

Page 1

Operating Instructions
Positioning Controller
VLT® 5000
VLT® 5000 FLUX
Page 2

Positioning Controller
Table of contents
Safety regulations _______________________________________________________________ 3
Introduction____________________________________________________________________ 4
Hardware ........................................................................................................................................................................ 5
VLT control card terminals.........................................................................................................................................5
Technical data............................................................................................................................................................. 5
Option card terminals..................................................................................................................................................5
Supply voltages........................................................................................................................................................... 6
Encoder monitor.........................................................................................................................................................7
Option card layout......................................................................................................................................................8
Technical Data.............................................................................................................................................................. 10
Description of the electrical and field bus interface ___________________________________ 12
Electrical interface VLT ...............................................................................................................................................12
Option card MK3A................................................................................................................................................... 14
Option card MK3C................................................................................................................................................... 15
Option card MK3B (secondary position feedback for absolute encoders when using VLT 5000 Flux)................... 15
Option card MK3D (primary position feedback)......................................................................................................16
Field bus interface.........................................................................................................................................................17
Data layout................................................................................................................................................................ 17
Description of the available parameters_____________________________________________ 20
Special LCP functions...................................................................................................................................................20
Description of parameters............................................................................................................................................. 21
An application example!_________________________________________________________ 35
Wiring diagram............................................................................................................................................................. 36
Basic set-up................................................................................................................................................................... 36
Parameter settings.........................................................................................................................................................38
Troubleshooting _______________________________________________________________ 41
Frequently asked questions........................................................................................................................................... 41
Appendix _____________________________________________________________________ 44
Binary selection of reference positions using digital control........................................................................................ 44
Binary selection of reference positions using fieldbus control...................................................................................... 44
Glossary of key terms ................................................................................................................................................... 46
Index............................................................................................................................................................................. 48
MG.50.P3.02 - VLT is a registered Danfoss trademark 1
Page 3

Positioning Controller
Positioning Controller for
VLT 5000 and VLT 5000Flux
Software Version 2.1X
Software Version number: See Parameter 779.
2 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 4
Positioning Controller
The voltage of the frequency converter is dangerous whenever the equipment is
connected to mains. Incorrect installation of the motor or the frequency converter may
cause damage to the equipment, serious personal injury or death. Consequently, the
instructions in this manual, as well as national and local rules and safety regulations, must
be complied with.
Safety regulations
1. The VLT frequency converter must be disconnected from mains if repair work is to be carried out.
Check that the mains supply has been disconnected and that the necessary time has passed before
removing motor and mains plugs.
2. The [STOP/RESET] key on the control panel of the frequency converter does not disconnect the
equipment from mains and is thus not to be used as a safety switch.
3. Correct protective earthing of the equipment must be established, the user must be protected against
supply voltage, and the motor must be protected against overload in accordance with applicable national
and local regulations.
4. The earth leakage currents are higher than 3.5 mA.
5. Protection against motor overload is not included in the factory setting. If this function is desired, set
parameter 128 to data value ETR trip or data value ETR warning.
Note:
For the North American market: The ETR functions provide class 20 motor overload protection in
6. Do not
7. Please note that the frequency converter has more voltage inputs than L1, L2 and L3, when load sharing
1. The motor can be brought to a stop by means of digital commands, bus commands, references or a
2. While parameters are being changed, the motor may start. Consequently, the stop key
3. A motor that has been stopped may start if faults occur in the electronics of the VLT frequency
The function is initialized at 1.16 x rated motor current and rated motor frequency.
accordance with NEC.
remove the plugs for the motor and mains supply while the frequency converter is connected to
mains. Check that the mains supply has been disconnected and that the necessary time has passed
before removing motor and mains plugs.
(linking of DC intermediate circuit) and external 24 V DC have been installed.
Check that all voltage inputs have been disconnected and that the necessary time has passed before
repair work is commenced.
Warning against unintended start
local stop, while the frequency converter is connected to mains.
If personal safety considerations make it necessary to ensure that no unintended start occurs, these
stop functions are not sufficient.
must always be activated, following which data can be modified.
converter, or if a temporary overload or a fault in the supply mains or the motor connection ceases.
[STOP/RESET]
Warning:
Touching the electrical parts may be fatal - even after the equipment has been disconnected from mains.
Also make sure that other voltage inputs have been disconnected, such as external 24 V DC, load sharing
(linkage of DC intermediate circuit), as well as the motor connection for kinetic back-up.
Using VLT 5001-5006 220 and 500 V units: wait at least 4 minutes
Using VLT 5008-5500 220 and 500 V units: wait at least 15 minutes
Using VLT 5001-5005 550-600 V units: wait at least 4 minutes
Using VLT 5006-5022 550-600 V units: wait at least 15 minutes
Using VLT 5027-5250 550-600 V units: wait at least 30 minutes
MG.50.P3.02 - VLT is a registered Danfoss trademark 3
Page 5

