

Page 1

Оглавление Руководство по проектированию
Оглавление
1 Введение
1.1 Цель «Руководства по проектированию»
1.2 Структура
1.3 Дополнительные ресурсы
1.4 Сокращения, символы и условные обозначения
1.5 Определения
1.6 Версия документа и программного обеспечения
1.7 Разрешения и сертификаты
1.7.1 Маркировка CE 11
1.7.1.1 Директива по низковольтному оборудованию 12
1.7.1.2 Директива по электромагнитной совместимости 12
1.7.1.3 Директива о машинном оборудовании 12
1.7.1.4 Директива ErP 12
1.7.2 Соответствие стандартам, обозначаемое символом C-tick 12
1.7.3 Соответствие техническим условиям UL 13
1.7.4 Соответствие требованиям использования на море 13
1.8 Техника безопасности
8
8
8
8
9
10
11
11
14
1.8.1 Общие принципы техники безопасности 14
2 Обзор изделия
2.1 Введение
2.2 Описание работы
2.3 Последовательность работы
2.3.1 Секция выпрямителя 21
2.3.2 Промежуточная секция 21
2.3.3 Секция инвертора 21
2.3.4 Дополнительное устройство торможения 21
2.3.5 Разделение нагрузки 22
2.4 Структуры управления
2.4.1 Разомкнутый контур структуры управления 22
2.4.2 Замкнутый контур структуры управления 23
2.4.3 Местное (Hand On) и дистанционное (Auto On) управление 24
2.4.4 Формирование задания 25
2.4.5 Формирование обратной связи 27
2.5 Автоматические рабочие функции
16
16
20
21
22
28
2.5.1 Защита от короткого замыкания 28
2.5.2 Защита от превышения напряжения 28
2.5.3 Обнаружение обрыва фазы двигателя 29
2.5.4 Обнаружение асимметрии фаз сети 29
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 1
Page 2
Оглавление
VLT® AQUA Drive FC 202
2.5.5 Коммутация на выходе 29
2.5.6 Защита от перегрузки 29
2.5.7 Автоматическое снижение номинальных параметров 30
2.5.8 Автоматическая оптимизация энергопотребления 30
2.5.9 Автоматическая модуляция частоты коммутации 30
2.5.10 Снижение номинальных параметров при высокой частоте коммутации 30
2.5.11 Автоматическое снижение номинальных параметров при избыточной
температуре 30
2.5.12 Автоматическое изменение скорости 31
2.5.13 Контур ограничения тока 31
2.5.14 Характеристики при колебаниях мощности 31
2.5.15 Плавный пуск двигателя 31
2.5.16 Подавление резонанса 31
2.5.17 Вентиляторы с управлением по температуре 31
2.5.18 Соответствие требованиям ЭМС 31
2.5.19 Измерение тока на всех трех фазах двигателя 31
2.5.20 Гальваническая развязка клемм управления 32
2.6 Функции для пользовательских применений
2.6.1 Автоматическая адаптация двигателя 32
2.6.2 Тепловая защита двигателя 32
2.6.3 Пропадание напряжения 33
2.6.4 Встроенный ПИД-регулятор 33
2.6.5 Автоматический перезапуск 33
2.6.6 Подхват вращающегося двигателя 33
2.6.7 Полный крутящий момент при пониженной скорости 34
2.6.8 Пропуск частоты 34
2.6.9 Предпусковой нагрев двигателя 34
2.6.10 4 программируемых набора параметров 34
2.6.11 Динамическое торможение 34
2.6.12 Торможение постоянным током 34
2.6.13 Режим ожидания 34
2.6.14 Разрешение работы 34
32
2.6.15 Интеллектуальное логическое управление (SLC) 35
2.6.16 Функция STO 36
2.7 Функции мониторинга сбоев, предупреждений и аварийных сигналов
36
2.7.1 Работа при превышении температуры 37
2.7.2 Предупреждение о высоком и низком задании 37
2.7.3 Предупреждение о высоком и низком сигнале обратной связи 37
2.7.4 Перекос фаз или потеря фазы 37
2.7.5 Предупреждение о высокой частоте 37
2 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 3
Оглавление Руководство по проектированию
2.7.6 Предупреждение о низкой частоте 37
2.7.7 Предупреждение о высоком токе 37
2.7.8 Предупреждение о низком токе 37
2.7.9 Предупреждение об отсутствии нагрузки/обрыве ремня 37
2.7.10 Потеря последовательного интерфейса 38
2.8 Интерфейс пользователя и программирование
2.8.1 Панель местного управления 38
2.8.2 Программное обеспечение для ПК 39
2.8.2.1 Средство конфигурирования MCT 10 39
2.8.2.2 ПО для расчета гармоник VLT® Harmonics Calculation MCT 31 40
2.8.2.3 Программное обеспечение для расчета гармоник (HCS) 40
2.9 Техобслуживание
2.9.1 Хранение 40
3 Интеграция системы
3.1 Температура окружающей среды
3.1.1 Влажность 41
3.1.2 Температура 41
3.1.3 Охлаждение 42
3.1.4 Перенапряжение, создаваемое двигателем в генераторном режиме 43
3.1.5 Акустический шум 43
3.1.6 Вибрационные и ударные воздействия 43
3.1.7 Агрессивные среды 43
38
40
41
41
3.1.8 Определения классов IP 45
3.1.9 Радиочастотные помехи 46
3.1.10 Соответствие требованиям PELV и гальванической развязки 46
3.1.11 Хранение 47
3.2 ЭМС, гармоники и защита от утечки на землю
3.2.1 Общие вопросы защиты от излучений в соответствии с требованиями ЭМС 47
3.2.2 Результаты испытаний ЭМС 49
3.2.3 Требования по излучению 51
3.2.4 Требования к помехоустойчивости 51
3.2.5 Изоляция двигателя 52
3.2.6 Подшипниковые токи двигателя 52
3.2.7 Гармоники 53
3.2.8 Ток утечки на землю 56
3.3 Подключение к сети
3.3.1 Конфигурации сети и воздействие ЭМС 57
3.3.2 Низкочастотные помехи в питающей сети 58
3.3.3 Анализ помех в питающей сети 59
47
57
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 3
Page 4
Оглавление
VLT® AQUA Drive FC 202
3.3.4 Возможности снижения помех в питающей сети 59
3.3.5 Радиочастотные помехи 59
3.3.6 Классификация места эксплуатации 59
3.3.7 Использование с изолированным входным источником 60
3.3.8 Компенсация коэффициента мощности 60
3.3.9 Задержка входного питания 60
3.3.10 Переходные процессы в сети 61
3.3.11 Работа с резервным генератором 61
3.4 Интеграция двигателя
3.4.1 Что следует учитывать при выборе двигателя 62
3.4.2 Синусоидные фильтры и фильтры dU/dt 62
3.4.3 Надлежаще заземление двигателя 62
3.4.4 Кабели двигателей 62
3.4.5 Экранирование кабеля двигателя 62
3.4.6 Подключение нескольких двигателей 63
3.4.7 Изоляция проводов управления 65
3.4.8 Тепловая защита двигателя 65
3.4.9 Выходной контактор 65
3.4.10 Функции торможения 65
3.4.11 Динамическое торможение 66
3.4.12 Расчет тормозного резистора 66
3.4.13 Кабельная проводка тормозного резистора 67
3.4.14 Тормозной резистор и тормозной IGBT 67
3.4.15 Энергоэффективность 68
3.5 Дополнительные входы и выходы
62
69
3.5.1 Схема подключений 69
3.5.2 Подключения реле 70
3.5.3 Электрическое подключение с учетом требований ЭМС 71
3.6 Планирование механических характеристик
72
3.6.1 Зазоры для охлаждения 72
3.6.2 Настенный монтаж 72
3.6.3 Доступ 73
3.7 Дополнительные устройства и принадлежности
73
3.7.1 Дополнительные устройства связи 78
3.7.2 Дополнительные устройства ввода/вывода, обратной связи и обеспечения
безопасности 78
3.7.3 Дополнительные устройства каскадного управления 78
3.7.4 Тормозные резисторы 80
3.7.5 Синусоидные фильтры 80
3.7.6 Фильтры dU/dt 80
4 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 5
Оглавление Руководство по проектированию
3.7.7 Фильтры синфазных помех 80
3.7.8 Фильтры гармоник 81
3.7.9 Комплект для корпуса IP21/NEMA Тип 1 81
3.7.10 Комплект дистанционного монтажа LCP 83
3.7.11 Монтажный кронштейн для корпусов размера A5, B1, B2, C1 и C2 84
3.8 Интерфейс последовательной связи RS 485
3.8.1 Краткое описание 85
3.8.2 Подключение сети 86
3.8.3 Оконечная нагрузка шины RS485 86
3.8.4 Обеспечение ЭМС 86
3.8.5 Краткое описание протокола FC 87
3.8.6 Конфигурация сети 87
3.8.7 Структура кадра сообщения по протоколу FC 87
3.8.8 Примеры протокола FC 91
3.8.9 Протокол Modbus RTU 92
3.8.10 Структура кадра сообщения Modbus RTU 93
3.8.11 Доступ к параметрам 97
3.8.12 Профиль управления FC (Drive) 98
3.9 Контрольный список проектирования системы
4 Примеры применения
4.1 Обзор прикладных функций
4.2 Функции избранных применений
85
105
107
107
108
4.2.1 SmartStart 108
4.2.2 Быстрое меню для систем водоснабжения и насосов 108
4.2.3 29-1* Deragging Function (Функция очистки) 108
4.2.4 Пре-/постсмазка 109
4.2.5 29-5* Подтверждение потока 110
4.3 Примеры настройки для различных применений
4.3.1 Работа с погружным насосом 113
4.3.2 Каскадный контролер BASIC 115
4.3.3 Каскадирование насосов с чередованием ведущего насоса 116
4.3.4 Состояние и работа системы 116
4.3.5 Схема электрических соединений каскадного контролера 117
4.3.6 Схема подключения насосов с фиксированной и переменной скоростью 118
4.3.7 Схема соединений для чередования ведущего насоса 118
5 Особые условия
5.1 Снижение номинальных характеристик вручную
5.2 Снижение номинальных параметров при подключении двигателя длинными
кабелями или кабелями с увеличенной площадью поперечного сечения
111
122
122
123
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 5
Page 6
Оглавление
VLT® AQUA Drive FC 202
5.3 Снижение номинальных характеристик в зависимости от температуры
окружающей среды
123
6 Код типа и его выбор
6.1 Заказ
6.1.1 Код типа 128
6.1.2 Язык программного обеспечения 130
6.2 Дополнительные устройства, принадлежности и запасные части
6.2.1 Дополнительные устройства и принадлежности 130
6.2.2 Запасные части 132
6.2.3 Пакеты с комплектом принадлежностей 133
6.2.4 Выбор тормозного резистора 134
6.2.5 Рекомендуемые тормозные резисторы 135
6.2.6 Альтернативные тормозные резисторы, T2 и T4 142
6.2.7 Фильтры гармоник 143
6.2.8 Синусоидные фильтры 145
6.2.9 Фильтры dU/dt 147
6.2.10 Фильтры синфазных помех 148
7 Технические характеристики
7.1 Электрические характеристики
128
128
130
149
149
7.1.1 Питание от сети 1 x 200–240 В перем. тока 149
7.1.2 Питание от сети 3 x 200–240 В перем. тока 150
7.1.3 Питание от сети 1 x 380–480 В перем. тока 154
7.1.4 Питание от сети 3 x 380–480 В перем. тока 155
7.1.5 Питание от сети 3 x 525–600 В перем. тока 159
7.1.6 Питание от сети 3 x 525–690 В перем. тока 164
7.2 Питание от сети
7.3 Выходная мощность и другие характеристики двигателя
7.4 Условия окружающей среды
7.5 Технические характеристики кабелей
7.6 Вход/выход и характеристики цепи управления
7.7 Предохранители и автоматические выключатели
7.8 Номинальная мощность, масса и размеры
7.9 Тестирование dU/dt
7.10 Номинальные характеристики акустического шума
7.11 Избранные дополнительные устройства
7.11.1 VLT® General Purpose I/O Module MCB 101 187
167
167
168
168
169
172
182
184
187
187
7.11.2 VLT® Relay Card MCB 105 188
7.11.3 VLT® PTC Thermistor Card MCB 112 189
7.11.4 VLT® Extended Relay Card MCB 113 191
6 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 7

Оглавление Руководство по проектированию
7.11.5 VLT® Sensor Input Option MCB 114 192
7.11.6 VLT® Extended Cascade Controller MCO 101 194
7.11.7 VLT® Advanced Cascade Controller MCO 102 195
8 Приложение — отдельные чертежи
8.1 Чертежи подключения сетевого питания (3 фазы)
8.2 Чертежи подключения двигателя
8.3 Чертежи клемм реле
8.4 Отверстия ввода кабелей
Алфавитный указатель
198
198
201
203
204
208
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 7
Page 8

