

Page 1

■ Índice
VLT®5000 FLUX
Seguridad
Cómo utilizar este manual ........................................................................................ 3
Reglas de seguridad ................................................................................................ 4
Advertencia contra arranque no deseado ................................................................. 4
Instalación del freno mecánico ................................................................................. 4
............................................................................................................. 3
Introducción ........................................................................................................ 5
Abreviaturas y definiciones ....................................................................................... 5
Tecnología ............................................................................................................... 8
Datos técnicos ................................................................................................. 14
Dimensiones mecánicas ......................................................................................... 14
Instalación .......................................................................................................... 17
Conexión a tierra de seguridad .............................................................................. 20
Instalación eléctrica - Alimentación de red ............................................................ 20
Conexión del motor ................................................................................................ 20
Instalación eléctrica - cable de freno .................................................................... 21
Instalación eléctrica: interruptor de temperatura de la resistencia de freno ............ 21
Instalación eléctrica - carga compartida ................................................................. 22
Instalación eléctrica - suministro externo de 24 V CC ............................................ 23
Instalación eléctrica - salidas de relé ..................................................................... 23
Protección adicional ............................................................................................... 23
Designación de terminal ......................................................................................... 36
Ejemplos de conexion ............................................................................................ 40
Instalación eléctrica - Precauciones EMC .............................................................. 42
Utilización de cables correctos en cuanto a EMC .................................................. 45
Conexión a tierra de cables de control apantallados y trenzados .......................... 46
Interruptor RFI ........................................................................................................ 47
Panel de control (LCP) ................................................................................. 50
Panel de control (LCP) ........................................................................................... 50
Display ................................................................................................................... 50
LEDs ...................................................................................................................... 50
Teclas de control ................................................................................................... 50
Configuración rápida con el Menú rápido .............................................................. 52
Modo de Menú (Ajuste de parámetros) ................................................................. 53
Inicialización a los ajustes de fábrica ...................................................................... 54
Manejo de referencias .................................................................................. 56
Control local y remoto ............................................................................................ 56
Manejo de referencias únicas ................................................................................ 57
Manejo de referencias múltiples ............................................................................. 59
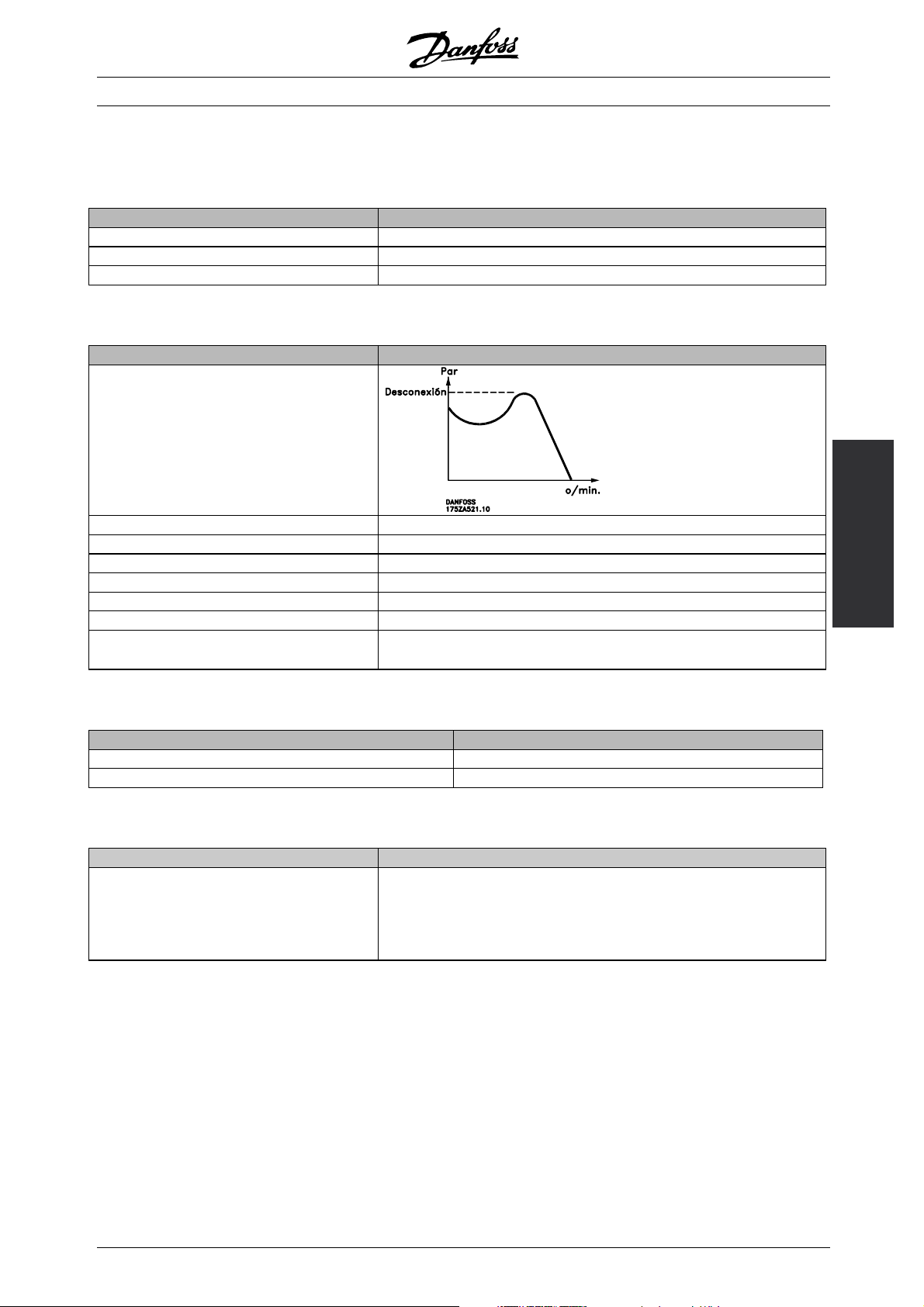
Programación de parada en el límite de par .......................................................... 60
Función de freno dinámico (Resistencia de freno) .................................................. 60
Adaptación automática del motor, AMA ................................................................. 61
Motor en giro ......................................................................................................... 63
Control de par de sobrecarga normal/alto ............................................................. 64
MG.55.A6.05 - VLT es una marca registrada de Danfoss
1
Page 2