Positioning Controller
Introduction
The Positioning Controller is an application option for the VLT 5000 and VLT 5000 Flux Series. It is
based on the SyncPos option card.
The positioning controller can be used in a wide range of applications where a frequency converter is
used for positioning. The controller holds information of up to 32 (64 in field bus mode) fixed positions.
Relative positions can be added to each other by triggering a new relative positioning command when
the controller is already executing a relative positioning command.
Full field bus support is now included meaning starting and stopping etc can be done via bus.
In field bus mode a “quickbus” mode is introduced to enable writing a target position directly. Hence an
unlimited number of positions can be reached.
Positions are defined either relative to a fixed home position (absolute positions) or relative to other
positions, or relative to a movable “touch probe” sensor.
An advanced mechanical brake controller is included. It is strongly advised to use this brake function
as suppose to the VLT mechanical brake handler.
If absolute encoders must be used for positioning feedback in conjunction with VLT 5000 Flux this is
now possible. Encoder input MK 3B can be programmed as option feedback input allowing the
feedback encoder input MK 3D to be used for VLT 5000 Flux.
The encoder(s) connected can now hardware wise be monitored for open or short-circuits.
Last but not least VLT manual run mode is introduced. It is selected via parameter 711.
This manual consists of the following parts:
Hardware
Description of the electrical interface
Description of the available parameters
An application example!
Troubleshooting
Appendix
4 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 6
Positioning Controller
Hardware
VLT control card terminals
The terminals on the control card are allocated for positioning controller functions the following
parameter settings should therefore not be changed in positioning mode (set-up 1):
Digital inputs 16, 17, 18, 19, 27, 29, 32 and 33
Parameters 300–303 and 305–307 are set to ”No operation” (default setting), then the inputs are
ignored by the control card but used as inputs to the positioning controller.
Analogue inputs 53, 54 and 60
Parameters 308, 311 and 314 are set to ”No operation”, then the inputs are ignored by the control card
but used as inputs to the positioning controller.
Digital/analogue outputs 42 and 45 (VLT 5000)
Parameters 319 and 321 are set to:
OPTION 0 … 20 mA [91] analogue output
(default setting)
Digital outputs 26 and 46 - Analogue outputs 42 and 45(VLT 5000 Flux)
Parameters 319 and 321 are set to:
OPTION 0 … 20 mA [90] analogue output
(default setting)
Parameters 341 and 355 are set to:
OPTION digital [90] digital output
(default setting)
Technical data
Technical data on the control card terminals can be found in the VLT 5000 design guide.
Option card terminals
There are two encoder interfaces, which are covering the following functions:
• Primary Feedback encoder input
• Secondary encoder input
There are 8 digital inputs, 8 digital output and terminals for 5 V and 24 V supply. The functions and
technical data of the terminals are described in the following.
Terminal A1
Incremental input A in in A B in in B Z in in Z
Absolute input Clk out out Clk Data in inData Not used Not used
Fig. 1
Terminal A2
Incremental input A in in A B in in B Z in in Z
Absolute input Clk out out Clk Data in inData Not used Not used
Fig. 2
A1 B1 B1 Z1 Z1
A2 B2 B1 Z2 Z2
MG.50.P3.02 - VLT is a registered Danfoss trademark 5
Page 7
Positioning Controller
Terminal description
There are 4 terminal blocks, 2 with 10 poles and 2 with 8 poles. (See figure below)
MK3A Digital Inputs
MK3B Secondary feedback
I1 I2 I3 I4 I5 I6 I7 I8 24V
COM 5V COM A1
A1
B1
B1
MK3C Digital Outputs
MK3D Primary feedback
O1 O2 O3 O4 O5 O6 O7 O8 24V COM 5V COM A2
A2
B2
B2
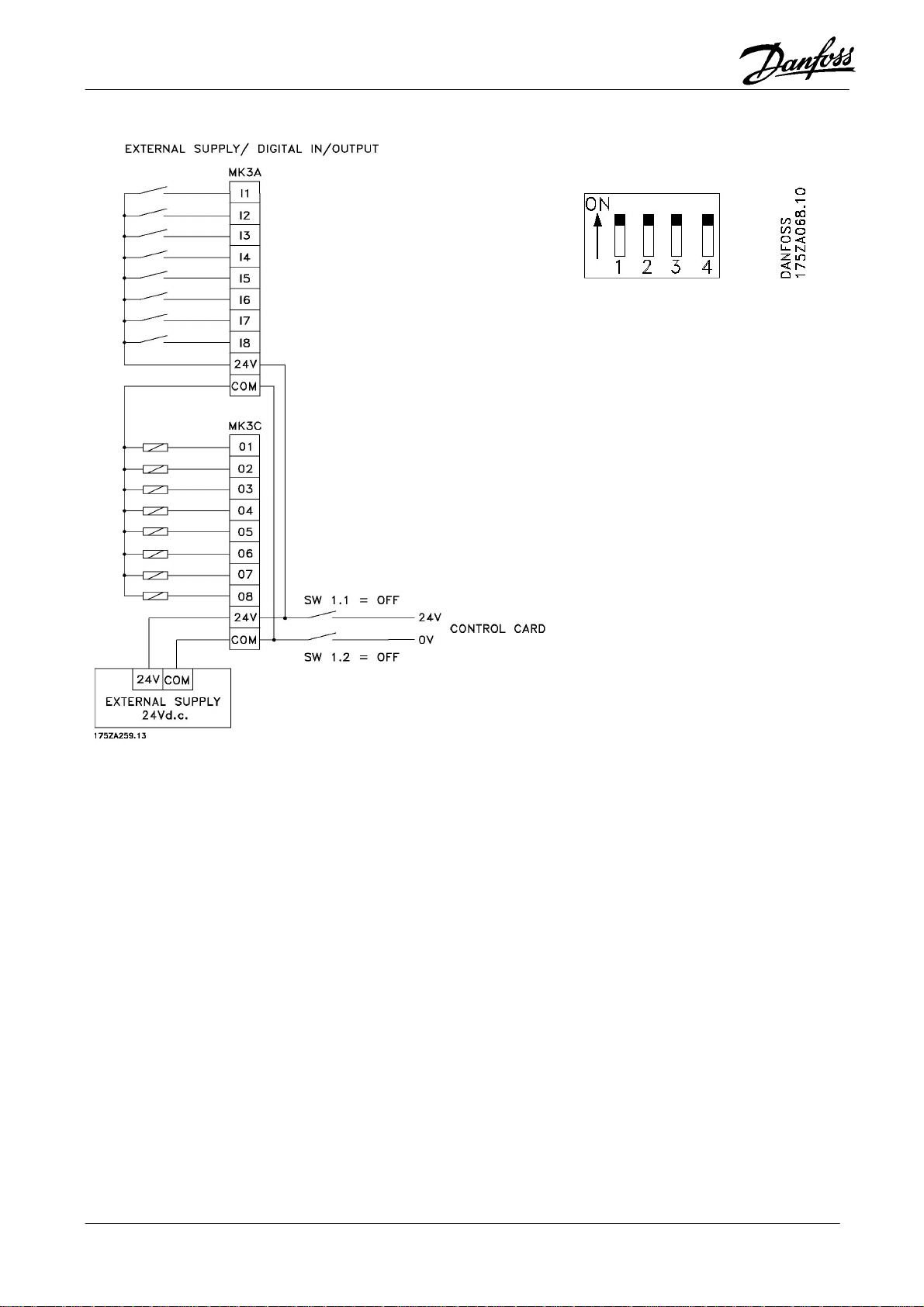
Supply voltages
The option card is supplied by the internal 24 V DC supply of VLT 5000, but as the available power is
limited it can be necessary to use an external 24 V DC supply.
The 24 V DC supply of VLT 5000 can supply a total of 420 mA including the load on the control card
(terminal 12, 13 and output 42 and 45 + 26 and 46 for VLT 5000 Flux).
The 5 V output on the option card is generated from the 24 V supply. The maximum power on the 5 V
side is 5 V * 280 mA = 1.4 W, this corresponds to app. 60 mA on the 24 V side.
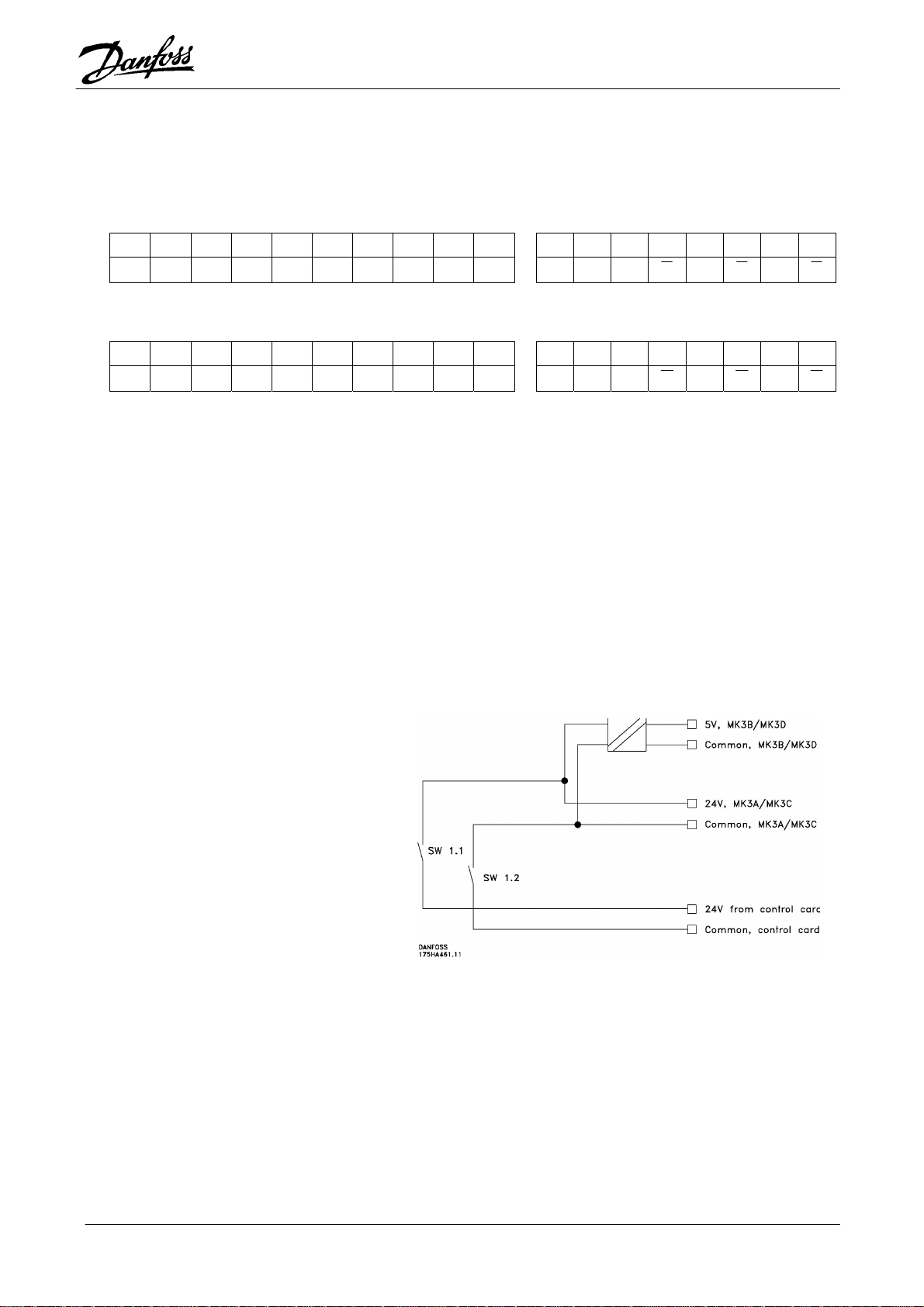
When an external 24 V DC voltage source is used the internal 24 V supply from the control card must
be disconnected, this is done by opening switch 1.1 and 1.2
Each digital input on the option card takes 8 mA. Each digital output on the option card can supply up
to 0.7 A (external 24V-supply) depending on the load. The load from the 24 V supply (internal or
external) can be calculated as follows:
8 mA * number of digital inputs
+
Load on digital outputs
(mk3 C, O1 – O8)
+
load on 5 V supply
(mk3 B/D, 5 V/com)
+
Load on control card
(24 V supply, terminal 12/13 and
outputs, terminal 42/45, 26/46)
Z1
Z2
Z1
Z2
6 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 8
Positioning Controller
Encoder monitor
Both encoder interfaces are equipped with a monitoring circuit that can detect open circuit as well as
short circuit of each encoder channel. Each encoder channel has a LED showing the status: Green
light means ok, no light means fault.
Zero channel monitoring can be switched off by means of switch 1.4, this is necessary when using
incremental encoders without Zero channel or absolute encoders. Switch 1.4 disables monitoring of
both Zero channels. If disabling of only one of the two Zero channels is required (e.g. when using
incremental Flux feedback encoder and absolute option feedback encoder) the unused Zero channel
input must be connected to 5V/common as shown below.
An encoder fault will only result in an ”Option error” 92 if encoder monitoring is activated via parameter
713.
Note: Monitoring of the secondary feedback encoder is disabled when switch 1.3 is ”OFF”.
MG.50.P3.02 - VLT is a registered Danfoss trademark 7
Page 9
y
Positioning Controller
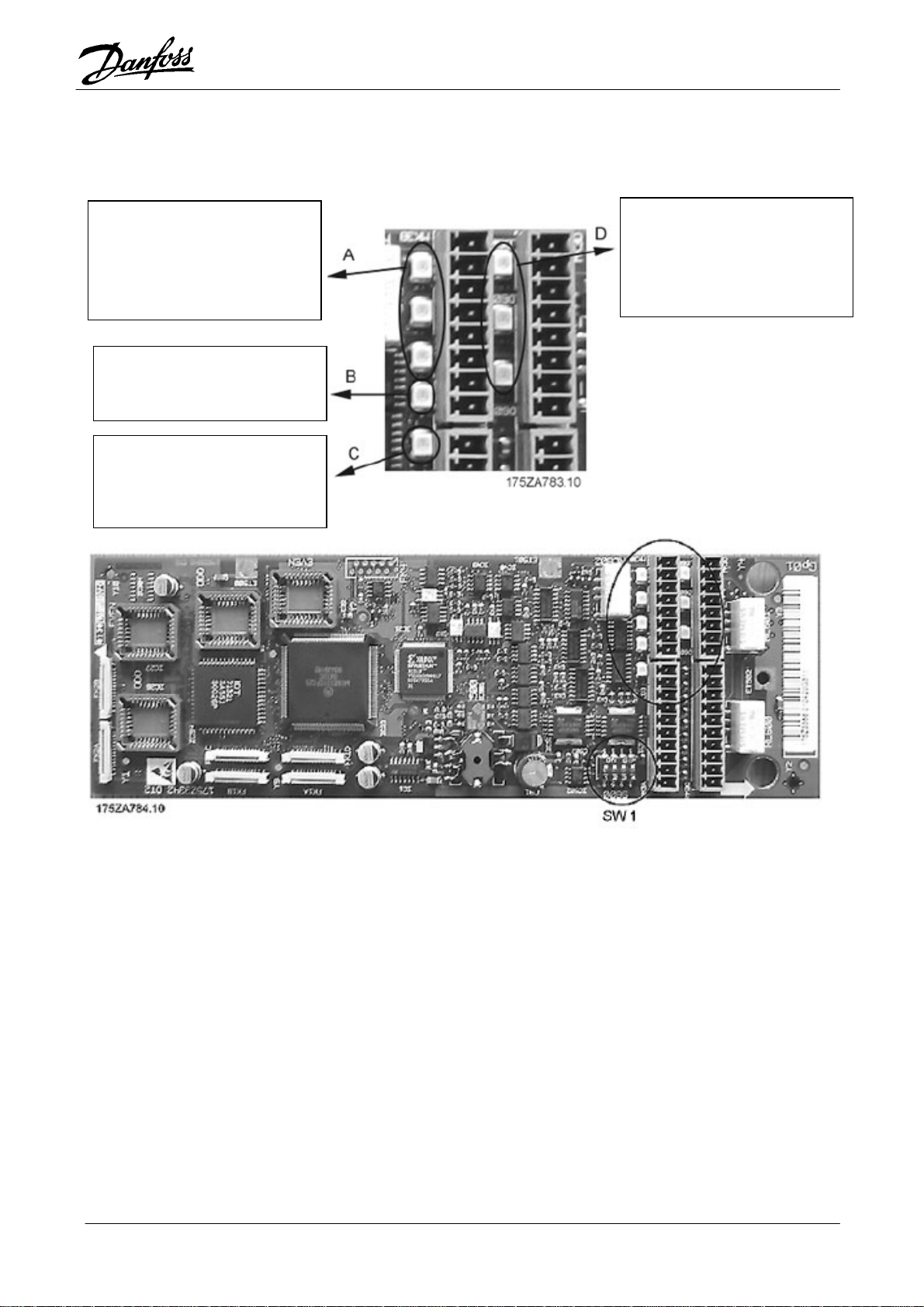
Option card layout
Option card layout showing the position of connectors and dip switch.
Encoder monitor secondary
input,
channel A, B and Z:
LED off = Short or open circuit
LED green = Ok.
5V monitor:
LED off = no 5V
LED Green = 5V ok.
CPU monitor:
LED must flash at 1 Hz to
indicate a running CPU
s
stem
Encoder monitor primary
input,
channel A, B and Z:
LED off = Short or open circuit
LED green = Ok
.
SW 1.1: Connect(ON)/disconnect(OFF) 24 V from control card (see description of supply voltages).
SW 1.2: Connect(ON)/disconnect(OFF) 24 V common from control card.
SW 1.3: Connect(ON)/disconnect(OFF) termination resistor for secondary encoder.
Note: When OFF the secondary encoder monitor is disabled.
SW 1.4: Switch Z-channel encoder monitor ON/OFF for both encoder inputs.
Default setting of switch 1.1. - 1.4 is ON.
8 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 10
Positioning Controller
MG.50.P3.02 - VLT is a registered Danfoss trademark 9
Page 11
Positioning Controller
Technical Data
Terminals:
Type..............................................................................................................Plugs with screw connections
Maximum cable size......................................................................................................1.3 mm
Digital inputs, MK3A:
Terminal designations .......................................................................................................................I1 – I8
Voltage level............................................................................................0 – 24 V DC (PNP positive logic)
Voltage threshold logical “0”............................................................................................................5 V DC
Voltage threshold logical “1”..........................................................................................................10 V DC
Maximum voltage .......................................................................................................................... 28 V DC
Input impedance..................................................................................................................................4 kΩ
Min. pulse duration (ON INT)...........................................................................................................1 msec
Galvanic isolation: All digital inputs are galvanically isolated by means of optocouplers,
but with the same common as the digital outputs.
Digital outputs, MK3C:
Terminal designations ...................................................................................................................O1 – O8
Voltage level............................................................................................................................0 – 24 V DC
Maximum load ........................................................................................0.7A (with external power supply)
Update rate......................................................................................................................................1 msec
Galvanic isolation: All digital outputs are galvanically isolated by means of optocouplers,
but with the same common as the digital inputs.
External 24 V DC supply:
(see VLT 5000 manual)
Encoder input 1, MK3B (secondary):
Terminal designations ..........................................................................................A1, A1, B1, B1, Z1, Z1.
Incremental:
Signal level ...........................................................................................................................5 V differential
Signal type.....................................................................................................................Linedriver, RS 422
Input impedance.............................................................................................120 Ω (Dip switch 1.3 = ON)
...................................................................................................................> 24 kΩ (Dip switch 1.3 = OFF)
Maximum frequency......................................................................................220 kHz (at 50 % duty cycle)
Phase displacement between A and B..........................................................................................90° ±30°
Absolute:
Signal level ...........................................................................................................................5 V differential
Signal type.............................................................................................................................................SSI
Data coding ................................................................................................................................ Gray code
Data length .........................................................................................................................................25 bit
Parity....................................................................................................................................................none
Clock frequency.................................................................................................................. 105 or 260 kHz
Protocol ...............................................................................................................................................Gray
Maximum positions per revolution.......................................................................................................8192
Maximum number of revolutions.........................................................................................................4096
2
(AWG 16)
10 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 12
Positioning Controller
Encoder input 2, MK3D (primary)
Terminal designations .........................................................................................A2, A2, B2, B2 , Z2, Z2
Incremental:
Signal level ...........................................................................................................................5 V differential
Signal type......................................................................................................................Linedriver, RS422
Input impedance................................................................................................................................120 Ω
Maximum frequency......................................................................................220 kHz (at 50 % duty cycle)
Phase displacement between A and B..........................................................................................90° ±30°
Absolute:
Signal level ...........................................................................................................................5 V differential
Signal type.............................................................................................................................................SSI
Protocol ......................................................................................................................................Gray code
Data length .........................................................................................................................................25 bit
Parity....................................................................................................................................................none
Clock frequency.................................................................................................................. 105 or 260 kHz
Maximum positions per revolution.......................................................................................................8192
Maximum number of revolutions.........................................................................................................4096
Encoder cable:
Cable type...Twisted pair and screened. Note: Please observe the prescriptions of the encoder supplier
Cable length.................................................................Observe the prescriptions of the encoder supplier.
Absolute encoder is tested ok up to 150 meter cable at 105 kHz clock and 100 m at 260 kHz clock.
(Tested with TR electronic encoder type CE-65 M 8192*4096 and appropriate cable prescribed by TR
electronic.)
Maximum allowed time delay between clock and data signal measured at the controller terminals...........
................................................................................................................................ 105 kHz clock = 9µsec
............................................................................................................................ 260 kHz clock = 3.5 µsec
MG.50.P3.02 - VLT is a registered Danfoss trademark 11
Page 13
Positioning Controller
Description of the electrical and field bus interface
Electrical interface VLT
Terminal Designation Description
12 24V DC
13 24V DC
16 Reference index Bit 0
(LSB)
17 Reference index Bit 1
18 Reference index Bit 2
19 Reference index Bit 3
20 GND
27 Reset / ENABLE (error
clear)
29 Reference index Bit 4
(MSB)
24V power supply for switches etc. maximum load 200 mA
24V power supply for switches etc. maximum load 200 mA
Reference position index number bit 0 (least significant bit).
Not used in field bus mode.
Reference position index number bit 1.
Not used in field bus mode.
Reference position index number bit 2.
Not used in field bus mode.
Reference position index number bit 3.
Not used in field bus mode.
Ground for 24V is normally bridged with Terminal 39, but can be
set to “OFF” by means of Switch SW 4 on the control card.
Errors are cleared on the rising edge (must be “0” min. 1 ms. to
guarantee edge detection). Not used in field bus mode.
To enable operation, this input must be maintained at “1” in
either digital control mode or field bus control mode.
Reference position index number bit 4 (most significant bit).
Not used in field bus mode.
32 Go to HOME position
33 LATCH new reference
position index number
While this input is high the drive executes the homing sequence.
While this input is high no position or jog operations are carried
out. Any homing sequence is interrupted by a low state on this
input.
Not used in field bus mode.
Active on the rising edge (must be “0” min. 1 ms. to guarantee
edge detection):
Latches reference position index number specified on terminal
16, 17, 18, 19, 29 into memory. Digital output MK3C 4 – 8 is
changed to mirror the new reference index specified when using
digital input control.
Not used in field bus mode.
12 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 14
Positioning Controller
Terminal Designation Description
01 COM; 240V AC/2A
02 Connect to electro
mechanical brake
NO
03 NC
04 COM; 50V AC/1A; 75V
DC/1A
05 Brake activated
NC
26 Touch probe position
locked in (VLT 5000
Flux only)
Common terminal for Relay 01-03.
Normal Open
Relay 01-03 is open (brake activated) during power off, and
start-up of the VLT 5000. It is always open after a “Quick Stop”
procedure or in connection with an error situation. Relay 01-03
only closes in connection with motion procedures or if specified
in P715.
Normal Closed
Common terminal for Relay 04-05.
Normal Closed
Relay 04-05 is closed to indicate an activated electromechanical
brake. It is open to indicate a deactivated electromechanical
brake.
Not used in field bus control mode.
A high “1” signal is present when a rising edge has been
detected on digital input 1 (terminal MK3A) and a target position
is fixed in memory.
A low signal is present when no target position has yet been
determined.
39 GND
42 Touch probe position
locked in (VLT 5000
Process only)
45 Watchdog output in
(VLT 5000 Process
only)
46 Watchdog output in
(VLT 5000 Flux only)
50 10V DC 17mA
53
± 10V-In
Manual jog positive
Not used in field bus mode.
Ground for analogue inputs/outputs is normally bridged with
Terminal 20, but can be set to “OFF” by means of Switch SW 4
on the control card.
A high “1” signal is present when a rising edge has been
detected on digital input 1 (terminal MK3A) and a target position
is fixed in memory.
A low signal is present when no target position has yet been
determined.
Not used in field bus mode.
This output toggles continually as long as the program is active.
This output toggles continually as long as the program is active.
Power supply for manual JOG inputs (terminal 53 and 54)
When high (above 5V), the drive will travel with jogging speed
(P723) and ramp (P724) in the positive direction.
When low (below 5V), the drive will ramp down and stop if no
other motion procedure is activated.
Jog positive has higher priority than Jog negative
Not used in field bus mode.
MG.50.P3.02 - VLT is a registered Danfoss trademark 13
Page 15
Terminal Designation Description
Positioning Controller
54
60
± 10V-In
Manual jog negative
± 20mA-In
When high (above 5V), the drive will travel with jogging speed
(P723) and ramp (P724) in the negative direction. When low
(below 5V), the drive will ramp down and stop if no other motion
procedure is activated.
Not used in field bus mode.
Not used
Option card MK3A
Terminal Designation Description
1 Touch probe switch
input
2 Positive HW limit
switch input
3 Negative HW limit
switch input
4 HOME reference
switch input
Interrupt triggered on the rising edge. If this signal goes high
when no touch probe target position is currently locked (VLT 5000
Process: terminal 42 low, VLT 5000 Flux: terminal 26 low), a new
touch probe target position is calculated and locked in memory.
Interrupt triggered on the falling edge. Triggers a HW limit error
and the drive is stopped according to P725.
Interrupt triggered on the falling edge. Triggers a HW limit error
and the drive is stopped according to P725.
Active high. Marks the HOME position in the application.
5 Go to the referenced
target position
6 Reset home flag
7 Reset touch probe
position
8 Quick stop
9 24V DC
10 COM
Active high. Upon activation the drive goes to the specified target
position. A low signal interrupts any positioning sequence.
Not used in field bus mode.
Active high. This input clears the home flag. This allows the user
to perform a second homing sequence.
Not used in field bus mode.
Active high. This input clears the touch probe position flag. The
reset is necessary to carry out a touch probe positioning
command to a new target position.
Not used in field bus mode.
Active low. This input activates the Quick Stop function. The drive
is stopped according to the setting of P725. After that the
electromechanical brake is always activated when the “Quick
stop” input is activated regardless of the P715 setting.
14 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 16
Option card MK3C
Positioning Controller
1 Homing completed
2 Referenced position
reached
3 Error occurred
4 Reference index bit 0
5 Reference index bit 1
6 Reference index bit 2
7 Reference index bit 3
8 Reference index bit 4
Active high. This output is always high if an absolute encoder is
specified in P713
Active high. This output is set when the target position is reached
according to the setting of P746.
Active high. This output is set every time an error occurs. It is
cleared every time a successful error clear is carried out. This
output will remain high as long as the Power recovery function is
selected (P736) and active.
Active high. Mirror of the currently locked-in reference index bit 0.
Not used in field bus mode.
Active high. Mirror of the currently locked-in reference index bit 1.
Not used in field bus mode.
Active high. Mirror of the currently locked-in reference index bit 2.
Not used in field bus mode.
Active high. Mirror of the currently locked-in reference index bit 3.
Not used in field bus mode.
Active high. Mirror of the currently locked-in reference index bit 4.
Not used in field bus mode.
9 24V DC
10 COM
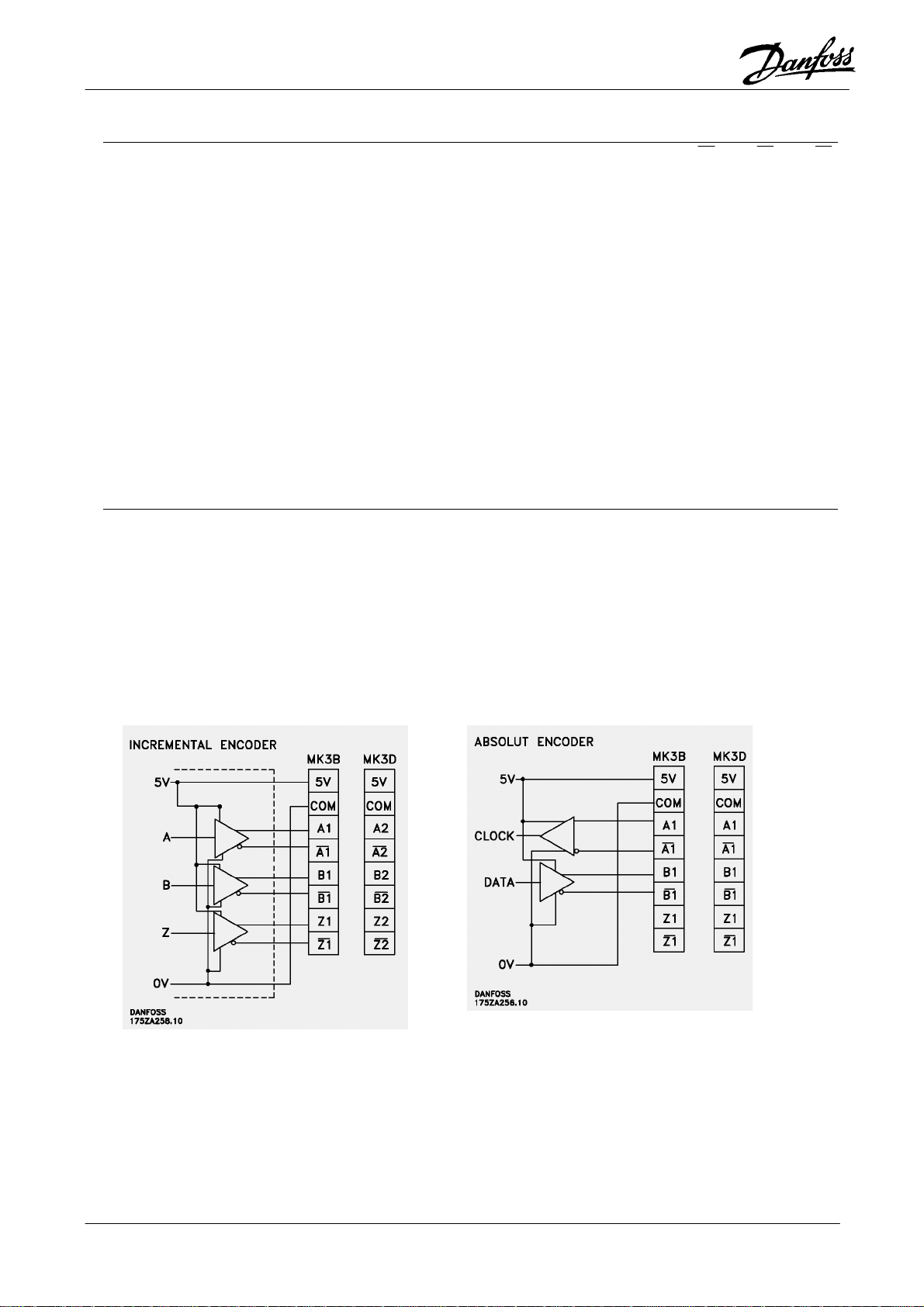
Option card MK3B (secondary position feedback for absolute encoders when using VLT 5000 Flux)
1
2
3
4
5
6
7
8
5V DC
COM
A1
/A1
B1
/B1
Z1
/Z1
Encoder supply
Encoder supply
Incremental encoder Absolute encoder
A-track Clock out
A-track inverted Clock out inverted
B-track Data in
B-track inverted Data in inverted
Zero-track Not used
Zero-track inverted Not used
MG.50.P3.02 - VLT is a registered Danfoss trademark 15
Page 17