Введение
VLT® AQUA Drive FC 202
1
1 Введение
1.1 Цель «Руководства по
проектированию»
Настоящее руководство по проектированию Danfoss
VLT® AQUA Drive предназначено для:
инженеров-проектировщиков и системных
•
инженеров;
консультантов по проектированию;
•
специалистов по применениям и продуктам.
•
Руководство по проектированию содержит техническую
информацию, необходимую для понимания
возможностей преобразователя частоты при
интегрировании в системы управления и мониторинга
двигателей.
Руководство по проектированию содержит
рекомендации по проектированию и данные для
планирования, позволяющие интегрировать
преобразователь частоты в систему. Руководство по
проектированию содержит информацию, необходимую
для выбора преобразователей частоты и
дополнительного оборудования для различных систем и
установок.
Анализ подробной информации о продукте на этапе
проектирования позволяет разработать хорошо
спланированную систему с оптимальной
функциональностью и эффективностью.
VLT® является зарегистрированным товарным знаком.
1.2
Структура
Глава 1 Введение: Общее назначение этого руководства
по проектированию и сведения о соблюдении
международных нормативов.
Глава 2 Обзор изделия: Внутренняя структура, а также
функциональные возможности преобразователя частоты
и эксплуатационные характеристики.
Глава 3 Интеграция системы: Условия эксплуатации;
ЭМС, гармоники, утечки на землю; входное питание;
двигатели и подключение двигателей; прочие
подключения; проектирование механических элементов;
а также описания дополнительных устройств и
принадлежностей.
Глава 4 Примеры применения: Образцы применения
продуктов и рекомендации по их использованию.
Глава 5 Особые условия
средах эксплуатации.
Глава 6 Код типа и его выбор: Процедуры заказа
оборудования и опций, соответствующих
предполагаемому варианту использования системы.
Глава 7 Технические характеристики: Подборка
технических данных в табличном и графическом
форматах.
Глава 8 Приложение — отдельные чертежи: Подборка
схем, показывающих подключение к электросети и
двигателям, клеммы реле и кабельные вводы.
: Сведения о нестандартных
1.3 Дополнительные ресурсы
Дополнительные ресурсы о расширенных режимах
работы преобразователя частоты, его
программировании и соответствии директивам:
Инструкции по эксплуатации VLT® AQUA Drive
•
FC 202 (далее в этом руководстве Инструкции
по эксплуатации) содержат подробную
информацию о монтаже и подготовке к
эксплуатации преобразователя частоты.
®
Руководство по проектированию VLT
•
Drive FC 202 содержит информацию о
проектировании и подготовке интеграции
преобразователя частоты в систему.
Руководство по программированию VLT® AQUA
•
Drive FC 202 (далее в этом руководстве
Руководство по программированию) содержит
более подробное описание работы с
параметрами и множество примеров
применения.
В Инструкциях по эксплуатации функции VLT
•
Safe Torque O описан порядок эксплуатации
преобразователей частоты Danfoss в
применениях, требующих обеспечения
функциональной безопасности. Данное
руководство поставляется с преобразователем
частоты, если присутствует функция STO.
Руководство по проектированию тормозных
•
резисторов VLT® содержит сведения по выбору
оптимальных тормозных резисторов.
Дополнительные публикации и руководства можно
загрузить на сайте danfoss.com/Product/Literature/Technical
+Documentation.htm.
AQUA
®
8 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 9
Введение Руководство по проектированию
I
УВЕДОМЛЕНИЕ
Некоторая информация в этих публикациях может
отличаться в зависимости от подключенного
дополнительного оборудования. Рекомендуется
прочитать инструкции, прилагаемые к
дополнительному оборудованию, для ознакомления с
особыми требованиями.
Для получения дополнительной информации обратитесь
к поставщику оборудования Danfoss или перейдите на
VLT,MAX
I
VLT,N
kHz Килогерц
LCP Панель местного управления
Младший бит Младший значащий бит
м метр
mA Миллиампер
MCM Млн круглых мил
MCT Служебная программа управления
сайт www.danfoss.com .
1.4 Сокращения, символы и условные
обозначения
60° AVM Aсинхронная векторная модуляция 60°
A Ампер
Перем. ток Переменный ток
AD Электростатический разряд через воздух
AOЭ Автоматическая оптимизация
энергопотребления
AI Аналоговый вход
ААД Автоматическая адаптация двигателя
AWG Американский сортамент проводов
°C
CD Постоянный разряд
CM Синфазный режим
CT Постоянный момент
Пост. ток Постоянный ток
DI Цифровой вход
DM Дифференциальный режим
D-TYPE В зависимости от типа привода
ЭМС Электромагнитная совместимость
ЭДС Электродвижущая сила
ЭТР Электронное тепловое реле
f
JOG
f
M
f
MAX
f
MIN
f
M,N
FC Преобразователь частоты
г Грамм
Hiperface
л. с. Мощность в л. с.
HTL Импульсы энкодера HTL (10–30 В) —
Гц Герц
I
I
I
®
INV
LIM
M,N
Градусы Цельсия
Частота двигателя в случае активизации
функции фиксации частоты.
Частота двигателя
Максимальная выходная частота на выходе
преобразователя частоты.
Минимальная частота двигателя на выходе
преобразователя частоты
Номинальная частота двигателя
Hiperface® является зарегистрированным
товарным знаком компании Stegmann.
высоковольтная транзистор-транзисторная
логика (High-voltage Transistor Logic, HTL)
Номинальный выходной ток инвертора
Предел по току
Номинальный ток двигателя
mH Индуктивность в миллигенри
мин Минута
мс Миллисекунда
Старший бит Старший значащий бит
η
VLT
nF Емкость в нанофарадах
NLCP Цифровая панель местного управления
Н·м Ньютон-метр
n
s
Оперативные/
автономные
параметры
P
торм., длит.
PCB Печатная плата
PCD Технологические данные
PELV Защитное сверхнизкое напряжение
P
m
P
M,N
Двигатель с ПМ С двигателем с постоянными магнитами
ПИД-регулятор
процесса
R
торм., ном.
RCD Датчик остаточного тока
Рекуперация Клеммы рекуперации
R
мин.
эфф. Эффективное (среднеквадратическое)
об/мин Число оборотов в минуту
R
рек.
с Секунда
SFAVM Асинхронная векторная модуляция с
STW Слово состояния
Максимальный выходной ток
Номинальный выходной ток,
обеспечиваемый преобразователем частоты
движением
КПД преобразователя частоты определяется
отношением выходной мощности и входной
мощности.
Скорость синхронного двигателя
Оперативные параметры вступают в
действие сразу же после изменения их
значений.
Номинальная мощность тормозного
резистора (средняя за время длительного
торможения).
Номинальная выходная мощность
преобразователя частоты при высокой
перегрузке (HO).
Номинальная мощность двигателя
ПИД-регулятор поддерживает необходимую
скорость, давление, температуру и т. д.
Номинальное сопротивление резистора, при
котором обеспечивается мощность
торможения на валу двигателя, равная
150/160 %, в течение 1 минуты.
Минимально допустимое преобразователем
частоты значение тормозного резистора
значение
Рекомендуемое сопротивление тормозных
резисторов Danfoss
ориентацией по магнитному потоку статора
1
1
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 9
Page 10
Введение
VLT® AQUA Drive FC 202
1
SMPS Импульсный источник электропитания
THD Общее гармоническое искажение
T
LIM
ТТЛ Импульсы энкодера ТТЛ (5 В) — транзистор-
U
M,N
В Вольты
VT Переменный крутящий момент
VVC+
Таблица 1.1 Сокращения
Условные обозначения
Нумерованные списки обозначают процедуры.
Маркированные списки указывают на другую
информацию и описания иллюстраций.
Текст, выделенный курсивом, обозначает:
•
•
•
•
Все размеры приведены в мм (дюймах).
* означает значение параметра, используемое по
умолчанию.
В этом документе используются следующие символы.
Предел крутящего момента
транзисторная логика
Номинальное напряжение двигателя
Векторное управление напряжением
перекрестную ссылку
веб-ссылку
сноску
название параметра, группы параметров,
значение параметра.
ВНИМАНИЕ!
Указывает на потенциально опасную ситуацию, при
которой существует риск летального исхода или
серьезных травм.
ПРЕДУПРЕЖДЕНИЕ
Указывает на потенциально опасную ситуацию, при
которой существует риск получения незначительных
травм или травм средней тяжести. Также может
использоваться для обозначения потенциально
небезопасных действий.
УВЕДОМЛЕНИЕ
Обозначает важную информацию, включая ситуации,
которые могут привести к повреждению
оборудования или имущества.
1.5 Определения
Тормозной резистор
Тормозной резистор представляет собой модуль,
способный поглощать мощность торможения,
выделяемую при рекуперативном торможении.
Регенеративная мощность торможения повышает
напряжение промежуточной цепи, и тормозной
прерыватель обеспечивает передачу этой мощности в
тормозной резистор.
Выбег
Вал находится в режиме свободного вращения.
Крутящий момент на двигателе отсутствует.
Характеристики СТ
Характеристики постоянного крутящего момента
(сonstant torque, CT), используемые во всевозможных
применениях, например в ленточных транспортерах,
поршневых насосах и подъемных кранах.
Инициализация
Если выполняется инициализация (14-22 Режим работы),
преобразователь частоты возвращается к заводским
настройкам.
Прерывистый рабочий цикл
Под прерывистым рабочим циклом понимают
последовательность рабочих циклов. Каждый цикл
состоит из периода работы под нагрузкой и периода
работы вхолостую. Работа может иметь либо
периодический, либо непериодический характер.
Коэффициент мощности
Истинный коэффициент мощности (лямбда) учитывает
все гармоники и всегда меньше, чем коэффициент
мощности (cos phi), учитывающий только первые
гармоники тока и напряжения.
P kW
cosϕ =
P kVA
Cosphi также называется коэффициентом реактивной
мощности.
Как лямбда, так и cosphi для преобразователей частоты
Danfoss VLT® указаны в глава 7.2 Питание от сети.
Коэффициент мощности показывает, в какой мере
преобразователь частоты нагружает питающую сеть.
Чем ниже коэффициент мощности, тем больше I
одной и той же мощности преобразователя (кВт).
Кроме того, высокий коэффициент мощности
показывает, что токи гармоник малы.
Во всех преобразователях частоты Danfoss имеются
реакторы цепи постоянного тока, встроенные в цепь
постоянного тока, что обеспечивает высокий
коэффициент мощности и уменьшает полный
коэффициент гармоник в сетевом питании.
Набор параметров
Настройки параметров можно сохранять в виде 4
наборов. Возможен переход между 4 наборами
параметров и редактирование одного набора
параметров во время действия другого набора
параметров.
Компенсация скольжения
Преобразователь частоты компенсирует скольжение
двигателя путем повышения частоты в соответствии с
измеряемой нагрузкой двигателя, обеспечивая почти
полное постоянство скорости вращения двигателя.
UλxIλxcosϕ
=
UλxIλ
эфф.
при
10 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 11
Введение Руководство по проектированию
Таблица 1.2 указаны версия документа и
Интеллектуальное логическое управление (SLC)
Интеллектуальное логическое управление — это
последовательность заданных пользователем действий,
которые выполняются в случае, если SLC признает
соответствующие, определенные пользователем
события истинными. (Группа параметров 13-**
Интеллектуальная логика)
Шина стандарта FC
Представляет собой шину RS485, работающую по
протоколу FC или протоколу MC. См. 8-30 Протокол.
Термистор
Терморезистор, устанавливаемый там, где требуется
контроль температуры (в преобразователе частоты или
в двигателе).
Отключение
Состояние, вводимое в аварийной ситуации, например,
в случае перегрева преобразователя частоты или когда
преобразователь частоты защищает двигатель,
технологический процесс или механизм. Перезапуск не
допускается до тех пор, пока причина неисправности не
будет устранена и состояние отключения не будет
отменено. Состояние отключения отменяется:
выполнением сброса или
•
посредством программированного
•
автоматического сброса преобразователя
частоты.
Не используйте отключение для обеспечения
безопасности персонала.
Отключение с блокировкой
Состояние, вводимое в аварийной ситуации, когда
преобразователь частоты осуществляет защиту
собственных устройств и требует физического
вмешательства, например, при возникновении
короткого замыкания на его выходе. Отключение с
блокировкой может быть отменено выключением сети
питания, устранением причины неисправности и новым
подключением преобразователя частоты. Перезапуск не
допускается до тех пор, пока состояние отключения не
будет отменено выполнением функции сброса или, в
некоторых случаях, посредством запрограммированного
автоматического сброса. Не используйте отключение
для обеспечения безопасности персонала.
Характеристики переменного крутящего момента:
Характеристики переменного крутящего момента для
управления насосами и вентиляторами.
В
соответствующая версия ПО.
Редакция Комментарии Версия ПО
MG20N6xx Заменяет MG20N5xx 2.20 и выше
Таблица 1.2 Версия документа и программного
обеспечения
1.7 Разрешения и сертификаты
Преобразователи частоты разрабатываются в
соответствии с требованиями описанных в этом разделе
директив.
Подробнее о разрешениях и сертификатах см. в разделе
загрузки на сайте http://www.danfoss.com/BusinessAreas/
DrivesSolutions/Documentations/.
Маркировка CE
1.7.1
Рисунок 1.1 CE
Маркировка CE (Communauté européenne) указывает,
что производитель продукта выполнил все применимые
директивы ЕС. Директивы ЕС, применимые к
конструкции и изготовлению преобразователей частоты,
перечислены в Таблица 1.3.
УВЕДОМЛЕНИЕ
Маркировка СЕ не определяет качество изделия. По
маркировке CE нельзя определить технические
характеристики.
УВЕДОМЛЕНИЕ
Преобразователи частоты с интегрированными
защитными функциями должны отвечать требованиям
директивы о машинном оборудовании.
1
1
1.6
Версия документа и программного
обеспечения
Данное руководство регулярно пересматривается и
обновляется. Все предложения по его улучшению будут
приняты и рассмотрены.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 11
Page 12
Введение
VLT® AQUA Drive FC 202
1
Директива ЕС Версия
Директива по низковольтному оборудованию 2006/95/EC
Директива по электромагнитной совместимости 2004/108/EC
Директива о машинном оборудовании
Директива ErP 2009/125/EC
Директива ATEX 94/9/EC
Директива RoHS 2002/95/EC
Таблица 1.3 Директивы ЕС, применимые к
преобразователям частоты
1) Соответствие требованиям директивы о машинном
оборудовании требуется только для преобразователей
частоты с интегрированными защитными функциями.
Декларации соответствия доступны по запросу.
1.7.1.1
Директива по низковольтному
1)
2006/42/EC
оборудованию
Директива относится ко всему электрическому
оборудованию, в котором используются напряжения в
диапазонах 50–1000 В перем. тока или 75–1600 В пост.
тока.
Цель директивы — обеспечить безопасность людей и
исключить повреждение имущества при условии
правильных установки и обслуживания работающего
электрооборудования, согласно его целевому
предназначению.
1.7.1.3
Директива о машинном
оборудовании
Цель директивы о машинном оборудовании —
обеспечить безопасность людей и исключить
повреждение имущества при использовании
механического оборудования согласно его целевому
предназначению. Директива о машинном оборудовании
относится к машинам, состоящим из набора
соединенных между собой компонентов или устройств,
как минимум одно из которых способно физически
двигаться.
Преобразователи частоты с интегрированными
защитными функциями должны отвечать требованиям
директивы о машинном оборудовании.
Преобразователи частоты без функции защиты не
подпадают под действие данной директивы. Если
преобразователь частоты входит состав системы
механизмов, Danfoss может предоставить информацию
по вопросам безопасности, связанным с
преобразователем частоты.
В случае использования преобразователей частоты в
машинах, в которых имеется хотя бы одна движущаяся
часть, изготовитель машины должен представить
декларацию, подтверждающую соответствие всем
уместным законодательным нормам и мерам
предосторожности.
1.7.1.4
Директива ErP
1.7.1.2
Директива по электромагнитной
совместимости
Цель директивы по ЭМС (электромагнитной
совместимости) — уменьшить электромагнитные
помехи и улучшить устойчивость электрооборудования
и установок к таким помехам. Базовое требование по
защите из директивы по электромагнитной
совместимости 2004/108/EC состоит в том, что
устройства, которые создают электромагнитные помехи
(ЭП) или на работу которых могут влиять ЭП, должны
конструироваться таким образом, чтобы ограничить
создаваемые электромагнитные помехи, а также должны
иметь приемлемый уровень устойчивости к ЭП при
условии правильной установки и обслуживания, а также
использования по назначению.
На устройствах, используемых по отдельности или в
составе системы, должна быть маркировка CE. Системы
не обязательно должны иметь маркировку CE, однако
должны соответствовать основным требованиям по
защите, изложенным в директиве по ЭМС.
Директива ErP — это европейская директива по
экологичному дизайну для связанных с энергетикой
изделий. Директива задает требования экологичного
дизайна для относящихся к энергетике изделий,
включая преобразователи частоты. Цель директивы —
повысить энергоэффективность и степень защиты
окружающей среды, в то же время увеличивая
безопасность источников питания. Влияние на
окружающую среду относящихся к энергетике изделий
включает потребление энергии в течение всего
жизненного цикла изделия.
Соответствие стандартам,
1.7.2
обозначаемое символом C-tick
Рисунок 1.2 Знак C-tick
Знак C-tick обозначает выполнение норм действующих
технических стандартов по электромагнитной
совместимости (ЭМС). Соответствие требованиям C-tick
12 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 13
1
2
130BD832.10
Введение Руководство по проектированию
обязательно для поставки электрических и электронных
устройств на рынки Австралии и Новой Зеландии.
Нормативы C-tick относятся к кондуктивным и
излучаемым помехам. Для преобразователей частоты
используйте предельные значения излучений,
указанные в EN/IEC 61800-3.
По запросу может быть предоставлена декларация
соответствия.
использовать, — это плата расширения
релейных выходов VLT® Extended Relay Card
MCB 113.
1.7.3 Соответствие техническим условиям
UL
Сертификация UL
Рисунок 1.3 UL
1
1
УВЕДОМЛЕНИЕ
Преобразователи частоты, рассчитанные на 525–690
В, не имеют сертификации UL.
Преобразователь частоты удовлетворяет требованиям
UL508C, касающимся тепловой памяти. Подробнее см.
глава 2.6.2 Тепловая защита двигателя.
Соответствие требованиям
1.7.4
использования на море
Модули с уровнем пылевлагозащиты IP55 (NEMA 12) и
выше предотвращают появление искр и
классифицируются как электрические аппараты с
ограниченной взрывоопасностью в соответствии с
Европейским соглашением о международной перевозке
опасных грузов по водным путям (ADN).
Перейдите на сайт www.danfoss.com для получения
дополнительной информации по соответствию
требованиям использования на море.
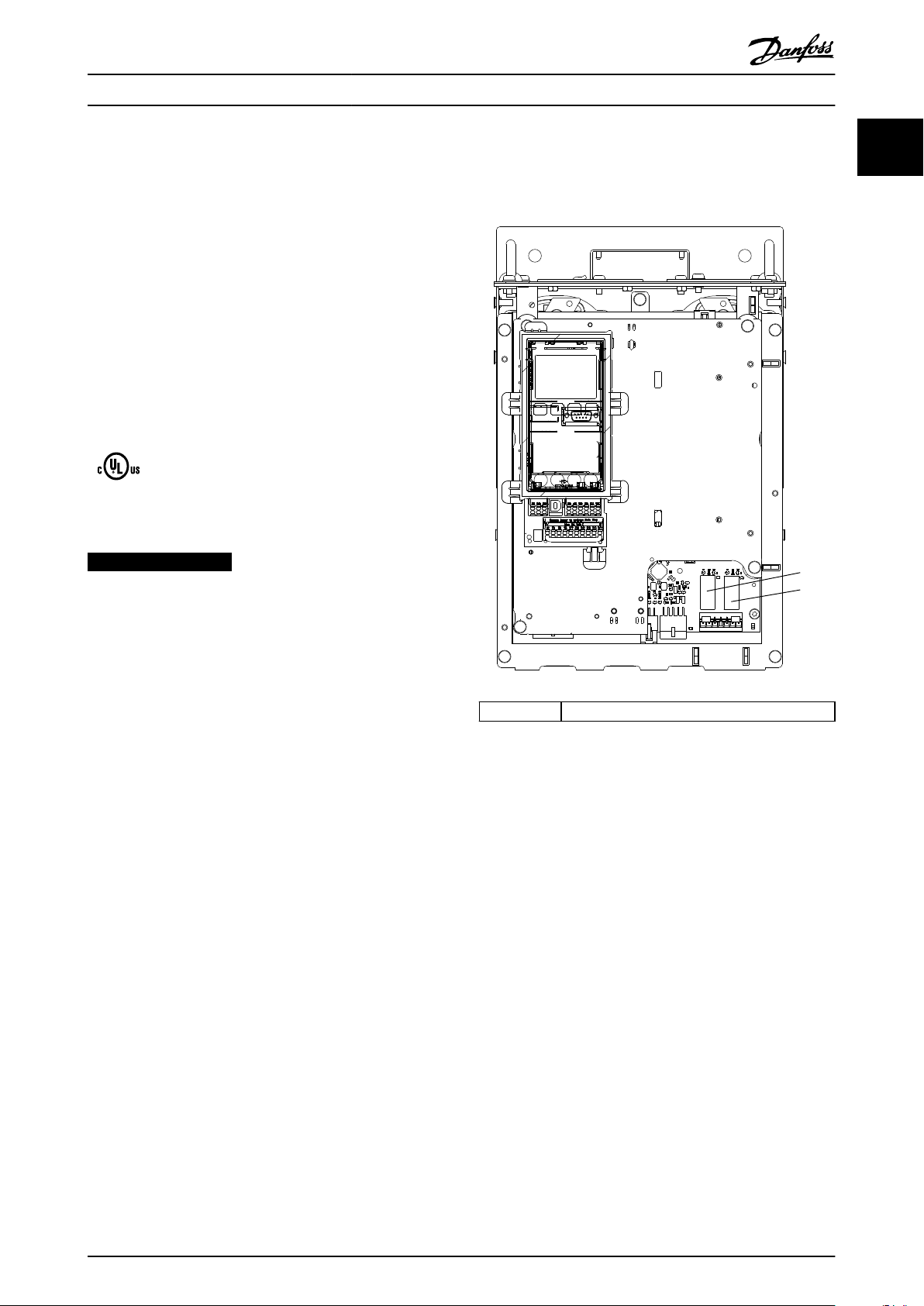
Чтобы предотвратить появление искр в устройствах со
степенью защиты IP20/шасси, IP21/NEMA 1 или IP54,
примите следующие меры.
Не устанавливайте сетевой выключатель.
•
Установите для параметра 14-50 Фильтр ВЧ-
•
помех значение [1] Включена
Удалите все заглушки реле с надписью RELAY
•
(РЕЛЕ). См. Рисунок 1.4.
Проверьте какие установлены дополнительные
•
реле (если есть). Единственное дополнительное
релейное устройство, которое допускается
1, 2 Заглушки реле
Рисунок 1.4 Расположение заглушек реле
Декларация изготовителя доступна по требованию.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 13
Page 14
Введение
VLT® AQUA Drive FC 202
1
1.8 Техника безопасности
1.8.1 Общие принципы техники
безопасности
Преобразователи частоты содержат высоковольтные
компоненты и при неправильном использовании могут
быть смертельно опасными. Монтаж и эксплуатация
этого оборудования должны выполняться только
квалифицированным персоналом. Запрещается
проводить любые ремонтные работы без
предварительного обесточивания преобразователя
частоты и без ожидания установленного промежутка
времени для рассеяния сохраненной электрической
энергии.
Строгое соблюдение мер предосторожности и
рекомендаций по технике безопасности обязательны
при эксплуатации преобразователя частоты.
Квалифицированный персонал
1.8.2
Правильная и надежная транспортировка, хранение,
монтаж, эксплуатация и обслуживание необходимы для
беспроблемной и безопасной работы преобразователя
частоты. Монтаж и эксплуатация этого оборудования
должны выполняться только квалифицированным
персоналом.
ВНИМАНИЕ!
НЕПРЕДНАМЕРЕННЫЙ ПУСК
Если преобразователь частоты подключен к сети
питания переменного тока, источнику переменного
тока или цепи разделения нагрузки, двигатель может
включиться в любой момент. Случайный пуск во
время программирования, техобслуживания или
ремонтных работ может привести к летальному
исходу, получению серьезных травм или порче
имущества. Двигатель может запуститься внешним
переключателем, командой по шине
последовательной связи, входным сигналом задания с
LCP либо после устранения неисправности.
Чтобы предотвратить случайный пуск двигателя:
Отсоедините преобразователь частоты от
•
сети.
Перед программированием параметров
•
обязательно нажмите на LCP кнопку [O/
Reset] (Выкл./Сброс).
Подключение проводки и монтаж
•
компонентов преобразователя частоты,
двигателя и любого подключенного
оборудования должны быть полностью
завершены, когда преобразователь частоты
подключается к сети переменного тока,
источнику постоянного тока или цепи
разделения нагрузки
Квалифицированный персонал определяется как
обученный персонал, уполномоченный проводить
монтаж, ввод в эксплуатацию и техническое
обслуживание оборудования, систем и цепей в
соответствии с применимыми законами и правилами.
Кроме того, персонал должен хорошо знать указания и
правила безопасности, описанные в этих инструкциях
по эксплуатации.
ВНИМАНИЕ!
ВЫСОКОЕ НАПРЯЖЕНИЕ!
Преобразователи частоты, подключенные к сети
переменного тока, источнику постоянного тока или
цепи разделения нагрузки, находятся под высоким
напряжением. Установка, пусконаладка и
техобслуживание должны выполняться
квалифицированным персоналом; несоблюдение
этого требования может привести к летальному
исходу или получению серьезных травм.
Монтаж, пусконаладочные работы и
•
обслуживание должны осуществляться
только квалифицированным персоналом.
ВНИМАНИЕ!
ВРЕМЯ РАЗРЯДКИ
В преобразователе частоты установлены
конденсаторы постоянного тока, которые остаются
заряженными даже после отключения сетевого
питания. Несоблюдение указанного периода
ожидания после отключения питания перед началом
обслуживания или ремонта может привести к
летальному исходу или серьезным травмам.
Остановите двигатель.
•
Отключите сеть переменного тока и
•
дистанционно расположенные источники
питания сети постоянного тока, в том числе
резервные аккумуляторы, ИБП и
подключения к сети постоянного тока других
преобразователей частоты.
Отсоедините или заблокируйте двигатель с
•
постоянными магнитами.
Перед выполнением работ по обслуживанию
•
и ремонту следует дождаться полной
разрядки конденсаторов. Время ожидания
указано в Таблица 1.4.
14 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 15
Введение
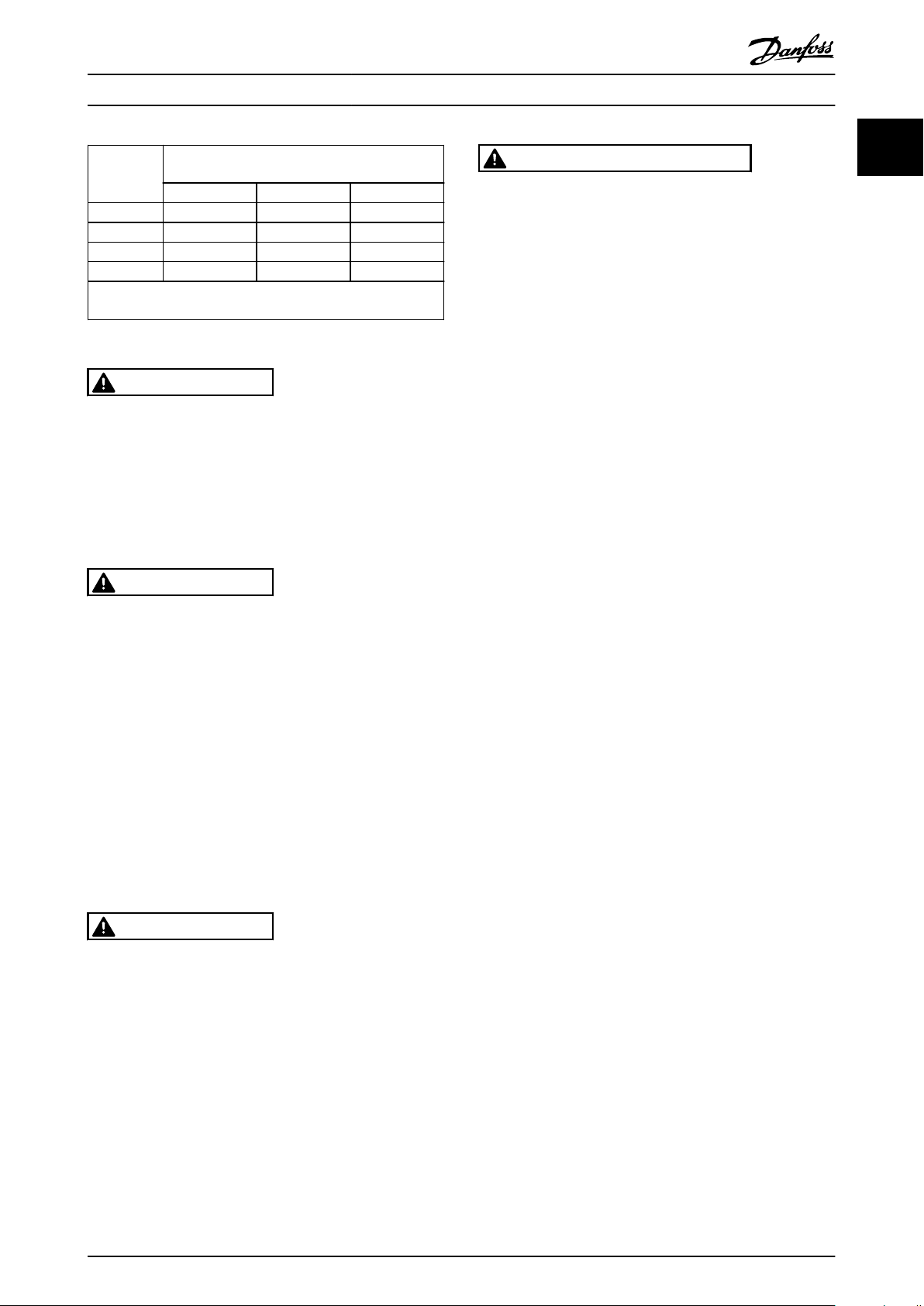
Напряжени
е
[B]
200-240 0,25–3,7 кВт - 5,5–45 кВт
380-480 0,37–7,5 кВт - 11–90 кВт
525-600 0,75–7,5 кВт - 11–90 кВт
525-690 - 1,1–7,5 кВт 11–90 кВт
Высокое напряжение может присутствовать даже в том
случае, если светодиоды предупреждений погасли.
Таблица 1.4 Время разрядки
Минимальное время ожидания
(в минутах)
4 7 15
Руководство по проектированию
ВНИМАНИЕ!
ОПАСНОСТЬ ТОКА УТЕЧКИ
Токи утечки превышают 3,5 мА. Неправильное
заземление преобразователя частоты может привести
к летальному исходу или серьезным травмам.
Правильное заземление оборудования
•
должно быть устроено сертифицированным
специалистом-электромонтажником.
ПРЕДУПРЕЖДЕНИЕ
ОПАСНОСТЬ В СЛУЧАЕ ВНУТРЕННЕГО
ОТКАЗА
Если преобразователь частоты не закрыт должным
образом, внутренняя неисправность в
преобразователе частоты может привести к
серьезным травмам.
Перед включением в сеть убедитесь, что все
•
защитные крышки установлены на свои
места и надежно закреплены.
1
1
ВНИМАНИЕ!
ОПАСНОЕ ОБОРУДОВАНИЕ
Прикосновение к вращающимся валам и
электрическому оборудованию может привести к
летальному исходу или серьезным травмам.
Обеспечьте, чтобы монтаж, пусконаладка и
•
техническое обслуживание выполнялись
только обученным и квалифицированным
персоналом.
Убедитесь, что электромонтажные работы
•
выполняются в соответствии с
государственными и местными
электротехническими нормами.
Соблюдайте процедуры, описанные в этом
•
документе.
ВНИМАНИЕ!
НЕПРЕДНАМЕРЕННОЕ ВРАЩЕНИЕ ДВИГАТЕЛЯ
САМОВРАЩЕНИЕ
Случайное вращение электродвигателей с
постоянными магнитами генерирует напряжение и
может заряжать цепи преобразователя, что может
привести к смертельному исходу, серьезным травмам
или повреждению оборудования.
Для предотвращения случайного вращения
•
убедитесь, что двигатели с постоянными
магнитами заблокированы.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 15
Page 16
130BD889.10
60
50
40
30
20
10
H
s
0 100 200 300 400
(mwg)
1350rpm
1650rpm
0
10
20
30
(kW)
40
50
60
200100 300
(
m3 /h
)
(
m3 /h
)
400
1350rpm
1650rpm
P
shaft
1
Обзор изделия
2 Обзор изделия
VLT® AQUA Drive FC 202
22
2.1 Введение
В этой главе представлены общие сведения об
основных узлах и контурах преобразователя частоты. В
ней описываются внутренние электрические функции и
функции обработки сигналов. Приводится также
описание внутренней структуры управления.
Кроме того, описываются автоматизированные и
дополнительные функции преобразователя частоты,
позволяющие разрабатывать стабильно
эксплуатируемые системы с расширенными функциями
управления и отчетности о состоянии.
Специализация продукта для
2.1.1
применения в системах
водоснабжения и водоотвода
Преобразователь частоты VLT
разработан для применения в системах водоснабжения
и водоотвода. Интегрированный мастер SmartStart и
быстрое меню Водоснабжение и насосы инструктируют
пользователя в процессе ввода в эксплуатацию. В числе
его стандартных и дополнительных функций:
Каскадное управление
•
Обнаружение работы всухую
•
Обнаружение конца характеристики
•
Чередование двигателей
•
Очистка
•
Начальное и конечное изменение скорости
•
Изменение скорости контрольного клапана
•
STO
•
Обнаружение низкого расхода
•
Пресмазка
•
Подтверждение потока
•
Режим заполнения трубы
•
Режим ожидания
•
Часы реального времени
•
Защита паролем
•
Защита от перегрузки
•
Интеллектуальное логическое управление
•
Мониторинг нижнего предела скорости
•
Произвольно программируемые
•
информационные, предупреждающие тексты и
тексты оповещений
®
AQUA Drive FC 202
2.1.2
Энергосбережение
По сравнению с другими системами и технологиями
управления, преобразователь частоты является
энергетически оптимальной системой управления
вентиляторами и насосами.
При использовании преобразователя частоты для
управления расходом, снижение скорости насоса на 20
% ведет к сокращению потребления электроэнергии на
50 % в типовых применениях. На
Рисунок 2.1 показан пример сокращения потребления
электроэнергии.
1 Энергосбережение
Рисунок 2.1 Пример: энергосбережение
16 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 17
n
100%
50%
25%
12,5%
50% 100%
80%
80%
175HA208.10
Power ~n
3
Pressure ~n
2
Flow ~n
Обзор изделия Руководство по проектированию
2.1.3 Пример энергосбережения
Как показано на Рисунок 2.2, управление расходом
осуществляется с помощью изменения скорости насоса
(измеряемой в оборотах в минуту). При уменьшении
скорости только на 20 % относительно номинальной
скорости расход уменьшается также на 20 %. Это
происходит потому, что расход прямо пропорционален
скорости. В то же время, потребление электроэнергии
снижается почти на 50 %.
Если система предназначена для обеспечения 100процентного расхода лишь в течение нескольких дней в
году, а в остальное время расход составляет менее 80 %
от номинального, количество сэкономленной
электроэнергии даже превышает 50 %.
На Рисунок 2.2 показана зависимость расхода, давления
и энергопотребления от скорости (об/мин) для
центробежных насосов.
Рисунок 2.2 Законы подобия для центробежных насосов
Q = расход
P = мощность
Q1 = расход 1 P1 = мощность 1
Q2 = пониженный расход P2 = пониженная мощность
H = давление n = регулируемая скорость
вращения
H1 = давление 1 n1 = скорость 1
H2 = пониженное давление n2 = пониженная скорость
вращения
Таблица 2.1 Законы подобия
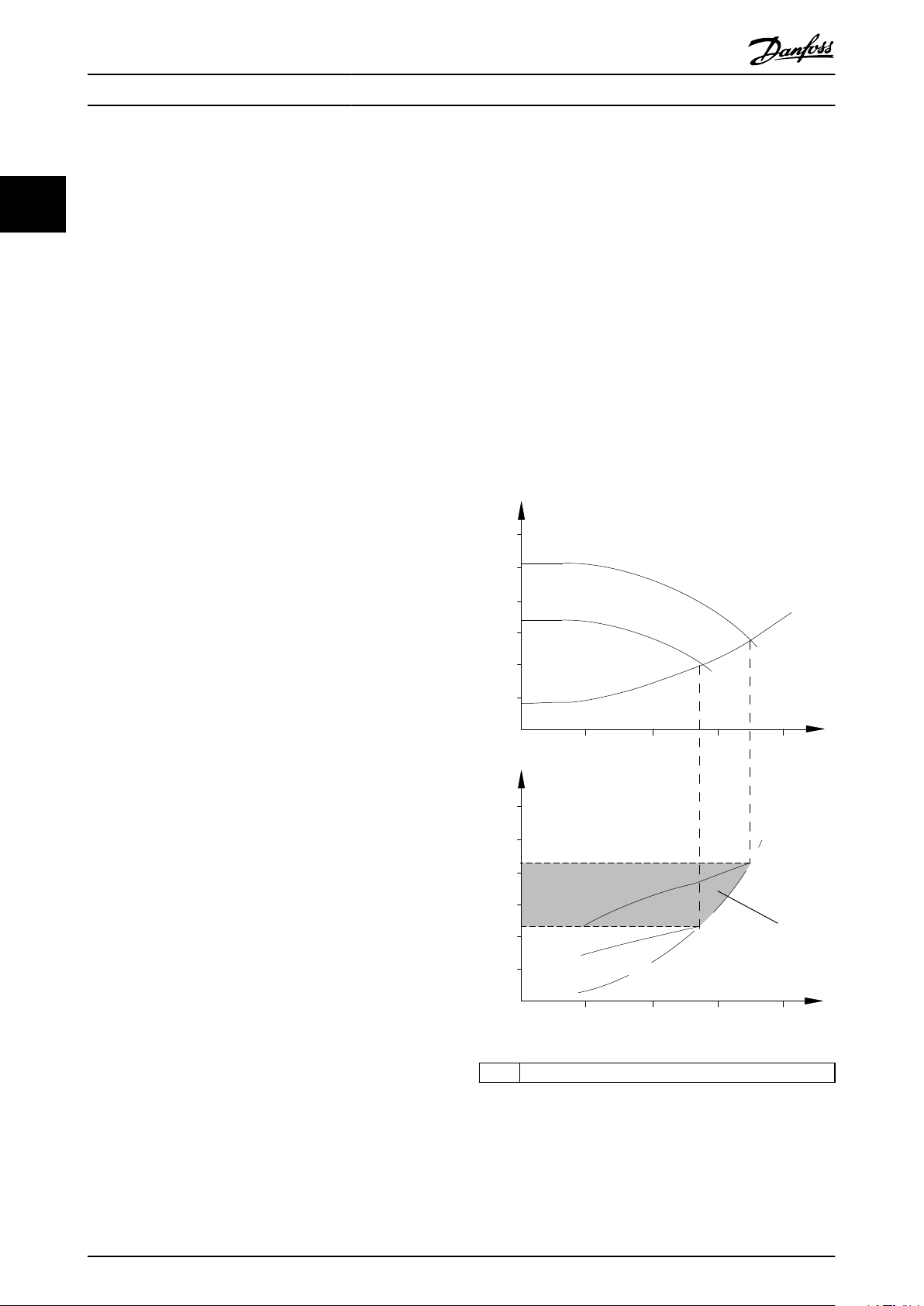
2.1.4 Управление при помощи клапанов
и при помощи регулирования
скорости для центробежных
насосов
Управление при помощи клапана
Так как потребности технологического процесса в
системах подачи воды могут изменяться, необходимо
соответствующим образом регулировать расход. Часто
используются такие методы управления потоком, как
дросселирование или рециркуляция с помощью
клапанов.
Слишком сильно открытый циркуляционный клапан
может привести к работе насоса в конце кривой
насосных характеристик, с высоким расходом и низким
напором. Такие условия не только вызывают потерю
энергии в связи с высокой скоростью работы насоса, но
и могут привести к кавитации, влекущей повреждение
насоса.
При регулировке потока с помощью клапана
увеличивается перепад давления на клапане (HP-HS).
Это можно сравнить с одновременным нажатием на
педаль газа и педаль тормоза с целью уменьшить
скорость автомобиля. На Рисунок 2.3 показано, что
дросселирование заставляет кривую системы повернуть
от точки (2) на кривой характеристик насоса к точке со
значительно меньшим КПД (1).
2 2
Q
n
1
Расход:
Давление:
Мощность:
1
=
Q
n
2
2
2
H
n
1
1
=
H
n
2
2
3
P
n
1
1
=
P
n
2
2
Предполагается одинаковая эффективность во всем
диапазоне скоростей.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 17
Page 18
100% speed
Flow
Flow
Pump curve
Head or pressure Head or pressure
Natural
operating point
Operating
point
Throttled
Unthrottled
Throttled system
Unthrottled system
60
65
70
75
78
80
80
78
75
3
1
1
2
2
3
Hs
Hp
130BD890.10
Flow
Head or Pressure
Pump curve
Operating
point
Natural
Operating point
system
Unthrottled
Speed
reduction
1
2
3
Hp
Hs
130BD894.10
140
130
120
110
100
90
80
70
60
50
40
30
20
10
0 10 20 30 40 50 60 70 80 90 100
Recirculation
Throttle
control
Cycle
control
VSD
control
Ideal pump
control
Q(%)
P(%)
130BD892.10
Обзор изделия
VLT® AQUA Drive FC 202
22
1 Рабочая точка при использовании дроссельного
клапана
2 Естественная рабочая точка
3 Рабочая точка при регулировании скорости
Рисунок 2.3 Уменьшение расхода посредством управления
клапаном (дросселирование)
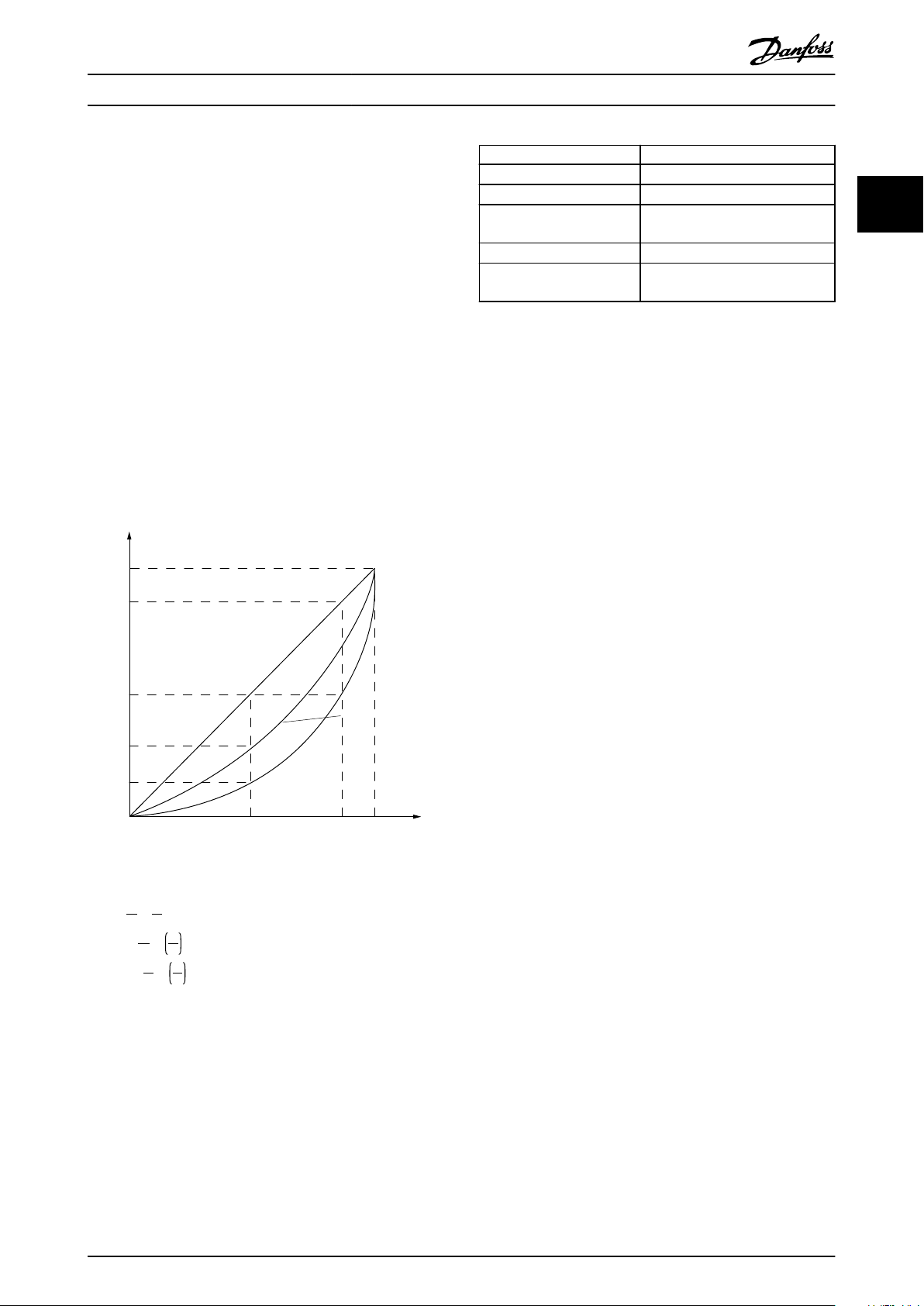
Регулирование скорости
Тот же поток может регулироваться путем снижения
скорости насоса, как показано на Рисунок 2.4. Снижение
скорости уводит кривую насоса вниз. Рабочая точка
является новой точкой пересечения кривой насоса и
кривой системы (3). Энергосбережение может быть
вычислено путем применения законов подобия, как
описано в глава 2.1.3 Пример энергосбережения.
18 Danfoss A/S © 09/2014 Все права защищены. MG20N650
1
Рабочая точка при использовании дроссельного
клапана
2 Естественная рабочая точка
3 Рабочая точка при регулировании скорости
Рисунок 2.4 Снижение расхода путем регулирования
скорости
Рисунок 2.5 Сравнительные кривые регулирования потока
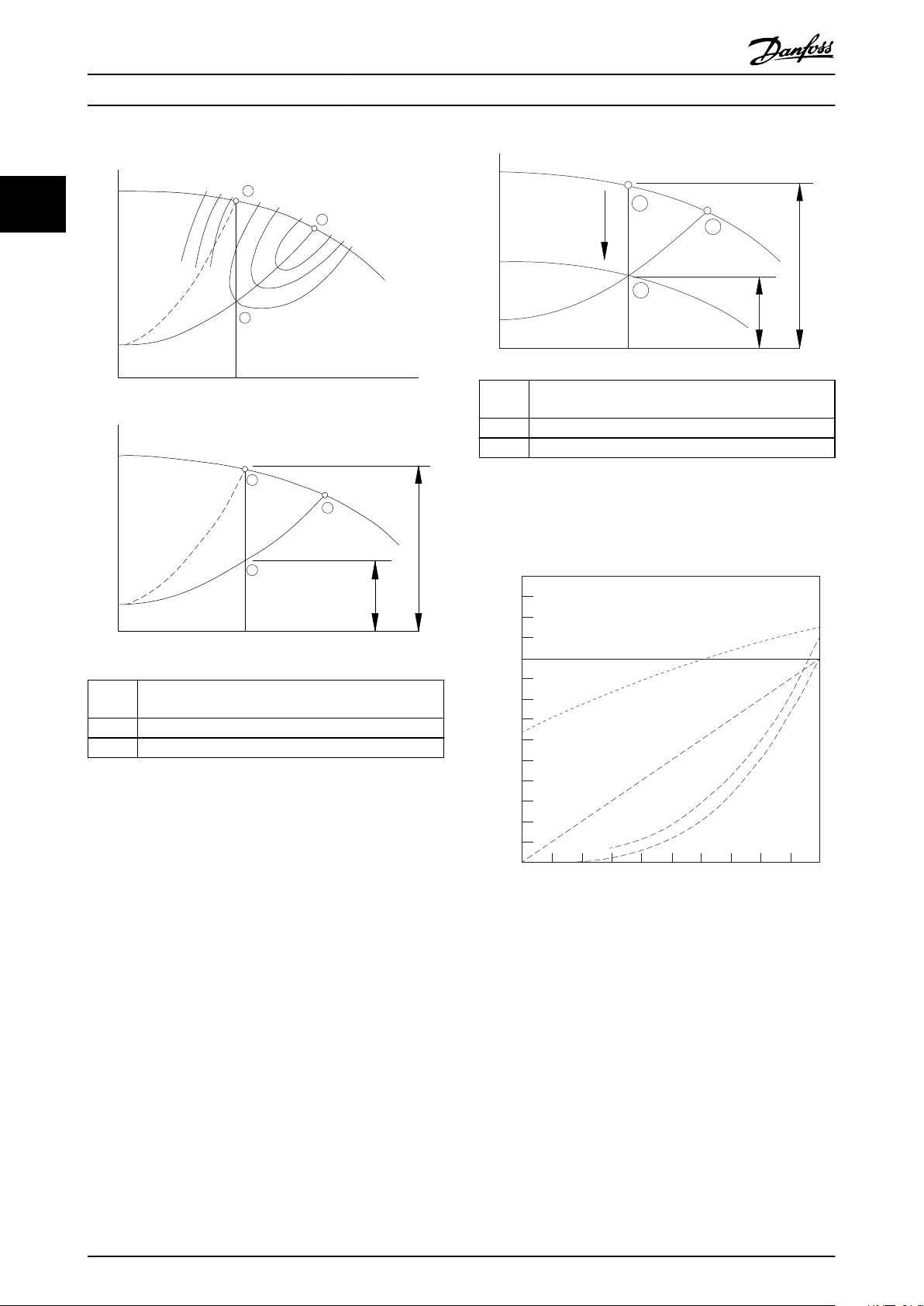
Пример расхода, изменяющегося в
2.1.5
течение 1 года
Этот пример рассчитан на основании характеристик
насоса, полученных из листа его технических данных,
показанных в Рисунок 2.7.
Полученные результаты показывают, что при данном
распределении расхода экономия за год превышает 50
%,
см. Рисунок 2.6. Срок окупаемости зависит от стоимости
одного киловатт-часа и стоимости преобразователя
частоты. В этом примере срок окупаемости составляет
Page 19
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Обзор изделия
Руководство по проектированию
менее года, если сравнивать с вариантом,
использующим клапаны и постоянную скорость.
т [ч] Продолжительность расхода. См. также
Таблица 2.2.
Q [м³/ч] Расход
Рисунок 2.6 Распределение расхода в течение 1 года
(длительность и объемы)
РасходРаспределениеРегулирование с
помощью клапана
% Продолж
ительнос
[м³/ч] [ч] [kW] [kWh] [kW] [kWh]
350 5 438
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752
1008760 – 275,064 – 26,801
Σ
Таблица 2.2 Результат
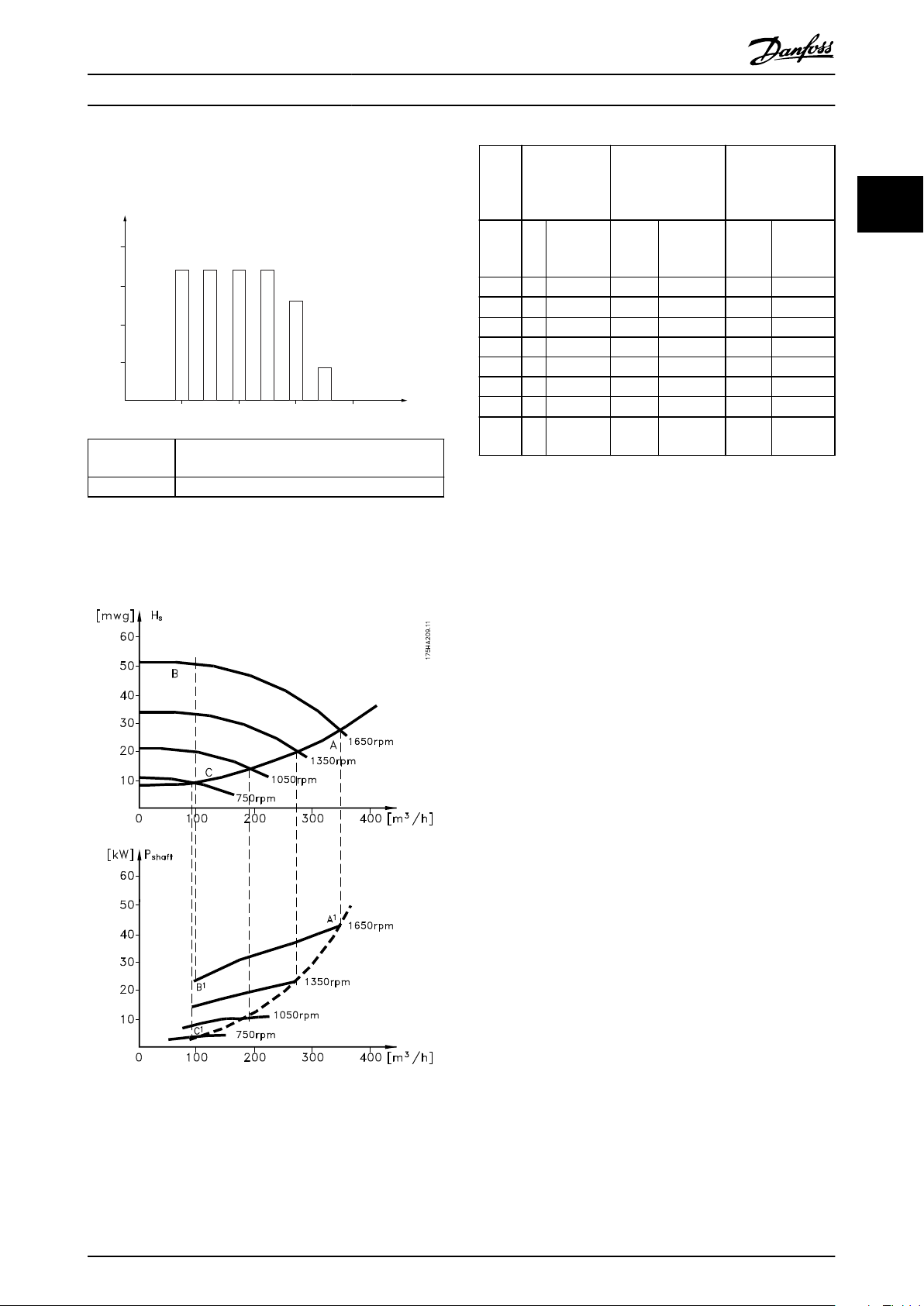
1) Показания мощности в точке A1
2) Показания мощности в точке B1
3) Показания мощности в точке C1
Улучшенное управление
2.1.6
Мощн
ость
ть
42,5
23,0
1)
2)
Потреб-
ление
18,615
40,296
Управление
с помощью
преобразователя
частоты
Мощн
ость
42,5
3,5
1)
3)
Потреб-
ление
18,615
6,132
2 2
Использование преобразователя частоты для
регулирования расхода или давления в системе дает
более высокое качество управления.
Преобразователь частоты может изменять скорость
вращения вентилятора или насоса, обеспечивая
плавное регулирование расхода и давления.
Кроме того, преобразователь частоты способен быстро
адаптировать скорость вращения вентилятора или
насоса к новым значениям расхода или давления в
системе.
Благодаря использованию встроенного ПИ-регулятора
обеспечивается простое управление процессом
(расходом, уровнем или давлением).
Пускатель типа «звезда/
2.1.7
треугольник» или устройство
плавного пуска
Для пуска мощных двигателей во многих странах
используются устройства ограничения пускового тока. В
более традиционных системах используется пускатель с
переключением обмоток двигателя со звезды на
треугольник или устройство плавного пуска. При
использовании преобразователя частоты такие
пускатели не требуются.
Рисунок 2.7 Потребление энергии для различных скоростей
Как показано на рисунке Рисунок 2.8, преобразователь
частоты не потребляет ток, превышающий
номинальный.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 19
Page 20
Full load
% Full load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
Обзор изделия
22
1
VLT® AQUA Drive FC 202
2 Пускатель типа «звезда/треугольник»
3 Устройство плавного пуска
4 Пуск непосредственно от сети
Рисунок 2.8 Пусковой ток
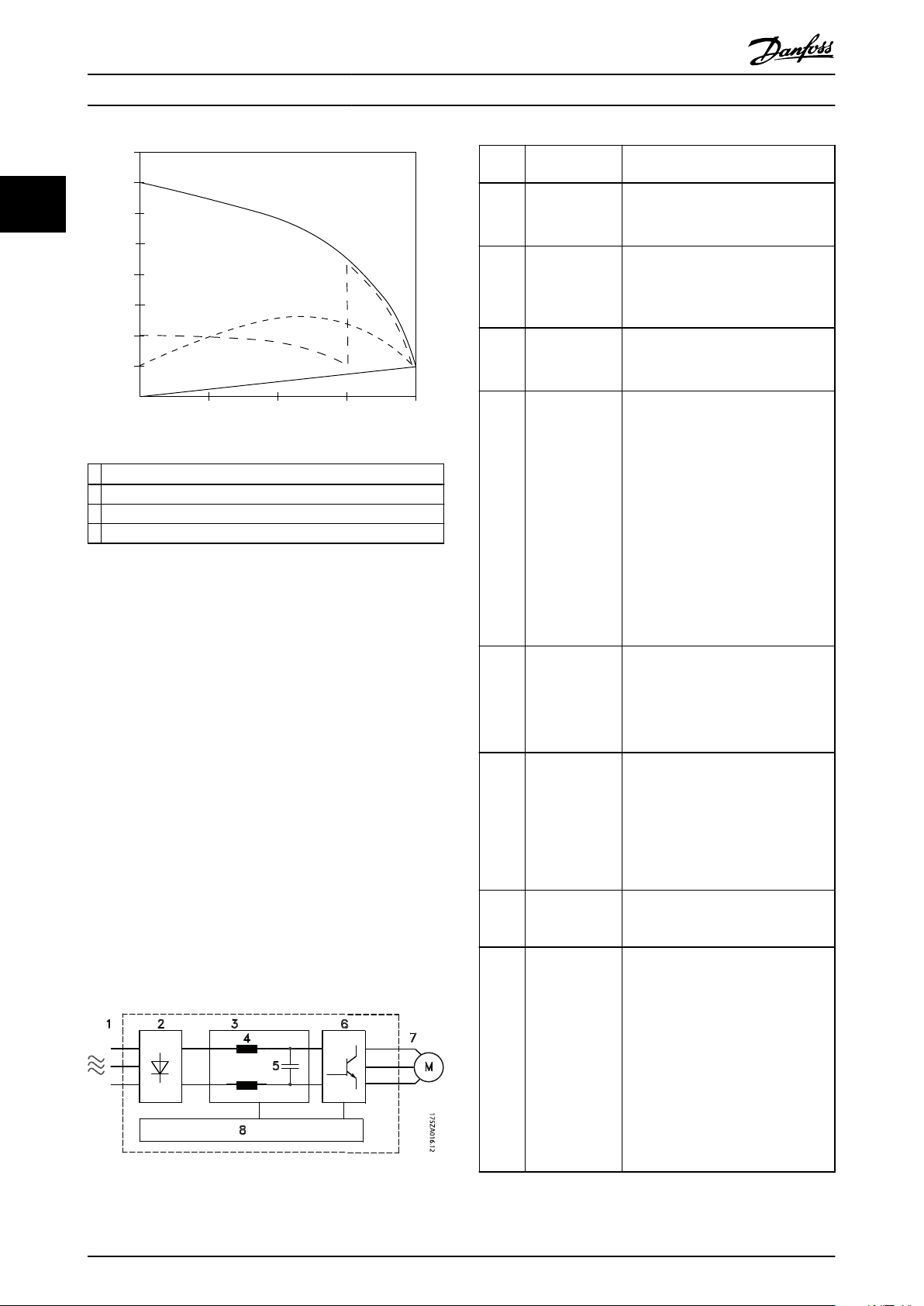
2.2
Описание работы
Преобразователь частоты обеспечивает подачу из сети
регулируемого количества переменного тока на
двигатель для регулирования частоты вращения этого
двигателя. Преобразователь частоты подает на
двигатель ток переменной частоты и напряжения.
Преобразователь частоты можно поделить на четыре
основных модуля:
Выпрямитель
•
Промежуточная цепь шины постоянного тока
•
Инвертор
•
Модуль управления и регулирования
•
На Рисунок 2.9 представлена блок-схема внутренних
компонентов преобразователя частоты. Описание их
функций см. в Таблица 2.3.
VLT® AQUA Drive FC 202
ОбластьНазвание Функции
Вход сетевого
1
питания
2 Выпрямитель
Шина
3
постоянного
тока
Реакторы
4
постоянного
тока
Конденсаторная
5
батарея
6 Инвертор
Выходной
7
сигнал на
двигатель
Управляющая
8
схема
3-фазное питание
•
преобразователя частоты от сети
переменного тока.
Выпрямительный мост
•
преобразовывает переменный
ток на входе в постоянный ток
для подачи питания на инвертор.
Промежуточная цепь шины
•
постоянного тока использует
постоянный ток.
Фильтруют напряжение
•
промежуточной цепи
постоянного тока.
Обеспечивают защиту от
•
переходных процессов в сети.
Уменьшают эффективное
•
значение тока.
Повышают коэффициент
•
мощности, передаваемой
обратно в сеть.
Уменьшают гармоники на входе
•
переменного тока.
Сохраняет энергию постоянного
•
тока.
Обеспечивает защиту от скачков
•
при краткосрочной потере
мощности.
Преобразовывает постоянный
•
ток в переменный ток на выходе
с формой колебаний,
регулируемой широтноимпульсной модуляцией (ШИМ),
для управления
электродвигателем.
Регулируемое 3-фазное выходное
•
питание на двигатель.
Выполняет мониторинг входного
•
питания, внутренней обработки,
выходного тока и тока двигателя
для обеспечения эффективности
работы и управления.
Выполняет мониторинг и
•
исполнение команд интерфейса
пользователя и внешних команд.
Рисунок 2.9 Блок-схема преобразователя частоты
20 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Обеспечивает вывод состояния и
•
контроль работы.
Таблица 2.3 Пояснения к Рисунок 2.9
Page 21
Inrush
R inr
Load sharing -
Load sharing +
LC Filter (5A)
LC Filter +
(5A)
Brake
Resistor
130BA193.14
M
L2 92
L1 91
L3 93
89(+)
88(-)
R+
82
R81
U 96
V 97
W 98
P 14-50 R Filter
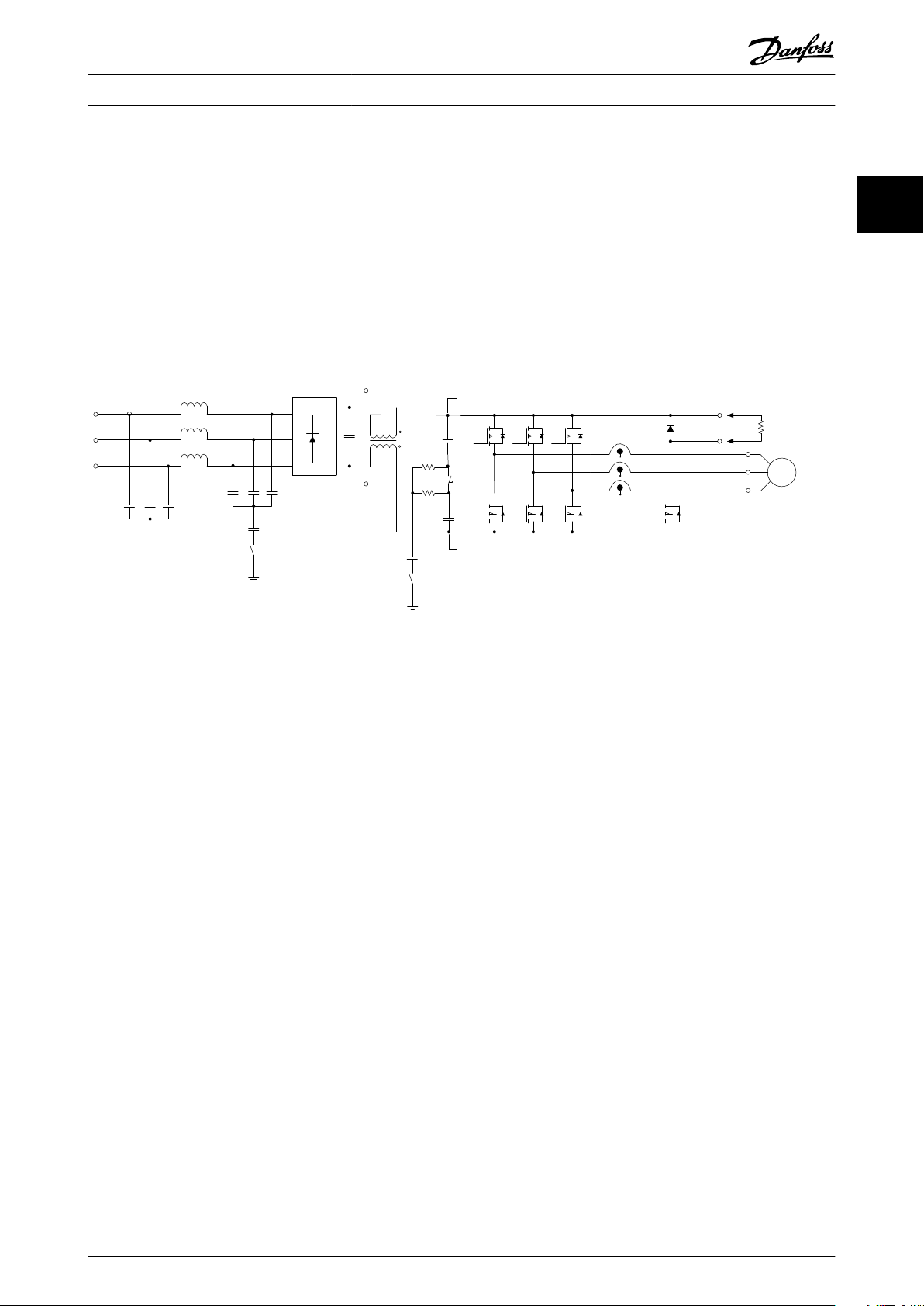
Обзор изделия Руководство по проектированию
1. Преобразователь частоты выпрямляет сетевое
переменное напряжение, преобразуя его в
постоянное напряжение.
2. Постоянное напряжение преобразуется в
переменный ток с регулируемой амплитудой и
частотой.
Преобразователь частоты подает на двигатель
изменяющиеся напряжение/ток и частоту, благодаря
чему обеспечивается плавное регулирование скорости
вращения стандартных трехфазных асинхронных
двигателей и неявнополюсных двигателей с постоянным
магнитами.
Преобразователь частоты может использовать
различные принципы управления двигателем, включая
режим U/f для специальных двигателей и векторное
управление напряжением (VVC+). Поведение при
коротком замыкании преобразователя частоты зависит
от трех преобразователей тока в фазах двигателя.
2 2
Рисунок 2.10 Структура преобразователя частоты
2.3 Последовательность работы
2.3.1 Секция выпрямителя
Когда сетевое питание подается на преобразователь
частоты, оно проходит через входные клеммы (L1, L2 и
L3) и разъединитель и/или дополнительное устройство
фильтрации ВЧ-помех, в зависимости от конфигурации.
2.3.2 Промежуточная секция
Пройдя через секцию выпрямителя, напряжение
поступает на промежуточную секцию. Выпрямленное
напряжение сглаживается в контуре синусоидного
фильтра, состоящем из катушки индуктивности шины
постоянного тока и батареи конденсаторов шины
постоянного тока.
Катушка индуктивности шины постоянного тока
обеспечивает продольное полное сопротивление к
изменению тока. Это способствует процессу фильтрации
и снижает гармонические искажения на форме входного
сигнала переменного тока, свойственные цепи
выпрямителя.
Секция инвертора
2.3.3
В секции инвертора, после получения команды
вращения и задания скорости, IGBT начинают
переключение для создания выходной формы сигнала.
Сигнал этой формы, сформированный по принципу
PWM VVC+ Danfoss в плате управления, обеспечивает
оптимальные характеристики и минимум потерь в
двигателе.
2.3.4 Дополнительное устройство
торможения
Для преобразователей частоты с динамическим
торможением используется тормозной IGBT с клеммами
81(R-) и 82(R+) для подключения внешнего тормозного
резистора.
Функция торможения IGBT служит для ограничения
напряжения в промежуточной цепи, когда превышено
максимальное напряжение. Это осуществляется
посредством коммутации внешнего резистора на шине
постоянного тока, чтобы снять избыточное напряжение
постоянного тока в конденсаторах шины.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 21
Page 22