VLT®5000 FLUX
Programación ................................................................................................... 65
Funcionamiento y Display ....................................................................................... 65
Carga y Motor ........................................................................................................ 73
Retardo de parada funcional, par 163 - Flujo ........................................................ 83
Referencias y límites ............................................................................................... 85
Señales de entrada y de salida .............................................................................. 95
Funciones especiales ........................................................................................... 111
Fallo de red, par. 407 - Flujo ............................................................................... 114
Comunicación serie .............................................................................................. 118
Funciones técnicas .............................................................................................. 125
Varios .................................................................................................................. 130
Resolución de problemas ..................................................................................... 130
Mensajes de estado ............................................................................................. 131
Lista de advertencias y alarmas ........................................................................... 135
Avisos ................................................................................................................... 136
Apéndice ........................................................................................................... 142
Ajuste de fábrica .................................................................................................. 142
Datos técnicos generales ..................................................................................... 150
Datos eléctricos ................................................................................................... 156
Fusibles ................................................................................................................ 166
Índice .................................................................................................................. 168
2
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 3
VLT®5000 FLUX
■Cómo utilizar este manual
Este manual proporciona la información necesaria para
instalar, arrancar y utilizar el convertidor de frecuencia.
Es aconsejable que lea atentamente este manual.
■Versión de software
VLT 5000 FLUX
Manual de Funcionamiento
Versión de software: 5.5x
Al utilizar una referencia cruzada en el texto
vea el contenido por favor.
TambiénpuedevisitarlapáginaWebdeDanfoss
Drives: www.danfoss.com/drives
175ZA735.15
Seguridad
Este manual de Funcionamiento puede emplearse para los
convertidores de frecuencia VLT 5000 FLUX que incorporen
la versión de software 5.5x. El número de dicha versión
puede verse en el parámetro 624.
Advertencia:
Tocar los elementos eléctricos puede producir la muerte,
incluso después de desconectar el equipo de la alimentación eléctrica.
Además, asegúrese de que ha desconectado las demás entradas de
tensión, como el suministro externo
de 24 V CC, la carga compartida (enlace del circuito
intermedio CC), y la conexión del motor para energía regenerativa.
Con VLT
Con VLT
Con VLT
Con VLT
Con VLT
Con VLT
5001 - 5006, 200-240 V: espere 4 minutos, como mínimo
5008 - 5052, 200-240 V: espere 15 minutos, como mínimo
5001 - 5006, 380-500 V: espere 4 minutos, como mínimo
5008 - 5062, 380-500 V: espere 15 minutos, como mínimo
5072 - 5302, 380-500 V: espere 20 minutos, como mínimo
5350 - 5500, 380-500 V: espere 15 minutos, como mínimo
175ZA901.10
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
3
Page 4
La tensión del convertidor de frecuencia
es peligrosa cuando el equipo está
conectado a la alimentación de red. La
instalación incorrecta del motor o del convertidor
de frecuencia puede producir daños al equipo,
lesiones físicas graves o la muerte.
En consecuencia, es necesario cumplir las
instrucciones de este Manual de Funcionamiento,
además de las normas y reglamentos de
seguridad nacionales y locales.
■Reglas de seguridad
1. El convertidor de frecuencia debe desconectarse
de la alimentación de red si es necesario realizar
actividades de reparación. Compruebe que se ha
desconectado la alimentación de red y que ha
transcurrido el tiempo necesario antes de retirar
los enchufes del motor y de la red eléctrica.
2. La tecla [STOP/RESET] del panel de control del
convertidor de frecuencia no desconecta el equipo
de la alimentación de red, por lo que n
utilizarse como un interruptor de seguridad.
3. Debe establecerse una correcta conexión a tierra
de protección del equipo, el usuario debe estar
protegido contra la tensión de alimentación,
y el motor debe estar protegido contra
sobrecargas de acuerdo con las reglamentaciones
nacionales y locales aplicables.
4. La corriente de fuga a tierra es superior a 3,5 mA.
5. La protección contra sobrecargas térmicas
del motor no está incluida en el ajuste de
fábrica. Si se requiere esta función, ajuste el
parámetro 128 al valor de dato Desconexión
or data value Advertencia.
ota: La función se inicializa a 1,16 x corriente
N
nominal del motor y frecuencia nominal del motor.
Para el mercado norteamericano: Las funciones
ETR proporcionan protección contra sobrecarga
del motor de la clase 20, de acuerdo con NEC.
o retire los enchufes del motor ni de la
6. N
alimentación de red mientras el convertidor de
frecuencia VLT esté conectado al suministro de
red eléctrica. Compruebe que se ha desconectado
la alimentación de red y que ha transcurrido el
tiempo necesario antes de retirar los enchufes
del motor y de la red eléctrica.
7. Tenga en cuenta que el convertidor tiene más
entradas de tensión que las entradas L1, L2 y
L3, cuando están instalados la carga compartida
(enlazado del circuito intermedio CC) y el suministro
externo de 24 V CC. Compruebe que ha
desconectado todas las entradas de tensión y que
ha transcurrido el período de tiempo suficiente
antes de comenzar el trabajo de reparación.
o debe
VLT®5000 FLUX
■Advertencia contra arranque no deseado
1. El motor puede pararse mediante comandos
digitales, comandos de bus, referencias o parada
local, mientras el convertidor de frecuencia esté
conectado a la alimentación eléctrica.
Si por motivos de seguridad personal es
necesario evitar que se produzca un arranque
accidental, unintended start e
de parada no son suficientes.
2. Durante el cambio de los parámetros, puede
arrancar el motor. Por lo tanto, siempre debe
estar activada la t
después de lo cual pueden modificarse los datos.
3. Un motor parado puede arrancar si ocurre
un fallo en los componentes electrónicos del
convertidor de frecuencia, o si desaparece una
sobrecarga provisional, un fallo de la red eléctrica
o un fallo de la conexión del motor.
■Instalación del freno mecánico
o conecte un freno mecánico a la salida del
N
convertidor de frecuencia antes de haber establecido
los parámetros relevantes del control de freno.
(La selección de la salida se establece en los
parámetros 319, 321, 323 ó 326, y la interrupción de
corriente y de frecuencia en los parámetros 223 y 225).
■Uso en red aislada
Consulte la sección Interruptor RFI relativa al uso
en redes de suministro a isladas .
Es importante seguir las recomendaciones relativas
a la instalación en redes IT puesto que se debe
observar la protección suficiente de toda la
instalación. Pueden producirse daños si no se tiene
cuidado con el uso de los dispositivos de control
correspondientes para las redes IT.
ecla de parada [STOP/RESET],
stas funciones
4
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 5
■Abreviaturas y definiciones
■Convertidor de frecuencia
Abreviatura/Definición Descripción
I
VLT,MAX
I
VLT,N
U
VLT,MAX
■Salida
Abreviatura/Definición Descripción
Par de arranque
VLT®5000 FLUX
La intensidad de salida máxima del convertidor de frecuencia.
La intensidad de salida nominal del convertidor de frecuencia.
La máxima tensión de salida.
f
M
I
M
n
mín
n
máx
n
JOG
U
M
η
VLT
Frecuencia transmitida al motor
Intensidad transmitida al motor
Velocidad mínima [rpm]
Velocidad máxima [rpm]
Velocidad por funcionamiento en velocidad fija [rpm]
Tensión transmitida al motor
El rendimiento del convertidor de frecuencia se define como la relación entre la
potencia de salida y la potencia de entrada
■Interruptor NO/NC
Abreviatura/Definición Descripción
NO Normalmente abierto
NC Normalmente cerrado
■Entrada
Abreviatura/Definición Descripción
Comando de control
Parada inmediata
Comando de parada
Mediante el LCP y las entradas digitales, es posible arrancar y parar el motor
conectado.
Introducción
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
5
Page 6
VLT®5000 FLUX
■Motor
Abreviatura/Definición Descripción
f
M,N
I
M,N
I
0
n
M,N
n
deslizamiento
P
M,N
P
0
R
Fe
R2’ Resistencia del rotor
R
S
T
M,N
U
M,N
X
1σ
X’
2σ
X
h
■Referencias
Abreviatura/Definición Descripción
Ref. analógica Señal transmitida a la entrada 53, 54 o 60. Puede ser tensión o intensidad
Ref. binaria Señal transmitida al puerto de comunicación serie
Ref
MAX
Frecuencia nominal del motor (datos de la placa de características)
Intensidad nominal del motor (datos de la placa de características)
Intensidad en vacío
Velocidad nominal del motor (datos de la placa de características)
Deslizamiento en la velocidad del motor
Potencia nominal absorbida por el motor (datos de la placa de características)
Pérdidas de potencia en vacío
Resistencia a la pérdida de hierro
Resistencia del estátor
Par nominal (motor)
Tensión nominal del motor (datos de la placa de características)
Reactancia de fuga del estátor
Reactancia de fuga del rotor
Reactancia principal
Valor máximo que puede tener la señal de referencia. Se ajusta en el parámetro
205
■Varios
Abreviatura/Definición Descripción
Entradas analógicas Las señales de entrada analógicas pueden utilizarse para controlar varias funciones del convertidor de
frecuencia. Hay dos tipos de entradas analógicas:
Entrada de corriente y entrada de tensión
Salidas analógicas Hay dos salidas de corriente analógicas
AWG Significa American Wire Gauge, es decir la unidad norteamericana de medición de sección de cables
Resistencia de freno La resistencia de freno es un módulo capaz de absorber la potencia de frenado que se produce en
frenado regenerativo. Esta energía de frenado regenerativo aumenta la tensión del circuito intermedio y
unchopperdefrenoaseguraquelaenergíasetransmitealaresistenciadefreno
ccw Rotación de derecha a izquierda
CL Bucle Cerrado
Inercia (motor) Elmotorfuncionalibrementehastaquesepara
CP Potencia constante
Características CT Características de par constante, utilizadas para todas las aplicaciones, como cintas transportadoras y
grúas.
cw Rotación de izquierda a derecha
Enlace CC Circuito intermedio en el convertidor de frecuencia
Entradas digitales Las señales de entrada digitales pueden utilizarse para controlar las distintas funciones del convertidor de
frecuencia
Salidas digitales Hay cuatro salidas digitales, dos de las cuales activan interruptores de relé.
DSP Procesamiento de Señal Digital. Se define el procesador de FLUJO como un DSP
6
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 7
VLT®5000 FLUX
■Varios- continuación
Abreviaturas/Definiciones Descripción
ED Ciclo de servicio
ELCB Ruptor de Circuito para Corriente de fuga a Tierra
ETR El relé térmico electrónico es un cálculo de carga térmica basado en la carga
presente y el tiempo transcurrido. Su finalidad es calcular la temperatura del
motor
Vector de Flujo Si se compara con el control de relación tensión/frecuencia estándar, Flux
Vector mejora la dinámica y la estabilidad, tanto cuando se cambia la referencia
de velocidad como en relación con el par de carga
Codificador incremental Un transmisor externo de pulsos digitales utilizado para informar del proceso
sobre la velocidad del motor. Se utiliza al codificador en aplicaciones donde se
requiere una precisión alta en el control de la velocidad
Inicialización Si se lleva a cabo una inicialización (véase el parámetro 620), el convertidor de
frecuencia vuelve a adoptar los ajustes de fábrica
KTY Sensor de temperatura de semiconductor
LCP El Panel de Control Local, que forma un interfaz completo para controlar y
programar el convertidor de frecuencia. El panel de control es desmontable y
puede, como alternativa, instalarse hasta a 3 metros de distancia del convertidor
de frecuencia, es decir, en un panel frontal, mediante la opción del kit de
instalación
Inicialización manual Presiones las teclas [PARAMET] + [MENU] + [OK] al mismo tiempo al arranciar
para realizar una inicialización manual. Consulte además el parámetro 620.
Tenga en cuenta que la inicialización manual sólo debe utilizarse si la función
de reinicio no funciona!
MCM Siglas de Mille Circular Mil, unidad de medida norteamericana para sección
de cables
1 MCM=0,5067mm
NEC Código Nacional de Seguridad Eléctrica
NTC Resistencia de Coeficiente de Temperatura Negativa
Parámetros en línea/fuera de línea Los parámetros en línea se activan inmediatamente después de cambiar el valor
de los datos. Los parámetros fuera de línea no se activan hasta que se haya
introducido OK en la unidad de control
OP Bucle abierto
OVC Control de Sobretensión
PELV Baja Tensión Eléctrica de Protección. Según EN 50178
ppr Pulsos por revolución
RPM Revoluciones por minuto
Termistor Una resistencia dependiente de la temperatura que se sitúa donde ha de
controlarse la temperatura (VLT o motor)
Desconexión Un estado que se produce en distintas situaciones, p. ej. si el convertidor
de frecuencia está sujeto a un aviso de cero activo. La desconexión puede
cancelarse pulsando Reinicio
Desconexión bloqueada Un estado que se produce en distintas situaciones, p. ej. si el convertidor de
frecuencia está sujeto a un exceso de temperatura. Una desconexión bloqueada
puede cancelarse cortando la alimentación eléctrica y reiniciando el convertidor
de frecuencia y presionando Reinicio
2
Introducción
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
7
Page 8
VLT®5000 FLUX
■Tecnología
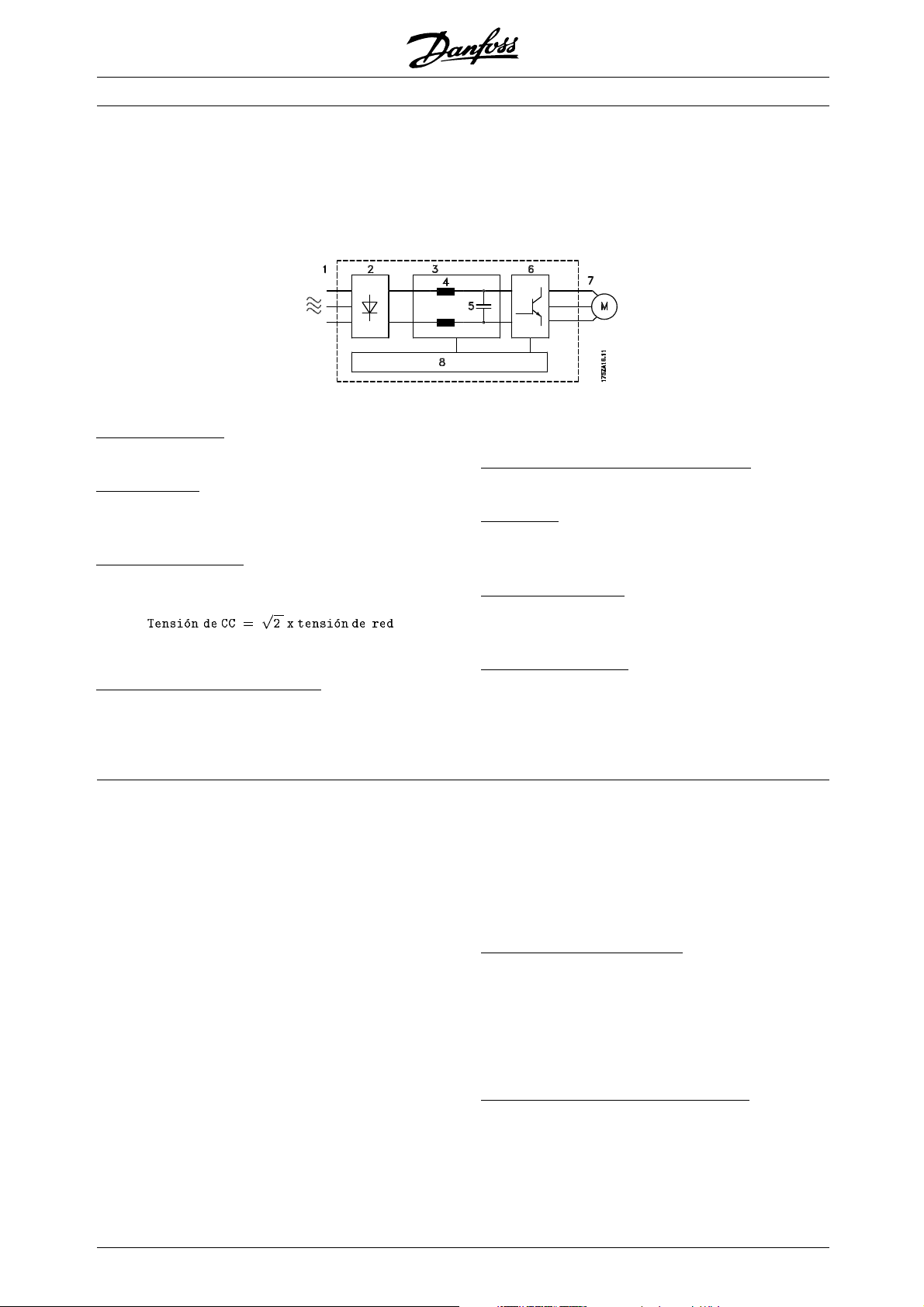
■Principio de control
Los convertidores de frecuencia rectifican la tensión
de CA de la red en tensión de CC y después
1. Tensión de red
3 x 400 - 500 V CA, 50 / 60 Hz.
2
. Rectificador
Puente rectificador trifásico que rectifica la tensión
de CA en tensión de CC.
3
. Circuito intermedio
la convierten de nuevo en tensión de CA con
amplitud y frecuencia variables.
Así, el motor recibe una tensión y frecuencia variables,
locualpermiteuncontrolinfinitamentevariabledela
velocidad de motores de CA trifásicos estándar.
5
. Condensadores del circuito intermedio
Suavizan la tensión del circuito intermedio.
6
. Inversor
Convierte la tensión de CC en tensión de CA
variable con una frecuencia variable.
7
. Tensión de motor
Tensión de CA variable, 0-100% de la tensión de red.
Frecuencia variable: 0 - 300 Hz.
4. Bobinas del circuito intermedio
Suavizan la intensidad del circuito intermedio y limitan
la carga en la red y los componentes (transformador
de alimentación, cables, fusibles y contactores).
■Principio de control devector de Flujo
El propósito de desarrollar el principio de control de
vector de Flujo ha sido obtener un control firme del
motor que tolere las diferentes características del
motor sin que haga falta reducir la potencia.
La intensidad se divide en intensidad magnetizante
e intensidad generadora de par y proporciona un
cálculo mucho más exacto y rápido de las cargas
reales del motor. Ahora es posible compensar los
cambios rápidos de carga. Puede obtenerse un
par total y un control de velocidad extremadamente
preciso incluso a bajas velocidades o reposo.
Garantiza unas buenas propiedades de control
de par, transiciones suaves entre funcionamiento
conysinlímitedeintensidad.
Ventajas del sistema de control de vector de Flujo:
- Control preciso de velocidad hasta velocidad 0
- Rápida respuesta desde la recepción de la
señal a par total del eje del motor
- Buena compensación de cambios de carga
. Circuito de control
8
En función de los parámetros, los ajustes de
referencia y las señales de entrada, se generan
patrones de pulsos para formar la tensión y la
frecuencia variables del motor.
- Transición controlada de funcionamiento normal a
funcionamiento con límite de intensidad (y viceversa)
- Control de par, que abarca el control de
los componentes generador de par y
magnetizante de la intensidad
-Parderetencióntotal
alidas de señal programables
S
El convertidor de frecuencia utiliza una tecnología
digital que permite programar las señales de salida.
Para esto resulta fácil programar las funciones que
desee con el panel de control del convertidor de
frecuencia o las interfaces de usuario RS 485/RS 232.
rotección contra interferencias de la red
P
El convertidor de frecuencia está protegido
contra los transitorios que tienen lugar en la
alimentación de red, por ejemplo, cuando se
acopla una unidad de compensación de reactiva
o cuando los fusibles se funden.
8
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 9
VLT®5000 FLUX
La tensión de motor nominal y el par total
pueden mantenerse hasta con un 10% de baja
tensión en la red de alimentación.
nterferencias menores en la red eléctrica
I
Debido a que el convertidor de frecuencia incluye
bobinas en el circuito intermedio, la interferencia de
armónicos en la red es muy baja. Esto garantiza
un buen factor de potencia y una intensidad de
pico menor, con lo cual se reduce la carga en
la instalación de red eléctrica.
rotección avanzada del VLT
P
La lectura de intensidad en las tres fases del
motor proporciona una protección perfecta del
convertidor de frecuencia contra fallos a tierra y
cortocircuitos en la conexión del motor.
El control eficaz de las tres fases de la alimentación
garantiza que la unidad se detenga en caso de fallo de
fase. Así se evita una sobrecarga del inversor y de los
condensadores del circuito intermedio, lo que reduciría
drásticamente la vida útil del convertidor de frecuencia.
Para obtener la máxima protección contra el
sobrecalentamiento del motor si éste está cubierto o
bloqueado, o si se produce un fallo del ventilador, es
posible incorporar un termistor y conectarlo a la entrada
de termistor del convertidor de frecuencia (terminales
53 ó 54), consulte los parámetros 128, 308 y 311.
Introducción
El convertidor de frecuencia incorpora de forma
estándar protección térmica integrada. Si se
produce una situación de sobrecarga térmica,
esta función desactiva el inversor.
islamiento galvánico fiable
A
En el convertidor de frecuencia todos los circuitos de
control están separados del potencial de red mediante
un aislamiento que cumple los requisitos PELV.
Un conjunto de contactos de relé, terminales
01 - 03, está separado de los circuitos de
control restantes mediante un aislamiento que
también cumple con PELV.
Además, los circuitos de control están colocados
en bloques separados individualmente mediante
un aislamiento funcional (< 100 V), consulte la
sección Datos técnicos generales.
rotección avanzada del motor
P
El convertidor de frecuencia incorpora una protección
térmica electrónica integrada del motor.
El convertidor de frecuencia calcula la temperatura
del motor a partir de la intensidad, la frecuencia
y el tiempo transcurrido.
En comparación con la protección tradicional
bimetálica, la protección electrónica tiene en cuenta
la disminución de la refrigeración producida a bajas
frecuencias debido a la reducción de la velocidad del
ventilador del motor (motores con ventilación interna).
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
9
Page 10
VLT®5000 FLUX
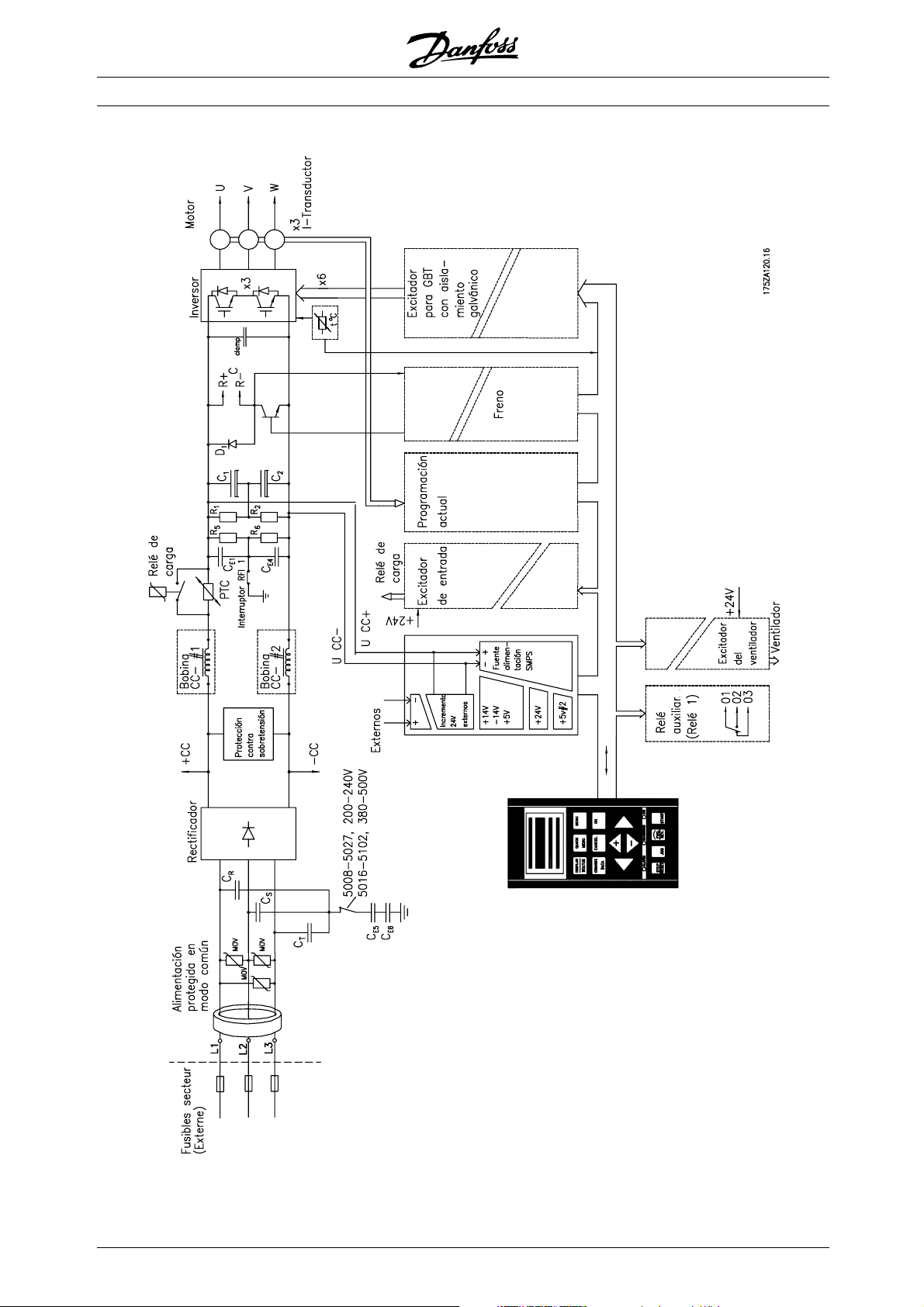
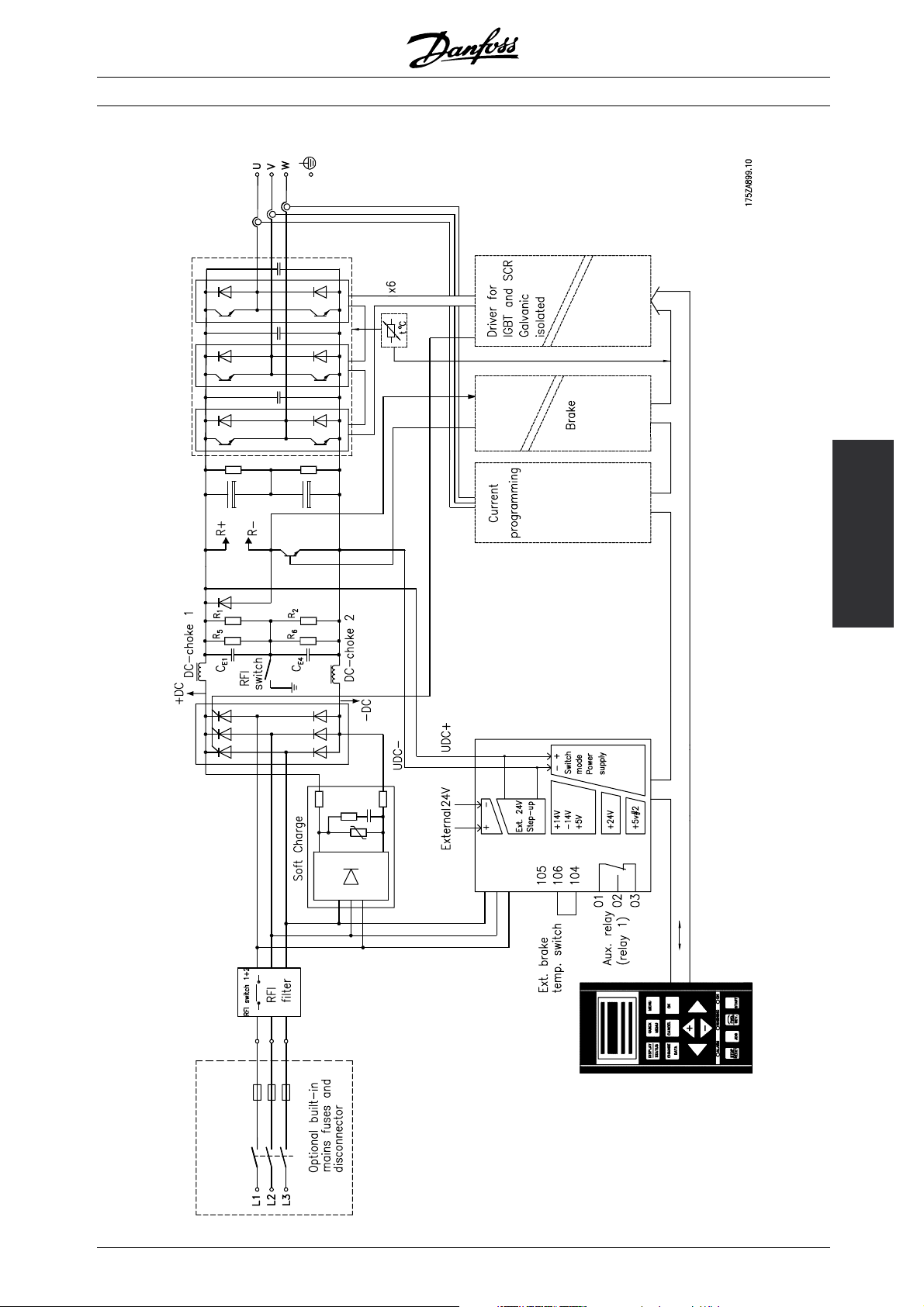
■Diagrama Clave para VLT 5001-5027 200-240 V, VLT 5001-5102 380-500 V
10
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 11
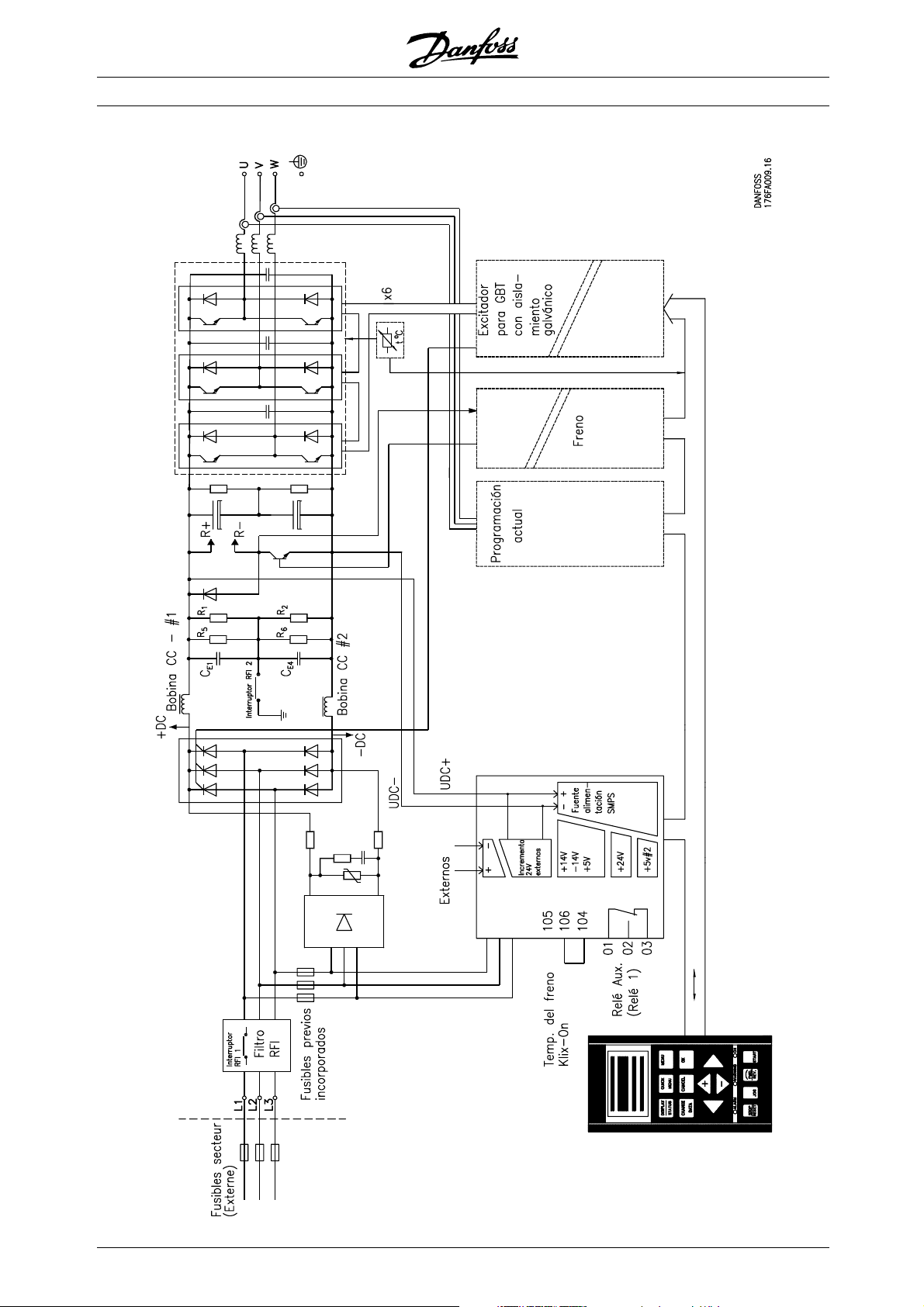
■Diagrama clave para VLT 5122-5302 380-500V
VLT®5000 FLUX
Introducción
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
11
Page 12
■Diagrama Clave para VLT 5032-5052 200-240 V
VLT®5000 FLUX
12
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 13
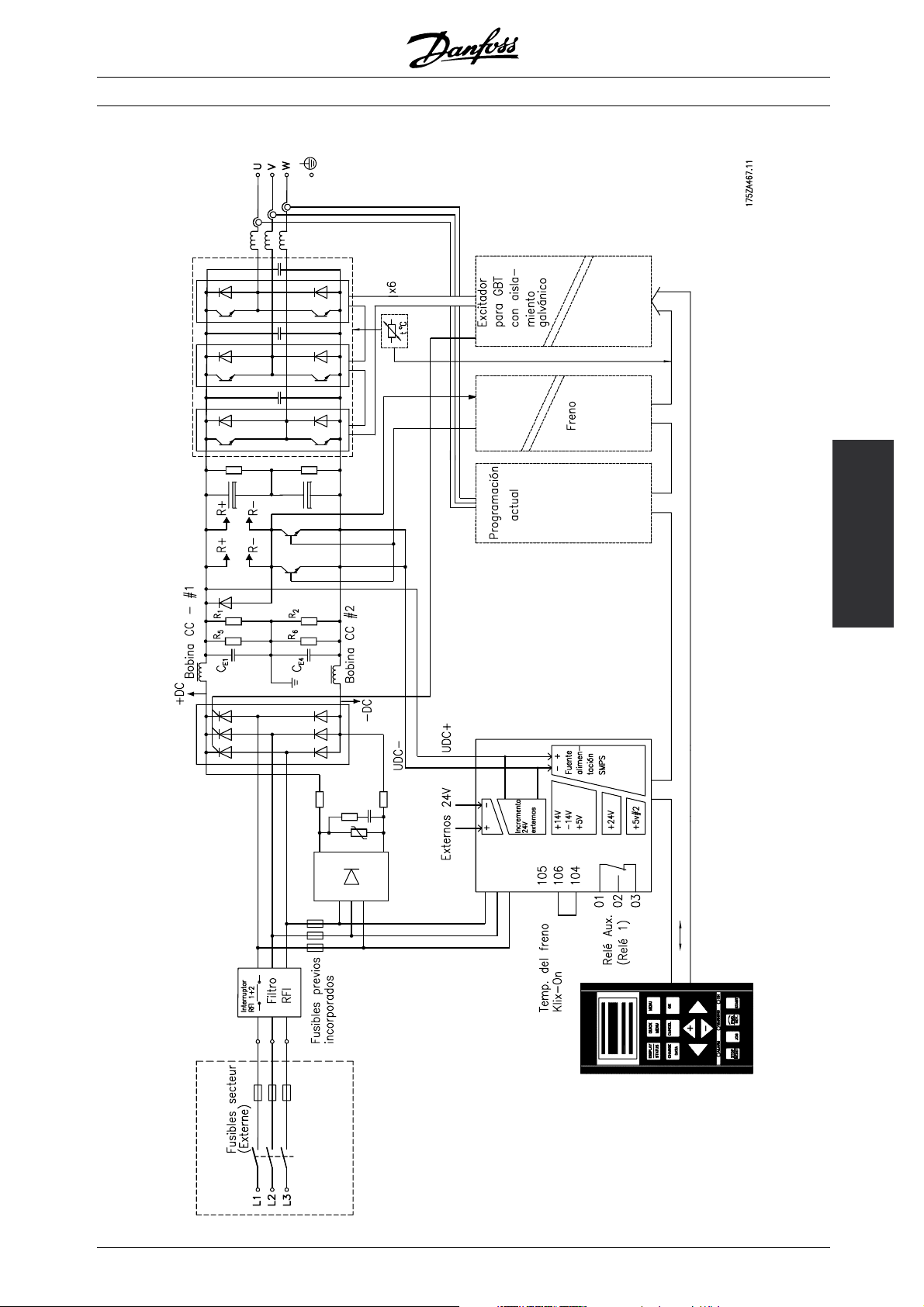
■Diagrama clave para VLT 5350-5500 380-500 V
VLT®5000 FLUX
Introducción
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
13
Page 14
VLT®5000 FLUX
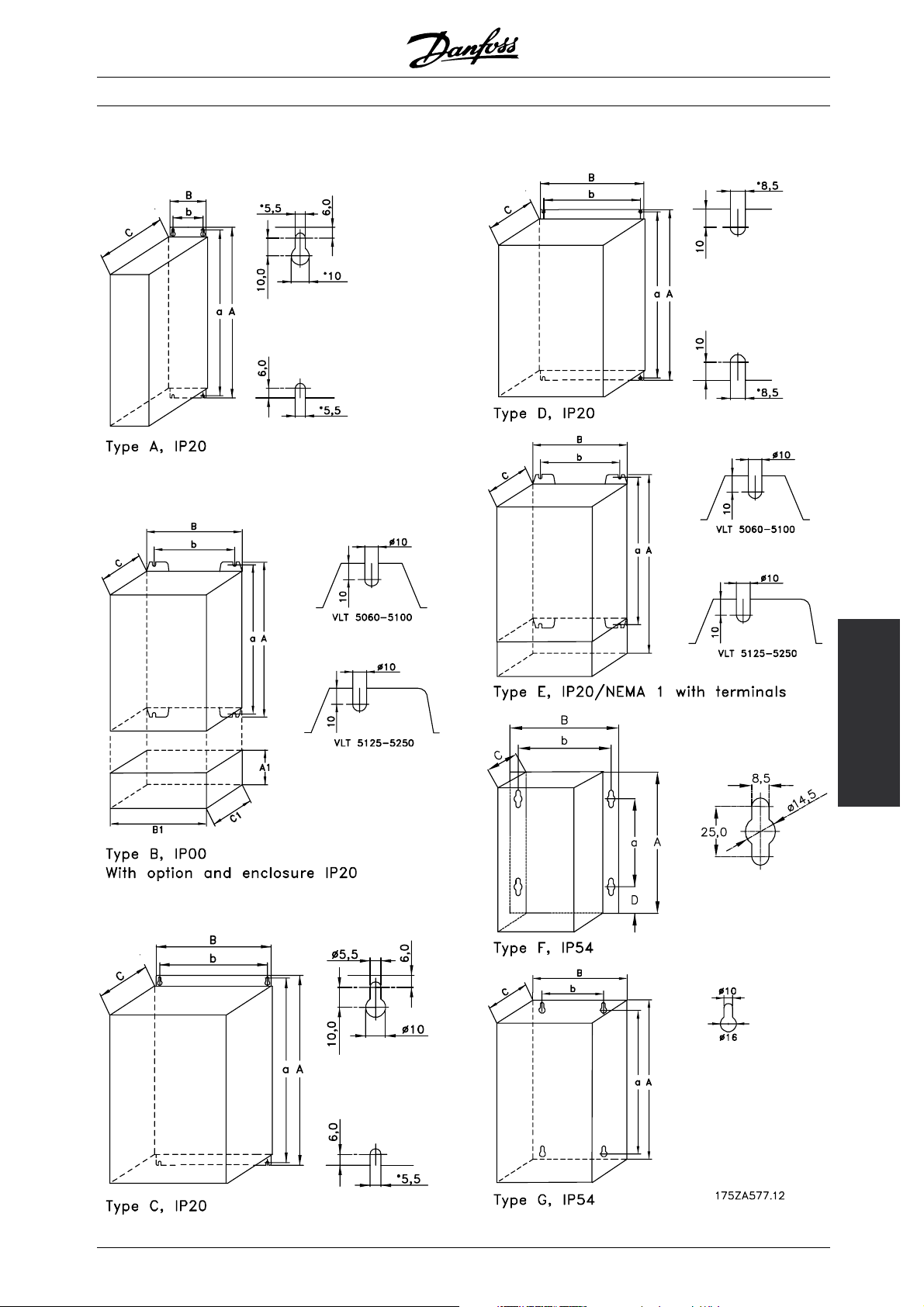
■Dimensiones mecánicas
Todas las dimensiones indicadas a continuación están expresadas en mm.
ABCDabab/beTipo
Bookstyle IP 20
5001 - 5003 200 - 240 V
5001 - 5005 380 - 500 V
5004 - 5006 200 - 240 V
5006 - 5011 380 - 500 V
Compacto IP 00
5032 - 5052 200 - 240 V 800 370 335 780 270 225 B
5122 - 5152 380 - 500 V 1046 408 375
5202 - 5302 380 - 500 V 1327 408 375
5350 - 5500 380 - 500 V 1896 1099 494 1847 1065 400
Compacto IP 20
5001 - 5003 200 - 240 V
5001 - 5005 380 - 500 V
5004 - 5006 200 - 240 V
5006 - 5011 380 - 500 V
5008 200 - 240 V
5016 - 5022 380 - 500 V
5011 - 5016 200 - 240 V
5027 - 5032 380 - 500 V
5022 - 5027 200 - 240 V
5042 - 5062 380 - 500 V
5072 - 5102 380 - 500 V 800 370 335 780 330 225 D
Compacto Nema 1/IP20/IP21
5032 - 5052 200 - 240 V 954 370 335 780 270 225 E
5122 - 5152 380 - 500 V 1208 420 373
5202 - 5302 380 - 500 V 1588 420 373
5350 - 5500 380 - 500 V 2010 1200 600 - - 400
Compacto IP 54/Nema 12
5001 - 5003 200 - 240 V
5001 - 5005 380 - 500 V
5004 - 5006 200 - 240 V
5006 - 5011 380 - 500 V
5008 - 5011 200 - 240 V
5016 - 5027 380 - 500 V
5016 - 5027 200 - 240 V
5032 - 5062 380 - 500 V
5032 - 5052 200 - 240 V 937 495 421 - 830 374 225 G
5072 - 5102 380 - 500 V 940 400 360 70 690 375 225 F
5122 - 5152 380 - 500 V 1208 420 373
5202 - 5302 380 - 500 V 1588 420 373
5350 - 5500 380 - 500 V 2010 1200 600 - - - 400
ab: Espacio mínimo encima del alojamiento’
be: Espacio mínimo debajo del alojamiento
1: Sólo espacio mínimo encima del alojamiento (ab)
IP 00 cuando está integrado en un armario Rittal.
2: Con desconectar, añada 42 mm.
395 90 260 384 70 100 A
395 130 260 384 70 100 A
2)
2)
1001 304 225 J
1282 304 225 J
395 220 160 384 200 100 C
395 220 200 384 200 100 C
560 242 260 540 200 200 D
700 242 260 680 200 200 D
800 308 296 780 270 200 D
2)
2)
1154 304 225 J
1535 304 225 J
460 282 195 85 260 258 100 F
530 282 195 85 330 258 100 F
810 350 280 70 560 326 200 F
940 400 280 70 690 375 200 F
2)
- 1154 304 225 J
2)
1535 304 225 J
1)
I
1
H
1)
H
14
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 15
■Dimensiones mecánicas,continuación
VLT®5000 FLUX
Datos
técnicos
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
15
Page 16
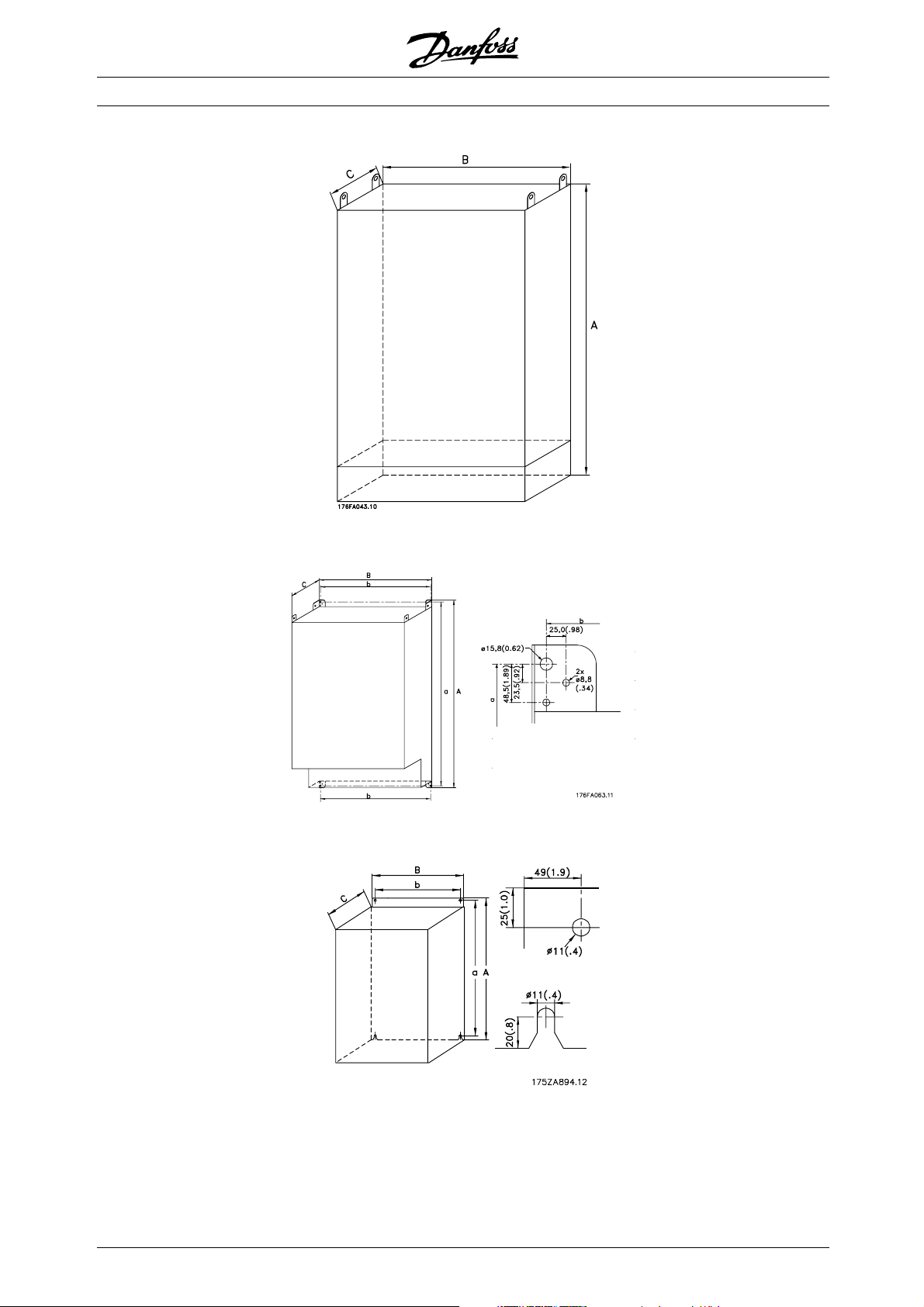
■Dimensiones mecánicas (cont.)
VLT®5000 FLUX
Tipo H, IP 20, IP 54
Tipo I, IP 00
Tipo J, IP 00, IP 21, IP 54
16
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 17
VLT®5000 FLUX
Preste atención a los requisitos relativos a
la integración y al kit de montaje en el lugar
de instalación; consulte la lista siguiente. La
información facilitada en la lista debe observarse al
pie de la letra para evitar daños o lesiones graves,
especialmente cuando se instalen unidades grandes.
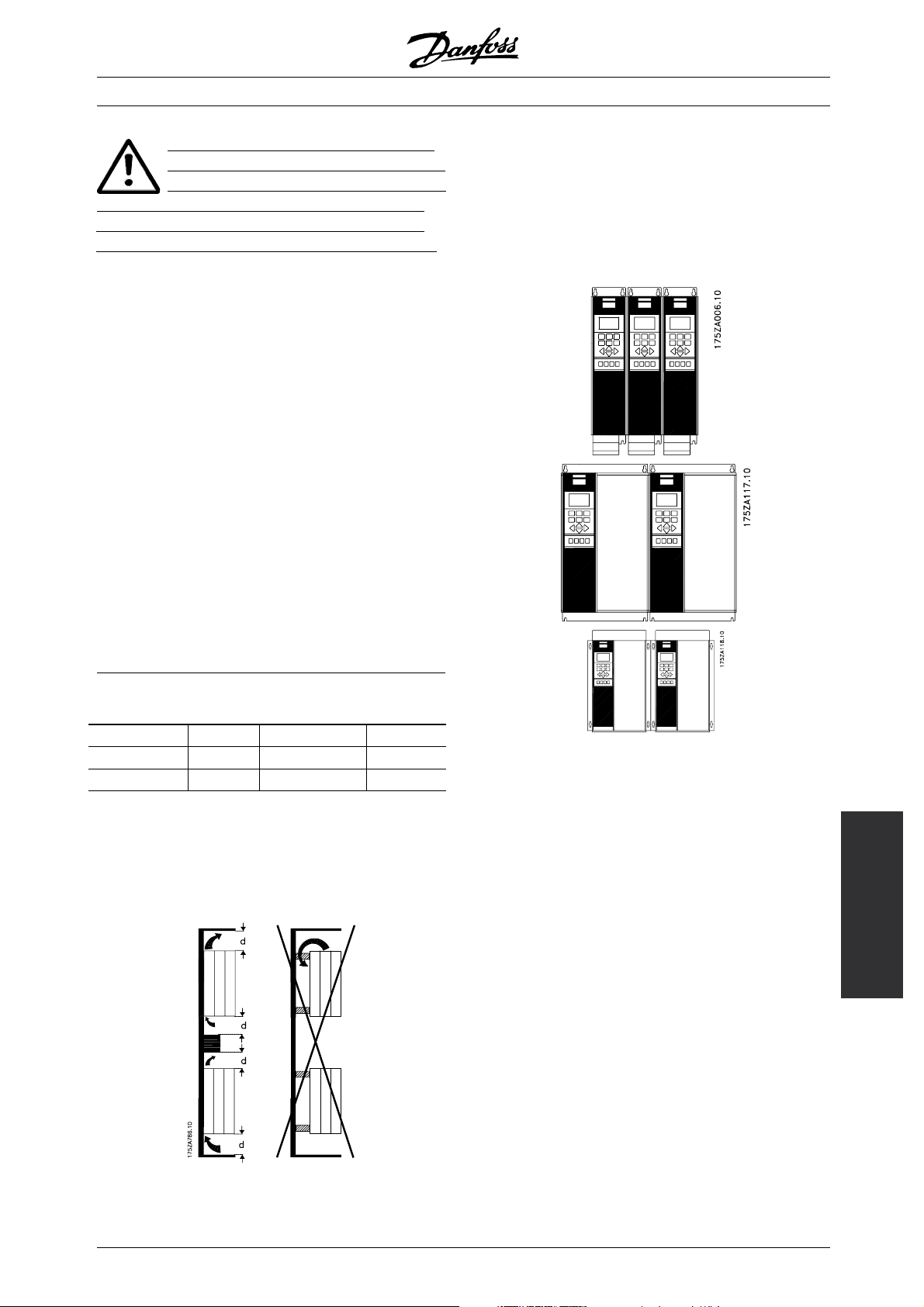
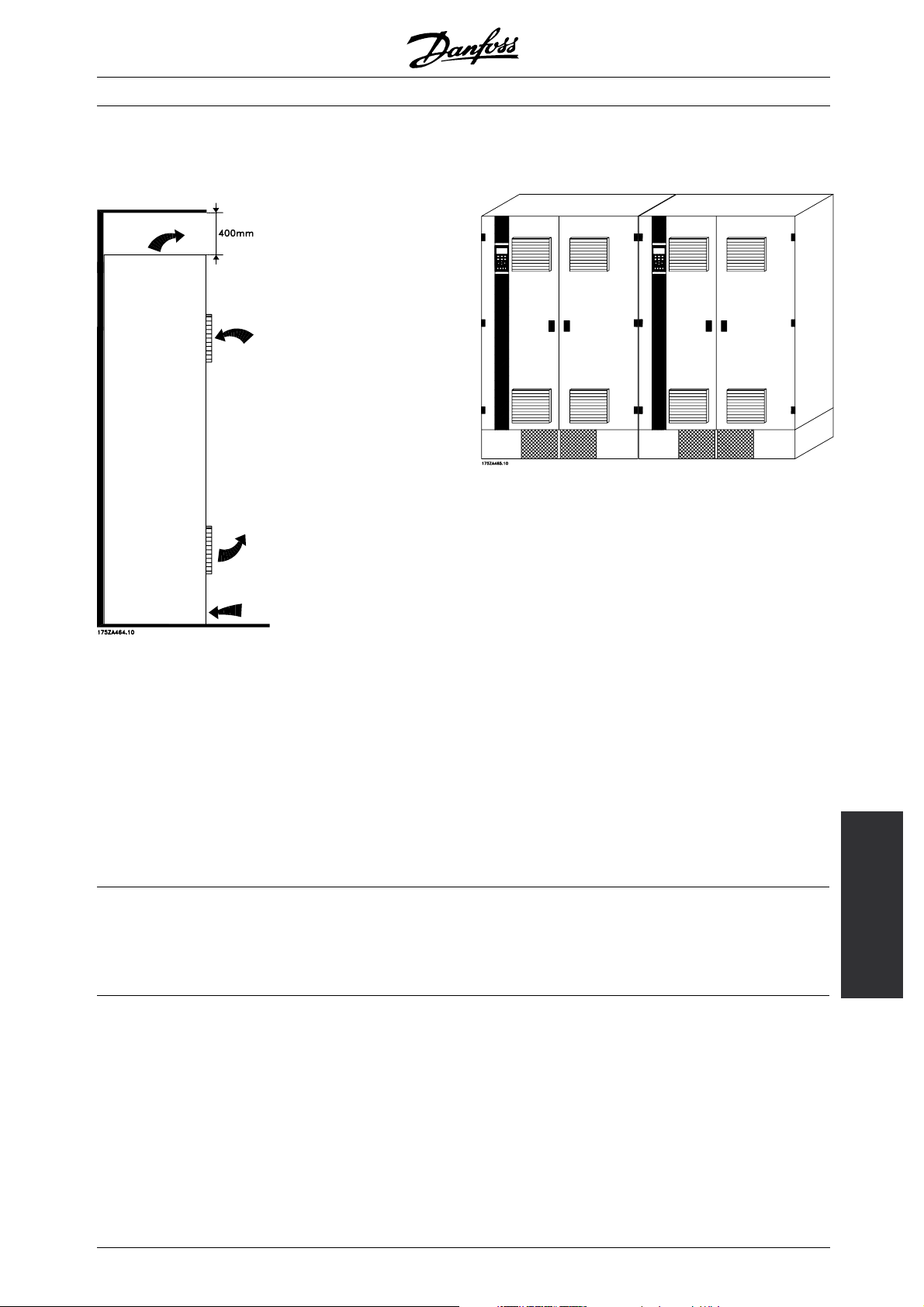
El convertidor de frecuencia debe instalarse
en posición vertical.
El convertidor de frecuencia se refrigera por circulación
de aire. Para que la unidad pueda soltar el aire de
refrigeración, la distancia mínima encima y debajo de
la unidad debe ser la indicada en la figura siguiente.
Para que la unidad no se sobrecaliente, compruebe
quelatemperaturaambienteno excede la temperatura
máxima indicada para el convertidor de frecuencia ni la
temperatura media de 24 horas. Ambas temperaturas
se indican en los Datos técnicos generales.
Es necesario reducir la potencia del convertidor de
frecuencia si la temperatura ambiente oscila entre
45° C - 55° C. Consulte la sección Reducción
de potencia en la Guía de Diseño.
La duración del convertidor de frecuencia disminuirá
si no se realiza una reducción de potencia en el
rango de temperatura ambiente anterior.
Todas las unidades Bookstyle y Compact
requieren un espacio mínimo por encima y
por debajo del alojamiento.
Lado a lado/brida a brida
Todos los convertidores de frecuencia se pueden
montar lado a lado/brida a brida.
■Integración
IP 00 IP 20/Nema 1 IP 54
Bookstyle - OK Compact OK OK OK
■Instalación de VLT 5001-5302
Todos los
de modo que se garantice una refrigeración adecuada.
Refrigeración
convertidores de frecuencia deben instalarse
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
17
Page 18
d[mm] Comentarios
Bookstyle
VLT 5001-5006, 200-240 V 100
VLT 5001-5011, 380-500 V 100
Compacto (todos los tipos de alojamiento)
VLT 5001-5006, 200-240 V 100
VLT 5001-5011, 380-500 V 100
VLT 5008-5027, 200-240 V 200
VLT 5016-5062, 380-500 V 200
VLT 5072-5102, 380-500 V 225
VLT®5000 FLUX
Instalación en una superficie vertical plana (sin separadores)
Instalación en una superficie vertical plana (sin separadores)
Instalación en una superficie vertical plana (sin separadores)
VLT 5032-5052, 200-240 V 225
VLT 5122-5302, 380-500 V 225
Instalación en una superficie vertical plana (sin separadores)
Los materiales de filtros de IP 54 deben cambiarse cuando estén sucios.
18
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 19
■Instalación de VLT 5350-5500 380-500V Compact
Nema1(IP20)eIP54
Refrigeración
VLT®5000 FLUX
Lado a lado
Compact Nema 1 (IP 20) e IP 54
Todas las unidades Nema 1 (IP 20) e IP 54 de la serie
indicada anteriormente se pueden instalar lado a lado
sin espacio entre ellas, puesto que estas unidades
no necesitan refrigeración en los laterales.
Todas las unidades de la serie indicada anteriormente
precisan un espacio mínimo de 400 mm encima del
alojamiento y deben instalarse sobre suelos pla
Esto se aplica a las unidades Nema 1 (IP 20) e IP 54.
Para el acceso al convertidor VLT 5350-5500,
también se requiere un espacio mínimo de 60
mm por delante del VLT.
Los materiales de filtro de las unidades IP 54
deben cambiarse periódicamente en función
del entorno de funcionamiento.
■IP 00 VLT 5350 - 55
La unidad IP 00 se ha diseñado para su instalación en
un armario cuando se instala según las instrucciones
00 380 - 500 V
nos.
5
de la Guía de Inst
MG.56.AX.YY. Tenga en cuenta que deben cumplirse
las mismas condiciones que para Nema 1 / IP 54.
alación de VLT 5350 - 5500,
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
19
Page 20
VLT®5000 FLUX
■Instalación eléctrica
La tensión del convertidor de frecuencia
es peligrosa cuando la unidad está
conectada a la alimentación de red. Una
instalación incorrecta del motor o del convertidor de
frecuencia podría causar daños materiales, lesiones
graves o incluso la muerte. Por ello, deben seguirse
las instrucciones de este manual, así como los
reglamentos de seguridad locales y nacionales.
Puede resultar peligroso tocar los elementos eléctricos
incluso después de desconectar la tensión.
Utilizando VLT 5001-5006, 200-240 V y 380-500
V: Espere al menos 4 minutos.
Utilizando VLT 50008-5052, 200-240 V:
espere al menos 15 minutos
Utilizando VLT 5008-5062, 380-500 V: espere
al menos 15 minutos
Utilizando VLT 5072-5302, 380-500 V: espere
al menos 20 minutos
Utilizando VLT 5350-5500, 380-500 V: espere
al menos 15 minutos
¡NOTA!:
Es responsabilidad del usuario o del electricista
certificado asegurar la conexión a tierra y
protección correctas según las reglas y
normas nacionales y locales aplicables.
■Conexión a tierra de seguridad
¡NOTA!:
El convertidor de frecuencia tiene una alta
corrientedefugaydebeconectarseatierra
de forma adecuada por razones de seguridad.
Utilice el termnal de conexión a tierra (consulte la
sección Instalación eléctrica, cables de potencia ),
que permite una conexión a tierra reforzada.
Aplique los reglamentos nacionales de seguridad.
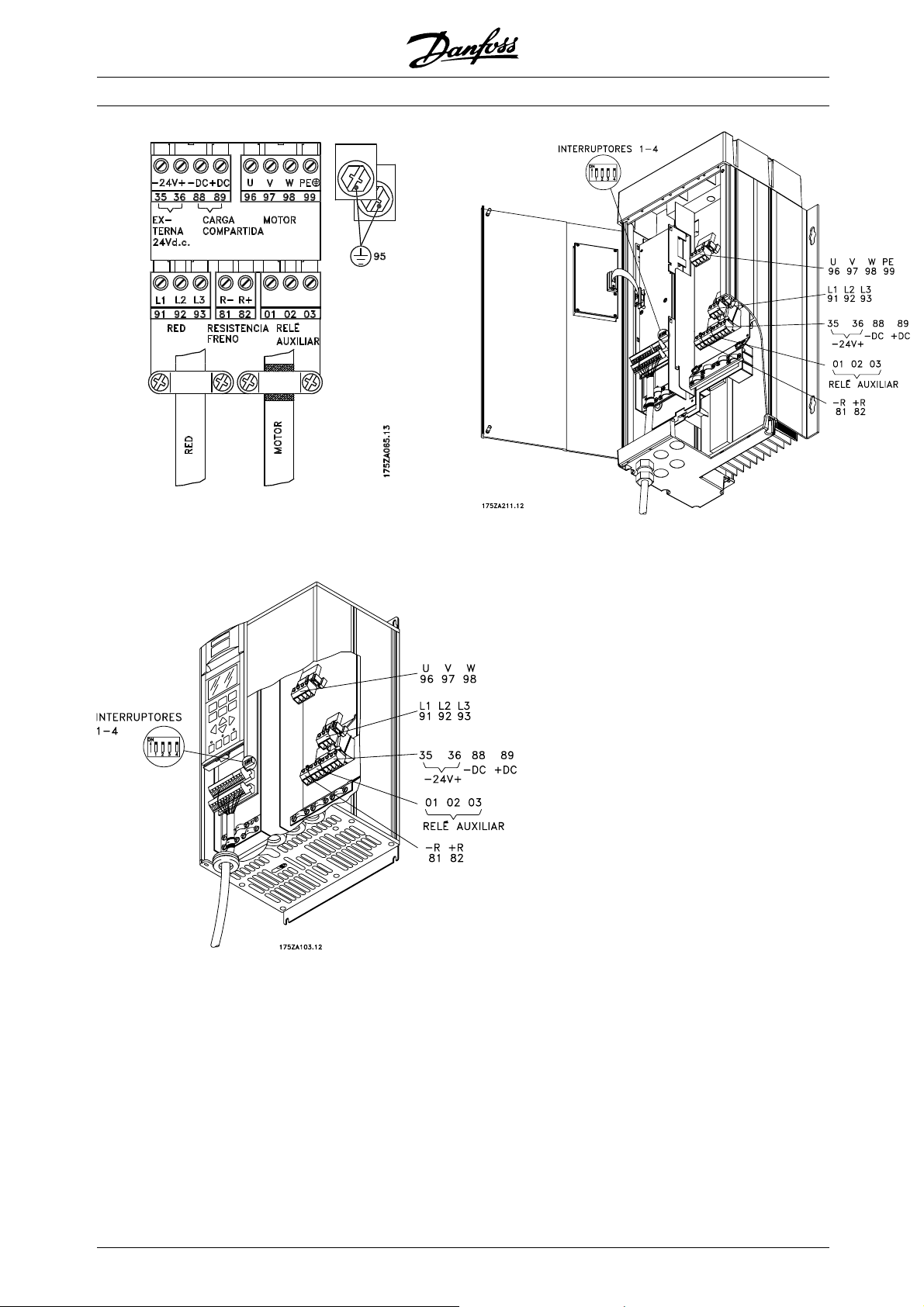
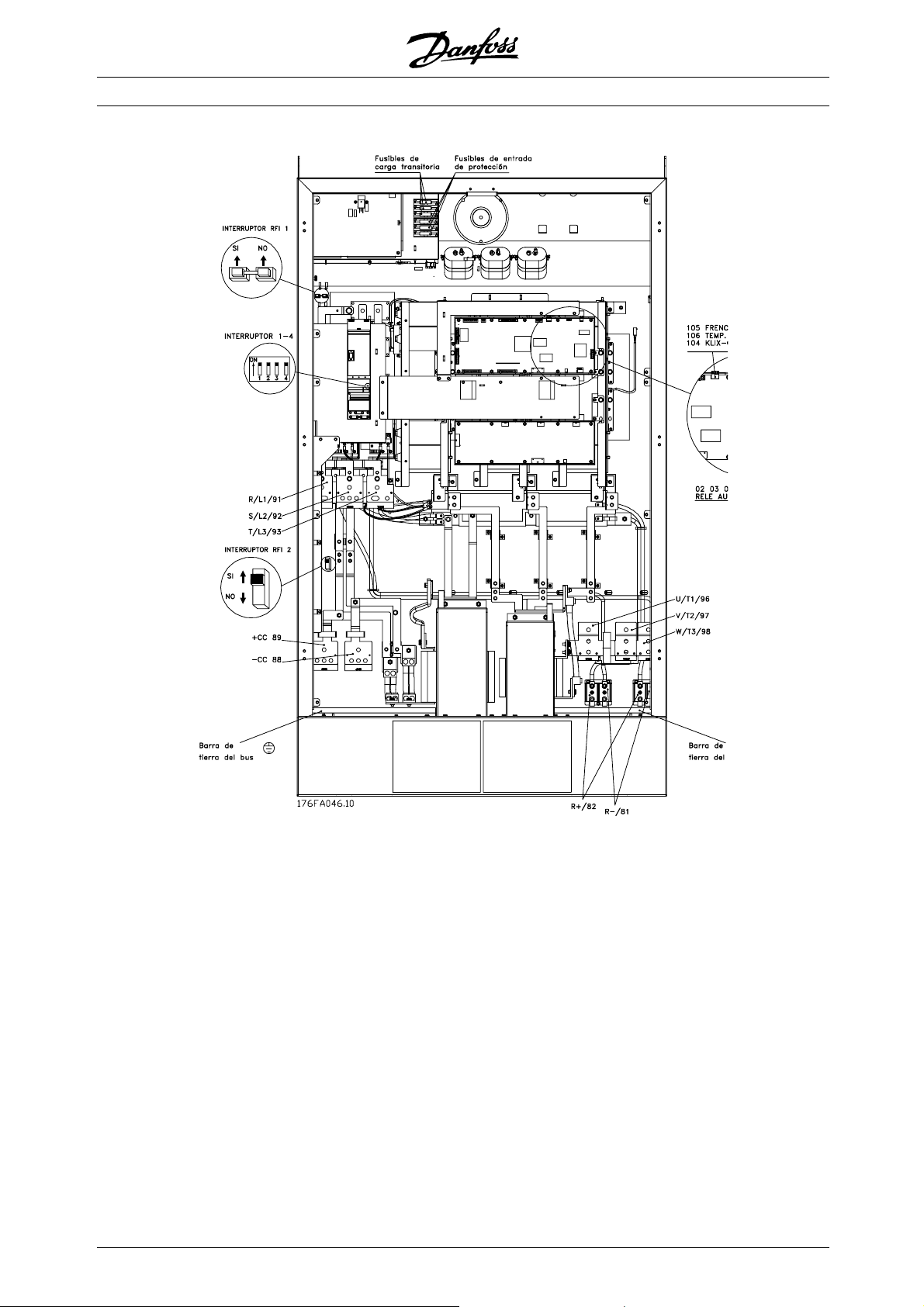
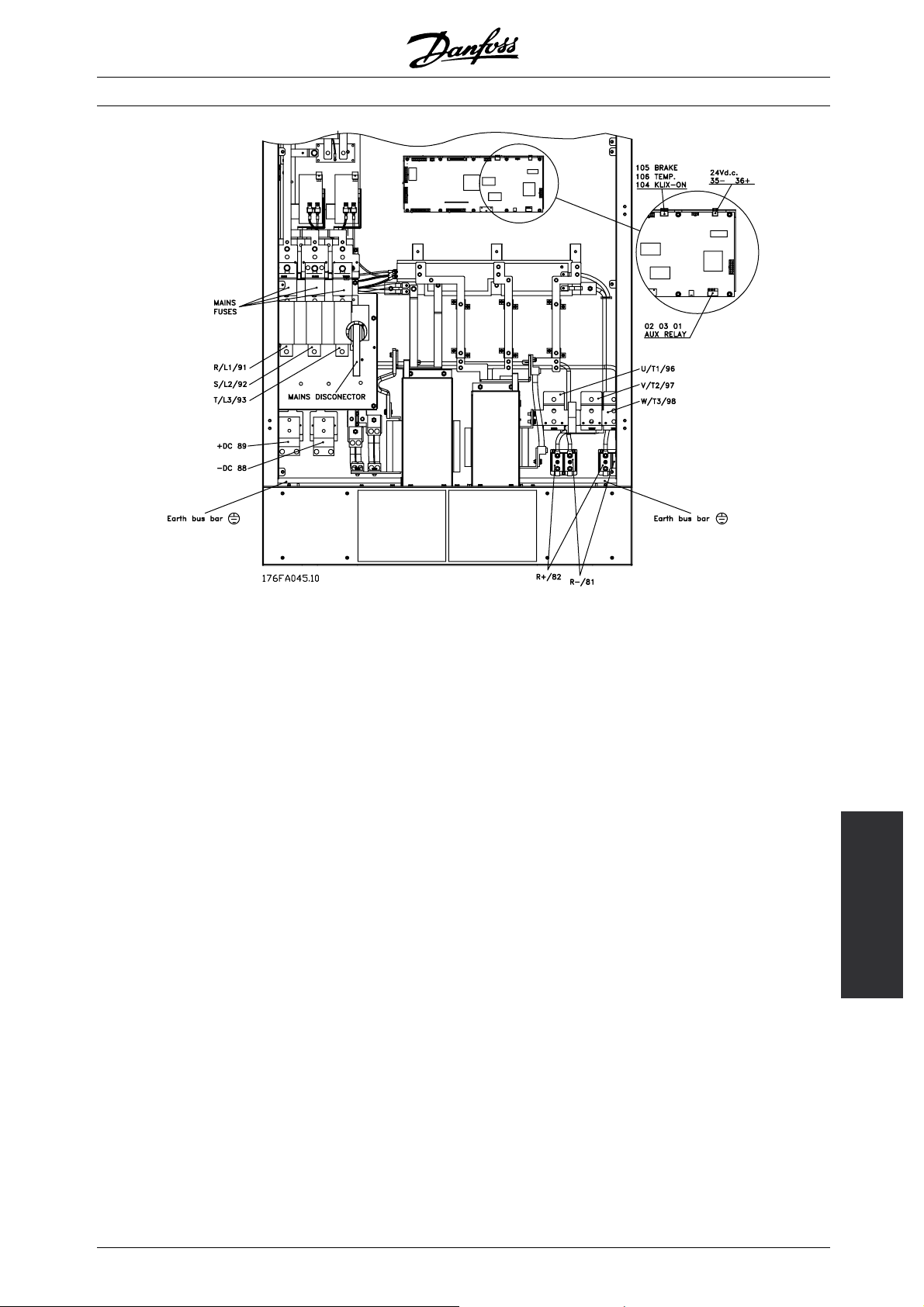
■Designación de terminal
Las designaciones de terminal para las
conexiones eléctricas son iguales en todos los
tamaños de inversor VLT.
Terminales de
alimentación de
91
R(L1)
92
S(L2)93T(L3)
red
Terminales de
motor
96
U
97
V
94 95 99Terminal de
conexión a tierra
Resistencia de
freno
81
R+
82
Rterminales
Carga compartida 88
-CC
89
+CC
98
W
■Prueba de alta tensión
Es posible realizar una prueba de alta tensión
poniendo en cortocircuito los terminales U, V,
W, L
1,L2yL3
el cortocircuito y el chasis con un máximo de
2,15 kV CC durante 1 segundo.
¡NOTA!:
El interruptor para interferencias de
radiofrecuencia debe estar cerrado (en la
posición ON) cuando se realicen las pruebas
de alta tensión (consulte la sección Interruptor
para interferencias de radiofrecuencia) .
Si se somete toda la instalación a una prueba
de alta tensión, la conexión de la alimentación
de red y del motor deberá interrumpirse si las
corrientes de fuga son demasiado altas.
mientras se aplica energía entre
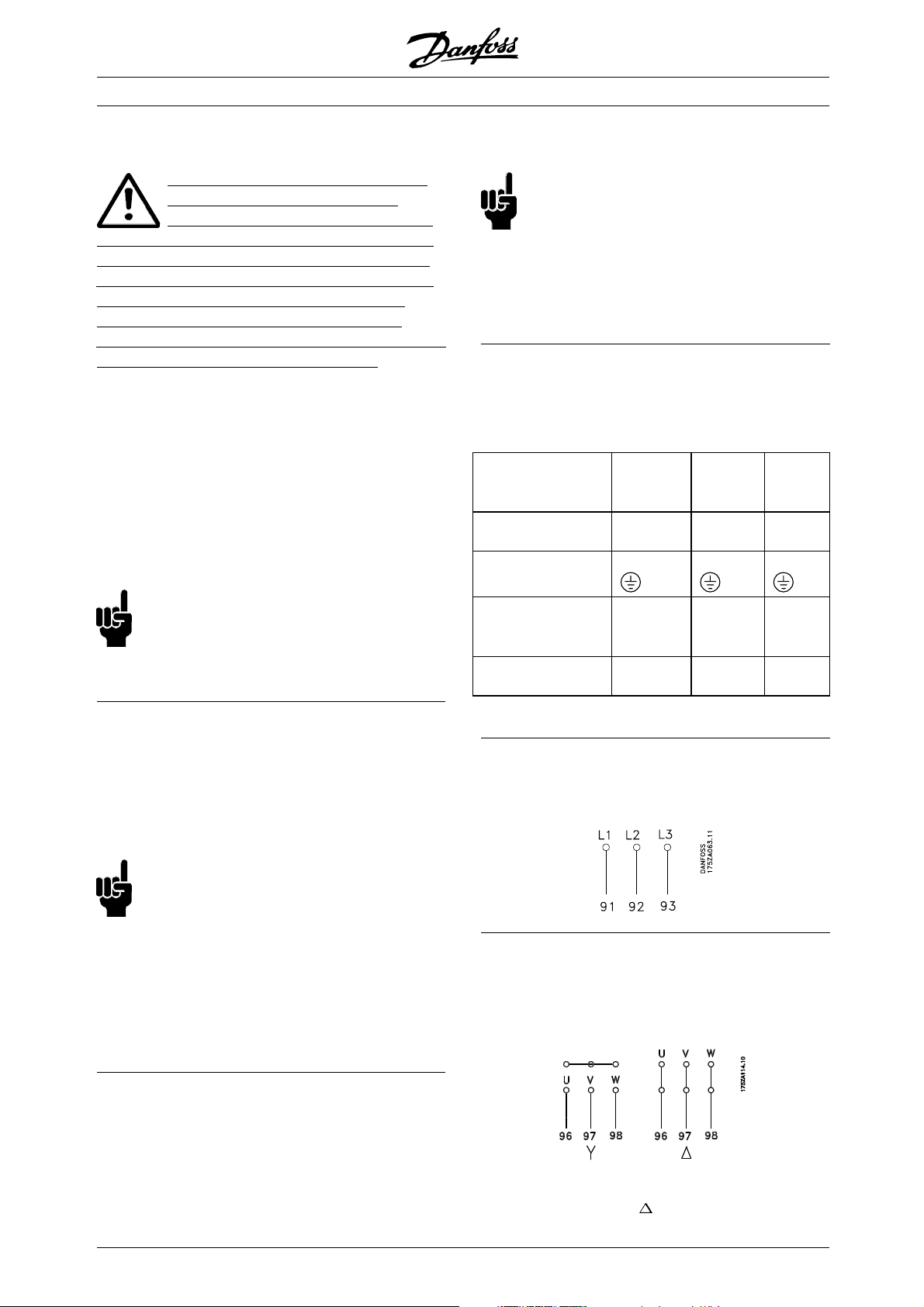
■Instalación eléctrica - Alimentación de red
Conecte las tres fases de l
alosterminalesL
■ Conexión del motor
Con el convertidor de frecuencia pueden
utilizarse todos los tipos de motores asíncronos
trifásicos estándar.
1,L2,L3
a red de alimentación
.
20
Normalmente, los motores pequeños se conectan
en estrella (200/400 V,
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
/Y).
Page 21
VLT®5000 FLUX
Los motores de gran tamaño se conectan en
triángulo (400/690 V,
Tenga en cuenta que el cable del motor
debe estar apantallado.
■Protección térmica del motor
El relé electrónico térmico (ETR) de los convertidores
con aprobación UL ha recibido la aprobación UL
para protección de un único motor con el parámetro
128 ajustado en ETR Desconexión y el parámetro
105 programado en la corriente nominal del motor
(consulte la placa de características del motor).
■Sentido de rotación del eje del motor
/Y).
■Instalación eléctrica - cable de freno
(Sólo estándar con freno y extendido con freno.
Código de tipo: SB, EB, DE, PB).
Núm. Función
81, 82 Terminales de resistencia de freno
El cable de conexión a la resistencia de freno d
ser apantallado. Conecte la pantalla mediante
abrazaderas a la placa conductora posterior del
convertidor de frecuencia y al armario
de la resistencia de freno.
Elija un cable de freno cuya sección se adecue al
par de frenado. Consulte tambi
del freno, MI.90.FX.YY y MI.50.SX.YY para obtener
información adicional sobre una instalación segura.
¡NOTA!:
Tenga en cuenta que pu
tensiones de CC de hasta 960 V
en los terminales, en función de la
tensión de alime
ntación.
én las Instrucciones
eden generarse
metálico
ebe
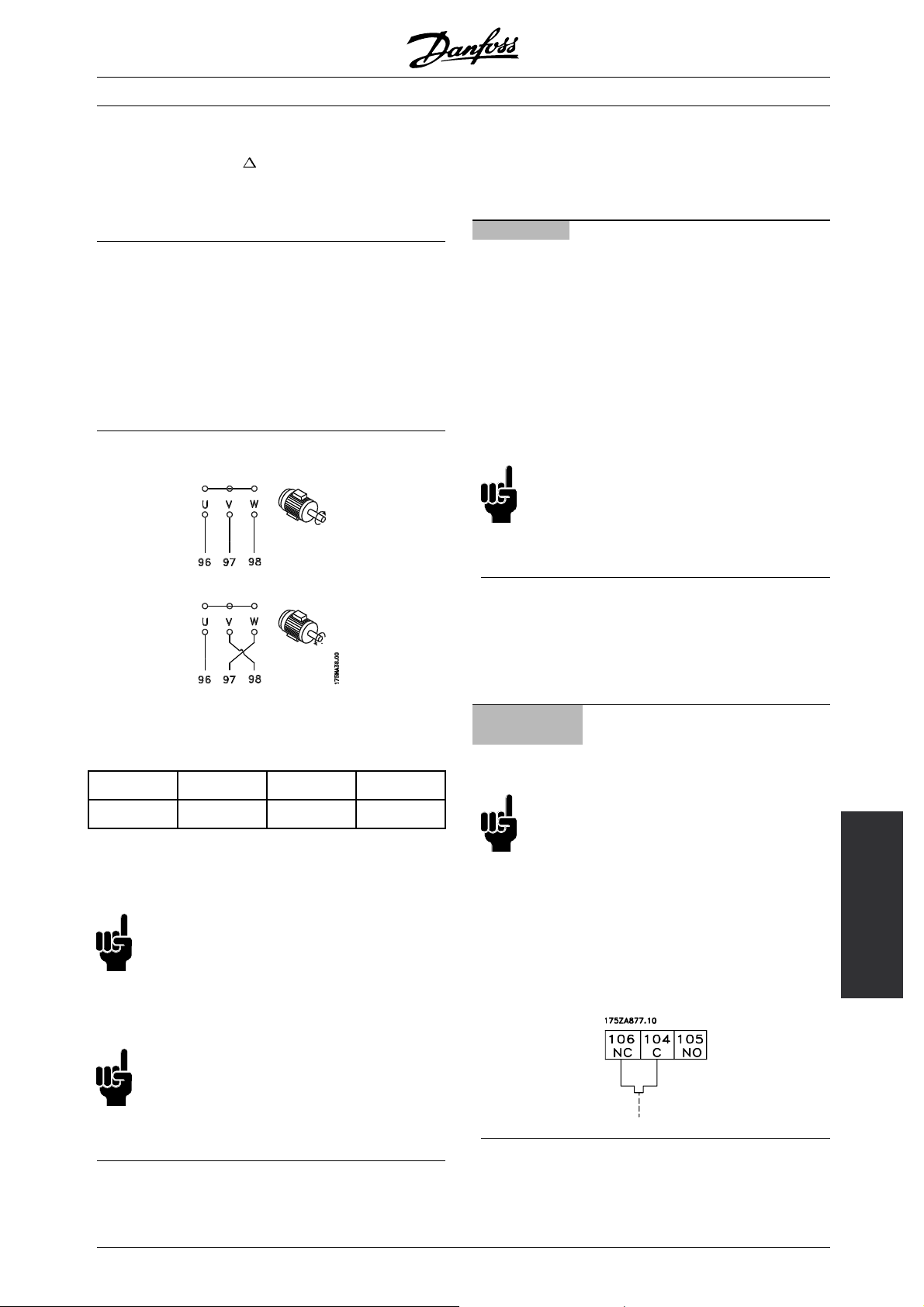
Según el ajuste de fábrica, el motor gira en el sentido
de las agujas del reloj con la salida del convertidor
de frecuencia conectada del modo siguiente:
CW U ⇒ 96 V ⇒ 97 W ⇒ 98
CCW U ⇒ 96 V ⇒ 98 W ⇒ 97
El sentido de rotación puede cambiarse invirtiendo
dos fases en el cable de motor.
¡NOTA!:
Si la aplicación funciona en bucle cerrado con
un codificador como señal de retroalimentación,
es necesario desconectar los cables A,A/B,B/
de señales del condificador o cambiar el sentido
del codificador en el parámetro 351.
¡NOTA!:
Las unidades de vector de flujo pueden
funcionar con un solo motor. No es posible
utilizar motores conectados en paralelo en la
parte de salida del convertidor de frecuencia.
■Instalación eléctrica: interruptor de temperatura
de la resistencia de freno
Par: 0,5-0,6 Nm
Tamaño de tornillo: M3
Nº. Función
106, 104,
105
¡NOTA!:
Esta función sólo está disponible en
VLT 5032-5052 200-240 V y VLT
5125-5500 380-500 V.
Si la temperatura de la resistencia de freno se
incrementa excesivamente y el interruptor termal se
desconecta, el convertidor de frecuencia dejará de
frenar. El motor comenzará a marchar por inercia.
Es necesario instalar un interruptor KLIXON que esté
’normalmente cerrado’. Si no se utiliza esta función,
es necesario que 106 y 104 presenten cortocircuito.
Interruptor de temperatura de la
resistencia de freno.
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
21
Page 22
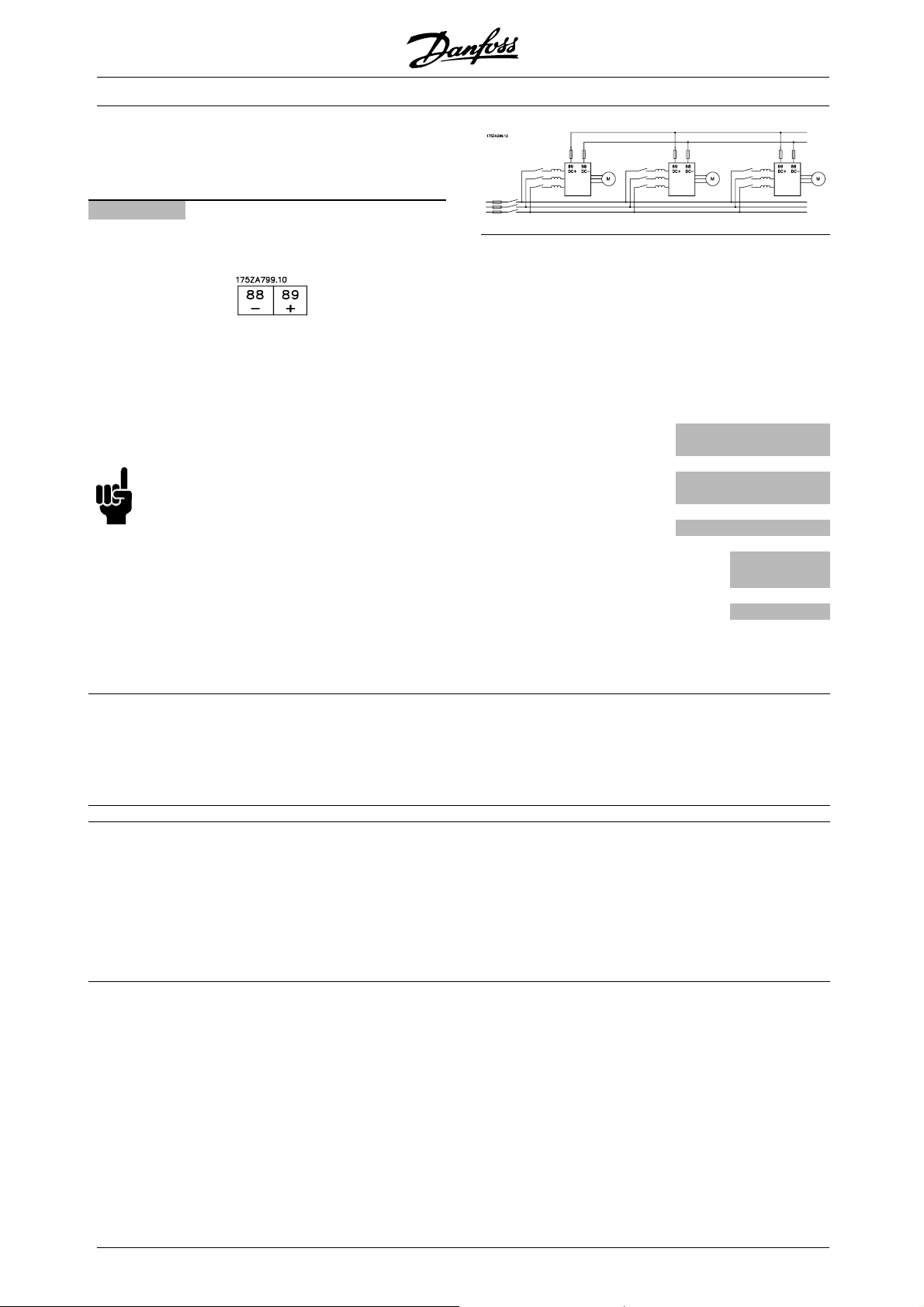
■Instalación eléctrica - carga compartida
(Sólo ampliados con códigos tipo EB, EX, DE y DX).
No. Función
88, 89 Carga compartida
VLT®5000 FLUX
Terminales para carga compartida
■Pares de apriete y tamaños de tornillo
La tabla muestra el par necesario para conectar los
terminales al convertidor de frecuencia. Para VLT
5001-5027 200-240 V y VLT 5001-5052 380-500 V,
El cable de conexión debe estar blindado y la
longitud máxima desde el convertidor de frecuencia
hastalabarradeCCesde25metros.
La carga compartida permite enlaza
rlos
los cables se deben apretar con tornillos. Para VLT
5032 - 5052 200-240 V y VLT 5122-5500 380-500 V,
los cables también deben apretarse con tornillos.
Estas figuras se aplican a los siguientes terminales:
circuitos intermedios de CC de varios
convertidores de frecuencia.
¡NOTA!:
Tenga en cuenta que en los
terminales pueden
Ter mi na les de r ed Números91, 92, 93
L1, L2, L3
Ter mi na les de m oto r Números96, 97, 98
U, V, W
generarse tensiones de hasta 960 V CC.
La carga compartida precisa equipos
adicionales. Para obte
ner más información, consulte
las Instrucciones de carga compartida MI.50.NX.XX.
Tipo de VLT
200-240 V
5001-5006 0,6 M3 Tornillo ranurado
5008 IP20 1,8 M4 Tornillo ranurado
5008-5011 IP54 1,8 M4 Tornillo ranurado
5011-5022 IP20 3 M5 Llave Allen 4 mm
5016-5022
5027 6 M6 Llave Allen 4 mm
5032-5052
380-500 V
5001-5011 0,6 M3 Tornillo ranurado
5016-5022 IP20 1,8 M4 Tornillo ranurado
5016-5027 IP54 1,8 M4 Tornillo ranurado
5027-5042 IP20 3 M5 Llave Allen 4 mm
5032-5042
5052-5062 6 M6 Llave Allen 5 mm
5072-5102 IP20 15 M6 Llave Allen 6 mm
5122-5302
5350-5500
3)
1)
3)
4)
5)
IP54 3 M5 Llave Allen 4 mm
IP54 3 M5 Llave Allen 4 mm
2)
IP54
Par [Nm] Tornillo/
11,3 M8 (perno y tornillo)
24 M8 Llave Allen 8 mm
19 Perno M10
42 Perno M12
Terminal de conexión a tierra No 94, 95, 99
Terminales de resistencia de
freno
Carga compartida 88, 89
Tamaño de perno
81, 82
Herramienta
1) Frene terminales: 3,0 Nm, Tuerca: M6
2) Freno y carga compartida: 14 Nm, tornillo M6 Allen
3) IP54 con RFI - Terminales línea 6Nm, Tornillo: M6 - llave Allen 5 mm
4) Carga compartida y terminales de fremp: 9,5 Nm; Perno M8
5) Terminales freno: 11,3 Nm; Perno M8
22
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 23
VLT®5000 FLUX
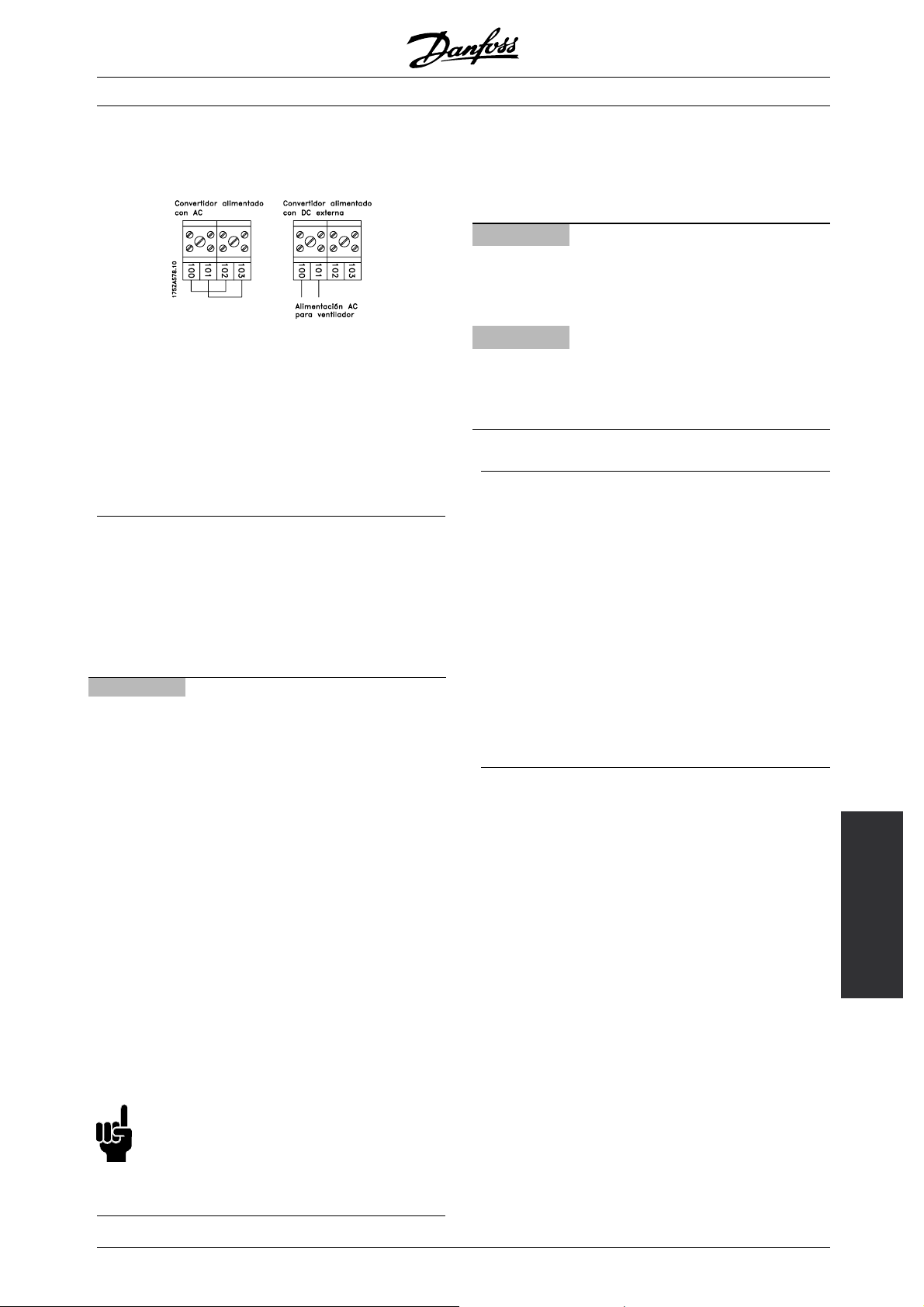
■Instalación eléctrica - ventilación externa
Par 0,5-0,6 Nm
Tamaño de tornillo: M3
Sólo para unidades IP54
rango de potencia VLT 5016-5102, 380-500 V y
VLT 5008-5027, 200-240 V CA. Si el bus de CC
(carga compar
unidad, no se suministra alimentación de CA a los
ventiladores. En este caso deberá suministrarse a los
ventilad
■Instal
acióneléctrica - suministroexternode24VCC
(Sólo versiones ampliadas. Código de tipo: PS,
PB,PD,PF,DE,DX,EB,EX).
Par: 0,5 - 0,6 Nm
o de tornillo: M3
Tamañ
tida)suministralaalimentaciónala
ores una alimentación externa de CA.
Núm. Funci
35, 36 Sumini
El suministro externo de 24 V CC puede utilizarse
como una alimentación de baja tensión para la tarjeta
de control y para cualquier otra tarjeta instalada como
opción. Esto permite el funcionamiento completo
del LCP (incluidos los ajustes de parámetros) sin
necesidad de realizar una conexión a la alimentación
de red. Tenga presente que se dará un aviso de
tensión baja cuando se haya conectado la alimentación
de 24 V CC; sin embargo, no se producirá una
desconexión. Si la alimentación externa de 24 V CC
está conectada o se enciende al mismo tiempo que la
alimentación de red, deberá ajustarse un tiempo mín.
de 200 ms en el parámetro 120 Retardo de arranque.
Puede conectarse un fusible previo de un mín.
de 6 Amp, de acción retardada, para proteger
la alimentación externa de 24 V CC. El consumo
de energía es de 15-50 W, en función de la
carga de la tarjeta de control.
comprendidas en el
ón
stroexternode24VCC
■Instalación eléctrica - salidas de relé
Par: 0,5 - 0,6 Nm
Tamaño de tornillo: M3
Nº Función
1-3 Salidadereléconmutado(1+3NC.,
1+2 NA) Consulte el parámetro
323 del Manual de Funcionamiento.
Consulte también Datos técnicos
generales.
4, 5 Salidaderelé(4+5NA)Consulte
el parámetro 326 del Manual de
Funcionamiento.
Consulte también Datos técnicos
generales.
■Protección adicional
Como protección adicional,
tensión ELCB con protección a tierra, siempre que
se cumplan las normas sobre seguridad locales.
En el caso de defecto a tierra, puede desarrollarse un
contenido de CC en la
Si se emplean relés d
cumplirse las reglamentaciones locales. Los relés
deben ser adecuados para proteger equipos trifásicos
con un puente re
descarga en el momento de la conexión.
■Corrientedefugaatierra
La corriente de fuga a tierra está causada
principalm
del motor y el apantallamiento del cable de motor.
Cuando se utiliza un filtro RFI, éste contribuye a una
corrien
se conecta a tierra mediante condensadores.
El tamaño de la corriente de fuga a tierra depende de
los sig
1. Longi
2. Cable del motor con o sin apantallamiento
3. Frecuencia de conmutación
4. Utiliza
5. Conexión a tierra del motor o no en su instalación
ente por la capacidad entre las fases
te de fuga adicional, ya que el circuito del filtro
uientes factores, en este orden de prioridad:
tud del cable de motor
ciónonodeunfiltroRFI
ctificador y para una pequeña
pueden utilizarse relés de
corriente de fuga a tierra.
e corriente ELCB, deben
Instalación
¡NOTA!:
Utilice una alimentación de 24 V CC de tipo
PELV para asegurar el correcto aislamiento
galvánico (de tipo PELV) de los terminales
de control del convertidor de frecuencia.
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
La corriente de fuga es importante para la seguridad
durante el manejo y funcionamiento del convertidor
cuencia si no se ha establecido una conexión
de fre
a tierra del mismo (por error).
23
Page 24
¡NOTA!:
Debido a que la corriente de fuga es
>3,5 mA, debe establecerse una conexión
a tierra reforzada, que se requiere para
cumplir la norma EN 50178.
En los convertidores de frecuencia trifásicos, sólo
se deben utilizar relés para corriente con defecto
a tierra que sean adecuados para la protección
contra intensidad CC (DIN VDE 0664). Los
relés RCD de tipo B cumplen estos requisitos de
acuerdo con la norma IEC 755-2.
Los relés deben cumplir los siguientes requisitos:
- Adecuados para la protección de equipos con
corriente continua (CC) en la intensidad con
defecto (rectificador trifásico).
- Adecuados para el arranque con una reducida
intensidad de descarga a tierra en forma de pulsos.
- Adecuados para una alta corriente de fuga.
VLT®5000 FLUX
24
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 25
■Instalación eléctrica, cables de a limentación
VLT®5000 FLUX
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Instalación
25
Page 26
Bookstyle
VLT 5001-5006 200-240 V
VLT 5001-5011 380-500 V
VLT®5000 FLUX
Compacto IP 54
Compacto IP 20/Nema 1
26
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 27
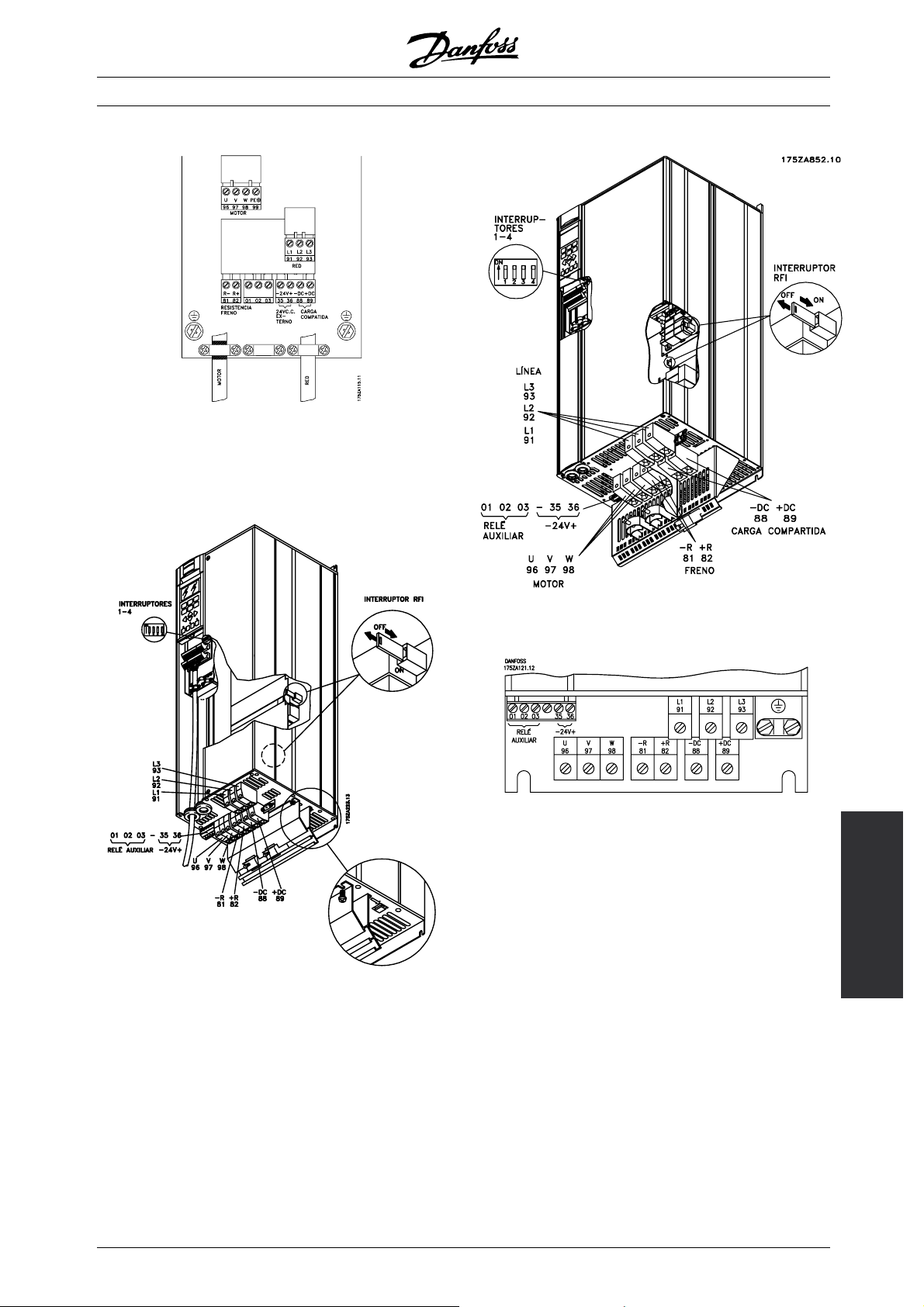
Compacto
VLT 5001-5006 200-240 V
VLT 5001-5011 380-500 V
■Instalación eléctrica, cables de a limentación
VLT®5000 FLUX
Compacto IP 20/Nema 1
VLT 5008-5027 200-240 V
VLT 5016-5062 380-500 V
Compacto IP 20
VLT 5072-5102 380-500 V
Compacto IP 20/Nema 1
VLT 5008-5027 200-240 V
VLT 5016-5102 380-500 V
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
27
Page 28
VLT®5000 FLUX
Compacto IP 54
VLT 5008-5027 200-240 V
VLT 5016-5062 380-500 V
Compacto IP 54
VLT 5072-5102 380-500 V
28
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 29
VLT®5000 FLUX
Compacto IP 00 sin desconectar y fusible
VLT 5122-5152 380-500 V
Compacto IP 00 con desconexión y fusible
VLT 5202-5302 380-500 V
Instalación
Compacto IP 21/IP54 sin desconexión y fusible
VLT 5122-5152 380-500 V
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
29
Page 30
VLT®5000 FLUX
Compacto IP 21/IP54 con desconexión y fusible
VLT 5202-5302 380-500 V
30
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 31