Positioning Controller
Option card MK3D (primary position feedback)
1
2
3
4
5
6
7
8
5V DC
COM
A1
/A1
B1
/B1
Z1
/Z1
Encoder supply
Encoder supply
Incremental encoder Absolute encoder
A-track Clock out
A-track inverted Clock out inverted
B-track Data in
B-track inverted Data in inverted
Zero-track Not used
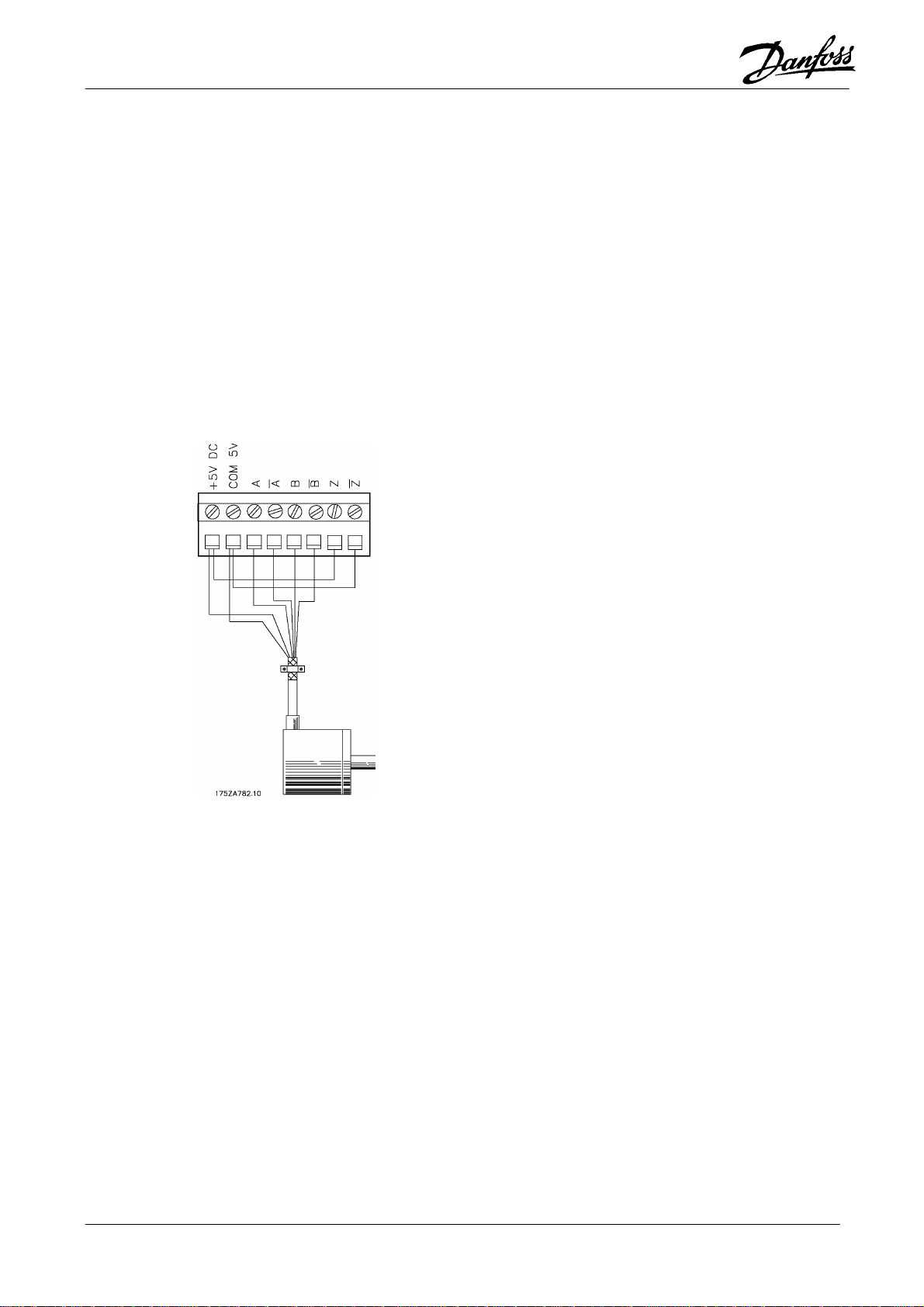
Zero-track inverted Not used
Fig.: Encoder connection for positioning applications
16 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 18

