristino [0] Ripristino manuale All set-ups TRUE - Uint8
14-21 Tempo di riavv. autom. 10 s All set-ups TRUE 0 Uint16
55
14-22 Modo di funzionamento [0] Funzion.norm. 1 set-up TRUE - Uint8
14-26 Azione al guasto inverter [0] Scatto All set-ups TRUE - Uint8
14-41 Magnetizzazione minima AEO 66 % All set-ups TRUE 0 Uint8
Tabella 5.18
Descrizione dei parametri Valore di default 2 Setup
Funz. durante sbilanciamento di
rete [0] Scatto All set-ups TRUE - Uint8
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
66 MG02C606 - VLT® è un marchio brevettato Danfoss

Elenchi dei parametri
5.1.16 15-** Inform. conv. freq.
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
15-00 Tempo di funzionam. 0 1 set-up TRUE 0 Uint32
15-01 Ore esercizio 0 1 set-up TRUE 0 Uint32
15-02 Contatore kWh 0 1 set-up TRUE 0 Uint32
15-03 Accensioni 0 1 set-up TRUE 0 Uint32
15-04 Sovratemp. 0 1 set-up TRUE 0 Uint16
15-05 Sovratensioni 0 1 set-up TRUE 0 Uint16
15-06 Riprist. contat. kWh [0] Nessun reset 1 set-up TRUE - Uint8
15-07
15-30 Log guasti: Codice errore 0 1 set-up TRUE 0 Uint8
15-40 Tipo FC 1 set-up FALSE 0 Stringa visibile
15-41 Sezione potenza 1 set-up FALSE 0 Stringa visibile
15-42 Tensione 1 set-up FALSE 0 Stringa visibile
15-43 Scheda di contr. SW id 1 set-up FALSE 0 Stringa visibile
15-46
15-48 N. ld LCP 1 set-up FALSE 0 Stringa visibile
15-51 Numero seriale conv. di freq. 1 set-up FALSE 0 Stringa visibile
Tabella 5.19
Descrizione dei parametri Valore di default 2 Setup
Ripristino contatore ore di
esercizio [0] Nessun reset 1 set-up TRUE - Uint8
N. d’ordine convertitore di
frequenza 1 set-up FALSE 0 Stringa visibile
Cambio durante
il funzionamento
Indice di
conversione
Tipo
5 5
MG02C606 - VLT® è un marchio brevettato Danfoss 67

Elenchi dei parametri
5.1.17 16-** Visualizz. dati
Guida alla Programmazione VLT® Micro Drive FC 51
Numero del
parametro
16-00 Parola di controllo 0 1 set-up TRUE 0 Uint16
16-01 Riferimento [unità] 0 1 set-up TRUE -3 Int32
16-02 Riferimento % 0 1 set-up TRUE -1 Int16
16-03 est. 0 1 set-up TRUE 0 Uint16
16-05 Val. reale princ. [%] 0 1 set-up TRUE -2 Int16
16-09 Visual. personaliz. 0 1 set-up TRUE -2 Int32
55
16-10 Potenza [kW] 0 1 set-up TRUE -3 Uint16
16-11 Potenza [hp] 0 1 set-up TRUE -3 Uint16
16-12 Tensione motore 0 1 set-up TRUE 0 Uint16
16-13 Frequenza 0 1 set-up TRUE -1 Uint16
16-14 Corrente motore 0 1 set-up TRUE -2 Uint16
16-15 Frequenza [%] 0 1 set-up TRUE -1 Uint16
16-18 Term. motore 0 1 set-up TRUE 0 Uint8
16-30 Tensione bus CC 0 1 set-up TRUE 0 Uint16
16-34 Temp. dissip. 0 1 set-up TRUE 0 Uint8
16-35 Termico inverter 0 1 set-up TRUE 0 Uint8
16-36 Corrente nom. inverter 0 1 set-up TRUE -2 Uint16
16-37 Corrente max inv. 0 1 set-up TRUE -2 Uint16
16-38 Condiz. regol. SL 0 1 set-up TRUE 0 Uint8
16-50 Riferimento esterno 0 1 set-up TRUE -1 Int16
16-51 Rif. impulsi 0 1 set-up TRUE -1 Int16
16-52 Retroazione [Unit] 0 1 set-up TRUE -3 Int32