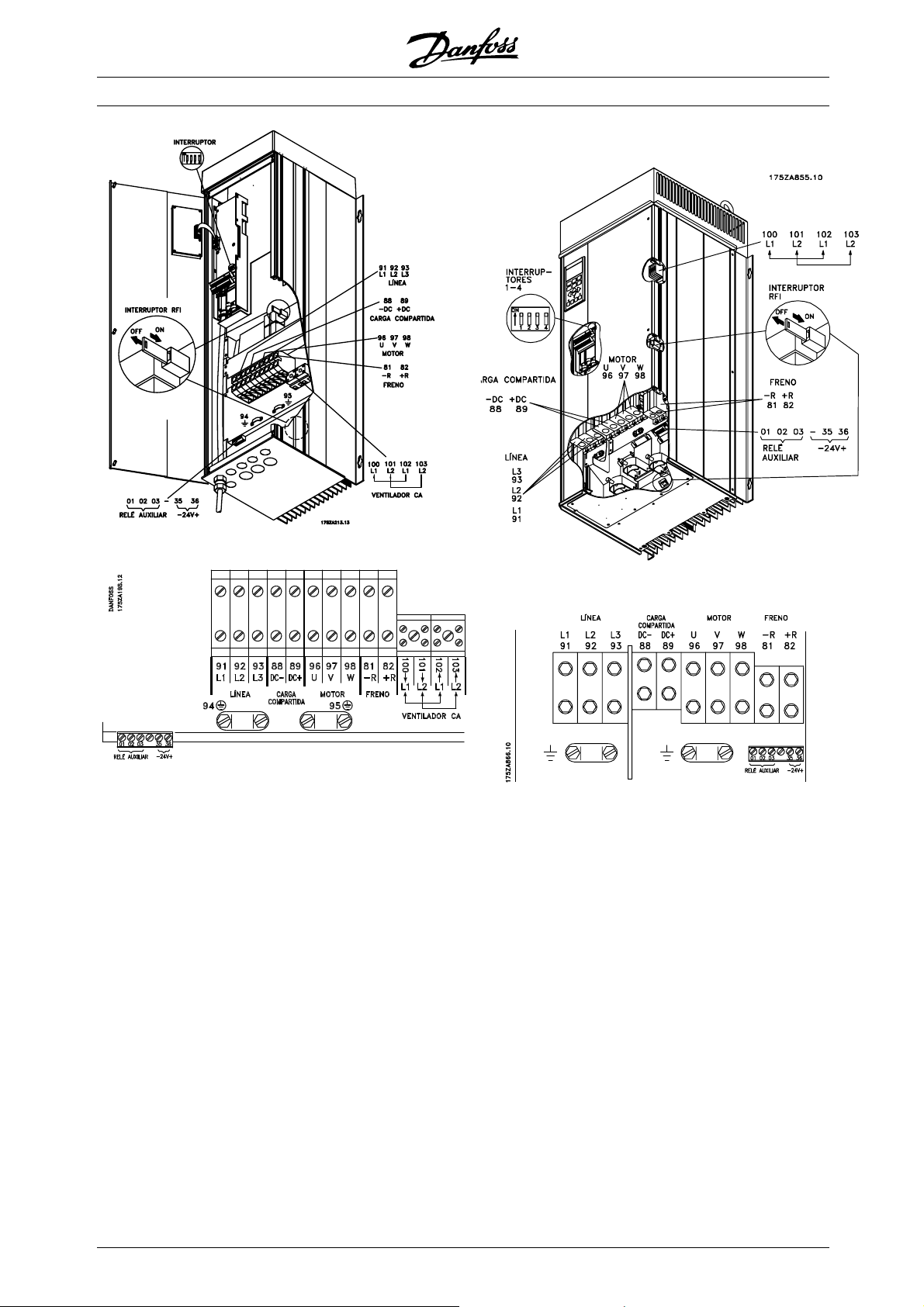
■Instalación eléctrica, cables de a limentación
VLT®5000 FLUX
Compacto I P 00/NEMA 1 (IP 20)
VLT 5032-5052 200-240 V
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Instalación
31
Page 32