Positioning Controller
Field bus interface
NOTE: This section is only relevant if the VLT is equipped with a Field bus interface (option) as well as
the Positioning controller.
The Positioning controller can be controlled via the digital/analogue inputs or via field bus. The control
source can be selected in parameter 749. There can only be one control source at a time meaning that
the digital/analogue inputs are inactive when Field bus is selected as control source and visa versa. The
only exceptions are listed in the digital interface section.
In field bus mode it is possible to specify only the target position and velocity. If the acceleration and
deceleration PCDs are left blank then the last used acceleration and deceleration chosen via an index is
used. This enables the use of PPO type 4
Data layout
Control and status signals are transferred via the so-called process data channel (PCD) of the various
field bus interfaces. The telegram structure and the available number of data words depends on the
Field bus used, please refer to the manual of the Field bus option in use for further details. The below
example is based on the layout of a PROFIBUS telegram, the so-called PPO:
Example using PROFIBUS PPO type 5:
Field bus control signals:
Field bus
[word.bit]
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
Go to home / Stop positioning (↑) / Go to position (↓)
Field bus mode Corresponding input
Quick bus go to target(↑)
Reset error (↑)
Read new trajectory index (↑)
Automatic (↑) / manual (↓) mode
Reset home status (↑)
Reset touch probe position (↑)
Quick stop (↓)
Positive jog (↑)
N\A
27
32
33
5
6
7
8
53
1.10
MG.50.P3.02 - VLT is a registered Danfoss trademark 17
Negative jog (↑)
54
Page 19

Positioning Controller
Field bus
[word.bit]
1.11
1.12
1.13
1.14
1.15
1.16
2
3
4
5
Field bus mode Corresponding input
Quick Bus Type Absolute (↑)
Quick Bus Type Relative (↑)
Quick Bus Type Touch Probe positive (↑)
Quick Bus Type Touch Probe negative (↑)
Teach in(via LCP or fieldbus) (↑)
Change sign on Quick Bus Target Position (↑)
Quick Bus Target Position(MSB) N\A
Quick Bus Target Position(LSB) N\A
Quick Bus Target Velocity N\A
Quick Bus Target Acceleration N\A
N\A
N\A
N\A
N\A
KEYPAD “JOG” &
“FWD\REW”
N\A
6
7.1
7.2
7.3
7.4
7.5
7.6
Quick Bus Target Deceleration N\A
Reference index bit 0 (LSB) (↑)
Reference index bit 1 (↑)
Reference index bit 2 (↑)
Reference index bit 3 (↑)
Reference index bit 4 (Digital MSB) (↑)
Reference index bit 5 (Fieldbus MSB) (↑)
16
17
18
19
29
N\A
18 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 20

Field bus status signals:
Positioning Controller
Field bus
[word.bit]
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
2.1
2.2
Field bus mode Corresponding
output / parameter
Homing done (↑)
Referenced position reached (↑)
Error occurred (↑)
Electro-mechanical brake output (↑)
Touch probe position locked (↑)
Watchdog output (toggling) 45(46 Flux)
Positive hardware limit (↑)
Negative hardware limit(↑)
Current index bit 0 (LSB) (↑)
Current index bit 1 (↑)
42(26 Flux)
1
2
3
04
N\A
N\A
4
5
2.3
2.4
2.5
2.6
3
4
5
Current index bit 4 (Digital MSB) (↑)
Current index bit 5 (Fieldbus MSB) (↑)
Current index bit 2 (↑)
Current index bit 3 (↑)
Actual Position (MSB) 795 (MSB)
Actual Position (LSB) 795 (LSB)
Error Status 798
6
7
8
N\A
MG.50.P3.02 - VLT is a registered Danfoss trademark 19
Page 21

p
Positioning Controller
Description of the available parameters
Special LCP functions
Multiple parameters display: To have multiple read-only parameters displayed at once on the LCP simply
press the [DISPLAY/STATUS] button after start-up. This will prompt the top line of the LCP to display up
to three read-only parameters that can be specified in P010, P011, and P012. The default settings will
bring up the following display:
Figure text: To the left: P798 –
the error status. In the middle:
P797 - the PID tracking error.
To the right: P795 – the actual
osition.
Holding down the [DISPLAY/STATUS] button will display which parameters are shown in the top line of
the display.
The TEACH-IN function: Pressing the [JOG] and [FWD./REV.] buttons at the same time will cause the
target position P739 to be updated with the actual position. This provides an easy way of programming
several positions. Simply jog to the desired position, then press the [JOG] and [FWD./REV.] buttons to
store that position in memory.
20 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 22

Description of parameters
Positioning Controller
No. Parameter Default
value
701 Operating mode
POSITIONING
MODE
702 Proportional gain
PROP. GAIN
703 Derivative gain
DER. GAIN
1 1 = POSITIONING This parameter never needs changing.
30 1 … 65,000 The proportional gain is the factor that is
0 0 … 65,000 The derivative gain is the factor that is
Range Description
multiplied with the PID tracking error to
produce the proportional part of the output
frequency.
The higher the setting of this parameter
the “harder” is the resulting control.
NB! Too high a setting of this parameter
will cause the controller to become
unstable.
multiplied with the change in the PID
tracking error to produce the derivative
part of the output frequency.
The higher the setting of this parameter
the “harder” is the resulting control.
704 Integral gain
INT. GAIN
The derivative gain has best effect if the
encoder is mounted directly on the motor
and an encoder with good resolution
(4096 pulses/rev) is used.
NB! Too high a setting of this parameter
will cause the controller to become
unstable.
0 0 … 65,000 The integral gain is the factor that is multi-
plied with the integrated PID tracking error
to produce the integral part of the output
frequency. The main function of the integral part is to provide zero steady-state
tracking error.
The higher the setting, the faster the
application will reach a zero steady-state
tracking error. The dynamic tracking error
however increases with increasing setting
of this parameter.
NB! Too high a setting of this parameter
will cause the controller to become
unstable.
705 Limit integral part
INT. LIMIT
MG.50.P3.02 - VLT is a registered Danfoss trademark 21
1,000 0 … 65,000 Here it is possible to clamp the integral
part of the PID output. A setting of 1000
corresponds to 100% of the maximum
allowed reference specified in parameter
205.
Page 23

No. Parameter Default
Positioning Controller
value
Range Description
706 Limit PID output
PID LIMIT
707 Feed-forward
velocity gain
F-FWD. VEL.
GAIN
708 Feed-forward
acceleration gain
F-FWD. ACC.
GAIN
1,000 0 … 1,000 Here it is possible to clamp the total output
of the PID controller. A setting of 1000
corresponds to 100 % of the maximum
allowed reference specified in parameter
205.
0 0 … 65,000 The velocity feed-forward gain is the factor
that is multiplied with the set-point (desired
trajectory) velocity to produce the feedforward part of the output frequency. The
function of the feed-forward part is to provide a fast (and fairly accurate) starting
point for the calculation of the output frequency.
NB! To get the fastest and most stable
controller response this parameter should
be set optimally. For this purpose
parameter 710 gives access to a function
that automatically calculates the optimal
setting of this parameter.
0 0 … 65,000 The acceleration feed-forward gain is the
factor that is multiplied with the set-point
acceleration to produce the feed-forward
part of the output frequency.
709 PID sample interval
SAMPLE
INTERVAL
710 FFVEL auto-
calculation
AUTOCALC.
FFVEL
1 ms 1 … 100 ms The sampling frequency of the controller
can be adjusted in this parameter. Normally, the fastest possible setting (1 ms) is
preferable, but in cases with low resolution
of the feedback signal it is a good idea to
set this parameter at a slightly higher
value.
0 0 = disabled
1 = FFVEL enabled
2 = FFVEL + PID
enabled
Setting this parameter to “1” will prompt
the program to calculate the optimal
setting of parameter 707. Setting this
parameter to “2” will prompt the program to
calculate the optimal setting of parameter
702, 703, 704 and 707. For VLT 5000
Process the following parameters
influence the result and must be set
correctly beforehand:
P104 nominal motor frequency
P106 nominal motor speed
P205 maximum reference frequency
P713 encoder type
P714 encoder resolution
P721 motor/encoder gear ratio numerator
22 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 24