Обзор изделия
VLT® AQUA Drive FC 202
Внешнее расположение тормозного резистора имеет то
преимущество, что резистор можно выбрать в
зависимости от потребностей применения; при этом
22
энергия резистора рассеивается за пределы панели
управления, что защищает преобразователь от
перегрева при перегрузке тормозного резистора.
На плате управления образуется сигнал драйвера
затвора тормозного IGBT, который через силовую плату
и плату драйверов поступает в тормозной IGBT. Кроме
того, плата питания и плата управления контролируют
соединение тормозного IGBT с тормозным резистором,
предотвращая возможность коротких замыканий и
перегрузок. Технические характеристики
предварительных предохранителей см. в
глава 7.1 Электрические характеристики. См. также
глава 7.7 Предохранители и автоматические
выключатели.
Разделение нагрузки
2.3.5
В устройствах со встроенным разделением нагрузки
есть клеммы 89 (+) и 88 (-) постоянного тока. В
преобразователе частоты эти клеммы подключены к
шине постоянного тока перед реактором цепи
постоянного тока и конденсаторами шины.
2.4
2.4.1 Разомкнутый контур структуры
соединить неограниченное число
преобразователей частоты, однако у всех
преобразователей должно быть одно и то же
номинальное напряжение. Кроме того, в
зависимости от мощности и числа устройств
может потребоваться установка в цепи
постоянного тока реакторов постоянного тока
и плавких предохранителей постоянного тока,
а в сети — реакторов переменного тока.
Использование этой конфигурации требует
учета различных специальных факторов.
Обратитесь за помощью к Danfoss.
2. Во второй конфигурации преобразователь
частоты питается исключительно от источника
постоянного тока. Для нее нужны:
2a источник постоянного тока.
2b способ постепенной подачи
напряжения на шину постоянного тока
при включении.
Использование такой конфигурации требует
учета различных специальных факторов.
Обратитесь за помощью к Danfoss.
Структуры управления
управления
За дополнительной информацией обращайтесь в
Danfoss.
При подключении клемм с разделением нагрузки
существуют две конфигурации.
1. При первом способе, клеммы используются для
подключения цепей шины постоянного тока от
разных преобразователей частоты. Это
позволяет блоку, находящемуся в
регенеративном режиме, передавать свое
излишнее напряжение на шине другому блоку,
который приводит двигатель. Разделение
нагрузки этим способом может снизить
потребность во внешних динамических
тормозных резисторах, а также способствует
экономии энергии. Таким образом можно
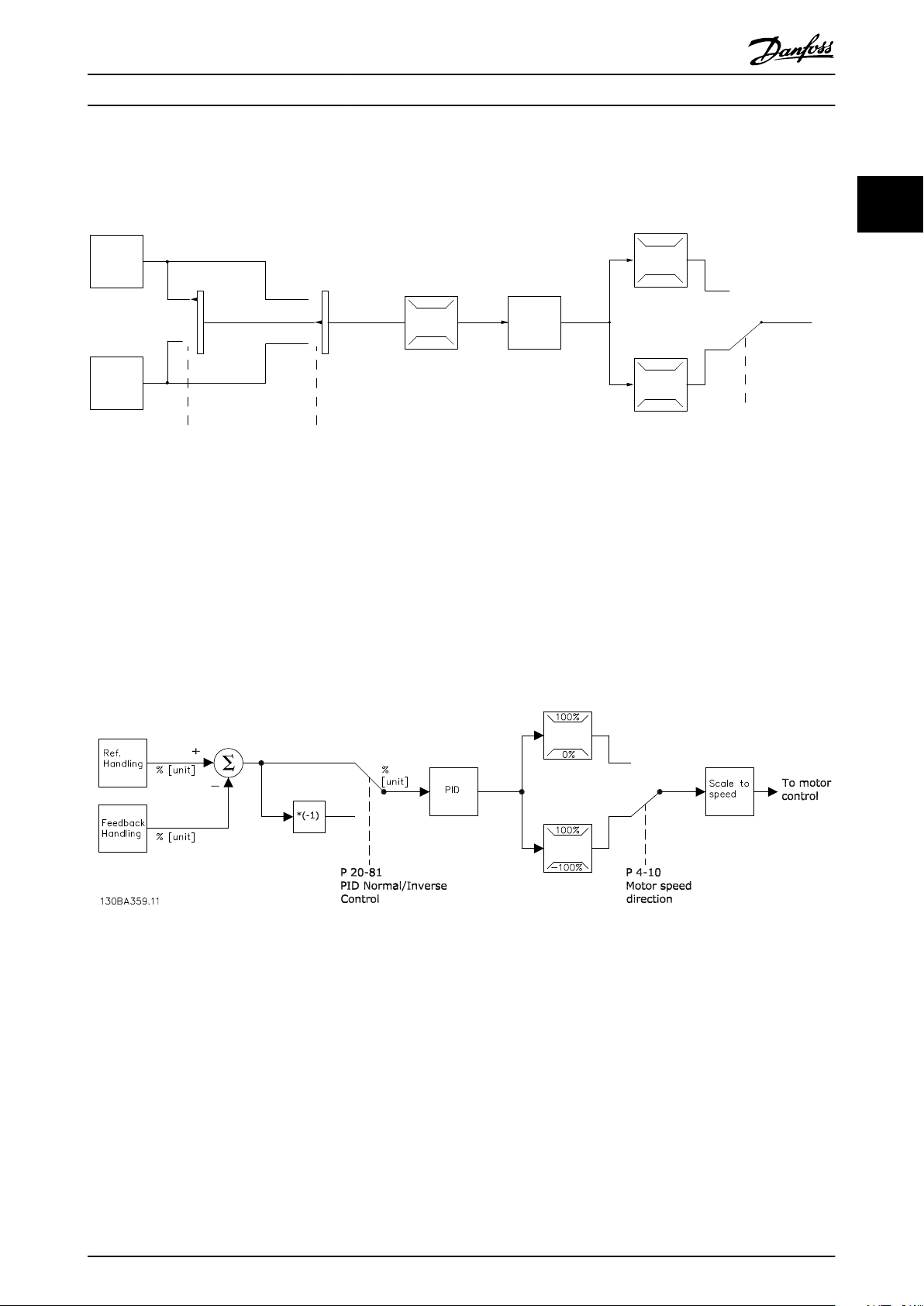
При работе в режиме с разомкнутым контуром
преобразователь частоты может управляться вручную с
панели местного управления (LCP) или дистанционно
через аналоговые/цифровые входы или по
последовательной шине.
В конфигурации, отображенной на Рисунок 2.11,
преобразователь частоты работает в режиме с
разомкнутым контуром. Он принимает входные сигналы
как от LCP (Ручной режим), так и сигналы от удаленного
источника (Автоматический режим). Сигнал (задание
скорости) принимается и модифицируется в
соответствии с запрограммированными минимальным и
максимальным пределами скорости двигателя (в об/мин
и Гц), временем ускорения и замедления, направлением
22 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 23
130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Обзор изделия Руководство по проектированию
вращения двигателя. Затем задание передается далее
для управления двигателем.
Рисунок 2.11 Блок-схема режима без обратной связи
Замкнутый контур структуры управления
2.4.2
2 2
В режиме замкнутого контура внутренний ПИДрегулятор позволяет преобразователю частоты
обрабатывать системные задания и сигналы обратной
связи и действовать в качестве независимого
сообщения (а также реализовывать функции с помощью
ряда других программируемых опций) для внешнего
мониторинга системы в ходе независимой работы по
схеме замкнутого контура.
устройства управления. Преобразователь может
выдавать сообщения о состоянии и аварийные
Рисунок 2.12 Блок-схема регулятора с замкнутым контуром
Рассмотрим, например, насосную систему, в которой
скорость насоса регулируется таким образом, чтобы
статическое давление в трубопроводе оставалось
постоянным (см. Рисунок 2.12). Преобразователь частоты
получает сигнал обратной связи от датчика,
установленного в системе. Сигнал обратной связи
сравнивается с величиной задания уставки и
определяет рассогласование (ошибку) между этими
сигналами, если таковое существует. После этого привод
изменяет скорость двигателя, чтобы устранить
рассогласование.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 23
Заданное значение статического давления является
сигналом задания для преобразователя частоты. Датчик
давления измеряет текущее статическое давление в
трубопроводе и подает измеренное значение на
преобразователь частоты в качестве сигнала обратной
связи. Если сигнал обратной связи больше задания
уставки, преобразователь частоты замедляет вращение,
снижая давление. Аналогично, если давление в
трубопроводе ниже задания уставки, преобразователь
частоты увеличивает скорость, увеличивая давление,
создаваемое насосом.
Page 24
Remote
reference
Local
reference
Auto mode
Hand mode
Linked to hand/auto
Local
Remote
Reference
130BA245.11
LCP Hand on,
o and auto
on keys
P 3-13
Reference site
130BD893.10
open loop
Scale to
RPM or
Hz
Scale to
closed loop
unit
closed loop
Local
ref.
Local
reference
Conguration
mode
P 1-00
Обзор изделия
VLT® AQUA Drive FC 202
Хотя значения по умолчанию для преобразователя
частоты в замкнутом контуре обычно обеспечивают
удовлетворительные рабочие характеристики,
22
управление системой часто удается оптимизировать
настройкой некоторых параметров ПИД-управления.
Для выполнения этой оптимизации используется
функция автоматической настройки.
Среди других программируемых функций:
Инверсное регулирование — скорость
•
двигателя повышается при высоком сигнале
обратной связи.
Пусковая частота позволяет системе быстро
•
достичь рабочего состояния, прежде чем
Рисунок 2.13 Активное задание
управление будет передано ПИД-регулятору.
Встроенный фильтр нижних частот — снижает
•
помехи в сигнале обратной связи.
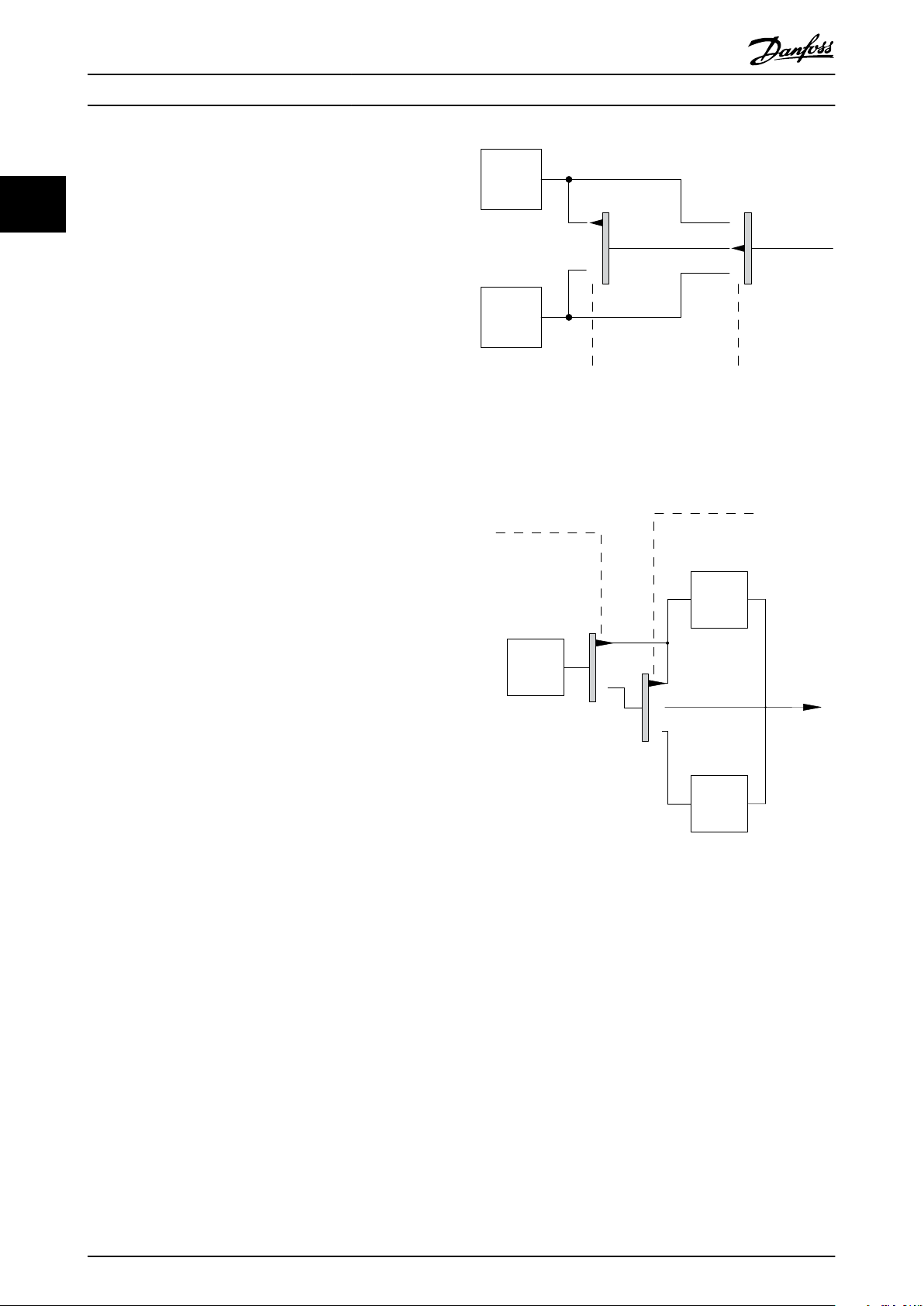
Местное (Hand On) и
2.4.3
дистанционное (Auto On)
управление
Преобразователь частоты может управляться вручную с
LCP или дистанционно через аналоговые и цифровые
входы или по последовательной шине.
Активное задание и режим конфигурирования
Активным может быть местное или дистанционное
задание. По умолчанию используется дистанционное
задание.
Чтобы использовать местное задание,
•
установите Ручной режим. Чтобы установить
Ручной режим, настройте значения параметров
в группе параметров 0-4* Клавиатура LCP.
Дополнительную информацию см. в
руководстве по программированию.
Чтобы использовать дистанционное задание,
•
установите Автоматический режим, который
является режимом по умолчанию. В
Автоматическом режиме можно управлять
преобразователем частоты с помощью
цифровых входов и по различным
последовательным каналам связи (RS485, USB
или по дополнительной периферийной шине).
На Рисунок 2.13 показан режим
•
конфигурирования в результате выбора
активного задания, местного или
дистанционного.
На Рисунок 2.14 показан ручной режим
•
конфигурирования для местного задания.
Рисунок 2.14 Режим конфигурирования
Принцип управления применением
И дистанционное задание, и местное задание активны в
любое время. Оба задания не могут быть активны
одновременно. Принцип прикладного управления (т. е.
разомкнутый контур или замкнутый контур)
устанавливается в 1-00 Режим конфигурирования, как
показано в Таблица 2.4.
Если включено местное задание, установите принцип
прикладного управления в 1-05 Конфиг. режима
местного упр..
Место задания устанавливается в 3-13 Место задания,
как показано в Таблица 2.4.
24 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 25
Обзор изделия Руководство по проектированию
Дополнительную информацию см. в Руководстве по
программированию.
Кнопки [Hand
On] (Ручной
пуск)
и [Auto On]
(Автоматическ
ий пуск)
на LCP
Hand (Ручной) Связанное Ручн/Авто Местное
Hand (Ручной)
⇒O (Выкл.)
Auto (Авто) Связанное Ручн/Авто Дистанционное
Auto (Авто)
⇒O (Выкл.)
Все кнопки Местное Местное
Все кнопки Дистанционное Дистанционное
Таблица 2.4 Конфигурации с местным и дистанционным
заданием
Формирование задания
2.4.4
Место задания
3-13 Место задания
Связанное Ручн/Авто Местное
Связанное Ручн/Авто Дистанционное
Активное
задание
Дистанционное задание
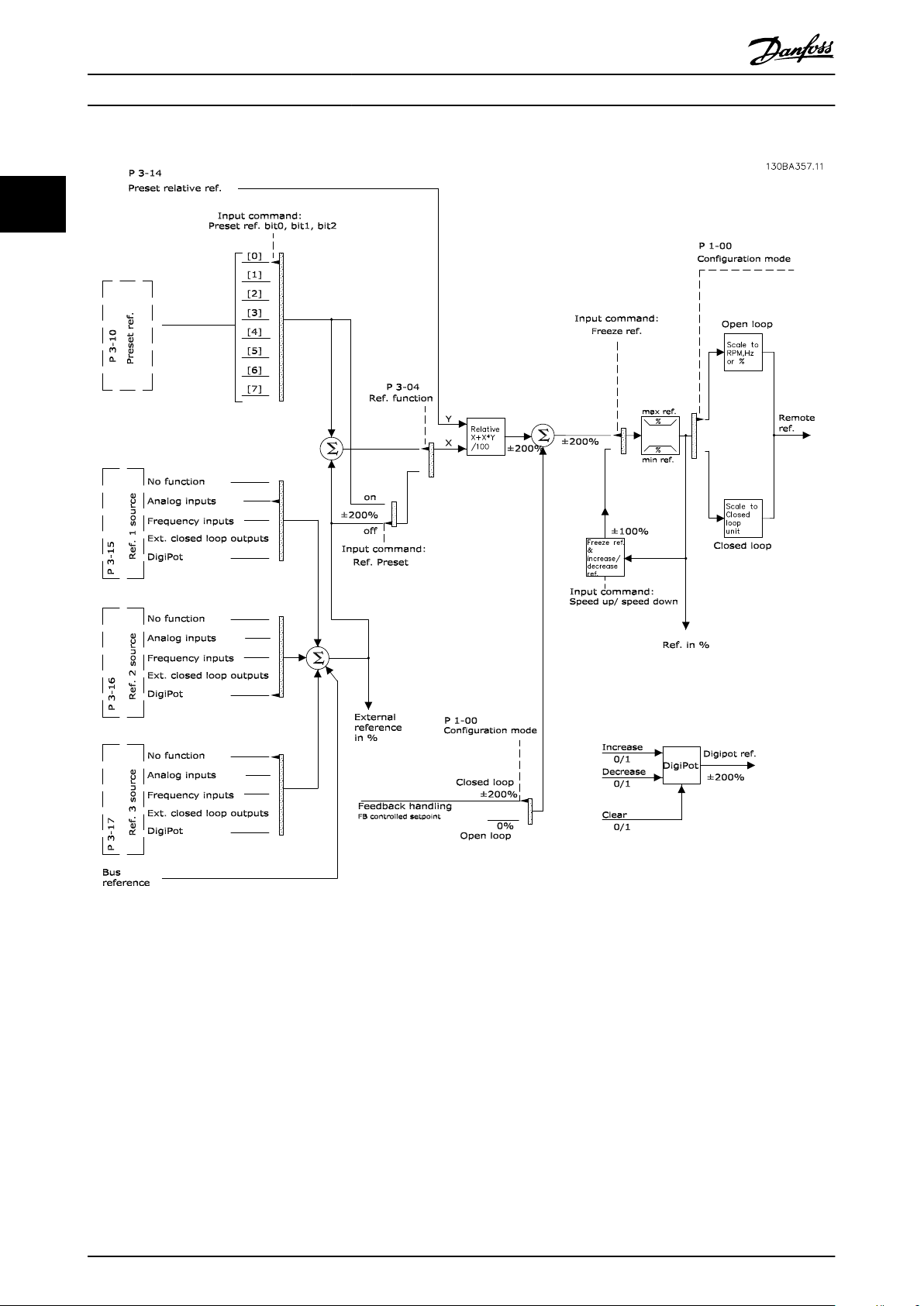
Дистанционное задание содержит следующие элементы
(см. Рисунок 2.15).
Предустановленные задания
•
Внешние задания:
•
Аналоговые входы
-
Частотно-импульсные входы
-
Входы цифрового потенциометра
-
Задания шины последовательной
-
связи
Предустановленное относительное задание
•
Уставка, управляемая обратной связью
•
2 2
Формирование задания применимо как при управлении
в режиме разомкнутого контура, так и в режиме
замкнутого контура.
Внутренние и внешние задания
В преобразователе частоты может программироваться
до 8 предустановленных заданий. Активное внутреннее
предустановленное задание можно выбрать извне с
помощью цифровых входов или по шине
последовательной связи.
Также на преобразователь может подаваться внешнее
задание, чаще всего через аналоговый управляющий
вход. Результирующее внешнее задание образуется
суммированием всех источников задания и задания по
шине. В качестве активного задания можно выбрать
внешнее задание, предустановленное задание, уставку,
или сумму этих 3 заданий. Это задание можно
масштабировать.
Масштабированное задание вычисляется следующим
образом:
Задание = X + X ×
Где: Х — внешнее задание, предустановленное задание
или сумма этих заданий, а Y —
3-14 Предустановл.относительное задание в [%].
Если значение Y, 3-14 Предустановл.относительное
задание, установлено равным 0 %, функция
масштабирования на задание действовать не будет.
Y
100
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 25
Page 26
Обзор изделия
VLT® AQUA Drive FC 202
22
Рисунок 2.15 Блок-схема обработки дистанционного задания
26 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 27
Обзор изделия Руководство по проектированию
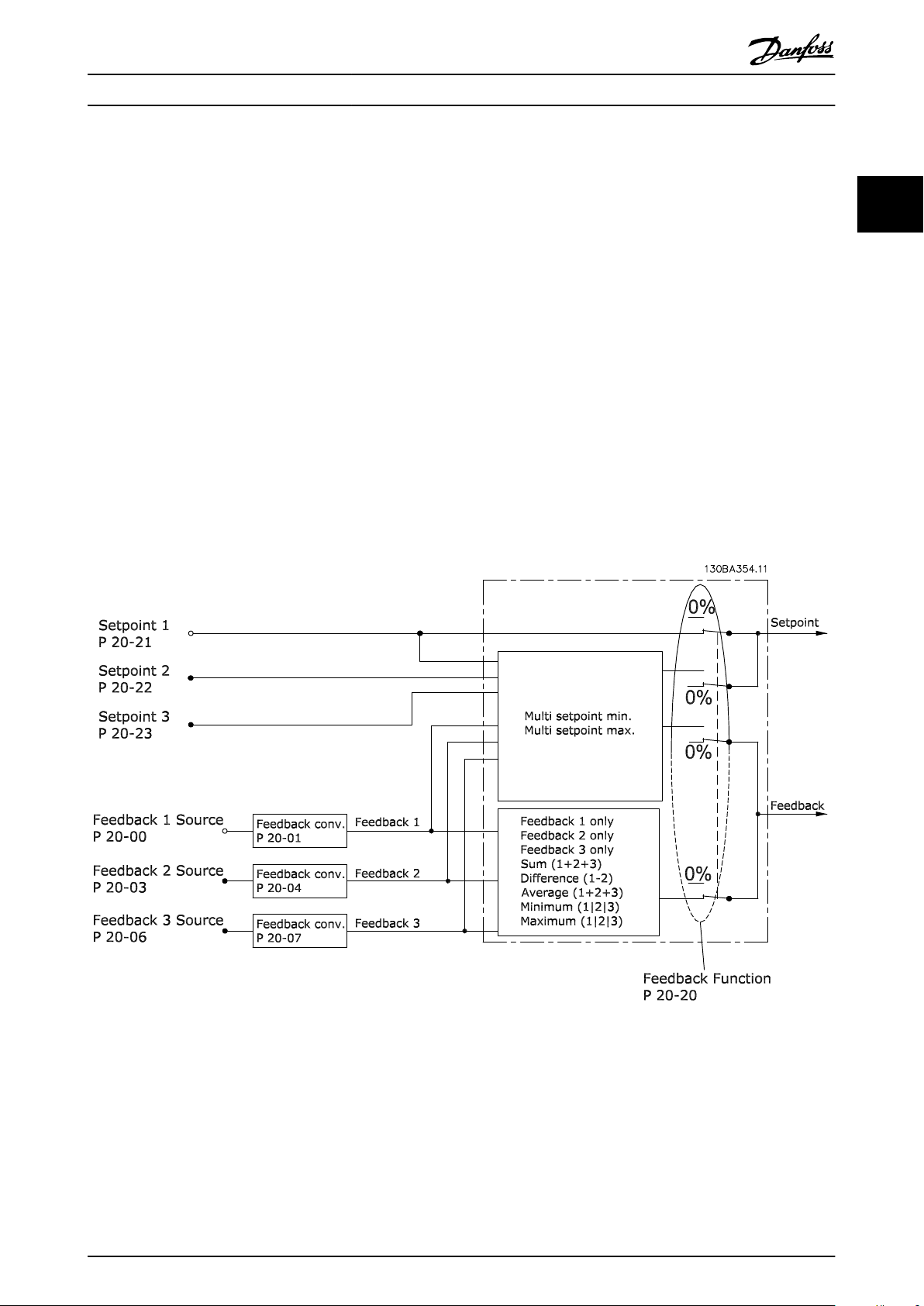
2.4.5 Формирование обратной связи
Функцию формирования сигнала обратной связи можно
конфигурировать таким образом, чтобы она работала с
приложениями, требующими усовершенствованного
управления, например с несколькими уставками и
несколькими типами обратной связи (см. Рисунок 2.16).
Обычно используются три типа управления:
Одна зона, одна уставка
Этот тип управления является базовым при
конфигурации обратной связи. Уставка 1 прибавляется к
любому другому заданию (если оно имеется) и
выбирается сигнал обратной связи.
Несколько зон, одна уставка
При этом типе управления используется 2 или 3 датчика
обратной связи, но только одна уставка. Сигналы
обратной связи могут складываться, вычитаться или
усредняться. Кроме того, может использоваться
максимальное или минимальное значение. В этой
конфигурации используется только уставка 1.
Несколько зон, уставка/обратная связь
Скоростью преобразователя частоты управляет пара
уставка/сигнал обратной связи с наибольшей
разностью. Максимум стремится поддерживать все зоны
на уровне или ниже соответствующих уставок, а
минимум — на уровне или выше соответствующих
уставок.
Пример
Применение с 2 зонами, 2 уставками Уставка зоны 1
равна 15 бар, а сигнал обратной связи равен 5,5 бар.
Уставка зоны 2 равна 4,4 бар, а сигнал обратной связи
эквивалентен 4,6 бар. Если выбран максимум, на ПИД-
регуляторе устанавливаются уставка и сигнал обратной
связи зоны 1, поскольку она имеет меньшую разность
(сигнал обратной связи больше уставки, т. е. разность
отрицательная). Если выбран минимум, на ПИД-
регуляторе устанавливаются уставка и сигнал обратной
связи зоны 2, поскольку она имеет большую разность
(сигнал обратной связи меньше уставки, т. е. разность
положительная).
2 2
Рисунок 2.16 Блок-схема обработки сигнала обратной связи
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 27
Page 28
Обзор изделия
VLT® AQUA Drive FC 202
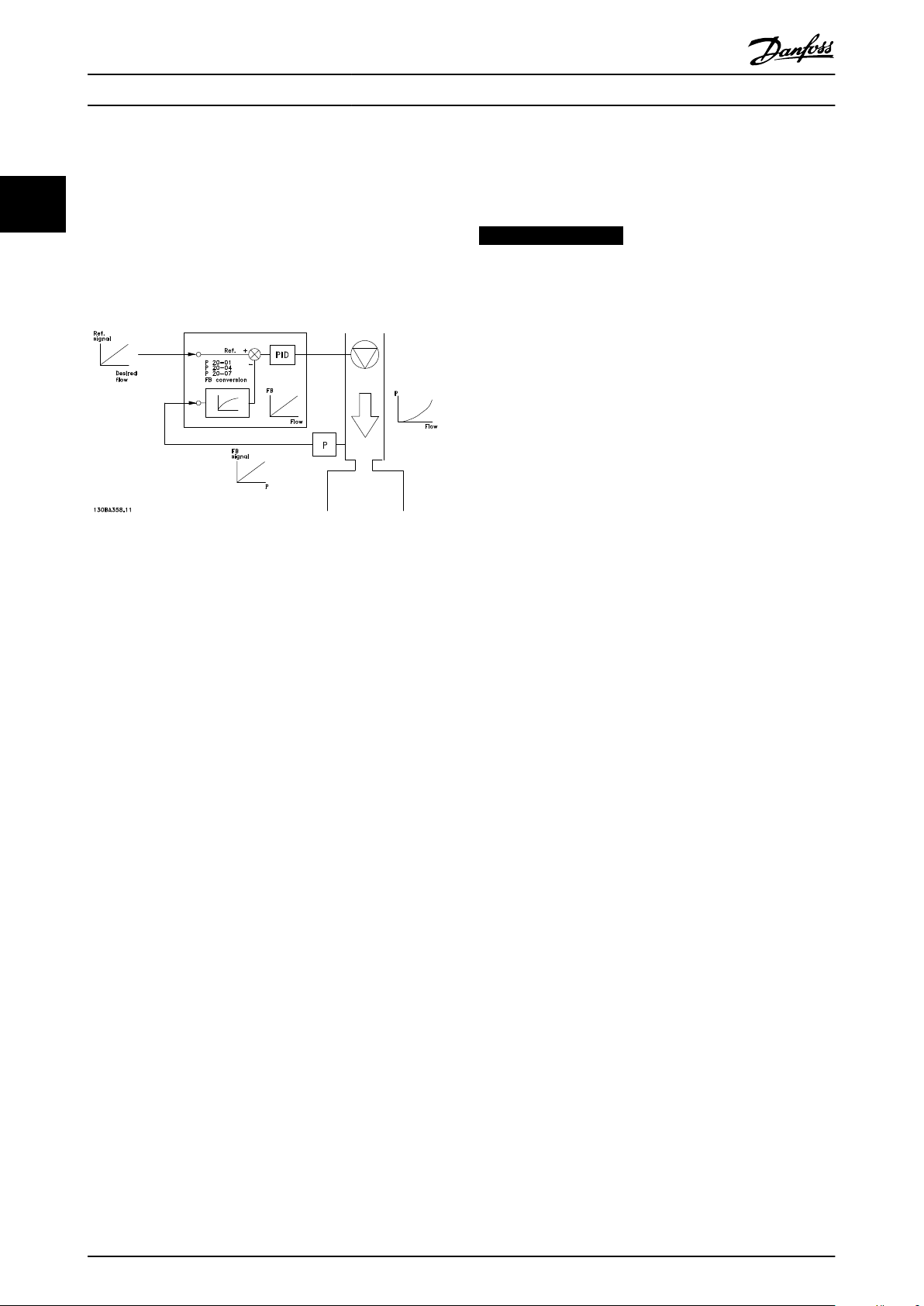
Преобразование обратной связи
В некоторых применениях полезно использовать
преобразование сигнала обратной связи. Один из
22
примеров — использование сигнала давления для
формирования сигнала обратной связи по расходу.
Поскольку квадратный корень из давления
пропорционален расходу, квадратный корень из
сигнала давления дает величину, пропорциональную
расходу, см. Рисунок 2.17.
Рисунок 2.17 Преобразование обратной связи
2.5 Автоматические рабочие функции
Автоматические рабочие функции активны сразу после
включения преобразователя частоты. Большинство из
них не требуют программирования или настройки. Учет
наличия этих функций может помочь при оптимизации
конструкции системы, а также, возможно, исключить
введение избыточных компонентов или функционала.
Более подробное описание любых требуемых настроек,
в частности параметров двигателя, см. в Руководстве по
программированию.
В преобразователе частоты имеется ряд встроенных
защитных функций, которые защищают сам
преобразователь и приводимый им двигатель.
Защита от короткого замыкания
2.5.1
Двигатель (межфазное)
Преобразователь частоты имеет защиту от короткого
замыкания на стороне двигателя, основанную на
измерении тока в каждой из трех фаз двигателя или в
цепи постоянного тока. Короткое замыкание между
двумя выходными фазами приводит к перегрузке
инвертора по току. Инвертор отключается, когда ток
короткого замыкания превышает допустимое значение
(аварийный сигнал 16, отключение с блокировкой).
Сторона сети
Правильно работающий преобразователь частоты
ограничивает ток, который он потребляет из источника
питания. Тем не менее, для защиты на случай поломки
компонента внутри преобразователя частоты
(неисправность первой категории) рекомендуется
использовать предохранители и/или автоматические
выключатели со стороны питания. Дополнительную
информацию см. в глава 7.7 Предохранители и
автоматические выключатели.
УВЕДОМЛЕНИЕ
Для обеспечения соответствия IEC 60364 (CE) и NEC
2009 (UL) обязательно требуется использовать
предохранители и/или автоматические выключатели.
Тормозной резистор
Преобразователь частоты защищен от короткого
замыкания в тормозном резисторе.
Разделение нагрузки
Для защиты шины постоянного тока от коротких
замыканий, а преобразователей частоты — от
перегрузки, установите предохранители постоянного
тока последовательно на клеммах разделения нагрузки
всех подключенных блоков. Дополнительную
информацию см. в глава 2.3.5 Разделение нагрузки.
Защита от превышения напряжения
2.5.2
Превышение напряжения, создаваемое двигателем
Напряжение в промежуточной цепи увеличивается,
когда двигатель переходит в генераторный режим. Это
происходит в следующих случаях.
Нагрузка раскручивает двигатель (при
•
постоянной выходной частоте
преобразователя), например нагрузка отдает
энергию двигателю.
В процессе замедления (уменьшения скорости)
•
при большом моменте инерции, низком трении
и слишком мало времени для замедления, что
недостаточно для рассеивания энергии в виде
потерь в преобразователе частоты, двигателе и
установке.
Неверная настройка компенсации скольжения
•
может привести к повышению напряжения в
цепи постоянного тока.
Противо-ЭДС при работе двигателя с
•
постоянными магнитами. При выбеге на
больших оборотах противо-ЭДС от двигателя с
постоянными магнитами потенциально может
превысить максимально допустимое
напряжение преобразователя частоты, что
может стать причиной поломки. Чтобы
предотвратить это, значение 4-19 Макс.
выходная частота автоматически
ограничивается исходя из результатов
внутреннего расчета, основанного на
значениях 1-40 Противо-ЭДС при 1000 об/мин,
1-25 Номинальная скорость двигателя и
1-39 Число полюсов двигателя.
28 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 29
Обзор изделия
Руководство по проектированию
УВЕДОМЛЕНИЕ
Во избежание разгона двигателя до слишком больших
скоростей (например, вследствие чрезмерного
самовращения или неконтролируемого расхода воды)
необходимо оснастить преобразователь частоты
тормозным резистором.
Контроль перенапряжения может осуществляться с
помощью функции торможения (2-10 Функция
торможения) и/или с помощью функции контроля
перенапряжения (2-17 Контроль перенапряжения).
2.5.4
Обнаружение асимметрии фаз сети
Работа при значительной асимметрии сети снижает срок
службы двигателя. Условия работы считаются жесткими,
если двигатель постоянно работает при нагрузке,
близкой к номинальной. По умолчанию, в случае
асимметрии сети происходит отключение
преобразователя частоты (14-12 Функция при
асимметрии сети).
2.5.5 Коммутация на выходе
2 2
Контроль перенапряжения (OVC)
Режим контроля перенапряжения (OVC) уменьшает
опасность отключения преобразователя частоты при
перенапряжении в цепи постоянного тока. Это
достигается автоматическим увеличением длительности
замедления.
УВЕДОМЛЕНИЕ
Функцию OVC можно активировать для двигателей с
постоянными магнитами (PM VVC+).
Функции торможения
Подключите тормозной резистор для рассеяния
избыточной энергии торможения. Подключение
тормозного резистора предотвращает возникновение
слишком высокого напряжения в цепи постоянного тока
в процессе торможения.
Для улучшения торможения без использования
тормозных резисторов может может быть выбран
режим торможения переменным током. Эта функция
управляет перемагничиванием двигателя при работе в
режиме генератора, что позволяет выработать
дополнительную энергию. Эта функция позволяет
улучшить контроль перенапряжения. Повышение
электропотерь в двигателе позволяет функции OVC
повысить крутящий момент торможения без
превышения предела напряжения.
УВЕДОМЛЕНИЕ
Режим торможения переменным током не так
эффективен, как динамическое резистивное
торможение.
2.5.3 Обнаружение обрыва фазы
двигателя
Функция обнаружения обрыва фазы двигателя
(4-58 Функция при обрыве фазы двигателя) включена по
умолчанию, чтобы предотвратить повреждение
двигателя в случае обрыва фазы двигателя. Настройка
по умолчанию — 1000 мс, но ее можно изменить, чтобы
ускорить обнаружение.
Допускается добавление переключателя на выходе
между двигателем и преобразователем частоты. Может
появиться сообщение о неисправности. Для подхвата
вращающегося электродвигателя включите функцию
подхвата.
Защита от перегрузки
2.5.6
Предел крутящего момента
Функция предела крутящего момента защищает
двигатель от перегрузки независимо от скорости
вращения. Предел крутящего момента устанавливается
в параметре 4-16 Двигательн.режим с огранич. момента
или 4-17 Генераторн.режим с огранич.момента, а время
до подачи предупреждения о превышении крутящего
момента устанавливается в 14-25 Задержка отключ.при
пред. моменте.
Предел по току
Предел по току регулируется в 4-18 Предел по току.
Предел скорости
Определите верхний и нижний пределы диапазона
рабочих скоростей с помощью следующих параметров:
4-11 Нижн.предел скор.двигателя[об/мин] или
•
4-12 Нижний предел скорости двигателя [Гц] и
•
4-13 Верхн.предел скор.двигателя [об/мин] или
4-14 Motor Speed High Limit [Hz]
•
Например, рабочую скорость можно определить как
диапазон от 30 до 50/60 Гц..
Параметр 4-19 Макс. выходная частота ограничивает
максимальную выходную скорость, которую может
обеспечить преобразователь частоты.
ЭТР
ЭТР — это электронная функция, которая на основе
внутренних измерений имитирует биметаллическое
реле. Характеристика представлена на Рисунок 2.18.
Предел напряжения
При достижении аппаратно заданного уровня
напряжения преобразователь частоты отключается для
защиты транзисторов и конденсаторов цепи
постоянного тока.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 29
Page 30

Обзор изделия
VLT® AQUA Drive FC 202
Перегрев
Преобразователь частоты содержит встроенные датчики
температуры и немедленно реагирует на критические
22
значения в соответствии с аппаратно закодированными
пределами.
частота коммутации (малая периодичность импульсов)
вызывает шум в двигателе, поэтому предпочтительно
использование более высокой частоты коммутации.
Однако высокая частота коммутации приводит нагреву
преобразователя частоты, который может ограничить
ток, подаваемый на двигатель.
2.5.7 Автоматическое снижение
номинальных параметров
Преобразователь частоты непрерывно проверяет
критические уровни:
Высокую температуру на плате управления или
•
радиаторе
Высокую нагрузку на двигатель
•
Повышенное напряжение в цепи постоянного
•
тока
Нижний предел скорости
•
При обнаружении критического уровня
преобразователь частоты регулирует частоту
коммутации. При критически высоких внутренних
температурах и низкой скорости двигателя
преобразователи частоты также могут принудительно
переключить метод коммутации с PWM на SFAVM.
УВЕДОМЛЕНИЕ
Автоматическое снижение номинальных
характеристик происходит иначе, когда для
параметра 14-55 Выходной фильтр указано значение
[2] Синусоид. фильтр, фиксиров.
2.5.8 Автоматическая оптимизация
энергопотребления
В режиме автоматической оптимизации
энергопотребления (АОЭ) преобразователь частоты
непрерывно отслеживает нагрузку на двигатель и
регулирует выходное напряжение для достижения
максимальной эффективности. При небольшой нагрузке
напряжение понижается и ток двигателя становится
минимальным. КПД двигателя повышается, нагрев
уменьшается, двигатель работает тише. Выбирать
кривую В/Гц не требуется, так как преобразователь
частоты автоматически регулирует напряжение
двигателя.
2.5.9
Автоматическая модуляция частоты
коммутации
Преобразователь частоты генерирует короткие
электрические импульсы и формирует волну
переменного тока. Скорость, с которой проходят эти
импульсы, называется частотой коммутации. Низкая
Автоматическая модуляция частоты коммутации
автоматически регулирует эти характеристики,
обеспечивая максимально возможную частоту
коммутации без перегрева преобразователя частоты.
Благодаря регулируемой высокой частоте коммутации
частоте шум от работы двигателя при низких скоростях
уменьшается (в этих режимах уменьшение слышимого
шума наиболее важно), в то же время при
необходимости на двигатель выдается полная выходная
мощность.
2.5.10
Снижение номинальных
параметров при высокой частоте
коммутации
Преобразователь частоты рассчитан на непрерывную
работу при полной нагрузке с частотами коммутации от
3,0 до 4,5 кГц (этот диапазон частот зависит от
типоразмера по мощности). Частота коммутации,
превышающая максимально допустимые значения этого
диапазона, приводит к повышенному теплообразованию
в преобразователе частоты и требует понижения
выходного тока.
В преобразователе частоты реализована автоматическая
функция управления частотой коммутации в
зависимости от нагрузки. Эта функция обеспечивает
преимущество подачи на двигатель настолько высокой
частоты коммутации, насколько это допускается
нагрузкой.
2.5.11
Автоматическое снижение
номинальных параметров при
избыточной температуре
Автоматическое снижение номинальных параметров
при избыточной температуре действует с целью
предотвращения отключения преобразователя частоты
при высокой температуре. Внутренние датчики
температуры определяют условия работы, защищая
силовые компоненты от перегрева. Преобразователь
может автоматически снижать частоту коммутации для
поддержания рабочей температуры в безопасных
пределах. После снижения частоты коммутации
преобразователь также может снизить выходную
частоту и ток даже на 30 %, чтобы избежать отключения
от перегрева.
30 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 31