16-60 Ingr. digitale 18,19,27,33 0 1 set-up TRUE 0 Uint16
16-61 Ingresso digitale 29 0 1 set-up TRUE 0 Uint8
16-62 Ingresso analogico 53 (V) 0 1 set-up TRUE -2 Uint16
16-63 Ingresso analogico 53 (mA) 0 1 set-up TRUE -2 Uint16
16-64 Ingresso analogico 60 0 1 set-up TRUE -2 Uint16
16-65 Uscita analogica 42 [mA] 0 1 set-up TRUE -2 Uint16
16-68 Ingr. impulsi 33 20 1 set-up TRUE 0 Uint16
16-71 Uscita a relè [bin] 0 1 set-up TRUE 0 Uint8
16-72 Contatore A 0 1 set-up TRUE 0 Int16
16-73 Contatore B 0 1 set-up TRUE 0 Int16
16-86 RIF 1 porta FC 0 1 set-up TRUE 0 Int16
16-90 Parola di allarme 0 1 set-up TRUE 0 Uint32
16-92 Parola di avviso 0 1 set-up TRUE 0 Uint32
16-94 Parola di stato est. 0 1 set-up TRUE 0 Uint32
Descrizione dei parametri Valore di default 2 Setup
Cambio durante il
funzionamento
Indice di
conversi
one
Tipo
Tabella 5.20
68 MG02C606 - VLT® è un marchio brevettato Danfoss

Ricerca ed eliminazione dei...
Guida alla Programmazione VLT® Micro Drive FC 51
6 Ricerca ed eliminazione dei guasti
Un avviso o un allarme vengono segnalati dal LED
corrispondente nella parte anteriore del convertitore di
frequenza e quindi da un codice a display.
Un avviso rimane attivo fino all'eliminazione della causa. In
alcuni casi è possibile continuare a far funzionare il
motore. I messaggi di avviso possono essere critici, ma non
sempre lo sono.
In caso di allarme, il convertitore di frequenza scatterà. Per
riavviare il sistema, è necessario ripristinare gli allarmi dopo
averne eliminato la causa.
Ciò può essere fatto in quattro modi:
1. Premendo [Reset].
2. Tramite un ingresso digitale con la funzione
“Reset”.
3. Mediante la comunicazione seriale.
NOTA!
Dopo un ripristino manuale premere [Reset], [Auto On] o
[Hand On] per riavviare l'unità.
Se un allarme non è ripristinabile, è possibile che la causa
non sia stata eliminata oppure l'allarme è bloccato (vedere
anche Tabella 6.1).
ATTENZIONE
Gli allarmi bloccati offrono un'ulteriore protezione perché
l'alimentazione di rete deve essere disinserita prima di
poter ripristinare l'allarme. Dopo la riaccensione, il convertitore di frequenza non è più bloccato e può essere
ripristinato come descritto in alto una volta che è stata
eliminata la causa.
È inoltre possibile ripristinare gli allarmi che non sono
bloccati utilizzando la funzione di ripristino automatico in
14-20 Reset Mode (Avviso: è possibile la fine pausa
automatica!)
Se è contrassegnato un avviso e un allarme per un codice
nella Tabella 6.1, ciò significa che un avviso precederà
l’allarme o che è possibile programmare se un dato guasto
deve generare un avviso o un allarme.
Ciò è possibile, ad es. in 1-90 Motor Thermal Protection.
Dopo un allarme o uno scatto, il motore girerà a ruota
libera e sul convertitore di frequenza lampeggeranno sia
l’allarme sia l'avviso. Dopo aver eliminato il problema,
continuerà a lampeggiare solo l'allarme.