No. Parameter Default
value
Positioning Controller
Range Description
P722 motor/encoder gear ratio denominator
For VLT 5000 Flux the following
parameters influence the result and must
be set correctly beforehand:
P205 maximum reference rpm
P713 encoder type
P714 encoder resolution
P721 motor/encoder gear ratio numerator
P722 motor/encoder gear ratio
denominator
NB! If you change any one of these para-
meters you should prompt a recalculation,
since the optimum value of 702, 703, 704
and 707 will have changed.
711 VLT local mode
VLT MANUAL
712 Positive direction
POS. DIRECTION
0 0 = Pos control
1 = VLT control
1 -2 = right rotation
-1 = left rotation
1 = right rotation
2 = left rotation
By setting this parameter to 1 the VLT
changes to setup “2” Manual running of the
VLT is now possible.
Here you specify which encoder direction
is considered positive. If you change this
setting the current actual position (P795)
will also change sign.
1 = standard, position is counting positive
when the drive is running forward.
-1 = position is counting negative when the
drive is running forward.
2 = as “1”, but with opposite sign of the
reference to the drive. This can be
used as alternative to swapping two
motor phases if direction of motor
rotation is wrong.
-2 = as “-1”, but with opposite sign of the
reference to the drive. This can be
used as alternative to swapping two
motor phases if direction of motor
rotation is wrong.
MG.50.P3.02 - VLT is a registered Danfoss trademark 23
Page 25

No. Parameter Default
Positioning Controller
value
Range Description
713 Encoder type
ENCODER TYPE
0 0 = incremental
1 = absolute
260kHz clock
2 = absolute
105kHz clock
3 = absolute
260kHz clock
& error
correction
4 = absolute
105kHz clock
& error
correction)/
+100 enable
hardware
encoder
monitor.
It is possible to use two types of encoder. If
you select any absolute encoder the home
flag is instantly set high, thus no homing is
required preceding a positioning
command.
Type 3 and 4 are to be used for linear
absolute encoder. A possible leap in the
position data can be detected if it is larger
than the encoder resolution/2. The correction is made by means of an artificial
position value which is calculated from the
last velocity. If the error continues for more
than 100 read-outs (> 100 ms), there will
be no further correction which will then
lead to a tolerated position error exceeded.
Type 3 and 4 are only available if encoder
feedback is via MK 3 D (see description of
parameter 748) type.
100 … 104 = like 0 … 4, however, hardware monitoring of the encoder will be
activated. Error 92 will be issued in case of
open or short circuit.
714 Encoder resolution
ENCODER RES.
715 Automatic brake
control
AUTO. BRAKE
CTRL
4.096 ps. 1 … 1,000,000
pulses
1 0 = disabled
1 = enabled
NB! When switching from a setting of absolute encoder to a setting of incremental
encoder, the home flag is automatically
cleared. A homing procedure afterwards is
necessary before any positioning commands can be executed.
The encoder resolution must be entered in
pulses per revolution (not quad-counts per
revolution).
When the automatic brake control function
is enabled, the electromechanical brake is
automatically activated every time the
application has been at standstill for a time
period specified in parameter 718. This is
especially useful in hoist applications
where the motor could overheat if it has to
deliver full torque at standstill for a prolonged period of time.
When the automatic brake control function
is disabled, the drive controls the application also at standstill.
24 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 26

No. Parameter Default
value
Positioning Controller
Range Description
716 Coast delay
COAST DELAY
717 Brake delay
BRAKE DELAY
718 Hold delay
HOLD DELAY
200 ms 0 … 1,000 ms Used in conjunction with the automatic
brake control function. The coast delay is
the delay after activating the electromechanical brake before disabling the controller
and coasting the drive.
Useful in hoisting applications where the
load would otherwise have a tendency to
drop a little after each stop because the
activation of the brake is slower than the
deactivation of the drive.
200 ms 0 … 1,000 ms Used in conjunction with the automatic
brake control function. The brake delay is
the delay after activating the control and
magnetizing the motor before the brake is
deactivated.
Useful in applications with (typically large)
motors that take a longer time to be fully
magnetized than the time it takes for the
electro mechanical brake to deactivate.
0 s 0 … 10,000 s Used in conjunction with the automatic
brake control function. The hold delay is a
waiting period in which the brake is not
activated even though the application is at
standstill.
719 Quick ramp time
QUICK RAMP
TIME
720 Ramp type
RAMP TYPE
721 Motor/encoder gear
nominator
MOT/ENC GEAR
NUM
5,000 ms 50 … 65,535 ms The quick ramp time is defined as the time
0 0 = trapezoidal
1 1 … 1,000 If the encoder is mounted on a gear where
1 = sinusoidal
Useful in applications where a sequence of
fast positioning commands is followed by
longer standstill periods.
to ramp down from the maximum velocity
to standstill.
The quick ramp time is used when the
quick stop function is activated or an error
has occurred.
Select trapeze shaped ramps to get the
optimal acceleration.
5 revolutions of the motor correspond to 2
revolutions of the encoder, P721 should be
set to “5” (the number of motor revolutions)
and P722 should be set to “2” (the number
of encoder revolutions).
If the encoder is mounted directly on the
motor shaft this parameter setting should
remain at “1”.
MG.50.P3.02 - VLT is a registered Danfoss trademark 25
Page 27

No. Parameter Default
Positioning Controller
value
Range Description
722 Motor/encoder gear
denominator
MOT/ENC GEAR
DEN
723 Maximum jog
velocity
MAX.JOG
VELOCITY
724 Jog ramp time
JOG RAMP TIME
725 Error behaviour
ERROR
BEHAVIOUR
1 0 … 1,000 See the description of P721.
100 ERPM 1 …
5,000 ms 50 … 100,000 ms This parameter specifies both the ramp-up
0 0 = electronic
999,999 ERPM
brake
1 = mechanical
brake
If the encoder is mounted directly on the
motor shaft this parameter setting should
remain at “1”.
The maximum speed allowed while jogging
the application is specified in terms of
Encoder Revolutions Per Minute (ERPM).
NB! This setting must never exceed a
value that is approx. 5% lower than the
value calculated in P799.
time as well as the ramp-down time used
during jogging.
The ramp time is defined as the time in
milliseconds it would take to ramp from
standstill to the maximum allowed velocity
(P799).
This parameter determines the behaviour
of the drive after an error is detected.
If “0” is selected the drive will ramp down to
standstill with the shortest possible ramp
(P719). After achieving standstill it will
activate the electronic brake according to
the setting of P716. If the drive is coasted at
any point during ramp down (e.g. due to an
OVER CURRENT trip – ALARM 13) the
drive will immediately activate the brake and
coast the drive.
If “1” is selected the drive will immediately
activate the brake and coast the drive.
NB! The brake is always activated after an
error situation (or quick stop) regardless of
the P715 setting.
726 Maximum tolerated
PID error
MAX. TRACK
ERROR
26 MG.50.P3.02 - VLT is a registered Danfoss trademark
20,000 qc 0 …
1,000,000,000 qc
The PID track error is defined as the difference between the internal controller setpoint and the actual position. The better
tuning of the PID controller (P702-709) the
lesser the PID track error.
At every sample time the current track
error is compared with the setting of P726.
It is defined as an error situation (“PID
track error too big” - P798 = 9) if the track
error is bigger than the setting of P726.
Page 28

No. Parameter Default
value
Positioning Controller
Range Description
After tuning the PID controller optimally
this parameter should be set to a value
approx. 50 % larger than the maximum
observed value of P797.
NB! The unit is quad-counts (QC) not user
units (UU).
727 Error reset
RESET ERROR
728 Home offset
HOME OFFSET
[UU]
729 Home ramp time
HOME RAMP TIME
730 Home velocity
HOME VELOCITY
731 Home type
HOME TYPE
0 0 = no reset
1 = reset error
0 UU -33,554,432 …
33,554,431 UU
5,000 ms 50 … 100.000 ms The home ramp time is defined as the time
100 ERPM -20,000 … 20,000
ERPM
0 -2 … 3 There are six types of homing sequences.
By setting this parameter to “1” it is possible to clear the error flag (provided that
the reason for the error is not still present).
The parameter automatically resets to “0”
when the error is successfully cleared.
This parameter defines an offset to the
“zero” (HOME) position. Any change in this
setting will immediately affect the actual
position displayed in P795.
in milliseconds it would take to ramp from
standstill to the maximum allowed velocity
(P799).
The home velocity is entered here. Notice
that the sign of the velocity determines the
direction in which the homing sequence
will be performed.
-2 = No homing is needed, the actual position (when using an incremental encoder) after power-up is set in
parameter 750.
-1 = No homing is needed, the actual
position (when using an incremental
encoder) after power-up is zero.
0 = The drive moves to the reference
switch (MK3A 4) with home velocity
(P730), then reverses and slowly (at
30% of home velocity) leaves the
switch, subsequently moves to the
next index pulse. The HOME position
is defined as that index position.
1 = Like “0” but without the search for the
index position. Instead the HOME
position is defined as the position at
which the reference switch goes low.
After defining the HOME position the
drive is then ramped down with the
home ramp (P729) and stopped.
MG.50.P3.02 - VLT is a registered Danfoss trademark 27
Page 29

No. Parameter Default
Positioning Controller
value
Range Description
2 = Like “0” but without reversing before
leaving the reference switch. Rather
the movement is slowly continued in
the same direction out of the switch.
3 = Like “1” but without reversing before
leaving the reference switch. Rather
the movement is slowly continued in
the same direction out of the switch.
732 User unit numerator
USER UNIT NOM.
733 User unit
denominator
USER UNIT DEN.
1,000 1 … 100,000 P732 and P733 together define the ratio
between User Units (UU) and quad-counts
(QC).
Let’s illustrate this parameter with the following example: By measurement it has
been determined that 1000 mm. of travel
correspond to 16345 QC (quad-counts).
Now instead of defining the target positions
in QC but rather in mm, the setting of P732
must be 16345, and the setting of P733
must be 1000.
NB! The target positions stored in memory
is defined according to the settings of
P732/P733, so changing the P732/P733
ratio might require that up to 32 positions
must be reprogrammed to achieve the
same result as before the change.
1,000 1 … 100,000 P732 and P733 together define the ratio
between User Units (UU) and quad-counts
(QC).
The setting of this parameter is illustrated
in the description of P732.
NB! The target positions stored in memory
is defined according to the settings of
P732/P733, so changing the P732/P733
ratio might require that up to 32 positions
must be reprogrammed to achieve the
same result as before the change.
734 Block reversal
BLOCK
DIRECTION
28 MG.50.P3.02 - VLT is a registered Danfoss trademark
0 0 = no blocking
1 = block reverse
2 = block forward
By selecting “1” it is defined as an error
situation (“Reverse operation prohibited” –
P798 = 12) if the drive is moving in reverse
direction.
By selecting “2” it is defined as an error
situation (“Forward operation prohibited” –
P798 = 13) if the drive is moving in forward
direction.
Selecting “0” disables the function.
Page 30

No. Parameter Default
value
Positioning Controller
Range Description
735 Brake wear limit
BRAKE WEAR
LIMIT
736 Power-recovery
POWER RECOVERY
0 0 ( = disabled) …
1,073,741,824 UU
1 0 = disabled
1 = enabled
Setting a value higher than “0” (disabled)
the drive defines an error situation (“Brake
wear limit exceeded” – P798 = 7) if the
drive moves more than the number of UU
specified in this parameter while the electronic brake is activated.
When the power recovery function is disabled (0), it is not possible to drive the
application by any means (neither jogging
nor positioning) as long as the application
is outside the HW or SW limits. The only
way to recover from this situation is to
move the application by hand.
When the power recovery function is
activated (1) however it is possible to
make a “partial reset“ of the limit error
(P798 = 2/3/4/5) whereby it will be possible
to use the jogging function to drive the
application out of the HW or SW limit area.
It is not possible to drive the application
otherwise by means of homing, positioning
or jogging (in the wrong direction), as long
as the application is still within the HW or
SW limit area.
737 Link LCP input to
index
LINK INDEXINPUT
0 0 = disabled
1 = enabled
The “error occurred” output (MK3C 2) will
remain high to indicate that these
restrictions are in effect. As soon as the
application is moved outside the HW or
SW limit area the error is automatically
cleared and the “error occurred” signal
goes low to indicate that normal operation
is now restored.
When activating this function (1) P738 will
be automatically updated with the last position reference number that has been loaded into memory. This enables to operator
to see what position reference is currently
given by the PLC system.
The function is deactivated when set to “0”.
This is necessary when programming a
position number different from the one
loaded into the PLC memory.
MG.50.P3.02 - VLT is a registered Danfoss trademark 29
Page 31