VLT®5000 FLUX
32
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 33

Compacto IP 54
VLT 5032-5052 200-240 V
VLT®5000 FLUX
■Instalación eléctrica, cables de a limentación
Compacto IP 00/Nema 1 (IP 20)
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
33
Page 34
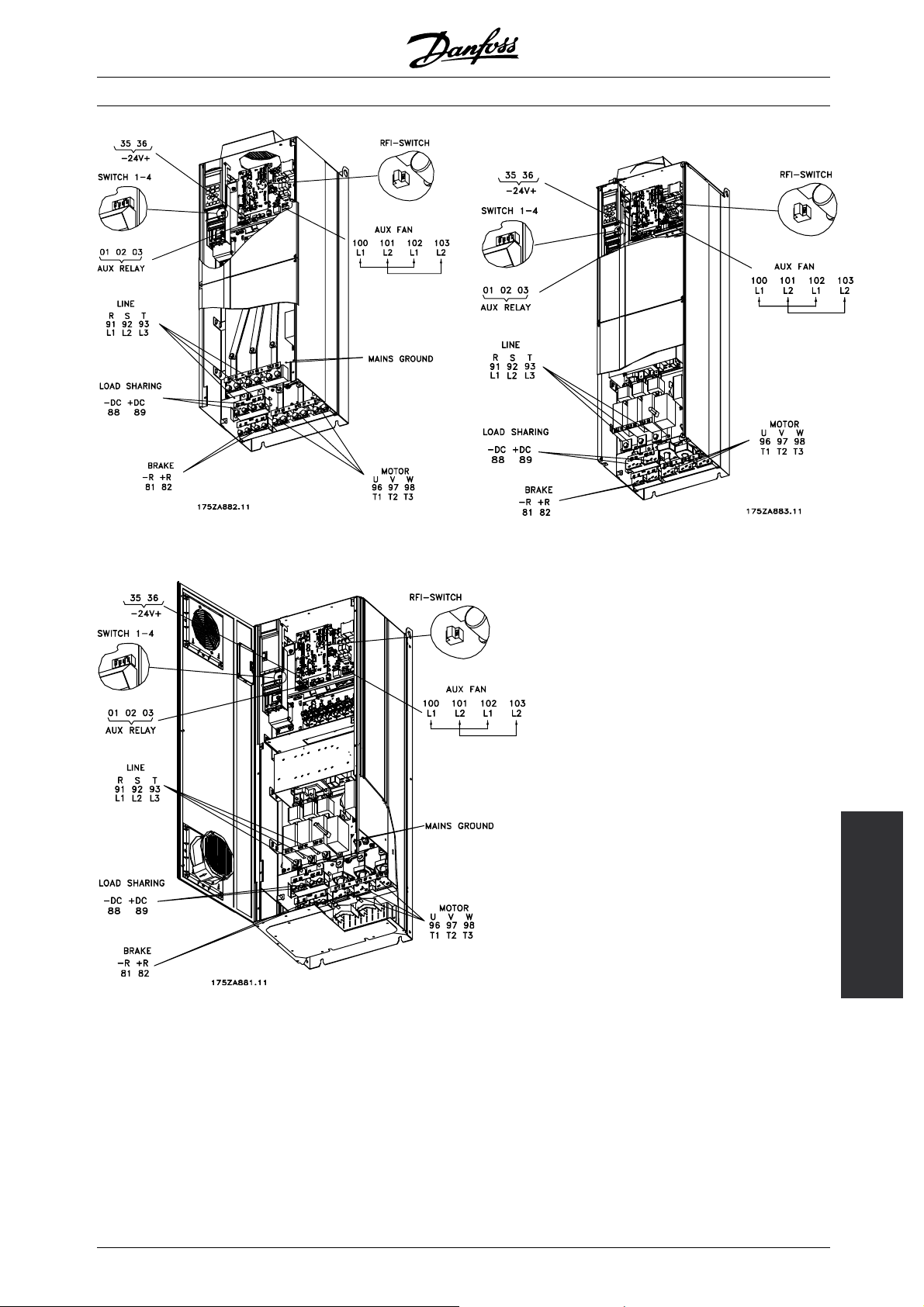
■Instalación eléctrica, cables de a limentación
VLT®5000 FLUX
Compact IP 00/Nema 1 (IP 20)/IP 54
sin desconector y fusibles de red
VLT 5350 - 5500 380 - 500 V
34
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 35
VLT®5000 FLUX
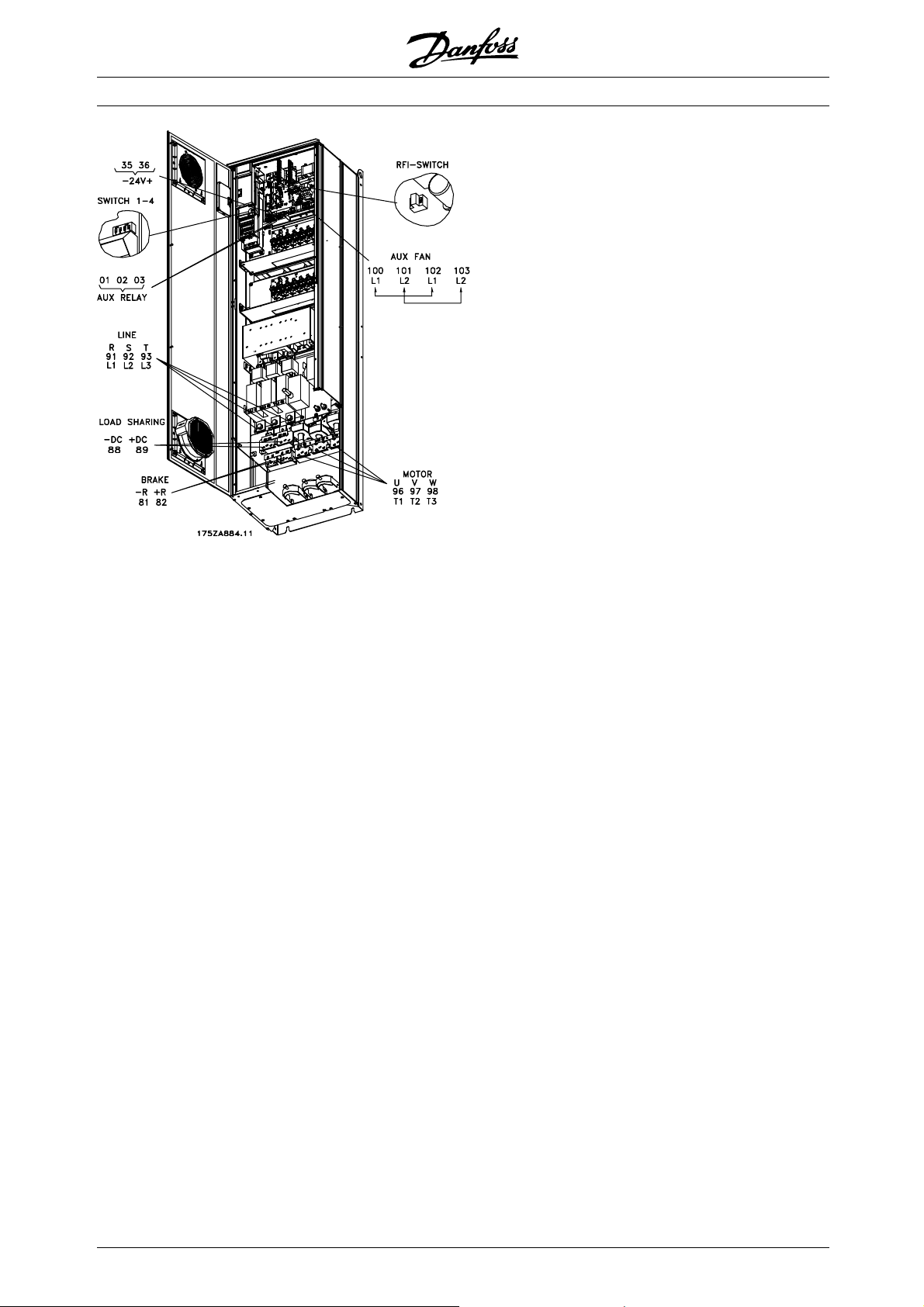
Compact IP 00/Nema 1 (IP 20)/IP 54
con desconector y fusibles de red
VLT 5350 - 5500 380 - 500 V
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
35
Page 36
VLT®5000 FLUX
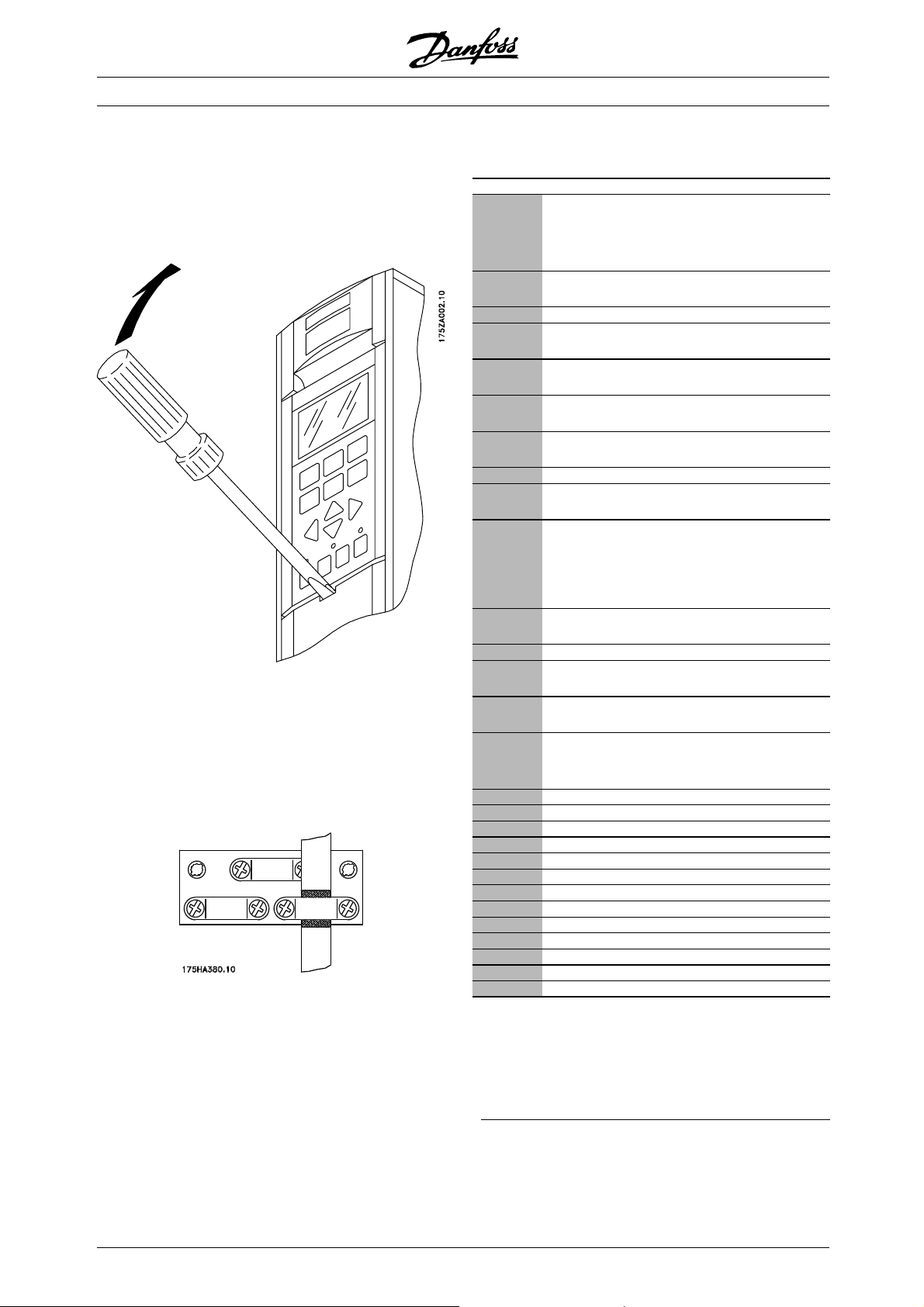
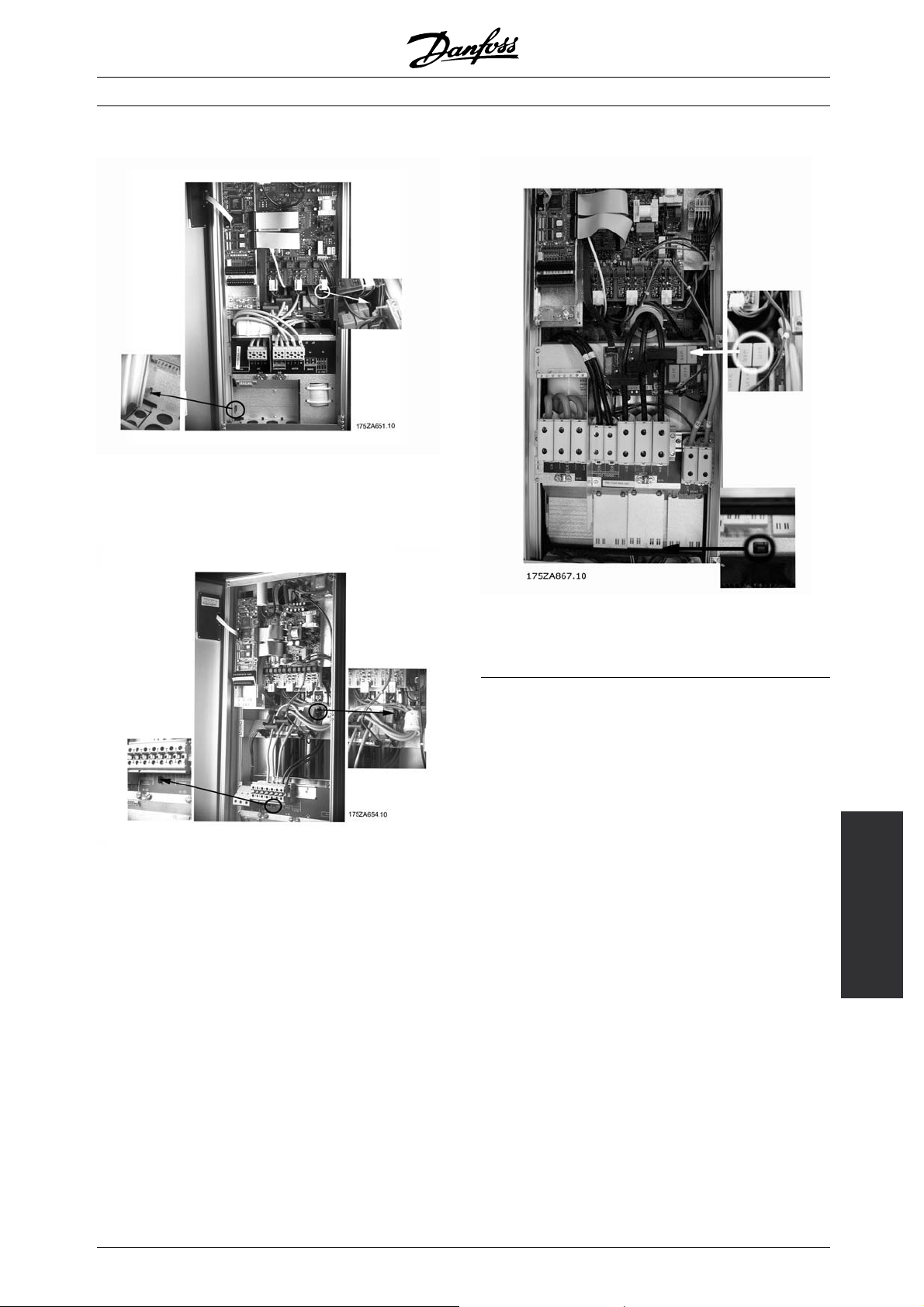
■Instalación de cables de control
Todos los terminales para los cables de control
están situados debajo de la cubierta protectora del
convertidor de frecuencia. La cubierta protectora
(consulte el dibujo) se puede retirar mediante un objeto
con punta, como por ejemplo un destornillador.
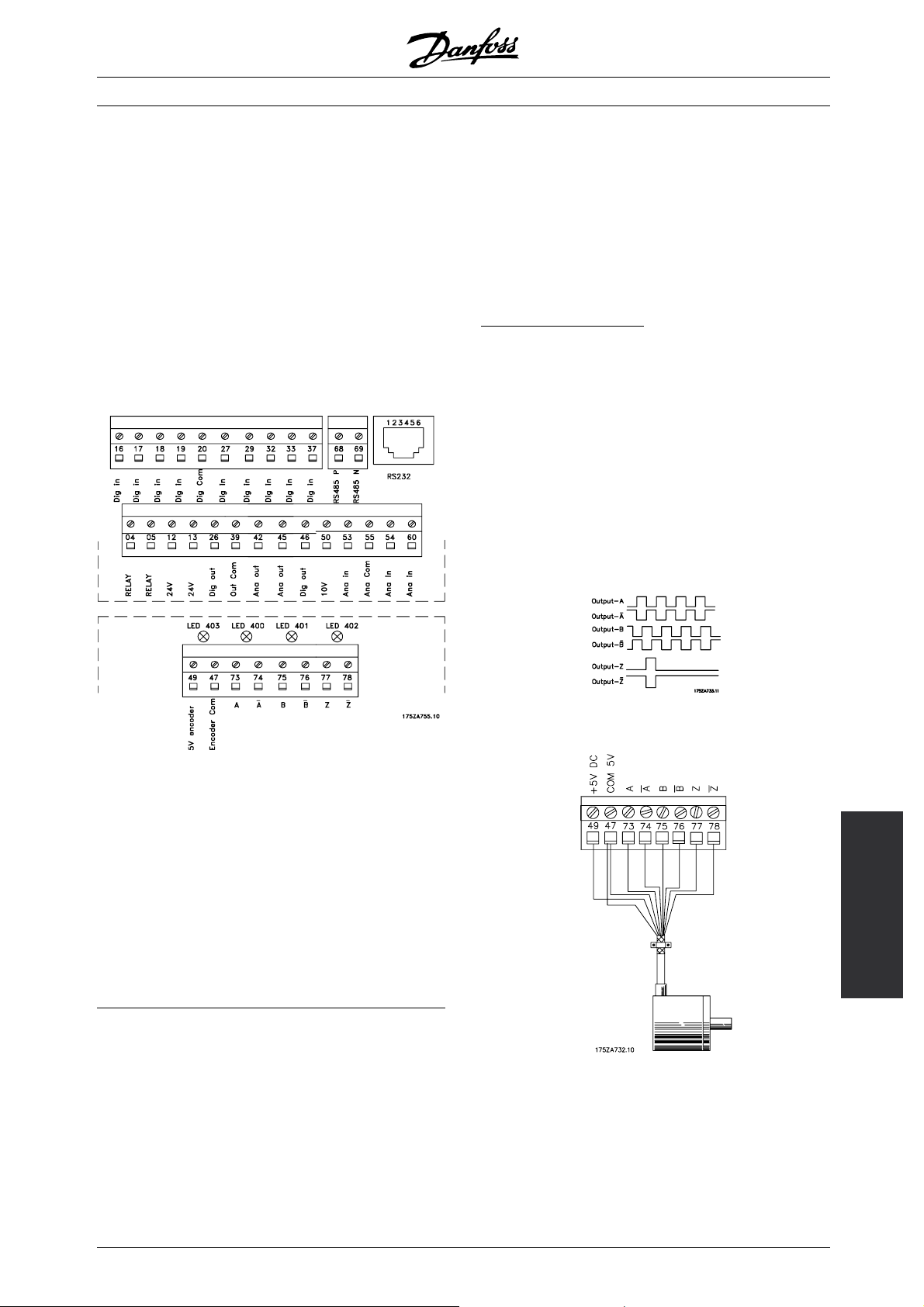
■Designación de terminal
Nº Función
04, 05 Salida de relé
+24 VCC. Alimentación a entradas digitales
12, 13
20
16 Entrada digital 1. Parámetro 300 [1] {RESET}
17
18
19
27
29 Entrada digital 6. Parámetro 305 [5] {JOG}
32
33
Imax: 200 mA. Sin conexión cuando se utiliza
alimentación externa de 24 VCC y el DIP SW4
está desactivado
GND para entradas digitales (conexión externa de
24 VCC)
Entrada digital 2. Parámetro 301 [7] {MANTENER
REFERENCIA}
Entrada digital 3. Parámetro 302 [1] {ARRANQUE}
1)
Entrada digital 4. Parámetro 303 [1] {CAMBIO
SENTIDO}
Entrada digital 5. Parámetro 304 [0] {PARADA
INERCIA}
Entrada digital 7. Parámetro 306 [11]
{Ajuste MSB/ACELERACIÓN}
Entrada digital 8. Parámetro 307 [1] {Ajuste
LSB/DECELERACIÓN}
1)
1)
1)
1)
1)
1)
1)
Una vez que se haya retirado la cubierta protectora,
podrá iniciarse la instalación real conforme a los
requisitos de compatibilidad electromagnética.
Consulte el dibujo de la sección Instalación
correcta en cuanto a EMC.
Conexión de la pantalla:
37
39 GND para salidas analógicas y digitales
26, 46
42, 45
50
55 GND para entradas de referencia analógicas
53 Entrada de referencia analógica ±10 V
54 Entrada de referencia analógica ±10 V
60 Entrada de referencia analógica 0/4 - 20 mA.
68, 69 Interfaz RS 485, comunicación serie.
49 Alimentación de +5 VCC para codificador.
47 GND para alimentación de codificador.
73 Canal A
74 Canal A invertido)
75 Canal B
76 Canal B invertido
77 Cero pulsos del codificador (Z)
78 Cero pulsos del codificador invertido
Entrada digital. Inercia del equipo. No influye
ningún parámetro. Desactivar etapa de salida.
Salidas digitales para lectura de velocidad,
referencia, intensidad o par
Salidas analógicas para lectura de velocidad,
referencia, intensidad o par
Alimentación de +10 VCC para entradas de
referencia analógicas como potenciómetros
externos, termistor o sensor KTY. Imax <12 mA
2)
2)
2)
2)
1) Ajustes de fábrica. En el caso de otras fun
consulte los parámetros 300 - 307
2)Normalmenteparagirodeizquierdaa
derecha del eje del codificador.
ciones,
36
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 37
El terminal 37 es una función de entrada de"
Inercia del equipo" para desactivar las etapas de
salida (IGBT). El terminal 37 no se puede desactivar,
manejar ni ajustar mediante ningún parámetro.
El terminal 37 se debe aumentar hasta 24 V
CC para que funcione la unidad.
Instalación de cables de control
Par de apriete: 0,22 -0,25 Nm
Tamaño de tornillo: M2
Tipo de destornillador: 0,4 x 2,5 x 80 mm
Consulte Conexión a t ierra de cables de control
apantallados/blindados trenzados para realizar
una conexión a tierra correcta.
VLT®5000 FLUX
■Sistema de realimentación
El sistema de realimentación es necesario cuando
la unidad se ajusta en funcionamiento de lazo
cerrado (Parámetro 100 [1] ó [5] ).
La unidad VLT 5000 Flux acepta codificadores
incrementales como sistema de realimentación
desde el motor.
onexión del codificador
C
La unidad VLT 5000 Flux admite la mayoría de los
tipos de codificadores incrementales de 4 canales +
cero pulsos como dispositivo de realimentación.
Luces indicadoras de la placa de codificador:
Cuando todos los LED están encendidos, la conexión
al codificador y el estado de éste son correctos.
LED 403 APAGADO: Falta suministro de 5 V
LED 400 APAGADO: El canal A o A inv. falta
o está cortocircuitado
LED 401 APAGADO: El canal B o B inv. falta
o está cortocircuitado
LED 402 APAGADO: El canal Z o Z inv. falta
o está cortocircuitado.
Fuente
de alimentación
Longitud
máx. del
cable
5 V CC máx. 250 mA
(Consumo eléctrico del codificador
máx. 0,75 Vatios).
(según la especificación RS422) <
150 m
Si se utilizan cables más largos,
póngase en contacto con Danfoss
Drives.
Patrón de impulsos característico de un
codificador incremental
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Conexión básica del codificador
37
Page 38
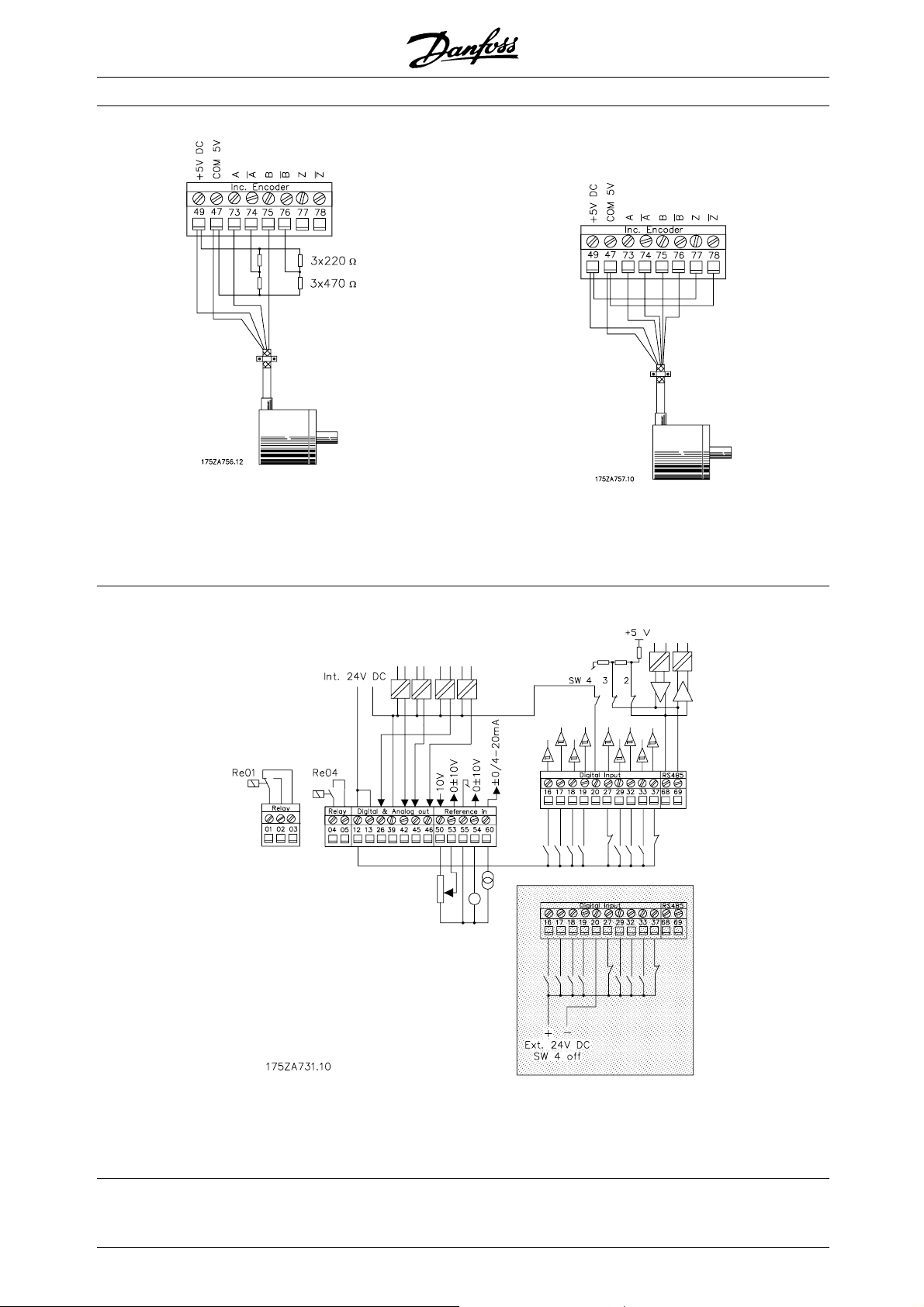
Si el codificador no tiene salidas invertidas, el cable
del codificador puede tener una longitud máxima
de 3 metros. La entrada de codificador debe
terminarse como se indica a continuación.
VLT®5000 FLUX
El sistema de control del codificador se debe
desactivar en el parámetro 350 [0].
Si el codificador no tiene cero pulsos y el monitor
de codificador está activado (parámetro 350), deben
terminarse las entradas 77 y 78.
■ Instalación eléctrica
Para obtener información sobre la programación
de las entradas y salidas analógicas y digitales,
consulte el grupo de parámetros 300.
38
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 39

VLT®5000 FLUX
■Conexión de bus RS 485
El bus serie está conectado a los terminales 68/69
del convertidor (señales P y N) de acuerdo con
el estándar RS 485 (2 hilos). La señal P es el
potencial positivo (TX+,RX+), mientras que la señal
N es el potencial negativo (TX-,RX-).
Si se va a conectar más de un convertidor de frecuencia
a un master, deben utilizarse conexiones en paralelo.
Con objeto de evitar corrientes ecualizadoras del
potencial los terminales 68 y 69 se conectan a tierra en
el bastidor del VLT mediante una resistencia de 100
■Conexión de bus RS 232
La finalidad del RS 232 es permitir la comunicación
entre un PC y un convertidor de frecuencia. Gracias
a esta comunicación es posible vigilar, programar
y controlar el convertidor de frecuencia.
Sin embargo, no es posible utilizar el RS 232
simultáneamente con el RS 485. Cuando utilice uno
de los buses, el otro deberá estar desconectado;
es decir, cuando utilice el RS 232, el conector
RS 485 debe retirarse de la tarjeta.
onexión de hardware del RS 232:
C
.
T
erminación de bus
El bus debe terminarse con una red de resistencias
en ambos extremos. Para ello, ajuste los
interruptores 2 y 3 de la tarjeta de control en
"ON", y consulte Interruptores 1-4.
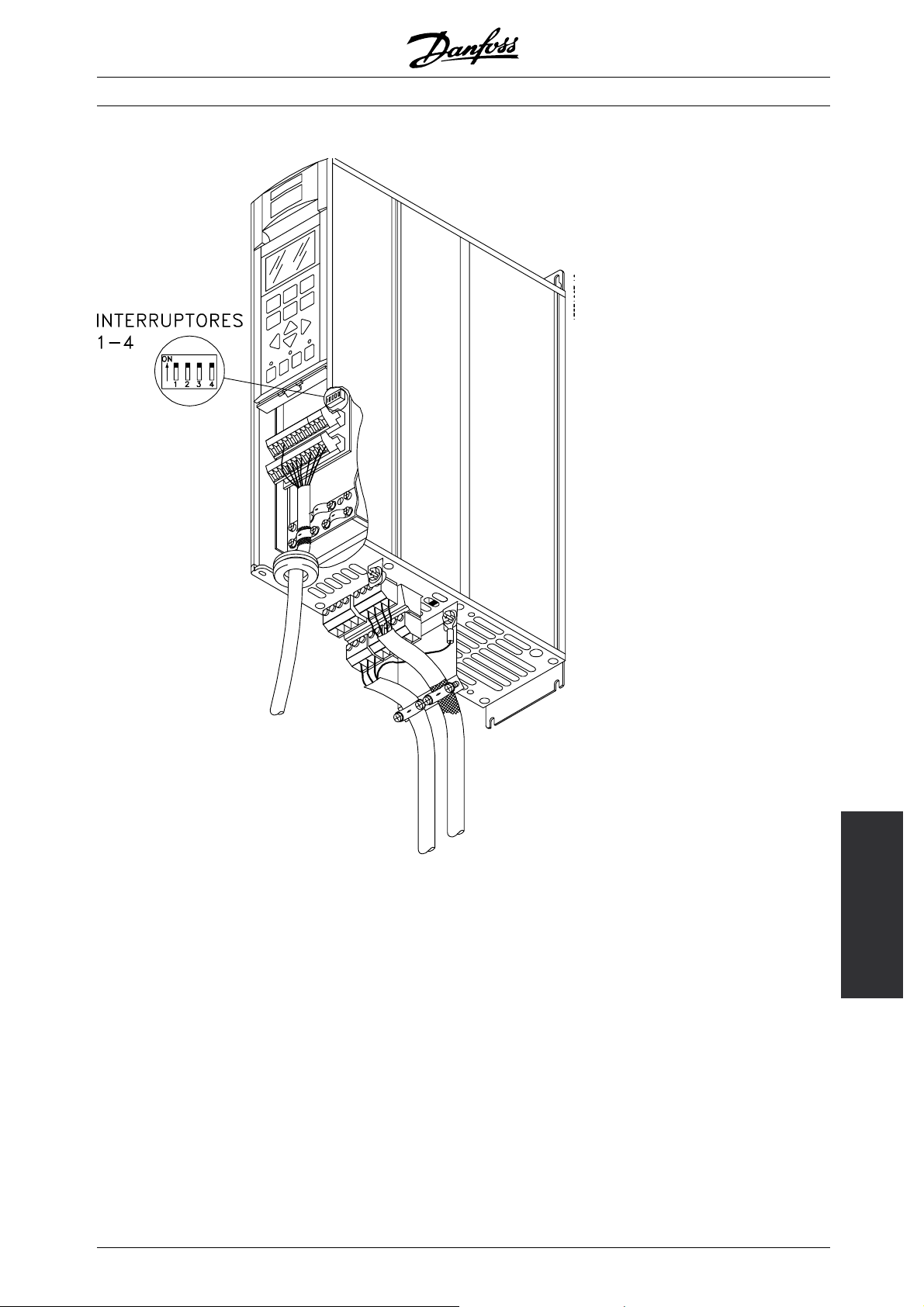
■ Interruptores DIP 1-4
El interruptor DIP está situado en la tarjeta de control.
Se utiliza junto con la comunicación serie,
terminales 68 y 69.
La posición de interruptores mostrada equivale
a los ajustes de fábrica.
El interruptor 1 siempre debe estar abierto (off).
Los interruptores 2 y 3 se utilizan para la terminación
de una interfaz RS 485, comunicación serie.
El interruptor 4 se utiliza para separar el potencial
común para el suministro interno de 24 V CC del
potencial común del suministro externo de 24 V CC.
La patilla 1 se conecta a la patilla 6 de la tarjeta
de control, lo que hace que el PC reciba un "Envío
permitido" cuando envía una "Solicitud de envío".
La patilla 1 es el terminal izquierdo de RJ-11.
Cable de comunicación con un conector macho RJ-11
en ambos extremos y un adaptador entre RJ-11 y el
conector Sub-D 9 (para conexión con PC) (175Z3217).
Instalación
¡NOTA!:
Observe que cuando el interruptor 4 está
en la posición "OFF", el suministro externo
de CC está aislado galvánicamente del
convertidor de frecuencia.
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
39
Page 40

VLT®5000 FLUX
■Ejemplos de conexion
■Arranque/parada con 2 hilos
Arranque - Parada
Parámetro 302 Arranque [1]
(18)
Parada rápida
(27)
Tiempo de rampa
de aceleración
Tiempo de rampa
de deceleración
Rampadeparada
Parámetro 304 Parada de
inercia inversa [0]
Parámetro 207/209
[0,01…3600]
Parámetro 208/210
[0,01…3600]
Parámetro 212 [0,01…3600]
rápida
■Arranque/parada de pulsos
Arranque (18) Parámetro 302 Arranque de
pulsos [2]
Parada (16) Parámetro 300 Parada inversa
[2]
Velocidad fija Parámetro 305 Velocidad fija [5]
Tiempo de
rampa de
Parámetro 207/209
[0,01…3600]
aceleración
Tiempo de
rampa de
Parámetro 208/210
[0,01…3600]
deceleración
Velocidad fija
(jog)
Tiempo de
Parámetro 213 [0,0…Parámetro
202]
Parámetro 211 [0,01…3600]
rampa de
velocidad fija
Parada rápida
(27)
Parámetro 304 Parada de
inercia inversa [0]
40
■ Cambio de ajuste
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 41

VLT®5000 FLUX
Arranque - Parada
Parámetro 302 Arranque [1]
(18)
Ajuste activo Parámetro 004 Varios ajustes
[5]
Ajuste MSB Parámetro 306 [11]
Ajuste LSB Parámetro 307 [11]
Term 33 Term 32
Selección de
00
ajuste 1
Selección de
10
ajuste 2
Selección de
01
ajuste 3
Selección de
11
ajuste 4
■ Aceleración/deceleracióndigital
■ Referencia del potenciómetro
Entrada
Parámetro 308 Referencia [1]
analógica (53)
Escalado mín.
Parámetro 309 [0,0….10,0 V]
(53)
Escalado máx.
(53)
Parámetro 310 [Parámetro
309…10,0 V]
Arranque - Parada
Parámetro 302 Arranque [1]
(18)
Mantener
referencia
Mayor velocida
Parámetro 305 Mantener
referencia [9
d
Parámetro 306 A
Menor velocidad Parámetro 307 De
[9]
Tiempo de rampa
de aceleración
Tiempo de rampa
de deceleración
Parámetro 209
[0,01...3600]
Parámetro 210
[0,01...3600]
celeración [9]
celeración
■ Transmisor de dos hilos
Entrada Ref
Parámetro 314 Referencia [1]
0/4-20 mA
Escalado mín.
Parámetro 315 [0,0…20,0 mA]
(60)
Escalado máx.
(60)
Parámetro 316 [Parámetro
315…20,0 mA]
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
41
Page 42

VLT®5000 FLUX
■Instalación eléctrica - Precauciones EMC
Las directrices siguientes constituyen una buena
práctica de ingeniería al instalar unidades. Se aconseja
seguir estas directrices cuando sea necesario cumplir
las normas de Primer entorno EN 61000-6-3, EN
61000-6-4, EN 55011 ó EN 61800-3. Si la instalación
se realiza según las normas de Segundo entorno
de EN 61800-3, es decir, en redes industriales
o en una instalación que cuenta con su propio
transformador, se considera aceptable el hecho de
desviarse de las presentes directrices. Sin embargo,
no se recomienda hacerlo. Consulte asimismo Marca
CE, Emisión y Resultados de las pruebas de EMC
en las condiciones especiales de la Guía de Diseño
para obtener más detalles al respecto.
uena práctica de ingeniería para asegurar una
B
instalación eléctrica correcta en cuanto a EMC:
• Utilice únicamente cables de motor trenzados,
blindados /apantallados y cables de control
trenzados blindados/apantallados. El
apantallamiento debería aportar una cobertura
mínima del 80%. El material del apantallamiento
debe ser metálico, normalmente de cobre, aluminio,
acero o plomo, aunque se admiten otros tipos. No
hay requisitos especiales en cuanto al cable de red.
• En instalaciones que utilizan conductos metálicos
rígidos no es necesario utilizar cable blindado, pero
el cable del motor se debe instalar en un conducto
separado de los cables de control y de red. Es
necesario conectar completamente el conducto
desde la unidad al motor. El rendimiento EMC de
los conductos flexibles varía considerablemente y
debe obtenerse información del fabricante.
• Conecte el apantallamiento/blindaje/conducto a
tierra en ambos extremos para los cables del
motor y de control. En algunos casos, no es
posible conectar la pantalla a ambos extremos.
En estos casos, es importante conectar la
pantalla al convertidor de frecuencia. Consulte
asimismo Conexión a tierra de cables de control
apantallados/blindados trenzados.
• Evite terminar el apantallamiento/blindaje con
extremos enrollados (espirales). Este tipo de
terminación aumenta la impedancia de alta
frecuencia del apantallamiento, lo cual reduce
su eficacia a altas frecuencias. Utilice en
cambio mordazas de cable o glándulas de
cable EMC de baja impedancia.
• Es importante asegurar un buen contacto eléctrico
entre la placa de montaje en la que se instale
el convertidor de frecuencia y el chasis metálico
del convertidor de frecuencia. Sin embargo,
esto no se aplica a las unidades IP54, ya que
están diseñadas para ser montadas en pared y
VLT 5122-5500, 380-500 V y VLT 5032-5052,
200-240 V en el alojamiento IP20/NEMA.
• Utilice arandelas de estrella y placas de instalación
galvánicamente conductoras para asegurar
una buena conexión eléctrica en instalaciones
de unidades IP 00 e IP20.
• Siempre que sea posible, evite utilizar cables de
motor o de control no apantallados/no blindados en
el interior de los armarios que albergan las unidades.
• Para las unidades IP 54 se necesita una
conexión ininterrumpida de alta frecuencia entre el
convertidor de frecuencia y las unidades de motor.
En la figura siguiente se muestra un ejemplo de una
instalación eléctrica correcta en cuanto a EMC de
un convertidor de frecuencia IP; el convertidor de
frecuencia se encuentra en un armario de instalación
con un contactor de salida y conectado a un PLC,
queenesteejemploestáinstaladoenunarmario
aparte. En las unidades IP 54 y VLT 5032-5052,
200-240 V en el alojamiento Nema 1 IP20/IP21, los
cables blindados se conectan utilizando conductos
EMC para garantizar un rendimiento EMC adecuado.
Véase la ilustración. Otras formas de instalación
podrán ofrecer un rendimiento EMC igualmente
bueno, siempre y cuando se sigan las anteriores
directrices de práctica de ingeniería.
Tenga en cuenta que cuando la instalación no se lleva
a cabo según las directrices y cuando se utilizan cables
no blindados y cables de control, es posible que no
se cumplan algunos requisitos relativos a emisiones
aunque sí se cumplan los relacionados con inmunidad.
Consulte la sección Resultados de las pruebas de
EMC en la Guía de Diseño para obtener más detalles.
42
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 43

VLT®5000 FLUX
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Instalación
43
Page 44

VLT®5000 FLUX
44
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 45

■Utilización de cables correctos en cuanto a EMC
Se recomienda utilizar cables trenzados
apantallados/blindados para optimizar la inmunidad
de EMC de los cables de control y la emisión
de EMC de los cables del motor.
La capacidad de un cable para reducir la radiación
entrante y saliente de interferencias eléctricas
dependedelaimpedanciadetransferencia(Z
).
T
El apantallamiento de un cable está diseñado
normalmente para reducir la transferencia
de interferencias eléctricas; sin embargo, un
apantallamiento con un valor menor de impedancia de
transferencia (Z
que tenga mayor impedancia de transferencia (Z
) es más eficaz que un apantallamiento
T
).
T
VLT®5000 FLUX
La impedancia de transferencia (Z
evaluar en base a los siguientes factores:
- La conductibilidad del material del apantallamiento.
- La resistencia de contacto entre cada
conductor del apantallamiento.
- La cobertura del apantallamiento, es decir,
la superficie física del cable cubierta por
el apantallamiento, a menudo se indica
como un porcentaje.
- El tipo de apantallamiento, trenzado o retorcido.
Revestimiento de aluminio con hilo de cobre.
Cable con hilo de cobre retorcido o hilo de acero
blindado.
)sepuede
T
Los fabricantes de cables rara vez indican la
impedancia de transferencia (Z
), pero a menudo
T
es posible calcular la impedancia de transferencia
) evaluando el diseño físico del cable.
(Z
T
Hilo de cobre trenzado de una sola capa
con un porcentaje variable de cobertura de
apantallamiento.
Éste es el cable de referencia típico de Danfoss.
Hilo de cobre trenzado de doble capa.
Doble capa de hilo de cobre trenzado con una
capa intermedia magnética apantallada/blindada.
Cablealojadoentuberíadecobreodeacero.
Cableforradoconplomoconungrosordepared
de 1,1 mm.
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
45
Page 46

■Conexiónatierradecablesdecontrol
apantallados y trenzados
En general, los cables de control deben estar
apantallados y trenzados, y el apantallamiento se
debe conectar mediante una abrazadera de cable en
ambos extremos al armario metálico de la unidad.
VLT®5000 FLUX
Correcta conexión a tierra
Los cables de control y los cables para comunicación
serie deben tener instaladas abrazaderas de
cable en ambos extremos para asegurar el
mejor contacto eléctrico posible.
El siguiente dibujo indica cómo se realiza la correcta
conexión a tierra, y qué hacer en caso de dudas.
Conexión a tierra incorrecta
Noutiliceextremosretorcidosdecable
(espirales), ya que incrementan la impedancia del
apantallamiento a altas frecuencias.
Protección respecto a potencial de tierra
entreelPLCyelVLT
Si es distinto el potencial de tierra entre el convertidor
de frecuencia y el PCL, puede producirse ruido
eléctrico que perturbará todo el sistema. Este
problema se puede solucionar instalando un cable
ecualizador, que debe estar junto al cable de control.
Sección mínima del cable: 16 mm
2
Para lazos de tierra de 50/60 Hz
Si se utilizan cables de control muy largos, pueden
ocurrir lazos de tierra de 50/60 Hz. Este problema
se puede solucionar conectando un extremo del
apantallamiento a tierra mediante un condensador
de 100nF (long. corta de pin).
Cables para comunicación serie
Pueden eliminarse corrientes de ruido de baja
frecuencia entre dos convertidores si se conecta un
extremo del apantallamiento al terminal 61. Este
terminal se conecta a tierra mediante un filtro RC
interno. Se recomienda intercambiar los cables de
par trenzado a fin de reducir la interferencia de
modo diferencial entre los conductores.
46
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 47

■Interruptor RFI
limentación de red aislada de tierra:
A
Si la alimentación del convertidor de frecuencia se
suministra desde una fuente aislada ( Terminales IT
), se recomienda apagar el interruptor RFI (OFF). En
caso de que se necesite un rendimiento óptimo de
EMC y estén conectados motores paralelos o la
longitud del cable del motor sea superior a 25 m, se
recomienda colocar el interruptor en la posición ON.
En la posición OFF se desconectan las capacidades
internas RFI (condensadores de filtro) entre el chasis
y el circuito intermedio para evitar dañar el circuito
intermedio y reducir las corrientes de capacidad
de puesta a tierra (según IEC 61800-3).
ConsultetambiénlanotadelaaplicaciónVLT
en terminales IT, MN.90.CX.02. Es importante
la utilización de monitores de aislamiento que
sean capaces de usarse junto con componentes
electrónicos de alimentación (IEC 61557-8).
¡NOTA!:
El interruptor RFI no se debe accionar
mientras la unidad está conectada a la
alimentación de red. Antes de accionar
el interruptor RFI, compruebe que la unidad está
desconectada de la alimentación de red.
VLT®5000 FLUX
osición de los interruptores RFI
P
Bookstyle IP 20
VLT 5001 - 5006 200 - 240 V
VLT 5001 - 5011 380 - 500 V
¡NOTA!:
Sólo se permite abrir el interruptor
RFI en frecuencias de conmutación
ajustadas en fábrica.
¡NOTA!:
El interruptor RFI desconecta galvánicamente
los condensadores de tierra.
Los interruptores rojos se pueden accionar mediante,
por ejemplo, un destornillador. Cuando están
extraídos se encuentran en la posición OFF, y cuando
están introducidos se hallan en la posición ON.
SeajustanenfábricaalaposiciónON.
Alimentación de red conectada a tierra:
El interruptor RFI debe estar en la posición ON
conelfindequeelconvertidordefrecuencia
cumpla la norma relativa a EMC.
Compacto IP 20/NEMA 1
VLT 5001 - 5006 200 - 240 V
VLT 5001 - 5011 380 - 500 V
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
47
Page 48

Compacto IP 20/NEMA 1
VLT 5008 200 - 240 V
VLT 5016 - 5022 380 - 500 V
VLT®5000 FLUX
Compacto IP 20/NEMA 1
VLT 5011 - 5016 200 - 240 V
VLT 5027 - 5032 380 - 500 V
Compacto IP 20/NEMA 1
VLT 5022 - 5027 200 - 240 V
VLT 5042 - 5102 380 - 500 V
Compacto IP 54
VLT 5001 - 5006 200 - 240 V
VLT 5001 - 5011 380 - 500 V
48
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 49
Compacto IP 54
VLT 5008 - 5011 200 - 240 V
VLT 5016 - 5027 380 - 500 V
VLT®5000 FLUX
Compacto IP 54
VLT 5016 - 5027 200 - 240 V
VLT 5032 - 5062 380 - 500 V
Compacto IP 54
VLT 5072 - 5102 380 - 500 V
Instalación
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
49
Page 50

VLT®5000 FLUX
■Panel de control (LCP)
La parte delantera del convertidor de frecuencia
presenta un panel de control LCP(panel de control
local), que proporciona una interfaz completa para el
funcionamiento y control de dicho convertidor.
Este panel de control es extraíble y, como alternativa,
puede instalarse alejado hasta 3 metros del convertidor
de frecuencia, por ejemplo, en un panel frontal,
mediante un kit de montaje opcional.
Las funciones del panel de control se dividen
en tres grupos:
• display
• teclas para cambiar los parámetros de
programación
• teclas para el funcionamiento local
Todos los datos se indican en un display alfanumérico
de 4 líneas, que puede mostrar continuamente
en el funcionamiento normal hasta 4 variables de
operación y 3 condiciones operativas. Durante
la programación, se presenta toda la información
necesaria para una rápida y efectiva configuración de
parámetros del convertidor de frecuencia. Tres luces
indicadoras adicionales para la tensión (suministro
externo de 24 V), advertencias y alarmas.
Todos los parámetros de programación se pueden
modificar inmediatamente desde el panel de
control, a menos que se haya bloqueado esta
función con el parámetro 018.
■ Display
modo de cambio de datos para mostrar el modo
o valor del parámetro seleccionado.
Una flecha indica el sentido de rotación del motor.
Además, se muestra el ajuste que se ha elegido
como ajuste activo en el parámetro 004. Cuando
se programe otro ajuste distinto al activo, el número
del ajuste que se está programando aparecerá a la
derecha. Este segundo número de ajuste parpadeará.
■LEDs
Si se sobrepasan determinados valores límite, se
iluminan los LEDs rojos de alarma y/o amarillos
de advertencia, junto con un texto de estado y
de alarma, en el panel de control.
El LED encendido se activa cuando se conecta la
tensión eléctrica al convertidor de frecuencia, o el
suministro externo de 24 V; al mismo tiempo se
enciende la iluminación posterior de la pantalla.
■ Teclas de control
Las teclas de control se dividen en funciones.
Esto significa que las teclas entre el display y
las luces indicadoras se utilizan para ajustar
parámetros, incluyendo la opción de lectura del
display durante el funcionamiento normal.
1. Line
2. Line
SETUP
1
175ZA734.10
3. Line
4. Line
1ª línea muestra hasta 3 variables de operación
continuamente en el estado de funcionamiento normal
o un texto que explica la segunda línea.
2ª línea muestra continuamente una lectura con
la unidad correspondiente, independientemente del
estado (excepto en caso de advertencia o alarma).
3ª línea está en blanco normalmente y se utiliza
en el modo de Menú para mostrar el número de
parámetro seleccionado o el número de grupo
de parámetros y su nombre.
4ª línea se utiliza en el estado de funcionamiento
para mostrar un mensaje de estado, o en el
50
Teclas de ajuste de parámetros:
El convertidor de frecuencia se puede utilizar
prácticamente para cualquier asignación de tareas
y permite elegir entre dos modos de programación:
modo de Menú y modo de Menú rápido.
El modo de Menú da acceso a todos los parámetros.
El modo de Menú rápido permite al usuario acceder
a los parámetros que permiten comenzar a utilizar
fácilmente el convertidor de frecuencia.
Los cambios en los parámetros tendrán efecto y
serán visibles tanto en el modo de Menú como
en el modo de Menú Rápido.
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 51
VLT®5000 FLUX
[DISPLAY / STATUS] se utiliza para seleccionar
el modo de Display o para cambiar a este modo
desdeelmododeMenúrápidooelmodode
Menú.
[QUICK ME NU] se utiliza para programar los
parámetros pertenecientes al modo de Menú
rápido. Es posible conmutar directamente entre el
modo de Menú Rápido y el modo de Menú.
[MENU] se utiliza para programar todos los
parámetros. Es posible conmutar directamente
entre el modo de Menú y el modo de Menú
Rápido.
[CHANGE DATA ] se utiliza para cambiar el
parámetro seleccionado en el modo de Menú o de
Menú rápido.
[CANCEL] se utiliza para cancelar un cambio en
el parámetro seleccionado.
[OK] confirma un cambio del parámetro
seleccionado.
[+/-] se utiliza para seleccionar un parámetro y
para cambiar el parámetro seleccionado o la
lecturadelalínea2.
[<>] se utiliza para seleccionar un grupo y para
mover el cursor cuando se modifican parámetros
numéricos.
¡NOTA!:
Si se han activado las teclas de control local,
permanecerán activas cuando se haya ajustado
la velocidad tanto en Control local como
en Control remoto por medio del parámetro 002.
[Fwd/rev] sólo se activa en funcionamiento local.
¡NOTA!:
Si no se ha seleccionado ninguna función de
parada externa y se ha desactivado la tecla
[Stop], el motor puede arrancarse y sólo se
parará desconectándole la alimentación eléctrica.
■ Estado de lectura del display
Es posible cambiar el estado de lectura del display
dependiendo de si el convertidor de frecuencia está
en funcionamiento normal o se está programando.
■ Modo de Display
En funcionamiento normal, pueden indicarse
continuamente hasta 4 variables de funcionamiento
distintas: En las líneas 1 y 2 el estado de
funcionamiento actual o las alarmas, y las
advertencias en la línea 4.
Teclas de control local:
[STOP/RESET] sirve para detener un motor
conectado o para reiniciar el convertidor de
frecuencia tras una desconexión. Puede activarse
o desactivarse mediante el parámetro 014. Si
se activa la parada, la línea 2 parpadea y ha de
activarse [START].
[JOG] sustituyelafrecuenciadesalidaporuna
frecuencia fija mientras se mantiene presionada
la tecla. Puede activarse o desactivarse con el
parámetro 015.
[FWD / REV] cambia el sentido de giro del motor,
que se indica por medio de una flecha en la
pantalla, aunque sólo en modo Local. Puede
activarse o desactivarse mediante el parámetro
016.
[START] arranca el convertidor de frecuencia
después de pararlo con la tecla de parada.
Siempre está activada, pero no puede cancelar
un comando de parada emitido mediante orden
externa.
■Modo de pantalla - selección del estado de lectura
• Estado de lectura I:
Éste es el estado de lectura predeterminado después
del arranque o de la inicialización.
FREQUENCY
1500 rpm
MOTOR IS RUNNING
En la línea 2 se muestra el valor de datos de una
variable de funcionamiento con la unidad relacionada.
Enlalínea1semuestrauntextoqueexplica
la línea 2. En el ejemplo se ha seleccionado la
velocidad como variable mediante el parámetro 009.
Durante el funcionamiento normal las variables se
pueden leer utilizando las teclas [+/-].
• Estado de lectura II:
Para cambiar entre los estados de lectura I y II se pulsa
la tecla [DISPLAY / STATUS] en menos de 1 segundo.
SETUP
1
175ZA736.10
(LCP)
Panel de control
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
51
Page 52