6
6
N. Descrizione Avviso AllarmeScatto bloccato Errore Riferimento
parametro
2 Errore tensione zero (X) (X) 6-01
4 Perdita fase di rete (X) (X) (X) 14-12
7 Sovratens. CC X X
8 Sottotens. CC X X
9 Inverter sovracc. X X
10 Sovratemp. ETR motore (X) (X) 1-90
11 Sovratemperatura del termistore motore (X) (X) 1-90
12 Limite di coppia (X) 4-16, 4-17
13 Sovracorrente X X X
14 Guasto di terra X X X
16 Cortocircuito X X
17 TO par. contr. (X) (X) 8-04
25 Resistenza freno in cortocircuito X X
27 Chopper di frenatura in cortocircuito X X
28 Controllo freno X
29 Sovratemperatura scheda di potenza X X
30 Fase U del motore mancante (X) (X) 4-58
31 Fase V del motore mancante (X) (X) 4-58
32 Fase W del motore mancante (X) (X) 4-58
38 Guasto interno X X
44 Guasto a terra 2 X X
47 Guasto tensione di comando X X
MG02C606 - VLT® è un marchio brevettato Danfoss 69

6
Ricerca ed eliminazione dei...
Guida alla Programmazione VLT® Micro Drive FC 51
N. Descrizione Avviso AllarmeScatto bloccato Errore Riferimento
parametro
51 AMT controllo U
52 AMT I
53 AMT, motore troppo grande X
54 AMT, motore troppo piccolo X
55 Parametro AMT fuori intervallo X
59 Limite di corrente X
63 Freno meccanico basso X
80 Convertitore di frequenza inizial. al valore di
default
84 È andato perso il collegamento tra il conver-
titore di frequenza e l'LCP
85 Puls. disattivato X
86 Errore di copiatura X
87 Dati LCP non validi X
88 Dati LCP non compatibili X
89 Parametri di sola lettura X
90 Database parametri occupato X
91 Il valore parametrico non è valido in questa
modalità
92 Il valore parametrico supera i limiti min/max X
bassa X
nom
nom
e I
nom
X
X
X
X
Tabella 6.1 Lista di codici di allarme/avviso
(X) Dipendente dal parametro
Uno scatto è l'intervento originato dalla presenza di un
allarme. Lo scatto fa marciare il motore a ruota libera e
può essere ripristinato premendo [Reset] o eseguendo il
ripristino mediante un ingresso digitale (gruppo di
parametri 5-1* [1]). L'evento originale che ha provocato
l'allarme non può danneggiare il convertitore di frequenza
o causare condizioni pericolose. Uno scatto bloccato è un
intervento che ha origine nel caso di un allarme che può
provocare danni al convertitore di frequenza o ai
componenti collegati. Una situazione di scatto bloccato
può essere ripristinata solo con un'operazione di "powercycling" (spegnimento e riaccensione) .
Indicazione LED
Avviso giallo
Allarme rosso lampeggiante
Tabella 6.2
Le parole di allarme, le parole di avviso e le parole di stato
estese possono essere visualizzate tramite il bus seriale o il
bus di campo opzionale per una diagnosi. Vedere anche
16-90 Alarm Word, 16-92 Warning Word e 16-94 Ext. Status
Word.
70 MG02C606 - VLT® è un marchio brevettato Danfoss

Ricerca ed eliminazione dei...
Guida alla Programmazione VLT® Micro Drive FC 51
6.1.1 Allarme, avviso e parola di stato estesa
Par. 16-90 Par. 16-92 Par. 16-94
Bit Hex Dec Parola di allarme Parola di avviso Parola di stato estesa
0 1 1 Controllo freno Funz. rampa
1 2 2 Temp. sch. pot Temp. sch. pot Funzionamento AMT
Avviamento s. orario/
2 4 4 Guasto di terra
3 8 8 Slow down
4 10 16 TO par. contr TO par. contr Catch up
5 20 32 Sovracorrente Sovracorrente Sopra retroaz. alta
6 40 64 Limite di coppia Sotto retroaz. bassa
7 80 128 Sovrtp.ter.mot Sovrtp.ter.mot Corrente di uscita alta
8 100 256 Sovr. ETR mot. Sovr. ETR mot.