Обзор изделия
Руководство по проектированию
2.5.12 Автоматическое изменение
скорости
Двигатель, который пытается разгонять нагрузку
слишком быстро для доступного тока, может привести к
срабатыванию защиты преобразователя. То же самое
верно и для слишком быстрого замедления.
Автоматическое линейное управление разгоном и
торможением защищает от таких ситуаций, продлевая
время изменения скорости (или, наоборот, замедления)
вращения двигателя в соответствии с доступным током.
2.5.13 Контур ограничения тока
Если допустимая нагрузка по току превышает
допустимую при нормальном функционировании
преобразователя частоты (из-за заниженного размера
преобразователя или двигателя), в ограничителе тока
снижается выходная частота для замедления двигателя
и снижения нагрузки. Доступен регулируемый таймер,
который позволяет ограничить длительность работы в
этом режиме 60 секундами или менее. По умолчанию
задано заводское ограничение в 110 % от
номинального тока двигателя, чтобы минимизировать
перегрузки от чрезмерного тока.
2.5.14
Характеристики при колебаниях
мощности
Преобразователь частоты выдерживает перепады в
сети, такие как:
переходные процессы;
•
моментальное отключение;
•
кратковременные падения напряжения;
•
броски напряжения.
•
Преобразователь частоты автоматически компенсирует
отклонения входных напряжений на ±10 % от номинала,
обеспечивая полные номинальные мощность и
крутящий момент двигателя. Если выбран
автоматический перезапуск, после временной потери
напряжения преобразователь частоты автоматически
включается. При подхвате вращающегося двигателя
преобразователь частоты синхронизируется с
вращением двигателя перед включением.
2.5.15
Преобразователь частоты подает на двигатель величину
тока, необходимую для преодоления инерции нагрузки
и раскрутки двигателя до нужной скорости. При этом на
неподвижный или медленно вращающийся двигатель не
подается полное напряжение электросети, что привело
бы к высокому выделения тепла и большому току. Такая
встроенная функция плавного пуска функция снижает
Плавный пуск двигателя
тепловую нагрузку и механические напряжения,
продлевает срок службы двигателя и обеспечивает
более тихую работу системы.
2.5.16 Подавление резонанса
Высокочастотный резонанс в двигателе можно
устранить путем демпфирования резонанса. Доступны
автоматическое демпфирование и демпфирование
выбранной вручную частоты.
2.5.17 Вентиляторы с управлением по
температуре
Внутренние вентиляторы охлаждения управляются по
температуре, определяемой датчиками в
преобразователе частоты. При работе с низкой
нагрузкой, в режиме ожидания или резерва
охлаждающие вентиляторы часто не вращаются. Это
уменьшает шум, повышает эффективность и продлевает
срок службы вентилятора.
2.5.18
Электромагнитные помехи или радиочастотные помехи
(в случае частот радиодиапазона) — это помехи,
которые могут повлиять на работу электрических цепей
в связи с электромагнитной индукцией или
электромагнитным излучением из внешнего источника.
Преобразователь частоты рассчитан на выполнение
требований к стандарту по ЭМС изделий для двигателей
IEC 61800-3, а также требований европейского стандарта
EN 55011. Чтобы обеспечить соответствие требованиям
к защите от излучений стандарта EN 55011 кабель
подключения двигателя должен быть экранирован и
надлежащим образом заделан. Подробнее о
характеристиках ЭМС см. глава 3.2.2 Результаты
испытаний ЭМС.
2.5.19
Соответствие требованиям ЭМС
Измерение тока на всех трех фазах
двигателя
Выходной ток на двигатель непрерывно измеряется по
всем 3 фазам для защиты преобразователя частоты и
электродвигателя от короткого замыкания, замыканий
на землю и потери фазы. Короткое замыкание выхода
на землю отслеживается в постоянном режиме. При
потере фазы электродвигателя преобразователь частоты
немедленно останавливается и выдает сообщение о
том, какая фаза потеряна.
2 2
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 31
Page 32

Обзор изделия
2.5.20 Гальваническая развязка клемм
управления
22
Такая изоляция соответствует жестким требованиям
PELV (защитное сверхнизкое напряжение) к изоляции.
Это означает, что схемы контроллера полностью
защищены от входных токов. Для клемм выходных реле
требуется отдельное заземление. Такая изоляция
соответствует жестким требованиям PELV (защитное
сверхнизкое напряжение) к изоляции.
Гальваническая развязка обеспечивается следующими
компонентами:
Источник питания, включая развязку сигналов.
•
Плата драйверов для IGBT, запускающие
•
трансформаторы и оптопары.
Датчики выходного тока на эффекте Холла.
•
2.6 Функции для пользовательских
применений
Для улучшения характеристик системы в
преобразователе частоты наиболее часто
программируются функции для пользовательских
применений. Они требуют лишь минимального
программирования или настройки. Учет наличия этих
функций может помочь при оптимизации проекта
системы, а также, возможно, исключить введение
избыточных компонентов или функционала. Подробные
инструкции по включению этих функций см. в
руководстве по программированию.
VLT® AQUA Drive FC 202
ЭТР вычисляет температуру двигателя с помощью
измерения тока, частоты и времени работы.
Преобразователь частоты отображает тепловую
нагрузку на двигатель в процентах и может выдавать
предупреждение при достижении заданной программно
величины перегрузки.
Программируемые варианты действий при перегрузке
позволяют преобразователю частоты останавливать
двигатель, уменьшать выходную мощность или не
реагировать на это состояние. Даже при низких
скоростях преобразователь частоты соответствует
требованиям класса 20 стандарта по перегрузке
электродвигателей I2t.
датчик PTC на обмотках двигателя,
-
подключенный к стандартному
аналоговому или цифровому входу.
PT100 или PT1000 в обмотках
-
двигателя и подшипниках двигателя,
подключенный к плате VLT® Sensor
Input MCB 114
вход от термистора PTC на плате
-
термисторов VLT® PTC Thermistor Card
MCB 112 (соответствует требованиям
ATEX)
С помощью механического термовыключателя
•
(типа Klixon) на цифровом входе.
Посредством встроенного электронного
•
теплового реле (ЭТР) для асинхронных
двигателей.
Автоматическая адаптация
2.6.1
двигателя
Автоматическая адаптация двигателя (ААД) представляет
собой автоматическую процедуру, в ходе которой
измеряются электрические характеристики двигателя. В
ходе ААД строится точная модель электронных
процессов в двигателе. Это позволяет преобразователю
частоты рассчитать оптимальные производительность и
КПД для двигателя. Выполнение процедуры ААД также
максимизирует эффект функции автоматической
оптимизации энергии в преобразователе частоты. ААД
выполняется без вращения двигателя и без
отсоединения двигателя от нагрузки.
2.6.2
Тепловая защита двигателя
Тепловая защита двигателя может быть обеспечена
тремя способами.
Через непосредственное измерение
•
температуры с помощью одного из следующих
приборов:
Рисунок 2.18 Характеристики ЭТР
На оси X на Рисунок 2.18 показано соотношение между
I
и номинальным значением I
двиг.
время в секундах перед срабатыванием ЭТР,
отключающим преобразователь частоты. На кривых
показана характерная номинальная скорость: вдвое
. По оси Y показано
двиг.
32 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 33

Обзор изделия
Руководство по проектированию
больше номинальной скорости и 0,2 от номинальной
скорости.
При низкой скорости функция ЭТР срабатывает при
более низкой температуре в связи с меньшим
охлаждением двигателя. Таким образом двигатель
защищен от перегрева даже на малой скорости.
Функция ЭТР вычисляет температуру двигателя на
основе фактического тока и скорости. Вычисленная
температура отображается как параметр для чтения в
16-18 Тепловая нагрузка двигателя.
2.6.3 Пропадание напряжения
При отключении напряжения сети преобразователь
частоты продолжает работать, пока напряжение
промежуточной цепи не снизится до минимального
уровня, при котором происходит выключение
преобразователя; обычно напряжение отключения на 15
% ниже минимально допустимого напряжения питания.
Продолжительность работы преобразователя частоты
при выбеге определяется напряжением сети перед
пропаданием питания и нагрузкой двигателя.
Преобразователь частоты можно настроить
(14-10 Отказ питания) на разные виды действий при
пропадании сетевого питания.
Отключение с блокировкой после потери
•
питания в цепи постоянного тока.
Выбег с подхватом вращающегося двигателя
•
при появлении напряжения (1-73 Запуск с хода).
Кинетический резерв.
•
Управляемое замедление.
•
Подхват вращающегося двигателя
Этот параметр позволяет «подхватить» двигатель,
который свободно вращается вследствие пропадания
напряжения. Этот параметр полезен для центрифуг и
вентиляторов.
Кинетический резерв
Этот параметр обеспечивает непрерывную работу
преобразователя частоты пока в системе имеется
энергия. В случае короткой потери питания от сети
работа возобновляется после восстановления сетевого
питания, при этом система не останавливается и
контроль не теряется ни на один момент. Можно
установить один из нескольких режимов кинетического
резерва.
Поведение преобразователя частоты при пропадании
напряжения в сети настраивается в параметрах
14-10 Отказ питания и 1-73 Запуск с хода.
2.6.4
Встроенный ПИД-регулятор
Четыре встроенных пропорционально-интегральнодифференциальных (ПИД) регулятора устраняют
необходимость использования вспомогательных
управляющих устройств.
Один из ПИД-регуляторов осуществляет непрерывное
управление системами с замкнутым контуром в которых
требуется выдерживать требования к давлению,
расходу, температуре или другим параметрам системы.
Преобразователь частоты может обеспечить
самостоятельное управление скоростью двигателя,
реагируя на сигналы обратной связи от удаленных
датчиков. Преобразователь частоты принимает два
сигнала обратной связи от двух различных устройств.
Эта функция позволяет управлять системами с
различными требованиями к обратной связи. Чтобы
оптимизировать производительность системы,
преобразователь частоты принимает решения по
управлению на основе сравнения двух сигналов.
Используйте 3 дополнительных и независимых
контроллера для управления другим технологическим
оборудованием, таким как насосы подачи химических
реагентов, управляющие клапаны или оборудование
аэрации с регулируемыми уровнями.
Автоматический перезапуск
2.6.5
Преобразователь частоты можно запрограммировать на
автоматический перезапуск двигателя после
незначительных отключений, например, при
моментальной потере питания или колебаниях питания.
Эта функция позволяет устранить потребность в ручном
сбросе и улучшает возможности автоматизированной
эксплуатации для удаленно управляемых систем. Число
попыток автоматического перезапуска, а также время
между попытками может быть ограничено.
Подхват вращающегося двигателя
2.6.6
Подхват вращающегося двигателя позволяет
преобразователю частоты синхронизировать свою
работу с вращением двигателя и разогнать двигатель до
полной скорости в любом из направлений. Это
предотвращает отключение из-за превышения
потребляемого тока. Это также минимизирует
механические нагрузки в системе, так как в двигателе
не происходит резкого изменения скорости при запуске
преобразователя частоты.
2 2
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 33
Page 34

Обзор изделия
VLT® AQUA Drive FC 202
2.6.7 Полный крутящий момент при
2.6.11
Динамическое торможение
пониженной скорости
Динамическое торможение осуществляется указанными
22
Преобразователь частоты работает по настраиваемой
кривой В/Гц, обеспечивая полный крутящий момент от
двигателя даже при уменьшенных скоростях вращения.
Полный выдаваемый крутящий момент может совпадать
с максимальной проектной рабочей скоростью
двигателя. В этом заключается отличие от
преобразователей с переменным крутящим моментом,
которые выдают уменьшенный крутящий момент при
низких скоростях, а также от преобразователей частоты
с постоянным крутящим моментом, для которых при
скорости меньшей, чем полная, характерны чрезмерное
напряжение, тепловыделение и шум от двигателя.
Пропуск частоты
2.6.8
В некоторых применениях отдельные скорости работы
системы могут вызывать механический резонанс. Это
может вызвать чрезмерный шум, а также привести к
повреждению механических элементов системы. У
преобразователя частоты имеется 4 программируемых
диапазона избегаемых частот. Благодаря этому
двигатель может быстро пропускать такие скорости, не
допуская возникновения резонанса.
Предпусковой нагрев двигателя
2.6.9
Для предварительного прогрева двигателя при пуске в
холодной или влажной среде можно использовать
непрерывную дозированную подачу небольшого
постоянного тока в двигатель, чтобы предотвратить
конденсацию и холодный пуск. Тем самым может быть
устранена необходимость использования обогревателя
помещения.
2.6.10
4 программируемых набора
параметров
Преобразователь частоты имеет четыре набора
параметров, которые могут быть запрограммированы
независимо друг от друга. При использовании
нескольких наборов параметров можно переключаться
между независимо программируемыми функциями,
активируемыми по цифровым входам или команде
через последовательный интерфейс. Независимые
настройки используются, например, для переключения
наборов параметров, для режимов работы днем и
ночью, летом и зимой или для управления несколькими
двигателями. Активный набор параметров отображается
на LCP.
Данные набора параметров могут копироваться из
преобразователя частоты в преобразователь частоты,
посредством загрузки со съемной LCP.
ниже способами.
Резистивное торможение
•
IGBT торможения поддерживает
перенапряжение на уровне ниже
определенного порога путем направления
энергии торможения от двигателя к
подключенному тормозному резистору
(2-10 Функция торможения = [1]).
Тормоз переменного тока
•
Энергия торможения распределяется в
двигателе путем изменения состояний потерь в
двигателе. Функция торможения переменным
током не может быть использована в
применениях с высокой частотой циклических
операций, поскольку это приводит к перегреву
двигателя (2-10 Функция торможения = [2]).
2.6.12
В некоторых применениях может потребоваться
торможение двигателя для его замедления или
останова. Подача постоянного тока на двигатель
тормозит двигатель и может исключить потребность в
отдельном тормозе для двигателя. В зависимости от
настройки, торможение постоянным током может
активироваться при заданной частоте или при
получении сигнала. Также можно запрограммировать
интенсивность торможения.
2.6.13
Режим ожидания автоматически останавливает
двигатель, когда в течение определенного периода
времени наблюдается низкая потребность. Если
потребность системы возрастает, преобразователь
перезапускает двигатель. Режим ожидания обеспечивает
энергосбережение и уменьшает износ двигателя. В
отличие от часов задержки, преобразователь всегда
готов к запуску при достижении установленного
условия пробуждения.
2.6.14
Преобразователь может ожидать дистанционного
сигнала готовности системы перед запуском. Если эта
функция активна, то преобразователь будет остановлен,
пока не получит разрешения на запуск. Сигнал
разрешения работы гарантирует, что система или
вспомогательное оборудование находятся в
надлежащем состоянии, прежде чем преобразователю
будет разрешено запустить двигатель.
Торможение постоянным током
Режим ожидания
Разрешение работы
34 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 35

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
130BA062.14
State 1
13-51.0
13-52.0
State 2
13-51.1
13-52.1
Start
event P13-01
State 3
13-51.2
13-52.2
State 4
13-51.3
13-52.3
Stop
event P13-02
Stop
event P13-02
Stop
event P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Обзор изделия
Руководство по проектированию
2.6.15 Интеллектуальное логическое
управление (SLC)
Интеллектуальное логическое управление (SLC)
представляет собой заданную пользователем
последовательность действий (см. 13-52 Действие
контроллера SL [x]), которая выполняется SLC, когда
соответствующее заданное пользователем событие (см.
13-51 Событие контроллера SL [x]) оценивается SLC как
TRUE (Истина).
Условием для события может быть определенный статус
или такое условие, при котором выход из логики или
операнда компаратора определяется как TRUE (Истина).
Это приведет к связанному действию, как показано на
Рисунок 2.19.
Когда выполнено последнее
событие/действие,
последовательность начинается снова с события [0]/
действия [0]. На рисунке Рисунок 2.20 показан пример с
четырьмя событиями/действиями.
Рисунок 2.20 Порядок выполнения, если
запрограммировано 4 события/действия
Компараторы
Компараторы используются для сравнения
непрерывных переменных (выходной частоты,
выходного тока, аналогового входного сигнала и т. д.) с
фиксированными предустановленными величинами.
2 2
Рисунок 2.21 Компараторы
Рисунок 2.19 Событие и действие SLC
Логические соотношения
С помощью логических операторов И, ИЛИ, НЕ можно
объединять до трех булевых входов (TRUE/FALSE)
(Истина/Ложь) от таймеров, компараторов, цифровых
События и действия пронумерованы и связаны в пары
(состояния). Это означает, что когда наступает событие
[0] (приобретает значение TRUE (Истина)), выполняется
действие [0]. После этого анализируются условия
события [1] и, если оно оценивается как TRUE (Истина),
выполняется действие [1] и т. д. В каждый момент
времени оценивается только одно событие. Если
входов, битов состояния и событий.
событие оценено как FALSE (Ложь), в течение текущего
интервала сканирования (в SLC) ничего не происходит и
никакие другие события не анализируются. Это значит,
что когда запускается SLC, в каждом интервале
сканирования выполняется оценка события [0] (и
только события [0]). И только когда событие [0] будет
оценено как TRUE (Истина), контроллер SLC выполнит
действие [0] и начнет оценивать событие [1]. Можно
запрограммировать от 1 до 20 событий и действий.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 35
Рисунок 2.22 Логические соотношения
Логические соотношения, таймеры и компараторы
доступны также для использования извне
последовательности SLC.
Page 36

Обзор изделия
VLT® AQUA Drive FC 202
Пример применения SLC см. в глава 4.3 Примеры
настройки для различных применений.3
22
2.6.16 Функция STO
Преобразователь частоты доступен в варианте с
функцией STO, реализованной через клемму управления
37. STO отключает управляющее напряжение на
силовых полупроводниках выходной ступени
преобразователя частоты. Это, в свою очередь,
препятствует генерированию напряжения, требуемого
для вращения двигателя. Если активирована функция
STO (на клемме T37), преобразователь частоты подает
аварийный сигнал, затем выполняется отключение
устройства и двигатель останавливается с выбегом.
Потребуется произвести перезапуск вручную. Функция
STO может использоваться для аварийной остановки
преобразователя частоты. В нормальном режиме
работы, когда STO не требуется, следует использовать
функцию обычного останова. Убедитесь, что при
использовании функции автоматического перезапуска
соблюдаются требования, указанные в стандарте ISO
12100-2, параграф 5.3.2.5.
Условия исполнения обязательств
Персонал, занимающийся монтажом и использованием
функции STO должен:
Прочитать и понять нормы и правила техники
•
безопасности, относящиеся к охране здоровья,
обеспечению безопасности и предупреждению
несчастных случаев.
Хорошо знать общие стандарты и стандарты в
•
области техники безопасности, относящиеся к
тем или иным применениям.
Пользователь определяется как:
Интегратор
•
Оператор
•
Техник по обслуживанию
•
Техник по ремонту
•
Стандарты
Использование функции STO на клемме 37 требует от
пользователя соблюдения всех мер безопасности,
включая соблюдение соответствующих законов, норм и
правил и рекомендаций. Дополнительная, поставляемая
по заказу, функция STO соответствует следующим
стандартам:
EN 954-1: 1996, категория 3
•
IEC 60204-1: 2005, категория 0 —
•
неуправляемый останов
IEC 61508: 1998 SIL2
•
IEC 61800-5-2: 2007 — функция STO
•
IEC 62061: 2005 SIL CL2
•
Информации и указаний инструкции по эксплуатации
недостаточно для правильного и безопасного
использования функции STO. Подробную информацию о
функции STO см. в инструкции по эксплуатации функции
VLT® Safe Torque O
Защитные меры
2.7
Преобразователь частоты контролирует множество
аспектов работы системы включая состояние сети,
нагрузку двигателя и его характеристики, а также
состояние преобразователя. Предупреждение или
аварийный сигнал не обязательно означают, что
проблема связана с самим преобразователем частоты.
Это может быть состояние, которое имеет место вне
преобразователя, но контролируемое по предельным
характеристикам. В преобразователе частоты
предусмотрены различные предварительно
программируемые реакции на возникающие сбои,
предупреждения и аварийные сигналы. Чтобы улучшить
или изменить характеристики системы, выберите
дополнительные функции для аварийных сигналов и
предупреждений .
В этом разделе описываются распространенные
функции аварийных сигналов и предупреждений. Учет
наличия этих функций может помочь при оптимизации
проекта системы, а также, возможно, исключить
введение избыточных компонентов или функционала.
ISO 13849-1: 2006, категория 3 PL d
•
ISO 14118: 2000 (EN 1037) — предотвращение
•
непреднамеренного пуска
.
Установка и ввод в эксплуатацию инженерных
•
систем безопасности должны выполняться
квалифицированным и опытным персоналом.
Устройство следует устанавливать в шкафах
•
IP54 или в эквивалентных условиях. Для
некоторых специальных применений требуется
более высокая степень защиты IP.
Кабель между клеммой 37 и внешним
•
устройством защиты должен быть защищен от
короткого замыкания в соответствии с
таблицей D.4 стандарта ISO 13849-2.
Если на ось двигателя воздействуют какие-либо
•
внешние силы (например нагрузки от
подвешенного оборудования), для
предотвращения рисков следует использовать
дополнительные меры (например
удерживающий тормоз).
Функции мониторинга сбоев,
предупреждений и аварийных
сигналов
36 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 37

Обзор изделия
Руководство по проектированию
2.7.1 Работа при превышении
температуры
По умолчанию, при перегреве преобразователь частоты
выдает аварийный сигнал и отключается. Если выбрать
функцию автоматическое снижение номинальных
характеристик и предупреждение, преобразователь
частоты выдаст предупреждение о состоянии, но
продолжит работу и попытается выполнить
самоохлаждение — вначале посредством снижения
частоты коммутации. Затем при необходимости будет
снижена выходная частота.
Автоматическое снижение номинальных характеристик
не заменяет собой процедуру снижения номинальных
характеристик в зависимости от температуры
окружающей среды (см. глава 5.3 Снижение
номинальных характеристик в зависимости от
температуры окружающей среды).
Предупреждение о высоком и
2.7.2
низком задании
В режиме разомкнутого контура сигнал задания
напрямую контролирует скорость преобразователя
частоты. При достижении запрограммированного
максимального или минимального значения на дисплее
появляется мигающее предупреждение о высоком или
низком задании.
предупреждения и продолжения нормальной работы.
До устранения асимметрии фаз может понадобиться,
чтобы блок работал, подключенный к сети с
асимметрией.
2.7.5 Предупреждение о высокой частоте
Функция полезна при постепенном включении
дополнительного оборудования (например, насосов или
вентиляторов охлаждения): при высокой скорости
преобразователь может выдавать предупреждение. В
преобразователь можно ввести точные параметры
высокой частоты. Если выходная частота превышает
установленный предел, то устройство выдает на
дисплей предупреждение о высокой частоте. Цифровой
выходной сигнал от преобразователя может запускать
внешние устройства.
Предупреждение о низкой частоте
2.7.6
Функция полезна при постепенном выключении
дополнительного оборудования: при низкой скорости
преобразователь может выдавать предупреждение.
Можно задать конкретные значения низкой частоты для
выдачи предупреждения и для отключения внешних
устройств. Предупреждение о низкой частоте не
подается, когда преобразователь частоты остановлен
или когда запуск уже выполнен, но рабочая частота еще
не достигнута.
2 2
Предупреждение о высоком и
2.7.3
низком сигнале обратной связи
В режиме замкнутого контура преобразователь частоты
контролирует выбранные верхнее и нижнее значения
обратной связи. В соответствующих случаях на дисплее
мигает предупреждение о низком или высоком
значении. Преобразователь может также
контролировать сигналы обратной связи в режиме
разомкнутого контура. Хотя сигналы не влияют на
работу преобразователя в разомкнутом контуре, они
могут быть полезны для индикации состояния системы
локально или по последовательной связи.
Преобразователь частоты способен работать с 39
различными единицами измерения.
2.7.4
Перекос фаз или потеря фазы
Повышенные пульсации тока на шине постоянного тока
указывают либо на асимметрию фаз сети, любо потерю
фазы. В случае потери фазы к преобразователю по
умолчанию выдается аварийный сигнал и выполняется
останов преобразователя, чтобы защитить
конденсаторы шины постоянного тока. Также доступны
варианты выдачи предупреждения и снижения
выходного тока до 30 % от полного или выдачи
Предупреждение о высоком токе
2.7.7
Эта функция аналогична предупреждению о высокой
частоте, с тем отличием, что функция высокого тока
выдает предупреждение и включает дополнительное
оборудование. Эта функция не активна, когда
преобразователь частоты остановлен или когда запуск
уже выполнен, но установленный рабочий ток еще не
достигнут.
Предупреждение о низком токе
2.7.8
Эта функция аналогична предупреждению о низкой
частоте (см. глава 2.7.6 Предупреждение о низкой
частоте), с тем отличием, что функция низкого тока
выдает предупреждение и выключает оборудование.
Эта функция не активна, когда преобразователь частоты
остановлен или когда запуск уже выполнен, но
установленный рабочий ток еще не достигнут.
2.7.9
Предупреждение об отсутствии
нагрузки/обрыве ремня
Эта функция может использоваться для контроля
ситуаций с отсутствием нагрузки, например, при обрыве
клиновидного ремня. После сохранения в
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 37
Page 38

130BP066.10
Обзор изделия
VLT® AQUA Drive FC 202
преобразователе нижнего предела по току,
преобразователь может быть запрограммирован при
обнаружении потери нагрузки выдавать аварийный
22
сигнал и отключаться или продолжать работу и
выдавать предупреждение.
2.7.10 Потеря последовательного
интерфейса
Преобразователь частоты может обнаруживать
пропадание последовательной связи. Можно выбрать
временную задержку до 99 секунд, чтобы исключить
реакцию в связи с нарушением работы шины
последовательной связи. При превышении времени
задержки соответствующее параметры позволяют
устройству:
Поддерживать последнюю заданную скорость.
•
Переходить к максимальной скорости.
•
Переходить на предустановленную скорость.
•
Останавливаться и выдавать предупреждение.
•
2.8
Интерфейс пользователя и
программирование
Для программирования функций применений в
преобразователе частоты используются параметры.
Параметры содержат описание функции и меню с
вариантами, из которых можно выбрать нужный, либо
позволяющее ввести числовое значение. Образец меню
программирования показан на Рисунок 2.23.
Дистанционный интерфейс пользователя
При дистанционном программировании, компания
Danfoss предлагает программное решение для
разработки, хранения и передачи программных команд
преобразователя частоты. Программное обеспечение
Средство конфигурирования MCT 10 позволяет
пользователю подключать к преобразователям частоты
ПК и выполнять программирование в оперативном
режиме без использования клавиатуры LCP. Или же
программирование можно выполнить автономно и
затем легко загрузить данные. Полный профиль
преобразователя частоты можно загрузить на ПК для
резервного хранения или анализа. Для подключения к
преобразователю частоты имеется разъем USB и клемма
RS485.
Программное обеспечение Средство конфигурирования
MCT 10 можно бесплатно скачать на веб-сайте www.VLT-
software.com. Кроме того, можно заказать компакт-диск,
указав в заказе номер позиции 130B1000. В руководстве
пользователя представлены детальные инструкции по
эксплуатации . См. также глава 2.8.2 Программное
обеспечение для ПК.
Программирование клемм управления
Каждая клемма может выполнять присущие
•
только ей функции.
Параметры, связанные с конкретной клеммой,
•
обеспечивают включение соответствующей
функции.
Для надлежащего функционирования
•
преобразователя частоты с использованием
клемм управления клеммы управления должны
быть:
правильно соединены;
-
запрограммированы на выполнение
-
предусмотренной функции.
Панель местного управления
2.8.1
Панель местного управления (LCP) представляет собой
графический дисплей, который расположен на передней
стороне блока и который обеспечивает интерфейс
Рисунок 2.23 Образец меню программирования
Местный интерфейс пользователя
При местном программировании доступ к параметрам
открывается нажатием на кнопку [Quick Menu] (Быстрое
меню) или [Main Menu] (Главное меню) на LCP.
Быстрое меню предназначено для первоначального
пуска , а также настройки характеристик двигателя. В
главном меню доступны все параметры, что позволяет
выполнять настройку для работы в более сложных
системах.
пользователя; на LCP имеются кнопки управления и
отображаются сообщения о состоянии, предупреждения
и аварийные сигналы, программируются параметры. LCP
может использоваться для выполнения и других
функций. Для ограниченного числа отображаемых на
дисплее параметров можно также использовать
цифровой дисплей. Изображение LCP приведено на
Рисунок 2.24.
38 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 39

Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BB465.10
a
b
c
d
130BT308.10
Обзор изделия
Руководство по проектированию
подключении ПК к преобразователю частоты по кабелю
USB.
Рекомендуется не использовать сетевой кабель ПК с
заземляющим контактом, когда ПК подключен к
преобразователю частоты по USB-кабелю. Это сократит
разность потенциалов заземления, но не устранит все
различия потенциалов при заземлении и экране,
подключенных к порту USB на ПК.
2 2
Рисунок 2.25 Разъем USB
2.8.2.1
Средство конфигурирования MCT
10
ПО Средство конфигурирования MCT 10 предназначено
для использования при вводе в эксплуатацию и при
Рисунок 2.24 Панель местного управления
Программное обеспечение для ПК
2.8.2
ПК подключается стандартным кабелем USB (хост/
устройство) или через интерфейс RS485.
USB является последовательной шиной с четырьмя
экранированными проводами, из которых контакт
провода 4 является заземлением и подключен к экрану
порта USB в компьютере. При подключении ПК к
преобразователю частоты с помощью USB-кабеля
ПК. Все стандартные ПК выпускаются без
существует риск повреждения хост-контроллера USB на
гальванической развязки порта USB.
Любая разность потенциалов заземления, вызванная
невыполнением рекомендаций, приведенных в
инструкциях по эксплуатации, может привести к
повреждению контроллера хоста USB через экран
кабеля USB.
Рекомендуется применять изолятор USB с
гальванической развязкой для защиты хост-контроллера
USB на ПК от разности потенциалов заземления при
техническом обслуживании преобразователя частоты и
включает в себя возможность пошагового
программирования каскад-контроллера, часов
реального времени, интеллектуального логического
управления, шагов профилактического обслуживания.
Программное обеспечение позволяет легко управлять
отдельными аспектами и в то же время предоставляет
общий обзор крупных и малых систем. Этот инструмент
подходит для преобразователей частоты всех серий,
усовершенствованных активных фильтров VLT®, а также
для данных, относящихся к устройствам плавного пуска
VLT®.
Пример 1. Сохранение данных на ПК через Средство
конфигурирования MCT 10
1. Соедините ПК с преобразователем частоты
через интерфейс USB или RS485.
2. Откройте Средство конфигурирования MCT 10.
3. Выберите порт USB или интерфейс RS485.
4.
Выберите команду сopy (копировать).
5.
Выберите раздел project (проект).
6.
Выберите paste (вставить).
7.
Выберите save as (сохранить как).
Теперь все параметры сохранены в памяти.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 39
Page 40

Обзор изделия
VLT® AQUA Drive FC 202
Пример 2. Передача данных из ПК в преобразователь
частоты через Средство конфигурирования MCT 10
1. Соедините ПК с преобразователем частоты
22
Все значения параметров передаются на
преобразователь частоты.
Для программы Средство конфигурирования MCT 10
доступно отдельное руководство. Программное
обеспечение и руководство можно загрузить на вебсайте www.danfoss.com/BusinessAreas/DrivesSolutions/
Softwaredownload/.
2.8.2.2
через порт USB или интерфейс RS485.
2. Откройте Средство конфигурирования MCT 10.
3.
Выберите Open (Открыть) — на экране будут
показаны сохраненные файлы
4. Откройте требуемый файл.
5.
Выберите Write to drive (Запись данных на
привод).
ПО для расчета гармоник VLT
®
2.9.1
Хранение
Как и все электронное оборудование, преобразователи
частоты следует хранить в сухом месте. Периодическое
формирование (зарядка конденсаторов) в ходе
хранения не требуется.
Рекомендуется хранить оборудование запечатанным в
упаковке до момента установки.
Harmonics Calculation MCT 31
Компьютерная программа расчета гармоник MCT 31
позволяет легко вычислить нелинейные искажения в
данной системе. Можно вычислить коэффициент
нелинейных искажений преобразователей частоты как
компании Danfoss, так и других производителей, не
Danfoss, — с учетом использования различных
дополнительных средств снижения гармоник, таких
фильтры AHF Danfoss и 12–18-импульсные выпрямители.
MCT 31 можно также загрузить с веб-страницы
www.danfoss.com/BusinessAreas/DrivesSolutions/Softwaredownload/.
2.8.2.3
Программное обеспечение для
расчета гармоник (HCS)
HCS — усовершенствованная версия программы для
расчета гармоник. Рассчитанные результаты
сравниваются с соответствующими нормативами, после
чего их можно распечатать.
Подробнее см. www.danfoss-hcs.com/Default.asp?
LEVEL=START
2.9
Техобслуживание
Модели преобразователя частоты Danfoss до 90 кВт не
нуждаются в техническом обслуживании.
Преобразователи частоты большой мощности (с
номиналом 110 кВт и выше) содержат встроенные
фильтрующие элементы, которые оператор должен
очищать с регулярностью, зависящей от концентрации
пыли и загрязнителей. В большинстве сред
рекомендуются интервалы техобслуживания около 3 лет
для вентиляторов и около 5 лет для конденсаторов.
40 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 41

Интеграция системы
3 Интеграция системы
Руководство по проектированию
В этой главе описываются соображения, которые
необходимо учесть при включении преобразователя
частоты в проект системы. Эта глава поделена на
следующие разделы:
Глава 3.1 Температура окружающей среды
•
Внешние условия работы для преобразователя
частоты, включая окружающую среду, корпус,
температуры, снижение номинальных
параметров и другие факторы.
Глава 3.3 Подключение к сети
•
Входы преобразователя частоты со стороны
сети электропитания, в том числе собственно
питание, гармоники, мониторинг, кабельная
проводка, предохранители и другие факторы.
Глава 3.2 ЭМС, гармоники и защита от утечки
•
на землю
Вход (рекуперация) от преобразователя
частоты к сети питания, в том числе мощность,
гармоники, мониторинг и другие факторы.
Глава 3.4 Интеграция двигателя
•
Выход от преобразователя частоты на
двигатель, включая типы двигателей, нагрузку,
мониторинг, кабельную проводку и другие
факторы.
Глава 3.5 Дополнительные входы и выходы,
•
Глава 3.6 Планирование механических
характеристик
Интеграция входов и выходов преобразователя
частоты для оптимальной конструкции
системы, включая подбор преобразователя
частоты/двигателя, характеристики системы и
другие возможности.
В комплексном проекте системы заранее
предусматриваются области потенциальных проблем и
возможные меры по их предотвращению, а также
реализуется наиболее эффективное сочетание функций
преобразователей. Следующая информация содержит
рекомендации по планированию и спецификации
системы управления двигателями, которая включает
преобразователи частоты.
В рабочих функциях содержится информация о ряде
подходов к проектированию, от простого управления
скоростью двигателя до полностью интегрированной
системы автоматизации с учетом обратной связи,
отчетностью по состоянию работоспособностью,
автоматической реакцией на отказы, удаленным
программированием и др.
Полный концептуальный проект включает подробные
спецификации требований и условий использования.
Типы преобразователей частоты
•
Электродвигатели
•
Требования к электросети
•
Структура управления и программирование
•
Последовательная связь
•
Размер, формы и масса оборудования
•
Требования к силовым кабелям и кабелям
•
управления; тип и длина
Предохранители
•
Вспомогательное оборудование
•
Транспортировка и хранение
•
Рекомендации по практическому выбору и
проектированию см. в глава 3.9 Контрольный список
проектирования системы.
Понимание этих функций и стратегии их использования
может помочь при оптимизации конструкции системы, а
также, возможно, исключить введение избыточных
компонентов или функционала.
3.1
Температура окружающей среды
3.1.1 Влажность
Хотя преобразователь частоты может нормально
работать при высокой влажности (до 95 %
относительной влажности), следует всегда избегать
конденсации. Конденсация особенно вероятна, когда
преобразователь частоты холоднее, чем окружающий
влажный воздух. Влажность в воздухе также может
конденсироваться на электронных компонентах и
вызывать короткие замыкания. Конденсация происходит
в блоках, на которые не подается питание. Если в связи
с условиями окружающей среды возможна конденсация,
рекомендуется установить в шкаф обогреватели. Не
производите установку в местах, где возможна
отрицательная температура.
Также можно использовать преобразователь частоты в
режиме ожидания (с подключением к сети): это
уменьшает вероятность конденсации. Убедитесь, что
рассеиваемого тепла достаточно, чтобы влажность не
воздействовала на схемы преобразователя.
3.1.2
Температура
Ограничения по минимальной и максимальной
температурам окружающей среды установлены для всех
преобразователей частоты. Защита оборудования от
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 41
Page 42

Интеграция системы
VLT® AQUA Drive FC 202
воздействия предельных температур окружающей
среды продлит срок его службы и увеличит общую
надежность системы. Следуйте приведенным
рекомендациям для обеспечения максимальных
эксплуатационных характеристик и длительного срока
службы оборудования.
33
Хотя преобразователь частоты может работать
•
при температуре до -10 °C, правильная работа
при номинальной нагрузке гарантируется
только при температурах 0 °C и выше.
Не допускайте повышения температуры выше
•
максимального предела.
При работе при температурах, превышающих
•
проектную, срок службы электронных
компонентов сокращается на 50 % на каждые
10 °C превышения.
Даже для устройств с классом защиты IP54,
•
IP55 и IP66 необходимо соблюдение указанных
диапазонов температуры окружающей среды.
Может потребоваться установка
•
дополнительного кондиционирующего
оборудования для шкафа или площадки, на
которой установлено оборудование.
Охлаждение
3.1.3
Преобразователи частоты рассеивают мощность в виде
тепла. Выполнение следующих рекомендаций
необходимо для эффективного охлаждения блоков.
Максимальная температура воздуха на входе в
•
корпус ни в коем случае не должна превышать
40 °C (104 °F).
Среднесуточная температура не должна
•
превышать 35 °C (95 °F).
Установите устройство так, чтобы обеспечить
•
поступление холодного воздуха через
охлаждающие пластины. Размеры зазоров,
которые необходимо оставлять при монтаже,
см. в глава 3.6.1 Зазоры для охлаждения.
Соблюдайте требования к минимальным
•
зазорам спереди и сзади для подачи холодного
воздуха Более подробную информацию о
требованиях правильной установки см. в
инструкциях по эксплуатации.
3.1.3.1
В преобразователе частоты имеется встроенные
вентиляторы, что обеспечивает оптимальное
охлаждение. Главный вентилятор направляет поток
воздуха на ребра охлаждения радиатора и
обеспечивает охлаждение внутри корпуса. В некоторых
типоразмерах по мощности имеется небольшой
Вентиляторы
дополнительный вентилятор недалеко от платы
управления; он обеспечивает циркуляцию внутреннего
воздуха и предотвращает его застой в горячих местах.
Главный вентилятор управляется в соответствии с
внутренней температурой в преобразователе частоты;
его скорость постепенно увеличивается по мере роста
температуры, что уменьшает шум и энергопотребление
при небольшой потребности в охлаждении и
обеспечивает максимальное охлаждение, когда оно
необходимо. С помощью параметра 14-52 Упр.
вентилят. можно отрегулировать управление
вентиляторами для любого конкретного применения и
защитить оборудование от негативного влияния
охлаждения в холодных климатических условиях. В
случае превышения температуры внутри
преобразователя частоты, он снижает частоту и
профиль коммутации. Подробнее см. глава 5.1 Снижение
номинальных характеристик.
3.1.3.2
Расчет требуемого воздушного
охлаждающего потока для
преобразователя частоты
Воздушный поток, необходимый для охлаждения
преобразователя частоты или для нескольких
преобразователей частоты в одном корпусе, может быть
рассчитан следующим образом:
1. Определите потери мощности при
максимальной выходной мощности для всех
преобразователей частоты по данным в
таблицах глава 7 Технические характеристики.
2. Суммируйте значения потери мощности всех
преобразователей частоты, работающих в одно
и то же время. Полученная сумма представляет
количество тепла Q, перенос которого
потребуется. Умножьте результат на
коэффициент f, определенный по Таблица 3.1.
Например, f = 3,1 м³ x K/Вт·ч над уровнем моря.
3. Определите самую высокую температуру
воздуха, поступающего в корпус. Вычтите эту
температуру из требуемой температуры внутри
корпуса, которая может составлять, например,
45 °C (113 °F).
4. Разделите сумму из шага 2 на сумму из шага 3.
Расчет выполняется по формуле:
f xQ
V =
Ti − TA
где
V = расход воздуха в м³/ч
f = коэффициент, м³ x K/Вт·ч
Q = тепло, которое должно быть перенесено, в Вт
Ti = температура внутри корпуса, в °C
TA = температура окружающей среды в °C
f = cp x ρ (удельная теплоемкость воздуха x плотность
воздуха)
42 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 43

Интеграция системы
Руководство по проектированию
УВЕДОМЛЕНИЕ
Удельная теплоемкость (cp) и плотность воздуха (ρ) не
постоянны: они зависят от температуры, влажности и
атмосферного давления. Поэтому они зависят от
высоты над уровнем моря.
В Таблица 3.1 показаны типичные значения
коэффициента f, рассчитанные для различных высот.
Высота над
уровнем
моря
[м] [kJ/kgK] [кг/м³] [м³⋅К/Вт⋅ч]
0 0,9480 1,225 3,1
500 0,9348 1,167 3,3
1000 0,9250 1,112 3,5
1500 0,8954 1,058 3,8
2000 0,8728 1,006 4,1
2500 0,8551 0,9568 4,4
3000 0,8302 0,9091 4,8
3500 0,8065 0,8633 5,2
Таблица 3.1 Коэффициент f, рассчитанный для различных
высот
Пример
Какой расход воздуха требуется для охлаждения двух
преобразователей частоты (теплопотери 295 Вт и 1430
Вт), работающих одновременно, при установке в
корпусе с пиковой температурой окружающей среды 37
°C?
1. Суммарные теплопотери обоих
преобразователей частоты составляют 1725 Вт.
2. При умножении 1725 Вт, 3,3 м³ x K/В⋅ч
получаем 5693 м³ x K/ч.
3.
Вычитание 37 °C из 45 °C дает 8 °C (=8 K).
4. При делении 5693 м x K/ч на 8 K получаем:
711,6 м³/час.
Если требуется рассчитать расход воздуха в куб. фут/
мин, используйте коэффициент пересчета 1 м³/ч = 0,589
куб. фут/мин.
Так, в приведенном выше примере 711,6 м³/ч = 418,85
куб. фут/мин.
3.1.4
Перенапряжение, создаваемое
двигателем в генераторном режиме
Удельная
теплоемкость
воздуха
cp
Плотность
воздуха
ρ
Коэффициент
f
Нагрузка раскручивает двигатель, когда
•
преобразователь частоты работает при
постоянной выходной частоте. Обычно это
явление называется контролируемой
нагрузкой.
В процессе замедления, если инерция нагрузки
•
велика, а для времени замедления
преобразователя установлено малое значение.
Преобразователь частоты не может возвращать энергию
обратно на вход. Поэтому он ограничивает энергию,
принимаемую от двигателя, при включении
автоматического изменения скорости. Преобразователь
частоты пытается сделать это посредством
автоматического увеличения времени замедления, если
перенапряжение возникает во время замедления. Если
это не приводит к желаемому результату, или если
нагрузка раскручивает двигатель при работе на
постоянной частоте, преобразователь частоты при
достижении критического уровня напряжения на шине
постоянного тока отключается и отображает сообщение
о неисправности.
Акустический шум
3.1.5
Акустический шум преобразователя частоты создается
тремя источниками:
катушками индуктивности (в промежуточной
•
цепи) постоянного тока
дросселем фильтра ВЧ-помех
•
внутренними вентиляторами
•
Номинальные значения акустического шума см. в
Таблица 7.60.
Вибрационные и ударные
3.1.6
воздействия
Преобразователь частоты испытан в соответствии с
методикой, основанной на стандартах IEC 68-2-6/34/35 и
36. При этих испытаниях на устройство воздействуют
силы до 0,7 g со случайными частотами от 18 до 1000 Гц
по трем осям в течение двух часов. Все
преобразователи частоты Danfoss удовлетворяют
требованиям, соответствующим этим условиям, при
монтаже блока на стене или на полу, а также в щитах
управления, закрепленных на стене или на полу.
3.1.7
Агрессивные среды
3 3
Напряжение постоянного тока в промежуточной цепи
(шине постоянного тока) увеличивается, когда двигатель
переходит в генераторный режим. Это может
происходить 2 способами:
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 43
3.1.7.1 Газы
Агрессивные газы, такие как сероводород, хлор или
аммиак, могут повредить электрические и механические
компоненты преобразователя частоты. Загрязнение
Page 44