VLT®5000 FLUX
24.3% 30.2% 13.8A
1500 rpm
MOTOR IS RUNNING
SETUP
1 2
175ZA737.11
Los valores de datos de los cuatro valores de
funcionamiento se muestran al mismo tiempo,
indicando la unidad relacionada (véase la tabla).
En el ejemplo, Referencia, Par, Intensidad y
Velocidad están seleccionadas como variables
en la primera y segunda líneas.
• Estado de lectura III:
El estado de lectura III se puede mostrar mientras
semantengapulsadalatecla[DISPLAY/STATUS].
Al soltarla, el sistema vuelve al estado de lectura II,
amenosquelateclasemantengapulsadadurante
menos de 1 segundo aproximadamente, en cuyo caso
el sistema siempre vuelve al estado de lectura I.
Aquí aparecen los nombres de parámetro y las
unidades para las variables de funcionamiento
de la primera y segunda líneas; la variable de
funcionamiento 2 no cambia.
Los valores de funcionamiento 1,1;1,2 y 1,3 de la
primera línea, así como el valor de funcionamiento
2 de la segunda línea, se seleccionan mediante
los parámetros 009, 010, 011 y 012.
• Estado de Display IV:
Este estado de display se puede producir durante
el funcionamiento si se desea cambiar otro
ajuste sin parar el convertidor de frecuencia.
Esta función se activa en el parámetro 005
Editar ajuste (EDITAR AJUSTE).
24.3% 30.2% 13.8A
1500 rpm
MOTOR IS RUNNING
SETUP
1 2
175ZA737.11
El número de ajuste de programación seleccionado
parpadeará a la derecha del ajuste activo. La cuarta
línea muestra mensajes de estado.
■Estructura del modo de Menú rápido comparado
conelmododeMenú
Además de tener un nombre, cada parámetro se
vincula con un número que es el mismo en todos los
modos de programación. En el modo de Menú, los
parámetros se dividen en grupos, donde el primer dígito
del número de parámetro indica dicho parámetro.
• El Menú rápido lleva al usuario por un conjunto de
parámetros que serán suficientes para hacer que el
motor funcione casi óptimamente, mientras que los
ajustes de fábrica de los demás parámetros toman
en cuenta las funciones de control deseadas,
además de la configuración de las entradas/salidas
de señal (terminales de control).
• El modo de Menú permite seleccionar y
cambiar todos los parámetros a elección del
usuario. Sin embargo, algunos parámetros
aparecerán atenuados, según la opción de
configuración (parámetro 100).
DISPLAY MODE
VAR 1.1 VAR 1.2 VAR 1.3
▲
MENU MODE
SPEED
1500 rpm
0 KEYB.&DISPLAY
Choice of
parameter
DATA MODE
SPEED
▲
VAR 2
STATUS
Choice of
group
▲
▲
▲
▲
QUICK MENU MODE
QUICK MENU 1 OF 13
1500 rpm
001 LANGUAGE
ENGLISH
1500 rpm
001 LANGUAGE
ENGLISH
DATA CHANGE MODE
SPEED
1500 rpm
001 LANGUAGE
ENGLISH
175ZA738.10
■ Configuración rápida con el Menú rápido
Este menú se utiliza para el ajuste de las
aplicaciones de bucle cerrado.
La configuración rápida se inicia presionando la
tecla [QUICK MENU], que da como resultado
la siguiente lectura en la pantalla:
Línea 3: Número y nombre del parámetro
▲
▲
Choice of
data value
▲
DATA CHANGE MODE
QUICK MENU 1 OF 13
1500 rpm
001 LANGUAGE
ENGLISH
52
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 53
VLT®5000 FLUX
Línea 4: Estado y valor del primer parámetro
de la configuración rápida
Laprimeravezquesepulsalatecla[QUICK
MENU] después de haber encendido la unidad,
las lecturas siempre empezarán en la posición
1; consulte la tabla siguiente.
La selección de un parámetro del Menú rápido
se realiza por medio de las teclas [+/-]. Puede
accederse a los siguientes parámetros:
Pos.: Nº: Parámetro: Unidad:
1 001 Idioma
2 102 Potencia del motor [kW]
3 103 Tensión del motor [V]
4 104 Frecuencia del
motor
5 105 Intensidad del motor [A]
6 106 Velocidad del motor [rpm]
7 107 Adaptación
automática del
motor, AMA
8 329 Pulso/rev. de
retroalimentación
del codificador
9 351 Dirección de
codificador
10 207 Tiempo de rampa
de aceleración 1
11 208 Tiempo de rampa
de deceleración 1
12 205 Referencia máx. [rpm]
13 417 Ganancia
proporcional de
PID de velocidad
14 418 Tiempo de integral
de PID de veloc.
15 221 Modo de motor de
límitedepar
16 222 Modo de
generación de límite
de par
[Hz]
[ppm]
[seg]
[seg]
[ms]
[%]
[%]
En la línea 3 se muestra el número y el nombre
del grupo de parámetros.
La selección de cada grupo se realiza
mediante las teclas [<>].
Es posible acceder a los siguientes grupos
de parámetros :
Nº de grupo Grupo de parámetros:
0 Funcionamiento y display
1 Carga y motor
2 Referencias y límites
3 Entradas y salidas
4 Funciones especiales
5 Comunicación serie
6 Funciones técnicas
7 Opciones de aplicación
8 Perfil de Fieldbus
9 Comunicación con Fieldbus
Una vez seleccionado el grupo de parámetro
s deseado,
puede elegirse cada parámetro con las teclas [+/-].
En la línea 3 se muestran el número y el nombre
del parámetro, mientras que el estado y el valor
de éste se indican en la línea 4.
■ Cambio de datos
El procedimiento de cambio de datos es el mismo en
el modo de Menú rápido y en el modo de Menú.
Lapulsacióndelatecla[CHAN
GE DATA] permite
cambiar el parámetro seleccionado, después de lo
cual parpadeará el subrayado en la línea 4.
■Cambio de un valor de texto
Si el parámetro seleccio
nado es un valor de texto,
este valor deberá cambiarse con las teclas [+/-].
■ Modo de Menú (Ajuste de parámetros)
El modo de Menú se inicia pulsando la tecla [MENU],
lo que produce la siguiente lectura en el display:
SPEED
1500 rpm
0 KEYB.& DISPLAY
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
SETUP
1
175ZA739.10
SPEED
1500 rpm
001 LANGUAGE
ENGLISH
SETUP
1
La línea inferior del display muestra el valor
de texto que se introducirá (almacenará) al
confirmar dicho valor [OK].
175ZA740.10
(LCP)
Panel de control
53
Page 54
VLT®5000 FLUX
■Cambio de valores nominales de datosnuméricos
Si el parámetro elegido representa un valor
de dato numérico, este valor se cambia
mediante las teclas [+/-].
SPEED
1500 rpm
102 MOTOR POWER
0.37 KW
SPEED
1500 rpm
102 MOTOR POWER
0.55 KW
El valor de dato elegido se indica con el
dígito intermitente.
La línea inferior del display muestra el valor de
dato que se introducirá (almacenará) cuando
lo confirme con [OK].
■ Cambio de valores de datos numéricos
infinitamente variable
Si el parámetro elegido representa un valor
de dato numérico, primero se selecciona un
dígito con las teclas [<>].
SETUP
1
SETUP
1
175ZA741.10
175ZA742.10
■Cambio de valores de datos, proced-
imiento por pasos
Algunos parámetros pueden cambiarse paso
apasoodeformavariable. Entreellosse
encuentran la Potencia del motor (parámetro 102),
Tensión del motor (parámetro 103) y Frecuencia
del motor (parámetro 104).
Los parámetros se cambian como grupo de
valores de datos numéricos y como valores de
datos numéricos de forma variable.
■Lectura y programación de parámetros indexados
Los parámetros se indexan cuando se sitúan
en una pila renovable.
Los parámetros 615 - 617 contienen un registro
histórico que puede leerse. Elija el parámetro, pulse
la tecla [CHANGE DATA] y utilice las teclas [+] y [-]
para desplazarse por el registro de valores. La línea
4 de la pantalla destellará durante la lectura.
Si se ha montado una opción de bus en la unidad, la
programación de los parámetros 915 - 916 deberá
llevarse a cabo de la manera siguiente:
Elija el parámetro, pulse la tecla [CHANGE DATA]
y utilice las teclas [+] y [-] para desplazarse por los
diferentes valores indexados. Para cambiar el valor del
parámetro, seleccione el valor indexado y pulse la tecla
[CHANGE DATA]. Al utilizar las teclas [+] y [-] destellará
el valor que se desea cambiar. Para aceptar el nuevo
ajuste, pulse [OK]; para cancelarlo, pulse [CANCEL].
SPEED
1500 rpm
130 START SPEED
09.0 rpm
A continuación el dígito elegido se cambia de
formavariablemediantelasteclas[+/-]:
SPEED
1500 rpm
130 START SPEED
10.0 rpm
El dígito elegido se indica mediante el dígito intermitente.
En la línea 4 se muestra el valor de dato que se
introducirá (almacenará) cuando lo confirme con [OK].
SETUP
1
SETUP
1
175ZA743.10
175ZA744.10
■Inicialización a los ajustes de fábrica
El convertidor de frecuencia se puede inicializar a
los ajustes de fábrica de dos formas distintas.
nicialización mediante el parámetro 620
I
- Inicialización recomendada
• Seleccione el parámetro 620
• Pulse [CHANGE]
• Seleccionar inicialización
• Pulselatecla[OK]
• Desconecte la alimentación de red y espere a
queseapaguelaluzdelapantalla.
• Vuelva a conectar el suministro eléctrico. El
convertidor ya está reiniciado.
54
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 55

Con este parámetro se inicializa todo excepto:
500 Dirección de comunicación serie
501 Velocidad en baudios para
comunicación serie
601-605 Datos de funcionamiento
615-617 Registros de fallos
Inicialización manual
VLT®5000 FLUX
• Desconecte la unidad de la red eléctrica y
a que se apague la luz de la pantalla.
• Pulse a la vez las siguientes teclas:
[Display/status]
[Change data]
[OK]
• Conecte de nuevo el suministro eléctric
mientras pulsa las teclas.
• Suelte las teclas
• El convertidor de frecuencia habrá
programado en el ajuste de fábrica.
qued ad o
espere
o
Con este parámetro se inicializa todo excepto:
600-605 Datos de funcionamiento
¡NOTA!:
Se reajustan los valores para la comunicación
serie y los registros de fallos.
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
(LCP)
Panel de control
55
Page 56
VLT®5000 FLUX
■ Control local y remoto
Hay dos posibilidades distintas para el funcionamiento
del convertidor de frecuencia: control local o
remoto. A continuación se incluye una lista de
Remota Local
Comando de control Perfil FC Local Local mixto
Arranque/parada LCP X
Velocidad fija LCP X X X
Reset LCP X X X
Cambio de sentido LCP Fallo de red inverso X X X
Reset X X X
Rampa 2 X X X
Arranque X - Parada inversa X - X
Parada rápida inversa X - X
Freno de CC inverso X - X
Inercia inversa X X (HW)
Cambio de sentido X - X
Velocidad fija X - Mantener salida X - Mantener referencia X - Aceleración X - Deceleración X - Referencia interna, sí X - Referencia interna, LSB X - Referencia interna, MSB X - Valor de enganche X - Enganche abajo X - Relé 01/relé 04 X X X
Seleccionar ajuste LSB X X X
Seleccionar ajuste MSB X X X
Activar arranque adelante X - X
Activar arranque inverso X - X
Aceleración/Seleccionar ajuste
LSB
Deceleración/Seleccionar ajuste
MSB
Arranque por pulsos X - Arranque inverso X - X
1)
2)
XXX
XXX
las funciones/comandos disponibles con las
teclas del panel de control, entradas mediante los
terminales digitales o el puerto de comunicación
serie en ambas situaciones.
Tipo de maniobra
XX
X-
3)
X
1)" X" Significa que el comando está disponible
2) "-" Significa que el comando NO está disponible
3) Terminal 37
56
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 57
■Manejo de referencias únicas
Utilizando una referencia única, sólo se conecta
una señal de referencia activa, ya sea en forma
de referencia externa o interna.
Las referencias externas pueden ser tensión,
intensidad, frecuencia (pulsos) o binarias mediante
puerto serie. A continuación se ofrecen dos ejemplos
del modo en que el convertidor de frecuencia
maneja las referencias únicas.
Ejemplo 1:
Ref. única
VLT®5000 FLUX
Externa Referencia de velocidad o
par
term 53 (±10 V)
term 54 (±10 V)
term 60 (0/4 - 20 mA)
term17ó29(frecuencia)
RS 485
Referencias internas (parámetro 215
- 218)
Manejo de
referencias
Señal ref. externa = 1 V (mín) - 5 V (máx)
Referencia = 20 - 1500 rpm
Configuración (parám. 100) - Control de
velocidad en lazo cerrado
Ejemplo 2:
Señal ref. externa = 0 V (mín) -10 V (máx)
Referencia = 1500 rpm ccw - 1500 rpm cw
Configuración (parám. 100) - Control de
velocidad en lazo cerrado
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
57
Page 58

VLT®5000 FLUX
Ejemplo 3: Señal ref. externa de fuente externa = -10 V (1500
rpm ccw) - +10 V (1500 rpm cw)
Configuración (parám. 100) = Control de
velocidad en lazo cerrado.
Ex 1
Configuración Parámetro 100 Configuración [1]
Term referencia (53) Parámetro 308 [1]
Señalref.mín.(1V) Parámetro 309 [0,0...10,0 V]
Señal ref. máx. (5 V) Parámetro 310 [Parámetro 309...10,0 V]
Rango ref. Parámetro 203 Mín - Máx[0]
Ref mín. (20,000 rpm) Parámetro 204 [-100.000,000...Parámetro 205]
Ref máx. (1500,000 rpm) Parámetro 205 [Parámetro 204...100.000,000]
Ex 2
Configuración Parámetro 100 Configuración [0 ó 5]
Term referencia (53) Parámetro 308 [1]
Señalref.mín.(0V) Parámetro 309 [0,0...10,0 V]
Señal ref. máx. (10 V) Parámetro 310 [Parámetro 309...10,0 V]
Rango ref. Parámetro 203 - Máx - + Máx[1]
Tipo ref Parámetro 214 Suma [0]
Ref máx. (3000,000 rpm) Parámetro 205 [Parámetro 204...100.000,000]
Ref. interna (-50%) Parámetro 215 [-100,00% -+100,00%]
Velocidad/sentido de salida Parámetro 200 4500 rpm Ambos sentidos [1]
Ex 3
Configuración Parámetro 100 Configuración [1]
Term referencia (53) Parámetro 308 [1]
Señalref.mín.(0V) Parámetro 309 [0,0...10,0 V]
Señal ref. máx. (10 V) Parámetro 310 [Parámetro 309...10,0 V]
Rango ref. Parámetro 203 - Máx - + Máx[1]
Tipo ref Parámetro 214 Suma [0]
Ref máx. (3000,000 rpm) Parámetro 205 [Parámetro 204...100.000,000]
Ref. interna (0%) Parámetro 215 [-100,00% -+100,00%]
Velocidad/sentido de salida Parámetro 200 4500 rpm Ambos sentidos [1]
Enganche arriba/abajo y mantenimiento de referencia a través de entradas digitales 16, 17, 29, 32 ó 33.
58
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 59

VLT®5000 FLUX
■Manejo de referencias múltiples
Las referencias múltiples se utilizan cuando se
conectan dos o más señales de referencia, en forma
de señales de referencia externas o internas.
El parámetro 214 se puede combinar en
las funciones siguientes:
• Suma
• Relativa
• Externa sí/no
ista de manejo de referencias múltiples
L
Manejo de
referencias
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
59
Page 60

VLT®5000 FLUX
■Programación de parada en el límite de par
En las aplicaciones con un freno electromecánico
externo, como por ejemplo, aplicaciones de elevación,
es posible parar el convertidor de frecuencia mediante
un comando de parada ’estándar ’, activando al
mismo tiempo el freno electromecánico externo.
El siguiente ejemplo ilustra la programación de las
conexiones de un convertidor de frecuencia.
El freno externo puede conectarse al relé 01 ó 04,
consulte Control de f reno mecánico.Programe
el terminal 27 en Parada de inercia inversa [0] o
Reset y parada de inercia inversa [1] y el terminal
46 en Límite de par y parada [27].
escripción:
D
Si hay un comando de parada activado mediante el
terminal 18 y el convertidor de frecuencia no está en
el límite de par, el motor decelerará hasta 0 rpm.
Si el convertidor de frecuencia está en el límite de par y
se activa un comando de parada, se activará el terminal
46, Salida (programado en Límite de par y parada
[27]). La señal al terminal 27 cambiará de ‘1 lógico’ a
‘0 lógico’ y el motor empezará a marchar por inercia.
- Terminal 01, salida de relé
Parámetro 323 = Control de freno mecánico [32].
■ Función de freno dinámico (Resistencia de freno)
La función de freno consiste en limitar la tensión
en el circuito intermedio cuando la carga acciona
el motor y la energía entra en dicho circuito. El
freno es un circuito de chopper con conexión
de una resistencia de freno externa.
El freno está protegido contra cortocircuitos en
la resistencia de freno y el transistor de freno
está controlado para garantizar la detección de
cortocircuitos en el transistor. Utilizando una salida
relé/digital, dicho transistor puede emplearse para
proteger la resistencia de freno de sobrecargas cuando
se produce un fallo en el convertidor de frecuencia.
Además, el freno permite leer la energía instantánea
y la media de los últimos 120 segundos, así como
controlar que la energía aplicada no exceda el límite
de control seleccionado en el parámetro 402. El
parámetro 403 selecciona la función que se realizará
cuandolapotenciaquesetransmitealaresistenciade
freno sobrepase el límite ajustado en el parámetro 402.
¡NOTA!:
El control de la energía del frenono es una
función de seguridad; para este propósito
es necesario un interruptor de seguridad. El
circuito de resistencia del freno no tiene protección
de corriente de fuga a tierra.
■Selección de Resistencia de Freno
Para seleccionar la resistencia de freno correcta,
es necesario conocer la frecuencia de frenado y
cuál es la energía de frenado resultante.
El ED de la resistencia es una indicación del ciclo
de trabajo en el que ésta funciona.
El ED de la resistencia se calcula de la manera siguiente:
donde tb es el tiempo de frenado en segundos
y T ciclo es el tiempo de ciclo total.
- Arranque/parada mediante el terminal 18.
Parámetro 302 = Arranque [1].
- Parada rápida mediante el terminal 27.
Parámetro 304 = Parada de inercia inversa [0].
- Terminal 46, salida
Parámetro 319 = Límite de par y parada [27].
60
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 61

La carga máxima admisible en la resistencia del
freno se establece como un pico de energía con
un ED dado. El ejemplo y fórmula siguientes sólo
son aplicables a la unidad VLT 5000 solamente. La
potencia pico se puede calcular sobre la base de la
resistencia de freno más alta requerida para el frenado:
VLT®5000 FLUX
P motor en kW.
¡NOTA!:
La resistencia de freno máx. seleccionada
debe tener un valor en ohmios que sea un 10%
inferior, como máximo, al valor que recomienda
Danfoss. Si se selecciona una resistencia de freno
con un valor en ohmios más alto, no se conseguirá el
par de frenado del 160% y existe el riesgo de que el
convertidor de frecuencia se desconecte por motivos
de seguridad. Para más información, consulte la
Instrucción Resistencia del Freno MI.90.FX.YY.
Manejo de
referencias
P
PICO=PMOTORxMBR(%)
donde M
es un porcentaje del par nominal.
BR(%)
x η
MOTOR
x η
VLT
[W]
La resistencia de freno se calcula de la
siguiente manera:
La resistencia de freno depende de la tensión
del circuito intermedio (UDC).
Con los convertidores de frecuencia VLT 5000 que
tienen una tensión de alimentación de 3 x 380-500
Voltios, el freno estará activo a 822 Voltios (UDC);
si el convertidor de frecuencia tiene una tensión
de alimentación de 3 x 200-240 Voltios, el freno
estará activo a 397 Voltios (UDC).
¡NOTA!:
La resistencia de freno utilizada debe tener
un valor nominal de 850 ó 430 voltios.
es la resistencia recomendada por Danfoss,
R
REC
es decir, la que garantiza al usuario que el
convertidor de frecuencia puede frenar en el par
de frenado máxima (M
está típicamente a 0,90, mientras que η
η
motor
) del 160%.
br
VLT
está típicamente a 0,98. Para los convertidores
de frecuencia de 200 V y 500 V, respectivamente,
a un par de frenado del 160% se puede
R
REC
escribir de la siguiente manera:
¡NOTA!:
Si se produce un cortocircuito en el transistor
del freno, la disipación de calor en la resistencia
de freno sólo se puede impedir por medio de
un contactor o un interruptor de red que desconecte la
alimentación eléctrica al convertidor de frecuencia. (El
convertidor de frecuencia puede controlar el contactor).
■Adaptación automática del motor, AMA
La adaptación automática del motor es un algoritmo
de prueba que mide los parámetros del motor
eléctrico mientras está parado. Esto significa que
AMA, por sí sola, no suministra ningún par.
AMA resulta útil durante la puesta en servicio de
sistemas en los que el usuario desea optimizar el ajuste
del convertidor de frecuencia al motor aplicado. Esta
función se utiliza, especialmente, cuando los ajustes de
fábrica no son adecuados para el motor en cuestión.
Hay cinco parámetros del motor (150-154) que son
de significancia primaria en adaptación automática
del motor: la resistencia del estator R
del rotor R
, la reactancia de fugas del rotor, X2yla
X
1
reactancia principal X
, la reactancia de fugas del estator,
r
. El parámetro 107 permite
h
,laresistencia
S
seleccionar la adaptación automática del motor,
con determinación de R
s,Xh,X1,X2,Rr
o una
adaptación automática del motor reducida mediante
la determinación de R
únicamente.
s
La duración de una adaptación automática del motor
total varía entre unos minutos para motores pequeños
y más de 10 minutos para motores grandes.
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
61
Page 62

Limitaciones y condiciones previas:
VLT®5000 FLUX
se puede seguir en la pantalla como puntos después
del texto WORKING en el parámetro 107.
¡NOTA!:
AMA se puede realizar en éxito solamente si
o hay alarmas durante el autoajuste.
n
Interrumpir AMA
Si se desea interrumpir la adaptación automática del
motor,pulselatecla[STOP/RESET]odesconecte
el terminal 18 del terminal 12.
• Para que AMA pueda determinar de manera óptima
los parámetros del motor, deben introducirse en
los parámetros 102 a 106 los datos correctos
de la placa de características del motor que está
conectado al convertidor de frecuencia.
• Para obtener el mejor ajuste del convertidor de
frecuencia, se recomienda realizar la AMA con
un motor frío. Si se ejecuta AMA repetidamente
se podrá calentar el motor, provocando un
aumento de la resistencia, R
and Rr.
s
• El procedimiento AMA sólo se puede realizar si
la intensidad nominal del motor es como mínimo
el 35% de la intensidad de salida nominal del
convertidor de frecuencia. AMA se puede llevar a
cabo en un máximo de un motor de gran tamaño.
• Si se inserta un filtro de LC entre el convertidor
de frecuencia y el motor, será preferible realizar
una prueba reducida. Si se necesita un ajuste
global, retire el filtro de LC mientras realice
unaAMAtotal. UnavezfinalizadalaAMA,
vuelva a insertar el filtro de LC.
• Los cables de motor largos pueden afectar
al resultado de la función AMA.
Cómo realizar una AMA
1. Pulse la tecla [STOP/RESET]
2. Defina los datos de la placa de características
en los parámetros 102-106
3. En el parámetro 107, seleccione si se debe
realizar una [ACTIVAR AMA COMPLETA] total
o[ACTIVARAMAREDUCIDA]
4. Conecte el terminal 12 (24 V CC) al terminal
37 de la tarjeta de control
5. Conecte el terminal 12 (24 V CC) al terminal
27 de la tarjeta de control
6. Conecte el terminal 12 (24 V CC) al terminal
18 de la tarjeta de control
7. Pulselatecla[START]parainiciarlaadaptación
automática del motor.
La adaptación automática del motor finaliza
con uno de los mensajes siguientes después
de realizarse la prueba:
[AMA ACABADO OK]
La función AMA se ha realizado correctamente
(parámetro 107).
o
Advertencias y mensajes de alarma
ALARMA 22
Optimización automático no OK
[FALLO ADAPT AUTO MOTOR]
Se ha detectado un fallo durante la adaptación
automática del motor. Pulse la tecla [STOP/RESET] o
desconecte el terminal 18 del terminal 12. Compruebe
la causa posible del fallo indicado por el mensaje
de alarma mostrado. La cifra que aparece a
continuación del texto es el código de error, que
puede verse en el registro de fallos del parámetro
615. La adapación automática del motor no ha
actualizado los parámetros. Puede optar por realizar
una adaptación automática del motor reducida.
PRUEBA P.103,105 [0]
[AUTO MOT ADAPT FAIL] El parámetro 102,
103 ó 105 tiene un ajuste erróneo. Corrija el
ajuste y vuelva a iniciar la AMA.
BAJO P.105 [1]
El motor es demasiado pequeño para poder
realizar la AMA. Para poder ejecutar la AMA, la
intensidad nominal del motor (parámetro 105) debe
ser superior al 35% de la intensidad de salida
nominal del convertidor de frecuencia.
IMPEDANCIA ASIMETRICA [2]
AMA ha detectado una impedancia asimétrica
en el motor que está conectado al sistema. El
motor podría ser defectuoso.
A continuación, la adaptación automática del motor
realizará cuatro pruebas (para la AMA reducida, sólo
las dos primeras pruebas). El proceso de la prueba
62
MOTOR DEMASIADO GRANDE [3]
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 63

VLT®5000 FLUX
El motor que está conectado al sistema es demasiado
grande para poder realizar la AMA. El ajuste del
parámetro 102 no coincide con el motor utilizado.
MOTOR DEMASIADO PEQUEÑO [4]
El motor que está conectado al sistema es demasiado
pequeño para poder realizar la AMA. El ajuste del
parámetro 102 no coincide con el motor utilizado.
TIEMPO [5]
La AMA ha resultado fallida debido a señales de
medida ruidosas. Pruebe a iniciar el procedimiento
AMA varias veces desde el principio, hasta que se
ejecute. Tenga en cuenta que si se ejecuta la prueba
AMA repetidamente se podrá calentar el motor hasta
un nivel en el que aumente la resistencia R
Sin embargo, esto no suele ser crítico.
INTERRUMPIDO POR USUARIO [6]
El usuario ha interrumpido el procedimiento AMA.
FALLO INTERNO [7]
Ha ocurrido un fallo interno en el convertidor de
frecuencia. Diríjase a su distribuidor de Danfoss.
FALLO VALOR LIMITE [8]
Los valores de parámetros encontrados para el motor
se encuentran fuera del rango aceptable en el que
puede funcionar el convertidor de frecuencia.
syRr
.
o desconecte el terminal 18 del terminal 12 para
interrumpir el procedimiento AMA.
AVISO: 39
PRUEBA P.104,106
El ajuste del parámetro 102, 104 ó 106
probablemente sea erróneo. Compruebe el ajuste
y seleccione ’Continuar’ o ’Parar’.
AVISO: 40
PRUEBA P.103,105
El ajuste del parámetro 102, 103 ó 105
probablemente sea erróneo. Compruebe el ajuste
y seleccione ’Continuar’ o ’Parar’.
AVISO: 41
MOTOR DEMASIADO GRANDE
El motor utilizado probablemente sea demasiado
grande para poder realizar la AMA. Puede que el
ajuste del parámetro 102 no coincida con el motor.
Compruebe el motor y seleccione "Continuar" o "Parar’.
AVISO: 42
MOTOR DEMASIADO PEQUEÑO
El motor utilizado probablemente sea demasiado
pequeño para poder realizar la AMA. Puede que el
ajuste del parámetro 102 no coincida con el motor.
Compruebe el motor y seleccione "Continuar" o "Parar’.
Manejo de
referencias
MOTORGIRA[9]
Es probable que el motor esté girando. Asegúrese de
que la carga no es capaz de hacer girar el eje del motor.
A continuación, vuelva a iniciar el procedimiento AMA.
SOBRECORRIENTE [10]
Se ha sobrepasado el límite de intensidad pico del
inversor. Compruebe que el tamaño del motor coincide
con el tamaño del convertidor de frecuencia.
SOBRETENSION (SOBRETENSION
ENLACE CC) [11]
La tensión del circuito intermedio (CC) supera el
límite de sobretensión del inversor.
BAJA TENSION (BAJA TENSION ENLACE CC) [12]
La tensión del circuito intermedio (CC) supera el
límite de subtensión del inversor.
AVISO 39 - 42
Se ha detectado un fallo durante la adaptación
automática del motor. Compruebe la posible causa
del fallo de acuerdo con el mensaje de aviso. Pulse
la tecla [CHANGE DATA] y seleccione "CONTINUAR"
si desea que continúe la prueba AMA a pesar del
aviso mostrado, o bien pulse la tecla [STOP/RESET]
■Motor en giro
Esta función hace posible "enganchar" un motor
quegirasincontrolyparaqueelconvertidorde
frecuencia tome el control de la velocidad del
motor. La función puede activarse o desactivarse
a través del parámetro 445.
Si se ha seleccionado la función de motor en giro,
habrán tres situaciones en que la función se activa:
1. Después de darse una señal de paro por
inercia a través del terminal 27.
2. Despuésdelapuestaenmarcha.
3. Si el convertidor de frecuencia está en
estado de desconexión por fallo y se ha
dado una señal de reinicio.
1. Motor en giro está activada (parámetro 445 [1]).
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
63
Page 64

2. Motor en giro está activada (parámetro 445 [1]).
VLT®5000 FLUX
■ Control de par de sobrecarga normal/alto
Esta función permite al convertidor de frecuencia
funcionar a un par constante del 100%, utilizando
un motor sobredimensionado.
La opción entre una característica de par de
sobrecarga alto (M) o normal (N) se selecciona
en el parámetro 101.
La secuencia de búsqueda del motor en giro depende
de la Velocidad/sentido de rotación (parámetro 200).
Si se selecciona sentido horario, el convertidor de
frecuencia empezará a buscar desde Velocidad m áx.
(parámetro 202) hasta 0 rpm. Si el convertidor de
frecuencia no encuentra el motor en giro durante
la secuencia de búsqueda, efectuará un frenado de
CC con el fin de intentar reducir la velocidad del
motor en giro hasta 0 rpm. Esto requiere que el
frenodeCCestéactivadoatravésdelosparámetros
125 y 126. Si se selecciona Ambos sentidos,el
convertidor de frecuencia detectará primero en qué
sentido gira el motor y después busca la velocidad.
Si no se detecta el motor, el sistema asume que el
motor está parado o está girando a baja velocidad,
y el convertidor de frecuencia arranca el motor de
la forma normal después de esta búsqueda.
3. El convertidor de frecuencia se desconecta
y se activa Motor en giro.
Si se elige una característica de par alto, un motor
de tamaño nominal con el convertidor de frecuencia
obtiene un par de hasta el 160% durante 1 minuto.
Si se selecciona una característica de par normal,un
motor sobredimensionado permitirá un rendimiento
de par de hasta el 110% durante 1 minuto.
La ventaja de seleccionar una característica de par
normal para un motor sobredimensionado consiste
en que el convertidor de frecuencia podrá suministrar
un par del 100% constantemente, sin reducción de
potencia como resultado del motor de mayor tamaño.
¡NOTA!:
Esta función n
las unidades VLT 5001-5006, 200-240 V,
o VLT 5001-5011, 380-500 V.
o se puede seleccionar para
64
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 65
VLT®5000 FLUX
■Funcionamiento y Display
■Introducción
El grupo de parámetros 001 - 099 proporciona el ajuste y los valores para el lugar de funcioamiento y para
la operación y los ajustes de la pantalla LCP (Panel de Control Local) y la unidad de almacenamiento.
PNU Parámetro Ajuste de fábrica Rango Cambios 4-Ajustes Conversión Datos
# descripción durante el funcionamiento índice tipo
001 Idioma Inglés No No 0 5
002 Control local/remoto Control remoto Sí Sí 0 5
003 Referencia local 000.000 Sí Sí -3 4
004 Ajuste activo Ajuste 1 Sí No 0 5
005 Editar ajuste Ajuste activo Sí No 0 5
006 Copiar ajustes Sin copia No No 0 5
007 Copia LCP Sin copia No No 0 5
008 Mostrar velocidad escalado 1 0.01 - 100.00 Sí Sí -2 6
009 Línea 2 de la pantalla Velocidad [rpm] Sí Sí 0 5
010 Líneadelapantalla1.1 Referencia [%] Sí Sí 0 5
011 Líneadelapantalla1.2 Intensidad del motor
[A]
012 Líneadelapantalla1.3 Potencia [kW] Sí Sí 0 5
013 Modo de funcionamiento local Control LCP Sí Sí 0 5
014 Parada local Activar Sí Sí 0 5
015 Velocidad fija local No es posible Sí Sí 0 5
016 Cambio sentido de giro local No es posible Sí Sí 0 5
017 Desconexión o reinicio local Posible Sí Sí 0 5
018 Bloquear cambio de datos Desbloqueado Sí Sí 0 5
019 Modo de arranque, control local Parada forzada, usar
ref. guardada.
024 Menú rápido definido por el
usuario
025 Ajuste de Menú Rápido 000 0-999 Sí No 0 6
No activo Sí No 0 5
Sí Sí 0 5
Sí Sí 0 5
Programación
Cambios durante el funcionamiento:
"Sí" significa que el parámetro puede cambiar
mientras el convertidor de frecuencia está funcionando.
"No" significa que hay que parar el convertidor
de frecuencia para realizar cambios.
-Ajustes:
4
"Sí" significa que este parámetro se puede programar
por separado en cada uno de los cuatro ajustes,
es decir, puede tener cuatro valo
res de dato
distintos. "No" significa que el valor de dato debe
ser idéntico en los cuatro ajustes.
se
ndice de conversión:
Í
Este número se refiere a una cifra de conversión
que se usa cuando se escribe o lee mediante
un convertidor de frecuencia.
Índice de conversión Factor de conversión
74 0.1
2100
110
01
-1 0.1
-2 0.01
-3 0.001
-4 0.0001
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
65
Page 66

VLT®5000 FLUX
Tipo de datos:
Indica el tipo y longitud del telegrama.
Tipo de datos Descripción
3Entero16
4Entero32
5Nofirmado8
6Nofirmado16
7Nofirmado32
9 Cadena de texto
001 Idioma
(LANGUAGE)
2. Las teclas [STOP], [JOG] y [RESET], siempre
3. La tecla [FWD/REV], siempre que se haya activado
4. Las teclas "Flecha arriba" y "Flecha abajo"
5. Un comando de control externo que puede
Valor:
✭Inglés (ENGLISH)
Alemán (DEUTSCH)
Francés (FRANCAIS)
Danés (DANSK)
Español (ESPAÑOL)
Italiano (ITALIANO)
[0]
[1]
[2]
[3]
[4]
[5]
Consulte también la sección Cambio entre el
Función:
control remoto y el control local.
Esteparámetrodefineelidiomaquese
utilizará en el display.
003 R eferencia local
002 Control local/remoto
(TIPO DE MANIOBRA)
Valor:
✭Control remoto (REMOTO)
Control local (LOCAL)
Función:
Se puede elegir entre dos métodos de control
del convertidor de frecuencia.
Descripción de opciones:
Si se selecciona Control remoto [0], el convertidor
de frecuencia puede controlarse mediante:
1. Los terminales de control o el puerto de
comunicación serie.
2. La tecla [START]. Sin embargo, no puede cancelar
los comandos de parada (también desactivación
de arranque) introducidos mediante las entradas
digitales o el puerto de comunicación serie.
3. Las teclas [STOP], [JOG] y [RESET], siempre
que estén activadas (consulte los parámetros
014, 015 y 017).
Si se selecciona Control local [1], el convertidor de
frecuencia puede controlarse mediante:
[0]
[1]
Valor:
Parámetro 203 = [0] ajustado para:
Ref
Parámetro 203 = [1] ajustado para:
-Ref
Función:
Este parámetro permite ajustar manualmente
el valor de referencia deseado.
La unidad sigue la configuración seleccionada
en el parámetro 100, donde la velocidad se
mide en RPM y el par en NM.
Descripción de opciones:
Local [1] debe seleccionarse en el parámetro
002 para utilizar este parámetro.
El valor ajustado se almacena en caso de corte de
electricidad, consulte el parámetro 019.
En este parámetro no se sale automáticamente del
Modo de Cambio de Datos (tras intervalo de tiempo).
La referencia local no puede ajustarse mediante
el puerto de comunicación serie.
1. La tecla [START]. No obstante, esto no
puede anular los comandos de parada en
los terminales digitales (si se ha seleccionado
[4] en el parámetro 013).
que estén activadas (consulte los parámetros
014, 015 y 017).
en el parámetro 016 y que se haya elegido
entre [3] en el parámetro 013.
para controlar la referencia local mediante
el parámetro 003.
conectarse al terminal 16, 17, 19, 27, 29, 32
ó 33. Sin embargo, será necesario seleccionar
[4] en el parámetro 013.
¡NOTA!:
Tenga en cuenta que el terminal 37 (inercia
del equipo) siempre está activado.
(REFERENCIA LOCAL)
MIN
-Ref
MAX
MAX
-+Ref
MAX
✭ 000.000
✭ 000.000
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
66
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 67

VLT®5000 FLUX
Aviso: Como el valor ajustado se
memoriza después de desconectar la
alimentación, el motor puede arrancar
sin advertirlo al restablecer la alimentación;
si el parámetro 019 se cambia a Rearranque
automático,
004 Ajuste Activo
Valor:
Ajuste de fábrica (AJUSTE DE FABRICA)
✭Ajuste 1 (AJUSTE 1)
Ajuste 2 (AJUSTE 2)
Ajuste 3 (AJUSTE 3)
Ajuste 4 (AJUSTE 4)
Ajuste múltiple (AJUSTE MULTIPLE)
Función:
EsteparámetrodefineelnúmerodeAjustepara
controlar las funciones del convertidor de frecuencia.
Todo parámetro se puede programar en cuatro
ajustes de parámetros individuales, Ajuste 1 Ajuste 4. Además, hay un Ajuste de Fábrica,
que no se puede modificar.
use ref. guardada. [0].
(AJUSTE ACTIVO)
[0]
[1]
[2]
[3]
[4]
[5]
Función:
Las opciones se refieren a los ajustes en que va
aefectuarselaprogramación(cambiodedatos)
durante el funcionamiento (mediante el panel de
control o el puerto de comunicación serie). Los 4
Ajustes pueden programarse de forma independiente
respecto al ajuste seleccionado como el ajuste
activo (seleccionado en el parámetro 004).
Descripción de opciones:
El Ajuste de fábrica [0] contiene los datos establecidos
en fábrica, y puede utilizarse como fuente de
datos si los demás ajustes van a establecerse
en una condición conocida.
Ajustes 1 a 4 [1]-[4] son ajustes individuales que
pueden utilizarse según se requieran. Es posible
programarlos libremente, con independencia del
ajuste que haya seleccionado como ajuste activo, que
controla las funciones del convertidor de frecuencia.
¡NOTA!:
Si se realiza un cambio general de datos o una
copia al ajuste activo, esto tendrá un efecto
inmediato en el funcionamiento de la unidad.
Programación
Descripción de opciones:
Ajuste de fábrica [0] contiene los datos establecidos
en fábrica. Puede emplearse como fuente de
datos si los demás ajustes van a establecerse
en una condición conocida.
Los parámetros 005 y 006 permiten copiar de un
Ajuste a otro o el resto de Ajustes.
Ajustes 1-4 [1]-[4] son cuatro Ajustes individuales
que pueden seleccionarse de forma individual.
Ajuste múltiple [5] se utiliza mediante conmutación
controlada a distancia entre varios Ajustes.
Pueden emplearse los terminales 16/17/29/32/33,
además del puerto de comunicación serie, para
conmutar entre los Ajustes.
Se debe aplicar una señal de parada
al cambiar entre las funciones de bucle
abierto y de bucle cerrado.
005 Edición de ajustes
(EDITAR AJUSTE)
Valor:
Ajuste de fábrica (AJUSTE DE FABRICA)
Ajuste 1 (AJUSTE 1)
Ajuste 2 (AJUSTE 2)
Ajuste 3 (AJUSTE 3)
Ajuste 4 (AJUSTE 4)
✭Ajuste activo (AJUSTE ACTIVO)
[0]
[1]
[2]
[3]
[4]
[5]
006 Copia de Ajustes
(COPIAR AJUSTE)
Valor:
✭Sin copia (NO COPIAR)
CopiaraAjuste1desde#(COPIAR AL AJUSTE1)
CopiaraAjuste2desde#(COPIAR AL AJUSTE2)
CopiaraAjuste3desde#(COPIAR AL AJUSTE3)
CopiaraAjuste4desde#(COPIAR AL AJUSTE4)
Copiar a todos los Ajustes desde #
(COPIAR A TODOS)
# = Ajuste seleccionado en el parámetro 005
Función:
Se realiza una copia del ajuste seleccionado en el
parámetro 005 a otro de los Ajustes, o a todos
simultáneamente. La función de copia de ajustes no
copia los parámetros 001, 004, 005, 500 y 501.
La copia sólo es posible en el modo de parada
(motor parado con un comando de Parada).
Descripción de opciones:
La copia comienza cuando se ha introducido la
función de copia deseada y se ha confirmado
presionando la tecla [OK].
La pantalla indica que la copia está en curso.
[0]
[1]
[2]
[3]
[4]
[5]
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
MG.55.A6.05 - VLT es una marca registrada de Danfoss
67
Page 68
VLT®5000 FLUX
¡NOTA!:
La Copia de Ajustes sólo puede realizarse
en el modo de Parada.
007 Copia con el LCP
(COPIAR LCP)
Valor:
✭Sin copia (NO COPIAR)
Recibir todos los parámetros
(RECUPERAR PARAM.)
Enviar todos los parámetros (VOLCAR PARAM.)
Enviar parám. no relativos a potencia
(VOLCAR PARTE PAR.)
Función:
Elparámetro007seempleasivaautilizarselafunción
de copia integrada del panel de control. El panel de
control es extraíble. Por lo tanto, puede copiar los
valores de un parámetro a otro con toda facilidad.
Descripción de opciones:
Seleccione Recuperar param [1] si todos los valores
de parámetros se van a transmitir al panel de control.
Seleccione Volcar param [2] si todos los valores
de parámetros transmitidos van a copiarse
al convertidor de frecuencia en el que está
montado el panel de control.
Seleccione Volcar parámetros independientes de
la potencia [3] si sólo se van a volcar parámetros
independientes de la potencia. Esto se utiliza cuando
se transfieren los parámetros a un convertidor
de frecuencia que tiene una potencia nominal
distinta a la del convertidor utilizado como origen
de la configuración de parámetros.
Tenga en cuenta que los parámetros en función
de la potencia 102-106, deben programarse
despuésdelacopiadeajustes.
¡NOTA!:
La recepción de parámetros sólo puede
realizarse en el modo de parada.
008 Mostrar velocidad escalado
(SPEED SCALE)
Valor:
0.01 - 100.00
Función:
Este parámetro selecciona el factor por el que se
multiplica la velocidad del motor, para la presentación
en el display, cuando los parámetros 009-012 se
han ajustado para Velocidad x Escalado [5].
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
[0]
[1]
[2]
[3]
✭ 1
Descripción de opciones:
Ajuste el factor de escalado requerido.
009 Línea de display 2
(LINEA DISPLAY 2)
Valor:
Referencia [%] (REFERENCIA [%])
Referencia [unidad] (REFERENCIA (UNID])
Frecuencia [Hz] (FRECUENCIA (HZ])
✭Velocidad [RPM] (VELOCIDAD [RPM])
Intensidad del motor [A] (INTENSIDAD MOTOR [A])
Par [%] (PAR [%])
Potencia [kW] (POTENCIA [KW])
Potencia [HP] (POTENCIA [HP] [US])
Energíadesalida[kWh]
(ENERGIA SALIDA [KWH])
Tensión motor [V] (TENSION MOTOR [V])
Tensión de CC [V] (TENSION CC [V])
Carga térmica, motor [%]
(TERMICO MOTOR [%])
Carga térmica, VLT [%] (TERMICO VLT [%])
Horas de funcionamiento [Horas]
(HORAS EJECUTADAS)
Entrada digital [Código binario]
(ENTRADA DIG. [BIN])
Entrada analógica 53 [V]
(ENTRADA ANALOG 53 [V])
Entrada analógica 54 [V]
(ENTRADA ANALOG 54 [V])
Entrada analógica 60 [mA]
(ENTRADA ANALOG 60 [MA])
Referencia de pulsos [Hz] (REF. PULSOS [HZ])
Referencia externa [%] (REFERENCIA EXT [%])
Código de estado [Hex]
(CODIGO ESTADO [HEX])
Efecto de frenado/2 min. [KW]
(ENERGIA FRENO/2MIN)
Efecto de frenado/seg. [kW]
(ENERGIA FRENO/S)
Temperatura del disipador térmico [°C]
(TEMP DISIPADOR [°C])
Código de alarma [Hex]
(CODIGO ALARMA [HEX])
Código de control [Hex]
(COD.CONTROL [HEX])
Código de advertencia 1 [Hex]
(EXT. ESTAD. CODIGO [HEX])
Código de advertencia 2 [Hex]
(CODIGOADVERT2[HEX])
Salida digital [Bin]
(SALIDA DIGITAL [BIN])
[1]
[2]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]
[29]
[30]
68
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 69
VLT®5000 FLUX
Advertenciadelatarjetadeopciónde
comunicaciones
(ADV.OPT.COM [HEX])
Sensor KTY [ºC] (TEMP SENSOR KTY)
Función:
Este parámetro permite presentar una opción de
valores de datos en la línea 2 de la pantalla.
Los parámetros 010 a 012 permiten utilizar tres
valores de datos más que se presentan en la línea 1.
Descripción de opciones:
Referencia [%] corresponde a la referencia
total (suma de enganche y deceleración
digital/analógico/predeterminado/bus/ref. mantener).
Referencia [unidad] da el valor de estado de los
terminales 17/29/53/54/60 utilizando la unidad definida
partiendo de la configuración del parámetro 100 (rpm).
Frecuencia [Hz] proporciona la frecuencia
del motor, es decir, la frecuencia de salida del
convertidor de frecuencia.
Velocidad [RPM] Muestra la velocidad en rmp
(revoluciones por minuto); es decir, la velocidad
del eje del motor en bucle cerrado.
Intensidad del motor [A] indica la corriente de
fase del motor medida como valor eficaz.
Par [%] indica la carga actual del motor. en
relación con el par motor nominal.
Potencia[kW] indica la potencia actual que
consume el motor en kW.
Potencia [HP] indica la potencia real que
consume el motor en HP.
Energía de salida [kWh] indica la energía
consumida por el motor desde que se efectuó el
último reinicio en el parámetro 618.
Tensión del motor [V] indica la tensión
de salida al motor.
Tensión CC [V] indica la tensión del circuito
intermedio en el convertidor de frecuencia.
Carga térmica, motor [%] indica la carga
térmica calculada/estimada del motor. 100%
es el límite de corte.
Carga térmica, VLT [%] indica la carga térmica
calculada/estimada del convertidor de frecuencia.
100% es el límite d corte.
Horas de funcionamiento [Horas] indica el número
de horas que ha funcionado el motor desde el
último reinicio en el parámetro 619.
Entrada digital [Códi go binario] indica los es
de señal de los 8 terminales digitales (16, 17, 18, 19,
27, 29, 32 y 33). La entrada 16 corresponde al bit del
extremo izquierdo. ’0’ = sin señal, "1"=seña
Entrada analógica 53 [V] indica el valor de
señal en el terminal 53.
lconectada.
[31]
[32]
tados
Entrada analógica 54 [V] indica el valor de
señal en el terminal 54.
Entrada analógica 60 [V] indica el valor de
señal en el terminal 60.
Referencia pulsos [Hz] indica los pulsos posibles en
HZ conectada a uno de los terminales 17 ó 29.
Referencia externa [%] da la suma de la referencia
serie como porcentaje (suma de analógica/pulso/bus).
Código estado [Hex] proporciona la palabra de
estado enviada por el puerto de comunicación serie
en código hexadecimal desde el convertidor
de frecuencia.
Potencia freno/2 min.[KW] indica la fuerza
de freno transferida a una resistencia de freno
externo. El valor indicado se calcula de manera
continua durante los últimos 120 seg.
El valor de la resistencia se debe introducir
en el parámetro 401.
Potencia freno/seg [kW] indica la fuerza de freno
transferida a una resistencia de freno externo. La
potencia se indica como valor instantáneo.
El valor de la resistencia se debe introducir
en el parámetro 401.
Temperatura disipador [ºC] indica la temperatura
actual del disipador térmico del convertidor de
frecuencia. El límite de desconexión es 90 ±
5°C, y el de reconexión 60 ± 5°C.
Código alarma [Hex] indica una o varias
alarmas en código hexadecimal.
Código control [Hex] da el código de control del
convertidor de frecuencia. Consulte Comunicación
serie, en la Guía de Diseño para VLT 5000 Process.
Código advertencia [Hex] indica una o más
advertencias en código hexadecimal.
Ext. Código Estado [Hex] indica una o más
condiciones de estado en código hexadecimal.
Salida Digital [Bin] (26, 46)
Advertencia tarjeta opción comunicaciones [Hex]
se emite un código de advertencia si hay un fallo en el
bus de comunicaciones. Este código sólo se activa si
se han instalado las opciones de comunicación. Si no
se han instalado dichas opciones, se muestra 0 Hex.
Sensor KTY [ºC] Indica la temperatura actual
de los bobinados del motor, cuando el sensor
KTY está conectado a la entrada analógica
(terminal 54). Cuando el sensor KTY no está
conectado, se muestra 20ºC.
Programación
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
69
Page 70