9 200 512 Sovraccarico inverter Sovraccarico inverter Sopra velocità, alta
10 400 1024 Sottotens. CC Sottotens. CC Sotto rif., basso
11 800 2048 Sovrat. CC Sovrat. CC
12 1000 4096 Cortocircuito
13 2000 8192 Frenata
14 4000 16384 Gua. fase rete Gua. fase rete
15 8000 32768 "AMT non OK" OVC attivo
16 10000 65536 Errore tensione zero Errore tensione zero Freno CA
17 20000 131072 Guasto interno
18 40000 262144
19 80000 524288 Guasto fase U Sopra riferimento, alto
20 100000 1048576 Guasto fase V Sotto rif., basso
21 200000 2097152 Guasto fase W Rif. locale/Rif. remoto
22 400000 4194304
23 800000 8388608 Guasto tensione di comando
24 1000000 16777216
25 2000000 33554432 Limite di corrente
26 4000000 67108864 Resistenza freno in cortocircuito
27 8000000 134217728 Cortocircuito IGBT freno
28 10000000 268435456 M4/M5: Guasto a terra (Desat) Fase motore mancante
29 20000000 536870912 Conv. freq iniz
30 40000000 1073741824 Non definito
31 80000000 2147483648 Fr. mecc. basso Database occupato
antiorario
Corrente di uscita
bassa
6
6
Tabella 6.3
Le parole di allarme, le parole di avviso e le parole di stato
estese possono essere visualizzate tramite il bus seriale per
una diagnosi. Vedere anche 16-94 Parola di stato estesa.
AVVISO/ALLARME 2, Guasto z. trasl.
Il segnale sul morsetto 53 o 60 è inferiore al 50% del
valore impostato in 6-10 Tens. bassa morsetto 53, 6-12
Corrente alta morsetto 53 e 6-22 Corrente bassa morsetto 60.
AVVISO/ALLARME 4, Perdita fase di rete
Mancanza di una fase sul lato alimentazione o sbilanciamento eccessivo della tensione di rete. Questo
messaggio viene visualizzato anche per un guasto nel
raddrizzatore di ingresso del convertitore di frequenza.
Ricerca ed eliminazione dei guasti: Controllare la tensione
di alimentazione e le correnti di alimentazione al conver-
MG02C606 - VLT® è un marchio brevettato Danfoss 71
titore di frequenza. Il guasto può essere causato da disturbi
nell'alimentazione di rete. L'installazione del filtro di linea
Danfoss può risolvere questo problema.
AVVISO/ALLARME 7, Sovratens. CC
Se la tensione del circuito intermedio supera il limite, il
convertitore di frequenza scatterà dopo un tempo
preimpostato.
Ricerca ed eliminazione dei guasti
Collegare una resistenza di frenatura
Estendere il tempo di rampa
Cambiare il tipo di rampa
Attivare le funzioni in 2-10 Funzione freno

Ricerca ed eliminazione dei...
Guida alla Programmazione VLT® Micro Drive FC 51
6
Aumento 14-26 Ritardo scatto al guasto inverter
Il guasto può essere causato da disturbi nell'alimentazione
di rete. L'installazione del filtro di linea Danfoss può
risolvere questo problema.
AVVISO/ALLARME 8, Sottotens. CC
Se la tensione del circuito intermedio (collegamento CC)
scende sotto il limite sottotensione, il convertitore di
frequenza verifica l’eventuale presenza di un’alimentazione
a 24 V CC. Se non è collegata alcuna alimentazione
ausiliaria a 24 V CC, il convertitore di frequenza scatta
dopo un ritardo prefissato. Il ritardo è funzione della taglia
dell'unità.
Ricerca ed eliminazione dei guasti
Controllare se la tensione di rete è compatibile
con i valori nominali del convertitore di
frequenza.
Eseguire il test della tensione di ingresso.
Eseguire il test del circuito di soft charge.