Интеграция системы
VLT® AQUA Drive FC 202
охлаждающего воздуха также может вызвать
постепенное разложение дорожек печатных плат и
уплотнителей дверец. Агрессивные загрязняющие
вещества часто присутствуют в установках по обработке
сточных вод и в плавательных бассейнах. Коррозия
меди однозначно указывает на агрессивную среду.
33
В агрессивных средах рекомендуется использовать
корпуса с высокими IP-классами защиты, а также
печатные платы с защитными покрытиями.
Характеристики конформных покрытий см. в
Таблица 3.2.
УВЕДОМЛЕНИЕ
В стандартной комплектации преобразователь
частоты поставляется с покрытием класса 3C2. По
заказу возможна поставка с покрытиями 3C3.
Ухудшение охлаждения
Возникают отложения пыли на поверхности устройства
и внутри, на печатных платах и электронных
компонентах. Эти отложения действуют как слои
изоляции, затрудняя передачу тепла окружающему
воздуху, что снижает эффективность охлаждения.
Компоненты сильнее нагреваются. Это ускоряет
старение электронных компонентов, и срок службы
устройства сокращается. Отложения пыли на радиаторе
в задней части блока также сокращают срок службы
устройства.
Вентиляторы охлаждения
Поток воздуха для охлаждения подается вентиляторами
охлаждения, обычно расположенными в задней части
устройства. В роторах вентиляторов находятся
небольшие подшипники, в которые может попасть
действующая как абразив пыль. Это приводит к
Класс
3C1 3C2 3C3
Тип
газа
Морска
я соль
Окиси
серы
Серово
дород
Оксиды
хлора
Хлоров
одород
Фторов
одород
Аммиак мг/м³ 0,3 1,0 3,0 10 35
Озон мг/м³ 0,01 0,05 0,1 0,1 0,3
Азота мг/м³ 0,1 0,5 1,0 3,0 9,0
Таблица 3.2 Номинальные характеристики классов
конформных покрытий
1) Максимальные значения соответствуют значениям пиков в
переходных режимах, они не должны присутствовать более 30
минут в день.
Ед.
изм.
нет
данных
мг/м³ 0,1 0,3 1,0 5,0 10
мг/м³ 0,01 0,1 0,5 3,0 10
мг/м³ 0,01 0,1 0,03 0,3 1,0
мг/м³ 0,01 0,1 0,5 1,0 5,0
мг/м³ 0,003 0,01 0,03 0,1 3,0
Средне
е
значен
ие
Отсутс
Соляной туман Соляной туман
твует
Макс.
величи
на
1)
Средне
е
значен
ие
Макс.
величи
на
1)
повреждению подшипника и отказу вентилятора.
Фильтры
Преобразователи частоты высокой мощности оснащены
вентиляторами охлаждения, отводящими горячий
воздух изнутри устройства. Вентиляторы больше
определенного размера оснащаются фильтрующими
элементами. Такие фильтры могут быстро забиваться
при использовании в запыленной среде. В таких
условиях необходимы профилактические меры.
Периодическое техобслуживание
При описанных выше условиях рекомендуется очищать
преобразователь частоты в ходе периодического
техобслуживания. Уберите пыль с радиаторов и
вентиляторов, очистите фильтрующие элементы.
3.1.7.3
Потенциально взрывоопасные
среды
Системы, работающие в потенциально взрывоопасных
средах, должны соответствовать особым требованиям.
Директива ЕС 94/9/EC описывает работу электронных
устройств в потенциально взрывоопасных атмосферах.
Температура двигателей, управляемых
преобразователями частоты, при работе в потенциально
взрывоопасных атмосферах должна отслеживаться с
помощью датчика температуры с положительным
температурным коэффициентом (PTC). В таких средах
3.1.7.2
Воздействие пыли
Нередко неизбежна установка частотных
преобразователей в средах с сильным воздействием
пыли. Пыль воздействует на блоки настенной или
рамной установки с уровнями защиты IP55 и IP66, а
также на устанавливаемые в шкафах устройства с
уровнями защиты IP21 и IP20. При установке
преобразователей частоты в подобных средах следует
учитывать три аспекта, описанные в этом разделе.
допустимо использование двигателей с защитой от
искрообразования класса d или e.
Класс защиты d предполагает, что в случае
•
появления искр они будут исключительно в
защищенной области. Также требуются особая
проводка и защитные средства, хотя они и не
требуют сертификации.
В потенциально взрывоопасных средах чаще
•
всего используется сочетание уровней защиты
d и e. Сам двигатель относится к классу e
защиты от искрообразования, а проводка
44 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 45

Интеграция системы
Руководство по проектированию
двигателя и соединительное оборудование
соответствует требованиям класса e.
Ограничение, применяемое к пространству
соединительных цепей по классу защиты e,
определяет максимальное допустимое в этом
пространстве напряжение. Выходное
напряжение преобразователя частоты обычно
ограничено напряжением сети. Модуляция
выходного напряжения может привести к
возникновению высокого пикового
напряжения, недопустимого по классификации
e. На практике использование фильтра
гармонических колебаний на выходе
преобразователя частоты показало себя как
эффективный способ сглаживания высоких
пиковых напряжений.
УВЕДОМЛЕНИЕ
Не устанавливайте преобразователь частоты в
потенциально взрывоопасной атмосфере.
Преобразователь частоты следует устанавливать в
шкафу за пределами этой зоны. Для ослабления роста
напряжения dU/dt и пикового напряжения
рекомендуется использовать синусоидный фильтр на
выходе преобразователя частоты. Кабели двигателя
должны быть как можно более короткими.
УВЕДОМЛЕНИЕ
Преобразователи частоты с дополнительной платой
MCB 112 имеют сертифицированную в соответствии
со стандартом PTB функцию мониторинга двигателей
с помощью термисторного датчика для потенциально
взрывоопасных сред. Если преобразователи частоты
работают с выходными синусоидальными фильтрами,
использование экранированных кабелей двигателя не
требуется.
3.1.8 Определения классов IP
От проникновения
твердых посторонних
предметов
0 (нет защиты) (нет защиты)
1
диаметр ≥50 мм
Первая
цифра
Вторая
цифра
Первая
буква
Дополните
льная
буква
2 диаметр 12,5 мм Палец
3 диаметр 2,5 мм Инструмент
4
диаметр ≥1,0 мм
5 Защита от пыли Провод
6 Пылегерметичный Провод
От попадания воды со
вредными
последствиями
0 (нет защиты)
1 Капли, падающие
вертикально
2 Капли, падающие под
углом 15°
3 Распыление воды
4 Разбрызгивание воды
5 Струи воды
6 Мощные струи воды
7 Временное погружение
8 Долгосрочное
погружение
Дополнительная
информация,
специально
относящаяся к
следующим объектам
A Тыльная сторона
B Палец
C Инструмент
D Провод
Дополнительная
информация,
специально
относящаяся к
следующим объектам
H Высоковольтное
устройство
M Устройство
перемещается при
водном испытании
S Устройство
неподвижно при
водном испытании
W Погодные условия
От доступа к
опасным частям
следующих
объектов
3 3
Тыльная сторона
ладони
Провод
ладони
Таблица 3.3 Определения классов защиты IP в соответствии
с IEC 60529
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 45
Page 46

Интеграция системы
VLT® AQUA Drive FC 202
3.1.8.1 Шкаф дополнительных устройств
и номиналы
Преобразователи частоты Danfoss поставляются в
исполнениях с 3 различными классами защиты:
IP00 или IP20 для установки в шкафу.
33
•
IP54 или IP55 для местного монтажа.
•
IP66 для тяжелейших условий окружающей
•
среды, таких как исключительно высокая
влажность (воздуха) или высокие концентрации
пыли либо химически агрессивных газов.
Радиочастотные помехи
3.1.9
Главная практическая цель — получить систему,
стабильно работающую без радиочастотных помех
между компонентами. Чтобы достичь высокого уровня
помехоустойчивости, рекомендуется использовать
преобразователи частоты с высококачественными
фильтрами ВЧ-помех.
Используйте фильтры категории C1 согласно
определению в стандарте EN 61800-3, соответствующие
ограничениям класса B общего стандарта EN 55011.
УВЕДОМЛЕНИЕ
Чтобы обеспечить работу системы «преобразователь
частоты — двигатель» без помех, всегда используйте
фильтр ВЧ-помех категории C1.
УВЕДОМЛЕНИЕ
Блоки VLT® AQUA Drive поставляются в стандартной
комплектации со встроенными фильтрами ВЧ-помех,
соответствующими категории C1 (EN 61800-3) для
использования с системами с напряжением сети 400 В
и номинальной мощностью до 90 кВт или категории
C2 для систем с номинальной мощностью 110–630 кВт.
Блоки VLT® AQUA Drive соответствуют категории C1
при использовании экранированных кабелей
двигателя длиной до 50 и категории C2 при
использовании экранированных кабелей двигателя
длиной до 150 м. Подробнее см. Таблица 3.4.
частоты с более высоким номиналом.
Максимальная длина кабеля к
двигателю для соблюдения
ограничений по ЭМС должна быть в
пределах 1–50 м. Возникают затраты
на материалы, кабель и сборку.
Совместимость по ЭМС не
проверяется.
Разместите предупреждающие сообщения на
преобразователе частоты, если фильтры ВЧ-помех не
соответствуют категории C1 (категория C2 или ниже).
Ответственность за правильную маркировку возлагается
на эксплуатанта.
На практике существует 2 способа использования
фильтров ВЧ-помех.
Встроенные в оборудование
•
Встроенные в фильтры занимают
-
пространство в шкафу, но исключают
дополнительные затраты на
размещение, проводку и материалы.
Однако самым важным
преимуществом интегрированных
фильтров является идеальное
соответствие требованиям к ЭМС и
кабелям.
Внешние дополнительные устройства
•
Дополнительные внешние фильтры
-
ВЧ-помех, устанавливаемые на входе
преобразователя частоты, вызывают
падение напряжения. На практике это
означает, что на входе
преобразователя частоты нет полного
напряжения сети, и может
потребоваться преобразователь
3.1.10 Соответствие требованиям PELV и
гальванической развязки
Обеспечьте защиту от поражения электрическим током,
если используется электрическое питание с защитным
сверхнизким напряжением (PELV), а монтаж выполнен в
соответствии с требованиями, изложенными в местных/
государственных нормативах для PELV.
Чтобы обеспечить защиту PELV на клеммах управления,
все соединения должны быть выполнены согласно
требованиям PELV, например, термистор должен иметь
усиленную/двойную изоляцию. Все клеммы управления
и выводы реле преобразователей частоты Danfoss
соответствуют требованиям PELV (защитное сверхнизкое
напряжение), за исключением заземленной ветви
треугольника с напряжением выше 400 В.
Гальваническая (гарантированная) развязка
обеспечивается выполнением требований по усиленной
изоляции и за счет соответствующих длин путей утечек
тока и изоляционных расстояний. Эти требования
указаны в стандарте EN 61800-5-1.
Электрическая изоляция обеспечивается, как показано
на Рисунок 3.1. Описанные компоненты соответствуют
требованиям PELV и гальванической развязки.
46 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 47

130BA056.10
1
3
25 4
6
ba
M
Интеграция системы
1 Источник питания (SMPS) с изоляцией сигнала V пост.
тока, характеризующего напряжение в промежуточной
цепи.
2 Плата приводов для IGBT
3 Преобразователи тока
4 Оптопара, модуль торможения
5 Внутренние цепи защиты от бросков тока, фильтры ВЧ-
помех и устройства для измерения температуры.
6 Заказные реле
a Гальваническая развязка для дополнительной платы
резервного питания 24 В
b Гальваническая развязка для стандартного интерфейса
шины RS485.
Рисунок 3.1 Гальваническая развязка
Монтаж на большой высоте над уровнем моря
Установки, превышающие ограничение по высоте, могут
не соответствовать требованиям PELV. Изоляция между
компонентами и важнейшими деталями может быть
недостаточной. Существует риск превышения
напряжения. Сократите риск превышения напряжения с
помощью внешних защитных устройств или
гальванической развязки.
При установках на большой высоте над уровнем моря
обратитесь в Danfoss относительно требований PELV.
380–500 В (корпус A, B и C): выше 2000 м (6500
•
футов)
380–500 В (корпус D, E и F): выше 3000 м (9800
•
футов)
525–690 В: выше 2000 м (6500 футов)
•
3.1.11
Как и все электронное оборудование, преобразователи
частоты следует хранить в сухом месте. Периодическое
формирование (зарядка конденсаторов) в ходе
хранения не требуется.
Рекомендуется хранить оборудование запечатанным в
упаковке до момента установки.
Хранение
Руководство по проектированию
3.2
ЭМС, гармоники и защита от утечки на
землю
3.2.1 Общие вопросы защиты от
излучений в соответствии с
требованиями ЭМС
Преобразователи частоты (и другие электрические
устройства) наводят электрические или магнитные поля,
которые могут вызывать помехи в окружающей среде.
Электромагнитная совместимость (ЭМС) таких эффектов
зависит от мощности и гармонических характеристик
этих устройств.
Неуправляемое взаимодействие между электрическими
устройствами в системе может ухудшить совместимость
и помешать надежной работе. Помехи могут принимать
форму искажения гармоник в сети, электростатических
разрядов, быстрых изменений напряжения или
высокочастотных помех. Электрические устройства и
формируют помехи, и, в свою очередь, подвергаются
воздействию помех, возникших в других источниках.
Электрические помехи обычно возникают в диапазоне
частот от 150 кГц до 30 МГц. Воздушные помехи из
системы преобразователя частоты в диапазоне частот
от 30 МГц до 1 ГГц создаются инвертором, кабелем
двигателя и двигателем.
Емкостные токи в кабеле двигателя, связанные с
высоким значением скорости изменения напряжения
двигателя dV/dt, создают токи утечки, как показано на
Рисунок 3.2.
Применение экранированного кабеля двигателя
приводит к увеличению тока утечки (см. Рисунок 3.2),
поскольку емкостная проводимость на землю таких
кабелей больше, чем у неэкранированных. Если ток
утечки не фильтруется, он вызывает большие помехи в
сети в ВЧ-диапазоне ниже приблизительно 5 МГц.
Поскольку ток утечки (I1) возвращается в устройство
через экран (I3), то, в соответствии с Рисунок 3.2,
экранированный кабель двигателя, в принципе, может
создавать только небольшое электромагнитное поле (I4).
Экран ограничивает излучаемые помехи, но
увеличивает низкочастотные помехи в сети. Подключите
экран кабеля двигателя к корпусу преобразователя
частоты и к корпусу двигателя. Наилучшим образом это
делается с использованием соединенных с экраном
зажимов, позволяющих исключить применение
скрученных концов экрана (скруток). Скрутки
увеличивают сопротивление экрана на высоких
частотах, что снижает эффект экранирования и
увеличивает ток утечки (I4).
Если экранированный кабель используется для
подключения реле, в качестве кабеля управления, для
передачи сигналов и подключения тормоза,
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 47
Page 48

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Интеграция системы
VLT® AQUA Drive FC 202
присоедините экран к корпусу на обоих концах. Однако
в некоторых случаях может потребоваться разрыв
быть удовлетворены, хотя большая часть требований к
помехозащищенности выполняется.
экрана, чтобы исключить возникновение контуров тока
в экране.
Для уменьшения уровня помех, создаваемых всей
системой (преобразователем частоты и установкой),
Если экран должен быть расположен на монтажной
33
пластине преобразователя частоты, эта пластина должна
быть металлической, поскольку токи экрана должны
передаваться обратно на устройство. Кроме того,
следует обеспечить хороший электрический контакт
монтажной платы с шасси преобразователя частоты
кабели двигателя и тормоза должны быть как можно
более короткими. Не прокладывайте сигнальные кабели
чувствительных устройств вдоль кабелей двигателя и
тормоза. ВЧ-помехи с частотами выше 50 МГц
(распространяющиеся по воздуху) создаются, главным
образом, электронными устройствами управления.
через крепежные винты.
При использовании неэкранированного кабеля
некоторые требования к излучению помех не могут
1 Провод заземления 3 Питание от сети перем. тока 5 Экранированный кабель
двигателя
2 Экран 4 Преобразователь частоты 6 Двигатель
Рисунок 3.2 Генерирование токов утечки
48 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 49

Интеграция системы Руководство по проектированию
3.2.2 Результаты испытаний ЭМС
Следующие результаты испытаний при номинальной частоте коммутации были получены на системе, в которую
входили преобразователь частоты, экранированный кабель управления и блок управления с потенциометром, а также
двигатель и экранированный кабель двигателя (Ölex Classic 100 CY). В Таблица 3.4 указаны максимальные длины
кабелей, отвечающие стандартам.
УВЕДОМЛЕНИЕ
При другом оборудовании условия могут значительно отличаться.
УВЕДОМЛЕНИЕ
Сведения о параллельно проложенных кабелях см. в Таблица 3.17.
Тип фильтра ВЧ-помех Кондуктивные помехи Излучаемые помехи
Длина кабеля [м] Длина кабеля [м]
Стандарт
ы
и
требован
ия
H1
FC 202
H2
FC 202 0,25–3,7 кВт, 200–240 В T2 Нет Нет 5 Нет Нет Нет
H3
FC 202
EN 55011 Класс B Класс А
Группа 1
Жилищнокоммунальн
ые объекты,
предприятия
торговли и
легкой
промышленн
ости
EN/IEC 61800-3 Категория C1 Категория C2 Категория С3 Категория C1 Категория C2 Категория
Первые
условия
эксплуатаци
и
Жилые
помещения
и офисы
0,25–45 кВт, 200–240 В T2 50 150 150 Нет Да Да
1,1–7,5 кВт, 200–240 В S2 50
0,37–90 кВт, 380–480 В T4 50 150 150 Нет Да Да
7,5 кВт, 380–480 В S4
5,5–45 кВт, 200–240 В T2 Нет Нет 25 Нет Нет Нет
1,1–7,5 кВт, 200–240 В S2 Нет Нет 25 Нет Нет Нет
0,37–7,5 кВт, 380–480 В T4 Нет Нет 5 Нет Нет Нет
4)
11–90 кВт, 380–380 В
7,5 кВт, 380–480 В S4 Нет Нет 25 Нет Нет Нет
11–30 кВт, 525–690 В
4)
37–90 кВт, 525–690 Вт
4)
0,25–45 кВт, 200–240 В T2 10 50 50 Нет Да Да
0,37–90 кВт, 380–480 В T4
T4 Нет Нет 25 Нет Нет Нет
1,
T7 Нет Нет 25 Нет Нет Нет
2,
T7 Нет Нет 25 Нет Нет Нет
50 100/150
10 50 50 Нет Да Да
Промышленны
е условия
Первые
условия
эксплуатации
Жилые
помещения и
офисы
100/150
5)
5)
Класс А
Группа 2
Промышленн
ые
условия
Вторые
условия
эксплуатации
Промышленн
ые
5)
100/150
5)
100/150
Класс B Класс А
Группа 1
Жилищнокоммунальн
ые объекты,
предприятия
торговли и
легкой
промышленн
ости
Первые
условия
эксплуатаци
и
Жилые
помещения
и офисы
Нет Да Да
Нет Да Да
Промышленн
ые
условия
Первые
условия
эксплуатации
Жилые
помещения и
офисы
Класс А
Группа 2
Промышлен
ные
условия
С3
Second
environment
Industrial
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 49
Page 50

Интеграция системы
Тип фильтра ВЧ-помех Кондуктивные помехи Излучаемые помехи
Длина кабеля [м] Длина кабеля [м]
Стандарт
ы
и
требован
33
ия
H4
FC 202
1)
Hx
FC 202
EN 55011 Класс B Класс А
EN/IEC 61800-3 Категория C1 Категория C2 Категория С3 Категория C1 Категория C2 Категория
1)
1,1–30 кВт, 525–690 В
37–90 кВт, 525–690 В
1,1–90 кВт, 525–600 В T6 Нет Нет Нет Нет Нет Нет
15–22 кВт, 200–240 В S2 Нет Нет Нет Нет Нет Нет
11–37 кВт, 380–480 В S4 Нет Нет Нет Нет Нет Нет
T7 Нет 100 100 Нет Да Да
2)
T7 Нет 150 150 Нет Да Да
VLT® AQUA Drive FC 202
Группа 1
Жилищнокоммунальн
ые объекты,
предприятия
торговли и
легкой
промышленн
ости
Первые
условия
эксплуатаци
и
Жилые
помещения
и офисы
Промышленны
е условия
Первые
условия
эксплуатации
Жилые
помещения и
офисы
Класс А
Группа 2
Промышленн
ые
условия
Вторые
условия
эксплуатации
Промышленн
ые
Класс B Класс А
Группа 1
Жилищнокоммунальн
ые объекты,
предприятия
торговли и
легкой
промышленн
ости
Первые
условия
эксплуатаци
и
Жилые
помещения
и офисы
Промышленн
ые
условия
Первые
условия
эксплуатации
Жилые
помещения и
офисы
Класс А
Группа 2
Промышлен
ные
условия
С3
Second
environment
Industrial
Таблица 3.4 Результаты испытаний на ЭМС (излучение) при максимальной длине кабеля
1) Размер корпуса B2.
2) Размер корпуса C2.
3) Версии Hx могут использоваться в соответствии с EN/IEC 61800-3, категория C4.
4) T7, 37–90 кВт с кабелем двигателя длиной 25 м соответствует классу A, группа 1. В отношении установленной системы
действуют определенные ограничения (за дополнительными сведениями обращайтесь в компанию Danfoss).
5) 100 м для кабелей «фаза—ноль», 150 м для кабелей «фаза-фаза» (но не от ТТ или ТN). Однофазные преобразователи частоты не
предназначены для двухфазного электропитания от сети ТТ или TN.
HX, H1, H2, H3, H4 или H5 определены определены в коде типа, в позициях 16–17, описывающих фильтры ЭМС.
Hx — в преобразователе частоты отсутствуют встроенные фильтры ЭМС.
H1 — встроенный фильтр ЭМС. Соответствует EN 55011, класс A1/B и EN/IEC 61800-3, категория 1/2.
H2 — ограниченный фильтр ВЧ-помех, содержащий только конденсаторы (без синфазной катушки). Соответствует EN 55011, класс
A2 и EN/IEC 61800-3, категория 3.
H3 — встроенный фильтр ЭМС. Соответствует EN 55011, класс A1/B и EN/IEC 61800-3, категория 1/2.
H4 — встроенный фильтр ЭМС. Соответствует EN 55011, класс A1 и EN/IEC 61800-3, категория 2.
H5 — морские версии. Версия повышенной прочности, соответствует тем же уровням излучения, что и версии H2.
50 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 51

Интеграция системы
Руководство по проектированию
3.2.3 Требования по излучению
Стандарт на ЭМС для преобразователей частоты
определяет 4 категории (C1, C2, C3 и C4) с
определенными требованиями к помехоустойчивости и
излучению. В Таблица 3.5 приведено определение этих 4
категорий и эквивалентная классификация согласно EN
55011.
Эквивалентны
Категория Определение
C1 Преобразователи частоты на
напряжение ниже 1000 В для
работы в первых условиях
эксплуатации (в жилых
помещениях и в офисах).
C2 Преобразователи частоты на
напряжение ниже 1000 В для
работы в первых условиях
эксплуатации (в жилых
помещениях и в офисах), не
являющиеся ни передвижными,
ни съемными, предназначенные
для монтажа и ввода в
эксплуатацию профессионалом.
C3 Преобразователи частоты на
напряжение ниже 1000 В для
работы во вторых условиях
эксплуатации (производственная
среда).
C4 Преобразователи частоты на
напряжение 1000 В и выше или
номинальный ток 400 А и выше,
предназначенные для работы во
вторых условиях эксплуатации
или использования в сложных
системах.
Таблица 3.5 Соответствие между IEC 61800-3 и EN 55011
При применении общих стандартов на излучение
(кондуктивное) преобразователи частоты должны
соответствовать предельным значениям, указанным в
Таблица 3.6.
условия
Первые
условия
эксплуатации
(жилые
помещения и
офисы)
Общие стандарты
на излучение
Стандарт на излучение EN/
IEC61000-6-3 для жилищнокоммунальных объектов,
предприятий торговли и
легкой промышленности.
й класс
излучения в
EN 55011
Класс B
Класс A,
группа 1
Класс A,
группа 2
Ограничительн
ый предел
отсутствует.
Разработайте
план
обеспечения
ЭМС.
Эквивалентный
класс
излучения в EN
55011
Класс B
Эквивалентный
условия
Вторые условия
эксплуатации
(производствен
ная среда)
Таблица 3.6 Соответствие между Общими стандартами на
'излучение (Generic Emission Standards) и
EN 55011
Требования к помехоустойчивости
3.2.4
Общие стандарты
на излучение
Стандарт на излучение EN/
IEC 61000-6-4 для
производственной среды.
класс
излучения в EN
55011
Класс A, группа
1
Требования к помехоустойчивости для
преобразователей частоты зависят от условий
эксплуатации. Требования для производственной среды
являются более высокими, нежели требования для
среды в жилых помещениях или офисах. Все
преобразователи частоты Danfoss соответствуют
требованиям к производственной среде и,
следовательно, отвечают также более низким
требованиям к среде в жилых помещениях и офисах с
большим запасом по безопасности.
Для подтверждения устойчивости к электрическим
помехам были проведены следующие испытания с
соответствии со следующими базовыми стандартами:
EN 61000-4-2 (IEC 61000-4-2):
•
Электростатические разряды (ESD).
Воспроизведение электростатических
разрядов, связанных с присутствием человека.
EN 61000-4-3 (IEC 61000-4-3): Излучение,
•
создаваемое проникающим электромагнитным
полем с амплитудной модуляцией.
Воспроизведение воздействий
радиолокационного оборудования и
оборудования связи, а также мобильных
средств связи.
EN 61000-4-4 (IEC 61000-4-4): Импульсные
•
переходные процессы. Моделирование помех,
вызываемых переключением контактора, реле
или аналогичных устройств.
EN 61000-4-5 (IEC 61000-4-5): Переходные
•
процессы с бросками напряжения.
Воспроизведение переходных процессов,
связанных, например, с ударом молнии вблизи
установок.
EN 61000-4-6 (IEC 61000-4-6): ВЧ-помехи в
•
синфазном режиме. Моделирование
воздействия радиопередающего оборудования,
соединенного между собой кабелями.
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 51
Page 52

Интеграция системы
См. Таблица 3.7.
VLT® AQUA Drive FC 202
Базовый стандарт
Импульсы
IEC 61000-4-4
33
Критерий приемки B B B A A
Диапазон напряжений: 200–240 В, 380–500 В, 525–600 В, 525–690 В
Сеть
Двигатель
Тормоз 4 кВ CM
Разделение нагрузки 4 кВ CM
Цепи управления
Стандартная шина 2 кВ CM
Провода реле 2 кВ CM
Дополнительные
устройства для системы и
периферийной шины
Кабель для LCP
Внешнее питание 24 В
пост. тока
Корпус
4 кВ CM
4 кВ CM
2 кВ CM
2 кВ CM
2 кВ CM
2)
2)
напряжения
IEC 61000-4-5
2 кВ/2 Ом DM
4 кВ/12 Ом СM
2 В CM
— —
0,5 кВ/2 Ом DM
1 кВ/12 Ом СM
Броски
4 кВт/2 Ом
4 кВт/2 Ом
4 кВт/2 Ом
2 кВ/2 Ом
2 кВ/2 Ом
2 кВ/2 Ом
2 кВ/2 Ом
2 кВ/2 Ом
1)
1)
1)
1)
1)
1)
1)
1)
2)
Эл.-статич.
разряды
61000-4-2
2)
электромагнитное поле
IEC
— —
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 кВ AD
6 кВ СD
Излучаемое
IEC 61000-4-3
10 В/м —
Напряжение ВЧ-
помех
в синфазном
режиме
IEC 61000-4-6
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
Таблица 3.7 Форма соответствия требованиями ЭМС по помехозащищенности
1) Наводка на экран кабеля
2) Значения обычно получаются в ходе испытаний
Изоляция двигателя
3.2.5
В cовременных двигателях, предназначенных для
использования с преобразователями частоты,
предусмотрена надежная изоляция, обеспечивающая
работу с IGBT с высоким КПД нового поколения, для
Номинальное напряжение
сети [В]
UN≤420
420 V< UN≤ 500 Усиленная: ULL=1600
500 V< UN≤ 600 Усиленная: ULL=1800
600 V< UN≤ 690 Усиленная: ULL=2000
которых характерно высокое отношение dU/dt. Для
модернизированных старых двигателей необходимо
Таблица 3.8 Изоляция двигателя
подтвердить соответствие изоляции двигателя или
снизить помехи с помощью фильтра dU/dt или, если
3.2.6 Подшипниковые токи двигателя
необходимо, синусоидного фильтра.
Для минимизации токов в подшипниках и валу,
Для длин кабелей двигателя ≤ максимальной длине
кабеля, указанной в глава 7.5 Технические
характеристики кабелей, рекомендуемые номиналы
изоляции указаны в Таблица 3.8. Если двигатель имеет
низкий уровень изоляции, рекомендуется использовать
фильтр dU/dt или синусоидный фильтр.
заземлите на ведомое оборудование следующие
компоненты:
•
•
•
Изоляция двигателя [В]
Стандартная: ULL=1300
Преобразователь частоты
Двигатель
Ведомое оборудование
52 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 53

Интеграция системы
Руководство по проектированию
Стандартные компенсационные меры
1. Использование изолированных подшипников
2. Строго соблюдайте процедуры установки:
2a Убедитесь, что двигатель и нагрузка
соответствуют друг другу.
2b Четкое соблюдение рекомендаций по
установке в соответствии с ЭМС.
2c Усиление защитного заземления для
уменьшения высокочастотного
импеданса защитного заземления в
сравнении с входными силовыми
проводами
2d Обеспечение надежного
высокочастотного соединения между
двигателем и преобразователем
частоты; например, с использованием
экранированного кабеля с
соединением 360° в двигателе и
преобразователе частоты
2e Убедитесь в том, что импеданс от
преобразователя частоты на землю
здания ниже импеданса заземления
машины. Это может представлять
проблему при использовании насосов.
2f Устройте прямое соединение
заземления между двигателем и
нагрузкой.
3. Уменьшите частоту коммутации IGBT.
4. Измените форму колебаний инвертора, 60°
AVM на SFAVM и наоборот.
5. Используйте систему заземления вала или
изолированную муфту.
6. Используйте токопроводящую смазку.
7. Если возможно, используйте минимальные
уставки скорости.
8. Постарайтесь обеспечить баланс напряжения
линии с землей. Это может быть
трудновыполнимым для систем IT, TT, TN-CS
или систем с заземленной ветвью.
9. Используйте фильтр dU/dt или синусоидный
фильтр
3.2.7
Гармоники
Электрические устройства с диодными выпрямителями,
такие как флюоресцентные лампы, компьютеры,
ксероксы, факсы, различное лабораторное
оборудование и телекоммуникационные системы, может
вызывать гармонические искажения в сети. В
преобразователях частоты используется входной
диодный мост, который также может вносить
гармонические искажения.
Преобразователь частоты потребляет неодинаковый ток
от линии электропередачи. Этот несинусоидальный ток
имеет компоненты, являющиеся гармоническим
составляющим основной частоты тока. Эти компоненты
называются гармониками. Необходимо контролировать
общее гармоническое искажение тока в питающей сети.
Хотя гармонические токи непосредственно не влияют
на потребление электроэнергии, они вызывают нагрев
проводки и трансформаторов, а также могут влиять на
другие устройства, подключенные к той же линии
питания.
3.2.7.1
Анализ гармоник
Различные характеристики электрической системы в
здании определяют точную степень влияния
гармонических искажений от преобразователя на
коэффициент искажения синусоидальности здания в
целом и на его соответствие стандартам IEEE. Обобщить
влияние гармонических искажений от
преобразователей частоты на то или иное здание в
целом довольно сложно. При необходимости проведите
анализ гармоник системы, чтобы определить
воздействие на нее оборудования.
Преобразователь частоты потребляет из сети
несинусоидальный ток, что увеличивает действующее
значение входного тока I
. Несинусоидальный ток
эфф
можно с помощью анализа Фурье преобразовать и
разложить на токи синусоидальной формы различных
частот, т. е. токи гармоник IN с частотой основной
гармоники 50 или 60Гц.
Гармоники не оказывают непосредственного
воздействия на потребление мощности, но увеличивают
тепловые потери в установке (в трансформаторе, в
катушках индуктивности, в кабелях). Соответственно в
установках с довольно большой долей нагрузки,
приходящейся на выпрямители, важно поддерживать
токи гармоник на низком уровне для исключения
перегрузки трансформатора, катушек индуктивности и
кабелей.
Сокращение Описание
f
1
I
1
U
1
I
n
U
n
n порядок гармоники
Таблица 3.9 Сокращения, относящиеся к гармоникам
основная частота
основной ток
основное напряжение
токи гармоник
гармоническое напряжение
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 53
Page 54

175HA034.10
Интеграция системы
VLT® AQUA Drive FC 202
Основная
Ток гармоник (In)
3.2.7.2
Требования к излучению гармоник
частота (I1)
Ток I
Частота
1
50 250 350 550
I
5
I
7
I
11
Оборудование, подключенное к коммунальной
электросети.
[Гц]
Дополнит
33
Таблица 3.10 Трансформированный несинусоидальный ток
ельное
Определение
оборудов
Ток Ток гармоник
I
эфф.I1
I
I
5
I
7
11-49
Входной ток 1,0 0,9 0,4 0,2 < 0,1
ание
1 IEC/EN 61000-3-2 Класс A для трехфазного
сбалансированного оборудования (для
профессионального оборудования суммарной
Таблица 3.11 Токи гармоник в сравнении с эффективным
значением входного
тока
2 IEC/EN 61000-3-12 Оборудование 16–75 A и
мощностью только до 1 кВт).
профессиональное оборудование от 1 кВт до тока
фазы 16 А.
Таблица 3.12 Стандарты на излучение гармоник
3.2.7.3
Рисунок 3.3 Катушки индуктивности промежуточной цепи
Результаты проверки на
гармоники (излучение)
Типоразмеры по мощности до PK75 в T2 и T4
УВЕДОМЛЕНИЕ
Некоторые токи гармоник могут нарушать работу
устройств связи, подключенных к тому же
трансформатору, или вызывать резонанс в батареях
конденсаторов, предназначенных для коррекции
коэффициента мощности.
Для обеспечения малых токов гармоник
преобразователь частоты оснащен пассивными
фильтрами. Катушки постоянного тока снижают полный
коэффициент гармонических искажений до 40 %.
Искажение напряжения питающей сети зависит от
величины токов гармоник, которые должны умножаться
на импеданс сети для рассматриваемой частоты.
Полный коэффициент нелинейных искажений
напряжения (THD) рассчитывается на основе отдельных
гармоник напряжения по следующей формуле:
2
THD
2
+ U
U
=
+ ... + U
5
7
U1
2
N
соответствуют классу A стандарта IEC/EN 61000-3-2.
Типоразмеры по мощности от P1K1 до P18K в T2 и до
P90K в T4 соответствуют стандарту IEC/EN 61000-3-12,
табл. 4. Типоразмеры по мощности P110–P450 в T4
также соответствуют стандарту IEC/EN 61000-3-12, хотя
этого и не требуется, поскольку токи превышают 75 A.
В Таблица 3.13 показано, что мощность короткого
замыкания источника питания S
в точке подключения
к.з.
источника питания пользователя к сети коммунального
электроснабжения (R
3 × R
=
S
К.З.
Фактический
(типичный)
Предельное
R
≥120
sce
Фактический
(типичный)
Предельное
R
≥120
sce
× U
SCE
сети
) выше или равна:
sce
× I
= 3 × 120 × 400 × I
оборуд.
оборуд.
Ток отдельных гармоник In/I1 (%)
I
5
I
7
I
11
I
13
40 20 10 8
40 25 15 10
Коэффициент гармонического искажения
тока (%)
PWHD (частичный
взвешенный
THD
коэффициент
гармонических
искажений)
46 45
48 46
Таблица 3.13 Результаты проверки на гармоники
(излучение)
54 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 55

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Интеграция системы
Руководство по проектированию
Монтажник или пользователь оборудования обязан
обеспечить подключение оборудования только к такому
источнику питания, мощность короткого замыкания S
к.з.
которого больше или равна указанной в уравнении, и в
случае необходимости должен проконсультироваться с
оператором распределительной сети.
Другие типоразмеры по мощности можно подключать к
сети общего пользования после консультаций с
оператором распределительных сетей.
Соответствие требованиям различных уровней системы:
Приведенные в Таблица 3.13 данные по току гармоник
даны в соответствии с IEC/EN61000-3-12 и с учетом
стандарта на системы силовых приводов. Они могут
использоваться в качестве основы для расчета влияния
тока гармоник на систему источника питания и для
документирования соответствия с соответствующими
региональными требованиями: IEEE 519 -1992 и G5/4.
3.2.7.4
Влияние гармоник в системе
распределения мощности
На Рисунок 3.4 первичная обмотка трансформатора
подключена к общей точке нескольких присоединений
(PCC1) источника среднего напряжения. Трансформатор
имеет импеданс Z
общей точке нескольких присоединений PCC2
подключены вместе все нагрузки. Каждая нагрузка
подключена посредством кабелей, которые имеют
импеданс Z1, Z2, Z3.
и питает несколько нагрузок. В
xfr
только гармоническую характеристику нагрузки,
невозможно предсказать искажение напряжения в PCC.
Чтобы предсказать искажение в PCC, необходимо знать
конфигурацию системы распределения и
соответствующие импедансы.
Для описания импеданса сети используется
распространенный термин «коэффициент короткого
замыкания», R
. Это отношение между кажущейся
sce
мощностью короткого замыкания источника питания в
точке PCC (S
нагрузки (S
R
=
sce
S
оборуд.
где
S
к.з.
) и номинальной кажущейся мощностью
к.з.
).
оборуд.
S
ce
2
U
=
Z
питания
и
S
оборуд.
= U × I
оборуд.
Негативное влияние гармоник имеет два аспекта
Токи гармоник вносят свой вклад в системные
•
потери мощности (в кабелях, в
трансформаторе).
Гармоническое искажение напряжения
•
вызывает возмущения в других нагрузках и
увеличивают потери в других нагрузках.
3 3
Рисунок 3.4 Малая система распределения
Токи гармоник нелинейных нагрузок вызывают
искажение напряжения из-за перепада напряжений на
импедансах системы распределения. Чем больше
импедансы, тем выше уровни искажения напряжения.
Искажение тока связано с характеристиками
напряжения связано с характеристиками системы. Зная
аппаратуры и отдельными нагрузками. Искажение
Рисунок 3.5 Отрицательное влияние гармоник
3.2.7.5 Стандарты и требования к
ограничению гармоник
Требования к ограничению гармоник могут быть
подразделены на следующие категории:
требования конкретных применений;
•
стандарты, которые необходимо соблюдать.
•
Требования, относящиеся к конкретным применениям,
связаны с конкретными системами, для которых
имеются технические причины стремиться к
ограничению гармоник.
Пример
Для подключения двух двигателей мощностью 110 кВт
достаточно трансформатора на 250 кВА, если один из
двигателей подключен непосредственно к сети питания,
а другой питается через преобразователь частоты.
Однако мощности трансформатора будет недостаточно,
если от преобразователя частоты будут питаться оба
двигателя. Чтобы обеспечить возможность питания
обоих двигателей через преобразователи частоты,
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 55
Page 56

130BB955.12
a
b
Leakage current
Motor cable length
Интеграция системы
VLT® AQUA Drive FC 202
необходимо использовать либо дополнительные
средства подавления гармоник в установке, либо
приводы с низкими гармониками.
Существуют различные стандарты, нормативы и
рекомендации, касающиеся подавления гармоник. В
33
разных географических районах и разных отраслях
применяются различные стандарты. Наиболее
распространены следующие стандарты:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Конкретные сведения о каждом стандарте см. в
Руководстве по проектированию AHF 005/010.
В Европе максимальное значение суммарного
коэффициента гармонических искажений (THVD)
составляет 8 %, если установка подключена к
коммунальной электросети. Если установка содержит
собственный трансформатор, то предельное значение
THVD равно 10 %. Конструктивно VLT® AQUA Drive
может выдерживать THVD 10 %.
3.2.8
Ток утечки на землю
Соблюдайте национальные и местные нормативы,
относящиеся к защитному заземлению оборудования с
током утечки > 3,5 мА.
Технология преобразователей частоты предполагает
высокочастотное переключение при высокой мощности.
При этом генерируются токи утечки в проводах
заземления.
Ток утечки на землю создается несколькими
источниками и зависит от конфигурации системы;
нужно учитывать следующие факторы:
Фильтры ВЧ
•
Длина кабеля двигателя
•
Экранирование кабеля двигателя
•
Мощность преобразователя частоты
•
3.2.7.6
На случаи, когда требуются дополнительные меры по
подавлению гармоник, Danfoss предлагает широкий
ассортимент оборудование подавления. К нему
относятся:
Выбор решения зависит от нескольких факторов.
Следует всегда рассматривать возможность подавления
гармоник, если в нагрузке трансформатора нелинейная
составляющая равна 40 % или более.
Danfoss предлагает средства для расчета гармоник, см.
глава 2.8.2 Программное обеспечение для ПК.
Подавление гармоник
12-импульсные приводы
•
Фильтры AHF
•
Приводы с низкими гармониками
•
Активные фильтры
•
Сеть (фоновые искажения, асимметрия сети,
•
резонанс, тип источника (трансформатор/
генератор)).
Применение (профиль нагрузки, количество и
•
размеры нагрузок).
Местные/национальные требования/правила
•
(IEEE519, IEC, G5/4 и т. д.).
Общая стоимость владения (начальная
•
стоимость, рентабельность, обслуживание и т.
д.).
Рисунок 3.6 Влияние длины кабеля двигателя и
типоразмера по мощности на ток утечки. Типоразмер по
мощности a > Типоразмер по мощности b
56 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 57