VLT®5000 FLUX
010 Línea 1,1 del display (LINEA DISPL. 1,1)
011 Línea 1,2 del display (LINEA DISPL. 1,2)
012 Línea 1,3 del display (LINEA DISPL. 1,3)
Valor:
Con relación al parámetro 009
Función:
Los parámetros 010 - 012 permiten mostrar
tres valores de datos distintos en el display,
línea 1, posición1; línea 1, posición 2; y línea
1, posición 3, respectivamente.
Para lecturas del display, pulse el botón
[DISPLAY/STATUS]. Consulte las seccionesPanel
de control y Modo de Display.
Descripción de opciones:
Se dispone de 32 valores de datos distintos,
consulte el parámetro 009.
Ajuste de fábrica para cada parámetro:
Parámetro 010 [1] Referencia [%]
Parámetro 011 [6] Intensidad del motor [A]
Parámetro 012 [8] Potencia [kW]
entradas digitales según la lista de la sección Cambio
entre el control local y el control remoto .
ambio de control remoto a control local
C
Se mantendrá la referencia actual.
C
ambio de control local a control remoto
La referencia se sustituirá por la señal de referencia
activa del control remoto.
014 Parada local
(PARADA LOCAL)
Valor:
Desactivar (DESACTIVAR)
✭Activar (ACTIVAR)
Función:
Este parámetro desactiva/activa la función de
parada local desde el LCP.
Descripción de opciones:
Si se selecciona Desactivar [0], la tecla [STOP]
estará desactivada.
[0]
[1]
013 Modo de funcionamiento local
(MODO FUNC. LOCAL)
Valor:
Localnoactivo(NO)
✭Control LCP (CONTROL LCP)
Control digital LCP (CONTROL LCP+DIG)
Función:
Aquí es donde se selecciona la función deseada si se
ha elegido el control local en el parámetro 002.
Consulte la descripción del parámetro 100.
Descripción de opciones:
Si Local no activo [0] está seleccionado, se
bloquea un posible ajuste deReferencia local
mediante el parámetro 003.
Sólo se puede cambiar a Local no activo [0] desde
una de las otras opciones de ajuste del parámetro
013, cuando el convertidor de frecuencia se haya
ajustado en Control remoto [0] en el parámetro 002.
Control LCP [3] se selecciona si la referencia se
va a definir mediante el parámetro 003.
Control digital LCP [4] funciona como Control LCP
[3], aunque cuando el parámetro 002 se ha ajustado
en Local [1], el motor puede controlarse mediante las
[0]
[3]
[4]
¡NOTA!:
Si se selecciona Activar,latecla[Stop]anula
todos los comandos de Arranque.
015 Velocidad fija local JOG (VELOC.FIJA
LOCAL)
Valor:
✭No es posible (DESACTIVAR)
Posible (ACTIVAR)
Función:
Este parámetro activa o desactiva la función
de velocidad fija en el LCP.
La tecla se utiliza si se ha definido el parámetro
002 como Control remoto [0] o Local [1].
Descripción de opciones:
Si se selecciona No [0], la tecla [JOG]
estará desactivada.
016 Ca mbio sentido de giro local
(CAMBIO SENTIDO)
Valor:
✭No es posible (NO)
Posible (SÍ)
[0]
[1]
[0]
[1]
✭
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
70
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 71
VLT®5000 FLUX
Función:
Este parámetro activa o desactiva la función de
cambio de sentido de giro en el LCP.
Esta tecla sólo se puede utilizar si el parámetro
002 se ha definido en Funcionamiento local [1] y
el parámetro 013 en Control LCP [3].
Descripción de opciones:
Si se selecciona No [0], la tecla [FWD/REV]
estará desactivada.
Consulte el parámetro 200.
017 Reset local de descon. (RESET LOCAL)
Valor:
No es posible (NO)
✭Posible (SÍ)
Función:
En este parámetro, la función en cuestión puede
seleccionarse o retirarse del conjunto de teclas.
La tecla se utiliza si se ha definido el parámetro
002 como Control remoto [0] o Local [1].
Descripción de opciones:
Si se selecciona No [0] en este parámetro, la
tecla [RESET] estará desactivada.
¡NOTA!:
Seleccione Desactivar [0] sólo si se ha
conectado una señal de reset externa
mediante las entradas digitales.
018 Bloquear cambio de datos
(BLOQUEO PARAMET.)
Valor:
✭Desbloqueado (DESBLOQUEADO)
Bloqueado (BLOQUEADO)
Función:
En este parámetro, el software se puede "bloquear",
es decir: no es posible realizar cambios de datos,
mediante LCP (sin embargo, esto sigue siendo posible
mediante el puerto de comunicación serie).
Descripción de opciones:
Si se ha seleccionado Bloqueado [1], no es
posible realizar cambios de datos.
[0]
[1]
[0]
[1]
019 Modo de arranque, control local
(MODO DE ARRANQUE)
Valor:
Rearranque auto., usa ref. almacenada
(REARRANQUE AUTOMAT)
✭Parada forzada, usa ref. almacenada
(LOCAL=PARADA+REF.)
Parada forzada, ajusta ref. en 0
(LOCAL=PARADA+REF.=0)
Función:
Ajuste del modo de funcionamiento requerido cuando
está conectada la alimentación eléctrica.
Está función sólo puede estar activada en
correspondencia con Control local [1] en
el parámetro 002.
Descripción de opciones:
Rearranque auto., usa ref. almacenada [0] se
selecciona si es necesario que la unidad arranque
con la referencia local (ajustada en el parámetro
003) y con las condiciones de arranque y parada
dadasconlasteclas[Start/Stop],justoantesde
desconectar la alimentación eléctrica.
Parada forzada, usa ref. almacenada [1] se utiliza
si es necesario que la unidad permanezca parada
cuando regresa la alimentación eléctrica, hasta
quesepresionelatecla[Start]. Despuésdel
comando de arranque, la referencia local utilizada
es la ajustada en el parámetro 003.
Parada forzada, ajusta ref. en 0 [2] se selecciona
si es necesario que la unidad permanezca parada
cuando regresa la alimentación de red. La referencia
local (parámetro 003) se inicializa.
¡NOTA!:
En el caso de control remoto (parámetro
002), la condición de arranque y parada
dependerá de los cambios externos. Si
la unidad va a permanecer parada después de
conectarla a la alimentación de red, seleccione
Arranque de pulso [2] en el parámetro 302.
024 Menú rápido definido por el usuario
(MENÚ RÁPIDO USUARIO)
Valor:
✭No activo (NO)
Activo (SÍ)
[0]
[1]
[2]
Programación
[0]
[1]
Función:
En este parámetro, puede seleccionar el ajuste
normal de la tecla Quick Menu del panel de
control y del panel LCP 2.
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
MG.55.A6.05 - VLT es una marca registrada de Danfoss
71
Page 72

Con esta función, en el parámetro 025 Ajuste de
Menú Rápido el usuario puede elegir hasta 20
parámetros distintos para la tecla Quick Menu.
Descripción de opciones:
Si se selecciona No [0], estará activado el ajuste
normal de la tecla Quick Menu.
Si se selecciona Sí [1], estará activado el Menú
Rápido definido por el usuario.
025 Ajuste de Menú Rápido
(AJUSTE DE MENÚ RÁPIDO)
Valor:
[Indice 1 -20] Valor: 0 - 999
Función:
En este parámetro, se definen los que se requieren
en el Menú Rápido cuando el parámetro 024 Menú
Rápido del usuario se ha ajustado en Sí [1]´.
Es posible elegir hasta 20 parámetros para el
Menú Rápido definido por el usuario.
✭ 000
VLT®5000 FLUX
Descripción de opciones:
El Menú Rápido se ajusta de la siguiente manera:
1. Seleccione el parámetro 025 Ajuste de Menú
Rápido y pulse [CHANGE DATA].
2. El índice 1 indica el primer parámetro del Menú
Rápido. Puede desplazarse por los números de
índice con las teclas [+ / -]. Seleccione el índice 1.
3. Utilizando [< >] puede desplazarse por las tres cifras.
Pulselatecla[<]unavezylaúltimacifradelnúmero
de parámetro podrá elegirse con las teclas [+ / -].
Ajuste el índice 1 en 100 para el parámetro
100 Configuración .
4. Pulse [OK] cuando el índice 1 esté ajustado en 100.
5. Repita los pasos 2 - 4 hasta que todos los
parámetros que desee se hayan ajustado
para la tecla Quick Menu.
6. Pulse[OK]paraterminarelajustedelMenúRápido.
Si el parámetro 100 Configuración se selecciona para
el índice 1, el Menú Rápido comenzará con este
parámetro cada vez que se active la tecla Quick Menu.
Tenga en cuenta que el parámetro 024 Menú
Rápido del usuario y el parámetro 025 Ajuste
de Menú Rápido se restablecen en los ajustes
de fábrica durante la inicialización.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
72
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 73
VLT®5000 FLUX
■Carga y Motor
■Introducción
El grupo de parámetros 100 - 199 proporciona los ajustes y valores para la carga y el motor conectado
al convertidor de frecuencia.
Nº
parám Descripción Ajuste de fábrica Rango Cambios 4 ajustes Índice de Tipo de
#delparámetro durante el
funcionamiento
100 Configuración Control de velocidad, lazo
cerrado
101 Tipo de par Par constante alto No Sí 0 5
102 Potencia del motor Dependedelaunidad 0,18-500kW No Sí 1 6
103 Tensi ón d el mo to r Depende de la unidad 200 - 500 V No Sí 0 6
104 Frecuencia del motor 50 Hz No Sí 0 6
105 Intensidad del motor Dependedelaunidad 0,01-I
106 Velocidad nominal del motor Depende de la unidad 100-60.000 rpm No Sí 0 6
107 Adaptación automática del motor,
AMA
115 Compensación de deslizamiento 100% -400% - +400% Sí Sí 0 3
116 Const. tiempo compens.
deslizam.
119 Pardearranquealto 0,0 s 0,0 - 0,5 s Sí Sí -1 5
120 Retardo de arranque 0,0 s 0,0 - 10,0 s Sí Sí -1 5
121 Función de arranque Inercia en retardo de
122 Funciónenparada Inercia Sí Sí 0 5
123 Velocidad mín. para activar
funciónenparada
124 Intensidad de CC mantenida 50 % 0 - 100 % Sí Sí 0 6
125 Intensidad de frenado de CC 50 % 0 - 160 % Sí Sí 0 6
126 Tiempo de frenado de CC 10,0 s 0,0 - 60,0 s Sí Sí -1 6
127 Velocidad de entrada del freno deCCApagado 0,0-par. 202 Sí Sí -1 6
Autoajuste desactivado No No 0 5
0,50 s 0,05-5,00 s Sí Sí -2 6
arranque
0 rpm 0 - 600 rpm Sí Sí -1 5
VLT,MAX
No Sí 0 5
No Sí -2 7
Sí Sí 0 5
conversión datos
Programación
128 Protección térmica del motor Sin protección Sí Sí 0 5
129 Ventilador de motor externo No Sí Sí 0 5
130 Velocidad de arranque 0,0 rpm 0,0 - 600 rpm Sí Sí -1 5
131 Intensidad inicial 0.0 Amp 0,0-par. 105 Sí Sí -1 6
150 Resistencia del estátor Depende de la unidad Ohmio No Sí -4 7
151 Resistencia del rotor Depende de la unidad Ohmio No Sí -4 7
152 Reactancia de fuga del estátor Depende de la unidad Ohmio No Sí -3 7
153 Reactancia de fuga del rotor Depende de la unidad Ohmio No Sí -3 7
154 Reactancia principal Depende de la unidad Ohmio No Sí -3 7
156 Número de polos Motor de 4 polos 2-100 No Sí 0 5
158 Resistencia de pérdida de hierro 10.000 1 - 10.000 No Sí 0 6
161 Inercia mínima Dependedelaunidad Kgm
2
No Sí -4 7
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
73
Page 74

VLT®5000 FLUX
Nº
parám Descripción Ajuste de fábrica Rango Cambios 4 ajustes Índice de Tipo de
#delparámetro durante el
funcionamiento
162 Inercia máxima Dependedelaunidad Kgm
163 Retardo de parada funcional 00-5sSíSí-17
164 Retardo de liberación de freno
mecánico
165 Par inicial de freno mecánico 20% +/- P221 Sí Sí -1 S16
166 Dirección inicial de freno mecánico [0]Deizqdaadcha [0]Deizqdaadcha
167 Refuerzo de ganancia
proporcional, durante la liberación
de freno
0,5 s 0,01 - 2,00 s Sí Sí -2 U16
100% 0-400% Sí Sí 0 S16
2
[1] Dir. ref.
No Sí -4 7
Sí Sí 0 U8
conversión datos
Consulte también Funcionamiento y Display para
obtener más información rel
ativa a Cambios durante el
funcionamiento, 4 ajustes e Índice de conversión.
100 Configuración
(MODO CONFIG.)
Valor:
Control de velocidad, bucle abierto
(BUCLE ABIERTO VELOC)
✭Control de velocidad, bucle cerrado
(BUCLE CERRADO VELOC)
Control de par, retroalimentación de velocidad
(VELOC. CONTROL PAR)
Función:
Este parámetro se utiliza para seleccionar la
configuración a la que se va a adaptar el convertidor
de frecuencia. Esto hace que sea sencillo realizar
la adaptación a determinada aplicación, ya que los
parámetros que no se utilizan en la configuración
correspondiente no se toman en cuenta (no activo).
Cambiando entre las diferentes configuraciones de
la aplicación se asegura la transferencia fluida.
[0]
[1]
[5]
Si se selecciona Control de par, realimentación
de velocidad [5], debe conectarse una señal
de realimentación de velocidad de codificador
a la entrada de codificador.
La conexión entre bucle abierto y bucle
cerrado puede suceder solamente cuando
se ha aplicado un comando de parada.
101 Características de par
(TIPO DE PAR)
Valor:
✭Par constante alto (PAR-M-CONSTANTE)
Par constante normal
(PAR-N CONSTANTE)
Función:
Selección de características de par.
Descripción de opciones:
En la unidad VLT 5000 Flux puede seleccionar Par
constante altoo Par constante normal .
[1]
[11]
Descripción de opciones:
Si se selecciona Cont
[0], se obtiene una regulación normal de la velocidad
(sin señal de retroalimentación), con compensación
automática que as
en cargas variables. Las compensaciones están
activadas pero se pueden desactivar si es preciso
en el grupo de p
Si se seleccio
na C ontrol de velocidad, bucle cerrado
[1] se obtiene un control total de par a 0 rpm, además
de incrementarse la precisión de la velocidad. Es
necesario
suministrar una señal de realimentación
y ajustar el regulador de velocidad PID.
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
74
rol de velocidad , bucle abierto
egura una velocidad constante
arámetros "Carga y motor".
102 Potencia del motor (POTENCIA MOTOR)
Valor:
0.18 kW (0.18 KW)
0.25 kW (0.25 KW)
0.37 kW (0.37 KW)
0.55 kW (0.55 KW)
0.75 kW (0.75 KW)
1.1 kW (1.10 KW)
1.5 kW (1.50 KW)
2.2 kW (2.20 KW)
3 kW (3.00 KW)
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
[18]
[25]
[37]
[55]
[75]
[110]
[150]
[220]
[300]
Page 75

VLT®5000 FLUX
4 kW (4.00 KW)
5.5 kW (5.50 KW)
7.5 kW (7.50 KW)
11 kW (11.00 KW)
15 kW (15.00 KW)
18.5 kW (18.50 KW)
22 kW (22.00 KW)
30 kW (30.00 KW)
37 kW (37.00 KW)
45 kW (45.00 KW)
55 kW (55.00 KW)
75 kW (75.00 KW)
90 kW (90.00 KW)
110 kW (110.00 KW)
132 kW (132.00 KW)
160 kW (160.00 KW)
200 kW (200.00 KW)
250 kW (250.00 KW)
280 kW (280.00 KW)
315 kW (315.00 KW)
355 kW (355.00 KW)
400 kW (400.00 KW)
450 kW (450.00 KW)
500 kW (500.00 KW)
[400]
[550]
[750]
[1100]
[1500]
[1850]
[2200]
[3000]
[3700]
[4500]
[5500]
[7500]
[9000]
[11000]
[13200]
[16000]
[20000]
[25000]
[28000]
[31500]
[35500]
[40000]
[45000]
[50000]
Depende de la unidad.
Función:
Aquí es donde se debe seleccionar el valor en kW que
corresponde a la potencia nominal del motor.
Se ha seleccionado en fábrica un valor nominal
en kW que depende del tipo de unidad.
Descripción de opciones:
Seleccione un valor idéntico a los datos de la placa
de características. Hay 4 posibles tamaños inferiores
o 1 superior, respecto al ajuste de fábrica.
Además, existe la posibilidad de ajustar el valor de la
potencia del motorcomo un valor v
ariable intermedio.
El valor establecido ayuda a seleccionar valores
adecuados para los parámetros del motor, en
los parámetros 150-154, 157, 161.
400 V
415 V
440 V
460 V
480 V
500 V
[400]
[415]
[440]
[460]
[480]
[500]
Depende de la unidad.
Nota: las tensiones de motor de 500 y 575 V
deben programarse manualmente, ya que no se
dispone de ajustes preestablecidos.
Función:
Seleccione la tensión del motor que sea igual a los
datos de la placa de características del motor.
¡NOTA!:
El motor siempre verá la tensión de pico,
según la tensión de alimentación conectada;
sin embargo, en el caso de funcionamiento
regenerativo, la tensión puede ser mayor.
Descripción de opciones:
Seleccione un valor que sea igual al valor de los
datos de la placa de características del motor,
con independencia de la tensión de red del
convertidor de frecuencia. Además, alternativamente
esposibleajustarelvalordelatensióndelmotor
de manera i
nfinitamente variable.
El valor establecido cambia automáticamente
los valores para los parámetros del motor en
los parámetros 150 a 154.
Para el funcionamiento a 87 Hz con motores
de 230/400 V, ajuste los datos de la placa de
características para 230 V/50 Hz. Adapte el parámetro
202 Límite máximo velocidad de salida y el parámetro
205 Referencia máxima a la aplicación de 87 Hz.
¡NOTA!:
Si se utiliza una conexión en triángulo,
debe seleccionarse la velocidad nominal del
motor para dicha conexión.
Programación
104 Frecuen. del motor
103 Tensión motor
(TENSION MOTOR)
Valor:
200 V
208 V
220 V
230 V
240 V
380 V
✭
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
[200]
[208]
[220]
[230]
[240]
[380]
(FRECUENCIA MOTOR)
Valor:
✭50 Hz(50 HZ)
60 Hz(60 HZ)
Frecuencia máxima de motor 300 Hz.
Función:
Selección de la frecuencia nominal del motor f
(datos de la placa de características).
[50]
[60]
M,N
75
Page 76

VLT®5000 FLUX
Descripción de opciones:
Seleccione un valor que sea igual a los datos de
la placa de características del motor.
También es posible ajustar un valor v
ariable
de la frecuencia del motor.
Si selecciona un valor distinto a 50 Hz ó 60 Hz, será
necesario corregir los parámetros 150 -154.
Para el funcionamiento a 87 Hz con motores
de 230/400 V, ajuste los datos de la placa de
características para 230 V/50 Hz. Adapte el
parámetro 202 Límite máximo de velocidad de
salida y el parámetro 205 Referencia máxima
a la aplicación de 87 Hz.
¡NOTA!:
Si se utiliza una conexión en triángulo,
debe seleccionarse la frecuencia nominal
del motor para dicha conexión.
105 Intensidad del motor (INTENSIDAD MOTOR)
Valor:
0,01-I
VLT,MAX
[0,01 - XXX,X]
Dependedelaunidad
Función:
La intensidad nominal I
del motor forma parte de
M,N
los cálculos del convertidor de frecuencia, es decir,
del par y de la protección térmica del motor.
Descripción de opciones:
La velocidad nominal n
del motor se utiliza,
M,N
por ejemplo, para calcular la compensación
de deslizamiento óptima.
¡NOTA!:
Es importante introducir el valor correcto, ya
queformapartedelafuncióndecontrolde
vector de flujo. El valor máximo es igual a
x 60. Defina f
f
M,N
en el parámetro 104.
M,N
107 Adaptación automática del motor, AMA
(ADAP AUTO MOT.)
Valor:
✭Autoajuste desactivado (NO)
Adaptación activada completa, R
S,X1,X2,Xh,Rr
(ACTIVAR AMA COMPLETA)
Adaptación activada reducida, R
S
(ACTIVAR AMA REDUCIDA)
Función:
Si se utiliza la función AMA, el convertidor de
frecuencia ajusta automáticamente los parámetros
de control necesarios (parámetros 150-154) con
el motor parado. La adaptación automática del
motor garantiza el uso óptimo del motor.
Para obtener la mejor adaptación posible del
convertidor de frecuencia, se recomienda realizar
la AMA con el motor en frío.
[0]
[1]
[2]
Descripción de opciones:
Seleccione el valor de la placa de características del motor.
Introduzca el valor en amperios.
¡NOTA!:
Es importante introducir el valor correcto,
yaqueformapartedelafunciónde
control de vector de flujo.
106 Velocidad nominal del motor
(VELOC.NOM.MOTOR)
Valor:
100-60000 rpm (RPM)
[100 - 60000]
Depende del tipo de motor.
Función:
El valor seleccionado corresponde a la velocidad
nominal del motor n
,delosdatosdelaplaca
M,N
de características del motor.
La función AMA se activa pulsando la tecla
[START] tras seleccionar [1] o [2].
Consulte también la sección Adaptación
automática del motor.
Después de la secuencia normal, el display
mostrará "AMA finalizada correctamente". Pulse la
tecla [STOP/RESET]. El convertidor de frecuencia
ahora está listo para funcionar.
Descripción de opciones:
Seleccione Activar AMA completa para que el
convertidor de frecuencia pueda efectuar la
adaptación automática de la resistencia del estátor
, la resistencia del rotor Rr, la reactancia de
R
S
fuga del estátor x
rotor X
y la reactancia principal Xh.
2
, la reactancia de fuga del
1
Seleccione Autoajuste activado, AMA reducida [2]
en caso de que vaya a realizar una adaptación
reducida en la que sólo se determine la resistencia
del estátor del sistema.
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
76
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 77

VLT®5000 FLUX
¡NOTA!:
Es importante ajustar correctamente los
parámetros 102-106 porque forman parte
del algoritmo AMA. Para una óptima
adaptación dinámica del motor, debe llevarse
a cabo una adaptación AMA.
El proceso de adaptación del motor puede durar
hasta 10 minutos, dependiendo de su potencia.
¡NOTA!:
No debe haber ningún par generativo
externamente durante la adaptación
automática del motor.
¡NOTA!:
Si se cambia el ajuste del parámetro
102-106, los parámetros 150-154 volverán
al ajuste de fábrica.
115 Compensación deslizamiento
(COMPENS. DESLIZA.)
Valor:
-400 - 400 %
✭ 100 %
Función:
Esta función se activa junto con Control de velocidad
Bucle Abierto (parámetro 100), lo que garantiza una
velocidad casi constante a distintas cargas. Las
compensaciones están activadas pero se pueden
desactivar si es preciso en el grupo de parámetros
"Carga y motor".La compensación del deslizamiento
se calcula automáticamente; es decir, sobre la base
de la velocidad nominal del motor n
M,N
.Enel
parámetro 115 puede ajustarse detalladamente la
compensación de deslizamiento, lo que compensa
tolerancias en el valor de n
M,N
.
La compensación de deslizamiento no está activa por
debajo del valor indicado en el parámetro 237.
Descripción de opciones:
Introduzca un valor porcentual de la frecuencia
nominal del motor (parámetro 104).
116 Const. tiempo compens. de deslizam.
(TIEMPO COMPENSAC)
Valor:
0,05 - 5,00 s
✭ 0,50 s
Función:
Esta función se activa junto con Control de
velocidad en bucle abierto (parámetro 100). Este
parámetro establece la velocidad de reacción de
la compensación del deslizamiento.
Descripción de opciones:
Un valor alto da como resultado una reacción lenta.
Por el contrario, un valor bajo resultará en una reacción
rápida. Si se producen problemas de resonancia a baja
frecuencia, el tiempo ajustado deberá ser más largo.
119 Par de arranque alto
(ALTO PAR ARRANQ.)
Valor:
0,0 a 0,5 segundos
✭ 0,0 seg.
Función:
Esta función se activa junto con Control Velocidad
Bucle Cerrado (parámetro 100). Para obtener un par
de arranque alto, aprox. 2 x I
durante máx. 0,5
VLT,N
seg. Sin embargo, la intensidad está restringida por el
límite de protección del convertidor de frecuencia.
Descripción de opciones:
Ajuste el tiempo de par de arranque alto.
120 Retardo de arranque (RETARDO ARRANQ.)
Valor:
0,0 - 10,0 s
✭ 0,0 s
Función:
Este parámetro permite un retardo del tiempo
de arranque.
El convertidor de frecuencia comienza con la función
de arranque seleccionada en el parámetro 121.
Programación
La compensación de deslizamiento está s
activa en bucle abierto de 10 Hz.
olamente
Descripción de opciones:
Establezca el tiempo de retardo de arranque que deba
transcurrir antes de que comience la aceleración.
Cuando se selecciona Liberación de freno mecánico
[6] en el Parámetro 121, se calcula un tiempo
mínimo en función de los datos del motor y del
tiempo establecido en el Parámetro 164.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
77
Page 78

VLT®5000 FLUX
121 Función de arranque (FUNCION ARRANQ.)
Valor:
CC mantenida en retardo de arranque
(C.C MANTENIDA/RET)
Freno de CC en retardo de arranque
(FRENO C.C/RETARDO)
Inercia en retardo de arranque
(INERCIA/RETARDO)
Velocidad/intensidad de arranque de
izquierda a derecha
(FUNC. VERTICAL)
Velocidad/intensidad de arranque en sentido
de referencia
(FUNC. HORIZONTAL)
✭Velocidad de arranque de izquierda a derecha
(START SPEED CLOCKW)
Liberación de freno mecánico
(MECH BRAKE RELEASE)
Función:
Selección de la función de arranque durante el retardo
de arranque cuando se selecciona (parámetro 120).
Descripción de opciones:
Si selecciona CC mantenida en retardo de arranque
[0] el motor recibe una intensidad de CC mantenida
(parámetro 124) en el tiempo de retardo de arranque.
[0]
[1]
[2]
[3]
[4]
[5]
[6]
se corresponderá con el ajuste de la intensidad de
arranque del parámetro 131 Intensidad de arranque.
Seleccione Velocidad de arranque de izquierda a
derecha [5] para utilizar sólo la función que se describe
en el parámetro 130 Velocidad de arranque, en el
tiempo de retardo de arranque. La intensidad de
arranque se calculará automáticamente.
Aviso: Esta función sólo utiliza la velocidad de
arranque en el tiempo de retardo de arranque.
Independientemente del valor establecido por la señal
de referencia, la velocidad de salida será igual al ajuste
de la velocidad de arranque del parámetro 130.
Liberación de freno mecánico suele utilizarse en
grúas, elevadores y otras aplicaciones de elevación.
Liberación de freno mecánico puede utilizarse tanto
en lazo cerrado como en lazo abierto.
122 Función de parada
(FUNCION PARADA)
Valor:
✭Inercia (INERCIA)
CC mantenida (C.C MANTENIDA)
Comprobación del motor (TEST MOTOR)
Premagnetización (PREMAGNETIZAR)
[0]
[1]
[2]
[3]
Seleccione Freno de CC en retardo de arranque
[1] para que el motor reciba una intensidad
de frenado de CC (parámetro 125) durante el
tiempo de retardo de arranque.
Seleccione Inercia en retardo de arranque [2]
y el convertidor de frecuencia no controlará el
motor durante el tiempo de retardo de arranque
(inversor desconectado).
Seleccione Velocidad/intensidad de arranque de
izquierda a derecha [3] para conectar la función
que se describe en los parámetros 130 y 131 en
el tiempo de retardo de arranque.
Independientemente del valor aplicado por la señal
de referencia, la velocidad de salida aplicará el ajuste
de la velocidad de arranque del parámetro 130
ylaintensidaddesalidasecorresponderáconla
intensidad de arranque del parámetro 131.
Seleccione Velocidad/intensidad de arranque en
sentido de referencia [4] para obtener la función que
se describe en los parámetros 130 y 131 durante
el tiempo de retardo de arranque. El motor girará
siempre en el sentido de referencia.
Si la señal de referencia es igual a cero (0), se ignorará
el parámetro 130 Velocidad de arranque y la velocidad
de salida también será cero (0). La intensidad de salida
Función:
Selección de la función del convertidor de
frecuencia después de un comando de parada
o cuando la frecuencia se ha reducido hasta
los valores del parámetro 123.
Descripción de opciones:
Seleccione Inercia [0] para que el convertidor de
frecuencia deje el motor en el modo libre.
Seleccione CC mantenida [1] para activar una corriente
de CC mantenida establecida en el parámetro 124.
Seleccione Test motor [2] si el convertidor de frecuencia
debe comprobar si se ha conectado un motor o no.
Seleccione Premagnetización [3]. El campo
magnético se crea con el motor detenido, pero
con la tensión conectada al mismo. Con ello se
asegura que el motor pueda ejecutar un par lo
más rápidamente posible al arrancar.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
78
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 79

VLT®5000 FLUX
123 Velocidad mín. para activar función
en parada
(FREC.MIN.PARADA)
Valor:
0-600 rpm
✭ 0rpm
Función:
Esteparámetroajustalavelocidadalaquedebe
activarse la función seleccionada en el parámetro 122.
Descripción de opciones:
Introduzca la velocidad deseada.
124 CC mantenida intensidad
(C.C MANTENIDA)
Valor:
✭ 50 %
0 - 100%
Función:
La intensidad CC mantenida se utiliza para
mantener la función del motor (par de soporte)
o para precalentarel motor.
¡NOTA!:
El valor máximo depende del tamaño
de la potencia.
o a través del puerto de comunicación serie. La
intensidad de frenado se activa durante el período
de tiempo definido en el parámetro 126.
¡NOTA!:
El valor máximo depende del tamaño
de la potencia.
Descripción de opciones:
Debe establecerse como un valor de porcentaje
de la intensidad nominal del motor I
M,N
ajustada
en el parámetro 105.
100% de intensidad de frenado CC corresponde a I
Advertencia: 100 % de intensidad durante
demasiado tiempo puede dañar el motor.
126 Tiempo de frenado CC
(TIEMPO FRENO C.C)
Valor:
0,0 (NO) -60,0 s
✭ 10,0 s
Función:
Ajuste del Tiempo de frenado CC en que
deberáactivarselaintensidaddefrenado
de CC (parámetro 125).
.
M,N
Programación
Descripción de opciones:
Este parámetro sólo se puede utilizar si ha
seleccionado CC mantenida [1] en los parámetros
121 ó 122. Ajuste Intensidad mantenida como valor
de porcentaje en relación con la intensidad nominal
del motor I
100% CC mantenida corresponde a I
ajustada en el parámetro 105.
M,N
M,N.
Advertencia: 100 % de intensidad durante
demasiado tiempo puede dañar el motor.
125 Intensidad de frenado CC
(INTENS.FRENO C.C)
Valor:
✭ 50 %
0 - 160%
Función:
Ajuste de la Intensidad de frenado CC cuando
se aplica un comando de parada. La función se
activa cuando se llega a la velocidad ajustada en el
parámetro127ocuandoelFrenado de CC inverso
se activa en el terminal 27 y en el parámetro 304,
Descripción de opciones:
Ajuste el tiempo de frenado CC.
127 Velocidad de entrada de freno CC
(FREC. FRENO C.C)
Valor:
0,0 - parámetro 202
✭ 0,0 rpm (NO)
Función:
Ajuste de la Velocidad de entrada de freno CC en la que
se activará la intensidad de frenado de CC (parámetro
125), en relación con un comando de parada.
Descripción de opciones:
Ajuste la velocidad de entrada.
128 Protección térmica del motor
(TERMICO MOTOR)
Valor:
✭Sin protección (NO)
Advertencia del termistor (AVISO TERMISTOR)
Desconexión del termistor (DESCON.TERMISTOR)
[0]
[1]
[2]
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
MG.55.A6.05 - VLT es una marca registrada de Danfoss
79
Page 80
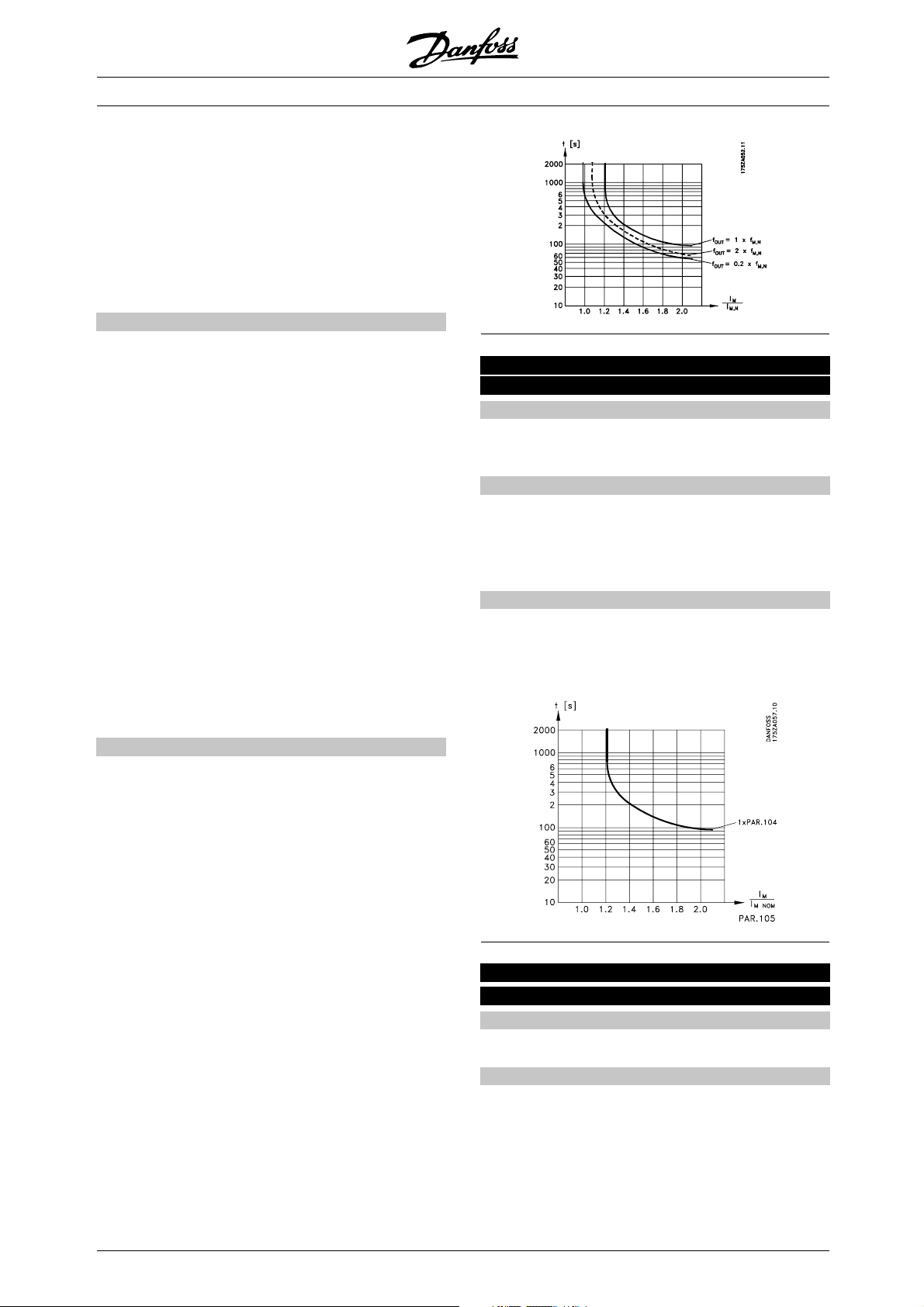
VLT®5000 FLUX
Advertencia ETR 1 (ETR ADVERT.1)
Desconexión ETR 1 (ETR DESCON.1)
Advertencia ETR 2 (ETR ADVERT.2)
Desconexión ETR 2 (ETR DESCON.2)
Advertencia ETR 3 (ETR ADVERT.3)
Desconexión ETR 3 (ETR DESCON.3)
Advertencia ETR 4 (ETR ADVERT.4)
Desconexión ETR 4 (ETR DESCON.4)
Función:
El convertidor de frecuencia puede detectar
la temperatura del motor, para protección de
este, de dos maneras distintas:
- Mediante un sensor de termistor conectado
a una de las entradas analógicas, terminales
53 y 54 (parámetros 308 y 311).
- Calculando la carga térmica basándose en la
carga real y el tiempo. Estos datos se comparan
con la intensidad nominal I
nominal f
del motor. Los cálculos tienen en
M,N
y la frecuencia
M,N
cuenta la necesidad de menor carga a menor
velocidad por la reducción de ventilación.
Las funciones ETR (Relé de terminal electrónico)
1-4 no empiezan a calcular la carga hasta que haya
un paso a los ajustes en los que se seleccionaron.
Para el mercado norteamericano: Las funciones
ETR proporcionan protección contra sobrecarga del
motor de la clase 20, de acuerdo con NEC.
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
129 Ventilador de motor externo
(VENTILADOR EXT.)
Valor:
✭No (NO)
Sí (SI)
Función:
Este parámetro comunica al convertidor VLT que
se ha montado un ventilador externo de suministro
de aire (ventilación externa) y por tanto no permitir
reducir el par a baja velocidad.
Descripción de opciones:
Si se ha seleccionado Sí [1] se seguirá el gráfico del
siguiente dibujo cuando la frecuencia del motor sea
más baja. Si es superior, el tiempo seguirá perdiendo
valor como si no se hubiese instalado ventilador.
[0]
[1]
Descripción de opciones:
Seleccione Sin protección si no se requiere
ninguna advertencia o desconexión cuando el
motor está sobrecargado.
Seleccione Advertencia del termistor si necesita
una advertencia cuando el termistor conectado
en el motor se caliente en exceso.
Seleccione Desconexión del termistor si necesita
una desconexión cuando el termistor conectado
en el motor se caliente en exceso.
Seleccione Advertencia ETR 1-4 si desea que
aparezca una advertencia en el display cuando el
motor se sobrecargue según los cálculos.
Seleccione Desconexión ETR 1-4 si requiere
una desconexión en el caso de que el motor se
sobrecargue según los cálculos.
Se puede programar una señal de advertencia
mediante una de las salidas digitales, en cuyo
caso la señal se da tanto para advertencia como
para desconexión (advertencia térmica).
130 Velocidad de arranque
(VELOC. ARRANQUE)
Valor:
0,0-600 rpm
✭ 0,0 rpm
Función:
Este parámetro permite ajustar la velocidad de
salidaenquevaaarrancarelmotor.
✭
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
80
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 81