AVVISO/ALLARME 9, Sovraccarico inverter
Il convertitore di frequenza sta per disinserirsi a causa di
un sovraccarico (corrente troppo elevata per un intervallo
di tempo troppo lungo). Il contatore della protezione
termica elettronica dell'inverter emette un avviso al 98% e
scatta al 100%, emettendo un allarme. Il convertitore di
frequenza non può essere ripristinato finché il contatore
non mostra un valore inferiore al 90%.
Il guasto è dovuto al fatto che il convertitore di frequenza
ha funzionato con oltre il 100% di sovraccarico per troppo
tempo.
Ricerca ed eliminazione dei guasti
Confrontare la corrente di uscita visualizzata
sull'LCP con la corrente nominale del convertitore
di frequenza.
Confrontare la corrente di uscita visualizzata
sull'LCP con la corrente misurata sul motore.
Visualizzare il carico termico del convertitore di
frequenza sull'LCP e monitorare il valore. In caso
di funzionamento oltre il valore di corrente
continua nominale del convertitore di frequenza il
contatore aumenta. In caso di funzionamento al
di sotto del valore di corrente continua nominale
del convertitore di frequenza, il contatore
diminuisce.
AVVISO/ALLARME 10, Temperatura sovraccarico motore
La protezione termica elettronica (ETR), rileva un surriscaldamento del motore. Consente all'utente di selezionare se
il convertitore di frequenza deve generare un avviso o un
allarme quando il contatore raggiunge il 100% in
1-90 Protezione termica motore. Il guasto si verifica quando
il motore è sovraccaricato oltre il 100% per troppo tempo.
Ricerca ed eliminazione dei guasti
Verificare un eventuale surriscaldamento del
motore.
Controllare un eventuale sovraccarico meccanico
del motore.
Verificare che la corrente motore impostata in
1-24 Corrente motore sia corretta.
Controllare che i Dati motore nei parametri da
1-20 a 1-25 siano impostati correttamente.
Funzionamento dell'AMT in 1-29 Adattamento
automatico motore (AMT). Il limite della corrente
di picco dell'inverter (circa il 200% della corrente
nom.) è stato superato. L'avvertenza permarrà per
circa 8-12 sec., dopodiché il convertitore di
frequenza scatta ed emette un allarme. Spegnere
il convertitore di frequenza e controllare se
l’albero motore può essere ruotato e se la portata
del motore è adatta al convertitore di frequenza.
Se è stato selezionato il controllo del freno
meccanico esteso, lo scatto può essere ripristinato
esternamente. Eseguendo l'AMA si tara il convertitore di frequenza sul motore con precisione e si
riduce il carico termico.
AVVISO/ALLARME 11, Sovratemp. term. motore
Il termistore potrebbe essere scollegato. Selezionare se il
convertitore di frequenza deve generare un avviso o un
allarme in 1-90 Protezione termica motore.
Ricerca ed eliminazione dei guasti
Verificare un eventuale surriscaldamento del
motore.
Controllare un eventuale sovraccarico meccanico
del motore.
AVVISO/ALLARME 13, Sovracorrente
Il limite della corrente di picco dell'inverter (circa il 200%
della corrente nom.) è stato superato. L'avvertenza
permarrà per circa 8-12 sec., dopodiché il convertitore di
frequenza scatta ed emette un allarme. Spegnere il convertitore di frequenza e controllare se l’albero motore può
essere ruotato e se la portata del motore è adatta al
convertitore di frequenza. Se è stato selezionato il
controllo del freno meccanico esteso, lo scatto può essere
ripristinato esternamente.
Ricerca ed eliminazione dei guasti:
Scollegare l'alimentazione e controllare se è
possibile ruotare l'albero motore.
Controllare se la taglia del motore è adatta al
convert. di freq.
Controllare i parametri del motore da 1-20 a 1-25
per assicurare che i dati del motore siano corretti.
72 MG02C606 - VLT® è un marchio brevettato Danfoss

Ricerca ed eliminazione dei...
Guida alla Programmazione VLT® Micro Drive FC 51
ALLARME 14, Guasto di terra (massa)
È presente una corrente dalle fasi di uscita verso terra, nel
cavo fra il convertitore di frequenza e il motore o nel
motore stesso.