130BB956.12
THVD=0%
THVD=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Интеграция системы
Руководство по проектированию
Ток утечки зависит также от линейных искажений.
Рисунок 3.7 Влияние искажения в цепи на ток утечки
Ток утечки включает несколько частот, происходящих
как от частоты сетевого питания, так и от частоты
коммутации. Обнаружение частоты коммутации зависит
от типа используемого датчика RCD.
3 3
Рисунок 3.8 Основные источники тока утечки
Величина тока утечки, обнаруживаемого RCD, зависит от
частоты среза в датчике RCD.
В соответствии со стандартом EN/IEC61800-5-1 (стандарт
по системам силового привода) следует соблюдать
особую осторожность в том случае, если ток утечки
превышает 3,5 мА. Следует усилить заземление согласно
следующим требованиям к подключению защитного
заземления.
Сечение провода заземления (клемма 95)
•
должно быть не менее 10 мм².
Следует использовать два отдельных провода
•
заземления соответствующих нормативам
размеров.
Дополнительную информацию см. в стандартах EN/
IEC61800-5-1 и EN50178.
Использование датчиков остаточного тока
Если используются датчики остаточного тока (RCD),
также известные как автоматические выключатели для
защиты от утечек на землю (ELCB), соблюдайте
следующие требования.
Используйте только RCD типа В, поскольку они
•
могут обнаруживать переменные и постоянные
токи.
Используйте RCD с задержкой, чтобы
•
предотвратить отказы в связи с переходными
токами на землю.
Размеры RCD следует подбирать с учетом
•
конфигурации системы и условий окружающей
среды.
Рисунок 3.9 Влияние предельной частоты датчиков
остаточного тока (RCD) на ток утечки
3.3
Подключение к сети
3.3.1 Конфигурации сети и воздействие
ЭМС
Существует несколько типов систем сети переменного
тока для питания преобразователей частоты. Каждый из
них влияет на характеристики ЭМС системы. С точки
зрения ЭМС наилучшей считается 5-проводная система
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 57
Page 58

Интеграция системы
VLT® AQUA Drive FC 202
TN-S, а система электропитания IT с изолированной
нейтралью наименее желательна.
Тип системы Описание
Системы
электропитания
33
TN
TN-S 5-проводная система с отдельными
TN-C 4-проводная система с совмещенной
Система
электропитания
TT
Система
электропитания IT
Таблица 3.14 Типы систем сети переменного тока
Низкочастотные помехи в
3.3.2
Существует 2 типа систем распределения
сети с системой заземления TN: TN-S и
TN-C.
проводниками нейтрали (N) и защитного
заземления (PE). Она обеспечивает
наилучшие свойства ЭМС и исключает
передачу помех.
нейтралью и проводником защитного
заземления (PE) по всей системе.
Объединение проводников нейтрали и
защитного заземления приводит к плохим
характеристикам ЭМС.
4-проводная система с заземленным
проводником нейтрали и отдельным
заземлением блоков преобразователей.
При правильном заземлении эта система
имеет хорошие характеристики ЭМС.
Изолированная 4-проводная система с
проводником нейтрали, который либо не
заземлен, либо заземлен через
сопротивление.
Стандарт Определение
EN 61000-2-2, EN
61000-2-4, EN
50160
EN 61000-3-2,
61000-3-12
EN 50178 Определяет порядок использования
Таблица 3.15 Стандарты проектирования EN по качеству
питания в электросети
3.3.2.3
Преобразователи частоты, не
Определяет пределы по напряжению
питания в электросети, которые должны
соблюдаться в коммунальных и
промышленных сетях электропитания.
Регулирует помехи в питающей сети,
возникающие в результате подключения
устройств.
электронного оборудования в силовых
установках.
создающие помехи
Каждый преобразователь частоты создает помехи в
питающей сети. Современные стандарты определены
только для диапазонов частот до 2 кГц. Некоторые
преобразователи сдвигают диапазон помех в
электросети в область выше 2 кГц, которая не
регламентируется стандартом, такие преобразователи
маркируются как не создающие помех. В настоящее
время исследуются возможные ограничения для этой
области. Преобразователи частоты не устраняют помехи
в питающей сети.
3.3.2.4
Как образуются помехи в
питающей сети
питающей сети
Помехи, искажающие синусоидальную волну в сети
3.3.2.1 Несинусоидальное питание от
сети
Сетевое напряжение редко бывает равномерным
синусоидальным напряжением с постоянной
амплитудой и частотой. Частично это обусловлено
нагрузками, которые отбирают из сети
несинусоидальные токи или имеют нелинейные
характеристики: это компьютеры, телевизоры,
импульсные источники питания, энергоэффективные
лампы и преобразователи частоты. Отклонения
неизбежны. В некоторых пределах они допустимы.
электропитания из-за пульсирующих входных токов,
обычно называются гармониками. По анализу Фурье их
можно оценить вплоть до 2,5 кГц, что соответствует 50-й
гармонике сети электропитания.
Этот вид гармонических помех в сети электропитания
создается входными выпрямителями преобразователей
частоты. Когда преобразователи частоты подключены к
сети 50 Гц, 3-я гармоника (150 Гц), 5-я гармоника (250 Гц)
или 7-я гармоника (350 Гц) демонстрируют самое
активное влияние. Общее содержание гармоник
называется полным коэффициент гармонических
искажений (THD).
3.3.2.2
В большей части Европы объективная оценка качества
питания в электросети производится согласно Акту по
электромагнитной совместимости устройств (EMVG).
Соответствие требованиям этого нормативного акта
гарантирует, что все устройства и сети, подключенные к
системе распределения электроэнергии, будут
выполнять свое предназначение без создания проблем.
58 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Соответствие Директивам по ЭМС
3.3.2.5
Гармоники и отклонения напряжения являются двумя
формами низкочастотных помех в питающей сети. Их
вид в источнике помех отличается от вида в любой
другой точке сети электропитания при подключенной
нагрузке. Поэтому при оценке эффектов помех в сети
электропитания необходимо совместно определить ряд
различных влияний. К ним относятся подача из сети
электропитания, ее структура и нагрузки.
Воздействие помех в сети питания
Page 59

Интеграция системы
Руководство по проектированию
В результате помех в сети электропитания могут
возникать предупреждения о пониженном напряжении
и более высокие потери при функционировании.
Предупреждения о пониженном напряжении
Неправильное измерение напряжения
•
вследствие искажения синусоидального
напряжения в сети.
Приводят к неправильному измерению
•
мощности, так как только измерения истинной
среднеквадратичной мощности учитывают
гармоническую составляющую.
Более высокие потери
Гармоники снижают активную мощность,
•
полную мощность и реактивную мощность.
Искажающие электрические нагрузки вызывают
•
слышимые помехи в других устройствах, а в
худшем случае могут привести к их выходу из
строя.
В результате нагрева срок службы устройств
•
сокращается.
УВЕДОМЛЕНИЕ
Излишнее содержание гармоник нагружает
оборудование по компенсации коэффициента
мощности и может даже привести к его выходу из
строя. По этой причине следует оборудовать
дросселями оборудование компенсации
коэффициента мощности при наличии излишнего
содержания гармоник.
3.3.4 Возможности снижения помех в
питающей сети
В общем случае помехи в питающей сети от
преобразователей сокращаются посредством
ограничения амплитуды пульсирующих токов. Это
улучшает коэффициент мощности λ (лямбда).
Есть несколько методов, которые рекомендуется
применять для исключения гармоник в питающей сети:
Входные дроссели или вставки постоянного
•
тока в преобразователях частоты.
Пассивные фильтры.
•
Активные фильтры.
•
Плоские вставки постоянного тока.
•
Устройства активной фильтрации и приводы с
•
низким уровнем гармоник.
Выпрямители с 12, 18 или 24 импульсами на
•
цикл.
Радиочастотные помехи
3.3.5
Преобразователи частоты создают ВЧ-помехи в связи с
их импульсами тока переменной длительности.
Преобразователи и кабели двигателей излучают эти
составляющие, а также проводят их в систему питающей
сети.
3 3
3.3.3 Анализ помех в питающей сети
Чтобы избежать ухудшения качества энергоснабжения в
питающей сети, можно воспользоваться рядом методов
анализа систем или устройств, порождающих
гармонические токи. Средства анализа сетей питания,
такие как ПО расчета гармоник (HCS), анализируют
проект системы на предмет гармоник. Можно заранее
испытать конкретные контрмеры и обеспечить
совместимость системы в дальнейшем.
Чтобы загрузить программное обеспечение для анализа
систем сетевого питания, перейдите на сайтhttp://
www.danfoss-hcs.com/Default.asp?LEVEL=START .
УВЕДОМЛЕНИЕ
Компания Danfoss обладает высоким уровнем
компетенции в области ЭМС и предоставляет
заказчикам услуги по анализу ЭМС с детальной
оценкой или расчетами сети, а также проводит
учебные курсы, семинары и практикумы.
Фильтры ВЧ-помех используются для уменьшения помех
в питающей сети. Они обеспечивают устойчивость к
шумам и защищают устройства от высокочастотных
наведенных по цепям питания помех. Они также
снижают помехи, наводимые на кабель питания от сети,
и излучение от кабеля питания сети. Фильтры
предназначены для ограничения помех до заданного
уровня. Встроенные фильтры часто являются
стандартным оборудованием, рассчитанным на
определенную степень помехоустойчивости.
УВЕДОМЛЕНИЕ
Все преобразователи частоты VLT® AQUA Drive в
стандартной комплектации оснащены встроенными
дросселями, подавляющими помехи в питающей сети.
3.3.6 Классификация места эксплуатации
Самым важным фактором, влияющим на выполнение
требований к ЭМС, является наличие точных
требований к среде, в которой будет работать
преобразователь частоты.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 59
Page 60

Интеграция системы
VLT® AQUA Drive FC 202
3.3.6.1 Среда 1/класс B: Жилые
3.3.7
Использование с изолированным
входным источником
Производственные объекты, подключенные к
коммунальной низковольтной сети, включая области с
малыми промышленными объектами, относятся к
категории среда 1/класс B. У них нет собственных
33
распределительных трансформаторов высокого или
среднего напряжения для создания отдельной сети
электропитания. Классификация сред применяется как
внутри зданий, так и снаружи. Среди типичных
примеров — деловые центры, жилые здания,
рестораны, автомобильные парковки и развлекательные
сооружения.
3.3.6.2
Промышленные электросети сети не соединены с
коммунальной электросетью. Вместо этого в них
используются собственные высоковольтные или
средневольтные распределительные трансформаторы.
Классификация сред применяется как внутри зданий,
так и снаружи.
Они определяются как промышленные и
характеризуются следующими конкретными
электромагнитными условиями:
3.3.6.3
В областях с трансформаторами среднего напряжения,
явно отделенных от других областей, сам пользователь
решает, к какому типу классификации отнести его
объекты. Пользователь несет ответственность за
обеспечение ЭМС, необходимой для бесперебойной
работы всех устройств в указанных условиях.
Примерами особых сред могут служить торговые
центры, супермаркеты, АЗС, офисные здания и склады.
Среда 2/класс A: Промышленные
Наличие научных, медицинских или
•
промышленных устройств.
Коммутация больших индуктивных и емкостных
•
нагрузок.
Присутствие сильных магнитных полей
•
(например, в связи с высокими токами).
Особые условия
По большей части в электроснабжении в США
используется грунтовое заземление. Хотя это редко
встречается в США, подача питания также может
производиться от изолированного источника. Все
преобразователи частоты Danfoss могут использоваться
как с изолированным источником входного тока, так и с
заземленными силовыми линиями.
3.3.8 Компенсация коэффициента
мощности
Оборудование компенсации коэффициента мощности
служит для снижения фазового сдвига (φ) между
напряжением и током, оно смещает коэффициент
мощности ближе к единице (cos φ). Это необходимо при
использовании в системе большого числа индуктивных
нагрузок, таких как электродвигатели или
пускорегулирующая аппаратура люминесцентных ламп.
Преобразователи частоты с изолированной цепью
постоянного тока вообще не потребляют реактивной
мощности из сети питания и не производят сдвига
коэффициента мощности. У них cos φ приблизительно
равен 1.
По этой причине двигатели с управляемой скоростью
не требуется учитывать при расчете характеристик
оборудования компенсации коэффициента мощности. В
то же время ток, потребляемый оборудованием
коррекции коэффициента мощности, возрастает, так как
частотные преобразователи формируют гармонические
колебания. По мере роста числа генераторов гармоник
растет нагрузка на конденсаторы и тепловыделение в
них. Поэтому следует оснастить оборудование
коррекции коэффициента мощности дросселями.
Дроссели также предотвращают резонанс между
индуктивностью нагрузок и емкостью. Для
преобразователей с φ <1 также требуются дроссели в
оборудовании коррекции коэффициента мощности.
Также следует учитывать более высокий уровень
реактивной мощности, при определении размеров
кабелей.
3.3.6.4
Когда преобразователь частоты не соответствует
требованиям категории C1, необходимо нанести
предупреждающее уведомление. За это несет
ответственность эксплуатант. Подавление помех
основано на классах A1, A2 и B в стандарте EN 55011. В
конечном счете эксплуатант несет ответственность за
правильную классификацию устройств и затраты на
решение связанных с ЭМС проблем.
60 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Предупреждающая маркировка
3.3.9
Задержка входного питания
Чтобы убедиться в правильности работы схем
подавления импульсов на входе, пронаблюдайте
временную задержку между успешной подачей
входного питания.
Page 61

Интеграция системы
Руководство по проектированию
В Таблица 3.16 указано минимальное разрешенное
время, которое должно проходить между подачами
входного питания.
Входное напряжение [V]
Время выдержки [с]
Таблица 3.16 Задержка входного питания
380 415 460 600
48 65 83 133
3.3.10 Переходные процессы в сети
Переходные процессы — это краткие скачки
напряжения порядка нескольких тысяч вольт. Они могут
возникать во всех видах систем распределения питания,
в том числе в промышленных и жилых средах.
Удары молнии — распространенная причина
переходных процессов. Они также возникают при
включении или отключении больших нагрузок и при
переключении другого оборудования по
противодействию переходным процессам, например,
оборудования коррекции коэффициента мощности.
Переходные процессы также могут быть вызваны
короткими замыканиями, срабатыванием
автоматических выключателей в системах
распределения питания или индукционной связью
между параллельными кабелями.
Формы этих переходных процессов и содержание в них
энергии описываются в стандарте EN 61000-4-1.
Существует ряд методов по ограничению их вредных
последствий. Первый уровень защиты от переходных
процессов с высокой энергией обеспечивают
газонаполненные разрядники и искровые промежутки.
Для защиты второго уровня в большинстве электронных
устройств, включая преобразователи частоты,
используются зависимые от напряжения резисторы
(варисторы), которые сглаживают переходные процессы.
Рекомендуется рассмотреть проект системы с
резервным генератором.
Когда система переключается с работы от сети
•
электропитания на работу от генератора,
обычно гармоническая нагрузка возрастает.
Проектировщикам следует рассчитать или
•
измерить увеличение гармонической нагрузки,
чтобы убедиться, что качество электропитания
соответствует нормативам, тем самым
предотвратив связанные с гармониками
проблемы и отказы оборудования.
Следует избегать асимметричной нагрузки
•
генераторов, так как она вызывает
повышенные потери и может увеличить общие
гармонические искажения.
Корзиночная намотка 5/6 обмотки генератора
•
ослабляет 5-ю и 7-ю гармоники, но вызывает
рост 3-й гармоники. Корзиночная намотка 2/3
уменьшает третью гармонику.
По возможности эксплуатанту следует
•
отключать оборудование коррекции
коэффициента мощности, так как оно может
вызывать в системе резонанс.
Дроссели или активные фильтры могут
•
ослаблять гармоники, также это возможно при
параллельном использовании резистивных
нагрузок.
Емкостные нагрузки, используемые
•
параллельно, создают дополнительную
нагрузку в связи с непредсказуемыми
эффектами резонанса.
Более точный анализ возможен с помощью ПО анализа
электросетей, такого как HCS. Чтобы загрузить
программное обеспечение для анализа систем сетевого
питания, перейдите на сайт http://www.danfoss-hcs.com/
Default.asp?LEVEL=START .
3 3
3.3.11
Используйте системы резервного питания, когда
необходимо продолжение работы и в случае отказа
питания от сети. Они также используются параллельно с
коммунальной электросетью для достижения большей
мощности питания. Это распространенная практика для
установок совмещенной генерации тепла и
электроэнергии, использующая преимущества высокой
энергоэффективности этой формы преобразования
энергии. Когда резервное питание поступает от
генератора, импеданс сети питания обычно выше, чем
при получении мощности от коммунальной электросети.
Это приводит к увеличению суммарных гармонических
искажений. При надлежащем проектировании
генераторы могут работать в системе с устройствами,
наводящими гармонические колебания.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 61
Работа с резервным генератором
В таблице пределов гармоник приведены максимальные
загрузки, допускающие бесперебойную работу
сооружений при работе с порождающими гармоники
устройствами.
Пределы гармоник
Выпрямители B2 и B6 ⇒максимум 20 % от
•
номинальной нагрузки генератора.
Выпрямитель B6 с дросселем⇒макс. 20–35 % от
•
номинальной нагрузки генератора, в
зависимости от ее состава.
Управляемый выпрямитель B6 ⇒максимум 10 %
•
от номинальной нагрузки генератора.
Page 62

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Интеграция системы
VLT® AQUA Drive FC 202
3.4 Интеграция двигателя
С преобразователем частоты могут использоваться
стандартные трехфазные асинхронные двигатели всех
3.4.1 Что следует учитывать при выборе
двигателя
типов. Заводская настройка задает вращение по
часовой стрелке, при этом выход преобразователя
частоты подключается следующим образом:
Преобразователь частоты может создавать
33
электрические нагрузки на двигатель. Поэтому при
сопряжении двигателя и преобразователя частоты
необходимо учесть следующие явления:
Напряжение изоляции
•
Напряжение подшипников
•
Тепловая нагрузка
•
Синусоидные фильтры и фильтры
3.4.2
dU/dt
Выходные фильтры могут быть полезны для некоторых
двигателей за счет снижения электрической нагрузки и
возможности использования более длинных кабелей.
Варианты выходных фильтров включают
синусоидальные фильтры (также называемые LCфильтрами) и фильтры dU/dt. Фильтры dU/dt уменьшают
резкость подъема фронта импульсов. Синусоидальные
фильтры сглаживают скачки напряжения и преобразуют
их в почти синусоиду напряжения на выходе. С
некоторыми преобразователями частоты синусоидные
фильтры соответствуют требованиям EN 61800-3 RFI,
категория C2, для неэкранированных кабелей двигателя,
см. глава 3.7.5 Синусоидные фильтры.
Подробнее о дополнительных синусоидных фильтрах и
фильтрах dU/dt см. в глава 3.7.5 Синусоидные фильтры и
глава 3.7.6 Фильтры dU/dt.
Подробнее о номерах для заказа дополнительных
синусоидных фильтров и фильтров dU/dt см. в и
глава 6.2.9 Фильтры dU/dt.
3.4.3
Правильное заземление электродвигателя крайне важно
для личной безопасности и выполнения требований по
ЭМС для низковольтного оборудования. Правильное
заземление необходимо для эффективной работы
экранирования и фильтров. Для правильной реализации
ЭМС необходимо проверить все проектные данные.
3.4.4
Рекомендации по выбору кабелей двигателя, а также
характеристики кабелей, приведены в
глава 7.5 Технические характеристики кабелей.
Надлежаще заземление двигателя
Кабели двигателей
Рисунок 3.10 Подключение клемм для вращения вала
двигателя по часовой стрелке и против часовой стрелки
Направление вращения может быть изменено путем
переключения двух фаз в кабеле двигателя или
посредством изменения настройки в 4-10 Направление
вращения двигателя.
Экранирование кабеля двигателя
3.4.5
На выходе преобразователей частоты возникают
импульсы с крутыми фронтами. Эти импульсы содержат
высокочастотные составляющие (в том числе
гигагерцевого диапазона), что может вызвать
нежелательное излучение от кабелей
электродвигателей. Экранированные кабели двигателя
снижают такое излучение.
62 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 63

130BD774.10
130BD775.10
130BD776.10
Интеграция системы Руководство по проектированию
Экранирование дает следующие результаты:
Снижает величину излучаемых помех.
•
Улучшает устойчивость к помехам отдельных
•
устройств.
Экран улавливает высокочастотные составляющие и
проводит их обратно в источник помех, в данном
случае — в преобразователь частоты. Экранированные
кабели двигателей также обеспечивают устойчивость к
помехам от расположенных вблизи внешних
источников.
При этом даже хорошее экранирование не устраняет
излучение полностью. Компоненты системы,
расположенные в облучаемых средах, должны работать
без ухудшения характеристик.
Подключение нескольких
3.4.6
двигателей
УВЕДОМЛЕНИЕ
Если мощности двигателей значительно различаются,
то могут возникать проблемы при пуске и на малых
скоростях вращения, поскольку относительно
большое активное сопротивление статора
маломощных двигателей требует более высокого
напряжения при пуске и на малых оборотах.
УВЕДОМЛЕНИЕ
Когда двигатели соединены параллельно, установите
для параметра 1-01 Принцип управления двигателем
значение [0] U/f.
3 3
Рисунок 3.11 Подключение общим жгутом для кабелей
малой длины
Преобразователь частоты может управлять несколькими
двигателями, включенными параллельно. При
использовании параллельного подключения двигателей
следует учитывать следующие моменты:
В некоторых системах может использоваться
•
режим VCC+.
Общий ток, потребляемый двигателями, не
•
должен превышать номинальный выходной ток
I
преобразователя частоты.
INV
Не используйте общие соединения для
•
длинных кабелей; см. Рисунок 3.12.
Требование к общей длине кабелей двигателей,
•
упомянутое в Таблица 3.4, действительно лишь
в случае, когда длина каждого из
параллельных кабелей не превышает 10 м, см.
Рисунок 3.14 и Рисунок 3.15.
Учитывайте перепад напряжений между
•
кабелями двигателя, см. Рисунок 3.15.
При наличии длинных параллельных кабелей
•
используйте индуктивно-емкостной фильтр, см.
Рисунок 3.15.
В случае длинных кабелей без использования
•
параллельного подключения см. Рисунок 3.16.
Рисунок 3.12 Подключение общим жгутом для кабелей
большой длины
Рисунок 3.13 Параллельные кабели без нагрузки
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 63
Page 64

130BD777.10
130BD778.10
130BD779.10
Интеграция системы
VLT® AQUA Drive FC 202
33
Рисунок 3.14 Параллельные кабели с нагрузкой
Рисунок 3.16 Длинные кабели при последовательном
подключении
Рисунок 3.15 Индуктивно-емкостной фильтр для длинных
параллельных кабелей
Размеры
корпусов
A1, A2, A4, A5 0,37–0,75
A2, A4, A5 1,1–1,5
A2, A4, A5 2,2–4
A3, A4, A5 5,5–7,5
B1, B2, B3, B4,
C1, C2, C3, C4
A3 1,1–7,5 525–690 100 50 33 25
B4 11–30 525–690 150 75 50 37
C3 37–45 525–690 150 75 50 37
Таблица 3.17 Максимальная длина каждого из параллельных кабелей
Мощность [кВт]
11–90
Напряжение [В] 1 кабель [м] 2 кабеля [м] 3 кабеля [м] 4 кабеля [м]
400 150 45 8 6
500 150 7 4 3
400 150 45 20 8
500 150 45 5 4
400 150 45 20 11
500 150 45 20 6
400 150 45 20 11
500 150 45 20 11
400 150 75 50 37
500 150 75 50 37
64 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 65

Интеграция системы
Руководство по проектированию
3.4.7 Изоляция проводов управления
Гармонические помехи, излучаемые проводками
двигателей, могут нарушать сигналы управления в
проводке управления преобразователем и приводить к
отказам управления. Кабели двигателя и кабели
управления должны прокладываться отдельно. При
раздельном размещении кабелей воздействие помех
значительно ослабляется.
Расстояние между кабелями управления и
•
кабелями двигателя должно быть больше 200
мм.
При меньшем расстоянии необходимы
•
разделительные элементы, или же станет
возможной передача и наводка помех.
Экраны управляющих кабелей должны быть
•
подключены с обоих концов, так же, как и
экраны силовых кабелей двигателей.
Наибольшее ослабление обеспечивают
•
экранированные кабеля с витыми
проводниками. Ослабление магнитного поля,
составляющее 30 дБ при одном экране,
возрастает до 60 дБ при двойном экране и до
75 дБ, если при этом также используются витые
проводники.
Тепловая защита двигателя
3.4.8
Преобразователь частоты обеспечивает тепловую
защиту двигателя несколькими способами:
Предел крутящего момента защищает
•
двигатель от перегрузки независимо от
скорости вращения.
Минимальная скорость ограничивает нижний
•
предел диапазона рабочих скоростей,
например значениями от 30 до 50/60 Гц.
Максимальная скорость ограничивает верхний
•
предел выходной скорости.
Имеется вход для внешнего термистора.
•
Электронное тепловое реле (ЭТР) для
•
асинхронных двигателей имитирует
биметаллическое реле на основе внутренних
измерений. ЭТР измеряет фактический ток,
скорость и время для вычисления температуры
двигателя и его защиты от перегрева путем
выдачи предупреждения или отключения
питания двигателя. Характеристики ЭТР
показаны в Рисунок 3.17.
Рисунок 3.17 Характеристики электронного теплового реле
На оси X показано соотношение между I
номинальным значением I
в секундах до того, как функция ЭТР отключает питание.
На кривых показана характерная номинальная скорость:
вдвое больше номинальной скорости и 0,2 от
номинальной скорости.
При низкой скорости функция ЭТР срабатывает при
более низкой температуре в связи с меньшим
охлаждением двигателя. Таким образом двигатель
защищен от перегрева даже на малой скорости.
Функция ЭТР вычисляет температуру двигателя на
основе фактического тока и скорости.
Выходной контактор
3.4.9
Хотя в общем случае такая схема не рекомендуется,
расположение выходного контактора между двигателем
и преобразователем частоты не приведет к
повреждению преобразователя частоты. При замыкании
ранее разомкнутого выходного контактора работающий
преобразователь частоты может подключиться к
остановленному электродвигателю. Это может привести
у отключению преобразователя частоты и выводу на
экран сообщения о неисправности.
3.4.10
Для торможения нагрузки на валу двигателя
используйте либо статический (механический), либо
динамический тормоз.
Функции торможения
. На оси Y показано время
двиг.
двиг.
и
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 65
Page 66

T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Load
Time
Speed
Интеграция системы
VLT® AQUA Drive FC 202
3.4.11 Динамическое торможение
Динамическое торможение осуществляется указанными
ниже способами.
Резистивное торможение. Тормозной IGBT
•
поддерживает перенапряжение на уровне
33
3.4.12
Тормозной резистор необходим, чтобы справиться с
рассеиванием тепла и ростом напряжения в цепи
постоянного тока в ходе электрически управляемого
торможения. Применение тормозного резистора
обеспечивает поглощение выделяемой энергии в
тормозном резисторе, а не в преобразователе частоты.
Подробнее см. Руководство по проектированию
тормозных резисторов.
Расчет рабочего цикла
Если величина кинетической энергии, передаваемой в
резистор в каждом интервале торможения, не известна,
среднюю мощность можно рассчитать на основе
времени цикла и времени торможения (то есть на
основе прерывистого рабочего цикла). Прерывистый
рабочий цикл резистора показывает интервал времени,
в течение которого резистор включен (см. Рисунок 3.18).
Поставщики двигателей часто пользуются параметром
S5, устанавливая допустимую нагрузку, которая
характеризует прерывистый рабочий цикл.
ниже определенного порога путем
направления энергии торможения от двигателя
на тормозной резистор.
Торможение переменным током. Энергия
•
торможения распределяется в двигателе путем
изменения состояний потерь в двигателе.
Функция торможения переменным током не
может быть использована в применениях с
высокой частотой циклических операций,
поскольку это приводит к перегреву двигателя.
Торможение постоянным током. Постоянный
•
ток с перемодуляцией, добавляемый к
переменному току, действует в качестве
сигнала индукционного торможения.
Расчет тормозного резистора
Рисунок 3.18 Рабочий цикл тормозного резистора
Прерывистый рабочий цикл для резистора
рассчитывается следующим образом:
Рабочий цикл = tb/T
T = время цикла в секундах
tb — время торможения в секундах (за время всего
цикла)
Компания Danfoss предлагает тормозные резисторы с
рабочим циклом 5 %, 10 %, and 40 %. Если используется
10 % рабочий цикл, тормозные резисторы поглощают
мощность торможения в течение 10 % времени цикла.
Остающиеся 90 % времени цикла используются для
рассеяния избыточного тепла.
Убедитесь, что тормозной резистор подходит для
обработки требуемого времени торможения.
Расчет тормозного резистора
Чтобы предотвратить отключение преобразователя
частоты по защите в ходе торможения двигателем,
выберите номиналы резисторов, исходя из пиковой
тормозной мощности и промежуточного напряжения в
цепи. Рассчитайте сопротивление тормозного резистора
по следующей формуле:
2
торм.
=
Udc
P
пик.
Ом
R
Работа тормозного резистора зависит от напряжения в
цепи постоянного тока (Udc).
Udc — это напряжение, при котором активируется
тормозной резистор. Функция торможения в серии FC
устанавливается в зависимости от сетевого питания.
66 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 67

Интеграция системы
Предупреж
Тормоз
Вход питания от сети
[В перем. тока]
FC 202 3 x 200–240 390 405 410
FC 202 3 x 380–480 778 810 820
FC 202 3 x 525–600
FC 202 3 x 525–600
FC 202 3 x 525–690 1099 1109 1130
Таблица 3.18 Напряжение цепи пост. тока (Udc)
1) Размеры корпуса A, B, C
2) Размеры корпуса D, E, F
активен
[В пост.
тока]
1)
2)
943 965 975
1099 1109 1130
напряжени
Руководство по проектированию
Аварийны
дение
о высоком
и
[В пост.
тока]
й сигнал
в связи с
перенапря
жением
[В пост.
тока]
Расчет средней мощности тормозного
•
резистора
Торможение инерции
•
3.4.13 Кабельная проводка тормозного
резистора
ЭМС (витые кабели/экранирование)
Чтобы обеспечить заданные характеристики ЭМС,
используйте экранированные кабели/провода. При
использовании неэкранированных проводов
рекомендуется свить провода между собой для
уменьшения электрических помех от проводов между
тормозным резистором и преобразователем частоты.
Для улучшения характеристик ЭМС используйте
металлический экран.
3 3
Используйте сопротивление торможения R
, которое
рек.
гарантирует способность преобразователя частоты к
торможению при максимально высоком крутящем
моменте (M
), равным 160 %. Формула имеет
торм.(%)
следующий вид:
2
P
двиг.
U
xM
R
Ом =
рек.
Типичное значение η
Типичное значение η
пост. тока
торм.( % )
двиг.
VLT
x100
xη
xη
VLT
равно 0,90
равно 0,98
двиг.
Если выбрано более высокое сопротивление
тормозного резистора, то тормозной момент не
достигнет 160 %/150 %/110 %, и возникнет вероятность
защитного отключения преобразователем частоты
напряжения в цепи постоянного тока.
Для торможения с меньшим крутящим моментом,
например, 80 % от номинального, можно установить
тормозной резистор с меньшим номиналом мощности.
Рассчитайте размер с помощью формулы для расчета
R
.
рек.
Преобразователи частоты с размерами корпуса D и F
имеют несколько тормозных прерывателей. Для этих
размеров корпусов следует использовать тормозные
резисторы на каждом из тормозных прерывателей.
Руководство по проектированию тормозных
резисторов VLT
®
MCE 101 содержит самую свежую
информацию относительно выбора резисторов, а также
содержит более подробное описание расчетов, в том
числе:
Расчет мощности торможения
•
Расчет пиковой мощности тормозного
•
резистора
3.4.14
Тормозной резистор и тормозной
IGBT
Контроль мощности тормозного резистора
Кроме того, функция контроля мощности торможения
обеспечивает возможность считывания значений
мгновенной мощности и средней мощности за
выбранный период времени. Тормоз может также
контролировать мощность торможения и обеспечивать,
чтобы она не превышала предела, установленного в
параметре 2-12 Предельная мощность торможения
(кВт). В параметре 2-13 Контроль мощности
торможения выбирается функция, которая будет
выполняться, когда мощность, передаваемая на
тормозной резистор, превысит предел, установленный в
параметре 2-12 Предельная мощность торможения
(кВт).
УВЕДОМЛЕНИЕ
Контроль мощности тормоза не является защитной
функцией. Цепь тормозного резистора не защищена
от утечки на землю.
Тормоз защищен от короткого замыкания тормозного
резистора, а тормозной транзистор контролируется с
целью обнаружения его короткого замыкания. Для
защиты тормозного резистора от перегрузки в случае
возникновения неисправности преобразователя частоты
используйте релейный или цифровой выход.
Вместо функции торможения можно с помощью
параметра 2-17 Контроль перенапряжения включить
функцию контроля перенапряжения (OVC). При росте
напряжения в цепи постоянного тока эта функция
становится активной для всех устройств. Функция дает
возможность избежать отключения. Это достигается
путем увеличения выходной частоты с целью
ограничения напряжения, поступающего из цепи
постоянного тока. Данная функция удобна, например,
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 67
Page 68

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Интеграция системы
VLT® AQUA Drive FC 202
при очень коротком времени замедления, поскольку
предотвращает отключение преобразователя частоты. В
этом случае время замедления увеличивается.
время для двигателей мощностью 11 кВт и
выше имеется существенный выигрыш в КПД.
Частота коммутации на КПД маломощных
•
двигателей не влияет. Для двигателей
3.4.15 Энергоэффективность
мощностью 11 кВт и выше КПД увеличивается
на 1–2 %. Это происходит потому, что при
33
КПД преобразователя частоты
Нагрузка преобразователя частоты мало влияет на его
КПД.
Это также означает, что КПД преобразователя частоты
не меняется при выборе других характеристик U/f.
Однако характеристики U/f все-таки влияют на КПД
высокой частоте коммутации ток двигателя
имеет почти идеальную синусоидальную
форму.
КПД системы
Для вычисления КПД системы необходимо умножить
КПД преобразователя частоты на КПД двигателя.
двигателя.
КПД несколько снижается при задании частоты
коммутации выше 5 кГц. КПД также немного
уменьшается при длине кабеля свыше 30 м.
Расчет КПД
При определении КПД преобразователя частоты для
различных скоростей и нагрузок используйте
Рисунок 3.19. Коэффициент на этой диаграмме нужно
умножить на удельный КПД, указанный в
глава 7.1 Электрические характеристики.
Рисунок 3.19 Типичные кривые КПД
Пример: Предположим, что имеется преобразователь
частоты с мощностью 55 кВт, 380–480 В перем. тока с
нагрузкой 25 % при скорости 50 %. На графике видно
значение 0,97, а номинальный КПД для привода 55 кВт
составляет 0,98. Фактический КПД равен: 0,97 x 0,98 =
0,95.
КПД двигателя
КПД двигателя, подключенного к преобразователю
частоты, зависит от уровня намагничивания. КПД
двигателя зависит от его типа.
В диапазоне крутящего момента 75–100 % от
•
номинального, КПД двигателя практически
68 Danfoss A/S © 09/2014 Все права защищены. MG20N650
постоянен как при работе от преобразователя
частоты, так и при питании непосредственно от
сети.
У маломощных двигателей влияние на КПД
•
характеристик U/f незначительно. В то же
Page 69

+ - + -
S202
**
*
Двигатель
Аналоговый выход
Реле 1
Реле 2
ON = подключено
OFF = разомкнуто
50 (ВЫХ. +10 В)
53
(АНАЛОГ. ВХ.)
54
(АНАЛОГ. ВХ.)
55
(ОБЩ. АНАЛОГ. ВХ.)
12 (
ВЫХ. +24 В)
13
(ВЫХ. +24 В)
37 (ЦИФР. ВХ.)
18
(ЦИФР. ВХ.)
(ОБЩ. ЦИФР. ВХ.)
(ОБЩ. АНАЛОГ. ВЫХ.) 39
(АНАЛОГ. ВЫХ.) 42
(P RS-485) 68
(N RS-485) 69
(ОБЩИЙ RS-485) 61
0/4–20 мА
~240 В, 2 А
24 В (NPN)
0 В (PNP)
0 В (PNP)
24 В (NPN)
19
(ЦИФР. ВХ.)
24 В (NPN)
0 В (PNP)
(ЦИФР. ВХ./ВЫХ.)
0 В (PNP)
24 В (NPN)
(ЦИФР. ВХ./ВЫХ.)
24 В (NPN)
0 В (PNP)
0 В (PNP)
24 В (NPN)
33 (ЦИФР. ВХ.)
32 (ЦИФР. ВХ.)
: шасси
: земля
~240 В, 2 А
~400 В, 2 А
9
1 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
20
10 В
15 мА 130/200 мА
(U) 96
(V) 97
(W) 98
(PE) 99
0 В
5 В
S801
RS-485
03
24 В
02
01
05
04
06
27
24 В
0 В
0 В
24 В
29
1 2
ON
S201
ON
21
ON = 0/4–20 мА
OFF = 0/-10 В ...
+10 В
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
130BD552.10
3-фазное
питание
Шина
пост. тока
+10 В
0/-10 В ...
+10 В
0/4–20 мА
0/-10 В ...
+10 В
0/4–20 мА
Импульсный
источник питания
Торм.
резистор
Интерфейс
RS-485
Интеграция системы
Руководство по проектированию
3.5 Дополнительные входы и выходы
3.5.1 Схема подключений
Подключенные и правильно запрограммированные клеммы управления реализуют следующие функции:
выдают на преобразователь частоты сигналы обратной связи, задание, а также другие входные сигналы;
•
сообщают о состоянии преобразователя частоты и неполадках в нем;
•
Реле для управления вспомогательным оборудованием.
•
Интерфейс последовательной связи.
•
24 В общий
•
Для программирования клемм управления на выполнение различных функций необходимо выбрать значения
параметров с помощью LCP на передней панели блока или с помощью внешних источников. Большая часть проводов
цепи управления предоставляется заказчиком (если они не заказаны на заводе).
3 3
Рисунок 3.20 Схема основных подключений
A = аналоговый, D = цифровой
*Клемма 37 (опция) используется для функции STO. Инструкции по установке STO см. в Инструкциях по эксплуатации
VLT® Safe Torque O.
**Не подключайте экран кабеля.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 69
Page 70

relay1
relay2
03
02
240Vac, 2A
240Vac, 2A
400Vac, 2A
01
06
05
04
130BA047.10
Интеграция системы
VLT® AQUA Drive FC 202
3.5.2 Подключения реле
1) Для добавления большего числа релейных выходов,
установите дополнительные модули релейных выходов
VLT® Relay Option Module MCB 105 или VLT® Relay Option
Module MCB 113.
Подробнее о реле см. глава 7 Технические
33
характеристики и глава 8.3 Чертежи клемм реле.
Подробнее о дополнительных реле см.
глава 3.7 Дополнительные устройства и
принадлежности.
Реле
1 1 общая
2 4 общая
1 01-02 замыкание (нормально
2 04-05 замыкание (нормально
Рисунок 3.21 Выходы реле 1 и 2, максимальные
напряжения
1)
Клемма
2 нормально разомкнутый
3 нормально замкнутый
5 нормально замкнутый
6 нормально замкнутый
01-03 размыкание (нормально
04-06 размыкание (нормально
Описание
контакт
максимум 240 В
контакт
максимум 240 В
контакт
максимум 240 В
контакт
максимум 240 В
разомкнутый)
замкнутый)
разомкнутый)
замкнутый)
70 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 71

130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
Интеграция системы
Руководство по проектированию
3.5.3 Электрическое подключение с учетом требований ЭМС
3 3
1 ПЛК 7 Двигатель, 3 фазы и защитное заземление (экранированный)
2 Преобразователь частоты 8 Сеть, 3 фазы и усиленное защитное заземление (без
экранирования)
3 Выходной контактор 9 Управляющая проводка (экранированная)
4 Кабельный зажим 10 Выравнивание потенциалов, мин. 16 мм² (0,025 дюйма)
5 Кабельная изоляция (зачищена)
6 Кабельное уплотнение
Рисунок 3.22 Электрическоеподключение с учетом требований ЭМС
Расстояние между кабелем управления, кабелем двигателя и
11
кабелем сети питания:
Минимум 200 мм.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 71
Page 72