La velocidad de salida ‘salta’ al valor establecido.
Este parámetro se puede emplear, por ejemplo, para
aplicaciones de elevación (motores de rotor cónico).
Descripción de opciones:
Ajuste la velocidad de arranque deseada.
Se presupone que la función de arranque en el
parámetro 121 se ha ajustado en [3], [4] o [5]
y que se ha ajustado un retardo de tiempo de
arranque en el parámetro 120; además, debe
haber una señal de referencia.
131 Intensidad inicial
(INTENS. INICIAL)
Valor:
0,0 - parámetro 105
Función:
Algunos motores, como los de rotor cónico,
necesitan una intensidad/velocidad de arranque
(refuerzo) adicional en el arranque, con el fin
de superar el freno mecánico.
Para este propósito, utilice los parámetros 130 y 131.
✭ 0,0 Amp
VLT®5000 FLUX
Programación
Descripción de opciones:
Ajuste el valor requerido para desactivar
el freno mecánico.
Se presupone que la función de arranque en
el parámetro 121 se ha ajustado en [3] o [4]
y que se ha ajustado un retardo de tiempo de
arranque en el parámetro 120; además, debe
haber una señal de referencia.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
81
Page 82
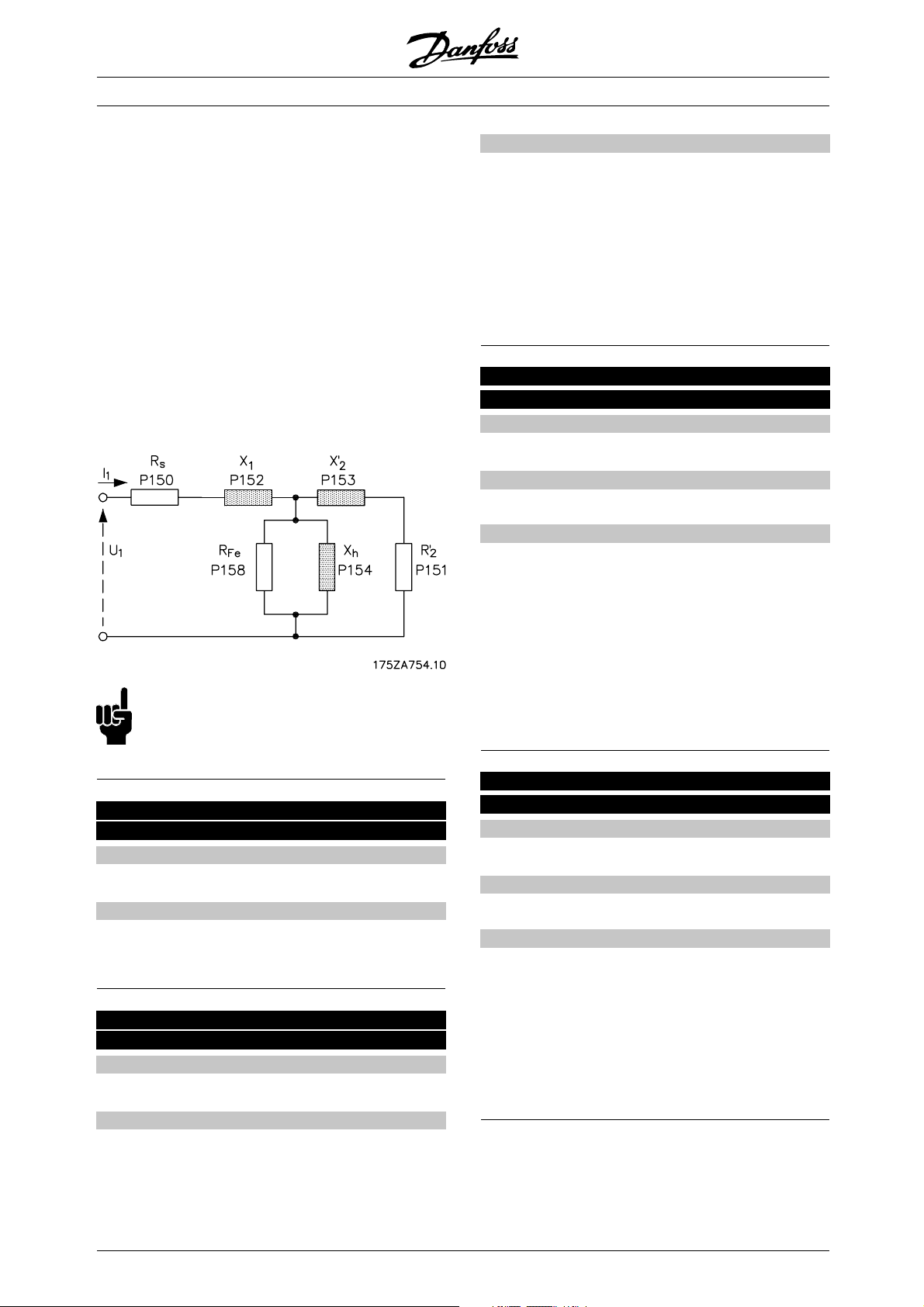
VLT®5000 FLUX
■Parámetros del motor adicionales
Los datos del motor en los parámetros 150-158 se
deben adaptar al motor específico para que éste
funcione correctamente. Los ajustes de fábrica
soncifrasquesebasanenparámetrosdemotor
comunes de motores estándar normales. Si estos
parámetros no se ajustan correctamente, pueden
causar una avería del sistema de la unidad.
Si no se conocen los datos del motor, es aconsejable
realizar una AMA (Adaptación automática del motor).
Consulte la sección Adaptación automática del motor.
La secuencia AMA ajustará todos los parámetros del
motor, excepto el momento de inercia del rotor.
Diagrama equivalente del motor para un
motor asíncrono:
¡NOTA!:
Si se cambian los ajustes de los parámetros
102-107, los parámetros 150-158 volverán
a los ajustes de fábrica.
150 Resistencia del estátor
(RESIST. ESTATOR)
Valor:
Ohmio
✭ Dependedelaunidad
Función:
Ajusta el valor de la resistencia del estátor del
motor para el control de vector de flujo.
151 Resistencia d el rotor
(RESIST. ROTOR)
Valor:
Ohmio
✭ Dependedelaunidad
Descripción de opciones:
’ se puede ajustar como sigue:
R
2
1. Adaptación automática del motor; el convertidor de
frecuencia mide el motor para determinar el valor.
Todas las compensaciones se reajustan al 100%.
2. El proveedor del motor define el valor.
3. Se utilizan los ajustes de fábrica de R
’
2
seleccionados por el convertidor de frecuencia
partiendo de los datos de la placa de características.
152 Reactancia de fuga del estátor
(FUGA ESTATOR)
Valor:
Ohmio
✭ Dependedelaunidad
Función:
Defina la reactancia de fuga del estátor del motor.
Descripción de opciones:
se puede ajustar como sigue:
X
1
1. Adaptación automática del motor; el convertidor de
frecuencia mide el motor para determinar el valor.
2. El proveedor del motor define el valor.
3. Se utiliza el ajuste de fábrica de X
seleccionado
1
por el convertidor de frecuencia partiendo de los
datos de la placa de características del motor.
153 R eactancia de fuga del rotor
(FUGA ROTOR)
Valor:
Ohmio
✭ Dependedelaunidad
Función:
Defina la reactancia de fuga del rotor del motor.
Descripción de opciones:
se puede ajustar como sigue:
X
2
1. Adaptación automática del motor; el convertidor de
frecuencia mide el motor para determinar el valor.
2. El proveedor del motor define el valor.
3. Se utiliza el ajuste de fábrica de X
seleccionado
2
por el convertidor de frecuencia partiendo de los
datos de la placa de características del motor.
Función:
La resistencia del rotor, R
’, introducida manualmente
2
siempresedebeaplicaraunmotorfrío.
El rendimiento del eje se puede mejorar si
se ajusta con precisión R
’.
2
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
82
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 83
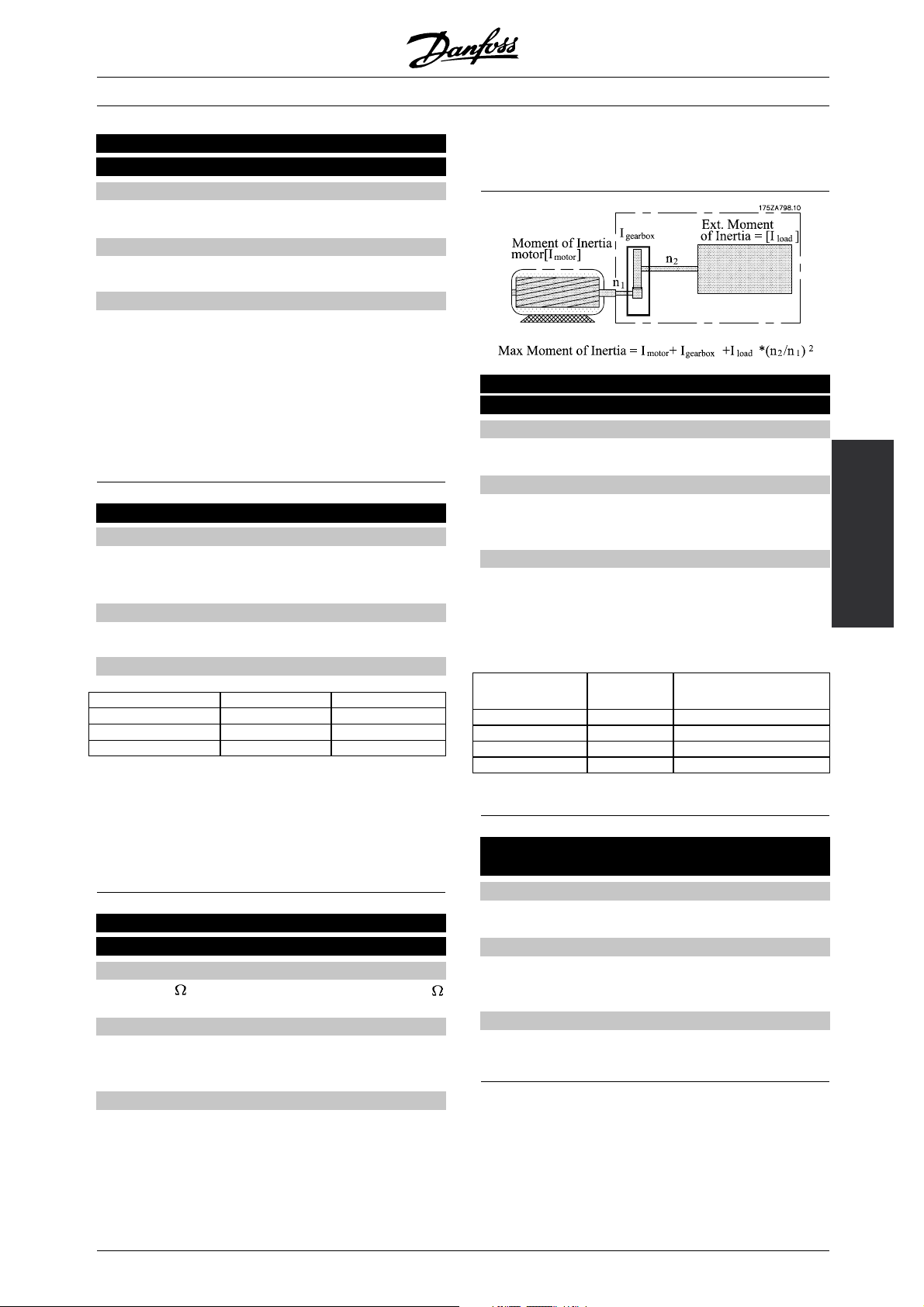
VLT®5000 FLUX
154 Reactancia principal
(REACTANCIA PRAL.)
Valor:
Ohmio
✭ Dependedelaunidad
Función:
Defina la reactancia principal del motor.
Descripción de opciones:
se puede ajustar como sigue:
X
h
1. Adaptación automática del motor; el convertidor de
frecuencia mide el motor para determinar el valor.
2. El proveedor del motor define el valor.
3. Se utiliza el ajuste de fábrica de X
seleccionado
h
por el convertidor de frecuencia partiendo de los
datos de la placa de características del motor.
156 Número de polos (NUMERO DE POLO)
Valor:
Depende del tipo de motor
Valor 2 - 100 polos
✭ Motor de 4 polos
Función:
Defina el número de polos del motor.
Descripción de opciones:
Polos ~nn@50Hz ~nn@60Hz
2 2700 - 2880 3250 - 3460
4 1350 - 1450 1625 - 1730
6 700 - 960 840 - 1153
R
Fe
<P0/I
2
0
161 Inercia mínima
(INERCIA MINIMA)
Valor:
2
Kgm
✭ Dependedelaunidad
Función:
Defina el momento de inercia mínimo del
sistema mecánico.
Descripción de opciones:
El convertidor de frecuencia calcula la ganancia
proporcional del controlador de velocidad basándose
en el valor promedio de la inercia mínima y máxima.
Factores de conversión:
Para convertirdea Factor de
2
ft lbs s
lbf pulgada
2
kgcm
2
GD
2
Kgm
2
Kgm
Kgm
Kgm
2
2
2
multiplicación
1,356
2,926*10
*10
-4
-4
0,25
Programación
En la tabla anterior se muestra el rango de
velocidad normal para varios tipos de motor.
Los motores diseñados para otras frecuencias
se deben definir por separado.
162 Inercia máxima
(INERCIA MÁX)
Valor:
2
[kgm
158 Resistencia a la pérdida de hierro
(RES. PERD. HIERR.)
Valor:
1 -10.000
Función:
Ajuste los equivalentes del R
para compensar
Fe
✭ 10.000
]
Función:
Ajusta el momento de inercia máximo del
sistema mecánico.
Descripción de opciones:
Consulte el parámetro 161.
✭ Dependedelaunidad
las pérdidas de hierro en el motor.
Descripción de opciones:
La función se desactiva cuando se selecciona
el valor 10.000.
La resistencia a la pérdida de hierro debe ser inferior a:
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
83
Page 84
VLT®5000 FLUX
163 Retardo de parada funcional
(RET. PARADA FUNC)
Valor:
0-10 s
Función:
Al parar, este retardo pospone el cambio a la función
de parada seleccionada, salvo que el freno de CC esté
activado. Durante este retardo, el eje se mantendrá a
velocidad cero con mantenimiento total del par.
Descripción de opciones:
Asegúrese de que el freno mecánico haya bloqueado la
carga antes de que el motor entre en modo de inercia.
Consulte Control de freno mecánic o.
164 Retardo de liberación de freno mecánico
(RET. LIBER. FRENO)
Valor:
0,01-2,00 s
Función:
Cuando se selecciona Liberación de freno mecánico
como función de arranque en el Parámetro 121, este
retardo describe el tiempo que tarda el freno en abrirse.
Durante este retardo, el motor se mantendrá a 0 RPM.
✭ 0
✭ 0,50 s
parámetro determina la dirección del par inicial que se
aplica contra el freno cerrado. En una aplicación de
grúa, la carga estará siempre en la misma dirección,
pero en otras aplicaciones tiene sentido aplicar el
par en la misma dirección que la referencia.
167 Refuerzo de ganancia proporcional,
durante la liberación de freno mecánico
(REF. GANANCIA FRENO)
Valor:
0-400%
Función:
Cuando se selecciona Liberación de freno mecánico
como función de arranque en el Parámetro 121, este
parámetro define una ganancia adicional en la parte P
(Par. 417) del controlador PI de velocidad durante el
Retardo de liberación de freno mecánico (Par. 164).
El refuerzo de la ganancia proporcional minimizará
el pequeño movimiento del eje del motor cuando el
motor tome la carga desde el freno mecánico.
✭ 100%
165 Par inicial de freno mecánico
(PAR INI FRENO)
Valor:
+/- p221
Función:
Cuando se selecciona Liberación de freno mecánico
como función de arranque en el Parámetro 121, se
creará este nivel de par contra el freno cerrado antes
de la liberación de éste. Cuando el convertidor de
frecuencia se utilice en una grúa, elevador u otra
aplicación de elevación, este par deberá establecerse
en un valor igual al par actual, cuando el freno se abra.
166 Dirección inicial del freno mecánico
(DIR INI FRENO)
Valor:
[Deizqdaadcha]
[Dir. ref.]
Función:
Cuando se selecciona Liberación de freno mecánico
como función de arranque en el Parámetro 121, este
✭ [Deizquierdaaderecha]
✭ 20%
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
84
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 85
VLT®5000 FLUX
■Referencias y límites
■Introducción
La finalidad del grupo de parámetros 2xx es seleccionar y ajustar las referencias, aumentar y reducir los
tiempos y ajustar los límites para las advertencias.
Referencia real Referencia resultante para velocidad/par
Referencia externa Referencia en los terminales 53, 54 ó 60, y referencias de pulso y de bus
Referencia interna Valor de las cuatro referencias internas.
Nº
parám Descripción Ajuste de fábrica Rango Cambios 4 ajustes Índice de Tipo de
#delparámetro durante el funcionamiento conversión datos
200 Rango/dirección de velocidad
de salida
202 Límite alto de velocidad de
salida
203 Rango de referencia Mín. - máx. Sí Sí 0 5
204 Referencia mínima 0.000 -100.000.000-Ref
205 Referencia máxima 1500.000 Ref
206 Tipo de rampa Lineal Sí Sí 0 5
207 Tiempo de aceleración 1 Depende de la unidad 0.01 - 3600 Sí Sí -2 7
208 Tiempo de deceleración 1 Depende de la unidad 0.01 - 3600 Sí Sí -2 7
209 Tiempo de aceleración 2 Depende de la unidad 0.01 - 3600 Sí Sí -2 7
210 Tiempo de deceleración 2 Depende de la unidad 0.01 - 3600 Sí Sí -2 7
211 Tiempo de rampa de velocidad
fija
212 Tiempo de rampa de
deceleración de parada rápida
213 Velocidad fija 200 rpm 0,0 - par. 202 Sí Sí -1 6
214 Función de referencia Suma Sí Sí 0 5
215 Referencia interna 1 0.00 % - 100.00 - 100.00 % Sí Sí -2 3
216 Referencia interna 2 0.00 % - 100.00 - 100.00 % Sí Sí -2 3
217 Referencia interna 3 0.00 % - 100.00 - 100.00 % Sí Sí -2 3
218 Referencia interna 4 0.00 % - 100.00 - 100.00 % Sí Sí -2 3
219 Valor de enganche arriba/abajo 0.00 % 0.00 - 100 % Sí Sí -2 6
Sólo de izquierda a
derecha, 0-4.500 rpm
3.000 rpm n
Depende de la unidad 0.01 - 3600 Sí Sí -2 7
Depende de la unidad 0.01 - 3600 Sí Sí -2 7
- par. 200 No Sí -1 6
MIN
MAX
-100.000.000 Sí Sí -3 4
MIN
No Sí 0 5
Sí Sí -3 4
Programación
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
85
Page 86
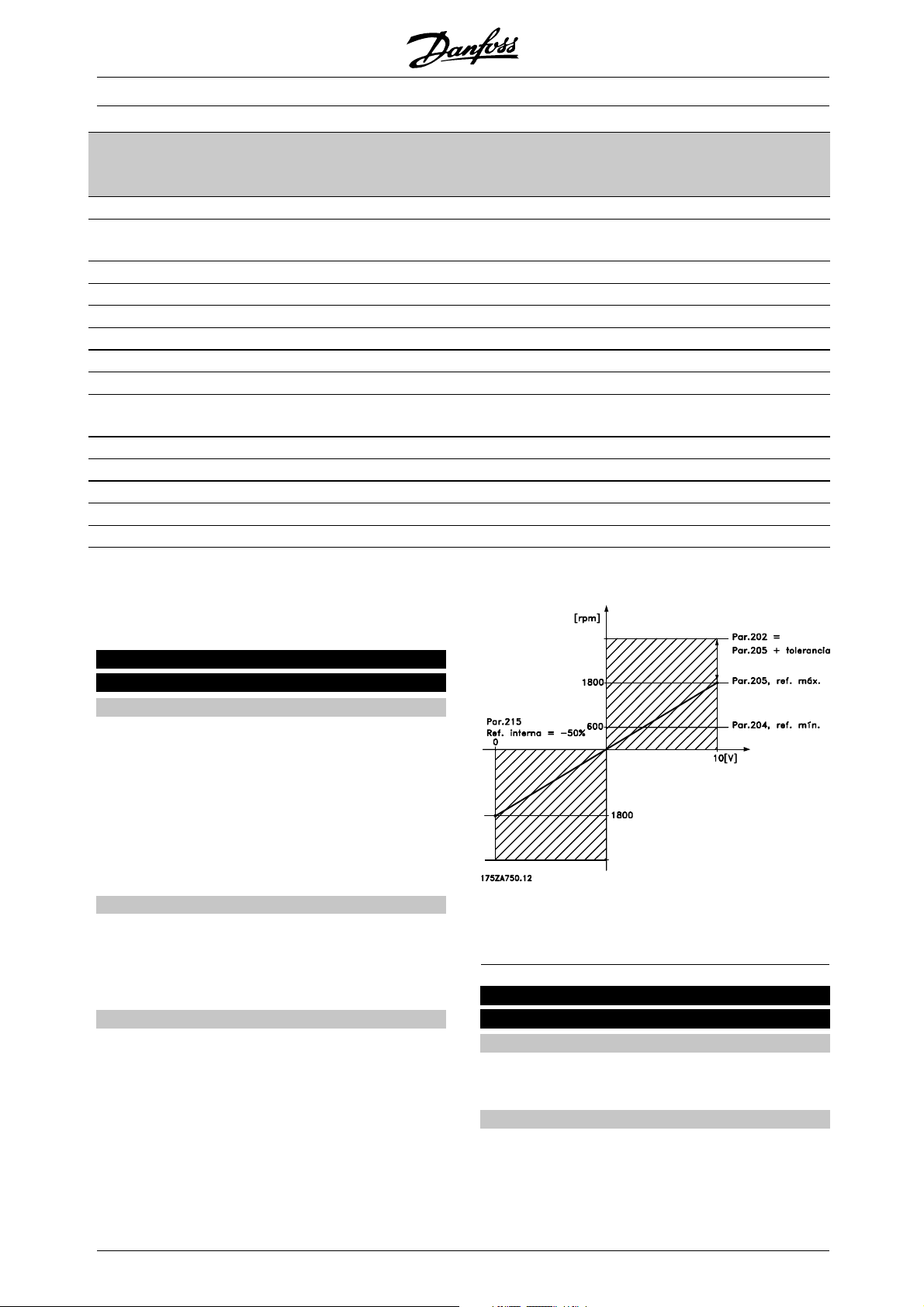
VLT®5000 FLUX
Nº
parám Descripción Ajuste de fábrica Rango Cambios 4 ajustes Índice de Tipo de
#delparámetro durante el funcionamiento conversión datos
221 Límite de par modo motor 160 % 0,0 % - xxx % Sí Sí -1 6
222 Límite de par para el
funcionamiento regenerativo
223 Advertencia: Intensidad baja 0,0 A 0,0 - par. 224 Sí Sí -1 6
224 Advertencia: Intensidad alta I
225 Advertencia: Velocidad baja 0 rpm 0 - par. 226 Sí Sí -1 6
226 Advertencia: Velocidad alta 100.000 rpm Par. 225 - par. 202 Sí Sí -1 6
234 Monitor de fases del motor Activar Sí Sí 0 5
235 Monitor de pérdida de fase Activar No No 0 5
236 Intensidad de baja velocidad 100% 0 - Depende del tamaño
237 Velocidad de Cambio modelo 20% de n
240 Tirón de aceleración 1 33% 0-100% No No 0 U16
241 Tirón de aceleración 2 33% 0-100% No No 0 U16
242 Tirón de deceleración 1 33% 0-100% No No 0 U16
243 Tirón de deceleración 2 33% 0-100% No No 0 U16
160 % 0,0 % - xxx % Sí Sí -1 6
VLT,MAX
nom
Par. 223 - I
del motor
10 Hz Sí No 0 6
VLT,MAX
Sí Sí -1 6
Sí Sí 0 6
Consulte también Funcionamiento y Display p
ara
obtener más información relativa a Cambios durante el
funcionamiento, 4 ajustes e Índice de conversión.
200 Rango/dirección de velocidad de salida
(RANGO SENT.GIRO)
Valor:
✭Solamente sentido horario, 0-4500 rpm
(4500 RPM SENTIDO HORARIO)
Ambos sentidos, 0 -4500 rpm
(4500 RPM AMBOS SENTID.)
Solamente sentido horario, 0-18000 rpm
(18000 RPM SENTIDO HORARIO)
Ambos sentidos, 0 -18000 rpm
(18000 RPM AMBOS SENTID.)
Función:
Este parámetro impide una inversión no deseada.
Además, puede seleccionarse la velocidad de salida
máxima que va a aplicarse, sin tomar en cuenta
los valores de otros parámetros.
Descripción de opciones:
Seleccione el sentidodesead. así como la
velocidad de salida.
Tenga en cuenta que si se seleccion
a Sentido
horario, 0-4500 rpm [0], Sentido horario, 0-18000
rpm [2],lavelocidaddesalidaestarálimitadaal
rango n
MIN-nMAX
(parámetro 202
).
Si se selecciona Ambos sentidos, 0-4500 rpm [1]
o Ambos sentidos, 0-18000 rpm [3], la velocidad
desalidaestarálimitadaal
rango ± n
MAX
.
[0]
[1]
[2]
[3]
Ejemplo:
Parámetro 200 Rango/sentido de frecuencia
de salida = Ambos sentidos.
202 Lím. sup. vel. salida (n
MAX
)
(LIM.SUP.VEL.SALIDA)
Valor:
0 - 4500/18000 rpm
(parámetro 200)
✭ 3000
Función:
Se puede seleccionar una velocidad máxima del
motor que corresponda a la velocidad máxima
a la que debe funcionar el motor.
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
86
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 87
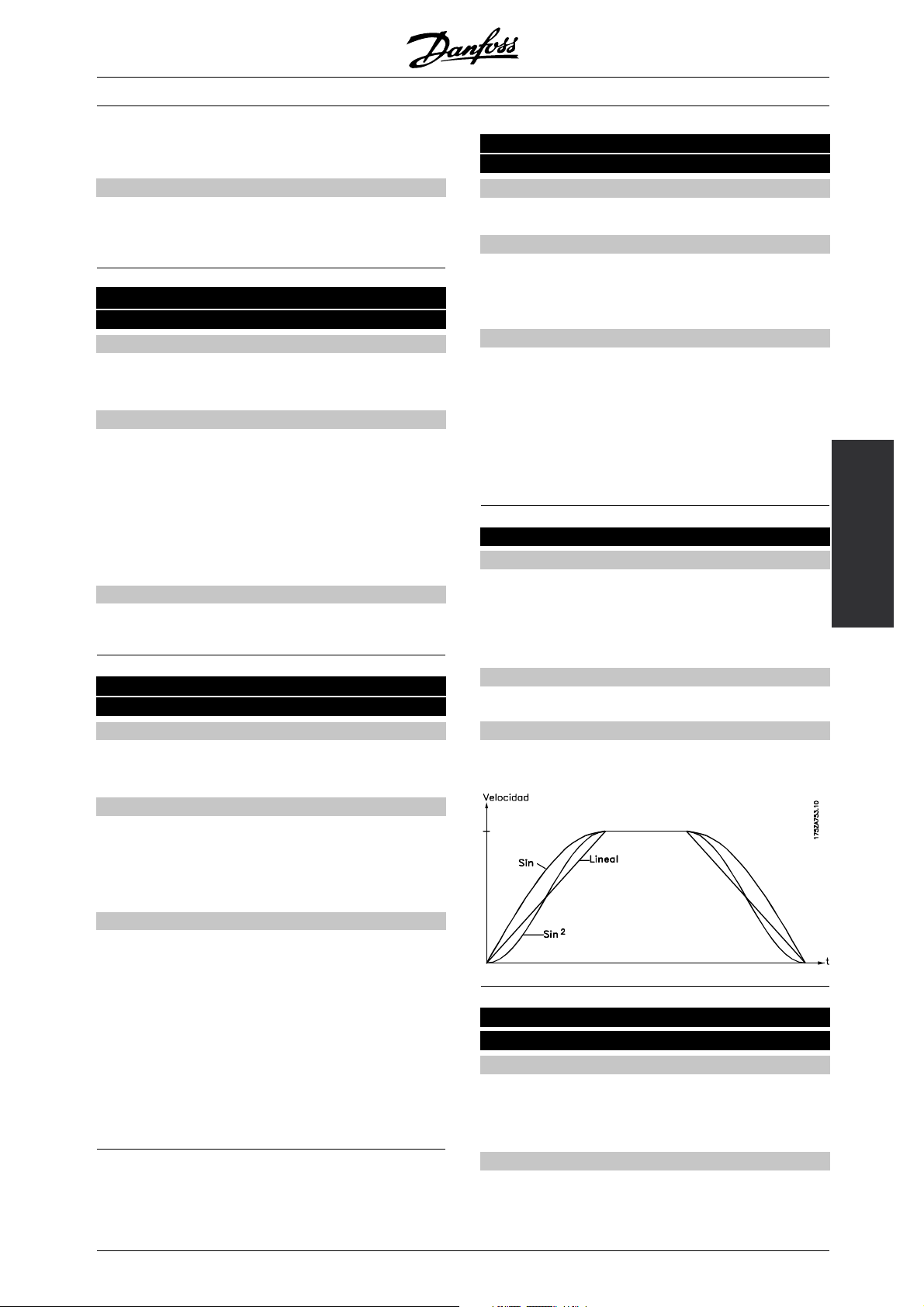
VLT®5000 FLUX
Consulte además el parámetro 205.
Descripción de opciones:
Puede seleccionarse un valor entre 0 y la opción
elegida para el parámetro 200.
203 Área de referencia/realimentación
(RANGO REF/REALIM)
Valor:
✭Mín - Máx (MIN - MAX)
- Máx - + Máx (-MAX-+MAX)
Función:
Este parámetro decide si la señal de referencia
y la señal de realimentación van a ser positivas
o pueden ser positiva y negativa.
El límite mínimo puede ser un valor negativo,
a menos que se haya seleccionado Control
de velocidad en lazo cerrado
(parámetro 100).
Descripción de opciones:
Elija el rango deseado.
[0]
[1]
205 Referencia máxima
(REFERENCIA MAX.)
Valor:
Ref
- 100,000.000
MIN
✭ 1500.000
Función:
La Referencia máxima proporciona el valor
más alto que puede establecerse por la suma
de todas las referencias.
Descripción de opciones:
La unidad sigue la opción de configuración
elegida en el parámetro 100.
Control de velocidad en lazo cerrado: rpm
Control de par, realimentación de
Nm
velocidad:
206 Tipo de rampa (TIPO RAMPA)
Valor:
✭Lineal (LINEAL)
Senoidal (S1)
2
(S2)
Sen
Ctrl tirón
Programación
[0]
[1]
[2]
[3]
204 Referencia mínima
(REFERENCIA MIN.)
Valor:
-100,000.000 - Ref
MAX
✭ 0.000
Depende del parámetro 100.
Función:
LaReferencia mínima da el valor mínimo que puede
establecerse por la suma de todas las referencias.
Referencia mínima sólo está activada si se ha ajustado
Mín. - Máx. [0] en el parámetro 203
Descripción de opciones:
Sólo está activado cuando el parámetro 203 se
ha ajustado en Mín. - Máx. [0].
Ajuste el valor requerido.
La unidad sigue la opción de configuración
elegida en el parámetro 100.
Control de velocidad en lazo cerrado: rpm
Control de par, realimentación de
Nm
velocidad:
Función:
Se pueden seleccionar 4 tipos de rampas distintos.
Descripción de opciones:
Seleccione el tipo de rampa que desee, en función
de los requisitos de aceleración/dec
eleración.
207 Tiempo de rampa de aceleración 1
(RAMPA ACELERA 1)
Valor:
0,00 - 3600 seg. (Bucle Cerrado)
0,05 - 3600 seg.
(Bucle abierto)
✭ depende de la unidad
Función:
El tiempo de rampa de aceleración es el tiempo que
se tarda en acelerar de 0 rpm hasta la velocidad
✭
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
87
Page 88
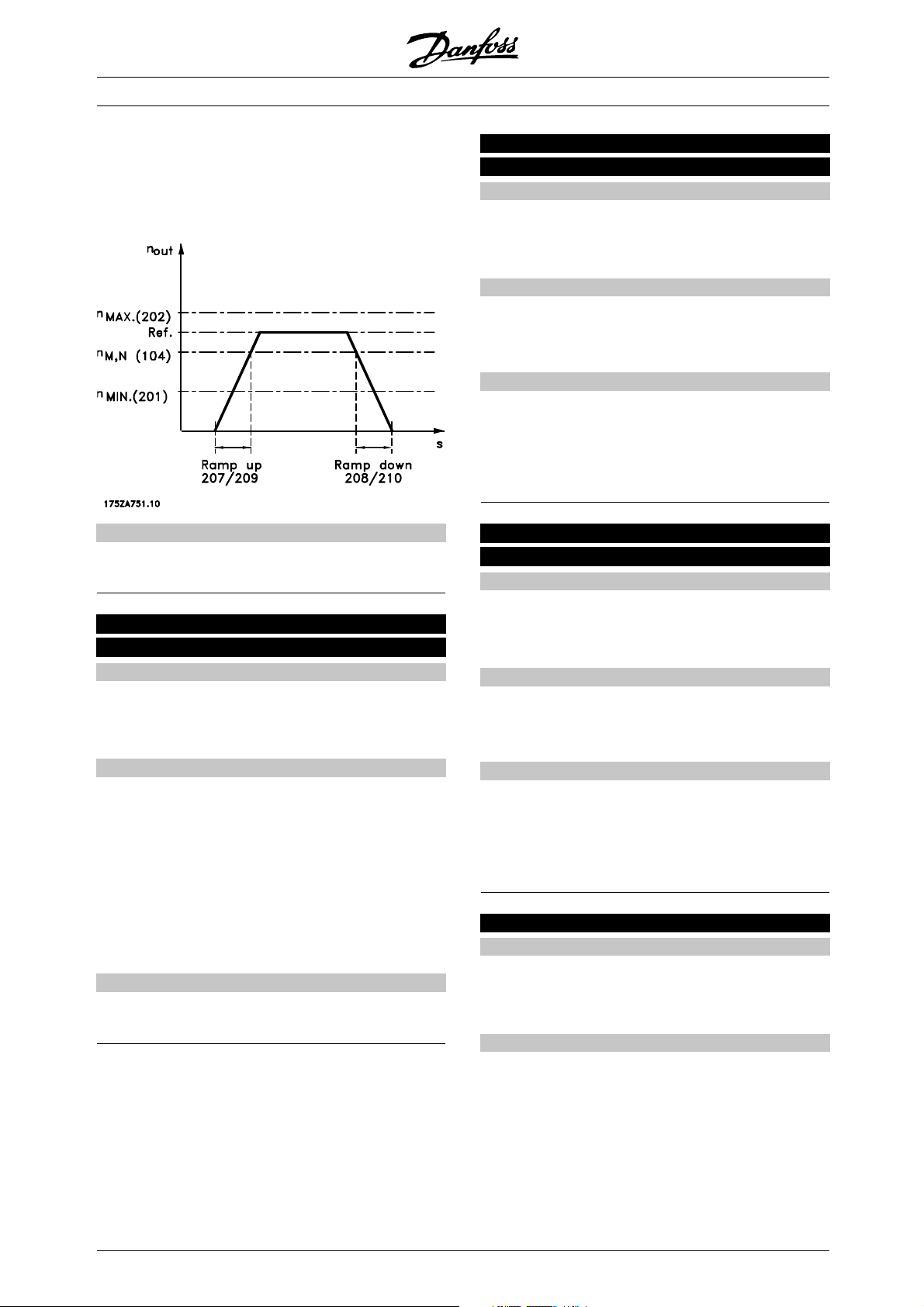
VLT®5000 FLUX
nominal del motor n
(parámetro 104). Esto
M,N
implica que la intensidad de salida no alcanza el
límite de par (que se ajusta en el parámetro 221).
Tenga en cuenta que el valor 0,00 corresponde
a 0,01 s en el modo de velocidad.
Descripción de opciones:
Ajuste el tiempo de rampa de aceleración requerido.
208 Tiempo de rampa de deceleración 1
(RAMPA DECELERA 1)
Valor:
0,00 - 3600 seg. (Bucle Cerrado)
0,05 - 3600 seg.
(Bucle abierto)
✭ depende de la unidad
209 Tiempo de rampa de aceleración 2
(RAMPA ACELERA 2)
Valor:
0,00 - 3600 seg. (Bucle Cerrado)
0,05 - 3600 seg.
(Bucle abierto)
✭ depende de la unidad
Función:
Consulte la descripción del parámetro 207. Tenga
en cuenta que el valor 0,00 corresponde a 0,01
s en el modo de velocidad.
Descripción de opciones:
Ajuste el tiempo de rampa de deceleración deseado.
El cambio a rampa 2 se puede activar mediante una
señal del terminal de entrada digital 16, 17, 29, 32
ó 33. Entonces se desactivará Rampa 1.
210 Tiempo de rampa de d eceleración 2
(RAMPA DECELERA 2)
Valor:
0,00 - 3600 seg. (Bucle Cerrado)
0,05 - 3600 seg.
(Bucle abierto)
✭ depende de la unidad
Función:
Consulte la descripción del parámetro 208. Tenga
en cuenta que el valor 0,00 corresponde a 0,01
s en el modo de velocidad.
Función:
El tiempo de rampa de deceleración es el tiempo
transcurrido desde la velocidad nominal del
motor n
(par. 104) a 0 rpm, siempre que
M,N
no se produzca una sobretensión en el inversor
a causa de un funcionamiento regenerativo del
motor, o si la intensidad generada alcanza el
límite de par (establecido en el parámetro 222).
Tenga en cuenta que el valor 0,00 corresponde
a 0,01 s en el modo de velocidad.
Descripción de opciones:
Ajuste el tiempo de rampa de deceleración requerido.
Descripción de opciones:
Ajuste el tiempo de rampa de deceleración deseado.
El cambio a rampa 2 se efectúa mediante una señal
del terminal de entrada digital 16, 17, 29, 32 ó
33. Entonces se desactivará Rampa 1.
211 Tiempo rampa velocidad fija (RAMPA JOG)
Valor:
0,00 - 3600 seg. (Bucle Cerrado)
0,05 - 3600 seg.
(Bucle abierto)
✭ depende de la unidad
Función:
El tiempo de rampa de velocidad fija es el tiempo que
se tarda en acelerar o decelerar desde 0 rpm hasta
la frecuencia nominal del motor n
(parámetro 104).
M,N
Implica que la intensidad de salida no será superior
al límite de par (ajustado en el parámetro 221).
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
88
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 89
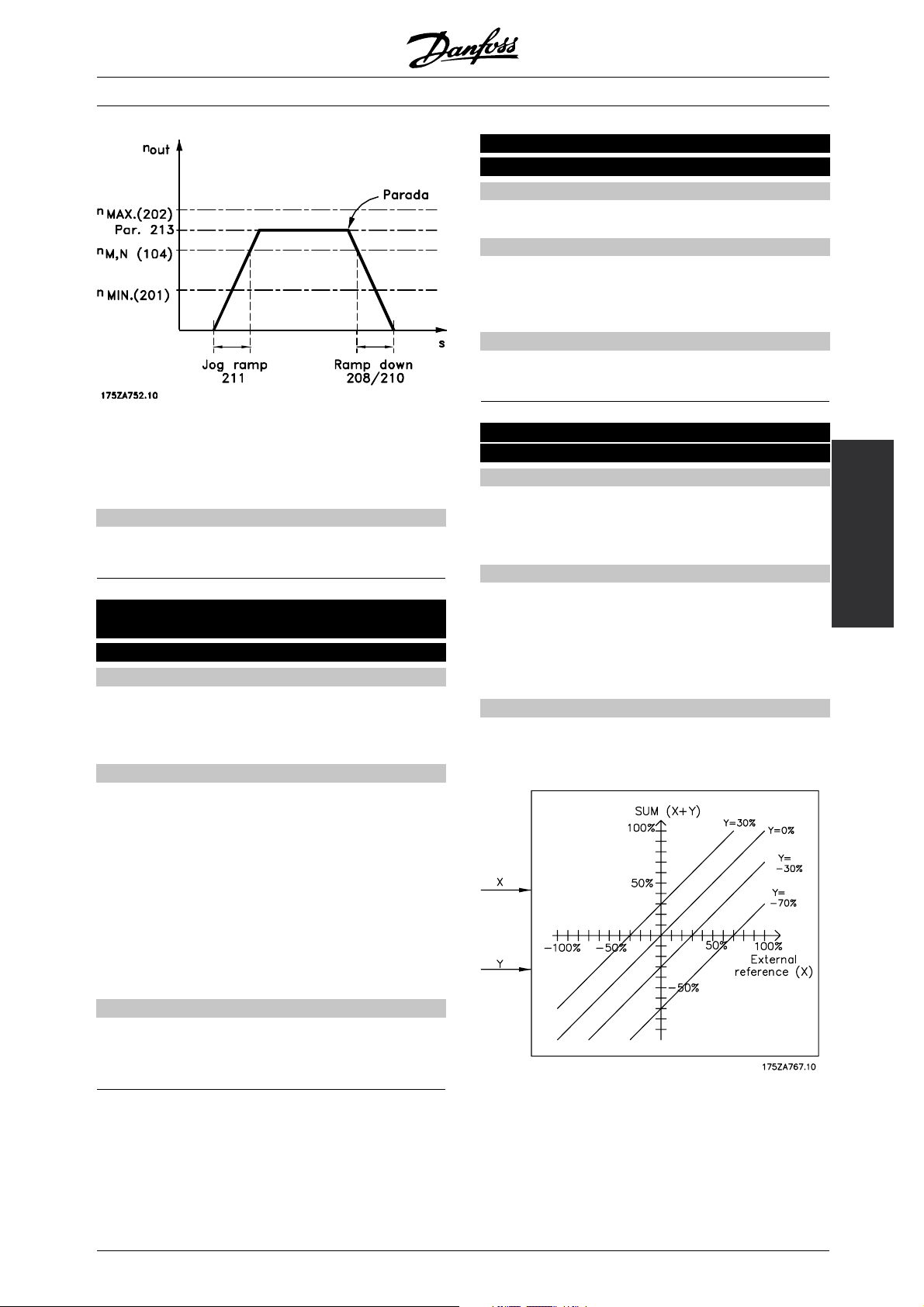
VLT®5000 FLUX
213 Velocidad fija
(JOG SPEED)
Valor:
0,0 - Parámetro 202
Función:
La velocidad fija n
es la velocidad de salida fija a
JOG
la que funciona el convertidor de frecuencia cuando
se activa la función de velocidad fija.
Descripción de opciones:
Ajuste la frecuencia deseada.
✭ 200 rpm
El tiempo de rampa prefijada empieza cuando se
transmite una señal de velocidad fija mediante
el panel de control, las entradas digitales o el
puerto de comunicación serie.
Descripción de opciones:
Ajuste el tiempo de rampa deseado.
212 Tiempo de rampa de deceleración
Parada rápida
(RAMP PARO RAPIDO)
Valor:
0,00 - 3600 seg. (Bucle Cerrado)
0,05 - 3600 seg.
(Bucle abierto)
✭ depende de la unidad
Función:
El tiempo de rampa de deceleración es el tiempo
que se tarda en decelerar desde la velocidad
nominal del motor hasta 0 rpm, siempre que no
surja una sobretensión en el inversor por causa
del funcionamiento regenerativo del motor, y la
intensidad generada no sobrepase el límite de par
(que se ajusta en el parámetro 222).
La parada rápida se activa mediante una señal
en el terminal de entrada digital 27 [2] o a través
del puerto de comunicación serie.
214 Función de referencia
(TIPO REF INTERNA)
Valor:
✭Suma (SUMA)
Relativa (RELATIVA)
Externa sí/no (EXTERNA SÍ/NO)
Función:
Para definir cómo se suman las referencias internas
a las demás referencias. Con este fin, se utilizan
Suma o Relativa. Con la función Externa sí/no
también es posible elegir si se debe cambiar entre
las referencias externas e internas.
Descripción de opciones:
Si selecciona Suma [0], una de las referencias internas
(parámetros 215-218) se suma como valor porcentual,
junto con las otras referencias externas.
[0]
[1]
[2]
Programación
Descripción de opciones:
Programe el tiempo de rampa de deceleración deseado.
Si se selecciona Relativa [1], una de las
referencias internas (parámetros 215-218 )
se suma a las referencias externas como un
porcentaje de la referencia real.
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
MG.55.A6.05 - VLT es una marca registrada de Danfoss
89
Page 90