No. Parameter Default
Positioning Controller
value
Range Description
738 Index number
INDEX NUMBER
739 Index target
position
TARGET
POSITION
0 0 … 31
0 … 63 in field bus
mode
0 -1,073,741,824 …
1,073,741,824 UU
Here it is possible to specify which position
data that should be displayed in P739-743.
Whenever this number is changed the
current values of P739-P743 are stored in
memory under the previously specified
index number. After that, the value of
P739-743 is updated with the data stored
in memory relevant to the newly specified
index number.
The meaning of this parameter depends
on the position type specified in P743.
If P743 = 0, the value of this parameter
refers to an absolute position (relative to
the fixed HOME position).
If P743 = 1 and the last position was obtained through jogging, the value of this parameter is a position relative to that position.
If the last position was reached as a result
of a positioning command, then the value
of this parameter specifies a position relative to the last target position (whether it
was reached or not).
If P743 = 2 the application will move in the
positive direction until a touch probe position is defined. If a touch probe position is
already defined the application will move
directly to that position.
A touch probe position is defined as the position at which the “touch probe switch” input
(MK3A 1) goes high plus the value of P739.
A touch probe position is cleared by a high
signal on the “reset touch probe position”
input (MK3A 7) input.
The output “Touch probe position locked”
(VLT5000 Terminal 42) is high if a touch
probe position is defined.
If P743 = 3 the application will move in the
negative direction until a touch probe posi-
30 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 32

No. Parameter Default
value
Positioning Controller
Range Description
tion is defined. If a touch probe position is
already defined the application will move
directly to that position.
NB! This parameter is automatically updated depending on P738.
740 Index ramp up time
RAMP UP TIME
741 Index ramp down
time
RAMP DOWN TIME
742 Index maximum
velocity
MAX. VELOCITY
5,000 50 … 100,000 ms This setting is relevant during positioning
with the current trajectory index.
The index ramp up time is defined as the
time in milliseconds it would take to ramp
from standstill to the maximum allowed
velocity (P799).
NB! This parameter is automatically updated depending on P738.
5,000 50 … 100,000 ms This setting is relevant during positioning
with the current trajectory index.
The index ramp down time is defined as
the time in milliseconds it would take to
ramp from the maximum allowed velocity
(P799) to standstill.
NB! This parameter is automatically updated depending on P738.
100 ERPM 1 … 999.999
ERPM
This setting is relevant during positioning
with the current trajectory index.
NB! This parameter is automatically
updated depending on P738.
The setting should never exceed a value
that is approx. 5% lower than the value
calculated in P799.
743 Index trajectory
type
TRAJECTORY
TYPE
744 Positive software
limit
POS. SW. LIMIT
MG.50.P3.02 - VLT is a registered Danfoss trademark 31
0 0 = absolute
1 = relative
2 = touch probe
positive
3 = touch probe
negative
1,073,000,000
-1,073,000,000 …
1,073,000,000 UU
The function of this parameter setting is
described under P739.
NB! This parameter is automatically
updated depending on P738.
If the actual position (P795) exceeds the
value specified in this parameter an error
situation is defined (P798 = 4) and handled
according to the setting of the “Error
behaviour” parameter (P725).
Page 33

No. Parameter Default
745 Negative software
limit
NEG. SW. LIMIT
Positioning Controller
value
–1,073,000,000
Range Description
–1,073,000,000 …
1,073,000,000 UU
If the actual position (P795) goes below
the value specified in this parameter an
error situation is defined (P798 = 5) and
handled according to the setting of the
“Error behaviour” parameter (P725).
746 Target position
window
TARGET WINDOW
747 Touch probe delay
PROBE DELAY
748 Feedback input
SWAP ENCODER
0 0 UU (< P726) …
1,073,741,824 UU
0 0 …100,000 ms This parameter enables for compensation
0 0 … 1 Choose feedback input for positioning con-
During a positioning sequence the “Referenced position reached” output (MK3C 2)
is set according to this parameter.
If the setting of this parameter is “0” then
the “Referenced position reached” output
goes high immediately when the internal
PID target position is equal to the requested target position.
If the setting of this parameter is larger
than “0” i.e. “200” then the “Referenced
position reached” output goes high when
the actual position (P795) is within
±200 UU of the requested target position.
in any fixed delay there may be in the
touch probe.
troller. Enter “0” to use MK3D, enter “1” to
use MK3B. This is used to enable the use
of absolute encoders for feedback together
with VLT 5000 Flux in closed loop mode.
In that case input MK3D has an incremental encoder fitted (feedback for Flux) and
MK3B has an absolute encoder fitted for
positioning feedback. The text in parameter 713 and 714 changes accordingly
749 Control source
FIELDBUS MODE
750 User APOS setting
SET APOS
751 Positive SW limit
active
POS SW LIM ACT
752 Negative SW limit
active
NEG SW LIM ACT
32 MG.50.P3.02 - VLT is a registered Danfoss trademark
0 0 … 1 Choose control source for pos. controller.
Enter “0” for digital inputs or “1” for fieldbus
control.
0 -1,073,741,824 …
1,073,741,824
1 0 … 1 Enter “0” to disable positive software limit
1 0 … 1 Enter “0” to disable negative software limit
At power-up if homing type is “-2” (see
parameter 731) the actual position is equal
the value set here.
switch. This should be done only when not
positioning within two fixed limits.
switch. This should be done only when not
positioning within two fixed limits.
Page 34

No. Parameter Default
value
Positioning Controller
Range Description
753 Endless positioning
ENDLESS POS.
776 Factory reset
FACTORY RESET
777 Parameter save
STORE DATA
778 Password
0 0 … 1 Set this parameter to “1” if drive must per-
form positioning continuously in one direction. Remember to also set parameter 751,
752 and 736 to “0”.
0 0 = disabled
1 = enabled
0 0 = no action
1 = SAVE
EEPROM
1,234 0 … 999,999,999 Not used.
By setting this parameter to “1” it is
possible to reset all parameter values to
default. This also resets all trajectory data
(P739-P743).
The parameter automatically resets to “0”
when the reset is successfully carried out.
Parameter and trajectory data is not automatically stored in EEPROM and will thus
not automatically be available after powerdown and power-up.
To permanently store changes made to
parameter values and/or trajectory data
parameter P777 must be set to “1”. This
parameter automatically resets to “0” when
the data is successfully stored.
PASSWORD
779 Software version
VERSION 2.10
795 Actual position
ACTUAL
POSITION
796 Actual inputs
ACTUAL INPUTS
797 PID tracking error
PID TRACK
ERROR
210 210 The text in this parameter shows the
current version number of the Positioning
Controller program.
0 –2,000,000,000 …
2,000,000,000 UU
00000000 00.00.00.00 /
11.11.11.11
0 –2,000,000,000 …
2,000,000,000 UU
READ-ONLY PARAMETER:
This parameter displays the latest position
obtained from the feedback encoder.
READ-ONLY PARAMETER:
This parameter displays the last read
status of the digital input on the option card
(MK3A). The status of the digital inputs on
the VLT5000 control card is accessible via
P528
READ-ONLY PARAMETER:
The current PID tracking error is displayed
in this parameter in user units.
MG.50.P3.02 - VLT is a registered Danfoss trademark 33
Page 35

No. Parameter Default
Positioning Controller
value
Range Description
798 Error status
ERROR STATUS
0 0 = OK
1 = Homing
needed
2 = Pos. HW limit
3 = Neg. HW limit
4 = Pos. SW limit
5 = Neg. SW limit
6 = VLT not
running
7 = Brake wear
limit
8 = Quick stop
9 = PID error too
big
10= Option error
11= VLT Exception
12= Rev. operation
READ-ONLY PARAMETER:
The current error code is displayed in this
parameter.
799 Maximum allowed
velocity
MAX. VELOCITY
1,500
ERPM
13= Fwd. operation
92= Encoder
hardware error
1 … 999,999
ERPM
READ-ONLY PARAMETER:
The maximum velocity allowed is calcula-
ted on the basis of P104, P106, P205,
P721, P722 and the result is presented in
this parameter. To increase this value one
or more of the above mentioned parameters must be changed (usually just P205).
34 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 36

Positioning Controller
An application example!
The drawing below shows a layout of a pallet conveyor system. Loaded pallets are coming from
four different produc t lines via the pallet inlet c onveyors. Each pallet must be transported from one
of the four inlet conveyors to the one of the two outlet conveyors. To do this a movable pallet
conveyor cart is used.
PALLET
INLET #1
PALLET
CART
PALLET
OUTLET
#1
DELIVERY
TRUCK
PALLET
INLET #2
PALLET
INLET #3
PALLET
OUTLET
#2
DELIVERY
PALLET
INLET #4
TRUCK
A typical work process could be;
1) Moving the (empty) pallet conveyor cart to pallet inlet no. 1 to pick up a loaded pallet
2) Waiting until the pallet is successfully transferred to the cart
3) Moving to pallet outlet no. 2.
4) Waiting until the pallet is successfully transferred to the outlet conveyor and so on…
MG.50.P3.02 - VLT is a registered Danfoss trademark 35
Page 37

Wiring diagram
Positioning Controller
Basic set-up
First, check the motor connection:
Please be ware the mechanical brake control cannot be trusted during this basic setup, therefore
control brake externally from the option until setup is finished. Also ensure that the motor can rotate
freely without causing damage or injury to personal.
1. Remove all signals to inputs 16-33 and I1-I8. Only Input 27(coast), I8 (q-stop), I3 (HW
limit) and I2 (HW limit) must be connected and high.
2. Select “Disable syncpos” in P700
3. Select “Local” function in Parameter 002. – VLT 5000 stops (display flashing)
4. Input the motor name plate data in P102-P106 and activate the “Automatic Motor
Adaptation” function in P107.
36 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 38

Positioning Controller
5. Press the [START] button on the VLT 5000 control panel and wait for the AMA to be
completed.
6. Set the frequency for a low positive value, for example +3 Hz in Parameter 003 please
note that motor should now rotate.
7. Press the [START] button on the VLT 5000 control panel and then the [STOP/Reset]
button watching the direction of rotation on the motor. If the motor rotates in the wrong
(negative) direction then exchange the motor phases.
When you have tested the motor speed direction you test encoder connection as follows, if an
incremental encoder is used go to step 10, if an absolute encoder is used go to step 8:
8. If you are using a VLT 5000 Flux remember to use MK3B as input for the absolute
encoder and enter “1” in parameter 748. Then enter the absolute encoder type and
resolution in parameter 713 and 714.
9. Repeat step 8 to 10 to test the encoder direction.
10. Press the [DISPLAY/STATUS] button on the VLT 5000 control panel. Now the following
values appear in the upper line of the display: Error status, PID tracking error, actual
position.
11. Rotate the slave drive motor shaft manually in the positive direction (you can repeat step
7). Now the display should show an ascending count of the actual position.
12. If the count is descending with an incremental encoder, exchange the feedback encoder
track A by B and A/ by B/. If there is no counting in the display then check the wiring of the
encoder.
When you have tested the encoders and the wiring of motor and encoders, continue as follows:
13. Change parameter 002 back to “Remote” and start the VLT 5000 by pressing the
[START] button on the local control panel (LCP).
14. Select “Enable syncpos” in P700
15. Reset any error by toggling input 27.
Now you come to the test run:
16. Drive the application back and forth by closing the contacts on terminal 53 (positive
direction) or terminal 54 (negative direction). Watch the PID track error via the LCP
display during these tests.
Now you can optimise the controller:
17. Optimise
parameter list for P710 parameter (the FFVEL auto-calculation function).
18. If the track error after entering “2” in parameter 710 is within specification, when jogging,
there is no reason to optimise any further, move to step 21.
19. Increase
right setting. If the drive becomes unstable or if a message is given about over-voltage or
over-current, then reduce the value in parameter 702 to about 70-80% of the set value.
20. Increase
Read the description concerning these parameters in the parameter list.
To store the optimised values
21. Change the value of parameter 777 to “1”. When the value returns to “0” the parameters
have been successfully saved (see the parameter list for a description of how the P777
parameter works).
the Feed forward velocity P707 by following the procedure described in the
the P-portion par. 702. After each change you should make a test run to find the
the other PID parameters P703 (if needed) by following the same approach.
MG.50.P3.02 - VLT is a registered Danfoss trademark 37
Page 39