Ricerca ed eliminazione dei guasti:
Scollegare l'alimentazione al convertitore di
frequenza e rimuovere il guasto di terra.
Verificare la presenza di guasti di terra misurando
la resistenza verso terra dei cavi del motore e del
motore con un megaohmetro.
ALLARME 16, Cortocircuito
Si è verificato un cortocircuito nel motore o nei cavi del
motore.
Scollegare l'alimentazione dal convertitore di frequenza ed
eliminare il corto circuito.
AVVISO/ALLARME 17, TO par. contr.
nessuna comunicazione con il convertitore di frequenza.
L'avviso è solo attivo quando 8-04 Funzione temporizz.
parola di controllo NON è impostato su OFF.
Se 8-04 Funzione temporizz. parola di controllo è impostato
su Stop e Trip viene visualizzato un avviso e il convertitore
di frequenza effettua una rampa di discesa fino a scattare,
emettendo un allarme. 8-03 Control Timeout Time può
eventualmente essere aumentato.
Ricerca ed eliminazione dei guasti:
Verificare i collegamenti del cavo di comunicazione seriale.
Aumento 8-03 Temporizzazione parola di controllo
Verificare il funzionamento dei dispositivi di
comunicazione.
Verificare la corretta installazione conformemente
ai requisiti EMC.
AVVISO 25, Resistenza freno in corto-circuito
La resistenza di frenatura viene monitorata durante il
funzionamento. In caso di corto circuito, la funzione freno
è disattivata e viene visualizzato l'avviso. Il convertitore di
frequenza è ancora in grado di funzionare, ma senza la
funzione di frenatura. Scollegare l'alimentazione al convertitore di frequenza e sostituire la resistenza di frenatura
(vedere 2-15 Controllo freno).
AVVISO/ALLARME 27, Guasto al chopper di fren.
Il transistor del freno viene controllato durante il funzionamento e, se entra in cortocircuito, la funzione freno
viene disattivata e viene visualizzato un avviso. Il convertitore di frequenza è ancora in grado di funzionare ma,
poiché il transistor del freno è entrato in corto circuito, una
potenza elevata viene trasmessa alla resistenza freno,
anche se non è attiva.
Scollegare l'alimentazione al convertitore di frequenza e
rimuovere la resistenza freno.
AVVISO/ALLARME 28, Controllo freno fallito
La resistenza di frenatura non è collegata o non funziona.
ALLARME 29, Temp. dissip.
La temperatura massima ammessa per il dissipatore è stata
superata. Il guasto dovuto alla temperatura non verrà
ripristinato finché la temperatura non scende al di sotto di
una temperatura del dissipatore prestabilita. I punti di
scatto e di ripristino sono diversi a seconda della taglia del
convertitore di frequenza.
Ricerca ed eliminazione dei guasti
Verificare le seguenti condizioni:
Temperatura ambiente troppo elevata.
Cavo motore troppo lungo.
Spazio scorretto per il flusso d'aria sopra e sotto il
convertitore di frequenza.
Circolazione aria assente attorno al convertitore
di frequenza.
Ventola dissipatore danneggiata.
Dissipatore sporco.
ALLARME 30, Fase U del motore mancante
Manca la fase U del motore fra il convertitore di frequenza
e il motore.
Scollegare l'alimentazione dal convertitore di frequenza e
controllare la fase U del motore.
ALLARME 31, Fase V del motore mancante
Manca la fase V del motore tra il convertitore di frequenza
e il motore.
Scollegare l'alimentazione dal convertitore di frequenza e
controllare la fase motore V.
ALLARME 32, Fase W del motore mancante
Manca la fase motore W tra il convertitore di frequenza e il
motore.
Scollegare l'alimentazione al convertitore di frequenza e
controllare la fase motore W.
ALLARME 38, Guasto interno
Ricerca ed eliminazione dei guasti
Spegnere e riavviare l'unità
Verificare che l'opzione sia installata corret-
tamente
Controllare se vi sono collegamenti allentati o
mancanti
Può essere necessario contattare il rivenditore o l'ufficio
assistenza Danfoss locale. Annotare il codice numerico per
poter ricevere ulteriori indicazioni sul tipo di guasto.