Si se selecciona Externa sí/no [2], se puede
cambiar entre las referencias externas y las
referencias internas mediante los terminales 16,
17, 29, 32 ó 33 (parámetros 300, 301, 305, 306
VLT®5000 FLUX
ó 307). Las referencias internas son un valor de
porcentaje del rango de referencias.
Las referencias externas son la suma de las referencias
analógicas, referencias de pulso y de bus. Consulte
también la sección Manejo de referencias .
¡NOTA!:
Si se selecciona Suma oRelativa, una de
las referencias internas siempre estará
activa. Si las referencias internas no deben
tener ninguna influencia, es necesario ajustarlas
en 0 % (ajuste de fábrica).
El ejemplo muestra cómo calcular la velocidad de
salida si se utiliza Referencias internas junto con
Suma y Relativa en el parámetro 214.
El parámetro 205 Referencia máxima se ha
ajustado en 1500 rpm.
Parám. 204
Referencia
mínima
Incremento
[rpm/V]
Velocidad
a4,0V[rpm]
Parám. 215
Referencia
interna
Parám. 214Tipode
referencia = Suma [0]
Velocidad de salida
Parám. 214Tipode
referencia = Relat iva [1]
Velocidad de salida1) 0 150 600 15 %
[rpm]
0+600+225 = 825 0+600+90 = 600
2) 300 120 480 15 % 300+480+180=960 300+480+72 = 852
3) 600 90 360 15 % 600+360+135=1095 600+360+54=1014
4) 900 60 240 15 % 900+240+90=1230 900+240+36=1176
5) 1200 30 120 15 % 1200+120+45=1365 1200+120+18=1338
Los valores son válidos para un motor
asíncrono de 4 polos.
215 Re ferencia interna 1 (REF. INTERNA 1)
216 Re ferencia interna 2 (REF. INTERNA 2)
217 Re ferencia interna 3 (REF. INTERNA 3)
218 Re ferencia interna 4 (REF. INTERNA 4)
Valor:
-100.00 % - +100.00 %
✭ 0.00%
del rango de referencias/referencia externa
Función:
Es posible programar hasta cuatro referencias
internas en los parámetros 215-218.
Lareferenciainternaseindicacomounporcentaje
del valor Ref
o como un porcentaje de las
MAX
otras referencias externas, dependiendo de la
selección realizada en el parámetro 214. Si se ha
programado un valor de Ref
≠ 0, la referencia
MIN
interna como porcentaje se calcula sobre la base
de la diferencia entre Ref
MAX
cual el valor se añade a Ref
yRef
MIN
.
,traslo
MIN
Descripción de opciones:
Ajuste las referencias internas que deban obtenerse.
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
90
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 91

VLT®5000 FLUX
Para utilizar las referencias internas, es necesario
haber seleccionado Referencia interna sí en el
terminal 16, 17, 29, 32 ó 33.
Las opciones entre referencias internas pueden
seleccionarse activando el terminal 16, 17, 29,
32 ó 33; consulte la tabla siguiente.
Terminales 17/29/33
Ref. interna, msb
Terminales 16/29/32
Ref. interna, lsb
00Ref.interna
1
01Ref.interna
221 Límite de par para modo de motor
(LIM. PAR MOTOR)
Valor:
0,0 % - xxx.x % de T
El par máximo depende de la unidad, del tamaño
de motor seleccionado y de los parámetros.
Función:
Esteparámetroajustaelparalímiteparael
funcionamiento del motor. La limitación de par está
activa en el rango de velocidades hasta la velocidad
nominal del motor (parámetro 106).
2
10Ref.interna
3
11Ref.interna
4
Consulte también las ilustraciones de la sección
Manejo de varias referencias.
M,N
✭ 160 % de T
M,N
Programación
219 Valor de enganche/arriba-abajo
(VALOR ENGANCHE)
Valor:
0,00-100% de la ref. de intensidad
Función:
Este parámetro permite la introducción de un
valor de porcentaje (relativo) que se sumará
o restará de la referencia.
Descripción de opciones:
Si se ha seleccionado Enganche arriba en uno de
los terminales 16, 29 o 32 (parámetros 300, 305 y
306), el valor porcentual (relativo) seleccionado en el
parámetro 219 se sumará a la referencia total.
Si se ha seleccionado Enganche abajo en uno de
los terminales 17, 29 o 33 (parámetros 301, 305 y
307), el valor porcentual (relativo) seleccionado en el
parámetro 219 se restará de la referencia total.
✭ 0.00%
Descripción de opciones:
Consulte también el parámetro 409 para
obtener más detalles.
Para evitar que el motor llegue a un par de arranque
máximo, el ajuste de fábrica es 1,6 x el
motor nominal (valor calculado).
Si se cambia un ajuste en los parámetros
101-106, los parámetros 221/222 no r
automáticamente el ajuste de fábrica.
par de
ecuperan
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
MG.55.A6.05 - VLT es una marca registrada de Danfoss
91
Page 92

VLT®5000 FLUX
Cambiando el parámetro 221 (LIM.
PAR MOTOR) cuando se ajuste el
parámetro 100 a VELOCIDAD BUCLE
ABIERTO (0), automáticamente se reajusta el
parámetro 236 (CORRIENTE BAJA VELOCIDAD).
Si el parámetro 221 > parámetro 236, se produce
un riesgo potencial de calar el motor.
222 Límite de par para modo regenerativo
(LIM.PAR.GENERA)
Valor:
0,0 % - xxx.x % de T
M,N
✭ 160 % de T
M,N
El par máximo depende de la unidad, del tamaño
de motor seleccionado y de los parámetros.
Función:
Este parámetro establece el límite de par para el
funcionamiento del motor. La limitación de par está
activa en el rango de velocidades hasta la velocidad
nominal del motor (parámetro 104).
Consulte la figura para obtener más información
sobre los parámetros 221 y 409.
Descripción de opciones:
Si se ha seleccionado Freno de resistencia [1]
en el parámetro 400, el límite de par se cambia
a1,6xelpardemotornominal.
Cambiando el parámetro 222 (LIM PAR
GENERA) cuando se ajusta el parámetro
100 a VELOCIDAD BUCLE ABIERTO (0), se
ajusta automáticamente el parámetro 236 (CORRIENTE
BAJA VELOCIDAD). Si el parámetro 222 > parámetro
236, se produce un riesgo potencial de calar el motor.
223 Advertencia: Baja intensidad
(ADVER. BAJA INTEN)
Valor:
0,0 - parámetro 224
✭ 0,0 A
Función:
Cuando la intensidad del motor está por debajo del
límite, I
, el display indica BAJA INTEN, excepto
LOW
si se ha seleccionado freno mecánico.
Las salidas de señal se pueden programar para
producir una señal de estado mediante el terminal
26ó46ymediantelasalidaderelé01ó04
(parámetro 319, 321, 323 ó 326).
Descripción de opciones:
El límite de señal inferior I
de la intensidad del
LOW
motor debe programarse en el intervalo de operación
normal del convertidor de frecuencia.
224 A dver tencia: Alta intensidad
(ADVER. ALTA INTEN)
Valor:
Parámetro 223 - I
VLT,MAX
✭ I
VLT,MAX
Función:
Si la intensidad del motor supera el límite programado,
I
, el display indicará INTENSIDAD ALTA.
HIGH
Las salidas de señal se pueden programar para
producir una señal de estado mediante el terminal
26 ó 46 y mediante la salida de relé 01 ó 04
(parámetro 319, 321, 323 ó 326).
Descripción de opciones:
El límite de señal superior de la intensidad del motor,
, debe programarse dentro del intervalo de
I
HIGH
operación normal del convertidor de frecuencia.
Consulte la ilustración del parámetro 223.
225 A dver tencia: Baja velocidad
(ADVER. BAJA VEL)
Valor:
0 - parámetro 226
✭ 0rpm
Función:
Cuando la velocidad del motor está por debajo del
límite, n
, el display indica VELOCIDAD BAJA.
LOW
Las salidas de señal se pueden programar para
producir una señal de estado mediante el terminal
26 ó 46 y mediante la salida de relé 01 ó 04
(parámetro 319, 321, 323 ó 326).
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
92
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 93

VLT®5000 FLUX
Descripción de opciones:
El límite de señal inferior de la velocidad del motor,
, debe programarse dentro del intervalo de
n
LOW
operación normal del convertidor de frecuencia.
Consulte la ilustración del parámetro 223.
226 Advertencia: Alta velocidad
(ADVER. ALTA VEL)
Valor:
parámetro 225 - parámetro 202
✭ 20.000 rpm
Función:
Cuando la velocidad del motor está por encima del
límite, n
, el display indica ALTA VELOCIDAD.
HIGH
Las salidas de señal se pueden programar para
producir una señal de estado mediante el terminal
26ó46ymediantelasalidaderelé01ó04
(parámetro 319, 321, 323 ó 326).
Descripción de opciones:
El límite de señal superior de la velocidad del motor,
, debe programarse dentro del intervalo de
n
HIGH
operación normal del convertidor de frecuencia.
Consulte la ilustración del parámetro 223.
234 Monitor de fases del motor
(MOTOR FASE MON.)
Valor:
✭Sí (SI)
No (NO)
[0]
[1]
Función:
Laspérdidasdefasedelasfasesdeentradase
controlan mediante esta opción.
Descripción de opciones:
Si se selecciona Sí, el convertidor de frecuencia
reaccionará ante la falta de una fase de entrada
emitiendo la alarma 4.
Si se selecciona No, no se da ninguna alarma aunque
falte una fase de alimentación. El convertidor de
frecuencia puede sufrir daños si funciona sin una
fase de entrada. Por ello, se recomienda mantener
ACTIVADA la función de monitor de pérdida de fases.
236 Intensidad de velocidad baja
(INTENS. VELOC. BAJA)
Valor:
0 - máx. 255% de la intensidad del motor
nominal Parámetro 105.
✭ 100%
Programación
Función:
Esta función sólo se activa cuando el parámetro 100 =
BUCLE ABIERTO VELOC. VLT 5000 FLUX funciona
con intensidad constante mediante motor cuando la
velocidad es inferior a 10 Hz. Si la velocidad supera los
10 Hz, el modelo flux de motor de la unidad controlará
el motor. El parámetro 236 se ajusta automáticametne
mediante los parámetros 221 y/o 222, dependiendo
de cual de los dos tenga el valor más alto. La
intensidad del parámetro 236 consta de la intensidad
generadora de par y la intensidad de magnetización.
Función:
En este parámetro, puede seleccionar la verificación
de las fases del motor.
Descripción de opciones:
Si se selecciona Sí, el convertidor de frecuencia
reaccionará ante la falta de una fase del motor,
Ex. si el parámetro 221 Límite de par para modo de
motor se define en 100% y el parámetro 222Límite
de par para modo regenerativo se define en 60%, el
parámetro 236 se configurará automáticamente en
un 127%, dependiendo del tamaño del motor.
Descripción de opciones:
emitiendo la alarma 30, 31 o 32.
Si se selecciona No, no se da ninguna alarma
aunque falte una fase del motor. El motor se puede
dañar/sobrecalentar si funciona sólo con dos fases.
Por ello, se recomienda mantener ACTIVADA la
función de monitor de fases del motor.
¡NOTA!:
Si el motor funciona por debajo de los 10
Hz durante más de un minuto, el valor del
parámetro 236 debe reducirse en consecuencia
para evitar que el motor se queme.
235 Monitor de pérdida de fases
(CTRL.PERD.DE FAS.)
Valor:
No (NO)
✭Sí (SÍ)
[0]
[1]
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
93
Page 94

VLT®5000 FLUX
237 Velocidad de Cambio modelo
(VELOCIDAD DE CAMBIO MODELO)
Valor:
2 Hz .. 80% de n
norm
✭ 10 Hz (defecto y n
dependiente)
norm
Función:
Con este parámetro es posible realizar un ajuste
del punto de desplazamiento, donde VLT 5000
FLUX cambia el modelo FLUX en el DSP.
Parámetro 100 modo CONTROL VELOCIDAD PAR [5]:
Parámetro 100 modo BUCLE ABIERTO [0]:
En bucle abierto, se debe determinar la velocidad de
la medida actual. Por debajo de n
x 0,2, la unidad
norm
está trabajando desde un modelo de intensidad
constante. Por encima de n
x 0,2 la unidad está
norm
trabajando desde el modelo FLUX en la unidad.
240 Tirón de aceleración 1
(SACUDIDA ACELERA 1)
Valor:
0-100%
✭ 33%
Función:
Si se selecciona Control de tirón como tipo de
rampa en el Parámetro 206, este parámetro define
el porcentaje de tiempo de rampa utilizado para
controlar el tirón de la aceleración inicial.
241 Tirón de aceleración 2
(SACUDIDA ACELERA 2)
Valor:
0-100%
✭ 33%
Función:
Si se selecciona Control de tirón como tipo de
rampa en el Parámetro 206, este parámetro define
el porcentaje de tiempo de rampa utilizado para
controlar el tirón de la aceleración final.
242 Tirón de deceleración 1
(SACUDIDA DECELERA 1)
Valor:
0-100%
✭ 33%
Descripción de opciones:
Modo de Par Constante: Para optimizar el control
de par puede ser necesario funcionar en un modelo
FLUX solamente para evitar cualquier choque durante
el cambio de modelo FLUX. Máx. velocidad p
modelo FLUX 1 es n
norm
-10%.
ara
Modo de Bucle Abierto: Para optimizar el punto de
conmutación desde la intensidad consta
nte ajustada
en el parámetro 236 y el modelo FLUX 2.
Función:
Si se selecciona Control de tirón como tipo de
rampa en el Parámetro 206, este parámetro define
el porcentaje de tiempo de rampa utilizado para
controlar el tirón de la deceleración inicial.
243 Tirón de deceleración 2
(SACUDIDA DECELERA 2)
Valor:
0-100%
✭ 33%
Función:
Si se selecciona Control de tirón como tipo de
rampa en el Parámetro 206, este parámetro define
el porcentaje de tiempo de rampa utilizado para
controlar el tirón de la deceleración final.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
94
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 95

VLT®5000 FLUX
■Introducción
El grupo de parámetros 3xx selecciona las entradas y salidas analógicas y digitales en la función deseada.
El escalado de las entradas y salidas también se realiza en este grupo. Entradas: La frecuencia máx. en
los terminales de entrada 16, 17, 18, 19, 27, 32 y 33 es 5 kHz. (24Vpp). La frecuencia máx. en el
terminal de entrada 29 es 65 kHz (24Vpp).
La frecuencia máx. en los terminales de entrada del codificador 73 - 78 es 250 kHz (5Vpp). Salidas: Los
terminales de salida analógica 42 y 45 son salidas de intensidad escalables. La frecuencia máx. en los
terminales de salida digitales 26 y 46 es 50kHz.
N°
par. Descripción del Ajuste de fábrica Rango Cambios 4 ajustes Índice de
# parámetro durante el
funcionamiento
300 Terminal 16, entrada Reset SíSí0 5
301 Terminal 17, entrada Mantener referencia Sí Sí 0 5
302 Terminal 18, arranque, entrada Arranque Sí Sí 0 5
303 Terminal 19, entrada Cambiodesentido SíSí0 5
304 Terminal 27, entrada Parada de inercia, inversa Sí Sí 0 5
305 Terminal 29, entrada Velocidadfija SíSí0 5
306 Terminal 32, entrada Selección de ajuste,
msb/aceleración
307 Terminal 33, entrada Selección de ajuste, bit menos
significativo/deceleración
308 Terminal 53, tensión de entrada analógica Referencia Sí Sí 0 5
309 Terminal 53, escalado mín. 0,0 V 0,0 -10,0 V Sí Sí -1 5
310 Terminal 53, escalado máx. 10,0 V 0,0 -10,0 V Sí Sí -1 5
311 Terminal 54, tensión de entrada analógica Sin función Sí Sí 0 5
312 Terminal 54, escalado mín. 0,0 V 0,0 -10,0 V Sí Sí -1 5
313 Terminal 54, escalado máx. 10,0 V 0,0 -10,0 V Sí Sí -1 5
314 Terminal 60, intens. de entrada analóg. Referencia Sí Sí 0 5
315 Terminal 60, escalado mín. 0,0 mA 0,0 - 20,0 mA Sí Sí -4 5
316 Terminal 60, escalado máx. 20,0 mA 0,0 - 20,0 mA Sí Sí -4 5
317 Intervalo de tiempo 10 s 0 -99 s Sí Sí 0 5
318 Función después de intervalo de tiempo No Sí Sí 0 5
319 Terminal 42, salida 0-n
321 Terminal 45, salida 0-n
323 Relé 01, salida Sin función Sí Sí 0 5
324 Relé 01, retardo CONEXIÓN 0,00 s 0,00 -600,00 s Sí Sí -2 6
325 Relé 01, retardo DESCONEXIÓN 0,00 s 0,00 -600,00 s Sí Sí -2 6
⇒ 0-20 mA Sí Sí 0 5
MAX
⇒ 0-20 mA Sí Sí 0 5
MAX
Sí Sí 0 5
Sí Sí 0 5
conver-
sión
Tipo
de
datos
Programación
326 Relé 04, salida Sin función Sí Sí 0 5
327 Referencia de pulso, frecuen. máx. 100-65000 Hz 5000 Hz Sí Sí 0 6
329 Pulso/rev de realimentación codificador 1024 pulsos/rev. 500 -10.000 pulsos/rev. Sí Sí 0 6
341 Terminal 46, salida digital Sin función Sí Sí 0 5
342 Terminal 46, salida, escalado de pulso 5000 Hz 1-50000 Hz Sí Sí 0 6
350 Control de codificador No No No 0 5
351 Dirección de codificador Normal No Sí 0 5
355 Terminal 26, salida digital Sin función Sí Sí 0 5
356 Terminal 26, salida, escalado de pulso 5000 Hz 1-50000 Hz Sí Sí 0 6
357 Terminal 42, escalado mínimo de salida 0 % 000 - 100% Sí Sí 0 6
358 Terminal 42, escalado máximo de salida 100% 000 - 500% Sí Sí 0 6
359 Terminal 45, escalado mínimo de salida 0 % 000 - 100% Sí Sí 0 6
360 Terminal 45, escalado máximo de salida 100% 000 - 500% Sí Sí 0 6
362 Tipo de sensor KTY KTY1 KTY 1-3 No Sí 0 5
Consulte también Funcionamiento y Display para
obtener más información relativa a Cambios durante el
funcionamiento, 4 ajustes e Índice de conversión.
✭
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
95
Page 96
VLT®5000 FLUX
■ Funciones de entrada digital
Entradas digitales Nº terminal 16 17 18 19 27 29 32 33
parámetro 300 301 302 303 304 305 306 307
Valor: (Grupo de comandos de funcionamiento)
Sin función (NO) [0] [0] [0] [0] [0] [0] [0]
Reset (RESET) [1]* [1] [1] [1] [1]
Parada de inercia, inversa (INERCIA INVERSA) [0]*
Reset y parada de inercia, inversa (RESET E INERCIA INVERSA) [1]
Parada rápida, inversa (PARADA RAPIDA INVERSA) [2]
Freno de CC, inverso (FRENO C.C INVERSO) [3]
Parada inversa (PARADA INVERSA) [2] [2] [4] [2] [2] [2]
Arranque (ARRANQUE) [1]*
Arranque por pulsos (ARRANQUE DE PULSOS) [2]
Cambio de sentido (CAMBIO SENTIDO) [1]*
Arranque e inversión (ARRANQ.+CAMB.SENT.) [2]
Sólo arranque adelante, sí (ARRANQUE ADELAN., SI) [3] [3] [3] [3]
Sólo arranque inverso, sí (ARRANQUE INVERSO, SI) [3] [3] [4] [3]
Velocidad fija (VELOCIDAD FIJA) [4] [4] [5]* [4] [4]
Referencia interna, sí (REF. INTERNA, SI) [5] [5] [6] [5] [5]
Referencia interna, bit menos significativo (REF. INTERNA, BIT MENOS
SIGNIFICATIVO)
Referencia interna, bit más significativo
Mantener referencia (MANTENER REFERENCIA) [7] [7]* [9] [7] [7]
Mantener salida (MANTENER SALIDA) [8] [8] [10] [8] [8]
Aceleración (AUMENTAR VELOCIDAD) [9] [11] [9]
Deceleración (DISMINUIR VELOCIDAD) [9] [12] [9]
Selección de ajuste, bit menos
significativo
Selección de ajuste, bit más significativo
Selección de ajuste, bit más
significativo/aceleración
Selección de ajuste, bit menos
significativo/deceleración
Enganche arriba (ENGANCHE ARRIBA) [11] [15] [12]
Enganche abajo (ENGANCHE ABAJO) [11] [16] [12]
Rampa 2 (RAMPA 2) [12] [12] [17] [13] [13]
Fallo de red invertido (FALLO RED INVERTIDO) [13] [13] [18] [14] [14]
Referencia de pulsos (REF. PULSOS) [28]
(REF. INTERNA, BIT MÁS
SIGNIFICATIVO)
(SELECCION AJUSTE BIT
MENOS SIGNIFICATIVO)
(SELECCION AJUSTE BIT MÁS
SIGNIFICATIVO)
(AJUSTE BIT MÁS
SIGNIFICATIVO/SUB.VEL)
(AJUSTE.BIT MENOS
SIGNIFICATIVO/BAJ.VEL)
[6] [7] [6]
[6] [8] [6]
[10] [13] [10]
[10] [14] [10]
[11]*
[11]*
Función:
Descripción de opciones:
Sin función El convertidor de frecuencia no reacciona
a las señales transmitidas al terminal.
Reset pone a cero el convertidor de frecuencia
después de una DESCONEXIÓN/ALARMA; no
obstante, no todas las alarmas pueden reinicializarse .
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
96
Parada de inercia (terminal 27) Entrada invertida
(NC). El convertidor de frecuencia deja el motor en
el modo libre. "0" lógico => parada de inercia.
Reset y parada de inercia (terminal 27) Entrada
invertida (NC). El convertidor de frecuencia deja el
motor en el modo libre y en lo sucesivo reinicia la
unidad. "0" lógico => parada de inercia y reset.
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 97
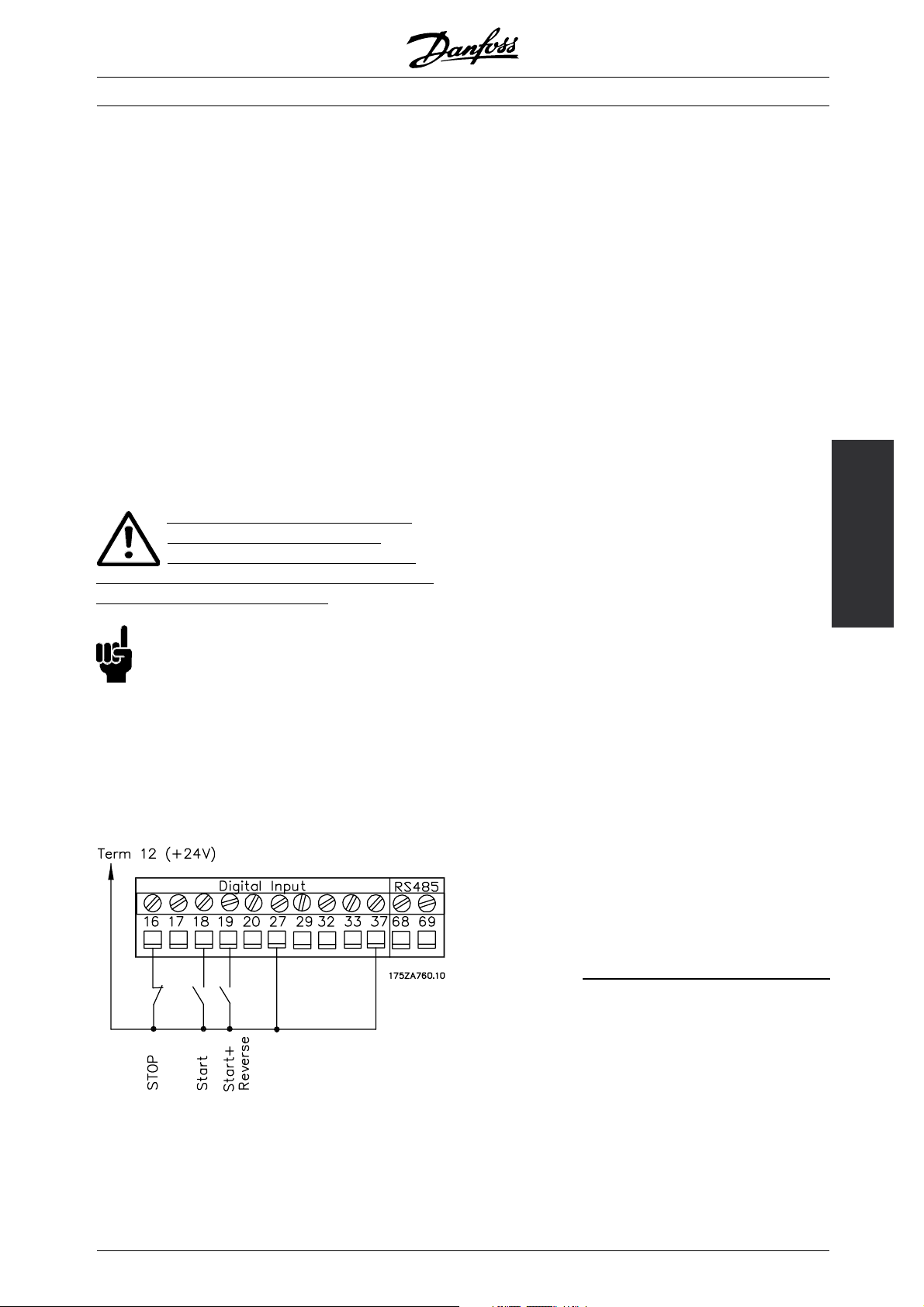
VLT®5000 FLUX
Parada rápida inversa (terminal 27) Entrada
invertida (NC). Genera una parada de acuerdo con
el tiempo de rampa de parada rápida (Parámetro
212). Cuando el motor se para el eje entra en el
modo libre. "0" lógico => parada rápida.
Freno de CC inverso (terminal 27) Entrada
invertida (NC). Detiene el motor al alimentarlo con
CC durante un período de tiempo determinado.
Consulte los parámetros 125-127. Esta función sólo
está activada cuando el valor del parámetro 126 es
distinto de 0. "0" lógico => Freno de CC.
Parada inversa Función invertida. Genera una
función de parada cuando el terminal seleccionado
pasa del nivel lógico "1" al "0". La parada se
realizará de acuerdo con el tiempo de rampa
seleccionado (Parámetros 207-210).
Ninguno de los comandos de parada
anteriores (arranque desactivado)
deben utilizarse como interruptores de
desconexión cuando haya que realizar reparaciones.
Desconecte la alimentación de red.
¡NOTA!:
Tenga en cuenta que cuando el convertidor
de frecuencia está en el límite de par y recibe
un comando de parada, sólo se detendrá si un
terminal de salida (42, 45, 01 o 04) se ha conectado al
terminal 27. La opción de datos en el terminal de salida
42, 45, 01 o 04 debe ser Límite de par yparada [27].
Seleccione Arranque si se requiere un comando de
arranque/parada (comando de funcionamiento, grupo
2). "1" lógico = arranque, "0" lógico = parada.
Cambio de sentido se utiliza para cambiar el sentido
de rotación del eje del motor. El "1" lógico llevará al
cambio de sentido. La señal de inversión sólo cambia
el sentido de giro, sin activar la función de arranque.
Ambos sentidos se debe seleccionar en
el parámetro 200.
Esta función no está activada en Control de par,
retroalimentación de velocidad.
Arranque e inversión se utiliza para el
arranque/parada (comando de funcionamiento,
grupo 2) y para el cambio de sentido en el mismo
cable. No puede haber una señal en el terminal
18 al mismo tiempo. Actúa como arranque e
inversión por pulsos si se ha seleccionado arranque
por pulsos en el terminal 18.
Sólo arranque adelante se utiliza cuando el eje del
motor debe girar de izquierda a derecha en el arranque.
Sólo arranque inverso se utiliza cuando el eje del
motor debe girar de derecha a izquierda en el arranque.
Programación
Velocidad fija se utiliza para cancelar la velocidad de
salida y emplear la velocidad fija determinada en el
parámetro 213. El tiempo de rampa puede ajustarse
en el parámetro 211. No se activa si se ha emitido un
comando de parada (arranque desactivado). Velocidad
fija anula la parada (comando de funcionamiento,
grupo 2). Consulte el ejemplo de conexión.
Referencia interna, sí se utiliza para cambiar entre
referencias externas e internas. Se da por supuesto
que se ha seleccionado Externa sí/no [2] en el
parámetro 214. "0" lógico = referencias externas
activadas; "1" lógico = una de las cuatro referencias
internas está activada según la tabla siguiente.
Referencia interna, BIT MENOS SIGNIFICATIVO
y BIT MÁS SIGNIFICATIVO selecciona una de las
cuatro referencias internas, según la tabla siguiente.
Ref. interna bit más
significativo
Ref. interna 1 0 0
Ref. interna 2 0 1
Ref. interna 3 1 0
Ref. interna 4 1 1
Arranque de pulsos, si se aplica un pulso durante
3 ms como mínimo, el motor arrancará siempre que
no se haya proporci
onado un comando de parada
(comando de funcionamiento, grupo 2). El motor se
para si se activa el comando de parada inversa.
✭
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
Mantener referencia mantiene la referencia real.
La referencia es ahora el punto de referencia de
Aceleración y Deceleración que se va a emplear.
Si se utiliza aceleración/deceleración, el cambio de
referencia siempre se lleva a cabo después de la rampa
2, parámetros 209 y 210, en el intervalo 0 - Ref
Ref. interna, bit
menos significativo
MAX
.
97
Page 98
VLT®5000 FLUX
Mantener salida mantiene la velocidad de motor
real (en rpm). La frecuencia mantenida del motor
es ahora el punto de partida o condición que se
utilizará para Aceleración y Deceleración .
Si se utiliza aceleración/deceleración, el cambio de
referencia siempre se lleva a cabo después de la rampa
2, parámetros 209 y 210, en el intervalo 0 - n
MAX
.
¡NOTA!:
Si ha seleccionado Mantener salida,el
convertidor de frecuencia no se puede parar
mediante los terminales 18 y 19, sino sólo con
el terminal 27 (que debe programarse en Parada de
inercia inversa [0] o Reset y parada de inercia inversa
[1]). Sin embargo, el convertidor de frecuencia siempre
puede detenerse mediante las señales de parada
(Inercia, Parada rápida, Freno de CC y Parada inversa).
Aceleración/Deceleración se utilizan para el
control de aceleración y deceleración de la velocidad
(potenciómetro motorizado). Esta función sólo está
activada si se ha seleccionado Mantener referencia o
Mantener salida. Si hay un "1" lógico en el terminal
seleccionado para la aceleración, la referencia
o la velocidad de salida aumentan.
Si hay un "1" lógico en el terminal seleccionado
para la deceleración, la referencia o la frecuencia
de salida disminuyen.
Los pulsos, "1" lógico como valor alto mínimo para
3 ms y un tiempo de interrupción mínimo de 3
ms, llevarán a una velocidad del 0,1% (referencia)
o 1 rpm (velocidad de salida).
Si Aceleración/Deceleración se activan durante
más de 400 ms., comenzará un cambio
continuo que utiliza rampa 2.
La selección de Ajuste BIT MENOSSIGNIFICATIVO
y BIT MÁS SIGNIFICATIVO activa uno de los cuatro
ajustes; sin embargo, esto depende del hecho de que
el parámetro 004 se haya ajustado en Ajuste múltiple.
La selección de Ajuste BIT M ÁS SIGNIFICATIVO/aceleración y Ajuste BIT MENOS
SIGNIFICATIVO/deceleración junto con el uso de
Mantener referencia o Mantener salida permiten el
cambio de velocidad de aceleración/deceleración.
La selección de Ajuste cambia de acuerdo
con la siguiente tabla:
Selec. de ajuste Mantener ref./
(32) bit
más significativo
Ajuste 1 0 0 0
Ajuste 2 0 1 0
Ajuste 3 1 0 0
Ajuste 4 1 1 0
Sin cambio de
velocidad
Deceleración 0 1 1
Aceleración 1 0 1
Deceleración 1 1 1
001
(33) bit
menos
significativo
Mantener salida
Enganche arriba/Enganche abajo se selecciona
si hay que aumentar o reducir el valor de referencia
según un valor de porcentaje programable
ajustado en el parámetro 219.
Enganche abajo Enganche
arriba
Ejemplo:
Terminal Mantener ref./
(16) (17) Mantener salida
Sin cambio de
velocidad
Deceleración 0 1 1
Aceleración 1 0 1
Deceleración 1 1 1
00 1
Sin cambio de velocidad 0 0
Reducida por valor % 1 0
Incrementada por valor % 0 1
Reducida por valor % 1 1
Rampa 2 se selecciona si se requiere el cambio
entre la rampa 1, parámetros 207-208, y la rampa
2, parámetros 209-210. "0" lógico ⇒ rampa 1,
mientras que "1" lógico ⇒ rampa 2.
La referencia de velocidad mantenida mediante
el panel de control puede modificarse aunque
se haya parado el convertidor de frecuencia.
Esta referencia se almacenará si hay un corte
de suministro de electricidad.
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
98
Se debe seleccionar Fallo de red invertido si el
parámetro 407 Fallo de red y/o el parámetro 408
Descarga rápida están activados. Fallo de red está
activado en la situación de "0" lógico.
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
Page 99
VLT®5000 FLUX
¡NOTA!:
El convertidor de frecuencia puede sufrir
daños importantes si se repite la función
Descarga rápida en la entrada digital con la
tensión de red conectada a la unidad.
Nº parám. Descripción Texto del display Frecuencia máx. al terminal
300 Terminal 16, entrada (ENTR. DIGITAL 16) 5 kHz
301 Terminal 17, entrada (ENTR. DIGITAL 17) 5 kHz
302 Terminal 18, arranque, entrada (ENTR. DIGITAL 18) 5 kHz
303 Terminal 19, entrada (ENTR. DIGITAL 19) 5 kHz
304 Terminal 27, entrada (ENTR. DIGITAL 27) 5 kHz
305 Terminal 29, entrada (ENTR. DIGITAL 29) 65 kHz
306 Terminal 32, entrada (ENTR. DIGITAL 32) 5 kHz
307 Terminal 33, entrada (ENTR. DIGITAL 33) 5 kHz
Para obtener información sobre Valor , Función
y Descripción de opciones,consultelatablade
la sección Funcion es de entrada digital .
■Entradas analógicas
Referencia de pulsos se selecciona si se
utiliza una secuencia de pulsos (velocidad) de
0 rpm, que corresponde a Ref
, parámetro
MIN
204. La frecuencia se ajusta en el parámetro
327, que corresponde a Ref
MAX
.
Programación
Entradas analógicas nº terminal 53(tensión) 54(tensión) 60(intensi-
dad)
parámetro 308 311 314
Valor:
Sin funcionamiento (NO) [0] [0]✭ [0]
Referencia (REFERENCIA) [1] ✭ [1] [1] ✭
Límite de par (CTRL LIMITE PAR) [3] [2] [3]
Termistor (TERMISTOR) [4] [3]
Termistor KTY (KTY THERMISTOR) [4]
Límite de velocidad (SPEED LIMIT CTRL) [15]
Función:
Descripción de opciones:
Entrada a nalógica Funciones
Sin funcionamiento Se selecciona cuando la señal
Termistor Se selecciona si un termistor integrado
en el motor para la protección contra sobrecarga
debe detener el convertidor de frecuencia en
caso de sobretemperatura del motor. El valor
de desconexión es >3 k
.
conectada al terminal está desactivada.
Referencia Se selecciona para activar el
cambio de referencia por medio de una señal
de referencia analógica.
Si se conectan otras entradas analógicas, se
añaden teniendo en cuenta su signo.
Límite de par Se utiliza si se modifica el valor
de límite de par del parámetro 221 mediante
una señal analógica.
✭
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.55.A6.05 - VLT es una marca registrada de Danfoss
99
Page 100

Sensor KTY Se selecciona cuando es necesario
corregir el modelo de regulación de acuerdo con
los cambios de temperatura y los devanados del
motor. Esto se realiza mediante la corrección de
las resistencias del estátor (R
ydelrotor(Rr), tal
S)
ycomosemuestraacontinuación:
VLT®5000 FLUX
Si un motor tiene un interruptor térmico, también
puede conectarse a la entrada. El parámetro 128
debe programarse en Advertencia del termistor
[1] o Desconexión del termistor [2].
Límite de velocidad se utliza si el valor de límite
de velocidad establecido en el Parámetro 202 se
modifica por medio de una señal analógica.
308 Terminal 53, tensión de entrada analógica
(ENTR. AI 53 [V])
Valor:
Consulte la tabla Entradas analógicas .
Función:
Selección de la opción deseada en el terminal 53.
El escalado de la señal de entrada se selecciona
en los parámetros 309 y 310.
Descripción de opciones:
Consulte la sección Funciones deentrada analógica.
=Rs(20°C) (1 + cu_alfa * (temper-
• R
s
atura_std_temperatura))
=Rr(20°C) (1 + cu_alfa * (temper-
• R
r
atura_std_temperatura)),
donde
• cu_alfa = 0,00393 es el coeficiente de
temperatura del cobre
• std_temperatura = 20°C es la temperatura estándar
309 Terminal 53, escalado mín.
(ESCALA MIN AI 53)
Valor:
0,0 - 10,0 voltios
Función:
Este parámetro se utiliza para ajustar el valor de
escalado de entrada analógica que corresponde al valor
de referencia mínimo establecido en el parámetro 204.
Descripción de opciones:
Ajuste el valor de tensión deseado.
Consulte también la sección Manejo de
referencias únicas.
310 Terminal 53, escalado máx.
(ESCALA MAX AI 53)
Valor:
Parámetro 309 - 10,0 Voltios
Función:
Se utiliza para ajustar el valor de escalado
¡NOTA!:
Si la temperatura del motor se utiliza mediante
un termistor a través del convertidor de
frecuencia, hay que tener en cuenta lo siguiente:
En caso de cortocircuito entre el devanado del motor
que corresponde al valor de referencia máximo
establecido en el parámetro 205.
Descripción de opciones:
Ajuste el valor de tensión deseado.
y el termistor, no se cumple con PELV. Para cumplir
con PELV, el termistor debe estar aislado.
= Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
✭
✭ 0,0 voltios
✭ 10,0 Voltios
100
MG.55.A6.05-VLTesunamarcaregistradadeDanfoss
 Loading...
Loading...