Positioning Controller
Parameter settings
Now determine the parameter settings fitting this application. The following list of parameters can be
determined right away:
P701 Default (“Positioning mode”)
P702 - P711 Determined during optimising of the PID controller
P712 Default (“1”)
P713 Incremental encoder used (“0”)
P714 Encoder resolution (“4096”)
P720 Trapeze ramps is used for fastest response (“0”)
P721 Default (encoder mounted directly on motor) (“1”)
P722 Default (encoder mounted directly on motor) (“1”)
P723 Default (“100”)
P724 Default (“1500”)
P728 Default (“0”)
P734 Default (“0”)
P747 Default (“0”)
P777 Default (“0”)
P778 “0” – no password protection required
Timing of the electromechanical brake (P715-P718)
If the application is not equipped with an electromechanical brake, P716-P718 are not very important.
Then, however, it is very important to set P715 to “0” to enable the drive also at standstill.
This application is equipped with mechanical brakes to allow it to stop rapidly even if the drive is somehow prevented from stopping the motor (damaged motor cables, damaged or short circuited motor,
inverter overload and so on).
P716-P718 is provided to time the interaction between the mechanical brake and the drive. A description
of these parameters can be found in the parameter list above. In this application the default values of
P716 and P717 is used (200 ms) but the P718 setting is changed to 30 seconds to minimize wear of the
brake.
Setting P732 and P733
Distances are measured in quad-counts (QC) but defined in millimetres. Therefore, it is necessary to
measure how many QC correspond to how many millimetres. To do this the cart is first moved as far to
the left as possible by activating the “Manual jog negative” input (terminal 54). The position is then
marked on the application and the corresponding value of P795 is noted. Then the cart is moved as far
to the right as possible by activating the “Manual jog positive” input (terminal 53). The travelled distance
in mm is now measured from the position of the mark to the position of the cart. Likewise the distance in
QC is calculated by subtracting the current value of P795 from the noted value of P795.
In this example it is measured that 871380 QC correspond to 4000 mm.
To prevent eventually overflow the parameters values are a factor 10 smaller than the measured QC
and mm so P732 is set to “87138” and P733 is set to “400”. Positions will now be displayed and entered
in millimetres. Settings like P732 set to “43569” and P733 set to ”200” will also give the positions in
millimetres.
38 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 40

Positioning Controller
Settings for the homing procedure (P728-P731)
The HOME ramp setting (P729) is reduced to the lowest allowable setting to get the fastest HOMING
procedure possible. The HOME velocity setting, however, should never be very high to enable a precise
result of the homing procedure, and because the exact position is not known during homing, it is not
advisable to go with a very high velocity for safety reasons. The default setting of P730 at 100 encoder
revolutions per minute (approx 1/15
default homing type defined in P731 is also maintained.
The resulting homing sequence is illustrated below.
th
of the max velocity) is therefore maintained in this application. The
Programming positions (P737-P743)
The program positions the conveyor cart in front of the various inlets and outlets. Different acceleration
and deceleration is allowed between the different positions. An empty pallet cart can be accelerated as
fast as possible while this is not allowed when transporting a fully loaded pallet.
Different settings for each position are available because every position is programmed with its own
setting for ramp and velocity. The different positions are defined below.
Negative HW limit switch
Home reference switch
Negative SW limit position
Position 1 (palletizer inlet #1)
Position 2 (palletizer outlet #1)
Position 3 (palletizer inlet #2)
Position 4 (palletizer inlet #3)
Position 5 (palletizer outlet #2)
Position 6 (palletizer inlet #4)
Positive SW limit position
Positive HW limit switch
PALLET
CART
0 mm
0 QC
2000 mm
435690 QC
4000 mm
871380 QC
MG.50.P3.02 - VLT is a registered Danfoss trademark 39
Page 41

The different positions are programmed using P738-P743 as interface. First, the application must be
homed to get at fixed reference for measuring (and entering) the positions. When this is done the first
position is programmed;
a) P738 is set to “1” either directly or by using the digital inputs and the “link” functionality of
P737.
b) The position is program med in P739 either directly on the LCP or by using the “TEACH-IN”
functionality (simply use the jog inputs (54, 53) to drive the application to the des ired position,
then press the [JOG] and [FWD./REV.] buttons to store that position in memory).
c) The individual ramp and velocity settings for this position is specified in P740-P742.
d) For trajectory type “absolute” is selected in P743 set to (“0”).
The following table shows the complete list of settings for each of the 6 target positions.
P738 P739 P740 P741 P742 P743
1 40000 900 900 500 0
2 80000 2000 2000 500 0
3 150000 900 900 500 0
4 220000 900 900 500 0
5 260000 2000 2000 500 0
6 330000 900 900 500 0
Positioning Controller
Software limits (P744-P745)
The software limits are placed just in front of the hardware limit switches with a distance to the hardware
limit switches that allows for the cart to be stopped with the shortest allowable ramp (P719) before the
HW limit switch is activated.
The settings are: P744 = “370000” and P745 = “-10000”.
Setting P719 and P725
If the pallet cart is transporting a loaded pallet and travelling at its top speed, it is not allowed to simply
activate the electromechanical brake (all the products on the pallet would be scattered across to floor
because of the deceleration). So if a “safety cage” or other safety device is opened and the “quick stop”
input is activated, the drive should ramp down with the appropriate ramp and then activate the safety
brake. This functionality is achieved by setting P725 to “0” and tuning P719 to the lowest allowable
setting.
Other settings (P726, P735, P736, P746)
The maximum PID track error was brought down to approximately +/- 100 QC during the optimising
sequence described above (steps 17-20). Therefore, it is an indication of an error, if the PID track error
should suddenly grow larger than approximately +/- 200 QC. Thus P726 Maximum tolerated PID error is
set at “200”.
The maximum tolerated travel of the brake before replacement is estimated at 4 mm so P735 Brake
wear limit is set to “4”.
If the application for some reason should ever go into the not allowed area beyond the SW limits it
should be possible to bring the application back into the allowed area by resetting the limit error and
using the jog inputs. This is achieved by setting P736 Power-recovery to “1”.
The allowed position tolerance is defined to be +/- 10 mm in this application so P746 Target position
window is set to “10”.
40 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 42

Positioning Controller
Troubleshooting
Frequently asked questions
Q1:
When I have a “PID TRACK ERROR TOO BIG”
error (P798=“9”), the inverter also trips on ALARM
13 (OVER CURRENT).
A1:
a) Check that the velocity setting (P723 for jogging
and P738/P742 for positioning) is at least 5% lower
than the maximum allowed velocity calculated in
P799. Either lower the velocity (P723 or P742)
setting or raise the maximum allowed velocity
(P799) by setting a higher value of P205 - please
see Q2.
b) The quick stop ramp time (P719) could be too
short. Try to increase the setting.
Q2:
How do I adjust the maximum allowed velocity in
P799?
A2:
You need to raise the setting of P205. Doing this
will also affect the performance of the parameters
P702, P703, P704, P707 and P708. Smaller
changes to P205 may not have any noticeable
effect on most of these parameters but P707
should always be recalculated using the autocalculation function P710.
Q3:
The inverter frequently trips on ALARM 7 (DC LINK
OVERVOLTAGE) while ramping down.
A3:
a) Use a higher ramp time setting (P719 for “quick
stop”, P724 for jogging and P738/P741 for positioning).
b) If a lower ramp time is required a brake resistor
should be installed.
MG.50.P3.02 - VLT is a registered Danfoss trademark 41
Q4:
The inverter frequently trips on ALARM 13 (OVER
CURRENT) while ramping up
A4:
a) The ramp settings may require too much torque.
Try to determine which operation (“quick stop”,
manual move or positioning) caused the trip, and
then set the corresponding ramp time (P719 for
“quick stop”, P724 for jogging and P738/P741 for
positioning) with a higher ramp time setting.
b) The PID controller settings may be unstable –
re-optimise the PID controller parameters (P702P709).
Q5:
The correct target position is reached, but the PID
tracking error (P797) is too big while the drive
moves.
A5:
Harder settings of the PID controller may be requi-
red – re-optimise the PID controller parameters
(P702-P709).
Q6:
The option sometimes seems to forget changes to
parameter values.
A6:
Changes to parameter values are not stored after
power-down unless P777 (STORE DATA) is activated before power-down.
Changes to trajectory data P705-P709 in
POSITIONING MODE is ignored unless the correct
password is entered in P778.
Page 43

Positioning Controller
Error messages
All messages are shown in P798 in the VLT 5000
LCP display. You can find detailed information,
additional notes on possible causes of errors as
well as tips for clearing errors in the following
section:
P798 – 0: Status OK. No errors detected.
Meaning
No errors detected.
P798 – 1: Homing needed
Meaning
The user has issued a positioning command to a
certain position while the home position is not
defined.
Note
The error must be cleared and a homing sequence
successfully completed before the next position
command is issued to the application.
P798 – 2: Positive hardware limit exceeded
Meaning
The positive hardware switch input has been
activated.
Causes
The application has hit the positive limit marker
switch. Alternatively, the connection to the limit
switch has been lost or the limit switch is defect.
P798 – 3: Negative hardware limit exceeded
Meaning
The negative hardware switch input is activated.
Causes
The application has hit the negative limit marker
switch. Alternatively, the connection to the limit
switch has been lost or the limit switch is defect.
P798 – 4: Positive software limit exceeded
Meaning
A motor command will cause / has caused the
software limit switch to be activated. The maximum
limit specified in P744.
Note
Before the error can be cleared the application
must be moved back from the limit. If “power
recovery” is enabled in P736, this can be done
through an error reset and a negative jog
(input 54).
P798 – 5: Negative software limit exceeded
Meaning
A motor command will cause / has caused the
software limit switch to be activated The minimum
limit specified in P745.
Note
Before the error can be cleared the application
must be moved back from the limit. If “power recovery” is enabled in P736 this can be done through
an error reset and a positive jog (input 53).
P798 – 6: VLT not running
Meaning
The motor was not magnetized in a situation where
it should have been. The electromechanical brake
is immediately activated in this case regardless of
the settings in P718 and P725.
Causes
While the motor was holding/driving the load, the
drive has tripped, connection to terminal 27 was
lost or the [STOP] button was pressed on the LCP.
P798 – 7: Brake wear limit exceeded
Meaning
This error message is given if the drive has moved
more than the allowed number of user units
specified in P735 while the electronic brake was
activated.
Causes
The mechanical brake is worn and should be
replaced in the near future or the limit specified in
P735 is too low.
42 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 44

Positioning Controller
P798 – 8: Quick stop input activated
Meaning
The quick stop input has been activated. As a
safety precaution the electromechanical brake is
activated according to the setting of P725 and the
drive is coasted regardless of the setting of P715.
Normal operation is resumed if the error is cleared.
P798 – 9: Controller (PID) tracking error too big
Meaning
The difference between the desired set-point posi-
tion and the actual position read via the encoder
feedback has exceeded the limit specified in P726.
Causes
Several reasons may exist:
1) The encoder is not properly connected.
Check the encoder connection.
2) The encoder is counting positive in the
wrong direction. Switch A- and B-channels if necessary.
3) The PID controller settings are not properly optimised. Follow the instructions for
optimising.
4) The limit specified in P726 may be too
low.
P798 – 10: SyncPos option error occurred
Meaning
An internal error on the option card has occurred.
Please note the corresponding error number and
contact Danfoss with a description of the conditions
before and after the error occurred.
P798 – 11: VLT Exception error detected
Meaning
An internal VLT 5000 error was detected during
start-up of the option card program. Please note
the corresponding error number and contact
Danfoss.
Causes
EMC in the environment surrounding the VLT5000
might cause exception errors to arise. If the exception error occurs at different code addresses it is a
good indication that EMC is causing the trouble. If
the exception error occurs repeatedly at the same
code address it is an indication that the EPROM’s
might be damaged
P798 – 12: Reverse operation prohibited
Meaning
The drives has been operated in reverse direction
while this was not allowed according to the setting
of P734.
P798 – 13: Forward operation prohibited
Meaning
The drives has been operated in forward direction
while this was not allowed according to the setting
of P734.
P798 – 92: Error from encoder monitoring
Meaning
Open or short circuit in accordance with the dis-
played LED. An error will be displayed even if no
encoder is connected and the monitor is active
(P713 => 100).
MG.50.P3.02 - VLT is a registered Danfoss trademark 43
Page 45
Positioning Controller
Appendix
Binary selection of reference positions using digital control
Pos. Number target
Pos. Number chosen
0 0 0 0 0 0
1 0 0 0 0 1
2 0 0 0 1 0
3 0 0 0 1 1
4 0 0 1 0 0
5 0 0 1 0 1
6 0 0 1 1 0
7 0 0 1 1 1
8 0 1 0 0 0
9 0 1 0 0 1
10 0 1 0 1 0
11 0 1 0 1 1
12 0 1 1 0 0
13 0 1 1 0 1
14 0 1 1 1 0
15 0 1 1 1 1
16 1 0 0 0 0
17 1 0 0 0 1
18 1 0 0 1 0
19 1 0 0 1 1
20 1 0 1 0 0
21 1 0 1 0 1
22 1 0 1 1 0
23 1 0 1 1 1
24 1 1 0 0 0
25 1 1 0 0 1
26 1 1 0 1 0
27 1 1 0 1 1
28 1 1 1 0 0
29 1 1 1 0 1
30 1 1 1 1 0
31 1 1 1 1 1
IN 29 (MSB)
O8
IN 19
O7
IN 18
O6
IN 17
O5
IN 16 (LSB)
O4
Binary selection of reference positions using fieldbus control.
Pos. Number target
Pos. Number chosen
0 0 0 0 0 0 0
1 0 0 0 0 0 1
2 0 0 0 0 1 0
3 0 0 0 0 1 1
4 0 0 0 1 0 0
5 0 0 0 1 0 1
6 0 0 0 1 1 0
7 0 0 0 1 1 1
8 0 0 1 0 0 0
9 0 0 1 0 0 1
44 MG.50.P3.02 - VLT is a registered Danfoss trademark
PCD 7,6
(MSB)
PCD 2,6
PCD 7,5
PCD 2,5
PCD 7,4
PCD 2,4
PCD 7,3
PCD 7,3
PCD 7,2
PCD 2,2
PCD 7,1
(LSB)
PCD 2.1
Page 46