AVVISO 47, Alim. 24 V bassa
I 24V CC sono misurati sulla scheda di comando. l'alimentazione esterna ausiliaria 24 V CC potrebbe essere
sovraccarica; in caso contrario, contattare il rivenditore
Danfoss.
ALLARME 51, controllo U
Probabilmente sono errate le impostazioni della tensione
motore, della corrente motore e della potenza motore.
Controllare le impostazioni dei parametri da 1-20 a 1-25.
nom
e I
nom
AMT
6
6
MG02C606 - VLT® è un marchio brevettato Danfoss 73

6
Ricerca ed eliminazione dei...
ALLARME 55, Parametro AMA fuori intervallo
I valori dei parametri del motore sono al di fuori del
campo accettabile. AMA non funziona.
ALLARME 63, Freno meccanico basso
La corrente motore effettiva non ha superato la corrente a
"freno rilasciato" entro la finestra di tempo "Ritardo
avviamento".
ALLARME 80, Inverter inizial. al valore di default
Le impostazioni dei parametri sono inizializzate alle
impostazioni di defaultriportate alle impostazioni di
fabbrica dopo un reset manuale. Ripristinare l'unità per
cancellare un allarme.
ALLARME 84, È andato perso il collegamento tra convertitore di frequenza e l'LCP
Tentare di riassemblare delicatamente l'LCP.
ALLARME 85, Puls. disattivato
Vedere il gruppo di parametri 0-4* LCP
ALLARME 86, Errore di copiatura
Si è verificato un errore durante la copiatura dal convertitore di frequenza all'LCP o viceversa.
ALLARME 87, dati LCP non validi
Avviene quando si copia dall'LCP se l'LCP contiene dati
errati - oppure se nessun dato è stato caricato sull'LCP.
ALLARME 88, dati LCP non compatibili
Avviene quando si copia dall'LCP se i dati vengono
spostati tra convertitori di frequenza con grandi differenze
nelle versioni software.
AVVISO 89, Parametri di sola lettura
Avviene quando si tenta di scrivere su un parametro di
sola lettura.
ALLARME 90, Database parametri occupato
L'LCP e il collegamento RS-485 stanno tentando di
aggiornare simultaneamente i parametri.
ALLARME 91, Il valore parametrico non è valido in questa
modalità
Avviene quando si tenta di scrivere un valore illegale in un
parametro.
ALLARME 92, Il valore parametrico supera i limiti min/max
Avviene quando si tenta di impostare una valore fuori
dall'intervallo. Il parametro può essere modificato soltanto
a motore fermo. Err. È stata inserita una password errata;
avviene se si usa una password errata per la modifica di un
parametro protetto da password.
Guida alla Programmazione VLT® Micro Drive FC 51
74 MG02C606 - VLT® è un marchio brevettato Danfoss

Indice
Guida alla Programmazione VLT® Micro Drive FC 51
Indice
,
, Della Corrente Motore...................................................................... 73
A
Abbreviazioni E Standard..................................................................... 7
Adattamento Automatico Motore (AMT).................................... 15
Allarme, Avviso E Parola Di Stato Estesa...................................... 71
Allarmi E Avvisi...................................................................................... 69
C
Carico Termico................................................................................ 16, 49
Carico/Motore........................................................................................ 57
Codice Identificativo.............................................................................. 5
Com. E Opzioni...................................................................................... 64
Compens. Scorrim................................................................................ 17
Compensaz. Del Carico....................................................................... 16
Compensazione
Del Carico..................................................................................... 51, 57
Dello Scorrimento..................................................................... 51, 57
Compensazioni Del Carico................................................................ 14
Comunicazione Seriale......................... 9, 25, 31, 38, 39, 40, 49, 50
Controllo
Della Sovratensione........................................................................ 51
Sovratensione............................................................................ 21, 58
Corrente
Di Dispersione..................................................................................... 4
Di Dispersione Verso Terra.............................................................. 3
Di Uscita............................................................................................... 72
Motore................................................................................................. 15
Nominale............................................................................................. 72
Nominale Di Magnetizzazione.................................................... 16
Cortocircuito.......................................................................................... 73
D
Dati Motore............................................................................................. 72
Direzione Motore.................................................................................... 9
Display........................................................................................................ 8
Dispositivo A Corrente Residua......................................................... 4
E
Edita Setup....................................................................................... 11, 13
EMC............................................................................................................ 73
F
Fase
Del Motore................................................................................... 49, 51
Motore.......................................................................................... 27, 60
Freni........................................................................................................... 58
Freno CC.............................................................................. 18, 20, 29, 51
Frequen. Motore................................................................................... 15
Funzionam./display............................................................................. 56
Funzioni Speciali............................................................................ 46, 66
I
I/O