130BD389.11
A2
B3 B3
A2
a
b
130BA419.10
Интеграция системы
VLT® AQUA Drive FC 202
Подробнее об ЭМС см. глава 2.5.18 Соответствие
требованиям ЭМС и глава 3.2 ЭМС, гармоники и защита
от утечки на землю.
УВЕДОМЛЕНИЕ
33
ПОМЕХИ ЭМС
В качестве кабелей двигателя и управления
используйте экранированные кабели, прокладывая
кабели входного питания, двигателя и управления
отдельно. Несоблюдение требований к изоляции
силовых кабелей, кабелей двигателя и кабелей цепи
управления может привести к непредусмотренным
ситуациям и снижению эффективности работы
оборудования. Минимальное расстояние между
кабелями управления, двигателя и питания составляет
200 мм.
Зазор по горизонтали, комплект корпуса IP21
При использовании комплекта IP 21 на корпусах A1, A2
или A3 между преобразователями частоты следует
обеспечить зазор не менее 50 мм.
Зазор по вертикали
Чтобы обеспечить оптимальные условия охлаждения,
оставьте свободные проходы для воздуха над и под
преобразователем частоты. См. Рисунок 3.24.
3.6 Планирование механических
характеристик
3.6.1 Зазоры для охлаждения
Параллельная установка бок о бок допустима для всех
типоразмеров корпусов, за исключением использования
комплекта корпуса IP21/IP4X/TYPE 1 (см.
глава 3.7 Дополнительные устройства и
принадлежности).
Зазор по горизонтали, IP20
Корпуса типоразмеров IP20 A и B можно размещать бок
о бок без промежутка между ними. В то же время
важен правильный порядок монтажа. Он показан на
рис. Рисунок 3.23.
Размер корпуса
а [мм] 100 200 225
b [мм] 100 200 225
Рисунок 3.24 Зазор по вертикали
Настенный монтаж
3.6.2
При монтаже на плоскую стену задняя панель не
требуется.
При монтаже на несплошную заднюю стену требуется
задняя панель, чтобы обеспечить достаточное
охлаждение радиатора. Заднюю панель следует
применять только для корпусов A4, A5, B1, B2, C1 и C2.
A1*/A2/A3/A4/
A5/B1
B2/B3/B4/
C1/C3
C2/C4
Рисунок 3.23 Правильная установка вплотную друг к другу
без зазоров
72 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 73

130BA219.11
1
130BA392.11
2
1
3
4
Интеграция системы
1 Задняя панель
Рисунок 3.25 Установка с использованием задней панели
Для преобразователей частоты с классом защиты IP66
используйте фибровые или нейлоновые шайбы (для
защиты эпоксидного покрытия).
1 Задняя панель
2 Преобразователь частоты с корпусом IP66
3 Задняя панель
4 Фибровая шайба
Рисунок 3.26 Установка с задней панелью для класса
защиты IP66
Доступ
3.6.3
При планировании доступа к кабелям перед монтажом
воспользуйтесь чертежами в глава 8.1 Чертежи
подключения сетевого питания (3 фазы) и
глава 8.2 Чертежи подключения двигателя.
Руководство по проектированию
3.7
Дополнительные устройства и
принадлежности
Дополнительное оборудование
Номера для заказа см. в глава 6 Код типа и его выбор
Экранирование сети
Экран Lexan® устанавливается перед клеммами
•
ввода питания и входной панелью для защиты
от случайного касания при открытой дверце
корпуса.
Нагревательные приборы и термостат:
•
Нагревательные приборы устанавливаются на
внутренней стороне шкафа в корпусе F,
регулируются автоматическими термостатами и
предотвращают конденсирование влаги внутри
корпуса. По умолчанию термостат включает
нагреватели при температуре 10 °C (50 °F) и
выключает их при температуре 15,6 °C (60 °F).
Фильтры ВЧ-помех
Преобразователь частоты в стандартной
•
комплектации оснащен встроенными
фильтрами ВЧ-помех класса А2. При
необходимости, дополнительная степень
защиты от помех ВЧ/ЭМС обеспечивается
дополнительными ВЧ-фильтрами класса А1,
которые подавляют ВЧ-помехи и
электромагнитное излучение согласно
требованиям EN 55011.
Датчик остаточного тока (RCD)
Использует балансовый метод для контроля замыкания
на землю в заземленных системах и заземленных
системах с высоким сопротивлением (системы TN и TT в
терминологии IEC). Существуют предаварийная уставка
(50 % от уставки основной аварийной сигнализации) и
уставка основной аварийной сигнализации. С каждой из
уставок связано однополюсное реле сигнализации на
два срабатывания (SPDT), предназначенное для
внешнего использования. Для него требуется внешний
трансформатор тока с проемом (поставляется и
устанавливается заказчиком).
Встраивается в цепь функции safe torque
•
преобразователя частоты
Устройство IEC 60755 Тип B контролирует токи
•
утечки на землю импульсного постоянного тока
и чистого постоянного тока
Шкальный индикатор уровня тока утечки на
•
землю от 10 до 100 % от уставки
Память отказов
•
Кнопка TEST/RESET (ТЕСТ/СБРОС)
•
o
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 73
Page 74

Интеграция системы
VLT® AQUA Drive FC 202
Устройство контроля сопротивления изоляции (IRM)
Выполняет контроль сопротивления изоляции в
незаземленных системах (системы IT в терминологии
IEC) между фазными проводниками системы и землей.
Для уровня изоляции существует омическая
33
предаварийная уставка и уставка основной аварийной
сигнализации. Аварийное реле SPDT для внешнего
использования связано с каждой уставкой. Примечание.
К каждой незаземленной (IT) системе можно
подключить только одно устройство контроля
сопротивления изоляции.
Включены в цепь безопасного останова
•
преобразователя частоты
ЖК-дисплей сопротивления изоляции
•
Память отказов
•
Кнопки INFO (Информация), TEST (Проверка) и
•
RESET (Сброс)
Тормозной прерыватель (IGBT)
Клеммы тормоза с цепью тормозного
•
прерывателя IGBT позволяют подключать
внешние тормозные резисторы. Подробнее о
тормозных резисторах см. глава 3.4.12 Расчет
тормозного резистора и .
Клеммы рекуперации
Эти клеммы позволяют подключать блоки
•
рекуперации к шине постоянного тока на
стороне блока конденсаторов реакторов цепи
постоянного тока для обеспечения
динамического торможения. Клеммы
рекуперации типоразмера F рассчитаны
приблизительно на ½ номинальной мощности
преобразователя частоты. Консультацию по
предельным значениям рекуперации мощности
для конкретного размера и напряжения
преобразователя частоты можно получить у
изготовителя.
Клеммы разделения нагрузки
Эти клеммы подключены к шине постоянного
•
тока на стороне выпрямителя реактора цепи
постоянного тока и обеспечивают
распределение мощности от шины постоянного
тока между различными приводами. Клеммы
разделения нагрузки типоразмера F расчитаны
приблизительно на 1/3 номинальной мощности
преобразователя частоты. Консультацию по
предельным значениям разделения нагрузки
для конкретного размера и напряжения
преобразователя частоты можно получить у
изготовителя.
Предохранители
Предохранители рекомендуются для
•
быстросрабатывающей защиты при перегрузке
по току в преобразователе частоты.
Предохранители снижают степень
Разъединитель
Автоматические выключатели
Контакторы
Ручные пускатели двигателей
Подает 3-фазное питание на электровентиляторы,
которые часто используются для более мощных
двигателей. Питание для пускателей подается со
стороны нагрузки любого поставляемого контактора,
автоматического выключателя или разъединителя и со
стороны входа ВЧ фильтра класса 1 (который
поставляется по заказу). Перед пускателем каждого
двигателя имеется предохранитель; питание отсутствует,
если питание, подаваемое на преобразователь частоты,
отключено. Допускается до двух пускателей (один, если
в заказе оговорена цепь на 30 А с защитой
предохранителями). Встраивается в цепь функции safe
torque o преобразователя частоты
Конструктивными элементами блока являются:
повреждений преобразователя частоты и
сводят к минимуму время обслуживания в
случае отказа. Использование предохранителей
необходимо для обеспечения соответствия
морским требованиям.
Рукоятка на дверце приводит в действие
•
разъединитель, котоый включает и выключает
питание преобразователя частоты, обеспечивая
более безопасные условия во время
проведения техобслуживания. Разъединитель
сблокирован с дверцами корпуса и
предотвращает их открытие, пока подается
питание.
Автоматический выключатель можно отключать
•
дистанционно, однако возвращать в исходное
положение нужно вручную. Автоматические
выключатели сблокированы с дверцами
корпуса и предотвращают их открытие, пока
подается питание Если автоматический
выключатель заказан как дополнительное
устройство, для обеспечения быстродействия
защиты преобразователя частоты от
перегрузки по току прилагаются также и
предохранители.
Контактор с электрическим управлением
•
обеспечивает дистанционное включение и
выключение подачи питания на
преобразователь частоты. Если дополнительно
заказывается опция аварийного останова IEC,
то предохранительное устройство Pilz
отслеживает вспомогательный контакт на
контакторе.
Переключатель (вкл./выкл.)
•
Цепь защиты от короткого замыкания и
•
перегрузок с функцией тестирования.
Функция ручного сброса.
•
74 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 75

Интеграция системы
Руководство по проектированию
Клеммы 30 А с защитой предохранителями
Трехфазное питание, соответствующее
•
напряжению сети, для подключения
вспомогательного оборудования заказчика.
Не предусмотрено, если выбран вариант с
•
двумя ручными пускателями двигателей.
Клеммы отключены, если питание, подаваемое
•
на преобразователь частоты, отключено.
Питание на клеммы с предохранителями
•
подается со стороны нагрузки любого
поставляемого контактора, автоматического
выключателя или разъединителя и со стороны
входа фильтра ВЧ-помех класса 1 (является
дополнительным оборудованием).
Источник питания 24 В пост. тока
5 А, 120 Вт, 24 В пост. тока.
•
Защита от выходных сверхтоков, перегрузки,
•
короткого замыкания и перегрева.
Для подачи питания на вспомогательные
•
устройства заказчика (например, датчики,
входы/выходы ПЛК, температурные зонды,
индикаторные лампочки и/или иные
электронные средства).
Для диагностики предусматриваются сухой
•
контакт контроля постоянного тока, зеленый
светодиод контроля постоянного тока и
красный светодиод перегрузки.
Внешнее устройство контроля температуры
Предназначен для контроля температур узлов
•
внешних систем (например, обмоток двигателя
и/или подшипников). Включает 8
универсальных входных модулей и 2
специализированных входных термисторных
модуля. Все 10 модулей могут включаться в
цепь safe torque o преобразователя частоты и
контролироваться по сети шины (для этого
требуется закупка отдельного блока
сопряжения модуль/шина). Для использования
функции мониторинга внешней температуры
закажите дополнительный тормоз для функции
safe torque o.
Последовательная связь
PROFIBUS DP V1 MCA 101
PROFIBUS DP V1 обеспечивает высокую степень
•
совместимости, высокий уровень
работоспособности, поддержку всех основных
поставщиков ПЛК и готовность к работе с
перспективными образцами.
Быстрота и эффективность связи, простота
•
установки, полная диагностика,
параметризация и автоконфигурация данных
процесса посредством файлов GSD.
Ациклическая параметризация с помощью
•
PROFIBUS DP V1, PROFIdrive или машин
состояния с профилем Danfoss FC, PROFIBUS DP
V1, класс главного устройства 1 и 2 Номер для
заказа: 130B1100 без покрытия, 130B1200 с
покрытием (класс G3/ISA S71.04-1985).
DeviceNet MCA 104
Эта современная модель средства связи
•
обладает уникальными возможностями,
которые позволяют эффективно определять,
какая информация необходима и когда.
Дополнительным преимуществом являются
•
интенсивные методики проверки
совместимости ODVA, которые обеспечивают
интероперабельность изделий. Номер для
заказа: 130B1102 без покрытия, 130B1202 с
покрытием (класс G3/ISA S71.04-1985).
PROFINET RT MCA 120
Дополнительная плата PROFINET предлагает
подключение к сетям PROFINET через протокол
PROFINET. Опция позволяет работать с одним
подключением с фактическим интервалом между
пакетами до 1 мс в обоих направлениях.
Встроенный веб-сервер для удаленной
•
диагностики и считывания основных
параметров преобразователя частоты.
Служба почтового оповещения может быть
•
настроена для отправки сообщений по
электронной почте на одно или несколько
принимающих устройств в случае поступления
определенных предупреждений и аварийных
сигналов или восстановления работы системы.
TCP/IP для легкого доступа к данным
•
конфигурации преобразователя частоты с
Средство конфигурирования MCT 10.
Отправка и загрузка файлов по протоколу FTP
•
(протоколу передачи файлов).
Поддержка DCP (протокола обнаружения и
•
конфигурации).
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 75
Page 76

Интеграция системы
VLT® AQUA Drive FC 202
EtherNet IP MCA 121
EtherNet — будущий стандарт для связи в заводском
цеху. В основе EtherNet лежит новейшая технология,
доступная для промышленного использования, которая
работает даже в самых тяжелых условиях применения.
Протокол Ethernet/IP расширяет готовый коммерческий
33
программный продукт Ethernet до общего
промышленного протокола (CIP™) — тот же протокол
верхнего уровня и объектная модель, которые
использованы в DeviceNet. MCA 121 предлагает
несколько усовершенствованных функций, в частности:
встроенный высокоэффективный коммутатор,
•
обеспечивающий топологию линий и
устраняющий необходимость во внешних
коммутаторах;
усовершенствованные функции коммутации и
•
диагностики;
встроенный веб-сервер;
•
почтовая клиентская служба для оповещения о
•
действиях техобслуживания;
Modbus TCP MCA 122
Дополнительная плата Modbus позволяет подключаться
к сетям Modbus на основе протокола TCP, таким как
ПЛК-система Groupe Schneider, с использованием
протокола Modbus TCP. Опция позволяет работать с
одним подключением с фактическим интервалом между
пакетами до 5 мс в обоих направлениях.
Встроенный веб-сервер для удаленной
•
диагностики и считывания основных
параметров преобразователя частоты.
Служба почтового оповещения может быть
•
настроена для отправки сообщений по
электронной почте на одно или несколько
принимающих устройств в случае поступления
определенных предупреждений и аварийных
сигналов или восстановления работы системы.
2 порта ethernet со встроенным коммутатором.
•
Отправка и загрузка файлов по протоколу FTP
•
(протокол передачи файлов).
Автоматическая настройка адреса в протоколе
•
IP.
Другое дополнительное оборудование
Ввод/вывод общего назначения MCB 101
Этот модуль ввода/вывода обеспечивает увеличенное
число входов и выходов управления.
3 цифровых входа 0–24 В: логический 0 < 5 В,
•
логическая 1 > 10 В;
2 аналоговых входа 0–10 В: разрешение 10 бит
•
+ знак
2 цифровых вывода NPN/PNP по двухтактной
•
схеме
1 аналоговый выход 0/4–20 мА
•
Плата реле MCB 105
Обеспечивает расширенные функции реле благодаря 3
дополнительным релейным выходам.
Дополнительное устройство аналогового ввода/
вывода MCB 109
Эта дополнительная плата аналогового ввода/вывода
легко устанавливается в преобразователь частоты,
позволяя обеспечить улучшенные характеристики и
расширить возможности управления благодаря
дополнительным входам/выходам. ОЭта дополнительная
плата также добавляет к преобразователю частоты
резервный батарейный источник питания для часов,
встроенных в преобразователь частоты. Это
обеспечивает стабильное использование всех функций
таймера преобразователя частоты в качестве
временных событий.
Подпружиненное соединение
•
Отдельные настройки параметров Номер для
•
заказа 130B1125 — без покрытия, 130B1212 —
с покрытием (класс G3/ISA S71.04-1985)
Макс. нагрузка на клеммах: резистивная
•
нагрузка АС-1: 240 В перем. тока, 2 A, AC-15
Индуктивная нагрузка при cos ф = 0,4: 240 В
•
перем. тока 0,2 A, DC-1
Резистивная нагрузка: 24 В пост. тока 1 A,
•
DC-13
Индуктивная нагрузка: при cos ф 0,4: 24 В пост.
•
тока, 0,1 А
Мин. нагрузка на клеммах: 5 В пост. тока: 10 мА
•
Макс. частота коммутации при номинальной/
•
минимальной нагрузке: 6 мин-1/20 с-1
Номер для заказа: 130B1110 без покрытия,
•
130B1210 с покрытием (класс G3/ISA
S71.04-1985)
3 аналоговых входа, каждый из которых
•
выполнен с возможностью настройки в
качестве входа напряжения и температуры.
Подключение аналоговых сигналов 0–10 В, а
•
также входов температуры PT1000 и NI1000.
3 аналоговых выхода, каждый с возможностью
•
настройки в качестве выхода 0–10 В.
В состав входит источник резервного питания
•
для стандартной функции часов
преобразователя частоты Резервный элемент
питания обычно служит около 10 лет (в
зависимости от среды эксплуатации). Номер
для заказа: 130B1143 без покрытия, 130B1243 с
покрытием (класс G3/ISA S71.04-1985).
76 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 77

Интеграция системы
Плата термистора PTC MCB 112
Плата термистора PTC MCB 112 позволяет использовать
все преобразователи частоты Danfoss с функцией STO
для контроля над двигателями в потенциально
взрывоопасной атмосфере. MCB 112 обеспечивает
лучшие характеристики по сравнению со встроенной
функцией электронного термореле и клеммами
термистора.
Защищает электродвигатель от перегрева.
•
Имеет допуск ATEX для работы с двигателями с
•
классом взрывозащиты EX d и EX e.
Использует функцию Safe Torque O
•
преобразователей частоты Danfoss для
останова двигателя в случае перегрева.
Сертифицировано для использования для
•
защиты двигателей в зонах 1, 2, 21 и 22.
Сертифицировано до уровня SIL2.
•
Sensor Input Card MCB 114
Эта дополнительная плата защищает двигатель от
перегрева посредством контроля температуры
подшипников и обмотки двигателя. Пределы и действие
регулируются, а температура каждого отдельного
датчика отображается на дисплее или передается по
сетевой шине.
Защищает электродвигатель от перегрева.
•
Три самоопределяющихся входа для 2- или 3-
•
проводных датчиков PT100/PT1000.
Один дополнительный аналоговый вход 4–20
•
мА.
Extended cascade controller MCO 101
Легко устанавливается, модернизирует встроенный
каскадный контроллер, обеспечивая управление
большим числом насосов и улучшенное управление
насосами в режиме «главный/подчиненный».
До 6 насосов в стандартном каскаде
•
До 6 насосов в конфигурации «главный/
•
подчиненный».
Технические характеристики: См.
•
дополнительную плату реле MCB 105
Extended relay card MCB 113
Плата расширения релейных выходов MCB 113
повышает гибкость использования VLT® AQUA Drive
путем добавления дополнительных входов/выходов.
7 цифровых входов: 0–24 В
•
2 аналоговых выхода: 0/4–20 мA
•
4 реле SPDT
•
Номиналы нагрузок реле: 240 В перем.тока/2 A
•
(Ом)
Соответствует рекомендациям NAMUR
•
Руководство по проектированию
Возможность гальванической развязки Номер
•
для заказа 130B1164 — без покрытия, 130B1264
— с покрытием (класс G3/ISA S71.04-1985)
Усовершенствованный каскад-контроллер MCO 102
Расширяет возможности типового каскад-контроллера,
встроенного в преобразователи частоты.
Обеспечивает 8 дополнительных реле для
•
установки дополнительных двигателей.
Обеспечивает точность управления расходом,
•
давлением и уровнем для максимальной
эффективности систем, в которых используется
несколько насосов или нагнетательных
вентиляторов.
Режим «главный/подчиненный» обеспечивает
•
работу всех вентиляторов/насосов на одной
скорости, что потенциально снижает
энергопотребление почти наполовину в
сравнении с дросселированием или
традиционным способом чередования
включения/выключения всей линии.
Попеременное выполнение насосами роли
•
ведущего приводит к равномерному
использованию нескольких насосов или
вентиляторов.
Дополнительный резервный источник питания 24 В
пост. тока MCB 107
Данное дополнительное устройство используется для
подключения внешнего источника постоянного тока с
целью поддержания работы секции управления и иных
дополнительных устройств в активном режиме в случае
прекращения питания от сети.
Диапазон напряжения на входе: 24 В
•
постоянного тока ±15 % (макс. 37 В в течение
10 с).
Максимальный входной ток: 2,2 А.
•
Максимальная длина кабеля: 75 м.
•
Емкость нагрузки на входе: <10 мкФ.
•
Задержка при подаче питания: 0,6 с.
•
Легко устанавливается в преобразователи
•
частоты в существующих машинах.
Поддерживает работоспособность платы
•
управления и опций при отключении внешнего
питания.
Поддерживает сетевые шины в активном
•
состоянии при отключении питания Номер для
заказа 130B1108 — без покрытия, 130B1208 —
с покрытием (класс G3/ISA S71.04-1985).
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 77
Page 78

Интеграция системы
VLT® AQUA Drive FC 202
3.7.1 Дополнительные устройства связи
VLT® PROFIBUS DP V1 MCA 101
•
VLT® DeviceNet MCA 104
•
VLT® PROFINET MCA 120
•
33
Дополнительные сведения см. глава 7 Технические
характеристики.
VLT® EtherNet/IP MCA 121
•
VLT® Modbus TCP MCA 122
•
3.7.2 Дополнительные устройства ввода/
вывода, обратной связи и
Расширенный каскадный контроллер может быть
использован в двух различных режимах.
С расширенными функциями, управляемыми из
•
группы параметров 27-** Cascade CTL Option
(Дополнительная плата каскад-контроллера).
Для увеличения количества доступных реле
•
базового каскада, управляемого группой
параметров 25-** Каскад-контроллер.
МСО 101 позволяет использовать в каскадном
управлении 5 реле. МСО 102 поддерживает до 8
насосов. Дополнительные устройства обеспечивают
чередование ведущего насоса с двумя реле на каждом
насосе.
обеспечения безопасности
VLT® General Purpose I/O Module MCB 101
•
VLT® Relay Card MCB 105
•
VLT® PTC Thermistor Card MCB 112
•
VLT® Extended Relay Card MCB 113
•
VLT® Sensor Input Option MCB 114
•
Дополнительные сведения см. в глава 7 Технические
характеристики.
Дополнительные устройства
3.7.3
каскадного управления
Дополнительные платы каскадного управления
позволяют увеличить число имеющихся реле. После
установки дополнительных устройств параметры,
необходимые для поддержания корректной работы
функций каскадного контроллера, будут доступны на
панели управления.
МСО 101 и 102 — это добавляемые устройства,
увеличивающие поддерживаемое количество насосов и
выполняющие функции встроенного каскадного
контроллера в VLT® AQUA Drive.
УВЕДОМЛЕНИЕ
Если устройство МСО 102 установлено, опции реле
МСВ 105 могут увеличить количество реле до 13.
Применение
Каскадное управление — это общая система контроля и
управления, используемая для контроля параллельно
включенных насосов или вентиляторов с целью
повышения эффективности использования
электроэнергии.
Дополнительный каскадный контроллер позволяет
управлять несколькими насосами, включенными
параллельно, следующими способами:
Автоматическое включение/выключение
•
отдельных насосов.
Управление скоростью насосов.
•
При использовании каскадных контроллеров отдельные
насосы автоматически включаются и выключаются таким
образом, чтобы получить на выходе системы
необходимые величины расхода или давления. Кроме
того, производится регулирование скорости насосов,
подключенных к VLT® AQUA Drive, что обеспечивает
плавное изменение выходной мощности системы.
Для VLT® AQUA Drive доступны следующие
дополнительные устройства каскадного управления:
Встроенный базовый каскадный контроллер
•
(стандартный каскадный контроллер)
MCO101 (расширенный каскад-контроллер)
•
MCO 102 (усовершенствованный каскад-
•
контроллер)
Для получения более подробной информации см.
глава 7 Технические характеристики.
78 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Целевое назначение
Хотя дополнительный каскадный контроллер
предназначен для применения в насосных установках,
его можно также использовать в любых системах,
требующих параллельной работы нескольких
электродвигателей.
Принцип работы
Программное обеспечение расширенного каскадного
контроллера действует с одного преобразователя
частоты, оборудованного платой дополнительного
каскадного контроллера. Он управляет группой насосов,
каждый из которых контролируется преобразователем
частоты или подключен к контактору или устройству
плавного пуска.
Page 79

100% 100% 200% 200%
130BA594.12
Relay 1
Relay 2
Relay 10
Интеграция системы Руководство по проектированию
Дополнительным (подчиненным) преобразователям
частоты в системе не требуется дополнительная плата
каскадного контроллера. Они работают в режиме
разомкнутого контура и получают свои задания
скорости от главного преобразователя частоты. Насосы,
подключенные к этим приводам, рассматриваются как
насосы переменной скорости.
Насосы, подключенные к сети через контактор или
устройство плавного пуска, называются насосами с
фиксированной скоростью.
Каждый насос с переменной или фиксированной
скоростью управляется с помощью реле в главном
преобразователе частоты.
Дополнительные устройства каскадного контроллера
может управлять несколькими насосами переменной и
фиксированной скорости.
Встроенный
MCO 101
MCO 102
3 3
от 1 до 6 VSP + от 1 до 5 FSP
(максимум 6 насосов)
parameter group 27-** Cascade CTL Option
(Дополнительная плата каскад-контроллера)
от 1 до 8 VSP + от 1 до 7 FSP
(максимум 8 насосов)
группа параметров 27-** Cascade CTL Option
(Дополнительная плата каскад-контроллера)
Встроенный
MCO 101
MCO 102
Рисунок 3.27 Обзор применения
1 VSP + 2 FSP
группа параметров 25-** Каскад-контроллер
1 VSP + 5 FSP
группа параметров 25-** Каскад-контроллер
1 VSP + 8 FSP
группа параметров 25-** Каскад-контроллер
Рисунок 3.28 Обзор применения
Встроенный
6 VSP
MCO 101
MCO 102
группа параметров 27-** Cascade CTL Option
(Дополнительная плата каскад-контроллера)
8 VSP
группа параметров 27-** Cascade CTL Option
(Дополнительная плата каскад-контроллера)
-
Рисунок 3.29 Обзор применения
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 79
Page 80

Интеграция системы
VLT® AQUA Drive FC 202
VSP = насос с переменной скоростью (подключен
непосредственно к преобразователю частоты)
FSP = насос с фиксированной скоростью (двигатель
может подключаться через контактор, устройство
плавного пуска или пускатель типа «звезда/
треугольник»)
33
3.7.4 Тормозные резисторы
В приложениях, в которых двигатель используется в
качестве тормоза, двигатель генерирует энергию,
которая возвращается в преобразователь частоты. Если
энергия не может передаваться обратно в двигатель,
напряжение в цепи постоянного тока преобразователя
повышается. В приложениях с частым торможением
и/или с нагрузками, имеющими большой момент
инерции, это может привести к отключению вследствие
перенапряжения в преобразователе и, в результате, к
останову. Для рассеивания энергии, вырабатываемой
при рекуперативном торможении, используются
тормозные резисторы. Резистор выбирается по
величине сопротивления, номиналу рассеиваемой
мощности и размерам. Компания Danfoss предлагает
широкий ассортимент различных резисторов,
специально предназначенных работы с
преобразователями частоты Danfoss. О подборе
размеров тормозных резисторов см. глава 3.4.12 Расчет
тормозного резистора. Номера для заказа см. в
глава 6.2 Дополнительные устройства,
принадлежности и запасные части.
Синусоидные фильтры
3.7.5
Когда двигатель управляется преобразователем частоты,
от двигателя слышен резонансный шум. Этот шум,
обусловленный конструкцией двигателя, возникает при
каждом переключении инвертора в преобразователях
частоты. Таким образом, частота резонансного шума
соответствует частоте коммутации преобразователя
частоты.
Компания Danfoss поставляет синусоидный фильтр,
ослабляющий акустический шум двигателя.
Этот фильтр уменьшает время нарастания напряжения,
пиковое напряжение на нагрузке U
ΔI, поступающий в двигатель, благодаря чему ток и
напряжение становятся практически синусоидальными.
В результате, акустический шум двигателя снижается до
минимума.
и ток пульсаций
ПИК.
3.7.6
Фильтры dU/dt
Danfoss поставляет фильтры dU/dt, которые
представляют собой дифференциальные фильтры
низких частот и которые сокращают пиковые
напряжения между фазами на клеммах двигателя и
уменьшают длительность переднего фронта до уровня,
который уменьшает нагрузку на изоляцию в обмотках
двигателя. Эта проблема особенно заметна при
использовании коротких кабелей электродвигателя.
В отличие от синусоидных фильтров (см.
глава 3.7.5 Синусоидные фильтры), у фильтров dU/dt
частота среза превышает частоту коммутации.
Фильтры синфазных помех
3.7.7
Сердечники высокочастотного фильтра синфазных
помех (сердечники HF-CM, high-frequency commonmode) уменьшает электромагнитные помехи и защищает
подшипники от электрических разрядов. Это
специальные нанокристаллические магнитопроводы,
которые имеют характеристики фильтрации
значительно превосходящие обычные ферритовые
сердечники. Сердечники HF-CM действуют как
синфазный дроссель между фазами и землей.
Устанавливаемые на трех фазах двигателя (U, V, W)
фильтры синфазных помех уменьшают высокочастотные
синфазные токи. В результате высокочастотныеэлектромагнитные помехи от кабеля двигателя
снижаются.
Необходимое количество сердечников зависит от длины
кабеля двигателя и напряжения преобразователя
частоты. Каждый комплект состоит из двух сердечников.
Чтобы определить необходимое количество
сердечников, см. Таблица 3.19.
Длина кабеля
[м] A и B C D
50 2 4 2 2 4
100 4 4 2 4 4
150 4 6 4 4 4
300 4 6 4 4 6
Таблица 3.19 Число сердечников
1) Если требуются более длинные кабеля, добавьте
дополнительные сердечники HF-CM.
1)
Размер корпуса
T2/T4 T7 T2/T4 T7 T7
Ток пульсаций в катушках синусоидного фильтра также
вызывает некоторый шум. Эта проблема решается путем
встраивания фильтра в шкаф или аналогичным образом.
80 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 81

PE U V W
130BD839.10
A
B
C
D
E
130BT323.10
Интеграция системы Руководство по проектированию
Установите сердечники HF-CM и протяните через
каждый сердечник кабель с тремя фазами двигателя (U,
V, W), как показано Рисунок 3.30.
Рисунок 3.30 Сердечник HF-CM с фазами двигателя
3 3
Фильтры гармоник
3.7.8
AHF 005 и AHF 010 от Danfoss представляют собой
усовершенствованные фильтры гармоник, с которыми
не могут сравниться традиционные фильтры гармоник.
Фильтры гармоник Danfoss специально разработаны для
использования с преобразователи частоты Danfoss.
При подключении фильтров гармоник Danfoss AHF 005
или AHF 010 перед преобразователем частоты Danfoss
обратные гармонические искажения тока, вызываемые в
сети питания, сокращаются до 5 % и 10 %
соответственно.
Комплект для корпуса IP21/NEMA
3.7.9
Тип 1
Для малогабаритных блоков IP 20 имеется в наличии
дополнительный элемент корпуса IP20/IP4X top/ТИП 1.
Если используется комплект принадлежностей для
корпуса, блок IP 20 должен быть доработан так, чтобы
он соответствовал комплекту IP21/4X top/ТИП 1.
Комплект IP4X top может использоваться со всеми
стандартными вариантами FC 202, имеющими защиту
IP20.
Рисунок 3.31 Размер корпуса A2
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 81
Page 82

B
A
E
C
D
130BT324.10
E
F
D
C
B
A
130BT620.12
Интеграция системы
VLT® AQUA Drive FC 202
Тип корпуса
A2 372 90 205
A3 372 130 205
B3 475 165 249
33
B4 670 255 246
C3 755 329 337
C4 950 391 337
Таблица 3.20 Размеры
1) Если используются дополнительные устройства в гнездах A/
B, глубина увеличивается (подробнее см. глава 7.8 Номинальная
мощность, масса и размеры).
Высота A
[мм]
Ширина B
[мм]
Глубина C
1)
[мм]
A Верхняя крышка
B Наличник
C Основание
D Крышка основания
E Винт(ы)
Рисунок 3.32 Размер корпуса A3
Установите верхнюю крышку как показано на рисунке.
Если используется дополнительное устройство в гнезде
A или B, должен быть установлен наличник,
закрывающий ввод сверху. Поместите основание C в
нижнюю часть преобразователя частоты и с помощью
скоб из комплекта принадлежностей закрепите кабели
надлежащим образом.
Отверстия для кабельных уплотнений:
Типоразмер A2: 2 x M25 и 3 x M32
•
Типоразмер A3: 3 x M25 и 3 x M32
•
Рисунок 3.33 Размер корпуса B3
82 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 83

130BT621.12
D
C
A
G
130BA138.10
Интеграция системы Руководство по проектированию
УВЕДОМЛЕНИЕ
При использовании Комплекта для корпусов IP21/IP4X/
TYPE 1 установка вплотную друг к другу невозможна.
3.7.10 Комплект дистанционного
LCP можно установить на передней стороне корпуса с
помощью выносного монтажного комплекта. Момент
затяжки крепежных винтов должен быть не более 1 Н-м.
Корпус LCP имеет класс защиты IP66.
Корпус
Максимальная длина кабеля между LCP и
блоком 3 м
Стандарт связи RS485
Таблица 3.22 Технические характеристики
монтажа LCP
3 3
IP66, передняя
панель
Рисунок 3.35 Монтажный комплект для LCP, включающий
графическую панель LCP, крепеж, кабель (3 м) и прокладку.
Номер для заказа 130B1113
Рисунок 3.34 Корпуса размеров B4, C3 и C4
Верхняя крышка
A
B Наличник
C Основание
D Крышка основания
E Винт(ы)
F Крышка вентилятора
G Верхний зажим
Таблица 3.21 Пояснения к Рисунок 3.33 и Рисунок 3.34
Если используются дополнительные модули A или B,
прикрепите наличник (B) к верхней крышке (A).
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 83
Page 84

130BA200.10
Max R2(0.08)
Panel
cut out
Min 72(2.8)
130BA139.11
129,5± 0.5 mm
64,5± 0.5 mm
(2.54± 0.04 in)
(5.1± 0.04 in)
130BA844.10
130BA845.10
A
B
Интеграция системы
VLT® AQUA Drive FC 202
3.7.11
Монтажный кронштейн для
корпусов размера A5, B1, B2, C1 и
C2
33
Рисунок 3.36 Монтажный комплект для LCP, включающий
цифровую LCP, крепеж и прокладку.
Номер для заказа 130B1114
Рисунок 3.38 Нижний кронштейн
Рисунок 3.37 Габаритные размеры комплекта LCP
Рисунок 3.39 Верхний кронштейн
См. размеры в Таблица 3.23.
84 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Размер корпуса IP A [мм] B [мм] Номер для заказа
A5 55/66 480 495 130B1080
B1 21/55/66 535 550 130B1081
B2 21/55/66 705 720 130B1082
B3 21/55/66 730 745 130B1083
B4 21/55/66 820 835 130B1084
Таблица 3.23 Сведения о фланцах для монтажа
Page 85

Интеграция системы Руководство по проектированию
3.8 Интерфейс последовательной связи
RS 485
3.8.1 Краткое описание
RS485 — интерфейс двухпроводной шины, совместимый
с топологией многоабонентской сети, в которой узлы
могут подключаться по шине или через ответвительные
кабели от общей магистральной линии. Всего к одному
сегменту сети может быть подключено до 32 узлов.
Сегменты сети разделены ретрансляторами, см.
Рисунок 3.40.
УВЕДОМЛЕНИЕ
Каждый ретранслятор действует как узел внутри
сегмента, в котором он установлен. Каждый узел в
составе данной сети должен иметь уникальный адрес,
не повторяющийся в остальных сегментах.
Замкните каждый сегмент на обоих концах, используя
либо конечный переключатель (S801) преобразователей
частоты, либо оконечную резисторную схему со
смещением. Для устройства шины всегда используйте
экранированную витую пару (STP) и следуйте
общепринятым способам монтажа.
Большое значение имеет обеспечение низкого
импеданса заземления экрана в каждом узле, в том
числе по высоким частотам. Подключите экран с
большой поверхностью к «земле» с помощью,
например, кабельного зажима или проводящего
кабельного уплотнения. Может потребоваться
применение кабелей выравнивания потенциалов с
целью создания одинакового потенциала по всей сети,
особенно в установках с кабелями большой длины.
Для предотвращения несогласования импедансов всегда
используйте во всей сети кабели одного типа.
Подключайте двигатель к преобразователю частоты
экранированным кабелем.
Кабель Экранированная витая пара (STP)
Импеданс [Ом]
Длина кабеля
[м]
Таблица 3.24 Технические характеристики кабелей
120
Не более 1200 м (включая ответвительные
линии)
Не более 500 м между станциями
3 3
Рисунок 3.40 Интерфейс шины RS485
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 85
Page 86

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BA060.11
68 69 68 69 68 69
RS 485
RS 232
USB
+
-
130BB021.10
12 13 18 19 27 29 32
33 20 37
Remove jumper to enable Safe Stop
61 68 69 39 42 50 53 54 55
Интеграция системы
VLT® AQUA Drive FC 202
Параметры
Функция Настройка
8-30 Протокол FC*
8-31 Адрес 1*
8-32 Скорость
9600*
передачи
33
данных
* = Значение по умолчанию
Примечания/комментарии.
Выберите протокол, адрес и
Рисунок 3.41 Параллельные соединения
скорость передачи с
помощью параметров,
указанных выше.
Цифровой вход D IN 37
является опцией.
Чтобы избежать протекания токов выравнивания
потенциала через экран, организуйте подключение
согласно Рисунок 3.20.
Таблица 3.25 Подключение сети RS485
Подключение сети
3.8.2
При помощи стандартного интерфейса RS485 к одному
контроллеру (или главному устройству) могут быть
подключены один или несколько преобразователей
частоты. Клемма 68 соединяется с сигнальным
проводом P (TX+, RX+), а клемма 69 — с сигнальным
проводом N (TX-,RX-). См. чертежи в глава 3.5.1 Схема
подключений.
Если к главному устройству подключается более одного
преобразователя частоты, используется параллельное
соединение.
86 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Рисунок 3.42 Клеммы платы управления
Оконечная нагрузка шины RS485
3.8.3
Подключите резисторную схему к обоим концам шины
RS-485. Для этого установите переключатель S801 на
плате управления в положение ON (Вкл.).
Выберите протокол связи в пар. 8-30 Протокол.
3.8.4
Обеспечение ЭМС
Рекомендуются следующие меры по обеспечению ЭМС,
позволяющие устранить помехи в сети RS485.
Соблюдайте соответствующие государственные и
местные нормы и правила, касающиеся, например,
подключения защитного заземления. Кабель связи
RS485 должен прокладываться на удалении от кабелей
Page 87

Fieldbus cable
Min. 200 mm
90° crossing
Brake resistor
130BD507.11
Интеграция системы
Руководство по проектированию
двигателя и тормозного резистора, чтобы предотвратить
взаимные ВЧ-помехи между кабелями. Обычно
достаточно расстояния 200 мм, однако рекомендуется
предусматривать максимально возможное расстояние
между кабелями, особенно там, где кабели проложены
параллельно на большой протяженности. Если не
удается избежать пересечения, кабель RS485 должен
пересекаться с кабелями двигателя и тормозного
резистора под углом 90°.
Протокол FC поддерживает разные форматы телеграмм:
Укороченный формат из 8 байтов для данных
•
процесса.
Удлиненный формат из 16 байтов, который
•
также включает канал параметров.
Формат, используемый для текстов.
•
3.8.6 Конфигурация сети
Чтобы ввести в действие протокол FC для
преобразователя частоты, установите следующие
параметры.
Номер параметра Настройка
8-30 Протокол FC
8-31 Адрес 1–126
8-32 Скорость передачи
порта ПЧ
8-33 Parity / Stop Bits Контроль по четности, 1
2400–115200
стоповый бит (по умолчанию)
3 3
Рисунок 3.43 Прокладка кабелей
Краткое описание протокола FC
3.8.5
Протокол FC, также называемый шиной FC или
стандартной шиной, является стандартным протоколом
Danfoss для периферийной шины. Он определяет
способ доступа к данным по принципу главныйподчиненный для связи по шине последовательной
связи.
К шине можно подключить 1 главное и до 126
подчиненных устройств. Главное устройство выбирает
подчиненные устройства по символу адреса в
телеграмме. Подчиненное устройство не может
передавать сообщение по собственной инициативе: для
этого требуется запрос; также невозможен обмен
сообщениями между подчиненными устройствами.
Связь осуществляется в полудуплексном режиме.
Функция главного устройства не может быть передана
другому узлу (система с одним главным устройством).
Физическим уровнем является RS485, т. е. используется
порт RS485, встроенный в преобразователь частоты.
Таблица 3.26 Параметры протокола FC
Структура кадра сообщения по
3.8.7
протоколу FC
3.8.7.1 Состав символа (байта)
Каждый передаваемый символ начинается со стартового
бита. Затем 8 бит данных передаются согласно байту.
Каждый символ защищается с помощью четности битов.
Этот бит устанавливается равным 1 после
подтверждения четности. Четность достигается, когда
суммарное число двоичных единиц в 8 битах данных и
бит четности являются четными. Символ завершается
стоповым битом, так что общее число битов равно 11.
Рисунок 3.44 Состав символа
3.8.7.2 Структура телеграммы
Каждая телеграмма имеет свою структуру:
Первый символ (STX) = 02 16-ричн.
•
Байт, указывающий длину телеграммы (LGE).
•
Байт, указывающий адрес преобразователя
•
частоты (ADR).
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 87
Page 88