Positioning Controller
Pos. Number target
Pos. Number chosen
10 0 0 1 0 1 0
11 0 0 1 0 1 1
12 0 0 1 1 0 0
13 0 0 1 1 0 1
14 0 0 1 1 1 0
15 0 0 1 1 1 1
16 0 1 0 0 0 0
17 0 1 0 0 0 1
18 0 1 0 0 1 0
19 0 1 0 0 1 1
20 0 1 0 1 0 0
21 0 1 0 1 0 1
22 0 1 0 1 1 0
23 0 1 0 1 1 1
24 0 1 1 0 0 0
25 0 1 1 0 0 1
26 0 1 1 0 1 0
27 0 1 1 0 1 1
28 0 1 1 1 0 0
29 0 1 1 1 0 1
30 0 1 1 1 1 0
31 0 1 1 1 1 1
32 1 0 0 0 0 0
33 1 0 0 0 0 1
34 1 0 0 0 1 0
35 1 0 0 0 1 1
36 1 0 0 1 0 0
37 1 0 0 1 0 1
38 1 0 0 1 1 0
39 1 0 0 1 1 1
40 1 0 1 0 0 0
41 1 0 1 0 0 1
42 1 0 1 0 1 0
43 1 0 1 0 1 1
44 1 0 1 1 0 0
45 1 0 1 1 0 1
46 1 0 1 1 1 0
47 1 0 1 1 1 1
48 1 1 0 0 0 0
49 1 1 0 0 0 1
50 1 1 0 0 1 0
51 1 1 0 0 1 1
52 1 1 0 1 0 0
53 1 1 0 1 0 1
54 1 1 0 1 1 0
55 1 1 0 1 1 1
56 1 1 1 0 0 0
57 1 1 1 0 0 1
58 1 1 1 0 1 0
59 1 1 1 0 1 1
60 1 1 1 1 0 0
61 1 1 1 1 0 1
62 1 1 1 1 1 0
63 1 1 1 1 1 1
MG.50.P3.02 - VLT is a registered Danfoss trademark 45
PCD 7,6
(MSB)
PCD 2,6
PCD 7,5
PCD 2,5
PCD 7,4
PCD 2,4
PCD 7,3
PCD 7,3
PCD 7,2
PCD 2,2
PCD 7,1
(LSB)
PCD 2.1
Page 47

Positioning Controller
Glossary of key terms
Incremental encoder This is an encoder system that picks up the speed and the direction of rota-
tion and transmits on the appropriate configuration. The number of tracks,
and thus the number of signals, indicates the properties of the encoder
system. There are single-track systems that deliver a pulse signal dependent
on the speed as well as a fixed direction signal. Dual-track systems deliver
two pulse signals that are offset 90 degrees. By evaluating the two tracks,
the direction signal is also obtained. Three-track encoders deliver, as well as
the two tracks of the dual-track encoder, an additional “zero-track“. This
emits a signal when the zero transit is passed through.
Fig.: Incremental encoder signals
Quadcounts Through edge detection, a quadrupling of the increments is produced by both
tracks (A/B) of the incremental encoder. This improves the resolution.
Fig.: Derivation of quad counts
Absolute value encoder This is a special form of incremental encoder, as it indicates not only the
speed and direction of rotation but also the absolute physical position. This is
communicated via transfer of the position in parallel form or in the form of a
telegram in serial form. Absolute value encoders also come in two versions:
Single-Turn encoders supply an absolute position on a shaft rotation; MultiTurn encoders can report the absolute position via a specific quantity, or via
a freely-definable number of rotations.
ERPM The speed is defined in relation to the RPM of the encoder. To underline this
the term “encoder revolutions per minute” is chosen as unit.
46 MG.50.P3.02 - VLT is a registered Danfoss trademark
Page 48

Positioning Controller
AMA Automatic Motor Adaptation” function in P107.
Motor/encoder gear ratio Since the encoder is not necessarily mounted on the motor itself, the rela-
tionship between the nominal motor speed in RPM and the nominal encoder
speed in ERPM must be specified.
Track error The PID track error is defined as the difference between the internal control-
ler set-point and the actual position. The track error is specified in UU, and is
displayed in P797.
NOTE! The maximum tolerated PID error is entered in P726 in QC.
Touch probe, trajectory type “2“
Input 33 is the latch reference index input in digital control mode. PCD 1.4 is
the latch reference index input in fieldbus control mode.
Input 1 is the touchprobe input.
Input 7 is the reset touchprobe input in digital control mode. PCD 1.7 is the
reset touchprobe input in fieldbus control mode
Output 42 (26 for Flux) is the touchprobe locked indicator output in digital
control mode. PCD 1.5 is the touchprobe locked indicator output in fieldbus
control mode.
NOTE! A delay in the touchprobe sensor will make the target position drift.
This means the target position will become larger than stated in parameter
739. To compensate for this please specify a delay value in parameter 747.
Only a constant delay can be compensated not a variable delay.
MG.50.P3.02 - VLT is a registered Danfoss trademark 47
Page 49

Index
Positioning Controller
A
Absolute value encoder ............................................46
Actual inputs P796....................................................33
Actual position P795.................................................33
adjust the maximum allowed velocity........................41
ALARM 13.................................................................41
ALARM 7...................................................................41
Appendix...................................................................44
Application example..................................................35
AUTOCALC. FFVEL .................................................22
Automatic brake control P715...................................24
FFVEL auto-calculation P710 .................................. 22
Field bus
control signals......................................................17
Data layout........................................................... 17
interface ......................................................... 12, 17
status signals ....................................................... 19
Forward operation prohibited................................... 43
Frequently asked questions.....................................41
G
Glossary of key terms............................................... 46
H
B
Binary selection of reference positions
using digital control...............................................44
using fieldbus control............................................44
Block reversal P734..................................................28
Brake delay P717......................................................25
Brake wear limit exceeded........................................42
Brake wear limit P735...............................................29
Hardware.................................................................... 5
Hold delay 718.........................................................25
Home offset P728 .................................................... 27
Home ramp time P729 ............................................. 27
Home type P731....................................................... 27
Home velocity P730................................................. 27
Homing needed........................................................ 42
I
C
Coast delay P716......................................................25
Control source P749.................................................32
Controller (PID) tracking error too big.......................43
D
Data layout................................................................17
DC LINK OVERVOLTAGE........................................41
Derivation of quad counts.........................................46
Derivative gain P703.................................................21
Description of
the available parameters.......................................20
Digital inputs, MK3A...............................................10
Digital outputs, MK3C............................................10
E
Electrical interface.....................................................12
Encoder cable.........................................................11
Encoder connection..................................................16
Encoder input 1, MK3B (secondary)....................10
Encoder input 2, MK3D (primary) ........................11
Encoder monitor..........................................................7
Encoder resolution P714...........................................24
Encoder type P713 ...................................................24
Endless positioning P753..........................................33
ERPM........................................................................46
Error behaviour P725................................................26
Error from encoder monitoring..................................43
Error messages.........................................................42
Error reset P727........................................................27
Error status P798......................................................34
Example Pallet conveyor system..............................35
External 24 V DC supply.......................................10
F
Factory reset P776....................................................33
Feedback input P748................................................32
Feed-forward
acceleration gain P708 .........................................22
velocity gain P707.................................................22
48 MG.50.P3.02 - VLT is a registered Danfoss trademark
Incremental encoder ................................................ 46
Incremental encoder signals....................................46
Index number P738.................................................. 30
Integral gain P704.................................................... 21
Interface...................................................................12
Introduction ................................................................ 4
J
Jog ramp time P724................................................. 26
L
LCP functions........................................................... 20
Limit integral part P705............................................21
Limit PID output P706 .............................................. 22
Link LCP input to index P737................................... 29
M
Maximum allowed velocity P799 .............................. 34
Maximum jog velocity P723...................................... 26
Maximum tolerated PID error P726.......................... 26
Maximum velocity P742 ........................................... 31
Motor/encoder
gear denominator P722........................................ 26
gear nominator P721............................................ 25
Motor/encoder gear ratio.......................................... 47
N
Negative hardware limit exceeded........................... 42
Negative software limit exceeded............................. 42
Negative software limit P745.................................... 32
Negative SW limit active P752................................. 32
O
Operating mode P701.............................................. 21
Option card layout...................................................... 8
Option card MK3A.................................................... 14
Option card MK3B (secondary position feedback
............................................................................. 15
Option card MK3C.................................................... 15
Page 50

Positioning Controller
Option card MK3D (primary position feedback).16
Option card terminals..................................................5
OVER CURRENT......................................................41
P
Pallet conveyor system.............................................35
Basic set-up..........................................................36
Parameter settings................................................38
Wiring diagram......................................................36
Parameter save P777...............................................33
Parameters Description ............................................21
Password P778.........................................................33
PID sample interval P709 .........................................22
PID TRACK ERROR TOO BIG.................................41
PID tracking error P797 ............................................33
Positive direction P712 .............................................23
Positive hardware limit exceeded..............................42
Positive software limit exceeded...............................42
Positive software limit P744......................................31
Positive SW limit active P751 ...................................32
Power-recovery P736................................................29
Proportional gain P702 .............................................21
Q
Quadcounts...............................................................46
Quick ramp time P719 ..............................................25
Quick stop input activated.........................................43
R
Ramp down time P741..............................................31
Ramp type P720.......................................................25
Ramp up time P740..................................................31
Reverse operation prohibited....................................43
S
Safety regulations ...................................................... 3
SAMPLE INTERVAL................................................22
Software version P779............................................. 33
Status OK. No errors detected................................. 42
STORE DATA...........................................................41
Supply voltages.......................................................... 6
SyncPos option error occured.................................. 43
T
Target position P739................................................ 30
Target position window P746................................... 32
Technical Data.....................................................5, 10
Terminal description................................................... 6
Terminals................................................................ 10
Touch probe delay P747.......................................... 32
Touch probe, trajectory type “2“............................... 47
Track error................................................................ 47
Trajectory type P743................................................ 31
Troubleshooting ....................................................... 41
U
User APOS setting P750.......................................... 32
User unit denominator P733 .................................... 28
User unit numerator P732........................................ 28
V
VLT control card terminals.........................................5
VLT Exception error detected................................... 43
VLT local jog P711................................................... 23
VLT not running........................................................ 42
W
Warning against unintended start......................... 3
MG.50.P3.02 - VLT is a registered Danfoss trademark 49
Page 51

www.danfoss.com/drives
XREF__BC
NOT LOADED ON RIP
175R0305 MG50P302
Rev. 2003-09-16
*MG50P302*
 Loading...
Loading...