Analogici............................................................................................. 62
Digitali.................................................................................................. 61
Identif. Conv. Freq................................................................................ 48
Indice Di Conversione......................................................................... 55
Inform. Conv. Freq................................................................................ 67
Istruzioni Di Smaltimento.................................................................... 4
L
LCP
11.............................................................................................................. 1
12.............................................................................................................. 1
Limiti/Avvisi............................................................................................ 60
Lista Di Codici Di Allarme/avviso.................................................... 70
M
Menu
Di Stato................................................................................................... 9
Principale........................................................................................ 9, 10
Rapido.................................................................................................... 9
Stato........................................................................................................ 9
Mod. Man................................................................................................. 31
Modalità
Manuale.......................................................................... 11, 14, 35, 57
Visualizzazione.................................................................................... 9
N
Non Modificabili Durante Il Funzionamento.............................. 12
Numero
Di Parametro........................................................................................ 8
Di Setup................................................................................................. 8
P
Potenza Motore.............................................................................. 73, 14
Programmazione Attiva..................................................................... 56
Protezione Da Sovraccarico Motore................................................. 4
R
Rampa
1 Tempo Rampa Di Discesa.......................................................... 24
1 Tempo Rampa Di Salita.............................................................. 24
Regolatori................................................................................................ 63
Reset.......................................................................................................... 74
MG02C606 - VLT® è un marchio brevettato Danfoss 75

Indice
Resistenza
Di Frenatura....................................................................................... 20
Di Frenatura (ohm).......................................................................... 51
Freno.............................................................................................. 31, 58
Rete IT.......................................................................................................... 4
Ricerca Ed Eliminazione Dei Guasti................................................ 69
Rif./rampe................................................................................................ 59
Riferimento
Massimo.............................................................................................. 22
Minimo................................................................................................. 22
Rifiuti Elettronici...................................................................................... 4
Ripristinato.............................................................................................. 72
Ripristino Scatto.................................................................................... 46
Risorsa Termistore................................................................................ 57
Guida alla Programmazione VLT® Micro Drive FC 51
S
Setup
Attivo.................................................................... 8, 45, 11, 13, 30, 51
Di Modifica....................................................................... 8, 12, 51, 56
Simboli........................................................................................................ 7
Smart Logic............................................................................................... 2
Software Di Setup MCT-10................................................................... 1
Sorgente Di Rete Isolata....................................................................... 4
Spie Luminose.......................................................................................... 9
Stato Motore.......................................................................................... 49
T
Tasti
Di Funzionamento............................................................................. 9
Di Navigazione.................................................................................... 9
Temperatura
Del Motore.......................................................................................... 51
Motore.......................................................................................... 18, 20
Tensione Motore................................................................................... 15
Termistore................................................................................. 18, 72, 51
U
Unità............................................................................................................ 8
V
Valore.......................................................................................................... 8
Velocità Nominale Del Motore........................................................ 15
Visualizz. Dati......................................................................................... 68
76 MG02C606 - VLT® è un marchio brevettato Danfoss

Indice
Guida alla Programmazione VLT® Micro Drive FC 51
MG02C606 - VLT® è un marchio brevettato Danfoss 77

www.danfoss.com/drives
132R0001 MG02C606 Rev. 2012-09-20
*MG02C606*
 Loading...
Loading...