STX LGE ADR DAT A BCC
195NA099.10
Интеграция системы
VLT® AQUA Drive FC 202
Затем следует несколько байтов данных (переменное
число, зависящее от типа телеграммы).
Телеграмма завершается управляющим байтом (BCC).
3.8.7.5
Контрольная сумма вычисляется как функция
«исключающее ИЛИ». До получения первого байта
телеграммы расчетная контрольная сумма (BCS) равна 0.
Управляющий байт (BCC)
33
Рисунок 3.45 Структура телеграммы
3.8.7.3 Длина телеграммы (LGE)
Длина телеграммы — это число байтов данных в сумме
с байтом адреса ADR и управляющим байтом BCC.
4 байта данных LGE = 4 + 1 + 1 = 6 байт
12 байтов данных LGE = 12 + 1 + 1 = 14 байт
Длина телеграмм, содержащих
тексты
Таблица 3.27 Длина телеграммы
1) Здесь 10 соответствует фиксированным символам, а n —
переменная величина (зависящая от длины текста).
101)+n байт
3.8.7.4
Адрес преобразователя частоты
(ADR)
Используются два разных формата адреса.
Диапазон адресов преобразователя частоты — от 1 до
31 или от 1 до 126.
Формат адреса 1–31
•
Бит 7 = 0 (действует формат адреса 1–
-
31)
Бит 6 не используется.
-
Бит 5 = 1: циркулярная рассылка, биты
-
адреса (0–4) не используются.
Бит 5 = 0: нет циркулярной рассылки.
-
Биты 0–4 = адрес преобразователя
-
частоты, 1–31.
Формат адреса 1–126
•
Бит 7 = 1 (действует формат адреса 1–
-
126).
Биты 0–6 = адрес преобразователя
-
частоты 1–126.
Биты 0–6 = 0: циркулярная рассылка.
-
В своей ответной телеграмме главному устройству
подчиненное устройство посылает адресный байт без
изменения.
88 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 89

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE INDADRLGESTX PCD1 PCD2 BCC
130BA271.10
PWE
high
PWE
low
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Интеграция системы Руководство по проектированию
3.8.7.6 Поле данных
Состав блоков данных зависит от типа телеграммы. Существуют телеграммы трех типов, при этом тип телеграммы
относится как к управляющим телеграммам (главное устройство⇒подчиненное устройство), так и к ответной
телеграмме (подчиненное устройство⇒главное устройство).
3 типа телеграмм:
Блок данных процесса (PCD)
PCD образуется блоком данных, состоящим из 4 байтов (2 слов), и содержит:
Командное слово и значение задания (от главного к подчиненному).
•
Слово состояния и текущую выходную частоту (от подчиненного устройства к главному).
•
Рисунок 3.46 Блок обработки
Блок параметров
Блок параметров используется для пересылки параметров между главным и подчиненным устройствами. Блок данных
состоит из 12 байтов (6 слов) и содержит также блок данных процесса.
3 3
Рисунок 3.47 Блок параметров
Текстовый блок
Текстовый блок используется для чтения или записи текстов посредством блока данных.
Рисунок 3.48 Текстовый блок
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 89
Page 90

15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA268.11
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Интеграция системы
VLT® AQUA Drive FC 202
3.8.7.7 Поле PKE
— и отправляет в значении параметра (PWE) отчет о
неисправности (см. Таблица 3.30):
Поле PKE содержит два подполя:
Команда параметра и ответ, AK.
•
Номер параметра, PNU.
•
Низкое PWE
(16-ричн.)
33
11 В текущем режиме работы преобразователя
82 Отсутствует доступ по шине к заданному
Рисунок 3.49 Поле PKE
В битах 12–15 пересылаются команды параметров от
83 Изменение данных невозможно, поскольку
Таблица 3.30 Отчет об ошибках значений параметров
Сообщение о неисправности
0 Используемый номер параметра не существует.
1 Отсутствует доступ для записи в заданный
параметр.
2 Значение данных превышает пределы
параметра.
3 Используемый подиндекс не существует.
4 Параметр не относится к типу массива.
5 Тип данных не соответствует указанному
параметру.
частоты изменение данных в заданном
параметре невозможно. Некоторые параметры
можно изменять только при выключенном
двигателе.
параметру.
выбрана заводская настройка
главного устройства к подчиненному и возвращаются
обработанные ответы подчиненного устройства
главному.
3.8.7.8
Номер параметра (PNU)
Номер бита Команда параметра
15 14 13 12
0 0 0 0 Нет команды
0 0 0 1 Считывание значения параметра
0 0 1 0 Запись значения параметра в ОЗУ
(слово)
0 0 1 1 Запись значения параметра в ОЗУ
(двойное слово)
1 1 0 1 Запись значения параметра в ОЗУ и
ЭСППЗУ (двойное слово)
1 1 1 0 Запись значения параметра в ОЗУ и
ЭСППЗУ (слово)
1 1 1 1 Чтение/запись текста
Таблица 3.28 Команды параметра: главное⇒подчиненное
Номер бита Ответ
15 14 13 12
0 0 0 0 Нет ответа
0 0 0 1 Значение параметра передано (слово)
0 0 1 0 Значение параметра передано
0 1 1 1 Команда не может быть выполнена
1 1 1 1 Передан текст
Таблица 3.29 Ответ: подчиненное⇒главное
Если команда не может быть выполнена, подчиненное
(двойное слово)
устройство посылает ответ:
0111 Команда не может быть выполнена
В битах 0–11 пересылаются номера параметров.
Функция соответствующего параметра определена в
описании параметров в Руководстве по
программированию.
3.8.7.9
Индекс (IND)
Индекс используется совместно с номером параметра
для доступа к чтению/записи параметров, которые
имеют индекс, например, 15-30 Жур.авар: код ошибки.
Индекс состоит из 2 байтов — младшего и старшего.
В качестве индекса используется только младший байт.
3.8.7.10
Значение параметра (PWE)
Блок значения параметра состоит из 2 слов (4 байтов), и
его значение зависит от поданной команды (AK). Если
блок PWE не содержит значения параметра, главное
устройство подсказывает его. Чтобы изменить значение
параметра (записать), запишите новое значение в блок
PWE и пошлите его от главного устройства в
подчиненное.
Если подчиненное устройство реагирует на запрос
значения параметра (команда чтения), текущее значение
параметра посылается в блоке PWE и возвращается
главному устройству. Если параметр содержит не
численное значение, а несколько вариантов выбора,
как, например, в 0-01 Язык, где [0] — английский язык, а
[4] — датский, то значение данных выбирается путем
90 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 91

PWE
high
PWE
low
Read text
Write text
130BA275.10
PKE IND
Fx xx 04 00
Fx xx 05 00
E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
Интеграция системы Руководство по проектированию
ввода значения в блок PWE. Последовательная связь
позволяет только считывать параметры, содержащие
данные типа 9 (текстовая строка).
15-40 Тип ПЧ–15-53 Серийный № силовой платы
содержат данные типа 9.
Например, размер блока и диапазон напряжения сети
можно посмотреть в 15-40 Тип ПЧ. При пересылке
текстовой строки (чтение) длина телеграммы
переменная, поскольку тексты имеют разную длину.
Длина телеграммы указывается во втором байте
телеграммы (LGE). При использовании передачи текста
символ индекса определяет, является ли команда
командой чтения или записи.
Чтобы прочесть текст с помощью блока PWE, для
команды параметра (AK) следует задать 16-ричное
значение F. Старший бит символа индекса должен быть
равен 4.
Некоторые параметры содержат текст, который можно
записывать по шине последовательной связи. Чтобы
записать текст с помощью блока PWE, для команды
параметра (AK) следует задать 16-ричное значение F.
Старший бит символа индекса должен быть равен 5.
Коэффициент преобразования
4-12 Нижний предел
скорости двигателя [Гц] равен 0,1. Если нужно
предварительно установить минимальную частоту
равной 10 Гц, то должно быть передано число 100.
Коэффициент преобразования 0,1 означает, что
переданная величина умножается на 0,1. Следовательно,
значение 100 читается как 10,0.
Примеры:
0 с⇒индекс преобразования 0
0,00 с⇒индекс преобразования -2
0 мс⇒индекс преобразования -3
0,00 мс⇒индекс преобразования -5
3.8.7.13
Слова состояния процесса (PCD)
Блок слов состояния процесса разделен на два блока
по 16 бит, которые всегда поступают в определенной
последовательности.
PCD 1 PCD 2
Слово состояния управляющей телеграммы
(главное устройство⇒подчиненное
устройство)
Слово состояния управляющей телеграммы
(подчиненное устройство⇒главное
устройство)
Значение
задания
Текущая
выходная частота
3 3
Рисунок 3.50 Текст в блоке PWE
3.8.7.11 Поддерживаемые типы данных
Без знака означает, что в телеграмме отсутствует знак
операции.
Типы данных Описание
3 Целое 16
4 Целое 32
5 Целое без знака 8
6 Целое без знака 16
7 Целое без знака 32
9 Текстовая строка
10 Строка байтов
13 Разность времени
33 Зарезервировано
35 Последовательность битов
Таблица 3.31 Поддерживаемые типы данных
3.8.7.12
Преобразование
Таблица 3.32 Слова состояния процесса (PCD)
Примеры протокола FC
3.8.8
3.8.8.1 Запись значения параметра
Измените значение 4-14 Верхний предел скорости
двигателя [Гц], чтобы оно составило 100 Гц.
Запишите данные в ЭСППЗУ.
PKE = E19E 16-ричн. — запись одного слова в
4-14 Верхний предел скорости двигателя [Гц].
IND = 0000 16-ричн.
PWEHIGH=0000 16-ричн.
PWELOW = 03E8 16-ричн. — Значение данных 1000,
соответствующее частоте 100 Гц, см.
глава 3.8.7.12 Преобразование.
Телеграмма имеет вид:
Рисунок 3.51 Запишите данные в ЭСППЗУ
В заводских установках отображаются различные
атрибуты каждого параметра. Значения параметров
передаются только как целые числа. Поэтому для
передачи дробной части числа используются
коэффициенты преобразования.
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 91
Page 92

119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
Интеграция системы
VLT® AQUA Drive FC 202
УВЕДОМЛЕНИЕ
4-14 Верхний предел скорости двигателя [Гц]
представляет собой одно слово, а командой
параметра для записи в ЭСППЗУ является E. Номером
параметра 4-14 в 16-ричном формате является 19E.
33
Ответ от подчиненного устройства главному имеет вид:
Рисунок 3.52 Ответ подчиненного устройства
3.8.8.2 Считывание значения параметра
Чтение значения в 3-41 Время разгона 1.
PKE = 1155 16-ричн. — чтение значения параметра в
3-41 Время разгона 1.
IND = 0000 16-ричн.
PWEHIGH=0000 16-ричн.
PWELOW = 0000 16-ричн.
Рисунок 3.53 Значение параметра
Если значение 3-41 Время разгона 1 равно 10 секундам,
ответ от подчиненного устройства главному имеет вид
Рисунок 3.54 Ответ подчиненного устройства
3E8 (16-ричн.) соответствует десятичному числу 1000.
Индекс преобразования для 3-41 Время разгона 1 -2, то
есть 0,01.
3-41 Время разгона 1 относится к типу Без знака 32.
3.8.9
Протокол Modbus RTU
3.8.9.1 Допущения
Danfoss предполагает, что установленный контроллер
поддерживает интерфейсы, описанные в этом
документе, и что все требования и ограничения,
предусмотренные в контроллере и преобразователе
частоты, строго соблюдаются.
MODBUS RTU (Remote Terminal Unit, дистанционный
терминал) предназначен для осуществления связи с
любым контроллером, который поддерживает
интерфейсы, указанные в настоящем документе.
Предполагается, что пользователь полностью
осведомлен о возможностях и ограничениях
контроллера.
3.8.9.2 Краткое описание Modbus RTU
Вне зависимости от типа физических
коммуникационных сетей, в кратком описании
протокола Modbus RTU рассматривается процесс,
который использует контроллер для запроса доступа к
другому устройству. В этом процессе описывается, как
Modbus RTU реагирует на запросы другого устройства,
как будут обнаруживаться ошибки и как о них будет
сообщаться. Кроме того, устанавливается общий формат
для компоновки и содержимого полей сообщения.
Во время обмена данными через сеть Modbus RTU
протокол:
Определяет, как каждый контроллер узнает
•
адрес своего устройства.
Распознает сообщение, направленное ему.
•
Определяет, какие действия предпринять.
•
Извлекает данные или прочие сведения,
•
содержащиеся в сообщении.
Если требуется ответ, контроллер формирует ответное
сообщение и отсылает его.
Контроллеры осуществляют связь по принципу
«главный — подчиненный», при котором только главное
устройство может инициировать операции связи
(называемые запросами). Подчиненные устройства
отвечают, посылая запрошенные данные главному
устройству или выполняя действие, затребованное
запросом.
Главное устройство может обращаться к отдельным
подчиненным устройствам или посылать циркулярное
сообщение всем подчиненным устройствам.
Подчиненные устройства посылают ответное сообщение
на запросы, которые им адресовались индивидуально.
На циркулярные запросы главного устройства ответы не
посылаются. Протокол Modbus RTU определяет формат
запроса от ведущего устройства, в котором задаются:
Адрес устройства (или циркулярной рассылки).
•
Код функции, определяющий требуемое
•
действие.
Любые данные, которые необходимо
•
отправить.
Поле контроля ошибок.
•
Ответное сообщение подчиненного устройства также
формируется с использованием протокола Modbus. Оно
содержит поля, подтверждающие выполненные
действия, любые возвращаемые данные и поле
обнаружения ошибок. Если при приеме сообщения
появляется ошибка или если подчиненное устройство
92 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 93

Интеграция системы
Руководство по проектированию
не может выполнить затребованное действие,
подчиненное устройство формирует сообщение об
ошибке и посылает его в ответе или возникает тайм-аут.
3.8.9.3 Преобразователь частоты с
Modbus RTU
Преобразователь частоты осуществляет передачу в
формате Modbus RTU через встроенный интерфейс
RS485. Протокол Modbus RTU обеспечивает доступ к
командному слову и заданию по шине преобразователя
частоты.
Командное слово позволяет главному устройству
Modbus управлять несколькими важными функциями
преобразователя частоты:
Пуск
•
Останов преобразователя частоты различными
•
способами:
Останов выбегом
-
Быстрый останов
-
Останов торможением постоянным
-
током
Нормальный останов (изменением
-
скорости)
Возврат в исходное состояние (сброс) после
•
аварийного отключения
Работа с различными предустановленными
•
скоростями
Работа в обратном направлении
•
Изменение активного набора параметров
•
Управление встроенным реле преобразователя
•
частоты
Для регулирования скорости обычно используется
задание по шине. Также возможен доступ к параметрам,
чтение их значений и, где предусмотрено, запись
значений в параметры. Это допускает диапазон
вариантов управления, включая управление уставкой
преобразователя частоты, когда используется его
внутренний ПИ-регулятор.
3.8.9.4
Конфигурация сети
Параметр Настройка
8-30 Протокол Modbus RTU
8-31 Адрес 1-247
8-32 Скорость передачи
данных
8-33 Биты контроля
четности / стоповые биты
Таблица 3.33 Параметры Modbus RTU
2400-115200
Контроль по четности, 1
стоповый бит (по умолчанию)
3.8.10 Структура кадра сообщения
Modbus RTU
3.8.10.1 Преобразователь частоты с
Modbus RTU
Контроллеры настраиваются на передачу по сети
Modbus с использованием режима RTU, в котором
каждый байт в сообщении содержит 2 4-битных
шестнадцатеричных символа. Формат для каждого байта
показан в Таблица 3.34.
Старт
овый
бит
Таблица 3.34 Формат для каждого байта
Система
кодирования
Битов на байт 1 стартовый бит.
Поле контроля
ошибок
Байт данных Остан
8-битовая двоичная, шестнадцатеричная
0–9, A–F.
Два шестнадцатеричных символа в
каждом 8-битовом поле сообщения.
8 битов данных, сначала посылается
младший значащий бит.
1 бит для контроля по четности/
нечетности; без бита четности, если
контроль не используется.
1 стоповый бит, если контроль по
четности используется; 2 стоповых бита,
если не используется.
Циклический контроль избыточности
(CRC).
Остан
ов/
контр
оль
четно
сти
ов
3 3
Чтобы разрешить протокол Modbus RTU на
преобразователе частоты, установите следующие
параметры:
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 93
3.8.10.2 Структура сообщения Modbus
RTU
Передающее устройство помещает сообщение Modbus
RTU в кадр с известными начальной и конечной
точками. Это позволяет принимающему устройству
начать с начала сообщения, прочитать адресную часть,
определить, кому адресуется сообщение (или всем
устройствам, если является циркулярным), и распознать,
когда сообщение закончено. Выявляются частичные
Page 94

Интеграция системы
VLT® AQUA Drive FC 202
сообщения и определяются как ошибочные.
Передаваемые символы в каждом поле должны быть
шестнадцатеричного формата от 00 до FF.
Преобразователь частоты непрерывно контролирует
сетевую шину, в том числе и во время интервалов
молчания. Когда получено первое поле (поле адреса),
33
каждый преобразователь частоты или устройство
декодирует его, чтобы определить, кому адресовано
сообщение. Сообщения Modbus RTU с нулевым адресом
являются циркулярными. В случае циркулярных
сообщений ответ не разрешается. Типичный кадр
сообщения показан в Таблица 3.35.
Пуск Адрес Функция Данные Контрол
ь CRC
T1-T2-T3-T48 бит 8 бит N x 8 бит 16 бит T1-T2-T3-
Таблица 3.35 Типичная структура сообщения Modbus RTU
3.8.10.3
Сообщения начинаются с периода молчания
продолжительностью не менее 3,5 символа. Это
реализуется как несколько знаковых интерфейсов при
выбранной скорости передачи данных в сети
(показывается как Начало T1–T2–T3–T4). Первый
передаваемым полем является адрес устройства. После
последнего переданного символа предусматривается
подобный период длительностью 3,5 знаковых
интервала, указывающий конец сообщения. После этого
периода может начаться новое сообщение. Весь кадр
сообщения должен передаваться в виде непрерывного
потока. Если перед окончанием кадра появляется
период молчания длительностью более 1,5 знаковых
интервалов, принимающее устройство игнорирует
неполное сообщение и считает, что следующий байт —
это адресное поле следующего сообщения.
Аналогичным образом, если новое сообщение
начинается в пределах 3,5 знаковых интервалов после
предыдущего сообщения, принимающее устройство
будет считать его продолжением предыдущего
сообщения. Это становится причиной тайм-аута (нет
ответа от подчиненного устройства), поскольку
значение в конечном поле CRC не действительно для
объединенных сообщений.
3.8.10.4
Адресное поле кадра сообщения содержит 8 бит.
Достоверные адреса подчиненных устройств находятся
в диапазоне десятичных чисел 0–247. Конкретным
подчиненным устройствам присваиваются адреса в
диапазоне 1–247. («0» оставлен для циркулярного
режима, который распознают все подчиненные
устройства.) Главное устройство обращается к
подчиненному путем ввода его адреса в адресное поле
сообщения. Когда подчиненное устройство посылает
Поля начала/останова
Адресное поле
Конец
T4
свой ответ, оно помещает в это адресное поле свой
адрес, чтобы позволить главному устройству
определить, какое подчиненное устройство отвечает.
3.8.10.5 Поле функции
Поле функции кадра сообщения содержит 8 бит.
Допустимые коды находятся в диапазоне 1–FF. Поля
функций используются для передачи сообщений между
главным и подчиненным устройствами. Когда
сообщение посылается от главного устройства к
подчиненному, поле кода функции сообщает
подчиненному устройству, какое действие требуется
выполнить. Когда подчиненное устройство отвечает
главному, оно использует поле кода функции, чтобы
указать, что ответ является либо нормальным (ошибки
нет), либо произошла какая-либо ошибка
(исключительный ответ). При нормальном ответе
подчиненное устройство просто повторяет
первоначальный код функции. Для исключительного
ответа подчиненное устройство возвращает код,
который эквивалентен первоначальному коду со
старшим значащим битом, установленным на
логическую «1». Кроме того, подчиненное устройство
помещает уникальный код в поле данных ответного
сообщения. Это извещает главное устройство о том,
какая произошла ошибка, или сообщает причину
исключения. См. также глава 3.8.10.10 Коды функций,
поддерживаемые Modbus RTU и
глава 3.8.10.11 Исключительные коды Modbus.
3.8.10.6
Поле данных формируется с помощью групп из двух
шестнадцатеричных цифр в диапазоне от 00 до FF. Они
состоят из одного символа RTU. Поле данных
сообщений, посылаемых главным устройством
подчиненному, содержит дополнительную информацию,
которую должно использовать подчиненное устройство
для совершения действия, определяемого кодом
функции. Оно может содержать такие элементы, как
адреса катушки или регистра, количество
обрабатываемых элементов и счет текущих байтов
данных в этом поле.
3.8.10.7
Сообщения содержат поле обнаружения ошибок с
действием по методу циклического контроля
избыточности (CRC). Поле CRC проверяет содержимое
всего сообщения. Это происходит независимо от того,
какой метод проверки четности используется для
отдельных символов сообщения. Значение CRC
вычисляется передающим устройством, которое
прилагает поле проверки CRC в качестве последнего
поля сообщения. Принимающее устройство
пересчитывает CRC во время приема сообщения и
Поле данных
Поле контроля CRC
94 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 95

Интеграция системы
Руководство по проектированию
сравнивает вычисленное значение с текущим
значением, принимаемым в поле CRC. Если эти два
значения не равны, результатом будет тайм-аут шины.
Поле обнаружения ошибок содержит двоичное число из
16 бит, образующих два 8-битовых байта. Когда это
происходит, сначала добавляется младший байт, а затем
старший. Старший байт CRC — последний байт,
посылаемый в сообщении.
3.8.10.8 Адресация катушек и регистров
В сети Modbus все данные организуются в катушках и
регистрах временного хранения. Катушки хранят 1 бит,
а регистры временного хранения хранят 2-байтовое
слово (16 бит). Все адреса данных в сообщениях Modbus
рассматриваются как нулевые. При первом появлении
элемента данных к нему адресуются как к элементу
номер 0. Например, катушка, известная в
программируемом контроллере как катушка 1, в
сообщении Modbus считается полем адреса данных.
Катушке с десятичным номером 127 присваивается
адрес 007EHEX (десятичный номер 126).
В поле адреса данных сообщения к регистру
временного хранения 40001 адресуются как к регистру
0000. Поле кода функции уже определяет операцию
регистра временного хранения, т. е. 4XXXX является
подразумеваемым. К регистру временного хранения
40108 адресуются как к регистру 006BHEX (десятичный
номер 107).
Номер
катушки
1–16 Командное слово преобразователя
17–32 Диапазон заданий скорости или
33–48 Слово состояния преобразователя
49–64 Режим разомкнутого контура:
65 Управление записью параметра (от
66-65536 Зарезервировано
Описание Направление
сигнала
От главного к
частоты.
уставки преобразователя частоты
0x0–0xFFFF (-200 % ... ~200 %).
частоты (см. Таблица 3.38)
выходная частота преобразователя
частоты.
Режим с замкнутым контуром:
сигнал обратной связи
преобразователя частоты.
главного к подчиненному)
0=Изменения параметров
записываются в ОЗУ
преобразователя частоты.
1=Изменения параметров
записываются в ОЗУ и ЭСППЗУ
преобразователя частоты.
подчиненному
От главного к
подчиненному
От
подчиненного
к главному
От
подчиненного
к главному
От главного к
подчиненному
Катушка0 1
01 Предустановленное задание, младший бит
02 Предустановленное задание, старший бит
03 Торможение
постоянным током
04 Останов выбегом Нет останова выбегом
05 Быстрый останов Нет быстрого останова
06 Фиксация выходной
частоты
07 Останов с изменением
скорости
08 Нет сброса Сброс
09 Нет фиксации частоты Фиксация частоты
10 Изменение скорости 1 Изменение скорости 2
11 Данные
недействительны
12 Реле 1 выкл. Реле 1 вкл.
13 Реле 2 выкл. Реле 2 вкл.
14 Установка младшего бита
15 Установка старшего бита
16 Нет реверса. Реверс
Таблица 3.37 Командное слово преобразователя частоты
(профиль FC)
Катушка0 1
33 Управление не готово Готовн. к управлению
34 Преобразователь частоты
не готов
35 Останов выбегом Защита замкнута
36 Нет авар. сигналов Аварийный сигнал
37 Не используется Не используется
38 Не используется Не используется
39 Не используется Не используется
40 Нет предупреждения Предупреждение
41 Не на задании На задании
42 Руч.режим Авт.режим
43 Вне частотного
диапазона
44 Остановлен Работа
45 Не используется Не используется
46 Нет предупр. о
напряжении
47 Не в пределе по току Предел по току
48 Нет предупр. о перегреве Предупр.о перегрев
Таблица 3.38 Слово состояния преобразователя частоты
(профиль FC)
Нет торможения постоянным
током
Нет фиксации выходной
частоты
Пуск
Данные действительны
Преобразователь частоты
готов
В част. диапазоне
Предупр. о напряжении
3 3
Таблица 3.36 Описания катушек
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 95
Page 96

Интеграция системы
VLT® AQUA Drive FC 202
Номер
регистра
00001-00006 Зарезервировано
00007 Последний код ошибки от интерфейса объекта
00008 Зарезервировано
33
00009
00010-00990 Группа параметров 000 (параметры от 0-01 до
01000-01990 Группа параметров 100 (параметры от 1-00 до
02000-02990 Группа параметров 200 (параметры от 2-00 до
03000-03990 Группа параметров 300 (параметры от 3-00 до
04000-04990 Группа параметров 400 (параметры от 4-00 до
... ...
49000-49990 Группа параметров 4900 (параметры от 49-00
50000 Входные данные: регистр командного слова
50010 Входные данные: регистр задания по шине
... ...
50200 Выходные данные: регистр слова состояния
50210 Выходные данные: регистр основного текущего
Таблица 3.39 Регистры временного хранения
1) Применяется для определения номера индекса,
используемого при доступе к индексируемому параметру.
3.8.10.9
Коды, которые можно использовать в полях функций и
данных сообщения Modbus RTU, перечислены в
Описание
данных FC
Индекс параметра
0-99)
1-99)
2-99)
3-99)
4-99)
до 49-99)
преобразователя частоты (CTW ).
(REF).
преобразователя частоты (STW).
значения параметра (main actual value, MAV)
преобразователя частоты.
1)
Управление преобразователем
частоты
3.8.10.10
Коды функций,
поддерживаемые Modbus RTU
Протокол Modbus RTU поддерживает использование
следующих кодов функций (см. Таблица 3.40) в поле
функции сообщения.
Функция Код функции (16-
ричн.)
Считать с катушки 1
Считать с регистров временного
хранения
Записать на одну катушку 5
Записать в один регистр 6
Записать на несколько катушек F
Записать в несколько регистров 10
Вызвать счетчик событий связи B
Сообщить идентиф. номер подчинен.
устройства
Таблица 3.40 Коды функций
Функция Код
функции
Диагностика8 1 Перезапустить связь
Код
подфункц
ии
2 Возвратить регистр
10 Очистить счетчики и
11 Возвратить счет
12 Возвратить счет ошибок
13 Возвратить счет ошибок
14 Возвратить счет
3
11
Подфункция
диагностики
регистр диагностики
сообщений,
передаваемых по шине
связи по шине
подчиненного устройства
сообщений
подчиненного устройства
глава 3.8.10.10 Коды функций, поддерживаемые Modbus
RTU и глава 3.8.10.11 Исключительные коды Modbus.
Таблица 3.41 Коды функций и подфункций
96 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Page 97

Интеграция системы
Руководство по проектированию
3.8.10.11 Исключительные коды Modbus
Полное описание структуры ответа исключительного
кода приведено в глава 3.8.10.5 Поле функции.
Код НаименованиеЗначение
1 Недопустима
я функция
2 Недопустимы
й адрес
данных
3 Недопустимо
е значение
данных
4 Ошибка
подчиненног
о устройства
Таблица 3.42 Исключительные коды Modbus
Код функции, полученный в запросе,
является недопустимым действием для
сервера (или подчиненного устройства).
Это может быть связано с тем, что код
функции применяется только к более
новым устройствам и не был внедрен в
выбранном устройстве. Он также может
указывать на то, что сервер (или
подчиненное устройство) находится в
ошибочном состоянии для обработки
запроса данного типа, например, он не
настроен и получает запрос на
возвращение значений регистра.
Адрес данных, полученный в запросе,
является недопустимым адресом для
сервера (или подчиненного устройства).
Если еще точнее, то сочетание номера
задания и длины передачи является
недопустимым. Для контроллера со 100
регистрами запрос со смещением 96 и
длиной 4 будет успешно обработан,
запрос со смещением 96 и длиной 5
создает исключение 02.
Значение в поле данных запроса
является недопустимым значением для
сервера (или подчиненного устройства).
Это указывает на ошибку в структуре
остатка сложного запроса, как будто
примененная длина является
неправильной. Это НЕ значит конкретно,
что элемент данных, отправленный для
сохранения в регистре, имеет значение,
не подходящее для прикладной
программы, поскольку протокол Modbus
не знает о значении определенного
значения определенного регистра.
Возникла неисправимая ошибка во
время попытки сервера (или
подчиненного устройства) выполнить
запрашиваемое действие.
3.8.11
Доступ к параметрам
3.8.11.1 Операции с параметрами
Номер параметра (PNU) переносится из адреса
регистра, содержащегося в читаемом или записываемом
сообщении Modbus. Номер параметра передается в
сообщение Modbus как десятичное число (10 x номер
параметра). Пример: показание 3-12 Значение разгона/
замедления (16 бит). Регистр временного хранения 3120
содержит значение параметра. Значение 1352
(десятичное) означает, что параметр установлен на 12,52
%.
Показание 3-14 Предустановл.относительное задание
(32 бита): регистры временного хранения 3410 и 3411
содержат значения параметра. Значение 11300
(десятичное) означает, что параметр установлен на
1113,00.
Сведения о параметрах, размере и индексе
преобразования, см. в руководстве по
программированию.
3.8.11.2
Десятичное значение параметра «Катушка 65»
определяет, куда будут записываться данные в
преобразователе частоты: в ЭСППЗУ и в ОЗУ (катушка 65
= 1) или только в ОЗУ (катушка 65 = 0).
3.8.11.3
Некоторые параметры в преобразователе частоты,
например 3-10 Предустановленное задание, являются
массивами. Поскольку Modbus не поддерживает
массивы в регистрах временного хранения, в
преобразователе частоты регистр временного хранения
9 зарезервирован в качестве указателя на массив.
Перед чтением или записью параметра массива
настройте регистр временного хранения 9. При
установке регистра временного хранения в значение 2
все последующие операции чтения/записи параметров
массива будут осуществляться по индексу 2.
3.8.11.4
Параметры, сохраняемые в виде текстовых строк,
вызываются таким же образом, как и прочие параметры.
Максимальный размер текстового блока — 20
символов. Если запрос на считывание параметра
предназначен для большего числа символов, чем
хранит параметр, ответ укорачивается. Если запрос на
считывание параметра предназначен для меньшего
числа символов, чем хранит параметр, свободное
пространство ответа заполняется.
Хранение данных
Индекс (IND)
Текстовые блоки
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 97
Page 98

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Интеграция системы
VLT® AQUA Drive FC 202
3.8.11.5 Коэффициент преобразования
Поскольку значение параметра можно пересылать
только как целое число, для передачи дробной части
числа после десятичной запятой следует использовать
коэффициент преобразования.
33
3.8.11.6 Значения параметров
Стандартные типы данных
Стандартными типами данных являются int 16, int 32,
uint 8, uint 16 и uint 32. Они хранятся как регистры 4x
(40001–4FFFF). Чтение параметров производится с
помощью функции 03 16-ричн., чтение регистров
временного хранения. Запись параметров
осуществляется с помощью функции 6 16-ричн.
Установка одного регистра для одного регистра (16
бит) и функции 10 16-ричн. Установка нескольких
регистров для двух регистров (32 бита). Диапазон
считываемых размеров: от 1 регистра (16 битов) до 10
регистров (20 символов).
Нестандартные типы данных
Нестандартные типы данных — текстовые строки; они
Бит Значение бита = 0 Значение бита = 1
00 Значение задания Младший бит внешнего
выбора
01 Значение задания Старший бит внешнего
выбора
02 Торможение
постоянным током
03 Выбег Нет выбега
04 Быстрый останов Изменение скорости
05 Фиксировать выходную
частоту
06 Останов с изменением
скорости
07 Не используется Сброс
08 Не используется Фиксация частоты
09 Изменение скорости 1 Изменение скорости 2
10 Данные не
действительны
11 Не используется Реле 01 включено
12 Не используется Реле 02 включено
13 Настройка параметров Младший разряд выбора
14 Настройка параметров Старший разряд выбора
15 Не используется Реверс
Изменение скорости
Использовать изменение
скорости
Пуск
Данные действительны
хранятся как регистры 4x (40001–4FFFF). Параметры
считываются с помощью функции 03 16-ричн., чтение
Таблица 3.43 Биты командного слова
регистров временного хранения, и записываются с
помощью функции 10 16-ричн., установка нескольких
регистров. Диапазон считываемых размеров: от 1
регистра (2 символа) до 10 регистров (20 символов).
Расшифровка управляющих битов
Биты 00/01
Биты 00 и 01 используются для выбора одного из
четырех значений задания, предварительно
3.8.12
Профиль управления FC (Drive)
запрограммированных в параметре
3-10 Предустановленное задание в соответствии с
3.8.12.1 командное слово,
соответствующее профилю FC
(8-10 Профиль управления =
Профиль FC)
Рисунок 3.55 Командное слово
Таблица 3.44.
Программируем
ое значение
задания
1
2
3
4
Параметр Бит 01 Бит 00
3-10 Предуста
новленное
задание [0]
3-10 Предуста
новленное
задание [1]
3-10 Предуста
новленное
задание [2]
3-10 Предуста
новленное
задание [3]
0 0
0 1
1 0
1 1
98 Danfoss A/S © 09/2014 Все права защищены. MG20N650
Таблица 3.44 Значения задания
Page 99

Интеграция системы
Руководство по проектированию
УВЕДОМЛЕНИЕ
Сделайте выбор в 8-56 Выбор предустановленного
задания, чтобы определить, как бит 00/01 логически
объединяется с соответствующей функцией на
цифровых входах.
Бит 02, торможение постоянным током
Бит 02 = 0 приводит к торможению постоянным током и
к останову. Установите ток торможения и длительность
в параметрах 2-01 Ток торможения пост. током и
2-02 Время торможения пост. током.
Бит 02 = 1 вызывает изменение скорости.
Бит 03, останов с выбегом
Бит 03 = 0: преобразователь частоты немедленно
отпускает двигатель (выходные транзисторы
запираются), который выбегом доводится до состояния
покоя.
Бит 03 = 1: преобразователь частоты запускает
двигатель, если выполняются другие условия запуска.
Значение параметра 8-50 Выбор выбега определяет, как
бит 03 логически объединяется с соответствующей
функцией на цифровом входе.
Бит 04, быстрый останов
Бит 04 = 0: вызывает снижение скорости вращения
двигателя до останова (устанавливается в параметре
3-81 Время замедл.для быстр.останова).
Бит 05, фиксация выходной частоты
Бит 05 = 0: фиксируется текущая выходная частота (в
Гц). Изменение зафиксированной выходной частоты
производится только с помощью цифровых входов
(параметры5-10 Клемма 18, цифровой вход–5-15 Клемма
33, цифровой вход), запрограммированных для
выполнения функции Увеличение скорости или
Уменьшение скорости.
УВЕДОМЛЕНИЕ
Если активизирована фиксация выхода, то остановить
преобразователь частоты можно только следующими
способами:
Бит 03, останов выбегом
•
Бит 02, торможение постоянным током
•
Цифровой вход (параметры 5-10 Клемма 18,
•
цифровой вход–5-15 Клемма 33, цифровой
вход), запрограммированный на Торможение
постоянным током, Останов выбегом или
Сброс и останов выбегом.
Бит 06, останов/пуск с изменением скорости
Бит 06 = 0: вызывает останов и заставляет двигатель
снижать скорость до останова с помощью выбранного
параметра замедления.
Бит 06 = 1: позволяет преобразователю частоты
запустить двигатель, если выполнены прочие условия
пуска.
Выберите значение параметра
определить, как бит 06 «Останов/пуск с изменением
скорости» логически объединяется с соответствующей
функцией на цифровом входе.
Бит 07, сброс
Бит 07 = 0: нет сброса.
Бит 07 = 1: сброс отключения. Сброс активируется по
переднему фронту сигнала, например при переходе
сигнала от логического 0 к логической 1.
Бит 08, фиксация частоты
Бит 08 = 1: выходная частота определяется параметром
3-19 Фикс. скорость [об/мин].
Бит 09, выбор изменения скорости 1/2
Бит 09 = 0: изменение скорости 1 включено (параметры
3-41 Время разгона 1–3-42 Время замедления 1).
Бит 09 = 1: изменение скорости 2 (параметры
3-51 Время разгона 2–3-52 Время замедления 2)
включено.
Бит 10, данные недействительны/данные
действительны
Указывает преобразователю частоты, использовать или
игнорировать командное слово.
Бит 10 = 0: командное слово игнорируется.
Бит 10 = 1: командное слово используется. Эта функция
имеет большое значение, поскольку независимо от типа
используемой телеграммы в ней всегда содержится
командное слово. Командное слово можно отключить,
если не требуется его использование при обновлении
или чтении параметров.
Бит 11, реле 01
Бит 11 = 0: реле не активизировано.
Бит 11 = 1: реле 01 активировано при условии, что в
параметре 5-40 Реле функций выбрано значение Кмнд.
слово, бит 11.
Бит 12, реле 04
Бит 12 = 0: реле 04 не активизировано.
Бит 12 = 1: реле 04 активировано при условии, что в
параметре 5-40 Реле функций выбрано значение Кмнд.
слово, бит 12.
Биты 13/14, выбор набора:
Биты 13 и 14 используются для выбора любого из
четырех наборов меню в соответствии с Таблица 3.45.
Набор параметров Бит 14 Бит 13
1 0 0
2 0 1
3 1 0
4 1 1
Таблица 3.45 Указание наборов параметров меню
Эта функция возможна только в том случае, если в
параметре 0-10 Активный набор выбрано значение [9]
Несколько наборов.
8-53 Выбор пуска, чтобы
3 3
MG20N650 Danfoss A/S © 09/2014 Все права защищены. 99
Page 100

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Интеграция системы
VLT® AQUA Drive FC 202
Значение параметра 8-55 Выбор набора определяет, как
бит 13/14 логически объединяется с соответствующей
функцией на цифровых входах.
Бит 15, реверс
Бит 15 = 0: нет реверса.
Бит 15 = 1: Реверс. При заводской настройке значение
33
параметра 8-54 Выбор реверса устанавливает
управление реверсом с помощью цифрового входа. Бит
15 вызывает реверс только в том случае, если выбран
один из следующих вариантов: Последовательная связь,
Логическое ИЛИ или Логическое И.
3.8.12.2 Слово состояния,
соответствующее профилю FC
(STW) (8-10 Профиль управления
= Профиль FC)
Объяснение битов состояния
Бит 00, управление не готово/готово
Бит 00 = 0: преобразователь частоты отключается.
Бит 00 = 1: система управления преобразователя
частоты готова, но не гарантируется получение питания
силовым блоком (при питании системы управления от
внешнего источника 24 В).
Бит 01, привод готов
Бит 01 = 1: преобразователь частоты готов к работе, но
через цифровые входы или по последовательной связи
подается команда останова выбегом.
Бит 02, останов выбегом
Бит 02 = 0: преобразователь частоты «отпускает»
двигатель.
Бит 02 = 1: преобразователь частоты запускает
двигатель командой пуска.
Бит 03, нет ошибки/отключение
Бит 03 = 0: преобразователь частоты не находится в
состоянии отказа.
Бит 03 = 1: преобразователь частоты отключается. Для
восстановления работы нажмите [Reset] (Сброс).
Бит 04, нет ошибки/ошибка (без отключения)
Рисунок 3.56 Слово состояния
Бит 04 = 0: преобразователь частоты не находится в
состоянии отказа.
Бит 04 = 1: преобразователь частоты отображает
Бит Бит = 0 Бит = 1
00 Управление не готово Готовн. к управлению
01 Привод не готов Привод готов
02 Выбег Разрешено
03 Нет ошибки Отключение
04 Нет ошибки Ошибка (нет отключения)
05 Зарезервировано 06 Нет ошибки Отключение с
блокировкой
07 Нет предупреждения Предупреждение
08 Скорость вращения ≠
задание
09 Местное управление Управление по шине
10 Частота вне диапазона Частота в заданных
11 Не используется В работе
12 Привод в норме Останов, автоматический
13 Напряжение в норме Превышение напряжения
14 Крутящий момент в норме Превышение крутящего
15 Таймер в норме Превышение таймера
Скорость вращения =
задание
пределах
пуск
момента
ошибку, но не отключается.
Бит 05, не используется
В слове состояния бит 05 не используется.
Бит 06, нет ошибки / отключение с блокировкой
Бит 06 = 0: преобразователь частоты не находится в
состоянии отказа.
Бит 06 = 1: преобразователь частоты отключен и
блокирован.
Бит 07, нет предупреждения/предупреждение
Бит 07 = 0: предупреждений нет.
Бит 07 = 1: появилось предупреждение.
Бит 08, скорость≠ задание/скорость = задание
Бит 08 = 0: двигатель работает, но текущая скорость
отличается от предустановленного задания скорости.
Такая ситуация возможна, например, когда происходит
разгон/замедление при пуске/останове.
Бит 08 = 1: скорость двигателя соответствует
предустановленному заданию скорости.
Бит 09, местное управление/управление по шине
Бит 09 = 0: На блоке управления активирована кнопка
[Stop/Reset] (Останов/сброс) или в 3-13 Место задания
выбрано Местное управление. Управление по каналу
Таблица 3.46 Биты слова состояния
последовательной связи невозможно.
Бит 09 = 1 означает, что преобразователь частоты
может управляться по периферийной шине или по
последовательной связи.
100 Danfoss A/S © 09/2014 Все права защищены. MG20N650
 Loading...
Loading...